IEEE Quadcopter - Anggita Bayu
3
Pengenalan Quadcopter (UAV) Untuk Perangkat Pengawasan Anggita Bayu Krisna Pambudi Fakultas Teknik Elektro, Universitas Telkom Jl. Telekomunikas, terusanbuah batu, Bandung. Indonesia [email protected] Abstract— Artikel ini di tulis untuk mengikuti rekruitasi anggota riset prediction club 2015. Menulis tentang pengenalan Quard Copter sebagai salah satu UAV yang mempunyai banyak manfaat untuk membantu pekerjaan manusia dalam hal pengawasan. Lalu lintas kota-kota besar sering terjadi macet setiap harinya, mulai akibat dari banyaknya pelanggaran lalu lintas hingga adanya musibah di jalan. Oleh karena itu fungsi pengawasan terhadap lalu lintas sangat penting dulakukan untuk menindak lanjuti dengan cepat terhadap kejadian yang ada. Quadcopter merupakan wahana terbang yang bergerak menggunakan empat buah rotor. Quadcopter dibuat dengan rangka utama aluminium atau fiberglass disertai dengan flight controller yang dilengkapi beberapa modul dan sensor untuk menunjang kemampuan quadcopter melakukan fungsi pengawasan. Keywords— Quard copter, Multi rotor, Unmanned Aerial Vehicle I. INTRODUCTION Saat ini UAV (Unmanned Aerial Vehicle) telah berkembang sangat pesat. Hal ini dikarenakan kegunaan UAV yang sangat penting untuk membantu pekerjaan manusia. Sebagai contoh UAV digunakan sebagai pesawat pengintai ( quadcopter ), pengendalian dilakukan jarak jauh dengan bantuan kamera yang terpasang dalam wahana dan terhubung ke monitor kontrol pusat kendali. Quadcopter memiliki empat buah baling-baling yang terpasang di bagian kiri dan kanan yang memudahkan quadcopter untuk bermanuver sehingga dengan cepat dapat bergerak berbagai arah. Quadcopter juga dilengkapi dengan sensor diantaranya sensor Global Positioning System (GPS) yang digunakan untuk bernavigasi, sensor Inertial Measurement Unit (IMU) yang berfungsi untuk menghitung percepatan serta orientasi arah pergerakan, sensor ultra sonic untuk mendeteksi keberadaan benda dan sensor-sensor lainnya yang mendukung fungsi dan kinerja dari quadcopter. Dengan manuverabilitas yang tinggi, rancangan yang sederhana dan kelengkapan sensor yang digunakan, membuat quadcopter sebagai perangkat yang dapat membantu petugas melakukan pengamatan jalan. II. BAGIAN-BAGIAN QUADCOPTER Quadcopter disusun dari beberapa komponen perangkat keras (hardware) terdiri dari sistem mekanik dan elektronik. Pada sistem elektronik, quadcopter dibentuk oleh rangkaian elektronik sebagai berikut : Figure 1 : Quad copter A. Microcontroller (Flight Controller) Flight Controller sebagai pusat pengendali quadcopter yang terhubung dengan berbagai modul dan sensor serta reciver untuk menerima sinyal dari pusat pengendali. B. Motor Driver Sebagai pengendali kecepatan motor penggerak rotor untuk menggerakkan wahana seperti apa yang kita inginkan C. Sensor Berfungsi menerima data-data untuk menunjang kemampuan wahana, bisa berupa sensor altimeter, gyroscope dan juga dapat ditambahkan Gps sebagai penunjuk koordinat letak wahana. D. Rotor ( baling-baling ) Sebagai perangkat untuk mengangkat quadcopter akibat dari putaran motor. E. Frame
-
Upload
anggita-bayu -
Category
Documents
-
view
24 -
download
0
description
artikel pengenal quadcopter
Transcript of IEEE Quadcopter - Anggita Bayu

Pengenalan Quadcopter (UAV)
Untuk Perangkat Pengawasan Anggita Bayu Krisna Pambudi
Fakultas Teknik Elektro, Universitas Telkom
Jl. Telekomunikas, terusanbuah batu, Bandung. Indonesia
Abstract— Artikel ini di tulis untuk mengikuti rekruitasi anggota
riset prediction club 2015. Menulis tentang pengenalan Quard
Copter sebagai salah satu UAV yang mempunyai banyak
manfaat untuk membantu pekerjaan manusia dalam hal
pengawasan.
Lalu lintas kota-kota besar sering terjadi macet setiap
harinya, mulai akibat dari banyaknya pelanggaran lalu lintas
hingga adanya musibah di jalan. Oleh karena itu fungsi
pengawasan terhadap lalu lintas sangat penting dulakukan
untuk menindak lanjuti dengan cepat terhadap kejadian yang
ada.
