Horizon Growth Planning: - Maximizing Business ... - Chief Outsiders

Transportation Research Part B 38 (2004) 251–270www.elsevier.com/locate/trb
A flow-maximizing adaptive local ramp metering strategy
Emmanouil Smaragdis 1, Markos Papageorgiou *, Elias Kosmatopoulos 2
Dynamic Systems and Simulation Laboratory, Technical University of Crete, 73100 Chania, Greece
Received 1 October 2002; received in revised form 8 January 2003; accepted 23 January 2003
Abstract
An extension of the feedback local ramp metering strategy ALINEA is proposed that allows the au-
tomatic tracking of the critical occupancy to help maximize the mainstream flow. The developed AD-
ALINEA strategy may be valuable whenever the critical occupancy cannot be estimated beforehand or is
subject to real-time change due to changing environmental conditions or traffic composition (e.g. trucks).
An upstream-measurement based version of the adaptive strategy (AU-ALINEA) is also developed. Both
strategies are successfully tested in a stochastic macroscopic simulation environment under various sce-narios.
� 2003 Elsevier Ltd. All rights reserved.
Keywords: Ramp metering; Freeway traffic control; Extremum-seeking regulators
1. Introduction
Ramp metering, when properly applied, is a valuable tool for efficient traffic management onfreeways and freeway networks. According to a recent overview (Papageorgiou and Kotsialos,2002), ramp metering strategies may be classified into:
(a) Reactive strategies (tactical level) aiming at maintaining the freeway traffic conditions close topre-specified set (desired) values by the use of real-time measurements and
* Corresponding author. Tel.: +30-38210-37289; fax: +30-28210-69568.
E-mail addresses: [email protected] (E. Smaragdis), [email protected] (M. Papageorgiou), [email protected]
(E. Kosmatopoulos).1 Tel.: +30-28210-37309; fax: +30-28210-69568.2 Tel.: +30-28210-37306; fax: +30-28210-69568.
0191-2615/$ - see front matter � 2003 Elsevier Ltd. All rights reserved.
doi:10.1016/S0191-2615(03)00012-2

252 E. Smaragdis et al. / Transportation Research Part B 38 (2004) 251–270
(b) Proactive strategies (strategic level) aiming at specifying optimal traffic conditions for a wholefreeway or a freeway network based on demand and model predictions over a sufficiently longtime horizon.
Both kinds of metering strategies may be combined within a hierarchical control structure,whereby a proactive network-wide strategy delivers optimal traffic conditions to be used as set(desired) values by sub-ordinate reactive strategies.Reactive ramp metering strategies may be local or coordinated. Local strategies make use of
traffic measurements in the vicinity of each ramp, to calculate the corresponding individual rampmetering values, while coordinated strategies may use available traffic measurements from greaterportions of a freeway. Local strategies are far more easy to design and implement; nevertheless,they have proved non-inferior to more sophisticated coordinated approaches under recurrenttraffic congestion conditions (Papageorgiou et al., 1997).The most well-known local ramp metering strategies are the demand-capacity (DC) strategy
(Masher et al., 1975), the occupancy (OCC) strategy (Masher et al., 1975) and ALINEA (Pa-pageorgiou et al., 1991). The DC and OCC strategies are feedforward disturbance–rejectionschemes that are based on mainstream measurements of flow and occupancy, respectively, up-stream of the ramp; on the other hand ALINEA is a feedback regulator that is based on main-stream measurements of occupancy downstream of the ramp. It is probably due to this feedbackstructure that ALINEA was found to lead to significantly better performance as compared to DCand OCC strategies in several comparative field-evaluations (Papageorgiou et al., 1997). Ac-cording to a recent report (Kenis and Tebebos, 2001), ALINEA has been implemented in varioussites in five European countries.Recent applications of ALINEA revealed a number of issues and needs that are not sufficiently
covered by ALINEA or other available local ramp metering strategies, including:
(i) Use of upstream (rather than downstream) measurements.(ii) Use of flow-based (rather than occupancy-based) set values and measurements.(iii) Automatic, real-time adaptation of set values, so as to maximize the downstream freeway
flow.(iv) Efficient ramp-queue control to avoid interference with surface street traffic.
These needs give rise to a line of new developments aiming at modifying and extending theALINEA strategy, so as to broaden the applicability spectrum of local ramp metering and improveits performance. Smaragdis and Papageorgiou (2003) suggested three new local ramp meteringcontrollers that address the aspects (i) and (ii) above, in isolation or in combination; the same paperproposes a suitable procedure to address aspect (iv). This paper suggests two further local rampmetering algorithms that address aspect (iii) in isolation or in combination with (i); preliminarysimulation testing of the new strategies employing a macroscopic traffic flow model is also reported.The rest of this paper is organized as follows. Section 2 provides some basic information re-
garding the ALINEA strategy and the employed simulation environment. Sections 3 and 4 pre-sent the motivation, the details, the features and the simulation results obtained for the new localramp metering algorithms AD-ALINEA and AU-ALINEA, respectively, while Section 5 sum-marizes the main conclusions and outlines intended future work.

