







Bahasa
Halaman
Hukum


ALGORITHM DESIGN FOR LOW LATENCYCOMMUNICATION IN WIRELESS NETWORKS
DISSERTATION
Presented in Partial Fulfillment of the Requirements for the Degree Doctor of
Philosophy in the Graduate School of the Ohio State University
By
Sherif ElAzzouni, B.S. M.S.
Graduate Program in Electrical and Computer Engineering
The Ohio State University
2020
Dissertation Committee:
Eylem Ekici, Advisor
Ness B. Shroff, Advisor
Atilla Eryilmaz

c© Copyright by
Sherif ElAzzouni
2020

ABSTRACT
The new generation of wireless networks is expected to be a key enabler of a myr-
iad of new industries and applications. Disruptive technologies such as autonomous
driving, cloud gaming, smart healthcare, and virtual reality are expected to rely
on a robust wireless infrastructure to support those applications’ vast and diverse
communication requirements. The successful realization of a large number of those
applications hinges on timely information exchange, and thus, Latency arises as
the critical requirement essential to unlock the true potential of the new 5G wire-
less generation. In order to ensure reliable low latency communication, new network
algorithms and protocols prioritizing latency need to be developed across different
layers of the network stack. Furthermore, a theoretical framework is needed to better
demonstrate the behavior of delay at the wireless edge and the proposed solutions’
performance.
In this dissertation, we study the problem of designing algorithms for low latency
communication by addressing traditional problems such as resource allocation and
scheduling from a delay-oriented standpoint, as well as, new problems that arise from
the new 5G architecture such as caching and Heterogeneous Networks (HetNets)
access. We start by a addressing the problem of designing real-time cellular downlink
resource allocation algorithms for flows with hard deadlines. Attempting to solve
this problem brings about the following two key challenges: (i) The flow arrival
and the wireless channel state information are not known to the Base Station (BS)
ii

apriori, thus, the allocation decisions need to be made in an online manner. (ii)
Resource allocation algorithms that attempt to maximize a reward in the wireless
setting will likely be unfair, causing unacceptable service for some users. We model
the problem of allocating resources to deadline-sensitive traffic as an online convex
optimization problem. We address the question of whether we can efficiently solve
that problem with low complexity. In particular, whether we can design a constant-
competitive scheduling algorithm that is oblivious to requests’ deadlines. To this
end, we propose a primal-dual Deadline-Oblivious (DO) algorithm, and show it is
approximately 3.6-competitive. We also explore the issues of fairness and long-term
performance guarantees. We then address the potential of caching at wireless end-
users where caches are typically very small, orders of magnitude smaller than the
catalog size. We develop a predictive multicasting and caching scheme, where the
BS in a wireless cell proactively multicasts popular content for end-users to cache,
and access locally if requested. We analyze the impact of this joint multicasting and
caching on delay performance and show that predictive caching fundamentally alters
the asymptotic throughput-delay scaling. This practically translates to a several-
fold delay improvement in simulations over the baseline at high network loads. We
highlight a fundamental delay-memory trade-off in the system and identify the correct
memory scaling to fully benefit from the network multicasting gains.
We then shift our focus from centralized wireless networks to distributed wire-
less adhoc networks. We build on recent results in wireless networks that show
that CSMA can be made throughput optimal by optimizing over activation rates
at the cost of poor delay performance, especially for large networks. Motivated by
those shortcomings, we propose a Node-Based version of the throughput optimal
CSMA (NB-CSMA) as opposed to traditional link-based CSMA algorithms, where
iii

links were treated as separate entities. Our algorithm is fully distributed and corre-
sponds to Glauber dynamics with “Block updates”. We show analytically and via
simulations that NB-CSMA outperforms conventional link-based CSMA in terms of
delay, highlighting that, exploiting the natural “hotspots” in wireless networks can
greatly improve delay performance. Finally, we shift our attention to the problem
of Heterogeneous Networks (HetNets) access, where a cellular device can connect to
multiple Radio Access Technologies (RATs) simultaneously including costly ubiqui-
tous cellular technologies and other cheap intermittent technologies such as WiFi and
mmWave. A natural question arises “How should traffic be distributed over differ-
ent interfaces, taking into account different application QoS requirements and the
diverse nature of radio interfaces?”. To this end, we propose the Discounted Rate
Utility Maximization (DRUM) framework with interface costs as a means to quan-
tify application preferences in terms of throughput, delay, and cost. We propose an
online predictive algorithm that exploits the predictability of wireless connectivity
for a small look-ahead window w. We show that the proposed algorithm achieves a
constant competitive ratio independent of the time horizon. Furthermore, the com-
petitive ratio approaches 1 as the prediction window increases. We conduct experi-
ments to better demonstrate the behavior of both delay-sensitive and delay-tolerant
applications under intermittent connectivity.
Our research demonstrates how low-complexity algorithms at the wireless edge
could be designed to enable reliable low-latency communication and enables a deeper
understanding of algorithm performance analysis from a delay standpoint.
iv

To my parents, Waguih ElAzzouni and Mary Iskander.
v

ACKNOWLEDGMENTS
First, I would like to express my sincere gratitude to my advisors. It was a privilege
working under the guidance of Prof. Eylem Ekici throughout my PhD journey. As
my advisor, Prof. Ekici taught me to think analytically and critically about research
problems, and how to translate an idea into a research problem. He also offered a lot
of guidance and advice on how to find interesting research directions, how to look at
the problem from all sides, and how to present my work effectively. I am very grateful
for the effort he put into my growth as a researcher, through continuous guidance and
thought-provoking feedback, as well his genuine care for his students’ success. As a
friend, Prof. Ekici was a source of continuous support and encouragement. I was also
very lucky to work under the guidance of Prof. Ness Shroff. Prof. Shroff’s mentorship
was invaluable for me as he guided me on how to conduct good research and how
to formulate an interesting research problem. His breadth of knowledge and level of
rigor were also immensely integral to my growth and evolution as an independent
researcher and are something I will forever benefit from in my career moving forward.
I am also very appreciative of Prof. Shroff’s perspective during our meetings as he
always offered an enlightening point of view. On the personal level, Prof. Shroff was
always a wise, supportive, and caring friend.
I am also thankful for Prof. Atilla Eryilmaz for serving on my candidacy com-
mittee, providing many insightful comments and suggestions, and for all the courses
he taught and I attended at OSU. I have immensely benefited from Prof. Eryilmaz’s
vi

inspiring work in our field and teaching talent. My discussions with Prof. Eryilmaz
were very helpful and enjoyable to me. I would also like to thank Prof. Abhishek
Gupta for serving on my candidacy committee. Prof. Gupta’s useful feedback and
insightful comments have significantly helped me into improving my dissertation. I
would also like to thank Dr. Gagan Choudhury for hosting me and being my mentor
during my summer internship. His guidance during our collaboration was very useful
for me and my perspective of our field. I would also like to thank my collaborator
Fei Wu for our joint work on caching. It has been a pleasure working together and it
has definitely benefited me greatly. I am also very grateful for all the useful courses I
have attended and discussions I’ve had with Prof. Can Emre Koksal, Prof. Hesham
El Gamal, Prof. Andrea Serrani, and Prof. Tasos Sidiropoulos. I would also like to
thank all my friends and colleagues at the IPS lab, for their continued support and
for all the discussions and time we had together.
On a personal level, I am immensely grateful for my family for being my support
system, especially my parents, my brother Karim, and my cousin Omar. I would also
like to thank all my friends in Egypt and USA for all the time we shared, and for
their continued support and advice throughout my PhD duration.
vii

VITA
November 6th, 1988 . . . . . . . . . . . . . . . . . . . Born in Alexandria, Egypt
2010 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . B.S., Electrical Engineering, AlexandriaUniversity
2014 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . M.S., Wireless Technologies, Nile Univer-sity
2014-Present . . . . . . . . . . . . . . . . . . . . . . . . . . Graduate Research Associate, GraduateTeaching Associate, The Ohio State Uni-versity
PUBLICATIONS
Sherif ElAzzouni, and Eylem Ekici “A Node-Based CSMA Algorithm For ImprovedDelay Performance in Wireless Networks”, in Proceedings of ACM MobiHoc, Pader-born, Germany, July 2016.
Sherif ElAzzouni, and Eylem Ekici “Node-Based Distributed Channel Access withEnhanced Delay Characteristics”, IEEE/ACM Transactions on Networking, 2018.
Sherif ElAzzouni, Eylem Ekici, and Ness Shroff “QoS-Aware Predictive Rate Allo-cation Over Heterogeneous Wireless Interfaces”, Proceedings of WiOpt, Shanghai,China, May 2018.
Sherif ElAzzouni, Eylem Ekici, and Ness Shroff “Is Deadline Oblivious SchedulingEfficient for controlling real-time traffic in cellular downlink systems?”, To appear inInfocom, Toronto, Canada, 2020.
viii

Sherif ElAzzouni, Fei Wu, Ness Shroff, and Eylem Ekici “Predictive Caching at TheWireless Edge Using Near-Zero Caches”, To appear in ACM Mobihoc, Shanghai,China, 2020.
FIELDS OF STUDY
Major Field: Electrical and Computer Engineering
Specialization: Network Science
ix

TABLE OF CONTENTS
Abstract . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . ii
Dedication . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . iv
Acknowledgments . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . vi
Vita . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . viii
List of Figures . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . xiii
CHAPTER PAGE
1 Introduction . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1
1.1 Resource Allocation for Cellular Real-Time Traffic . . . . . . . . . 21.2 Caching at The Wireless Edge . . . . . . . . . . . . . . . . . . . . 31.3 Distributed Throughput-Optimal Low-Latency Scheduling . . . . . 51.4 Managing Cellular Access across Heterogeneous Wireless Interfaces 71.5 Contribution and Thesis Organization . . . . . . . . . . . . . . . . 9
2 Resource Allocation for Cellular Real-Time Traffic . . . . . . . . . . . . 13
2.1 Introduction . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 132.2 System Model . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 152.3 Problem Formulation . . . . . . . . . . . . . . . . . . . . . . . . . 172.4 Deadline Oblivious (DO) Algorithm . . . . . . . . . . . . . . . . . 20
2.4.1 Algorithm . . . . . . . . . . . . . . . . . . . . . . . . . . . 202.4.2 Analysis . . . . . . . . . . . . . . . . . . . . . . . . . . . . 212.4.3 Lightweight Algorithm . . . . . . . . . . . . . . . . . . . . 25
2.5 Stochastic Setting with timely throughput constraints . . . . . . . 262.5.1 Virtual Queue Structure . . . . . . . . . . . . . . . . . . . 282.5.2 D Look-ahead Algorithm . . . . . . . . . . . . . . . . . . . 292.5.3 Long-term Fair Deadline Oblivious (LFDO) Algorithm . . 32
2.6 Numerical Results . . . . . . . . . . . . . . . . . . . . . . . . . . . 342.7 Conclusion and Future Work . . . . . . . . . . . . . . . . . . . . . 37
x

3 Predictive Caching at the Wireless Edge . . . . . . . . . . . . . . . . . 39
3.1 Introduction . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 393.2 System Model . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 42
3.2.1 Basline On-demand Unicast System . . . . . . . . . . . . . 423.2.2 Predictive Caching . . . . . . . . . . . . . . . . . . . . . . 44
3.3 Analysis of Unicast On-Demand System . . . . . . . . . . . . . . . 473.4 Duality Framework . . . . . . . . . . . . . . . . . . . . . . . . . . 49
3.4.1 Capacity of Predictive Caching . . . . . . . . . . . . . . . 493.4.2 Duality between Scheduling and Routing . . . . . . . . . . 51
3.5 Performance of Predictive Caching . . . . . . . . . . . . . . . . . . 533.5.1 Main Result . . . . . . . . . . . . . . . . . . . . . . . . . . 533.5.2 Discussion of Main Result . . . . . . . . . . . . . . . . . . 553.5.3 Proof of Main Result . . . . . . . . . . . . . . . . . . . . . 573.5.4 Closed-Form Delay-Memory Trade-off for the approximate
model . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 643.6 Simulations . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 663.7 Conclusion and Future Work . . . . . . . . . . . . . . . . . . . . . 69
4 Distributed Node-Based Low Latency Scheduling . . . . . . . . . . . . 71
4.1 Introduction . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 714.2 Related Work . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 754.3 System Model . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 764.4 Node Based CSMA : Glauber Dynamics with Block updates . . . . 80
4.4.1 Step 1: Forming Blocks . . . . . . . . . . . . . . . . . . . . 814.4.2 Step 2: Updating Blocks . . . . . . . . . . . . . . . . . . . 82
4.5 Performance of the NB-CSMA Algorithm . . . . . . . . . . . . . . 834.6 Collocated Networks . . . . . . . . . . . . . . . . . . . . . . . . . . 95
4.6.1 Q-CSMA Starvation time . . . . . . . . . . . . . . . . . . . 974.6.2 NB-CSMA Starvation time . . . . . . . . . . . . . . . . . . 100
4.7 Numerical Results . . . . . . . . . . . . . . . . . . . . . . . . . . . 1044.7.1 General Networks . . . . . . . . . . . . . . . . . . . . . . . 1044.7.2 Collocated Networks . . . . . . . . . . . . . . . . . . . . . 108
4.8 Practical Implementation of NB-CSMA . . . . . . . . . . . . . . . 1104.9 Conclusion . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 115
5 Cellular Access Over Heterogeneous Wireless Interfaces . . . . . . . . . 117
5.1 Introduction . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1175.2 System Model . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 121
5.2.1 Channel Model . . . . . . . . . . . . . . . . . . . . . . . . 1225.2.2 Flow Utility . . . . . . . . . . . . . . . . . . . . . . . . . . 123
5.3 Problem Formulation . . . . . . . . . . . . . . . . . . . . . . . . . 1245.4 Online Predictive Rate Allocation . . . . . . . . . . . . . . . . . . 125
xi

5.4.1 Receding Horizon Control . . . . . . . . . . . . . . . . . . 1255.4.2 Average Fixed Horizon control (AFHC) . . . . . . . . . . . 127
5.5 Competitive Ratio of AFHC . . . . . . . . . . . . . . . . . . . . . 1285.6 Numerical Results . . . . . . . . . . . . . . . . . . . . . . . . . . . 1325.7 Conclusion . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 137
6 Conclusion . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 139
Appendix A: Proofs for Chapter 2 . . . . . . . . . . . . . . . . . . . . . . . . 146
A.1 Proof of Lemma 2.4.2 . . . . . . . . . . . . . . . . . . . . . . . . . 146A.2 Proof of Lemma 2.4.3 . . . . . . . . . . . . . . . . . . . . . . . . . 146A.3 Proof of Lemma 2.4.5 . . . . . . . . . . . . . . . . . . . . . . . . . 147A.4 Proof of Theorem 2.4.1 . . . . . . . . . . . . . . . . . . . . . . . . 148A.5 Proof of Theorem 2.5.2 . . . . . . . . . . . . . . . . . . . . . . . . 148
Appendix B: Proofs for Chapter 3 . . . . . . . . . . . . . . . . . . . . . . . . . 151
B.1 Proof of Lemma 3.3.1 . . . . . . . . . . . . . . . . . . . . . . . . . 151B.2 Proof of Proposition 3.5.1 . . . . . . . . . . . . . . . . . . . . . . . 152
Appendix C: Proofs for Chapter 4 . . . . . . . . . . . . . . . . . . . . . . . . . 155
C.1 Proof of Theorem 4.5.1 . . . . . . . . . . . . . . . . . . . . . . . . 155C.2 Proof of Theorem 4.5.2 . . . . . . . . . . . . . . . . . . . . . . . . 156C.3 Proof of Theorem 4.5.4 . . . . . . . . . . . . . . . . . . . . . . . . 158C.4 Proof of Theorem 4.5.6 . . . . . . . . . . . . . . . . . . . . . . . . 161
Appendix D: Proofs for Chapter 5 . . . . . . . . . . . . . . . . . . . . . . . . 163
D.1 Proof of Lemma 5.5.1 . . . . . . . . . . . . . . . . . . . . . . . . . 163D.2 Proof of Lemma 5.5.2 . . . . . . . . . . . . . . . . . . . . . . . . . 164D.3 Proof of Theorem 5.5.1 . . . . . . . . . . . . . . . . . . . . . . . . 165
Bibliography . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 167
xii

LIST OF FIGURES
FIGURE PAGE
2.1 Real-Time Cellular Traffic System Model . . . . . . . . . . . . . . . . 16
2.2 Comparison of performance of different algorithms . . . . . . . . . . 36
2.3 Resource allocation per user under DO and LFDO . . . . . . . . . . 37
3.1 On-Demand Unicast Baseline System Model . . . . . . . . . . . . . . 42
3.2 Predictive Caching Model . . . . . . . . . . . . . . . . . . . . . . . . 44
3.3 Predictive Caching Model . . . . . . . . . . . . . . . . . . . . . . . . 47
3.4 Capacity Region of different delivery systems . . . . . . . . . . . . . 51
3.5 Duality between routing and scheduling problems . . . . . . . . . . . 53
3.6 Scaling of (3.5.25) . . . . . . . . . . . . . . . . . . . . . . . . . . . . 66
3.7 Effect of Predictive Caching on Delay . . . . . . . . . . . . . . . . . . 67
3.8 Normalized Cache Size supporting Predictive Caching . . . . . . . . 67
3.9 Empirical Delay-Cache size Trade-off . . . . . . . . . . . . . . . . . . 69
4.1 An Example of a simple 5 node network topology and the correspond-ing conflict graph (1-Hop interference relationship) . . . . . . . . . . 77
4.2 State space of Q-CSMA in collocated network, equal throughput case 98
4.3 State space of NB-CSMA in collocated network, equal throughput case 100
4.4 600x600m Random Network Topology . . . . . . . . . . . . . . . . . 105
4.5 Average Queue Length per link vs. ρ . . . . . . . . . . . . . . . . . 106
4.6 Average Queue Length per link vs. ρ (Delayed CSMA, T = 2, T = 8.) 107
xiii

4.7 Mean Starvation time of link 1 vs. ρ . . . . . . . . . . . . . . . . . . 108
4.8 Average Queue Length per link vs. ρ (Collocated Networks) . . . . . 109
4.9 The POLLING/CTU exchange in the contention period . . . . . . . 113
5.1 System Model . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 122
5.2 Secondary Interface capacity process . . . . . . . . . . . . . . . . . . 132
5.3 Optimal Rate Allocations of heterogeneous flows, U(r) = log(1 +r), pc = 0.75. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 133
5.4 Competitive Ratios of RHC and AFHC compared to the functionf(w) = 1− 1
w+1. U(r) = r(1−α)
1−α , pc = 0.55, β = 0, 0.7, 0.95, α = 0.5. 134
5.5 Competitive Ratios of RHC and AFHC as a function of βmax. U(r) =r(1−α)
1−α , pc = 0.55, β = 0, 0.3, βmax, α = 0.5, w = 3. . . . . . . . . . . 134
5.6 Reward obtained by OPT, RHC and AFHC as a function of βmax.U(r) = r(1−α)
1−α , pc = 0.55, β = 0, 0.3, βmax, α = 0.5, w = 3. . . . . . . 135
5.7 Comparison between theoretical lower bound and simulated competi-
tive ratio, β = 0.2, 0.4, 0.6, U(r) = (1+r)(1−α)
1−α − 11−α , α = 0.5. . . . . 137
B.1 Generic Resource Pooling queue . . . . . . . . . . . . . . . . . . . . . 151
xiv

CHAPTER 1
INTRODUCTION
The last few years have witnessed an explosion in the proliferation, capability, and
ubiquity of mobile devices and networks. This growth has opened the door for a
new “5G” ecosystem, where mobile networks are increasingly relied on for the tech-
nological advancements that are expected to power the economic growth, and shape
various aspects of our lives in the next decade. Applications like remote medicine,
autonomous driving, Internet-of-Things (IoT), and virtual/augmented reality are ex-
amples of new disruptive applications that are expected to heavily rely on the robust
communication infrastructure promised by the new wireless technology generation.
For many of the applications that 5G aims to facilitate, such as critical commu-
nication and interactive applications, Latency is the most important performance
consideration. The survey in [1] identifies several key 5G services that require an
end-to-end latency on the order of 1 millisecond (ms). This requirement is much
more stringent than the delays seen in current LTE 4G Networks, reported to be in
the 20-60 ms range [2] [3]. Network Latency or Network Delay (we shall use the terms
interchangeably) is the time it takes for data to travel between the transmitter and
the receiver. Thus, the total latency seen by the average packet is affected by every
layer in the stack in both radio and core networks. This means that a novel network
architecture aiming to provide reliable low-latency communication has to redesign
every layer in the network with this fundamental goal in mind.
1

From a theoretical standpoint, latency is a complicated metric to analyze and
optimize in algorithm design due to the complex interactions between different as-
pects of the system. This is exacerbated for wireless networks due to the interaction
between wireless channel conditions such as fading, scattering, shadowing, path-loss,
etc., physical layer techniques employed by the network, and the higher layer design
choices. This means that a wireless low-latency communication system design should
target different problems in the system from traditional ones such as scheduling to
new ones included in the 5G design with the goal of reducing latency such as caching.
In this dissertation, we focus on system design and evaluation across four aspects
of the low-latency communication system: 1. Resource Allocation for Cellular Real-
Time Traffic. 2. Caching at The Wireless Edge. 3. Distributed Throughput-Optimal
Low-Latency Scheduling. 4. Managing Cellular Access across Heterogeneous Wireless
Interfaces.
1.1 Resource Allocation for Cellular Real-Time Traffic
Next generation mobile networks are poised to support a set of diverse applications,
many of which are both bandwidth-intensive and latency-sensitive, having strict re-
quirements on end-to-end delay. In applications like Virtual Reality, Cloud Gaming,
and Video Streaming, it is critical that end users receive the bulk of their data within
a prespecified hard deadline. Any extra delay would usually render the transmission
useless. On the other hand, the high bandwidth requirements of those applications
would often make streaming all users’ data within the deadline impossible, thus,
a good scheduler has to balance those two goals, intelligently making decisions on
how to use the available bandwidth to maximize end users’ satisfaction. This mo-
tivates the design of resource allocation schemes that jointly account for bandwidth
2

requirements, hard deadlines and applications’ priorities in terms of what has to be
transmitted to end-users to maintain a seamless experience.
Due to the continuous arrivals of flows and change in the wireless channel state, the
resource allocation of spectrum has to be made online without knowledge of future
events. The central question becomes “Can we find a constant-competitive
solution that has low-complexity?”. Specifically, we are interested in the class
of “deadline-oblivious” algorithms, that make scheduling decisions without taking
individual flows’ deadline requirements into account. Those algorithms have low
complexity, are more amenable to implementation than deadline-aware schedulers,
and are robust against deadline information absence or inaccuracy.
We show that the answer to this question is affirmative and develop an online
primal-dual algorithm that is provably constant-competitive and has an empirical
performance that is very close to the offline optimal as illustrated by simulations. We
then address the problem of long-term fairness by reformulating the online optimiza-
tion resource allocation problem as a stochastic optimization problem and modifying
our algorithm to account for long-term throughput fairness between users. We then
combine the primal-dual analysis of online algorithms with the Lyapunov tools for
stochastic control to show that our modified algorithm tracks the offline problem
closely in terms of reward while satisfying long-term stochastic constraints. Thus,
we show that deadline-oblivious scheduling algorithms can be efficient in controlling
real-time cellular traffic.
1.2 Caching at The Wireless Edge
Caching is poised to play a key role in most proposed future network architectures.
The huge increase in mobile traffic, expected to reach 77 exabytes of data per month
by 2022 [4], and higher user expectations in terms of high throughput and low latency
3

have pushed the networking community to rely on edge caching as a central pillar
of emerging architectures due to its potential to increase network capacity, reduce
latency, and alleviate peak-hour congestion among other expected benefits. Recently,
there has been a special IEEE JSAC issue that was dedicated to answer the question of
“What role will caching play in future communication systems?” [5]. As an example,
the Information Centric Networks (ICN) [6] proposal is an ambitious project to evolve
the internet away from the host-centric paradigm to a new content-centric paradigm
that decouples senders and receivers. In ICN, the sender requests a certain object,
rather than establishing a connection with the object’s host, and the network then
leverages in-network caches to locate that item and deliver it to the user. The
reliance on caching has motivated modeling ICN as a “network of caches”. Another
domain where caching has been gaining significant traction is 5G cellular networks.
There have been many works examining the potential of caching in both the core and
the RAN edge [7] [1], and significant commercialization efforts to deploy caching in
existing networks, enabling the operation of the Radio Access Network as a Content
Delivery Network [8] [9].
Central to the recent increased interest in caching is the possibility of caching at
the wireless edge [10]. Utilizing Base Stations (BSs)/Access Points (APs) to cache
popular content has been proposed [11], which has sometimes been referred to as
femtocaching. This enables users to fetch content from the closest Base Station,
if possible. This decreases the Round-trip delay of communication. Furthermore,
femtocaching reduces network congestion by alleviating the need to continuously move
popular content between the core servers and edge devices (such as RANs). Although
femtocaching can significantly reduce access delay, femtocaching cannot reduce the
last mile wireless network delay, thus, we present the following question: “If caching
content in last mile edge devices can cause significant delay reduction, can we go
4

one step further and push popular content to end-users devices’ caches?”. Users can
access cached content locally with zero-delay. Furthermore, this helps reduce the
overall delay by avoiding having to continuously transmit redundant content over the
wireless medium, which dissipates expensive wireless resources, that may be the delay
bottleneck especially during the busy hour. We address that fundamental question
“Can small cache sizes at the end-users be exploited to significantly reduce delay?”.
To this end, we propose a predictive caching scheme whereby popular content
is multicast to all users proactively and have end users cache that content. We
formalize the notion of “small caches” by defining the concept of “vanishing caches”,
where the usable cache size goes to zero as the network approaches full-load. To
analyze the effect of our proposed scheme, we apply the heavy-traffic analysis in a
novel way, and show that predictive caching has the ability to fundamentally alter
the delay-throughput scaling, practically translating to multiple fold delay increases.
We quantify the effect of cache sizes on delay savings highlighting the fundamental
delay-memory trade-off in the system. Furthermore, we identify the correct memory
scaling to obtain multicasting gains. We expect this result to aid in future practical
cache dimensioning at the wireless edge.
1.3 Distributed Throughput-Optimal Low-Latency Schedul-
ing
Scheduling is an essential task for resource allocation in communication networks.
This task is especially challenging in wireless networks due to inherent mutual inter-
ference among wireless links, and for various networks, the absence of central control
and/or resource management decision making. Typically, a good scheduling algo-
rithm should be able to achieve three goals; i)High Throughput: Characterized by
5

the fraction of the network capacity region a scheduling algorithm achieves. Ideally
a scheduling algorithm should be able to support any set of arrival rates within the
capacity region. ii)Low Delay: A good scheduling algorithm should be able to main-
tain the throughput required by the application without incurring excessive delay at
any of the links. Furthermore, the expected delay should scale favorably with the
size of the network. iii)Low Complexity: Required to ensure easy implementation
and to minimize resources required to run the algorithm.
A recent breakthrough in wireless network scheduling happened when it was shown
that CSMA-like algorithms can be made throughput optimal if every link’s acti-
vation rate is optimized [12] or taken to be an appropriate function of the queue
length [13], [14]. This result is attractive because CSMA algorithms are fully dis-
tributed. However, despite the promise of those algorithms, they were found to suffer
from poor delay performance due to the well-known CSMA starvation problem. A
weakness of the current implementations of throughput-optimal CSMA algorithms
is that they tend to treat all wireless links as separate autonomous entities that do
not communicate. This is not true in many instances of wireless networks. In many
practical wireless network deployments (e.g. wireless mesh networks and wireless ad-
hoc networks), nodes typically control multiple outgoing links. We use this fact to
motivate our proposed Node-Based CSMA (NB-CSMA) algorithm, where scheduling
decisions are made on a node level rather than a link level. This allows us to exploit
the interdependence between links along with the presence of hotspots in wireless net-
works to guide the scheduling process. We design our NB-CSMA algorithms guided
by the Glauber dynamics with block transitions idea from statistical physics to en-
sure throughput optimality and fully exploit link interdependies to minimize delay.
We rigorously analyze the proposed NB-CSMA: First, we demonstrate that for fixed
6

networks the delay performance of NB-CSMA is no worse than the baseline by ana-
lyzing the second order properties of link starvation times. Second, we analyze the
fraction of the capacity region where the delay is guaranteed to grow as a polynomial
in the size of the network (as opposed to exponential) and show that the fraction
in NB-CSMA networks is larger than that of link-based CSMA. Third, we derive a
closed-form mean-starvation time for collocated networks for both NB-CSMA and
the baseline which further highlights the key reasons node-based scheduling improves
delay performance. Finally, to assess our proposed algorithm we build a simulator
to test different distributed scheduling algorithms for arbitrary topologies and show
that NB-CSMA consistently achieves around 50% delay reduction over the baseline
for a variety of practical scenarios.
1.4 Managing Cellular Access across Heterogeneous Wire-
less Interfaces
The demand growth is straining cellular networks, as it is becoming clear that oper-
ators cannot increase capacity to meet the demand by deploying more base stations.
Thus, alternative approaches to capacity increase must be undertaken to provide
users with the bandwidth needed to support their applications. One such approach
is exploiting alternative Radio Access Technologies (RATs) that may be available to
smart phones such as WiFi, Bluetooth, mmWave, etc., to aid the cellular network in
data transmission [15]. Furthermore, the Dynamic Spectrum Access (DSA) technol-
ogy [16] could also be used to aid the cellular network in data transfer. An interesting
question arises from this proposal: How can we best distribute mobile traffic
over heterogeneous RATs, taking into account the inherent differences between
interfaces? Cellular networks are ubiquitous but have high cost on the operator in
7

terms of congesting the cellular network, as well as having high energy consumption
that may drain the phone battery. WiFi networks, if accessible, are usually free, but
WiFi coverage is not always present. Furthermore, it is typical for public places to
throttle WiFi rates. DSA is usually free-of-charge and has high rates. However, the
connection is intermittent as the user is only allowed to access this spectrum when
the spectrum owner is absent. These heterogeneous properties necessitate a frame-
work for mobile users to take all these factors into account and make a decision on
traffic allocation that is optimal in terms of throughput, Quality of Service (QoS)
constraints satisfaction, and cost.
The “correct” solution of this problem is different for different applications. For
example, for interactive applications such as phone/video calls, it is critical that a
minimum amount of throughput be available all the time irrespective of the interface,
whereas, a delay tolerant application such as downloads would be served better by
waiting until a“cheap” connection such as WiFi is available. The challenge in manag-
ing cellular access is that all those applications are contending for available resources,
thus, a good scheduler needs to balance the available resources along with application
specific QoS requirements. We approach the problem by designing an application spe-
cific utility function that proportionally weighs the long-term throughput as well as
the short-term service regularity to capture each application QoS requirements. We
then leverage the link prediction capability of mobile users that has been well docu-
mented to design predictive QoS-aware resource allocation algorithms that provable
maximizes applications’ utility while minimizing the expensive cellular link usage. We
rigorously analyze our predictive solutions and assess the effect of prediction quality
on the competitive ratio showing that our algorithms are O( 1
w
)-competitive, where
w is the length of the prediction window. We demonstrate via simulations how our
8

predictive solutions allocate available resources across applications and adapts to the
intermittency of secondary connections such as WiFi.
1.5 Contribution and Thesis Organization
This dissertation focuses on designing efficient network control algorithms to enable
robust low-latency communication by addressing four specific networking areas: re-
source allocation for real-time traffic (Chapter 2), caching and multicasting at the
wireless edge (Chapter 3), distributed scheduling (Chapter 4), and heterogeneous
network access (Chapter 5). Specifically, in Chapter 2, we investigate the capability
of low-complexity deadline-oblivious algorithms have in controlling real-time wireless
traffic. In Chapter 3, we analyze predictive wireless caching using multicasting and
its effect on the asymptotic delay-throughput relationship. In Chapter 4, we inves-
tigate throughput optimal distributed algorithms outlining how exploiting interlink
dependencies can significantly improve delay performance. In Chapter 5, we address
the problem of heterogeneous network access for contending applications, and how
predictability of link quality can be exploited for resource allocation tailored to ap-
plications’ needs. The contributions of this dissertation are described in more detail
below.
In Chapter 2, we study the problem of resource allocation for cellular traffic with
hard-deadlines. Attempting to solve this problem brings about the following two key
challenges: (i) The flow arrival and the wireless channel state information are not
known to the Base Station (BS) apriori, thus, the allocation decisions need to be
made in an online manner. (ii) Resource allocation algorithms that attempt to maxi-
mize a reward in the wireless setting will likely be unfair, causing unacceptable service
for some users. We model the problem of allocating resources to deadline-sensitive
traffic as an online convex optimization problem, where the BS acquires a per-request
9

reward that depends on the amount of traffic transmitted within the required dead-
line. We address the question of whether we can efficiently solve that problem with
low complexity. In particular, whether we can design a constant-competitive schedul-
ing algorithm that is oblivious to requests’ deadlines. To this end, we propose a
primal-dual Deadline-Oblivious (DO) algorithm, and show it is approximately 3.6-
competitive. Furthermore, we show via simulations that our algorithm tracks the
prescient offline solution very closely, significantly outperforming several algorithms
that were previously proposed. Our results demonstrate that even though a sched-
uler may not know the deadlines of each flow, it can still achieve good theoretical and
empirical performance. In the second part, we impose a stochastic constraint on the
allocation, requiring a guarantee that each user achieves a certain timely throughput
(amount of traffic delivered within the deadline over a period of time). We propose
a modified version of our algorithm, called the Long-term Fair Deadline Oblivious
(LFDO) algorithm for that setup. We combine the Lyapunov framework for stochas-
tic optimization with the Primal-Dual analysis of online algorithms, to show that
LFDO retains the high-performance of DO, while satisfying the long-term stochastic
constraints.
In Chapter 3, we study the effect of predictive caching on the delay of wireless
networks. We explore the possibility of caching at the wireless end-users where caches
are typically very small, orders of magnitude smaller than the catalog size. We develop
a predictive multicasting and caching scheme, where the Base Station (BS) in a
wireless cell proactively multicasts popular content for end-users to cache, and access
locally if requested. We analyze the impact of this joint multicasting and caching
on the delay performance. Our analysis uses a novel application of Heavy-Traffic
theory under the assumption of vanishing caches to show that predictive caching
fundamentally alters the asymptotic throughput-delay scaling. This in turn translates
10

to a several-fold delay improvement in simulations over the baseline as the network
operates close to the full load. We highlight a fundamental delay-memory trade-off in
the system and identify the correct memory scaling to fully benefit from the network
multicasting gains.
In Chapter 4, we consider the problem of distributed scheduling in wireless ad-
hoc networks. We build on recent studies in wireless scheduling have shown that
CSMA can be made throughput optimal by optimizing over activation rates. It
has been found those throughput optimal CSMA algorithms suffer from poor delay
performance, especially at high throughputs where the delay can potentially grow
exponentially in the size of the network. We argue that exploiting interdependencis
between wireless links can greatly improve delay performance while preserving the
fully distributed scheduling functionality of CSMA. We propose a Node-Based version
of the throughput optimal CSMA (NB-CSMA) as opposed to traditional link-based
CSMA algorithms, where links were treated as separate entities. Our algorithm is
fully distributed and corresponds to Glauber dynamics with “Block updates”. We
show analytically and via simulations that NB-CSMA outperforms conventional link-
based CSMA in terms of delay for any fixed-size network. We also characterize the
fraction of the capacity region for which the average queue lengths (and the average
delay) grow polynomially in the size of the network, for networks with bounded-degree
conflict graphs. This fraction is no smaller than the fraction known for link-based
CSMA, and is significantly larger for many instances of practical wireless ad-hoc
networks. Finally, we restrict our focus to the special case of collocated networks,
analyze the mean starvation time using a Markov chain with rewards framework and
use the results to quantitatively demonstrate the improvement of NB-CSMA over the
baseline link-based algorithm.
In Chapter 5, we focus on the problem of heterogeneous network access through
11
multiple radio interfaces. A natural approach to alleviate cellular networks conges-
tion is to use, in addition to the cellular interface, secondary interfaces such as WiFi,
Dynamic spectrum and mmWave to aid cellular networks in handling mobile traf-
fic. The fundamental question now becomes: How should traffic be distributed over
different interfaces, taking into account different application QoS requirements and
the diverse nature of radio interfaces. To this end, we propose the Discounted Rate
Utility Maximization (DRUM) framework with interface costs as a means to quantify
application preferences in terms of throughput, delay, and cost. The flow rate alloca-
tion problem can be formulated as a convex optimization problem. However, solving
this problem requires non-causal knowledge of the time-varying capacities of all radio
interfaces. To this end, we propose an online predictive algorithm that exploits the
predictability of wireless connectivity for a small look-ahead window w. We show
that, under some mild conditions, the proposed algorithm achieves a constant com-
petitive ratio independent of the time horizon T . Furthermore, the competitive ratio
approaches 1 as the prediction window increases. We also propose another predictive
algorithm based on the “Receding Horizon Control” principle from control theory
that performs very well in practice. Numerical simulations serve to validate our for-
mulation, by showing that under the DRUM framework: the more delay-tolerant the
flow, the less it uses the cellular network, preferring to transmit in high rate bursts
over the secondary interfaces. Conversely, delay-sensitive flows consistently transmit
irrespective of different interfaces’ availability. Simulations also show that the pro-
posed online predictive algorithms have near-optimal performance compared to the
offline prescient solution under all considered scenarios.
Finally, concluding remarks and possible future research directions are presented
in Chapter 6.
12

