A LIFECYCLE THINKING APPROACH - UBC Open Collections
207
RECHARGING INFRASTRUCTURE PLANNING FOR ELECTRIC VEHICLES: A LIFECYCLE THINKING APPROACH by Kaluthantirige Piyaruwan Harindra Perera M.B.A., Postgraduate Institute of Management, University of Sri Jayewardenepura, 2015 M.Sc. Eng., University of Moratuwa, 2011 B.Sc. Eng. (Hons), University of Moratuwa, 2009 A THESIS SUBMITTED IN PARTIAL FULFILLMENT OF THE REQUIREMENTS FOR THE DEGREE OF DOCTOR OF PHILOSOPHY in THE COLLEGE OF GRADUATE STUDIES (Civil Engineering) THE UNIVERSITY OF BRITISH COLUMBIA (Okanagan) June 2020 © Piyaruwan Kaluthantirige, 2020
-
Upload
khangminh22 -
Category
Documents
-
view
7 -
download
0
Transcript of A LIFECYCLE THINKING APPROACH - UBC Open Collections

RECHARGING INFRASTRUCTURE PLANNING FOR ELECTRIC VEHICLES: A
LIFECYCLE THINKING APPROACH
by
Kaluthantirige Piyaruwan Harindra Perera
M.B.A., Postgraduate Institute of Management, University of Sri Jayewardenepura, 2015
M.Sc. Eng., University of Moratuwa, 2011
B.Sc. Eng. (Hons), University of Moratuwa, 2009
A THESIS SUBMITTED IN PARTIAL FULFILLMENT OF
THE REQUIREMENTS FOR THE DEGREE OF
DOCTOR OF PHILOSOPHY
in
THE COLLEGE OF GRADUATE STUDIES
(Civil Engineering)
THE UNIVERSITY OF BRITISH COLUMBIA
(Okanagan)
June 2020
© Piyaruwan Kaluthantirige, 2020

ii
The following individuals certify that they have read, and recommend to the College of Graduate
Studies for acceptance, the dissertation entitled:
Recharging Infrastructure Planning for Electric Vehicles: A Lifecycle Thinking Approach
submitted by Kaluthantirige Piyaruwan Harindra Perera
in partial fulfillment of the requirements for
the degree of Doctor of Philosophy
Examining Committee:
Dr. Kasun N. Hewage, School of Engineering
Supervisor
Dr. Rehan Sadiq, School of Engineering
Co-supervisor
Dr. Shahria M. Alam, School of Engineering
Supervisory Committee Member
Dr. Abbas Milani, School of Engineering
Supervisory Committee Member
Dr. Nathan Pelletier, Faculty of Management
University Examiner
Dr. Mohamed H. Issa, University of Manitoba
External Examiner

iii
Abstract
Decarbonizing the road transportation sector has gained immense attention with the greenhouse
gas targets stipulated by the Canadian government in 2007. Transport electrification using low-
emission electricity has been identified as one of the key methods for achieving climate action
targets and reducing the extensive fossil fuel demands. Substituting conventional light-duty
vehicles with electric vehicles (EVs) is considered more scalable in the Canadian context.
However, the limited vehicle ranges, limited recharging infrastructure availability, and extensive
switching costs are key challenges that limit the widespread adoption of EVs. Conventional EV
recharging infrastructure planning and investment strategies are based on ad-hoc decisions. Those
practices have overlooked lifecycle impacts and costs of electric transport systems, including
multi-period recharging demands and investment paybacks, strategies for sustainable
infrastructure deployment, and acquiring anticipated recharging demands. The primary goal of this
study is to develop a planning and management framework for EV recharging infrastructure. A
lifecycle thinking approach was used to identify the best desirable low-emission fuel technology
and strategies to deploy recharging infrastructure for Canadian provinces. In most provinces, EVs
showed higher cradle-to-gate emissions and lower cradle-to-grave emissions compared to
conventional vehicles. Moreover, the EV cost of ownership is considered as one of the key barriers
that limit the widespread adoption of EVs. Hence, an incentive planning framework was developed
to identify the most appropriate incentive-scheme for Canadian regions to strategically sustain the
anticipated recharging demands. Accordingly, vehicle purchasing rebates, sales tax waivers,
government subsidize recharging, and carbon-tax policies were found as viable incentives and tax
options. A project delivery method selection framework was developed to encourage investors by
incorporating partnering and collaborative approaches to deploy infrastructure for multiple
periods. Public-private-partnerships for early adoption and integrated project management for
business-as-usual was identified as the most desirable project delivery methods for recharging
infrastructure deployment process. Municipalities and government institutions can use developed
frameworks to identify locations for recharging facilities, evaluate different incentive options, and
compare the overall impacts of transport electrification at the planning stages. Moreover, the
outcome of this research advocates communities reducing their transport-based carbon footprint
and growing the low-emission travel culture for a sustainable future.

iv
Lay Summary
Electric vehicle (EV) demands are limited in Canada due to the lack of recharging infrastructure
availability, premium costs, range limitations of EVs, and low investment potential due to
uncertain demands. Recharging infrastructure can be placed strategically to promote EVs while
improving infrastructure pay-backs and sustaining anticipated demands throughout the
infrastructure life span. This study presents a comprehensive approach in planning and managing
EV recharging infrastructure for urban centers. The tools proposed in this study integrate the life
cycle thinking approach with low-emission fuel selection, incentive planning, and recharging
infrastructure development for multi-period EV demands. Outcomes of this research will assist
urban planners, municipalities, and investors in locating potential recharging facilities and
developing infrastructure capacity improvement plans to propose incentives and tax policies for
low-emission fuel-based vehicles. Researchers can extend the proposed methodology to plan for
similar infrastructure needs in the future.

v
Preface
I, Piyaruwan Perera, intellectualized and developed the entire thesis under the supervision of Dr.
Kasun Hewage and Dr. Rehan Sadiq. Five journal articles, two conference proceedings, and one
poster presentation, which are currently published, accepted, or under review, have been prepared
directly or indirectly from the research presented in this thesis. The first journal paper was focused
on the selection of alternative low-emission fuels to decarbonize the existing transportation in
Canada, which also comprised a section of the literature review. The incentive planning for
household interventions for domestic and transport activities, and prioritizing those activities to be
incentivized, were determined in the second article. Dr. Sharia Alam, who acts as a committee
member, assisted for the second paper by providing his recommendations and suggestions for
improvements. A cluster-based electric vehicle recharging infrastructure capacity planning and
location-allocation approach was introduced in the third journal article. In addition to that, the
fourth journal article, which is on the selection and ranking of project delivery methods for small-
scale distributed infrastructure, is in preparation. This article will support sustainable infrastructure
planning, construction, operations, and management in the long-term electric vehicle recharging
infrastructure deployment process. The final journal paper and conference articles are indirectly
related to this thesis. The references for the completed and in-progress papers are provided below.
Journal Articles (Published):
1. Perera, P., Hewage, K., Sadiq, R., (2017) Are we ready for alternative fuel transportation
systems in Canada: A Regional Vignette, Journal of Cleaner Production, doi:
10.1016/j.jclepro.2017.08.078.
2. Perera, P., Hewage, K., Alam, M. S., Merida, W., Sadiq, R. (2018) Scenario-based Economic
and Environmental Analysis of Clean Energy Incentives for Households in Canada: Multi-
Criteria Decision Making Approach, Journal of Cleaner Production, doi:
10.1016/j.jclepro.2018.07.014.

vi
3. Perera, P., Hewage, K., Sadiq, R., (2020) Electric Vehicle Recharging Infrastructure Planning
and Management in Urban Communities: Journal of Cleaner Production, doi:
10.1016/j.jclepro.2019.119559.
Journal Articles (Under Preparation)
4. Perera, P., Hewage, K., Sadiq, R., Project Delivery Method Selection for Electric Vehicle
Refuelling Infrastructure Deployment: A Fuzzy MADM based Approach: Expected to submit
Journal of Cleaner Production in June 2020.
5. Perera, P., Amin., S., Amaiya, K., Hewage, K., Sadiq, R., Mobile Energy Hub Panning for
Complex Urban Networks: A Robust Optimization Approach: Expected to submit Journal of
Cleaner Production in June 2020
Conference Proceedings
6. Perera, P., Rana, A., Hewage, K., Alam, M. S., Sadiq, R. (2019) Solar Photovoltaic Electricity
for Single-Family-Detached-Households: Lifecycle Thinking-based Assessment, 8th
CSCECRC International Construction Specialty Conference, Montreal, Canada.
Poster Presentations:
7. Perera, P., Hewage, K., Sadiq, R., (2018) Lifecycle Thinking Approach for Recharging
Infrastructure Planning of Electric Vehicles, The 4th Annual Engineering Graduate
Symposium, Kelowna, Canada.

vii
Table of Contents
ABSTRACT .............................................................................................................................................................. III
LAY SUMMARY ..................................................................................................................................................... IV
PREFACE ................................................................................................................................................................... V
TABLE OF CONTENTS ........................................................................................................................................ VII
LIST OF TABLES ...................................................................................................................................................... X
LIST OF FIGURES .................................................................................................................................................. XI
LIST OF ABBREVIATIONS ................................................................................................................................. XII
ACKNOWLEDGMENTS ..................................................................................................................................... XIV
DEDICATION ....................................................................................................................................................... XVI
CHAPTER 1 INTRODUCTION ............................................................................................................................... 1
1.1 THE CHALLENGE .............................................................................................................................................. 1
1.2 RESEARCH GAP ................................................................................................................................................ 3
1.3 RESEARCH MOTIVATION .................................................................................................................................. 6
1.4 RESEARCH OBJECTIVES ................................................................................................................................... 7
1.5 THESIS ORGANIZATION .................................................................................................................................... 7
CHAPTER 2 RESEARCH METHODOLOGY ..................................................................................................... 11
CHAPTER 3 LITERATURE REVIEW ................................................................................................................. 15
3.1 TRANSPORTATION AND ENERGY USE ............................................................................................................. 15
3.2 ROAD TRANSPORTATION DECARBONIZING .................................................................................................... 17
3.3 TRANSPORTATION ELECTRIFICATION ............................................................................................................. 22
3.4 RECHARGING INFRASTRUCTURE FOR ELECTRIC VEHICLES ............................................................................ 23
3.4.1 Incentives and Policies to Encourage EVs and EV-RI Investments ..................................................... 24
3.4.2 Consumer Recharging Behaviours ...................................................................................................... 26
3.4.3 Consumer Concerns about Energy Depletion and GHG Emissions .................................................... 26
3.4.4 Consumer Cost Perception .................................................................................................................. 27
3.4.5 Range Preference of Vehicle Consumers ............................................................................................. 28
3.5 PLANNING ELECTRIC VEHICLE RECHARGING INFRASTRUCTURE ................................................................... 28
3.5.1 EV Demand Modeling and Sustaining Approaches ............................................................................. 29
3.5.2 Facility Location Selection .................................................................................................................. 31
3.5.3 EV-RI Construction, Maintenance and Disposal Process ................................................................... 33
3.5.4 Project Delivery Methods .................................................................................................................... 34
3.6 ENVIRONMENTAL AND ECONOMIC ASSESSMENTS ......................................................................................... 36
3.6.1 Life Cycle Assessment (LCA) ............................................................................................................... 36
3.6.2 Life Cycle Cost (LCC).......................................................................................................................... 39

viii
3.6.3 Eco-efficiency Assessment ................................................................................................................... 40
3.7 MULTI-CRITERIA DECISION MAKING ............................................................................................................. 40
3.8 DECISION-MAKING UNDER UNCERTAINTY ..................................................................................................... 41
3.8.1 Scenario-based Assessment ................................................................................................................. 41
3.8.2 Fuzzy Logic and Fuzzy Sets ................................................................................................................. 42
3.8.3 Fuzzy Multi-Attribute Decision Making ............................................................................................... 44
CHAPTER 4 SELECTION OF DESIRABLE ALTERNATIVE FUEL TRANSPORTATION SYSTEMS .... 45
4.1 BACKGROUND ................................................................................................................................................ 45
4.2 METHODOLOGY TO SELECT DESIRABLE TRANSPORT FUEL OPTIONS ............................................................. 46
4.3 RESULTS AND DISCUSSION ............................................................................................................................. 59
4.3.1 Life Cycle Inventory for Different Fuel Options and Different Mixes of the Source Energy ............... 59
4.3.2 Compare Vehicle Options using Cradle-to-Gate Emissions ................................................................ 63
4.3.3 Compare Vehicles using Cradle-to-Grave Emissions .......................................................................... 65
4.3.4 Life Cycle Costs of Different Fuel Options .......................................................................................... 68
4.3.5 Eco-efficiency-based Alternative Fuel Option Selection ..................................................................... 69
4.4 SUMMARY ...................................................................................................................................................... 70
CHAPTER 5 ELECTRIC VEHICLE RECHARGING INFRASTRUCTURE PLANNING AND
MANAGEMENT FOR URBAN CENTERS ........................................................................................................... 72
5.1 BACKGROUND ................................................................................................................................................ 72
5.2 METHODOLOGY FOR EV-RI CAPACITY PLANNING AND LOCATION-ALLOCATION FRAMEWORK ................... 73
5.3 CASE STUDY-BASED MODEL DEMONSTRATION ............................................................................................. 85
5.3.1 Data Migration and Development of the Optimization Model ............................................................ 86
5.3.2 ArcGIS-based Distance Matrix ............................................................................................................ 87
5.3.3 Optimal Capacity Planning and Location Allocation Model for EV-RIs ............................................ 89
5.3.4 Case Study: Results and Discussion .................................................................................................... 90
5.3.5 Case Study: Model Validation ............................................................................................................. 93
5.4 SUMMARY ...................................................................................................................................................... 98
CHAPTER 6 STRATEGIC INCENTIVE AND TAX PLANNING APPROACH FOR SUSTAINED
RECHARGING INFRASTRUCTURE ................................................................................................................. 100
6.1 BACKGROUND .............................................................................................................................................. 100
6.2 METHODOLOGY FOR HOUSEHOLD INCENTIVE AND TAX PLANNING TOOL ................................................... 102
6.3 HIPT DEMONSTRATION USING A CASE STUDY ............................................................................................ 112
6.3.1 Household Data Collection for the Demonstration ........................................................................... 112
6.3.2 Incentive and Tax Policies for Electric Vehicles in Canada .............................................................. 113
6.3.3 Local Building Upgrades and Retrofit Options ................................................................................. 114
6.4 RESULTS AND DISCUSSION ........................................................................................................................... 117

ix
6.4.1 Regional Retrofit or Upgrade Selection for Single Detached Houses ............................................... 117
6.4.2 Best Incentive and Tax Policies for Electric Vehicles........................................................................ 119
6.4.3 Decision Making for Government Incentive Investment .................................................................... 120
6.4.4 Consumer-centric Decision-making .................................................................................................. 121
6.5 SUMMARY .................................................................................................................................................... 124
CHAPTER 7 PROJECT DELIVERY METHOD SELECTION FOR ELECTRIC VEHICLE REFUELLING
INFRASTRUCTURE DEPLOYMENT ................................................................................................................ 126
7.1 BACKGROUND .............................................................................................................................................. 126
7.2 METHODOLOGY FOR PDM SELECTION FRAMEWORK................................................................................... 127
7.3 PDM SELECTION MODEL DEMONSTRATION ................................................................................................ 136
7.3.1 EV-RI Deployment Stages for Multiple Periods ................................................................................ 136
7.3.2 Stakeholder Data Collection for the Case Demonstration................................................................. 138
7.3.3 PDM Decision Matrix for Ranking .................................................................................................... 141
7.3.4 Multi-period and Multi-stakeholder-based Attribute Weights ........................................................... 141
7.3.5 Ranking Alternative PDMs and PDM Selection ................................................................................ 142
7.4 SUMMARY ............................................................................................................................................... 145
CHAPTER 8 CONCLUSIONS AND RECOMMENDATIONS ......................................................................... 147
8.1 SUMMARY AND CONCLUSIONS ..................................................................................................................... 147
8.2 ORIGINALITY AND CONTRIBUTIONS ............................................................................................................. 151
8.3 LIMITATIONS OF THE STUDY ........................................................................................................................ 152
8.4 FUTURE RESEARCH ...................................................................................................................................... 153
REFERENCES ........................................................................................................................................................ 155
APPENDICES .......................................................................................................................................................... 171

x
List of Tables
Table 3-1 Available Alternative Fuel Options for Transportation ............................................................................... 17
Table 3-2 Comparison of Electric and Hydrogen based transportation with conventional Gasoline transportation ... 19
Table 3-3 Potential Incentive for Electric Vehicles ..................................................................................................... 25
Table 3-4 Maturity Stages of the EV Market and Consumer Behaviours [50] ............................................................ 30
Table 3-5 Existing Solutions for Optimal Infrastructure Location-Allocation ............................................................ 32
Table 3-6 Literature-based Typical Project Delivery Methods .................................................................................... 35
Table 4-1 Compare Alternative Fuel Technologies for Road Transportation ............................................................. 49
Table 4-2 Life Cycle Cost Calculation for the System (LCC_S)................................................................................. 56
Table 4-3 Vehicle Life-Cycle Inventory ...................................................................................................................... 60
Table 4-4 Electricity (Generation to Recharging) Life-Cycle Inventory ..................................................................... 61
Table 4-5 Hydrogen and Gasoline Well to Pump (WtP) Life-Cycle Inventory ........................................................... 62
Table 5-1 Indicators for Preliminary Site Selection .................................................................................................... 77
Table 5-2 Potential EV-RI Locations for Kelowna, BC .............................................................................................. 86
Table 5-3 Simple Payback Calculations ...................................................................................................................... 91
Table 5-4 Scenarios Developed for Model Validation ................................................................................................ 95
Table 6-1 Incentive and Tax Policies for Low-emission Fuel Vehicles .................................................................... 113
Table 6-2 Energy Retrofits for Single Detached Households .................................................................................... 114
Table 6-3 Provincial Incentive Schemes for Residential Buildings ........................................................................... 116
Table 6-4 Regional Retrofit Selection for SFDHs ..................................................................................................... 118
Table 6-5 Province-based Incentive and Tax Policies ............................................................................................... 120
Table 7-1 PDM Selection Factors .............................................................................................................................. 129
Table 7-2 Decision Matrix for the Proposed PDM Selection Approach.................................................................... 131
Table 7-3 Triangular-fuzzy Numbers used to Convert Attributes of Different PDMs .............................................. 131
Table 7-4 Triangular-fuzzy Numbers that Represent Stakeholder Judgment ............................................................ 132
Table 7-5 Triangular-fuzzy Numbers to Incorporate Stakeholder Expertise for Decision-making ........................... 134
Table 7-6 Focus Group Interview-based Data Collection and Database Development ............................................. 138
Table 7-7 Stakeholder Judgment Matrix ................................................................................................................... 139
Table 7-8 Linguistic Terms to Indicate LoI towards the Considered Project Stage .................................................. 139
Table 7-9 Stakeholder Expertise in EV-RI Deployment and Conventional Infrastructure Projects .......................... 140
Table 7-10 Linguistics Terms to Indicate LoE of the Stakeholders on the Subjected Criteria [156] ........................ 140
Table 7-11 Linguistic Terms to Convert the Decision Matrix into Fuzzy Numbers [250] ........................................ 141
Table 7-12 Final Weights of the Expert Data Collected as Inputs for the PDM Selection Tool ............................... 142

xi
List of Figures
Figure 1-1 Integration of Objectives, Information Flow, and Thesis Organization ..................................................... 10
Figure 2-1 Research Methodology .............................................................................................................................. 11
Figure 3-1 Energy use for transportation in Canada by Mode [75] [77] ...................................................................... 16
Figure 3-2 LCA Framework as Shown in ISO14041 .................................................................................................. 37
Figure 3-3 Conventional Vehicle Life Cycle and Fuel Life Cycle [8]......................................................................... 38
Figure 3-4 A Trapezoidal Fuzzy Number A = (a,b,c) .................................................................................................. 42
Figure 4-1 Methodology Framework to Select the Low-emission Fuel Technology .................................................. 47
Figure 4-2 Boundary of the Life Cycle Assessment .................................................................................................... 50
Figure 4-3 Cradle-to-gate Emission of Alternative Fuel-based Vehicle Options ........................................................ 64
Figure 4-4 Mid-point Indicators for Alternative Fuel Options .................................................................................... 66
Figure 4-5 Environmental Scores of Alternative Fuel Options (Most Likely and Conventional) ............................... 67
Figure 4-6 Provincial-based LCC for Electric, Gasoline, and Hydrogen Light-duty Vehicles.................................... 68
Figure 4-7 Eco-efficiency-based Comparison for Alternative Fuel Options ............................................................... 69
Figure 5-1 EV-RI Planning and Management Framework for Complex Urban Network ........................................... 74
Figure 5-2 Development of Distance Matrix ............................................................................................................... 79
Figure 5-3 Model Developed to Formulate Distance Matrix Using ArcGIS Model-Builder ...................................... 88
Figure 5-4 Multi-Period Improvement Plan for Public Recharging Infrastructure Network for Kelowna, BC ........... 92
Figure 5-5 EV-RI Network Demand vs. Payback Period ............................................................................................ 93
Figure 5-6 Results of Software Generated Dual Fitness Functions for Multiple Iterations ......................................... 94
Figure 5-7 Results of the Scenarios Developed Using Conventional EV-RI Planning Approach ............................... 96
Figure 6-1 Proposed Research Framework for Household Incentive Planning Tool (HIPT) .................................... 103
Figure 6-2 Building Level GHG Emissions and LCC vs. Retrofitting Investment for BC, Canada .......................... 117
Figure 6-3 Difference of LCC of EV with LCC of ICEV vs. Potential Incentives for BC, Canada .......................... 119
Figure 6-4 Compare the Eco-efficiencies of Electrified Transportation and Building Retrofitting ........................... 121
Figure 6-5 Household GHG Emissions and Consumer Annual Cost Comparison .................................................... 122
Figure 6-6 Province-wise Household Eco-efficiency Index (HEEI) ......................................................................... 123
Figure 7-1 PDM Selection Methodology for EV-RIs ................................................................................................ 128
Figure 7-2 Maturity Stage-wise EV-RI Deployment ................................................................................................. 137
Figure 7-3 F-TOPSIS-based PDM Rankings for Multi-period EV-RI Deployment Projects .................................... 143
Figure 8-1 Proposed Strategic Map ........................................................................................................................... 150

xii
List of Abbreviations
AHP Analytic hierarchy process
AFV Alternative fuel vehicle
ALW Acidification of land and water
BC British Columbia
CAPEX Capital Expenditure
CC Closeness Coefficient
CECT CANMET Energy Technology Center
CF Cost Factors
CFL Compact fluorescent lamp
CM Construction Management at Risk
CoC Carbon off-set cost
CoCf Carbon off-set cost factor
DB Design-Build
DBB Design-Bid-Build
DBOT Design-Build-Operate-Transfer
DC-FC Direct Current Fast Charging
DNR Depletion of non-renewable energy resources
EF Environmental Factors
EN Eutrophication
EoL End-of-life
EV Electric vehicle
EV-RI Electric Vehicle Recharging Infrastructure
FF Fossil Fuels
F-MADM Fuzzy Multi-Attribute Decision Making
F-TOPSIS Fuzzy Technique for Order of Preference by Similarity to Ideal Solution
GGRT Greenhouse Gas Reduction Targets Act
GHG Greenhouse gas
GIS Geographic Information System
GREET Greenhouse gases, regulated emissions, and energy use in transportation
GWP Global warming potential
H2M Houses with retrofits (Home of Tomorrow)
H2T Houses without retrofits (Home of Today)
HEEI Household Eco-efficiency Index
HEPS Household environmental performance score
HES Household eco-score
HFC Hydrogen Fuel Cell
HFCV Hydrogen fuel cell Vehicle
HHC Household Cost
HHE Household Emissions
HIPT Household Incentive and Tax Planning Tool
ICE Internal combustion engine
ICEV Internal combustion engine vehicle
JSON JavaScript Object Notation
LB Lower Bound
LCA Life cycle assessment
LCC Life cycle cost
LD-EV Light-duty Electric vehicle
LD-HFCV Light-duty hydrogen fuel cell vehicle
LDV Light-duty vehicle
LED Light-emitting diode bulb

xiii
LoE Level of Expertise
LoI Level of Impact
LP Linear Programming
LS Likert Scale
LT Linguistic Term
MAGDM Multi-attribute group decision-making
MCDM Multi-criteria decision making
ML Most Likely
MSRP Manufacturer’s suggested retail price
NG Natural Gas
NIS Negative Ideal Solution
NOGEPA Netherlands Oil and Gas Exploration and Production Association
OCP Official Community Plan
OD Origin Destination
OPEX Operational Expenditure
PBP Profit-based priced
PDM Project Delivery Method
PEV Plug-in electric vehicle
PHEV Plug-in hybrid electric vehicles
PIS Positive Ideal Solution
POF Photochemical ozone formation
PPP Private-Public Partnership
PM Project Manager
PV Photovoltaic
RB Building Intervention
RI Recharging Infrastructure
RT Transport Intervention
SBP Service-based priced
SF Social Factors
SFDH Single-family detached houses
SOD Stratospheric ozone depletion
ST Vehicle sales tax
TAZ Traffic Analysis Zones
TF Technical Factors
TOPSIS Technique for Order of Preference by Similarity to Ideal Solution
UB Upper Bound
USA United State of America
W2P Well to Pump cycle
W2W Well to Wheel cycle

xiv
Acknowledgments
First and foremost, I would like to convey my special thanks to Dr. Kasun Hewage for his timely
guidance, continuous support, patience, and faith in me throughout my graduate studies. His
inspiration, motivation, kindness, and energy have made me strong, resilient, and diligent. I have
gained a lot from my supervisor towards my academic and professional growth. I will forever be
in debt to him for his support throughout my graduate studies.
My heartfelt appreciation goes to my co-supervisor, Dr. Rehan Sadiq, for his mentorship,
guidance, and support during the course of my studies at UBC. He has kept following my progress,
providing advice and moral support amidst his busy schedule and responsibilities.
I would like to express my thanks to Dr. Shahria Alam, who guided me as a committee member
and as the principal investigator of the Wilden Living Lab project. The knowledge and the
expertise gained from him has helped me to mature my research ideas with exposure to real-world
applications.
I would also like to thank my other committee members, Dr. Abbas Milani, and a former
committee member, Dr. Ahmed O. Idris. The advice and encouragement I received from them has
helped me to shape my initial research idea and enhance the quality of this thesis. Furthermore,
the valuable knowledge and techniques I learned from Dr.Ahmed O. Idris, Dr.Abbas Milani,
Dr.Zheng Liu, Dr. Jannik Eikenaar, and Mr. Bill Berry helped me to effectively improve my
research. In addition to that, I would like to acknowledge the School of Engineering and the
administrative staff of UBC-Okanagan for their continuous support during the past few years.
Part of my research funding was from the Natural Science and Engineering Research Council of
Canada (NSERC) through the Wilden Living Lab project and the other part was from the Fortis-
UBC Energy Chair Project, which was funded by Mitacs, Canada. The input of the project partners
was vital for the successful completion of my research. Hence, I would like to thank Mrs. Karin-
Eger Blenk (Wilden), Mr. Russ Foster (Wilden), Mr. Martin Blenk (Wilden), Mr. Scott Tyerman
(Authentech Homes), Mr. Rafael Villarreal (City of Kelowna), Mrs. Carol Suhan (FortisBC), and

xv
Michael Leyland (FortisBC). Moreover, financial support from NSERC, Mitacs, Wilden, and
FortisBC were beneficial in proceeding with my studies.
The support I received from the project life cycle management laboratory and the research team
has been enormous. I would like to express my special thanks to Dr. Rajeev Ruparathna for the
moral support and the guidance delivered for my studies as well as my stay in Canada. I really
appreciate Rajeev and his wife, Kaushi’s support, especially at difficult times of this journey.
Moreover, my thanks go to Dr. Gyan Kumar Chippi-Shrestha, Mr. Fasihur Rahman, Dr. Ezzeddin
Bakhtavar, Dr. Hirushie Karunathilake, Mr. Isuru Gamalath, Mr. Tharaka Wanniarachchi, Ms.
Ravihari Kotagodahetti, Dr. Amin Shotorbani, Ms. Anber Rana, and all other current and past
research team members who have supported me in various situations.
My gratitude goes to my loving parents, Mr. K.S Perera and Mrs. Nandawathie Menika, who have
undergone many hardships, especially during the early part of my life to raise me up and make me
into the person who I am. I consider my self fortunate to be their son. Moreover, I would like to
convey my gratitude to my extended family, Mrs. Piumi Perera, Mr. Thranga Dissanayaka, Dr.
Dananjaya Eleperuma, Mrs. Ranjani Eleperuma, Dr. Dharshana Eleperuma, and Dr. Esha
Eleperuma.
Last but not least, I would like to appreciate Mrs. Manisha Eleperuma, my wife, for her love,
caring, and moral support within the last few years. Her patience, commitment, and understanding
helped a lot to balance both studies and the family.
xvi
Dedication
Lovingly dedicated to,
MY PARENTS, MANISHA, ERAN & YASIRU

1
Chapter 1 Introduction
1.1 The Challenge
Climate change and resource depletion have gained extensive public attention as a critical global
issue. Road transportation using Fossil Fuels (FF) is one of the largest contributors (19%) to the
national Greenhouse Gas (GHG) inventory of Canada [1]. FF is the main transportation fuel
source, accounting for 82.5% of transportation emissions inventory [1]. The larger environmental
impacts of FF consumption include global warming, stratospheric ozone depletion, acidification
of land and water, eutrophication, tropospheric ozone formation, and depletion of non-renewable
energy resources [2][3]. The increasing demand for FF in transportation has been a topic of major
discussions due to the aforementioned adverse environmental impacts and the possibility of
running out in the near future. Thus, enhancing vehicle efficiencies, improving and promoting
active transportation while reducing automobile dependency, and shifting to lower-carbon or non-
carbon power trains are considered preliminary solutions to reduce global FF consumption [4][5].
Out of the above strategies, alternative fuel-based vehicles can be considered a disruptive
technology that needs extensive research and development to ensure wider adaptation and long
term sustainability.
Low-emission renewable energy technologies and systems have been identified as an effective
strategy for decarbonizing road transportation [6][5][6]. The traditional line of thinking has had
tunnel vision when evaluating alternative transportation fuel sources where operational emission
was the predominant consideration [7][8][9]. Electric and hybrid vehicles are at the forefront of
public attention as a sustainable mode of transportation. The above vehicles gained public trust
due to their technological and commercial viability and the possibility of operating from
renewable, low-emission energy sources [4]. Despite its significant future potential, Electric
Vehicle (EV) adoption is still in prenatal stages in Canada. Reasons for slow EV adoption in
Canada include higher switching costs of EVs [10][11], limited on-board electricity storage
(Vehicle range) [11][12], and inadequate availability/access to recharging infrastructure
[10][13][11]. Systematic planning and optimal deployment of recharging infrastructure networks
can be used to minimize the aforementioned challenges and support the widespread adoption of
electric transportation [14].

2
Electric vehicle recharging infrastructure (EV-RI) is a critical element in electric-based
transportation [15]. EV-RIs transfer electricity from the smart grid (energy cycle) to vehicles
(mobility cycle) [15]. Currently, around 500 public direct-current fast-charging stations and nearly
4,000 public slow-charging facilities have been established in Canada [16]. The existing EV-RI
capacities do not satisfy the zero-emission vehicle mandates established by federal and provincial
governments [17]. Moreover, there is no strategic approach developed to deploy an optimal
network to service current and future EV demands. Thus, federal, provincial, and municipal level
decision-makers, practitioners, and investors need to take more stringent approaches to collectively
plan and manage more EV-RIs to achieve potential recharging demands.
EVs can be recharged at home using domestic recharging units. Fast charging has gained immense
attention from EV consumers due to limited access to domestic and office charging and longer
recharging periods. However, the recharging demands met by domestic and office recharging
facilities have not been incorporated into existing recharging demand estimations. Furthermore, as
a logical sequence for EV-RI deployment projects and supported procedures, tools have not been
developed and distributed to Canadian municipalities. Thus, an ad-hoc EV-RI placement and
capacity planning approach was adopted conventionally to develop existing EV-RI facilities [18].
The conventional EV-RI planning and managing approach reduces the aforementioned challenges
pertaining to EV consumers, to a degree [18]. However, these systems might create investor-
related challenges, such as lack of return on investments and higher infrastructure payback periods,
due to the lack of a systematic EV-RI placement and capacity improvement approach [19].
Because of these challenges, timely investments in EV-RIs can not be expected as required, where
there will be limited public EV-RI availability and access. Hence, inadequate infrastructure
availability and access may discourage potential vehicle users from switching to EVs by escalating
demand uncertainties for future EV-RIs. Ultimately, the government mandates for zero-emission
vehicles, and GHG reduction targets will not be met in the long run. Therefore, there is a need for
a systematic EV-RI planning and management approach to enhance the efficiencies of EV-based
transport systems and to ensure benefits to all stakeholders.
A systematic EV-RI planning and managing approach consists of determining EV recharging
demands for public EV-RIs, developing strategies to sustain the anticipated demands, identifying

3
an optimal need of EV-RIs, and deploying and maintaining EV-RIs for multiple periods [20].
Although there are zero-emission vehicle mandates available for practitioners to develop an
optimal EV-RI network, a method should be in place to estimate public fast-charging demands to
determine optimal EV-RI capacities. Then there should be a scientific EV-RI planning tool to
determine the stochastic and temporal deployment of EV-RIs for the long run. In that case, the
optimized infrastructure placement and capacity enhancement will reduce the range anxiety of
potential consumers [21][22][23]. However, there are several other tasks to be completed by the
infrastructure investors, government, and policymakers to maximize the benefits of EV-RIs to all
relevant stakeholders. These are planning and managing incentives; and potential financial aids,
risk, and uncertainty sharing that can be used to motivate investors and consumers in order to
achieve anticipated EV demands and EV recharging investments in the long run [24]. From a
government perspective, the government and policymakers can develop an incentive scheme to
enhance infrastructure investment and to reduce the upfront costs of alternative fuel vehicles.
However, the aforementioned incentive schemes should focus on their long-term GHG targets and
other community development strategies. In addition, project delivery methods can be used to
share the risks and costs in EV-RI projects to make them more feasible for local investors at EV
early adoption stages.
1.2 Research Gap
A comprehensive review revealed the following key knowledge gaps on electric vehicle
recharging infrastructure planning and management.
Lifecycle thinking is lacking in recharging infrastructure planning: The literature for
recharging infrastructure planning and development revealed that the majority of low-emission
fuels were selected, and corresponding planning was done, by considering emissions during
operational phase of the vehicles [25]. Furthermore, the recharging infrastructure placement was
conducted using the upfront costs of infrastructure facilities without considering the costs related
to other stakeholders at the different phases of the transportation system (e.g. access costs,
location-based costs, etc.) [26][27][28][29][30]. Although the literature reveals that decision
making related to infrastructure facilities needs to be assisted by the life cycle thinking approach,
which quantifies long-term economic and environmental impacts for society [31], the integration
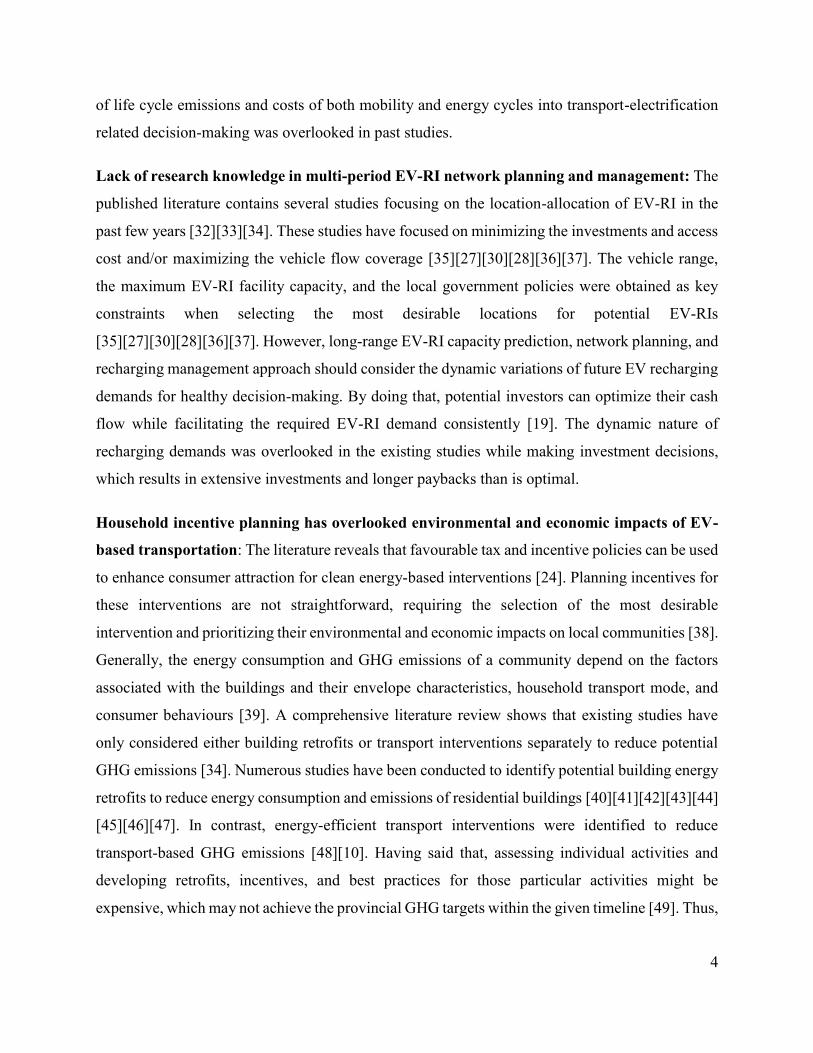
4
of life cycle emissions and costs of both mobility and energy cycles into transport-electrification
related decision-making was overlooked in past studies.
Lack of research knowledge in multi-period EV-RI network planning and management: The
published literature contains several studies focusing on the location-allocation of EV-RI in the
past few years [32][33][34]. These studies have focused on minimizing the investments and access
cost and/or maximizing the vehicle flow coverage [35][27][30][28][36][37]. The vehicle range,
the maximum EV-RI facility capacity, and the local government policies were obtained as key
constraints when selecting the most desirable locations for potential EV-RIs
[35][27][30][28][36][37]. However, long-range EV-RI capacity prediction, network planning, and
recharging management approach should consider the dynamic variations of future EV recharging
demands for healthy decision-making. By doing that, potential investors can optimize their cash
flow while facilitating the required EV-RI demand consistently [19]. The dynamic nature of
recharging demands was overlooked in the existing studies while making investment decisions,
which results in extensive investments and longer paybacks than is optimal.
Household incentive planning has overlooked environmental and economic impacts of EV-
based transportation: The literature reveals that favourable tax and incentive policies can be used
to enhance consumer attraction for clean energy-based interventions [24]. Planning incentives for
these interventions are not straightforward, requiring the selection of the most desirable
intervention and prioritizing their environmental and economic impacts on local communities [38].
Generally, the energy consumption and GHG emissions of a community depend on the factors
associated with the buildings and their envelope characteristics, household transport mode, and
consumer behaviours [39]. A comprehensive literature review shows that existing studies have
only considered either building retrofits or transport interventions separately to reduce potential
GHG emissions [34]. Numerous studies have been conducted to identify potential building energy
retrofits to reduce energy consumption and emissions of residential buildings [40][41][42][43][44]
[45][46][47]. In contrast, energy-efficient transport interventions were identified to reduce
transport-based GHG emissions [48][10]. Having said that, assessing individual activities and
developing retrofits, incentives, and best practices for those particular activities might be
expensive, which may not achieve the provincial GHG targets within the given timeline [49]. Thus,

5
a holistic analysis of household activities, including the integrated behaviour of domestic and
transport activities, may enhance the opportunities to select the most desirable interventions or
retrofits to be incentivized.
Scientific project delivery selection approaches are lacking for multi-period distributed-
infrastructure projects: EV consumers can be categorized into five key categories innovators,
early adopters, early majority, late majority, and laggards - based on their user behaviours and
market characteristics [50]. EV demands are dynamic in the above market maturity levels with a
high degree of uncertainty [51][52]. The literature reveals that demand uncertainty would lead to
significant structural and cost variations in the deployment of infrastructure networks [53]. A
project delivery method (PDM) can be used to transfer project risks and costs to other parties while
minimizing the impacts of the uncertainties [54]. Typically, the PDM is decided based on the
experience and influences of the project manager and other relevant stakeholders [55]. The
uncertainty of those decisions and the expert experiences of the knowledge area are not considered
in current PDM decision-making practices [56][57][58][59]. Thus, conventional PDM selection
practices are not desirable for the initial phases of recharging infrastructure deployment projects
due to lack of industry experience and possible project risks and costs. Moreover, there is no
evidence on enhanced PDM selection practices specifically designed for EV-RI development
projects in the existing literature.
By considering the gaps mentioned above in the existing body of knowledge, the following
research questions arose in this study.
i) What are the best energy sources and technologies for road passenger transportation when
considering regional factors and life cycle environmental and economic impacts?
ii) How can electric vehicle recharging infrastructure placement and expansions be conducted
for the growing public recharging demands, considering multiple stakeholder perspectives?
iii) What are the incentives for household energy interventions to encourage local communities
while achieving the regional GHG targets faster?
iv) What are the project delivery methods for small-scale, long-term infrastructure development
projects to handle demand and technological uncertainties?
6
1.3 Research Motivation
The motivation for this research originated with the zero-emission vehicle mandate developed and
launched by Transport Canada. According to this mandate, 10% of new light-duty vehicle sales
are to be zero-emission vehicles by 2025, 30% by 2030, and 100% by 2040 [60]. This zero-
emission vehicle mandate was launched to support the Greenhouse Gas Reduction Act (GGRTA),
which aims to reduce total GHG emissions in Canada by 30% in 2030 and 80% in 2050 from the
2005 levels [61]. The reduction of GHG emissions will benefit communities, neighbourhoods, and
municipalities by reducing human health impacts, global warming, and climate change potentials.
The proposed zero-emission vehicles program will supply incentives for new zero-emission
vehicle purchases, including battery-electric, plug-in hybrid, and hydrogen fuel cell vehicles [60].
Electric and hydrogen vehicle demands are expected to increase with time, and therefore
investments in low-emission electric vehicle recharging infrastructure were given significant
importance in provincial clean transport deployment agendas [62]. Accordingly, most Canadian
provinces allocate funding (e.g. British Columbia has allocated CAD 40 Million in 2017) to
support future low-carbon and zero-carbon refueling/ recharging infrastructure projects [63][64].
However, existing studies indicate that there is a lack of knowledge on an efficient EV planning
and management approach for urban centers in the Canadian context. Hence, EV technologies
have not yet achieved the expected consumer attraction in Canada due to insufficient recharging
infrastructure accessibility, insufficient government regularities, and limited commercial viability
[65][66][67].
At present, EV-RI planning and decision-making are generally done on an ad-hoc basis in a
reactive manner. Hence, an integrated approach that combines technical, economic, and
environmental aspects to develop an optimized EV-RI network is emphasized by many previous
studies, including Natural Resources Canada (NRCan) [68]. To plan EV-RI infrastructure
effectively and proactively, the developers, planners, practitioners, investors, and policymakers
need to be given scientific tools, forms, and checklists to support their EV-RI planning and
decision management. These tools should address all required information and EV-RI deployment
needs, considering an effective EV-RI network to meet multi-period EV demands. The work
conducted within this study attempts to fulfill the above industrial need for the Canadian context.

7
1.4 Research Objectives
The goal of this research is to develop a planning and management framework for public fast-
recharging infrastructure for light-duty electric vehicles in Canada using life cycle thinking
approach. The specific objectives of this study are as follows:
1. Determine economic and environmental impacts of alternative low-emission fuel options
for transportation
2. Quantify current and future EV demands and potential public recharging demands in urban
centers.
3. Develop a temporal and spatial model for EV-RI placement and capacity improvement.
4. Evaluate different incentive options considering regional environmental and economic
impacts.
5. Assess project delivery methods for construction, maintenance, expansion, and operation
of EV-RIs considering multi-period EV demands.
The outcomes of the research are expected to bring a scientific planning and management approach
for EV-RI facilities for light-duty electric vehicles by considering multi-period recharging
demands. The inefficient ad-hoc planning approach can be substituted with the proposed planning
and management approach to enhance the efficiencies and stakeholder engagement of the entire
deployment process. Moreover, the developed tools and proposed project delivery methods can be
used as a comprehensive package for recharging infrastructure planning, consistent with the
selection of most appropriate low-emission alternative energy source for transportation, location-
allocation and capacity improvement of electric vehicle recharging infrastructure, household
incentive planning for energy interventions, and pre-project planning of recharging infrastructure
projects. The outcomes and deliverables of this research will help policymakers such as
municipalities, infrastructure and urban planners, developers, and infrastructure investors to come
up with scientific decisions to decarbonize the transport sector in Canada.
1.5 Thesis Organization
This thesis consists of eight chapters that focus on the logical sequence of infrastructure planning
and deployment.

8
The first chapter provides an overall introduction to the background and pressures, research gaps,
motivation, objectives and deliverables, research concepts, and the overall electric vehicle public
recharging infrastructure planning framework proposed in the study.
The second chapter provides an insight into the key research phases, and the methods followed in
achieving the goal of each phase. Each phase of this methodology is further detailed in the content
chapters, 4 to 7.
The third chapter provides a comprehensive literature review on the state-of-the-art electric vehicle
recharging infrastructure, current limitations and deployment state, and the need for electric
vehicle recharging infrastructure planning for the Canadian context. The gaps identified in this
chapter were used to develop the research objectives and methodologies. The literature-based
database developed in this section was used in the content chapters, 4 to 7.
The fourth chapter presents the life cycle assessment and life cycle cost assessment of each energy
system, including both energy and mobility cycle. The database developed in Chapter 3 was used
to conduct the life cycle assessment. The developed life cycle data were stored in a separate
database to be used for Chapters 5, 6, and 7. This chapter covers all the life cycle economic and
environmental impacts of electric vehicles and other alternative fuel options that are required in
the first objective.
The core methodology of recharging infrastructure planning is covered in Chapter 5, which aligns
with the expectations of the second and third objectives. Multi-period recharging demand was
predicted as required by the second objective and those recharging demands, and the life cycle
cost data obtained from Chapter 4 were used in developing the EV-RI location-allocation and
capacity improvement planning tool. Furthermore, several other factors and assumptions were
obtained from the literature-based database that was developed in Chapter 3.
The material in Chapter 6 support the content in Chapter 5. The incentive planning method
discussed in Chapter 6 sustains the anticipated recharging demands in the previous chapter. This
method follows a life cycle thinking-based approach, where the potion of life cycle data was

9
obtained from the life cycle database developed in the third chapter. This chapter is related to the
forth objective of the study.
Chapter 7 proposes a stakeholder judgment-based PDM selection tool as required in the final
objective. The data relevant to market maturity levels, PDM selection factors, and PDM
characteristics were obtained from the database developed in the third chapter. The different
project characteristics were obtained from the fifth chapter based on the case study data.
Finally, Chapter 8 consists of the findings derived from the complete study. Moreover, the
recommendations for EV-RI planning and management in the Canadian context, the originality of
the study, and future research potential is also explained in this chapter. Figure 1-1 shows the
interconnections between the research objectives and thesis chapters. A detailed description of all
the chapters is given below.

10
Figure 1-1 Integration of Objectives, Information Flow, and Thesis Organization

11
Chapter 2 Research Methodology
The focus of the research is to develop a recharging infrastructure planning and management
framework considering dynamic electric vehicle demands. The objectives, as mentioned in section
1.4, were achieved in several research phases. The details of the proposed framework and the
demonstration steps are explained in the body of this thesis. Figure 2-1 depicts the connection
between the various research phases.
Figure 2-1 Research Methodology

12
Phase 1 – Literature review, content analysis, and data collection
This phase involved a comprehensive literature review on EVs and recharging infrastructure
technologies. Moreover, the life cycle emissions and cost data for EVs and EV-RIs and local traffic
data for case studies, were also collected to demonstrate the proposed model.
EVs and infrastructure technologies: A comprehensive content analysis was conducted to identify
the existing state-of-the-art technologies available for EVs and EV-RIs. The characteristics of EV-
RI and consumer perception values were also identified in this study. Articles published in reputed
journals within the last 15 years were considered for this review. Moreover, the expert data related
to the EV-RI projects and their characteristics were collected through several brainstorming
sessions, which were conducted with local developers, contractors, utilities, and municipalities.
Life cycle emissions and life cycle costs: The Greenhouse gases, Regulated emissions, and Energy
use in Transportation Model (GREET) database developed by Argonne National Laboratory was
used to identify the potential emissions of the fuel and vehicle life cycle in both conventional and
alternative fuel-based road transportation. Moreover, the recently published literature was used to
extend the life cycle assessment to recharging infrastructure to obtain the total life cycle costs of
the EV-based transport culture.
Traffic and transport data collection: Regional-based traffic and transport data and relevant socio-
demographic data were collected from the databases of relevant public and private institutions.
This included trip origin-destination matrix, mode-split model, and traffic assignment rules from
the year 2020 to 2050. The transport planning managers of relevant municipalities (City of
Kelowna) were contacted to access the municipal databases, and research directors of relevant
utility companies (FortisBC) were contacted to access the databases developed by the utility
companies to identify the EV recharging and EV-RI connection-related data.
The detailed findings of the literature review and data collection are presented in Chapter 3.

13
Phase 2 - Low-emission fuel selection and prioritization
A preliminary selection method was proposed to choose low-emission alternative fuel sources for
the Canadian context. At the initial stages of this study, a rule-based alternative fuel selection
method was introduced to filter commercially viable low-emission fuel options. The selected
options were analyzed using an eco-efficiency index to identify the most desirable low-emission
fuel options for different regions in Canada. Factors such as life cycle economic and environmental
aspects of both transport energy and mobility cycles and the technical know-how of the alternative
fuel options, were assessed and compared with conventional fossil fuel-based transportation
considering regional variations of grid mixes. The detailed methodology of the low-emission fuel
selection and prioritization framework is provided in Chapter 4, section 4.2.
Phase 3 – Recharging infrastructure capacity and location planning
This phase involved defining a lifecycle thinking-based multi-period infrastructure-planning
framework to develop sustainable public EV-RIs for complex urban road networks. This
framework consists of a temporal model to find the dynamic EV-RI demands, a stochastic model
to obtain travel distances, and a multi-objective optimization model to select the best desirable
capacities and locations for potential EV-RIs. The recharging access distances, life cycle cost of
the entire EV-RI network, and EV coverage were considered for the multi-objective optimization
model. The above methodology is detailed in Chapter 5, section 5.2.
Phase 4 – Household incentive planning for low-emission transportation and domestic activities
This phase involved achieving local governments GHG targets faster by selecting the most
desirable interventions for Canadian households through incentives, rewards, and tax concessions.
Globally available incentive policies for low-emission vehicles and locally available retrofit
options for single-family detached houses were identified during this phase. The life cycle thinking
approach was used to assess economic parameters, such as capital investment and annualized
consumer cost, and environmental parameters such as greenhouse gas emissions for the identified
intervention options. Multi-attribute decision-making approaches were used to rank different
interventions, and a scenario-based approach was used to select the most desirable interventions

14
for different regions in Canada. The detailed methodology for household incentive planning for
low-emission transportation and domestic activities is given in Chapter 6, section 6.2.
Phase 5 – Selection of project delivery method for electric vehicle recharging infrastructure
projects
A stakeholder judgment-based assessment was proposed to select the most desirable project
delivery method for the small-scale distributed infrastructure planning process. A fuzzy multi-
attribute decision-making technique was used to aggregate expert opinions and obtain attribute
weights and rank project delivery methods. Furthermore, different project delivery methods for
different project phases were prioritized using the market maturity levels shown in the Rogers
diffusion model [69]. This methodology is detailed in Chapter 7, section 7.2.
Phase 6 – Developing decision support tools and case study demonstration
The research findings of the phases mentioned above were used to develop a decision support tool
for the planning and management of electric vehicle recharging infrastructure network projects for
small-scale urban centers. The deliverables are in the form of an Excel-based decision support tool
(DST). ArcGIS, GREET, HOT2000, and IBM ILOG CIPLEX software were used to simulate
specific stages of the planning process to obtain intermediate inputs to the Excel-based decision
support tool. The decision-making tool was demonstrated via a case study of a medium-scale
community in the Okanagan region of BC and the results were validated when necessary. The
implementation of the proposed methods in an urban center is described as a strategic map in
Chapter 8, section 8.1.

15
Chapter 3 Literature Review
Parts of this chapter have been published in the Journal of Cleaner Production, as articles titled
“Are we ready for alternative fuel transportation systems in Canada: A regional vignette,”
“Scenario-based economic and environmental analysis of clean energy incentives for households
in Canada: Multi-criteria decision making approach,” and “Electric vehicle recharging
infrastructure planning and management in urban communities”; and in conference proceedings
of the CSCE Construction Specificity Conference 2019 as “Solar photovoltaic electricity for
single-family detached households: Life cycle thinking-based assessment” [70][38][71][72].
3.1 Transportation and Energy Use
Transportation plays a vital role in the formation of society. Typically, transportation consists of
two sectors known as “mobility” and “accessibility.” Mobility refers to the movement of people
and goods, whereas accessibility refers to the ability to reach goods and services in a desired
destination [73]. Enhancing mobility to maximize accessibility is the key objective of an effective
transportation system [74]. The demand side of transportation is serviced by different
transportation modes that can be categorized as active and passive transportation modes [64].
Active transportation modes are walking, cycling, and public transport methods, where the per
capita energy consumption is zero or very low [64]. However, transport by heavy-duty vehicles,
light-duty vehicles, and motorcycles is known as passive transportation, where the transport energy
use per capita is significantly higher than in active transportation [64]. Figure 3-1 shows the
different active transportation methods in Canada [75].
Transportation as a whole is one of the most significant contributors to national GHG inventory,
accounting for 38% [76]. According to Figure 3-1, road transportation consumes the largest
amount of national energy (79%), which accounts for 82.5% of national transportation emissions
[1]. Although road transportation consists of different modes of transportation, light-duty vehicle-
based transportation is the key energy consumer (59%) and also has comparatively high per capita
energy use [77]. The majority of light-duty vehicles are Internal Combustion Engine (ICE)
vehicles that use gasoline or diesel as their primary source of energy [78].

