
Acoustic Echo Cancelling and Noise Suppression with ... - DiVA
34
Research Report 4/99 Acoustic Echo Cancelling and Noise Suppression with Microphone Arrays by Nedelko Grbic, Mattias Dahl, Ingvar Claesson Department of Telecommunications and Signal Processing University of Karlskrona/Ronneby S-372 25 Ronneby Sweden ISSN 1103-1581 ISRN HKR-RES99/4SE
-
Upload
khangminh22 -
Category
Documents
-
view
3 -
download
0
Transcript of Acoustic Echo Cancelling and Noise Suppression with ... - DiVA
Research Report 4/99
Acoustic Echo Cancelling and NoiseSuppression with Microphone Arrays
by
Nedelko Grbic, Mattias Dahl,Ingvar Claesson
Department of Telecommunicationsand Signal ProcessingUniversity of Karlskrona/RonnebyS-372 25 RonnebySweden
ISSN 1103-1581ISRN HKR-RES�99/4�SE

Acoustic Echo Cancelling and Noise Suppression with Microphone Arrays
by Nedelko Grbic, Mattias Dahl, Ingvar Claesson
ISSN 1103-1581ISRN HKR-RES�99/4�SE
Copyright © 1999 by Nedelko Grbic, Mattias Dahl, Ingvar ClaessonAll rights reservedPrinted by Psilander Grafiska, Karlskrona 1999

Abstract
This report presents a method to achieve acoustic echo canceling and noise sup-
pression using microphone arrays. The method employs a digital self-calibrating
microphone system. The on-site calibration process is a simple indirect calibration
which adapts in each speci�c case to the environment and the electronic equipment
used. The method also continuously reduces environmental disturbances such as
car engine noise and fan noise. The method is primarily aimed at hands free mobile
telephones by suppressing the hands free loudspeaker and car cabin noise simulta-
neously. The report also contains an evaluation of the impact of echo and noise
suppression on a real conversation, accomplished in a car using a microphone array.

Contents
1 Introduction 3
2 Working Scheme for the Adaptive Echo Canceling and Noise Sup-
pressing Beamformer 5
2.1 Phase 1 - The Gathering Process . . . . . . . . . . . . . . . . . . . . 5
2.2 Calibration signals . . . . . . . . . . . . . . . . . . . . . . . . . . . 8
2.3 Phase 2 - The Operating Mode . . . . . . . . . . . . . . . . . . . . . 8
2.3.1 Idle/I-mode . . . . . . . . . . . . . . . . . . . . . . . . . . . 8
2.3.2 Transmit/TX-mode . . . . . . . . . . . . . . . . . . . . . . . 9
2.3.3 Receive/RX-mode . . . . . . . . . . . . . . . . . . . . . . . . 9
2.3.4 Double Talk/DT-mode . . . . . . . . . . . . . . . . . . . . . 9
2.4 Calibration Signal Levels . . . . . . . . . . . . . . . . . . . . . . . . 10
3 Evaluation Conditions 12
3.1 Car Environment . . . . . . . . . . . . . . . . . . . . . . . . . . . . 12
3.2 Microphone con�gurations . . . . . . . . . . . . . . . . . . . . . . . 12
4 Implementation 14
4.1 Algorithm Implementation . . . . . . . . . . . . . . . . . . . . . . . 14
4.2 Normalized Least Mean Square (NLMS) algorithm . . . . . . . . . 14
4.3 Fully Connected Neural Network . . . . . . . . . . . . . . . . . . . 15
4.4 Optimal Least Square solution to the normal equations . . . . . . . 15
5 Evaluation 18
5.1 Neural Network - Performance Evaluation . . . . . . . . . . . . . . 19
5.2 Normalized Least Mean Square - Performance Evaluation . . . . . . 20
5.3 Calibration process - Calibration Signal Level . . . . . . . . . . . . 20
5.4 Noise Suppression, LS-solution - Performance Evaluation . . . . . . 20
5.5 Echo Canceling, LS-solution - Performance Evaluation . . . . . . . 21
5.6 Calibration Sequence Length - Performance Evaluation . . . . . . . 21
1

6 Summary and Conclusions 22
A Figures-Evaluation 24
2
Chapter 1
Introduction
Far-end speech
Loudspeaker
Acoustic echo
Acoustic echo path
Near-end speech
Near-end speech signal
Far-end speech signal
Microphone
Near-end speech
Environment noise
Near-end speaker
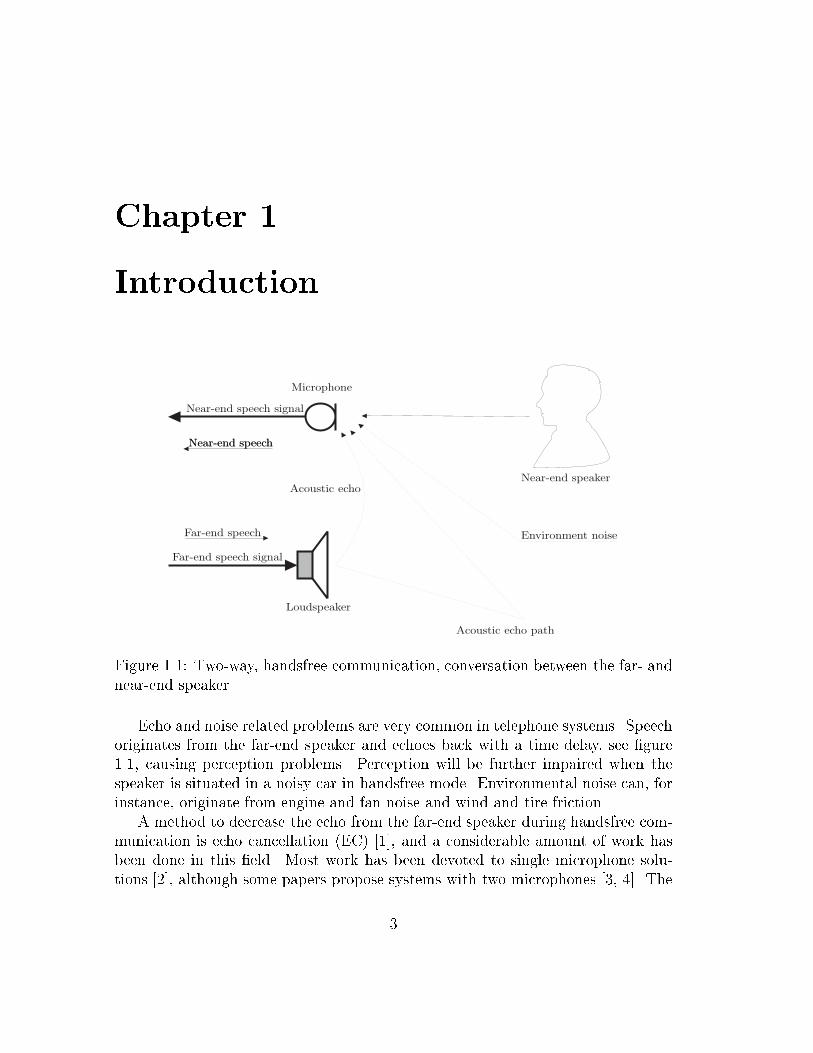
Figure 1.1: Two-way, handsfree communication, conversation between the far- and
near-end speaker.
Echo and noise related problems are very common in telephone systems. Speech
originates from the far-end speaker and echoes back with a time delay, see �gure
1.1, causing perception problems. Perception will be further impaired when the
speaker is situated in a noisy car in handsfree mode. Environmental noise can, for
instance, originate from engine and fan noise and wind and tire friction.
A method to decrease the echo from the far-end speaker during handsfree com-
munication is echo cancellation (EC) [1], and a considerable amount of work has
been done in this �eld. Most work has been devoted to single microphone solu-
tions [2], although some papers propose systems with two microphones [3, 4]. The
3