CHAPTER 2
RESOURCE ALLOCATION FOR CELLULAR
REAL-TIME TRAFFIC
2.1 Introduction
In this chapter, we address the problem of resource allocation for real-time cellu-
lar traffic [17]. To model the problem of resource allocation and scheduling for
bandwidth-intensive latency-critical applications, we propose approaching the prob-
lem as an online scheduling problem, where requests arrive to the BS carrying a
payload, a hard deadline, and a concave reward function that rewards successful par-
tial transmission within the prespecified hard deadline. Our motivations is that, in
many applications, completing a request partially within a deadline is acceptable.
For example in video transmission, frame-dropping and error concealment are used
to adapt to lower bandwidths, thus, this fits our model where 1. transmitting a
frame after the deadline is useless, 2. the portion of the request completed exhibits
a diminishing return. Another example is VR applications and/or 360 videos where
tiles outside field-of-view can be adaptively streamed at a lower rate if needed [18].
A third example is mobile cloud gaming, where the cloud server adaptively trans-
mit most-likely sequences depending on the bandwidth availability [19], thus, also an
example of a high-bandwidth hard deadline application with diminishing returns.
We focus on the class of Deadline Oblivious algorithms that allocate resources
13

without taking deadline information into account. Deadline Oblivious algorithms are
preferable due to their lower complexity as the scheduler need not track individual
flows’ deadlines, and their robustness against deadline information absence or inaccu-
racy. Our solution to the problem follows the online primal-dual approach presented
in [20] for online linear programs and used in [21] [22] [23] in the context of datacenter
scheduling. The problem of online deadline-sensitive scheduling in wireless networks
presents the following unique challenges: 1. Time-varying complex non-orthogonal
capacity regions due to the nature of the wireless channel, and a set of power control,
coding and MIMO capabilities, that a Base Station (BS) can use to achieve rates
within the capacity region. Our problem formulation treats instantaneous capacity
region as a time-varying closed convex region with no assumptions on the orthogonal-
ity of user rates. 2. Susceptibility of opportunistic scheduling to unfairness, as any
utility-maximizing algorithm would prefer users with consistently good channels. We
tackle long-term unfairness through stochastic timely-throughput constraints. Our
key contributions can be summarized as follows:
1. We develop a Primal-Dual Deadline Oblivious (DO) algorithm to solve the
problem of scheduling deadline sensitive traffic, and show in Theorem 2.4.1,
that our online solution provides a 3.6 competitive ratio compared to the offline
prescient solution that has all the information apriori.
2. We show in Theorem 2.5.3 that the Primal-Dual algorithm can be modified to
satisfy long-term stochastic “Timely Throughput” constraints. Timely through-
put is the amount of traffic delivered to the end user within the allowed dead-
line over a certain time period. We show that this modification causes minimal
sacrifice to performance by utilizing a virtual queue structure and Lyapunov
arguments in a novel way.
14

3. We show via simulations that our algorithm outperforms some well-known al-
gorithms proposed in the literature for deadline-sensitive traffic scheduling. We
also show that our algorithm closely tracks the offline optimal solution. Further-
more, we verify the efficacy of the modified Long-term Fair Deadline Oblivious
(LFDO) algorithm in satisfying timely throughput constraints.
Online Scheduling of Deadline-constrained traffic is a classical problem in networking
[24]. This problem has received increased recent attention with the proliferation of
deadline-sensitive applications in datacenters. A preemptive algorithm that relies on
the slackness metric was proposed in [22]. In [23], it was shown that online primal-
dual algorithms are also energy efficient. Perhaps closest to our setup is the work
in [21], where hard-deadlines and partial utilities are considered for multi-resource
allocation. We compare our algorithm to the one in [21] in the simulation section
and show that our algorithm has better performance due to reliance on primal-dual
updates rather than only primal updates. The aforementioned works however do
not take into account the fundamental challenges of the wireless setup that we have
discussed.
In the wireless setting, there has been an increasing interest in deadline-constrained
traffic. In particular, the concept of “timely-throughput” has been proposed and
studied extensively [25] [26] [27] for packets with deadlines. However, these works
target packet transmissions and do not consider the “diminishing returns” properties
of bandwidth-intensive traffic at the flow level.
2.2 System Model
The system model is shown in Fig.1. Every time slot, we model every job/request j
arriving at the BS as the tuple (aj, dj, Yj, fj(.), Uj), representing arrival time, deadline,
job size, concave reward function that rewards the amount of the job served x with
15

!!
!"
"!
""Problem Setup
Capacity Region of two Users
Time
Jobs
Sequence of Jobs
(#!:Arrival time, %!:Deadline, '!: Job Size, (! . : Reward Function, *!:User)
+
(!(+)
'!
Figure 2.1: Real-Time Cellular Traffic System Model
fj(x), and an intended user among an available N users, that is, Uj ∈ 1, 2, . . . , N.
At each time slot, t, the BS calculates an instantaneous feasible rate region R[t],
based on the CSI feedback. The feasible rate region determines the rates that the BS
can allocate to different users at each time slot. We do not make any assumptions
on R[t], except that it is closed, bounded, and convex. We model the feasible rate
regions over time in this way to capture both the time variability characteristic of
wireless networks as well as the BS capabilities to employ power control, coding, and
MIMO to extend the rate region beyond the simple orthogonal capacity region (see
for example [28]). We remark that this assumption changes the problem significantly
from the typical datacenter job-resource pairing (e.g. [21]), where the capacity is
assumed to be orthogonal with no time-variation.
Each job j is active between its arrival time, aj, and its deadline dj, after which
the job expire and no reward would be gained from transmitting it. At each time slot
t, each active job j is allocated a rate xtj. We use the variable Atj as an indicator of
whether a job j is active at time t. We collect those indicators at time t in a diagonal
matrix that we refer to as At. We denote all the jobs that arrive over the problem
horizon by the set J , and all rates given to all jobs at time t by xt = (xt1, xt2, . . . , xtJ).
16

We assume that utility functions fj(.) are continuous, strictly concave, non-
decreasing, and differentiable with a gradient ∂fj(.) and fj(0) = 0 for all jobs
j. This captures the diminishing return properties of the job service. With some
abuse of notation we will refer to the vector of the gradients of all functions as
∇f( ) = (∂f1( ), ∂f2( ), . . . , ∂fJ( )).
2.3 Problem Formulation
We model the problem as a finite-horizon online convex optimization problem aiming
to maximize the total utility obtained from the total resources received by each job
prior to expiry. Formally:
maxx1,x2,...,xt
∑j∈J
fj(T∑t=1
Atjxtj) (2.3.1a)
subject toT∑t=1
xtj ≤ Yj, ∀j (2.3.1b)
xt ∈ R[t], ∀t = 1, 2, . . . , T. (2.3.1c)
The objective function (2.3.1a) is the utility achieved by each job, due to the sum
of resources allocated to that job over its activity window. The constraint (2.3.1b)
ensures jobs are not allocated more than their size. The constraint (2.3.1c) ensures
that the rates allocated by the BS are feasible w.r.t the rate region estimated from
the CSI feedback. Technically, this constraint should be on the users rates, not on
the jobs. However, it is easy to transform the constraints on users’ sum rates to
constraints on individual jobs, since every job has a single intended user.
Our performance metric throughout will be the Competitive Ratio (CR). The
Competitive Ratio, γ, guarantees that the online algorithm always achieves at least,
a1
γfraction of the total reward achieved by an optimal offline prescient solution
17

that knows all jobs’ details before-hand as well as all the rate regions, independent
of the problem size. Denote the total reward achieved by an online algorithm as
P =∑j∈J
fj(T∑t=1
Atjxtj). We call the offline optimal algorithm OPT, and denote the
total reward achieved by OPT as P ∗ =∑j∈J
fj(T∑t=1
Atjx∗tj)
Definition 2.3.1. Competitive Ratio: An online algorithm is γ-competitive if the
following holds:
γ ≤ supSj ,R[1],R[2],...,R[T ]
P ∗
P(2.3.2)
where Sj is the input job sequence over all slots.
Dual Problem
Since our solution is based on simultaneously updating the primal and dual solutions,
we start by deriving the dual optimization problem:
minα,β
T∑t=1
maxxt∈R[t]
< Atα− β,x > +βTY −J∑j=1
f ∗j (αj) (2.3.3a)
subject to α, β ≥ 0 (2.3.3b)
where α = [α1, . . . , αJ ] is the J × 1 Fenchel Dual vector , β = [β1, . . . , βJ ] is the J × 1
multiplier of the constraint (2.3.1b), and Y = [Y1, . . . , YJ ]. The operator < , > is the
inner product operator. The function f ∗j (αj) is the cocave conjugate of the function
fj( ) [29], which can be written as:
f ∗j (αj) = infx≥0
< αj, x > −fj(x) (2.3.4)
18

A solution (x, α, β) is a primal-dual solution if and only if:
xt = argmaxx∈R[t]
< Atα− β,x >, αj = ∂(fj(T∑t=1
Atjxtj)). (2.3.5)
To derive a Competitive Ratio bound for our algorithm, we use the following theorem
on primal and dual problems:
Theorem 2.3.1. (Weak and Strong Duality [29]) Let (x1, . . . ,xT ) and (α, β) be fea-
sible solutions for the Primal and the Dual problems respectively, then the following
holds:
D =
T∑t=1
σt(α, β) + βTY −J∑j=1
f∗j (αj) ≥∑j∈J
fj(
T∑t=1
Atjxtj) = P (2.3.6)
where σt(α, β) = maxx∈R[t]
< Atα − β,x >. For the optimal offline Primal and Dual
solutions, assuming strong duality, the following holds:
D ≥ D∗ = P ∗ ≥ P (2.3.7)
This gives us a method to bound the competitive ratio of any primal-dual online
algorithm by showing thatD ≤ γP , which implies that P ∗ ≤ D ≤ γP . This technique
is covered in depth for online linear programs in [20] (e.g. Theorem 2.3), for many
applications. We use the same idea to analyze our online algorithm presented in the
next section.
19

2.4 Deadline Oblivious (DO) Algorithm
2.4.1 Algorithm
Before presenting our algorithm, we give some intuition on how we developed it.
It is useful to think of our problem as an online fractional matching problem with
edge weights on a bipartite graph. One side of the graph are the jobs, and on the
other side are the time slots. Each time slot brings new information on the capacity,
edge weights, and utility functions. It is well known that for the simplest online
matching problem with linear rewards, there exists an e−1-competitive Primal-Dual
algorithm that outperforms the simple Greedy Algorithm that is 2-competitive [30].
Later, this framework was extended for concave reward functions for covering/packing
problems [31], and for online matching problems [32]. In fact, our algorithm builds
on the algorithm presented in [32] for online matching with capacity constraints only
and no job size constraints. We develop a complete resource allocation algorithm
for deadline sensitive traffic with job sizes constraints, as well as tackling the long-
term stochastic constraints. The algorithm continuously allocates resources to active
jobs by controlling xt, and updates the per-job dual variables αt = [αt1, . . . , αtJ ], and
βt = [βt1, . . . , βtJ ] every time slot accordingly. Line 4 of the algorithm jointly allocates
the primal and dual variables by solving a low complexity saddle point problem. We
will later show how to use approximation to further reduce the complexity of the
problem. Line 5 updates the dual variable β that ensures that no job is allocated
more resources than its size. This discounts the reward obtained from any job as it
gets closer to completion, hence, this discounting gives priority to jobs that have more
work remaining. Note that the instantaneous primal and dual allocations of all jobs
do not use the knowledge of the activity window after time t. Since the algorithm is
20

Algorithm 1: Deadline Oblivious (DO) Algorithm
1 Initialize: At t = 0, set βtj = 0, ∀j2 for t = 1 to T do3 BS receives new jobs arriving at time t, and calculates R[t]4 Calculate the pair (αt,xt) that solves the following saddle point problem:
minα≥0
maxx∈R[t]
− f ∗(α)+ < α− βt−1,
t−1∑s=1
Asxs + Atx >
Update the dual variable for every job βtj as follows:
βtj =∂f(∑t
s=1 Asjxsj)
∂f(∑t−1
s=1 Asjxsj)
(1 +
AtjxtjYj
)βt−1j
+∂f(∑t
s=1Asjxsj)Atjxtj(C − 1)Yj
deadline oblivious, decisions only depend on current activity of a job and do not take
into account the future activity until the deadline.
We define the capacity-to-file-size ratio, Fmax, as the maximum ratio between
the resources any job can receive at any one time slot and the total job size. We
assume, that Fmax > 1, i.e., no job can be fully transmitted over one time-slot. This
assumption is essential to obtain a constant competitive ratio. This is equivalent to
the “bid-to-budget” ratio assumption in online matching problems [30]. Also, let C
in line 5 of the algorithm be C = (1 +Fmax)1
Fmax . Note that as Fmax approaches zero,
C approaches e, which will be useful when we derive the competitive ratio.
2.4.2 Analysis
In the next few Lemmas, we will show that the DO algorithm has some useful prop-
erties that enable us to derive a relationship between the primal and dual objectives.
We first define a complementary pair
21

Definition 2.4.1. x and α are said to be a Complementary Pair if any one of those
properties hold (It can be shown that they are all equivalent)
f ′(x) = α, f ∗′(α) = x, f(x) + f ∗(α) = xα,
where f ∗(α) is the concave conjugate defined in (2.3.4).
Lemma 2.4.1. DO produces a primal-dual solution (x, α, β) that guarantees the fol-
lowing for all time slots:
1. (αtj,t∑
s=1
Asjxsj) are a complementary pair for all time slots t, and for all jobs
j ∈ J , i.e., αtj ∈ ∂fj(t∑
s=1
Asjxsj)
2. xt ∈ argmaxx∈R[t]
< α− β,t−1∑s=1
Asxs + Atx >
The Proof of the Lemma is immediate from the properties of the concave-conjugate
property and the inner maximization problem in line 4 of the algorithm. The next
two Lemmas ensures that DO produces a feasible primal-dual solution
Lemma 2.4.2. For any job j, the dual variable βtj grows as a geometric series that
can be bounded from below as follows
βtj ≥∂f(∑t
s=0Asjxsj)
C − 1(C
∑ts=0 Asjxsj
Yj − 1) (2.4.1)
Proof. see Appendix A.1.
Lemma 2.4.3. (Properties of DO) DO produces a primal solution [xtj],∀j ∈ J , and
a dual solution (αtj, βtj),∀j ∈ J , for all time slots t, with the following properties:
1. The dual solution is feasible for all jobs at all time-slots:
αtj ≥ 0,∀j ∈ J, ∀t = 1, 2, . . . , T (2.4.2)
22

βtj ≥ 0, ∀j ∈ J, ∀t = 1, 2, . . . , T (2.4.3)
2. The Primal solution is almost feasible for all jobs at all time slots. The following
conditions are satisfied:
xt ∈ R[t],∀t = 1, 2, . . . , T (2.4.4)T∑t=1
xtj ≤ Yj(1 + Fmax),∀j ∈ J (2.4.5)
We say that the solution is “almost feasible” since the job size constraint can
be slightly violated as seen in (2.4.5). In particular, allocations of a job can exceed
the job size by Fmax, which we assume to be small. We can easily obtain a feasible
solution by multiplying all allocations xtj by (1− Fmax).
Proof. See Appendix A.2
To prove a competitive ratio bound, we will bound the Dual cost in terms of the
Primal reward using the next key theorem, and then use the weak duality in Theorem
2.3.1 to obtain our main result.
Theorem 2.4.1. (Key Theorem) The dual cost given the Primal-Dual online solution
obtained by DO can be bounded as follows:
D =T∑t=1
σt(ATt αT − βT ) + βTT Y −
J∑j=1
f ∗j (αTj) (2.4.6)
≤ P + P + P
(1 +
1
C − 1
)= P
(3 +
1
C − 1
)(2.4.7)
To prove the Theorem, we will give three lemmas. Each of those lemmas is to
bound one term on the RHS of (2.4.6).
23

Lemma 2.4.4. For any time slot t, DO chooses an allocation that satisfies the fol-
lowing:
< αt,Atxt >≤ 4P (2.4.8)
where 4P =∑j
4Pj =∑j
fj(t∑
s=1
Atjxtj)−fj(t−1∑s=1
Atjxtj) is the instantaneous utility
obtained by DO at time t.
Proof. Let f(y) =∑j
fj(yj). By Lemma 2.4.1, we know that αt ∈ ∇f(t∑
s=1
Asxs).
Substituting in the LHS of (2.4.8), and using the concavity of utility function, we get
the following
< ∇f(t∑
s=1
Asxs),Atxt >≤ f(t∑
s=1
Asxs)− f(t−1∑s=1
Asxs) = 4P (2.4.9)
Lemma 2.4.5. The sequence of vectors [β1, β2, . . . , βt] produced by DO has the fol-
lowing property:
(βt − βt−1)TY ≤ 4P(
1 +1
C − 1
)(2.4.10)
Proof. See Appendix A.3
The next Lemma bounds the last term in (2.4.6) by bounding the concave conju-
gate in terms of the original function.
Lemma 2.4.6. The concave conjugate f ∗(α) can be bounded using the term, µf given
by
µf = supc|f ∗(α) ≥ cf(u), α ∈ ∂f(u), u ∈ K (2.4.11)
24

for a proper cone K, and −1 ≤ µf ≤ 0.
The proof is straightforward from Lemma 2.4.1. A complete proof of this property
is given in Lemma 1 in [32].
We are now ready to proof our key Theorem:
Proof. (Theorem 2.4.1): See Appendix A.4
Corollary 2.4.1.1. The online solution found by DO is (3 +1
C − 1)-competitive.
We note two things about our results
1. To guarantee primal feasibility, the BS can multiply the resource allocation
solution by (1 − Fmax) at each time slot. This adds an extra factor to the
Competitive Ratio making the algorithm (3 +1
C − 1)(1− Fmax)-competitive.
2. Practically, we expect Fmax to be small as the job service times have a slower
time scale than the scheduling job completion time scale. Thus we expect
Fmax → 0 making the algorithm approximately 3 +1
e− 1-competitive.
2.4.3 Lightweight Algorithm
The complexity of the DO Algorithm can be further reduced by splitting the saddle
point problem in line 4 into two separate steps as follows:
maxx∈R[t]
< αt−1 − βt−1, Atx >, αtj ∈ ∂(fj(t∑
s=1
Asjxsj))
This approximation was proposed in [32] in the context of online bipartite matching.
This formulation approximates the saddle point problem with a Linear Programming
problem, reducing complexity. However, the price of this reduction in complexity is an
increase in the constant-competitive ratio bound that depends on the specific utility
25

function gradients ( [32] analyzes this penalty in the bipartite matching problem).
We will show using numerical simulations that this approximation retains the good
performance of the DO algorithm.
2.5 Stochastic Setting with timely throughput constraints
Although the job/reward formulation in (2.3.3) has been used extensively in modeling
scheduling with hard deadlines, for example [21] [22] [23] , a formulation that aims to
maximize total rewards of jobs is susceptible to unfairness. For example, the BS can
maximize the sum of rewards by consistently allocating resources to a nearby user
experiencing better channels all the time. This phenomenon was reported in previous
works [33] and is further validated by simulations. Furthermore, the results in the
previous section hold for adversarial models, designed for “worst case” inputs. In
practice however, both the job arrivals processes and the rate regions are stochastic.
We propose a new model to deal with those two issues that have the following extra
assumptions:
Assumption 2.5.1. 1. We assume a frame structure: At the beginning of a frame
of size D, some jobs arrive to the BS to be transmitted to users. By the end of
the frame after D slots, all jobs expire, and the system is empty. Note that jobs
can still have different deadlines as long as they are all upper bounded by D.
The frame structure has been extensively used in modeling deadline-constrained
traffic [25] [34] [35]. This assumption has been shown to adequately approximate
practical scenarios, while enabling the design of efficient scheduling algorithms
with deterministic bounds on delay.
2. We assume that there are l-job classes with specified deadlines, reward func-
tions, and sizes. Each of these l-classes arrive at the beginning of the frame
26

according to an i.i.d arrival process Ak. We assume that the number of the new
jobs arriving at the beginning of a frame can be deterministically bounded, i.e.,
(m(t)) ≤M , where m(t) is a random variable representing the number of active
jobs at time t.
3. We assume that the instantaneous rate region R[t] is sampled every time slot
from a set of finite convex regions in an i.i.d manner unknown to the BS. The
realization of rate regions over a frame is denoted as Rk.
The new formulation is presented in (2.5.1). Our goal now is to maximize the
long-term average expected rewards over frames k = 1, . . . , K. We denote the jobs
that arrive at frame k as Jk. In (2.5.1b), we introduce a new constraint to guarantee
fairness by ensuring that every user gets an expected timely-throughput higher
than δn. Timely-throughput is the amount of traffic delivered within the deadline
over a period of time. It has been used extensively to analyze networks with real-
time traffic [25] [26]. The function U( ) simply maps the job j to its intended user n.
maxx1,...,xt
lim infK→∞
1
K
K∑k=1
E∑j∈Jk
fj(
(k+1)D−1∑t=kD
Atjxtj)
(2.5.1a)
subject to lim infK→∞
1
K
K∑k=1
E ∑j∈Jk∩U(j)=n
(k+1)D−1∑t=kD
Atjxtj
≥ δn (2.5.1b)
T∑t=1
xtj ≤ Yj, ∀j (2.5.1c)
xt ∈ R[t], ∀t = 1, 2, . . . , T. (2.5.1d)
We refer to a random realization of job arrivals and rate regions over a frame as q.
The optimization problem (2.5.1) can be solved by a stationary scheduler that maps
27

q = Ak,Rk into the set of feasible actions over the frame: χ = x|(k+1)D−1∑t=kD
xtj ≤
Yj, ∀j ∈ Jk,xt ∈ R[t],∀t = kD, . . . , (k + 1)D − 1 with probabilities pqχ. Thus, the
optimal solution can be derived by finding the probabilities pqχ that solve (2.5.2).
This is practically infeasible as the probabilities q are typically unknown to the BS.
Even if the probabilities were known, the BS needs to non-causally know the rate
regions for the entire frame. This motivates us to extend our DO algorithm for the
stochastic setting to solve (2.5.2) and derive performance guarantees.
maxpqχ
∑q
νq
∫χ∈Xq
pqχ∑j
fj(
(K+1)D−1∑t=KD
Atjxtj)dχ (2.5.2a)
subject to∑q
νq
∫χ∈Xq
pqχ∑
j|U(j)=n
(K+1)D−1∑t=KD
Atjxtjdχ ≥ δn (2.5.2b)∫χ∈Xq
pqχdχ = 1 ∀q (2.5.2c)∫χ∈Xq
pqχ ≥ 0 ∀q (2.5.2d)
2.5.1 Virtual Queue Structure
To deal with the new timely throughput constraints (2.5.1b) for each user n, we define
a virtual queue that records constraint violations. For every frame, the amount of
unserved work under the δn requirement, δn −T∑t=1
Atjxtj is added to the queue, i.e.,
the queue is updated as follows:
Qn[k + 1] = (Qn[k] + δn −∑
j∈Jk∩U(j)=n
(k+1)D−1∑t=kD
Atjxtj)+, (2.5.3)
where (x)+ = max(0, x). There are two time-scales at play here. First, the slower
frame-level time scale. At the beginning of a frame, jobs arrive and by the end of the
frame, those jobs expire. Second, the faster slot level time-scale, where the channels
28

change and the BS allocates rates x. Each frame consists of D time slots where all
jobs are guaranteed to expire by the end of the frame by Assumption 2.5.1. Virtual
queues are used to analyze the time-average constraint violation for a given scheduling
policy. It can be shown that stability of the virtual queue ensures that the constraint
is satisfied in the long term. We state that well-known result as a Lemma without
proof (The proof is simple and can be found in [36] [37])
Lemma 2.5.1. For any user n, the virtual queue length upper bounds the constraint
violation at all times as follows:
Qn[K]
K− Qn[0]
K≥ δn −
1
K
K∑k=1
∑j∈Jk∩U(j)=n
(k+1)D−1∑t=kD
Atjxtj (2.5.4)
Furthermore the mean rate stability defined as:
limK→∞
E(Qn[K])
K= 0 (2.5.5)
implies that the constraint (2.5.1b) is satisfied in the long-term.
2.5.2 D Look-ahead Algorithm
Before explaining our algorithm, we present and analyze a non-causal frame-based
algorithm that we refer to as the D look-ahead algorithm. The benefits of this hy-
pothetical algorithm are two-fold: First, it guides our design of the practical LFDO
algorithm in the next section, and second, it will be crucial in analyzing the perfor-
mance of LFDO.
The D look-ahead algorithm observes the jobs Jk at the beginning of the frame and
non-causally observes all rate regions over the frame R[k],R[k+ 1], . . . ,R[k+D−1],
29

and allocates rates x′ of jobs over the frame k by solving the following optimization
problem:
maxxkD,..,x(k+1)D−1
V∑j∈Jk
fj(
(k+1)D−1∑t=kD
Atjxtj)
+N∑n=1
Qn[k]
( ∑j|U(j)=n
(k+1)D−1∑t=kD
Atjxtj
) (2.5.6a)
subject toT∑t=1
xtj ≤ Yj, ∀j ∈ Jk (2.5.6b)
xt ∈ R[t], ∀t ∈ [kD, (k + 1)D − 1] (2.5.6c)
where V is a free parameter that will be used to manage the trade-off between the
timely-throughput short-term constraint violation and total reward achieved by the
algorithm. The D look-ahead algorithm is essentially a version of the well-known drift-
plus-penalty algorithm introduced in [36] that has been used extensively in stochastic
constrained optimization problems, where a queue structure can be used to deal with
long-term constraints.
To simplify the notation, we will refer to the frame k D look-ahead reward and
timely throughput, respectively as follows:
P ′[k] =∑j∈Jk
fj(
(k+1)D−1∑t=kD
Atjx′tj) (2.5.7)
b′n[k] =
( ∑j∈Jk|U(j)=n
(k+1)D−1∑t=kD
Atjx′tj
)(2.5.8)
30

We define the quadratic Lyapunov function L(Q[t]) =1
2
N∑n=1
Q2n[t]. We also define
the one step Lyapunov drift and bound it as follows:
4Θ(Q) = E(L(Q[k + 1])− L(Q[k])|Q[k] = Q)
≤ B +N∑n=1
Qn[k](δn − bn[k]) (2.5.9)
where B is a bound on the term E((δn− bn[k])2
), which is guaranteed to exist due to
the boundedness of the number of jobs and the job sizes. It can be seen that the D
Look-ahead algorithm in (2.5.6) attempts to maximize the reward while minimizing
the drift (and subsequently the queue lengths), using the parameter V to manage the
trade-off. We are now ready to state the theorem that bounds the performance of
the D look-ahead theorem.
Theorem 2.5.2. Suppose there exists a solution that can achieve a timely throughput
strictly greater than δn + ε, for some ε > 0, for all users. Under the D look-ahead
solution, the queues Qn,∀n are mean-rate stable, and the following holds:
lim infK→∞
1
K
K∑k=1
E(P ′[k]) ≥ P ∗ − B
V(2.5.10)
lim supK→∞
1
K
K∑k=1
N∑n=1
E(Qn[k]) ≤ B + VMfmax(Ymax)
ε(2.5.11)
Before giving the proof, we point out that Theorem 2.5.2 shows that the D look-
ahead algorithm can be made arbitrarily close to OPT by increasing V , at the cost of
increasing the queue lengths, which implies higher short term violation of the timely
throughput constraint. The main assumption of the theorem is a mild assumption
31

that a strictly feasible solution exists, i.e., timely throughput constraints cannot be
set arbitrarily and must be strictly feasible under some solution. This corresponds to
the “Slater conditions” that are essential to applying the Lyapunov arguments [36].
Proof. See Appendix A.5
2.5.3 Long-term Fair Deadline Oblivious (LFDO) Algorithm
We are now ready to present our modified deadline oblivious algorithm that can
satisfy long-term timely throughput constraints. As can be seen in Algorithm 2,
Algorithm 2: Long-term Fair Deadline Oblivious (LFDO) Algorithm
Initialize: At k = 0, set Qn[k] = 0, ∀n1 for k = 1 to K do
Initialize Frame: Receive jobs at the beginning of the frame2 for t = kD to (k + 1)D − 1 do3 Perform the DO algorithm with the modified job reward function, gj:4
gj(x) = V fj(x) +N∑n=1
1(U(j) = n)Qn[k]Atjxtj (2.5.12)
5 Update the queues according to (2.5.3)
LFDO is a modified version of the DO algorithm incorporating long term timely
throughput guarantees. This is done by building on the virtual queue idea shown in
the D look-ahead solution. There are two time scales at play here:
• Frame time scale: The slower time scale where virtual queues are updated according
to the LFDO solution over the frame duration.
32

• Slot time scale: The faster time scale where the DO algorithm operates. Every
frame length acts as the “horizon” for the DO algorithm. At the beginning of the
frame, DO re-initializes to serve the jobs that belong to that frame.
The reward function in line 3 has been modified to add the user queue length infor-
mation to the job reward function. This follows the drift-plus-reward maximization
used to obtain the D look-ahead solution in (2.5.6). The difference is, unlike the D
look-ahead solution, LFDO does not know the future rate regions. Thus, on time-
slot scale, LFDO uses the primal-dual optimization used for DO with the modified
reward. We are now ready to combine our results of the DO algorithm performance
and the D look-ahead solution performance to obtain a powerful performance result
for the LFDO algorithm in the next theorem
Theorem 2.5.3. Under the LFDO Algorithm in the stochastic setting, all queues are
mean rate-stable. Furthermore, the expected reward and the expected queue length can
be bounded as follows:
lim infK→∞
1
K
K∑k=1
E(P [k]) ≥ 1
γ(P ∗ − B
V) (2.5.13)
lim supK→∞
1
K
K∑k=1
N∑n=1
E(Qn[k]) ≤ γ(B + VMfmax(Ymax))
ε(2.5.14)
where γ is the Competitive Ratio achieved by the DO algorithm.
This result asserts that the LFDO algorithm maintains its power when moving
from the adversarial to the stochastic setting. In particular, LFDO satisfies the
timely throughput constraint by (2.5.14). This comes at the cost of a larger queue
length compared to the D Look-ahead algorithm. Similarly, the LFDO algorithm can
be made arbitrarily close to achieve a1
γ-fraction of the stationary optimal reward,
where γ is the constant competitive ratio achieved by the DO algorithm in Corollary
33

2.4.1.1. This reduction of reward compared to the D Look-ahead algorithm is due
to the non-causality advantage that the D look-ahead algorithm has over the LDFO
algorithm. However, Theorem 2.5.3 shows that LFDO guarantees each user a long-
term stochastic timely throughput while achieving a constant fraction of the long-term
optimal reward independent of the problem size. Proving 2.5.3 is straight-forward
given the machinery we have already built.
Proof. We prove the theorem by applying the key Theorem 2.4.1 with reward-plus-
drift function, over the frame length. Since LFDO maximizes the sum of gj( ) func-
tions over every frame, Theorem 2.4.1 guarantees that LFDO achieves a modified
reward that is at least a1
γ-fraction of the reward achieved by any offline solution.
Thus, we can relate the reward-plus-drift achieved by the LFDO (in the LHS) to the
one achieved by the D look-ahead (in the RHS) as follows:
γ
( N∑n=1
Qn[k](δn − bn[k])− V P [k])≤
N∑n=1
Qn[k](δn − b′n[k])− V P ′[k] (2.5.15)
The rest of the proof is straight-forward and follows exactly the steps of the proof of
Theorem 2.5.2
2.6 Numerical Results
We assess the performance of our proposed algorithms with numerical simulations.
We first show that Lightweight DO tracks the offline solution very closely, outper-
forming several existing algorithms in the literature. We compare DO to a state of
the art algorithm that was proposed in [21] in the datacenter context. We call that
algorithm “Primal” since it is also a deadline oblivious algorithm that only relies on
the primal but not the dual updates to determine the allocation. Despite being a dat-
acenter algorithm, Primal also attempts to maximize total partial job rewards, and is
34

therefore comparable to DO (although the competitive ratio results were derived for a
wired setting only). We also compare the performance against the Earliest-Due Date
(EDD) that was analyzed in [38] for packets as a benchmark, and a greedy algorithm
that was proposed for linear reward functions in [39].
Setup: We simulate a downlink cell with three users (we chose a small number
of users to enable the offline solver to run with reasonable memory requirements).
Each time slot, for each user, a new jobs arrive to the BS intended to that user with
probability p. Thus, p represents the traffic intensity of the system. The job sizes
are uniformly distributed between 5 and 25 units. Each job has a random deadline
uniformly distributed between 2 and Dmax time slots. Dmax represents the laxity
of the system. Smaller Dmax means tighter deadlines. Large Dmax implies more
variety in traffic. The instantaneous rate region is generated by sampling a uniformly
random distribution for each user, then taking the convex hull of those user samples.
The resultant rate region is non-orthogonal. Finally, each job has a random reward
function ofv(0.1 + x)(1−ψ)
1− ψ, where v and ψ are uniformly distributed between 0 and
1.
Performance of DO: In Fig. 2.2a, we plot the performance of different al-
gorithms and OPT while varying traffic intensity, p. It is clear that DO tracks the
OPT very closely, confirming our premise that Deadline Oblivious scheduling is ef-
ficient for real-time traffic. DO consistently performs 8 − 15% better than Primal
at a lower complexity, since lightweight DO has the complexity of a linear program
while primal solves a general convex program. Greedy and EDD perform significantly
worse. In Fig. 2.2b, we vary Dmax between 2 and 40 time slots to simulate different
workloads. The results are similar to the previous figure with DO closely tracking
OPT. Interestingly, there is a slight performance degradation for very small values
35

