
Sur les solutions invariantes et conditionnellement invariantes des equations de la MHD (Ph.D)
187
par D´ epartement de Physique Facult´ e des arts et des sciences Th` ese pr´ esent´ ee `a la Facult´ e des ´ etudes sup´ erieures en vue de l’obtention du grade de Philosophiæ Doctor (Ph.D.) en Physique d´ ecembre 2003 c Philippe Picard, 2003
-
Upload
independent -
Category
Documents
-
view
1 -
download
0
Transcript of Sur les solutions invariantes et conditionnellement invariantes des equations de la MHD (Ph.D)

Universite de Montreal
Sur les solutions invariantes et conditionnellement invariantesdes equations de la magnetohydrodynamique
par
Philippe Picard
Departement de Physique
Faculte des arts et des sciences
These presentee a la Faculte des etudes superieures
en vue de l’obtention du grade de
Philosophiæ Doctor (Ph.D.)
en Physique
decembre 2003
c© Philippe Picard, 2003

ii
Universite de MontrealFaculte des etudes superieures
Cette these intitulee
Sur les solutions invariantes et conditionnellement invariantesdes equations de la magnetohydrodynamique
presentee par :
Philippe Picard
a ete evaluee par un jury compose des personnes suivantes :
Pavel Winternitz
(president-rapporteur)
Alfred Michel Grundland
(directeur de recherche)
Alain Vincent
(membre du jury)
Willy Hereman
(examinateur externe)
Veronique Hussin
(representante du doyen de la FES)
These acceptee le :
v
TABLE DES MATIERES
Resume . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . iii
Abstract . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . iv
Liste des tableaux . . . . . . . . . . . . . . . . . . . . . . . . . vii
Liste des abreviations et Notation . . . . . . . . . . . . . . . . . viii
Remerciements . . . . . . . . . . . . . . . . . . . . . . . . . . . . x
Introduction . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1
CHAPITRE 1. Notions de magnetohydrodynamique. . . . . . . . . 6
1.1 Les equations de la magnetohydrodynamique. . . . . . . . . . . . . 6
1.2 Les lois de conservation. . . . . . . . . . . . . . . . . . . . . . 14
1.3 La vorticite en MHD. . . . . . . . . . . . . . . . . . . . . . . 16
1.4 Le theoreme de la conservation du flot magnetique. . . . . . . . . . 17
CHAPITRE 2. Solutions conditionnellement invariantes des equations
MHD. Ondes multiples. . . . . . . . . . . . . . . . . . . . . . . 19
2.1 Les ondes simples pour des systemes quasilineaires d’EDP. . . . . . . 19
2.2 Les ondes simples decrites par le systeme MHD. . . . . . . . . . . 27
2.2.1 Les ondes simples entropiques (E). . . . . . . . . . . . . . . 31
2.2.2 Les ondes simples d’Alfven (A). . . . . . . . . . . . . . . . . 37
2.2.3 Les ondes simples magnetoacoustiques rapide (F) et lente (S). . . 40
2.3 Les ondes multiples pour des systemes quasilineaires d’EDP. . . . . . 50
2.4 Les ondes doubles decrites par le systeme MHD. . . . . . . . . . . 55
2.4.1 Les ondes doubles entropiques (E1E1). . . . . . . . . . . . . . 58
2.4.2 Les ondes doubles d’Alfven (AA). . . . . . . . . . . . . . . . 61
2.4.3 Les ondes doubles Alfven-Entropique (AE1). . . . . . . . . . . 62
2.4.4 Les ondes doubles magnetoacoustiques (FF). . . . . . . . . . . 70
2.4.5 Les ondes doubles magnetoacoustique et entropique (FE1). . . . . 74
vi
2.5 Resolution du systeme MHD par imposition de contraintes differentielles. 78
CHAPITRE 3. Reduction par symetrie des equations de la MHD. . 83
3.1 Notions fondamentales sur la theorie des groupes. . . . . . . . . . . 83
3.1.1 Groupe local de transformations. . . . . . . . . . . . . . . . 85
3.1.2 Generateur infinitesimal. . . . . . . . . . . . . . . . . . . . 86
3.1.3 Groupes et equations differentielles. . . . . . . . . . . . . . . 89
3.1.4 Prolongation. . . . . . . . . . . . . . . . . . . . . . . . . 91
3.2 La methode de reduction par symetrie des equations differentielles. . . 95
3.2.1 Conditions frontieres. . . . . . . . . . . . . . . . . . . . . 98
3.3 La M.R.S appliquee aux equations de la MHD. . . . . . . . . . . . 100
CHAPITRE 4. Conclusion : Discussion et developpements futurs. . 164
References . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 172
! "#
! "# $ % # & # & # '$ && &
( & "# ) # ## #& & & %* + , , $ # #$ $ # # %* - % & #, + #
## . - # ( # & / - # & , ## ' & , - # #
' $ , ## -#$ # # & # &$ + ,
! & ( ( % 011 # - 2 ( #& % -#$ #&$ & & # ' # & $ % ##
3 # ( $ % # # # $ $ $ # '4 ' $ ( # # #
5 $ # & & & 2 ' # 2 & &6 & # "# 7$
! ( $ % & # ( ( ## # ' - -# / % & # '4 $ # & 3 # ( $ % & & #
& 8 7 "# ) 2 # 8 7 $ # + #
# & $ # "# $ ## - # $ & && & % # & 5* 9 # 9 && - $ 2 &&$ $ && , 5* &$ 5*$ & # ! + -# 3 #&$ ##
'##- ! 2 & 9&& "# ! '##- !! #
$ - - & , #.
# # & 2 $ #& 9 #&$ ( : #$ : 3 :
)
) ! $ # &6 2 %* $ & & + ' 2 & #:
! # , & & & # & & # # 5 $ + ,- ## %*
. ! 8 $ "# ) #& %*: ! ## , ,+ ## #,: ! & , ## #,:
7 ## ( # # : ; -#$ $ $ < & $ =8( $ , $ :
> &( ( # # : 3 # # $ + #, # #:
? ! - - ( # ( ' 2 , ( :
@ 3 # "# $ - - & &
0 - & & # 2 A # "#7 " $ < ( ( #
# & ( , - %* &
-# & % #&$ & # Æ & ## #& %*
! ## $ % & # !$ # & $ ## (
# # & 2 , & # ' $ & ## ; $ % #( & #
# ## ! #& 6 & "#
5$ "# 7 & & 2
! #$ & & %B % & # ! %
% 3
5& )C$ )11
7

iii
Resume
Cette these est consacree a la resolution des equations de la magnetohydrody-
namique en (3 + 1) dimensions suivant deux methodes distinctes qui sont basees sur
les reductions par symetries et sur les symetries conditionnelles.
Dans le Chapitre 1, nous rappelons les equations constituant la magnetohydrodyna-
mique (MHD) : celles-ci decrivent l’ecoulement compressible et isentropique d’un flu-
ide ideal et conducteur soumis a un champ magnetique ~H et dont la conductivite
electrique tend vers l’infini. Dans le Chapitre 2, nous presentons d’abord une version
de la methode des symetries conditionnelles pour resoudre des systemes d’equations
aux derivees partielles du premier ordre, quasilineaires, homogenes et du type hyper-
bolique, cela afin d’obtenir des solutions de rang un (ondes simples) qui s’expriment en
termes des invariants de Riemann. Dans la section 2, nous appliquons cette methode
au systeme constitue des equations MHD pour obtenir les ondes simples de type en-
tropiques, d’Alfven, magnetoacoustique lente et rapide qui correspondent aux trois
modes de propagation en MHD. Dans la section 3, nous generalisons cette methode
aux ondes multiples. Ce qui nous permettra dans la section 4 de construire des
ondes doubles decrites par le systeme MHD qui resultent de la superposition non
lineaire de deux ondes simples. Dans la section 5, nous imposons au systeme MHD
des contraintes differentielle desquelles nous obtenons de nouvelles solutions. Dans le
chaptre 3, nous appliquons la methode de reductions par symetries au systeme MHD.
Precisons que l’algebre de symetrie et la classification des sous-algebres (dont les di-
mensions varient entre 1 et 4) par classes de conjugaison ont deja ete calculees dans
un travail anterieur [17]. Ici, nous considerons seulement les sous-algebres du type
similitude galileenne de dimension trois qui nous permettent de reduire le systeme
MHD de depart en un systeme compose d’equations differentielles ordinaires qui don-
nent alors des solutions G-invariantes. Dans le Chapitre 4 nous concluons cette these
par l’analyse des resultats obtenus et des possibles travaux futurs qui en decoulent.
Mots cles: MHD, symetries conditionnelles, invariants de Riemann, onde simple,
onde double, Groupe de Lie, reductions par symetrie, solutions G-invariantes.

iv
Abstract
This thesis is devoted to the resolution of the equations of magnetohydrody-
namics in (3 + 1) dimensions with two different approaches based on the methods of
conditional and classical symmetry reductions.
In Chapter 1, we briefly introduce the equations that constitute magnetohy-
drodynamics. The flow under consideration is assumed to be ideal, nonstationary
and isentropic for a compressible conductive fluid placed in a magnetic field ~H. The
electrical conductivity of the fluid is assumed to be infinitely large. In Chapter 2,
we present in Section 1 a version of the conditional symmetry method for resolving
quasilinear hyperbolic systems of partial differential equations of the first order. The
rank-one solutions (also called simple waves solutions) obtained by this method are
expressed in terms of Riemann invariants. In Section 2, we use it to obtain simple
waves of MHD system equations. Section 3 generalizes the above construction to the
case of many simple waves described in terms of Riemann invariants. In Section 4
we present some double waves solutions admitted by the MHD equations. Finally,
in Section 5 we impose some differential constraints in order to get some new classes
of solutions. In Chapter 3, we have applied the symmetry reduction method to the
MHD system of equations. The symmetry algebra and its classification by conju-
gacy classes of r-dimensional subalgebras (1 ≤ r ≤ 4) was already known [17]. We
restrict our study to the three dimensional galilean similitude subalgebras that give
systems of ordinary differential equation from which we obtain G-invariant solutions.
Finally, Chapter 4 contains conclusions of the obtained results and possible futures
developments.
Key words : MHD, conditional symmetry, Riemann invariants, simple wave, double
wave, Lie groups, symmetry reduction, G-invariant solutions.
viii
Liste des abreviations
E.D.O. : equations differentielles ordinaires
E.D.P. : equations aux derivees partielles
M.H.D. : magnetohydrodynamique
M.R.S. : methode de reduction par symetrie
M.S.C. : methode des symetries conditionnelles
Onde Ei (i = 1, 2, 3) : onde simple entropique
Onde A : onde simple d’Alfven
Onde S/F : onde simple magnetoacoustique lente (S)/rapide (F )
Notation
εijk : symbole de Levi-Cevita
δij : symbole de Kronecker
E : espace des variables independantes
U : espace des variables dependantes
Γf : graphe de la fonction u = f(x)
~ei ; (i = 1, 2, 3) : vecteurs orthonormes formant le repere de coordonnees cartesiennes
x =(t, ~x = (x, y, z)
)∈ E ⊂ IR4 : variables independantes
ρ : densite du fluide
p : pression hydrodynamique du fluide
~v = (ui) = (u, v, w), (i = 1, 2, 3) : velocite du flot
~H = (Hi) = (H1,H2,H3), (i = 1, 2, 3) : champ magnetique
u =(ρ, p, ~v, ~H) ∈ U ⊂ IR8 : variables dependantes
κ : exposant adiabatique du fluide
a =(κp/ρ
) 12
: vitesse de propagation du son dans le fluide
~Fm = − 14π
~H × (∇× ~H) = − 18π∇| ~H|2 +
14π
( ~H · ∇) ~H : la force de Lorentz
ix
M = Ji, Ki, Pµ, F, G, H : l’algebre de symetrie du type similitude-galileenne des
equations de la MHD dont voici la liste des generateurs infinitesimaux qui l’engendrent
Pµ = ∂xµ , (µ = 0, 1, 2, 3) : translations,
Ki = t∂xi + ∂ui , (i = 1, 2, 3) : boosts galileens,
Jk = εijk
(xj∂xj + uj∂uj + Hj∂Hj
), (i, j, k = 1, 2, 3) : rotations,
F = xµ∂xµ , (µ = 0, 1, 2, 3) : dilatation,
G = −t∂t − 2ρ∂ρ + u∂u + v∂v + w∂w : dilatation,
H = 2ρ∂ρ + 2p∂p + H1∂H1 + H2∂H2 + H3∂H3 : dilatation et centre de l’algebre M ,
R et A : les invariants des sous-algebres etudiees qui sont associes respectivement a
la densite et a la pression du fluide,
U , V et W : les invariants des sous-algebres etudiees qui sont associes respectivement
aux composantes de la vitesse ~v du flot,
X, Y et Z : les invariants des sous-algebres etudiees qui sont associes respectivement
aux composantes du champ magnetique ~H,
s est designee comme etant la variable de symetrie de la sous-algebre etudiee.
( )′ =d
ds[ ] : la derivee d’une quantite par rapport a la variable s.
Les constantes arbitraires sont denotees par Co, C1 et C2 ∈ IR ; Ro, Ao; Uo, Vo, Wo; Xo,
Yo, Zo sont des constantes arbitraires reelles associees respectivement a la densite ρ et
a la pression p, aux composantes de la vitesse ~v et du champ magnetique ~H.
x
Remerciements
Comme il est coutume de le faire, l’etudiant temoigne d’abord sa profonde
gratitude envers son directeur de these. Dans mon cas, je dois souligner avec em-
pressement sa contribution inestimable a l’avancement de ma these, en l’occurence le
professeur Alfred Michel Grundland. En effet, je lui serais toujours redevable pour
m’avoir initie a la physique mathematique notamment grace a son excellent cours
“Equations de la Physique Mathematique” et de ses innombrables cours personnels
traitant de l’application de la theorie des groupes aux equations differentielles. Sans
cet apport academique absolument indispensable, cette these n’aurait pas abouti. Je
le remercie aussi pour son support financier.
Aussi, je voudrais exprimer ma profonde reconaissance envers le professeur Pavel
Winternitz qui a fortement enrichi mes connaissances sur le sujet notamment avec
son cours “Symetries et Equations Differentielles” et ses judicieux conseils.
Je tiens a souligner la contribution des professeurs Raynald Laprade, ancien directeur
du departement de physique, et Jean Le Tourneux qui m’ont permis d’entreprendre
ce present doctorat a l’automne 1999 sous la gouverne du professeur Alfred Michel
Grundland et surtout pour avoir veille a son bon deroulement.
Egalement, je ne peux passer sous silence le soutien constant et le professionnal-
isme du personnel du Centre de Recherches Mathematiques, dont le travail contribue
grandement a creer un milieu propice a la recherche.
J’aimerais ensuite remercier les membres du jury pour le temps consacre a l’evaluation
de ce present travail.
Finalement, je ne peux oublier le support tant materiel (couvert et gıte) que
psychologique de mes parents, soient mon pere Jean Picard et ma mere Marie Marthe
Gauthier. Sans leur aide, l’accomplissement de cette these n’aurait ete possible.

1
Introduction
L’objectif de cette these est de trouver certaines classes de solutions pour
les equations de la magnetohydrodynamique (MHD) avec l’approche des symetries
ponctuelles de Lie. Celles-ci sont effectuees en appliquant d’abord des cas partic-
uliers de la methode des symetries conditionnelles dans le but de construire des ondes
multiples de Riemann, et ensuite d’y appliquer la methode de reduction par symetrie
(MRS). Les equations MHD etudiees dans ce travail decrivent le flot isentropique et
non stationnaire d’un fluide ideal, conducteur et compressible soumis a un champ
magnetique ~H. Les effets dissipatifs sont negligeables: la viscosite et la conductivite
thermique du fluide sont nulles. La conductivite electrique σ est suffisament elevee
pour que σ 7→ ∞. Nous supposons qu’il n’y a aucune force externe agissant sur le
fluide. Le milieu considere est isotrope, sans conditions frontieres et initiales. Sous
les hypotheses ci-haut considerees, les equations MHD en (3 + 1) dimensions peuvent
s’exprimer par un systeme d’equations aux derivees partielles (EDP) du premier ordre
qui est quasilineaire et hyperbolique
∂ρ
∂t+ (~v · ∇)ρ + (∇· ~v)ρ = 0 ,
ρ∂~v∂t
+ ρ(~v · ∇)~v +∇p +14π
~H × (∇× ~H) = 0 ,
∂p
∂t+ (~v · ∇)p + κ(∇· ~v)p = 0 ,
∂ ~H
∂t−∇× (~v× ~H) = 0 ,
∇· ~H = 0 .
(I)
Les variables dependantes sont notees par ρ, p, ~v = (u, v, w), et ~H = (H1,H2,H3), qui sont
respectivement la densite et la pression hydrodynamique du fluide, la vitesse du flot
2
et le champ magnetique, κ est l’exposant adiabatique. Les variables independantes
sont denotees par (xµ) = (t, x, y, z) ⊂ IR4 , µ = 0, 1, 2, 3.
Dans la premiere partie de la these, nous introduisons une nouvelle variante
de la methode des symetries conditionnelles (MSC) telle que presentee par A.M.
Grundland et J. Tafel [14], [15] pour construire des ondes multiples. Le principe
de base de cette approche consiste a ajouter au systeme de depart certaines con-
traintes differentielles du premier ordre qui doivent satisfaire le critere de symetrie
infinitesimal. Le systeme d’equations surdetermine ainsi obtenu, donne dans certains
cas un plus large eventail de symetries de Lie ponctuelles et permet alors d’obtenir
de nouvelles classes de solutions du systeme de depart. La MSC a ete developpee
a l’origine par G. Bluman et J. D. Cole [9], puis developpee notamment par P. A.
Clarkson et P. Winternitz [6], P. J. Olver et P. Rosenau [28], W. I. Fushchych [13].
Pour plus amples informations a ce sujet, on consultera les auteurs P. J. Olver et
E.M. Vorobev qui donnent une revue de la MSC dans [29] (vol.3, chap. 11).
Concernant la methode de reduction par symetrie (MRS) appliquee aux equations
MHD, certaines etapes ont deja ete completees. Voici brievement le travail accompli.
L’algebre de symetrie du systeme MHD, denotee par M , a ete determinee par A.M.
Grundland et al. [16], et independamment par J.C. Fuchs [12]. Elle est engendree par
les 13 generateurs suivants
Pµ =∂xµ , F = xµ∂xµ , i = 1, 2, 3, µ = 0, 1, 2, 3,
K1 =t∂x + ∂u, K2 = t∂y + ∂v, K3 = t∂z + ∂w,
qui sont identiques a ceux obtenus pour la dynamique des fluides compressibles et
ideaux [16], auxquels viennent s’ajouter les generateurs
G =− t∂t − 2ρ∂ρ + u∂u + v∂v + w∂w,
H =2ρ∂ρ + 2p∂p + H1∂H1 + H2∂H2 + H3∂H3 ,
J1 =(y∂z − z∂y) + (v∂w − w∂v) + (H2∂H3 −H3∂H2),
J2 =(z∂x − x∂z) + (w∂u − u∂w) + (H3∂H1 −H1∂H3),
J3 =(x∂y − y∂x) + (u∂v − v∂u) + (H1∂H2 −H2∂H1).
3
Les generateurs Pµ, Ki, et Jk sont associes respectivement aux translations spatiales
et temporelle, aux boosts galileens, et aux rotations. Les generateurs F , G et H
representent des dilatations. Les relations de commutation entre les generateurs sont
les suivantes :
(I) L’algebre galileenne est engendree par Pµ, Jk,Ki:
[Ji, Jj ] = εijkJk , [Ji, Pj ] = εijkPk , [Ji, Po] = 0,
[Ji,Kj ] = εijkKk , [Ki, Po] = −Pi, [Ki,Kj ] = 0,
[Pi, Pj ] = 0, [Ki, Pj ] = 0.
Ici εijk est le symbole de Levi-Cevita avec i, j, k = 1, 2, 3.
(II) L’algebre similitude-galileenne est engendree par Pµ, Jk,Ki, F, G,H:
[F, Po] = −Po, [F, Pi] = −Pi, [F,Ki] = 0,
[F, JG] = 0, [G, Ji] = 0, [F,Ki] = 0,
[G,Po] = Po, [G, Pi] = 0, [G,Ki] = −Ki ,
ou H est le centre de l’algebre M .
Par la suite A.M. Grundland et al. [17] ont classifie les sous-algebres du type similitude
galileenne par les classes de conjugaison dont les dimensions varient entre 1 et 4 inclu-
sivement. Leur methode de classification est basee sur un algorithme developpe par
J. Patera et al. [31] [32]. Precisons que la classification des sous-algebres galileennes
a ete etablie precedemment par L. Gagnon et al. [26].
Dans cette these, nous utilisons systematiquement la structure des sous-groupes
d’invariance de la MHD pour obtenir toutes les reductions par symetrie. Nous nous
limitons ici au cas quand les variables de symetrie sont invariantes par rapport aux
sous-groupes ayant des orbites generiques de codimension 1 dans l’espace des vari-
ables independantes. La MRS permet de reduire le systeme MHD de depart en un
systeme compose d’equations differentielles ordinaires (EDO). Ensuite, on etudie la
structure des singularites des EDO pour determiner si elles possedent les proprietes
4
de Painleve. Nous donnons en detail la procedure de construction des solutions des
systemes reduits et nous presentons une interpretation physique des resultats obtenus.
De nombreux travaux sur les equations MHD ont ete effectues en employant les
algebres galileenes, citons notamment Fuchs [12], Coggeshall [8], Infeld [23]. A
notre connaissance, aucune recherche basee sur les sous-algebres similitude-galileennes
n’a ete effectuee jusqu’a maintenant. Par consequent, dans ce travail nous utilisons
systematiquement ce type de sous-algebres pour etudier les equations MHD en (3+1)
dimensions. Le nombre de sous-algebres de dimension trois determinees par les classes
de conjugaison est egale a 104. Parmis tous ces representants, 92 de ceux-ci nous
menent a des systemes reduits d’EDO. Pour les douze sous-algebres restantes, le rang
de la matrice caracteristique constituee des champs vectoriels associes a ces sous-
algebres est de rang 1 (i.e. le defaut de structure de la solution δ = rang [Qαk ] = 1).
Donc les solutions correspondantes sont partiellement invariantes (SPI), cependant
nous ne les abordons pas de maniere systematique dans cette these.
Le corps de la these sur ce sujet comporte trois chapitres. Dans le Chapitre
1, nous introduisons les equations classiques de la MHD (cf.(I)) par une breve in-
terpretation physique de celles-ci. Ensuite nous donnons les lois de conservation de
l’impulsion et de l’energie. Puis nous concluons par le theoreme de Kelvin concernant
la vorticite du fluide et le theoreme de conservation du flot magnetique.
Dans le Chapitre 2, a la section 1 ; nous presentons la methode de construc-
tion des solutions de rang un (ondes simples de Riemann) pour des systemes d’EDP
hyperboliques et quasi-lineaires du premier ordre. Pour obtenir ces classes de solu-
tions, une version de la MSC a ete developpee a partir d’une distribution abelienne
de champs vectoriels constituant les symetries du systeme d’EDP de depart et qui
est sujette a certaines contraintes differentielles du premier ordre. Dans la section
2, nous appliquons cette methode pour construire des ondes simples de Riemann qui
sont admises comme solutions du systeme MHD en (3 + 1) dimensions. Par la suite
nous retrouvons les trois modes de propagation presents en MHD ; ceux-ci sont deja
5
connus dans la litterature traitant du sujet: Boillat [3], L. Landau et E. Lifshitz [25];
les ondes entropiques, d’Alfven et magnetoacoustiques lente et rapide. La section 3
contient une generalisation de la MSC ayant comme but de construire des solutions
de rang k (k ≥ 2). Cela inclut les ondes multiples de Riemann (k-ondes). Dans la
section 4, on applique la methode presentee dans la section 3 pour construire des
ondes doubles admises comme solutions du systeme MHD : nous en avons trouve
une quinzaine. Finalement la section 5 est consacree a la resolution du systeme
MHD par l’imposition de contraintes differentielles du type “side conditions” telles
que discutees dans [30]. Dans certains cas, nous retrouvons les resultats obtenus par
la MSC mais aussi de nouvelles solutions sont trouvees et une certaine interpretation
physique y sera donnee.
Dans le Chapitre 3, section 1 nous resumons l’application de la theorie des
groupes aux equations differentielles. Ce qui nous permet d’introduire dans la section
2 la MRS par une breve synthese de celle-ci et de son application aux equations MHD
dans la section 3 : nous presentons les solutions des systemes reduits et donnons
une certaine interpretation physique des resultats obtenus.
Le Chapitre 4 contient les conclusions et les developpements futurs. En parti-
culier, nous considerons la possibilite de traiter les solutions partiellement invariantes
en y presentant un exemple. Nous voudrions souligner que tres peu de ces classes de
solutions sont donnees dans la litterature traitant de MHD. Celles-ci feront l’objet
d’un travail futur.
Finalement, soulignons que cette these a fait l’objet de deux publications (sous
presse) :
A.M. Grundland and P. Picard, “On Conditionally Invariant Solutions of Magneto-
hydrodynamic Equations. Multiple Waves”,J. Nonlinear Math. Phys. 11,1,(2004).
A.M. Grundland and P. Picard, “Invariant and Conditionally Invariant Solutions
of Magnetohydrodynamic Equations in (3+1) Dimensions”, Proceedings of the Fifth
International Conference SYMMETRY in Nonlinear Mathematical Physics,(2004).
6
1. Notions de magnetohydrodynamique.
1.1 Les equations de la magnetohydrodynamique.
Dans ce chapitre, nous debutons par une breve description des equations for-
mant la magnetohydrodynamique ideale et leurs conditions de validite. Ensuite nous
donnons les lois de conservation (impulsion et energie) et la vorticite du fluide. Puis
nous conclurons par le theoreme de conservation du flot magnetique. Nos principales
references sont les ouvrages de Davidson [10], Landau et Lifshitz [25], et Shih-Pai [37].
Nous considerons un fluide conducteur, de densite ρ, qui s’ecoule dans un
champ magnetique externe ~B sans dissiper d’energie ; le fluide est dit parfait ou ideal.
La presence du champ ~B influence le mouvement hydrodynamique des porteurs de
charge qui composent le fluide : des champs electriques y sont induits et il en resulte
des courants electriques. Mais, des forces d’origine electromagnetique agissent sur ces
courants et peuvent alors modifier notablement le mouvement du fluide. D’autre part,
ces memes courants electriques changent le champ magnetique lui-meme. Les effets
hydrodynamiques et electromagnetiques sont donc inter-relies. Qualitativement pour
decrire le mouvement du fluide, on doit ajouter aux equations de l’hydrodynamique
celles de Maxwell qui regissent les interactions electromagnetiques entre ~B et la vitesse
du flot ~v. Nous obtenons alors un systeme d’equations couplees qui composent la
magnetohydrodynamique (MHD).
Nous commencons par l’equation de continuite :
∂ρ
∂t+∇· (ρ~v
)= 0. (1.1.1)
qui represente la conservation de la masse a l’interieur d’un volume fixe.

7
On introduit la derivee lagrangienne (ou convective) qui donne la variation d’une
quantite dans le referentiel se deplacant avec une particule de fluide :
d
dt≡ ∂
∂t+ (~v · ∇) . (1.1.2)
Dans l’equation (1.1.2), la partie ∂/∂t donne la variation dans le temps en un point
fixe alors que (~v · ∇) traduit le changement spatial dans la direction de ~v resultant du
deplacement du fluide a un instant donne.
L’equation de continuite se recrit dans le referentiel en mouvement comme suit :
dρ
dt+ ρ
(∇· ~v)= 0. (1.1.3)
Ensuite nous avons l’equation d’Euler
ρd~vdt
= −∇p + ~Fem . (1.1.4)
qui donne le bilan des forces volumiques (force par unite de volume) agissant sur un
element de fluide : p etant la pression hydrodynamique exercee par la matiere envi-
ronnante, les seules forces exterieures presentes sont d’origine electromagnetique: ~Fem
(on y reviendra plus loin), l’influence de la gravite est supposee ici comme negligeable.
Les interactions electromagnetiques sont decrites par les equations de Maxwell ex-
primees en unites gaussiennes (cgs) :
∇× ~E = −1c
∂ ~B
∂t; loi de Faraday, (1.1.5)
∇× ~H =4π
c~J +
1c
∂ ~E
∂t; loi d’Ampere, (1.1.6)
∇· ~B = 0 ; inexistance de monopoles magnetiques, (1.1.7)
ou c est la vitesse de la lumiere dans le vide, ~E, ~H, et ~J sont respectivement le champ
electrique, l’intensite magnetique et la densite de courant. Le milieu considere n’est
pas magnetique si bien que la permeabilite µm est proche de l’unite : ~B ∼ ~H.

8
Par ailleurs, la densite de courant ~J est reliee aux champs ~E et ~B par la loi d’Ohm
~J = σ
(~E +
~v× ~B
c
), (1.1.8)
ou le champ d’induction electrique (~v× ~B)/c s’ajoute au champ electrique ~E produit
dans le repere fixe, la conductivite electrique σ est scalaire et elle n’est pas modifee
par la presence du champ magnetique ~B ; le milieu considere est isotrope.
La validite de la magnetohydrodynamique repose sur trois conditions auxquelles sont
associees les trois parametres suivants :
(i) la vitesse du flot est non relativiste :
Rc ≡ |~v|2c2
¿ 1,
(ii) le champ electrique mesure ~Eo et le champ d’induction sont du meme ordre :
Re ≡ cEo
voHo∼ 1,
ou l’indice “o” specifie les valeurs experimentales. Puisque le fluide est un conducteur
parfait (σ →∞), pour des valeurs finies de ~J et ~B il faut donc que ~E + (~v× ~B)/c = 0.
(iii) l’echelle de temps consideree to est du meme ordre que le rapport entre la longueur
caracteristique L : la distance sur laquelle ~v et ~H varient notablement et ~vo :
Rt ≡ tovo
L∼ 1 ,
autremement dit, les phenomenes de hautes frequences sont ignores.
Ces conditions nous permettent de faire certaines approximations. Pour les justifier,
nous introduisons les variables sans dimension suivantes (toutes proches de l’unite) :
x∗ =x
L, ∇∗ = L · ∇, t∗ =
t
to, ~V ∗ =
~vvo
,
~E∗ =~E
Eo, ~H∗ =
~H
Ho, ~J∗ =
c ~J
σvoHo.

9
La loi d’Ampere (1.1.6) s’exprime en terme de ces quantites comme suit:
1Rσ
∇∗ × ~H∗ = ~J∗ +Rc
Rσ
∂ ~E∗
∂t∗, (1.1.9)
ou
Rσ =4πσ
c2Lvo
est une quantite sans dimension appelee le nombre de Reynolds magnetique. En
pratique, pour un fluide conducteur, on a Rc/Rσ ¿ 1. Par consequent, le courant
de deplacement, qui correspond au dernier terme de l’equation (1.1.9), est toujours
negligeable par rapport au rotationnel de ~H.
Ainsi la loi d’Ampere (1.1.6) se resume a
∇× ~H =4π
c~J , (1.1.10)
ou l’on note que ∇· ~J = 0 : le courant de deplacement est effectivement nul.
Maintenant nous pouvons determiner l’equation d’evolution de ~H a partir de
la loi de Faraday (1.1.6) dans laquelle les variables ~E et ~J sont eliminees aux moyens
des equations (1.1.8) et (1.1.10) pour obtenir :
∂ ~H
∂t= ∇× (~v× ~H) + νH∇2 ~H , (1.1.11)
ou
νH =c2
4πσ=
Lvo
Rσ
est la viscosite magnetique. L’equation (1.1.11) met en evidence le couplage entre ~H et
le champ de vitesse ~v ; si le mouvement du fluide est connu, elle decrit l’evolution de
~H. De plus, il ressort de cette equation deux mecanismes differents qui font evoluer
~H en un point donne : le premier depend de la vitesse du fluide alors que l’autre est
proportionnel a sa resistivite.
Supposons que le fluide soit au repos, l’equation (1.1.11) se reduit a
∂ ~H
∂t= νH∇2 ~H.

10
Sous cette forme, on retrouve l’analoge vectorielle d’une equation de diffusion : νH
etant le coefficient de diffusion de ~H. Ceci exprime le fait que toute perturbation
locale de ~H tend a s’attenuer par diffusion dans un temps de relaxation τd ∼ 1/νH .
Au contraire, quand la conductivite electrique σ → ∞ ⇔ νH → 0 (ou Rσ À 1),
c’est-a-dire pour des durees t ¿ τd : ce qui correspond aux conditions de validite de
la MHD, on a comme equation d’evolution de ~H :
∂ ~H
∂t= ∇× (~v× ~H). (1.1.12)
Le mecanisme de convection est dominant: les lignes de force sont alors entraınees
avec le fluide. Nous le prouverons dans la derniere section de ce chapitre.
Pour calculer ~v a partir de l’equation d’Euler (1.1.4), on doit d’abord faire le bilan des
forces volumiques d’origine electromagnetique :
~Fem = ρe~E + ~Fm
ou ρe~E est la force electrique par unite de volume engendree par la densite de charge
ρe et ~Fm est la force de Lorentz volumique :
~Fm =1c
~J × ~H .
En comparant la force electrique et la force de Lorentz ~Fm, on a
|ρe~E|
1c | ~J × ~B|
∼ Rc ¿ 1 :
ceci confirme l’hypothese du conducteur parfait car tout ecart a la neutralite electrique
du fluide est immediatement compensee, on peut donc considerer ρe = 0.
En tenant compte de l’expression (1.1.9), la force de Lorentz s’ecrit
~Fm = − 14π
~H × (∇× ~H) ,
qui peut egalement s’exprimer sous la forme
~Fm = − 18π∇| ~H|2 +
14π
( ~H · ∇) ~H. (1.1.13)

11
Pour mettre en evidence l’action qu’exerce ~H sur la matiere fluide, on exprime ~Fm
dans le repere de Frenet-Serret fixe a une ligne de force locale qui se deplace avec le
fluide [11]. On note par ~τ , ~n et ~b les vecteurs unitaires formant ce repere et ceux-ci
sont respectivement tangentiel, normal et binormal a cette ligne de force locale. Les
derivees dans ces directions respectives sont notees par : ∂/∂τ , ∂/∂n et ∂/∂b.
Dans le repere de Frenet-Serret, on exprime
( ~H · ∇) ~H = ~H∂
∂b(H~τ) =
τ
2∂
∂b(| ~H|2) +
| ~H|2Rc
~n
en precisant que
∂~τ
∂b=
~n
Rc
ou Rc est le rayon de courbure locale. La force de Lorentz s’ecrit donc dans ce repere:
~Fm =14π
(| ~H|2Rc
− 12
∂
∂n(| ~H|2)
)~n− 1
8π
(∂
∂b(| ~H|2)
)~b . (1.1.14)
Ainsi, dans le plan perpendiculaire a ~H (i.e. le plan normal forme par les vecteurs ~n et
~b), la force de Lorentz ~Fm est la somme d’un gradient de pression isotrope, appelee la
pression magnetique : pM = | ~H|2/8π, et d’une tension magnetique (ou force de traction)
qui “tend” les lignes de force (comme des cordes elastiques soumises a une tension)
dans la direction ~n (i.e. le terme | ~H|2/Rc provenant de ( ~H · ∇) ~H).
Nous obtenons alors la forme definitive de l’equation d’Euler (1.1.4) :
ρd~vdt
+∇p +14π
~H × (∇× ~H) = 0. (1.1.15)
Pour decrire completement le flot, on doit ajouter aux equations (1.1.1), (1.1.12)
et (1.1.15) l’equation d’etat qui relie la densite ρ et la pression p. Le fluide etant parfait:
il n’y aucune dissipation d’energie sous forme de frottement, ni d’echange de chaleur
entre le fluide et le milieu environnant. Ces conditions sont verifiees par les relations:
Rν ≡ voL
ν¿ 1 , RK ≡ K
cp¿ 1
12
ou Rν est le nombre de Reynolds hydrodynamique, ν est la viscosite cinematique, K est
la conductivite thermique, et cp est la chaleur specifique du fluide a pression constante
par unite de volume.
L’ecoulement du fluide est adiabatique (absence d’apport calorifique) de sorte que
l’entropie s du fluide est une quantite conservee le long du flot :
ds
dt= 0.
Ceci implique que tout processus est par nature reversible. Le flot est dit isentropique.
En MHD, l’approximation du gaz parfait est valable pour decrire la fonction d’etat du
fluide en equilibre thermodynamique. Selon la theorie cinetique classique, l’equation
d’etat d’un tel gaz s’exprime par
p = ρRT
ou R est la constante specifique propre au gaz et T est sa temperature. La chaleur
specifique a volume constant cv est reliee a cp par l’equation de Mayer :
cp − cv = R .
On considere ici cp et cv comme des constantes. Dans ce cas l’entropie est donnee par
s = cv ln [pρ−κ] + so ,
ou so est une constante arbitraire et κ = cp/cv est l’exposant adiabatique qui vaut en
particulier 5/3 pour un gaz monoatomique situe dans un espace a trois dimensions.
On peut alors relier p et ρ par une fonction de l’entropie
A (s) =p
ρκ,
ou A(s) satisfait la loi de conservation (1.1.15) qui donne en considerant (1.1.3) :
dp
dt+ κ(∇· ~v)p = 0 . (1.1.16)

13
Maintenant nous sommes en mesure d’introduire le systeme MHD qui se compose des
equations (1.1.1), (1.1.15), (1.1.16), (1.1.12) et (1.1.7) disposees dans l’ordre suivant
dρ
dt+ (∇· ~v)ρ = 0 ,
ρd~vdt
+∇p +14π
~H × (∇× ~H) = 0 ,
dp
dt+ κ(∇· ~v)p = 0 ,
∂ ~H
∂t−∇× (~v× ~H) = 0 ,
∇· ~H = 0 .
(1.1.17)
Celles-ci, appelees aussi les equations de Lundquist, decrivent completement le mou-
vement du fluide et le champ magnetique ~H dans lequel il s’ecoule. Elles forment un
systeme hyperbolique compose de neuf equations aux derivees partielles quasilineaires
du premier ordre dont les inconnues sont les composantes de ~v = (u, v, w), la densite
ρ, la pression p, et les composantes de ~H = (H1, H2, H3).
Les equations (1.1.17) sont invariantes sous les transformations de Galilee entre
deux referentiels K et K ′ en mouvement l’un par rapport a l’autre suivant une vitesse
constante ~vo. Les lois de transformations correspondantes s’ecrivent :
t′ = t , ~x′ = ~x + ~vo t , ~v′ (~x′, t′) = ~v (~x, t) + ~vo t ,
ρ′ (~x′, t′) = ρ (~x, t) , p′ (~x′, t′) = p (~x, t) ,
~H ′ (~x′, t′) = ~H (~x, t) , ~E′ (~x′, t′) = ~E (~x, t)− ~vo × ~H (~x, t) .
Cela traduit le caractere non-relativiste du flot exprime par la condition (i).
Nous terminons cette section a propos des systemes d’unites employes en
MHD. Dans le present travail, nous optons pour le systeme cgs dont les unites fon-
damentales sont la longueur (en cm), la masse (en g) et le temps (en seconde). En
unites MKSA ou SI, les equations MHD conservent la meme forme que celles ex-
primees en unites cgs a l’exception de l’equation d’Euler (1.1.15) dont le facteur 1/4π
est remplace par 1/µo ou la permeabilte du milieu considere est proche de celle du
vide (i.e. µm ∼ µo).

14
1.2 Les lois de conservation.
Dans cette section nous resumons les lois de conservation de l’impulsion et de
l’energie qui sont obtenues a partir des equations de la MHD.
Conservation de l’impulsion.
A l’aide des equations (1.1.3) et (1.1.5) on obtient la loi de conservation de l’impulsion
∂(ρui)∂t
= −∂Πhik
∂xk− ∂Πm
ik
∂xk, i, k = 1, 2, 3 , (1.2.1)
avec la sommation implicite sur l’indice k, cette equation contient les termes :
Πhik = ρuiuk + p δik : le tenseur flux de densite d’impulsion hydrodynamique, (1.2.2)
ou ρ ui uk correspond au transport de la composante ρui dans la direction i de
l’impulsion par les particules de fluide en mouvement dans la direction k, et p δik
est le transport de l’impulsion associe aux forces de pression :
Πmik =
14π
[12δik| ~H|2 −HiHk
]: le tenseur des contraintes de Maxwell, (1.2.3)
dont la divergence donne la force de Lorentz ~Fm (e.g. (1.1.13))
Conservation de l’energie.
La loi de conservation de l’energie s’exprime sous la forme abregee
∂
∂t(Eh + Em) = −∇· (~qh + ~S) . (1.2.4)
Les quantites Eh et ~qh sont respectivement la densite d’energie et le flux d’energie
hydrodynamique qui resultent exclusivement du mouvement du fluide :
Eh = Ec + ρK (1.2.5)
ou Ec =12ρ|~v|2 est l’energie cinetique et K =
1κ− 1
p
ρest l’energie interne.
~qh = ~qc + ρW~v ; (1.2.6)
~qc =ρ|~v|2
2~v est le flux associe a l’energie cinetique et W = K +
p
ρest l’enthalpie.

15
On doit ajouter aux equations (1.2.5) et (1.2.6) la densite d’energie magnetique Em :
Em =| ~H|28π
, (1.2.7)
precisons que la densite d’energie electrique est negligeable puisque Ec ∼ Rc| ~H|2/8π.
Le flux d’energie electromagnetique est donne par le vecteur de Poynting ~S :
~S =14π
~H × (~v× ~H). (1.2.8)
Maintenant nous pouvons prouver l’assertion du debut : a savoir que les effets
hydrodynamiques et electromagnetiques sont effectivement couples. Pour cela, nous
separons l’equation de conservation de l’energie en deux sous-equations :
∂Ec
∂t= −∇· ~qc − (~v · ∇p) + (~Fm · ~v) , (1.2.9)
qui signifie que la variation temporelle de l’energie cinetique Ec resulte des puissances
exercees par les forces de pression et de Lorentz et aussi des pertes causees par le flux
d’energie cinetique ~qc traversant la surface de l’element de fluide.
De meme que
∂Em
∂t= −(~Fm · ~v)−∇· ~S , (1.2.10)
indique egalement que la variation temporelle de l’energie magnetique Em resulte de
la puissance exercee par la force de Lorentz et des pertes causees par le flux d’energie
de Poynting traversant la surface de l’element de fluide.
Les deux equations (1.2.9) et (1.2.10) nous demontre clairement qu’un change-
ment dans l’energie cinetique amene un changement dans les forces magnetiques qui
consequemment influencent a leur tour le mouvement du fluide.

16
1.3 La vorticite en MHD.
La circulation de la vitesse se definit par l’integrale
Γc =∮
C
~v · ~d` =∫
S
~ω · n ds (1.3.1)
faite le long d’un contour ferme entourant l’element de fluide considere. En utilisant
le theoreme de Stokes, ou l’integration est faite sur la surface S bornant l’element
de fluide, on a introduit le champ de vecteur ~ω = ∇× ~v qui est appele vorticite de
l’ecoulement.
En presence d’un champ magnetique ~B, la variation de Γc est donnee par
dΓc
dt=
∮
C
d~vdt· ~d` =
∫
S
d~ω
dt· n ds . (1.3.2)
Pour determiner la variation de ~v, on utilise l’equation d’Euler (1.1.4) exprimee sous
la forme de Lamb
d~vdt
≡ ∂~v∂t
+ ~ω × ~v +12∇[ |~v|2] = −1
ρ∇p− 1
4πρ~H × (∇× ~H). (1.3.3)
En prenant le rotationnel de l’equation (1.3.3), on obtient la variation de ~ω
D [~ω] ≡ d~ω
dt+ (∇· ~v)~ω − (~ω · ∇)~v = − 1
ρ2[∇ρ×∇p] +
14π∇×
[1ρ
[ ~H × (∇× ~H)]]
. (1.3.4)
En l’absence de ~H, pour un fluide parfait dont la densite ρ s’exprime comme une fonc-
tion de la densite (fluide barotrope) et soumis a des forces conservatrices (i.e. derivant
d’un potentiel), la circulation est une quantite conservee (i.e. dΓc/dt = 0) et ~ω obeit
a une equation d’evolution ayant la meme forme que l’equation (1.1.12) ; les lignes
de vorticite sont entraınees avec celles du fluide. C’est precisement le theoreme de
Kelvin.
Par contre, ce theoreme n’est plus valide en MHD du fait que la force de
Lorentz n’est pas necessairement conservatrice : elle communique au fluide un mou-
vement de rotation. Dans ce cas, il demontrable que D [~ω] ≥ 0 et |~ω| est donc une
fonction croissante [37].

