Utilisation des RBFs pour la construction de surfaces paramétriques interpolantes
10
Utilisation des RBFs pour la construction de surfaces paramétriques interpolantes A. Jonquet, O. Nocent, Y. Remion CReSTIC LERI/Université de Reims Champagne-Ardenne [email protected] olivier.nocent,[email protected] Résumé : La qualité d’une simulation mécanique repose principalement sur la définition géométrique des corps impliqués. Puisque nous avons opté pour le formalisme lagrangien, nous nous efforçons de préserver la continuité des quantités physiques que nous manipulons. Dans le cas de l’articulation du genou, le contact entre le fémur et le tibia peut être exprimé sous la forme d’une contrainte liant deux surfaces continûment différentiables. Mais la plupart du temps, les données réelles issues de périphériques d’acquisition sont représentées sous une forme discrète. Dans cet article, nous présentons une méthode permettant de construire une surface paramétrique continue à partir d’un maillage triangulaire. Dans un premier temps, nous calculons une paramétrisation globale d’un maillage topologiquement équivalent à un disque. Puis nous construisons une surface paramétrique qui interpole les données initiales à l’aide des fonctions à base radiale (RBFs). Cette technique permet d’exprimer des quantités géométriques tels que les vecteurs tangents ou la valeur de la courbure en tout point de la surface. En dehors du contexte de la biomécanique, nous évoquons d’autres applications envisageables de notre approche pour le raffinement de maillage ou le rendu non-photoréaliste. Mots-clés : Modélisation géométrique, surfaces continues, paramétrage global, interpolation 1. Introduction Depuis plusieurs années déjà, l’équipe Modélisation et Animation Dynamique pour la Simulation (MADS) du CReSTIC-LERI propose des modèles mécaniques continus fondés sur le formalisme lagrangien [RNN01, NR01]. Dans le cadre du projet régional SysRééduc visant à développer un dispositif de rééducation du genou, nous travaillons à l’élaboration d’un modèle informatique de l’articulation du genou. Cette articulation, pourtant de nature complexe, a déjà fait l’objet de nombreuses études en majorité motivées par la gravité des pathologies rencontrées au niveau du genou. On peut classer les travaux existants en deux grandes catégories. La première utilise la mécanique des corps rigides pour déterminer l’évolution des os. Les collisions sont calculées à partir d’une représentation géométrique discrète sous la forme d’un maillage 3D [KK99, PD01]. La deuxième catégorie repose sur la méthode des éléments finis (MEF) [MWH+90, GW03]. Même si l’utilisation de la MEF permet de prendre en compte des éléments déformables tels que les ligaments, cette approche souffre du même inconvénient que la première, à savoir l’utilisation d’une description discrète de la surface osseuse. Cette dépendance vis-à-vis de la définition géométrique des objets conditionne la qualité de la simulation. De plus, la nature polyédrique des surfaces est à l’origine d’artefacts dans le mouvement lors de la gestion des contacts. (a) (b) (c) Fig. 1. Etapes importantes de notre méthode. (a) maillage triangulaire (b) paramétrage global (c) surface paramétrique interpolante. Notre approche se limite pour le moment à identifier les degrés de liberté réels de l’articulation du genou lors du mouvement de flexion extension. Puisqu’il s’agit de proposer une simulation réaliste et non une animation plausible, il nous paraît important de prendre en considération la géométrie osseuse. Nous excluons donc toute simplification méthodologique visant à réduire le contact osseux à un contact de type sphère plan [AH98].
-
Upload
independent -
Category
Documents
-
view
0 -
download
0
Transcript of Utilisation des RBFs pour la construction de surfaces paramétriques interpolantes

Utilisation des RBFs pour la construction de surfaces paramétriques interpolantes
A. Jonquet, O. Nocent, Y. Remion
CReSTIC LERI/Université de Reims Champagne-Ardenne [email protected]
olivier.nocent,[email protected]
Résumé : La qualité d’une simulation mécanique repose principalement sur la définition géométrique des corps impliqués. Puisque nous avons opté pour le formalisme lagrangien, nous nous efforçons de préserver la continuité des quantités physiques que nous manipulons. Dans le cas de l’articulation du genou, le contact entre le fémur et le tibia peut être exprimé sous la forme d’une contrainte liant deux surfaces continûment différentiables. Mais la plupart du temps, les données réelles issues de périphériques d’acquisition sont représentées sous une forme discrète. Dans cet article, nous présentons une méthode permettant de construire une surface paramétrique continue à partir d’un maillage triangulaire. Dans un premier temps, nous calculons une paramétrisation globale d’un maillage topologiquement équivalent à un disque. Puis nous construisons une surface paramétrique qui interpole les données initiales à l’aide des fonctions à base radiale (RBFs). Cette technique permet d’exprimer des quantités géométriques tels que les vecteurs tangents ou la valeur de la courbure en tout point de la surface. En dehors du contexte de la biomécanique, nous évoquons d’autres applications envisageables de notre approche pour le raffinement de maillage ou le rendu non-photoréaliste.
