
TRUYEN DONG CO KHI- VU THI HANH 2014-1
182
Truyền động cơ khí- Vũ Thị Hạnh 1 TRUYỀN ĐỘNG CƠ KHÍ 1. Tên học phần: Truyền động cơ khí; Tên tiếng Anh: Mechanical Power Transmission 2. Mã học phần: Số tín chỉ: 03 3. Khoa/Bộ môn phụ trách học phần: Khoa Sư phạm Kỹ thuật 4. Trình độ: Cho sinh viên năm thứ 3 5. Điều kiện của học phần: - Các học phần tiên quyết: Không có - Các học phần học trước: Cơ học lý thuyết, Sức bền vật liệu - Các học phần song hành: Công nghệ kim loại, Vật liệu học - Các yêu cầu khác đối với học phần: Không có 6. Phân bổ thời gian đối với các hoạt động: - Lý thuyết: 41 tiết + Bài tập: 04 tiết - Thực hành, thí nghiệm: + Thảo luận: 00 - Tự học, tự nghiên cứu: 90 tiết 7. Mục tiêu của học phần 7.1. Mục tiêu chung: Cung cấp cho sinh viên các kiến thức cơ bản về cấu trúc, về phương pháp phân tích động học và lực học cơ cấu. Trang bị cho sinh các kiến thức cơ bản về tính toán thiết kế các chi tiết máy, bộ phận máy trong hệ dẫn động cơ khí... làm cơ sở cho việc thiết kế hoàn thiện một máy. 7.2. Mục tiêu cụ thể: Mục tiêu của học phần là trang bị cho người học: Kiến thức: Trang bị cho sinh viên các kiến thức cơ bản về cấu trúc, về phương pháp phân tích động học và lực học cơ cấu. Trang bị cho sinh các kiến thức cơ bản về tính toán thiết kế các bộ truyền cơ khí, cũng như các chi tiết máy đỡ nối... làm cơ sở cho việc thiết kế hoàn thiện một máy. Kỹ năng: Biết phân tích cấu trúc cơ cấu, phân tích nguyên lý làm việc, phân tích động học và lực học cơ cấu. Có khả năng tính toán thiết kế các bộ truyền cơ khí, các chi tiết máy đỡ nối..., trên cơ sở đó có thể thiết kế hoàn chỉnh một thiết bị cơ khí. Thái độ: Học cách độc lập vận dụng kiến thức vào việc thiết kế máy và cơ cấu.
-
Upload
independent -
Category
Documents
-
view
2 -
download
0
Transcript of TRUYEN DONG CO KHI- VU THI HANH 2014-1

Truyền động cơ khí- Vũ Thị Hạnh 1
TRUYỀN ĐỘNG CƠ KHÍ
1. Tên học phần: Truyền động cơ khí;
Tên tiếng Anh: Mechanical Power Transmission
2. Mã học phần: Số tín chỉ: 03
3. Khoa/Bộ môn phụ trách học phần: Khoa Sư phạm Kỹ thuật
4. Trình độ: Cho sinh viên năm thứ 3
5. Điều kiện của học phần:
− Các học phần tiên quyết: Không có
− Các học phần học trước: Cơ học lý thuyết, Sức bền vật liệu
− Các học phần song hành: Công nghệ kim loại, Vật liệu học
− Các yêu cầu khác đối với học phần: Không có
6. Phân bổ thời gian đối với các hoạt động:
− Lý thuyết: 41 tiết + Bài tập: 04 tiết
− Thực hành, thí nghiệm: + Thảo luận: 00
− Tự học, tự nghiên cứu: 90 tiết
7. Mục tiêu của học phần
7.1. Mục tiêu chung: Cung cấp cho sinh viên các kiến thức cơ bản về cấu trúc, về phương
pháp phân tích động học và lực học cơ cấu. Trang bị cho sinh các kiến thức cơ bản về tính
toán thiết kế các chi tiết máy, bộ phận máy trong hệ dẫn động cơ khí... làm cơ sở cho việc
thiết kế hoàn thiện một máy.
7.2. Mục tiêu cụ thể: Mục tiêu của học phần là trang bị cho người học:
Ki ến thức: Trang bị cho sinh viên các kiến thức cơ bản về cấu trúc, về phương pháp phân
tích động học và lực học cơ cấu. Trang bị cho sinh các kiến thức cơ bản về tính toán thiết kế
các bộ truyền cơ khí, cũng như các chi tiết máy đỡ nối... làm cơ sở cho việc thiết kế hoàn
thiện một máy.
Kỹ năng: Biết phân tích cấu trúc cơ cấu, phân tích nguyên lý làm việc, phân tích động
học và lực học cơ cấu. Có khả năng tính toán thiết kế các bộ truyền cơ khí, các chi tiết máy
đỡ nối..., trên cơ sở đó có thể thiết kế hoàn chỉnh một thiết bị cơ khí.
Thái độ: Học cách độc lập vận dụng kiến thức vào việc thiết kế máy và cơ cấu.

Truyền động cơ khí- Vũ Thị Hạnh 2
7.3. Kết quả đầu ra (Chuẩn đầu ra):
Sau khi học học phần, sinh viên có khả năng:
− Hiểu biết đầy đủ về nguyên tắc cấu trúc của cơ cấu
− Có khả năng phân tích động học và lực học cơ cấu
− Có khả năng tính toán thiết kế các hệ truyền động cơ khí.
8. Tóm tắt nội dung học phần
Cấu trúc cơ cấu - Phân tích động học và lực học cơ cấu - Truyền động bánh răng - Hệ bánh
răng - Truyền động trục vít - Truyền động xích - Truyền động đai - Truyền động vít đai ốc -
Các chi tiết máy đỡ nối (trục, ổ lăn, nối trục).
Bài tập lớn: Phân tích động học và lực học cơ cấu.
9. Nhiệm vụ của sinh viên:
− Dự lớp
− Làm bài tập và bài tập lớn, nộp bài tập lớn
− Kiểm tra giữa học kỳ
− Thi cuối học kỳ
10. Tài liệu học tập:
- Sách, Giáo trình, bài giảng chính:
[1] Đinh Gia Tường, Nguyễn Xuân Lạc, Trần Doãn Tiến, Nguyên lý máy, Nhà xuất bản
Đại học và Trung học chuyên nghiệp Hà Nội 1969.
[2] Đinh Gia Tường, Tạ Khánh Lâm, Nguyên lý máy Tập I, Nhà xuất bản Khoa học và
Kỹ thuật, Hà Nội 1995.
[3] Chi tiết máy tập I & II, Nguyễn Trọng Hiệp, Nguyễn Văn Lẫm, Nhà xuất bản Giáo
dục Hà Nội 1997, 1994.
[5] Thiết lập các bản vẽ trong đồ án Chi tiết máy, Nguyễn Văn Yến, Nxb. Giao thông
Vận tải, Hà Nội 2005
[6] Lê Cung, Bài giảng Truyền động cơ khí, Bài giảng trường ĐHBK Đà Nẵng 2007.
[7] Nguyễn Văn Yến, Giáo trình Chi tiết máy, Nxb. Giao thông vận tải Hà Nội 2005.
- Tài liệu tham khảo:
[1] Cơ sở thiết kế máy và chi tiết máy, Trịnh Chất, Nxb. KH và KT, Hà Nội 1998
[2] Lê Cung, Bài giảng Nguyên lý máy, Bài giảng trường ĐHBK Đà Nẵng 2007.
[3] Lê Cung, Cơ sở thiết kế máy Phần 1 & 2, Bài giảng trường ĐHBK Đà Nẵng 2007.

Truyền động cơ khí- Vũ Thị Hạ
11. Tiêu chuẩn đánh giá sinh viên
− - Chuyên cần và Bài tậ
− - Kiểm tra giữa học kỳ
− - Thi kết thúc học phần
12. Thang điểm: 10 và 4.
13. Thông tin về đội ngũ giảng viên
1. Lê Cung: ĐT: 0905124879
2. Nguyễn Văn Yến: Đ
3. Vũ Thị Hạnh: ĐT: 0983198141
4. Bùi Minh Hiển: ĐT: 0905268297
5. Nguyễn Tường Quy: Đ
6. Nguyễn Xuân Hùng: Đ
14. Nội dung chi tiết học phần
Chương 1: Cấu trúc
1.1. Khái niệm và định ngh
1.1.1. Khâu, chi tiết máy
1. Khâu: Máy và cơ cấu gồm nhi
có chuyển động tương đố
Mỗi bộ phận có chuyển đ
này của máy được gọi là m
có thể là một chi tiết máy đ
một số chi tiết máy ghép c
nhau. Khâu có thể là mộ
biến dạng, vật rắn biến d
xo...) hoặc có dạng dây dẻ
trong bộ truyền đai...). Môn h
động cơ khí chỉ xét đến khâu và coi khâu
như thành phần cơ bản và
ũ ị Hạnh
ánh giá sinh viên:
ập: trọng số: 0,2
ỳ: trọng số: 0,3 (Hình thức: Tự luận)
n: trong số: 0.5 (Hình thức: Tự luận)
ng viên
ĐT: 0905124879 - Địa chỉ hộp thư: [email protected]
n: ĐT: 0914038888- Địa chỉ hộp thư: [email protected]
ĐT: 0983198141 - Địa chỉ hộp thư: [email protected]
ĐT: 0905268297 - Địa chỉ hộp thư: [email protected]
ng Quy: ĐT: 0903578614 - Địa chỉ hộp thư: [email protected]
n Xuân Hùng: ĐT: 0913476885- Địa chỉ hộp thư: [email protected]
n:
trúc cơ cấu (2 tiết)
nh nghĩa
t máy
m nhiều bộ phận
ối đối với nhau.
n động riêng biệt
i là một khâu. Khâu
t máy độc lập hay do
t máy ghép cứng lại với
ột vật rắn không
n dạng (ví dụ lò
ẻo (ví dụ dây đai
Môn học truyền
n khâu và coi khâu
n và là một vật rắn Hình 1. 3
Hình 1. 1

Truyền động cơ khí- Vũ Thị Hạ
không biến dạng (vật rắn tuy
Ví dụ: Xét động cơ đốt trong ki
khí cháy bên trong xi lanh (nhi
lượng - Hình 1. 1
Động cơ đốt trong bao gồm nhi
trượt OAB (Hình 1. 2) làm nhi
quay của trục khuỷu (1). cơ c
(1), thanh truyền (2), pittông (3) và xi lanh (4) g
máy. Trong hệ quy chiếu gắ
khâu có chuyển động riêng biệ
khâu (2) chuyển động song ph
khâu (4) cố định.
2. Chi tiết máy: Mỗi chi tiế
không thể tháo rời nhỏ hơ
khuỷu là một chi tiết máy đ
tiết máy như thân, bạc lót, đ
lại với nhau.
1.1.2. Nối động, thành ph
Bậc tự do tương đối giữa hai khâu
Số bậc tự do tương đối giữa hai khâu là s
chuyển động độc lập tương đ
khâu kia (tức là số khả năng chuy
khâu này trong một hệ quy chi
kia). Bậc tự do còn là số thông s
xác định vị trí của cơ cấu.
Khi để rời hai khâu trong không gian, gi
có 6 bậc tự do tương đối. Theo
độ vuông góc Oxyz gắn liền v
6 khả năng chuyển động: TX,T
QX,QY,QZ (chuyển động quay xung quanh các tr
độc lập với nhau. Mỗi khả nă
khác, hai khâu để rời trong không gian có 6 b
ũ ị Hạnh
n tuyệt đối).
t trong kiểu pittông-tay quay được dùng để biến đ
bên trong xi lanh (nhiệt năng, hóa năng) thành cơ năng trên trục khu
m nhiều cơ cấu. Cơ cấu chính trong máy là cơ
) làm nhiệm vụ biến chuyển tịnh tiến của pistông (3) thành c
ơ cấu tay quay con trượt OAB (hình 1.2) có 4 khâu: Tr
n (2), pittông (3) và xi lanh (4) gắn liền với vỏ
ắn liền với khâu (4) (vỏ máy), mỗi
ệt: Khâu (1) quay xung quanh tâm O,
ng song phẳng, khâu (3) chuyển động tịnh tiến,
ết máy là một bộ phận hoàn chỉnh,
hơn được nữa của máy. Ví dụ: Trục
t máy độc lập. Thanh truyền gồm nhiều chi
c lót, đầu to, bu lông, đai ốc... ghép cứng
ng, thành phần khớp động, khớp động
a hai khâu
a hai khâu là số khả năng
ương đối của khâu này đối với
ăng chuyển động độc lập của
quy chiếu gắn liền với khâu
thông số độc lập cần thiết để
i hai khâu trong không gian, giữa chúng sẽ
Theo Hình 1. 5, trong hệ tọa
n với khâu (1), khâu (2) có
,TY,TZ (chuyển động tịnh tiến dọc theo các tr
ng quay xung quanh các trục Ox, Oy, Oz). Sáu khả nă
năng chuyển động như vậy được gọi là một b
i trong không gian có 6 bậc tự do tương đối với nhau.
4
n đổi năng lượng của
c khuỷu (máy năng
u chính trong máy là cơ cấu tay quay-con
a pistông (3) thành chuyển động
OAB (hình 1.2) có 4 khâu: Trục khuỷu
c theo các trục Ox, Oy, Oz) và
năng này hoàn toàn
t bậc tự do. Nói cách
Hình 1. 2
Hình 1. 3
Truyền động cơ khí- Vũ Thị Hạ
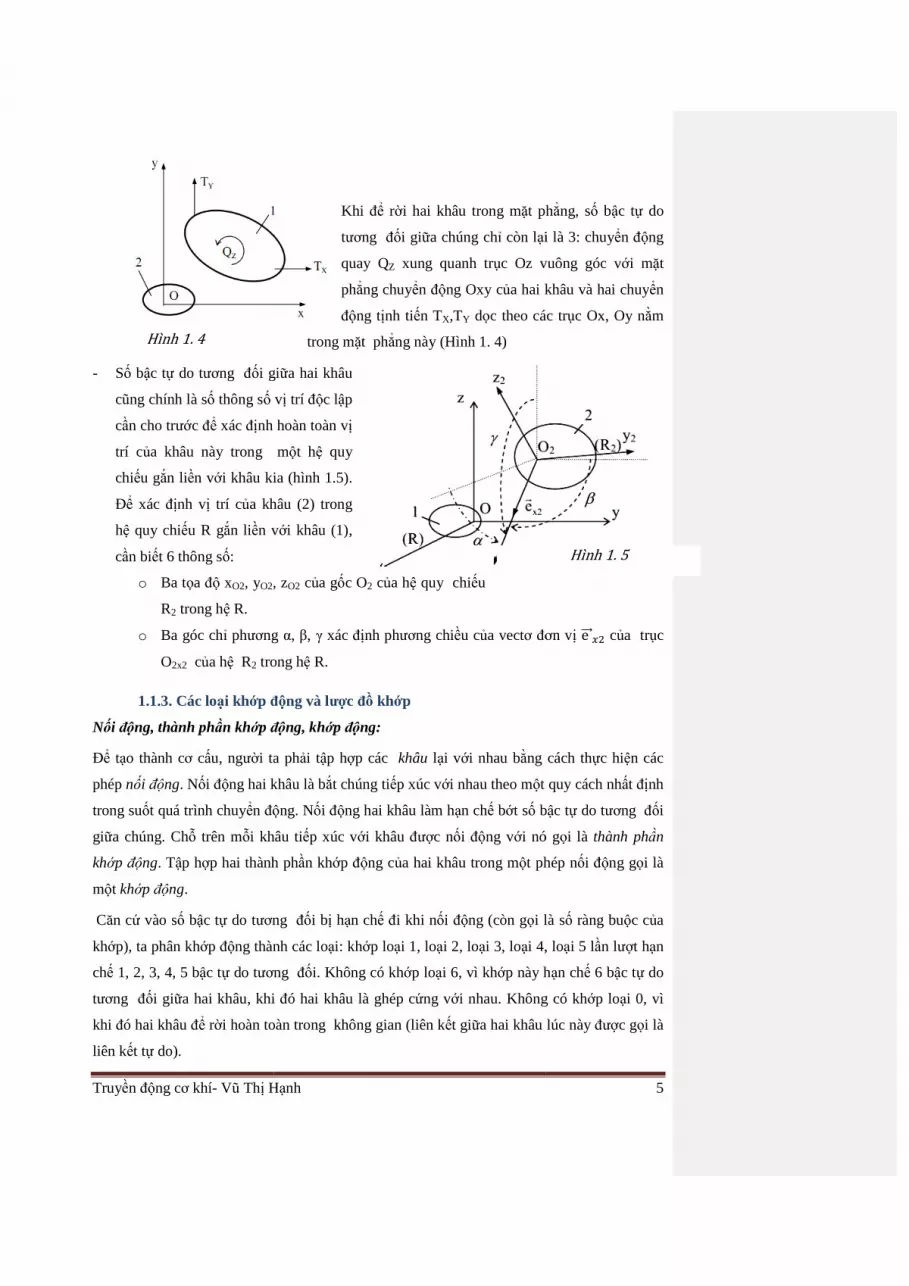
- Số bậc tự do tương đối gi
cũng chính là số thông số
cần cho trước để xác định hoàn toàn v
trí của khâu này trong m
chiếu gắn liền với khâu kia (hình 1.5)
Để xác định vị trí của khâu (2)
hệ quy chiếu R gắn liền v
cần biết 6 thông số:
o Ba tọa độ xO2, yO2, z
R2 trong hệ R.
o Ba góc chỉ phương
O2x2 của hệ R2 trong h
1.1.3. Các loại khớp đ
Nối động, thành phần khớp đ
Để tạo thành cơ cấu, người ta ph
phép nối động. Nối động hai khâu là b
trong suốt quá trình chuyển độ
giữa chúng. Chỗ trên mỗi khâu ti
khớp động. Tập hợp hai thành ph
một khớp động.
Căn cứ vào số bậc tự do tương
khớp), ta phân khớp động thành các lo
chế 1, 2, 3, 4, 5 bậc tự do tương
tương đối giữa hai khâu, khi đ
khi đó hai khâu để rời hoàn toàn trong không gian (liên k
liên kết tự do).
Hình 1. 4
ũ ị Hạnh
Khi để rời hai khâu trong mặt ph
tương đối giữa chúng chỉ còn lại là 3: chuy
quay QZ xung quanh trục Oz vuông góc v
phẳng chuyển động Oxy của hai khâu và hai chuy
động tịnh tiến TX,TY dọc theo các tr
trong mặt phẳng này (Hình 1. 4)
i giữa hai khâu
vị trí độc lập
nh hoàn toàn vị
a khâu này trong một hệ quy
i khâu kia (hình 1.5).
a khâu (2) trong
n với khâu (1),
, zO2 của gốc O2 của hệ quy chiếu
ương α, β, γ xác định phương chiều của vectơ đơ
trong hệ R.
p động và lược đồ khớp
p động, khớp động:
i ta phải tập hợp các khâu lại với nhau bằng cách th
ng hai khâu là bắt chúng tiếp xúc với nhau theo một quy cách nh
ộng. Nối động hai khâu làm hạn chế bớt số b
i khâu tiếp xúc với khâu được nối động với nó g
p hai thành phần khớp động của hai khâu trong một phép n
ương đối bị hạn chế đi khi nối động (còn gọi là s
ng thành các loại: khớp loại 1, loại 2, loại 3, loại 4, lo
ương đối. Không có khớp loại 6, vì khớp này h
a hai khâu, khi đó hai khâu là ghép cứng với nhau. Không có kh
i hoàn toàn trong không gian (liên kết giữa hai khâu lúc này
5
t phẳng, số bậc tự do
i là 3: chuyển động
c Oz vuông góc với mặt
a hai khâu và hai chuyển
c theo các trục Ox, Oy nằm
ơ đơn vị e của trục
ng cách thực hiện các
t quy cách nhất định
bậc tự do tương đối
i nó gọi là thành phần
t phép nối động gọi là
i là số ràng buộc của
i 4, loại 5 lần lượt hạn
p này hạn chế 6 bậc tự do
i nhau. Không có khớp loại 0, vì
a hai khâu lúc này được gọi là
Hình 1. 5

Truyền động cơ khí- Vũ Thị Hạ
Căn cứ vào đặc điểm tiếp xúc c
− Khớp cao: nếu thành ph
nhau theo điểm hoặc đ
− Khớp thấp: nếu thành ph
1.1.4. Kích thước động c
Kích thước động của khâu là các thông s
đối giữa các thành phần khớp đ
Ví dụ, Hình 1. 6 thanh truyền (2) trong
nối với tay quay (1) và với pittông (3) b
thành phần khớp động trên thanh truy
đường trục song song với nhau. Kích th
Hình 1. 7 ũ ị Hạnh
p xúc của hai khâu khi nối động, ta phân khớp động thành các lo
u thành phần khớp động là các điểm hay các đường
c đường)
u thành phần khớp động là các mặt (hai khâu tiếp xúc nhau theo
ng của khâu và lược đồ khâu
a khâu là các thông số xác định vị trí tương
p động trên khâu.
n (2) trong động cơ đốt trong được
i pittông (3) bằng các khớp quay, các
ng trên thanh truyền là các mặt trụ trong có
i nhau. Kích thước động của thanh
truyền là khoảng
cách li giữa hai
đường trục của
các khớp quay.
Mỗi khâu có thể có mộ
6
ng thành các loại:
ng (hai khâu tiếp xúc
p xúc nhau theo mặt).
ột hay nhiều kích
Hình 1. 6

Truyền động cơ khí- Vũ Thị Hạ
thước động. Ví dụ, khâu 3 trên
quay D, C, E. Khâu 3 có ba kích th
khớp quay. Khâu được biểu di
thể hiện các kích thước động c
1.1.5. Chuỗi động và cơ
Chuỗi động:
Chuỗi động là tập hợp các khâu
Dựa trên cấu trúc chuỗi động, ta phân chu
động kín.
− Chuỗi động hở là chuỗi độ
− Chuỗi động kín là chuỗi đ
khâu tạo thành các chu vi khép kín, m
ũ ị Hạnh
, khâu 3 trên Hình 1. 7 được nối động với ba khâu 6, 2 và 4 b
quay D, C, E. Khâu 3 có ba kích thước động, đó là khoảng cách trục lEC
u diễn bằng các lược đồ gọi là lược đồ động củ
ng của nó và lược đồ các khớp động nối nó với các khâu khác
ng và cơ cấu
p các khâu được nối với nhau bằng các khớp động trong m
ng, ta phân chuỗi động thành hai loại: chuỗi đ
ộng trong đó các khâu chỉ được nối với một khâu khác
i động trong đó mỗi khâu được nối ít nhất với hai
o thành các chu vi khép kín, mỗi khâu tham gia ít nhất hai khớp đ
7
i ba khâu 6, 2 và 4 bằng ác khớp
EC, lDE, lDC giữa các
ủa khâu, trên li đó
i các khâu khác.
trong một hệ thống.
i động hở và chuỗi
t khâu khác.
i hai khâu khác (các
p động).

Truyền động cơ khí- Vũ Thị Hạ
Dựa trên tính chất chuyển độ
Chuỗi động không gian là chu
song song với nhau.
Chuỗi động phẳng là chu
động có tất cả các khâu
chuyển động trên những m
phẳng song song với nhau.
Chuỗi động trên Error!
Reference source not found.
có 4 khâu nối nhau bằng 3 kh
quay có đường trục song song v
đó cả 4 khâu có mặt phẳng chuy
động nối động với 2 khâu khác, nên chu
Chuỗi động trên Error! Reference source not found.
quay có đường trục vuông góc v
các mặt phẳng không song song v
một khâu khác nên đây là mộ
Cơ cấu
Cơ cấu là một chuỗi động, trong
là cố định), các khâu còn lại có chuy
khâu động). Tương tự như chu
biệt cơ cấu phẳng và cơ cấu không gian
- Ví dụ, chọn khâu 4 trong chu
Error! Reference source not found.
trong chuỗi động phẳ
source not found. làm giá, ta
phẳng.
- Chọn khâu 4 trong chu
Error! Reference source not found.
có cơ cấu không gian.
ũ ị Hạnh
ộng, ta phân biệt chuỗi động không gian và chu
là chuỗi động có các khâu chuyển động trên các m
là chuỗi
các khâu
ng mặt
Error!
Reference source not found.
ng 3 khớp quay và 1 khớp tr
c song song với nhau và vuông góc với phương trượt c
chuyển động song song với nhau. Hơn nữa mỗ
i 2 khâu khác, nên chuỗi động nói trên là một chuỗ
Error! Reference source not found. gồm 4 khâu, nối nhau b
c vuông góc với nhau từng đôi một, do đó các khâu chuy
ng không song song với nhau. Mặc khác, khâu 3 và khâu 4 ch
ột chuỗi động không gian hở.
ng, trong đó một khâu được chọn làm hệ quy chiếu (g
i có chuyển động xác định trong hệ quy chiếu này (và g
ư chuỗi động, ta cũng phân
u không gian.
n khâu 4 trong chuỗi động phẳng kín
Error! Reference source not found., khâu 6
ẳng kín Error! Reference
làm giá, ta được các cơ cấu
n khâu 4 trong chuỗi động không gian
Error! Reference source not found. làm giá, ta
.
Hình 1. 8
8
ng không gian và chuỗi động phẳng.
ng trên các mặt phẳng không
p trượt, các khớp
t của khớp trượt, do
ỗi khâu trong chuỗi
ỗi động phẳng kín.
i nhau bằng 3 khớp
ó các khâu chuyển động trong
c khác, khâu 3 và khâu 4 chỉ được nối với
u (gọi là giá, coi giá
u này (và gọi là các
Hình 1. 9
Hình 1. 10

Truyền động cơ khí- Vũ Thị Hạ
- Error! Reference source not found.
chuyển động quay của khâu 1 thành chuy
- Hình 1.10: cơ cấu 6 khâu ph
động quay của khâu 1 thành chuy
- Hình 1.10: cơ cấu tay máy
chuỗi động hở như cơ c
1.2. Bậc tự do của cơ cấu
1.2.1. Khái niệm về b
Số bậc tự do của cơ cấu là số
để vị trí của toàn bộ cơ cấu hoàn toàn xác
cấu cũng chính là khả năng chuy
1.2.2. Công thức tính b
Bậc tự do thể hiện cho khả năng chuy
loại khớp. Xét cơ cấu gồm giá c
khâu động của cơ cấu khi để
ràng buộc do các khớp trong cơ
Xác định W0: trường hợp tổng quát, m
đối so với giá, nên nếu cơ cấu có n khâu thì s
Xác định R:
Đối với các cơ cấu mà lược đ
khớp đóng kín, sau khi nối n khâu
loại j hạn chế j bậc j tự do tươ
bằng:
Khi đó 6Ví dụ, với cơ cấu tay máy hình 1.12
ũ ị Hạnh
Error! Reference source not found.1: cơ cấu tay quay con trư
a khâu 1 thành chuyển động tịnh tiến của khâu 3 và ng
u 6 khâu phẳng sử dụng trong máy sàng lắc, dùng
a khâu 1 thành chuyển động tịnh tiến qua lại của con trư
u tay máy ba bậc tự do, cơ cấu được tạo thành t
ư cơ cấu tay máy.
bậc tự do của cơ cấu
thông số vị trí độc lập cần cho 1 trước
u hoàn toàn xác định. Số bậc tự do của cơ
ăng chuyển động độc lập của cơ cấu đó.
c tính bậc tự do của cơ cấu
năng chuyển động của cơ cấu, nó phụ thuộc vào s
m giá cố định và n khâu động. Gọi W0 : tổng số
ể rời nhau trong hệ quy chiếu gắn liền với giá. R
p trong cơ cấu tạo ra. Thì bậc tự do của cơ cấu sẽ bằng:
WW0–R (1-1)ng quát, một khâu để rời trong không gian có 6 b
u có n khâu thì số bậc tự do tương đối sẽ là
W06n (1-2)
c đồ không có một đa giác nào cả, tức là không có kh
i n khâu động lại với nhau và với giá bằng pj kh
do tương đối, nghĩa là tạo ra j ràng buộc, tổng s
R∑ !"#"$% (1-3) & ∑ !""
hình 1.12
9
u tay quay con trượt dùng để biến
a khâu 3 và ngược lại.
c, dùng để biến chuyển
a con trượt 5.
o thành từ
c vào số khâu, khớp và
ố bậc tự do của các
i giá. R: tổng số các
ng:
i trong không gian có 6 bậc tự do tương
c là không có khớp nào là
ớp loại j, mỗi khớp
ng số các ràng buộc
Hình1.11

Truyền động cơ khí- Vũ Thị Hạnh 10
n = 3, p5 = 3 (ba khớp quay loại 5) ⇒W = 3.6−(3.5) = 3.
Đối với các cơ cấu mà lược đồ là một hay một số đa giác đóng kín, hoặc đối với một số cơ
cấu có các đặc điểm về hình học, ta phải xét đến các ràng buộc
trùng và ràng buộc thừa trong công thức tính bậc tự do. Khi đó:
( )* & (∑ +,+ & -./0*1 & -.203+ ) (1-4)Hay W = 6n – (5p5 + 4p4 + 3p3 + 2p2 +1p1)
Ngoài ra, trong số các bậc tự do được tính theo công thức (1.2), có thể có những bậc tự do
không có ý nghĩa đối với vị trí các khâu động trong cơ cấu, nghĩa là không ảnh hưởng gì đến
cấu hình của cơ cấu. Các bậc tự do này gọi là bậc tự do thừa và phải loại đi khi tính toán bậc
tự do của cơ cấu. Tóm lại, công thức tổng quát để tính bậc tự do:
6 − 45 !" − 6789:; − 67<9=" > − 7<9=
• Với cơ cấu phẳng
Một khâu có nhiều nhất 3 bậc tự do so với giá. Nên tổng số bậc tự do của n khâu sẽ là
W0 = 3n
Trong cơ cấu phẳng thường chỉ dùng ba loại khớp trên nên tổng số các ràng buộc do các
khớp trong cơ cấu phẳng tạo ra:
R = 2p5+p4
Như vậy, bậc tự do của cơ cấu:
W3n&(2p5+p4)(1-5) Ví dụ, cơ cấu 4 khâu bản lề phẳng:
n = 3; p5 = 4; p4 = 0⇒ W = 3.3 - (2.4 + 0) = 1
Tuy nhiên, kể đến các ràng buộc trùng, ràng buộc thừa và bậc tự do thừa, công thức tổng quát
để tính bậc tự do của cơ cấu phẳng như sau:
W = 3n−(2p5+p4−Rtrung−Rthua)−Wthua
1.2.3. Khâu dẫn, khâu bị dẫn, khâu phát động
Khâu dẫn là khâu có thông số vị trí cho trước (hay có quy luật chuyển động cho trước ). Ví
dụ trong cơ cấu 4 khâu bản lề hình 1.12, khâu dẫn là khâu 1 có quy luật chuyển động φ = φ
(t) cho trước. Khâu dẫn được chọn là khâu nối với giá bằng khớp quay và chỉ cần một thông
Hình1.12

Truyền động cơ khí- Vũ Thị Hạ
số để xác định vị trí của nó. Vì
vị trí của cơ cấu hoàn toàn xác
khâu dẫn.
Khâu bị dẫn Ngoài giá và khâu d
Khái niệm khâu dẫn, khâu bị
cấu này, không có khâu nào mà chuy
hay một số khâu khác, chuyển đ
biệt.
Khâu phát động Khâu phát đ
máy chuyển động. Ví dụ, với đ
Khâu dẫn thường là khâu có v
góc không đổi, ở đây chọn trụ
trùng với khâu dẫn, tuy nhiên thông th
động.
1.3. Xếp hạng cơ cấu phẳng
Theo phương pháp phân tích c
nếu một cơ cấu có W bậc tự do thì bao g
và những nhóm có bậc tự do b
khác, các khâu trong một cơ c
Loại thứ nhất là khâu dẫn có qui lu
trước, số khâu loại này bằng s
Loại thứ hai là các khâu bị
nhóm tĩnh định có bậc tự do b
Át-xua.
1) Nhóm Átxua – Hạng c
Xét cơ cấu phẳng chỉ chứa toàn nh
Át-xua phải thỏa mãn điều kiệ
Nhóm tĩnh định: Nhóm tĩnh
nhóm nhỏ hơn có bậc tự do b
ũ ị Hạnh
Vì số bậc tự do của cơ cấu là số thông số vị trí c
u hoàn toàn xác định, do đó cơ cấu có bao nhiêu bậc tự do s
Ngoài giá và khâu dẫn ra, các khâu còn lại đợc gọi là khâu bị
dẫn không có ý nghĩa đối với các cơ cấu rôb
ng có khâu nào mà chuyển động hoàn toàn phụ thuộc vào chuy
n động của mỗi khâu được điều khiển bằng m
Khâu phát động là khâu được nối trực tiếp với nguồn nă
i động cơ đốt trong hình 1.1, khâu phát động là pittông.
ng là khâu có vận tốc góc không đổi hay theo yêu cầu làm vi
ục khuỷu làm khâu dẫn. Khâu phát động có th
n, tuy nhiên thông thường người ta chọn khâu dẫn trùng v
ng
ng pháp phân tích cấu tạo cơ cấu của Át-xua:
do thì bao gồm W khâu dẫn
do bằng không. Nói cách
ơ cấu được chia làm 2 loại:
n có qui luật chuyển động biết
ng số bậc tự do của cơ cấu.
dẫn tập hợp thành những
do bằng không, còn gọi là nhóm
ng của nhóm
a toàn những khớp thấp gồm n khâu và p5 khớp lo
ện của nhóm:
W = 3n - 2p5 = 0
ĩnh định là nhóm có bậc tự do bằng 0 và không th
do bằng 0. Xét cơ cấu bốn khâu bản lề ABCD (hình 1.
Hình 1.
Hình 1. 11
trí cần cho trước để
do sẽ cần có bấy nhiêu
ị dẫn.
u rôbốt. Trong các cơ
c vào chuyển động của một
ng một kích hoạt riêng
n năng lượng làm cho
ng là pittông.
u làm việc phải có vận tốc
ng có thể trùng hay không
n trùng với khâu phát
p loại 5, một nhóm
ng 0 và không thể tách thành các
ABCD (hình 1.13). Tách
Hình 1. 13
Hình 1. 14

Truyền động cơ khí- Vũ Thị Hạ
khỏi cơ cấu khâu dẫn 1 và giá 4, s
nhóm gồm hai khâu 2 và 3 nố
quay C (hình 1.14). Ngoài ra trên m
thành phần khớp và được gọi là kh
B và khớp chờ C. Như vậy nhóm còn l
khâu (n = 2) và ba khớp quay (p
của nhóm:
Đây là một nhóm tĩnh định vì khi cho tr
C hoàn toàn xác định.
Hạng của nhóm tĩnh định
Vì số khâu và khớp phải là số
n
n =
n =
Nhóm tĩnh định chỉ có hai khâu và ba kh
nhóm Atxua hạng II như sau
phải là một nhóm tĩnh định vì b
Nhóm Atxua có hạng cao hơn II
đa giác thì hạng của nhóm Atxua
giác thì hạng của nhóm lấy bằ
1.17 có thể tách thành khâu d
1.18). Các khớp chờ là khớp B, E, G. Các kh
giác khép kín là CDF có ba đỉ
ũ ị Hạnh
n 1 và giá 4, sẽ còn lại một
ối với nhau bằng khớp
). Ngoài ra trên mỗi khâu còn một
i là khớp chờ: khớp chờ
y nhóm còn lại gồm có hai
p quay (p5 = 3), bậc tự do
W = 3.2 – 2.3 = 0.
vì khi cho trước vị trí của các khớp chờ thì vị
nguyên nên các nhóm được phân loại như sau
= 2 → p5 = 3 nhóm 2 khâu 3 khớp
= 4 → p5 = 6 nhóm 4 khâu 6 khớp
= 6 → p5 = 9 nhóm 6 khâu 9 khớp
có hai khâu và ba khớp được gọi là nhóm Atxua hạ
ư sau (Hình.1-15). Nhóm gồm có hai khâu và ba kh
nh vì bậc tự do của nhóm bằng 1.
Hình 1. 15 ơn II : Nếu các khớp trong của một nhóm tĩnh
a nhóm Atxua được lấy bằng số đỉnh của đa giác, nếu t
ằng số đỉnh của đa giác nhiều đỉnh nhất. Ví d
tách thành khâu dẫn 1 nối giá bằng khớp và một nhóm tĩnh đ
p B, E, G. Các khớp trong là khớp C, D, E. Nhóm này có m
ỉnh nên là nhóm hạng III.
12
ị trí của khớp trong
ư sau
ạng II. Có năm loại
m có hai khâu và ba khớp trượt không
ĩnh định tạo thành một
u tạo thành nhiều đa
Ví dụ cơ cấu trên hình
định BCDEG (hình
Nhóm này có một đa

Truyền động cơ khí- Vũ Thị Hạ
Nhóm 4 khâu 6 khớp gọi là nhóm lo
+ Nhóm Atxua có hạng cao hơ
một đa giác thì hạng của nhóm Atxua
đa giác thì hạng của nhóm lấy
hình 1.31 có thể tách thành khâu d
(hình 1.32). Các khớp chờ là kh
một đa giác khép kín là CDF có ba
2) Hạng của cơ cấu
Cơ cấu hạng I là cơ cấu có m
nối với giá bằng khớp quay, ví d
roto máy điện.
Cơ cấu có số khâu động lớn hơ
coi là tổ hợp của một hay nhi
hạng I với một số nhóm Atxua. N
nhóm Atxua thì hạng của cơ c
hạng của cơ cấu lấy bằng hạng c
1.17 là cơ cấu hạng III.
Việc xếp hạng cơ cấu có ý ngh
học và lực học của cơ cấu.
Chương 2: Phân tích
2.1. Bài toán phân tích động h
Phân tích động học cơ cấu là nghiên c
quy luật chuyển động của khâu d
của khâu dẫn, cần phải:
- Xác định vị trí của các khâu và qu
chuyển động. Đây là b
ũ ị Hạnh
i là nhóm loại 3 (H.1-16).
ng cao hơn II : Nếu các khớp trong của một nhóm t
a nhóm Atxua được lấy bằng số đỉnh của đa giác, n
y bằng số đỉnh của đa giác nhiều đỉnh nhất.
tách thành khâu dẫn 1 nối giá bằng khớp và một nhóm t
là khớp B, E, G. Các khớp trong là khớp C, D, E
là CDF có ba đỉnh nên là nhóm hạng III.
u có một khâu động
p quay, ví dụ cơ cấu
n hơn 1 có thể
t hay nhiều cơ cấu
nhóm Atxua. Nếu cơ cấu chỉ có một
ơ cấu là hạng của nhóm. Nếu cơ cấu có nhiề
ng của nhóm Atxua có hạng cao nhất. Ví d
u có ý nghĩa thiết thực trong việc nghiên cứu các mộ
Phân tích động học và lực học cơ cấ
tiết)
ng học cơ cấu phẳng
u là nghiên cứu chuyển động của cơ cấu khi cho tr
a khâu dẫn. Cụ thể: cho trước lược đồ cơ cấu, quy lu
a các khâu và quỹ đạo của các điểm trên khâu trong quá trình c
bài toán vị trí và quỹ đạo.
Hình 1.
13
t nhóm tĩnh định tạo thành
đa giác, nếu tạo thành nhiều
. Ví dụ cơ cấu trên
t nhóm tĩnh định BCDEG
p C, D, E. Nhóm này có
ều nhóm Atxua thì
Ví dụ cơ cấu trên hình
ột số bài tính động
ấu phẳng (5
u khi cho trước cơ cấu và
u, quy luật chuyển động
m trên khâu trong quá trình cơ cấu
Hình 1. 16

Truyền động cơ khí- Vũ Thị Hạnh 14
- Xác định vận tốc của các điểm trên khâu và vận tốc góc các khâu tại từng vị trí và
quy luật vận tốc các điểm trên khâu, vận tốc gĩc các khâu khi cơ cấu chuyển động.
Đây là bài toán vận tốc.
- Xác định gia tốc của các điểm trên khâu, gia tốc góc các khâu tại từng vị trí và quy
luật gia tốc các điểm trên khâu, gia tốc giữa các khâu khi cơ cấu chuyển động. Đây là
bài toán gia tốc.
Khi nghiên cứu động học cơ cấu ta không để ý đến nguyên nhân của chuyển động và thường
giả thiết khâu dẫn chuyển động đều.
2.1.1. Nội dung bài toán phân tích động học cơ cấu phẳng
Nội dung bài toán phân tích động học cơ cấu:
Số liệu cho trước: Lược đồ động của cơ cấu. Khâu dẫn và quy luật chuyển động của khâu dẫn
Yêu cầu: Xác định quy luật chuyển động của cơ cấu.
Có nhiều phương pháp khác nhau để giải bài toán phân tích động học cơ cấu. Chương này
chủ yếu giới thiệu phương pháp họa đồ (phương pháp vẽ - dựng hình). Hình vẽ biểu diễn vị
trí tương đối giữa các khâu ứng với các vị trí khác nhau của khâu dẫn AB được gọi là hoạ đồ
chuyển vị của cơ cấu. Hình vẽ biểu diễn vị trí tương đối giữa các khâu ứng với một vị trí xác
định của khâu dẫn AB được gọi là hoạ đồ cơ cấu.
2.1.2. Bài toán vị trí và quỹ đạo
Số liệu cho trước: Lược đồ động của cơ cấu, khâu dẫn.
Yêu cầu: Xác định quy luật chuyển vị của các khâu bị dẫn theo góc quay (góc vị trí)ϕ của
khâu dẫn:
- Quy luật chuyển vị s = s(φ) nếu khâu bị dẫn tịnh tiến.
- Quy luật chuyển vị ψ = ψ(φ) nếu khâu bị dẫn quay xung quanh một điểm cố định.
- Quỹ đạo của một điểm bất kỳ trên cơ cấu
Ví dụ: Cho trước lược đồ động của cơ cấu tay quay- con trượt (hình 2.1). Khâu dẫn là khâu
AB. Yêu cầu: Xác định quy luật chuyển vị s = s(φ)của con trượt C. Xác định quỹ đạo của
điểm D trên thanh truyền BC
Cách xây dựng đồ thị s = s(φ) :Dựng vòng tròn tâm A, bán kính lAB. Chia vòng tròn (A, lAB)
thành n phần đều nhau bằng các điểm B1, B2,..., Bn.
- Vòng tròn (Bi, lBC) cắt phương trượt Ax của con trượt C tại điểm Ci.

Truyền động cơ khí- Vũ Thị Hạ
- Chọn vị trí C0 của con trư
Chiều dương để xác định s là chi
- Chọn Ax làm gốc để xác đ
là chiều quay của ω1. Khi đ
= ABCD của khâu dẫn AB.
- Với các cặp (ϕi,si) khác nhau, ta d
góc quay φ của khâu dẫn AB (
Xây dựng quỹ đạo của điểm D trên thanh truy
- Khi dựng các vị trí BiCi c
Nối các điểm Di này lại, ta đư
- Đường cong (D), quỹ đạo c
thanh truyền.
ũ ị Hạnh
a con trượt C tương ứng với vị trí B0 của điểm B làm g
nh s là chiều ngược chiều Ax.
xác định góc quay φ của khâu dẫn AB. Chiều dư
Khi đó si = EFEGHHHHHH là chuyển vị của con trượt C ứ
n AB.
) khác nhau, ta dựng được đồ thị chuyển vị s = s(φ) củ
n AB (Hình 2. 1).
Hình 2. 1 m D trên thanh truyền BC
của thanh truyền BC, ta dựng các điểm Di tươ
i, ta được quỹ đạo (D) của điểm D (Hình 2. 1). [D1]
o của một điểm D trên thanh truyền BC được g
15
m B làm gốc để xác định s.
ương để xác định φ
ứng với góc quay φ i
ủa con trượt C theo
tương ứng trên BiCi.
[D1]
c gọi là đường cong

Truyền động cơ khí- Vũ Thị Hạ
- Vì cơ cấu chuyển động có chu k
cấu trở về vị trí ban đầu) nên qu
là chu kỳ vị trí hay chu kỳ
dùng tỷ xích μ%:
J% Tương tự như trên, các trục s và
JK L MMMN và JK LO=P
MMN
2.1.3. Bài toán vận tố
Số liệu cho trước: Lược đồ độ
Yêu cầu: Xác định vận tốc của t
Ví dụ 1: Cho trước lược đồ đ
tốc góc là ω1 với ω1 = hằng s
vị trí khâu dẫn có vị trí xác định b
Phương pháp giải bài toán v
Vận tốc của một khâu coi như đư
định nếu biết hoặc vận tốc góc
và vận tốc dài của một điểm trên khâu
đó, hoặc vận tốc dài của hai đi
khâu. Do vậy với bài toán đã cho, ch
cần xác định vận tốc QR của đi
khâu 2 (hay trên khâu 3).
Hai điểm B và C thuộc cùng m
phương trình vận tốc:
QR QS + QRS Khâu AB quay xung quanh đ
QS T BC và VB = ω1lAB.
QRS là vận tốc tương đối củ
QRS T CE và VCB = ω2lBC. Do
ũ ị Hạnh
ng có chu kỳ bằng Φ = 2π (sau một vòng quay củ
u) nên quỹ đạo của điểm D là đường cong kín. Chu k
ỳ động học của cơ cấu. Khi dựng họa đồ chuy
;Uá78ị7<ựYZíY<7<ướYZíY<7<ướY^Uể9PUễ: abc
dS L MMMN
c s và φ của đồ thị chuyển vị s = s(φ) cũng có t
ốc
ộng của cơ cấu. Khâu dẫn và quy luật vận tốc c
a tất cả các khâu của cơ cấu tại một vị trí cho trư
động của cơ cấu bốn khâu bản lề ABCD. Khâu d
ng số. Yêu cầu: Xác định vận tốc của tất cả các khâu c
nh bằng góc e1 (hình 2.2) [D2]
i bài toán vận tốc
t khâu coi như được xác
c góc của khâu
m trên khâu
a hai điểm trên
cho, chỉ
a điểm C trên
c cùng một khâu (khâu 2) có
(2-1)Khâu AB quay xung quanh điểm A, nên vận tốc
ủa điểm C so với điểm B:
. Do ω2 chưa biết nên giá trị của QRS là một ẩn s
16
ủa khâu dẫn AB, cơ
Chu kỳ Φ được gọi
chuyển vị của cơ cấu,
Nũng có tỷ xích lần lượt là
c của khâu dẫn.
trí cho trước.
Khâu dẫn AB có vận
các khâu của cơ cấu tại
n số của bài toán.
Hình2.2
Hình2.3

Truyền động cơ khí- Vũ Thị Hạnh 17
Khâu 3 quay quanh điểm D, do đó: QR T fE và VC = ω3lDC. Do ω3 chưa biết nên giá trị
của V là một ẩn số của bài toán.
Dùng phương pháp họa đồ giải phương trình (2.1) [D3]
− Chọn một điểm p làm gốc.
− Từ p vẽ !^ biểu diễn QS − Qua b vẽ đường thẳng Δ song song với phương của QRS − Trở về gốc p, vẽ đường thẳng ∆’ và ∆, giao nhau tại điểm C.
− Suy ra: !Y biểu diễn QR , vectơ hiY biểu diễn QRS (hình 2.3).
Hình vẽ (2.3) gọi là họa đồ vận tốc của cơ cấu. Điểm p gọi là gốc học đồ.
Hoạ đồ vận tốc cũng được vẽ với tỷ xích là μj:
Jk lmánoịnℎựiqậnốitíiℎnℎướiiủvđxạhmểzmễ QS!h L |
||. N
Đo các đoạn pc và bc trên họa đồ vận tốc, ta có thể xác định giá trị của các vận tốc QR và QRS QR ~MK Jk ~M/K
MM . !i|| và QRS ~MK Jk ~M/KMM . hi||
Vận tốc góc của khâu 3 và khâu 2
ja và jc
ac
Chiều của ω3 và ω2 được suy từ chiều của QR và QRS ( hình 2.2).
Vận tốc Q của một điểm E trên khâu 2:
Do hai điểm B và E thuộc cùng một khâu (khâu 2), ta có phương trình vận tốc:
Q QS + QS (2-2)QS là vận tốc tương đối của điểm E so với điểm B: QS T C và VEB = ω2lBE.
Phương trình (2.2) có hai ẩn số là giá trị và phương của Q nên có thể giải bằng phương
pháp họa đồ như sau:
Từ p vẽ h biểu diễn QS Qua b vẽ đường thẳng Δ song song với phương của QRS Trở về gốc p, vẽ đường thẳng ∆’ và ∆, giao nhau tại điểm C.
Suy ra: ! biểu diễn Q

Truyền động cơ khí- Vũ Thị Hạnh 18
+ Hai điểm C và E cũng thuộc cùng một khâu (khâu 2), do đó ta có:
Q QR + QR QR àvận tốc tương đối của điểm E so với điểm B. Mặc khác ! !i +i . Mà !i biểu
diễn Q R, ! biểu diễn Q . Do vậy i biểu diễn QR Nhận xét về họa đồ vận tốc (hình 2.3):
− Các vectơ có gốc tại p, mút tại b, c, e... biểu diễn vận tốc tuyệt đối của các điểm tương
ứng trên cơ cấu: !h biểu diễn QS ;!i biểu diễn QR ; ! biểu diễn Q ... − Các vectơ không có gốc tại p như hi , h , i biểu diễn vận tốc tương đối giữa hai
điểm tương ứng trên cơ cấu: hi biểu diễn QRS ; h biểu diễn QS ; i biểu diễn QR ... Định lý đồng dạng thuận:
Hình nối các điểm trên cùng một khâu đồng dạng thuận với hình nối mút các vectơ vận tốc
tuyệt đối của các điểm đó trên họa đồ vận tốc. Thật vậy, ba điểm B, C, E thuộc cùng khâu 2
(hình 2.2). [D4]Mút của các vectơ vận tốc của các điểm B, C, E lần lượt là b, c, e. Vì CE T h
(hayQRS ); BE Tbe (hay QS ); CETce ( hayQR ) nên ∆CE ≈ bce. Mặc khác, thứ tự các chữ
B, C, E và b, c, e đều đi theo cùng một chiều như nhau: hai tam giác BCE và bce đồng dạng
thuận với nhau.
Định lý đồng dạng thuận được áp dụng để xác định vận tốc của một điểm bất kỳ trên một
khâu khi đã biết vận tốc hai điểm khác nhau thuộc khâu đó.
Ví dụ xác định vận tốc của điểm F trên khâu 3 (hình 2.2): [D5]Do ba điểm C, D, F
thuộc cùng khâu 3 và mút của các vectơ vận tốc của các điểm C, D lần lượt là c và d ≡
p nên khi vẽ tam giác cdf trên họa đồ vận tốc đồng dạng thuận với tam giác CDF trên
cơ cấu thì ! sẽ biểu diễn vận tốc Q của điểm F (hình 2.3)[D6].
Dạng họa đồ vận tốc chỉ phụ thuộc vào vị trí cơ cấu (hay chỉ phụ thuộc vào góc vị trí φ1 của
khâu dẫn), do đó các tỷ số: jc ,
, j ,
…chỉ phụ thuộc vào vị trí cơ cấu, nghĩa là:
QRS% QRS%(e%), % %
(e%), QR% , % %(e%)
Số liệu cho trước: Lược đồ động của cơ cấu bốn culít (hình 2.4). Khâu dẫn AB có vận tốc
góc là ω1 với ω1 = hằng số. Yêu cầu xác định vận tốc của tất cả các khâu của cơ cấu tại vị trí
(thời điểm) khâu dẫn có vị trí xác định bằng góc e%.

