
Active Suspensions
68
Active Suspensions Dott. Alessio Romano Dott. Carlo Mure’ Dott. Jacopo Sini Dott. Vincenzo Lo Schiavo Politecnico di Torino Automotive Control Systems 16 January 2015
Transcript of Active Suspensions

Active Suspensions
Dott. Alessio Romano
Dott. Carlo Mure’
Dott. Jacopo Sini
Dott. Vincenzo Lo Schiavo
Politecnico di Torino
Automotive Control Systems
16 January 2015

Summary
Market
Suspension description
Matlab/Simulink implementation
CarSim implementation and simulation
Future solutions
Technology
Conclusions
Introduction
Introduction
Introduction
Suspensions have 2 main
functions:
Support the chassis;
Insulate chassis from the
ground asperity.

Passive ActiveSemi-active
Kinds of suspensionsIntroduction

Introdcution
Unfortunately the suspensions’ designer have
to satisfy two incompatible requirements
Comfort : «soft» suspension can modify fastly its
length reducing the acceleration of the sprung mass,
but at same time it reduces the force exchanged
between ground and tires.
Handling: «rigid» suspension guarantees better
adherence of tires, but applies bigger vertical
acceleration to the sprung mass.
Active suspensions are the best way to manage this
trade-off

Introdcution
Standards for comfort evaluation
RMS vertical acceleration level [m/s2] Degree of comfort
(1) < 0,315 Not uncomfortable
(2) 0,315 – 0,63 A little uncomfortable
(3) 0,5 – 1 Fairly uncomfortable
(4) 0,8-1,6 Uncomfortable
(5) 1,25-2,5 Very uncomfortable
(6) > 2 Extremely uncomfortable
RMS vertical acceleration level and degree of comfort
From ISO 2631-1 1997: Mechanical vibration and shock

Introdcution
Standards for comfort evaluation
Minimum tolerance
between 4 Hz (25.13
rad/s) and 8 Hz
(50.26 rad/s) due to
vertical resonance of
the abdominal
cavity.
Small inflection
between 10 Hz
(62.83 rad/s) and 20
Hz (125.66 rad/s)
due for example to
head resonance at 10
Hz.

They were adopted by the following constructors:
Lotus (Ayrton Senna) ;
Williams-Renault (Nigel Mansell and Riccardo Patrese) with a
neural network controller able to make more than 60 asset
variations per second and to keep the vehicle at less than 1 cm
from ground to keep the ground effect.
Introduction
History
First active suspensions were designed by an English
engineer in 1985. Their first use took place in Formula 1
in 1987.

Introduction
In 1993 Alex Zanardi was involved in a terrible accident caused
by an erroneous operation of the active suspensions system.
In 1994 active suspension was forbidden for safety and sport
reasons (their high efficacy gave too many advantages to the
users): the active suspension research ended.
Today some manufacturers develop active suspensions for their
high-performance cars and motorbikes.

Market
Passive suspensions are largely used in vehicles thanks to
their simplicity and low cost.
Passive suspensions

Market
The semi-active suspensions use a parallel of a spring and a
damper but it is possible to tune the damping factor.
Semi-active suspensions

Market
Active suspensions use an actuator to generate a tunable force F(t).
First commercial active suspensions system was implemented in 1991
by Toyota in the Soarer UZZ 32.
Active suspensions - I

Market
Another vehicle that uses active suspensions is the
Mercedes-Benz SL500.
Active suspensions - II

Vehicles
Today the MagneRide is the most used commercial
technology.
Ferrari california (sopra)
Audi R8 (sotto)
Active suspensions - III

Description
Physical modelVehicles are very complex systems.
Among the most important things to consider are:
Suspensions geometry;
Coupled behavior.
The most used models are
the following ones:
Quarter-Car;
Half-Car;
Full Car.

Description
ACTIVE SEMI-ACTIVE PASSIVE
Quarter-car representation

Matlab/Simulinkimplementation
Suspensions control
We implemented two control methods:
Loop shaping, controlling firstly the
vertical acceleration and secondly the
handling;
H-infinity, in order to optimize acceleration
and handling performances contemporarily.

Matlab/Simulinkimplementation
We started from the implementation of the quarter-car
physical model in Simulink, modelled by Euler-Newton
equations.
Simulation model

Matlab/Simulinkimplementation
Here are the values of the physical quantities involved:
Simulation model
mb = 300 kg
mw = 60 kg
bs = 1000 N/m/s
ks = 16000 N/m
kt = 190000 N/m
Bt = 0 N/m/s

Matlab/Simulinkimplementation
Loop shaping controller of acceleration
Input (u): actuator force.
Disturbance (w): we chose to consider as disturbance a
10cm step.
Output (y): sprung mass (car body) acceleration.
Target: setting time < 1 second, small overshoot,
rejection of road profile disturbance.