16
Figure 3-1 Emissions and Energy Use for Transportation in Canada by Mode [75] [77][79]
The demand growth of fossil fuels (FF) such as gasoline and diesel has been a topic of major
discussion in the past few years, mainly due to their adverse environmental consequences and the
possibility of running out in the near future. Accordingly, the extensive consumption of FF results
in global warming, stratospheric ozone depletion, acidification of land and water, eutrophication,
tropospheric ozone formation, and depletion of non-renewable energy resources [2][3].
The use of conventional fuel began with the exploration and production of crude oil, which is
refined into fuels, stored, and distributed to supply chain networks of retail stations [80]. The crude
oil refining process was developed in 1850 and became popular after the development of Internal
Combustion Engine Vehicles (ICEV) [81]. Although gasoline and diesel are used as energy
sources for conventional road transportation, gasoline is the primary fossil-based fuel used in
Canada [78]. Gasoline is mainly used for private light-duty conventional vehicles such as cars,
sport utility vehicles, light-duty trucks, etc. [78].
Propane, hydrogen fuel cell, biodiesel, electricity, and natural gas can be identified as key
alternative fuel sources for road transportation [82]. However, these fuel technologies have their
own unique emissions and cost behaviours, and their popularity depends on the fulfillment of
79%
3%
10%
4% 4%
86%
2%4%
4%4%
Road Marine Air Rail Other
59%
41%
Light-duty Heavy-duty
Energy Use
Emissions
Road Transport
Contribution
17
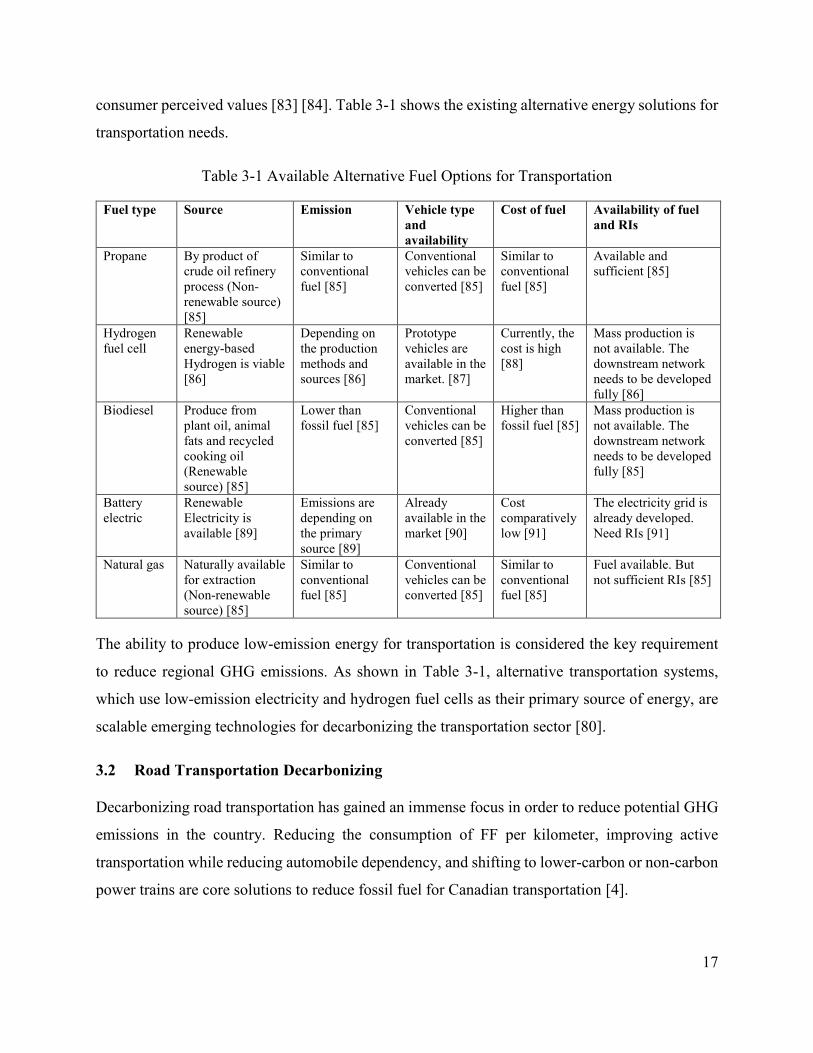
consumer perceived values [83] [84]. Table 3-1 shows the existing alternative energy solutions for
transportation needs.
Table 3-1 Available Alternative Fuel Options for Transportation
Fuel type Source Emission Vehicle type
and
availability
Cost of fuel Availability of fuel
and RIs
Propane By product of
crude oil refinery
process (Non-
renewable source)
[85]
Similar to
conventional
fuel [85]
Conventional
vehicles can be
converted [85]
Similar to
conventional
fuel [85]
Available and
sufficient [85]
Hydrogen
fuel cell
Renewable
energy-based
Hydrogen is viable
[86]
Depending on
the production
methods and
sources [86]
Prototype
vehicles are
available in the
market. [87]
Currently, the
cost is high
[88]
Mass production is
not available. The
downstream network
needs to be developed
fully [86]
Biodiesel Produce from
plant oil, animal
fats and recycled
cooking oil
(Renewable
source) [85]
Lower than
fossil fuel [85]
Conventional
vehicles can be
converted [85]
Higher than
fossil fuel [85]
Mass production is
not available. The
downstream network
needs to be developed
fully [85]
Battery
electric
Renewable
Electricity is
available [89]
Emissions are
depending on
the primary
source [89]
Already
available in the
market [90]
Cost
comparatively
low [91]
The electricity grid is
already developed.
Need RIs [91]
Natural gas Naturally available
for extraction
(Non-renewable
source) [85]
Similar to
conventional
fuel [85]
Conventional
vehicles can be
converted [85]
Similar to
conventional
fuel [85]
Fuel available. But
not sufficient RIs [85]
The ability to produce low-emission energy for transportation is considered the key requirement
to reduce regional GHG emissions. As shown in Table 3-1, alternative transportation systems,
which use low-emission electricity and hydrogen fuel cells as their primary source of energy, are
scalable emerging technologies for decarbonizing the transportation sector [80].
3.2 Road Transportation Decarbonizing
Decarbonizing road transportation has gained an immense focus in order to reduce potential GHG
emissions in the country. Reducing the consumption of FF per kilometer, improving active
transportation while reducing automobile dependency, and shifting to lower-carbon or non-carbon
power trains are core solutions to reduce fossil fuel for Canadian transportation [4].

18
Magnusson et al. emphasized that GHG emissions can be decreased by reducing the consumption
of fuel per kilometers (fuel-efficient vehicles), reducing car use (improving active transportation
and reducing automobile dependency), and shifting to lower-carbon or non-carbon fuels or power
trains such as Hydrogen Fuel Cell Vehicles (HFCVs) and EVs [4]. Hence, vehicle fuel efficiency
improvements in conventional vehicles were considered a prevalent marketing tool by vehicle
manufacturers and marketers in the recent past. However, despite the enhancement of fuel
efficiencies and the affordability of fossil fuels, there has been no decrease in energy consumption
as a whole or in potential GHG emissions, due to high population growth and an increase of vehicle
dependency [92]. Thus, vehicle fuel efficiency improvements have not been affected by transport
energy savings and emission reductions as significantly as expected by decision-makers.
Therefore, past and current researchers and vehicle manufacturers have focused more on
alternative fuel-based vehicles with low- and zero-carbon emissions [80]. Hydrogen fuel cell
(HFC) and low-emission electricity can be identified as the most desirable environmentally-
friendly fuel sources for road transportation [82]. These fuel technologies have their unique values,
and the popularity of these fuels depends on the fulfillment of consumer perceived values [83]
[84]. Table 3-2 shows a comparison of the aforementioned alternative energy solutions considering
their primary energy source, emissions, vehicle type and availability, fuel cost and supply chain
network, and availability.

19
Table 3-2 Comparison of Electric and Hydrogen based transportation with conventional Gasoline transportation
Fuel type Gasoline Hydrogen Electric
Vehicle Types Conventional Internal Combustion
Engine Vehicle (ICEV) [81]
Hydrogen Fuel Cell vehicle (HFCV) [87] Plug-in hybrid electric vehicle (PHEV) & Plug-in
electric vehicle (PEV) [89]
Fuel production
method
Crude oil refining process [80] Alkaline water electrolysis using electricity,
Central steam methane reformation, Central
coal gasification, Biomass gasification and
Thermochemical water splitting with nuclear
Cu–Cl cycle are used to produce Hydrogen fuel
[93], [94].
Hydropower, natural gas-fuelled thermal plants,
biomass power plants, wind power plants, diesel
electricity, solar photovoltaic (PV) energy, tidal
power arrays and geothermal power plants are
used to generate electricity [95]
Fuel
Transportation
Transport through dedicated pipe-lines
over long-distance and distribution using
rail, ship or road tankers [81]
Gaseous hydrogen can be distributed using
dedicated pipe-lines over long distance and the
liquefied hydrogen can be transported by rail,
ship or road tankers [93].
Transport using a smart grid or on-site
production and storage using a stationary battery
pack [96]
Fuel retailing
and re-fuelling
infrastructure
Well established re-fuelling network,
which includes short-term, and long-term
storage facilities, transportation trough
road tankers, ships and pipelines, Oil
separation using refineries and retailing
using fuel dispensers [97].
Gaseous hydrogen can be distributed using
dedicated pipe-lines over long distance and the
liquefied hydrogen can be transported by rail,
ship or road tankers [93]. Dedicated fuel
dispensers are using to re-fuelling the HFCVs.
The infrastructure network needs to be
developed from scratch, which needs extensive
investments.
Grid electricity, Solar or wind electricity retail
through,
Conventional options,
1. Domestic: Level 01 charging [89] [98]
2. Office/commercial: Level 02 charging [89] [98]
3. Public: Level 03 fast-charging [89] [98]
Advanced options:
1. Battery swapping method [99]
2. In-motion/ inductive re-charging [90], [98],
[100].
Fuel-cycle
emissions (W2P
cycle)
Depending on the crude oil extraction,
transportation, and the time of the year
[101] [102] [103]. The average emission
level has been identified as 0.295
kgCO2e per liter of gasoline [104].
Depending on the source characteristics and the
emissions of production, supply, and storage of
the produced hydrogen [86]. Appendix A1
shows the emissions for different production
methods.
The emissions due to electricity production
emissions change with energy source [105]. The
common energy sources and the respective
emission rates are provided in Appendix A2.

20
Fuel type Gasoline Hydrogen Electric
Vehicle
manufacturing
and emissions
The manufacturing emissions are
assumed as proportionate to the weight of
the vehicle [106]. Based manufacturing
emission for 1532kg weighted vehicle is
2013 kgCO2e [106]
The manufacturing emissions are assumed as
proportionate to the weight of the vehicle [106].
Based manufacturing emission for 1532kg
weighted vehicle is 2013 kgCO2e [106]
The manufacturing emissions are assumed as
proportionate to the weight of the vehicle [106].
Based on manufacturing emission for 1532kg
weighted EV is 2244 kgCO2e including the
battery emissions [106] The average
manufacturing emissions of the EV battery (Li-
ion) has been estimated as 70 kg CO2e per kWh
[107].
Vehicle
operation
mechanism and
emissions
The energy for the conventional vehicle
is generated using gasoline as the fuel
for the Internal Combustion Engine [81].
The operational emission of the vehicles
are depending on vehicle fuel
consumption [108].
It generates electricity inside the HFCV
through an electrochemical reaction of
Hydrogen and Oxygen and operates as an EV
[87]. However, HFCV has on-board fuel
storage, driving range and re-fuelling system as
similar to the ICEV [87]. The vehicle operation
emission can be considered as negligible [108]
The grid electricity or other electricity source is
used to re-charge the on-board battery of the EV.
The battery electricity used to operate the electric
motor of the vehicle [87]. The vehicle operation
emission can be considered as negligible [108].
Vehicle
maintenance
and re-cycling
emissions
End-of-life emissions and emissions
from maintenance and repairs for
automobiles are not significant [35].
End-of-life emissions and emissions from
maintenance and repairs for automobiles are
not significant [35].
End-of-life emissions and emissions from
maintenance and repairs for automobiles are not
significant [35]. The end-of-life emissions of the
EV battery is proportionate to the total mileage
traveled during the vehicle’s lifetime [107].
Approximate
re-fuelling time
and range1
3-5min time for re-fuelling and it has
approximately 500millage per one re-
fuelling cycle
3-5min time for re-fuelling and it has
approximately 500millage per one re-fuelling
cycle [87].
Conventional options: 15min to 8hrs [109]
Advance options: 0min to 2min [110]
Range varies from 110km (Mitsubishi iMiEV)
[111] to 435km (Tesla Model S) [112].
Re-fuelling/
recharging cost
Depending on the proximity to the source
and the time of the year [101] [102]. The
provincial-level average prices of
Due to the cost of the infrastructure and small-
scale production, the average retail price of
Hydrogen is CAD13/kg H2 [88].
The provincial-level average domestic rates of
grid electricity are shown in Appendix A3.
1 Range is known as the estimated driving distance (kilometers) on fully charged battery or full tank of liquid fuel (hydrogen or gasoline) [108]

21
Fuel type Gasoline Hydrogen Electric
Gasoline for June 2017 are shown in
Appendix A4 [113].
Advantages in
mass-market
adoption
Very convenient to store vehicle on-
board energy
Already experienced by the market and
proven as reliable and affordable [97]
Availability of specialized and extensive
logistics infrastructure network [97]
Very convenient to store vehicle on-board
energy [114]
Vehicle cost can be reduced than EV in mass
production
Decentralized and centralized production is
possible [115]
The infrastructure investment is relatively
smaller than hydrogen due to the use of existing
smart grid [116]
Home-based re-charging stations are available
which may convenient for users [116]
Renewable small scale energy production can be
used to fuel transportation [116]
The
disadvantage in
mass-market
adoption
High GHG emission [92]
High carcinogenic and non-carcinogenic
chemical emissions [92]
High investments in hydrogen infrastructure
and supply chain development
lack of technical know-how [117]
Cost of vehicle-related issues [11], [12]
Range anxiety2 [12], [23]
2 The vehicle range can be varied with on-board energy storage capacity [140], consumption rate and the availability of infrastructure [12], [140]. For widespread
adoption of AFVs, the range can be considered as a physiological barrier [12]. Limitations in available locations of alternative fuel infrastructure and the lower
range of vehicle cause a psychological effect on consumers which is known as “range anxiety” [12], [23]. Range anxiety makes potential consumers to decide
against the use of AFVs [21]–[23].

22
Hydrogen is the least capable technology to take advantage of the existing or low-cost fuel
infrastructure investment where the hydrogen fuel infrastructure investment is significantly higher
than the electricity fuel infrastructure cost [116]. Therefore, the electricity-based transport system
is preferred for this study3. Alternative fuel-based transportation can be compared and evaluated
with the viability of alternative fuel vehicles by explaining the life cycle based emission and cost
of each vehicle and fuel cycle [118].
3.3 Transportation Electrification
Transport electrification consists of energy and mobility sectors [119]. The energy sector consists
of energy generation to energy storage and distribution system (e.g. smart grid for electricity),
whereas the mobility sector consists of using alternative fuel-based vehicles (e.g. EVs and HFCVs)
for transportation [119].
Energy Sector: Regional electricity emissions and costs vary with the grid electricity mix and the
primary energy source. The electricity grid energy mix, costs, and overall emissions for Canada
are shown in Appendix A3. Moreover, the recharging of EVs from the existing electricity grid may
result in higher electricity demand [89]. The current electricity transmission system is optimized
for the current electricity usage, and additional electricity consumption may destabilize the system
[96]. This may cause high overloads in the on-line transformers, feeder congestion, and undue
circuit failures [120][121]. Therefore, it is essential to consider the “feeder capacity” (electricity
supply or excess electricity availability) when allocating recharging infrastructure for EVs.
Mobility Sector: The “time required for recharging,” “access to the recharging infrastructure,”
and “government policies” are the critical concerns in an EV recharging infrastructure network.
Additionally, having “home charging access” has been identified as the most significant predictor
for future PEV interest [10]. People living in apartments or condos do not have access to their own
recharging stations [122], so a properly arranged public charging (Level 3) network will be
3 A regional based analysis was done using literature-based data to evaluate the different energy options for British Columbia (BC) transportation
needs. Accordingly, Electricity-based transportation was identified as best clean energy technology for BC. "Are we ready for alternative fuel transportation systems in Canada: A Regional Vignette” Submitted to Journal of Cleaner Production (Elsevier) in February 2017. (Menu script:
JCLEPRO-D-17-00819)

23
beneficial for a widespread increase in EVs. The geographical, economic, and environmental
constraints are considered the core concerns for the spatial planning of EV-RIs [15]. Land-use
patterns such as potential developments, traffic generation, and distribution, etc. can be integrated
into the transport infrastructure plan by linking national political and social conditions, such as
government policies and consumer behaviours [15].
Generally, the energy sector and mobility sector are connected via an optimal network of electric
vehicle recharging infrastructure.
3.4 Recharging Infrastructure for Electric Vehicles
“Level 1 (Domestic),” “Level 2 (Domestic and Work),” and “Level 3 (Commercial or Public)” are
the conventional plug-in recharging infrastructure (RI) types currently available for day-to-day use
in electric vehicle recharging [89]. In addition, extensive research is being conducted on enhancing
re-charging speed while reducing system losses. Current research is focusing on: 1) Innovative
ways to enhance battery storage capacities; 2) Innovative ways to implement in-motion charging
mechanisms, which will reduce initial vehicle cost and allow travel with higher mileage [123]; and
3) Innovative ways to establish net-zero energy systems using renewable distributed energy
systems. Currently, the following recharging infrastructures and techniques are found in the
literature:
1) Level 1 chargers are developed for household use using domestic electricity (110-120V)
[89][98]. This is the cheapest recharging infrastructure investment [98], with a cost of around CAD
150 - 500 for basic installation [98]. The charging time is comparatively high (11-36 hours) [98]
and the cost of re-charging is comparatively low [87].
2) Level 2 charging is done using 220-240V charging points [98][10]. This is an additional
installation for potential PEV consumers, at a cost of CAD 1,600 to CAD 12,000 depending on
labour charges [87][89]. The charging time is 2-6 hours, depending on the vehicle battery capacity
[98].
3) A Level 3 type charging station uses 208–600V electricity and offers fast, direct-current
recharging (DC-FC). It has high voltage output and charging is done within 0.4–1 hour based on

24
the EV battery capacity [89][98]. This facility would cost around CAD 35,000 to CAD 46,000
[87]. Level 3 type is used for public recharging facilities for consumers who prefer high-speed
charging [98].
4) The battery-swapping infrastructure is another innovative and proven EV recharging concept.
In this system, the EV battery is owned by the company that operates the battery swapping facility
[13][124][99], so the battery and the electric vehicle are considered two separate cost and
ownership entities [13]. Battery swapping infrastructure-based systems will potentially reduce EV
battery replacement cost (due to the battery being owned by the company) [99] and vehicle capital
cost (upfront vehicle cost without battery) [13][99], and increase the vehicle’s driving range [99].
5) Additionally, current research studies are focusing on EV in-motion charging by wireless power
transmission technology using the inductive power transfer concept [98][100][90]. In such a
system, EV designers can use low capacity batteries, which reduces the battery purchase cost and
thereby reduces the purchasing cost of the EV [90]. Moreover, in-motion charging can be used to
reduce the constraints related to energy storage and existing charging issues [98][90], and mitigate
the charging time obstacles and range related issues [125] by providing a significant amount of
energy on the roadway. However, high capital investment is required to modify existing roadways
for wireless power transfer technology [110].
The use of the above recharging facilities and potential investments vary with several factors
related to consumers, investors, and developers. Consumer behavioural factors, consumer cost
perception, consumer concerns about energy depletion and GHG emission, range expectancy, and
current and potential incentives and taxes are critical factors in deciding to switch to EVs. Those
factors are further discussed below,
3.4.1 Incentives and Policies to Encourage EVs and EV-RI Investments
Several countries provide incentives to encourage the use of cleaner vehicles to reduce potential
GHG emissions. The government contribution in the top four countries, Norway, the Netherlands,
China, and the USA, is discussed in Table 3-3 to identify favourable potential government
incentives for Canada.

25
Table 3-3 Potential Incentive for Electric Vehicles
Region/
Country
Capital incentives Operational incentives Disposal
incentives
Ref.
Norway Exempt purchasing tax and
25% value-added tax
Reduce 50% of tax if an EV
is used as a company vehicle
Exempt from annual vehicle tax
Exempt road tolls
Free parking at Municipal parking facilities
Access to transit lanes
Exempt from car ferry charges
None [126]
[127]
Netherlands Reduce purchase tax
Purchase rewards to
commercial EVs
Conventional vehicle scrap
reward for potential EV
buyers
Exempt monthly road tax
4% taxable income additions for EV drivers
Environment investment allowance up to
36%
On-the-road-electric mobility
Free EV parking facility
Subsidiary for EV home recharging
None [128]
[127]
Shanghai,
China
Government subsidies for
EV purchases
Exempt from license plate
lottery system
Exempt from road tolls
US$14 billion for EV recharging
infrastructure development
Exempt
from sales
tax
[127]
California,
USA
Federal and local
government income tax
credit for EV users
Rebates to switch from
conventional vehicle to EVs
Reduce register and license
plate tax for new purchases
Access to HOV lanes
PEV only parking space
Motor vehicle inspection exemption and
emissions testing waiver
Toll reduction and exemptions
EV infrastructure tax exemption
EV battery tax exemption
Exemption from state fuel taxes
Free recharging at state-owned charging
facilities
Sales tax
reduction
[129]
Although these policies have significant positive outcomes (see Table 3-3) that contribute to the
development of clean energy-based transportation, there can be adverse impacts on the
government. As an example, income from toll fees, parking fees, and ferry fees will not be
sufficient for future infrastructure investments and regular maintenance of the existing
infrastructure [128]. However, Transport Canada is currently working on EV-favourable policies
for Canadian transportation, and the province of BC has allocated CAD 40Mn to improve its EV
infrastructure and related policies [62][63].
Although government and government-related institutions provide incentives for both energy-
efficient buildings and vehicles, household transportation and residential buildings are considered
separate entities in planning incentive schemes. Hence, incentives for households have been
introduced on an ad-hoc basis, ignoring the integrating effect of energy consumption for household
transportation and domestic activities. Therefore, it is vital to introduce a comprehensive model to

26
integrate residential economic activities and their resulting emissions with the resulting emissions
of vehicle-based economic activities. A comprehensive literature review revealed that there is a
lack of knowledge of incentive planning for overall household energy reduction [130]. Evaluation
and selection of the optimal incentive out of the feasible options is a formidable task that needs a
scientific platform. Even though the literature is saturated with multi-criteria based retrofit
selection tools for buildings [44][45][46], there are no comprehensive frameworks to select overall
household energy interventions that suit the expectations of multiple stakeholders. A proper energy
intervention selection framework would be used to identify an integrated set of government
policies and practices that guide consumers to a low-emission based economy [70]. National,
provincial, and municipal governments and non-government institutions are more concerned with
local emission trends related to residential buildings and transport, as they need to reduce their
GHG emissions and achieve their GHG targets quickly.
3.4.2 Consumer Recharging Behaviours
Per the Canadian survey on transport electrification, about 63% of EV users rely on overnight
charging at home, and having home-based charging access is identified as the most significant
predictor for EV interests in the future [10]. However, consumers who recharge using public
recharging facilities tend to refuel in pre-defined areas according to their mental maps and are
usually refueling at the beginning or end of their journey [131][132]. In this case, the refueling
station is known as the “brick & motor” location [84] and the business is driven by the destination
or the location [84]. In simple terms, the re-fueling facility needs the physical presence of the
consumer/vehicle in order to fuel the vehicle [84]. The main disadvantage of plug-in re-charging
facilities is the safety concerns in a wet and hostile environment, longer access to the recharging
units, and extensive time needed for recharging [90][109][123].
3.4.3 Consumer Concerns about Energy Depletion and GHG Emissions
Although Canadian transportation sectors contribute more to the national GHG inventory, the
literature reveals that the consumer perception of energy on emissions in the Canadian residential
sector is significantly higher than the transport sector. Canadian households contribute to GHG
emissions directly and indirectly. Direct emissions are comprised of emissions from residential

27
energy use and emissions from motor vehicle use, while indirect emissions are GHGs emitted
when producing goods and services for household use [133]. In 2015, the residential sector
consumed about 17% of domestic energy and contributed to 14% of the national GHG inventory
[134]. Household energy consumption and GHG emissions depend on factors associated with
building type, envelope characteristics, household transport mode, and consumer behaviours [39].
Some research is focusing on studies related to building energy retrofits, and other research is
focusing on interventions for transportation-based GHG reduction. According to the literature,
numerous studies have been conducted to identify potential building energy retrofits to reduce
energy consumption and emissions of residential buildings [40][41][42][43]. Gustafsson et al.
(1991), Flourentzou et al. (2002), and Asadi et al. (2012) developed models to optimize building
energy consumption, thermal comfort, and retrofit costs [44][45][46]. The use of a life cycle
assessment-based approach to identify optimal retrofits for net-zero emission buildings has been
conducted by Ruparathna et al. (2017) [47]. In contrast, energy-efficient transport interventions
were identified to reduce transport-based GHG emissions [48][10]. However, there is a lack of
knowledge on the combined research approach, which considers both building energy retrofits and
low-emission transport interventions considering household consumer behaviours, local utility
emissions, costs, etc.
3.4.4 Consumer Cost Perception
Per the transport survey done by Canada and Norway, the cost of fuel factors heavily in current
EV users’ decision to buy an electric vehicle [24][10]. In the Norwegian market, 41% of consumers
buy EVs to save money [24], whereas the Canadian survey showed that the Canadian EV market
is also sensitive to vehicle operating cost, which is mainly the price of fuel [10]. However, the
study done by Turrentine et al. suggested that, practically, automobile owners do not have basic
costing attributes to make calculated decisions on better fuel economy, and most of them do not
track their fuel cost over a significant period [135]. The fuel cost for EV depends on local
electricity prices [136]. Accordingly, the fuel cost of EVs can be considered CAD 3 per 100km to
CAD 4 per 100km in BC, depending on the vehicle type for domestic charging facility. The cost
of public recharging, however, varies with costing policy; some charge CAD 0 to 10 per hour [91]
while others charge it as a parking cost [91].

28
Moreover, the life cycle cost of the battery is the main component of the EV life cycle cost [137].
This includes the purchasing cost of the battery, battery lifetime, battery cycle time, battery
replacement cost, etc. [137]. High costs of batteries will increase the switching costs and user costs
of EVs as well as increasing the insurance and registration costs of the vehicle [137].
3.4.5 Range Preference of Vehicle Consumers
“Range” can be described as the mileage expected by the consumer in a single refueling cycle [12].
EVs have been designed with an inadequate battery level, which makes it impossible to travel
longer distances in one charging cycle due to the high cost of high capacity batteries [21][22][80].
Tran et al. (2013) suggested that increasing recharging facilities may offset the consumer
expectation for a long-range vehicle [138][139]. Limitations in the available locations of EV-RI
and the lower range of vehicles cause a psychological effect on consumers, which is known as
“range anxiety” [12][23]. Range anxiety makes potential consumers decide against the use of EVs
[21][22][23], so the limited range of affordable EVs and limited EV-RI facilities are considered
critical constraints for the widespread adoption of EVs [12]. This barrier can be mitigated by
scientifically improving charging opportunities to enhance them at minimal cost. Having said that,
there are only a limited number of EV recharging facilities in Canada compared to traditional
(gasoline) refueling facilities due to the lack of EV demand [23][140][141]. Therefore, an efficient
EV-RI network (EV-RI system) is vital for widespread adoption of an EV-based transportation
system in Canada.
3.5 Planning Electric Vehicle Recharging Infrastructure
Infrastructure system planning plays a vital role in transport system planning [142]. The approach
used for this can vary with infrastructure use and characteristics such as type, capacity, location,
etc., source characteristics, economic factors, consumer demands, government policies, and
procedures [143].
Generally, macroscopic modeling is used for system planning. According to Pollalis (2016),
sustainable infrastructure system planning can be explained using a four-level approach [20]:

29
1. Determine the demand and consumption required to service by the proposed infrastructure
system.
2. Develop a strategic approach to employ resources to achieve the required demands.
3. Identify facilities and operations that realize the strategic plans developed.
4. Locate facilities and operations to cover the spatial needs of the system.
Accordingly, the travel demand assessment and facility location-allocation are critical elements in
infrastructure system planning.
3.5.1 EV Demand Modeling and Sustaining Approaches
Travel demand forecasting and sustaining the current and potential demands are vital to ensure the
continuity of EV-based transportation systems. In these cases, travel demand forecasting models
are used to evaluate the impacts of land use, transport facilities, infrastructure, and demographic
changes in the existing transport system [144]. Firstly, existing transportation systems need to be
decoded to estimate transport demands in the future. The transport system decoding model
includes four-steps: trip generation, trip distribution, mode split modeling, and trip assignment
[20]. Secondly, behavioural models can be used to investigate the impacts of incentives and taxes
that can be used to sustain EV demands through variations. Thus, EV-RI locations can be
strategically assigned, considering anticipated EV demands.
3.5.1.1 Estimate and forecast EV demands
Estimated and forecasted trips can be estimated using trip generation models that can be developed
initially. The purpose of trip generation is to understand the need for transportation. Trip (𝑇𝑖𝑗𝑘𝑛)
can be described as a one-way movement from origin to destination, which can be classified as
home-based (THB) and non-home-based (TNHB) trips [145]. Trip generation models are used to
describe trip lengths, distribution in time, the number of trips generated, trip classification, and
land-use pattern (trip generation and attraction) [20]. Generally, the trip pattern changes with
socio-demographic and land-use factors [145]. The theory of adoption and diffusion (Rogers
diffusion model) [146], explains the market growth of an innovative product, which can be applied
to EVs as well [34]. Accordingly, EV consumers can be categorized as innovators, early adopters,

30
early majority, late majority, and laggards [50]. Table 3-4 shows the typical EV technology adopter
categories and their behaviours.
Table 3-4 Maturity Stages of the EV Market and Consumer Behaviours [50]
EV consumer type Description
Innovators Technologically savvy, high-risk appetite, high-income category
Early adoptors Younger in age, high income, highly educated, Socially forward, high opinion leadership
Early majority Slow adoption, average social status, imitators, average opinion leadership
Late majority Average income, low social status, high imitators, low-average opinion leadership
Laggards No-opinion leadership, No risk appetite, “traditional” behaviours, generally “business-
as-usual” type
According to the expectation of the above consumer categories, trip behaviour can be changed
with the dynamic EV market. Therefore, the trip classification needs to be defined according to
the expectations of the actual users [50]. Linear regression modeling and cross-classification
modeling are conventional techniques used for trip generation simulations [145]. However, these
models have extensive data requirements, which are based on travel surveys of the considered
traffic zones.
Moreover, trip distribution modeling can be used to match the origins and destinations (O-D) of
the trip generated and develop a “most-likely” trip matrix considering multiple zones. A gravity
model can be used to define the trip matrix (O-D matrix) for a given network, which is given as
Equation (1).
𝑇𝑖𝑗 = 𝛼 𝑂𝑖𝐷𝑗𝑓𝑖𝑗 Equation 1
Where, α – proportionality factor, 𝑓𝑖𝑗 − The generalized function of time, distance, and cost [144]
Generally, forecasting of continuing patterns and/or relationships are easy to model, while pattern
changes are complicated to model [147].

31
3.5.1.2 Extended EV demands using EV favourable cost and incentive policies
Developing the mode-choice model will support examination of social, economic, and
environmental impacts to society from the proposed modes [20]. Multinomial Logit Model is the
conventional method to achieve mode-choices of trip makers. Axen et al. (2015) used the
Multinomial Logit Model to develop an EV market share assessment model for BC [34]. A survey
approach was used to obtain the data required to train the developed model, which included a
survey sample of 538 respondents in BC [34]. The Norwegian and Californian policies were
considered the best global regulatory due to the highest EV per capita globally. Hence, Norwegian
and Californian EV-favourable policies4 were considered strong demand-focused policies [34].
Literature reveals that the availability of multiple charging point access and the cost of electricity
are the key supply-based factors, which could affect the selection of EVs by a potential vehicle
buyer.
3.5.2 Facility Location Selection
The facility location selection can be “Macroscopic (macro-level)” and “Microscopic (micro /
individual-level)”. The macro-level can be defined as regional or community level RI network
planning, whereas the micro-level is individual level facility planning. The UBC TIPS lab shows
a scenario-based approach to identify individual sites for EV-RI locations [50]. Visibility,
convenience, cultural branding, reliability, affordability, operating cost, initial cost,
competitiveness, gas vehicle displacement, and energy use were used as multiple attributes to rank
the alternative locations for each scenario [50]. However, the macro-level planning approach has
not been considered in this study.
As a macro level, long-range planning mechanism, RI locations need to be placed strategically by
considering the locations of neighbouring facilities that cater to the dynamic demands of EVs in
the future. An optimization approach can be used with a multi-period demand assessment. A
content analysis was conducted for Automated Teller Machines (ATMs), gasoline stations,
4 Refer to Table 3-3 for Norwegian and California EV favourable policies.

32
convenience stores, and EV recharging station location-allocation research-based publications.
Multi-objective genetic programming and particle sworn optimization were identified as the
standard mechanisms used to simulate the aforementioned models [148][149]. Table 3-5 shows
the published literature on transportation-based location optimization.
Table 3-5 Existing Solutions for Optimal Infrastructure Location-Allocation
Author/s Model developed
Objective
function
Constraints and
parameters used Approach
Methods
Used
Ref
No.
Ma
xim
ize f
low
ca
ptu
red
Min
imiz
e c
ost
Ra
nge
Wa
itin
g/a
cce
ss
tim
e B
att
ery c
ha
rgin
g
eff
icie
ncy
/tim
e
Gri
d c
on
strain
ts
By
-la
w c
on
strain
ts
Sin
gle
sta
tio
n
ba
sed
C
orri
dor b
ase
d
Netw
ork
-ba
sed
Kuby and
Lim
(2005)
The flow-refueling location
problem for alternative-fuel
vehicles
√ √ √ MIP [35]
Upchurch,
Kuby, and
Lim,
(2009)
Capacitated flow refueling
location model (CFRLM)
based on flow capturing
location model (FCLM)
√ √ √ √ MIP [26]
Lim and
Kuby
(2010)
Heuristic algorithms for
siting alternative refueling
location using FCLM
√ √ √ MIP [27]
Kim and
Kuby
(2012)
The deviation-flow
refueling location model
(DFRLM)
√ √ √ MILP [150]
Capar and
Kuby
(2012)
An efficient flow refueling
location model for
alternative-fuel stations
√ √ √ MBIP [151]
Chen,
Kockelma
n, Khan,
(2013)
EV charging station location
problem: parking based
assignment method to
Seattle
√ √ √ √ MIP [28]
Shao-yun,
Liang,
Hong, and
Long
(2012)
The planning of EV
charging stations in the
urban area (location and
sizing)
√ √ √ √ √ Queuing
theory
[37]
Mehar and
Senouci
(2013)
An optimization location
scheme for electric charging
stations
√ √ √ GA [152]
Yan
(2014)
Optimal layout and scale of
charging stations for EVs
√ √ √ √ Heuristic
algorithm
[36]
Huang et
al. (2010)
A GIS-based framework for
bus network optimization
√ √ √ GA and
GIS
[29]
Wang and
Lin (2013)
Locating capacited multiple
types of recharging stations
√ √ √ √ √ √ MIP [30]

33
Grid constraints such as substation capacity, charging power, node voltage aptitudes, feeder mix,
and access point capacity are the key constraints related to the electricity grid [152]. The
constraints stated on government policies, by-laws, and guidelines need to be assessed in order to
ensure a standardized EV recharging infrastructure network [26]. Moreover, either “cost
minimization” [152][37] or “flow captured maximization” [35][26] were selected as an objective
for the above methods. According to Table 3-5, mixed integer programming (MIP) and genetic
algorithms (GA) are the most common techniques used to solve this problem. However, Wang and
Lin (2013) developed a method using mixed-integer programming by considering both “cost
minimization” and “flow captured maximization” to locate slow-recharging stations [30].
Moreover, Li et al. (2009) studied the teller machine location optimization problem where the
“return on investments maximizing” was considered an objective function to maximize the returns
on investment [149]. Hence, they expect to ensure the maximum returns from those machines for
a sustainable service.
Geographic information systems (GIS) can be used as a spatial analytical tool in this study [29]
[149]. The main purpose of the GIS platform is to convert the continuous plan into a coordinate
grid system [153]. According to the study done by Liu et al. (2006), mixed integer programming
and genetic algorithms can be coded using C, C++, and PYTHON. These scripts can be registered
into a dynamic link library [153]. Those coded functions can be linked to the macro Visual Basic
script in ArcGIS that can be called upon to proceed with the optimization [153].
3.5.3 EV-RI Construction, Maintenance and Disposal Process
Infrastructure systems are subjected to construction, maintenance, and rehabilitation [154].
Effective management of infrastructure leads to maximized benefits to all stakeholders [154].
Generally, risk factors such as political risk, construction risk, legal risk, economic risk, operation
risk, market risk, project selection risk, relationship risk, project finance risk, and inherent risks
are significant in infrastructure development and maintenance projects [155]. The project time,
costs, and quality performances of a construction project will be affected by the risk involved
[156].

34
According to 3.4.1, EV demands are increasing with government regulations, which leads to an
increase in recharging demands. The capacity of EV-RIs needs to be increased with time to ensure
maximum access for potential EV consumers. However, these EV demands have significant
uncertainty on RI development scope and financials. Hence, the financial risk (due to EV demand
uncertainty) and scope changes (due to capacity required) are critical factors for the
implementation of EV-RI facilities.
3.5.4 Project Delivery Methods
A project delivery method (PDM) is a method of procurement in which the project risk and
performance can be transferred to other parties [54]. This can be used to establish a framework for
the design, procurement, and construction of infrastructure projects. The selection of an
appropriate PDM is one of the core decision strategies that affect the successful completion of a
project [157]. This will drive project cost, quality, and schedule [158]. Generally, PDMs can be
categorized as traditional, collaborative, integrative, and partnership strategies [159]. Sample
PDMs in these four categories, which are commonly used in the construction industry are listed in
Table 3-6.
The selection of an appropriate PDM is vital to ensure successful project completion [157].
Conventionally, the choice of the PDM is made as part of the procurement strategy. In most cases,
this decision is made by the owner with the help of the project manager at the project pre-planning
stage [160]. In general, a PDM evaluation matrix is prepared by the project manager, and the owner
selects the PDM method based on the details given in the matrix [161]. The factors considered in
these matrices vary with the project and the expertise of the project managers. Mafakheri et al.
(2007) have shown that the project delivery method is based on the project cost, schedule, quality,
complexity, value engineering, experience, risk, scope changes, uniqueness, external approvals,
culture, financial guarantee, and project size [162]. A study, done by Vanhouche (2012) identified
that project complexity (technical know-how), project risk, and project are critical factors in PDM
selection [163]. Moreover, the Government of Idaho proposed that complexity and innovation,
delivery schedule, level of design, risk, agency factors, market factors, and third party coordination
are critical factors in selecting an appropriate PDM for a dynamic project [161]. However, there is
very little scientific knowledge of PDM selection using MCDM.

35
Table 3-6 Literature-based Typical Project Delivery Methods
PDMs /
Category
Description Advantages Disadvantages Ref
Design-Bid-
Build (DBB)
- Traditional
In DBB, design, and
construction are considered as
separate entities. Construction
starts once the design is
completed. The bidding will
be followed afterward.
Familiar PDM
Defined roles and
responsibilities
Presents the lowest possible
cost to the building
High potential for
change orders and
conflicts
No cost-sharing
No “fast-tracking”
available
[164]
[165]
Design-Build
(DB) -
Collaborative
The private party will be
responsible for designing and
building the total project.
Single contract for design and
build
Can proceed with fast track
projects
No change orders needed
Cost-sharing is possible
The owner has limited
involvement, The
process will not bring
the best design and
best builder together
Quality checks will be
done by the contractor
[164]
[165]
Design-
Build-
Operate-
Transfer
(DBOT) -
Partnership
Public property owner enters
into the contract with a private
party for the design,
construction, finance, and
operation for a pre-authorized
period. Ownership will be
transferred afterward.
An external source of capital
Time-saving (speed-up with
the private sector experiences)
Cost-saving (By using the
private sector contracting
mechanisms)
Risk transferring possible
Lack of familiarity in
similar applications
Specialized projects
Limited public owner
control over the
project until the
transferring is done.
[166]
Build-Own-
Operate-
Transfer
(BOOT) -
Partnership
Public property owner enters
in to contract with a private
party for the design,
construction, finance, and
operation for a pre-authorized
period of time. The ownership
will be transferred to the
public owner at the end of the
period. (used for large scale
projects).
An external source of capital,
Time-saving (speed-up with
the private sector experiences)
Cost-saving (By using the
private sector contracting
mechanisms), Risk
transferring (finance, quality,
schedule, operation, and
maintenance), Possibility to
control over the design
Lack of familiarity in
similar applications
Specialized projects
Change orders might
be possible
[164]
Public-
private
partnership
(PPP) -
Partnership
A corporate venture between
private and public partners to
achieve a common public goal
by using their expertise
through proper resource
allocation, risk-sharing, and
rewarding.
An external source of capital
Time-saving (speed-up with
the private sector experiences)
Cost-saving (By using the
private sector contracting
mechanisms) Risk-sharing is
possible
The conflict between
public sector welfare-
based objectives and
private sector profit-
based objectives
[167]
[168]
[169]
Construction
Management
at-risk -
Collaborative
An owner selects the
construction manager (CM)
based on his qualifications and
fees. Then the CM has to
represent the owner and
proceed with the construction.
Ensure high quality at
minimal cost, owner transfers
the risk to CM, Cost-sharing
is possible CM will be
selected based on
qualifications and fees.
Perceptional price
competition is limited.
The owner has limited
control over general
contractors
[165]
Integrated
Project
Delivery
(IPD)
Collaborative
A collaborative alliance of
project resources (people,
systems, equipment etc.,) to
acquire optimal project
performance. A trust-based
method focuses on the overall
project goal.
Mutual respect and trust,
Scope and goal definition,
risk, cost-sharing are possible,
the project schedule can be
dynamic and project quality
control is better than other
PDMs.
Control over the
design and
involvement after
awarding are limited.
[170]

36
An AHP-based tool was developed to evaluate the above parameters and select the most suitable
project delivery method from prior-selected PDMs [162]. However, in some developments such
as the deployment of EV-RIs, demand uncertainty would lead to significant structural and cost
variations in the optimal refueling infrastructure network [53][71]. Thus, cost and demand
uncertainties need to be captured for selection of the most desirable PDMs for EV-RI deployment
projects. Mostafavi, A. et al. (2010) describe a fuzzy TOPSIS-based approach to incorporate
project uncertainties to select project delivery methods for construction projects [157].
EV-RIs can be considered smaller-scale infrastructure developments than traditional
transportation infrastructures such as roads, bridges, etc. Local developers, investors, and other
decision-makers do not have much knowledge of the deployment at the early stage of EV-RI
deployment projects. Hence, the use of multi-stakeholder synergies will be vital for successful
implementation of EV-RI networks in urban communities. In that case, selecting PDMs
considering the rogers model to evaluate EV recharging market factors and incorporating multiple
stakeholder opinions would enhance project performances [71]. There is a lack of knowledge on
an integrated approach to select PDM strategies based on the owner, project manager and other
relevant stakeholders' opinions for novel and long-term projects similar to EV-RI deployment.
3.6 Environmental and Economic Assessments
The life cycle environmental and economic assessment can be conducted using a life cycle
assessment (LCA) and life cycle cost assessment (LCC) [171]. Accordingly, the LCC and LCA
are explained as follows.
3.6.1 Life Cycle Assessment (LCA)
The life cycle assessment (LCA) is an important process development technique in terms of
environmental sustainability [172][173]. According to the United State Environmental Protection
Agency, LCA can be defined as “A methodology for estimating the environmental burdens of
processes and products (goods and services) during their lifecycle from the cradle to the grave”
(USEPA 1995), and according to the Society of Environmental Toxicology and Chemistry, LCA
is defined as “A process to evaluate the environmental burdens associated with products,
processes, or activities by identifying and quantifying energy and material used and water released

37
to the environment; to assess the impact of this energy, and material uses a release to the
environment, and to identify and evaluate opportunities to affect environmental improvements”
(SETAC 1993).
ISO 14041 shows a comprehensive framework of LCA with the respective phases to be conducted.
According to Figure 3-2, the life cycle assessment consists of a goal, scope, inventory analysis,
impact assessment, and interpretation. The goal of the LCA consists of the objective, the target of
the audience, and the reason for the study [174]. LCA focuses on the environmental impacts of the
process/product over its total life cycle. LCA enables decision-makers to improve the
environmental performance of a particular product in a strategic planning process [118].
The scope of the LCA study consists of the functions of the product system, the functional unit,
the product system boundaries, allocation procedures, types of impact and methodology of impact
assessment, subsequent interpretation to be used, data requirements, assumptions, limitations,
initial data quality requirements, type of critical review if any, and type and format of the report
required for the study [174].
According to ISO 14041, the life cycle inventory analysis and results interpretation include the
following steps. 1) Inventory classification that is required to assign each inventory item to
different impact categories; 2) Life cycle impact identification by converting inventory items into
impacts using conversion factors, which is called characterization; 3) Normalizing potential
impacts into a comparable format; 4) Grouping impacts and assigning weights to emphasize the
importance of each impact category; and 5) Evaluating the life cycle impact assessment results.
Life Cycle Assessment Framework
Goal and Scope
Definition
Inventory Analysis
Definition Impact Assessment
Interpretation
Figure 3-2 LCA Framework as Shown in ISO14041

38
The inventory analysis needs to be conducted after the scope definition in order to identify the
overall life cycle inventory. According to GREET, the vehicle life cycle can be divided into two
key cycles.
Vehicle Life Cycle: The vehicle life cycle study is comprised of vehicle manufacturing, vehicle
operations, and vehicle end-of-life [175][176]. Vehicle life cycle (LCA_V) emissions can be
explained as Equation (2) as follows:
LCA_V = E + Erecurring + Eend-of-life Equation 2
Where, E – Vehicle manufacturing emissions (kgCO2e), Erecurring – fuel-based operational
emissions and maintenance emissions (kgCO2e), Eend-of-life – End-of-life emissions (kgCO2e)
Fuel life cycle: Fuel life cycle can be categorized as “Well to Pump cycle (W2P)” and “Well to
Wheel cycle (W2W)” [177]. The feedstock (including feedstock recovery, transportation, and
storage) and fuel (including fuel production, transportation, storage, and distribution) are
cumulatively known as the W2P cycle [177]. The extended cycle, which includes the operational
phase emissions of the vehicle, is known as the W2W cycle [177]. Both of these processes generate
emissions and consume energy. According to Argonne National Laboratory (2016), the
relationship between the vehicle cycle and the fuel cycle can be shown in Figure 3-3.
Raw Material Extraction
Vehicle
Manufacturing
Vehicle
Operation
Vehicle
Maintenance/
Repair
Vehicle Disposal
Vehicle Life
CycleFuel Life
Cycle
Fuel Production /
Electricity
generation
Transportation /
Transmission
Retailling
Raw Material
Energy
Environmental
Impacts
Economic
Impacts
Figure 3-3 Conventional Vehicle Life Cycle and Fuel Life Cycle [8]

39
3.6.2 Life Cycle Cost (LCC)
Life cycle cost (LCC) can be defined as the external and internal costs associated with a project or
a process over its total lifetime [178]. The LCC can be assessed for the life cycles of fuel and
vehicle to obtain the complete life cycle of vehicle transportation. As described in section 2.1, the
vehicle purchase/manufacturing cost, operational cost, maintenance cost, repair cost, recycle cost,
fuel extraction, storage, transportation, and retailing cost are major parts of the vehicle life cycle.
The LCC for a product can be expressed as Equation (3) [179].
LCC = C + PV recurring – PV residual-value Equation 3
Where, PV recurring = Present value of the all recurring costs, C = Initial investment / purchase cost,
PV residual-value = Present value of the end-of-life value
NPV and annualized cost can be calculated by using Equation (4) and Equation (5) [180],
𝑁𝑃𝑉(𝑖, 𝑁) = ∑𝑅𝑡
(1+𝑖)𝑡𝑁𝑡=0 Equation 4
𝐸𝑞𝑢𝑖𝑣𝑎𝑙𝑎𝑛𝑡 𝐴𝑛𝑛𝑢𝑎𝑙 𝐶𝑜𝑠𝑡 = 𝑁𝑃𝑉 . (𝑖
1−1
(1+𝑖)𝑡
) Equation 5
Where: NPV -Net Present Value, Rt - net cash flow, i - discount rate, N - study period, t - time of
the cash flow
Vehicle fuel cost depends on energy production costs, supply chain cost, and retailer overheads.
The energy production costs vary based on the energy source and the production method.
Moreover, alternative fuel infrastructure cost varies with respect to the refueling infrastructure
capacity [87], refueling/recharging method [181], safety requirement [181], service radius [181],
terrain condition [181], and environment conditions [181]. Reducing the cost of alternative fuel
sources is the core factor in motivating users to shift from traditional transportation to alternative
energy transportation [24][10][182]. Therefore, the alternative fuel infrastructure costs need to be
kept to the minimum, in order to provide low-cost fuel [177][181].

40
3.6.3 Eco-efficiency Assessment
Eco-efficiency is a concept that is used to measure the combined effect of environmental and
economic costs and benefits of a particular product or product system through its entire life cycle
[183]. Huppes and Ishikawa (2007) described a concept called “eco-efficiency ratio” to compare
different alternatives and to identify trade-offs in order to select the best alternative [184]. Using
general terms, the units of value generation per unit of environmental impact is known as the eco-
efficiency of the particular product [183][185]. Equation (6) can be used to calculate the eco-
efficiency ratio.
Eco − efficiency Ratio = Value generation ($)
Units of enviornmental impacts (kg CO2eq) Equation 6
3.7 Multi-criteria Decision Making
Multi-criteria decision making (MCDM) is prevalent in engineering applications, where the
decisions are related to complex problems with conflicting objectives and multiple stakeholders
[186]. MCDM problems are described using a decision matrix to indicate multiple attributes and
alternatives [187]. These methods can be categorized into non-compensatory and compensatory
methods based on the decision-making approach.
Non-compensatory methods: These methods can not be used for decisions where there are no
trade-offs between multiple attributes [187]. In this case, each attribute stands on its own, and the
comparison should be made based on the individual attribute [187]. Dominance, maximin,
maximax, conjunctive-constraint, and disjunctive-constrain are some of the common non-
compensatory methods used for engineering applications [187].
Compensatory methods: These methods are used to incorporate trade-offs between multiple
attributes during the decision-making process [187]. The following compensatory methods are
frequently used for engineering applications.
1) Scoring methods – Here, a score is used to express the decision-makers’ preference for each
alternative [187]. Analytical Hierarchy Process (AHP) and Simple Additive Weighting method are
popular scoring methods used in the literature.

41
2) Compromising methods – These methods choose the best desirable alternative that has the
lowest distance to the ideal solution [187]. The Technique for Order Preference by Similarity to
Ideal Solution (TOPSIS) method is a prevalent compromising method for engineering
applications.
3) Concordance methods – These methods establish concordance measures and generate a
preference ranking to obtain the best desirable solution [187]. In this case, alternatives with highly
ranked attributes should get higher ranks. The linear programming method is a prevalent approach
that uses concordance-based decision-making.
4) Evidential Reasoning Approach – This is a novel MCDM approach in which each attribute of
an alternative is denoted by a distributed assessment using a belief structure [187].
The above-mentioned MCDM methods can be used to obtain ideal solutions, non-dominated
solutions, satisfying solutions, and preferred solutions based on the nature of the problem, nature
of the desired solution, and the method used. Moreover, these methods can be further improved by
integrating uncertainty.
3.8 Decision-making under Uncertainty
Uncertainty can be described as the vagueness of available data and lack of data availability.
Several methods can be used for decision making by incorporating the data and project
uncertainties, where the Scenario-based and fuzzy-based approaches are prominent in the existing
studies [188].
3.8.1 Scenario-based Assessment
Scenario-based assessment is prevalent in the long-range infrastructure planning method under
uncertainties [189]. Decision-makers are using scenario-based assessment for long-range
infrastructure expansion projects such as water treatment plants [189], renewable energy storage
plants, district energy systems [190], electricity production plants, and other commodity
production plants [191]. Literature reveals that time-sensitive infrastructure demands can be
assessed using well-developed scenarios [189]. Hence, decision-makers such as facility managers,
developers, and public and private authorities can decide the appropriate time to invest in
infrastructure expansion to increase capacity for potential demands [189].

42
Scenarios can be described as plausible futures [192]. Scenario planning defines evidence-based,
hypothetical alternatives for how planning might proceed [192]. This method can be used to
establish model changes in the product life cycle or process life cycle, such as replacing the
conventional product at the “over-maturity” stage by a new product category [192]. The scenario-
based assessment consists of the following steps:
- Identify scenarios (e.g. best case, worst case, most likely case, etc…) [193]
- Define variables that affect future outcome, based on the selected scenarios [193]
- Create scenarios by assigning the qualitative and quantitative reasonable value to the defined
variable [193].
3.8.2 Fuzzy Logic and Fuzzy Sets
According to Zadeh (2006), classical logic theories have limitations in automated decision making,
including imprecision, uncertainty, incompleteness of information, conflicting information,
partiality of truth, and partiality of possibility information [194][195]. Therefore, the fuzzy
approach can be used to associate uncertainty in the strategic decision-making process [196]. In
that case, the elements that the transition is not well-defined are known as fuzzy sets [196].
Because, the boundaries of fuzzy sets can be vague and ambiguous [196], these sets are measured
with a function that attempts to describe vagueness and ambiguity [196]. Equation (7) defines a
basic function of a fuzzy set. Consider a classical set A of the universe U, a fuzzy set A is defined
by a set of ordered pairs, a binary relation,
A = {(x , µA (x)) | x ϵ [0,1] } Equation 7
Where, 0< µA (x) 1 is a membership function of x and A. A trapezoidal fuzzy number was also
introduced as Figure 3-4 [197].
µA (x)=
(x-a)/(b-a), axb
(c-x)/(c-b), bxc
0, Otherwise,
a b c x
µA
(x) 1
0
Figure 3-4 A Trapezoidal Fuzzy Number A = (a,b,c)

43
Let fuzzy number A1 = (a1,b1.c1) and A2 = (a2,b2,c2) and A1, A2 > 0, the arithmetic operations of
fuzzy numbers [198] are shown as follows.
Fuzzy addition is shown as Equation (8):
A1 A2 = (a1+a2, b1+b2, c1+c2) Equation 8
Fuzzy subtraction is shown as Equation (9):
A1¶ A2 = (a1- c2, b1-b2, c1-a2) Equation 9
Fuzzy multiplication is shown as Equation (10):
A1 A2 = (a1.a2, b1.b2, c1.c2) Equation 10
Fuzzy division is shown as Equation (11):
A1⨸A2 = (a1/c2, b1/b2, c1/a2) Equation 11
Moreover, the distance between two triangular fuzzy numbers d(A1,A2) is shown in Equation (12)
[199].
𝑑(𝐴1 , 𝐴2) = √[(𝑎1 − 𝑎2)2 + (𝑏1 − 𝑏2)2 + (𝑐1 − 𝑐2)2] 3⁄ Equation 12
The centroid method, weighted average method, mean max method, and lambda-cut method can
be used as defuzzification methods; the centroid method is widely used in engineering studies due
to its simplicity and ability to solve different fuzzy sets [200]. Crisp number (Z*) calculated using
the centroid method can be expressed as Equation (13).
𝑍∗ = ∫ µ 𝐴(𝑥) . 𝑋 𝑑𝑥 ∫ µ 𝐴(𝑥) 𝑑𝑥⁄ Equation 13
The above fuzzy operations were used to solve the complex fuzzy-based tool developed for F-
MADM based decision-making.

44
3.8.3 Fuzzy Multi-Attribute Decision Making
The F-MADM approach can be selected based on the attributes available and the required results
of the study. Generally, Fuzzy Analytic Hierarchy Process (F-AHP), Fuzzy Elimination Et Choix
Traduisant la Realité (F-ELECTRE), Fuzzy Rule-based selection, and Fuzzy Technique for Order
of Preference by Similarity to Ideal Solution (F-TOPSIS) can be selected as typical F-MADM
methods, which are used to select the best desirable alternatives under data uncertainty [200].

