A robust real-time message scheduling scheme capable of handling channel errors in wireless local...
10
A Robust Real-Time Message Scheduling Scheme Capable of Handling Channel Errors in Wireless Local Area Networks Junghoon Lee 1 , Mikyung Kang 2 , Gyung-Leen Park 1 , In-Hye Shin 1 , Hanil Kim 1 , and Sang-Wook Kim 3, 1 Dept. of Computer Science and Statistics, Cheju National University 2 Information Sciences Institute East, University of Southern California 3 College of Information and Communications, Hanyang University {jhlee, glpark, ihshin76, hikim}@cheju.ac.kr, [email protected], [email protected] Abstract. This paper proposes and analyzes the performance of a ro- bust real-time message scheduling scheme capable of handling channel er- rors by exploiting an auxiliary schedule on the IEEE 802.11 WLAN. While the primary schedule is derived from the legacy EDF (Earliest Deadline First) scheme, the auxiliary schedule is generated based on the slack and arrival times of each message stream. During runtime, with the support of a channel probing functionality, the access point dynamically switches the two polling schedules according to the channel status, giving a temporaily unreachable stream more chances to meet its time constraints. Simulation results show that the proposed scheme improves the success ratio by up to 8.56 % and performs well even if the length of error duration gets larger, demonstrating that it is also robust to the bursty errors. 1 Introduction Wireless communication technology is gaining a wide-spread acceptance for dis- tributed systems and applications in recent years[1]. As both speed and capacity of wireless media such as IEEE 802.11 WLAN (Wireless Local Area Network) increase, so does the demand for supporting real-time applications such as broad- band VOD (Video On Demand) and remote monitoring system. Real-time mes- sages are inherently time sensitive and their time constraints are given from their own applications. For example, in the wireless sensor network, the periodically sampled data are delivered to the appropriate station within a reasonable dead- line to produce timely and meaningful response[2]. The message of sensor data has a hard real-time constraint that it should be transmitted within a bounded delay as long as the corresponding channel stays in an error-free state. Otherwise, the data are considered to be lost. This research was supported by the MIC, Korea, under the ITRC support program supervised by the IITA (IITA-2006-C1090-0603-0040). Corresponding author. O. Gervasi and M. Gavrilova (Eds.): ICCSA 2007, LNCS 4707, Part III, pp. 169–178, 2007. c Springer-Verlag Berlin Heidelberg 2007
-
Upload
independent -
Category
Documents
-
view
2 -
download
0
Transcript of A robust real-time message scheduling scheme capable of handling channel errors in wireless local...

A Robust Real-Time Message SchedulingScheme Capable of Handling Channel Errors in
Wireless Local Area Networks�
Junghoon Lee1, Mikyung Kang2, Gyung-Leen Park1, In-Hye Shin1,Hanil Kim1, and Sang-Wook Kim3,��
1 Dept. of Computer Science and Statistics, Cheju National University2 Information Sciences Institute East, University of Southern California
3 College of Information and Communications, Hanyang University{jhlee, glpark, ihshin76, hikim}@cheju.ac.kr,
[email protected], [email protected]
Abstract. This paper proposes and analyzes the performance of a ro-bust real-time message scheduling scheme capable of handling channel er-rors by exploiting an auxiliary schedule on the IEEE 802.11 WLAN. Whilethe primary schedule is derived from the legacy EDF (Earliest DeadlineFirst) scheme, the auxiliary schedule is generated based on the slack andarrival times of each message stream. During runtime, with the support ofa channel probing functionality, the access point dynamically switches thetwo polling schedules according to the channel status, giving a temporailyunreachable stream more chances to meet its time constraints. Simulationresults show that the proposed scheme improves the success ratio by up to8.56 % and performs well even if the length of error duration gets larger,demonstrating that it is also robust to the bursty errors.
1 Introduction
Wireless communication technology is gaining a wide-spread acceptance for dis-tributed systems and applications in recent years[1]. As both speed and capacityof wireless media such as IEEE 802.11 WLAN (Wireless Local Area Network)increase, so does the demand for supporting real-time applications such as broad-band VOD (Video On Demand) and remote monitoring system. Real-time mes-sages are inherently time sensitive and their time constraints are given from theirown applications. For example, in the wireless sensor network, the periodicallysampled data are delivered to the appropriate station within a reasonable dead-line to produce timely and meaningful response[2]. The message of sensor datahas a hard real-time constraint that it should be transmitted within a boundeddelay as long as the corresponding channel stays in an error-free state. Otherwise,the data are considered to be lost.� This research was supported by the MIC, Korea, under the ITRC support program
supervised by the IITA (IITA-2006-C1090-0603-0040).�� Corresponding author.