17
1.4 Le theoreme de la conservation du flot magnetique.
Suite a l’equation (1.1.12), nous avons affirme que pour un fluide parfait, les
lignes de force de ~H etaient entraınees avec le flot par convection. Dans cette section,
nous l’attesterons en prouvant le theoreme de la conservation du flot magnetique ou
aussi connu comme le theoreme de convection. Celui-ci a ete enonce par Alfven [2].
Considerons un fluide conducteur dont l’ecoulement est adiabatique et soumis
a un champ magnetique ~H. A un instant t donne, soient C un contour ferme bornant
un element de fluide et ` une ligne de force de ~H. A un instant ulterieur t′, les elements
du fluide se sont deplaces : les points de la ligne ` decrivent maintenant la ligne `′,
idem pour le contour C qui s’est transforme en un contour C ′. Par le theoreme de
convection, il s’ensuit que le flux magnetique Φ(C ′) passant a travers C ′ est egale au
flux initial Φ(C) passant par C, de meme que la ligne de force magnetique `′ se confond
avec la ligne de force initiale `. Il y a donc conservation du flot magnetique.
La demonstration de ce theoreme comporte deux parties. Debutons par l’equation
(1.1.5) que l’on integre comme suit :
∫
s
(∇× ~E) · n ds = −1c
∫∂ ~H
∂t· n ds , (1.4.1)
ou n est un vecteur unitaire normal a la surface S delimitant l’element de fluide. Par
le theoreme de Stokes et a l’aide de l’equation (1.1.6), l’expression (1.4.1) se recrit :
∮
C
[ ~E +(~v× ~H)
c] · ~d` =
dΦdt
,
ou Φ est le flux magnetique :
Φ =∫
~H · ~ds.
Or nous savons que pour un conducteur parfait (σ → ∞) ; ~E + (~v × ~H/c) = 0,
donc la variation dans le temps du flux magnetique est nulle. Consequemment le
nombre de lignes de force traversant le contour ferme demeure toujours constant.
Nous venons de prouver la loi de Faraday.

18
La demonstration se complete a partir de l’equation (1.1.12) recrite sous la forme :
∂ ~H
∂t= ( ~H · ∇)~v− (~v · ∇) ~H − ~H(∇· ~v) (1.4.2)
dans laquelle on elimine ∇· ~v a l’aide de l’equation (1.1.3) pour finalement obtenir
d
dt
(~H
ρ
)=
(~H
ρ· ∇
)~v . (1.4.3)
Maintenant prenons une ligne de fluide quelconque se deplacant avec les par-
ticules qui la compose. Pour etablir sa variation dans le temps, on considere un arc
infinitesimale ~δ` de cette ligne. Si ~v est la vitesse de l’une de ces extremites, l’autre
bout aura une vitesse ~v + (~δ` · ∇)~v. Pendant une duree dt, cet arc aura varie de la
quantite dt(~δ` · ∇)~v de sorte que la variation dans le temps de ~δ` est donnee par
d
dt[~δ`] = (~δ` · ∇)~v . (1.4.4)
Ainsi les lignes de force ~H/ρ obeissent a la meme equation differentielle que l’arc ~δ` .
Par consequent, les particules de fluide situees sur une meme ligne de force magnetique
y demeuront indefiniment et la grandeur | ~H|/ρ va varier proportionnellement a la
distance qui les separe. On dit alors que “les lignes de force magnetiques et la matiere
fluide sont gelees l’un et l’autre”. Donc, lorsque la conductivite electrique est tres
elevee ; i.e. σ 7→ ∞, les lignes de force du champ magnetique ~H sont entraınees par le
fluide, on peut alors leur associer des proprietes elastiques (pression et tension) qui
ressortent finalement comme celles du fluide.

19
2. Solutions conditionnellement invariantes des equations MHD. Ondes multiples.
2.1 Les ondes simples pour des systemes quasilineaires d’EDP.
Nous etudions les systemes composes de m equations aux derivees partielles
(EDP) du premier ordre, qui sont quasilineaires (QL), homogenes et du type hyper-
bolique. Ceux-ci sont exprimes sous la forme :
p∑
i=1
q∑α=1
Ai lα (u)uα
xi = 0 , l = 1, . . . , m , (2.1.1)
avec p variables independantes x = (x1, . . . , xp) ∈ E ⊂ IRp et q variables dependantes
u = (u1, . . . , uq) ∈ U ⊂ IRq ; les derivees partielles sont notees par uαxi = ∂uα/∂xi. Le
systeme (2.1.1) est dit bien determine si m = q. Nos considerations seront toujours
locales ; il suffit de determiner les solutions definies au voisinage de l’origine x = 0. Les
fonctions considerees ici seront suffisament lisses pour en justifier les manipulations.
Le systeme (2.1.1) peut se mettre sous la forme matricielle (avec la sommation
implicite sur les indices) :
Aµ (u)uxµ = 0 , µ = 1, . . . , p , (2.1.2)
ou A1, . . . , Ap sont des matrices de dimensions m × q. Il est convenu d’adopter la
notation suivante pour les variables independantes : t = xo, x1, . . . , xn avec p = n + 1,
de sorte que l’equation (2.1.2) se recrit :
Ao (u)ut +n∑
i=1
Ai (u)uxi = 0. (2.1.3)
Si m = q, la matrice Ao est l’identite et nous obtenons la forme evolutive de (2.1.2) :
ut +n∑
i=1
Ai (u)uxi = 0 .

20
Definition 2.1.1. Un vecteur d’onde associe aux matrices A1, . . . , Ap est un
vecteur non nul
λ (u) = (λ1 (u), . . . , λp (u))
tel que
ker (λµAµ) 6= 0 .
Cette definition implique la relation d’onde :
γ ∈ U tel que(λµ (u)Aµ
α (u))γα = 0. (2.1.4)
L’equation (2.1.4) admet des solutions non triviales pour le vecteur de polarisation γ:
1) si m = q, det [ λµ (u)Aµ (u)] = 0,
2) si m 6= q, rang [ λµ (u)Aµ (u)] < min (m, q).(2.1.5)
L’equation (2.1.5) est appelee la relation de dispersion.
Definition 2.1.2. La fonction
r (x,u) = λµ (u)xµ (2.1.6)
est appelee un invariant de Riemann associe au vecteur d’onde λ.
L’equation
u = f (r (x,u)) (2.1.7)
definit de maniere unique la fonction u(x) au voisinage de l’origine x = 0 pour toute
fonction f : IR → IRq.
Sa derivee partielle par rapport a xµ est donnee par
∂uα
∂xµ= φ (x)−1
λµ
(u(x)
)f ′α
(r (x,u)
), (2.1.8)
ou l’on a introduit la notation suivante :
φ (x) = 1− ∂r
∂uα
(x,u(x)
)f ′α est un scalaire suppose non nul, (2.1.9)

21
et la derivee de la fonction f par rapport a r est notee par
f ′α =df
dr
α
.
Demontrons l’expression (2.1.8) en calculant explicitement la derivee partielle de uα
par rapport a xµ :
∂uα
∂xµ=
df
dr
α ∂r
∂xµ+
∂r
∂uβ
∂uβ
∂xµ
,
sachant que λµ = ∂r/xµ, on recrit l’equation ci-haut sous la forme
Ψαβ
∂uβ
∂xµ= λµ f ′α , (2.1.10)
ou Ψαβ est une matrice supposee inversible :
Ψαβ ≡ δα
β −∂r
∂uβf ′α. (2.1.11)
Multiplions l’equation (2.1.10) par la matrice inverse (Ψ−1)αβ qui donne
∂uα
∂xµ= λµ(Ψ−1)α
β f ′ β . (2.1.12)
Pour completer la demonstration, il suffit de determiner la matrice (Ψ−1)αβ de la
maniere suivante. On multiplie d’abord l’equation (2.1.11) par f ′ β pour obtenir :
Ψαβ f ′β =φ (x) f ′α . (2.1.13)
Ensuite, apres avoir multiplie l’equation (2.1.13) par Ψ−1, on compare membre a mem-
bre avec l’equation (2.1.12) pour finalement aboutir a l’expression (2.1.8).
Les solutions de l’equation (2.1.2) ayant la forme prescrite par l’expression (2.1.7)
sont appelees ondes de Riemann ou ondes simples. Le rang de la solution u(x) est au
plus egale a un. En effet car la formule (2.1.8) exprime le fait que les derivees partielles
de u(x) soient decomposables dans le sens
∂uα
∂xµ∼ γα (u) λµ (u) (2.1.14)

22
avec
γα =df
dr
α
, α = 1, . . . , q. (2.1.15)
Afin d’en donner une interpretation geometrique, on introduit les vecteurs suivants:
ξa (u) =(ξ1a (u), . . . , ξp
a (u))T
, a = 1, . . . , p− 1 , (2.1.16)
qui satisfont la relation d’orthogonalite
λ · ξa = 0. (2.1.17)
En fixant le vecteur d’onde λ, nous pouvons alors choisir un ensemble de vecteurs
ξa qui soint orthogonaux a λ. Notons que le choix des ξa n’est pas unique et que
l’ensemble des vecteursλ, ξ1, . . . , ξp−1
forment une base dans l’espace des variables
independantes E.
Multiplions l’equation (2.1.8) par ξa, nous obtenons l’expression
ξµa
(u(x)
)∂uα
∂xµ= 0
impliquant que u1 (x), . . . , uq (x) soient des invariants par rapport aux champs vectoriels
ξµa
(u(x)
) ∂
∂xµ
agissant dans l’espace E. Par consequent le graphe Γ =(
x,u(x))
(qui est une sous-
variete de dimension p) est invariant sous l’action de chaque champ vectoriel :
Xa = ξµa (u)
∂
∂xµ, a = 1, . . . , p− 1 , (2.1.18)
agissant dans l’espace des variables independantes et dependantes E × U ⊂ IRp × IRq.
Ces champs vectoriels forment une distribution abelienne :
[Xa, Xb] = 0 , a, b = 1, . . . , p− 1. (2.1.19)
23
Reciproquement, si u (x) est une fonction a q composantes, definie au voisinage
de x = 0, tel que son graphe Γ =(
x,u(x))
soit invariant sous l’action de tous les
champs vectoriels donnes par (2.1.18) satisfaisant la relation (2.1.17) alors u (x) est
une solution de l’equation (2.1.7) pour une certaine fonction f . Ainsi, on caracterise
geometriquement les solutions exprimees sous la forme (2.1.7).
Si u (x) est solution de (2.1.7) alors
Aµ(u(x)
) ∂u∂xµ
= φ−1 (x)λµ
(u(x)
)Aµ
(u(x)
)f ′
(r (x,u)
), (2.1.20)
donc u (x) est une solution de l’equation (2.1.2) si et seulement si
λµ (f)Aµ (f) f ′ = 0 (2.1.21)
autrement dit ; si et seulement si f ′ est un element de ker (λµAµ).
Resumons les caracteristiques des solutions de rang un.
(1). L’equation (2.1.21) constitue un systeme sous-determine d’equations differentielles
ordinaires (EDO) du premier ordre pour la fonction f qui depend de la dimension de
ker (λµAµ). Par exemple : si λµAµ = 0 alors il y a aucune contrainte sur la fonction f .
(2). Le rang de la solution de l’equation (2.1.2) est au plus egal a un. Le graphe
Γ =(
x,u(x))
est invariant sous l’action des champs vectoriels donnes par l’expression
(2.1.18) qui satisfont la relation d’orthogonalite λ · ξa = 0 et commutent entre eux.
(3). On peut faire un changement d’echelle du vecteur d’onde λ sans que la solu-
tion (2.1.7) soit changee (ces solutions appartiennent a la meme classe d’equivalence)
puisque l’equation de depart (2.1.2) est homogene : seule la direction de λ importe et
non sa norme.
Maintenant, nous choisissons un repere de coordonnees dans l’espace E ×U de
maniere a rectifier les champs vectoriels (2.1.18) et d’obtenir les conditions d’invariance
qui assurent l’existence des solutions de rang un. Supposons que l’une des com-
posantes de λ soit non nulle : choisissons λ1 6= 0. A partir de la relation d’orthogonalite

24
(2.1.17), nous exprimons les composantes des vecteurs ξa ; a = 2, . . . , p, en termes des
composantes du vecteur d’onde λ :
ξ2 (u) =(−λ2
λ1, 1 , . . . , 0 , . . . , 0
)T
, . . . , ξp (u) =(−λp
λ1, 0 , . . . , 0 , 1
)T
. (2.1.22)
En substituant les expressions (2.1.22) dans la formule (2.1.18), on obtient (p−1) champs
vectoriels qui sont lineairement independants
X2 =∂
∂x2− λ2
λ1
∂
∂x1, . . . , Xp =
∂
∂xp− λp
λ1
∂
∂x1, (2.1.23)
et ceux-ci forment une distribution abelienne.
Ensuite on fait le changement de coordonnees dans l’espace E × U :
x 1 = r(x,u) , x 2 = x2, . . . , x p = xp , u 1 = u1 , u 2 = u2 , . . . , u q = uq , (2.1.24)
ou les champs vectoriels donnes par (2.1.23) deviennent rectifies comme suit :
X2 =∂
∂x 2 , . . . , Xp =∂
∂x p . (2.1.25)
Pour prouver l’expression (2.1.25), on prend par exemple le champ vectoriel X2
X2 =∂
∂x2− λ2
λ1
∂
∂x1=
∂x 1
∂x2
∂
∂x 1 +∂x 2
∂x2
∂
∂x 2 −λ2
λ1
∂x 1
∂x1
∂
∂x 1 ,
en particulier∂x 1
∂x2=
∂r(x,u)∂x2
=∂r
∂x2+
∂r
∂uα
∂uα
∂x2,
∂x 1
∂x1=
∂r(x,u)∂x1
=∂r
∂x1+
∂r
∂uα
∂uα
∂x1,
(2.1.26)
puisque r = λµ (u)xµ, alors
∂r
∂uα=
∂λµ
∂uαxµ ,
et a l’aide de la formule (2.1.8) nous obtenons
X2 =
λ2 +(
∂λµ
∂uαxµ
) (φ−1(x)λ2
)f ′α
∂
∂x1 +∂
∂x 2 −λ2
λ1
λ1 +
(∂λµ
∂uαxµ
) (φ−1(x)λ1
)f ′α
∂uα
∂x1
=∂
∂x 2 .
Cette demonstration se generalise aisement aux autres champs vectoriels Xa.
25
L’ensemble des invariants sous l’action des champs vectoriels (2.1.25) est
x 1 = r(x,u), u1, . . . , uq
. (2.1.27)
Notons qu’une sous-variete a p dimensions est transversale a la projection (x,u) → x
a l’origine x = 0 si et seulement si elle est transversale a la projection (x,u) → x a
x = 0. Ces sous-varietes transversales, invariantes sous l’action des champs vectoriels
X2, . . . , Xp, sont definies par les equations ayant la forme :
u = f (x1) (2.1.28)
ou f : IR → IRq est une fonction arbitraire (comparee a (2.1.7)), i.e. u = f (x1) est une
solution generale des conditions d’invariance :
ux2 = 0 , . . . ,uxp = 0 . (2.1.29)
Le systeme (2.1.2) se recrit en termes des nouvelles coordonnees (x,u) comme suit :
Ai (
x,u,ux)uxi = 0 , (2.1.30)
ou
Ai ≡ Dx i
DxjAj ,
en particulier :
A1
=Dr
DxiAi , A
2= A2 , . . . , A
p= Ap , (2.1.31)
ou
Dr
Dxi
∣∣∣∣ux2 , ... ,uxp=0
= Φ−1λi avec Φ = 1− ∂r
∂uα uα1 .
La demonstration de l’expression (2.1.31) est directe. D’abord on recrit l’equation de
depart (2.1.2) comme ceci :
Ai (u)uxi = Aiα (u)
∂uα
∂xj
∂xj
∂xi= 0.

26
Puis en utilisant les equations (2.1.26) et (2.1.29), on arrive a
A1 (u)∂u∂x1
[∂r
∂x1+
∂r
∂uα
∂uα
∂x1
]+ . . . + Ap (u)
∂u∂x1
[∂r
∂xp+
∂r
∂uα
∂uα
∂xp
]= 0 ,
qui donne effectivement l’expression (2.1.31) compte tenue de la formule (2.1.8).
En ajoutant les conditions d’invariance (2.1.29) au systeme (2.1.30), nous obtenons le
systeme surdetermine
∆ :
[λi (u)Ai (u)
]ux1 = 0,
ux2 = 0 , . . . ,uxp = 0,
(2.1.32)
qui admet comme solution generale
u(x)
= f(x1
)
ou f : IR → IRq est une fonction satisfaisant l’equation (2.1.21).
Supposons maintenant que la courbe integrale Γ, associee au champ vectoriel
γα (u)∂/∂uα agissant dans l’espace des variables dependantes U , satisfait les equations
differentielles ordinaires (2.1.15). Supposons egalement que le vecteur d’onde λ (u)
soit ramene sur la courbe Γ par “pull back” ; i.e. f∗(λ). Alors les fonctions λµ (u)
deviennent des fonctions du parametre r defini sur la courbe Γ. Les ensembles (2.1.6)
et (2.1.7) definissent des relations implicites entre les variables uα, xµ et r qui peuvent
s’ecrire sous la forme
uα = fα (r) , r = λµ (r)xµ . (2.1.33)

27
2.2 Les ondes simples decrites par le systeme MHD.
Dans cette section nous utilisons les ondes simples pour resoudre le systeme
MHD (1.1.17). Rappelons que ce systeme comporte m = 9 EDPs qui sont quasilineaires
et du premier ordre, il est homogene et hyperbolique. Ce systeme peut s’exprimer
sous la forme normale (Cauchy-Kovalewski) si on le dispose de cette facon :
dρ
dt+ (∇· ~v)ρ = 0 ,
d
dt
[p
ρκ
]= 0 ,
d~vdt
+1ρ∇p +
14πρ
[12∇(| ~H|2)− ( ~H · ∇) ~H
]= 0 ,
∂ ~H
∂t−∇× (~v× ~H) = 0 ,
(2.2.1)
ou l’equation (1.1.7) est alors consideree comme une contrainte differentielle ;
∇· ~H = 0. (2.2.2)
Pour justifier cette affirmation, il suffit de prendre la divergence de la loi de Faraday
(1.1.5) pour obtenir que
∇· ∂ ~H
∂t=
∂
∂t(∇· ~H) = −1
c∇· (∇× ~E) = 0 :
si les donnees initiales satisfont l’equation (2.2.2) a l’instant t = 0 alors elles la satis-
fairont pour tout instant t > 0 [7]. Introduit de cette facon, le systeme MHD (1.1.17)
comporte dorenavant m = 8 equations avec p = 3+1 variables independantes: x = (t, ~x),
et q = 8 variables dependantes : u =(ρ, p, ~v = (u, v, w), ~H = (H1,H2, H3)
).
Maintenant on ecrit le systeme MHD (2.2.1) sous la forme evolutive (2.1.3) :
Ao ut + A1 ux + A2 uy + A3 uz = 0 , (2.2.3)
ou les matrices carrees 8× 8 sont les suivantes :
Ao =
1 0 0 0 0 0 0 00 1 0 0 0 0 0 00 0 ρ 0 0 0 0 00 0 0 ρ 0 0 0 00 0 0 0 ρ 0 0 00 0 0 0 0 1 0 00 0 0 0 0 0 1 00 0 0 0 0 0 0 1
, A1 =
u 0 ρ 0 0 0 0 00 u κp 0 0 0 0 00 1 ρu 0 0 0 H2
4πH34π
0 0 0 ρu 0 0 −H14π 0
0 0 0 0 ρu 0 0 H14π
0 0 0 0 0 u 0 00 0 H2 −H1 0 0 u 00 0 H3 0 −H1 0 0 u
,

28
A2 =
v 0 ρ 0 0 0 0 00 v κp 0 0 0 0 00 0 ρv 0 0 −H2/4π 0 00 1 0 ρv 0 H1/4π 0 H3/4π0 0 0 0 ρv 0 0 −H2/4π0 0 −H2 H1 0 v 0 00 0 0 0 0 0 v 00 0 0 H3 −H2 0 0 v
,
A3 =
w 0 0 0 ρ 0 0 00 w 0 0 κp 0 0 00 0 ρw 0 0 −H3/4π 0 00 0 0 ρw 0 0 −H3/4π 00 1 0 0 ρw H1/ 4π H2/4π 00 0 −H3 0 H1 w 0 00 0 0 −H3 H2 0 w 00 0 0 0 0 0 0 w
.
Nous cherchons les elements simples du systeme (2.2.1) en employant la formule
(2.1.15). Ainsi, pour chaque variable dependante on lui associe une composante du
vecteur de polarisation γ tel que note par
(ρ, p, ~v, ~H
)
(γρ ≡ dρ
ds, γp ≡ dp
ds, ~γ ≡ d~v
ds, ~h ≡ d ~H
ds
), (2.2.4)
et les variables independantes sont associees aux composantes du vecteur d’onde λ :
(t, ~x
)
(λo, ~λ
).
Les derivees partielles se recrivent en termes des elements simples :
∂uα
∂t→ λoγ
α ,∂uα
∂xµ→ λµγα, µ = 0, 1, 2, 3 ; α = 1, . . . , 8 , (2.2.5)
et la derivee lagrangienne (1.1.2) s’ecrit comme suit :
d
dt≡ ∂
∂t+ (~v · ∇) −→ λo + ~v · ~λ ≡ δ|~λ| , (2.2.6)
ou on definit la grandeur δ|~λ| comme etant la frequence caracteristique de l’onde simple
mesuree dans le referentiel se deplacant avec le fluide.

29
Donc, en decomposant les derivees partielles du systeme (2.2.1) et de la contrainte
differentielle (2.2.2) suivant les elements simples (2.2.5), on obtient
γρ δ|~λ|+ ρ (~γ · ~λ) =0 ,
ρ δ|~λ|(γp − κp
ργρ
)=0 ,
ρ δ|~λ|~γ + γp~λ +
14π
( ~H · ~h)~λ− 14π
( ~H · ~λ)~h =0 ,
δ|~λ|~h + (~γ · ~λ) ~H − ( ~H · ~λ)~γ =0 ,
~h · ~λ =0 .
(2.2.7)
Le systeme (2.2.7) est appele le systeme caracteristique, il admet des solutions non-
triviales pour le vecteur de polarisation γ =(γρ, γp, ~γ,~h
)si et seulement si le determinant
caracteristique de sa forme matricielle apparaissant dans l’equation (2.2.3) est nul :
c’est la relation de dispersion (e.g. equation (2.1.5));
δ2|~λ|2(
δ2|~λ|2 − ( ~H · ~λ)2
4πρ
)[δ4|~λ|4 − δ2|~λ|2
(| ~H|24πρ
+ a2
)+ a2 ( ~H · ~λ)2
4πρ
]= 0 , (2.2.8)
ou
a =[(
∂p
∂ρ
)
s
] 12
=(
κp
ρ
) 12
est la vitesse de propagation du son dans le fluide.
(2.2.9)
L’equation (2.2.8) est un polynome du huitieme degre en δ|~λ| dont les racines donnent
les frequences caracteristiques des trois branches de propagation des ondes en MHD:
(1) δE |~λ| = 0 pour les ondes entropiques, (2.2.10)
(2) δAε |~λ| = ε( ~H · ~λ)√4πρ
pour les ondes d’Alfven, (2.2.11)
(3) δF |~λ| =ε
2
(a~λ +
~H√4πρ
)2
12
+
(a~λ−
~H√4πρ
)2
12 ,
δS |~λ| =ε
2
(a~λ +
~H√4πρ
)2
12
−
(a~λ−
~H√4πρ
)2
12 ,
(2.2.12)
30
pour les ondes simples magnetoacoustiques rapides (F) et lentes (S), ε = ±1 indique
que dans une direction donnee, l’onde peut se propager dans un sens ou dans l’autre.
On peut etablir certaines correspondances entre les ondes simples et les modes propres
qui sont obtenus en resolvant le systeme MHD (1.1.17) par linearisation [1], [38] ;
c’est-a-dire en y remplacant u = (u)o + (u)1 ou (u)o sont les variables dependantes a
l’equilibre et (u)1 sont celles perturbees par le passage de l’onde ; on fait l’hypothese
que (u)1 ¿ (u)o. Les solutions du systeme MHD ainsi linearisees s’expriment en termes
d’ondes planes et de leurs superpositions lineaires comme
(uα)1 = Aα exp[i(~k · ~x− ωkt)
], α = 1, . . . , 8 , (2.2.13)
ou Aα est l’amplitude du mode propre et correspond au vecteur de polarisation :
Aα ←→ γα. Ensuite, (ωk,~k) ←→ λ = (λo, ~λ) ; ωk est la frequence d’oscillations des modes
propres et correspond a λo, ~k est le vecteur d’onde et correspond a ~λ : la famille
constituee de plans d’onde se propage suivant la direction de ~k avec la vitesse de
phase vφ = ωk/|~k| qui correspond a la vitesse caracteristique δ. Selon notre approche,
la vitesse de groupe se definit par
~vg = −dλo
d~λ. (2.2.14)
Dans la section suivante, nous presentons les solutions de rang un du systeme
MHD (1.1.17) qui sont obtenues en resolvant le systeme reduit (2.2.7) (cf.(2.1.21)). Les
equations (2.1.4), (2.1.5) et (2.1.17) determinent les directions caracteristiques λ, γ et ξa
pour lesquelles il en existe de quatre types. Les differentes symetries associees aux
champs vectoriels Xa (2.1.18) nous conduisent a quatre types de solutions.

31
2.2.1 Les ondes simples entropiques (E).
En substituant δE |~λ| = 0 dans le systeme caracteristique (2.2.7) nous obtenons
le systeme qui determine les elements simples entropiques :
~γ · ~λ =0 ,
γp~λ +
14π
( ~H · ~h)~λ− 14π
( ~H · ~λ)~h =0 ,
( ~H · ~λ)~γ =0 ,
~h · ~λ =0 ,
(2.2.15)
La resolution du systeme (2.2.15) nous conduisent a trois types de solutions. D’abord
deux de ces solutions sont donnees par
γ =(γρ,− ( ~H · ~h)
4π,~γ ,~h
)et λ =
(− ~v · ~λ,~λ), (2.2.16)
avec les contraintes vectorielles :
~γ · ~λ = 0 , ~H · ~λ = 0 , ~h · ~λ = 0 . (2.2.17)
L’analyse des relations (2.2.17) nous amene a conclure que les vecteurs ~H, ~λ et ~h doivent
etre lineairement dependants. Il en decoule deux possibilites auxquelles sont associees
les ondes entropiques de types E1 et E2.
La troisieme solution, appelee l’onde entropique de type E3, est donnee par :
γ =(γρ, 0,~0 ,~0
)et λ =
(− ~v · ~λ,~λ). (2.2.18)
(i). Le Cas E1 : les ondes de type E1 se caracterisent par le fait que les vecteurs
~γ ,~h , ~H forment un plan (i.e. ne sont pas paralleles l’un a l’autre). Ainsi pour chaque
vecteur ~γ, il existe un seul et unique vecteur ~λ = (λ1, λ2, λ3).
Comme choix des vecteurs ξa orthogonaux au vecteur d’onde λ, nous prenons
ξ1 =
(λ1
(~v · ~λ), 1, 0, 0
)T
, ξ2 =
(λ2
(~v · ~λ), 0, 1, 0
)T
, ξ3 =
(λ3
(~v · ~λ), 0, 0, 1
)T
, (2.2.19)

32
desquels sont determines les champs vectoriels par l’expression (2.1.18)
X1 =λ1
(~v · ~λ)
∂
∂t+
∂
∂x, X2 =
λ2
(~v · ~λ)
∂
∂t+
∂
∂y, X3 =
λ3
(~v · ~λ)
∂
∂t+
∂
∂z. (2.2.20)
Les invariants de la sous-algebre X1, X2, X3 sont
s = ~λ(s) · ~x− (
~λ(s) · ~v)t ; ρ, p, ~v, ~H
. (2.2.21)
En faisant le changement de coordonnees (2.1.24) dans l’espace E × U :
x = r(x,u) = ~λ(s) · ~x− (~λ(s) · ~v)
t t = t , y = y , z = z ,
ρ = ρ , p = p , u = u, v = v, w = w, Hi = Hi , i = 1, 2, 3 ,
les champs vectoriels (2.2.20) sont rectifies comme suit :
X1 =∂
∂t, X2 =
∂
∂y, X3 =
∂
∂z.
L’ensemble des invariants sous l’action de ces champs rectifies coıncide avec celui des
invariants (2.2.21) par rapport aux invariants des champs vectoriels (2.2.20).
En posant que ρ, p, ~v, ~H soient toutes des fonctions de la variable de symetrie
s, et apres les avoir substituees dans le systeme de depart (2.2.1), nous obtenons les
solutions suivantes :
ρ = ρ (s), p (s) +18π| ~H|2 = po, ~v =u (s)~e1 + v (s)~e2 + w (s)~e3 ,
~H =H1 (s)~e1 + H2 (s)~e2 + H3 (s)~e3 ,
(2.2.22)
ou po est une constante arbitraire, et les vecteurs ~v et ~H doivent satisfaire la relation:
(d ~H
ds× d~v
ds
)· ~H = 0 , (2.2.23)
attestant que ~γ, ~h et ~H sont situes dans plan, et le vecteur ~λ(s) est donne par
~λ =~H
| ~H|2× d ~H
ds. (2.2.24)
De ces resultats, nous pouvons deduire certaines proprietes des ondes entropiques E1.
D’abord, on en deduit par la forme de la variable de symetrie s que les solutions
33
(2.2.22) sont constantes sur les plans perpendiculaires au vecteur ~λ(s) : les ondes E1
sont donc des ondes planes, et ~H demeure toujours tangent a ces plans. De plus, les
ondes E1 n’existent que dans un fluide incompressible, comme l’indique la relation
~γ · ~λ = 0, et se propagent avec le flot puisque leur vitesse de groupe ~vg = ~v.
La force de Lorentz associee aux ondes entropiques E1 est donnee par :
~Fm = − 18π∇(| ~H|2) = ∇p , (2.2.25)
il y a donc equilibre entre la force magnetique et la pression hydrodynamique :
l’element de fluide n’est pas soumis a des forces de torsion provenant du terme ( ~H ·∇) ~H.
Consequemment, en vertu du theoreme de Kelvin, la circulation
Γc =∮
C
~v · ~d` (2.2.26)
autour d’un element de fluide est preservee. Le fait que
~Fm · ~v 6= 0 (2.2.27)
indique la presence d’un couplage entre les effets hydrodynamique et magnetique dans
le bilan de l’energie cinetique (1.2.9).
L’action de l’operateur d/dt (donne par l’expression (2.2.6)) sur les fonctions ρ, p, ~v, et
~H est identiquement nulle. Consequemment toutes ces quantites sont conservees le
long du flot.
A partir de la loi de conservation de l’impulsion (1.2.1) ;
∂(ρvi)∂t
= −∂Πhik
∂xk− ∂Πm
ik
∂xk, i, k = 1, 2, 3 , (2.2.28)
qu’on peut reformuler a l’aide de (2.2.25) comme suit :
∂(ρ~v)∂t
= −(~v · ∇)(ρ~v) , (2.2.29)
cela signifie que pour les ondes E1 la variation de l’impulsion d’une particule de fluide
n’a pas d’incidence sur l’evolution du champ magnetique ~H.

34
Finalement considerons le cas stationnaire, c’est-a-dire quand ~v ·~λ = 0, on peut
exprimer la solution (2.2.22) sous la forme
~λ = ~eo ; ρ = ρ (s), ~v = ~α (s)× ~eo, ~H = ~β (s)× ~eo, p (s) +18π| ~H|2 = po, (2.2.30)
ou ~eo est vecteur unitaire constant, ~α et ~β sont des vecteurs arbitraires, et po est une
constante arbitraire. La solution (2.2.30) est constante sur les plans orthogonaux a ~eo
qui sont engendres par les vecteurs ~v et ~H.
(ii). Le cas E2 de la solution (2.2.16) correspond a la situation ou les vecteurs ~γ, ~h et ~H
sont paralleles l’un a l’autre. Alors les solutions sont appelees des ondes entropiques
de type E2 : les vecteurs ~γ et ~h sont tous les deux colineaires a ~H ;
~γ = ζ ~H, et ~h = χ ~H , (2.2.31)
ou ζ et χ sont des fonctions arbitraires de u. Les elements simples correspondants
s’ecrivent
γ =(γρ,− ( ~H · ~h)
4π,~γ ,~h
)et λ =
(− ~v · (~α i × ~H), ~α i × ~H
), i = 1, 2, (2.2.32)
ou ~α 1 et ~α 2 sont deux vecteurs lineairement independants dont les composantes sont
des fonctions arbitraires de u.
Dans ce cas, pour un vecteur ~γ donne, il existe deux vecteurs ~λ 1 et ~λ 2 lineairement
independants qui engendrent un plan orthogonal a ~γ.
Par simplicite, nous choisissons le repere de coordonnees tel que
~H = (0, 0,H), ~α 1 = (α1, α2, 0) et ~α 2 = (−α2, α1, 0) .
Les vecteurs d’onde s’ecrivent
λ1 =(− ~v · ~λ 1, α2H,−α1H, 0
)et λ2 =
(− ~v · ~λ 2, α1H, α2H, 0
). (2.2.33)
Nous choisissons comme vecteurs orthogonaux a λ1 et λ2 :
ξ1 =(1, 1/v, u/v, 1, 0
)T
et ξ2 =(0, 0, 0, 1
), (2.2.34)

35
desquels nous obtenons les champs vectoriels
X1 =1v
∂
∂t+
u
v
∂
∂x+
∂
∂y, X2 =
∂
∂z. (2.2.35)
Les invariants sont de la sous-algebre X1, X2 sont
s = x + y − (u + v)t ; ρ, p, ~v, ~H
. (2.2.36)
En substituant dans le systeme (2.2.1) les fonctions ρ, p, ~v, ~H, qui dependent de la
variable de symetrie s, on obtient les solutions associees aux ondes entropiques E2
ρ = ρ (s), p(s) +18π| ~H|2 = po, ~v = u(s)~e1 + v(s)~e2 + w(s)~e3, ~H = H(s)~e3 , (2.2.37)
ayant comme contrainte que
u (s) + v (s) = Co , (2.2.38)
ou po et Co sont des constantes arbitraires. Cependant nous devons tenir compte de la
relation (2.2.31) et de l’orientation prise pour ~H : les composantes de la vitesse situees
dans le plan genere par les vecteurs ~e1 et ~e2 sont donc des constantes ; u = uo et v = vo,
ceci satisfait evidemment la contrainte (2.2.38).
Par une transformation de Galilee appropriee, nous pouvons toujours choisir un
referentiel tel que uo = vo = 0, la solution (2.2.37) se resume alors a
ρ = ρ(s), p(s) +18π| ~H|2 = po, ~v = α(s)~e3, ~H = β(s)~e3 ; ~H · ~λi = 0 , i = 1, 2 , (2.2.39)
ou ρ,α et β sont des fonctions arbitraires de la variable de symetrie s = x + y, et po est
une constante arbitraire. Dans ce cas, l’onde entropique E2 est une onde stationnaire
qui se propageant dans un fluide incompressible s’ecoulant suivant ~H.
La force de Lorentz est donnee par l’expression (2.2.25) mais elle n’a pas de com-
posante suivant ~e3 ; il n’y a donc pas de couplage entre les effets hydrodynamique et
magnetique dans le bilan de l’energie cinetique car ~Fm · ~v = 0.

36
(iii) Finalement, il reste la troisieme solution (2.2.18) qui correspond aux ondes en-
tropiques de type E3. Dans ce cas, pour chaque vecteur ~γ = ~0, il existe trois vecteurs ~λ
lineairement independants qui sont normalises par les trois vecteurs unitaires ~ei. Les
vecteurs d’ondes λ i s’ecrivent alors
λ i =(− ~v · ~ei, ~ei
)avec |~ei|2 = 1, ~ej · ~ei = 0, i = 1, 2, 3 (2.2.40)
Le vecteur ξ orthogonal a chaque λ i (i = 1, 2, 3) est donne par
ξ =(1, u, v, w
)T
, (2.2.41)
duquel on deduit le seul champ vectoriel
X =∂
∂t+ u
∂
∂x+ v
∂
∂y+ w
∂
∂z. (2.2.42)
Les invariants de la sous-algebre X sont
s = x + y + z − (u + v + w)t ; ρ, p, ~v, ~H
. (2.2.43)
Nous obtenons les solutions associees aux ondes E3 en remplacant ρ, p, ~v, ~H dans le
systeme de depart (2.2.1)
ρ = ρ (s), ~v = u (s)~e1 + v (s)~e2 + w (s)~e3, ~H = H1 (s)~e1 + H2 (s)~e2 + H3 (s)~e3, (2.2.44)
ayant comme contraintes que
u (s) + v (s) + w (s) = Co, H d
ds[~v] = ~0,
H1 (s) + H2 (s) + H3 (s) = Ho, ∇ [p +
18π| ~H|2 ]
=14π
( ~H · ∇) ~H ,
(2.2.45)
ou Co et Ho sont des constantes arbitraires.
En se reportant a l’expression (2.2.18), nous avons que γp = 0, ~γ = ~0 et ~h = ~0 : la
vitesse du fluide et le champ magnetique sont donc des vecteurs constants ; ~v = ~vo et
~H = ~Ho, et la pression est constante : p = po. Dans ce cas, les contraintes (2.2.44) sont
effectivement verifiees, la solution (2.2.43) se recrit alors
ρ = ρ (s), p = po, ~v = ~vo~H = ~Ho . (2.2.46)
Par une transformation de Galilee appropriee, on peut toujours poser que ~vo = ~0
de telle sorte que l’onde E3 soit une onde stationnaire se propageant dans un fluide
incompressible et la force de Lorentz qui en resulte est evidemment nulle.

37
2.2.2 Les ondes simples d’Alfven (A).
On substitue la frequence caracteristique (2.2.11) des ondes d’Alfven
δAε |~λ| = ε( ~H · ~λ)√
4πρ, ε = ±1 ,
dans le systeme (2.2.7) pour obtenir le systeme caracteristique correspondant :
ε( ~H · ~λ)√
4πργρ + ρ (~γ · ~λ) =0 ,
ε( ~H · ~λ)√
4πρ
(γp − κ
p
ργρ
)=0 ,
ε( ~H · ~λ)√
4πρ~γ +
γp
ρ~λ +
14πρ
( ~H · ~h)~λ− 14πρ
( ~H · ~λ)~h =0 ,
ε( ~H · ~λ)√
4πρ~h + (~γ · ~λ) ~H − ( ~H · ~λ)~γ =0 ,
~h · ~λ =0 .
(2.2.47)
La resolution du systeme (2.2.47) donne les elements simples d’Alfven suivants:
γ =
(0, 0,
ε~h√4πρ
,~h
), ε = ±1 ,
λ =(λo, ~λ
)ou λo ≡ ε( ~H · ~λ)√
4πρ− ~v · ~λ , et ~λ = (λ1, λ2, λ3) .
(2.2.48)
En fixant le vecteur d’onde λ, on choisit les trois vecteurs ξa qui lui sont orthogonaux:
ξ1 =(−λ1
λo, 1, 0, 0
)T
, ξ2 =(−λ2
λo, 0, 1, 0
)T
, ξ3 =(−λ3
λo, 0, 0, 1
)T
,
desquels, par l’expression (2.1.18), on calcule les champs vectoriels correspondants :
X1 = −λ1
λo
∂
∂t+
∂
∂x, X2 = −λ2
λo
∂
∂t+
∂
∂y, X3 = −λ3
λo
∂
∂t+
∂
∂z. (2.2.49)
Les invariants de la sous-algebre X1, X2, X3 sont
s = ~λ(s) · ~x + λot ; ρ, p, ~v, ~H
. (2.2.50)
Soulignons que le changement de coordonnees (2.1.24) dans l’espace E × U :
x = r(x,u) = ~λ · ~x + λot , t = t , y = y , z = z ,
ρ = ρ , p = p , u = u, v = v, w = w, Hi = Hi , i = 1, 2, 3 ,

38
mene a la rectification des champs vectoriels (2.2.49) :
X1 =∂
∂t, X2 =
∂
∂y, X3 =
∂
∂z
et que l’ensemble des invariants sous leur action est identique a (2.2.50).
On pose que les fonctions ρ, p, ~v, ~H soient toutes des fonctions de la variable de
symetrie s. Apres les avoir substituees dans le systeme de depart (2.2.1), on obtient
les solutions suivantes
ρ = ρo, p = po, ~v =ε ~H√4πρo
, | ~H|2 = H2o , ε = ±1 , (2.2.51)
ou ρo, po et H2o sont des constantes arbitraires, et avec les contraintes :
~γ · ~λ = 0, ~h · ~λ = 0. (2.2.52)
De ces resultats, nous en deduisons que les ondes d’Alfven ne modifient ni la densite
ni la pression du fluide ; l’ecoulement est incompressible ; ~γ · ~λ = 0, et suit les lignes
de force. Aussi, nous avons que λo = 0, celles-ci sont donc des ondes stationnaires
n’ayant pas de vitesse de groupe ; elles ne sont pas dispersives, ce qui est en accord
avec la theorie lineaire [25].
De meme, la norme de ~H est preservee. Cela s’explique par la force de Lorentz
~Fm =14π
( ~H · ~λ)~h ,
qui ne contient que le terme associe aux forces de tension suivant les lignes de force
magnetiques : elle est orientee perpendiculairement a la direction de propagation de
l’onde ~λ ; ainsi on dit que l’onde d’Alfven est une onde transversale bien qu’elle se
propage longitudinalement aux lignes de force magnetiques [38].
Les ondes d’Alfven n’existent qu’en MHD comme en temoigne leur mecanisme
de propagation que nous en resumons ainsi. La matiere fluide et le champ magnetique
etant geles l’un dans l’autre, le deplacement transversal des particules de fluide,

39
resultant de la force de Lorentz, courbe les lignes de force qui les composent, et
consequemment les eloignent ou les pacquent par endroits. Mais en tenant compte
des proprietes des forces electromagnetiques exprimees par le tenseur des contraintes
de Maxwell (cf. (1.2.3) ) ; les lignes de force sont comprimees tout en se repoussant
mutuellement. Pour le prouver, supposons que l’une de ces lignes de force coıncide
avec l’axe ~e3 ; la contrainte longitudinale est donnee par Πmzz = −H2
o/8π tandis que les
contraintes transversales Πmxz et Πm
yz sont egales au terme positif H2o/8π.
Les lignes de force peuvent se comparer a des cordes vibrantes tendues par la force
magnetique ~Fm, il en resulte des forces quasi-elastiques qui tendent a les redresser de
nouveau vers leur etat de repos, d’ou l’apparition d’oscillations qui se propagent a la
vitesse d’Alfven :
vA =Ho√4πρo
. (2.2.53)
Concernant les lois de conservation de l’impulsion (1.2.1) et de l’energie (1.2.4), celles-ci
sont identiquement verifees. En effet, la densite d’impulsion d’un element de fluide
s’ecrit
~P =√
ρo
4π~H .
Par le caractere stationnaire des ondes d’Alfven, on a que ∂ ~P∂t = 0. Le tenseur
d’impulsion total (cf. (1.2.2) et (1.2.3) ) s’exprime alors comme une matrice diagonale
de dimensions 3× 3 dont les elements sont des constantes :
Πii = po +H2
o
8π, i = 1, 2, 3 .
L’energie totale E = Eh + Em et le flux d’energie correspondant ~q sont donnes par :
E =1
κ− 1po +
H2o
4π,
~qE =ε ~H√4πρo
(H2o
8π+
2κ− 1κ− 1
po
).
Il n’y a pas d’influx d’energie magnetique puisque ~S = ~0 (cf.(1.2.8)), ni meme de
couplage entre les energies hydrodynamique et magnetique car ~Fm · ~v = 0. Ainsi les
ondes d’Alfven ne modifient que la direction du champ magnetique ~H sans en changer
la norme.