45
Chapter 4 Selection of Desirable Alternative Fuel Transportation Systems
Sections of this chapter have been published in the Journal of Cleaner Production, as articles titled
“Are we ready for alternative fuel transportation systems in Canada: A regional vignette” and
“Scenario-based economic and environmental analysis of clean energy incentives for households
in Canada: Multi-criteria decision making approach” [70][38].
4.1 Background
Decarbonizing the transportation sector using low-emission alternative energy sources has gained
immense attention from city planners, developers, and policymakers to steadily achieve GHG
emission reduction targets considering long-range urban planning [5] [6]. The emission level of
the transport energy cycle changes with the primary energy source and the energy production
method. According to the available literature, propane, hydrogen fuel cell, biodiesel, electricity,
and natural gas are being used to decarbonize road transportation depending on their availability,
accessibility, technical know-how, and favourable economic impacts [82]. However, as explained
in recent studies, alternative transportation systems, that use low-emission electricity and hydrogen
fuel cell as their primary source of energy are considered scalable emerging technologies for
decarbonizing the transportation sector [80]. These fuel technologies have their own unique
emissions, cost behaviours, and regional availability and appropriateness. For electricity, some
provinces use low-emission primary energy sources such as hydro, wind, solar photovoltaic (PV),
etc. to generate low-emission electricity, while other provinces use high-emission fuels such as
coal, fossil fuels, natural gas, etc. to generate electricity. For hydrogen fuel cells, some hydrogen
production methods emit high emissions based on the method and primary energy sources used to
produce hydrogen fuel cells for vehicles. Moreover, commercial production of hydrogen fuel cells
requires major investments and better paybacks for those investments based on investor
perspectives [59]. Therefore, the selection of the most desirable low-emission fuel technology for
transpiration is not straightforward and requires scientific analysis of the environmental and
techno-economic factors considering the stochastic (regional) variations of the primary sources of
energy.

46
A literature review showed a significant number of studies and methodologies available to evaluate
and compare the life cycle emissions of alternative fuel vehicles [7][8]. The greenhouse gases,
regulated emissions, and energy use in transportation (GREET) model developed by Argonne
national laboratory is one of the popular models available in the recent body of the knowledge
[8][9]. However, the aforementioned models only consider the life cycle emissions of alternative
and conventional vehicles for a given location. Hence, there is a knowledge gap in terms of
decision support perspective, where there is a need for life cycle cost and technical viability
assessment to evaluate the commercial/investment readiness of the proposed low-emission road
transportation method and mode. Accordingly, a systematic investigation needs to be conducted
to consider all the regional economic and environmental factors throughout the entire life of the
conventional and potential passive road transportation options.
This chapter focuses on selecting the best desirable alternative fuel-based low-emission
transportation option to replace conventional light-duty vehicles. Factors such as the economic and
environmental aspects of both transport energy and mobility cycles, and the technical know-how
of the alternative fuel options were assessed considering the life cycle thinking aspect and the
regional variations of grid mixes. The proposed framework consists of potential GHG emissions
considering the primary energy source and the energy production method used in different regions
in Canada. In addition to that, the economic factors (e.g. vehicle purchasing cost and operating
cost) [10], [11], vehicle range limitations [11], [12], limited fuel production, storage, and re-
fuelling infrastructure availability [10], [11], [13] were also considered as limitations of the use of
alternative fuel-based vehicle options. This work can drive policy decision making related to
provincial alternative transport infrastructure planning in Canada.
4.2 Methodology to Select Desirable Transport Fuel Options
This section discusses the methodology used to select the best desirable low-emission fuel
technology for different regions in Canada. A life cycle thinking-based scientific framework is
proposed and developed to assess the regional economic and environmental viability of the use of
EVs and HFCVs compared to conventional internal combustion engine vehicles (ICEVs).

47
Figure 4-1 Methodology Framework to Select the Low-emission Fuel Technology

48
The research methodology diagram is shown in Figure 4-1. This methodology consists of five key
phases: 1) Data collection and database preparation; 2) Preliminary selection of low-emission
alternative fuel options; 3) Life cycle assessment; 4) Life cycle cost assessment; and 5) Eco-
efficiency based fuel option selection for different regions in Canada.
Phase 1: Data Collection and Database Preparation
A comprehensive literature review was conducted to collect the necessary data and develop the
required database. Accordingly, the study used “Google Scholar” and “Compendex Engineering
Village” to search peer-reviewed articles relevant to this subject area. Hence, the study used
“Alternative fuel vehicles,” “Electrified Transportation,” “Range Anxiety,” and “Emission
Factors” as its keywords. Moreover, both electronic and printed materials were analyzed using the
document analysis procedure [201], which includes an analysis of historical data, newspaper
articles, advertisements, web-based documents, survey reports, and organizational and
institutional reports. The life cycle inventory data were collected from the databases provided by
the Argonne National Laboratory (2015), Athena Impact estimator, and SimaPro databases.
Phase 2: Preliminary Selection of Low-emission Alternative Fuel Options
Literature-based data was used to filter and select the scalable alternative fuel-based road
transportation technologies for the Canadian Context. A preliminary model was developed
considering techno-economic, environmental, and social factors. The factor categories and
considered factors are given in Table 4-1. The linguistic terms (LT) and the respective Likert scale
(LS) are shown in Table 4-1.
The rule-based method was used to filter the desirable low-emission fuel technologies to replace
the conventional transportation system in Canada. A four-point Likert scale was used to rate the
factor levels according to the defined rules. The following rules were defined in order to filter the
potential low-emission alternative fuel technologies for road transportation.
Rule 1: All technical factors should be positive. The technologies that do not have commercial
production of vehicles, commercial production of fuels, or available non-renewal energy options
cannot be considered in this work. (TF1 > 0 and TF2 > 0 and TF3 > 0)
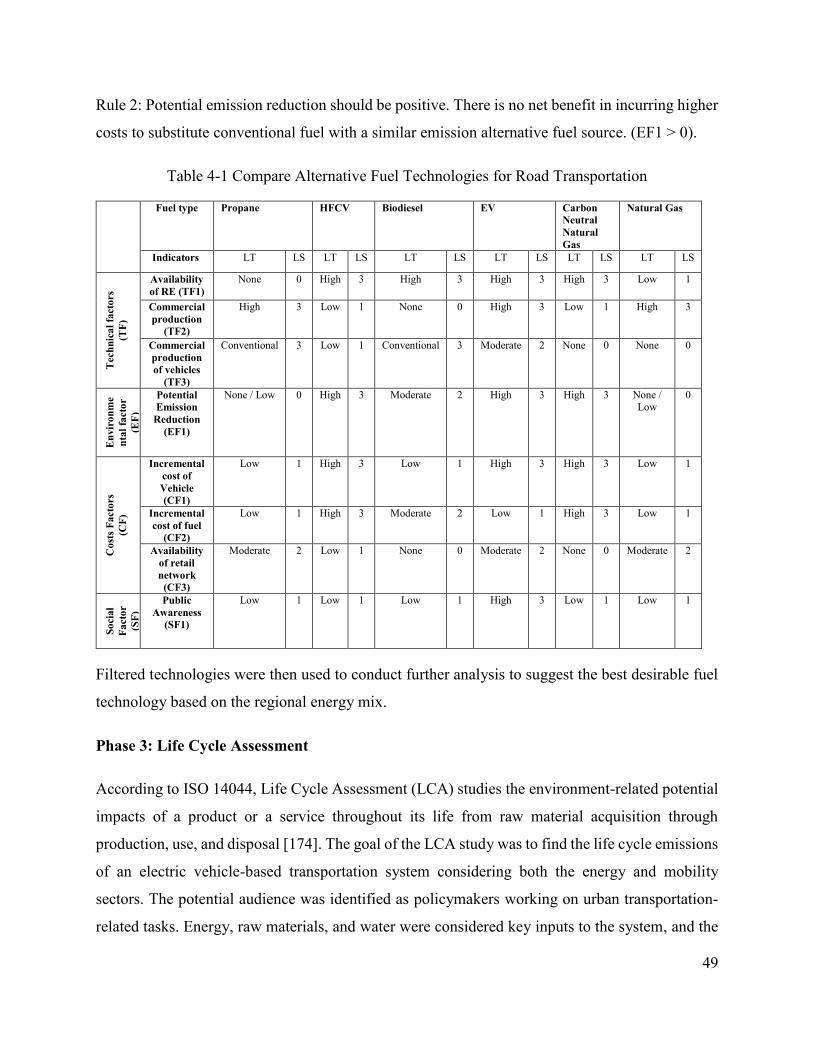
49
Rule 2: Potential emission reduction should be positive. There is no net benefit in incurring higher
costs to substitute conventional fuel with a similar emission alternative fuel source. (EF1 > 0).
Table 4-1 Compare Alternative Fuel Technologies for Road Transportation
Fuel type Propane HFCV Biodiesel EV Carbon
Neutral
Natural
Gas
Natural Gas
Indicators LT LS LT LS LT LS LT LS LT LS LT LS
Tech
nic
al
facto
rs
(TF
)
Availability
of RE (TF1)
None 0 High 3 High 3 High 3 High 3 Low 1
Commercial
production
(TF2)
High 3 Low 1 None 0 High 3 Low 1 High 3
Commercial
production
of vehicles
(TF3)
Conventional 3 Low 1 Conventional 3 Moderate 2 None 0 None 0
En
vir
on
me
nta
l fa
cto
r
(EF
)
Potential
Emission
Reduction
(EF1)
None / Low 0 High 3 Moderate 2 High 3 High 3 None / Low
0
Co
sts
Fa
cto
rs
(CF
)
Incremental
cost of
Vehicle
(CF1)
Low 1 High 3 Low 1 High 3 High 3 Low 1
Incremental
cost of fuel
(CF2)
Low 1 High 3 Moderate 2 Low 1 High 3 Low 1
Availability
of retail
network
(CF3)
Moderate 2 Low 1 None 0 Moderate 2 None 0 Moderate 2
So
cia
l
Fa
cto
r
(SF
)
Public
Awareness
(SF1)
Low 1 Low 1 Low 1 High 3 Low 1 Low 1
Filtered technologies were then used to conduct further analysis to suggest the best desirable fuel
technology based on the regional energy mix.
Phase 3: Life Cycle Assessment
According to ISO 14044, Life Cycle Assessment (LCA) studies the environment-related potential
impacts of a product or a service throughout its life from raw material acquisition through
production, use, and disposal [174]. The goal of the LCA study was to find the life cycle emissions
of an electric vehicle-based transportation system considering both the energy and mobility
sectors. The potential audience was identified as policymakers working on urban transportation-
related tasks. Energy, raw materials, and water were considered key inputs to the system, and the
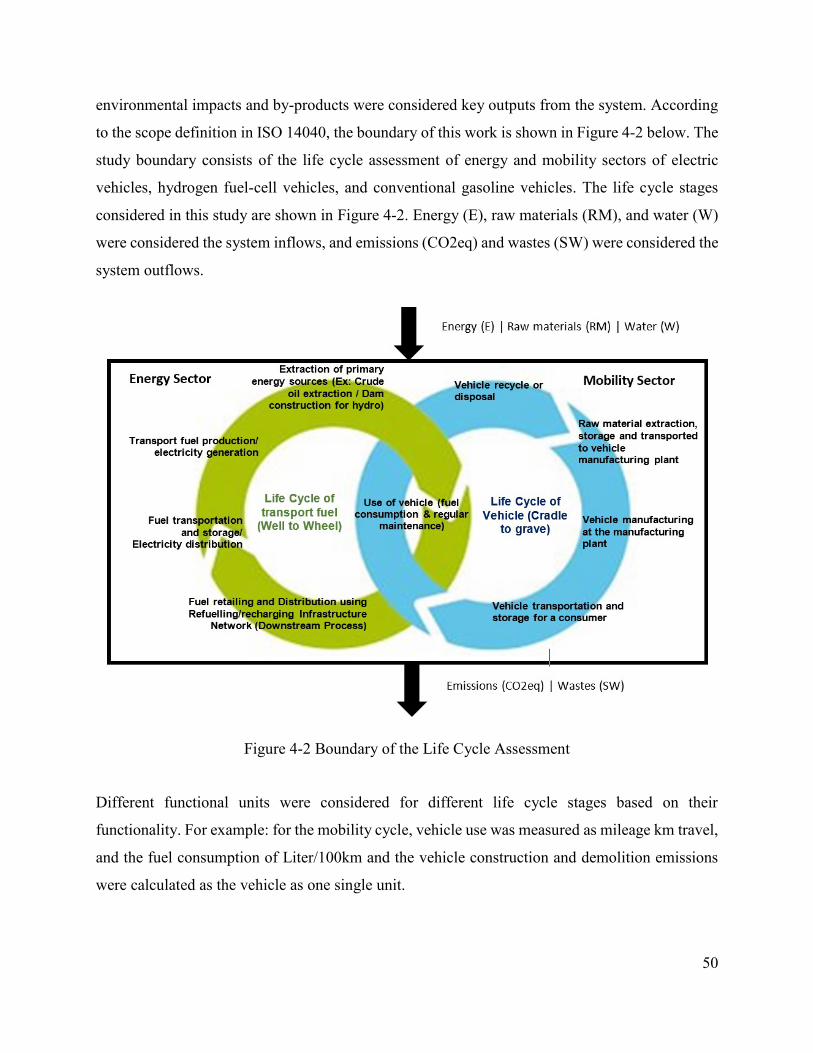
50
environmental impacts and by-products were considered key outputs from the system. According
to the scope definition in ISO 14040, the boundary of this work is shown in Figure 4-2 below. The
study boundary consists of the life cycle assessment of energy and mobility sectors of electric
vehicles, hydrogen fuel-cell vehicles, and conventional gasoline vehicles. The life cycle stages
considered in this study are shown in Figure 4-2. Energy (E), raw materials (RM), and water (W)
were considered the system inflows, and emissions (CO2eq) and wastes (SW) were considered the
system outflows.
Different functional units were considered for different life cycle stages based on their
functionality. For example: for the mobility cycle, vehicle use was measured as mileage km travel,
and the fuel consumption of Liter/100km and the vehicle construction and demolition emissions
were calculated as the vehicle as one single unit.
Figure 4-2 Boundary of the Life Cycle Assessment

51
The duration of the life cycle and the average mileage operated per year were considered to
estimate the total operational energy consumption of the vehicle within the considered life cycle.
For the energy cycle, the life cycle assessment was conducted to find the total emission of unit fuel
from well-to-pump. Ultimately, however, all those units were converted to kgCO2eq/vehicle,
considering the emissions factors for the impact category to find the total life cycle impacts of the
vehicle. In addition to that, the following assumptions were made for the life cycle assessment of
EV, HFCV, and conventional ICEV:
1. According to previous studies, the vehicle life span is considered 12-15 years [202]. However,
in this study, the vehicle use period/ life span is assumed as 5 years due to the lack of data on
maintenance after 5 years.
2. Due to the various vehicles available in the market, three specific vehicles were considered to
obtain life cycle cost data for the analysis. Those representative vehicles and the reason for
the selection are: 1) A mid-size passenger car (Nissan Leaf S 5DR) [203] (Electric), selected
based on its high market penetration as an economical EV; 2) A mid-size sports utility vehicle
(Hyundai Tucson FCEV) [204] (Hydrogen), selected because it is a popular, commercially
available vehicle in HFCV market segment; 3) A spark-ignition mid-size passenger car
(Toyota Yaris 4DR) [205], selected as the ICEV for this study due to high market penetration
as an economical vehicle and its similar engine power torque (Hp) to aforementioned
alternative vehicles.
3. The annual mileage of a vehicle in Canada is assumed as 18,000km per year [206].
In addition to the mobility cycle, the energy cycle for each energy alternative considered in this
analysis can be explained as follows:
Gasoline for transportation: Octane 85 gasoline was considered to find the life cycle inventory for
conventional ICEV refueling. The functional unit for this fuel was taken as litre fuel consumption
per 100 kilometers (l/100km). The database developed by Argonne National Laboratory was used
to collect and prepare the life cycle inventory database for gasoline fuel-based light-duty vehicles.
Hydrogen fuel-cell technology for transportation: Hydrogen fuel cell (HFC) production using
Natural Gas (NG) gasification was considered the commercially available method to produce

52
mass-scale hydrogen fuel cells for road transportation [207]. Hence, the functional unit of
hydrogen was considered as litre hydrogen fuel cells consumed per 100 kilometers (l/100km).
Furthermore, the LCA impacts of the common low-emission hydrogen production methods, which
are alkaline water electrolysis using low-emission electricity, thermochemical water splitting with
nuclear Cu-Cl cycle, and central biomass gasification, etc., were also considered in this analysis.
The database developed by the Argonne National Laboratory (2015) and other North American
databases were used to obtain data and develop the LCA databases for the analysis.
Electricity for transportation: As shown in Appendix A2, electricity generation emissions vary
with the primary energy source. The electricity mix of Canada changes by province due to the
availability of resources, raw materials, and technology. Hence, the life cycle emissions of the use
of different fuels vary with the location. The LCA inventory of grid electricity from electricity
generation to the consumer recharging point via the smart grid was calculated using GREET
software developed by Argonne National Laboratory. Different energy mixes of the electricity
generation process were defined in the aforementioned software to find the mid-point indicators
for the life cycle inventory.
The system inputs were: 1) Fossil Fuel (GJ/Unit vehicle or kJ/100litre fuel); 2) Coal Fuel (GJ/Unit
vehicle or J/100litre fuel); 3) Natural Gas Fuel (GJ/Unit vehicle or kJ/100litre fuel); 4) Petroleum
Fuel (GJ/Unit vehicle or kJ/100litre fuel); 5) Renewable (GJ/Unit vehicle or kJ/100litre fuel); 6)
Biomass (GJ/Unit vehicle or kJ/100litre fuel); 5) Nuclear (J/Unit vehicle or kJ/100litre fuel); 6)
Non-Fossil Fuel (GJ/Unit vehicle or kJ/100litre fuel); and 7) Total Water (m3/Unit vehicle or
m3/100litre fuel).
The system outputs were: 1) Volatile organic compound (VOC) (kg/Unit vehicle or mg/100litre
fuel); 2) Carbon Monoxide (CO) (kg/Unit vehicle or mg/100litre fuel); 3) Nitrogen Oxides
emissions (NOx) (kg/Unit vehicle or mg/100litre fuel); 4) Particles between 2.5 and 10 microns
(micrometers) in diameter (PM10) (kg/Unit vehicle or mg/100litre fuel); 5) Fine particulate matter
less than 2.5 micrometers in diameter (PM2.5) (kg/Unit vehicle or mg/100litre fuel); 6) Sulphur
oxides emissions (SOx) (kg/Unit vehicle or mg/100litre fuel); 7) Methane (CH4) (kg/Unit vehicle
or mg/100litre fuel); 8) Carbon Dioxide (CO2) (kg/Unit vehicle or mg/100litre fuel); 9) Nitrous

53
Oxide (N2O) (g/Unit vehicle or mg/100litre fuel); 10) Bio Carbon (BioC) (g/Unit vehicle or
mg/100litre fuel); and 11) Particle Oxidation Catalysts (POC) (g/Unit vehicle or mg/100litre fuel).
Equation (14) was used to find operational emissions based on the emissions of unit fuel
consumption.
𝐸(𝑟𝑒𝑐𝑢𝑟𝑟𝑖𝑛𝑔) = 𝛾 × 𝐴𝑀 × 𝐿𝑇 𝑉𝐹𝐶⁄ Equation 14
Where, E(recurring) – Vehicle operation (fuel) emissions (kgCO2e); 𝛾 – Emission factor
(emissions per unit fuel); AM – Annual mileage (km/year); LT – life span (year); VFC – Fuel
consumption (km/per unit fuel)
The vehicle (from cradle-to-grave) with fuel (from well-to-pump) was considered for the complete
life cycle of the mobility and energy cycles, used to describe the total emissions related to road
transportation [177]. Hence, the life cycle of the overall system was described as Equation (15).
The possible light-duty vehicle options were developed accordingly, using different fuel-
production methods, regional energy-mixes, and commercial availability of mass fuel sources. The
options considered in this work including hydrogen fuel cell vehicles with different hydrogen fuel
production methods, EVs with different grid-mixes within Canada, and conventional gasoline fuel-
based vehicles (ICEVs).
LCA_S = LCA_V + LCA_Fw2p Equation 15
Where, LCA_S – Life cycle emissions of the system (vehicle life cycle & fuel life cycle)
(kgCO2e); LCA_V – Life cycle emissions of the vehicle (kgCO2e)*; LCA_Fw2p – Life cycle
emissions of fuel from well to wheel (kgCO2e)**
The impacts of the inventory were then organized into impact categories. Literature-based
inventory-impact conversion factors obtained from the study conducted by Asdrubali, F., et al.
(2015), were used to find LCA impacts of each impact category [208]. The mid-point indicators
were considered in this chapter to show the relationship to emission flows and used for further
comparison. Hauschild, M., H., and Huijbregts, M., A., J., (2015) showed a comparison of mid-
point indicators and end-point indicators where the mid-point indicators are highly suitable to show
elementary flows and lower modeling uncertainty [209]. The following mid-point impact

54
categories were considered in this analysis and will be most affected by local communities in the
long-run [210] [211]. There are: 1) Global warming potential (GWP); 2) Photochemical ozone
formation (POF); 3) Acidification of land and water (ALW); 4) Eutrophication (EN); 5)
Stratospheric ozone depletion (SOD); and 6) Depletion of non-renewable energy resources (DNR).
Phase 4: Life Cycle Cost Assessment
According to the available literature, life cycle cost (LCC) can be explained as the complete costs
of a vehicle in its entire life span. Typically, the vehicle life cycle cost varies with the vehicle type,
use behaviours, local fuel prices, other vehicle costs, and vehicle end-of-life cost. Generally, the
vehicle shows negative end-of-life cost (positive income), which reduces the overall life cycle cost.
The LCC for the vehicle can be expressed as Equation (16) [179].
LCCVehicle = Vcapex + Vopex + VEoL Equation 16
Where, LCCvehicle = Life cycle cost of the vehicle (CAD/vehicle); Vcapex = Vehicle capital
expenditure / purchasing price (CAD/vehicle); Vopex = Present value of the all operational
expenditure (CAD/vehicle); VEoL = Vehicle end-of-life costs (CAD/vehicle)
The data provided in Table 4-2 was used to calculate the vehicle capital expenditure (CAPEX),
operational expenditure (OPEX), and vehicle end-of-life costs (EoL). The operational cost was
calculated using Equation (17).
Vopex = VOC + VM&RC + EVBC Equation 17
Where, Vopex = Present value of the all operational expenditure (CAD/vehicle); Voc = Present value
of the operating costs (CAD/vehicle.lifecycle); VM&RC = Present value of the maintenance and
repair cost (CAD/vehicle.lifecycle); EVBC = Cost of electric vehicle battery replacement (EVBC)
– (CAD/battery.life cycle)
The vehicle operating costs and electric vehicle battery replacement costs were calculated as
Equation (18) and Equation (19), respectively.

55
VOC = Fc . AM VFC⁄ Equation 18
Where, Voc = Vehicle operating cost (CAD/vehicle.life cycle); Fc = Fuel or electric cost of the
considered region (CAD/litre or CAD/kwh); AM = Average annual millage travel
(km/year.vehicle); VFC = Vehicle fuel / electricity consumption (Litres/100km or km/kWh)
EVBC = CF. EVCB. AM EVBRC. Rng⁄ Equation 19
Where, CF= Cost factor for EV battery – (CAD 300 /kWh [212]); EVCB = Capacity of battery –
30kWh (see Annexure D); EVBRC = No. of re-charging cycles in battery life cycle – Li-ion battery
with 3,000 cycles; Rng = Vehicle range per one recharging cycle (km/cycle); AM = Average
annual millage travel (km/year.vehicle)
The Net Present Value (NPV) was calculated using Equation (20) [180] in order to compare the
costs of different vehicles.
NPV(i, N) = ∑ Rt (1 + i)t⁄Nt=0 Equation 20
Where, NPV = Net Present Value (CAD), Rt = Net cash flow (CAD); i = Discount rate (%); N =
Study period (Years); t = Time of the cash flow
The cost data of the considered vehicles are given in Table 4-2. The full collection of the data is
attached as appendices, as stated in Table 4-2. The vehicle purchase price (in British Columbia,
Canada) was considered as the product purchase cost or the initial investment. Operational
expenses such as fuel expenses and maintenance and repair expenses were considered as recurring
costs. Additionally, end-of-life cost after the life of the vehicle was considered positive, which is
generally a gain to the consumer.

56
Table 4-2 Life Cycle Cost Calculation for the System (LCC_S)
Gasoline Hydrogen Electricity
Vehicle purchase price (C)
Vehicle capital expenditure
/ purchasing price (Vcapex)
CAD 21,151/vehicle CAD 66,940/vehicle5 CAD 26,688/Vehicle
Vehicle operational and maintenance cost (PVrecurring)
Fuel or electric cost (Fc) Refer Appendix A4 Provincial data not
available. The average
price is CAD 5 per kg
Hydrogen [213]
Refer Appendix A3 and
retailor margin of CAD
0.02915/ kWh.
Fuel consumption rate (Vfc) 12.32 km per Liter of
Gasoline
77 km per kg of
Hydrogen 34 kWh per 100km
Maintenance and repair cost
(VM&RC)
Refer Appendix B1 Refer Appendix B1 Refer Appendix B1
Cost of Battery Replacement
(EVBC)
Negligible Negligible CAD 406 /
(year.vehicle)
Vehicle residual value (PVresidual-value)
End-of-life cost CAD 8,006 CAD 20,082 CAD 6,345
The following assumptions were made to perform necessary LCC calculations.
1. The insurance costs of the vehicles depend on the valuation of the vehicle, driver, policies,
and vehicle use [214]. Therefore, insurance costs have not been considered for the LCC of
vehicles.
2. The regional hydrogen production method was assumed based on the availability of green
electricity and natural gas in a particular region.
3. The vehicle end-of-life cost was assumed as 30% of the vehicle purchasing cost.
4. Assumed 10 year payback period for EV infrastructure facility and zeroed residual value
after ten years lifetime.
5. EV re-charging facility operates with an 80% efficiency rate for 16 hours per day and 365
days per year. The public re-charging station capacity was assumed as 50kW [215].
5 Includes fuel cost, maintenance and repair cost for first 03 years. Please see Appendix B1.
57
6. The consumer price index for Canada is 2% [113], and the discount rate for Canada is taken
as 3.5% (Innovation, Science and Economic Development Canada, 2014) for annualizing
the cost factors.
7. The retailer’s profit mark-up was assumed as 12%.
8. Average cost of level III facility is CAD 35,000 to 45,000 per facility [87].
9. CAD 2,000 per year without including the cost of energy [217].
According to the aforementioned methodology, the overall life cycle cost of each fuel option was
calculated based on the provincial data obtained in Canada.
Phase 5: Select the most desirable alternative fuel option for road transportation
This section explains the methodology used to select the best desirable fuel option for road
transportation considering regional economic and environmental parameters of the available fuel
options. As the first stage, the alternative fuel options were defined using different combinations
considering the regional fuel availability. Those were coded as follows to enhance the clarity of
the explanation.
OP1_EV EVs operated using the provincial grid electricity (Central)
OP2_EV EVs operated using renewable energy such as Solar(PV), wind, etc. (Distributed)
OP3_HFCV HFCVs operated using hydrogen fuel cells (HFCs) produced by the provincial
grid electricity (Central)
OP4_HFCV HFCVs operated using HFCs produced by water electrolysis using renewable
energy such as Solar(PV), wind, etc. (Distributed)
OP5_HFCV HFCVs operated using HFCs produced by central coal gasification (Central)
OP6_HFCV HFCVs operated using HFCs produced by biomass gasification (Distributed)
OP7_HFCV HFCVs operated using HFCs produced by thermochemical water splitting with
nuclear Cu–Cl cycle (Central)
OP8_HFCV HFCVs operated using Canadian natural gas-based HFCs Production (Central)
BC_ICEV The conventional use of ICEVs using gasoline as the fuel source

58
The mid-point impacts identified from the LCA to obtain the damage impacts to the environment
were calculated for the options mentioned above (including the conventional fuel-based vehicles).
Mid-point indicators were compared and conclusions were given considering environmental
perspective. However, the comparison showed different options for different indicators. Therefore,
the environmental score was defined to obtain a single value for each considered option to compare
and select the most desirable vehicle option.
The single life cycle impact index obtained using Netherlands Oil and Gas Exploration and
Production Association (NOGEPA) suggested weights can be defined as the “Environmental Score
(EnvS)” for each alternative fuel option. NOGEPA weights were selected from the literature to
indicate the relative importance of each impact indicator considering the industrial (oil and gas)
applicability and appropriateness of those weights for the eco-efficiency-based studies [218]. The
NOGEPA weights for GWP, SOD, ALW, EN, POF, and DNR were considered as 32, 5, 6, 13, 8,
and 8, respectively [218]. The indicator values were normalized using Equation (21) prior to
multiplying with the NOGEPA weights.
Xi,normalized = (xi,j − xi,min) (xi,max − xi,min)⁄ Equation 21
Where, X I,normalized – Normalized value for the alternative I and indicator j; Xi,j – Value given in
alternative I and indicator j; Xi,min – Value given in alternative I and minimum value of indicator j;
Xi,max – Value given in alternative I and maximum value of indicator j
The normalized mid-point impacts were then multiplied with NOGEPA weights and aggregated
to obtain a single impact per each alternative fuel option [219]. LCC for the aforementioned fuel
options were also assessed and normalized in order to obtain the “Economic Score (EconS)” of
the different alternative fuel options. Equation (21) was used to normalize the LCC values, and the
normalized values were aggregated to find the economic score.
EnvS and EconS were compared individually and discussed the appropriateness of each fuel option
in different provinces. A single indicator-based eco-efficiency analysis was conducted to evaluate
and obtain the most desirable alternative fuel type for a given region, considering the economic
and environmental perspective. Equation (22) was used to calculate the eco-efficiency of the
selected fuel option.

59
Eco − efficiency score = EnvS EconS⁄ Equation 22
Where, EnvS – Environmental score; EconS – Economic score
Accordingly, the most desirable fuel options were determined for each province in Canada.
4.3 Results and Discussion
The Canadian federal government and provincial governments are more concerned with reduction
of transport-based GHG emissions, which will eventually lead to achieving provincial greenhouse
gas reduction targets. This section discusses the results of the aforementioned study. Accordingly,
the alternative fuel options for Canada were assessed using the rule-based method, and EVs and
HFCVs were chosen based on their appropriateness. Afterward, the EVs and HFCVs were further
analyzed with a detailed LCC and LCA. Different regional energy mixes and technologies were
considered in this analysis. The results obtained from the LCC, LCA and enhanced LCC
calculations are described in this section. Light-duty vehicles operated using electricity, hydrogen
fuel cells, and gasoline were compared with each other.
4.3.1 Life Cycle Inventory for Different Fuel Options and Different Mixes of the Source
Energy
The life cycle inventory results for hydrogen fuel cell vehicles, electric vehicles, and conventional
vehicles are shown in Table 4-3. In this analysis, the fuel cycle was not considered and the vehicle
cradle-to-grave was considered without the operational emissions. Table 4-3 shows the resource
required to manufacture vehicles, and resultant emissions are significantly higher than the vehicle
maintenance and end-of-life phase. Conventional vehicles show the lowest manufacturing
emissions in almost all categories, whereas EVs show the highest manufacturing emissions in most
emission categories. However, operational emissions need to be integrated into the above life cycle
values to identify the most desirable vehicle categories. Hence, cradle-to-grave emissions of
hydrogen fuel cells and electricity are shown in Table 4-4 and Table 4-5, respectively.
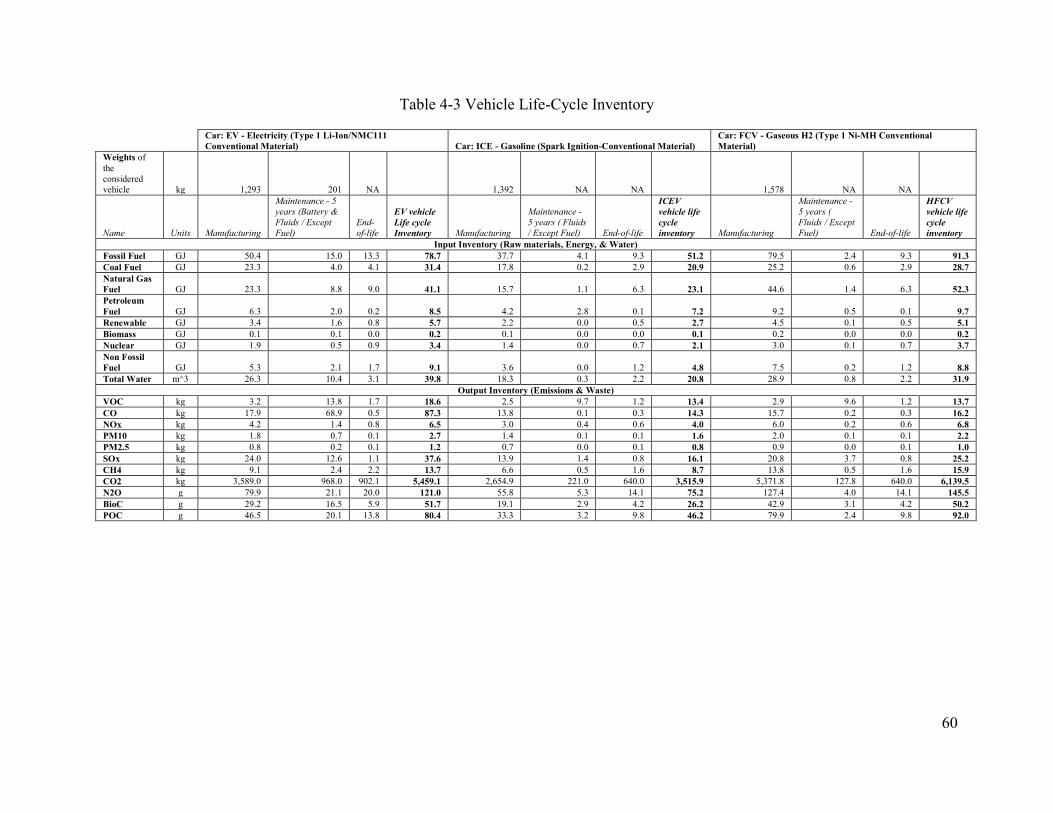
60
Table 4-3 Vehicle Life-Cycle Inventory
Car: EV - Electricity (Type 1 Li-Ion/NMC111
Conventional Material) Car: ICE - Gasoline (Spark Ignition-Conventional Material)
Car: FCV - Gaseous H2 (Type 1 Ni-MH Conventional
Material)
Weights of
the
considered
vehicle kg 1,293 201 NA 1,392 NA NA 1,578 NA NA
Name Units Manufacturing
Maintenance - 5
years (Battery &
Fluids / Except
Fuel)
End-
of-life
EV vehicle
Life cycle
Inventory Manufacturing
Maintenance -
5 years ( Fluids
/ Except Fuel) End-of-life
ICEV
vehicle life
cycle
inventory Manufacturing
Maintenance -
5 years (
Fluids / Except
Fuel) End-of-life
HFCV
vehicle life
cycle
inventory
Input Inventory (Raw materials, Energy, & Water)
Fossil Fuel GJ 50.4 15.0 13.3 78.7 37.7 4.1 9.3 51.2 79.5 2.4 9.3 91.3
Coal Fuel GJ 23.3 4.0 4.1 31.4 17.8 0.2 2.9 20.9 25.2 0.6 2.9 28.7
Natural Gas
Fuel GJ 23.3 8.8 9.0 41.1 15.7 1.1 6.3 23.1 44.6 1.4 6.3 52.3
Petroleum
Fuel GJ 6.3 2.0 0.2 8.5 4.2 2.8 0.1 7.2 9.2 0.5 0.1 9.7
Renewable GJ 3.4 1.6 0.8 5.7 2.2 0.0 0.5 2.7 4.5 0.1 0.5 5.1
Biomass GJ 0.1 0.1 0.0 0.2 0.1 0.0 0.0 0.1 0.2 0.0 0.0 0.2
Nuclear GJ 1.9 0.5 0.9 3.4 1.4 0.0 0.7 2.1 3.0 0.1 0.7 3.7
Non Fossil
Fuel GJ 5.3 2.1 1.7 9.1 3.6 0.0 1.2 4.8 7.5 0.2 1.2 8.8
Total Water m^3 26.3 10.4 3.1 39.8 18.3 0.3 2.2 20.8 28.9 0.8 2.2 31.9
Output Inventory (Emissions & Waste)
VOC kg 3.2 13.8 1.7 18.6 2.5 9.7 1.2 13.4 2.9 9.6 1.2 13.7
CO kg 17.9 68.9 0.5 87.3 13.8 0.1 0.3 14.3 15.7 0.2 0.3 16.2
NOx kg 4.2 1.4 0.8 6.5 3.0 0.4 0.6 4.0 6.0 0.2 0.6 6.8
PM10 kg 1.8 0.7 0.1 2.7 1.4 0.1 0.1 1.6 2.0 0.1 0.1 2.2
PM2.5 kg 0.8 0.2 0.1 1.2 0.7 0.0 0.1 0.8 0.9 0.0 0.1 1.0
SOx kg 24.0 12.6 1.1 37.6 13.9 1.4 0.8 16.1 20.8 3.7 0.8 25.2
CH4 kg 9.1 2.4 2.2 13.7 6.6 0.5 1.6 8.7 13.8 0.5 1.6 15.9
CO2 kg 3,589.0 968.0 902.1 5,459.1 2,654.9 221.0 640.0 3,515.9 5,371.8 127.8 640.0 6,139.5
N2O g 79.9 21.1 20.0 121.0 55.8 5.3 14.1 75.2 127.4 4.0 14.1 145.5
BioC g 29.2 16.5 5.9 51.7 19.1 2.9 4.2 26.2 42.9 3.1 4.2 50.2
POC g 46.5 20.1 13.8 80.4 33.3 3.2 9.8 46.2 79.9 2.4 9.8 92.0

61
Table 4-4 Electricity (Generation to Recharging) Life-Cycle Inventory
Input Inventory
(Raw materials |
Energy | Water)
Province-wise grid-electricity generation (Unit impact per MJ electricity)
Unit
British
Columbia Manitoba Quebec
Newfoundland
and Labrador Yukon
Northwest
Territories Ontario
New
Brunswick Saskatchewan
Nova
Scotia Alberta
Prince
Edward
Island Nunavut
Water m^3 0.004251 0.494 0.0044 0.0044 0.0043 0.0021 0.0015 0.0012 0.00093 0.000751 0.000035 0.0000107 0.001954
Non fossil fuels KJ 1,192 1,000 1,035 950.61 920.92 418.25 988.17 804.42 180.99 439.09 171.93 1,025 53.68
Renewable KJ 1,192 1,000 1,035 950.27 920.41 413.7 396.57 442.54 180.45 437.53 171.15 1,025 24.05
Biomass KJ 271.5 0 45.25 0.001 0.016 145.83 45.3 181.06 0.017 226.3 90.53 45.25 0.949
Fossil Fuels KJ 61.61 0 1.14 154.01 241.86 1906 125.74 949.36 2105 2075 2312 34.22 12,000
Petroleum Fuels KJ 36.35 0 1 121.14 181.76 1665 2929.06 254.7 21.43 389.39 114.09 31.27 11,000
Natural Gas
Fuels KJ 24.79 0 0.012 31.44 57.94 221.89 115.76 242.11 803.63 345.35 944.46 2.59 8875
Coal Fuels J 460.07 0 13.61 1,427.03 2,154.97 19340 7,055.08 452,550 1,280,000 1,340,000 1,253,000 363 125.8
Nuclear J 107.99 0 3.19 335.76 506.92 4,552.8 591,600 361,880 0.544 1,564.47 788.22 85.5 29.63
Output Inventory
(Emissions |
Waste)
Province-wise grid-electricity generation (Unit impact per MJ electricity)
Unit
British
Columbia Manitoba Quebec
Newfoundland
and Labrador Yukon
Northwest
Territories Ontario
New
Brunswick Saskatchewan
Nova
Scotia Alberta
Prince
Edward
Island Nunavut
Total CO2 g 0.51 0 0.058 0.012 18.25 150 7.37 20.83 170 54.66 180 2.69 950
VOC mg 0.11 0 0.41 1.02 1.63 12.04 1.88 0.77 16.57 1.29 18.85 0.62 73.52
CO mg 1.27 0 13.18 3.62 5.89 40.78 19.62 3.92 54.96 6.57 90.51 13.86 240
NOX mg 0.67 0 2.9 48.47 73.27 660 11.11 10.42 120 24.37 170 14.73 4260
PM10 mg 0.48 0 5.78 2.06 3.11 27.99 6.14 1.59 19.82 3.85 32.73 6.29 180
PM2.5 mg 0.16 0 1.7 1.5 2.27 20.29 1.98 1.03 8.59 2.61 13.16 2.06 130
SOX mg 0.36 0 1.81 33.1 50.68 460 4.94 41.7 310 120 330 10.17 3010
CH4 mg 0.25 0 1.47 15.44 24.99 180 22.7 1.41 240 1.69 260 4.41 1060
N2O mg 0.02 0 0.18 0.11 0.17 1.3 0.29 0.3 3.15 0.8 3.74 6.21 8.05
BioC mg 0.02 0 0.24 0.12 0.18 1.57 0.3 0.069 0.56 0.15 1.16 0.27 10.09
POC mg 0.05 0 0.55 0.14 0.21 1.7 0.66 0.16 1.43 0.32 2.71 0.58 10.68
H2 mg 0 0 0 0 0 0 0 0 0 0 0 0 0
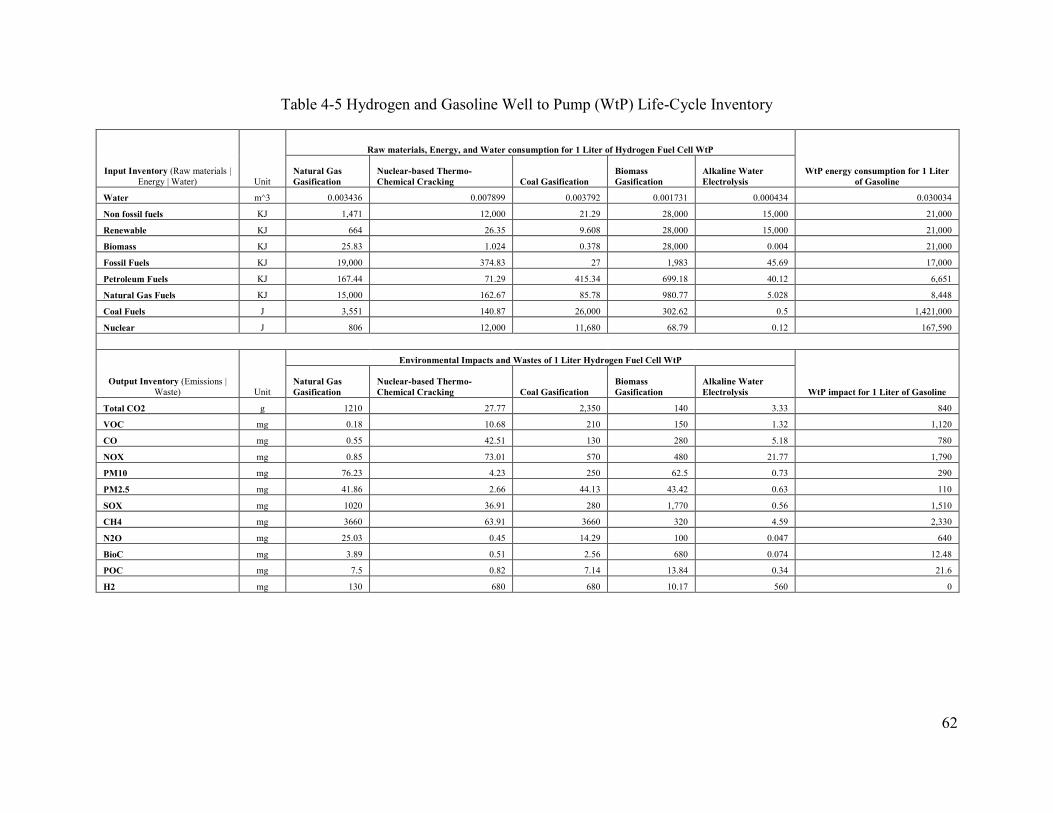
62
Table 4-5 Hydrogen and Gasoline Well to Pump (WtP) Life-Cycle Inventory
Input Inventory (Raw materials |
Energy | Water) Unit
Raw materials, Energy, and Water consumption for 1 Liter of Hydrogen Fuel Cell WtP
WtP energy consumption for 1 Liter
of Gasoline
Natural Gas
Gasification
Nuclear-based Thermo-
Chemical Cracking Coal Gasification
Biomass
Gasification
Alkaline Water
Electrolysis
Water m^3 0.003436 0.007899 0.003792 0.001731 0.000434 0.030034
Non fossil fuels KJ 1,471 12,000 21.29 28,000 15,000 21,000
Renewable KJ 664 26.35 9.608 28,000 15,000 21,000
Biomass KJ 25.83 1.024 0.378 28,000 0.004 21,000
Fossil Fuels KJ 19,000 374.83 27 1,983 45.69 17,000
Petroleum Fuels KJ 167.44 71.29 415.34 699.18 40.12 6,651
Natural Gas Fuels KJ 15,000 162.67 85.78 980.77 5.028 8,448
Coal Fuels J 3,551 140.87 26,000 302.62 0.5 1,421,000
Nuclear J 806 12,000 11,680 68.79 0.12 167,590
Output Inventory (Emissions |
Waste) Unit
Environmental Impacts and Wastes of 1 Liter Hydrogen Fuel Cell WtP
WtP impact for 1 Liter of Gasoline
Natural Gas
Gasification
Nuclear-based Thermo-
Chemical Cracking Coal Gasification
Biomass
Gasification
Alkaline Water
Electrolysis
Total CO2 g 1210 27.77 2,350 140 3.33 840
VOC mg 0.18 10.68 210 150 1.32 1,120
CO mg 0.55 42.51 130 280 5.18 780
NOX mg 0.85 73.01 570 480 21.77 1,790
PM10 mg 76.23 4.23 250 62.5 0.73 290
PM2.5 mg 41.86 2.66 44.13 43.42 0.63 110
SOX mg 1020 36.91 280 1,770 0.56 1,510
CH4 mg 3660 63.91 3660 320 4.59 2,330
N2O mg 25.03 0.45 14.29 100 0.047 640
BioC mg 3.89 0.51 2.56 680 0.074 12.48
POC mg 7.5 0.82 7.14 13.84 0.34 21.6
H2 mg 130 680 680 10.17 560 0

63
Table 4-4 shows the topological variations of cradle-to-grave resource consumption and resultant
emissions for grid electricity due to different energy mixes in different provinces. Manitoba,
British Columbia, Quebec, and Prince Edward Island show lower consumption of non-renewable
energy and result in lower emissions compared with Saskatchewan, Alberta, Nunavut, and the
Northwest Territories. Table 4-5 shows the fuel life cycle for hydrogen fuel cells. Accordingly,
alkaline water electrolysis using renewable energy sources has the lowest resource consumption
and emissions, followed by the gasification of biomass, natural gas, coal, and nuclear-based
thermo-chemical cracking. The carbon-capturing techniques for HFC production were not
considered in this analysis due to a lack of available data.
According to the life cycle inventory information, the following comparisons were conducted and
the results of the same are given as follows:
1. Vehicle cradle-to-gate environmental impacts - To identify the alternative vehicle category
that emits the highest emissions in its production process.
2. Vehicle cradle-to-grave environmental impacts – To identify the alternative vehicle
categories that emit the highest emissions in their entire life cycle. This includes fuel-based
emissions from well-to-wheel.
4.3.2 Compare Vehicle Options using Cradle-to-Gate Emissions
Cradle-to-gate emissions of the selected alternative fuel-based vehicles were compared in this
section to identify the production emissions of the considered vehicle options. The following
vehicle manufacturing emissions, including vehicle battery-based emissions, were considered in
the analysis: VOC, CO, NOx, PM10, PM2.5, SOx, CH4, CO2, N2O, BC or BioC, and POC. The
conversion factors below were used to convert the emissions mentioned above into mid-point
indicators [209] [220].
Depletion of non-renewable resources is a cumulative total of fossil fuels, 6.12 times of
petroleum fuels, 7.8 times of natural gas fuels, and 0.25 times of coal fuels.
Global warming potential is a cumulative total of total CO2 emissions, 28 times of CH4, and
265 times of N2O.

64
Photochemical ozone creation is a cumulative total of 0.416 times of VOC, 0.036 of CO, and
0.007 times of CH4.
Eutrophication is a cumulative total of 0.04 times of NOx and 0.09 times of N2O.
Acidification and land and water is a cumulative total of 40.04 times of NOx and 50.79 times
of SOx.
The mid-point indicator values were considered to compare both EVs and HFCVs based on their
cradle-to-gate emissions, which are shown in Figure 4-3.
Figure 4-3 Cradle-to-gate Emission of Alternative Fuel-based Vehicle Options
As indicated, EVs and HFCVs contribute to the environment differently. On one hand, resource
consumption is higher in HFCVs than EVs, and therefore more resources are needed to
manufacture an HFCV than an EV. HFCV manufacturing enhances global warming and
eutrophication compared to similar EVs. On the other hand, EVs emit a higher amount of photo-
oxidants and acids to the environment compared with HFCV as a result of the emissions created
by the EV battery. The NOGEPA weights were used to develop a single environmental score for
each HFCV and EV cradle-to-gate emissions to compare both vehicles. The environmental scores
were calculated as 56.22 for the HFCV and 48.78 for the EV. Accordingly, the cradle-to-gate
emissions of EVs are considerably higher than similar ICEVs, which is slightly lower than a similar
HFCVs. However, these emissions can be lowered with technological advancements such as low
0% 10% 20% 30% 40% 50% 60% 70% 80% 90% 100%
Acdification land and water
Eutrophication
Global Warming Potential
Photochemical Ozone Creation
Depletion of non-renewable energy resources
EV cradle-to-gate emissions HFCV cradle-to-gate emissions

65
emission production methods, high recycling and reuse of materials, carbon-capturing
technologies, etc. in the future.
4.3.3 Compare Vehicles using Cradle-to-Grave Emissions
The vehicle cradle-to-gate emissions, operational emissions including the wheel to pump
emissions of the fuel, and vehicle end-of-life emissions were considered in this analysis. The
cradle-to-grave LCA mid-point indicators for EVs and HFCVs were compared to each other to
observe the environmental appropriateness of each fuel option, to replace conventional fuels in the
long run. The comparison is shown in Figure 4-4 for different fuel options.
According to the analysis, the OP4_HFCV, OP2_EV, and OP7_HFCV showed lower emissions
in all provinces. However, OP4_HFCV and OP2_EV need nearly zero-emission electricity to
achieve the given emission targets, which might not be an ideal option for most of those provinces
due to the lack of renewable resources. OP7_HFCV requires HFCVs to operate using HFCs
produced by thermochemical water splitting with nuclear Cu–Cl cycle, which is a significantly
higher cost option. The above transport options need green electricity, while some provinces have
minimal renewable options due to lack of resources, investments, and technology know-how.
The OP1_EV, OP3_HFCV, OP5_HFCV, and OP6_HFCV showed comparatively better
environmental performances except for the Northwest Territories, Saskatchewan, Nova Scotia,
Alberta, and Nunavut. Moreover, ICEV-based conventional transportation showed a negative
impact on the environment in all provinces except Nunavut. To analyze this further, an
environmental index for each fuel option was calculated, as discussed in the methodology.
Accordingly, the OP2_EV, OP4_HFCV, and OP7_HFCV were considered optimistic options,
though they are beyond the current scope of the work. OP1_EV, OP3_HFCV, OP6_HFCV,
OP5_HFCV, and OP8_HFCV were considered as most likely fuel options that are viable to
achieve within the foreseeable future. Conventional fuel was considered the pessimistic fuel
option, which can be continued if other options fail in the deployment process.

