A new car-following model with consideration of roadside memorial
6
Physics Letters A 375 (2011) 3845–3850 Contents lists available at SciVerse ScienceDirect Physics Letters A www.elsevier.com/locate/pla A new car-following model with consideration of roadside memorial T.Q. Tang a,b,∗ , Y.H. Wu b , L. Caccetta b , H.J. Huang c a School of Transportation Science and Engineering, Beihang University, Beijing 100191, China b Department of Mathematics and Statistics, Curtin University, Perth WA 6845, Australia c School of Economics and Management, Beihang University, Beijing 100191, China article info abstract Article history: Received 30 June 2011 Accepted 3 August 2011 Available online 27 August 2011 Communicated by A.R. Bishop Keywords: Traffic flow Car-following model Roadside memorial In this Letter, a car-following model with consideration of roadside memorial is proposed. The numerical results show that the proposed model can qualitatively describe the impacts of roadside memorial on traffic flow and the traffic risk coefficient. It is also shown that roadside memorial can enhance the traffic safety. © 2011 Elsevier B.V. All rights reserved. 1. Introduction To date, many traffic flow models have been proposed to inves- tigate various complex traffic phenomena [1,2]. The existing traffic flow models can be divided into macroscopic models [3–6] and microscopic models [7–12]. Although the existing models can de- scribe many complex traffic phenomena, they cannot be used to explore the impacts of roadside memorial on traffic flow since this factor is not considered in the models. On the other hand, in many real traffic systems, roadside memorials are used to mark the spots where traffic accident occurs, to warn other people of potential dangers, to connect with the decreased vehicle occupants, and to communicate the fatality that occurs at these locations [13]. These roadside memorials will thus affect the driving behavior. To de- scribe the effect of roadside memorial, many models and methods have been proposed [13–20], but they cannot directly measure the short-term and long-term effects of roadside memorials on traf- fic velocity. Recently, Tay et al. [21] applied the results obtained in Refs. [14,19,20] to investigate the short-term effects of roadside memorial on speed and headway on an intercity freeway as well as its long-term effects on traffic velocity on an urban freeway, and found that the placement of roadside memorial has no significant effects on traffic velocity or headway, either in short-term or long- term. The studies [13–21] show that roadside memorial has great effects on traffic flow, but they cannot describe the effects of road- * Corresponding author at: School of Transportation Science and Engineering, Beihang University, Beijing 100191, China. Tel.: +86 10 82339327; fax: +86 10 82316009. E-mail address: [email protected] (T.Q. Tang). side memorial on the car-following behavior. In this Letter, we develop a new car-following model with roadside memorial and use numerical simulation to test whether the proposed model can describe the effects of roadside memorial on the car-following be- havior. 2. A car-following model with consideration of roadside memorial Many car-following models have been used to explore traffic flow. Most of the models can be described by the generalized equation: dv n dt = f ( v n ,x n ,v n ,...), (1) where v n ,x n ,v n are respectively the nth vehicle’s velocity, headway and relative velocity, f ( v n ,x n ,v n ,...) is the stimulus function determined by the nth vehicle’s velocity, headway, rela- tive velocity and other factors. Eq. (1) can be divided into the OV (optimal velocity) version [7,9], the FVD (full velocity difference) version [10,11] and the FVAD (full velocity and acceleration difference) version [11]. The OV version can be expressed by dv n dt = κ ( V (x n ,x n+1 ,...,x n+m−1 ) − v n ) , (2) where κ is the reaction coefficient, V (x n ,x n+1 ,...,x n+m−1 ) is the optimal velocity. The FVD version can be formulated as follows: dv n dt = κ ( V (x n ) − v n ) + m i =1 λ i v n+i −1 , (3) 0375-9601/$ – see front matter © 2011 Elsevier B.V. All rights reserved. doi:10.1016/j.physleta.2011.08.006
Transcript of A new car-following model with consideration of roadside memorial
Physics Letters A 375 (2011) 3845–3850
Contents lists available at SciVerse ScienceDirect
Physics Letters A
www.elsevier.com/locate/pla
A new car-following model with consideration of roadside memorial
T.Q. Tang a,b,∗, Y.H. Wu b, L. Caccetta b, H.J. Huang c
a School of Transportation Science and Engineering, Beihang University, Beijing 100191, Chinab Department of Mathematics and Statistics, Curtin University, Perth WA 6845, Australiac School of Economics and Management, Beihang University, Beijing 100191, China
a r t i c l e i n f o a b s t r a c t
Article history:Received 30 June 2011Accepted 3 August 2011Available online 27 August 2011Communicated by A.R. Bishop
Keywords:Traffic flowCar-following modelRoadside memorial
In this Letter, a car-following model with consideration of roadside memorial is proposed. The numericalresults show that the proposed model can qualitatively describe the impacts of roadside memorial ontraffic flow and the traffic risk coefficient. It is also shown that roadside memorial can enhance the trafficsafety.