E. Smaragdis et al. / Transportation Research Part B 38 (2004) 251–270 253
2. Background and frame of investigations
2.1. The ALINEA strategy
Local ramp metering strategies make use of real-time traffic measurements in the vicinity of afreeway ramp, to calculate suitable ramp metering flows. The strategies are activated at each timeinterval T , whose value is typically selected from the range 20 to 60 s. More specifically, at the endof each running period T , period-averaged measurements of traffic volume (flow) and occupancyare used to calculate (via the corresponding strategy) the ramp flow to be implemented in the nextperiod.The feedback ramp metering strategy ALINEA (Papageorgiou et al., 1991, 1997) reads (see
Fig. 1)
rðkÞ ¼ rðk � 1Þ þ KR½o_ � ooutðk � 1Þ� ð1Þ
where k ¼ 1; 2; . . . is the discrete time index; rðkÞ is the ramp flow (in veh/h) to be implementedduring the new period k; ooutðk � 1Þ is the last measured downstream freeway occupancy (in %)(averaged over all lanes); KR > 0 is a regulator parameter and o
_is a set (desired) value for the
downstream occupancy. Typically, but not necessarily, o_ ¼ ocr may be selected, in which case the
downstream freeway flow becomes close to qcap, the downstream freeway capacity (see Fig. 2 for aqualitative sketch of the well-known fundamental diagram). ALINEA is an I-type regulator (seeIsermann, 1981, or any basic textbook on Automatic Control), that is the control input rðkÞ isobtained via integration (over time) of the control error o
_ � oðk � 1Þ. As a consequence it is easilyseen that at a stationary state (i.e. if the upstream freeway flow qin is constant and hence all othervariables obtain stationary values �rr and �ooout), o
_ ¼ �ooout results from (1), independently of the inflowvalue �qqin that is not explicitly used in the strategy. Note that the same value of KR has been used inall known simulation or field applications of ALINEA without any need for fine-tuning.The ramp flow rðkÞ resulting from (1) is truncated if it exceeds a range [rmin, rmax], where rmin is a
minimum admissible ramp flow and rmax is the ramp�s flow capacity. This calculated and truncatedramp flow value is used as rðk � 1Þ in (1) in the next time step, to avoid the well-known wind-up
Fig. 1. Illustration of ALINEA strategy.

Fig. 2. The fundamental diagram.
254 E. Smaragdis et al. / Transportation Research Part B 38 (2004) 251–270
effect of I-type regulators. The application of ramp metering may lead to the formation of an on-ramp queue; if the queue length exceeds a certain limit, such that interference with the surfacestreet traffic appears likely, ramp metering is temporarily disengaged (queue override) to allow adecrease of the ramp queue, see also Smaragdis and Papageorgiou (2003) for a more efficientqueue-control procedure.ALINEA reacts smoothly even to slight errors o
_ � ooutðk � 1Þ, thus stabilizing the traffic flowaround the set value. Comparative field-evaluations in various countries demonstrated the clearsuperiority of ALINEA as compared to feedforward ramp metering strategies (Papageorgiouet al., 1997).
2.2. Simulation environment
This paper suggests suitable modifications and extensions of ALINEA that enable some newaspects and needs to be taken into account. The proposed new strategies are tested by use of themacroscopic simulator METANET (Technical University of Crete and Messmer, 2000), in orderto investigate and demonstrate their basic impact and characteristics. METANET employs avalidated second-order macroscopic traffic flow model (Papageorgiou et al., 1990), which isdeemed sufficient for a first investigation of the proposed ramp metering strategies; further testingusing microscopic simulation and field implementation at the Autobahn A94 near Munich,Germany, are planned for the near future within the European project RHYTHM (http://www.ist-rhythm.com/index.htm).The simulation investigations aim at testing and demonstrating the control impact of the
strategies according to their specific control goal. To avoid interference of various phenomenathat may deter attention from the specific control tasks, the simulation is conducted for a long,homogeneous three-lane freeway axis of 3 km with a single on-ramp located at km 2. Themainstream capacity (resulting from the utilized model parameter values) is about 6000 veh/h andis obtained at density values in the range of 35–40 veh/km/lane. The space and time discretizationintervals for the macroscopic simulation model amount to 250 m and 5 s, respectively. ‘‘Up-stream’’ measurements used by some ramp metering strategies correspond to the macroscopicvariables of the segment just upstream of the ramp, while ‘‘downstream’’ measurements corre-spond to the macroscopic traffic variables of the segment where the on-ramp is merging (Fig. 3a).Traffic density q is used in the controllers in place of traffic occupancy, because density is the