O. Gervasi and M. Gavrilova (Eds.): ICCSA 2007, LNCS 4707, Part III, pp. 169–178, 2007.c© Springer-Verlag Berlin Heidelberg 2007

170 J. Lee et al.
Not a few scheduling schemes for the real-time message have been proposedin various respects of its time constraints[3]. In soft real-time applications, aproportional share of network resources is prospective, as can be shown in fairqueuing approaches[4]. On the other hand, a hard real-time message stream needsthe guarantee from the underlying network that its time constraints are alwaysmet in advance of the system operation or connection setup, while the guaranteeis provided based on a rigid priority driven scheduler. EDF (Earliest DeadlineFirst), which dynamically picks a message that has the closest deadline amongthe pending ones, is known to be the most common scheduling policy for real-time message streams[5]. WLAN can also exploit EDF for message scheduling invarious ways on the assumption that the communication pattern of sensory datais fixed and known in priori. For example, AP (Access Point) polls each stationaccording to the offline EDF schedule built prior to the system operation.
As was pointed out for the fair packet scheduling case, however, it is not clearhow well this algorithms will work for the wireless networks, since wireless chan-nels are subject to unpredictable location-dependent and bursty errors, whichmake a real-time application fail to send or receive some of its real-time pack-ets[6]. As a result, the reservation-based guarantee scheme alone is not sufficient.A message may be unable to use the reserved network time due to channel statusfluctuation, no matter how sophisticatedly its reservation was made. Therefore,the real-time performance such as network throughput or deadline meet ratiodepends on how to reallocate the unused or invalidated time slots as well as howto compensate hosts whose packets are corrupted or postponed behind its reser-vation. This paper addresses these problems based on the additional auxiliarypolling schedule which can switch the primary one when a specific channel fallsin a bad state.
The rest of this paper is organized as follows: Section 2 introduces relatedworks on real-time message scheduling and then Section 3 explains basic assump-tions on network and error models. Section 4 presents the proposed schedulingscheme in detail. After exhibiting performance measurement results in Section5, Section 6 concludes this paper with a brief description of future works.
2 Related Works
We will begin with a description of IEEE 802.11 WLANs, as plenty of relatedresearches on the wireless sensor network employ WLAN as their underlyingnetwork. Thanks to the inherent nature of a wireless medium, messages arebroadcasted to all the nodes inside the cell[7]. Correspondingly, the IEEE 802.11was developed as a MAC (Medium Access Control) standard for WLANs[8]. Thestandard includes a basic DCF (Distributed Coordination Function) and an op-tional PCF (Point Coordination Function) to support efficient delivery of bothreal-time and non-real-time messages. The DCF exploits CSMA/CA (CarrierSense Multiple Access with Collision Avoidance) protocol as the basic channel ac-cess mechanism to transmit asynchronous messages. Due to the contention-basednature, packet collisions are intrinsic to CSMA, and their resolving procedure
A Robust Real-Time Message Scheduling Scheme 171
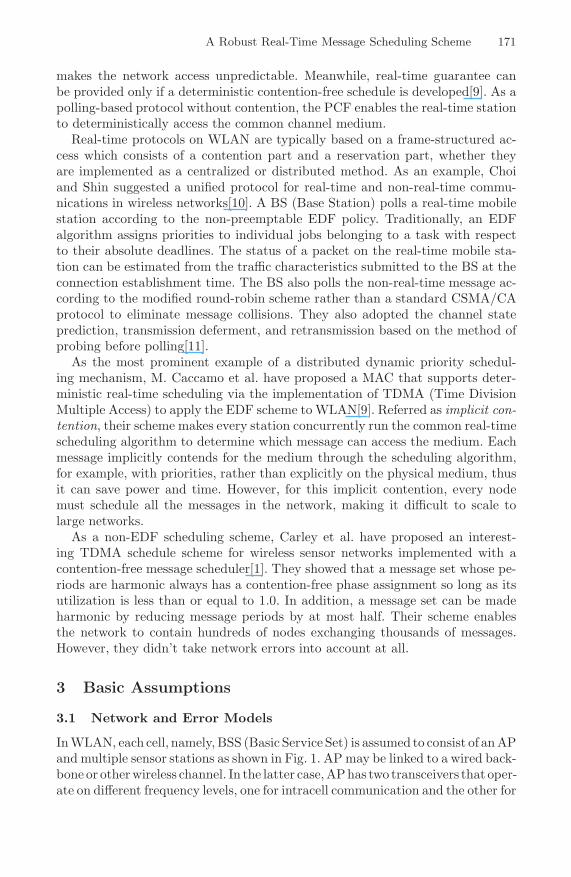
makes the network access unpredictable. Meanwhile, real-time guarantee canbe provided only if a deterministic contention-free schedule is developed[9]. As apolling-based protocol without contention, the PCF enables the real-time stationto deterministically access the common channel medium.
