UNIVERSIDAD DE SANTIAGO DE CHILE
12
UNIVERSIDAD DE SANTIAGO DE CHILE FACULTAD DE INGENIERÍA Departamento de Ingeniería Mecánica SANTIAGO TITULO DE LA EXPERIENCIA ________________________________________________________________________________ ________________________ EXPERIENCIA N° __________Grupo N°_______Fecha de la Exp_________________ Fecha de Entrega _________________ NOMBRE ASIGNATURA_________________________________________________________CODIGO ___________ CARRERA__________ ____________________________________Modalidad (Diurna o Vespertina)___________________________ NOMBRE DEL ALUMNO__________________________________________________________- _________________ Apellido Paterno Apellido Materno Nombre ________________________ Firma del alumno Fecha de Recepción Nota de Interrogación ________________ Nombre del Profesor ________________________________________ Nota de Participación ________________ MODELAMIENTO MATEMATICO DE SISTEMAS BUSTOS BUSTOS CLAUDIO ANDRES ING EJECUCION MECANICA AUTOMATIZACION L01 2 DIURNA HECTOR MUÑOZ 1506 12-10- 26-10-
-
Upload
independent -
Category
Documents
-
view
5 -
download
0
Transcript of UNIVERSIDAD DE SANTIAGO DE CHILE

UNIVERSIDAD DE SANTIAGO DECHILE
FACULTAD DE INGENIERÍADepartamento de Ingeniería Mecánica
SANTIAGO
TITULO DE LA EXPERIENCIA________________________________________________________________________________________________________
EXPERIENCIA N° __________Grupo N°_______Fecha de la Exp_________________ Fechade Entrega _________________
NOMBRE ASIGNATURA_________________________________________________________CODIGO___________
CARRERA__________ ____________________________________Modalidad (Diurna o Vespertina)___________________________
NOMBRE DEL ALUMNO__________________________________________________________-_________________
Apellido Paterno Apellido Materno Nombre
________________________ Firma del alumno
Fecha de Recepción
Nota de Interrogación ________________ Nombre del Profesor ________________________________________
Nota de Participación ________________
MODELAMIENTO MATEMATICO DE SISTEMAS
BUSTOS BUSTOS CLAUDIO ANDRESING EJECUCION MECANICA
AUTOMATIZACION
L01 2
DIURNA
HECTOR MUÑOZ
1506
12-10- 26-10-

2
Nota de Informe ____________________ _________________________________
Nota Final __________________ ______ ________________ Firma delProfesor
SE RECOMIENDA AL ESTUDIANTE MEJORAR EN SU INFORME LA MATERIA MARCADA CONUNA X
________ Presentación ________Cálculos, resultados, gráficos
________ Características Técnicas________ Discusión, conclusiones
________ Descripción del Método seguido _______ ApéndiceOBSERVACIONES
1.
Índice
Pág.
1. Resumen del Contenido 3
2. Objetivos de la Experiencia3
3. Características Técnica de los Equipos e Instrumentos3
4. Descripción del Método Seguido 4
5. Presentación de los Resultados 5

3
6. Discusión de los Resultados, Comentarios y Conclusiones Personales 6
7. Apéndice 7
a) Desarrollo de Cálculos 7b) Tabla de Datos Obtenidos y Calculados 8c) Bibliografía Empleada 9

4
Modelamiento Matemático de Sistemas Dinámicos
1. Resumen del ContenidoLa experiencia trata sobre el modelamiento matemático de sistemas dinámicos deprimer orden en atraso, particularmente, para un sistema compuesto por un motorde corriente continua el cual mediante un acople elástico transmite el movimientorotativo hacia el tacogenerador, que a su vez transforma las revolucionesproducto del voltaje de alimentación del motor en un voltaje de salidacaracterístico según la constante que posea este elemento. Al modelar el sistemay encontrar su diagrama de bloques respectivo con las simplificaciones adecuadas,como asimilarlo a un sistema de primer orden, se define la forma normalizada dela función transferencia y a partir de los datos experimentales se encuentran lasconstantes involucradas para la determinación empírica de la función que explicael comportamiento dinámico.
2. Objetivos de la ExperienciaObjetivo GeneralFamiliarizar al alumno con la metodología para modelar matemáticamente lossistemas dinámicos, realizando análisis y síntesis de sistemas de primer ysegundo orden en atraso.
Objetivos Específicos Familiarizar al alumno con el procedimiento para deducir la ecuación
diferencial que gobierna el comportamiento global de los sistemaspropuestos en el laboratorio.
Que el alumno Internalice el concepto de linealización. Capacitar al alumno para deducir la función transferencia de los sistemas
dinámicos lineales. Que el alumno internalice los conceptos de análisis y síntesis de sistemas
dinámicos lineales de primer y segundo orden en atraso. Que el alumno comprenda el procedimiento para administrar los errores en
las mediciones basados en la teoría de error.
3. Características Técnicas de los Equipos e Instrumentos
Osciloscopio Digital
Modelo: EZ DS-1150 Ancho de Frecuencia: CC – 150 MHz Pantalla: 5.7” LCD Canales: 2 (digitalizador dual)