Fig. 3. Simulation environment: (a) freeway topology and discretization and (b) the utilized demand scenario.
E. Smaragdis et al. / Transportation Research Part B 38 (2004) 251–270 255
variable closest to occupancy that may be directly provided by the macroscopic simulator.The time interval T used for all controllers in all investigations amounts to 30 s. The mini-mum admissible ramp flow rmin is set equal to 400 veh/h while the ramp�s flow capacity is rmax ¼1600 veh/h.The same trapezoidal demand scenario displayed in Fig. 3 for the mainstream and the on-ramp
is used in all investigations over a time horizon of 4 h. More specifically, the demand starts withlow values and increasing tendency; about 70 min later the total demand of mainstream and on-ramp exceeds the freeway capacity and remains at over-capacity levels for about 100 min beforereturning to low values. This demand scenario, which is quite typical for a peak period, wasselected in order to test the strategy performance under different traffic conditions. Each inves-tigation is performed twice:
(i) With deterministic demands (as in Fig. 3b) and deterministic modeling equations in META-NET in order to assess the control performance under visually clear conditions.
(ii) With stochastic noise added to both the demands of Fig. 3b and to some modeling equationsin METANET, in order to test the control behavior in a typical noisy environment; the sameseries of stochastic numbers is generated for all reported investigations.

256 E. Smaragdis et al. / Transportation Research Part B 38 (2004) 251–270
2.3. Preliminary simulation results
Fig. 4 displays the simulation results obtained in the cases of no control and ALINEA ap-plication for the deterministic (i) and stochastic (ii) scenarios.In the no-control case, the density (Fig. 4a) reaches the critical range at about t ¼ 75 min, at
which time the traffic volume (Fig. 4c) reaches the capacity level of 6000 veh/h; as the densitycontinues to increase (congestion) due to the uncontrolled high demand, the outflow drops tovalues around 5500 veh/h; the created congestion persists until about t ¼ 210 min, after whichdensity and flow return to low values in accordance with the low demand.In the ALINEA case, the density trajectory is identical to the one of no control until about
t ¼ 85 min, after which it gets stabilised on the set value of q_ ¼ 37:5 veh/h, leading to a stable
capacity flow of 6000 veh/h (Fig. 4c).Figs. 3, 4b and d display similar control and no-control behaviour as above, albeit only with
regard to average values due to the introduced noise. For comparison, Fig. 5 presents a sample offield results obtained via ALINEA application (in Glasgow, Scotland) based on occupancies. Theresemblance with the simulation results of Fig. 4 is apparent. Note that the occupancy values ofFig. 5 start drifting from the set value o
_ ¼ 26% after 17:50 h due to lack of demand, similarly toFig. 4b after t ¼ 170 min.Clearly the ramp metering action leads to the formation and dissipation of a ramp queue, but
no queue-override actions are applied in the investigations of this paper so as to focus attention on
Fig. 4. ALINEA versus no-control results, downstream traffic density qoutðkÞ: (a) deterministic and (b) stochasticscenario, and downstream traffic volume qoutðkÞ: (c) deterministic and (d) stochastic scenario.

Fig. 5. Sample of ALINEA field implementation results in Glasgow, Scotland: o_ ¼ 26% and resulting trajectory
ooutðkÞ.
E. Smaragdis et al. / Transportation Research Part B 38 (2004) 251–270 257
the mainstream impact of the ramp metering strategies. Note that, due to the higher outflow, thedensity under ALINEA becomes undercritical much earlier (at t ¼ 175 min), i.e. the demand isbeing served earlier than in the no-control case. Thus the ramp metering action leads to a cor-responding reduction of the total time spent by all vehicles, including those of the ramp queue.
3. A new adaptive ramp metering strategy (AD-ALINEA)
3.1. Motivation
The ALINEA ramp metering strategy is very efficient in stabilizing the freeway traffic condi-tions downstream of the on-ramp around the selected set-value o
_. If ALINEA is operated in an
isolated way, the typical control goal is the maximization of the downstream freeway flow qout, inwhich case o
_ ¼ ocr should be chosen according to Fig. 2. On the other hand, if local ramp me-tering is operated as part of a more comprehensive network-wide strategy, the set value may besuitably specified (and changed) in real time by a superior coordinating control layer (or anoperator) so as to achieve an overall control objective (see Papageorgiou and Kotsialos, 2002);even in this case, however, the superior control message for several on-ramps may be flowmaximization, i.e. o
_ ¼ ocr.In short, whenever the downstream flow maximization is the goal of ALINEA, the set value o
_
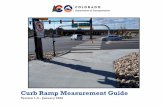
should be set equal to the critical occupancy ocr, which must therefore be known before ALINEAcan be applied to this end. The value of ocr may be estimated visually from a (qout; oout)-diagramwhere measurement points covering a broad range of traffic conditions (free, critical, congested)have been plotted, see e.g. Fig. 6a where, by visual inspection, ocr ¼ 17%. Clearly, there is aninterest in avoiding the necessity for this preparatory procedure if possible. Moreover, this pro-cedure of ocr-specification may not be feasible or fully satisfactory under certain conditions dis-cussed below.