Matlab/Simulinkimplementation
Loop shaping controller of acceleration
Starting from the Simulink model, we computed the
transfer functions from output to input and from
output to disturbance.

Matlab/Simulinkimplementation Starting from the Bode diagram, we computed some control laws.
First target was the open loop stability.
Loop shaping controller of acceleration
In the Bode diagram we have a
positive +40 dB/decade slope:
the system has two zeros in the
origin. The resonance peak is
caused by the two pure
imaginary zeros at 56,3 rad/s.
With our controller we have infinite
gain margin and phase margin
equal to 50,8 at 54.8 rad/s (crossover
frequency).
Stability is verified!

Matlab/Simulinkimplementation
After the open loop function, we need to analyze the Bode diagram of sensitivity
and complementary sensitivity functions.
Loop shaping controller of acceleration
As we can see, the complementary sensitivity function (azure) acts
like a low-pass filter (65 rad/s). The sensitivity (green) has a good
attenuation of the disturbance on all the frequencies, except at 40 rad/s.

Matlab/Simulinkimplementation Closed loop analysis
Loop shaping controller of acceleration
The crossover frequency is equal to 11 rad/s.
The gain margin is 85.9dB and the phase margin is infinite.

Matlab/Simulinkimplementation
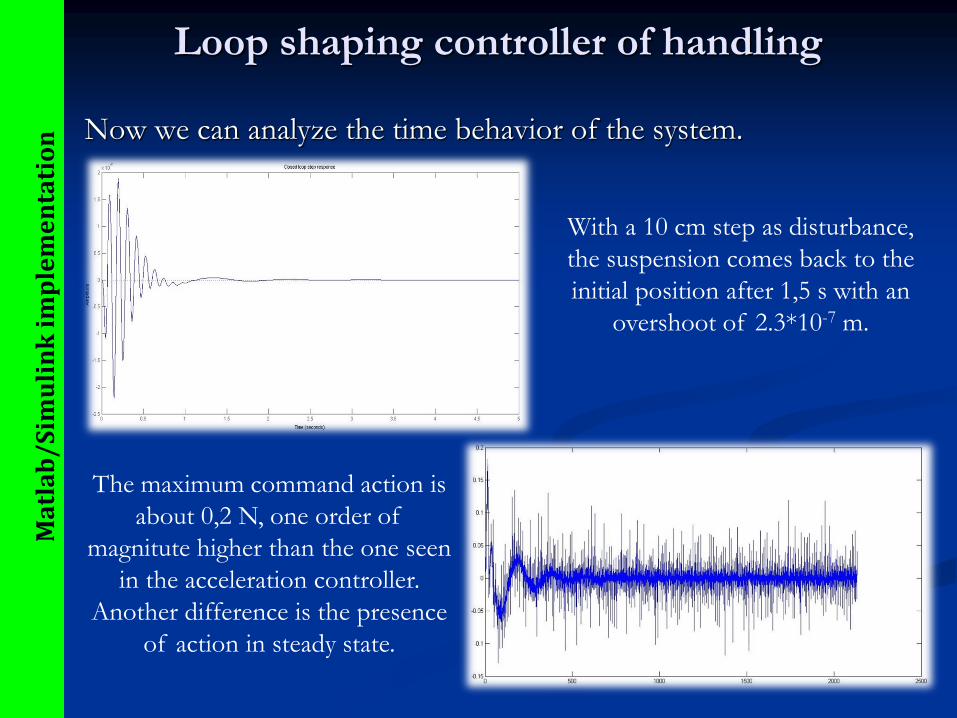
Now we can analyze the time behavior of the system.
Loop shaping controller of acceleration
With a 10 cm step as disturbance,
the acceleration becomes null
after about 1 s with an overshoot
of 3.44*10-5 m/s2.
The maximum command action is
about 0.015 N.
In constant speed condition, we
have the same behavior for the
power.

