Tema: Aplicación de Vectores en el Espacio en las Ciencias Fisicas Fecha
20
UNIVERSIDAD TECNOLOGICA DE EL SALVADOR Nombre: Carnet: Catedrático: Asignatura: Sección: Tema: Fecha: Amilcar Alexander Reyes Molina 25-0920-2012 Vladimir Chávez Matemáticas III 03 Aplicación de Vectores en el Espacio en las Ciencias Fisicas 18 de noviembre de 2014
Transcript of Tema: Aplicación de Vectores en el Espacio en las Ciencias Fisicas Fecha
UNIVERSIDAD TECNOLOGICA DE EL
SALVADOR
Nombre:
Carnet:
Catedrático:
Asignatura:
Sección:
Tema:
Fecha:
Amilcar Alexander Reyes Molina
25-0920-2012
Vladimir Chávez
Matemáticas III
03
Aplicación de Vectores en el Espacio en las
Ciencias Fisicas
18 de noviembre de 2014
INTRODUCCIÓN
La presente investigación consiste en una recopilación de libros e internet
sobre las aplicaciones de vectores en el espacio en las ciencias físicas las
cuales usan los vectores para cálculos físicos que se aplican a la realidad y en
la mayoría de cosas que hacemos una vida cotidiana, y de la importancia que
tienen por su aplicación en nuestro entorno.
OBJETIVOS GENERALES
Comprender el alcance de la teoría de los vectores en el entorno en que
vivimos, así como aprender a resolver correctamente cálculos físicos
vectoriales, de modo que al resolverlos podamos trasladar la teoría a la
práctica.
OBJETIVO ESPECIFICO
Aprender a aplicar la teoría vectorial en los aspectos de nuestra vida cotidiana,
aprender a resolver cálculos vectoriales de manera sencilla, comprender su
aplicación en esta rama de la ciencia que es la Física y notar tanto las
similitudes como las diferencias de aplicación entre las Matemáticas y Física.
Magnitudes vectoriales.
Si hacemos un repaso de las magnitudes físicas nos encontramos que éstas pueden agruparse en dos clases bien diferenciadas, las llamadas magnitudes escalares (que pueden determinarse completamente mediante un número, tal como masa, temperatura,carga eléctrica,...) y las magnitudes vectoriales que no pueden determinarse completamente por un simple número.
Efectivamente, decir que un móvil se mueve con velocidad de 150 km/h es incompleto mientras no indiquemos la dirección del movimiento, por ejemplo dirección 35º NE. Otros ejemplos de magnitudes vectoriales son la fuerza, momento, campo eléctrico,...
Así debemos distinguir:
* Un escalar es una magnitud que tiene cantidad, pero no dirección.
* Un vector es una magnitud que tiene cantidad y dirección.
1.2 Noción de vector. Suma y resta de vectores.
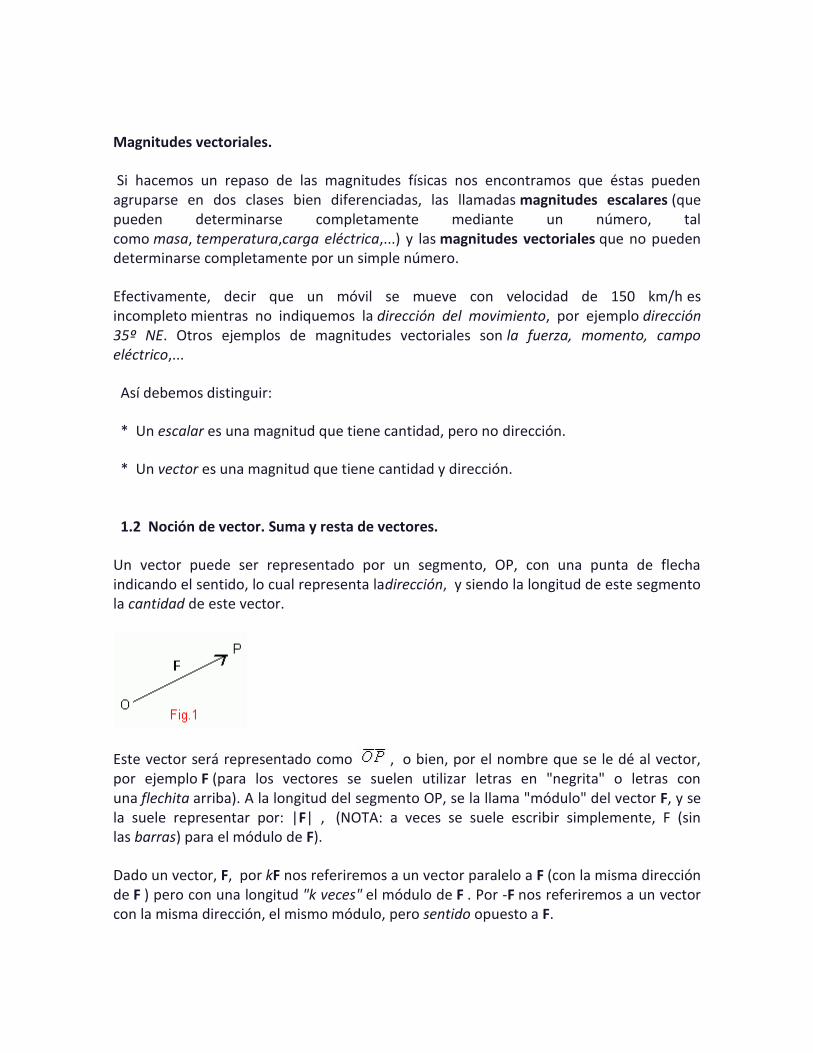
Un vector puede ser representado por un segmento, OP, con una punta de flecha indicando el sentido, lo cual representa ladirección, y siendo la longitud de este segmento la cantidad de este vector.
