Your Guide to Subjects Ranging From Atlantis, Magic, and ...
Upload
wwwuniroma1Category
view
0download
0
DOI 10.1140/epjp/i2011-11072-2
Regular Article
Eur. Phys. J. Plus (2011) 126: 72 THE EUROPEANPHYSICAL JOURNAL PLUS
Testing gravitational physics with satellite laser ranging
Ignazio Ciufolini1,a, Antonio Paolozzi2, Erricos C. Pavlis3, John Ries4, Rolf Koenig5, Richard Matzner6,Giampiero Sindoni2, and Hans Neumayer5
1 Dipartimento di Ingegneria dell’Innovazione, Universita del Salento, Italy2 Scuola di Ingegneria Aerospaziale, Sapienza Universita di Roma, Italy3 Goddard Earth Science and Technology Center, University of Maryland - Baltimore County, USA4 Center for Space Research, University of Texas at Austin, USA5 GeoForschungsZentrum - Potsdam, Germany6 Center for Relativity, University of Texas at Austin, USA
Received: 15 December 2010 / Revised: 26 June 2011Published online: 11 August 2011 – c© Societa Italiana di Fisica / Springer-Verlag 2011
Dedicated to Nicola Cabibboone of the masters of theoretical physics of
the XX century
Abstract. Laser ranging, both Lunar (LLR) and Satellite Laser Ranging (SLR), is one of the most accuratetechniques to test gravitational physics and Einstein’s theory of General Relativity. Lunar Laser Ranginghas provided very accurate tests of both the strong equivalence principle, at the foundations of GeneralRelativity, and of the weak equivalence principle, at the basis of any metric theory of gravity; it hasprovided strong limits to the values of the so-called PPN (Parametrized Post-Newtonian) parameters, thatare used to test the post-Newtonian limit of General Relativity, strong limits to conceivable deviations tothe inverse square law for very weak gravity and accurate measurements of the geodetic precession, aneffect predicted by General Relativity. Satellite laser ranging has provided strong limits to deviations to theinverse square gravity law, at a different range with respect to LLR, and in particular has given the firstdirect test of the gravitomagnetic field by measuring the gravitomagnetic shift of the node of a satellite, aframe-dragging effect also called Lense-Thirring effect. Here, after an introduction to gravitomagnetism andframe-dragging, we describe the latest results in measuring the Lense-Thirring effect using the LAGEOSsatellites and the latest gravity field models obtained by the space mission GRACE. Finally, we describean update of the LARES (LAser RElativity Satellite) mission. LARES is planned for launch in 2011 tofurther improve the accuracy in the measurement of frame-dragging.
1 Introduction
During the past century the theory of General Relativity [1–3] gave rise to an experimental triumph [3–5]. On theone hand, a number of key predictions of Einstein’s gravitational theory have been experimentally confirmed withimpressive accuracy [5]. On the other hand, Einstein’s gravitational theory today has practical applications in spaceresearch [3], geodesy, astronomy and navigation in the Solar System, from the global positioning satellite system to thetechniques of very long baseline interferometry (VLBI) and satellite laser ranging, and is a fundamental componentfor the understanding of some astrophysical and cosmological observations.
Despite all the observational tests passed by General Relativity, we have recently discovered supernovae that appearto accelerate away from us [6,7]. This can be explained by “dark energy” that is accelerating the expansion of theUniverse, and may imply a non-zero value to Einstein’s “cosmological constant”, or an exotic new form of energyknown as “quintessence” [8,9], or perhaps a modification of the theory of General Relativity. Together with darkmatter, approximately 96% of the mass-energy of the Universe should be of a form unknown to us. A relativistictheory of gravity, combining the theory of General Relativity, at some level, with quantum mechanics, may help to
a e-mail: [email protected]

Page 2 of 19 The European Physical Journal Plus
reveal what dark energy is and whether it might be related to dark matter. Therefore, new effects are being soughton very small length scales [10], on very large scales [11] and even in the Solar System [12] for what they might revealabout theories such as quantum gravity, string and brane-world models of the Universe. Furthermore, even though abreakdown of the general theory of relativity should occur at the quantum level, some viable modifications of Einstein’stheory already give different predictions at the classical, non-quantum, level [4]. Therefore, every aspect of GeneralRelativity should be directly tested and the accuracy of the present measurements of Einstein’s theory and of thefoundations of gravitational theories should be further improved.
Today, the biggest observational efforts in gravitational physics are for direct detection of gravitational waves,although we already know from the rate of change of the orbital period of the binary pulsar PSR B1913116 that thissystem emits gravitational waves at the predicted level [5], and for the accurate measurement of gravitomagnetismand frame-dragging [13]. In this paper we first describe the confirmation of frame-dragging by spin with an accuracyof the order of 10% using the LAGEOS satellites and the GRACE gravity models (refs. [14,15] and [16]), we thenreport on the LARES space experiment to be launched in 2011 for a few percent test of gravitomagnetism. In the nextsection we briefly describe the phenomena of frame-dragging and gravitomagnetism.
2 Gravitomagnetism and frame-dragging
The origin of inertia has intrigued scientists and philosophers for centuries. Inertial frames of reference permeate ourdaily life. The inertial and centrifugal forces, such as the pull and push that we feel when our vehicle accelerates, brakesand turns, arise because of changes in velocity relative to uniformly moving inertial frames. A classical interpretationascribed these forces to acceleration relative to some absolute frame independent of the cosmological matter, whereasan opposite view related them to acceleration relative to all the masses and “fixed stars” in the Universe. An echoand partial realization of the latter idea can be found in Albert Einstein’s theory of General Relativity, which predictsthat a spinning mass will “drag” inertial frames along with it.
Inertial frames are systems in which any isolated body, not subjected to any interaction, is at rest or movingwith constant velocity. However, what determines an inertial frame? And, in general, what is the origin of inertia? Inthe mechanics of Galileo Galilei and Isaac Newton an inertial frame has an absolute existence, uninfluenced by thematter in the Universe. In Einstein’s theory of General Relativity [1–3], the inertial and centrifugal forces are dueto our accelerations and rotations with respect to the so-called local inertial frames which, in turn, are determined,influenced and dragged by the distribution and flow of mass-energy in the Universe [13]. In particular, they are draggedby the motion and rotation of nearby matter; this general relativistic phenomenon is called frame-dragging (ref. [17],and see page 544 of ref. [3], for example) and represents in Einstein’s theory the remnant of the ideas of Ernst Machon the origin of inertia. Mach thought that centrifugal and inertial forces are due to rotations and accelerations withrespect to all the masses in the Universe; this is known as Mach’s principle [18–20].
Since 1896 researchers, influenced by these ideas, tried to measure the frame-dragging effects generated by therotation of the Earth on torsion balances [21] and gyroscopes [22–24]. In 1916, on the basis of General Relativity,de Sitter [25] derived the Mercury perihelion precession due to the Sun angular momentum and, in 1918, Lense andThirring [26,27] gave a general weak-field description of the frame-dragging effect on the orbit of a test-particle arounda spinning body, today known as Lense-Thirring effect.
Frame-dragging has also an intriguing influence on the flow of time around a spinning body. Indeed, synchronizationof clocks all around a closed path near a spinning body is not possible [28,29] in any rigid frame not rotating relativeto the “fixed stars”, because light corotating around a spinning body would take less time to return to a starting point(fixed relative to the “distant stars”) than would light rotating in the opposite direction [28–32].
In General Relativity, a torque-free spinning gyroscope defines an axis non-rotating relative to the local inertialframes, however, the orbital plane of a test-particle is also a kind of gyroscope. Since frame-dragging affects clocks,light, gyroscopes [33–35] (e.g., the gyroscopes of GP-B space experiment) and orbiting particles [26,27] (see the nextsections on the LAGEOS satellites and on the LARES space experiment), it also affects matter orbiting and falling ona spinning body. Indeed, an explanation of the constant orientation of the spectacular jets from active galactic nucleiand quasars, emitted in the same direction during a time that may reach millions of years, is based on frame-draggingof the accretion disk due to a super-massive spinning black hole [36,37] acting as a gyroscope.
Frame-dragging may be usefully described by a formal analogy of General Relativity, in a weak gravitational fieldand for slow motion, with electrodynamics [37,3] (see fig. 1). In General Relativity, the gravitomagnetic field, H, dueto the angular momentum J of a central body is, in the weak-field and slow-motion approximation
H = ∇ × h ∼= 2G
[J − 3(J · x)x
c3r3
], (1)
where r is the radial distance from the central body, x is the position unit-vector and h is the so-called “gravitomagneticvector potential” (equal to the non-diagonal, space and time, part of the metric).

Ignazio Ciufolini et al.: Testing gravitational physics with satellite laser ranging Page 3 of 19
Fig. 1. Frame-dragging and the gravitomagnetic analogy of General Relativity with electrodynamics. In General Relativity,freely falling test-gyroscopes define axes fixed relative to the local inertial frames, where the equivalence principle holds, thatis, where the gravitational field is locally “unobservable”; if we rotated with respect to these gyroscopes, we would then feelcentrifugal forces, even though we may not rotate at all with respect to the “distant stars”, contrary to our everyday intuition.Indeed, a gyroscope is dragged by spinning masses, that is its orientation changes with respect to the “distant stars”. Frame-dragging phenomena, which are due to mass currents and mass rotation, have been called gravitomagnetism [37,3] because ofa formal analogy of electrodynamics with the general theory of relativity (in the weak-field and slow-motion approximation).Whereas an electric charge generates an electric field and a current of electric charge generates a magnetic field, in Newtoniangravitational theory the mass of a body generates a gravitational field but a current of mass, for example the rotation of abody, would not generate any additional gravitational field. On the other hand, Einstein’s gravitational theory predicts that acurrent of mass would generate a gravitomagnetic field that would exert a force on surrounding bodies and would change thespacetime structure by generating additional curvature [38]. The gravitomagnetic field generates frame-dragging of a gyroscope,in a similar way to the magnetic field producing the change of the orientation of a magnetic needle (magnetic dipole). Indeed,in the general theory of relativity, a current of mass in a loop (that is, a gyroscope) has a behaviour formally similar to thatof a magnetic dipole in electrodynamics, which is made of an electric current in a loop. In panel a, we show the magnetic fieldB generated by a magnetic dipole m and a test magnetic dipole μ, that is a magnetic needle, which tends to be aligned alongB. In panel b is the gravitomagnetic field [37,39] H generated by the spin J of a central body and frame dragging Ω of atest-gyroscope S.
2.1 The Lense-Thirring effect
In Einstein’s gravitational theory the local inertial frames have a key role [1–3]. The strong equivalence principle, at thefoundations of General Relativity, states that the gravitational field is locally “unobservable” in the freely falling framesand thus, in these local inertial frames, all the laws of physics are the laws of Special Relativity. However, the localinertial frames are determined, influenced and dragged by the distribution and flow of mass-energy in the Universe.The axes of these non-rotating, local, inertial frames are determined by free-falling torque-free test-gyroscopes, i.e.,sufficiently small and accurate spinning top. Therefore, these gyroscopes are dragged by the motion and rotation ofnearby matter [1–3], i.e., their orientation changes with respect to the distant stars: this is the “dragging of inertialframes” or “frame-dragging”, as Einstein named it in a letter to Ernst Mach [17].