Truyền động cơ khí- Vũ Thị Hạ
Hai khâu 1 và 2 nối nhau bằng kh
khớp trượt nên ω2 = ω3. Do v
điểm B3 trên khâu 3. Hai điể
nhau nối nhau bằng khớp trượ
QS QS Do QS QS% và khâu 1 quay xung quanh
QS% T ABvà VB2 = VB1 = ω1lAB
QSS là vận tốc trượt tương đ
QS%S song song với phương trư
của QSS là một ẩn số của bài toán
Khâu 3 quay quanh điểm C, do đ
V là một ẩn số của bài
toán. Phương trình (2.3)
[D7]có hai ẩn số và giải
được bằng phương pháp
họa đồ:
Chọn một điểm p làm gốc.
Từ p vẽ !h biểu diễn
QS QS% . Qua b2, vẽ
đường thẳng ∆ song song
với phương của QSS (tức là song song với BC). Trở
Suy ra: !h biểu diễn QS , h%2.1.4. Bài toán gia tốc
Cho trước: Lược đồ động của cơ
dẫn. Yêu cầu xác định gia tốc c
Ví dụ 1
ũ ị Hạnh
ng khớp quay nên: QS% QS . Khâu 2 và khâu 3 n
Do vậy, chỉ cần tìm vận tốc QS của
ểm B3 và B2 thuộc hai khâu khác
ợt, do đó phương trình vận tốc:
+ QS%S (2- 3)
và khâu 1 quay xung quanh điểm A nên QS AB.
ương đối của điểm B3 so với điểm B2:
ương trượt của khớp trượt B. Giá trị
a bài toán.
m C, do đó: QS T BC và VB3 = ω3lAB. Do ω3 chưa bi
ở về gốc p, vẽ đường thẳng ∆, giao nhau tại đ
%h biểu diễn QSS (hình 2.5).
c
a cơ cấu. Khâu dẫn và quy luật vận tốc, quy lu
c của tất cả các khâu của cơ cấu tại một vị trí cho tr
Hình2.5
19
Khâu 2 và khâu 3 nối nhau bằng
ưa biết nên giá trị của
i điểm b3.
c, quy luật gia tốc của khâu
trí cho trước.
Hình2.4

Truyền động cơ khí- Vũ Thị Hạ
Cho trước lược đồ động của cơ
tốc góc ω1 với ω1 = hằng số
tất cả các khâu của cơ cấu tại v
Phương pháp giải bài toán gia t
Giả sử bài toán vận tốc đã gi
Gia tốc của một khâu được xác
nếu biết hoặc gia tốc dài của hai
trên khâu đó, hoặc vận tốc góc, gia t
góc của khâu và gia tốc dài c
điểm trên khâu đó. Do vậy, ch
định gia tốc vR của điểm C trên khâu 2
(hay khâu 3).
Phương trình gia tốc của hai đ
và C thuộc cùng một khâu (khâu 2),
Hay vR Khâu 1 quay đều quanh tâm A nên gia t
vRS là gia tốc tương đối của đ
- vRS : là thành phần pháp
từ B về C
- vRS 7 là thành phần tiếp tuy
Mặt khác do khâu 3 xoay quanh tâm D nên ta có
vR v- vR : là thành phần pháp tuy
từ C về D
- vR 7 là thành phần tiếp tuy
Giá trị của vR 7là một ẩn số củ
vR 7 + vR : v
ũ ị Hạnh
a cơ cấu bốn khâu bản lề ABCD (hình 2.6). Khâu d
ố (gia tốc góc của khâu 1: ε1 = 0). Yêu cầu x
i vị trí khâu dẫn có vị trí xác định bằng góc e%i bài toán gia tốc
ã giải xong.
c xác định
a hai điểm
c góc, gia tốc
c dài của một
y, chỉ cần xác
m C trên khâu 2
ai điểm B
t khâu (khâu 2),
vR vS + vRS vS + vRS : + vRS 7 (2-4
u quanh tâm A nên gia tốc vS của điểm B hướng từ B về A và a
a điểm C so với điểm B.
pháp tuyến của gia tốc vRS : vRS: SR
p tuyến của vRS : vRS7 SR và vRS 7 T CEt khác do khâu 3 xoay quanh tâm D nên ta có
vR : + vR 7 (2-5)n pháp tuyến của gia tốc vR :vRS: SR
p tuyến của vR : vR7 R và vR 7 T fE
ủa bài toán. Từ (2.4) và (2.5) suy ra:
vR vS +vRS : + vRS 7 (2
Hình2.6
20
Khâu dẫn AB có vận
xác định gia tốc của
%
4)A và aB = %lAB.
jcac , vRS : hướng
CE
jcac và vRS 7 hướng
(2-6)

Truyền động cơ khí- Vũ Thị Hạ
Giải phương trình (2.6) có hai
- Chọn điểm π làm gốc.
- Từ π vẽ h′ biểu di
diễn vRS :.
- Qua nCB vẽ đường thẳng
- Trở về gốc π, vẽ vectơ
- Qua nC vẽ đường thẳng
- Hai đường thẳng ∆ và ∆
- Suy ra: i′ biểu diễn
vR 7, RSi′ biểu diễn vHình vẽ (2.7) gọi là họa đồ gia t
được vẽ với tỷ xích là J=:
J= tíiℎĐo đoạn πc' trên họa đồ gia tố
Cách xác định gia tốc góc của khâu 3 và khâu 2:
Chiều của ε3 và ε2 được suy t
Cách xác định gia tốc v của đ
Do hai điểm B và E thuộc cùng m
v vS +Trong đó: vS là gia tốc tương đ
- vS : là thành phần pháp tuy
vS:
- vS 7 là thành phần tiếp tuy
ũ ị Hạnh
trình (2.6) có hai ẩn số là giá trị của vR 7và vRS 7 bằng phương pháp
c.
ễn vS . Qua b’ vẽ h′ RS biểu
ng ∆ song song với vRS 7. vectơ R biểu diễn vR :.
ng ∆' song song với vR 7. ∆ và ∆' giao nhau tại c’.
n vR (hình 2.6). Ri′ biểu diễn
vRS 7 gia tốc của cơ cấu. Điểm π gọi là gốc học đ
lmánoịnℎựilmvnốinℎướiiủvđxạhmểzmễ vSh′ L
|||.
ốc, ta có thể xác định giá trị của gia tốc vR : vR ~| J=
|/|| ¡ . i′||
a khâu 3 và khâu 2:
=¢a và =c¢ac
suy từ chiều của vR 7và vRS 7 (hình 2.6).
a điểm E trên khâu 2:
c cùng một khâu (khâu 2), ta có phương trình gia t
@vS : @ vS 7 (2-7ương đối của điểm E so với điểm B.
n pháp tuyến của gia tốc vS : S jc£ac£ , vS : hướng từ E về B
p tuyến của vS :
21
ương pháp họa đồ.
c đồ. Họa đồ gia tốc
N
trình gia tốc:
7)
Hình2.7

Truyền động cơ khí- Vũ Thị Hạnh 22
vS7 S và vS 7 ⊥ C
Phương trình (2.7) giải bằng phương pháp họa đồ (hình 2.7), hai ẩn số là giá trị và phương
của v - Từ b’ vẽ h′S biểu diễn vS :
.
- Qua nEB vẽ S′ biểu diễn vS 7.
- Suy ra: ′ biểu diễn v . Hai điểm C và E thuộc cùng khâu 2, do đó ta có:
v vR @vR với vR là vận tốc tương đối của điểm E so với điểm C.
Mặc khác:
¤ i¤ @ i¤¤ . ′ biểu diễn v , i′ biểu diễn vR . Do vậy i′′ biểu diễn vR . Nhận xét về họa đồ gia tốc hình 2.7:
- Các vectơ có gốc tại π, mút tại b, c, e... biểu diễn gia tốc tuyệt đối của các điểm tương
ứng trên cơ cấu: h′ biểu diễn vS ; i′ biểu diễn vR ; ′ biểu diễn v ; - Các vectơ không có gốc tại π biểu diễn vận tốc tương đối giữa hai điểm tương ứng
trên cơ cấu: h′i′ biểu diễn vRS ; h′′ biểu diễn vS ; i′′ biểu diễn vR Định lý đồng dạng thuận:
Hình nối các điểm trên cùng một khâu đồng dạng thuận với hình nối mút các vectơ gia tốc
tuyệt đối của các điểm đó trên họa đồ gia tốc. Xét ba điểm B, C, E thuộc cùng khâu 2 (hình
2.6). Mút của các vectơ gia tốc của các điểm B, C, E lần lượt là b, c, e.
tg(h′i′HHHHH,h′RSHHHHHHH) = =c¢=c¥ ¦acac
tg(h′i′HHHHH,CEHHHH) = tgα.
tg(h′′HHHHH,CHHHH) = tgα
tg(i′′HHHHH,EHHHH) = tgα.

Truyền động cơ khí- Vũ Thị Hạ
Điều đó có nghĩa là các cạnh b’c’, b’e’, c’e’ c
theo cùng một chiều so với các c
giác BCE và bce đồng dạng thu
Ví dụ 2
Cho trước lược đồ động của cơ
AB có vận tốc góc ω1 với ω1
= 0). Yêu cầu xác định gia tốc c
trí khâu dẫn có vị trí xác định b
Phương pháp giải bài toán gia t
Hai khâu 1 và 2 nối nhau bằng kh
Khâu 2 và khâu 3 nối nhau b
ε3.
Bài toán này, chỉ cần tìm vận t
điểm B3 và B2 thuộc hai khâu khác nhau n
trượt, do đó phương trình gia t
vSDo vS vS và khâu 1 quay
vS $ vS $ %dS
− vSS 8 là vận tốc trượt tươ
phương trượt của khớ
− vSS Z là gia tốc Côriôlít trong chuy
Phương chiều của vSS Z là chi
Mặc khác, điểm B3 thuộc khâu 3, khâu 3 quay quanh
vTrong đó:
− vS : là thành phần hướ
ũ ị Hạnh
nh b’c’, b’e’, c’e’ của tam giác b’c’e’ đã lần lượt quay
i các cạnh tương ứng CB, EB, EC của tam giác BCE, nên hai tam
ng thuận với nhau.
a cơ cấu culít (hình 2.8). [D8]Khâu dẫn
hằng số (gia tốc góc của khâu 1: ε1
c của tất cả các khâu của cơ cấu tại vị
nh bằng góc φ1
i bài toán gia tốc
ng khớp quay nên: vS vS . i nhau bằng khớp trượt nên ω2 = ω3 và ε2 =
n tốc vS của điểm B3 trên khâu 3. Hai
c hai khâu khác nhau nối nhau bằng khớp
gia tốc như sau:
S vS @vSS Z @ vSS 8 (2- 8) và khâu 1 quay đều xung quanh điểm A nên vS vS
t tương đối của điểm B3 so với điểm B2: vSớp trượt B. Giá trị của vSS 8là một ẩn số của bài toán
c Côriôlít trong chuyển động tương đối của khâu 3 so v
vSS Z 2⋀QSS là chiều của vectơ QSS quay 900 theo chiều của
vZSS 2⋀QSS
c khâu 3, khâu 3 quay quanh điểm C, do đó:
vS vS : @ vS 7 (2- 9) ớng tâm của vS : vS hướng từ B về C
23
t quay đi một góc α
a tam giác BCE, nên hai tam
hướng từ B về A,
SS 8song song với
a bài toán.
a khâu 3 so với khâu 2:
Hình 2. 8

Truyền động cơ khí- Vũ Thị Hạnh 24
v:S RS QSRS
− vS 7là thành phần tiếp tuyến của vS : vS 7 ⊥ EC và v7S RS.
Do ε3 chưa biết nên giá trị của vS 7 là một ẩn số của bài toán.
Từ (2.8) và (2.9) suy ra:
vS vS : @ vS 7 vS @vSS Z @ vSS 8(2-10)Bằng phương pháp họa đồ giải phương trình (2.10) ẩn số là giá trị của vS 7 và vSS 8 − Chọn một điểm π làm gốc. Từ π vẽ h′ biểu diễn vS . − Qua b2’ vẽ h′t biểu diễn vSS Z
.
− Qua k vẽ đường thẳng ∆ song song với vSS 8tức là song song với phương trượt của
con trượt B.
− Trở về gốc π, vẽ S biểu diễn vS :.
− Qua nB3 vẽ đường thẳng ∆’ song song với phương trượt của vS 7 tức là vuông góc
với CB.
− Hai đường ∆ và ∆’ giao nhau tại điểm b3’.
− Suy ra h′ biểu diễn vS , th′ biểu diễn vSS 8, Sh′ biểu diễn vS 7 Phương pháp phân tích động học trên đây được gọi là phương pháp họa đồ vectơ, thường
được sử dụng rộng rãi cho các cơ cấu phẳng trong đó tất cả khớp động đều là khớp thấp:
khớp quay và khớp trượt.
2.2. Nghiên cứu động học cơ cấu phẳng toàn khớp thấp
2.2.1. Khái niệm về cơ cấu phẳng toàn khớp thấp
Cơ cấu phẳng toàn khớp thấp là cơ cấu phẳng trong đó chỉ dùng các khớp quay và khớp trượt
với điều kiện các khớp quay trong cơ cấu phải có đường trục song song nhau với nhau, các
khớp trượt trong cơ cấu phải có phương trượt nằm trong các mặt phẳng song song với nhau
và vuông góc với đường trục của các khớp quay. Điều kiện nói trên được gọi là điều kiện
phẳng của cơ cấu.

Truyền động cơ khí- Vũ Thị Hạ
2.2.2. Cơ cấu bốn khâu bả
Các cơ cấu phẳng toàn khớp th
phẳng toàn khớp thấp có 4 khâu
Cơ cấu 4 khâu phẳng toàn kh
gọi là cơ cấu 4 khâu bản lề. Các c
cấu bốn khâu phẳng thông dụng đư
[D9] Mỗi cơ cấu 4 khâu phẳng có m
truyền và hai khâu nối với giá g
dụng, có ít nhất một khâu đư
được liên tục quanh giá của nó thì
cấu 4 khâu bản lề là dạng cơ b
khác đều có thể xem là biến th
2.3. Bài toán phân tích lực h
2.3.1. Các lực tác dụng lên c
Khi làm việc cơ cấu chịu tác đ
Hình 2. 9 Cơ cấu bốn khâu bản lề
Hình 2. 11 Cơ cấu culít.
ũ ị Hạnh
ản lề
p thấp thông dụng là các cơ cấu có bốn khâu và sáu khâu. C
p có 4 khâu được gọi là cơ cấu 4 khâu phẳng gồm có các c
ng toàn khớp quay
. Các cơ
ng được cho trên hình 2.9, 2.10, 2.11, 2.12
ng có một khâu cố định là giá, một khâu không n
i giá gọi là các khâu nối giá. Trong các cơ cấu 4 khâu ph
được nối với giá bằng khớp bản lề. Nếu khâu n
a nó thì được gọi là tay quay, nếu không được g
ng cơ bản nhất của cơ cấu 4 khâu phẳng. Các cơ c
n thể của cơ cấu 4 khâu bản lề.
c học cơ cấu phẳng
ng lên cơ cấu
u tác động của các ngoại lực sau:
Hình 2. 10 Cơ cấu tay quay con tr
25
n khâu và sáu khâu. Cơ cấu
m có các cơ cấu hạng II.
t khâu không nối giá gọi là thanh
u 4 khâu phẳng thông
u khâu nối giá này quay
c gọi là cần lắc. Cơ
ng. Các cơ cấu 4 khâu phẳng
ấu tay quay con trượt.

Truyền động cơ khí- Vũ Thị Hạ
1) Ngoại lực
− Lực phát động: Lực từ độ
dẫn. Lực phát động thường có d
− Lực cản kỹ thuật: Lực từ
Lực cản kỹ thuật là lực cầ
được đặt trên một khâu bị
− Ví dụ lực cắt tác động lên các d
dụng lên lưỡi cày trong máy cày, tr
chuyển... Lực cản kỹ thuật đư
− Trọng lượng các khâu: Nế
cản, ngược lại nếu trọng tâm
Trọng lượng khâu thứ i đư
2) Lực quán tính
Ngoài ngoại lực, trên các khâu chuy
tốc còn có lực quán tính. Lực quán tính ký hi
Pqt, còn momen lực quán tính ký hi
Dưới tác động của ngoại lực và l
các khớp động của cơ cấu xu
khớp động. Phản lực khớp độ
phần khớp động tác động lên thành ph
được nối với nó trong khớp đ
thứ i tác dụng lên khâu thứ j đư
Trong mỗi khớp động bao giờ
khâu 1 tác động lên khâu 2 m
621 = −612 (hình 2.12).
Phản lực khớp động gồm hai thành ph
− áp lực khớp động: Thành ph
thành phần khớp động
đối. Áp lực khớp động t
− Lực ma sát: Thành phầ
song với phương chuy
ũ ị Hạnh
ộng cơ đặt trên khâu dẫn của cơ cấu thông qua m
ng có dạng một momen lực và ký hiệu là MĐ.
đối tượng công nghệ tác động lên bộ phận làm vi
ần khắc phục để thực hiện quy trình công ngh
dẫn của cơ cấu.
ng lên các dụng cụ trong các máy cắt gọt kim loại, l
i cày trong máy cày, trọng lượng các vật cần di chuyể
t được ký hiệu là PC hay MC.
ếu trọng tâm các khâu đi lên thì trọng lượng có tác d
ng tâm đi xuống thì trọng lượng có tác dụng như
được ký hiệu là Gi.
c, trên các khâu chuyển động có gia
c quán tính ký hiệu là
c quán tính ký hiệu là Mqt.
c và lực quán tính, trong
u xuất hiện các phản lực
ộng là lực từ mỗi thành
ng lên thành phần khớp động
p động. Phản lực khớp động từ khâu
j được ký hiệu 6G¸
ờ cũng có một đôi phản lực khớp động trực đ
ng lên khâu 2 một lực 612 , thì khâu 2 sẽ tác động lên khâu 1 m
m hai thành phần:
Thành phần không sinh công trong chuyển động tươ
ng. Áp lực khớp động vuông góc với phương chuy
ng từ khâu thứ i tác dụng lên khâu thứ j được ký hi
ần sinh công âm trong chuyển động tương đố
ương chuyển động tương đối (hoặc xu hướng chuyể
26
u thông qua một hệ truyền
.
n làm việc của máy.
n quy trình công nghệ của máy, lực này
i, lực cản của đất tác
ển trong máy nâng
ng có tác dụng như lực
ng như lực phát động.
c đối với nhau: Nếu
ng lên khâu 1 một lực 621 với
ng tương đối giữa các
ương chuyển động tương
c ký hiệu là ¹G¸ ối. Lực ma sát song
ển động tương đối).
Hình2.12

Truyền động cơ khí- Vũ Thị Hạnh 27
Lực ma sát từ khâu thứ i tác dụng lên khâu thứ j được ký hiệu là ºG¸ . Lực ma sát trong
khớp động là một lực cản có hại, công của lực ma sát làm nóng và làm mòn các thành
phần khớp.
2.3.2. Nội dung và giả thiết của bài toán phân tích lực trên cơ cấu
Số liệu cho trước:
− Lược đồ động của cơ cấu, khâu dẫn và vận tốc góc ω1 của khâu dẫn.
− Các ngoại lực tác động lên các khâu
− Các thông số quán tính gồm: Khối lượng mi và vị trí trọng tâm Si của mỗi khâu.
Momen quán tính JSi đối với trọng tâm của các khâu chuyển động quay.
Giả thiết
Khi phân tích lực trên khâu dẫn, giả thiết khâu dẫn quay đều, vận tốc góc bằng hằng số. Do
các khớp động thường được bôi trơn đầy đủ nên giá trị lực ma sát trong khớp động thường
khá nhỏ so với giá trị áp lực khớp động tương ứng, do vậy khi giải bài toán phân tích lực
người ta thường bỏ qua lực ma sát, nghĩa là đồng nhất áp lực khớp động với phản lực khớp
động.
Đối với cơ cấu phẳng, để bài toán phân tích lực được đơn giản, ta giả thiết các lực tác dụng
lên cơ cấu nằm trong cùng một mặt phẳng song song với mặt phẳng chuyển động của cơ cấu.
Phân tích lực cơ cấu bao gồm:
− Phân tích lực trên khâu bị dẫn, xác định áp lực tại các khớp động trong các nhóm tĩnh
định của cơ cấu.
− Phân tích lực khâu dẫn, xác định lực hay momen lực cần phải đặt trên khâu dẫn bảo
đảm cho khâu dẫn có vận tốc bằng hằng số. Lực và momen lực được ký hiệu là
»ih và momen cân bằng ký hiệu là ¼ih . Ngoài ra, còn phải xác định áp lực tại khớp
động nối khâu dẫn với giá.
− Chương này trình bày bài toán phân tích lực trên cơ cấu phẳng bằng phương pháp
họa đồ vectơ.

Truyền động cơ khí- Vũ Thị Hạ
2.3.3. Nguyên tắc và trình
1) Nguyên lý Đalămbe:
Áp lực khớp động là nội lực đ
tính toán, ta phải hình dung tách các kh
ra, ta đặt phản lực tương ứng.
Ví dụ trong cơ cấu 4 khâu b
(hình.12), khi hình dung tách các kh
lực tương ứng: ¹ ½; ¹ ;¹ Khi cơ cấu chuyển động, các khâu nói chung có gia t
đặt trên các thành phần khớp c
viết các phương trình cân bằng l
Đălămbe, nếu ngoài các ngoại l
thêm vào đó các lực quán tính và momen l
ngoại lực thì sẽ được một hệ l
của tĩnh học cho khâu và giải đ
2) Điều kiện tĩnh định của bài toán phân tích áp l
Khi viết phương trình cân bằng l
phương trình cân bằng lực có th
khâu bản lề (hình 2.15) thì s
phương trình cân bằng lực bằ
Hình2.14
ũ ị Hạnh
trình tự giải bài toán phân tích áp lực khớp
c đối với cơ cấu. Để làm xuất hiện các lực này trong công th
i hình dung tách các khớp động ra. Tại mỗi thành phần kh
.
u 4 khâu bản lề
), khi hình dung tách các khớp đặt tại các thành phần khớp động B, C, D các ph
;¹ %;¹ % (hình 2.14).
ng, các khâu nói chung có gia tốc, hệ lực gồm ngoạ
p của nó không phải là một hệ lực cân bằng. Như
ng lực để giải tìm áp lực khớp động. Tuy nhiên, theo nguyên lý
i lực và các áp lực tại các thành phần khớp đ
c quán tính và momen lực quán tính của khâu và coi chúng nh
lực cân bằng. Khi đó có thể viết các phương tr
i để xác định các áp lực khớp động.
a bài toán phân tích áp lực khớp động
ng lực của tĩnh học, nếu chúng ta viết cho từng khâu m
c có thể nhỏ hơn số ẩn cần tìm. Ví dụ với khâu 3 trong c
thì số ẩn số là 4 (phương và giá trị của các l
ằng 3 (2 phương trình hình chiếu và 1 phương tr
Hình2.13
28
p động
c này trong công thức
n khớp động được tách
ng B, C, D các phản
ại lực và các áp lực
ng. Như vậy không thể
Tuy nhiên, theo nguyên lý
p động trên khâu, nếu
a khâu và coi chúng như là những
ương trình cân bằng lực
ng khâu một, thì số
i khâu 3 trong cơ cấu 4
a các lực: ¹ ½; ¹ ;), số
ương trình momen).

Truyền động cơ khí- Vũ Thị Hạ
Vì vậy cần phải viết phương tr
ẩn số mới có thể bằng số phươ
Xét một nhóm gồm n khâu b
cả các khớp chờ của nhóm).
− Đối với cơ cấu phẳng, ta thư
khớp cao loại 4 như khớp bánh r
− Đối với khớp quay (hình 2.15
tâm quay O của khớp, do đ
trong khớp quay, cần xác đ
− Đối với khớp trượt (hình 2.15
phương trượt xx, do đó áp l
Để xác định áp lựcN trong kh
điểm đặt của ¹ . Như vậy,
với hai ẩn số của bài toán
− Đối với khớp cao phẳng (hình
thành phần khớp cao, có phươ
đó để xác định ¹ chỉ cần xác
ứng với hai ẩn số của bài toán phân tích l
trên là 2p5+ p4.
Vì với mỗi khâu (xem như là v
phương trình hình chiếu và 1 ph
ũ ị Hạnh
ương trình cân bằng lực cho một nhóm các khâu bị
ương trình cân bằng lực lập được.
m n khâu bị dẫn kề nhau, trong đó có p5 khớp loại 5 và p
ng, ta thường gặp các khớp thấp loại 5 là khớp quay, kh
p bánh răng phẳng, khớp cam phẳng.
2.15a), do áp suất giữa các thành phần khớp quay
p, do đó áp lựcN cũng đi qua tâm quay O. Để xác
n xác định giá trị của ¹ và góc α xác định phương c
2.15b), do áp suất giữa các thành phần khớp đ
đó áp lực ¹ trong khớp trượt cũng vuông góc vớ
cN trong khớp trượt, cần xác định giá trị của ¹ và thông s
y, áp lực tại mỗi khớp động loại 5 (khớp quay,
phân tích lực.
ng (hình 2.15c), áp lực ¹ có điểm đặt là điểm ti
p cao, có phương song song với phương pháp tuyến chung nn t
n xác định giá trị của ¹ , tức là áp lực tại mỗ
a bài toán phân tích lực. Như vậy số ẩn số cần tìm
ư là vật rắn tuyệt đối) ta viết được 3 phương trình cân b
u và 1 phương trình momen), nên số phương trình cân b
Hình 2. 15
29
ị dẫn kề nhau thì số
i 5 và p4 khớp loại 4 (kể
p quay, khớp trượt và các
p quay đồng quy tại
xác định áp lực ¹ ương của ¹ .
p đều vuông góc với
ới phương trượt xx.
và thông số x xác định
quay, khớp trượt) ứng
m tiếp xúc M của hai
n chung nn tại M, do
ỗi khớp động loại 4
tìm đối với nhóm nói
ình cân bằng lực (2
ình cân bằng lực lập

Truyền động cơ khí- Vũ Thị Hạ
được bằng 3n. Để giải được bài toán phân tích l
phải bằng số ẩn số cần tìm, tứ
3 &Tóm lại để giải được bài toán phân tích l
một nhóm tĩnh định. Điều kiệ
áp lực khớp động.3)
3)Trình tự giải bài toàn phân tích áp
Số liệu cho trước
- Lược đồ động của cơ cấu tay quay con tr
- Khâu dẫn là khâu 1, vận tốc góc khâu d
- Ngoại lực tác động lên các khâu
− Khâu 2 chịu tác đ
− Khâu 3 chịu tác đ
- Khối lượng mi, vị trí khối tâm S
Yêu cầu giải bài toán phân tích áp l
a) Tính lực truyền của khâu b
Để phân tích lực trên các khâu b
− Tách cơ cấu thành các nhóm t
Cơ cấu tay quay con trượt ch
khâu 3) và ba khớp (khớp quay B, kh
khớp quay B và khớp trư
trong của nhóm là khớp quay C. C
cấu có một bậc tự do nên sau khi tách
nhóm tĩnh định ra, chỉ còn l
dẫn AB nối giá bằng khớp quay
− Xác định lực và momen l
tác động lên các khâu
− Đặt các ngoại lực, các lự
lực quán tính, các áp lực kh
các nhóm.
ũ ị Hạnh
c bài toán phân tích lực, số phương trình cân
ức là phải có điều kiện:
(2!# @!½ 0 (2-11)c bài toán phân tích lực ta phải xét đồng thời các khâu, các kh
ện (2.11) được gọi là điều kiện tĩnh định của bài toán phân tích
i bài toàn phân tích áp lực khớp động
u tay quay con trượt
c góc khâu dẫn bằng ω1 với ω1 = hằng số
ng lên các khâu:
u tác động của lực », momen ¼ và trọng lượng
u tác động của lực » , momen ¼ và trọng lượng
i tâm Si và momen quán tính JSi đối với trọng tâm c
i bài toán phân tích áp lực khớp động tại vị trí đang xét của cơ c
a khâu bị dẫn
c trên các khâu bị dẫn, ta tiến hành theo trình tự sau đây:
u thành các nhóm tĩnh định, còn lại là khâu dẫn (hoặc các khâu d
t chỉ có một nhóm tĩnh định, đó là nhóm gồm hai khâu (khâu 2,
p quay B, khớp quay C và khớp trượt C). Khớ
p trượt C. Khớp
p quay C. Cơ
do nên sau khi tách
còn lại một khâu
p quay.
c và momen lực quán tính
ực và momen
c khớp chờ lên
30
ình cân bằng lực lập được
i các khâu, các khớp trong
a bài toán phân tích
ng ¾ ng ¾ . ng tâm của mỗi khâu.
ơ cấu (hình 2.16)
c các khâu dẫn) nối giá.
m hai khâu (khâu 2,
ớp chờ của nhóm là
Hình2.16

Truyền động cơ khí- Vũ Thị Hạ
− Giả sử rằng hệ lực gồm các
ngoại lực kể cả lực và
momen lực quán tính tác
động lên khâu 2 được thu
gọn thành lực »¿¿ lên khâu
3 thành lực »¿¿¿ (hình
2.17).
− Viết và giải phương trình
cân bằng lực cho các nhóm
− Bài toán phân tích áp lực kh
đến nhóm gần khâu dẫn.
Hệ lực tác động lên nhóm (2+3) g
¹% @ »¿¿ Phương trình (2.12) có 3 ẩn s
được. Phân tích ¹% thành hai th
BC.
− Giá trị của ¹% 7xác đ
điểm C của tất cả các l
2.18 :
∑¼R »¿¿p¿¿ & ¹%7Phương trình (2-12) trở thành
¹% : @¹% 7 @ »¿¿ @ »¿¿¿ @Phương trình (2.13) có hai
pháp họa đồ (hình 3.5):
Cách sắp xếp phương trình cân
− Hai lực chưa biết được s
− Các lực thuộc cùng mộ
ũ ị Hạnh
m các
c và
c quán tính tác
c thu
lên khâu
(hình
ình
c cho các nhóm.
c khớp động được giải cho các nhóm xa khâu d
ng lên nhóm (2+3) gồm các lực »¿¿ ,»¿¿¿ ,¹% ,¹½ là một hệ l
¿¿ @»¿¿¿ @ ¹½ 0 (2-12)n số (giá trị và phương của ¹% , giá trị của ¹
thành hai thành phần: ¹% :song song với BC, ¹% 7song
xác định như sau. Từ momen đối với
các lực tác động lên khâu 2 trên hình
%SR 0 ⇒¹%7 ÀÁÁ<ÁÁac
@¹½ 0 (2-13)ẩn số và có thể giải bằng phương
ình cân bằng lực (2.13) như sau:
c sắp xếp hai đầu.
ột khâu được sắp xếp gần nhau
Hình2.17
31
i cho các nhóm xa khâu dẫn trước sau đó
lực cân bằng, ta có:
¹½ ), chưa thể giải
song vuông góc với
Hình2.18

Truyền động cơ khí- Vũ Thị Hạ
− Hai thành phần của cùng m
Chọn một điểm P làm gốc.
- Từ P vẽ vectơ »B biểu di
- Qua điểm A vẽ vectơ BC- Qua điểm B vẽ vectơ CE- Qua điểm C, vẽ đường th
- Qua gốc P vẽ đường th
- Hai đường thẳng này c
- Suy ra: vectơ Ef biểu di
Xác định điểm đặt của lực ¹½3 (hình 2.19):
∑¼R ¹½. A & »¿¿¿. p¿¿¿ 0
Hệ lực tác động lên khâu 3 g
N3 , N½3 (hình 2.19) là một hệ
bằng, ta có:
¹ @¹½ @»¿¿¿ 0(2 Dùng phương pháp hoạ
phương trình (2-14) có hai ẩn s
trị và chiều N3 .Hình 2.20 vect
biểu diễn N3 3.
b) Tính lực trên khâu dẫn
− Với cơ cấu một bậc tự
nối giá.
− Với cơ cấu tay quay con tr
AB nối giá bằng khớp quay A (hình
Giả thiết khâu dẫn có vận tốc
dẫn một lực cân bằng »ih hay m
• Trường hợp đặt lên khâu dẫn m
ũ ị Hạnh
a cùng một lực được sắp xếp gần nhau.
u diễn lực ¹% 7. BC biểu diễn »¿¿ . CE biểu diễn »¿¿¿ .
ng thẳng (∆) song song với phương của ¹½ . ng thẳng song song với phương của ¹% :.
này cắt nhau tại điểm D.
u diễn ¹½ . vectơ f» biểu diễn ¹% :, vectơ fB½ : Momen đối với điểm C của tất cả các lực tác
0 ⇒ A ÀÁÁÁ.<ÁÁÁÂÃ
ng lên khâu 3 gồm PIII , ệ lực cân
(2-14) đồ giải
n số là giá
vectơ fC
ự do, sau khi tách các nhóm tĩnh định, sẽ còn l
u tay quay con trượt, sau khi tách nhóm tĩnh định (2+3) s
p quay A (hình 2.21).
ω1 = hằng số, và ở trạng thái cân bằng. Do đó ph
hay một momen cân bằng để cân bằng với lực ¹n một momen cân bằng ¼ih (hình 2.21):
Hình2.
Hình2.20
32
.
fB biểu diễn ¹% . c tác động lên khâu
còn lại một khâu dẫn
nh (2+3) sẽ còn lại khâu dẫn
Do đó phải đặt lên khâu
¹ % ).
Hình2.19

Truyền động cơ khí- Vũ Thị Hạ
Momen đối với điểm A của tấ
∑¼d Xét cân bằng lực khâu dẫn, ta có:
Đặt lên khâu dẫn một lực cân b
lên khâu dẫn:
∑¼d »Y^ Hệ lực tác động lên khâu dẫn
»Y^Giải phương trình (2.15) bằng ph
4) Phương pháp di chuyển kh
Nguyên lý di chuyển khả dĩ:
Dùng nguyên lý này ta có thể
trên toàn bộ cơ cấu để tìm ra
Hệ lực gồm các ngoại lực »G bằng ¼Y^ (hay lực cân bằng »Đặt lên khâu dẫn một momen cân b
∑»Ä QÄ @∑¼Ä Ä @ Trong đó:
ũ ị Hạnh
ất cả các lực tác động lên khâu dẫn:
¼Y^ &¹%. p% 0Å ⇒ ¼Y^ ¹%. p% n, ta có:
¹½% &¹% c cân bằng »ih : Momen đối với điểm A của tất c
Y^ . pY^ &¹%. p% 0Å ⇒ »Y^ Â.<<ÆÇ
n là cân bằng, ta có:
Y^ @ ¹% @¹½% 0 (2-15)ng phương pháp hoạ đồ (hình 2.21), tìm được ¹
n khả dĩ để tính ÈÉÊ , ËÉÊ : “Tổng công suất tức thời của một hệ lực cân b
ể tính ¼ih hay »ih mà không cần phân tính áp l
tìm ra ¹% . »G , các momen ngoại lực ¼G tác động lên cơ c
»Y^ ) là một hệ lực cân bằng.
t momen cân bằng ¼Y^ , ta có:
@¼Y^ % 0 ⇒¼Y^ & %Ì Í∑»Ä QÄ @
Hình2.21
33
t cả các lực tác động
<ÆÇ
¹½%
c cân bằng bằng 0”.
n phân tính áp lực khớp động
ơ cấu và momen cân
∑¼Ä Ä @Î

Truyền động cơ khí- Vũ Thị Hạnh 34
− »Ä , ¼G là ngoại lực và momen ngoại lực tác động lên khâu thứ i (kể cả lực và
momen lực quán tính);
− QG : vận tốc điểm đặt lực »G ; Ä : vận tốc góc khâu thứ i trên đó có đặt momen ¼Ä − Nếu ¼Y^ > 0 thì ¼Y^ cùng chiều với % . − Nếu ¼Y^ < 0 thì ¼Y^ ngược chiều với % .
Đặt lên khâu dẫn một một lực cân bằng »Y^ ) ∑»Ä QÄ @∑¼Ä Ä @ »Y^ QY^ 0 ⇒»Y^ QY^ &∑Í»Ä QÄ @ ¼Ä Ä Î
Trong đó: QY^ là vận tốc điểm đặt lực »Y^ .
Chương 3: Một số vấn đề cơ bản trong tính toán thiết kế
truy ền động cơ khí (3.5 tiết)
3.1. Tải tr ọng và ứng suất
1.2.1. Tải trọng tác dụng lên máy và chi tiết máy
Tải trọng gồm lực, momen tác dụng lên máy hay bộ phận máy trong quá trình làm việc (và
được gọi là tải trọng làm việc). Theo đặc tính thay đổi theo thời gian, phân thành:
− Tải trọng tĩnh là tải trọng không thay đổi theo thời gian hoặc thay đổi không đáng kể.
− Tải trọng thay đổi là tải trọng có cường độ, phương hoặc chiều thay đổi theo thời gian.
− Tải trọng va đập là tải trọng đột nhiên tăng mạnh rồi giảm ngay tức khắc.
Khi tính toán thiết kế chi tiết máy, còn cần phân biệt tải trọng danh nghĩa, tải trọng tương
đương và tải trọng tính toán:
− Tải trọng danh nghĩa Qdn là tải trọng được chọn trong số các tải trọng tác dụng lên
máy trong chế độ làm việc ổn định, thường là tải trọng lớn hay tải trọng tác dụng lâu
dài nhất.
- Tải trọng tương đương Qtđ: Khi máy làm việc với chế độ tải trọng thay đổi nhiều mức
(hình 3.1) ⇒ để tính toán thiết kế, ta thay thế bằng chế độ tải trọng một mức (không
đổi) và gọi là tải trọng tương đương: Qtd = kN. Qdn

Truyền động cơ khí- Vũ Thị Hạ
kN: hệ số tuổi thọ, ph
thay đổi được chọn làm t
- Tải trọng tính toán Qtt
phân bố không đều của tải trọ
đổi hay tải trọng tĩnh), điều ki
Qtt = Qtđ. Ktt. Kđ. K
Ktt: hệ số xét đến sự phân b
trọng trên các bề mặt tiếp xúc.
Kđ: hệ số tải trọng động.
Kđk: hệ số phụ thuộc vào đtế.
1.2.2. Ứng suất
Dưới tác dụng của tải trọng, trong
xuất hiện ứng suất. Ứng suấ
tĩnh (không thay đổi theo thờ
trị số thay đổi không đáng kể
thay đổi (trị số hoặc chiều ho
và chiều thay đổi theo thời gian).
suất thay đổi được đặc trưng
trình thay đổi ứng suất. Mộ
đổi ứng suất qua giá trị lớn nh
rồi về giá trị ban đầu được gọ
trình ứng suất. Thời gian thự
gọi là một chu kỳ ứng suất (hình
được đặc trưng bằng:
Ứng suất trung bình:
Biên độ ứng suất:
Hệ số chu trình ứng suất:
ũ ị Hạnh
, phụ thuộc đồ thị thay đổi tải trọng và tải trọng nào trong các t
n làm tải trọng danh nghĩa.
tt là tải trọng tương đương, có kể thêm ảnh hư
ọng trên các bề mặt tiếp xúc, tính chất tải tr
u kiện làm việc thực tế
. Kđk
phân bố không đều của tải
p xúc.
c vào điều kiện làm việc thực
ng, trong chi tiết máy
ất có thể là ứng suất
ời gian, hoặc
ể) hoặc suất
u hoặc cả trị số
i gian). Ứng
ưng bằng chu
ột vòng thay
nhất, nhỏ nhất
ọi là một chu
ực hiện một chu trình được
(hình 3.2). Chu trình ứng suất
ÏM ÏM= @ ÏMU:2
Ï= ÐÑÒÓÔÐÑÌ¥
o ÏMU:ÏM=
Hình 3.
Hình 3.
35
ng nào trong các tải trọng
nh hưởng của đặc tính
i trọng (tải trọng thay
Hình 3. 1
Hình 3. 2

Truyền động cơ khí- Vũ Thị Hạnh 36
- Khi r = -1 ⇒ chu trình đối xứng ⇒ σm = 0; σa = σmax = - σmin
- Khi r = 0 ⇒ chu trình mạch động ⇒ σmin = 0; σm = σa = σmax/2
- Khi r > 0 ⇒ chu trình ứng suất không đối xứng cùng dấu.
- Khi r < 0 chu trình ứng suất không đối xứng khác dấu.
- Khi r = 1 ⇒ ứng suất không thay đổi.
Ứng suất có thể thay đổi ổn định (σa và σm không thay đổi theo thời gian) hay không ổn
định (σa và σm hoặc một trong hai đai lượng này thay đổi theo thời gian).Tải trọng tác dụng
gây ra trong chi tiết máy các loại ứng suất: ứng suất pháp (kéo σk,nén σn, uốn σf), ứng suất tiếp
(cắt τc, xoắn τ), ứng suất dập σd, ứng suất tiếp xúc σh,... Ứng suất kéo, nén, uốn, cắt, xoắn xuất
hiện trên từng chi tiết, còn ứng suất dập và ứng suất tiếp xúc xuất hiện khi các chi tiết máy
trực tiếp tiếp xúc và có tác dụng tương hỗ với nhau.
3.2. Độ bền mỏi của chi tiết máy
3.2.1. Hiện tượng phá hủy do mỏi
Quan sát các chi tiết máy chịu ứng suất thay đổi theo thời gian sẽ
thấy quá trình phá hủy mỏi bắt đầu từ các vết nứt tế vi tại vùng
chịu ứng suất lớn hoặc những nơi có khuyết tật của vật liệu. Khi
số chu trình làm việc tăng lên ⇒ các vết nứt và mỏi phát triển dần
cả bề rộng lẫn bề sâu, làm giảm dần diện tích chịu tải của cho tiết
máy, do đó làm tăng giá trị ứng suất, cho đến khi chi tiết máy
không còn đủ sức bền tĩnh thì nó bị phá hỏng.
Hiện tượng nói trên gọi là hiện tượng phá hủy mỏi và khả năng của
chi tiết máy cản lại sự phá hủy mỏi được gọi là độ bền mỏi. Vết gãy do mỏi thường bao gồm
hai vùng (hình 3.3): Một vùng tương đối mịn, hạt nhỏ là vùng phát sinh và phát triển vết nứt
với tốc độ chậm sau một số lớn chu kỳ chịu tải, còn vùng kia thô hơn, hạt to hoặc có thớ, phát
triển nhanh chỉ sau một số nhỏ chu kỳ ở giai đoạn cuối của quá trình phá hủy mỏi. Bằng thực
nghiệm, người ta xây dựng được đường cong biểu diễn quan hệ giữa ứng suất (biên độ ứng
suất σm hay ứng suất lớn nhất σmax) và số chu kỳ thay đổi ứng suất N mà chi tiết máy hay mẫu
thử có thể chịu được cho đến khi bị phá hủy, đường cong nói trên được gọi là đường cong
mỏi (hình 3.4).Phương trình đường cong mỏi có dạng:
ÏM¹ ixn Với m là bậc của đường cong mỏi.Dựa vào đường cong mỏi, ta thấy:
Hình 3. 3

Truyền động cơ khí- Vũ Thị Hạ
- Khi ứng suất sinh ra trong chi ti
chịu tải ⇒ NK được gọ
- Ngược lại, để chi tiết máy không b
ra trong chi tiết máy ph
hơn hoặc bằng σK ⇒
gọi là giới hạn mỏi ng
ứng với tuổi thọ NK.
- Khi ứng suất sinh ra trong chi
tiết máy càng lớn thì tu
chi tiết máy càng giảm.
- Khi σK giảm xuống đ
giá trị σr nào đó thì số
làm việc NK có thể tăng lên
là giới hạn mỏi dài hạn
mỏi dài hạn σr .
Bằng thực nghiệm, còn xây d
được đồ thị các ứng suất gi
(hình 3.5) biểu thị quan hệ gi
trị số giới hạn của ứng suất l
σmax và ứng suất nhỏ nhất σ
chu trình ứng σmax suất với ứ
trung bình σm. Đồ thị này có
điểm: đường mm biểu thị ứ
trung bình, đường AB biểu th
số giới hạn của σmax đường CD bi
thị các trị số giới hạn của σa
- Miền nằm giữa hai nhánh AB và
CD là những trị số ứng suấ
- Các giao điểm của AB và CD v
Các tung độ tính từ đường mm
3.2.2. Những nhân tố
1) Vật liệu
ũ ị Hạnh
t sinh ra trong chi tiết máy bằng σK thì nó sẽ bị phá h
ọi là tuổi thọ ứng với mức ứng suất σK.
t máy không bị phá hủy sau NK chu kỳ chịu tả
t máy phải nhỏ
σK được
i ngắn hạn
t sinh ra trong chi
n thì tuổi thọ
m.
ng đến một
ố chu kỳ
tăng lên khá lớn mà mẫu thử vẫn không bị gãy h
n của vật liệu. Số chu kỳ thay đổi ứng suất N
m, còn xây dựng
t giới hạn
giữa các
t lớn nhất
σmin của
ứng suất
này có đặc
ứng suất
u thị các trị
ng CD biểu
a hai nhánh AB và
ất không làm hỏng vật liệu.
a AB và CD với trục tung là trị số và của chu trình đ
ng mm đến AB và CD là các giá trị của biên độ
ố ảnh hưởng đến độ bền mỏi của chi tiết máy
Hình 3. 4
Hình 3. 5
37
phá hủy sau NK chu kỳ
ải thì ứng suất sinh
gãy hỏng. σr được gọi
t N0 ứng với giới hạn
đối xứng, ký hiệu σ.
ộ ứng suất σa
t máy

Truyền động cơ khí- Vũ Thị Hạnh 38
Vật liệu có ảnh hưởng lớn đến sức bền mỏi của chi tiết máy. Chi tiết máy được chế tạo bằng
vật liệu có cơ tính cao, sức bền mỏi của chi tiết sẽ cao. Vì vật liệu có cơ tính cao, thì khả năng
xuất hiện các vết nứt sẽ khó khăn hơn. Chi tiết máy chế tạo bằng vật liệu kim loại có độ bền
mỏi cao hơn bằng vật liệu phi kim loại. Chi tiết máy được chế tạo bằng kim loại đen có độ
bền mỏi cao hơn so với bằng hợp kim màu. Chi tiết máy bằng thép có độ bền mỏi cao hơn
bằng gang. Chi tiết máy bằng thép hợp kim có độ bền mỏi cao hơn bằng thép các bon thường.
Trong các loại thép thường, chi tiết máy bằng thép có hàm lượng các bon càng cao độ bền
mỏi của của chi tiết máy càng cao.
2) Kết cấu của chi tiết máy
Chi tiết máy có kết cấu phức tạp sẽ làm giảm độ bền mỏi của chi tiết máy. Do có sự tập trung
ứng suất, vết nứt xuất hiện và phát triển nhanh. Trong tính toán, ảnh hưởng của kết cấu đến
sức bền mỏi của chi tiết máy được kể đến bằng hê số điều chỉnh kσ, kτ, gọi là hệ số tập trung
ứng suất.
kσ = σr / σrt
kτ = τr / τrt.
Trong đó σrt, σr là giới hạn mỏi của mẫu có tập rung ứng suất; còn τr, τrt là giới hạn mỏi của
mẫu không có tập trung ứng suất.
3) Kích thước tuyệt đối của chi tiết máy
Kích thước tuyệt đối của CTM càng tăng thì giới hạn mỏi càng giảm. Vì khi kích thước tăng
lên thì sự không đồng đều về cơ tính vật liệu tăng lên, CTM có thể thêm nhiều khuyết tật,
đồng thời tỷ lệ giữa chiều dày lớp bề mặt được tăng bền nhờ nhiệt luyện hoặc gia công cơ so
với kích thước tổng sẽ giảm xuống. Ảnh hưởng của kích thước tuyệt đối được đặc trưng bởi
hệ số ảnh hưởng kích thước e. Đó là tỷ số giữa giới hạn mỏi của chi tiết có đường kính d và
giới hạn mỏi của mẫu có đường kính d0 ( thông thường d0 = 7÷10 mm):
εσ = σrd / σrdo, ετ = τrd / τrdo
4) Công nghệ gia công bề mặt
Công nghệ gia công bề mặt quyết định trạng thái bề mặt chi tiết máy, có ảnh hưởng quan
trọng đến độ bền chi tiết máy. Lớp bề mặt chi tiết máy thường là lớp chịu ứng suất lớn nhất vì
các vết nứt mỏi thường sinh ra từ bề mặt chi tiết máy.
- Có các yếu tố tập trung ứng suất như các nhấp nhô, các vết xước sau gia công cơ hoặc
phát sinh trong quá trình sử dụng;
Truyền động cơ khí- Vũ Thị Hạnh 39
- Có chứa những tinh thể bị phá huỷ làm giảm sức bền ở vùng bề mặt;
- Ứng suất khi chịu tải uốn, xoắn, tiếp xúc đều lớn hơn ứng suất ở lớp bên trong;
- Là nơi trực tiếp chịu ảnh hưởng của môi trường.
Để đánh giá ảnh hưởng của lớp bề mặt đến độ bền của chi tiết máy người ta dùng hệ số trạng
thái bề mặt β, là tỉ số giữa giới hạn bền mỏi của mẫu có trạng thái bề mặt như của chi tiết
máy (được mài, đánh bóng hoặc tiện.., có gia công tăng bền hay không) với giới hạn mỏi của
mẫu có bề mặt mài mà không được gia công tăng bền. Nếu bề mặt chi tiết được tăng bền thì β
> 1, nếu không được tăng bền thì β ≤ 1.
5) Trạng thái ứng suất:
Tình trạng thay đổi của ứng suất (giá trị của σa, σm) ảnh hưởng đến giới hạn mỏi: Biên độ ứng
suất là thành phần chủ yếu gây nên phá huỷ mỏi. Tuy nhiên thực nghiệm cho thấy trị số của
ứng suất trung bình cũng có ảnh hưởng đến độ bền mỏi của chi tiết máy.
- Khi ứng suất trung bình σm > 0, σm càng lớn thì giới hạn biên độ ứng suất σa càng nhỏ,
tức là khi sm tăng thì σa tuy nhỏ cũng có thể gây nên phá huỷ mỏi.
- Khi ứng suất trung bình σm = 0, giới hạn của biên độ ứng suất bằng giới hạn mỏi ở chu
kỳ đối xứng σ-1.
- Khi ứng suất trung bình σm < 0, σa cao hơn giới hạn bền mỏi trong chu kỳ đối xứng σ-1.
3.2.3. Các biện pháp nâng cao độ bền mỏi của chi tiết máy
Để tránh cho CTM không bị hỏng do mỏi hoặc để kéo dài tuổi thọ của nó, người ta dùng các
biện pháp kết cấu và các biện pháp công nghệ.
Các biện pháp kết cấu:
Dạng hỏng do mỏi là do CTM chịu ứng suất thay đổi. Những vết nứt do mỏi thường sinh ra ở
những chỗ có tập trung ứng suất. Do đó khi định kết cấu của CTM cần chú ý dùng các biện
pháp làm giảm tập trung ứng suất. Cụ thể như sau:
- Bố trí các chỗ gây tập trung ứng suất ở xa các phần chịu ứng suất cao của CTM (nếu có
thể được). Tại chỗ lượn chuyển tiếp giữa các bậc của CTM, cần tạo hình dạng hợp lý như
thay chỗ lượn sắc cạnh bằng các chỗ lượn tròn có bán kính lớn nhất có thể, hoặc chỗ lượn
có cung elip.
- Dùng rãnh để giảm tập trung ứng suất. Khi có rãnh then bằng, nên dùng rãnh then chế tạo
bằng dao phay đĩa. Dùng then hoa răng thân khai thay cho then hoa răng chữ nhật.