Fig. 6. Plotted (qout; oout)-measurements for three ramps (taken from Jia et al., 2000).
258 E. Smaragdis et al. / Transportation Research Part B 38 (2004) 251–270
(i) The largest part of most freeways around the world are virtually never operated at capacity.As typical examples, consider the California freeway investigated by Jia et al. (2000) or theringroad of Paris, France, (Papageorgiou et al., 1990) or of Amsterdam, the Netherlands,(Kotsialos and Papageorgiou, 2001) which experience serious recurrent congestion duringevery day�s peak hour. Recurrent congestions typically start at the same location and timeevery day, and the corresponding shock-wave spreads in the upstream direction, reachingmany up-stream on-ramps at a time the freeway flow there is still far from capacity; as a con-sequence, freeway measurement points (qout; oout) selected near these upstream ramps are seento ‘‘jump’’ from free to congested conditions without ever covering the area of the critical oc-cupancy (Fig. 6b); hence the value of ocr can hardly be extracted from available measurementsfor these ramps. On the other hand, freeway sections located downstream of the recurrentcongestion may never experience traffic conditions near capacity (Fig. 6c), hence the valueof ocr cannot be determined for the corresponding on-ramps neither.
(ii) The critical occupancy ocr was found to be less sensitive than the capacity qcap with respect tochanging environmental conditions (darkness, rain, etc.) or traffic composition (e.g. percent-age of trucks), see Keen et al., 1986. Nevertheless, even ocr is subject to change due to envi-ronmental conditions, in which case it would be desirable for the set values o
_to track in
real time the changing values of ocr.
For the above reasons, there is an interest in designing a local ramp metering regulator thatautomatically maximizes the freeway flow qout without having to rely on constant pre-specified setvalues o
_ ¼ ocr. This is an extremum-seeking feedback control problem (see e.g. Krsti�cc and Wang,

E. Smaragdis et al. / Transportation Research Part B 38 (2004) 251–270 259
1997; Pan and Ozg€uuner, 2002) for a process including significant external disturbances (such asqin) and various constraints (such as rmin, rmax, ramp queue override).The approach pursued in this paper is to design an estimation algorithm that utilizes real-time
measurements qoutðk � 1Þ, ooutðk � 1Þ and attempts to produce estimates ~oocrðkÞ of the currentlyprevailing critical occupancy, for which the freeway flow qout is maximized. The produced esti-mates ~oocrðkÞ are subsequently used as set values by the ordinary ALINEA strategy according toFig. 7. The complete local ramp metering strategy is given the name AD-ALINEA (adaptiveALINEA). Note that in Control Engineering a control strategy is called adaptive if it includes adevice that adapts specific internal parameters on the basis of real-time measurements.
3.2. Estimation algorithm for ocr
The main idea behind the developed estimation algorithm for the critical occupancy is to firstestimate the derivative D ¼ dqout=doout at the current estimate ~oocrðk � 1Þ. If the derivative D issufficiently positive (respectively, negative), the new estimate ~oocrðkÞ is produced by adding (re-spectively, subtracting) an increment D (e.g. D ¼ 1%) to the current estimate ~oocrðk � 1Þ. On theother hand, if the value of the derivative D is found to be around zero, the new estimate ~oocrðkÞ isset equal to ~oocrðk � 1Þ. This procedure is executed in real time, using measurements qoutðk � 1Þ andooutðk � 1Þ. However, the time period TE of the estimation algorithm may be a multiple of the timeperiod T of ALINEA.The basic steps of the real-time estimation algorithm implementing the outlined procedure are
given below and are discussed in more detail in what follows.
(a) Enter the new measurements qoutðk � 1Þ and ooutðk � 1Þ.(b) If j~oocrðk � 1Þ � ooutðk � 1Þj > P1 then ~oocrðkÞ ¼ ~oocrðk � 1Þ; go to (e).(c) Produce/update the estimated derivative D ¼ dqout=doout at ~oocrðk � 1Þ.
Fig. 7. Basic structure of AD-ALINEA.