Page 4 of 19 The European Physical Journal Plus
The precession ΩSpin of the spin axis of a test-gyroscope by the angular momentum J of the central body is:
ΩSpin =3G((J · r)r − J)
c2r3, (2)
where r is the position unit-vector of the test-gyroscope and r is its radial distance from the central body. Similarly,the orbital plane of a planet, moon or satellite is a huge gyroscope that “feels” general relativistic effects. Indeed,frame-dragging of an orbiting test-particle is the rate of change of the test-particle orbital angular momentum vector.This is known as Lense-Thirring effect, that is, the precession of the nodes of a satellite, i.e., the rate of change of itsnodal longitude:
ΩLense-Thirring =2GJ
c2a3(1 − e2)3/2, (3)
where Ω is the longitude of the nodal line of the satellite (the intersection of the satellite orbital plane with theequatorial plane of the central body), J is the angular momentum of the central body, a the semimajor axis of theorbiting test-particle, e its orbital eccentricity, G the gravitational constant and c the speed of light. The rate of changeΩLense-Thirring of the longitude of the pericentre of a test-particle, that is, of the so-called Runge-Lenz vector, is
ωLense-Thirring =2GJ
c2a3(1 − e2)3/2(J + 3 cos Il ), (4)
where I is the orbital inclination, that is, the angle between the orbital plane of the test-particle and the equatorialplane of the central object, J is the angular momentum unit-vector of the central body and l the orbital angularmomentum unit-vector of the test-particle.
Since frame-dragging and Lense-Thirring effect are due to the additional spacetime curvature produced by therotation of a mass, to precisely characterize these phenomena it has been proposed to use spacetime curvature invariantsbuilt using the Riemann curvature tensor (see [40,41] and sect. 6.11 of [3]).
For discussions on the meaning of frame-dragging and gravitomagnetism, see [42–48,41,40] and sect. 6.11 of [3].
3 Measurement of gravitomagnetism with the LAGEOS satellites and the GRACE Earthgravity models
Since 1995-2001, the Lense-Thirring effect was observed using the LAGEOS and LAGEOS 2 satellites [49–56].The basic components used in this older approach to detect the Lense-Thirring effect were: 1) the very accurately
tracked orbits of the laser-ranged satellites LAGEOS and LAGEOS 2, 2) the accurate Earth gravity models JGM-3and EGM96 and 3) three observables: the two nodes of LAGEOS and LAGEOS 2 and the perigee of LAGEOS 2.These three observables are needed in order to remove the errors due to the uncertainty in the Earth’s quadrupolemoment, J2, to the uncertainty in the next largest even zonal harmonic, J4, and to measure the Lense-Thirring effect,i.e., the use of three observables are needed for the three unknowns: Lense-Thirring effect, δJ2 and δJ4. We recall thatthe equation describing the nodal rate ΩClass of a satellite, due to the even zonal harmonics, is
ΩClass = −32n
(R⊕a
)2 cos I
(1 − e2)2
{J2 + J4
[58
(R⊕a
)2
(7 sin2 I − 4)
(1 + 3
2e2)
(1 − e2)2
]+ ΣN2n × J2n
}, (5)
where the J2n are the non-normalized even zonal harmonic coefficients, N2n their coefficients (in the equation for thenodal rate) functions of the orbital parameters a, I and e, n = 2π/P is the orbital mean motion, P the orbital periodand R⊕ the Earth equatorial radius.
Unfortunately, a) the Earth gravity models JGM-3 and EGM96, even though representing the state of the artin 1995-1996, were not accurate enough for a precise measurement of the Lense-Thirring effect and b) the thirdobservable, i.e., the perigee of a satellite, is not as stable under non-gravitational perturbations as its node. Indeed, inclassical mechanics the node (orbital angular momentum) is conserved under any central force, however, the perigee(Runge-Lenz vector) is conserved only under a central force of the type ∼ 1/r2. For these reasons it was quite difficultto assess the total error budget of these 1995–2004 observations of frame-dragging.
Therefore, since 1996, our effort was to find a new observable to replace the perigee of LAGEOS 2 (see sect. 5), inorder to use the nodes only, and to use a more accurate Earth gravity field model.

Ignazio Ciufolini et al.: Testing gravitational physics with satellite laser ranging Page 5 of 19
3.1 Method of the 2004 analysis with LAGEOS, LAGEOS 2 and the GRACE models
The accurate measurement of the Lense-Thirring effect, obtained in 2004 and following years, is described in thepresent paper. It has been obtained by using the laser-ranging data of the satellites LAGEOS (LAser GEOdynam-ics Satellite) and LAGEOS 2 [57,58] and the Earth gravity field models obtained by the GRACE space mission:EIGEN-GRACE02S, EIGEN-GRACE03S, JEM03G, GGM02S, EIGEN-CG03C, GIF22a, JEM04G, EIGEN-GL04C,JEM01-RL03B, GGM03S, ITG-GRACE03S, EIGEN-GL05C [59–67]. Most of these gravity models can be found athttp://icgem.gfz-potsdam.de/ICGEM/ICGEM.html. The period of analysis covered an observational period betweenabout 11 years and 14 years, i.e. more than 2.5 times longer than in any previous analyses.
The LAGEOS satellites are heavy brass and aluminum satellites, of about 406 kg weight, completely passive andcovered with retro-reflectors, orbiting at an altitude of about 6000 km above the surface of the Earth. LAGEOS,launched in 1976 by NASA, and LAGEOS 2, launched by NASA and ASI (the Italian Space Agency) in 1992, havean essentially identical structure but they have different orbits. The semimajor axis of LAGEOS is a ∼= 12, 270 km,the period P ∼= 3.758 h, the eccentricity e ∼= 0.004 and the inclination I ∼= 109.9◦. The semimajor axis of LAGEOS 2is aII
∼= 12, 163 km, the period P ∼= 3.708 h, the eccentricity eII∼= 0.014 and the inclination III
∼= 52.65◦. We haveanalyzed the laser-ranging data using the principles described in [68] and adopted the underlying IERS (InternationalEarth Rotation and Reference Systems Service) conventions in our modeling, except that, in the 2004 analysis andthe following ones, we used the GRACE Earth’s static gravity models listed above. Our analysis was performed using15-day arcs. For each 15-day arc, initial state vector (position and velocity), coefficient of reflectivity (CR) and polarmotion were adjusted. Solar radiation pressure, Earth albedo, and anisotropic thermal effects were modeled accordingto [69–72]. In modeling the thermal effects, the orientation of the satellite spin axis was obtained from [73]. We haveapplied a J4 = −1.41 · 10−11/y correction [60,74], where the value of J4 is ∼ −1.6 · 10−6, thus, in one year, therelative correction δJ4
J4is ∼ 10−5. Lunar, solar, and planetary perturbations were also included in the equations of
motion, formulated according to Einstein’s general theory of relativity with the exception of the Lense-Thirring effect,which was purposely set to zero. Polar motion was adjusted and the Earth’s rotation was modeled from the very longbaseline interferometry-based series SPACE [75] which are extended annually. We analyzed the laser-ranging data andthe orbits of the LAGEOS satellites using the orbital analysis and data reduction softwares GEODYN II (NASA) [76],EPOS-OC (GFZ, GeoForschungsZentrum) and UTOPIA (CSR-UT).
In sect. 2.1 we have seen how the node and the perigee of a test-particle are dragged by the angular momentum of acentral body. From the Lense-Thirring formula (sect. 2), we get for the nodes of the satellites LAGEOS and LAGEOS
2: ΩLense-ThirringI
∼= 31mas/y and ΩLense-Thirring
II∼= 31.5mas/y, where mas is a millisecond of arc. The argument of
pericenter (perigee in our analysis), ω, of the LAGEOS satellites has also a Lense-Thirring drag [55]. However, whereasin a previous observation of the Lense-Thirring effect [55] we used both the nodes of LAGEOS and LAGEOS 2 andthe perigee of LAGEOS 2, in the present analyses we only use the nodes of LAGEOS and LAGEOS 2. Indeed, theperigee of an Earth satellite such as LAGEOS 2 is affected by a number of perturbations whose impact in the finalerror budget is not easy to be assessed. However, using the previous models JGM-3 and EGM96, we were forced to usethree observables and thus we also needed to use the perigee of LAGEOS 2. Nevertheless, for a measurement of theLense-Thirring effect with an accuracy of the order of 10%, using a number of 2004–2008 GRACE models, thanks to thedramatic improvement in the determination of the Earth’s gravity field due to GRACE, it is just enough to eliminatethe uncertainty in the Earth’s quadrupole moment and thus to just use two observables, i.e. the two nodes of theLAGEOS satellites. However, for a measurement of the Lense-Thirring effect with an accuracy of the order of 1%, it isnecessary to use one additional observable that will be provided by the node of the LARES satellite described in sect. 5.
To precisely quantify and measure the gravitomagnetic effects we have introduced the parameter μ that is bydefinition 1 in General Relativity [3] and zero in Newtonian theory (thus, our approach is not based on the metricgravitational theories described by the PPN, Parametrized Post-Newtonian, approximation).
The main error in this measurement is due to the uncertainties in the Earth’s even zonal harmonics and their timevariations. The unmodeled orbital effects due to the harmonics of lower degree, especially J2, are of the same order ofmagnitude of the Lense-Thirring effect (see [77]). However, by analyzing the GRACE models and their uncertaintiesin the even zonal harmonics, and by calculating the secular effects of these uncertainties on the orbital elements ofLAGEOS and LAGEOS 2, we find that by far the main source of error in the determination of the Lense-Thirringeffect is just due to the first even zonal harmonic, J2.
We can therefore use the two observable quantities ΩI and ΩII to determine μ [49–51,78], thereby avoiding thelargest source of error arising from the uncertainty in J2. We do this by solving the system of the two equations forδΩI and δΩII in the two unknowns μ and J2, obtaining for μ
δΩExpLAGEOS I + cδΩExp
LAGEOS II = μ(31 + c31.5)mas/y + other errors ∼= μ(48.2mas/y), (6)
where c = 0.545.The nodes of two laser-ranged satellites of LAGEOS type to measure the Lense-Thirring effect, by eliminating in this
way the Earth spherical harmonics uncertainties, was first proposed and published in [79,49] and further studied in [56].