40
2.2.3 Les ondes simples magnetoacoustiques rapide (F) et lente (S).
En premier lieu, rappelons que l’equation de dispersion de ces ondes correspond
a l’expression (2.2.12)
δ4|~λ|4 − δ2|~λ|2(| ~H|24πρ
+ a2
)+ a2 ( ~H · ~λ)2
4πρ= 0 , (2.2.54)
ou a =√
kpρ est la vitesse de propagation du son dans le fluide. Les racines du polynome
(2.2.54) sont les frequences caracteristiques des ondes simples magnetoacoustiques:
δF |~λ| =ε|~λ|√
2
(a2 +
| ~H|2√4πρ
)+
√√√√(
a2 +| ~H|2√4πρ
)2
− a2
πρ( ~H · ~λ)2
12
,
δS |~λ| =ε|~λ|√
2
(a2 +
| ~H|2√4πρ
)−
√√√√(
a2 +| ~H|2√4πρ
)2
− a2
πρ( ~H · ~λ)2
12
,
(2.2.55)
qui peut aussi s’exprimer sous la forme plus commode :
δF |~λ| =ε
2
√√√√(
a~λ +~H |~λ|√4πρ
)2
+
√√√√(
a~λ−~H |~λ|√4πρ
)2 ,
δS |~λ| =ε
2
√√√√(
a~λ +~H |~λ|√4πρ
)2
−
√√√√(
a~λ−~H |~λ|√4πρ
)2 ,
(2.2.56)
ou ε = ±1. Le systeme caracteristique des ondes magnetoacoustiques est obtenu en
substituant la valeur δ|~λ|, donnee par (2.2.56), dans le systeme (2.2.7) :
γρ δM + ρ (~γ · ~λ) =0 ,
ρ δM
(γp − κ
p
ργρ
)=0 ,
ρ δM ~γ + γp~λ +
14π
( ~H · ~h)~λ− 14π
( ~H · ~λ)~h =0 ,
δM~h + (~γ · ~λ) ~H − ( ~H · ~λ)~γ =0 ,
~h · ~λ =0 ,
(2.2.57)

41
ou l’indice M designe respectivement F pour l’onde magnetoacoustique rapide et S
pour l’onde magnetoacoustique lente. La resolution du systeme (2.2.57) donne les
elements simples magnetoacoustiques :
γ =
(ρδ2
M|~λ|2 − ( ~H · ~λ)2, κp[δ2M |~λ|2 −
1ρ( ~H · ~λ)2
], εδM |~λ|
[( ~H · ~λ)
~H
ρ− δ2
M~λ], δ2
M
[|~λ|2~H − ( ~H · ~λ)~λ
]),
λ =(δM |~λ| − ~v · ~λ, ~λ
), ε = ±1 .
(2.2.58)
Soulignons que les elements simples magnetoacoustiques (2.2.58) peuvent egalement
s’exprimer sous la forme
γ =
(γρ, κ
p
ργρ,
|~h|√4πρ
[|~h|2 − γρ
ρ ( ~H · ~h)] (~h− γρ
ρ~H), ~h
),
λ =
(± |~h|| ~H × ~h|2√
4πρ[|~h|2 − γρ
ρ ( ~H · ~h)] − ~v · [~h× ( ~H × ~h) ] , ~h× ( ~H × ~h)
),
ou pour chaque ~λ fixe, il existe quatre vecteurs lineairement independants ~γ, γρ et |~h|
sont des parametres qui doivent satisfaire la contrainte
|~h|24πρ
[γρ
ρ| ~H|2 − ~H · ~h
]− κp
ρ
γρ
ρ
[|~h|2 − γρ
ρ~H · ~h
]= 0 .
Pour resoudre le systeme (2.2.57) par la MSC, nous fixons d’abord le vecteur d’onde ~λ =
(λ1, λ2, λ3) donne par (2.2.58) et nous choissisons les vecteurs ξa qui lui sont orthogonaux:
ξ1 =(−λ1
λo, 1, 0, 0
)T
, ξ2 =(−λ2
λo, 0, 1, 0
)T
, ξ3 =(−λ3
λo, 0, 0, 1
)T
,
desquels nous obtenons par la formule (2.1.18) les champs vectoriels suivants :
X1 = −λ1
λo
∂
∂t+
∂
∂x, X2 = −λ2
λo
∂
∂t+
∂
∂y, X3 = −λ3
λo
∂
∂t+
∂
∂z. (2.2.59)
Les invariants de la sous-algebre X1, X2, X3 sont
s = ~λ(s) · ~x +
(δM |~λ| − ~v · ~λ(s)
)t ; ρ, p, ~v, ~H
. (2.2.60)

42
On peut verifier que le changement de coordonnees (2.1.24) dans l’espace E × U :
x = r(x,u) = ~λ(s) · ~x +(δM |~λ| − ~v · ~λ(s)
), t = t , y = y , z = z ,
ρ = ρ , p = p , u = u, v = v, w = w, Hi = Hi , i = 1, 2, 3 ,
permet de rectifier les champs vectoriels (2.2.60) sous la forme
X1 =∂
∂t, X2 =
∂
∂y, X3 =
∂
∂z,
et que l’ensemble des invariants sous l’action de ces champs rectifies coıncide avec
l’ensemble des invariants de la sous-algebre X1, X2, X3.
Ensuite on pose ρ, p, ~v, ~H comme etant des fonctions de la variable de symetrie s que
l’on remplace dans le systeme de depart (2.2.1) pour obtenir le systeme reduit constitue
d’EDO non lineaires :
γρ =η (s)δ2M
ρ[δ2M − ( ~H · λ)2
4πρ
],
~γ =− η (s)δM
[δ2M λ− ( ~H · λ)
4πρ~H
],
~h =η (s)[~H − ( ~H · λ) λ
]
(2.2.61)
ou λ = ~λ/|~λ| et le coefficient η (s) est defini par
η = a2
[δ2M − | ~H|2
4πρ
]−1
. (2.2.62)
Quand δ2M = | ~H|2/4πρ, les vecteurs ~H et ~λ sont alors colineaires : nous traitons ce cas
particulier subsequemment. Au systeme reduit (2.2.61) s’ajoutent les contraintes:
p = Aoρκ, ~H · (~λ× ~h) = 0, ~H · (~λ× ~γ) = 0 (2.2.63)
ou Ao est une constante arbitraire. La premiere relation de l’equation (2.2.63) signifie
que les ondes magnetoacoustiques n’existent que dans un fluide compressible, les deux
relations restantes indiquent que les vecteurs ~λ et ~H generent un plan dans lequel se
trouve les vecteurs ~h et ~γ et donc ~H demeure toujours dans ce plan.

43
La vitesse de groupe de l’onde magnetoacoustique F est donnee par
~vgF= ~v+
εa
2√
4πρ
(
(a~λ +
~H√4πρ
)2− 1
2
+
(a~λ−
~H√4πρ
)2− 1
2 )[~λ×
(~H × ~λ
)]
− ε
2
(
(a~λ +
~H√4πρ
)2
12
+
(a~λ−
~H√4πρ
)2
12 )
~λ , ε = ±1 ,
(2.2.64)
et celle pour l’onde magnetoacoustique S par
~vgS= ~v+
εa
2√
4πρ
(
(a~λ +
~H√4πρ
)2− 1
2
−(
a~λ−~H√4πρ
)2− 1
2 )[~λ×
(~H × ~λ
)]
− ε
2
(
(a~λ +
~H√4πρ
)2
12
−
(a~λ−
~H√4πρ
)2
12 )
~λ , ε = ±1 .
(2.2.65)
La force de Lorentz associee a ces ondes s’ecrit
~Fm = η(s) ~H × ( ~H × ~λ). (2.2.66)
Les effets hydrodynamiques et magnetiques sont couples sauf quand ~v ‖ ~H pour lequel
~Fm · ~v ≡ 0 et consequemment les lois de conservation des energies hydrodynamique
(1.2.9) et magnetique (1.2.10) sont separees.
La resolution du systeme (2.2.61) s’avere etre une tache ardue. Neanmoins, on
peut aborder le probleme en prenant deux cas limites ou les vecteurs ~H et ~λ sont
perpendiculaires et paralleles l’un a l’autre, on en tire les deux theoremes suivants.
Theoreme 2.2.1. Pour ~H · ~λ = 0 ;
la direction de ~H est constante ⇔
δS = 0 ,
∇× ~v = 0 ⇔ δF = ε
√a2 +
| ~H|24πρ
, ε = ±1 .
D’apres l’expression (2.2.56), les ondes magnetoacoustiques S deviennent des ondes en-
tropiques. Les ondes magnetoacoustiques F se propagent transversalement au champ

44
magnetique ~H qui pointe dans une direction fixe, et dans ce cas l’ecoulement est ir-
rotationnel ; le champ des vitesses ~v derive d’un potentiel. Nous obtenons comme
solutions
ρ = ρ (s), p = Ao ρκ, ~H = ρ ~Ho , (2.2.67)
ou Ao et po sont des constantes arbitraires, ~Ho est un vecteur constant et perpendic-
ulaire a ~λ. La vitesse du flot est colineaire au vecteur ~λ :
~v = εv(ρ)~λ , ε = ±1 , (2.2.68)
dont sa norme est donnee par
v(ρ) = 2
√Ao
[√βoρ + 1− arc tanh[
√βoρ + 1]
]pour κ = 1 ,
√2Ao(βo + 1)
√ρ pour κ = 2 ,
√κAo
(κ− 1)
√ρκ−1 + βoρ
[1 +
(κ− 2)√
βo√ρκ−2 + βo
]2F1
(a1, b1, c1;
−ρκ−2
βo
)pour κ 6= 1, 2 ,
(2.2.69)
ou 2F1 (a1, b1, c1; z) est une fonction hypergeometrique de seconde espece dependant de
la variable z = −ρκ−2/βo, avec
βo ≡ | ~Ho|24πκAo
∼ δ2A
a2, (2.2.70)
et des parametres a1 = 1/2(κ− 2), b1 = 12 , c1 = 1 + 1/2(κ− 2).
Le parametre βo donne l’importance relative entre le pression magnetique pM =
| ~Ho|2/8π et la pression hydrodynamique ρv2/2 ∼ Ao (| ~Ho|2 et Ao etant des donnees
experimentales) qui agissent toutes deux sur l’ecoulement du fluide. Si βo ∼ 1, les
effets hydrodynamiques et magnetiques sont comparables. Au contraire, si βo À 1 :
l’action de champ magnetique ~H devient predominante sur l’ecoulement du fluide .
Les solutions (2.2.67)− (2.2.69) dependent de la variable de symetrie
s = ~λ(s) · ~x +
([κAoρ
κ−1 +ρ| ~Ho|2
4π
] 12
− ~v · ~λ(s)
)t. (2.2.71)

45
Par analogie avec des ondes acoustiques, l’onde magnetoacoustique F se propage dans
le fluide par compressions et extensions des lignes de force des regions fortes en densite
magnetique vers des regions moins denses sans en changer la direction. Ceci s’explique
par la force de Lorentz qui derive du gradient de pression magnetique pM = | ~Ho|2/8π:
~Fm = − 18π∇(| ~H|2) = −|
~Ho|24π
ρdρ
ds~λ ;
il n’y a pas de torsion des particules de fluide causee par le terme ( ~H · ∇) ~H. Puisque
∇× ~v = 0, le fluide n’a pas de vorticite, et du fait que ~Fm soit une force conservatrice
force, la circulation (1.3.1) est une constante en vertu du theoreme de Kelvin.
Theoreme 2.2.2. Pour ~H ‖ ~λ .
Si δ2A ≡ | ~H|2/4πρ < a2 ≡ κp/ρ ;
~H est constant ⇔ δF = a,
| ~H| est constant ⇔ δS = δA .
Si δ2A ≡ | ~H|2/4πρ > a2 ≡ κp/ρ ;
~H est constant ⇔ δS = a,
| ~H| est constant ⇔ δF = δA .
Si δA < a, l’onde magnetoacoustique F (ou S si δA > a) devient simplement une onde
acoustique qui se propage dans la direction d’un champ magnetique constant ~Ho. La
vitesse d’ecoulement est aussi orientee suivant ~Ho et il n’y a pas ici d’effet magnetique
car ~Fm ≡ ~0. L’onde magnetoacoustique S (ou F si δA > a) devient une onde d’Alfven;
δS = δA, qui a la particularite de se propager dans un fluide compressible: l’onde
magnetoacoustique S (ou F si δA > a) est dite une onde d’Aflven compressive [38].
Pour l’onde S (ou F si δA > a), les solutions du systeme caracteristique (2.2.57) s’ecrivent
en terme du parametre βo :
ρ =[(
2κ + 12βo
)(1+2/κ)
− (κ + 2)βo
s
]−1/(κ+2)
, p = Aoρκ , ~H = Hoλ(s) , (2.2.72)

46
ou Ao et Ho sont des constantes arbitraires. La vitesse du flot s’exprime comme
la somme vectorielle de deux composantes qui sont respectivement longitudinale et
transversale au vecteur unitaire λ :
~v = εv[sin θ λ(s)− cos θ λ⊥(s)] , ε = ±1 (2.2.73)
dont l’angle θ = 6 (λ, ~γ) est donne par
tan θ ≡ −δ2A
a2∼ −βoρ
−κ , (2.2.74)
et sa norme par
v (ρ) =Ho√
πρ−(κ+ 1
2 )
[√ρ2κ + βo
2 − 2κβo
(1 + 2κ) 2F1
(a1, b1, c1 ;−ρ2κ
βo2
)](2.2.75)
ou 2F1 (a1, b1, c1; z) est une fonction hypergeometrique de seconde espece dependant de
la variable z = −ρ2κ/βo2, avec βo = H2
o/4πκAo, et des parametres a1 = −(1 + 2κ)/4κ,
b1 = 12 , c1 = 1− (1 + 2κ)/4κ.
La densite ρ est une fonction de la variable de symetrie
s = λ(s) · ~x +(δA − v sin θ
)t .
Ainsi pour βo ∼ 1, les lignes de force, etant gelees a la “matiere fluide”, subissent en
alternance des compressions et des extensions resultant de la composante longitudi-
nale de ~γ suivant λ mais aussi des forces de torsion qui proviennent de la force de
Lorentz :
~Fm =H2
o
4πρλ⊥(s) .
Pour βo À 1, le champ magnetique est si intense que le fluide devient incompressible :
(λ · ~γ) =a2
δ2A
−→ 0 ⇔ θ → π
2;
la densite et la pression sont alors des constantes. Dans cette limite, les expressions
(2.2.73)− (2.2.75) donnent comme vitesse du flot :
~v =εHo√4πρo
λ(s) , ε = ±1 ,

47
qui correspond a l’expression (2.2.51) obtenue pour l’onde d’Alfven decrite dans la
section (2.2.2) : dans cas on l’appelle l’onde d’Alfven de torsion [38] car elle se
propage dans un fluide incompressible et stationnaire en “tordant” les lignes de force.
Dans la situation plus generale ou l’onde magnetoacoustique se propage dans
une direction donnee (i.e. ~λ est constant), les solutions du systeme reduit (2.2.61)
peuvent se reformuler en terme de la densite ρ :
~v = −(∫
δMdρ
ρ
)~λ + v⊥(ρ)~λ⊥ , p = Ao ρκ . (2.2.76)
En tenant compte des theoremes (2.2.1) et (2.2.2), la composante longitudinale de ~H
suivant ~λ ; Ho, demeure constante alors que sa composante transversale a ~λ varie en
fonction de la densite ρ :
~H = Ho~λ + H⊥(ρ)~λ⊥ . (2.2.77)
Les fonctions v⊥(ρ) et H⊥(ρ) sont determinees en resolvant les EDO suivantes :
dH⊥dρ
≡ 4πδ2M H⊥
(4πρ δ2M −H2
o ),
dv⊥dρ
≡ Ho δM
(4πρ δ2M −H2
o )
(H⊥ρ
),
ou la vitesse caracteristique δM est egale a
δM =12
[a2 +
H2⊥ + H2
o
4πρ+
2aHo√4πρ
] 12
± 12
[a2 +
H2⊥ + H2
o
4πρ− 2aHo√
4πρ
] 12
,
et la densite ρ une fonction arbitraire de la variable de symetrie
s =(
δM −∫
δMdρ
ρ
)t + ~λ · ~x.

48
En conclusion, nous resumons les liens entre les ondes simples et la MHD. D’abord,
nous donnons dans le tableau (2.1) les relations entre les vitesses caracteristiques des
ondes simples selon des criteres lies a leur direction de propagation par rapport au
champ magnetique ~H et les caracteristiques physiques du fluide.
Tableau 2.1. Degenerescence des vitesses caracteristiques pour des ondes simples.
δA = 0 ⇔ ~H · ~λ = 0
δS = 0 ⇔ δF = ±√
a2 + | ~H|24πρ ⇔ ~H ⊥ ~λ
Si | ~H|24πρ < a2 alors
(δS = ( ~H·~λ)√
4πρ, δF = a
)⇔ ~H ‖ ~λ
Si | ~H|24πρ > a2 alors
(δS = a , δF = ( ~H·~λ)√
4πρ
)⇔ ~H ‖ ~λ
δS = δF ⇔ a2 = | ~H|24πρ et ~H ‖ ~λ
En vertu de l’equation (2.2.55), les vitesses caracteristiques δM satsifont la relation :
(δ2M − a2)
(δ2M − ( ~H · ~λ)2
4πρ
)= δ2
M
(| ~H|24πρ
− ( ~H · ~λ)2
4πρ
)≥ 0
de laquelle nous tirons les inegalites :
δS ≤ a ≤ δF , δS ≤ ( ~H · ~λ)√4πρ
≤ δS
qui menent finalement a
0 = δE ≤ δS ≤ δA ≤ δF . (2.2.78)
Pour conclure cette section, nous faisons la synthese des proprietes des ondes
simples de la magnetohydrodynamique en presentant dans le tableau (2.2) la propaga-
tion de ces ondes dans fluide soumis a certaines contraintes physiques.

49
Tableau 2.2.Proprietes des ondes simples MHD soumises a des contraintes physiques.
Contraintes Physiques E1 E2 E3 A F S
ρ = constante × × − + − −
p = constante × × + + − −
p = Aoρκ × × − + + +
~v est constant × × + − − −
~H est constant × × + − a −
| ~H |2= constante × × + + a A
p2 + | ~H|28π = constante + + + + × E
∇× ~v = 0 × × + − × E
~Fm = 0 × × + − a a
~H · (∇× ~H) = 0, ~H · (∇× ~v) = 0 E2 + + + + +
Legende
+ Aucune contrainte sur la propagation
× Contrainte sur la propagation de l’onde
− L’onde simple n’existe pas
E L’onde simple devient une onde entropique
A L’onde simple devient une onde d’Alfven
a L’onde simple devient une onde acoustique
Les solutions de rang un coıncident avec les ondes de Riemann. Les resultats obtenus
pour les ondes simple sont une reconstruction deja etablie dans la litterature traitant
de la MHD : [1], [24], [37].

50
2.3 Les ondes multiples pour des systemes quasilineaires d’EDP.
Dans cette section, nous generalisons la theorie des ondes simples donnee dans
la section (3.1) au cas des ondes multiples qui resultent de la superposition de plusieurs
ondes simples : celles-ci sont decrites en termes des invariants de Riemann. Pour cela,
nous fixons d’abord k vecteurs d’onde lineairement independants
λ1, . . . , λk, 1 ≤ k ≤ p ,
pour lesquels sont associes les invariants de Riemann correspondants
r1 (x,u) = λ1µ (u)xµ, . . . , rk (x,u) = λk
µ (u)xµ . (2.3.1)
L’equation
u = f(r1 (x,u), . . . , rk (x,u)
)(2.3.2)
definit de maniere unique la fonction u(x) au voisinage de l’origine x = 0 pour toute
fonction f : IRk → IRq. La matrice de Jacobie est donnee par
∂uα
∂xµ=
(φ−1 (x)
)l
jλj
µ
(u(x)
) ∂fα
∂rl
(r (x,u)
), l, j = 1, . . . , k ; µ = 1, . . . , p ; α = 1, . . . , q ,
(2.3.3)
ou(φ (x)
)l
j= δl
j −∂rl
∂uα
∂fα
∂rj
(r (x,u)
).
est une matrice de dimensions k × k consideree comme inversible. Cette supposition
exclut la catastrophe du gradient pour la fonction u. La preuve de la formule (2.3.3)
est analogue a celle faite pour l’onde simple (2.1.8). Notons que le rang de la matrice
de Jacobie est au plus egal a k.
Nous choisissons un ensemble de (p− k) vecteurs
ξa (u) =(
ξ1a (u), . . . , ξp
a (u))T
, a = 1, . . . , p− k , (2.3.4)

51
tels qu’ils soient tous orthogonaux a chaque vecteur d’onde λi :
λi · ξa = 0 , i = 1, . . . , k. (2.3.5)
L’ensemble des vecteursλ1, . . . , λk, ξ1, . . . , ξp−k
forment une base dans l’espace des
variables independantes E ⊂ IRp. Soulignons que le choix des vecteurs ξa n’est pas
unique et que seule la direction des vecteurs d’onde importe et non leur norme.
Alors, nous obtenons de l’equation (2.3.3) que
ξµa
(uα (x)
)∂uα
∂xµ= 0 , a = 1, . . . , p− k , (2.3.6)
impliquant que u1 (x), . . . , uq (x) soient invariants par rapport aux champs vectoriels
ξµa
(u(x)
) ∂
∂xµ, a = 1, . . . , p− k ,
agissant dans l’espace E. Par consequent le graphe Γ =(
x,u(x))
est une sous-variete
invariante sous l’action de chaque champ vectoriel :
Xa = ξµa
(u) ∂
∂xµ, a = 1, . . . , p− k , (2.3.7)
agissant dans l’espace des variables independantes et dependantes E × U ⊂ IRp × IRq.
Si u(x) est une fonction a q composantes, definie au voisinage de x = 0, tel que
son graphe Γ =(
x,u(x))
soit invariant sous l’action de tous les champs vectoriels Xa
(2.3.7) satisfaisant la propriete (2.3.5) alors u(x) est une solution de l’equation (2.3.2)
pour une certaine fonction f . Les fonctions r1, . . . , rk, u1 . . . , uq forment un ensemble
complet d’invariants de l’algebre abelienne engendree par les champs vectoriels Xa.
Cela caracterise geometriquement les solutions exprimees sous la forme (2.3.2). En
substituant l’expression (2.3.2) dans le systeme (2.1.3), on obtient le systeme reduit
(φ−1 (x)
)l
jλj
i
(u(x)
)Ai
(u(x)
)∂fα
∂rl
(r(x,u(x)
))= 0 . (2.3.8)
La comparaison avec (2.1.20) nous laisse entrevoir qu’une reduction semblable a celle
menant a (2.1.21) est plus difficile a obtenir ici car φ est dorenavant une matrice k× k.

52
En consequence de ces faits nous pouvons enonce ceci.
Proposition. Une fonction u(x), definie au voisinage de x = 0, satisfait
l’equation (2.3.2) pour une certaine fonction f : IRk → IRq si et seulement si son graphe
Γ =(
x,u(x))
est invariant sous l’action de tous les champs vectoriel Xa (2.3.7). Une
telle fonction u(x) est une solution du systeme (2.1.3) si et seulement si les equations
aux derivees partielles (2.3.8) sont satisfaites.
Maintenant, nous faisons un changement de variables qui permet de rectifier
les champs vectoriels Xa et d’obtenir consequemment un systeme reduit qui admet
comme solutions des ondes multiples. Pour cela, nous introduisons la matrice carree
k × k supposee inversible :
Λ =(
λ ij
), 1 ≤ i, j ≤ k . (2.3.9)
Les champs vectoriels s’expriment comme
Xk+1 =∂
∂xk+1−
k∑
i,j=1
(Λ−1
)j
iλi
k+1
∂
∂xj, . . . , Xp =
∂
∂xp−
k∑
i,j=1
(Λ−1
)j
iλi
p
∂
∂xj, (2.3.10)
qui ont la meme forme que l’expression (2.1.18) avec la propriete d’orthogonalite (2.3.5).
Le changement des variables independantes et dependantes
x 1 = r1(x,u), . . . , x k = rk(x,u), x k+1 = x k+1 , . . . , x p = xp, u1 = u1, . . . , u q = uq
(2.3.11)
permet de rectifier les champs vectoriels comme suit
Xk+1 =∂
∂x k+1, . . . , Xp =
∂
∂x p . (2.3.12)
La preuve de cette rectification est analogue a celle faite dans la section (2.1) pour
l’expression (2.1.25). Par consequent, le graphe Γ =(
x,u(x))
, etant invariant par
rapport aux champs vectoriels Xk+1, . . . , Xp, est defini par les equations de la forme:
u = f ( x1, . . . , xk ) (2.3.13)
ou f : IRk → IRq est une fonction arbitraire(comparativement a (2.3.2)
)qui est une
solution generale des conditions d’invariance :
uxk+1 = 0 , . . . ,uxp = 0. (2.3.14)

53
Le systeme (2.1.2) se recrit en termes des nouvelles variables (x,u) comme :
Ai (
x,u,ux)uxi = 0 , (2.3.15)
ou l’on a introduit la notation :
Ai ≡ Dx i
DxµAµ ,
en particulier pour chaque terme :
A1
=Dr1
DxµAµ, . . . , A
k=
Drk
DxµAµ , A
k+1= Ak+1, . . . , A
p= Ap , (2.3.16)
ou
Dri
Dxµ
∣∣∣∣u
xk+1 , ... ,uxp=0
=(Φ−1
)i
jλj
µ ,
avec
(Φ−1)i
j= δi
j −∂ri
∂uα uαj , i, j = 1, . . . , k.
En ajoutant les conditions d’invariance (2.3.14) au systeme (2.3.15), on obtient alors un
systeme d’EDP quasilineaire et surdetermine qui s’exprime en termes des nouvelles
variables (x,u) sous la forme :
∆ :
k∑i,j=1
p∑l=1
(Φ−1
)i
jλj
l Aluxi = 0 ,
uxk+1 = 0 , . . . , uxp = 0 .
(2.3.17)
Pour k ≥ 2, le systeme (2.3.17) devient plus complique a resoudre que son correspondant
(2.1.32) de rang un puisque Φ n’est plus ici un scalaire mais une matrice k × k.
Comme il a ete demontre dans [14] (page 885, Theoreme 2) ; le critere in-
finitesimal nous assure l’existence de solutions G-invariantes (2.3.2) (i.e. solutions de
rang-k) du systeme surdetermine (2.3.17) tant que
pr(1) Xa [∆] = 0 , a = 1, . . . , p− k (2.3.18)
ou les equations ∆ = 0 sont satisfaites.

54
Nous completons notre construction de solutions de rang k par “pullback” des vecteurs
d’onde λ1, . . . , λk sur la sous-variete S ⊂ U de dimensions k qui est obtenue en resolvant
le systeme (2.3.17). Alors les vecteurs d’onde λ1 (u), . . . , λk (u) deviennent des fonctions
des parametres r1, . . . , rk. Les ensembles (2.3.1) et (2.3.2) definissent des relations im-
plicites entre les variables uα, xµ et r1, . . . , rk qui peuvent s’exprimer ainsi :
u = f(r), rs = λsµ (r)xµ , s = 1, . . . , k (2.3.19)
ou r = (r1, . . . , rk). Notons que les solutions (2.3.19) incluent les k-ondes de Riemann.
Il a ete prouve dans [19] et [33] que si les conditions initiales sont suffisament
petites pour les fonctions Rs (t, ~x) telles que
(i) les derivees partielles ∂Rs/∂xµ possedent supports compacts et disjoints :
∃ as, bs ∈ IR1, s = 1, 2, supp
(∂Rs
∂xµ
)(to, ~x) ⊂ [as, bs] ,
supp
(∂R1
∂xµ
)(to, ~x) ∩ supp
(∂R2
∂xµ
)(to, ~x) = ∅ ,
(ii) la condition suivante est satisfaite :
∃ c > 0, ∀(t, ~x), (t′, ~x′) ∈ [to, T ]× IR3 tel que |v1 (t, ~x)− v2 (t′, ~x′)| ≥ c ;
c’est-a-dire que chaque caracteristique de la famille C1 a une tangente dont l’angle
d’inclinaison est plus petit que toute caracteristique de la famille C2.
Alors la superposition de deux ondes simples, qui peuvent etre decrites en termes
des invariants de Riemman, se decompose exactement en deux ondes du meme type
presentes a l’instant initial t = 0. Dans ce cas, il y a conservation du nombre et du
type d’ondes simples. Suivant la terminologie employee [7], on est en presence d’une
“interaction elastique” d’ondes simples.

55
2.4 Les ondes doubles decrites par le systeme MHD.
Dans cette section, nous construisons des ondes doubles pour le systeme MHD
(2.2.1) qui resultent de la superposition non lineaire de deux ondes simples telles que
decrites dans la section (2.2). D’abord, nous appliquons la theorie des ondes multiples
introduite dans la section precedente pour le cas k = 2. Puis nous posons certaines
hypotheses de travail afin d’en simplifier les calculs.
Soient les deux vecteurs d’onde lineairement independants suivants :
λs =(λs
o,~λs
), ou λs
o = δs − ~v · ~λs, s = 1, 2, (2.4.1)
dont les vecteurs unitaires ~λs s’expriment dans le repere de coordonnees spheriques:
~λ1 =(
sin β cosϕ, sin β sin ϕ, cos β), ~λ2 =
(sin γ cos θ, sin γ sin θ, cos γ
). (2.4.2)
ou les angles β = β(u), γ = γ(u), ϕ = ϕ(u) et θ = θ(u) sont des fonctions a etre
determinees. On introduit le vecteur ~n = (n1, n2, n3) = ~λ1 × ~λ2 donne par
~n =(
sin β cos γ sin ϕ−sin γ cos β sin θ, sin γ cos β cos θ−sin β cos γ cos ϕ, sin γ sin β sin(θ − ϕ))
(2.4.3)
qui n’est pas forcement un vecteur unitaire, le fait qu’il ne soit pas nul nous assure
que les vecteurs d’onde λ1 et λ2 sont lineairement independants.
Nous determinons les vecteurs ξa (u) =(
ξoa (u), ξ1
a (u), ξ2a (u), ξ3
a (u)), a = 1, 2; qui sont
orthogonaux a chaque vecteur d’onde λs ; s = 1, 2, en resolvant la relation (2.3.5) :
ξ1 =(
n3
det[Λ],
1det [Λ]
[δ2 sin β sin ϕ− δ1 sin γ sin θ + n3 u− n1 w
], 1 , 0
)T
,
ξ2 =(− n2
det [Λ],
1det [Λ]
[δ2 cos β − δ1 sin γ + n2 u + n1 v
], 0 , 1
)T
,
(2.4.4)
ou det[Λ] est le determinant de la matrice Λ de dimensions 2× 2(cf. (2.3.9)
)
det[Λ] ≡ δ1 sin γ cos θ − δ2 sin β cos ϕ + n3 v − n2 w . (2.4.5)

56
De la formule (2.3.7) on deduit l’expression des champs vectoriels Xa:
X1 = ξ01
∂
∂t+ ξ1
1
∂
∂x+
∂
∂y, X2 = ξ0
2
∂
∂t+ ξ1
2
∂
∂x+
∂
∂z. (2.4.6)
Les invariants de la sous-algebre X1, X2 forment l’ensemble suivant
s, r ; ρ, p, ~v, ~H
ou les variables de symetrie s et r coıncident avec les invariants de Riemann:
s = λ1µxµ = (δ1 − ~v · ~λ1)t + ~λ1 · ~x , r = λ2
µxµ = (δ2 − ~v · ~λ2)t + ~λ2 · ~x . (2.4.7)
Ensuite, nous supposons que les fonctions inconnues u = (ρ, p, ~v, ~H) s’expriment en
termes des invariants de Riemann s et r
ρ = ρ (s, r), p = p (s, r), ~v =u (s, r)~e1 + v (s, r)~e2 + w (s, r)~e3 ,
~H =H1 (s, r)~e1 + H2 (s, r)~e2 + H3 (s, r)~e3 ,
(2.4.8)
et consequemment ces fonctions sont invariantes sous l’action des champs vectoriels
(2.4.6). En les remplacant dans le systeme de depart (2.2.1), nous obtenons ainsi
un systeme reduit compose d’EDPs qui decrit les ondes doubles a partir des vecteurs
d’onde λs relatifs aux deux ondes simples superposees. Vu la complexite de ce systeme
reduit, nous posons certaines hypotheses supplementaires sur les differentes orienta-
tions possibles des vecteurs ~λs. De cette facon, nous abordons le probleme en deux
cas elementaires qui vont nous permettre de construire des ondes doubles.
I) Configuration planaire. Dans ce cas, nous fixons les deux vecteurs ~λs dans le
plan genere par les vecteurs ~e1 et ~e2 de sorte que la dependence en z des solutions
(2.4.8) disparait. Cela se traduit dans l’expression des champs vectoriels (2.4.6):
X1 =sin(θ − ϕ)
det[Λ]∂
∂t+
[δ2 sin ϕ− δ1 sin θ + u sin(θ − ϕ)]det[Λ]
∂
∂x+
∂
∂y,
X2 =∂
∂z, ou det[Λ] = δ1 cos θ − δ2 cosϕ + v sin(θ − ϕ) .
(2.4.9)
Nous retrouvons l’analogue de l’ecoulement plan en hydrodynamique : le champ
magnetique et la vitesse n’ont que deux composantes alors que la troisieme suiv-
ant l’axe z est un parametre qu’on peut fixer. Puisque ∇· ~H = 0, le champ magnetique

57
peut s’exprimer a partir d’une certaine fonction scalaire Φ(s, r) appelee la fonction
courant [36] telles que ses composantes s’ecrivent sous la forme :
H1 =∂Φ∂s
, H2 = −∂Φ∂r
. (2.4.10)
De meme si le fluide est incompressible ; ∇· ~v = 0, le champ de vitesse peut aussi
s’exprimer directement a partir d’une seule composante d’une fonction courant Ψ(s, r).
II) Configuration axiale. Dans ce cas, on fixe le vecteur ~λ1 le long de l’axe z tandis
que l’autre vecteur ~λ2 est libre de circuler dans le plan genere par les vecteurs ~e1 et
~e2. Le vecteur ~n n’a que deux composantes et il est perpendiculaire a ~λ2. Les champs
vectoriels (2.4.6) s’ecrivent donc
X1 = − tan θ∂
∂x+
∂
∂y, X2 =
∂
∂t+ (u + v tan θ − δ2)
∂
∂x+ (w − δ1)
∂
∂z. (2.4.11)
Dans la section suivante, nous presentons les solutions de rang-2 qui resultent
des differentes combinaisons possibles des champs vectoriels Xa. Nous les denotons par
EiEj, AεAε, AεEi, FF , FEi, . . . , i, j = 1, 2, 3, ou les indices i, j represente la dimension
generee par les vecteurs λs. Pour chaque type de solution, nous faisons une breve
description physique de la synergie obtenue par la superposition non lineaire de deux
ondes simples. Les resultats de notre analyse sont resumes dans le tableau (2.3).
Tableau 2.3. Les ondes doubles de Riemann decrites par les equations MHD, +
indique que l’onde double existe ; − indique que l’onde double n’existe pas, ε = ±1.
Ondes E Aε F ε Sε
E + + + −
Aε + + − −
F ε + − + −
Sε − − − −

58
2.4.1 Les ondes doubles entropiques (E1E1).
Dans l’analyse des ondes doubles entropiques E1E1, on a traite separement les
deux cas suivants.
1). Configuration planaire. Les deux vecteurs ~λ1 et ~λ2 sont situes dans le plan
genere par les vecteurs unitaires ~e1 et ~e2. On a donc
λ1 =(− (~λ1 · ~v), ~λ1
), λ2 =
(− (~λ2 · ~v), ~λ2),
~λ1 =(cosϕ, sin ϕ, 0) , ~λ2 = (cos θ, sin θ, 0) ,
(2.4.12)
ou ϕ et θ sont des fonctions des invariants de Riemann s et r a etre determinees. La
solution du type E1E1 est invariante sous l’action des champs vectoriels (2.4.9)
X1 =1v
∂
∂t+
u
v
∂
∂x+
∂
∂y, X2 =
∂
∂z, (2.4.13)
qui est determinee par le systeme d’equations
d
dtρ, p, ~v, ~H = 0 , (i)
∇p = − 18π∇| ~H|2 +
14π
( ~H · ∇) ~H , (ii)
( ~H · ∇)~v = 0 , (iii) ,
∇· ~v = 0 , ∇· ~H = 0 , (iv)
(2.4.14)
ou ρ, p, ~v et ~H sont des fonctions arbitraires des invariants de Riemann
s = ~λ1 (s, r) · (~x− ~vt), r = ~λ2 (s, r) · (~x− ~vt). (2.4.15)
Le systeme reduit (2.4.14) decrit la propagation d’une onde double entropique E1E1
dans un fluide incompressible pour lequel les quantites ρ, p, ~v et ~H sont conservees le
long de son flot. Dans le bilan des forces agissant sur celui-ci, il y a equilibre entre le
gradient de pression hydrodynamique et la force de Lorentz qui resulte d’un gradient
de pression magnetique | ~H|2/8π et d’une force de tension ( ~H · ∇) ~H. Le vecteur ∇p est
en tout point dirige suivant la surface normale a la surface isobarique passant par ce
59
point. En se referant aux equations (1.1.10) et (1.1.13), la contrainte (ii) indique que les
vecteurs ~J et ~H sont situes dans le plan tangent a cette surface isobarique. Soulignons
que la contrainte (ii) avec la loi d’Ampere (1.1.10) servent de base a la theorie simplifiee
du confinement d’un plasma par un champ magnetique [11].
La contrainte ( ~H · ∇)~v = 0 implique que la vitesse de l’ecoulement demeure constante
suivant les lignes de force de ~H. Par consequent, les lignes de force magnetiques
et les lignes de courant sont tracees sur des surfaces isobariques et sur lesquelles la
vitesse du flot demeure constante. L’onde double entropique genere de la vorticite,
et la circulation du fluide est preservee puisque la force de Lorentz bien qu’etant non
conservatrice (i.e. elle ne derive d’un potentiel) est contrebalancee par la pression
hydrodynamique. Si nous imposons que la force de Lorentz ne depend que de la
pression magnetique, nous obtenons alors comme solution
ρ = ρ(s, r), p(s, r) +12| ~H(s, r)|2 = po, ~v = w(s, r)~e3, ~H = H (s, r)~e3 , (2.4.16)
ou po est une constante arbitraire ; ρ, w et H sont des fonctions arbitraires des invari-
ants de Riemann ;
s = ~λ1(s, r) · ~x , r = ~λ2(s, r) · ~x. (2.4.17)
L’onde double entropique se propage dans un fluide incompressible dont le flot est
unidimensionel et stationnaire sans vorticite.
2). Configuration axiale. On fixe la direction du vecteur ~λ1 suivant ~e3 tandis que le
vecteur ~λ2 circule dans le plan perpendiculaire a ~λ1. Les vecteurs d’onde entropiques
s’ecrivent sous la forme
λ1 =(− w, 0, 0, 1), λ2 =
(− (~λ2 · ~v), ~λ2), (2.4.18)
ou ~λ2 = (cos θ, sin θ, 0) ; θ est une fonction des invariants de Riemann s et r qui sont a
etre determines. Les champs vectoriels correspondants (2.1.7) sont donnes par
X1 = − tan θ∂
∂x+
∂
∂y, X2 =
∂
∂t+ (u + v tan θ)
∂
∂x+ w
∂
∂z. (2.4.19)
60
Maintenant, on peut considerer deux types de solutions MHD, invariantes sous l’action
de l’algebre X1, X2, qui dependent de l’orientation choisie pour le champ magnetique
~H par rapport aux vecteurs ~λ1 et ~λ2.
2.a). Le champ magnetique ~H est perpendiculaire aux deux vecteurs ~λ1 et ~λ2.
Dans ce cas, la solution est donnee par
ρ = ρ(s, r), p(s, r) +12| ~H(s, r)|2 = po, ~v = v(s, r)~λ2
⊥(r) + w(s)~e3, ~H = H(s, r)~λ2⊥(r), (2.4.20)
ou po est une constante arbitraire; ρ, v, w et H sont fonctions arbitraires de leurs ar-
guments, le vecteur unitaire ~λ2⊥ =
(−sin θ (r), cos θ (r), 0
)est perpendiculaire au vecteur
~λ2 et l’angle θ est une fonction arbitraire de r. Les invariants de Riemann s et r sont
donnes par
s = ~λ2 (r) · ~x, r = z − w(s)t . (2.4.21)
2.b). Le champ magnetique ~H est perpendiculaire au vecteur constant ~λ2o. Dans ce
cas, la solution s’ecrit sous la forme
ρ = ρ(s, r), p(s) +12| ~H(s)|2 = po, ~v = v(s)~eo + w(s)~e3, ~H = H⊥(s)~eo + H3(s)~e3 , (2.4.22)
ou po est une constante arbitraire, le vecteur constant ~eo =(− sin θo, cos θo, 0
)est
perpendiculaire au vecteur ~λ2o, ρ est une fonction arbitraire des deux invariants de
Riemann s et r ; de meme pour v, w, H⊥ et H3 qui sont des fonctions arbitraires de
l’invariant de Riemann s. Les invariants s et r sont donnes par
s = ~λ2o · ~x, r = z − w(s)t . (2.4.23)
Dans les deux cas 2.a) et 2.b), La force de Lorentz force est contrebalancee par le
gradient de pression hydrodynamique. Donc, le fluide n’est soumis a aucune force, et
en vertu du theoreme de Kelvin, la circulation du fluide est preservee.

61
2.4.2 Les ondes doubles d’Alfven (AA).
Nous discutons de la superposition de deux ondes d’Alfven Aε pour lesquelles
leurs vecteurs d’onde sont de la forme
λ1 =(λ1
o , λ11, λ
12, λ
13
), λ2 =
(λ2
o , λ21, λ
22, λ
23
), (2.4.24)
ou
λio = ε
( ~H · ~λi)√4πρ
− ~v · ~λi , i = 1, 2, ε = ±1 . (2.4.25)
Nous supposons que les vecteurs ~λ1 et ~λ2 soient lineairement independants ; et donc
il en va de meme pour les vecteurs d’onde λ1 et λ2 qui leurs sont associes.
Les champs vectoriels correspondants sont donnes par
X1 =(λ1
1λ22 − λ1
2λ21)
(λ1oλ
21 − λ1
1λ2o)
∂
∂t+
(λ12λ
2o − λ1
oλ22)
(λ1oλ
21 − λ1
1λ2o)
∂
∂x+
∂
∂y,
X2 =(λ1
1λ23 − λ1
3λ21)
(λ1oλ
21 − λ1
1λ2o)
∂
∂t+
(λ13λ
2o − λ1
oλ23)
(λ1oλ
21 − λ1
1λ2o)
∂
∂x+
∂
∂z.
(2.4.26)
Les solutions invariantes sous l’action de X1, X2 sont
ρ = ρo, p = po, ~v (s, r) =ε√
4πρo
~H (s, r), | ~H|2 = H2o, ε = ±1 , (2.4.27)
ou ρo, po, H2o sont des constantes arbitraires, ~v et ~H sont des fonctions vectorielles des
invariants de Riemann suivants
s = ~λ1 (s, r) · ~x , r = ~λ2 (s, r) · ~x . (2.4.28)
Le champ magnetique ~H doit satisfaire les contraintes suivantes
d ~H
ds· ~λ1· = 0,
d ~H
dr· ~λ2 = 0 . (2.4.29)
L’onde double d’Alfven AA se propage dans un fluide incompressible et stationnaire
qui s’ecoule suivant les lignes de force du champ magnetique ~H.

