Adaptive modelling of transient vibration signals
18
Mechanical Systems and Signal Processing Mechanical Systems and Signal Processing 20 (2006) 825–842 Adaptive modelling of transient vibration signals Fenglin Wang, Chris K. Mechefske Department of Mechanical and Materials Engineering, Queen’s University, Kingston, Ont., Canada K7L 3N6 Received 31 May 2004; received in revised form 24 November 2004; accepted 20 December 2004 Available online 5 February 2005 Abstract Conventional vibration signal processing techniques are most suitable for stationary processes. However, most mechanical faults in machinery reveal themselves through transient events in vibration signals. Time- series modelling, including autoregressive moving average (ARMA) modelling and autoregressive (AR) modelling, is an efficient approach for transient signal analysis. Based on the adaptive prediction technique, this paper applies the principle of the adaptive line enhancer (ALE) to the modelling of transient vibration signals. The time-series models, adaptive algorithms and the rational time–frequency transfer function are investigated in the paper. Simulation and experimental studies with different time–frequency–amplitude distributions and transient vibration responses are described. The results show that the adaptive modelling method can trace the time–frequency signal and extract dynamic features such as time–frequency distributions and time–amplitude distributions from sample signals. Given the simple programming and potentially easy implementation in on-line applications, this method should have application in machine monitoring and fault diagnosis. r 2005 Elsevier Ltd. All rights reserved. Keywords: Time-series modelling; Adaptive line enhancer; Time–frequency analysis; Transient vibration signals 1. Introduction Transient vibration processes are typical in machinery operation during machine run-up, shutdown, or changing speed or load conditions in a short time. These operation processes will ARTICLE IN PRESS www.elsevier.com/locate/jnlabr/ymssp 0888-3270/$ - see front matter r 2005 Elsevier Ltd. All rights reserved. doi:10.1016/j.ymssp.2004.12.004 Corresponding author. Tel.: +1 613 533 3148; fax: +1 613 533 6489. E-mail addresses: [email protected] (F. Wang), [email protected] (C.K. Mechefske).
-
Upload
independent -
Category
Documents
-
view
5 -
download
0
Transcript of Adaptive modelling of transient vibration signals

ARTICLE IN PRESS
Mechanical Systemsand
Signal ProcessingMechanical Systems and Signal Processing 20 (2006) 825–842
0888-3270/$ -
doi:10.1016/j.
�CorresponE-mail add
www.elsevier.com/locate/jnlabr/ymssp
Adaptive modelling of transient vibration signals
Fenglin Wang, Chris K. Mechefske�
Department of Mechanical and Materials Engineering, Queen’s University, Kingston, Ont., Canada K7L 3N6
Received 31 May 2004; received in revised form 24 November 2004; accepted 20 December 2004
Available online 5 February 2005
Abstract
Conventional vibration signal processing techniques are most suitable for stationary processes. However,most mechanical faults in machinery reveal themselves through transient events in vibration signals. Time-series modelling, including autoregressive moving average (ARMA) modelling and autoregressive (AR)modelling, is an efficient approach for transient signal analysis. Based on the adaptive prediction technique,this paper applies the principle of the adaptive line enhancer (ALE) to the modelling of transient vibrationsignals. The time-series models, adaptive algorithms and the rational time–frequency transfer function areinvestigated in the paper. Simulation and experimental studies with different time–frequency–amplitudedistributions and transient vibration responses are described. The results show that the adaptive modellingmethod can trace the time–frequency signal and extract dynamic features such as time–frequencydistributions and time–amplitude distributions from sample signals. Given the simple programming andpotentially easy implementation in on-line applications, this method should have application in machinemonitoring and fault diagnosis.r 2005 Elsevier Ltd. All rights reserved.
Keywords: Time-series modelling; Adaptive line enhancer; Time–frequency analysis; Transient vibration signals
1. Introduction
Transient vibration processes are typical in machinery operation during machine run-up,shutdown, or changing speed or load conditions in a short time. These operation processes will
see front matter r 2005 Elsevier Ltd. All rights reserved.
ymssp.2004.12.004
ding author. Tel.: +1 613 533 3148; fax: +1 613 533 6489.
resses: [email protected] (F. Wang), [email protected] (C.K. Mechefske).