Page 6 of 19 The European Physical Journal Plus
The use of the combination of the nodes only of a number of laser-ranged satellites was first explained in [50, p. 3102],see also [3, p. 336], where “. . . A solution would be to orbit several high-altitude, laser-ranged satellites, similar toLAGEOS, to measure J2, J4, J6, etc., and one satellite to measure ΩLense-Thirring . . .” is written. The use of the nodesof LAGEOS and LAGEOS 2, together with the explicit expression of the LAGEOS satellites nodal equations, was firstproposed in [51]; the explicit expression of this combination, that is, however, a trivial step on the basis of the explicitequations given in [51], was presented during the 2002 I-SIGRAV school and published in its proceedings [78]. Adetailed study of the various possibilities to measure the Lense-Thirring effect using LAGEOS and other laser-rangedsatellites was presented in [80]. The use of the GRACE-derived gravitational models, when available, to measure theLense-Thirring effect with an accuracy of a few percent was first published in [81,82] and [83]. For other proposals tomeasure relativistic effects and frame-dragging using LAGEOS or polar satellites see [84–87].
GRACE is a space mission using a pair of spacecraft flying in tandem formation (nominally 250 km apart), enhancedwith higher-quality accelerometers and a one-way radio frequency range difference measuring system on both of them.This configuration of satellite-to-satellite tracking between two low orbiters is called Low-Low Satellite-to-SatelliteTracking (LL SST). The LL configuration is characterized from its ability to resolve features proportional to thedistance between the two spacecraft. GRACE therefore, since it also carries GPS receivers on both spacecrafts, con-tributes to the observation of the long, as well as the medium wavelengths (up to degree and order 120 of the sphericalharmonics of the Earth’s gravitational field) of the gravitational spectrum.
Equation (6) for μ does not depend on J2 nor on its uncertainty, thus, the value of μ that we obtain is unaffectedby the largest error, due to δJ2, and it is sensitive only to the smaller uncertainties due to δJ2n, with 2n ≥ 4.
The next largest error source is due to uncertainty in J4 that may be as large as 10% of the Lense-Thirring effect.To eliminate this error source we need a new observable that will indeed be provided by the node of LARES, allowinga measurement of the Lense-Thirring effect at about the 1% level.
Similarly, regarding tidal, secular and seasonal changes in the geopotential coefficients, the main effects on thenodes of LAGEOS and LAGEOS 2, caused by tidal and other time variations in the Earth’s gravitational field [50,56,88], are due to changes in the quadrupole coefficient J2, e.g., by the 18.6 year lunar tide with the period of the Moonnode and by the post-glacial rebound, and due to anomalous variations of J2 (see [77]). However, the tidal errors in J2
and the errors resulting from other unmodeled, medium and long period, time variations in J2, including its secularand seasonal variations, are removed by the combination (6) of the node residuals. In particular, most of the errorsresulting from the 18.6 and 9.3 years tides, associated with the lunar node, are removed in our measurement. Thevarious error sources that can affect the measurement of the Lense-Thirring effect using the nodes of the LAGEOSsatellites have been extensively treated in a large number of papers by several authors, see, e.g., [49,50,56,51,53,54,69–73,89–91] and the main error sources and error budget are treated in detail in [77].
4 Results: measurement of the Lense-Thirring effect and its uncertainty
4.1 Error budget
In the measurement of the Lense-Thirring effect, that is a secular change of the nodal longitude of a satellite, thelargest error sources are due to the other secular and long-period orbital perturbations affecting the node; the periodicalperturbations affecting the measurement of frame-dragging are treated in [77]. Among the secular perturbations ofthe node of the LAGEOS satellites there are the shift of the nodal line due to the even zonal harmonics of the Earth’sgravitational field [92], the geodetic precession [25] and the gravitomagnetic or Lense-Thirring effect. The geodeticprecession has been measured with an accuracy of about 6 × 10−3 and since its effect on the node of the LAGEOSsatellites is only 17.6 mas [50], its uncertainty is negligible in the Lense-Thirring measurement. However, as discussedin the previous section, the uncertainty in the even zonal harmonics is a critical factor for the determination of frame-dragging (see the analysis of the various perturbations affecting the node of the LAGEOS satellites in [49,50,56,51,53,54,69–73,89,91,90]). Nevertheless, as discussed in the previous section and as shown in detail in [77], due to thehigh accuracy of the recent novel Earth’s gravity field models based on GRACE data, the error in the frame-draggingmeasurement with the LAGEOS satellites, due to the even zonal harmonic uncertainties, is at a level of about 10% orless. In regard to the periodic perturbations, including the non-gravitational perturbations, in addition to a detailedtreatment of the various perturbations affecting the LAGEOS node and their uncertainties given in [77], we stress thatby performing a number of different fits of our residuals of the combination of the nodes, with a secular trend plusa number of different periodical perturbations, we found that the periodical perturbations cannot introduce an errorlarger than about 3%, or at most 4%, in our determination of the Lense-Thirring effect.
In the next sect. 4.2 we report the results of the measurement of the Lense-Thirring effect using the GRACEmodels EIGEN-GRACE02S, EIGEN-GRACE03S and JEM03G. Using EIGEN-GRACE02S, whose uncertainties inEarth’s even zonal harmonics include to a certain extent systematic errors, the contribution of the even zonal errorsto the total error budget is 4% only, or more realistically 8% by doubling it to take into account some underestimationof the published errors of this model (see also the discussion in [77]). The values of the spherical harmonic coefficients

Ignazio Ciufolini et al.: Testing gravitational physics with satellite laser ranging Page 7 of 19
Fig. 2. Residuals of the node of LAGEOS (in blue), node of LAGEOS 2 (in green) and combination of the nodes of LAGEOSand LAGEOS 2 using formula (6) (in red), JEM03G is the GRACE Earth gravity model used here.
describing the Earth’s gravity field model may appreciably change with longer periods of observations. However, ouranalysis is not sensitive to changes in the Earth’s quadrupole moment and it is only affected by changes in the smallerhigher zonal harmonics. Therefore, in the future, more accurate determinations of the even zonal coefficients and oftheir uncertainties might lead to slightly different values of μ and consequently to a slightly different and improvedtotal error budget. However, it is important to stress that when more accurate models using GRACE, CHAMP orGOCE are available, it will be straightforward to, a posteriori, very accurately re-assess the total error of the presentanalysis. This will be done by simply taking the differences between the values of the even zonals of the presently usedmodels (EIGEN-GRACE02S, EIGEN-GRACE03S, JEM03G, etc.) with the corresponding values of the future, moreaccurate, models and by considering the uncertainties of these forthcoming models. Thus, one will be able to easilyre-estimate the total error in the present measurement of μ.
In summary, by doubling for each GRACE gravity model the published errors in the static even zonal harmonics(see [77]) and by summing up the absolute value of the error due to each even zonal harmonic, in the analysis withEIGEN-GRACE02S and EIGEN-GRACE03S, including the uncertainties in the non-gravitational orbital perturba-tions, we get a total error budget of, respectively, about 9% and 13% of the Lense-Thirring effect. However, in the caseof JEM03G, only the formal uncertainties of the J2n were available to us but not their calibrated uncertainties, i.e.,the uncertainties including the systematic errors, and we have then tentatively used the uncertainties of the GRACEmodel GGM02S; then, using the published, calibrated, uncertainties of GGM02S we obtain a total error budget, in-cluding the uncertainties in the non-gravitational orbital perturbations, of about 10%, or by doubling the static evenzonal harmonics uncertainties we get a total error of about 18% [77]. The main perturbations in our determination ofthe Lense-Thirring effect are described and analyzed in [77].
John Ries et al. (2008) [16] have extended the measurement of the Lense-Thirring effect to the models GGM02S,EIGEN-CG03C, GIF22a, JEM04G, EIGEN-GL04C, JEM01-RL03B, GGM03S, ITG-GRACE03S and EIGEN-GL05Cusing the orbital estimator UTOPIA, the results are presented in sect. 4.2 and in fig. 5. Using a number of GRACEmodels and the LAGEOS and LAGEOS 2 orbital data, Ries et al. have confirmed the general relativistic prediction forthe Lense-Thirring effect, they have determined its mean value to be 99% of the prediction of General Relativity andhave concluded that the total error budget in the measurement of the Lense-Thirring effect using the latest GRACEEarth gravity models is of the order of 10% (see sect. 4.2 and table 1).
4.2 Results of the measurement of the Lense-Thirring effect
In this section we present the results in the measurement of the Lense-Thirring effect on the basis of a number of differ-ent GRACE Earth gravitational models, through the analysis of the nodal rates of the LAGEOS and LAGEOS 2 satel-lites. We first report the results we obtained using EIGEN-GRACE02S, EIGEN-GRACE03S and JEM03G (figs. 2, 3and 4) over a period of about 11 years. We also separately plot the integrated residuals of the node of LAGEOS, of

Page 8 of 19 The European Physical Journal Plus
Fig. 3. Fit of the residuals of the nodes of LAGEOS and LAGEOS 2, using the combination (5) with: (a) the model EIGEN-GRACE02S, (b) EIGEN-GRACE03S, (c) JEM03G. In (d) the fit of the nodes of LAGEOS and LAGEOS 2, using the orbitalestimator EPOS-OC of the German GRACE team of GFZ and the model EIGEN-GRACE02S is shown. The fits in (a) to (d)are with a secular trend plus six periodic terms, corresponding to 1044-day, 905-day, 281-day, 569-day, 111-day and 284.5-dayperiods. The slope in (a) is μ � 0.99, in (b) μ � 0.93, in (c) μ � 0.99 and in (d) μ � 1.0.
Fig. 4. Measurement of the Lense-Thirring effect with the GRACE models EIGEN-GRACE02S [14], EIGEN-GRACE03S, andJEM03G, obtained using GEODYN and EPOS-OC. The error bar includes systematic errors calculated using the publisheduncertainties of each model (see sect. 4.2).

