
A study of the recursive filter for computing scalar eddy covariances
7
A study of the recursive filter for computing scalar eddy covariances Mikhail S. Pekour * , Marvin L. Wesely, David R. Cook, Timothy J. Martin Environmental Research Division, Argonne National Laboratory, Argonne, IL 60439-4843, USA Received 19 February 2004; received in revised form 11 November 2004; accepted 4 December 2004 Abstract Values of turbulent fluxes in the atmospheric surface layer obtained with block averaging and with recursive filtering showed consistent differences during a 4-day experiment conducted over grassland in central Kansas. Analysis of the direct and indirect impacts of recursive filtering on the calculated fluxes showed that flux values can be affected significantly by mismatched filtering in different channels, unsuitable filter initialization, a poor choice of coordinate rotation technique, or a combination of these. # 2005 Elsevier B.V. All rights reserved. Keywords: Eddy covariance; Recursive filtering; Atmospheric turbulent fluxes 1. Introduction The current study grew from an investigation of unexpected results from a short field campaign designed to compare different flux measurement systems as a part of an AmeriFlux intercomparison at the Walnut River Watershed site in southeastern Kansas in May 2001. Among other data conditioning and quality control procedures, we evaluated possible flux loss from recursive filtering by comparing: (1) 30 min flux estimates obtained by block averaging and (2) flux estimates calculated with recursive filters applied with various effective time constants. Under reasonably stationary conditions, we expected recursive filter estimates to approach the block-averaged value from below as the effective time constants are increased. However, we found that recursive filtering produced flux densities 5–10% lower than block averaging, even for very long effective time constants. Recursive filtering is a well-known technique that has been broadly used. However, it has several inherent problems that tend to be overlooked. Although current common opinion does not favor recursive filtering, the procedure is still in use (Kruijt et al., 2004) and it is indispensable for applications such as real-time mea- surements made from a moving platform (aircraft, vessel, car, etc.). Adequate accounting for the low frequency contribu- tion to fluxes is important for long-term flux measure- ments (e.g., Sakai et al., 2001; Massman and Lee, 2002; Kruijt et al., 2004). In this context, we look to a case study of artifact flux underestimation to reveal potential sources of significant errors in long-term flux studies. 2. Experimental data We deployed two eddy covariance systems at the AmeriFlux Walnut River Watershed site in southeastern Kansas on 15–17 May, 2001. The major objective of the campaign was to compare several flux measuring www.elsevier.com/locate/agrformet Agricultural and Forest Meteorology 136 (2006) 101–107 * Corresponding author. Present address: Atmospheric Science and Global Change Division, Pacific Northwest National Laboratory, Richland, WA 99352, USA. Tel.: +1 509 375 2470; fax: +1 509 372 6168. E-mail address: [email protected] (M.S. Pekour). 0168-1923/$ – see front matter # 2005 Elsevier B.V. All rights reserved. doi:10.1016/j.agrformet.2004.12.011
-
Upload
independent -
Category
Documents
-
view
5 -
download
0
Transcript of A study of the recursive filter for computing scalar eddy covariances

A study of the recursive filter for computing scalar
eddy covariances
Mikhail S. Pekour *, Marvin L. Wesely, David R. Cook, Timothy J. Martin
Environmental Research Division, Argonne National Laboratory, Argonne, IL 60439-4843, USA
Received 19 February 2004; received in revised form 11 November 2004; accepted 4 December 2004
Abstract
Values of turbulent fluxes in the atmospheric surface layer obtained with block averaging and with recursive filtering showed
consistent differences during a 4-day experiment conducted over grassland in central Kansas. Analysis of the direct and indirect
impacts of recursive filtering on the calculated fluxes showed that flux values can be affected significantly by mismatched filtering in
different channels, unsuitable filter initialization, a poor choice of coordinate rotation technique, or a combination of these.
# 2005 Elsevier B.V. All rights reserved.
Keywords: Eddy covariance; Recursive filtering; Atmospheric turbulent fluxes
www.elsevier.com/locate/agrformet
Agricultural and Forest Meteorology 136 (2006) 101–107
1. Introduction
The current study grew from an investigation of
unexpected results from a short field campaign designed
to compare different flux measurement systems as a part
of an AmeriFlux intercomparison at the Walnut River
Watershed site in southeastern Kansas in May 2001.