5
Descripción: Representación gráfica de señales eléctricas que pueden variar en el tiempo.
Fuente de Poder
Modelo: HY 3005 Tipo de corriente: Continua Voltaje: 0-30 [v] (ajustable) Corriente: 0-5 [A] (ajustable) Pantalla: Led (voltaje e intensidad)
Tacómetro
Marca: Lutron DT2236 Mecanismo: Foto-Contacto Rango operación: 0,5 – 100000 [rpm] Resolución: 0,1 [rpm] < 1000 [rpm]
Multitester: CC/CA
Sistema – Motor CC/ Tacogenerador
Sistema en el cual se efectúa laexperiencia de laboratorio, el cual consta deel montaje del motor conectado a una carga pormedio de un acople elástico hasta eltacogenerador. Con este sistema se deberádeterminar la función transferencia que rigey explica el comportamiento en funcióndel tiempo para un sistema dinámico, suponiéndolo de primero orden en atraso.
4. Descripción del Método SeguidoLa experiencia comienza con una introducción teórica en donde se muestran losconceptos relacionados con el modelamiento matemático de sistemas dinámicos. Paraeste laboratorio, se analiza el modelamiento de un sistema compuesto por un motorelectro de alimentación con corriente continua desde una fuente continua (entregavoltaje VAM) que transmite el movimiento mediante un acople elástico a un eje decarga que se acopla con un tacogenerador que tiene una señal de salida envoltaje, es decir, convierte las revolución producidas por el motor eléctrico aun voltaje de salida (VTG). Por lo tanto, se debe determinar la constante deltacogenerador que transforma el valor de las revoluciones a voltaje.

6
Para lograr el objetivo de calcular la función transferencia que explica elcomportamiento de las revoluciones en el tiempo cuando se efectúan perturbaciónde tipo escalón en el voltaje de alimentación para el motor, se debe modelar enbase a las leyes y ecuaciones que gobiernan los fenómenos involucrados, como laley de Kirchhoff para el voltaje en la armadura del motor y la segunda ley deNewton para el eje de rotación del sistema en conjunto. Para finalmente obtenerel diagrama de bloques respectivo y encontrar la función transferencia. Luego seanaliza el orden del sistema, es decir, de primer o segundo orden, en este casose puede aproximar a un sistema de primero orden en atraso debido a que el tiempode respuesta para el circuito eléctrico del motor es poco significativo respectoal del tiempo de respuesta mecánico del motor.
El diagrama de bloques anterior señala y explica el modelamiento matemáticoanalizado (teórico). Sin embargo, el sistema estudiado no es en lazo cerrado, esdecir, la función transferencia del diagramas de bloques señalado simboliza elconversor energético y la planta, para terminar con el sistema en el sistema demedición equivalente al tacogenerador en lazo abierto ya que no se compara con elvalor referencial. Por lo tanto, la función transferencia quedará de la siguientemanera, incluyendo la función transferencia de la planta y el conversorenergético.
VTG(s)VAM(s)
=GMotor∙KTG
Τ∙S+1
Finalmente, en la introducción teórica se explican los comportamientos de laperturbación tipo escalón y la respuesta de forma grafica que tendrá el sistemacon respecto de las revoluciones de salida y el voltaje de alimentación delmotor. En base a los grafico señalados se deberá determinar de forma experimentalla ganancia y tiempo de respuesta del motor, considerando la constante detransformación del tacogenerador.
Concluida la introducción teórica, se procede a realizar las mediciones,previamente preparado el sistema a utilizar, en donde se miden las variables paradeterminar las constante del tacogenerador, esto es, el voltaje producido por eltacogenerador (VTG) y las revoluciones realizadas por el motor eléctrico (N),utilizando el multitester y el tacómetro respectivamente. Con esto se deberáobtener una grafica y rectificarla para así obtener la constante que está

