Met num 9
16
72 5. 6 Interpolasi Polinom Lagrange Seperti diketahui dari rumusan polinom linier : p 1 (x) = y 0 + 0 0 1 0 1 x x x x y y (5. 2. 3) Persamaan ini dapat ditulis kembali sebagai, p 1 (x) = y 0 1 0 1 x x x x + y 1 0 1 0 x x x x (5. 6. 1) yang dapat dinyatakan dalam bentuk sebagai berikut : p 1 (x) = a 0 L 0 (x) + a 1 L 1 (x) (5. 6. 2) dengan, a 0 = y 0 , L 0 (x) = 1 0 1 x x x x dan, a 1 = y 1 , L 0 (x) = 0 1 0 x x x x Bentuk persamaan (5. 6. 2) disebut dengan polinom Lagrange derajat 1. Secara umum persamaan ini dapat ditulis sebagai berikut : n 0 i i i n ) x ( f ) x ( L ) x ( p (5. 6. 3) dengan ‘ n ’ pada ) x ( f n berarti pendekatan polinomial ke n dengan fungsi ) x ( f y diberikan ) 1 n ( titik data n n 1 n 1 n 1 1 0 0 y , x , y , x ,......, y , x , y , x , ini dapat dibuktikan bahwa, data ini melalui setiap titik data tersebut dan n i j 0 j j i j i x x x x ) x ( L (5. 6. 4) ) x ( L i adalah fungsi pemberat (weighting) yang merupakan perkalian dari bentuk ) 1 n ( di mana tidak terjadi jika i j . Ini dapat dibuktikan bahwa jika kasus i j maka penyelesaiannya tidak unik. Polinom Lagrange tidak hanya berlaku untuk titik – titik yang berjarak sama, tetapi dapat juga digunakan untuk titik data yang berbeda. Interpolasi Linier Lagrange Berikut contoh penerapan dari polinom derajat satu dari interpolasi linier Lagrange: Contoh 5. 6. 5 Seperti pada kasus sebelumnya kecepatan sebuah roket dapat ditunjukkan sebagai fungsi waktu pada tabel 1, berikut :
-
Upload
amri-sandy -
Category
Documents
-
view
485 -
download
1
Transcript of Met num 9

72
5. 6 Interpolasi Polinom Lagrange
Seperti diketahui dari rumusan polinom linier :
p1(x) = y0 +
0
01
01 xxxx
yy
(5. 2. 3)
Persamaan ini dapat ditulis kembali sebagai,
p1(x) = y0
10
1
xx
xx
+ y1
01
0
xx
xx
(5. 6. 1)
yang dapat dinyatakan dalam bentuk sebagai berikut :
p1(x) = a0 L0(x) + a1 L1(x) (5. 6. 2)
dengan, a0 = y0, L0(x) =
10
1
xx
xx
dan, a1 = y1, L0(x) =
01
0
xx
xx
Bentuk persamaan (5. 6. 2) disebut dengan polinom Lagrange derajat 1.
Secara umum persamaan ini dapat ditulis sebagai berikut :
n
0i
iin )x(f)x(L)x(p (5. 6. 3)
dengan ‘ n ’ pada )x(f n berarti pendekatan polinomial ke n dengan fungsi )x(fy
diberikan )1n( titik data nn1n1n1100 y,x,y,x,......,y,x,y,x , ini dapat
dibuktikan bahwa, data ini melalui setiap titik data tersebut dan
n
ij0j ji
j
ixx
xx)x(L (5. 6. 4)
)x(Li adalah fungsi pemberat (weighting) yang merupakan perkalian dari bentuk )1n(
di mana tidak terjadi jika ij . Ini dapat dibuktikan bahwa jika kasus ij maka
penyelesaiannya tidak unik. Polinom Lagrange tidak hanya berlaku untuk titik – titik yang
berjarak sama, tetapi dapat juga digunakan untuk titik data yang berbeda.
Interpolasi Linier Lagrange
Berikut contoh penerapan dari polinom derajat satu dari interpolasi linier Lagrange:
Contoh 5. 6. 5
Seperti pada kasus sebelumnya kecepatan sebuah roket dapat ditunjukkan sebagai
fungsi waktu pada tabel 1, berikut :