Among other data conditioning and quality control
procedures, we evaluated possible flux loss from
recursive filtering by comparing: (1) 30 min flux
estimates obtained by block averaging and (2) flux
estimates calculated with recursive filters applied with
various effective time constants. Under reasonably
stationary conditions, we expected recursive filter
estimates to approach the block-averaged value from
below as the effective time constants are increased.
However, we found that recursive filtering produced
* Corresponding author. Present address: Atmospheric Science and
Global Change Division, Pacific Northwest National Laboratory,
Richland, WA 99352, USA. Tel.: +1 509 375 2470;
fax: +1 509 372 6168.
E-mail address: [email protected] (M.S. Pekour).
0168-1923/$ – see front matter # 2005 Elsevier B.V. All rights reserved.
doi:10.1016/j.agrformet.2004.12.011
flux densities 5–10% lower than block averaging, even
for very long effective time constants.
Recursive filtering is a well-known technique that has
been broadly used. However, it has several inherent
problems that tend to be overlooked. Although current
common opinion does not favor recursive filtering, the
procedure is still in use (Kruijt et al., 2004) and it is
indispensable for applications such as real-time mea-
surements made from a moving platform (aircraft, vessel,
car, etc.).
Adequate accounting for the low frequency contribu-
tion to fluxes is important for long-term flux measure-
ments (e.g., Sakai et al., 2001; Massman and Lee, 2002;
Kruijt et al., 2004). In this context, we look to a case study
of artifact flux underestimation to reveal potential
sources of significant errors in long-term flux studies.
2. Experimental data
We deployed two eddy covariance systems at the
AmeriFlux Walnut River Watershed site in southeastern
Kansas on 15–17 May, 2001. The major objective of the
campaign was to compare several flux measuring

M.S. Pekour et al. / Agricultural and Forest Meteorology 136 (2006) 101–107102
systems within the AmeriFlux framework; here, we use
the data collected as convenient material to illustrate the
problem, our approach, and the results.
The eddy covariance systems used sonic anem-
ometers and open-path infrared gas analyzers for fast
synchronous measurements of wind, temperature, and
densities of water vapor and carbon dioxide. The sonic
anemometers used were from Gill Instruments (http://
www.gill.co.uk1), Omnidirectional Model R3. One
infrared gas analyzer was an ATDD (Atmospheric
Turbulence and Diffusion Division, http://www.atdd.-
noaa.gov2) instrument, and the other was a LI-7500 (LI-
COR Environmental, http://www.licor.com/env/3)
instrument. The two systems were set up side-by-side
and 4 m apart, with sensors 4 m above ground level, in a
grazed, mixed-grass field with a slight slope to the south
and good fetch in all directions.
Raw data recorded with a 20 Hz acquisition rate
were saved in 30 min periods. The data were screened
for spikes, excessive noise, and unusual spectral shapes;
30 min data sets with unwanted characteristics were
excluded from subsequent analyses.
Data analyses included estimation of heat, moisture,
and carbon dioxide fluxes by using 30 min block
averages or a recursive filter with effective time
constants ranging from 50 to 800 s.
The recursive filter was implemented in the form:
xi ¼ xi þ e�D=tðxi�1 � xiÞ (1)
x0i ¼ xi � xi: (2)
Here, xi is the local mean (low-frequency component),
x0 is the departure from the local mean (fluctuating part),
D is the sampling interval (0.05 s), and t is the effective
time constant.
Traditional two-dimensional coordinate rotations
were performed to force means of transverse and vertical
wind components to zero. For block averaging, we used
rotation to bring the mean of vertical wind to zero; for
recursive filtering, however, the mean of the fluctuating
part of the vertical wind was forced to zero. When the
vertical wind is decomposed into mean w and fluctuating
w0 parts by high-pass filtering, the mean value of either
portion is not necessarily equal to zero. The meanvalue of
any one of three vertical wind variables (w; w; or w0)might be zeroed by coordinate rotation; this choice can
1 Gill Instruments.2 Atmospheric Turbulence and Diffusion Division.3 LI-COR Environmental.
have great impact on subsequent flux calculations, as will
be shown later.