Mots-clés : Modélisation géométrique, surfaces continues, paramétrage global, interpolation
1. Introduction Depuis plusieurs années déjà, l’équipe Modélisation et Animation Dynamique pour la Simulation (MADS) du CReSTIC-LERI propose des modèles mécaniques continus fondés sur le formalisme lagrangien [RNN01, NR01]. Dans le cadre du projet régional SysRééduc visant à développer un dispositif de rééducation du genou, nous travaillons à l’élaboration d’un modèle informatique de l’articulation du genou. Cette articulation, pourtant de nature complexe, a déjà fait l’objet de nombreuses études en majorité motivées par la gravité des pathologies rencontrées au niveau du genou. On peut classer les travaux existants en deux grandes catégories. La première utilise la mécanique des corps rigides pour déterminer l’évolution des os. Les collisions sont calculées à partir d’une représentation géométrique discrète sous la forme d’un maillage 3D [KK99, PD01]. La deuxième catégorie repose sur la méthode des éléments finis (MEF) [MWH+90, GW03]. Même si l’utilisation de la MEF permet de prendre en compte des éléments déformables tels que les ligaments, cette approche souffre du même inconvénient que la première, à savoir l’utilisation d’une description discrète de la surface osseuse. Cette dépendance vis-à-vis de la définition géométrique des objets conditionne la qualité de la simulation. De plus, la nature polyédrique des surfaces est à l’origine d’artefacts dans le mouvement lors de la gestion des contacts.
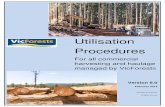
(a) (b) (c)
Fig. 1. Etapes importantes de notre méthode. (a) maillage triangulaire (b) paramétrage global (c) surface paramétrique interpolante.
Notre approche se limite pour le moment à identifier les degrés de liberté réels de l’articulation du genou lors du mouvement de flexion extension. Puisqu’il s’agit de proposer une simulation réaliste et non une animation plausible, il nous paraît important de prendre en considération la géométrie osseuse. Nous excluons donc toute simplification méthodologique visant à réduire le contact osseux à un contact de type sphère plan [AH98].

Conformément aux développements antérieurs entrepris dans notre activité liée à la simulation, nous attachons une grande importance à l’aspect continu des phénomènes. Dans cet état d’esprit, nous envisageons le contact osseux comme un contact entre deux surfaces continûment dérivables. Le suivi continu du point, bien qu’encore marginal, est un centre d’intérêt croissant dans la communauté de l’informatique graphique [KP03]. Malheureusement, les données réelles utilisées pour initialiser la simulation sont issues la plupart du temps de périphériques d’acquisition tels que des scanners 3D ou IRM. Ces informations géométriques sont représentées en général par un nuage discret de points 3D, voire un maillage triangulaire. Dans cet article, nous proposons une méthode qui permet de générer une surface paramétrique interpolante à partir d’un maillage 3D. Cette méthode se décompose en deux étapes (Fig. 1). La première étape consiste à construire une paramétrisation globale du maillage 3D. Il est important que la paramétrisation soit globale afin de permettre un suivi continu du point de contact durant le mouvement de flexion extension. La deuxième étape utilise les fonctions à base radiale (RBFs) pour générer une surface paramétrique interpolante du maillage 3D initial. Dans la mesure où la surface est décrite explicitement, le point de contact est naturellement identifié par son paramètre. Cette méthode répond exactement aux questions soulevées par notre problématique puisqu’elle offre une représentation continûment dérivable en tout point des données réelles. Dans la suite de l’article, nous décrivons en détail les deux étapes de notre méthode. Nous poursuivons en présentant différentes applications en commençant par le suivi continu du point de contact entre deux surfaces. Convaincus de l’intérêt de disposer d’une représentation continue d’un maillage 3D, nous évoquons d’autres applications envisageables comme le raffinement de maillage s’appuyant sur une formulation continue du champ de courbure ou bien le rendu non-photoréaliste basé sur des lignes isoparamétriques ou des lignes de courant du champ de courbure.
