SEMINARIO DE SIMULACIÓN NUMÉRICA EN SISTEMAS DE NUMÉRICA EN SISTEMAS DE PROPULSIÓN
Upload
academiamilitarCategory
view
1download
0
J. A. M. Felippe de Souza 4 - Sistemas
1
4 – Sistemas
4.1 – Introdução aos Sistemas 3
4.2 – Principais Classificações de Sistemas 7
Natureza física 7
Continuidade no tempo 9
Linearidade 10
4.3 – Modelização de Sistemas 11
Exemplo 4.1 14
4.4 – Outras Classificações de Sistemas 17
Variância no tempo 17
Exemplo 4.2 17
Natureza aleatória 18
Memória 19
Exemplo 4.3 19
Inversibilidade 20
Exemplo 4.4 20
Exemplo 4.5 21
Causalidade 22
Exemplo 4.6 22
4.5 – Sistemas Lineares e Invariantes no Tempo (SLIT) 23
4.6 – Propriedades da Convolução 25
4.7 – SLIT sem memória 29

J. A. M. Felippe de Souza 4 - Sistemas
2
4.8 – SLIT inversíveis 30
Exemplo 4.7 32
4.9 – Estabilidade 33
Exemplo 4.8 34
Exemplo 4.9 35
Exemplo 4.10 35
4.10 – Teoria de Sistemas 36
Modelização (‘modeling’) 36
Identificação de parâmetros 36
Controlo de sistemas 36
Optimização 37
Simulação 37
Realimentação (‘ feedback’) 37
Estimação de estados 37
Sistemas robustos 37
Sistemas tolerantes à falhas 37
Processamento paralelo ou distribuído 38
Sistemas ‘fuzzy’ 38
Sistemas inteligentes 38

J. A. M. Felippe de Souza 4 - Sistemas
3
Sistemas 4.1 – Introdução aos Sistemas A noção de sistemas é intuitiva. Quase tudo que nos rodeia é algum tipo de sistema. Qualquer mecanismo, ou dispositivo, que funcione como a internecção de componen-tes físicos é um sistema. Um circuito eléctrico, (com resistências, bobinas e condensadores); ou um circuito electrónico (com transístores, díodos, etc.) são exemplos de sistemas. Na figura 1 vemos um exemplo de cada um destes tipos de circuitos.
Fig. 1 – Um circuito eléctrico (à esquerda) e um circuito electrónico (à direita). Um simples mecanismo como uma alavanca, ou um mecanismo mais complexo como o motor de um carro são também exemplos de sistemas. Na figura 1 vemos um exemplo de cada um destes tipos de mecanismos.

J. A. M. Felippe de Souza 4 - Sistemas
4
Fig. 2 – Uma alavanca, um mecanismo simples(à esquerda), e o motor de um carro,
um mecanismo mais complexo (à direita). Um automóvel, um robô ou um avião (ilustrados na figura 3) são outros exemplos de sistema. São sistemas mais complexos pois dentro deles têm muitos circuitos eléctri-cos e electrónicos assim como muitos mecanismos. Ou seja, são sistemas que pos-suem dentro outros sistemas, ou subsistemas.
Fig. 3 – Um automóvel, um robô e um avião, exemplos de sistemas mais complexos;
sistemas com subsistemas dentro. O corpo humano é também um exemplo de sistema, e de um sistema bastante sofis-ticado, cheio de subsistemas: o sistema circulatório, o sistema respiratório, o apare-lho digestivo, o sistema nervoso, etc., etc. Na verdade, o corpo humano de cada pessoa é um sistema diferente. E cada órgão deste, (seja o cérebro, ou o coração, ou os pulmões, ou o fígado, ou os rins, ou o in-testino, ou o pâncreas, etc.), também é um sistema por si só, ou seja, é um subsistema do mesmo.

J. A. M. Felippe de Souza 4 - Sistemas
5
Fig. 4 – O corpo humano, outro exemplo de um sistema complexo; na verdade, um sistema com muitos subsistemas dentro.
Entretanto, há muitos outros sistemas menos palpáveis que estes exemplificados acima, como por exemplo:
o aquecimento de uma casa; o funcionamento dos elevadores de um edifício; a automação de uma fábrica; a gestão e a economia de um país; etc.
Fig. 5 – O sistema de elevadores de um prédio grande, o sistema de automação de uma indústria, outros exemplos de sistemas bastante complexos.
J. A. M. Felippe de Souza 4 - Sistemas
6
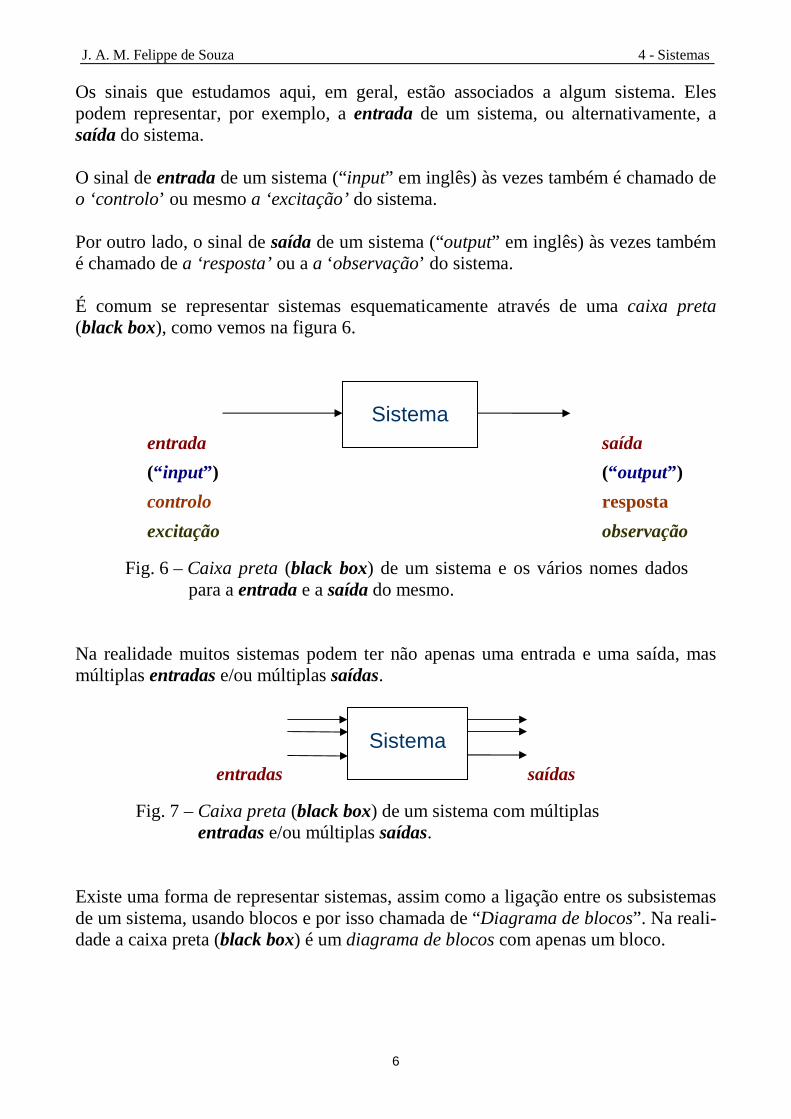
Os sinais que estudamos aqui, em geral, estão associados a algum sistema. Eles podem representar, por exemplo, a entrada de um sistema, ou alternativamente, a saída do sistema. O sinal de entrada de um sistema (“input” em inglês) às vezes também é chamado de o ‘controlo’ ou mesmo a ‘excitação’ do sistema. Por outro lado, o sinal de saída de um sistema (“output” em inglês) às vezes também é chamado de a ‘resposta’ ou a a ‘observação’ do sistema. É comum se representar sistemas esquematicamente através de uma caixa preta (black box), como vemos na figura 6.
entrada saída
(“ input” ) (“ output” )
controlo resposta
excitação observação
Fig. 6 – Caixa preta (black box) de um sistema e os vários nomes dados para a entrada e a saída do mesmo.
Na realidade muitos sistemas podem ter não apenas uma entrada e uma saída, mas múltiplas entradas e/ou múltiplas saídas.
entradas saídas
Fig. 7 – Caixa preta (black box) de um sistema com múltiplas entradas e/ou múltiplas saídas.
Existe uma forma de representar sistemas, assim como a ligação entre os subsistemas de um sistema, usando blocos e por isso chamada de “Diagrama de blocos”. Na reali-dade a caixa preta (black box) é um diagrama de blocos com apenas um bloco.
Sistema
Sistema
J. A. M. Felippe de Souza 4 - Sistemas
7
4.2 – Principais Classificações de Sistemas Há muitas maneiras possíveis de se classificar os sistemas. Nesta secção veremos al-gumas das principais.
Natureza física Quanto a natureza física, sistemas podem ser classificados de muitas formas diferen-tes. Abaixo citamos algumas das principais formas de sistemas que lidamos em enge-nharia e tecnologia:
eléctricos; informáticos;
electrónicos; aeronáuticos;
mecânicos; aeroespaciais;
electromecânicos; biológicos;
térmicos; biomédicos;
hidráulicos; económicos;
ópticos; sociológicos;
acústicos; sócio-económicos;
químicos; etc.
Entretanto, a maioria dos sistemas complexos são combinações de vários subsistemas de naturezas diferentes. Veículos (carros, motocicletas, comboios, aviões, helicópteros, etc) são exemplos de sistemas electromecânicos pois claramente ele tem partes eléctricas e electrónicas nos seus comandos assim como partes mecânicas para os seus movimentos. Outros sistemas complexos que combinam mais de uma natureza das mencionadas acima: computadores, antenas parabólicas para receber emissões de satélites artifici-ais, robôs em geral, seja um braço manipulador robótico encontrados em processos de manufactura nas indústrias ou seja um robô humanóide (que imita o homem) ou antropomórfico (que imita algum ser vivo). Estes sistemas estão ilustrados na figura 8.