In the calculation of covariances, special attention
was given to choosing the proper time delay between
data streams from different sensors. Time delays can be
caused by differences in the processing time of digital
sensors (e.g., Zeller et al., 2001), spatial separation of
the sensors, etc. We used the maximum of the
corresponding covariance function as a pointer to the
appropriate time lag. For the Gill–ATDD combination,
the sonic data had to be advanced by one digitization
time step (+0.05 s), while for the Gill–LI-COR
combination, the sonic data had to be delayed by four
steps (�0.2 s). The ATDD sensor is an analog device
that has virtually no time lag between measurement and
data output; the Gill R3 sonic anemometer has a time
delay of about 0.05 s, which explains the 0.05 s lag for
the Gill–ATDD pair. The LI-COR sensor has an
unavoidable internal delay of 0.230 s; it was pro-
grammed for an additional 0.019 s delay to bring the
total delay closer (within 0.02 s) to an integer number of
digitization steps.
Net radiation data were obtained from a REBS
(Radiation and Energy Balance Systems, Inc., Seattle,
Washington) Q*7.1 net radiometer, and soil heat flow
was obtained from an array of five sets of REBS STP-1
soil temperature probes, SMP-1 soil moisture probes,
and HFT-3 heat flow plates. Further details of the
eddy covariance system and other instrumentation
are on line at http://www.atmos.anl.gov/ABLE/instru-
ments.html4.
After spectral corrections for limited frequency
response and space separation of the sensors (Massman,
2000; Rannik, 2001), the sum of sensible and latent heat
fluxes, H + lE, found by 30 min block averaging, was
sufficiently large to close the energy balance for both
systems (Fig. 1). These flux estimates were consistently
larger than the fluxes computed with the recursive
filters. The differences during the daytime were usually
largest for water vapor, intermediate for carbon dioxide,
and smallest for heat. The differences for the recursive
filter were typically 10–18% with a 50 s time constant
and 5–10% with an 800 s time constant. An example of
the average difference between sensible heat flux
estimates made by using block averaging and recursive
filters is shown in Fig. 2, line 1.
In general, an energy balance closure test may not be
the best evaluation of the performance of an eddy
covariance system (e.g. Twine et al., 2000); it involves
4 Argonne Boundary Layer Experiments.

M.S. Pekour et al. / Agricultural and Forest Meteorology 136 (2006) 101–107 103
Fig. 1. Daytime energy balance components with 30 min block
averaging for the eddy fluxes of sensible and latent heat, H + lE,
vs. the sum of net radiation and soil heat flux, Rn + G, for two systems,
Gill–ATDD (+) and Gill–LI-COR (�). The dashed lines show coin-
cidence and �15% difference.
data from several different sensors, each with errors and
limitations. Even more important, there are large
differences in footprints among the sensors, from several
square meters for the soil heat flow and net radiation
measurements, to tens of thousands of square meters for
eddy covariance fluxes. However, in our case of fairly
stationary conditions and rather uniform terrain, we can
take the result of the energy balance test as reasonable
proof that block-averaged fluxes may be used as a valid
Fig. 2. Relative flux loss associated with recursive filter application.
Line 1 (�—�) is the average difference (‘‘loss’’) in daytime sensible
heat flux estimates for recursive filtering as compared to block
averaging, expressed as percentage of block-averaged values. Line
2 (+—+) is an estimate of the effect of high-pass filtering [attenuation
factor b(t) as in Eq. (19)] on sensible heat flux under neutral
conditions for the Kaimal cospectrum, with mean wind speed of
4 m s�1 and height of 4 m above the ground. Line 3 (D—D) is the
average difference of sensible heat flux estimates made with the same
recursive filters and two coordinates rotation schemes, w ¼ 0 and
w0 ¼ 0, expressed as percentage of block-averaged values.
approximation to ‘‘true’’values in comparisons and in the
demonstration of relative flux lost.