© 2011 Elsevier B.V. All rights reserved.
1. Introduction
To date, many traffic flow models have been proposed to inves-tigate various complex traffic phenomena [1,2]. The existing trafficflow models can be divided into macroscopic models [3–6] andmicroscopic models [7–12]. Although the existing models can de-scribe many complex traffic phenomena, they cannot be used toexplore the impacts of roadside memorial on traffic flow since thisfactor is not considered in the models. On the other hand, in manyreal traffic systems, roadside memorials are used to mark the spotswhere traffic accident occurs, to warn other people of potentialdangers, to connect with the decreased vehicle occupants, and tocommunicate the fatality that occurs at these locations [13]. Theseroadside memorials will thus affect the driving behavior. To de-scribe the effect of roadside memorial, many models and methodshave been proposed [13–20], but they cannot directly measure theshort-term and long-term effects of roadside memorials on traf-fic velocity. Recently, Tay et al. [21] applied the results obtainedin Refs. [14,19,20] to investigate the short-term effects of roadsidememorial on speed and headway on an intercity freeway as wellas its long-term effects on traffic velocity on an urban freeway, andfound that the placement of roadside memorial has no significanteffects on traffic velocity or headway, either in short-term or long-term.
The studies [13–21] show that roadside memorial has greateffects on traffic flow, but they cannot describe the effects of road-
* Corresponding author at: School of Transportation Science and Engineering,Beihang University, Beijing 100191, China. Tel.: +86 10 82339327; fax: +86 1082316009.
E-mail address: [email protected] (T.Q. Tang).
0375-9601/$ – see front matter © 2011 Elsevier B.V. All rights reserved.doi:10.1016/j.physleta.2011.08.006
side memorial on the car-following behavior. In this Letter, wedevelop a new car-following model with roadside memorial anduse numerical simulation to test whether the proposed model candescribe the effects of roadside memorial on the car-following be-havior.
2. A car-following model with consideration of roadsidememorial
Many car-following models have been used to explore trafficflow. Most of the models can be described by the generalizedequation:
dvn
dt= f (vn,�xn,�vn, . . .), (1)
where vn,�xn,�vn are respectively the nth vehicle’s velocity,headway and relative velocity, f (vn,�xn,�vn, . . .) is the stimulusfunction determined by the nth vehicle’s velocity, headway, rela-tive velocity and other factors.
Eq. (1) can be divided into the OV (optimal velocity) version[7,9], the FVD (full velocity difference) version [10,11] and theFVAD (full velocity and acceleration difference) version [11]. TheOV version can be expressed by
dvn
dt= κ
(V (�xn,�xn+1, . . . ,�xn+m−1) − vn
), (2)
where κ is the reaction coefficient, V (�xn,�xn+1, . . . ,�xn+m−1) isthe optimal velocity. The FVD version can be formulated as follows:
dvn
dt= κ
(V (�xn) − vn
) +m∑
λi�vn+i−1, (3)
i=1
3846 T.Q. Tang et al. / Physics Letters A 375 (2011) 3845–3850
Fig. 1. The scheme of car-following model with a roadside memorial.
where λi is the reaction coefficient of the relative velocity �vn+i−1.The FVAD version can be expressed as follows:
dvn
dt= κ
(V (�xn,�xn+1, . . . ,�xn+m−1) − vn
)
+q∑
j=1
λ j�vn+ j−1 +p∑
i=1
μi�an+i−1, (4)
where μi is the reaction coefficient of the acceleration difference�an+i−1.