J. A. M. Felippe de Souza 4 - Sistemas
8
Fig. 8 – Exemplos de sistemas electromecânicos: um computador portátil, uma antena parabólica, um braço manipulador mecânico, e um robô antropomórfico (que imita um cão).
Na medicina também encontramos muitos sistemas de bioengenharia, ou seja, siste-mas biológicos e biomédicos em simultâneo com sistemas mecânicos, eléctricos ou electrónicos.
Um membro artificial, ou cada aparelho utilizados em cirurgias são alguns exemplos de sistemas biomédicos.
Fig. 9 – Exemplos de sistemas electromecânicos: um membro artificial e equipamentos médicos de uma sala de operação.

J. A. M. Felippe de Souza 4 - Sistemas
9
Continuidade no Tempo Quanto a Continuidade no Tempo, sistemas podem ser classificados como:
contínuos
discretos
discretizados
Fig. 9 – Ilustração do comportamento de um sistema contínuo (à esquerda) e de um
sistema discreto (à direita). Sistemas podem ser naturalmente contínuos, naturalmente discretos, ou contínuos que são tornados discretos e neste caso são chamados de discretizados.
Fig. 10 – Sistema contínuo que foi discretizado tornando-se um sistema discreto.
Quando o sistema que foi digitalizado é armazenado em “bits” (sequências de “zeros” e “uns”) entao diz-se que o sistema foi digitalizado. Isso era o caso em alguns dos sinais que descreviam o comportamento de sintemas nos exemplos que vimos no capítulo anterior: a música em CD, os sistemas digitais de áudio ou de vídeo, e até mesmo os exames de electrocardiogramas e electroencefalogramas que são armaze-nados digitalmente no computador.
J. A. M. Felippe de Souza 4 - Sistemas
10
A digitalização não é o mesmo que a discretização. Normalmente são usados muitos “bits” para armazenar cada posição discreta.
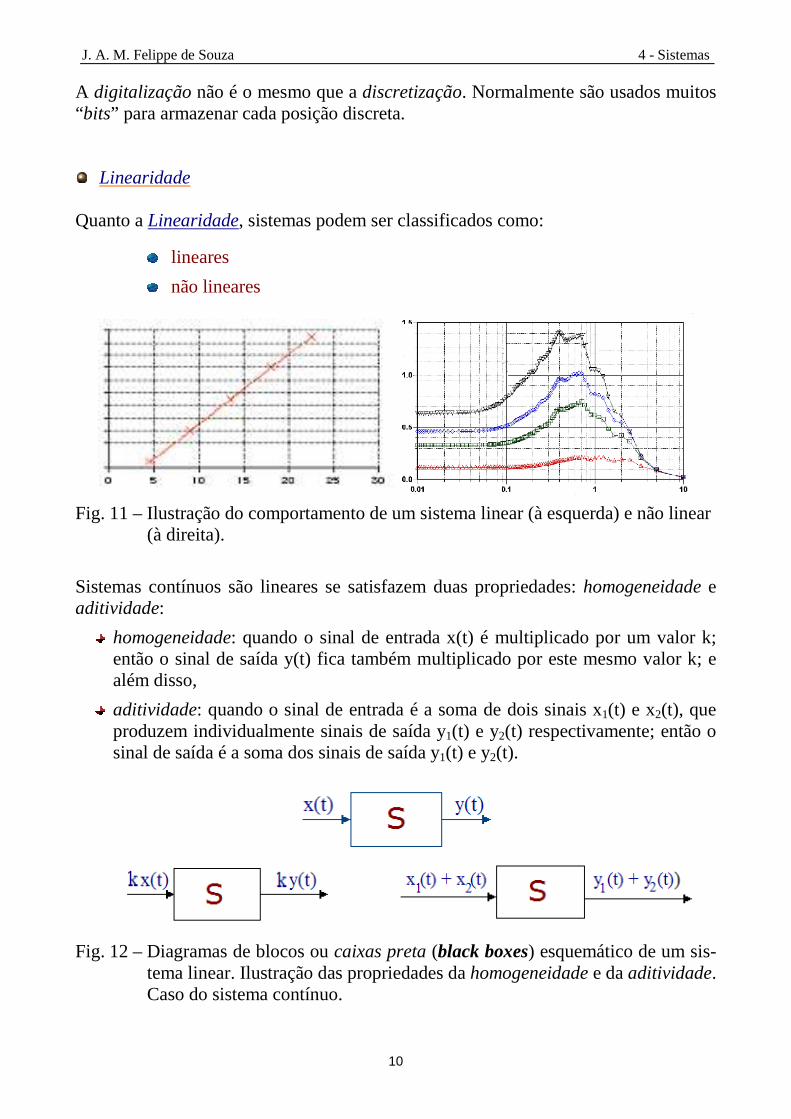
Linearidade Quanto a Linearidade, sistemas podem ser classificados como:
lineares
não lineares
Fig. 11 – Ilustração do comportamento de um sistema linear (à esquerda) e não linear
(à direita).
Sistemas contínuos são lineares se satisfazem duas propriedades: homogeneidade e aditividade:
homogeneidade: quando o sinal de entrada x(t) é multiplicado por um valor k; então o sinal de saída y(t) fica também multiplicado por este mesmo valor k; e além disso,
aditividade: quando o sinal de entrada é a soma de dois sinais x1(t) e x2(t), que produzem individualmente sinais de saída y1(t) e y2(t) respectivamente; então o sinal de saída é a soma dos sinais de saída y1(t) e y2(t).
Fig. 12 – Diagramas de blocos ou caixas preta (black boxes) esquemático de um sis-tema linear. Ilustração das propriedades da homogeneidade e da aditividade. Caso do sistema contínuo.