2.Paramétrisation de maillages triangulaires Les contacts considérés lors du mouvement de flexion extension sont localisés sur les extrémités des os. Pour le suivi continu des points de contact, nous n’avons donc besoin que d’une paramétrisation globale de ces zones d’intérêt. Voilà pourquoi nous nous sommes limités aux techniques permettant de construire une paramétrisation globale d’un maillage triangulaire topologiquement équivalent à un disque. Il serait bien entendu intéressant d’étendre notre application aux surfaces équivalentes à une sphère en utilisant une paramétrisation sphérique [PH03] ou même à des surfaces de genre topologique quelconque par découpage et dépliement de la surface [SH02]. Mais le découpage introduit des discontinuités dans le paramétrage qui risqueraient de perturber le suivi continu du point de contact. La paramétrisation consiste à associer pour chaque sommet is d’une surface 3D un couple de coordonnées ( , )i iu v désignant un point de l’espace paramétrique [0,1] [0,1]× afin d’obtenir une relation bijective entre l’espace paramétrique et l’espace 3D. Bien que les surfaces convexes puissent facilement être paramétrisées par projection sur un plan, les surfaces concaves peuvent présenter des chevauchements une fois projetées dans l’espace paramétrique. Il n’est donc pas trivial de définir automatiquement une paramétrisation pour une surface quelconque. La théorie des plongements de graphes planaires fournit un formalisme intéressant pour l’étude de ce type de problèmes. En effet, il est possible, sous certaines conditions de définir un graphe planaire à partir d’un maillage 3D. Il reste ensuite à organiser ce graphe afin qu’il s’adapte à l’espace paramétrique souhaité. Tutte [Tut63] introduit la notion d’application barycentrique pour le plaquage uniforme d’un graphe planaire sur un espace 2D. Floater [Flo97] reprend ces concepts en remplaçant les isobarycentres par des combinaisons convexes, dont les coefficients permettent de minimiser les déformations. Afin de détailler cette dernière méthode, nous rappelons quelques éléments de la théorie des graphes :
(a) (b) (c)
Fig. 2. Paramétrisation de la frontière. (a) maillage triangulaire (b) paramétrisation uniforme (c) paramétrisation en abscisse curviligne

Un graphe ( , )G G S A= est constitué d’un ensemble fini de sommets 1{ , , }nS = s s et d’un ensemble d’arêtes
{ }{ , }:1 , ,A i j i j n i j= ≤ ≤ ≠ . Le sommet js est voisin du sommet is si { , }i j A∈ . Par convention, les voisins de is sont notés ijs pour 1, , ij d= . Le degré id (ou valence) du sommet is correspond au nombre total de ses voisins. Un graphe ( , )G G S A= est dit planaire si ses sommets se projettent en des points distincts du plan de sorte que ses arêtes ne soient pas sécantes. Un graphe planaire partitionne le plan en régions connexes appelées faces. La paramétrisation d’un maillage consiste donc à définir un graphe à partir de ce maillage puis à le transformer en graphe planaire dont la frontière épouserait la frontière du domaine paramétrique. La paramétrisation étant bijective, la transformation en graphe planaire doit être inversible. Le graphe planaire ne doit donc pas admettre de chevauchement. Pour parvenir à ce résultat, Floater commence par positionner les sommets appartenant à la frontière du graphe sur la frontière du domaine paramétrique. Le plaquage de la frontière du maillage sur la frontière du domaine paramétrique peut se faire en répartissant les sommets de façon uniforme ou conformément à l’abscisse curviligne en tenant compte de la longueur de arêtes du maillage 3D (Fig. 2). Enfin, il exprime les coordonnées paramétriques ( , )i iu v d’un sommet interne is du graphe comme une combinaison convexe des coordonnées paramétriques ( , )ij iju v de ses voisins ijs (Eq. 2.1). De cette manière, il en déduit un système linéaire dont la résolution assure le non recouvrement des faces du graphe.
1 1 1
, avec 1i i id d d
i ij ij i ij ij ijj j j
u u v vα α α= = =
= = =∑ ∑ ∑ (2.1)
Le choix des coefficients de la combinaison convexe agit sur la déformation appliquée au maillage lors de sa transformation en graphe planaire. Il est possible d’attribuer un poids identique à chacun des voisins. Il s’agit de la paramétrisation barycentrique illustrée par (Eq. 2.2). On peut aussi choisir des poids selon un critère comme la préservation de la forme du maillage ou de la proportion des aires de chaque face.