Eqs. (2)–(4) can reproduce many complex traffic phenomenaand thee analytical and numerical results indicate that consider-ing multi headways, relative velocities and acceleration differencescan improve the stability of traffic flow, but they cannot be appliedto directly explore the effects of roadside memorial on the drivingbehavior because they do not explicitly consider this factor. On theother hand, there exist roadside memorials on many freeways (seeFig. 1) and the roadside memorials often affect traffic flow [20,21],so this factor should be considered when we describe the drivingbehavior on the road with roadside memorial.
A roadside memorial will affect the nth vehicle’s driving behav-ior when it is between the nth and (n + 1)th vehicles. When thenth vehicle’s driver sees the roadside memorial, he/she will adjusthis/her vehicle’s acceleration based on the distance �x′
n , but if �x′n
is very short, the nth vehicle will run at a relative low velocity un-til it passes by the roadside memorial (see Fig. 1). Thus, we candevelop a new car-following model with roadside memorial, i.e.⎧⎪⎪⎪⎪⎪⎪⎪⎪⎨⎪⎪⎪⎪⎪⎪⎪⎪⎩
if xn+1 � x0 or xn � x0,dvn
dt= κ
[V (�xn) − vn
] + λ�vn,
otherwise,⎧⎪⎨⎪⎩
dvn
dt= κ
[V
(�x′
n
) − vn], if �x′
n � xc0 ,
dvn
dt= 0 and vn = V (xc0), otherwise,
(5)
where x0 is the roadside memorial’s position, �x′n = x0 − xn is the
distance between the nth vehicle and the roadside memorial, V (·)is the optimal velocity, and xc0 is a critical value. In addition, weset the nth vehicle’s effective headway as follows:⎧⎨⎩
if xn+1 � x0 or xn � x0, �x̄n = �xn,
otherwise, �x̄n ={
�x′n, if �x′
n � xc0 ,
xc0 , if �x′n < xc0 .
(6)
We should here note that during the period when the nth vehi-cle passes by the roadside memorial, although the distance �x′
nis shorter than xc0 , the vehicle’s velocity is always kept at V (xc0 ),and so we assume that the effective headway is xc0 . In addition,we set κ as constant and define λ as follows [10]:
λ ={
a, �x̄n � sc,
b, �x̄n > sc,(7)
where a,b, sc are constants. The nth vehicle’s optimal velocity isdefined as follows [8]:
V (�x̄n) = V 1 + V 2 tanh(C1(�x̄n − lc) − C2
), (8)
where lc is the vehicle length, V 1, V 2, C1, C2 are constants.Eq. (5) has explicitly considered the effect of roadside memo-
rial, so it can better describe traffic flow on the road with roadsidememorial than other car-following models.
3. Simulation
In this section, we use numerical simulation to test whetherEq. (5) can describe the effects of roadside memorial on the car-following behavior. The parameters in our model are as follows:
κ = 0.41 s−1, a = 0.5, b = 0, sc = 150 m, xc0 = 5 m,
V 1 = 6.75 m/s, V 2 = 7.91 m/s, C1 = 0.13 m−1,
C2 = 1.57, lc = 5 m. (9)
To compare with the model [10], the initial conditions are hereset as follows: 11 vehicles are distributed on the road with a road-side memorial and traffic light; the distance between the leadingvehicle and traffic light is 7.4 m; the distance between the road-side memorial and leading vehicle is hc ; the 11th vehicle is at theorigin; all vehicles’ headways are 7.4 m; all vehicles are still whent < 0; when t = 0, the traffic light turns green, the leading vehi-cle immediately starts, other vehicles will gradually start and allvehicles will finally pass by the roadside memorial. Fig. 2 is theevolutions of the 11 vehicles’ velocities from the starting time tothe time when they pass by the roadside memorial. From this fig-ure, we find that the roadside memorial has very significant effectson each vehicle’s motion. The results are detailed as follows:
1) Each vehicle’s velocity is divided into four prominent steps.In the first step, each vehicle’s velocity first increases, but the vehi-cle’s starting speed and transient speed are less than those of themodel [10] since the roadside memorial reduces the leading ve-hicle’s acceleration and velocity. In the second step, each vehicle’svelocity sharply decreases since the roadside memorial causes eachvehicle to slow down quickly. In the third step, each vehicle passesby the roadside memorial at relatively low velocity. In the fourthstep, each vehicle quickly accelerates to the maximum velocity andthen runs forward at the maximum velocity.