62
2.4.3 Les ondes doubles Alfven-Entropique (AE1).
Dans cette sous-section, nous construisons des ondes doubles AE1 a partir des
vecteurs d’onde respectifs de l’onde simple d’Alfven Aε et de l’onde entropique E1 :
λ1 =(λ1
o , λ11, λ
12, λ
13
), λ2 =
(λ2
o, λ21, λ
22, λ
23
), (2.4.30)
ou les vecteurs ~λ1 et ~λ2 sont associes respectivement aux vecteurs ~λA de l’onde d’Alfven
et ~λE de l’onde entropique, et
λ1o = ε
( ~H · ~λ1)√4πρ
− ~v · ~λ1 , ε = ±1 , λ2o = −~λ2 · ~v . (2.4.31)
Les solutions du systeme MHD (2.1.2) doivent etre invariantes sous l’action des champs
vectoriels (2.3.7) :
X1 =(λ1
1λ22 − λ1
2λ21)
(λ1oλ
21 − λ1
1λ2o)
∂
∂t+
(λ12λ
2o − λ1
oλ22)
(λ1oλ
21 − λ1
1λ2o)
∂
∂x+
∂
∂y,
X2 =(λ1
1λ23 − λ1
3λ21)
(λ1oλ
21 − λ1
1λ2o)
∂
∂t+
(λ13λ
2o − λ1
oλ23)
(λ1oλ
21 − λ1
1λ2o)
∂
∂x+
∂
∂z,
(2.4.32)
celles-ci sont donnees par
ρ =ρ(r) , p(r) +18πH2(r) = po , | ~H|2 = H2 (r) ,
~v =ε ~H√4πρ(r)
+ ~φ(r), ~H = α(s, r)~φ + β(s, r)~φ + ~ψ(r), ε = ±1 ,
(2.4.33)
et elles s’expriment en termes des invariants de Riemann s et r :
s = ~λ1 (s, r) · ~x , r = ~λ2 (s, r) · ~x−(~λ2 (s, r) · ~v
)t . (2.4.34)
Precisons que po est une constante arbitraire, ρ, p et H sont des fonctions arbitraires
de r. Les fonctions vectorielles ~φ et ~ψ doivent satisfaire les relations :
~φ · ~λ1 = 0, ~φ · ~λs = 0, ~φ · ~λs = 0,...
~φ ·~λ2 = 0, ~ψ · ~λ2 = 0, ~ψ · ~λ2 = 0 pour s = 1, 2. (2.4.35)
Dans les expressions (2.4.33) et (2.4.35) nous avons adopte la notation suivante:
~φ =d~φ
dr, ~φ =
d2~φ
dr2,
...
~φ=d3~φ
dr3, ~ψ =
d~ψ
dr. (2.4.36)
63
La fonction α (s, r) s’exprime en termes de β (s, r), des fonctions vectorielles ~φ, ~ψ et de
leurs derivees respectives :
α =−[(~φ · ~φ)β + (~φ · ~ψ)]±√∆
|~φ|2, (2.4.37)
ou la solution (2.4.37) est reelle si le discriminant ∆ est positif, i.e.
∆ =[(~φ · ~φ)β + (~φ · ~ψ)
]2
− |~φ|2[|~φ|2β2 + 2(~φ · ~ψ)β + |~ψ|2 −H2(r)
]≥ 0 . (2.4.38)
Pour determiner la fonction β, on doit resoudre une equation differentielle non-lineaire
dont les coefficients sont exprimes en termes de ~φ, ~ψ et de leurs derivees respectives:
[(~φ× ~ψ) · ~φ
]∂β
∂r+
[(~φ× ~φ)·
...
~φ
]β2 +
[(~φ× ~ψ)·
...
~φ +(~φ× ~φ) · ~ψ − |~φ|−2[(~φ× ~ψ) · ~φ(~φ · ~φ) ]]β
− |~φ|−2[(~φ× ~ψ) · ~φ][(~φ · ~ψ)∓
√∆
]+ [(~φ× ~ψ) · ~ψ] = 0.
(2.4.39)
Notons que la dependance de la fonction β en terme de s intervient de maniere
parametrique. Donc l’equation (2.4.39) peut etre consideree comme une EDO du
premier ordre pour la fonction β par rapport a la variable r.
La force de Lorentz ~Fm resulte de l’action combinee des ondes simples E1 et A. En
effet, le gradient de pression magnetique provient seulement de l’onde E1 alors que
les forces de tension exercees sur les lignes de force sont associees a l’onde d’Alfven.
L’ecoulement est rotationnel (∇× ~v 6= 0) et incompressible (∇· ~v = 0). La circulation
du fluide n’est pas preservee a cause des forces de tension qui rendent ~Fm non conser-
vatrice. La norme et la direction de la vitesse s’en trouvent ainsi modifiees. De plus,
le terme ~Fm ·~v 6= 0 indique la presence d’un couplage entre les effets hydrodynamiques
et magnetiques dans l’equation de conservation de l’energie(cf.(1.2.9) et (1.2.10)
).

64
Onde double AE1 stationnaire.
En imposant que l’onde double AE1 soit stationnaire, les calculs pour obtenir des solu-
tions du systeme MHD (2.2.1) s’en trouvent simplifier notamment si nous considerons
les configurations planaire et axiale. Voici les resultats obtenus.
1). Configuration planaire. Les deux vecteurs ~λ1 et ~λ2 sont contraints de circuler
dans le plan genere par les vecteurs unitaires ~e1 et ~e2. On a donc
λ1 =(δA − (~λ1 · ~v), ~λ1
), λ2 =
(− (~λ2 · ~v), ~λ2),
~λ1 =(cosϕ, sinϕ, 0) , ~λ2 = (cos θ, sin θ, 0) ,
(2.4.40)
ou ϕ et θ sont des fonctions des invariants de Riemann s et r a etre determinees, et
δA = ε( ~H · ~λ1)√
4πρ, ε = ±1.
La solution du type AE1 est invariante sous l’action des champs vectoriels (2.4.9)
X1 = sin(θ − ϕ)∂
∂t− [δA sin θ + u sin(ϕ− θ)]
∂
∂x+ [δA cos θ + v sin(θ − ϕ)]
∂
∂y, X2 =
∂
∂z.
(2.4.41)
Nous posons que les fonctions inconnues u = (ρ, p, ~v, ~H) sont des fonctions des invariants
de Riemann s = ~λ1 ·~x+(δA− (~λ1 ·~v)
)t et r = ~λ2 ·~x− (~λ2 ·~v)t, et apres les avoir substituees
dans le systeme (2.2.1), nous obtenons comme solutions stationnaires
ρ = ρ(r), p(r) +18πH2(r) = po, ~v =
ε ~H√4πρ(r)
+ w(r)~e3, ε = ±1,
~H =H(r)[cosϕ(s)~e1 + sin ϕ(s)~e2],
(2.4.42)
ou po une constante arbitraire, ρ, p, w H et ϕ sont des fonctions arbitraires de leurs
arguments respectifs : les invariants de Riemann r et s sont donnes par
s = x cosϕ + y sin ϕ , r = y cosϕ− x sin ϕ . (2.4.43)
Les solutions (2.4.42) decrivent la propagation d’une onde double AE1 dans un fluide
incompressible et stationnaire : le vecteur ~λ1 est colineaire au champ magnetique

65
~H, et tous deux sont perpendiculaires au vecteur ~λ2. De plus, le fait que ~v · ~λ2 = 0
confirme le caractere stationnaire de l’onde entropique E1 (cf. (2.2.30)). Soulignons
que les solutions (2.4.42) satisfont les contraintes
~λ1 · ∇ρ = 0 , ~λ1 · ∇p = 0 , ~λ1 · ∇w = 0 , (2.4.44)
qui nous indiquent que ρ, p et w sont des quantites conservees dans la direction ~λ1
mais varient suivant ~λ2 : ainsi l’onde entropique E1 modifie la densite, la pression et
la norme du champ magnetique (et donc celle de la vitesse) suivant sa direction de
propagation alors que la contribution de l’onde d’Alfven consiste seulement a modifier
la direction du champ magnetique ; θ ≡ θ (s).
Prenons le cas pour lequel l’ecoulement est bidimensionnel ; i.e. w(r) ≡ 0. Les lignes de
courant (qui coıncident avec les lignes de force de ~H) sont des cercles concentriques
de rayon r = constante et le champ de vitesse est perpendiculaire au rayon vecteur
s = constante. L’ecoulement etant stationnaire : le gradient de pression magnetique
contrebalance celui de la pression hydrodynamique, le reste de la force de Lorentz,
associe aux forces de tension ( ~H · ∇) ~H ∼ ( ~H · ~λ1)∂ ~H/∂s, agit sur le fluide comme une
force centripete. Quant a la circulation du fluide, elle est conservee sur chaque ligne
de courant r = constante .
En guise de comparaison, l’action de l’onde double AE1 sur le fluide est l’analogue
en hydrodynamique d’un champ de vitesse engendre par un fil tourbillonnaire infini-
ment long et de diametre tres petit pour un ecoulement plan et incompressible [36];
l’onde d’Alfven induit la circulation du fluide alors que l’onde entropique maintient
l’equilibre entre les gradients de pression ci-haut mentionnes.
II). Configuration axiale. L’onde d’Alfven circule dans le plan genere par les
vecteurs ~e1 et ~e2, et l’onde entropique se propage suivant la direction ~e3. Les vecteurs
d’onde sont donnes par
λ1 =(δA − (~λ1 · ~v), ~λ1
), λ2 =
(− (~λ2 · ~v), ~λ2),
~λ1 =(cos θ, sin θ, 0) , ~λ2 = (0, 0, 1) ,
(2.4.45)

66
ou θ est une fonction des invariants de Riemann s et r a etre determinee, et
δA = ε( ~H · ~λ1)√
4πρ, ε = ±1.
Les champs vectoriels (2.4.11) s’expriment dans ce cas-ci sous la forme
X1 = − tan θ∂
∂x+
∂
∂y, X2 =
∂
∂t+ (u + v tan θ − δA)
∂
∂x+ w
∂
∂z. (2.4.46)
Etant donne le caractere stationnaire de l’onde AE1, nous obtenons comme solutions:
ρ = ρ(r) , p(r) +18πH2(r) = po , ~v =
ε ~H√4πρ(r)
, ε = ±1 ,
~H =H(r)[cos θ(s)~e1 + sin θ(s)~e2] ,
(2.4.47)
ou po une constante arbitraire, ρ, p, θ et H sont des fonctions arbitraires de leur
argument respectif : c’est-a-dire en termes des invariants de Riemann
s = x cos θ + y sin θ , r = z . (2.4.48)
Pour la configuration axiale, l’onde double AE1 se propage dans un fluide incompress-
ible et stationnaire dont le flot est bidimensionnel et s’ecoule suivant les lignes de
force du champ magnetique ~H. Dans le plan z = constant, la densite et la pression du
fluide ainsi que la norme de ~H demeurent constantes. Autrement dit, l’onde d’Alfven
ne modifie pas ces quantites :
~λ1 · ∇ρ = 0 , ~λ1 · ∇p = 0 , ~λ1 · ∇[H] = 0 . (2.4.49)
Quant a la force de Lorentz agissant sur le fluide : nous avons dans la direction ~e3
un equilibre entre les pressions hydrodynamique et magnetique (comme l’indique la
contrainte obtenue dans (2.4.47)). La contribution de l’onde d’Alfven est attribuable
aux forces de tension ( ~H · ∇) ~H, situees dans le plan ou circule ~λ1, qui agissent sur les
lignes de force suivant la direction du vecteur ~n (cf.(1.1.14)).

67
Sous la configuration axiale, l’onde double AE1 stationnaire contribue a la generation
d’une densite de courant ~J (cf.(1.1.10)) suivante
~J =4π
c∇× ~H = −4π
c
dHdr
[sinθ ~e1 − cos θ ~e2]− 4π
cHdθ
ds~e3 (2.4.50)
ainsi une partie du courant produit circule dans le plan ou s’ecoule le fluide, con-
trairement a la configuration planaire ou celui-ci ne circule que dans la direction
transvsersale a l’ecoulement.
Outre les configurations planaire et axiale, nous pouvons aussi examiner le cas
plus general pour lequel les vecteurs ~λ1 et ~λ2 sont orthogonaux a un certain vecteur
unitaire constant ~eo qui n’est cependant jamais colineaire au champ magnetique ~H:
~λ1 · ~eo = 0 , ~λ2 · ~eo = 0 . (2.4.51)
Pour construire l’onde doubles AE1 a partir de cette configuration, nous procedons
de la meme facon que precedemment : les expressions generales des vecteurs d’onde
λ1 et λ2 sont donnees par (2.4.30) et (2.4.31) et les champs vectoriels, qui laissent les
solutions du systeme MHD (2.2.1), s’expriment sous la forme (2.4.32).
Ensuite, apres avoir remplacees les fonctions inconnues u = (ρ, p, ~v, ~H) qui dependent
des invariants de Riemann s = ~λ1 · ~x + (δA − (~λ1 · ~v)t et r = ~λ2 · ~x− (~λ2 · ~v)t, nous devons
tenir compte des conditions de consistance des elements simples entropiques du type
E1 et d’Alfven Aε; cf. (2.2.17), (2.2.30), (2.2.52) :
~λ1 · ∂ ~H
∂s= 0 , ~λ1 · ∂~v
∂s= 0 , ~λ2 · ~H = 0 , ~λ2 · ∂ ~H
∂r= 0 , ~λ2 · ∂~v
∂r= 0 . (2.4.52)
Ce qui nous amene aux solutions stationnaires suivantes
ρ = ρ(r) , p(r) +H2(r)8π
= po , ~v =ε ~H√4πρ(r)
+ a(r)~eo , ε = ±1 , (2.4.53)
ou po est une constante arbitraire, ρ et a sont des fonctions arbitraires de leurs argu-
ments respectifs. L’expression du champ magnetique ~H reste indeterminee : la seule
contrainte imposee sur celle-ci est que sa norme H soit une fonction arbitraire de r.

68
Les invariants de Riemann sont donnes par
s =
(∂ ~H
∂s× ~eo
)· ~x , r =
(~H × ~eo
) · ~x . (2.4.54)
Soulignons que pour cette configuration, les vecteurs ~λ1 et ~λ2 s’ecrivent
~λ1 =∂ ~H
∂s× ~eo , ~λ2 = ~H × ~eo
(2.4.55)
puisque les vecteurs ~H et ∂ ~H/∂s sont toujours orthogonaux, nous avons donc que ~e1
et ~e2 sont lineairement independants et generent un plan perpendiculaire a ~eo.
La force de Lorentz associee a l’onde double AE1 s’exprime
~Fm =14π
( ~H · ~λ1)∂ ~H
∂s− H
4π
dHdr
~λ2 ; (2.4.56)
le premier terme a droite de l’egalite de (2.4.56) represente la contribution de l’onde
d’Afven : les forces de tension agissant transversalement aux lignes de force, alors que
le second terme, qui provient du gradient de pression magnetique, est contrebalance
par la pression hydrodynamique dans la direction ~λ2 (cf. (2.4.53)).
Notons qu’en choisissant ~eo = ~e3 et en prenant pour le champ magnetique la forme
particuliere:
~H = H(r)H(s) (2.4.57)
ou H est un vecteur unitaire situe dans le plan genere par ~e1 et ~e2, alors les solutions
(2.4.53) coıncident avec celles obtenues pour la configuration planaire (2.4.42).
Finalement, nous pouvons aussi considerer le cas particulier ou la direction
de propagation de l’onde entropique E1 est fixee suivant ~e3 alors que l’onde d’Alfven
balaie tout l’espace. Nous tenons compte encore des conditions de consistance (2.4.52)
et de la forme (2.4.57) pour le champ magnetique ~H. Apres avoir repeter les memes
etapes de calculs que precedemment, nous aboutissons aux solutions suivantes:
ρ = ρ(r) , p(r) +H2
8π= po , ~v =
ε ~H√4πρ(r)
, ε = ±1,
~H =H(r)(
cosϕ(s) , sin ϕ(s) , 0)
,
(2.4.58)

69
ou po est une constante arbitraire ; ρ, α et ϕ sont des fonctions arbitraires de leurs
arguments respectifs. Les invariants de Riemann sont donnes par
s = x cos ϕ + y sin ϕ + χz , r = z . (2.4.59)
ou χ est une fonction arbitraire de s qui resulte du fait que l’onde d’Alfven se propage
hors du plan genere par ~e1 et ~e2 :
~λ1 =(
cosϕ(s), sinϕ(s), χ(s))
.
Les solutions (2.4.58) sont similaires a celles obtenues pour la configuration axiale :
elles decrivent la propagation d’une onde double AE1 dans un fluide incompressible
et stationnaire dont l’ecoulement est bidimensionnel et suit les lignes de force du
champ magnetique ~H. Il en va de meme pour le bilan des forces agissant sur le fluide:
cancellation des gradients de pression hydrodynamique et magnetique, les forces de
tension de ~Fm agissent sur les lignes de force magnetiques comme des forces centripetes
orientees suivant le rayon de courbure Rc.
Sur chaque plan z = constant, les fonctions ρ, p et H demeurent constantes. Cependant
la direction du champ magnetique (et consequemment la vitesse du flot) varie d’un
plan z = constant a l’autre etant donnee la presence de la fonction χ.
Pour cette configuration, nous avons comme densite de courant ~J:
~J =4π
c
(χHdθ
dscos θ − dH
drsin θ
)~e1 +
4π
c
(χHdθ
dssin θ +
dHdr
cos θ
)~e2 − 4π
cHdθ
ds~e3 (2.4.60)
comparativement a l’expression obtenue pour la configuration axiale (2.4.50), nous
avons certains termes supplementaires lies a la fonction χ qui s’ajoutent au courant
circulant dans le plan ou s’ecoule le fluide.

70
2.4.4 Les ondes doubles magnetoacoustiques (FF).
Nous traitons separement deux cas pour lesquels la direction de propagation
de chaque onde simple magnetoacoustique F est fixe et orientee perpendiculairement
au champ magnetique ~H.
(1). Nous considerons que les directions de propagation des ondes simples F soient
transversales : nous les choisissons suivant ~e1 et ~e2, respectivement, avec ~H = (0, 0,H).
Leurs vecteurs d’onde respectifs a chaque onde simple F sont
λ1 =(δF − u, 1, 0, 0
), λ2 =
(δF − v, 0, 1, 0
). (2.4.61)
ou la vitesse caracteristique de l’onde magnetoacoustique s’ecrit
δF = ε
[κp
ρ+| ~H|2
ρ
] 12
, ε = ±1 .
Les champs vectoriels (2.3.7) correspondants sont donnes par
X1 =∂
∂t+ (u− δF )
∂
∂x+ (v − δF )
∂
∂y, X2 =
∂
∂z. (2.4.62)
Nous posons que les fonctions inconnues u = (ρ, p, ~v, ~H) sont des fonctions des invariants
de Riemann s = x + (δF − u)t et r = y + (δF − u)t. En les remplacant dans le systeme
MHD (2.2.1), nous obtenons les solutions
ρ = ρ(s, r), p = Aoρκ, ~v =
[v(s, r) +
12[f(r) + g(s)]
]~e1 + v(s, r)~e2 + w(s− r)~e3, ~H = Hoρ~e3,
(2.4.63)
ou Ao et Ho sont des constantes arbitraires, v et w sont des fonctions arbitraires de
leurs arguments respectifs. Les invariants de Riemann s’exprime alors sous la forme
s = x +(
δF − 12[f(r) + g(s)]− v
)t, r = y + (δF − v)t (2.4.64)
et les fonctions f et g (egalement arbitraires) sont reliees a la densite ρ par
f(r)− g(s) = 4ε
√Ao
[√βoρ + 1− arc tanh[
√βoρ + 1]
]pour κ = 1 ,
√2Ao(βo + 1)
√ρ pour κ = 2 ,
√κAo
(κ− 1)
√ρκ−1 + βoρ
[1 +
(κ− 2)√
βo√ρκ−2 + βo
]2F1
(a1, b1, c1;
−ρκ−2
βo
)pour κ 6= 1, 2 ,
(2.4.65)

71
ou ε = ±1, 2F1 (a1, b1, c1; z) est une fonction hypergeometrique de seconde espece qui
depend de la variable z = −ρ(κ−2)/βo, avec βo = H2o/4πκAo, et des parametres a1 =
1/2(κ− 2), b1 = 12 , c1 = 1 + 1/2(κ− 2).
Pour l’onde double FF , la force de Lorentz presente dans le fluide est donnee par
~Fm = − 18π∇[| ~H|2] = −H2
o
4πρ
[∂ρ
∂s~e1 +
∂ρ
∂r~e2
]. (2.4.66)
Par consequent, l’onde double FF se propage dans le fluide en causant des com-
pressions et des extensions sur les lignes de force magnetiques dans les directions ~e1
et ~e2 qui leurs sont perpendiculaires. Le fait que ~Fm · ~v 6= 0 indique que les effets
hydrodynamiques et electromagnetiques sont couples.
Sous ces conditions, la vorticite du fluide ∇× ~v n’est pas nulle. Puisque la force de
Lorentz derive du gradient de pression magnetique pM = | ~H|2/8π (les forces de tension
etant nulles) : ~Fm est une force conservatrice. Par consequent, la circulation du fluide
est preservee selon le theoreme de Kelvin.
(2). Nous considerons maintenant le cas unidimensionnel pour lequel les deux on-
des magnetoacoustique F se propagent dans une meme direction fixe (mais en sens
contraire) que nous choisissons suivant ~e2, avec des vitesses de phases λεo = δF + εu,
ε = ±1. Ainsi, le champ magnetique peut avoir deux composantes : ~H =(0, H2,H3
).
Neanmoins, les vecteurs d’onde correspondants sont lineairement independants :
λ1 =(δF − u, 1, 0, 0
), λ2 =
(− (δF + u), 1, 0, 0). (2.4.67)
ou
δF =
[κp
ρ+| ~H|28π
] 12
.
Dans ce cas, les champs vectoriels (2.3.7) sont simplement
X1 =∂
∂y, X2 =
∂
∂z. (2.4.68)

72
Les solutions invariantes sous l’action X1, X2 sont
ρ = ρ (s, r) , p = Aoρκ , ~v =
12[f(r) + g(s)]~e1 + v(s + r)~e2 + w(s + r)~e3 ,
~H =ρHo[cosϕ(s + r)~e2 + sinϕ(s + r)~e3] ,
(2.4.69)
ou Ao et Ho sont des constantes arbitraires, v, w et ϕ sont des fonctions arbitraires de
leurs arguments respectifs. Les invariants de Riemann sont
s = x +(
δF − 12[f(r) + g(s)
])t , r = x−
(δF +
12[f(r) + g(s)
])t , (2.4.70)
de meme que les fonctions f et g qui sont reliees a la densite ρ par l’expression (2.4.65).
L’onde double FF agit sur la composante de la vitesse longitudinale a sa direction de
propagation alors que les composantes transversales de la vitesse : v et w, sont des
fonctions arbitraires qui ne sont pas reliees a la densite ρ et leurs presences contribuent
a la vorticite du fluide. Notons que la circulation du fluide est conservee d’apres la
solution (2.4.69) puisque les forces de tension ( ~H · ∇) ~H = 0.
La valeur κ = 2 represente un cas interessant pour lequel nous considerons un flot uni-
dimensionnel qui s’ecoule transversalement au champ magnetique ~H. Nous obtenons
alors comme solutions du systeme MHD (2.2.1)
ρ =[f(r)− g(s)]2
16[2Ao + H2o ]
, p = Aoρ2 , ~v =
12[f(r) + g(s)]~e1 , ~H = ρHo~e3 , (2.4.71)
ou Ao et Ho sont des constantes arbitraires, f et g sont des fonctions arbitraires des
invariants de Riemann r et s, respectivement. Ceux-ci sont donnes par les relations
s = x− 14(3g + f)t, r = x− 1
4(3f + g)t . (2.4.72)
Dans ce cas, la force de Lorentz prend la forme
~Fm = − 18π∇[| ~H|2] = −Ho
2
4πρ
[∂ρ
∂s+
∂ρ
∂r
]~e1 .
Ainsi l’onde double FF se propage dans le fluide par la combinaison d’une onde de
compression associee a la fonction arbitraire f [x− (δF + u)t] et d’une onde d’expansion
associee a la fonction arbitraire g[x+(δF −u)t]. Ici, le flot est irrotationnel car ∇×~v = 0.

73
Ce cas particulier illustre le principe de base du generateur MHD [10]: le fluide s’ecoule
suivant la direction ~e1 a l’interieur d’une cloison ou regne un fort champ magnetique
oriente dans la direction ~e3. Par la loi d’Ampere (cf. (1.1.10)), il en resulte un courant
electrique qui s’exprime par
~J =c
4π∇× ~H =
cHo
32π
[f(r)− g(s)][2Ao +
H2o
4π
][dg
ds− df
dr
]~e2 .
(2.4.73)
Consequemment, ce meme courant electrique ~J avec le champ magnetique ~H con-
tribuent a leur tour a l’entretient de la force de Lorentz. Ce processus permet ainsi
de convertir l’energie cinetique du fluide en energie electrique.
3) Finalement, considerons le cas unidimensionnel ou l’onde double FF se propage
dans la direction du champ magnetique ~H. Les solutions invariantes sous les champs
vectoriels (2.4.68) sont alors donnees par:
ρ = ρ(s, r), p = Aoρκ, ~v =
12[f(r) + g(s)]~e1, ~H = Ho ~e1 , (2.4.74)
ou Ao et Ho sont des constantes arbitraires, f et g sont des fonctions arbitraires de
leur argument respectif : elles sont reliees a la densite ρ par
f(r)− g(s) =
4κ− 1
√κAoρ(κ−1) pour κ 6= 1,
ln ρ pour κ = 1.
(2.4.75)
Les invariants de Riemann s’expriment sous la forme
s = x−(
12[f(r) + g(s)] +
√κAoρ(κ−1)
)t, r = x−
(12[f(r) + g(s)] +
√κAoρ(κ−1)
)t.
(2.4.76)
Dans ce cas, l’onde double FF devient simplement une onde double acoustique (comme
decrite en hydrodynamique [35]) qui se propage le long des lignes de force d’un champ
magnetique constant ~Ho et celui-ci n’a aucune influence sur l’ecoulement du fluide.

74
2.4.5 Les ondes doubles magnetoacoustique et entropique (FE1).
Nous imposons que le vecteur ~λF de l’onde magnetoacoustique F et le vecteur
~λE1 de l’onde entropique E1 soient tous deux orthogonaux au champ magnetique ~H.
Sous cette hypothese de base, nous etudions les deux cas suivants.
1.a). Nous considerons le cas unidimensionnel pour lequel l’onde magnetoacoustique
F et l’onde entropique E1 se propagent suivant la direction ~e3, et le champ magnetique
est dispose selon ~H = (H1,H2, 0). Leur vitesse de phase sont donnees respectivement
par λFo = δF − w et λE
o = −w.
Les vecteurs d’onde correspondants s’ecrivent
λF =(δF − w, 0, 0, 1
), λE1 =
(− w, 0, 0, 1)
, (2.4.77)
ou
δF = ε
[κp
ρ+| ~H|24πρ
] 12
, ε = ±1 . (2.4.78)
Dans ce cas, les champs vectoriels (2.3.7) sont simplement
X1 =∂
∂x, X2 =
∂
∂y. (2.4.79)
Nous posons que les inconnues u = (ρ, p, ~v, ~H) sont des fonctions des invariants de
Riemann s = z + (δF − w)t et r = z − wt. Apres les avoir subsituees dans le systeme
MHD (2.2.1), nous trouvons comme solutions invariantes sous X1, X2
ρ = ρ(s), p = Aoρκ, ~v = ~α(r)× ~e3 + w(ρ)~e3, ~H =Ho ρ(s) [cosϕ(r)~e1 + sinϕ(r)~e2] , (2.4.80)
ou Ao et Ho sont des constantes arbitraires, ρ, ϕ et ~α = (α1, α2, 0) sont des fonctions
arbitraires de leurs arguments respectifs. Les invariants de Riemann invariants s et r
sont donnes par
s = z −(
w(ρ)− ε
[κAoρ
(κ−1) + H2oρ
] 12)
t , r = z − w(ρ)t , ε = ±1 . (2.4.81)

75
La fonction w s’exprime sous la forme
w(ρ) =2
√Ao
[√βoρ + 1− arc tanh[
√βoρ + 1]
]pour κ = 1 ,
√κAo
(κ−1)
√ρκ−1 + βoρ
[1 +
(κ− 2)√
βo√ρκ−2 + βo
]2F1
(a1, b1, c1;
−ρκ−2
βo
)pour κ 6= 1, 2
(2.4.82)
ou 2F1 (a1, b1, c1; z) est une fonction hypergeometrique de seconde espece dependant de
la variable z = −ρκ−2/βo, avec βo = H2o/4πκAo, et des parametres : a1 = 1/2(κ− 2), b1 = 1
2 ,
c1 = 1 + 1/2(κ− 2).
La force de Lorentz associee a l’onde double FE1 derive du gradient de pression
magnetique :
~Fm = − 18π∇[| ~H|2] = −H2
o
4πρdρ
ds~e3 (2.4.83)
qui resulte de l’onde magnetoacoustique F: les forces de tension sur les lignes de force
sont nulles. Notons que les effets hydrodynamiques et magnetiques sont couples etant
donne que ~Fm · ~v 6= 0.
Le gradient de pression hydrodynamique provient lui aussi de l’onde F :
∇p = κAoρ(κ−1) dρ
ds~e3 , (2.4.84)
il s’ensuit que les lignes de force subissent des compressions et des extensions suivant
la direction de propagation de l’onde magnetoacoustique F (i.e. ~λF ). D’autre part,
l’onde entropique E1 contribue a la vorticite du fluide:
∇× ~v = ~e3 ×(
d~α
dr× ~e3
). (2.4.85)
Puisque ~Fm est une force conservatrice, la circulation du fluide est preservee selon le
theoreme de Kelvin.
1.b). Pour le cas particulier ou κ = 2, les solutions (2.4.80) se recrivent comme suit:
ρ = ρ(s), p = A(r)ρ2, ~v = ~α(r)× ~e3 + 2ε√
C2ρ~e3, ~H = ρ(s)H(r)[cosϕ(r)~e1 + sinϕ(r)~e2], ε = ±1
(2.4.86)

76
ou C2 est une constante arbitraire, les fonctions A(r) et H(r) doivent satisfaire
2A(r) +14πH2(r) = C2 . (2.4.87)
L’onde entropique E1 agit sur | ~H| et sur p toutefois, comme l’indique la relation
(2.4.87), sans perturber l’equilibre entre les gradients de pression hydrodynamique et
magnetique. Cela se traduit egalement dans le bilan des energies hydrodynamique et
magnetique(cf.(1.2.5) et (1.2.7)
):
E = Ec + Em =12ρ |~α|2 +
12ρ w2 +
1κ− 1
p +| ~H|28π
; (2.4.88)
pour κ = 2 : l’onde entropique E1 agit sur tous les termes alors que pour κ 6= 2 son
action se limite a l’energie cinetique Ec. La contribution de l’onde magnetoacoustique
F est independante de κ : elle modifie l’energie totale E via la densite.
2). Nous considerons le cas ou les ondes simples magnetoacoustique F et entropique
E1 se propagent dans des directions transversales que nous choisissons comme etant
~λF = (1, 0, 0) et ~λE1 = (0, 1, 0), avec pour orientation du champ magnetique ~H = (0, 0,H).
Les vecteurs d’onde sont alors donnees par :
λF =(δF − u, 1, 0, 0
), λE1 =
(− v, 0, 1, 0)
. (2.4.89)
ou
δF = ε
[κp
ρ+
H2
4πρ
] 12
, ε = ±1 .
Les champs vectoriels (2.3.7) s’expriment sous la forme
X1 =1v
∂
∂t+
(u− δF )v
∂
∂x+
∂
∂y, X2 =
∂
∂z. (2.4.90)
Pour κ 6= 2, les solutions invariantes sous l’action de X1, X2 sont donnees par
ρ = ρ(s), p = Aoρκ, ~v = [b(r)− f(ρ)]~e1 + vo~e2 + w(r)~e3, ~H = Hoρ(s)~e3 , (2.4.91)
ou Ao, vo et Ho sont des constantes arbitraires, ρ, b et w sont des fonctions arbitraires
de leurs arguments respectifs; i.e. en termes des invariants de Riemann s = x+(δF −u)t
et r = y − vot. La fonction f est reliee a la densite par la relation (2.4.82).

77
L’analyse physique est identique a celle faite pour le cas 1.b), soulignons que les
compressions et les extensions des lignes de force se font dans la direction ~e1 (i.e. ~λF )
et le fluide demeure incompressible suivant les directions ~e2 et ~e3.
Le cas κ = 2 met davantage en evidence la synergie entre les ondes magnetoacoustique
F et entropique E1. Les solutions du systeme (2.2.1) sont alors donnees par
ρ = ρ(s), p = A(r)ρ2, ~v = [b(r)− 2ε√
C2ρ(s)]~e1 + vo~e2 + w(r)~e3, ~H = ρ(s)H(r)~e3 , (2.4.92)
ou ε = ±1, C2 et vo sont des constantes arbitraires, ρ, b et w sont des fonctions arbitraires
de leurs arguments respectifs. Les invariants de Riemann sont
s = x +(3ε
√C2ρ(s)− b(r)
)t , r = y − vot , ε = ±1 .
Les fonctions A(r) et H(r) doivent satisfaire la relation
2A(r) +14πH2(r) = C2 . (2.4.93)
Le caractere spatial de la synergie ressort dans l’expression de la force de Lorentz qui
comporte alors deux composantes :
~Fm = − 18π∇[| ~H|2] = −ρH
4π
[Hdρ
ds~e1 + ρ
dHdr
~e2
], (2.4.94)
de meme que pour le gradient de pression hydrodynamique qui s’ecrit
∇p = 2Aρdρ
ds~e1 + ρ2 dA
dr~e2. (2.4.95)
Dans l’equation d’Euler (1.1.15), en tenant compte de la contrainte (2.4.93), la somme
des forces agissant sur le fluide est nulle suivant ~e2 (i.e. ~λE1). Par consequent, les
lignes de forces subissent des compressions et des extensions que dans la direction de
propagation l’onde magnetoacoustique F .
La vorticite du fluide est associee a l’onde entropique E1
∇× ~v =dw
dr~e1 − db
dr~e3 ,
et la force de Lorentz ~Fm etant conservatrice, la circulation du fluide est preservee
par le theoreme de Kelvin.

78
2.5 Resolution du systeme MHD par imposition de contraintes differentielles.
Par la methode des symetries conditionnelles, nous avons pu exprimer les so-
lutions des equations MHD en termes des invariants de Riemann. Le but de cette
section est d’obtenir des solutions en imposant directement certaines contraintes
differentielles aux equations de la MHD. Nous serons alors en mesure d’etablir des
comparaisons avec les resultats de la derniere section.
I) Nous debutons en considerant que le fluide soit incompressible :
∇· ~v = 0 . (2.5.1)
Dans ce cas, les equations de la MHD sont donnees par
dρ
dt= 0 , (i)
d~vdt
+1ρ∇p +
14πρ
[12∇| ~H|2 − ( ~H · ∇) ~H
]= 0 , (ii)
d ~H
dt= ( ~H · ∇)~v , (iii)
∇· ~H = 0 . (iv)
(2.5.2)
I.1) Dans le referentiel se deplacant avec le fluide, les equations MHD se trouvent
etre les contraintes obtenues pour les ondes doubles E1E1 : i.e. les quantites ρ, p, ~v et
~H sont conservees le long du flot et les equations (2.5.2)− (ii) et (iii) se resument a
∇p = − 18π∇| ~H|2 +
14π
( ~H · ∇) ~H , (2.5.3)
( ~H · ∇)~v = 0 , (2.5.4)
ou l’equation (2.5.3) represente l’equilibre statique entre les gradients de pression hy-
drodynamique et magnetique et les forces de tension agissant sur les lignes de force.
L’equation (2.5.4) exprime le fait que le champ des vitesses demeure constant suivant
~H et cela nous permet de poser comme hypothese que la vitesse s’ecrit,
~v = f(ρ) ~H , (2.5.5)

79
ou f est une fonction arbitraire de la densite ρ que l’on fixe pour certains cas.
I.2) En premier lieu, imposons la contrainte suivante
~v =ε ~H√4πρ
, ε = ±1 .
En tenant compte des equations (2.5.2), nous avons les contraintes
~H · ∇ρ = 0 , ~H · ∇p = 0 , ~H · ∇[ | ~H|2 ] = 0 . (2.5.6)
Pour des densites ; ρ = ρo, pressions ; p = po et | ~H| = Ho constantes, nous obtenons les
ondes doubles d’Alfven (AA).
I.3) Prenons encore
~v =ε ~H√
4πρ(x, y), ε = ±1 ,
mais avec ρ comme fonction arbitraire de x et y, le champ magnetique circule dans le
plan genere par les vecteurs ~e1 et ~e2 :
~H = H(x, y)[sin θ~e1 + cos θ~e2] ,
ou θ est une fonction arbitraire de x et y, la fonction H est reliee a la pression par
p2 +18πH2 = po
ou po est une constante arbitraire. Les fonctions ρ, p et H obeissent aux contraintes
(2.5.6). Ce cas correspond a une onde double stationnaire de type AE1 que l’on a
obtenue pour la configuration planaire.
I.4) Considerons le cas pour lequel nous posons que
~v =ε ~H√4πρ
+ w(x, y)~e3 , ε = ±1 ,
ou ρ = ρ(z) et w sont des fonctions arbitraires de leurs arguments respectifs, le champ
magnetique circule dans le plan genere par ~e1 et ~e2 :
~H = H(z)[sin θ~e1 + cos θ~e2] ,

80
ou θ est une fonction arbitraire de x et y, H est reliee a la pression par
p2 +18πH2 = po ,
ou po est une constante arbitraire. Ceci correspond a l’onde double stationnaire de
type AE1 obtenu pour la configuration axiale.
II) Nous considerons que le fluide soit compressible :
∇· ~v 6= 0 . (2.5.7)
II.1) Supposons que le flot s’ecoule au travers des lignes de force :
~H · ~v = 0 , (2.5.8)
avec comme choix d’orientation : ~H = (0, 0, H3) et ~v = (u, v, 0).
La compressibilite du fluide implique la relation d’adiabacite
p = Aoρκ (2.5.9)
ou Ao est une constante arbitraire.
Sous les hypotheses (2.5.7) et (2.5.9), le systeme MHD se resume aux equations :
∂ρ
∂t+ (~v · ∇)ρ + (∇· ~v)ρ = 0 , (2.5.10)
∂~v∂t
+ (~v · ∇)~v +∇[Aoρ
κ +Ho
2
8πρ2
]= 0 , (2.5.11)
qui determinent la densite du fluide ρ = ρ(t, x, y) et la vitesse de son ecoulement :
~v = u(t, x, y)~e1 + v(t, x, y)~e2. Precisons que le champ magnetique obeit a une equation
ayant la meme forme que celle pour ρ : ~H s’exprime donc en terme de ρ ;
~H = Ho ρ(t, x, y)~e3 ou Ho est une constante arbitraire.
Ce cas correspond aux ondes doubles magnetoacoustiques de type FF.

81
II.2) Nous supposons encore que le flot s’ecoule au travers des lignes de force :
~H · ~v = 0 , (2.5.12)
avec comme orientation : ~H = (0, 0,H3) et ~v = (u, vo, 0) ou vo est une constante arbitraire.
Prenons le cas particulier κ = 2 pour lequel la relation d’adiabacite s’ecrit
p = A(t, y)ρ2(t, x) (2.5.13)
Sous les hypotheses (2.5.12) et (2.5.13), le systeme MHD se resume aux equations :
∂ρ
∂t+ (~v · ∇)ρ + (∇· ~v)ρ = 0 , (2.5.14)
∂u
∂t+ (~v · ∇)u +
po
2π
∂ρ
∂x= 0 , (2.5.15)
qui determinent ρ et la vitesse du flot : ~v = u(t, x, y)~e1 + vo~e2.
Puisque ~H obeit a une equation de la meme forme que (2.5.14), nous l’exprimons
comme suit
~H = H(t, y) ρ(t, x)~e3 ,
dont sa norme H est reliee a la fonction A(t, y) par l’expression
A (t, y) +H2
8π= po ,
po etant une constante arbitraire.
Dans ce cas, nous retrouvons les ondes doubles de type magnetoacoustique F et
entropique E1.
II.3) Finalement, en imposant les contraintes
p = Aoρκ ~v = Co
~H/ρ (2.5.16)

82
ou Co et Ao sont des constantes arbitraires, et la force de Lorentz est nulle
~Fm = − ~H × (∇× ~H) = ~0, (2.5.17)
et avec
∇· ~H = 0 . (2.5.18)
Sous les contraintes (2.5.16), le systeme MHD se reduit a une seule equation
C2o
2| ~H|2ρ2
+ Aoκ
κ− 1ρκ−1 = Do pour κ 6= 1 ,
C2o
2| ~H|2ρ2
+ Ao ln ρ = Do pour κ = 1 ,
(2.5.19)
ou Do est une constante arbitraire.
Le fait que
~Fm = − ~H × (∇× ~H) = ~0 avec ∇· ~H = 0 (2.5.20)
ameme a deux possibilites.
(1) Si on impose que ∇× ~H = 0 alors on peut ecrire :
~H = ∇φ ,
et la condition (2.5.18) implique que
4φ = 0. (2.5.21)
Par consequent, φ est une fonction harmonique, il en va de meme pour ~H, et ρ via
l’equation (2.5.19). Les fonctions p et ~v telles que donnees par (2.5.16) sont stationnaires.
(2) En considerant
∇× ~H = α (~x) ~H (2.5.22)
duquel on prend la divergence et compte tenu de (2.5.18), nous obtenons que
( ~H · ∇)α = 0 ,
ou α (~x) est une fonction scalaire arbitraire pour laquelle la valeur α = constante definie
une surface magnetique [11].
83
3. Reduction par symetrie des equations de la MHD.
3.1 Notions fondamentales sur la theorie des groupes.
Dans cette section, nous debutons par des notions elementaires concernant la theorie
des groupes et de son application a la resolution d’equations differentielles. Notre
synthese se base principalement sur un resume de Winternitz [39] et les livres d’Olver
[27] et d’Ibragimov [22]. Nous terminons cette section en introduisant la methode de
reduction par symetrie (MRS) afin de resoudre les equations de la MHD.
Definition 3.1.1. Un groupe est un ensemble G muni par une loi de composition
interne, qui a deux elements quelconques x, y, en fait correspondre un troisieme note
par x · y. Celle-ci satisfait les trois axiomes suivants.
(i) Elle est associative : (x · y) · z = x · (y · z) , ∀x, y, z ∈ G.
(ii) Il existe dans G un seul et unique element neutre note e tel que :
x · e = e · x = x , ∀x ∈ G.
(iii) Tout element x de G possede un seul et unique inverse note x−1 tel que
x · x−1 = x−1 · x = e .
L’ordre d’un groupe est le nombre d’elements le constituant. Si la loi de composition
interne est commutative : x · y = y · x, alors le groupe est commutatif ou abelien. Un
sous-groupe H d’un groupe G est une partie de G qui est un groupe pour la loi de
composition interne definie dans G.
84
Definition 3.1.2. Soient g1, g2 et x les trois elements d’un groupe G tels que
x−1 · (g1 · x) = g2 : ou g2 resulte de la transformation de similarite de g1 par x ; les
elements g1 et g2 sont des conjugues l’un de l’autre qui ont les proprietes suivantes :
(1) Tout element de G est le conjugue de lui-meme.
(2) Si g1 est le conjugue de g2 et reciproquement : g1 = x−1 · g2 · x, alors il existe
y ∈ G tel que g2 = y−1 · g1 · y.
(3) Si g1 est le conjugue de g2 et g3 alors g2 et g3 sont conjugues l’un de l’autre.
Voici en vrac la nomenclature suivante. Une classe de conjugaison est un ensemble
complet d’elements d’un groupe qui sont les conjugues les uns des autres. Tout
element d’un groupe possede sa periode n telle que gn = e, n ∈ IN . Si pour un
groupe fini donne il existe des elements s’exprimant comme le produit fini de leur
puissance alors ceux-ci forment l’ensemble generateur. Un groupe ne possedant qu’un
seul generateur est dit cyclique. La definition abstraite d’un groupe represente un
ensemble de regles auxquelles satisfont les generateurs.
Definition 3.1.3. Un groupe de Lie G est un ensemble muni d’une structure de
variete analytique separee reelle, de dimension finie et d’une structure de groupe telles
que les applications de multiplication et d’inversion :
(x, y) → xy de G×G dans G, ∀x , y ∈ G,
x → x−1 de G dans G
soient analytiques. Un groupe de Lie a r parametres est un groupe de Lie dont la
variete analytique est de dimension r. Deux groupes de Lie sont isomorphes s’il
existe entre eux un diffeomorphisme tel qu’il preserve la structure de groupe.
Un groupe de Lie est dit local lorsque les applications de multiplication et d’inversion
sont definies au voisinage de l’element neutre e.
85
3.1.1 Groupe local de transformations.
Nous definissons la transformation d’un ensemble comme une application bi-
jective de cet ensemble sur lui-meme. Une famille de transformations forment un
groupe si elle contient toute transformation et son inverse ainsi que tout produit de
deux transformations de celle-ci. Cette definition s’etend aux ensembles munis de
structures algebrique (celle de groupe) et geometrique (celle de variete).
Definition 3.1.4. Un groupe local de transformations agissant sur une variete
analytique M est constitue d’un groupe local de Lie G, d’un ouvert U defini tel que
e × M ⊂ U ⊂ G × M , et d’une application differentiable Φ: U → M satisfaisant les
conditions suivantes :
(i) Φ(e, x) = x , ∀x ∈ M,
(ii) Φ (g, Φ(h, x)) = Φ (g · h, Φ(h, x)) ,
pour g, h ∈ G ; x ∈ M ; et (h, x), (g, Φ(h, x)), ( g · h, x) ∈ U.
Definition 3.1.5. Soit M une variete et x ∈ M , le sous-ensemble de M resultant de
l’action du groupe de Lie local de transformations Φ sur x :
Gx =
Φ(g, x)∣∣g ∈ G
s’appelle l’orbite du point x.
Dorenavant nous utiliserons la notation Φ(g, x) ≡ g · x qui sous-entend l’action de
l’application Φ telle qu’etablit dans la definition (3.1.4).

