
① O ① ① O O - repository civitas UGM
14
lnternational Conference on lntelligent Unmanned Systems NOVEMBER,3.5 BALI.INOONESIA ① O ① ① O O Chairman Message Papers Search,. About:C:US2010 :nsta‖ Adobe Acrobat Rea Exit Jく 11翌
-
Upload
khangminh22 -
Category
Documents
-
view
4 -
download
0
Transcript of ① O ① ① O O - repository civitas UGM
lnternational Conference onlntelligent Unmanned Systems
NOVEMBER,3.5BALI.INOONESIA
①O①①OO
Chairman Message
Papers
Search,.
About:C:US2010
:nsta‖ Adobe Acrobat Reader
Exit
Jく 11翌
Papers
Orde. by Paper No I orde. by Author I order by ritle
ICIUS-2010-0102 [ View Abstract ] [ View Paper ]Topology Optimizatlon of a Flappjng Wing using Equivalent Static LoadsJung-Sun Choi, Liangyu Zhao. Gyung-Jin Park, Sunil K. Agrawal and Raymond M. Kolonay
ICIUS-2010-0104 [ View Abstract ] [ View Paper ]Deslgn and Implementatlon of a Danger-aware Operational Flight Program for an UnmannedHellcopterHogeun Song, lungguk Kim and Shin Heu
ICIuS-2010-0106[View Abstract〕 〔View Paper]Communication SuppOrt Fo「 Co‖abo「 at ve Embedded Contro‖ ers in Unmanned Aer al Vehicles
sang‐ Hun Lce and Hyun― Wook]in
ICIUS-2010-0107 [ View Abstract ] [ View Paper ]Experiments and numerical simulations for the quantification of lift in flapping fli9htSiddharth, K, Dwarakanath, T. and Sreenivas, K. R.
:CIuS-2010‐ 0108〔 View Abstract][View Paper]Deslgn and Test ng Ofan unmanned Sma‖ ‐scale Air― Land― VVater Vehicle
A「hamiAbd Muta‖ b′ Kha"d Hasnan.Abas Ab Wahab
ICIuS-2010-0111[V eW Abstract][V eW Paper]Towards AutOnomous MAV Contro in Atmosphe「 c TurbulenceS VVatk ns′ M Abdurah m,M Marnoand S Rav
ICIUS-2o10-0112 [ View Abstract ] [ View Paper ]Formatlon of 3D outlines of objects using MOPS and SIFT using monocular vislonSang-Heon Park and Jeong-Oog Lee
lCluS-2010-0113〔 View Abst「act][Vlew Pape「 ]
System ldent ncat On Of NN― based Model Reference ContrO of RUAV during HoverBhaskar P「 asad RIma.Id「 s E Putro′ Agus Budivono′ Dugki MiR′ Eunmi cい oi
ICIuS-2010-0114[View Abstract][View Paper]Non‖near Ceomet「 lc and Different al Ceomet「 c Guidance of UAVs w th V sion Sens ng forReaCtive Co‖ Islon Avoldance
A Cupta and R Padhi
ICIUS-2010-0115 [ View Abstract ]Reactive Obstacle Avoidance osingC.Chawla and R. Padhi
I View Paper ]Aiming Point Guidance
IC:uS‐2010-0116[View Abstract][View Paper]Field Evaluatlon oF a Mob‖ e Robot c unit for Frult Harvest ng
A A Al‐ ]anobl′ S A A Hamed and S A AI Suhaibanl
IC:uS-2010-0117[View Abstract][View Pape「 ]
Opt mal Path P,anning For Sma‖ UAVs in VV nd
Sikha Hota and Debasish Ghose
ICIuS-2010-0118[VieW Abstract][V eW Pape「 〕FabⅢ cation oF Photo itho9raphy Micro-9rating pattern for DNA Opt cal B10senso「 s
Naphat Chathirat′ N thi Atth,Charndet Hruanun,Amp。「n Poyat and Tanakorn Osotchan
ICIuS‐2010-0119[View Abstract][View Paper〕Increaslng the Autonomy Of unmanned AircraFt Vehic es with a Game Theory ApproachD Taurino′ S Tarag‖ o′ A Tedesch′ A Pasquini′ v Nannl
IC:uS-2010‐0120[VieW Abstract]〔 View Paper]3C‐ 3D Velocity Fleld Measurements ofthe Wake Reg10n of LowFlat Plate under90ing Transient Pitch‐ Ramp MOtion
Reynolds Nurnber Flow around a
Page 1 of 8
fllcプ/Eへscs html 03/10/2013
Papers
A J. Buchner, N. Buchmann, C. Atkinson and J. Soria
ICIUS-2010-0121 [ View Abstract ] [ View Paper ]FormalVerification of Process Communications an Operational Flight Program for a Small-ScaleUnmanned HelicopterDong-Ah Lee,.Junbeom Yoo and Doo-Hyun Kim
ICIUS-2010-0122 [ View Abstract ] [ View Paper ]Vlsion-based Autonomous Landlng for I.JAV Using Blocked Histogram MatchinqKlho Cho, Dongwoon Jeon and Doo-Hyun Klm
ICIUS-2010-0124 [ View Abstract I I View Paper ]Antennal positloning behavior in flying lnsectsAnand Krlshnan, Subashini Sudarshan, Sunil Prabhakar and Sanjay P. Sane
ICIUS-2o10-0125 [View Abstract ] [ View Paper ]Vision Based 3D Map Building Indoor EnvironmentSunggyu lm, Jungken Park, Keun-Hwan Lee, leong-Oog Lee
ICIUS-2010-0126 [ View Abstract ] [ View Paper ]Dynamic Behaviors of Butterfly Wing and Their Application to Small Flapping RobotM. Fuchiwaki. T. Imura and K. Tanaka
ICIUS-2010-0127 [ View Abstract ] [ View Paper ]Vortex Flow Developed in the Vicinity of a Wall of an Elastic Heaving Airfoils and its DynamicBehavlorT. Kurlnami, M, Fuchiwakl and K. Tanaka
ICIUS-2010-0128 [ View Abstract ] [ View Paper ]Fluld Structure Interaction Simulation of Flow Field around Elastic l'loving AirfoilsT. Naqata, 14. Fuchiwaki and K. Tanaka
ICIUS-2010-0129 [ View Abstract ] [ View Paper ]Experlmental Analysis of Primary-Shadow Replicatlon Scheme for Fault-Tolerant OperationalFllght Program of Small UAVJunyeong Kim, Nodir Kodirov, Doo-Hyun Klm, Chun-Hyon Chan9, Changjoo Kim, Yonghyun Kim
ICIUS-2010-0130 [ view abstract ] [ vie',,r' Paper ]Experlmental Effectiveness Analysis of EDF-ecos for Real-Time computing in Small L,nmannedHelicopter OFPNodir Kodlrov, Doo-Hyun Klm,.lun-Yeong Xim, Chang-Joo I\4oon