acoustic echo and noise canceller introduced in [5] is further evaluated here. The
method is not based on conventional array theory [6, 7], but relies on an indirect
calibration [8] by gathering data from the actual environment. The calibration
developed here will take on a slightly di�erent form. Di�erent adaptive algorithms
will be compared and evaluated in this report.
The system is aimed at mobile hands free communication systems, and it there-
fore should also take into account the near �eld in a small enclosure. The near �eld
is di�cult to describe in an a-priori model. This brings up the solution of employing
gathered signal-information from the real target and jammer positions. Obviously
these gathered signals contain useful information about the acoustic environment
as well as electronic equipment, such as microphones, ampli�ers, A/D-converters
and anti-aliasing �lters. Other important information is the microphone element
geometry and other spatial and spectral information inherent in the gathered tar-
get and jammer signals. Instead of calculating a large number of statistical a-priori
information from the gathered data, we will merely use the signals as they appear
during the operating phase.
The methods evaluated in this report are a Normalized Least Mean Square
(NLMS) algorithm, a fully connected Neural Network algorithm, and an optimal
Least Square solution to the normal equations where the gathered data are consid-
ered as deterministic signals, i.e. the correlations are estimated directly from the
data.
4
Chapter 2
Working Scheme for the Adaptive
Echo Canceling and Noise
Suppressing Beamformer
The working scheme for the beamformer can be divided in two phases: phase 1,
which is the gathering phase and phase 2, which is the continuous �ltering and
adaptation phase. During phase 2 the beamformer utilizes the calibration signals
gathered in phase 1.
2.1 Phase 1 - The Gathering Process
The gathering phase takes place on-site in the actual environment by emitting rep-
resentative sequences from each jammer and target position. Array signals for each
sequence and channel are memorized in a digital memory bank for subsequent use.
All array signals are stored simultaniously in the memory bank. The gathered,
multi-channel, memorized signals will be used later to form the input and refer-
ence for the beamformer in the operating phase. Since a-priori modeling almost
always leads to the loss of some information, the main idea in this straight-forward
solution is that the calibration signals themselves \are the best tutor". The cal-
ibration signals contain information about the acoustical environment, variations
in the electrical equipment, and spatial and frequency responses.
During and after the calibration phase some restrictions are, however,
imposed:
� The microphone elements and placement can be chosen arbitrarily, but must
not be altered or moved unless a new calibration is made.
5

x1(t)
x2(t)
xM(t)
x1 [n]
x2 [n]
xM [n]
MemoryJammercalibrationsignals
MemoryTargetcalibrationsignals
Anti-Aliasingand
A/D conversion
Figure 2.1: Target calibration signals recording.
6

x1(t)
x2(t)
xM(t)
x1 [n]
x2 [n]
xM [n]
MemoryJammercalibrationsignals
MemoryTargetcalibrationsignals
Anti-Aliasingand
A/D conversion
Figure 2.2: Jammer calibration signals recording.
7