73
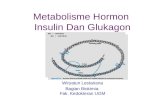
Tabel 1. Kecepatan sebagai fungsi waktu
Waktu [detik] 0 10 15 20 22.5 30
v(t) [m/detik] 0 227.04 362.78 517.35 602.97 901.67
0
250
500
750
1000
0 10 20 30 40
t [s]
v (t) [s]
Gambar 5. 6a. Kecepatan terhadap waktu sebuah roket
Tentukan nilai kecepatan pada t = 16 detik, dengan menggunakan polinomial derajat
pertama dari Lagrange.
Penyelesaian
Untuk polinomial derajat pertama (disebut dengan interpolasi linier), ditunjukkan
sebagai,
1
0i
ii )t(v)t(L)t(v
)t(v)t(L)t(v)t(L 1100
kemudian kecepatan pada waktu t = 16, dipilih titik yang mengurung data t = 16.
selanjutnya dua titik itu adalah to = 15 dan t1 = 20.
78.362t,15t 00
35.517t,20t 11
1
0j0j j0
j
0tt
tt)t(L
10
1
tt
tt

74
1
1j0j j1
j
1tt
tt)t(L
01
0
tt
tt
)t(vtt
tt)t(v
tt
tt)t(v 1
01
0
0
10
1
)35.517(1520
15t)78.362(
2015
20t
)35.517(1520
1516)78.362(
2015
2016)16(v
)35.517(2.0)78.362(8.0
7.393 m/detik.
dapat ditunjukkan bahwa 8.0)t(L0 dan 2.0)t(L1 merupakan pemberat pada
kecepatan t = 15 dan t = 20 untuk menghitung pada saat kecepatan t = 16.
Interpolasi Kuadrat Lagrange
Untuk polinom interpolasi derajat dua (disebut juga sebagai interpolasi kuadrat)
kecepatan diberikan sebagai,
2
0i
ii )t(v)t(L)t(v
)t(v)t(L)t(v)t(L)t(v)t(L 221100
Contoh 5. 6. 6
Kecepatan sebuah roket dapat ditunjukkan sebagai fungsi waktu pada tabel 2 berikut
Tabel 2. Kecepatan sebagai fungsi waktu
Waktu [detik] 0 10 15 20 22.5 30
v(t) [m/detik] 0.00 227.04 362.78 517.35 602.97 901.67
Tentukan nilai kecepatan pada saat t = 16 detik, dengan menggunakan polinomial
derajat dua dari Lagrange. Carilah galat mutlak dari persamaan tersebut.
Penyelesaian
Diketahui kecepatan pada saat t = 16 detik, dibutuhkan data yang mengurung data
ini, sehingga dipilih tiga titik, t0 = 10, t1 = 15, t2 = 20.
04.227tv,10t oo

75
78.362tv,15t 11
35.517tv,20t 22
diketahui,
2
0j0j j0
j
0tt
tt)t(L
20
2
10
1
tt
tt
tt
tt
2
1j0j j1
j
1tt
tt)t(L
21
2
01
0
tt
tt
tt
tt
2
2j0j j2
j
2tt
tt)t(L
12
1
02
0
tt
tt
tt
tt
)t(vtt
tt
tt
tt)t(v
tt
tt
tt
tt)t(v
tt
tt
tt
tt)t(v 2
12
1
02
0
1
21
2
01
0
0
20
2
10
1
)35.517()1520)(1020(
)1516)(1016(
)78.362()2015)(1015(
)2016)(1016()04.227(
)2010)(1510(
)2016)(1516()16(v
)35.517)(12.0()78.362)(96.0()04.227)(08.0(
19.392 m/detik.
Galat pendekatan absolutnya a , yang diperbandingkan dengan hasil antara polinomial
derajat satu dan dua adalah :
10019.392
70.39319.392a
%38502.0
Contoh 5. 6. 7
Kecepatan sebuah roket dapat ditunjukkan sebagai fungsi waktu pada tabel 3 berikut :
Tabel 3. Kecepatan sebagai fungsi waktu
Waktu [detik] 0 10 15 20 22.5 30
v(t) [m/detik] 0.00 227.04 362.78 517.35 602.97 901.67
a) Tentukan nilai kecepatan pada saat t = 16 detik, gunakan interpolasi polinomial
Lagrangian derajat 3. Carilah nilai pendekatan galat absolut dari persamaan ini.