Truyền động cơ khí- Vũ Thị Hạnh 40
- Đối với mối ghép bằng độ dôi phải vát mép mayơ hoặc tăng độ mềm của mayơ để áp suất
giữa trục và mép mayơ giảm xuống, dẫn đến ứng suất trong mối ghép phân bố đều hơn
v.v...
Các biện pháp công nghệ:
- Dùng các biện pháp nhiệt luyện và hoá nhiệt luyện như tôi bề mặt, thấm than, thấm nitơ. - Dùng biện pháp biến cứng nguội như lăn nén, phun bi... - Dùng các biện pháp gia công tinh bề mặt như đánh bóng, mài nghiền v.v... để giảm độ
nhám bề mặt.
3.3. Những chỉ tiêu chủ yếu về khả năng làm việc của chi tiết máy
3.3.1. Độ bền
Khả năng làm việc của chi tiết máy được đánh giá bằng các chỉ tiêu chủ yếu sau đây:
- Độ bền
- Độ cứng
- Độ bền mòn
- Khả năng chịu nhiệt
- Độ ổn định dao động
Vật liệu, hình dạng, kích thước của chi tiết máy được xác định theo một hay nhiều chỉ tiêu,
tùy theo điều kiện làm việc của chi tiết máy.
Khái niệm
Độ bền là khả năng tiếp nhận tải trọng của chi tiết máy mà không bị phá hỏng. Độ bền là
chỉ tiêu quan trọng nhất đối với phần lớn chi tiết máy. Nếu chi tiết máy không đủ độ bền ⇒
bên trong nó sẽ xuất hiện biến dạng dư lớn ⇒ làm thay đổi hình dạng của chi tiết máy, phá
hoại điều kiện làm việc bình thường của các bộ phận máy, đồng thời có thể phá hỏng bản
thân chi tiết máy (gãy, vỡ hoặc hư hỏng bề mặt). Người ta phân biệt hai dạng phá hỏng: phá
hỏng tĩnh và phá hỏng mỏi liên quan đến độ bền tĩnh và độ bền mỏi.
1. Phá hỏng tĩnh: do ứng suất làm việc vượt qua giới hạn bền tĩnh của vật liệu (thường do
quá tải đột ngột gây nên).
2. Phá hỏng mỏi: do tác dụng lâu dài của ứng suất thay đổi có giá trị vượt qua giới hạn bền
mỏi của vật liệu.
Phương pháp tính độ bền
Phương pháp tính thông dụng về độ bền là so sánh ứng suất tính toán với ứng suất cho phép. Điều kiện bền có dạng:
σ ≤ [σ] hay: τ ≤ [τ]
σ, τ: ứng suất sinh ra khi chi tiết máy chịu tải

Truyền động cơ khí- Vũ Thị Hạnh 41
[σ], [τ]: ứng suất cho phép
Đôi khi tính độ bền xuất phát từ điều kiện bảo đảm hệ số an toàn lớn hơn hoặc bằng hệ số an toàn cho phép: s ≥ [s]
s: hệ số an toàn
[s ]: hệ số an toàn cho phép
1. Cách xác định ứng suất sinh ra trong chi tiết máy
Ứng suất sinh ra bên trong chi tiết máy được tính toán theo công thức của sức bền vật liệu
hay lý thuyết đàn hồi, có xét đến hình dạng và điều kiện làm việc cụ thể của chi tiết máy.
- Khi chi tiết máy chịu ứng suất phức tạp ⇒ tiến hành tính toán theo ứng suất tương
đương:
σtđÕσ2+3τ2 (theo thuyết bền thế năng biến đổi hình dạng)
σtđ√σ2+4τ2 (theo thuyết bền ứng suất tiếp lớn nhất)
- Khi tính toán độ bền bề mặt: Diện tích tiếp xúc tương đối lớn ⇒ dùng ứng suất dập σd
sinh ra trên bề mặt làm việc. Diện tích tiếp xúc khá nhỏ so với kích thước chi tiết máy
⇒ dùng ứng suất tiếp xúc cực đại σH sinh ra tại tâm vùng tiếp xúc.
- Khi chi tiết máy chịu ứng suất thay đổi không ổn định: Giả sử chi tiết máy chịu tác
dụng của các ứng suất σ1, σ2... σN, với số chu kỳ tác dụng của các ứng suất này là
N1, N2... Nn (hình 3.6). Khi đó ta quy về chế độ làm việc ổn định tương đương: coi
như chi tiết máy chịu tác dụng của ứng suất thay đổi ổn định là
σtđ = σmax = max(σ) ứng với số chu kỳ tác dụng bằng:
¹7đ 5 × σØÏM=ÙÚ NÜ
Ý
Ø$%
với m: bậc của đường cong mỏi.
2. Cách xác định ứng suất cho phép
Tra bảng hay dùng các công thức thực nghiệm: Bằng thực nghiệm, người ta xây dựng được
các bảng giá trị ứng suất cho phép cho các mẫu thử khác nhau, bằng vật liệu khác nhau, với
tính chất làm việc khác nhau... Ngoài ra, trong một số trường hợp, người ta cũng xây dựng
các công thức thực nghiệm để xác định ứng suất cho phép. Xác định theo ứng suất giới hạn
trong đó:
Ï ÐÞßK hay τ áÞßK

Truyền động cơ khí- Vũ Thị Hạ
σgh, τgh: ứng suất pháp và tiếp gi
thử bị phá hỏng); s: hệ số an toàn.
s1: hệ số xét đến mức độ
đồng nhất về cơ tính của v
Cách xác định ứng suất giới h
Chi tiết máy chịu ứng suất tĩnh:
- Đối với vật liệu dẻo: ứng su
hạn được lấy bằng giới h
của vật liệu (giới hạn ch
hay giới hạn chảy về ứng su
- Đối với vật liệu dòn: ứng su
hạn được lấy bằng giới hạ
vật liệu (giới hạn bền uốn
hạn bền về ứng suất tiếp τ…).
Chi tiết máy chịu ứng suất thay
suất giới hạn được lấy bằng gi
Trường hợp ứng suất thay đổi
- Nếu số chu kỳ làm việc N
kỳ cơ sở N0 của đường cong m
- Nếu N < N0 ⇒ σgh = σrN
Nếu ứng suất thay đổi không
3.3.2. Độ bền mòn
Chi tiết máy bị mòn sẽ làm gi
với dụng cụ đo), làm giảm hi
hở tăng lên quá lớn), làm tăng t
ũ ị Hạnh
p giới hạn (khi đạt đến các giá trị này thì chi ti
an toàn. Hệ số an toàn s được xác định như sau:
s = s1. s2. s3
chính xác khi xác định tải trọng và ứng suất s2: h
a vật liệu.s3: hệ số xét đến các yêu cầu đặc biệt về
i hạn
ĩnh:
ng suất giới
i hạn chảy σch
n chảy về uốn σ
ng suất tiếp τ..)
ng suất giới
ạn bền σb của
n σbu hay giới
p τ…).
t thay đổi: ứng
ng giới hạn mỏi.
i ổn định:
c N ≥ số chu
ng cong mỏi ⇒σgh = σr
σr là giới hạn mỏi dài hạn.
với σrN là giới hạn mỏi ngắn hạn:
i không ổn định: tương tự như khi chịu ứng suất thay đ
¹7đ 5 × ÏUÏÚâãÙÚ .NØ
:
U$%
làm giảm độ bền (do kích thước giảm), làm giảm đ
m hiệu suất của máy (đối với piston - xi lanh c
ăng tải trọng động, tăng tiếng ồn (đối với răng bánh
Hình3.6
42
này thì chi tiết máy hay mẫu
: hệ số xét đến độ
an toàn.
t thay đổi ổn định,
m độ chính xác (đối
xi lanh của động cơ do khe
ăng bánh răng).
6

Truyền động cơ khí- Vũ Thị Hạnh 43
Do vậy, khi thiết kế chi tiết máy tiếp xúc, phải đảm bảo cho chúng có đủ độ bền mòn,
nghĩa là làm việc ổn định trong suốt thời hạn đã quy định mà không bị mòn qua một giá trị
cho phép. Cường độ mòn phụ thuộc vào trị số ứng suất tiếp xúc hay áp suất, vận tốc trượt
tương đối giữa hai bề mặt tiếp xúc, sự bôi trơn và hệ số ma sát, tính chống mòn của vật liệu.
Để nâng cao độ bền mòn cần phải bôi trơn bề mặt tiếp xúc, dùng vật liệu giảm ma sát (như
đồng thanh, gang chịu ma sát..), dùng các phương pháp nhiệt luyện để tăng độ rắn bề mặt
làmviệc.
Tính toán độ bền mòn xuất phát từ điều kiện bảo đảm chế độ bôi trơn ma sát ướt (nghĩa là
bảo đảm giữa hai bề mặt tiếp xúc luôn luôntốn tại một lớp dầu bôi trơn ngăn cách không cho
các đỉnh máp mộtrực tiếp tiếp xúc với nhau), Khi đó mòn sẽ không xảy ra. Trường hợp không
thể tạo ra chế độ bôi trơn ma sát ướt, tính toán độ bền mòn dựa trên cơ sở hạn chế áp suất p
hoặc tích số pv của áp suất và vận tốc trượt tại bề mặt tiếp xúc không vượt qua giá trị cho
phép:
p ≤ [p] và pv ≤ [pv]
3.3.3. Độ cứng
Độ cứng là khả năng của chi tiết máy cản lại sự thay đổi hình dạng dưới tác dụng của tải
trọng. Nếu chi tiết máy không đủ độ cứng, khi làm việc chi tiết máy sẽ bị biến dạng đàn hồi
vượt qua trị số cho phép ⇒ phá hoại điều kiện làm việc bình thường của chi tiết máy và các
chi tiết máy lắp ghép.
Ví dụ: trục bị võng quá nhiều ⇒ các bánh răng tiếp xúc không tốt, làm mòn vẹt các
mép ổ. Đối với máy công cụ, biên dạng của trục chính, ổ lăn, đồ gá... làm giảm độ
chính xác của chi tiết gia công.
Độ cứng còn chi phối việc chọn vật liệu chi tiết: Để có kích thước chi tiết nhỏ gọn ⇒ ta chọn
vật liệu có độ bền cao. Tuy nhiên với thép chẳng hạn, khi cơ tính tăng, modun đàn hồi hầu
như không đổi ⇒ kích thước chi tiết xác định theo điều kiện độ bền có thể không đảm bảo
độ cứng. Cũng có trường hợp, khi giảm độ cứng sẽ làm tăng độ bền mỏi của chi tiết máy, ví
dụ giảm độ cứng vành răng sẽ làm tăng độ bền mỏi của răng bánh răng. Phân biệt hai loại độ
cứng: độ cứng thể tích liên quan đến biên dạng của toàn bộ vật liệu chi tiết và độ cứng tiếp
xúc liên quan đến biên dạng của lớp bề mặt. Tính toán về độ cứng thể tích xuất phát từ điều
kiện chuyển vị thực không vượt qua giá trị cho phép:
∆l ≤ [∆l] (độ dãn dài)

Truyền động cơ khí- Vũ Thị Hạnh 44
f ≤ [f] (độ võng)
ϕ ≤ [ϕ] (góc xoay tại một tiết diện khi bị uốn)
θ ≤ [θ] (góc xoắn)
Tính toán về độ cứng tiếp xúc theo điều kiện biến dạng của bề mặt tiếp xúc không vượt quá
giá trị cho phép: ∆h ≤ [∆h] với ∆h là biến dạng của bề mặt tiếp xúc.
3.3.4. Khả năng chịu nhiệt
Khi làm việc, do ma sát trong các cơ cấu, bộ phận máy ⇒ chi tiết máy bị nóng lên (nhất là
những chỗ bị trượt nhiều như trong bộ truyền trục vít...). Nung nóng chi tiết máy có thể gây
ra các tác hại:
- Làm giảm khả năng chịu tải của chi tiết máy (khi nhiệt độ tăng lên quá cao, cơ tính của
vật liệu sẽ giảm xuống. Với thép: khi nhiệt độ lớn hơn 300°C÷400°C, với hợp kim màu
khi nhiệt độ lớn hơn 50°C÷100°C ⇒ giới hạn mỏi giảm, vật liệu trơn nên dòn hoặc
xảy ra hiện tượng từ biến.
- Làm giảm độ nhớt của dầu bôi trơn ⇒ làm tăng mòn hay dính.
- Biến dạng nhiệt làm cong vênh các chi tiết máy hay thay đổi khe hở trong các liên kết
động (khi khe hở trong ổ trượt bị giảm hay mất đi ⇒ ngõng trục có thể bị kẹt trong lót
ổ...).
- Làm thay đổi tính chất của các bề mặt tiếp xúc, ví dụ làm giảm hệ số ma sát trong các bộ
phận hãm.
- Làm giảm độ chính xác của máy.
Do vậy, với các chi tiết máy bị trượt nhiều, khi thiết kế cần phải tính toán về nhiệt.
Phương pháp tính toán về nhiệt
Xác định nhiệt độ trung bình sinh ra khi sử dụng máy và hạn chế nó không cho vượt qua một
giá trị cho phép: t ≤ [t]
Trong đó:
t- nhiệt độ ổn định trung bình khi sử dụng máy;
[t]- nhiệt độ cho phép. Nhiệt độ ổn định trung bình t được xác định từ phương trình
cân bằng nhiệt: Nhiệt lượng sinh ra Ω và nhiệt lượng Ω′ thoát đi trong một đơn vị thời
gian phải bằng nhau.
Để nâng cao khả năng chịu nhiệt của chi tiết máy, cần chế tạo chi tiết máy bằng vật liệu
chịu nhiệt, tìm cách tăng diện tích thoát nhiệt của bộ phận máy hay dùng các biện pháp bôi
trơn làm mát.

Truyền động cơ khí- Vũ Thị Hạnh 45
3.3.5. Tính ổn định dao động
Dao động xuất hiện chủ yếu do các chi tiết máy quay hay cơ cấu không được cân bằng (do đó
sinh ra các lực quán tính biến thiên có chu kỳ). Ngoài ra, có thể do tác động của lực kích
thích biến thiên có chu kỳ từ bên ngoài tác động lên chi tiết (ví dụ lực cắt tác động lên chi tiết
gia công trên các máy cắt kim loại...). Dao động gây nên ứng suất phụ thay đổi có chu kỳ,
có thể dẫn đến phá hỏng và mỏi. Dao động trong truyền động bánh răng gây nên tiếng ồn.
Dao động trong máy cắt kim loại làm giảm độ chính xác gia công và độ nhẵn bề mặt của
sản phẩm. Khi tần số của lực kích thích gần bằng tần số riêng của chi tiết máy hay bộ phận
máy ⇒ xuất hiện hiện tượng cộng hưởng, biên độ dao động sẽ rất lớn, chi tiết máy làm việc
lâu trong vùng cộng hưởng sẽ bị phá hủy. Vì vậy, tính toán dao động là cần thiết, đặc biệt đối
với các máy quay nhanh. Có thể tính toán về dao động theo hai cách: Hoặc xác định tần số
dao động riêng của máy hay của cơ cấu để tránh cộng hưởng. Hoặc tính toán biên độ dao
động và hạn chế nó trong phạm vi cho phép.
Để nâng cao chất lượng làm việc của máy và cơ cấu, có thể giải quyết chống rung cho máy
bằng các biện pháp: triệt tiêu các ngoại lực gây nên dao động (ví dụ: cân bằng máy...),
thay đổi tính chất động lực học của hệ thống (thay đổi momen quán tính của chi tiết máy
và độ cứng của mối ghép...) nhằm thay đổi tần số riêng của hệ, dùng các thiết bị giảm rung...
cần được sửa chữa, phục hồi, thay thế các chi tiết bị hỏng.
3.4. Các thông số chủ yếu của bộ truy ền cơ khí
Trong các thiết bị và dây chuyền công nghệ, sử dụng nhiều loại truyền động khác nhau:
- Truyền động cơ khí
- Truyền động điện
- Truyền động thủy lực
- Truyền động khí nén
Trong đó truyền động cơ khí là thông dụng hơn cả. Giáo trình chi tiết máy chỉ nghiên cứu
truyền động cơ khí.Truyền động cơ khí là những cơ cấu dùng để truyền cơ năng từ động cơ
đến các bộ phận công tác của máy, thông thường có biến đổi tốc độ, lực hoặc momen và đôi
khi, biến đổi cả đặc tính và quy luật chuyển động.
Theo nguyên lý làm việc, có thể chia truyền động cơ khí thành hai nhóm chính:
- Truyền động bằng ma sát: truyền động bánh ma sát (tiếp xúc trực tiếp), truyền động
đai (tiếp xúc gián tiếp)

Truyền động cơ khí- Vũ Thị Hạnh 46
- Truyền động bằng ăn khớp: truyền động bánh răng, truyền động trục vít-bánh vít
(tiếp xúc trực tiếp), truyền động xích (tiếp xúc gián tiếp)...
- Ngoài các bộ truyền dùng để truyền chuyển động quay, còn sử dụng truyền động
vít-đai ốc, truyền động bánh răng-thanh răng để biến đổi chuyển động quay thành
chuyển động tịnh tiến.
Lý do cần dùng các bộ truyền làm khâu nối giữa động cơ và bộ phận công tác:
- Tốc độ cần thiết của bộ phận công tác của máy khác với tốc độ của động cơ tiêu
chuẩn
- Nhiều khi cần truyền động từ một động cơ đến nhiều cơ cấu máy làm việc với tốc độ
khác nhau
- Động cơ quay đều nhưng bộ phận công tác có thể chuyển động tịnh tiến hay chuyển
động với tốc độ thay đổi theo một quy luật nào đó
- Vì kết cấu máy, vì điều kiện sử dụng và an toàn lao động, không cho phép nối trực
tiếp động cơ với bộ phận công tác.
Chương 4: Truyền động bánh răng (10 tiết)
4.1. Đại cương về truy ền động bánh răng
Giới thiệu
Cơ cấu bánh răng là cơ cấu có khớp cao dùng để biến đổi hoặc truyền chuyển động theo
nguyên tắc ăn khớp trực tiếp giữa hai khâu. Truyền động bánh răng thực hiện truyền chuyển
động hay biến đổi chuyển động nhờ sự ăn khớp giữa các răng trên bánh răng hay thanh răng.
Phân loại
Theo vị trí tương đối giữa các trục, phần truyền động bánh răng thanh: Truyền động giữa
các trục song song: bộ truyền bánh răng trụ tròn răng thẳng (hình 4.1a), răng nghiêng (hình
4.1b), răng chữ V (hình 4.1c). Truyền động giữa hai trục chéo nhau: bộ truyền bánh răng
trụ chéo (hình 4.1d), bộ truyền bánh răng nón chéo (hay bánh răng hypôit) (hình 4.1g), bộ
truyền trục vít (hình 4.1h). Ngoài ra còn dùng truyền động bánh răng-thanh răng (hình 4.1j)
dùng để biến chuyển động quay thành chuyển động tịnh tiến.
Theo phương của răng so với các đường sinh, phân thành:
- Bộ truyền răng thẳng (bánh trụ răng thẳng, bánh nón răng thẳng)

Truyền động cơ khí- Vũ Thị Hạ
- Bộ truyền răng nghiêng, ră
Theo hình dạng của biên dạng r
răng cung tròn (hay bánh răng Nôvikôp), bánh r
được sử dụng phổ biến hơn c
được để hở (bộ truyền hở) hoặ
Ngoài ra, cũng chia ra bộ truy
(ngoại tiếp - hình 4.1a, b, c, d, f...) khi vành r
tốc góc hai bánh ngược chiề
4.2a) khi vành răng bánh nhỏ
nhau (hình 4.2). Trong chương này ch
chỉ nghiên cứu bộ truyền bánh ră
ũ ị Hạnh
ng nghiêng, răng cong (bánh trụ răng nghiêng, bánh răng nón r
ng răng (prôfin răng), phân thành: bánh răng thân khai, bánh
ăng Nôvikôp), bánh răng xiclôit, trong đó bánh r
ơn cả.Theo kết cấu của bộ truyền, phân thành: b
ặc lắp trong hộp được che kín (bộ truyền kín).
truyền bánh răng thành: bộ truyền bánh răng
hình 4.1a, b, c, d, f...) khi vành răng bánh nó nằm ngoài vành ră
ều nhau; bộ truyền bánh răng ăn khớp trong (n
nằm trong vành răng bánh lớn, vận tốc góc hai bánh cùng chi
ương này chỉ trình bày những nội dùng về bánh ră
n bánh răng ăn khớp ngoài.
Hình 4. 1
47
ăng nón răng cong).
ng), phân thành: bánh răng thân khai, bánh
đó bánh răng thân khai
n, phân thành: bộ truyền bánh răng
n kín).
n bánh răng ăn khớp ngoài
m ngoài vành răng bánh kia, vận
p trong (nội tiếp - hình
c góc hai bánh cùng chiều
bánh răng thân khai và

Truyền động cơ khí- Vũ Thị Hạ
4.2. Định lý cơ bản về ăn kh
4.2.1. Tỷ số truy ền củ
(Điều kiện để tỷ số truyền củ
cấu bánh răng phụ thuộc vào d
cạnh răng). Với điều kiện nào t
Ta có tỷ số vận tốc góc giữa hai bánh r
Ký hiệu: m%
ũ ị Hạnh
ăn khớp bánh răng
ủa cặp biên dạng - Định lý cơ bản về ăn khớ
ủa một cặp biên dạng răng bằng hằng số) Tỷ
c vào dạng đường cong được chọn làm biên dạng r
n nào tỷ số truyền của một cặp biên dạng răng bằng h
a hai bánh răng, gọi là tỷ số truyền.
Hình 4. 2
48
ớp
số truyền trong cơ
ng răng (còn gọi là
ng hằng số ?

Truyền động cơ khí- Vũ Thị Hạnh 49
Với với vận tốc góc của khâu dẫn ω1 và khâu bị dẫn ω2. m%> 0 khi 2 bánh răng quay cùng
chiều, và m%< 0 khi 2 bánh răng quay ngược chiều.
Xét 2 khâu 1 và 2 đang tiếp xúc nhau tại K, quay quanh O1, O2 (hình 4.1)tương ứng với vận
tốc góc ω1 và ω2. Điều kiện để 2 biên hình luôn tiếp xúc (không rời nhau, không lấn vào
nhau) là hình chiếu của các vận tốc tức thời lên phương pháp tuyến phải bằng nhau. Nghĩa là:
VK1.cosβ1 = VK2.cosβ2 ⇒ ω1.O1N1 = ω2.O2N2
- Tỷ số truyền:
|m%| å%å æ¹æ%¹% ×
æ»æ%»Ù Với P là giao điểm của pháp tuyến chung của 2 biên hình tại tiếp điểm được xét và đường
nối 2 tâm quay O1 và O2; P được gọi là cực ăn khớp.
Định lý ăn khớp cơ bản: Pháp tuyến chung của 2 biên hình tại điểm ăn khớp (điểm tiếp
xúc giữa 2 biên hình) chia đường nối tâm thành những đoạn thẳng tỷ lệ nghịch với tỷ số
truyền.
- Nhận xét: để cho tỷ số truyền giữa 2 khâu không thay đổi, cực ăn khớp phải có vị trí cố
định trên đường nối tâm. Các bánh răng có biên hình là đường thân khai, đường xyclôít (êpi-
xyclôít và hypô-xyclôít) đều thoả mãn điều kiện này.
4.2.2. Biên dạng thân khai thỏa mãn định lý cơ bản về ăn khớp
Đường thân khai của đường tròn là quỹ tích của một điểm nằm trên đường thẳng lăn không
trượt trên đường tròn (gọi là đường tròn cơ sở). Tính chất của đường thân khai:
- Luôn nằm ngoài đường tròn cơ sở.
- Pháp tuyến của đường thân khai là tiếp tuyến của đường tròn cơ sở.
- Bán kính cong ở mỗi điểm bằng chiều dài cung trên vòng tròn cơ sở nằm giữa điểm gốc
của đường thân khai (N0) và tâm quay tức thời.
- Phương trình của đường thân khai: trên hệ toạ độ cực (Ox, θ); do lăn không trượt ta có
ro.tgαx = ro(αx + θx) hay θx = tgαx - αx
Mặc khác: rx = OM = ro/cosαx .Đây là phương trình đường thân khai trong hệ toạ độ cực.
Tính chất của ăn khớp thân khai: Tỷ số truyền trong ăn khớp thân khai là hằng số. Độ dịch
tâm không ảnh hưởng đến tỷ số truyền. Điểm ăn khớp K luôn nằm trên đường n-n chứa N1N2.

Truyền động cơ khí- Vũ Thị Hạnh 50
4.2.3. Một vài khái niệm cơ bản
• Đường ăn khớp - Đoạn ăn khớp lý thuyết
Đường ăn khớp là quỹ tích các vị trí tiếp xúc M giữa hai biên dạng răng trong quá trình ăn
khớp. Trong quá trình ăn khớp của cặp biên dạng (E2), (E1), điểm tiếp xúc M luôn luôn di
chuyển trên đường thẳng N1N2, tiếp tuyến chung của hai vòng tròn cơ sở (Cb1), (Cb2). Đường
thẳng N1N2 chính là đường ăn khớp của cặp biên dạng thân khai. Tuy nhiên, trong cặp bánh
răng ngoại tiếp, điểm tiếp xúc M không thể chạy vượt ra ngoài đoạn N1N2: đoạn thẳng N1N2
được gọi là đoạn ăn khớp lý thuyết.
• Góc ăn khớp
Góc αW tạo bởi pháp tuyến chung tại điểm tiếp xúc M của hai biên dạng (cũng chính là đường
ăn khớp nn) và tiếp tuyến chung tt tại P với hai vòng lăn (Cb1),(Cb2):
αW = (nn,tt)
và ixÅ 8Ç8ç
8Ç8ç
Với cặp biên dạng thân khai, hai tâm quay O1, O2 cho trước, các bán kính rb1,rb2 của các vòng
tròn cơ sở là không đổi nên đường ăn khớp N1N2 cố định. Như vậy, góc ăn khớp αW trong
cặp biên dạng thân khai là không đổi.
• Khả năng dịch trục của cặp biên dạng răng thân khai
Ta có:
rb1 = O1P.cosαw = rw1cosαw
rb2 = O2P.cosαw = rw2cosαw ⇒ m èÀèÀ 8é
8é 8Ç8Ç
Nghĩa là tỷ số truyền có thể xác định theo bán kính các vòng tròn cơ sở, không phụ thuộc vào
khoảng cách trục
aw = O1O2 = rw1+r w2.
Do đó, khi thay đổi khoảng cách trục aW của cặp biên dạng răng thân khai cho trước, thì bán
kính các vòng lăn rW1, rW2 đều thay đổi, nhưng tỷ số truyền i12 vẫn không thay đổi, bởi vì bán
kính các vòng cơ sở rb1,rb2 vẫn không thay đổi. Đặc điểm quan trọng này của cặp bánh răng
thân khai gọi là khả năng dịch trục. Khi lắp ráp, nếu khoảng cách trục aw của cặp bánh răng
thân khai có không chính xác thì tỷ số truyền vẫn không thay đổi.

Truyền động cơ khí- Vũ Thị Hạ
4.3. Điều kiện để tỷ số truy
Với một cặp bánh răng thân khai,
bởi hai vòng đỉnh răng (Ca1) và (C
4.3. Cặp biên dạng (E1),(E2) ti
đường thẳng nn, tiếp xúc với hai
khớp của cặp biên dạng (E1),(E
B1 = (C
Khi điểm tiếp xúc M của cặp biên d
B1 đến điểm B2, thì pháp tuyế
P cố định. Lúc đó tỷ số truyền c
điểm B2 gọi là điểm ra khớp. Đ
Sau điểm ra khớp B2, n
ví dụ tại vị trí (E’1),(E’2).
Chúng sẽ tiếp xúc nhau tại
điểm M’ nằm trên vòng
đỉnh (Ca1) của biên dạng
(E1,). Tại M’, pháp tuyến
của (E1,) là vô định vì M’
là điểm nhọn, còn pháp
tuyến của (E2,) là đường
thẳng M’N’ 2, tiếp tuyến
với vòng tròn (Cb2). Khi
đó, pháp tuyến chung tại
điểm M’ của (E’1),(E’2). sẽ
là đường thẳng M’N’ 2, và
tâm ăn khớp bây giờ là P,
= M’N’ 2,∩O1O2. Điểm P
đã tiến dần về phía tâm
quay O1, tỷ số truyền i12
của cặp biên dạng đã bị
thay đổi
ũ ị Hạnh
truy ền của cặp bánh răng thân khai bằng h
ăng thân khai, mỗi cặp biên dạng răng ăn khớp (E1)
) và (Ca2). Giả sử bánh dẫn là bánh (1) và có chi
) tiếp xúc nhau tại M. Pháp tuyến chung tại M c
i hai vòng tròn cơ sở (Cb1),(Cb2). Đường N1N2
),(E2). Gọi
= (Ca2)∩(N1N2) và B2 = (Ca1)∩(N1N2).
p biên dạng răng (E1),(E2) di chuyển trong đo
ến chung nn của cặp biên dạng cắt đường nối tâm O
n của cặp biên dạng là hằng số. Điểm B1 gọi là
p. Đoạn thẳng B1B2 gọi là đoạn ăn khớp thực.
, nếu cặp biên dạng nói trên còn tiếp tục đẩy nhau chuy
51
ng hằng số
và (E2) bị giới hạn
n là bánh (1) và có chiều quay như hình
i M của (E1),(E2) là
2 chính là đường ăn
n trong đoạn B1B2, từ điểm
i tâm O1O2 tại điểm
i là điểm vào khớp,
y nhau chuyển động,
Hình 4. 3

Truyền động cơ khí- Vũ Thị Hạnh 52
Tóm lại, trong cặp bánh răng thân khai, mỗi cặp biên dạng ăn khớp (E1), (E2) chỉ cho tỷ số
truyền i12 bằng hằng số khi điểm tiếp xúc M của chúng chạy trong đoạn ăn khớp thực B1B2,
từ B1 đến điểm B2.
Quá trình ăn khớp của cặp bánh răng thân khai là sự liên tục kế tiếp nhau vào tiếp xúc của
nhiều cặp biên dạng răng ăn khớp. Do đó, để tỷ số truyền i12 của một cặp bánh răng là hằng
số, thì mỗi cặp biên dạng răng chỉ được tiếp xúc với nhau trong đoạn ăn khớp thực B1B2.
Muốn vậy thì khi cặp biên dạng ăn khớp thứ nhất (E1), (E2) đang tiếp xúc tại B2 (đang bắt đầu
ra khớp tại B2) thì cặp biên dạng kế tiếp (E’1),(E’2) phải bắt đầu vào tiếp xúc hay đã vào tiếp
xúc trên đoạn ăn khớp thực B1B2. Điều kiện này gọi là điều kiện ăn khớp đều của cặp bánh
răng thân khai. Để thỏa mãn điều kiện ăn khớp đều, cần phải thỏa mãn đồng thời hai điều
kiện sau đây: Điều kiện ăn khớp đúng và điều kiện ăn khớp trùng.
1) Điều kiện ăn khớp đúng và điều kiện ăn khớp trùng của cặp bánh răng thân
khai
Giả sử cặp biên dạng thứ nhất (E1), (E2) đang chuẩn bị ra khớp tại điểm B2. Cặp biên dạng
kế tiếp là (E1’), ( E2’) phải đang tiếp xúc nhau tại một điểm M nằm trong đoạn B1B2. Gọi
pN1và pN2 là bước răng đo trên đường ăn khớp N1N2 (khoảng cách đo trên đường ăn khớp
giữa hai biên dạng răng cùng phía kề nhau, còn gọi là bước ăn khớp).
Để (E1’) và ( E2’) có thể tiếp xúc với nhau, phải có điều kiện:
,êë ,êì ,ê
Hơn nữa, để (E1’) và ( E2’) có thể tiếp xúc với nhau tại một điểm M’ nằm trong đoạn ăn khớp
thực B1B2, phải có thêm điều kiện:
hay í îëîì,ê ≥ ë
Điều kiện (10.1) được gọi là điều kiện ăn khớp đúng. Điều kiện (10.2) được gọi là điều kiện
ăn khớp trùng í îëîì,ê được gọi là hệ số trùng khớp.
Theo tính chất đường thân khai, ta có: pN1 = pb1; pN2 = pb2 với pb1; pb2 là bước răng đo trên
vòng cơ sở của bánh 1 và của bánh (1) và bánh (2). Điều kiện ăn khớp đúng viết lại như sau:
,Êë ,Êì ,Ê

Truyền động cơ khí- Vũ Thị Hạ
Điều kiện ăn khớp đúng cũng có th
răng trên vòng lăn của bánh (1) và bánh (2).
2) Điều kiện ăn khớp kh
Sau khi điều kiện ăn khớp đúng và
răng sẽ bằng hằng số nếu như
có chiều quay ω1 thì cặp biên d
khớp lý thuyết là N1N2, đoạn ă
biên dạng làm việc đổi phía thành (E’
trở thành N’1N’2 và B’1B’ 2 (hình
Nếu giữa (E’1), ( E’2) không có ti
răng) thì trước tiên sẽ có hiện t
trình chuyển tiếp từ khi cặp biên d
(E’2) vào ăn khớp, tỷ số truyền i
ũ ị Hạnh
ũng có thể viết theo bước răng: pw1 = pw2 với p
a bánh (1) và bánh (2).
Hình 4. 4 p khít của cặp bánh răng thân khai
đúng và ăn khớp trùng đã thoả mãn, tỷ số truy
ư bánh dẫn không đổi chiều quay. Nếu bánh (1) là bánh d
p biên dạng làm việc là (E1), ( E2) đang tiếp xúc nhau t
n ăn khớp thực là B1B2. Nếu bánh dẫn đổi chi
i phía thành (E’1), (E’2), đoạn ăn khớp lý thuyết và đ
(hình 4.4).
) không có tiếp xúc (giữa hai biên dạng có khe hở δ
n tượng gián đoạn truyền động, sau đó là va đậ
p biên dạng (E1), ( E2) thôi ăn khớp đến khi cặ
n i12 của cặp bánh răng đã bị thay đổi.
53
i pw1; pw2 là bước
truyền i12 của cặp bánh
bánh (1) là bánh dẫn và
p xúc nhau tại M, đoạn ăn
i chiều quay thì cặp
t và đoạn ăn khớp thực
δ gọi là khe hở cạnh
ập. Do đó trong quá
ặp biên dạng (E’1),

Truyền động cơ khí- Vũ Thị Hạnh 54
Như vậy, để tỷ số truyền i12 của cặp bánh răng bằng hằng số khi bánh dẫn (1) đổi chiều quay
thì, tương ứng với điểm M’, cặp biên dạng làm việc phải là (E’1), (E’’2) đang tiếp xúc với
nhau. Ăn khớp không có khe hở cạnh răng δ được gọi là ăn khớp khít.
Gọi
a = (E1)∩(CW1); b = (E’1)∩(CW1); c = (E2)∩(CW2); d = (E’’ 2)∩(CW2)
Khi bánh dẫn quay theo chiều ω1 đến khi điểm tiếp xúc M của (E1), (E2) trùng với P thì:
a→P và c→P. Vì (CW1),(CW2) lăn không trượt trên nhau nên:
3Ëð = ÉËð (10.3)
Khi bánh dẫn quay theo chiều ngược lại đến khi điểm tiếp xúc M’ của (E’1), (E’’ 2) trùng với
P thì: b→P và d→P. Vì (CW1),(CW2) lăn không trượt trên nhau nên:
ÊËð = ñËð (10.4)
suy ra: 3Êð = Éñð hay WW1=SW2
Tương tự: SW1 = WW2
Với WW1,WW2 là chiều rộng rãnh trên vòng lăn của bánh (1) và bánh (2);
SW1,SW2 là chiều dày răng trên vòng lăn của bánh (1) và bánh (2).
Điều kiện ăn khớp khít của cặp bánh răng thân khai: Chiều dày răng trên vòng lăn của bánh
nọ bằng chiều rộng rãnh trên vòng lăn của bánh kia. Trên thực tế, để bù lại các sai số do chế
tạo và lắp ráp, để phòng ngừa sự dãn nở vì nhiệt và lưu thông dầu bôi trơn, người ta thường
tạo ra một khe hở cạnh răng nhất định, do đó rất khó bảo đảm được điều kiện ăn khớp khít.
4.4. Các thông số chế tạo của cơ bản của bánh răng thân khai
4.4.1. Nguyên tắc bao hình để tạo hình biên dạng thân khai
Xét cơ cấu cam cần đẩy đáy bằng, có biên dạng cam là đường thân khai (E), có vòng tròn cơ
sở là Cb(O,rb), đáy cần là đường thẳng (K), góc áp lực đáy cần là α0 (hình 4.5). Lúc đầu, cam
và cần ở vị trí (E) và (K), tiếp xúc nhau tại điểm M, pháp tuyến chung tại M của (E) và (K)
là đường thẳng NM tiếp xúc với vòng cơ sở (Cb ). Sau khoảng thời gian dt, cam và cần đến
vị trí mới là (E’) và (K’), tiếp xúc nhau tại M’, cần đi được một đoạn dS, cam quay được một
góc de, pháp tuyến chung tại M’ của (E’) và (K’) là đường thẳng N’M’ ti ếp xúc với vòng cơ
sở (Cb).

Truyền động cơ khí- Vũ Thị Hạ
Ta có ò óó¤YôKõö và e
Gọi V và ω lần lượt là vận tố
Suy ra: j
8ÇYôKõö hay Q
Từ O, vẽ đường thẳng vuông góc v
Đặt r = OP suy ra o 8ÇYôKõ
Gọi (C) là vòng tròn tâm O, bán kính r = OP g
(tt) là đường thẳng gắn cứng trên c
(C) tại điểm P. Do V = r.ω, tứ
tròn (C) nên đường thẳng (tt) lă
ũ ị Hạnh
Hình 4. 5 óÇó¤ÇD8Ç óó¤8Ç ⇒ P÷Pø 8ÇYôKõö
ốc tịnh tiến của cần và vận tốc góc của cam, ta có
P÷P7 Q,
en
8ÇYôKõö .
ng vuông góc với phương trượt của cần, cắt NM tại P.
ÇYôKõö ⇒ Q o
i (C) là vòng tròn tâm O, bán kính r = OP gắn trên cam.
ng trên cần, song song với phương trượt của c
ức là vận tốc tịnh tiến của cần bằng vận tốc ti
ng (tt) lăn không trượt trên vòng tròn (C).
55
a cam, ta có
a cần và tiếp xúc với
c tiếp tuyến của vòng

Truyền động cơ khí- Vũ Thị Hạ
Như vậy, khi cho cam và cầ
đường thẳng (tt) gắn trên cần s
khi cho (tt) gắn trên cần lăn không tr
với vận tốc góc ω, cần tịnh tiế
đẩy nhau chuyển động và do đ
nhau của (K) trong chuyển độ
Phương pháp bao hình để tạo hình biên d
trượt với vòng tròn (C). Gọ
thẳng gắn cứng trên (tt), có pháp tuy
với (tt) một góc bằng α0. T
điểm khác nhau trong chuyể
đối của (tt) đối với vòng (C), ta ghi l
vết của (K) trên mặt phẳng g
vòng (C). Ta sẽ nhận được h
mà bao hình là đường thân khai vòng tròn
(hình 4.6)
ũ ị Hạnh
ần tiếp xúc và đẩy nhau chuyển động thì :
n sẽ lăn không trượt với vòng tròn (C) gắn trên cam. Ng
ăn không trượt với vòng tròn (C) gắn trên cam, tứ
ến với vận tốc V với Q 8ÇYôKõö, thì cam và c
ng và do đó biên dạng thân khai (E) sẽ là bao hình c
ộng tương đối đối với cam.
Hình 4. 6 o hình biên dạng răng thân khai : Cho đường th
ọi (K) là đoạn
ng trên (tt), có pháp tuyến làm
. Tại những thời
ển động tương
i vòng (C), ta ghi lại các
ng gắn liền với
họ đường thẳng
ng thân khai vòng tròn.
Hình 4. 56
: Q 8ÇYôKõö và
n trên cam. Ngược lại,
ức là cho cam quay
, thì cam và cần sẽ tiếp xúc và
là bao hình của các vị trí khác
ng thẳng (tt) lăn không
Hình 4. 7

Truyền động cơ khí- Vũ Thị Hạ
Nếu thay vì đoạn thẳng (K), ta
phẳng gắn liền với vòng tròn (C), s
cặp biên dạng thân khai đối xứ
4.4.2. Thanh răng sinh và thông s
Thanh răng dùng để tạo hình bánh r
và kích thước thanh răng sinh quy
răng theo phương pháp bao h
sinh có các răng hình thang cân, gi
song song với đường đỉnh và đư
bình. Trên t0t0, chiều rộng răng s
Các thông số
- Bước răng của thanh răng
răng kề nhau đo trên một đư
- Mođun: |F ùöú . Mođun m
- Góc áp lực của thanh răng
chuẩn hoá: α0 = 200 và là m
- Chiều dày răng s0 và chi
- Chiều cao đỉnh răng h’0, và chi
đến đường đỉnh và đường chân): h
- Chiều cao răng h0 = 2,5m0
- Chiều cao phần lượn tròn
ũ ị Hạnh
ng (K), ta gắn cứng lên (tt) thanh răng hình
i vòng tròn (C), sẽ nhận được những họ đường thẳng mà bao hình là các
ứng với nhau từng đôi một của bánh răng thân khai
ăng sinh và thông số của thanh răng sinh
o hình bánh răng thân khai gọi là thanh răng sinh (hình 4.8)
ăng sinh quyết định hình dạng và kích thước của dao dùng c
ng pháp bao hình, do đó thanh răng sinh được tiêu chuẩn hoá.
ình thang cân, giống hệt nhau và bố trí cách đều nhau.
nh và đường chân, chia đôi răng theo chiều cao g
ăng s0 bằng chiều rộng rãnh w0: s0 = w0.
ăng p0 (khoảng cách giữa hai biên dạng răng cùng phía c
t đường thẳng song song với đường đỉnh hoặc đư
đun m0 được tiêu chuẩn hoá.
ăng α0: nửa góc ở đỉnh của hình thang cân. Góc
và là một thông số về hình dạng răng.
và chiều rộng rãnh w0 đo trên đường trung bình.
F ûF !F2 |F2
, và chiều cao chân răng h”0, (khoảng cách từ
ng chân): h’ 0 = h”0 = 1,25m0
0
ở đỉnh răng và ở chân răng: c0 = 0,25m0
Hình4.8
57
ình thang thì trên mặt
ng mà bao hình là các
ăng thân khai (hình 4.7)
(hình 4.8). Hình dạng
a dao dùng cắt bánh
n hoá. Thanh răng
u nhau. Đường thẳng t0t0
u cao gọi là đường trung
ăng cùng phía của hai
c đường chân)
a hình thang cân. Góc α0 cũng được tiêu
ừ đường trung bình

Truyền động cơ khí- Vũ Thị Hạnh 58
- Người ta thường dùng chiều cao lý thuyết của đỉnh răng h’0 = 1.m0 và chiều cao lý
thuyết của răng h0 = 2,25m0.
4.4.3. Các thông số chế tạo cơ bản của bánh răng thân khai
- Bước răng p trên vòng chia (vòng tròn C) p=p0
- Mođun: |F | ùú
ùöú . Mođun m0 được tiêu chuẩn hoá.
- Góc áp lực của thanh răng α: góc ăn khớp của thanh răng và bánh răng trong quá trình
tạo hình bánh răng thân khai cos α= 8Ç8
- Số răng Z của bánh răng :ü! 2o ⇒ ü| 2o ⇒ ü 8M
- Khoảng dịch dao ý, hệ số dịch dao x. Do trong qua trình tạo hình bánh răng , đường
trung bình và đường chia không luôn trùng nhau, ýlà khaongr cách giữa hai đường, tỉ
số x=þM gọi là hệ số dịch dao
Quy ước về dấu:
- x = 0: nếu đường trung bình tiếp xúc với vòng chia (gọi là bánh răng tiêu chuẩn)
- x > 0: nếu đường trung bình nằm ngoài vòng chia (bánh răng dịch dao dương)
- x < 0: nếu đường trung bình cắt vòng chia. (bánh răng dịch dao âm)
Bốn thông số m, α, Z và x là bốn thông số cơ bản của bánh răng thân khai. m là thông số về
kích thước, tất cả các kích thước của bánh răng đều được tính theo m. α là thông số về biên
dạng răng. Khi biết bốn thông số trên, kích thước của bánh răng hoàn toàn xác định.
− Xác định kích thước cơ bản của bánh răng
Với bánh răng tiêu chuẩn (x = 0): Đường chia và đường trung bình trùng nhau. Do đó trên
đường chia, ta có:
F F !F2 |F2
Mặt khác, đường chia và vòng chia lăn không trượt trên nên: F , F với s và w là
chiều dày răng và chiều rộng rãnh của bánh răng đo trên vòng chia.
Do đó ù úM
Với bánh răng dịch dao, trên đường chia tt, chiều dày răng của thanh răng:
s0 = A’B’ = AB−2AA’

Truyền động cơ khí- Vũ Thị Hạ
F |2Do đường chia (tt) lăn không trư
Suy ra:
Chu vi vòng cơ sở: Z.pb = 2πr
r = 1/2mZ và r = r
Do đó, có thể viết lại điều kiện ă
pb1 =
Vậy để thỏa mãn điều kiện ăn kh
áp lực trên vòng chia, tức là hai bánh r
4.5. Hiện tượng cắt chân ră
Hiện tượng cắt chân ră
là hiện tượng phần biên dạng thân khai g
trình cắt bánh răng bằng phươ
ũ ị Hạnh
|F & 2A|FnlÅF ⇒F |F L2 & 2AnlÅFN
ăn không trượt trên vòng chia (C) nên w = s0
û F |L2 @ 2AnlÅN
| Lú @ 2AnlÅN
πrb⇒ Bước răng trên vòng cơ sở: pb = 2πrb/Z
r = 1/2mZ và r = rb/2 cosα ⇒ pb = πmcosα.
n ăn khớp đúng như sau:
= pb2 ⇔ m1 = m2 = m và α1 = α2 = α
ăn khớp đúng, hai bánh răng ăn khớp phải có cùng mo
c là hai bánh răng phải được tạo hình từ cùng một thanh r
t chân răng, số răng tối thi ểu và hệ số dịch dao t
t chân răng
ng thân khai gần gốc bị dao thanh răng cắt lẹm g
ương pháp bao hình Trong quá trình tạo hình bánh r
Hình4.9
59
N
i có cùng mođun và góc
t thanh răng sinh.
ch dao tối thi ểu
m gần chân trong quá
o hình bánh răng thân

Truyền động cơ khí- Vũ Thị Hạnh 60
khai bằng thanh răng sinh, điểm tiếp xúc M của cạnh răng (K) của thanh răng và biên dạng
(E) của bánh răng vạch nên đường thẳng PN gọi là đường ăn khớp của quá trình tạo hình.
Hiện tượng cắt chân răng xảy ra khi đường đỉnh lý thuyết (T) của thanh răng sinh cắt đường
ăn khớp PN tại một điểm không thuộc nửa đường thẳng Nx (hình 4.9)
Chứng minh: Giả sử đường đỉnh lý thuyết (T) của thanh răng cắt đường ăn khớp PN tại một
điểm S không thuộc nửa đường thẳng Nx. Cạnh răng (K) của thanh răng và biên dạng thân
khai (E) đang tiếp xúc nhau tại điểm N: biên dạng (E) đang nằm bên phải của cạnh răng (K).
Khi vòng chia (C) quay được một góc dφ, biên dạng (E) và cạnh răng (K) dịch chuyển đến vị
trí mới (E’) và (K’) . (E) đi được một khoảng ¹¹”D trên vòng tròn (Cb), (một đoạn vv’ð , trên
vòng chia (C); cạnh răng (K) đi được một khoảng ¹¹′ð trên PN, một khoảng hh’ð = ds trên
đường chia (tt).
Ta có:
¹¹′ð = bb’cosα = ds.cosα
¹¹”D = rb.dφ= rcosα.dφ = vv cosα
Do đường chia (tt) lăn không trượt trên vòng chia (C) nên: ⇒ vv′ð = hh’ð = ds
¹¹′ð = ds.cosα =¹¹′HHHHH Nghĩa là phần gốc của đường thân khai (E’) bây giờ đã nằm bên trái cạnh răng (K’). Nói khác
đi phần chân gần gốc của biên dạng thân khai đã bị dao thanh răng cắt lẹm đi khi tạo hình.
Nhận xét Trong quá trình ăn khớp của cặp bánh (Cb2) răng, chỉ có một phần biên dạng răng
tham gia ăn khớp và được gọi là phần làm việc của biên dạng răng. Xác định phần làm việc
của biên dạng răng như sau: Từ điểm vào khớp B1, vẽ vòng tròn tâm O1, bán kính O1B1, cắt
biên dạng thân khai (E) tại điểm b. Cung ab chính là phần làm việc của biên răng (E). Khi
chân răng bị cắt lẹm đi, nhưng không lẹm vào phần làm việc của biên dạng răng, thì về mặt
động học tỷ số truyền i12 vẫn không thay đổi. Tuy nhiên sức bền uốn của răng giảm xuống
(do giảm tiết diện đáy răng). Khi phần làm việc của biên dạng răng bị cắt lẹm đi, thì hệ số
trùng khớp bị giảm xuống, điều kiện ăn khớp trùng có thể bị vi phạm. Hiện tượng cắt chân
răng là một hiện tượng có hại, cần phải tránh.
Số răng và hệ số dịch dao tối thiểu
Từ N hạ NQ⊥OP. Để không xảy ra hiện tượng cắt chân răng: e ≤ PQ (hình 4.10).
Mà: PQ = PN.sinα = OP.sinα. sinα = OPsin2α
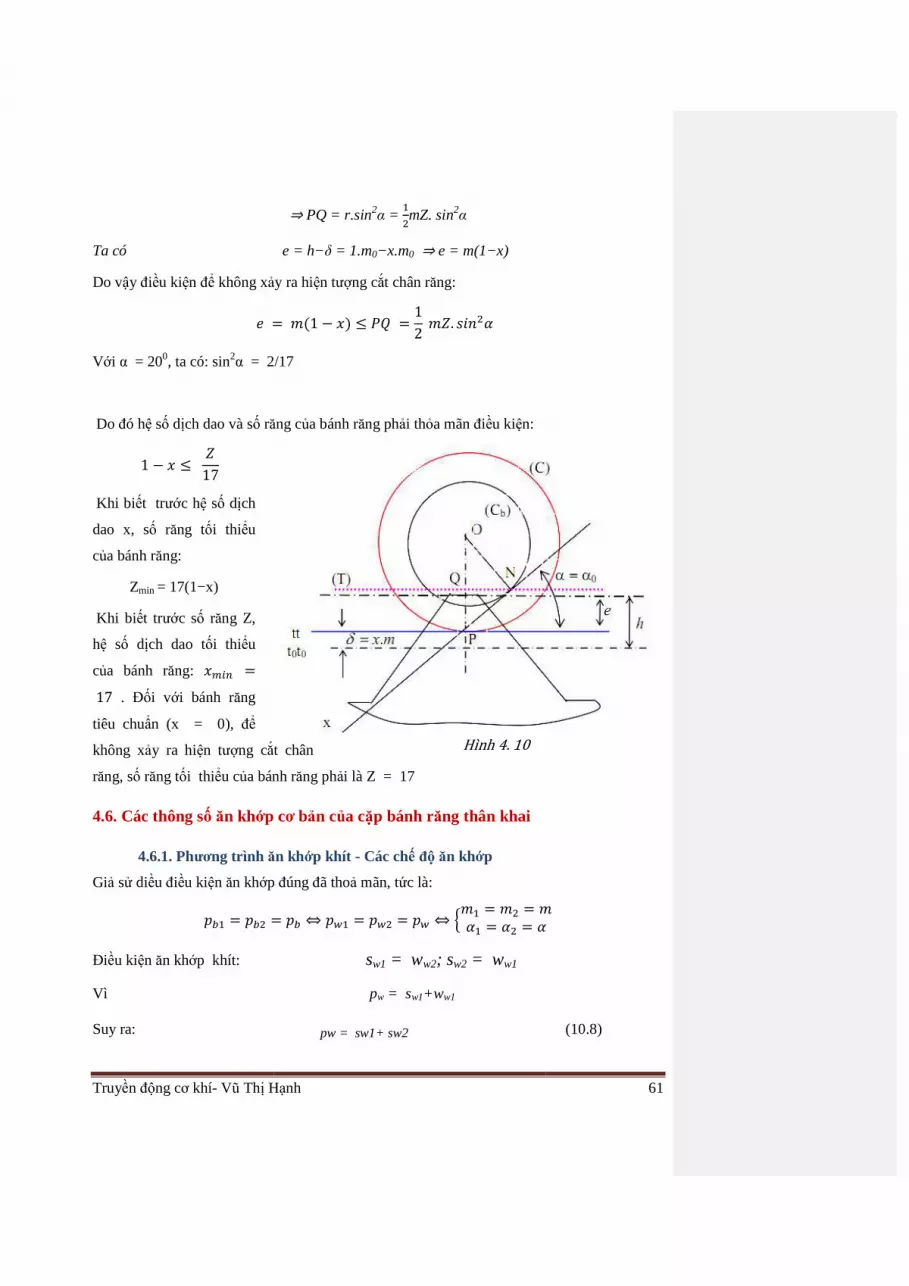
Truyền động cơ khí- Vũ Thị Hạ
Ta có
Do vậy điều kiện để không xả
Với α = 200, ta có: sin2α = 2
Do đó hệ số dịch dao và số răng c
1 & A ü17
Khi biết trước hệ số dịch
dao x, số răng tối thiểu
của bánh răng:
Zmin = 17(1−x)
Khi biết trước số răng Z,
hệ số dịch dao tối thiểu
của bánh răng: AMU: 17 . Đối với bánh răng
tiêu chuẩn (x = 0), để
không xảy ra hiện tượng cắ
răng, số răng tối thiểu của bánh r
4.6. Các thông số ăn khớp cơ
4.6.1. Phương trình ăn kh
Giả sử diều điều kiện ăn khớp đ
!^% !^ Điều kiện ăn khớp khít:
Vì
Suy ra:
ũ ị Hạnh
⇒ PQ = r.sin2α = %mZ. sin2α
e = h−δ = 1.m0−x.m0 ⇒ e = m(1−x)
ảy ra hiện tượng cắt chân răng:
|(1 & A » 12 |ü. mÅα = 2/17
răng của bánh răng phải thỏa mãn điều kiện:
ắt chân
a bánh răng phải là Z = 17
p cơ bản của cặp bánh răng thân khai
ăn khớp khít - Các chế độ ăn khớp
p đúng đã thoả mãn, tức là:
!^ ⇔ !% ! ! ⇔ |% | |Å% Å Å sw1 = ww2; sw2 = ww1
pw = sw1+ww1
pw = sw1+ sw2
Hình4.10
61
|Å
(10.8)

Truyền động cơ khí- Vũ Thị Hạ
Đây cũng là một dạng của điề
Tính bước pw trên vòng lăn (hình 4.11)
Ta có:
Ta có chu vi vòng lăn
! !ü ⇒ ! ú8
Tính sw1, sw2 trên vòng lăn (hình 4.11)
Ta có
Đồng thời
Thay vào ta có
ũ ị Hạnh
ều kiện ăn khớp khít.
(hình 4.11)
rb = rcosα và rb = rw.cosαw⇒rw = 8.YôKõ
ú8é ⇒ ! ⇒ ! ú
. %|ü. YôKõYôKõé ⇒ ! |(hình 4.11)
@ + với Ké8é và K8 mqÅ, mqÅ
Hình4.
62
|. YôKõYôKõé
Hình4.11

Truyền động cơ khí- Vũ Thị Hạnh 63
Ké8é @ mqÅ K8 @ mqÅ
⇒ 2o 2o @ mq(Å) & mq(Å) Thay o o. YôKõ
YôKõé , o % |ü, |Lú
+ m2AnlÅN
⇒ | ixÅixÅ 2 + 2AnlÅ + ümq(Å) & mq(Å)
⇒ % | ixÅixÅ 2 + 2A%nlÅ + ü%mq(Å) & mq(Å)
⇒ | ixÅixÅ 2 + 2AnlÅ + ümq(Å) & mq(Å)
⇒ | ixÅixÅ | ixÅ
ixÅ L + 2(A + A%)nlÅ + (ü% + ü)mq(Å) & mq(Å)N
⇒ mq(Å) 2(A + A%)(ü% + ü) nlÅ + mq(Å) Do đó phương trình ăn khớp khít cho ta mối liên hệ giữa một thông số ăn khớp cơ bản của
cặp bánh răng (góc ăn khớp αw ) và các thông số chế tạo cơ bản của từng bánh răng trong cơ
cấu. Từ đó căn cứ vào các thông số chế tạo của từng bánh răng, suy ra điều kiện ăn khớp của
cặp bánh răng. Hoặc tuỳ theo yêu cầu ăn khớp, có thể chọn các thông số chế tạo (x1, x2) cho
thích hợp.
4.6.2. Các chế độ ăn khớp của cặp bánh răng thân khai
Từ phương trình ăn khớp khít (10.11), ta thấy rằng khi cho trước α, Z1, Z2 thì ứng với các giá
trị khác nhau của tổng x = x1 + x2, ta có các giá trị khác nhau của góc ăn khớp αw , nghĩa là có
các chế độ ăn khớp khác nhau.
− Chế độ ăn khớp tiêu chuẩn khi x1 = x2 = 0: cặp bánh răng được gọi là cặp bánh răng
tiêu chuẩn.
− Chế độ ăn khớp dịch chỉnh đều khi x1 = − x2: cặp bánh răng được gọi là cặp bánh
răng dịch chỉnh đều.
− Chế độ ăn khớp dịch chỉnh dương khi x1 + x2 > 0: cặp bánh răng được gọi là cặp
bánh răng dịch chỉnh dương.