Matlab/Simulinkimplementation
The interesting point is to notice that the jounce behavior in
this control system is not very good.
Loop shaping controller of acceleration

Matlab/Simulinkimplementation
Loop shaping controller of handling
Now we can optimize the handling of the vehicle.
The targets are the same of the previous controller:
setting time around 1s, small overshoot, rejection of
road profile disturbance.
Input (u): actuator force.
Disturbance (w): we chose to consider as disturbance a 10cm
step.
Output(y): In the literature there are lots of discussions about
which parameter maximizes the handling*.
As a lot of authors, we considered the relative
displacement between the sprung and the unsprung
masses, i.e. the suspension elongation.
*Probably the best parameter is the tire deformation, but the
measurements are very difficult.

Matlab/Simulinkimplementation
Loop shaping controller of handling
Starting from the Simulink model, we computed the transfer
functions from output to input and from output to disturbance.

Matlab/Simulinkimplementation Starting from the Bode diagram, we computed some control laws.
First target is the open loop stability.
Loop shaping controller of handling
Also in this case, we have a
resonance peak caused by
two pure imaginary
zeros at about 23 rad/s.
In open loop we have infinite
gain margin and phase
margin equal to 66 at 137
rad/s (crossover frequency).
Stability is verified!

Matlab/Simulinkimplementation After the open loop function, we need to analyze the Bode diagram of sensitivity
and complementary sensitivity function.
Loop shaping controller of handling
As we can see, the complementary sensitivity function (azure) acts
like a low-pass filter 102 rad/s. The sensitivity (green) has a good
attenuation of the disturbance on all the frequencies, expect at 60 rad/s.

Matlab/Simulinkimplementation Closed loop analysis
Loop shaping controller of handling
The crossover frequency is equal to 55 rad/s.
The gain margin is 95,3 dB and the phase margin is infinite.
Matlab/Simulinkimplementation Now we can analyze the time behavior of the system.
Loop shaping controller of handling
With a 10 cm step as disturbance,
the suspension comes back to the
initial position after 1,5 s with an
overshoot of 2.3*10-7 m.
The maximum command action is
about 0,2 N, one order of
magnitute higher than the one seen
in the acceleration controller.
Another difference is the presence
of action in steady state.

Matlab/Simulinkimplementation As before it’s interesting to see the acceleration behavior in this controller.
Loop shaping controller of handling
This kind of acceleration profile is not very comfortable for the
passengers.

Matlab/Simulinkimplementation
Loop shaping controller of handling
Observation
In this control we have a lot of simplifications; for example
the geometry is simple and a filter to the road disturbance is
applied.
Nevertheless, it’s well evident that optimizing one of the two
specifications, the other one is not satisfied.
For this reason, we focused our attention on the
H-infinity control.

Matlab/Simulinkimplementation
H-infinity control
Main problem : there are two conflicting objectives, that
are passenger comfort and road holding.
Solution: the H-infinity control is aimed to find a
compromise between them.

Matlab/Simulinkimplementation
H-infinity control
Factors that influence the control design :
•Characteristics of the road disturbance;
•Quality of the sensor measurements for feedback;
•Limits on the available control force.
Matlab/Simulinkimplementation
H-infinity control
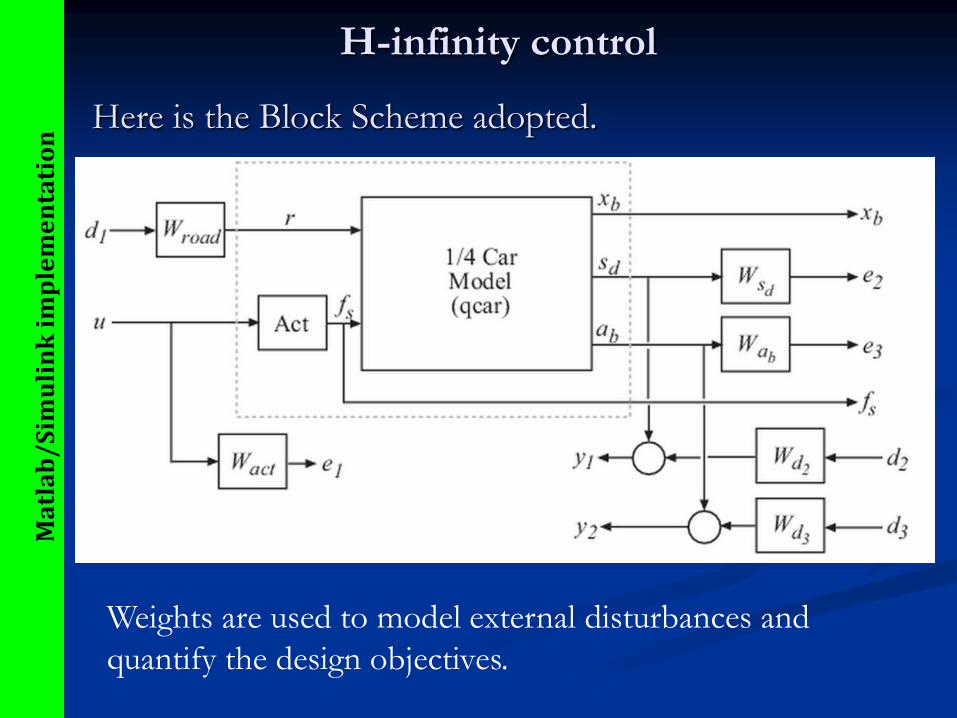
Here is the Block Scheme adopted.
Weights are used to model external disturbances and
quantify the design objectives.