86
3.1.2 Generateur infinitesimal.
Prenons un groupe de Lie local de transformations a un seul parametre reel identifie
par a. Soit la transformation Ta : IRn → IRn (n ∈ IN) telle que
x = f(x, a) , x, x ∈ IRn, (3.1.1)
ou f est la loi de composition etablie dans la definition (3.1.4).
Faisons ensuite l’expansion de Ta en serie de Taylor au voisinage de a = 0 :
xi ' xi + a ξ(xi) , i = 1, . . . , n,
ou ξ (x) =∂
∂a
[f i(x, a)
]a=0
;
on obtient alors une transformation infinitesimale ou ξ =(ξ1(x), . . . , ξn(x)
)represente
le vecteur tangent a l’orbite Gx au point x et s’appelle le generateur infinitesimal
du groupe de Lie local de transformations. De celui-ci nous definissons le champ de
vecteurs
X =n∑
i=1
ξi (x)∂
∂xi (3.1.2)
qui correspond a un operateur differentiel agissant sur des fonctions analytiques
F : IRn → IR.
Theoreme 3.1.1. Soient G un groupe de Lie local a un parametre reel a et Ta une
transformation infinitesimale telle que definie par l’expression (3.1.1) alors xi = f i(x, a)
satisfait le systeme d’equations differentielles ordinaires appelees equations de Lie :
dxi
da= ξ (x) , i = 1, . . . , n ,
ayant comme conditions initiales : xi∣∣∣a=0
= xi .
87
Geometriquement, la solution de ce systeme est la courbe integrale passant par le
point x ∈ IRn et le champ de vecteurs tangent a celle-ci est donne par l’expression
(3.1.2).
Definition 3.1.6. Une algebre de Lie L est un espace vectoriel reel de dimension
finie qui est muni d’une application bilineaire L × L → L, notee (X,Y ) → [X, Y ], et
verifiant les deux identites suivantes :
(i) [X,Y ] = −[Y,X] , ∀X, Y ∈ L, (antisymetrie).
(ii)[[X, Y ], Z
]+
[[Z,X], Y
]+
[[Y,Z], X
]= 0 , ∀X, Y, Z ∈ L, (identite de Jacobi).
En general le produit [X, Y ], appele commutateur ou crochet de X et Y, n’est pas
associatif, cependant pour une algebre dont le produit l’est : [X, Y ] → XY , dans ce cas
on peut la munir d’une structure algebrique de Lie en posant [X, Y ] = XY − Y X.
Ceci s’applique a l’algebre formee par les champ de vecteurs definis par l’expression
(3.1.2). Cette algebre de Lie est identifiee par Lr ou l’indice r specifie sa dimension.
Soient Xα = ξα(x)∂/∂xi , α = 1, . . . , n , les generateurs formant une base dans
Lr. Ainsi tout champ de vecteurs X ∈ Lr s’exprime dans cette base comme une
combinaison lineaire X = Cα Xα ou Cα est une constante, en particulier pour :
Xi, Xj ∈ Lr =⇒ [Xi, Xj ] ∈ Lr .
Consequemment [Xi, Xj ] = Cγαβ Xγ ; α, β = 1, . . . , r ou les coefficients Cγ
αβ sont appeles
les constantes de structure et elles dependent de la base choisie. Celles-ci satisfont
les deux identites (i) et (ii) de la definition (3.1.6) et donnent un systeme d’equations
algebriques qui determine completement l’algebre de Lie Lr.
Les concepts d’algebre et de groupe de Lie sont relies par le theoreme suivant.

88
Theoreme 3.1.2. Soit L une algebre de Lie ; il existe un groupe local de Lie G
dont L en est l’algebre. De plus il existe l’application exponentielle ; exp : L → G
qui est un diffeomorphisme d’un voisinage de l’origine dans L vers un voisinage de
l’element neutre dans G tel que exp[tα] soit un sous-groupe a un parametre α de G.
Donc tout element de G suffisament proche de l’element neutre, reste uniquement sur
un sous-groupe a un parametre.
Connaissant le sous-groupe a un parametre : φ (exp[tα], x) ≡ (φ1(t, x), . . . , φn(t, x)
), nous
pouvons calculer le generateur infinitesimal correspondant :
ξα =d
dt[φi (t, x)]
∣∣∣t=0
duquel nous obtenons le champ de vecteurs
X = ξα(x)∂
∂xi.
On generalise le concept de groupe de Lie a plusieurs parametres reels a l’aide du
theoreme suivant.
Theoreme 3.1.3. Soit E un espace vectoriel a r dimensions qui est engendre par
les champs de vecteurs suivants :
Xα = ξiα(x)
∂
∂xi, α = 1, . . . , r,
et la transformation infinitesimale Ta = Tar ( . . . )Ta1 resultant de la composition des r
transformations infinitesimales qui sont associees chacune a un groupe de Lie local a
un seul parametre. Pour chaque Xα, le groupe de Lie local a r parametres correspon-
dant est obtenu en resolvant les equations de Lie donnees par
dxi
daα= ξi
α (x) ; xi∣∣∣aα=0
= xi, aα = a1, . . . , ar ; i = 1, . . . , n.
Tous ces sous-groupes de Lie locaux a un seul parametre engendrent un groupe de Lie
local a r parametres si et seulement si E est une algebre de Lie.

89
3.1.3 Groupes et equations differentielles.
Soit S le systeme compose de m equations aux derivees partielles (EDP) d’ordre k :
∆l(x,u(k)) = 0, l = 1, 2, ...,m,
ayant p variables independantes et q variables dependantes que l’on note par
x =(x1, x2, ..., xp) ∈ E ⊂ IRp,
u =(u1, u2, ..., uq) ∈ U ⊂ IRq.
ou E et U sont respectivement les espaces des variables independantes et dependantes,
u(k) designe un vecteur contenu dans l’espace des derivees U (k) ≡ U × . . . × Uk ou Uk
est un espace dont la dimension est egale au nombre de derivees de u d’ordre k.
L’objectif est d’obtenir des solutions du systeme S en determinant un groupe local de
transformations : appele le groupe de symetrie qui agit dans l’espace E×U de maniere
a transformer l’une des solutions de S en une autre.
Definition 3.1.7. Pour un systeme S d’EDP donne, on definit comme groupe de
symetrie : le groupe de Lie local de transformations G agissant sur l’espace M ⊂ E×U
tel que si u = f(x) est une solution de S alors
f = g · f est aussi une solution de S (g ∈ G).
Nous considerons des transformations infinitesimales et ponctuelles qui ne dependent
pas des derivees de u, celles-ci s’expriment en terme d’un parametre ε ¿ 1 :
xi =xi + ε ξi(x,u) , i = 1, . . . , p ,
uα =uα + ε φα(x,u) , α = 1, . . . , q ,
ou ξi(x,u) et φα(x,u) sont des fonctions a etre determinees. Ces transformations
infinitesimales permettent de lineariser le systeme S d’equations differentielles puisque
tous les termes en serie de puissance suivant εn ; n ≥ 2, seront negliges dans le calcul
de toutes les derivees.

90
L’expression des champs de vecteurs correspondants s’ecrit
X =p∑
i=1
ξi(x,u)∂
∂xi+
q∑α=1
φα(x,u)∂
∂uα. (3.1.3)
Une fois que ξi(x,u) et φα(x,u) sont connus (nous verrons comment les obtenir plus
loin), nous determinons ensuite chaque sous-groupe a un seul parametre en resolvant
le systeme des equations de Lie :
dxi
dλ= ξi (x, u) ; xi |λ=0 = xi, i = 1, . . . , p ,
duα
dλ=φα (x, u) ; uα |λ=0 = uα, α = 1, . . . , q .
(3.1.4)
Par le theoreme (3.1.3), le groupe de symetrie G est alors engendre par tous les sous-
groupes a un parametre
g = g(λ1)g(λ2) . . . g(λr)
ou r est la dimension de l’algebre de Lie L associee a G.
Precisons que l’action du groupe de symetrie G se fait sur le graphe Γf de la fonction
u = f(x) :
Γf = (
x, f(x))∣∣∣x ∈ Ω
⊂ E × U ,
ou Ω est le domaine de definition de f. En prenant une partie suffisament petite de Ω
et g ∈ G proche de l’element neutre, l’action de g sur Γf s’exprime comme le graphe
g ·Γf ≡ Γf
d’une certaine fonction u = f (x) que nous definissons comme la transformee
de f par g.
Maintenant il reste a determiner les fonctions ξi(x,u) et φα(x,u). Mais nous devons
au prealable introduire le concept de prolongation d’une fonction et celle d’un champ
de vecteurs.

91
3.1.4 Prolongation.
Soit la fonction f : E → U que l’on exprime sous la forme uα = fα(x), α = 1, . . . , q. En
la derivant jusqu’a l’ordre k par rapport a toutes les variables independantes, nous
obtenons pk ≡(p+k−1
k
)derivees partielles de f . Pour abreger les expressions de celles-ci,
il est convenu d’utiliser la notation a indice multiple pour les derivees partielles de f :
uαJ ≡
∂|J|uα
∂xj1∂xj2 ...∂xjpou J = (j1, j2, . . . , jp) ∈ INp et |J | = j1 + j2 + ... + jp
qui nous donne les q · pk derivees partielles d’ordre k = j1 + j2 + ... + jk .
Definition 3.1.8. Soit la fonction analytique f : E → U , on definit la fonction
pr(k)[f ]: E → U (k) comme la kieme prolongation de f et son graphe est donne par les
equations : uαJ = ∂J fα (x); ou α = 1, . . . , q et J = (j1, j2, . . . , jp) ∈ INp.
La prolongation pr(k)[f ] s’interprete comme l’expansion de f en polynomes de Taylor
d’ordre k qui est evaluee a un certain point xo :
fα (xo) =∑
J
uαJ
J !(xo − x)J , x, xo ∈ E.
Definition 3.1.9. Soit J (k) = E × U (k) l’espace qu’on appelle fibre de jet ou k-jet.
Nous pouvons maintenant reformuler le systeme d’EDP S comme une application
∆: J (k) → IRm agissant dans la sous-variete (qui represente le systeme d’EDP) :
S∆ =
(x,u(k)) ∈ J (k)∣∣ ∆(x,u(k)) = 0
⊂ J (k)
qui est reguliere de codimension m si la matrice de Jacobie
∂ (∆1, . . . , ∆m)∂(x, u(k))
est toujours de rang m dans un domaine ouvert de J (k).
En associant S a une sous-variete de J (k), nous avons transforme un systeme d’EDP
en un systeme d’equations algebriques. Ainsi nous pouvons redefinir une solution du
systeme S∆ comme suit.

92
Definition 3.1.10. Soient Ω une sous-variete de E et l’application differentiable
f : Ω → U , f est une solution du systeme S∆ si
∆(x, pr(k)[f(x)] ) = 0 , ∀x ∈ Ω ,
et le graphe correspondant est donne par : Γ(k)f = (x, pr(k)[f(x)] ) ⊂ S∆.
Nous etendons le concept de prolongation a un groupe local de transformations qui
agit maintenant dans l’espace J (k). Prenons g ∈ G et proche de l’element neutre e, la
fonction g · f definie au voisinage de (x, u) = g (x,u) a pour kieme prolongation :
pr(k)[g · (x,u(k) )] = (x, u(k))
ou uk a pour composantes uαJ = ∂J [ (g · f)α (x)]. Notons que l’action de G sur la
prolongation de f est independante de la fonction elle-meme. Consequemment la
nieme prolongation : pr(n)[G] est identique a pr(m)[G] pour toutes les derivees dont
l’ordre est m ≤ n.
Finalement pour des groupes de Lie locaux, nous arrivons au theoreme du critere
infinitesimal qui conlue notre synthese.
Theoreme 3.1.4. Soit S∆ le systeme compose de m equations aux derivees partielles
d’ordre k :
∆l(x,u(k)) = 0 , l = 1, 2, . . . ,m,
qui sont definies dans M ⊂ E × U et dont la matrice de Jacobie
∂ (∆1, . . . , ∆m)∂(x, u(k))
est toujours de rang m pour (x,u(k)) ∈ S∆ .
Si G est un groupe de Lie local de transformations agissant sur M , et
pr(k)[ξ∣∣∣(x,u(k))=0
∆l]
= 0, i = l, . . . , m, chaque fois que ∆l(x,u(k)) = 0 ,
pour tout generateur infinitesimal ξ ∈ G, alors G est le groupe de symetrie de S·.

93
Suite a la definition (3.1.10) au theoreme (3.1.4), nous pouvons calculer ξi (x,u) et
φα (x,u) a l’aide d’un algorithme [21] qui se compose des etapes suivantes.
(1) Construire la kieme prolongation du champ de vecteurs X a l’aide de
pr(k) [X] = X +q∑
α=1
∑
J
ψJα(x,u(k))
∂
∂uαJ
, 1 ≤ |J | ≤ k,
ou les coefficients ψJα sont determines de maniere recurrente comme suit. D’abord les
coefficients de la premiere prolongation sont donnes par
ψJiα = Diφα(x,u)−
p∑
j=1
uαJj
Diξj(x,u) ,
ou Ji est un p-uplet compose de 1 a la iieme position et de zeros partout ailleurs, et
on introduit la derivee totale :
Di =∂
∂xi+
q∑α=1
∑
J
uαJ+Ji
∂
∂uαJ
, 0 ≤ |J | ≤ k.
Les prolongations d’ordres superieurs sont calculees avec la relation de recurrence :
ψJ+Ji
l = DiψJl −
p∑
j=1
ulJ+Jj
Diξj(x,u), |J | ≥ 1.
Notons que les prolongations des champs de vecteurs sont lineaires et satisfont les
crochets de Lie :
pr(k)[αX + βY ] =α pr(k)[X] + β pr(k)[Y ] , ou α et β sont des constantes,
pr(k)[X, Y ] =[pr(k)[X] , pr(k)[Y ]
].
Si l’ensemble X forme une algebre de Lie L alors les prolongations de ces champs
de vecteurs engendrent aussi une algebre de Lie qui est isomorphe a L.
Selon cet algorithme, les variables xi,uα et uαJ sont traitees comme des variables
independantes tandis que les variables dependantes sont ξi (x,u) et φα (x,u).
(2) Le systeme S· est equivalent a un systeme algebrique ou les m composantes du
vecteur u(k) sont renomees v1, . . . , vm. Celles-ci sont choisies, si c’est possible, telles
que chaque vi soit au moins la derivee partielle de uα (α = 1, . . . , q) par rapport a une
94
seule des variables xi (i = 1, . . . , p). Le systeme S peut alors se resoudre algebriquement
ou vi s’exprime en termes des composantes restantes de u(k) que l’on note par w. Ainsi,
on obtient des relations vi = Si(x, w).
(3) On applique pr(k)[X] a chaque equation ∆i(x,u(k)) en imposant que
pr(k)[ X ∆i ]∣∣∣∆j=0
= 0 , i, j = 1, . . . ,m.
Cette condition nous garantie que le champ de vecteurs X est un element de l’algebre
de symetrie L, autrement dit : u(x) est une solution de S∆ chaque fois que u(x) est
une solution de S∆. Ensuite on utilise les relations vi = Si(x, w) calculees a l’etape
(2) pour eliminer vi et toutes ses derivees de sorte que les variables restantes soient
independantes les unes des autres. Le resultat final doit s’exprimer sous la forme d’un
polynome en uαJ .
(4) Chaque coefficient des monomes en uαJ doit etre pose comme nul, on obtient
alors pour les coefficients ξi (x,u) et φα (x,u) un systeme habituellement surdetermine
d’equations differentielles lineaires appelees les equations determinantes.
(5) La resolution du systeme forme des equations determinantes mene aux trois types
de solutions distinctes pour les symetries du systeme differentiel considere :
(i) Le systeme determinant admet seulement la solution triviale : ξi (x,u) ≡ 0
et φα (x,u) ≡ 0. On a alors X ≡ 0 et g ≡ α : i.e. la transformation identite.
(ii) La solution generale des equations determinantes depend de r constantes
d’integration (r < ∞). La dimension de l’algebre L et du groupe G de symetrie est
dimL = dimG = r.
(iii) La solution generale depend de fonctions arbitraires. L’algebre et le
groupe de symetrie sont alors de dimension infinie.

95
3.2 La methode de reduction par symetrie des equations differentielles.
Dans cette section, nous introduisons la methode de reduction par symetrie
(MRS) pour resoudre des equations differentielles a l’aide d’une definition et de deux
theoremes qui en sont le fondement. Ensuite, nous la resumons par un algorithme.
Definition 3.2.1. Soit G un groupe de symetrie d’un systeme d’EDP S. Une
solution u = f(x) de S est dite G-invariante si g · Γf = Γf , ∀ γ ∈ G. Le graphe Γf est
alors un ensemble G-invariant.
Theoreme 3.2.1. Considerons un groupe de symetrie G d’un systeme S dont
l’action est reguliere et qui donne des orbites de dimension r dans l’espace des vari-
ables independantes. Il existe trois possibilites pour les solutions de S:
(i). Toutes les solutions G-invariantes du systeme S sont obtenues en resolvant le
systeme reduit d’equations differentielles, note ∆/G = 0, en termes de p − r variables
independantes (r < p).
(ii). Si r = p, les solutions G-invariantes sont obtenues en resolvant un systeme
d’equations algebriques.
(iii). Si r > p, il n’y a pas de solution G-invariante.
Theoreme 3.2.2. Supposons que G soit un groupe de Lie local de transformations
ayant comme champs de vecteurs :
Xk =p∑
i=1
ξk(x,u)∂
∂xi+
q∑α=1
φkα(x,u)
∂
∂uα, k = 1, . . . , r ,
et Q1, . . . , Qr sont les caracteristiques des champs de vecteurs X1, . . . , Xr.
Alors u est une solution G-invariante si et seulement si elle est une solution du
systeme d’EDP du premier ordre :
Qαk (x, u(1)) ≡ φk
α(x,u)−p∑
i=1
ξk(x,u)∂uα
∂xi= 0 , k = 1, . . . , r ; α = 1, . . . , q .
96
Le principe de base est de considerer un certain sous-groupe Go ⊂ G telle que
la solution du systeme d’equations differentielles soit invariante sous l’action de Go
(au lieu de la transformer en une autre solution). Cependant ce principe d’invariance
impose des contraintes sur la solution qui debouchent sur des equations aux derivees
partielles lineaires du premier ordre. En resolvant ces contraintes, nous obtenons des
solutions qui apres les avoir substituees dans le systeme de depart, le simplifient.
La methode de reduction par symetrie MRS consiste principalement a reduire le
nombre de variables independantes de maniere a obtenir un systeme d’equations
differentielles ordinaires (EDO), voire meme un systeme d’equations algebriques.
Differents sous-groupes Go menent a des solutions differentes, mais deux sous-groupes
conjugues a un meme groupe G menent a des reductions equivalentes. Il est donc
important d’en faire une classification.
Generalement, il n’est pas necessaire de prendre tous les sous-groupes de G, on tient
seulement compte de ceux qui agissent de facon appropriee dans l’espace M ∼ E ×
U . En fait, n’importe lequel des sous groupes Go ⊂ G va agir sur l’espace M et
consequemment associer certaines orbites dans cet espace. Ceci implique qu’il existe
des invariants Ii (x,u) fonctionnellement independants dont leur nombre N = p + q − r
est egal a la codimension des orbites generiques (de dimension r) resultant de l’action
de Go sur l’espace M . Ces invariants forment une base I1 (x,u), . . . , IN (x,u). Puisque
les coefficients ξk(x,u) des champs vectoriels Xk sont independants des derivees de uα;
l’action du groupe de symetrie est dite projective, la base des invariants comporte
deux parties :
I1 (x), . . . , Ip−r (x)∣∣∣ Ip−r+1 (x,u), . . . , Ip−r (x,u)
.
Le sous-groupe Go ⊂ G nous donne des solutions explicites du groupe invariant si les
invariants satisfont aux deux conditions suivantes :
(i) Les N invariants existent et dependent seulement des variables independantes xj,
on les appelle les variables de symetrie denotees par η1, . . . , ηp−r
97
(ii) Il existe q autres invariants tel que le Jacobien correspondant ne soit pas nul :
det
[∂Ii
∂uα
]6= 0 , i = p− r + 1, . . . , p + q ; α = 1, . . . , q . (3.2.1)
Si ces deux conditions sont satisfaites, les q invariants s’expriment sous la forme
ηp−r+j (x,u) = Fj ( η1 (x), . . . , ηp−r (x)) , j = 1, . . . , q , (3.2.2)
ou Fj sont des fonctions arbitraires dependantes des variables de symetrie η1, . . . , ηp−r.
En vertu de (3.2.1) et du theoreme des fonctions implicites, il est possible de resoudre
le systeme (3.2.2) en termes des variables dependantes ;
ul = U l (F1 (η) , . . . , Fq (η), x1, . . . , xp) , l = 1, . . . , q , (3.2.3)
ou η ≡ (η1, . . . , ηp−r) et U l sont des fonctions arbitraires.
En substituant ul dans le systeme de depart, nous obtenons un systeme d’equations
pour Fµ; µ = 1, . . . , q, ne comprenant que les variables de symetries. Les vari-
ables independantes x qui ne peuvent etre exprimees en terme des variables de
symetries seront eliminees des equations reduites. L’explication reside dans le fait que
ηj , Fµ forme un ensemble complet d’invariants pour la transformation du groupe G
et consequemment
ηj , Fµ,∂Fµ
∂ηj,
∂2Fµ
∂ηj∂ηi, . . .
forme un ensemble complet d’invariants pour pr(k)G .
Les equations reduites sont alors de la forme
∆j
(ηj , Fµ,
∂Fµ
∂ηj,
∂2Fµ
∂ηj∂ηi, . . .
)= 0 .
Voici les etapes a suivre pour effectuer la MRS pour le systeme S∆.
(1) Determiner le groupe de symetrie du systeme d’EDP S a l’aide de l’algorithme
decrit dans la derniere section. Cette tache peut etre en grande partie accomplie par
des programmes informatiques ; [5], [21].
98
(2) Classifier tous les sous-groupes Go ⊂ G par classes de conjugaison. Ensuite les
ordonner suivant leur dimension egale ou inferieure a r. Choisir un representant Go
de chacune des classes de conjugaison.
(3) Pour chaque representant des sous-groupes Go, determiner les invariants de chaque
sous-groupe Go agissant dans l’espace M ∼ E × U . Ceux-ci sont calculer en resolvant
le systeme d’EDP du premier ordre
Xk
[H(x,u)
]= 0 , k = 1, . . . , r ,
ou Xk est un champ de vecteurs de l’algebre de Lie associee a Go qui agit sur une
certaine fonction arbitraire H(x,u).
(4) Substituer ul dans le systeme de depart S, on obtient alors le systeme reduit
d’equations differentielles, note par ∆µ/G = 0, pour F1, . . . , Fq.
(5) Resoudre le systeme reduit dont les solutions substituer dans l’expression (3.2.3)
donne les solutions G-invariantes du systeme de depart S. Appliquer une transforma-
tion generale de groupe de symetrie au resultat. Cela donnera une famille de solutions
particulieres.
3.2.1 Conditions frontieres.
Nous terminons cette section en faisant certaines remarques sur les conditions
frontieres qui peuvent etre imposees aux solutions obtenues par la MRS, notamment
concernant les solutions stationnaires [40].
Une solution stationnaire (pour t = to) d’un systeme d’EDP S est specifiee en imposant
de maniere appropriee les conditions frontieres pour le cas etudier sur une frontiere
donnee F dans l’espace euclidien a trois dimensions. La surface F et les conditions
frontieres imposees sur celle-ci ne sont pas necessairement invariantes sous l’action
du groupe de symetrie G. Les conditions frontieres vont alors briser la symetrie et les
solutions obtenues sont invariantes sous l’action de certains sous-groupes de G. En
regle generale, les conditions frontieres generiques brisent entierement la symetrie du
99
probleme et les solutions correspondantes sont invariantes sous l’action de l’element
identite d’un certain sous-groupe de G.
La methode de reduction par symetrie nous fournit des solutions particulieres qui sont
invariantes sous l’action de certains sous-groupes (non triviaux) Go ⊂ G. Cependant,
cela entraıne de severes restrictions sur les conditions frontieres. Consequemment,
la surface F doit etre une orbite du sous-groupe Go dans l’espace euclidien et les
conditions frontieres sur F doivent etre compatibles avec le groupe de symetrie Go.
En particulier, si la reduction conduit a une EDO du premier ordre, la condition
ayant la forme u = φ(ξ)Y(x) implique que la surface F soit determinee par l’equation
ξ (x, y, z) = ξo pour t = to. (3.2.4)
Dans le cas d’une EDO du second ordre, la solution correspondante est determinee
en imposant deux conditions initiales que l’on peut specifier par
P (ξo) = Po ,dP
dξ(ξo) = Qo . (3.2.5)
Selon l’expression u = φ(ξ)Y(x), les conditions frontieres pour u (to, x, y, z), qui sont
compatibles avec le groupe de symetrie Go, s’expriment sous la forme
u∣∣ξ=ξo
= φ (x, y, z)∣∣ξ=ξo
Po . (3.2.6)
Les conditions frontieres permises sont soit des plans, des cylindres, des spheres, des
hyperboloıdes, des cones, des demi-plans et des surfaces helicoıdales.
En resume : pour une solution G-invariante u (x), le groupes d’invariance Go determine
la variable ξ (x) et le multiplicateur φ (x). Les conditions frontieres ne peuvent etre
imposees que sur les surfaces de niveaux de l’invariant ξ comme (3.2.4). La fonction
P (ξ) satisfait l’ODE obtenue par reduction et la solution specifique va dependre de
deux constantes Po et Qo figurant dans les conditions frontieres (3.2.6). Le choix de ces
constantes va nous indiquer si les fonctions sont finies ou possedent des singularites,
reelles ou complexes, periodiques ou non periodiques, etc.

100
3.3 La M.R.S appliquee aux equations de la MHD.
L’objectif de cette section est de trouver des solutions G-invariantes du systeme
MHD (1.1.17) a l’aide de la MRS qui se resume a l’algorithme donne dans la sec-
tion precedente. En premier lieu, faisons un bref bilan du travail jusqu’a main-
tenant accompli. Les deux premieres etapes de la MRS ont deja ete completees par
A.M. Grundland et al. [16], [17]: ceux-ci ont d’abord determine l’algebre de symetrie
du systeme MHD qui est engendree par les 13 generateurs tels que donnes dans
l’introduction, puis ils ont classifie les sous-algebres du type similitude galileenne
par classes de conjugaison dont les dimensions varient entre 1 et 4 inclusivement.
Notre tache est de completer les etapes 3,4 et 5 de la MRS. En particulier, les etapes
intermediaires 3 et 4 qui consistent successivement a calculer les N = p+q−r invariants
de chaque representant des sous-algebres de dimension r = 3 qui proviennent des clas-
sifications ci-haut mentionnnees et d’en extraire les orbites de groupe correspondantes
qui s’expriment en fonction d’une seule variable de symetrie. Dans le tableau (3.1),
nous avons dresse la liste des sous-algebres suivant les differents types de variables de
symetrie obtenues.
Ensuite, pour chacune de ces 104 sous-algebres de dimension trois, on substitue dans
le systeme MHD les orbites de groupe pour finalement obtenir un systeme reduit (on
en a calcule 92) compose d’EDO. En dernier lieu, il nous reste a resoudre chaque
systeme reduit surdetermine qui se compose dans notre cas de neuf EDO pour huit
inconnues et qui mene finalement aux solutions G-invariantes. Nous avons regroupe
ensemble certains systemes reduits qui ont en commun la meme equation reliee a la
contrainte differentielle ∇· ~H = 0. Il s’avere que la resolution de ces systemes reduits
ainsi regroupes est tres similaire. Nous en donnons la liste dans les tableaux (3.2)-(3.5).
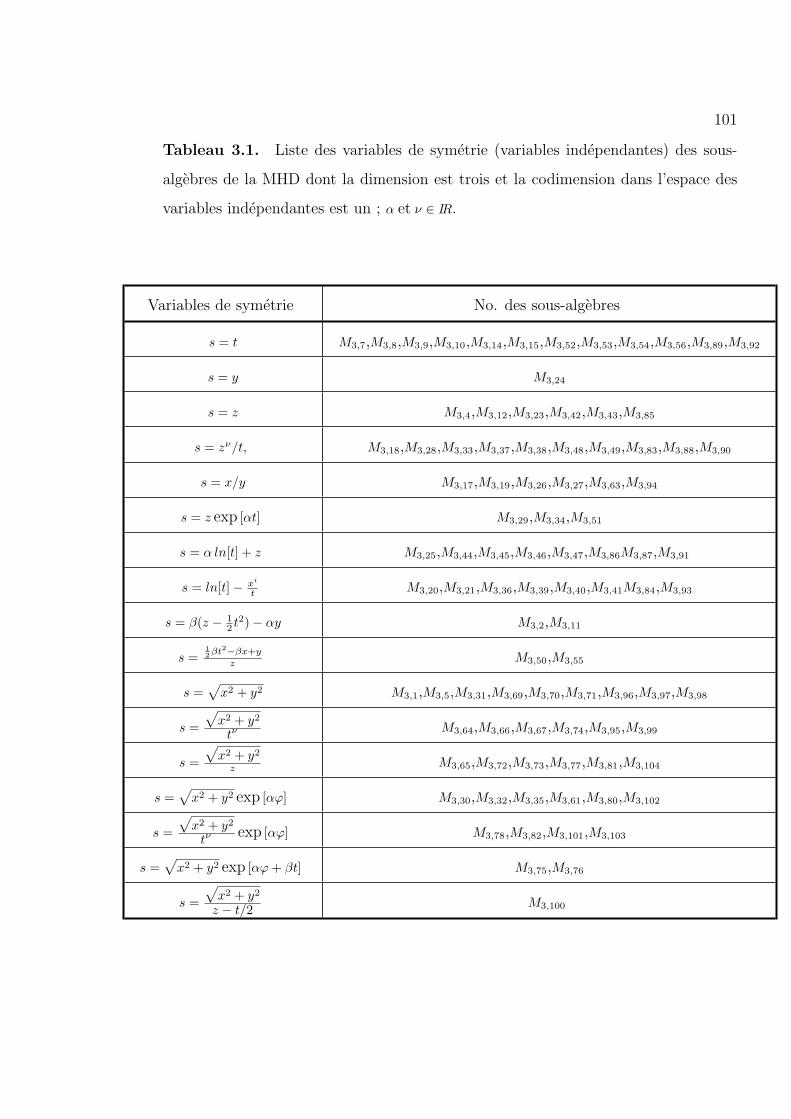
101
Tableau 3.1. Liste des variables de symetrie (variables independantes) des sous-
algebres de la MHD dont la dimension est trois et la codimension dans l’espace des
variables independantes est un ; α et ν ∈ IR.
Variables de symetrie No. des sous-algebres
s = t M3,7,M3,8,M3,9,M3,10,M3,14,M3,15,M3,52,M3,53,M3,54,M3,56,M3,89,M3,92
s = y M3,24
s = z M3,4,M3,12,M3,23,M3,42,M3,43,M3,85
s = zν/t, M3,18,M3,28,M3,33,M3,37,M3,38,M3,48,M3,49,M3,83,M3,88,M3,90
s = x/y M3,17,M3,19,M3,26,M3,27,M3,63,M3,94
s = z exp [αt] M3,29,M3,34,M3,51
s = α ln[t] + z M3,25,M3,44,M3,45,M3,46,M3,47,M3,86M3,87,M3,91
s = ln[t]− xi
t M3,20,M3,21,M3,36,M3,39,M3,40,M3,41M3,84,M3,93
s = β(z − 12 t2)− αy M3,2,M3,11
s =12 βt2−βx+y
z M3,50,M3,55
s =√
x2 + y2 M3,1,M3,5,M3,31,M3,69,M3,70,M3,71,M3,96,M3,97,M3,98
s =√
x2 + y2
tνM3,64,M3,66,M3,67,M3,74,M3,95,M3,99
s =√
x2 + y2
z M3,65,M3,72,M3,73,M3,77,M3,81,M3,104
s =√
x2 + y2 exp [αϕ] M3,30,M3,32,M3,35,M3,61,M3,80,M3,102
s =√
x2 + y2
tνexp [αϕ] M3,78,M3,82,M3,101,M3,103
s =√
x2 + y2 exp [αϕ + βt] M3,75,M3,76
s =√
x2 + y2
z − t/2 M3,100
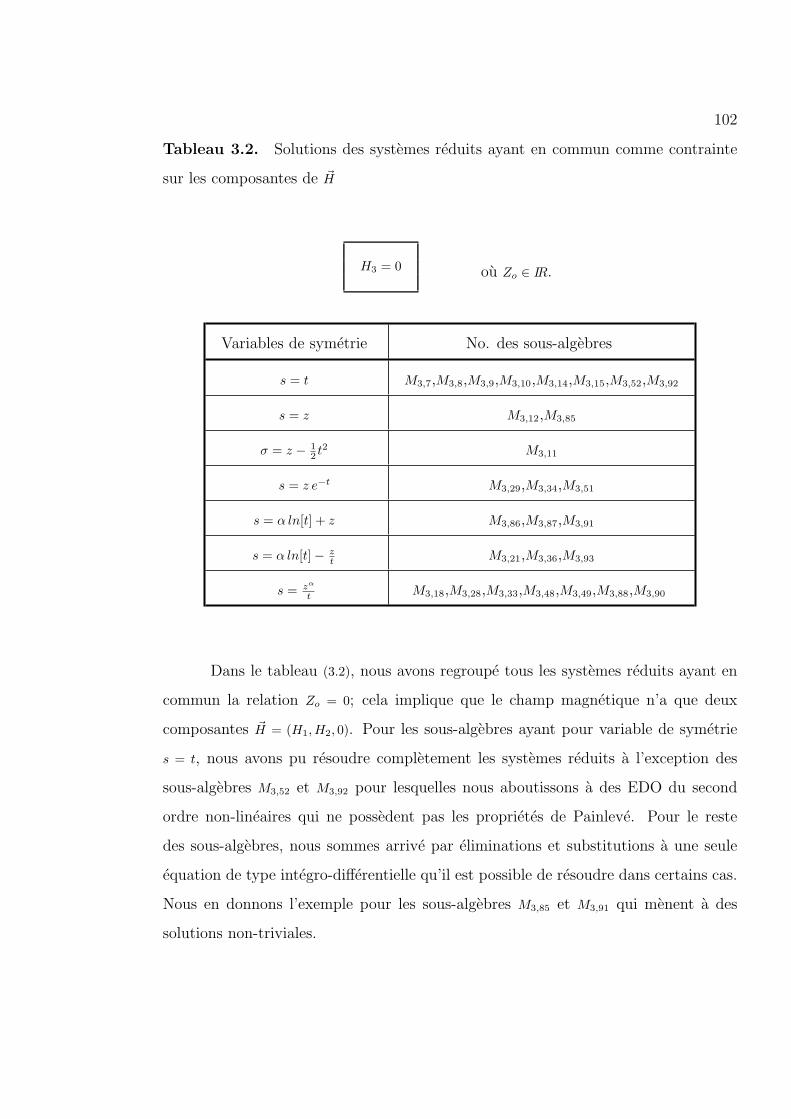
102
Tableau 3.2. Solutions des systemes reduits ayant en commun comme contrainte
sur les composantes de ~H
H3 = 0 ou Zo ∈ IR.
Variables de symetrie No. des sous-algebres
s = t M3,7,M3,8,M3,9,M3,10,M3,14,M3,15,M3,52,M3,92
s = z M3,12,M3,85
σ = z − 12 t2 M3,11
s = z e−t M3,29,M3,34,M3,51
s = α ln[t] + z M3,86,M3,87,M3,91
s = α ln[t]− zt M3,21,M3,36,M3,93
s = zα
t M3,18,M3,28,M3,33,M3,48,M3,49,M3,88,M3,90
Dans le tableau (3.2), nous avons regroupe tous les systemes reduits ayant en
commun la relation Zo = 0; cela implique que le champ magnetique n’a que deux
composantes ~H = (H1,H2, 0). Pour les sous-algebres ayant pour variable de symetrie
s = t, nous avons pu resoudre completement les systemes reduits a l’exception des
sous-algebres M3,52 et M3,92 pour lesquelles nous aboutissons a des EDO du second
ordre non-lineaires qui ne possedent pas les proprietes de Painleve. Pour le reste
des sous-algebres, nous sommes arrive par eliminations et substitutions a une seule
equation de type integro-differentielle qu’il est possible de resoudre dans certains cas.
Nous en donnons l’exemple pour les sous-algebres M3,85 et M3,91 qui menent a des
solutions non-triviales.

103
M3,7; J3 + α1K3 + α2P3 + α3H, K1 + P2,K2 − P1
variable de symetrie: s = t
Soient les fonctions suivantes
I =∫
dt(t2 + 1)(1−κ)
(α1t + α2)κ,
A =Ao[(t2 + 1)(α1t + α2)](1−κ) ,
R =Ro
(t2 + 1)(α1t + α2)exp
[ −1(α1t + α2)
[α2+
ηo
α1+
α23X
2o
2α21π
]−α2
3X2o
2α21π
ln[α1t + α2](α1t + α2)
+4α23Ao
∫I(t) dt
(α1t + α2)2
],
V =Vo − 12α3
ln[(α1t + α2)(t2 + 1)R] , θ = V − z
(α1t + α2),
W =1
2α3(α1t + α2)
[ηo − α2
1t + 4α23
∫dtA(t) +
α23
α21
X2o
2πln[α1t + α2]
]+
α1
2α3,
X =Xo
√R
(α1t + α2),
Y =Yo + arctan(t) + V .
Les solutions du systeme MHD associees a cette sous-algebre sont :
ρ = exp[
2α3z
(α1t + α2)
]R ,
p = exp[
2α3z
(α1t + α2)
]AR ,
u =t(x− Uo sin θ) + (y − Uo cos θ)
t2 + 1,
v =t(y − Uo cos θ)− (x− Uo sin θ)
t2 + 1,
w =α1z
(α1t + α2)−W ,
H1 = exp[
α3z
(α1t + α2)
]X sin
(Y − z
(α1t + α2)
),
H2 = exp[
α3z
(α1t + α2)
]X cos
(Y − z
(α1t + α2)
),
H3 =0 ,
ou Ao, Ro, Uo, et Xo > 0; Vo, ηo ∈ IR; α1 > 0; α2, α3 ∈ IR.

104
M3,8; J3 + α1P3 + α2H, K1 + P2,K2 − P1
variable de symetrie: s = t
Soient les fonctions suivantes
A =Ao(t2 + 1)(1−κ) ,
R =Ro
(t2 + 1)exp
[−2α2
α1Wot +
α22
α21
X2o
4πt2 + 4
α22
α21
∫dt
∫dξA(ξ)
],
V =Vo +Wo
α1t− α2
α21
[2
∫dt
∫dξA(ξ) +
X2o
8πt
],
θ =Vo +Wo
α1t− α2
α21
[2
∫dt
∫dξA(ξ) +
X2o
8πt
]− z
α1,
W =Wo − 2α2
α1
∫dtA(t)− α2
α1
X2o
8πt ,
Y =Yo + Vo + arctan(t) +Wo
α1t− α2
α21
[2
∫dt
∫dξA(ξ) +
X2o
8πt
].
Les solutions du systeme MHD associees a cette sous-algebre sont :
ρ = exp[2α2z
α1
]R ,
p =Aρ ,
u =t(x− Uo sin θ) + (y − Uo cos θ)
t2 + 1,
v =t(y − Uo cos θ)− (x− Uo sin θ)
t2 + 1,
w =W ,
H1 = exp[α2z
α1
]√R sin
(Y − z
α1
),
H2 = exp[α2z
α1
]√R cos
(Y − z
α1
),
H3 =0 ,
ou Ao, Ro, Uo, et Xo > 0; Vo, Yo ∈ IR; α1 > 0, α2 ∈ IR.

105
M3,9; J3 + K3 + α1P1 + α2H,K1,K2
variable de symetrie: s = t
Soient les fonctions suivantes
A = Ao[t2(t + α1)](1−κ) , I(t) =∫
dtA(t) ,
R =Ro
t2(t + α1)exp
[ −1(t + α1)
[5α1 + ηo +
X2o
2π
]− X2
o
2π
ln[t + α1](t + α1)
+ 4α22
∫dt
I(t)(t + α1)2
],
V =− 12α2
ln
[Vo
t2(t + α1)R
],
W =1
2α2(t + α1)
[5α1 + ηo + 4α2
2
∫dtA(t) + α2
2
X2o
2πln[t + α1]
],
X =Xo
√R
(t + α1),
Y =− 12α2
ln
[Yo
t2(t + α1)R
].
Les solutions du systeme MHD associees a cette sous-algebre sont :
ρ = exp[
2α2z
(t + α1)
],
p =Aρ ,
u =1t
[x− Uo sin
(V − z
α1 + t
)],
v =1t
[y − Uo cos
(V − z
α1 + t
)],
w =W +z
α1 + t,
H1 = exp[
α2z
(t + α1)
]X sin
(Y − z
α1 + t
),
H2 = exp[
α2z
(t + α1)
]X cos
(Y − z
α1 + t
),
H3 =0 ,
ou Ao, Ro, Uo, et Xo > 0; Vo, ηo, Xo et Yo ∈ IR; α1, α2 ∈ IR.

106
M3,10; J3 + P3 + αH, K1,K2
variable de symetrie: s = t
Soient les fonctions suivantes
R =
Ro
t2exp
[α2
[2Ao
(3− 2κ)(2− κ)t2(1−κ) +
X2o
4π
]t2 + Cot
]pour κ 6= 3/2, 2 ,
Ro
t2exp
[α2
[4Ao
∫dt ln[t] +
X2o
4πt2
]+ Cot
]pour κ = 3/2 ,
Rot−(1+4α2Ao) exp
[α2 X2
o
4πt2 + Cot
]pour κ = 2 ,
W =
−α
[2Ao
(3− 2κ)t2(1−κ) +
X2o
4π
]t− Co
2αpour κ 6= 2 ,
−α
[2Ao ln[t] +
X2o
4πt
]− Co
2αpour κ = 2 .
Les solutions du systeme MHD associees a cette sous-algebre sont :
ρ =e2αz R ,
p =Aot2(1−κ)ρ ,
u =x
t− Uo
tsin
(Vo − 1
αln
[t√
R
]− z
),
v =y
t− Uo
tcos
(Vo − 1
αln
[t√
R
]− z
),
w =W ,
H1 =Xoeαz√
R sin
(Yo − 1
αln
[t√
R
]− z
),
H2 =Xoeαz√
R cos
(Yo − 1
αln
[t√
R
]− z
),
H3 =0 ,
ou Ao, Ro, Uo, et Xo > 0; Vo, Co, Yo ∈ IR; α ∈ IR∗.