Truyền động cơ khí- Vũ Thị Hạnh 64
4.6.3. Các thông số ăn khớp và đặc điểm của chúng trong từng chế độ ăn khớp
Góc ăn khớp
Khi x1 + x2 > 0 : Từ (10.11) suy ra : inv(αw)>inv(α) hay αw >α
Khi x1 + x2 = 0 : Ta có : αw =α
Bán kính vòng lăn rw
o% o% YôKõYôKõé ; o o YôKõYôKõé
Khi x1 + x2 > 0 : rw1 >r 1 ; rw2 >r 2
Khi x1 + x2 = 0 : Ta có rw1 = r1 ; rw2 = r2
Khoảng cách trục của cặp bánh răng aw
v o%@o o% @ o ixÅixÅ
⇒ v 12|(ü% @ ü)ixÅixÅ
Gọi a0 là khoảng cách trục tiêu chuẩn, vF %|(ü% @ ü)
Khi x1 + x2 > 0 : aw >a0 ;
Khi x1 + x2 = 0 : Ta có aw = a0
Tỉ số truyền i12
m% % o%o
o %o o%o
1 2 |ü1 2 |%ü%
Điều kiện ăn khớp đúng : m1 = m2 do đó m%
4.6.4. Một vài đặc điểm của việc dịch dao và dịch chỉnh ăn khớp
Với bánh răng dịch dao dương x > 0
- Số răng tối thiểu của bánh răng để không xảy ra hiện tượng cắt chân răng :
Zmin=17(1−x). Như vậy số răng tối thiểu Zmin có thể nhỏ hơn 17 mà không bị cắt
chân răng.
- Khi dịch dao dương bán kính cong của phần làm việc của biên dạng răng tăng lên,
nhờ đó sức bền tiếp xúc tăng lên. Tuy nhiên chiều rộng răng trên vòng đỉnh giảm

Truyền động cơ khí- Vũ Thị Hạnh 65
xuống, có thể gây nên hiện tượng nhọn đỉnh răng. Khi thiết kế cần kiểm tra điều kiện
không nhọn đỉnh răng : sa ≤ 0,4.m với m và sa lần lượt là mođun và chiều dày răng
trên vòng đỉnh.
- Khi dịch dao dương, chiều dày chân răng tăng lên, nhờ đó sức bền uốn tăng lên.
Với cặp bánh răng dịch chỉnh:
− Phân bố hệ số dịch dao x1, x2 một cách hợp lý sao cho bảo đảm sức bền uốn đều ở
chân răng hai bánh. Mặt khác, nếu khéo chọn hệ số dịch dao thì hệ số trượt lớn nhất ở
chân răng hai bánh có thể cân bằng nhau, nhờ đó bảo đảm được độ bền mòn đều ở
chân răng hai bánh.
− Với cặp bánh răng dịch chỉnh dương x1+ x2 > 0 dùng để bảo đảm một khoảng cách
trục cho trước của cơ cấu bánh răng.
Khi x1+ x2 = 0, khoảng cách trục
v vF 12|(ü% @ ü) m được tiêu chuẩn hoá m = 1 ; 1,5 ; 2 ; 2,5..., là số nguyên. Do đó không thể bảo đảm
được một khoảng cách trục lẻ tuỳ ý cho trước của cặp bánh răng.
Khi x1+ x2 > 0, khoảng cách trục bằng :
v 12|(ü% @ ü)ixÅixÅ
Khi thay đổi góc ăn khớp αw, có thể đảm bảo một khoảng cách trục tùy ý cho trước.
Tuy nhiên dịch chỉnh dương có thể làm giảm hệ số trùng khớp của cặp bánh răng, do
đó không nên chọn x1+ x2 quá lớn và cần kiểm tra điều kiện ăn khớp trùng :ε ≥1.
4.7. Bánh răng trụ tròn r ăng thẳng và bánh răng trụ tròn r ăng nghiêng
Trong phần trên, chúng ta chỉ mới nghiên cứu bánh răng thân khai phẳng trên một tiết diện
vuông góc với trục quay của bánh răng. Khi xét đến bề rộng bánh răng thì tùy theo hình dạng
đường răng (giao tuyến của mặt răng với một mặt trụ đồng trục với trục quay) sẽ có các kiểu
bánh răng khác nhau :
− Bánh răng trụ tròn răng thẳng : đường răng là một đường thẳng
− Bánh răng trụ tròn răng nghiêng : đường răng là một đường xoắn ốc trụ tròn

Truyền động cơ khí- Vũ Thị Hạ
− Bánh răng trụ tròn r
tiếp và đối chi
4.7.1. Bánh răng trụ tròn r ăng th
a) Mặt răng
Tạo hình mặt răng
Cho mặt phẳng (Π) lăn không tr
đường thẳng thuộc mặt phẳng (Π
một mặt (Σ) gọi là mặt trụ thân khai. M
Tính chất
Giao tuyến của mặt răng (Σ) v
(Γb) là một đường thân khai vòng tròn
là một đường sinh MbM’ b, c
phẳng (Π), tiếp xúc với mặt tr
của mặt trụ cơ sở (Γb). Tiếp di
thân khai (Σ) và ngược lại.
ũ ị Hạnh
tròn răng chữ V : đường răng là hai đường xo
i chiều nhau.
ăng thẳng
ăn không trượt trên mặt trụ (Γb) theo đường sinh NN’. G
ng (Π) và song song với NN’. Khi đó, đường th
thân khai. Mặt trụ (Γb) được gọi là mặt trụ cơ sở
Σ) với một mặt phẳng vuông góc với trục OO’ c
ng thân khai vòng tròn (E) . Giao tuyến của mặt răng (Σ) và m
, của mặt trụ cơ sở (Γb). Giao tuyến của mặ
t trụ cơ sở (Γb), là một đường thẳng (∆) song song v
p diện (Π) với mặt trụ cơ sở (Γb) cũng là pháp di
Hình 4. 12
66
ng xoắn ốc trụ tròn nối
ng sinh NN’. Gọi (∆) là một
g thẳng (∆) vạch nên
ở (hình 4.12a).
c OO’ của mặt trụ cơ sở
à mặt trụ cơ sở (Γb)
ặt răng (Σ) với mặt
∆) song song với trục OO,
ũng là pháp diện của mặt trụ

Truyền động cơ khí- Vũ Thị Hạnh 67
b) Đặc điểm tiếp xúc của hai mặt răng
Cho mặt phẳng (Π) lăn không trượt trên mặt trụ (Γb1) theo đường sinh N1N’1, . Khi đó,
đường thẳng (∆1) thuộc mặt phẳng (Π) với (∆1)// N1N’ 1, vạch nên một mặt răng (Σ1) của
bánh răng (1). Cũng cho mặt phẳng (Π) lăn không trượt trên mặt trụ (Γb2) theo đường sinh
N2N’2, . Khi đó, đường thẳng (∆2) thuộc mặt phẳng (Π) với (∆2)// N2N’2, vạch nên một mặt
răng (Σ2) của bánh răng (2) (hình 4.12).
Vì hai trục quay O1O1 và O2O2 song song với nhau nên (∆1)//(∆2). Do vậy khi cho bánh (1)
quay theo chiều ω1 thì có lúc đường thẳng (∆1) đến trùng với đường thẳng (∆2). Hay nói khác
đi, khi ăn khớp hai mặt răng (Σ1) và (Σ2) tiếp xúc nhau theo một đường thẳng (∆) song song
với các trục của hai bánh răng và nằm trong mặt phẳng ăn khớp (Π) - mặt phẳng tiếp xúc với
chung của hai mặt trụ cơ sở (Γb1) và (Γb2).
Nhận xét
- Bánh răng trụ tròn răng thẳng có thể xem như là một hình khối do một mặt cắt vuông
góc với trục của nó vạch ra khi chuyển động tịnh tiến dọc theo trục này. Khi đó, các
phần tử hình học trước đây là điểm trở thành đường, là đoạn trở thành miền, là vòng
tròn trở thành mặt trụ...
- Ví dụ vòng chia, vòng lăn, vòng đỉnh.... trở thành mặt trụ chia, mặt trụ lăn, mặt trụ
đỉnh.... ; đoạn ăn khớp thực trở thành miền ăn khớp thực... ; đường ăn khớp trở thành
mặt phẳng ăn khớp...
- Thông số chế tạo của bánh răng trụ tròn răng
(Π) thẳng hoàn toàn giống như các thông số
chế tạo xét trên một mặt cắt ngang (mặt cắt
vuông góc với B B, trục quay), chỉ thêm một
thông số là bề rộng bw của bánh răng.
- Do hai mặt răng (Σ1) và (Σ2) không phải dài vô
hạn mà bị giới hạn bởi hai mặt trụ đỉnh răng
(Γa), (Γa2) và hai mặt đầu của các bánh răng,
nên hai mặt răng chỉ có thể tiếp xúc nhau trong
B, miền ăn khớp thực B1B’1,B2B’ 2, với B1 B’1,
và B2B’2, (hình 4.13) lần lượt là giao tuyến của
mặt trụ đỉnh (Γa2) và (Γa1) với mặt phẳng ăn
khớp (Π). Khi đường thẳng tiếp xúc chung (∆) Hình 4. 13

Truyền động cơ khí- Vũ Thị Hạnh 68
của hai mặt răng di chuyển đến vị trí B1B’ 1, thì hai mặt răng vào khớp theo đoạn
B1B’1
- Khi (∆) di chuyển cặp bánh răng trụ răng thẳng đến B2B’2, thì hai mặt răng ra khớp
theo đoạn B2B’2, . Như vậy, với cặp bánh răng trụ tròn răng thẳng, hai mặt răng vào
khớp và ra khớp đột ngột trên suốt bề rộng bánh răng : ăn khớp không êm, có va đập
và tiếng ồn.
4.7.2. Bánh răng trụ tròn r ăng nghiêng
a) Mặt răng
Tạo hình mặt răng
Cho mặt phẳng (Π) lăn không trượt trên mặt trụ (Γb) theo đường sinh NN’. Gọi (∆) là một
đường thẳng thuộc mặt phẳng (Π) và hợp với NN’ một góc βb ≠0. Khi đó, đường thẳng (∆)
vạch nên một mặt (Σ) gọi là mặt xoắn ốc thân khai. Mặt trụ (Γb) được gọi là mặt trụ cơ sở
(hình 4.12b).
Tính chất
- Giao tuyến của mặt răng (Σ) với một mặt phẳng vuông góc với trục OO’ của mặt trụ
cơ sở (Γb) là một đường thân khai vòng tròn (E) .
- Giao tuyến của mặt răng (Σ) và mặt trụ cơ sở (Γb) là đường xoắn ốc trụ tròn MbM’ b, ,
có góc nghiêng βb , bởi vì MbM’ b, chính là vết in của đường thẳng (∆) trên mặt trụ cơ
sở (Γb).
- Giao tuyến của mặt răng (Σ) với mặt phẳng (Π), tiếp xúc với mặt trụ cơ sở (Γb), là một
đường thẳng (∆) hợp với đường sinh N1N’ 1, của mặt trụ cơ sở (Γb) một góc bằng βb.
- Tiếp diện (Π) với mặt trụ cơ sở (Γb) cũng là pháp diện của mặt xoắn ốc thân khai (Σ)
và ngược lại.
Bánh răng trụ tròn răng nghiêng có thể coi như là một hình khối do một tiết diện ngang vạch
ra, khi cho tiết diện này chuyển động xoắn ốc dọc theo trục thẳng góc xuyên tâm của nó. Do
vậy, giao tuyến của mặt răng với các mặt trụ đồng trục với trục quay OO là những đường
xoắn ốc trụ tròn có cùng bước xoắn.
b) Đặc điểm tiếp xúc của hai mặt răng
- Cho mặt phẳng (Π) lăn không trượt trên mặt trụ (Γb1) theo đường sinh N1N’ 1 . Khi đó,
đường thẳng (∆1) của mặt phẳng (Π) với (∆1,N1N’1,) = βb sẽ vạch nên một mặt răng (Σ1)
của bánh răng (1).

Truyền động cơ khí- Vũ Thị Hạnh 69
- Cũng cho mặt phẳng (Π) lăn không trượt trên mặt trụ (Γb2) theo đường sinh N2N’ 2, . Khi
đó, đường thẳng (∆2) của mặt phẳng Π với (∆2,N2N’2) = βb sẽ vạch nên một mặt răng
(Σ) của bánh răng (2) (hình 4.12)
- Vì hai trục quay O1O1 và O2O2 song song với nhau nên (∆1)//(∆2). Do vậy khi cho bánh
(1) quay theo chiều ω1 thì có lúc đường thẳng (∆1) đến trùng với đuờng thẳng(∆2). Hay
nói khác đi, khi ăn khớp, hai mặt răng (Σ1) và (Σ2) tiếp xúc nhau theo một đường thẳng
(∆) hợp với hai trục quay của hai bánh răng một góc βb. Đường thẳng (∆) nằm trong mặt
phẳng ăn khớp (Π) của cặp bánh răng.
c) Các thông số chế tạo của bánh răng trụ tròn răng nghiêng
Ngoài những thông số chế tạo như trong cặp bánh răng trụ tròn răng thẳng là m, α , Z, x và
một số thông số chế tạo khác như bán kính vòng đỉnh ra , bán kính vòng chân rf , bề rộng
bánh răng bw ..., trong bánh răng trụ tròn răng nghiêng còn thêm một số thông số đặc trưng
cho độ nghiêng của răng.
Thông số xét trên mặt cắt vuông góc với trục quay của bánh răng (mặt cắt ngang) :
- Bước răng trên vòng chia, được gọi là bước trên mặt đầu, ký hiệu pS (hay còn gọi là
bước răng ngang).
- Môđun bánh răng, được gọi là môđun mặt đầu, ký hiệu mS (hay còn gọi là mođun
ngang).
mS = ùú và o %|Kü
- Góc áp lực trên vòng chia, được gọi là góc áp lực mặt đầu, ký hiệu αS (hay còn gọi là góc
áp lực ngang).
ixÅK 8Ç8 r
- Bước răng trên vòng cơ sở, được gọi là bước cơ sở trên mặt đầu, ký hiệu pbS
Thông số đặc trưng cho độ nghiêng của bánh răng
Góc nghiêng của đường răng trên mặt trụ cơ sở βb
Góc nghiêng của đường răng trên mặt trụ chia β
Góc nghiêng của đường răng trên mặt trụ lăn βw
nl nl^ixÅK Thông số đo trên mặt cắt vuông góc với đường răng trên mặt trụ chia (mặt cắt pháp)

Truyền động cơ khí- Vũ Thị Hạnh 70
Bước pháp pn là bước răng đo trên giao tuyến giữa mặt trụ chia và một mặt cắt pháp
Mođun pháp : |: ù¥ú !: !Kix ⇒|: |Kix
Góc áp lực pháp αn :
Ta có (hình 10.27): tgαn = tgαS.cosβ
Trong bánh răng nghiêng, αn và mn được tiêu chuẩn hóa : αn =200
d) Bánh răng thay thế của bánh răng trụ tròn răng nghiêng
Để thuận tiện cho việc giải một số bài toán về cấu tạo và động lực học của cặp bánh răng trụ
tròn răng nghiêng, người ta tìm cách quy về các bài toán tương ứng của cặp bánh răng trụ
tròn răng thẳng bằng khái niệm bánh răng thay thế.
Giả sử cặp bánh răng là dịch chỉnh không (x1+ x2 = 0). Khi đó mặt trụ lăn trùng với mặt trụ
chia tương ứng.
Xét mặt phẳng(P) vuông góc tại P với hai đường răng (E1) và (E2) trên mặt trục chia (Γ1)và
(E1) (tức là vuông góc với tiếp tuyến chung tt của (E1) và (E2)). Giao của mặt phẳng (P) với
(Γ1)và (Γ2) là hai tiết diện hình êlíp.
Tại lân cận tâm ăn khớp P, ta thấy (Γ2) sự ăn khớp của cặp bánh răng trụ tròn răng nghiêng
tương đương với sự ăn khớp của cặp bánh răng trụ tròn răng thẳng có tiết diện là hình êlíp.
Tuy nhiên tại lân cận tâm ăn khớp P, hai hình êlíp gần trùng với hai vòng tròn mật tiếp
(C1,)và(C2,). Do đó, tại lân cận tâm ăn khớp P, có thể xem như sự ăn khớp của cặp bánh răng
trụ tròn răng nghiêng tương đương với sự ăn khớp của cặp bánh răng trụ tròn răng thẳng, có
vòng chia là hai vòng tròn(C’1),(C’2), có môđun là m’ đúng bằng môđun pháp mn của cặp
bánh răng trụ tròn răng nghiêng.
Cặp bánh răng trụ tròn răng thẳng nói trên gọi là cặp bánh răng trụ tròn răng thẳng thay thế
cho cặp bánh răng trụ tròn răng nghiêng đang xét.Thông số của bánh răng thay thế gồm :

Truyền động cơ khí- Vũ Thị Hạ
Bán kính vòng chia r’1,r’2, của c
trụ chia và góc nghiêng của đư
nghiêng.
- Theo tính chất của êlíp, bán kính vòng tròn m
- a là bán trục lớn,b là bán tr
- Với vòng tròn mật tiếp (C’
- Do đó bán kính vòng tròn m
- Tương tự, với vòng tròn m
- Số răng Z’1, Z’ 2 của cặ
với : mn = mScosβ ;
ũ ị Hạnh
a cặp bánh răng thay thế r1, r2, β lần lượt là các bán kính m
a đường răng trên mặt trụ chia của cặp bánh răng tr
a êlíp, bán kính vòng tròn mật tiếp tại P : =^
n,b là bán trục nhỏ của êlíp.
p (C’1) (hình 4.14), ta có :
v 8YôK ; b = r1òng tròn mật tiếp (C’1) bằng : o′% 8YôK
i vòng tròn mật tiếp (C’2), ta có : o′ 8YôK ặp bánh răng thay thế
ü′% 2o′%|¤ 2o%ix|:
Hình4.14
71
t là các bán kính mặt
ăng trụ tròn răng

Truyền động cơ khí- Vũ Thị Hạnh 72
mS , mn là mođun mặt đầu và môđun pháp của bánh răng trụ tròn răng nghiêng. Do đó, số
răng của bánh răng trụ tròn răng thẳng thay thế :
ü′% 2o%ix|K ⇒ ü′% ü%ix
Tương tự : ü′ YôK
e) Đặc điểm ăn khớp của cặp bánh răng trụ tròn răng nghiêng
Trên hai mặt trụ lăn trong cặp bánh răng trụ tròn răng nghiêng ngoại tiếp, hai đường răng là
hai đường xoắn ốc có cùng góc nghiêng nhưng hướng xoắn ngược nhau :
βW1 = −βW2
Hai mặt răng (Σ1) và (Σ2) trong cặp bánh răng trụ tròn răng nghiêng (Π) tiếp xúc nhau theo
một đường thẳng (∆) hợp với hai trục quay của
hai bánh răng một góc βb và nằm trong mặt
phẳng ăn khớp (П), tiếp diện chung của hai mặt
trụ cơ sở.
Tương tự như trong bánh răng trụ tròn răng
thẳng, do hai mặt răng (Σ1) và (Σ2) không phải
(2) dài vô hạn mà bị giới hạn bởi hai hình trụ
đỉnh răng (Γa1), (Γa2) và hai mặt đầu của các
bánh (1) răng, nên hai mặt răng chỉ có thể tiếp
xúc nhau trong miền ăn khớp thực B1B’1,B2B’2,
(hình 4.15). Khi đường thẳng tiếp xúc chung
(∆) của hai mặt răng di chuyển đến vị tríB1*B’ 1,
thì hai mặt răng vào khớp tại B’ 1 trên mặt đầu
thứ nhất. Chiều dài tiếp xúc giữa hai mặt răng
tăng dần. Khi (∆) đến vị trí B1 thì hai mặt răng
tiếp xúc nhau trên suốt chiều dài răng. Khi (∆)
đến vị trí điểm B’2, , chiều dài tiếp xúc bắt đầu
giảm dần. Khi (∆) đến vị trí điểmB2 , hai mặt răng
bắt đầu ra khớp tại một điểmB2 trên mặt đầu thứ hai.
Hình 4. 15

Truyền động cơ khí- Vũ Thị Hạnh 73
Tóm lại, cặp bánh răng trụ tròn răng nghiêng vào khớp tại một điểm trên một mặt đầu, chiều
dài tiếp xúc nằm chéo trên mặt răng và tăng dần đến một giá trị cực đại, sau đó giảm dần và
ra khớp tại một điểm trên mặt đầu bên kia. Do đó, quá trình ăn khớp diễn ra êm hơn so với
cặp bánh răng trụ tròn răng thẳng.
f) Điều kiện ăn khớp đúng và ăn khớp trùng với cặp bánh răng trụ tròn răng nghiêng
Điều kiện ăn khớp đúng :
pN1 =pN2 = pN
Với pN1; pN2 là bước răng đo trên đường thẳng B1B2.
Điều kiện ăn khớp trùng :
Khi cặp bánh răng thứ (1) đang ra khớp tại điểm B2 thì cặp răng kế tiếp phải đã hoặc đang
vào B’ . Do đó pN ≤ B*1B2.
- Hệ số trùng khớp của cặp bánh răng nghiêng :
:;<U:; C%∗C! C%C! @C%∗C%! ⇒:;<U:; 7<=:; @ hnlÇ! với : bW là bề rộng bánh răng, βb là góc nghiêng của đường răng trên mặt trụ cơ sở
εthang : là hệ số trùng khớp của cặp bánh răng trụ tròn răng thẳng tương ứng.
Như vậy, với các điều kiện khác như nhau, hệ số trùng khớp trong cặp bánh răng trụ tròn răng
nghiêng lớn hơn trong cặp bánh răng trụ tròn răng thẳng.
- Số răng tối thiểu của bánh răng trụ tròn răng nghiêng : Gọi Z1,Z2 là số răng của cặp
bánh răng trụ tròn răng nghiêng, Z’1Z’ 2, là số răng của cặp bánh răng trụ tròn răng
thẳng thay thế.
Z1,2 =Z’1,2.cos3β .
Khi bánh răng trụ tròn răng thẳng thay thế bị cắt chân răng thì bánh răng trụ tròn răng
nghiêng tương ứng cũng bị cắt chân răng.
Trong bánh răng trụ tròn răng thẳng tiêu chuẩn (x = 0), số răng tối thiểu để không xảy ra
hiện tượng cắt chân răng là 17: Z’1,2min =17. Do vậy, với bánh răng trụ tròn răng nghiêng tiêu
chuẩn : Z’1,2min = Z’1,2min.cos3β = 17.cos3β < 17, nghĩa là số răng tối thiểu của bánh răng trụ
tròn răng nghiêng tiêu chuẩn có thể nhỏ hơn 17 mà không bị cắt chân răng.

Truyền động cơ khí- Vũ Thị Hạ
Bánh răng trụ tròn răng nghiêng có nh
chiều trục khác 0, do đó đòi h
đỡ chặn, khiến cho kết cấu g
khắc phục nhược điểm này, ngư
răng nghiêng có góc nghiêng đ
lẫn nhau, không truyền lên các g
4.8. Kết cấu và vật li ệu chế
Kết cấu bánh răng phụ thuộc vào
răng, quy mô sản xuất và phươ
- Nếu da < 150mm ⇒ chế
khoét lõm (hình 4.17). K
răng trụ) hay s < 1,6.m (v
bánh răng được chế tạo li
bánh răng liền trục, không ph
then trên trục và trên mayơ
răng lên trục, tăng được đ
khớp.
ũ ị Hạnh
ăng nghiêng có nhược điểm là khi ăn khớp có thành ph
òi hỏi phải có biện pháp cố định bánh răng trên tr
u gối đỡ trục cũng như việc tính chọn ổ cũng ph
m này, người ta dùng bánh răng chữ V hoặc trên mỗ
ng nghiêng có góc nghiêng đối ứng nhau. Khi đó thành phần phản lực chi
n lên các gối đỡ trục (hình 4.16 ).
ế tạo bánh răng
c vào đường kính bánh
ương pháp lắp với trục.
ế tạo liền khối, không
. Khi s < 2,5.m (với bánh
) hay s < 1,6.m (với bánh răng nón) ⇒
o liền trục (hình). Với
c, không phải gia công rãnh
c và trên mayơ, kông phải lắp ghép bánh
c độ cứng và độ chính xác ăn
Hình 4. 16
Hình 4.
74
p có thành phần phản lực
ăng trên trục và phải dùng ổ
ũng phức tạp hơn. Để
ỗi trục lắp hai bánh
c chiều trục triệt tiêu
Hình 4. 17

Truyền động cơ khí- Vũ Thị Hạ
- Nếu da < 500mm ⇒ dùng phôi rèn hay
phôi dập (bánh răng không quan tr
có thể dùng phương pháp
dùng thép cán); khoét lõm
khối lượng, làm lỗ trên đ
lên máy cắt và thuận ti
chuyển (hình 4.18).
- Nếu da > 500mm ⇒ bánh r
sản xuất bằng hàn (nếu s
chiếc) hoặc được chế tạo b
lớn). Có thể chế tạo riêng vành r
phần lõi đúc bằng gang ho
bắt vít thêm. Với các bánh ră
một số mảnh (3-4 mảnh), đ
Vật liệu
Bánh răng chủ yếu được chế t
loại. Tuỳ theo cách nhiệt luyệ
chính:
Nhóm bánh răng có độ rắn b
Trước khi cắt răng, người ta nhi
cắt răng không phải tôi và sửa ră
răng, và đảm bảo sức bền đều cho hai bánh r
của bánh 2, nên chọn vật liệu
dẫn có HB1 = HB2 + (30÷50), HB
tải trọng nhỏ và trung bình nên ch
răng chịu tải nhỏ, dùng trong các c
C40, C45, thường hoá.
Nhóm bánh răng có độ rắn b
Các bánh răng thuộc nhóm này,
sau đó đem cắt răng. Thực hi
khi tôi. Sau khi tôi phải gia công s
bánh răng bằng cùng một loại v
ũ ị Hạnh
dùng phôi rèn hay
ăng không quan trọng
ương pháp đúc hay
dùng thép cán); khoét lõm để giảm
trên đế để gá kẹp
n tiện khi vận
bánh răng được
u sản xuất đơn
o bằng đúc (nếu sản xuất hàng loạt
o riêng vành răng bằng thép tốt lắp với
ng gang hoặc thép chất lượng thường, bằng các kiểu l
i các bánh răng khá lớn (da > 3000mm), vành răng thư
nh), đôi khi số mảnh có thể lớn hơn.
tạo bằng thép, ngoài ra có thể dùng gang, ho
ện, và độ rắn mặt răng, có thể chia bánh răng thép ra hai nhóm
n bề mặt HB≤ 350
i ta nhiệt luyện phôi liệu bằng tôi cải thiện hoặc thư
a răng. Chi phí cho cắt gọt tương đối thấp. Để
u cho hai bánh răng, vì số chu kỳ ứng suất c
u bánh răng nhỏ khác vật liệu bánh răng lớn. Th
50), HB2 là độ rắn mặt răng bánh bị dẫn. Đối với các bánh r
và trung bình nên chọn thép C40, C45, C50Mn, tôi cải thiện.
, dùng trong các cơ cấu không quan trọng, có thể chọn thép CT51, CT61,
n bề mặt HB > 350
c nhóm này, được gia công phức tạp hơn. Phôi liệu đư
c hiện tôi bề mặt: thường thấm than, thấm nitơ, th
i gia công sửa răng bằng nguyên công mài hoặc nghi
i vật liệu, nhiệt luyện đạt độ rắn bề mặt như nhau.
Hình 4. 19
75
u lắp có độ dôi và
ăng thường được ghép từ
dùng gang, hoặc vật liệu phi kim
ăng thép ra hai nhóm
c thường hoá. Sau khi
ể hạn chế dính xước
t của bánh 1 lớn hơn
n. Thường chọn bánh
i các bánh răng chịu
n. Đối với các bánh
n thép CT51, CT61,
u được ủ cho ổn định,
ơ, thấm xianua trước
c nghiền. Nên chọn hai
ư nhau.
Hình 4. 18

Truyền động cơ khí- Vũ Thị Hạ
Thường dùng các thép có hàm l
được thấm than trước khi tôi.
4.9. Độ chính xác của bộ truy
Chất lượng làm việc của bộ
bánh răng. Ví dụ: sai số về bư
truyền tức thời u bị thay đổi), gây nên t
so với đường sinh của mặt tr
răng. Tiêu chuẩn Việt Nam TCVN quy
đến cấp 12, theo thứ tự độ chính xác gi
ba chỉ tiêu:
Chỉ tiêu chính xác động học:
với góc quay danh nghĩa c
răng trong giới hạn một vòng quay
cho nó ăn khớp với bánh ră
chính xác).
Chỉ tiêu làm việc êm: xác đị
bước răng và sai số profin răng.
Chỉ tiêu vết ti ếp xúc: đư
theo kích thước các vết tiếp xúc trên các
răng khi ăn khớp. Để quan sát các v
xúc, người ta bôi một lớp sơ
các các răng. Tiêu chuẩn về
của răng trong bộ truyền (hình 4.
được xác định theo các thông s
khớp, còn phải bảo đảm bộ
định 6 loại khe hở cạnh răng: H: không có khe h
nho; B: khe hở trung bình; A: khe h
trục, độ nghiêng trục và một s
Cấp chính xác được chọn theo đ
vào vận tốc vòng để chọn cấp chính xác. T
8 ÷ 9, với bộ truyền bánh răng quan tr
ũ ị Hạnh
àm lượng các bon thấp như: thép C15, C20, 15Cr, 20Cr, b
truy ền bánh răng
truyền bánh răng phụ thuộc nhiều vào độ
bước và profin răng ⇒ giảm độ chính xác đ
i), gây nên tải trọng va đập và tiếng ồn. Sai s
t trụ chia ⇒ tải trọng phân bố không đều trên chi
t Nam TCVN quy định 12 cấp chính xác chế tạo bánh r
chính xác giảm dần. Mỗi một cấp chính xác đư
c: được đặc trưng bằng sai số toàn phần gi
ĩa của bánh
t vòng quay (khi
i bánh răng mẫu
ịnh bởi sai số
ăng.
ợc đánh giá
p xúc trên các
quan sát các vết tiếp
p sơn mỏng lên
vết tiếp xúc
n (hình 4.20)
theo các thông số: theo chiều dài răng: đồng thời, để tránh k
truyền có khe hở canh răng. Tiêu chuẩn Vi
ăng: H: không có khe hở ; E: khe hở nhỏ; C, D: khe h
trung bình; A: khe hở lớn.Tiêu chuẩn còn quy định dùng sai kho
t số thông số khác.
n theo điều kiện làm việc và công dụng của bộ
p chính xác. Trong chế tạo máy, thường dùng c
ăng quan trọng dùng cấp chính xác 6 ÷ 7.
76
: thép C15, C20, 15Cr, 20Cr, bề mặt
chính xác chế tạo
chính xác động học (làm tỉ số
n. Sai số về phương răng
u trên chiều rộng vành
o bánh răng, từ cấp 1
p chính xác được đặc trưng bằng
n giữa góc quay thực
tránh kẹt răng khi ăn
n Việt nam TCVN quy
; C, D: khe hở tương đối
nh dùng sai khoảng cách
truyền. Có thể dựa
ng dùng cấp chính xác:
Hình 4. 20

Truyền động cơ khí- Vũ Thị Hạ
4.10. Tải tr ọng trong truyề
4.10.1. Lực tác dụng lên các r
Coi tải trọng phân bố được tậ
trung tại điểm giữa vành răng
và bỏ qua ảnh hưởng của lự
ma sát sinh ra trên bề mặt răng,
lực pháp tuyến toàn phần Fn1
do bánh 2 tác dụng lên bánh 1
sẽ nằm trong mặt phẳng ăn
khớp và vuông góc với các
răng làm việc (hình 4.21). Trên
bánh 1 Lực pháp tuyến Fn1
được chia thành hai thành phầ
Lực vòng và lực hướng tâm
º7% Pé ; º8% º7%. nlÅ
Trên bánh 2 ta có;
º7 &º7%; º8 &º8% Chiều của lực vòng trên bánh d
luôn cùng chiều với chiều quay c
ũ ị Hạnh
ền động bánh răng
ng lên các răng khi ăn khớp trong BTBR tr ụ
ập
ăng
ực
ăng,
n1
ng lên bánh 1
ng ăn
i các
. Trên
n1
ần
ng tâm
%; º:% º: ¢YôKõé
c vòng trên bánh dẫn luôn hướng ngược chiều với chiều quay, trên bánh b
u quay của bánh răng. (hình 4.22)
Hình4.
77
răng thẳng
u quay, trên bánh bị dẫn
Hình4.21

Truyền động cơ khí- Vũ Thị Hạ
4.10.2. Lực tác dụng lên các r
Coi tải trọng phân bố được tập t
sát sinh ra trên bề mặt răng, l
bánh 2 tác dụng lên bánh 1 sẽ
hướng vuông góc với đường ti
Lực pháp tuyến Fn1 được chia thành ba thành ph
Lực vòng
Lực dọc trục và lực hướng tâm
º=% º7%. nl ; º8% º7%. nl
Trên bánh 2 ta có;
º7 &º7%; º8 &º8%4.10.3. Các hệ số tải tr
Tải trọng ngoài phân bố không đ
các răng còn chịu thêm tải trọ
danh nghĩa. Đối với bánh răng tr
không đều tải trọng theo cihểu r
H
nn l
Fq =
- Fn là tải trọng pháp tuy
- KHv là hệ số kể đến tải tr
- KHβ là hệ số kể đến phân b
xúc;
ũ ị Hạnh
ng lên các răng khi ăn khớp trong BTBR tr ụ
p trung tại điểm giữa vành răng và bỏ qua ảnh hư
ăng, lực pháp tuyến toàn phần Fn1 do
ẽ nằm trong mặt phẳng ăn khớp và
ng tiếp tuyến trung của hai mặt răng.
c chia thành ba thành phần (hình 4.23)
º7% Pé ng tâm
nlÅ
%; º: ¢YôKõ¥éYôKé
i tr ọng
không đều trên chiều dài răng và cho các răng, đồng th
ọng động phụ làm tải trọng riêng thực tế tăng lên so v
ăng trụ, cường độ tải trọng pháp tuyến qn có xét
u rộng vành răng và tải trọng động.
βHHvH
n KK .. với ℓH, ℓF – chiều dài tiếp xúc.
ng pháp tuyến, lH là tổng chiều dài tiếp xúc;
i trọng động dùng để tính ứng suất tiếp xúc;
n phân bố tải không đều trên chiều dài răng, khi tính
Hình4.23
78
răng nghiêng
nh hưởng của lực ma
ng thời khi ăn khớp
ăng lên so với tải trọng
có xét đến sự phân bố
ăng, khi tính ứng suất tiếp
Hình4.22

Truyền động cơ khí- Vũ Thị Hạnh 79
Đặt KH, KF – hệ số tải trọng khi tính vào độ bền tiếp xúc và độ bền mòn
j
KF = KFβ. KFV
Tải trọng riêng khi tính độ bền tiếp xúc qH
! !: º:.
Tải trọng riêng khi tính độ bến uốn qF
! !: º:.
Tải trọng chỉ phân bố đều khi bộ truyền được chế tạo chính xác và trục với ổ tuyệt đối cứng.
Trong thực tế, do biến dạng đàn hồi của trục, ổ, vỏ máy và bản thân bánh răng, do sai số chế
tạo và lắp ráp nên khi ăn khớp các răng tiếp xúc không đều làm tải trọng phân bố không đều
trên chiều rộng vành răng. Sự phân bố tải trọng không đều phụ thuộc vào vị trí của bánh răng
so với ổ, chiều rộng tương đối của vành răng, khả năng chạy mòn của răng
4.10.4. Ứng suất trên r ăng bánh răng
a) Khi tính theo độ bền mỏi tiếp xúc
Giá trị của ứng suất tiếp xúc cho phép [σH], có thể tra bảng, hoặc xác định theo công thức
kinh nghiệm:
[σH] = σHlim.SH.ZR.ZV.ZXH
Trong đó: σHlim là giới hạn mỏi tiếp xúc của mặt răng, tra bảng để có giá trị.
SH là hệ số an toàn khi tính sức bền tiếp xúc, có thể lấy SH = 1,1 - 1,2 ;
ZR là hệ số kể đến độ nhám bề mặt, bánh răng thông thường lấy ZR = 0,95.
ZV là hệ số kể đến vận tốc vòng, bánh răng thông thường lấy ZV = 1,1.
ZXH là hệ số kể đến kích thước của bánh răng, các bánh rằng da < 700 mm, lấy ZXH = 1.
b) Khi tính theo độ bền mỏi uốn : Giá trị của ứng suất uốn cho phép [σF] được tra
bảng hoặc tính theo công thức công thức kinh nghiệm:
[ ] XFSRF
FF YYY
S..limσσ =
Trong đó: σFlim là giới hạn mỏi uốn của răng, tra bảng để có giá trị.

Truyền động cơ khí- Vũ Thị Hạnh 80
SF là hệ số an toàn khi tính sức bền uốn, có thể lấy SF = 1,1 - 1,2.
YR là hệ số kể đến độ nhám mặt lượn chân răng, các bánh răng thông thường lấy YR = 1. Các
bánh răng có chân răng được đánh bóng, lấy YR= 1,0 -1,1.
YS là hệ số kể đến kích thước của răng, thông thường lấy YS = 1,08.
YXF là hệ số kể đến kích thước của bánh răng, đối với bánh răng thông dụng có da < 700
mm, lấy KXF =1.
c) Ứng suất cho phép khi quá tải
Ứng suất tiếp xúc [σ]Hmax và ứng suất uốn [σ]Fmax khi quá tải phụ thuộc vào phương pháp
nhiệt luyện bánh răng. Bánh răng thường hóa, tôi cải thiện (HB ≤ 350):
[σ]Hmax =2,8σch ; [σ]Fmax = 0,8σch
Bánh răng tôi bề mặ t, thấm than, thấm nitơ (HB > 350):
[σ]Hmax =40HRC ; [σ]Fmax = 0,6σch
Vớ i: HRC là độ rắn bề mặ t răng, σb ;σch là giới hạ n bền và giới hạn chảy của vật liệu.
4.11. Các dạng hỏng và chỉ tiêu tính toán truyền động bánh răng
1. Các dạng hỏng
Truyền động bánh răng có các dạng hỏng chủ yếu sau:
a) Gãy răng
- Gãy răng là dạng hỏng nguy hiểm nhất do tác dụng lâu dài của ứng suất uốn thay đổi
theo chu kỳ hoặc do quá tải. Gãy răng làm bộ truyền mất khả năng làm việc, nhiều khi
còn làm hỏng các chi tiết máy khác như trục, ổ. Vết gãy thường bắt đầu ở chân răng,
chỗ góc lượn phía chịu kéo, là nơi tập trung ứng suất (hình 4.13).
- Với răng nghiêng và răng chữ V, thường gãy theo tiết diện xiên vì đường tiếp xúc
nằm chếch từ chân lên đỉnh răng.
- Để tránh dạng hỏng này cần tính răng theo độ bền mỏi uốn, kiểm nghiệm ứng suất
uốn quá tải theo điều kiện bền tĩnh.
- Có thể tăng sức bền uốn cho răng bằng cách: tăng mô đun, dịch chỉnh bánh răng,
nhiệt luyện, tăng bán kính góc lượn chân răng và nâng cao độ nhẵn góc lượn chân
răng.

Truyền động cơ khí- Vũ Thị Hạ
b) Tróc vì mỏi bề mặt răng:
Là dạng hỏng bề mặt chủ y
truyền được bôi trơn tốt. Tróc là do tác d
của ứng suất tiếp xúc thay đổi theo chu k
Tróc thường bắt đầu ở vùng g
(về phía chân răng) vì tại đây
xúc σH lớn nhất do thường ch
khớp và lực ma sát lớn. Tróc ch
chân răng vì tại phần này, khi
nén từ miệng vào trong vết nứ
tróc (hình 4.15). Tróc có hai d
- Tróc nhất thời: Là tróc ch
ở các bộ truyền có độ r
- Tróc lan: Vết tróc luôn
toàn bộ bề mặt chân răng.
Tróc làm mặt răng mất nhẵn, d
được màng dầu bôi trơn, răng b
tróc rỗ cần tính răng theo độ
góc ăn khớp α bằng dịch chỉnh góc, nâng cao
c) Mòn răng
ũ ị Hạnh
Hình 4. 24 ăng:
yếu ở những bộ
t. Tróc là do tác dụng
i theo chu kỳ.
vùng gần tâm ăn khớp
đây ứng suất tiếp
chỉ có một đôi ăn
n. Tróc chỉ xảy ra ở phần
này, khi ăn khớp dầu bị
ứt, bị ép lại và làm cho các vết nứt phát triển, gây ra
Tróc có hai dạng:
i: Là tróc chỉ xuất hiện trong thời gian ngắn rồi dừng l
rắn thấp (HB ≤ 350).
t tróc luôn luôn phát triển, lan khắp bề mặt chân răng, d
t chân răng.
n, dạng răng bị méo mó, tải trọng động tăng, không h
ơ ăng bị mòn và xước nhanh, bộ truyền nóng, rung và
bền mỏi tiếp xúc, tăng độ rắn mặt răng bằng nhi
nh góc, nâng cao độ chính xác chế tạo và độ nh
Hình 4. 25
81
n, gây ra hiện tượng
ng lại. Thường xảy ra
ăng, dẫn đến phá hỏng
ăng, không hình thành
n nóng, rung và ồn. Để tránh
ng nhiệt luyện, tăng
nhẵn bề mặt răng
25

Truyền động cơ khí- Vũ Thị Hạnh 82
Xảy ra ở các bộ truyền bôi trơn không tốt như bộ truyền hở hoặc bộ truyền kín nhưng có hạt
mài mòn rơi vào. Răng bị mòn nhiều ở đỉnh và chân răng vì tại đó vận tốc trượt lớn. Mòn làm
dạng răng thay đổi, tải trọng động tăng, tiết diện răng giảm có thể làm gãy răng.
Để giảm mòn có thể dùng các biện pháp: Nâng cao độ rắn và độ nhẵn mặt răng, giữ không
cho hạt mài mòn rơi vào, giảm vận tốc trượt bằng cách dùng dịch chỉnh, hoặc giảm chiều cao
chân răng hay dùng loại dầu bôi trơn thích hợp.
d) Dính răng
Thường xảy ra ở các bộ truyền chịu tải lớn, vận tốc cao. Nhất là các cặp bánh răng cùng vật
liệu và không tôi bề mặt răng. Do tại chỗ tiếp xúc nhiệt độ sinh ra quá cao dẫn đến phá huỷ
màng dầu bôi trơn làm các răng tiếp xúc trực tiếp với nhau. Khi chuyển động trong điều kiện
nhiệt độ và áp suất cao, những mảnh kim loại có thể bị dứt khỏi bề mặt bánh răng này bám
lên bề mặt bánh răng gây dính. Dính làm bề mặt răng bị xước, dạng răng bị hỏng. Để tránh
dính cần phối hợp cặp vật liệu thích hợp, hiệu quả nhất là dùng dầu chống dính. Ngoài ra còn
có thể dùng các biện pháp giống như chống mòn. Ngoài bốn dạng hỏng trên, trong truyền
động bánh răng còn xuất hiện các dạng hỏng:
- Biến dạng dẻo bề mặt: xảy ra với các bánh răng bằng thép có độ rắn thấp, chịu tải nặng,
vận tốc thấp.
- Bong bề mặt răng: xảy ra ở các bánh răng thấm các bon, thấm ni tơ hoặc tôi bề mặt khi
chất lượng nhiệt luyện kém, chịu tải lớn.
2. Chỉ tiêu tính toán
Từ các dạng hỏng trên, để bánh răng làm việc lâu dài, cần tính toán bánh răng theo các chỉ
tiêu sau:
- Tính răng về độ bền tiếp xúc nhằm tránh tróc rỗ vì mỏi là chủ yếu, hạn chế mòn và dính
theo điều kiện: σH ≤ [σH], với [σH] là ứng suất tiếp xúc cho phép xác định từ thực nghiệm,
áp dụng với các bộ truyền kín, bôi trơn đầy đủ.
- Tính răng về độ bền uốn đề tránh gãy răng, xuất phát từ điều kiện: σF ≤ [σF], áp dụng với
các bộ truyền hở bôi trơn kém.
- Kiểm nghiệm răng về quá tải đề phòng gãy giòn hoặc biến dạng dẻo bề mặt.
4.12. Tính độ bền bộ truy ền bánh răng trụ
4.12.1. Tính độ bền bộ truy ền bánh răng trụ tròn r ăng thẳng
Trong phần này, chỉ nghiên cứu bộ truyền bánh răng thân khai ăn khớp ngoài.

Truyền động cơ khí- Vũ Thị Hạnh 83
1. Tính theo độ bền tiếp xúc
Sử dụng công thức Hec để xác định ứng suất tiếp xúc, điều kiện bền tiếp xúc có dạng:
ρσ
.2. n
MH
qZ=
Với:
qn: tải trọng riêng pháp tuyến (tải trọng pháp tuyến trên một đơn vị chiều dài tiếp xúc);
ρ: bán kính cong tương đương của hai bề mặt tiếp xúc.
ZM: hệ số xét đến cơ tính của vật liệu;
)]1.()1.(.[
..2221
212
21
µµπ −+−=
EE
EEZM
Trong đó: E1, E2, µ1, µ2: modun đàn hồi và hệ số poatxông của vật liệu bánh dẫn và bánh bị
dẫn
- Với bánh răng thép: ZM = 275 (MPa)1/2
- Tải trọng riêng pháp tuyến: !: º "#."#$a#
Trong đó:
- Fn là tải trọng pháp tuyến, lH là tổng chiều dài tiếp xúc; - KHv là hệ số kể đến tải trọng động dùng để tính ứng suất tiếp xúc; - KHβ là hệ số kể đến phân bố tải không đều trên chiều dài răng, khi tính ứng suất tiếp xúc;
º: 2%%%. ixÅ ⟹ ! 2%%%. ixÅ'. 'Q'
Với bánh răng trụ răng thẳng, khi hệ số trùng khớp ngang 1< εα< 2, có tối thiểu là một, tối đa
là hai đôi răng ăn khớp đồng thời⇒ lH = bw hoặc lH = 2bw, trong tính toán có thể lấy:
() Ê*+íì
với Zε là hệ số tính đến chiều dài tiếp xúc, lấy theo công thức kinh nghiệm: +í ,-Ôí.
Hệ số trùng khớp ngang được tính gần đúng theo công thức (trường hợp x1 + x2 = 0):
í ë, // & ., ì ë +ë+ì ¡ É012
Bán kính cong tương đương ρ: 21
21.
ρρρρρ
+=

Truyền động cơ khí- Vũ Thị Hạ
Vì hiện tượng tróc rỗ bề mặt
đơn giản cho tính toán, ρ1, ρ2 đư
Thay (4.4), (4.3) vào
(4.1), suy được công
thức kiểm nghiệm bộ
truyền bánh răng trụ
răng
thẳng theo độ bền tiếp
xúc:
uB
KKT
d
ZZZ Hv
w
HMH .
...2.. 1
1
= εσ
trong đó: T1 [N.mm]; σH[MPa];
wHZ
α2sin
2= gọi là hệ số xét đ
Từ công thức kiểm nghiệm (4.5), có th
răng thẳng theo hai cách:
1. bw = ψd.dw1. Lấy gần đ
275
Thay bw = ψd.dw1 vào (4.5), suy
ñsuy ra đường kính vòng lăn bánh b
2. Hoặc đặt: h 3Thay vào (4.5), suy được công th
ũ ị Hạnh
răng chủ yếu xảy ra ở phần chân răng gần tâm
được lấy tại tâm ăn khớp P (hình 4.16):
u
uKH )1( +β
xét đến hình dạng bề mặt tiếp xúc.
m (4.5), có thể suy ra công thức thiết kế bộ truy
n đúng: ZH = 1,76 (αw≈200); εα = 1.6 với bánh r
vào (4.5), suy được đường kính vòng lăn của bánh dẫn:
ñ*ë ï 4456ë7)27)80 @ ë3ñ9)ì0.
ăn bánh bị dẫn và bề rộng bánh răng theo công thứ
z. % ; h 3ñ. %
33. v
công thức xác định
Hình 4. 26
84
tâm ăn khớp nên để
truyền bánh răng trụ
i bánh răng thép: ZM =
n:
ức:

Truyền động cơ khí- Vũ Thị Hạ
Suy ra đường kính vòng lăn hai bánh và b
% ψ
2. Tính theo độ bền uốn
Trong khi ăn khớp, điểm đặt l
răng. Ta xét trường hợp nguy hi
tuyến Fn tác dụng tại đỉnh răng,
răng) là lớn nhất. Bỏ qua ảnh hư
Dời lực Fn về trục đối xứng củ
- Thành phần Fcosα' gây ra
- Thành phần Fsinα' gây ra
σn trên tiết diện nguy hi
Trong đó: α' là góc áp lực trên vòng
αw). Các vết nứt do mỏi uốn và hi
răng bắt đầu ở phần răng chịu kéo, do
toán ứng suất uốn tại điểm (1) trên ti
răng. Ta có: σ = σu - σn do đ
Với A và Wu là diện tích tiết di
momen chống uốn
Đặt l = e.m, và s = g.m. Trong
hằng số tính toán, m là mô đun r
pháp tuyến w
tn d
TFF
α.2
cos==
KFv là hệ số kể đến tải tr
ũ ị Hạnh
3* ≥ :;(0 @ ë)56ë7)27)83ñ9)ì0.
hai bánh và bề rộng bánh răng
3*9<% ; z. % ; h 3ñ. %
ψd, ψb là hệ số chiều rộng bánh răng
t lực pháp tuyến toàn phần Fn di chuyển trên m
nguy hiểm nhất là khi chỉ có một đôi răng đang ăn kh
ăng, khi đó ứng suất uốn trong tiết diện nguy hi
nh hưởng của lực ma sát đối với ứng suất uốn
ủa răng và chia thành hai thành phần (hình 4.1
ây ra ứng suất uốn σu
ây ra ứng suất nén
n nguy hiểm (gãy răng)
c trên vòng đỉnh (α' >
n và hiện tượng gãy
u kéo, do đó ta tính
m (1) trên tiết diện đáy
do đó
t diện nguy hiểm và
g.m. Trong đó e và g là
đun răng. Và tính lực
ww
FFv
d
KKT
αβ
cos.
...
1
1.
i trọng động, tính cho sức bền uốn,
Hình4.27
85
n trên mặt làm việc của
đang ăn khớp và lực pháp
hiểm của răng (gãy
n trong răng.
(hình 4.17):
27

Truyền động cơ khí- Vũ Thị Hạ
KF là hệ số kể đến sự phân b
Thay các giá trị các thông s
Suy ra
Vậy w
aF g
eY
αα
cos.
cos..62
−=
Ứng suất σ được gọi là ứng su
công thức:
w
FFvF gmBd
KKT .6
..
...2
1
1 βσ
=
Giá trị của YF không phụ thuộc mô
dạng của răng. YF được gọi là hệ
các bảng tra trong sách Bài tập Chi ti
bánh răng.Với
Đây chính là công thứ
1Fσ
Bài toán thiết kế:
Chọn trước số răng Z1. Đặt bw
Lấy trung bình: KFV = 1.37.
Thay bw = ψd.m.Z1 và dw1 = d
Suy ra được công thức thiết kế
ũ ị Hạnh
phân bố tải không đều dọc theo chiều dài răng.
các thông số vào công thức tính ứng suất σF, ta có:
w
a
g αα
cos.
sin gọi là hệ số dạng răng
ng suất danh nghĩa. Giá trị của ứng suất thực tế
Fw
FFv
w
a
w
a YmBd
KKT
gg
e.
..
...2
cos.
sin
cos.
cos..
1
1
2
β
αα
αα =
−
ụ thuộc mô đun m, mà chỉ phụ thuộc vào các thông số
ợ ọi là hệ số dạng răng. Khi tính bánh răng, xác định giá tr
ng tra trong sách Bài tập Chi tiết máy, phụ thuộc vào số răng z và hệ số
1
212 .
F
FFF Y
Yσσ =
ức kiểm nghiệm độ bền uốn của bộ truyền bánh r
11
1 ...
...2F
w
FFv YmBd
KKT β= ; 1
212 .
F
FFF Y
Yσσ =
w = ψd.aw. Coi gần đúng dw1 = d1 = m.Z1 ⇒
d1 = mZ1 vào (4.10).
ế bộ truyền bánh răng trụ răng thẳng:
86
ăng.
ế σF được tính theo
c vào các thông số xác định hình
ịnh giá trị của YF từ
ệ số dịch dao x của
n bánh răng trụ
bw = ψd.m.Z1.