Este vector será representado como , o bien, por el nombre que se le dé al vector, por ejemplo F (para los vectores se suelen utilizar letras en "negrita" o letras con una flechita arriba). A la longitud del segmento OP, se la llama "módulo" del vector F, y se la suele representar por: |F| , (NOTA: a veces se suele escribir simplemente, F (sin las barras) para el módulo de F).
Dado un vector, F, por kF nos referiremos a un vector paralelo a F (con la misma dirección de F ) pero con una longitud "k veces" el módulo de F . Por -F nos referiremos a un vector con la misma dirección, el mismo módulo, pero sentido opuesto a F.

* Adicción y sustracción de vectores
En nuestra vida corriente estamos acostumbrados a sumar cantidades escalares, por ejemplo, una masa de 3 kg más una masa de 7 kg suponen una masa de 10 kg. Sin embargo, este tipo de suma no puede utilizarse para los vectores, pues estos están compuestos de módulo y dirección.
La suma de dos vectores, , es otro vector , que geométricamente puede ser representado por el vector que une el extremo A con la punta de C, tal como se aprecia en la figura 2:
Vectorialmente lo expresaremos: F = G + H . El vector F podría ser, por ejemplo, la resultante de dos fuerzas que tienen distinta dirección.
Para la diferencia entre dos vectores, G - H, es equivalente a la suma de G + (-H), es decir, hacer la suma del vector G con el opuesto de H, representado como -H. Tal como se puede apreciar en la figura 3.
En la figura 3, viene representada geométricamente la operación: F = G - H .
1.3 Vector unitario.
Se llama vector unitario a todo vector cuyo módulo sea 1, tales vectores se suelen representar con letras coronadas con un símbolo "^": î, û, ...

Dado un vector no unitario F, podemos definir a partir de él otro vector con su misma dirección pero unitario, sin más que tomar: F/F, es decir, multiplicando a F por el inverso de su módulo, 1/F.
En la figura 4, supongamos al vector F , o bien , teniendo de módulo F. Entonces el vector û = (1/F) F , representa un vector unitario en la dirección de F.
El interés de el vector unitario û es que F puede expresarse como F = F û . Y en general un conjunto de vectores paralelos a F se expresarían de manera análoga, todos ellos como el producto de su módulo por û.
Componentes cartesianas de un vector.
Dos dimensiones:
Consideremos situado en un plano un vector F, este vector puede ser descompuesto sobre un sistema de ejes cartesianos, en forma de sus dos componentes Fx, Fy . En los ejes cartesianos se definen dos vectores unitarios î, ^j, (respectivamente en las direcciones del eje x y del eje y, como se muestra en la figura 5.).
Vectorialmente esta descomposición puede expresarse:
F = Fx + Fy
o también,
F = Fx î + Fy j
(Siendo Fx, Fy los módulos respectivos de Fx, Fy). Por otra parte, si F es el módulo de F observe en la figura 3 cómo se verifica:
Fx = F cos Fy = F cos
Estas cantidades Fx, Fy se llaman "proyecciones" del vector F sobre los ejes x, y; mientras que vistos como vectores sobre los ejes,Fx, Fy, se llaman "componentes" del vector F.
Se da la siguiente relación entre F (módulo de F) y sus proyecciones:
F² = Fx² +Fy²
relación obvia si se observa cualquiera de los triángulos rectángulos de la figura 5.
