
Fast and stable solution�of banded-plus-semiseparable linear systems
Upload
edithcowanCategory
view
4download
0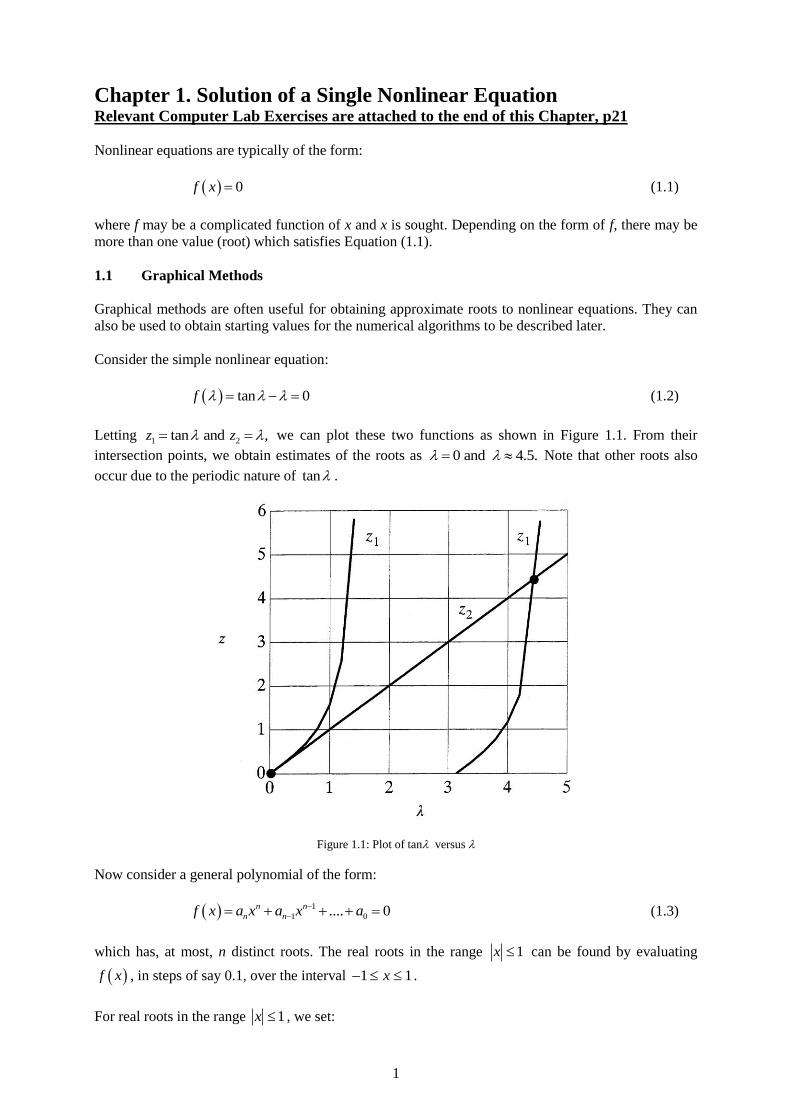
1
Chapter 1. Solution of a Single Nonlinear Equation Relevant Computer Lab Exercises are attached to the end of this Chapter, p21
Nonlinear equations are typically of the form:
0f x (1.1)
where f may be a complicated function of x and x is sought. Depending on the form of f, there may be
more than one value (root) which satisfies Equation (1.1).
1.1 Graphical Methods
Graphical methods are often useful for obtaining approximate roots to nonlinear equations. They can
also be used to obtain starting values for the numerical algorithms to be described later.
Consider the simple nonlinear equation:
tan 0f (1.2)
Letting 1 2tan and ,z z we can plot these two functions as shown in Figure 1.1. From their
intersection points, we obtain estimates of the roots as 0 and 4.5. Note that other roots also
occur due to the periodic nature of tan .
Figure 1.1: Plot of tan versus
Now consider a general polynomial of the form:
1
1 0.... 0n n
n nf x a x a x a
(1.3)
which has, at most, n distinct roots. The real roots in the range 1x can be found by evaluating
f x , in steps of say 0.1, over the interval 1 1x .
For real roots in the range 1x , we set:

2
1x z (1.4)
and rewrite (1.3) as
0)( 1
10
n
nn azazazf (1.5)
We then examine the behaviour of f z over the range 1 1z to find the roots in terms of z.
Once these are known, the roots in terms of x are found from (1.4).
To illustrate this technique, consider the polynomial equation:
3 24 10 2 6 0f x x x x (1.6)
Figure 1.2: Roots of cubic polynomial f x
Figure 1.3: Roots of cubic polynomial f z