Real-time protocols on WLAN are typically based on a frame-structured ac-cess which consists of a contention part and a reservation part, whether theyare implemented as a centralized or distributed method. As an example, Choiand Shin suggested a unified protocol for real-time and non-real-time commu-nications in wireless networks[10]. A BS (Base Station) polls a real-time mobilestation according to the non-preemptable EDF policy. Traditionally, an EDFalgorithm assigns priorities to individual jobs belonging to a task with respectto their absolute deadlines. The status of a packet on the real-time mobile sta-tion can be estimated from the traffic characteristics submitted to the BS at theconnection establishment time. The BS also polls the non-real-time message ac-cording to the modified round-robin scheme rather than a standard CSMA/CAprotocol to eliminate message collisions. They also adopted the channel stateprediction, transmission deferment, and retransmission based on the method ofprobing before polling[11].
As the most prominent example of a distributed dynamic priority schedul-ing mechanism, M. Caccamo et al. have proposed a MAC that supports deter-ministic real-time scheduling via the implementation of TDMA (Time DivisionMultiple Access) to apply the EDF scheme to WLAN[9]. Referred as implicit con-tention, their scheme makes every station concurrently run the common real-timescheduling algorithm to determine which message can access the medium. Eachmessage implicitly contends for the medium through the scheduling algorithm,for example, with priorities, rather than explicitly on the physical medium, thusit can save power and time. However, for this implicit contention, every nodemust schedule all the messages in the network, making it difficult to scale tolarge networks.
As a non-EDF scheduling scheme, Carley et al. have proposed an interest-ing TDMA schedule scheme for wireless sensor networks implemented with acontention-free message scheduler[1]. They showed that a message set whose pe-riods are harmonic always has a contention-free phase assignment so long as itsutilization is less than or equal to 1.0. In addition, a message set can be madeharmonic by reducing message periods by at most half. Their scheme enablesthe network to contain hundreds of nodes exchanging thousands of messages.However, they didn’t take network errors into account at all.
3 Basic Assumptions
3.1 Network and Error Models
In WLAN, each cell, namely, BSS (Basic Service Set) is assumed to consist of an APand multiple sensor stations as shown in Fig. 1. AP may be linked to a wired back-bone or otherwireless channel. In the latter case,APhas two transceivers that oper-ate on different frequency levels, one for intracell communication and the other for
172 J. Lee et al.
APWired link
802.11b WLAN
Backbone network
Wireless link
Other wireless network
MS
MS
MS
MS
MS : Mobile Station
Fig. 1. Network model
intercell communication. Every station shares medium on the common frequencyband and accesses according to the predefined MAC protocol. Each flow is ether anuplink (MS to AP) or downlink (AP to MS), while AP coordinates the overall net-work operations. This paper exploits the TDMA style access policy as in [1][6][10],now that the real-time guarantee cannot be provided without developing a deter-ministic access schedule, as well as the contention resolution via packet collisionsconsumes the precious communication energy.