107
M3,14; J3 + P3 + αH, P1, P2
variable de symetrie: s = t
Soient les fonctions suivantes
R =Ro exp[α2
[2Ao +
X2o
4π
]t2 +
Co
2αt
], V = Vo − α
[2Ao +
X2o
4π
]t2 +
Co
2αt , Y = Yo + V .
Les solutions du systeme MHD associees a cette sous-algebre sont :
ρ = e2αz R , u = Uo sin(V − z) , H1 = Xoeαz√
R sin (Y − z) ,
p = Aoρ , v = Uo cos(V − z) , H2 = Xoeαz√
R cos (Y − z) ,
w = − 12α
[Co + α2
[4Ao +
X2o
2π
]t
], H3 = 0,
ou Ao, Ro, Uo, et Xo > 0; Vo, Co, Yo ∈ IR∗; α ∈ IR∗.
M3,15; J3 + K3 + αH, P1, P2
variable de symetrie: s = t
Soient les fonctions suivantes
A = Aot2(1−κ) ,
R =
Ro
t exp[
4α2Ao
(2− κ)(1− κ)t−κ − α2 X2
o
2π
ln[t]t
− 2α
t[Wo +
αX2o
4π]]
pour κ 6= 1, 2 ,
Ro
texp
[−2α
t[Wo + α(2Ao +
X2o
4π)]− α2[4Ao +
X2o
2π]ln[t]
t
]pour κ = 2 ,
Ro
t(1−4α2Ao)exp
[−2α
t[Wo + α
X2o
4π]− α2 X2
o
2π
ln[t]t
]pour κ = 1 ,
V = Vo − 12α
ln
[tR
], Y = Yo + V .
W =
Wo + 2Ao
(2−κ) t(2−κ) +
X2o
4πln[t] pour κ 6= 2 ,
Wo + α
[2Ao +
X2o
2π
]ln[t] pour κ = 2 .
Les solutions du systeme MHD associees a cette sous-algebre sont :
ρ = e2α zt R , u = Uo sin
(V − z
t
), H1 = Xoe
α zt
√Rt sin
(Y − z
t
),
p = Aρ , v = Uo cos(V − z
t
), H2 = Xoe
α zt
√Rt sin
(Y − z
t
),
w =z −W
t, H3 = 0,
Ao, Ro, Uo, Xo > 0; Vo, Wo, Yo ∈ IR; α ∈ IR.

108
M3,52; F + G + αH, K1 + P2, P1
variable de symetrie: s = t
Il existe trois types de solutions MHD qui sont lies aux valeurs de α ∈ IR.
(I) Si α 6= 12. Soit ν = 1/(2α− 1),
ρ = z2(α−1) R , u = y − z Vo (Uo + t) Rν , H1 = zα Yo(Xo + t) Rν(1+α) ,
p = z2αAo R−(κ+2α)ν , v = Voz Rν , H2 = zα Yo Rν(1+α) ,
w =z
2α− 1R′
R, H3 = 0 .
La fonction R est determinee par l’EDO
R R′′ + 2α (R′)2 + 2α(1− 2α)Ao Rν(κ+4α) + α(2α− 1)Y 2
o
4π[(t + Xo)2 + 1] Rν(4α+3) = 0 ,
avec la contrainte que R(s) > 0, Ao, Uo, Xo > 0; Vo, Yo ∈ IR.
(II) Si α = 12 , . Soit µ = 1/(κ + 1)
ρ =Ro
z, u = y − z Vo (Uo + t) Aµ , H1 = z
12 Yo(Xo + t)A
32 µ ,
p = z A , v = Voz Aµ , H2 = z12 Yo A
32 µ ,
w =z
κ + 1A′
A. H3 = 0
La fonction A est determinee par l’EDO
AA′′ − κ (A′)2 +(κ + 1)
RoA3 − (κ + 1)Y 2
o
8π Ro[(t + Xo)2 + 1]Aµ(5+2κ) = 0 ,
avec la contrainte que A(s) > 0, Ao, Uo, Xo > 0; Vo, Yo ∈ IR.
(III) Si α = 0,
ρ = Ro(Wo + t)
z2, u = y − z
(Uo + Vot)Wo + t
, H1 =Xo + (Yo − ZoUo)t
Wo + t,
p =Ao
(Wo + t)κ, v =
Vo z
Wo + t, H2 =
Yo + ZoVot
Wo + t,
w =z
Wo + t, H3 = Zo ,
avec Ao, Ro, Uo, et Xo > 0; Vo, Wo, Yo, Zo ∈ IR.

109
M3,92; J1 + α1(F + G) + α2H, K1 + P2,K2 − P1
variable de symetrie: s = t
Il existe deux types de solutions lies aux valeurs des coefficients α2 et α1.
I) Soit β ≡ 2α2 − α1 6= 0. On introduit d’abord les fonctions suivantes
U =Uo[(t2 + 1)R]α1/β ,
V =Vo − 1β
ln
[(t2 + 1)R
], θ = V − 1
α1ln[z] ,
X =Xo(t2 + 1)2α1/β R(α1+α2)/β ,
Y = arctan(t) + V .
Les solutions du systeme MHD associees a cette sous-algebre sont :
ρ =z2α1/(α2−α1) R ,
p =Ao (t2 + 1)a R(2α2+κα1)/β ou a ≡ 2[(α1 − α2)κ− α2]β
,
u =t(x− zU sin θ) + (y − zU cos θ)
t2 + 1,
v =t(y − zU cos θ)− (x− zU sin θ)
t2 + 1,
w =α1
βz
[R′
R+
2t
(t2 + 1)
],
H1 =zα2/α1 X sin
(Y − 1
α1ln[z]
),
H2 =zα2/α1 X cos
(Y − 1
α1ln[z]
),
H3 =0 .
La fonction R est determinee par l’EDO :
RR′′ − 2α2
β(R′)2 − 2β
α1
t
(t2 + 1)RR′ − 2βα2Ao(t2 + 1)a Rb − βα2
X2o
4π(t2 + 1)
4α1β R
(4α2+α1)β
− 2β
[2α1t4 + (2α2 + α1)t2 + α1 − 2α2]
R2
(t2 + 1)2= 0 ,
ou b = α1(κ−1)+4α2β , avec R(s) > 0; Ao, Ro, Uo, et Xo > 0; Vo, Wo, Yo ∈ IR; α1 6= 0; α2 ∈ IR.

110
II) Pour le cas particulier ou α1 = 2α2. Introduisons les fonctions suivantes
U =Uo[(t2 + 1)A]−1/(κ+1) ,
V =Vo − 1α1(κ + 1)
ln
[(t2 + 1)A
],
θ =V − 1α1
ln[z] ,
X =Xo(t2 + 1)(1−2κ)/(κ+1) R3/(κ+1) ,
Y = arctan(t) + V.
Les solutions du systeme MHD associees a cette sous-algebre sont :
ρ =Ro
z(t2 + 1),
p =zA ,
u =t(x− zU sin θ) + (y − zU cos θ)
t2 + 1,
v =t(y − zU cos θ)− (x− zU sin θ)
t2 + 1,
w =− z
(κ + 1)
[A′
A+
2t
(t2 + 1)
],
H1 =√
z X sin
(Y − 1
α1ln[z]
),
H2 =√
z X cos
(Y − 1
α1ln[z]
),
H3 =0 .
La fonction A est determinee par l’EDO :
AA′′ − (κ + 2)(κ + 1)
(A′)2− 1(κ + 1)
2t
(t2 + 1)AA′ − X2
o
4πRo(t2 + 1)
(2−κ)(κ+1) A
(5+2κ)(κ+1) − (κ + 1)
R2o
(t2 + 1)A3
− 1(κ + 1)
[4t4 + 2(κ + 3)t2 − 2(κ + 1)]A2
(t2 + 1)2= 0 ,
ou A(s) > 0; Ro, Uo, et Xo > 0; Vo, Wo, Yo ∈ IR; α1 = 2α2 6= 0; α1 ∈ IR.

111
M3,12; J3 + Po + H,P1, P2
variable de symetrie: s = z
Les solutions MHD associees a cette sous-algebre sont
ρ =Ro
Wexp
[2αt− 2α
∫ds
W
],
p =Ao
Wκexp
[2αt− 2α
∫ds
W
],
u =Uo sin
(∫ds
W− t + Vo
),
v =Uo cos
(∫ds
W− t + Vo
),
w =W ,
H1 =Xo
Wexp
[αt− α
∫ds
W
]sin
(∫ds
W+ Yo − t
),
H2 =Xo
Wexp
[αt− α
∫ds
W
]cos
(∫ds
W+ Yo − t
),
H3 =0 .
La fonction W est donnee implicitement par
s + so =
αWX2
o
Ro−
(X2
o
πAo+
4Ro
)2F1
(1
(2− κ), 1, 1 +
1(2− κ)
,−8πAo
X2o
W (2−κ)
)
−2α
κW 4
2F1
(4
(2− κ), 1, 1 +
4(2− κ)
,−8πAo
X2o
W (2−κ)
)pour κ 6= 2 ,
[α
(2Ao +
X2o
4π
)]−1
W
(Ro
4W 2 +
X2o
4π− 2Ao
)pour κ = 2 ,
(3.3.1)
ou Ao > 0, Ro > 0, so, Uo, Vo, Xo et Yo ∈ IR ; α1 > 0, β 6= 0, α ∈ IR.
M3,85; G + α H, K1, K2
variable de symetrie: s = z
Pour cette sous-algebre, nous obtenons deux types de solution MHD.
I) α ∈ IR.
ρ =Ro
Wt−2α exp
[2(α− 2)
∫ds
W
],
p =Ao
Wκt−2α exp
[2(α− κ)
∫ds
W
],

112
u = x−Uo
t , H1 = Xo
W t−α exp[(α− 1)
∫dsW
],
v = y−Vo
t , H2 = Yo
W t−α exp[(α− 1)
∫dsW
],
w = Wt , H3 = 0 .
La fonction W est determinee par l’equation integro-differentielle
W 3 W ′−W 3+Ao
Ro[2(α−κ)−κW ′] W (2−κ) exp
[2(2−κ)
∫ds
W
]+
X2o
4πRo[W ′+α−1] exp
[3
∫ds
W
]= 0
ou Ao > 0, Ro > 0, Uo, Vo et Xo ∈ IR.
Nous pouvons resoudre cette equation en posant que
W = s + C2, ou C2 ∈ IR .
Ce qui fixe κ = 2 et la constante Ao = αX2o/8π(3− α) avec 0 < α < 3.
ρ = Rot−2α(s + C2)(2α−5) , u = x−Uo
t , H1 = Xo
tα (s + C2)α−1
p = Aot−2α(s + C2)2(α−3) , v = y−Vo
t , H2 = Xo
tα (s + C2)α−1 ,
w = s+C2t , H3 = 0 .
II) Pour α = 2, nous considererons Zo 6= 0 et ainsi obtenir les solution suivantes
ρ = R , u =x
t− 1
t[Uo − Zo
4πRoX] , H1 =
X
t2,
p = Ao
t4
(RRo
)κ
exp[2(2− κ)
∫dsR
], v =
y
t− 1
t[Vo − Zo
4πRoY ] , H2 =
Y
t2,
w =Ro
R t, H3 =
Zo
t2,
ou nous avons introduit les fonctions
X =Xo
Ro
R
[1− ηo R]exp
[1
Ro
∫R ds
[1− ηo R]
], Y =
Yo
Ro
R
[1− ηo R]exp
[1
Ro
∫R ds
[1− ηo R]
],
ou Ao > 0, Ro, Uo, Vo Xo, Yo, Zo ∈ IR; ηo = Z2o/4πR2
o . La fonction R satisfait la relation
(1− ηo R)[R2
o + (Co −Ro s)R]+
Ao
Rκo
(1− ηo R) R(κ+1) exp[2(2− κ)
Ro
∫R ds
]
+(X2
o + Y 2o )
8π R2o
R3 exp[
2Ro
∫R ds
[1− ηo R]
]= 0 ,
avec la condition que R(s) > 0, Co ∈ IR

113
M3,11; K3 + βPo + α1J3 + α2H,P1, P2
variable de symetrie: s = z − t2
2β
Les solutions MHD associees a cette sous-algebre sont
ρ =Ro
Wexp
[2α2
βt− 2α2
β
∫ds
W
],
p =Ao
Wκexp
[2α2
βt− 2α2
β
∫ds
W
],
u =Uo sin
(α1
β
∫ds
W+ Vo − α1
βt
),
v =Uo cos
(α1
β
∫ds
W+ Vo − α1
βt
),
w =W +t
β,
H1 =Xo
Wexp
[α2
βt− α2
β
∫ds
W
]sin
(α1
β
∫ds
W+ Yo − α1
βt
),
H2 =Xo
Wexp
[α2
βt− α2
β
∫ds
W
]cos
(α1
β
∫ds
W+ Yo − α1
βt
),
H3 =0 .
La fonction W est donnee implicitement par
s + so =
αWX2
o
Ro−
(X2
o
πAo+
4Ro
)2F1
(1
(2− κ), 1, 1 +
1(2− κ)
,−8πAo
X2o
W (2−κ)
)
−2α
κW 4
2F1
(4
(2− κ), 1, 1 +
4(2− κ)
,−8πAo
X2o
W (2−κ)
)pour κ 6= 2 ,
[α
(2Ao +
X2o
4π
)]−1
W
(Ro
4W 2 +
X2o
4π− 2Ao
)pour κ = 2 ,
(3.3.2)
ou Ao > 0, Ro > 0, so, Uo, Vo, Xo et Yo ∈ IR ; α1 > 0, β 6= 0, α2 ∈ IR.

114
M3,29; F + G + βPo + αH, P1, P2
variable de symetrie: s = z e−tβ
Les solutions du systeme MHD associees a cette sous-algebre sont:
ρ =Ro
Gexp
[2(α− 1)
βt + (1− 2α)
∫ds
G
],
p =Ao
Gκexp
[2αt
β− (2α + κ)
∫ds
G
],
u =Uo exp[
t
β−
∫ds
G
],
v =Vo exp[
t
β−
∫ds
G
],
w =1β
etβ [G + s] ,
H1 =Xo
Gexp
[α
βt− (1 + α)
∫ds
G
],
H2 =Yo
Gexp
[α
βt− (1 + α)
∫ds
G
],
H3 =0 .
La fonction G est determinee par l’equation integro-differentielle :
G3G′ + 2G3 + sG2 − β Ao
Ro[κG′+κ + 2α]G(2−κ) exp
[−(1 + κ)
∫ds
G
]+
− β(X2o + Y 2
o )4π Ro
[G′ + 1 + α] exp[−3
∫ds
G
]= 0.
Ro > 0, Ao > 0, Uo, Vo, Xo et Yo ∈ IR; β 6= 0 ; α ∈ IR.
M3,34; J3 + α1(F + G) + Po + α2H, P1, P2
variable de symetrie: s = ze−α1t
Les solutions du systeme MHD associees a cette sous-algebre sont:
ρ =Ro
Gexp
[2(α2 − α1)t + (α1 − 2α2)
∫ds
G
],
p =Ao
Gκexp
[2α2t + (κα1 + 2α2)
∫ds
G
],

115
u =Uo exp[α1t− α1
∫ds
G
]sin
(∫ds
G+ Vo − t
),
v =Uo exp[α1t− α1
∫ds
G
]cos
(∫ds
G+ Vo − t
),
w =eα1t
[G + α1s
],
H1 =Xo
Gexp
[α2t− (α1 + α2)
∫ds
G
]sin
(∫ds
G+ Yo − t
),
H2 =Xo
Gexp
[α2t− (α1 + α2)
∫ds
G
]cos
(∫ds
G+ Yo − t
),
H3 =0 .
La fonction G est determinee par l’equation integro-differentielle
G3G′ + 2α1 G3 + α21sG2 − Ao
Ro
[κG′ + 2α2 + κα1
]G(2−κ) exp
[−α1(κ + 1)
∫ds
G
]
− X2o
4πRo
[G′ + α1 + α2
]exp
[−3α1
∫ds
G
]= 0
ou Ao > 0, Ro > 0, Uo, Vo, Xo et Yo ∈ IR, α1 6= 0 ; α2 ∈ IR.
M3,51; F + G + γPo + αH,K1 + βP2, P1
variable de symetrie: s = z e−tγ
Les solutions MHD associees a cette sous-algebre sont donnees par :
ρ =Ro
Gexp
[2(α− 1)
γt + (1− 2α)
∫ds
G
],
p =Ao
Gκexp
[2αt
γ− (2α + κ)
∫ds
G
],
u =1β
[y − e
tγ Uo exp
[−
∫ds
G
]],
v =etγ Vo exp
[−
∫ds
G
],
w =t
γe
tγ [G + s] ,
H1 =[
1β
∫ds
G+ Xo
]exp
[α
γt− (1 + α)
∫ds
G
],
H2 =Yo
Gexp
[α
γt− (1 + α)
∫ds
G
],
H3 =0 .

116
La fonction G est determinee par l’equation integro-differentielle :
G3G′+2G3 + sG2 − β Ao
Ro[κG′ + κ + 2α]G(2−κ) exp
[−(1 + κ)
∫ds
G
]+
− γY 2o
4πβ2 Ro
[ ∫ds
G+ βXo − [G′ + 1 + α]
[(∫ds
G+ βXo
)2
+ β2
] ]exp
[−3
∫ds
G
]= 0.
Ro > 0, Ao > 0, Uo, Vo, Xo et Yo ∈ IR, γ 6= 0 ; α ∈ IR.
M3,86; G + P1 + α1P3 + α2 H, K1,K2
variable de symetrie: s = α1 ln[t] + z
Les solutions MHD associees a cette sous-algebre sont donnees par
ρ =Ro
Gt2(1−2α2) exp
[2(α2 − 2)
∫ds
G
],
p =Ao
Gκt−2α2 exp
[2(α2 − κ)
∫ds
G
],
u =1t
[ln[t] + x− Uo +
∫ds
G
],
v =y − Vo
t,
w =G− α1
t,
H1 =Xo
Gt−α2 exp
[(α2 − 1)
∫ds
G
],
H2 =Yo
Gt−α2 exp
[(α2 − 1)
∫ds
G
],
H3 =0 .
La fonction G est determinee par l’equation integro-differentielle :
G3G′ −G3+α1 G2 − Ao
Ro[κG′ + 2(α2 − 2)] G(2−κ) exp
[2(2− κ)
∫ds
G
]+
− (X2o + Y 2
o )4π Ro
[G′ + 1− α2] exp[2
∫ds
G
]= 0.
Ro > 0, Ao > 0, Uo, Vo, Xo et Yo ∈ IR, α1 ≥ 0; α2 ∈ IR.

117
M3,87; G + βP3 + α H, K1,K2
variable de symetrie: s = β ln[t] + z
Les solutions MHD associees a cette sous-algebre sont donnees par
ρ =Ro
Gt2(1−2α) exp
[2(α− 2)
∫ds
G
],
p =Ao
Gκt−2α exp
[−2(α− κ)
∫ds
G
],
u =x− Uo
t,
v =y − Vo
t,
w =G− β
t,
H1 =Xo
Gt−α exp
[(α− 1)
∫ds
G
],
H2 =Yo
Gt−α exp
[(α− 1)
∫ds
G
],
H3 =0 .
La fonction G est determinee par l’equation integro-differentielle :
G3G′ −G3+β G2 − Ao
Ro[κG′ + 2(α− 2)] G(2−κ) exp
[2(2− κ)
∫ds
G
]+
− (X2o + Y 2
o )4π Ro
[G′ + 1− α] exp[2
∫ds
G
]= 0.
Ro > 0, Ao > 0, Uo, Vo, Xo et Yo ∈ IR, β ≥ 0; α ∈ IR.
M3,91; J3 + α1(F + G) + Po + α2H,K1, K2
variable de symetrie:s = ν ln[t] + z ou ν ≡ 1α1
Les solutions MHD sont
ρ =Ro
Gt2(1−να2) exp
[2(να2 − 2)
∫ds
G
],
p =Ao
Gκt−2να2 exp
[2(να2 − κ)
∫ds
G
],

118
u =x
t− Uo
tsin
(Vo − ν
∫ds
G+ ν ln[t]
),
v =y
t− Uo
tcos
(Vo − ν
∫ds
G+ ν ln[t]
),
w =1t
[G− ν
],
H1 =Xo
Gt−να2 exp
[−ν(α2 + 1)
∫ds
G
]sin
(Yo − ν
∫ds
G+ ν ln[t]
),
H2 =Xo
Gt−να2 exp
[−ν(α2 + 1)
∫ds
G
]cos
(Yo − ν
∫ds
G+ ν ln[t]
),
H3 =0 .
La fonction G est determinee par l’equation integro-differentielle
G3G′ −G3 + νG2 − Ao
Ro
[κG′ + 2(κ−να2)
]G(2−κ) exp
[2(2− κ)
∫ds
G
]
− X2o
4πRo
[G′ + ν(α2 + 1)
]exp
[4− 2ν(1 + α2)
∫ds
G
]= 0,
ou Ao, Ro, Uo, Xo > 0, Vo et Yo ∈ IR; α1 6= 0, ν = 1/α1, α2 ∈ IR.
Pour resoudre cette equation integro-differentielle, nous posons que
G = C1s + C2 ou C1, C2 ∈ IR.
Il en resulte les solutions MHD particulieres suivantes
ρ =Rot2(1−να2)(C1s + C2)[(2να2−4)/C1−1] ,
p =Aot−2να2(C1s + C2)[2(να2/−κ)/C1−κ] ,
u =x
t− Uo
tsin
(Vo + ν ln[t]− ν
C1ln[C1s + C2]
),
v =y
t− Uo
tcos
(Vo + ν ln[t]− ν
C1ln[C1s + C2]
),
w =1t
[C1s + C2 − ν
],
H1 =Xo
tνα2(C1s + C2)−[ν(α2+1)/C1+1] sin
(Yo + ν ln[t]− ν
C1ln[C1s + C2]
),
H2 =Xo
tνα2(C1s + C2)−[ν(α2+1)/C1+1] cos
(Yo + ν ln[t]− ν
C1ln[C1s + C2]
),
H3 =0 .

119
On distingue quatre types de solutions MHD qui correspondent aux valeurs de C1.
1.a) C1 = 1, κ = 4/3, ν = 1/(1 + 2α2).
La constante Ro est reliee a Ao et Xo par la relation
Ro = (3α2 + 2)[2Ao +
X2o
4π
];
indiquant un couplage entre la densite et la pression du fluide, et le champ magnetique.
La valeur particuliere α2 = −1/2 implique que Xo ≡ 0 : ce qui correspond au cas
hydrodynamique. α2 ∈ ]− 2/3,−1/2[ ∪ ]− 1/2,+∞[
1.b) C1 = 1, κ = 4/3, ν = −1/(1 + α2).
La constante Ro est donnee par
Ro = −2(3α2 + 2)Ao ,
ou α2 < −2/3, Ao > 0. Le champ magnetique ~H produit une force de Lorentz nulle.
2.a) C1 =2(2− κ)
κ, κ =
6[5− ν(1 + 2α2)]
.
Les constantes Ao et Xo sont donnees par
Ao =Ro
2(2α1 − α2), X2
o =4π(4− 3κ)Ro
4 + κ[ν(α2 + 1)− 2]
2.b) C1 = 2− ν(1 + 2α2), κ =(4− C1)(C1 + 2)
.
Les constantes Ao et Xo sont donnees par
Ao =[1− ν(1 + 2α2)]Ro,
κ[4− ν(1 + 2α2)]− 2να2X2
o =4π Ro
(2α1 − α2).
Les cas 2.a) et 2.b) montrent que la pression hydrodynamique et l’intensite du champ
magnetique sont reliees a la densite du fluide.
M3,21; F + βK3 + αH, P1, P2variable de symetrie: s = β ln[t]− z
t
Les solutions MHD associees a cette sous-algebre sont donnees par
ρ =Ro
Gt2α exp
[−(2α + 1)
∫ds
G
],
p =Ao
Gκt2α exp
[−(2α + κ)
∫ds
G
],

120
u = Uo , H1 = Xo
G tα exp[−(α + 1)
∫dsG
],
v = Vo , H2 = Yo
G tα exp[−(α + 1)
∫dsG
],
w = β ln[t] + β − (G + s) , H3 = 0 .
La fonction G est determinee par l’equation integro-differentielle
G3[G′+1]−βG2+(1−κ)Ao
RoG(2−κ)[1+G′] exp
[(1−κ)
∫ds
G
]− (X2
o + Y 2o )
4πRo[1+α+G′] exp
[−∫
ds
G
]= 0.
Ro > 0, Ao > 0, Uo, Vo, Xo et Yo ∈ IR, β 6= 0 ; α ∈ IR.
M3,36; J3 + α1F + K3 + α2H,P1, P2
variable de symetrie: s = 1α1
ln[t]− zt
Les solutions MHD sont
ρ =Ro
Gt2
α2α1 exp
[− 2
α1(α2 + α1)
∫ds
G
],
p =Ao
Gκt2
α2α1 exp
[− 2
α1(α2 + κα1)
∫ds
G
],
u =Uo exp[−
∫ds
G
]sin
(Vo +
1α1
∫ds
G− 1
α1ln[t]
),
v =Uo exp[−
∫ds
G
]cos
(Vo +
1α1
∫ds
G− 1
α1ln[t]
),
w =1α1
ln[t] +1α1
− [G + s] ,
H1 =Xo
Gt
α2α1 exp
[− 1
α1(α2 + α1)
∫ds
G
]sin
(Yo +
1α1
∫ds
G− 1
α1ln[t]
),
H2 =Xo
Gt
α2α1 exp
[− 1
α1(α2 + α1)
∫ds
G
]cos
(Yo +
1α1
∫ds
G− 1
α1ln[t]
),
H3 =0 .
La fonction G est determinee par l’equation integro-differentielle
G3G′ + G3 − G2
α1− Ao
Ro
[κG′ +
2α2
α1+ κ
]G(2−κ) exp
[(1− κ)
∫ds
G
]
− X2o
4πRo
[G′ +
α2
α1+ 1
]exp
[−
∫ds
G
]= 0
ou Ao > 0, Ro > 0, Uo, Vo, Xo et Yo ∈ IR, α1 6= 0, α2 ∈ IR.

121
M3,93; J3 + α1F + K3 + α2H,K1, K2
variable de symetrie: s =1α1
ln[t]− z
t
Les solutions MHD sont
ρ =Ro
Gt2
α2α1 exp
[− 1
α1(2α2 + α1)
∫ds
G
],
p =Ao
Gκt2
α2α1 exp
[− 1
α1(2α2 + 3κα1)
∫ds
G
],
u =x
t− Uo exp
[−
∫ds
G
]sin
(Vo +
1α1
∫ds
G− 1
α1ln[t]
),
v =y
t− Uo exp
[−
∫ds
G
]cos
(Vo +
1α1
∫ds
G− 1
α1ln[t]
),
w =1α1
ln[t] +1α1
− [G + s] ,
H1 =Xo
Gt
α2α1 exp
[− 1
α1(α2 + 2α1)
∫ds
G
]sin
(Yo +
1α1
∫ds
G− 1
α1ln[t]
),
H2 =Xo
Gt
α2α1 exp
[− 1
α1(α2 + 2α1)
∫ds
G
]cos
(Yo +
1α1
∫ds
G− 1
α1ln[t]
),
H3 =0 .
La fonction G est determinee par l’equation integro-differentielle
G3G′ + G3 − G2
α1− Ao
Ro
[κG′ +
2α2
α1+ 3κ
]G(2−κ) exp
[3(1− κ)
∫ds
G
]
− X2o
4πRo
[G′ +
α2
α1+ 2
]exp
[−
∫ds
G
]= 0
ou Ao > 0, Ro > 0, Uo, Vo, Xo et Yo ∈ IR, α1 6= 0; α2 ∈ IR.
M3,18; F + αH, P1, P2
variable de symetrie: s = zt
Les solutions MHD associees a cette sous-algebre sont donnees par
ρ =Ro
Gt2α exp
[−(2α + 1)
∫ds
G
], u = Uo , H1 =
Xo
Gtα exp
[−(α + 1)
∫ds
G
],
p =Ao
Gκt2α exp
[−(2α + κ)
∫ds
G
], v = Vo , H2 =
Xo
Gtα exp
[−(α + 1)
∫ds
G
],
w = G + s , H3 = 0 .
La fonction G est determinee par l’equation integro-differentielle
G3[G′+1]+ (1−κ)AoG(2−κ)[1+G′] exp
[(1−κ)
∫ds
G
]− (X2
o + Y 2o )
4π Ro[1+α+G′] exp
[−
∫ds
G
]= 0.

122
Ro > 0, Ao > 0, Uo, Vo, Xo et Yo ∈ IR, α ∈ IR.
M3,28; F + α G + βH, P1, P2
variable de symetrie: s = zσ
t ou σ ≡ 1− α 6= 0
Les solutions MHD associees a cette sous-algebre sont donnees par
ρ =t2(β−α)
σRo
Gexp
[1σ
[2(α− β)− 1]∫
sασ
Gds
],
p =t2βσ
Ao
Gκexp
[− 1
σ(2β + κ)
∫s
ασ
Gds
],
u =tασ Uo exp
[−α
σ
∫s
ασ
Gds
],
v =tασ Vo exp
[−α
σ
∫s
ασ
Gds
],
w =1σ
tασ [G + s
1σ ] ,
H1 =tβσ
Xo
Gexp
[− (1 + β)
σ
∫s
ασ
Gds
],
H2 =tβσ
Yo
Gexp
[− (1 + β)
σ
∫s
ασ
Gds
],
H3 =0 .
La fonction G est determinee par l’equation integro-differentielle
G[(α + 1)sασ + σG′]+αs
α+1σ − σ3 Ao
Gκ
[(κ + 2β)
σs
ασ + κG′
]exp
[(1− 2α− κ)
σ
∫s
ασ
Gds
]+
− σ3
4π Ro
(X2o + Y 2
o )G2
[(1 + β)
σs
ασ + G′
]exp
[− (1 + 2α)
σ
∫s
ασ
Gds
]= 0.
Ro > 0, Ao > 0, Uo, Vo, Xo et Yo ∈ IR, α 6= 0, β ∈ IR.
M3,33; J3 + α1F + α2G + α3H, P1, P2
variable de symetrie: s = z/tβα1 ou β = 1(α1−α2)
Les solutions MHD associees a cette sous-algebre sont donnees par
ρ =Ro
Gt2β(α3−α2) exp
[β[2(α2 − α3)− α1]
∫ds
G
],
p =Ao
Gκt2βα3 exp
[−[β(2α3 + κα1)]
∫ds
G
],

123
u =Uotβα2 exp
[−βα1
∫ds
G
]sin
(Vo + β
∫ds
G− β ln[t]
),
v =Uotβα2 exp
[−βα1
∫ds
G
]cos
(Vo + β
∫ds
G− β ln[t]
),
w =tβα2 [βα1s + G] ,
H1 =Xo
Gtβα3 exp
[−β(α1 + α3)
∫ds
G
]sin
(Yo + β
∫ds
G− β ln[t]
),
H2 =Xo
Gtβα3 exp
[−β(α1 + α3)
∫ds
G
]cos
(Yo + β
∫ds
G− β ln[t]
),
H3 =0 .
La fonction G est determinee par l’equation integro-differentielle
G3[G′+β(α1 + α2)] + βα1α2sG2 − X2
o
4πRo
[G′ + β(2α1 + α3 − α1)
]exp
[β(2− 3α1)
∫ds
G
]
− κAo
Ro
[G′ + β(α1 + 2α3) + 2
]G(2−κ) exp
[β[(1− κ)(α1 + 2)− 2α2]
∫ds
G
]= 0 ,
ou Ao > 0, Ro > 0, Uo, Vo, Xo et Yo ∈ IR, α1 ou α2 6= 0; α1 6= α2 ; α3 ∈ IR.
M3,48; F + α1 G + α2 H,K1, P1 + βP2
variable de symetrie: s = zσ
t ou σ ≡ 1− α1 6= 0
Soient les fonctions suivantes :
V =Vo exp[−α1
σ
∫s
α1σ
Gds
], U = Uo exp
[− 1
σ
∫s
α1σ
Gds
]− V ,
Y =Yo
Gexp
[1σ
(α1 − α2 − 2)∫
sα1σ
Gds
], X =
1β
Y +Xo
Gexp
[−1σ
(α2 + 1)∫
sα1σ
Gds
].
Les solutions MHD associees a cette sous-algebre sont donnees par
ρ =Ro
Gt2(α2−α1)/σ exp
[1σ
[3α1 − 2(α2 + 1)]∫
sα1σ
Gds
], u =
x
t− tα1/σ
βU , H1 = tα2/σ X ,
p =Ao
Gκt2α exp
[−(2α + κ)
∫ds
G
], v = tα1/σV , H2 = tα2/σ Y ,
w = G + s , H3 = 0 .
La fonction G est determinee par l’equation integro-differentielle
G[(α1 + 1)sα1σ + σG′] +
σ3Ao
RoGκ
[κG′ +
s1σ
σ+ as
α1σ
]exp
[b
∫s
α1σ
Gds
]+ α1s
α1+1σ +
18π
d
ds
[X2 + Y 2
]= 0,

124
ou a = 2α2/σ + κ, b = [3(1 − κ) − 2α1(κ − 2)]/σ, Ro > 0, Ao > 0, Uo, Vo, Xo et Yo ∈ IR,
α1 6= 0, β ≥ 0, α2 ∈ IR.
M3,49; F + α1 G + α2 H,K1, P2
variable de symetrie: s = zσ
t ou σ ≡ 1− α1 6= 0
Soient les fonctions suivantes :
X =Xo
Gexp
[1σ
(α2 + 1)∫
sα1σ
Gds
], Y =
Yo
Gexp
[−1σ
(α1 − α2 − 2)∫
sα1σ
Gds
].
Les solutions MHD associees a cette sous-algebre sont donnees par
ρ =Ro
Gt
2σ (α2−α1) exp
[1σ
[3α1 − 2(α2 + 1)]∫
sα1σ
Gds
],
p =Ao
Gκt
2α2σ exp
[1σ
[κ(α1 − 2)− 2α2]∫
sα1σ
Gds
],
u =x
t− t
α1σ
βUo exp
[− 1
σ
∫s
α1σ
Gds
], H1 = t
α2σ X ,
v = tα1σ Vo exp
[−α1
σ
∫s
α1σ
Gds
], H2 = t
α2σ Y ,
w = tα1σ [G + s
1σ ] , H3 = 0 .
La fonction G est determinee par l’equation integro-differentielle
G[(α1 + 1)sα1σ + σG′] +
σ3Ao
RoGκ
[κG′ +
s1σ
σ+ as
α1σ
]exp
[b
∫s
α1σ
Gds
]+ α1s
α1+1σ +
18π
d
ds
[X2 + Y 2
]= 0,
ou a = 2α2/(σ + κ), b = [3(1− κ)− 2α1(κ− 2)]/σ; Ro > 0, Ao > 0; Uo, Vo, Xo et Yo ∈ IR,
α1 6= 0, α2 ∈ IR.
M3,88; F + α1G + α2H, K1,K2
variable de symetrie: s = zσ
t ou σ ≡ 1− α1 6= 0
Les solutions MHD associees a cette sous-algebre sont donnees par
ρ =Ro
Gt
2σ (α2−α1) exp
[1σ
[4α1 − 2α2 − 3]∫
sα1σ
Gds
],
p =Ao
Gκt2
α2σ exp
[1σ
[κ(2α1 − 3)− 2α2]∫
sα1σ
Gds
],

125
u =x
t− Uo t
α1σ exp
[− 1
σ
∫s
α1σ
Gds
], H1 =
Xo
Gt
α2σ exp
[1σ
(α1 − α2 − 2)∫
sα1σ
Gds
],
v =y
t− Vo t
α1σ exp
[− 1
σ
∫s
α1σ
Gds
], H2 =
Yo
Gt
α2σ exp
[1σ
(α1 − α2 − 2)∫
sα1σ
Gds
],
w =1σ
tα1σ [G + s
1σ ] , H3 = 0 .
La fonction G est determinee par l’equation integro-differentielle
G[(α1 + 1)sα1σ + σG′]− σ3
4π Ro
(X2o + Y 2
o )G2
[1σ
(α2 − α1 + 2)sα1σ + G′
]exp
[− (1 + 2α1)
σ
∫s
α1σ
Gds
]
+α1sα1+1
σ − σ3 Ao
Ro Gκ
[[3κ + 2(α2 − α2)]
σs
ασ + κG′
]exp
[[3(1− κ)− 2α1(κ− 2)]
σ
∫s
α1σ
Gds
]= 0 ,
ou Ro > 0, Ao > 0, Uo, Vo, Xo et Yo ∈ IR, α1 6= 0; α2 ∈ IR
M3,90; J3 + α1F + α2G + α3H, K1,K2
variable de symetrie: s = z/tβα1 ou β = 1(α1−α2)
Les solutions MHD associees a cette sous-algebre sont donnees par
ρ =Ro
Gt2β(α3−α2) exp
[−β[2(α3 − α2) + 2 + α1]
∫ds
G
],
p =Ao
Gκt2βα3 exp
[−[κ(βα1 + 2) + 2βα3]
∫ds
G
],
u =x
t− Uot
βα2 exp[−βα1
∫ds
G
]sin
(Vo + β
∫ds
G− β ln[t]
),
v =y
t− Uot
βα2 exp[−βα1
∫ds
G
]cos
(Vo + β
∫ds
G− β ln[t]
),
w =tβα2 [βα1s + G] ,
H1 =Xo
Gtβα3 exp
[−β(2α1 + α3 − α2)
∫ds
G
]sin
(Yo + β
∫ds
G− β ln[t]
),
H2 =Xo
Gtβα3 exp
[−β(2α1 + α3 − α2)
∫ds
G
]cos
(Yo + β
∫ds
G− β ln[t]
),
H3 =0 .
La fonction G est determinee par l’equation integro-differentielle
G3[G′+β(α1 + α2)] + βα1α2sG2 − X2
o
4πRo
[G′ + β(2α1 + α3 − α2)
]exp
[β(2− 3α1)
∫ds
G
]
− Ao
Ro
[κG′ + β(κα1 + 2α3) + 2κ
]G(2−κ) exp
[β[(1− κ)(α1 + 2)− 2α2]
∫ds
G
]= 0 ,
ou Ao > 0, Ro > 0, Uo, Vo, Xo et Yo ∈ IR, α1 ou α2 6= 0; α1 6= α2 ; α3 ∈ IR.

126
L’analyse physique de toutes ces solutions permet de degager certaines proprietes
du fluide et du champ magnetique ~H qui sont communes a l’ensemble des solutions
obtenues.
• L’ecoulement du fluide est compressible (sauf pour M3,14) et est non stationnaire.
• Le champ magnetique ~H circule dans le plan (xOy) et depend seulement de t et z.
Consequemment la force de Lorentz derive du gradient de pression magnetique et est
dirigee suivant ~e3 ; les forces de tension ( ~H · ∇) ~H sont nulles. La circulation du fluide
est donc preservee par le theoreme de Kelvin.
• Le courant de conduction ~J =c
4π∇× ~H circule dans le plan (xOy) et est perpendic-
ulaire au champ magnetique ~H.
• ~Fm · ~v 6= 0 indique la presence d’un couplage entre les effets magnetiques et hydro-
dynamiques.
Tableau 3.3. Solutions des systemes reduits ayant en commun comme contrainte
sur les composantes de ~H
βγX − βY + (1− γt)Z = 0
ou β et γ sont des coefficients qui dependent de la sous-algebre consideree.
Variables de symetrie No. des sous-algebres
s = t M3,53,M3,54,M3,56,M3,89

127
M3,53; F + G + αH, K1 + P2 + β P3, P1 + γ P2
variable de symetrie: s = t
Il existe deux types de solution MHD lies a la valeur de α ∈ IR.
I) Pour α 6= 12 , on introduit le coefficient ν = 1/(2α− 1) et les fonctions suivantes :
U =Rν
[βαγ
∫ 2AoR
κν +R2ν
4π
[(Xo +
Zo
βt
)2
+ Y 2o + Z2
o
] dt +
∫R−νW dt + Uo
],
V =Rν
[α
∫ 2AoR
κν + βR2ν
4π
[(Xo +
Zo
βt
)2
+ Y 2o + Z2
o
] dt + Vo
],
W =Rν
[α
∫(1− γt)
2AoR
κν +R2ν
4π
[(Xo +
Zo
βt
)2
+ Y 2o + Z2
o
] dt + Wo
],
ou
R = Ro exp[
1ν
∫[γU + βV − (1− γt)W ] dt
],
γ ≥ 0; β ∈ IR, Ro, Ao, Uo, Vo et Wo sont des constantes arbitraires reelles; Xo,Yo et Zo
sont des constantes reelles qui satisfont la relation
βγXo − βYo + Zo = 0 .
Les solutions MHD sont donnees par
ρ =R
[β(γx− y) + (1− γt)z
]2(α−1)
,
p =AoRν(κ−γ)
[β(γx− y) + (1− γt)z
]2α
,
u =1β
[z − [β(γx− y) + (1− γt)z]U
],
v =[β(γx− y) + (1− γt)z]V ,
w =[β(γx− y) + (1− γt)z]W ,
H1 =[Xo +Zo
βt]Rν(1+α)
[β(γx− y) + (1− γt)z
]α
,
H2 =βYo Rν(1+α)
[β(γx− y) + (1− γt)z
]α
,
H3 =Zo Rν(1+α)
[β(γx− y) + (1− γt)z
]α
.

128
II) Si α = 12 , on redefinit les fonctions U , V et W en introduisant µ = 1/(κ + 1)
U =Aµ
[βγ
∫ Aκµ
R2o
+18π
A[(1−κ)µ]
[(Xo +
Zo
βt
)2
+ Y 2o + Z2
o
]dt +
∫A−µW dt + Uo
],
V =Aµ
[β
∫ Aκµ
R2o
+18π
A[(1−κ)µ]
[(Xo +
Zo
βt
)2
+ Y 2o + Z2
o
]dt + Vo
],
W =Aµ
[∫(1− γt)
Aκµ
R2o
+18π
[(Xo +
Zo
βt
)2
+ Y 2o + Z2
o
]dt + Wo
],
ou
A = Ao exp[
1µ
∫[γU + βV − (1− γt)W ] dt
],
γ ≥ 0; β ∈ IR, Ro, Ao, Uo, Vo et Wo ∈ IR; Xo, Yo et Zo sont des constantes reelles qui
satisfont la relation
βγXo − βYo + Zo = 0 .
Les solutions du systeme MHD sont donnees par :
ρ =Ro
[β(γx− y) + (1− γt)z],
p =[β(γx− y) + (1− γt)z] A ,
u =1β
[z − [β(γx− y) + (1− γt)z]U
],
v =[β(γx− y) + (1− γt)z] V ,
w =[β(γx− y) + (1− γt)z] W ,
H1 =[Xo +Zo
βt] A
32 µ
[β(γx− y) + (1− γt)z
] 12
,
H2 =βYo A32 µ
[β(γx− y) + (1− γt)z
] 12
,
H3 =Zo A32 µ
[β(γx− y) + (1− γt)z
] 12
.