Matlab/Simulinkimplementation
H-infinity control
Here are the weight function used:
•Wroad = 0.07
•.
•Wd2=0.01, Wd3=0.5
•Wsd = β/HandlingTarget, where
•Wab = (1-β)/ComfortTarget, where
In particular β is a blending parameter, used to modulate the
trade-off. The Matlab command used to introduce β is the
following one:
β = reshape([0.01 0.5 0.99],[1 1 3]).
We use the command hinfsyn to compute an H-infinity controller
for each value of the blending parameter, β.

Matlab/Simulinkimplementation
H-infinity control
Here are the plots of the closed-loop targets compared to the
open-loop responses in the frequency domain.
-80
-70
-60
-50
-40
-30
-20
-10
0
10
20
From: d1
To: sd
100
101
102
103
-100
-50
0
50
To: ab
Response to road disturbance
Frequency (rad/s)
Magnitu
de (
dB
)
Open-loop
Closed-loop target

Matlab/Simulinkimplementation
H-infinity control
Here is the comparison between the different frequency responses
from the road disturbance to sd,xb and ab for the passive and
active suspensions, according to what we found in the literature.
-50
0
50
From: r
To: xb
-40
-30
-20
-10
0
10
20
To: sd
100
101
102
0
10
20
30
40
50
60
To: ab
Body travel, suspension deflection, and body acceleration due to road
Frequency (rad/s)
Magnitu
de (
dB
)
Open-loop
Comfort
Balanced
Handling

Matlab/Simulinkimplementation
H-infinity control
Here is the comparison between the different frequency responses
from the road disturbance to sd and ab for the passive and active
suspensions, after the implementation of our controller.
56.27 rad/s is called the tire-hop frequency and it is the frequency of
the imaginary-axis zero of the transfer function from actuator to
acceleration.

Matlab/Simulinkimplementation
H-infinity control
To further evaluate the three designs, we performed time-domain
simulations using the following road disturbance signal r(t):
r(t)=a(1−cos8πt), 0≤t≤0.25
r(t)=0 otherwise.
This signal corresponds to a road bump of height 5 cm.
Time-domain evaluation

Matlab/Simulinkimplementation
H-infinity control
Here are the time-domain responses of the closed-loop models to
the road disturbance signal, according to what we found in the
literature.
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1-0.04
-0.02
0
0.02
0.04
0.06
0.08
0.1Body travel
xb (
m)
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1-20
-15
-10
-5
0
5
10Body acceleration
ab (
m/s
2)
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1-0.1
-0.05
0
0.05
0.1Suspension deflection
Time (s)
sd (
m)
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1-0.4
-0.3
-0.2
-0.1
0
0.1
0.2
0.3
Control force
Time (s)
f s (
N)
Open-loop
Comfort
Balanced
Suspension
Road Disturbance

Matlab/Simulinkimplementation
H-infinity control
Here are the time-domain responses of the closed-loop models to the
road disturbance signal, after the implementation of our controller.
0 1 2 3 4 5 6 7 8 9 10-4
-3
-2
-1
0
1
2
3
4Body acceleration
ab (
m/s
2)
Open-loop
Comfort
Balanced
Suspension
Road Disturbance
0.05 0.1 0.15 0.2 0.25 0.3
-0.5
0
0.5
1
1.5
Body acceleration
ab (
m/s
2)
Open-loop
Comfort
Balanced
Suspension
Road Disturbance

Matlab/Simulinkimplementation
H-infinity control
0 1 2 3 4 5 6 7 8 9 10-0.08
-0.06
-0.04
-0.02
0
0.02
0.04
0.06Suspension deflection
Time (s)
sd (
m)
Open-loop
Comfort
Balanced
Suspension
Road Disturbance
0 1 2 3 4 5 6 7 8 9 10-0.2
-0.15
-0.1
-0.05
0
0.05
0.1
0.15Control force
Time (s)
f s (
N)
Open-loop
Comfort
Balanced
Suspension
Road Disturbance

CarSim
implementation
Carsim Simulation
We also implemented our designed control on CarSim(shortly
C.S.) Program.
First, we selected C.S. dataset “Semi-Active Suspension”
Controller in order to study how it worked.
The control is for a semi-active suspension and for this reason it
aims to find the damping factor and then the force to apply
to each wheel.