1 1, ,ij ii
j dd
α = ∀ = (2.2)
Floater propose une méthode permettant de préserver la forme des faces du maillage 3D dans le graphe planaire. Cette méthode se décompose en deux étapes : premièrement, elle consiste à projeter le sommet d’intérêt et ses voisins dans un plan, puis à déterminer la pondération adaptée pour chaque voisin. On commence donc par déterminer un paramétrage local en exprimant les sommets voisins à l’aide des coordonnées polaires (Fig. 3).
Fig. 3. Illustration du calcul des coefficients pour la méthode de préservation de forme.
Le sommet is se projette en un point (0,0)i =p . Soit , , 1j i j + l’angle entre les vecteurs j i−s s et 1j i+ −s s et
1, , 1id
i jj i jθ
== +∑ (le parcours des voisins de is étant cyclique, l’indice suivant id est égal à 1). Les voisins ijs
du sommet is se projettent en des points ijp définis par (Eq. 2.3).
11
1, , , 1j
ij j iki
k i kθ+
=
⎛ ⎞= − +⎜ ⎟⎝ ⎠
∑p s s (2.3)
Dans cet espace paramétrique, on définit ( )ik jp et ( ) 1ik j +p les deux points à l’extrémité de l’arête concourante
avec la droite définie par (0,0)i =p et ijp . On obtient donc un triangle ( )( ) ( ) 1, ,ij ik j ik j +p p p contenant le point ip . On peut donc définir pour chaque triangle ainsi obtenu :
pik(j)
pik(j)+1
pj
pi
si
si1
si2 si3
si4
si5
pi2pi3
pi4 pi1
pi5
pi

( )( )
( ) ( ) 1
( ) ( ) 1
, ,
, ,i ik j ik j
ijij ik j ik j
aire
aireλ +
+
=p p p
p p p
( )( )
( ) 1( )
( ) ( ) 1
, ,
, ,j i ik j
ik jij ik j ik j
aire
aireλ +
+
=p p p
p p p
( )( )
( )( ) 1
( ) ( ) 1
, ,
, ,j ik j i
ik jij ik j ik j
aire
aireλ +
+
=p p p
p p p (2.4)
En posant ( ) ( ) ( )1 2 3( ) ( ) 1si , si ( ) et si ( ) 1ij ij ij ik j ij ik jl j l l k j l l k j lχ λ χ λ χ λ += = = = = + = , on obtient finalement
pour chaque voisin du sommet is :
1 2 3
1
( ) ( ) ( )pour
idij ij ij
ijk i
k k kk j
dχ χ χ
α=
+ += ≠∑ (2.5)
D’après (Eq. 2.4) et (Eq. 2.5), on a 1
1idijj
α=
=∑ . On peut donc exprimer les coordonnées paramétriques de
is comme une combinaison convexe des coordonnées paramétriques de ces voisins ijs . En définitive, cette méthode permet de calculer un couple de coordonnées ( , )i iu v distinctes pour chaque sommet
is du maillage 3D puisqu’elle interdit tout recouvrement en limitant le domaine de définition à un espace paramétrique défini par la frontière du graphe planaire. De par le choix des poids ijα , cette technique offre un certain contrôle sur la manière dont le maillage 3D est plaqué sur l’espace paramétrique (Fig. 4). Plus récemment, Levy [LM00] a repris ce principe en introduisant un nouveau terme pour la prise en compte de la déformation afin de fournir une interface encore plus flexible.
(a) (b)
(c)
Fig. 4. Influence de la paramétrisation sur la qualité du maillage.