0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9
1
2
3
4
5
6
7
8
9
(a) Varying p
0 10 20 30 402
3
4
5
6
7
8
(b) Varying Dmax
Figure 2.2: Comparison of performance of different algorithms
of Dmax when deadlines are very tight. This is consistent with our findings regarding
the dependence of competitive ratio bound on Fmax, the job-size-to-capacity ratio.
Performance of LFDO: In Fig. 2.3, we simulate the system for five users. We
set up the simulation, such that User 1 consistently gets low feasible rates compared
to other users. In particular, we sample the random rates such that User 1 can get
a maximum timely throughput of 0.05, and other users can get up to 0.5 timely
throughput. The instantaneous rate region is the convex hull of random rates. We
set a minimum timely throughput constraint of 0.045, thus pushing the system to the
boundary of the “capacity region” by forcing User 1 to operate very close to its upper
limit. In Fig. 2.3a, we show the timely throughput of all users under DO. Since DO
tries to maximize reward with no regard to timely throughput constraints, we see
that User 1 converges to a timely throughput well below the requirement. In Fig.
2.3b, we run LFDO for the same system with V = 1. Despite the improvement over
DO, the convergence to the required timely-throughput level is slow since virtual
queues are allowed to backlog before being cleared. In Fig. 2.3c, we set V = 0.1
emphasizing the importance of timely throughput constraints. The result is that
36

0 100 200 3000
0.1
0.2
0.3
0.4
0.5
(a) DO
0 100 200 3000
0.1
0.2
0.3
0.4
0.5
(b) LFDO, V = 1
0 100 200 3000
0.1
0.2
0.3
0.4
0.5
(c) LFDO, V = 0.1
Figure 2.3: Resource allocation per user under DO and LFDO
User 1 can now satisfy the constraint with fairly quick convergence at the expense of
slightly decreased reward (within 95% of DO reward). This outlines the previously
stated trade-off between the reward and the timely throughput guarantees.
2.7 Conclusion and Future Work
We have studied the problem of resource-allocation of low-latency bandwidth-intensive
traffic. We have formulated the problem as an online convex optimization problem,
developed a low-complexity Primal-Dual DO algorithm and derived its competitive
ratio. We have demonstrated that our algorithm is efficient and does not rely on
deadline information. We have also proposed the LFDO algorithm, that modifies
DO to satisfy long-term stochastic timely-throughput constraints. We have shown
via simulations that our proposed algorithms tracks the offline optimal solution very
closely and performs better than existing solutions. In the future work, we aim to
understand the properties of DO algorithm better, for example, we aim to analyze
how many jobs are served to their completion. This will enable us to expand the
algorithm to serve traffic that must be served to completion as well as traffic that
has the partial utility property. We aim to develop our work to take the unreliability
37

of wireless channels and inaccurate channel estimations into account. We also plan
to test our algorithm with a real-time setup through the variety of traffic seen in 5G
networks.
38

CHAPTER 3
PREDICTIVE CACHING AT THE WIRELESS EDGE
3.1 Introduction
In this chapter, we investigate the potential of caching at mobile end-users in wire-
less networks. While Base Station (BS) caching has been extensively studied, we
present the following question: “If caching content in last mile edge devices can cause
significant delay reduction, can we go one step further and push popular content to
end-users devices’ caches?”. Users can access cached content locally with zero-delay.
Furthermore, this helps reduce the overall delay by avoiding having to continuously
transmit redundant content over the wireless medium, which dissipates expensive
wireless resources, that may be the delay bottleneck especially during the busy hour.
We address that fundamental question “Can small cache sizes at the end-users be
exploited to significantly reduce delay?”. The motivating principle behind our work
is the “commonality of information”, i.e., the same content being requested by a
large number of users over a short period of time. Indeed, most content publishers
and sharing platforms often exhibit their trending content, encouraging more users
to request that content. This phenomena has been widely studied and a significant
effort has been done to statistically model it [40]. From a networking standpoint,
serving trending content in an on-demand unicast fashion (as is prevalent in today’s
39

networks) unnecessarily strains the network, wasting radio resources on fulfilling re-
dundant requests. Intuitively, the network is better off multicasting trending content
to all users that may request it, exploiting the broadcast nature of the wireless chan-
nel. Thus, instead of using a single resource (for example the number of LTE resource
blocks needed to transmit a video) per each user request, the operator can use a single
resource to fulfill all requests.
The joint deployment of multicasting and caching has been previously proposed
in [41] for energy minimization for transmissions that can tolerate a small amount of
delay. Joint caching and multicasting was studied for minimization of delay, power,
and fetching cost in [42], and maximization of successful transmission probability
in [43]. A deep reinforcement learning approach was undertaken in [44] to determine
which content to multicast. Despite the interest in joint caching and multicasting,
a study of the effect of combining both on delay has been absent. The fundamental
idea of multicasting popular content for end users to cache faces two fundamental
challenges. The first challenge is that users are likely to request the same content
at different times. Some works [41] have circumvented that obstacle by waiting for a
constant window before multicasting content to all users with outstanding requests,
forcing users to wait until the end of the window (on the order of a few minutes)
which might be unacceptable for users less tolerant to delay. Conversely, we propose
proactively multicasting popular content upon generation then exploiting end-users
caches to hold popular content. We refer to this scheme as Predictive Caching. Pre-
dictive Caching consists of two steps:1. Popular content is proactively multicast to
all users in the cell. 2. End users cache that content upon receipt in their local caches
for a duration equal to the typical requests lifetime, before discarding that content
to empty cache space for newer content. The users can then access that content any
time from the local cache with zero-delay. The second challenge is that end-users
40

have very limited cache sizes. Much of the previous work on wireless caching [11] [45]
assumed that the local cache size is on the order of the catalog size. This assumption
is not suitable for a variety of wireless networks, where the end devices (e.g., smart
phones, tablets, etc.) have limited memory. Thus, we carry out our analysis under
the assumption that cache sizes at end users can be very small. More precisely, we
show that significant delay reductions are attained even if the end-user cache sizes
vanish as the load increases. Our contributions can be summarized as follows:
1. We propose a predictive caching system whereby a BS (or an AP) divides the
bandwidth as a load-dependent θ-fraction (constrained by the cache sizes) for
predictive caching and a (1 − θ)-fraction for traditional on-demand unicast.
The BS then uses that θ-fraction to proactively multicast popular content for
end-users to cache by exploiting the wireless broadcast channel.
2. We model the predictive caching system as a downlink scheduling problem.
We introduce the Heavy-Traffic (HT) queuing framework to analyze the delay
performance under predictive caching. We use a novel duality framework to
simplify the scheduling problem with a load-dependent capacity region into a
single dimensional routing problem that is easier to analyze using standard HT
tools.
3. We analyze the predictive caching system for vanishing cache sizes vis-a-vis the
baseline unicast on-demand system. We show that predictive caching alters
the asymptotic delay scaling in the heavy traffic limit. This means that the
average delay of the predictive caching regime grows slower than the baseline
as a function of the network load, leading to significant delay savings as the
network approaches full load. We also illustrate via simulations that this delay
41

scaling altering translates to many-fold savings in delay for reasonable cache
sizes.
4. We characterize the effect of cache sizes, popularity distribution, number of
users in the system, and network load on the delay. We identify and formalize
the inherent delay-memory trade-off in the system, which is expected to aid
in end-user cache dimensioning. We also characterize the memory scaling as a
function of throughput to attain favorable delay scaling.
3.2 System Model
3.2.1 Basline On-demand Unicast System
New
Content
generated
with rate r
Edge
Server:
Receives
and routes
requestsShared Wireless Channel
Figure 3.1: On-Demand Unicast Baseline System Model
The system model is shown in Fig. 3.1. We assume new content is continu-
ously generated by the network with rate r. Each new content/item has a popularity
p ∈ [0, 1] drawn from a prior popularity distribution f(p). Upon content generation,
each user will request this new content with probability p. For ease of presentation,
42

we assume the popularity distribution is homogeneous across different users. Never-
theless, the theoretical framework could be extended to the case with heterogeneous
popularity distributions. The Base Station (BS) keeps a queue, Qi, for each user
i, to hold their requests until they are served. Each queue has an arrival rate Ai[t]
depending on the content requests and a service rate Si[t] that depends on the BS
scheduling algorithm. We assume that the channel between the BS and the end users
is a collision channel, where each time slot, the BS can transfer one item to one user.
For simplicity, we assume that all items are equal in size, which is justified by the fact
that large items can be split up to smaller chunks of equal size. The BS can deploy
any scheduling algorithm to serve outstanding requests. However, in the on-demand
unicast system, requests have to be fulfilled individually and reactively.
Formally, the on-demand unicast queues evolve as follows:
Qi[t+ 1] = (Qi[t] + Ai[t]− Si[t])+, ∀i = 1, . . . , N,where (3.2.1)
Si[t] ∈ 0, 1, ∀i = 1, . . . , N.,N∑i=1
Si[t] ≤ 1, ∀i = 1, . . . , N. (3.2.2)
λ = E[Ai[t]] = r
∫ 1
0
pf(p)dp (3.2.3)
ε = E(SΣ[t])− E(AΣ[t]) = 1−Nλ, (3.2.4)
where (x)+ = max(0, x). AΣ[t] and SΣ[t] are the sum of arrivals and service of all
queues at time t, respectively, and ε quantifies the network load, so a network with
ε→ 0 is said to be operating at full load. Condition (3.2.2) highlights that only one
user can be served at a a time-slot We can see from Fig. 1 that popular contents that
are requested by multiple users over a short period of time cause a lot of redundancy
in the queues, which for crowded cells can cause users to experience large delays.
This phenomena was empirically verified in [46], where the traffic from big events
43

0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1
Content Popularity: p
0
0.5
1
1.5
2
2.5
3
3.5
4
4.5
PD
F: f(
p)
Popular Content
Proactively multicast
and cached by
all users
(a) Popularity Distribution highlightingγ(θ, ε)
New
Content
generated
with rate r
Edge
Server:
Receives
and routes
requestsShared Wireless Channel
Multicast
Channel
𝜽-fraction
(1-𝜽)-fraction
Popular content
sent to
predictive
multicast queue
(b) Predictive Caching System Model
Figure 3.2: Predictive Caching Model
was analyzed (in this case the superbowl), and it was reported that popular content
(in this case game related content) constituted the majority of traffic requests by
users. However, it was reported that simultaneous requests for same content were
rare, rendering direct multicast ineffective. This motivates our predictive caching
solution that we now present.
3.2.2 Predictive Caching
In order to reduce the redundancy in the network and exploit the commonality of
information and temporal locality in users’ content requests, we propose the model
in Fig. 3.2. The main idea is that content that is known to be popular is likely to be
widely requested, thus, the BS can proactively multicast those items and have end
users cache them and access them locally. In order to do that, we propose the BS
divides the bandwidth into a θ(ε)-fraction dedicated to multicasting, and a (1− θ(ε))-
fraction dedicated to on-demand unicast. The choice of θ(ε) is determined by two
things: The first is the network load ε, and the second is the amount of physical
44

memory available at the end users. Physical memory imposes a constraint on how
large θ(ε) can be independent of the load. To see this, assume that all items have a
lifetime T , for which they can be requested. This approximates the temporal locality
phenomenon of content requests reported in [40]. Assuming a physical cache size of
M (with respect to a normalized item size), θ(ε) can be bounded proportionally to
M
Tto ensure that items are available in the cache for a duration no shorter than
their lifetime. From here on, we will use the multicast bandwidth fraction, θ(ε), as
representative of the amount of end user cache used to hold content. We further
assume that the multicast channel has a rate of 1 to transmit an item to all users.
Once new content is generated in the network, the BS makes a choice on whether
to predictively multicast that content and have end-users cache it. The BS makes
that decision by simply setting a popularity threshold γ(θ, ε). Any item that has
popularity greater than γ(θ, ε) is automatically multicast, where the threshold is
chosen to ensure that the multicast queue is stable. Thus, the contents are divided
into two sets, as shown in Fig. 3.2(a), a popular set to be multicast, C(θ,ε), and a
unicast on-demand set, C(θ,ε)
.
C(θ,ε) =
c ∈ Contents |p(c) ≥ γ(ε, θ) = F−1
(1− θ(ε)
r
), (3.2.5)
where F−1 denotes the inverse CDF of the popularity distribution. This can be
equivalently written in terms of the cache arrival rate by picking the threshold to
ensure a certain arrival rate of items to the cache size that guarantees that, with
high probability, items stay in the cache for a duration no shorter than their request
lifetime:
r
∫ 1
γ(θ,ε)
f(p)dp = θ(ε) (3.2.6)
45

Predictive caching reduces both the arrival rates and service rates of unicast queues.
We denote those two quantities as A∗i [t], S∗i [t], respectively. We can now write down
the equations that make up the unicast queues of the Predictive Caching system as
follows:
Qi[t+ 1] = (Qi[t] + A∗i [t]− S∗i [t])+, ∀i = 1, . . . , N. (3.2.7)
S∗i [t] ∈ 0, 1, ∀i = 1, . . . , N,N∑i=1
S∗i [t] =
0 w.p. θ(ε),
1 w.p. 1− θ(ε).
(3.2.8)
E[A∗i [t]] = λ∗ = r
∫ γ(θ,ε)
0
pf(p)dp (3.2.9)
δ(ε, θ) = E[SΣ[t]]− E[AΣ[t]] = 1− θ(ε) −Nλ∗ (3.2.10)
Note that the now in the predictive caching regime, arrivals to the unicast queues
excludes items that belong to the set C(θ,ε), since those items are multicast, cached,
and accessed locally by end-users whenever requested. Similarly, the channel is acces-
sible by unicast queues in (3.2.8) only for a fraction of 1− θ(ε), and for a θ(ε)-fraction,
the wireless channel is dedicated to serving the multicast queue. Thus, the load
of delivering those requests is now deferred to the multicast queue at the cost of a
θ(ε)-fraction of the bandwidth.
The key question in this chapter is: Can we achieve delay gains even if the cache
available is asymptotically zero as the network approaches the full load, i.e., θ(ε) → 0
as ε→ 0? An affirmative answer to that question means that in practice, even small
caches at end users could be leveraged to reduce the overall user delay. We carry
out a detailed analysis that shows that indeed, predictive caching can improve the
asymptotic delay scaling for vanishing caches.
46

λ "
λ #
(λ #, λ ")
𝜖
ℱ(#)
𝑐 #(*)1
1
Figure 3.3: Predictive Caching Model
3.3 Analysis of Unicast On-Demand System
We start by analyzing the baseline unicast on-demand system to provide a basis
for comparison when we analyze the predictive caching scheme. We first derive a
lower bound on the sum queue lengths at the BS by utilizing the resource pooling
lower bound [47]. In the unicast problem, the BS scheduler makes a decision on
which user should be served every time slot depending possibly on the requests’
queue lengths (For example the scheduler can give the channel to the user with
the longest queue of outstanding requests). It is known that the capacity region is
R = Convex Hull(S), where S is the set of feasible schedules. Under our assumption
of a collision homogeneous channel, S could be written as S = Si, i = 1, . . . , N, |Si ∈
0, 1,∀i,N∑i=1
Si = 1
Since the number of users, N , is finite, the region S is a polyhedron that can be
fully described by as intersection of hyperplanes as follows:
R = r ≥ 0 : 〈c(k), r〉 ≤ b(k), k = 1, . . . , K (3.3.1)
where K is the number of hyperplanes describing the polyhedron. The notation
〈., .〉 indicates an inner product. The k−th hyperpane, H(k), can be described by the
47

pair (c(k), b(k)). For the special case of the collision channel, the capacity region can
be described by the single hyperplane R = r : r ≥ 0,1√N〈1, r〉 ≤ 1√
N. We plot in
Fig. 3.3 the capacity region for the two user case.
Having defined the capacity region, we can now utilize the “resource pooling”
system to derive a lower bound on the steady-state queue lengths in the heavy traffic
setting. The queue lengths process Qi[t]Ni=1 can be modelled as a Markov chain
that converges in distribution to steady-state QiNi=1 when the system is stable, i.e.,
the Markov chain is positive Harris recurrent. We are interested in characterizing the
steady-state of the sum queue lengths. Intuitively, pooling the resources of all queues
into one queue leads to a natural lower bound on the system. We parameterize the
system with the network load, ε = 1 − Nλ, and derive the steady-state sum queue
lengths at this loadN∑i=1
Q(ε)
, in particular, we are interested in the behavior of the
system in the Heavy-traffic limit, i.e., when ε → 0 pushing the operating point to
the boundary of the capacity region. This idea was introduced and applied in [47]
for both the routing and scheduling problems. The next Lemma characterizes the
resource pooling lower bound for the on-demand unicast baseline system:
Lemma 3.3.1. In the on-demand unicast system described above, let ε = 1 − Nλ,
the sum queue lengths in the network is lower-bounded as follows:
E[N∑i=1
Q(ε)
i ] ≥ ζ(ε)
2ε− 1
2(3.3.2)
where ζ(ε) =√N(σ
(ε)A )2 + ε2, and (σ
(ε)A )2 is the variance of the arrivals for each queue
at each time slot. Furthermore, using the conditional variance of the arrivals, we
can show that (σ(ε)A )2 = µ(ε)
p − (µ(ε)p )2, where µp is the mean of the prior popularity
distribution. Furthermore, taking the heavy traffic limit as ε → 0, the steady-state
48

sum queue lengths limit is asymptotically lower bounded as follows:
lim infε→0
εE[ N∑i=1
Qi
]≥ ζ
2(3.3.3)
Where Qi is the limit of Q(ε)
i as ε → 0. ζ =√Nσ2
A, where σ2A = lim
ε→0(σ
(ε)A )2. Equiva-
lently, the sum queue lengths in the steady-state asymptotically scales as Ω(1
ε).
Proof. The proof of the result can be directly obtained by applying the resource
pooling lower bound for the generic single queue in [47] to a queue with an arrival
rate of 〈1,A[t]〉, where 1 = [1, 1, . . . , 1] and a deterministic service rate equal to 1. A
complete proof is given in Appendix B.1
The important thing to note in Lemma 1 is that the expected steady state sum
queue lengths in the on-demand system scales as Ω(1
ε). We will show that the predic-
tive caching fundamentally alters this scaling to a slower scaling leading to arbitrarily
large delay saving in the HT limit. In order to do that we introduce the duality frame-
work that maps the scheduling problem into an easier routing problem.
3.4 Duality Framework
3.4.1 Capacity of Predictive Caching
In order to motivate our duality framework, it is essential to understand how pre-
dictive caching alters the capacity region. Consider a general capacity region, C, for
an on-demand system. Recall that the predictive caching reserves a fraction θ(ε) for
multicasting popular content for end users to cache. We make the key design choice
of vanishing cache size: θ(ε) → 0 as ε → 0, i.e., as the network load approaches the
full load, the multicast bandwidth decreases until this multicast bandwidth vanishes
at the full-load. The motivation for this choice is two-fold:
49

1. We aim to show that small memory sizes typical of end-user devices, such as
hand held devices, can still be used to achieve significant delay savings. Having
the vanishing cache size assumption emphasizes that even diminishing caches
can be useful at high network loads, furthermore, a smaller cache at high load
can be more useful than a larger cache at lower load. This is crucial to show that
our results hold for practical systems and do not make the common assumption
in wirless caching previous works [11] [48] [45] [49] that the cache size can hold
a significant fraction of the content catalog.
2. As the network approaches full-load, less resources could be dedicated to pre-
dictive caching, and the scheduler needs to dedicate all of the resources to fulfill
on-demand requests to guarantee stability.
Since θ(ε) of the the bandwidth is sacrificed to predictive caching, the BS unicast
scheduler sees a reduced capacity region C(ε), as shown in Fig. 4. Specifically, the
scheduler gets an aggregate 1 − θ(ε) capacity to allocate to unicast traffic. However,
the average user arrival rate is also reduced from λi to λ∗i due to predictive caching
of popular content. Thus, the network load changes from ε to a new load: δ(ε, θ) (we
write the new load δ as a function of ε and θ to emphasize the dependence). Ideally,
we design our algorithm such that δ(ε, θ) > ε. If we can show that the average delay of
the unicast queues under predictive caching scales as O(1
δ(ε, θ)), then this establishes
that predictive caching alters the asymptotic scaling of delay at the heavy-traffic
leading to arbitrarily large delay savings as ε→ 0.
We can see in Fig. 4 that the capacity region, C(ε) is dependent on the load, ε, with
the property that limε→∞C(ε) = C, due to the vanishing caches assumption. The standard
analysis for scheduling algorithms in the HT regime [47] [50] [51] [52] is carried out
under the assumption of a fixed capacity region independent of ε. It is unclear how the
analysis can be altered to fit the load-dependent regime, since now the Hyperplanes
50

!"
!#
!
! (#)
! (&)
! (")' (")' (#)' (&)
(a) On-demand Unicast CapacityRegion: C
𝜃(#) Multicast
𝜆∗
𝜆/
𝜆0 1 − 𝜃(#) Unicast
δ(𝜖, 𝜃) (8)δ(𝜖, 𝜃)
(0)
δ(𝜖, 𝜃) (/)
𝜆 ∗(0)
𝜆 ∗(8)
𝜆 ∗(/)
(b) Predictive Caching CapacityRegion: C(ε)
Figure 3.4: Capacity Region of different delivery systems
that define the capacity region are dependent on ε. To avoid a complicated analysis,
we introduce a duality framework that transforms the scheduling problem into a
simpler routing problem more amenable to standard HT tools.
3.4.2 Duality between Scheduling and Routing
We now present a method to map the scheduling problem into an equivalent routing
problem that allows us to extend the existing HT framework to directly analyze the
predictive caching problem. Intuitively, scheduling a non-empty queue (denoted as
i) over a time-slot leads to reduction of that queue by one request. This can be
equivalently viewed as all queues except queue i adding one request if all queues have
a constant independent service equal to 1 request/slot, as shown in Fig. 5. Thus,
Instead of solving the scheduling problem by determining which queue to schedule at
time t, we can equivalently solve a routing problem by determining where to route
N − 1 “artificial arrivals”. We denote those artificial arrivals as B[t]. We formalize
this intuition in the next Theorem.
Theorem 3.4.1. Duality of Routing and Scheduling Problems: Given two Systems
U1 and U2. U1 is a scheduling problem described by equations (3.2.1)-(3.2.4) and some
51

(possibly random) scheduling rule s[t] = g(Q[t]), that depends on the queue lengths at
time t. U2 is an (N − 1)-routing problem described by the following equations:
Qi[t+ 1] = (Qi[t] + Ai[t] +Bi[t]− Si[t])+, ∀i = 1, . . . , N. (3.4.1)
Si[t] = 1, E[Ai[t]] = λ, ∀i = 1, . . . , N.
Bi[t] ∈ 0, 1, BΣ[t] =N∑i=1
Bi[t] = N − 1, ∀i = 1, . . . , N.
ε = E[SΣ]− E[AΣ]− E[BΣ] = 1−Nλ (3.4.2)
Where the router makes routing decisions according to some, possibly random func-
tion, B[t] = h(Q[t]), depending on the queue lengths at time t. If the scheduling rule
in U1 and the routing rule in U2 satisfy:
Pg(Q) chooses Qifor scheduling = Ph(Q) routes requests to
all queues except Qi ∀i = 1, . . . , N (3.4.3)
Then the systems U2 and U1 are Sample-path equivalent, i.e., for the same sample
path (same realizations of requests arrivals and scheduling/routing random decisions),
Q[t] are equal in U1 and U2 with probability 1 at all times t, assuming the same initial
state Q[0].
The Proof is straightforward by induction. We give two examples to further
illustrate the duality condition (3.4.3). The first example is the Longest-Queue-First
(LQF) scheduling algorithm, breaking ties uniformly at random. Thus g(Q[t]) =
RANDargmax(Q[t]). This scheduling rule can be mapped to the Join-the-Shortest
N − 1 Queues (JS(N − 1)Q), as we can express the routing rule that routes to N − 1
shortest queues as follows g(Q[t]) = Q \ RANDargmax(Q[t]). where ‘\’ is the set
52

𝐴"[𝑡]
𝑺 𝑡 =𝑆( 𝑡 , i = 1, . . , N |𝑆 𝑡 𝜖 0,1,∑(2"3 𝑆( 𝑡 =1
𝐴4[𝑡]
𝐴5[𝑡]
𝑆"[𝑡]
𝑆4[𝑡]
𝑆5[𝑡]
Scheduler
(a) Single Resource Scheduling Problem
𝐴"[𝑡]𝑩 𝑡 =𝐵( 𝑡 , i =1, . . , n |𝐵( 𝑡 𝜖 0,1,∑(2"3 𝐵( 𝑡 =N-1 𝐴4[𝑡]
𝐴5[𝑡]
𝑆" 𝑡 = 1
Router
𝑆5 𝑡 = 1
𝑆4 𝑡 = 1
𝐵"[𝑡]
𝐵5[𝑡]
𝐵4[𝑡]𝐵7 𝑡 = 𝑁 − 1
(b) N − 1-Routing problem
Figure 3.5: Duality between routing and scheduling problems
difference notation. It is straightforward to see that LQF and JS(N − 1)Q satisfy
(3.4.3). Another example is Random Scheduling (RS) and (N−1)−Random Routing
(N − 1)-RR which respectively make the routing and scheduling decisions uniformly
at random (where each queue can get at most one request in the routing system). It
is easy to see that RS and (N − 1)RR satisfy (3.4.3).
3.5 Performance of Predictive Caching
3.5.1 Main Result
We now analyze a predictive caching algorithm that we call Predictive Caching
Longest-Queue First (PC-LQF) that follows the outline of Section II. PC-LQF mul-
ticasts items that have a popularity p higher than threshold γ(ε, θ) for end users to
cache, and unicasts all other items. PC-LQF serves the multicast queue with prob-
ability θ(ε), and the unicast queue with probability 1 − θ(ε). In the unicast mode,
the BS schedules the longest queue for unicast transmissions breaking ties randomly.
PC-LQF is summarized in Algorithm 1. Having described the PC-LQF algorithm.
We are now interested in the delay scaling in the HT limit as ε→ 0, under the vanish-
ing caches assumption. In particular, we are interested in the scaling as it compares
53

Algorithm 3: Predictive Caching-Longest Queue First (PC-LQF)
1 for time slot t do2 Receive new content items generated by the network3 if new item c has popularity pc ≥ γ(ε, θ) then4 Send item c to Multicast Queue QM to be sent to all users to cache
5 else6 Only forward c to Qi when requested by user i
7 w.p. θ(ε)
8 Serve Multicast Queue, QM
9 w.p. 1− θ(ε)
10 Choose the longest unicast queue to serve, i.e.,
s[t] = RANDargmaxi
Qi[t]
to Lemma 3.3.1. We are also interested in how different factors such as popularity
distribution, cache sizes, and number of users in the network affect the asymptotic
delay scaling. The result in Theorem 1 exactly characterizes that
Theorem 3.5.1. Main Result: Consider the Predictive Caching System shown in Fig.
3.2 with homogeneous arrivals equal to λi = r
∫ 1
0
pf(p)dp, satisfying ε = 1−Nλ > 0.
If the BS applies Algorithm 1, then, the system is stable as long as γ(θ, ε) >1
N, and
the limiting steady-state queue length vector Q(ε) satisfies the following:
E[ N∑i=1
Q(ε)
i
]≤ ζ∗(ε)
2δ(ε, θ)+B
∗(ε)(3.5.1)
where ζ∗(ε) = (N(σ(ε)A )2 + θ(1− θ) + δ(ε, θ)2), and B
∗(ε)= o(
1
δ(ε, θ)), with (σ
(ε)A )2 being
the variance of a single queue arrival at any time slot. Furthermore, the scaling factor
54

δ(ε, θ) can be bounded as follows
ε+ θ(Nγ(θ, ε)− 1) ≤ δ(ε, θ) ≤ ε+ θ(N − 1) (3.5.2)
Additionally, in the Heavy-traffic limit as ε → 0, which implies Nrλ → 1,
(σ(ε)A )2 → σ2
A, and θ(ε) → 0, by the vanishing caches assumption, the asymptotic
limit becomes:
lim supε→0
δ(ε, θ)E[ N∑i=1
Qi
]≤ ζ
2(3.5.3)
where ζ = Nσ2A.
Finally, PC-LQF is Heavy-Traffic optimal within all algorithms with predictive
caching capability.
3.5.2 Discussion of Main Result
Before proving our main result, we highlight a few key observations from the main
theorem:
1. The most important observation is that predictive caching alters the asymptotic
delay scaling, namely, it significantly “slows down” the delay build-up as ε
vanishes. To see that it is useful to contrast the scaling in Theorem 3.5.1 with
Lemma 3.3.1. We see that for the baseline unicast system, the sum queue
lengths in the steady state is lower bounded by a Ω(1
ε) scaling, whereas the
PC-LQF system is upper bounded by O(1
δ(ε, θ)) scaling. Under the assumption
that δ(ε, θ) > ε (we will show the mild conditions for this assumption to be
true), the average queue lengths under PC-LQF are arbitrarily smaller than
55

the unicast system as ε→ 0. This leads to many-fold delay savings in practical
heavily-loaded systems as seen in simulations.
2. To get a sufficient condition for delay scaling improvement, it is useful to note
that having γ(ε,θ) >1
N, guarantees δ(ε, θ) > ε. This means that the BS should
use the rule in (3.2.5) for caching as long as the item’s popularity p >1
N. This
is expected since this rule guarantees that an item that is multicast and cached
is expected to be requested more than once, giving multicasting gains over the
unicast system. Thus, this rule can lead the BS to be more conservative in
multicasting in cases where end users have no commonality of information to
be exploited.
3. The main result answers the question of “How should cache sizes scale with
respect to the network load to maintain asymptotic reduction in delay?”. This
can be seen by inspecting (3.5.2): To obtain asymptotic delay improvement, we
need the second term in the bound to be on the order of Ω(ε). The next corollary
characterizes the expected improvement in delay according to the cache size
scaling with ε.
Corollary 3.5.1.1. Under a mild condition that limε→0
γ(ε, θ) > c, for some con-
stant c, the cache-size scaling with the network load ε determines the improve-
ment in delay as follows:
(a) Case I: θ(ε) = o(ε): No improvement in delay asymptotics can be achieved
since δ(ε, θ) and ε are on the same order.
(b) Case II: θ(ε) = Θ(ε): Improves the constant in the delay asymptotics.
(c) Case III: θ(ε) = ω(ε): Improves the scaling in the delay asymptotics.
This corollary introduces the fundamental requirement for delay improvement
56

in terms of cache scaling. This requirement can translate practically by having
end-users allocate the appropriate device memory for content caching at high
network loads when instructed by the BS. Thus at congestion, the end-users
can still decrease their cache sizes to zero as long as the decrease is slower than
ε.
4. From Corollary 3.5.1.1 , we see that scaling memory as Ω(ε) alters the asymp-
totic delay scaling as O( 1
ε+NΩ(ε)
), reducing the average delay linearly in the
number of users N . This is the Multicasting Gain that the predictive caching
offers over the baseline system.
5. Finally, the theorem points to the effect of “commonality of information”. Given
any value of ε, we see from (3.2.5), that a heavier tail of the popularity distribu-
tion means a higher value for the threshold γ(ε, θ) which in turn further slows
down the delay scaling lower bound as ε grows. This is expected since a heavier
tail means the existence of more high popularity items that are useful to cache.
Equivalently, a heavier tail implies that users are more likely to request similar
contents from the distribution tail which increases the multicasting gains.
3.5.3 Proof of Main Result
The proof of the main result utilizes the main idea used in HT analysis of routing
and scheduling algorithms presented in [47]. The outline of the proof can be broken
down into four steps.
1. We find the appropriate dual system (as in Fig. 3.5) that satisfies Theorem
3.4.1. The analysis is carried out for the dual system.
2. We derive the resource pooling lower bound to be used to show Heavy-traffic
optimality of PC-LQF.
57

3. We show that under PC-LQF, the queue lengths are close to each other at high
network loads. This is formally known as the State-space collapse.
4. We use the results from state-space collapse to derive the main result in Theorem
3.5.1.
Deriving the Dual System
We follow the guidelines implied by Theorem 3.4.1 to derive an equivalent dual sys-
tem to the PC-LQF system. We refer to the dual system as Predictve Caching-Join
the Shortest (N − 1) Queues (PC-JS(N − 1)Q). The new system retains the struc-
ture of PC-LQF by forwarding the most popular content to a multicast queue, and
splitting the bandwidth between on-demand unicast and multicast. However, the key
difference is that in the new system model, the queues are not contending for the
wireless shared channel. The dual system equations can be derived from Theorem
3.4.1 as follows:
Qi[t+ 1] = Qi[t] + A∗i [t] +B∗i [t]− S∗i [t] + Ui[t], ∀i = 1, . . . , N.
BΣ[t] =
0 w.p. θ(ε),
N − 1 w.p. 1− θ(ε).
, Si[t] =
0 w.p. θ(ε),
1 w.p. 1− θ(ε).
E[A∗i [t]] = λ∗ =
∫ γ(θ,ε)
0
pf(p)dp, δ(ε, θ) = 1− θ(ε) − rNλ∗
Where BΣ[t] is the sum of “artificial” arrivals to be routed in the new equivalent dual
problem. Also Si[t] and BΣ[t] are coupled, meaning they follow the same “coin flip”
to decide the value they take at time t. Finally, Ui[t] denotes the unused service of
queue i at time t, namely, Ui[t] = max(0, Si[t]− Ai[t]−Bi[t]−Qi[t]) .
58

Resource Pooling Lower Bound
We start by providing a lower bound for the queue lengths in the next lemma
Lemma 3.5.1. For any predictive caching system, the steady-state sum queue lengths
for a load 1−Nλ = ε can be lower bounded as follows:
E[N∑i=1
Q(ε)
i ] ≥ ζ ′(ε)
2δ(ε, θ)− N
2(3.5.4)
where ζ ′(ε) = N(σ(ε)A )2 + θ(1− θ) + δ(ε, θ)2
The proof is identical to the resource pooling lower bound in Appendix B.1 applied
to the predictive caching system.
State-Space Collapse
In order to prove state-space collapse, we use the result in [53] for bounding the
moments of a Markov Chain defined on a countable state-space:
Lemma 3.5.2. [53] For an irreducible and aperiodic Markov chain Q[t]t≥0 over
a countable state space χ, suppose Z : χ → R+ is a nonnegative-valued Lyapunov
function. We define the drift of Z at Q as:
∆(Z)4= [Z(Q[t+ 1])− Z(Q[t])]I(Q[t] = Q), (3.5.5)
where I(.) is the indicator function. If the following conditions are satisfied:
1. The exists η > 0 and B <∞ such that:
E[∆Z(Q)|Q[t] = Q] ≤ −η, ∀Q ∈ χ with Z(Q) ≥ B. (3.5.6)
59

2. There exists a D <∞ such that
P(|δZ(Q)| ≤ D) = 1 for all Q ∈ χ (3.5.7)
Then, there exists θ∗ > 0 and C∗ <∞ such that
lim supt→∞
E[eθ∗Z(Q[t])] ≤ C∗ (3.5.8)
Furthermore, if Q[t]t is positive recurrent. Then Z(Q[t]) converges in distribution
to a random variable that satisfies
E[eθ∗Z ] ≤ C∗ (3.5.9)
which implies all moments of Z exist and are finite.
A key step of proving our main result is showing that as ε → 0, under PC-
JS(N − 1)Q, all user queue lengths are close to each other in size. This enables us to
show that at the steady state, the system behaves as a single resource pooling queue
that scales slower than the unicast regime. We parametrize the model by the
unicast ε = 1−Nλ(ε), where λ = r
∫ 1
0
pf(p)dp. We are interested in the queue-length
process Q(ε)[t]t and its steady state Q(ε)
under the PC-JS(N − 1)Q policy. This
is done by decomposing the queue lengths vector into two components: a parallel
component that averages all queue lengths, i.e., a projection of the Q onto the vector
c =1√N
1, and a perpendicular component that quantifies the differences in queue
lengths:
Q(ε)‖
∆=
∑Ni=1Q
(ε)i
N1 Q
(ε)⊥
∆=
[Qi −
1
N
N∑i=1
Q(ε)i
]Ni=1
60

