







Bahasa
Halaman
Hukum


PSIG 1604
Modelling and Simulation of Gassco Wet Gas Pipelines Garry Hanmer, Dr. David Basnett, Fayaz Issak - ATMOS International Limited
Ola Johan Rinde – Gassco
© Copyright 2016, PSIG, Inc.
This paper was prepared for presentation at the PSIG Annual Meeting held in Vancouver, British Columbia, 11 May – 13 May 2016.
This paper was selected for presentation by the PSIG Board of Directors following review of information contained in an abstract submitted by the author(s). The material, as presented, does not necessarily reflect any position of the Pipeline Simulation Interest Group, its officers, or members. Papers presented at PSIG meetings are subject to publication review by Editorial Committees of the Pipeline Simulation Interest Group. Electronic reproduction, distribution, or storage of any part of this paper for commercial purposes without the written consent of PSIG is prohibited. Permission to reproduce in print is restricted to an abstract of not more than 300 words; illustrations may not be copied. The abstract must contain conspicuous acknowledgment of where and by whom the paper was presented. Write Librarian, Pipeline Simulation Interest Group, 945 McKinney, Suite #106, Houston, TX 77002, USA – [email protected].
Abstract This paper addresses the application of a single phase
simulation software to Gassco’s wet gas pipelines. To meet
their on-line pipeline modelling and simulation requirements
Gassco carried out a thorough review of both multi-phase and
single-phase simulation software solutions in the market. To
help with their evaluations, a single-phase software was
configured and implemented on three wet gas networks. For
these pipelines and operations the simulation results were
surprisingly close to actual measured flow and pressure values.
To provide liquid build up estimations, an additional module
has been developed. With this enhancement accurate gas and
liquid estimates have become possible for on-line and offline
simulations.
Introduction The accurate simulation of a wet gas pipeline is a challenging
problem. Under many operational conditions the fluid in the
pipeline separates into gas, condensate and water/MEG phases.
This means that a full simulation of the pipeline dynamics
involves tracking these 3 elements separately, along with their
interactions and the transfer of mass between them as the
pressure and temperature change. In addition the various
processes all operate on different time scales.
Gassco supplies Norwegian natural gas to the European market
through nearly 8,000 km (5000 miles) of large-diameter high-
pressure subsea pipelines. The Norwegian export pipelines are
between 300 and 900 km (200-560 miles) long, and have
diameters up to 44 inches. Pressure transmitters, flow meters
and temperature measurements are only located at the inlet and
outlet. The state of the gas between those two points can only
be predicted by computer models and simulators, which are
very important in order to obtain optimal operation of the
pipelines.
Following the successful implementation of the new pipeline
management system on the single phase pipelines [1], Gassco
wanted to replace their existing multiphase Pipeline
Management System. After a comprehensive research of
different options, they decided to explore the application and
benefit of re-using the single phase Pipeline Management
System on their wet gas pipelines.
Gassco Wet Gas Pipelines Most of the pipelines Gassco operate are single-phase gas
pipelines, but Gassco also run five wet gas pipelines. These five
wet gas pipelines are detailed below:
Pipeline A consists of a 147 km (91 miles) mainline pipe of 30
inchwith a 35 km (22 miles), 20 inch pipe branch that supplies
gas to the main pipeline 2 km (1.2 miles) downstream of the
platform. Metering is only available at the inlet and the outlet
of the pipeline.
Pipeline B is a 22 inch diameter pipeline and is 176 km (109
miles) in length. The pipeline goes from one platform to another
and has a relatively flat profile with a riser at each end, with the
deepest point at 136 m (445 feet) below sea level. Metering is
only available at the inlet and the outlet of the pipeline.
The third pipline system consists of three parallel pipes which
will be considered as pipelines C, D and E. Each pipe is 36 inch
in diameter and 67 km (41 miles) long. All three parallel pipes
have an inclination from 340 m (1115 feet) below sea level to
the onshore terminal. Metering is only available at the inlet and
the outlet of the pipeline.
Single Phase Model Results The wet gas pipelines typically have a small condensate and
water content, and it was considered feasible that modelling
these with a single phase model could provide accurate results.