(a) maillage initial (b) paramétrisation barycentrique (c) paramétrisation avec préservation de forme
3. Interpolation de maillages triangulaires Une fois la première étape effectuée, nous disposons d’un paramètre ( , )i iu v pour chaque sommet is du maillage triangulaire initial. La deuxième étape consiste à construire une surface paramétrique interpolant les données discrètes (Eq. 3.1). [ ] ( )2 3: 0,1 , , 1, ,i i iu v i n→ = ∀ =s s s (3.1) Notre application nécessite que la surface d’interpolation soit définie à partir d’un unique paramétrage global afin de garantir le suivi continu du point de contact. D’autre part, nous ne souhaitons pas imposer de contraintes au niveau de la répartition spatiale des sommets du maillage. Pour cette raison, nous excluons toutes les techniques d’interpolation locale à base de patches, comme les surfaces paramétriques locales ou bien les schémas de subdivision. De plus, afin d’exprimer la contrainte de contact, il nous faut disposer d’une expression continûment différentiable de la surface interpolante. Pour assurer cette continuité, les techniques à base de patches doivent imposer des contraintes sur les bordures, se traduisant par des contraintes d’alignement sur le

maillage. Par ailleurs, des aberrations géométriques sont susceptibles d’apparaître à cause de la répartition non régulière des sommets du maillage triangulaire. Nous avons donc orienté nos choix sur des méthodes d’interpolation globale. Les fonctions à base radiale (Radial Basis Functions ou RBFs) sont largement utilisées pour construire une surface implicite à partir d’un ensemble discret de sommets [CBC+01]. Cette méthode consiste à définir un champ de potentiel continu signé 3:f → dans l’espace 3D qui s’annule en chaque sommet ( ( ) 0 1, ,if i n= ∀ =s ). Pour obtenir une surface autre que la solution triviale 3( ) 0f = ∀ ∈x x , il est nécessaire de compléter les données initiales avec des points supplémentaires se trouvant à l’intérieur ( ( ) 0f <x ) et à l’extérieur ( ( ) 0f >x ) de la surface. Cette méthode accroît significativement la taille du système linéaire à résoudre pour déterminer les poids de chaque sommet. De plus, la description implicite de la surface ne permet pas d’identifier facilement le point de contact et rend difficile son suivi dans le temps. Cependant, les RBFs disposent de propriétés intéressantes comme la prise en compte de tous les sommets et une indépendance vis-à-vis de la répartition géométrique des données initiales. L’utilisation des RBFs pour construire une surface paramétrique a déjà été étudiée dans le cadre de la déformation d’image [NN00, RM95]. Nous proposons une extension de cette méthode en considérant que le résultat de la fonction d’interpolation évolue dans l’espace 3D. Notre surface paramétrique interpolante ( ),u vs est donc définie comme suit :
[ ] ( ) ( )( )2 3
1: 0,1 , ,
n
i i ii
u v d u vφ=
→ =∑s s λ (3.2)
La fonction ( ),id u v correspond au carré de la distance euclidienne dans l’espace paramétrique entre un point de
coordonnées ( ),u v et celui de coordonnées ( ),i iu v (Eq. 3.3).
[ ] ( ) ( ) ( )2 2 2: 0,1 , 1, ,i i i id d u v u u v v i n+→ = − + − ∀ = (3.3) Nous avons ensuite opté pour des fonctions iφ multiquadriques où x correspond au carré de la distance euclidienne.
( ) ( ) ( ) 2: , où min , ,i i i i i i ij ijx x c c u v u vφ φ+ +→ = + = − (3.4)
L’expression de la surface à base de RBFs dépend alors uniquement de la valeur de chacun des poids (vecteurs 3D a priori différents des sommets initiaux) ( )x y z T
i i i iλ λ λ=λ affectés aux sommets ( )x y z Ti i i is s s=s du
maillage triangulaire. Au regard de (Eq. 3.2), ces poids sont les solutions du système linéaire suivant :
( )( )( ) ( )1 1
, , 1,..,
, , ,
x x
y y
z z
ij i i j j
T T
n n
a d u v i j n
s s x y zα α α α α α
φ
λ λ α
⎛ ⎞ ⎛ ⎞⎛ ⎞⎜ ⎟ ⎜ ⎟⎜ ⎟ =⎜ ⎟ ⎜ ⎟⎜ ⎟
⎜ ⎟⎜ ⎟ ⎜ ⎟⎝ ⎠⎝ ⎠ ⎝ ⎠
= ∀ =
= = ∀ =
A λ sA λ s
A λ s
λ s
(3.5)
On peut mentionner que, compte tenu des fonctions ( )i xφ choisies, la matrice A n’est ni symétrique, ni creuse. On peut donc difficilement espérer utiliser une méthode vraiment optimale pour la résolution du système linéaire de (Eq. 3.5).
(a) (b) (c)
Fig. 5. Amélioration du plaquage de texture grâce à la génération d’un maillage plus régulier.

Après précalcul des coefficients iλ , on dispose d’une surface paramétrique interpolante que l’on peut évaluer en tout point de l’espace paramétrique [0,1] [0,1]× . Cette surface est de plus continûment différentiable puisque nous avons pris soin de choisir une fonction ( )i xφ continûment dérivable. L’avantage de cette approche explicite des RBFs réside dans le fait qu’il n’est pas nécessaire d’utiliser un algorithme de type marching cube [CBC+01] pour déduire un nouveau maillage. Il suffit pour cela de procéder à une subdivision régulière ou bien adaptative du domaine paramétrique pour générer de nouveaux sommets dans l’espace 3D (Fig. 5).