Ignazio Ciufolini et al.: Testing gravitational physics with satellite laser ranging Page 9 of 19
Fig. 5. Measurement of the Lense-Thirring effect with the GRACE models: EIGEN-GRACE02S, GGM02S, EIGEN-CG03C,GIF22a, JEM04G, EIGEN-GL04C, JEM01-RL03B, GGM03S, ITG-GRACE03S and EIGEN-GL05C, obtained using UTOPIA;see [16].
the node of LAGEOS 2 and of their J2-free combination (fig. 2). In fig. 3, we report the result of the measurement ofthe Lense-Thirring effect with EIGEN-GRACE02S using the orbital estimator GEODYN (NASA), corresponding tofigs. 3a, b and c, and the orbital estimator EPOS-OC by the German GRACE group of GFZ, fig. 3d, this program isindependent of GEODYN; thus this independent result confirms our previous analyses obtained with GEODYN. Then,in fig. 4, we present the results with these three models, including an error bar representing the total estimated errorin our measurement including systematic errors. Finally, in fig. 5 we report the result of Ries et al. (2008) [16] for themeasurement of the Lense-Thirring effect using a number of GRACE models, including EIGEN-GRACE02S, GGM02S,EIGEN-CG03C, GIF22a, JEM04G, EIGEN-GL04C, JEM01-RL03B, GGM03S, ITG-GRACE03S and EIGEN-GL05C.
Figure 2 shows (in blue) the integrated residuals of the node of LAGEOS from January 1993 to October 2003using the model JEM03G, the integrated node residuals of LAGEOS 2 (in green) using JEM03G and the integratedcombination of the nodes residuals of LAGEOS and LAGEOS 2 (in red), according to our formula (6), using JEM03G;this figure shows that the large residuals of the node of each satellite (in blue and green) due to the error in J2 areeliminated in the combined residuals (in red).
Figure 3 displays the result of the measurement of the Lense-Thirring effect using the three GRACE Earth modelsEIGEN-GRACE02S (a), EIGEN-GRACE03S (b) and JEM03G (c), by fitting the orbital residuals with a secular trendtogether with six periodic effects, corresponding to 1044-day, 905-day, 281-day, 569-day, 111-day, 284.5-day periods.Figure 3d represents the result of the measurement of the Lense-Thirring effect using the orbital estimator EPOS-OCof the German GRACE team of GFZ, with EIGEN-GRACE02S, and by fitting the orbital residuals with a seculartrend together the six listed periodic effects.
In conclusion, by fitting our combined residuals with a secular trend plus 6 periodic signals, using EIGEN-GRACE02S, we found over an observational period of 11 years
μEIGEN-GRACE02S = 0.994 ± 0.10,
with RMS of the post-fit residuals of 5.98 mas using GEODYN II, however using EPOS-OC and the correspondingGFZ set-up describing the satellites orbital perturbations we found: μEIGEN-GRACE02S = 1.0 ± 0.10 (with RMS ofthe post-fit residuals of 6.92 mas); this small 0.6% difference for μ using the two orbital estimators is due to a differentmodeling of the orbital perturbations in the two cases.
By fitting our combined residuals with a secular trend plus the six periodic signals listed above, using EIGEN-GRACE03S and JEM03G, we found, respectively,
μEIGEN-GRACE03S � 0.93 ± 0.13
andμJEM03G � 0.99,
where these uncertainties include all systematic errors. The static gravitational errors for the models EIGEN-GRACE02S, EIGEN-GRACE03S and JEM03G have been calculated by simply adding the absolute values of theerrors in our combined residuals due to the even zonal harmonics uncertainties and by then multiplying this totalerror for a factor 2, in order to take into account for possible underestimations of the published uncertainties of eachmodel. However, in the case of JEM03G, only the formal uncertainties of the J2n were available to us but not theircalibrated uncertainties, i.e., the uncertainties including the systematic errors.

Page 10 of 19 The European Physical Journal Plus
In the case of EIGEN-GRACE02S, by fitting our combined residuals with 2, 6, or 10 periodic terms we practicallyobtained the same value for the Lense-Thirring effect and by analyzing the data with the NASA orbital estimatorGEODYN II and with the GFZ orbital estimator EPOS-OC with their corresponding different set-up for the orbitalperturbations, we substantially obtained the same result. Furthermore, these different measurements of the Earthframe-dragging effect obtained with EIGEN-GRACE02S, EIGEN-GRACE03S and JEM03G are in agreement witheach other within their uncertainties. Therefore, our measured value of the Lense-Thirring effect with the Earthgravity models EIGEN-GRACE02S, EIGEN-GRACE03S and JEM03G agree with the general relativistic predictionand the corresponding uncertainty of our measurement using the more recent GRACE models is of the order of 10%.
John Ries et al. (2008) [16] have extended the measurement of the Lense-Thirring effect to a number of more recentmodels, including EIGEN-GRACE02S, GGM02S, EIGEN-CG03C, GIF22a, JEM04G, EIGEN-GL04C, JEM01-RL03B,GGM03S, ITG-GRACE03S and EIGEN-GL05C, using the orbital estimator UTOPIA and corresponding set-up forthe orbital perturbations, the results are presented in fig. 5. Ries et al. have concluded that the mean value of theLense-Thirring effect using these models is 0.99 μ with a total error budget in the measurement of the Lense-Thirringeffect of about 12%.
In conclusion, the analysis of the University of Salento, Sapienza University of Rome, University of Maryland Bal-timore County and GFZ Potsdam/Munich (using the orbital estimators GEODYN and EPOC-OC), and of the Centerfor Space Research of the University of Texas at Austin have confirmed the general relativistic prediction for Lense-Thirring effect using the LAGEOS and LAGEOS 2 orbital data with an accuracy of the order of 10% (see figs. 4 and 5).
4.3 The error due to Earth’s gravity field uncertainties and a realistic assessment of the accuracy of the GRACEEarth gravity models
By far, the main source of error in the measurement of the Lense-Thirring effect with the LAGEOS satellites is due tothe uncertainties in the Earth’s even zonal harmonics; this error can be quantified by simply propagating on the nodesof the LAGEOS satellites the published uncertainties in the Earth’s even zonal harmonics of the GRACE models usedin our orbital estimation.
In [77] we discuss how the published uncertainties of the Earth’s even zonal harmonics of the GRACE models,and therefore the error in the Lense-Thirring measurement, are representing the true errors in our knowledge of theseharmonics. The conclusion, based on a comparison carried out by CSR [64] between different GRACE gravity fieldmodels, is that the true errors in the lower degree even zonal harmonics of the GRACE models are, on average,contained within the published uncertainties of the recent GRACE models multiplied by a factor 2 or at most 3. Thus,for a realistic assessment of the corresponding error in the Lense-Thirring measurement, it is sufficient to multiply bya factor 2, or at most 3, the error obtained by propagating the published GRACE uncertainties on the nodes of theLAGEOS satellites.
For an extensive error analysis we refer to [77], here we simply report the final error budget.
4.4 Summary of error budget
In summary, for EIGEN-GRACE02S, EIGEN-GRACE03S and JEM03G, multiplying by a factor 2 their publishedeven zonal harmonics uncertainties, we have:
δμEven zonal harmonics-EIGEN-GRACE02S ∼ 8% μ,
δμTime variationsin gravitational field and tides ∼ 3% μ,
δμNon-gravitationalperturbations � 3% μ,
δμOther error sources � 2% μ.
Therefore, by taking into account all the error sources, for EIGEN-GRACE02S we finally find a grand total RSS error
(δμ/μ)EIGEN-GRACE02S ∼ 9% μ. (7)
Whereas for EIGEN-GRACE03S we have:
δμEven zonal harmonics-EIGEN-GRACE03S ∼ 12% μ; and we finally find a grand total RSS error for EIGEN-GRACE03S
(δμ/μ)EIGEN−GRACE03S ∼ 13% μ. (8)