Each station is associated with a channel which has either of two states, namely,error state and error-free state at any time instant. A channel is defined betweeneach mobile and the AP, and it can be modeled as a Gilbert channel[12]. We candenote the transition probability from state good to state bad by p and the prob-ability from state bad to state good by q, as shown in Fig. 2. The pair of p and qrepresenting a range of channel conditions has been obtained by using the trace-based channel estimation. The average error probability and the average length of aburst of errors are derived as p
p+q and 1q , respectively. A packet is received correctly
if the channel remains in state good for the whole duration of packet transmission.Otherwise, it is received in error. Channels between the AP and respective stationsare independent of one another in their error characteristics.
BadGood
p
q
1−p
1−q
Fig. 2. Error model
3.2 Message Model
A station, currently inactive, can be activated by an upper layer query commandthat wants to monitor or process the data flow from the sensor station[13]. Thequery may also specify a sampling period as well as a precision level of neededdata (hence, message length) on a station. In case of a change in the active flowset, the network schedule should be recalculated[5]. The destination of a message

A Robust Real-Time Message Scheduling Scheme 173
can be either within a cell or outside a cell, while the outbound messages are firstsent to the AP and then forwarded to the remote destination. Internal messagesare also relayed by the AP. Hence, the AP also acts as another source of messagestream with an exception that it is just virtually polled.
The traffic of sensory data is typically isochronous (or synchronous), consistingof message streams that are generated by their sources on a continuing basis anddelivered to their respective destinations also on a continuing basis[5]. This paperfollows the general real-time message model which has n streams, namely, S1,S2, ..., Sn, each of which generates a message of less than Ci at each beginningof its period, Pi. In addition, the first message of each stream arrives at time0. Each packet must be delivered to its destination within Di time unit fromits generation or arrival at the source, otherwise, the packet is considered to belost. Generally, Di coincides with Pi to ensure that the transmission completesbefore the generation of the next message. However, sometimes, Di is larger thanPi, and in this case, more errors can be recovered within the message deadline.Finally, the stream belongs to a specific station, so if a slot is assigned to astream, it means that the AP should poll that station at its slot time.
4 Network Operation
4.1 Bandwidth Management
The network time is divided into a series of fixed-size slots, each of which isexclusively assigned to a real-time station, completely removing the possibilityof packet collision, for the purpose of both real-time guarantee and power saving,as mentioned earlier. The slot length, say L, is as large as the basic unit ofwireless data transmission and every traffic is also segmented to fit this slotsize[9]. On WLAN, this TDMA-style network access can be implemented bymaking AP poll each station according to the predefined schedule, as well asmaking a polled node send for as large as L. The allocation scheme assigns eachslot to a specific real-time stream, taking into account their time constraints.This assignment implies that a preemption occurs only at the slot boundary.Meanwhile, as every message is transmitted by the way of AP, be it intercell orintracell message, the AP knows whether a transmission has succeeded or failed.So the error recovery function is performed also under the control of the AP.
For the access point to decide the polling order for a stream set, each stream,Si, submits a tuple of (Pi, Ci) information. At first, the schedulability of messagestreams is tested by the following sufficient condition[9]:
∀i, 1 ≤ i ≤ n∑i
k=1Ck
Pk+ Δ ≤ 1.0,
which assumes that all the messages are sorted in increasing order of relativedeadlines and that there are n streams. Also, Δ denotes the overhead term orig-inated from the network management such as polling/probing overhead, beaconpacket broadcast, interframe space, and so on. As Δ is fixed for a stream set, wecan calculate per-slot overhead and merge it into Ci. If we let Δp the per-slot

174 J. Lee et al.
overhead, the modified transmission time, Ct+1i , can be calculated iteratively
with the following equation until Ct+1i becomes equal to Ct
i .
Ct+1i = Ct
i + �Cti
L �Δp
As a result, if we think Δ is absorbed into Ci, Δ can be assumed to be 0, enablingus to concentrate on the problem of slot allocation.