From the continuous mapping theorem, we know that the convergence of Q(ε)[t]t
implies the convergence of Q(ε)‖ [t]t and Q(ε)
⊥ [t]t. Following the approach of [47],
we are interested in showing that Q(ε)
⊥ is uniformly bounded for all ε > 0.
Proposition 3.5.1. Under the dual system considered parametrized by ε = 1 − Nλ
, applying the JS(N − 1)Q routing to the arrivals BΣ[t]t. Then for any feasible
arrival rate, i.e., Nλ < 1, there exists a sequence of finite numbers Nrr=1,2,... such
that E[ ∥∥∥Q(ε)
⊥
∥∥∥r ] < Nr, for all ε > 0, and for all r = 1, 2, . . ..
Before proving the preposition, we state an important Lemma from [47] that
bounds the Lyapunov function of Q⊥ in terms of other functions that are easier to
manipulate.
Lemma 3.5.3. [47] For any queuing system where the arrival and service processes of
each queue are bounded every time slot by Amax and Smax, respectively. Let ∆L(X) =
(L(X[t+ 1])− L(X[t]))1(X[t] = X), denote the single-step drift for any appropriate
Lyapunov function, L, and any state, X. Then the following bounds hold for V⊥(Q):
∆V⊥(Q) ≤ 1
2 ‖Q⊥‖(∆W (Q)−∆W‖(Q)), ∀Q ∈ RN
+ (3.5.10)
|∆V⊥(Q)| ≤ 2√N max(Amax, Smax)∀Q ∈ RN
+ (3.5.11)
We are now ready to prove the main state-space collapse result:
Proof. See Appendix B.2
Deriving Upper Bounds on queues
The next step in our proof is utilizing Proposition 3.5.1 to obtain the sum-queue
lengths bound on the main Theorem. We state a Lemma from [47] applied to our
predictive caching system which enables us to bound the sum queue lengths in the
steady-state.
61

Lemma 3.5.4. [47] Given the dual predictive caching routing system where with ar-
rival A[t], artificial arrival B[t], and service S[t] vectors at time t, where the artificial
arrivals depend on the queue lengths. Suppose Q[t]t converges in distribution to a
random vector Q with all bounded moments, then for any positive vector c ∈ RN+ , the
following applies
E[〈c,Q〉〈c,S−A−B(Q)〉] =E[〈c,S−A−B(Q)〉2]
2+
E[〈c,U(Q)〉2]
2
(3.5.12)
+E[〈c,S−A−B(Q)〉〈c,U(Q)〉], (3.5.13)
where the term in (3.5.13) can be further bounded as follows
(3.5.13) ≤√
E[‖Q⊥‖2]E[U(‖Q‖2] (3.5.14)
The proof of Lemma is a straightforward application of Lemma 8 and Lemma
9 in [47] into our system. We can now bound the expression (3.5.12) (3.5.13) to
conclude the main Theorem. We start by analyzing the LHS in (3.5.12) as follows
E[〈c,Q〉〈c,S−A−B(Q)〉] =δ(ε, θ)
NE[ N∑i=1
Q(ε)
i
](3.5.15)
Denote the first term in the RHS asζ(ε)
2. This can be calculated directly as
ζ(ε) ∆= E[〈c,S−A−B(Q)〉2] =
1
N(N(σ
(ε)A )2 + θ(1− θ) + δ(ε, θ)2) (3.5.16)
The second term in the RHS of (3.5.12) can be bounded as follows:
E[〈c,U(Q)〉2] ≤ 〈c,1〉E[〈c,U(Q)〉] ≤ δ(ε, θ) (3.5.17)
62

Similarly, we can bound (3.5.13) by applying Proposition 3.5.1 into the bound (3.5.14)
as follows:
(3.5.13) ≤√
E[‖Q⊥‖2]E[‖U(Q)‖2]
≤√
E[‖Q⊥‖2]E[〈1, U(Q)〉] ≤√N2δ(ε, θ) (3.5.18)
Substituting (3.5.15), (3.5.16), (3.5.17), and (3.5.18) into Lemma 3.5.4:
δ(ε, θ)
NE[ N∑i=1
Q(ε)i
]≤ ζ(ε)
2+δ(ε, θ)
2+√N2δ(ε, θ) (3.5.19)
This proves (3.5.1). Taking the limit as ε → 0 leads to to the expression in (3.5.3).
Also taking the limit and comparing to the lower bound in Lemma 3.5.1 establishes
HT optimality since the lower and the upper bound match asymptotically.
Deriving δ(ε, θ)
To conclude the proof of Theorem 3.5.1, it remains to find the bounds characterizing
δ(ε, θ). This could be obtained by rewriting δ(ε, θ) as follows:
δ(ε, θ) = E[S∗Σ]− E[A∗Σ] = 1− θ(ε) − rN∫ γ(θ,ε)
0
pf(p)dp (3.5.20)
=1− λ+ rN
∫ 1
γ(θ,ε)
pf(p)dp− θ = ε+ rN
∫ 1
γ(θ,ε)
pf(p)dp− θ (3.5.21)
We use the fact that
∫ 1
γ(θ,ε)
pf(p)dp ≥∫ 1
γ(θ,ε)
γ(θ, ε)f(p)dp to obtain the following
lower bound:
δ(ε, θ) ≥ ε+ rNγ(θ, ε)
∫ 1
γ(θ,ε)f(p)dp
(a)= ε+ θ(Nγ(θ, ε)− 1) (3.5.22)
63

Where (a) follows the substitution in (3.2.6). Similarly, an upper bound can be
obtained for δ(ε, θ) by using the inequality
∫ 1
γ(θ,ε)
pf(p)dp ≤∫ 1
γ(θ,ε)
1f(p)dp.
δ(ε, θ) ≤ ε+ rNγ(θ, ε)
∫ 1
γ(θ,ε)
f(p)dp(a)= ε+Nθ − θ = ε+ θ(N − 1) (3.5.23)
3.5.4 Closed-Form Delay-Memory Trade-off for the approximate model
The result in Theorem 3.5.1 illustrates the fundamental delay-memory trade-off in
the predictive caching system. Intuitively, larger cache sizes at the users mean more
bandwidth can be used to multicasting, which in turn implies more items can be
served locally which leads to lower delay. We further illustrate that by proposing a
specific approximate model.
We use the Poisson Shot Noise model that was found to empirically fit content
requests well in [40] and used in the caching literature [54] to obtain an approximate
request model as follows:
1. The aggregate requests from all users for a single item follows a Poisson(Nrλ)
distribution.
2. The parameter λ is random for every item, sampled from a Pareto distribu-
tion, i.e., λ ∼ βαβ
(λ+ α)β, λ > 0, where α, β are the scale and shape parameter,
respectively.
The Pareto distribution approximates the well known Zipf distribution [55] used to
model content requests in the infinite catalog regime. We use this model for its
practical utility and analytic tractability, as the scaling term δ(ε, θ) in (3.5.1) can be
obtained exactly in closed-form in the next corollary:
64

Corollary 3.5.1.2. For the approximate Poisson-Pareto model, the PC-LQF algo-
rithm multicasts the items with a Poisson Parameter λ > γ(θ, ε), where the threshold
can be quantified as follows:
γ(θ, ε) = α
((rN
θ
) 1β
− 1
))(3.5.24)
then, PC-LQF achieves the an asymptotic (1
δ(ε, θ), θ(ε))-Queue length scaling-Memory
trade-off, where δ(ε, θ), is quantified as follows
δ(ε, θ) = ε+Nrα
[1
(β − 1)( rNθ
)1− 1β
+α(( rNθ
)1β − 1
)rNθ
]− θ (3.5.25)
The Corollary is a straightforward application of Theorem 3.5.1 applied to the
approximate model. Although the theorem was derived for a different model, an
identical proof can be carried out with the exception that now the Poisson arrivals
every slot cannot be bounded by a number Amax as required by Lemma 3.5.3, however,
it was shown in [56] that the boundedness condition could be relaxed to a bound on
the Moment Generating Function, which is satisfied for our Poisson arrivals, since the
parameter γ clips the Poisson parameter of the arrivals at any slot. We proceed to
plot the Queue length Scaling-Memory trade-off of the approximate model in Fig. 3.6,
with a Pareto(1,3.5) popularity distribution, and a cell with 100 users, for different
values of network utilization ρ =E[AΣ]
E[SΣ], to further illustrate the essential dynamic
in our system. We note two important observations: 1. Reduction in scaling is
more significant at higher network utilization confirming the utility of our proposal
in congested networks. 2. The relationship between the queue length scaling and the
cache size is concave and decreasing. The decreasing part highlights that intelligent
caching indeed causes continuous decrease in scaling as the cache sizes increases (as
long as items being cached have expected requests higher than 1, and the unicast
65

regime is stable). The concave part highlights diminishing returns of increasing cache
sizes: A relatively small cache that can hold most of the “trending content” can offer
great savings by eliminating most redundancy. Once the cache sizes increase beyond
that, the BS starts multicasting less popular items that are otherwise, not widely
requested by the networks causing the savings to slow down. This further confirms
our main message that small practical cache sizes can be very beneficial in reducing
delay.
0 0.005 0.01 0.015 0.020
20
40
60
80
100
Figure 3.6: Scaling of (3.5.25)
3.6 Simulations
We simulate a cellular downlink channel with 100 users, following our request system
model. We are interested in the effect of predictive caching at the “busy hour”, i.e.,
in a congested network. Thus we define the network utilization, ρ =E[AΣ]
E[SΣ], and
simulate cells with varying values of ρ. Note that ρ → 1 is equivalent to ε → 0. We
simulate three scenarios, the baseline unicast on-demand system, a predictive caching
66

;0.8 0.85 0.9 0.95 1
Ave
rage
del
ay (
slot
)
0
10
20
30
40
50
60Baseline: LQFPC-LQF, 3 = 0:1# 0PC-LQF, 3 = 0:0447#
p0
(a) Average Delay vs ρ, f(p) : Beta(1, 4)
;0.8 0.85 0.9 0.95 1
Ave
rage
del
ay (
slot
)
0
10
20
30
40
50Baseline: LQFPC-LQF, 3 = 0:1# 0PC-LQF, 3 = 0:0447#
p0
(b) Average Delay vs ρ, f(p) : Beta(1, 9)
Figure 3.7: Effect of Predictive Caching on Delay
;0.8 0.85 0.9 0.95 1
Nor
mal
ized
cac
he s
ize
0
0.5
1
1.5
2
2.5Baseline: LQFPC-LQF, 3 = 0:1 # 0PC-LQF, 3 = 0:0447 #
p0
(a) Normalized Cache Size vs ρ, f(p) :Beta(1, 4)
;0.8 0.85 0.9 0.95 1
Nor
mal
ized
cac
he s
ize
0
0.5
1
1.5
2
2.5Baseline: LQF
PC-LQF, 3 = 0:1 # 0
PC-LQF, 3 = 0:0447 #p0
(b) Normalized Cache Size vs ρ, f(p) :Beta(1, 9)
Figure 3.8: Normalized Cache Size supporting Predictive Caching
67

system with cache sizes that scale as c1ε, and a predictive caching system with cache
sizes that scale as c2
√ε , i.e., a scaling of ω(ε) (as ε decays to 0).
In Fig. 3.7, we plot the average delay by varying network utilization, ρ, for
two scenarios: Fig. 3.7 (a) for contents sampled from the popularity distribution
Beta(1,4). and (b) sampled from Beta(1,9). We plot the corresponding normalized
cache sizes (with respect to the user request rate, r) in Fig. 3.8. Fig 3.8 constitutes
the price we pay to get delay savings in terms of cache size. Following the vanishing
cache sizes assumption, the normalized cache sizes decay to zero for both the θ(ε)
and the θ(√ε) scaling. The first thing to note in both figures, is the vast delay
reduction for predictive caching over the baseline as ρ → 1, for example as ρ =
0.99, predictive caching offers 10 times delay reduction for θ(ε) cache sizes, and 30
times delay reduction for θ(√ε) cache sizes, which indicates the benefits of predictive
caching. This comes at the cost of a normalized cache sizes of 0.1 and 0.5, roughly
meaning a cache size equal to 10% − 50% of user request rate per content lifetime
(often on the order of a day/few days [40]) , respectively, indicating the power of a
small cache to offer great delay reduction at a congested network. The second thing
to notice is that the figures further solidify our intuition gained from Corollary 3.5.1.1,
since the θ(√ε) offers favorable scaling that empirically alters delay asymptotics as
the delay build-up is very slow compared to the other case. Finally, the discrepancy
between the average delay in Fig. 3.7 (a) and Fig. 3.7 (b) points out to the effect of
popularity distributions on the average delay. The reason case (a) has better delay
performance is because the Beta(1,4) distribution has a heavier tail than the Beta
(1,9) distribution. Heavier tails imply more items with high popularity suggesting
more homogeneity in user requests which increases the multicasting gains in delay
saving. Thus, predictive caching exploits that commonality information which might
68

offer a guiding principle in design that users with similar tastes should be grouped in
physical or virtual cells to fully realize the benefits of predictive caching.
In Fig. 3.9, we plot the empirical delay-memory tradeoff by directly plotting the
delay vs. the cache size for various values of ρ. The average delay value for the
on-demand unicast system(equivalently when the cache sizes are zero) appears on
the Y-axis. and the predictive caching average delay appear on the X-axis. The
figure further highlights that a small cache can offer very significant delay reductions
especially in congested networks.
Figure 3.9: Empirical Delay-Cache size Trade-off
3.7 Conclusion and Future Work
We have studied the potential of predictive caching to reduce delay at wireless cells
especially at high traffic. We introduced a novel duality framework between routing
and scheduling problems that we expect to be of independent interest in simplifying
analysis of scheduling algorithms. We have shown that under a vanishing cache size
assumption, predictive caching that utilizes multicasting alters the delay-throughput
69

scaling as the network approaches full-load, which translates to many-fold reduction in
average delay in simulations. We highlighted a fundamental delay memory trade-off in
the system and characterized the correct delay scaling to obtain linear multicasting
gains in the number of users. Future works include the treatment of personalized
predictions where multicasting and caching can be done taking into account some
information of user tastes. This combines the advances in recommender systems and
online learning with the delivery problem that aims to build efficient multicasting
trees. Furthermore, we aim to develop the PC-LQF scheduling algorithm to operate
under non-ideal radio conditions, such as fading, where achievable rates can vary
for various receivers. Choosing the correct multicasting rate becomes a non-trivial
problem. We also plan to test that practical algorithm with real-life data traces using
testbeds to accurately quantify the empirical effect of memory usage on delay.
70

CHAPTER 4
DISTRIBUTED NODE-BASED LOW LATENCY
SCHEDULING
4.1 Introduction
In this chapter, we study the design, analysis, and empirical performance of node-
based distributed scheduling algorithms [57] [58] . It is well known that distributed
scheduling algorithms in large wireless networks is very challenging due to inter-
ference between wireless link and lack of central coordination. This problem has
hampered the development and deployment of wireless adhoc networks and wireless
mesh networks on a large scale. Thus, developing efficient fully-distributed schedul-
ing algorithm is of utmost importance to realize large wireless decentralized networks
and fully benefit from their capabilities. A good scheduling algorithms balances three
objects: i)High Throughput: Characterized by the fraction of the network capac-
ity region a scheduling algorithm achieves. Ideally a scheduling algorithm should be
able to support any set of arrival rates within the capacity region. ii)Low Delay: A
good scheduling algorithm should be able to maintain the throughput required by the
application without incurring excessive delay at any of the links. Furthermore, the
expected delay should scale favorably with the size of the network. iii)Low Com-
plexity: Required to ensure easy implementation and to minimize resources required
to run the algorithm.
71

The seminal work of [59] is the first example of a throughput-optimal scheduling
algorithm, which can support any arrival rate vector within the network capacity
region without any of the link queues growing to infinity. It was shown that if the in-
terference relationships of the network is modeled by a conflict graph, the max-weight
algorithm, where the weight of the link is taken to be the queue size, is throughput
optimal. However, max-weight based algorithms suffer from high complexity: In
general networks, determining the maximum weight independent set is NP-hard.
It was recently shown that CSMA-like algorithms could be made throughput-
optimal, if designed intelligently, namely, if every static link’s activation rate is opti-
mized [12] according to the network topology and operating point or taken as appro-
priate function of the queue length [13], [14]. This result is attractive because CSMA
algorithms are fully distributed. The idea behind such algorithms is to run a Markov
chain of collision-free schedules that have a stationary distribution approximating the
max-weight solution. When the Markov chain converges to the max-weight solution,
throughput optimality is achieved. A major shortcoming of these algorithms is their
delay performance which has been shown to be unsatisfactory for many cases [60].
For example, in [61], it has been shown that the delay can grow exponentially with
the size of the network in general graphs. Furthermore, it was shown in [62] that there
exists worst case topologies, such that, even to attain a fraction of the capacity region,
either the delay or the complexity must increase exponentially. The canonical exam-
ple that illustrates the poor performance of CSMA is the network that has a torus
or lattice conflict graph. We can easily see the existence of two optimal schedules:
the “odd” and the “even” schedules. As the network size increases the transitions
between the “odd” and “even” schedules become less frequent, causing the average
delay to increase. This is known as the starvation problem of CSMA [63]. CSMA
gets stuck in a “good” schedule for a very long time. This means that the key to
72
decreasing the average-delay of CSMA-like algorithms, is to decrease the starvation
time of all links.
Throughput-optimal CSMA algorithms tend to treat links as separate autonomous
entities that do not communicate. We argue that this squanders the opportunity to
exploit hotspots in the networks that can control a large number of outgoing links
to obtain favorable delay performance. In many practical wireless network, such as
wireless mesh networks and wireless ad-hoc networks, many nodes typically control
multiple outgoing links, and thus those nodes can use that to make better scheduling
decisions. Furthermore, it is a desirable trait for wireless ad-hoc networks to be k -
connected [64] to ensure connectivity and fault tolerance. This means that every node
will have a minimum of k outgoing links. Thus, we use those practical properties
in networks to motivate a new Node-Based CSMA (NB-CSMA), where scheduling
decisions are made on a node level rather than a link level. The node-based CSMA
implementation was touched upon in [14], however the node based implementation
is described as a straight-forward extension to the link based Q-CSMA, that is, it
still relies on “single-site updates” in the underlying Glauber dynamics as opposed to
the proposed NB-CSMA that relies on updating a number of vertices in the conflict
graph jointly. The motivation behind the NB-CSMA algorithm is our observation
that at high throughput regimes, activation rates tend to be high and links tend to
be increasingly greedy acquiring and keeping the medium. Thus, a node’s ability to
switch between two links in one slot without having to go through an idle slot is
expected to make switching between dominant schedules more frequent. This causes
the starvation period of all links to decrease. Our contributions can be summarized
as follows:
73

1. We propose a new throughput-optimal distributed Node-Based CSMA (NB-
CSMA) algorithm, where the scheduling decisions are made on a node level
rather than a link level.
2. We compare the Node-Based CSMA (NB-CSMA) to the link based CSMA
(Q-CSMA) [14] in terms of expected delay for any fixed network. We show
analytically and via simulations that NB-CSMA performs no worse than Q-
CSMA for any network setting.
3. We use mixing time analysis to characterize the fraction of the capacity region
where under the NB-CSMA algorithm, the expected queue lengths and expected
delay can be bounded by a polynomial in the size of the network (as opposed to
exponential mixing). We show that this fraction is no smaller than the known
fraction of capacity region under Q-CSMA.
4. For a special class of networks, namely, collocated networks, we derive analyti-
cally a closed-form for the link mean starvation time using a Markov chain with
rewards framework. We then use the results in the case where all link through-
puts are equal to quantitatively demonstrate the improvement of NB-CSMA
over Q-CSMA as a function of both topology and network load.
This list shows that NB-CSMA achieves all three objectives of scheduling: Throughput-
Optimality, improved delay over Q-CSMA and distributed implementation. Throughput-
Optimality can be shown by analyzing the Markov chain generated by the scheduling
algorithm. Delay performance, however, is very hard to analyze. Therefore, to show
the delay benefits of NB-CSMA, we look at different angles of delay performance,
namely, the second order behavior of the per-link service late under NB-CSMA as
compared to Q-CSMA, the delay scaling as a function of the network size and the
per-link mean starvation time. These different angles give us a comprehensive view
74

of delay improvements of NB-CSMA. We supplement the analysis using extensive
numerical simulations that show that NB-CSMA results in around a 50% reduction
of average delay over Q-CSMA for all considered scenarios.
4.2 Related Work
Delay performance of throughput optimal CSMA algorithms have been discussed in
the literature in several works. In [65], it was shown via a mixing time analysis that
for bounded-degree graphs and for a fraction of the capacity region, the delay growth
is upper bounded by a polynomial in the size of the network. In [66], it was further
shown that for a reduced fraction of the capacity region, the delay is bounded by a
constant independent of the network size. In addition to delay analysis, much of the
existing research focused on how to alter the CSMA algorithms to improve the net-
work delay performance while maintaining throughput optimality and low complexity.
In [61], resetting the algorithm periodically is proposed to prevent starvation in the
network. This was shown to be order optimal (with respect to the size of the network)
for networks that have a torus or lattice shaped conflict graphs. In [67], the authors
propose a new update rule, where the Metropolis algorithm is used as a substitute to
the underlying Glauber dynamics-based algorithm to update the schedule. This was
shown to have better delay performance for fixed sized networks. In [68], a modified
version of the CSMA algorithm is proposed, where only links with queue lengths ex-
ceeding a certain threshold where allowed to contend for the medium. This has the
effect of reducing the number of contending links every time slot and consequently
reducing average delay. Elegant solutions to the delay problem were proposed in [69]
and [70] where multiple Markov chains of collision free schedules are run in parallel,
and the actual schedule is chosen from them probabalistically [69] or periodically [70].
Intuitively, as the number of parallel Markov Chains increases, the probability that
75

the scheduling algorithm gets “stuck” in one good schedule for a long time decreases,
decreasing the expected delay. It was also showed in [71] that the delayed-CSMA pro-
posed in [70], with a suitable number of parallel schedules, achieves order optimal per
link steady state delay. However, this vast improvement of steady state delay comes
at the cost of fast increase of convergence time as the number of parallel schedules
increases. This has a detrimental effect on the transient delay, i.e., these algorithms
have favorable steady state delay performance, however the time to get to that steady
state can still be exponential in the size of the network. Therefore, the resulting de-
lay performance can still be unsatisfactory. Complementary to delay analysis, some
works such as [63] [72] have focused their efforts on studying link starvation; another
quantity of interest that relates to delay. Link starvation can be roughly defined
as the time it takes the link to regain the transmission medium after ceasing trans-
mission. Some works such as [69] and [68] have also studied starvation performance
of their respective proposed algorithms and related it to the Head-Of-Line packet
waiting time and average delay respectively.
4.3 System Model
We model the wireless network by the connectivity graph G(K,V ) where K is the set
of nodes in the network and V is the set of the directional links. Links are assumed to
have binary interference relationships. The interference relationship between different
links in the network can be represented by a conflict graph G(V,E), where V is the
set of communication links in the network. An undirected edge (i, j) ∈ E exists if
link i and link j interfere with each other. This is called the Interference Graph
Model, and can be used to model any interference relationship such as Geometric,
M-Hop, etc., as long as interference relationships between links are binary. We define
the neighbors of a link v, Nv = w ∈ V : (v, w) ∈ E. Neighboring links in the
76

1
2
3
4
5
A
BE
C
DF
(a) G(K,V )
E
A
B
C
D
F
K1
(b) G(V,E)
Figure 4.1: An Example of a simple 5 node network topology and the correspondingconflict graph (1-Hop interference relationship)
conflict graph are not allowed to transmit simultaneously to avoid collision. We
assume that a node can only activate one outgoing link in each slot, which is the case
in most wireless networks. Note that under this assumption, outgoing links of node
k ∈ K form a clique (complete subgraph) in the conflict graph. We denote this set
of links as Kk. Fig. 1 is an example of this modeling for a simple 5-node network
with primary exclusive constraints, i.e., links can be scheduled if and only if they
constitute a matching in G. The clique K1 is also highlighted as an example.
We consider a slotted system, where each slot is divided into a contention period
and a transmission period. Our system follows the Discrete-time Synchronous-CSMA
framework. At the beginning of each time slot, there is a fixed contention period
where all links cease transmission and start contending for the medium while sensing
to determine whether they should transmit or sense for the transmission period of the
current time slot. We define a schedule s(t) = (sv)v∈V (t) ∈ 0, 1|V | which represents
a set of transmitting links in a given time slot, i.e., link v is active at time t if sv(t) = 1.
We use the bold notation s(t) to denote the schedule of all links in a certain time slot.
77

The mean service rates of all links are E(s(t)) = µ. A feasible schedule is one which
does not violate the conflict relationships of E, therefore a schedule s is feasible if
si + sj ≤ 1 ∀(i, j) ∈ E. We denote the set of all feasible schedules by Ω. Note that a
feasible schedule is mapped to an independent set of vertices in the conflict graph.
Each link v has a queue qv to store incoming packets. We assume an independent
stationary arrival process av(t) at each link with a mean equal to E(av(t)) = νv. The
queue dynamics for each link are given by
qv(t+ 1) = (qv(t)− sv(t) + av(t))+ ∀v ∈ V (4.3.1)
We assume all traffic is single hop, where a packet exits the network right after a
successful transmission. These assumptions imply that the queue state of all links
(q1(t), q2(t), . . . , q|V |(t)) evolves as a discrete-time Markov chain. We define the Ca-
pacity Region of the network, Λ ⊆ [0, 1]n to be the set of arrival rate vectors νvv∈V ,
of which there exists a scheduling algorithm that can stabilize all the queues, i.e.,
under some feasible scheduling algorithm, the expected queue length remains finite
for all links in the network. A condition for stability is that the Markov chain of the
queue evolution process is positive recurrent. It was shown in [59], that the Capacity
Region of any network is the convex hull of all feasible schedules:
Λ = ν 0 : ∃µ ∈ Co(Ω), ν ≺ µ (4.3.2)
where Co(.) is the convex hull operator, and vector inequalities are component-wise.
Definition 4.3.1. A scheduling algorithm is said to be Throughput-Optimal if it
can keep all queues stable for any arrival rate vector ν ∈ Λ.
78

CSMA: Glauber Dynamics Single Site Update
We now briefly explain the discrete time throughput optimal link-based CSMA pro-
posed in [14] (Q-CSMA) to motivate and introduce our NB-CSMA algorithm in the
next section. The throughput-optimal CSMA algorithm applies the Glauber dy-
namics from statistical physics with appropriate activation rates. Here, a feasible
schedule corresponds to an independent set in the conflict graph G. One application
of Glauber dynamics is sampling independents sets on a graph. This is known in
the statistical physics literature as the hardcore model (see [73] for details and ex-
amples). Q-CSMA is basically an application of Glauber dynamics on the conflict
graph to sample weighted independent sets. In every time slot t, a link v is randomly
chosen to update as follows:
• If∑w∈Nv
sw(t) = 0, then
sv(t+ 1) = 1 w.p.
λv1 + λv
sv(t+ 1) = 0 w.p.1
1 + λv
• Otherwise, sv(t+ 1) = 0
• and for all w 6= v, let sw(t+ 1) = sw(t)
The schedule s(t) then forms an irreducible aperiodic reversible Markov chain with
stationary distribution:
π(s) =1
Z
∏v∈V
λsvv (4.3.3)
where Z =∑sv∈Ω
∏v∈V
λsvv is a normalizing constant. The throughput optimal Q-CSMA
[14] uses a modified version of the Glauber dynamics where multiple parallel updates
at non-conflicting links are allowed using the same update rule. The activation rate
or fugacity (we use those two expressions interchangeably), λv, of any link v changes
dynamically over time depending on a local weight function wv that is taken as a
79
concave non-decreasing function of the queue length qv. For example, if the fugacity
λv is taken as
λv = ewv , (4.3.4)
this implies that the stationary distribution of the Q-CSMA is
π(s) =1
Ze∑v∈s wv(t) (4.3.5)
The intuition behind the throughput optimality is that the Q-CSMA approximates
the max-weight solution, which is known to be Throughput-Optimal [59].
The extension to a node-based implementation in [14] describes a protocol to
determine which nodes can update their links using an RTS/CTS mechanism. Se-
lected nodes then choose an outgoing link uniformly to update link activity using
the Q-CSMA rules. Clearly, the node-based implementation of Q-CSMA does not
allow switching between outgoing links. This motivates our Node-Based CSMA (NB-
CSMA).
4.4 Node Based CSMA : Glauber Dynamics with Block up-
dates
In this section, we introduce our proposed NB-CSMA algorithm. The reason behind
Q-CSMA’s poor delay performance is the need for high activation rates that causes
all links to be greedy when contending for the medium, which causes the Q-CSMA to
converge to one good schedule and remain at that schedule (or fluctuate around it)
for a long time. In NB-CSMA, we attempt to solve that problem by examining the
possibility of directly switching between links that share a common transmitter. The
80

intuition is that the network will then switch between dominant schedules more often,
without having to pay the price of an idle time slot every time a switch happens.
4.4.1 Step 1: Forming Blocks
We now explain how NB-CSMA works. Recall that the outgoing links of every node
k ∈ K are mapped to a clique in the conflict graph that we call Kk. At the beginning
of each slot, a subset of nodes is selected for update. Each one of those selected nodes
chooses a subset of outgoing links to update in that slot. We call this subset of links
the update clique, Ck, for a node k that is allowed to update this slot. The selection
of update cliques Ck is made such that
1. Ck ⊆ Kk
2. For any two nodes that will update at the same slot k, l ∈ K, we have (v, w) /∈
E ∀v ∈ Ck, w ∈ Cl
The first condition simply states that each update clique Ck is a subset of the outgoing
links that have a common transmitter node k ∈ K. This ensures that the algorithm
is fully distributed with respect to the nodes, i.e., the only information needed to
make a scheduling decision comes from the queue lengths at each physical node. The
second condition is more subtle: It states that the links (vertices on conflict graph)
of update cliques should not have an edge between them, i.e., they do not interfere.
This requirement is necessary to ensure that the resulting schedule is feasible since
the update clique can turn any of its links on. We denote the collection of update
cliques at each time slot as C. A simple RTS/CTS-like scheme can be used, whereby
each node polls its outgoing links and adds them to the update clique if no conflict
exists. This simple scheme can be shown to find update cliques that satisfy the two
81

conditions with no siginificant messaging overhead. We denote the probability of
choosing a particular update clique collection C at any time slot as P (C).
4.4.2 Step 2: Updating Blocks
Now that the update cliques C have been found, we proceed to explain how the
schedule shall be updated. We call x(t+1) the proposed schedule. This schedule will
be used to obtain the actual schedule s(t + 1). The NB-CSMA update procedure is
given in Algorithm 4. We can see that lines 3-8 in Algorithm 4 describe an operation
Algorithm 4: NB-CSMA Algorithm
1 for Ck in C do2 if ∃v ∈ Ck s.t. sv(t) = 1 then
3 w.p.1
|Ck|4 sv(t+ 1) = 1, sw(t+ 1) = 0, ∀w ∈ Ck \ v w.p.
λv1 + λv
5 sv(t+ 1) = 0, sw(t+ 1) = 0, ∀w ∈ Ck \ v w.p.1
1 + λv
6 w.p.|Ck| − 1
|Ck|7 xw(t+ 1) = 1, xz(t+ 1) = 0, ∀z ∈ Ck \ w w.p.
λw∑z∈Ck(1 + λz)
, ∀w ∈ Ck \ v
8 xw(t+ 1) = sw(t), ∀w ∈ Ck Otherwise
9 else10 pick link w ∈ Ck uniformly at random
11 xw(t+ 1) = 1 w.p.λw
1 + λw
12 xw(t+ 1) = 0 w.p.1
1 + λw13 if xw(t+ 1) + sz(t) ≤ 1, ∀w ∈ Ck, ∀z ∈ Nw \ Ck then14 sw(t+ 1) = xw(t+ 1), ∀w ∈ Ck15 else16 sw(t+ 1) = sw(t), ∀w ∈ Ck
82

where an already active link is chosen to be updated according to a procedure similar
to the Q-CSMA. Similarly, lines 10-12 describe how an inactive link with no active
neighbor is chosen randomly and added to the schedule with some probability. This
is again similar to the Q-CSMA procedure, i.e., lines 3-8 and 10-12 just describe the
classical Glauber dynamics to generate independent sets with some desired distribu-
tion. Lines 6-8 represent the addition provided by making the CSMA algorithm node
based. A node can switch from one active link to an inactive one according to the
probability defined in line 7. Lines 14-18 state that a link update is only accepted if
the new schedule is an independent set to ensure that no collisions happen; otherwise
the links’ state in the new time slot remains identical to the one in the previous time
slot.
Note that the NB-CSMA algorithms corresponds to performing “Block updates”
as opposed to single site updates in Q-CSMA. The block updates have been used
before for Glauber dynamics to analyze the mixing time [74], [73].
4.5 Performance of the NB-CSMA Algorithm
Since the schedule s(t+1) depends only on the schedule of the previous time slot s(t),
the evolution of schedules over time forms a Discrete Time Markov Chain (DTMC)
with state space Ω. To write the transition probability between two feasible schedules
s and s′, it is useful to look at the conditional transition probabilities given a particular
choice of update cliques C. Let sCk(t) be the schedule of clique Ck at time slot t.
We can breakdown update cliques into three types and characterize their different
transition probabilities P (sCk , s′Ck)
1. Type A: CA: sw(t) = 0, ∀w ∈ CA and s′v(t + 1) = 1, ∃v ∈ CA and
P (sCA , s′CA) =
1
|CA|λv
1 + λv
83

2. Type B: CB: sv(t) = 1, ∃v ∈ CB and s′w(t + 1) = 0, ∀w ∈ CB and
P (sCB , s′CB) =
1
|CB|1
1 + λv
3. Type C: CC: sv(t) = 1, ∃v ∈ CC and s′w(t + 1) = 1, ∃w ∈ CC \ v and
P (sCC , s′CC ) =
|CC | − 1
|CC |λw∑
z∈CC (1 + λz)
Since changes over different cliques at each time slot are independent, the conditional
transition probability given some update cliques C, P (s, s′|C), is calculated by multi-
plying the transition probabilities over every clique depending on the transition type
as described above. Let CA,CB and CC be the cliques that will have a transition of
type A, B or C respectively. The total transition probability follows.
P (s, s′) =∑C
P (C)P (s, s′|C) (4.5.1)
=∑(C)
P (C)( ∏CA∈CA
P (sCA , s′CA)
∏CB∈CB
P (sCB , s′CB)
∏CC∈CC
P (sCC , s′CC ))
(4.5.2)
The DTMC of transmission schedules is both irreducible and aperiodic. Irreducibility
can be checked by noticing that starting from the state s, sv = 0 ∀v ∈ V , any
feasible state s′ ∈ Ω can be reached in finite number of steps. Aperiodicity is easy
to check as well, by noticing that every schedule s ∈ Ω has a self transition if every
clique in the update cliques makes no transition, which always happens with a non-
zero probability.
Theorem 4.5.1. The DTMC is reversible with stationary distribution given by
π(s) =1
Z
∏v∈V
λsvv (4.5.3)
where Z =∑sv∈Ω
∏v∈V
λsvv is a normalizing constant.
Proof. See Appendix C.1
84