Ignazio Ciufolini et al.: Testing gravitational physics with satellite laser ranging Page 11 of 19
Table 1. Estimated error budget for Lense-Thirring test [16].
Error Source % of Lense-Thirring
Scatter due to method (linear fit w/wo tidal lines) 1
Solar radiation pressure, Earth albedo, thermal reradiation effects 3
Zonal rates (quadratic effect; after mapping to mean epoch)∗ 1
C40 (estimated from scatter of GRACE gravity models)∗∗ 10
C60 (estimated from scatter of GRACE gravity models)∗∗ 5
C40 (20% uncertainty in mapping to mean epoch)∗∗∗ 3
C60 (50% uncertainty in mapping to mean epoch)∗∗∗ 2
RSS % of Lense-Thirring 12
∗Epoch of GRACE gravity models typically ∼ 2004.0–2005.0; mean epoch of SLR data ∼ 2000.0.
∗∗Assigned sigmas typically too small; used C40 scatter 1.3 · 10−11, C60 scatter 1.0 · 10−11.
∗∗∗ C40 uncertainty is estimated to be 20% of 4.7 · 10−12/y and for C60 50% of 1.7 · 10−12/y. Cl0 are the normalized evenzonal harmonics [92].
In the case of JEM03G, the calibrated, i.e., including systematic errors, uncertainties were not available to us. Ifwe multiplied the published even zonal harmonics uncertainties of EIGEN-GRACE02S and EIGEN-GRACE03S by afactor 3, we would then get a final grand total error of, respectively, about 12.9% and about 18.6%; these errors shouldrepresent final measurement uncertainties closer to a 3-sigma error estimate.
In conclusion, using the latest GRACE gravity models our measurement of the Lense-Thirring effect has a totalerror, including systematic errors, of the order of 10%. This error analysis is in very good agreement with that of [16],for the latest GRACE models, that is summarized in table 1.
5 Introduction to the LARES experiment
The LARES space experiment, by the Italian Space Agency (ASI), is based on the launch of a new laser-ranged satellite,called LARES (LAser RElativity Satellite), using the new launch vehicle VEGA. LARES will have an altitude of about1450 km, orbital inclination of about 70 degrees and nearly zero eccentricity. The LARES satellite together with theLAGEOS (NASA) and LAGEOS 2 (NASA and ASI) satellites and with the GRACE (NASA-CSR and DLR-GFZ)Earth’s gravity field models will allow a measurement of the Earth’s gravitomagnetic field and of the Lense-Thirringeffect with an uncertainty of a few percent.
In 1984, the use of the nodes of two laser-ranged satellites of LAGEOS type to measure the Lense-Thirring effectwas proposed [79,49]. The idea was to orbit a laser-ranged satellite of LAGEOS type (called LAGEOS III and lateron LARES), with an inclination supplementary to the one of LAGEOS (launched in 1976 by NASA), in order tocancel all the secular effects on the nodes of the two laser-ranged satellites due to the deviations of the Earth’sgravitational field from the spherical symmetry and in particular due to the Earth’s even zonal harmonics. All theother orbital parameters of LARES/LAGEOS III were proposed to be equal to the ones of LAGEOS, in particularthe semimajor axis was proposed to be approximately equal to 12270 km. The mass of LAGEOS and of the proposedLAGEOS III satellite was about 400 kg. Several papers [49,50], international studies [56], proposals [93] and PhDdissertations [94,80] analyzed the LAGEOS III proposal.
Unfortunately, even though such an orbit of LARES would have allowed a complete cancellation of the staticEarth’s spherical harmonics secular effects in order to measure the much smaller Lense-Thirring effect, the weight ofthe proposed LARES satellite of about 400 kg and especially the high altitude of its orbit implied an expensive launchvehicle. For this reason a LARES satellite of only about 100 kg of weight was later designed [93], but the high altitudeof LARES was still somehow expensive to achieve.
Nevertheless, three new factors have changed the need of such a high-altitude orbit for LARES: a) the idea to usethe nodes of N laser-ranged satellites to measure the Lense-Thirring effect and to cancel the uncertainty due to thefirst N-1 even zonal harmonics [50,3,14], b) the launch of the GRACE spacecraft in 2002 and the publication of a newgeneration of very accurate Earth gravity field models using the GRACE observations [60,95–97] and c) the possibilityto launch the LARES satellite using the much less expensive qualifying flight of the new launcher VEGA, built byESA and ELV (ASI and AVIO), however at a much lower altitude than originally planned.
a) The idea to use the nodes of N satellites of LAGEOS type to cancel the effect of the first N-1 Earth evenzonal harmonics and to measure the Lense-Thirring effect was published in 1989 [50] (see also [3], on page 336) as apossible alternative to the concept of the supplementary inclination satellites (see sect. 3.1). This technique to use Nobservables to cancel the effect of the first N-1 even zonal harmonics was explicitly described in [51] (see sect. 3.1 and
Page 12 of 19 The European Physical Journal Plus
see also the explicit calculations about the use of the nodes of N laser-ranged satellites in [80]). In particular the ideato use the two nodes of the satellites LAGEOS and LAGEOS 2, together with the perigee of LAGEOS 2, was describedin detail, together with the corresponding formula, in 1996 [51]. This led to an observation of the Lense-Thirring effectusing the LAGEOS and LAGEOS 2 satellites and the gravity field model EGM96 [52,55]. In this work, the nodes ofLAGEOS and LAGEOS 2 and the perigee of LAGEOS 2 were used in order to cancel the error in the first two evenzonal harmonics by using these three “observables”, including the perigee, which, however, introduced relatively largeerrors due to its unmodelled non-gravitational perturbations. This technique to use the nodes of N satellite’s to cancelthe effect of the first N-1 even zonal harmonics led to the 2004–2008 measurements [14–16,77] of the Lense-Thirringeffect (with accuracy of the order of about 10%) described in the previous sections, by using the two LAGEOS satellitesand the accurate Earth’s gravity field models obtained by using the GRACE spacecraft. In these last measurementswe used the same technique of the 1998 paper but we did not use the perigee of LAGEOS 2 (that we have tried fora long time to avoid since the publishing of our 1997–1998 papers) thanks to the new generation of GRACE Earth’sgravity models. The 2004 measurement is just the case of N = 2 described in the above-mentioned 1989 paper andit uses the nodes of the two laser-ranged satellites LAGEOS and LAGEOS 2 in order to cancel the effect of the firsteven zonal harmonic coefficient J2 of the Earth and to measure the Lense-Thirring effect (the explicit expression ofthis combination was also given in [78]).
b) The 2004 accurate measurement of the Lense-Thirring effect was possible thanks to the launch of the GRACEsatellite and the publication of its accurate gravity field models by GFZ, Center for Space Research (CSR) of theUniversity of Texas at Austin and by other groups [60,95–97]. The use of the GRACE-derived gravitational models,when available, to measure the Lense-Thirring effect with an accuracy of a few percent has been, for over a decade, awell-known possibility to all the researchers in this field [82,83].
c) In 2004, Paolozzi of the “Scuola d’Ingegneria Aerospaziale” of the University of Rome “La Sapienza” discoveredthe possibility to use the qualifying flight of the new launcher VEGA to orbit LARES [98]. However, this launch forLARES will be at a much lower semimajor axis than that of the originally planned satellite at 12270 km. The altitudeachievable with this qualifying launch is of about 1450 km. In 2005, J. Ries [99] informed us that the CSR had donesome simulations supporting the possibility of using a lower-orbit laser-ranged satellite to measure the Lense-Thirringeffect, this possibility was later on discussed also in [100,101].
In the following, we describe the orbit of the LARES satellite in relation to the error in the measurement of theLense-Thirring effect.
6 A new laser-ranged satellite at a lower altitude than LAGEOS and LAGEOS 2
The simplest conceivable orbit to cancel the effect of all the even zonal harmonics on the node of a satellite wouldbe a polar orbit, indeed for such an orbit the effect of the even zonal harmonics on the satellite node would be zeroand, however, the node of the satellite would be still perturbed by the Earth’s gravitomagnetic field, i.e., it would beaffected by the Lense-Thirring effect.
Unfortunately, as pointed out in the 1989 LAGEOS III NASA/ASI study [56] and explicitly calculated by Peterson(1997) (chapt. 5 of [80]) the uncertainty in the K1 tide (tesseral, m = 1, tide) would make such an orbit unsuitable forthe Lense-Thirring measurement. In addition, it would be quite demanding to launch LARES with the requirementof a small orbital injection deviation from a polar orbit.
However, a quasi-polar orbit would have a nodal precession, due to its departure from 90 degrees of inclination,and thus one could simply fit for the effect of the K1 tide using a periodical signal exactly at the nodal frequency.Such frequency (with the period of the LAGEOS satellites node) is indeed observed in the LAGEOS 1 and LAGEOS 2analyses already mentioned [55,14] and is the largest periodical amplitude observed in the combined residuals.
In regard to the effect of the static even zonal harmonics, by using the technique explained in [50,51] and by usingthe nodes of the satellites LARES, LAGEOS and LAGEOS 2, we would be able to cancel the uncertainties due to thefirst two even zonal harmonics, J2 and J4, and our measurement would only be affected by the uncertainties due tothe even zonal harmonics with degree strictly higher than 4.
By solving the system of the three equations for the nodal precessions of LAGEOS, LAGEOS I and LARES in thethree unknowns, J2, J4 and Lense-Thirring effect, we have a combination of three observables (the three nodal rates)which determines the Lense-Thirring effect independently of any uncertainty δJ2 and δJ4 in the first two even zonalharmonics. This same technique was applied in [55] using the nodes of LAGEOS and LAGEOS 2 and the perigee ofLAGEOS 2 and in [14] using the nodes of LAGEOS and LAGEOS 2 only.
It turns out that some values of the inclination of LARES would minimize the error in the measurement of theLense-Thirring effect since they would minimize the error due to the uncertainty in the largest (not cancelled usingthe combination of the three observables) even zonal harmonic J6.
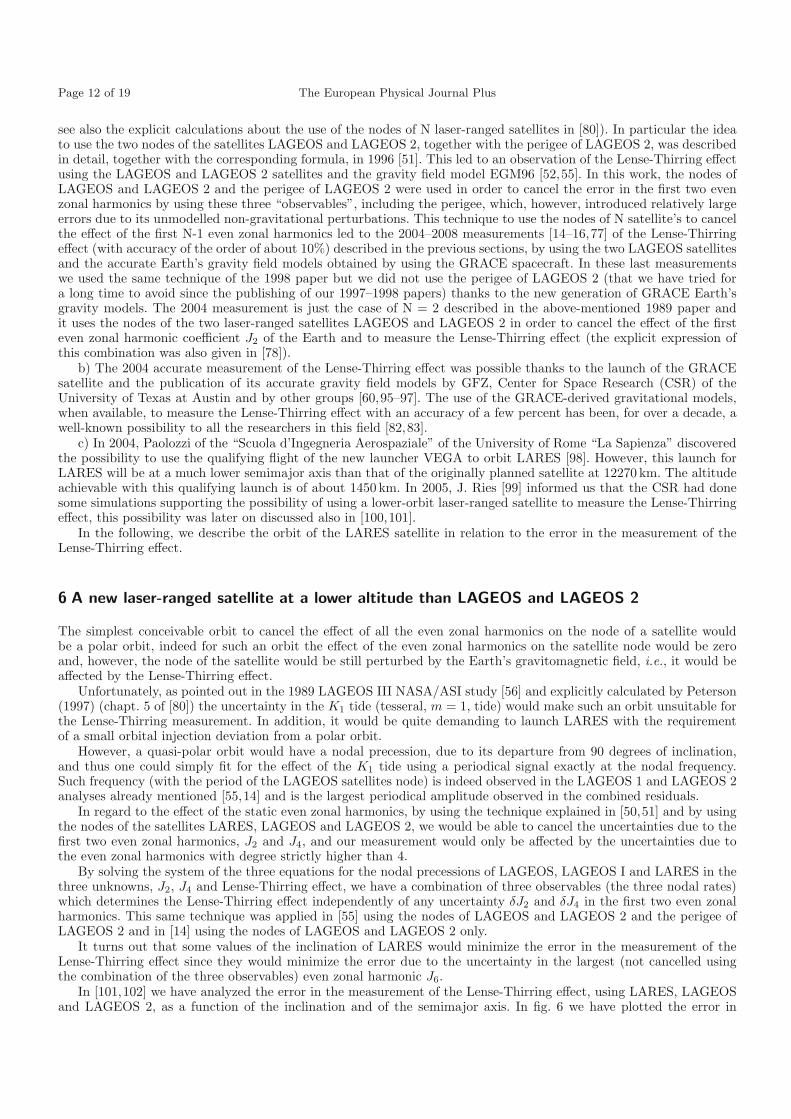
In [101,102] we have analyzed the error in the measurement of the Lense-Thirring effect, using LARES, LAGEOSand LAGEOS 2, as a function of the inclination and of the semimajor axis. In fig. 6 we have plotted the error in