ARTICLE IN PRESS
F. Wang, C.K. Mechefske / Mechanical Systems and Signal Processing 20 (2006) 825–842826
excite the dynamic properties of the mechanical system and are useful when acquiring informationsuch as machine resonant frequencies, vibration modes or even initial machine fault features. Thisimportant information, hidden in the transient vibration process, is usually in the form of chirpsignals with both frequency and amplitude continuously varying with time. Conventional signalanalysis techniques cannot be used to extract the useful information in the form of thetime–frequency–amplitude characteristics. There are several available signal processing methodsincluding parametric and non-parametric approaches, for example, time-series modelling, wavelettransform (WT) and short-time Fourier transform (STFT), which have been studied and used toanalyse the transient signal in machine condition monitoring [1–6], structure vibration analysis [7]and machine condition monitoring [8].By assuming stationarity of the signals within short intervals, the STFT is used to analyse the
transient signal and achieve good time–frequency feature in some situation [9]. However, theSTFT suffers from its inherent limitation of the spectrum versus narrowing the time intervals, andfrom the averaging effect of signal spectrum when the sudden frequency components occur in thetransient process. Decomposing the transient signal into its orthogonal complementary parts withlow-pass filter and high-pass filter, and iterating the decomposition in time scale, WT [10] has beenincreasingly applied to transient vibration analysis in wide research area. Although WT possessesthe multi-resolution analysis of the transient signal, it also has shortcomings in analysis of thecontinuous transient signal such as the frequency overlapping and sensitive to the signal noise [8].Comparatively, parametric signal processing approaches or time-varying coefficient models are
efficient in tracking and modelling the chirp signals [11,12]. Identification of the time-varyingparameters is crucial for the modelling process. From the viewpoint of the linear prediction filter,the identification of the modelling parameters is the process of solving time-varying Toeplitzmatrix equations by using the Prony method [1–6] or the Levinson–Durbin algorithm [13]. On theother hand, the adaptive line enhancer (ALE) [14], adaptive time-series modelling, has long beenapplied to on-line machine diagnosis and fault detection [15,16]. The structure of an ALE isillustrated in Fig. 1 and its application in the enhancement of signal-to-noise ratio (SNR) is shownin Fig. 2. After digitalising with an A/D converter, the input signal x(n), composed of a vibrationsignal s(n) with background noise v(n), goes into two channels. One is treated as the expected
X(n) e(n)
y(n)
+
−
W1n W2
n W3n WL
n
Adaptive filter algorithms
+ + +
Z-m
Z-1 Z-1 Z-1 Z-1
Fig. 1. The adaptive line enhancer with FIR filter structure.

ARTICLE IN PRESS
X(t)
Low pass filter
LPF A/D
X(n)
-m Adaptive filter
Y(n)e(n)
+ -
The ALE prediction
Fig. 2. Application of the ALE in digital signal prediction.
F. Wang, C.K. Mechefske / Mechanical Systems and Signal Processing 20 (2006) 825–842 827
signal to an adaptive filter. The other goes through a decorrelation delay m and then acts as areference input signal to the adaptive filter model. The adaptive algorithm will continue to adjustthe time-varying filter model coefficients according to the principle of least mean square (LMS)error between its output and expected signal. After optimum convergence process of the adaptiveiteration, the adaptive time-varying parametric model will be obtained. The output y(n) of themodel will approach the predicted signal x(n), and the background noise is then suppressed. Thisis called ‘‘the ALE’’.Focusing on adaptive parametric time-varying modelling, this paper applies the adaptive
filtering algorithms and ALE structure to modelling the chirp signals, swept sinusoidal excitationsignals and transient vibration responses. First, the chirp excitation signal, transient response andthe wavelet transformation are introduced and briefly discussed. Time-series models, adaptivemodelling algorithms and its time–frequency-tracking ability are then explored. Multiple-harmonic stationary signals, frequency- and amplitude-varying chirp signals and transientvibration responses are modelled with adaptive model process. Experimental studies on modellingof a machinery run-up process and transient vibration responses are engaged in a machinery fault-testing device. The results show the time–frequency–amplitude characteristics extracted from thetransient vibration process, and also indicate that the adaptive modelling method could be appliedto other transient signal analyses as well.
2. Chirp signals, vibration response and wavelet time–frequency analysis
Chirp signals with continuous frequency and amplitude varying are common non-stationarysignals widely encountered in machine transient process, sonar object detection or even bats’object shooting. Among various chirp signals, linear chirp signals with linearly increasingfrequency with respect to time give the best SNR excitation and become one of the typical signalsused in structure modal testing. The linear chirp signal is often measured when changing machinespeed such as a rapid acceleration or deceleration process. The linear chirp signal can be expressedas
xðtÞ ¼ x0ðtÞ sin y ¼ x0ðtÞ sin o0tþ1
2bt2
� �¼ x0ðtÞ sin 2pf 0tþ p
f 1 � f 0
tS
� �t2
� �; (1)