Tres dimensiones:
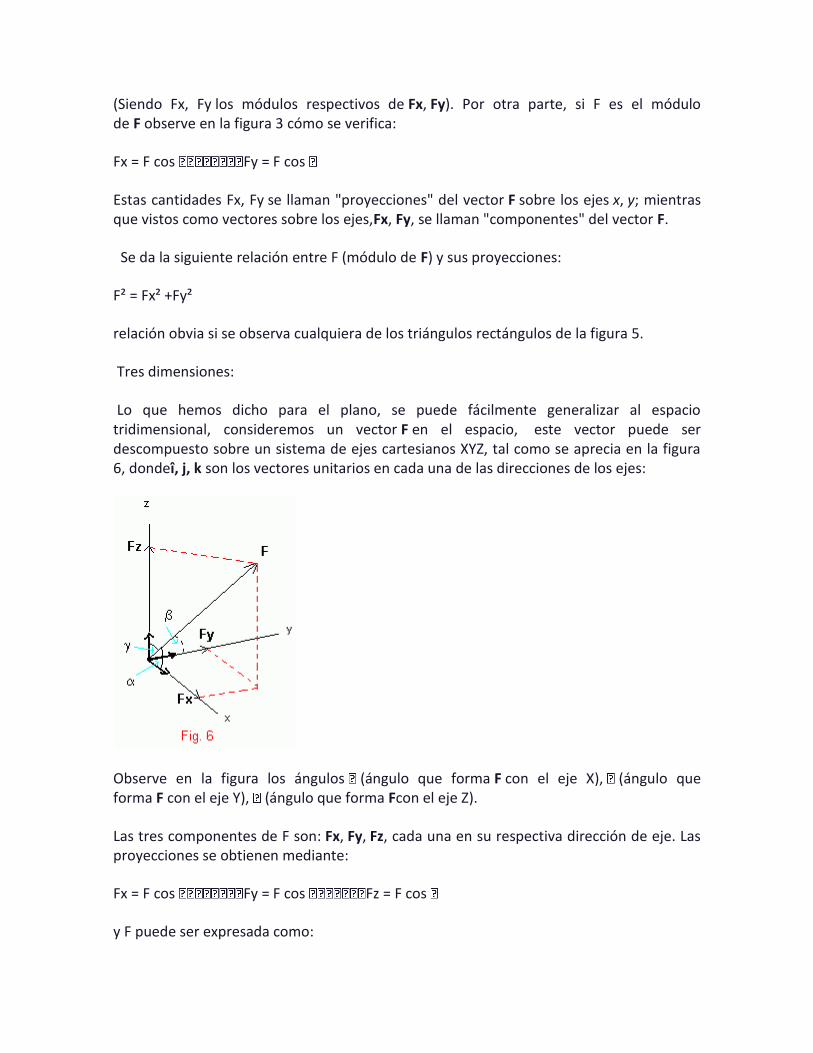
Lo que hemos dicho para el plano, se puede fácilmente generalizar al espacio tridimensional, consideremos un vector F en el espacio, este vector puede ser descompuesto sobre un sistema de ejes cartesianos XYZ, tal como se aprecia en la figura 6, dondeî, j, k son los vectores unitarios en cada una de las direcciones de los ejes:
Observe en la figura los ángulos (ángulo que forma F con el eje X), (ángulo que forma F con el eje Y), (ángulo que forma Fcon el eje Z).
Las tres componentes de F son: Fx, Fy, Fz, cada una en su respectiva dirección de eje. Las proyecciones se obtienen mediante:
Fx = F cos Fy = F cos Fz = F cos
y F puede ser expresada como:
F = Fx î + Fy j + Fz k
y observando la figura 6 es fácil concluir para F (módulo de F):
F² = Fx² + Fy² + Fz²
OBSERVACIÓN: Teniendo en cuenta esta última relación es muy fácil demostrar esta otra entre los cosenos de los ángulos (llamados "cosenos directores") del vector F:
cos² cos² cos² = 1
1.5 Suma y resta de vectores (mediante sus componentes).
Dados dos vectores, F = Fx î + Fy j + Fz k , G = Gx î + Gy j + Gz k, la suma F+G o resta F-G puede realizarse analíticamente sin más que operar componente a componente:
Es por esto, que cuando tenemos varios vectores en un sistema cartesiano, lo primero que deberíamos hacer es descomponerlos en sus componentes, entonces operar analíticamente con ellos es muy simple.