3
For the roots in the range 1x we plot the function f x over the domain 1 1x at intervals of
0.2. From the plot of Figure 1.2, we see that roots occur at 0.75 and 0.8.x x For the roots in the
range 1x we plot the function
3 26 2 10 4 0f z z z z (1.7)
over the domain 1 1z at intervals of 0.2. From the plot of Figure 1.3 we see that a root occurs at
0.4.z This implies that a root occurs in the vicinity of 1 0.4 2.5.x
1.2 Bisection Algorithm
The bisection algorithm is one of the simplest methods for solving nonlinear equations. The method,
which is illustrated in Figure 1.4, is very robust and requires only that f x is continuous. To begin
the bisection algorithm, we need two values of lx and ux such that 0l uf x f x , which implies
that andl uf x f x must be of opposite sign. An improved estimate of the root is obtained by
computing the average of the end points lx and ux according to 1
1
2l ux x x
Figure 1.4: The bisection algorithm
If the product of 1f x and lf x is positive, then the new value for lx is set to 1x . Else, the new
value for ux is set to 1x . The whole process is then repeated in an iterative manner until the interval
u lx x becomes small. Thus the key idea behind the bisection method is to repeatedly halve the
interval in which the root must lie. All of the steps involved in the technique are shown in Algorithm
1.1.
Bisection Algorithm
In: End points l ux , x , tolerance , maximum number of iterations M.
Out: Solution x or error message.
f l = f ( x l )
loop i = 1 to M
1 u l
x
x = x + x - x 2
f = f x
if thenx l
l
l x
f f >0
x = x
f = f
else
ux = x
endif

4
if u 1x - x 2 ε then exit with root x
end loop
error: too many iterations.
Algorithm 1.1: The bisection algorithm
In the step which tests for convergence, is a small positive constant which determines the accuracy
of the computed solution. For typical floating point operations with a 32 bit word length, which gives
roughly 7 decimal digits of precision, is typically set somewhere in the range 10-5
to 10-6
. For double
precision arithmetic, where the machine accuracy is increased to approximately 15 decimal digits,
much smaller values can be employed. In most engineering applications, an accuracy of 10-6
is
sufficient.
Note that a variety of checks may be used to test for convergence. Each of these have particular
advantages and disadvantages, some of which will be discussed later in this Section. In the bisection
algorithm we insist that the interval which brackets the root is small so that 2 .u lx x Imposing
this condition guarantees that the best estimate for the root, which is the midpoint 2u ex x x ,
has an absolute error less than or equal to . The absolute sign is required in the test since we are only
interested in the magnitude of u lx x , and not its sign. Since we do not insist that u lx x , this
difference may in fact be negative and the algorithm will still work.
In all numerical methods for solving nonlinear equations, we also have to be careful of multiple roots
which, depending on the function, may be quite close together.
Each iteration of the bisection method halves the interval containing the root. Thus the number of
iterations required for convergence is given by the expression
22
u l
n
x x
(1.8)
or
2
10
10
10
log 2
1log 2
log 2
3.32log 2
u l
u l
u l
n x x
x x
x x
(1.9)
This implies that the number of iterations required for the bisection algorithm can always be estimated
beforehand.
To illustrate the bisection algorithm, consider the solution of the polynomial equation
2 2 3 1 3 0f x x x x x (1.10)
which has roots at 1 and 3.x x Let us start the iterations with the values 1 and 4l ux x
which bracket the positive root and set the convergence tolerance = 0.01. Substituting 3u lx x
and = 0.01, we predict from (1.9) that the algorithm will require precisely 8 iterations to isolate the
root. The iterations proceed as follows:
Input: 1, 4, 0.01l ux x

5
4l lf f x
Iteration 1:
2 2.5l u lx x x x
2.5 1.75xf f
1.75 4 7x lf f
0x lf f
2.5
1.75
l
l x
x x
f f
2 4 2.5 2 0.75u lx x
Iteration 2:
2 3.25l u lx x x x
3.25 1.0625xf f
1.0625 1.75 1.859375x lf f
0x lf f
3.25ux x
2 3.25 2.5 2 0.375u lx x
Iteration 3:
2 2.875l u lx x x x
2.875 0.484375xf f
0.484375 1.75 0.847656x lf f
0x lf f
2.875
0.484375
l
l x
x x
f f
2 3.25 2.875 2 0.1875u lx x
Iteration 4:
2 3.0625l u lx x x x
3.0625 0.253906xf f
0.253906 0.484375 0.122986x lf f
0x lf f
3.0625ux x
2 3.0625 2.875 2 0.09375u lx x
Iteration 5:
2 2.96875l u lx x x x
2.96875 0.124023xf f
0.124023 0.484375 0.060074x lf f
0x lf f
2.96875
0.124023
l
l x
x x
f f
2 3.0625 2.96875 2 0.046875u lx x

6
Iteration 6:
2 3.015625l u lx x x x
3.015625 0.062744xf f
0.062744 0.124023 0.007782x lf f
0x lf f
3.015625ux x
2 3.015625 2.96875 2 0.023438u lx x
Iteration 7:
2 2.992188l u lx x x x
2.992188 0.031189xf f
0.031189 0.124023 0.003868x lf f
0x lf f
2.992188
0.031189
l
l x
x x
f f
2 3.015625 2.992188 2 0.011719u lx x
Iteration 8:
2 3.003906l u lx x x x
3.003906 0.01564xf f
0.01564 0.031189 0.000488x lf f
0x lf f
3.003906ux x
2 3.003906 2.992188 2 0.005859u lx x
0.005859 0.01 3.003906exit with root
To reach the solution with a convergence tolerance of = 0.01, the bisection algorithm thus requires a
total of 8 iterations. This confirms the prediction from equation (1.0). A plot of f x versus iteration
number, shown in Figure 1.5, indicates that the bisection scheme converges relatively slowly.
Figure 1.5: Convergence of bisection algorithm