To investigate this, pipeline A was simulated using an online
single phase simulation using measurement data from the
summer of 2014. The modelled and measured pressures and
flows were then compared at each of the pipeline metering
facilities. Figure 1 shows that the pressure results give a close
match with an Root Mean Square (RMS) difference of 0.28 bar
(4.06 psi).
Figure 2 illustrates that the flow results also give a close match
– there are a few very short periods with higher discrepancies,
these are associated with periods when there are large transients
in the pipeline. The RMS difference is 0.58 MSm3/d (20.4
MMSCFD), which is 2.3% of the nominal flow, equal to around
25 MSm³/d (882 MMSCFD).
The fluid was typically a single phase (gas phase) at the pipeline
inlet and started to condensate when flowing through the
pipelines. In the cases where there was compression of the fluid
downstream of the last separator, the fluid was dryer and the

2 Modelling and Simulation of Gassco Wet Gas Pipelines PSIG 1604
condensation of liquid started when drop-out conditions in the
pipeline were met. Note that some of the pipelines have MEG
injected at the inlet, and a few have condensate injected at the
inlet as well, leading to more liquid in the pipeline than the gas
composition alone would provide.
Because the gas was condensing in the pipeline, the pressure
drop was higher than the model prediction when using the
physical pipeline roughness in the model. Accordingly, it was
required to increase the roughness to match the pressure drop in
the pipeline. The new roughness was tuned to match the
pressure drop during stable periods with high flow rate.
During operation, the liquid content and the pressure drop will
however change according to the current operational
conditions. This was handled by the online efficiency tuning
since the liquid accumulation is a relatively slow process in
these pipelines. This led to a few issues during flow rate
increases and reduction of the liquid content in the pipeline. The
reason for this is that the model tuning adjusted the efficiency
in the pipeline model down because of the increased pressure
drop caused by the liquid. When the liquid is transported out of
the pipelines when the flow rate is increased, the real pressure
drop will be reduced quicker than the model can increase the
tuned efficiency.
Liquid Holdup Estimation Having determined that a single phase model provided accurate
simulation of the real-time pressure and flow within the wet gas
pipelines, a method of estimating the liquid holdup within the
pipelines was required to provide the extra information that a
full multiphase simulation would provide. The aim was to find
a fast and simple algorithm that could be run online in real time
to estimate the liquid holdup in the pipeline.
Initial Investigation Three methods were considered for estimating the liquid
content in wet gas pipelines without the need of having an
online multiphase engine. These methods were:
1. Liquid estimation from pressure drop
2. Liquid estimation from accumulators
3. Liquid estimation based on a simplified multiphase
engine
An initial consideration of the feasibility excluded the creation
of a simplified multiphase engine on grounds of cost and
complexity, so this option was not investigated any further.
The remaining two methods were assessed by comparing the
estimates they produced with the results from the online
multiphase model that was running when the evaluation was
conducted. This was done since no metering data of the liquid
content was available.