J. A. M. Felippe de Souza 4 - Sistemas
11
No caso discreto a definição de sistemas lineares é semelhante. Sistemas lineares são aqueles que:
quando o sinal de entrada x[n] é multiplicado por um valor k; então o sinal de saída y[n] fica também multiplicado por este mesmo valor k; e além disso,
quando o sinal de entrada é a soma de dois sinais x1[n] e x2[n], que produzem individualmente sinais de saída y1[n] e y2[n] respectivamente; então o sinal de saída é a soma dos sinais de saída y1[n] e y2[n].
Novamente aqui, estas duas propriedades acima são chamadas respectivamente de: homogeneidade e aditividade.
Fig. 13 – Diagramas de blocos ou caixas preta (black boxes) esquemático de um sis-
tema linear. Ilustração das propriedades da homogeneidade e da aditividade. Caso do sistema discreto.
4.3 – Modelização de Sistemas A ‘modelização’ (em inglês “modeling”) em português às vezes é também traduzido para: ‘modelação’, ou ‘modelamento’, ou até mesmo ‘modelagem’.
A modelização está associada com a construção de um modelo matemático, isto é, forma de representar matematicamente o sistema, o equacionamento.
Os modelos matemáticos adoptados para representar os sistemas são muito comum-mente descritos, ou equacionados:
com Equações de Diferenças [caso discreto]
com Equações Diferenciais Ordinárias (EDO) [caso contínuo]
com Equações Diferenciais Parciais (EDP) [caso contínuo]
com Equações de Retardo [caso contínuo]

J. A. M. Felippe de Souza 4 - Sistemas
12
As Equações de Diferenças, caso discreto, e as Equações Diferenciais Ordinárias (EDO), no caso contínuo, são as formas mais comuns de representar sistemas em ciências como Física, Química, Biologia, Engenharia, Economia, etc. Há no entanto muitas outras formas de descrever sistemas, como por exemplo:
com Tabelas [caso discreto]
com Fluxogramas ou Gráfico de fluxos [caso discreto ou contínuo]
com Equações Integrais [caso contínuo]
com Equações Integro-Diferenciais [caso contínuo]. embora algumas destas formas não tenham interesse directo para presente este texto sobre análise de sinais. Abaixo apresentamos alguns sistemas discretos, para exemplificar, que são descritos por Equações de Diferenças:
Fig. 14 – Caixas preta (black box) esquemático de um sistema discreto.
Sistema I:
[ ] [ ] [ ] [ ] [ ]1nx4nx2ny21ny7ny −−=−+−+ Sistema II:
[ ] [ ]1nx4ny −−= Sistema III:
[ ] [ ] [ ] [ ]nx21nx1nyn5ny −+=−− Sistema IV:
[ ] [ ]( ) [ ]nx4nx2ny 2 −= Sistema V:
[ ] [ ]3 2nxny =
J. A. M. Felippe de Souza 4 - Sistemas
13
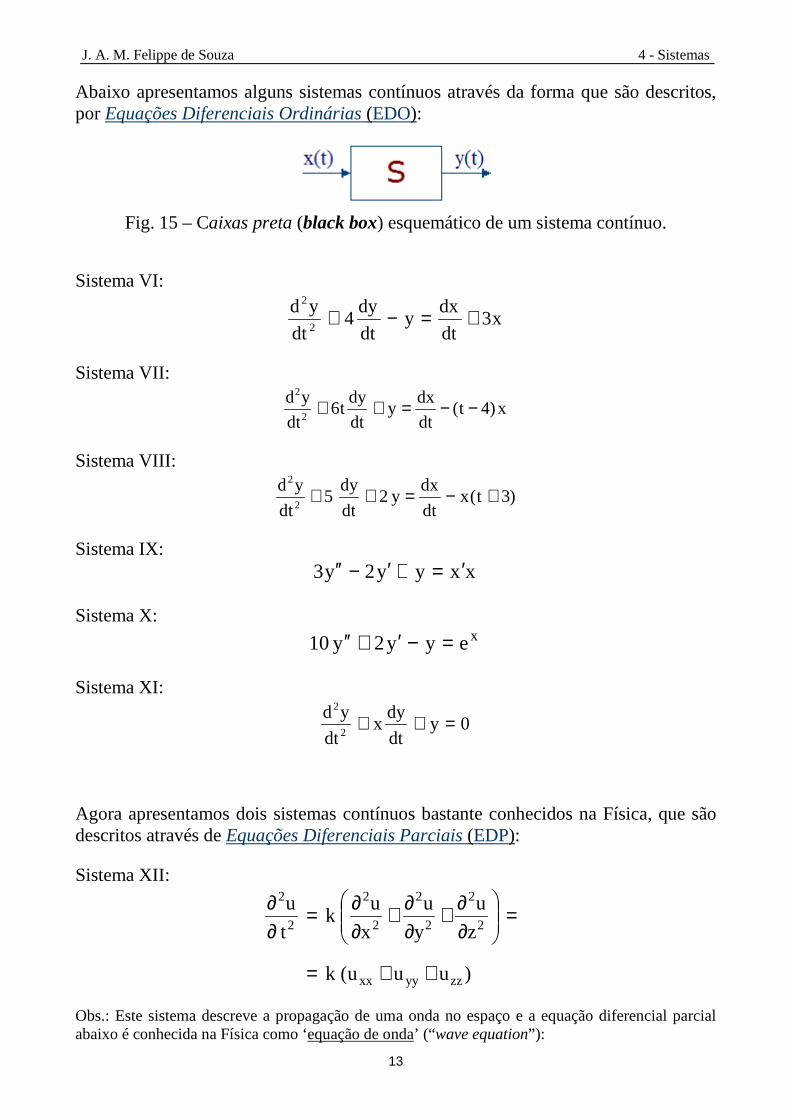
Abaixo apresentamos alguns sistemas contínuos através da forma que são descritos, por Equações Diferenciais Ordinárias (EDO):
Fig. 15 – Caixas preta (black box) esquemático de um sistema contínuo.
Sistema VI:
x3dt
dxy
dt
dy4
dt
yd2
2
+=−+
Sistema VII:
x)4t(dt
dxy
dt
dyt6
dt
yd2
2
−−=++
Sistema VIII:
)3t(xdt
dxy2
dt
dy5
dt
yd2
2
+−=++
Sistema IX:
xxyy2y3 ′=+′−′′ Sistema X:
xeyy2y10 =−′+′′ Sistema XI:
0ydt
dyx
dt
yd2
2
=++
Agora apresentamos dois sistemas contínuos bastante conhecidos na Física, que são descritos através de Equações Diferenciais Parciais (EDP): Sistema XII:
)uuu(k
z
u
y
u
x
uk
t
u
zzyyxx
2
2
2
2
2
2
2
2
++=
=
∂∂+
∂∂+
∂∂=
∂∂
Obs.: Este sistema descreve a propagação de uma onda no espaço e a equação diferencial parcial abaixo é conhecida na Física como ‘equação de onda’ (“ wave equation”):

J. A. M. Felippe de Souza 4 - Sistemas
14
Sistema XIII:
)uuu(k
z
u
y
u
x
uk
tu
zzyyxx
2
2
2
2
2
2
++=
=
∂∂+
∂∂+
∂∂=
∂∂
Obs.: Este sistema descreve a propagação do calor no espaço e a equação diferencial parcial abaixo é conhecida na Física como ‘equação de calor’ (“ heat equation”): Agora apresentamos dois exemplos de sistemas contínuos que são descritos através de Equações de Retardo: Sistema XIV:
) x(t y(t) δ−= Sistema XV:
x(t))y(t3y(t) (t)y' =τ−−+ Sistema XVI:
]nx[n5y[n] δ−= Finalmente apresentamos exemplos de sistemas discretos e contínuos que são descri-tos por Equações Algébricas: Sistema XVII:
7 x(t)2 y(t) −= Sistema XVIII:
32x(t) (t)x y(t) 2 +−−= Sistema XIX:
x[n]2 y[n] −= Sistema XX:
x[n])cos(21 y[n] ⋅π−= Exemplo 4.1:
Vamos classificar os sistemas acima quanto à continuidade no tempo (contínuo ou discreto) e quanto à linearidade (linear ou não linear).

J. A. M. Felippe de Souza 4 - Sistemas
15
Sistema I: [ ] [ ] [ ] [ ] [ ]1nx4nx2ny21ny7ny −−=−+−+
(sistema discreto e linear) Sistema II:
[ ] [ ]1nx4ny −−= (sistema discreto e linear)
Sistema III:
[ ] [ ] [ ] [ ]nx21nx1nyn5ny −+=−− (sistema discreto e linear)
Sistema IV:
[ ] [ ]( ) [ ]nx4nx2ny 2 −= (sistema discreto e não linear)
Sistema V:
[ ] [ ]3 2nxny =
(sistema discreto e não linear) Sistema VI:
x3dt
dxy
dt
dy4
dt
yd2
2
+=−+
(sistema contínuo e linear) Sistema VII:
x)4t(dt
dxy
dt
dyt6
dt
yd2
2
−−=++
(sistema contínuo e linear) Sistema VIII:
)3t(xdt
dxy2
dt
dy5
dt
yd2
2
+−=++
(sistema contínuo e linear) Sistema IX:
xxyy2y3 ′=+′−′′ (sistema contínuo e não linear)
Sistema X:
xeyy2y10 =−′+′′ (sistema contínuo e não linear)