rcrus-2010-0131 [Numerical Study ofM. Kim and J. Kim
View Abstract I I View Paper ]Unsteady Flow past a Circular Cylinder
ICIUS-2o10-0132 [ View Abstract ] [ View Paper ]Eeetle's elytra lnsplred structure design and its mechanlcal properties lnvestigatlonCe Guo, Wen Wei Song, Zhen Dong Dai
ICTUS'2010-0133 [ View Abstract ] [ View Paper ]Use of a Piezocomposite Generating Element in Harvesting Wind Energy in Urban RegionsCam Minh Tri Tlen, Hung Truyen Luong, Nam Seo Goo and Hoon Cheol Park
ICIUS-2o10-0136 [ View Abstract ] [ View Paper ]Understanding Flapping Flight through PIV I'leasurements on a Butterfly Simulating l4odelSaiJrav K. Ghosh, Chandrala L. Dora, Garunendra K. Bunkar and Debopam Das
ICIUS-2010-0138 [ View Abstract ] [ View Paper ]Configuration Deslgn and Optimization Study on Compound GyroplaneYoung lae Lee, Ngoc Anh Vu, li Min Kim, Jae_Woo Lee, Sangho Kim, and In lae Chung
Page 2 of8
file:/E:\ses.html 03/10/2013
Papers
The RoboFriend ResearchSami Salama Hajjaj et a
Project
ICIUS-2o10-0140 [ V]ew Abstract I I View paper ]Vision Based 3D l4ap Building in Indoor EnvironmentSunggyu Im, Jungken Park, Keun-Hwan Lee, leong Oog Lee
ICIUS-2010-0141〔 VieW Abst「 act
Rea Time Linu× ―based RotorcraFtKlseok Park, Chang― ,oo Moon
I I View Paper ]UAV Flight Control Software Development
ICIUS-2010-0142 [ View Abstract ] [ View paper ]Setup Hardware in the Loop Simulation (HILS) For JustificationImplementation of Strategic ControlHerma Yudhi Irv/anto and Wahidin Wahab
of UAV Des,9n And
ICIUS-2o10-0143 [ View Abstract ] [ View paper ]Sampled Values Transmission based on Net\aork protocol Design for Intelligent SystemSeunghwan Choi, Brrl Van Hieu, Seunghyun Beak, Seungchul Han, Jaehyun park, and TaikyeongJeon9
ICIuS-2010-0144[View Abstract][View Paper]Mut‐Agent Rendezvous A19orthms under valous lnfo「 mauon Pa「 ad OmsKaushik Das and Debasish Chose
ICIUS-2010‐0145[View Abstract]〔 View Paper]Autonomous functions fOr uAV survel‖ anceJ Ryde‖ ,G Haapalahti′ 」 KaHholm′ F NasstrOm′ P sko91a「′K― C Stenbo「 g′ M ulvklo
ICIUS‐2010-0146[View Abstrad][VieW Paper]Mode‖ ng and Simulation of Mic「 o― Manipulator Robot c System Fo「 NeurosurgeryYabkob Yusofand M R Arshad
ICIUS-2010‐ 0147[VieW Abstract][View Pape「]
Vlsion― baSed Virtual lnput using Cesture Recogn tionNadra Nordin and M R A「 shad
ICIuS-2010-0148〔 View Abstract][View Paper]Control and Visua“ zat on System For UAV Heicopte「 using the HIL SimulatlonV19nesh Kumar Chandhraseka「 an′ Eunml Choi′ Hyoim Shin′ ulughbek Mus‖ mov and Dugkl Min
ICIuS‐ 2010-0149[VleW Abstract][View Paper]Bukit Merah Lake Contour Mapping us ng swarm oF mini ASVsZulkini zainal Abidin′ Khal「ul:zman Abdul Rahim′ Mohd Rizal Arshad′ umi Kathum Ngah
ICIUS-2010-0150 [ View Abstract ] [ View Paper ]An Applicatlon of the Blade Element Theory to Estimate Unsteady Aerodynamic Force producedby a Flapplng WingQ TTruong, Q V Nguyen, H C Park, DY Byun and N S Goo
ICIUS-2010-0151 [ Vlew Abstract ] [ View Paper ]Genetic PD Control for Two-Link Manipulator Using Inverse DynamtcsOsama I. Hassanein, Sreenatha G. Anavatti, Tapabrata Ray
ICIUS-2010-0152 [ View Abstract ] [ View Paper ]PID and Fuzzy Control of Unmanned Underwater VehicleS. A. Salman, Sreenatha A. Anavatti and T. Asokan
ICIUS-2010-0153 [ View Abstract ] [ View Paper ]A Novel Hovering Mechanism from a Flapping Two-Dimensional Flerible FoilJaywant H. Arakeri and Sachin Y. Shinde
Page 3 ofB
file:/,8:\ses.html 03/10/201R
Papcrs
Development of EM Simulator for Sea Bed LoggingHanita Daud, Noorhana Yahya, Vijanth Asirvadam
Appl jcations using IvIATLABand Khairul Ihsan
ICIUS-2010-0155 [ View Abstract ] [ View Paper ]Numerical Simulation of Flapping Alrfoll Aerodynamics Ustng a Lagrangian Particle BasedTechniqueS. Sarkar, A, Krlshnan, S. Charied, L. Chandravnashi
ICIUS-2o10-0156 [ View Abstract ] [ View Paper ]Unsteady Wake characteristics of a flapping wing through 3D TR-PIVSaurav K. Ghosh, Garunendra K. Bunkar, Chandrala L. Dora and Debopam Das
ICIuS-2010-0157[V ew Abstract][V eW Paper〕Hc Robust Contro‖ erfor a SmaI Scale Autonomous HeLcopte「 Hover ng COntrol
Tり aniI B′ RI∩ i AkmeiawatL Ariし e9owo′ Agus Budiyono,and A G Abdul Mutha F
ICIUS-2010-0158 [ Vjew Abstract ] [ View Paper ]Hlgh Order Accurate and Emclent Computation Via Wavelet Transformation l4ethodHyungmln Kang, Sangwoo Kim, Dongho Lee, Dohyunq Lee and Dochan Kwak
ICIUS-2010-0159[V ew Abstract l[view PaperP「opulsion of An Osci‖ ating FleXible Fo
Mysa RaVi Cha thanya′ Kartlk Venkatrama n
]
ICIUS-2010-0160 [ View Abstract ] [ View Paper ]Pitch Ramp Maneuvers as a Prototypical Case in Low Reynolds Number Unsteady AerodynamacsMlchael V. OL, Kenneth Granlund, and Luls Bernal
ICIUS-2010-0162 [ View Abstract ] [ Vrew Paper ]Safety Analysls of Helicopter Models usinq Hybrid Systems wlth Geometric ProgrammingSalmah, Endra Joellanto, Noorma Y. Megawati, Agus Budiyono, Herman Y. Sutarto, and IndahEmllla W.