129
M3,54; F + G + αH, K1 + P3, P1 + βP2
variable de symetrie: s = t
Il existe deux types de solution MHD lies a la valeur de α ∈ IR.
I) Pour α 6= 12 , introduisons le coefficient ν = 1/(2α− 1) et les fonctions suivantes :
U =Rν
[βα
∫ 2AoR
κν +R2ν
4π[(Xo + Zot)2 + β2X2
o + Z2o ]
dt +
∫R−νW dt + Uo
],
V =Rν
[α
∫ 2AoR
κν +R2ν
4π[(Xo + Zot)2 + β2X2
o + Z2o ]
dt + Vo
],
W =Rν
[βα
∫t
2AoR
κν +R2ν
4π[(Xo + Zot)2 + β2X2
o + Z2o ]
dt + Wo
],
ou
R = Ro exp[
1ν
∫[βU + V + βtW ]dt
],
β ≥ 0 ; Ro, Ao, Uo, Vo, Wo; Xo, Yo et Zo sont des constantes arbitraires reelles.
Les solutions MHD sont donnees par
ρ = [β(x− tz)− y]2(α−1) R , u = z − [β(x− tz)− y]U , H1 = [Xo + tZo][β(x− tz)− y]αRν(1+α) ,
p = AoRν(κ+2α)[β(x− tz)− y]2α, v = [β(x− tz)− y]V , H2 = βXo[β(x− tz)− y]αRν(1+α) ,
w = [β(x− tz)− y]W , H3 = Zo[β(x− tz)− y]αRν(1+α) .
II) Pour α = 12 , introduisons le coefficient µ = 1/(κ + 1) et les fonctions suivantes :
U =Aµ
[β
∫ Aκµ
R2o
+18π
A[(1−κ)µ] [(Xo + Zot)2 + β2X2o + Z2
o ]
dt +∫
A−µW dt + Uo
],
V =Aµ
[β
∫ Aκµ
R2o
+18π
A[(1−κ)µ] [(Xo + Zot)2 + β2X2o + Z2
o ]
dt + Vo
],
W =Aµ
[β
∫t
Aκµ
R2o
+18π
A[(1−κ)µ] [(Xo + Zot)2 + β2X2o + Z2
o ]
dt + Wo
],
ou
A = exp[
1µ
∫[βU + V + βtW ]dt
],
β ≥ 0; Ro, Ao, Uo, Vo, Wo; Xo, Yo et Zo sont des constantes arbitraires reelles.

130
Les solutions du systeme MHD sont donnees par
ρ = Ro
[β(x−tz)−y] , u = z − [β(x− tz)− y]U , H1 =[Xo[β(x− tz)− y]
12 + tZo
]A
32 µ ,
p = [β(x− tz)− y] A , v = [β(x− tz)− y]V , H2 = βXo[β(x− tz)− y]12 A
32 µ ,
w = [β(x− tz)− y]W , H3 = Zo[β(x− tz)− y]12 A
32 µ .
M3,56; F + G + αH, K1 + P3, P2
variable de symetrie: s = t
Il existe trois types de solution MHD lies a la valeur de α ∈ IR.
I) Si α = 0, introduisons les fonctions
R(t) = Ro exp[−Uot
], M(t) = ηo exp
[Wo
R+ Wo Uot
], Z(t) = Zo +
∫dtM,
ou Ro > 0 et Uo, Vo, ηo et Zo sont des constantes arbitraires reelles.
Les solutions MHD sont donnees par
ρ =Ro
(x− tz)2, u = z − (Uo −Wot)
R(x− tz) , H1 =
1Wo
[RM − [Uo − tWo]Z
],
p = Ao[x− tz]R−(κ+2) , v =Vo(x− tz)
R, H2 =
[Z exp
[1R
]+ Yo
]exp
[Uo
R
],
w =Wo(x− tz)
R, H3 = Z,
II) Si α 6= 12 , introduisons le coefficient ν = 1/(2α− 1) et les fonctions suivantes :
U =Rν
[α
∫ 2AoR
κν +R2ν
4π[Y 2
o + Z2o (t2 + 1)]
dt +
∫R−νW dt + Uo
], V = Vo Rν ,
W =Rν
[α
∫t
2AoR
κν +R2ν
4π[Y 2
o + Z2o (t2 + 1)]
dt + Wo
],
ou
R = Ro exp[
1ν
∫[U + tW ] dt
],
Ro, Ao, Uo, Vo, Wo; Xo, Yo et Zo sont des constantes arbitraires reelles.
Dans ce cas, les solutions MHD sont donnees par
ρ = (x− tz)2(α−1) R , u = z − (x− tz)U , H1 = Xo (x− tz)α tRν(1+α) ,
p = Ao(x− tz)2αRν(κ+2α) , v = (x− tz)V , H2 = Yo (x− tz)α Rν(1+α) ,
w = (x− tz)W , H3 = Zo (x− tz)α Rν(1+α),

131
III) Pour α = 12 , introduisons le coefficient µ = 1/(κ + 1) et les fonctions suivantes :
U =Aµ
[∫ Aκµ
R2o
+18π
A[(1−κ)µ] [Y 2o + Z2
o (t2 + 1)]
dt +∫
A−µW dt + Uo
], V = Vo Aµ ,
W =Aµ
[∫t
Aκµ
R2o
+18π
A[(1−κ)µ] [Y 2o + Z2
o (t2 + 1)]
dt + Wo
],
ou
A = exp[
1µ
∫dt[U + tW ]
],
Ro, Ao, Uo, Vo, Wo; Xo, Yo et Zo sont des constantes arbitraires reelles.
Les solutions MHD sont donnees par
ρ =Ro
(x− tz), u = z − (x− tz)U , H1 = Xo(x− tz)
12 tA
32 µ ,
p = (x− tz)A , v = (x− tz)V , H2 = Yo (x− tz)12 A
32 µ ,
w = (x− tz)W , H3 = Zo(x− tz)12 A
32 µ.
M3,89; F + G + αH,K1 + α1P2 + α2P3, K2 + β1P1 + β2P2 + β3P3
variable de symetrie: s = t
On definit les fonctions suivantes :
C(t) = β1α2 − β3t , B(t) = α2t + α2β2 − β3α1 , ξ = C(t)(α2y − α1z)−B(t)(α2x− tz),
ou αi, βi ∈ IR; αi et βi ne sont jamais nuls simultanement. Il existe quatre types de
solution qui dependent des valeurs respectives de α et β3.
I) Si α 6= 12 et β3 6= 0, soient ν ≡ 1/(2α− 1) et σ = α2β1/β3 et
U =Rν
Cσ
[β1
∫R−νCσ−1 W dt− αα2
∫Cσ B t
2AoR
κν + R2νH2
4π
dt + Uo
],
V =Rν
[α2
∫U
CtR−ν dt +
∫Wt
CR−ν dt− αα2
∫C
2AoR
κν + R2νH2
4π
dt + Vo
],
W =Rν
[∫[α1 C −Bt]
2(α− 1) AoR
κν + αR2νH2
4π
dt + Wo
],
avec
R = Ro exp[
1ν
∫ [α2
B
tU + α2 CV + [B t− α1C]W − β3
C
]dt
],

132
ou
H2 ≡[β1
β3Zo + XoC(t)
]2
+[(
Zo
β3+ α2Xo
)t + Yo
]2
+ Z2o ;
Ro, Ao, Uo, Vo, et Wo ∈ IR; Xo,Yo et Zo ∈ IR et satisfont la relation :
[α2β2 − β3α1] Xo − Yo +β2
β3Zo = 0 .
Les solutions MHD sont donnees par
ρ =ξ2(α−1) R ,
p =Aoξ2α Rν(κ+2α) ,
u =x
t− 1
t
[ξU +
β1
C(α2x− tz)
],
v =ξV +1C
(α2x− tz) ,
w =ξW ,
H1 =ξα
[β1
β3Z + XoC Rν(1+α)
],
H2 =ξα
[(Zo
β3+ α2Xo
)t + Yo Rν(1+α)
],
H3 = Zo ξα Rν(1+α) ,
II) Si α = 12 et β3 6= 0, soient µ = 1/(κ + 1), σ = α2β1/β3 et les fonctions suivantes :
U =Aµ
Cσ
[β1
∫A−µCσ−1 W dt− α2
2
∫CσB(t) t
2Aκµ
R2o
+ A[(1−κ)µ]H2
4π
dt + Uo
],
V =Aµ
[α2
∫U
CtA−µ dt +
∫Wt
CA−µ dt− α2
2
∫C
2Aκµ
R2o
+ A[(1−κ)µ]H2
4π
dt + Vo
],
W =Aµ
[∫[α1C −Bt]
A[(1−κ)µ]H2
8π− Aκµ
R2o
dt + Wo
],
avec
A = exp[− 1
µ
∫dt
[α2
B
tU + α2 CV + [B t− α1 C]W − β3
C
]],
ou
H2 ≡[β1
β3Zo + XoC(t)
]2
+[(
Zo
β3+ α2Xo
)t + Yo
]2
+ Z2o ,

133
Ro, Ao, Uo, Vo, et Wo ∈ IR; Xo, Yo et Zo ∈ IR et satisfont la relation
[α2β2 − β3α1] Xo − Yo +β2
β3Zo = 0 .
Les solutions MHD sont donnees par
ρ =Ro
ξ, u =
x
t− 1
t
[ξU +
β1
C(α2x− tz)
], H1 =
√ξ
[β1
β3Z + Xo C A
32 µ
],
p = ξ A , v = ξV +1C
(α2x− tz) , H2 =√
ξ [Z
β3+ α2X]t + Yo A
32 µ ,
w = ξW , H3 = Zo
√ξ A
32 µ ,
III) Si α 6= 12 et β3 ≡ 0, soit ν = 1/( 2α− 1) et les fonctions suivantes :
U =Rνet
[1α2
∫e−tR−νW dt− αα2
∫e−tB t[2AoR
κν + R2νH2
4π] dt + Uo
],
V =Rν
[1β1
∫U
tR−ν dt +
1β1α2
∫WtR−ν dt− αβ1(α2)2
∫[2AoR
κν + R2νH2
4π] dt + Vo
],
W =Rν
[∫[α1 C −Bt]
2(α− 1)AoR
κν + αR2νH2
4π
dt + Wo
],
avec
R = Ro exp[
1ν
∫ [α2
B
tU + α2 CV + [B t− α1C]W
]dt
],
ou
H2 ≡[
t
α2Zo + Xo
]2
+[
t
β1Xo + Yo
]2
+ Z2o ,
Ro, Ao, Uo, Vo, et Wo ∈ IR; Xo,Yo et Zo ∈ IR et satisfont la relation
α2[β2 Xo − β1Yo] + α1β1Zo = 0.
Les solutions MHD sont donnees par
ρ = ξ2(α−1) R , u =x
t− 1
t
[ξU +
1α2
(α2x− tz)]
, H1 = ξα
[1α2
tZ + Xo Rν(1+α)
],
p = Aoξ2α Rν(κ+2α) , v = ξV +
1β1α2
(α2x− tz) , H2 = ξα
[1β1
Xo t + Yo
]Rν(1+α) ,
w = ξW , H3 = Zo ξα Rν(1+α) .

134
IV) Si α = 12 et β3 ≡ 0, soit µ = 1/(κ + 1) et les fonctions suivantes :
U =Aµet
[1α2
∫e−tA−µW dt− αα2
∫e−tB t
[2Aκµ
R2o
+ A[µ(1−κ)]H2
4π
]dt + Uo
],
V =Aµ
[1β1
∫A−µ
tU dt +
1β1α2
∫WtA−µ dt− αβ1(α2)2
∫[2Aκµ
Ro+ A[µ(1−κ)]H2
4π] dt + Vo
],
W =Aµ
[∫[α2α1β1C −Bt]
A[(1−κ)µ]H2
8π− Aκµ
R2o
dt + Wo
],
avec
A = exp[− 1
µ
∫dt
[α2
B
tU + α1α2β1V + [B t− α1α2β1]W
]]
ou
H2 ≡[
t
α2Zo + Xo
]2
+[
t
β1Xo + Yo
]2
+ Z2o ,
Ro, Ao, Uo, Vo, et Wo ∈ IR ; Xo,Yo et Zo ∈ IR et satisfont la relation :
α2[β2 Xo − β1Yo] + α1β1Zo = 0 .
Les solutions MHD sont donnees par
ρ = Ro
ξ , u = xt − 1
t
[ξU + 1
α2(α2x− tz)
], H1 = ξ
12
[1
α2tZ + Xo A
32 µ
],
p = ξ A , v = ξV + 1β1α2
(α2x− tz) , H2 = ξ12
[1β1
Xo t + Yo
]A
32 µ ,
w = ξW , H3 = Zo ξ12 A
32 µ.
L’analyse physique de ces solutions nous permet de deduire les faits suivants.
• L’ecoulement du fluide est compressible, non stationnaire et tridimensionnel.
• La force de Lorentz ~Fm pointe dans une direction fixe et sa norme depend de t (a
l’exception du cas (I) de la sous-algebre M3,56 ou elle nulle). La circulation du fluide
est donc conservee par le theoreme de Kelvin.
• Il existe deux types de solutions qui dependent des coefficients de la sous-algebre
etudies. Pour le premier type : la densite, les composantes de la vitesse ~v et l’intensite
magnetique | ~H| sont couplees l’une a l’autre, la pression est reliee a la densite via la
fonction R. Dans l’autre type, la pression remplace la densite pour le couplage entre
~v et | ~H|, la densite n’est reliee a aucune de ces quantites (i.e. R = Ro).
• ~Fm · ~v 6= 0 indique la presence d’un couplage entre les effets magnetiques et hydro-
dynamiques.
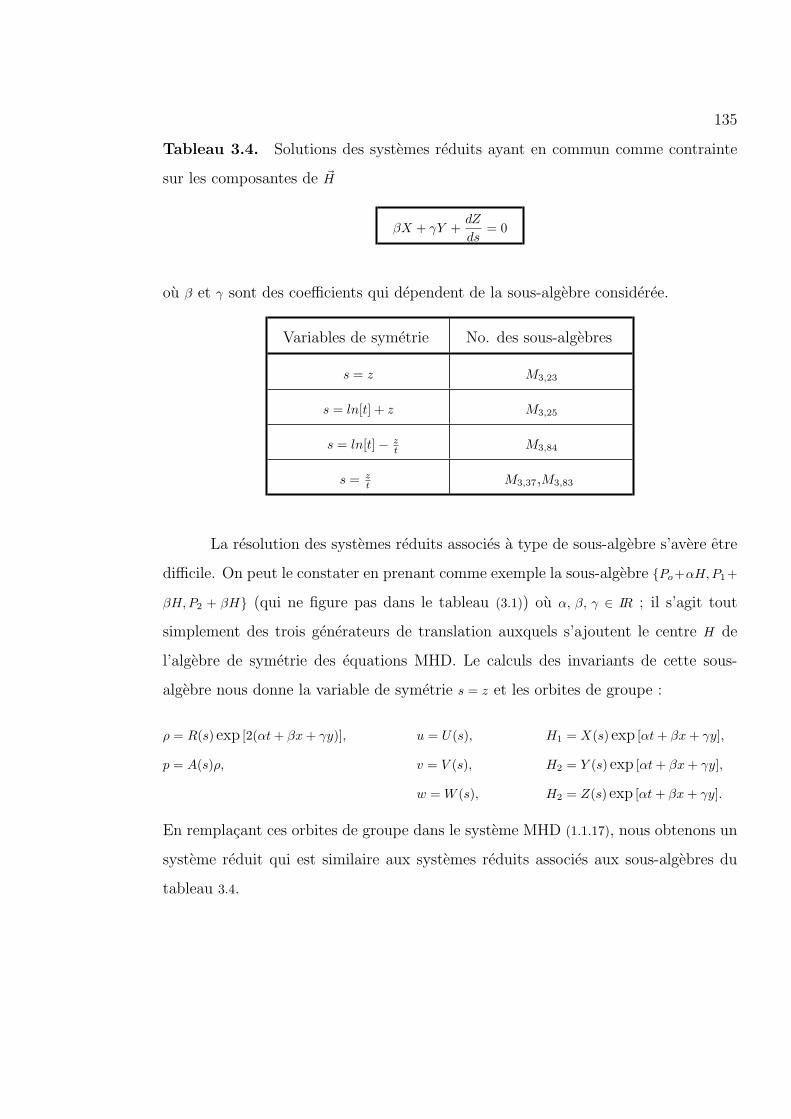
135
Tableau 3.4. Solutions des systemes reduits ayant en commun comme contrainte
sur les composantes de ~H
βX + γY +dZ
ds= 0
ou β et γ sont des coefficients qui dependent de la sous-algebre consideree.
Variables de symetrie No. des sous-algebres
s = z M3,23
s = ln[t] + z M3,25
s = ln[t]− zt M3,84
s = zt M3,37,M3,83
La resolution des systemes reduits associes a type de sous-algebre s’avere etre
difficile. On peut le constater en prenant comme exemple la sous-algebre Po+αH, P1+
βH,P2 + βH (qui ne figure pas dans le tableau (3.1)) ou α, β, γ ∈ IR ; il s’agit tout
simplement des trois generateurs de translation auxquels s’ajoutent le centre H de
l’algebre de symetrie des equations MHD. Le calculs des invariants de cette sous-
algebre nous donne la variable de symetrie s = z et les orbites de groupe :
ρ = R(s) exp [2(αt + βx + γy)], u = U(s), H1 = X(s) exp [αt + βx + γy],
p = A(s)ρ, v = V (s), H2 = Y (s) exp [αt + βx + γy],
w = W (s), H2 = Z(s) exp [αt + βx + γy].
En remplacant ces orbites de groupe dans le systeme MHD (1.1.17), nous obtenons un
systeme reduit qui est similaire aux systemes reduits associes aux sous-algebres du
tableau 3.4.

136
Systeme reduit
pour la sous-algebre
M3 Po + αH, P1 + βH, P2 + γ Hvariable de symetrie: s = z
W
R
dR
ds+
dW
ds+ 2βU + 2γ V + 2α = 0
RWdU
ds+ 2β A +
14π
[β[Y 2 + Z2]−
[γY X +
dX
dsZ
]]= 0
RWdV
ds+ 2γ A +
14π
[γ[X2 + Z2]−
[βXY +
dY
dsZ
]]= 0
RWdW
ds+
dA
ds+
18π
d
ds
[X2 + Y 2
]− 18π
[βX + γY ]Z = 0
W
A
dA
ds+ κ
dW
ds+ 2βU + 2γV + 2α = 0
[βU + γV + α]X +d
ds[WX]− Z
d
ds[U ] = 0
[βU + γV + α]Y +d
ds[WY ]− Z
d
ds[V ] = 0
[βU + γV + α]Z + WdZ
ds= 0
βX + γY + dZds = 0
Par substitutions et eliminations succesives, nous parvenons aux solutions MHD :
ρ =Z2
Z2o
1W
exp[2(αt + βx + γy)
], u =
[W
X
Z+ Uo
], H1 = X(s) exp
[2(αt + βx + γy)
],
p =Ao
Z2o
Z2
Wκexp
[2(αt + βx + γy)
], v =
[W
Y
Z− 1
γ(α + βUo)
], H2 = Y (s) exp
[2(αt + βx + γy)
],
w = W (s), H3 = Z(s) exp[2(αt + βx + γy)
],
ou Ao et Zo ∈ IR, α, β, γ ∈ IR, les fonctions X et Y s’expriment en termes
X = − 1(β2 + γ2)
[β
dZ
ds+ εγ
√∆
], Y = − 1
γ
[βX +
dZ
ds
], ε = ±1 ,
pour lesquelles on a introduit la fonction
∆ =(
4π
Z2o
[d
ds
[W
Z
dZ
ds
]− 1
Z
dZ
ds
]−(β2 + γ2)
[8πAo
Z2oWκ
+ 1]− d
ds
[1Z
dZ
ds
])Z2−
(dZ
ds
)2
> 0 .
Les fonctions inconnues W et Z sont determinees par les deux EDO :d2G
ds2+ 2
[1η
dη
ds+ η +
(β2 + γ2)η
]dG
ds+
[1η
d2η
ds2+ 2
dη
ds
]G = 0 ,
η3 − 1G
dG
dsη2 +
(G + Go)2Go
Λ η +(β2 + γ2)
2Go+
14π
d
ds[ΛG] = 0 ,
(3.3.3)

137
ou pour abreger les expressions nous avons adopte les notations suivantes :
G = W −Go, η =1Z
dZ
ds, Λ = (β2 + γ2)
[2Ao
G(G + Go)κ+
Go
G
]+
Go
C2o
1G3
; Go = Z2o/4π, Co ∈ IR.
Etant donnee la complexite du systeme d’EDO (3.3.3), nous avons du poser certaines
hypotheses pour pouvoir le resoudre. Ainsi en considerant W = 0, nous obtenons
ρ = R(z) exp [2(αt + βx + γy)] ,
p =18π
C2o
η2o(β2 + γ2)
[η2o − (ζ2
o + β2 + γ2)] sin2 (ηoz + θo) exp [2(αt + βx + γy)] ,
u = Uo , v = − 1γ
(α + βUo) , w = 0 ,
H1 = − Co
ηo(β2 + γ2)
[βηo cos (ηoz + θo) + εγζo sin (ηoz + θo)
]exp [αt + βx + γy] ,
H2 =Co
ηo(β2 + γ2)
[εβζo sin (ηoz + θo)− γηo cos (ηoz + θo)
]exp [αt + βx + γy] ,
H3 =Co
ηosin (ηoz + θo) exp [αt + βx + γy] ,
ou ε = ±1, R est une fonction arbitraire definie positivement; Uo, θo ∈ IR ; ηo et ζo sont
des constantes reelles qui doivent satisfaire la contrainte η2o > (ζ2
o + β2 + γ2). Dans ce
cas particulier, la vitesse du flot est constante : il y a equilibre des forces entre le
gradient de pression hydrodynamique et la force de Lorentz.
Pour W 6= 0 (sans qu’on aille pu resoudre le systeme (3.3.3)) nous constatons que le flot
devient compressible et non stationnaire : la circulation du fluide n’est pas conservee
puisque la force de Lorentz n’est pas conservatrice. Les composantes u et v de la
vitesse sont alors couplees aux composantes H1 et H2 du champ magnetique.
Nous presentons maintenant les resultats obtenus pour les systemes reduits
associes aux sous-algebres du tableau 3.4. Ceux-ci s’apparentent au systeme reduit
donne en exemple. Cependant leurs resolutions menent a des equations integro-
differentielles en raison des generateurs de dilatations F et G presents dans les sous-
algebres rencontrees.

138
M3,23; G + αH, P1 + β H, P2 + γ H
variable de symetrie: s = z
Les solutions du systeme MHD associees a cette sous-algebre sont:
ρ =t2(1−α)
Wexp
[2(βx + γy)− 2F
]Z2
Z2o
,
p =Ao
Z2o
t2(1−α)
Wκe2(βx+γy) Z2 ,
u =1t
[W
X
Z− βα
(β2 + γ2)
],
v =1t
[W
Y
Z+
α(2β2 + α2)γ(β2 + γ2)
],
w =W
t,
H1 =tαe(βx+γy)X ,
H2 =tαe(βx+γy)Y ,
H3 =tαe(βx+γy)Z ,
ou Ao et Zo ∈ IR, α, β, γ ∈ IR. Les fonctions F , X et Y s’expriment en termes des
fonctions W (s) et Z(s)
F =∫
ds
W,
X = − 1(β2 + γ2)
[β
dZ
ds+ εγ
√∆
], Y = − 1
γ
[βX +
dZ
ds
], ε = ±1 ,
ou l’on definit la fonction
∆ =(
4π
Z2o
e−2F
[d
ds
[W
Z
dZ
ds
]− 1
Z
dZ
ds+
α
W
]−(β2 + γ2)
[8πAo
Z2oWκ
+ 1]− d
ds
[1Z
dZ
ds
])Z2−
(dZ
ds
)2
> 0.
Les fonctions W et Z sont determinees par les EDO suivantes:
dW
ds− 1 +
Z2o
8πZ2
e2F
(β2 + γ2)d
ds
[4πe−2F Z2
Z2o
(d
ds
[W
Z
dZ
ds
]− 1
Z
dZ
ds+
α
W
)− d
ds
[1Z
dZ
ds
]Z2
]= 0 ,
e2F
(W − Z2
o
4π
)d
ds
[√∆
Z
]+
(dW
ds− 1
) √∆
Z= 0 .

139
M3,25; G + P3 + αH, P1 + βH, P2 + γ H
variable de symetrie: s = ln[t] + z
Les solutions du systeme MHD associees a cette sous-algebre sont:
ρ =t2(1−α)
fexp
[2(βx + γy)− 2F
]Z2
Z2o
,
p =Ao
Z2o
t2(1−α)
fκe2(βx+γy) Z2 ,
u =1t
[W
X
Z− βα
(β2 + γ2)
],
v =1t
[W
Y
Z+
α(2β2 + α2)γ(β2 + γ2)
],
w =f − 1
t,
H1 =tαe(βx+γy)X ,
H2 =tαe(βx+γy)Y ,
H3 =tαe(βx+γy)Z ,
ou Ao et Zo ∈ IR, α, β, γ ∈ IR. Les fonctions F , X et Y s’expriment en termes des
fonctions f(s) et Z(s)
F =∫
ds
f,
X = − 1(β2 + γ2)
[β
dZ
ds+ εγ
√∆
], Y = − 1
γ
[βX +
dZ
ds
], ε = ±1 ,
ou l’on definit la fonction
∆ =(
4π
Z2o
e−2F
[d
ds
[f
Z
dZ
ds
]− 1
Z
dZ
ds+
α
f
]−(β2 + γ2)
[8πAo
Z2ofκ
+ 1]− d
ds
[1Z
dZ
ds
])Z2−
(dZ
ds
)2
> 0.
Les fonctions f et Z sont determinees par les equations integro-differentielles :
f
(df
ds− 1
)+
1f
+Z2
o
8πZ2
e2F
(β2 + γ2)d
ds
[4πe−2F Z2
Z2o
(d
ds
[f
Z
dZ
ds
]− 1
Z
dZ
ds+
α
f
)− d
ds
[1Z
dZ
ds
]Z2
]= 0,
e2F
(f − Z2
o
4π
)d
ds
[√∆
Z
]+
(df
ds− 1
) √∆
Z= 0 .

140
M3,83; F + αH, K1 + βH, K2 + γH
variable de symetrie: s = zt
Les solutions du systeme MHD associees a cette sous-algebre sont:
ρ = =t2α
fexp
[F +
2t[βx + γy]
]Z2
Z2o
,
p =Ao
Z2o
t2α
fκexp
[(4− 3κ)F +
2t[βx + γy]
]Z2 ,
u =x− Ut
t,
v =y − V t
t,
w =f + s ,
H1 =tα exp[1t[βx + γy]
]X ,
H2 =tα exp[1t[βx + γy]
]Y ,
H3 =tα exp[1t[βx + γy]
]Z ,
ou Ao et Zo ∈ IR, α, β, γ ∈ IR. Les fonctions F , X et Y s’expriment en termes des
fonctions f(s) et Z(s)
F =∫
ds
f,
X = − 1(β2 + γ2)
[β
dZ
ds+ εγ
√∆
], Y = − 1
γ
[βX +
dZ
ds
], ε = ±1 ,
ou l’on definit la fonction
∆ =(
4π
Z2o
eF
[d
ds
[f
Z
dZ
ds
]− 1
Z
dZ
ds+
α + 2f
]−(β2 + γ2)
[8πAo
Z2ofκ
+ 1]− d
ds
[1Z
dZ
ds
])Z2−
(dZ
ds
)2
> 0,
U =X
Zf +
β(2 + α)(β2 + γ2)
, V =Y
Zf +
(2 + α)γ
− β2(2 + α)γ(β2 + γ2)
.
Les fonctions f et Z sont determinees par les equations integro-differentielles :
df
ds− 1 +
Z2o
8πZ2
e−F
(β2 + γ2)d
ds
[4πeF Z2
Z2o
(d
ds
[f
Z
dZ
ds
]− 1
Z
dZ
ds+
(α + 2)f
)− d
ds
[1Z
dZ
ds
]Z2
]= 0 ,
e−F
(f − Z2
o
4π
)d
ds
[√∆
Z
]+
(df
ds− 1
) √∆
Z= 0 .

141
M3,84; F + K3 + αH, K1 + βH, K2 + γH
variable de symetrie: s = ln[t]− zt
Les solutions du systeme MHD associees a cette sous-algebre sont:
ρ = =t2α
fexp
[F +
2t[βx + γy]
]Z2
Z2o
,
p =Ao
Z2o
t2α
fκexp
[(4− 3κ)F +
2t[βx + γy]
]Z2 ,
u =x− Ut
t,
v =y − V t
t,
w = ln[t]− (f + s) + 1 ,
H1 =tα exp[1t[βx + γy]
]X ,
H2 =tα exp[1t[βx + γy]
]Y ,
H3 =tα exp[1t[βx + γy]
]Z ,
ou Ao et Zo ∈ IR, α, β, γ ∈ IR. Les fonctions F , X et Y s’expriment en termes des
fonctions f(s) et Z(s)
F =∫
ds
f,
X =1
(β2 + γ2)
[β
dZ
ds+ εγ
√∆
], Y =
1γ
[dZ
ds− βX
], ε = ±1 ,
ou l’on definit la fonction
∆ =(
4π
Z2o
eF
[d
ds
[f
Z
dZ
ds
]− 1
Z
dZ
ds+
α + 2f
]−(β2 + γ2)
[8πAo
Z2ofκ
+ 1]− d
ds
[1Z
dZ
ds
])Z2−
(dZ
ds
)2
> 0,
U =X
Zf +
β(2 + α)(β2 + γ2)
, V =Y
Zf +
(2 + α)γ
− β2(2 + α)γ(β2 + γ2)
.
Les fonctions f et Z sont determinees par les equations integro-differentielles :
fdf
ds−f− 1
f+
Z2o
8πZ2
e−F
(β2 + γ2)d
ds
[4πeF Z2
Z2o
(d
ds
[f
Z
dZ
ds
]− 1
Z
dZ
ds+
(α + 2)f
)− d
ds
[1Z
dZ
ds
]Z2
]= 0 ,
e−F
(f − Z2
o
4π
)d
ds
[√∆
Z
]+
(df
ds− 1
) √∆
Z= 0 .

142
M3,37; F + αH, K1 + βH, P1 + γP2
variable de symetrie: s = zt
Les solutions du systeme MHD associees a cette sous-algebre sont:
ρ = =t2α
fexp
[2β
γt(γx− y)
]Z2
Z2o
,
p =Ao
Z2o
t2α
fκexp
[2(κ− 1)F +
2β
γt(γx− y)
]Z2 ,
u =[γx− y]
γt+
X
Zf +
1γ
∫ds
Y
Z,
v =Y
Zf +
∫ds
Y
Z+
γ
β(α + 1) ,
w =W ,
H1 =tα exp[
β
γt(γx− y)
]X ,
H2 =tα exp[
β
γt(γx− y)
]Y ,
H3 =tα exp[
β
γt(γx− y)
]Z ,
ou Ao et Zo ∈ IR, α, β, γ ∈ IR. Les fonctions F , X et Y s’expriment en termes des
fonctions f(s) et Z(s)
F =∫
ds
f,
Y =γ
(γ2 + 1)
[1β
Z ′εγ√
(γ2 + 1)ξ2 − γ2(Z ′)2]
, X =1γ
Y − 1β
Z ′ , ε = ±1 ,
ou l’on definit la fonction
∆ =(
4πγ2
Z2oβ2
[d
ds
[f
Z
dZ
ds
]− 1
Z
dZ
ds+
(α + 1)f
]− (1 + γ2)
[8πAo
Z2ofκ
exp[2(1− κ)F
]+ 1
])Z2
− d
ds
[1Z
dZ
ds
]Z2 −
(dZ
ds
)2
> 0.
Les fonctions f et Z sont determinees par les equations integro-differentielles :
df
ds+ 1 +
γ2Z2o
8πβ2(1 + γ2)Z2
d
ds
[4πγ2
Z2oβ2
([d
ds
[f
Z
dZ
ds
]− 1
Z
dZ
ds+
(α + 1)f
])Z2 − d
ds
[1Z
dZ
ds
]Z2
]= 0 ,
(Z2
4π+ f
)d
ds
[√∆
Z
]+
(df
ds+
Z2
Z2o
) √∆
Z− (α + 1)
βf
Z2
Z2o
= 0 .

143
Tableau 3.5. Solutions des systemes reduits ayant en commun comme contrainte
sur les composantes de ~H
βXi +dXj
ds= 0 (i 6= j)
ou β est un coefficient qui depend de la sous-algebre.
Variables de symetrie No. des sous-algebres
s = z M3,4,M3,42,M3,43
s = α ln[t] + z M3,44,M3,45,M3,46,M3,47
s = zt M3,38
s = ln[t]− yt M3,41
M3,4; Po + αH, K1 + P2 + βH, P1
variable de symetrie: s = z
Introduisons les fonctions
A =Ao W (1−κ) ,
V =12β
1R
d
ds[RW ] + 2α
,
X =Yo
√RW
W − Z2o
α
βZo
∫ds
W+ Xo
, Y = − 1
2β
Zo√RW
d
ds[RW ] , Z = Zo
√RW ,
ou Ao > 0, Xo, Yo et Zo sont des constantes arbitraires reelles, α, β ∈ IR.
Les solutions du systeme MHD associees a cette sous-algebre sont:
ρ = e2(αt+βy)R, u = y +∫
dsRW
[Z
d
ds[X]− d
ds[Z] X
]−
∫ds
v
W+ Uo, H1 = eαt+βy X ,
p = Aρ , v = V , H2 = eαt+βy Y ,
w = W , H3 = eαt+βy Z .
Les fonctions W et R sont determinees par
(RW )d
ds[V ] + 2βAR +
β
4π[X2 + Z2]− Z
4π
d
ds[Y ] = 0 ,
(RW )d
ds[W ] +
d
ds[AR] +
18π
d
ds
[X2 + Y 2 + Z2
]= 0 .

144
M3,42; G + αH, K1, P1 + γ1 P2 + γ2 H
variable de symetrie: s = z
Introduisons F =∫
ds
Wet les fonctions suivantes
A =Ao W (1−κ) e(3−κ) F ,
U =γ1
∫ds
RW[d
ds[Z]X − Z
d
ds[X]]−
∫ds
V
W+ Uo , V = − 1
2β
1R
d
ds[RW ] + 3− 2α
,
X =
√(RW )
(W − Z2o eF )
e32 F
(1− α)
γ2Zo e−F + Xo
,
Y =− Zo
2β (RW )
d
ds[RW ] + R
, Z = Zo
√(RW ) e
12 F ,
ou Ao > 0, Uo, Xo et Zo ∈ IR; β = γ2/γ1, γ1 ≥ 0, α, γ2 ∈ R.
Les solutions du systeme MHD associees a cette sous-algebre sont:
ρ = t2(1−α)e2βy R , u =[γ1x− y − U ]
γ1t, H1 = t−αeβy X , ,
p = t−2 Aρ , v =V
t, H2 = t−αeβy Y ,
w =W
t, H3 = t−αeβy Z .
Les fonctions W et R sont determinees par
(RW )d
ds[V ]−RV + 2βAR +
β
4π[X2 + Z2]− Z
4π
d
ds[Y ] = 0 ,
(RW )[d
ds[W ]− 1] +
d
ds[AR] +
18π
d
ds
[X2 + Y 2 + Z2
]= 0 .
M3,43; G + αH, K1, P2 + βH
variable de symetrie: s = z
Soit F =∫
ds
Wet les fonctions suivantes
A =Ao W (1−κ) e(3−κ) F ,
U =∫
ds
RW
[d
ds[Z] X − Z
d
ds[X]
]+ Uo , V = − 1
2β
1R
d
ds[RW ] + 3− 2α
,
X =Xo
√RW
(W − Z2o eF )
e32 F , Y = − 1
2β RW
d
ds[RW ] + R
Z, Z = Zo
√RWe
12 F ,
ou Ao > 0, Uo, Xo et Zo sont des constantes arbitraires reelles, α , β ∈ IR.

145
Les solutions du systeme MHD associees a cette sous-algebre sont:
ρ = t2(1−α)e2βy R , u =x− U
t, H1 = t−αeβyX ,
p = t−2Aρ , v =V
t, H2 = t−αeβyY ,
w =W
t, H3 = t−αeβyZ .
Les fonctions W et R sont determinees par
(RW )d
ds[V ]−RV + 2βAR +
β
4π[X2 + Z2]− Z
4π
d
ds[Y ] = 0
(RW )[
d
ds[W ]− 1
]+
d
ds[AR] +
18π
d
ds
[X2 + Y 2 + Z2
]= 0 .
M3,44; G + P2 + α1 P3 + α2H, K1, P1 + β1 P2 + β2 H
variable de symetrie: s = α1 ln[t] + z
Introduisons f = f(s) et F =∫
ds
f, ainsi que les fonctions suivantes
A =Ao f (1−κ) e(3−κ) F ,
U =β1
∫ds
Rf
[d
ds[Z] X − Z
d
ds[X]
]− β1
∫ds
V
f− F + Uo, V = − 1
2β
1R
d
ds[Rf ] + 3− 2α2
,
X =√
Rf
f − Z2o eF
e32 F
[(1− α)
β2− 1
β1
]Zo e−F + Xo
,
Y =− Z
2β Rf
d
ds[Rf ] + R
, Z = Zo
√(Rf)e
12 F ,
ou Ao > 0, Uo et Zo ∈ IR ; β = β2/β1, α1 ≥ 0, α2, β1 β2 ∈ IR.
Les solutions du systeme MHD associees a cette sous-algebre sont:
ρ = t2(1−α2)e2νy R , u =1
tβ1[β1x− U − (ln[t] + y)] , H1 = t−α2eνy X ,
p = t−2Aρ , v =V
t, H2 = t−α2eνy Y ,
w =f − α1
t, H3 = t−α2eνy Z .
Les fonctions f et R sont determinees par les EDO suivantes :
(Rf)d
ds[V ]−RV + 2βAR +
β
4π[X2 + Z2]− Z
4π
d
ds[Y ] = 0 ,
(Rf)[d
ds[f ]− 1] + α1R +
d
ds[AR] +
β
8π
d
ds
[X2 + Y 2 + Z2
]= 0 .

146
M3,45; G + P3 + αH, K1, P1 + β1 P2 + β2 H
variable de symetrie: s = ln[t] + z
Introduisons f = f(s), F =∫
ds
fet les fonctions suivantes
A =Ao f (1−κ) e(3−κ) F ,
U =β1
∫ds
Rf
[d
ds[Z]X − Z
d
ds[X]
]−
∫ds
V
f+ Uo, V = − 1
2β
1R
d
ds[Rf ] + 3− 2α
,
X =√
Rf
(f − Z2o eF )
e32 F
(1− α)
β2Zo e−F + Xo
,
Y =− 12β Rf
d
ds[Rf ] + R
Z, Z = Zo
√(Rf) e
12 F ,
ou Ao > 0, Uo, Xo et Zo ∈ IR ; ν = β2/β1, β1 ≥ 0, α, β2 ∈ IR.
Les solutions du systeme MHD correspondant a cette sous-algebre sont:
ρ = t2(1−α)e2νy R , u =1
tβ1[β1x− U − y] , H1 = t−αeνy X ,
p = t−2Aρ , v =V
t, H2 = t−αeνy Y ,
w =f − 1
t, H3 = t−αeνy Z .
Les fonctions f et R sont determinees par
(Rf)d
ds[V ]−RV + 2βAR +
β
4π[X2 + Z2]− Z
4π
d
ds[Y ] = 0 ,
(Rf)[d
ds[f ]− 1] + R +
d
ds[AR] +
18π
d
ds
[X2 + Y 2 + Z2
]= 0 .
M3,46; G + P1 + α1 P3 + α2H, K1, P2 + βH
variable de symetrie: s = α1 ln[t] + z
Introduisons f = f(s), F =∫
ds
fet les fonctions suivantes
A =Ao f (1−κ) e(3−κ) F ,
U =∫
ds
Rf
[d
ds[Z] X − Z
d
ds[X]
]+ F + Uo, V = − 1
2β
1R
d
ds[Rf ] + 3− 2α2
,
X =1
f − Z2o eF
Z + Xo
√Rfe
32 F
, Y = − Z
2β(Rf)
d
ds[Rf ] + R
, Z = Zo
√(Rf)e
12 F ,
ou Ao > 0, Uo, Xo et Zo ∈ IR ; α1 ≥ 0, α2, β ∈ IR.