260 E. Smaragdis et al. / Transportation Research Part B 38 (2004) 251–270
D if D > Dþ8>
(d)<
~oocrðkÞ ¼ ~oocrðk � 1Þ þ �D if D < D�
0 else:>: ð2Þ
(e) Set o_ðkÞ ¼ ~oocrðkÞ for ALINEA.
Step (b) above checks whether the new measurements actually reflect traffic conditions near thecurrent set value o
_ðk � 1Þ ¼ ~oocrðk � 1Þ. This will be mostly the case if ALINEA works properly,i.e. if no constraints (rmin, rmax, queue override) are active. This check is necessary to assure thatthe derivative D will indeed be produced for traffic conditions near the current estimate ~oocrðk � 1Þ.In view of the noise magnitude in Fig. 5, a value of P1 ¼ 3% appears appropriate (althoughslightly different values may prove more appropriate in field implementations). Thus, ifj~oocrðk � 1Þ � ooutðk � 1Þj > P1, the algorithm will refrain from producing a new estimate (i.e.~oocrðkÞ ¼ ~oocrðk � 1Þ will be set for the running period).Step (d) above includes the parameters Dþ P 0 (respectively, D�
6 0) which define the region ofsufficient positivity (respectively, negativity) of the derivative D that will lead to an incrementationof the estimate. Fig. 8 visualizes the step function expressed in (2). The current ~oocr-estimate is notchanged if D is found to lie within the dead zone [D�;Dþ]; note that jDþj > jD�j is chosen toreflect the non-symmetric form of the fundamental diagram around ~oocr; note also that, if D ¼ 1%is indeed selected, then from (2) Dþ (or D�) may be understood as the least acceptable increase ofthe outflow qout that should lead to a change of the estimate of ocr. For example, if Dþ ¼ 25 veh/h/% and D ¼ 1%, a new estimate will only be produced if D > 25 veh/h/%, i.e. only if the expectedincrease of the outflow exceeds 25 veh/h.From a Control Engineering viewpoint, the action of AD-ALINEA may be viewed as a cascade
control system comprising two control loops (Fig. 9). The inner control loop corresponds to theclassical ALINEA action while the outer control loop is due to the proposed adaptation of the setvalue o
_. The inner control loop is much faster, hence its transfer function may be assumed equal
to 1 (i.e. o_ oout) when designing the outer loop controller. Under this assumption, the process
under outer control is a static DðooutÞ-function and the control goal is to drive D close to a setvalue D
_
¼ 0. In view of the proportional (static) character of the process under control, an I-type
Fig. 8. Adaptation function for ~oocr.

Fig. 9. AD-ALINEA�s cascade control loop.
E. Smaragdis et al. / Transportation Research Part B 38 (2004) 251–270 261
regulator appears adequate, and this is indeed the type of regulator implemented via the incre-mentation mechanism of (2).The estimation of the derivative D in step (c) above is of paramount importance for the proper
functioning of the overall adaptive procedure. An encountered difficulty when estimating D in astochastic environment is due to the high correlation of the stochastic time-series qoutðkÞ andooutðkÞ; in fact, small stochastic traffic flow perturbation waves are characterized by small changes(around a slower moving average) of qout and oout that have usually the same sign for bothvariables. As a consequence, D-estimates derived on the basis of the qoutðkÞ and ooutðkÞ mea-surements have the tendency to be positively biased. Possible countermeasures include:
1. Longer estimation periods to lower the stochastic variations of qoutðkÞ and ooutðkÞ.2. Asymmetric parameters jDþj > jD�j in (2) to counter the positively biased D-estimates.
In the following, we will present two alternative methods for the real-time estimation of D instep (c). The first method is simpler but was found in the simulation investigations to be moresensitive to the choice of various included parameters. The second method is slightly morecomplex but proved more robust in the simulation investigations. Experimentation with realtraffic should enable the final decision on the method to be adopted.
3.3. Simple derivative estimation
The derivative D may be simply estimated at each time step by calculating first
dðkÞ ¼ Dqoutðk � 1Þ=Dooutðk � 1Þ ð3Þ
where D ðk � 1Þ ¼ ðk � 1Þ � ðk � 2Þ are time differences of the involved measurements (to bemore precise, ðk � 2Þ is the last measurement that passed the test of step (b)), and eventuallyapplying an exponential filter
DðkÞ ¼ adðkÞ þ ð1� aÞDðk � 1Þ ð4Þ
where a 2 ð0; 1Þ is a constant smoothing parameter.Eqs. (3) and (4) are executed in step (c) of the estimation algorithm at each time interval.
Dðk � 1Þ is set equal to zero so as to restart the derivative estimation whenever a non-zero in-crementation of ~oocrðk � 1Þ is decided in step (d).