1.6 Producto escalar de dos vectores.
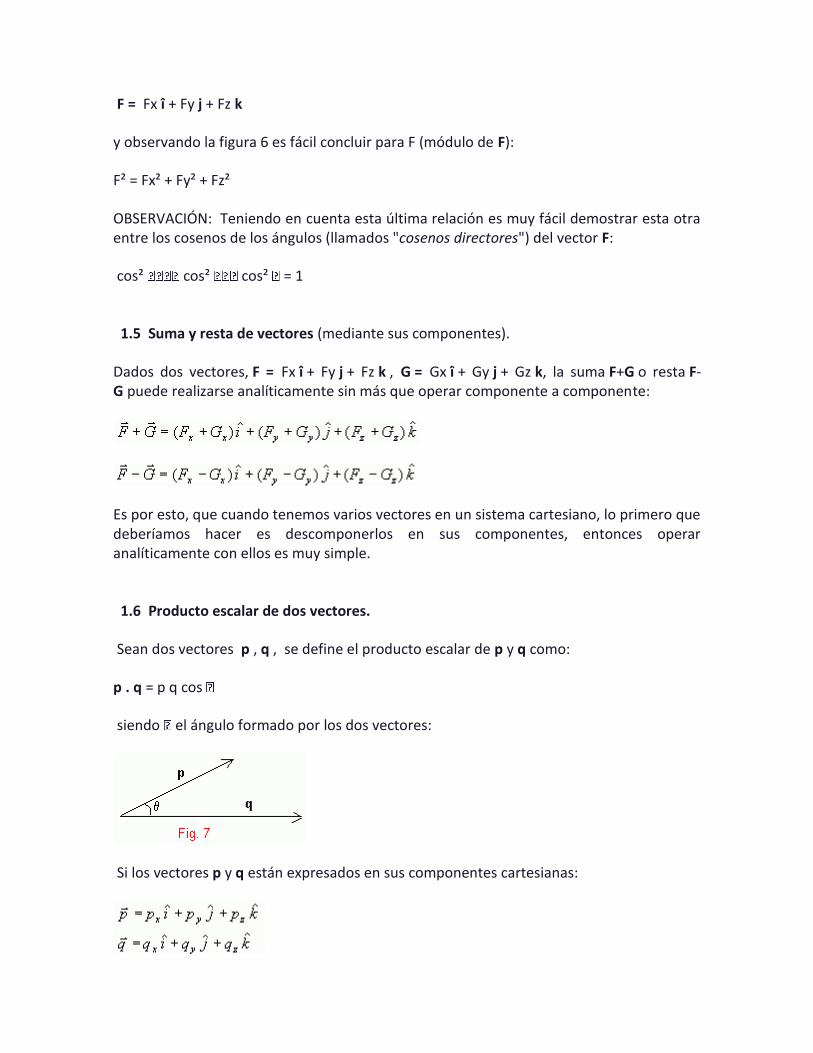
Sean dos vectores p , q , se define el producto escalar de p y q como:
p . q = p q cos
siendo el ángulo formado por los dos vectores:
Si los vectores p y q están expresados en sus componentes cartesianas:
entonces su producto escalar es:
(obsérvese que p.q es un escalar).
* PROPIEDADES DEL PRODUCTO ESCALAR:
1) Para dos vectores cualesquiera p, q, se tiene:
p . q = q . p
2) Dados tres vectores p, q, r, se tiene:
p . (q + r) = p . q + p . r
3) Para dos vectores paralelos p, q, se tiene:
p . q = p q
puesto que cos 0 = 1. Un caso especial es el producto escalar de un vector por sí mismo:
p . p = p²
4) Para dos vectores perpendiculares p, q, se tiene:
p . q = 0
puesto que cos 90º = 1. Teniendo en cuenta las dos últimas propiedades, para el caso de los vectores unitarios en los ejes coordenados cartesianos:
1.7 Producto vectorial de dos vectores.
Sean dos vectores p , q , se define el producto vectorial de p y q como:
p /\ q = p q sin n
siendo n un vector unitario perpendicular al plano formado por ambos vectores en el sentido de la regla del tornillo (al hacer girar phacia q el tornillo avanza hacia arriba), tal como se aprecia en la figura 8:
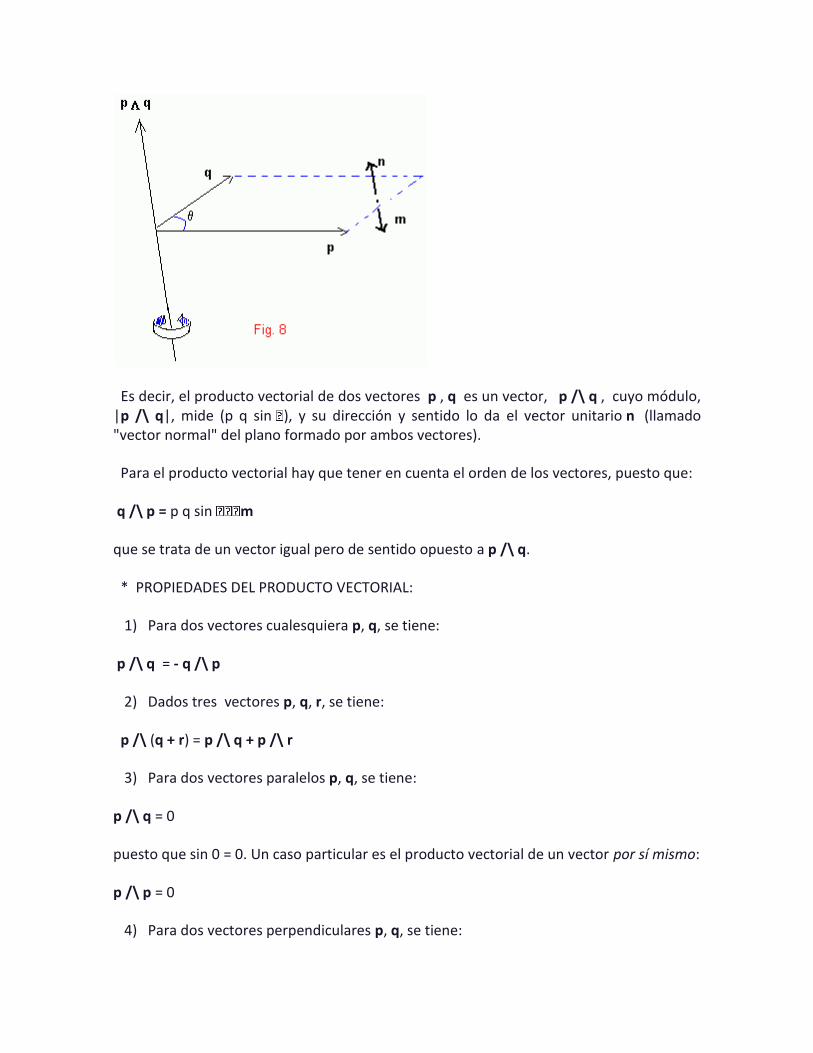
Es decir, el producto vectorial de dos vectores p , q es un vector, p /\ q , cuyo módulo, |p /\ q|, mide (p q sin ), y su dirección y sentido lo da el vector unitario n (llamado "vector normal" del plano formado por ambos vectores).