66
Figure 4-4 Mid-point Indicators for Alternative Fuel Options
OP1_EV OP2_EV OP3_HFCV OP4_HFCV OP5_HFCV OP6_HFCV OP7_HFCV OP8_HFCV BC_ICEVBRITISH COLUMBIAALW 0.28 0.28 0.00 0.00 0.28 0.84 0.03 0.40 1.00EN 0.07 0.00 0.00 0.00 0.17 0.20 0.02 0.01 1.00GLW 0.00 0.00 0.01 0.00 1.00 0.07 0.02 0.54 0.78POF 0.27 0.27 0.00 0.00 0.11 0.07 0.01 0.02 1.00DNR 0.02 0.00 0.03 0.00 0.27 0.10 0.02 1.00 0.90MANITOBAALW 0.28 0.28 0.00 0.00 0.28 0.84 0.03 0.40 1.00EN 0.00 0.01 0.01 0.01 0.18 0.21 0.03 0.02 1.00GLW 0.00 0.02 0.02 0.02 1.00 0.09 0.03 0.55 0.79POF 0.27 0.27 0.00 0.00 0.11 0.07 0.01 0.02 1.00DNR 0.00 0.00 0.00 0.00 0.27 0.10 0.02 1.00 0.90QUEBECALW 0.29 0.28 0.01 0.00 0.28 0.84 0.03 0.40 1.00EN 0.00 0.01 0.01 0.01 0.17 0.20 0.02 0.02 1.00GLW 0.00 0.02 0.02 0.02 1.00 0.09 0.03 0.55 0.79POF 0.28 0.27 0.01 0.00 0.11 0.07 0.01 0.02 1.00DNR 0.00 0.00 0.00 0.00 0.27 0.10 0.02 1.00 0.90NEWFOUNDERLAND & LABRADORALW 0.47 0.28 0.23 0.00 0.28 0.84 0.03 0.40 1.00EN 0.08 0.00 0.12 0.00 0.17 0.20 0.02 0.01 1.00GLW 0.00 0.02 0.02 0.02 1.00 0.09 0.03 0.54 0.79POF 0.28 0.27 0.01 0.00 0.11 0.07 0.01 0.02 1.00DNR 0.06 0.00 0.07 0.00 0.27 0.10 0.02 1.00 0.90YUKONALW 0.57 0.28 0.36 0.00 0.28 0.84 0.03 0.40 1.00EN 0.13 0.00 0.18 0.00 0.17 0.20 0.02 0.01 1.00GLW 0.03 0.00 0.07 0.00 1.00 0.07 0.01 0.54 0.78POF 0.28 0.27 0.01 0.00 0.11 0.07 0.01 0.02 1.00DNR 0.09 0.00 0.11 0.00 0.27 0.10 0.02 1.00 0.90NORTHWEST TERRITORIESALW 0.89 0.09 1.00 0.00 0.09 0.26 0.01 0.12 0.31EN 0.79 0.00 1.00 0.00 0.11 0.12 0.01 0.01 0.63GLW 0.40 0.00 0.53 0.00 1.00 0.07 0.01 0.54 0.78POF 0.32 0.27 0.06 0.00 0.11 0.07 0.01 0.02 1.00DNR 0.67 0.00 0.84 0.00 0.27 0.10 0.02 1.00 0.90ONTARIOALW 0.32 0.28 0.05 0.00 0.28 0.84 0.03 0.40 1.00EN 0.01 0.00 0.03 0.00 0.17 0.20 0.02 0.01 1.00GLW 0.00 0.00 0.03 0.00 1.00 0.07 0.01 0.54 0.78POF 0.28 0.27 0.01 0.00 0.11 0.07 0.01 0.02 1.00DNR 0.05 0.00 0.07 0.00 0.27 0.10 0.02 1.00 0.90NEWBRUNSWICKALW 0.41 0.28 0.16 0.00 0.28 0.84 0.03 0.40 1.00EN 0.01 0.00 0.03 0.00 0.17 0.20 0.02 0.01 1.00GLW 0.04 0.00 0.07 0.00 1.00 0.07 0.01 0.54 0.78POF 0.28 0.27 0.00 0.00 0.11 0.07 0.01 0.02 1.00DNR 0.22 0.00 0.28 0.00 0.27 0.10 0.02 1.00 0.90SASKATCHEWANALW 1.00 0.21 0.99 0.00 0.21 0.62 0.02 0.29 0.74EN 0.23 0.00 0.30 0.00 0.17 0.20 0.02 0.01 1.00GLW 0.46 0.00 0.60 0.00 1.00 0.07 0.01 0.54 0.78POF 0.34 0.27 0.09 0.00 0.11 0.07 0.01 0.02 1.00DNR 0.43 0.00 0.54 0.00 0.27 0.10 0.02 1.00 0.90NOVA SCOTIAALW 0.65 0.28 0.46 0.00 0.28 0.84 0.03 0.40 1.00EN 0.04 0.00 0.06 0.00 0.17 0.20 0.02 0.01 1.00GLW 0.13 0.00 0.19 0.00 1.00 0.07 0.01 0.54 0.78POF 0.28 0.27 0.01 0.00 0.11 0.07 0.01 0.02 1.00DNR 0.36 0.00 0.46 0.00 0.27 0.10 0.02 1.00 0.90ALBERTAALW 0.98 0.18 1.00 0.00 0.18 0.55 0.02 0.26 0.65EN 0.33 0.00 0.43 0.00 0.17 0.20 0.02 0.01 1.00GLW 0.49 0.00 0.64 0.00 1.00 0.07 0.01 0.54 0.78POF 0.36 0.27 0.11 0.00 0.11 0.07 0.01 0.02 1.00DNR 0.52 0.00 0.65 0.00 0.27 0.10 0.02 1.00 0.90PRINCE EDWARD ISLANDALW 0.34 0.28 0.07 0.00 0.28 0.84 0.03 0.40 1.00EN 0.04 0.00 0.07 0.00 0.17 0.20 0.02 0.01 1.00GLW 0.00 0.01 0.02 0.01 1.00 0.08 0.02 0.54 0.78POF 0.28 0.27 0.01 0.00 0.11 0.07 0.01 0.02 1.00DNR 0.01 0.00 0.02 0.00 0.27 0.10 0.02 1.00 0.90NUNAVUTALW 0.81 0.01 1.00 0.00 0.01 0.04 0.00 0.02 0.05EN 0.80 0.00 1.00 0.00 0.02 0.02 0.00 0.00 0.10GLW 0.79 0.00 1.00 0.00 0.30 0.02 0.00 0.16 0.23POF 0.58 0.27 0.38 0.00 0.11 0.07 0.01 0.02 1.00DNR 0.80 0.00 1.00 0.00 0.03 0.01 0.00 0.11 0.10

67
These normalized indicators were multiplied by NOGEPA weights and aggregated to find the
environmental score of different fuel options. Figure 4-5 shows the environmental score of
different fuel options for different provinces. Accordingly, OP1_EV, OP3_HFCV, and
OP6_HFCV were shown as better fuel options for British Columbia, Manitoba, Quebec,
Newfoundland and Labrador, Yukon, Ontario, New Brunswick, Nova Scotia, and Prince Edward
Island. Only OP6_HFCV was shown as a better option for Saskatchewan, Northwest Territories,
Alberta, and Nunavut.
Figure 4-5 Environmental Scores of Alternative Fuel Options (Most Likely and Conventional)
Accordingly, EV operation emissions are highly dependent on the provincial grid-electricity mix
and the emissions of the HFCVs highly depend on the primary energy source that is used to
produce hydrogen fuel cells. The provinces with low-emission electricity such as Manitoba, British
Columbia, Quebec, and Prince Edward Island, show high potential for EVs. Moreover, the use of
HFCVs powered by hydrogen fuel-cells produced using alkaline water electrolysis from low-
emission electricity shows the lowest impact compared to other alternative vehicle options.
However, the mass production and distribution of hydrogen fuel cell energy needs to be developed
throughout the country in a cost-effective manner. Therefore, the LCC of the aforementioned fuel
options needs to be considered in decision making on a sustainable alternative fuel option for the

68
future. Hence, the LCC-based cost parameter would benefit from selecting the final alternative
fuel option for Canadian provinces.
4.3.4 Life Cycle Costs of Different Fuel Options
Generally, the switching cost of the vehicle, infrastructure, and operational expenditure are high
when substituting conventional products with innovative products. For alternative fuel vehicles,
the daily operating cost consists of vehicle re-fueling cost and maintenance cost. Based on the
literature, the hydrogen fuel cost is two times higher than the gasoline cost and approximately four
times higher than the domestic electricity cost. Hence, conventional gasoline vehicle users are
more likely to switch over to EVs than HFCVs by only considering the economic perspective.
However, the cost of hydrogen fuel depends on the method of production, distribution and other
supply chain costs. Therefore, the actual hydrogen cost and production capacity can vary from one
province to another. The calculated LCC for electric, hydrogen fuel cell, and gasoline fuel-based
light-duty vehicles are shown in Figure 4-6. The detail calculations of LCC of EVs and ICEVs are
shown in Appendix C1 and Appendix C2, respectively.
Figure 4-6 Provincial-based LCC for Electric, Gasoline, and Hydrogen Light-duty Vehicles
LCC for HFCV was assumed as fixed for all fuel options since there are not many details in the
literature regarding mass commercial production and retailing of Hydrogen in different regions in
Canada. The cost of mass hydrogen production using natural gas reforming is approximately CAD
5per kg of HFCs, whereas other methods show higher costs due to the non-availability of mass
0
10000
20000
30000
40000
50000
60000 LCC-ICEV LCC_EV LCC-HFCV

69
production capacities [213]. Hence, the well-to-pump costs of all hydrogen fuel cell production
methods were assumed as similar to the hydrogen fuel cell production using natural gas
gasification.
Accordingly, Figure 4-6 shows that the LCC of HFCV is the highest of all the three alternative
fuel light-duty vehicles. However, as a percentage, the gap between ICEV and EV life cycle costs
is less than 10% in Quebec, British Columbia, Manitoba, Yukon, and Newfoundland and Labrador,
where low-cost green electricity is available. According to the above analysis, the alternative fuel
selection criteria is not straight-forward due to the environmental concerns of the government and
the cost sensitivity of Canadian consumers. Therefore, a scientific-based decision-making
approach needs to be incorporated to select the most desirable fuel option for each province,
considering environmental, economic, and regional variations.
4.3.5 Eco-efficiency-based Alternative Fuel Option Selection
As discussed in the literature section, the eco-efficiency approach was used to select the most
desirable alternative fuel option for light-duty transportation in Canadian provinces. The
environmental and economic scores developed in the above sections were used to compare EVs
and HFCVs with conventional ICEVs.
Figure 4-7 Eco-efficiency-based Comparison for Alternative Fuel Options

70
The eco-efficiency index-based comparison of different fuel alternatives is shown in Figure 4-7.
Figure 4-7 indicates that light-duty electric vehicles are highly feasible in Quebec, British
Columbia, Manitoba, Yukon, and Newfoundland and Labrador in terms of their life cycle GHG
emissions and EV life cycle costs. Accordingly, reducing upfront costs and enhancing the
recharging infrastructure network may improve EV penetration in the aforementioned regions.
Provinces such as Ontario, New Brunswick, Nova Scotia, Prince Edward Island, Saskatchewan,
and Alberta show relatively good potential for electric vehicle-based transportation. The use of
EVs will not reduce the emissions of Nunavut and the Northwest Territories due to their high
impact grid electricity, so conventional transportation methods or a renewable energy-based EV
or HFCV-based transport system can be deployed to achieve provincial GHG targets in those
provinces. However, the cost reduction of HFCVs and hydrogen production using alkaline water
electrolysis using green electricity such as solar (PV), mini-hydro, wind-based electricity, etc.
Biomass gasification and nuclear-based thermo-chemical cracking may enhance the potential for
HFCVs in Canada due to their low environmental and economic impacts in the long run.
4.4 Summary
The government is committed to reduce GHG emissions by promoting alternative fuel-based
transportation methods in Canada. Hence, several initiatives are being deployed by the federal and
provincial governments to promote alternative fuel-based vehicles. However, there is a lack of
knowledge on the overall life cycle costs and environmental impacts of proposed alternative fuel
vehicles due to different provincial costs, taxes, and primary energy sources. This chapter
analyzed the commercial viability of the potential alternative fuel systems for Canada. As the
initial phase of this work, a rule-based alternative fuel selection method was introduced to filter
commercially viable low-emission fuel options. EVs and HFCVs were identified as desirable fuel
options considering the fundamental environmental, economic, and social parameters. Then, a
detailed life cycle cost and impact assessment were conducted to find the provincial suitability of
EVs and HFCVs as substitutes for conventional fuels. The provincial fuel and electricity costs,
fuel well-to-pump emissions, grid electricity mix and their emissions, impacts of different
hydrogen fuel cell production methods, and different primary energy sources were considered in

71
the aforementioned analysis. The conclusions of this chapter are: 1) Low cradle-to-grave emissions
can be expected from EVs compared to conventional ICEVs except for the province of Nunavut;
2) EVs have 71% more cradle-to-gate emissions than conventional ICEVs due to the
environmental impacts of EV batteries; 3) HFCVs are possible only if low cost and low-emission
mass hydrogen fuel cells can be produced; 4) The provinces with a high-emission grid can focus
on centralized electricity production methods with carbon-capturing options, or decentralized low-
emission electricity production using renewable electricity options such as solar (PV); 5)
Conventional vehicles can be substituted by EVs if EV purchasing and operating costs are reduced
by 6% to 22% (varied with provincial electricity prices) through favourable government policies.
The methodology and the database developed in this study can be used to formulate the steps
similarly for other regions and find the most desirable alternative low-emission fuel source for
road transportation.

72
.
Chapter 5 Electric Vehicle Recharging Infrastructure Planning and
Management for Urban Centers
Sections of this chapter have been published in the Journal of Cleaner Production, as an article
titled “Electric vehicle recharging infrastructure planning and management for urban
communities” [71].
5.1 Background
Transport electrification is identified as a commercially viable solution to reduce conventional
fossil fuel-based transportation in regions with a low-emission electricity grid [70][38]. Therefore,
public and private investors, developers, and policymakers are focusing on electricity-based
transport infrastructure investments to fulfill future electric vehicle (EV) growth. According to the
literature, higher switching costs [10][11], limited vehicle range (on-board electricity storage
issues) [11][12], and limited re-charging infrastructure availability/access [10][13][11] are key
barriers for the growth of electrical vehicle-based transportation systems in Canada. These barriers
can be resolved using a well-planned electric vehicle-recharging infrastructure (EV-RI) network
that is capable of catering to total EV recharging demands while minimizing the life cycle costs of
the EV transportation system. Hence, scientific knowledge in planning and management of an
optimal EV-RI network is a key solution to enhance the sustainability of transportation
electrification in Canada. An optimal EV-RI network will maximize recharging infrastructure
availability and access, and offset the aforementioned barriers by deploying an eco-friendly
transportation system.
The published literature contains several studies focusing on the location-allocation of EV-RI in
the past few years [32][33][34]. These studies have focused on minimizing the investments and
access cost and/or maximizing the vehicle flow coverage [35][27][30][28][36][37]. Vehicle range,
maximum EV-RI facility capacity, and local government policies were obtained as key constraints
when selecting the most desirable locations for potential EV-RIs. However, the dynamic nature of
recharging demands was overlooked in the above studies while making investment decisions. As
a result, the most desirable facility location and capacity were estimated without considering
different stakeholder costs (e.g. EV-RI access cost to vehicle owners, cost of facility overheads,

73
.
etc.), location-based cost variations (e.g. land lease cost, grid connection cost, etc.), and dynamic
variations in EVs recharging demands. This conventional approach has increased the switching
costs of electricity-based transportation for both infrastructure investors and consumers and shown
longer payback periods. Therefore, the resultant infrastructure plan and the payback suggested by
the existing methods were far from the most desirable EV-RI locations and capacities. Long-range
EV-RI capacity prediction, network planning, and a recharging management approach considering
the dynamic variations of future EV recharging demands are vital in healthy decision making
where investors can optimize their cash flow while facilitating the required EV-RI demand
consistently [19].
This chapter proposes a comprehensive planning and management framework for a sustainable
EV-RI network in an urban context by considering multi-period EV public net recharging
demands, life cycle costs, and total elapsed times. This methodology consists of five key phases:
1) Life cycle cost assessment of direct-current fast-charging (DC-FC) (level III) electric vehicle
recharging infrastructure; 2) Determine shortest path matrix between the centroids of all the traffic
analysis zones (TAZ) and potential refueling locations; 3) Obtain factorial demands for DC-FC
based EV recharging; 4) Develop a location-allocation model using multi-objective optimization;
and 5) Integrate dynamic variation of EV demands and develop a comprehensive planning and
management framework. A case study was conducted to demonstrate the proposed methodology
by exploring the EV-RI locations and capacities for Kelowna, British Columbia, Canada, by
considering location-based factors. The developed framework can help decision-makers in
municipalities, EV-RI investors, and builders to predict multi-period net public recharging
demands and plan EV-RI facilities accordingly.
5.2 Methodology for EV-RI Capacity Planning and Location-Allocation Framework
This section discusses the methodology used to select the best desirable location and capacities for
electric vehicle recharging facilities in different periods. This work started with a literature review
and database development on EV-RI deployment-related information. A methodology was
proposed to plan and manage an EV-RI network for urban networks considering multi-period EV
demands. However, the scope of this work was limited to the deployment of public fast-recharging
facilities for the use of light-duty passenger vehicles in small, medium, and large scale urban

74
.
communities with complex route networks. The proposed research framework is illustrated in
Figure 5-1.
Figure 5-1 EV-RI Planning and Management Framework for Complex Urban Network
The phases shown in Figure 5-1 are further explained below.
Phase 1: Data Collection and Database Development
Literature-based data is essential to identify characteristics and life cycle stages associated with
state-of-the-art recharging facilities. Published high-impact peer-reviewed journal articles,

75
.
conference proceedings, institutional reports, and online articles were referenced to obtain EV-RI
life cycle costs, local utility rates, and other recharging infrastructure-based information. In
addition to the data obtained from the literature review, municipality household survey data,
location-based multi-period vehicle demands for conventional vehicles, conventional vehicle and
electric vehicle growth factors, neighbourhood-based dwelling mix, and other necessary
demographic data were collected to develop an application to the proposed model using a case
study for a medium-scale municipality. The data collected from the above methods were arranged
in a systematic database for future reference.
Phase 2: Preliminary Site Selection
Potential EV-RI locations were pre-screened, and selected vacant lands were considered for further
evaluations of best desirable locations for future EV-RI facilities by considering the practical
aspects of infrastructure planning. However, it is possible to find the best desirable locations from
a given municipality without having pre-screened potential locations for EV-RI facilities. In that
case, geo-processing tools can be used to create raster maps in the municipality and consider each
raster cell as a potential location for an EV-RI facility. In that case, the analysis may increase the
simulation time and cost due to an extensive number of iterations. Therefore, it is sensible to use
pre-screened locations in the optimization process. The Site Inspection Form (SIF_2019) was
developed to collect existing parking infrastructure data, which needs to be collected by multiple
site visits to the potential parking infrastructure. A sample SIF_2019 is attached as Appendix D1.
The data collected from the aforementioned SIF_2019 was used to develop indicator categories,
indicators, and indicator levels, which were used to develop the preliminary site selection
framework. The pre-feasibility planning framework developed by the University of British
Columbia Transportation Infrastructure and Public Space (UBC-TIPS) Laboratory in 2012 [50]
was used to identify the indicators and indicator categories for the proposed preliminary site
selection framework. The relevant indicators and indicator levels are shown in Table 5-1.
Accordingly, the data obtained from SIF_2019 was transferred into Table 5-1 using linguistics
terms (LT) and converted to numerical values using the given Likert scale (LS) (ῶpqr) given in the
same table for each indicator level. The weights of the indicator category and indicators (WPQ) of
the matrix were weighted using expert opinion based on the decision-makers' perspective and the

76
.
conditions of the communities. Decision-makers such as public sector planners, city, utility
providers, and other interested stakeholders can be used to generate the aforementioned weights
using focus group meetings with the selected subject experts. The normalized weight (ὦpqr) of each
indicator level was obtained from Equation (23).
ὦ𝒑𝒒𝒓 = ῶ𝒑𝒒𝒓 ∑ ῶ𝒑𝒒𝒓𝑹𝒓=𝟏⁄ Equation 23
Where, p = Indicator categories (∀𝑝 = 1,2, … , 𝑃); q = Indicators (∀𝑞 = 1,2, … , 𝑄); r = Indicator
levels (∀𝑟 = 1,2, … , x, … , 𝑅); ῶpqr = Nominal weight of rth indicator level at pth indicator category
level and qth indicator, ὦpqr = Relative importance (normalized weight) of rth indicator level at pth
indicator category level and qth indicator
The weighted sum model was used to obtain the Priority Index (PI) of a particular site, which was
then used to rank multiple sites and select suitable parking infrastructure for the optimization-
based EV-RI capacity planning module. Accordingly, the PI of a particular parking infrastructure
was obtained from Equation (24).
PI(m) = ∑ ∑ ∑ ὦpqr . WpqRr=1
Qq=1
Pp=1 Equation 24
Where, m = Number of potential EV-RI sites in the study area (∀𝑚 = 1,2, … , 𝑀); p = Indicator
categories (∀𝑝 = 1,2, … , 𝑃); q = Indicators (∀𝑞 = 1,2, … , 𝑄); r = Indicator levels (∀𝑟 =
1,2, … , x, … , 𝑅); Wpq = Weightage of the pth indicator category and qth indicator; ὦpqr = Relative
importance (Normalized weight) of rth indicator level at pth indicator category level and qth
indicator, PI(m) = Priority Index of mth parking infrastructure.

77
.
Table 5-1 Indicators for Preliminary Site Selection
Indicator
Category (P) Indicators (Q)
Indicator Level 1
(r=1)
Indicator Level 2
(r=2)
Indicator Level 3
(r=3)
Indicator Level 4
(r=4)
Existing
Condition of the
parking facility
Availability of EV recharging infrastructure
LT Not possible to
install Expensive to Install Cheap to Install Already Available
LS 0 1 2 3
The average size of the parking infrastructure LT High Average Low Not Available
LS 3 2 1 0
The average size of the parking stall LT High Average Low Not Available
LS 3 2 1 0
Need for re-sizing parking stalls for mobile-hub LT Satisfied Partly Satisfied Not Satisfied Not Applicable
LS 3 2 1 0
Land-Use
requirements
Access to the nearest highway LT High Average Low Not Available
LS 3 2 1 0
Access to the nearest interchange LT High Average Low Not Available
LS 3 2 1 0
Access to traffic from multiple directions LT High Average Low Not Available
LS 3 2 1 0
No. of lanes of the access road LT 1 2 3 More (4 or 5)
LS 4 3 2 1
Posted speed of the access road (Max) - V LT V<49km/h 50km/h<V<69km/h 70km/h<V<100km/h 100km/h<V
LS 4 3 2 1
Availability of disability access
LT Not possible to
install Expensive to Install Cheap to Install Already Available
LS 0 1 2 3
Utility
requirements
Step-down transformers
LT Not possible to
install Expensive to Install Cheap to Install Already Available
LS 0 1 2 3
Step-up transformers
LT Not possible to
install Expensive to Install Cheap to Install Already Available
LS 0 1 2 3
Electricity availability
LT Not possible to
install Expensive to Install Cheap to Install Already Available
LS 0 1 2 3
Proximity to the nearest Utility Service Panel
LT Not possible to
install High Average Available in the site
LS 0 1 2 3
Availability of lighting
LT Not possible to
install Expensive to Install Cheap to Install Already Available
LS 0
1 2 3

78
.
Indicator
Category (P) Indicators (Q)
Indicator Level 1
(r=1)
Indicator Level 2
(r=2)
Indicator Level 3
(r=3)
Indicator Level 4
(r=4)
Comply with
regulatory
requirements
Satisfy with Canadian electricity codes LT Satisfied Partly Satisfied Not Satisfied Not Applicable
LS 3 2 1 0
Satisfy with Canadian occupation health and
safety (COHS) regulations
LT Satisfied Partly Satisfied Not Satisfied Not Applicable
LS 3 2 1 0
Satisfy with Workers compensation act (WCA) LT Satisfied Partly Satisfied Not Satisfied Not Applicable
LS 3 2 1 0
Satisfy with local by-laws LT Satisfied Partly Satisfied Not Satisfied Not Applicable
LS 3 2 1 0
Satisfy with local building codes LT Satisfied Partly Satisfied Not Satisfied Not Applicable
LS 3 2 1 0
Access to
renewable sources
Accessibility to the district energy system LT High Average Low Not Available
LS 3 2 1 0
Accessibility to renewable energy sources LT High Average Low Not Available
LS 3 2 1 0
Safety-related
requirement Standing water/flood issues
LT High Average Low Not Available
LS 3 2 1 0
LT – Linguistic Terms
LS – Likert Scale

79
.
Phase 3: Development of the Distance Matrix
The municipality under consideration can be segregated geographically into multiple Traffic
Assessment Zones (TAZ) in order to determine micro-level trip distribution throughout the
municipality. Accordingly, the TAZ map of the considered municipality was collected from
the respective municipality. Two types of trips were identified from the municipal trip
database: 1) Trips generated from one TAZ to a different TAZ were defined as inter-zonal trips;
and 2) Trips generated from a specific TAZ to the same TAZ were defined as intra-zonal trips.
For a given municipality, the trip distance matrix consists of shortest distances of inter-zonal
trips, intra-zonal trips, and recharging trips from the selected origin to the destination through
an available recharging facility. Figure 5-2 shows the development of the distance matrix.
Figure 5-2 Development of Distance Matrix
In this work, centroids of TAZs are considered trip generation and trip attraction points.
ArcGIS geo-processing tools were used to obtain the centroid of each TAZ. These centroids
were used as the trip generator and trip attraction of each TAZ. The inter-zonal, intra-zonal,
and shortest distance via recharging infrastructure can be further explained as follows:
1) The distance of inter-zonal trips: There are several methods that can be used to find the
shortest distance between two points. Dijkstra’s algorithm is one of the common methods
used to solve the single-source shortest path problem [221]. Dijkstra’s algorithm can be
explained using triangular inequality shown in Equation (25).

80
.
d(Oi,Dj) ≤ d(Oi,Y) + d(Y ,Dj) Equation 25
Where, 𝑑(𝑂𝑖,𝐷𝑗) - The shortest path distance between Oi and Dj (km), 𝑑(𝑂𝑖,𝑌) − The distance
between the origin Oi and the variable point of Y (km), 𝑑(𝑌 ,𝐷𝑗) - The distance between the
variable point Y to the destination Dj (km)
2) The distance of intra-zonal trips: According to Parker et.al. (1989), a TAZ can be assumed
as a nearly circular shape and the population is distributed uniformly through out the area
of the TAZ [222]. Therefore, the intra-zonal distances of a TAZ can be calculated using
Equation (26) [222].
dii = 0.846 . √ Ai π⁄ Equation 26
Where, dii – Intra-zonal distance of ith TAZ (km), Ai – TAZ ith area (sq. km)
3) Shortest distance from the trip origin to destination via an available EV-RI location:
Feasible locations for EV-RI facilities (Rm) were obtained using the previously discussed
preliminary site selection framework. The distance from the origin to the selected future
EV-RI location (Oi~Rm) and the distance from a future EV-RI location to the trip
destination (Rm~Dj) were calculated for all possible route combinations. However, some
assumptions were made to ease the simulation. There are: 1) A particular vehicle recharges
on its way to the destination or while it is returning to the origin (assumed no additional
trips were generated for recharging purposes); 2) The vehicle follows the shortest path
throughout the trip. Accordingly, the recharging trip requires a detour from the original
route, which increases the burden on EV consumers. The origin, EV-RI point, and
destination were arranged in ascending order to find the best desirable location for potential
EV-RI where the lowest distance can be achieved. Dijkstra’s algorithm was applied to
obtain the shortest path. The path from origin to the EV-RI and EV-RI to destination were
determined and the extra mileage was used as the input parameter to the optimization
model.
𝑑(𝑚,𝑛) = 𝑑(𝑂𝑖,𝑚) + 𝑑(𝑚,𝐷𝑗) Equation 27
Where, 𝑑(𝑚,𝑛) = Shortest distance of nth trip through mth recharging facility (Oi⁓ Rm~Dj)
(km), 𝑑(𝑂𝑖,𝑚) = Shortest distance from origin ith to mth recharging facility (Oi~Rm) (km),

81
.
𝑑(𝑚,𝐷𝑙) = Shortest distance from mth recharging facility to destination jth (Rm~Dj) (km), n =
Route which has the origin of Oi and the destination of Dj , m = Potential EV-RI
The literature revealed that the Geographic Information System (GIS) can be used as a spatial
analytical tool to conduct a network-based analysis in complex urban systems [29][149]. In the
proposed tool, the network analyst extension of ArcGIS was used to find the aforementioned
distance matrices of a given route network. The model builder module of ArcGIS was used to
develop an iteration-based simulation to program Dijkstra’s algorithm to obtain the all-to-all
distance matrix (shown in Figure 5-2) using the pre-screened potential locations for future EV-
RIs. Python programming script was used to record the results of the above iterations and a
JavaScript Object Notation (JSON) file was developed as a result of the simulation. The JSON
file was used as an input file for the optimization model.
Phase 4: Module to Determine Multi-Period Public Fast-Charging Demands
This module was developed using the data obtained from the location-based databases.
Municipal household travel surveys data were used to obtained origins, destinations, and the
amount and type of municipal trips. The following assumptions were made to find the public
fast-charging (DC-FC) demands of the selected municipality:
1. Factored vehicle growth (gvt) rates and multi-period EV demands (Rev
t) for the region were
obtained from the literature and institutional reports. This was used to obtain the multi-
period recharging demands within the considered TAZ.
2. Range (FREV) can be described as the mileage expected by the consumer in a single
refueling/recharging cycle [12][140]. However, according to Frank A, et al., (2013), EV
users are comfortable utilizing approximately 75%-80% of their FREV before they recharge
their EVs [47]. Therefore, EV recharging frequency was calculated by considering the
number of days that a typical EV consumer needed to utilize 80% of EV range.
3. The number of O-D trips was obtained from the trip survey data and assumed that the travel
pattern of EVs is similar to the general travel patterns of the municipality. Trip distances
were assumed as the shortest path from trip origin to the destination.
4. The availability of home-based recharging facilities causes a reduction in potential demand
for public recharging facilities [10]. Moreover, the availability of off-street dedicated
parking space with access to grid electricity also improves the viability of domestic
recharging. However, due to a variety of parking configurations and a lack of local parking

82
.
information, this tool assumed the owners who are staying in apartments, townhouses, and
other multifamily residences do not own home recharging facilities and do not have the
potential to share a neighbor’s recharging facilities [223]. Accordingly, the “home-based
recharging ratio (RHC)” was defined based on the availability of multi-family residences as
a percentage of total residences of the considered TAZ.
5. The overall contribution of the privately-owned and operated recharging facilities (e.g.
offices, hotels, shops, etc.) was obtained as a percentage of total recharging demand, which
was assumed as “other recharging impacts” (Ro).
The EV recharging demands for the tth year from Oi to Dj (Route n) was calculated using
Equation (28) below.
TEV(Oi,Dj)t = 1 0.8 . FREV⁄ (T(Oi,Dj)
o . d(Oi,Dj). gvt . REV
t . RHC. Ro) Equation 28
Where, 𝑑(𝑂𝑖,𝐷𝑗)-The shortest distance between Oi and Dj (km), 𝑇(𝑂𝑖,𝐷𝑗)𝑜 - Traffic demand from
origin to destination at the base year (vehicles/day), 𝑔𝑣𝑡 – The vehicle growth rate from base
year to tth year in the considered TAZ (%), 𝑅𝐸𝑉𝑡 - Estimated electric vehicle registered as a
percentage of the total vehicle registered as at tth year (%), 𝑅𝐻𝐶- Home-based recharging ratio
(as described in phase 3), 𝑅𝑜- Other recharging impacts (E.g., impact on work-based
recharging, public slow recharging etc.), FREV – EV range or millage run per a single
recharging cycle (km/recharge), 𝑇𝐸𝑉(𝑂𝑖,𝐷𝑗)𝑡 - EV traffic demand from origin to destination (nth
route) at tth year (vehicles/day)
Phase 5: Life Cycle Cost Assessment
The life cycle cost (LCC) of electric vehicle recharging infrastructure can be defined as the
total cost of ownership associated with the recharging facility over its total lifetime, which
consists of DC-FC units, installation cost, cost of civil works, operational cost, maintenance
cost, repair cost, recycle cost, and end-of-life cost. The investment cost of a recharging facility
was kept to a minimum by assuming that all EV-RIs are connected to the same grid and do not
have an alternative in-site electricity generation method. The LCC for the kth EV-RI at time of
t (𝐿𝐶𝐶𝑘𝑡) can be expressed as Equation (29).

83
.
𝐿𝐶𝐶𝑘𝑡 = ∑ 𝑋(𝑘,𝑛)
𝑡𝑁𝑛=1 (𝛽. 𝐶 + 𝛽. 𝐿𝐶𝑘 + 𝛽. 𝐸𝐼 + 𝛽. 𝐶𝑊 + 𝐸𝐶 + 𝑁𝐹 + 𝛽. 𝑀𝐹 + 𝛽. 𝑅𝐹) + 𝑀𝐶
Equation 29
Where NUkt = Number of DC-FC units proposed in the kth EV-RI at the time of t, which is also
equal to β. ∑ X(k,n)tN
n=1 , β = Average daily recharging capacity of a typical DC-FC port
(charger/vehicles.day), C = Unit investment of DC-FC unit (CAD/unit), LCk = Present worth
of total land rent/cost/lease per unit DC-FC unit in the kth EV-RI (CAD/unit) (According to
EV-RI design guideline provided by UBC-TIPS Lab in 2015 [224], the accessible parking
space is approximately 60m2 per DC-FC unit), EI = Unit cost of the electrical installation of
DC-FC (CAD/unit), CW = Cost of civil work per DC-FC unit (e.g. paving, curbs etc.)
(CAD/unit), MF = Present worth of total management fee (paid annually) per unit (CAD/unit),
RF = End-of-life cost per unit (CAD/unit), X(k,n)t = Total number of vehicles used nth route and
get served from kth facility at time t, EC = Present worth of electricity units consumer by an
average vehicle (CAD/vehicle), NF = Present worth of network fee per vehicle recharge
(CAD/vehicle), MC = Present worth of total miscellaneous fee incurred by the EV-RI
(CAD/facility)
Phase 6: Multi-Objective Optimization-Based EV-RI Capacity Planning
Multiple objectives were considered to obtain the optimal recharging facility locations and
capacities considering multi-stakeholder perspectives. EV consumers and EV-RI investors
were considered the key stakeholders in the EV-RI network development process. Therefore,
the consumer and investor perspectives were optimized using the following methodology.
EV consumer perspective: Due to the ad-hoc placement and lack of available recharging
facilities, consumers should drive an additional mileage (detour distance) to reach recharging
facilities, which acts as a barrier to switching from conventional transportation. Therefore, this
additional distance needs to be minimized in order to increase users’ satisfaction with
electrified transportation. Accordingly, Equation (30) was used to minimize the
aforementioned detour distance for all EV trips in the municipality. In addition, the range
anxiety of potential EV consumers can be lowered by providing sufficient recharging
infrastructure access and availability that may encourage potential vehicle users to switch from
conventional vehicles to EVs [24][10][182]. Therefore, the proposed recharging network
service coverage should be maximized to meet the overall public recharging demands within

84
.
the considered municipality. However, there is a capacity constraint in each EV-RI facility,
hence the EV recharging demand serviced by the particular facility should be less than or equal
to the maximum capacity of the specific recharging facility. Both the demand and capacity
constraints were defined as follows to develop this module in order to obtain the optimal EV-
RI network.
Z1 = Min(∑ ∑ (X(m,n)tN
n=1Mm=1 . d(m,n))) Equation 30
Subject to,
EV-RI capacity constraint,
∑ 𝑋(𝑚,𝑛)𝑡𝑁
𝑛=1 ≤ β. 𝑁𝑈𝑚𝑡
EV-RI demand constraint,
∑ 𝑋(𝑚,𝑛)𝑡𝑀
𝑚=1 = 𝑇𝐸𝑉(𝑜,𝑛)𝑡
𝑋(𝑚,𝑛)𝑡 ≥ 0 ∀𝑚, 𝑛, 𝑡
Where, m = Number of EV-RIs in the study area (∀𝑚 = 1,2, … , 𝑀), n = Total number of routes
(∀𝑛 = 1,2, … , 𝑁), t = Considered time periods (∀𝑡 = 1,2, … , 𝑇), 𝑋(𝑚,𝑛)𝑡 = No. of EVs that are
traveling from nth trip (Oi⁓Dj) served from mth EV-RI at time t, 𝑑(𝑚,𝑛) = Detoured distance of
nth trip (Oi⁓Dj) through mth EV-RI facility, 𝑁𝑈𝑚𝑡 = Number of DC-FC units proposed in the
mth EV-RI at the time of t, β = Average daily recharging capacity of a typical DC-FC port
(charger/vehicles.day), 𝑇𝐸𝑉(𝑜,𝑛)𝑡 = EV traffic demand from origin to destination (nth route) at tth
year (vehicles/day)
EV-RI investor perspective: Financial benefits are essential to encourage more investments
in the early stages of the industry. Having lower investments and higher returns may encourage
investors to invest more [177][181]. Aligning EV-RI investments with accurate EV-RI DC-FC
demands will provide required recharging availability and optimal investments. In addition,
lowering investments will result in lower recharging rates, which may encourage EV
consumers to use more public recharging facilities [24][10][182]. Although the unit costs of
DC-FC stations (e.g. investment cost, civil work, installation, etc.) do not vary based on
location, Equation (6) shows that the land acquisition costs, recharging facility size, and shape
do vary by location as well as the location-based demands. However, EV-RI demand is not
uniformly distributed throughout the day, resulting in underutilized DC-FC units in the facility.
Therefore, the number of units in the facility will be estimated based on DC-FC port to EV
ratio (β), which depends on regional travel behaviours, location type, and regional charging

85
.
behaviours [223]. Equation (31) was used to incorporate the aforementioned aspect into the
optimization module.
𝑍2 = 𝑀𝑖𝑛 (𝛽. ∑ ∑ 𝐿𝐶𝑚. 𝑋(𝑚,𝑛)𝑡𝑁
𝑛=1𝑀𝑚=1 ) Equation 31
Subject to,
𝑋(𝑚,𝑛)𝑡 ≥ 0, ∀𝑚, 𝑛, 𝑡
Where, m = Number of EV-RIs in the study area (∀m = 1,2,….,M), n = Total number of routes
(∀n = 1, 2,…..N), t = Considered time periods (∀𝑡 = 1,2, … , 𝑇), 𝑋(𝑚,𝑛)𝑡 = No. of EVs that are
traveling from nth trip (Oi⁓Dj) served from mth EV-RI at time t, 𝑑(𝑚,𝑛) = Detoured distance of
nth trip (Oi⁓Dj) through mth EV-RI facility, 𝑁𝑈𝑚𝑡 = Number of DC-FC units proposed in the
mth EV-RI at the time of t, β = Average daily recharging capacity of a typical DC-FC port
(charger/vehicles.day), 𝑇𝐸𝑉(𝑜,𝑛)𝑡 = EV traffic demand from origin to destination (nth route) at tth
year (vehicles/day)
The Linear Programming (LP) method was used in this tool to obtain the most desirable EV-
RI locations and capacities for a given period. The linear objectives were enable the use of LP
model that can handle comparatively big databases by using user-friendly tools. Moreover, LP
models are flexible in terms of adding new constraints into the optimization algorithm.
Accordingly, the proposed methodology was used to obtain the multi-period EV-RI network
for a medium-scale municipality in British Columbia, Canada. Each period (t) was analyzed
separately and combined to obtain the complete EV-RI development plan for the selected
municipality.
5.3 Case Study-based Model Demonstration
The Census Metropolitan Area of Kelowna, which is located at Southern interior British
Columbia, was the primary focus are in this case study. Kelowna has a population of 194,885,
a total of 81,380 households as of 2016, and it is distributed into 181 Traffic Analysis Zones
(TAZ) [225]. In 2015, Kelowna was declared the fastest growing population in Canada, with a
population growth rate of 3.1% [225]. The City of Kelowna was consulted to obtain the data
required to conduct the case study. The data obtained from the municipality consist of
household survey data, multi-period conventional vehicle demands, vehicle growth factors,
neighbourhood-based dwelling mix, and other necessary demographic data. The Official

86
.
Community Plan (OCP) was also referenced to identify the short-term objectives of the local
government and the budget allocated for the development of green transportation.
5.3.1 Data Migration and Development of the Optimization Model
The data obtained from the aforementioned sources were migrated to developed databases and
formulated optimization module based on the given methodology. Accordingly, the following
factors and assumptions were made to carry out the analysis.
1. The unit cost of land 𝐿𝐶𝑚required for the facility was assumed based on real estate prices
in Kelowna (see Table 5-2). The average land requirement per DC-FC recharging unit was
assumed as 60m2 [50].
Table 5-2 Potential EV-RI Locations for Kelowna, BC
Location
ID (m)
Neighborhood Longitude Latitude TAZ No. Land cost Factor
(LCm) (CAD/ m2)
Max. Capacity
(NUm)
1 LAKESHORE/PANDOSY -119.491 49.86083 107 2,500 10
2 UNIVERSITY PLAZZA -119.389 49.92223 154 2,900 10
3 MCCURDY CORNER -119.405 49.90209 63 3,200 20
4 COOPER CENTRE -119.445 49.88261 52 3,500 10
5 BANKS-SPRINGFIELD -119.425 49.88871 55 3,500 10
6 CAPRI CENTRE MALL -119.475 49.88117 34 3,200 16
7 ORCHARD PLAZA -119.469 49.88195 35 3,600 10
8 SPALL PLAZA -119.458 49.8821 28 3,300 16
9 GLENMORE -119.443 49.91531 160 2,500 20
10 RICHTER -119.49 49.88477 24 3,800 10
11 CLEMENT -119.476 49.89292 15 2,600 10
12 SPRINGFIELD -119.456 49.87627 50 2,600 20
13 BANKS -119.428 49.8836 58 3,600 10
14 RUTLAND -119.398 49.89007 77 2,000 20
2. The traffic demands data relevant to the 2014 household travel survey was obtained from
the municipality. Accordingly, the forecasted traffic growth from the year 2014 to year tth
(𝑔𝑣𝑡 ) was assumed as 43% in 2020- Period 1 (gv
1), 45% in 2030-Period 2 (gv2), 50% in
2040-Period 3 (gv3) and 55% in 2050-Period 4 (gv
4).
3. According to the studies conducted in BC, Canada, light-duty electric vehicle stock was
estimated as 4% in 2020 (Rev1), 24% in 2030 (Rev
2), 71% in 2040 (Rev3) and 98% in 2050
(Rev4) by assuming that strong government policies force the adoption of EVs [226].
4. R0 and RHC were assumed as 1, considering there is a negligible number of home and
workplace recharging facilities due to the lack of available databases.

87
.
5. DC-FC port to EV ratio (β) was assumed as 1/10. Accordingly, it was assumed that the
average recharging rate is 10 vehicles per day and mostly done during peak hours. The
actual average EV recharging data were obtained from several existing EV-RI facilities and
the average was calculated accordingly.
Geographic maps (shape files) were collected from the City of Kelowna. This data consists of
the city boundary, TAZ boundaries, road network, and other relevant geographic data. Those
were imported to ArcGIS and centroids of TAZs were mapped.
5.3.2 ArcGIS-based Distance Matrix
The model-builder module of ArcGIS software (ArcMap 10.4.1) was used to formulate a
network analysis-based model. According to the aforementioned methodology, the distance
matrix was calculated and recorded as JSON files. The overall model developed from the model
builder is shown in Figure 5-3. A custom-made python script was used to record the distance
matrix and create the JSON file.
As per the case study data, 180 trip origins (Oi) were considered with the same 180 trip
destinations (Dj). The model hierarchy 2 and 3 were used to find the shortest distance of all the
OD pairs (𝑑(𝑂𝑖,𝐷𝑗)𝑜𝑟 𝑑(𝑜,𝑛)) and formulate those as base OD matrix (180 x 180). The elements
of the OD matrix were considered as routes (n=32,400). The pre-screened locations (Rm) were
selected for potential recharging infrastructure (m = 14), shown in Table 5-2. All the models
given in Figure 5-3 were used to find the shortest routes from all origins to all destinations
through all Rm locations (𝑑(𝑚,𝑛)). This was formulated as a new matrix that contained 453,600
elements (32,400 x 14), which were recorded as a JSON file. This model was simulated for
approximately 72 hours using an Intel Core I7-7700 16GB desktop computer. The resultant
JSON file was used as an input to the optimization model.

88
.
Figure 5-3 Model Developed to Formulate Distance Matrix Using ArcGIS Model-Builder

89
.
5.3.3 Optimal Capacity Planning and Location Allocation Model for EV-RIs
The objective functions were combined and derived as a single fitness function f(x(i,j)), given
below. Three weight schemes can be obtained using multi-stakeholder perspectives and obtain the
fitness function. These are: 1) Buyer’s perspective: more weight to consumer elapsed
distance/time; 2) Investor’s perspective: more weight to investor cost; and 3) Balance perspective:
equal weights to buyers and investors. However, due to the non-availability of exact data on
investor’s and buyer’s perspective, equal weights were considered to each objective while creating
the fitness function. Therefore, w1 and w2 were introduced as 0.5 and 0.5 to develop the f(x(m,n)),
and linear scaling transformation-based normalization was used to convert input parameters to
align with the fitness function. The fitness function for the case study problem is shown in Equation
(32). The source code developed for this problem is given in Appendix D2.
f(x(m,n)) = ( w1 Z1 + w2Z2) Equation 32
Subject to,
∑ 𝑋(𝑚,𝑛)𝑡32,795
𝑛=1 ≤ β. 𝑁𝑈𝑚𝑡
∑ 𝑋(𝑚,𝑛)𝑡14
𝑚=1 = 𝑇𝐸𝑉(𝑜,𝑛)𝑡
𝑋(𝑚,𝑛)𝑡 ≥ 0 ∀𝑚, 𝑛, 𝑡
Where, Using Equation (29) , 𝑍1 = 𝑀𝑖𝑛(∑ ∑ (𝑋(𝑚,𝑛)𝑡32,975
𝑛=114𝑚=1 . 𝑑(𝑚,𝑛))) and using Equation (8),
𝑍2 = 𝑀𝑖𝑛 (10. ∑ ∑ 𝐿𝐶𝑚. 𝑋(𝑚,𝑛)𝑡32,975
𝑛=114𝑚=1 ), 𝑤1 and 𝑤2 = Weights of each objective function in
order to obtain the fitness function, m = Number of EV-RIs in the study area (∀𝑚 = 1,2, … ,14), n
= Total number of routes (∀𝑛 = 1,2, … ,32975), t = Period 1-2020 to period 4 - 2050 (∀𝑡 =
1,2,3,4), 𝑋(𝑚,𝑛)𝑡 = No. of EVs, which are traveling from nth trip (Oi⁓Dj) served from mth EV-RI at
time t, 𝑑(𝑚,𝑛) = Detoured distance of nth trip (Oi⁓Dj) through mth EV-RI facility (As per the results
obtained from the ArcGIS model), 𝑁𝑈𝑚𝑡 = Number of DC-FC units proposed in the mth EV-RI at
the time of t (see Appendix D3), 𝑇𝐸𝑉(𝑜,𝑛)𝑡 = EV traffic demand from origin to destination (nth route)
at tth year (vehicles/day)
Linear programming (LP) is a mathematical method for determining a way to achieve the best
outcome within the defined constraints. A single-index transportation problem [227] was

90
.
formulated based on the linear programming method to solve the above EV-RI location-allocation
and capacity planning problem. The model was created to minimize f(x(m,n)) in order to find the
optimal location and capacities of EV-RI infrastructures in a given time t. The dual simplex method
of the IBM ILOG CPLEX Studio IDE 12.8.0 was used to run the simulation and obtain the
optimization results. This simulation was consumed approximately 30 minutes to complete the
overall calculations using an Intel Pentium (R) 1.90GHz 8GB laptop computer. Then the
developed model was validated using the software-generated curves for different capacities and
infrastructure locations.
5.3.4 Case Study: Results and Discussion
Based on the assumptions made in section 5.3.1, the optimal EV-RI network proposed for
Kelowna, BC will provide access to 14,400 consumers in 2020 (t1), 93,600 consumers in 2030 (t2),
306,000 consumers in 2040 (t3), and 468,000 consumers in 2050 (t4). The multi-period DC-FC
recharging network development plan is shown in Figure 5-4 and the resultant capacities with the
most desirable locations for multi-period EV demands are shown in Appendix C.
According to the life cycle cost calculations, the investment (cradle-to-gate) cost for the proposed
EV-RI network is CAD 392,400 in 2020, CAD 2,158,200 in 2030, CAD 5,784,900 in 2040, and
CAD 4,414,500 in 2050. The operational cost was calculated assuming a tier-2 domestic electricity
rate of CAD 0.15/kWh [228] and 2% interest rates for the land lease [70]. Assuming 80%
recharging of 30kWh battery with 340Wh/km electricity consumption, the recharging capacity per
vehicle was estimated as 15.2kWh/recharge [70][229]. Therefore, considering 10 vehicles per day
for each DC-FC station, the annual operational electricity cost per DC-FC station was estimated
as CAD 8,208/year. The land lease costs were calculated as CAD 35,226/year in 2020, CAD
226,035/year in 2030, CAD 741,586/year in 2040, and CAD 1,039,175/year in 2050, considering
a 20year mortgage term. The total annual operating cost was estimated as CAD 8,633/year by
considering the annual networking cost of CAD 225/year and the annual DC-FC maintenance cost
of CAD 200/year. The overhead costs and end-of-life cost of EV-RI stations were considered
negligible. The total revenue of the DC-FC unit was calculated as CAD 30,636/year by assuming
CAD 8.51 (CAD 7.06 recharging fee and CAD 0.91 transaction fee) per typical charging event for
a consumer [230]. The simple payback periods of the multi-period EV-RI investments are shown

91
.
in Table 5-3. Here, the DC-FC cost reduction rate due to economy of scale and technology
advancement was assumed as the same as the discount rate.
Table 5-3 Simple Payback Calculations
Period 1:2020 Period 2:2030 Period 3:2040 Period 4:2050
Total DC-FC units 4 26 85 130
Capital cost CAD 392,400 CAD 2,158,200 CAD 5,787,900 CAD 4,414,500
Variable (land)- Annual CAD 35,226 CAD 226,035 CAD 741,586 CAD 1,039,175
Electricity cost- Annual CAD 32,832 CAD 213,408 CAD 697,680 CAD 1,067,040
Revenue - Annual CAD 122,544 CAD 796,536 CAD 2,604,060 CAD 3,982,680
Simple payback (years) 7.20 6.04 4.97 2.35
Multi-period payback periods were compared with the EV trip growth in the municipality as shown
in Figure 5-5. According to Figure 5-5, the payback of the proposed EV-RI network will be higher
in the early stages of the EV deployment process, due to the low number of consumers and the
capital costs needed to initiate these EV-RI facilities. This payback will be gradually reduced with
the maturity of the EV market, which may enhance the investment opportunities and benefits for
the infrastructure investors.

92
.
Figure 5-4 Multi-Period Improvement Plan for Public Recharging Infrastructure Network for
Kelowna, BC

93
.
Figure 5-5 EV-RI Network Demand vs. Payback Period
Accordingly, financial incentives and government corporations are needed in the early stages of
the EV-RI deployment process. Reducing the initial investments through interest-free loans,
delayed mortgage payment mechanisms, government tax benefits, reward programs, and public-
private partnerships for the development of EV fast-charging facilities may reduce the payback
period obtained above. The low paybacks may enhance potential EV-RI investments, which will
be a better solution to cover the existing and potential recharging infrastructure gap in the
community.
5.3.5 Case Study: Model Validation
The framework validation is vital to determine the effectiveness and reliability of the proposed
method compared to the conventional EV-RI planning approach. There is a lack of information in
location planning and expansion scheduling for EV-RI placement in complex networks. According
to municipal expert interviews, municipal planning of the aforementioned EV-RIs is conducted
using expert recommendations, municipal by-laws, and general infrastructure guidelines.
However, there are no dedicated frameworks or tools to compare and improve those
recommendations using a scientific background. In that case, model validation can be done using
two approaches. There are: 1) Validate based on software-generated alternative capacities and
locations (random-bases); and 2) Validate based on expert-based alternative capacities and
locations (conventional-based planning). Both validation results are explained below.
EV
-RI
dem
and
s p
er y
ear
Sim
ple
pay
-bac
k p
erio
d (
yea
rs)
0
50000
100000
150000
200000
250000
300000
350000
400000
450000
500000
0.00
1.00
2.00
3.00
4.00
5.00
6.00
7.00
8.00
Period 1:2020 Period 2:2030 Period 3:2040 Period 4:2050
Simple payback Average demand of the period

94
.
Validated based on the software-generated locations and capacities
The simulation was conducted as dual optimization, where the minimization function was initially
converted to a maximization function. The solution to the dual problem provides a lower bound to
the solution of the primal (minimization) problem [231]. Hence, the software used an iterative
approach to find the maximized value of the given optimization problem. Accordingly, the
software itself generated random alternatives during the simulation and obtained the maximized
value for the dual function. Those curves related to the years 2040 and 2050 can be used to prove
the validity of the obtained answers (very few iterations were simulated to solve period 1 & 2 due
to the simplicity of the optimization model).
Figure 5-6 shows the multiple iterations and the corresponding dual f(x(m,n)) values based on the
data obtained from the CIPLEX model. Accordingly, the final iterations show the maximum value
that is optimal for this problem. Hence, the software-based value can be identified as the optimal
capacities and the locations for the EV-RI infrastructure planning problem.
Validated based on locations and capacities generated using the conventional approach
In this case, the expert opinion was considered to develop multiple scenarios and the results of the
aforementioned case study were considered as the base case scenario. Accordingly, six possible
scenarios were developed using expert opinion-based placements and capacities, which are shown
76200
76400
76600
76800
77000
77200
77400
77600
0 2000 4000 6000 8000 10000 12000116000
117000
118000
119000
120000
121000
122000
123000
0 5000 10000 15000 20000
Period 3 - 2040 Period 4 - 2050
du
al f
(x(m
,n))
du
al f
(x(m
,n))
No. of iterations No. of iterations
Figure 5-6 Results of Software Generated Dual Fitness Functions for Multiple Iterations

95
.
in Table 5-4. The results obtained from the proposed framework were compared with expert-
developed scenarios to validate the effectiveness and reliability of the proposed method.
The proposed model was used to generate the life cycle cost, payback, and catered demand results
for developed scenarios. Figure 5-7 shows the results of the aforementioned scenarios in terms of
payback period, unutilized capacity, and required capacity. Those results were compared with the
optimistic or the base-case scenario to find best scenario considering the multi-stakeholder
perspective.
Table 5-4 Scenarios Developed for Model Validation
Scenario
No. Description
Additional recharging capacities as a percentage
of estimated total EV net public fast charging
demands for year 2050
2020 2030 2040 2050
1 Pessimistic Scenario (Full demands in
2020)
100% 0% 0% 0%
2 Fast-Track Scenario 50% 50% 0% 0%
3 Linear Growth Scenario 25% 25% 25% 25%
4 Early-Majority Focused Scenario 0% 50% 50% 0%
5 Late-Majority Focused Scenario 0% 25% 75% 0%
6 Laggards Focused Scenario 0% 0% 100% 0%
Scenario 1 can be considered a pessimistic scenario. This scenario was developed to cater to the
total EV market penetration calculated for the year 2050. The full infrastructure requirement will
be developed and operated from 2020 without considering the actual variation of EV public fast
charging demands. Figure 5-7 shows that the upfront cost is much higher, resulting in a higher
payback of 35 years. Infrastructure utilization is significantly lower than all other scenarios. In this
scenario, investments are very high and investors will not get the anticipated payback. Financial
assistance from the government will be very high if policymakers want to achieve the required
payback for this scenario. However, EV consumers will get access to multiple facilities where
consumer satisfaction will be significantly higher than in other scenarios. In Scenario2, 50% of
recharging infrastructure development was proposed in 2020 and the remaining 50% was proposed
to be completed by the year 2030. The dynamic market variation was not considered and the
planning was done based on the estimated EV penetration for the year 2050.