Truyền động cơ khí- Vũ Thị Hạ
3.4.1m≥
Với ][ F
FY
σ là giá trị lơn nhất củ
4.12.2. Tính độ bền b
1. Đặc điểm trong tính toán
Quá trình ăn khớp êm, tả i tr
Ở bánh răng nghiêng, các răng không h
β. Mô đun tiêu chuẩn là mô đun trong m
mn = pn/π; pn
Do các răng chịu tải và thôi t
nên bánh răng nghiêng làm việ
Chiều dài tiếp xúc lớn:
Gọi lH là tổng chiều dài tiếp xúc c
εα hoặc hệ số trùng khớp dọc
đường tiếp xúc di động, bởi vì chi
thì chiều dài tiếp xúc của đôi ră
Khi điều kiện trên không tho
theo công thức:
ℓ >>õ ix hệ số thay đổi; Ke = 0,9 - 1 v
0,97 - 1 với răng chữ V.
Đường tiếp xúc nằm chếch trên mTả i trọng phân bố không đ
Khi đôi răng nghiêng ăn kh
không song song với đường sinh mà n
bề mặt răng nên dọc theo đư
ũ ị Hạnh
121
11
].[.
...
Fd
FFFv
z
YKKT
σψβ
ủa ][ 1
1
F
FY
σvà
][ 2
2
F
FY
σ
n bộ truy ền bánh răng trụ răng nghiêng (hay ră
m trong tính toán độ bền bánh răng trụ răng nghiêng
i tr ọng động giảm
ăng không hướng theo đường sinh mà làm với đư
n là mô đun trong mặt cắt vuông góc với đường răng m
n- bước răng trong mặt cắt pháp.
i và thôi tải một cách từ từ và luôn có ít nhất hai đôi ră
ệc êm hơn, va đập và tiếng ồn giảm so với bánh r
p xúc của các đôi răng. Khi một trong hai hệ số
c εβ là số nguyên, tổng chiều dài tiếp xúc lH
i vì chiều dài tiếp xúc của đôi răng đang ra kh
i răng đang vào khớp tăng bấy nhiêu và xác định nh
ℓ >õ hix^
n trên không thoả mãn, tổng chiều dài tiếp xúc lH thay đổi theo chu k
hix^
1 với răng nghiêng; Ke =
ch trên mặt răng - không đều
ăn khớp, đường tiếp xúc
ng sinh mà nằm chếch trên
đường tiếp xúc, tổng độ Hình 4.
87
ng nghiêng (hay răng chữ V)
i đường sinh một góc
ăng mn:
đôi răng cùng ăn khớp
i bánh răng thẳng.
ố trùng khớp ngang
không thay đổi khi
ang ra khớp giảm bao nhiêu
nh như sau:
i theo chu kỳ và tính
Hình 4. 28

Truyền động cơ khí- Vũ Thị Hạ
cứng của đôi răng ăn khớp thay đ
nguyên nhân gây tập trung tải tr
hiểm khi bị uốn uốn không ph
một góc µ < 900
Bánh răng tương đương
Khi tính toán người ta thay th
chia bằng bán kính cong lớn nh
thẳng tương đương của bánh ră
Mô đun m = mn. Đường kính vòng chia
Góc nghiêng của đường răng đ
nghiêng và β = 28÷40 với bánh r
như bánh răng thẳng có kích th
hơn bánh răng thẳng.
2. Tính bộ truyền bánh ră
Từ các đặc điểm ăn khớp của bánh r
bánh răng trụ răng thẳng có th
Công thức kiểm nghiệm độ bề
Ï üCông thức thiết kế:
ũ ị Hạnh
p thay đổi và tải trọng phân bố không đều (ngay c
i trọng khác). Do đường tiếp xúc nằm chếch nên ti
n không phải là tiết diện chân răng mà là tiết diện xiên, t
i ta thay thế bánh răng nghiêng bằng bánh răng thẳng có bán kính vòng
n nhất trong mặt cắt pháp. Bánh răng thẳng đ
a bánh răng nghiêng (còn gọi là bánh răng thay thế), có các thông s
k 2d 2vi ix
ng kính vòng chia d. Số răng
?k k| |:ix
ăng đo trên mặt trụ chia: Thường lấy bằng β = 8÷15
i bánh răng chữ V. Nhờ góc nghiêng β, bánh răng nghiêng
ng có kích thước lớn hơn. Do đó khả năng tải của bánh
n bánh răng trụ răng nghiêng theo độ bền tiếp xúc
a bánh răng trụ răng nghiêng và dựa trên cơ sở
ng có thể suy ra công thức tính toán bánh răng nghiêng nh
ền tiếp xúc.
üóü¦ü 52%% õ kz @ 1h% z Ï
v =z @ 15 %% hÏ z
88
u (ngay cả khi không có các
ch nên tiết diện nguy
n xiên, tạo với đáy răng
ng có bán kính vòng
ng đó gọi là bánh răng
), có các thông số:
8÷15 với bánh răng
ăng nghiêng được coi
a bánh răng nghiêng lớn
ở tính toán
ghiêng như sau:

Truyền động cơ khí- Vũ Thị Hạ
ZM - hệ số xét đến cơ tính của vậ
Zε - hệ số xét đến tổng chiều dài ti
εα - hệ số trùng khớp ngang.
ZH - hệ số xét đến hình dạng mặ
βb - góc nghiêng của răng trên m
αtw - bằng góc ăn khớp đo trong m
- hệ số chiều rộng bánh r
[σH] - ứng suất tiếp xúc cho phép.
3. Tính bộ truyền bánh ră
Công thức kiểm nghiệm
Từ công thức tính toán của bánh r
răng nghiêng, có thể suy ra công
Với: m - mô đun pháp của bánh r
- Yβ - hệ số xét đ
- Yε - hệ số xét đ
Công thức thiết kế
Xác định môđun pháp:
ũ ị Hạnh
ật liệu, tính theo
u dài tiếp xúc.
ặt tiếp xúc.
ng trên mặt trụ cơ sở: βb = arctg (cosαtwtgβb);
o trong mặt phẳng mặt mút;
ng bánh răng;
p xúc cho phép.
n bánh răng trụ răng nghiêng theo độ bền uốn
a bánh răng trụ răng thẳng, kể đến các đặc điểm c
công thức kiểm nghiệm độ bền uốn của bánh ră
a bánh răng nghiêng.
xét đến ảnh hưởng của góc nghiêng răng:
xét đến ảnh hởng của việc thay đổi điểm đặt lực.
89
m của bánh
a bánh răng nghiêng:
c.

Truyền động cơ khí- Vũ Thị Hạ
Trong đó:
- hệ số chiều rộng bánh răng.
Trị số m sau khi tính được cầ
4.12.3. Kiểm nghiệm đ
Khi bánh răng chịu quá tải độ
và ứng suất uốn cực đai theo đ
Theo ứng suất tiếp xúc
Nhằm tránh biên dạng dư bề m
T1max: momen xoắn quá t
[σH] suất tiếp xúc sinh ra trên bánh 1 khi ch
[σH] max: ứng suất tiếp xúc cho phép khi quá t
Lưu ý kiểm nghiệm cho bánh có [
Theo ứng suất uốn
Nhằm tránh gãy răng do giòn và biên d
Điều kiện bền:
ũ ị Hạnh
ần qui tròn theo tiêu chuẩn.
m độ bền của răng khi chịu quá tải
ột ngột trong thời gian ngắn, cần kiểm nghiệm
đai theo độ bền tĩnh.
mặt hay bề mặt bị phá hủy do giòn điều kiện b
quá tải trên bánh 1;
p xúc sinh ra trên bánh 1 khi chịu momen xoắn T1;
p xúc cho phép khi quá tải
m cho bánh có [σH] max nhỏ hơn
òn và biên dạng dư do uốn.
90
m ứng suất tiếp xúc
n bền:

Truyền động cơ khí- Vũ Thị Hạnh 91
- T1max: momen xoắn quá tải trên bánh 1;
- σF: ứng suất uốn sinh ra trên bánh 1 khi chịu momen xoắn T1;
- [σF ]: ứng suất uốn cho phép
4.13. Trình tự thiết kế bộ truy ền bánh răng trụ
Trong nhiệm vụ thiết kế bộ truyền bánh răng, thường cho số liệu về các thông số làm việc
chủ yếu của bộ truyền, yêu cầu xác định các thông số hình học, vẽ kết cấu của bộ truyền, bản
vẽ chế tạo các bánh răng. Phần này trình bày các bước tính toán thiết kế bộ truyền bánh răng
trụ răng nghiêng. Trình tự thiết kế bộ truyền bánh răng trụ răng thẳng, răng chữ V, bánh răng
nón cũng được thực hiện theo các bước tương tự như bánh răng trụ răng nghiêng.
Các bước thiết kế bao gồm:
1. Chọn vật liệu chế tạo các bánh răng, cách nhiệt luyện, tra cơ tính của vật liệu.
a. Đối với các bánh răng có độ rắn bề mặt HB ≤ 350, thường chọn vật liệu bánh
1 có cơ tính cao hơn bánh 2, HB1 = HB2 + (30÷50).
b. Đối với các bánh răng có độ rắn bề mặt HB > 350, thường chọn vật liệu hai
bánh như nhau.
2. Xác định giá trị ứng suất cho phép, [σH1], [σH2], [σF1], [σF2]. Nếu bộ truyền làm việc
có quá tải trong thời gian ngắn, cần xác định thêm giá trị của [σHqt1], [σHqt2], [σFqt1] và
[σFqt2].
3. Tính đường kính dwt1, hoặc khoảng cách trục awt, sau khi đã chọn hệ số ψd, hoặc ψa,
hệ số KHv, KHβ và KHα.
4. Lấy giá trị mô đun mn trong khoảng (0,01 ÷ 0,02).awt, thuộc dãy số tiêu chuẩn.
5. Chọn sơ bộ giá trị góc nghiêng β trong khoảng 80 ÷ 150 (đối với bánh răng chữ V
chọn β = 200 ÷ 450). Tính mô đun mt = mn/cosβ. Lấy z1 ≈ dwt1/mt, làm tròn thành số
nguyên. Tính z2 = u.z1. Tính lại góc nghiêng β theo công thức:, chọn giá trị cho β.
a. Tính chính xác khoảng cách trục, đường kính các bánh răng, theo số răng, mô
đun răng và góc nghiêng đã chọn.
b. Xác định chiều rộng vành răng B = ψa.awt, Tính hệ số trùng khớp dọc εβ, tính
hệ số trùng khớp εα.
c. Kiểm tra điều kiện hoặc εβ > 1, hoặc εα > 1. Nếu không thoả mãn, phải điều
chỉnh lại kích thước của bộ truyền.

Truyền động cơ khí- Vũ Thị Hạnh 92
6. Kiểm tra lại sức bền tiếp xúc và sức bền uốn của các bánh răng. Nếu không thoả nãm,
phải điều chỉnh lại kích thước của các bánh răng.
7. Kiểm tra sức bền tĩnh của các bánh răng, nếu như có tải trọng quá tải trong thời gian
ngắn. Nếu không thoả mãn, phải điều chỉnh lại kích thước của các bánh răng.
8. Xác định các kích thước khác, vẽ kết cấu của các bánh răng trong bộ truyền.
9. Tính lực tác dụng lên trục và ổ. Để có số liệu tính toán thiết kế trục và ổ mang bộ
truyền bánh răng.
10. Chú ý: Khi thiết kế bộ truyền bánh răng trụ răng thẳng, tính số răng z1 = dw1/m, làm
tròn z1, tính z2 = z1.u. Lúc này giá trị của dw1, dw2 và khoảng cách trục aw bị thay đổi.
Muốn duy trì giá trị đường kính và khoảng cách trục đã định, dùng cặp bánh răng dịch
chỉnh góc. Với góc ăn khớp αw được tính từ công thức:
αα cos.)1.(
).(cos
1
21
++=
ud
mzz
ww
,
- Hoặc với tổng hệ số dịch dao (xt = x1 + x2) được tính theo công thức:
2.2
)1.( 211 zz
m
udx w
t
+−+
=
4.14. Đánh giá truyền động bánh răng
So với các kiểu truyền động khác, truyền động bánh răng có những ưu điểm:
- Kích thước nhỏ, khả năng tải lớn.
- Tuổi thọ cao, làm việc tin cậy.
- Hiệu suất cao, có thể đạt 0,97 - 0,99.
- Tỉ số truyền không đổi.
Nhược điểm:
- Chế tạo phức tạp, yêu cầu độ chính xác cao.
- Gây ồn khi vận tốc lớn.
Phạm vi sử dụng:
Sử dụng rất rộng rãi: từ đồng hồ, khí cụ đến các máy hạng nặng. Phạm vi sử dụng
lớn về công suất, tốc độ và tỉ số truyền (V tới 200 m/s, P tới hàng chục nghìn kW, tỉ
số truyền lớn hàng trăm, thậm chí hàng nghìn trong một số cấp).

Truyền động cơ khí- Vũ Thị Hạ
Chương 5: Hệ bánh r
5.1. Đại cương
5.1.1. Đặt vấn đề
Mỗi cặp bánh răng chỉ thực hi
dùng một cặp bánh răng để th
thước, trọng lượng, kết cấu củ
một tỷ số truyền i lớn, phải dùng h
Ngoài ra, hệ bánh răng có nhữ
vi sai ô tô...) .Sử dụng hệ bánh ră
- Thực hiện nhiều tỷ số
- Cần truyền chuyển động quay gi
- Truyền chuyển động gi
- Thay đổi chiều quay (H.9
- Hợp nhiều chuyển động thành 1 chuy
chuyển động độc lập nhau (b
cầu đặc biệt (cơ cấu máy b
hợp bê tông..)
Phân loại: có 2 loại cơ bản là h
5.2.2. Các loại hệ bánh r
a) Hệ bánh răng thường : hệ
trong đó các bánh răng đều có
trục cố định (trong một hệ quy chi
liền với giá). Hệ gồm nhiều c
răng nối tiếp nhau trên hình
hệ bánh răng thường. Bậc tự do c
W = 3n – 2p5 – p4 với p5 = 6; p
W =1
b) Hệ bánh răng vi sai : là h
trong đó mỗi cặp bánh răng có ít nh
ũ ị Hạnh
bánh răng (1,5 tiết)
c hiện một tỷ số truyền i không lớn lắm, thông th
thực hiện một tỷ số truyền lớn sẽ dẫn đến b
ủa bộ truyền và lãng phí về vật liệu chế tạo. Do
i dùng hệ bánh răng, gồm nhiều cặp bánh răng ph
ững công dụng khác như, truyền động với nhi
bánh răng có thể đạt được những công dụng khác nhau nh
truyền (hộp tốc độ...), tỷ số truyền lớn (H.9-24a).
ng quay giữa những trục cách xa nhau (H.9-24b).
ng giữa các trục cần thay đổi tỷ số truyền (hộp số
u quay (H.9-24d).
ng thành 1 chuyển động, hay chia 1 chuyển đ
p nhau (bộ vi sai) (H.9-24e). Thực hiện các chuy
u máy bện cáp, cơ cấu máy tiện trục khuỷu, cơ
n là hệ bánh răng thường và hệ bánh răng vi sai.
bánh răng
ệ bánh răng
u có đường
quy chiếu gắn
u cặp bánh
p nhau trên hình 12.1 là một
do của hệ:
= 6; p4 = 5; n = 6 ⇒
là hệ bánh răng mà
ăng có ít nhất một bánh
Hình 5. 1
Hình 5. 2 93
m, thông thường i ≤5. Nếu
n bất hợp lý về kích
o. Do đó, để thực hiện
p bánh răng phối hợp nhau.
i nhiều bậc tự do (hộp
ng khác nhau như:
24a).
24b).
ố) (H.9-24c).
n động thành nhiều
n các chuyển động có yêu
u, cơ cấu máy trộn hỗn
2

Truyền động cơ khí- Vũ Thị Hạ
răng có đường trục di động (không c
đường trục cố định gọi là bánh ră
răng vệ tinh. Khâu động mang tr
12.2 là một hệ bánh răng vi sai. B
W = 3n−2p
Bánh trung tâm là bánh (1) và bánh 4 (3), bánh v
(C) mang hai bánh vệ tinh (2), (2')
thường.
d) Hệ bánh răng hành tinh:
răng trung tâm c
bánh trung tâm (3) c
hình 12.2 thì hệ
hành tinh (hình 12.3).
Bậc tự do của hệ:
W = 3n−2p5−p4 với: p5 = 3
1.
Hình 12.4, 12.5 mô tả một số
có sử dụng cặp bánh răng nội ti
12.5), đường trục của các bánh trung tâm (1), (3), và
cùng một đường thẳng. Điều ki
Hình 5. 3
ũ ị Hạnh
ng (không cố định trong hệ quy chiếu gắn liền với giá)
i là bánh răng trung tâm, bánh răng có đường trục di đ
ng mang trục của bánh vệ tinh gọi là cần. Hệ bánh ră
ăng vi sai. Bậc tự do của hệ:
−2p5−p4 với: p5 = 4; p4 = 2; n = 4⇒W = 2.
Bánh trung tâm là bánh (1) và bánh 4 (3), bánh vệ tinh là bánh (2) và (2'). C
tinh (2), (2'). Khi cố định cần (C), hệ vi sai nói trên tr
ng hành tinh: là hệ bánh răng vi sai (có W = 2) trong
ng trung tâm cố định. Khi cố định
bánh trung tâm (3) của hệ vi sai trên
này trở thành một hệ
hành tinh (hình 12.3).
3; p4 = 2; n = 3⇒W =
ố hệ hành tinh trong đó
i tiếp. Trong hệ vi sai và hành tinh phẳng (hình 12.2, 12.3, 12.4,
a các bánh trung tâm (1), (3), và đường trục của cần (C) ph
u kiện này được gọi là điều kiện đồng trục của h
Hình 5.
Hình 5. 5
94
i giá). Bánh răng có
c di động gọi là bánh
bánh răng cho trên hình
tinh là bánh (2) và (2'). Cần là khâu động
vi sai nói trên trở thành hệ
2) trong đó có một bánh
ng (hình 12.2, 12.3, 12.4,
n (C) phải nằm trên
a hệ.
Hình 5. 4

Truyền động cơ khí- Vũ Thị Hạ
d) Hệ vi sai kín: là hệ vi sai trong
đều không cố định, nhưng hai bánh trung tâm ho
bánh trung tâm và cần được n
thường. Ví dụ hệ trên hình 12.6
là một hệ hỗn hợp gồm một h
một hệ thường (Z3, Z4, Z4’, Z5). H
trung tâm Z1 và cần C của hệ
sai kín: W = 1.
5.2. Phân tích động học hệ
5.2.1. Tỷ số truy ền trong h
a) Hệ thường phẳng
Tỷ số truyền của hệ:
Với %HHHH, AHHHHlà giá trị đại số củ
m%A HHHHBHHHH HHHHHHHH .HHHHHHHH .HHHHÃHHHH .ÃHHHHCHHHHTỷ số truyền của mỗi cặp bánh ră
Dấu (-) ứng với cặp bánh răng ngo
m%A %HHHHAHHHH Hay m%A HHHHBHHHH &1Z
¤
Nhận xét : Trong hệ bánh răng th
bánh răng trên trục trước và tr
thức tỷ số truyền i16. Bánh ră
không có ý nghĩa đối với giá tr
quay của trục ra. Ngoài ra còn có ý ngh
ũ ị Hạnh
vi sai trong đó các bánh trung tâm
ưng hai bánh trung tâm hoặc một
c nối với nhau bằng một hệ
12.6 là một hệ vi sai kín. Đây
t hệ vi sai (Z1, Z2, cần C) và
ng (Z3, Z4, Z4’, Z5). Hệ thường nối bánh
ệ vi sai. Bậc tự do của hệ vi
ệ bánh răng
n trong hệ bánh răng thường
m%A %HHHHAHHHH ủa vận tốc góc trục vào (1) và trục ra (6) của h
HH ÃHCH . CHHHHBHHHH do đó m%A m%. m¤. m¤½. m½¤#. m#
p bánh răng có thể tính theo số răng:
m% &üü% ; … m¤½ @ü½ü…
ăng ngoại tiếp, dấu (+) ứng với cặp bánh răng nộ
HH ×&üü%Ù ×& üü′Ù ×@ü½üÙ ×& ü#ü′½Ù ×& üAü′Ã
C¤ÃB¤C với k là số cặp bánh răng ngoại tiếp
bánh răng thường hình 12.1, bánh răng (5) ăn khớp đ
c và trục liền sau nó nên số răng của nó không có m
Bánh răng (5) được gọi là bánh răng nối không. Bánh r
i giá trị tuyệt đối của tỷ số truyền, mà chỉ có ý ngh
c ra. Ngoài ra còn có ý nghĩa về kết cấu.
Hình5.
95
a hệ.
#¤A
ội tiếp.
Ù × üA′#Ù p
p đồng thời với hai
a nó không có mặt trong công
i không. Bánh răng nối không
có ý nghĩa đối với chiều
Hình5.6

Truyền động cơ khí- Vũ Thị Hạ
b) Hệ thường phẳng
Do các trục quay không song song v
nhau nên dấu của vận tốc góc và c
truyền không còn ý nghĩa nữ
chỉ dùng giá trị tuyệt đối.
Tỷ số truyền i13: |m%| Do đó |m%| Chiều quay của trục ra (bánh r
được xác định dựa trên chiều quay c
như trên hình 12.7.
5.2.2 Quan hệ vận tốc góc trong h
Hệ vi sai có 2 bậc tự do đó vậ
hai khâu dẫn. Do vậy ở đây, ta tính t
bị dẫn cuối cùng và hai khâu d
Hệ vi sai phẳng
Cần xác định quan hệ giữa các v
12.). Xét chuyển động tương đ
đường trục của các bánh răng đ
khâu (1), (3) trở thành: D%R Tỷ số truyền giữa khâu (1) và (3) trong chuy
Trong chuyển động tương đối, h
m%Tương tự
ũ ị Hạnh
c quay không song song với
c góc và của tỷ số
ữa, vì vậy ta
.
. ¤ c ra (bánh răng Z3)
u quay của trục vào (bánh răng Z1) nhờ phươ
c góc trong hệ vi sai
ận tốc góc khâu bị dẫn cuối cùng phụ thuộc vào v
đây, ta tính tỷ số truyền bằng cách tìm quan hệ vậ
i cùng và hai khâu dẫn.
a các vận tốc góc của bánh (1), (3) và cần (C) trong h
ương đối của hệ đối với cần (C). Trong chuyển độ
ăng đều cố định, do đó hệ trở thành hệ thường, v
D D% &DR; DR D &DR a khâu (1) và (3) trong chuyển động tương đối:
m%R D%RDR D% &DRD &DR
i, hệ trở thành hệ thường, do đó m%R L& N%R D% & DRD & DR ×&üü%Ù . ×& üü′Ù
m%R D% & DRD &DR ×&üü%Ù
Hình5.
96
ương pháp đánh dấu
c vào vận tốc góc của
ận tốc góc của khâu
n (C) trong hệ vi sai (hình
n động tương đối này,
ng, vận tốc góc của các
N . L& ¤N
Hình5.7

Truyền động cơ khí- Vũ Thị Hạ
Hệ vi sai không gian
Điều kiện đồng trục: Mọi bánh trung tâm và c
chung một đỉnh (hình
5.8). Quan hệ giữa các
vận tốc góc: Xét
chuyển động tương đối
của hệ đối với cần (C)
trong hệ vi sai không
gian (hình 5.9), khi đó
hệ vi sai không gian
trở thành hệ thường
không gian, vận tốc
góc của khâu (1), khâu
(2): %R % & Y; R Tỷ số truyền giữa khâu (1) và khâu (2)
trong chuyển động tương đối đ
C:
Em%RE F %R RF F % & &Trong chuyển động tương đ
thành hệ thường, do đó Em%RESuy ra G 1& i
2& iG Em%RE Vì | & Y| @R &Do T Y ⇒ Y 0 ⇒Do %// Y ⇒ | % & Y| |
Suy ra Em%RE G G |Ô,<
Tương tự như trên, khi xét chuy
Emũ ị Hạnh
i bánh trung tâm và cần đều đồng trục, mọi m
& Y a khâu (1) và khâu (2)
i đối với cần
F & Y& YF
ương đối, hệ trở
E GG E & 2 Y | & Y| @R
|% & Y| Æ| với Em%RE tính tương tự hệ không gian
trên, khi xét chuyển động tương đối của hệ đối với cần C, ta có:
Em%RE F %R RF F % & Y & YF üü% üü′
Hình5.8
Hình5.9
97
i mặt nón lăn phải có
n C, ta có:

Truyền động cơ khí- Vũ Thị Hạ
Vì %, , Rcùng phương nên có th
đến dấu của tỷ số truyền m%Rchiều nhau
5.2.3. Tỷ số truy ền trong h
Hệ hành tinh có một bậc tự do. T
trong hệ hành tinh. Xét hệ hành tinh ph
định: ω3 = 0
Thay vào m%R DÔDDÔD L&m%R
Nên m%R DD 1 & m%R
Suy ra m%R DD UÆUÆ 5.3. Chọn số răng các bánh r
Số răng trong hệ hành tinh đư
mãn các điều kiện:
Điều kiện đồng trục: Trong h
tinh phẳng đường trục của các
trung tâm (1), (3), và đường tr
cần (C) phải nằm trên cùng m
thẳng.
Hình5.10ũ ị Hạnh
ương nên có thể dùng các giá trị đại số của vận tốc góc và có th
R . Trong hệ thường tương ứngm hai vận tốc
Em%RE D% &DRD &DR &üü% üü′ n trong hệ hành tinh
do. Từ quan hệ vận tốc góc trong hệ vi sai, suy ra t
hành tinh phẳng như trên hình 12.3, trong đó bánh trung tâm (3
L& N . L& ¤N ta có
D ÔD ÔD hay m%R L& N . L& ¤N
%ÔL&ü2ü1N.L&ü3ü′2N%ÔL&ü3ü′2N
ng các bánh răng trong hệ hành tinh
ược chọn dựa trên yêu cầu về tỷ số truyền, đ
Trong hệ hành
a các bánh
ng trục của
m trên cùng một đường
Hình5.11
98
c góc và có thể xét
c %Rqà R ngược
vi sai, suy ra tỷ số truyền
đó bánh trung tâm (3) cố
n, đồng thời phải thỏa

Truyền động cơ khí- Vũ Thị Hạ
Điều kiện lắp:, các bánh vệ tinh (hay các kh
ly tâm. Để cân bằng các lực ly tâm, c
mỗi nhánh mang ổ trục của m
nhiều bánh vệ tinh phân bố
mođun các bánh răng có thể nh
thời, lực hướng tâm tác dụng lên tr
Vấn đề đặt ra là phải lắp được các bánh v
vệ tinh đồng thời ăn khớp vớ
tinh.
Xét hệ hành tinh hình 5.11. C
được tỷ số truyền, điều kiện đ
và cùng môđun.
1) Điều kiện đồng trục
Để các bánh trung tâm Z1, Z3 và c
Trong đó r1,r2,r3 là bán kính vòng l
Do các bánh răng ăn khớp với nhau ph
Hay ü Ô
Do Z2 là số nguyên nên các s
phải đều cùng là số lẻ hay đ
chẵn.
2) Điều kiện lắp
Để có thể lắp được, cung in đ
hình 5.12 phải bằng số nguyên l
răng p trên vòng lăn của các bánh
Do đó: ü @: @ : t phả
ũ ị Hạnh
tinh (hay các khối bánh vệ tinh) khi chuyển độ
c ly tâm, cần (C) có dạng một chạc gồm nhiều nhánh phân b
a một bánh vệ tinh (hay một khối bánh vệ tinh) (hình
đều, lực tác dụng sẽ phân bố cho các bánh v
nhỏ, kích thước hướng kính của hệ hành tinh s
ng lên trục của bánh trung tâm và cần (C) gần
c các bánh vệ tinh lên các nhánh của cần (C), sao cho các
ới các bánh trung tâm. Đây chính là điều kiệ
. Cần phải xác định các số răng của hệ để đ
n đồng trục và điều kiện lắp. Giả sử các bánh ră
các bánh trung tâm Z1, Z3 và cần (C) đồng trục với nhau, phải có:
o o% @ 2o là bán kính vòng lăn của các bánh 1, 2, 3.
i nhau phải có cùng môđun m, hệ thức (12.3) tr
12|ü 12|ü% @ 2.12|ü ⇒ ü ü% @ 2ü
nguyên nên các số răng Z3, Z1
hay đều cùng là số
c, cung in đậm (t) trên
nguyên lần bước
a các bánh.
ải là số nguyên,
Hình5.10 99
ộng gây nên các lực
nhánh phân bố đều,
tinh) (hình 5.10). Dùng
cho các bánh vệ tinh, nhờ đó
hành tinh sẽ nhỏ gọn. Đồng
n như bằng không.
n (C), sao cho các bánh
ện lắp của hệ hành
đồng thời bảo đảm
các bánh răng đều tiêu chuẩn
c (12.3) trở thành:
10

Truyền động cơ khí- Vũ Thị Hạ
với n là số bánh răng vệ tinh hay s
Như vậy ü% @ ü phải là bội s
Vậy để thỏa mãn cả hai điều ki
üphải là bội số của n nếu n ch
Chương 6: Truyền đ
6.1. Khái niệm chung
6.1.1. Giới thi ệu
Bộ truyền trục vít bao gồm tr
dùng để truyền chuyển động và t
trục chéo nhau nhờ sự ăn khớ
vít với các răng trên bánh vít.
nhau giữa hai trục bằng ∑ =
bánh vít là bánh bị dẫn.
6.1.2. Phân loạ
Tr ục vít: Có cấu tạo như một tr
vít trụ (hình 6.1), trục vít lõm hay tr
rãi hơn cả. Chương này chỉ nghiên c
Tùy theo hình dạng ren, trục vít tr
6.3):
Tr ục vít ác-si-met: Trong
mặt cắt dọc chữa đường tâm
trục vít ⇒ cạnh răng là đoạn
thẳng. Giao tuyến của mặt
ren với mặt cắt ngang là
đường xoắn ốc ácsimet. Có
thể cắt ren trên máy tiện
thông thường. mặt ren khó mài, mu
ũ ị Hạnh
tinh hay số chạc của cần C). Suy ra: ü% @ ü (i số của n.
u kiện đồng trục và điều kiện lắp, cần phải có
u n chẵn; bội số của 2n nếu n lẻ.
n động trục vít (2 tiết)
m trục vít và bánh vít, được
ng và tải trọng giữa hai
ớp của các ren trên trục
vít. Thông thường góc chéo
900, trục vít là trục dẫn,
ại
t trục trên đo có nhiều vòng ren. Có nhiều lo
c vít lõm hay trục vít glôbôit (hình 6.2), tuy nhiên trụ
nghiên cứu trục vít trụ.
c vít trụ ược phân thành ba loại (hình
Trong
m
n
t
t ngang là
c ácsimet. Có
n
t ren khó mài, muốn mài phải dùng đã mài đa hình, gây khó kh
Hình6.
Hình6.
100
(t &ü2
i có điều kiện: ü% @
u loại trục vít như trục
ục vít trụ dùng rộng
ình, gây khó khăn cho việc
Hình6.1
Hình6.2

Truyền động cơ khí- Vũ Thị Hạ
gia công và độ chính xác giả
không mài.
Tr ục vít kôn-vô-lut: Trong m
Giao tuyến của mặt ren với m
tiện thông thường, những cũng c
Trục vít thân khai: Trong mặ
tuyến của mặt ren với mặt cắt ngang là
khai răng nghiêng, có góc nghiêng r
thể mài bằng đá mài dẹt ⇒ thích h
45HRC.
Bánh vít Chế tạo bằng dao phay l
vít (chỉ khác là đường kính đỉ
hướng tâm ở chân răng
bánh vít). Quá trình
chuyển động khi cắt gọt
giống hệt như quá trình ăn
khớp giữa trục vít và bánh
vít, vị trí đặt dao khi cắt
giống như vị trí trục vít khi
ăn khớp, do đó mặt chân
răng bánh vít là một phần
mặt xuyãn, đồng thời mặt
trụ chia và mặt trụ lăn của
bánh vít trùng nhau. Để
ren trục vít tiếp xúc với ren
bánh vít được nhiều hơn,
mặt đỉnh răng bánh vít
cũng được chế tạo có hình
mặt xuyến.Trong chương này ch
6.1.3. Thông số hình h
Trong mặt cắt vuông góc vớ
prôfin răng hình thang, giống như
ũ ị Hạnh
ảm ⇒ thường dùng khi độ rắn bề mặt ren nh
Trong mặt cắt pháp tuyến với đường ren ⇒ cạnh ră
i mặt cắt ngang là đường kôn-vô-lut. Cũng có th
ũng cần đá mài đặc biệt để mai, do đó loại này ít dùng.
ặt cắt tiếp xúc với mặt trụ cơ sở ⇒ cạnh răng là đ
t ngang là đường thân khai. đây chính là bánh ră
ng nghiêng, có góc nghiêng rất lớn, số răng khá nhỏ (1÷4 răng, gọi là s
thích hợp cho các bộ truyền có yêu cầu độ rắn b
ng dao phay lăn, có hình dạng giống hệt như trục vít s
ỉnh dao lớn hơn đường kính đỉnh ren trục vít đ
ương này chỉ trình bày bộ truyền trục vít trụ có dạng ren
hình học chủ yếu của bộ truy ền trục vít
ới trục của bánh vít và chứa đường tâm trục vít
ng như thanh răng.
Hình 6. 3
101
t ren nhỏ hơn 350HB và
nh răng là đoạn thẳng.
ũng có thể tiện ren trên máy
i này ít dùng.
ăng là đoạn thẳng. Giao
ây chính là bánh răng trụ tròn thân
i là số mỗi ren). Có
n bề mặt ren lớn hơn
c vít sẽ ăn khớp với bánh
c vít để tạo nên khe hở
ng ren ácsimet.
c vít ⇒ trục vít có

Truyền động cơ khí- Vũ Thị Hạ
Góc prô-fin răng: α = 200 (hình
Modun dọc của trục vít: m =
trục vít. Giá trị của m được ch
m = 1; 1,25; (1,5); 1,6; 2; 2,5; (3); (3,5); 4; 5; (6);
6,3;(7); 8; 10; 12,5; 16; (18); 20; 25.
Hệ số đường kính q: q = d1
khi cắt bánh vít không những ph
đun với trục vít mà còn có kích th
như trục vít ăn khớp với bánh vít (tr
tâm). Như vậy, kích thước bánh vít không nh
vào đường kính dao. Để hạn ch
đường kính q. Giá trị của q đư
(7,1); 8; (9); 10; (11,2); 12,5; (14); 16; (18); 20; (22,4); 25.
Các giá trị của m và q được dùng trong th
m 2 2,5 3 q 16 12 12 14m 8 q 8 9 10 12q 16 12 12 14m 8 q 8 9 10 12
đường kính mặt trụ chia của tr
đường kính mặt trụ lăn: d w1
Trong đó: x: hệ số dịch dao khi c
Số ren (số mỗi ren) của trục vít:
Góc xoắn vít trên mặt trụ chia γ
nlH ùÓúP ùúP úMúPVới: px là bước của đường xo
Thông thường lấy: γ = 5÷20
ũ ị Hạnh
(hình 6.4).
= p/ π với p: bước dọc của
c chọn theo dãy số tiêu chuẩn:
1; 1,25; (1,5); 1,6; 2; 2,5; (3); (3,5); 4; 5; (6);
8; 10; 12,5; 16; (18); 20; 25.
1/m. Vì vành bánh vít lõm,
ng phải dùng dao có cùng mô
c vít mà còn có kích thước và hình dạng giống
i bánh vít (trừ đường kính vòng đỉnh lớn hơn để
c bánh vít không những phụ thuộc vào mô đun mà c
n chế số lượng dao và sử dụng dao tiêu chuẩn, c
a q được chọn theo dãy số tiêu chuẩn theo bảng dư
(7,1); 8; (9); 10; (11,2); 12,5; (14); 16; (18); 20; (22,4); 25.
c dùng trong thực tế ghi trong bảng dưới đây:
4 5 14 9 10 12 14 16 9 10 12 9 10
10 12 16 12 8 10 12 8 10 8 9 14 9 10 12 14 16 9 10 12 9 10
10 12 16 12 8 10 12 8 10 8 9
a trục vít: d1 = q.m
= (q+2x)m
ch dao khi cắt bánh vít.
c vít: Z1 = 1; 2; 4
chia γ (hình 6.5):
⟹ nlH I
ng xoắn vít (bước xoắn); p là bước dọc của tr
5÷200
Hình 6.
Hình 6.
102
ể tạo khe hở hướng
đun mà còn phụ thuộc
n, cần đưa vào hệ số
ng dưới đây: q = 6,3;
6 12 14
12 14
a trục vít: px = Z1.p
Hình 6. 4
Hình 6. 5

Truyền động cơ khí- Vũ Thị Hạ
- Số răng Z1 càng nhỏ ⇒càng lớn ⇒ hiệu suất tă
− Khi truy
− Khi u =
− khi u =
- Chọn Z2 cần lưu ý sao cho
quá nhỏ sẽ xảy ra cắt chân r
mãn điều kiện: 28 ≤ Z2
- Góc xoắn vít trên mặt tr
- đường kính mặt trụ đỉnh, m
với: h' = 1, h'' = 1,25
- Chiều dài phần cắt ren trên tr
với nhiều răng bánh vít nh
Bánh vít
Góc nghiêng β của răng trên bánh vít:
Modun ngang ms của bánh vít: modun
góc với trục của bánh vít và ch
chính bằng modun dọc m của tr
Số răng bánh vít: z2.
Đường kính mặt trụ chia d2, m
ũ ị Hạnh
⇒ góc xoắn γ càng nhỏ ⇒ hiệu suất của bộ
t tăng những chế tạo phức tạp, kích thước bộ truy
Khi truyền động với công suất lớn không nên dùng Z
= 10÷18, nên lấy Z1 = 4
= 18÷40 nên lấy Z1 = 2 và khi u > 40 nên lấ
ý sao cho Z2 = u.Z1 không quá lớn làm bộ truy
t chân răng, nên dựa vào tỉ số truyền u để chọn Z
2 ≤ 60.
t trục lăn γw: Suy luận tương tự như tgγ, ta có:
nh, mặt trụ chân ren =% % @ 2p¤. |; J%
1,25
t ren trên trục vít b1: được lấy theo điều kiện ăn kh
ng bánh vít nhất.
ăng trên bánh vít: β = γ
a bánh vít: modun đo trên mặt trụ chia của bánh vít trong m
a bánh vít và chữa đường tâm trục vít. Modun ngang ms
a trục vít.
, mặt trụ lăn dw2: đường kính mặt trụ đỉnh và mặ
Hình 6. 6
103
ộ truyền sẽ thấp. Z1
truyền sẽ tăng.
n không nên dùng Z1 = 1.
ấy Z1 = 1.
truyền cồng kềnh hoặc
n Z1 sao cho Z2 thỏa
ó: nlH I<
% & 2p¤¤. |
ăn khớp cùng một lúc
a bánh vít trong mặt cắt vuông
s của bánh vít cũng
ặt trụ chân

Truyền động cơ khí- Vũ Thị Hạnh 104
= @ 2(p¤ @ A); J & 2(p¤¤ & A) Với h' = 1, h'' = 1,25
Đường kính lớn nhất của bánh vít: =ó @ %(1 & ixý) Với 2δ: góc tiếp xúc giữa ren trục vít và răng bánh vít (hình 5.6). Thường lấy: 2δ = 1000
Bề rộng b2 của bánh vít (lấy theo điều kiện đảm bảo góc tiếp xúc 2δ).
Khoảng cách trục
- Ta có:v Pé<Pé
- Suy ra: aw = 0,5m(q+Z2 +2x)
Giá trị của aw được lấy theo dãy số tiêu chuẩn: 40; 50; 63; 80; 100; 125; 160; 180; 200;
225; 250; 280; 315; 355; 400; 450; 500.
Với khoảng cách trục cho trước, có thể thay đổi m, q và x để có được các tỷ số truyền
khác nhau.
- Dịch chỉnh trong bộ truyền trục vít chủ yếu nhằm bảo đảmkhoảng cách trục a tiêu chuẩn
hay đã trước. Để bảo đảm khoảng cách trục aw cho trước, cần xác định hệ số dịch dao
theo
A v| & 0,5(! @ ü) 6.1.4. Độ chính xác của bộ truy ền trục vít
Cũng như bộ truyền bánh răng, tiêu chuẩn Việt nam quy định 12 cấp chính xác: 1 ÷12 (cấp 1
có độ chính xác cao nhất). Với các bộ truyền yêu cầu cao về độ chính xác động học, dùng từ
cấp chính xác 3÷6. Cấp chính xác 7, 8, 9 thường dùng cho các bộ truyền để truyền tải trọng.
Việc chọn cấp chính xác dựa trên vận tốc trượt.
Với mỗi cấp chính xác cũng quy định 3 chỉ tiêu:
chỉ tiêu chính xác động học,
chỉ tiêu làm việc êm,
chỉ tiêu về mức tiếp xúc giữa ren trục vít và răng bánh vít.
Tiêu chuẩn còn quy định 6 dạng khe hở giữa ren trục vít và răng bánh vít A, B, C, D, E, H
(theo thứ tự khe hở cạnh răng giảm dần).
- Giữa dạng khe hở cạnh răng và cấp chính xác động học có mỗi li ền hệ với nhau như sau:
Dạng khe hở: A, B, C, D, E, H
Cấp chính xác động học: 5-12 3-9 3-8 1-6
- Ngoài ra, do bộ truyền trục vít rất nhay với các sai số lắp ghép hơn bộ truyền bánh răng,
nên tiêu chuẩn còn quy định chặt chẽ hơn về dung sai khoảng cách trục và dung sai vị trí

Truyền động cơ khí- Vũ Thị Hạnh 105
mặt phẳng trung bình của bánh vít so với trục vít. Khi lắp, vị trí này được kiểm tra bằng
các vết tiếp xúc.
6.1.5. Kết cấu trục vít và bánh vít

Truyền động cơ khí- Vũ Thị Hạ
Trục vít thường được chế tạo li
đường kính trục, cần lưu ý làm
riêng rồi lắp lên trục. Khi da2
để tiết kiệm kim loại màu ⇒thanh...), rồi ghép vào thân bánh vít b
sản xuất hàng loạt, thường dùng vành bánh vít b
6.2. Cơ học truyền động tr
6.2.1. Vận tốc và t
Vận tốc vòng: Vận tốc vòng v
ũ ị Hạnh
o liền với trục. Trường hợp đường kính chân ren tr
ý làm đoạn thoát dụng cụ cắt khi gia công ren.Bánh vít
a2 ≤ 120mm ⇒ chế tạo bánh vít liền khối (hình
⇒ thường chế tạo bánh vít bằng vật liệu gi
i ghép vào thân bánh vít bằng gang (nhờ độ dôi và bắt vít thêm
ng dùng vành bánh vít bằng đồng thanh đúc trực tiế
ng trục vít
c và tỷ số truy ền
c vòng v1 và v2 của bánh vít và trục vít: q% úP:AF.%FFF ;
Hình 6. 8 Hình 6. 7
Hình 6. 9
106
ng kính chân ren trục vít nhỏ hơn
Bánh vít được chế tạo
i (hình 6.7) Khi da2 lớn,
u giảm ma sát (đồng
t vít thêm – hình 6.8). Trong
ếp vào moayơ
; q úP:AF.%FFF

Truyền động cơ khí- Vũ Thị Hạnh 107
- Vận tốc trượt tại điểm tiếp xúc trùng với tâm ăn khớp P (hình 5.10), ta có:
q q% @ q7 - Trong đó: v1 là vận tốc tương đối, nằm theo phương tiếp tuyến với đường xoắn
ốc của ren trục vít trên mặt trụ lăn và gọi là vận tốc trượt.
- Như vậy khi bộ truyền làm việc, ren trục vít trượt dọc trên răng bánh vít.
Dựa trên hình 5.10, suy ra:
q7 q%ixH %60.1000. ixH
Với bộ truyền không dịch chỉnh (x = 0): % % |!
Mặt khác:
nlH ü%! ; ixH 1Õ1 + nlH !
Õü% + !
Tóm lại:
q7 |%19100 ,ü% + !
Ta thấy, vận tốc trượt vt bao giờ cũng lớn hơn vận tốc vòng v1 của trục vít. Hiện tượng
trượt dọc răng làm tăng mất mát về ma sát, làm giảm hiệu suất, làm tăng nguy hiểm về mòn
và dính. Trong tính toán thiết kế, vận tốc trượt chính là cơ sở để chọn vật liệu bánh vít. Khi
vận tốc trượt lớn phải dùng vật liệu có hệ số ma sát thấp và có khả năng chống dính lớn.
Tỷ số truyền
z %
Suy ra:
z % q%q . % 1nlH % ⟹ z %nlH
nlH |ü%% ; |ü ⟹ z üü%
Mà: Z1 = 1,2,4 và 28 ü 60 do đó tỷ số truyền u của bộ truyền trục vít khá lớn.

Truyền động cơ khí- Vũ Thị Hạnh 108
6.2.2. Lực tác dụng trong bộ truy ền trục vít
Lực tác dụng giữa ren trục vít và răng bánh vít phân bố trên chiều dài tiếp xúc, quy ước coi
như lực tập trung tại tâm ăn khớp P. Lực pháp tuyến Fn nằm trong mặt cắt pháp n-n và được
phân thành ba thành phần: lực vòng Ft1, lực dọc trục Fa và lực hướng tâm Fr. Do trục trục vít
và trục bánh vít vuông góc nhau nên:
º= &º7; º8 &º8%; º8% &º8;
Ta có
º=% º7 2%
Khi trục vít là trục chủ động quay, lực vòng Ft1 trên trục vít có thể tính theo lực dọc trục Fa1
theo biểu thực (tương tự như quan hệ giữa lực vòng Ft cần tác dụng lên đai ốc chịu lực dọc
trục Fa trong khớp ren vít khi muốn và n đai ốc vào):
º7% º= º=%nlH @ e′ Lực hướng tâm:
Hình6.10

Truyền động cơ khí- Vũ Thị Hạnh 109
º8% º8 º∗nlÅ: º7ixH nlÅ:
Lực pháp tuyến toàn phần
Thông thường: φ’< 30 ⇒ có thể bỏ qua ảnh hưởng của lực ma sát, đồng thời coi góc áp lực
pháp αn bằng với góc profin ren trục vít: αn ≈ α. Do đó:
º=% º7 2%
º8% º8 º∗nlÅ: º7ixH nlÅ:
º7% º= º=%nl(H @ e′) º: º7ixH nlÅ:
6.2.3. Hiệu suất truy ền động trục vít
Công suất truyền động bị mất mát do ma sát giữa ren trục vít và răng bánh vít, ma sát trong ổ
trục và do khuấy dầu. Chỉ kể đến tổn thất do ma sát giữa ren trục vít và răng bánh vít
K ¹¹% %%% º7º7%%% Khi trục vít dẫn động, ta có:
º7% º7nlH @ e′) Mặt khác:
z %
%nlH
do đó
K nlHnl(H @ e′)
Nếu kể đến mất mát công suất do khuáy dầu: η = 0,95
- Hiệu suất η tăng khi góc xoắn vít γ trên mặt trụ chia của trục vít tăng hay khi góc ma sát
thay thế e’ giảm. Do tgγ = Z1/q ⇒ muốn tăng γ phải giảm q hay tăng Z1.
- Khi Z1 tăng ⇒ chế tạo bộ truyền phức tạp hơn, đồng thời làm tăng Z2 khiến kích thước bộ
truyền tăng.

Truyền động cơ khí- Vũ Thị Hạnh 110
- Khi q giảm ⇒ d1 = m.q giảm ⇒ trục vít không đủ độ cứng.
- Do đó, thực tế thường lấy γ không qua 250.
- Với bộ truyền công suất lớn không nên lấy Z1 = 1, và khi đó hiệu suất thấp, mất mát
công suất nhiều, bộ truyền sẽ nóng.
Trường hợp bánh vít là bánh dẫn, hiệu suất truyền động bằng
K 0,95. nlHnl(H + e′)
Nếu góc vít γ nhỏ hơn góc ma sát thay thế φ’ thì hiệu suất bộ truyền sẽ nhỏ hơn 0 ⇒ bộ
truyền bị tự hãm, chuyển động không thể truyền ngược từ trục vít sang bánh vít. Sử dụng tính
chất tự hãm này trong các cơ cấu nâng và một số cơ cấu khác.
6.3. Tính toán độ bền bộ truy ền trục vít
6.3.1. Các dạng hỏng và chỉ tiêu tính toán
1. Các dạng hỏng
Truyền động trục vít cũng có các dạng hỏng tương tự như trong truyền động bánh răng,
nhưng do xuất hiện hiện tượng trượt dọc răng với vận tốc trượt lớn, sinh nhiệt nhiều, đồng
thời, điều kiện hình thành màng dầu bôi trơn ma sát ướt tại chỗ tiếp xúc không thuận lợi nên
hiện tượng dính và mòn nguy hiểm hơn cả.
Dính
- Đặc biệt nguy hiểm khi bánh vít làm bằng vật liệu tương đối rắn (như đồng thanh không
thiếc, gang...).
- Khi bánh vít làm bằng vật liệu tương đối rắn, hiện tượng dính đặc biệt nguy hiểm bởi vậy
dưới tác dùng của tải trọng và vận tốc lớn, các hạt kim loại ở răng bánh vít bị đứt ra, dính
chặt vào mặt ren trục vít, làm mặt ren trục vít bị sần sùi, khi tiếp xúc với bánh vít, ren trục
vít sẽ mai mòn nhanh răng bánh vít.
- Với vật liệu bánh vít mềm hơn (như đồng thanh thiếc), kim loại bị đứt ra thành từng lớp
mòng, quết dần lên bề mặt ren trục vít, mà không làm cho mặt ren trục vít bị sần sùi ⇒
hiện tượng dính ít nguy hiểm hơn.
Mòn
- Thường xảy ra ở răng bánh vít, do răng bánh vít làm bằng vật liệu có cơ tính thấp hơn.
- Mòn càng nhanh khi lắp ghép không chính xác, dầu bôi trơn có lẫn cặn bẩn, bề mặt trục
vít không đủ nhẵn, hoặc khi đóng mỡ máy luôn (lúc này điều kiện bôi trơn không tốt).