7
representada por la pendiente de dicha curva. Y por último, se efectuó unaperturbación tipo escalón y se observo mediante el osciloscopio el comportamientoen el tiempo, con el objeto de calcular la ganancia de la función transferenciadel sistema en conjunto y el tiempo de respuesta de éste.
5. Presentación de los ResultadosA continuación, se muestran los resultados obtenidos a raíz de la experiencia,detallando la función transferencia para el sistema de primer orden en atrasoN(s)/VAM(s) (por simplificación) e identificando la ganancia de motor (GM), eltiempo de respuesta (T¿, la constante del tacogenerador (KTG) y la función queexplica la evolución en el tiempo de las revoluciones del motor.
N(s)VAM(s)
=78,038
0.025∙s+1 [ rpmvolt ]GM=78,038[ rpmvolt ]T=0,025[seg]
n (t )=78,038∙∆∙ (1−e−t /0.025 )=202,890∙ (1−e−t/0.025) [rpm]
La ganancia del sistema completo, considerando la constante del tacogenerador esGsist=0,5385 [V /V ].
6. Discusión de los Resultados, Conclusiones y Observaciones Personales
Gracias a la experiencia se pudo analizar un sistema conformado por un motoreléctrico, el cual a través de una perturbación de tipo escalón en el voltaje dealimentación se puede determinar el comportamiento dinámico de las revolucionesgeneradas. Sin embargo, para realizar aquello se tuvo que analizar el sistema conel osciloscopio y medir la respuesta del voltaje de salida del tacogenerador, porlo tanto, se tuvo que encontrar una constante en base a las revoluciones delmotor y el voltaje de salida del tacogenerador que transforme las revolucionesgeneradas por el motor eléctrico a el voltaje de salida. Además, con este valor ymediante el desarrollo del diagrama de bloques equivalente para este sistema(conversor energético y planta) por la constante del sistema se obtuvo la funcióntransferencia y dinámica del sistema en el tiempo.

8
Respecto del modelamiento del sistema, se puede mencionar que este realmente esde segundo orden al modelarlo en base a las leyes de Kirchhoff y Newton para laparte eléctrica y mecánica del sistema, respectivamente y al aplicar Laplace aesta, se obtienen 2 funciones transferencia para cada parte (eléctrica ymecánica) multiplicada por las constantes respectivas, cada una de estasfunciones son de primer orden en atraso, por lo tanto, al determinar la funcióngeneral para el sistema queda una función de segundo grado, pero al comparar lostiempos de respuesta para cada uno se concluye que para el circuito eléctrico espoco significativo y como consecuencia se obtiene una función de primer orden enatraso, con las simplificaciones que implica en realizar y analizar un sistemamás simple. Esta afirmación se evidencia claramente al observar el gráficoentregado por el osciloscopio donde la perturbación escalón se observa como unafunción de primer orden.
Los resultados para la función transferencia del motor son la ganancia y eltiempo de respuesta. La ganancia significa la amplificación de la magnitud de laperturbación de entrada del sistema, es decir, la razón entre el valor derespuesta alcanzada luego de la estabilización y la perturbación escalón deentrada para este caso. El tiempo de respuesta, equivale al tiempo necesario paralograr una respuesta igual al 63% del valor final.
La función transferencia determinada, es muy útil ya que explica elcomportamiento dinámico del sistema para una perturbación, esta función es:n (t )=202,890∙ (1−e−t/0.025). De esta relación se observa que el tiempo de respuesta
es muy pequeño lo que indica el sistema es prácticamente instantáneo, ya que delgrafico de respuesta del osciloscopio el tiempo mínimo para la estabilización esaproximadamente de 50 mili-segundos.
De los resultados de referencia se observa que la intensidad de la corriente semantiene prácticamente constante, pero si varia el voltaje de alimentación delmotor esto se debe a la fricción presente entre el eje del motor y la fijación deéste, además de las pérdidas que deben compensarse en la relación corriente deentrada y el voltaje de alimentación, principalmente este fenómeno se presentapara revoluciones mayores, siendo significativo la diferencia entre el voltaje dealimentación y el voltaje del tacogenerador, ya que la ganancia del sistema paraesta situación es del orden de 0.53, es decir, el voltaje de alimentación debeser aproximadamente el doble del voltaje de salida. Entonces, para revolucionesmayores la fricción y las pérdidas de calor en contacto con el eje serán mayores.
Como conclusión general, se puede decir y destacar la importancia de losmodelamientos matemáticos y la funcionalidad para predecir el comportamientodinámico en el tiempo y por medio de los diagramas de bloques y para determinaruna función transferencia que represente el sistema.