ICIUS-2o10-0163 [ View Abstract ] [ View Paper ]Development of KL,-Quadrotor Control System for Indoor ApplicationGalar B. Raharja, Kim GyuBeom. A. Budiyono and K.l.Yoon
iCIuS-2010-0164[VieW Abstract〕 〔View Pape「 ]
The DeVelopment of A Novel Fault ldent ncat On Techntque by Combining Minimum― DIstancePatte「n‐ ReCOgnition and Discrete VVavelet Transform
Pulung Nurprasetlo′ Komang Bagiasna′ DJoko Suhalto′ and Te9oeh TlahJoWidOd。
:CIuS‐ 2010‐0166[View Abstract][View Paper]system ldent ncat On OF Secondary Path in ANC using Comblned FIR and Functional LInkArtincial Neural Network
R Y Rediand RIyanto T Bamban9
ICIUS-2010-0168 [ View Abstract ] [ View Paper ]Multlple UAV Collision Avoidance Using Realistic UAV ModelsJoel George and Debaslsh Ghose
ICIUS-2010-0169[VieW Abstract][View Paper]Multiple UAV RendeZvous with Co‖ islon Avoidance
」oel Ceorge and Debaslsh Gい ose
ICluS-2010-0171〔 VieW Abstract][View Paper]Facet Classincat on in 3D pOlygon Maps for Autonomous Veい icle Loca sation
S ThompsOn′ S Kagamiand M Okalma
ICIUS-2010-0172 [ View Abstract ] [ View Paper ]Comparison of Closed-Loop Systems Performance Using Low-Order Controllers via l"lodelReduction: Heat Conduction Case
Page 4 of8
fllcプlEAscs html 03′ 10/2013
|
Pape$
Fatmawatl, Riyanto T. Bambang
ICIUS-2010-0173 [ View Abstract ] [ View Paper ]Automatlc Control Deslgn for Cost-effectlve Wastewater TreatmentSeno D. Panjaltan and Berllan Sltorus
ICIUS-2o10-0174 [ View Abstract ] [ View Paper ]Dynamlc 14odeling and Simulation of UAV (Unmanned Aerial Vehicle) OctorotorTauflq Hilal Tawab, Riyanto T. Bambang, WidyawardanaAdlprawita
ICIUS-2o10-0176 [ View Abstract ] [ Vrew Paper ]Virtual Prototype design of UAV flight control systemWang Xlchao, CaoYunfeng. Zhuang Likui, WangBiao, LiLr Xinghua
ICIUS-2o10-0177 [ View Abstract ] [ View Paper ]Development of Hardware-in-the-Loop Simulation for Visual Target Tracking of Octorotor UAVRyan Trladhltama, Rlyanto T. Bambang, Widyawardana Adiprawita, Artiko Wibowo
ICIUS-2010-0178 [ View Abstract ] [ View Paper ]Rotor Load Measurements and Stabilization in Tethered Hover of a Mini-HellcopterB. Bharati Swaroop, H. Ravinder and C. Venkatesan
ICIUS-2010-0179 [ View Abstract ] [ View Paper ]Dynamlc System ldentification of Unmanned Air Vehicle Octorotor HelicopterNovlyantoro sadewo, Bambang Riyanto Trilaksono, and Widyawardana Adiprawita
ICIUS-2010-0181 [ View Abstract ] [ View Paper ]Model Predictive Control for Autonomous Underwater VehicleAgus Budiyono
ICIUS-201.0-0182 [ View Abstract ] [ View Paper ]Nonlinear Modeling of Quadrotor Aerial VehicleIdris E. Putrol, Agus Budiyono, Yoon Kwang Joon
ICIUS-2o10-0183 [ View Abstract ] [ View Paper ]Color Constancy in Robocup Robot VisionYasunori Takemura and Kazuo Ishii
ICIUS-2010-0184 [ View Abstract ] [ View Paper ]Deliberatlve Behavior Planner for UGV with Actively Articulated Suspenslon on L,nstructuredTerrain Uslng Q-Learnlng with Expert tlodelKyeong BIn LIm and Yong-San Yoon
ICIUS-2010-0185 [ View Abstract ] [ View Paper ]Development of Linear Parameter Varying Control System for Autonomous Underwater VehicleH.Y Sutarto and Agus Eudiyono
ICIUS-2010-0186 [ View Abstract ] [ View Paper ]System Identlfication using I'lodular Network SOM (mnSO!1)Muhammad Aziz Muslim, Goegoes Dwi Nusantoro
ICIUS-2o10-0188 [ View Abstract ] [ View Paper ]H-Infinity Control System Design for a Small Scale Autonomous Helicopter with NonlinearDynamlcs and UncertaintlesByung Ha Kim, Taesam Kang, Hardian Reza Dharmayanda, Gigun Lee, Agus Budiyono
ICIUS-2o10-0189 [ View Abstract ] [ View Paper ]Parameter Identlfication and a Robust Controller Design for an Autonomous Quad-rotorApplicationGigun Lee, Dong Yun Jung, Taesam Kang, and K\dang Joon Yoon
ICIUS-2010-0190 [ View Abstract ] [ view Paper ]
Page 5 of8
file://E:\ses.html 03/10/2013
一 (
Papers
Dynamics I'lodeling and Parameter Estimation for Small Scale Vehlcle Navigation SystemMochamad Safarudin, Joga Setiawan, Hady Efendy
ICIUS-20r0-0191 [ View Abstract ] [ View Paper ]Unsteady Aerodynamics of Flapping Wing of a Birdl"lochammad Agoes Moelyadi and Hendra Adi Putra
ICIUS-2010-0192 [ View Abstract ] [ View Paper ]Development of Dynamic Load Cell and Data Acquisition System for Flapping Wing ForceIVeasurementPramudita 5.P. and Lavi R. Zuhal
lC:uS-2010‐ 0193[View Abstract][View Pape「 〕SaFety Analysis Of a Class of Timed Automata Hybr d systems with SosNoo「ma Y Megawati′ Salmah and lndah Emlia VV
ICluS-2010-0194〔 VieW Abstract][View Pape「]
Development oF Quad Roto「 Based UAV Model of Flying Ca「Muり。W dOdo Kartidjo′ DJarot VV dagdo
ICIUS-2010-0195 [ View Abstract ] [ View Paper ]Deslgn and Analysis of Valveless Pulse.jetH. Firmansyah, F. Hartono, 1,1. A. f,loelyadi
ICluS-2010-0196[View Abstract][View Paper〕C「uc Form Fin Actuator fo「 UAV ControI Su faceEndra」oenantO′ Mujowidodo K and Sapto Adi N
ICIuS‐ 2010‐0197[VieW Abstract][View Pape「 〕Deslgぃ oF SWATH BaSed unmanned Sulface Veh cleMuり。WidOdo K′ SaptoAdi N′ Nico Prayo9o,Munf Suda:γ onO
ICIuS‐ 2010-0198[View Abstract][V eW Pape「]
P tch and YaWing Fin Control Maneuver on QuadrOtorMuljow`dodo K′ KurniantOrO w H s′ saptO AdI N
:CIuS-2010-0199〔 V eW Abstract][v eW Pape「 〕Vlbration Cance‖ at On by sacr nced mass method fo「 UAV Gymbal Came「aWayan Suweca′ MulJowidOdO K′ Sapto Adi N′ Nico Pmyo9o′ Kat,a Mayang M
ICIUS-2010-0200 [ View Abstract ] [ View Paper ]Output feedback controller for dlssipative networked control systems vla markovian lumpsystem approachAsep Najmurrokhman, Bambang Riyanto, Arief Syaichu-Rohman, and Romeo Ortega