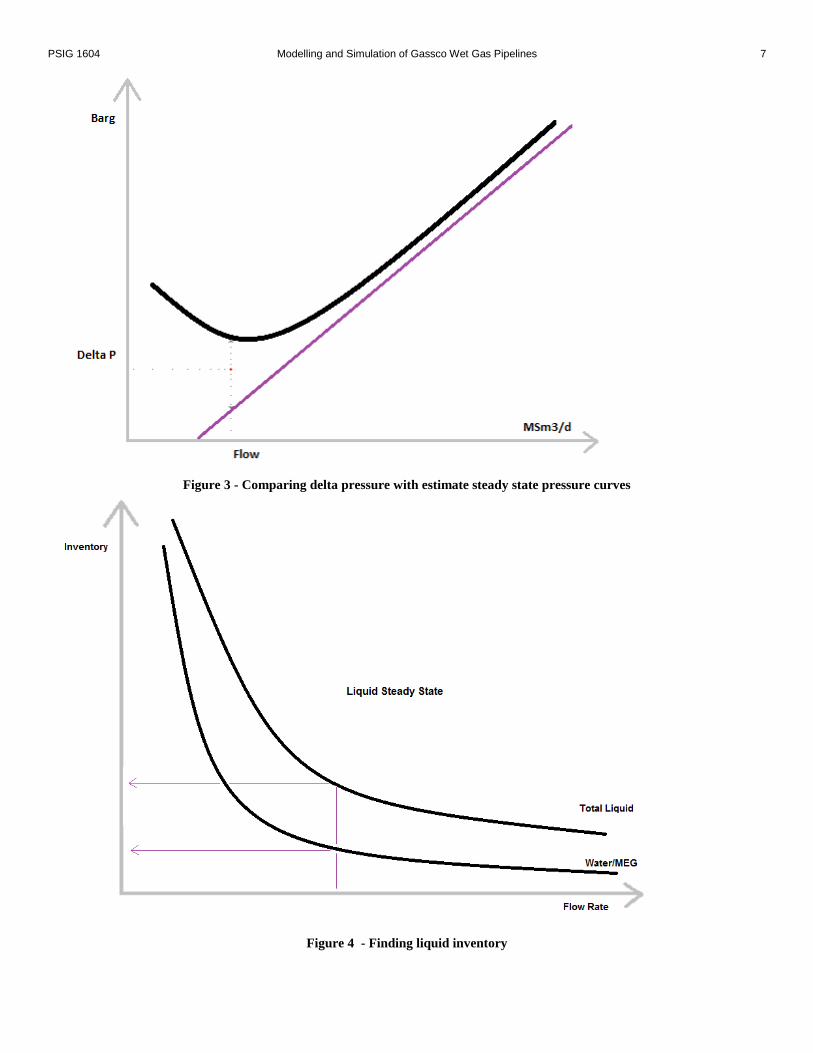
Liquid Estimation from Pressure Drop This method uses the current flow rate to determine the steady
state inventory, by looking this up from the curves shown in
Figure 4. These curves were produced by an offline analysis of
the pipeline.
The second step of this method is to compare the measured
pressure drop along the pipeline to the pressure drop that would
be expected for the current flow rate in steady state. This is done
using the curve from Figure 3, which was produced by an
offline analysis of the pipeline.
How close to steady state the current pipeline values are to
steady state is then estimated by calculating the factor:
SteadyState
SteadyState Linear
P P
P P
With ∆PLinear>=0 the linear pressure drop for the current flow
rate taken from the straight line in Figure 3, this gives a value
α<=1. This factor is then used as a multiplier on the steady state
level from Figure 4 to calculate the estimated pipeline
inventory.
The estimated liquid volume V is given as:
1SteadyState Linear LinearV V V V
The method uses a 10 minute running mean value on pressure
and flow measurement to smooth out inventory peaks. The rate
of change in the liquid inventory cannot exceed the expected
inventory change per time step, thus a dampening factor was
introduced. The maximum allowed growth in the liquid
inventory introduced was:
1n n InV V L F
Where InL F is the liquid dropout rate per time step at the
current inlet flow rate.
In this analysis no limitation on the rate of change has been put
on the amount of liquid out of the pipeline, as this is difficult to
quantify. This would affect the result as the average liquid
volume would be under estimated.
Pipeline C, D and E The test case considers pipeline C in the time period from
01.10.2014 to 31.10.2014. Average outlet pressure is 87.5 barg
(1270 psig).
Figure 5 shows delta pressure with liquid estimation result
from the multiphase model and delta pressure inventory
algorithm. The mean difference between the multiphase model
and liquid estimate is 14.1 m3 (500 ft3) with a standard deviation
of 27.3 m3 (965 ft3).

3 Garry Hanmer, David Basnett, Fayaz Issak, Ola Johan Rinde PSIG 1604
Pipeline B The test for pipeline B, uses data from a start-up period from
10.01.15 to 16.02.15. Note that there is an issue with the
comparison to the multiphase model due to the number of
restarts in the online system. Each time the online multiphase
model has to be restarted, it restarts from a steady state, leading
to a jump in the liquid levels. It would be possible to get a better
set of results if the online data was re-run.