J. A. M. Felippe de Souza 4 - Sistemas
16
Sistema XI:
0ydt
dyx
dt
yd2
2
=++
(sistema contínuo e não linear)
Sistema XII:
)uuu(kz
u
y
u
x
uk
t
uzzyyxx2
2
2
2
2
2
2
2
++=
∂∂+
∂∂+
∂∂=
∂∂
(sistema contínuo e linear)
Sistema XIII:
)uuu(kz
u
y
u
x
uk
t
uzzyyxx2
2
2
2
2
2
++=
∂∂+
∂∂+
∂∂=
∂∂
(sistema contínuo e linear)
Sistema XIV: ) x(t y(t) δ−=
(sistema contínuo e linear)
Sistema XV: x(t))y(t3y(t) (t)y' =τ−−+
(sistema contínuo e linear)
Sistema XVI: ]nx[n5y[n] δ−=
(sistema discreto e linear)
Sistema XVII: 7 x(t)2 y(t) −=
(sistema contínuo e não linear)
Sistema XVIII:
32x(t) (t)x y(t) 2 +−−= (sistema contínuo e não linear)
Sistema XIX: x[n]2 y[n] −=
(sistema discreto e linear)
Sistema XX: x[n])cos(21 y[n] ⋅π−=
(sistema discreto e não linear)
J. A. M. Felippe de Souza 4 - Sistemas
17
4.4 – Outras Classificações de Sistemas
Variância no tempo Quanto a Variância no Tempo, sistemas podem ser classificados como:
variantes no tempo
invariantes no tempo
Fig. 16 – A variância no tempo de um sistema está associada às características dinâ-
micas do mesmo, se elas se alteram ou não com o tempo. Um sistema invariante no tempo é aquele que para um sinal de entrada x(t), o sinal de saída é y(t), não importa quando é aplicada esta entrada. Ou seja, as condições dinâmicas do sistema não mudam com o passar do tempo. Na realidade nenhum sistema é invariante no tempo, mas na prática consideramos como invariante no tempo muitos sistemas cuja variação no tempo é muito lenta.
Exemplo 4.2:
Nos sistemas I a XX descritos acima temos que apenas o sistema III e o sistema VII são variantes no tempo, Sistema III:
[ ] [ ] [ ] [ ]nx21nx1nyn5ny −+=−− (sistema variante no tempo)
Sistema VII:
x)4t(dt
dxy
dt
dyt6
dt
yd2
2
−−=++
(sistema variante no tempo)

J. A. M. Felippe de Souza 4 - Sistemas
18
pois um ou mais de seus coeficientes variam com o tempo (seja ‘t’ ou ‘n’). Os demais sistemas são invariantes no tempo.
Natureza aleatória
Quanto a Natureza Aleatória, sistemas podem ser classificados como:
determinísticos
estocásticos
Fig. 17 – A natureza aleatória de um sistema está associada às incertezas e perturba-ções aleatórias na dinâmicas do mesmo.
Um sistema determinístico é aquele que não sofre a influência de nenhuma perturba-ção aleatória, ou seja, não tem incerteza. O sinal de saída y(t) para um sinal de entrada x(t) pode ser calculado (ou “determinado”) com precisão quando se conhece o modelo do sistema. Na realidade, aqui novamente, nenhum sistema é determinístico. Todos os sistemas têm algum tipo de incerteza ou carácter aleatório e portanto chamados de estocásticos. Na prática entretanto consideramos como determinísticos muitos sistemas cujas per-turbações aleatórias são pequenas ou desprezíveis. Os sistemas I a XX acima são todos descritos por modelos matemáticos determinísti-cos: equações de diferenças, EDO ou EDP determinísticas. No caso de sistemas estocásticos, estas equações apresentariam variáveis adicionais de natureza aleatória que descreveriam estatisticamente as incertezas associadas à dinâmica do sistema.

J. A. M. Felippe de Souza 4 - Sistemas
19
Memória Quanto a Memória, sistemas podem ser classificados como:
sem memória
com memória Um sistema sem memória é aquele que: se o seu sinal de saída no instante t1 depende apenas do sinal de entrada daquele instante t1.
Exemplo 4.3:
Nos sistemas I a XX acima temos que os sistemas IV, V, XVII, XVIII, XIX e XX são sem memória: Sistema IV:
[ ] [ ]( ) [ ]nx4nx2ny 2 −= (sistema sem memória)
Sistema V:
[ ] [ ]3 2nxny =
(sistema sem memória) Sistema XVII:
7 x(t)2 y(t) −= (sistema sem memória)
Sistema XVIII:
32x(t) (t)x y(t) 2 +−−= (sistema sem memória)
Sistema XIX:
x[n]2 y[n] −= (sistema sem memória)
Sistema XX:
x[n])cos(21 y[n] ⋅π−= (sistema sem memória)
pois a saída y[n], ou y(t), depende da entrada x[n], ou x(t), apenas nos instantes de tempo (‘t’ ou ‘n’). Os demais são sistemas com memória pois dependem da entrada x[n] nos instantes (n–1), (n–2), etc; ou de derivadas em relação ao tempo ‘t’.

J. A. M. Felippe de Souza 4 - Sistemas
20
Inversibilidade
Quanto a Inversibilidade, sistemas podem ser classificados como:
inversíveis
não inversíveis Sistemas são inversíveis se entradas distintas levam a saídas distintas. Desta forma, para um sistema S com sinal de entrada x[n], ou x(t), que produz um sinal de saída y[n], ou y(t), respectivamente, é possível achar um sistema inverso S-1 cuja entrada y[n], ou y(t), produz a saída x[n], ou x(t), respectivamente. Através de um esquema em que os sistemas S e S-1 são postos em cascata, (isto é, a saída y(t) do Sistema S é a entrada do Sistema S-1), podemos recuperar x(t), o sinal de entrada aplicado em S, na saída de S-1.
Fig. 18 – Diagrama de bloco esquemático de um sistema inversível S em cascata com
o seu inverso S-1. Exemplo 4.4:
Os sistemas XVII e XIX acima são inversíveis. Sistema XVII:
7 x(t)2 y(t) −=
(sistema inversível) Sistema XIX:
x[n]2 y[n] −= (sistema inversível)
Obviamente, nestes dois sistemas, cada sinal de entrada x, produz um sinal de saída y exclusivo, diferente das saídas das outras entradas. Por isso o sinal de entrada x pode ser expresso em termos do sinal de saída y como:
x(t) = ½ (y(t) + 7),
no caso do sistema XVII, e

J. A. M. Felippe de Souza 4 - Sistemas
21
x[n] = – y[n]/2,
no caso do sistema XIX. Exemplo 4.5:
O sistema XIV acima também é inversível. Sistema XIV:
y(t) = x(t – δ) (sistema inversível) Este é o chamado sistema com retardo (“time delay system”) pois a saída reproduz a entrada com um atraso de δ unidades de tempo. Alternativamente, podemos ver o sistema com retardo (“time delay system”) como sendo uma translação (“shift”) para a direita de δ unidades de tempo. Pode-se facilmente verificar que para este sistema, sinais de entrada x(t) distintos pro-duzem sinais de saída y(t) distintos. Além disso, o sinal de entrada x(t) expresso em termos do sinal de saída y(t) é de facto: x(t) = y(t + δ) eq. (4.1) que é conhecido como sistema em avanço (“time advance system”) pois neste caso o sinal de saída x(t) reproduz o que será o sinal de entrada y(t) em δ unidades de tempo depois. Podemos ver também o sistema em avanço (“time advance system”) como sendo uma translação (“shift”) para a esquerda de δ unidades de tempo que obviamente também é a operação inversa translação (“shift”) para a direita do sistema com retardo. No caso discreto o sistema com retardo (“time delay system”) tem a forma: y[n] = x[n – nδ ]. eq. (4.2) Alternativamente, podemos ver o sistema com retardo (“time delay system”) como sendo uma translação (“shift”) para a direita de nδ unidades de tempo. O sistema inverso, o sistema em avanço (“time advance system”) que expressa x[n] em função de y[n] é
x[n] = y[n + nδ] eq. (4.3)