After acceptance test for a given stream set, the transmission is reservedfor each stream. That is, the AP creates a polling table for the entire pollingsequence[14]. The invocation behavior of a periodic task set repeats itself onceevery T time units, where T , called the planning cycle of the task set, is theleast common multiple of the periods of all periodic tasks. Hence, we only need toconsider all the task invocation in T . For Si, every message arrival is estimatedat 0, Pi, 2Pi, and so on, while each invocation needs �Ci
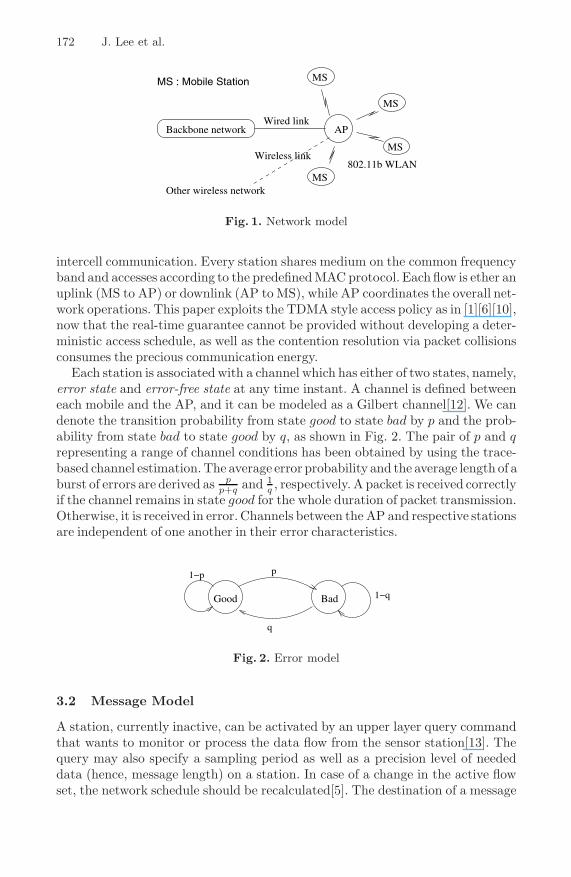
L � slots. With thisestimation, the AP selects the message whose deadline is closest at each slotboundary and assigns the slot to the corresponding stream. If no slot request ispending at a slot boundary, the scheduler leaves it unassigned. Fig. 4 also showsthe allocation example for the stream set, τ :{A(6,1), B(3,1), C(4,2)} whoseutilization is 1.0.
Though this polling schedule canmeet the time constraints of a given streamset,the AP may be unable to poll the stream at the scheduled time because the channelbetween itself and the stream has fallen to a bad state. In this case, the existing pollis invalidated. Without some compensation procedure, the invalidated stream willfail to meet its deadline. To overcome this situation, this paper proposes an auxil-iary schedule shown in Fig. 3. The auxiliary schedule helps the runtime schedulerto pick alternative stream when it cannot poll the stream in the primary sched-ule. To build an auxiliary schedule, AP generates both arrival time and slack timeof each slot in the primary schedule based on EDF policy. By Et, we denote thestream AP will poll at time t. If Et is M , At and Lt denote the arrival time and theslack time of M , respectively. Slack means the redundant time to the completionof a given task or message. It can be calculated by subtracting the current timeand the execution time from the deadline. Let’s assume that slot t is assigned tostream M , that is, Et = M . In addition, M is unreachable at time t during theactual network runtime. If the poll to M is switched by a poll to another streamat t
′, and t
′is less than or equal to the deadline of M , M has one more chance to
be delivered within its deadline.Based on this concept, we fill the auxiliary polling list as follows: for M at time
t, from the stream located at t + Lt down to t + 1, the scheduler checks whetherthe occupied message, say M
′, is already pending. If so, that is, the arrival time
of M′is less than or equal to time t, M
′is selected for Et. t + Lt is the farthest
slot to which M can be moved. Fig. 4 shows the example. For time 2, the primaryschedule is to poll stream C, while A2 and L2 are 0 and 1, respectively. The firstcandidate for the auxiliary schedule for slot 2 is the stream located in the primaryschedule at time 2 + L2, namely, stream A. In addition, A3 is 0 and is less thancurrent time, 2, so we can conclude that A is already pending at time 2. After all,A is selected for the alternative schedule for E2, namely, C.