ICIUS-2010-0202 [ View Abstract ] [ View Paper ]Flight Control of a Biological Robot via Neurocybernetics InterfaceTlen Van Truong, Doyoung Byun, Laura Corley Lavine, Douglas J. Emlen, Hoon Choel Park
ICIUS-20r0-0203 [ View Abstract ] [ View Paper ]Unsteady force measurement of SD7003 foil under pitch-up, hold and pitch-down motion at Re
= 1.2x104 for Micro Aerial Vehicle (f.,lAV) applicationsChal Wee Sern, Vincent and Srigrarom, Sutthiphong
ICIuS‐ 2010‐0204[View Abst「 act][View Paper]Camera Locking AlgOrthm for Target Fo‖ owe「 Functlon on QuadrotorMuり。W dOdo K′ Monammad A RaSyld
ICIUS-2010-0205 [ View Abstract ] [ View Paper ]He Control of Nonlinear Polynomial Fuzzy Systems: A Sum of Squares Approach
Wibowo S. Bomo and Riyanto T. Bambang
Page 6 of 8
file://E:\ses.html 03/10/2013
′
l
Papers
Development of Sea Glider AutonomoLrs Underwater vehicle (SG_AUVITB) for Marine Explorationand l,lonltorlngFaisal Sagala, Riyanto Bambang
ICIUS-2010-0207 [ view Abstract ]Multiple Target Tracking Using AntIfan Waranto and Endra Joelianto
I View Paper ]Colony Optimization and Artnc al Neural Netwo「 k
ICIUS-2010-0208 [ View Abstract ] [ View Paper IAn Optlmal Control Deslgn of Albatrosses Dynamic Soarlng wlth CrosswindHerry Lukas and Endra Joelianto
ICIuS-2010-0209[VieW Abst「 act〕 [View Paper〕Fixed l・ Ving Unmanned Ae「 al Veh cle(UAV)ContrOI
Cost COntro Based PID ControlerEnd「 a〕oe"anto′ CordOVa′ and VV Adipra・・7ita
systems Design using Robust Guaranteed
ICIUS-2010-0210 [ View Abstract ] [ View Paper ]Dynamic Optimlzation based Control System Design for l'!inimal Time Multi Way Polnts Trackingof A Quadrotor uAvE..Joelianto, E. lYaryami and E. Ekawati
ICIUS-2010-0211[ View Abstract ] [ view Paper ]Multl Way Polnts Tracking Control System Deslgn of A Quadrotor UAV by 14eans of DynamicoptlmizatlonE. loellanto, D. Renanlnq and E. Ekawati
ICIUS-2010-0212 [ view Abstract ] [ View Paper ]Model Predictlve control System oesign for a Small scale Autonomous HelicopterEndra Joelianto, Edwina 14aryami, Agus Budiyono and Dini Renaning
ICIUS-2010-0213〔 View Abstract〕 [View Paper]Speed ContrO1 0f OC Servomotor using Fuzzy Hybrid ReFe「 ence Control
E ,oe‖ anto and P S M Naing9olan
IC:uS‐ 2010-0215[View AbStract〕 〔View Paper]Octorotor uAV For Visual Target TrackingRIyanto T 3ambang′ Widyawardana Adl,「 awlta′ Rusdiana Haklm′ Noviantoro Sadewo′ Ryan
Triadhitama,Reza Syahr zal TalFah′ Pradithya A「ia Pura′ Edi Sofyan
ICIuS-2010‐0216[VieW Abst「 act][View Paper]Op● ca Fiow Tracking a gonthm fOr QuadrOtOr PosiuOn ng ControMuり。WidOdo K′ MOhammad A Rasyld
ICIUS-2010-0217 [ View Abstract ] [ View Paper ]Llnear QuadGtlc Regulator Control Design for an Autonomous Small Scale HelicopterJoga D Setiawan, Agus Budiyono, Mochammad Ariyanto
ICIUS-2010-0218 [ View Abstract ] [ View Paper ]Hoverlng Control for a Small Scale Helicopter under Wind DisturbanceAgus Budlyono, loga D Setiawan
ICIUS-2010-0219 [ view Abstract ] [ View Paper ]Remote Monitorlng of Carbon Dioxide ConcentrationG. Nugroho and s.B. Wibowo
in Yogyakarta City
ICIUS-2010-0220 [ View Abstrad ] [ View Paper ]Dynamics Modeling. Hybrid Controller Destgn and Simulation for a Small_size AutonomousHelicopteG. Nugroho
ICIUS-2010-0222〔 View Abstract I I View Paper ]
Page 7 of8
file:/,8:\ses.html 03ア 10/2013
一 ●
Papers
Des gn of Systems for Underwater OpticalLeiTian, Jonathan C. Petruccelli, lason S.
imaging in the Presence of ParticulatesKu, Xiaogang Liu. and George Barbastathis
ICIUS-2o10-0223 [ View Abstract ] [ View Paper ]Subspace LPV Identification of Secondary Reforming ProcessLlstyanto Adinuqroho, Bambang Riyanto
ICIUS-2O10-0224 [ view abstract ] [ View Paper ]Development of Obstacle Avoidance Sensor form I\4icro Aerial Vehicle Based on InfraredTemperature SensorWidyawardana Adiprawita, Adieb Aryasepta Haryadi, Arief Syaichu Rochman
ICIUS-2o10-0225 [ View Abstract ] [ View Paper ]Thrust Analysis of A Fish Robot Actuated by Piezoceramic Composite ActuatorsQ. S. Nguyen, H. C. Park, and D. Y. Byon
ICIUS-2010-0226 [ View Abstract ] [ View Paper ]Design And Construction of Rotating L,ltra-Sonic Ranging Device for Environmental SensingArdya Dlpta Nandavirl, Kusprasapta Mutiiarsa, Widyawardana Adiprawita
ICIUS-2010-0227 [ view Abstract ] [ view Paper ]Infra-red Face Recognition Using Ensemble Back-propagation Neural NetworksBenyamin Kusumoputro, Stephen Roy Imantaka, Lina and Brahmastro Kresnaraman
ICIUS-2010-0228 [ View Abstract ] [ View Paper ]Efficient Goal Seeking for Robots in Unknown Environments with wall like ObstaclesV, R. llsha and D. Ghose
ICIUS-2010-0229 [ View Abstract ] [ View Paper ]Uncertainty Quantlficatlon for a Flapping Airfoil with a Stochastlc Velocity DeviatlonLiangyu Zhao and Shuxing Yang
ICIUS-2010-0230 [ View Abstract ] [ View Paper ]Flnite Energy Coverage Control with Limited Range Anisotropic Sensor for I{obile SensorNetlvorks.Risvan Dirza, Takeshi Hatanaka, I'lasayuki Fujita and Bambang Riyanto.T
ICIUS-2010-0231 [ View Abstract ] [ view Paper IAdaptlve, Integrated Guidance and Control Deslgn for Automatic Landing of a fixed Wing UAVBoo Mln Klm, liTae Kim, Byoung Soo Kim, and cheolgun Ha
Page 8 of8
file:/E:\ses.html 03/10/2013
一
―
一

ICluS 2010Nov 3‐5 2010Ball lndonoSia
ICIUS 2010 0162
Safety Analysis of Helicopter Models using Hybrid Systems rvith
Geometric Programming
Srlmrh', Endm Joelirnto', Noorn, Y.ltegaw.tir, Agus Budiyono', Hermafl Y. Sutirtos,
and lndrh Emilia W.'