262 E. Smaragdis et al. / Transportation Research Part B 38 (2004) 251–270
3.4. Kalman-filter based derivative estimation
The main idea behind the Kalman-filter based estimation of the derivative D is to use real-timemeasurements qoutðk � 1Þ, ooutðk � 1Þ (that pass the check of step (b)) to fit a straight line
qout ¼ Dðoout � ~oocrÞ þ E ð5Þ
i.e. to recursively estimate the parameters D (veh/h/%) and E (veh/h) around the current estimate~oocr (Fig. 10).The state vector x of the Kalman filter comprises both parameters x ¼ ½D E�T with stateequation (random walk)
xðkÞ ¼ xðk � 1Þ þ zðkÞ ð6Þ
and output equationyðkÞ ¼ cðkÞxðkÞ þ wðkÞ ð7Þ
where, in view of (5), y ¼ qout and c ¼ ½ðoout � ~oocrÞ 1�; zðkÞ and wðkÞ are the system and outputnoise, respectively, whose covariance matrices will determine the dynamic tracking properties ofthe resulting Kalman filter. More specifically, if the covariance Z of the system noise is set rel-atively high, compared to the covariance W of the output noise, the filter will tend to be moresensitive to output errors yðkÞ � cðkÞx_ðk � 1Þ because the gain vector Hðk � 1Þ in (8) will tend tobe higher. In view of the physical significance and corresponding units of the stochastic variableszðkÞ and wðkÞ, the following choice of covariance matrices appears appropriateZ ¼ 102 0
0 104
� �; W ¼ 104:
The resulting Kalman filter reads
x_ðkÞ ¼ x
_ðk � 1Þ þHðk � 1Þ½yðkÞ � cðkÞx_ðk � 1Þ� ð8Þ
where the filter gain vector HðkÞ is calculated fromHðk � 1Þ ¼ ½Pðk � 1Þ þ Z�cðkÞTfcðkÞ½Pðk � 1Þ þ Z�cðkÞT þW g�1 ð9Þ
Fig. 10. Illustration of the D-estimation procedure; black dots are (qout; oout)-measurements.

E. Smaragdis et al. / Transportation Research Part B 38 (2004) 251–270 263
while the error covariance matrix P is updated via
PðkÞ ¼ ½Pðk � 1Þ þ Z� �Hðk � 1ÞcðkÞ½Pðk � 1Þ þ Z�: ð10Þ
The recursive Eqs. (8)–(10) of the Kalman filter call for suitable initial values x_ð0Þ and Pð0Þ at thestart. Note that, if D 0, then E may be viewed as the capacity of the freeway stretch downstreamof the ramp. Hence, in view of the physical significance of the parameters D, E, the initial statemay be chosen x
_ð0Þ ¼ ½0 2000 k�T (where k is the number of lanes of the freeway in question)while the initial covariance Pð0Þ ¼ Z appears appropriate.The Eqs. (8)–(10) of the Kalman filter are executed in step (c) of the estimation algorithm at
each time interval. Whenever a non-zero incrementation of ~oocrðk � 1Þ is decided in step (d), x_and
P must be reset to the above initial values to lance the new round of D-estimation around the newestimate ~oocrðkÞ.
3.5. Simulation results
AD-ALINEA was tested in the simulation environment described in Section 2.2 under variousconditions. With the simple method of D-estimation, the utilized parameter values were D ¼ 1veh/km/lane, P1 ¼ 3 veh/km/lane, Dþ ¼ 50 km/h, D� ¼ �10 km/h, a ¼ 0:3.Fig. 11 displays the adaptive behaviour of AD-ALINEA for various estimation periods TE
(stochastic scenario). More precisely, ~qqcr ¼ 25 veh/km/lane is set within AD-ALINEA at thebeginning of the simulation while maximum flows of 6000 veh/h are reached in METANET fordensities in the range 35–40 veh/km/lane. The far too low initial estimate ~qqcr remains unchangeddue to the test of step (b) as long as the traffic density is well below ~qqcr. At about t ¼ 50 min, thedensity approaches 25 veh/km/lane (see Fig. 4) and the tracking is actually activated; the adap-tation is de-activated at t ¼ 180 min when the density falls below ~qqcr due to lack of demand. Bestresults are obtained for TE equal to 1 and 2 min. For TE ¼ 5 min, the adaptation appears ratherslow. For TE ¼ 30 s the adaptation mechanism overreacts in positive direction due to the corre-lation of qout and qout, as mentioned in Section 3.2. This deficient behaviour when the estimationperiod TE is too low, is also demonstrated in Fig. 11b, where an initial estimate ~qqcr ¼ 50 veh/km/lane was used; it may be seen that the qcr-estimates diverge for TE ¼ 30 s while the adaptationworks properly for TE ¼ 1 min. All subsequent results are based on TE ¼ 1 min.Fig. 12 displays the behaviour of AD-ALINEA for various initial values of ~qqcr. Fig. 12a reflects
the deterministic scenario of Section 2.2 while Figs. 5 and 12b–d were obtained for the stochasticscenario. Figs. 5, 12a and b demonstrate the good adaptive capabilities of AD-ALINEA underboth deterministic and stochastic conditions. The density trajectories (Fig. 12c) follow closely therespective real-time changing set values via the action of the subordinate ALINEA. The corre-sponding traffic volumes (Fig. 12d) are indeed maximized, leading to an earlier drop of the trafficdensity, as compared to the also displayed no-control case, similarly to Fig. 4.In a next experiment, an initial estimate of ~qqcr ¼ 40 veh/km/lane was used, but the critical
density of METANET was reduced abruptly by 7 veh/km/lane at t ¼ 120 min, which reduces themaximum achievable traffic volume from 6000 to 5000 veh/h. AD-ALINEA should track thischange automatically in the aim of flow maximization. Note that in this simulation scenario, thepeak values of the demand profiles of Fig. 3b were altered to 4300 veh/h, respectively, 1800 veh/hfor the mainstream, respectively, the ramp demands due to lower set values. Fig. 13a displays a