Throughput Optimality
It was shown in [14] that any scheduling algorithm that has the stationary distribu-
tion of the form (4.5.3) is Throughput-Optimal under the time-scale separation as-
sumption, i.e., assuming that the DTMC of schedules converges on a fast time-scale
compared to the queue evolution. This means that it is sufficient for the schedul-
ing algorithm to have the “correct” stationary distribution in (4.5.3) in order to be
Throughput-Optimal, thus, NB-CSMA is Throughput-Optimal. The time-scale
separation assumption means that the schedules can be assumed to be always at the
stationary distribution. This assumption was justified in [75]. The intuition behind
Throughput-Optimality can be shown by defining a weight function of link v as
wv = f(qv), ∀v ∈ V (4.5.4)
where f is a concave nondecreasing function of the queue length q (usually taken as
a function slower than log( ) for technical reasons). Then, if we take the link fugacity
to be:
λv = ewv , (4.5.5)
we obtain the stationary distribution of the DTMC as:
π(s) =1
Ze∑v∈s wv(t). (4.5.6)
Intuitively, (4.5.6) approximates the max-weight solution that is known to be Throughput-
Optimal every time slot [59]. We note that the stationary distribution of NB-CSMA
is equal to the one of Q-CSMA in [14], that is, in terms of the stationary distribution
85

of schedules, NB-CSMA and Q-CSMA are equivalent. It is the second-order behavior
that is different, which causes NB-CSMA to have favorable delay performance.
Delay Performance
Due to complex interactions between different links, the delay performance is gener-
ally hard to assess. However, several tools have been used to analyze the delay of
CSMA-like algorithms. We begin our delay performance assessment by comparing
the delay performance between Q-CSMA and NB-CSMA for a fixed size network,
showing that under NB-CSMA algorithm, each link sees a service process that has
less variability, implying better delay performance. We then proceed to test how NB-
CSMA scales as the network size increases. In particular, we are interested in char-
acterizing the fraction of the capacity region where the queue sizes can be bounded
polynomially in the number of links (as opposed to exponentially). A similar result
for Q-CSMA was found in [65]. We show that the fraction of the throughput region
where the NB-CSMA is fast mixing is usually larger that the one found in [65], except
for some special cases when the two regions coincide. Before we proceed, we make
three simplifying assumptions for the sake of tractability:
A1 All fugacities, λv ∀v, are fixed and possibly heterogeneous, as opposed to the
dynamic fugacities used to prove throughput optimality. Suitable fixed fugac-
ities can be found using the problem formulation/solution in [12] to stabilize
any arrival rate vector in the capacity region.
A2 We assume for our comparison purposes that both NB-CSMA and Q-CSMA
perform a single update per time slot, i.e., in Q-CSMA one link (vertex in the
conflict graph) is updated, and in NB-CSMA one node (clique in the conflict
graph) is updated. This does not change the stationary distribution in (4.5.3);
86

it just provides easier grounds for comparison at the cost of slower convergence
to the stationary distribution since only one update per slot is allowed.
A3 We assume that in Q-CSMA, each time slot, a link is chosen uniformly at
random to be updated (with probability1
n, where n is the number of links).
We assume on the other hand in NB-CSMA, each time slot a node k is updated
at random with probability proportional to the number of outgoing links (with
probability|Kk|n
). This makes the probability that a particular link is turned
ON or OFF equal in both Q-CSMA and NB-CSMA.
We note that A2-A3 suit the case of continuous-time CSMA. However, in discrete-time
NB-CSMA, the network has to perform parallel updates (dropping A2-A3) for two
reasons: 1. Performing single-site updates require network-wide coordination which
is not practical in large networks. 2. Parallel updates enables the network to track
the optimal max-weight solution faster (and speeds up mixing time by O(n) [65])
which translates to a reduction in network delay.
Comparison to Q-CSMA for fixed size networks
In a fixed size network setting, we are interested in comparing the steady-state delay
performance between Q-CSMA and NB-CSMA. The approach we use is similar to the
one used in [67] to compare fixed size networks. This approach depends on looking at
the service process of any link v in isolation. First, define the service process of link
v under NB-CSMA and Q-CSMA algorithms as σv(t) and σv(t), respectively. Also
define P, P , π, π to be the transition matrix and the stationary distribution of the
NB-CSMA and the Q-CSMA Markov chains, respectively. Throughout this analysis,
we assume that both Markov chains P and P have already converged to their steady
state distribution.
87

Let B be the subset of schedules that include link v in them: B = s ∈ Ω : sv = 1.
The service process σv(t) is a 0-1 process with
P (σv(t) = 1) =∑s∈B
π(s). (4.5.7)
We define
T1 = mint ≥ 0 : σv(t) = 1 (4.5.8)
Ti+1 = mint > Ti : σv(t) = 1. (4.5.9)
For the states s ∈ B, Let τi = Ti+1 − Ti (i ≥ 1) be the sequence of recurrence times
and πB be their steady state probability. The quantities πB, σ(t), τi are defined simi-
larly. We are interested in comparing the quantities E(τi),E(τ 2i ) with the quantities
E(τi),E(τi2).
Theorem 4.5.2. Under assumptions A1-A3, for any link v, the following inequalities
hold
E(τi) = E(τi) (4.5.10)
E(τ 2i ) ≤ E(τ 2
i ) (4.5.11)
Proof. See Appendix C.2
Fast Mixing Activation Rates
We are now interested in characterizing the asymptotic delay performance of the NB-
CSMA as the size of the network grows for networks with bounded-degree conflict
graphs. It was shown in [61], that at high throughput values, the delay of the con-
ventional CSMA algorithm grows exponentially with the number of the links in the
88

network, which makes the delay performance unacceptable in large networks. Our
goal is to characterize the throughput region where the average delay is bounded by
a polynomial, because this is the region where the network is guaranteed to operate
with acceptable delay performance. In [65], this region was shown to be contained in
the region where the schedules Markov chain is “fast mixing”. Thus, our target is to
find the fraction of the capacity region that makes the network fast mixing.
We first define the total variation distance between the Markov chain distribution
at time t starting from state x and the stationary distribution π:
dTV (P tx, π) = max
A⊂Ω|P tx(A)− π(A)| (4.5.12)
The mixing time of the Markov Chain is defined as
Tmix(ε) = mint |maxx
dTV (P tx, π) < ε. (4.5.13)
Our tool for bounding the mixing time will be coupling. The coupling of two Markov
chains is a pair process (X t, Y t) such that
1. Each of the Markov Chains (X t, Y t) when viewed in isolation remains faithful
to the original Markov Chain.
2. If X t = Y t then X t+1 = Y t+1.
The mixing time is bounded by the stopping time taken for any two coupled processes
to meet, that is
Tmix ≤ maxx,y
mint : X t = Y t|X0 = x, Y 0 = y. (4.5.14)
89

Equivalently, instead of computing the stopping time explicitly, we can define a dis-
tance metric on Ω, and compute the time taken for the distance between the two
processes to go to zero. Path coupling introduced in [76] is a powerful tool that
makes it easier to design and analyze couplings, by showing that to bound the mix-
ing time, it is enough to restrict the couplings to pairs of states that are adjacent
in the metric. This is much easier than bounding mixing time using couplings for
arbitrary pairs of states. Formally:
Theorem 4.5.3. [76] Let δ be an integer valued metric on Ω×Ω which takes values
0, ..., D . Let S be a subset of Ω×Ω such that for all (xt, yt) ∈ Ω×Ω, there exists
a path xt = e0, e1, ..., er = yt between xt and yt such that (el, el+1) ∈ S, ∀ 0 ≤ l < r
and
r−1∑l=0
δ(el, el+1) = δ(xt, yt) (4.5.15)
Define a coupling (x, y)→ (x′, y′) on the Markov Chain P on all pairs (x, y) ∈ S and
suppose there exists β ≤ 1 s.t. E(δ(x′, y′)) ≤ βδ(x, y) for all x, y ∈ S . If β < 1 the
mixing time Tmix(ε) satisfies
Tmix(ε) ≤log(Dε−1)
1− β, (4.5.16)
where D = maxx,y∈Ω
δ(x, y), i.e., the maximum distance between any two states in terms
of the metric δ(x, y).
Later, we shall apply this theorem with the Hamming distance metric, i.e., δ(x, y) =∑v∈V
1(xv 6= yv). Thus, for our results, we can substitute D with the number of links
in the network, n. Instead of analyzing the NB-CSMA Markov chain, P , we analyze
a different Markov Chain Q that is linearly related to the original Markov chain P ,
90

and rely on the relationship between P and Q to estimate the mixing time of P .
Throughout this section, we shall assume that assumptions A1, A2 and A3 hold. For
notational convenience, we refer to the set of outgoing links of node k, that contains
link v as Kv. Recall that Kv is also a clique in the conflict graph. Furthermore under
A2, since only one node gets to update its schedule every time slot, we assume this
node always chooses to update all outgoing links Kv. Let λ1 ≤ λ2... ≤ λmax be the set
of fugacities of all links v ∈ V . Define the transitions of Markov Chain Q as specified
in Algorithm 5. It is not difficult to check that the Markov Chain Q has a stationary
distribution equal to that of (4.3.3) and (4.5.3).
Theorem 4.5.4. Given the Markov Chain Q, if λmax <1
maxv
(dv − |Kv|), then the
mixing time of Q satisfies
Tmix(ε) ≤2n(1 + λmax) log(nε−1)
1−maxv
(dv − |Kv|)λmax
= O(n log n). (4.5.17)
Where dv is the interference degree of link v (number of neighbors in conflict graph
or number of interferers).
Proof. See Appendix C.3
Now that we have bounded the mixing time of Q, we need to relate it to the mixing
time of P . We make use of the following Lemma stated as Theorem 5.3 in [77].
Lemma 4.5.1. [77] Given two Markov chains P and Q, let their mixing times be
T Pmix and TQmix respectively. If
P ≥ αQ, (4.5.18)
then T Pmix ≤ 2α−1TQmix log(π∗(2ε)−1) where π∗ = maxx∈Ω
√1− π(x)
π(x).
91

Algorithm 5: Evolution of Markov Chain Q
1 Pick a Clique Kv to update randomly w.p.|Kv|n
2 w.p.1
23 s(t+ 1) = s(t)
4 w.p.1
25 if ∃v ∈ Kv s.t. sv(t) = 1 then
6 w.p.1
|Kv|7 sv(t+ 1) = 1, sw(t+ 1) = 0, ∀w ∈ Kv \ v w.p.
λv1 + λmax
8 sv(t+ 1) = 0, sw(t+ 1) = 0, ∀w ∈ Kv \ v w.p.1
1 + λmax
9 w.p.|Kv| − 1
|Kv|10 xw(t+ 1) = 1, xz(t+ 1) = 0, ∀z ∈ Kv \ w w.p.
λw2(|Kv| − 1)(1 + λmax)
, ∀w ∈ Kv \ v
11 xw(t+ 1) = sw(t), ∀w ∈ Kv otherwise
12 else13 pick link w ∈ Kv uniformly at random
14 xw(t+ 1) = 1 w.p.λw
1 + λmax
15 xw(t+ 1) = 0 w.p.1
1 + λmax
16 if xw(t+ 1) + sz(t) ≤ 1, ∀w ∈ Kv, ∀z ∈ Nw \Kv then17 sw(t+ 1) = xw(t+ 1), ∀w ∈ Kv
18 else19 sw(t+ 1) = sw(t), ∀w ∈ Kv
92

Before we apply this Lemma to bound the mixing time of P, we state another
Lemma
Lemma 4.5.2. Let P ∗ be the lazy version of the Markov Chain P (by having a self
transition with probability1
2every time slot). Then P ∗ ≥ αQ, where α =
1
2.
Proof. Denote the transition from s to s′ as P ∗(s, s′) and Q(s, s′) in the P ∗ and Q
chains respectively. We verify that α =1
2for all three types of transitions (and we
add type 4 for self-transitions
T1 P ∗(s, s′) =λv
2n(1 + λv)≥ λv
2n(1 + λmax)≥ Q(s, s′) ≥ αQ(s, s′)
T2 P ∗(s, s′) =1
2n(1 + λv)≥ 1
2n(1 + λmax)≥ Q(s, s′) ≥ αQ(s, s′)
T3 P ∗(s, s′) =|Kv| − 1
2n
λw∑z∈Kv(1 + λz)
≥ |Kv| − 1
2n
λw|Kv|(1 + λmax)
≥ αQ(s, s′)
T4 P ∗(s, s′) ≥ 1
2≥ α ≥ αQ(s, s′)
We can now directly bound the mixing time of P using the following theorem:
Theorem 4.5.5. Given the NB-CSMA Markov Chain P, if λmax <1
maxv
(dv − |Kv|),
then the mixing time of P can be bounded as
Tmix(ε) = O(n2 log n). (4.5.19)
Proof. The theorem is proved by applying Lemma 5 for P ∗ with α =1
2from Lemma
6. Also, for any graph, log(π∗) = O(n) [77]. Applying Lemma 5 with these quantities,
and noticing that P ∗ has double the mixing time of P concludes the theorem.
93

It remains to find the fraction of the capacity region that causes the Markov
chain P to be fast mixing, and consequently causes the queue lengths of links to be
polynomially bounded in the number of links. Before we state our main theorem we
state a related result from [12] as a Lemma
Lemma 4.5.3. [12] Given any ν ∈ Λ, there exists suitable activation rates λ such
that for every link v, the mean service rate E(sv) is equal to the mean arrival rate νv.
The last Lemma ensures the existence of fixed activation rates (fugacities) that
stabilize the queues whenever the arrival rate vector falls within the capacity region.
Now we are ready to present our final theorem
Theorem 4.5.6. Given an arrival rate vector ν that satisfies ν ∈ γΛ, where
γ =1
maxv
(dv − |Kv|+ 1), (4.5.20)
the Markov chain P is fast mixing, and the expected queue lengths of any link v can
be bounded by
E(qv(t)) = O(Tmix) = O(n2log(n)) (4.5.21)
Proof. See Appendix C.4
Discussion
In the last theorem, we characterized the fraction of the capacity region that makes
the Markov chain P fast-mixing. This is the fraction of the capacity region for which
the average queue lengths grow polynomially in the number of links n. The region
in Theorem 6 is no smaller than the regions found in [65] and [66]. In fact the result
in [65] showed that the network was fast-mixing for ν ∈ 1
4Λ, where 4 = max
vdv is
94

the conflict graph degree. The difference between this result and ours is the following:
In [65] we have to decrease the throughput as the number of interferers increase to
get acceptable delay performance. In Theorem 9, we have to decrease the throughput
only when the number of external interferers increase (interferers that have a different
transmitter). We expect the difference to be significant in ad-hoc networks when the
average node degree increases as the network becomes dense. Another difference is
the following: The mixing time bound obtained in [65] was O(log(n)) under parallel-
updates assumption (with assumption A2 removed). However the mixing time of Q-
CSMA for single-site updates is lower bounded by Ω(n log(n)) [78]. Furthermore, in
Theorem 9, an additional O(n) factor comes from the log(π∗) term in the comparison
theorem in Lemma 5. Thus the mixing time upper bound of P is of order O(n)
larger than that of Q. However, as asserted in [77], this additional O(n) factor is
almost certainly an artifact of the analysis. Thus, although the bound of Theorem 9
is O(n2) times that of [65], we do not expect the mixing time of Q-CSMA to be less
than that of NB-CSMA for any arrival rate vector. This will be further validated by
simulations.
4.6 Collocated Networks
In this section, we restrict our study to collocated networks where every link interferes
with all other links. It is easy to see that the resulting conflict graph is complete and
at most one link can be active each time slot, i.e., for a network with n links, we have
n+1 feasible schedules enumerating all links in the network plus the empty schedule.
We focus on collocated networks for both their relative simplicity compared to general
networks which have O(2n) feasible schedules and their practical importance as they
are often used to model wireless local area networks. Several works have analyzed
collocated networks separately: [65] analyzed the mixing time of the schedules Markov
95

chain. [79] formulated the link access probability as an optimization problem, and [80]
derived a lower bound on mean delay for dynamic activation rates. Our goals in this
section are
1. We analyze collocated networks using the Markov Chain with rewards frame-
work [81] to derive a closed-form expression for the mean starvation time for
individual links under both Q-CSMA and NB-CSMA.
2. We use mean starvation expressions to infer, in a quantifiable way, the expected
gains from using NB-CSMA over Q-CSMA as a function of activation rates and
network topology. To this end, we use simplifying assumptions for the network
for the sake of obtaining closed-form expressions.
We remark that our approach is inspired by [66] where the marginal service rate
process along with stochastic dominance were used to derive average delay bound for
any link in a general network with bounded-degree conflict graph. However, we note
that finding the mean-delay bounds obtained in [66] involves inverting the transition
matrix, which is only possible computationally and does not offer clear insights on how
the bound depends on different network parameters. We first note that for any
collocated network, feasible schedules can be enumerated as (0, e1, e2, ..., en), where
eu = s|su = 1 and sv = 0, ∀v 6= u. For the rest of our analysis, we will consider the
behavior of link 1, without loss of generality. Similar to our analysis in Section 5.2,
we define ζi as the ith starvation time. Formally, we have ζi = Ti+1 − Ti| s1(Ti) =
1, s1(Ti+1) = 1 and s1(t) = 0 ∀Ti < t < Ti+1. Note that the difference between
starvation time ζi and recurrence time τi is that starvation time counts the time
between two “ON” slots such that all the slots between them link 1 is “OFF”, whereas
recurrence time counts the time between “ON” slots even if they are consecutive. Our
96

goal is to explicitly express E(ζi) for a collocated network performing both Q-CSMA
and NB-CSMA and relating their performance ratio to the network topology
4.6.1 Q-CSMA Starvation time
General Case
To compute the mean starvation time for a collocated network executing Q-CSMA,
we assume without loss of generality that one link is chosen uniformly at random
to update each time slot w.p.1
n. We then modify the Markov chain governing the
schedules by making the state e1 absorbing (by modifying probabilities such that
P11 = 1 and P1u = 0, for u 6= 1. We can now write the modified Markov chain
transition matrix SQ (where the transitions from/to schedule e1 were moved to the
last row/column respectively) as follows:
1−∑n
i=1λi
n(1+λi)λ2
n(1+λ2)λn
n(1+λn)λ1
n(1+λ1)
. . . . . . . . . . . . . . .
1n(1+λn)
. . . 1− 1n(1+λn)
0
0 0 0 1
(4.6.1)
Let vi be the expected first-passage time from ei to e1. The vector v can be found
using a a first-step analysis by solving the following linear equations [81, Chapter 4.5]
v = 1 +Qv (4.6.2)
which can be simplified to:
v0 = 1 +n∑i=2
λin(1 + λi)
vi +
(1−
n∑i=2
λin(1 + λi)
)v0 (4.6.3)
97

1 0 B
1
n(1 + λ)
1− 1
n(1 + λ) (n− 1)λ
n(1 + λ)
1
(1 + λ)
λ
n(1 + λ)
1
n(1 + λ)
1− 1
n(1 + λ)
Figure 4.2: State space of Q-CSMA in collocated network, equal throughput case
vi = 1 +1
n(1 + λi)v0 +
(1− 1
n(1 + λi)
)vi, 1 < i ≤ n (4.6.4)
We can easily solve these linear equations to obtain vi for i = 0 and all i > 1. Note
that under Q-CSMA, the scheduling Markov chain can only depart schedule e1 to
schedule 0, i.e., we have E(ζ1) = v0, thus, solving (4.6.3) and (4.6.4) we get
E(ζ1) = v0 =(∑n
i=2 λi + 1)(n(1 + λ1))
λ1
. (4.6.5)
Equal Throughput Case
If we further simplify the network to assume all links in the network having the same
arrival rate, we can assume that all activation rates in the network are fixed and
equal, we drop the subscript and refer to this unified fugacity as λ. Under these
assumptions, we can simplify the state space of the scheduling Markov chain s(t) by
making the following observation: Link 1 only sees the medium in three states: 1.
ON: whenever s(t) = e1, i.e., link 1 currently owns the medium and freely transmits
if it has any packets in its queues, 2. IDLE: whenever s(t) = e0: No link owns
the medium, link 1 can acquire the medium with probabilityλ
n(1 + λ), and finally, 3.
98

BLOCKED: whenever s(t) ∈ e2, e3, ..., en. The state diagram of the new transition
matrix is shown in Fig. 2. The reason of this is when activation rates are equal, it
does not make a difference what other link has the medium from the point of view
of link 1. More formally, the states e2, e3, ..., en are statistically indistinguishable
when we are interested in analyzing the behavior of link 1. We consolidate these
states into a single state eB and rewrite the matrix Q in (4.6.1) as
Q =
1
1+λ(n−1)λn(1+λ)
λn(1+λ)
1n(1+λ)
1− 1n(1+λ)
0
0 0 1
(4.6.6)
Performing a first-step analysis for the new Markov Chain to obtain the mean-first
passage times (v0, vB) starting from the schedules (e0, eB), respectively, we get:
v0 = 1 +1
1 + λv0 +
(n− 1)λ
n(1 + λ)vB (4.6.7)
vB =1
n(1 + λ)v0 + (1− 1
n(1 + λ))v2 (4.6.8)
Solving the two linear equations, we get the following expression for the mean-
starvation time
E(ζQ1 ) = v0 = n2 + n(n− 1)λ+n
λ, (4.6.9)
where we have used the fact that any starvation epoch will have to start from the
state e0 since the state e1 can only transition to state e0. As a sanity check, we note
that letting all activation rates λi = λ for all links in (4.6.5) gives us the expression
in (4.6.9).
99
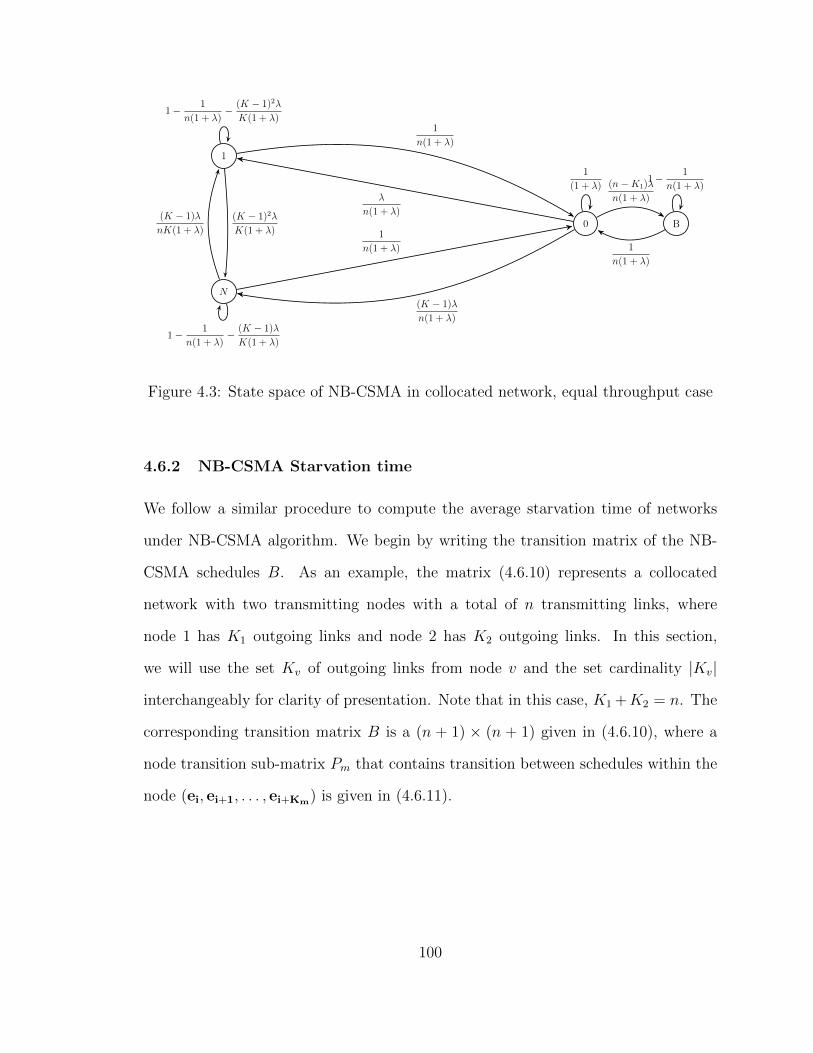
1
N
0 B
1
n(1 + λ)
1− 1
n(1 + λ)− (K − 1)2λ
K(1 + λ)
(K − 1)2λ
K(1 + λ)
(n−K1)λ
n(1 + λ)
1
(1 + λ)λ
n(1 + λ)
(K − 1)λ
n(1 + λ)
1
n(1 + λ)
1− 1
n(1 + λ)
1
n(1 + λ)
1− 1
n(1 + λ)− (K − 1)λ
K(1 + λ)
(K − 1)λ
nK(1 + λ)
Figure 4.3: State space of NB-CSMA in collocated network, equal throughput case
4.6.2 NB-CSMA Starvation time
We follow a similar procedure to compute the average starvation time of networks
under NB-CSMA algorithm. We begin by writing the transition matrix of the NB-
CSMA schedules B. As an example, the matrix (4.6.10) represents a collocated
network with two transmitting nodes with a total of n transmitting links, where
node 1 has K1 outgoing links and node 2 has K2 outgoing links. In this section,
we will use the set Kv of outgoing links from node v and the set cardinality |Kv|
interchangeably for clarity of presentation. Note that in this case, K1 +K2 = n. The
corresponding transition matrix B is a (n + 1) × (n + 1) given in (4.6.10), where a
node transition sub-matrix Pm that contains transition between schedules within the
node (ei, ei+1, . . . , ei+Km) is given in (4.6.11).
100

B =
1−∑n
i=1λi
(1+λi)λ1
n(1+λ1). . .
λK1
n(1+λK1)
λK1+1
n(1+λK1+1). . . λn
n(1+λn)
1−∑n
i=1λi
(1+λi)
λ1n(1+λ1)
...
λK1
n(1+λK1)
P1 0
1−− 1n(1+λK1+1)
...
1n(1+λn)
0 P2
(4.6.10)
We can repeat the steps in the previous section to obtain a result similar to (4.6.5).
However due to the less-sparse structure of the matrix B, we cannot get a closed-form
solution for the mean starvation time of any link in a network operating under the
NB-CSMA scheduling algorithm. Therefore, we focus on the special case of equal
throughputs.
Similar to Section 4.6.1, when studying the mean starvation time of link 1 of node
1, which has a total of K1 outgoing links under the equal throughput assumption, we
simplify the state space into four states relevant to link 1: 1. ON: whenever s(t) = e1,
i.e., link 1 currently owns the medium and freely transmits if it has any packets in its
queues, 2. IDLE: whenever s(t) = e0: No link owns the medium, link 1 can acquire
Pm =
1− 1
n(1+λi)−∑j 6=i
(Km−1)λj
n∑i+Km
l=i (1+λl)
(km−1)λi+1
n∑i+Km
l=i (1+λl)
(km−1)λi+Km
n∑i+Km
l=i (1+λl)(km−1)λi
n∑i+Km
l=i (1+λl)1− 1
n(1+λi+1)−∑j 6=i+1
(Km−1)λj
n∑i+Km
l=i (1+λl). . .
(km−1)λi+Km
n∑i+Km
l=i (1+λl)
. . . . . . . . . . . .(km−1)λi
n∑i+Km
l=i (1+λl)1− 1
n(1+λi+Km ) −∑j 6=i+Km
λj∑i+Kml=i (1+λl)
(4.6.11)
101

the medium with probabilityλ
n(1 + λ), 3. NEIGHBOR: The medium is owned by a
link that is outgoing from node 1, thus at anytime the schedule can switch to link
1 w.p.(K1 − 1)λ
nK1(1 + λ). The NEIGHBOR state is entered whenever s(t) ∈ eK1 \ e1
4. BLOCKED: whenever s(t) ∈ eS \ (eK1 ∪ e0). In the rest of this section, we will
denote K1 simply as K for clarity of presentation. The state diagram of the new
transition matrix is shown in Fig. 4.3.
To derive the mean starvation time of link 1, we modify the Markov chain in Fig.
4.3 of schedules by making the state e1 absorbing. We repeat the procedure of Section
4.6.1.A. to derive the first-passage time of all states to the target state e1. Solving
the associated linear equations, we obtain the vector of mean first passage times
[vN , v0, vB]. Under the NB-CSMA in Fig. 4.3, the schedule can transition out of state
e1 to either the IDLE state e0 or the NEIGHBOR state eN with probabilityP10
P10 + P1N
andP1N
P10 + P1N
respectively. Therefore, to compute the mean starvation time we take
the inner product between the initial distribution α = [P10
P10 + P1N
P1N
P10 + P1N
0] and
the mean first-passage time α = [v0 vN vB] to obtain:
E(ζN1 ) = αᵀv =Kn(λ+ 1)(nλ− λ+ 1)
λ(λk2 + (1− 2λ)k + λ)(4.6.12)
In this section, we compare the service processes of both Q-CSMA and NB-CSMA
in the case of collocated networks in the equal throughput case, when all nodes have K
outgoing links. We first begin by stating the following Lemma in choosing activation
rates λ in our special case of equal throughputs.
Lemma 4.6.1. Given a collocated network running Q-CSMA or NB-CSMA with
equal throughputs for all links, an activation rate of λ =ρ
n(1− ρ)+ ε for any ε > 0
stabilizes any throughput requirement ν =ρ
nfor 0 < ρ < 1.
The proof is immediate by checking that the stationary probability of the Markov
102

chain π(ei) =λ
1 + nλ>ρ
nwhich guarantees the stability of all queues. Recall that the
stability region of a collocated network is given by ν|n∑i=1
ν < 1 and for the special
case of equal throughputs the stability conditions reduces to the single condition of
ν <1
n. The ρ in Lemma 4.6.1 takes values between 0 and 1 and represents the traffic
intensity in the network.
We are now ready to compare the ratio between mean starvation times of both
Q-CSMA and NB-CSMA in the following theorem
Theorem 4.6.1. Given a collocated network with n links,K
nnodes each with K
outgoing links and equal throughputs at all links with ν =ρ
n, the ratio r between
mean starvation times of NB-CSMA and Q-CSMA is given by
r =K
K + λ(K2 − 2K + 1)(4.6.13)
where
λ =ρ
n(1− ρ)+ ε, for any ε > 0. (4.6.14)
The proof is immediate by dividing (4.6.12) by (4.6.9). The ratio gives the decrease
observed when using NB-CSMA instead of Q-CSMA in a given network. Theorem
4.6.1 leads to the following observations:
1. The ratio decreases with outgoing links K as Θ(K2), which means that for a
given network, we see greater improvement in starvation times as the number of
outgoing links per node increases. This result is expected since larger K means
that many decisions will be centralized for more links.
2. The ratio decreases as Θ(1
(1− ρ)2) as well, which means: the higher the network
103

traffic intensity, the more improvement we expect to get from NB-CSMA in
terms of starvation times.
3. Each link will see an alternating renewal service process with equal long-term
mean service times between all links under both NB-CSMA and Q-CSMA
scheduling algorithms. However, the service process under each algorithm will
be as follows
Q-CSMA: The link will be ON for a Geometrically distributed, Geo(1
n(1 + λ)),
epoch, then OFF for an epoch that has a discrete Phase-Type distribution with
mean E(ζQ1 ) given in (4.6.9).
NB-CSMA: The link will be ON for a Geometrically distributed, Geo(1
n(1 + λ)+
(K − 1)2λ
K(1 + λ)), epoch, then OFF for an epoch that has a discrete Phase-Type dis-
tribution with mean E(ζN1 ) given in (4.6.12).
4.7 Numerical Results
4.7.1 General Networks
We simulate a random topology where 20 wireless nodes are placed uniformly at
random in a 600x600m square. A wireless link is established with probability 1, if
the transmitter node is within 150m from the receiver node, and with probability
0.5 if the transmitter is within 250m from the receiver. All links in this simulation
are unidirectional. We assume a geometric interference relationship between links
whereby two links interfere with each other if a)they share a transmitter node, b)they
share a receiver node, c)the transmitter node of one link is within 250m of the receiver
node of the other one. The resulting instance of the geometric random network has
48 links. To determine the decision schedule of Q-CSMA and the update blocks of
104

0 100 200 300 400 500 600
X
0
100
200
300
400
500
600
700
Y
Nodes
Links
Figure 4.4: 600x600m Random Network Topology
the NB-CSMA, we use a contention window of size 8 and a random back-off scheme,
where every link waits a random time, then attempts to include itself in the update
blocks (decision schedule). If no conflict happens, the inclusion is successful. We also
use the dynamic fugacities λv =log(1 + qv)
log(e+ log(1 + qv))found to have the best delay
performance [75]. Thus effectively in the simulation we have dropped assumptions
(A1-A3) of Section 4.5. The arrivals at different links are independent Bernoulli
processes. We determine the arrival rates of all links using the following three steps:
a) We compute all the maximal independent sets of the conflict graphG of the network
G in Fig. 4.4, we call this set of independent sets AM . b) For each of these sets,
Am∈M , we obtain an arrival rate vector νm on the boundary of the capacity region
by setting the arrival rates of all links v included in the set to νvm = 1, ∀v ∈ m
and otherwise νvm = 0, ∀v /∈ m. c) By taking the average of νm that is, taking the
average of the binary vector [νvm]m∈M at each link v, we get an arrival rate vector
ν∗ at the boundary of the capacity region that has a strictly positive arrival rate
for every link v ∈ V . We multiply ν∗ by a factor ρ ∈ (0, 1) that we call “Traffic
105

0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8
Traffic Intensity (ρ)
0
50
100
150
200
250
300
350
Avera
ge Q
ueue L
ength
Per
Lin
k
NB-CSMA
Q-CSMA
Figure 4.5: Average Queue Length per link vs. ρ
Intensity” to simulate the network at different levels of throughput. In Fig. 4.5,
we plot the time-average queue lengths per link against the traffic intensity ρ. We
calculate the average queue lengths for 2 × 105 time slots. In all simulations, we
neglect the evolution of queue lengths for the first half of the simulation time when
calculating time-averages, to make sure that we have minimized the influence of the
transient behavior at the beginning of the simulation. We can see as expected that
NB-CSMA outperforms Q-CSMA for all values of ρ. In this example, the average
queue lengths of NB-CSMA is on average half of that of Q-CSMA for all values of
ρ. By Little’s la w [81], we know that the average delay is the ratio of the average
queue length of any link (and of the whole network) to the arrival rate. Thus, for
this example, NB-CSMA results in 50% decrease in average delay for any arrival rate
vector within the capacity region.
We consider a recent proposal that greatly improves the performance of Q-CSMA,
and compare the performance of the modified Q-CSMA to the performance of NB-
CSMA when they both implement the same modification. Namely, we consider the
106

0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8
Traffic Intensity ( )
0
50
100
150
200
250
300
350
Ave
rag
e Q
ue
ue
Le
ng
th P
er
Lin
k
Delayed CSMA, T=2 [16]
Delayed NB-CSMA, T=2
Delayed CSMA, T=8 [16]
Delayed NB-CSMA, T=8
Figure 4.6: Average Queue Length per link vs. ρ (Delayed CSMA, T = 2, T = 8.)
case of “Delayed CSMA” proposed in [70] [71] (and slightly differently in [69], [72])
whereby the links keep T parallel schedules and update each schedule independently.
For instance, if T = 2, then the network keeps two separate schedules: one for even
time slots and one for odd time slots. Intuitively, when two or more schedules evolve
independently, it becomes less likely that any link will be starved for a long time.
In Fig. 4.6, the resullts of the implementation of Delayed-CSMA for both Q-CSMA
and NB-CSMA are presented. We simulate the network in Fig. 4.4 for different
traffic intensities. We note that, both Q-CSMA and NB-CSMA see improvements
when the number of parallel schedules T , grow from 2 to 8. In fact, Q-CSMA sees a
28% reduction in average delay, whereas NB-CSMA sees a 33% reduction, i.e., NB-
CSMA sees more reduction when the schedules are parallelized. Also when T = 8
at high throughputs, the average delay under Delayed NB-CSMA is 40-50% that
of Delayed-CSMA. This suggests that the benefits of improvements to link-based
CSMA algorithms, such as parallelization, carry over to NB-CSMA whenever those
improvements are implemented on top of NB-CSMA.
107