� The equipment must be time invariant.
� A fair signal to noise ratio during gathering is necessary.
2.2 Calibration signals
The gathered calibration signals must arrive from the desired/unwanted (target/jammer)
positions, and the signals must contain approximately the same spectral content
as a real target/jammer signal. There are di�erent methods to facilitate these
conditions. A simple approach is to collect human utterances from the target po-
sition. A di�erent kind of calibration procedure is to place loudspeakers in the
desired/unwanted positions and let the loudspeakers emit, one at a time, at or
colored bandlimited noise, or gathered speech (see �gures 2.1 and 2.2).
2.3 Phase 2 - The Operating Mode
A telephone conversation can be divided into four modes: Idle, Receive, Transmit
and Double Talk mode.
2.3.1 Idle/I-mode
During the I-mode only car noise exists, i.e. there is no speech from the near or
far-end speaker.
Near-end speaker: quiet
Far-end speaker: quiet
Upper beamformer: Copy of LB
Lower beamformer: Adaptation on
Environmental noise impinges on each of the microphone elements in the mi-
crophone array, and is added with virtual near- and far-end speech signals, i.e. the
memorized signals. Note that the noise signals have passed through the same elec-
tronic equipment as the memorized signals. The virtually gathered speech signals
represent a speaker talking from the correct environment/position and a handsfree
loudspeaker, gathered with high SNR. These sets of signals are mixed and comprise
the inputs to the adaptive �lters (see �gure 2.3). The desired signal for the adaptive
�lters is formed by a suitable combination of the memorized target signals only.
The adaptive algorithm now has access to all the information needed to adapt the
�lters both in the spatial- and frequency-domain.
8
The coe�cients are continuously copied into the upper beamformer/�lter which
produces the output. Note that the inputs to the upper beamformer contain only
signals coming from the microphone elements.
2.3.2 Transmit/TX-mode
During the TX-mode only near-end speech and car noise are present.
Near-end speaker: talking
Far-end speaker: quiet
Upper beamformer: Fixed
Lower beamformer: Adaptation o�
When near-end speech is detected, the adaptation is turned o�. Incoming
microphone signals from the microphone array are now processed by the �xed upper
beamformer, using the latest set of �lter coe�cients adapted to the latest actual
situation. The �lter coe�cients also suit in all probability the actual disturbance
since the situation is short term stationary.
2.3.3 Receive/RX-mode
During the RX-mode, only far-end speech and car noise signals are present.
Near-end speaker: quiet
Far-end speaker: talking
Upper beamformer: Copy of LB
Lower beamformer (LB): Adaptation on
The algorithm behavior is similar to the I-mode described above. The main
di�erence is that the microphone signals in this mode consist of real noise and
speech from the far-end speaker.
2.3.4 Double Talk/DT-mode
During the DT-mode, near- and far-end speech as well as car noise are present.
Near-end speaker: talking
Far-end speaker: talking
Upper beamformer: Fixed
Lower beamformer: Adaptation o�
In double talk mode, no adaptation is made; the beamformer coe�cients are
�xed, and the output from the upper beamformer is transmitted.
9
2.4 Calibration Signal Levels
During phase 2, the balance (see �gure 2.3) between the memorized inputs and
microphone inputs to the adapting beamformer can be controlled by:
1. Factor � =)Near-end memorized speech signal ampli�cation/attenuation.
2. Factor � =)Far-end memorized speech signal ampli�cation/attenuation.
3. Factor =)Incoming environment noise ampli�cation/attenuation for sig-
nals from the microphone array.
The mix of the components will control the adaptive �lter suppression or am-
pli�cation of sources both in the frequency- and spatial-domain. A large value of
and � versus � will cause the adaptive �lter to emphasize cancellation of both
the far-end speech and/or car noise. However, too large a suppression will yield
degradation of the near-end speech signal. Suitable choices of �; � and are val-
ues which make the signal levels vary around nominal values with a maximum
of �10dB. Extreme choices of �; � and can possibly have advantages in some
situations.
10
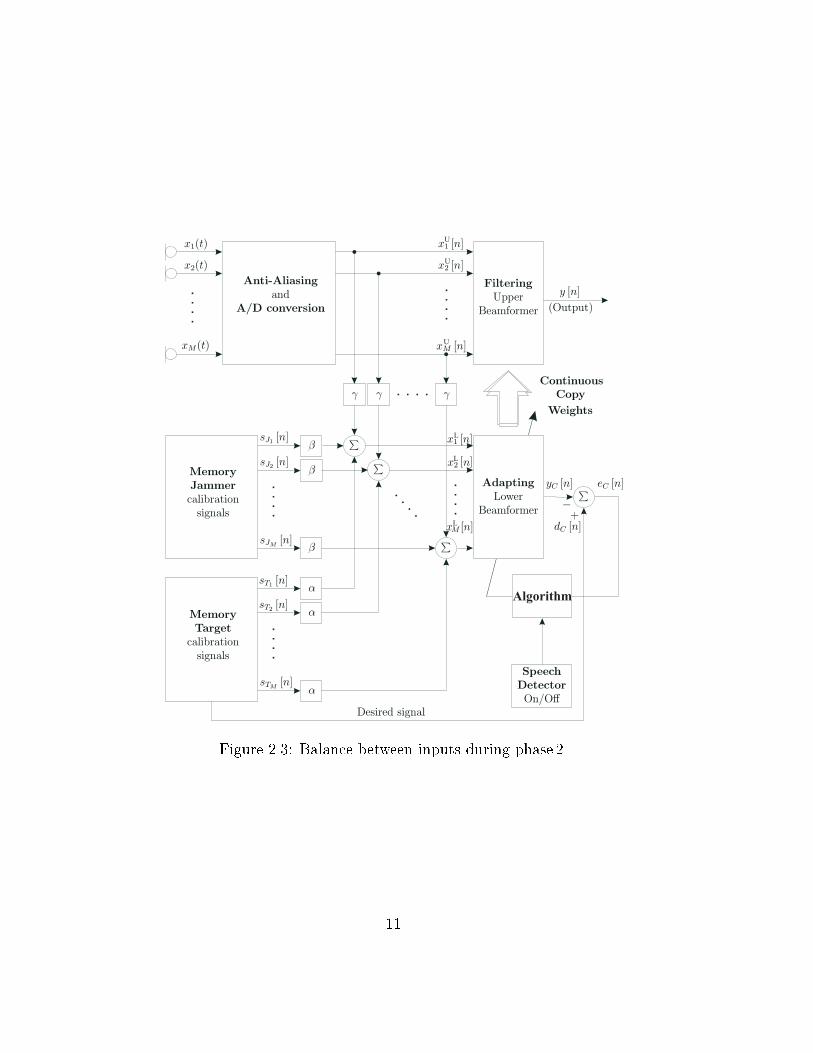
Figure 2.3: Balance between inputs during phase 2.
11
Chapter 3
Evaluation Conditions
3.1 Car Environment
The performance evaluation of the acoustic noise and echo canceling beamformer
was made in a Volvo 940 GL station wagon. Data was gathered on a multichannel
DAT-recorder with a sample rate of 12 kHz, and with a 5 kHz bandwidth. In order
to facilitate simultaneous driving and recording, a loudspeaker was mounted in the
passenger seat to simulate a real person's speaking.
3.2 Microphone con�gurations
The microphones used in the evaluation were high quality Sennheiser microphones,
and six of them were mounted at on the visor. The distance between the speaker
position and the microphone array was 350 mm. The mounting of the linear array
can be seen in �gures 3.1 and 3.2. This con�guration were used throughout the
evaluation.
12