A Robust Real-Time Message Scheduling Scheme 175
for all t in the planning cyclet′
= t + Lt
while (t′
> t)if (At′ ≤ t)
select Et′ as Xt
t′
← t′
− 1end while
end for
Fig. 3. The construction of an auxiliary schedule
0
B C C A B C C B A B C C
1 2 3 4 5 6 7 8 9 10 11
0 1 2 3 4 5 6 7 8 9 10 11
0 0 0 0 3 4 4 6 6 9 8 8
E t( )
X t( )
O t( )
A t( )
L t( )
Probing + Poll
0 1 2 3 4 5 6 7 8 9 10 11
− −1 3 3 5 7 8
0 1 2 3 4 5 6 7 8 9 10 11
C A A C B C CA − −B
4
−
− 11 11
0 1 2 3 4 5 6 7 8 9 10 11
2 2 1 2 1 2 1 1 3 2 1 0
schedulePrimary
scheduleAuxiliary
Original location
Arrival
Slack
Fig. 4. Slot allocation and probing
4.2 Runtime Operation
At runtime, the AP has the primary and auxiliary schedules, and at each begin-ning of a planning cycle, the primary scheduling table is reloaded. In additionto Et, At, and Lt, we further define Xt as the auxiliary schedule at time t, whileOt denotes the original location of Xt. As specified in the primary reservationtable, each station is polled one by one, while the unallocated slot can be usedfor retransmission. The AP also maintains a retransmission queue ordered by thedeadline of failed messages and a message entry will be automatically removedwhen its deadline expires. In addition, it is advantageous to probe a channelbefore polling or transmitting, as it can not only avoid a useless transmissionover a bad channel, but also decrease the need for retransmitting packets. Thechannel estimation is achieved by transmitting a probing control packet to thescheduled station, which then returns the control packet, just like the RTS/CTS(Request To Send/Clear To Send) interaction[10]. If the AP does not receive theprobing control packet correctly from the station, the channel is estimated to

176 J. Lee et al.
be bad. However, even though the probing indicates the channel stays good, theensuing transmission can fail if a state goes to bad during the transmission.
If the probing fails for a stream, the scheduler should select another one andtry to poll, but at this time, without a probing, as the unlimited number ofprobe may invalidate the schedule which is based on the fixed size slots. If thetransmission succeeds, the scheduler modifies some schedules. Fig. 5 summarizesthe runtime operation steps.
t = 0while system operation
get a stream, Et, from the primary polling tableif Et is unassigned
get the stream from the retransmission queue and pollreturn
probe the channel status of Et
if goodpoll Et
elsepoll Xt
if successfulplace Et in the slot time Ot
elseput Et into the retransmission queue
t ← (t+1) mod T
end while
Fig. 5. Description of runtime operation on AP
However, the proposed scheme has some margin to further improve the per-formance. Let’s assume that C is in bad state from time 1 to 2 in Fig. 4. X1 andX2 are both A. In this case, as A may be already transmitted at time 1 in placeof C, switch to X2 at time 2 is meaningless. This situation requires the moresophisticated selection of the auxiliary schedule.
5 Performance Evaluation
This section measures the performance of the proposed scheme in terms of the suc-cess ratio according to the packet error rate as well as the average length of errorduration, 1
q in Fig. 2, via simulation using the ns-2 event simulator[15]. The suc-cess ratio means the ratio of the number of successfully transmitted packets withintheir deadlines to the total number of generatedpackets. For the target streamsets,we fixed the length of a planning cycle to 24 as well as the number of streams to 3,and generated every possible stream sets whose utilization ranges from 0.2 to 1.0.Such sets have various utilization, slack distribution, and so on, as the number 24
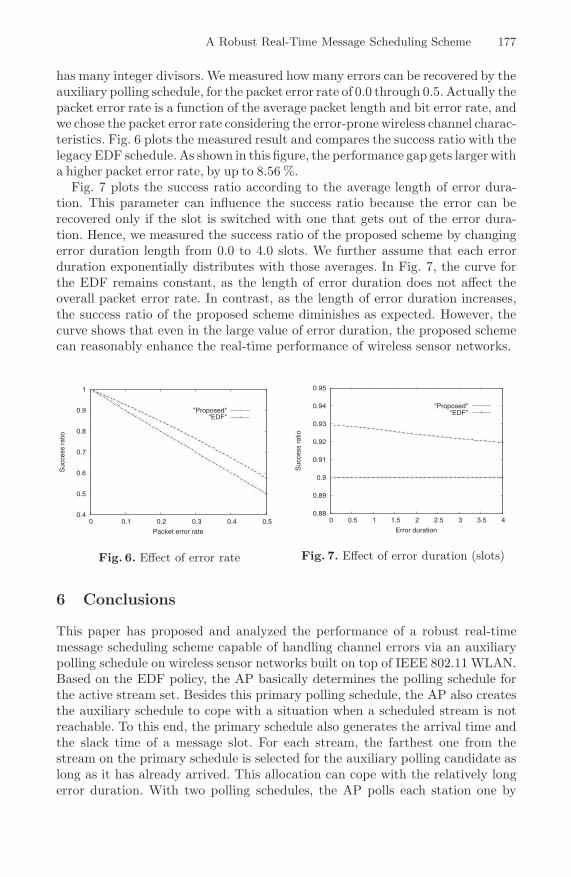
A Robust Real-Time Message Scheduling Scheme 177
has many integer divisors. We measured how many errors can be recovered by theauxiliary polling schedule, for the packet error rate of 0.0 through 0.5. Actually thepacket error rate is a function of the average packet length and bit error rate, andwe chose the packet error rate considering the error-prone wireless channel charac-teristics. Fig. 6 plots the measured result and compares the success ratio with thelegacy EDF schedule. As shown in this figure, the performance gap gets largerwitha higher packet error rate, by up to 8.56 %.