76
b) Dengan menggunakan interpolasi polinomial derajat 3 untuk kecepatan, carilah
jarak yang dicapai roket pada saat t = 11 sampai dengan t = 16 detik.
c) Carilah percepatan dari roket pada saat t = 16 detik.
Penyelesaian :
a) Untuk polinomial derajat 3 (disebut juga dengan intepolasi kubik), dipilih
kecepatan sebagai,
3
0i
ii )t(v)t(L)t(v
)t(v)t(L)t(v)t(L)t(v)t(L)t(v)t(L 33221100
kemudian pada saat kecepatan t = 16 detik, dipilih empat data yang mengurung data ini
adalah, t0 = 10, t1=15, t2 = 20 dan t3 = 22.5.
04.227tv,10t oo
78.362tv,15t 11
35.517tv,20t 22
97.602tv,5.22t 33
sehingga,
3
0j0j j0
j
0tt
tt)t(L
30
3
20
2
10
1
tt
tt
tt
tt
tt
tt
3
1j0j j1
j
1tt
tt)t(L
31
3
21
2
01
0
tt
tt
tt
tt
tt
tt
3
2j0j j2
j
2tt
tt)t(L
32
3
12
1
02
0
tt
tt
tt
tt
tt
tt
3
3j0j j3
j
3tt
tt)t(L
23
2
13
1
03
0
tt
tt
tt
tt
tt
tt
)t(vtt
tt
tt
tt
tt
tt)t(v
tt
tt
tt
tt
tt
tt
)t(vtt
tt
tt
tt
tt
tt)t(v
tt
tt
tt
tt
tt
tt)t(v
3
23
2
13
1
03
0
2
32
3
12
1
02
0
1
31
3
21
2
01
0
0
30
3
20
2
10
1

77
)97.602()205.22)(155.22)(105.22(
)2016)(1516)(1016()35.517(
)5.2220)(1520)(1020(
)5.2216)(1516)(1016(
)78.362()5.2215)(2015)(1015(
)5.2216)(2016)(1016()04.227(
)5.2210)(2010)(1510(
)5.2216)(2016)(1516()16(v
)97.602)(1024.0()35.517)(312.0()78.362)(832.0()04.227)(0416.0(
06.392 m/detik
Pendekatan Nilai persentase galat mutlak, a untuk kecepatan v(16) diantara polinomial
ketiga dan kedua adalah,
10006.392
19.39206.392a
%033427.0
b) Jarak yang ditempuh roket antara waktu t = 11 dan t = 16 detik dapat dihitung dengan
interpolasi polinomial :
5.22t10untuk
),97.602()205.22)(155.22)(105.22(
)20t)(15t)(10t()35.517(
)5.2220)(1520)(1020(
)5.22t)(15t)(10t(
)78.362()5.2215)(2015)(1015(
)5.22t)(20t)(10t()04.227(
)5.2210)(2010)(1510(
)5.22t)(20t)(15t()t(v
)97.602()5.2)(5.7)(5.12(
)20t)(150t25t()35.517(
)5.2)(5)(10(
)5.22t)(150t25t(
)78.362()5.7)(5)(5(
)5.22t)(200t30t()04.227(
)5.12)(10)(5(
)5.22t)(300t35t()t(v
22
22
)5727.2)(3000t6502
t453
t()1388.4)(3375t5.7122
t5.473
t(
)9348.1)(4500t8752
t5.523
t()36326.0)(6750t5.10872
t5.573
t()t(v
,t00544.0t13195.0t265.21245.4)t(v32 5.22t10
Diketahui bahwa polinomial antara t = 10 dan t = 22.5, ditunjukkan sebagai pendekatan
dari limit t = 11 dan t = 16.
Jadi,
16
11
dt)t(v)11(s)16(s
16
11
32dt)t00544.0t13195.0t265.21245.4(