Mic:# 6 5 4 3 2 1
# # # # # #
� � � � � �
Figure 3.1: Linear microphone geometry with six microphones. The distance be-
tween elements is 50 mm.
Figure 3.2: Placement of the Sennheiser microphones, linear mount.
13
Chapter 4
Implementation
The data gathered from the multichannel DAT recorder was converted into Mat-
lab format, which is a conventionally used mathematics software package. The
evaluation part of the report is based on this data and all processing is done in
Matlab.
4.1 Algorithm Implementation
The lower beamformer according to �gure 2.3 has been adapted to a sequence of
band-limited noise emitted from the jammer and target positions and actual noise
in the car by making a recording of the six microphones. The resulting weights
have then been used in the upper beamformer in order to enhance the target speech
with regard to echo and noise. In the evaluation of the algorithms the parameter
L, used in the following sections, is set to 256.
4.2 Normalized Least Mean Square (NLMS) al-
gorithm
A conventional NLMS algorithm with L �lter taps for every microphone is used.
The training is done in epochs, i.e. the same training set is used iteratively. The
stepsize is normalized to the mean power of all microphone signals, furthermore the
stepsize is decreased during epochs. With FIR-�lters the output from the upper
beamformer is given by
y [n] =MXm=1
wTmx
Um [n] ; (4.1)
14

where xUm[n] denotes an L-by-1 input vector from the m-th microphone element
in the upper beamformer, and wm denotes the L-by-1 corresponding �lter weight
vector. Overscript T stands for vector transpose. The total number of �lter weights
is ML.
4.3 Fully Connected Neural Network
A feedforward Neural Network has been used to enhance the speech signal. The
Neural Network is a fully connected Multiple Layer Perceptron (MLP) and consists
of the input layer, one hidden layer and the output layer. The hidden layer consists
of six neurons with bipolar sigmoid transfer functions and the output layer consists
of one single neuron with a corresponding linear transfer function. Both the hidden
layer and the output layer have corresponding bias weights to each neuron. The
network weights are updated by using a conventional supervised backpropagation
learning rule in an on-line manner, i.e. the weights are updated at every time sam-
ple. As for the NLMS algorithm the training has been done in epochs, and the
same normalization and damping of the stepsize during epochs has been used. The
output of the upper beamformer when using the MLP is described by
y (n) =PPp=1
wp � f
MPm=1
�wTm;px
Um [n]
�+ bp
!+ bo
where xUm[n] denotes an L-by-1 input vector from the m-th microphone element
in the upper beamformer and wm;p denotes the L-by-1 corresponding �lter weight
vector from input m to neuron p in the hidden layer. Parameter wp represents
synaptic weights (scalars) between each of the hidden units and the output. Pa-
rameters bp and bo denote adaptive o�sets or biases, and f(�) is the sigmoid function.
Parameter P is the number of neurons in the hidden layer and M is the number
of input signals, i.e. microphones. The number of �lter taps for every neuron is
P (ML + 2) + 1 which is a factor of six more than with a LMS algorithm.
4.4 Optimal Least Square solution to the normal
equations
The �lters used in the upper beamformer are conventional FIR-�lters where the
�lter weights are found by solving the normal equations. When formulating the
normal equations the total correlation matrix Rxx is de�ned as
15

Rxx =
0BBBB@Rx1x1 Rx1x2 : : : Rx1x6
Rx2x1 Rx2x2 : : : Rx2x6...
.... . .
...
Rx6x1 Rx6x2 : : : Rx6x6
1CCCCA
where
Rxixj =
0BBBB@
rij(0) rij(1) rij(2) : : : rij(L� 1)
rij(1) rij(0) rij(1) : : : rij(L� 2)...
.... . .
......
rij(L� 1) rij(L� 2) : : : : : : rij(0)
1CCCCA
and
rij(k) =1
N
N�k�1Xn=0
xi(n)xj(n + k) ; k = 0; 1; ::::L� 1
which is a biased cross-correlation estimator due to the constant normalization
factor but gives constant varianse for all lags. This estimator is appropriate for
both deterministic and random data, so no decision regarding the form of the data
is necessary. Parameter N is the total number of time samples in the correlation
estimates. Parameter L is the number of �lter taps in the FIR-�lters.
By arranging the �lter vectors wm as a column vector
W = [wT1wT
2: : : wT
6]T
and formulating a cross-correlation vector between the desired signal d(n) and the
input signals xm(n) as
Gxd = [g1 g2 : : : g6]T
where
gi = [gi(0) gi(1) : : : gi(L� 1)]
and
gi(k) =1
N
N�k�1Xn=0
xi(n)d(n+ k) ; k = 0; 1; ::::L� 1
16
the normal equations can be formulated as
RxxW = Gxd
Solving this set of equations gives the optimal least square solution to the beam-
forming problem, based on the data in the memory bank.
17

Chapter 5
Evaluation
Performance evaluation from the Volvo is illustrated in Appendix A �gures A.1-
A.14
Common information for all plots are:
� Near-end speech, coming from the drivers seat is denoted \Speech Male/Female".
� Far-end speech echo, i.e. handsfree loudspeaker or jammer speech, is denoted
\Echo Male/Female".
� All signals are within a bandwidth of 5 kHz.
� The calibration signals are at noise within the bandwidth.
� All sequences are of 8 second duration.
� All �gures begin with 8 second sequence of the unadapted single microphone
signal from position 4, i.e. the plain un�ltered single channel microphone
signal.
� The results are presented as short time (20 ms) power estimates in dB.
In the adaptation phase (phase 2) the control parameters �; �; can be con-
trolled in order to supress or amplify the sources both in frequency and spatial
domains. The Memory-Signal-to-Interference Ratio MSIR is controlled by the
ratio between � and � by:
MSIR = 10 log
0BBB@
MPm=0
NPn=1
(� � sTm [n])2
MPm=0
NPn=1
(� � sJm[n])2
1CCCA ;
18