J. A. M. Felippe de Souza 4 - Sistemas
22
Podemos ver também o sistema em avanço (“time advance system”) como sendo uma translação (“shift”) para a esquerda de nδ unidades de tempo que obviamente também é a operação inversa translação (“shift”) para a direita do sistema com retardo. Causalidade Quanto a Causalidade, sistemas podem ser classificados como:
causais (ou não antecipativos)
não causais (ou antecipativos) Um sistema é causal (ou não antecipativo) se a saída no instante t1 depende da entrada apenas nos instantes 1tt ≤ . É claro que se a saída no instante t1 dependesse da entrada em instantes t > t1 então este sistema anteciparia o que ia acontecer e portanto seria “antecipativo” ou não causal. No nosso mundo físico real, se a variável ‘t’ (ou ‘n’ no caso discreto) representa o tempo, então tem uma dinâmica que evolui no tempo e portanto não é possível se ter um sistema não causal pois não é possível se prever o futuro. Entretanto, há casos que a esta variável ‘t’ (ou ‘n’ no caso discreto) pode representar outro parâmetro ou uma outra grandeza física (que não seja o tempo) e desta forma já é possível ocorrer sistemas causais. Exemplo 4.6:
Nos sistemas I a XX acima temos que apenas sistema III é não causal (ou antecipa-tivo): Sistema III:
[ ] [ ] [ ] [ ]nx21nx1nyn5ny −+=−−
(sistema não causal ou antecipativo) pois a saída y[n] depende da entrada x[n] no instante de tempo (n+1). Os demais são sistemas causais (ou não antecipativos).
Entretanto, no Exemplo 4.5 acima, os sistemas em avanço (“time advance systems”) das equações eq. (4.1) e eq. (4.3) são também claramente exemplos de sistemas não causais ou antecipativos.

J. A. M. Felippe de Souza 4 - Sistemas
23
4.5 – Sistemas lineares e Invariantes no tempo (SLIT) No caso particular de Sistemas L ineares e Invariantes no Tempo chamaremos de SLIT. Na literatura inglesa estes sistemas são chamados de “LTI systems” (Linear time invariant systems). Em um SLIT usa-se a notação de h[n] e h(t) para as respostas do sistema à entrada impulso, uo[n] ou uo(t), respectivamente. Isso é ilustrados nas figuras 19 e 20. Esta “resposta ao impulso” h[n] ou h(t), também chamada de “reposta impulsional”, traz consigo informações intrínsecas dos sistema que permite se calcular a resposta à qualquer outra entrada x(t).
Resumindo:
h[n] = a saída do sistema quando a é entrada impulso, uo[n], (caso discreto),
Fig. 19 – Diagrama de bloco ou caixa preta (black box) esquemático de h[n], a saída do sistema quando a é entrada impulso uo[n] (sistema discreto).
e,
h(t) = a saída do sistema quando a é entrada impulso uo(t), (caso contínuo).
Fig. 20 – Diagrama de bloco ou caixa preta (black box) esquemático de h(t), a saída
do sistema quando a é entrada impulso uo(t) (sistema contínuo). Um resultado clássico em Teoria de Sistemas é que:
No caso discreto, a saída de um sistema linear invariante no tempo (SLIT) toma a forma de uma soma de convolução:
[ ] [ ] [ ][ ] [ ]kxknh
nxnhny
k
⋅−=
∗=
∑∞+
−∞=
eq. (4.4)
J. A. M. Felippe de Souza 4 - Sistemas
24
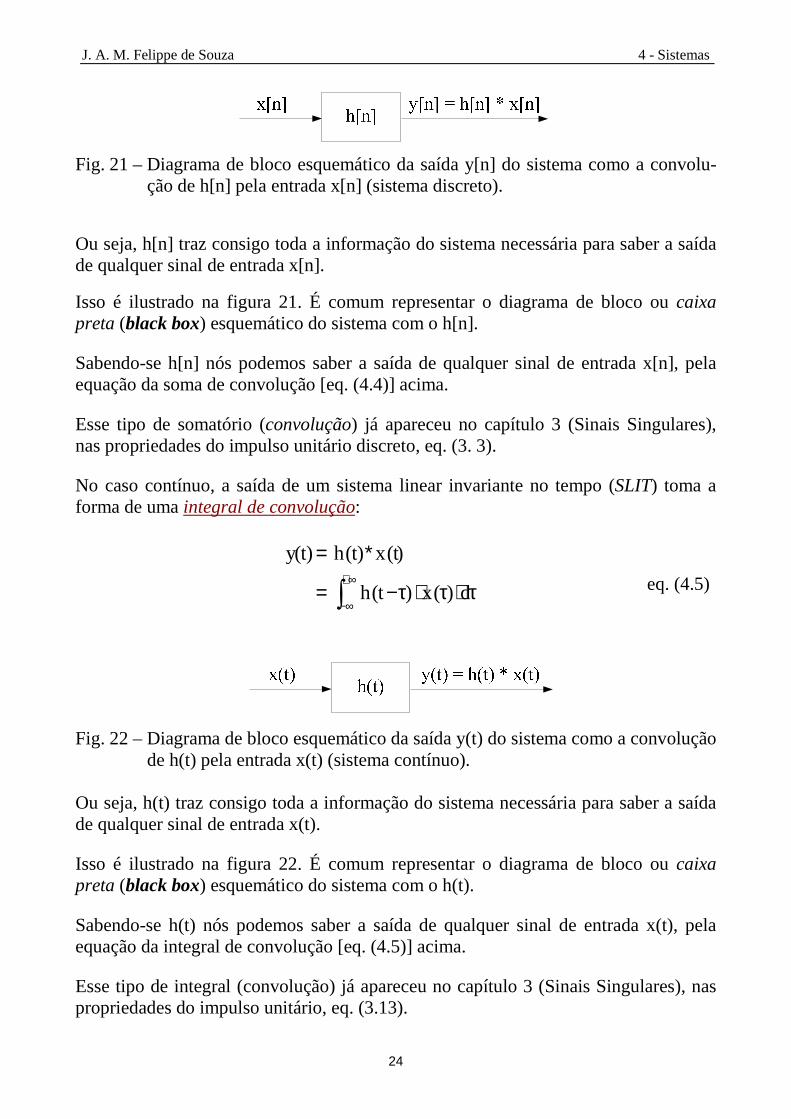
Fig. 21 – Diagrama de bloco esquemático da saída y[n] do sistema como a convolu-ção de h[n] pela entrada x[n] (sistema discreto).
Ou seja, h[n] traz consigo toda a informação do sistema necessária para saber a saída de qualquer sinal de entrada x[n].
Isso é ilustrado na figura 21. É comum representar o diagrama de bloco ou caixa preta (black box) esquemático do sistema com o h[n]. Sabendo-se h[n] nós podemos saber a saída de qualquer sinal de entrada x[n], pela equação da soma de convolução [eq. (4.4)] acima. Esse tipo de somatório (convolução) já apareceu no capítulo 3 (Sinais Singulares), nas propriedades do impulso unitário discreto, eq. (3. 3). No caso contínuo, a saída de um sistema linear invariante no tempo (SLIT) toma a forma de uma integral de convolução:
τ⋅τ⋅τ−=
∗=
∫∞+
∞−d)(x)t(h
)t(x)t(h)t(y
eq. (4.5)
Fig. 22 – Diagrama de bloco esquemático da saída y(t) do sistema como a convolução de h(t) pela entrada x(t) (sistema contínuo).
Ou seja, h(t) traz consigo toda a informação do sistema necessária para saber a saída de qualquer sinal de entrada x(t). Isso é ilustrado na figura 22. É comum representar o diagrama de bloco ou caixa preta (black box) esquemático do sistema com o h(t). Sabendo-se h(t) nós podemos saber a saída de qualquer sinal de entrada x(t), pela equação da integral de convolução [eq. (4.5)] acima. Esse tipo de integral (convolução) já apareceu no capítulo 3 (Sinais Singulares), nas propriedades do impulso unitário, eq. (3.13).