Figure 6 shows the pressure based liquid accumulation in the
test period. The mean difference between the multiphase model
and liquid estimate is 146.4 m3 (5160 ft3) with a standard
deviation of 119 m3 (4200 ft3).
Liquid Estimation from Accumulators Calculating the liquid inventory by using accumulators uses an
equation which converge towards the steady state volume. The
steady state volumes and accumulation rates can be found from
either analysis of the data for the running pipeline, or a steady
state run of a multiphase model. The following simplistic
equation has been used:
11 1 n
n n In
SteadyState In
VV V L F
V F
Where InL F is the total liquid (Water + Condensate)
accumulation rate at the current inlet flow rate and 1nV is the
accumulated liquid volume in the previous time step.
If the inventory is above the steady state level, the liquid level
is updated by:
2
11 1 n
n n In
SteadyState In
VV V L F
V F
Note that now 1SteadyState In nV F V and so this reduces the
accumulated volume.
Water/MEG and Condensate Split The above method provides an estimate of the total liquid
content. It was extended to provide an estimate of the separation
between the Water/MEG and Condensate phase by tracking the
water/MEG as well as the total liquid. For the Water/MEG a
linear accumulation in the pipeline was assumed, giving.
, , 1Water n Water n Water InV V L F
The Water/MEG drainage is assumed as:
, 1
, , 1
,
1Water n
Water n Water n Water In
Water SteadyState In
VV V L F
V F
As with the total liquid estimate, the steady state water/MEG
volumes and accumulation rates required can be found from
either analysis of the data for the running pipeline, or a steady
state run of a multiphase model.
Performance of this SApproach
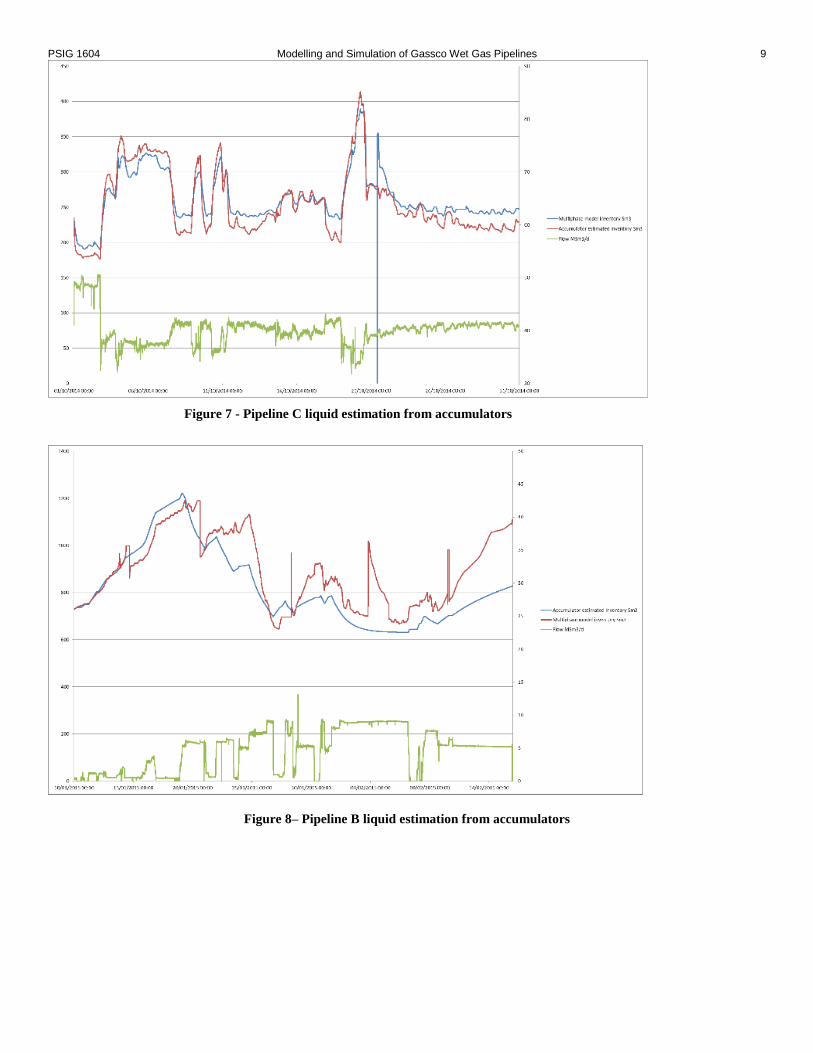
Pipeline C The test case for pipeline C covers the time period from
01.10.2014 to 31.10.2014.