Para el producto vectorial hay que tener en cuenta el orden de los vectores, puesto que:
q /\ p = p q sin m
que se trata de un vector igual pero de sentido opuesto a p /\ q.
* PROPIEDADES DEL PRODUCTO VECTORIAL:
1) Para dos vectores cualesquiera p, q, se tiene:
p /\ q = - q /\ p
2) Dados tres vectores p, q, r, se tiene:
p /\ (q + r) = p /\ q + p /\ r
3) Para dos vectores paralelos p, q, se tiene:
p /\ q = 0
puesto que sin 0 = 0. Un caso particular es el producto vectorial de un vector por sí mismo:
p /\ p = 0
4) Para dos vectores perpendiculares p, q, se tiene:

p /\ q = p q n
puesto que sin 90º = 1. Teniendo en cuenta las dos últimas propiedades, para el caso de los vectores unitarios en los ejes coordenados cartesianos tenemos:
En la primera fila los productos vectoriales son nulos por ser entre vectores iguales (y por tanto auto-paralelos). Para las otras tres filas podemos considerar un esquema mnemotécnico similar a:
Siempre que el orden del producto vectorial sea el levógiro (sentido "anti-horario") el vector resultante viene con signo "+", de lo contrario, aparece con signo "-". Por ejemplo, k /\ j es dextrógiro (sentido "horario") y por tanto: k /\ j = - i.
* Calculo del producto vectorial por componentes cartesianas:
Si los vectores p y q están expresados en sus componentes cartesianas:
entonces su producto vectorial es:
lo cual suele expresarse por medio de un determinante así:
Algunas aplicaciones de productos escalar y vectorial.
* Trabajo de una fuerza.