.University of Gadjah Mada
Yoglakarta, Indonesia
E-mail: syalmal'@yahoo.com, [email protected], [email protected]
$Bandung Institute of Technology
Jalan Ganesha 10, Bandung 40132, Indonesia
E-mail: cjo€[email protected], [email protected]
#Depanment of Aerospace Information Engineering
Konkuk University, Seoul, Korea
E-mail: [email protected]
Abstrnct
D“Ⅲ 昴8 8ulonom lus■ lght ω■lrot w“ em For a mini sc81●
hd“ plerヽ ve,ch‖ enJng d∝ t。 !卜 dr l:ま
"nOdい
lar lnd
ungab o い施vb` unlよ c iも fu‖6● mm“…
thcmaule ral cal modct of mini scalc heに opter enわ its n。1。oy:К嵐燎爆
“●:1蒟,10∞ oいl hpu● 田d d sturbl― but J"
hgher b3● 1綱h of is●■mにs me tpprOach O conmlthe
““
1“ェッ壺m`″ bnd∞nm]‐ hnlq“ wh chお pr.●‐ led
onいo lhctttlo● Inはb mode o Mで o snlpl● l nl● ‐ dc]
ThsI日ヽb="に bhg ttЫen“薗産 of ch鴨“
Gom Onc
nde to moい o mode in iヽ nig tl enve:ope Thヽ p■ per
itw“ lgales saFe,Inalysヽ of helcopler model du● ■8 modem応
“
On“ In3"brm,sten tlp o“h ln●`o産
■おヽ
lmi"dЮ ″ヽo nod● cond“ [on inい 。heli∞ ple,mαttie hoV。 ,
細●cruv
Ketwordsi StFeo Ara[yS, "bnd WStemヽ PdⅢ●lr■ 1,
S輌面
“
Sy壼饉
l lntroductlon
Advanced con¨ l thco● es are kno″ n lo handic ct mplex
and Юnlinear syslems such s mllncuveに or autOnOmous
vchに lcs A d、s of tis conlrK l syslemお knoln as hvb■d
contol wttms tticl dcal wi● dypamic chttges and
unsL10n behⅣ lour bemeen the cllanges A small∝ ale
hel∞ plc=も known lo htrenJy hae the%realtts u]Inthis pper.the behⅣ
`oぉ
of a sman sttc helicopter are
represented inlo a"ncanm model at t■ m∞ ndl● osWhcn a wider reg10n of nig lt envelo「 s∞sideo● thも
appro“h icads to a s″"ching pЮ
blem reprewnun8
颯“
Fcn one mode lo anolher modc h aっ Πガinned
ottr for saFe and suc―
“
i nighL In gencnt慟 ●Lads to
a swl“ M wstem which ls 8,brd dy口 面raり“cm
conS“ n3o,a Fa‐nly oFel nlnuous ti■ le鉗け stemS and a
nllc ual gOVems thc,″ itching辰Ⅲ″ccn Ⅲ m〔 2〕 ヽcse
SBN 07&97● 169551,
dis.rcte switchcs of ihe continuous dynsmics oft.n hay€glat influene on lh€ir p€rfomanc.. Becau!€ of ftcnindcain8 prcti@l impodde, silched systemi havcbeen rcceived morc dd morc ancntionrcendy 12-51.
Tle papcr conems with malysis of svitched controlsystems for a mod.l helicaprer exciEd with extlmalsitches fiat change lhe flighl d)namics frem hov.r to@ise modes by latisfyint some consLainls in lh.fiajectories b fulfill a sdety condition. Aulonohousrehicles musl sflilsy $e srlety cond,rrcn in ordcr io giv.srfc ed succ.sstul flighl mission. Tlte slfeF/ conditionaalysis cnsu€s rhat rhe hybrid conrrol syst m not onlyporides stability of lhe body of th. hcli@pt r but ahot_acks flighr tajeclory within a tiven co.stnt.t.
2 Helicopter Model
A h.li@pter model dynMic which is a lineariz€d cqualionis d.rilcd fiom thc Newlon-Euld cqualiotrs for a rigidbody lhat has six deg@s offtecdom moving in Aace. The.xt mal forces, consisting of emdynmic arldgmvirational focs, &€ rcpEvnted in a shbility dcrivalivefom. Following lhe vell known ref.rmcc in shall s.rlehelicopt r modeling and conuol l. fie .qwtions ofmotion of the ,nodel tElicopte. co.sis oftlk tus.lage aIdcoupled roioGfly-bd dynMics. Tt. mathcmalical modelof rhe h€licoptc. dynmics i. d.sib.d in the slale [email protected]. The modcl is oblaincd by @llccling .llditr.mtial .qui.ions including cqualion into veclor
(l)
0"10に IUS321

rcIJs2010
sh.rc , Md,rdenot ihe stalc vcctor od the inpur vecror
rcspectively. Th. syst m malrix I @ftsponds ro the
slability d.rivltives: the input marrix I @ntaiff the inpulderivarives. Tt. dynaDics ofh.li@pter ar an exMple of a
lin.& hybrid sfslen mdcl lepcs.nting g?icd helimp&rb.haviors consist of many modcs. Tlte papg will onlyconcenlrale *ill hover and cruise modes Helicoprersexnibir dynamic rcsponse dillcrcntly in hore.Ilient than incruiso flighr. In thc pammererized ,nodel. thesc dif.En@sdo not significandy afiecl lhe oder md thc sructurc olthem.0lemriicd modcls.
ln rlE nEd.ling stage, ihe iade-off betec.n accuiacy andsimplicity is imponant to ea$ thc design andimplerE tarion of dl€ connol sysLms. To design a highbddwidth conEol syscrq ihc cff.cts of thc roioFfuselaA.coupling, for instar@, mNt b. accoutld for explicitly.Mcanwhilc, a prdclical dd insiehlful mntmller slnlh.sisnec€ssibtls a simple enough model. Typical hclicopterflighr mode is compoed of: (l) take{n, (2) hov€r, (l)asccnt (4) d.wnr (5) foNard flight (6) bukrorum (7)pircwnc (8) leding. Frcm this p.6pec1iv., a flighls@io of a hclicoptr can bc unde66od as a scquenlial&mbin tion ol some of th€s. modes. A flight scenario is
uscd in this simulation compdss a hover od a fopardflight rodc. The hovq mdc is the mn .ss.ntial flighinod. to h. a..omplished by the autopilor contol systembecalsc almon all Aidt sa@ios 80 lhmugh th. hovormo&. Thc hovcr indiclt.slhe stat. wheE heli@pEr slaysin lhc air vith ncgliSibl. spcd sd h@dir8 cheSe ed aleall th€ loops in tlight @ntrol lmp @ activated ro sray al th.given @rdinste whilc rackirg the ref.rence heading.