ARTICLE IN PRESS
F. Wang, C.K. Mechefske / Mechanical Systems and Signal Processing 20 (2006) 825–842828
where x0ðtÞ is the varying amplitude; y is the total angular rotation; o0 is the starting angularvelocity with starting frequencyf 0; f 1 is the finishing sweep frequency; tS is the sweep timeinterval; and b is the constant value of angular acceleration.With conventional FFT techniques, the sweep process must be slowly enough to calculate the
frequency response function (FRF). The sweep frequency band must cover the rotation speed ofthe machinery to get the machine resonant frequencies and corresponding vibration peaks. Fortransient machinery operation, the linear chirp signal can be used to simulate machine excitationsignal. According to the modal expansion concept, a multiple-degree-of-freedom (mdof) systemwith zero initial conditions can be used to calculate the transient vibration process of themechanical system. The system response of the linear chirp excitation can be expressed by usingthe Duhamel integral.
yrsðtÞ ¼XI
k¼1
~ark �~ask
onk
ffiffiffiffiffiffiffiffiffiffiffiffiffi1� z2k
qZ t
0
xðtÞe�zonkðt�tÞ sin onk
ffiffiffiffiffiffiffiffiffiffiffiffiffi1� z2k
qðt� tÞ
� �dt; (2)
where yrs is the response of the mass of order r under the excitation acting on the mass of order s;~ark and ~ask are eigenvectors of M�1K ; K is the stiffness matrix of the first-order mdof system; M isthe mass matrix of the first-order mdof system; onk is the k order natural frequency of the mdofsystem; and zk is the k order damping ratio of the system.In view of signal filtering, WT uses a series of orthogonal filters to sample the transient
signal. The orthogonal high- and low-pass filters are used to extract one sample from two anddecompose the transient signal into a series of constituent parts in time domain. Due to itsorthogonal property, WT can extract time–frequency features effectively and keep the signalinformation ‘‘unaffected’’ during the decomposition process. So, the WT is suitable for theanalysis of non-stationary signals, especially for the signals from machine fault monitoring whereabnormal condition causes the sudden change of signal frequency components. However, afteranytime of wavelet decomposition, the sampling frequency decreases by one-half, which makesfrequency aliasing exist in the high-frequency decomposition coefficients. Every time frequencyaliasing will influence the consecutive decomposition and will cause the more serious frequencyaliasing as described in [17]. For example, the WT of a constant liner chirp signal xðtÞ ¼sinð2p� 125t2Þ by using wavelet packet algorithm [18] is shown in Fig. 3. From the figure it canbee seen that many interference terms exist in the time–frequency distribution. The occurrence ofthe time–frequency component shift or overlapping in WT is inevitable due to its basicconvolution definition [8]. In some cases this will mislead the analysis of signal. By the frequency-shifting processing, the corrected WT transform of the chirp signal is shown in Fig. 4. Thisexample indicates that WT may not be quite suitable in the analysis of continuous frequency-varying chirp signals.
3. Adaptive signal modelling and its time–frequency-tracking ability
Generally transient signals can be modelled with time-dependent parameter autoregressive(AR) model and autoregressive moving average (ARMA) model. The relations of input seriesx(n) and the output series y(n) of AR and ARMA models can be expressed in the following

ARTICLE IN PRESS
1
0
-1
Am
plitu
de (
lin)
16
14
12
10
8
6
4
2
Frequency(*64 Hz)
00.2
0.40.6
0.81
Time (s)
Fig. 3. The chirp signal WT decomposition of using Wickerhauser wavelet packet.
1
0
-1
Am
plitu
de (
lin)
16
14
12
10
8
6
4
2
Frequency(*64 Hz)
00.2
0.40.6
0.81
Time (s)
Fig. 4. The corrected WT of the chirp signal by rearranging constituent parts.
F. Wang, C.K. Mechefske / Mechanical Systems and Signal Processing 20 (2006) 825–842 829