78
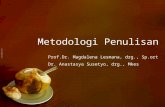
(x0, y0)
(x1, y1)
f1 (x)
x
y
16
11
432
]4
t00544.0
3
t13195.0
2
t265.21t245.4[
1605 m
c) Percepatan pada saat t = 16 diberikan,
16t
tvdt
d16a
Diketahui,
32t00544.0t13195.0t265.21245.4)t(v 5.22t10
32t00544.0t13195.0t265.21245.4
dt
dtv
dt
dta
2t01632.0t26390.0265.21
2
)16(01632.0)16(26390.0265.21)16(a
5. 7 Interpolasi Polinom Newton Terbagi
Untuk mengillustrasikan metode ini, ditunjukkan pada interpolasi derajat satu dan
dua.
5. 7. 1 Interpolasi Linier :
Diberikan titik ),y,x( 00 ),y,x( 11 dengan menginterpolasi kedua titik data
tersebut. Dengan )x(fy 00 dan )x(fy 11 , diasumsikan linier, sehingga interpolasi
)x(f 1 diberikan sebagai,
)xx(bb)x(f 0101
sehingga pada titik 0xx ,
00010001 b)xx(bb)x(f)x(f ,
dan pada 1xx ,

79
)xx(bb)x(f)x(f 0110111 )xx(b)x(f 0110
sehingga,
01
01
1xx
)x(f)x(fb
jadi,
)x(fb 00
01
01
1xx
)x(f)x(fb
sehingga interpolasi linier,
)xx(bb)x(f 0101
)xx(xx
)x(f)x(f)x(f)x(f 0
01
01
01
Contoh 5. 7. 2 :
Kecepatan sebuah roket dapat ditunjukkan sebagai fungsi waktu pada tabel 3 berikut :
Tabel 3. Kecepatan sebagai fungsi waktu
Waktu [detik] 0 10 15 20 22.5 30
v(t) [m/detik] 0.00 227.04 362.78 517.35 602.97 901.67
a. Tentukan nilai kecepatan pada saat t = 16 detik, gunakan interpolasi polinomial
Newton terbagi derajat 1.
0
250
500
750
1000
0 10 20 30 40
t [s]
v (t) [s]
Gambar 5. 7a. Data Kecepatan Roket terhadap waktu tempuhnya
Penyelesaian :

80
Untuk interplasi linier, diberikan
)tt(bb)t(v 010
pada saat 16t , ditunjukkan data yang mengurung 16t . Sehingga dapat diambil dua
titik 15t dan 20t .
,15t0 78.362)t(v 0
,20t1 35.517)t(v 1
diberikan,
)t(vb 00 78.362
01
01
1tt
)t(v)t(vb
1520
78.36235.517
914.30
sehingga,
)tt(bb)t(v 010
),15t(914.3078.362 20t15
pada saat 16t
)1516(914.3078.362)16(v
69.393 m/detik
Jika diperluas maka,
),15t(914.3078.362)t(v 20t15
sehingga,
,t914.3093.100)t(v 20t15
dan hal ini dapat ditunjukan sama dengan metode lansung sebelumnya.
5. 7. 2 Interpolasi Kuadratik :
Diberikan ),y,x( 00 ),y,x( 11 dan ),y,x( 22 dengan menginterpolasi kuadrat
ketiga data. Dengan ),x(fy ),x(fy 00 ),x(fy 11 dan ),x(fy 22 dengan
asumsi interpolasi kuadratik )x(f 2 diberikan
)xx)(xx(b)xx(bb)x(f 1020102
Untuk 0xx ,
)xx)(xx(b)xx(bb)x(f)x(f 100020010020 0b
sehingga )x(fb 00

81
untuk 1xx
)xx)(xx(b)xx(bb)x(f)x(f 110120110121
)xx(b)x(f)x(f 01101
maka,
01
01
1xx
)x(f)x(fb
Untuk 2xx
)xx)(xx(b)xx(bb)x(f)x(f 120220210222
)xx)(xx(b)xx(xx
)x(f)x(f)x(f)x(f 1202202
01
01
02
1202
02
01
01
02
2xxxx
xxxx
)x(f)x(f)x(f)x(f
b
=
1202
02
01
01
01
01
02
xxxx
xxxx
)x(f)x(fxx
xx
)x(f)x(f
=
02
02
1201
01
01
1201
02
xx
xxxxxx
)x(f)x(fxx
xxxx
)x(f)x(f
=
02
02
1201
1
01
1201
2
xx
xxxxxx
)x(fxx
xxxx
)x(f
02
02
1201
0
01
1201
0
xx
xxxxxx
)x(fxx
xxxx
)x(f
maka
02
01
01
12
12
2xx
xx
)x(f)x(f
xx
)x(f)x(f
b
sehingga interpolasi kuadratnya adalah
)xx)(xx(b)xx(bb)x(f 1020102
)0xx(
0x1x
)0x(f)1x(f)0x(f)x(2f