In the remainder of this paper, we do not apply
spectral corrections to any flux estimate. This is
because: (a) corrections due to sensors (dimensions,
separation, time response, etc.) are the same for all
filtering methods; (b) the difference between the
spectral correction for block averaging and for recursive
filtering becomes negligible with sufficiently long time
constants; (c) we wish to avoid involving in the
discussion another complex, still unresolved matter
(i.e., spectral corrections) that would unnecessarily
complicate and obscure the results.
3. Discussion
Since the effects of the 800 s recursive filter are
roughly equivalent to block averaging over a period of
40 min, some mechanisms besides simple filter attenua-
tion must be responsible for the additional flux loss. We
consider three factors associated with filtering as
possible causes: (a) direct recursive filter effects, (b)
unmatched filter initialization, and (c) distortion of
computed vertical flux resulting from improper coordi-
nate rotation.
3.1. Direct filter effects
Filter impact can be described by using the approach
of Kristensen (1998) (see also Horst, 2000, and
references herein). Let wðtÞ and s(t) be the vertical
velocity component and the scalar, respectively; then,
recursive high-pass filtering with a time constant t can
be expressed as:
w0ðtÞ ¼1
t1
Z t
0
wðt � t1Þ exp
�� t1
t1
�dt1; (3)
s0ðtÞ ¼1
t2
Z t
0
sðt � t2Þ exp
�� t2
t2
�dt2; (4)
w0ðtÞ ¼ wðtÞ � w0ðtÞ; (5)
s0ðtÞ ¼ sðtÞ � s0ðtÞ; (6)
where w0ðtÞ and s0(t) are local means, and w0ðtÞ and s0(t)are fluctuations (deviations from local means). Then,
the covariance of fluctuating parts for a series of length
T becomes:
w0s0 ¼ wsþ w0s0 � ws0 � w0s; (7)
where

M.S. Pekour et al. / Agricultural and Forest Meteorology 136 (2006) 101–107104
w0s0 ¼Z T
0
dt1
t1
exp
�� t1
t1
�Z T
0
dt2t2
exp
�� t2
t2
�wðt � t1Þsðt � t2Þ
¼Z T
0
dt1
t1
exp
�� t1
t1
�Z T
0
dt2t2
exp
�� t2
t2
�Z þ1�1
GðvÞ expðivðt2 � t1ÞÞ dv; (8)
w0s ¼Z T
0
dt1t1
exp
�� t1
t1
�Z þ1�1
GðvÞ expð�ivt1Þ dv; (9)
ws0 ¼Z T
0
dt2t2
exp
�� t2
t2
�Z þ1�1
GðvÞ expðivt2Þ dv; (10)
and G(v) = Co(v) + iQ(v) is the complex cross spec-
trum, with Co(v) and Q(v) being the cospectrum and
quadrature spectrum, respectively. The last two terms
on the right-hand side of (7) represent so-called Leo-
nard fluxes, which are not equal to zero in this case,
because filtering does not obey Reynolds averaging
rules.
After integration over t1 and t2, and using standard
symmetry considerations, we get:
w0s0 ¼Z þ1�1
ðR1R2 �I1I2ÞCoðvÞ � ðR1I2þR2I1ÞQðvÞð1þ ðvt1Þ2Þð1þ ðvtÞ2Þ
dv;
(11)
w0s ¼Z þ1�1
R1CoðvÞ � I1QðvÞð1þ ðvt1Þ2Þ
dv; (12)
ws0 ¼Z þ1�1
R2CoðvÞ � I2QðvÞð1þ ðvt2Þ2Þ
dv; (13)
where
R1 ¼ 1� exp
�� T
t1
�cosðvTÞ
þ exp
�� T
t1
�vt1 sinðvTÞ; (14)
R2 ¼ 1� exp
�� T
t2
�cosðvTÞ
þ exp
�� T
t2
�vt2 sinðvTÞ; (15)
I1 ¼ exp
�� T
t1
�sinðvTÞ � vt1
þ exp
�� T
t1
�vt1 cosðvTÞ; (16)
I2 ¼ �exp
�� T
t2
�sinðvTÞ � vt2
þ exp
�� T
t2
�vt2 cosðvTÞ: (17)
Note that no imaginary part is left in (11)–(17); all of the
values are real.