ARTICLE IN PRESS
F. Wang, C.K. Mechefske / Mechanical Systems and Signal Processing 20 (2006) 825–842830
time-varying difference equation:
xðnÞ ¼XMi¼1
aiðnÞxðn� iÞ þ gs; (3)
yðnÞ ¼XMi¼0
biðnÞxðn� iÞ þXN
j¼1
ajðnÞyðn� jÞ þ gs; (4)
where gs is Gaussian noise, and aiðnÞ and bjðnÞ are time-varying parameters related to the polesand zeros of the rational transfer function of the system.Comparatively, there are the finite impulsive response (FIR) filter structure and the infinite
impulsive response (IIR) filter structure in adaptive filtering. For FIR ALE structure, the relationbetween the output and the input of digital signals is
yðnÞ ¼XL
k¼0
wkðnÞxðn�m� kÞ: (5)
The input X(n) and the time-varying weighting factors W(n) can be defined in the followingvectors:
X ðn�mÞ ¼ ½xðn�mÞ; xðn�m� 1Þ; . . . ; xðn�m� LÞ�T ;
W ðnÞ ¼ ½w0ðnÞ;w1ðnÞ; . . . ;wLðnÞ�T :
When applying the LMS algorithm in [14], the adaptive FIR modelling process can be expressedas
yðnÞ ¼ X ðn�mÞT W ðnÞ;
eðnÞ ¼ xðnÞ � X ðnÞT W ðnÞ;
W ðnþ 1Þ ¼W ðnÞ þ 2m� eðnÞX ðnÞ; ð6Þ
where m is the convergence factor of the algorithm and L is the length of the adaptive filter.After the adaptive process converges to its optimum, the transfer function of the FIR filter
model can be written as
HðzÞ ¼Y ðzÞ
X ðzÞ¼XL
k¼0
wkðnÞz�m�k: (7)
For adaptive IIR filter structure, the relation between the output and the input of digitalsignals is
yðnÞ ¼XM 0
i¼0
biðnÞxðn�m� iÞ þXN 0j¼1
ajðnÞyðn� jÞ; (8)
where ajðnÞ is the time-varying AR coefficient estimation of the IIR filter; bjðnÞ is the time-varyingmoving average coefficient estimation of the IIR filter; and M0 and N0 are the lengths of theadaptive forward filter and recursive filter separately.

ARTICLE IN PRESS
F. Wang, C.K. Mechefske / Mechanical Systems and Signal Processing 20 (2006) 825–842 831
In vector notation, the input digital signals and the time-varying weight factors are defined as
Uðn�mÞ ¼ ½xðn�mÞ; xðn�m� 1Þ; . . . ; xðn�m�MÞ; yðn� 1Þ; yðn� 2Þ; . . . ;xðn�NÞ�T :
V ðnÞ ¼ ½b0ðnÞ; b1ðnÞ; . . . ; bMðnÞ; a1ðnÞ; a2ðnÞ; . . . ; aNðnÞ�T
By utilising the RLMS algorithm proposed by Feintuch [19], the adaptive IIR modellingalgorithm can be expressed as
yðnÞ ¼ Uðn�mÞT V ðnÞ;
eðnÞ ¼ xðnÞ �UðnÞT V ðnÞ;
V ðnþ 1Þ ¼ V ðnÞ þ 2w� eðnÞUðnÞ; ð9Þ
where w is the convergence factor of the algorithm.After the adaptive process converges to its optimum, the transfer function of the IIR filter
model can be written as
HðzÞ ¼Y ðzÞ
X ðzÞ¼
BðzÞ
1� AðzÞ¼
PM 0
i¼0biðnÞz�m�i
1�PN 0
j¼1ajðkÞz�j: (10)
When the input signal is Gaussian noise, the adaptive modelling process of Eqs. (5) and (8) willapproach to the AR modelling of Eq. (3) and the ARMA modelling of Eq. (4). When the adaptiveiteration reaches its optimum, the transfer function estimations of Eqs. (7) and (10) will tend to bethe time-series models of AR modelling and ARMA modelling.As predicted by B. Widrow et al. in [14], ‘‘the ALE has capabilities that may exceed those of
conventional spectral analysers when the unknown sine wave has finite bandwidth or is frequencymodulated’’. Eqs. (7) and (10) indicate that the adaptive transfer functions of FIR and IIRstructure will track and model the transient signals by varying their time-varying parameters.Actually, the time–frequency-tracking ability of the ALE system was discussed in [20]. Thetheoretical transfer function of the ALE with FIR structure after the adaptive process convergesto its optimum was written as
HðzÞ ¼SNR
1þ LSNR
z
zðtÞ
� ��m1� ½z=zðtÞ��L
1� ½z=zðtÞ��1: (11)
Its time-varying FRF is:
H½o;oðtÞ� ¼SNR
1þ LSNRe�j½o�oðtÞ�ðmþðL�1Þ=2ÞT sin½L=2½o� oðtÞ�T �
sin½1=2½o� oðtÞ�T �; (12)
where zðtÞ is the z transform of the input time-varying frequency o(t) and T is the samplingfrequency of the signal.Eqs. (11) and (12) indicate that the adaptive FIR model functions as a frequency-tracking filter
at the center of the input time-varying frequency oðtÞ: Theoretical FRF with time-shift frequencyinputs are shown in Fig. 5. By freezing the time scale, the ALE of FIR structure with the length of128 weights was compared with the DFT transform of 256 points in [14]. The results show that theALE has the same frequency resolution when using the same amount of input data. Digital filter