4. Applications
4.1.Suivi continu du contact entre surfaces rigides Dans le contexte de la simulation réaliste de l'articulation du genou, nous avons besoin de préserver le contact entre les surfaces osseuses du fémur et du tibia. Sur le plan mécanique, chaque os est assimilé à un corps rigide dont l’évolution dépend de six degrés de liberté (position et orientation). En dehors de tout contact, le système mécanique à étudier est donc composé de douze degrés de liberté. Le contact entre les deux surfaces osseuses peut se traduire sous deux formes différentes. La première consiste à réduire manuellement l’ensemble des degrés de liberté du système afin de limiter l'espace des configurations atteignables. Kry et al. [KP03] proposent une méthode visant à exprimer la configuration (position et orientation) d'un des solides par rapport à l'autre. Cette réduction du codage cinématique permet de garantir que le contact sera préservé malgré les erreurs d’arrondi générées lors du calcul numérique. Mais cette approche a un inconvénient majeur : puisque le contact est implicitement intégré dans le codage cinématique du système, il ne peut pas être décroché. Malheureusement, lors d'une flexion totale du genou, le fémur et le tibia ne sont plus en contact. L'autre approche consiste à exprimer le contact comme une contrainte. L'avantage d'une telle approche dans notre contexte de travail est que la contrainte peut être supprimée aisément lors de la flexion totale du genou. Cette contrainte est une équation implicite dépendant des degrés de liberté du système mais aussi de variables supplémentaires permettant d’identifier le point glissant de contact entre les surfaces. Dans un rapport technique interne, Remion [Rem03] développe un formalisme afin d'étendre l'expression des contraintes à des équations intégrant des inconnues surnuméraires appelées variables libres. Au prix d'une réécriture des équations de contraintes, ces variables libres sont gérées au même titre que les degrés de libertés initiaux et les multiplicateurs de Lagrange associés à chaque contrainte. Ce schéma de résolution permet donc de formuler des contraintes de nature plus complexe comme le contact glissant entre des courbes et des surfaces. Cette technique a été utilisée avec succès par Lenoir et al. dans le cadre de la simulation de sutures [LMGC04]. Grâce à l’expression paramétrique de la surface [ ]2 3: 0,1 →s , on peut aisément obtenir en tout point continu de la surface deux vecteurs tangents alignés avec les fibres issues du paramétrage (Eq. 4.1).
( ) ( )( ) ( )1
, , , avec ,n
i i i ii
u v d u v d u v u vα αφ α=
′∂ = ∂ =∑s λ (4.1)
La normale en ce point est obtenue par un simple produit vectoriel (Eq. 4.2).
( ) ( ) ( )( ) ( )
, ,,
, ,u v
u v
u v u vu v
u v u v∂ ∧ ∂
=∂ ∧ ∂
s sn
s s (4.2)
(a) (b)
Fig. 6. Visualisation d’un repère local dans l’espace paramétrique (a) et sur la surface de la tête du fémur (b).

Soient 1s et 2s deux surfaces paramétriques associées respectivement au fémur et au tibia. Le point de contact entre 1s et 2s est un point commun aux deux surfaces de sorte que les plans tangents de chaque surface coïncident en ce point. Si le couple ( ),i iu v correspond aux coordonnées du point de contact dans le paramétrage
de la surface is pour 1,2i = , la contrainte de contact est synthétisée par l’équation (Eq. 4.3).
( ) ( )( ) ( )( ) ( )
1 1 1 2 2 2
1 1 1 2 2 2
1 1 1 2 2 2
, ,
, , 0
, , 0
u
v
u v u v
u v u v
u v u v
− =
∂ ⋅ =
∂ ⋅ =
s s 0
s n
s n
(4.3)
4.2.Raffinement de maillage L’intérêt de disposer d’une version continue d’un maillage triangulaire réside dans la faculté de pouvoir exprimer n’importe quelle quantité géométrique en tout point continu de la surface. Même si nous n’avons pas exploité cet aspect de nos résultats, l’expression continue de la courbure d’un maillage triangulaire nous semble intéressante pour des travaux où les courbures gaussienne et moyenne sont utilisées comme critère de raffinement de maillage [KKL02, DHKL00]. On rappelle brièvement les formules nécessaires au calcul de la courbure.