7
1.3 Regula Falsi Algorithm
In the bisection algorithm, the next estimate for the root is taken simply as an average of the end point
values andl ux x . No attempt is made to predict the likely behaviour of the function within this
interval to obtain an even better estimate.
In the regular falsi algorithm, we assume that the function is linear over the interval ,l ux x as shown
in Figure 1.6.
Figure 1.6: The regula falsi algorithm
Using similar triangles we see that
1
0 l u l
l u l
f x f x f x
x x x x
where 1x is the approximation of the root. Rearranging for 1x gives
1
l u l
l
u l
f x x xx x
f x f x
(1.11)
Once the improved estimate for the root is found, the method proceeds in the same way as the
bisection scheme. If 1 0,lf x f x then the root lies in the interval 1, ux x and the new value for
lx is set to 1x . Else, the root lies in the interval 1,lx x and the new value for ux is set to 1x . This
process ensures that root always lies in the interval ,l ux x and is repeated in an iterative manner
until f x , or ,u lx x becomes small. The fact that the bisection and regula falsi methods always
bracket the root prevents the iterations from diverging and is one of their key advantages. The steps
involved in the regula falsi method are summarised in Algorithm 1.2.
Regula Falsi Algorithm
In: End points l ux , x , tolerance , maximum number of iterations M.
Out: Solution x or error message.
l ef = f x
u uf = f x
loop i = 1 to M
l l u l u l
x
x = x - f x - x f f
f = f x

8
if thenexit withrootxf x
if thenx l
l
l x
f f >0
x = x
f = f
else
u
u x
x = x
f = f
endif
if then exit with rootu 1x - x 2 ε x
end loop
error: too many iterations.
Algorithm 1.2: The regula falsi algorithm
Note that two convergence tests are used at different stages in the algorithm. The first test, which is
done immediately after the new estimate for the root is computed, checks whether the absolute value
of the function is less or equal to . The second test is the same as that used for the bisection method.
The first test is necessary because the regula falsi scheme may obtain a very accurate estimate of the
root but still have a significant difference between lx and .ux
To illustrate the regula falsi algorithm, we again consider the polynomial equation (1.10) with the
starting values 1 and 4l ux x and the convergence tolerance = 0.01.
: 1, 4, 0.01
4
5
l u
l l
u u
Input x x
f f x
f f x
Iteration 1:
2.333333l l u l u lx x f x x f f
2.333333 2.222222
2.222222 0.01
2.222222 4 8.888887
0
x
x
x l
x l
f f
f
f f
f f
2.333333
2.222222
l
l x
x x
f f
2 4 2.333333 2 0.833333u lx x
Iteration 2:
2.846154l l u l u lx x f x x f f
2.846154 0.591715
0.591715 0.01
0.591715 2.222222 1.314923
0
x
x
x l
x l
f f
f
f f
f f
2.846154
0.591715
l
l x
x x
f f

9
2 4 2.846154 2 0.576923u lx x
Iteration 3:
2.968254l l u l u lx x f x x f f
2.968254 0.125977
0.125977 0.01
0.125977 0.591715 0.074543
0
x
x
x l
x l
f f
f
f f
f f
2.968254
0.125977
l
l x
x x
f f
2 4 2.968254 2 0.515873u lx x
Iteration 4:
2.993610l l u l u lx x f x x f f
2.993610 0.025519
0.025519 0.01
0.025519 0.125977 0.003215
0
x
x
x l
x l
f f
f
f f
f f
2.993610
0.025519
l
l x
x x
f f
2 4 2.993610 2 0.503195u lx x
Iteration 5:
2.998720l l u l u lx x f x x f f
2.998720 0.005117
0.0051187 0.01 2.998720
x
x
f f
f exit with root
The convergence of the regula falsi algorithm is shown in Figure 1.7.
Figure 1.7: Convergence of regula falsi algorithm

10
It requires only 5 iterations to converge, compared with the 8 iterations needed for the bisection
scheme. Note that the algorithm terminates with a small value for ,f x even though the difference
between andl ux x is still fairly large.
1.4 Pegasus Algorithm
The regula falsi algorithm may converge slowly if linear interpolation does not estimate the location
of the root accurately. Such cases occur when the iterations approach the root from one side only, as
shown in Figure 1.8. This type of behaviour was indeed observed in the previous example.
Figure 1.8: Problem case for regula falsi algorithm
Figure 1.9: Pegasus algorithm
In the Pegasus algorithm, shown in Figure 1.9, we again assume that the function is linear over the
interval ,l ux x so that the improved estimate for the root is given by equation (1.11). However, if the
function has the same sign for two successive root estimates, uf x is replaced by ug f x where
1 and 0 1,l lg f x f x f x g before proceeding to the next iteration. The same type of
correction is also applied at the other end of the interval when necessary. At all times, the root
remains bracketed. The effect of this simple change, as shown in Figure 1.9, is to accelerate the
convergence of the regula falsi scheme by shifting the estimate toward the true root. An efficient
implementation of the Pegasus scheme is given in Algorithm 1.3.