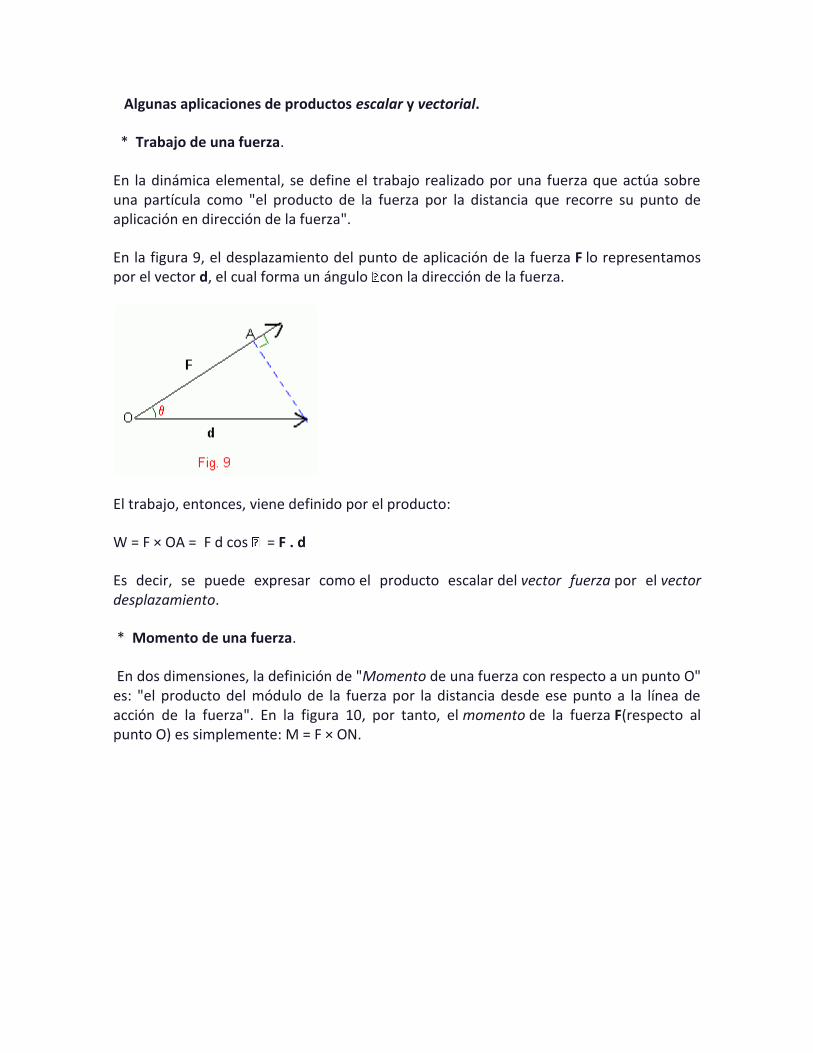
En la dinámica elemental, se define el trabajo realizado por una fuerza que actúa sobre una partícula como "el producto de la fuerza por la distancia que recorre su punto de aplicación en dirección de la fuerza".
En la figura 9, el desplazamiento del punto de aplicación de la fuerza F lo representamos por el vector d, el cual forma un ángulo con la dirección de la fuerza.
El trabajo, entonces, viene definido por el producto:
W = F × OA = F d cos = F . d
Es decir, se puede expresar como el producto escalar del vector fuerza por el vector desplazamiento.
* Momento de una fuerza.
En dos dimensiones, la definición de "Momento de una fuerza con respecto a un punto O" es: "el producto del módulo de la fuerza por la distancia desde ese punto a la línea de acción de la fuerza". En la figura 10, por tanto, el momento de la fuerza F(respecto al punto O) es simplemente: M = F × ON.

En tres dimensiones, sin embargo, la definición de momento de una fuerza debe ser doblemente generalizada. En primer lugar se define el momento respecto de un eje (no respecto de un punto), y en segundo lugar el momento se define como un vector (no como un escalar); momento de la fuerza F (respecto a un eje) se define como "el producto del módulo de la fuerza por la distanciamedida en la dirección perpendicular al eje, desde la línea de acción de F". En la misma figura 10, suponga cualquier eje que pasa por O, en este caso, el módulo del momento es M = F × ON, mientras que su dirección es perpendicular al plano que contiene a Fy a O. Es decir,
M = r /\ F
siendo P, un punto cualquiera de la línea de acción de F, y siendo r un vector que va del eje a la línea de acción de F. Obsérvese que el módulo del momento es
|r /\ F| = F r sin = F × ON
igual al caso de dos dimensiones.
* Velocidad angular para un sólido rígido.
Consideremos un sólido rígido que está girando con una velocidad angular alrededor del eje OZ, tal como se ve el la figura 11.

Si dentro del sólido consideramos un punto, tal como P, que viene determinado mediante el vector de posición r (a partir de un origen dado O). La velocidad lineal (su módulo) de ese punto P la da el producto × NP, mientras que su dirección es perpendicular al plano definido por los puntos ONP. Por tanto, definiendo la velocidad angular del sólido como un vector, cuyo módulo es y cuya dirección es la del eje de rotación y sentido el del avance del tornillo, entonces para un punto P, tenemos:
v = /\ r
Producto mixto
Consideremos tres vectores p, q, r , en principio podemos suponer que no son coplanares (no están los tres en un mismo plano), tal como se aprecia en la figura 12.
Por "producto mixto" de estos tres vectores se entiende: p . (q /\ r)
Es decir, se trata de hacer el producto escalar de p con (q /\ r), cuyo resultado será obviamente un escalar.