In the simplest case, with a sufficiently long series
T� t and with the same filter used on both variables
(t1 = t2 = t), Eq. (7), after substitution of (11)–(17) into
(8)–(10), reverts to the well-known high-pass filter
expression:
w0s0 ¼ ws�Z þ1�1
CoðvÞ1þ ðvtÞ2
dv: (18)
To illustrate the influence of high-pass filtering, we
calculated attenuation factor:
bðtÞ ¼ ws� w0s0
ws(19)
against filter time constant for sensible heat flux under
ordinary conditions (wind speed of 4 m s�1 and height
of 4 m above the ground) by using the Kaimal cospec-
trum of temperature and vertical wind for neutral
stratification (Fig. 2, line 2). Low-frequency attenuation
seems to be negligible, for practical purposes, at less
than 1% for t � 200 s.
In the case of limited series length, when condition
T� t is no longer valid, we get:

M.S. Pekour et al. / Agricultural and Forest Meteorology 136 (2006) 101–107 105
w0s0 ¼ ws
�Z þ1�1
1þ 2 exp
�� T
t
�vt sinðvTÞ � exp
�� 2 T
t
�1þ ðvtÞ2
CoðvÞ dv: (20)
Note that (20) does not depend on the quadrature
spectrum. The function:
Fðv; tÞ ¼2 exp
�� T
t
�vt sinðvTÞ � exp
�� 2 T
t
�1þ ðvtÞ2
(21)
is plotted in Fig. 3 for a half-hour series (T = 1800 s) and
three filter time constants. This function determines the
deviation of filter transfer function from that for a
simple high-pass filter due to ‘‘border effects.’’ This
deviation seems to be negligible for Tt� 5 in the prac-
tical frequency range. This condition can be used to
determine the maximum value of the time constant.
In the case of different filters (t1 6¼ t2) but a
sufficiently long series (T� t), Eq. (7) becomes:
w0s0 ¼ ws�Z þ1�1
ðv2ðt21 þ t2
2Þ þ ð1� v2t1t2ÞÞCoðvÞ þ v3t1t2ðt2 � t1ÞQðvÞð1þ ðvt1Þ2Þð1þ ðvt2Þ2Þ
dv: (22)
The term that contains the quadrature spectrum
describes the so-called out-of-phase corruption; in
other words, two signals that experience different filter
time delays introduce an additional frequency-depen-
dent time lag that leads to underestimation of
covariance.
Fig. 3. ‘‘Border effect’’ function F(v,t) [Eq. (21)] calculated for a
series length of 1800 s and three filter time constants. The angular
frequency v (in radians) has been converted into natural frequency
f = v/2p (in Hz).
Because little is known about the quadrature spectra
of the vertical wind and scalars, it may be instructive to
look at the ratio D(a,t1) of coefficients to Q(v) and
Co(v) in (22):
Dða; t1Þ ¼aða� 1Þv3t3
1
1þ v2t21ða2 � aþ 1Þ ; (23)
where
a ¼ t2
t1
: (24)
Fig. 4 shows the ratio D(a, t1) for several values of
a and filter time constant t1. The absolute value of
the quadrature spectrum is usually assumed to be
lower than the cospectrum by several orders of
magnitude. However, Fig. 4 shows that at frequencies
above 0.5 Hz the contribution from the quadrature
spectrum might become significant because of the v3
multiplier. One important conclusion is that if any of
the sensors has internal high-pass filtering of any kind
(electronic, spatial, digital, recursive, etc.), the impact
of possible phase corruption must be assessed in the
analysis.
3.2. Filter initialization
A recursive filter needs to be initialized at the
beginning of a data series with some mean value.
Fig. 4. Ratio D(a,t) [Eq. (23)] for three different values of t and three
values of a: thick solid line, a = 10; thin solid line, a = 5; dashed line,
a = 2. The angular frequency v (in radians) has been converted into
natural frequency f = v/2p (in Hz).