11
Pegasus Algorithm
In: End points l ux , x , tolerance , maximum number of iterations M.
Out: Solution x or error message.
l lf = f x
u uf = f x
loop i = 1 to M
l l u l u l
x
x = x - f x - x f f
f = f x
if thenexit withrootf xx
if thenx l
u u l l x
f f >0
f = f f f + f
else
u l
u l
x = x
f = f
endif
l
l x
x = x
f = f
if then exit with rootu ex - x 2 ε x
end loop
error: too many iterations.
Algorithm 1.3: Pegasus algorithm
The above implementation is not obvious and needs study to be understood. The algorithm uses the
fact that the linear interpolation formula of (1.11) can be used to obtain the new estimate for x,
regardless of whether ux is greater or smaller than .lx
To illustrate the Pegasus algorithm, we again consider the polynomial equation (1.10) with the
starting values 1 and 4l ux x and the convergence tolerance = 0.01.
: 1, 4, 0.01
4
5
l u
l l
u u
Input x x
f f x
f f x
Iteration 1:
2.333333
2.333333 2.222222
2.222222 0.01
l l u l u lx x f x x f f
f x f
f x
2.222222 4 8.888887lf x f x
0lf x f x
3.214286u u l l xf f f f f
2.333333
2.222222
2 4 2.333333 2 0.833333
l
l
u l
x x
f f x
x x
12
Iteration 2:
3.014599
3.014599 0.058608
0.058608 0.01
0.058608 2.222222 0.130239
0
l l u l u l
l
l
x x f x x f f
f x f
f x
f x f x
f x f x
2.333333
2.222222
u l
u l
x x
f f
3.014599
0.058608
2 2.333333 3.014599 2 0.340633
l
l
u l
x x
f f x
x x
Iteration 3:
2.997093
2.997093 0.011620
0.011620 0.01
0.011620 0.0558608 0.000681
0
l l u l u l
l
l
x x f x x f f
f x f
f x
f x f x
f x f x
3.014599
0.058608
u l
u l
x x
f f
2.997093
0.011620
2 3.014599 2.997093 2 0.008753
l
l
u l
x x
f f x
x x
0.008753 0.01 2.997093exit withroot
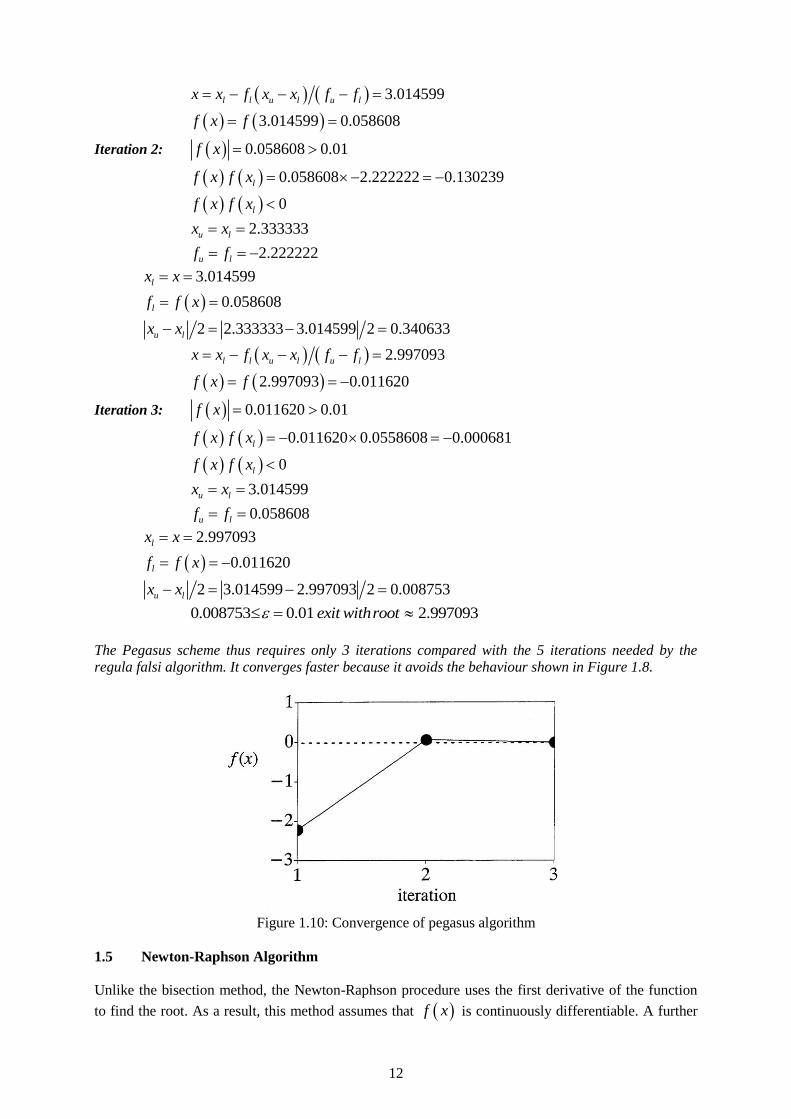
The Pegasus scheme thus requires only 3 iterations compared with the 5 iterations needed by the
regula falsi algorithm. It converges faster because it avoids the behaviour shown in Figure 1.8.
Figure 1.10: Convergence of pegasus algorithm
1.5 Newton-Raphson Algorithm
Unlike the bisection method, the Newton-Raphson procedure uses the first derivative of the function
to find the root. As a result, this method assumes that f x is continuously differentiable. A further