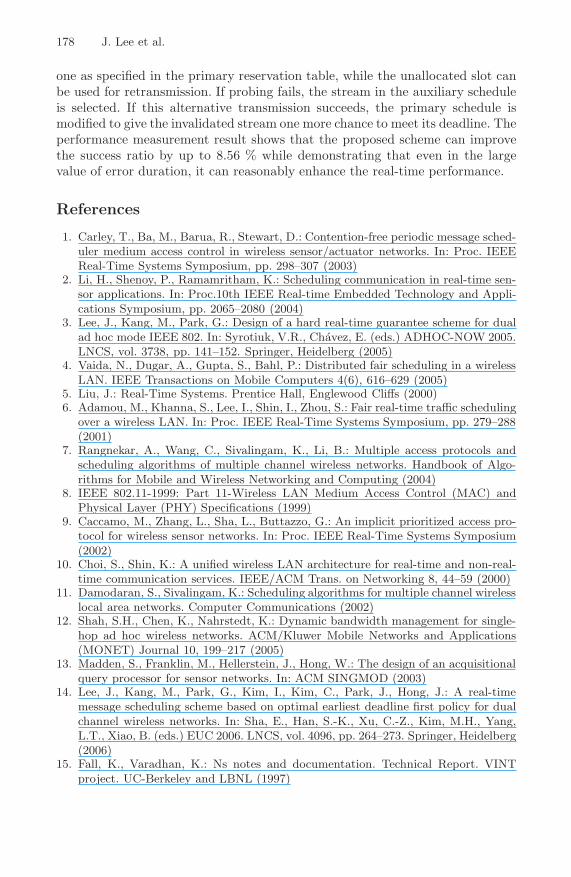
Fig. 7 plots the success ratio according to the average length of error dura-tion. This parameter can influence the success ratio because the error can berecovered only if the slot is switched with one that gets out of the error dura-tion. Hence, we measured the success ratio of the proposed scheme by changingerror duration length from 0.0 to 4.0 slots. We further assume that each errorduration exponentially distributes with those averages. In Fig. 7, the curve forthe EDF remains constant, as the length of error duration does not affect theoverall packet error rate. In contrast, as the length of error duration increases,the success ratio of the proposed scheme diminishes as expected. However, thecurve shows that even in the large value of error duration, the proposed schemecan reasonably enhance the real-time performance of wireless sensor networks.
0.4
0.5
0.6
0.7
0.8
0.9
1
0 0.1 0.2 0.3 0.4 0.5
Suc
cess
rat
io
Packet error rate
"Proposed""EDF"
Fig. 6. Effect of error rate
0.88
0.89
0.9
0.91
0.92
0.93
0.94
0.95
0 0.5 1 1.5 2 2.5 3 3.5 4
Suc
cess
rat
io
Error duration
"Proposed""EDF"
Fig. 7. Effect of error duration (slots)
6 Conclusions
This paper has proposed and analyzed the performance of a robust real-timemessage scheduling scheme capable of handling channel errors via an auxiliarypolling schedule on wireless sensor networks built on top of IEEE 802.11 WLAN.Based on the EDF policy, the AP basically determines the polling schedule forthe active stream set. Besides this primary polling schedule, the AP also createsthe auxiliary schedule to cope with a situation when a scheduled stream is notreachable. To this end, the primary schedule also generates the arrival time andthe slack time of a message slot. For each stream, the farthest one from thestream on the primary schedule is selected for the auxiliary polling candidate aslong as it has already arrived. This allocation can cope with the relatively longerror duration. With two polling schedules, the AP polls each station one by