where sT and sJ denote the memorized calibration signals for target and jammer,
respectively. In the handsfree mode this corresponds to the speaker, usually placed
in the front seat, and the handsfree loudspeaker in the middle of the instrument
panel, directed towards the driver. The number of microphones in the array, M , is
6, while the number of samples, N , varies between 2400� 48000 in the memorized
calibration sequence.
In addition, the MSNR for the calibration phase is de�ned as:
MSNR = 10 log
0BBB@
MPm=0
NPn=1
(� � sT [n])2
MPm=0
NPn=1
( � sD[n])2
1CCCA ;
where sT and sD denote the memorized calibration signals for the target and the
actual ambient disturbances. In the car environment sD corresponds to environ-
mental car noise such as engine-, wind- and tire friction.
Keeping � �xed at 0 dB and varying � and in dB units will a�ect the MSIR
and the MSNR by the same amount.
During the �ltering phase, or the evaluation mode, the true signal level for the
jammer is used, i.e SIR = 0 dB, and for noise disturbance, SNR = �5 dB has
been used in order to make it possible to subjectively decide if any distortion is
present. This reduction does not a�ect the suppression levels in the linear cases at
all and these levels are not noticeably a�ected in the non-linear case.
The sound �les corresponding to the �gures in Appendix A, �gures A.1-A.14,
are available in .wav- format from http://www.hk-r.se/isb.
5.1 Neural Network - Performance Evaluation
The Neural Network (MLP) has been trained by using a sequence of 4800 sample
records for each input signal and the desired signal. The input signals were created
by recording an emission of band-limited at noise from the jammer and target
positions and actual noise on the six microphones in the car, while driving. The
target (desired) signals were created by doing the same recording on microphone
4 while the car was parked and the emission was done from the target position
alone, see �gure 2.3. The sequence was iterated for 1000 epochs and the stepsize
was damped exponentially from 0.1 in the �rst epoch to 0.0001 in the last epoch.
The balance parameters �, �, and were �xed at 0 dB.
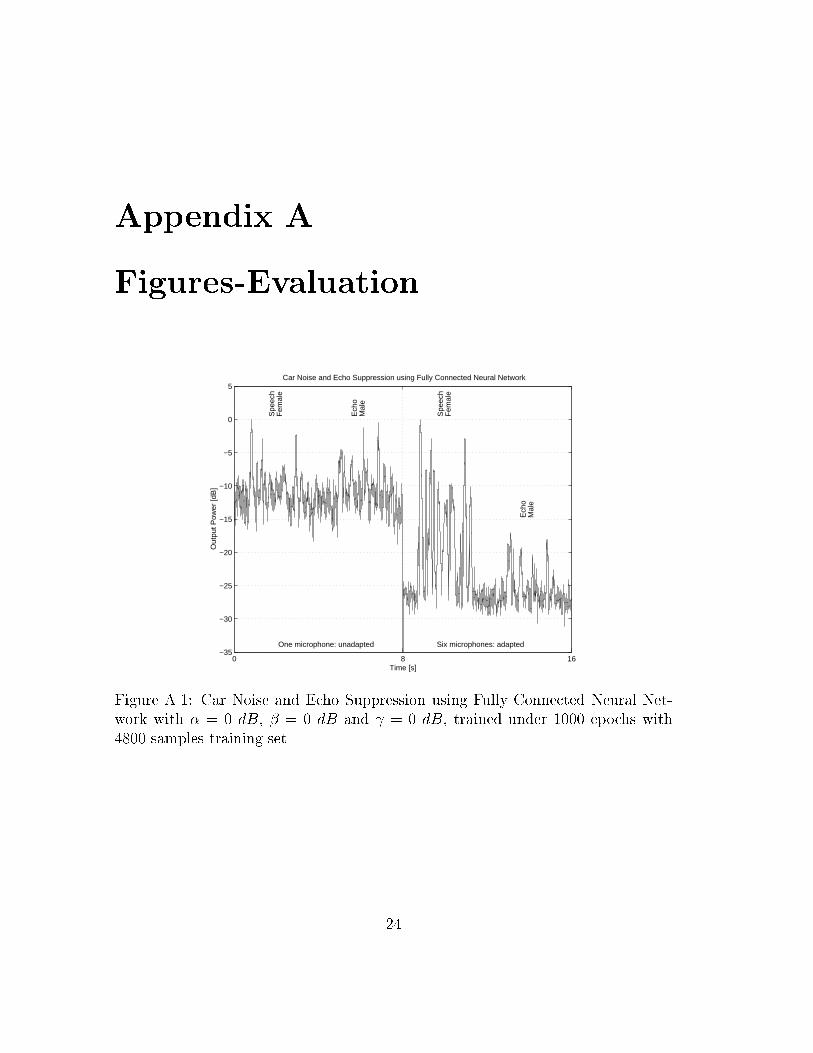
The result is shown in �gure A.1, and it can be seen that a suppression of
approximately 15 dB is achieved for both echo and noise.
19
5.2 Normalized Least Mean Square - Performance
Evaluation
The same conditions have been evaluated for the NLMS algorithm as for the Neural
Network. The result is shown in �gure A.2. The noise suppression has improved
to approximately 17 dB when compared to the Neural Network solution, while
the echo suppression is the same. A subjective listener test gives no di�erences in
distortion between the two methods.
5.3 Calibration process - Calibration Signal Level
The training sequence used here is the same as with the MLP and the NLMS,
while the �lter weights have been calculated rather than found by training. The
calculation is done by solving the normal equations de�ned in chapter 4.4. The
solution to this set of equations is determined by using Matlab. The balance
parameters � and are here modi�ed by the same amount while � is �xed at 0 dB.
This modi�cation a�ects the mix of jammer and noise level in contrast to target
level in the training sequence. Three settings are compared, (�; ) = 0dB; 5dB and
10dB. The result can be seen in �gures A.3-A.5 which show that these settings have
a very little impact on the �nal result, when it comes to suppression. Subjective
listening shows that the distortion is increased when increasing these levels. In all
three cases the damping of both noise and echo is improved by approximately 1-2
dB, when compared to the NLMS solution.
5.4 Noise Suppression, LS-solution - Performance
Evaluation
Pure noise suppression is evaluated by solving the normal equations for a 4800
sample sequence. This calculation is done by emitting band-limited noise from
the target position alone, without car noise present, when recording the training
sequence. This process is the same as letting � = �1 dB. The solution is the
same as with both echo- and noise suppression except for this modi�cation of
the training sequence. Figure A.6 shows the result where echo is present in the
sequence and �gure A.7 is a �ltering without any echo present. The result shows
that approximately a 22 dB suppression of the noise is achieved while the echo is
left almost unsuppressed.
20