3 Stf.tyAn.lFh ofswitched Sy ehs
A switchcd rysllm is E cl&ss of hyLtrid dynmi@l sy$emsconsist ofa family ofco inuous-ti,n€ subsystems and a
rulc lhra tpvcms th! saitching b.!w..n thm. The*discr.L swnch.s of lhc continuous dynmics on n havegnat inflrlcncc on their pcrformancc. The main point in thcs.cffiio is how io hEdlc lh€ tr sition phcnoms in th.slvi(chcd contsl rnd !o .valuaL rh. safcty analysis byusins the hybrid trodcl simuldion.
For switching dynamical syst ms wilh a switchingcoorDll4 in rh. fom
*O)-.r'(0+rr{4,{E}-.r (z)
Considcr a switching fecdb@k ontol syslcm und.r licexkmar s*irch,nr law Ld t, l:{ aid {(it};. "*"the tint€ inslants of s*,lchings and ih. mod. of the
switching csp..livcly. In addition, dcfnc S c /rI as thc
'a "r O" (i(t + t) (t)) uar @ occur in a ccrtain
s,wibhiog timc tr. td,(t) = i e 1 i, [r.,r,,, ) *a u.clos€d loop plani dyramics is dcnot d by
,(n - ,"'tr(,
tsBN 97&9791 6955-1-{)
tctus-2fiqo162
with dre tull naie fecdba.l contol law for c&h
{t)= i e ri" [r,,r,.,) is gi,* uy
u(t)= K x(t) (3)
suci tlrat 9(1, (,,{.7, )) < 0, for j = l,A ,n., whic} d!found by usiDg fie sare o.$od itr [6].Now considd srfety predicatcs of hybnd syst 6,esp.cially for lvo inod€s sy*em shown in figuc l. Lcislan wifi fie syst m ar modc I wilh dynamics cqutionJE rEr. Assunc $at if , > ,o: , ulc mode jwnps ftom
mode I i0 modE 2 with ncw dynarnics cquation 9.4,r.Th. polyh.drsl s.l of rhc initi"l stab (4,,Xo)aid d'c
tcnninar sarc (e,,-tr) Erc dcrrma os follow:
Xo = {iro € R' 14, < xo < r@}
Xr=lxrePlhr,<xr<hrr\ (1)
when Io, , n, e Rt ar'a hn,h, e N .
F'g.E r: Hybrid Sy'cDt r rvo Eod4
Nop de8ne rcachabiliry ser ofhybrid systems [7-8]
D.lioitiotr t. $!l. (4,i) is ssid tt&h!b|., ifth.rc
cxisls s finiG c)\cursion (r.4,.x) $hcrc r={.,,t.11;_o
ed (4(r, ), r(?r, )) = (4, i) Arl coll€crion or
r.&h0bk stat is ¬ d by tbe *\ R.ach e qX .
If unsafe sta!€ of rie hyb.id system! is derot d by X/, dE
sdeD pEdiclr. ot hybrid syst N is drlln.d 6 follow!.
D.finiriotr 2. If X/ d nod. 4? is the tenrunal siate
or rt. unsfc aae. rne saf.ty prcd,@te " [t". tr] I'
safTs"d(r,i{&xti(r?x'D = F'-"4"ffif*Tte ploblems in safety aalysis of hybdd sysremsm:
@ 2010 rcllJs322
tctus20l0
| . Given initial &d teminal polyhcdB s.ts
2. Dclemine the ftquiEd timc to chmgc mod. singthepolyhed@l sets
3. D.temiDe \lhedlcr lhc systcm is sfe.
4. If ll)e sys&m is unsafc, det€mine the time inreaalI- , It.*'. * lH.ne lhe srvirching syst m is sale il t\e lollowing
conditions are s51ist'€d
sarel.._l (4(q,,x.),(q,, x/)) = I,
saferr_.,_t (,{, (c, , x. ), (c,, x/ )) = o,
sarer,_.-l (4(c,,x.),(q,,x/)) = l.
Fmm lhe d.finilion of lh. E&h8bility of hybrid syst ms,
ille followirg slcps @ wd to solve lh. slfcty prcdicite of
l. DcErminc *E initial polyhcdEl ill modc i tnd th. inalpolyh.dnl in mode i+1, vhich k solution of mod. ,
2. D.t nninc $e flquirEd timc tom mod. i to modc r'+/.'nlc probl€m is solved by choosins |ll. nme such tlatlh€ traj@roriE of solution fron polyhedml in modeiwillfall to polyhedralin modc i+/.
3. D.tmire the solution of dilfercnlial cqudion at
''od.- I ( q, ) *n.E ro e Xo . Find the srlle Yalue or
r (f) whcrc r dcnor.s dE oc.rir.nc. of th. discretc
Fansition. Thc aa|e r(f) becorEs $e inirial $ate of
ote mode-2 (q1) d.ior.d by ;o = i(0) = i(r).4. D€iernirc efety andysh using th. sar. stcps with
rhc inirial nal. mode'2 ( q, ) is to = ;(0) = {D .