2) The second step is similar to the braking process when thereis an obstacle [22], but the 11 vehicles do not stop completely andwill pass by the roadside memorial at relatively low velocity; thelast step is similar to the starting process of the model [10] but the11 vehicles’ initial velocities are not zero. These results show thatthe roadside memorial can be regarded as an obstacle that doesnot cause the vehicles to completely stop.
3) In the first step, the effect of the roadside memorial oneach vehicle’s velocity turns weaker when the distance betweenthe leading vehicle and roadside memorial increases (i.e. the dif-ference between our model’s results and those of the model [10]decreases with the increase of the distance). On the other threesteps, the distance has little effects.
Using Fig. 2, we obtain the evolutions of each vehicle’s accel-eration and motion trail (see Figs. 3 and 4). From Fig. 3, we seethat each vehicle’s acceleration can be divided into four prominentsteps. In the first step, each vehicle’s acceleration is similar to theone obtained in the model [10], which shows that this step can belooked on as the starting process. Each vehicle’s acceleration thendecreases to zero in the second step and then holds at zero in thethird step. In the last step, each vehicle’s acceleration first quicklyincreases then immediately decreases to zero. In addition, it can benoted that the distance between the leading vehicle and the road-side memorial has great effects on the first step but little effectson the other three steps.

T.Q. Tang et al. / Physics Letters A 375 (2011) 3845–3850 3847
Fig. 2. The evolution of each vehicle’s velocity from the time when the traffic light turns green to the time when the vehicles pass by the roadside memorial, where (a) isthe results obtained by the model [13], (b)–(d) are the results of the proposed model with the distances between the leading vehicle and the roadside memorial respectively50 m, 100 m and 150 m.