0.6 0.65 0.7 0.75 0.8 0.85 0.9 0.95
Traffic Intensity ( )
200
300
400
500
600
700
800
900
1000
1100
1200
Me
an
Sta
rva
tion
Tim
e:
E(
)
Q-CSMA-Analytical
Q-CSMA-Simulated
NB-CSMA-Analytical
NB-CSMA-Simulated
0.4776 0.4639 0.4467 0.4248 0.3956 0.3550 0.2945 0.1949
Ratio: r
0.4776
0.4639
0.4467
0.4248
0.3956
0.3550
Figure 4.7: Mean Starvation time of link 1 vs. ρ
4.7.2 Collocated Networks
We simulate a collocated topology with the assumptions of Section 4.6 (symmetric
networks, fixed fugacities, equal throughputs), with four nodes each having six out-
going links (K = 6, n = 24) for 106 slots. In Fig. 4.7, we plot the analytical and
simulated mean starvation times against the traffic intensity ρ. We also added the
corresponding ratio r for each ρ at the top x-axis. We first note that the mean starva-
tion time increases as we increase ρ for Q-CSMA whereas it decreases for NB-CSMA.
The behavior of Q-CSMA can be explained by taking the derivative of (4.6.9) with
respect to λ. We find that the mean starvation time is decreasing for λ <
√1
n− 1
and increasing for λ >
√1
n− 1. Therefore, at high traffic intensities we observe a
sharp increase in mean starvation times. The behavior of NB-CSMA is more compli-
cated, as the expression in (4.6.12) is a fractional polynomial, thus, increasing traffic
intensity may cause mean starvation time to increase, decrease or oscillate depending
on the network topology. As traffic intensity increases, there are two forces that affect
108
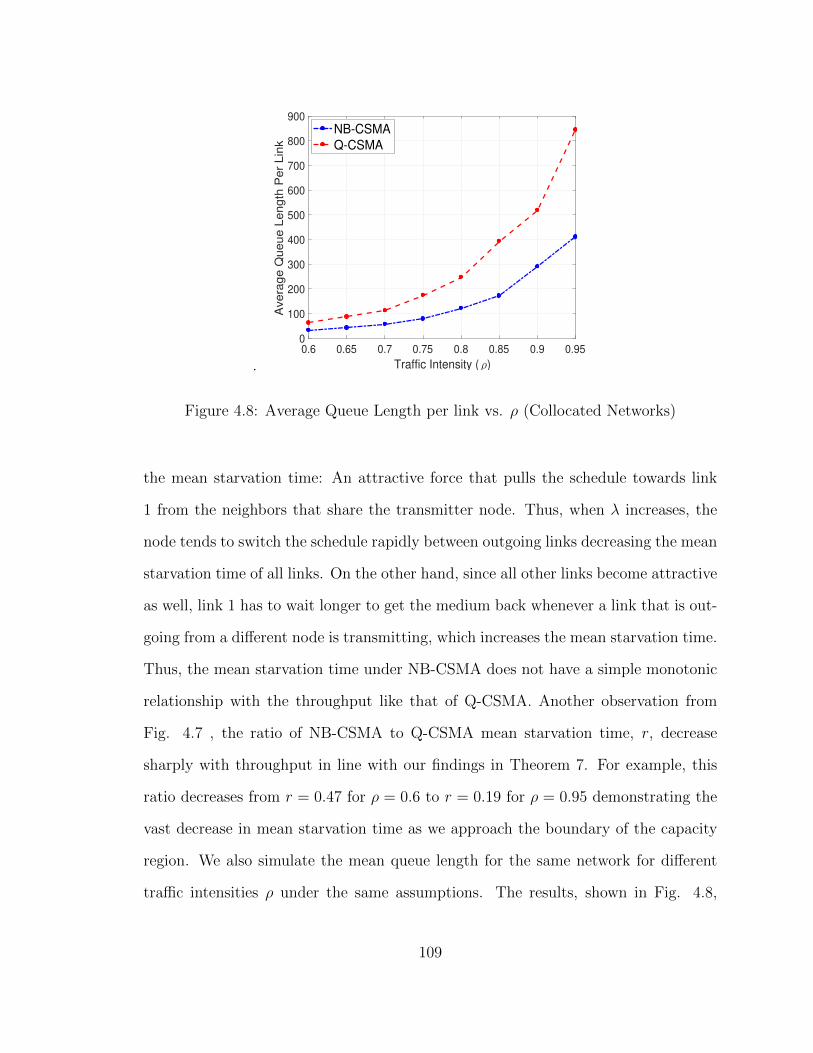
.0.6 0.65 0.7 0.75 0.8 0.85 0.9 0.95
Traffic Intensity ( )
0
100
200
300
400
500
600
700
800
900
Ave
rag
e Q
ue
ue
Le
ng
th P
er
Lin
k
NB-CSMA
Q-CSMA
Figure 4.8: Average Queue Length per link vs. ρ (Collocated Networks)
the mean starvation time: An attractive force that pulls the schedule towards link
1 from the neighbors that share the transmitter node. Thus, when λ increases, the
node tends to switch the schedule rapidly between outgoing links decreasing the mean
starvation time of all links. On the other hand, since all other links become attractive
as well, link 1 has to wait longer to get the medium back whenever a link that is out-
going from a different node is transmitting, which increases the mean starvation time.
Thus, the mean starvation time under NB-CSMA does not have a simple monotonic
relationship with the throughput like that of Q-CSMA. Another observation from
Fig. 4.7 , the ratio of NB-CSMA to Q-CSMA mean starvation time, r, decrease
sharply with throughput in line with our findings in Theorem 7. For example, this
ratio decreases from r = 0.47 for ρ = 0.6 to r = 0.19 for ρ = 0.95 demonstrating the
vast decrease in mean starvation time as we approach the boundary of the capacity
region. We also simulate the mean queue length for the same network for different
traffic intensities ρ under the same assumptions. The results, shown in Fig. 4.8,
109

show that NB-CSMA consistently achieves around 50% of the delay achieved by Q-
CSMA across all traffic intensities ρ. Interestingly, this is similar to the reduction we
obtained in the random topology with unequal throughputs and adaptive fugacities.
4.8 Practical Implementation of NB-CSMA
We now discuss the practical implementation of NB-CSMA. NB-CSMA is synchro-
nized, in the sense that all nodes perform contention simaltanuously. As we shall
show, this completely eliminates problems such as Hidden-Terminal problem and
Exposed-terminal problem. This is unlike the 802.11 protocol model which is asyn-
chronous, but follows earlier practical implementations for throughput-optimal CSMA,
such as [14], which are synchronous. A similar discussion was presented in [14] for
the link-based Q-CSMA. We give the Node-based counterpart of the implementation
that satisfies the NB-CSMA requirements and procedures.
Similar to the WiFi RTS/CTS/Data/ACK scheme, our implementation of NB-
CSMA takes four steps:
1. POLLING: Sent by a potentially transmitting node, S, each time slot to explore
outgoing link states.
2. Clear To Update (CTU): Sent by a receiving node, R, as a response to the
POLLING signal by S, to indicate that a link (S,R) is available for update this
time slot.
3. Data: Transmission of the packet by transmitter node S to receiver node R.
4. ACK: Sent by receiver R to acknowledge successfully receiving a packet.
For the purposes of Forming Blocks (Section 4.4-Step 1 ), each node keeps a num-
ber of flag bits that are updated each time slot:
110

• AVAILABLE Tx, AVAILABLE Rx : A bit that indicates whether a node is
available or blocked as a transmitter or a receiver, respectively.
• SENSE Tx, SENSE Rx : A bit that indicates that a node has sensed an active
transmitter or receiver, respectively, in its neighborhood in the previous slot.
• ACTIVE Tx, ACTIVE Rx : A bit that indicates that a node was active as a
transmitter or receiver, respectively, in the previous slot.
Recall from Section 4.4, Each node k has a set of out going links Kk. Each time slot,
node k forms an update clique Ck where schedule updates take place. Furthermore,
we define Hk as the set of nodes that can overhear a transmission from node k and
vice-versa. We assume Symmetry in hearing, i.e. if k′ ∈ Hk then k ∈ Hk′ . Finally,
each nodes keep a set of potential receivers, Rk, where a link (k, k′) exists if k′ ∈ Rk,
and a set of potential transmitters, Tk, where a link (k′, k) exists if k′ ∈ Tk.
A the beginning of each time slot, there is a contention period of length W mini-
slots, where the “Forming Blocks” step takes place. Each frame in the contention
window consists of V + 1 sub-mini-slots. Nodes use the contention window to form
the update cliques Ck that follow both conditions stated in Section 4.4, Step 1. We
will shortly give the details of how that is achieved, and later show that this takes
care of both the Hidden and the Exposed Terminal problems.
First we give the details of how each node performs the step of “Updating Blocks”
in Section 4.4, Step 2. In order perform that step, each node needs to know the state
of the neighboring links to each of its outgoing links in the previous time slot, t. This
is achieved as follows:
Updating Blocks: At time t, node k updates its flags as follows.
1. If one of the outgoing links of node k (say (k, k′)) was active as a transmitter
in the previous time slot, then node k sets ACTIVE Tx and ACTIVE Rx to
111

1 and 0 respectively. By the collision-free nature of the algorithm, No other
transmitter or receiver neighbor can be active in the previous time slot, thus,
SENSE Tx and SENSE Rx are set to 0. Using this information, node k knows
that sk,k′(t) = 1. Thus, by Algorithm 1, node k is free to activate any of it’s
outgoing links (k, j) at time t+ 1 provided that 1.(k, j) ∈ Ck(t+ 1) and 2.The
CTU message from k′ confirms that k′ sensed no other active transmitter in
the previous time slot.
2. If one of the incoming links of node k was active at time t (say (k′, k), then
node k sets ACTIVE Rx= 1, and all other flags to 0. At time slot t + 1, node
k knows that none of it’s outgoing or incoming links can be activated at time
slot t + 1, except for (k′, k). This informs node k that∑
z∈N(w)
sz = 1, ∀w ∈ Tk
and by lines 17-20 in Algorithm 1, none of the links in Tk can be active at t+ 1
to avoid collisions. Thus, node k sets all outgoing links to OFF at t+ 1.
3. If node k overhears a Data packet at time slot t, it sets SENSE Tx to 1. At
time t + 1, node k knows it cannot be active as a receiver (by lines 17-20 in
Algorithm 1). Furthermore, node k piggybacks its flags on the CTU messages
at the next time slot to inform potential transmitters they can not transmit in
the next slot to avoid Hidden-terminal collision.
4. If node k overhears an ACK packet at time slot t intended to another node,
it sets SENSE Rx to 1. At time t + 1, node k knows it can not be active as
a transmitter (by lines 17-20 in Algorithm 1). Thus, node k sets all outgoing
links to OFF at time t+ 1.
5. If node k was neither transmitting or receiving at time t, and does not sense a
Data or an ACK packet, then node k is free to be a transmitter or a receiver
112

S
R1
R2
R3
POLLING
t=1
POLLING CTU1
POLLING CTU1 CTU2
POLLING CTU1 CTU2 CTU3
t=1 t=2 t=3 t=4
t=2t=1 t=3
t=1 t=2
Figure 4.9: The POLLING/CTU exchange in the contention period
at time t if one of the outgoing/incoming links (k, k′) is included in Ck and is
updated to ON.
We note that as mentioned in [14], the state flags SENSE Tx, SENSE Rx, AC-
TIVE Tx, ACTIVE Rx can be piggybacked on the CTU message to inform the
transmitter with the state of its potential receiver. This eliminates any possibility
of collision due to hidden-terminals, since the transmitter k knows whether any of
the neighbors of its receiver k′ were active (through the SENSE Tx bit of node k′
piggybacked on the CTU packet from k′ to k) during the previous time slot. Also,
each node differentiates between being blocked as a transmitter and as a receiver,
which eliminates the exposed terminal problem, since a node blocked as a receiver
can still be a transmitter given its receiver is not blocked.
Forming Blocks: At the beginning of each contention period, Each node sets
the bits AVAILABLE Tx and AVAILABLE Rx to 1. Each node randomly chooses
an integer TBackoff between [0,W − 1]. This will be the back-off time of that node at
the current contention period. Node k then does the following:
113

1. At time TBackoff, if node k has AVAILABLE Tx= 1, it will randomly choose
min(Kk, V ) outgoing links at random (Recall that Kk is the set of outgoing
links from node k, and V + 1 is the number of contention sub-mini-slots in each
contention mini-slot). Node k then sends a POLLING message, directing those
min(Kk, V ) chosen potential receivers to send a CTU message in a designated
sub-mini-slot as shown in Fig. 4.9. Node k then listens for CTU messages from
potential receivers. If node k hears a CTU message from k′, then (k, k′) will
be included in the update block Ck. At the “Update Block” step, node k can
utilize the information piggy-packed on the CTU message to infer the state of
k′ neighbors. Node k then sets AVAILABLE Rx= 0, indicating that the no
block can contain any incoming links to k.
2. At time t < TBackoff, if node k hears a POLLING message directed to it (possibly
among other potential receivers), node k will first check the AVAILABLE Rx
bit. if the AVAILABLE Rx bit is 1, node k will set both AVAILABLE Tx
and AVAILABLE Rx to 0 and then send a CTU message in its designated
sub-mini-slot as instructed by the POLLING message.
3. At time t < TBackoff, if node k hears a CTU message not directed to it. Node
k knows it can not include any outgoing links to avoid collisions and thus, sets
AVAILABLE Tx bit to 0.
4. At time t < TBackoff, if node k hears a POLLING message not directed to it,
node k will set AVAILABLE Rx= 0, indicating that none of the incoming links
to node k can be included in the update block Ck′ of any node.
5. At time t < TBackoff, if node k hears a collision of POLLING messages from two
transmitters, node k will set AVAILABLE Rx= 0, indicating that none of the
incoming links to node k can be included in the update block Ck′ of any node.
114

Theorem 4.8.1. The Update Cliques formed using the abouve signalling protocols
satisfy the conditions:
1. Ck ⊆ Kk
2. For any two nodes that will update at the same slot k, l ∈ K, we have (v, w) /∈
E ∀v ∈ Ck, w ∈ Cl
It is straight-forward to see that the update cliques formed by the provided
POLLING/CTU scheme is non-interfering. The key is noticing that the handshake
is successful only if none of the links that interfere with Ck are included in any up-
date clique Ck′ . Steps 2-5 indicate that a CTU message is only sent as a response
to a POLLING message only if: 1. In the previous mini-slots there were no other
POLLING messages heard. 2. A successful POLLING message was received with
no collisions. This completely eliminates the hidden-terminal problem. Furthermore,
differentiating between transmitter and receiver availability of any node eliminates
the exposed-terminal problem.
To summarize, Our model assumes a discrete-time synchronized CSMA system,
where all nodes have a common contention period. Nodes keep multiple flags to indi-
cate availability as a transmitter or a receiver as well as sensing results. Following a
POLLING/CTU handshake, update cliques can be formed that satisfy the theoreti-
cal conditions needed to prove our results. Furthermore, the synchronization as well
as the signaling scheme eliminate the possibility of hidden or exposed terminals.
4.9 Conclusion
We have proposed a node-based CSMA algorithm that is throughput optimal and
outperforms link-based CSMA. The improvement margin depends on network topol-
ogy, but for practical ad-hoc networks, we expect the improvement to be significant.
115

NB-CSMA is also fully distributed, in the sense that the nodes make their decisions
based solely on local information. Our mixing time analysis gives an insight on how
topology affects the low delay fraction of the capacity region. In particular, we have
shown that interferers that originate from the same transmitter do not contribute to
the shrinkage of the fraction of the capacity region with low delays under NB-CSMA.
Furthermore, our framework of deriving mean starvation times assists us in under-
standing how making node-based decisions affects link starvation. Our simulation
results show a significant improvement in mean delay and mean starvation time over
link-based CSMA. In future work, we can investigate the delay performance of NB-
CSMA in multihop ad-hoc networks and refine our delay analysis to include dynamic
update rules and more general topologies. We will also investigate how our mean
starvation time framework could be extended to obtain bounds on the mean delay in
both special collocated and more general networks.
116

CHAPTER 5
CELLULAR ACCESS OVER HETEROGENEOUS
WIRELESS INTERFACES
5.1 Introduction
In this chapter, we tackle the problem of allocating resources to different applications
with Quality of Service (QoS) requirements across different radio interfaces [82]. Mo-
bile devices are often presented with two types of connectivity coming from their
accessible Radio Access Technologies (RATs): A ubiquitous expensive cellular RAT
coming from the cellular provider and an intermittent cheap connection coming from
different alternative RATs such as WiFi, mmWave, and Dynamic Spectrum Access
in white spaces. The interesting question is: How can we best distribute mo-
bile traffic over heterogeneous RATs, taking into account availability and cost
differences between interfaces? Furthermore, different applications have different con-
nectivity requirements in terms of long-term throughput and short-term regularity.
The heterogeneous cost and availability properties, along with different applications’
connectivity requirements introduce the need for schedulers that could balance ap-
plications’ utilities along with RATs properties.
In general, two approaches have been employed to address this question. The first
approach is Intelligent Network Selection by choosing the suitable RAT for each
application. This approach assumes that the user is allowed to use only one RAT at
117

any given time. The current default policy employed by Android phones falls into this
category: Android default policy is to choose WiFi over LTE whenever possible with
the option of setting some applications to only use WiFi. This is known as delayed
offloading, where delay tolerant applications are only allowed to use WiFi. If WiFi is
not immediately available, then these applications will delay their transmissions up
to a deadline or until a WiFi connection is established. This policy was proposed and
analyzed in [83] and [84,85], respectively. However, this solution is more suitable for
3G deployments, where WiFi consistently offers significantly higher rates than the
cellular network. More recently, however, [86] has shown that this is not the case in
LTE deployments. In particular, it was shown that LTE outperforms WiFi in terms
of rate 40% of the time. One feature that has been used in the literature is the
predictability of wireless connectivity. In particular, it was shown in [87] that short-
term future wireless connectivity can be forecast accurately. Thus, a slightly delay-
tolerant application can delay a transmission if the connectivity forecast indicates
that preferable network conditions will be available in the near future. Using this
predictive ability, [88] modeled the problem as a Finite-Horizon Markov Decision
Process where the user follows a network-selection policy that minimizes the expected
energy when uploading a single file before a deadline. In [89], a Lyapunov drift-plus-
penalty approach was taken for network selection with the aim of minimizing power
subject to queue stability. In [90], the different applications’ QoS needs in terms of
throughput, delay and cellular cost were quantified as a utility function. Then, each
user solves an open-loop planning problem to choose the best transmission time for
each application according to its QoS and the availability of WiFi at any given time.
Aside from client-controlled solutions, [91,92] proposed network-controlled centralized
solutions to the problem, where a single entity has a perfect view of all RAT states, of
all users, and can assign users to RATs accordingly. The centralized control, however,
118

is not realistic in today’s settings as different networks are often controlled by different
entities. This is somewhat similar to our approach, however, as will be seen later, the
paper did not consider the possibility of operating multiple interfaces simaltanuously.
Furthermore, the timescale assumed in this paper is in terms of hours whereas we
consider decisions that are made over a few seconds. Finally this paper considered
deferring whole files to future time-slots whereas we consider elastic traffic sources
with no pre-defined file size.
The second possible approach to solve the problem is Simultaneously utilizing
all RATs at any given time. This is sometimes referred to as multihoming. This
approach is more flexible as it gives the user the opportunity to utilize the entire
bandwidth from all available RATs at any given time. Our problem formulation
takes this approach. The current de-facto solution for utilizing different RATs is the
MPTCP protocol [93]. However, MPTCP suffers from a variety of problems such as
high energy consumption [94] and over-utilization of the cellular link [95], which might
cause an increased monetary cost to the user. Several other approaches have been
proposed to exploit different RATs: [96] models the scheduling over different RATs
as a Mixed-Linear-Integer-Program and propose a greedy heuristic to defer delay
tolerant flows to later times. In [97], the problem is considered with flow-interface
assignment constraints. A minimum deficit round-robin policy is proposed and it is
shown that this policy is max-min fair. However, the result strongly depends on the
policy being work-conserving, which might cause over-utilization of a metered cellular
link. In [95], managing several RATs is studied for the case of transmission of video
chunks. The problem is formulated as a 0-1 min-knapsack problem that takes into
account different bandwidths, usage costs, and deadlines of video chunks. A practical
online heuristic is proposed and good performance is established via simulations.
In [98], the authors proposed an integrated transport layer that modifies SCTP to
119

allow the exploitation of heterogeneous RATs in vehicular networks. The paper uses
a Network Utility Maximization formulation with link costs. However, the issues of
QoS differentiation per application, application-level fairness and temporal variation
in secondary capacity are not addressed as implementation details are emphasized.
There are many challenges in solving the problem of rate-allocation over hetero-
geneous RATS: 1) Cellular and Secondary interfaces have different costs. While the
cellular network is usually metered, secondary RATs such as public WiFi are often
free to use. This may cause the optimal policy in terms of throughput, cost, and
QoS to be non-work conserving which complicates the problem. 2) Secondary
interfaces are inherently intermittent and unreliable. WiFi have limited coverage and
DSA is only allowed to access spectrum in absence of the spectrum owner. 3) Differ-
ent applications have different requirements in terms of delay and throughput. Thus,
a good rate-allocation policy has to incorporate individual application requirements
when allocating rates. However, all these applications share the same RATs that
have limited capacity. Thus, the allocations of all applications are coupled. Our
contributions can be summarized as follows:
1. We apply the DRUM framework, proposed in [99], in the context of allocating
rates to different cellular users to exploit temporal diversity, to the problem of
application rate allocation over different RATs. We demonstrate that using the
DRUM framework with a discount tied to application delay sensitivity results
in a fair allocation with desirable characteristics in terms of balancing the per-
application trade-off between throughput, delay, and cost.
2. We propose two online low complexity algorithms that exploit limited look-head
predictions of future connectivity.
3. We analyze one of those online algorithms and show that: in the presence of a
120

prediction window of length w time slots, under some mild conditions, the on-
line algorithm achieves a reward that is no less than (1− c
w + 1)Reward(OPT),
where c is a constant and OPT is the prescient offline solution. Thus, the pro-
posed algorithm is constant-competitive independent of the time horizon T , and
approaches the optimal reward as the prediction window increases. Simulations
show that, in practice, these proposed algorithms perform much better than
the theoretical bound under all considered scenarios.
Our work relates to [89] by being predictive and QoS-aware. The difference is that [89]
does not offer differentiated service to flows. The formulation in [98] relates to our
formulation of utility with link costs. However, [98] does not differentiate between
flows, nor does it consider time variations of secondary RAT, and instead, attempts
to solve a static optimization problem every time slot. Perhaps the closest work to
our problem are [90, 96] which considered all three factors of throughput, delay and
cost. [96] considered inelastic traffic that needs to be served over T time slots, whereas
[90] considered a mixture of inelastic and fixed-time elastic traffic. However, both of
these papers assumed full knowledge (or a good estimate) on all future connectivity,
and used heuristics to find good solutions for the hard traffic assignment problem.
5.2 System Model
We consider a mobile user running N applications, where each application creates a
flow i. At each time slot, the mobile user can use the cellular network, the secondary
network or both to transmit traffic belonging to flow i. We denote the rate received
by flow i over the cellular network at time t as yi[t], and the rate received by flow i
over the secondary network as xi[t].
121

Figure 5.1: System Model
5.2.1 Channel Model
We consider a smart-phone with two interfaces as shown in Fig. 5.1 a cellular in-
terface and a secondary interface. The extension of the formulation and the online
algorithms to the case of multiple secondary interfaces is straightforward. The sec-
ondary interface has a time varying capacity c[t] every time slot to capture the effects
of intermittence, unreliability, and possible user mobility. We do not have any statis-
tical assumptions on c[t]. We assume the user can accurately predict the secondary
capacity up to a future window of w time slots. The predictability assumption has
been used extensively for similar problems [83, 89, 100], and the feasibility of WiFi
prediction was shown in [87, 101]. We assume that the cellular interface has a con-
stant normalized capacity equal to 1 every time slot, i.e., we assume that the cellular
operator offers a constant rate to the user throughout the time-horizon. This cap-
tures the effect of ubiquity of the cellular network in contrast to intermittence of the
secondary network. Although the cellular network is affected by fading, we assume
that the cellular operator can employ scheduling, resource-block allocation, MIMO,
etc., to guarantee that the client gets a constant rate every time slot over the problem
horizon. The “time-slot” in the system is in the order of a few seconds, a sufficient
122

time for the state of secondary interface connectivity to change. In our model, the
rates xi[t] and yi[t] take continuous non-negative values. Finally, we assume that all
queues carrying different flows are infinitely backlogged, i.e., we assume that the flows
are elastic.
5.2.2 Flow Utility
We use the Discounted Rate Utility framework introduced in [99] to capture the
utility of flow i
Definition 5.2.1. (β-Discounted Rate [99]): For a given β ∈ [0, 1], we define the
β-discounted rate of flow i at time t ≥ 0 as:
R(βi)i [t]
∆=
∑tτ=0 β
t−τ (xi[τ ] + yi[τ ])∑tτ=0 β
t−τ(5.2.1)
As an illustrative example, we write down the β-discounted rate for β = 0, β ∈
(0, 1) and β = 1 as follows:
R(βi)i [t] =
xi[t] + yi[t] if β = 0,∑tτ=0 β
t−τ (xi[τ ] + yi[τ ])∑tτ=0 β
t−τif β ∈ (0, 1),
1
t
t∑τ=0
(xi[τ ] + yi[τ ]) if β = 1.
(5.2.2)
The β-discounted rate ties the utility of a certain flow to both the throughput and
average delay by adding a weight β to the history of allocated rates. Closer inspection
of (5.2.2) shows when β = 0, the β-discounted rate is equal to the instantaneous rate,
representing maximum delay sensitivity as no weight is given to the rate allocation
history. When β = 1, the β-discounted rate represents the time-average of allocated
rates since time 0. This is suitable for modeling a flow with no delay sensitivity.
123

To summarize, an increase in β models less delay sensitivity, thus, an application
with a high value of β can afford to wait for “favorable” transmission opportunities,
whereas lower β represents a flow that emphasizes importance of delay over possible
cost. Finally, we model the cost of using the cellular network as a linear coefficient
pc. Thus, every flow i has to pay a cost of pcyi[t] every time slot, in order to transmit
at rate yi[t] on the cellular network. This cost corresponds to a cellular operator that
meters usage of the cellular network. Furthermore, cellular cost helps as a factor
discouraging delay tolerant applications from using the cellular interface if they can
afford to wait and transmit on the secondary interface. This encapsulates the idea
of delayed offloading. However, while most existing literature of delayed offloading
considers inelastic traffic that should be transmitted in full, our model considers
elastic traffic that balances the trade-off between throughput and delay by using β
as a control knob.
5.3 Problem Formulation
We formulate the Finite-Horizon Discounted-Rate Utility Maximization (DRUM)
problem. For a horizon of T slots and N flows, each having its own discount fac-
tor β(i) we can write the problem as:
P1 : maxx[1],y[1],...,x[T ],y[T ]
T∑t=1
N∑i=1
wiU(R(βi)i [t])− pcyi[t] (5.3.1)
subject to (5.3.2)
N∑i=1
xi[t] ≤ c[t], t = 1, . . . , T (5.3.3)
N∑i=1
yi[t] ≤ 1, t = 1, . . . , T (5.3.4)
xi[t], yi[t] ≥ 0, i = 1, . . . , N, and t = 1, . . . , T, (5.3.5)
124

where the bold notation in x[t],y[t] refers to the allocation of all flows (x1[t], x2[t], . . . , xN [t])
and (y1[t], y2[t], . . . , yN [t]) at time t, respectively. Also, wi is a positive weight and
U() is a suitable concave non-decreasing utility function that aims to achieve fairness
between different flows. Examples of utility functions that provide fairness are the α-
fairness functions of the form U(r) =r(1−α)
1− αthat were introduced in [102]. However,
the difference between that formulation and the standard Network Utility Maximiza-
tion (NUM) framework is that the utility function is taken over a β-discounted rate
that puts a weight β on the history of rate allocated. Every flow i is parameterized
with the pair (wi, β(i)) where wi indicates a higher priority in rate allocation and a
lower βi indicates higher sensitivity to delay. The constraint (5.3.3) ensures that the
sum of the rates allocated on the secondary interface does not exceed the instanta-
neous capacity c[t]. Similarly, the constraint (5.3.4) ensures that the sum of rates
allocated on the cellular interface does not exceed the constant normalized cellular
capacity. The problem P1 is a standard constrained convex optimization problem
with 2NT decision variables (rate per flow per time-slot per interface) and 2T +2NT
constraints. Solving this problem requires non-causal knowledge of secondary ca-
pacities (c[1], c[2], . . . , c[T ]). In the next section, we provide two predictive online
solutions that depend on the knowledge of capacities up to a window w and have
theoretical bounds on worst-case performance as well as good practical performance.
5.4 Online Predictive Rate Allocation
5.4.1 Receding Horizon Control
RHC, also referred to in control literature as Model Predictive Control (MPC) [103,
104], is a feedback control technique that provides an online solution to the original
125

problem by approximating the original problem as a sequence of open-loop optimiza-
tion problems over the prediction horizon [t, t+w]. After solving the open-loop prob-
lem and obtaining the solution, the algorithm implements the first step of the solution
only, i.e., (x[t],y[t]), updates the state, finds the new prediction at time t+w+1 and
repeats the procedure at time t + 1. We now give a detailed description of the algo-
rithm. System State: Since the optimization is over the β-discounted rate, which
is a function of the rates allocated in the past, the system has to keep a “memory”
of past allocations. Since the equivalent rates in (5.2.2) are updated as a discounted
sum, it is sufficient to save a vector R[t−1] = (R(β1)1 [t−1], R
(β2)2 [t−1], . . . , R
(βN )N [t−1])
of the equivalent rates at time t − 1. Define the control input θi[t] = (xi[t], yi[t])T
where ( )T is the vector transpose notation. It can be shown from (5.2.2), that the
β-discounted rate of flow i is updated over time as follows:
R(βi)i [t] = βiR
(βi)i [t− 1]
(1− βt−1
i (1− βi)1− βti
)+
1− βi1− βti
1T θi[t]
≈ βiR(βi)i [t− 1] + (1− βi)1T θi[t] (5.4.1)
To obtain the online rate allocation, we first solve the following open-loop RHC
optimization problem. Let A = [1, 0]T and B = [0, 1]T . Also define the vector
Θ(R[t− 1]) = (θ[t|R[t− 1]], θ[t+ 1|R[t− 1]], . . . , θ[t+w|R[t− 1]]) as the 2× (w+ 1)
vector that solves the following open-loop optimization problem:
P2: maxθ[t],...,θ[t+w]
t+w∑τ=t
N∑i=1
wiU(R(βi)i [τ ])− pcBT θi[τ ] (5.4.2)
subject to
R(βi)i [τ ] = βiR
(βi)i [τ − 1] + (1− βi)1T θi[τ ], (5.4.3)
τ = t, t+ 1, . . . , t+ w, and i = 1, . . . , N
126

N∑i=1
AT θi[τ ] ≤ c[τ ], τ = t, t+ 1, . . . , t+ w (5.4.4)
N∑i=1
BT θi[τ ] ≤ 1, τ = t, t+ 1, . . . , t+ w (5.4.5)
θi[τ ] ≥ 0, i = 1, . . . .N, and τ = t, t+ 1, . . . , t+ w (5.4.6)
After solving the RHC optimization problem, the scheduler implements only the first
step of the solution, i.e.,
θRHC[t] = Θ(R[t− 1])[t] (5.4.7)
The state R[t] is then updated according to (5.4.1), the new prediction c[t + w + 1]
is obtained from the predictor, and the procedure is repeated to obtain the updated
solution.
5.4.2 Average Fixed Horizon control (AFHC)
The AFHC algorithm was proposed in [105] and analyzed in [106] for online convex
optimization (where the objective function is unknown every time slot) with switching
costs. AFHC is more amenable to theoretical analysis and sometimes outperforms
RHC. Similar to RHC, AFHC approximates the offline problem with a series of open-
loop optimization problems. However unlike RHC, AFHC does not only implement
the first step of the solution and discards the rest of the solution. Instead, AFHC
saves all solutions from all open-loop approximations and averages them out. Thus,
both algorithms have the same time complexity. However, AFHC needs 2N space
whereas RHC only needs N space. We next give the algorithm formally.
First, we define the Fixed Horizon Control parametrized by k where k = 0, 1, . . . , w.
FHC(k) only solves the problem at time slots Ωk = z : z ≡ kmod(w+1), i.e., FHC(k)
127

solves the problem P2 every w+1 slots at times k, k+(w+1), k+2(w+1), . . . etc., and
implements the solutions for the entire horizon. Let θ(k)[t] be the solution obtained
by FHC(k) for time t, we have
[θ(k)[t], θ(k)[t+ 1], . . . , θ(k)[t+ w]] = Θ(R[t− 1]), ∀t ∈ Ωk (5.4.8)
For example FHC(0) will implement the solution by solving the problem at 0, w+
1, 2(w + 1), . . . etc., FHC(1) will implement the solution by solving the problem at
1, 1 + (w + 1), 1 + 2(w + 1), . . . etc., and so on up to k = w. To complete the AFHC
solution, at time slot t ∈ Ωk, the scheduler will first solve FHC(k) to obtain the
allocation [θ(k)[t], θ(k)[t+ 1], . . . , θ(k)[t+ w]] and then sets
θi,AFHC[t] =
∑wk=0 θ
(k)i [t]
w + 1, ∀i = 1, . . . , N (5.4.9)
5.5 Competitive Ratio of AFHC
A natural question to ask is how well does the proposed algorithm perform under dif-
ferent conditions: number of flows, (wi, βi) of each flow, length of prediction window,
etc. While it is known that deriving competitive ratios for general online convex op-
timization problems is hard [106], under some mild conditions, we are able to derive
a lower bound on the competitive ratio (the competitive ratio here is w.r.t to reward
rather than cost, so we are looking for lower bounds to the ratio between rewards
achieved by the online algorithm and offline algorithm, respectively).
Definition 5.5.1. (Competitive Ratio): An algorithm ALG is said to be γ-competitive
if
infc[1],c[2],...,c[T ]
Reward(ALG)
Reward(OPT)≥ γ (5.5.1)
128

where Reward( ) is the function that computes the objective function according to
(5.3.1), and OPT is the offline prescient solution of P1.
Note that the definition we use here is slightly different from the definition used in
most online algorithms’ literature. Conventionally, an algorithm is called c-competitive
if Reward(ALG) ≥ 1
cReward(OPT). We choose to use γ =
1
cin Definition 1, instead
of the conventional c-competitive notation, since it makes our results more intuitive
and understandable.
Theorem 5.5.1. Given N flows, all with weights wi = 1 and β ∈ [0, 1). Under the
following assumptions:
A1 U(0) = 0 and U(r)− pcr > 0 for all r > 0.
A2 The (sub)-gradient of U( ) is uniformly bounded by G over the feasible domain.
A3 c[t] ≤ cmax,∀t ∈ 1, 2, . . . , T , we take the cellular capacity to be y[t] = yc,∀t
(instead of the normalized value 1 in the RHS of (5.3.4) to derive a more general
result.)
then, under AFHC:
Competitive Ratio ≥ 1− 1
w + 1
Gβmax
D(1− βmax)(5.5.2)
where
D = min
(U(yc)− pcyc
yc,U(yc + cmax)− pcyc
yc + cmax
)(5.5.3)
Before proving the theorem, we discuss the implications of this result. First, it is
clear that the bound improves with increased prediction window w. This is expected
since better foresight enables the scheduler to make better instantaneous decisions.
129

Second, the factor1
1− βimplies that an increase in β worsens the bound. This is
also expected since a delay tolerant flow has more flexibility on when it should be
allocated optimally. Thus, prediction window discards important information about
future opportunities to defer delay tolerant transmissions. Since the competitive ratio
bound is valid for all sequences of secondary capacities (c[1], c[2], . . . , c[T ]), even cases
where an adversary can observe the system state and controls, then generate future
secondary capacities accordingly. The bound is expectedly loose for practical cases,
and the empirical competitive ratio does not increase sharply with β as suggested by
the bound. In order to prove Theorem 5.5.1, three Lemmas are needed. The proof
generally follows the same approach as [105] by bounding the difference between
the reward of OPT and the reward of FHC(k) over a short horizon, and then using
Jensen Inequality to bound the competitive ratio. The difference between our proof
and [105] is that: 1. The formulation in [105] minimizes a convex function of the
current control action only plus a switching cost that penalizes difference between
current and previous control actions, whereas in our formulation, the reward is a
function of a state that depends on both control action and previous state. Thus, we
need extra steps of using first-order conditions to bound difference between rewards
(Lemma 5.5.2). 2. The way we define the Competitive Ratio in (5.5.1) requires
finding a linear underestimator of the reward function (Lemma 5.5.1).
Lemma 5.5.1. Given a vector of β-discounted rate vectors (R[1],R[2], . . . ,R[T ]),
the total reward achieved by this vector according to (5.3.1) satisfies the following
linear bound
T∑t=1
N∑i=1
U(R(βi)i [t])− pcyi[t] ≥
T∑t=1
N∑i=1
DR(βi)i [t] (5.5.4)
where D is given by (5.5.3).
130