Fig. 11. Adaptation of qcr (simple D-estimation), stochastic scenario.
264 E. Smaragdis et al. / Transportation Research Part B 38 (2004) 251–270
good but somewhat ‘‘nervous’’ tracking behaviour for ~qqcr, while the density qout follows closelythe ~qqcr-values due to the ALINEA action. The frequent spikes observed in the correspondingestimated D-trajectory (Fig. 13b) are due to the relatively high value of a in (4); unfortunately, ithas not been possible to obtain satisfactory adaptive behaviour of the algorithm for a-valuesmuch lower than 0.3. The traffic volume (Fig. 13c) is shown to be maximized, taking valuesaround 6000 veh/h before t ¼ 120 min and 5000 veh/h after.AD-ALINEA based on Kalman filter estimation of the derivative D was applied with the same
values of D, P1 and D� but with Dþ ¼ 25 km/h. As mentioned in Section 3.4, the noise covarianceswere Z11 ¼ 102 km2/h2, Z22 ¼ 104 veh2/h2, W ¼ 104 veh2/h2. An adaptation period of TE ¼ 1 minwas chosen on similar grounds as for the simple method.Fig. 14 displays the adaptive behaviour of AD-ALINEA (with Kalman filter) for various initial
values of ~qqcr (stochastic scenario) which is quite similar to the one of Fig. 12b, hence the corre-sponding diagrams of density and traffic volumes are omitted. Fig. 15 displays the behaviour of

Fig. 12. AD-ALINEA results (simple D-estimation).
E. Smaragdis et al. / Transportation Research Part B 38 (2004) 251–270 265
ALINEA when METANET�s critical density is abruptly reduced at t ¼ 120 min. Comparing withthe corresponding diagrams of Fig. 13, we observe a satisfactory adaptive control behaviour,albeit with a smoother D-trajectory leading to less frequent changes of ~qqcr. This is mainly due tothe chosen covariance values in the Kalman filter as mentioned earlier.Summarizing the results of these and further experiments conducted, the Kalman-filter based
AD-ALINEA proved to be smoother in its adaptive behaviour and less sensitive to differentparameter values; in contrast, the simple-estimation AD-ALINEA was much more sensitive to theparameter values and, as mentioned earlier, it failed to converge for several combinations ofvalues, e.g. for a clearly less than 0.3. Field experiments should lead to a final decision as for themost adequate method to be used within AD-ALINEA.
4. Upstream-measurement based adaptive ALINEA (AU-ALINEA)
In some cases the application of AD-ALINEAmay be hindered due to the lack of measurementdevices downstream of the on-ramp. This situation may be present due to previous installation offeedforward strategies or due to other operational reasons. Smaragdis and Papageorgiou (2003)addressed this problem for the ordinary ALINEA strategy. More specifically, they proposed somesimple formulas that allow the real-time estimation of qout and oout based on upstream and rampmeasurements and used these estimated values to feed ALINEA. The same approach is adoptedhere for AD-ALINEA.

Fig. 13. Tracking behaviour of AD-ALINEA (simple D-estimation).
266 E. Smaragdis et al. / Transportation Research Part B 38 (2004) 251–270

Fig. 14. Adaptation of qcr (Kalman filter), stochastic scenario.
E. Smaragdis et al. / Transportation Research Part B 38 (2004) 251–270 267
To produce an estimate for ooutðkÞ, we start with the known relationship (the time index k isomitted for brevity)
qout ¼qoutmout
ð11Þ
where mout is the freeway mean speed downstream of the ramp. An estimate ~qqout of the downstreamflow may be obtained from
~qqout ¼ qin þ qramp ð12Þ
where qramp is the measured ramp flow entering the freeway, which may sometimes be differentfrom the ordered ramp flow r. For an estimate ~mmout of the mean speed we assume~mmout ¼ min ¼qinqin
ð13Þ
where min is the freeway mean speed upstream of the ramp. Although mout may sometimes beslightly lower than min due to the merging process, the approximation is deemed reasonable.Replacing (12) and (13) in (11) and recalling that o ¼ q g, where g is the g-factor, we obtain thefollowing estimate ~oooutðkÞ of the downstream occupancy, based on measurements of the upstreamoccupancy, the upstream flow and the ramp flow
~oooutðkÞ ¼ oinðkÞ 1�
þ qrampðkÞqinðkÞ
�kinkout
� �ð14Þ
where kin, respectively, kout denote the number of mainstream lanes upstream, respectively,downstream of the ramp. The term (kin=kout) results from the accordingly different g-factor for thetwo locations in this case.AU-ALINEA is obtained if the estimates of ~qqoutðkÞ and ~oooutðkÞ from (12) and (14) are used
instead of the related direct measurements, all further calculations and procedures remainingidentical as in AD-ALINEA of Section 3.The simulation results obtained for AU-ALINEA both with the simple method and with the
Kalman filter estimation of the derivative D, are similar to their counterparts of Section 3 and aretherefore omitted here.