13
difference is that the algorithm only needs a single starting value in order to begin the iteration
process. Provided this starting value is fairly close to the true root, the convergence of the Newton-
Raphson technique is extremely rapid.
With reference to Figure 1.11, we see that, for a given 0x , a better estimate for the root is x, defined by
0
0
0 1
f xf x
x x
Rearranging to isolate 1x gives
0
1 0
0
f xx x
f x
(1.12)
Equation (1.12), which defines the updated estimate for the root, may be written as a more general
recurrence relation according to
1
1
1
i
i i
i
f xx x
f x
(1.13)
Figure 1.11: The Newton-Raphson algorithm
where ix is the ith iteration, which is generated from the 1th
i iteration using (1.13). An initial
guess 0x is required to start the iterations. In the usual form of the Newton-Raphson method, it is
necessary to compute f x explicitly as indicated in Algorithm 1.4.
Newton-Raphson Algorithm
In: Initial guess 0x , tolerance , maximum number of iterations M.
Out: Solution x or error message.
loop i = 1 to M
0 0 0x = x - f x f x
if thenexit withrootf x x
0x = x
end loop
error: too many iterations.
Algorithm 1.4: Newton-Raphson Algorithm

14
Unlike the bisection and regula falsi algorithms discussed previously, the Newton procedure does not
maintain two values which bracket the root. This means that the iterations may become unstable, as
shown in Figure 1.12, or enter a nonconvergent cycle, as shown in Figure 1.13.
Figure 1.12: Divergent Newton-Raphson iterations
Figure 1.13: Nonconvergent cycle of Newton-Raphson iterations
This potential disadvantage, however, is counteracted by its speed of convergence. The method
typically doubles the number of significant figures with each iteration which, for many problems,
means that only three or four iterations are needed to obtain an accurate solution.
Because of the potential instability of the Newton scheme, it is generally prudent to ensure that a good
initial guess for the root is supplied. In some cases, it is beneficial to first use one of the previous
methods with a coarse tolerance to obtain a rough estimate of the root. This can then be improved
using the Newton method.
To illustrate the Newton algorithm we again consider the polynomial equation (1.10) with the starting
value 0 4x and the convergence tolerance 0.01.
Input: 0 4, 0.01x
Iteration 1:
0 0 0
0
3.166667
0.694445 0.01
3.166667
x x f x f x
f x
x x
Iteration 2:
0 0 0
0
3.006410
0.025681 0.01
3.006410
x x f x f x
f x
x x
Iteration 3:

15
0 0 0 3.000010
0.000041 0.01 3.000010
x x f x f x
f x exit with root
The Newton scheme converges rapidly and gives a solution with 5 significant figures of accuracy after
only 3 iterations. Note that after the first iteration, the solution has 1 significant figure of accuracy.
The accuracy of the estimate is increased to 3 significant figures after the second iteration. Thus the
number of significant figures is seen to approximately double with each iteration and the method is
said to display “quadratic” convergence. The rapid convergence of the Newton-Raphson method is
shown in Figure 1.14.
Figure 1.14: Convergence of Newton algorithm
1.6 Secant Algorithm
The secant procedure uses an approximation to the first derivative of the function and therefore, unlike
the Newton scheme, does not require the derivative to be computed explicitly. The algorithm needs
two starting values to begin the iteration process. These need not bracket the true root and, provided
they are fairly close to it, the convergence of the secant technique is usually rapid.
Using similar triangles, we see from Figure 1.15 that
1 0 1
1
1 0 2 1
0f x f x f xf x
x x x x
Rearranging, this gives x as
1 02 1 1
1 0
x xx x f x
f x f x
(1.14)
The general recurrence relation for the ith iteration thus becomes
1 21 1
1 2
i ii i i
i i
x xx x f x
f x f x
(1.15)
where two initial guesses 0x and 1,x are required to start the iterations. Using (1.15), we see that it is
not necessary to evaluate the derivative of the function explicitly in the secant method. Because the