Truyền động cơ khí- Vũ Thị Hạ
- Mòn làm giảm thời hạn làm vi
- Răng bị mòn nhiều sẽ bị gãy.
Tróc rỗ bề mặt răng
- Xảy ra chủ yếu ở các bánh vít làm b
2. Chỉ tiêu tính toán
Do chưa có phương pháp tin c
quan đến ứng suất tiếp xúc ⇒bền uốn như trong bánh răng theo
ảnh hưởng của dính và mòn đư
Vì bánh vít làm bằng đồng thanh hay gang
thép nên tính toán độ bền tiế
tương đối nhỏ, lại đặt trên hai
khi đó đường kính bánh vít khá l
thân trục vít theo hệ số an toàn (xem ph
với vận tốc trượt lớn ⇒ mất mát công su
toán độ bền cần tính về nhiệt.
6.3.2. Tính bộ truy ền tr
Sử dụng công thức Hec, đi
bền tiếp xúc có dạng:
Ï üó5!:2 Ï
Trong đó: ZM: hệ số xét đến cơ
của vật liệu;
ρ: bán kính cong tương đương
%% @
qn: tải trong riêng pháp tuy
[σH]: ứng suất tiếp xúc cho phép c
ũ ị Hạnh
n làm việc của bộ truyền.
gãy.
các bánh vít làm bằng đồng thanh thiếc có độ bền
ng pháp tin cậy để tính về mòn và dính, hơn nữa mòn và dính c
⇒ vẫn tính toán bộ truyền trục vít theo độ bền ti
ăng theo điều kiện:
Ï Ï và Ï Ï được chú y đến khi chọn ứng suất tiếp xúc cho phép.
ng thanh hay gang là vật liệu có cơ tính kém hơn v
ến hành cho răng bánh vít. Ngoài ra thân tr
t trên hai ổ cách nhau khá xa (nhất là khi bộ truyền có t
bánh vít khá lớn), do đó chịu ứng suất uốn lớn ⇒ cần ki
an toàn (xem phần tính toán trục). Do có hiện tư
t mát công suất và ma sát ⇒ nung nóng bộ truy
n trục vít theo sức bền tiếp xúc
điều kiện
n cơ tính
đương;
i trong riêng pháp tuyến;
p xúc cho phép của vật liệu bánh vít.
Hình 6. 11
111
n chống dính cao.
a mòn và dính cũng liên
n tiếp xúc và theo độ
p xúc cho phép.
ơn vật liệu trục vít là
Ngoài ra thân trục vít có tiết diện
n có tỷ số truyền lớn,
n kiểm tra độ bền của
n tượng trượt dọc răng
truyền ⇒ sau khi tính

Truyền động cơ khí- Vũ Thị Hạnh 112
Do hiện tượng dính và tróc rỗ bắt đầu ở vùng tâm ăn khớp ⇒ tiến hành tính toán bán kính
cong tương đương tại vùng này. Ở vùng tâm ăn khớp, sự ăn khớp của bộ truyền trục vít tương
đương với sự ăn khớp của bánh răng nghiêng với một thanh răng sinh nghiêng có cạnh thẳng
Tải trọng riêng pháp tuyến
!: º::
Gần đúng, có thể xem bánh vít như bánh răng nghiêng có góc nghiêng β = γ.
Khi đó tổng chiều dài tiếp xúc giữa các răng của bánh vít và ren trục vít:
: hõ¦ixH
- b: chiều dài răng bánh vít,
- εα là hệ số trùng khớp ngang,
- Kε là hệ số thay đổi: Kε = 0,75.
Bánh vít ôm trục vít theo cung tròn với góc ôm 2δ chiều dài răng bánh vít: δ tính bằng độ
h 2ý360F
Lực pháp tuyến toàn phần Fn º: 2%ixH nlÅ:
Suy ra: !: 2%360F j%hõ¦2ý
Lấy trung bình: ¦ 0,75 Trục vít bằng thép, ăn khớp với bánh vít bằng đồng thanh hay gang: Công thức kiểm nghiệm
độ bền tiếp xúc của răng bánh vít:
Ï 480 5% j% Ï
Thay d1 = mq; d2 = mZ2 và m ≈ 2aw/(Z2+q) vào (5.5) suy được công thức thiết kế bộ
truyền trục vít bánh vít theo độ bền tiếp xúc:

Truyền động cơ khí- Vũ Thị Hạnh 113
6.3.3. Tính bộ truy ền trục vít theo sức bền uốn
Việc xác định ứng suất uốn ở chân răng bánh vít rất phức tạp và dạng răng bánh vít thay đổi
theo chiều rộng bánh vít và chân răng lại cong, do đó dùng cách tính gần đúng: coi bánh vít
như bánh răng trụ răng nghiêng có góc nghiêng β = γ và tiến hành tính toán tương tự như
đối với bộ truyền bánh răng trụ răng nghiêng.
Từ công thức của bánh răng nghiêng, với lực vòng trên bánh vít lấy γ = 100,
M 1 & 140F ≈ 0,93; ¦ 0,75; õ 1,8 ⟹ M¦ 1
140F công thức kiểm nghiệm độ bền uốn của răng bánh vít
Ï 1,4%Mjh| Ï
Trong đó: mn là modun pháp của răng bánh vít: mn = m.cosγ; b2: bề rộng bánh vít.
YF: hệ số dạng răng của bánh vít, được tra trong các sổ tay thiết kế theo số răng tương đương:
ü7đ üixH
6.3.4. Kiểm nghiệm độ bền của răng bánh vít khi chịu quá tải
Tương tự như trong bộ truyền bánh răng:
Kiểm nghiệm theo ứng suất tiếp xúc (nhằm tránh biên dạng dư hay dính bề mặt răng):
Ï M= Ï 5%M=% Ï M= Trong đó:
- T2max; T2: momen lớn nhất và momen xoắn danh nghĩa
- σH: ứng suất tiếp xúc khi chịu momen xoắn T2
- [σH]max: ứng suất tiếp xúc khi bánh vít chịu quá tải
Kiểm nghiệm theo ứng suất uốn (nhằm tránh biên dạng dư do uốn hay gãy răng do giòn):
ÏM= Ï %M=% Ï M=
Trong đó:
- T2max; T2: momen lớn nhất và momen xoắn danh nghĩa
- σF: ứng suất uốn khi chịu momen xoắn
- [σ]Fmax : ứng suất uốn khi bánh vít chịu quá tải Fmax

Truyền động cơ khí- Vũ Thị Hạnh 114
6.3.5. Tính toán nhiệt bộ truy ền trục vít
Khi làm việc, do vận tốc trượt lớn, bộ truyền sinh nhiệt nhiều dẫn đến nhiệt độ của dầu trong
hộp giảm tốc trục vít có thể vượt qua giới hạn cho phép ⇒ phá hỏng màng dầu bôi trơn giữa
các bề mặt tiếp xúc của ren trục vít và răng bánh vít ⇒ gây nên dính.
Do đó, phải tiến hành tính toán nhiệt của bộ truyền trục vít theo điều kiện: θ≤[θ]
- với θ: nhiệt độ của dầu trong hộp giảm tôc;
- [θ]: nhiệt độ cho phép của dầu.
Điều kiện cần bằng nhiệt của hộp giảm tốc:
Nhiệt lượng sinh ra bằng nhiệt lượng thoạt đi (trong 1 đơn vị thời gian):
1000(1 & K)¹% B( & F)(1 @ O) - η: hiệu suất của bộ truyền;
- N1: công suất trên trục vít [KW];
- KT: hệ số tỏa nhiệt [W/(m2.0C)];
- θ: nhiệt độ của dầu [0C];
- θ0: nhiệt độ của mỗi trường không khí [0C];
- A: diện tích bề mặt thoát nhiệt của hộp [m2];
- ψ = 0,25: hệ số xét đến sự thoát nhiệt qua đáy hộp xuống bề máy.
Suy ra:
1000(1 & K)¹%B(1 @ O)
Với β là hệ số xét đến sự giảm nhiệt sinh ra trong một đơn vị thời gian do bộ truyền làm việc
ngắt quãng hay do tải trọng làm việc giảm so với tải trọng danh nghĩa N1:
nYZ¹a∑¹aUnU
- tck là chu kỳ tải trọng;
- N1i, tI là công suất và thời gian chịu tải ở chế độ thứ i của chu kỳ (hình 5.14).
Nếu điều kiện (5.7) không thỏa mãn, cần dùng các biện pháp; làm nguội nhân tạo (lắp quạt
gió ở đầu trục vít, dùng ống dẫn nước làm nguội..). Khi thiết kế có thể chọn trước nhiệt độ
của dầu nhỏ hơn nhiệt độ cho phép ⇒ suy ra diện tích tỏa nhiệt của vỏ hôp.

Truyền động cơ khí- Vũ Thị Hạnh 115
6.4. Vật li ệu chế tạo và ứng suất cho phép
a) Vật liệu
Tr ục vít :Do trong bộ truyền trục vít xuất hiện vận tốc trượt lớn, đồng thời điều kiện hình
thành màng dầu bôi trơn không thuận lợi, mòn và dính xảy ra tương đối nhiều. Do đó cần
phối hợp vật liệu trục vít và bánh vít sao cho có hệ số ma sát f thấp, ít bị dính và lâu mòn (khi
f thấp sẽ giảm mòn, mặt khác hiệu suất truyền động tăng, sinh nhiệt ít hơn nên giảm dính).
Ngoài ra, do tỷ số truyền u lớn, tần số chịu tải của trục vít lớn hơn nhiều so với bánh vít nên
vật liệu trục vít phải có cơ tính cao hơn vật liệu bánh vít. Do vậy, thường chọn trục vít bằng
thép ăn khớp với bánh vít làm bằng vật liệu giảm ma sát như đồng thanh, gang.
Trục vít được chế tạo từ thép cácbon chất lượng tốt, thép hợp kim. Khi chịu tải nhỏ hoặc
trung bình: dùng thép C45, C50... tôi cải thiện; HB < 350, sau khi cắt ren trục vít không
mài. Khi chịu tải lớn hay trung bình: dùng thép cácbon trung bình (C45, 40Cr, 40CrNi...),
tôi bề mặt hay tôi thể tích đạt độ rắn HRC = 50÷55 hoặc thép ít cácbon (15Cr, 20Cr,
18CrMnTi...) thấm than đạt độ rắn HRC = 58÷63, sau khi thám than, bề mặt ren trục vít
được mài và đánh bóng.
Bánh vít : Vận tốc trượt là cơ sở để chọn vật liệu chế tạo bánh vít và cấp chính xác chế tạo
của bộ truyền. Bánh vít thường được làm bằng vật liệu giảm ma sát, chia thành 3 nhóm:
Đồng thanh σ < 300MPa, bao gồm:
- Đồng thanh nhiều thiếc (như BCuSn10P1, BCuSn10NiP,...): chống dính tốt, nhưng
đắt tiền, chỉ dùng khi v = 6÷25m/s.
- Đồng thanh thiếc kẽm (như BCuSn6Zn6Pb3, BCuSn5Zn5Pb5): dùng khi v =
5÷12m/s
- Đồng thanh không thiếc (như BCul9Fe4, BCul10Fe4Ni4), đồng thau (LCu66
Al6Fe3Mg2, LCu58Mg2Pb2,...), σb > 300MPa: có cơ tính tốt, rẻ tiền hơn đồng thanh
thiếc, những chống dính kẽm, chỉ dùng khi vt < 5m/s.
Để tăng khả năng chống dính và giảm mòn, trục vít được mài và đánh bóng cẩn thận,
đồng thời cần có độ rắn cao HRC≥ 45.
Gang xám tương đối mềm: như GX12-28; GX15-32... dùng thích hợp cho các bộ truyền
quay chậm, tại thấp với vt< 2m/s.Bánh vít làm bằng vật liệu có cơ tính kém hơn trục vít
nên trong tính toán độ bền chỉ cần xác định ứng suất cho phép đối với vật liệu bánh vít.

Truyền động cơ khí- Vũ Thị Hạ
b) Ứng suất tiếp xúc cho phép
Bánh vít bằng đồng thanh thi
xúc cho phép [σH] được xác đ
- [σH0] ứng suất tiếp xúc cho phép
- [σH0] = (0,75÷0,90).σb
- với σb: giới hạn bền kéo c
- mH: bậc của đường cong m
- NHE số chu kỳ thay đổi ứ
Trong đó:
- T2i, n2i, t2i: momen xoắn trên bánh vít, s
độ thứ i; T2max: momen xoắ
Bánh vít bằng đồng thanh không thi
hiểm do đó ứng suất tiếp xúc cho phép [
thuôc vào vận tốc trượt vt, không ph
được xác định từ điều kiện độ
c) Ứng suất uốn cho phép
Bánh vít bằng đồng thanh:
Với:
[σF0] ứng suất uốn cho phép
khi b
[σF0] = 0,16σb khi bộ truyền quay hai chi
σch và σb: giới hạn chảy và gi
mF: bậc của đường cong mỏi u
ũ ị Hạnh
p xúc cho phép
ng thanh thiếc, σb < 300MPa, có độ bền chống dính cao,
ác định theo điều kiện tránh hỏng và mỏi bề m
Ï ÍÏ öÎ 510P¹
Ñ#
p xúc cho phép ứng với số chu kỳ chịu tải là 107.
n kéo của vật liệu.
ng cong mỏi tiếp xúc
ứng suất tương đương:
¹ 60.5Q%U %M= R½:
U$%UnU
n trên bánh vít, số vòng quay của bánh vít, số
ắn lớn nhất trong các momen xoắn T2i
ng thanh không thiếc, đồng thau hay gang: Dạng hỏng về
p xúc cho phép [σH] được xác định theo điều kiệ
t vt, không phụ thuộc vào số chu kỳ chịu tải (hay nói khác
ộ bền tĩnh)
n cho phép
Ï ÍÏöÎ 510P¹
ÑS
n cho phép ứng với số chu kỳ chịu tải là 106;
khi bộ truyền quay một chiều,
n quay hai chiều.
y và giới hạn bền kéo của đồng thanh;
i uốn: mF = 9;
116
ng dính cao, ứng suất tiếp
mặt răng:
giờ làm việc ở chế
ề dính đặc biệt nguy
ện chống dính, phụ
i (hay nói khác đi, [σH]

Truyền động cơ khí- Vũ Thị Hạnh 117
NFE:số chu kỳ thay đổi ứng suất tương đương:
¹ 60.5L%U %M= NT:
U$%UnU
Trong đó:
- T2i, n2i, t2i: momen xoắn trên bánh vít, số vòng quay của bánh vít, số giờ làm việc
ở chế độ thứ i;
- T2max: momen xoắn lớn nhất trong các momen xoắn T2i.
Bánh vít bằng gang:
[σF] = 0,12σbu khi bộ truyền quay một chiều; [σF] = 0,075σbu khi bộ truyền quay hai
chiều; σbu: giới hạn bền uốn
d) Ứng suất cho phép khi quá tải
Đồng thanh thiếc: Ï M= 4ÏY< ; ÏM= 0,8. ÏY<
Đồng thanh không thiếc: Ï M= 2,6ÏY< ; ÏM= 0,8. ÏY<
Gang Ï M= 1,5ÏY< ; ÏM= 0,6. ÏY<
Trong đó: σch: giới hạn chảy, σb: giới hạn bền kéo.
65. Trình tự thiết kế bộ truy ền trục vít
Thiết kế bộ truyền trục vít có thể thực hiện theo trình tự sau:
1. Chọn vật liệu trục vít, cách nhiệt luyện. Dự đoán vận tốc trượt vsb, chọn vật liệu bánh
vít. Chọn phương pháp gia công, chọn cấp chính xác gia công.
2. Xác định ứng suất cho phép [σH2], [σF2], nếu có tải trọng quá tải cần xác định thêm
[σHqt], [σFqt]. Xác định [Fa] và [θ].
3. Chọn số mối ren z1, tính số răng z2 = u.z1. Chọn hệ số đường kính trục vít q theo tiêu
chuẩn. Tính góc nâng γ = arctg(z1/q). Chọn giá trị sơ bộ của hiệu suất ηsb.
4. Tính khoảng cách trục aw. Tính mô đun m = 2.aw/(z2+q), lấy giá trị của m theo tiêu
chuẩn. Tính mô đun pháp mn = m.cosγ
5. Tính các kích thước chủ yếu của bộ truyền:
6. Đường kính vòng chia trục vít, d1 = m.d;
7. Đường kính vòng chia bánh vít, d2 = m.z2;
8. Chiều rộng vành bánh vít B2 = 0,75.da1, khi z1 = 1 hoặc 2.

Truyền động cơ khí- Vũ Thị Hạnh 118
B2 = 0,67.da1, khi z1 = 4.
9. Chiều dài phần gia công ren của trục vít có thể lấy:
B1 ≥ (11+0,07.z2).m, khi z1 = 1 hoặc 2.
B1 ≥ (12,5+0,09.z2).m, khi z1 = 4.
10. Kiểm tra vận tốc trượt vtr, kiểm tra giá trị hiệu suất η. Nếu sai khác so với giá trị sơ bộ
ban đầu quá 5%, thì phải chọn lại giá trị vsb, hoặc chọn lại ηsb và tính lại.
11. Kiểm tra sức bền uốn của bánh vít. Nếu không thỏa mãn, phải điều chỉnh kích thước
của bộ truyền.
12. Kiểm tra điều kiện ổn định của trục vít. Nếu không thỏa mãn, phải điều chỉnh kích
thước của bộ truyền.
13. Kiểm tra điều kiện chịu nhiệt của bộ truyền. Nếu không thỏa mãn, phải tìm cách xử lý.
14. Vẽ kết cấu của trục vít, bánh vít.
11. Tính lực tác dụng lên trục và ổ.
6.6. Đánh giá bộ truy ền trục vít
Ưu điểm:
- Tỉ số truyền rất lớn.
- Làm việc êm, không ồn.
- Có khả năng tự hãm.
Nhược điểm:
- Hiệu suất thấp, sinh nhiệt nhiều do có trượt dọc răng.
- Cần sử dụng vật liệu giảm ma sát đắt tiền (đồng thanh) để chế tạo vành bánh vít.
- Yêu cầu cao về độ chính xác lắp ghép.
Phạm vi sử dụng:
Truyền động trục vít đắt và chế tạo phức tạp hơn bánh răng nên chỉ sử dụng khi cần
truyền chuyển động giữa hai trục chéo nhau và tỉ số truyền lớn. Mặt khác do hiệu suất thấp
và nguy hiểm về dính nên cũng hạn chế khả năng truyền công suất của bộ truyền này.
Thường dùng để truyền công suất nhỏ và trung bình P = 50 ÷ 60 kW; tỉ số truyền trong
khoảng 20-60, đôi khi đến 100 (trong khí cụ hoặc cơ cấu phân độ: u = 300).

Truyền động cơ khí- Vũ Thị Hạ
Chương 7: Truyền đ
7.1. Khái niệm chung
7.1.1. Giới thi ệu bộ truy ền xích
Xích là một chuỗi các mắt xích n
với nhau bằng khớp bản lề. B
xích truyền chuyển động và t
nhờ sự ăn khớp của các mắt xích v
các răng đĩa xích. Cấu tạo chính c
truyền xích gồm đĩa dẫn 1, đĩa b
và xích 3
Ngoài ra bộ truyền xích có th
xích (hình 7.2), bộ phận bôi tr
Chuyển động quay và tải trọ
sang đĩa bị dẫn (2) nhờ sự ăn kh
xích với các răng của đĩa xích (hình
thể dùng một bộ truyền xích đ
một đĩa dẫn sang nhiều đĩa bị
Theo công dụng có thể phân ra.
- Xích trục, xích kéo: dùng đ
hạ các vật nặng.
- Xích truyền động: dùng để
giữa các trục. Xích truyề
xích ống, xích ống con lăn, xích r
Trong phạm vi giáo trình ch
truyền động; xích trục và xích kéo
trình bày trong các giáo trình chuyên
7.1.2. Các loại xích truy
1. Các loại xích truyền độ
ũ ị Hạnh
n động xích (3 tiết)
n xích
t xích nối
Bộ truyền
ng và tải trọng
t xích với
hính của bộ
ĩa bị dẫn 2
n xích có thể có bộ phận căng
n bôi trơn, che kín.
ọng từ đĩa dẫn (1)
ăn khớp giữa các mắt
ĩa xích (hình 7.3). Có
n xích để truyền động từ
dẫn (hình 7.2).
phân ra.
c, xích kéo: dùng để vận chuyển, nâng
ể truyền chuyển động
ền động có các loại:
ăn, xích răng.
m vi giáo trình chỉ trình bày về xích
c và xích kéo được
trình bày trong các giáo trình chuyên ngành.
i xích truyền động và kết cấu đĩa xích
ộng
Hình 7. 1
Hình 7. 2
Hình 7. 3
119

Truyền động cơ khí- Vũ Thị Hạ
a) Xích ống con lăn
Các mắt xích được tạo
thành từ các má xích xếp
xen kẽ nhau. Các má ngoài 2
lắp chặt với chốt bản lề 4,
các má trong 1 lắp chặt với
ống 3. Ống 3 lắp có khe hở
với chốt 4 do đó chúng có
thể xoay tương đối với nhau
tạo thành khớp bản lề. Phía
ngoài ống 3 lồng con lăn 5
(có thể xoay tự do). Con lăn
5 lăn trên răng đĩa. Nhờ có con l
trên răng được thay thế bằng ma sát l
cuối của xích lại với nhau thành vòng kín, th
cố gắng dùng số mắt xích là ch
chịu thêm ứng suất uốn). Bướ
khoảng cách của
ai tâm chốt bản lề sát nhau).
b) Xích ống
Kết cấu hoàn toàn giống như
lượng và giá thành rẻ hơn xích
hơn. Vì vậy chỉ dùng xích ống trong các b
nhỏ, làm việc với vận tốc thấp (v
c) Xích răng
ũ ị Hạnh
5
ăn
có con lăn nên khi xích ăn khớp với răng đĩa, mộ
ng ma sát lăn, do đó giảm mòn cho răng đĩa xích.
i nhau thành vòng kín, thường dùng chốt chẻ. Nên
t xích là chẵn để tránh dùng mắt xích chuyển (mắt xích
ớc xích p là thông số quan trọng nhất của truy
ng như xích ống con lăn, chỉ khác là không có con l
ơn xích ống con lăn cùng cỡ, tuy vậy bản lề và ră
ng trong các bộ truyền không quan trọng ho
p (v = 1m/s).
Hình 7. 4
120
ột phần ma sát trượt
ĩa xích. Để nối hai mắt
t xích này sẽ bị yếu do
a truyền động xích (là
khác là không có con lăn do vậy khối
và răng đĩa mòn nhanh
ng hoặc cần khối lượng

Truyền động cơ khí- Vũ Thị Hạ
Gồm nhiều má xích hình răng, x
làm việc của mỗi má xích là hai m
7.5) và sẽ tiếp xúc với hai răng c
xích A có lỗ đa hình được lắp ch
hình, được lắp chặt với chốt hình qu
sinh của mặt trụ ngoài của chố
lăn không trượt với nhau.
Để xích không bị tuột khỏi đĩ
răng. Má xích dẫn hướng C có th
ứng) hoặc dùng hai má xích d
Xích răng có kết cấu chắc ch
những nặng nề, chế tạo phức t
làm việc vận tốc thấp (v ≤ 1m/s), có yêu c
suất và vận tốc lớn. Với tải trọ
Tùy theo công suất truyền, xích
xích ống con lăn, khi tải trọng l
va đập mạnh có hại và kích thư
này chủ yếu nghiên cứu xích ố
2. Đĩa xích.
ũ ị Hạnh
ăng, xếp xen kẽ nhau và nối với nhau bằng các b
i má xích là hai mặt ngoài, dạng phẳng hợp với nhau m
i hai răng của đĩa xích. Kết cấu bản lề được mô tả
p chặt với chốt hình quạt (1). Tương tự, má xích B c
t hình quạt (2). Hai chốt (1) và (2) tiếp xúc nhau theo m
ốt. Khi hai má xích xoay tương đối với nhau, hai ch
ĩa theo phương dọc trục, dùng má xích dẫn hư
ng C có thể đặt chính giữa (Khi đó trên đĩa xích cầ
c dùng hai má xích dẫn hướng ap vào hai mặt mút của đĩa xích (hình
c chắn hơn xích con lăn, khả năng tải cao hơn, làm vi
c tạp hơn. Xích ống chỉ dùng cho các bộ truyền không quan tr
≤ 1m/s), có yêu cầu khối lượng nhỏ. Xích răng đư
ọng và vận tốc trung bình, dùng xích con lăn thích h
n, xích ống và xích con lăn có thể là một dãy hay nhi
ng lớn, vận tốc cao, để khỏi chọn bước xích l
i và kích thước bộ truyền cồng kềnh, có thể tăng số dãy xích lên.
ống con lăn.
Hình 7. 5
121
ng các bản lề. Bề mặt
i nhau một góc 600 (hình
trên hình 6.5b: Má
, má xích B cũng có lỗ đa
p xúc nhau theo một đường
i nhau, hai chốt (1) và (2)
n hướng C không có
ần phay rãnh tương
ĩa xích (hình 7.5).
ơn, làm việc ít bị ồn,
n không quan trọng,
ăng được dùng khi công
ăn thích hợp hơn.
t dãy hay nhiều dãy. Với
c xích lớn gây nên những
dãy xích lên. Chương

Truyền động cơ khí- Vũ Thị Hạ
Kết cấu đĩa xích tương tự như
răng. Kích thước và dạng profin r
xích có đường kính nhỏ được ch
Với đĩa xích có đường kính trung bình và l
moayơ bằng hàn hay bu lông... (hình 6.6b, hình 6.6c). Profin r
lõm bán kính r, cung lõm CD bán kính R;
R1 (hình 7.8). Profin trên hình chi
Vật liệu xích và đĩa xích:
- má xích: Thép cán ngu
40Cr, 40CrNi), tôi đạt đ
cácbon C15, C20, 15Cr th
- đĩa xích Chịu tải nhỏ, v
cao hơn. Tải trọng và v
40CrNi, tôi đạt độ rắn HRC
rồi tôi.
7.2. Thông số chủ yếu của b
a) Đường kính vòng chia và s
Vòng chia là vòng tròn đi qua t
ũ ị Hạnh
như kết cấu bánh răng (hình 7.6, hình 7.7), chỉ
ng profin răng đĩa xích phụ thuộc loại xích và được tiêu chu
c chế tạo bằng phương pháp dập.
ng kính trung bình và lớn, vành đĩa được chế tạo riêng r
ng hàn hay bu lông... (hình 6.6b, hình 6.6c). Profin răng đĩa xích con l
r, cung lõm CD bán kính R; đoạn thẳng chuyển tiếp BC; cũng lôi AB bán kính
.8). Profin trên hình chiều canh có cung lồi bán kính R2 (hình 6.7).
Thép cán nguội (thép cácbon chất lượng tốt và thép hợp kim nh
t độ rắn HRC = 40 ÷ 50 Bản lề (chốt,ống, con lă
cácbon C15, C20, 15Cr thấm than rồi tôi đạt độ rắn HRC = 50 ÷ 65
, vận tốc thấp (v < 3m/s) ⇒ gang xám GX20 hay gang có
ng và vận tốc cao hơn ⇒ thép cácbon hay thép hợp kim C45, 40Cr,
n HRC = 50÷60 hoặc thép ít cácbon như C15, C20 th
a bộ truyền xích ống con lăn
ng kính vòng chia và số răng đĩa xích: d1 và d2.
đi qua tấm các bản lề xích
Hình 7. 6
122
ỉ khác ở phần vành
c tiêu chuẩn hóa. đĩa
o riêng rồi ghép lên
ĩa xích con lăn gồm: cung
ũng lôi AB bán kính
i bán kính R2 (hình 6.7).
p kim như: C40, C45,
ng, con lăn) Thép ít
50 ÷ 65
gang xám GX20 hay gang có độ bền
p kim C45, 40Cr,
ư C15, C20 thấm than

Truyền động cơ khí- Vũ Thị Hạ
Số răng của đĩa dẫn và đĩa bị d
đĩa xích càng nhỏ thì xích càng chóng
vào khớp và ra khớp e ú
Số răng càng ít thì vận tốc và t
Số răng tối thiểu Zmin được ch
Khi v ≥ 2m/s ⇒ Z1min
Khi số răng Z càng lớ
thì số răng đĩa xích lớn Z
Khi Z2 lớn quá, sau m
Do bị mòn, bướ
vòng tròn đi qua t
với cùng một lư
thì ∆d tăng, ngh
dễ bị tuột xích hơ
Với xích con lăn, có th
Z
1
v
à
Z
2
n
nên lấy là số lẻ ăn khớ
đều hơn.
b) Bước xích:
Bước xích p càng lớn ⇒ khả
càng tăng ⇒ khi vận tốc cao nên ch
ũ ị Hạnh
dẫn: Z1 và Z2 cần phải hạn chế số răng tối thi
thì xích càng chóng mòn do góc xoay tương đối của b
càng lớn.
c và tỷ số truyền dao động càng lớn, tải trọng độ
c chọn theo kinh nghiệm. Với xích con lăn, có th
= 17, khi v < 2m/s ⇒ Z1min = 15.
ớn ⇒ mòn xảy ra chậm hơn, nhưng khi tăng s
n Z2 = u.Z = (với u > 1) sẽ tăng lên;
n quá, sau một thời gian làm việc xích bị mòn, rất dễ bị tu
ớc xích lúc còn mới là p sẽ tăng thành p +∆p, đư
đi qua tâm các bản lề sẽ tăng lên thành d+∆d với
t lượng mòn, làm tăng bước xích cũng một lượ
ng, nghĩa là xích ăn khớp với răng đĩa xích càng xa t
t xích hơn (hình 6.10) ⇒ cần hạn chế Z2max
ăn, có thể lấy: Z2max = 100÷120.
ớp với số mắt xích chẵn ⇒ các bản lề và răng
ả năng tải càng cao, những tải trọng động, va
c cao nên chọn bước xích p nhỏ. Tuy nhiên, khi lấ
Hình 7. 7
123
i thiểu Zmin vì: Số răng
a bản lề xích khi xích
ộng và va đập tăng.
ăn, có thể lấy như sau:
ăng số răng đĩa nhỏ Z1
tuột xích.
p, đường kính d của
i ∆ ∆ùØÝ (ú )
ợng ∆p, nếu Z tăng,
a xích càng xa tâm đĩa ⇒ càng
và răng đĩa xích sẽ mòn
ng, va đập và tiếng ồn
ấy bước xích p nhỏ,

Truyền động cơ khí- Vũ Thị Hạ
thì khả năng tải của bộ truyền s
có thể tăng số dãy xích. Khi thi
trong các tài liệu và thiết kế chi ti
c) Khoảng cách trục và s
Khoảng cách trục
Khoảng cách trục a có ảnh h
mắt xích ít, số lần va đập của m
ôm của xích nhỏ α1 càng giả
nhất amin được xác định theo hai
không chạm nhau:
Å% 180F
Để hai đĩa xích không chạm nhau:
v
Khoảng cách trục a càng lớn thì s
tương đối nhỏ cũng làm cho xích dài thêm nhi
chế amax = 80p. Theo kinh nghi
Số mắt xích
Khi biết khoảng cách trục a, ta có th
định với bộ truyền đai).
Gọi x là số mắt xích, thay L =
Số mắt xích sau khi tính được qui tròn
Sau đó tính chính xác khoảng cách tr
ũ ị Hạnh
n sẽ giảm. Khi đó với xích ống con lăn để bả
dãy xích. Khi thiết kế phải kiểm tra điều kiện: p ≤ pmax. Giá tr
chi tiết máy.
c và số mắt xích
nh hưởng đến khả năng làm việc của bộ truyền xích. N
a mỗi mắt xích vào răng đĩa sẽ lớn, tuổi thọ gi
m nếu giảm khoảng cách trục a. Vì vậy kho
nh theo hai điều kiện góc ôm trên đĩa nhỏ α1 = 120
F & 57F & %v ï 120F → vMU: ï & %
m nhau:
vMU: ï = & v%2 @ 30 V 50||
n thì số mắt xích x sẽ càng nhiều, do đó với độ
ng làm cho xích dài thêm nhiều, xích càng chóng bị chùng. Do v
heo kinh nghiệm khoảng cách trục nên lấy a = (30 - 50)p
c a, ta có thể tìm được chiều dài xích L (theo công th
= xp; pd = Z.p ta có:
c qui tròn đến số chẵn gần nhất để tránh phải dùng m
ng cách trục a.
124
ảo đảm khả năng tải
pmax. Giá trị pmax tra bảng
n xích. Nếu a nhỏ, số
giảm. Ngoài ra góc
y khoảng cách trục nhỏ
120o và hai đĩa xích
ộ tăng bước xích ∆p
chùng. Do vậy cần hạn
50)p.
u dài xích L (theo công thức như đã xác
i dùng mắt chuyển.

Truyền động cơ khí- Vũ Thị Hạ
Với bộ truyền có đường nối tâm hai
nên giảm a một lượng ∆a = 0,002
7.3. Cơ học truyền động xích
7.3.1. Vận tốc và tỉ số
Vận tốc trung bình của xích:
Xem rằng: π.d ≈ Z.p ⇒
Trong đó: n [vòng/phút]; Z: số
Vận tốc vòng trung bình trên hai
Tỷ số truyền trung bình:
Thực ra, trên đây là vận tốc và t
Tỉ số truyền tức thời u của b
khớp với các răng của đĩa xích theo hình
ăn khớp, B sắp vào khớp với ră
- Vx hướng dọc theo nhánh xích (v
ũ ị Hạnh
i tâm hai đĩa xích tạo với mặt phẳng nằm ngang m
0,002÷0,004 để xích không bị căng, làm tăng đ
ng xích
ố truy ền
ố răng; p: bước xích [mm], V[m/s]
c vòng trung bình trên hai đĩa xích bằng nhau ⇒
c và tỷ số truyền trung bình.
ộ truyền xích biến đổi theo thời gian, bởi vậ
ĩa xích theo hình đa giác (hình 6.10). Trên đĩa dẫn
i răng C. Vận tốc vào của bản lề được phân thành:
c theo nhánh xích (vận tốc xích);
Hình 7. 8 125
m ngang một góc ψ = 70o
ăng độ mòn của xích.
ậy các mắt xích ăn
n (1), bản lề A đang
c phân thành:

Truyền động cơ khí- Vũ Thị Hạ
- Vy hướng vuông góc v
Ta có: Vx = 0,5.ω
Vy = 0,5.ω1.
Với θ1 thay đổ
Tương tự cho đ
Từ đó suy được tỉ số truyền tứ
- Do θ1 và θ2thay đổi theo th
thay đổi theo thời gian.
- Do vận tốc của xích và c
⇒ xích chuyển động có gia t
- Ngoài ra, khi bản lề B vào
phương thẳng đứng củ
điểm C là Vy’, hai thành ph
bản lề xích và răng đĩa xích
- Tải trọng động và va đ
và bước xích p càng tă
của vận tốc bản lề C càng l
7.2.2. Lực tác d
a) Lực căng trên các nhánh xích
Khi chưa làm việc, trọng lư
căng ban đầu F0:
Với: a chiều dài đoạn xích t
bằng khoảng cách trục a);
mét xích; Kf: hệ số ph
xích; g: gia tốc trọng trườ
Khi truyền momen xoắn T1, trên các m
khớp với răng đĩa xích sẽ xu
2T1/d1. Lúc này, lực căng trên hai nhá
trên nhánh bị dẫn F0 biến thành F
ũ ị Hạnh
vuông góc với nhánh xích.
0,5.ω1.d1.cosθ1
.d1.sinθ1
ổi từ −φ1/2 đến φ1/2
cho đĩa bị dẫn:
ức thời:
i theo thời gian ⇒ tỉ số truyền tức thời u và và vậ
i gian.
a xích và của đĩa bị dẫn thay đổi theo thời gian (cho d
ng có gia tốc gây nên tải trọng động.
B vào ăn khớp với răng đĩa xích tại C, thành ph
ủa B điểm là Vy, còn thành phần thẳng đứng c
thành phần này hướng ngược nhau, khi vào kh
ĩa xích. Các va đập liên tiếp sẽ gây nên tiếng ồ
ng và va đập càng tăng lên khi số răng Z càng nhỏ, khi s
c xích p càng tăng (bởi vậy khi đó gia tốc cực đai của xích và thành ph
C càng lớn). Do đó cần hạn chế n1 và không nên l
c tác dụng trong bộ truy ền xích
nh xích
ợng xích gây nên lực
n xích tự do (lấy gần đúng
c a); qm: khối lượng một
ụ thuộc độ võng f của
ờng g = 9,81m/s2.
, trên các mắt xích ăn
xuất hiện lực vòng: Ft≈
ăng trên hai nhánh xích bị thay đổi: trên nhánh dẫn F
nh F2.
Hình 7.
126
ận tốc xích VX cũng
i gian (cho dù ω1 = hằng số)
i C, thành phần vận tốc theo
ng của vận tốc của
c nhau, khi vào khớp gây nên va đập
ồn trong bộ truyền.
, khi số vòng quay n1
a xích và thành phần Vy’
và không nên lấy p quá lớn.
F0 tăng lên thành F1,
Hình 7. 9

Truyền động cơ khí- Vũ Thị Hạnh 127
Điều kiện cần bằng đĩa xích, cho ta: Ft = F1 - F2
Ngoài ra, khi xích vòng qua đĩa xích sẽ sinh ra lực ly tâm làm xuất hiện lực căng phụ FV trên
các nhánh xích: Fv = qm.v12.Trong đó: v: vận tốc xích, qm: khối lượng một mét xích.
Lúc này trên nhánh xích căng có lực F1 = F0 + Ft + Fv
trên nhánh không căng có lực F2 = F0 + Fv.
Ngoài ra, do chuyển động có gia tốc, dây xích còn chịu một lực quán tính Fđ, gây va đập trên
cả hai nhánh xích. Fđ được tính gần đúng theo công thức:
Fđ = mx.axmax
axmax là gia tốc lớn nhất của dây xích.
Trong tính toán bộ truyền xích, giá trị của các lực F0, Fv, Fđ được kể đến bằng các hệ số tính
toán K. Lực tác dụng lên trục và ổ mang bộ truyền xích là lực hướng tâm Fr, có phương
vuông góc với đường trục đĩa xích, có chiều kéo hai đĩa xích lại gần nhau. Giá trị của Fr được
tính như sau: Fr = Kt.Ft
Trong đó Kt là hệ số kể đến trọng lượng của dây xích. Lấy Kt = 1,15 khi bộ truyền nằm
ngang, và Kt = 1,05 khi bộ truyền thẳng đứng.
7.4. Tính bộ truyền xích
7.3.1. Các dạng hỏng và chỉ tiêu tính toán
- Các dạng hỏng chủ yếu
Mòn bản lề xích
Dạng hỏng thường gặp nhất, và khi xích con lăn chịu tải, bề mặt tiếp xúc giữa chốt và ống
chịu áp suất lớn, có sự xoay tương đối khi vào và ra khớp với răng đĩa xích, trong điều kiện
bôi trơn ma sát ướt không thể hình thành.
Chốt và ống chỉ mòn một phía, nên khi bản lề xích bị mòn thì bước xích p sẽ tăng lên,
xích ăn khớp không chính xác với răng đĩa xích; càng bị mòn ⇒ xích ăn khớp càng xa tấm
đĩa ⇒ xích hay bị tuột khỏi đĩa. Đồng thời, mòn làm yếu các mắt xích, xích có thể bị đứt.
Mòn làm giảm đáng kể tiết diện ngang của chốt, có thể dẫn đến gẫy chốt. Các phần tử của
dây xích bị mỏi: rỗ bề mặt con lăn, ống lót, gẫy chốt, vỡ con lăn. Mòn răng đĩa xích, làm
nhọn răng, răng đĩa xích bị gẫy.

Truyền động cơ khí- Vũ Thị Hạnh 128
Các phần từ của xích bị hỏng do mỏi
Các phần từ của xích như xích, con lăn... bị hỏng do mỏi dẫn đến xích bị đứt, con lăn bị rỗ,
bề mặt hoặc bị vỡ. Hỏng và mỏi do tác dụng của ứng suất thay đổi gây ra bởi tải trọng làm
việc, tải trọng động hay va đập; thường chỉ xảy ra khi bộ truyền chịu tải trọng lớn, vận tốc
cao, làm việc trong hộp kín, được bôi trơn tốt nên ít mòn.
Xích bị đứt
Đứt xích, dây xích bị tách rời ra không làm việc được nữa, có thể gây nguy hiểm cho người
và thiết bị xung quanh. Xích có thể bị đứt do mỏi, do quá tải đột ngột, hoặc do các mối ghép
giữa má xích với chốt bị hỏng.
- Chỉ tiêu tính toán
Mòn bản lề là dạng hỏng nguy hiểm hơn cả ⇒ chỉ tiêu tính toán bộ truyền xích: tính về độ
bền mòn, theo điều kiện: p0 ≤ [p0]
Với p0: áp suất sinh ra trong bản lề; [p0]: áp suất cho phép.
7.3.2. Tính toán xích con lăn về độ bền mòn
Áp suất sinh ra trong bản lề xích phải thỏa mãn điều kiện: Áp suất trên mặt tiếp xúc được tính
theo công thức:
XX
t
KAd
TK
KA
FKp
..
..2
.
.
1
1==
Trong đó: A là diện tích tính toán của bản lề, A = dc.l0.
K là hệ số tải trọng, giá trị của K phụ thuộc vào đặc tính tải trọng, kích thước, vị trí và điều
kiện sử dụng bộ truyền. K được tính theo công thức:
K = Kđ.Ka.K0.Kđc.Kb
- Kđ là hệ số kể đến tải trọng động. Nếu tải trọng va đập mạnh lấy Kđ = 1,8. Nếu tải trọng
va đập trung bình, lấy Kđ = 1,2 ÷ 1,5.
- Ka là hệ số kể đến số vòng chạy của xích trong một giây. Nếu a = (30 ÷50).px, lấy Ka =
1. Nếu a = (60 ÷ 80).px, lấy Ka = 0,8. Nếu a < 25.px, lấy Ka = 1,25.
- K0 là hệ số kể đến cách bố trí bộ truyền. Nếu bộ truyền đặt nghiêng so với phương ngang
một góc nhỏ hơn 600, lấy K0 = 1. Trường hợp khác lấy K0 = 1,25.
- Kđc là hệ số kể đến khả năng điều chỉnh lực căng xích. Nếu không điều chỉnh được, lấy
Kđc = 1,25. Nếu điều chỉnh được thường xuyên, lấy Kđc = 1.

Truyền động cơ khí- Vũ Thị Hạnh 129
- Kb là hệ số kể đến điều kiện bôi trơn. Nếu bôi trơn ngâm dầu, lấy Kb = 0,8. Nếu bôi trơn
nhỏ giọt, lấy Kb = 1. Nếu bôi trơn định kỳ, lấy Kb = 1,5.
- Kx là hệ số kể đến dùng nhiều dãy xích. Nếu dùng xích 1 dãy, lấy Kx = 1. Nếu dùng xích
2 dãy, lấy Kx = 1,7. Nếu dùng 3 dãy xích, lấy Kx = 2,4.
Áp suất cho phép [p] được xác định theo thực nghiệm. Tra bảng trong các sổ tay thiết kế phụ
thuộc vào số vòng quay và bước xích.
- Bài toán kiểm tra bền bộ truyền xích được thực hiện theo các bước:
+ Xác định áp ứng suất cho phép [p].
+ Tính áp suất p sinh ra trên bề mặt tiếp xúc
+ So sánh p và [p], đưa ra kết luận:
Nếu p > [p], bộ truyền không đủ bền,
Nếu p ≤ [p], bộ truyền đủ bền.
- Bài toán thiết kế bộ truyền xích thực hiện các nội dung chủ yếu sau đây:
+ Chọn loại xích, dự kiến số vòng quay, xác định áp suất cho phép [p].
+ Giả sử chỉ tiêu (15-5) thỏa mãn, ta viết được
][..
..2
1
1 pKAd
TK
X
≤
Có thể tính gần đúng d1 = z1.px/π; và diện tích A ≈ 0,28.px2. Lúc đó ta có:
3
1
1
].[.
..82,2
pKz
TKp
Xx ≥
Chọn px theo giá trị tiêu chuẩn, tính các kích thước khác của bộ truyền, vẽ kết cấu
của đĩa xích dẫn, đĩa xích bị dẫn.
7.5. Trình tự thiết kế bộ truy ền xích
Kích thước của bộ truyền xích được tính toán thiết kế theo trình tự sau:
1. Chọn loại xích. Thông thường chọn xích ống con lăn.
2. Chọn số răng đĩa xích nhỏ, z1 = 29 – 2u ≥19. Tính z2 = uz1.
3. Tính bước xích px, lấy px theo dãy số tiêu chuẩn. Kiểm tra điều kiện px ≤ pxmax. Nếu
không thoả mãn, phải tăng số dãy xích để giảm giá trị bước xích.
4. Tính đường kính của đĩa xích. d1 = pxsinπ/z1(/); d2 = ud1..
5. Xác định sơ bộ khoảng cách trục asb.

Truyền động cơ khí- Vũ Thị Hạnh 130
- Lấy asb = (30÷50).px.
6. Kiểm tra điều kiện asb > (d1 + d2)/2 + 2h.; h là chiều cao của răng đĩa xích. Tính góc ôm
α1. Kiểm tra điều kiện α1 ≥ 1200. Nếu không thoả mãn, phải điều chỉnh khoảng cách trục
asb.
7. Tính chiều dài xích Lsb theo asb.
8. Tính số mắt xích Nx = Lsb/px. Lấy Nx là số chẵn.
9. Tính chiều dài L = Nxpx.. Tính khoảng cách trục a theo L.
10. Để tránh lực căng ban đầu trong xích, bớt khoảng cách trục a đi một lượng
∆a = (0,002 ÷ 0,004).a.
11. Tính chiều rộng B của đĩa xích.
12. Vẽ kết cấu đĩa xích dẫn và đĩa xích bị dẫn.
13. Tính lực tác dụng lên trục Fr
7.6. Đánh giá bộ truy ền xích
Ưu điểm
- Có thể truyền chuyển động giữa các trục cách nhau tương đối lớn (amax = 8m).
- Khuôn khổ kích thước nhỏ hơn so với truyền động đai.
- Không có hiện tượng trượt (trượt đàn hồi, trượt trơn) như truyền động đai.
- Có thể cùng một lúc truyền chuyển động cho nhiều trục.
- Lực tác dụng lên trục nhỏ hơn truyền động đai vì không cần căng xích với lực căng ban
đầu.
Nhược điểm
- Do có sự va đập khi vào khớp nên có nhiều tiếng ồn khi làm việc, vì vậy không thích hợp
với vận tốc cao.
- Đòi hỏi chế tạo, lắp ráp chính xác hơn so với truyền động đai. Yêu cầu chăm sóc và bảo
quản thường xuyên (bôi trơn, điều chỉnh làm căng xích).
- Vận tốc và tỷ số truyền tức thời không ổn định.
- Chóng mòn khớp bản lề, nhất là khi bôi trơn không tốt và làm việc nơi bụi bẩn.
Phạm vi sử dụng
- Truyền động với khoảng cách trục trung bình và yêu cầu kích thước nhỏ gọn, làm

Truyền động cơ khí- Vũ Thị Hạ
việc không có trượt.
- Thích hợp với vận tốc thấp, th
- Công suất truyền dẫn P = 120 kw; kho
- Vận tốc thông thường: V =
Chương 8: Truyền đ
8.1. Khái niệm chung
8.1.1. Giới thi ệ
Bộ truyền đai thường dùng đ
chiều (Hình 7.1), trong một số
quay ngược chiều - truyền độ
đai nửa chéo (Hình 7-2).
Bộ truyền đai thông thường gồ
- Bánh đai dẫn số 1, có đư
n1, công suất truyền độ
ũ ị Hạnh
p, thường lắp ở đầu ra của các hộp giảm tốc.
120 kw; khoảng cách trục lớn nhất amax = 8 m.
= 15m/s, đôi khi có thể tới 35 m/s;
n động đai (3 tiết)
ệu bộ truy ền đai
ng dùng để truyền chuyển động giữa hai trục song song và quay cùng
ố trường hợp có thể truyền chuyển động giữa các tr
ộng đai chéo, hoặc truyền giữa hai trục chéo nhau
Hình 8. 1
ồm 4 bộ phận chính:
1, có đường kính d1, được lắp trên trục dẫn I, quay v
ộng P1, mô men xoắn trên trục T1.
Hình 8. 2
131
8 m.
c song song và quay cùng
a các trục song song
c chéo nhau - truyền động
n I, quay với số vòng quay

Truyền động cơ khí- Vũ Thị Hạ
- Bánh đai bị dẫn số 2, có đư
quay n2, công suất truy
- Dây đai 3, mắc vòng qua hai
bánh đai.
- Bộ phận căng đai, t
căng ban đầu 2F0 kéo c
hai nhánh đai. Để tạ
căng F0, có thể dùng tr
lượng động cơ (Hình
dùng vít đẩy, hoặc dùng
bánh căng đai.
ũ ị Hạnh
2, có đường kính d2, được lắp trên trục bị dẫn II, quay v
t truyền động P2, mô men xoắn trên trục T2.
qua hai
ạo lực
o căng
ạo lực
dùng trọng
ình 7.3),
c dùng Hình 8. 3
132
n II, quay với số vòng

Truyền động cơ khí- Vũ Thị Hạ
Nguyên lý làm việc của bộ truy
xúc của dây đai và bánh đai có áp su
trượt tương đối giữa dây đai và bánh
động và dây đai lại kéo bánh b
sang bánh bị dẫn nhờ lực ma sát gi
8.1.2. Các loại đ
ũ ị Hạnh
truyền đai: dây đai mắc căng trên hai bánh đai,
đai có áp suất, có lực ma sát Fms. Lực ma sát cả
đai và bánh đai. Do đó khi bánh dẫn quay sẽ kéo dây
i kéo bánh bị dẫn quay. Như vậy chuyển động đã được truy
c ma sát giữa dây đai và các bánh đai.
i đai và kết cấu bánh đai
Hình 8. 5
Hình 8. 4
Hình 8. 6
133
hai bánh đai, trên bề mặt tiếp
ản trở chuyển động
kéo dây đai chuyển
c truyền từ bánh dẫn

Truyền động cơ khí- Vũ Thị Hạ
Tùy theo hình dạng của dây đai, b
Đai dẹt, hay còn gọi là đai ph
- Tiết diện đai là hình chbánh đai hình trụ tròn, thẳng hoặc hình tang trlàm việc là mặt rộng củ
- Kích thước b và h củđược tiêu chuẩn hóa. Giá trdày h thường dùng là 3mm. Giá trị chiều rộdùng 20; 25; 32 40; 5090; 100;.... mm.
- Vật liệu chế tạo đai dbông, sợi len, sợi tổng hsu. Trong đó đai vải cao su
- Đai vải cao su gồm nhisunfua hóa. Các lớp vđể liên kết, bảo vệ các lvới bánh đai. Đai vải cao su cuộn, người thiết kế cắthành vòng kín. Đai đưdùng bu lông kẹp chặtạo thành vòng kín, do đđược tiêu chuẩn hóa.
Đai thang
- Tiết diện đai hình thang, bánh thang, thường dùng nhitruyền.
- Vật liệu chế tạo đai thang là vxếp hoặc lớp sợi bện chphía ngoài đai, lớp cao su chĐai thang làm việc theo hai m
- Hình dạng và diện tích tichuẩn hóa. TCVN 2332thường Z, O, A, B, C, D. TCVN 3210loại đai thang hẹp SPZ, SPA, SPB.
- Đai thang được chế tạtruyền đai thang thường dùng có chi1000, 1120, 1250, 1400, 1600, 1800, 2000, 2240, 2500, 4500, 5000... mm.
Đai tròn
- Tiết diện đai hình tròn, bánh thường dùng để truyền công su
ũ ị Hạnh
a dây đai, bộ truyền đai được chia thành các loại:
đai phẳng.
ình chữ nhật hẹp, tròn, đường sinh
c hình tang trống, bề mặt ủa đai. ủa tiết diện đai
n hóa. Giá trị chiều ng dùng là 3; 4,5; 6; 7,5
ộng b thường 50; 63; 71; 80;
đai dẹt là: da, sợi ng hợp, vải cao
i cao su được dùng rộng rãi nhất. m nhiều lớp vải bông và cao su p vải chịu tải trọng, cao su dùng các lớp vải, và tăng hệ số ma sát
i cao su được chế tạo thành ắt đủ chiều dài cần thiết và nối
Đai được nối bằng cách may, hoặc ặt. Đai sợi tổng hợp được chế
, do đó chiều dài của đai cũng
ình thang, bánh đai có rãnh hình ng dùng nhiều dây đai trong một bộ
đai thang là vải cao su. Gồm lớp sợi n chịu kéo, lớp vải bọc quanh
p cao su chịu nén và tăng ma sát. c theo hai mặt bên. n tích tiết diện đai thang được tiêu
n hóa. TCVN 2332-78 quy định 6 loại đai thang ng Z, O, A, B, C, D. TCVN 3210-79 quy định 3
p SPZ, SPA, SPB. ạo thành vòng kín, chiều dài đai cũng được tiêu chung dùng có chiều dài: 400, 450, 500, 560, 630, 710, 800, 900,
1000, 1120, 1250, 1400, 1600, 1800, 2000, 2240, 2500, 2800, 3150, 3550, 4000,
ình tròn, bánh đai có rãnh hình tròn tương ứng chứn công suất nhỏ.
Hình 8. 7
134
c tiêu chuẩn hóa. Bộ u dài: 400, 450, 500, 560, 630, 710, 800, 900,
2800, 3150, 3550, 4000,
ứa dây đai. Đai tròn
7
Hình 8. 8