M.S. Pekour et al. / Agricultural and Forest Meteorology 136 (2006) 101–107106
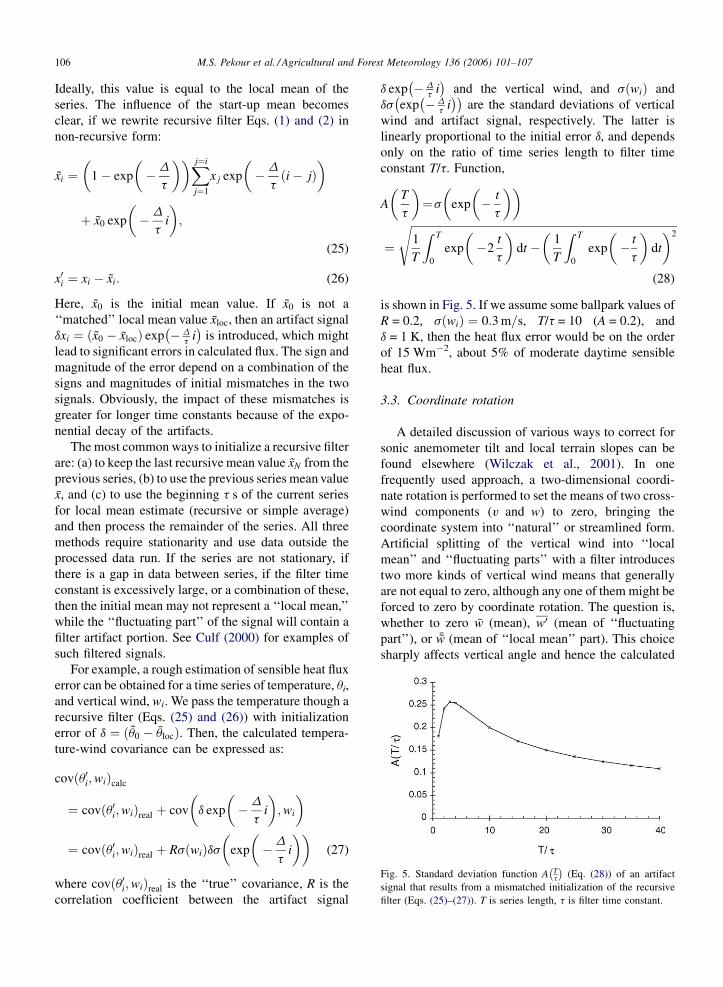
Fig. 5. Standard deviation function A Tt
� �(Eq. (28)) of an artifact
signal that results from a mismatched initialization of the recursive
filter (Eqs. (25)–(27)). T is series length, t is filter time constant.
Ideally, this value is equal to the local mean of the
series. The influence of the start-up mean becomes
clear, if we rewrite recursive filter Eqs. (1) and (2) in
non-recursive form:
xi ¼�
1� exp
��D
t
��Xj¼i
j¼1
x j exp
��D
tði� jÞ
�
þ x0 exp
��D
ti
�;
(25)
x0i ¼ xi � xi: (26)
Here, x0 is the initial mean value. If x0 is not a
‘‘matched’’ local mean value xloc, then an artifact signal
dxi ¼ ðx0 � xlocÞ exp � Dt
i� �
is introduced, which might
lead to significant errors in calculated flux. The sign and
magnitude of the error depend on a combination of the
signs and magnitudes of initial mismatches in the two
signals. Obviously, the impact of these mismatches is
greater for longer time constants because of the expo-
nential decay of the artifacts.
The most common ways to initialize a recursive filter
are: (a) to keep the last recursive mean value xN from the
previous series, (b) to use the previous series mean value
x, and (c) to use the beginning t s of the current series
for local mean estimate (recursive or simple average)
and then process the remainder of the series. All three
methods require stationarity and use data outside the
processed data run. If the series are not stationary, if
there is a gap in data between series, if the filter time
constant is excessively large, or a combination of these,
then the initial mean may not represent a ‘‘local mean,’’
while the ‘‘fluctuating part’’ of the signal will contain a
filter artifact portion. See Culf (2000) for examples of
such filtered signals.