ARTICLE IN PRESS
Fig. 5. The time–frequency function changing with the input shift frequencies.
F. Wang, C.K. Mechefske / Mechanical Systems and Signal Processing 20 (2006) 825–842832
theory also indicates that theoretically the FIR filter modelling with the filter length of N+1 willpossess the efficient bandwidth of 1/(N+1).
4. Simulation results
Based on the adaptive algorithms and modelling structure analysis, simulation studies on theadaptive modelling of harmonic signals, linear chirp signals, and transient vibration responseswere carried out.
4.1. Modelling of multiple-harmonic stationary signals
First, we begin a tracking simulation of a multiple-harmonic signal with arbitrary initial phasesgiven by
uðtÞ ¼ 0:5 sinð25ptÞ þ 0:4 sinð50ptþ 0:1pÞ þ 0:3 sinð75ptþ 0:2pÞ
þ 0:2 sinð100ptþ 0:3pÞ þ 0:1 sinð125ptþ 0:4pÞ
þ 0:05 sinð150ptþ 0:5pÞ þ 0:025 sinð175ptþ 0:6pÞ: ð13Þ
There are seven frequency components unchanged with time in this signal. The first fiveamplitudes are higher than the last two. By using the adaptive modelling method, thetime–frequency distributions and tracking filter features of the signal are shown in Fig. 6. Fromthis figure, it can be seen that a tracking comb-like narrowband filter centered at the five harmonic

ARTICLE IN PRESS
Fig. 6. The tracking ability of the ALE with the input of a multiple-harmonic signal.
F. Wang, C.K. Mechefske / Mechanical Systems and Signal Processing 20 (2006) 825–842 833
frequencies is first formed, and then the same filter function with the last two harmoniccomponents are adaptively formed as time progresses. These results further confirm that to theharmonic stationary signal the adaptive modelling method functions as a group of comb-likenarrowband tracking filters widely used in on-line weak signal detection and machinery conditionmonitoring.
4.2. Modelling of linear chirp signals
The accelerating process of a machine can be simulated by a constant linear chirp signal, whichis given by
uðtÞ ¼ 0:5 sinðp� 25t2Þ: (14)
The time–frequency distribution calculated by the adaptive modelling approach is shown inFig. 7a. It can be seen that, except for some variable wave amplitude and several interruptedtime–frequency distributions at the zero-status start of the adaptive iteration process, thetime–frequency features of the signal are fully revealed. The time–frequency–amplitudedistribution of the signal is in agreement with the theoretical analysis of the linear time–frequencydistribution (Fig. 5).Further, a transient chirp signal composed of two different frequency rates was also simulated.
The signal is given by
uðtÞ ¼ 0:5 sinðp� 28t2Þ þ 0:5 sinð2p� 70þ pt2Þ: (15)

ARTICLE IN PRESS
Fig. 7. Time–frequency distribution of swept sinusoidal signals. (a) One frequency-varying component and (b) two
frequency-varying component.
F. Wang, C.K. Mechefske / Mechanical Systems and Signal Processing 20 (2006) 825–842834
The first frequency component is linearly increasing with time and the second frequencycomponent is varying slowly with time. The time–frequency–amplitude distributions calculated bythe adaptive modelling approach are shown in Fig. 7b. It can be seen that the adaptive modellingmethod can track the two combined frequency components quite well, and the resolution of thetime and frequency are reasonably good.The next transient signal to be simulated is a time–frequency and time–amplitude-varying signal
and it is expressed as
uðtÞ ¼ 0:5 sinðp� 28t2Þ þ 0:5½1þ 0:2 sinð2p� 6tÞ� sinð2p� 88tÞ: (16)
Two frequency components exist in the signal: one has the frequency changing quickly withtime and the other has a constant frequency but the amplitude changes periodically. Thetime–frequency–amplitude distributions are shown in Fig. 8. From the figure it can be seen thatthe signal characteristics with both varying time–frequency and varying time–amplitudedistributions are extracted by the adaptive modelling approach.
4.3. Modelling of transient vibration responses
A general analytical solution for the transient vibration response of the constant linear chirpexcitation is not possible and numerical techniques must be used. The transient vibration responseof the chirp signal through a 2 dof system and a typical error of the adaptive modelling are shownin Fig. 9. From the figure, it can be seen that the transient vibration responses are frequency- andamplitude-varying chirp signals. The adaptive modelling process converges quickly and can trackthe transient signals.