16
secant procedure does not maintain two values which bracket the root, the iterations may become
unstable. This feature demands that good initial guesses for the root are supplied to ensure
convergence. The secant procedure converges rapidly, but slightly less so than the Newton method.
An efficient implementation of the Secant algorithm is shown in Algorithm 1.5.
Figure 1.15: The secant algorithm
Secant Algorithm
In: Initial guesses 0x and 1x , tolerance , maximum number of iterations M.
Out: Solution x or error message.
0 0f = f x
1 1f = f x
loop i = 1 to M
0 01 1 1 1x = x - f x - x f f
if thenexit withrootf x x
0 1
0 1
1
1
x = x
f = f
x = x
f = f x
end loop
error: too many iterations.
Algorithm 1.5: Secant algorithm
To illustrate the secant algorithm we again consider the polynomial equation (1.10) with the starting
values 0 11 and 4x x and the convergence tolerance = 0.01.
0 1
0 0
1 1
: 1, 4, 0.01
4
5
Input x x
f f x
f f x
Iteration 1:

17
1 1 1 0 1 0
0 1
0 1
1
1
2.333333
2.222222 0.01
4
5
2.333333
2.222222
x x f x x f f
f x
x x
f f
x x
f f x
Iteration 2:
1 1 1 0 1 0
0 1
0 1
1
1
2.846154
0.591715 0.01
2.333333
2.222222
2.846154
0.591715
x x f x x f f
f x
x x
f f
x x
f f x
Iteration 3:
1 1 1 0 1 0
0 1
0 1
1
1
3.032258
0.130073 0.01
2.846154
0.591715
3.032258
0.130073
x x f x x f f
f x
x x
f f
x x
f f x
Iteration 4:
`
1 1 1 0 1 0 2.998720
0.005117 0.01 2.998720
x x f x x f f
f x exit with root
Figure 1.16: Convergence of secant algorithm
Thus the secant scheme meets the convergence tolerance on f x after 4 iterations. When the
derivative of the function is difficult to evaluate, the secant scheme is an attractive alternative to the
Newton method. The convergence rate of the two methods is very similar, although the secant scheme
is not quite quadratic. Figure 1.16 illustrates the variation of f x with iteration number for the
secant scheme.

18
1.7 Comparison of Algorithms for Nonlinear Equations
Key features of the various methods for solving a single nonlinear equation are summarised in Table
1.1. If stability is of the utmost importance, the Pegasus algorithm is a good choice for many
applications. For all continuous functions f x , this method is unconditionally stable and has fast
convergence. For well behaved continuous functions which are continuously differentiable, the
Newton scheme offers quadratic convergence and is generally the fastest of all the methods. It is
essential, however to furnish sound initial guesses for this algorithm if divergence problems are to be
avoided.
Method Initial Values
Required
Derivative
Required Root Bracketing
Speed of
Convergence
bisection 2 no
yes
very stable slow
regula falsi 2 no
yes
very stable medium
Pegasus 2 no
yes
very stable fast
Newton 1 yes
no
conditionally stable very fast
secant 2 no
no
conditionally stable fast
Table 1.1 Features of algorithms for nonlinear equations
1.8 Precision
When designing error and convergence tests for numerical algorithms, it is essential to have a
knowledge of the precision of the numbers that you are using. Precision is critically important for real
numbers, since these are stored only approximately in the computer due to its finite number system.
Roundoff errors also occur when the machine adds, subtracts, multiplies and divides numbers. The
influence of both of these types of error is reduced when the numbers are stored with high precision.
In most computers, integer and real numbers are stored as words which, in turn, are comprised of
bytes. At the next level down, bytes are comprised of bits. To store a number certain bits are reserved
to hold the sign, the exponent, the sign of the exponent, and the mantissa. The number of bits in the
mantissa defines the precision of a real number. The number of bits in the exponent defines the range
of the computer number system; that is the size of the largest and the smallest number that can be
represented on the machine. For numerical work, the precision of the computer number system is
usually of more concern than its range. In most languages, the default precision for real numbers on a
32 bit computer is about 7 decimal places. For large scale calculations this level of precision is not
sufficient, and many languages, such as FORTRAN and C, have double precision (long) reals which
typically give about 16 decimal places. In some extreme cases, where roundoff error is a serious
problem, it is also possible to use quadruple precision.
The level of precision affects the choice of the tolerance that can be used in all of the previous
algorithms. If all quantities are of the order of unity, typical values for would be in the range 410
to 610 for single precision on a 32 bit computer. It would be inappropriate to try and enforce a very
stringent tolerance of, say, 1010
in this case as the machine may be unable to satisfy this value. For
double precision on a 32 bit computer, much tighter values, such as 1210
to 1410
, may be specified
with safety.
Absolute and Relative Error
In numerical computation it is useful to quantify the notion of error. The simplest type of error is
known as absolute error and is defined as