J. A. M. Felippe de Souza 4 - Sistemas
25
4.6 – Propriedades da Convolução A convolução, definida na secção anterior, como uma operação que é, satisfaz algu-mas propriedades. Aqui vamos mencionar as 3 principais:
a) Propriedade Comutativa
b) Propriedade Distributiva
c) Propriedade Associativa
A Propriedade Comutativa:
[ ] [ ] [ ] [ ]nhnxnxnh ∗=∗
)t(h)t(x)t(x)t(h ∗=∗ Pela propriedade comutativa podemos concluir que, no caso discreto, a resposta y[n] de um sistema linear invariante no tempo (SLIT) tanto pode ser a convolução de h[n] * x[n] como também pode ser a convolução de x[n] * h[n] . Ou seja, a eq. (4.4) acima é equivalente à
[ ] [ ] [ ] [ ] [ ]
[ ] [ ] [ ] [ ].khknxnhnx
kxknhnxnhny
k
k
⋅−=∗=
=⋅−=∗=
∑
∑∞+
−∞=
+∞
−∞=
Semelhantemente, a propriedade comutativa permite concluir que, no caso contínuo, a resposta y(t) de um sistema linear invariante no tempo (SLIT) tanto pode ser a con-volução de h(t) * x(t), como também pode ser a convolução de x(t) * h(t). Ou seja, a eq. (4.5) acima é equivalente a
.d)(h)t(x)t(h)t(x
d)(x)t(h)t(x)t(h)t(y
τ⋅τ⋅τ−=∗=
τ⋅τ⋅τ−=∗=
∫
∫∞+
∞−
+∞
∞−

J. A. M. Felippe de Souza 4 - Sistemas
26
A Propriedade Distributiva:
[ ] [ ]( ) [ ] [ ] [ ] [ ] [ ]nxnhnxnhnxnhnh 2121 ∗+∗=∗+
( ) )t(x*)t(h)t(x)t(h)t(x)t(h)t(h 2121 +∗=∗+
Por outro lado a propriedade distributiva corresponde ao facto de que se 2 sistemas, S1 e S2, lineares e invariantes no tempo (SLIT), são somados, então a resposta à entrada impulso unitário da soma dos sistemas (S1 + S2) é também a soma ( h1[n] + h2[n] ) no caso discreto ou a soma ( h1(t) + h2(t) ) no caso contínuo, onde obviamente
h1[n] ou h1(t) = a resposta do sistema S1 à entrada impulso unitário; isto é, a resposta impulsiona do sistema S1;
e
h2[n] ou h2(t) = a resposta do sistema S2 à entrada impulso unitário; isto é, a resposta impulsiona do sistema S2.
Portanto, no caso discreto, a resposta y[n] da soma de 2 sistemas S1 e S2, lineares e invariantes no tempo (SLIT), tanto pode ser a soma das convoluções h1[n] * x[n] com h2[n] * x[n] , como também pode ser a convolução da soma ( h1[n] + h2[n] ) com o sinal de entrada x[n] . Ou seja:
[ ] [ ] [ ] [ ] [ ] [ ] [ ]( ) [ ]nx*nhnhnxnhnxnhny 2121 +=∗+∗=
Semelhantemente, no caso contínuo, a resposta y(t) da soma de 2 sistemas S1 e S2, lineares e invariantes no tempo (SLIT), tanto pode ser a soma das convoluções h1(t) * x(t) com h2(t) * x(t), como também pode ser a convolução da soma ( h1(t) + h2(t) ) com o sinal de entrada x(t). Ou seja:
( ) )t(x)t(h)t(h)t(x)t(h)t(x)t(h)t(y 2121 ∗+=∗+∗=

J. A. M. Felippe de Souza 4 - Sistemas
27
Fig. 23 – Diagrama de bloco esquemático da soma de 2 sistemas S1 e S2 nos quais são
aplicados a mesma entrada x(t) (caso contínuo).
Fig. 24 – Diagrama de bloco equivalente ao diagrama da figura 23 (sistema contínuo).
A Propriedade Associativa:
[ ] [ ]( ) [ ] [ ] [ ] [ ]( )nxnhnhnxnhnh 2121 ∗∗=∗∗
( ) ( ))t(x)t(h)t(h)t(x)t(h)t(h 2121 ∗∗=∗∗
A propriedade associativa da convolução diz respeito à sistemas ligados em cascata. Isto é, sistemas em que a saída de um deles é a entrada do outro. A propriedade associativa nos diz que: se 2 sistemas S1 e S2, lineares e invariantes no tempo (SLIT), estão ligados em cascata então a resposta à entrada impulso unitário dos 2 sistemas juntos (S1 e S2) é a convolução ( h1[n] * h2[n] ) no caso discreto ou a convolução ( h1(t) * h2(t) ) no caso contínuo.
Fig. 25 – Diagrama de bloco de 2 sistemas em cascata.
J. A. M. Felippe de Souza 4 - Sistemas
28
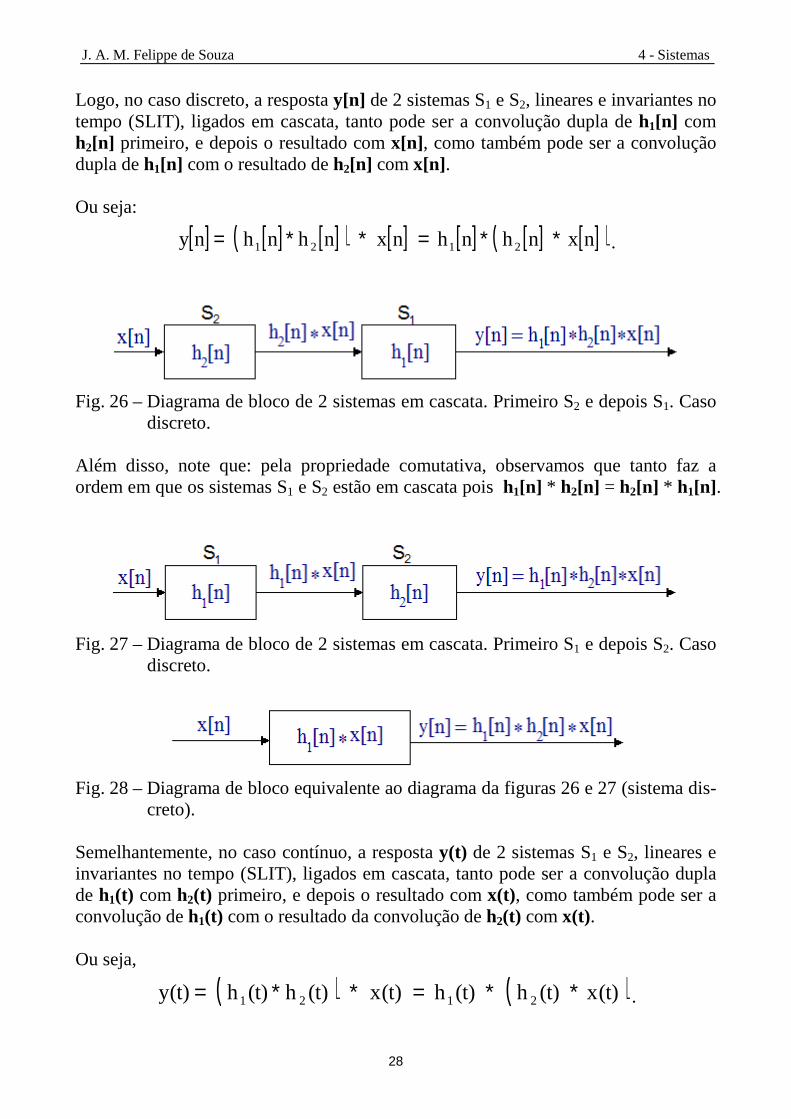
Logo, no caso discreto, a resposta y[n] de 2 sistemas S1 e S2, lineares e invariantes no tempo (SLIT), ligados em cascata, tanto pode ser a convolução dupla de h1[n] com h2[n] primeiro, e depois o resultado com x[n] , como também pode ser a convolução dupla de h1[n] com o resultado de h2[n] com x[n] . Ou seja:
[ ] [ ] [ ]( ) [ ] [ ] [ ] [ ]( )nxnhnhnxnhnhny 2121 ∗∗=∗∗= .
Fig. 26 – Diagrama de bloco de 2 sistemas em cascata. Primeiro S2 e depois S1. Caso
discreto. Além disso, note que: pela propriedade comutativa, observamos que tanto faz a ordem em que os sistemas S1 e S2 estão em cascata pois h1[n] * h2[n] = h2[n] * h1[n] .
Fig. 27 – Diagrama de bloco de 2 sistemas em cascata. Primeiro S1 e depois S2. Caso
discreto.
Fig. 28 – Diagrama de bloco equivalente ao diagrama da figuras 26 e 27 (sistema dis-
creto). Semelhantemente, no caso contínuo, a resposta y(t) de 2 sistemas S1 e S2, lineares e invariantes no tempo (SLIT), ligados em cascata, tanto pode ser a convolução dupla de h1(t) com h2(t) primeiro, e depois o resultado com x(t), como também pode ser a convolução de h1(t) com o resultado da convolução de h2(t) com x(t). Ou seja,
( ) ( ))t(x)t(h)t(h)t(x)t(h)t(h)t(y 2121 ∗∗=∗∗= .
J. A. M. Felippe de Souza 4 - Sistemas
29
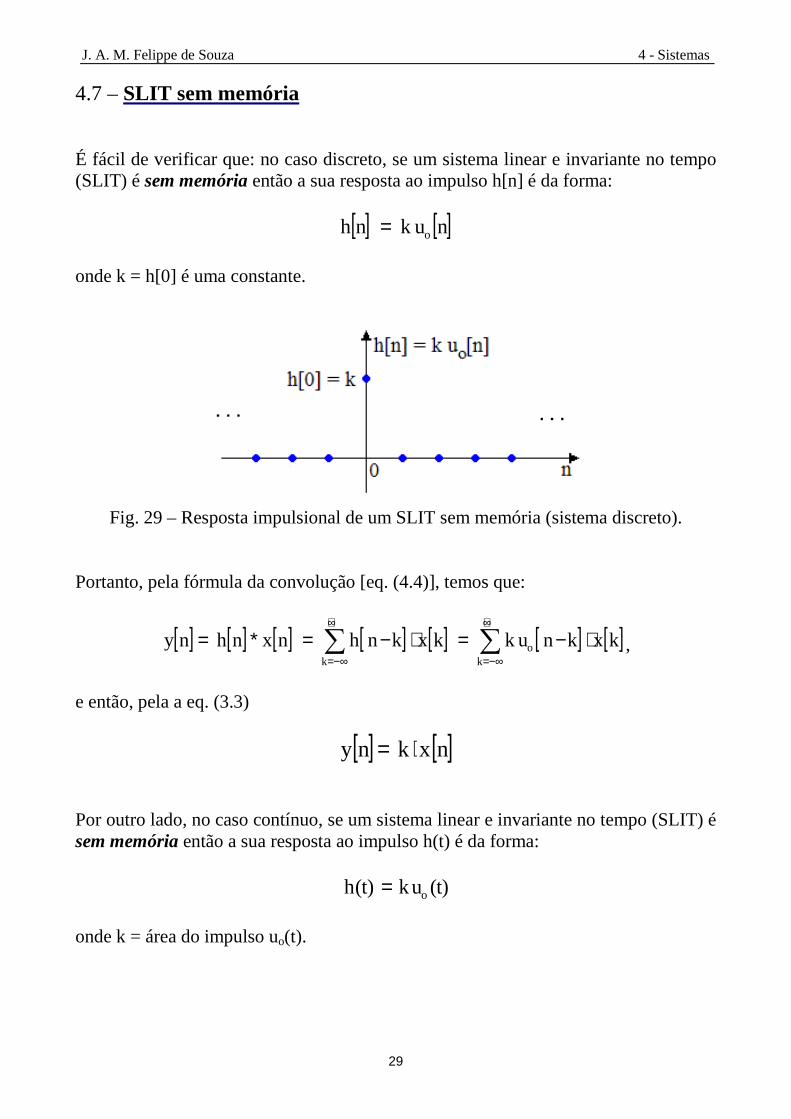
4.7 – SLIT sem memória É fácil de verificar que: no caso discreto, se um sistema linear e invariante no tempo (SLIT) é sem memória então a sua resposta ao impulso h[n] é da forma:
[ ] [ ]nuknh o= onde k = h[0] é uma constante.
Fig. 29 – Resposta impulsional de um SLIT sem memória (sistema discreto).
Portanto, pela fórmula da convolução [eq. (4.4)], temos que:
[ ] [ ] [ ] [ ] [ ] [ ] [ ]kxknukkxknhnxnhnyk
ok
⋅−=⋅−=∗= ∑∑+∞
−∞=
+∞
−∞=,
e então, pela a eq. (3.3)
[ ] [ ]nxkny ⋅= Por outro lado, no caso contínuo, se um sistema linear e invariante no tempo (SLIT) é sem memória então a sua resposta ao impulso h(t) é da forma:
)t(uk)t(h o= onde k = área do impulso uo(t).