82
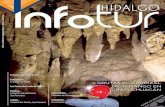
(x0, y0)
(x1, y1) (x2, y2)
f2 (x)
x
y
)1xx)(0xx(
0x2x
0x1x
)0x(f)1x(f
1x2x
)1x(f)2x(f
Gambar 5.7a. Interpolasi Kuadratik
Tentukan kecepatan pada waktu t = 16 detik, gunakan interpolasi Newton terbagi
derajat dua (kuadratik). Carilah pendekatan galat mutlak relatif.
Penyelesaian
Rumus kecepatan dapat diadaptasi kebentuk,
)tt)(tt(b)tt(bb)t(v 102010
selanjutnya akan diccari kecapatan pada saat ,16t dibutuhkan tiga data yang mengurung
16t , sehingga ,10t0 ,15t1 and 20t2 .
,10t0 04.227)t(v 0
,15t1 78.362)t(v 1
,20t 2 35.517)t(v 2
maka,
)t(vb 00 04.227
01
01
1tt
)t(v)t(vb
1015
04.22778.362
148.27
02
01
01
12
12
2tt
tt
)t(v)t(v
tt
)t(v)t(v
b

83
1020
1015
04.22778.362
1520
78.36235.517
10
148.27914.30
37660.0
sehingga,
)tt)(tt(b)tt(bb)t(v 102010
),15t)(10t(37660.0)10t(148.2704.227 20t10
untuk ,16t
)1516)(1016(37660.0)1016(148.2704.227)16(v
19.392 m/detik
Jika diperluas maka,
),15t)(10t(37660.0)10t(148.2704.227)t(v 20t10
sehingga
2
t37660.0t733.1705.12)t(v , 20t10
Hal ini, dapat ditunjukkan bahwa metode ini sama dengan metode langsung.
5. 7. 3 Bentuk Umum Interpolasi Polinomial Newton Terbagi
Dari dua kasus diatas, dapat diturunkan rumus umum polinomial metode Newton
terbagi. Misalkan untuk rumus umum polinomial kuadratik,
)xx)(xx(b)xx(bb)x(f 1020102
dengan,
)x(fb 00
01
01
1xx
)x(f)x(fb
02
01
01
12
12
2xx
xx
)x(f)x(f
xx
)x(f)x(f
b
dengan pengertian, ,b0 ,b1 dan 2b merupakan terbagi berhingga. Dengan ,b0 ,b1 and 2b
adalah selisih terbagi pertama, kedua dan ketiga. Notasi selisih terbagi pertama adalah :
)x(f]x[f 00
kedua,
01
01
01xx
)x(f)x(f]x,x[f

84
dan ketiga
02
0112
012xx
]x,x[f]x,x[f]x,x,x[f
02
01
01
12
12
xx
xx
)x(f)x(f
xx
)x(f)x(f
dimana ],x[f 0 ],x,x[f 01 dan ]x,x,x[f 012 sebagai fungsi variabel pengurung.
Dapat ditulis ulang sebagai,
)xx)(xx](x,x,x[f)xx](x,x[f]x[f)x(f 1001200102
Secara umum dapat ditulis ulang interpolasi polinomial Newton selisih terbagi untuk
)1n( titik data, nn1n1n1100 y,x,y,x,......,y,x,y,x sebagai
)xx)...(xx)(xx(b....)xx(bb)x(f 1n10n010n
dimana
]x[fb 00
]x,x[fb 011
]x,x,x[fb 0122
]x,....,x,x[fb 02n1n1n
]x,....,x,x[fb 01nnn
berdasarkan hal tersebut diatas definisi untuk thm selisih terbagi adalah
]x,........,x[fb 0mm
0m
01m1m
xx
]x,........,x[f]x,........,x[f
berdasarkan definsi ini, dapat ditunjukkan perhitungan rekursif.
Contoh polinomial derajat 3 untuk data ),y,x( 00 ),y,x( 11 ),y,x( 22 dan ),y,x( 33
dapat diturunkan sebagai :
)xx)(xx)(xx](x,x,x,x[f
)xx)(xx](x,x,x[f)xx](x,x[f]x[f)x(f
2100123
1001200103