96
.
As shown in Figure 5-7, the upfront cost is significantly higher (though lower than scenario 1),
resulting in a higher payback of 32 years. Infrastructure utilization is comparatively low and
investment is high, resulting in high payback periods. Financial assistance from the government
will be comparatively high if policymakers want to achieve the required payback for this scenario.
However, EV consumers will get access to multiple facilities where consumer satisfaction will be
high. A linear fast-recharging infrastructure development method was proposed in scenario 3.
Accordingly, 25% of the full EV infrastructure requirement will be developed in 2020, 25% in
Figure 5-7 Results of the Scenarios Developed Using Conventional EV-RI Planning Approach

97
.
2030, 25% in 2040, and 25% in 2050. Linear EV growth was considered and the planning was
done based on the estimated EV penetration for the year 2050, which required lower investments
than scenarios 1 and 2. However, there will be unutilized recharging capacity based on Figure 5-7,
which increases the payback period to 27 years. The upfront costs and the payback periods are
higher than the optimal scenario. Scenarios 4, 5, and 6 were planned for late-adopters without
considering potential early-adopters. Scenario 4 focused on the early majority, which proposed
50% EV fast-recharging capacity in the year 2030 and 50% capacity in the year 2040. Scenario 5
focused on the late-majority, which proposed 25% EV fast recharging capacity in the year 2030
and 75% capacity in the year 2040. Scenario 6 focused only on the laggards, which proposed 100%
capacity development in the year 2040. All these scenarios (4, 5, and 6) have ignored the early-
adopters and carry unutilized capacity after their development. Accordingly, scenarios 4, 5, and 6
will not satisfy consumers in the early stages of EV adoption and showed longer payback periods
compared to the base case.
The case study has shown that the proposed planning framework is better than the conventional
approach used by EV recharging infrastructure planners and developers. Furthermore, the
proposed approach can be fulfilled using an appropriate project delivery method and an appropriate
contracting strategy based on the maturity level of the EV market. The selection of an appropriate
project delivery method is one of the core decision strategies that affects successful completion of
a project [157]. Public-private partnerships, design-built-finance-operate-transfer, build-own-
operate-transfer, and built-own-lease-transfer are some of the viable project delivery methods that
can be used to ensure sustainable deployment of the EV-RI network for the urban context. Further
to that, this study can be extended with a detailed investment framework that shows the impacts
of different factors used in this study. That framework can be used to develop policies and best
practices to make infrastructure investments more effective.
The methodology helps EV-RI planners to determine dynamic changes in capacities, costs,
payback periods, and locations of EV-RI facilities based on estimated EV consumer demands. Site
selection data and municipality data (geographic maps, route network, etc.) were the key inputs
that change with the selected municipality. Therefore, the application of this methodology for
different municipalities is reasonably simple and can be used with minimal expertise. In addition,

98
.
the proposed number of DC-FC units depends on the pre-defined average productive recharging
capacity of a typical DC-FC port per day (β), which may vary with local trip behaviours. The
proposed framework can be simulated with the pre-defined β and derive the best desirable plan for
a multi-stage EV-RI deployment process. An additional advantage of the proposed framework is
that time-based EV recharging rate policies can be introduced to enhance the utilization of DC-FC
stations, and increase β. Those policies can be simulated as a scenario approach to obtain the most
desirable time-based recharging pricing schemes for public EV-RI facilities. In that case, the
utilization of existing EV-RI facilities will increase and EV-RI investments will decrease in the
long run. Moreover, a minimum payback period will also be shown for EV-RI infrastructure
investors.
5.4 Summary
Recharging infrastructure (RI) deployment plays a vital role in improving public recharging
availability for transport electrification. Decarbonizing transportation using low-emission
electricity requires a massive RI network. Though consumers are reluctant to purchase electric
vehicles (EVs) until RIs are sufficiently placed, investors are not willing to invest in RIs due to
recharging demand uncertainties. Therefore, a scientific planning framework is needed to ensure
the sustainable deployment of EV-RIs in complex networks. In this work, a lifecycle thinking-
based multi-period infrastructure-planning framework is proposed to develop sustainable public
EV-RIs in an urban context. This framework consists of 1) A preliminary site selection framework;
2) A distance matrix to model the shortest distance between TAZs; 3) A temporal model to find
dynamic EV-RI demands; and 4) A stochastic model to select the best desirable capacities and
locations for potential EV-RIs. A case study of a typical medium-scale municipality in Canada
was used to demonstrate the proposed framework. Furthermore, the results obtained from the
aforementioned model were validated using randomly generated alternative combinations and
conventional infrastructure planning scenarios. The geo-processing data, regional travel
behaviours, and recharging characteristics were used as model inputs.
The results of the case study showed that the proposed framework could be used to estimate multi-
period public recharging demands, minimize lifecycle costs, maximize service coverage and
infrastructure utilization, and ensure reasonable paybacks compared to conventional planning

99
.
approaches. Moreover, this framework can be used to compare different investment assistances,
which are required in the early stages of the RI deployment process to encourage investors.
Furthermore, government and private institutions can use this framework to identify recharging
demands, permitting, and developing RIs in the long run.
The proposed approach will reduce upfront costs, maximize infrastructure utilization throughout
the infrastructure life cycle, and result in minimal payback periods. The multi-period recharging
demands of each facility, traffic impacts to the existing route network, and potential electricity
demands from the grid can be assessed using the proposed framework. Moreover, this framework
can be used to evaluate different incentives, rewards, and loan facilities in order to obtain payback
periods for long-term decision-making. Furthermore, the scientific knowledge generated from this
study can be generalized for other alternative fuel-based infrastructure development projects in the
future.

100
.
Chapter 6 Strategic Incentive and Tax Planning Approach for Sustained
Recharging Infrastructure
Sections of this chapter have been published in the Elsevier journal of Cleaner Production, as
articles titled “Scenario-based economic and environmental analysis of clean energy incentives for
households in Canada: Multi-criteria decision making approach” and “Are we ready for alternative
fuel transportation systems in Canada: A regional vignette” [70] [232].
6.1 Background
Fossil fuel-based low-occupancy trips can be categorized into home-based, work-based, and non-
work-based, based on trip purpose [233]. These trips, which are related to light-duty vehicles, can
be analyzed at the household level using the data obtained from a travel survey. Electrifying the
trips, as mentioned earlier, using EVs would be expensive for vehicle users and infrastructure
investors. On the one hand, potential vehicle users need to invest in expensive low-emission
vehicles even though the recharging infrastructure and vehicle ranges are not on par with
conventional vehicles. On the other hand, potential investors need to invest in recharging
infrastructure even though they have uncertain recharging demands and paybacks at the early
stages of EV deployment. The above mentioned additional costs and limitations can discourage
consumers from adopting some GHG reduction interventions [130]. As a solution for this, the
government can absorb the aforementioned additional expenditure by providing incentives, tax
benefits, and rewards for potential interventions to encourage consumers to move towards energy-
efficient buildings and low-emission transport options [24].
Major portions of the national and local incentives are primarily sourced by the government and
government institutions using the tax money paid by the citizens of the country. Carbon offset
taxes can be imposed on high-emission energy sources to discourage consumers and to invest in
those incentives for low-emission interventions [31]. Therefore, maximizing the favourable
impacts of potential incentives is vital to achieve national and local targets faster. However,
incentive and tax planning are not straight-forward. This requires a logical and comprehensive
framework that aligns the national priorities. In this case, the municipal level incentives for clean
energy-based interventions can be divided into two sectors considering their application:

101
.
1) Incentives to improve the energy efficiency of buildings via energy upgrading in new
households and energy retrofitting in existing households, using energy-efficient systems and
appliances. Fundamentally, consumers are affected by the additional costs for energy and
emission-related interventions of households, and resultant savings or costs. An additional cost for
retrofit installation, operations, and maintenance for buildings can be expected with innovative
and proven interventions for building-level applications.
2) Incentives to improve the emission levels of road transportation via incentivizing alternative
low-emission transport interventions such as low-emission vehicles, active transportations, and
high-occupancy vehicles. An additional cost for low-emission vehicle purchases, operation, and
maintenance can also be expected for vehicle level applications [48] [10].
In addition, carbon offset taxes can be considered an additional source of income that contributes
to municipal clean energy funds. These funds can be used to provide the aforementioned incentives
and infrastructure investments for clean energy-based interventions. The carbon offset tax can be
explained as an additional amount imposed on energy, based on estimated GHG emissions [234].
Decision-making to obtain the optimal incentive and tax schemes using key factors such as
multiple stakeholders, regional climate profile, emissions, and cost profiles of different energy
mixes, regional practices, and consumer behavioural patterns have been overlooked in previous
studies [39]. Stakeholders such as homeowners, government institutes, utility suppliers, etc., need
to know the net economic and environmental impacts of their clean energy investments to ensure
business continuity. Therefore, multi-stakeholder analysis of household GHG reduction
interventions (including residential building retrofits and clean energy transport) and benefits of
different clean energy opportunities need to be assessed to achieve greenhouse gas reduction
targets at the lowest possible cost. A comprehensive literature review shows that existing studies
have only considered either building retrofits or transport interventions to reduce potential GHG
emissions [34].
This chapter presents a comprehensive analysis of both building retrofits and transport
interventions for Canadian households in order to develop incentive and tax schemes to achieve
municipal GHG targets. A decision support tool was developed to identify the most desirable

102
.
intervention to reduce GHG emissions from household transport and domestic activities
considering regional economic and environmental factors. Accordingly, this chapter discussed the
methodology and demonstration of the development of the Household Incentive and Tax Planning
Tool (HIPT), which will consider overall energy use and GHG emissions of a selected household
for both domestic and transportation activities. The scenario-based analysis allows decision-
makers such as public and private authorities to decide the appropriate sector to incentivize in
order to minimize energy demands and GHG emissions in a timely way and for a given location
[189].
6.2 Methodology for Household Incentive and Tax Planning Tool
A scenario-based approach was used to assess plausible futures. However, the methodology started
with data collection and database development of regional characteristic-based EV policies and
building retrofit incentives. The key regional characteristics considered in this tool are regional
meteorological data, energy cost and accessibility, local energy tariffs, and energy mix [235].
Provinces with a population greater than one million were considered in this analysis, and EVs
were assumed as the only scalable alternative fuel technology available in Canada. Moreover, the
scope of this study was limited to single-family residential buildings and light-duty vehicles,
considering data availability. The proposed research framework for HIPT is given in Figure 6-1.

103
.
Figure 6-1 Proposed Research Framework for Household Incentive Planning Tool (HIPT)

104
.
Phase 1: Data Collection and Database Development
To identify the parameter values for this work, the recent literature was examined with a focus on
the provincial analysis of residential buildings and transport-based emissions. The database
developed in Chapter 4 and the output life cycle data were used to obtain the EV and ICEV related
data for this study. The provincial incentives and tax policies for clean energy vehicles were
collected from federal and provincial reports. However, municipal level incentives were ignored
due to the complexity of the data collection. Moreover, data related to household retrofits,
government and utility incentives, transport interventions, clean energy-related incentives, travel
behaviour-related data, and other regional characteristics were collected from peer-reviewed
journal articles, institutional reports, and online data sources. Local builders were contacted, and
data related to local building materials, construction types, costs, and commercially available
retrofit types were collected from their databases. Moreover, the RS-Means database was used to
collect the up-to-date cost of materials within the province. Data relevant to the case study were
also collected from local databases provided by the developers, utilities, and municipalities.
Phase 2: Incentive/Tax Policies for Low-emission Transportation Options
The purpose of this phase is to identify the optimal incentive scheme to increase low-emission
vehicle demands based on regional characteristics. The potential incentives and tax policies were
identified initially using the literature and expert opinions. Those were indicated from RT1 to
RT(n) considering n number of incentives and tax policies. Moreover, the intermediate levels of
each incentive and tax policies were also identified with their potential financial impacts to the
consumer and society. Those were inserted as inputs to the HIPT.
Impact of Different Tax/Incentive Policies for Vehicle Life Cycle Cost
The vehicle LCC consists of vehicle purchase/manufacturing cost, operational cost, maintenance
cost, repair cost, recycle cost, fuel extraction cost, storage cost, transportation cost, and retailing
cost, which are the key cost components of a vehicle’s life cycle. Equation (33) was derived using
Equation (16), which was used to calculate the annualized LCC of alternative and conventional
fuel vehicles. Accordingly, HIPT is an Excel-based tool that was used to assess the annualized
LCCs of light-duty vehicles. In this tool, the vehicle lifespan, annual mileage, vehicle

105
.
characteristics, fuel tariffs, incentive/tax/rewards, and interest rates were obtained from the
existing literature and can be changed based on regional characteristics.
HHCVannualized = VCAPEX
annualized+VOPEXannualized + + VEOL
annualized Equation 33
where, 𝑉𝐶𝐴𝑃𝐸𝑋𝑎𝑛𝑛𝑢𝑎𝑙𝑖𝑧𝑒𝑑 – Annualized vehicle capital costs (CAD/vehicle.year); 𝑉𝑂𝑃𝐸𝑋
𝑎𝑛𝑛𝑢𝑎𝑙𝑖𝑧𝑒𝑑 –
Annualized vehicle operating costs (CAD/vehicle.year); VEOL - Vehicle end-of-life cost
(CAD/vehicle.year); HHCVAnnualized - Household annualized life cycle cost of the vehicle
(CAD/vehicle.year)
According to Equation (17), the formula for VOPEX can be shown as Equation (34).
VOPEXannualized = VOC
annualized + VM&RCannualized + VAC
annualized + EVBCannualized Equation 34
Where, 𝑉𝑂𝑃𝐸𝑋𝑎𝑛𝑛𝑢𝑎𝑙𝑖𝑧𝑒𝑑 - Annualized value of all operational expenditure (CAD/vehicle.year);
𝑉𝑂𝐶𝑎𝑛𝑛𝑢𝑎𝑙𝑖𝑧𝑒𝑑 −Annualized value of the operating costs (CAD/vehicle.year); 𝑉𝑀&𝑅𝐶
𝑎𝑛𝑛𝑢𝑎𝑙𝑖𝑧𝑒𝑑 -
Annualized value of the maintenance and repair cost (CAD/vehicle.year); 𝑉𝐴𝐶𝑎𝑛𝑛𝑢𝑎𝑙𝑖𝑧𝑒𝑑 –
Annualized other costs such as parking, road tolls, insurance costs, and vehicle licensing costs, etc.
(CAD/vehicle.year); 𝐸𝑉𝐵𝐶𝑎𝑛𝑛𝑢𝑎𝑙𝑖𝑧𝑒𝑑 - Annualized cost of electric vehicle battery change
(CAD/battery.year).
Vehicle operating costs and EV battery costs were calculated using equations given in Chapter 4.
The vehicle capital costs (VCAPEX) were calculated as Equation (35) below.
VCAPEX = (MSRP - DMSRP) (ST% * RST%) Equation 35
Where, VCAPEX – Vehicle final consumer capital cost; the manufacturer’s suggested retail price
(MSRP) (CAD/vehicle); ST – Provincial vehicle sales tax percentage from the selling price (%) ,
DMSRP - Purchase rebate from MSRP (CAD/vehicle); and RST% - Tax rebate from sales tax (%).
The identified incentives and tax policies were then combined and the combined effect on the
country’s economy was found for all possible combinations. Therefore, a customized Python script
was coded and integrated to HIPT to propagate the individual incentives and identify the combined

106
.
effects of different incentives and tax policy combinations. The HIPT was further extended to
obtain the overall LCC impact of different EV incentive combinations for different regions.
Select the Best Incentive and Tax Policies for Low-emission Fuel Vehicles
The selection of the most desirable incentives and tax policies is not straight-forward. There are
relevant factors that need to be considered in order to find the most viable incentive scheme for
clean energy vehicles. On the one hand, consumers would like to get more incentives for EVs to
reduce their costs; on the other hand, the government wants to reduce incentives and improve the
required taxes to balance their budgets.
Accordingly, the HIPT was further extended to select the most desirable incentive combination
with the lowest positive economic impacts to the region. A comprehensive survey conducted by
the National Renewable Energy Laboratory, USA, shows that the majority (71%) of existing
vehicle owners would not pay more or would like to pay less for new automobile technologies
[236]. Considering the consumer perspective, therefore, the LCC of low-emission vehicles should
be less or equal to the LCCs of conventional vehicles. Equation (36) shows the above constraint
for the incentive selection problem.
𝐻𝐻𝐶𝐸𝑉𝐴𝑛𝑛𝑢𝑎𝑙𝑖𝑧𝑒𝑑 < = 𝐻𝐻𝐶𝐼𝐶𝐸𝑉
𝐴𝑛𝑛𝑢𝑎𝑙𝑖𝑧𝑒𝑑 Equation 36
Subjected to, 𝐻𝐻𝐶𝐸𝑉𝐴𝑛𝑛𝑢𝑎𝑙𝑖𝑧𝑒𝑑& 𝐻𝐻𝐶𝐼𝐶𝐸𝑉
𝐴𝑛𝑛𝑢𝑎𝑙𝑖𝑧𝑒𝑑 𝜖 𝐻𝐻𝐶𝑉𝐴𝑛𝑛𝑢𝑎𝑙𝑖𝑧𝑒𝑑
𝐻𝐻𝐶𝐸𝑉𝐴𝑛𝑛𝑢𝑎𝑙𝑖𝑧𝑒𝑑; 𝐻𝐻𝐶𝐼𝐶𝐸𝑉
𝐴𝑛𝑛𝑢𝑎𝑙𝑖𝑧𝑒𝑑 ≥ 0
Where, 𝐻𝐻𝐶𝐸𝑉𝐴𝑛𝑛𝑢𝑎𝑙𝑖𝑧𝑒𝑑- Annualized household life cycle cost for electric vehicles (CAD/year);
𝐿𝐶𝐶𝐼𝐶𝐸𝑉𝐴𝑛𝑛𝑢𝑎𝑙𝑖𝑧𝑒𝑑 – Annualized household life cycle cost for conventional gasoline vehicles
(CAD/year).
Considering the government's perspective, the total economic impacts from additional incentives
and tax policies need to be minimized. Moreover, the value generated from those incentives needs
to be maximized in order to enhance the efficiency of capital deployment. Therefore, the objective
function is 𝑀𝑖𝑛 ( 𝑉𝑅𝑇𝐴𝑛𝑛𝑢𝑎𝑙𝑖𝑧𝑒𝑑), where 𝑉𝑅𝑇
𝐴𝑛𝑛𝑢𝑎𝑙𝑖𝑧𝑒𝑑 is the annualized component of the total

107
.
vehicle taxes and incentives calculated from the list identified in 3.4.1. The rule-based method or
linear graphical method can be used to find the most desirable solution to minimize government
expenditure on incentives and keep the LCCs of low-emission vehicles lower than conventional
vehicles.
Phase 3: Retrofit Selection for Single Family Detached Houses
Phase 3 of the HIPT development is discussed in this section, which discusses identifying the most
desirable building upgrade/ retrofit options to reduce building level GHG emissions and energy
consumption in a given region.
Identify locally available upgrade/ retrofit options
Innovative and proven locally available energy efficiency upgrades /retrofit options were identified
using expert opinion and databases developed by local suppliers and developers. Those upgrades
were categorized into five key categories based on their energy consumption behaviours. They are:
1) Building heating, ventilation, air conditioning (HVAC) system; 2) Domestic hot water system;
3) Insulation of the building envelope; 4) In-situ renewable energy generation; and 5) Building
appliances and lighting. Those retrofits were labeled as RB1 to RB5. Moreover, a base case house,
known as the conventional house, was defined using the minimum building standards of the
municipality. Conventional house and the selected upgrade/ retrofit options were evaluated by a
panel of developers, builders, energy experts, and research academics to proceed with necessary
simulations.
Energy simulation, costs, and GHG emissions of the proposed upgrades
Energy simulation tools such as HOT2000, Design Builder, etc. can be used to simulate building
energy. In the base case, the conventional building was simulated using the selected energy
simulation software. Then the building was modified with the above-identified upgrade/retrofit
option and simulated. The outputs of the aforementioned energy simulations were transferred to
HIPT for the selected upgrade/retrofit options. In the meantime, the capital costs of those
upgrade/retrofit options and GHG emission factors were also inserted into the HIPT. Then the
developed python script was used to propagate those energy values, costs, and emissions to

108
.
identify the energy efficiencies and capital cost impacts of all possible combinations. The analysis
was simplified by assuming zero interactions between different retrofit options while combining
those into a single building [47]. Provincial electricity and natural gas tariff data were updated to
the HIPT using the utility tariff data (cost per unit energy and tier levels) obtained from the
respective utility providers.
Similar to phase 2, HIPT was used to calculate the capital upgrade/retrofit investments and
annualized life cycle costs of each retrofit option based on regional characteristics. Equation (37)
[47] was used to calculate the annual GHG emissions from the energy consumption data obtained
from the aforementioned HOT2000 building energy models. Literature-based regional emission
factors were inserted to HIPT to calculate the GHG potential.
HHEH.jAnnualized = ECj x GHGf
k Equation 37
Where "𝐻𝐻𝐸𝐻.𝑗𝐴𝑛𝑛𝑢𝑎𝑙𝑖𝑧𝑒𝑑" is the “Annual household GHG emissions of the house (H) with retrofit
j”, “ECj” is the “Annual energy consumption of house with retrofit j” and "𝐺𝐻𝐺𝑓𝑘" is the “GHG
emission factor for the fuel type k”.
Equation (5) [70] [180] was used to calculate the annualized cost of the capital investment for
SFDHs with or without retrofit options. Equation (38) shows the annualized life cycle cost (LCC)
for SFDHs with the retrofit option “j”.
HHCH.JAnnualized = EACj
capital−incentives+ OCj
annualized + MCjannualized+EoLj
annualized
Equation 38
Where, “HHC H.J Annualized” is “Annual household life cycle cost for a house (H) with retrofit j”,
“EACfcapital-incentives” is “Equivalent Annual cost of the capital cost with incentives for a house with
retrofit j”, “OCfannualized” is “Annualized operational cost of a house with retrofit j”, “MCf
annualized”
is “Annualized maintenance cost of a house with retrofit j” and “EoLfannualized” is “End-of-life cost
of a house with retrofit j”. However, the maintenance cost and end-of-life cost of houses were
assumed as negligible during these calculations due to the lesser impacts of both maintenance cost
and end-of-life cost compared to operational and purchasing cost. House lifetime was assumed as

109
.
25 years since the general mortgage period of home purchases is between 25 and 30 years in
Canada.
Ranking Upgrade/Retrofit Options
The purpose of retrofit planning is to minimize potential GHG emissions and energy costs and
enhance the value generated by potential retrofit investments [47]. Therefore, the retrofit ranking
was developed to identify the most desirable retrofit option to achieve minimal GHG emissions,
investment, and annual consumer cost. Multi-criteria decision making (MCDM) methods such as
weighted sum, Analytic Hierarchy Process (AHP), and the Technique for Order of Preference by
Similarity to Ideal Solution (TOPSIS) can be used to rank potential retrofit options[237][238].
The TOPSIS method is simple and can be extended easily with fresh alternatives by swapping the
final ranking when new alternatives are included in the model [239]. Therefore, the TOPSIS
method was used to extend the HIPT to rank upgrade/retrofit options. According to Opricovic et
al. (2004), the following steps were conducted to calculate the shortest distance to the positive
ideal solution and rank all the retrofits [238]:
- Calculated the normalized decision matrix using vector normalization
- Calculated weighted normalized decision matrix
- Determined the positive ideal and negative ideal solutions
- Calculated the separation measures, using the n-dimensional Euclidean distance
- Calculated the relative closeness to the ideal solution
- Ranked the preference order based on relative closeness
Phase 4: Scenario Development and Assessment
Scenario-based assessment is prevalent in long-range infrastructure planning in response to
uncertainties [189]. Scenario planning method defines evidence-based future imaginations for how
planning might proceed [192]. The literature reveals that this method can be used to establish
model changes in replacing the conventional product (at the “over-maturity” stage) with a new
product category [192]. Therefore, a scenario-based assessment was considered to identify the
most desirable household type for different regions in the country. The scenario-based assessment
consists of the following steps:

110
.
- Identify scenarios (e.g.. best case, worst case, most likely case, etc…) [193]
- Define variables that influence future outcomes, based on the selected scenarios [193]
- Create scenarios by assigning the qualitative and quantitative reasonable value to the defined
variable [193].
Scenarios were developed using multiple combinations of light-duty vehicle options and
residential buildings combined to be operated as a household. Two building types were defined
based on the retrofits identified in phase 2: conventional or base-house, which is “House without
retrofits”; and upgraded house, which is “House with retrofits”. Moreover, conventional (ICE) and
electric (EV) light-duty vehicles were used to define different transport opportunities for
households.
Scenario Development to Prioritize Sectors for Investment
Scenario development consists of identifying scenarios, and defining variables that affect future
outcomes, and assigning quantitative and qualitative values to the defined variables [193]. In this
analysis, four scenarios were developed as follows.
Scenario 1: This scenario is titled “Electric Mobility.” The modern electricity-based transport
technology, EV, was considered with the conventional residential building (House without
retrofits) to find the overall environmental and economic impact of alternative transportation
within the household cluster. Electricity and natural gas are considered the key secondary energy
sources for residential buildings, and electricity is considered the unique energy source for
transportation.
Scenario 2: This scenario is titled “Business as Usual.” This is the reference case for most
provinces in Canada. Conventional transport technology (ICE vehicles) was considered with the
conventional residential building (House without retrofits) to find the environmental and economic
performance of the conventional household cluster.
Scenario 3: This scenario is titled “Moderate Future.” The modern electricity-based transport
technology (EV) was considered with upgraded residential buildings (House with retrofits) to find

111
.
the overall environmental and economic performance of the energy-efficient interventions within
the household cluster.
Scenario 4: This scenario is titled “Beyond Conventional.” Conventional transport technology
(ICE) was considered with the upgraded residential building (House with retrofits) to find the
overall environmental and economic impact of residential building operational performance in the
household cluster.
Residential costs and GHG emissions calculated in Phase 2 and the transport costs and GHG
emissions calculated in Phase 3 were used to assign parameter values for all aforementioned
scenarios. Accordingly, the tool developed in Phase 2 and 3 was further extended with an eco-
efficiency methodology to compare different scenarios.
Scenario-based Decision Making Using Household Eco-efficiency Index (HEEI)
Considering the concept of eco-efficiency (see Section 3.6.3), the Household Eco-efficiency Index
(HEEI) was defined as the “units of household environmental impact reduction per dollar invested
on interventions.” Accordingly, Equation (39) shows the HEEI calculation for the ith scenario
(HEEISi).
HEEISi = HEPSSi HESSi⁄ Equation 39
The household value generated was defined as the “Household eco-score (HES)” and was
calculated by normalizing the annualized household cost of the particular scenario (Si) from the
reference scenario (SR). HES for ith scenario (HESSi) can be calculated using Equation (40).
HESSi = HHCAnnualizedSi HHCAnnualized
SR⁄ or GCCSi GCCSR⁄ Equation 40
Where, HESSi - Household eco-score for the ith scenario (Si ϵ S1, S2, S3, and S4); HHC = HHCH +
HHCV; HHCSiAnnualized - Annualized household cost for the ith scenario (CAD/year); GCCSi -
Government total cost contribution for the ith scenario (CAD/house); HHCSRAnnualized – Annualized
household cost for the reference scenario (In this section reference scenario is considered as
“Business As Usual” (Scenario 2)) (CAD/year); GCCSR – Government total cost contribution for

112
.
the reference scenario ( “Business As Usual” (Scenario 2) was considered as the reference case)
(CAD/house)
The household environmental performance score (HEPS) can be calculated by normalizing the
annualized household emissions of the particular scenario (Si) from the reference scenario (SR).
HEPS for ith scenario (HEPSSi) can be calculated using Equation (41).
HEPSSi = HHEAnnualizedSi HHEAnnualized
SR⁄ Equation 41
Where, HEPSSi - Household environmental performance score for the ith scenario (Si ϵ S1,S2, S3,
and S4); HHE = HHEH + HHEV where resident emissions were obtained from Equation (33) and
vehicle emissions were obtained from the literature; HHESiAnnualized - Annualized household
emissions for the ith scenario (kgCO2e/year.house); HHESRAnnualized – Annualized household
emissions for the reference scenario (“Business As Usual” (Scenario 2) was considered as the
reference case) (kgCO2e/year.house)
The HEEIs for each scenario were compared and ranked for different provinces to identify the
most desirable scenario for each province.
6.3 HIPT Demonstration Using a Case Study
The case study was conducted to demonstrate the methodology mentioned above and develop the
HIPT for Canadian provinces using Single Family Detached Households (SFDH). Provincial data
were collected and the data obtained for Chapter 3 were used when necessary.
6.3.1 Household Data Collection for the Demonstration
Building- and vehicle-related data were obtained as the household data. Accordingly, data related
to a typical local household, a typical conventional vehicle, and similar horse-power electric
vehicles were selected as follows.
Residential Building: A mid-size SFDH built in the Southern Interior of BC was considered for
building retrofitting and energy simulation purposes. As-built drawings and building specifications
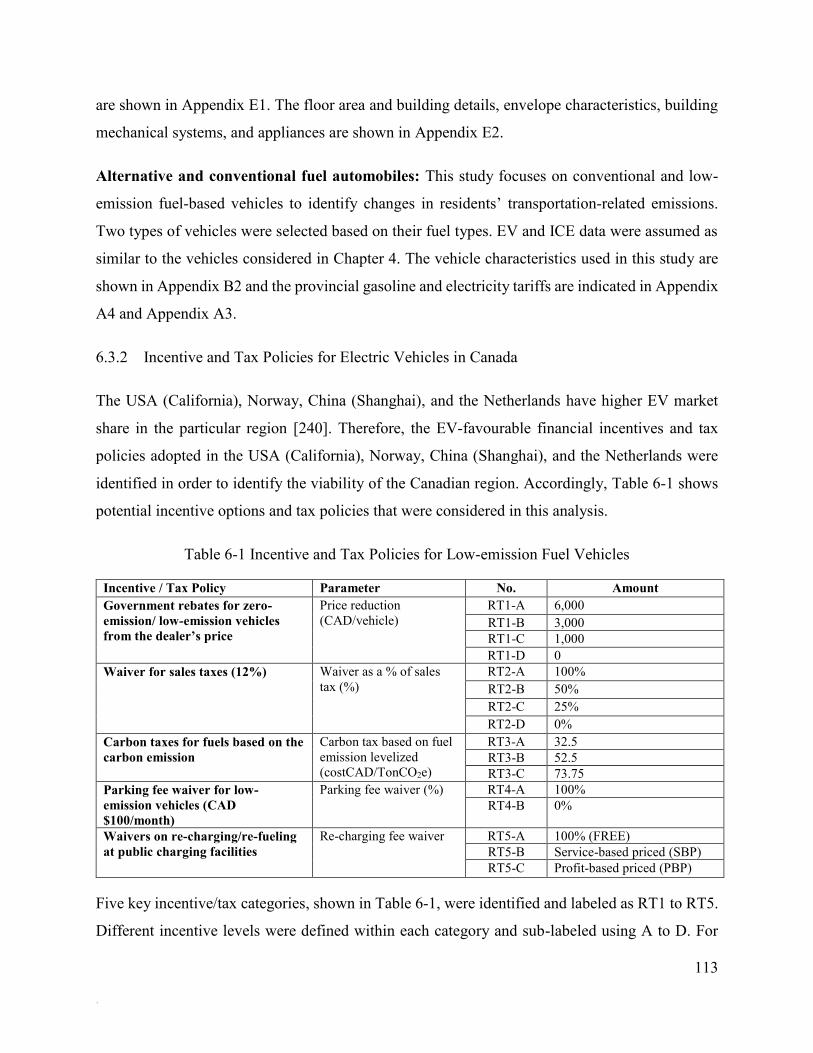
113
.
are shown in Appendix E1. The floor area and building details, envelope characteristics, building
mechanical systems, and appliances are shown in Appendix E2.
Alternative and conventional fuel automobiles: This study focuses on conventional and low-
emission fuel-based vehicles to identify changes in residents’ transportation-related emissions.
Two types of vehicles were selected based on their fuel types. EV and ICE data were assumed as
similar to the vehicles considered in Chapter 4. The vehicle characteristics used in this study are
shown in Appendix B2 and the provincial gasoline and electricity tariffs are indicated in Appendix
A4 and Appendix A3.
6.3.2 Incentive and Tax Policies for Electric Vehicles in Canada
The USA (California), Norway, China (Shanghai), and the Netherlands have higher EV market
share in the particular region [240]. Therefore, the EV-favourable financial incentives and tax
policies adopted in the USA (California), Norway, China (Shanghai), and the Netherlands were
identified in order to identify the viability of the Canadian region. Accordingly, Table 6-1 shows
potential incentive options and tax policies that were considered in this analysis.
Table 6-1 Incentive and Tax Policies for Low-emission Fuel Vehicles
Incentive / Tax Policy Parameter No. Amount
Government rebates for zero-
emission/ low-emission vehicles
from the dealer’s price
Price reduction
(CAD/vehicle)
RT1-A 6,000
RT1-B 3,000
RT1-C 1,000
RT1-D 0
Waiver for sales taxes (12%) Waiver as a % of sales
tax (%)
RT2-A 100%
RT2-B 50%
RT2-C 25%
RT2-D 0%
Carbon taxes for fuels based on the
carbon emission
Carbon tax based on fuel
emission levelized
(costCAD/TonCO2e)
RT3-A 32.5
RT3-B 52.5
RT3-C 73.75
Parking fee waiver for low-
emission vehicles (CAD
$100/month)
Parking fee waiver (%) RT4-A 100%
RT4-B 0%
Waivers on re-charging/re-fueling
at public charging facilities
Re-charging fee waiver RT5-A 100% (FREE)
RT5-B Service-based priced (SBP)
RT5-C Profit-based priced (PBP)
Five key incentive/tax categories, shown in Table 6-1, were identified and labeled as RT1 to RT5.
Different incentive levels were defined within each category and sub-labeled using A to D. For

114
.
example, “Waiver for Sales Tax” was identified as a key incentive for electric vehicles and labeled
as RT2. The tax waiver can be a “Full waiver” (100%), labeled as RT2-A; or a “half waiver”
(50%), labeled as RT2-B, and so on. Accordingly, 1,215 incentive schemes (combinations) were
identified for an EV-based transport system using the individual incentive options given in Table
6-1. The linear programming graphical method was used to identify the most desirable incentive
policy for each province.
6.3.3 Local Building Upgrades and Retrofit Options
The primary upgrades /retrofit options were identified from Okanagan builders and developers for
local single-detached households. Table 6-2 shows the aforementioned upgrade/retrofit options
that represent the above major components.
Table 6-2 Energy Retrofits for Single Detached Households
Retrofit
No.
Category Retrofitting
component
Retrofit
RB1
Energy-efficient building
envelope (enhance
insulation and enhance U-
value of windows)
(Additional Investment:
CAD16,932)
Foundation ICF blocks, 6” RCA reinforced, R-14 insulation, 2”
Styrofoam
Exterior wall
(Section 1)
3/8” EPS Styrofoam, 2”×6” wood studs @ 24” OC,
3/8” OSB sheeting, R-20 insulation, ½” drywall
Ground floor Engineered I joist 11 7/8” @ 19.2” OC, ¾” plywood,
R-14 insulation
Ceiling R-20 batt, R-50 blown-in ceiling, ½” drywall
Windows Vinyl triple glazed windows c/w 366 lowE Air
Tightness: 0.2 L/s.m2
RB2
Appliances (Additional
Investment: CAD2,535)
Heat recovery
system
ECM variable-speed blower
Stove and oven Energy Star rated double ovens (Avg: 450kWh/year,
Max: 615kWh)
Hot water
system
Energy star rated heat recovery electric hot water tank
2EF (Hot water temperature: 1310F)
RB3
Effective lighting (Ex:
LED and CFL)
(Additional Investment:
CAD1,000)
Lighting
(interior)
More than 75% LED or CFL
RB4
Fuel switching to greener
HVAC systems to reduce
potential emissions (e.g.,
geo exchange-based
HVAC with multi-zoning)
(Additional Investment:
CAD8,370)
Space heating
system
Ground heat source pump 4COP & Energy Star rated
electric fireplace 100% SS
HVAC
controller
SMART HVAC controller with multi-zoning
Space cooling
system
Ground heat source pump 5.6COP
RB5
Alternative in-situ green
energy production
(CAD9,385)
Solar (PV) 140 ft2 solar array, 150 Azimuth, 14.2% module
efficiency and 90% inverter efficiency

115
.
The specifications of the conventional household are shown in Appendix E3.
Initially, the energy model of the base case building was modeled using HOT2000 V11.3b90
developed by CANMET Energy Technology Center (CECT). The model was further modified
with multiple simulations considering all possible retrofit combinations (32 retrofit combinations),
and the resultant energy consumptions were obtained and recorded for all provinces. The
provincial weather profiles were obtained from CECT weather data libraries. The results generated
from the energy simulations were transferred to HIPT with the specification of each combination.
The utility tariff data used in this study are indicated in Appendix A5. Moreover, the current
incentive programs for SFDH upgrades available in Canadian provinces are shown in Table 6-3.
Provincial electricity GHG emission factors were obtained from Perera et al. (2017) [70]. Natural
gas cradle-to-grave emission factors were obtained as 49.87 kgCO2e/GJ Natural Gas [241].
Moreover, the HIPT was further extended with the TOPSIS method, which was used to rank all
32 building upgrade /retrofit options for all seven provinces.

116
.
Table 6-3 Provincial Incentive Schemes for Residential Buildings
Source: On-line databases of provincial utility providers and government institutions (Accessed in November 2017)
Quebec (QC) Ontario
(ON) British
Columbia (BC) Alberta (AB) Saskatchewa
n (SK) Manitoba
(MN) Nova Scotia
(NS)
Base house H2M (House with retrofits) H2D H2M H2D H2M H2D H2M H2D H2M H2D H2M H2D H2M H2D H2M
8” reinforced concrete, R-22
insulation
ICF blocks, 6” RCA reinforced, R-
14 insulation, 2”styroform
0 0 625 1250 0 0 132 132 0 0
0 0 0 5000
2”×6” wood studs @ 24” OC, 3/8” OSB sheeting, R-20 insulation, ½”
drywall
3/8” EPS Styrofoam, 2”×6” wood
studs @ 24” OC, 3/8” OSB
sheeting, R-20 insulation, ½” drywall
0 0 1875 1875 0 0 129
8 1298 0 0
Engineered I joist 11 7/8” @ 19.2”
OC, ¾” plywood, R-11 insulation
Engineered I joist 11 7/8” @ 19.2”
OC, ¾” plywood, R-14 insulation 0 0 190 190 0 0 0 0 0 0
R-22 Batt, R-40 blown in celling, ½” drywall
R-20 batt, R-50 blown in celling, ½” drywall
0 0 500 750 0 0 788 788 0 0
Vinyl double-glazed windows c/w
180 lowE Air Tightness: 0.2 L/s.m2
Vinyl triple-glazed windows c/w
366 lowE Air Tightness: 0.2 L/s.m2
0 0 0 0 0 0 0 500 0 0
Single stage PSC blower ECM variable speed blower 0 0 375 375 0 0 0 0 0 0 150 150 0 0
Standard Refrigerator Standard Refrigerator 0 0 0 0 100 100 100 100 0 0 0 0 0 0
Standard energy star cloth dryer Standard energy star cloth dryer 0 0 0 0 100 100 100 100 0 0 0 0 0 0
Standard Energy Star rated Cooker and oven (565kWh/year)
Energy Star rated Double ovens
(Avg: 450Wh/year, Max:
615kWh)
0 0 0 0 0 0 0 0 0 0 0 0 0 0
Energy star rated natural gas hot water tank 1EF (Hot water
temperature: 1310F) (60Gal)
Energy star rated heat recovery electric hot water tank 2EF (Hot
water temperature: 1310F)
0 0 375 375 1000 1000 945 0 0 0 0 0 0 0
25%-75% LED or CFL More than 75% LED or CFL 0 0 0 0 0 0 0 0 0 0 0 0 0 0
Energy star rated duel fuel (Natural
Gas & electric) EF - 92.1%, 56000 BTU/hr, switching temperature
350F & Natural gas fireplace 2kW,
6824.28 BTU/hr 30% SS
Ground heat source pump 4COP & Energy Star rated electric fireplace
100% SS
0 2800 625 4375 2000 0 0 0 0 0 0 0 0 0
SMART HVAC controller SMART HVAC controller with
multi-zoning
25 225 0 0 0 0 100 100 0 0 0 0 0 0
Energy star rated central split
system, (electric), 14SEER Ground heat source pump 5.6COP
0 0 250 250 0 0 0 0 0 0 0 0 0 0
Not available 140 ft2 Solar array, 150 Azimuth, 14.2% module efficiency & 90%
inverter efficiency
0 0 0 0 0 0 0 2607 0 0 0 5000 0 0

117
.
6.4 Results and Discussion
The results obtained from the transport incentive and building retrofit assessment are discussed in
this section.
6.4.1 Regional Retrofit or Upgrade Selection for Single Detached Houses
All the retrofit options and their combinations (32 combinations) were assessed and ranked to
obtain the best retrofit option based on regional characteristics. As an example, the results obtained
for BC, Canada are shown in Figure 6-2.
Figure 6-2 Building Level GHG Emissions and LCC vs. Retrofitting Investment for BC, Canada
According to Figure 6-2, the annual GHG emissions and building life cycle costs to the consumer
are indicated against the additional retrofitting investment per residential building. The trend
shows that annual GHG emissions of residential buildings decrease with increasing retrofit
investments. However, the annualized consumer cost also increases with additional retrofitting
investments due to resultant mortgage payments of premium upgrade costs. Therefore, in this
section, the environment and economic parameters were given equal weights. Accordingly, capital
investment and annualized consumer cost were each assigned a weight of 0.25 and GHG emissions
An
nu
al G
HG
em
issi
on
s (k
gC
O2eq
/yea
r)

118
.
were assigned a weight of 0.5. Based on the TOPSIS results, the distance to the ideal solution was
calculated. Accordingly, the best retrofit option for each province is shown in Table 6-4.
Table 6-4 Regional Retrofit Selection for SFDHs
Most desirable retrofit combination based on regional characteristics
Quebec
(RQC)
Ontario (RON) Alberta (RAB) British
Columbia (RBC)
Saskatchewan
(RSK)
Manitoba (RMN) Nova Scotia (RNS)
RB2+RB4 RB3 RB3 RB4 RB3 RB2+RB4 RB3
Parameter values for the house with retrofits
RQK RON RAB RBC RSK RMN RNS
HHE
H 58.11 1,626.63 1,2476.25 152.48 11,133.80 87.02 12,436.25
HHC
H 26,716.63 28,401.52 26,126.33 27,297.00 28,598.36 26,264.29 29,802.53
GCCH 3,025.00 9,440.00 5,623.98 3,200.00 500.00 5,150.00 5,000.00
Parameter values for house without (w/o) retrofits
W/O-RQK W/O-RON W/O-RAB W/O- RBC W/O-RSK W/O-RMN W/O-RNS HHE
H 168.13 1,657.96 1,2695.78 199.43 11,358.06 234.23 12,603.43
HHC
H 27,255.49 28,375.56 26,073.52 27,319.01 28,575.40 27,013.01 29,770.26
GCCH 25.00 4,815.00 3,461.74 1,200.00 0.00 150.00 0.00
According to Table 6-4, RB2 (high energy-efficient appliances) and RB4 (fuel switching to
greener HVAC systems) are affordable and the most effective retrofitting methods for the
provinces with low-emission electricity grid. Energy-efficient equipment is capable of reducing
electricity consumption in the house, and greener HVAC systems (e.g. ground source heat pump)
can reduce the use of natural gas consumption for space heating and cooling. Traditional homes in
provinces with high-emission electricity grids (fossil and coal power source electricity) can reduce
their electricity usage by promoting energy-efficient lighting systems. Heat-source pump-based
HVAC systems are not desirable for provinces with high-emission electricity grids due to the
extensive electricity consumption of the heat pump. Hence, energy-efficient natural gas HVAC
systems can be more productive and affordable. Additional wall and roof insulation and multiple-
pane windows (RB1) will enhance energy efficiency in all provinces. However, according to the
analysis, the capital retrofitting investment for additional insulation would be significant.

119
.
6.4.2 Best Incentive and Tax Policies for Electric Vehicles
The life cycle cost (LCC) of the EV was assessed and arranged in ascending order to select the
best incentive scheme based on regional characteristics. Vehicle lifespan was assumed as five
years [70]. Figure 6-3 shows the LCC gap between EV and ICE vehicles in BC for different
incentive schemes (LCC gap between EV and ICE vehicles for different incentives in all other
provinces are shown in Annex E). The majority of those schemes show more significant LCC
reductions to the consumer. However, those LCC savings will directly or indirectly affect
provincial and federal governments as a loss of income or as an additional expenditure. Therefore,
the selection criteria can be changed with the decision maker’s opinions and expert judgment by
incorporating a premium cost amount based on the potential buyers’ willingness to pay for electric
vehicles. However, in this work, it was assumed that potential buyers would pay no premium for
electric vehicles. Hence, the resultant incentive schemes were selected where the LCC of potential
EVs should be equal to or less than the LCC of ICEs.
Figure 6-3 Difference of LCC of EV with LCC of ICEV vs. Potential Incentives for BC, Canada
According to Figure 6-3, multiple results (points) that match the selection criteria were indicated
from the analysis. However, the combinations of individual retrofit types were selected to find the
provincial economic and environmental impacts of improving low-emission vehicle demands.
RT1, RT2, RT4, and RT5 reduce consumer cost and RT3 reduces the gap of the costs between
conventional and low-emission vehicles. Moreover, RT3 increases the operating cost of both
conventional and low-emission vehicles, which discourages private automobile usage in the long

120
.
run. Table 6-5 shows the incentive and tax policies selected for each province based on regional
characteristics.
Table 6-5 Province-based Incentive and Tax Policies
Quebec Ontario Alberta British
Columbi
a
Saskatchewa
n
Manitoba Nova Scotia
Desirable
policy
combination
RT1D+RT
2C+RT3C+
RT4B+RT5
B
RT1C+RT2B
+RT3B+RT4
B+RT5B
RT1D+RT2B
+RT3B+RT4
B+RT5B
RT1D+RT2
C+
+RT4B+RT
5B
RT1B+RT2B+RT
3B+RT4B+RT5B
RT1C+RT2D
+RT4B+RT5
B
RT1A+RT2D+R
T3C+RT4B+RT5
C
Incentive
category
Scheme
RT1 ($/vehicle)
0 1,000 0 0 3,000 1,000 6,000
RT2 25% 50% 50% 25% 50% 0% 0%
RT3 ($/TonCO2e)
73.75 52.50 52.50 0 52.50 0 73.75
RT4 50% 50% 50% 50% 50% 50% 50%
RT5 SBP SBP SBP SBP SBP SBP PBP
EV with
Incentives
EVQC EVON EVAB EVBC EVSK EVMN EVNS
HHEV 826.95 1,396.72 5,827.60 859.38 5,399.20 830.01 5,093.20 HHCV 11,466.9
0
11,447.56 11,423.05 11,672.16 11,447.50 11,510.96 11,409.96
GCCV 1,527.75 3,282.98 860.29 1,535.07 4,346.27 1,854.46 4,951.61
ICE w/o
incentives
ICEQK ICEON ICEAB ICEBC ICESK ICEMN ICENS
HHEV 2,980.64 2,980.64 2,980.64 2,980.64 2,980.64 2,980.64 2,980.64 HHCV 11,473.5
7
11,448.62 11,440.58 11,674.81 11,476.20 11,530.58 11,410.25
GCCV -158.93 -112.87 -112.87 0.00 -112.87 0.00 -158.93
6.4.3 Decision Making for Government Incentive Investment
The results shown in Table 6-4 and Table 6-5 are used to identify the eco-efficiency of transport
and residential building incentive programs in each province. Accordingly, this work identified
the amount of GHG emission reduction per dollar spent by the government for building and
transport sector incentives. Equation 5 was used to obtain the eco-efficiency ratio for these cases.
The eco-efficiency ratios obtained for each province are shown in Figure 6-4. Accordingly, the
incentives given for building retrofits in Nova Scotia, Alberta, and Saskatchewan show positive
GHG reductions, whereas the incentives given for EVs result in negative GHG reductions.
Accordingly, in these provinces, electrified transportation may increase life cycle emissions in the

121
.
long run. Therefore, the provinces with high-emission electricity grids can focus on incentive
schemes for building retrofits.
Figure 6-4 Compare the Eco-efficiencies of Electrified Transportation and Building Retrofitting
Figure 6-4 shows lower emission reductions for building retrofits compared to the incentives given
for electrified transportation. Therefore, provinces with low-emission electricity grids, such as
British Columbia, Manitoba, and Quebec, can focus on incentives and tax rewards for EVs and
EV infrastructure development projects. Proper incentive schemes for EVs will result in these
provinces achieving their GHG targets faster.
6.4.4 Consumer-centric Decision-making
The provincial-based annual household emissions for different scenarios (HHESiAnnualized) are
indicated in Figure 6-5. Accordingly, provinces that have low-emission electricity, like British
Columbia, Manitoba and Quebec, show significantly lower emissions in both scenario 1 and
scenario 3. Accordingly, electricity-operated vehicles and residential buildings have high potential
in these provinces due to the low-emission hydroelectric grid. Nova Scotia, Saskatchewan, and
Alberta show comparatively high emissions in all scenarios. However, scenario 4 shows slightly
lower emissions than other scenarios. Therefore, the provinces that have high emission electricity
can focus on retrofitting residential buildings instead of electric mobility. Conventional fuel
vehicles with greater fuel efficiencies might reduce GHG emissions in the short run. Nevertheless,
-15.0
-10.0
-5.0
0.0
5.0
10.0Quebec
Ontario
Alberta
British ColumbiaSaskatchewan
Manitoba
Nova Scotia
Electrified transportation eco-efficiency ration (kgCO2 reduction /$ invested)
Residential building retrofitting(kgCO2 reduction / $ invested)

122
.
active transportation systems such as walking, cycling, and low-emission public transit systems
would be the best options in the long run.
Figure 6-5 Household GHG Emissions and Consumer Annual Cost Comparison
In addition to GHG emissions, consumer operational cost is also essential in describing the
practicality of these greener interventions. Therefore, the annualized household cost for different
scenarios (HHCSiAnnualized) was also analyzed and shown in Figure 6-5. Consumer costs for the four
scenarios in all provinces do not show much difference, because the transport incentives have
made the cost of EVs approximately similar to the cost of conventional vehicles. However, there
is a minor cost difference among scenarios, which is mostly based on the operational cost of
residential buildings due to climate actions of different provinces. However, the eco-efficiency
method was used to analyze these scenarios further.
The GHG emission reduction requirements to achieve local and provincial targets and the
consumer cost premiums for reduced GHG levels were considered in the HEEI analysis. The
results obtained for HHC and HHE are provided in Appendix E4 for different scenarios. The
provincial comparison for HEEI is shown in Figure 6-6. A lower HEEI represents an increase in
GHG reduction for each dollar spent. According to Figure 6-6, Manitoba, Ontario, Quebec, and
British Columbia show a similar pattern in all scenarios, where scenario 3 and scenario 1 have
significantly lower HEEIs than the other scenarios. Scenario 3 shows the lowest HEEI, which
contains H2M with EVs. The premium price pays for the H2M and EVs has reduced GHG

123
.
Figure 6-6 Province-wise Household Eco-efficiency Index (HEEI)
emissions drastically. Accordingly, the government can promote both H2M and EVs by giving
more tax rewards to users.
Additionally, improving availability and accessibility to infrastructure for electric mobility will
reduce range anxiety6, which leads to increases in electric mobility in these provinces. Therefore,
local/provincial authorities with low-emission electricity grid can quickly achieve their long-term
and short-term GHG reduction targets due to increasing EV demands. Other provinces, like Nova
Scotia, Saskatchewan, and Alberta, do not show significant differences in HEEI in all scenarios
6For widespread adoption of AFVs, the range can be considered as a physiological barrier [12]. Limitations in available
locations of alternative fuel infrastructure and the lower range of vehicle cause a psychological effect on consumers
which is known as “range anxiety” [12]. Range anxiety makes potential consumers to decide against the use of AFVs.

124
.
and thus can focus on low-emission based retrofits for residences, such as LED lighting, energy-
efficient appliances, and insulation for building envelope. The provincial governments of the
aforementioned provinces need to focus their incentives more on residential building retrofit
improvements to achieve their provincial GHG targets.
The outlined analysis demonstrates that provinces with low-emission electricity, like British
Columbia, Manitoba, and Quebec, need to invest in electrified light-duty vehicles to reduce GHG
emissions. The provincial government of these provinces can provide incentives and invest in
charging-infrastructure facilities to enhance EV penetration. As the second priority, the above
provinces can develop an incentive scheme for alternative-fuel HVAC systems to reduce GHG
emissions further, which reduces the potential fossil fuel (natural gas) consumption for space
heating and water heating. Hence, the low-emission and low-cost alternative fuels or fuel hybrids
such as electricity/geo-exchange, etc. were used to replace fossil fuel-based appliances. As the
third priority, the aforementioned provinces can award rebates for energy-efficient appliances and
LED lighting. Finally, incentives can be granted for additional building envelope insulation
upgrades or retrofits.
Alberta, Nova Scotia, and Saskatchewan have high-emission electricity grids. Therefore, the use
of electricity should be minimized in these provinces, and alternative fuels such as natural gas and
hydrogen can be used for household activities. Hydrogen-based vehicles can be a better option for
the above provinces. However, hydrogen vehicles were not considered in this analysis due to the
lack of available data. Moreover, provincial incentives can be developed to increase the use of
energy-efficient appliances, LED lighting, and energy-efficient natural gas space heating and water
heating systems.
6.5 Summary
Premium investment costs and higher payback periods are the fundamental limitations of electric
vehicle transportation and energy-efficient building upgrades. Various incentive policies are used
to share the total impacts of investment cost among multiple stakeholders and encourage
consumers to switch to greener initiatives. Accordingly, local, provincial, and federal governments
are providing incentives for different sectors without assessing the overall household impacts

125
.
scientifically. Direct and indirect incentives that are provided for energy retrofits of residential
buildings and greener transportation can be considered as the domestic sector incentivizes to
reduce potential GHG emissions. Prioritizing interventions within the household cluster and
providing the right amount of incentives to the most desirable interventions is vital to maximizing
the effectiveness and efficiency of governments’ contribution, which will ensure maximum
consumer engagement to achieve government GHG targets faster.
This work focused on the emissions and cost of residential buildings and the transport activities
within the household cluster. A comprehensive literature review was conducted, and the life cycle
costs and impact data for EVs were collected from prior phases. Subsequently, a decision support
tool was prepared for all combinations of retrofits and incentive schemes. The MCDM-based
framework was used with a scenario-based decision-making approach. The potential economic
and environmental impacts of low-emission intervention investments were also discussed for the
considered scenarios. Government-centric and consumer-centric investment priorities for each
province were identified.
The results of this chapter indicate that the “Moderate future” incentive scenario, which consists
of electrified residential buildings with EVs are more desirable for provinces like Manitoba, British
Columbia, Ontario, and Quebec. These interventions would reduce building and transport GHG
emissions in the long run. The proposed incentive schemes for EVs can be comprised of purchasing
rebates and sales tax waivers for EVs, EV parking fee waivers, and government-subsidized
recharging costs. It was recommended to implement carbon tax policies to discourage fossil fuel
vehicles and reduce passive transportation in the future. The “Beyond Conventional” incentive
scenario, consisting of houses with retrofits with conventional fossil fuel vehicles is more desirable
for provinces like Saskatchewan, Alberta, and Nova Scotia. Hence, their incentive policies can be
focused on incentives for residential building retrofits to achieve their GHG targets faster.
Incentive schemes can be developed on energy-efficient natural gas-based HVAC systems and
energy-efficient appliances. Moreover, the additional income from carbon taxes can be used as
incentives for infrastructure investments and to develop recharging infrastructure for EVs. Hence,
the overall economic impacts to the government due to electrified transportation can be reduced,
which may lead to achieving provincial GHG targets faster than usual.