J. A. M. Felippe de Souza 4 - Sistemas
30
Fig. 30 – Resposta impulsional de um SLIT sem memória (sistema contínuo).
Portanto, pela fórmula da convolução [eq. (4.5)], temos que, em sistemas SLIT sem memória:
τ⋅τ⋅τ−=τ⋅τ⋅τ−=∗= ∫∫+∞
∞−
+∞
∞−d)(x)t(ukd)(x)t(h)t(x)t(h)t(y o
e então, pela a eq. (3.13)
)t(xk)t(y =
4.8 – SLIT inversíveis Se um sistema linear e invariante no tempo (SLIT) é inversível então a seu inverso também é um SLIT. A figura 31 ilustra a situação para o caso discreto:
Fig. 31 – Caso discreto. Diagrama de blocos de um SLIT inversível em cascata com
seu sistema inverso. A saída do segundo bloco é a própria entrada do pri-meiro bloco.
onde aqui, obviamente:
h1[n] = a resposta do sistema S à entrada impulso unitário; e
h2[n] = a resposta do sistema inverso, S-1, à entrada impulso unitário.

J. A. M. Felippe de Souza 4 - Sistemas
31
A figura 32 ilustra a situação para o caso contínuo:
Fig. 32 – Caso contínuo. Diagrama de blocos de um SLIT inversível em cascata com
seu sistema inverso. A saída do segundo bloco é a própria entrada do pri-meiro bloco.
onde aqui, obviamente:
h1(t) = a resposta do sistema S à entrada impulso unitário; e
h2(t) = a resposta do sistema inverso, S-1, à entrada impulso unitário. No caso discreto temos que o sistema total (“overall system”), em cascata, ambos o sinal de entrada e o sinal de saída são x[n], e portanto este sistema total é a identidade, conforme ilustrado na figura 33. E, como para o sistema identidade, a resposta impulsional h[n] = uo[n], temos então que:
h1[n] * h2[n] = uo[n] eq. (4.6)
Fig. 33 – Caso discreto. Diagrama de blocos de um SLIT inversível em cascata com
seu sistema inverso. O sistema total (“overall system”) é a identidade. Semelhantemente, no caso contínuo temos que o sistema total (“overall system”), em cascata, ambos o sinal de entrada e o sinal de saída são x(t), e portanto este sistema total é a identidade, conforme ilustrado na figura 34.
E, como para o sistema identidade, a resposta impulsional h(t) = uo(t), temos então que:
h1(t) * h2(t) = uo(t) eq. (4.7)

J. A. M. Felippe de Souza 4 - Sistemas
32
Fig. 34 – Caso contínuo. Diagrama de blocos de um SLIT inversível em cascata com
seu sistema inverso. O sistema total (“overall system”) é a identidade.
Exemplo 4.7: Os sistemas com retardo (“time delay systems”) descritos no Exemplo 4.5 acima y[n] = x[n – nδ ] (caso discreto) e
y(t) = x(t – δ) (caso contínuo) são SLIT e temos que as respostas ao impulso unitário h1(t) e h2(t) para os sistemas das equações eq. (4.2) e eq. (4.3) são respectivamente: h1(t) = uo(t – δ) e h2(t) = uo(t + δ) e, pela eq. (3.10), verifica-se que h1(t) e h2(t) satisfazem a eq. (4.7) acima, ou seja,
h1(t) * h2(t) = uo(t). Por outro lado temos que as respostas ao impulso unitário h1[n] e h2[n] para os siste-mas das equações eq. (4.1) e eq. (4.2) são respectivamente: h1[n] = uo[n – nδ ] e h2[n] = uo[n + nδ] e, pela eq. (3.3), verifica-se que h1[n] e h2[n] satisfazem a eq. (4.6) acima, isto é,
h1[n] * h2[n] = uo[n]

J. A. M. Felippe de Souza 4 - Sistemas
33
4.9 – Estabilidade Há muitas definições de estabilidade de sistemas. Uma definição bastante usada para definir estabilidade de sistemas é a seguinte: Definição: Estabilidade de Sistemas: Um sistema é estável se para todo sinal de entrada limitado ele produz um sinal de saída limitado. Às vezes usa-se a sigla BIBO estável para descrever esta definição de estabilidade de sistemas, onde o nome “bibo” vem do idioma inglês:
BIBO = Bounded Input, Bounded Output
(ou seja: “entrada limitada, saída limitada”)
Fig. 35 – Diagrama de blocos ilustrativo de um sistema BIBO estável.
No caso de SLIT (sistemas lineares e invariantes no tempo) temos resultados espe-cíficos para este tipo de estabilidade: Para um SLIT discreto prova-se que: O sistema é estável se e somente se a resposta ao impulso unitário h[n] satisfaz
[ ] ∞∑∞
−∞=
<khk
eq. (4.8)
Um sinal h[n] que satisfaz a equação eq. (4.8) é dito ser absolutamente somável. Portanto, um SLIT discreto é estável se e somente se a resposta ao impulso unitário h[n] é absolutamente somável.