( ) ( ) ( )( ) ( ) ( ){ }( ) ( ) ( ) ( )
( ) ( )( )
( ) ( ) ( ) ( )
2
1
1
3
, , , où ,
, , ,
1 1avec ,2 4
et , 2 , , 2
n
i i i i i i ii
n
uv i i i u i v ii
i ii i
u i i v i i
u v d d u v d d u v u v
u v d d u v d u v
x xx c x c
d u v u u d u v v v
αα α ααφ φ α
φ
φ φ
=
=
′′ ′∂ = ∂ + ∂ =
′′∂ = ∂ ∂
−′ ′′= =+ +
∂ = − ∂ = −
∑
∑
s λ
s λ (4.4)
On peut alors définir les coefficients de la première et de la deuxième forme fondamentale [Far96] :
( ) ( ) ( ) ( ) ( ) ( )
( ) ( ) ( ), , , , , , , ,
, , , , ,u u u v v v
uu uv vv
e u v u v f u v u v g u v u v
l u v m u v n u v
= ∂ ⋅∂ = ∂ ⋅∂ = ∂ ⋅∂
= ⋅∂ = ⋅∂ = ⋅∂
s s s s s s
n s n s n s (4.5)
La courbure gaussienne K et la courbure moyenne H découlent de la formule suivante :
( )
2
2 2
2,2
ln m ne mf lgK Heg f eg f− − +
= =− −
(4.6)
On peut donc évaluer pour chaque point de la surface ses courbures gaussienne et moyenne (Fig. 7).
(a) (b)
Fig. 7. Visualisation des champs de courbure gaussienne (a) et moyenne (b) sur la surface du fémur.
4.3.Rendu non-photoréaliste Elber propose une méthode de rendu basé sur le dessin de lignes isoparamétriques [Elber99]. Cette approche est limitée aux surfaces paramétriques comme les surfaces de révolution. L’apport de notre méthode consiste, par l’intermédiaire de la surface interpolante, à pouvoir tracer des lignes isoparamétriques à partir d’un maillage triangulaire. D’autres techniques exploitent le champ de courbure pour tracer des lignes de courant. Malheureusement, la propagation de ces lignes est dépendante de la résolution du maillage [RKS00]. Dans notre
0
+
-

cas, l’existence d’une surface continue permet de tracer des lignes indépendamment de la définition géométrique du maillage initial. Pour une surface paramétrique, la courbure k peut être définie comme une fonction dépendant de la pente
/dv duλ = du déplacement dans l’espace paramétrique [0,1] [0,1]× (Eq. 4.7).
( )2
2
22
l m nke f g
λ λλλ λ
+ +=
+ + (4.7)
Les courbures principales 1 1( )k k λ= et 2 2( )k k λ= qui correspondent aux courbures minimale et maximale sont obtenues à partir des rapports 1 2,λ λ qui sont solutions de (Eq. 4.8).
2 1det 0e f g
l m n
λ λ⎡ ⎤−⎢ ⎥ =⎢ ⎥⎢ ⎥⎣ ⎦
(4.8)
Pour le rendu, on génère aléatoirement des points dans l’espace paramétrique qui servent de point de départ à des lignes isoparamétriques (alignées avec les axes principaux) ou à des lignes qui suivent la courbure maximale de la surface (Fig. 8 et 9).
Fig. 8. Rendu non-photoréaliste à partir de lignes isoparamétriques.
Fig. 9. Rendu non-photoréaliste à partir de lignes de courbure maximale.
5. Conclusion Dans cet article, nous avons présenté une méthode permettant de construire une surface paramétrique continûment dérivable à partir d'un maillage triangulaire de sommets 3D. Cette nouvelle technique nous permet, dans le cadre du projet SysRééduc, de franchir une nouvelle étape. A partir des données réelles qui décrivent la surface osseuse du fémur et du tibia sous la forme d'un maillage triangulaire, nous sommes désormais en mesure d'en déduire une version continue pour les besoins de la simulation. La suite de notre travail consiste maintenant à intégrer les contraintes à variables libres dans notre moteur d'animation dynamique lagrangien afin de suivre le point de contact entre les deux surfaces en fonction des sollicitations extérieures. Dans un premier temps, nous désirons confronter les résultats de notre simulation avec des valeurs expérimentales lors du mouvement de flexion extension. Puis, nous nous efforcerons d'identifier les véritables degrés de liberté de l'articulation du genou afin d'obtenir un modèle mécanique réaliste.

Nous avons aussi évoqué d'autres applications possibles de notre démarche. Afin d'étayer notre argumentation en ce qui concerne le raffinement de maillage, nous aimerions entreprendre une comparaison quantitative des méthodes classiques basées sur une définition discrète du champ de courbure avec la nôtre. Enfin, nos premières tentatives de rendu non-photoréaliste nous encouragent à persévérer. Notre méthode permet en effet de générer des courbes isoparamétriques à partir d'un maillage même grossier qui ouvre des perspectives intéressantes pour le rendu temps-réel.
Références
[AH98] E.M. Abdel-Rahman, M.S. Hefzy. Three-Dimensional Dynamic Behavior of the Human Knee Joint under Impact Loading. Medical Engineering & Physics. 20(4): 276–290. 1998.