Fig. 15. Tracking behaviour of AD-ALINEA (Kalman filter).
268 E. Smaragdis et al. / Transportation Research Part B 38 (2004) 251–270

E. Smaragdis et al. / Transportation Research Part B 38 (2004) 251–270 269
5. Conclusions
An extension of the feedback local ramp metering strategy ALINEA has been proposed thatallows the automatic tracking of the critical occupancy in the aim of mainstream flow maximi-zation. The developed AD-ALINEA strategy may be valuable whenever the critical occupancycannot be estimated beforehand, or is subject to real-time change due to changing environmentalconditions or traffic composition (e.g. trucks). An upstream-measurement based version of theadaptive strategy (AU-ALINEA) has also been proposed. Both strategies were tested successfullyin a stochastic macroscopic simulation environment. Further testing is planned within the Eu-ropean project RHYTHM under real traffic conditions to increase confidence in the trackingcapabilities of the proposed methods as well as to specify suitable values for the parameters in-volved.
Acknowledgements
This research was partly supported by the European Commission�s IST (Information SocietyTechnologies) Program under the project RHYTHM (IST-2000-29427). All statements of thepaper are under the sole responsibility of the authors and do not necessarily reflect EuropeanCommission�s policies or views.
References
Isermann, R., 1981. Digital Control Systems. Springer-Verlag, Berlin, Germany.
Jia, Z., Varaiya, P., Petty, K., Skabardonis, A., 2000. Congestion, excess demand and effective capacity in California
freeways. Available on-line: http://transacct.eecs.berkeley.edu.
Keen, K.G., Schofield, M.J., Hay, G.C., 1986. Ramp metering access control on M6 motorway. In: Proceedings of 2nd
IEE International Conference on Road Traffic Control, London, UK.
Kenis, E., Tebebos, R., 2001. Ramp Metering Synthesis. Report of the Centrico Project, European Commission (DG
TREN), Brussels, Belgium.
Kotsialos, A., Papageorgiou, M., 2001. Nonlinear optimal control applied to coordinated ramp metering in the
Amsterdam ringroad. Preprints of 9th IFAC/IFORS/IMACS/IFIP Symposium on Large Scale Systems Theory and
Applications, Bucharest, Romania, July 18–20, pp. 472–477.
Krsti�cc, M., Wang, H.-H., 1997. Design and stability analysis of extremum seeking feedback for general nonlinear
systems. In: Proceedings of the 36th Conference on Decision and Control, San Diego, California, pp. 1743–1748.
Masher, D.P., Ross, D.W., Wong, P.J., Tuan, P.L., Zeidler, H.M., Petracek, S., 1975. Guidelines for Design and
Operation of Ramp Control Systems. Stanford Research Institute, Menlo Park, California.
Pan, Y., Ozg€uuner, U., 2002. Extremum seeking control with sliding mode. Preprints-CD ROM, 15th IFAC WorldCongress, Barcelona, Spain.
Papageorgiou, M., Blosseville, J.-M., Hadj-Salem, H., 1990. Modelling and real-time control of traffic flow on the
southern part of Boulevard P�eeriph�eerique in Paris––Part I: modelling. Transportation Research 24A, 345–359.Papageorgiou, M., Haj-Salem, H., Blosseville, J-M., 1991. ALINEA: A local feedback control law for on-ramp
metering. Transportation Research Record 1320, 58–64.
Papageorgiou, M., Haj-Salem, H., Middleham, F., 1997. ALINEA local ramp metering: summary of field results.
Transportation Research Record 1603, 90–98.

270 E. Smaragdis et al. / Transportation Research Part B 38 (2004) 251–270
Papageorgiou, M., Kotsialos, A., 2002. Freeway ramp metering: an overview. IEEC Conference on Intelligent
Transportation Systems 3, 271–281.
Smaragdis, E., Papageorgiou, M., 2003. A series of new local ramp metering strategies. In: 82nd Annual Meeting of the
Transportation Research Board, Washington DC, Paper No. 03-3171.
Technical University of Crete, Messmer, A., 2000. The documentation of METANET: a simulation program for
motorway networks. Technical University of Crete, Dynamic Systems and Simulation Laboratory, Greece.
Copyright © 2022 FDOKUMEN