J. A. M. Felippe de Souza 4 - Sistemas
34
Para um SLIT contínuo prova-se que: O sistema é estável se e somente se a resposta ao impulso unitário h(t) satisfaz
∞τ⋅τ∫
∞
∞−
<d)h( eq. (4.9)
Um sinal h(t) que satisfaz a equação eq. (4.9) acima é dito ser absolutamente integrá-vel. Portanto, um SLIT contínuo é estável se e somente se a resposta ao impulso unitário h(t) é absolutamente integrável. Exemplo 4.8:
Tomando-se novamente os sistemas com retardo (“time delay systems”) descritos no Exemplo 4.5 acima
y[n] = x[n – nδ ] (caso discreto) e y(t) = x(t – δ) (caso contínuo) observamos que, no caso discreto
[ ] [ ] 1nnukhk
ok
=−= ∑∑∞
−∞=
∞
−∞=δ
e portanto a eq. (4.8) é satisfeita e o sistema com retardo discreto é estável. Semelhantemente, observamos que, no caso contínuo
1d)(ud)h( o =τ⋅δ−τ=τ⋅τ ∫∫∞
∞−
∞
∞−
e portanto a eq. (4.9) é satisfeita e o sistema com retardo contínuo também é estável. Este resultado é de certa forma óbvio pois um sinal de entrada limitado irá permane-cer limitado após uma translação (shift) para a direita (retardo).

J. A. M. Felippe de Souza 4 - Sistemas
35
Exemplo 4.9:
O sistema discreto cuja relação entre os sinais de entrada/saída é dada pela equação abaixo:
[ ] [ ]∑∞
−∞=
=k
kxny
é chamado de “somador” ou “acumulador”. É fácil observar que h[n], a resposta ao impulso unitário, para este sistema é
h[n] = u1[n] = degrau unitário discreto.
Fig. 36 – O sinal u1[n], degrau unitário discreto.
Este sistema não é estável pois nitidamente não satisfaz a eq. (4.8) uma vez que:
[ ] [ ] ∞=+++== ∑∑∞
−∞=
∞
−∞=
)111(kukhk
1k
K
Ou seja, h[n] deste sistema não é absolutamente somável. Exemplo 4.10:
No caso contínuo, o sistema cuja relação entre os sinais de entrada/saída é dada pela equação abaixo:
( ) ( ) τ⋅τ= ∫ ∞−dxty
t
é chamado de “integrador” ou “acumulador”.

J. A. M. Felippe de Souza 4 - Sistemas
36
É fácil observar que h(t), a resposta ao impulso unitário, para este sistema é
h(t) = u1(t) = degrau unitário contínuo.
Fig. 37 – O sinal u1(t), degrau unitário contínuo.
Este sistema não é estável pois nitidamente não satisfaz a eq. (4.9) uma vez que:
∞=τ=τ⋅τ=τ⋅δ−τ=τ⋅τ∞∞∞∞
∞−∫∫∫
02dd)(ud)h(
2
00
1
Ou seja, h(t) deste sistema não é absolutamente integrável.
4.10 – Teoria de Sistemas O que vimos aqui neste capítulo foram apenas algumas noções básicas de sistemas. Entretanto, a Teoria de Sistemas é muito mais ampla e inclui muitos outros temas de estudo. Abaixo vamos ilustrar alguns dos principais tópicos estudados em Teoria de Sistemas.
Modelização (‘modeling’) Já referido na secção 4.3, a modelização estuda as técnicas de escrever o modelo do sistema. No nosso caso o modelo matemático do sistema.
Identificação de parâmetros Estuda as técnicas de identificar os valores dos parâmetros do modelo. Isto é, encontrar os valores que melhor ajusta o sistema real ao seu modelo.
Controlo de sistemas A “Teoria de Controlo” estuda as técnicas de controlar um sistema, ou seja, conduzir um sistema de um estado inicial para um estado final desejado.

J. A. M. Felippe de Souza 4 - Sistemas
37
Optimização Estuda as técnicas de optimizar o desempenho do sistema.
Simulação Estuda as técnicas de construir um modelo simulado do sistema. A simulação permite que se teste um sistema sem ter que utilizar o próprio sistema real, mas sim o modelo simulado, em um laboratório ou, muito comummente em um computador. Em fase de projecto muitas vezes é necessário testar um sis-tema por muitas vezes e em certos casos os testes danificam ou alteram o desempenho do sistema. Com o uso de simulação essas tarefas são realizadas com o modelo simulado do sistema.
Realimentação (‘ feedback’) Estuda as técnicas de reintroduzir informações da saída na entrada com o objectivo de corrigir o rumo do sistema e desta forma melhorar o desempe-nho e obter a saída desejada.
K
+ -
Y(s)R(s)S
Fig. 38 – Diagramas de blocos de um sistema com realimentação (“feedback”).
Estimação de estado Estuda técnicas de recuperar informações do estado inicial do sistema e desta forma recuperar todos os estados subsequentes.
Sistemas robustos Existem técnicas que tornam sistemas robustos. A robustez é a qualidade de um sistema ficar imune, ou protegido, ou inalterado a eventuais alterações nos parâmetros do modelo, seja por envelhecimento dos componentes ou por variações ambientais como a mudança de temperatura por exemplo.
Sistemas tolerantes à falhas Estuda técnicas de criar sistemas cujo desempenho não é prejudicado em casos de avarias ou falhas.

J. A. M. Felippe de Souza 4 - Sistemas
38
Processamento paralelo ou distribuído Estuda a repartição do processamento de um sistema, com o uso de computa-dores, tal que cada tarefa seja dividida em sub-tarefas que são processadas de forma mais ágil e de forma simultâneas em computadores diferentes e mais acessíveis.
Sistemas ‘fuzzy’ Usando a lógica‘fuzzy’ estuda técnicas que permitem um linguajar mais natural e menos matemático nas comunicações e nas definições de variáveis como o “input” e a “output”.
Sistemas inteligentes Estuda técnicas para serem implementadas em máquinas, robôs, computado-res, etc. de forma a estes poderem realizar tarefas que nós humanos ainda hoje fazemos melhor que a máquina. Em geral são tarefas que nós, os huma-nos, usamos a nossa mente para realizá-las.
o reconhecimento de coisas e objectos. Por exemplo, nós, os humanos, até mesmo uma criança, sabemos distinguir uma maçã de uma pêra, apesar do facto de que não há duas maçãs iguais. Semelhantemente, sabemos distin-guir um cão de um gato, apesar do facto de que há muitas raças diferentes de cães. Nós humanos, até mesmo uma criança, sabemos dizer ao olhar um cesto cheio de frutas quais estão podres e devem ser retiradas. Todas estas tarefas são difíceis para uma máquina realizar.
o reconhecimento de pessoas. Por exemplo, nós humanos, somos capazes de reconhecer fisionomias, mesmo que a pessoa esteja de lado, ou esteja diferente do usual: com bigode ou barba ou cabelo mais comprido, ou usando um chapéu. Somos até capazes de reconhecer uma pessoa mesmo depois de alguns anos sem vê-la e ela já esteja mudada. Uma máquina tem muita dificuldade de fazer reconhecimento de pessoas.
muitas tarefas do nosso dia a dia como: caminhar, falar, ler, escrever, subir e descer escadas, lembrar de nomes, factos ou coisas, conduzir (um veículo), identificar uma placa de trânsito, cozinhar, costurar, etc. etc. Nós humanos usamos o cérebro para realizá-las e é muito difícil ensinar máquinas para fazê-las por nós.
tarefas como: cantar, dançar, tocar um instrumento, compor, redigir um texto, pintar um quadro, ou outras actividades que envolvem arte, são também exemplos de tarefas que é muito difícil ensinar máquinas para fazê-las por nós pois nós, os humanos, usamos o nosso cérebro para rea-lizá-las.
Copyright © 2022 FDOKUMEN