19
true value approximate value (1.16)
This type of error measure can be misleading. Consider the case where the true value = 1000 and the
approximate value = 999. Although the absolute error is 1, the approximation is fairly accurate.
However, if the true value = 1 and the approximate value = 2, then the absolute error is again 1 but the
approximation is very inaccurate. This inconsistency arises because the test is dependent on the scales
of the numbers being used.
The second type of error, known as relative error, is defined as
true value approximate value
true value
(1.17)
Unlike the absolute error test, this type of error measure is insensitive to the scale of the numbers
being tested. It can be used for numbers of widely varying magnitudes and is a good estimator of the
accuracy of an approximation. In the above example, where the true value = 1000 and the approximate
value = 999, the relative error is 31 10 . This indicates that the approximation is relatively accurate.
When the true value = 1 and the approximate value = 2, however, the relative error is 1 which
indicates that the approximation is very inaccurate. Because of its scale independence, the relative
error measure is generally preferable to the absolute error measure. One important exception to this
rule occurs when the true value is zero or very small. In this case, the use of (1.17) may lead to an
arithmetic error due to division by zero or division by a small number.
1.10 The Concept of Significant Figures
The concept of significant figures is used to gauge the accuracy of an approximate value and is
related to the notion of relative error. Formally, the number x* is defined to approximate the true value
x to t significant digits if
*
5 10 tx x
x
(1.18)
where t is a non negative integer. For example, if x = 1000 and x* = 999.4, then
41000 999.4
6 101000
(1.19)
35 10 (1.20)
and x* approximates x to 3 significant figures. Similarly, if x = 1000 and x* = 999.6, then
41000 999.6
4 101000
(1.21)
45 10 (1.22)
and x* is said to approximate x to 4 significant figures. The number of significant figures indicates
how many leading digits in the approximation can be “trusted”. The concept is important in designing
error traps and convergence tests for numerical algorithms, where the exact solution is usually
unknown.
1.11 Testing for Convergence
In all of the previous iteration schemes, we need a test (or tests) to decide when the iterative
solution is sufficiently close to the true solution. This is not as trivial as it may seem, and often causes
20
problems in practical calculations. Letting the subscript i denote iteration number and a small
tolerance, a number of choices for testing convergence may be developed.
One of the simplest criteria uses the absolute change in successive iterates as shown below
1i ix x (1.23)
This test assumes that if the values of x are not changing very much from one iteration to the next,
then the current solution must be quite close to the true solution. This assumption is usually a
reasonable one, although the criterion may sometimes signal premature convergence if the iterative
changes in the solution are small but not changing rapidly with i. A key problem with using the
absolute error test is that the tolerance has to be chosen to reflect the magnitude of the solution x. For
example, if the solution was found to be of the order of 1210 , it would be inappropriate to use a
tolerance of 610 as this would demand roughly 18 decimal places of accuracy in the arithmetic
involving the mantissa.
Instead of using the absolute change, we can check the relative change in successive iterates
according to
1i i
i
x x
x
(1.24)
This criterion also assumes that small changes in the iterates for x imply that the current solution is
quite close to the true solution, but has the extra advantage of being scale independent because it uses
a relative, rather than absolute, error measure. Moreover, comparing equation (1.24) with equation
(1.18), we see that the test gives a rough estimate of the number of significant figures in the solution
(assuming that ix is relatively close to the true solution). Note that this type of criterion cannot be
applied to cases where the root approaches zero, since this may lead to problems with division by zero
or arithmetic overflow (where the root is very small but not identically zero).
In practical codes, it is usual to combine the tests of (1.23) and (1.24) into a single criterion known
as a mixed convergence test. This takes the form
1i i rel i absx x x (1.25)
where andrel abs are, respectively, relative and absolute error tolerances. Whenever ix approaches
zero, the mixed test is essentially an absolute criterion of the form of equation (1.23). For large values
of ix , however, it becomes a relative test of the form of (1.24). This type of test is very robust and
works for all ranges of x values. Using precision arithmetic on a 32-bit machine, typical settings for
andrel abs are in the range 4 610 to 10 .
For algorithms which maintain two bounds that bracket the root, such as the regula falsi and
Pegasus methods, the absolute difference in the bounds can be used to test convergence according to
u lx x (1.26)
Although simple, this test has the same drawbacks as (1.23) in that it is scale dependent. To overcome
this disadvantage, the relative difference in the bounds can be used in the form
u l
u
x x
x
(1.27)
with the restriction that 0.ux In practice, this type of test should not be used if ux is likely to be
small. In practice, the tests (1.26) and (1.27) are often combined into a single mixed bounds test of the
form

21
u l rel u absx x x (1.28)
This type of criterion has the same characteristics and advantages as (1.25), and similar values for the
tolerances andrel abs are used.
Finally, the absolute value of the function can be used as a test for convergence according to
if x (1.29)
Since our aim is to find x such that 0f x , this test has the dual advantages of being both simple
and direct. Unfortunately, it can indicate premature convergence for cases where large changes in x
give only small changes in .f x This occurs when 0f x at the root and is not especially
uncommon. A related problem can arise if the same absolute error test is used for x and for f x as
in several of the algorithms of the Chapter. If the units of f x are different from those of x, then
either the common test for convergence should be relative, or separate values of should be used.
Other tests may also be devised. In many practical codes, it is usual to use a combination of tests to
ensure that true root has been correctly identified.
Computer Lab. MATLAB tutorial: Solving the friction factor equation.
One of the many empirical relations between the friction factor f and the Reynolds number,
Re, for fully developed pipe flow, is
90.010
)(
2332631.0)(log873.1
1
fRefRe
f (1.1)
This relationship can be used to determine the pressure drop in a pipe network and hence
the size of the pump required to drive the flow.
For iteratively solving this equation, an appropriate starting value f0, for at any Re is given
by
2
9.0
100 )/74.5(log25.0
Ref (1.2)
To check your analysis: when Re = 104, f = 0.0324, and for Re = 10
6, f = 0.0119.
Matlab has the function fzero to determine the roots of a function of a single variable. You
can find out about fzero in the main Matlab window (with the prompt >>) by typing
>> help fzero
as you can for most of the Matlab functions and tools. To invoke the function,
>> f = fzero(‘fname’, f0)