Figure 7 shows values from the multiphase model and liquid
estimation from accumulators. The mean difference between
multiphase model and liquid estimate is 7.3 m3 (258 ft3) with a
standard deviation of 16.4 m3 (580 ft3).
Pipeline B Start-up period from 10.01.15 to 16.02.15 has been used as a
test case for both pressure based and accumulator based liquid
estimation.
Figure 8 shows the result from the liquid accumulator
approach. The mean difference between multiphase model and
liquid estimate is 7.5 m3 (265 ft3) with a standard deviation of
85.1 m3 (3005 ft3). The match for liquid content would be better
if the model had not been cold started as often as it has, since
the model results would not contain the ‘jumps’ from being
restarted.
Investigation Results Pressure drop based liquid estimation gives consistently good
results when the pressure drop is stable. In addition it gives fast
result as it does not use the historical data. The pressure drop
liquid estimation has issues when the pressure drops vary, and
without limiting the rate of change in the results it could become
inaccurate. A drawback of this approach is that pressure
changes not related to the liquid volume could give changes in
liquid inventory results.
Accumulator liquid estimation gives a closer match between the
estimate and multiphase model results than the pressure drop
method. Testing shows that a rough estimate of the separation
between water/MEG and condensate is achievable. The results
of this method should tend towards the correct liquid levels
when the pipeline operates close to steady state.
The result from the tests shows that the accumulator approach
has the greatest potential as water/MEG content can be
estimated.
Chosen Solution Based on the above analysis, it was decided that a solution
based on the liquid estimation from accumulators would
provide the best results.
Some changes were made to the basic algorithms presented
above. For flow rates below a given threshold value, the total
liquid accumulates linearly up to the steady state level, instead
of having a term based on the ratio of estimated steady state
liquid accumulation. This then gives the low flow accumulation

4 Modelling and Simulation of Gassco Wet Gas Pipelines PSIG 1604
as:
1n n InV V L F
Tuning parameters were added for the 4 rates:
1. Total liquid accumulating
2. Total liquid draining
3. Water/MEG accumulating
4. Water/MEG draining
These tuning rates were added as multipliers to the
accumulation rates from the steady state lookup tables. So in
the above equations, wherever InL F appears, this would
be multiplied by the appropriate tuning factor.
Manual tuning of these parameters gave closer agreements with
the multiphase model results than in the original analysis.
To improve the results of the system further, manual tuning of
the accumulation and draining rates were carried out. The
tuning consisted of a simple multiplier applied to the steady
state rates for the current pressure and flow.
Tuning Pipeline C Using the algorithm as described above, and running for the
data from January 2014:
In Figure 9 we can see that the results for the liquid level are in
pretty good agreement. The liquid content accumulates slightly
faster than the estimated results do, and there are a few points
where the results appear to have converged to a “steady state”
level, but the estimated results continue to accumulate.
We can see from the comparison of the water content in Figure
10, the estimator does a far worse job of matching the results.
In particular, the results drain the water far faster than the
estimator when the flow rate changes. This makes it hard to see
whether the accumulation rates are accurate or not, although the
slope of the lines during accumulation are similar.
Based on the observation that the water drains much faster than
the estimator predicts, the water drain expression from the
original approach was replaced with one that uses a linear
model for draining.
The tuning factors for the accumulation and drain rates were
estimated to be.
Liquid Accumulation Factor = 1.5
Liquid Drain Factor = 1.0
Water Accumulation Factor = 1.05
Water Drain Factor = 10.0
For the liquid level, the tuning gives a slightly closer visual
match to the data in Figure 11, although the estimator is now
overshooting on a few of the peaks, rather than undershooting,
suggesting that the liquid accumulation factor may be a little bit
too high, and require further tuning. However the results
already matched pretty well, so the improvement is not
dramatic. Looking at the RMS errors they haven’t really
changed, being about 42 m3 (1483 ft3) in each case.