Fig. 3. The evolution of each vehicle’s acceleration from the time when the traffic light turns green to the time when the vehicles pass by the roadside memorial, where (a) isthe results obtained by the model [13], (b)–(d) are the results of the proposed model with the distances between the leading vehicle and the roadside memorial respectively50 m, 100 m and 150 m.
3848 T.Q. Tang et al. / Physics Letters A 375 (2011) 3845–3850
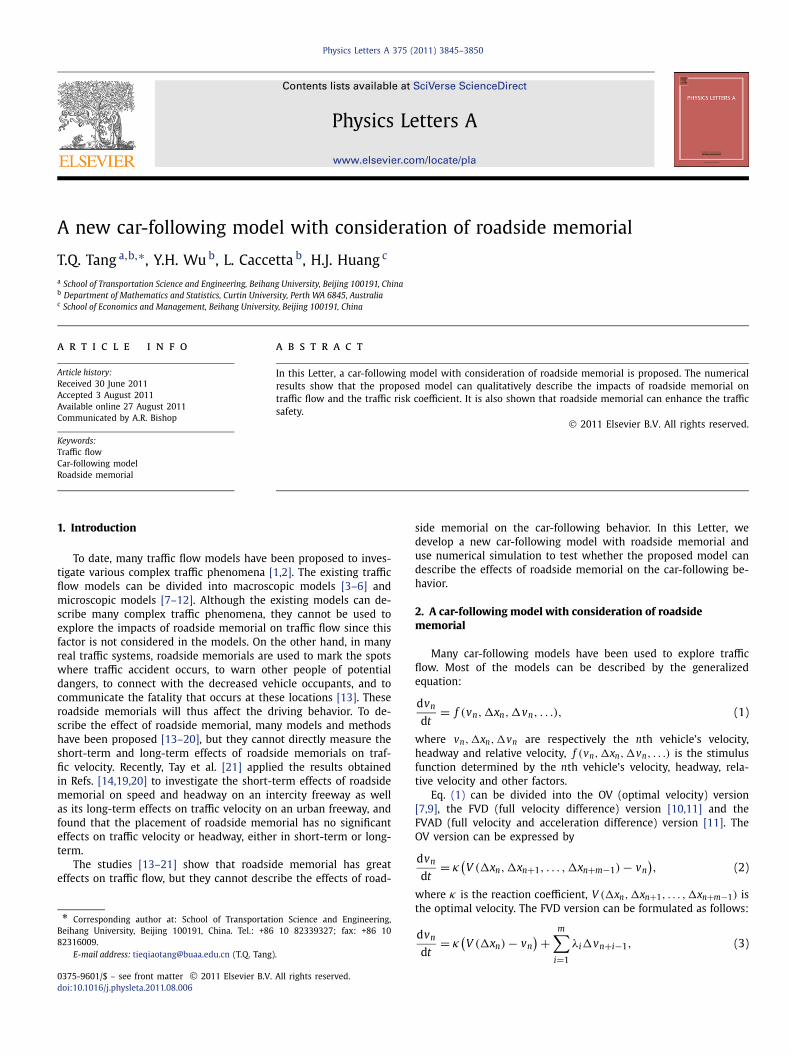
Fig. 4. Each vehicle’s motion trail from the time when the traffic light turns green to the time when the vehicles pass by the roadside memorial, where (a) is the resultsobtained by the model [13], (b)–(d) are the results of the proposed model with the distances between the leading vehicle and the roadside memorial respectively 50 m,100 m and 150 m.
From Fig. 4, we can conclude the following findings:
(i) Using the model [10] to study the vehicles’ motion trail, eachvehicle will slowly accelerate during the whole starting pro-cess and then run forward at the maximum velocity (seeFig. 4(a)).
(ii) The roadside memorial causes each vehicle to slow down af-ter it starts, so one prominent shock appears at the upstreamof the roadside memorial; but once each vehicle passes by theroadside memorial, it will quickly accelerate to the maximumvelocity and then run forward at the maximum velocity. In ad-dition, the distance between the leading vehicle and roadsidememorial has little effect on each vehicle’s motion trail (seeFigs. 4(b)–4(d)).
Next, we use the periodic boundary condition to explore theeffects of the roadside memorial on the evolution of a small per-turbation. The initial conditions are as follows:
x1(0) = 1 m, xn(0) = (n − 1)L
N, if n �= 1;
v1(0) = V
(L
N− 1
), v N(0) = V
(L
N+ 1
),
vn(0) = V
(L
N
), if n �= 1,7, N, (10)
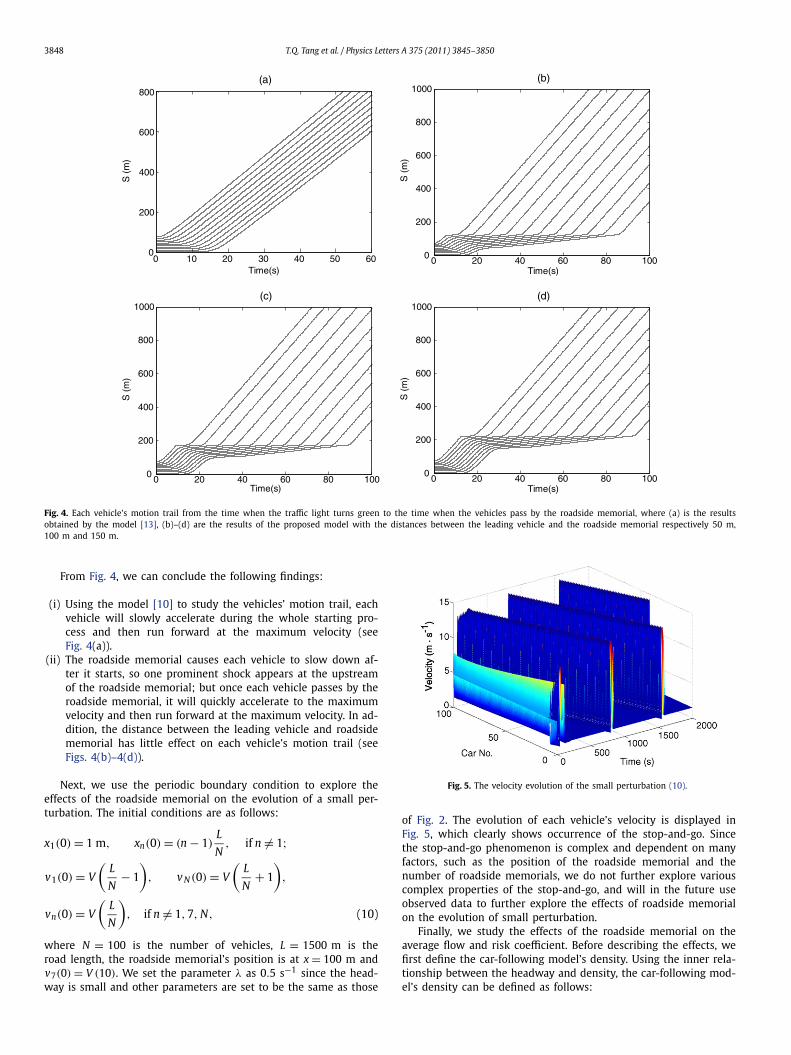
where N = 100 is the number of vehicles, L = 1500 m is theroad length, the roadside memorial’s position is at x = 100 m andv7(0) = V (10). We set the parameter λ as 0.5 s−1 since the head-way is small and other parameters are set to be the same as those