Quadcopter merupakan wahana terbang yang bergerak
menggunakan empat buah rotor. Quadcopter dibuat dengan
rangka utama aluminium atau fiberglass disertai dengan flight
controller yang dilengkapi beberapa modul dan sensor untuk
menunjang kemampuan quadcopter melakukan fungsi
pengawasan.
Keywords— Quard copter, Multi rotor, Unmanned Aerial
Vehicle
I. INTRODUCTION
Saat ini UAV (Unmanned Aerial Vehicle) telah
berkembang sangat pesat. Hal ini dikarenakan kegunaan UAV
yang sangat penting untuk membantu pekerjaan manusia.
Sebagai contoh UAV digunakan sebagai pesawat pengintai
( quadcopter ), pengendalian dilakukan jarak jauh dengan
bantuan kamera yang terpasang dalam wahana dan terhubung
ke monitor kontrol pusat kendali.
Quadcopter memiliki empat buah baling-baling yang
terpasang di bagian kiri dan kanan yang memudahkan
quadcopter untuk bermanuver sehingga dengan cepat dapat
bergerak berbagai arah.
Quadcopter juga dilengkapi dengan sensor diantaranya
sensor Global Positioning System (GPS) yang digunakan
untuk bernavigasi, sensor Inertial Measurement Unit (IMU)
yang berfungsi untuk menghitung percepatan serta orientasi
arah pergerakan, sensor ultra sonic untuk mendeteksi
keberadaan benda dan sensor-sensor lainnya yang mendukung
fungsi dan kinerja dari quadcopter.
Dengan manuverabilitas yang tinggi, rancangan yang
sederhana dan kelengkapan sensor yang digunakan, membuat
quadcopter sebagai perangkat yang dapat membantu petugas
melakukan pengamatan jalan.
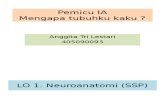
II. BAGIAN-BAGIAN QUADCOPTER
Quadcopter disusun dari beberapa komponen perangkat
keras (hardware) terdiri dari sistem mekanik dan elektronik.
Pada sistem elektronik, quadcopter dibentuk oleh rangkaian
elektronik sebagai berikut :
Figure 1 : Quad copter
A. Microcontroller (Flight Controller)
Flight Controller sebagai pusat pengendali quadcopter
yang terhubung dengan berbagai modul dan sensor serta
reciver untuk menerima sinyal dari pusat pengendali.
B. Motor Driver
Sebagai pengendali kecepatan motor penggerak rotor
untuk menggerakkan wahana seperti apa yang kita
inginkan
C. Sensor
Berfungsi menerima data-data untuk menunjang
kemampuan wahana, bisa berupa sensor altimeter,
gyroscope dan juga dapat ditambahkan Gps sebagai
penunjuk koordinat letak wahana.
D. Rotor ( baling-baling )
Sebagai perangkat untuk mengangkat quadcopter akibat
dari putaran motor.
E. Frame

Kerangka quadcopter biasanya terbuat dari plastik,
aluminum, atau serat karbon sebagai base untuk
meletakkan semua komponen wahana.
III. MANUVER QUADCOPTER
Quadcopter memiliki dua pasang baling-baling, dimana
pasangan tersebut bergerak berlawanan arah dengan pasangan
lainnya. Baling-baling bagian depan dan belakang quadcopter
bergerak berlawanan arah jarum jam, sedangkan balingbaling
bagian kiri dan kanan bergerak searah jarum jam. Konfigurasi
arah berlawanan dari baling-baling ini dapat menggantikan
kebutuhan untuk memiliki baling-baling di ekor sebagaimana
yang dimiliki helikopter standar, yang digunakan untuk
mengatur arah pergerakan.
Figure 2 : Rotor rotation
A. Hover
Dalam melakukan terbang melayang di udara, yang
dikenal dengan sebutan hover, quadcopter perlu
menggerakkan keempat baling-balingnya dengan
kecepatan yang sama.
Setiap pasangan baling-baling memiliki arah gaya
dorong yang memiliki fungsi berbeda, satu pasang sebagai
pendorong (pusher) dan satu pasang sebagai penarik
(puller). Dengan adanya pergerakan yang menghasilkan
gaya dorong serta gaya tarik yang melawan.
B. Rotation
Dalam melakukan terbang melayang di udara, yang
dikenal dengan sebutan hover, quadcopter perlu
menggerakkan keempat baling-balingnya dengan
kecepatan yang sama. Setiap pasangan baling-baling
memiliki arah gaya dorong yang memiliki fungsi berbeda,
satu pasang sebagai pendorong (pusher) dan satu pasang
sebagai penarik (puller).