ARTICLE IN PRESS
Fig. 9. The transient response of a 2 dof system and the error of the adaptive iteration.
Fig. 8. The distribution of the signal with varying time–frequency–amplitude.
F. Wang, C.K. Mechefske / Mechanical Systems and Signal Processing 20 (2006) 825–842 835
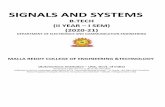
The time–frequency distributions of transient vibration responses to a 1 dof system and a 2 dofsystem are shown in Fig. 10. It can be seen that the vibration modes and transient workingconditions of the vibration system can be modelled and revealed by the adaptive modelling
ARTICLE IN PRESS
Fig. 10. The frequency–time distribution of sdof and 2 dof vibration responses. (a) 1 dof system and (b) 2 dof system.
F. Wang, C.K. Mechefske / Mechanical Systems and Signal Processing 20 (2006) 825–842836
method. The time–frequency–amplitude distributions of the transient vibration responses havethe following characteristics:
(1)
Compared to continuous time–frequency distribution of the linear chirp signal, thedistribution of the transient vibration responses are discontinuous and interrupted by thesystem resonances.(2)
The amplitude distributions of transient vibration process are often condense or intensified inthe resonant peak area with some gaps along the time–frequency axis .(3)
After passing through a resonant peak, there are some residual amplitude responses withdecaying magnitude with respect to time.(4)
There is a time- or frequency-delay between the maximum response amplitude and itstheoretical resonant peak for the run-up transient vibration response a s discussed in [18].Fig. 11 shows the time–frequency distribution of a transient vibration response through a 4 dofsystem under the constant linear chirp excitation. Its natural frequencies are 14, 28, 38, and 44Hz,respectively, and all the features discussed above are further evidenced.
5. Experimental results
Experimental studies on the adaptive modelling of the machine transient operating process andtransient vibration responses were engaged in a machinery fault-testing device as shown in Fig. 12.The rotor device is composed of a changeable electrical motor, changeable mechanicaltransmissions, and mechanical loading. Our focus is on the transient processes and resonantresponses of the device. The highest rotor speed is 3500 rpm (58.3Hz) and the transient frequency

ARTICLE IN PRESS
Signal amplifier
Signal amplifier
Low pass filter
Data acquisition &computer system
Mechanicaltransmission Loading
Electrical motor
Fig. 12. Schematic of the machinery fault-testing device.
Fig. 11. The distribution of transient vibration responses from a 4 dof system.
F. Wang, C.K. Mechefske / Mechanical Systems and Signal Processing 20 (2006) 825–842 837
band was set as 0–55Hz. The sampling frequency is 1000Hz and the signals were sampled andprocessed by using adaptive modelling process. First, an electrical motor with an electrical currentsensor was installed and connected with a large rotational inertia gearbox in free loadingcondition. The time–frequency distribution of the run-up current signal is shown in Fig. 13. It canbe seen that the run-up process follows a linear-frequency-increasing period and then changes to aconstant frequency phase in which the rotor is in the steady-state or constant speed condition(see lower right-hand corner of Fig. 13).Second, the resonance case with quick running up of the testing device was devised for
modelling of transient vibration processes, in which a motor with a small rotational inertia rotorsystem was installed. There are two close resonant peaks located between 30 and 45Hz in therotor resonant system. During the experiment both the acceleration transient process and thedeceleration transient process were operated and measured. All the A/D sampling time was set a

ARTICLE IN PRESS
Fig. 13. The time–frequency distribution of the run-up current signal.
Fig. 14. The frequency–time distributions of machinery run-up or close-down. (a) Acceleration process of 0–53Hz and
(b) deceleration process of 55–22Hz.
F. Wang, C.K. Mechefske / Mechanical Systems and Signal Processing 20 (2006) 825–842838
little earlier than the start of machinery run-up and after slow-down in order to capture the entiretransient response and to avoid the adaptive transient process and high-peak response affectingthe modelling of the experimental run-up process. The transient response data were thenprocessed by the adaptive modelling approach off-line. The time–frequency distributions of thevibration responses are shown in Fig. 14. Considering the fact that mechanical noise was causedby the power transmission elements such as several pairs of rolling bearings, the time–frequencydistribution is not as good as the simulation results. So, it is recommended that a tracking filtershould be used to acquire a better SNR transient vibration response in later experimental