Fig. 5. The velocity evolution of the small perturbation (10).
of Fig. 2. The evolution of each vehicle’s velocity is displayed inFig. 5, which clearly shows occurrence of the stop-and-go. Sincethe stop-and-go phenomenon is complex and dependent on manyfactors, such as the position of the roadside memorial and thenumber of roadside memorials, we do not further explore variouscomplex properties of the stop-and-go, and will in the future useobserved data to further explore the effects of roadside memorialon the evolution of small perturbation.
Finally, we study the effects of the roadside memorial on theaverage flow and risk coefficient. Before describing the effects, wefirst define the car-following model’s density. Using the inner rela-tionship between the headway and density, the car-following mod-el’s density can be defined as follows:

T.Q. Tang et al. / Physics Letters A 375 (2011) 3845–3850 3849
Fig. 6. The average flow and traffic risk coefficient near the roadside memorial, where (a) is the average flow and (b) is the traffic risk coefficient.
ρn = 1/�x̄n, (11)
where ρn is the density near the nth vehicle. Thus the optimalvelocity in Eq. (8) becomes the equilibrium velocity. For simplicity,we here define it as follows [23]:
ve(ρn) = v f
(1/(
1 + exp
{ρn/ρ j − 0.25
0.06
})− 3.72 × 10−6
),
(12)
where v f = 30 m/s is the free flow velocity, ρ j = 1/lc = 0.2 veh/mis the jam density. For simplicity, we here use uniform flow to ex-plore the effects of the roadside memorial on the average flow andrisk, and so the initial conditions can be set as follows:
xn(0) = (n − 1)L/n, vn(0) = V (L/n), (13)
where N = 100 is the total vehicles, L is the length of the road. Wehere assume that other parameters are the same as that of Fig. 5.
If we do not consider the effect of roadside memorial, the pro-posed model is the FVD model and the flow can be written asfollows:
q = 3600ρve(ρ), (14)
where q is the flow. The risk coefficient is here defined as fol-lows [24]:
R(ρ) = σqθ−1 = σ(ρve(ρ)
)θ−1, (15)
where σ , θ are two parameters respectively having values σ =0.01, θ = 1.5.