Ignazio Ciufolini et al.: Testing gravitational physics with satellite laser ranging Page 13 of 19
Fig. 6. Uncertainty in the measurement of the Lense-Thirring effect, due to the even zonal harmonics uncertainties, as afunction of the inclination of LARES, using LARES, LAGEOS and LAGEOS 2. The altitude of LARES is here 1500 km andthe range of the inclination between 0 and 180 degrees.
the measurement of the Lense-Thirring effect as a function of the inclination by assuming an altitude of LARES of1500 km, i.e., a LARES semimajor axis of about 7880 km.
From fig. 6 we can see that any inclination from 60 degrees to 86 degrees and from 94 to 120 degrees would besuitable for a measurement of the Lense-Thirring effect with an accuracy of a few percent. An inclination of LARES ofabout 110 degrees or 70 degrees would minimize the error. In deriving this result, a) we have assumed: zero eccentricityfor the LARES orbit, b) we have only considered the effect of the first 5 even zonal harmonics: J2, J4, J6, J8 andJ10 and c) we have considered the uncertainties in the spherical harmonics J6, J8 and J10 equal to those of theEIGEN-GRACE02S Earth’s gravity model [60]. However, by including higher-degree even zonal harmonics, the resultsof fig. 6 would only slightly change. Indeed, in [102] we have analyzed the error in the measurement of the Lense-Thirring effect, with LARES, LAGEOS and LAGEOS 2, due to the uncertainties in the even zonal harmonics up todegree 70, corresponding to a LARES orbit of 1450 km of altitude and 71.5 degrees of inclination (71.5 degrees wasthe inclination originally chosen for the VEGA orbit, nevertheless the error due to the even zonal harmonics wouldbe even smaller for a LARES orbit with an inclination of 70 degrees; see fig. 6); this error is shown here in fig. 7corresponding to the gravity field model EIGEN-GRACE02S. These results are based on the calibrated uncertainties(i.e., including systematic errors) of the EIGEN-GRACE02S model (used in [14]); even though the real error in theseEIGEN-GRACE02S coefficients would probably be about two or three times larger than these published uncertainties,EIGEN-GRACE02S was a preliminary 2004 model and by the time of the launch of LARES and of its data analysis(about 2012–2018), much improved the Earth’s gravity field models based on the much longer data set of GRACEobservations will be available, with true errors even less than the EIGEN-GRACE02S uncertainties we used in theanalysis of this paper.
In regard to a detailed treatment of the other orbital perturbations that affect the LARES experiment, tidal effects,particle drag and thermal drag, we refer to [50,56,15,77,102]. In regard to the orbital perturbations on the LARESexperiment due to the time-dependent Earth gravity field, we observe that the largest tidal signals are due to thezonal tides with l = 2 and m = 0, due to the Moon node, and to the K1 tide with l = 2 and m = 1 (tesseral tide).However, the medium- and long-period zonal tides (l = 2 and m = 0) will be cancelled using the combination of thethree nodes together with the static J2 uncertainty (also the uncertainty in the time-dependent secular variations J2,J4 will be cancelled using this combination of three observables). Furthermore, the tesseral tide K1 will be fitted forover a period equal to the LARES nodal period (see [56] and chapt. 5 of [80]) and this tide would then introduce asmall uncertainty in our combination. In regard to the non-gravitational orbital perturbations, we observe here thatthe unmodelled thermal drag perturbations on the LARES orbit would be reduced with respect to the LAGEOSsatellites thanks to the much smaller (by a factor of about 0.38) cross-section–to–mass ratio of LARES (see sect. 6.2on the LARES structure). We finally point out that the neutral and charged-particle drag on the LARES node atan altitude of about 1450 km would be a negligible effect for an orbit with very small eccentricity, even by assumingthat the exosphere would be co-rotating with the Earth at 1450 km of altitude. Indeed, as calculated in [50] for the

Page 14 of 19 The European Physical Journal Plus
Fig. 7. Percent error in the measurement of the Lense-Thirring effect using LARES, LAGEOS and LAGEOS 2 as a function ofthe uncertainty due to each even zonal harmonic. The points in blue are the errors obtained using the model EIGEN-GRACE02Sand the points in red are the errors obtained using as uncertainty of each coefficient the difference between the value of thiscoefficient in the two different models EIGEN-GRACE02S and GGM02S. The total error in the measurement of the Lense-Thirring effect using EIGEN-GRACE02S is 1.4% and by using as uncertainties the differences between the coefficients of thetwo models is 3.4%. However, at the time of the LARES data analysis an improvement of about one order of magnitude has tobe taken into account with respect to these 2004 models that were based on less than 365 days of observations of the GRACEspacecraft.
LAGEOS III satellite, in the case of zero orbital eccentricity, e = 0, the total drag effect on the LARES node wouldbe zero; indeed the nodal rate of a satellite due to particle drag is a function of sin ν · cos ν (ν is the true anomaly)and the total nodal shift is then zero over one orbit; in the case of a small orbital eccentricity, the total shift would beproportional to the eccentricity and it would still be a small effect as calculated in [50].
6.1 Gravitational uncertainties and even zonal harmonics
According to what is shown in fig. 6 and to what can be achieved with the first VEGA flight, the orbital parametersof LARES will be: inclination equal to about 70 degrees, semimajor axis equal to about 7830 km and eccentricitynearly zero.
Using the node of the new laser-ranged satellite LARES and the nodes of the LAGEOS and LAGEOS 2, thanksto the accurate Earth gravity field models obtained with the GRACE spacecraft, it is then possible to achieve ameasurement of the Lense-Thirring effect and of the Earth gravitomagnetic field with an accuracy of the order of 1%.The error sources of gravitational origin, i.e., those due to the uncertainties in the Newtonian gravitational field, are byfar larger than the uncertainties of non-gravitational origin, i.e. radiation pressure, both from Sun and Earth, thermalthrust and particle drag; indeed the LAGEOS satellites and especially the LARES satellite are extremely densespherical satellites with very small cross-sectional area-to-mass ratio [50]. In particular LARES is made of tungstenalloy and has a radius of only 18.2 cm making it the densest known single object in the Solar System (see below).Among the gravitational perturbations of the orbit of the LARES and LAGEOS satellites by far the largest ones aredue to the non-sphericity of the Earth gravity field, both its static and time-dependent part, described by the expan-sion of the Earth potential in spherical harmonics [92,50]. In particular, the only secular effects affecting the orbit ofan Earth satellite are due to the axially symmetric deviations from the spherical symmetry of the Earth gravitationalpotential described by the even zonal harmonics, i.e., the spherical harmonics of the Earth gravitational potential ofeven degree and zero order, e.g., the J2 harmonic describing the well-known quadrupole moment of the Earth.
In fig. 7 below we display the error in the LARES experiment due to each even zonal harmonic up to degree 70.Once again we stress that the large errors due to the uncertainties of the first two even zonal harmonics, i.e., of degree2 and 4, are eliminated using the 3 observables, i.e. the 3 nodes. Figure 7 clearly shows that the error due to each evenzonal harmonic of degree higher than 4 is considerably less than 1% and in particular that the error is substantiallynegligible for the even zonal harmonics of degree higher than 26. In fig. 7 we show the percent errors in the measurementof the Lense-Thirring effect in the LARES experiment due to each individual uncertainty of each even zonal harmonic

Ignazio Ciufolini et al.: Testing gravitational physics with satellite laser ranging Page 15 of 19
Fig. 8. The LARES satellite before the mounting of its retro-reflectors. Courtesy of the Italian Space Agency (ASI).
corresponding to the model EIGEN-GRACE02S (GFZ, Potsdam, 2004) and we display the maximum percent errorsdue to each even zonal harmonic obtained by considering as uncertainty for each harmonic the difference between thevalue of that harmonic in the EIGEN-GRACE02S model minus its value in the GGM02S model; this is a standardtechnique in space geodesy to estimate the reliability of the published uncertainties of a model; of course, in order touse this technique, one must difference models of comparable accuracy, i.e., models that are indeed comparable, oruse this technique only to assess the errors of the less accurate model.
In conclusion, using EIGEN-GRACE02S and GGM02S (see [102], the total error in the measurement of the Lense-Thirring effect due to the even zonal harmonics is, respectively, 1.4% and 2.1%. However, a substantial improvementis expected at the time of the LARES data analysis. Indeed, these two models, EIGEN-GRACE02S and GGM02Shave been obtained with a relatively small amount of observations of the GRACE spacecraft (launched in 2002) andtherefore a substantial factor of improvement of these GRACE models, of about one order of magnitude, has to betaken into account at the time of the LARES data analysis (between 2012 and 2018), thanks to longer GRACEobservational periods and to other space geodesy missions, too.
6.2 Requirements for the structure
The LARES satellite (fig. 8) has been designed [93,103–105] in such a way to minimize all the non-gravitationalperturbations such as particle drag and thermal thrust (induced by the anisotropic thermal radiation from the satellitedue to the anisotropic temperature distribution over the satellite surface). Indeed, the orbit of LARES is much lowerthan that of the two LAGEOS satellites, therefore the minimization of the non-gravitational perturbations is especiallyimportant for LARES.
The minimization of the cross-sectional area-to-mass ratio AM = 3
4ρr , where ρ is the mean satellite density andr its radius, is a critical parameter for the minimization of the non-gravitational perturbations. Indeed, the non-gravitational accelerations of the satellite are basically proportional to the satellite cross-sectional area and inverselyproportional to its mass. Therefore, one would deduce that an ideal satellite should be very large. However, due toobvious limitations of size and weight of the space structures we cannot optimize the ratio A/M by only acting on theradius of the satellite. The main constraint in our case is the mass of the satellite which, for technical reasons, shouldnot be larger than about 400 kg. Consequently our optimization problem simplifies because the optimal condition willbe obtained by taking the highest value for ρ and by keeping the mass of the satellite fixed at approximately 400 kg. Byconsidering all the elements with the highest densities in the periodic table, by taking into account price, workabilityand procurement time, the best compromise for LARES appeared to be the use of a tungsten alloy. There are a varietyof tungsten alloys, some of which can reach a density as high as 18500 kg/m3.