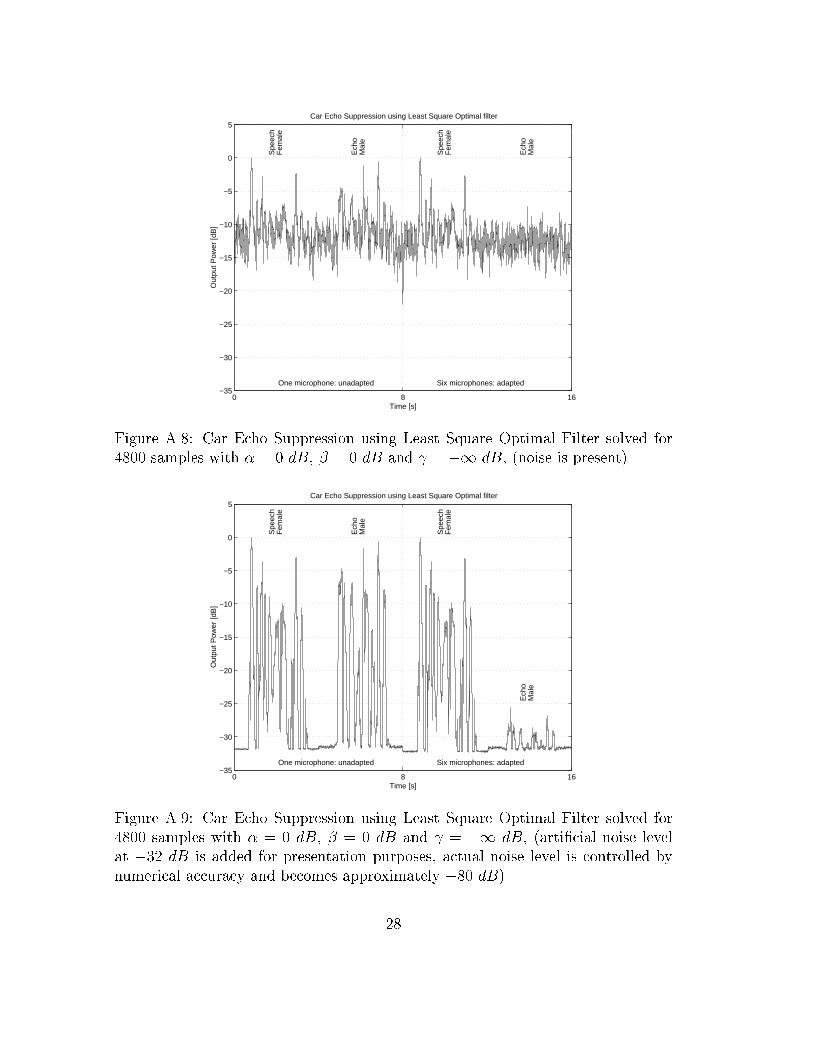
5.5 Echo Canceling, LS-solution - Performance
Evaluation
Echo canceling is evaluated in the same manner as with pure noise suppression but
with �1 dB when recording the training sequence. Figures A.8-A.9 show the
result with and without noise present (of course, some noise is always present). It
can be seen that the noise component is left almost unsuppressed while the echo
component is reduced by approximately 25 dB.
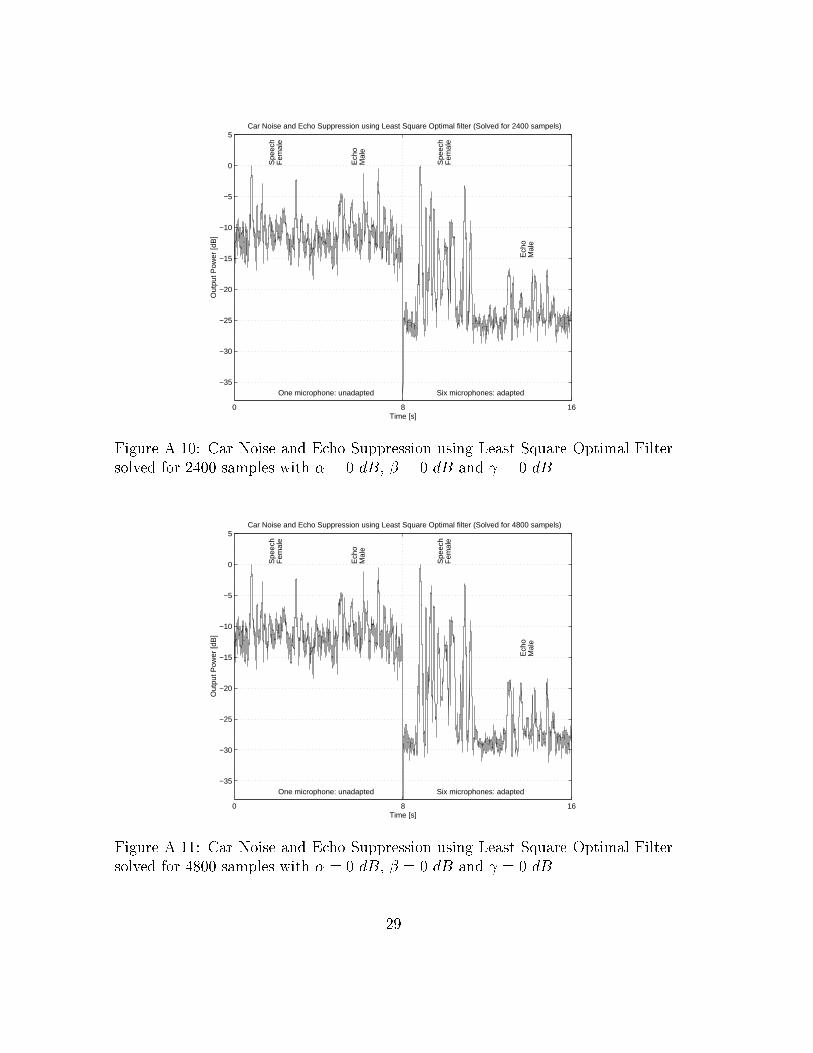
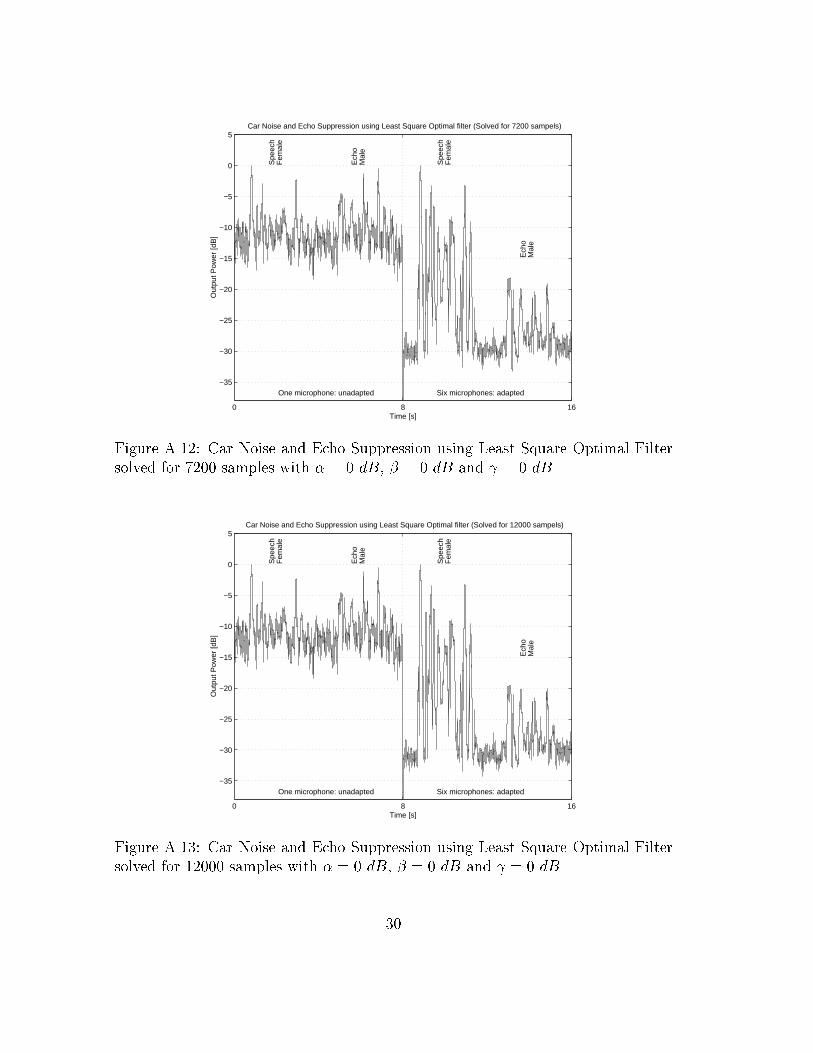
5.6 Calibration Sequence Length - Performance
Evaluation
The least square solution to both echo and noise suppression by solving the normal
equations is done here with varying length of the training sequence. The balance
parameters �, � and are held at nominal values, i.e. they are at 0 dB. Fig-
ures A.10-A.14 show the resulting suppression for di�erent selections of training
sequence length. It can be seen that increasing the training length from 12000
samples to 48000 gives only slightly better performance. The resulting suppression
with a training set of 48000 samples is approximately 20 dB for both echo and
noise. Subjective listening indicates that the distortion is small.
21