The roadside memorial will destroy uniform flow, so we onlystudy the effects of the roadside memorial on its average flow. Be-fore describing the effects, we first define the average velocity, i.e.
v̄ = 1
N
1
T
N∑n=1
T∑i=1
vn(i), (16)
where vn(i) is the nth vehicle’s velocity at the ith step and T isthe total time steps. We here use the boundary condition, so theaverage density is just equal to the initial density ρ0. Thus, theaverage flow can be defined as follows:
q̄ = 3600ρ0 v̄. (17)
Using the above conditions, we can obtain the average flow andrisk coefficient (see Fig. 6). From Fig. 6, we have the following find-ings:
The roadside memorial has great effects on the average flowand risk coefficient when the initial density is moderate but little
effects on the average flow and risk coefficient when the initialdensity is very low or high. The reductions of the average flowand risk coefficient first increase then decrease when the initialdensity increases, which illustrates that the roadside memorial canimprove the traffic safety.
4. Conclusions
Many traffic flow models cannot describe the effects of theroadside memorial on traffic flow though they can reproduce manycomplex traffic phenomena. On the other hand, roadside memori-als exist on many roads. To explore the roadside memorials, manymodels and methods have been proposed and many important re-sults have been obtained. However, the effects of roadside memo-rial on the car-following behavior have not been studied before. Inthis Letter, we develop a car-following model with considerationof roadside memorial to study the effects of roadside memorial onvehicle’s starting process, evolution of small perturbation, and theaverage flow and risk coefficient. The numerical results illustratethat our model can qualitatively reproduce some complex phe-nomena resulted by the roadside memorials and that the roadsidememorials can improve the traffic safety.
Acknowledgements
This study has been supported by the Program for New CenturyExcellent Talents in University, China (NCET-08-0038), the NationalNatural Science Foundation of China (70971007 and 70821061)and the WA Centre of Excellence in Industrial Optimization.
References
[1] D. Chowdhury, L. Santen, A. Schadschneider, Phys. Rep. 329 (2000) 199.[2] D. Helbing, Rev. Mod. Phys. 73 (2001) 1067.[3] M.J. Lighthill, G.B. Whitham, Proc. R. Soc. London Ser. A 229 (1955) 317.[4] P.I. Richards, Oper. Res. 4 (1956) 42.[5] H.J. Payne, in: G.A. Bekey (Ed.), Mathematical Models of Public System, in: Sim-
ulation Councils Proceedings Series, vol. 1, 1971, pp. 51–61.[6] R. Jiang, Q.S. Wu, Z.J. Zhu, Transp. Res. B 36 (2002) 405.[7] M. Bando, K. Hasebe, A. Nakayama, A. Shibata, Y. Sugiyama, Phys. Rev. E 51
(1995) 1035.[8] D. Helbing, B. Tilch, Phys. Rev. E 58 (1998) 133.[9] T. Nagatani, Phys. Rev. E 60 (1999) 6395.
[10] R. Jiang, Q.S. Wu, Z.J. Zhu, Phys. Rev. E 64 (2001) 017101.[11] X.M. Zhao, Z.Y. Gao, Eur. Phys. J. B 47 (2005) 145.[12] G.H. Peng, D.H. Sun, Phys. Lett. A 374 (2010) 1694.[13] J. Clark, A. Cheshire, Omega 48 (2003) 203.[14] K. Hartig, K. Dunn, Austral. Geographic Stud. 36 (1998) 5.[15] H. Everett, Folklore 111 (2000) 91.[16] J. Reid, C. Reid, Death Ser. 25 (2001) 341.

3850 T.Q. Tang et al. / Physics Letters A 375 (2011) 3845–3850
[17] C. Collins, C. Rhine, Omega 47 (2003) 221.[18] J. Clark, M. Franzman, Death Stud. 30 (2006) 579.[19] A. Churchill, R. Tay, Canad. J. Transp. 2 (2008) 1.[20] R. Tay, Accident Anal. Prev. 41 (2009) 663.
[21] R. Tay, A. Churchill, A.G. De Barros, Accident Anal. Prev. 43 (2011) 483.[22] C.Y. Li, T.Q. Tang, H.J. Huang, H.Y. Shang, Chin. Phys. Lett. 28 (2011) 038902.[23] B.S. Kerner, P. Konhäuser, Phys. Rev. E 48 (1993) R2335.[24] S.S.C. Steimetz, Transp. Res. B 42 (2008) 703.