Dengan adanya pergerakan yang menghasilkan gaya
dorong serta gaya tarik yang melawan gaya gravitasi
tersebut, quadcopter dapat terbang melayang di udara
dengan stabil.
Untuk bergerak terbang ke atas dan ke bawah,
quadcopter perlu menaikkan atau menurunkan kecepatan
putar setiap baling-baling dengan jumlah yang sama.
Menaikkan kecepatan akan mengakibatkan quadcopter
terbang ke atas, dan menurunkan kecepatan akan
mengakibatkan quadcopter terbang ke bawah.
C. Rotation
Untuk melakukan gerakan tersebut, perlu dilakukan
perubahan kecepatan perputaran baling-baling pada salah
satu pasangan baling-baling. Untuk berputar pada sumbu x
(roll) perubahan kecepatan dilakukan pada pasangan
baling-baling kiri dan kanan, sedangkan untuk berputar
pada sumbu y (pitch) perubahan kecepatan dilakukan pada
pasangan baling-baling depan dan belakang.
Perubahannya adalah salah satu anggota pasangan
baling-baling dikurangi kecepatannya dan anggota
pasangan baling-baling lainnya dinaikkan dengan selisih
kecepatan yang sama, sedangkan baling-baling lainnya
dibiarkan dengan kecepatan tetap.
Dengan pengaturan seperti ini, quadcopter akan
bergerak memutar dari arah pasangan baling-baling yang
berkecepatan lebih rendah, ke arah pasangan baling-baling
yang berkecepatan lebih tinggi.
D. Yaw
Gerakan ini dilakukan dengan menurunkan kecepatan
satu pasang baling-baling, atas-bawah atau kiri-kanan, dan
menaikkan kecepatan satu pasangan baling-baling lainnya.
Nantinya, quadcopter akan bergerak berputar ke arah
perputaran pasangan baling-baling yang lebih lambat
kecepatannya dibandingkan pasangan yang lainnya.
IV. KELEBIHAN QUADCOPTER
Quadcopter memiliki baling-baling yang cukup kecil,
sehingga lebih aman untuk digunakan pada area yang sempit
dan pekerjaan yang melibatkan interaksi dengan objek yang
dekat. Desain quadcopter lebih sederhana jika dibandingkan
helikopter standar, dalam hal pembuatan, pemeliharaan, dan
perbaikan.
Selain itu quadcopter juga memiliki kemampuan
mengangkat muatan dengan cukup baik walaupun ukurannya
kecil dikarenakan memiliki empat rotor. Kemampuan itu bisa
digunakanuntuk mendukung pekerjaannya, seperti membawa
kamera untuk mengambil gambar dari udara dalam proses
pengawasan lalu lintas
V. KEKURANGAN QUADCOPTER
Robot quadcopter juga memiliki kelemahan yang cukup
mempengaruhi kinerjanya, dimana quadcopter hanya dapat
terbang dalam jangka waktu pendek, jika dibandingkan
dengan UAV lainnya.
Hal ini disebabkan quadcopter menggunakan tenaga
elektrik untuk bergerak dengan kapasitas baterai yang terbatas.
Sehingga jangka waktu yang pendek tersebut secara tidak
langsung akan mempengaruhi kapasitas beban, kecepatan
terbang, dan jarak tempuh quadcopter tersebut dalam proses
pengawasan.

VI. CONCLUSIONS
Quadcopter merupakai salah satu UAV yang memiliki
keuntungan karena kemampuan berbagai fitur karena adanya
bermacam-macam sensor dan manuver serta kestabilan yang
bagus terhadap adanya angin yang berubah tiba-tiba.
Robot quadcopter sangat cocok untuk perangkat
pengawasan lalu lintas karena memiliki daya jelajah yang
cukup dan dapat membawa kamera untuk fungsi pengawasan.
Namun quadcopter memiliki keterbatasan jarak jelajah
karena terkendala oleh kapasitas baterai untuk menggerakkan
empat motor dan komponen yang lain.
REFERENCES
[1] Quadcopter: Zona Elektro http://zonaelektro.net/quadcopter/
[2] Komponen dan prinsip kerja Quadcopter : Zona Elektro
http://zonaelektro.net/komponen-dan-prinsip-kerja-quadcopter/ [3] Robot Pemantau Udara : Zata Nadra
http://zatanadra.blogspot.com/2012/12/robot-pemantau-dari-iudara-
quadcopter.html.