126
Chapter 7 Project Delivery Method Selection for Electric Vehicle Refuelling
Infrastructure Deployment
A version of this chapter is under preparation for a peer-reviewed journal paper, as an article titled
“Project delivery method selection for electric vehicle refuelling infrastructure deployment: A
fuzzy-based approach” that will be submitted to the Journal of Cleaner Production in July 2020.
7.1 Background
The life cycle of the electric vehicle recharging infrastructure project can be described using key
project phases: construction, operation, maintenance, and end-of-life [175][176]. The construction
phase has a greater investment, whereas the operational phase generates revenue [242]. The
success of EV-RI projects depends on acquiring the anticipated demands; identifying potential
risks; deploying risk sharing; allocation, and mitigation strategies; and maintaining the anticipated
project performance [157]. According to the Rogers diffusion model, EV recharging demands and
associated economic risks are dynamic in nature and vary with the maturity level of the EV market.
Project Delivery Methods (PDMs) are used to share project risks among project stakeholders and
ensure minimal risk to concerned parties [54]. In addition to the risk, properly selected PDMs
allows projects to obtain third-party assistance in relation to technical know-how, resources, design
and management standards, and other project-related benefits while ensuring possible benefits to
all stakeholders [162][243]. Lower paybacks, unnecessary responsibility allocation, and adverse
opportunity costs are possible disadvantages of selecting less suitable PDMs [243]. Moreover,
PDMs can be used to create professional relationships among project stakeholders such as project
owners, designers, builders, and managers to pursue and complete a project successfully while
utilizing team synergies [244][245].
The current knowledge on existing projects shows that project owners or project managers are the
key decision-makers in selecting the PDM method [243][245]. Concerning innovative and novel
projects, project owners, and project managers might not have the necessary experience and
expertise to select the most suitable PDM, so key stakeholder perception also enhances the
effectiveness of the above decisions [243]. Hence, PDM selection for public EV-RI development

127
projects requires project stakeholder opinion to overcome possible deployment challenges such as
defining needs, acquiring funding, and dealing with project-related risks, design, and construction
issues [246].
A comprehensive literature review revealed that multiple researchers published articles on PDM
selection for construction projects [162][53]. However, most of those researchers overlooked PDM
selection complications that arise with novel and innovative projects and the involvement of key
stakeholders [55][247]. By integrating stakeholder opinion on PDM selection, the synergies that
are formed by project stakeholders can be used to overcome project limitations such as lack of
technical know-how and experience with innovative and novel projects at their initial stages.
Moreover, the financial risks of those projects due to demand uncertainties and other potential
technical uncertainties can be managed collectively, and the risk can be minimized for project
decision-makers. A compensatory MCDM approach will strengthen the collective decision
making and provide a scientific platform.
This chapter presents a framework to select the stakeholder expertise-based PDM method for
innovative and novel projects. A fuzzy multi-attribute decision-making approach was introduced
to rank alternative PDM methods to identify the most desirable PDM method for long-range EV-
RI deployment projects in urban centers. The developed methodology was applied to the case
study in Chapter 5 to identify possible PDMs for multi-period EV-RI planning projects for
Kelowna, BC.
7.2 Methodology for PDM Selection Framework
The methodology of this work initiated with a comprehensive literature review and expert
interviews on current PDM selection strategies for construction projects. Figure 7-1 shows the
method adopted to develop the PDM selection framework considering the stochastic and temporal
variation of the estimated EV demands.

128
Figure 7-1 PDM Selection Methodology for EV-RIs
The phases of the PDM selection framework are further explained below.
Phase 1: Identification of PDM selection attributes
The database related to project delivery methods (PDMs), factors, and different characteristics of
mostly available PDMs were collected from recently published literature. Recent peer-reviewed
journal articles, conference proceedings, and institutional reports were used to collect the
background data related to infrastructure management and PDMs for infrastructure development

129
projects. PDMs for infrastructure projects, PDM selection factors, infrastructure risk management,
and infrastructure cost-sharing were used as keywords for the literature review. Table 7-1 shows
prominent attributes that help determine the most desirable PDM for small-scale and medium-
scale infrastructure development projects such as EV-RI facilities. These attributes were selected
using existing literature and validated by subject experts.
Table 7-1 PDM Selection Factors
Section
Attributes Selection
Attribute
No.
Description Ref.
Project
characteristics
Scope definition SA 1
Maximize the importance of having a pre-defined
scope baseline for the project (Not an agile type of
a project)
[162]
Project schedule SA 2 Maximize the importance of having very accurate
and tight project schedules and baselines.
[162]
[161]
Contract
Strategy SA 3
Minimize the cost uncertainties due to not having
cost baseline and contract strategy (High-cost
uncertainties in measure and pay, cost-plus, etc.)
[162]
Complexity SA 4
Maximize the external expertise for complex
projects for identifying the technical-know-how
requirement
[162]
[163]
[161]
Owners pre-
requests
Constructability
studies SA 5
Maximize the importance of the constructability
studies before the project initialization
[162]
Value
engineering
studies
SA 6
Maximize the importance of the involving value
engineering processers during the project to
enhance the project efficiency
[162]
Contract
packaging SA 7
Maximize the importance of creating work
packages and award contracts accordingly.
[162]
Contract
awarding criteria SA 8
Maximize the importance of having a systematic
contract awarding criteria, which will consider cost,
quality, and previous experiences for the selections.
[162]
Cost Sharing SA 9
Maximize the importance of cost-sharing or
additional funding due to the expensiveness and
lower pay-back of the project
[162]
[161]
Owners
preferences
Responsibility SA 10 Minimize the owners’ responsibilities to obtain
minimal risks and responsibilities
[161]
Design control SA 11 Maximize the importance of having design control
to the owner at the initiation and during the project.
[163]
[161]
Involvement
after awarding SA 12
Minimizing the owners’ involvement during the
project and keep minimal disturbance to the owner
[163]
Risk
Change orders SA 13 Minimize the possibilities of initiating a high
amount of change orders during the project.
[162]
Risk-sharing SA 14
Maximize the importance of the risk-sharing or risk
allocating ability from the owner to a third party in
a high-risk project.
[162]
Quality
Quality control
and quality
assurance
SA 15
Maximize the importance of having a specific
avenue to conduct third party quality control and
quality assurance.
[162]

130
These factors were used to develop the decision matrix for alternative PDMs.
Phase 2: Determine the importance of PDMs and develop a decision matrix
The literature revealed that there are multiple PDMs for different infrastructure development
projects. The key PDMs can be categorized as Traditional; Partnership; or Collaborative [159].
Literature-based details on the selected PDMs are shown in Table 3-6. Six PDMs were considered
to develop the decision matrix: 1) Design-Bid-Build (DBB) (Traditional method); 2) Design-Build
(DB) (Collaborative method); 3) Construction Management at Risk (CM) (Collaborative method);
4) Design-Built-Operate and Transfer (DBOT) (Partnership method); 5) Public-private partnership
(PPP) (Partnership method); and 6) Integrated Project Delivery (IPD) (Collaborative method). The
studies conducted by Oyetunji A. A. and Anderson S. D (2006) and Mostafavi A. and Karamouz
M. (2010) were used to identify the relative importance of each factor for the above considered
PDMs [157]. The following linguistics terms were used to indicate the relative importance of the
attributes for each PDM:
‘Not Applicable’ was used when the attribute is not applicable to be considered for the EV
maturity level
‘Equally Important’ was used when the attribute is applicable but have no considerable
impact on the selection of PDM.
‘Moderately Important’ was used when the attribute is applicable and has considerable
impact on the selection of a PDM.
‘Strong Important’ was used when the attribute is applicable and has a significant impact
on the selection of a PDM.
‘Very Strong Important’ was used when the attribute is applicable and has a very strong
impact on the selection of a PDM.
‘Extremely Important’ was used when the attribute is applicable and has an extremely high
impact on the selection of a PDM.
Table 7-2 shows the relevant attribute values based on the PDM.

131
Table 7-2 Decision Matrix for the Proposed PDM Selection Approach
Attribute
No.
Decision
Type Linguistic Terms
MAX MIN DBB DB CM DBOT PPP IPD
SA 1 1 0 Equal
Important
Extremely
strong
Equal
Important
Strong
important
Extremely
strong
Extremely
strong
SA 2 1 0 Equal
Important
Equal
Important
V. Strong
important
Equal
Important
Strong
important
Equal
Important
SA 3 0 1 Equal
Important
Equal
Important
Extremely
strong
Equal
Important
Equal
Important
Strong
important
SA 4 1 0 Extremely
strong
Equal
Important
V. Strong
important
Strong
important
V. Strong
important
Extremely
strong
SA 5 1 0 Not
Applicable
Extremely
strong
Not
Applicable
Extremely
strong
Moderate
Important
V. Strong
important
SA 6 1 0 Not
Applicable
Extremely
strong
Not
Applicable
Extremely
strong
Moderate
Important
Extremely
strong
SA 7 1 0 Not
Applicable
Extremely
strong
Not
Applicable
Extremely
strong
Moderate
Important
V. Strong
important
SA 8 1 0 Equal
Important
Extremely
strong
Equal
Important
V. Strong
important
Strong
important
V. Strong
important
SA 9 1 0 Not
Applicable
Moderate
Important
Not
Applicable
Extremely
strong
Extremely
strong
Moderate
Important
SA 10 0 1 V. Strong
important
Extremely
strong
Equal
Important
Moderate
Important
Extremely
strong
Moderate
Important
SA 11 1 0 Extremely
strong
Equal
Important
Strong
important
Equal
Important
Strong
important
Moderate
Important
SA 12 0 1 Equal
Important
Extremely
strong
Equal
Important
V. Strong
important
Strong
important
Moderate
Important
SA 13 0 1 Extremely
strong
Equal
Important
Strong
important
Equal
Important
Strong
important
Moderate
Important
SA 14 1 0 Equal
Important
Moderate
Important
Strong
important
Extremely
strong
Extremely
strong
Moderate
Important
SA 15 1 0 Extremely
strong
Moderate
Important
V. Strong
important
Equal
Important
V. Strong
important
Extremely
strong
The attributes shown in Table 7-2 were converted to triangular-fuzzy numbers using the scale
shown in Table 7-3.
Table 7-3 Triangular-fuzzy Numbers used to Convert Attributes of Different PDMs
Linguistic Terms Triangular fuzzy numbers
Not Applicable (𝑎1, 𝑎1, 𝑎1)
Equal Important (𝑎1, 𝑎2, 𝑎3)
Moderately Important (𝑎2, 𝑎3, 𝑎4)
Strong Important (𝑎3, 𝑎4, 𝑎5)
Very Strong Important (𝑎4, 𝑎5, 𝑎6)
Extreme Important (𝑎5, 𝑎6, 𝑎6)
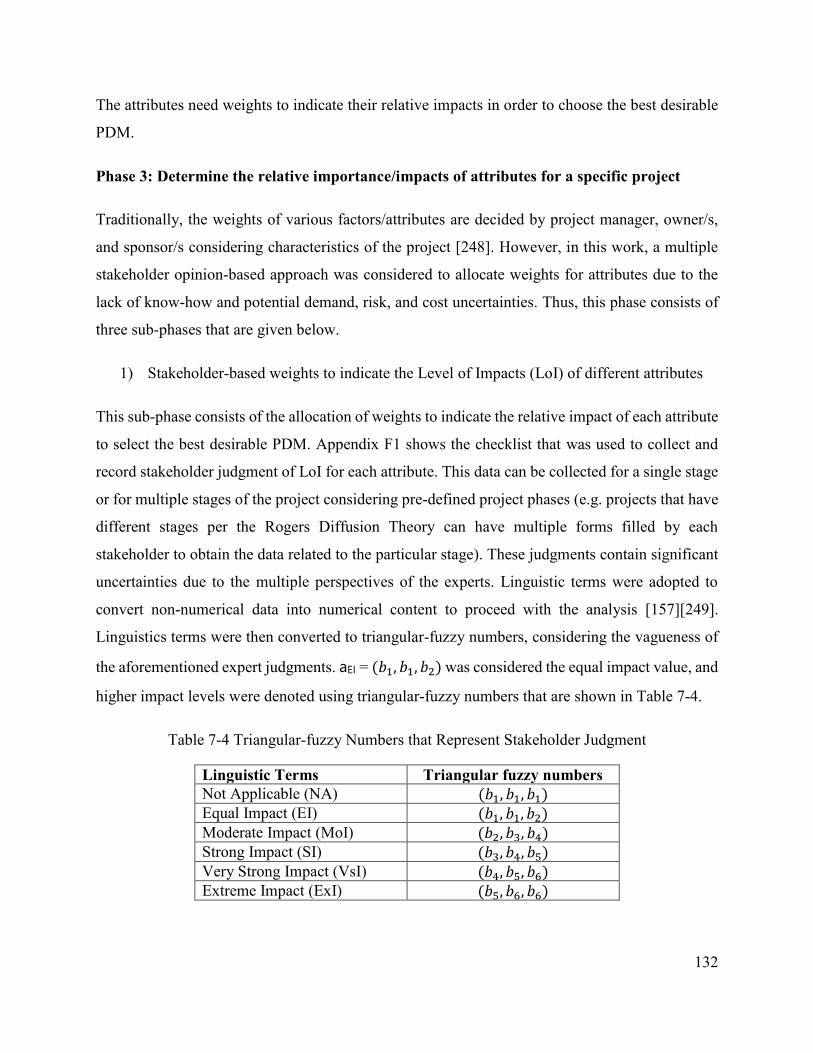
132
The attributes need weights to indicate their relative impacts in order to choose the best desirable
PDM.
Phase 3: Determine the relative importance/impacts of attributes for a specific project
Traditionally, the weights of various factors/attributes are decided by project manager, owner/s,
and sponsor/s considering characteristics of the project [248]. However, in this work, a multiple
stakeholder opinion-based approach was considered to allocate weights for attributes due to the
lack of know-how and potential demand, risk, and cost uncertainties. Thus, this phase consists of
three sub-phases that are given below.
1) Stakeholder-based weights to indicate the Level of Impacts (LoI) of different attributes
This sub-phase consists of the allocation of weights to indicate the relative impact of each attribute
to select the best desirable PDM. Appendix F1 shows the checklist that was used to collect and
record stakeholder judgment of LoI for each attribute. This data can be collected for a single stage
or for multiple stages of the project considering pre-defined project phases (e.g. projects that have
different stages per the Rogers Diffusion Theory can have multiple forms filled by each
stakeholder to obtain the data related to the particular stage). These judgments contain significant
uncertainties due to the multiple perspectives of the experts. Linguistic terms were adopted to
convert non-numerical data into numerical content to proceed with the analysis [157][249].
Linguistics terms were then converted to triangular-fuzzy numbers, considering the vagueness of
the aforementioned expert judgments. aEI = (𝑏1, 𝑏1, 𝑏2) was considered the equal impact value, and
higher impact levels were denoted using triangular-fuzzy numbers that are shown in Table 7-4.
Table 7-4 Triangular-fuzzy Numbers that Represent Stakeholder Judgment
Linguistic Terms Triangular fuzzy numbers
Not Applicable (NA) (𝑏1, 𝑏1, 𝑏1)
Equal Impact (EI) (𝑏1, 𝑏1, 𝑏2)
Moderate Impact (MoI) (𝑏2, 𝑏3, 𝑏4)
Strong Impact (SI) (𝑏3, 𝑏4, 𝑏5)
Very Strong Impact (VsI) (𝑏4, 𝑏5, 𝑏6)
Extreme Impact (ExI) (𝑏5, 𝑏6, 𝑏6)

133
Accordingly, each stakeholder was denoted by a weight based on the importance of their decision
to select the PDM. The weights of the ith attribute, which was denoted by the jth stakeholder, was
shown as lower bound (LB) value of “pij”, most likely (ML) value of “qij”, and upper bound (UB)
value of “rij” [249]. Accordingly, the triangular fuzzy membership value of the ith criteria denoted
by jth stakeholder was (pij, qij, rij). “Xij” was considered as the matrix of the weights of the ith
criteria denoted by the jth stakeholder and is expressed in Equation (42).
Equation 42
Generally, these decisions are based on personal opinion, skills, experiences, and other available
resources of the selected decision-makers [248]. Areas of expertise of experts’ are not uniform.
Some experts have more knowledge of some attributes where other experts might have a lack of
knowledge. Thus, the PDM selection approach needs to be able to integrate different expertise in
the decision-making process.
2) Evaluate stakeholder expertise and incorporate Level of Expertise (LoE) weights
The LoI of the above attributes was defined by decision-makers or subject experts based on their
experiences and expertise, which are typically a qualitative (non-numerical) judgment [248]. Thus,
linguistics terms were used to express the Level of Expertise (LoE) of the decision-makers to adjust
the relative importance of the considered attributes. CNE = (𝑐1, 𝑐1, 𝑐1) was considered no expertise
and CLE = (𝑐1, 𝑐1, 𝑐2) was considered low expertise. Accordingly, higher expertise levels were
denoted using fuzzy-triangular numbers, shown in Table 7-5 [157].
Xij =
(p11,q11,r11) (p12,q12,r12) … (p1j,q1j,r1j) … (p1n,q1n,r1n)
(p21,q21,r21) (p22,q22,r22) … (p2j,q2j,r2j) … (p2n,q2n,r2n)
...
...
...
...
(ai1,bi1,ci1) (ai2,bi2,ci2) … (aij,bij,cij) … (ain,bin,cin)
...
...
...
...
(am1,bm1,cm1) (am2,bm2,cm2) … (amj,bmj,cmj) … (amn,bmn,cmn)

134
Table 7-5 Triangular-fuzzy Numbers to Incorporate Stakeholder Expertise for Decision-making
Description Linguistic Term Triangular fuzzy numbers
Not an expert No Expertise (𝑐1, 𝑐1, 𝑐1)
Had some experience Low Expertise (𝑐1, 𝑐1, 𝑐2)
An expert, but currently not practicing Moderate Expertise (𝑐1, 𝑐2, 𝑐3)
An expert and working as a professional High Expertise (𝑐2, 𝑐3, 𝑐3)
3) Multi-attribute group decision-making approach (Compensatory method)
Generally, multi-stakeholder problems are solved using mathematical approaches that are used to
optimize the decisions of rational decision-makers. The Simple Additive Weighting method can
be used to score combined judgments [187][186]. This is a compromising method that permits
trade-offs between stakeholders [187]. Accordingly, the jth stakeholder’s expertise to decide the ith
criteria was given the weight of “Wij” considering other stakeholders. “W’ij” represents the fuzzy
weights given based on the relative importance of the jth stakeholder to decide ith criteria. The
weighted sum of each criterion was calculated, and the final weights were created to proceed with
further analysis [249]. Accordingly, the equations for the final attribute weights can be shown as
Equation (43).
Equation 43
Basic fuzzy arithmetic operations consisting of fuzzy addition, multiplication, and division (see
Section 3.8.2) were used to solve Equation (42). The fuzzy weights associated with the multiple
stakeholder perspectives were used to proceed with PDM selection for the considered EV-RI
deployment.
𝑫𝒊′ =
𝑾𝟏′ = ∑ (𝑾𝟏𝒋⨂𝑿𝟏𝒋
𝒏
𝒋=𝟏) ∑ 𝑾𝟏𝒋
𝒏
𝒋=𝟏⁄
𝑾𝟐′ = ∑ (𝑾𝟐𝒋⨂𝑿𝟐𝒋
𝒏
𝒋=𝟏) ∑ 𝑾𝟐𝒋
𝒏
𝒋=𝟏⁄
...
𝑾𝒊′ = ∑ (𝑾𝒊𝒋⨂𝑿𝒊𝒋
𝒏
𝒋=𝟏) ∑ 𝑾𝒊𝒋
𝒏
𝒋=𝟏⁄
…
𝑾𝒎′ = ∑ (𝑾𝒎𝒋⨂𝑿𝒎𝒋
𝒏
𝒋=𝟏) ∑ 𝑾𝒎𝒋
𝒏
𝒋=𝟏⁄

135
Phase 4: Select the most desirable PDM using F-TOPSIS
The weights obtained from phase 3 (from different sub-phases) were considered for this phase.
Each alternative method was simulated individually. Fuzzy weights given to the kth alternative
were normalized to obtain the fuzzy decision matrix, which is Ãik = [ãik]. The positive ideal criteria
is shown in Equation (44) and the negative ideal criteria is shown in Equation (45).
To the positive ideal;
Ã𝑖𝑘 = (𝑝𝑖𝑘 𝑟𝑘∗⁄ , 𝑞𝑖𝑘 𝑟𝑘
∗⁄ , 𝑟𝑖𝑘 𝑟𝑘∗⁄ ) 𝑎𝑛𝑑 𝑟𝑘
∗ = max𝑖
{𝑟𝑖𝑘} Equation 44
To the negative ideal;
Ã𝑖𝑘 = (𝑝𝑘− 𝑟𝑖𝑘⁄ , 𝑝𝑘
− 𝑞𝑖𝑘⁄ , 𝑝𝑘− 𝑟𝑖𝑘⁄ ) 𝑎𝑛𝑑 𝑝𝑘
− = min𝑖
{𝑝𝑖𝑘} Equation 45
The 𝐷𝑖′ weights were used to calculate the weighted normalized fuzzy decision matrix, which is
Ã’ik = [ã’ik]. Equation (46) shows the calculation of Ã’ik .
Ã𝑖𝑘′ = Ã𝑖𝑘 𝐷𝑖
′ Equation 46
Then the fuzzy positive ideal solution (PIS) (most desirable alternative) and the fuzzy negative
ideal solution (NIS) (worst case alternative) were obtained [197][249].
To the positive ideal;
𝐴∗ = (Ã1′∗ , Ã2
′∗, … … . , Ã𝐾′∗), 𝑤ℎ𝑒𝑟𝑒 Ã𝑘
′∗ = 𝑚𝑎𝑥𝑖
{Ã𝑖𝑘𝑈𝐿′ } Equation 47
To the negative ideal;
𝐴− = (Ã1′− , Ã2
′−, … … . , Ã𝐾′−), 𝑤ℎ𝑒𝑟𝑒 Ã𝑘
′− = 𝑚𝑖𝑛𝑖
{Ã𝑖𝑘𝐿𝐵′ } Equation 48
Accordingly, Equation (47) and Equation (48) were used to calculate fuzzy PIS and fuzzy NIS.
Equation (12) was used to calculate the distances between the PIS that denotes as 𝑑(Ã𝒊𝒌′ , Ã𝒌
′∗), and

136
NIS, which denotes as 𝑑(Ã𝒊𝒌′ , Ã𝒌
′−). Accordingly, the above-calculated distances, the cumulative
distances (𝑑𝑖∗) and (𝑑𝑖
−) were calculated using Equation (49) and Equation (50).
𝑑𝑖∗ = ∑ 𝑑(𝐾
𝑘=1 Ã𝑖𝑘′ , Ã𝑘
′∗) Equation 49
𝑑𝑖− = ∑ 𝑑(𝐾
𝑘=1 Ã𝑖𝑘′ , Ã𝑘
′−) Equation 50
The above distances were used to calculate the closeness coefficient (CCi) for each PDM as shown
in Equation (51).
𝐶𝐶𝑖 = 𝑑𝑖− (𝑑𝑖
−⁄ + 𝑑𝑖∗) Equation 51
The closeness coefficient was used to rank the considered PDMs based on project attribute values.
The PDM method with the highest closeness coefficient (CC) was chosen as the most desirable
and recommended project delivery method to proceed with the project. Other PDMs were ranked
according to the CC obtained from the above analysis. Then the applicability of the selected PDMs
was discussed with favourable and adverse impacts considering the sustainability of the transport
electrification in a given urban center.
7.3 PDM Selection Model Demonstration
The data obtained from Chapter 5 was used to demonstrate the proposed PDM selection model.
Accordingly, multi-period EV-RI deployment data for the Census Metropolitan Area of Kelowna
were taken as model inputs, which were organized into two product maturity stages.
7.3.1 EV-RI Deployment Stages for Multiple Periods
The theory of adoption and diffusion (Rogers model) [146] was used to explain the market growth
of EVs in the long run. Accordingly, five key product maturity stages can be considered in EV-RI
deployment to the business-as-usual stage: 1) Innovators; 2) Early adopters; 3) Early majority; 4)
Late majority; and 5) Laggards [50]. The innovation stage can be considered as the very early stage
of electric vehicle testing in which there is a lack of commercialized product at the local market
[250]. Hence, this work was started by early adopters and continue up to laggards. As mentioned

137
by Perera et al. (2020), the different EV-RIs were segregated by the different deployment stages,
shown in Figure 7-2.
Figure 7-2 Maturity Stage-wise EV-RI Deployment
However, the aforementioned stages were combined and considered as two stages, described
below, to reduce the complexity of the data collection and expert consultation.
1. The initial deployment stage: Early adopters and early majority stages were combined in
this stage. The infrastructure developed and invested in early stages of the product maturity
can be considered in this stage of the project, which consists of higher financial risk due to
limited public charging demands and longer payback, inadequate technical know-how due
to lack of local DC-FC recharging infrastructure construction experience, and a high
potential for significant design changes during the construction and operating periods.
Constructability analysis can be done at the pre-planning stage of the project. However, it
might be too early to conduct work packaging and value engineering, since the project
processers, durations, and costs have higher uncertainties due to lack of experience. The
possibility of having potential design changes, change orders, and baseline changes are
considerably greater at the early stages of product maturity.
2. The way forward to the business-as-usual stage: Late majority and laggards were combined
in this stage. These investments have comparatively lower risk and lower paybacks than
the previous stage. Furthermore, the technical know-how is higher, where the potential
demands and risks can be calculated more accurately using historical data obtained from
the earlier investments. Infrastructure developers can use the previous project cost, time,
and schedule data to ensure proper costing, scheduling, and operating of the infrastructure.

138
Potential change orders will be limited during the project life cycle, and the owners' control
after awarding the contract will be minimized. With time, the deployment process turns in
to a usual development task, where there are minimal financial and technical risks. The
project implementation, operation, and management process will be in-placed, and the
project can be done as work packages. Value chain optimization can be done to minimize
costs and obtain a competitive advantage by enhancing the value of the infrastructure
facilities. The payback periods should be significantly lower compared to the previous
stage.
7.3.2 Stakeholder Data Collection for the Case Demonstration
Potential project stakeholders and subject experts were consulted to acquire necessary data to
demonstrate the developed methodology for a medium-scale community in BC. The ethics
approval obtained for the MITACS Fortis Energy Chair Project was used to conduct the expert
consultation process. In this case study, the experts were categorized as: 1) Utility providers and
existing investors, and 2) Project manager and developers. Their expertise was collected using
focus group interviews. The experts who were interviewed are shown in Table 7-6. The collective
opinion of each expert category was recorded using several focus-group interviews that were
conducted with the aforementioned stakeholders/experts.
Table 7-6 Focus Group Interview-based Data Collection and Database Development
Stakeholder
Category
Knowledge Area Number of Experts
consulted
1
Investors and Owners: This category includes current
owners, investors, utility providers, EV-RI operators, and
EV-RI facility managers
4
2
Project Managers and builders: This category includes
building and infrastructure developers, Marketing managers,
technology managers, PMs, and other construction-related
decision-makers.
4
The different weights obtained from the aforementioned experts are shown in Table 7-7 for both
the first and second stages of the EV-RI deployment process.
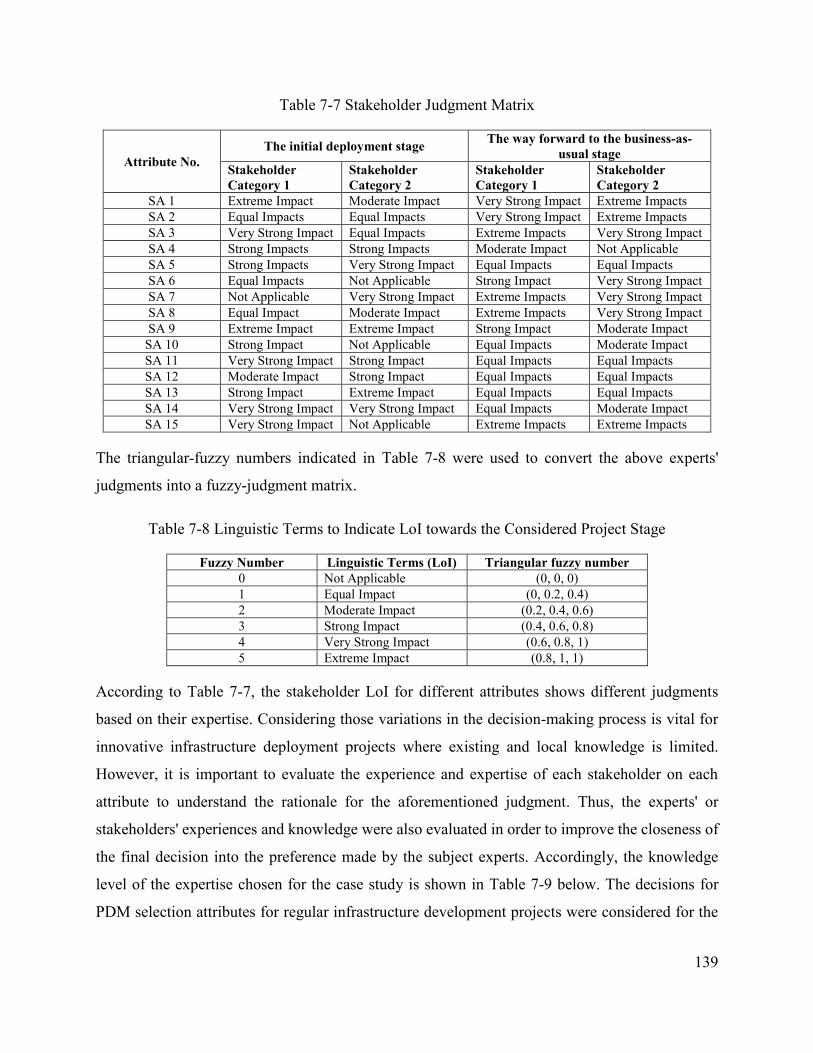
139
Table 7-7 Stakeholder Judgment Matrix
Attribute No.
The initial deployment stage The way forward to the business-as-
usual stage
Stakeholder
Category 1
Stakeholder
Category 2
Stakeholder
Category 1
Stakeholder
Category 2
SA 1 Extreme Impact Moderate Impact Very Strong Impact Extreme Impacts
SA 2 Equal Impacts Equal Impacts Very Strong Impact Extreme Impacts
SA 3 Very Strong Impact Equal Impacts Extreme Impacts Very Strong Impact
SA 4 Strong Impacts Strong Impacts Moderate Impact Not Applicable
SA 5 Strong Impacts Very Strong Impact Equal Impacts Equal Impacts
SA 6 Equal Impacts Not Applicable Strong Impact Very Strong Impact
SA 7 Not Applicable Very Strong Impact Extreme Impacts Very Strong Impact
SA 8 Equal Impact Moderate Impact Extreme Impacts Very Strong Impact
SA 9 Extreme Impact Extreme Impact Strong Impact Moderate Impact
SA 10 Strong Impact Not Applicable Equal Impacts Moderate Impact
SA 11 Very Strong Impact Strong Impact Equal Impacts Equal Impacts
SA 12 Moderate Impact Strong Impact Equal Impacts Equal Impacts
SA 13 Strong Impact Extreme Impact Equal Impacts Equal Impacts
SA 14 Very Strong Impact Very Strong Impact Equal Impacts Moderate Impact
SA 15 Very Strong Impact Not Applicable Extreme Impacts Extreme Impacts
The triangular-fuzzy numbers indicated in Table 7-8 were used to convert the above experts'
judgments into a fuzzy-judgment matrix.
Table 7-8 Linguistic Terms to Indicate LoI towards the Considered Project Stage
Fuzzy Number Linguistic Terms (LoI) Triangular fuzzy number
0 Not Applicable (0, 0, 0)
1 Equal Impact (0, 0.2, 0.4)
2 Moderate Impact (0.2, 0.4, 0.6)
3 Strong Impact (0.4, 0.6, 0.8)
4 Very Strong Impact (0.6, 0.8, 1)
5 Extreme Impact (0.8, 1, 1)
According to Table 7-7, the stakeholder LoI for different attributes shows different judgments
based on their expertise. Considering those variations in the decision-making process is vital for
innovative infrastructure deployment projects where existing and local knowledge is limited.
However, it is important to evaluate the experience and expertise of each stakeholder on each
attribute to understand the rationale for the aforementioned judgment. Thus, the experts' or
stakeholders' experiences and knowledge were also evaluated in order to improve the closeness of
the final decision into the preference made by the subject experts. Accordingly, the knowledge
level of the expertise chosen for the case study is shown in Table 7-9 below. The decisions for
PDM selection attributes for regular infrastructure development projects were considered for the

140
business-as-usual stage due to the lack of expertise on current mass scale EV-RI infrastructure
projects in the concerned community.
Table 7-9 Stakeholder Expertise in EV-RI Deployment and Conventional Infrastructure Projects
Attribute No.
Knowledge related to initial phases of
EV-RI planning and management
Knowledge related to conventional
infrastructure planning and
management
Stakeholder
Category 1
Stakeholder
Category 2
Stakeholder
Category 1
Stakeholder
Category 2
SA 1 Low Expertise High Expertise Low Expertise High Expertise
SA 2 Low Expertise High Expertise Low Expertise High Expertise
SA 3 Low Expertise High Expertise Low Expertise High Expertise
SA 4 High Expertise Low Expertise High Expertise Low Expertise
SA 5 High Expertise Low Expertise High Expertise Low Expertise
SA 6 Moderate Expertise Moderate Expertise Moderate Expertise High Expertise
SA 7 No Expertise No Expertise No Expertise High Expertise
SA 8 No Expertise Moderate Expertise Moderate Expertise Moderate Expertise
SA 9 High Expertise Moderate Expertise High Expertise Moderate Expertise
SA 10 High Expertise Moderate Expertise High Expertise Moderate Expertise
SA 11 High Expertise Low Expertise No Expertise High Expertise
SA 12 High Expertise Low Expertise No Expertise High Expertise
SA 13 Moderate Expertise High Expertise No Expertise High Expertise
SA 14 High Expertise Moderate Expertise High Expertise Moderate Expertise
SA 15 Moderate Expertise No Expertise No Expertise High Expertise
Table 7-9 shows that the experience and expertise of all stakeholders are not uniform. Although
the individual stakeholder expertise did not fulfill the full attribute list to finalize the best desirable
PDM for EV-RI projects, the combined expertise has covered the majority of those attributes.
Hence, combining multi-stakeholder judgments using compensatory methods will enhance the
applicability and reliability of the final PDM decision compared to the conventional individual
decision-making concepts.
The triangular-fuzzy numbers that are indicated in Table 7-10 were used to convert the linguistic
terms used in Table 7-9.
Table 7-10 Linguistics Terms to Indicate LoE of the Stakeholders on the Subjected Criteria [157]
Fuzzy Number Linguistic Terms (Expertise) Triangular fuzzy number
0 No expertise (0, 0, 0)
1 Low expertise (0, 0, 0.5)
2 Moderate expertise (0, 0.5, 1)
3 High expertise (0.5, 1, 1)
The LoE and LoI matrices are shown in Appendix F2 and Appendix F3, respectively.

141
7.3.3 PDM Decision Matrix for Ranking
Table 7-2 can be converted into a fuzzy matrix using triangular-fuzzy numbers. The triangular-
fuzzy numbers shown in Table 7-11 were used for the conversion.
Table 7-11 Linguistic Terms to Convert the Decision Matrix into Fuzzy Numbers [251]
Fuzzy Number Linguistic Terms (LoI) Triangular fuzzy number
0 Not Applicable (0, 0, 0)
1 Equal Important (0, 0.2, 0.4)
2 Moderate Important (0.2, 0.4, 0.6)
3 Strong Important (0.4, 0.6, 0.8)
4 Very Strong Important (0.6, 0.8, 1)
5 Extremely Strong (0.8, 1, 1)
The fuzzy decision matrix for alternative PDMs is shown in Appendix F4.
7.3.4 Multi-period and Multi-stakeholder-based Attribute Weights
As described in the methodology section 7.2, the compensatory weights were calculated using
Equation (43) for both stage one and two of EV-RI deployment projects. Those weights are given
in Appendix F5. The individual and compensatory weights for each attribute in stages one and two
were defuzzified to crisp numbers using the Center of Gravity method to show their relative
importance in the PDM selection process. Accordingly, Table 7-12 shows the impact of each
attribute that was used to select the best desirable PDM for EV-RI projects in different product
maturity stages.

142
Table 7-12 Final Weights of the Expert Data Collected as Inputs for the PDM Selection Tool
7.3.5 Ranking Alternative PDMs and PDM Selection
The F-TOPSIS method discussed in the methodology was used to select the best desirable PDM
method for different EV-RI deployment stages. Normalized attribute matrices, distances from the
negative and positive ideal solutions, and closeness coefficients for different PDM methods were
calculated. The final closeness coefficient of alternative PDM methods and rankings of those for
different life cycle stages are shown in Figure 7-3.

143
Figure 7-3 F-TOPSIS-based PDM Rankings for Multi-period EV-RI Deployment Projects
Figure 7-3 shows the rankings obtained using different stakeholder opinions and different
characteristics of EV-RI deployment stages.
Considering the initial EV-RI deployment stage, the resultant PDMs obtained from both individual
stakeholder opinions and their compensatory opinion resulted in a partnering PDM approach. The
analysis shows that the PPP method was proposed by stakeholder category 1: the potential and
current owners and investors based on their expertise. In addition, the DBOT method was proposed
by stakeholder category 2: PMs, builders, and developers based on their knowledge. As discussed
in section 7.3.4, lack of expertise is present in different stakeholder categories due to a lack of
project-related experiences. Thus, the compensatory method makes more sense to fulfill the
StakeholderCategory 1
StakeholderCategory 2
CompensatoryWeight
StakeholderCategory 1
StakeholderCategory 2
CompensatoryWeight
The initial deployment stageThe way forward to the business-as-usual
stage
DBB 0.322 0.186 0.334 0.212 0.165 0.203
DB 0.464 0.553 0.429 0.625 0.680 0.637
CM 0.455 0.358 0.488 0.398 0.359 0.395
DBOT 0.629 0.796 0.648 0.636 0.658 0.643
PPP 0.801 0.730 0.787 0.702 0.690 0.708
IPD 0.682 0.653 0.650 0.731 0.757 0.755
0.000
0.100
0.200
0.300
0.400
0.500
0.600
0.700
0.800
0.900C
lose
nes
s C
oef
fici
ent
(CC
)EV-RI Initial Stages EV-RI Mature Stages
3
1
2
1
2
3
3
1
2
3
2
1
3
2
1
3
2
1
144
required expertise from multiple stakeholders and proceed with group-based decision-making. The
PPP method has resulted from the compensatory approach for the initial stages of EV-RI
deployment. Accordingly, the PPP can be considered the best desirable PDM for the EV-RI initial
development stages. Based on the EV-RI location-allocation and capacity enhancement plan for
Kelowna, BC, the potential fast public recharging facilities proposed for Glenmore, Springfield,
Rutland, Pandosy, Clement, and University Plaza can be developed using the PPP method. Thus,
the aforementioned EV-RI deployments may reduce the advance financial impacts to private
investors or municipalities, where larger-scale government or private investments will take place.
As a result of partial or full funding by third-party institution, EV-RI facilities will be built and
transferred to an individual small-scale institution to overlook operations. Hence, the financial and
operational risk to small-scale investors will be minimal. This approach will also solve the concern
of lack of technical know-how with the potential technical support from the partnering institution.
The analysis done for the second stage of the EV-RI deployment project, which is on the way
forward to the business-as-usual stage, showed that the IPD method was the most desirable PDM.
Generally, facilities developed in this stage will have shorter payback, relatively higher demands,
and considerably lower financial risks. Moreover, demand trends can be forecasted using historical
data, which helps to predict EV-RI cash flow more accurately. Therefore, the scope, schedule, and
cost baselines can be defined more precisely compared with stage 1. Local experts can work on
the project with experience gained from the previous stages, and these projects can be awarded as
packages based on the diversion of technical know-how. Per the results obtained from the EV-RI
location-allocation and capacity enhancement plan, fast public EV-RIs proposed for McCurdy
corner, Cooper center, Banks, Capri center, Spall plaza, and Richter can be developed using the
IPD method. Thus, the construction speed and value generated by the project will be increased,
and the project costs and paybacks will be minimized.
Accordingly, EV-RI investors, developers, and municipalities can work together and use the
aforementioned PDM selection approach to decide the most suitable PDM method for potential
EV-RI projects. The use of compensatory methods with multiple stakeholder judgments to adjust
the final decision based on their expertise may reduce potential impacts to all stakeholders and
sustain the overall EV-RI deployment process.

145
7.4 Summary
Generally, project delivery methods (PDM) are used to establish a framework to design, procure,
construct, and manage infrastructure or an asset, which affects the successful completion of the
project. The selection of the most desirable PDM is not straightforward as it depends on several
project related factors and market maturity. Therefore, the best suitable PDM can change with the
decision-maker, their expertise, the nature of the project, and market factors. Hence, a scientific
framework to select the most desirable PDM for innovative projects is vital. The proposed PDM
selection framework discusses an essential section of the electric vehicle recharging infrastructure
(EV-RI) planning and management framework considering different stages of the electric vehicle
product maturity cycle (multi-period) and the vagueness (uncertainty) of the project stakeholders
and subject experts.
The existing body of knowledge, experts’ judgment, and existing databases were used to develop
the decision-matrix for alternative PDM methods. The PDMs related to conventional, partnering,
and collaborative approaches were selected for the decision matrix. Then the methodology was
developed to acquire multi-stakeholder knowledge on different attributes and convert those to a
fuzzy-judgment matrix to incorporate vagueness of those judgments. Moreover, the different
expertise of different stakeholder categories was also evaluated and incorporated with the
judgment matrix using compensatory MCDM methods. An F-TOPSIS selection framework was
used to select the most desirable PDM method for different project stages of the EV-RI projects.
Furthermore, a case study for Kelowna, BC, was conducted to demonstrate the developed PDM
selection procedure, and the data obtained from the EV-RI location-allocation model was used as
the key data input for the proposed framework.
The procedure developed to select the most desirable PDM can minimize the adverse economic
and social impacts of innovative long-term infrastructure development projects. The project
stakeholder can integrate their expertise and perceptions on potential risks, costs, and benefits to
enhance the EV-RI deployment for more extended periods. Thus, the potential financial risks to
the investors due to uncertain demands and extensive investments can be minimized using local
expertise. As a conclusion of the results obtained for the case study, a partnering approach in the
form of a private-public partnerships (PPP) method can be proposed for the initial stages of EV-

146
RI deployment, and a collaborative approach in the form of Integrated Project Delivery (IPD) can
be proposed for the later stages of EV-RI deployment projects. Hybrid strategies can also be used
based on the characteristics of the projects, which need to be further analyzed with in-detail project
specifications. The proposed PDM selection procedure and the extended decision matrix would
help urban designers, planners, investors, practitioners, and contractors to select the appropriate
PDM for small-scale, long-range infrastructure development projects.

147
Chapter 8 Conclusions and Recommendations
Decarbonizing the transport sector using electric vehicles (EVs) has gained immense attention
from policymakers and practitioners. However, EVs have not being attractive to vehicle users and
infrastructure investors due to lack of proper recharging network, limited vehicle range, higher
switching costs, and lack of potential infrastructure investments. Although there is a vast potential
for EVs as alternative low-emission fuel vehicles for Canadian road transportation, the EV market
is still in its early adoption stages due to the limitations mentioned above.
This research proposes to fill a critical gap in multi-period planning and managing recharging
infrastructure for urban centers. This study has developed decision support tools to locate and
expand recharging infrastructure networks considering multi-period public recharging demands,
plan incentives and tax policies to sustain anticipated EV demands, and to encourage investors to
invest in public recharging infrastructure network by using the best desirable project delivery
methods. The outcome of this study delivers a scientific framework that supports long-term public
recharging facility planning, operating, and managing the process. Government and private
institutions in Canada that are responsible for the development, planning, and managing of EV-
RIs can use the proposed framework to improve electrified transportation by evaluating and
identifying the most desirable long-term policies and practices. Local urban planners, developers,
and infrastructure investors can also utilize developed decision support tools and methodologies
to deploy low-emission transportation solutions, incorporating the expertise of local professionals.
Furthermore, the proposed framework can be generalized with a few modifications to incorporate
future low-emission fuel-based transportation such as hydrogen fuel cells, etc. Ultimately, this
framework will assist in reducing fossil fuel use for road transportation, achieving national GHG
emission targets more rapidly, and reducing local contribution to the depletion of non-renewable
energy sources.
8.1 Summary and Conclusions
A summary of the specific sections of the study and the main conclusions are presented below.
Chapter 4 proposed a life cycle thinking approach to compare and evaluate alternative energy
options by considering multiple factors. Literature-based data was used to identify the technical,

148
environmental, economic, and social characteristics of different fuel options that can be used as an
energy source for road transportation. A framework was developed as a two-step model to choose
the best desirable fuel option to reduce transport-based GHG emissions in Canada. The first step
was used to filter desirable fuel technologies using a rule-based method, and the second step was
used to select the best desirable low-emission renewable fuel option using the life cycle thinking-
based assessment. This approach would assist decision-makers such as government institutions
and policymakers in making high-level decisions on long-term transportation fuel options. The
database developed in this analysis can be used by researchers and practitioners to evaluated
different fuel options using local characteristics. The implementation of this framework was
demonstrated for Canadian provinces, and a comprehensive life cycle impact database was
developed for different fuel-options that can be used for transportation purposes in Canada. In
addition, the following conclusions were made from the case study. Those are, 1) The cradle-to-
gate impacts of EVs are 71% higher than similar ICEVs due to the adverse impacts of EV batteries;
2) Although EVs do not emit adverse substances to the environment in their operating stage, the
FF-based mass electricity generation process may have some adverse impacts on the environment;
3) EVs are more desirable for provinces with low-emission grid electricity and EVs may not be
environmentally feasible for 90%-100% FF-based grids; and 4) HFCVs are commercially viable
only if low-cost and low-emission mass HFC can be produced locally using distributed production
plants.
Chapter 5 presented a spatial-temporal planning framework to determine the multi-period
capacities and locations of recharging infrastructure for electric vehicles in a given city center.
Three different modules were introduced and integrated in order to extend the existing body of
knowledge to achieve both temporal and spatial planning approaches. Those are, 1) A literature-
based multi-period public recharging demand assessment module; 2) A distance-matrix for the
selected municipality; and 3) A multi-period optimal recharging infrastructure location-allocation
and capacity planning module. A case study of a typical medium-scale municipality in Kelowna,
BC, Canada was assessed using the proposed framework and validated using conventional
infrastructure planning scenarios. The results of the case study showed that the proposed
framework estimated multi-period public recharging demands, minimized lifecycle costs,
maximized service coverage and infrastructure utilization, and resulted in lower paybacks for

149
infrastructure investments compared to conventional planning approaches. The conventional ad-
hoc planning approach required 1%-117% additional investment that recovered in additional 10 to
30 years. This framework can be used to compare different investment strategies and municipal
recharging tariff policies, which are required in the early stages of the RI deployment process to
encourage investors, and existing and potential EV users. Furthermore, government institutions,
utility providers, and private institutions can use this framework to appraise public recharging
demands, permitting, and developing RIs in the long run.
Chapter 6 proposed a systematic and holistic approach for incentive planning and developing tax
policies to reduce municipal GHG emissions. This approach evaluates both building and transport
interventions together and prioritize the most desirable sectors and interventions to be incentivized.
A multi-criteria decision-making approach was used by considering multiple investment scenarios.
The developed method was demonstrated for a single-family detached household located in the
Okanagan region of BC. The case study results indicated that incentives for EVs can be developed
by provinces with low-emission grid electricity, and sales tax waivers can be imposed to reduce
upfront costs. Furthermore, EV parking fee waivers and government-subsidized recharging costs
can be used to reduce operating costs. Carbon taxes can also be imposed on vehicle emissions and
building systems to discourage the use of high-emission vehicles and encourage switching to low-
emission vehicle options. Furthermore, provinces with a high-emission grid can focus on possible
incentives for residential building interventions. Carbon taxes will support municipal clean energy
incentive budgets. Accordingly, this approach will strategically determine the most desirable
clean-energy interventions for new and existing households. The developed tool can be used by
municipalities and policymakers to develop favourable policies to achieve municipal, provincial,
and national level GHG targets faster by promoting key interventions.
Chapter 7 presented a stakeholder judgment-based method to select the most desirable project
delivery method for infrastructure deployment projects. A fuzzy-based compensatory MCDM
approach was used to incorporate uncertainties associated with stakeholder judgment and
stakeholder expertise. The developed methodology was applied to the case study given in the
Chapter 5, which was used to identify possible PDMs for multi-period EV-RI planning projects
for Kelowna, BC. The results of the case study showed that partnering approaches such as private-

150
public-partnerships (PPP) are best for EV-RI development projects at low EV penetration.
Collaborative PDM approaches such as Integrated Project Management (IPD) are best for EV-RI
projects with high EV penetration. The decision-matrix developed in this work can be further
extended with hybrid PDMs to select hybrid-PDM methods for specific projects. Further to that,
the method will deliver a local expert judgment-based selection approach for small-scale
infrastructure development projects considering the presence of high risks and low technical know-
how. Hence, the proposed PDM selection procedure can be implemented in a wide variety of
innovative projects at the municipal level, where there is limited expertise available.
The reproducibility of the results from this work was assessed by deploying the above-proposed
methodologies to implement by-directional recharging facilities. Accordingly, these models were
re-stimulated by a different researcher, and the same results were acquired to ensure the
reproducibility of the work.
Figure 8-1 depicts the strategic map where the methods developed in this study and proposed tools
are fit into municipal EV-RI development projects. This study can be used to strategically identify
an environmentally friendly and economically affordable alternative fuel system for a region, and
the necessary incentives can be planned scientifically to achieve national GHG reduction targets.
Figure 8-1 Proposed Strategic Map

151
The methods mentioned to select the PDM strategy and to develop an optimal temporal and spatial
recharging/refueling facility network can be used to enhance the sustainability of alternative fuel
availability and access throughout the country. This strategic map can be used by the federal,
provincial, and municipal governments to scientifically plan and manage EV-RI networks for a
growing EV population and achieve their GHG reduction targets faster.
8.2 Originality and Contributions
This research study brought the following unique contributions to the existing body of knowledge
that will assist with clean energy-based transport culture.
Life Cycle Thinking-based Multi-period EV Recharging Infrastructure Planning:
Conventional recharging infrastructure planning approaches have ignored the life cycle thinking
approach and multi-period planning strategies in their decision-making process. The proposed
research framework integrates life cycle costs and emissions of both energy and mobility cycles
into multi-period planning and management of electric vehicle recharging infrastructure for urban
centers. Moreover, this study was conducted beyond the traditional focuses by incorporating multi-
period user behaviours for different EV maturity stages by enhancing the applicability of the
proposed methodology for long-range infrastructure planning. The life cycle results obtained here
can be used by the federal and provincial government level policymakers to develop policies to
promote low-emission transport options.
A strategic sequence with a comprehensive planning approach to develop EV-RI:
Conventional EV-RI planning is based on ad-hoc decisions of decision-makers that increase the
infrastructure investments and results in longer paybacks. This study presents a strategic sequence
in the EV-RI planning framework for urban centers. The efficiencies of conventional planning
approaches were expanded with scientific decision-making approaches and state-of-the-art
software by proposing interactive forms, tools, and checklists. The comprehensive planning
approach proposed in this study can be used to plan and manage recharging infrastructure
deployment projects more effectively and cost-efficiently than conventional practices.
An incentive planning framework to motivate clean energy use for households: There is a lack
of information on a unified incentive planning approach that considers both transport and building

152
sectors to achieve government GHG targets rapidly. This study proposes an integrated incentive
planning approach by considering both building and transport electrification. This approach will
accelerate GHG emission reduction, enhance energy-efficiencies, and promote renewable low-
emission energy sources by incentivizing the most desirable upgrade, regardless of individual
transport or building-related upgrade assessments. The tools developed in this research can be used
by policymakers such as local municipalities, and provincial and federal government institutions
to design and develop the most desirable incentive schemes and tax policies to achieve faster GHG
reduction and to achieve national GHG goals.
A multi-stakeholder opinion-based planning and management framework: Transport
electrification is novel for most Canadian municipalities. And there is a lack of expertise. In this
study, multi-stakeholder perspectives were used to develop a scientific plan for EV-RIs within
municipalities. The consumer perspective was considered by maximizing EV-RI service coverage,
minimizing EV-RI access distance, and establish possible incentive options to reduce EV
switching costs. The investor perspective was considered in lowering construction costs and
paybacks and selecting the most appropriate PDMs. The developer and urban planner perspectives
were considered by providing a platform to find the most desirable and cost-effective location from
available sites within the municipality. Ultimately, the government perspective was considered by
incentivizing the most appropriate interventions to maximize local GHG reduction. Accordingly,
the proposed EV-RI planning framework will help all key stakeholders make decisions
scientifically for planning and management of the EV-RI network.
8.3 Limitations of the Study
Several limitations were identified in this study. Reasonable adjustments were made to mitigate
the impacts of those limitations and generalize the results of this study.
Data limitations: EV-RI experts and EV related databases for the Canadian context are minimal
and challenging because EV deployment is in the early stages. Data obtained from local utility
providers, survey databases of BC higher institutions, and literature-based data were used in this
study, with limited representation of the entire country. However, the objective of this research is
to provide and deploy the proposed methodology in a selected city center, so the methodology was

153
provided with reasonable assumptions that can be easily modified with data from any other
municipality for their decision making.
Focused only on a specific transportation mode: This research only focused on light-duty
vehicles in developing the aforementioned decision-making tools. Although light-duty vehicles
contribute the highest amount of GHG emissions in the country, they do not represent all possible
vehicle options in Canada. Other vehicle options such as heavy-duty vehicles, and public transit,
can also be considered for conversion to electricity and incorporated into the decision-making tools
mentioned in this study.
Focus only on current technologies: The developed decision support frameworks only consider
EV-based mobility with current vehicle ranges and battery level. However, the rate of technology
change is significant and a more cost-effective vehicle with better ranges and lower recharging
requirements may be coming. Furthermore, recharging durations might decrease with innovative
recharging technologies and facilities. There may also be other low-emission transport system
options that offer lower costs and more significant savings. In that case, different attributes, cost
of tariffs, emission factors, and recharging methods (stationary or mobile) will need to be inserted
into the model. For example, this model requires a significant modification to deal with battery
swapping and dynamic recharging options.
8.4 Future Research
The following research areas were identified as possible extensions of this research.
Incorporate technological uncertainty: EV recharging and battery technologies change rapidly
with the extensive attention of researchers and scientists [98][100][90]. In such a system, EV
designers can come-up with advanced EV technologies that are less expensive and solve current
range anxiety issues. Therefore, expanding this study by integrating technological uncertainty
would benefit all stakeholders for the long-range deployment of EVs.
Integrate and compare with active transport options: This research is aimed to improve the
energy efficiency of the passive transport option in order to achieve GHG emission reductions and
reduce urban sprawl. The literature revealed that the fuel savings from reducing automobile

154
transportation is higher than the fuel-saving from increasing vehicle fuel efficiency [252].
However, there is minimal information on investigations of active and passive transport
intervention integration into existing transport systems in order to achieve faster GHG reductions.
Integrating passive transport options with active transport options will consider the adverse
impacts of potential traffic increase from EVs and associated social impacts while selecting the
best desirable option for urban centers.

155
References
[1] R. Hirsch, R. Bezdek, and R. Wendling, Peaking of world oil production and its mitigation.
Driving climate change: cutting carbon from Transportation, Burlington, MA: Academic
Press, 2007.
[2] G. Harrison, H. Whittington, and S. Gundry, “Climate change impacts on hydroelectric
power,” Proc Univ Power Eng Conf, vol. 1, no. 1, pp. 391–394, 1998.
[3] S. Manabe and R. T. Wetherald, “On the distribution of climate change resulting from an
increase in CO2 content of the atmosphere,” Journal of the Atmospheric Sciences, vol. 37.
pp. 99–118, 1980.
[4] M. Nilsson, K. Hillman, A. Rickne, and T. Magnusson, Paving the road to Sustainable
Transport: Governance and innovation in Low-Carbon Vehicles. Routledge, 2012.
[5] Canadian Press, “Canadian Electric Vehicle Sales Hit Records,” Business Canada, 2016.
[Online]. Available: http://www.huffingtonpost.ca/2016/08/10/electric-vehicles-
canada_n_11431394.html. [Accessed: 23-Dec-2016].
[6] A. Van Santvoort, “Canada’s electric car market in slow lane: report,” Business Vancouver,
2016. [Online]. Available: https://www.biv.com/article/2016/8/canadas-electric-car-
market-slow-lane-report/. [Accessed: 12-Dec-2016].
[7] M. Wang, C. Saricks, and M. Wu, “Publications of the GREET Model Development and
Applications,” 2010.
[8] H. Cai, J. Han, M. Wang, and A. Elgowainy, “Regional Differences in Life-Cycle
Greenhouse Gas and Criteria Air Pollutant Emissions of Light-Duty Vehicles in the United
States,” pp. 1–15.
[9] a Burnham, M. Wang, and Y. Wu, “Development and Applications of GREET 2.7 — The
Transportation Vehicle-Cycle Model,” 2006.
[10] J. Axsen et al., “Electrifying Vehicles Early Release Insights from the Canadian Plug-in
Electric Vehicle Study,” 2015.
[11] J. Romm, “The car and fuel of the future,” Energy Policy, vol. 34, no. 17, pp. 2609–2614,
2006.
[12] T. Franke, I. Neumann, F. B??hler, P. Cocron, and J. F. Krems, “Experiencing Range in an
Electric Vehicle: Understanding Psychological Barriers,” Appl. Psychol., vol. 61, no. 3, pp.
368–391, 2012.
[13] H.-Y. Mak, Y. Rong, and Z.-J. M. Shen, “Infrastructure Planning for Electric Vehicles with
Battery Swapping,” Manage. Sci., vol. 59, no. 7, pp. 1557–1575, 2013.
[14] F. He, D. Wu, Y. Yin, and Y. Guan, “Optimal deployment of public charging stations for
plug-in hybrid electric vehicles,” Transp. Res. Part B, vol. 47, no. 2013, pp. 87–101, 2015.
[15] P. Alpkokin, “Historical and critical review of spatial and transport planning in the
Netherlands,” Land use policy, vol. 29, no. 3, pp. 536–547, 2012.