The ssfoty prcbtcm is soFcd by defining ts an optimizationp.obLm. Thc oprinizrlion probl.ns are d.flm.d as fol'ow:
zn= Lo
Hoxo< ho
H txt shl
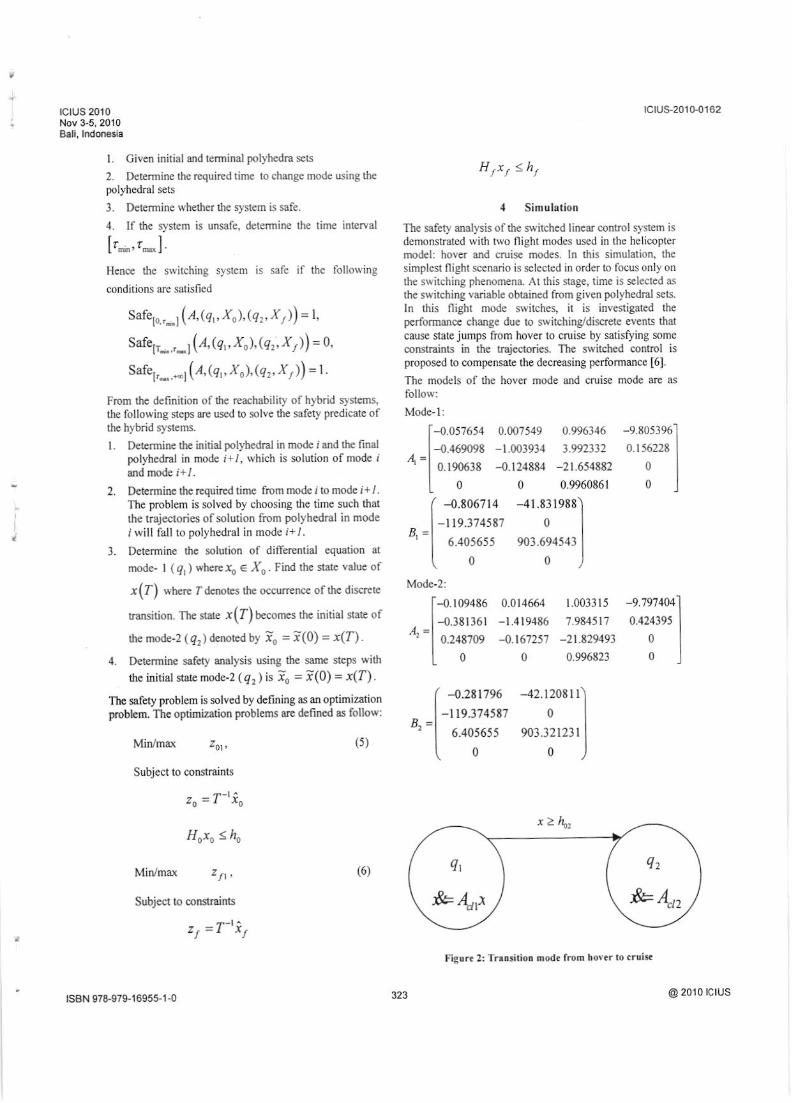
4 Simuhtior
Tlc safet) eallsisofth. sitched linear controlslslem i.demoNtrat d with two flight modes u!€d in lhe heli@ptertrDdcl: holer and ctuise modcs. ln this simulation, thesimplest flight s.enario is selected in ord.r to focs only onthe swirchinA phenomena. At rhis stage. timc is elecled as
fie s*itching vdiablc obbined frcm given polyhedral s.t .
ln his night mode sqitches, ii is investigated fieperfoMc. change du. io switching/di!.relc ev€nts $alcaus. slat iumps from hover lo cruis by satisfyine some
connraints in thc rEjcclo.ici 'IrE switclEd contol isproposed !o compcrualc lhe dec.e&sine p.rromece 16l.
Th. models of thc hover mode and @ise modc are as
Mode-l:
l-4.057654 0.007549 0 99{,j46 -q.805laol
, _la.*oo,r -r'olel4 lqc2]r2 0.r56228 I' | 0 190618 -{.124884 -21.654882 o I
L o 0 0.9960861 0l/ -o 806714 -41.E11988)I -,,n',ror*, o I
R=l' I 6.405655 903.694541 Itt\00)
Mode-21
f-{.r0e4so 0.014664 r 0013r5 -q ?974041
I 4 lRllarl -l 419486 ,9M517 0.424395 I
4=l ororr, 416i251 -2t.a2g4g3 o I
looo.ee6E2rol
ICIUS 2010 0162
8
2
0
1
‐2
0
32
0
″ 螂
¨̈い。
つ
・11
●
′―
〓ら
4z
&A,,Qt
&4tt
lSBN 978 979 16055'-0
2t =T-tltFiem. 2: T..uirio! morlr rmm hor.r.o.ruir
@2010lcrus

為0
,
ハ0
53
0
0
一00文〓為^
0
0
1
〓
匈 1,,' 匈
“
1 017“ ―,,2, -1%,0,,,, -21620 2"“ 02`2`
“
喀=●
|
:"輿 0口 お 】0“0“ ∞1` ―■12'
O 0 0%1 0 00“) 01'1, ●48“ `- 1"'`0け∞ ,螂 -40%
“
メ ■0,"174,` 1い 2 ● 文0 'お =-11,=口詢 0■
`` 0“,' llち , :"'
●`“
●●1'1 ●ゆ つ" “
,卿0柳
“
● 2つ lωω 01` ―〕― O
ti“1 0“ 11 ,2` ,る (2 嶺 おЮ
l," ―●1お, 1廊 ,"“ “ "“1夕
" 1,“勉 -10`,“ 1,リ ー1-
-1“" 2富“
-17勁 `,1陀 ―瑯
“
1'
3"0●“
, 01114 1"" '“ ●O
m"1 ,o" ,,ぉ 1∞
1“¨ イ`ω '
あ t`,,
お●●I 10= ",,
"“, ,知Ю "=,〕∞
10匈“
お ,嘉 ぶ ¨
● 1蜘 0期 -1“"
コ|" ““
,0'3'―0 0 0
,,,`= 初`," 2●
7`
m●・Q ■21Ю “
●●|
り1,∞ ―lu t7"靭 t7● 1
0- 0,“ -1取 】
―――――――ココ
Oo00的¨
For ltc cruise mode, il is oblained
ヘ
――
―
―
―
―
――
―
ト
ー
ー
ーー
ー
ー
ー
「
り
281806
02714
184268
220231
6%49〃.″′・
1769
158炒
2810'`
1,7,2
18蝉 2
will matrk tansFonnation r‐ 4 thisに ads lo the螢 io ρ
coordinate“
lc`uS 20(ONov,5,20,03ol lnd-8
cヽ gan tedback κ,,′ =1,2 at fOund s h【 61 such
that the clo史 d loop syslems for lle hover nlode and雌
cruise mode are given by
4 ●
恥●n be lnvei gated whether醸 ,brd w¨ m“ 銀 In
tbc¨ nlodes 4 and 4 have● o κd agenlalucs md
thEC 四 ∞mplex elgenvalles 映 鮨c lbe matrix И
SИ =胎 尤]・・̈4 man輌 画
eigenv」ucs or″ and 4 matr破 Wlth ∞m口ex
eigenvalles OFИ
Forthc hover mode itis obtained
-82∞4 252860 0 0 0
-2,28ω -8204 0 0 0
o o -27949 ,402, 0
0 0 -34023 -2,,49 0
o o 0 0 -1710, 1
o o 0 0 1 6451-1
0000
0000つ ,673 48784 0 0
● 8784 つ
“
7' 0 0
0 0 -1曖 7 19671
0 0 -1"l -1鯰 27
Th. Equircd time frcm hovcr mod. to @is. mode is 0.05
Now consid€r tle safety ealysis for tn. hover mod..Solulioo for $bsysLm I for 7=a0J sccond tlt n b.cotrtcsdlc inilial valw for the cruis. modc, is
For hoyer mode, $e triD co.dition is u1 m/s, and w=0,bd for ctuise mode. rhe rrin condition G n=8 m/s md、→ 2 Lct
・ ・
‐
(iLel the irmsfomation ,natrix is defined by f = 1 . UsinS
the melhod as iD I9l, it is foDnd ihal
ul53 , .al s l,8E?c
-ei19ts..t5-:.r$B-!1134 ! +' t :O75$
-lemutz^s12.16i15.