Truyền động cơ khí- Vũ Thị Hạ
- Đai hình lược, là trường hnhau như răng lược. M2÷20, tối đa là 50 răng. Ti
Đai hình lược
- Cũng chế tạo thành vòng kín, tr
Đai răng
- Là một dạng biến thể răng, bánh đai có răng gnguyên tắc ăn khớp là ch
- Cấu tạo của đai răng bao gchất dẻo.
- Thông số cơ bản của đchuẩn của m: 1; 1,5; 2;
- Dây đai răng được chếtự như đai hình thang.
Trên thực tế, bộ truyền đai dẹ
này chủ yếu trình bày bộ truyề
Kết cấu bánh đai
ũ ị Hạnh
ng hợp đặc biệt của bộ truyền đai thang. Các đc. Mỗi răng làm việc như một đai thang. Số ăng. Tiết diện răng được tiêu chuẩn hóa.
o thành vòng kín, trị số tiêu chuẩn của chiều dài tương t
của bộ truyền đai. Dây đai có hình dạng gầăng gần giống như bánh răng. Bộ truyền đai ră
p là chính, ma sát là phụ, lực căng trên đai khá nhđ ăng bao gồm các sợi thép bện chịu tải, nền và răng b
a đai răng là mô đun m, mô đun được tiêu chu; 3; 4; 5; 7; 10 mm. ế tạo thành vòng kín. Giá trị tiêu chuẩn của chi ẹt và đai thang được dùng nhiều hơn cả. Vì v
ền đai dẹt và đai thang.
Hình 8. 9 u bánh đai
Hình 8. 10 135
ai thang. Các đai được làm liền răng thường dùng
ương tự như đai thang.
ần giống như thanh đai răng làm việc theo
đai khá nhỏ. ăng bằng cao su hoặc
c tiêu chuẩn hóa, gía trị tiêu
a chiều dài đai tương
. Vì vậy, trong chương

Truyền động cơ khí- Vũ Thị Hạ
Kết cấu bánh đai phụ thuộc vào lo
có đường kính d ≤ 100mm thư
Khi đường kính lớn hơn dùng bánh
(hình 7.10d) để giảm bớt khối lư
với đai, moayơ để lắp lên trụ
thước rãnh đai hình thang đượ
Với đai thang, góc chêm φ trên bánh
380, 400 bởi vậy khi mắc đai lên bá
hòa chịu kéo, phần dưới chịu nén
của đai bị giảm xuống ⇒ cần ph
bánh đai xuống cho phù hợp, nh
đều hơn cho đai và bánh đai. đư
nhỏ ⇒ đai càng bị biến dạng nhi
của bánh đai càng nhỏ.
8.1.3. Các thông số hình h
ũ ị Hạnh
Hình 8. 11 c vào loại đai, khả năng công nghệ và quy mô s
ường được chế tạo bằng dập, đúc, không khoét l
ơn dùng bánh đai khoét lõm, có lỗ (hình 7.9b) hoặc có 4
i lượng ⇒ bánh đai thường gồm có ba phần: vành ngoài ti
ục và đĩa hay nan hoa nối vành với moayơ.V
ợc tiêu chuẩn hóa ( ϕ,e, t, c, B) (hình 7.11).
ên bánh được lấy nhỏ hơn góc chêm trên dây đ
đai lên bánh đai và bộ truyền làm việc, phần đai ph
u nén → Góc chêm thực tế
n phải giảm góc chêm của
p, nhờ đó tải trọng sẽ phân bố
đai. đường kính bánh đai càng
ng nhiều hơn ⇒ lấy góc chêm
hình học chủ yếu của bộ truy ền đai
Hình 8.
136
và quy mô sản xuất. Bánh đai
úc, không khoét lõm (hình 7.9a).
c có 4 đến 6 nan hoa
n: vành ngoài tiếp xúc
Với đai thang: Kích
n góc chêm trên dây đai: φ = 340, 360,
đai phần trên lớp trung
Hình 8. 12

Truyền động cơ khí- Vũ Thị Hạ
Đường kính tính toán của bánh đ
của vòng tròn tiếp xúc với lớp trung hòa c
kéo, mà cũng không bị nén khi dây
Khoảng cách trục a,
Là khoảng cách giữa tâm bánh đ
ôm α1 càng nhỏ ( trường hợp u
sẽ tăng ảnh hưởng đến tuổi th
đảm bảo α1 ≥1500 với đai dẹt và
Với đai dẹt amin = (1,5 ÷ 2)( d
- Hệ số 1,5 dùng cho bộ
- Hệ số 2 dùng cho bộ truy
Với đai thang amin = 0,55( d
Tuy nhiên nếu khoảng cách tr
dao động ngang của đai sẽ lớ
thang, vì vậy với bộ truyền đai thang a
Khi thiết kế từ khoảng cách tr
theo tiêu chuẩn (với đai thang). Tr
trong 1 giây i không quá lớn (do yêu c
- Với đai dẹt i = 3 ÷ 5;
- Với đai thang, đai lược i = 20 ÷30.
Góc ôm trên nhánh đai
Góc ôm của dây đai trên bánh d
ũ ị Hạnh
Hình 8. 13 a bánh đai: của bánh đai dẫn d1, của bánh bị dẫn d
p trung hòa của dây đai. Lớp trung hoà của đ
nén khi dây đai vòng qua các bánh đai.
d2 = d1.u.(1-ξ).
a tâm bánh đai dẫn và bánh bị dẫn; Khoảng cách trục a càng nh
p u ≠ 1) làm giảm khả năng tải, tần số thay đổi
i thọ vì vậy cần phải giới hạn khoảng cách trụ
t và α1 ≥1200 với đai thang.
(1,5 ÷ 2)( d1+ d2);
ộ truyền quay nhanh.
truyền vận tốc trung bình.
0,55( d1+ d2)+h.
ng cách trục quá lớn thì khuôn khổ kích thước bộ truy
ớn ảnh hưởng lớn đến sự làm việc (nhất là v
đai thang amax = 2 (d1 + d2)
ng cách trục a đã chọn ta xác định chiều dài L theo công th
đai thang). Trị số a, L phải thoả mãn điều kiện số
n (do yêu cầu về tuổi thọ):
20 ÷30.
i
ai trên bánh dẫn α1, trên bánh bị dẫn α2.
137
n d2. Là đường kính
a đai là lớp không bị
c a càng nhỏ thì góc
i ứng xuất trong đai
ục tối thiểu amin để
truyền cồng kềnh và
t là với bộ truyền đai
o công thức và làm tròn
vòng chạy của đai

Truyền động cơ khí- Vũ Thị Hạ
α1 = 180
Chiều dài dây đai L;
Được đo theo lớp trung hòa c
a được xác định như sau:
(
4
1La −= π
Các thông số khác
Số dây đai trong bộ truyền đai h
Diện tích tiết diện mặt cắt ngang c
Đối với đai dẹt, A = b x h. V
Đối với đai thang, A = A0. z. V
Chiều rộng bánh đai B1, B2. Thông th
Đối với bánh đai dẹt, lấy B =
Đối với bánh đai thang, lấy B
8.2. Cơ học truyền động đai
8.2.1. Vận tốc và t
Gọi v1 và v2 là vận tốc vòng trên bánh d
Trong đó: d1, d2 [mm]; n1, n2 [vòng /phút].
Do có hiện tượng trượt đàn hồ
xuống: v2 < v1.
Do đó thể việt: v2 = v1 (1- ξ),
Suy ra tỷ số truyền u của bộ truy
ũ ị Hạnh
180 - β; α2 = 1800 + β; β ≅ 570.(d2 -d1) / a
p trung hòa của dây đai. Quan hệ giữa chiều dài dây đai và kho
a
ddddaL
4
)(
2
)(2
21212 −+++≈ π
[ ] 1221212 )(2
2
)(
2
)(dd
ddL
dd −−+−++ π
đai hình thang, z.
t ngang của dây đai, A;
h. Với b là chiều rộng, h là chiều cao của tiết diệ
z. Với A0 là diện tích tiết diện của một dây đai.
. Thông thường B1 = B2 bằng chiều rộng tính toán B.
= 1,1.b + (10÷15).
y B = (z - 1).pth + 2.e
ng đai
c và tỷ số truy ền
c vòng trên bánh dẫn và bánh bị dẫn
[vòng /phút].
ồi giữa dây đai và bánh đai, vận tốc vòng củ
ξ), ξ được gọi là hệ số trượt.
truyền đai:
138
đai và khoảng cách trục
2
ện.
đai.
ng tính toán B.
ủa bánh bị dẫn giảm

Truyền động cơ khí- Vũ Thị Hạ
Nếu bỏ qua hiện tượng trượt:
8.2.2. Lực tác d
Khi chưa làm việc, dây đai đư
lực ban đầu F0. Khi chịu tải tr
và T2 trên trục II, xuất hiện lự
nhánh đai căng thêm, gọi là nhánh c
bánh bớt căng đi.
• Lúc này lực căng trên nhánh c
F0 + Ft /2, lực căng trên nhánh không
căng:
F2 = F0 - Ft /2.
Khi các bánh đai quay, dây đai b
khỏi bánh đai. Trên các nhánh đ
căng Fv = qm.v2, với qm là kh
đai. Lực Fv còn có tác hại làm gi
• Lúc này trên nhánh đai că
lực F2 = F0 - Ft /2 + F
Lực tác dụng lên trục và ổ mang b
đường trục bánh đai, có chiều kéo hai bánh
Giá trị của Fr được tính như sau: F
8.2.3. Ứng suất trong đ
Dưới tác dụng của lực căng F1
Tương tự, trên nhánh đai không c
ũ ị Hạnh
c tác dụng trong bộ truy ền truy ền đai
đai được kéo căng bởi
i trọng T1 trên trục I
c vòng Ft, làm một
i là nhánh căng, và một
ăng trên nhánh căng: F1 =
ăng trên nhánh không
ai quay, dây đai bị ly tâm tách xa
ai. Trên các nhánh đai chịu thêm lực
là khối lượng của 1 mét
i làm giảm lực ma sát giữa dây đai và các bánh đai.
đai căng có lực F1 = F0 + Ft /2 + Fv, trên nhánh đ
/2 + Fv
mang bộ truyền đai là lực hướng tâm Fr, có phươ
u kéo hai bánh đai lại gần nhau.
ư sau: Fr = 2.F0.cos(γ/2).
t trong đai
1, trên nhánh đai căng có ứng suất
đai không căng có
Hình 8.
139
đai.
trên nhánh đai không căng có
, có phương vuông góc với
Hình 8. 14

Truyền động cơ khí- Vũ Thị Hạ
Với là ứng suất do lự
ứng suất có ích do lự
Đương nhiên σ1 > σ2.
Ngoài ra, khi dây đai vòng qua bánh
Trong đó E là mô đun đàn hồi c
Tương tự, khi dây đai vòng qua bánh
Ta thấy σu2 < σu1.
Sơ đồ phân bố ứng suất trong dây
Quan sát sơ đồ ứng suất trong đ
tiết diện của đai sẽ thay đổi từ
đến giá trị
Như vậy dây đai sẽ bị hỏng do m
của đai thay đổi 4 lần. Để hạn ch
truyền đai, có thể khống chế s
Để cho σu1 và σu2 không quá l
ũ ị Hạnh
ực căng phụ Fv gây ra
ực vòng Ft gây ra
òng qua bánh đai 1, nó bị uốn, trong đai có ứng suất u
σu1 = E.h/d1.
i của vật liệu đai.
òng qua bánh đai 2, trong đai có
σu2 = E.h/d2.
t trong dây đai, dọc theo chiều dài của đai được trình bày trên hình
t trong đai, ta có nhận xét: Khi bộ truyền làm việ
ừ giá trị
σmin = σ2
σmax = σ1 + σu1.
ng do mỏi. Khi dây đai chạy đủ một vòng, ứng su
n chế số chu kỳ ứng suất trong đai, kéo dài th
số vòng chạy của đai trong một dây.
không quá lớn, chúng ta nên chọn tỷ lệ d1/h trong khoảng t
Hình 8. 15 140
t uốn
c trình bày trên hình
ệc, ứng suất tại một
ng suất tại mỗi tiết diện
ai, kéo dài thời gian sử dụng bộ
ng từ 30÷ 40.

Truyền động cơ khí- Vũ Thị Hạ
8.2.4. Hiện tượng trư
a) Trượt đàn hồi
Trên bánh dẫn (1), đai vào tiế
λ1, đai rời khỏi bánh đai tại B v
Do F1 > F2 nên λ1 > λ2 ⇒ khi đ
bánh dẫn, đai chạy chậm hơn bánh d
chạy nhanh hơn bánh bị dẫn.
Hiện tượng trượt trên đây là k
được gọi là trượt đàn
hồi.Trượt đàn hồi càng
nhiều khi chênh lệch lực
căng Ft = F1 - F2 càng lớn,
do đó muốn truyền được
lực vòng, không thể tránh
khỏi trượt đàn hồi ⇒ trượt
đàn hồi không thể khắc
phục được. Tuy nhiên,
trượt đàn hồi không xảy ra
trên toàn bộ cũng ôm AB = α
mới vào tiếp xúc, sự thay đổi l
chỉ sau cung tĩnh, sự thay đổi c
IB và KD gọi là cung trượt. Cung AI và CK g
b) Trượt trơn
- Khi tải trọng Ft càng tă
- Khi lực vòng Ft tăng lên
đai, tức là khi bộ truyề
ra hiện tượng trượt trơn hoàn toàn gi
hiệu suất của bộ truyề
việc với tải trọng thích h
ũ ị Hạnh
ượt trong bộ truy ền đai
ếp xúc với bánh đai tại A với lực căng F1 ⇒ bi
i B với lực căng là F2 ⇒ biến dạng của đai là λ2
khi đai vòng qua bánh dẫn, đai bị co lại, sinh ra s
ơn bánh dẫn. Ngược lại, trên bánh bị dẫn, đai b
đây là kết quả của biến dạng đàn hồi khác nhau trên hai nhánh
α1 và CD = α2, mà chỉ xảy ra trên cũng IB và KD (b
i lực căng còn nhỏ ⇒ biến dạng đàn hồi thay đ
i của biên dạng đàn hồi mới rõ rệt ⇒ sự trượt m
t. Cung AI và CK gọi là cung tĩnh.
càng tăng thì cung trượt càng lớn, cung tĩnh càng gi
ăng lên đến mức Ft lớn hơn lực ma sát Fms sinh ra gi
ền bị quá tải, khi đó cung trượt chiếm toàn b
trơn hoàn toàn giữa dây đai và bánh đai dẫn: bánh b
ền bằng không. Có thể tránh trượt trơn bằng cách cho
ng thích hợp
Hình 8. 16
141
biến dạng của đai là
i, sinh ra sự trượt giữa đai và
đai bị dãn dần ra, đai
i khác nhau trên hai nhánh đai và
ũng IB và KD (bởi vậy, khi
i thay đổi chưa đáng kể,
t mới bắt đầu). Cung
nh càng giảm.
sinh ra giữa đai và bánh
m toàn bộ cung ôm ⇒ Xảy
n: bánh bị dẫn dừng lạii,
ng cách cho đai làm

Truyền động cơ khí- Vũ Thị Hạ
- Trượt đàn hồi và trượt trơ
cho đai và bánh đai mau m
8.2.5. Khả năng kéo, đư
- Khả năng kéo của bộ
Bỏ qua lực căng phu F
hay
- Trong đó:
gọi là hệ số kéo
- Khả năng kéo của bộ
phụ thuộc vào lực căng ban
F0 và hệ số kéo ψ (tức là vào h
số ma sát f* giữa đai và bánh
và góc ôm α1 trên bánh đ
- Để nghiên cứu ảnh hư
trượt trong bộ truyền đ
suất truyền động, và m
nghiệm, xây dựng đườ
kéo ψ, giữa hiệu suất η
Khi hệ số kéo thay đổi từ 0 đ
tăng, đồng thời hiệu suất η cũng t
Khi ψ biến thiên từ ψ0 đến ψmax
trơn từng phần, hiệu suất của b
Khi ψ = ψmax bộ truyền trượt trơ
Tại giá trị ψ = ψ0 bộ truyền có hi
phần. Lúc này bộ truyền đã sử
ũ ị Hạnh
t trơn làm cho tỷ số truyền của bộ truyền đai không
đai mau mòn.
ăng kéo, đường cong trượt, đường cong hiệu suất
truyền đai đặc trưng bằng lực vòng Ft (hoặc momen xo
ăng phu FV do lực ly tâm gây nên, ta có:
được
ộ truyền đai
ăng ban đầu
c là vào hệ
đai và bánh đai
trên bánh đai).
nh hưởng của sự
n đai đến hiệu
ng, và mất vận tốc của bánh đai bị dẫn. Người ta ti
ờng cong biểu diễn quan hệ giữa hệ số trượt
η với hệ số kéo
)1(1
2
ξ−=
d
du ,
2
112
)1(.
d
dnn
ξ−=
0 đến ψ0, lúc này trong bộ truyền chỉ có trượt đ
ũng tăng.
max hệ số trượt tăng nhanh, lúc này trong bộ
bộ truyền giảm rất nhanh.
t trơn hoàn toàn, hiệu suất bằng 0, còn hệ số trư
n có hiệu suất cao nhất, mà vẫn chưa có hiện tư
ử dụng hết khả năng kéo. Đây là trạng thái làm vi
Hình 8. 17
142
đai không ổn định, làm
c momen xoắn T1).
i ta tiến hành các thí
với hệ số
t đàn hồi, hệ số trượt
truyền đai có trượt
trượt bằng 1.
n tượng trượt trơn từng
ng thái làm việc tốt nhất của
17

Truyền động cơ khí- Vũ Thị Hạnh 143
bộ truyền. Giá trị ψ0 gọi là hệ số kéo tới hạn của bộ truyền. Khi tính thiết kế bộ truyền đai, cố
gắng để bộ truyền làm việc trong vùng bên trái sát với đường ψ = ψ0.
8.3. Tính bộ truyền đai
8.3.1. Chỉ tiêu tính toán bộ truy ền đai
Trong quá trình làm việc bộ truyền đai có thể bị hỏng ở các dạng sau:
- Trượt trơn, bánh đai dẫn quay, bánh bị dẫn và dây đai dừng lại, dây đai bị mòn cục
bộ.
- Đứt dây đai, dây đai bị tách rời ra không làm việc được nữa, có thể gây nguy hiểm
cho người và thiết bị xung quanh. Đai thường bị đứt do mỏi.
- Mòn dây đai, do có trượt đàn hồi, trượt trơn từng phần, nên dây đai bị mòn rất nhanh.
Một lớp vật liệu trên mặt đai mất đi, làm giảm ma sát, dẫn đến trượt trơn. Làm giảm
tiết diện đai, dẫn đến đứt đai.
- Dão dây đai, sau một thời gian dài chịu kéo, dây đai bị biến dạng dư, dãn dài thêm
một đoạn. Làm giảm lực căng, tăng sự trượt. Làm giảm tiết diện đai, đai dễ bị đứt.
- Mòn và vỡ bánh đai, bánh đai mòn chậm hơn dây đai. Khi bánh đai mòn quá giá trị
cho phép bộ truyền làm việc không tốt nữa. Bánh đai làm bằng vật liệu giòn, có thể bị
vỡ do va đập và rung động trong quá trình làm việc.
Để hạn chế các dạng hỏng kể trên, bộ truyền đai cần được tính toán thiết kế hoặc kiểm tra bền
theo các chỉ tiêu sau:
σt ≤ [σt]
U ≤ [U];
ψ ≤ ψ0
σ0 ≤ [σ0]
Trong đó σt là ứng suất có ích trong đai, do lực Ft gây nên,
- [σt] là ứng suất có ích cho phép của dây đai,
- U là số vòng chạy của đai trong một dây,
- [U] là số vòng chạy cho phép của đai trong một giây,
- σ0 là hệ số kéo tới hạn của bộ truyền đai.
- σ0 là ứng suất ban đầu trong đai, do lực căng ban đầu F0 gây nên,

Truyền động cơ khí- Vũ Thị Hạ
- [σ0] là ứng suấ
8.3.2. Tính toán đ
Với đai dẹt: A = b.h với b và h: b
Lực vòng:
với N1: công suất trên bánh chu
Ứng suất có ích σt: A
FK tt
.=σ
Trong đó
- K là hệ số tải tr
độ làm việc của b
- Đối với đai dẹt, di
- Đối với đai thang, di
Ứng suất có ích cho phép [σt] đư
Trong đó
- [σt]0 là ứng suất có ích cho phép c
xác định ứng suất có ích cho phép. B
việc v1 = 10 m/s, đặt n
sổ tay cơ khí. Đối với đ
- Cα là hệ số điều chỉnh, k
tra bảng, hoặc tính gần đ
- Cv là hệ số kể đến độ l
hoặc tính gần đúng theo công th
- Cb là hệ số kể đến vị trí c
- Đối với đai thang, v
- Đối với đai dẹt, n
- nếu 60 < β ≤ 80
ũ ị Hạnh
ất ban đầu cho phép của dây đai.
.3.2. Tính toán đai dẹt
i b và h: bề rộng và chiều cao của đai dẹt.
t trên bánh chu động [kW]; v: vận tốc đai [m/s]
Ad
TK
.
.2.
1
1=
trọng, giá trị của K phụ thuộc vào đặc tính c
a bộ truyền. Có thể lấy trong khoảng 1,0 ÷ 1,25.
t, diện tích tiết diện đai A = b.h,
đai thang, diện tích tiết diện đai A = z.A0.
] được xác định theo công thức:
[σt] = [σt]0.Cα.Cv.Cb
t có ích cho phép của bộ truyền chuẩn, được chọn làm thí nghi
t có ích cho phép. Bộ truyền chuẩn có góc σ1 =
t nằm ngang, tải trọng không có va đập. Giá tr
i đai vải cao su, có thể lấy trong khoảng 2,1 ÷ 2,4 MPa.
nh, kể đến độ lệch của góc α1 so với chuẩn. Giá tr
n đúng theo công thức:
Cα = 1 - 0,003.(1800 - α1)
lệch của vận tốc v1 so với chuẩn. Giá trị của C
đúng theo công thức:
Cv = 1,04 - 1,0004.v12.
rí của bộ truyền. Có thể chọn như sau:
đai thang, với mọi vị trí của bộ truyền luôn lấy Cb =
t, nếu 0 ≤ β ≤ 600, thì chọn Cb = 1
800, thì chọn Cb = 0,9
144
c tính của tải trọng và chế
ng 1,0 ÷ 1,25.
n làm thí nghiệm để
= 1800, vận tốc làm
Giá trị của [σt]0 tra trong
ng 2,1 ÷ 2,4 MPa.
n. Giá trị của Cα có thể
a Cv có thể tra bảng,
= 1.

Truyền động cơ khí- Vũ Thị Hạ
- nếu 80 < β ≤ 90
Thay thế A, Ft vào [σt] suy ra công th
Thông thường chọn h theo d1
trên bánh đai nhỏ, khi h/d1 quá l
8.3.3. Tính toán đ
- Gọi z là số đai.
- Tiết diện đai hình thang: A
- trong đó: A1: di
đai thang được ch
trong các tài liệ
- Điều kiện bền:
Trong đó:
- N: công suất tác dụng trên bánh d- [N] = A.v.[σ ]: công suất có
- - [N]: công suất có ích cho phép xác
d1 xác định và vận tốc v khác nhau, vα1 = 1800, chiều dài l0, làm vitiết máy).
- Cα: hệ số xét đến ảnh hưởtăng). - Cu: hệ số xét đến ảnh hư
khi vòng qua bánh đai l- CL: hệ số xét đến ảnh hư
suất trong đai giảm ⇒ - Cz: hệ số xét đến sự phân b
trọng càng phân bố không - Số đai z không nên quá 6
đều cho các đai, đồng th
ũ ị Hạnh
900, thì chọn Cb = 0,8.
suy ra công thức xác định bề rộng B của đai dẹt:
1 sao cho h/d1 không qua lớn, nhằm tránh ứng su
quá lớn ⇒ ứng suất uốn sinh ra trong đai sẽ quá l
.3.3. Tính toán đai thang
đai.
ình thang: A = A1.z,
: diện tích một đai, phụ thuộc vào loại tiết diệ
c chọn theo momen xoắn T1 tác dụng lên bánh d
ệu thiết kế chi tiết máy).
n:
ng trên bánh dẫn [kW] [ t có ích cho phép [kW]:
t có ích cho phép xác định bằng thực nghiệm cho mỗi loạ
c v khác nhau, với điều kiện số đai z = 1, tỷ số truy, làm việc không có va đập (Tra bảng trong các tài li
ởng của góc ôm α1 (khi α1 tăng ⇒ khả năng kéo c
nh hưởng của tỉ số truyền u (khi u tăng ⇒ d2 tăng, đđai lớn). nh hưởng của chiều dài đai L (khi L/L0 tăng ⇒
tuổi thọ bộ truyền tăng lên) phân bố không đều của tải trọng cho các đai
không đều trên các đai) ai z không nên quá 6 đai, và khi z càng lớn tải trọng càng phân b
ng thời làm tăng chiều rộng bánh đai.
145
ng suất uốn quá lớn
quá lớn.
ện đai, loại tiết diện
ng lên bánh dẫn (Tra bảng
ại tiết diện đai, ứng truyền u = 1, góc ôm
ng trong các tài liệu thiết kế chi
ăng kéo của bộ truyền
ăng, đai ít bị uốn hơn
tần số thay đổi ứng
(khi z tăng ⇒ tải
ng càng phân bố không đồng

Truyền động cơ khí- Vũ Thị Hạnh 146
8.4. Trình tự thiết kế bộ truy ền đai
Số liệu cho trước
- Công suất truyền lớn nhất N [kw],
- Số vòng quay trong một phút n1 của bánh dẫn,
- Tỷ số truyền u,
- Công dụng và điều kiện làm việc của bộ truyền,
- Cách bố trí bộ truyền.
Yêu cầu xác định
- Vật liệu đai (loại đai)
- Các kích thước cơ bản của tiết diện đai, kích thước của bánh đai,
- Khoảng cách trục a
- Chiều dài đai L,
- Số đai Z (với đai thang),
- Lực tác dụng lên trục của bô truyền
1. Kích thước của bộ truyền đai dẹt được tính toán thiết kế theo trình tự sau:
2. Chọn loại vật liệu đai. Tùy theo vận tốc dự kiến, và điều kiện làm việc, lựa chọn loại đai
vải cao su, đai sợi tổng hợp, hoặc đai vải. trong đó đai vải cao su được dùng nhiều hơn cả.
3. Xác định đường kính bánh đai nhỏ theo công thức kinh nghiệm:
3111 /).13001100( nPd ÷=
Có thể lấy d1 theo dãy số tiêu chuẩn 50, 55, 63, 71, 80, 90, 100, 112, 125, 140, 160,
180, 200, 224, 250, 280, 315,....
4. Tính vận tốc v1
- v1 = π.d1.n1/(6.104)
- kiểm tra điều kiện v1 ≤ vmax.
- Nếu không thỏa mãn thì phải giảm giá trị đường kính d1.
- Có thể lựa chọn vmax khoảng (20 ÷ 30) m/s.
5. Tính đường kính bánh đai bị dẫn d2,
- d2 = d1.u.(1-ξ),
- lấy giá trị của ξ trong khoảng 0,01 ÷ 0,02.
- Có thể lấy d2 theo dãy số tiêu chuẩn.

Truyền động cơ khí- Vũ Thị Hạnh 147
- Khi lấy d2 theo tiêu chuẩn, thì cần kiểm tra tỷ số truyền và số vòng quay n2. Điều
chỉnh d1 và d2 sao cho u và n2 không được sai khác với đầu bài quá 4%.
6. Xác định khoảng cách trục a và chiều dài L.
- Xác định chiều dài nhỏ nhất Lmin của đai
- Tính khoảng cách amin theo Lmin
- Kiểm tra điều kiện amin ≥ 2.(d1 + d2).
- Nếu thỏa mãn, lấy a = amin và lấy L = Lmin.
- Nếu không thỏa mãn, lấy a = 2.(d1 + d2). tính L theo theo a,
- Lấy thêm một đọan chiều dài L0 để nối đai, tùy theo cách nối đai có thể lấy L0 trong
khoảng 100 ÷ 400 mm.
7. Tính góc ôm α1 - Kiểm tra điều kiện α ≥ 1500
- Nếu không đạt, thì phải tăng khoảng cách trục a, và tính lại chiều dài L.
8. Xác định tiết diện đai.
- Chọn trước chiều cao h của đai, h ≤ 40/d1, lấy h theo dãy số tiêu chuẩn.
- Tính chiều rộng b của đai, lấy b theo dãy số tiêu chuẩn.
- Tính chiều rộng B của bánh đai.
- Lấy B = 1,1.b + (10 ÷15) mm.
- Chọn các kích thước khác của bánh đai, vẽ kết cấu bánh đai dẫn và bánh đai bị dẫn.
Kết cấu của bánh đai được chọn đảm bảo cho các phần thuộc bánh đai có sức bền đều.
9. Tính lực căng ban đầu F0, kiểm tra điều kiện căng ban đầu F0/(b.h) ≤ 1,8 MPa.
10. Tính lực tác dụng lên trục Fr.
8.5. Đánh giá bộ truy ền đai
Ưu điểm
- Kết cấu đơn giản, giá thành ha
- Làm việc êm, không ôn nhờ độ dẻo của đai ⇒ thích hợp với vận tốc v lớn Có khả
năng truyền động giữa hai trục xa nhau
- Để phỏng được quá tải cho máy, nhờ đai trượt trơn trên bánh đai khi quá tải.
Nhược điểm
- Khuôn khổ kích thước lớn (cũng điều kiện làm việc, đường kính bánh đai lớn hơn 5
lần đường kính bánh răng)
- Tỷ số truyền u khác hàng số, do sự trượt đàn hồi không tránh khỏi của đai.

Truyền động cơ khí- Vũ Thị Hạ
- Lực tác dụng lên trục và ôl
2 đến 3 lần so với lực tác d
- Tuổi thọ đai thấp (trongkho
Phạm vi sử dụng
- Truyền động đai đượ
Trong hệ truyền động cơ
sát với động cơ nhằm đ
- Truyền động đai được s
Chương 9: Truyền đ
9.1. Khái niệm chung
9.1.1. Giới thi ệu b
truy ền vít đai ốc
Bộ truyền vít đai ốc dùng đ
đổi chuyển động quay thành
chuyển động tịnh tiến, nhờ
tiếp xúc và đẩy nhau giữa ren
của đai ốc với ren trên trục vít.
Bộ truyền vít đai ốc có 2 bộ ph
- Vít số 1 có ren ngoài quay v
công suất truyền động P
T1. Vít có ren ngoài tươ
Trong trường hợp này vít là khâu d
- Đai ốc số 2, chuyển đ
v2, công suất trên đai
trong giống như đai
Trường hợp này đai ốc là khâu b
ũ ị Hạnh
c và ôlớn, do phải căng đai với lực căng ban đ
c tác dụng từ bộ truyền bánh răng trụyền đến tr
p (trongkhoảng từ 1000h đến 5000h).
ợc dùng khi cần truyền động giữa hai trục cách nhau khá xa.
ng cơ khê, đai thường đặt ở cấp nhanh (chịu tải nh
m để phỏng quá tải cho máy.
c sử dụng để truyền công suất dưới 50 kW, vậ
n động vít - đai ốc (2 tiết)
u bộ
c dùng để
ng quay thành
ờ
a ren
c vít.
phận chính:
quay với số vòng quay n1,
ng P1, mô men xoắn trên trục
. Vít có ren ngoài tương tự như bu lông.
p này vít là khâu dẫn.
n động tịnh tiến với vận tốc
đai ốc là P2. Đai ốc có ren
ư đai ốc trong mối ghép ren.
c là khâu bị dẫn.
Hình 9. 1
Hình 9.
148
ăng ban đầu F0 (lớn gáp từ
n trục và ô.
c cách nhau khá xa.
i nhỏ hơn) hay bố trí
ận tốc tới 30m/s.
Hình 9. 2

Truyền động cơ khí- Vũ Thị Hạ
Trong những bộ truyền khác, có th
vít là khâu bị dẫn, chuyển động t
Tùy theo yêu cầu về bố trí và
sử dụng có thể có các phương
án truyền động cảu vít và đai
ốc như sau:
- Vít quay, đai ốc tịnh
tiến (Hình 8.2a). Ví d
như chuyển động củ
bàn xe dao trong máy ti
- Vít vừa quay vừa tịnh ti
động của vít trong kích vít.
Đai ốc vừa quay vừa tịnh tiến, còn vít
ốc trong cơ cấu kẹp chặt của đ
ũ ị Hạnh
n khác, có thể đai ốc là khâu dẫn, đai ốc quay với số
ng tịnh tiến với vận tốc v2.
trí và
ương
đai
nh
). Ví dụ
ủa
bàn xe dao trong máy tiện.
nh tiến, còn đai ốc đứng yêu (Hình 8-2 b,c). Ví d
a vít trong kích vít.
n, còn vít đứng yên (Hình 8-2 d). Ví dụ như chuy
a đồ gá.
Hình 9. 3
Hình 9. 4
149
ố vòng quay n1; còn
). Ví dụ như chuyển
ư chuyển động của đai

Truyền động cơ khí- Vũ Thị Hạ
9.1.2. Phân loại bộ truy
Tùy theo hình dạng mặt cắt ngang c
loại:
- Vít có ren hình thang: lo
chiều. Ren được gia công d
- Vít có ren chữ nhật: Bộ
chuyển động dọc trục chính xác cao. Hi
khả năng tải không cao. Giá thành t
ũ ị Hạnh
truy ền vít - đai ốc
t ngang của tiết diện ren, bộ truyền vít đai ốc đư
Vít có ren hình thang: loại này được dùng phổ biến để truyền chuy
c gia công dễ dàng trên máy tiện ren.
ộ truyền loại này dùng để thực hiện
c chính xác cao. Hiệu suất truyền động cao. Tiết diện chân ren nh
i không cao. Giá thành tương đối đắt.
Hình 9. 5
150
c được chia thành các
n chuyển động theo hai
n chân ren nhỏ, nên

Truyền động cơ khí- Vũ Thị Hạ
- Vít có ren răng cưa: có hi
dùng truyền tải trọng theo m
- Vít có ren tam giác, gi
xác. Loại này có hiệu su
Bộ truyền vít đai ốc bi: (hình 8.4)
nhiều trong các máy tự động, đ
cần phải có đường dẫn hồi bi. Giá thành c
xác khi thực hiện dịch chuyển d
chỉnh, khử khe hở giữa bi và rãnh ch
người ta điều chỉnh lại khe h
này có giá thành cao hơn loạ
Trục vít có ren phải: nhìn vào
Trục vít có ren trái: theo hướng đ
Ngoài ra ren còn được phân thành lo
ren bước lớn, ren bước nhỏ.
9.1.3. Thông số hình h
ũ ị Hạnh
có hiệu suất truyền động cao, khả năng tải trung bình. Th
ng theo một chiều nhất định.
Vít có ren tam giác, giống như bu lông. Dùng để thực hiện chuyển đ
u suất truyền động thấp.
(hình 8.4) có ma sát nhỏ, hiệu suất truyền động cao.
ng, để thực hiện các dịch chuyển chính xác. Vít bi ch
i bi. Giá thành của bộ truyền vít đai ốc bi rất đắt.
n dọc trục, người ta dùng đai ốc bi hai nửa. Lo
a bi và rãnh chứa bi. Sau một thời gian sử dụng, bi và rãnh b
i khe hở, độ chính xác của bộ truyền được khôi ph
ại. Tùy theo chiều của đường xoắn vít, bộ truy
i: nhìn vào đường ren, theo hướng đi lên, ta thấy ren đ
ng đi lên, ren đi về phía tay trái.
c phân thành loại có một đầu mối, loại có hai hay nhi
hình học chủ yếu của bộ truy ền vít - đai ốc
Hình 9. 6
151
i trung bình. Thường
n động chậm, chính
ng cao. Được dùng
n chính xác. Vít bi chế tạo phức tạp,
t. Để tăng độ chính
a. Loại này có thể điều
ng, bi và rãnh bị mòn,
c khôi phục. Bộ truyền loại
truyền được chia ra:
y ren đi về phía tay phải.
i có hai hay nhiều đầu mối. Loại

Truyền động cơ khí- Vũ Thị Hạ
- Đường kính ngoài củ
vít d, đai ốc D. Còn g
đường kính danh nghĩa.
- Đường kính trong củ
vít d1 là đường kính c
vòng tròn đi qua chân ren.
(đường kính chân ren).
Đường kính trong của đ
D1, là đường kính vòng tròn
đi qua đỉnh ren của đai
- Đường kính trung bình c
- Số mối ren của trục vít
- Bước ren pr. Giá tr
với mỗi giá trị
- Ví dụ: với d =
d = 60 có b
- Bước xoắn vít px
- Góc nâng của đường xo
- Góc profil của tiết diện ren thang
- Chiều rộng của đai ốc B, c
ũ ị Hạnh
ủa trục
c D. Còn gọi là
ĩa.
ủa trục
ng kính của
i qua chân ren.
ng kính chân ren).
a đai ốc
ng kính vòng tròn
đai ốc.
ng kính trung bình của vít d2, của đai ốc là D2.
d2 = (d+d1)/2; D2 = (D1+D)/2.
c vít z; là số đầu mối của các đường xoắn vít.
. Giá trị của pr được tiêu chuẩn hóa lấy theo đư
của d có quy định ren bước nhỏ, bước bình th
= 40 có bước ren pr = 3; 6; 10.
60 có bước ren pr = 3; 8; 12.
px = z.pr.
ng xoắn vít γ tg γ = px/(π.d2).
n ren thang α
c B, cũng có thể gọi là chiều cao đai ốc H.
Hình 9. 7
Hình 9. 8
152
y theo đường kính d. Ứng
c bình thường và bước lớn.

Truyền động cơ khí- Vũ Thị Hạnh 153
- Chiều dài phần gia công ren trên trục vít lr.
- Khoảng cách giữa hai gối đỡ trục vít l0
- Chiều dài toàn bộ trục vít l
9.2. Tính toán bộ truy ền vít - đai ốc
9.2.1. Các dạng hỏng và chỉ tiêu tính toán
Trong khi làm việc, bộ truyền vít đai ốc có thể xảy ra các dạng hỏng:
- Mòn ren của vít và đai ốc. Do vận tốc trượt lớn, áp suất trên mặt ren lớn, nên tốc độ
mòn tương đối cao. Mòn làm tăng khe hở, giảm kích thước tiết diện ren, bộ truyền
làm việc không tốt nữa. Để hạn chế mòn ren, người ta tính toán bộ truyền vít đai ốc
theo các chỉ tiêu sau: p ≤ [p]
p là áp suất trên bề mặt tiếp xúc của ren, [p] là áp suất cho phép,
- Cắt đứt ren, hoặc dập bề mặt ren. Do tải trọng quá lớn, áp suất trên mặt ren lớn.
- Trục vít bị uốn cong, do mất ổn định. Các trục vít mảnh, chịu lực dọc trục lớn thường
có dạng hỏng này.
- Trục vít bị gẫy. Nếu tải trọng quá lớn, hoặc sử dụng quá thời gian cho phép, trục vít
không đủ bền, nó sẽ bị gẫy, hỏng.
Do đó người cần kiểm nghiệm bộ truyền vít đai ốc theo độ bền σtđ ≤ [σ] và độ ổn định (tính
về uốn dọc) Fa ≤ [Fa]
Trong đó: Fa là lực dọc trục tác dụng lên vít, [Fa] là lực dọc trục cho phép,
σtđ là ứng suất sinh ra trên tiết diện chân ren, có đường kính d1 của vít, [σtđ] là ứng
suất cho phép.
9.2.2. Tính toán bộ truy ền vít - đai ốc theo độ bền mòn
Áp suất trên bề mặt tiếp xúc của ren được tính theo công thức:
Hh
aa
d
FK
xhd
FKp
ψψππ ...
.
...
.222
== (16-4)
Trong đó:
K là hệ số tải trọng, có thể lấy K = 1÷1,25
h là chiều cao của tiết diện ren. h = ψh.pr
Hệ số chiều cao ren ψh có thể chọn như sau:

Truyền động cơ khí- Vũ Thị Hạnh 154
ψh = 0,5 đối với ren hình thang,
ψh = 0,75, đối với ren chữ nhật và ren răng cưa,
ψh = 0,54, đối với ren tam giác.
x là số vòng ren trên đai ốc, số vòng ren tiếp xúc x = H/pr = ψH.d2/pr
ψH là hệ số chiều cao đai ốc, ψH = H/d2 Có thể chọn giá trị của ψH trong khoảng 1,2 ÷ 1,5.
Áp suất cho phép [p] có thể chọn như sau:
+ Với bộ truyền bằng vật liệu thép tôi - đồng thanh, lấy [p] = 11 ÷ 13 MPa,
Với bộ truyền bằng vật liệu thép không tôi - đồng thanh, lấy [p] = 8 ÷ 10 MPa,
Với bộ truyền bằng vật liệu thép tôi - gang, lấy [p] = 4 ÷ 6 MPa.
Bài toán kiểm tra bền bộ truyền vít đai ốc được thực hiện như sau:
Tính áp suất p sinh ra trên mặt ren, theo công thức (16-4).
Xác định áp suất cho phép [p].
So sánh giá trị của p và [p], rút ra kết luận. Nêu p ≤ [p], bộ truyền đủ bền mòn.
Bài toán thiết kế bộ truyền theo độ bền mòn được thực hiện như sau:
Xác định áp suất cho phép [p].
Giả sử điều kiện (16-1) thoả mãn, sử dụng công thức (16-4), ta tính được
].[..
.2 p
FKd
Hh
a
ψψπ= (16-5)
Có d2 ta tính toán được các kích thước khác của bộ truyền.
9.2.3. Tính toán bộ truy ền vít - đai ốc theo độ bền
Ứng suất tương đương sinh ra trên tiết diện nguy hiểm của trục vít được tính theo thuyết bền
thứ tư: 22 .3 Xtd τσσ +=
Trong đó ứng suất pháp σ do lực Fa gây nên, 21.
.4
d
Fa
πσ =
Ứng suất tiếp τx do mô men xoắn gây nên, 31
231 .2,0.2
).'(.
.2,0 d
dtgF
d
T ax
ϕγτ +==
Trong đó φ’ - góc ma sát tương đương, γ -góc nâng của đường xoắn vít.
Ứng suất cho phép [σ] có thể lấy theo giới hạn chảy của vật liệu chế tạo trục vít,

Truyền động cơ khí- Vũ Thị Hạnh 155
[σ] = σch/s. Hệ số an toàn s có thể lấy bằng 3.
9.2.4. Tính toán bộ truy ền vít - đai ốc theo điều kiện ổn định
Lực dọc trục Fa được biết trước, hoặc tính toán từ tải trọng tác dụng lên bộ truyền.
Lực dọc trục cho phép [Fa] được xác định như sau:
2
2
)..(
..][
ta lS
JEF
µπ= (16-6)
Trong đó:
E là mô đun đàn hồi của vật liệu chế tạo trục vít, MPa.
J là mô men quán tính của tiết diện chân ren, 64
. 41d
Jπ=
S là hệ số an toàn, có thể lấy S = 2,5 ÷4
µ là hệ số liên kết của trục vít. Nếu hai đầu có ổ đỡ lấy µ = 1,nếu một đầu ngàm lấy
µ = 2.
lt là chiều dài tính toán ổn định.
Kiểm tra điều kiện ổn định của bộ truyền: So sánh giá trị của Fa và [Fa], nếu Fa ≤ [Fa], bộ
truyền đủ điều kiện ổn định.
9.3. Trình tự thiết kế bộ truy ền vít - đai ốc
Kích thước của bộ truyền vít đai ốc được tính thiết kế theo trình tự sau:
1. Chọn vật liệu chế tạo trục vít và vật liệu chế tạo đai ốc.
2. Xác định áp suất cho phép [p]; lực dọc [Fa] và ứng suất cho phép [σ].
3. Chọn các giá trị của hệ số chiều cao ren ψh và chiều cao đai ốc ψH.
4. Xác định đường kính trung bình d2. Chọn d2 theo tiêu chuẩn, xác định d và d1, các
kích thước khác của bộ truyền. Vẽ kết cấu của bộ truyền vít - đai ốc.
5. Kiểm tra điều kiện ổn định của trục vít. Nếu không thoả mãn, phải điều chỉnh kích
thước của bộ truyền.
6. Tính ứng suất tương đương. Kiểm tra độ bền của vít. Nếu không đủ bền, phải điều
chỉnh kích thước của trục vít.
7. Vẽ bản vẽ chế tạo trục vít, đai ốc.

Truyền động cơ khí- Vũ Thị Hạnh 156
9.4. Đánh giá bộ truyền vít - đai ốc
Chương 10: Các chi tiết máy đỡ nối (8 tiết)
10.1. Trục
10.1.1. Giới thi ệu chung về trục
Trục là một chi tiết máy dùng để đỡ các tiết máy quay, để truyền mômen xoắn hoặc để thực
hiện đồng thời cả hai nhiệm vụ trên.
a) Phân loại
Theo đặc điểm chịu tải phân ra:
Trục tâm: chỉ dùng để đỡ các CTM và chỉ chịu mômen uốn. Ví dụ như trục tàu hoả, trục
trước hoặc sau xe đạp v.v... Trục tâm có thể quay (trục tàu hoả) hoặc không quay (trục trước
hoặc sau xe đạp).
Trục truyền: vừa để đỡ các chi tiết máy quay, vừa để truyền mômen xoắn. Ví dụ trục giữa xe
đạp, trục trong các hộp giảm tốc...
Theo dạng đường tâm trục phân
ra: Trục thẳng: đường tâm trục
là đườngthẳng (hình 9.1a, b);
Trục khuỷu: đường tâm trục là
đường gãy khúc (hình 9.1c);
Trục mềm: đường tâm trục là
một đường thay đổi.
Theo cấu tạo trục phân ra: trục
trơn, trục bậc, trục đặc, trục
rỗng.
a) Kết cấu và vật liệu trục
Hình 10. 1

Truyền động cơ khí- Vũ Thị Hạ
Trục là một chi tiết phức tạp v
hưởng trực tiếp đến sự làm việ
trục cần phải chú ý đồng thờ
nghệ chế tạo, nhiệt luyện...
Kết cấu trục được xác định theo tr
và cố định các chi tiết máy lắp trên tr
Ngõng trục (1) là đoạn trục đ
theo trị số tiêu chuẩn. Các ngõng tr
mặt. Ngõng trục lắp với ổ lăn thư
hình trụ hoặc hình côn (để điề
Thân trục (2) là đoạn trục để
v.v... Vì có lắp ghép với các chi ti
bóng và độ chính xác cao. Các tr
Đoạn trục chuyển tiếp (3) là ph
thoát đá mài (h3.1.3a), là mặt lư
giảm tải.
Phần cố định các chi tiết máy l
Cố định theo phương dọc trụ
bằng độ dôi v.v... Cố định theo ph
độ dôi
ũ ị Hạnh
p về công nghệ và kết cấu. Trục làm việc t
ệc của các chi tiết máy lắp trên nó hoặc của c
ời đến các vấn đề về kết cấu, độ bền, độ cứ
nh theo trị số và tình hình phân bố lực tác dụng trên tr
p trên trục, phương pháp gia công và lắp ghép v.v...
c để lắp với ổ (ổ trượt hay ổ lăn). Đường kính ngõng tr
n. Các ngõng trục lắp với ổ trượt yêu cầu cao về độ bóng và
ăn thường có dạng hình trụ, ngõng trục lắp với
ều chỉnh ổ khi mòn).
lắp với các chi tiết máy quay như bánh răng, bánh
i các chi tiết máy quan trọng nên thân trục cần ph
chính xác cao. Các trị số đường kính thân trục cũng phải theo tr
là phần trục nằm giữa hai bậc trục. Chúng có th
t lượn với bán kính r không đổi hoặc thay đổi ho
t máy lắp trên trục (4):
ục: dùng vai trục, gờ trục, mặt côn, vòng chặ
nh theo phương tiếp tuyến có thể dùng then, then hoa ho
Hình 10. 2
157
c tốt hay xấu có ảnh
a cả máy. Khi thiết kế
ứng, dao động công
ng trên trục, cách bố trí
p ghép v.v...
ng kính ngõng trục phải lấy
bóng và độ cứng bề
i ổ trượt đỡ có dạng
ăng, bánh đai, đĩa xích
n phải chế tạo với độ
i theo trị số tiêu chuẩn.
c. Chúng có thể là đoạn rãnh
i hoặc có thể là rãnh
ặn, đai ốc hoặc lắp
dùng then, then hoa hoặc lắp bằng

Truyền động cơ khí- Vũ Thị Hạnh 158
Cố định theo phương tiếp tuyến: dùng then, then hoa, chốt hoặc lắp bằng độ dôi v.v....
10.1.2. Phương pháp tính toán thiết kế trục
1. Các dạng hỏng và chỉ tiêu tính toán
1. Phần lớn các trục, nhất là các trục ở máy quay nhanh thường bị gãy hỏng và mỏi do
tác dụng của ứng suất thay đổi có chu kỳ, do đó độ bền mỏi của trục là chỉ tiêu quan
trọng nhất về khả năng làm việc của trụ, nên ta cần tính toán trục theo độ bền mỏi.
2. Khi trục chịu quá tải đột ngột, chẳng hạn khi mở máy, trục có thể bị biến dạng dư quá
lớn hoặc gãy hỏng, cần kiểm nghiệm trục theo độ bền tĩnh.
3. Độ cứng uốn của trục có ảnh hưởng đến sự làm việc của các chi tiết máy quay và ổ
trục.
a. Ví dụ khi trục lắp bánh răng bị võng nhiều, phá hỏng sự ăn khớp chính xác
của cặp bánh răng gây nên tải trọng phân bố không đều dọc theo bề rộng vành
răng.
b. Khi góc xoay của trục tại chỗ ổ trục quá lớn, làm mòn vẹt mép ổ; làm thay đổi
khe hở giữa ngõng trục và lót ổ, phá hủy màng dầu bôi trơn ma sát ướt trong ổ
trượt
c. Biên dạng xoắn của các đoạn trục trong các cơ cấu như đầu phân độ máy
phay,... ảnh hưởng đến độ chính xác của chi tiết gia công.
d. Biên dạng xoắn của trục liền bánh răng ⇒ tăng sự phân bố không đều của tải
trọng trên bề rộng vành răng và giữa các bánh răng...
4. Do vậy, bên cạnh độ bền, cũng cần tính toán trục theo độ cứng uốn và độ cứng xoắn.
5. Đối với các trục quay nhanh, trục còn có thể bị hỏng do dao động ⇒ trong những
trường hợp này, cũng cần kiểm nghiệm trục về dao động.
2. Tính toán trục về độ bền
Chỉ tiêu quan trọng nhất đối với phần lớn các trục là độ bền, ngoài ra là độ cứng và đối với
các trục quay nhanh là độ ổn định dao động. Tính thiết kế trục về độ bền bao gồm các bước
sau đây:
- chọn vật liệu trục,
- xác định các ứng suất cho phép;
- tính sơ bộ đường kính trục;
- tính gần đúng đường kính các đoạn trục;

Truyền động cơ khí- Vũ Thị Hạ
- kiểm nghiệm trục về đ
- kiểm nghiệm trục về q
a) Tính sơ bộ đường kính tr
Để tính toán độ bền của trục, c
trục. Tuy nhiên, lúc đầu chỉ
phần chủ yếu của trục (như chi
uốn nên chưa thể xác định chính xác
vào momen xoắn T hoặc các công th
Tính theo momen xoắn T
Điều kiện bền về xoắn:
Suy ra:
- N: công suất truyền qua tr
- n: số vòng quay của trụ
- [τ]: ứng suất xoắn cho phép.
Với vật liệu trục là thép CT5, thép 45, 40Cr có th
với trục vào của hộp giảm tôc, tr
- Tính theo công thức th
cơ điện bằng khớp nối:
- đường kính trục bị dẫn: d
b) Tính gần đúng đường kính các
Từ đường kính trục sơ bộ, đã s
momen uốn trên các tiết diện tr
đoạn trục dựa trên tác dụng đồ
Có thể tiến hành theo các bướ
a) Xác định tả i trọng tác d
ũ ị Hạnh
độ bền mỏi (tính chính xác trục),
quá tải.
ng kính trục
c, cần phải xác định momen xoắn, momen uốn... trên các ti
biết momen xoắn tác dụng lên trục, chưa bi
ư chiều dài các đoạn trục...), nên chưa thể xác đ
nh chính xác đường kính các đoạn trục. Do vậy trư
c các công thức kinh nghiệm để xác định sơ bộ đườ
n qua trục [KW],
ục trong 1 phút [vòng/phút],
n cho phép.
c là thép CT5, thép 45, 40Cr có thể lấy [τ] = (15 ÷ 50)MPa, tr
m tôc, trị số lớn đối với trục ra.
c thực nghiệm đường kính đầu vào của hộp giả
i: d = (0,8÷1,2)ddongco, ddongco: đường kính trụ
n: d = (0,3÷0,35).a với a làkhoảng cách trục.
ng kính các đoạn trục
ã sơ bộ kết cấu trục, chiều dài các đoạn trục..., sau
n trục. Bước tính gần đúng trục nhằm xác đị
ồng thời của momen uốn và momen xoắn.
ớc sau đây:
ng tác dụng lên trục
159
n... trên các tiết diện
ưa biết kích thước các
xác định được momen
y trước hết phải dựa
ờng kính trục.
(15 ÷ 50)MPa, trị số nhỏ đối
ảm tốc nối với động
ục động cơ.
c.
c..., sau đó tính toán
ịnh đường kính các