CarSim
implementation
The inputs used by the software for each wheel are the following
ones: tire deformation, jounce, wheel velocity, body velocity
and jounce rate.
Carsim Control
Where
•K1= - 14184;
• K2= 8624;
• K3= 1088;
• K4= - 2504
•Gain4 = 2.5
•Gains 5,6,7 and 8 are
the spring stiffnesses
•Gain9 = 1

CarSim
implementation
The first four inputs are multiplied by different gain K1=
- 14184; K2= 8624; K3= 1088; K4= - 2504; then they
are summed together and moltiplied by gain1=1. The
jounce signals are also divided and moltiplied by the
spring stiffness (front and rear) in order to find the
force on each suspension, then reunited.
After this operation it sums the two signals, compute the
product between the sign of the jounce rate and
moltiply by the gain2=2.5 and find the damping factor.
Finally it compute the product between the jounce rate
and the found damping factor in order to find the
force to apply at each wheel.

CarSim
implementation
Comfort Control implementation
We implemented our comfort control and simulated it.
First of all, in order to be really close to our simulation
conditions, we changed the default parameters of the dataset
with our parameters:
unsprung mass (60 kg);
car weight with passenger (1500 kg),
suspensions and tires stiffnesses (respectively 16 N/mm and
190 N/mm).

CarSim
implementation
Here is the Simulink Scheme Block adopted.
Procedure : “bump(very sharp 3.5 cm high,40 cm long)” ,
reshaped as 5 cm step.
The constant velocity of the car was set to 35 km/h.
CarSim
implementation
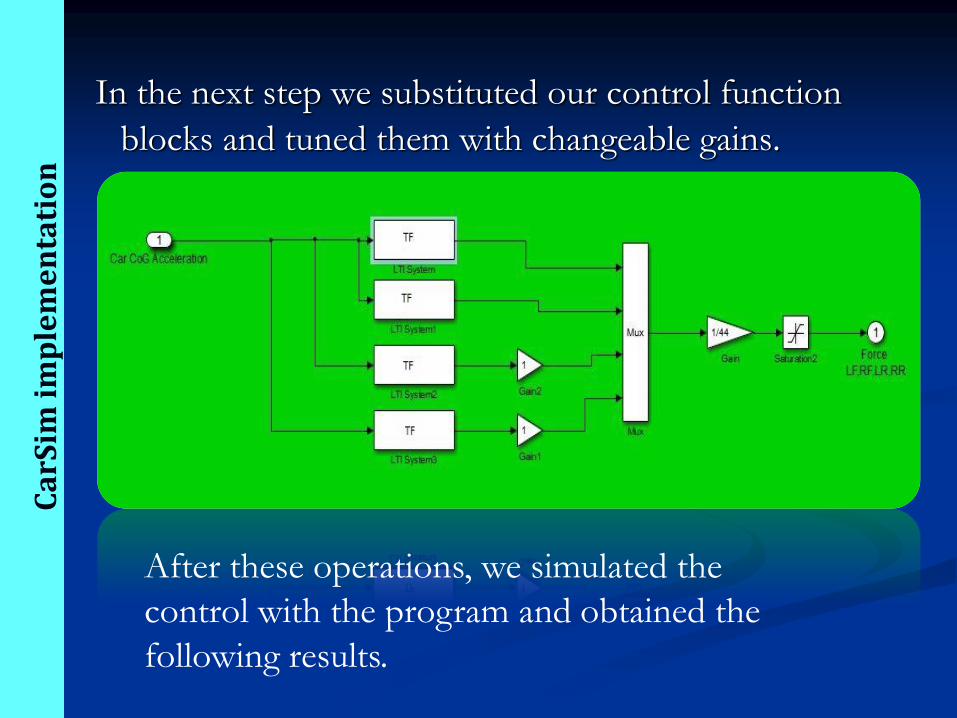
In the next step we substituted our control function
blocks and tuned them with changeable gains.
After these operations, we simulated the
control with the program and obtained the
following results.