For example, a rough estimation of sensible heat flux
error can be obtained for a time series of temperature, ui,
and vertical wind, wi. We pass the temperature though a
recursive filter (Eqs. (25) and (26)) with initialization
error of d ¼ ðu0 � ulocÞ. Then, the calculated tempera-
ture-wind covariance can be expressed as:
covðu0i;wiÞcalc
¼ covðu0i;wiÞreal þ cov
�d exp
��D
ti
�;wi
�
¼ covðu0i;wiÞreal þ RsðwiÞds�
exp
��D
ti
��(27)
where covðu0i;wiÞreal is the ‘‘true’’ covariance, R is the
correlation coefficient between the artifact signal
d exp � Dt
i� �
and the vertical wind, and sðwiÞ and
ds exp � Dt
i� �� �
are the standard deviations of vertical
wind and artifact signal, respectively. The latter is
linearly proportional to the initial error d, and depends
only on the ratio of time series length to filter time
constant T/t. Function,
A
�T
t
�¼s
�exp
�� t
t
��
¼
ffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffi1
T
Z T
0
exp
��2
t
t
�dt �
�1
T
Z T
0
exp
�� t
t
�dt
�2s
(28)
is shown in Fig. 5. If we assume some ballpark values of
R = 0.2, sðwiÞ ¼ 0:3 m=s, T/t = 10 (A = 0.2), and
d = 1 K, then the heat flux error would be on the order
of 15 Wm�2, about 5% of moderate daytime sensible
heat flux.
3.3. Coordinate rotation
A detailed discussion of various ways to correct for
sonic anemometer tilt and local terrain slopes can be
found elsewhere (Wilczak et al., 2001). In one
frequently used approach, a two-dimensional coordi-
nate rotation is performed to set the means of two cross-
wind components (v and w) to zero, bringing the
coordinate system into ‘‘natural’’ or streamlined form.
Artificial splitting of the vertical wind into ‘‘local
mean’’ and ‘‘fluctuating parts’’ with a filter introduces
two more kinds of vertical wind means that generally
are not equal to zero, although any one of them might be
forced to zero by coordinate rotation. The question is,
whether to zero w (mean), w0 (mean of ‘‘fluctuating
part’’), or ¯w (mean of ‘‘local mean’’ part). This choice
sharply affects vertical angle and hence the calculated

M.S. Pekour et al. / Agricultural and Forest Meteorology 136 (2006) 101–107 107
flux. The error in the vertical heat flux can vary from 9%
per degree of tilt error for neutral stability to 1% per
degree of tilt error for unstable conditions (Wilczak
et al., 2001). Evidently, the choice of the appropriate
vertical wind to zero should be made with respect to
the reason for filtering the data in the first place (to
remove sensor bias or drift, to assure stationarity of
signals, etc.).
In our particular case, the wind directions during the
experiment were from the same quadrant (south); our
block averaging procedure used coordinate rotation to
attain w ¼ 0, which repeatedly produced a vertical
angle consistent with the local slope of about 2–38. The
other procedure (recursive filtering) used coordinate
rotation to attain w0 ¼ 0 and produced more or less
random vertical angles of small absolute value, so that
hypothetical tilt errors were on the order of the local
terrain slope, with unchanged sign because of persistent
wind direction. Coordinate rotation based on forcing
w0 ¼ 0 was a major source of flux underestimation. Line
3 in Fig. 2 illustrates the average relative difference
between sensible heat flux calculated by using
coordinate rotations w ¼ 0 and w0 ¼ 0 for the same
set of recursive-filtered data. Although forcing w0 ¼ 0
was incorrect in our case (a ‘‘legacy’’ of older sensors
initially overlooked), many other studies calculate
vertical angle on the basis of detrended vertical winds
(Aubinet et al., 2000).
4. Conclusions
1. Our research upholds the already widely supported
belief that the use of recursive filters in eddy
covariation measurements should be avoided when-
ever possible.