Chapter 6
Summary and Conclusions
The best resulting suppression was approximately 20 dB for both echo and noise.
This result was achieved by solving the normal equations to the beamforming prob-
lem.
The structure with non-linearities in the adaptive �lter, the Neural Network, gives
no extra performance in spite of the large number degrees of freedom, i.e. a factor
of six more weights than with the NLMS.
The scheme of training the adaptive �lter in epochs, for both NLMS and the
MLP, and by decreasing the stepsize during epochs, gives better results than by
increasing the length of the training set accordingly, compare [5]. Further, by in-
creasing the level of both � and in comparison to �, when solving the normal
equations, no extra echo and noise suppression is attained, while the distortion is
increased. The mix between echo canceling and noise suppression can be controlled
by the relative levels of disturbance, i.e. by controlling �, �, . Here, the situa-
tions of letting � and equal zero are evaluated, respectively. The result is that
when � equals zero no major echo suppression is attained, and when equals zero
no major noise reduction is attained. Approximately 25 dB echo suppression is
achieved when solving the normal equations for pure echo canceling with correla-
tion estimates based on 4800 data samples. For pure noise suppression with the
same conditions approximately 22 dB suppression is achieved.
Solving the normal equations for a 48000 sample training set gives only a slightly
better result than for a training set of 12000 samples. This indicates that further in-
creasing of the length of the training set may not increase the resulting disturbance
suppression.
22
Bibliography
[1] B.Widrow, S. D. Stearns, \Adaptive Signal Processing", Prentice Hall, 1985.
[2] M. Sondhi and W. Kellermann, \Adaptive Echo Cancellation for speech signal",
Chapter 11 in Advances in Speech Signal Processing, Edited by S. Furui and
M. Sondhi, Dekker, New York, 1992.
[3] Sen M. Kuo, Zhibing Pan, \Adaptive Acoustic Echo Cancellation Microphone",
J. Acoust. Soc. Am., vol 93, no 3,March 1993, pp 1629-1636.
[4] M. Rainer, P. Vary, \Combined acoustic echo cancellation dereverberation and
noise reduction: a two microphone approach", Ann. T�el�ecommun., 49, no. 7-8,
1994, pp 429-438.
[5] M. Dahl, I. Claesson, \Acoustic Echo Cancelling with Microphone Arrays",
Research Report 2/95, Feb. 1995.
[6] I. Claesson, S. Nordholm, \A Spatial Filtering Approach to Robust Adaptive
Beamforming", IEEE Transactions on Antennas and Propagation, vol. 40, no.
9., Sept 1992.
[7] S. Nordebo, I. Claesson, S. Nordholm, \Adaptive Beamforming: Spatial Filter
Designed Blocking Matrix", IEEE Journal of Oceanic Engineering, vol. 19, no.
4, Oct. 1994
[8] S. Nordebo, I. Claesson, S. Nordholm, B. A. Bengtsson \ `In situ' Calibrated
Adaptive Microphone Array", Research Report 2/94, ISSN 1103-1581.
23
Appendix A
Figures-Evaluation
0 8 16−35
−30
−25
−20
−15
−10
−5
0
5Car Noise and Echo Suppression using Fully Connected Neural Network
Time [s]
Out
put P
ower
[dB
]
One microphone: unadapted Six microphones: adapted
Spe
ech
Fem
ale
Ech
oM
ale
Spe
ech
Fem
ale
Ech
oM
ale
Figure A.1: Car Noise and Echo Suppression using Fully Connected Neural Net-
work with � = 0 dB, � = 0 dB and = 0 dB, trained under 1000 epochs with
4800 samples training set
24

0 8 16−35
−30
−25
−20
−15
−10
−5
0
5Car Noise and Echo Suppression using Normalized LMS
Time [s]
Out
put P
ower
[dB
]
One microphone: unadapted Six microphones: adapted
Spe
ech
Fem
ale
Ech
oM
ale
Spe
ech
Fem
ale
Ech
oM
ale
Figure A.2: Car noise and echo Suppression using Normalized LMS algorithm with
� = 0 dB, � = 0 dB and = 0 dB, trained under 1000 epochs with 4800 samples
training set
0 8 16−35
−30
−25
−20
−15
−10
−5
0
5Car Noise and Echo Suppression using Least Square Optimal filter
Time [s]
Out
put P
ower
[dB
]
One microphone: unadapted Six microphones: adapted
Spe
ech
Fem
ale
Ech
oM
ale
Spe
ech
Fem
ale
Ech
oM
ale
Figure A.3: Car Noise and Echo Suppression using Least Square Optimal Filter
solved for 4800 samples with � = 0 dB, � = 0 dB and = 0 dB
25