CarSim
implementation
Plots
0 5 10 15 20 25 30 35 40-0.08
-0.06
-0.04
-0.02
0
0.02
0.04
0.06
0.08
0.1
time [t]
Suspensio
n d
eflection [
m]
front wheels
rear wheels
Suspension deflection

CarSim
implementation
Plots
Vertical acceleration
0 5 10 15-0.8
-0.6
-0.4
-0.2
0
0.2
0.4
0.6
0.8
time [t]
Vehic
le v
ert
ical accele
ration [
g]

0 5 10 15 20 25 30 35 40-50
0
50
100
150
200
250
300
350
400
450
time [t]
Forc
e [
N]
CarSim
implementation
Plots
Force
CarSim
implementation
Consideration
The results of our simulation weren’t the expected ones
and so the controller had to be revised.
However, there are several considerations to make:
- Differences in the physical model (combinated
behavior, geometry, etc.) ;
- Parameters modification (damper characteristcs);
- Different internal logical working principle of the
program ( units of measurement, discrete or
continuous time, etc.)

CarSim
implementation
Handling control
We performed another test on CarSim, based on the handling
control. In this case, we didn’t modify any parameter of the
car, given in the original dataset:
Sprung mass = 1370 kg;
Unsprung mass = 80 kg (for each “quarter”);
Spring rate of the front wheels =153 N/mm;
Spring rate of the rear wheels =82 N/mm;
Damper compression/jounce ratio of the front wheels =
0.65144;
Damper compression/jounce ratio of the rear wheels = 0.797;

CarSim
implementation
Handling control
Procedure : “Small,smooth bump”.
The constant velocity of the car was set to 50 km/h and the path
station length was set to 200 m.
94 96 98 100 102 104 106
0
0.005
0.01
0.015
0.02
0.025
0.03
path lenght [m]
bum
p h
eig
ht
[m]

CarSim
implementation
Handling control
We used a two-lead controller with a constant gain equal to 30:

CarSim
implementation
Plots
Suspension deflection
0 5 10 15 20 25 30-0.04
-0.03
-0.02
-0.01
0
0.01
0.02
0.03
time [t]
Suspensio
n d
eflection [
m]
rear wheels
front wheels

CarSim
implementation
Plots
Vertical acceleration
0 5 10 15 20 25 30-0.8
-0.6
-0.4
-0.2
0
0.2
0.4
0.6
time [t]
Vehic
le v
ert
ical accele
ration [
g]

CarSim
implementation
Plots
Force
0 5 10 15 20 25 30-1500
-1000
-500
0
500
1000
1500
time [t]
Forc
e [
N]
rear wheels
front wheels

Technology
Hydraulic actuator
A possible solution is the use of an oil
dynamic actuator.
These actuators can generate the required
forces but they are so big that can be
difficult to find the necessary free space in
a car.
The nominal actuator dynamics can be
represented by the first-order transfer
function:
The maximum displacement is 0.05 m.

Technology
Linear magnetic actuators
Recently manufacturers started to use linear magnetic actuators.
This kind of actuators guarantees faster response than the one of the
hydraulic ones.
Another advantage in the use of electronic system is the possibility the
store energy instead of dissipating it, increasing the efficiency of
the system.
The disadvantage of this solution is the low force that these actuators
can generate.

Future
Ground profile measure
A possible innovative solution can be an anticipated
measure of the ground profile variation.
In this way we can anticipate the tune of our
suspension and have a more precise control.

Future
Another idea can be splitting comfort and handling on two
different elements. The vehicle suspension system can be
designed to maximize the handling, and a new suspension under
the seat can be used to filter the chassis vibration.
This solution is usually used in heavy vehicles.
Damping seat

Conclusions
Conclusions
Evidence of the comfort/handling comprimise;
H-infinity as best control method for the analysis and
the resolution of the compromise;
Difference between project and simulation;
Pratical realization problem;
Deeper analysis of the future solution.
In conclusion we can resume these points:
The problem could be further developed and
improved in different ways

Bibliography
o “Automotive Control System” U.Kiencke,
L.Nielsen;
o “Introduzione al Controllo Ottimo” S.A.Malan,
G.Fiorio;
o “Modellistica, analisi e controllo di sospensioni
attive per autoveicoli” Ing. A. Pisano;
o Different thesies on the web
o www.mathworks.com

Thank you for your attention
Politecnico di Torino




