156
[16] I. Bickis, “Canada’s EV charging network growing up as numbers and power improve,”
The Canadian Press, 2019. [Online]. Available: https://www.ctvnews.ca/autos/canada-s-
ev-charging-network-growing-up-as-numbers-and-power-improve-1.4365685. [Accessed:
10-Mar-2020].
[17] PluginBC, “Policy,” pluginbc.ca, 2019. [Online]. Available: https://pluginbc.ca/policy/.
[Accessed: 10-Mar-2020].
[18] K. Huang, P. Kanaroglou, and X. Zhang, “The design of electric vehicle charging network,”
Transp. Res. Part D, vol. 49, pp. 1–17, 2016.
[19] Y. Alhazmi, “Planning Model for Implementing Electric Vehicle Charging Infrastructure
in Distribution System,” 2016.
[20] S. Pollalis, Planning Sustainable Cities: An infrastructure-based approach. Routledge
Taylor and Francis Group, 2016.
[21] J. Neubauer and E. Wood, “The impact of range anxiety and home, workplace, and public
charging infrastructure on simulated battery electric vehicle lifetime utility,” J. Power
Sources, vol. 257, pp. 12–20, 2014.
[22] C. King, W. Griggs, F. Wirth, K. Quinn, and R. Shorten, “Alleviating a form of electric
vehicle range anxiety through on-demand vehicle access,” Int. J. Control, vol. 88, no. 4, pp.
717–728, Apr. 2015.
[23] T. Anegawa, “Development of Quick Charging System for Electric Vehicle Development
of Quick Charging System,” Proceeding World Energy Congr. 11th-16th Sept 2010, 2010.
[24] P. Haugneland and H. H. Kvisle, “Norwegian electric car user experiences,” Int. J. Automot.
Technol. Manag., vol. 15, no. 2, p. 194, 2015.
[25] A. Poullikkas, “Sustainable options for electric vehicle technologies,” Renew. Sustain.
Energy Rev., vol. 41, pp. 1277–1287, 2015.
[26] C. Upchurch, M. Kuby, and S. Lim, “A model for location of capacitated alternative-fuel
stations,” Geogr. Anal., vol. 41, no. 1, pp. 127–148, 2009.
[27] S. Lim and M. Kuby, “Heuristic algorithms for siting alternative-fuel stations using the
Flow-Refueling Location Model,” Eur. J. Oper. Res., vol. 204, no. 1, pp. 51–61, 2010.
[28] T. D. Chen, C. J. Hall, and K. M. Kockelman, “The electric vehicle charging station location
problem: A parking based assignment method for seattle,” 2013.
[29] Z. D. Huang, X. J. Liu, C. C. Huang, and J. W. Shen, “A GIS-based framework for bus
network optimization using genetic algorithm,” Ann. GIS, vol. 16, no. 3, pp. 185–194, Nov.
2010.
[30] Y. W. Wang and C. C. Lin, “Locating multiple types of recharging stations for battery-
powered electric vehicle transport,” Transp. Res. Part E Logist. Transp. Rev., vol. 58, pp.
76–87, 2013.
[31] S. Akhtar, B. Reza, K. Hewage, A. Shahriar, A. Zargar, and R. Sadiq, “Life cycle
sustainability assessment (LCSA) for selection of sewer pipe materials,” Clean Technol.
Environ. Policy, pp. 973–992, 2014.

157
[32] M. Forouzanfar, A. Doustmohammadi, S. Hasanzadeh, and H. Shakouri G, “Transport
energy demand forecast using multi-level genetic programming,” Appl. Energy, vol. 91, no.
1, pp. 496–503, Mar. 2012.
[33] G. Bustos-Turu, K. H. van Dam, S. Acha, and N. Shah, “Estimating plug-in electric vehicle
demand flexibility through an agent-based simulation model,” in IEEE PES Innovative
Smart Grid Technologies, Europe, 2014, pp. 1–6.
[34] J. Axsen, S. Goldberg, and J. Bailey, “Electrif ying Vehicles ELECTRIFYING,” 2015.
[35] M. Kuby and S. Lim, “The flow-refueling location problem for alternative-fuel vehicles,”
Socioecon. Plann. Sci., vol. 39, no. 2, pp. 125–145, 2005.
[36] L. Yan, “Optimal layout and scale of charging stations for electric vehicles,” in CIRED
Workshop-Rome, 2014, no. 0037, pp. 11–12.
[37] G. Shao-yun, F. Liang, L. Hong, and W. Long, “The Planning of Electric Vehicle Charging
Stations in the Urban Area,” 2nd Int. Conf. Electron. Mech. Eng. Inf. Technol., pp. 1598–
1604, 2012.
[38] P. Perera, K. Hewage, M. S. Alam, W. Merida, and R. Sadiq, “Scenario-based economic
and environmental analysis of clean energy incentives for households in Canada : Multi
criteria decision making approach,” Journel Clean. Prod., vol. 198, pp. 170–186, 2018.
[39] N. Fumo, “A review on the basics of building energy estimation,” Renew. Sustain. Energy
Rev., vol. 31, pp. 53–60, 2014.
[40] P. Gluch and H. Baumann, “The life cycle costing (LCC) approach: A conceptual discussion
of its usefulness for environmental decision-making,” Build. Environ., vol. 39, no. 5, pp.
571–580, 2004.
[41] R. S. M. C. Staff, Green building : project planning and cost estimating. R.S. Means, 2002.
[42] K. Eric and A.-R. Timo, “Life cycle costing: a review of published case studies,” Manag.
Audit. J., vol. 23, pp. 240–261, 2008.
[43] A. Jonsson, T. Bjorklund, and A.-M. Tillman, “LCA of concrete and steel building frames,”
Int. J. Life Cycle Assess., vol. 3, no. 4, pp. 216–224, Jul. 1998.
[44] S. I. Gustafsson and B. G. Karlsson, “Window retrofits: Interaction and life-cycle costing,”
Appl. Energy, vol. 39, no. 1, pp. 21–29, 1991.
[45] F. Flourentzou and C. A. Roulet, “Elaboration of retrofit scenarios,” Energy Build., vol. 34,
no. 2, pp. 185–192, 2002.
[46] E. Asadi, M. G. da Silva, C. H. Antunes, and L. Dias, “A multi-objective optimization model
for building retrofit strategies using TRNSYS simulations, GenOpt and MATLAB,” Build.
Environ., vol. 56, pp. 370–378, Oct. 2012.
[47] R. Ruparathna, K. Hewage, and R. Sadiq, “Rethinking investment planning and optimizing
net zero emission buildings,” Clean Technol. Environ. Policy, vol. 19, no. 6, pp. 1711–1724,
2017.
[48] D. Potoglou and P. S. Kanaroglou, “Household demand and willingness to pay for clean

158
vehicles,” Transp. Res. Part D Transp. Environ., vol. 12, no. 4, pp. 264–274, 2007.
[49] K. Steemers, “Energy and the city : density , buildings and transport,” Energy Build., vol.
35, pp. 3–14, 2003.
[50] TIPS Lab, “Electric Vehicle Fast Charging Deployment Staging and Siting,” Vancouver,
BC, 2012.
[51] N. Sathaye and S. Kelley, “An approach for the optimal planning of electric vehicle
infrastructure for highway corridors,” Transp. Res. Part E Logist. Transp. Rev., vol. 59,
2013.
[52] H. Yang, X. Xie, A. V Vasilakos, and S. Member, “Noncooperative and Cooperative
Optimization of Electric Vehicle Charging Under Demand Uncertainty : A Robust
Stackelberg Game,” IEEE Trans. Veh. Technol., no. May, 2018.
[53] A. Almansoori and N. Shah, “Design and operation of a stochastic hydrogen supply chain
network under demand uncertainty,” Int. J. Hydrogen Energy, vol. 37, no. 5, pp. 3965–
3977, 2012.
[54] I. M. Mahdi and K. Alreshaid, “Decision support system for selecting the proper project
delivery method using analytical hierarchy process (AHP),” Int. J. Proj. Manag., vol. 23,
no. 7, pp. 564–572, 2005.
[55] I. Graham and P. Llewelyn, Expert Systems : Knowledge , Uncertainty , And Decision. 2010.
[56] B. Sankaran, S. M. Asce, J. T. O. Connor, D. Ph, M. Asce, and W. B. Hale, “Innovations in
Project Delivery Method Selection Approach in the Texas Department of Transportation,”
Am. Soc. ofCivil Eng., vol. 34, no. 6, pp. 1–11, 2018.
[57] A. Touran et al., “Selection of Project Delivery Method in Transit : Drivers and Objectives,”
Am. Soc. ofCivil Eng., vol. 27, no. January, pp. 21–27, 2011.
[58] F. L. Ribeiro, “Project delivery system selection : a case-based reasoning framework,”
Logist. Inf. Manag., vol. 14, no. 5, pp. 367–375, 2001.
[59] E. Bingham, M. El Asmar, and G. E. Gibson, “Project Delivery Method Selection: Analysis
of User Perceptions on Transportation Projects,” Constr. Res. Congr., pp. 2110–2118, 2016.
[60] Transport Canda, “Government of Canada invests in zero-emission vehicles,”
www.Canada.ca, 2019. [Online]. Available: https://www.canada.ca/en/transport-
canada/news/2019/04/government-of-canada-invests-in-zero-emission-vehicles.html.
[Accessed: 11-Mar-2020].
[61] Ministry of Environment BC, “British Columbia Greenhouse Gas Inventory Report 2012,”
2014.
[62] Transport Canada, “Transportation 2030 – Infographic,” 2016. [Online]. Available:
https://www.tc.gc.ca/eng/transportation-2030-infographic.html. [Accessed: 16-Feb-2017].
[63] PluginBC, “$40 Million in New Funding for Clean Energy Vehicles,” Plugin BC, 2017.
[Online]. Available: http://pluginbc.ca/2016-stellar-year-evs-bc/. [Accessed: 16-Feb-2017].
[64] City of Vancouver, “Transportation 2040,” 2010.
159
[65] P. C. Flynn, “Commercializing an alternate vehicle fuel: Lessons learned from natural gas
for vehicles,” Energy Policy, vol. 30, no. 7, pp. 613–619, 2002.
[66] United States General Accounting Office, Report to Congressional Requesters, no. July.
2003.
[67] A. Dini, S. Washington, and G. Hawkins, “No TitleUnderstanding barriers to consumer
demand of plug-in vehicles in Australia,” in Australian Transport Research Forum, 2013.
[68] Natural Resources Canada, “Zero Emission Vehicle Infrastructure Program,”
www.nrcan.gc.ca, 2020. [Online]. Available: https://www.nrcan.gc.ca/energy-
efficiency/energy-efficiency-transportation/zero-emission-vehicle-infrastructure-
program/21876. [Accessed: 11-Mar-2020].
[69] S. Mollaoglu-korkmaz, V. D. Miller, and W. Sun, “Assessing key dimensions to effective
innovation implementation in interorganizational project teams : an Integrated Project
Delivery case,” Eng. Proj. Organ. J., no. January 2014, 2014.
[70] P. Perera, K. Hewage, and R. Sadiq, “Are we ready for alternative fuel transportation
systems in Canada: A regional vignette,” J. Clean. Prod., vol. 166, pp. 717–731, Nov. 2017.
[71] P. Perera, K. Hewage, and R. Sadiq, “Electric vehicle recharging infrastructure planning
and management in urban communities,” J. Clean. Prod., p. 119559, 2020.
[72] P. Perera, A. Rana, K. Hewage, S. M. Alam, and R. Sadiq, “PHOTOVOLTAIC
ELECTRICITY FOR SINGLE-FAMILY DETACHED HOUSEHOLDS : LIFE CYCLE
THINKING-BASED ASSESSMENT,” in CSCE Annual Conference, 2019, pp. 1–12.
[73] T. Litman, “Measuring transportation: Traffic, mobility and accessibility,” ITE J. (Institute
Transp. Eng., vol. 73, no. 10, pp. 28–32, 2003.
[74] P. Alpkokin, “Historical and critical review of spatial and transport planning in the
Netherlands,” Land use policy, vol. 29, no. 3, pp. 536–547, 2012.
[75] M. van der Hoeven, Y. Kobayashi, and R. Diercks, “Technology Roadmap,” 2013.
[76] Natural Resources Canada, “Energy Efficiency Trends in Canada 1990 to 2013,” Ottawa,
2016.
[77] Statistics Canada, “Canada year book,” Ottawa, ON, 2012.
[78] National Energy Board of Canada, “Canadian Energy Demand: Passenger Transportation,”
2009.
[79] Railway Association of Canada, “How railways can be part of Canada ’ s climate change
solution,” 2016.
[80] D. Freedman, “Market-driven considerations affecting the prospects of alternative road
fuels.,” Philos. Trans. A. Math. Phys. Eng. Sci., vol. 372, no. 2006, p. 20120326, 2014.
[81] R. D. Bott, Of Canada ’ s oil and gas industry. Canadian center for energy information,
2007.
[82] J. Hackney and R. De Neufville, “Life cycle model of alternative fuel vehicles: Emissions,
energy, and cost trade-offs,” Transp. Res. Part A Policy Pract., vol. 35, no. 3, pp. 243–266,

160
2001.
[83] G. Armstrong, S. Adam, S. Denize, and P. Kotler, Principles of Marketing. Pearson
Australia, 2014.
[84] B. R. Simmons, “Location.”
[85] John A. Volpe Center, “Alternative Fuel Guidelines for Alternative Transportation
Systems,” 2011.
[86] C. A. Geffen, J. A. Edmonds, and S. H. Kim, “Transportation and Climate Change: The
Potential for Hydrogen Systems,” 2004.
[87] C. . Thomas, Sustainable Transportation Options for the 21st Century and Beyond. 2015.
[88] G. Shenhar, “Living with the Hyundai Tucson Fuel-Cell Vehicle,” 2015. [Online].
Available: http://www.consumerreports.org/cro/news/2015/02/first-drive-review-hyundai-
fuel-cell-vehicle/index.htm. [Accessed: 22-Mar-2016].
[89] International energy agency, “Electrification roadmap: Revolutionizing transportation and
achieving energy security,” 2009.
[90] H. H. Wu, A. Gilchrist, K. Sealy, P. Israelsen, and J. Muhs, “A review on inductive charging
for electric vehicles,” in 2011 IEEE International Electric Machines & Drives Conference
(IEMDC), 2011, pp. 143–147.
[91] “Public Charging Stations,” 2012. [Online]. Available:
http://vehiculeselectriques.gouv.qc.ca/english/particuliers/recharge-publics.asp.
[Accessed: 22-Mar-2016].
[92] Environment Canada, “Canada’s Emissions Trends,” 2011.
[93] A. Hugo, P. Rutter, S. Pistikopoulos, A. Amorelli, and G. Zoia, “Hydrogen infrastructure
strategic planning using multi-objective optimization,” Int. J. Hydrogen Energy, vol. 30,
no. 15, pp. 1523–1534, Dec. 2005.
[94] U.S Department of Energy, “Hydrogen and Fuel Cells Program,” U.S Department of
Energy, 2005. [Online]. Available: https://hydrogendoedev.nrel.gov/production.html.
[Accessed: 23-Dec-2015].
[95] Energy BC, “Where our electricity comes from,” Energy BC, 2012. [Online]. Available:
http://www.energybc.ca/map/bcenergymap.html. [Accessed: 23-Dec-2015].
[96] BC Hydro, “BC Hydro Annual Report,” 2013.
[97] F. S. Manzano, “Supply Chain Practices in the Petroleum Downstream,” Eng. Syst. Div.,
vol. Master of, p. 59, 2005.
[98] M. Yilmaz and P. T. Krein, “Review of Battery Charger Topologies, Charging Power
Levels, and Infrastructure for Plug-In Electric and Hybrid Vehicles,” IEEE Trans. Power
Electron., vol. 28, no. 5, pp. 2151–2169, May 2013.
[99] J. S. Neubauer and A. Pesaran, “A techno-economic analysis of bev service providers
offering battery swapping services,” SAE Tech. Pap., vol. 2, no. March, 2013.
[100] J. Shin et al., “Design and Implementation of Shaped Magnetic-Resonance-Based Wireless

161
Power Transfer System for Roadway-Powered Moving Electric Vehicles,” IEEE Trans.
Ind. Electron., vol. 61, no. 3, pp. 1179–1192, Mar. 2014.
[101] C. Harper and J. J. Liccione, “Toxilogical Profile for Gasoline,” 1995.
[102] Sciencecorps, “Gulf Oil Spill health hazards,” Lexington, MA, 2010.
[103] U. S. D. of H. and H. S. Agency for Toxic Substances and Disease Registry, “Toxicological
Profile for Total Petroleum Hydrocarbons (TPH),” Atlanta, Georgia, 1999.
[104] D. Serpa, “Co2 Emissions From Refining Gasoline,” p. 4589, 2008.
[105] World Nuclear Association, “Comparison of Lifecycle Greenhouse Gas Emissions of
Various Electricity Generation Sources,” p. 6, 2011.
[106] J. Sullivan, A. Burnham, and M. Wang, “Energy-consumption and carbon-emission
analysis of vehicle and component manufacturing.,” Transp. Res., pp. 1–37, 2010.
[107] J. Zhang, J. Pan, J. Pan, L. Shao, J. Shu, and M. Zhou, “Micro-sized cadmium tungstate as
a high-performance anode material for lithium-ion batteries,” J. Alloys Compd., vol. 614,
pp. 249–252, 2014.
[108] Natural Resources Canada, “2013 Fuel Consumption Guide,” 2013.
[109] O. C. Onar, J. M. Miller, S. L. Campbell, C. Coomer, C. P. White, and L. E. Seiber, “A
novel wireless power transfer for in-motion EV/PHEV charging,” in 2013 Twenty-Eighth
Annual IEEE Applied Power Electronics Conference and Exposition (APEC), 2013, pp.
3073–3080.
[110] A. Khaligh and S. Dusmez, “Comprehensive Topological Analysis of Conductive and
Inductive Charging Solutions for Plug-In Electric Vehicles,” IEEE Trans. Veh. Technol.,
vol. 61, no. 8, pp. 3475–3489, Oct. 2012.
[111] “Mitsubishi iMiEV in Manitoba,” no. December 2013.
[112] “TESLA,” 2016. [Online]. Available:
https://www.teslamotors.com/en_CA/models/design?source=models-features1. [Accessed:
21-Mar-2016].
[113] Statistics Canada, “Consumer Price Index, June 2016,” 2016. [Online]. Available:
http://www.statcan.gc.ca/daily-quotidien/160722/dq160722a-eng.htm. [Accessed: 25-Jul-
2016].
[114] International Energy Agency, “Technology Roadmap: Hydrogen and fuel cells,” 2015.
[115] International Energy Agency, “Technology Roadmap: Hydrogen and fuel cells,” 2015.
[116] National petrolium Council, “Infrastructure,” Washington, 2012.
[117] P. Agnolucci and W. McDowall, “Designing future hydrogen infrastructure: Insights from
analysis at different spatial scales,” Int. J. Hydrogen Energy, vol. 38, no. 13, pp. 5181–5191,
May 2013.
[118] ISO 14040:2006(en), “Environmental management — Life cycle assessment — Principles
and framework,” ISO 14040:2006, 2006. .

162
[119] E. R. Transport, E. T. Platform, and S. Paper, “The Electrification Approach to Urban
Mobility and Transport,” Wind Energy, no. 2007, pp. 1–19, 2009.
[120] International energy agency, “Electrification roadmap: Revolutionizing transportation and
achieving energy security,” 2009.
[121] S. Shao, M. Pipattanasomporn, and S. Rahman, “Grid Integration of Electric Vehicles and
Demand Response With Customer Choice,” IEEE Trans. Smart Grid, vol. 3, no. 1, pp. 543–
550, Mar. 2012.
[122] J. Moorhouse and K. Laugenberg, “Electrical Vehicles: Powering the Future,” Vancouver,
BC, 2010.
[123] O. C. Onar, J. M. Miller, S. L. Campbell, C. Coomer, C. P. White, and L. E. Seiber, “A
novel wireless power transfer for in-motion EV/PHEV charging,” in 2013 Twenty-Eighth
Annual IEEE Applied Power Electronics Conference and Exposition (APEC), 2013, pp.
3073–3080.
[124] M. R. Sarker, H. Pandzic, and M. A. Ortega-Vazquez, “Optimal Operation and Services
Scheduling for an Electric Vehicle Battery Swapping Station,” IEEE Trans. Power Syst.,
vol. 30, no. 2, pp. 901–910, Mar. 2015.
[125] Siqi Li and C. C. Mi, “Wireless Power Transfer for Electric Vehicle Applications,” IEEE J.
Emerg. Sel. Top. Power Electron., vol. 3, no. 1, pp. 4–17, Mar. 2015.
[126] M. A. Aasness and J. Odeck, “The increase of electric vehicle usage in Norway-incentives
and adverse effects,” Eur. Transp. Res. Rev., vol. 7, no. 4, 2015.
[127] S. Harryson and I. Ab, “OVERVIEW AND ANALYSIS OF ELECTRIC VEHICLE
INCENTIVES APPLIED ACROSS EIGHT SELECTED COUNTRY Incitament för elbilar
Summering och utvärdering,” 2015.
[128] Ministry of Economic Affairs, “Electromobility in the Netherlands,” p. 20, 2015.
[129] U.S. Department of Energy, “Transportation and Climate initiative of the Northeast and
Mid-atlantic States,” 2013.
[130] W. Abrahamse, L. Steg, C. Vlek, and T. Rothengatter, “A review of intervention studies
aimed at household energy conservation,” J. Environ. Psychol., vol. 25, no. 3, pp. 273–291,
2005.
[131] R. Kitamura and D. Sperling, “Refueling behavior of automobile drivers,” Transp. Res. Part
A Gen., vol. 21, no. 3, pp. 235–245, 1987.
[132] D. Sperling and R. Kitamura, “Refueling and new fuels: An exploratory analysis,” Transp.
Res. Part A Gen., vol. 20, no. 1, pp. 15–23, 1986.
[133] Statistics Canada, “Greenhouse gas emissions–a focus on Canadian households,” 2015.
[Online]. Available: https://www.statcan.gc.ca/pub/16-002-x/2008004/article/10749-
eng.htm. [Accessed: 14-Dec-2017].
[134] NRCan, “Improving Energy Performance in Canada,” 2016.
[135] T. S. Turrentine and K. S. Kurani, “Car buyers and fuel economy?,” Energy Policy, vol. 35,

163
no. 2, pp. 1213–1223, 2007.
[136] J. Tchir, “How much does it cost in fuel to run an electric vehicle?,” The Globe and
mail.com, 2015. [Online]. Available: http://www.theglobeandmail.com/globe-
drive/culture/commuting/how-much-does-it-cost-in-fuel-to-run-an-electric-
vehicle/article26999091/. [Accessed: 22-Mar-2016].
[137] M. E. Delucchi and L. E. Timothy, “An Analysis of the Retail and Lifecycle Cost of
Barrery-Powered Electric Vehicles,” Transp. Res. Part D, vol. 6, pp. 371–404, 2001.
[138] N. Ito, K. Takeuchi, and S. Managi, “Willingness-to-pay for infrastructure investments for
alternative fuel vehicles,” Transp. Res. Part D Transp. Environ., vol. 18, no. 1, pp. 1–8,
2013.
[139] M. Tran, D. Banister, J. D. K. Bishop, and M. D. McCulloch, “Simulating early adoption
of alternative fuel vehicles for sustainability,” Technol. Forecast. Soc. Change, vol. 80, no.
5, pp. 865–875, 2013.
[140] T. Franke and J. F. Krems, “What drives range preferences in electric vehicle users?,”
Transp. Policy, vol. 30, pp. 56–62, 2013.
[141] S. Carley, R. M. Krause, B. W. Lane, and J. D. Graham, “Intent to purchase a plug-in electric
vehicle: A survey of early impressions in large US cites,” Transp. Res. Part D Transp.
Environ., vol. 18, no. 1, pp. 39–45, 2013.
[142] J. Camp, M. Abkowitz, G. Hornberger, L. Benneyworth, and J. C. Banks, “Climate Change
and Freight-Transportation Infrastructure: Current Challenges for Adaptation,” J.
Infrastruct. Syst., vol. 19, no. 4, pp. 363–370, 2013.
[143] A. M. Geoffrion and R. F. Powers, “Facility Location Analysis Is Just the Beginning,”
Interfaces, vol. 10, no. 2. p. 9, 1980.
[144] Y. Chiu et al., “Dynamic Traffic Assignment,” Transp. Netw. Model. Comm., no. June, pp.
1–39, 2011.
[145] J. de D. Ortúzar, L. G. Willumsen, and J. D. D. Ortuzar, Modelling Transport. Wiley, 2011.
[146] F. M. Bass, “A New Product Growth for Model Consumer Durables,” Manag. Sience, vol.
15, no. 5, pp. 215–227, 1969.
[147] C. Chase, Ed., Demand-Driven Forecasting. Hoboken, NJ, USA: John Wiley & Sons, Inc.,
2012.
[148] M. Genevois, D. Celik, and H. Ulukan, “ATM Location Problem and Cash Management in
Automated Teller Machines,” Int. J. Soc. Behav. Educ. Econ. Bus. Ind. Eng., vol. 9, no. 7,
pp. 2506–2511, 2015.
[149] Y. Li, H. Sun, C. Zhang, and G. Li, “Sites selection of ATMs based on particle swarm
optimization,” Proc. - 2009 Int. Conf. Inf. Technol. Comput. Sci. ITCS 2009, vol. 2, pp.
526–530, 2009.
[150] J.-G. Kim and M. Kuby, “The deviation-flow refueling location model for optimizing a
network of refueling stations,” Int. J. Hydrogen Energy, vol. 37, no. 6, pp. 5406–5420, 2012.
164
[151] I. Capar and M. Kuby, “An efficient formulation of the flow refueling location model for
alternative-fuel stations,” IIE Trans., vol. 44, no. 8, pp. 622–636, 2012.
[152] S. Mehar and S. M. Senouci, “An optimization location scheme for electric charging
stations,” in 2013 International Conference on Smart Communications in Network
Technologies (SaCoNeT), 2013, pp. 1–5.
[153] N. Liu, B. Huang, and M. Chandramouli, “Optimal Siting of Fire Stations Using GIS and
ANT Algorithm,” J. Comput. Civ. Eng., vol. 20, no. 5, pp. 361–369, 2006.
[154] B. Reza, R. Sadiq, and K. Hewage, “Emergy-based life cycle assessment (Em-LCA) for
sustainability appraisal of infrastructure systems: A case study on paved roads,” Clean
Technol. Environ. Policy, vol. 16, no. 2, pp. 251–266, 2014.
[155] N. Alkaf and A. Karim, “Risk Allocation in Public-Private Partnership (Ppp) Project : a
Review on Risk Factors,” Int. J. Sustain. Constr. Eng. Technol., vol. 2, no. 2, 2011.
[156] A. S. Akintoye and M. J. MacLeod, “Risk analysis and management in construction,” Int.
J. Proj. Manag., vol. 15, no. 1, pp. 31–38, 1997.
[157] A. Mostafavi and M. Karamouz, “Selecting Appropriate Project Delivery System: Fuzzy
Approach with Risk Analysis,” J. Constr. Eng. Manag., vol. 136, no. 8, pp. 923–930, Aug.
2010.
[158] A. Mogerman, D. Mendis, and K. N. Hewage, “Project delivery and contracting strategies
for district energy projects in Canada,” Can. J. Civ. Eng., vol. 43, no. 5, pp. 461–471, May
2016.
[159] C. Nick and G. Armstrong, “Project Delivery Strategy: Getting It Right,” p. 24, 2010.
[160] Project Management Institute Inc, A guide to the project management body of knowledge
(PMBOK® guide). 2000.
[161] The Government of Idaho, “Project Delivery Method Evaluation Matrix,” 2012.
[162] F. Mafakheri, L. Dai, D. Slezak, and F. Nasiri, “Project Delivery System Selection under
Uncertainty: Multicriteria Multilevel Decision Aid Model,” J. Manag. Eng., vol. 23, no. 4,
pp. 200–206, Oct. 2007.
[163] M. Vanhoucke, Project Management with Dynamic Scheduling. 2012.
[164] C. W. Ibbs, Y. H. Kwak, T. Ng, and A. M. Odabasi, “Project Delivery Systems and Project
Change: Quantitative Analysis,” J. Constr. Eng. Manag., vol. 129, no. 4, pp. 382–387, Aug.
2003.
[165] “Project Delivery Method Analysis,” 2014.
[166] W. Ritchie, “Alternative Project Delivery,” pp. 1–8, 2001.
[167] S. Alim, “Public – private partnerships for future urban infrastructure,” vol. 169, 2016.
[168] L. Tang, Q. Shen, and E. W. L. Cheng, “A review of studies on Public-Private Partnership
projects in the construction industry,” Int. J. Proj. Manag., vol. 28, no. 7, pp. 683–694,
2010.
[169] M. Saunders, “Bridging the financial gap with PPPs,” Public roads, 2006.

165
[170] The American Institute of Architects, “Integrated Project Delivery : A Guide,” 2007.
[171] G. Felio and Z. Lounis, “Model Framework for Assessment of State, Performance, and
Management of Canada’s Core Public Infrastructure,” 2009.
[172] ISO 14040:2006(en), “Environmental management — Life cycle assessment — Principles
and framework,” ISO 14040:2006, 2006. [Online]. Available:
https://www.iso.org/obp/ui/#iso:std:iso:14040:ed-2:v1:en. [Accessed: 11-Aug-2016].
[173] F. I. Khan, R. Sadiq, and B. Veitch, “Life cycle iNdeX (LInX): a new indexing procedure
for process and product design and decision-making,” J. Clean. Prod., vol. 12, no. 1, pp.
59–76, Feb. 2004.
[174] ISO14041, “Environmental managment - Life cycle assessment - Principles and
framework,” 1997.
[175] E. Eriksson, M. Blinge, and G. Lövgren, “Life cycle assessment of the road transport
sector,” Sci. Total Environ., vol. 189–190, pp. 69–76, 1996.
[176] V. K. Soo, P. Compston, and M. Doolan, “Interaction between New Car Design and
Recycling Impact on Life Cycle Assessment,” Procedia CIRP, vol. 29, pp. 426–431, 2015.
[177] J. M. Ogden, R. H. Williams, and E. D. Larson, “Societal lifecycle costs of cars with
alternative fuels/engines,” Energy Policy, vol. 32, no. 1, pp. 7–27, 2004.
[178] J. L. Warren, “Development of an integrated life-cycle cost assessment model,” Electron.
Environ. 1994. ISEE 1994, pp. 155–163, 1994.
[179] Stanford_University, “GUIDELINES FOR LCCA in Buildings,” October, no. October,
2005.
[180] Megan Davis, “GUIDELINES FOR LIFE CYCLE COST ANALYSIS.” Stanford
University Land and Buildings, 2005.
[181] C. Wang, J. Yang, N. Liu, and Y. Mao, “Study on siting and sizing of battery-switch
station,” in 2011 4th International Conference on Electric Utility Deregulation and
Restructuring and Power Technologies (DRPT), 2011, pp. 657–662.
[182] X. Li, C. D. Clark, K. L. Jensen, S. T. Yen, and B. C. English, “Consumer purchase
intentions for flexible-fuel and hybrid-electric vehicles,” Transp. Res. Part D Transp.
Environ., vol. 18, no. 1, pp. 9–15, 2013.
[183] H. Brattebø, “Toward a Methods. Framework for Eco-efficiency Analysis?,” J. Ind. Ecol.,
vol. 9, no. 4, pp. 9–11, 2005.
[184] G. Huppes and M. Ishikawa, Quantified Eco-Efficiency: An Introduction with Applications.
Springer Science & Business Media, 2007.
[185] O. Tatari and M. Kucukvar, “Eco-Efficiency of Construction Materials: Data Envelopment
Analysis,” J. Constr. Eng. Manag. © Asce / June 2012 / 733, vol. 138(6), no. February 2017,
pp. 733–741, 2012.
[186] Z. Yue, “Approach to group decision making based on determining the weights of experts
by using projection method,” Appl. Math. Model., vol. 36, no. 7, pp. 2900–2910, 2012.

166
[187] L. Xu and J. Yang, “Introduction to Multi-Criteria Decision Making and the Evidential
Reasoning Approach,” 2001.
[188] S. Bobek and G. J. Nalepa, “Uncertainty handling in rule-based mobile context-aware
systems,” Pervasive Mob. Comput., 2016.
[189] D. Kang and K. Lansey, “Multiperiod Planning of Water Supply Infrastructure Based on
Scenario Analysis,” J. Water Resour. Plan. Manag., vol. 140, no. 1, pp. 40–54, Jan. 2014.
[190] S. Fazlollahi, G. Becker, A. Ashouri, and F. Maréchal, “Multi-objective, multi-period
optimization of district energy systems: IV – A case study,” Energy, vol. 84, pp. 365–381,
May 2015.
[191] W. Ben Yahia, N. Cheikhrouhou, O. Ayadi, and F. Masmoudi, “A Multi-objective
Optimization for Multi-period Planning in Multi-item Cooperative Manufacturing Supply
Chain,” 2013, pp. 635–643.
[192] M. Lindgren and H. Bandhold, Scenario Planning - Revised and Updated Edition. 2009.
[193] J. F. Coates, “Scenario planning,” Technol. Forecast. Soc. Change, vol. 65, no. 1, pp. 115–
123, 2000.
[194] L. A. Zadeh, “Is there a need for fuzzy logic?,” Inf. Sci. (Ny)., vol. 178, no. 13, pp. 2751–
2779, 2008.
[195] L. A. Zadeh, “Generalized theory of uncertainty (GTU)-principal concepts and ideas,”
Comput. Stat. Data Anal., vol. 51, no. 1, pp. 15–46, 2006.
[196] T. Ross, Fuzzy logic with engineering applications, Second edi. John Wiley & sons Ltd,
2005.
[197] B. Sodhi and T. V Prabhakar, “A Simplified Description of Fuzzy TOPSIS,” pp. 1–4.
[198] J. Wang, “Fuzzy outranking approach to prioritize design requirements in quality function
deployment,” Int. J. Prod. Res., vol. 7543, no. 37, pp. 899–916, 2010.
[199] C. Chen, “Extensions of the TOPSIS for group decision-making under fuzzy environment,”
Fuzzy sets Syst., vol. 114, pp. 1–9, 2000.
[200] T. Ross, Fuzzy Logic with Engineering Applications. Chichester, WEst Sussex, England:
John Wiley & Sons, 2004.
[201] G. A. Bowen, J. Rowley, M. Healy, and C. Perry, “Document Analysis as a Qualitative
Research Method,” Qual. Res. J. Doc. Anal. as a Qual. Res. Method Qual. Res. J. Manag.
Res. Rev. Qual. Mark. Res. An Int. J. Iss Qual. Res. Account. & Manag., vol. 9, no. 3,
pp. 27–40, 2009.
[202] M. Messagie, F. S. Boureima, T. Coosemans, C. Macharis, and J. Van Mierlo, “A range-
based vehicle life cycle assessment incorporating variability in the environmental
assessment of different vehicle technologies and fuels,” Energies, vol. 7, no. 3, pp. 1467–
1482, 2014.
[203] Nissan Motor corp., “Nissan Leaf Specification,” 2016. [Online]. Available:
http://www.nissan.ca/en/electric-cars/leaf/versions-specs/. [Accessed: 25-Jul-2016].

167
[204] Caranddriver.com, “Hyundai Tucson Fuel Cell,” 2016. [Online]. Available:
http://www.caranddriver.com/hyundai/tucson-fuel-cell. [Accessed: 25-Jul-2016].
[205] Toyota Corp., “2016 Toyota Yaris Hatchback - Capacity Specifications,” 2016. [Online].
Available: http://www.toyota.ca/toyota/en/vehicles/yaris-
hatchback/specifications/capacity. [Accessed: 25-Jul-2016].
[206] Canada Automobile Association, “Driving Costs. Beyond the price tag : Understanding
your vehicle expenses,” 2012.
[207] J. H. Han, J. H. Ryu, and I. B. Lee, “Modeling the operation of hydrogen supply networks
considering facility location,” Int. J. Hydrogen Energy, vol. 37, no. 6, pp. 5328–5346, 2012.
[208] F. Asdrubali, G. Baldinelli, F. D. Alessandro, and F. Scrucca, “Life cycle assessment of
electricity production from renewable energies : Review and results harmonization,”
Renew. Sustain. Energy Rev., vol. 42, pp. 1113–1122, 2015.
[209] M. Z. Hauschild and M. A. J. Huijbregts, Life Cycle Impact Assessment. Springer, 2015.
[210] M. Yeheyis, K. Hewage, M. S. Alam, C. Eskicioglu, and R. Sadiq, “An overview of
construction and demolition waste management in Canada: A lifecycle analysis approach
to sustainability,” Clean Technol. Environ. Policy, vol. 15, no. 1, pp. 81–91, 2013.
[211] A. Ahamed, K. Yin, B. J. H. Ng, F. Ren, V. W. C. Chang, and J. Y. Wang, “Life cycle
assessment of the present and proposed food waste management technologies from
environmental and economic impact perspectives,” J. Clean. Prod., vol. 131, pp. 607–614,
2016.
[212] B. Nykvist and M. Nilsson, “Rapidly falling costs of battery packs for electric vehicles,”
Nat. Clim. Chang., vol. 5, no. 4, pp. 329–332, Apr. 2015.
[213] P. Ahmadi and E. Kjeang, “ScienceDirect Comparative life cycle assessment of hydrogen
fuel cell passenger vehicles in different Canadian provinces,” Int. J. Hydrogen Energy, vol.
40, 2015.
[214] The British Columbia Automobile Association, “Auto Insurance Quick Estimate,” 2016.
[Online]. Available: https://www.bcaa.com/insurance/auto/overview/quick-quote.
[Accessed: 25-Jul-2016].
[215] M. Simpson and T. Markel, “Plug-in electric vehicle fast charge station operational analysis
with integrated renewables,” 26th Electr. Veh. Symp. 2012, EVS 2012, vol. 2, no. August,
pp. 833–838, 2012.
[216] Innovation Science and Economic Development Canada, “Cost-Benefit Analysis of the
Canada Small Business Financing Program,” 2014. [Online]. Available:
https://www.ic.gc.ca/eic/site/061.nsf/eng/02918.html. [Accessed: 26-Jul-2016].
[217] U.S. Department of Energy, “Electric Vehicle Charging Station Locations,” Altern. Fuel
Data Cent., no. June, 2015.
[218] G. Huppes and L. Van Oers, Background Review of Existing Weighting Approaches in Life
Cycle Impact Assessment ( LCIA ). 2011.
[219] J. Cooper, “Life Cycle Impact Assessment Weights to Support Environmentally Preferable

168
Purchasing in the United,” 2007.
[220] Intergornmental Panel on Climate Change, “Climate Change and Land,” 2019.
[221] B. F. Zhan, “Three fastest shortest path algorithms on real road networks: Data structures
and procedures,” Journal of Geographic Information and Decision Analysis, vol. 1, no. 1.
pp. 70–82, 1997.
[222] a. J. Parker, Store choice, store location and market analysis, vol. 9, no. 3. 1989.
[223] M. Nicholas and D. Hall, “Lessons Learned on Early Electric Vehicle Fast-Charging
Deployment,” 2018.
[224] UBC-TIPS Labs, “DESIGN GUIDELINES AND STANDARDS BC PUBLIC ELECTRIC
VEHICLE,” 2013.
[225] Statistics Canada, “Census Profile, 2016 Census,” Statistics Canada Catalogue no. 98-316-
X2016001, 2017. [Online]. Available: http://www12.statcan.gc.ca/census-
recensement/2016/dp-
pd/prof/details/page.cfm?Lang=E&Geo1=CMACA&Code1=915&Geo2=PR&Code2=47
&Data=Count&SearchText=Kelowna&SearchType=Begins&SearchPR=01&B1=All.
[Accessed: 25-Aug-2017].
[226] M. Wolinetz, J. Axsen, J. Peters, and C. Crawford, “Simulating the value of electric-
vehicle–grid integration using a behaviourally realistic model,” Nat. Energy, vol. 3, no. 2,
pp. 132–139, 2018.
[227] P. Perera, J. M. S. . Bandara, and S. C. Wirasinghe, “Methodology to select the Optimum
Location for new facilities and Server Systems for Disaster Risk Reduction,” in Plenary
Session 3: Risk Management, 2010.
[228] P. Perera, M. Kumar, and A. Rana, “Solar Power – The Freedom of Choice : Findings from
the Wilden Living Lab so far,” Wilden Living Lab, 2018. [Online]. Available:
https://wildenlivinglab.com/2018/09/25/does-solar-power-make-sense/. [Accessed: 27-
Feb-2019].
[229] U.S. Department of Energy, “Charging Plug-In Electric Vehicles at Home,” Alternative
Fuels Data Center. [Online]. Available:
https://afdc.energy.gov/fuels/electricity_charging_home.html. [Accessed: 20-Mar-2019].
[230] Plugndrive.ca, “Guide-ev-charging,” plugndrive.ca. [Online]. Available:
https://www.plugndrive.ca/guide-ev-charging/. [Accessed: 21-Mar-2019].
[231] S. Boyd and L. Vendenberghe, Convex Optimization. Cambrige University Press, 2009.
[232] H. Karunathilake, K. Hewage, and R. Sadiq, “Opportunities and challenges in energy
demand reduction for Canadian residential sector: A review,” Renew. Sustain. Energy Rev.,
vol. 82, no. February, pp. 2005–2016, Feb. 2018.
[233] J. Krumm, “How People USe Their Vehicles: Statistics from the 2009 National Household
Travel Survey,” 2012.
[234] K. K. Dhanda and P. J. Murphy, “The New Wild West Is Green: Carbon Offset Markets,
Transactions, and Providers,” Acad. Manag. Perspect., vol. 25, no. 4, pp. 37–49, 2012.

169
[235] H. Karunathilake, P. Perera, R. Ruparathna, K. Hewage, and R. Sadiq, “Renewable energy
integration into community energy systems: A case study of new urban development,” J.
Clean. Prod., 2016.
[236] M. Singer, “Consumer Views: Fuel Economy, Plug-in Electric Vehicle Battery Range, and
Willingness to Pay for Vehicle Technology,” National Renewable Energy Laboratory,
2017. [Online]. Available: https://www.nrel.gov/docs/fy17osti/68201.pdf. [Accessed: 27-
Dec-2017].
[237] M. Reisi, L. Aye, A. Rajabifard, and T. Ngo, “Transport sustainability index: Melbourne
case study,” Ecol. Indic., vol. 43, pp. 288–296, 2014.
[238] S. Opricovic and G. H. Tzeng, “Compromise solution by MCDM methods: A comparative
analysis of VIKOR and TOPSIS,” Eur. J. Oper. Res., vol. 156, no. 2, pp. 445–455, 2004.
[239] A. Kolios, V. Mytilinou, E. Lozano-Minguez, and K. Salonitis, “A Comparative Study of
Multiple-Criteria Decision-Making Methods under Stochastic Inputs,” Energies, vol. 9, no.
7, p. 566, Jul. 2016.
[240] Z. Yang, P. Slowik, N. Lutsey, and S. Searle, “Principles for effective electric vehicle
incentive design,” 2016.
[241] BC Ministry of Environment, “BC Best Practices Methodology for Quantifying Greenhouse
Gas Emissions. Victoria.” 2014.
[242] G. Kim, S. An, and K. Kang, “Comparison of construction cost estimating models based on
regression analysis , neural networks , and case-based reasoning,” Build. Environ., vol. 39,
pp. 1235–1242, 2004.
[243] D. Moore, “Selecting the best project delivery system,” in Project Management Institute
Annual Seminars and Symposium, 2000.
[244] Desing-Build Institute of America, “Choosing a Project Delivery Method,” 2015.
[245] British Columbia Construction Association, “RECOMMENDED GUIDELINES FOR THE
SELECTION OF A CONSTRUCTION,” 2012.
[246] R. Bo, “Choosing the Right Project Delivery Method Can Make or Break a Project,”
Phoenix, 2013.
[247] S. Ward, C. Chapman, S. Ward, and C. Chapman, “Stakeholders and uncertainty
management in projects,” Constr. Manag. Econ., vol. 6193, 2008.
[248] Y. Chang and C. Yeh, “Evaluating airline competitiveness using multiattribute decision
making,” Internaitonal J. Manag. Sceince, vol. 29, pp. 405–415, 2001.
[249] S. Nadaban, S. Dzitac, and I. Dzitac, “Fuzzy TOPSIS : A General View,” Procedia Comput.
Sceince 91, vol. 91, no. Itqm, pp. 823–831, 2016.
[250] J. Axsen, H. J. Bailey, and G. Kamiya, “The Canadian Plug-in Electric Vehicle Survey (
CPEVS 2013 ): Anticipating Purchase , Use , and Grid Interactions in British Columbia,”
no. Cpevs, pp. 1–81, 2013.
[251] R. H. Abiyev, T. Saner, S. Eyupoglu, and G. Sadikoglu, “Measurement of job satisfaction

170
using fuzzy sets,” Procedia - Procedia Comput. Sci., vol. 102, no. August, pp. 294–301,
2016.
[252] T. Litman, “Win-Win Emission Reduction Strategies,” no. June 2007, 2009.
[253] C. Wulf and M. Kaltschmitt, “Life cycle assessment of hydrogen supply chain with special
attention on hydrogen refuelling stations,” Int. J. Hydrogen Energy, vol. 37, no. 21, pp.
16711–16721, Nov. 2012.
[254] E. Cetinkaya, I. Dincer, and G. F. Naterer, “Life cycle assessment of various hydrogen
production methods,” Int. J. Hydrogen Energy, vol. 37, no. 3, pp. 2071–2080, Feb. 2012.
[255] Qulliq Energy Corporation, “Qulliq Energy Corporation Request for Rate Increase
Approved,” News Release (June 3, 2014), Qulliq, 03-Jun-2014.
[256] “National Inventory Report 1990-2012 Greenhouse Gas Sources and Sinks in Canada Part
1-3,” 2012.
[257] C. Windeyer, “Yukon, N.W.T. and Nunavut differ in outlooks for renewable energy,” CBC
News, 18-Oct-2014.
[258] Hydro-Québec, “Comparison of electricity prices in major North American cities,” Hydro-
Québec, p. 80, 2014.
[259] Environment and climate change Canada, “National Inventory Report 1990-2012
Greenhouse Gas Sources and Sinks in Canada Part 1-3,” 2012.
[260] Environment and Climate Change Canada, “Total Generation by Fuel (2009),” Environment
and Climate Change Canada, 2009. [Online]. Available: http://www.ec.gc.ca/energie-
energy/C00AD28F-5C87-4C64-97BF-98CBCC8EEFF6/TotalGenerationByFuel.jpg.
[Accessed: 11-May-2016].
[261] Northwest Territories Power Corporation, “Residential Electrical Rates,” Northwest
Territories Power Corporation, 2015. [Online]. Available:
https://www.ntpc.com/customer-service/residential-service/what-is-my-power-rate.
[Accessed: 11-May-2016].
[262] Environment and Climate Change Canada, “Total Generation by Fuel (2009),” 2009. .
[263] Hydro-Québec, “Comparison of electricity prices in major North American cities,” Hydro-
Québec, p. 80, 2014.
[264] Yucon Energy, “How Do Our Rates Compare? October 21, 2010,” 2010. [Online].
Available: https://www.yukonenergy.ca/blog/how_do_our_rates_compare. [Accessed: 11-
May-2016].
[265] C. Windeyer, “Yukon, N.W.T. and Nunavut differ in outlooks for renewable energy,” CBC
News, Oct-2014.
[266] Cars.com, “5 year cost of Ownership,” 2016. [Online]. Available: http://www.cars.com.
[Accessed: 25-Jul-2016].
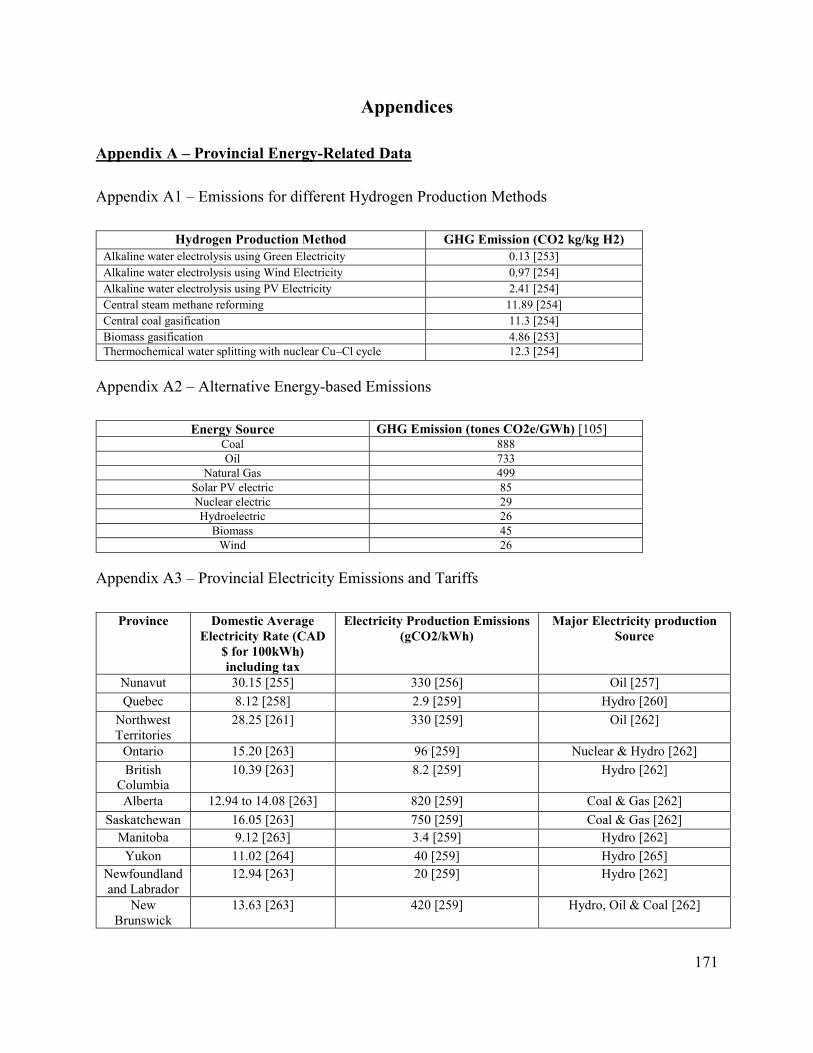
171
Appendices
Appendix A – Provincial Energy-Related Data
Appendix A1 – Emissions for different Hydrogen Production Methods
Hydrogen Production Method GHG Emission (CO2 kg/kg H2)
Alkaline water electrolysis using Green Electricity 0.13 [253]
Alkaline water electrolysis using Wind Electricity 0.97 [254]
Alkaline water electrolysis using PV Electricity 2.41 [254]
Central steam methane reforming 11.89 [254]
Central coal gasification 11.3 [254]
Biomass gasification 4.86 [253]
Thermochemical water splitting with nuclear Cu–Cl cycle 12.3 [254]
Appendix A2 – Alternative Energy-based Emissions
Energy Source GHG Emission (tones CO2e/GWh) [105] Coal 888
Oil 733
Natural Gas 499
Solar PV electric 85
Nuclear electric 29
Hydroelectric 26
Biomass 45
Wind 26
Appendix A3 – Provincial Electricity Emissions and Tariffs
Province Domestic Average
Electricity Rate (CAD
$ for 100kWh)
including tax
Electricity Production Emissions
(gCO2/kWh)
Major Electricity production
Source
Nunavut 30.15 [255] 330 [256] Oil [257]
Quebec 8.12 [258] 2.9 [259] Hydro [260]
Northwest
Territories
28.25 [261] 330 [259] Oil [262]
Ontario 15.20 [263] 96 [259] Nuclear & Hydro [262]
British
Columbia
10.39 [263] 8.2 [259] Hydro [262]
Alberta 12.94 to 14.08 [263] 820 [259] Coal & Gas [262]
Saskatchewan 16.05 [263] 750 [259] Coal & Gas [262]
Manitoba 9.12 [263] 3.4 [259] Hydro [262]
Yukon 11.02 [264] 40 [259] Hydro [265]
Newfoundland
and Labrador
12.94 [263] 20 [259] Hydro [262]
New
Brunswick
13.63 [263] 420 [259] Hydro, Oil & Coal [262]

172
Nova Scotia 16.83 [263] 700 [259] Coal [262]
Prince Edward
Island
17.34 [263] 22 [259] Wind [262]
Appendix A4 – Other Utility Tariffs for Households
Natural Gas price Gasoline
Province Base ($/month) level 1 level2 level3 ($/100 liter)
Quebec (Montreal) 16.57 $0.2674/ m3
(~900m3)
$0.1829 /m3
(900m3~2170 m3)
$0.15995/m3
(2179 m3~)
107.00
Ontario (Ottawa) 20.00 $ 0.2504/m3 106.10
British Columbia (Mainland) 12.06 $ 7.16 / Gj 121.60
Alberta (Edmonton) 30.16 $ 1.83/GJ 105.60
Saskatchewan (Saskatoon) 23.20 $ 0.2311/m3 107.80
Manitoba (Winnipeg) 14.00 $ 0.2235/m3 112.70
Nova Scotia (Halifax) 21.87 $ 18.075/GJ 103.10
Source: On-line databases of provincial utility providers (Accessed in November 2017)
Appendix B – Characteristics of Representing Vehicles
Appendix B1 – Maintenance and Repair Cost Data for Vehicles Considered in the Study
Based on cars.com Cars.com, 2016, the maintenance cost as at 2016 from year 1 to 5 years are as below,
Year 00
(CAD$)6
Year 01
(CAD$)7
Year 02
(CAD$)8
Year 03
(CAD$)9
Year 04
(CAD$)10
Year 05
(CAD$)11
Yaris 4DR LE 2016 (1500 cc) 108 247 2,061 975 880 4,272
Hyundai Tucson FCEV 4 DR5 0 0 0 0 802 4,789
Nissan Leaf S 5DR 213 357 2,412 1,008 802 4,789
5 Hyundai maintenance cost is assumed as similar to the Nissan leaf due to the similar power train options. But the
capital cost covered the cost of maintenance and cost of fuel for the next 03 years, and the last 02 years are assumed
to be similar to the Nissan Leaf. 6,7,8,9,10,11Source: [266]
Appendix B2 – Vehicle Specifications
Nissan Leaf S 5DR1 Hyundai Tucson FCEV2 Toyota Yaris 4DR LE3 Unit
Year of Manufacturing 2016 2016 2016
Range 133 500 500 Km/ per re-fueling cycle
Consumption 34 kWh/100km 77 km/kg 12.32 km/l
Size of Battery Pack 30 - - kWh
Cost of Vehicle 26,688 66,9404 21,151 CAD $
Engine power torque 107 134 106 hp
Gross Weight 1481 1882 1515 kg 1 Source [203] 2 Source [204] 3 Source [205] 4 This includes the fuel cost and general maintenance cost for the first 03 years of the vehicle.