Page 16 of 19 The European Physical Journal Plus
Another parameter that affects the A/M ratio is the geometry of the cavity containing the cube corner reflectors(CCR). In order to minimize A/M , this cavity should be as small as possible. In [102] two possible solutions areanalyzed: i) cylindrical cavities (design directly derived from LAGEOS cavities) and ii) conical cavities that minimizeA/M . The conical cavities have been finally chosen for the LARES satellite.
7 Conclusions
Using the latest GRACE gravity models and the satellites LAGEOS and LAGEOS 2, our team of the University ofSalento, Maryland University, Baltimore County, GeoForschungsZentrum, Potsdam and Sapienza University of Romehas measured the gravitomagnetic field generated by the Earth’s rotation and the frame-dragging effect on the orbitof the LAGEOS satellites. The accuracy of our measurement is, including systematic errors, of the order of 10%. Thiserror analysis is in very good agreement with that of the Center for Space Research of the University of Texas atAustin, using the latest GRACE models, that is summarized in table 1 of sect. 4.4.
The LARES satellite, that is ready for a launch at an altitude of about 1450 km, together with the LAGEOSsatellites and with the GRACE models, will provide a measurement of the Earth’s gravitomagnetism with an accuracyof a few percent. In order to minimize the measurement error induced by the uncertainties in the Earth even zonalharmonics and, however, by necessarily taking into account the VEGA qualifying flight launch constraints, the orbitalparameters finally chosen for LARES are: inclination 70 degrees ±1 degree, minimum value of the semimajor axis7830 km and eccentricity nearly zero. An orbital injection error in the inclination of ±1 degree (that can be achievedwith VEGA) from its nominal value of 70 degrees, is quite acceptable for the accurate measurement of gravitomag-netism. Indeed, from fig. 6, we see that an orbital injection error in the inclination of about 1 degree would still allowa measurement of frame-dragging with a few percent accuracy. Any value of the semimajor axis larger than 7830 kmwould indeed increase the accuracy of the frame-dragging measurement and finally a small value of the eccentricitywould not affect the cancellation of the uncertainties in the first two even zonal harmonics and thus would still allowa measurement of frame-dragging at a few percent level. The mass of the LARES satellite is about 385 kg, its radius18 cm and its cross-sectional area-to-mass ratio, A/M , is smaller than that of the LAGEOS satellites by a factor ofabout 0.38; LARES will have 92 cube corner reflectors housed in conical cavities. The satellite has been designed inorder to minimize the non-gravitational perturbations and to be as nearly as possible a test-particle freely falling inthe Earth gravitational field. This will allow the accurate measurement of tiny relativistic perturbations such as theLense-Thirring effect.
The authors acknowledge the International Laser Ranging Service for providing high-quality laser ranging tracking of thetwo LAGEOS satellites. I. Ciufolini and A. Paolozzi gratefully acknowledge the support of the Italian Space Agency, grantsI/043/08/0 and I/016/07/0, E.C. Pavlis the support of NASA grant NNX09AU86G and J.C. Ries the support of NASA ContractNNG06DA07C. We would also like to thank the anonymous referee for useful suggestions and comments to improve the paper.
References
1. C.W. Misner, K.S. Thorne, J.A. Wheeler, Gravitation (Freeman, San Francisco, 1973).2. S. Weinberg, Gravitation and Cosmology: Principles and Applications of the General Theory of Relativity (Wiley, New
York, 1972).3. I. Ciufolini, J.A. Wheeler, Gravitation and Inertia (Princeton University Press, Princeton, NJ, 1995).4. C.M. Will, Theory and Experiment in Gravitational Physics, 2nd edition (Cambridge University Press, Cambridge, UK,
1993).5. C.M. Will, Living Rev. Rel. 9, 3 (2006); http://www.livingreviews.org/lrr-2006-3.6. A. Riess et al., Astron. J. 116, 1009 (1998).7. S. Perlmutter et al., Astrophys. J. 517, 565 (1999).8. S. Perlmutter, Phys. Today 56, 53 (2003).9. R.R. Caldwell, Phys. World 17, 37 (2004).
10. E. Adelberger, B. Heckel, C.D. Hoyle, Phys. World 18, 41 (2005).11. G. Amelino-Camelia, J. Ellis, N.E. Mavromatos, D.V. Nanopoulos, S. Sarkar, Nature 393, 763 (1998).12. G. Dvali, Filtering Gravity: Modification at Large Distances? in Proceedings of Nobel Symposium 127, Sigtuna, Swe-
den, 2003, edited by U. Danielsson, A. Goobar, B. Nilsson (World Scientific, Singapore, 2005) pp. 92-98; Preprint athttp://arXiv.org/hep-th/0402130 (2004).
13. I. Ciufolini, Nature 449, 41 (2007).14. I. Ciufolini, E.C. Pavlis, Nature 431, 958 (2004).15. I. Ciufolini, E.C. Pavlis, R. Peron, New Astron. 11, 527 (2006).

Ignazio Ciufolini et al.: Testing gravitational physics with satellite laser ranging Page 17 of 19
16. J.C. Ries, R.J. Eanes, M.M. Watkins, Confirming the Frame-Dragging Effect with Satellite Laser Rang-ing, in 16th International Workshop on Laser Ranging, 13-17 October 2008, Poznan, Poland, available athttp://cddis.gsfc.nasa.gov/lw16/docs/papers/sci 3 Ries p.pdf andhttp://cddis.gsfc.nasa.gov/lw16/docs/presentations/sci 3 Ries.pdf.
17. A. Einstein, Letter to Ernst Mach. Zurich, 25 June 1913, in ref. [1], p. 544.18. E. Mach, Die Mechanik in Ihrer Entwicklung Historisch Kritisch-Dargestellt (Brockhaus, Leipzig, 1912); translated in
English, The Science of Mechanics (Open Court, La Salle, Illinois, 1960).19. J. Barbour, H. Pfister (Editors), Mach’s Principle. From Newton’s Bucket to Quantum Gravity (Birkhauser, Boston, 1995).20. C. Schmid, Phys. Rev. D 74, 044031 (2006); see also, for implications of Mach principle and frame-dragging in cosmology
see, e.g., chapt. 4 of ref. [3].21. B. Friedlander, I. Friedlander, Absolute und Relative Bewegung? (Simion-Verlag, Berlin, 1896).22. A. Foppl, Sitzb. Bayer. Akad. Wiss. 34, 5 (1904).23. A. Foppl, Phys. Z. 5, 416 (1904).24. A. Foppl, Sitzb. Bayer. Akad. Wiss. 34, 383 (1904).25. W. de Sitter, Mon. Not. R. Astron. Soc. 76, 699 (1916).26. J. Lense, H. Thirring, Phys. Z. 19, 156 (1918).27. B. Mashhoon, F.W. Hehl, D.S. Theiss, Gen. Relativ. Gravit. 16, 711 (1984); English translation of [26].28. L.D. Landau, E.M. Lifshitz, The Classical Theory of Fields, 3rd revision, English edition (Pergamon, London, 1971).29. Ya.B. Zeldovich, I.D. Novikov, Relativistic Astrophysics, Vol. I, Stars and Relativity (University of Chicago Press, Chicago,
1971).30. I. Ciufolini, F. Ricci, Class. Quantum Grav. 19, 3863 (2002).31. I. Ciufolini, F. Ricci, Class. Quantum Grav. 19, 3875 (2002).32. I. Ciufolini, F. Ricci, S. Kopekin, B. Mashhoon, Phys. Lett. A 308, 101 (2003).33. G.E. Pugh, Proposal for a Satellite Test of the Coriolis Prediction of General Relativity, Weapons Systems Evaluation
Group Research Memorandum N. 11 (The Pentagon, Washington, 1959).34. L.I. Schiff, Proc. Nat. Acad. Sci. 46, 871 (1960).35. L.I. Schiff, Phys. Rev. Lett. 4, 215 (1960).36. J.M. Bardeen, J.A. Petterson, Astrophys. J. 195, 65 (1975).37. K.S. Thorne, R.H. Price, D.A. Macdonald, The Membrane Paradigm (Yale University Press, NewHaven, 1986).38. R.P. Kerr, Phys. Rev. Lett. 11, 237 (1963).39. G. Schafer, J. Gen. Relativ. Gravit. 36, 2223 (2004).40. I. Ciufolini, Class. Quantum Grav. 11, 73 (1994).41. I. Ciufolini, New Astron. 15, 332 (2010).42. N. Ashby, B. Shahid-Saless, Phys. Rev. D 42, 1118 (1990).43. R.F. O’Connell, Class. Quantum Grav. 22, 3815 (2005).44. B.M. Barker, R.F. O’Connel, Gen. Relativ. Gravit. 11, 149 (1979).45. A.R. Khan, R.F. O’Connell, Nature 261, 480 (1976).46. T.W. Murphy Jr., K. Nordtvedt, S.G. Turyshev, Phys. Rev. Lett. 98, 071102 (2007).47. S.M. Kopeikin, Phys. Rev. Lett. 98, 229001 (2007) Comment on ref. [46].48. T.W. Murphy Jr., K. Nordtvedt, S.G. Turyshev, Phys. Rev. Lett. 98, 229002 (2007); reply to comment [47].49. I. Ciufolini, Phys. Rev. Lett. 56, 278 (1986).50. I. Ciufolini, Int. J. Mod. Phys. A 4, 3083 (1989) see also [55].51. I. Ciufolini, Nuovo Cimento A 109, 1709 (1996).52. I. Ciufolini, F. Chieppa, D. Lucchesi, F. Vespe, Class. Quantum Gravit. 14, 2701 (1997).53. I. Ciufolini, D. Lucchesi, F. Vespe, F. Chieppa, Europhys. Lett. 39, 359 (1997).54. I. Ciufolini et al., Nuovo Cimento A 109, 575 (1996).55. I. Ciufolini, E.C. Pavlis, F. Chieppa, E. Fernandes-Vieira, J. Perez-Mercader, Science 279, 2100 (1998).56. B. Tapley, J.C. Ries, R.J. Eanes, M.M. Watkins, NASA-ASI Study on LAGEOS III, CSR-UT publication n. CSR-89-3,
Austin, Texas (1989); and I. Ciufolini et al., ASI-NASA Study on LAGEOS III, CNR, Rome, Italy (1989). See also: I.Ciufolini et al., INFN study on LARES/WEBER-SAT (2004).
57. S.C. Cohen, P.J. Dunn (Editors), J. Geophys. Res. 90, 9215 (1985).58. P. Bender, C.C. Goad, The use of satellites for geodesy and geodynamics, in Proceedings of the Second International
Symposium on the Use of Artificial Satellites for Geodesy and Geodynamics, Vol. II, edited by G. Veis, E. Livieratos(National Technical University of Athens, 1979) p. 145.
59. Ch. Reigber, P. Schwintzer, K.-H. Neumayer, F. Barthelmes, R. Konig, Ch. Forste, G. Balmino, R. Biancale, J.-M. Lemoine,S. Loyer, S. Bruinsma, F. Perosanz, T. Fayard, Adv. Space Res. 31, 1883 (2003).
60. C. Reigber, R. Schmidt, F. Flechtner, R. Koenig, U. Meyer, K.H. Neumayer, P. Schwintzer, S.Y. Zhu, J. Geody-namics 39, 1 (2005). The EIGEN-GRACE02S gravity field coefficients and their calibrated errors are available athttp://op.gfz-potsdam.de/grace/index GRACE.html.
61. C. Forste, F. Flechtner, R. Schmidt, R. Stubenvoll, M. Rothacher, J. Kusche, K.-H. Neumayer, R. Biancale, J.-M. Lemoine,F. Barthelmes, J. Bruinsma, R. Koenig, U. Meyer, EIGEN-GL05C - A new global combined high-resolution GRACE-basedgravity field model of the GFZ-GRGS cooperation. General Assembly European Geosciences Union (Vienna, Austria 2008),in Geophysical Research Abstracts, 10, No. EGU2008-A-06944 (2008).