85
Contoh 5. 7. 3. 1
Diketahui kecepatan sebuah roket diberikan sebagai fungsi waktu, seperti pada
Tabel 3 berikut :
Tabel 3. Kecepatan sebagai fungsi waktu
Waktu [detik] 0 10 15 20 22.5 30
v(t) [m/detik] 0.00 227.04 362.78 517.35 602.97 901.67
a) Tentukan nilai kecepatan pada waktu t = 16 detik gunakan interpolasi polinomial
Newton selisih terbagai derajat tiga. Carilah nilai pendekatan galat mutlak polinomial
derajat interpolasi tersebut.
b) Gunakan interpolasi polinomial derajat tiga dari kecepatan roket pada bagian (a).
Carilah jarak yang ditempuh roket pada waktu t = 11 sampai t = 16 detik.
c) Gunakan interpolasi polinomial derajat tiga dari kecepatan roket pada bagian (a), untuk
mencari percepatan roket pada t = 16 detik.
Penyelesaian :
a) Kecepatan roket dapat dirumuskan sebagai berikut :
)tt)(tt)(tt(b)tt)(tt(b)tt(bb)t(v 2103102010
selanjutnya kecepatan pada waktu ,16t dibutuhkan 4 buah data yang mengurung titik
data 16t . Kemepat data itu adalah ,10t0 ,15t1 ,20t 2 dan 5.22t 3
,10t0 04.227)t(v 0
,15t1 78.362)t(v 1
f [x1,x0]
f [x2,x1]
f [x3,x2]
f [x2,x1,x0]
f [x3,x2,x1]
f [x3,x2,x1,x0]
x0 f (x0)
x1 f (x1)
x2 f (x2)
x3 f (x3)
b0
b1
b3
b2

86
,20t 2 35.517)t(v 2
,5.22t 3 97.602)t(v 3
dimana,
]t[vb 00 )t(v 0 04.227
]t,t[vb 011 01
01
tt
)t(v)t(v
1015
04.22778.362
148.27
]t,t,t[vb 0122 02
0112
tt
]t,t[v]t,t[v
dengan, 12
12
12tt
)t(v)t(v]t,t[v
1520
78.36235.517
914.30
148.27]t,t[v 01
02
0112
2tt
]t,t[v]t,t[vb
1020
148.27914.30
37660.0
03
012123
3tt
]t,t,t[v]t,t,t[vb
dimana,
13
1223
123tt
]t,t[v]t,t[v]t,t,t[v
23
23
23tt
)t(v)t(v]t,t[v
205.22
35.51797.602
248.34
12
12
12tt
)t(v)t(v]t,t[v
1520
78.36235.517
914.30
sehingga,
13
1223
123tt
]t,t[v]t,t[v]t,t,t[v
155.22
914.30248.34
44453.0
37660.0]t,t,t[v 012
dan,
]t,t,t,t[vb 01233 03
012123
tt
]t,t,t[v]t,t,t[v
105.22
37660.044453.0
310x4347.5
dimana,

87
)tt)(tt)(tt(b)tt)(tt(b)tt(bb)t(v 2103102010
)20t)(15t)(10t(10*4347.5
)15t)(10t(37660.0)10t(148.2704.227
3
pada ,16t
)2016)(1516)(1016(10*4347.5
)1516)(1016(37660.0)1016(148.2704.227)16(v
3
06.392 m/detik
b) Jarak yang ditempuh roket tersebut pada waktu t = 11 dan t = 16 detik dapat dihitung
dengan interpolasi polinomial berikut :
)20t)(15t)(10t(10*4347.5
)15t)(10t(37660.0)10t(148.2704.227)t(v
3
5.22t10
32t0054347.0t13204.0t265.212541.4 5.2210 t
Hasil perhitungan menunjukkan bahwa nilai ini, cukup dekat dengan perhitungan nilai
antara t = 10 dan t = 22.5 yang dicakup nilai pada t = 11 dan t = 16.
Jadi
16
11
dttv11s16s
dt)t0054347.0t13204.0t265.212541.4(32
16
11
16
11
432
4
t0054347.0
3
t13204.0
2
t265.21t2541.4
m 1605
c) Percepatan pada saat t = 16 diberikan sebagai,
16t)t(vdt
d)16(a
32t0054347.0t13204.0t265.212541.4)t(v
32t0054347.0t13204.0t265.212541.4
dt
d)t(v
dt
d)t(a
2t016304.0t26408.0265.21
2
)16(016304.0)16(26408.0265.21)16(a 2ikdet/m 664.29