[CBC+01] J.C. Carr, R.K. Beatson, J.B. Cherrie, T.J. Mitchell, W.R. Fright, B.C. McCallum, T.R. Evans. Reconstruction and representation of 3D objects with radial basis functions. SIGGRAPH '01: Proceedings of the 28th annual conference on Computer graphics and interactive techniques, pages 67-76, 2001.
[DHKL00] N. Dyn, K. Hormann, S.J. Kim, D. Levin. Optimizing 3D Triangulations Using Discrete Curvature Analysis. Mathematical Methods for Curves and Surfaces, pages: 135-146. 2000.
[Elb99] G. Elber. Interactive Line Art Rendering of Freeform Surfaces. Eurographics 99. 18(3): 1-12. September 1999.
[Far96] G. Farin. Curves and Surfaces for Computer Aided Geometric Design. A Practical Guide. Academic Press, 1996.
[Flo97] M.S. Floater. Parametrization and smooth approximation of surface triangulations. In Computer Aided Geometric Design. 14(3): 231-250, 1997.
[GW03] C. Gardiner, J.A. Weiss. Subject-Specific Finite Element Analysis of the Human Medial Collateral Ligament During Valgus Knee Loading. In Journal of Orthopaedic Research, Vol. 21, pages 1098-1106, 2003.
[KK99] E. Keeve, R. Kikinis. Biomechanics-based simulation of knee dynamics. In Biomedical Engineering and Engineering in Medicine and Biology Society Conference, Vol. 1, pages 558, 1999.
[KKL02] S.J. Kim, C.H. Kim, D. Levin. Surface simplification using a discrete curvature norm. Computers & Graphics. 26(5): 657-663. 2002.
[KP03] P.G. Kry, D.K. Pai. Continuous contact simulation for smooth surfaces. ACM Transactions on Graphics. 22(1): 106-129. January 2003.
[LM00] B. Levy, J.L. Mallet. Paramétrisation des surfaces triangulées. Revue Internationale de CFAO et d'Informatique Graphique. 15(1): 25-42. Juin 2000.
[LMGC04] J. Lenoir, P. Meseure, L. Grisoni, C. Chaillou. A Suture Model for Surgical Simulation, 2nd International Symposium on Medical Simulation, pages 105-113, 2004.
[MWH+90] A.D. McCarthy, I.D. Wilkinson, D.R. Hose, D.C. Barber, S. Wood, G. D. Darwent, D. Chan, D.R. Bickerstaff. Musculo-Skeletal Simulation: Finite Element Meshes Derived From Magnetic Resonance Volumes. Proceedings of the International Society for Magnetic Resonance in Medicine. May 2002.
[NN00] J.Y. Noh, U. Neumann. Talking Faces. IEEE International Conference on Multimedia and Expo (II), pages 627-630, 2000.
[NR01] O. Nocent, Y. Remion. Continuous deformation energy for Dynamic Material Splines subject to finite displacements. Eurographics Workshop in Computer Animation and Simulation, pages 87-97. September 2001.

[PD01] S.J. Piazza, S.L. Delp. Three-dimensional dynamic simulation of total knee replacement motion during a step-up task, Journal of Biomechanical Engineering. 123(6): 599-606. December 2001.
[PH03] E. Praun, H. Hoppe. Spherical parametrization and remeshing. ACM Transactions on Graphics. 22(3): 340-349, 2003.
[Rem03] Y. Remion. Prise en compte de « contraintes à variables libres ». Rapport technique CReSTIC 03-02-01, pages 1-4, February 2003.
[RKS00] C. Rössl, L. Kobbelt, H.P. Seidel. Line art rendering of triangulated surfaces using discrete lines of curvature. In Proceedings of WSCG’2000, pages 168-175, February 2000.
[RM95] D. Ruprecht, H. Muller. Image Warping with Scattered Data Interpolation. IEEE Computer Graphics and Applications. 15(2): 37-43, March 1995.
[RNN01] Y. Remion, J.M. Nourrit, O. Nocent. D-dimensional parametric models for dynamic animation of deformable objects. The Visual Computer Journal. 17(3): 167-178, October 2001.
[SH02] A. Sheffer, J.C. Hart. Seamster: Inconspicuous Low-Distortion Texture Seam Layout. In VIS '02: Proceedings of the conference on Visualization '02, pages 291-298, 2002.
[Tut63] W. Tutte. How to draw a graph. Proceedings of London Mathematics Society. Vol. 13, pages 743–768, 1963.