Proof. See Appendix D.1
The next Lemma provides a bound on the difference between the reward achieved
by the offline solution and the reward achieved by the approximation P2. We first
write the reward achieved in the interval [t, t + w] with a control decision vector
(θ[t], θ[t+ 1], . . . , θ[t+ w]) as a function of the initial state at time t− 1 as follows:
g(R[t− 1]; θ[t], . . . , θ[t+ w]) =t+w∑τ=t
N∑i=1
U(R(βi)i [τ ])− pcBT θi[τ ]
=N∑i=1
t+w∑τ=t
U(βτ−t+1R(βi)i [t− 1] +
τ∑η=t
βη−t(1− β)1T θ[η])
−pcN∑i=1
t+w∑τ=t
BT θn[τ ]. (5.5.5)
Lemma 5.5.2. Denote the offline solution (OPT) of problem P1 and the resulting
states as (θ∗[1], θ∗[2], . . . , θ∗[T ]) and (R∗[1],R∗[2], . . . ,R∗[T ]), respectively. Suppose
we were running the FHC(k) algorithm from time 0 up to time t ∈ Ωk. Let the
system state at time t − 1 be R(k)[t − 1] and denote the online solution at time
t of problem P2 given R(k)[t − 1] as Θ(k)(R(k)[t − 1]) = (θ(k)[t|R(k)[t − 1]], θ(k)[t +
1|R(k)[t−1]], . . . , θ(k)[t+w|R(k)[t−1]]). Under assumptions A1-A3 of Theorem 5.5.1,
the following inequality holds:
g(R(k)[t− 1]; Θ(k)(R(k)[t− 1])) ≥ g(R∗[t− 1]; θ∗[t], . . . , θ∗[t+ w])
−N∑i=1
Gβi1− βi
(R(βi)∗
i [t − 1] − R(βi)(k)
i [t − 1]) (5.5.6)
where G is the uniform bound of the (sub)-gradient of the function U( ) over the
domain as stated by A2 in Theorem 5.5.1.
131

c[t] = 0 c[t] = 2 c[t] = 4
0.15
0.85
0.25
0.6
0.15 0.25
0.75
Figure 5.2: Secondary Interface capacity process
Proof. See Appendix D.2
The next Lemma bounds the total reward achieved by the FHC(k) algorithm as a
function of the total reward achieved by OPT. With some abuse of the notation, we
denote the reward gained over the horizon of AFHC, FHC(k), and OPT as g1:T (θAFHC),
g1:T (θ(k)), and g1:T (θ∗), respectively.
Lemma 5.5.3. Given any k = 0, 1, . . . , w, the following holds
g1:T (θ(k)) ≥ g1:T (θ∗)
−∑τ∈Ωk
N∑i=1
Gβi1− βi
(R(βi)∗
i [t − 1] − R(βi)(k)
i [t − 1]) (5.5.7)
The proof of this Lemma is straight-forward by summing the expression in (5.5.6)
over the set Ωk.
Proof of Theorem 5.5.1. See Appendix D.3
5.6 Numerical Results
To validate our formulation, we first assume that the secondary capacity generation
process follows the Markov chain in Fig. 5.2. We simulate the case when two flows
132

0 50 100 150 200 250 300 350 400 450 500
0
1
2
3
4
0 50 100 150 200 250 300 350 400 450 500
0
0.2
0.4
0.6
0.8
1
Figure 5.3: Optimal Rate Allocations of heterogeneous flows, U(r) = log(1 + r), pc =0.75.
exist, a delay sensitive flow with β = 0 and a delay tolerant flow with β = 0.9. Fig.
5.3 shows the allocation of OPT when the utility function U(r) = log(1 + r) and
the cellular price, pc = 0.75. We note the following: The delay tolerant flow cellular
usage is almost non-existent (less than 1% of the total flow rate) whereas the delay
sensitive flow uses the cellular interface whenever the secondary connectivity is weak
or absent. In Fig. 5.3, the delay sensitive flow transmits 15% of its traffic over the
cellular interface. The delay tolerant flow transmits in bursts whenever a secondary
network is available. Furthermore, the delay tolerant flow tends to increase its rate
whenever it predicts a period with no secondary connectivity at the expense of the
delay sensitive flow. The burstiness effect can be captured by noticing the following:
the means of total rate allocated to the delay-tolerant and the delay sensitive flows
are 1.01 and 0.87 respectively, whereas the variance of the total rate allocated to the
delay-tolerant flow is 1.11, more than 4 times that of the delay sensitive flow 0.27.
133

0 10 20 30 40
0.5
0.6
0.7
0.8
0.9
1
Figure 5.4: Competitive Ratios of RHC and AFHC compared to the function f(w) =
1− 1
w + 1. U(r) =
r(1−α)
1− α, pc = 0.55, β = 0, 0.7, 0.95, α = 0.5.
0.4 0.5 0.6 0.7 0.8 0.9 1
0.75
0.8
0.85
0.9
0.95
1
Figure 5.5: Competitive Ratios of RHC and AFHC as a function of βmax. U(r) =r(1−α)
1− α, pc = 0.55, β = 0, 0.3, βmax, α = 0.5, w = 3.
.
134

0.4 0.5 0.6 0.7 0.8 0.9 11900
2000
2100
2200
2300
2400
2500
2600
Figure 5.6: Reward obtained by OPT, RHC and AFHC as a function of βmax. U(r) =r(1−α)
1− α, pc = 0.55, β = 0, 0.3, βmax, α = 0.5, w = 3.
.
In Fig. 5.4, we simulate three flows with β values equal to 0, 0.7, 0.95, repre-
senting different delay sensitivities for a horizon T = 500. The secondary capacity
evolves as the Markov Chain shown in Fig. 5.2. We take the utility function as the
α-fairness function with α = 0.5. We set pc to be equal to 0.55. We plot the empirical
competitive ratio as a function of w. We see that the RHC performance is slightly
superior to AFHC for all values of prediction window w. Naturally, we see that the
competitive ratio increases with the increase of w. Interestingly, the empirical rate of
increase is very similar to the growth of the function 1− 1
w + 1, which suggests that
our theoretical lower bound matches the empirical results order-wise up to a constant
factor. However our findings confirm that the CR converges to 1 as w increases. It is
worth noting that the α-fairness functions do not satisfy the assumption A2 in Theo-
rem 1, since the gradient is unbounded. However, this can be fixed by modifying the
utility functions to be U(r) =(ε+ r)(1−α)
(1− α)− ε
1− α. This will cause the gradient to be
bounded by ε. A small ε approximates α-fairness functions efficiently at the expense
135

of a loose lower bound on the competitive ratio. Thus, to get a fairly tight bound
we have to either use a larger ε or refine the bound in Lemma 2 by using special
properties of the utility function such as strong concavity.
In Fig. 5.5, we use the same setup as the previous case to simulate the empir-
ical performance of three flows with parameters 0, 0.3, βmax, where βmax is varied
between 0.4 and 0.99. We use a small prediction window with w = 3. Our lower
bound have suggested that there might be some performance degradation of online
algorithms as flows become more delay tolerant. However, while our lower bound
suggests very fast degradation in performance (as1
1− βmax
), simulations show that
degradation happens at a much slower rate, and that a small window, w = 3 achieves
over 85% of the utility of OPT, even as βmax is increased to 0.95. In Fig. 5.6, we
plot the objective function of OPT, AFHC, and RHC under the same setup. Fig. 5.6
shows that while Reward(OPT) is guaranteed to be non-decreasing with increased
βmax, since more delay tolerance enables flows to defer transmissions until favorable
conditions appear. On the other hand, Reward(AFHC) and Reward(RHC) are not
guaranteed to increase with βmax.
In Fig. 5.7, we compare the lower bound derived from Theorem 1 to the empirical
lower bound. For this figure we assume that c[t] is an i.i.d random variable that takes
a value uniformly distributed between 0 and 5. We use a modified α-fairness function
as our utility value function. In particular, we use U(r) =(1 + r)(1−α)
1− α− 1
1− α, which
is concave increasing and satisfies assumptions A1-A3. The system for this figure has
3 flows with β = 0.2, 0.4, 0.6. We can see that the lower bound is loose. This is
due to two reasons. First, the lower bound covers all possible sequences of secondary
capacities including adversarial cases, where an adversary can view the scheduler’s
decision and generate future capacities to minimize the scheduler’s reward. In Fig.
5.7, the capacities are sampled as an i.i.d sequence, which naturally performs much
136

0 5 10 15
0
0.2
0.4
0.6
0.8
1
Figure 5.7: Comparison between theoretical lower bound and simulated competitive
ratio, β = 0.2, 0.4, 0.6, U(r) =(1 + r)(1−α)
1− α− 1
1− α, α = 0.5.
better than the adversarial worst-case. Second, The approximation in Lemma 1 is
very coarse since it must apply to all possible utility functions. We can see that up to
w = 2, there is no theoretical guarantee for performance whereas practically, AFHC
achieves over 90% of the utility achieved by OPT. However, the bound gets tighter
as the prediction window increases.
5.7 Conclusion
In this chapter, we have studied the problem of application rate allocation over dif-
ferent radio interfaces. We have addressed the issue of different delay requirements
of applications using the discounted-rate framework. We have proposed two online
predictive algorithms to handle the intermittence of secondary interface(s). We have
shown that for the AFHC algorithm, the competitive ratio is 1 − Ω(1
w + 1) when
using a prediction window of length w. We have tested our algorithms for a number
137

of practical scenarios using different utility functions. The empirical performance of
the proposed online algorithms are consistently near-optimal using small prediction
windows. We intend to extend our work in two directions: 1. We plan to consider
systems with arrivals, whereby flows of different classes arrive randomly. The flows
are then served at a rate determined by the proposed algorithms and exit the system
once they receive a total rate equal to their random size. The interesting questions
include a characterization of the stable region of the proposed algorithms (in the sense
of [107]), as well as the effect of (wi, βi) on the mean flow response time. 2. We plan
on testing our algorithm in realistic scenarios using real world traces of user mobility
and mobile flows that belong to real applications, which will enable us to compare
the performance of the proposed algorithms to other solutions in the literature.
138

CHAPTER 6
CONCLUSION
In this dissertation, we have studied the design of algorithms to enable low latency
communication in wireless networks. We have identified the fundamental properties
that make low latency wireless communication a challenge, and how network algo-
rithms and protocols across the stack could be designed to enable it. Furthermore,
we have shown how a wide set of theoretical tools from optimization and queuing
theory can be applied to analyze the performance analysis from a delay standpoint.
Our research results enable a deeper understanding of how reliable high-throughput
low-latency wireless communication needed to support many 5G applications can be
realized using delay-oriented algorithm design across the network stack.
First, we looked at the fundamental problem of cellular downlink resource allo-
cation for real-time traffic. Specifically, we were interested in bandwidth-intensive
latency-critical traffic with hard deadlines such as Virtual/Augmented Reality and
Cloud Gaming. We were able to show that deadline-oblivious resource allocation
schemes can be very efficient by approaching the problem as an online convex op-
timization problem and utilizing primal-dual analysis tools from online algorithms.
139

Furthermore, we developed a modified version of our deadline-oblivious resource al-
location algorithm to account for long-term fairness and were able to show via com-
bining primal-dual analysis with Lyapunov stochastic control tools that deadline-
oblivious schedulers can be competitive while satisfying long-term performance guar-
antees. This result is important as it shows that efficient real-time schedulers need
not know the individual jobs’ deadlines which drastically reduces their complexity
compared to schedulers that track individual jobs’ deadlines. We expect this result
to guide in the MAC layer protocol design of 5G bandwidth-intensive traffic as we
have outlined the theoretical guidelines in designing low-complexity schedulers along
with methods to assess their performance.
Second, we studied the problem of predictive caching in wireless networks. As
storage and networking become increasingly intertwined in datacenters and content
delivery networks, there is a similar trend in wireless networks of relying on edge
caches for content dissemination to mobile users. We have proposed pushing the
problem of edge caching one step further by caching popular content at end users’
mobile devices, utilizing the wireless channel broadcast property. To model the small
end users’ caches, we have the developed the notion of “diminishing caches” to ana-
lyze the system in heavy traffic as cache size approaches zero in the limit. We have
studied the delay effect of this wireless “predictive caching” system and have shown
that intelligent predictive caching fundamentally alters the delay-throughput scaling
in the heavy traffic translating to several fold practical savings in delay as the wire-
less link approaches full-utilization. To this end, we applied the heavy-traffic tools
from queuing theory to characterize the fundamental delay-memory trade-off in the
system highlighting the critical memory dimensioning with throughput increase to
realize multicasting gains in delay savings. This result motivates the practical im-
plementation of predictive caching which can utilize existing LTE/5G multicasting
140

protocols to reduce delay, and further lays a theoretical foundation for analyzing the
interplay between delay and storage as caching becomes an integral part of emerging
wireless systems.
Third, we addressed the classical open problem of distributed wireless scheduling.
Building on recent developments [13] [14] that have shown that distributed CSMA
algorithms can be made throughput optimal but were shown to suffer from poor de-
lay performance due to the CSMA starvation problem. We proposed a Node-Based
CSMA (NB-CSMA) algorithm that exploits inter-dependencies between links and the
presence of hotspots in large wireless networks. The underlying algorithm design built
on ideas from statistical physics Glauber dynamics with “Block Updates”, this en-
abled us to preserve the throughput optimality of the algorithm. We have shown that
NB-CSMA has superior delay performance for fixed networks by analyzing the second
order properties of the underlying scheduling Markov chains. We have also shown
that NB-CSMA further expands the polynomial delay fraction (the capacity-region
fraction where delay scales polynomially with the size of the network) of the compa-
rable link-based CSMA algorithms in the literature. We also studied the special case
of Collocated networks and presented a new simple method to obtain the expected
per-link starvation time. We have utilized that to further highlight the benefits of
NB-CSMA and the network topology effects. To empirically assess NB-CSMA, we
built a simulator that can assess the performance of any scheduling algorithm for
any network topology. We have shown that NB-CSMA provides around 50% delay
reduction consistently over comparable link-based algorithms in the literature. This
work can guide the design of layer 2 protocols in large wireless ad-hoc networks,
and illustrates the benefits of designing node-based layer 2 scheduling protocols while
maintaining the fully distributed properties of CSMA.
141

Finally, we studied the problem of managing different cellular interfaces in a mo-
bile device. This problem is especially relevant as Heterogeneous Networks (HetNets)
are becoming an integral part of the 5G architecture. As mobile devices add more Ra-
dio Access Technology (RAT) capabilities, how to manage interfaces becomes critical
to realizing the full potential of the emerging technologies such as mmWave. In mobile
devices, there are usually two connection modes: A ubiquitous “expensive” cellular
connection (in terms of congestion to the cellular network, cost, or energy), and an
intermittent cheap connection such WiFi, Dynamic Spectrum Access, and mmWave.
A scheduler allocates those two types of resources to applications with different QoS
requirements. Finally, some works have shown that wireless link can be reliably pre-
dicted for a few minutes ahead from mobility information [87]. We modelled the
problem of allocating wireless resources over different RATs to applications as an on-
line convex optimization problem. We leveraged the prediction capability to develop
two low complexity allocation algorithms to proactively allocate wireless resources
to applications. We have shown that our allocation schemes appropriately serve ap-
plications according to their QoS preference maintaining a consistent throughput for
delay-stringent applications while taking advantage of cheap connections for delay
tolerant ones by transmitting into bursts. We also analyzed the effect of prediction
quality on allocation efficiency quantified by the competitive ratio, showing that the
competitive ratio shrinks as O( 1
w
)with the prediction window length, w. The im-
plications of this work are two-fold: first, we give a simple client-base predictive rate
allocation scheme for different applications over radio interfaces, second: we quantify
the benefit of link-prediction using online convex optimization tools. We expect this
to aid in designing and assessing the benefits of predictive resource allocation schemes
in other wireless networking domains.
The investigations in this dissertation show how Online Convex Optimization
142

could be used to assess wireless resource allocation algorithms. Traditionally, convex
optimization has been used for resource allocation in networks [108] [109] [110] to
optimize long-term averages. However, traditional convex optimization techniques
are not suited to real-time traffic with deadlines as in Chapter 2 or non-stochastic
models such as the mobility model in Chapter 5. This dissertation demonstrates how
these cases can be approached using an Online Convex Optimization framework. Fur-
thermore, it is shown how Primal-Dual and Predictive algorithms can be designed to
obtain performance that is constant-competitive compared to the offline optimal.
We also show in Chapter 2 how to combine Online Convex Optimization tools with
traditional Stochastic Control tools to obtain powerful algorithms for real-time traffic
satisfying long-term constraints.
We have also provided a novel method to analyze caching from a network delay
standpoint. Caching networks are notoriously hard to analyze due to non-linearities
in the system and the curse of dimensionality. Thus, the effect of caching on network
delay has been mostly empirically studied without proper theoretical understanding.
To this end, we have introduced a novel application of the Heavy-Traffic framework,
used to analyze delay scaling when the network approaches the full-load, that is
suited to analyze caching systems. We have introduced the “zero caches” notion to
capture the practical limitations of end-user cache sizes. We have leveraged those
two developments to present a strong delay scaling result for caching systems. Thus,
this investigation reveals the applicability of Heavy-traffic tools for analyzing delay
aspects of caching systems, which could be leveraged to understand more caching
systems from a theoretical delay standpoint.
Regarding the main focus in this dissertation, there are still many interesting
open problems to fully realize reliable low-latency wireless communication in the next
generation of networks. One line of work that could be extended in this dissertation is
143

a better understanding of the interplay of delay and caching in wireless networks. As
networking and storage become more coupled at the edge, new frameworks are needed
to approach networking and caching jointly as one problem at the wireless edge.
For instance, cache replacement policies are well understood from a miss-probability
standpoint but combining the costs of delivery of predictive or opportunistic caching
along with networking metrics such as throughput and delay, open up new spaces
to better understand cache policies from a networking standpoint. Furthermore,
building on our result that multicasting and caching can still reduce delay open the
door to designing complex multicast algorithms that target users with personalized
content, instead of broadcasting globally popular content to every user in the cell.
Thus, combining recommender systems, caching, and multicasting could aid us in
developing new network/link layers that intelligently disseminate content in novel
ways that drastically reduce delay. There is a need for such a holistic approach in
both 5G and Information Centric Networks.
Another interesting research direction is the control of real-time traffic in cellular
downlinks. We have shown that deadline-oblivious algorithms can indeed be very
efficient in the “best effort” model, where a concave reward is obtained according
to the amount of traffic served from every flow. While this model is accurate in
applications such as Virtual Reality and Cloud gaming, a 5G downlink has to allocate
resources to other applications that do not necessarily fit this model, for example,
some applications are only rewarded if they are fully served, thus their reward function
is a step function not a concave smooth function. Modifications would be needed to
accommodate that type of traffic. It is also worth investigating whether premeption
might be the right solution for this type of traffic. Other real-time cellular traffic
includes Ultra Low Latency Reliable Communication (URLLC) traffic that requires
deterministic delay along with very high reliability. In that case, the scheduler needs
144

to take into account coding and retransmissions along with very stringent reliability
constraints. This also implies that the functionality of the scheduler needs to be
significantly expanded and new algorithms need to be developed to accommodate
that large variety of low-latency communication.
Finally, low-latency communication would further require developments across
all the network layer stack, starting from physical layer new technologies such as
mmWave and massive MIMO, to radio layer developments such as HetNets addressed
in Chapter 5, to upper layers developments such as caching capabilities addressed in
Chapter 3. Novel holistic approaches are still needed to fully integrate the benefits
offered by the developments across each layer to further enhance wireless networks
capability in supporting low latency communication.
145

APPENDIX A: PROOFS FOR CHAPTER 2
A.1 Proof of Lemma 2.4.2
We prove the Lemma by induction. The base case is t = 0, where βtj ≥ 0 is trivially
satisfied. Suppose the claim is true for t−1, then substituting in the update equation
in Algorithm 1, line 5, we obtain the following:
βtj =∂f(∑t
s=1Asjxsj)
∂f(∑t−1
s=1Asjxsj)
(1 +
AtjxtjYj
)βt−1j
+∂f(∑t
s=1Asjxsj)Atjxtj(C − 1)Yj
(A.1.1)
(a)
≥ ∂f(∑t
s=1Asjxsj)
C − 1
(C
∑t−1s=0 Asjxsj
Yj(1 +
AtjxtjYj
)− 1
)(A.1.2)
(b)
≥ ∂f(∑t
s=1Asjxsj)
C − 1
(C
∑ts=0 Asjxsj
Yj − 1
), (A.1.3)
where (a) is from the induction hypothesis and (b) follows the inequalitylog(1 + y)
y≤
log(1 + x)
xwhen y ≥ x, and we have chosen Fmax ≥
AtjxtjYj
, ∀j, ∀t.
A.2 Proof of Lemma 2.4.3
eqrefdual1 is straightforward, since by line 4 in the algorithm, α ≥ 0. (2.4.3) can be
shown by noticing that for any job j, βtj is a non-decreasing geometric series that
starts from 0, thus, βtj ≥ 0, ∀j ∀t. (2.4.4) is also guaranteed by the choice of xt by line
4 in the algorithm. (2.4.5) is a consequence of Lemma 2.4.1 and Lemma 2.4.2. Given
146

that a job is completely served, i.e.,t∑
s=1
Atjxtj ≥ Yj, Lemma 2.4.2 guarantees it’s dual
variable βtj ≥ ∂(f(t∑
s=1
Atjxtj)). Lemma 2.4.1 tells us that αtj = ∂f(t∑
s=1
Atjxtj) ≤ βtj.
Since DO tries to maximize the inner product < α − β,t−1∑s=1
Asxs + Atx >, having
αtj ≤ βtj implies that xtj = 0 is optimal. It follows that when a job is completely
served, no resources are allocated to that job from thereon. There can only be one
iteration where a job can be served over its size, bounding that excess resources by
FmaxYj concludes the Lemma.
A.3 Proof of Lemma 2.4.5
For any active job j, we can bound each element in the LHS inner product as follows:
(βt − βt−1)TY(a)
≤βt−1jYj
(∂f(∑t
s=1 Asjxsj)
∂f(∑t−1
s=1Asjxs)
(1 +
AtjxtjYj
)− 1
)+∂f(∑t
s=1 Asjxsj)Atjxtj(C − 1)
(A.3.1)
(b)
≤ ∂f(t∑
s=1
Asjxsj)Atjxtj
(βt−1j
∂f(∑t−1
s=1Asjxsj)+
1
C − 1
)(A.3.2)
(c)
≤ 4Pj(1 +1
C − 1) (A.3.3)
Here (a) is due to the update equation of β. (b) is obtained by noticing that
∂f(t∑
s=1
Asxs) ≤ ∂f(t−1∑s=1
Asxs) by concavity. (c) is because βt−1j ≤ ∂f(t−1∑s=1
Asxs) if
xtj > 0 (since this implies that αt−1j > βt−1j).
147

A.4 Proof of Theorem 2.4.1
The first two terms in (2.4.6) can be bounded as follows
D′ =T∑t=1
σt(ATt αT − βT ) + βTT Y (A.4.1)
=T∑t=1
< αT − βT ,t∑
s=1
Asxs > +βTT Y (A.4.2)
(a)
≤T∑t=1
< αT ,
t∑s=1
Asxs > +βTT Y (A.4.3)
(b)
≤T∑t=1
< αt,t∑
s=1
Asxs > +βTT Y (A.4.4)
(c)=
T∑t=1
< αt,t∑
s=1
Asxs > +T∑t=1
(βt − βt−1)TY (A.4.5)
(d)
≤T∑t=1
4P (2 +1
C − 1) = P (2 +
1
C − 1) (A.4.6)
where (a) is because βT ≥ 0, so dropping the term < −βT,t∑
s=1
Asxs > can only
increase the objective. (b) is because αt ≥ αT , by Lemma 2.4.1 and the concavity of
the function, thus decreasing gradients. (c) is true due to telescoping and the fact that
β0 = 0. (d) holds by substituting the bounds from Lemmas 2.4.4 and 2.4.5. Finally
by (2.4.6), we have D = D′ −J∑j=1
f ∗j (αTj). We can bound that extra −J∑j=1
f ∗j (αTj)
term on the RHS by P utilizing Lemma 2.4.6. Adding that bound to the bound on
D′ concludes the proof.
A.5 Proof of Theorem 2.5.2
Let the reward achieved and the amount of traffic served by the D look-ahead be
denoted by P ′[k] and b′[k] as in (2.5.7) and (2.5.8), respectively. Similarly OPT
148

achieves P ∗[k] and b∗[k]. By the maximization in (2.5.6a), we have:
N∑n=1
Qn[k](δn − b′n[k])− V P ′[k] ≤N∑n=1
Qn[k](δn − b∗n[k])− V P ∗[k] (A.5.1)
for any frame instance, thus, the inequality holds for the conditional expectation
given the queue lengths equal to Q. Noting the definition of the drift in (2.5.9), we
can bound E(4Θ′(Q))− V E(P ′[k]|Q) as follows:
≤ E(4Θ∗(Q))− V E(P ∗[k]|Q) (A.5.2)
(a)
≤ B +N∑n=1
Qn[k]E(δn − b∗n[k])− V E(P ∗[k]|Q) (A.5.3)
(b)
≤ B − V E(P ∗[k]|Q) (A.5.4)
where (a) is by the bound in (2.5.9), and (b) is because the optimal stationary solution
satisfies the constraint in expectation independent of Q. Taking the expectation over
Q and taking the time average over all the frames, we can use telescoping sums to
arrive at the key equation
L(Q[k])− L(Q[0])− V
K
K∑k=1
E(P ′[k]) ≤ B − V P ∗ (A.5.5)
Noting that L(Q[k]) is non-negative, initializing L(Q[0]) to 0, and rearranging the
sum gives (2.5.10). To prove (2.5.11), we can follow the same steps by comparing
the solution produced by the D Look-ahead algorithm to another solution that can
strictly satisfy the constraint (2.5.1b), i.e., E(δn − bn[k]) < −ε,∀n, for some ε > 0.
This solution is guaranteed to exist by the assumption in the Theorem statement. We
denote the reward of that solution as P (ε). Repeating the same steps up to (A.5.3)
149

we get the following inequality:
E(4Θ′(Q[k]))− V E(P ′[k]) ≤ B − εN∑n=1
E(Qn[k])− V E(P (ε)[k]|Q) (A.5.6)
Similar to last part, we can take the time average over frames and telescope to get
1
K
K∑k=1
N∑n=1
E(Qn[k]) ≤ B + V E(P (ε))− E(P ′)) + E(L(Q[0])
ε
Bounding P (ε) by the Mfmax(Ymax), the maximum achievable reward over the frame,
and taking the limit gives (2.5.11).
150

APPENDIX B: PROOFS FOR CHAPTER 3
B.1 Proof of Lemma 3.3.1
To prove a lower bound, we follow the resource pooling approach in [47], by first
defining the generic queuing system shown in Fig. 5 that evolves as follows:
φ[t+ 1] = (φ[t] + α[t]− β[t])+ (B.1.1)
= φ[t] + α[t]− β[t] + χ[t] (B.1.2)
where χ[t] is the unused work equal to max(0, β[t] − α[t] − φ[t]). We assume that
both distribution have finite support, i.e., there exists αmax and βmax, such that,
α[t] ≤ αmax, and β[t] ≤ βmax, for all t almost surely. The means and variances of the
arrival and service rates respectively are µα, σ2α and µβ, σ2
β. It was shown in [47] that
in the steady-state, the expected queue length can be lower bounded as follows:
E[φ] ≥ ζ(ε)
2ε−B1 (B.1.3)
[#]ɸ[#]
β[#]
Figure B.1: Generic Resource Pooling queue
151

where ζ(ε) = σ2A + µ2
β + ε2, and B1 =βmax
2. A resource pooling lower bound for
the on-demand system can be obtained from the capacity region face, F , by taking
the arrival to be α[t] = 〈c, A[t]〉, where c = [1√N,
1√N, . . . ,
1√N
], and b =1√N
. We
have used the assumption that the users’ arrivals are homogeneous, as well as the
assumption of a collision channel. Applying the resource pooling lower bound on the
scheduling problem in [47], we obtain the following bound on the steady state queue
lengths:
E[〈c,Q(ε)〉] ≥(σ(ε))2 + ε2
Nε√N
− 1
2√N
(B.1.4)
Multiplying the LHS and RHS by√N gives (3.3.2). Taking ε→ 0 gives (3.3.3).
B.2 Proof of Proposition 3.5.1
We begin the proof by analyzing the Lyapunov drift of the function W (Q). For
convenience we drop the ε superscript notation and the time index t.
E[∆W [Q]] = E[‖Q[t+ 1]‖2 − ‖Q[t]‖2 |Q] (B.2.1)
=E[‖Q + A + B− S‖2 + 2〈Q + A + B− S,U〉+ ‖U‖2 − ‖Q‖2 |Q]
(a)
≤E[‖Q + A + B− S‖2 − ‖Q‖2 |Q](b)
≤ 2E[〈Q,A + B− S〉|Q] + 2N (B.2.2)
where (a) follows form (Qi +Ai +Bi− Si)Ui < 0), and (b) is since Ai, Bi, and Si are
all bounded by 1. We proceed to bound the first term in LHS in (B.2.2) by defining
a hypothetical arrival rate λB =(1− θ)(N − 1)
N1. Denote the expectation of the
service rate as E[Si[t]] = µ. The term can be then bounded as follows:
E[〈Q,A + B− S〉|Q] = E[〈Q,B− λB〉|Q] + E[〈Q, λB + A− S〉|Q]
152

= 〈Q,E[B|Q]〉 − 〈Q, λB〉+ 〈Q, λ∗A + λB − µ〉
(a)
≤ (1− θ)( N∑i=1
Qi −Qmax
)−
N∑i=1
(1− θ)(N − 1)Qi
N− δ(ε, θ)√
N
∥∥Q‖∥∥=−(1− θ)
N
N∑i=1
(Qmax1−Qi)−δ(ε, θ)√N
∥∥Q‖∥∥=−(1− θ)
N‖Qmax1−Q‖1 −
δ(ε, θ)√N
∥∥Q‖∥∥(b)
≤ −(1− θ)N
‖Qmax1−Q‖ − δ(ε, θ)√N
∥∥Q‖∥∥(c)
≤ −(1− θ)N
∥∥∥∥∥1∑N
i=1 Qi
N−Q
∥∥∥∥∥− δ(ε, θ)√N
∥∥Q‖∥∥(d)= −(1− θ)
N‖Q⊥‖ −
δ(ε, θ)√N
∥∥Q‖∥∥ (B.2.3)
where the first term in (a) follows from the fact that the JS(N − 1)Q routing policy
increases the lengths of all queues by 1 except for one queue having the maximal
length whenever N − 1 requests arrive to the router which happens with probability
(1− θ), the second term is by direct computation, and the third term is by the fact
that λ∗A + λB − µ = −[(1− θ)N
− r
∫ τ(θ,ε)
0
pf(p)dp]1 = −δ(ε, θ)N
1. (b) follows from
the fact that for any vector x ∈ RN , ‖x‖1 ≥ ‖x‖, i.e., the L1 norm of any vector is
always greater than or equal the L2 norm. (c) follows from the fact that the average
is less than or equal than the maximum. (d) is by definition of Q⊥. The next step in
the proof is finding a lower bound for E[W‖(Q)|Q]. It is straightforward to show the
following holds:
E[W‖(Q)|Q] =E[〈c,Q+ A+B − S + U〉2 − 〈c,Q〉2|Q]
≥2〈c,Q〉〈c, λ∗ + E[B|Q]− µ〉 − 2E[〈c, S〉〈c, U〉]
≥− 2δ(ε, θ)√N
∥∥Q‖∥∥− 2δ(ε, θ) (B.2.4)
153

We can plug the bounds in (B.2.2), (B.2.3), and (B.2.4) in (3.5.10) to get:
E[∆V⊥(Q)|Q] ≤ −(1− θ)N
+N + 1
‖Q⊥‖(B.2.5)
This inequality establishes the first condition (3.5.6) in Lemma 3.5.2. The second
condition is satisfied by assumption, and thus, applying the conclusion of the Lemma
3.5.2 in (3.5.9) to V⊥(Q) concludes the proof.
154

APPENDIX C: PROOFS FOR CHAPTER 4
C.1 Proof of Theorem 4.5.1
Given the update cliques C, for two feasible schedules (s, s′), define the symmetric
difference as s4s′ = (s \ s′) ∪ (s′ \ s). It is easy to see that for the transition to
happen, the update cliques should fulfill the condition that
s4s′ ⊆ C (C.1.1)
Given any such selection of update cliques, we have for any Ck ∈ C:
1. If ∃!v ∈ Ck∩ (s′ \s) s.t. s4s′∩Ck = v, then P (sCk , s′Ck) is a Type A transition,
where ∃!a means “there exists a unique a”.
2. If ∃!w ∈ Ck∩(s\s′) s.t. s4s′∩Ck = w, then P (sCk , s′Ck) is a Type B transition.
3. If ∃x, y ∈ Ck s.t. x ∈ (s \ s′) and y ∈ (s′ \ s), then P (sCk , s′Ck) is a Type C
transition.
A straight-forward substitution shows that
π(s)P (s, s′|C) = π(s′)P (s′, s|C)) (C.1.2)∑C
P (C)π(s)P (s, s′|C) =∑C
P (C)π(s′)P (s′, s|C)) (C.1.3)
π(s)P (s, s′) = π(s′)P (s′, s) (C.1.4)
155

Thus the stationary distribution satisfies the detailed balance equations.
C.2 Proof of Theorem 4.5.2
When comparing the reversible Markov Chains P, P we first notice that π(s) =
π(s), ∀s ∈ Ω by (4.3.3) and (4.5.3). It is a well-known fact of Markov Chains that
the stationary distribution of a state is the reciprocal of its expected recurrence time,
i.e., for any state (or group of states) the following holds by (4.3.3) and (4.5.3)
1
E(τi)= πB = πB =
1
E(τi)(C.2.1)
Next we define the Dirichlet form ε(f, f) for functions f : Ω→ R [73] by
ε(f, f) =1
2
∑x,y∈Ω
(f(x)− f(y))2π(x)P (x, y) (C.2.2)
The comparison method in [111] provides a method to compare the Dirichlet forms
of two reversible Markov Chains defined on the same state space Ω to obtain linear
inequalities between them when the Markov Chains do not necessarily have a linear
relationship. Define E = (x, y) : P (x, y) > 0. An E-path from x to y is a sequence
Γ = (e1, e2, ..., em) of edges in E such that e1 = (x, x1), e2 = (x1, x2), ...., em =
(xm−1, y) for some states x1, ..., xm−1 ∈ Ω. The length of E-path Γ is denoted by
|Γ|. Suppose that for each (x, y) ∈ E there is an E-path from x to y. We refer to this
path as Γxy. Now, define the congestion ratio as
A = max(z,w)∈E
1
π(z)P (z, w)
∑E(z,w)
|Γxy|π(x)P (x, y) (C.2.3)
156