The changes have made a far more dramatic improvement to
the water content for this data set as seen in Figure 12. The
estimator results are now responding quickly to draining of the
line, in the same way as the source results. It appears that the
drain rate may now be slightly too fast, since the estimator
results overshoot several times, so the water drain factor could
probably be tuned further. Looking at the slopes of the line
when accumulating water, they look similar, so the
accumulation does not need any more tuning. The RMS error
in the water content has been reduced from 42 m3 (1483 ft3) to
25 m3 (882 ft3).
Leak Detection During the model performance evaluation an investigation of
the volume balance accumulators and the deviation between the
metered and modelled pressures and flows was performed.
The volume balance is a calculation of the deviation between
the inlet and outlet flow including the modelled pipeline
inventory as an estimate for changes in the pipeline inventory.
The imbalance calculated by the equation is accumulated over
a running time period and if the value is above a user defined
threshold an alarm is raised.
Typically, the performance was good during periods with stable
production, particularly when the flow rate was high and the
liquid was moving with a constant flow rate out of the pipeline.
When the flow rate was reduced to a low level, liquid starts to
accumulate in the pipeline and less volume exiting the pipeline
than entering at the inlet. The volume balance will then indicate
that the volume is disappearing in the pipeline and it will look
like a leak. This deviation was however small since the amount
of liquid that condensed in the pipeline was small because of a
relatively dry gas at the pipeline inlet.
After shutdowns and the subsequent start-up of the pipeline,
larger deviations between the model and the metered data were
observed. This resulted in a larger deviation in the balance. It is
believed that the increased deviation after shutdowns/start up is
caused by an error in the gas inventory in the pipeline model.
This will give a deviation between the modelled and metered
pressure and flow that influence the leak detection. In some
cases, the deviation could be large for a limited period after the
startup. The error is caused by a different pressure profile in a
dry gas pipeline and a pipeline with liquid. Since the liquid
concentration is higher at the end of the pipeline this led to a
higher pressure drop towards the end of the line. When the
liquid is transported up the riser at the end of the pipeline (or
where it hits land) there is always an additional pressure drop
caused by the liquid transport in the inclined sections. Because
of this, there will be a higher pressure drop in the last half of the
multiphase pipeline than simulated by the single phase model
and the inventory will also be different compared with reality.
To compensate for the model errors caused by the liquid in the
pipeline, a dynamic leak detection threshold functionality was

5 Garry Hanmer, David Basnett, Fayaz Issak, Ola Johan Rinde PSIG 1604
created. This functionality will adjust the leak detection
thresholds according to user-defined settings. Typically, the
thresholds will be increased when there have been large rate
changes in the pipeline that caused changes in the amount of
liquid in the pipeline or after shutdowns where the inventory
errors have an influence on the results.
Two scenarios were considered for enhancing the leak detection
performance of a multi-phase pipeline by using the liquid
estimator described above in combination with single phase
leak detection software. This functionality was not developed,
but could be future work to improve the system.
1. Liquid is accumulating in the pipeline:
The current liquid level is used and compared with the steady
state liquid level. If the difference is greater than a given delta,
the liquid level can be considered to be accumulating, and the
simulated inventory calculations are considered to be degraded.
The sensitivity of the leak detection can then be degraded. 2. Liquid is draining out of the pipeline:
The current liquid level is used and compared with the steady
state liquid level. If the liquid known to be exiting the pipeline
is above a given threshold the sensitivity of the leak detection
can then be degraded.
Once the difference between steady state level and current
liquid level is below a threshold value, the sensitivity can be
returned to normal operating conditions.
Conclusions This paper shows that for the pipelines of interest, accurate
simulation of the pressure and flow in a wet gas pipeline is
possible using suitably tuned single phase simulation software
when online tuning is activated.