Truyền động cơ khí- Vũ Thị Hạ
- Tải trọng tác dụng lên trụ
bánh răng, trục vít, bánh vít...; l
trục khi lắp hai nửa khớp n
thường được bỏ qua khi tính toán.
- Lực tác dụng khi ăn khớp trong b
Ft, lực hướng tâm Fr, lực d
giữa bề rộng bánh răng.
- Khi dời về tâm trục, lực F
lực Fa tương đương với mộ
- Đối với bộ truyền đai/xích, l
này đều là lực hướng tâm, có
bánh đai/đĩa xích, hướng t
- Khi dùng khớp nối, do sự
lực hướng tâm Fk, tính gần đ
- Fk ≈ (0,2 ÷0,3).F
- T: momen xo
trục chốt đàn h
- Lực Fk có điểm đặt nằm trên
nhiên khi lắp ghép khớp n
Fk làm tăng ứng suất và biên d
nên.
ũ ị Hạnh
ục gồm momen xoắn; lực tác dụng khi ăn kh
c vít, bánh vít...; lực căng đai, lực căng xích; lực lệch tâm
p nối. trọng lượng bản thân trục, lực ma sát trong các
qua khi tính toán.
p trong bộ truyền bánh răng trụ răng nghiêng, bao g
c dọc trục Fa, coi như tập trung tại tâm ăn kh
t tương đương với một lực Ft đặt tại tâm trục và momen xo
ột lực Fa đặt tại tâm trục tâm trục và momen u
đai/xích, lực tác dụng Fr lên trục do lực căng đai/xích t
ng tâm, có điểm đặt nằm trên đường tâm trục, tại đ
ng từ bánh đai/xích lắp trên trục đến tâm bánh đai/xích kia.
không đồng tâm giữa các trục được nối, trên kh
n đúng theo công thức:
≈ (0,2 ÷0,3).Ft với Ft là lực vòng trên khớp nối
T: momen xoắn, D1: đường kính vòng tròn qua tấm các ch
t đàn hồi.
m trên đường tâm trục, phương chiều bất kỳ phụ
p nối, nhưng trong sơ đồ tính toán, nên chọn phươ
t và biên dạng do lực vòng của các chi tiết quay khác l
Hình 10. 3
160
ăn khớp trong bộ truyền
ch tâm do sự không đồng
c ma sát trong các ổ trục
ng nghiêng, bao gồm: lực vòng
ăn khớp và đặt tại điểm
c và momen xoắn T;
và momen uốn Mu.
đai/xích tạo nên. Các lực
i điểm giữa bề rộng
m bánh đai/xích kia.
trên khớp nối xuất hiện
m các chốt nếu dùng nối
ụ thuộc sai số ngẫu
n phương chiều để lực
t quay khác lắp trên trục gây

Truyền động cơ khí- Vũ Thị Hạ
b) Xác định chiều dài các đtrí đ iểm đặt các lực tạ i các
- Dựa trên đường kính trục sơ
kính các đoạn trục, cần dự
công nghệ: thuận tiện khi gia công; yêu c
từ đường kính chỗ lắp ổ tr
dài ổ trượt.
- Dựa vào đường kính
trục chỗ lắp bánh
răng, bánh vít, bánh
xích, bánh đai, khớp
nối ⇒ Xác định chiều
dài moayơ của các chi
tiết máy nói trên.
- Dựa vào sơ đồ động
của trục và điều kiện
làm việc cụ thể, chiều
dài moayơ của các chi
tiết quay, chiều rộng
ổ, khe hở cần thiết và
một số yếu tố khác để
xác định chiều dài các đoạ
- Xác định vị trí điểm đặt cá
- Lập sơ đồ tính toán trục
Trục được xem như m
c) Tính phản lực tác dụng t
Vẽ biểu đồ momen uố
momen xoắn T
d) Tính momen uốn tổng Mu và momen thiểm
ũ ị Hạnh
u dài các đoạn trục, vị trí đ iểm đặt các lực tác di các ổ trục.
c sơ bộ ⇒ tiến hành đã sơ bộ kết cấu trục. Khi xác
ựa vào các yêu cầu về lắp ghép: thao lắp thu
n khi gia công; yêu cầu về côđã và đã vị các chi ti
trục ⇒ tra sổ tay ổ lăn để tìm chiều rộng ổ lăn hay xác
ạn trục.
t các lực tác dụng lên trục, vị trí điểm đặt các lực t
ư một dám đặt trên các gối tựa là các ổ trục (hình 9.8).
ng tạ i các gố i đỡ trong mặt phẳng zOy và zOx.
ốn Muy và Mux trong các mặt phẳng zOy và zOx. V
ng Mu và momen tương đương Mtd tạ i các ti
Hình 10. 4
161
c tác dụng lên trục, vị
c. Khi xác định đường
p thuận tiện; yêu cầu về
các chi tiết máy trên trục...
ăn hay xác định chiều
c tại ổ trục.
(hình 9.8).
ng zOy và zOx.
ng zOy và zOx. Vẽ biểu đồ
i các tiết diện nguy

Truyền động cơ khí- Vũ Thị Hạ
[σ]: ứng suất cho phép của thép làm tr
e) Tính đường kính trục tạ
f) Định kết cấu trục
Dựa theo đường kính của các ti
ứng, đồng thời chú y đến yêu c
mặt trục) và yêu cầu công ngh
về cố định và định vị các chi ti
c) Kiểm nghiệm trục về đ
Trên đây, khi xác định đường kính tr
mỏi của trục như đặc tính thay đ
yếu tố kích thước, chất lượng b
trục về độ bền mỏi có xét đến các y
đảm độ bền mỏi nếu hệ số an toàn t
Trong đó:
- [s] = 1,5÷2: hệ số an toàn cho phép. Khi c
không cần kiểm tra độ
- sσ: hệ số an toàn chỉ xét riêng
- sτ: hệ số an toàn chỉ xét riêng
ũ ị Hạnh
a thép làm trục (Tra bảng trong các sổ tay thiết kế
ạ i các tiết diện nói trên:
a các tiết diện trục vừa tính được và chiều dài các
n yêu cầu về lắp ghép (tháo lắp thuận tiện, không làm h
u công nghệ (bảo đảm độ chính xác và thuận tiện khi gia công), yêu c
các chi tiết máy trên trục, để xác định đầy đủ kết cấu tr
độ bền mỏi
ng kính trục, chữa xét đến một số yếu tố ảnh hư
c tính thay đổi của chu kỳ ứng suất, các yếu tố gây t
ng bề mặt.v.v... Và vậy sau khi đã kết cấu trục, c
n các yếu tố ảnh hưởng nêu trên. Kết cấu trụ
an toàn tại các tiết diện nguy hiểm thỏa mãn điề
an toàn cho phép. Khi cần tăng độ cứng trục, l
cứng của trục.
xét riêng ứng suất uốn:
xét riêng ứng suất xoắn:
9.1
162
ế).
u dài các đoạn trục tương
n, không làm hỏng các bề
n khi gia công), yêu cầu
u trục.
nh hưởng đến độ bền
gây tập trung ứng suất,
c, cần kiểm nghiệm
ục vửa thiết kế bảo
ều kiện:
c, lấy [s] = 2,5÷3 và

Truyền động cơ khí- Vũ Thị Hạ
- σ-1; τ-1: giới hạn mỏi u
đường kính 7÷10mm;
- τ: biên độ ứng suất uốn và
- τ: ứng suất uốn và ứng su
- ψ: hệ số xét đến ảnh hư
- ε: hệ số xét đến ảnh hư
- τ: hệ số tập trung ứng su
- β: hệ số tăng bền bề m
Nếu không thỏa mãn điều kiện (9.1) có th
- Tăng đường kính trục ho
- Tìm các biện pháp giả
dao phay ngón để phay rãnh then, t
tăng bền bề mặt.
Cách xác định ứng suất trong các ti
Dưới tác dụng của momen uố
suất xoắn τ và ứng suất uốn σu
Ứng suất uốn trên trục thay đổ
với: Wu: momen chống uốn c
Trục đặc, tiết diện tròn, đường kính d:
Wu ứng suất xoắn trên tr
Chu trình mạch động nếu trục quay m
W0: momen chống xoắ
Trục đặc, tiết diện tròn, đường kính d:
Chu trình đối xứng nếu trục quay hai chi
ũ ị Hạnh
i uốn và mỏi xoắn trong chu trình đối xứng c
n và ứng suất xoắn trong tiết diện của trục
ng suất xoắn trung bình
nh hưởng của ứng suất trung bình đến độ bền mỏi;
nh hưởng của kích thước tiết diện trục đến độ bền m
ng suất thực tế khi uốn và khi xoắn
mặt
n (9.1) có thể:
c hoặc chọn vật liệu có độ bền cao hơn.
ảm tập trung ứng suất (ví dụ, dùng dao phay đ
phay rãnh then, tăng bán kính góc lượn) hoặc dùng các bi
t trong các tiết diện trục
ốn Mu và momen xoắn T, trong các tiết diện tr
u (bỏ qua ứng suất kéo hoặc nén do lực dọc tr
ổi theo chu trình đối xứng:
n của tiết diện trục.
ng kính d:
n trên trục thay đổi theo:
c quay một chiều:
ắn của tiết diện trục.
ng kính d:
c quay hai chiều:
163
ng của mẫu nhẵn có
i;
n mỏi
, dùng dao phay đĩa thay và dùng
c dùng các biện pháp
n trục xuất hiện ứng
c trục sinh ra).

Truyền động cơ khí- Vũ Thị Hạ
d) Kiểm nghiệm trục về quá t
Điều kiện bền khi chịu quá tải
(theo thuyết bền thể năng biến đ
Với:
Trục tiết diện tròn, đườ
[σ]qt, Tqt: momen uốn và momen xo
3. Tính trục về độ cứng
a) Tính độ cứng uốn
Điều kiện bảo đảm độ cứng u
- Với: f, φ: độ vòng, góc xoay c
b) Tính độ cứng xoắn
Điều kiện bảo đảm độ cứng xo
1. Với: θ: góc xoắn củ
2. Các giá trị của f, φ
4.Tính toán dao độ
Khi trục làm việc, dao động c
có chu kỳ của tải trọng, sự m
phân bố không đều của tải trọ
và các chi tiết lắp với nó. Dao
trục hoặc các tiết máy lắp trên nó.
Trục có thể bị dao động ngang, dao
xoắn. Trong thực tế thường chú ý
động xoắn vì tần số riêng củ
ũ ị Hạnh
quá tải
i
n đổi hình dạng) M T
ờng kính d:
n và momen xoắn quá tải tại tiết diện nguy hiểm
ng uốn của trục: f ≤[f]; φ ≤[φ]
vòng, góc xoay của tiết diện trục; [f], [φ]: độ vòng, góc xoay cho phép
ng xoắn của trục: θ≤[θ]
ủa trục; [θ]: góc xoắn cho phép.
φ và θ được đã theo phương pháp của môn học s
Tính toán dao động của trục
ng của trục xuất hiện do sự thay đổi
ất cân bằng của các vật quay, sự
ọng trong vùng tiếp xúc giữa trục
i nó. Dao động mạnh có thể làm hỏng
p trên nó.
ng ngang, dao động dọc và dao động
ng chú ý đến dao động ngang và dao
ủa dao động ngang và dao động
Hình 10. 164
m
vòng, góc xoay cho phép
c sức bền vật liệu.
Hình 10. 5

Truyền động cơ khí- Vũ Thị Hạ
xoắn tương đối thấp. Đối với ph
ra do thiếu cân bằng của các ti
số của tần số riêng của dao đ
của trục khi xảy ra hiện tượng c
hưởng, thường cho trục làm vi
Tính toán dao động của trục là v
tính toán đơn giản về dao động ngang c
Giả sử có một trục, trên đó l
lệch tâm với trục một khoảng b
khoảng y ta có:
Coi trục như một dầm đặt trên hai g
với
Là lực gây nên độ võng bằng m
Suy ra và
Ta thấy khi ω tăng thì y tăng.
Khi thì trục s
Vận tốc góc tối hạn của trục
Số vòng quay tới hạn trong mộ
Gọi yt là độ võng do trọng lượ
Suy ra
ũ ị Hạnh
i phần lớn các trục quay nhanh, lực kích thích ch
a các tiết máy quay. Khi tần số tác dụng của lực này b
a dao động ngang của trục thì xảy ra hiện tượng cộ
ng cộng hưởng gọi là vận tốc tới hạn. Để tránh hi
c làm việc thấp hơn hoặc cao hơn vận tốc tới hạn.
c là vấn đề khá phức tạp. Dưói đây chỉ trình bày m
ng ngang của trục do lực ly tâm gây nên.
đó lắp đĩa có khối lượng m, đặt ở khoảng cách gi
ng bằng e. Dưói tác dụng của lực ly tâm Q, tr
trong đó
t trên hai gối tựa, l- khoảng cách giữa hai gối, ta có
ng một đơn vị
c sẽ xảy ra cộng hưởng và bị phá hỏng.
ột phút
ợng G = mg của trục gây ra
165
c kích thích chủ yếu là lực sinh
c này bằng hoặc là bội
ộng hưởng. Vận tốc
tránh hiện tượng cộng
trình bày một trường hợp
ng cách giữa hai ổ trục và
, trục bị võng đi một
i, ta có
.

Truyền động cơ khí- Vũ Thị Hạ
10.2. Ổ lăn
10.2.1. Giới thi ệu chung v
Ổ lăn là loại ổ mà tải trọng truy
lăn nên ma sát trong ổ à ma sát lă
Ổ lăn: gồm vòng ngoài 1, vòng trong 2, con l
thường có rãnh để dẫn hướng cho con l
trục, vòng ngoài lắp với gối tr
trục, còn vòng ngoài thì đứng yên, nh
vòng trong đứng yên cùng vớ
cách có tác dụng ngăn cách các con l
1. Phân loại ổ lăn
Theo hình dáng con lăn phân ra:
thể của ổ đũa trụ dài.
Theo khả năng chịu tải trọng phân ra:
- ổ đỡ: chịu lực hướng tâm là ch- ổ chặn: chỉ chịu được lự- ổ đỡ chặn: chịu được đ
lực dọc trục (); - ổ chặn đỡ: chịu lực dọc tr
một ít lực hướng tâm.
Theo số dãy con lăn phân ra: ổ
Theo cỡ đường kính ngoài và chi
Hình 10.
ũ ị Hạnh
u chung về ổ lăn
ng truyền từ trục đến các gối trục phải qua các con l
à ma sát lăn.
m vòng ngoài 1, vòng trong 2, con lăn 3 và vòng cách 4. Vòng trong và vòng ngoài
ng cho con lăn và để giảm ứng suất. Vòng trong l
i trục (vỏ máy, thân máy). Thường thì vòng trong quay
ng yên, nhưng cũng có khi vòng ngoài quay cùng v
ới trục. Con lăn có thể là bi hoặc đũa, lăn trên r
ăn cách các con lăn không cho chúng tiếp xúc với nhau.
lăn
ăn phân ra: ổ bi và ổ đũa. ổ kim là biến
ng phân ra:
ớng tâm là chủ yếu () ợc lực dọc trục () đồng thời cả lực hướng tâm và
ị ự ọc trục đồng thời chịu được
ổ một dãy, hai dãy, bốn dãy.
ng kính ngoài và chiều rộng ổ lăn (với cùng
Hình 10. 7 Hình 10.
Hình 10. 166
i qua các con lăn. Nhờ có con
òng cách 4. Vòng trong và vòng ngoài
t. Vòng trong lắp với ngõng
ng thì vòng trong quay cùng với
ng có khi vòng ngoài quay cùng với gối trục còn
ăn trên rãnh lăn. Vòng
i nhau.
Hình 10. 6
Hình 10. 8

Truyền động cơ khí- Vũ Thị Hạ
đường kính trong) chia ra: ổ đ
Theo khả năng tự lựa của ổ: ổ
ngoài là mặt cầu, nhờ đó góc nghiêng c
biệt; ổ đũa trụ đặt chéo nhau.
2. Độ chính xác ch
Độ chính xác chế tạo ổ lăn quy
lòng ổ và độ chính xác khi quay (
Tiêu chuẩn quy định 5 cấp chính xác: 0, 6, 5, 4, 2 (theo th
Thường dùng cấp chính xác 0 (hôp gi
ngành cơ khí). Cấp chính xác cao h
trong các dụng cụ đo chính xác...
3. Các loại ổ lăn thư
- Ổ bi đỡ một dãy (h 10.4a): ch
lực dọc trục bằng 70% l
đến là hiệu giữa lực hư
có thể làm việc bình th
20’.
ũ ị Hạnh
đặc biệt nhẹ, nhẹ, nhẹ rộng, trung bình, trung bình r
Hình 10. 9
Hình 10. 10 ổ tự lựa và ổ không tự lựa; ổ lăn tự lựa có m
đó góc nghiêng của vòng trong và vòng ngoài có thể
chính xác chế tạo ổ lăn
ăn quyết định bởi độ chính xác của các kích thư
chính xác khi quay (độ đảo hướng tâm, độ đao dọc trục...).
p chính xác: 0, 6, 5, 4, 2 (theo thứ tự độ chính xác t
p chính xác 0 (hôp giảm tôc, hộp tốc độ, các kết cấu thông th
p chính xác cao hơn được dùng trong trục chính máy c
o chính xác...
ăn thường dùng
t dãy (h 10.4a): chủ yếu là để chịu lực hướng tâm, nhưng c
ng 70% lực hướng tâm không dùng đến (lực hướng tâm không dùng
c hướng tâm cho phép với lực hướng tâm thực tế
c bình thường khi trục nghiêng một góc nghiêng nh
167
ng, trung bình, trung bình rộng, nặng.
a có mặt trong của vòng
ể tới 2o30; ổ lăn đặc
a các kích thước lắp ghép các
chính xác tăng dần).
u thông thường trong
c chính máy cắt kim loại, trục
ưng cũng có thể chịu
ng tâm không dùng
ế). Ổ bi đỡ một dãy
t góc nghiêng nhỏ, không quá 15’-

Truyền động cơ khí- Vũ Thị Hạ
- Ổ bi đỡ lòng cầu hai dãy (h 10.4b): ch
chịu thêm tải trọng dọc tr
ổ có thể làm việc bình th
- Ổ đũa trụ ngắn đỡ mộ
một dãy cùng kích thư
70%, đồng thời chịu va đ
chịu được lực dọc trục và c
- Ổ đũa đỡ lòng cầu hai dãy (h 10.5b): ch
lực hướng tâm của lo
thước và có thể chịu đư
- Ổ kim (h 10.5c): là ổ
nhiều gấp mấy lần so v
những chỗ cần hạn chế
- Ổ đũa trụ xoắn đỡ (h 10.5e): là
cuốn lại (gọi là đũa trụ
có tính đàn hồi cao nên
trục nghiêng tới 30’.
- Ổ bi đỡ chặn một dãy (h 10.4c): ch
năng chịu lực hướng tâm c
năng chịu lực dọc trụ
xúc giữa bi với vòng ngoài
lớn thì khả năng chịu l
- Ổ đũa côn đỡ chặn (h 10.5d): có th
hướng tâm lẫn lực dọc tr
- Đũa côn đỡ chặn có th
tâm bằng 170% so vớ
kích thước. Loại này đư
tạo máy vì tháo lắp đơn gi
bù lượng mòn thuận tiệ
ũ ị Hạnh
u hai dãy (h 10.4b): chủ yếu chịu tải trọng hướng tâm, nh
c trục bằng 20% khả năng chịu lực hướng tâm không dùng
c bình thường khi trục nghiêng một góc nghiêng tới 2
ột dãy (h 10.5a): chủ yếu để chịu lực hướng tâm. So v
ước loại ổ này có khả năng chịu lực hướng tâm l
u va đập tốt hơn. Tuy nhiên một số kiểu ổ đũa tr
c và cũng không cho phép nghiêng trục.
u hai dãy (h 10.5b): chủ yếu để chịu lực hướng tâm, kh
a loại này gấp hai lần so với ổ bi đỡ lòng cầu ha
u được lực dọc trục bằng 20% lực hướng tâm không dùng t
mà con lăn là những đũa trụ nhỏ và dài - g
n so với số đũa trong các ổ đũa thông thường.
ế kích thước hướng kính.
(h 10.5e): là ổ mà con lăn là hình trụ rỗng, bằng b
ụ xoắn), ổ này không chịu được lực dọc trục. Nh
i cao nên ổ chịu tải trọng va đập tốt, có thể làm việ
t dãy (h 10.4c): chịu được cả lực hướng tâm và l
ng tâm của ổ này lớn hơn ổ bi đỡ một dãy kho
c phụ thuộc vào góc tiếp
i vòng ngoài - góc tiếp xúc càng
u lực càng lớn.
n (h 10.5d): có thể chịu cả lực
c trục lớn. ổ
n có thể chịu được lực hướng
ới ổ bi đỡ một dãy cùng
i này được dùng nhiều trong chế
đơn giản, điều chỉ khe hở và
ện.
Hình 10. 168
ng tâm, nhưng có thể
ng tâm không dùng đến.
i 2-30.
ng tâm. So với ổ bi đỡ
ng tâm lớn hơn khoảng
ũa trụ ngắn đỡ không
ng tâm, khả năng chịu
u hai dãy cùng kích
ng tâm không dùng tới.
gọi là kim. Số kim
ng. ổ kim hay dùng ở
ng băng thép mỏng
c. Nhờ đũa trụ xoắn
ệc bình thường khi
ng tâm và lực dọc trục. Khả
t dãy khoảng 30-40%. Khả
Hình 10. 11

Truyền động cơ khí- Vũ Thị Hạ
10.2.2. Lực và ứng su
1. Sự phân bố lự
Lực hướng tâm Fr từ trục truy
tác dụng của Fr chỉ có các con lă
chịu lực. Con lăn chịu lực lớn nh
Bài toán về phân bố lực giữa các con l
con lăn bố trí đối xứng với mặ
Theo điều kiện cân bằng của l
- trong đó: với z là s
- Fi: lực tác dụng lên con lă
Giả thiết dưới tác dụng của lự
Do tác dụng của lực Fr vòng
chuyển theo phương của lực F
Biến dạng của con lăn chịu l
theo phương Fi) là di (i = 1-n)
Gần đúng có thể viết:
Theo lý thuyết biến dạng tiếp xúc, quan h
- C- hệ số phụ thuộc bán
- j- số mũ; j = 2/3 đối v
Như vậy đối với ổ bi ta có:
Thay Fi ta được:
ũ ị Hạnh
ng suất trong ổ lăn
ực trên các con lăn
c truyền tới vòng trong và phân bố không đều trên các con l
có các con lăn nằm trong miền chịu tải choán cung không quá 180
n nhất nằm trong mặt phẳng tác dụng của lực F
a các con lăn là bài toán siêu tĩnh. Để đơn giản, gi
ặt phẳng tác dụng của lực Fr.
a lực ta có:
i z là số con lăn;
on lăn thứ i (i = 1-n).
ực Fr các vòng ổ không bị uốn và không có khe h
vòng ổ và con lăn bị biến dạng chỗ tiếp xúc, vòng trong c
c Fr một lượng d0.
u lực Fmax là d0 và biến dạng của con lăn chịu l
).
với
p xúc, quan hệ giữa biến dạng và lực gây nên bi
c bán kính cong ở điểm tiếp xúc và mô đun đàn hồ
i với ổ bi và j = 1 đối với ổ đũa.
169
u trên các con lăn. Dưới
i choán cung không quá 1800 mới
c Ft.
n, giả thiết rằng các
n và không có khe hở hướng tâm.
p xúc, vòng trong của ổ di
u lực Fi (biến dạng
c gây nên biến dạng:
ồi;

Truyền động cơ khí- Vũ Thị Hạ
Do đó tải trọng tác dụng lên viên bi ch
Với
Với các ổ bi có z = 10÷20 thì k
ảnh hưởng của khe hở hướng tâm và sai s
lấy k = 5 và:
Tương tự, đối với ổ đũa đỡ:
Các loại ổ khác cũng tính toán t
Trong ổ bi chặn, lực tác dụng lên m
- trong đó Fa - lực dọc tr
- z - số bi và 0,8 là hệ
không chính xác).
2. Ứng suất tiếp xúc trong
Ứng suất tiếp xúc sinh ra giữa c
lực Fi khác nhau, tại những ch
tiếp xúc tính theo công thức Héc s
cùng chịu lực lớn nhất Fo, khi này
ũ ị Hạnh
ng lên viên bi chịu lực lớn nhất là:
20 thì k = 4,38; 4,37; 4,36, do dó lấy trung bình là 4,37 nên k
ng tâm và sai số chế tạo, khi này số con lăn chị
ng tính toán tương tự.
ng lên mỗi viên bi:
c trục tác dụng lên ổ;
số xét đến sự phân bố lực không đều giữa các bi (do ch
p xúc trong ổ lăn
a con lăn với vòng trong và vòng ngoài ổ. Dư
ng chỗ tiếp xúc giữa con lăn với vòng trong và vòng ngoài,
c Héc sẽ khác nhau. Trường hợp ổ bi, tại điểm A và
t Fo, khi này ứng suất tiếp xúc là:
170
y trung bình là 4,37 nên kể đến
ịu lực ít hơn, do đó
a các bi (do chế tạo
ưới tác dụng của các
vòng trong và vòng ngoài, ứng suất
m A và điểm B (hình)

Truyền động cơ khí- Vũ Thị Hạ
với bán kính cong t
Vì ρA lấy dấu + (tiếp xúc ngoài) và
. Như vậy ứng su
trên phương tác dụng của lực
khi tiếp xúc đường).
Các công thức xác định ứng su
lăn. Ta không chú ý đến các công th
mà căn cứ vào tải trọng tác dụ
Khi ổ lăn làm việc, mỗi điểm trên b
tăng dần rồi thoát tải khi đi ra kh
kỳ mạch động gián đoạn; tần s
trong quay, cứ sau mỗi vòng quay, m
nhất một lần. Còn khi vòng ngoài quay, vòng trong c
lớn nhất (điểm A) không di chuy
trong lại chịu ứng suất tiếp xúc l
Như vậy, khi vòng ngoài quay, s
làm cho ổ lăn chóng hỏng vì m
đến ảnh hưởng của vòng nào quay.
10.2.3. Tính chọn ổ lă
1. Các dạng hỏng c
Các dạng hỏng
- Tróc vì mỏi bề mặt làm vi
thay đổi ứng suất đạt t
sinh ra những vết nứt r
vòng chịu ứng suất lớn nh
Trên con lăn, tróc xảy ra t
hỏng chủ yếu trong các
tốt.
- Biến dạng dư bề mặt làm vi
khi ổ không quay hoặc quay r
ũ ị Hạnh
bán kính cong tương đương.
p xúc ngoài) và ρB lấy dấu - (tiếp xúc trong) nên
ng suất tiếp xúc có trị số lớn nhất tại điểm A trên vòng trong v
c Fr. Trường hợp ổ đũa cũng tính tương tự ( theo công th
ng suất tiếp xúc cho mỗi loại ổ được trình bày trong các sách v
n các công thức này vì tính toán chọn ổ lăn không d
ụng lên ổ.
m trên bề mặt các vòng và con lăn sẽ đi vào vùng ti
đi ra khỏi vùng tiếp xúc. Do đó ứng suất tiếp xúc
n số thay đổi của nó phụ thuộc vào vòng nào
i vòng quay, mỗi điểm trên vòng trong sẽ chịu ứng
n. Còn khi vòng ngoài quay, vòng trong cố định, thì điểm chịu
m A) không di chuyển, vì vậy cứ mỗi lần con lăn vào tiếp xúc v
p xúc lớn nhất một lần.
y, khi vòng ngoài quay, số chu kỳ chịu tải của điểm nguy hiểm sẽ tă
ng vì mỏi hơn. Vì vậy, khi xác định khả năng tải c
a vòng nào quay.
lăn
ng của ổ lăn và chỉ tiêu tính toán
t làm việc: do ứng suất tiếp xúc thay đổi khi quay. Khi s
t tới trị số đủ lớn, trên bề mặt tiếp xúc (của rãnh l
t rồi phát triển thành tróc. Tróc thường bắt đầ
n nhất, phần lớn là vòng trong, riêng ổ lòng c
y ra tại những chỗ vật liệu có cơ tính thấp nh
u trong các ổ làm việc với vận tốc cao, tải trọng lớn, che kín và bôi tr
t làm việc: do chịu tải trọng va đập hoặc tải tr
c quay rất chậm (n nhỏ hơn 1 vòng/phút).
171
p xúc trong) nên ρA < ρB, do đó
m A trên vòng trong và nằm
( theo công thức Héc
y trong các sách về ổ
ăn không dựa vào ứng suất
đi vào vùng tiếp xúc, chịu tải
p xúc thay đổi theo chu
c vào vòng nào quay. Khi vòng
ng suất tiếp xúc lớn
u ứng suất tiếp xúc
xúc với điểm đó, vòng
tăng lên rất nhiều và
i của ổ lăn, phải kể
i khi quay. Khi số chu kỳ
a rãnh lăn hoặc con lăn)
ầu trên rãnh lăn của
lòng cầu là vòng ngoài.
p nhất. Tróc là dạng
n, che kín và bôi trơn
i trọng tĩnh quá lớn

Truyền động cơ khí- Vũ Thị Hạ
- Mòn vòng ổ và con lă
không tốt.
- Vỡ vòng cách: do lực ly tâm và tác d
ổ quay nhanh.
- Vỡ vòng ổ và con lăn:
không chính xác (làm cho vòng b
dạng hỏng này không x
Chỉ tiêu tính toán:
Hiện nay tính toán ổ lăn dựa theo hai ch
- Các ổ làm việc với vận t
tĩnh để tránh biến dạng dư
- Các ổ làm việc với vậ
bền lâu hay còn gọi là tính theo kh
- Các ổ làm việc với số
năng tải động.
- Các ổ làm việc với vậ
ngh; ngh - số vòng quay gi
2. Tính ổ lăn theo kh
Khả năng tải động tính toán c
Với:
- Q - tải trọng làm việc quy
- L - tuổi thọ cần thiết (tri
- m = 3 với ổ bi và m =
Trường hợp tuổi thọ tính bằng gi
Như vậy, muốn xác định khả
trọng quy ước được tính theo các công th
- Với ổ bi đỡ, ổ bi đỡ ch
- Với ổ chặn đỡ: Q = (XF
- Với ổ chặn: Q = Fa K
- Với ổ đũa trụ ngắn đỡ: Q
ũ ị Hạnh
và con lăn: xảy ra với các ổ làm việc ở những nơi b
c ly tâm và tác dụng của con lăn gây nên; hay x
ăn: xảy ra khi ổ bi quá tải do va đập, chấn động ho
không chính xác (làm cho vòng bị lệch, con lăn bị kẹt). Nếu sử d
ng này không xảy ra.
a theo hai chỉ tiêu:
n tốc thấp (n < lv/ph) hoặc đứng yên được tính theo kh
ng dư bề mặt làm việc.
ận tốc cao hoặc tương đối cao (n = 10v/ph) đư
i là tính theo khả năng tải động, để tránh tróc vì m
vòng quay 1<n<10 v/ph thì lấy n = 10 v/ph và tính
ận tốc cao, cần kiểm tra số vòng quay của ổ
vòng quay giới hạn của ổ (cho trong sổ tay).
ăn theo khả năng tải động
ng tính toán của ổ lăn Cd được xác định theo công thức:
c quy ước (kN);
t (triệu vòng);
= 10/3 với ổ đũa.
ng giờ, ký hiệu Lh, thì:
ả năng tải động tính toán cần xác định Q. Tu
h theo các công thức sau:
chặn và ổ đũa côn: Q = (XV Fr + YFa) KdK t
(XFr + YFa) KdKt
KdKt
: Q = VFr KdK t
172
ng nơi bụi bẩn, bôi trơn
n gây nên; hay xảy ra đối với các
ng hoặc do lắp ghép
dụng đúng kỹ thuật,
c tính theo khả năng tải
10v/ph) được tính theo độ
tránh tróc vì mỏi.
10 v/ph và tính ổ theo khả
theo điều kiện n ≤
nh Q. Tuỳ theo loại ổ, tải

Truyền động cơ khí- Vũ Thị Hạnh 173
Trong các công thức trên:
- V - hệ số ảnh hưởng của vòng nào khi quay, khi vòng trong quay V = 1; khi vòng
ngoài quay V = 1,2.
- Kd - hệ số xét đến ảnh hưởng của đặc tính tải trọng (tra bảng);
- K t - hệ số xét đến ảnh hưởng của nhiệt độ (tra bảng);
- X, Y - hệ số tải trọng hướng tâm và tải trọng dọc trục (tra bảng);
- Fr - lực hướng tâm tác dụng lên ổ, kN;
- Fa - lực dọc trục, tuỳ thuộc loại ổ, kN.
Xác định lực dọc trục Fa
Đối với ổ bi đỡ, ổ bi đỡ lòng cầu hai dãy và ổ đũa đỡ lòng cầu hai dãy, Fa là tổng lực dọc
trục ngoài (lực ăn khớp của các bộ truyền) tác dụng lên trục và truyền đến ổ.
Đối với ổ đỡ chặn và ổ chặn đỡ do tồn tại góc tiếp xúc a, khi Fr tác dụng sẽ sinh ra lực dọc
trục phụ Fs (hình 3.2.8) tính theo các công thức sau:
Với ổ đũa côn: Fs = 0,83.e.Fr
- trong đó: e hệ số, e = 1,5 tgα
Với ổ bi đỡ chặn: Fs = eFr
- với e - hệ số, phụ thuộc góc tiếp xúc.
- α (tra bảng); Riêng ổ bi đỡ và đỡ chặn có α = 12o thì e phụ thuộc vào tỉ số
iFa/C0
với:
Hình 10. 12

Truyền động cơ khí- Vũ Thị Hạ
- Fa- tải trọng dọc trục tác d
- C0 - khả năng tải tĩnh c
- Lực dọc trục Fs trên mộ
Vì vậy, với ổ đỡ chặn, lực dọc tr
- Gọi ΣFzj là tổng lực d
ngoài Fat và lực dọc trụ
- Dấu + khi Fat cùng chi
phụ, tác dụng lên ổ mang d
- Nếu Fsj của ổ đang tính j tho
ngược lại nếu Fsj < ΣFzj
- Tức là Faj = Max(Fsj,
- Chú ý: với ổ loại 36000 (
nhưng Fa lại chưa biết nên ti
- Tính sơ bộ e theo công th
- Dùng e vừa xác định đ
- Dùng Faj để tính i.Faj/C
Xác định các hệ số X, Y
Các hệ số X, Y được tra bảng theo t
Chú ý Với sơ đồ dùng gối kép
- ổ tuỳ động (ổ bi đỡ; ổ
trục tác dụng lên ổ bằng 0).
- ổ của gối kép (gối cố đ
theo sơ đồ thuận (còn g
Việc tính ổ kép theo khả năng t
tính toán cần chú ý:
- Tải trọng dọc trục tác d
- Khả năng tải động trong b
bi, hoặc xác định như sau:
o Với ổ bi:
ũ ị Hạnh
c tác dụng lên ổ;
ĩnh của ổ, tra bảng tuỳ thuộc loại ổ sơ bộ chọn.
ột ổ sẽ tác dụng lên trục và qua trục tác dụng lên
c trục Fa được tính như sau:
c dọc trục tác động vào ổ đang xét j, bao gồm t
ục phụ Fsk từ ổ kia (), ta có: ΣFzj = Fsk ± Fat
cùng chiều với Fsk và ngược lại (hoặc: lực dọc trục, k
ang dấu + nếu làm giảm khe hở cho ổ và ngượ
đang tính j thoả mãn điều kiện Fsj ≥ Fzj thì đối với ổ đ
zj thì Faj = Σ Fzj
ΣFzj).
i 36000 (α = 12o), vì e phụ thuộc lực dọc trục tác d
t nên tiến hành tính như sau:
e theo công thức: nếu e < 0,3 thì lấy e = 0,3;
nh để tính các lực Faj cho ổ thứ j;
/C0 rồi tra e chính xác theo bảng; với i là số dãy con l
ng theo tỉ số Fa/(V.Fr) và e.
i kép
đũa trụ ngắn đỡ kiểu 2000 …) chỉ chịu lực hư
ng 0).
định) gồm 2 ổ bi đỡ chặn hoặc 2 ổ đũa côn; chúng có th
n (còn gọi là sơ đồ chữ O) hoặc sơ đồ ngược (còn gọ
ăng tải động hoặc tải tĩnh được tiến hành như đ
c tác dụng lên ổ chỉ có tải trọng ngoài (bỏ qua lực d
ng trong bảng của ổ kép được tra trong các bảng trong các s
ư sau:
174
ng lên ổ kia.
m tổng lực dọc trục
c, kể cả lực dọc trục
ợc lại).
đang tính Faj = Fsj;
c tác dụng lên ổ Fa
dãy con lăn.
c hướng tâm (lực dọc
ũa côn; chúng có thể bố trí
ọi là sơ đồ chữ X)
đối với ổ 2 dãy. Khi
c dọc trục phụ).
ng trong các sổ tay vòng

Truyền động cơ khí- Vũ Thị Hạ
o Với ổ đũa:
o trong đó Cb1- kh
- Khả năng tải tĩnh trong b
bi, hoặc xác định như sau: C
trong đó C01 – kh
Trường hợp ổ lăn chịu tải thay đ
Khi này tải trọng quy ước Q đ
- trong đó: m = 3 v
- Qi - tải trọng quy ư
- Li - số triệu vòng quay
3. Tính ổ lăn theo kh
Với các ổ lăn không quay ho
cần trục, móc treo, kích, thiết b
theo khả năng tải tĩnh để tránh bi
cho phép theo điều kiện: Qt ≤ C
trong đó: Co - khả năng tải tĩnh
Qt - tải trọng quy ước, xác đ
+ Với ổ đỡ và đỡ chặn: Qt =
nhưng nếu Qt < Fr thì Qt = Fr
+ Với ổ chặn và chặn đỡ: Qt
nhưng khi a = 90o thì Qt = Fa
Trong đó: X0, Y0 - hệ số tải trọ
Fa – lực dọc trục (xác định như
ũ ị Hạnh
khả năng tải động của ổ một dãy cùng loại.
ĩnh trong bảng của ổ kép được tra trong các bảng trong các s
ư sau: C0 = 2C01
khả năng tải tĩnh của ổ một dãy cùng loại.
i thay đổi
c Q được thay bằng tải trọng tương đương QE:
3 với ổ bi, m = 10/3 với ổ đũa;
ng quy ước khi chịu tải trọng tĩnh ở chế độ thứ i,
u vòng quay ở chế độ thứ i; nếu tuổi thọ tính bằng giờ
ăn theo khả năng tải tĩnh
n không quay hoặc quay với số vòng quay rất nhỏ (n < l v/ph),
t bị ép v.v.., ổ lăn được chọn
tránh biến dạng dư quá trị số
≤ Co
ĩnh - tra bảng trong sổ tay.
c, xác định như sau:
= XoFr + YoFa
r.
= Fa + 2,3 Frtgα
Fa.
ọng hướng tâm và dọc trục tĩnh (tra bảng);
như phần trên).
175
ng trong các sổ tay vòng
ờ Lhi thì:
(n < l v/ph), như ổ chặn của

Truyền động cơ khí- Vũ Thị Hạ
10.3. Khớp nối
10.3.1. Giới thi ệu chung v
Khớp nối dùng để nối các trụ
một số công việc khác như: đ
chỉnh tốc độ...
1. Các loại khớp n
Theo công dụng khớp nối đượ
- Nối trục: Dùng để nố
trục mới rời nhau.
o Nối trục có các lo
- Ly hợp: Dùng để nối ho
lúc nào. Ly hợp có các lo
- Ly hợp tự động: Có th
khác. Ly hợp tự động có các lo
a) Nối trục chặt
ũ ị Hạnh
u chung về khớp nối
ục hoặc chi tiết máy. Ngoài ra khớp nối còn
: đóng mở cơ cấu, giảm tải trọng động, ngăn ng
p nối
Nối trục ống dùng chốt
Nối trục chốt dùng then ợc chia thành:
ối cố định các trục, chỉ khi nào dừng máy, tháo n
c có các loại: nối trục chặt, nối trục bù, nối trục đàn h
i hoặc tách các trục hoặc các chi tiết máy quay khác trong b
p có các loại: ly hợp ăn khớp, ly hợp ma sát, ly hợp đ
thể tự động nối hoặc tách các trục hoặc các chi ti
ng có các loại: ly hợp an toàn, ly hợp ly tâm, ly h
176
i còn được dùng để làm
ăn ngừa quá tải, điều
ng máy, tháo nối trục thì các
đàn hồi v.v...
t máy quay khác trong bất kỳ
p điện từ...
c các chi tiết máy quay
p ly tâm, ly hợp một chiều...

Truyền động cơ khí- Vũ Thị Hạ
Dùng để nối cứng các trục có đư
tương đối với nhau. Nối trục ch
cần định tâm chính xác các trụ
Nố i tr ục ống
Ống thép hay ống gang, lồng vào hai
12.1 và hình 12.2). Chế tạo đơ
và phải di động trục theo phươ
mộtkhoảng khá lớn. Chỉ dùng
trục có đường kính nhỏ (< 60
Nố i tr ục đĩa
Hai đĩa, có moayơ, lắp lên đầ
then và độ dôi, rồi dùng bu lông ghép hai
lại với nhau (hình 12.3). Bu lông l
⇒ momen xoắn truyền được nh
sinh ra trên bề mặt tiếp xúc c
siết bu lông gây nên (bu lông ch
chịu kéo).
Bu lông lắp không có khe h
truyền trực tiếp qua bu lông (bu lông ch
hơn ⇒ dùng rộng rãi hơn. Đị
tương ứng trên đĩa (2). hoặc nh
Dùng rộng rãi trong chế tạo máy
kết cấu đơn giản và kích thước không l
b) Nối trục bù
Dùng để nối các trục có sai l
hồi của các trục, do sai số ch
vị trí tương đối giữa các trục: đ
tâm ∆r, độ lệch góc ∆α (hình 12.4). Th
tổng hợp của ba độ lệch trên.
lệch vị trí tương đối được bù l
giữa các chi tiết cứng trong nố
ũ ị Hạnh
c có đường tâm nằm trên cũng một đường thẳng và không di chuy
c chặt không bù lại được các sai số chế tạo và l
ục được nối với nhau.
ng
ng vào hai đầu trục, ghép với trục bằng chốt hay b
o đơn giản, kích thước hướng kính nhỏ, nhưng l
c theo phương dọc trục
dùng để nối các
(< 60-70mm).
ầu mỗi trục bằng
i dùng bu lông ghép hai đĩa
). Bu lông lắp có khe hở
c nhờ lực ma sát
p xúc của hai đĩa do lực
t bu lông gây nên (bu lông chịu xoắn và
p không có khe hở ⇒ momen xoắn
p qua bu lông (bu lông chịu cắt và dập). Khi đó, kích thướ
ịnh tâm hai trục nhờ phần lồi trên đĩa (1) l
nhờ thân bu lông trong trường hợp bu lông lắ
o máy để nối các trục có đường kính tới 200mm và l
c không lớn.
c có sai lệch về vị trí do biên dạng đàn
ế tạo và lắp ghép. Sai lệch về
c: độ lệch dọc trục ∆a, độ lệch
(hình 12.4). Thường gặp độ lệch
ch trên. Khi dùng nối trục bù, sai
c bù lại nhờ khả năng di động
ối trục bù.
Nối trục đ
177
ng và không di chuyển
o và lắp ghép, do đó
t hay bằng then (hình
ưng lắp ghép khó khăn
ớc nối trục nhỏ gọn
ĩa (1) lồng vào phần lõm
ắp không có khe hở.
i 200mm và lớn hơn, nhờ
đĩa

Truyền động cơ khí- Vũ Thị Hạ
Bao gồm các loại: nối trục ră
đăng)...
Nối trục răng:
Hai ống (1) và (2) có răng ngoài, l
với nhau bằng bu lông. Khi làm vi
truyền được momen xoắn.
Độ lệch trục được bù lại nhờ
đỉnh răng có dạng cũng tròn, r
ống ngoài không quá 30’.
Ưu điểm: Có khả năng tải lớ
việc với vận tốc cao ⇒ dùng nhi
c) Nối tr ục đàn hồi
Hai nửa nối trục lắp cố định v
Nhờ biến dạng của các chi ti
tương đối của hai trục, đồng th
do dao động xoắn gây nên (vớ
Bao gồm các loại: nối trục vòng (ch
ũ ị Hạnh
c răng, nối trục xích, nối trục chữ thập, nối trụ
ăng:
Nối trục răng ăng ngoài, lắp với hai đầu trục. Hai ống (3) và (4) có r
ng bu lông. Khi làm việc, các răng của ống trong và ống ngoài ă
các răng có khe hở hướng kính và khe hở cạ
ũng tròn, răng có dạng hình trống. Góc lệch giữa đường tâm
ớn, làm việc tin cậy, kích thước tương đối nh
dùng nhiều trong chế tạo máy hạng nặng
nh với hai đầu trục và được nối với nhau bằng bộ
a các chi tiết đàn hồi, nối trục đàn hồi có thể bù lại đư
ng thời có thể: giảm va đập và chấn động; đề phòng c
ới nối trục bộ phận đàn hồi có độ cứng thay đ
c vòng (chốt) đàn hồi, nối trục lò xo xoắn ốc trụ, n
Sai lệch Sai l
178
ục bản lề (khớp các
ng (3) và (4) có răng trong ghép
ng ngoài ăn khớp với nhau
ạnh răng. Ngoài ra,
ng tâm ống trong và
i nhỏ gọn, có thể làm
ộ phận đàn hồi.
i được các sai lệch
phòng cộng hưởng
ng thay đổi).
, nối trục răng lò xo.
Sai lệch vị trí tương đối

Truyền động cơ khí- Vũ Thị Hạ
Nố i tr ục vòng (ch
Cấu tạo tương tự như nối trụ
bọc ống (hoặc các vòng) đàn h
[∆a] =
Tuy nhiên khi các trục lệch nhau, t
mòn nhanh, gây ra lực hướng tâm ph
Cấu tạo đơn giản, dễ chế tạo, giá r
nhất là khi momen xoắn nhỏ
động cơ điện với các cơ cấu khác.
d) Ly hợp ma sát
Ly hợp ma sát trụyền được momen xo
thành. Khi đóng ly hợp, momen xo
thể đóng ly hợp với bất kỳ chênh l
đập, đồng thời có thể điều ch
sát còn đóng vai trò của một thi
Nối trục vòng đàn hồi
ũ ị Hạnh
c vòng (chốt) đàn hồ i
ục đĩa, nhưng bu lông bắt chặt hai đĩa được thay b
đàn hồi bằng cao su. Nối trục đàn hồi cho phép:
= 1-5mm; [∆r] = 0,3-0,6mm; [∆α = 10]
ch nhau, tải trọng sẽ phân bố không đều cho các ch
ng tâm phụ tác dụng lên trục và ổ.
o, giá rẻ, dễ thay thế các vòng đàn hồi ⇒ sử
và trung bình: T<15000Nmm, d<150mm. Th
u khác.
c momen xoắn nhờ lực ma sát do ép các b
p, momen xoắn sẽ tăng dần tùy theo độ tăng của l
chênh lệch nào của vận tốc hai trục, đóng mở ly h
u chỉnh trị số momen giới hạn trụyền qua ly hợp, do
t thiết bị an toàn cho máy.
179
c thay bằng chốt có
u cho các chốt, vòng cao su bị
dụng khá rộng rãi,
và trung bình: T<15000Nmm, d<150mm. Thường dùng để nối
c ma sát do ép các bề mặt ma sát tạo
a lực ép, nhờ đó có
ly hợp êm, không va
p, do đó ly hợp ma

Truyền động cơ khí- Vũ Thị Hạ
- Momen xoắn mà ly hợp có th
lại với nhau, vào hệ số ma sát và vào hình d
- Nhược điểm của ly hợp ma sát là khó b
nhau, do có trượt giữa các b
- Theo hình dạng bề mặt ti
(loại một đĩa và loại nhiề
điều khiến phân thành: ly h
khí nén...
Ly hợp ma sát đ
Ly hợp ma sát đĩa được sử d
gian bố trí ly hợp. Với cũng m
thước dọc trục nhỏ hơn những kích th
Ly hợp đĩa ma sát đơn giản nh
đĩa lắp chặt với một trục, còn
đĩa sẽ ép chặt với nhau, trên b
momen xoắn. Để giảm bớt l
kích thước ly hợp, thường dùng ly h
Ly hợp nón ma sát
Ly hợp gồm hai đĩa lắp trên hai tr
động dọc trục. Mặt làm việc c
trên bề mặt ma sát sinh ra áp su
có phương theo đường tiếp tuy
Ly hợp ma sát
ũ ị Hạnh
p có thể trụyền động được, phụ thuộc vào lực ép hai b
ma sát và vào hình dạng hình học của bề mặt tiế
p ma sát là khó bảo đảm số vòng quay của hai tr
a các bề mặt ma sát.
t tiếp xúc, có thể phân ly hợp ma sát thành: Ly h
ều đĩa), ly hợp nón ma sát. Dựa trên năng lư
n phân thành: ly hợp điều khiến bằng cơ khí, bằng thuy lực, b
p ma sát đĩa
dụng khá rộng rãi. Số đĩa được sử dụng phụ
ũng một momen xoắn cần trụyền như nhau, ly hợ
ng kích thước hướng kính lớn hơn so với ly hợp nhi
n nhất (hình 12.7) bao gồm hai nửa ly hợp là hai
c, còn đĩa thử hại lắp di động trên trục kia. đóng ly h
i nhau, trên bề mặt hai đĩa sinh ra lực ma sát để trụyề
t lực dọc trục Fa cần thiết dùng để ép hai nử
ng dùng ly hợp ma sát nhiều đĩa.
p nón ma sát
p trên hai trục (hình 12.8), một đĩa lắp chặt còn
c của các đĩa là mặt côn, có góc côn α. Dưới tác d
t ma sát sinh ra áp suất, gây nên lực ma sát để trụyền momen xo
p tuyến với các vòng tròn trên mặt côn.
ợp ma sát đĩa
180
c ép hai bề mặt ma sát
ếp xúc.
a hai trục được nối bằng
nh: Ly hợp đĩa ma sát
ăng lượng của hệ thống
c, bằng điện tử, bằng
ụ thuộc vào không
ợp một đĩa có kích
p nhiều đĩa.
p là hai đĩa ma sát, một
đóng ly hợp ma sát, hai
ền chuyển động và
ửa ly hợp và giảm
t còn đĩa kia có thể di
i tác dụng của lực Fa
n momen xoắn. Lực ma sát

Truyền động cơ khí- Vũ Thị Hạ
10.3.2. Tính chọn khớ
12.2.1. Phương pháp tính ch
Các loại khớp nối thông dụng đ
được cho trong các sổ tay. Kh
trong đó:
Tt - mômen xoắn tính toán;
T - mômen xoắn danh ngh
K - hệ số chế độ làm vi
Tb- mômen xoắn cho phép c
Chú ý: với mỗi trị số mômen xo
ứng với đường kính trục khác nhau. Sau khi tra
trong trường hợp cần thiết còn c
12.2.2. Tính nối trục ch
Kích thước chính của nôi trục vòng
kiểm nghiểm ứng suất dập sinh ra gi
Giả sử ứng suất dập phân bố đ
ũ ị Hạnh
Ly hợp nón ma sát ớp nối
ng pháp tính chọn khớp nối
ng đã được tiêu chuẩn hoá. Các kích thước chủ
tay. Khớp nối được chọn theo mô men xoắn theo điề
Tt = KT ≤ Tbm
n tính toán;
n danh nghĩa;
làm việc (tra bảng);
n cho phép của khớp nối (tra bảng).
mômen xoắn, khớp nối có một số đường kính trong khác nhau
c khác nhau. Sau khi tra được các kích thước cơ b
t còn cần kiểm nghiệm độ bền của khâu yếu nhất trong kh
c chốt đàn hồi
c vòng đàn hồi được chọn theo trị số momen xo
p sinh ra giữa các chốt với vòng cao su và ứng su
đều trên các chốt, ta có điều kiện:
181
ủ yếu của khớp nối
ều kiện:
ng kính trong khác nhau để thích
c cơ bản của khớp nối,
t trong khớp nối.
momen xoắn tính, sau đó
ng suất uốn trong chốt.
Truyền động cơ khí- Vũ Thị Hạnh 182
Trong đó:
Z là số chốt,
dk đường kính vòng tròn qua các tấm chốt,
dc: đường kính chốt,
l: chiều dài phần từ đàn hồi.
[σd]: ứng suất dập cho phép của ống cao su, có thể lấy [σd] = 1,8÷2MPa.
Bài tập lớn: Phân tích động học và lực học cơ cấu.




