22
where f is the root, fname is the function name, and f0 is an initial guess. This command
will automatically print the value of f, whereas
>> f = fzero(‘fname’, f0);
will store the answer in f without printing it. An alternative way of invoking the function is
through the “function handle” @:
>> f = fzero(@fname, f0);
Matlab purists generally prefer function handles. The easiest way to use fzero is to have
two auxiliary M-files, the first to obtain f0, and then the function given by (1.1). M-files
are a simple way of storing Matlab commands or evaluations so that they do not have to be
continually retyped. An M-file is created by selecting File in the Matlab window, then
New and then M-file. The M-file to give the initial guess from (1.2) has the following
contents:
function fric_0 = friction_0(Re) % All comments are preceded by a percentage sign
fric_0 = 0.25/(log10(5.74/Re^0.9))^2; % The semi-colon (;) prevents fric_0 being printed when the function is invoked.
and the file must be saved as friction_0.m. The file is then executed in the Matlab window
by
>>friction_0(10000)
which will return the answer 0.0310. If instead you use
>>f0 = friction_0(10000)
then f0 will hold the initial guess for the friction factor which can then be used in fzero.
fzero uses a mixture of root finding algorithms, but in its simplest form is limited to
functions of only one variable. Thus the M-file that evaluates (1) for the friction factor
cannot have Re as a function argument: it must be set in the function. (This problem does
not arise for Equation (2).) The outline of the methods used by fzero is:
Find xu and xl as so that f(xu) and f(xl) have opposite signs
Use the Secant method to find new x as approximation to the root
Repeat until convergence is achieved
Arrange xu, xl, and x so that f(xu) and f(xl) have opposite signs, | f(xu) | | f(xl) |, and
x is the previous value of xu.
If x xl, consider using the “inverse quadratic interpolation” algorithm which we
have not studied
If x = xl, consider using the Secant method
If either of the two previous steps give a solution in the interval [xu, xl] take the step,
otherwise use bisection again.

23
(This information about fzero comes from Chapter 4 of Cleve Moler “Numerical
Computing with Matlab” which is freely available from www.mathworks.com/moler.
Moler has developed a large number of the Matlab routines.)
Write an M-file that will solve (1) for f, noting that the form of the function must be F(f) =
0 and that the mathematical function sqrt(x) in Matlab returns the square root of x. If you
call your function friction, then you can now solve (1) by a statement similar to
>> f = fzero(‘friction’, f0)
You can also plot the function using the Matlab routine plot. One way to do this is to write
another M-file, called, say, plot_frict.m. Type the following into the file:
for k = 1:1:10 x(k) = 0.03 + (k-1)*.001; %values appropriate to Re = 1.e4 y(k) = friction(x(k)); end plot(x, y, 's-')
for Re = 10
4. Note that the code beginning “for” and ending “end” is Matlab’s way of
looping. The “loop variable” k has the successive values: 1, 2, 3, 4, … Note also that an M-
file may reference another M-file (friction.m in this case).
Then in the Matlab window
>> plot_frict
and a plot of the function going through zero should appear in a separate window. Under
“Edit” and “Axes Properties” you should find how to turn on the grid for the plot which
will show more clearly where the function goes through zero. Use help plot to figure out
the meaning of 's-'.
Exercises
1. Rewrite friction.m and plot_frict.m to plot the values of f going through zero for Re = 10
6.
2. Repeat the calculations using
>> f = fzero(‘friction’, f0, optimset(‘disp’, ‘iter’))
which gives information about how Matlab searches for the root and how many
iterations it requires. Check help fzero and help optimset for information on these
options. Relate the information to the outline of fzero given on the previous page.
3. Repeat Part with f0 replaced by 0.02, 0.04, 0.1 0.2, etc until Matlab cannot find the
root. Note how the number of iterations increases as the initial guess moves further
away from the root.
4. It is possible (in a somewhat roundabout way) to pass the Reynolds number to a
modified version of friction.m using
>> f = fzero(‘friction’, f0, [], Re);
Try modifying friction.m to do this.
24
5. Extra plot features can be obtained, e.g:
for k = 1:1:10 x(k) = 0.03 + (k-1)*.001; %values appropriate to Re = 1.e4 y(k) = friction(x(k)); end plot(x, y, 's-') title(‘Plot of the the friction factor formula”) xlabel(‘friction factor’) ylabel(‘F(f)’) grid
6. A simpler way of creating the x array in the above Matlab code would be
x = 0.03:0.001:0.04;
Explain why the following won’t work:
x = 0.03:0.001:0.04; y = friction(x);
Copyright © 2022 FDOKUMEN




