Veamos una interpretación geométrica de este producto mixto:
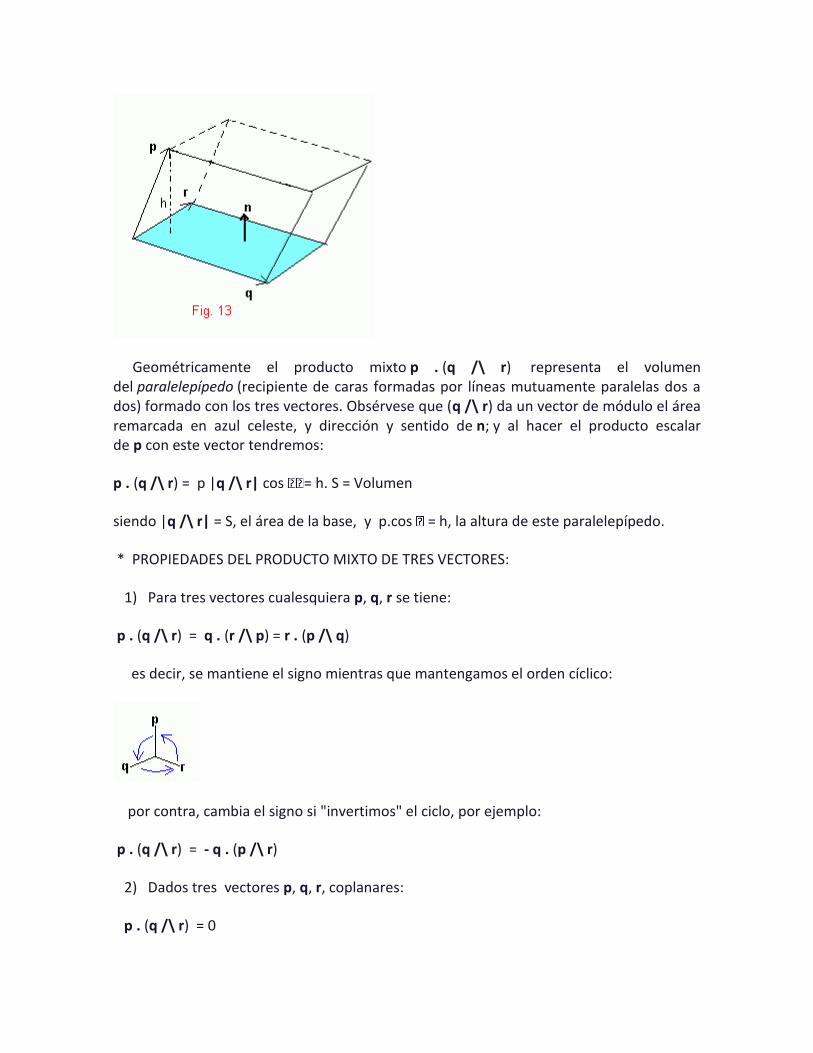
Geométricamente el producto mixto p . (q /\ r) representa el volumen del paralelepípedo (recipiente de caras formadas por líneas mutuamente paralelas dos a dos) formado con los tres vectores. Obsérvese que (q /\ r) da un vector de módulo el área remarcada en azul celeste, y dirección y sentido de n; y al hacer el producto escalar de p con este vector tendremos:
p . (q /\ r) = p |q /\ r| cos = h. S = Volumen
siendo |q /\ r| = S, el área de la base, y p.cos = h, la altura de este paralelepípedo.
* PROPIEDADES DEL PRODUCTO MIXTO DE TRES VECTORES:
1) Para tres vectores cualesquiera p, q, r se tiene:
p . (q /\ r) = q . (r /\ p) = r . (p /\ q)
es decir, se mantiene el signo mientras que mantengamos el orden cíclico:
por contra, cambia el signo si "invertimos" el ciclo, por ejemplo:
p . (q /\ r) = - q . (p /\ r)
2) Dados tres vectores p, q, r, coplanares:
p . (q /\ r) = 0

* Calculo del producto mixto mediante sus componentes cartesianas:
Si los vectores p , q, r están expresados en sus componentes cartesianas:
entonces, el producto mixto de estos tres vectores, p . (q /\ r), puede expresarse por medio del determinante:
EJERCICIOS DE APLICACIÓN
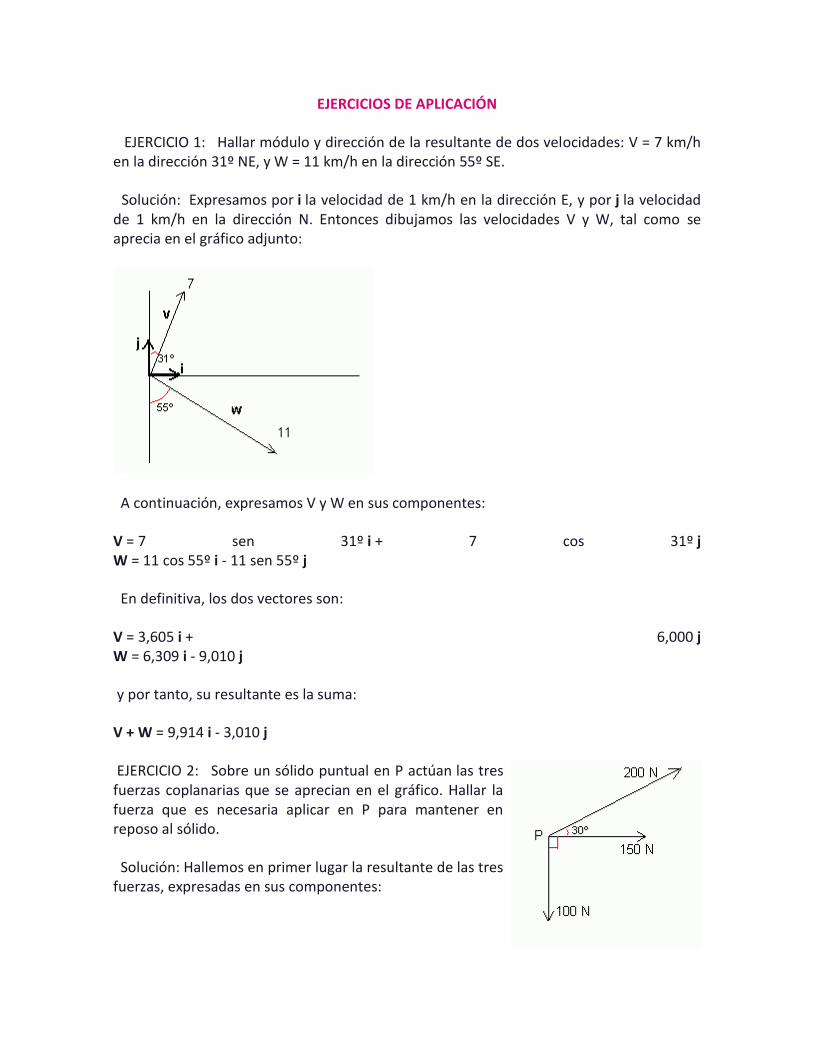
EJERCICIO 1: Hallar módulo y dirección de la resultante de dos velocidades: V = 7 km/h en la dirección 31º NE, y W = 11 km/h en la dirección 55º SE.
Solución: Expresamos por i la velocidad de 1 km/h en la dirección E, y por j la velocidad de 1 km/h en la dirección N. Entonces dibujamos las velocidades V y W, tal como se aprecia en el gráfico adjunto:
A continuación, expresamos V y W en sus componentes:
V = 7 sen 31º i + 7 cos 31º j W = 11 cos 55º i - 11 sen 55º j
En definitiva, los dos vectores son:
V = 3,605 i + 6,000 j W = 6,309 i - 9,010 j
y por tanto, su resultante es la suma:
V + W = 9,914 i - 3,010 j