178 J. Lee et al.
one as specified in the primary reservation table, while the unallocated slot canbe used for retransmission. If probing fails, the stream in the auxiliary scheduleis selected. If this alternative transmission succeeds, the primary schedule ismodified to give the invalidated stream one more chance to meet its deadline. Theperformance measurement result shows that the proposed scheme can improvethe success ratio by up to 8.56 % while demonstrating that even in the largevalue of error duration, it can reasonably enhance the real-time performance.
References
1. Carley, T., Ba, M., Barua, R., Stewart, D.: Contention-free periodic message sched-uler medium access control in wireless sensor/actuator networks. In: Proc. IEEEReal-Time Systems Symposium, pp. 298–307 (2003)
2. Li, H., Shenoy, P., Ramamritham, K.: Scheduling communication in real-time sen-sor applications. In: Proc.10th IEEE Real-time Embedded Technology and Appli-cations Symposium, pp. 2065–2080 (2004)
3. Lee, J., Kang, M., Park, G.: Design of a hard real-time guarantee scheme for dualad hoc mode IEEE 802. In: Syrotiuk, V.R., Chavez, E. (eds.) ADHOC-NOW 2005.LNCS, vol. 3738, pp. 141–152. Springer, Heidelberg (2005)
4. Vaida, N., Dugar, A., Gupta, S., Bahl, P.: Distributed fair scheduling in a wirelessLAN. IEEE Transactions on Mobile Computers 4(6), 616–629 (2005)
5. Liu, J.: Real-Time Systems. Prentice Hall, Englewood Cliffs (2000)6. Adamou, M., Khanna, S., Lee, I., Shin, I., Zhou, S.: Fair real-time traffic scheduling
over a wireless LAN. In: Proc. IEEE Real-Time Systems Symposium, pp. 279–288(2001)
7. Rangnekar, A., Wang, C., Sivalingam, K., Li, B.: Multiple access protocols andscheduling algorithms of multiple channel wireless networks. Handbook of Algo-rithms for Mobile and Wireless Networking and Computing (2004)
8. IEEE 802.11-1999: Part 11-Wireless LAN Medium Access Control (MAC) andPhysical Layer (PHY) Specifications (1999)
9. Caccamo, M., Zhang, L., Sha, L., Buttazzo, G.: An implicit prioritized access pro-tocol for wireless sensor networks. In: Proc. IEEE Real-Time Systems Symposium(2002)
10. Choi, S., Shin, K.: A unified wireless LAN architecture for real-time and non-real-time communication services. IEEE/ACM Trans. on Networking 8, 44–59 (2000)
11. Damodaran, S., Sivalingam, K.: Scheduling algorithms for multiple channel wirelesslocal area networks. Computer Communications (2002)
12. Shah, S.H., Chen, K., Nahrstedt, K.: Dynamic bandwidth management for single-hop ad hoc wireless networks. ACM/Kluwer Mobile Networks and Applications(MONET) Journal 10, 199–217 (2005)
13. Madden, S., Franklin, M., Hellerstein, J., Hong, W.: The design of an acquisitionalquery processor for sensor networks. In: ACM SINGMOD (2003)
14. Lee, J., Kang, M., Park, G., Kim, I., Kim, C., Park, J., Hong, J.: A real-timemessage scheduling scheme based on optimal earliest deadline first policy for dualchannel wireless networks. In: Sha, E., Han, S.-K., Xu, C.-Z., Kim, M.H., Yang,L.T., Xiao, B. (eds.) EUC 2006. LNCS, vol. 4096, pp. 264–273. Springer, Heidelberg(2006)
15. Fall, K., Varadhan, K.: Ns notes and documentation. Technical Report. VINTproject. UC-Berkeley and LBNL (1997)