173
Appendix C – Intermediate Results of the Life Cycle Assessment
Appendix C1: The life cycle impacts of the vehicle except for the operational phase
Electric vehicle ICEV HFCV -
Weight kg 1293 201 NA 1392 NA NA 1578 NA NA
Name Units Con. RM EoL T_LCIA_EV Con. RM EoL T_LCIA_ICEV Con. RM EoL T_LCIA_HFCV
Inputs
Total Energy GJ 26.1 16.9 15.0 58.1 41.3 4.2 10.5 56.0 87.3 2.6 10.5 100.4
Water m^3 26.3 10.4 3.1 39.8 18.3 0.3 2.2 20.8 28.9 0.8 2.2 31.9
Non fossil fuels GJ 5.3 2.1 1.7 9.1 3.6 0.0 1.2 4.8 7.5 0.2 1.2 8.8
Renewable GJ 3.4 1.6 0.8 5.7 2.2 0.0 0.5 2.7 4.5 0.1 0.5 5.1
Biomass GJ 0.1 0.1 0.0 0.2 0.1 0.0 0.0 0.1 0.2 0.0 0.0 0.2
Fossil Fuels GJ 50.4 15.0 13.3 78.7 37.7 4.1 9.3 51.2 79.5 2.4 9.3 91.3
Petroleum
Fuels GJ 6.3 2.0 0.2 8.5 4.2 2.8 0.1 7.2 9.2 0.5 0.1 9.7
Natural Gas
Fuels GJ 23.3 8.8 9.0 41.1 15.7 1.1 6.3 23.1 44.6 1.4 6.3 52.3
Coal Fuels GJ 23.3 4.0 4.1 31.4 17.8 0.2 2.9 20.9 25.2 0.6 2.9 28.7
Nuclear GJ 1.9 0.5 0.9 3.4 1.4 0.0 0.7 2.1 3.0 0.1 0.7 3.7
Outputs
CO2 kg 3589.0 968.0 902.1 5459.1 2654.9 221.0 640.0 3515.9 5371.8 127.8 640.0 6139.5
VOC kg 3.2 13.8 1.7 18.6 2.5 9.7 1.2 13.4 2.9 9.6 1.2 13.7
CO kg 17.9 68.9 0.5 87.3 13.8 0.1 0.3 14.3 15.7 0.2 0.3 16.2
NOx kg 4.2 1.4 0.8 6.5 3.0 0.4 0.6 4.0 6.0 0.2 0.6 6.8
PM10 kg 1.8 0.7 0.1 2.7 1.4 0.1 0.1 1.6 2.0 0.1 0.1 2.2
PM2.5 kg 0.8 0.2 0.1 1.2 0.7 0.0 0.1 0.8 0.9 0.0 0.1 1.0
SOx kg 24.0 12.6 1.1 37.6 13.9 1.4 0.8 16.1 20.8 3.7 0.8 25.2
CH4 kg 9.1 2.4 2.2 13.7 6.6 0.5 1.6 8.7 13.8 0.5 1.6 15.9
N2O g 79.9 21.1 20.0 121.0 55.8 5.3 14.1 75.2 127.4 4.0 14.1 145.5
BC g 29.2 16.5 5.9 51.7 19.1 2.9 4.2 26.2 42.9 3.1 4.2 50.2
POC g 46.5 20.1 13.8 80.4 33.3 3.2 9.8 46.2 79.9 2.4 9.8 92.0
H2 9 0 0 0 0 0 0 0 0 0 0 0 0
Con. – Construction phase
RM – Regular maintenance
EoL – End of life T_LCIA_V – Total life cycle impacts of the vehicle (Except the operation phase)

174
Appendix C2: Vehicle Operational Impacts for the Considered Life Cycle of the Vehicle
Appendix C3 Total life cycle inventory of the different fuel options
Input
Inventory
Province-wise energy and resources consumption for EVs (Complete Life Cycle Inventory) Raw materials and Energy for HFCVs ICEVs
Unit BC MN QC NF YK NWT ON NB SK NS AB PEI NU Natural
Gas Nuclear Coal Biomass Electrolysis
Water m^3 5.E+02 5.E+04 5.E+02 5.E+02 5.E+02 3.E+02 2.E+02 2.E+02 1.E+02 1.E+02 4.E+01 4.E+01 3.E+02 9.E+01 2.E+02 9.E+01 6.E+01 4.E+01 5.E+02
Non fossil
fuels GJ 1.E+05 1.E+05 1.E+05 1.E+05 1.E+05 5.E+04 1.E+05 9.E+04 2.E+04 5.E+04 2.E+04 1.E+05 6.E+03 2.E+04 2.E+05 4.E+02 5.E+05 2.E+05 3.E+05
Renewable GJ 1.E+05 1.E+05 1.E+05 1.E+05 1.E+05 5.E+04 4.E+04 5.E+04 2.E+04 5.E+04 2.E+04 1.E+05 3.E+03 1.E+04 4.E+02 2.E+02 5.E+05 2.E+05 3.E+05
Biomass GJ 3.E+04 2.E-01 5.E+03 3.E-01 2.E+00 2.E+04 5.E+03 2.E+04 2.E+00 2.E+04 1.E+04 5.E+03 1.E+02 4.E+02 2.E+01 6.E+00 5.E+05 3.E-01 3.E+05
Fossil Fuels GJ 7.E+03 8.E+01 2.E+02 2.E+04 3.E+04 2.E+05 1.E+04 1.E+05 2.E+05 2.E+05 3.E+05 4.E+03 1.E+06 3.E+05 6.E+03 5.E+02 3.E+04 8.E+02 3.E+05
Unit BC MN QC NF YK NWT ON NB SK NS AB PEI NU
Natural
Gas Nuclear Coal Biomass Electrolysis
Water m^3 468 54419 485 485 474 231 165 132 102 83 4 1 215 57 130 63 29 7 496
Non fossil fuels GJ 131311 110160 114016 104719 101449 46074 108857 88615 19938 48370 18940 112914 5913 24294 198187 352 462436 247734 346827
Renewable GJ 131311 110160 114016 104682 101392 45573 43686 48750 19878 48198 18854 112914 2649 10966 435 159 462436 247734 346827
Biomass GJ 29908 0 4985 0 2 16065 4990 19946 2 24929 9973 4985 105 427 17 6 462436 0 346827
Fossil Fuels GJ 6787 0 126 16966 26643 209965 13852 104581 231887 228582 254690 3770 1321920 313796 6191 446 32750 755 280765
Petroleum Fuels GJ 4004 0 110 13345 20023 183416 322665 28058 2361 42895 12568 3445 1211760 2765 1177 6860 11547 663 109845
Natural Gas Fuels GJ 2731 0 1 3463 6383 24443 12752 26671 88528 38044 104042 285 977670 247734 2687 1417 16198 83 139524
Coal Fuels GJ 51 0 1 157 237 2130 777 49853 141005 147614 138030 40 14 59 2 429 5 0 23469
Nuclear GJ 12 0 0 37 56 502 65171 39865 0 172 87 9 3 13 198 193 1 0 2768Impacts of
ICEV
Total CO2 kg 56 0 6 1 2010 16524 812 2295 18727 6021 19829 296 104652 19984 459 38812 2312 55 30559
VOC kg 0.0 0.0 0.0 0.1 0.2 1.3 0.2 0.1 1.8 0.1 2.1 0.1 8.1 0 0 3 2 0 26
CO kg 0.1 0.0 1.5 0.4 0.6 4.5 2.2 0.4 6.1 0.7 10.0 1.5 26.4 0 1 2 5 0 166
NOX kg 0.1 0.0 0.3 5.3 8.1 72.7 1.2 1.1 13.2 2.7 18.7 1.6 469.3 0 1 9 8 0 36
PM10 kg 0.1 0.0 0.6 0.2 0.3 3.1 0.7 0.2 2.2 0.4 3.6 0.7 19.8 1 0 4 1 0 5
PM2.5 kg 0.0 0.0 0.2 0.2 0.3 2.2 0.2 0.1 0.9 0.3 1.4 0.2 14.3 1 0 1 1 0 2
SOX kg 0.0 0.0 0.2 3.6 5.6 50.7 0.5 4.6 34.1 13.2 36.4 1.1 331.6 17 1 5 29 0 25
CH4 kg 0.0 0.0 0.2 1.7 2.8 19.8 2.5 0.2 26.4 0.2 28.6 0.5 116.8 60 1 60 5 0 39
N2O g 2047 0 20 12 19 143 32 33 347 88 412 684 887 413 7 236 1652 1 10993
BC g 2329 0 26 13 20 173 33 8 62 17 128 30 1112 64 8 42 11231 1 81
POC g 5478 0 61 15 23 187 73 18 158 35 299 64 1177 124 14 118 229 6 492
H2 g 0 0 0 0 0 0 0 0 0 0 0 0 0 2147 11231 11231 168 9249 0
Input for
ICEV
operation
Impacts of HFCV vehicle operation
Province-wise raw material group and environmental impacts based on grid electricity mix (Total operational impacts)
Province-wise raw material group and environmental impacts based on grid electricity mix (Total operational impacts)
Raw materials for HFCV vehicle operation

175
Petroleum
Fuels GJ 4.E+03 8.E+00 1.E+02 1.E+04 2.E+04 2.E+05 3.E+05 3.E+04 2.E+03 4.E+04 1.E+04 3.E+03 1.E+06 3.E+03 1.E+03 7.E+03 1.E+04 7.E+02 1.E+05
Natural Gas
Fuels GJ 3.E+03 4.E+01 4.E+01 4.E+03 6.E+03 2.E+04 1.E+04 3.E+04 9.E+04 4.E+04 1.E+05 3.E+02 1.E+06 2.E+05 3.E+03 1.E+03 2.E+04 1.E+02 1.E+05
Coal Fuels GJ 8.E+01 3.E+01 3.E+01 2.E+02 3.E+02 2.E+03 8.E+02 5.E+04 1.E+05 1.E+05 1.E+05 7.E+01 5.E+01 9.E+01 3.E+01 5.E+02 3.E+01 3.E+01 2.E+04
Nuclear GJ 2.E+01 3.E+00 4.E+00 4.E+01 6.E+01 5.E+02 7.E+04 4.E+04 3.E+00 2.E+02 9.E+01 1.E+01 7.E+00 2.E+01 2.E+02 2.E+02 5.E+00 4.E+00 3.E+03
Output
Inventory Province-wise environmental impacts of EVs (Complete Life Cycle Inventory) Method-wise impacts of HFCVs ICEVs
Total CO2 kg 6.E+03 5.E+03 5.E+03 5.E+03 7.E+03 2.E+04 6.E+03 8.E+03 2.E+04 1.E+04 3.E+04 6.E+03 1.E+05 3.E+04 7.E+03 4.E+04 8.E+03 6.E+03 3.E+04
VOC kg 2.E+01 2.E+01 2.E+01 2.E+01 2.E+01 2.E+01 2.E+01 2.E+01 2.E+01 2.E+01 2.E+01 2.E+01 3.E+01 1.E+01 1.E+01 2.E+01 2.E+01 1.E+01 4.E+01
CO kg 9.E+01 9.E+01 9.E+01 9.E+01 9.E+01 9.E+01 9.E+01 9.E+01 9.E+01 9.E+01 1.E+02 9.E+01 1.E+02 2.E+01 2.E+01 2.E+01 2.E+01 2.E+01 2.E+02
NOX kg 7.E+00 6.E+00 7.E+00 1.E+01 1.E+01 8.E+01 8.E+00 8.E+00 2.E+01 9.E+00 3.E+01 8.E+00 5.E+02 7.E+00 8.E+00 2.E+01 1.E+01 7.E+00 4.E+01
PM10 kg 3.E+00 3.E+00 3.E+00 3.E+00 3.E+00 6.E+00 3.E+00 3.E+00 5.E+00 3.E+00 6.E+00 3.E+00 2.E+01 3.E+00 2.E+00 6.E+00 3.E+00 2.E+00 7.E+00
PM2.5 kg 1.E+00 1.E+00 1.E+00 1.E+00 1.E+00 3.E+00 1.E+00 1.E+00 2.E+00 1.E+00 3.E+00 1.E+00 2.E+01 2.E+00 1.E+00 2.E+00 2.E+00 1.E+00 3.E+00
SOX kg 4.E+01 4.E+01 4.E+01 4.E+01 4.E+01 9.E+01 4.E+01 4.E+01 7.E+01 5.E+01 7.E+01 4.E+01 4.E+02 4.E+01 3.E+01 3.E+01 5.E+01 3.E+01 4.E+01
CH4 kg 1.E+01 1.E+01 1.E+01 2.E+01 2.E+01 3.E+01 2.E+01 1.E+01 4.E+01 1.E+01 4.E+01 1.E+01 1.E+02 8.E+01 2.E+01 8.E+01 2.E+01 2.E+01 5.E+01
N2O g 2.E+03 1.E+02 1.E+02 1.E+02 1.E+02 3.E+02 2.E+02 2.E+02 5.E+02 2.E+02 5.E+02 8.E+02 1.E+03 6.E+02 2.E+02 4.E+02 2.E+03 1.E+02 1.E+04
BC g 2.E+03 5.E+01 8.E+01 6.E+01 7.E+01 2.E+02 8.E+01 6.E+01 1.E+02 7.E+01 2.E+02 8.E+01 1.E+03 1.E+02 6.E+01 9.E+01 1.E+04 5.E+01 5.E+01
POC g 6.E+03 8.E+01 1.E+02 1.E+02 1.E+02 3.E+02 2.E+02 1.E+02 2.E+02 1.E+02 4.E+02 1.E+02 1.E+03 2.E+02 1.E+02 2.E+02 3.E+02 1.E+02 5.E+02
H2 g 0.E+00 0.E+00 0.E+00 0.E+00 0.E+00 0.E+00 0.E+00 0.E+00 0.E+00 0.E+00 0.E+00 0.E+00 0.E+00 2.E+03 1.E+04 1.E+04 2.E+02 9.E+03 0.E+00
Appendix C4: Life Cycle Cost Assessment of Electric Vehicles
Province
Average Electricity
Domestic rate (CAD $ for
100kWh) including tax
Infrastructure cost
(Annualized) (CAD
$ for 100kWh)
Total electricity retail
price with 12% margin
(CAD$ for 100kWh)
Electricity cost for 5yr
operation (CAD $)
LCC for EV for 5 year
life span (CAD $)
Nunavut 30.15 2.92 37.03 11332.07 36835.74
Quebec 8.12 2.92 12.36 3781.95 29285.62
Northwest Territories 28.25 2.92 34.90 10680.90 36184.58
Ontario 15.2 2.92 20.29 6208.40 31712.08
British Columbia 10.39 2.92 14.90 4559.92 30063.60
Alberta 13.51 2.92 18.40 5629.21 31132.88
Saskatchewan 16.05 2.92 21.24 6499.72 32003.39
Manitoba 9.12 2.92 13.48 4124.67 29628.34
Yukon 11.02 2.92 15.61 4775.83 30279.51
Newfoundland and Labrador 12.94 2.92 17.76 5433.86 30937.53
New Brunswick 13.63 2.92 18.53 5670.33 31174.01
Nova Scotia 16.83 2.92 22.11 6767.04 32270.71
Prince Edward Island 17.34 2.92 22.69 6941.83 32445.50
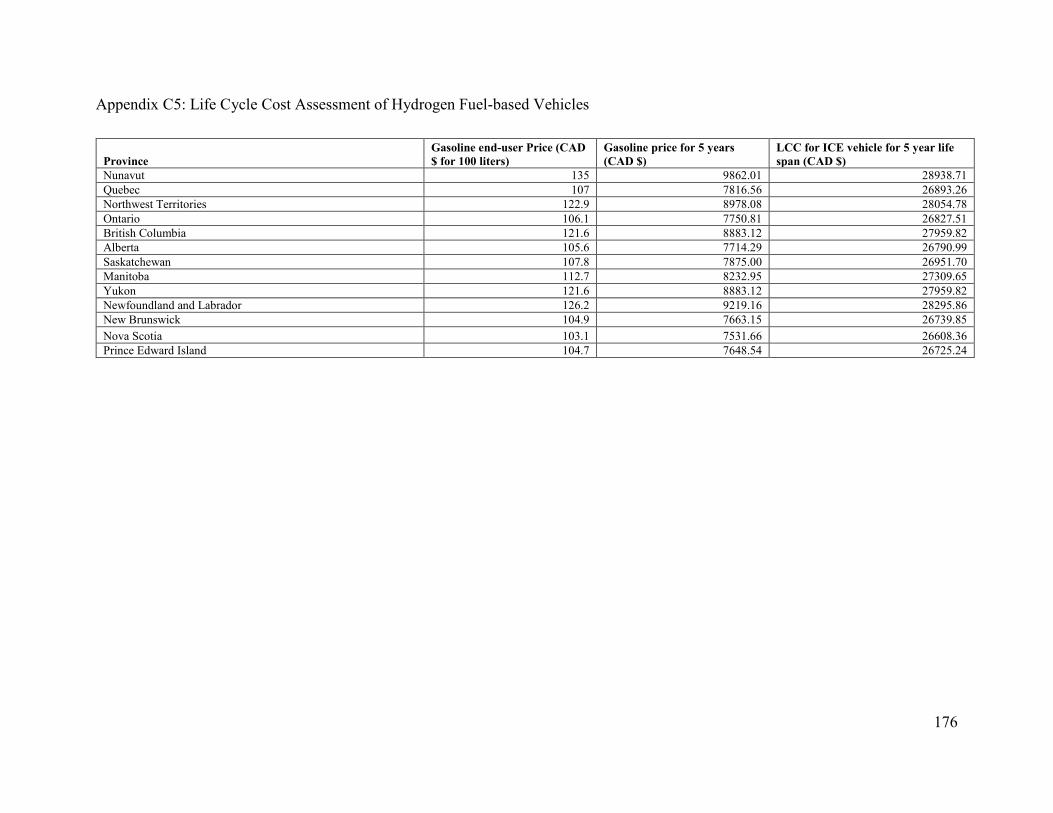
176
Appendix C5: Life Cycle Cost Assessment of Hydrogen Fuel-based Vehicles
Province
Gasoline end-user Price (CAD
$ for 100 liters)
Gasoline price for 5 years
(CAD $)
LCC for ICE vehicle for 5 year life
span (CAD $)
Nunavut 135 9862.01 28938.71
Quebec 107 7816.56 26893.26
Northwest Territories 122.9 8978.08 28054.78
Ontario 106.1 7750.81 26827.51
British Columbia 121.6 8883.12 27959.82
Alberta 105.6 7714.29 26790.99
Saskatchewan 107.8 7875.00 26951.70
Manitoba 112.7 8232.95 27309.65
Yukon 121.6 8883.12 27959.82
Newfoundland and Labrador 126.2 9219.16 28295.86
New Brunswick 104.9 7663.15 26739.85
Nova Scotia 103.1 7531.66 26608.36
Prince Edward Island 104.7 7648.54 26725.24

177
Appendix D – EV-RI Location Allocation Data
Appendix D1 – Site Inspection Form for Site-specific Data Gathering

178
Appendix D2 – Multi-objective Problem Solving using IBM ILOG CPLEX Source Code
/********************************************* * OPL 12.8.0.0 Model * Author: piyaru1 * Creation Date: Feb 11, 2019 at 12:46:51 PM *********************************************/ // parameters int n = ...; //No of demand points int m = ...; //No of re-charging stations range route = 1..n; range EVRI = 1..m; float distance[route,EVRI]=...; float demand_cap[route]=...; float supply_cap[EVRI]=...; float Cap_cost[EVRI]=...; float Var_cost[EVRI]=...; //variables dvar float+ x[route][EVRI]; // Decision variable minimize ((sum (j in EVRI, i in route)x[i][j]*Var_cost[j]/10)+ sum (i in route, j in EVRI) distance[i][j]*x[i][j]); // fitness function subject to { forall(i in route) available_demand_cap: sum(j in EVRI) x[i][j] == demand_cap[i]; // Demand constraint forall(j in EVRI) available_supply_cap: sum(i in route) x[i][j] <= supply_cap[j]; // Supply constraint }
/********************************************* * OPL 12.8.0.0 Data * Author: piyaru1 * Creation Date: Feb 11, 2019 at 12:46:51 PM *********************************************/ n=32975; // Number of routes m=14; // Number of potential EV-RI facilities SheetConnection my_sheet ("Worksheet2.xlsx"); SheetConnection my_sheet1 ("DEF.xlsx"); distance from SheetRead(my_sheet,"'Sheet1'!B2:O32976"); // Output from the ArcGIS model demand_cap from SheetRead(my_sheet,"'Sheet1'!P2:P32976"); // Array changes with the time period supply_cap from SheetRead(my_sheet,"'Sheet1'!S2:S15"); // Location-based capacity inputs Cap_cost from SheetRead(my_sheet,"'Sheet1'!T2:T15"); // Location-based cost inputs Var_cost from SheetRead(my_sheet,"'Sheet1'!U2:U15"); // Location-based cost inputs
x to SheetWrite(my_sheet1,"'Sheet1'!B2:O32976");

179
Appendix D3 – Model inputs for the case study
Paving and land preparation cost (CAD/sq.meter) Cp $135.00
land required per each EV-RI - Fast charging (sq.m/unit) LI 60
EV-RI unit costs
Paving cost per each EV-RI (CAD/fast charging unit) CI $8,100.00
Unit cost of Electric vehicle infrastructure - Fast Charging
(CAD/unit)
ρ1 $40,000
Installation and Labour cost (CAD/unit)
$50,000
Total DC-FC related costs
$98,100
Annual networking fee (CAD/unit.year)
$225
Annual maintenance (CAS/unit.year)
$200
Total operating cost per year per unit (CAD/unit.year) (Except the
cost of electricity)
$425
Current electricity cost ($/kWh) ꙋ0 0.15
kW power consumption of the vehicle I (kWh/100 km) λi 34
Useful power supply from EV-RI- Fast Charging(kW/unit) Pu1 50
Average recharging sessions per year per unit
3600
Vehicle types (TIPSLab-UBC)
Battery operated vehicles (Electricity only) 160 km
maximum fast charging 80%
Battery capacity 30 kWh
Consumption 340 Wh/km
Therefore, Recharge capacity per time 15.2 kWh/recharge
Land mortgage term 20 years
Inflation/ discount rate 3.50%

180
Appendix D4 : Total investment cost and payback calculation based on the optimization results
Location
ID
Neighbourhood Multi-period EV-RI
capacities in terms of DC-FC
units (NUmt ) and potential
locations (Optimization
Results)
Multi-period EV-RI
capacities improvement in
terms of DC-FC units
Lan
gitu
de
Lati
tud
e
TAZ
No
.
Lan
d c
ost
Fac
tor
(LC
m)
(CA
D/s
q.m
)
Max
. Cap
acit
y (N
Um
)
Max
imu
m v
ehic
le c
apac
ity
New DC-FC investment Land acquisition costs
2020
2030
2040
2050
2020
2030
2040
2050
(20
20)
(20
30)
(20
40)
(20
50)
(20
20)
(20
30)
(20
40)
(20
50)
1 PANDOSY 1 6 10 10 1 5 4 0 -119.491 49.86083 107 2500 10 36000 $98,100 $490,500 $392,400 $0 $9,174 $55,041 $82,562 $27,521
2 UNIVERSITY PLAZZA 0 1 5 10 0 1 4 5 -119.389 49.92223 154 2900 10 36000 $0 $98,100 $392,400 $490,500 $0 $10,641 $53,206 $95,771
3 MCCURDY CORNER 0 0 1 9 0 0 1 8 -119.405 49.90209 63 3200 20 72000 $0 $0 $98,100 $784,800 $0 $0 $11,742 $105,679
4 COOPER CENTRE 0 0 0 2 0 0 0 2 -119.445 49.88261 52 3500 10 36000 $0 $0 $0 $196,200 $0 $0 $0 $25,686
5 BANKS-SPRINGFIELD 0 0 0 1 0 0 0 1 -119.425 49.88871 55 3500 10 36000 $0 $0 $0 $98,100 $0 $0 $0 $12,843
6 CAPRI CENTRE MALL 0 0 5 16 0 0 5 11 -119.475 49.88117 34 3200 16 57600 $0 $0 $490,500 $1,079,100 $0 $0 $58,710 $187,873
7 ORCHARD PLAZA 0 0 0 0 0 0 0 0 -119.469 49.88195 35 3600 10 36000 $0 $0 $0 $0 $0 $0 $0 $0
8 SPALL PLAZA 0 0 0 7 0 0 0 7 -119.458 49.8821 28 3300 16 57600 $0 $0 $0 $686,700 $0 $0 $0 $84,763
9 GLENMORE 1 3 14 20 1 2 11 6 -119.443 49.91531 160 2500 20 72000 $98,100 $196,200 $1,079,100 $588,600 $9,174 $27,521 $119,256 $146,776
10 RICHTER 0 0 0 4 0 0 0 4 -119.49 49.88477 24 3800 10 36000 $0 $0 $0 $392,400 $0 $0 $0 $55,775
11 CLEMENT 0 3 10 10 0 3 7 0 -119.476 49.89292 15 2600 10 36000 $0 $294,300 $686,700 $0 $0 $28,621 $95,404 $66,783
12 SPRINGFIELD 1 4 20 20 1 3 16 0 -119.456 49.87627 50 2600 20 72000 $98,100 $294,300 $1,569,600 $0 $9,540 $38,162 $181,269 $143,107
13 BANKS 0 0 0 1 0 0 0 1 -119.428 49.8836 58 3600 10 36000 $0 $0 $0 $98,100 $0 $0 $0 $13,210
14 RUTLAND 1 9 20 20 1 8 11 0 -119.398 49.89007 77 2000 20 72000 $98,100 $784,800 $1,079,100 $0 $7,339 $66,049 $139,437 $73,388
Network Investment Cost (CAD) $392,400 $2,158,200 $5,787,900 $4,414,500 $35,226 $226,035 $741,586 $1,039,175

181
Appendix E – Household Related Data
Appendix E1 – Residential Building As-Is Drawing
(Source: AuthenTech Homes Ltd.)
Appendix E2 – Specifications of Base-Case Residential Building
Building parameters (Reference case)
Year of manufacturing 2017
Total floor area 2,690 ft2
Orientation Northwest
Thermal zone settings Single Thermostat
Main floor set points: Daytime – 69.80F & night time – 64.40F
Cooling set point: 770F
Night time set back duration: 8 hrs
Occupancy 2 – Adults & 1 – Child (50% occupancy time)
Foundation 8” reinforced concrete, R-22 insulation
Basement slab 4” concrete
Exterior wall (Section 1) 2”×6” wood studs @ 24” OC, 3/8” OSB sheeting, R-20 insulation, ½” drywall
Interior wall 2”×4” wood studs, ½” drywall
Ground floor Engineered I joist 11 7/8” @ 19.2” OC, ¾” plywood, R-11 insulation
Ceiling R-22 Batt, R-40 blown in insulation, ½” drywall
Roof Engineered trusses (wood), 1/2” OSB sheeting, Asphalt
Windows Vinyl double glazed windows c/w 180 low-E Air Tightness: 0.2 L/s.m2
Space heating system Energy star rated dual fuel (Natural Gas & Electric) EF - 92.1%, 56000 BTU/hr,
switching temperature 350F & Natural gas fireplace 2kW, 6824.28 BTU/hr 30% SS
Space cooling system Energy star rated central split system, (electric), 14SEER

182
Washer & Dryer Standard (916kWh/year)
Heat recovery system Single stage PSC blower
Refrigerator Standard (639kWh/year)
Stove & Oven Standard Energy Star rated cooker and oven (565kWh/year)
Hot water system Energy star rated natural gas hot water tank 1EF (Hot water temperature: 1310F)
(60Gal)
Other electricity use 12kWh/day
Lighting 25%-75% LED or CFL
Solar(PV) electricity
generator
Not available
House construction cost
(CAD)7
414,032.99
Appendix E3 Results of EV Incentive Scheme Ranking
7 Purchase cost excluding the land value and the profit of the builders, contractors and developers.

183
Appendix E4 - Building Retrofit Options
Quebec**** Ontario*** British Columbia* Alberta** Saskatchewan Manitoba Nova Scotia## B
uild
ing
retr
ofi
t in
cen
tive
scem
es
An
nu
aliz
ed c
on
sum
er c
ost
savi
ngs
An
nu
aliz
ed G
HG
red
uct
ion
:
H2
D (
kgC
O2
e/ye
ar)
An
nu
aliz
ed c
on
sum
er c
ost
savi
ngs
An
nu
aliz
ed G
HG
red
uct
ion
: H
2D
(kg
CO
2e/
year
)
An
nu
aliz
ed c
on
sum
er c
ost
sa
vin
gs
An
nu
aliz
ed G
HG
red
uct
ion
: H
2D
(kg
CO
2e/
year
)
An
nu
aliz
ed c
on
sum
er c
ost
sa
vin
gs
An
nu
aliz
ed G
HG
red
uct
ion
:
H2
D (
kgC
O2
e/ye
ar)
An
nu
aliz
ed c
on
sum
er c
ost
savi
ngs
An
nu
aliz
ed G
HG
red
uct
ion
: H
2D
(kg
CO
2e/
year
)
An
nu
aliz
ed c
on
sum
er c
ost
savi
ngs
An
nu
aliz
ed G
HG
red
uct
ion
: H
2D
(kg
CO
2e/
year
)
An
nu
aliz
ed c
on
sum
er c
ost
sa
vin
gs
An
nu
aliz
ed G
HG
red
uct
ion
: H
2D
(kg
CO
2e/
year
)
Null 0.00 0.00 0.00 0.00 0.00 0.00 0.00 0.00 0.00 0.00 0.00 0.00 0.00 0.00
R1 973.33 4.61 698.08 35.63 933.74 6.42 838.38 409.70 950.49 275.17 982.83 7.03 593.33 397.80
R2 188.69 13.34 98.77 -127.20 150.43 3.71 170.96 -1414.50 286.63 -1249.05 134.31 15.13 125.23 -1053.52
R3 36.17 0.43 25.96 31.33 40.59 1.65 52.80 219.53 22.95 224.26 48.57 0.50 32.26 167.19
R4 -727.55 96.69 -72.54 -299.04 99.34 46.95 -956.63 -4562.11 -416.33 -4579.52 -883.03 132.07 -
172.85 -2767.49
R5 352.22 8.13 232.88 256.17 341.79 18.45 319.16 2255.10 160.50 2219.65 120.10 10.16 191.59 1739.49
R1+R2 1162.02 17.95 796.86 -91.57 1084.17 10.13 1009.35 -1004.81 1237.12 -973.89 1117.14 22.16 718.56 -655.72
R1+R3 1009.51 5.04 724.05 66.95 974.34 8.07 891.19 629.23 973.45 499.42 1031.41 7.54 625.60 564.98
R1+R4 245.79 101.29 625.55 -263.42 1033.08 53.37 -118.24 -4152.41 534.16 -4304.36 99.80 139.11 420.48 -2369.69
R1+R5 1325.55 12.74 930.96 291.80 1275.53 24.87 1157.54 2664.80 1110.99 2494.82 1102.93 17.19 784.92 2137.29
R2+R3 224.86 13.77 124.74 -95.87 191.02 5.36 223.77 -1194.97 309.58 -1024.80 182.88 15.63 157.49 -886.33
R2+R4 -538.86 110.02 26.24 -426.24 249.77 50.66 -785.66 -5976.62 -129.70 -5828.58 -748.72 147.20 -47.62 -3821.01
R2+R5 540.90 21.47 331.65 128.98 492.22 22.16 490.12 840.60 447.12 970.60 254.40 25.29 316.81 685.97
R3+R4 -691.37 97.12 -46.57 -267.71 139.94 48.60 -903.82 -4342.58 -393.37 -4355.27 -834.45 132.58 -
140.58 -2600.31

184
R3+R5 388.39 8.57 258.84 287.50 382.38 20.10 371.96 2474.64 183.45 2443.91 168.67 10.66 223.85 1906.67
R4+R5 -375.33 104.82 160.34 -42.87 441.13 65.40 -637.47 -2307.01 -255.83 -2359.87 -762.93 142.23 18.74 -1028.00
R1+R2+R3 1198.20 18.38 822.82 -60.25 1124.77 11.78 1062.15 -785.27 1260.08 -749.63 1165.71 22.67 750.83 -488.53
R1+R2+R4 434.47 114.63 724.32 -390.61 1183.51 57.08 52.72 -5566.92 820.79 -5553.41 234.11 154.24 545.71 -3423.21
R1+R2+R5 1514.24 26.08 1029.73 164.60 1425.96 28.58 1328.51 1250.30 1397.62 1245.76 1237.24 32.32 910.15 1083.77
R1+R3+R4 281.96 101.73 651.51 -232.09 1073.68 55.02 -65.44 -3932.88 557.12 -4080.10 148.38 139.61 452.75 -2202.51
R1+R3+R5 1361.72 13.17 956.92 323.13 1316.12 26.52 1210.35 2884.33 1133.94 2719.07 1151.50 17.69 817.18 2304.47
R1+R4+R5 598.00 109.43 858.42 -7.24 1374.87 71.82 200.92 -1897.31 694.66 -2084.71 219.90 149.27 612.07 -630.20
R2+R3+R4 -502.68 110.46 52.20 -394.91 290.37 52.31 -732.86 -5757.09 -106.75 -5604.32 -700.15 147.71 -15.36 -3653.82
R2+R3+R5 577.08 21.90 357.61 160.30 532.81 23.81 542.93 1060.13 470.08 1194.85 302.98 25.79 349.08 853.16
R2+R4+R5 -186.64 118.15 259.11 -170.07 591.56 69.11 -466.50 -3721.51 30.80 -3608.93 -628.63 157.36 143.97 -2081.52
R3+R4+R5 -339.16 105.25 186.30 -11.54 481.72 67.05 -584.66 -2087.48 -232.88 -2135.62 -714.36 142.74 51.00 -860.82
R1+R2+R3+R4 470.65 115.06 750.28 -359.29 1224.11 58.73 105.52 -5347.39 843.75 -5329.16 282.69 154.74 577.98 -3256.02
R1+R2+R3+R5 1550.41 26.51 1055.70 195.93 1466.55 30.23 1381.31 1469.83 1420.57 1470.02 1285.81 32.82 942.41 1250.95
R1+R2+R4+R5 786.69 122.76 957.20 -134.44 1525.30 75.53 371.88 -3311.81 981.29 -3333.76 354.21 164.40 737.30 -1683.72
R1+R3+R4+R5 634.18 109.86 884.39 24.08 1415.46 73.47 253.72 -1677.78 717.61 -1860.45 268.47 149.77 644.33 -463.02
R2+R3+R4+R5 -150.47 118.59 285.08 -138.74 632.15 70.76 -413.70 -3501.98 53.75 -3384.67 -580.05 157.86 176.23 -1914.34
R1+R2+R3+R4+R5 (H2M) 822.86 123.20 983.16 -103.11 1565.89 77.18 424.68 -3092.28 1004.24 -3109.50 402.78 164.90 769.56 -1516.54

185
Appendix F –PDM Selection Process
Appendix F1 – Data Collection Form to Collect the Stakeholder Perception of Different Attributes
Section Attributes Description Very
Important
Better to
have it
Not that
important
Not
Applicable
Project
characteristics
Scope definition Having an exact goal about the EV-RI development
Project schedule Having an exact schedule for the development
Contract Strategy Having an exact payment method for the EV-RI development
Complexity The complexity of the development process and evaluate the
technical know-how of the development
Owners pre-
requests
Constructability
studies
Do a feasibility study beforehand
Value engineering
studies
Do value engineering to optimize the construction procedure
Contract packaging Do the modular type of construction by having multiple
subcontractors to distribute work
Contract awarding
criteria
Evaluate contract awarding criteria before starting the procurement
process
Cost Sharing Share the cost of the recharging infrastructure with a third party
(having a separate funding partner)
Owners
preferences
Responsibility Share the responsibility of the recharging infrastructure with a
third party (having a construction manager for the project)
Design control Control the design by the owner or having it contracted to a third
party
Involvement after
awarding
Involve with decisions during the construction phase of the project
Risk
Change orders Change the initial design during the construction
Risk-sharing Share the risk of the recharging infrastructure with a third party
(having separate insurance to cover the risk)
Quality Quality control and
quality assurance
Check the quality of the final product
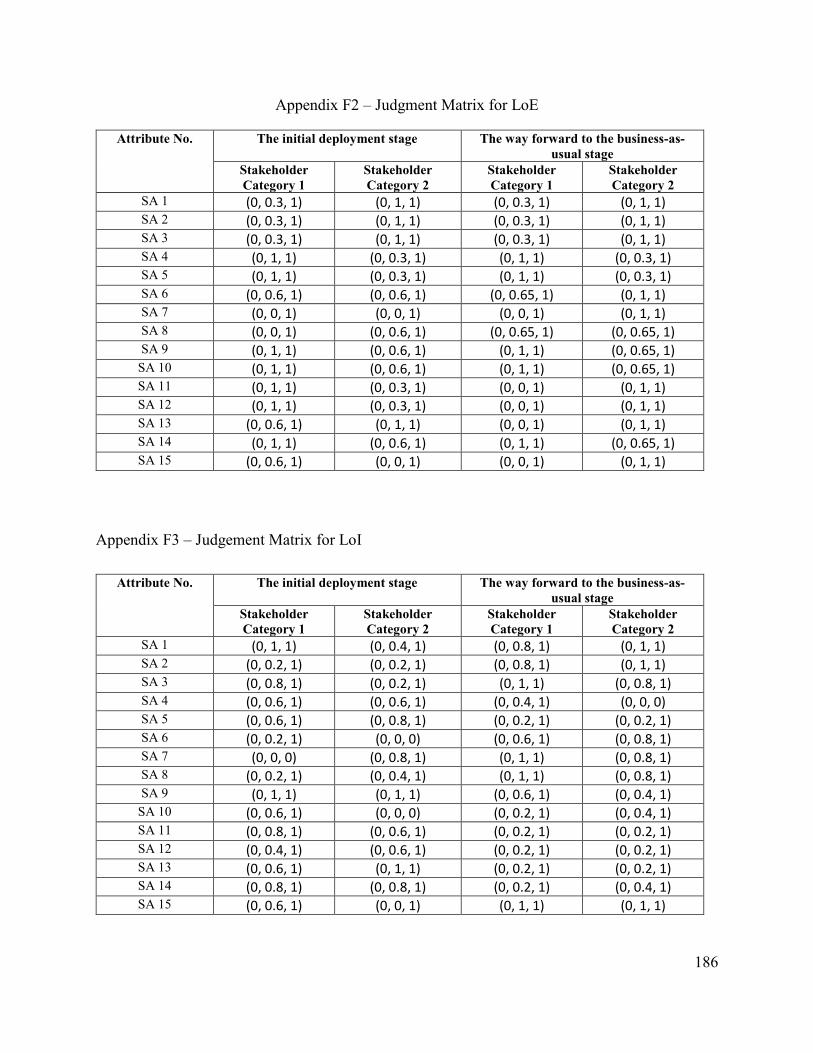
186
Appendix F2 – Judgment Matrix for LoE
Attribute No. The initial deployment stage The way forward to the business-as-
usual stage
Stakeholder
Category 1
Stakeholder
Category 2
Stakeholder
Category 1
Stakeholder
Category 2
SA 1 (0, 0.3, 1) (0, 1, 1) (0, 0.3, 1) (0, 1, 1) SA 2 (0, 0.3, 1) (0, 1, 1) (0, 0.3, 1) (0, 1, 1) SA 3 (0, 0.3, 1) (0, 1, 1) (0, 0.3, 1) (0, 1, 1) SA 4 (0, 1, 1) (0, 0.3, 1) (0, 1, 1) (0, 0.3, 1) SA 5 (0, 1, 1) (0, 0.3, 1) (0, 1, 1) (0, 0.3, 1) SA 6 (0, 0.6, 1) (0, 0.6, 1) (0, 0.65, 1) (0, 1, 1) SA 7 (0, 0, 1) (0, 0, 1) (0, 0, 1) (0, 1, 1) SA 8 (0, 0, 1) (0, 0.6, 1) (0, 0.65, 1) (0, 0.65, 1) SA 9 (0, 1, 1) (0, 0.6, 1) (0, 1, 1) (0, 0.65, 1)
SA 10 (0, 1, 1) (0, 0.6, 1) (0, 1, 1) (0, 0.65, 1) SA 11 (0, 1, 1) (0, 0.3, 1) (0, 0, 1) (0, 1, 1) SA 12 (0, 1, 1) (0, 0.3, 1) (0, 0, 1) (0, 1, 1) SA 13 (0, 0.6, 1) (0, 1, 1) (0, 0, 1) (0, 1, 1) SA 14 (0, 1, 1) (0, 0.6, 1) (0, 1, 1) (0, 0.65, 1) SA 15 (0, 0.6, 1) (0, 0, 1) (0, 0, 1) (0, 1, 1)
Appendix F3 – Judgement Matrix for LoI
Attribute No. The initial deployment stage The way forward to the business-as-
usual stage
Stakeholder
Category 1
Stakeholder
Category 2
Stakeholder
Category 1
Stakeholder
Category 2
SA 1 (0, 1, 1) (0, 0.4, 1) (0, 0.8, 1) (0, 1, 1) SA 2 (0, 0.2, 1) (0, 0.2, 1) (0, 0.8, 1) (0, 1, 1) SA 3 (0, 0.8, 1) (0, 0.2, 1) (0, 1, 1) (0, 0.8, 1) SA 4 (0, 0.6, 1) (0, 0.6, 1) (0, 0.4, 1) (0, 0, 0) SA 5 (0, 0.6, 1) (0, 0.8, 1) (0, 0.2, 1) (0, 0.2, 1) SA 6 (0, 0.2, 1) (0, 0, 0) (0, 0.6, 1) (0, 0.8, 1) SA 7 (0, 0, 0) (0, 0.8, 1) (0, 1, 1) (0, 0.8, 1) SA 8 (0, 0.2, 1) (0, 0.4, 1) (0, 1, 1) (0, 0.8, 1) SA 9 (0, 1, 1) (0, 1, 1) (0, 0.6, 1) (0, 0.4, 1)
SA 10 (0, 0.6, 1) (0, 0, 0) (0, 0.2, 1) (0, 0.4, 1) SA 11 (0, 0.8, 1) (0, 0.6, 1) (0, 0.2, 1) (0, 0.2, 1) SA 12 (0, 0.4, 1) (0, 0.6, 1) (0, 0.2, 1) (0, 0.2, 1) SA 13 (0, 0.6, 1) (0, 1, 1) (0, 0.2, 1) (0, 0.2, 1) SA 14 (0, 0.8, 1) (0, 0.8, 1) (0, 0.2, 1) (0, 0.4, 1) SA 15 (0, 0.6, 1) (0, 0, 1) (0, 1, 1) (0, 1, 1)

187
Appendix F4 – Decision Matrix
Attribute
No.
Decision
Type Linguistic Terms
MAX MIN DBB DB CM DBOT PPP IPD
SA 1 1 0 (0,0.2,0.4) (0.8,1,1) (0,0.2,0.4) (0.4,0.6,0.8) (0.8,1,1) (0.8,1,1)
SA 2 1 0 (0,0.2,0.4) (0,0.2,0.4) (0.6,0.8,1) (0,0.2,0.4) (0.4,0.6,0.8) (0,0.2,0.4)
SA 3 0 1 (0,0,0) (0,0,0) (0,0,0) (0,0,0) (0,0,0) (0,0,0)
SA 4 1 0 (0.8,1,1) (0,0.2,0.4) (0.6,0.8,1) (0.4,0.6,0.8) (0.6,0.8,1) (0.8,1,1)
SA 5 1 0 (0,0,0) (0.8,1,1) (0,0,0) (0.8,1,1) (0.2,0.4,0.6) (0.6,0.8,1)
SA 6 1 0 (0,0,0) (0.8,1,1) (0,0,0) (0.8,1,1) (0.2,0.4,0.6) (0.8,1,1)
SA 7 1 0 (0,0,0) (0.8,1,1) (0,0,0) (0.8,1,1) (0.2,0.4,0.6) (0.6,0.8,1)
SA 8 1 0 (0,0.2,0.4) (0.8,1,1) (0,0.2,0.4) (0.6,0.8,1) (0.4,0.6,0.8) (0.6,0.8,1)
SA 9 1 0 (0,0,0) (0.2,0.4,0.6) (0,0,0) (0.8,1,1) (0.8,1,1) (0.2,0.4,0.6)
SA 10 0 1 (0,0,0) (0,0,0) (0,0,0) (0,0,0) (0,0,0) (0,0,0)
SA 11 1 0 (0.8,1,1) (0,0.2,0.4) (0.4,0.6,0.8) (0,0.2,0.4) (0.4,0.6,0.8) (0.2,0.4,0.6)
SA 12 0 1 (0,0,0) (0,0,0) (0,0,0) (0,0,0) (0,0,0) (0,0,0)
SA 13 0 1 (0,0,0) (0,0,0) (0,0,0) (0,0,0) (0,0,0) (0,0,0)
SA 14 1 0 (0,0.2,0.4) (0,0.2,0.4) (0.4,0.6,0.8) (0.8,1,1) (0.8,1,1) (0.2,0.4,0.6)
SA 15 1 0 (0.8,1,1) (0.2,0.4,0.6) (0.6,0.8,1) (0,0.2,0.4) (0.6,0.8,1) (0.8,1,1)
Appendix F5 – Data Collection for Case Demonstration
Background of the project: The use of low-carbon and non-carbon based alternative fuels for
transportation has gained immense global attention, which would have long-term impacts on the
reduction of anthropogenic Greenhouse Gas (GHG) emissions. According to Transport Canada
(2016), an innovative, green, and integrated transport system that supports a cleaner environment
plays a key role in its vision statement. Accordingly, electric vehicle recharging infrastructure
(EV-RI) development is being considered as their third objective to ensure energy security for
light-duty electric vehicles (LD-EVs) in 2030 [1]. Therefore, the province of BC allocated CAD
40 Million in 2017 to support future low-carbon and zero-carbon refueling/ recharging
infrastructure projects [2]. Hence, the government of Canada, Government of British Columbia
(BC), and municipalities are working towards the fully-fledged EV-RI planning and management
framework to increase the growth rate of LD-EVs in BC to achieve Greenhouse Gasses Reduction
Target Act (GGRTA) [3].
BC has a 93% renewable electricity grid that enabled travelers to travel with nearly emission-free
travel using LD-EVs. However, alternative transportation technologies such as electric vehicles
and hydrogen fuel cell vehicles have not achieved the expected consumer attraction in BC due to
insufficient recharging/ refueling infrastructure accessibility, insufficient government regularities,
and lack commercial viability [4][5][6][7]. This will limit the potential public and private
investments on alternative fuel refueling/recharging infrastructure due to a lack of economic,
environmental, and social feasibility.

188
The motivation of this study is to develop a macroscopic planning and management framework
for an effective EV-RI network by considering customers, private infrastructure investors, and
government perspectives. This will minimize range anxiety by developing an efficient EV-RI
network and maximize returns on EV-RI investments. Government and private institutions in BC
at municipal, provincial, and federal levels who are responsible for the design, operation,
maintenance, rehabilitation, and development of EV recharging infrastructure would directly
benefit from the outcomes of this research study.
Overall objective: The goal of this research is to develop a planning and management framework
for LD-EV recharging infrastructure for road transport electrification in the Southern interior of
BC.
Data Requirement: The City of Kelowna (CoK) is identified as one of the highest developing municipalities in Canada [14]. The annual population growth of the region is 2.7% [14]. Therefore, it is vital to be focused on the dynamic changes in future transport demands and resultant carbon footprint to support regional GHG targets. Hence, in this study, the CoK will be considered as a medium-scale municipality in Southern interior BC. The data obtained from the municipality and expert opinion will be used to develop and validate the model. A brief description of the requested data and their expected uses are shown in Table 1.
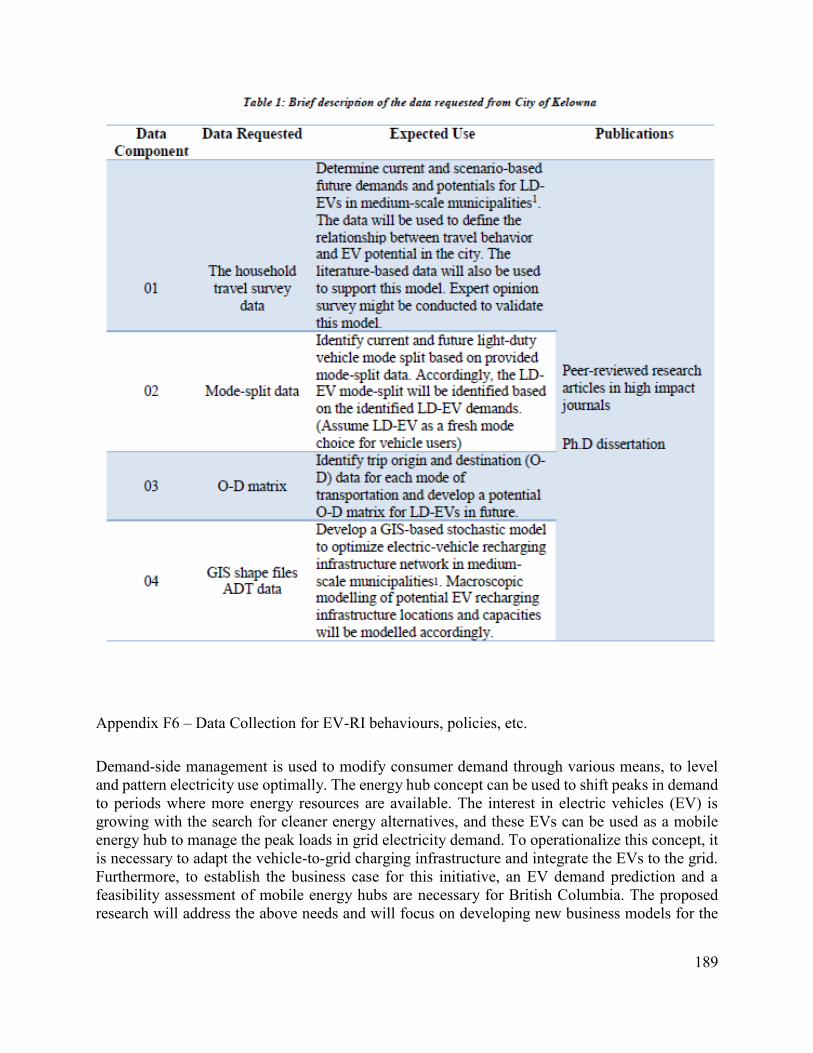
189
Appendix F6 – Data Collection for EV-RI behaviours, policies, etc.
Demand-side management is used to modify consumer demand through various means, to level
and pattern electricity use optimally. The energy hub concept can be used to shift peaks in demand
to periods where more energy resources are available. The interest in electric vehicles (EV) is
growing with the search for cleaner energy alternatives, and these EVs can be used as a mobile
energy hub to manage the peak loads in grid electricity demand. To operationalize this concept, it
is necessary to adapt the vehicle-to-grid charging infrastructure and integrate the EVs to the grid.
Furthermore, to establish the business case for this initiative, an EV demand prediction and a
feasibility assessment of mobile energy hubs are necessary for British Columbia. The proposed
research will address the above needs and will focus on developing new business models for the

190
electricity sector in the province and across Canada. The study will develop a load balancing
strategy for the central grid using the EV fleet as a mobile energy hub, and tariff schemes and
incentives will be investigated to identify the optimal business model for mobile energy bus-based
demand-side management.
The following data inputs are required to conduct the proposed research, and the collected data
will be solely used for research purposes only.
3.1. EVs, Batteries, and EV Demands in BC
A: Discussion points
1. EV growth with the time (Ex: EV sales as a percentage of conventional vehicles and EV
registered in the province/country as a percentage of conventional vehicles)
2. Existing federal/provincial/municipal rewards, incentives, policies, and procedures
related to promoting EVs.
3. EV recharging patterns and EV user behaviours (Consumer behavioral/survey data)
4. EV battery lifetime, replacement costs, capacities, and battery degradation curves
B: Additional information
1. Potential rewards, incentives, policies, and procedures related to promoting EVs.
2. EV user behavior changes with the time
3. Potential technological changes related to the EV battery lifetime, replacement costs,
capacities, and battery degradation curves
3.2. V2G Technologies
A: Discussion points
1. Existing V2G technologies (types, costs, transfer rates, risks, limitations)
2. Primary utility rates for different levels of V2G unidirectional electricity transfers
B: Additional information
1. Potential V2G technologies (types, costs, transfer rates, risks, limitations)
2. Potential rewards, incentives, and financial assistance for V2G infrastructure
development
3. Potential costs associated with V2G transfer (e.g. the overhead costs, network fee, and
management fee)
3.3. G2V Technologies
A: Discussion points
1. Existing G2V technologies (types, costs, transfer rates, risks, limitations)

191
2. A database on public recharging facilities in the province/country (details related to
location, capacities, costs, and average use)
3. A database on shared or private recharging facilities in the province/country (Ex.
Apartments, office buildings, shopping malls, universities and other institutions etc.)
4. A database on domestic recharging facilities in the province/country
5. Existing rewards, incentives, and financial assistance for recharging infrastructure
development
6. Primary utility rates for different levels of G2V unidirectional electricity transfers
B: Additional information
1. Potential G2V technologies in Canada (types, costs, transfer rates, risks, limitations for
wireless static charging and dynamic charging facilities)
2. Potential rewards, incentives, and financial assistance for recharging infrastructure
development
3. Potential costs associated with G2V transfer (e.g. the overhead costs, network fee, and
management fee)
4. Factors considering to identify the best-desirable location of the facility
3.4. Mobile Energy Hub Planning for BC
A: Discussion points
1. Viability of V2G and G2V technologies use as a smart bidirectional recharging system
(SBRS)
2. Existing information on smart bidirectional recharging systems (SBRS) (types, costs,
technical applicability to the grid, limitations etc.)
3. The ability of net-metering in SBRS technologies and the tariff calculation
4. The possibility of supplying electricity for the electricity grid (to smoothen the peak
load) using mobile energy hubs. Acceptable technologies, benefits, costs, risks, and
limitations.
B: Additional information
1. Impacts to batteries due to SBRS technologies and the additional costs/benefits to the
consumers and utility providers
2. Potential limitations, risks, advantages, and disadvantages of SBRS. (Details of any
prototype or conceptual designs developed for Canadian context)
3. The possibility of converting the existing parking infrastructure to mobile energy hubs.
The political, environmental, social, and technological impacts.