ARTICLE IN PRESS
Fig. 15. The frequency–time–amplitude distributions of motors under free loading. (a) Healthy run-up process and (b)
faulty run-up process.
F. Wang, C.K. Mechefske / Mechanical Systems and Signal Processing 20 (2006) 825–842 839
research. Even though the noise exists in the sampling signal, it can be seen that the amplitudespectral distributions are concentrated between 30 and 50Hz in the figure. In the accelerationcase, the first resonant peak response occurs at about 38Hz with some residual amplituderesponses. The second resonance peak appears at about 45Hz with some spectral distributiongaps. About 6 s later the running process changed into the steady-state working condition at theconstant speed frequency of 53Hz. In the deceleration case, the slow-down process runs from theconstant frequency at 55Hz and then reduces to the speed at 22Hz. The high resonant peakoccurs at about 43Hz with spectral concentration and the low resonance peak appears at about35Hz with some residual amplitude responses.A third experiment was conducted to analyse the run-up process of the electrical motor current.
Comparison measurements were made between a healthy motor and a faulty one with a brokenrotor bar. The healthy motor and the faulty motor were installed and run in the fault-testingdevice under free loading. The transient current signals of the run-up process were sampled andthe time–frequency–amplitude properties were analysed and are shown in Fig. 15. From the figureit can be seen that both the healthy motor and the faulty one have starting current peaks at thebeginning and end of the transient period before entering steady-state speed. However, thestarting current peak of faulty motor is higher than that of healthy motor. The two motors weresubsequently tested under mechanically loaded conditions (70 lb-in). The time–frequency–ampli-tude properties were analysed and are shown in Fig. 16. From the figure it can be seen that theamplitude difference between the healthy motor and the faulty one is significant. These resultsindicate that the amplitude of the transient process might be regarded as one criterion for judgingthe fault condition in an electric motor.
6. Conclusions
The transient vibration process is difficult to analyse and model due to its continuousfrequency- and amplitude-varying characteristics. Non-parametric approaches such as short-time