It also details the investigation into a simple online system for
estimation of the liquid holdup in these pipelines. The system
produces good results in many circumstances. This has been
validated by comparing the results from the liquid estimator
with the results for liquid holdup from a multiphase simulator
engine.
For future improvement further work could be carried out in the
following areas:
Automate tuning of the accumulation and drain rates
for the liquid estimator to minimize RMS errors. This
would require more data than the current liquid
estimator requires. The target drain and accumulation
rates are not measured directly, and so they would
have to be provided by a multiphase simulation,
suggesting that an offline tool would be required.
As part of the development, the facility was added to
feed the liquid drained from one pipeline as extra
liquid volume to another pipeline. Currently this
injected liquid is added directly to the total liquid
estimate for the current step. It would be possible to
track the injected and accumulated liquids separately.
Since the flow rate is known in the pipeline, an
estimate of the injected liquid flow rate could be
derived from this, and thus estimating the arrival time
of the injected fluid at the outlet of the pipeline. This
would require further investigation to assess the
feasibility and accuracy of such an approach.
REFERENCES 1. Ben Velde, Willy Postvoll, Garry Hanmer, James
Munro, “Application Benefit of the Online Simulation
Software for Gassco’s Subsea Pipeline Network”,
PSIG Annual Meeting held in Prague, Czech
Republic, 16 April – 19 April 2013.
Author Biography Garry Hanmer is a Principal Project Engineer at ATMOS
International in Manchester, United Kingdom. Garry Hanmer
has over 10 years’ experience in the pipeline industry with an
emphasis on pipeline hydraulic simulation. He also has
experience in development and delivery of pipeline operations
and integrity management software systems. Garry Hanmer has
a Master of Engineering in Aeronautical Engineering (MEng
Hons) from the University of Salford, UK.
Dr. David Basnett is the Chief Scientist at Atmos International,
where he has been developing pipeline application software for
more than 13 years, specializing in simulation. David has a
degree in Mathematics from Cambridge University UK, and a
PhD from UMIST UK, he is registered as a Chartered
Mathematician with the Institute of Mathematics and its
Applications.
Fayaz Issak is a senior software engineer and project manager
at Atmos International in Manchester, UK. He has 10 years’
experience in the pipeline industry, working in risk analysis,
pipeline operations, leak detection, pipeline simulation and
pipeline management systems. Fayaz has a Bachelor of Science
in Computer Science from the University of Salford and is
Microsoft and Prince2 Certified.
Ola Johan Rinde has a Master of Science in mechanical
engineering at NTNU in Norway with specialization on wet gas
compressing. Ola has worked for 5 years in the Polytec R&D
foundation and 9 years in Gassco. Ola has mainly worked on
multiphase pipeline operation and development of online single
and multiphase simulation systems.

FIGURES
Figure 1 - Measured and modelled pressure at outlet of pipeline A
Figure 2 - Measured and modelled flow at outlet of pipeline A
PSIG 1604 Modelling and Simulation of Gassco Wet Gas Pipelines 7
Figure 3 - Comparing delta pressure with estimate steady state pressure curves
Figure 4 - Finding liquid inventory

8 PSIG 1604 Garry Hanmer, Dr. David Basnett, Fayaz Issak - ATMOS International Limited, Ola Johan Rinde – Gassco
Figure 5– Pipeline C liquid estimation from pressure
Figure 6– Pipeline B liquid estimation from pressure
PSIG 1604 Modelling and Simulation of Gassco Wet Gas Pipelines 9
Figure 8– Pipeline B liquid estimation from accumulators
Figure 7 - Pipeline C liquid estimation from accumulators

10 PSIG 1604 Garry Hanmer, Dr. David Basnett, Fayaz Issak - ATMOS International Limited, Ola Johan Rinde – Gassco
Figure 9 – Pipeline C un-tuned liquid estimation
Figure 10 – Pipeline C untuned water estimation

PSIG 1604 Modelling and Simulation of Gassco Wet Gas Pipelines 11
Figure 11 - Pipeline C tuned liquid estimation
Figure 12 - Pipeline C tuned water estimation
Top Related
Copyright © 2022 FDOKUMEN