0 8 16−35
−30
−25
−20
−15
−10
−5
0
5Car Noise and Echo Suppression using Least Square Optimal filter
Time [s]
Out
put P
ower
[dB
]
One microphone: unadapted Six microphones: adapted
Spe
ech
Fem
ale
Ech
oM
ale
Spe
ech
Fem
ale
Ech
oM
ale
Figure A.4: Car Noise and Echo Suppression using Least Square Optimal Filter
solved for 4800 samples with � = 0 dB, � = 5 dB and = 5 dB
0 8 16−35
−30
−25
−20
−15
−10
−5
0
5Car Noise and Echo Suppression using Least Square Optimal filter
Time [s]
Out
put P
ower
[dB
]
One microphone: unadapted Six microphones: adapted
Spe
ech
Fem
ale
Ech
oM
ale
Spe
ech
Fem
ale
Ech
oM
ale
Figure A.5: Car Noise and Echo Suppression using Least Square Optimal Filter
solved for 4800 samples with � = 0 dB, � = 10 dB and = 10 dB
26

0 8 16−40
−35
−30
−25
−20
−15
−10
−5
0
5Car Noise Suppression using Least Square Optimal filter
Time [s]
Out
put P
ower
[dB
]
One microphone: unadapted Six microphones: adapted
Spe
ech
Fem
ale
Ech
oM
ale
Spe
ech
Fem
ale
Ech
oM
ale
Figure A.6: Car Noise Suppression using Least Square Optimal Filter solved for
4800 samples with � = 0 dB, � = �1 dB and = 0 dB, (echo is present)
0 8 16−40
−35
−30
−25
−20
−15
−10
−5
0
5Car Noise Suppression using Least Square Optimal filter
Time [s]
Out
put P
ower
[dB
]
One microphone: unadapted Six microphones: adapted
Spe
ech
Fem
ale
Spe
ech
Mal
e
Spe
ech
Fem
ale
Spe
ech
Mal
e
Figure A.7: Car Noise Suppression using Least Square Optimal Filter solved for
4800 samples with � = 0 dB, � = �1 dB and = 0 dB, (no echo present)
27
0 8 16−35
−30
−25
−20
−15
−10
−5
0
5Car Echo Suppression using Least Square Optimal filter
Time [s]
Out
put P
ower
[dB
]
One microphone: unadapted Six microphones: adapted
Spe
ech
Fem
ale
Ech
oM
ale
Spe
ech
Fem
ale
Ech
oM
ale
Figure A.8: Car Echo Suppression using Least Square Optimal Filter solved for
4800 samples with � = 0 dB, � = 0 dB and = �1 dB, (noise is present)
0 8 16−35
−30
−25
−20
−15
−10
−5
0
5Car Echo Suppression using Least Square Optimal filter
Time [s]
Out
put P
ower
[dB
]
One microphone: unadapted Six microphones: adapted
Spe
ech
Fem
ale
Ech
oM
ale
Spe
ech
Fem
ale
Ech
oM
ale
Figure A.9: Car Echo Suppression using Least Square Optimal Filter solved for
4800 samples with � = 0 dB, � = 0 dB and = �1 dB, (arti�cial noise level
at �32 dB is added for presentation purposes, actual noise level is controlled by
numerical accuracy and becomes approximately �80 dB)
28
0 8 16
−35
−30
−25
−20
−15
−10
−5
0
5Car Noise and Echo Suppression using Least Square Optimal filter (Solved for 2400 sampels)
Time [s]
Out
put P
ower
[dB
]
One microphone: unadapted Six microphones: adapted
Spe
ech
Fem
ale
Ech
oM
ale
Spe
ech
Fem
ale
Ech
oM
ale
Figure A.10: Car Noise and Echo Suppression using Least Square Optimal Filter
solved for 2400 samples with � = 0 dB, � = 0 dB and = 0 dB
0 8 16
−35
−30
−25
−20
−15
−10
−5
0
5Car Noise and Echo Suppression using Least Square Optimal filter (Solved for 4800 sampels)
Time [s]
Out
put P
ower
[dB
]
One microphone: unadapted Six microphones: adapted
Spe
ech
Fem
ale
Ech
oM
ale
Spe
ech
Fem
ale
Ech
oM
ale
Figure A.11: Car Noise and Echo Suppression using Least Square Optimal Filter
solved for 4800 samples with � = 0 dB, � = 0 dB and = 0 dB
29
0 8 16
−35
−30
−25
−20
−15
−10
−5
0
5Car Noise and Echo Suppression using Least Square Optimal filter (Solved for 7200 sampels)
Time [s]
Out
put P
ower
[dB
]
One microphone: unadapted Six microphones: adapted
Spe
ech
Fem
ale
Ech
oM
ale
Spe
ech
Fem
ale
Ech
oM
ale
Figure A.12: Car Noise and Echo Suppression using Least Square Optimal Filter
solved for 7200 samples with � = 0 dB, � = 0 dB and = 0 dB
0 8 16
−35
−30
−25
−20
−15
−10
−5
0
5Car Noise and Echo Suppression using Least Square Optimal filter (Solved for 12000 sampels)
Time [s]
Out
put P
ower
[dB
]
One microphone: unadapted Six microphones: adapted
Spe
ech
Fem
ale
Ech
oM
ale
Spe
ech
Fem
ale
Ech
oM
ale
Figure A.13: Car Noise and Echo Suppression using Least Square Optimal Filter
solved for 12000 samples with � = 0 dB, � = 0 dB and = 0 dB
30

0 8 16
−35
−30
−25
−20
−15
−10
−5
0
5Car Noise and Echo Suppression using Least Square Optimal filter (Solved for 48000 sampels)
Time [s]
Out
put P
ower
[dB
]
One microphone: unadapted Six microphones: adapted
Spe
ech
Fem
ale
Ech
oM
ale
Spe
ech
Fem
ale
Ech
oM
ale
Figure A.14: Car Noise and Echo Suppression using Least Square Optimal Filter
solved for 48000 samples with � = 0 dB, � = 0 dB and = 0 dB
31




