EJERCICIO 2: Sobre un sólido puntual en P actúan las tres fuerzas coplanarias que se aprecian en el gráfico. Hallar la fuerza que es necesaria aplicar en P para mantener en reposo al sólido.
Solución: Hallemos en primer lugar la resultante de las tres fuerzas, expresadas en sus componentes:

cuya resultante es:
R = 323,205 i
Por lo tanto, en P habrá que aplicar una fuerza opuesta, es decir: F = - 323,205 i
EJERCICIO 3: Determinar el vector unitario perpendicular al plano formado por los dos vectores: A = 2i - 6j -3k, B = 4i + 3j -k .
Solución: El producto vectorial A /\ B representa un vector perpendicular al plano en el que se hallan A y B. Este producto vectorial es:
y para hallar un vector unitario en la dirección de A /\ B multiplicamos a este vector por el inverso de su módulo, es decir:
EJERCICIO 4: Deducir el teorema de los senos para un triángulo plano.
Solución: Sea el triángulo ABC de la figura adjunta, cuyos lados están formados por los tres vectores a, b y c, llamamos A, B y C a los ángulos opuestos a su respectivo vector.
Es fácil comprobar que según esta construcción se tiene:
a + b + c = 0
Si multiplicamos vectorialmente a por la expresión de arriba se tiene:
a /\ (a + b + c) = 0
por tanto, a /\ b + a /\ c = 0 (puesto que a /\ a = 0). Es decir:
a /\ b = c /\ a
A continuación multiplicamos vectorialmente b por la primera expresión , y luego c por la misma, se obtiene resultados similares al anteriormente hallado. Por tanto:
a /\ b = b /\ c = c /\ a
lo cual en módulos es: ab sin C = bc sin A = ca sin B
y dividiendo entre (abc) nos queda:
CONCLUSIÓN
La mayoría de las teorías matemáticas que hablan sobre la resolución de cálculos con vectores son aplicadas a las Ciencias Físicas aunque su comprensión y aplicación va más enfocado en la existencia de los mismos en la realidad cálculos de los fenómenos que afectan en nuestro entorno, tomando en cuenta no solo lo matemático si no lo mecánico en cálculos dinámicos sobre donde existen los vectores en los cálculos físicos de nuestro entorno.