2. I
f recursive filtering is used, the same filter timeconstant should be employed for both signals to
avoid phase corruption at the high-frequency end. If
one or both sensors have internal high-pass filtering,
that filtering must be taken into account. Special
analysis of combined (sensor + filter) transfer func-
tions is required to estimate possible phase corrup-
tion errors. Otherwise, additional, albeit unknown,
distortion of calculated fluxes is possible.
3. T
o avoid low-frequency distortion due to ‘‘bordereffects,’’ the time constant of the filter should not
exceed 1/5 of the series length.
4. P
roper initialization of the filter is necessary at thebeginning of processing for each new series.
Otherwise, artifact signals may distort calculated
flux values.
5. S
pecial care is needed in choosing a coordinaterotation algorithm; if the algorithm uses filtered data,
then the effect of possible tilt errors or non-zero mean
vertical wind on the resulting flux needs to be
analyzed.
Acknowledgments
This work was supported by the U.S. Department of
Energy, Office of Science, Office of Biological and
Environmental Research, Global Change Research
Division, under contract W-31-109-Eng-38.
References
Aubinet, M., Grelle, A., Ibrom, A., Rannik, U., Moncrieff, J., Foken,
T., Kowalski, A.S., Martin, P.H., Berbigier, P., Bernhofer, Ch.,
Clement, R., Elbers, J., Granier, A., Grunwald, T., Morgenstern,
K., Pilegaard, K., Rebmann, C., Snijders, W., Valentini, R., Vesala,
T., 2000. Estimates of the annual net carbon and water exchange of
forests: the EUROFLUX methodology. Adv. Ecol. Res. 30, 113–
175.
Culf, A.D., 2000. Examples of the effects of different averaging
methods on carbon dioxide fluxes calculated using the eddy
correlation method. Hydrol. Earth Syst. Sci. 4 (1), 193–198.
Horst, T.W., 2000. On frequency response corrections for eddy
covariance flux measurements. Bound-Layer Meteorol. 94,
517–520.
Kristensen, L., 1998. Time Series Analysis, Dealing with Imperfect
Data. Report Risø-I-1228(EN), Risø National Laboratory, P.O.
Box 49, DK-4000 Roskilde, Denmark.
Kruijt, B., Elbers, J.A., von Randow, C., Araujo, A.C., Oliveira, P.J.,
Manzi, A.O., Nobre, A.D., Kabat, P., Moors, E.J., 2004. The
robustness of eddy correlation fluxes for Amazon rain forest
conditions. Ecol. Appl. 14 (4), S101–S113.
Massman, W.J., 2000. A simple method for estimating frequency
response corrections for eddy covariance systems. Agric. Forest
Meteorol. 104, 185–198.
Massman, W.J., Lee, X., 2002. Eddy covariance flux corrections and
uncertainties in long-term studies of carbon and energy exchanges.
Agric. Forest Meteorol. 113, 121–144.
Rannik, U., 2001. A comment on the paper by W.J. Massman. A
simple method for estimating frequency response corrections for
eddy covariance systems. Agric. Forest Meteorol. 107, 241–
245.
Sakai, R.K., Fitzjarrald, D.R., Moore, K.E., 2001. Importance of low-
frequency contributions to eddy fluxes observed over rough
surfaces. J. Appl. Meteorol. 40, 2178–2192.
Twine, T.E., Kustas, W.P., Norman, J.M., Cook, D., Houser, P.R.,
Meyers, T.P., Prueger, J.H., Starks, P.J., Wesely, M.L., 2000.
Correcting eddy-covariance flux underestimates over a grassland.
Agric. Forest Meteorol. 103, 279–300.
Wilczak, J.M., Oncley, S.P., Stage, S.A., 2001. Sonic anemometer tilt
correction algorithms. Bound-Layer Meteorol. 99, 127–150.
Zeller, K., Zimmerman, G., Hehn, T., Donev, E., Denny, D., Welker, J.,
2001. Analysis of inadvertent microprocessor time lag on eddy
covariance results. J. Appl. Meteorol. 40, 1640–1646.




