Page 18 of 19 The European Physical Journal Plus
62. C. Forste, R. Schmidt, R. Stubenvoll, F. Flechtner, U. Meyer, R. Konig, H. Neumayer, R. Biancale, J.-M. Lemoine, S.Bruinsma, S. Loyer, F. Barthelmes, S. Esselborn, J. Geodesy 82, 331 (2008).
63. C. Forste, F. Flechtner, R. Schmidt, U. Meyer, R. Stubenvoll, F. Barthelmes, R. Konig, K.H. Neumayer, M. Rothacher,Ch. Reigber, R. Biancale, S. Bruinsma, J.-M. Lemoine, J.C. Raimondo, A New High Resolution Global Gravity Field ModelDerived From Combination of GRACE and CHAMP Mission and Altimetry/Gravimetry Surface Gravity Data, in EGUGeneral Assembly Vienna, Austria, April 2005, 24-29 (2005).
64. B. Tapley, J. Ries, S. Bettadpur, D. Chambers, M. Cheng, F. Condi, S. Poole, The GGM03 Mean Earth Gravity Modelfrom GRACE, Eos Trans. AGU 88(52), Fall Meet. Suppl., Abstract G42A-03 (2007).
65. T. Mayer-Guerr, A. Eicker, K.-H. Ilk, ITG-Grace02s: A GRACE Gravity Field Derived from Short Arcs of the SatellitesOrbit, in Proceedings of the 1st International Symposium of the International Gravity Field Service “Gravity Field of theEarth”, Istanbul (2007).
66. T. Mayer-Guerr, ITG-Grace03s: The latest GRACE gravity field solution computed in Bonn, presentation at GSTM+SPP,Potsdam, 15-17 Oct. 2007.
67. The JEM models were provided by JPL-Caltech.68. International Earth Rotation Service (IERS) Annual Report, 1996. Observatoire de Paris, Paris (1997).69. D.P. Rubincam, J. Geophys. Res. 93, 13803 (1988).70. D.P. Rubincam, J. Geophys. Res. 95, 4881 (1990).71. D.P. Rubincam, A. Mallama, J. Geophys. Res. 100, 20285 (1995).72. C.F. Martin, D.P. Rubincam, J. Geophys. Res. 101, 3215 (1996).73. J.I. Andres et al., J. Geophys. Res. 109, B06403 (2004).74. I. Ciufolini, E.C. Pavlis, New Astron. 10, 636 (2005).75. R.S. Gross, J. Geophys. Res. 101, 8729 (1996).76. D.E. Pavlis et al., GEODYN operations manuals, contractor report, Raytheon, ITSS, Landover MD (1998).77. I. Ciufolini, E.C. Pavlis, J. Ries, R. Koenig, G. Sindoni, A. Paolozzi, H. Newmayer, Gravitomagnetism and Its Measurement
with Laser Ranging to the LAGEOS satellites and GRACE Earth Gravity Models, in John Archibald Wheleer and GeneralRelativity, edited by I. Ciufolini, R. Matzner (Springer Verlag, 2010) pp. 371–434.
78. I. Ciufolini, Frame-dragging and its measurement, in Gravitation: from Hubble Length to the Planck Length, Proceedingsof the Ist SIGRAV School on General Relativity and Gravitation, Frascati, Rome, September 2002 (IOP, 2005) pp. 27-69.
79. I. Ciufolini, Theory and Experiments in General Relativity and other Metric Theories, PhD Dissertation, University ofTexas, Austin (Ann Arbor Publishers, Michigan, 1984).
80. G.E. Peterson, Estimation of the Lense-Thirring Precession Using Laser-Ranged SAtellites, Ph. Dissertation (Universityof Texas, Austin, 1997).
81. J.C. Ries, R.J. Eanes, B.D. Tapley, Lense-Thirring Precession Determination from Laser Ranging to Artificial Satellites,in Nonlinear Gravitodynamics, the Lense-Thirring Effect, Proceedings III William Fairbank Meeting (World Scientific,Singapore, 2003) pp. 201-211.
82. J.C. Ries, R.J. Eanes, B.D. Tapley, G.E. Peterson, Prospects for an improved Lense-Thirring test with SLR and the GRACEgravity mission, in Toward Millimeter Accuracy Proceedings of the 13th International Laser Ranging Workshop, edited byR. Noomen, S. Klosko, C. Noll, M. Pearlman (NASA CP 2003-212248, NASA Goddard, Greenbelt, MD, 2003).
83. E.C. Pavlis, Geodetic Contributions to Gravitational Experiments in Space, in Recent Developments in General Relativity,Genoa 2000, edited by R. Cianci et al.(Springer-Verlag, Milan, 2002) pp. 217-233.
84. D.P. Rubincam, Celest. Mech. 15, 21 (1977).85. L. Cugusi, E. Proverbio, Astron. Astrophys. 69, 321 (1978).86. H. Yilmaz, Bull. Am. Phys. Soc. 4, 65 (1959).87. R.A. Van Patten, C.W.F. Everitt, Phys. Rev. Lett. 36, 629 (1976).88. R.J. Eanes, A study of temporal variations in Earth’s gravitational field using Lageos-1 laser ranging observations, Ph.
Dissertation (University of Texas, Austin, 1995).89. D.M. Lucchesi, Planet. Space Sci. 49, 447 (2001).90. D.M. Lucchesi, Planet. Space Sci. 50, 1067 (2002).91. E.C. Pavlis, L. Iorio, Int. J. Mod. Phys. D 11, 599 (2002).92. W.M. Kaula, Theory of Satellite Geodesy (Blaisdell, Waltham, 1966).93. I. Ciufolini, A. Paolozzi et al., LARES, Laser Relativity Satellite, for the study of the Earth gravitational field and general
relativity measurement, Phase A Report for ASI, 1998.94. J.C. Ries, Simulation of an experiment to measure the Lense-Thirring precession using a second LAGEOS satellite, Ph.
Dissertation (University of Texas, Austin, 1989).95. Ch. Reigber, F. Flechtner, R. Koenig, U. Meyer, K. Neumayer, R. Schmidt, P. Schwintzer, S. Zhu, GRACE Orbit and
Gravity Field Recovery at GFZ Potsdam - First Experiences and Perspectives, Eos. Trans. AGU, 83(47), Fall Meet. Suppl.,Abstract G12B-03 (2002).
96. B.D. Tapley, The GRACE Mission: Status and Performance Assessment, Eos. Trans. AGU, 83(47), Fall Meet. Suppl.,Abstract G12B-01 (2002).
97. M.M. Watkins, D. Yuan, W. Bertiger, G. Kruizinga, L. Romans, S. Wu, GRACE Gravity Field Results from JPL, Eos.Trans. AGU, 83(47), Fall Meet. Suppl., Abstract G12B-02 (2002).
98. A. Paolozzi, Private communication (2004).99. J. Ries, Private communication (2005).

Ignazio Ciufolini et al.: Testing gravitational physics with satellite laser ranging Page 19 of 19
100. L. Iorio, New Astron. 10, 616 (2005).101. I. Ciufolini, On the Orbit of the LARES Satellite, arXiv:gr-qc/0609081 (2006).102. I. Ciufolini, A. Paolozzi, E.C. Pavlis, J. Ries, R. Koenig, R. Matzner, G. Sindoni, The LARES Space Experiment: LARES
Orbit, Error Analysis and Satellite Structure, in John Archibald Wheleer and General Relativity, edited by I. Ciufolini, R.Matzner (Springer Verlag, 2010) pp. 467–492.
103. I. Ciufolini, D.G. Currie, A. Paolozzi, E.C. Pavlis, LARES/WEBERSAT Frame-dragging and fundamental physics, inFrontier Science 2004, Physics and Astrophysics in Space, Frascati, 14-19 June (2004) pp. 499-512.
104. A. Paolozzi, I. Ciufolini, A. Lucantoni, D. Arnold, Optical Design of LARES Satellite, XX AIDAA Congress Milano, Italy,June 29-July 3, 2009.
105. A. Paolozzi, I. Ciufolini, C. Vendittozzi, I. Peroni, Mechanical Design of LARES Satellite, XX AIDAA Congress Milano,Italy, June 29-July 3, 2009.
Copyright © 2022 FDOKUMEN