For €v.ry subsfslei! it is oblain.d
l. tor subsrsrcm /, wilh +. -'aec""se zL,,{, >o Nd zln <O < 4,th.r,'t(xlr,thenbe concludc lhat subsyslem 1 is safe.
2. For subsyst m,, with zrr=e3t1q'46)2,
beears. zld,z!, >0 od z, < 0 < z; , th€n it is rouid
rhar subsystem 2 is safe.
It can th€n bc summarized that
saret.-t((4,,. x "),(A,,,
x t)\=lNow l.t considcr thc salety ealysis for lhe .auis nod..kt rfo 01, is elution for I-0 0J s.cond. for hover mde,ttu lrim condilion e q{ nvs ard r=-0.0E29, lh.polyhedEl wioi inirisl sr!l. in 4 ond fmal iar. io tl[dc
q: is siven by
1
-1
0
0
0
0
0
0
0
0
0
0
0
0
1
-1
0
0
0
0
0
O
O
0
0
0
0
0
1
-1
0
0
0
0
O
O
0
0
0
0
0
0
1
-1
0
O
0
0
0
0
0
0
0
0
0
0
1
-1
0
0
,4“ 1
,241,つ 0322
06,1,
35``5
-3044-26拗
84,,6
94,2-,2,01
■ 0372
0`‰
lCIじS20100162
1,67'6
lSBN 973 979 16955 1 0 321 0 2010 1CluS
ら.‐
lclUS 2040Nov3 5 2010Bal loOones a
14555≦ /、 1 ≦61383,
26812≦ ρ笠 ≦38328,
84627≦ pO.≦ 86777,
0≦ ),1≦ 156799,
0≦ ρ′2≦250739,
0≦ ρ′〕≦159499
Now lel∞nsider,fe,analySiS h ρ ∞ordinatc ln′
coord● Ⅲ ,lt is oblau ed ulat all Юluton is irrcasibic
枷 rcfo記 ,■ おnot necesarv lo cosiderthe mfe,anJy● S
hθ ∞ordhale n can be∞ nctuded● at ule suけ slen
wiul ttal eigenvttuc is,t Thereforc thc slhole wslem iS
safe or
SaFe O..l((4.,χ 。),(42,為 か 1
S Conclusio■ s
The paper disttFd銀 ,anall"S Of mode● Ms●ion of
mh●硼 c he“∞pler modci ne paper esPcia1ly∞nemed wi■ saFety mtty● s oflanSlon be“ m hove,nlode田● crui“ mo● ‐ 田 lysis ws tarrled out by
Epに,ndng the nlode m● おn as a,bnd dynamical
wstem mt can be sOlved by geomet“ PЮgal mu18
appЮ∝h as an exteston oF sare,an」 ySも oF lhcar
WSteins Fttuler wOrk is extended to dca wi● globd
modes ofhel∞ pler nodcI
Ack■owlodgmen`
ne authOs wOuld llke to rateFu‖ y acbo″ledge the
Fullding“ m the lntematiot a ,oumal Pubication and
R6arch Colabontlon G山 、 Dinχ lonte of Highe,
Educatlon, Minis●y oF Edllotion, Indonesia 2010 No
4267SP2H7PP7DP2ヽ クVνつ010¬に flN md田∞nd author
wっuld uke lo acに Юwledtt thc ttpolt
“
m PЮ l
●″ang‐ Joon Yoon dunng●Ю visit a the Depar● ncnt of
AcD平閣∝ Infomalon EngШχ■ng K。遺 uk univぃ iリ
Scout Kotta"∞ mplec ulis wOt
`clus_2olo0162
口I E Jodialto and D Winiammn"slab口 1● of i tlpul● ve
Dynami“ t Syゞ輛 I P7p`グθ″々 IEEEO γヽ、′“
ο″
Dooお′ο"α
″ Co""4 pp 3717● 722,1998
14〕 D Libe閻ヽ赫″ 1々電 71阿″な α″ Gm。4
KllltverAceden■ 、US,2007
【,lE'oe‖ anlo and H Y Sutarlo,・Contoned swilching
Dpamictt wstmS usng し■lca lmpus■ e
Difrerend」 Eql atiOns,in Budiyono,A,B Rtyalto E
Jodimio,(Eも),2019,あ ″″七`ィ
′ひ。"α
″″ 跡 セ港 :
rl`οヮα″″〃た。●α■,Studに s on Compulatlora
lnlellignce もヽl l,2 SpHngel.Bcrlin Cennan“ pp
227‐ 244,2009
〔6〕 H Y Sum。 ,A BudipЮ.E,ocllanto md CI Hお ng`'Switched Linear Conml or A Model Hcli∞ Ⅲ ピ,
P,oce“″′
`jC4RC/2にSingapore,pp 13帷 1307.
2006
〔71 N Y Mcgawat H Y Sularo,Salnd、 A Su髯鵬″anto,
I Em‖ la W,Solulmュ A Bud,onOda E,∝hanb.
Safet● Anal"`ora Class OF Tlmed Aulomala Hybnd
Sysle騒, 力“
j虚 7●●″α●′ “
ψ′ 0″
"′利"`“"`の“"′
α″И“わ商′勧
“
aり 2ω,
Band ng indonesla pp 277‐ 282201'
18]H Y Sularto,N Y MegNat,ヽ lmⅢ A Sup‐ anttl,
E loe“ano,I E Wlj,ml A Budl"∞ and
Sollkl atull“ 銀 ,AndySs of H● icoptr Modcヽ
using ■ lEI Aulomata HybHd Sy壺 応 ", Prtルiγ面 ●″ Cり
' α お れ 闊 物 渤 ス
Co″″"‐
″ο"″ ヵO■″″ο“ 2■
“"●Oωゼ
Biα"““
′DttЙ″′盟g`“
'■
3LB鴫 2ωλ Bandun31ndonsiヽ 2009
191 H Y… 18nd C,P“●s,'Ceomeic Progra―ing
RelⅨ江bns for Linear ヽ¨m Reachabil,10,で
`″″客 И
"`蔵a Cα
“"′
COり●υτa pp 553-559,20X
References
B Mcttlet M B ■schicl■ Kanade and, HBura uglles“ system ldendttcatlon Modeling Of a
Small scac Uman 10d RoltlrcraFt for Flghi con"1
De"gn・ ノグルИ″ゼ″a,ル|=中●′` で″ク47.50,
2012
M S Bmicky VS BorL・ and SK Miti ⅢAUnined Fnmcwork ror Hybrid Cont● I Model andOplmal Con“ i",■EEEη ,"な ο″И″ο池
`た
Cο″ゎ4bヽ1 43,pp 31‐ 45, 1998
lSBN 978 979 16955 1 0 @20101010S




