The comparison theorem then states that
ε(f, f) ≤ Aε(f, f). (C.2.4)
The key to calculating the congestion ratio A is noticing that all the Q-CSMA Markov
chain’s transitions are contained within the NB-CSMA Markov chain’s transitions.
In particular, line 4, line 5, line 11 and line 12 of Algorithm 4 are exactly Q-CSMA
operations. Furthermore, the first and third assumption ensures that the probability
of “refreshing” any link v ∈ V is equal for both Q-CSMA and NB-CSMA, i.e.:
P (x, y) = P (x, y), ∀x, y ∈ Ω s.t. P (x, y) > 0. (C.2.5)
We argue that the extra “transitions” in NB-CSMA Markov chain entails better delay
performance. To apply the comparison theorem, we simply take the E-path Γxy given
any x and y to be (x, y). Furthermore, by the equation in (C.2.5), and the fact that
both chains have the same stationary distribution, the computation of the congestion
ratio in (C.2.3) gives A = 1. By the comparison theorem
ε(f, f) ≤ ε(f, f). (C.2.6)
Define the hitting time HB as (HB is defined similarly)
HB = mint ≥ 0 : σv(t) = 1. (C.2.7)
The hitting time HB is the time needed to reach the subset of states B where link v
is active. We are interested in the expected hitting time: The time needed to reach
subset B starting from a randomly chosen state. By the formula in [67] (Presented
157

originally in [112, Ch.3, Proposition 41]) we have
E(H) = supg 1
ε(g, g): −∞ < g <∞, g(.) = 1 on B and
∑s∈Ω
π(s)g(s) = 0 (C.2.8)
By the equality of stationary distributions of the two chains, and substituting with
the inequality relating their Dirichlet forms (C.2.6) in (C.2.8), we get that
E(H) ≤ E(H), (C.2.9)
Again from [112], we obtain an important relationship relating the recurrence time
and the hitting time
E(τ 2i ) =
2E(H) + 1
πB(C.2.10)
Substituting Inequality (C.2.9) in (C.2.10)
E(τ 2i ) =
2E(H) + 1
πB≤ 2E(H) + 1
πB= E(τ 2
i ) (C.2.11)
C.3 Proof of Theorem 4.5.4
We choose our distance metric function δ(x, y) to be the Hamming distance between
the two schedules x and y, δ(x, y) =∑v∈V
1(xv 6= yv). We take the subset S ⊆ Ω to
be the states that are different at only 1 link , i.e., δ(x, y) = 1. It is straightforward
to check that the subset S satisfies the condition (4.5.15). Line 2 in Algorithm 5 has
the effect of making the Markov chain lazy (probability of staying in any state is at
least1
2). Making the Markov chain lazy makes the task of relating the mixing time
of Q to the mixing time of P easier in Theorem 4.5.5. Also, making Q lazy has the
effect of doubling the mixing time. Therefore we neglect this self transition (Line 2
158

and Line 3 in Algorithm 5) in the analysis and compensate for it by a factor of 2 at
the end of the analysis. We will use the prime symbol to donate states after one slot
has elapsed, for example P (X ′, Y ′|x, y) is the distribution of the schedule at time slot
t + 1 given that the Markov chain was at state (x, y) at time t. The next step is to
calculate E(δ(x′, y′)), that is, the expected distance between the states after one time
slot has elapsed.
Let x and y be two feasible schedules on Ω that agree everywhere except at link
v. Suppose WLOG that xv = 1 and yv = 0. Note that this directly implies that
xw = yw = 0 ∀w ∈ Nv. We run the Markov chain Q for one slot and estimate the
expected distance metric after one time slot δ(x′, y′). There are 5 different cases that
result in different E(δ(x′, y′)). We define the coupling for each of these cases:
1. Kv is chosen to be updated w.p.|Kv|n
for both (X, Y ). Furthermore both
(X, Y ) choose link v to update w.p.1
|Kv|(where x is performing lines 7, 8
of algorithm 5 and y is performing lines 13, 14 of algorithm 5), and P (X ′ =
X, Y ′ = X) =λv
n(1 + λmax), P (X ′ = Y, Y ′ = Y ) =
1
n(1 + λmax). Thus, in this
case δ(x′, y′) = 0 w.p. 1.
2. Kv is chosen to be updated w.p.|Kv|n
for both (X, Y ), also both X and Y
attempt to activate a new link w ∈ Kv that has xz(t) = yz(t) = 0, ∀z ∈ Nw \v.
Define the coupling as follows
P (X ′ = Y ∪ w, Y ′ = Y ∪ w) =1
2n
λw(1 + λmax)
(C.3.1)
P (X ′ = X, Y ′ = Y ∪ w) =1
2n
λw(1 + λmax)
(C.3.2)
where x is performing lines 10, 11 and y is performing lines 14, 15 of Algorithm
5. Since Both contributions are equal we have E(δ(x′, y′)) = 1.
159

3. A link w ∈ Nv \Kv where w ∈ Cw and∑w∈Cw
xw =∑w∈Cw
yw = 0 . Now both x and
y are performing lines 13, 14 of Algorithm refnb:QMC. We have the following
coupling
P (X ′ = X, Y ′ = Y ∪ w) =λw
n(1 + λmax)(C.3.3)
P (X ′ = X, Y ′ = Y ) =1
n(1 + λmax)(C.3.4)
Thus, in the first equation δ(x′, y′) = 2, and in the second equation δ(x′, y′) = 1.
4. A link w ∈ Nv \Kv where w ∈ Cw and∑w∈Cw
xw =∑w∈Cw
yw = 1 . Now both x and
y are performing lines 10, 11 of Algorithm 5. We have the following coupling
P (X ′ = X, Y ′ = Y ∪ w) =λw
2n(1 + λmax)(C.3.5)
P (X ′ = X, Y ′ = Y ) =1
2n(1 + λmax)(C.3.6)
Thus, in the first equation δ(x′, y′) = 3 and the second equation δ(x′, y′) = 1.
5. A link w is chosen to updated where w does not fall in any of the previous four
categories. In that case, the coupling is defined to make both X and Y perform
the same update. In this case, we have δ(x′, y′) = 1.
It is straightforward to see that there are at most |Kv| − 1 links satisfying case 2,
and at most dv − |Kv| + 1 satisfying case 3 and case 4. By collecting the individual
contributions of all cases we obtain the following result
E(δ(x′, y′)− 1) ≤ 1
n
( ∑w∈Nv\Kv
λw1 + λmax
− 1)
(C.3.7)
≤ 1
n
((dv − |Kv|+ 1)
λmax
1 + λmax
− 1)
(C.3.8)
160

Now by taking λmax < minv
1
dv − |Kv|=
1
maxv
(dv − |Kv|), we get the β term in Theo-
rem 4.5.3 as
β = 1− 1
n
(1−maxv
(dv − |Kv|)λmax + 1)
1 + λmax
< 1 (C.3.9)
Directly applying Theorem 3 proves the theorem.
C.4 Proof of Theorem 4.5.6
We follow the approach of [65] to prove the theorem. The first equality states that
the expected per-link queue length is bounded order-wise by the underlying Markov
Chain mixing time. This result was proven in [65] using a Lyapunov analysis.
To prove the second equality, we need to show that the mixing time of the Markov
Chain is bounded order-wise by O(n2 log(n)). We have seen in Theorem 5 that, if the
activation rates are bounded by1
maxv
(dv − |Kv|), then the mixing time bound holds.
The critical part in the proof is showing that there exist a set of activation rates that
satisfies λv <1
dv − |Kv|, ∀v ∈ V that stabilizes the network when ν ∈ γΛ, i.e., those
activation rates cause all the queues to see a service rate no lower than the arrival
rate when the arrival rate vector is in the region γΛ.
Now Suppose that E(sv) = νv, this implies stability of any arrival rate in γΛ.
Let pv0 be the probability that the medium as seen by link v is not blocked. It is
straightforward to see (and proved in detail in [65]) that the service rate satisfies
E(sv) =λv
1 + λvpv0. By the union bound we have
1− pv0 ≤∑j∈Kv
sj +∑
k∈Nv\Kv
sk =∑j∈Kv
νj +∑
k∈Nv\Kv
νk (C.4.1)
161

Also, note that ν ′ =1
γν ∈ Λ. Hence, there exists another set of activation rates sch2
(λ′1, λ′2, . . . , λ
′|V |) which can stabilize ν ′. Under sch2, we have 1 − ν ′v as the fraction
of time where link v is idle. During these idle slots, at most 1 link from Kv and
dv − |Kv|+ 1 links from Nv \Kv are active, but the total service of link v neighbors
cannot exceed (1− ν ′v) to ensure that v is stable, thus
∑j∈Kv
ν ′j +∑
k∈Nv\Kv
ν ′k ≤ (dv − |Kv|+ 2)(1− ν ′v). (C.4.2)
Combining (C.4.1) and (C.4.2)
1− pv0 ≤∑j∈Kv
νj +∑
k∈Nv\Kv
νk ≤ γ(dv − |Kv|+ 2)(1− νvγ
) ≤ (1− νvγ
) (C.4.3)
Hence, νv ≤ γpv0 which impliesλv
1 + λv≤ γ. A direct substitution gives λv ≤
1
dv − |Kv|, and this concludes the proof.
162

APPENDIX D: PROOFS FOR CHAPTER 5
D.1 Proof of Lemma 5.5.1
Taking 1T θi[t] = xi[t] + yi[t] in (5.4.1) we get the following bound:
yi[t] ≤1
1− βi(R
(βi)i [t]− βR(βi)
i [t− 1]). (D.1.1)
The reward per-flow every time slot can be bounded as follows
U(R(βi)i [t])− pcyi[t] ≥ U(R
(βi)i [t])− pc
1− βi( Ri[t]− βRi[t− 1]). (D.1.2)
Setting R[0] = 0 and summing over all flows and over all time slots, we have the
following inequality:
T∑t=1
N∑i=1
U(R(βi)i [t])− pcyi[t] ≥
T∑t=1
N∑i=1
U(R(βi)i [t])− pcR(βi)
i [t]. (D.1.3)
By noting that the linear cost at the RHS cannot exceed pcyc (since the cellular
allocation cannot exceed the cellular capacity), we can refine the bound on the LHS
of (D.1.3)
≥
T∑t=1
N∑i=1
U(R(βi)i [t])− pcR(βi)
i [t] forN∑i=1
Ri[t] ≤ yc
T∑t=1
N∑i=1
U(R(βi)i [t])− pcyc for
N∑i=1
Ri[t] ≥ yc
163

(a)
≥
T∑t=1
N∑i=1
U(yc)− pcycyc
R(βi)i [t] for
N∑i=1
Ri[t] ≤ yc
T∑t=1
N∑i=1
U(yc + cmax)− pcycyc + cmax
R(βi)i [t] for
N∑i=1
Ri[t] ≥ yc
≥T∑t=1
N∑i=1
DR(βi)i [t]
where inequality (a) comes from the fact that the two summand functions on the
LHS are concave in Ri[t], thus, each of those two one-dimensional functions can
be lower bounded by a straight line connecting points (0, U(yc) − pcyc), (U(yc) −
pcyc, U(yc + cmax) − pcyc), respectively. Those two straight lines in turn lie between
linesU(yc)− pcyc
ycRi[t] and
U(yc + cmax)− pcycyc + cmax
Ri[t], thus taking the minimum will
give us a lower bound everywhere in the domain.
D.2 Proof of Lemma 5.5.2
By concavity of the function U( ), it is straight-forward to see that the function
g(R[t−1]; Θ(R[t−1]) is concave in the variable R[t−1]. By first order conditions of
concavity in the variable R[t−1] only (where Θ(R[t−1]) are treated as parameters):
g(R∗[t− 1]; θ∗[t], .., θ∗[t+ w]) ≤ g(R(k)[t− 1]; θ∗[t], .., θ∗[t+ w])
+∇g(R(k)[t− 1]; θ∗[t], . . . , θ∗[t+ w]))T (R∗[t− 1]−R(k)[t− 1]) (D.2.1)
Where ∇ is the gradient operator w.r.t. R[t − 1]. The first term in the RHS of
(D.2.1) can be bounded as follows:
g(R(k)[t− 1]; θ∗[t], .., θ∗[t+ w]) ≤ g(R(k)[t− 1];Θ(k)(R(k)[t− 1])) (D.2.2)
164

This is because, given the initial state R(k)[t−1], Θ(k)(R(k)[t−1]) is the maximizing
vector of g(R(k)[t− 1]; θ[t], .., θ[t+w]) according to the formulation in P2. To bound
the second term in the RHS, we can use the expression in (5.5.5) to explicitly derive
the gradient w.r.t. the vector R[t − 1]. The ith term of the gradient vector can be
bounded as follows:
∂g( )
∂Ri[t− 1]=
t+w∑τ=t
βτ−t+1i U ′
(βτ−t+1i Rn[t− 1])
+τ∑η=t
βη−ti (1− βi)1T θi[η])) (b)
≤ Gt+w∑τ=t
βτ−t+1i ≤ Gβi
(1− βi)(D.2.3)
Where (b) comes from assumption A2 in Theorem 5.5.1. Taking the inner product
of the gradient in (D.2.3) and (R∗[t − 1] − R(k)[t − 1]) and combining the bounds
gives the desired result.
D.3 Proof of Theorem 5.5.1
The reward obtained over the horizon by the AFHC control algorithm can be lower
bounded as follows
g1:T (θ(AFHC))(c)
≥ 1
w + 1
w+1∑k=1
g1:T (θ(k))
(d)
≥ g1:T (θ∗)
− 1
w + 1
w+1∑k=1
∑τ∈Ωk
N∑i=1
Gβi1− βi
(R(βi)∗
i [t− 1]−R(βi)(k)
i [t− 1])
≥ g1:T (θ∗)− 1
w + 1
T∑t=1
N∑i=1
Gβi1− βi
R(βi)∗
i [t− 1]
165

≥ g1:T (θ∗)− 1
w + 1
Gβmax
1− βmax
N∑i=1
T∑t=1
R(βi)∗
i [t− 1]
Where (c) is by Jensen Inequality (averaging property of AFHC) and (d) is a
result of Lemma 3. Dividing both sides by g1:T (θ∗) results in the Competitive Ratio
(CR) lower bound
CR ≥ 1− 1
w + 1
Gβmax
1− βmax
∑Tt=1
∑Ni=1R
(βi)∗
i [t− 1]
g1:T (θ∗)(D.3.1)
Using Lemma 1 to bound g1:T (θ∗) linearly and noticing that R[0] = 0 gives the
desired result.
166

BIBLIOGRAPHY
[1] I. Parvez, A. Rahmati, I. Guvenc, A. I. Sarwat, and H. Dai, “A survey on lowlatency towards 5g: Ran, core network and caching solutions,” IEEE Commu-nications Surveys & Tutorials, vol. 20, no. 4, pp. 3098–3130, 2018.
[2] H. Holma and A. Toskala, LTE for UMTS: Evolution to LTE-advanced. JohnWiley & Sons, 2011.
[3] M. Laner, P. Svoboda, P. Romirer-Maierhofer, N. Nikaein, F. Ricciato, andM. Rupp, “A comparison between one-way delays in operating hspa and ltenetworks,” in 2012 10th International Symposium on Modeling and Optimiza-tion in Mobile, Ad Hoc and Wireless Networks (WiOpt), pp. 286–292, IEEE,2012.
[4] C. V. Forecast, “Cisco visual networking index: Global mobile data trafficforecast update, 2017–2022 white paper,” 2019.
[5] G. S. Paschos, G. Iosifidis, M. Tao, D. Towsley, and G. Caire, “The role ofcaching in future communication systems and networks,” IEEE Journal onSelected Areas in Communications, 2018.
[6] B. Ahlgren, C. Dannewitz, C. Imbrenda, D. Kutscher, and B. Ohlman, “Asurvey of information-centric networking,” IEEE Communications Magazine,2012.
[7] X. Wang, M. Chen, T. Taleb, A. Ksentini, and V. C. Leung, “Cache in theair: Exploiting content caching and delivery techniques for 5g systems,” IEEECommunications Magazine, 2014.
[8] “Qwilt’s* open edge cloud* puts content delivery at the network edge,” WhitePaper, 2018.
[9] “Saguna* and intel – using mobile edge computing to improve mobile networkperformance and profitability,” White Paper, 2018.
[10] G. Paschos, E. Bastug, I. Land, G. Caire, and M. Debbah, “Wireless caching:Technical misconceptions and business barriers,” IEEE Communications Mag-azine, 2016.
167

[11] K. Shanmugam, N. Golrezaei, A. G. Dimakis, A. F. Molisch, and G. Caire,“Femtocaching: Wireless content delivery through distributed caching helpers,”IEEE Transactions on Information Theory, 2013.
[12] L. Jiang and J. Walrand, “A distributed csma algorithm for throughput andutility maximization in wireless networks,” IEEE/ACM Transactions on Net-working (TON), 2010.
[13] S. Rajagopalan, D. Shah, and J. Shin, “Network adiabatic theorem: an effi-cient randomized protocol for contention resolution,” in ACM SIGMETRICSPerformance Evaluation Review, 2009.
[14] J. Ni, B. Tan, and R. Srikant, “Q-csma: queue-length-based csma/ca algo-rithms for achieving maximum throughput and low delay in wireless networks,”IEEE/ACM Transactions on Networking, 2012.
[15] M. Wang, J. Chen, E. Aryafar, and M. Chiang, “A survey of client-controlledhetnets for 5g,” IEEE Access, 2017.
[16] I. F. Akyildiz, W.-Y. Lee, M. C. Vuran, and S. Mohanty, “Next generation/dynamicspectrum access/cognitive radio wireless networks: A survey,” Computer net-works, 2006.
[17] S. ElAzzouni, E. Ekici, and N. Shroff, “Is deadline oblivious scheduling efficientfor controlling real-time traffic in cellular downlink systems?,” arXiv preprintarXiv:2002.06474, 2020.
[18] M. Hosseini and V. Swaminathan, “Adaptive 360 vr video streaming: Divideand conquer,” in 2016 IEEE International Symposium on Multimedia (ISM),pp. 107–110, IEEE, 2016.
[19] K. Lee, D. Chu, E. Cuervo, J. Kopf, Y. Degtyarev, S. Grizan, A. Wolman,and J. Flinn, “Outatime: Using speculation to enable low-latency continuousinteraction for mobile cloud gaming,” in Proceedings of the 13th Annual Interna-tional Conference on Mobile Systems, Applications, and Services, pp. 151–165,ACM, 2015.
[20] N. Buchbinder, J. S. Naor, et al., “The design of competitive online algorithmsvia a primal–dual approach,” Foundations and Trends R© in Theoretical Com-puter Science, vol. 3, no. 2–3, pp. 93–263, 2009.
[21] Z. Zheng and N. B. Shroff, “Online multi-resource allocation for deadline sensi-tive jobs with partial values in the cloud,” in Computer Communications, IEEEINFOCOM 2016-The 35th Annual IEEE International Conference on, pp. 1–9,IEEE, 2016.
168
[22] B. Lucier, I. Menache, J. S. Naor, and J. Yaniv, “Efficient online scheduling fordeadline-sensitive jobs,” in Proceedings of the twenty-fifth annual ACM sympo-sium on Parallelism in algorithms and architectures, pp. 305–314, ACM, 2013.
[23] N. R. Devanur and Z. Huang, “Primal dual gives almost optimal energy-efficientonline algorithms,” ACM Transactions on Algorithms (TALG), 2018.
[24] K. Pruhs, J. Sgall, and E. Torng, “Online scheduling.,” 2004.
[25] I.-H. Hou, “Scheduling heterogeneous real-time traffic over fading wireless chan-nels,” IEEE/ACM Transactions on Networking, vol. 22, no. 5, pp. 1631–1644,2014.
[26] S. Lashgari and A. S. Avestimehr, “Timely throughput of heterogeneous wire-less networks: Fundamental limits and algorithms,” IEEE Transactions on In-formation Theory, vol. 59, no. 12, pp. 8414–8433, 2013.
[27] S. Shakkottai and R. Srikant, “Scheduling real-time traffic with deadlines overa wireless channel,” Wireless Networks, vol. 8, no. 1, pp. 13–26, 2002.
[28] L. Dai, B. Wang, Y. Yuan, S. Han, I. Chih-Lin, and Z. Wang, “Non-orthogonalmultiple access for 5g: solutions, challenges, opportunities, and future researchtrends,” IEEE Communications Magazine, 2015.
[29] S. Boyd and L. Vandenberghe, Convex optimization. Cambridge universitypress, 2004.
[30] A. Mehta et al., “Online matching and ad allocation,” Foundations and Trends R©in Theoretical Computer Science, 2013.
[31] Y. Azar, N. Buchbinder, T. H. Chan, S. Chen, I. R. Cohen, A. Gupta, Z. Huang,N. Kang, V. Nagarajan, J. Naor, et al., “Online algorithms for covering andpacking problems with convex objectives,” in IEEE 57th Annual Symposiumon Foundations of Computer Science (FOCS), 2016, pp. 148–157, IEEE, 2016.
[32] R. Eghbali and M. Fazel, “Designing smoothing functions for improved worst-case competitive ratio in online optimization,” in Advances in Neural Informa-tion Processing Systems, pp. 3287–3295, 2016.
[33] X. Liu, E. K. P. Chong, and N. B. Shroff, “Opportunistic transmission schedul-ing with resource-sharing constraints in wireless networks,” IEEE Journal onSelected Areas in Communications, vol. 19, no. 10, pp. 2053–2064, 2001.
[34] J. J. Jaramillo and R. Srikant, “Optimal scheduling for fair resource allocationin ad hoc networks with elastic and inelastic traffic,” IEEE/ACM Transactionson Networking (TON), vol. 19, no. 4, pp. 1125–1136, 2011.
169

[35] L. Deng, C.-C. Wang, M. Chen, and S. Zhao, “Timely wireless flows with gen-eral traffic patterns: Capacity region and scheduling algorithms,” IEEE/ACMTransactions on Networking, vol. 25, no. 6, pp. 3473–3486, 2017.
[36] M. J. Neely, “Stochastic network optimization with application to communica-tion and queueing systems,” Synthesis Lectures on Communication Networks,vol. 3, no. 1, pp. 1–211, 2010.
[37] B. Tan and R. Srikant, “Online advertisement, optimization and stochasticnetworks,” IEEE Transactions on Automatic Control, vol. 57, no. 11, pp. 2854–2868, 2012.
[38] A. Dua and N. Bambos, “Downlink wireless packet scheduling with deadlines,”IEEE Transactions on Mobile Computing, vol. 6, no. 12, pp. 1410–1425, 2007.
[39] M. Agarwal and A. Puri, “Base station scheduling of requests with fixed dead-lines,” in Proceedings. Twenty-First Annual Joint Conference of the IEEEComputer and Communications Societies, vol. 2, pp. 487–496, IEEE, 2002.
[40] S. Traverso, M. Ahmed, M. Garetto, P. Giaccone, E. Leonardi, and S. Niccolini,“Temporal locality in today’s content caching: why it matters and how to modelit,” ACM SIGCOMM Computer Communication Review, 2013.
[41] K. Poularakis, G. Iosifidis, V. Sourlas, and L. Tassiulas, “Exploiting cachingand multicast for 5g wireless networks,” IEEE Transactions on Wireless Com-munications, 2016.
[42] B. Zhou, Y. Cui, and M. Tao, “Optimal dynamic multicast scheduling for cache-enabled content-centric wireless networks,” IEEE Transactions on Communi-cations, 2017.
[43] Y. Cui and D. Jiang, “Analysis and optimization of caching and multicasting inlarge-scale cache-enabled heterogeneous wireless networks,” IEEE transactionson Wireless Communications, 2016.
[44] S. O. Somuyiwa, A. Gyorgy, and D. Gunduz, “Multicast-aware proactive cachingin wireless networks with deep reinforcement learning,” in IEEE SPAWC, 2019.
[45] M. Ji, G. Caire, and A. F. Molisch, “Wireless device-to-device caching networks:Basic principles and system performance,” IEEE Journal on Selected Areas inCommunications, 2015.
[46] J. Erman and K. K. Ramakrishnan, “Understanding the super-sized traffic ofthe super bowl,” in Proceedings of the 2013 conference on Internet measurementconference, ACM, 2013.
[47] A. Eryilmaz and R. Srikant, “Asymptotically tight steady-state queue lengthbounds implied by drift conditions,” Queueing Systems, 2012.
170

[48] S. Gitzenis, G. S. Paschos, and L. Tassiulas, “Asymptotic laws for joint contentreplication and delivery in wireless networks,” IEEE Transactions on Informa-tion Theory, 2012.
[49] M. A. Maddah-Ali and U. Niesen, “Fundamental limits of caching,” IEEETransactions on Information Theory, 2014.
[50] W. Wang, K. Zhu, L. Ying, J. Tan, and L. Zhang, “Maptask scheduling inmapreduce with data locality: Throughput and heavy-traffic optimality,” IEEE/ACMTransactions on Networking (TON), vol. 24, no. 1, pp. 190–203, 2016.
[51] S. T. Maguluri and R. Srikant, “Heavy traffic queue length behavior in a switchunder the maxweight algorithm,” Stochastic Systems, vol. 6, no. 1, pp. 211–250,2016.
[52] B. Li, R. Li, and A. Eryilmaz, “Wireless scheduling design for optimizing bothservice regularity and mean delay in heavy-traffic regimes,” IEEE/ACM Trans-actions on Networking, vol. 24, no. 3, pp. 1867–1880, 2015.
[53] B. Hajek, “Hitting-time and occupation-time bounds implied by drift analysiswith applications,” Advances in Applied probability, vol. 14, 1982.
[54] M. Leconte, G. Paschos, L. Gkatzikis, M. Draief, S. Vassilaras, and S. Chou-vardas, “Placing dynamic content in caches with small population,” in IEEEINFOCOM, 2016.
[55] M. E. Newman, “Power laws, pareto distributions and zipf’s law,” Contempo-rary physics, 2005.
[56] X. Zhou, F. Wu, J. Tan, K. Srinivasan, and N. Shroff, “Degree of queue im-balance: Overcoming the limitation of heavy-traffic delay optimality in loadbalancing systems,” Proceedings of the ACM on Measurement and Analysis ofComputing Systems, 2018.
[57] S. ElAzzouni and E. Ekici, “A node-based csma algorithm for improved delayperformance in wireless networks,” in Proceedings of the 17th ACM Interna-tional Symposium on Mobile Ad Hoc Networking and Computing, pp. 31–40,2016.
[58] S. ElAzzouni and E. Ekici, “Node-based distributed channel access with en-hanced delay characteristics,” IEEE/ACM Transactions on Networking, vol. 26,no. 3, pp. 1474–1487, 2018.
[59] L. Tassiulas and A. Ephremides, “Stability properties of constrained queueingsystems and scheduling policies for maximum throughput in multihop radionetworks,” IEEE Transactions on Automatic Control, 1992.
171

[60] N. Bouman, S. C. Borst, and J. S. van Leeuwaarden, “Delay performance inrandom-access networks,” Queueing Systems, 2014.
[61] M. Lotfinezhad and P. Marbach, “Throughput-optimal random access withorder-optimal delay,” in INFOCOM, IEEE, 2011.
[62] D. Shah, D. N. Tse, and J. N. Tsitsiklis, “Hardness of low delay network schedul-ing,” IEEE Transactions on Information Theory, 2011.
[63] K.-K. Lam, C.-K. Chau, M. Chen, and S.-C. Liew, “Mixing time and temporalstarvation of general csma networks with multiple frequency agility,” in ISIT,IEEE, 2012.
[64] C. Bettstetter, “On the minimum node degree and connectivity of a wirelessmultihop network,” in Proceedings of the 3rd ACM MobiHoc, 2002.
[65] L. Jiang, M. Leconte, J. Ni, R. Srikant, and J. Walrand, “Fast mixing of par-allel glauber dynamics and low-delay csma scheduling,” IEEE Transactions onInformation Theory, 2012.
[66] V. G. Subramanian and M. Alanyali, “Delay performance of csma in networkswith bounded degree conflict graphs.,” in ISIT, 2011.
[67] C.-H. Lee, D. Y. Eun, S.-Y. Yun, and Y. Yi, “From glauber dynamics tometropolis algorithm: Smaller delay in optimal csma,” in IEEE ISIT, 2012.
[68] D. Xue and E. Ekici, “On reducing delay and temporal starvation of queue-length-based csma algorithms,” in Allerton, IEEE, 2012.
[69] P.-K. Huang and X. Lin, “Improving the delay performance of csma algorithms:A virtual multi-channel approach,” in INFOCOM, IEEE, 2013.
[70] J. Kwak, C.-H. Lee, et al., “A high-order markov chain based scheduling algo-rithm for low delay in csma networks,” in INFOCOM, IEEE, 2014.
[71] D. Lee, D. Yun, J. Shin, Y. Yi, and S.-Y. Yun, “Provable per-link delay-optimalcsma for general wireless network topology,” in INFOCOM, IEEE, 2014.
[72] C. H. Kai and S. C. Liew, “Temporal starvation in csma wireless networks,” inICC, IEEE, 2011.
[73] D. A. Levin, Y. Peres, and E. L. Wilmer, Markov chains and mixing times.American Mathematical Soc., 2009.
[74] F. Martinelli, “Lectures on glauber dynamics for discrete spin models,” in Lec-tures on probability theory and statistics, pp. 93–191, Springer, 1999.
[75] J. Ghaderi and R. Srikant, “On the design of efficient csma algorithms forwireless networks,” in 49th IEEE CDC, 2010, IEEE, 2010.
172

[76] R. Bubley and M. Dyer, “Path coupling: A technique for proving rapid mixingin markov chains,” in 38th FOCS, IEEE, 1997.
[77] M. Dyer and C. Greenhill, “On markov chains for independent sets,” Journalof Algorithms, 2000.
[78] T. P. Hayes and A. Sinclair, “A general lower bound for mixing of single-sitedynamics on graphs,” in 46th FOCS, IEEE, 2005.
[79] J. Ghaderi and R. Srikant, “Effect of access probabilities on the delay perfor-mance of q-csma algorithms,” in INFOCOM, IEEE, 2012.
[80] N. Bouman, S. Borst, J. van Leeuwaarden, and A. Proutiere, “Backlog-basedrandom access in wireless networks: fluid limits and delay issues,” in Proceedingsof the 23rd International Teletraffic Congress, 2011.
[81] R. G. Gallager, “Discrete stochastic processes,” 2012.
[82] S. ElAzzouni, E. Ekici, and N. B. Shroff, “Qos-aware predictive rate alloca-tion over heterogeneous wireless interfaces,” in 2018 16th International Sympo-sium on Modeling and Optimization in Mobile, Ad Hoc, and Wireless Networks(WiOpt), pp. 1–8, IEEE, 2018.
[83] A. Balasubramanian, R. Mahajan, and A. Venkataramani, “Augmenting mobile3g using wifi,” in Proceedings of MobiSys, ACM, 2010.
[84] K. Lee, J. Lee, Y. Yi, I. Rhee, and S. Chong, “Mobile data offloading: Howmuch can wifi deliver?,” IEEE/ACM Transactions on Networking (TON), 2013.
[85] F. Mehmeti and T. Spyropoulos, “Is it worth to be patient? analysis andoptimization of delayed mobile data offloading,” in INFOCOM, IEEE, 2014.
[86] S. Deng, R. Netravali, A. Sivaraman, and H. Balakrishnan, “Wifi, lte, or both?:Measuring multi-homed wireless internet performance,” in Proceedings of the2014 Conference on Internet Measurement Conference, ACM, 2014.
[87] A. J. Nicholson and B. D. Noble, “Breadcrumbs: forecasting mobile connectiv-ity,” in MobiCom, ACM, 2008.
[88] M. H. Cheung and J. Huang, “Optimal delayed wi-fi offloading,” in WiOpt,IEEE, 2013.
[89] H. Yu, M. H. Cheung, L. Huang, and J. Huang, “Predictive delay-aware networkselection in data offloading,” in GLOBECOM, IEEE, 2014.
[90] Y. Im, C. Joe-Wong, S. Ha, S. Sen, M. Chiang, et al., “Amuse: Empoweringusers for cost-aware offloading with throughput-delay tradeoffs,” IEEE Trans-actions on Mobile Computing, 2016.
173
[91] R. Mahindra, H. Viswanathan, K. Sundaresan, M. Y. Arslan, and S. Rangara-jan, “A practical traffic management system for integrated lte-wifi networks,”in MobiCom, ACM, 2014.
[92] H. Deng and I.-H. Hou, “Online scheduling for delayed mobile offloading,” inINFOCOM, IEEE, 2015.
[93] A. Ford, C. Raiciu, M. Handley, S. Barre, and J. Iyengar, “Architectural guide-lines for multipath tcp development,” tech. rep., 2011.
[94] A. Nikravesh, Y. Guo, F. Qian, Z. M. Mao, and S. Sen, “An in-depth under-standing of multipath tcp on mobile devices: Measurement and system design,”in MobiCom, ACM, 2016.
[95] B. Han, F. Qian, L. Ji, V. Gopalakrishnan, and N. Bedminster, “Mp-dash:Adaptive video streaming over preference-aware multipath.,” in CoNEXT, 2016.
[96] O. B. Yetim and M. Martonosi, “Adaptive delay-tolerant scheduling for efficientcellular and wifi usage,” in WoWMoM, IEEE, 2014.
[97] K.-K. Yap, T.-Y. Huang, Y. Yiakoumis, S. Chinchali, N. McKeown, and S. Katti,“Scheduling packets over multiple interfaces while respecting user preferences,”in Proceedings of the ninth ACM conference on Emerging networking experi-ments and technologies, ACM, 2013.
[98] X. Hou, P. Deshpande, and S. R. Das, “Moving bits from 3g to metro-scale wififor vehicular network access: An integrated transport layer solution,” in ICNP,IEEE, 2011.
[99] A. Eryilmaz and I. Koprulu, “Discounted-rate utility maximization (drum): Aframework for delay-sensitive fair resource allocation,” in WiOpt, IEEE, 2017.
[100] S. Deng, A. Sivaraman, and H. Balakrishnan, “Delphi: A software controllerfor mobile network selection,” 2016.
[101] J. Pang, B. Greenstein, M. Kaminsky, D. McCoy, and S. Seshan, “Wifi-reports:Improving wireless network selection with collaboration,” IEEE Transactionson Mobile Computing, 2010.
[102] J. Mo and J. Walrand, “Fair end-to-end window-based congestion control,”IEEE/ACM Transactions on Networking (ToN), 2000.
[103] J. Mattingley, Y. Wang, and S. Boyd, “Receding horizon control,” IEEE ControlSystems, 2011.
[104] D. Q. Mayne, J. B. Rawlings, C. V. Rao, and P. O. Scokaert, “Constrainedmodel predictive control: Stability and optimality,” Automatica, 2000.
174

[105] M. Lin, Z. Liu, A. Wierman, and L. L. Andrew, “Online algorithms for ge-ographical load balancing,” in Green Computing Conference (IGCC), IEEE,2012.
[106] N. Chen, A. Agarwal, A. Wierman, S. Barman, and L. L. Andrew, “Online con-vex optimization using predictions,” in SIGMETRICS Performance EvaluationReview, ACM, 2015.
[107] J. Liu, A. Proutiere, Y. Yi, M. Chiang, and H. V. Poor, “Stability, fairness, andperformance: A flow-level study on nonconvex and time-varying rate regions,”IEEE Transactions on Information Theory, 2009.
[108] D. P. Palomar and M. Chiang, “A tutorial on decomposition methods for net-work utility maximization,” IEEE Journal on Selected Areas in Communica-tions, vol. 24, no. 8, pp. 1439–1451, 2006.
[109] F. P. Kelly, A. K. Maulloo, and D. K. Tan, “Rate control for communicationnetworks: shadow prices, proportional fairness and stability,” Journal of theOperational Research society, vol. 49, no. 3, pp. 237–252, 1998.
[110] X. Lin, N. B. Shroff, and R. Srikant, “A tutorial on cross-layer optimization inwireless networks,” IEEE Journal on Selected Areas in Communications, 2006.
[111] P. Diaconis and L. Saloff-Coste, “Comparison theorems for reversible markovchains,” The Annals of Applied Probability, 1993.
[112] D. Aldous and J. Fill, “Reversible markov chains and random walks on graphs.(monographin preparation.),” 2002.
175
Top Related
Copyright © 2022 FDOKUMEN