9
7. Apéndice
a) Desarrollo de Cálculos
El siguiente diagrama esquematiza la planta y el conversor energético (primerbloque) y la constante de transformación del tacogenerador que convierte lasrevoluciones entregadas por el motor a un voltaje de medición en la salida.
Por lo tanto, al simplificar el diagrama de bloque se obtiene el siguiente y comoconsecuencia al aplicar las relaciones involucradas la ganancia que se calcularáen primera instancia será del sistema completo y es equivalente a Gsist=GM∙KTG
De este diagrama se obtiene la función transferencia y ésta en forma normalizadasería:
VTG(s)VAM(s)
=Gsist/TM
s+1 /TM→VTG (s)=
Gsist /TM
s+1/TM∙VAM (s )(¿)
De los gráficos observados en el osciloscopio se define la perturbación escalóndel voltaje de alimentación del motor vam (t)y la respuesta estabilizada delvoltaje de salida del tacogenerador vtg(t). Esto valores quedan definidos por:
vam (t)=∆∙u (t)=2,6 [volt]∙u (t )→VAM (s )=2,6 [volt]∙1 /svtg (t=∞ )=1,4[volt]
Con estos valores en la ecuación (¿) se puede obtener aplicando la inversa deLaplace, la relación del voltaje de salida del tacogenerador en función deltiempo. Entonces:
VTG (s )=Gsist/TM
s+1/TM∙ 2,6 [volt ]
s→vtg (t)=Gsist∙2,6 [volt ]∙(1−e−t /TM)
Entonces para encontrar la ganancia del sistema y el tiempo de respuesta delmotor, se debe aplicar el siguiente procedimiento: como se sabe que la respuestaestabilizada (en el infinito) del voltaje del tacogenerador es igual a laganancia del sistema por la magnitud de la perturbación, ya que el término(1−e−t/TM) tiene a 1 y con esto e igualando el valor de la estabilización delvoltaje se obtiene la ganancia del sistema es:

10
Gsist=GM∙KTG=vtg(∞)/∆Gsist=1,4 [volt ]/2,6[volt ]=0,53846[volt/volt]
Del grafico adjunto en la sección siguiente se determina la pendiente querelaciona los datos experimentales con la cual se obtiene la constante deltacogenerador KTG=0,0069[volt/rpm ]. Con este valor ahora se puede determinar laganancia particular del motor y es:
GM=Gsist /KTG=0,53846 [volt/volt]/0,0069 [rpm/volt]→GM=78,038[rpm /volt]Además del grafico en el osciloscopio, como 63% de la respuesta sometida a laperturbación es equivalente en el eje del periodo al tiempo de respuesta, sepuede determinar dicha variable. Entonces, por inspección el tiempo de respuestadel motor es aproximadamente: TM=0,025[seg].
Finalmente, ya calculadas todas las variable involucradas se obtiene la funcióntransferencia del motor y el comportamiento dinámico debido a una perturbaciónescalón.
N(s)VAM(s)
=78,038
0.025∙s+1 [ rpmvolt ]Al modificar la ecuación anterior y aplicar las tablas de Laplace se obtiene:
n (t )=202.89∙ (1−e−t /0.025 )[rpm ]
b) Tabla de Datos Obtenidos y Calculados
Datos Obtenidos
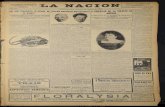
Imagen del osciloscopio de la perturbación escalón y la respuesta de lafunción transferencia que relaciona el sistema completo VTG(s) /VAM(s). Enel grafico de arriba se observa el escalón de perturbación del voltaje dealimentación (VAM) y en la de abajo la respuesta en el tiempo del voltajede salida (VTG).

11
A continuación, los datos obtenidos para el cálculo de la constante deltacogenerador y además los datos referenciales medidos.
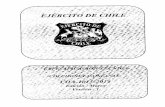
Del siguiente grafico se obtiene la constante del tacogenerador y es KTG=0,0069[rpm/volt ].
-1000 -500 0 500 1000
-8-6-4-202468
f(x) = 0.00690173256532484 x + 0.0408982807446156R² = 0.999984305118993
V v/s N - Tacogenerador
N [rpm]
VTG
[vol
ts]
Datos Calculados
Resultados finales de la experiencia:

12
N(s)VAM(s)
=78,038
0.025∙s+1 [ rpmvolt ]GM=78,038[ rpmvolt ]T=0,025[seg]
n (t )=202.89∙ (1−e−t /0.025 )[rpm ]
Donde el sistema de primer orden en atraso N(s)/VAM(s) (por simplificación) eidentificando la ganancia de motor (GM), el tiempo de respuesta (T¿, laconstante del tacogenerador (KTG) y la función que explica la evolución en eltiempo de las revoluciones del motor. La ganancia del sistema completo,considerando la constante del tacogenerador es Gsist=0,5385 [Volt/Volt].
c) Bibliografía Empleada
Guía de Laboratorio, L01 Vida Modelamiento Matemático de Sistemas Dinámicos, DIMEC.
Apuntes “Resumen Ingeniería de Control Moderna, Ogata”, Prof. Héctor Muñoz.