ARTICLE IN PRESS
Fig. 16. The frequency–time–amplitude distributions of motors under loading. (a) Healthy run-up process and (b)
faulty run-up process.
F. Wang, C.K. Mechefske / Mechanical Systems and Signal Processing 20 (2006) 825–842840
Fourier transform (STFT) and wavelet transform (WT) have their inherent limitations ofspectrum versus the time intervals or ‘‘frequency aliasing’’ problems when being used to analysethe time–frequency–amplitude chirp signals. Parametric approaches of time-series AR modellingand ARMA modelling have been previously proven to be efficient tools in modelling the transientvibration signal and revealing its dynamic properties. This paper, from the viewpoint of anadaptive prediction filter, puts forward an innovative approach based on the principle of theadaptive liner enhancer (ALE) to tracking and modelling of linear chirp vibration signals.Simulation and experimental studies indicate that the new modelling approach is capable oftracking and modelling the transient vibration signals. The ALE procedure also has thecharacteristic of potentially easy on-line application as follows:
(1)
The adaptive prediction filter principle and adaptive algorithms can be applied to time-seriesmodelling and the parameter estimation process. The application of the ALE system to thetransient signal analysis was shown as a successful example.(2)
When the adaptive iteration reaches its optimum, the transfer function estimations of FIRfilter and IIR filter will converge to the time-series models of AR modelling and ARMAmodelling. These adaptive time-varying modelling approache s possess the capacity oftracking time–frequency–amplitude chirp signals and modelling the transient vibrationprocess. The model parameters can be estimated by using the least mean square (LMS)algorithm and the recursive least mean square (RLMS) adaptive algorithms.(3)
To the stationary harmonic signal, the adaptive modelling approach functions as a group ofcomb-like narrowband tracking filters, which is widely used in weak signal detection andmachinery condition monitoring. The adaptive modelling approach can track and modelsingles with constant amplitude swept sinusoidal excitation , compound swept sinusoidalexcitation, and varying time–frequency and time– amplitude sinusoidal excitation.(4)
Due to the superior ability of suppressing the wide band noise and enhancing the SNR ofvibration signals, the adaptive ALE modelling approach not only can extract thetime–frequency–amplitude spectral distributions from transient linear chirp signals and the
ARTICLE IN PRESS
F. Wang, C.K. Mechefske / Mechanical Systems and Signal Processing 20 (2006) 825–842 841
vibration responses in simulation condition but can also work in machine transient operatingprocesses with background noise condition. Besides, the adaptive modelling method has itsclear physical meanings in time–frequency–amplitude spectrum compared to the results ofwavelet transformation.
(5)
Experimental studies of tracking the non-stationary run-up and slow-down processindicate that the adaptive modelling method can model the transient machine operatingprocess with clear physical meanings. When passing through the natural frequency of thesystem, the time– frequency–amplitude spectrums are interrupted and intensified by theresonant peak responses along the time–frequency distribution. After passing through aresonant peak, there are occasional residual amplitude responses with magnitude decay withrespect to time.(6)
The adaptive modelling method was successfully applied to monitoring the transient running-up process of a healthy motor and a faulty one with a broken rotor bar. The results indicatethat it can be applied to monitoring other transient vibration processes.Acknowledgements
The authors would like to express many thanks to Mr. Wei Shao and Mr. Colin Zhou for thehelpful discussions in the numerical vibration analysis of multiple dof vibration system and to Dr.Weidong Li for his help carrying out the experimental portion of this work. This work was fundedby the Natural Sciences and Engineering Research Council of Canada.
References
[1] C.K. Mechefske, Z. Chen, Transient vibration signal analysis for machinery condition assessment, International
Journal of COMADEM 5 (1) (2002) 21–30.
[2] Z. Chen, C.K. Mechefske, Diagnosis of machine fault status using transient vibration signal parameters, Journal of
Vibration and Control 8 (3) (2002) 321–335.
[3] Z. Chen, C.K. Mechefske, Machine signature identification by analysis of impulse vibration signals, Journal of
Sound and Vibration 244 (1) (2001) 155–167.
[4] Z. Chen, C.K. Mechefske, Diagnosis of machine faults based on transient vibration signals, Insight—Journal of
Non-Destructive Testing and Condition Monitoring 42 (8) (2000) 504–511.
[5] Z. Chen, C.K. Mechefske, Machine condition monitoring based on transient vibration signal analysis,
International Journal of Acoustics and Vibration 5 (3) (2000) 141–145.
[6] M.P. Ribeiro, D.J. Ewins, D.A. Robb, Non-stationary analysis and noise filtering using a technique extended from
the original Prony method, Mechanical Systems and Signal Processing 17 (3) (2003) 533–549.
[7] S.A. Neild, P.D. McFadden, M.S. Williams, A review of time–frequency methods for structural vibration analysis,
Engineering Structures 25 (2003) 713–728.
[8] Z.K. Peng, F.L. Chu, Application of the wavelet transform in machine condition monitoring and fault diagnostics:
a review with bibliography, Mechanical Systems and Signal Processing 18 (2004) 199–221.
[9] L. Cohen, Time–Frequency Analysis, Prentice-Hall, Englewood Cliffs, NJ, 1995.
[10] D.E. Newland, An Introduction to Random Vibrations, Spectral & Wavelet Analysis, third ed, Wiley, New York,
1993.
[11] A.S. Kayhan, Difference equation representation of chirp signals and instantaneous frequency/amplitude
estimation, IEEE Transactions on Signal Processing 44 (12) (1996) 2948–2958.

ARTICLE IN PRESS
F. Wang, C.K. Mechefske / Mechanical Systems and Signal Processing 20 (2006) 825–842842
[12] B. Volcker, B. Ottersten, Chirp parameter estimation from a sample covariance matrix, IEEE Transactions on
Signal Processing 49 (3) (2001) 603–612.
[13] J.S. Owen, B.J. Eccles, B.S. Choo, M.A. Woodings, The application of auto-regressive time series modeling for the
time–frequency analysis of civil engineering structures, Engineering Structures 23 (2001) 521–536.
[14] B. Widrow, S.D. Sterns, Adaptive Signal Processing, first ed, Prentice-Hall, Englewood Cliffs, NJ, 1985.
[15] W. Hernandez, Improving the response of a wheel speed sensor using an adaptive line enhancer, Measurement 33
(3) (2003) 229–240.
[16] T. Williams, X. Ribadeneira, S. Billington, T. Kurfess, Rolling element bearing diagnostics in run-to-failure
lifetime testing, Mechanical Systems and Signal Processing 15 (5) (2001) 979–993.
[17] Z.X. Geng, L.S. Qu, Frequency shift algorithm of wavelet packets and vibration signal analysis, Journal of
Vibration Engineering 9 (2) (1996) 145–152 (in Chinese).
[18] M.V. Wickerhauser, Adapted Wavelet Analysis—From Theory to Software, A.K. Peters Ltd, Massachusetts,
1994.
[19] P.L. Feintuch, An adaptive recursive LMS filter RLMS, Proceedins of the IEEE 64 (1976) 1622–1624.
[20] F.L. Wang, K.C. Mechefske, Frequency properties of an adaptive line enhancer, Mechanical Systems and Signal
Processing 18 (5) (2004) 797–812.