147
Les solutions du systeme MHD associees a cette sous-algebre sont:
ρ = t2(1−α2)e2βy R , u =x− U + ln[t]
t, H1 = t−α2eβy X ,
p = t−2α2Aρ , v =V
t, H2 = t−α2eβy Y ,
w =f − α1
t, H3 = t−α2eβy Z .
Les fonctions f et R sont determinees par
(Rf)d
ds[V ]−RV + 2βAR +
β
4π[X2 + Z2]− Z
4π
d
ds[Y ] = 0 ,
(Rf)[d
ds[R]− 1] + R +
d
ds[AR] +
18π
d
ds
[X2 + Y 2 + Z2
]= 0 .
M3,47; G + P3 + αH, K1, P2 + βH
Introduisons f = f(s), F =∫
ds
fet les fonctions suivantes
A =Ao f (1−κ) e[(3−κ) F ,
U =∫
ds
Rf
[d
ds[Z] X − Z
d
ds[X]
]+ Uo, V = − 1
2β
1R
d
ds[Rf ] + 3− 2α
,
X =Xo
√(Rf)
e32 F
(f − Z2o eF )
, Y = − Z
2β(Rf)
d
ds[Rf ] + R
, Z = Zo
√(Rf)e
12 F ,
ou Ao > 0, Uo, Xo et Zo ∈ IR ; α, β ∈ IR.
Les solutions du systeme MHD associees a cette sous-algebre sont:
ρ = t2(1−α)e2βy R , u =x− U
t, H1 = t−αeβy X ,
p = t−2αAρ , v =V
t, H2 = t−αeβy Y ,
w =f − 1
t, H3 = t−αeβy Z .
Les fonctions f et R sont determinees par
(Rf)d
ds[V ]−RV + 2βAR +
β
4π[X2 + Z2]− Z
4π
d
ds[Y ] = 0 ,
(Rf)[d
ds[R]− 1] + R +
d
ds[AR] +
18π
d
ds
[X2 + Y 2 + Z2
]= 0 .
M3,38; F + αH, K1 + βH, P2
variable de symetrie: s = zt

148
Introduisons f = f(s) et les fonctions suivantes
A =Ao f (1−κ) exp[2(1− κ)
∫ds
f
],
U =12β
1R
d
ds[Rf ] + 2(α + 1)
, V =
∫ds
Rf
[d
ds[Z]Y − Z
d
ds[Y ]
]+ Vo ,
X =− 12β
Z
Rf
d
ds[Rf ] , Y = Yo
√Rf
f − Z2o
exp[−
∫ds
f − Z2o
], Z = Zo
√Rf ,
ou Ao > 0, Uo, Vo, Xo, Yo et Zo ∈ IR; α, β ∈ IR.
Les solutions du systeme MHD associees a cette sous-algebre sont:
ρ = t2αe2βx/t R , u =x− U
t, H1 = tαeβx/t X ,
p = t2αAρ , v =V
t, H2 = tαeβx/t Y ,
w =f + s
t, H3 = tαeβx/t Z .
Les fonctions f et R sont determinees par
(Rf)d
ds[U ] + RU − 2βAR− β
4π[Y 2 + Z2] +
Z
4π
d
ds[X] = 0
(Rf)[d
ds[f ] + 1] +
d
ds[AR] +
18π
d
ds
[X2 + Y 2 + Z2
]= 0 ,
M3,41; F + K2 + αH, K1 + β H, P3variable de symetrie: s = ln[t]− y
t
Introduisons f = f(s) et les fonctions suivantes :
A =Ao f (1−κ) exp[2(1− κ)
∫ds
f
], U =
12β
1R
d
ds[Rf ] + 2(α + 1)
,
X =− 12β
Y
Rf
d
ds[Rf ] , Y = Yo
√Rf, Z = Zo
√Rf
f − Y 2o
exp[−
∫ds
f − Y 2o
],
ou Ao > 0, Uo, Vo, Xo, Yo et Zo ∈ IR ; α, β ∈ IR.
Les solutions du systeme MHD associees a cette sous-algebre sont:
ρ = t2αe2βx/t R , u =x− Ut
t, H1 = tαeβx/t X ,
p = Aρ , v = ln[t]− [f + s] + 1 , H2 = tαeβx/t Y ,
w =∫
ds
Rf
[d
ds[Y ] Z − Y
d
ds[Z]
], H3 = tαeβx/t Z .
Les fonctions f et R sont determinees par
(Rf)d
ds[U ] + RU − 2βAR− β
4π[Y 2 + Z2]− Y
4π
d
ds[X] = 0 ,
(Rf)[
d
ds[f ] + 1
]−R +
d
ds[AR] +
18π
d
ds
[X2 + Y 2 + Z2
]= 0 .
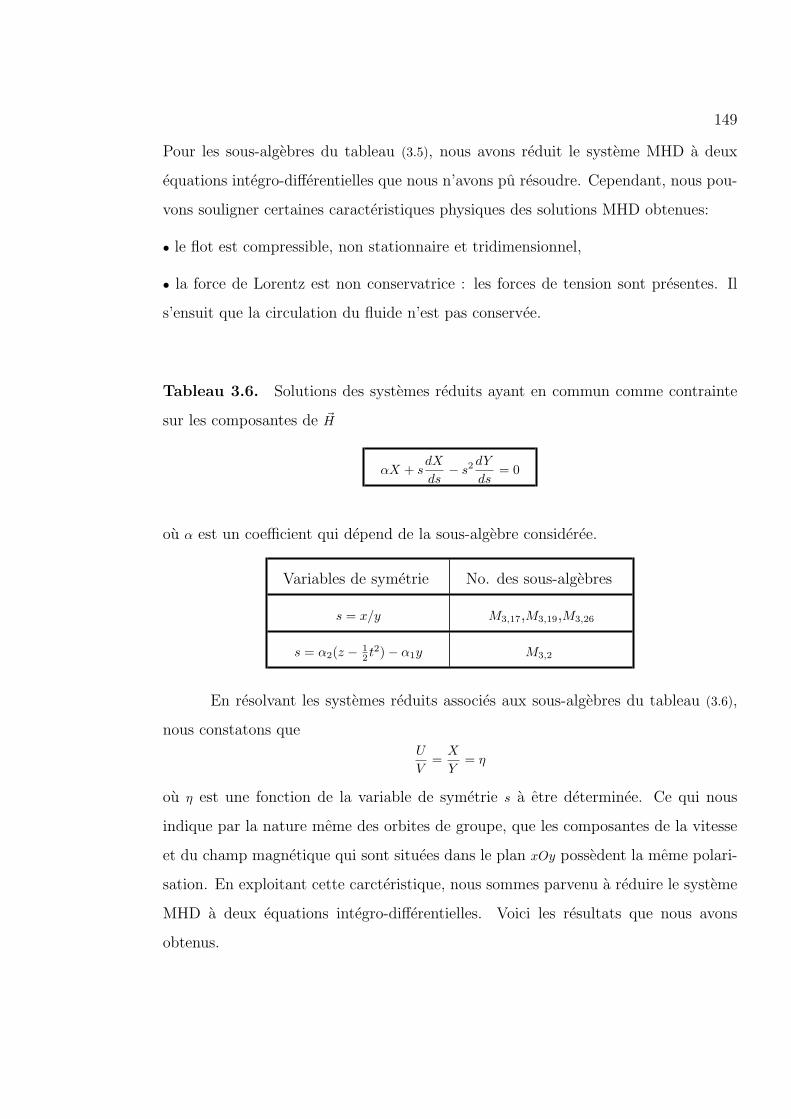
149
Pour les sous-algebres du tableau (3.5), nous avons reduit le systeme MHD a deux
equations integro-differentielles que nous n’avons pu resoudre. Cependant, nous pou-
vons souligner certaines caracteristiques physiques des solutions MHD obtenues:
• le flot est compressible, non stationnaire et tridimensionnel,
• la force de Lorentz est non conservatrice : les forces de tension sont presentes. Il
s’ensuit que la circulation du fluide n’est pas conservee.
Tableau 3.6. Solutions des systemes reduits ayant en commun comme contrainte
sur les composantes de ~H
αX + sdX
ds− s2 dY
ds= 0
ou α est un coefficient qui depend de la sous-algebre consideree.
Variables de symetrie No. des sous-algebres
s = x/y M3,17,M3,19,M3,26
s = α2(z − 12 t2)− α1y M3,2
En resolvant les systemes reduits associes aux sous-algebres du tableau (3.6),
nous constatons que
U
V=
X
Y= η
ou η est une fonction de la variable de symetrie s a etre determinee. Ce qui nous
indique par la nature meme des orbites de groupe, que les composantes de la vitesse
et du champ magnetique qui sont situees dans le plan xOy possedent la meme polari-
sation. En exploitant cette carcteristique, nous sommes parvenu a reduire le systeme
MHD a deux equations integro-differentielles. Voici les resultats que nous avons
obtenus.

150
M3,17; F + αH, Po, P3
variable de symetrie: s = xy
Introduisons
η = η (s) , F =∫
ds
(η − s),
et les fonctions suivantes:
R =Ro
(η − s)Vexp
[−
∫(2αη + s)s(η − s)
ds
], A = Ao[(η − s)V ](1−κ) exp
[(1− κ)
∫ds
(η − s)
],
Y =Yo
(η − s)exp
[−
∫(αη + s)s(η − s)
ds
], Z =
Zo[(η − s)V eF − Y 2
o
4πRo
] exp[−α
∫η ds
s(η − s)
],
ou Ao > 0, Ro > 0, Yo et Zo ∈ IR ; α ∈ IR.
Les solutions du systeme MHD s’expriment en termes de η et V :
ρ = x2α R, u = η (s)V , H1 = xαη (s)Y ,
p = Aρ , v = V (s) , H2 = xαY ,
w =YoZo
[4πRo(η − s)V eF − Y 2o ]
+ Wo , H3 = xαZ .
Les fonction η et V sont determinees par les equations integro-differentielles :
s(η − s)RVd
ds[ηV ] + 2αAR + s
d
ds[AR] +
α
4π[Y 2 + Z2] +
s
8π
d
ds
[Y 2 + Z2
]+
s2
4πY
d
ds[ηY ] = 0 ,
(η − s)RdV
ds− s
d
ds[AR]− s
8π
d
ds
[(1 + η2)Y 2 + Z2
]+
Y 2
4π
dη
ds= 0 .
M3,19; F + K3 + αH, Po, P3
variable de symetrie: s = xy
Introduisons
η = η (s) , F =∫
ds
(η − s),
et les fonctions suivantes:
R =Ro
(η − s)Vexp
[−
∫(2αη + s)s(η − s)
ds
], A = Ao[(η − s)V ](1−κ) exp
[(1− κ)
∫ds
(η − s)
],
Y =Yo
(η − s)exp
[−
∫(αη + s)s(η − s)
ds
], Z =
Zo
[(η − s)V eF − Y 2o
4πRo]exp
[−α
∫η ds
s(η − s)
],
ou Ao > 0, Ro > 0, Yo et Zo ∈ IR ; α ∈ IR.

151
Les solutions du systeme MHD s’expriment en termes de η et V :
ρ = x2α R , u = η (s)V , H1 = xαη (s)Y ,
p = Aρ , v = V (s) , H2 = xαY ,
w = ln[x]− YoZo[4πRo(η − s)V eF − Y 2
o
] −∫
η
s(η − s)ds , H3 = xαZ .
Les fonction η et V sont determinees par les equations integro-differentielles :
s(η − s)RVd
ds[ηV ] + 2αAR + s
d
ds[AR] +
α
4π[Y 2 + Z2] +
s
8π
d
ds
[Y 2 + Z2
]+
s2
4πY
d
ds[ηY ] = 0 ,
(η − s)RdV
ds− s
d
ds[AR]− s
8π
d
ds
[(1 + η2)Y 2 + Z2
]+
Y 2
4π
dη
ds= 0 .
M3,26; F + α1 G + α2 H,Po, P3
variable de symetrie: s = xy
Introduisons
η = η (s) , F =∫
[s + α1η] ds
s(η − s),
et les fonctions suivantes:
R =Ro
(η − s)Vexp
[−
∫(2α2 − α1)η + s
s(η − s)ds
], A =
Ao
[(η − s)V ]κexp
[−
∫[(2α2 + α1)η + κs]ds
s(η − s)
],
Y =Yo
(η − s)exp
[−
∫α2η + s
s(η − s)ds
], Z =
Zo
[(η − s)V eF − Y 2o
4πRo]exp
[−α2
∫ηds
s(η − s)
],
ou Ao > 0, Ro > 0, Yo et Zo ∈ IR ; α1 6= 0, 1, α2 ∈ IR.
Les solutions du systeme MHD s’expriment en termes de η et V :
ρ = x2(α2−α1) R , u = x−α1η (s)V , H1 = x−α2η (s)Y ,
p = x2α2 A, v = x−α1V (s) , H2 = x−α2Y ,
w = x−α1 exp[−α1
∫η ds
s(η − s)
]YoZo
[4πRo(η − s)V eF − Y 2o ]
]+ Wo
, H3 = x−α2Z .
Les fonctions η et V sont determinees par les equations integro-differentielles :
s(η−s)RVd
ds[ηV ]+α1 R(ηV )2+2α2A+s
d
ds[A]+
α2
4π[Y 2+Z2]+
s
8π
d
ds
[Y 2 + Z2
]+
s2
4πY
d
ds[ηY ] = 0 ,
s(η − s)RdV
ds+ α1 Rη V 2 − s2 d
ds[A]− s2
8π
d
ds
[(1 + η2)Y 2 + Z2
]+
sY 2
4π
dη
ds= 0 .

152
M3,2; K3 + Po + αH, K1 + α1 P3 + α2 P2 + α3 H, P1variable de symetrie: s = α2(z − 1
2 t2)− α1 y
Introduisons
η = η (s) , F = 2α
∫ds
(α2 − α1η)W, Λ = (α2 − α1η)W e−F − Z2
o
4πRo, Γ = α
∫ds
e−F
Λ,
et les fonctions suivantes:
R =Ro
(α2 − α1η)Wexp
[−2
∫(βηW + α)
(α2 − α1η)Wds
], A = Ao[(α2 − ηα1)W ](1−κ),
U =α2ZoXo
4πRo
[1Λ
exp [Γ + F ]− 2α
∫exp [Γ + F ]
Λ(α2 − α1η)Wds
]+ Uo ,
X =Xo
Λexp
[−
∫ds
[2α
e−F
Λ+
βη
(α2 − ηα1)
] ], Z =
Zo
(α2 − α1η)exp
[−β
∫η ds
(α2 − α1η)
],
ou Ao > 0, Ro > 0, Uo, Xo et Zo ∈ IR ; α, α1, α2, α3 ∈ IR, β = α3/α2.
Les solutions du systeme MHD s’expriment en termes de η et W :
ρ = e2(βy+αt) R, u = 1α2
(U + y) , H1 = e(βy+αt) X ,
p = Aρ , v = η(s)W , H2 = e(βy+αt) η(s)Z ,
w = W , H3 = e(βy+αt) Z .
Les fonction η et W sont determinees par les equations integro-differentielles :
[(α2−α1η)W−α2]Rd
ds[ηW ]+2βAR−α1
d
ds[AR]+
β
4π[X2+Z2]−α1
8π
d
ds
[X2 + Z2
]−α2Z
4π
d
ds[ηZ] = 0,
[(α2 − α1η)W − α2]RdW
ds+ R + α2
d
ds[AR] +
α2
8π
d
ds
[(1 + η2)Z2 + X2
]− α1Z2
4π
dη
ds= 0 .
De ces resultats, nous constatons que les solutions MHD sont stationnaires (sauf
pour M3,2). Le flot est compressible, tridimensionnel et soumis a une force de Lorentz
non-conservatrice.
Maintenant, nous considerons les sous-algebres dont la variable de symetrie
est respectivement du type cylindrique, conique et spirale logarithmique. Les systeme
reduits qui leurs sont associes sont d’une grande complexite. Consequemment, nous
avons choisi les sous-algebres possedant une symetrie axiale (a l’exception de M3,65).
Cela nous a permis de reduire le systeme MHD a deux equations integro-differentielles
qui determinent variables angulaires des composantes de la vitesse et du champ
magnetique (etant V et Y respectivement).

153
M3,1; J3 + K3 + αH, Po + βH, P3
variable de symetrie: s =√
x2 + y2
Pour cette sous-algebre, nous avons exploite la symetrie axiale (i.e. suivant l’axe z),
c’est-a-dire de poser dans le systeme reduit correspondant que Z = 0. Nous obtenons
alors que β = 0, V = Y et il en decoule les solutions particulieres suivantes
ρ =Ro
sU cos(V )exp
[−2αϕ− 2α
∫ds
stan(V )
], ou ϕ ≡ arctan [x/y] ,
p =Ao
[sU cos(V )]κexp
[−2αϕ− 2α
∫ds
stan(V )
],
u =U sin(ϕ− V )
v =U cos(ϕ− V ) ,
w =− ϕ−∫
ds
stan(V ) ,
H1 =Xo
scos(V )exp
[−αϕ− α
∫ds
stan(V )
]sin(ϕ− V ) ,
H2 =Xo
scos(V )exp
[−αϕ− α
∫ds
stan(V )
]cos(ϕ− V ) ,
H3 =0 .
Les fonctions U et V sont determinees par les deux EDO suivantes:
[Uκ − κAoU
−1[s cos(V )](1−κ)
]dU
ds+ κAos
(2−κ)[cos(V )]−κ sin(V )dV
ds− κAos
−κ[cos(V )](1−κ) = 0,
([κAo
Ros(2−κ)U (1−κ)[cos(V )]−κ sin2(V ) +
X2o
4πRoU [cos(V )]−1 − sU2 cos(V )
]dV
ds
− κAo
Ros(2−κ)U−κ[cos(V )](1−κ) sin(V )
dU
ds− U2 sin(V )− αX2
o
4πRos−1U [cos(V )]−2
− Ao
Ro[sU cos(V )](1−κ)
[sin(V )[κ + 2α tan(V )] + 2α cos(V )
]= 0
)
avec Ao, Ro, et Xo > 0, α, β ∈ IR.

154
M3,64; J3 + αH, F + βH,P3
variable de symetrie: s =√
x2+y2
t
Pour cette sous-algebre, nous avons fixe α = 0 et β = −1. De plus, en exploitant la
symetrie axiale nous avons suppose que l’ecoulement soit plannaire (w = 0) et que
H3 = 0. Nous introduisons d’abord les fonctions suivantes
ϕ = arctan [x/y] ,
U =s[Yo cos(Y ) + Xo sin(Y )]
sin(Y − V ),
R =Ro
s[U cos(V )− s],
A =Ao[sU cos(V )− s2]−κ ,
X =Xo
s cos(Y ),
ou Ao > 0, Ro > 0, Wo et Xo sont des constantes arbitraires.
Les solutions MHD associees a cette sous-algebre sont
ρ =R
t2, u = U sin(ϕ− V ) , H1 =
X
tsin(ϕ− Y ) ,
p =A
t2, v = U cos(ϕ− V ) , H1 =
X
tcos(ϕ− Y ) ,
w = 0 , H3 = 0 .
Les inconnues V et Y sont determinees par les deux EDO suivantes :
12
d
ds
[U2 + (XU)2 sin2(Y − V )
]+ sU cos(V )
dA
ds= 0
UdV
ds+ RU2 sin(V )− s sin(V )
dA
ds−X cos(Y − V )
d
ds[XU sin(Y − V )] = 0
M3,65; J3 + αH, F + βH,Po
variable de symetrie: s =√
x2+y2
z
La resolution du systeme reduit correspondant s’avere tres difficile. Neanmoins, nous
sommes arrive a reduire le systeme MHD a trois equations integro-differentielles en
posant α = 0 et β = −2 et en utilisant la representation polaire pour les composantes
de la vitesse ~v et du champ magnetique ~H :
f = U sin(V ), g = U cos(V ), h1 = X sin(Y ), h2 = X cos(Y ) .

155
Introduisons les fonctions suivantes
R =Ro
s[g − sW ]exp
[2
∫Wds
s[g − sW ]
],
A =Ao
sκ[g − sW ]κexp
[(4− 3κ)
∫Wds
s[g − sW ]
],
h1 =1
s[g − sW ]exp
[∫g ds
s[g − sW ]
](∫ds exp
[−
∫g ds
s[g − sW ]
](Xo
df
ds− (Xo + s2)
sf
)+ ho
)
h2 =Xo[sW + 1]s[g − sW ]
,
Z =Xo W
s[g − sW ].
Les solutions MHD associees a cette sous-algebre sont
ρ =R
z4, u =
[gy − fx]√x2 + y2
, H1 =[h2y − h1x]√
x2 + y2,
p =A
z4, v =
[gx + fy]√x2 + y2
, H1 =[h2x + h1y]√
x2 + y2,
w = W , H3 =Z
z2.
Les inconnues f , g et W sont determinees sont determinees par les equations integro-
differentielles:(s[g − sW ]
dg
ds− f2 − Ao
Rosκ[g − sW ]κ
[κ
d
ds[s(g − sW )] + (3κ− 4)
]exp
[(2− 3κ)
∫W ds
s[g − sW ]
]
+1
4πRoexp
[−2
∫W ds
s[g − sW ]
](12[g − sW ]
d
ds
[s2h2
1
]− sX2oW
d
ds
[(sW + 1)g − sW
]) )= 0 ,
s[g − sW ]df
ds+ gf − Xo
4πRoexp
[−2
∫ds
W
s[g − sW ]
](s
d
ds
[s2h1
]− [sW + 1]d
ds[sh1]
)= 0 ,
(W 2 + [g − sW ]W +
[3κsW + κ
d
ds[s(g − sW )]
]exp
[(2− 3κ)
∫W ds
s[g − sW ]
]
+[g − sW ]
4πRoexp
[∫ −2Wds
s[g − sW ]
][2s[h2
1 + h22]+ s2 d
ds
[h2
1 + h22
]+
X2o [sW + 1](g − sW )
d
ds
[W
s(g − sW )
]])= 0 ,
ou Ro, Ao et ho sont des constantes arbitraires reelles.

156
M3,30; J3 + α1F + α2G + α3H, Po, P3
variable de symetrie: s =√
x2 + y2 eα1ϕ
ou ϕ ≡ arctan [x/y], α1 6= α2, α1 6= 0; α3 ∈ IR
Introduisons les fonctions suivantes
S(V ; 1,−α1) = cos(V )− α1 sin(V ) ,
F =∫
ds[sin(V )− s]
sS(V ; 1,−α1).
Nous obtenons comme solutions MHD
ρ =Ro
sUS(V ; 1,−α1)exp [2(α2 − α3)ϕ− (2α3 − α2 + α1)F ] ,
p =Ao
[sUS(V ; 1,−α1)]κexp [−2α3ϕ− (2α3 + κα2 + α1)F ] ,
u = exp [−α2ϕ]U sin(ϕ− V ) ,
v = exp [−α2ϕ]U sin(ϕ− V ) ,
w =Wo exp [−α2(ϕ + F )] ,
H1 =Xo
sS(V ; 1,−α1)exp [−α3ϕ− (α1 + α3)F ] sin(ϕ− V ) ,
H2 =Xo
sS(V ; 1,−α1)exp [−α3ϕ− (α1 + α3)F ] cos(ϕ− V ) ,
H3 =0 ,
ou Ao > 0, Ro > 0, Wo et Xo sont des constantes arbitraires.
Les fonctions U et V sont determinees par les equations integro-differentielles:
Ao
Ro[sUS(V ; 1,−α1)](1−κ) exp [−(κ + 1)α2F ]
[κ
U
d
ds[US(V ; 1,−α1)] + (κα2 + α1) sin(V )
]
− sUS(V ; 1,−α1)dU
ds− α2U
2 sin(V ) = 0 ,
[sU2S(V ; 1,−α1)]dV
ds+ U2 sin(V ) +
X2o
4πRo
U exp [−(α1 + α2)F ]s[S(V ; 1,−α1)]2
[α1 + α3 + (1 + α1)s
dV
ds
]
− Ao[sU ](1−κ)exp [−(κ+1)α2F ]
Ro[S(V ; 1,−α1)]κ
[S(V ; 1,−α1)
[κ
U
d
ds[US(V ; 1,−α1)]+(κα2 + α1) sin(V )
]+2α3
]= 0.

157
M3,82; J3 + α1 F + α2H,F + β1 G + β2 H,P3
variable de symetrie: s =√
x2+y2
t1σ
exp [νϕ].
ou ϕ ≡ arctan [x/y], σ ≡ 1− β1, ν = −α1β1σ
En choisissant : α1 = −α2, β2 = −1, β2 = −1, et en introduisant la notation suivante
S(V ; α, β) = α cos(V ) + β sin(V ) , S(Y ; α, β) = α cos(Y ) + β sin(Y ) .
Soient les fonctions suivantes
U =s[Co cos(Y ) + βBo sin(Y )]
(Bo − νCo) sin(Y − V ), G = s
[S(V ; 1,−ν)U − s
σ
],
R =Ro
Gexp
[2
∫ds
G
[νU sin(V )− β1s
σ
]], A =
Ao
Gκexp
[2(1− κ)
∫ds
G
[νU sin(V )− s
σ
]],
X =σ(Bo − νCo)σS(Y ; 1,−ν)
,
ou Ao > 0, Ro > 0, Bo et Co sont des constantes arbitraires.
Nous obtenons comme solutions MHD
ρ =t−2σ (1+β1) exp
[2ν(1− α1)ϕ
],
p =t−2σ exp [2νϕ] ,
u =tν exp [να1ϕ]U sin(ϕ− V ) ,
v =tν exp [να1ϕ]U cos(ϕ− V ) ,
w =0 ,
H1 =t−1σ exp [νϕ]X sin(ϕ− V ) ,
H2 =t−1σ exp [νϕ]X cos(ϕ− V ) ,
H3 =0 .
Les fonctions V et Y sont determinees par les equations integro-differentielles:
GdU
ds+ U [
β1s
σ+ νU sin(V )]+
[2σ
s2
Gcos(V )− sκ
GS(V ; 1, β)
(dG
ds+ 2[νU sin(V ) +
s
σ])]
A
R
+(ν2 + 1)
4π
sX2
RS(Y ; 1,−ν)]sin(Y − V )
dY
ds= 0 ,
sGUdV
ds+ U2 sin(V )− s
G
[κS(V ;−β, 1)
(dG
ds+ 2[νU sin(V ) +
s
σ])
+ 2[νU sin(V ) +s
σ]]A
R
− (ν2 + 1)4π
sX2
RS(Y ; 1,−ν)]cos(Y − V )
dY
ds= 0 .

158
M3,75; J3 + Po + αH, F + G + β1 Po + β2 H, P3
variable de symetrie : s =√
x2 + y2 exp[
1β1
(t + ϕ)]
ou ϕ ≡ arctan [x/y]
En choisissant : α = 0, β1 ≡ 1β > 0, β2 = −1, et en introduisant la notation suivante
S(V ;α, β) =α cos(V ) + β sin(V ) ,
S(Y ;α, β) =α cos(Y ) + β sin(Y ) .
Soient les fonctions suivantes
U =s[Co cos(Y ) + βBo sin(Y )]
(Co + Bo) sin(Y − V ),
G =s
[S(V ; 1, β)U − βs
], F =
∫ds
G
[U sin(V )− s
],
ou Bo et Co sont des constantes arbitraires.
Nous obtenons comme solutions MHD
ρ =Ro
Gexp [−2β(ϕ + 2t)− 2βF ] ,
p =Ao
Gκexp [−2β(ϕ + 2t) + 2(κ− 1)βF ] ,
u = exp [−2β(ϕ + 2t)]U sin(ϕ− V ) ,
v = exp [−2β(ϕ + 2t)]U cos(ϕ− V ) ,
w =0 ,
H1 =(Co + Bo)sS(Y ; 1, β)
exp [−2β(ϕ + 2t)] sin(ϕ− V ) ,
H2 =(Co + Bo)sS(Y ; 1, β)
exp [−2β(ϕ + 2t)] cos(ϕ− V ) ,
H3 =0 ,
ou Ao > 0 et Ro > 0 sont des constantes arbitraires.
Les fonctions V et Y sont determinees par les equations integro-differentielles:
sGdU
ds+ βU [s− U sin(V )]+
sAo
RoGκexp [2κF ]
[2βs cos(V )− κS(V ; 1, β)
(dG
ds− 2β[U sin(V )− s]
)]
+ (β2 + 1)(Bo + Co)2
4πRo
G
[S(Y ; 1, β)]3exp [2βF ] sin(Y − V )
dY
ds= 0 ,
sGUdV
ds+ U2 sin(V )+
sAo
RoGκexp [2κF ]
[κS(V ;−β, 1)
[dG
ds− 2β[U sin(V )− s]
]+ 2β[U − s sin(V )]
]
+ (β2 + 1)(Bo + Co)2
4πRo
G
[S(Y ; 1, β)]3exp [2βF ] cos(Y − V )
dY
ds= 0 .

159
M3,24; G + P1 + αH, P3 + βH, Po
variable de symetrie: s = y
Pour cette sous-algebre, nous avons obtenu deux types de solutions MHD en
considerant les deux cas suivants. (I) En imposant que ~Fm = 0. (II) En posant U = V
et βX = αZ dans le systeme reduit correspondant.
I) Introduisons d’abord les fonctions
F (s) = α− ωo tan(ϕ), G(s) =α
ωotan(ϕ) , ϕ = ωo s + δo .
desquelles nous exprimons les solutions MHD comme suit
ρ =(
12αAo
)(2α−1)/ν
exp[2[(α− 1)x + βz]
]V a/ν
[F (s)UV + G(s)V 2 − U2
](2α−1)/ν
,
p =A
(1−2α)/νo
(2α)(2α+κ)/νexp
[2(αx + βz)
]V a/ν
[F (s)UV + G(s)V 2 − U2
](2α+κ)/ν
,
u =exU, v = exV, w = ex
[βωo U2 + β[ωo(1− α)− α tan(ϕ)] UV
]
[αωoU − α2 tan(ϕ)],
H1 =αZo
βe(αx+βz) sin(ϕ), H2 =
ωoZo
βe(αx+βz) cos(ϕ), H3 = Zoe
(αx+βz) sin(ϕ) ,
ou ωo =√
α2 + β2, ; Ao, δo et Zo ∈ IR ; α, β ∈ IR, a = 2[(α− 1)κ− α], ν = κ + 1.
Les inconnues U et V sont determinees par le systeme d’equations algebriques
([β2
α+ (1− 2α)− ωo cot(ϕ)
]U3 + [1− ωo cot(ϕ)] [2α + G(s)] V 3+
+[(
(2α− 1) +β2
α− ωo cot(ϕ)
)G(s) + [ωo cot(ϕ)− 1]F (s) + r(s) + 2α
]UV 2+
−[(
(2α− 1) +β2
α− ωo cot(ϕ)
)F (s) + [ωo cot(ϕ)− 1]− q(s)
]U2V
)= 0 ,
([(κ− 1)
(ωo cot(ϕ)− β2
α
)− (κ + 1)
]U3 +
[(κ− 1)[ωo cot(ϕ)− 1]G(s) + n(s)
]V 3+
+[(κ− 1)[1− ωo cot(ϕ)] F (s) +
[(κ− 1)
(ωo cot(ϕ)− β2
α
)− (κ + 1)
]G(s) + r(s)
]UV 2+
+[(1− κ)[1− ωo cot(ϕ)]−
[(κ− 1)
(ωo cot(ϕ)− β2
α
)+ (κ + 1)
]F + q(s)
]U2V
)= 0

160
ou pour abreger les expressions nous avons definie les fonctions suivantes
n(s) =α− 2α tan2(ϕ) +α(α− 2)
ωotan(ϕ) ,
r(s) =α(α + 2)−(
ωo(2α + 1 + β2) +2α
ωo
)tan(ϕ)− αωo cot(ϕ) ,
q(s) =α(α + 2) +β2
α(2α− ωo)− αωo cot(ϕ)− 2ωo tan(ϕ) .
En definissant une nouvelle variable U/V (ou V/U) avec V 6= 0 (ou U 6= 0), on peut
resoudre ce systeme d’equations algebriques par la methode de Cardano, ce qui permet
alors d’exprimer U et V en terme de s.
Dans ce cas particulier, la force de Lorentz est nulle : cela resulte du choix des
composantes du champ magnetique. L’ecoulement du fluide est stationnaire (comme
d’ailleurs les solutions MHD) et compressible, evidemment la circulation du flot est
conservee.
II) En posant que U = V et βX = αZ, nous obtenons comme solutions MHD :
ρ =Ro
Vexp
[2[(α− 1)x + βz] + (1− 2α)
∫U
Vds
],
p =Ao
V κexp
[2(αx + βz)− (κ + 2α)
∫U
Vds
],
u =exU, v = exV, w = exU
H1 = − 1α
dY
dse(αx+βz), H2 = Y e(αx+βz) H3 = − 1
α
dY
dse(αx+βz) ,
ou Ro > 0 et Ao > 0 sont des constantes arbitraires reelles ; α, β ∈ IR.
Les inconnues U , V et Y sont determinees par le systeme d’equations
Ud2Y
ds2+
[d2U
ds2+ 2
dU
ds− (α + 1/2)
]dY
ds− (α + 1/2)Y = 0,
VdU
ds+U2+2α
Ao
Roexp
[−(1+κ)
∫U
Vds
]V (1−κ)+
V Y
4πRoexp
[(2α−1)
∫U
Vds
][αY +
12α
d2Y
ds2
]= 0,
VdV
ds+ UV − Ao
RoV κexp
[−(1 + κ)
∫U
Vds
][κ
dV
ds+ (κ + 2α)U
]
− V Y
4πRoexp
[(12α− 1)
∫U
Vds
][1
2α2
d2Y
ds2− dY
ds
]= 0.
Nos hypotheses de depart repose sur la symetrie suivant l’axe y. Le flot est stationnaire
et compressible. La force de Lorentz presente est non conservatrice, donc la circulation
du fluide n’est pas conservee par le theoreme de Kelvin.

161
M3,20; F + K3 + αH, P2, P3 + βP1
variable de symetrie: s = β ln[t] +x− βz
t
Pour κ = 3, nous obtenons les solutions particulieres suivantes :
ρ =Ro t2α(C1 − s/2
)4α+1,
p =Ro t2α
(β2 + 1)(4α + 3)(C1 − s/2
)4α+3,
u =1
(1 + β2)2β ln
(C1 − s/2
)+ s/2
+
C1 + β(C2 − 1)(1 + β2)
,
v =Vo ,
w = ln(t) +1
(1 + β2)2 ln
(C1 − s/2
)− βs/2
+C2 + β(β − C1)
(1 + β2),
H1 =βZotα(C1 − s/2
)2α+1,
H2 =Yotα(C1 − s/2
)2α+1,
H3 =Zotα(C1 − s/2
)2α+1.
Les constantes Ro, Ao, Zo et Yo doivent satisfaire la relation suivante:
−β Ro
8π(2α + 1)(1 + β2)= [Y 2
o + (1 + β2)Z2o ]
ou β ≥ 0 ; −3/4 < α < −1/2 ; Vo, C1 et C2 ∈ IR.
On retrouve des cas similaires en hydrodynamique comme par exemple les tourbillons
de Benard-von Karmen [36]. Etant donne que la force de Lorentz ~Fm derive du
gradient de pression magnetique et qu’elle agisse sur le fluide par compressions et
extansions des lignes de force suivant les deux directions ~e1 et ~e3, la circulation du
fluide est conservee selon le theoreme de Kelvin. De plus, le fait que ( ~H ·∇)~v = 0 indique
que le champ des vitesses est constant suivant les lignes de forces magnetiques. Le
couplage entre les effets magnetiques et hydrodynamiques est confirme par ~Fm · ~v 6= 0.
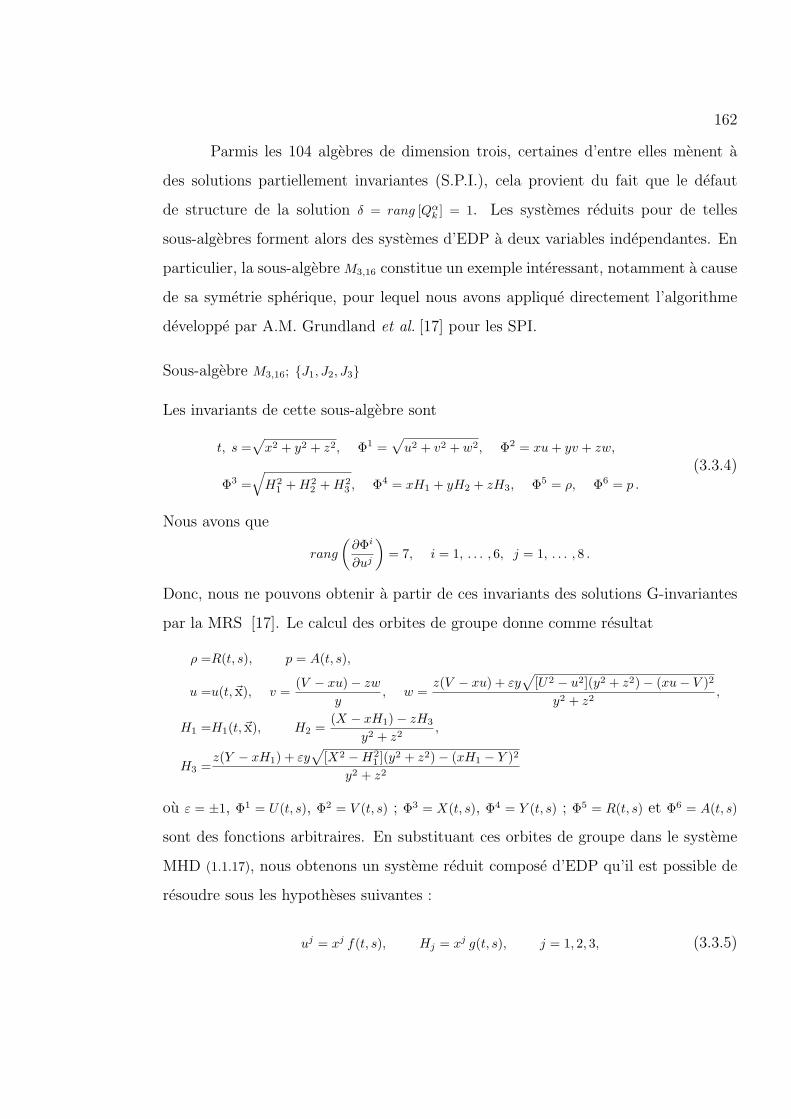
162
Parmis les 104 algebres de dimension trois, certaines d’entre elles menent a
des solutions partiellement invariantes (S.P.I.), cela provient du fait que le defaut
de structure de la solution δ = rang [Qαk ] = 1. Les systemes reduits pour de telles
sous-algebres forment alors des systemes d’EDP a deux variables independantes. En
particulier, la sous-algebre M3,16 constitue un exemple interessant, notamment a cause
de sa symetrie spherique, pour lequel nous avons applique directement l’algorithme
developpe par A.M. Grundland et al. [17] pour les SPI.
Sous-algebre M3,16; J1, J2, J3
Les invariants de cette sous-algebre sont
t, s =√
x2 + y2 + z2, Φ1 =√
u2 + v2 + w2, Φ2 = xu + yv + zw,
Φ3 =√
H21 + H2
2 + H23 , Φ4 = xH1 + yH2 + zH3, Φ5 = ρ, Φ6 = p .
(3.3.4)
Nous avons que
rang
(∂Φi
∂uj
)= 7, i = 1, . . . , 6, j = 1, . . . , 8 .
Donc, nous ne pouvons obtenir a partir de ces invariants des solutions G-invariantes
par la MRS [17]. Le calcul des orbites de groupe donne comme resultat
ρ =R(t, s), p = A(t, s),
u =u(t, ~x), v =(V − xu)− zw
y, w =
z(V − xu) + εy√
[U2 − u2](y2 + z2)− (xu− V )2
y2 + z2,
H1 =H1(t, ~x), H2 =(X − xH1)− zH3
y2 + z2,
H3 =z(Y − xH1) + εy
√[X2 −H2
1 ](y2 + z2)− (xH1 − Y )2
y2 + z2
ou ε = ±1, Φ1 = U(t, s), Φ2 = V (t, s) ; Φ3 = X(t, s), Φ4 = Y (t, s) ; Φ5 = R(t, s) et Φ6 = A(t, s)
sont des fonctions arbitraires. En substituant ces orbites de groupe dans le systeme
MHD (1.1.17), nous obtenons un systeme reduit compose d’EDP qu’il est possible de
resoudre sous les hypotheses suivantes :
uj = xj f(t, s), Hj = xj g(t, s), j = 1, 2, 3, (3.3.5)

163
ou f et g sont des fonctions a etre determinees par le systeme MHD (1.1.17). Puisque
Ji
(uj − xj f(t, s)
)= 0, Ji
(Hj − xj g(t, s)
)= 0 , i, j = 1, 2, 3,
les fonctions donnees par (3.3.5) sont donc invariantes sous l’action de J1, J2, J3.En remplacant les fonctions (3.3.5) dans le systeme MHD (1.1.17) et en prenant que
p = Ao ρκ, nous arrivons au systeme reduit suivant∂R
∂s+ sf
∂R
∂s+ (3f + s
∂f
∂s)R =0,
∂f
∂t+ (f + s
∂f
∂s)f + κ
Ao
sR(κ−2) ∂R
∂s=0,
3g + s∂g
∂s= 0, Ao ∈ IR .
(3.3.6)
Par la methode de separation des variables, nous resolvons le systeme (3.3.6) pour
obtenir les solutions MHD:
ρ = ρo
[s2
2α
d2α
dt2− s2
α2
(dα
dt
)2
+ C1α3(κ−1)
]1/(κ−1)
, p = Aoρκ, uj = −xj
α
dα
dt, Hj =
α
s3xj , (3.3.7)
ou
ρo =(
κ− 1κAo
)1/(κ−1)
, α (t) = C2 exp[∫
η(t′) dt′], C1, C2 ∈ IR, j = 1, 2, 3 .
La fonction η satisfait l’EDO suivante
d2η
dt2− (1 + 3κ)η
dη
dt+ (3κ− 1)η3 = 0 (3.3.8)
qui peut se resoudre comme suit. D’abord, on introduit le changement de variable
ζ(η) =dη
dt,
si bien que l’EDO (3.3.8) se recrit
ζdζ
dη− (1 + 3κ)ηζ + (3κ− 1)η3 = 0 . (3.3.9)
En employant un second changement de variable
ζ(η) = η2χ(τ) , ou τ = ln η ,
nous resolvons l’EDO (3.3.9) pour finalement obtenir
τ = −∫
χdχ
2χ2 − (1 + 3κ)χ + (3κ− 1)+ τo , τo ∈ IR .
Dans ce cas, l’ecoulement du fluide est compressible et irrotationnel. La force de
Lorentz est nulle etant donnee que ∇× ~H = 0. La circulation du fluide est donc
conservee par le theoreme de Kelvin.
164
4. Conclusion : Discussion et developpements futurs.
Dans le Chapitre 2, nous avons developpe la methode des symetries conditionnelles
comme moyen pour obtenir certaines classes de solution d’un systeme d’EDP hyper-
bolique et quasilineaire qui ont ete exprimees en termes d’invariants de Riemann et de
leurs superpositions. Le principe meme de cette approche a d’abord ete enonce dans
l’article de A.M. Grundland et J. Tafel [14], ou notamment, le critere de symetrie
pour des solutions G-invariantes de rang k y a ete demontre. Le progres effectue dans
cette these reside dans le fait d’avoir adapte la methode des symetries conditionnelles
afin d’exprimer des solutions sous la forme d’invariants de Riemann. L’element fonda-
mental de cette approche repose sur la condition que le graphe de la solution doit etre
invariant par rapport aux champs vectoriels (2.3.7) avec la propriete d’orthogonalite
(2.3.5). Lorsque ces conditions sont satisfaites, on peut par un changement de vari-
ables approprie rectifier les champs vectoriels (2.3.7), et consequemment, determiner
les conditions d’invariances qui sont imposees au systeme d’EDP de depart.
Les ondes de Riemann et leurs superpositions ont deja ete largement etudiees dans
le cadre de la methode generale des caracteristiques [34]. Cette approche repose
sur l’imposition de certaines conditions sur les champs vectoriels γs et λs des on-
des simples qui entrent en interaction. Pour comparer ces deux methodes, il faut
d’abord resumer les principes de bases qui sous-tendent la methode generale des car-
acteristiques (MGC).
On postule que la forme de la solution, appelee k-onde simple, s’exprime a l’aide de
l’application tangentielle du comme suit :
du =∂uα
∂xµ(x)dxµ =
k∑s=1
ξs (x)γαs (u)λs
µ (u)dxµ , (4.1.1)
165
ou ξs 6= 0 sont traitees comme des fonctions arbitraires de x et les champs vectoriels
γ1, . . . , γk sont lineairement independants. On suppose que les commutateurs de tous
les champs vectoriels γl = γαl ∂/∂uα et γs = γα
s ∂/∂uα soient des combinaisons lineaires
de ceux-ci :
[γl, γs] ∈ span γl, γs , ∀l 6= s = 1, . . . , k . (4.1.2)
Si ces conditions sont satisfaites alors, a cause du caractere homogene de la rela-
tion d’onde (2.1.4), on peut changer la norme des vecteurs γl et γs de sorte que les
commutateurs de ces champs vectoriels deviennent nuls
[γl, γs] = 0 , ∀l 6= s = 1, . . . , k . (4.1.3)
Par consequent, les champs vectoriels γ1, . . . , γk forment une distribution abelienne
dans l’espace des variables dependantes U . Il existe alors une parametrisation de
l’integrale de surface S dans l’espace U qui est tangente a ces champs
S : u = f(r1, . . . , rk
), (4.1.4)
de telle sorte que
∂f
∂rs= γs , ∀ s 6= l = 1, . . . , k . (4.1.5)
Les vecteurs d’onde λs (u) deviennent alors des fonctions des parametres r1, . . . , rk.
Consequemment les differentiels de (4.1.4) sont donnes par
du =k∑
s=1
∂f
∂rsdrs , drs =
p∑µ=1
∂rs
∂xµdxµ , (4.1.6)
desquels, avec la forme postulee (4.1.1), menent au systeme compose des formes
exterieures
drs = ξs (x)λsµ (r1, . . . , rk) dxµ . (4.1.7)
Tel qu’il est montre dans [4] et [33] le systeme (2.1.3) admet des solutions si les condi-
tions suivantes sont satisfaites :
∂λs
∂rl∈ span λs, λl , ∀ s 6= l = 1, . . . , k . (4.1.8)
166
Les conditions (4.1.3) et (4.1.8) assurent que l’ensemble des solutions du systeme de
depart (2.1.3), sujet a la forme prescrite par (4.1.1), depend de k fonctions arbi-
traires a une seule variable. Il a ete demontre dans [33] que toutes les solutions
(i.e. les integrales generales) du systeme (4.1.7), sous les conditions (4.1.8), peuvent
etre obtenues en resolvant (par rapport aux variables r1, . . . , rk) le systeme exprime
sous la forme implicite
λsµ (r1, . . . , rk)xµ = ψs (r1, . . . , rk) (4.1.9)
ou ψs sont des fonctions arbitraires de k variables r1, . . . , rk. Les solutions exprimees
sous la forme (4.1.9) sont constantes sur les hyperplans a (p − k) dimensions perpen-
diculaires aux vecteurs d’onde λs.
Comme on vient de le voir, les deux methodes discutees exploitent les pro-
prietes d’invariance du systeme d’equations de depart. Dans la MGC, on emploie
l’aspect geometrique de la surface integrale (4.1.4), alors que pour la MSC on con-
sidere les proprietes d’invariance comme des proprietes des groupes de symetrie du
systeme de depart (2.1.3). Donc, ces deux approches decrivent deux facettes d’un
meme objet geometrique.
Il existe neanmoins deux differences essentielles entre la methode generale des car-
acteristiques et notre approche. Les ondes multiples de Riemann definies par la
formule (4.1.1) constituent une classe de solutions plus limitees que les solutions de
rang k telles que postulees dans la methode des symetries conditionnelles. Cette
difference provient du fait que les fonctions scalaires ξs(x) presentes dans l’expression
(4.1.2) (decrivant les profils des ondes simples) sont remplacees dans notre cas (i.e. dans
l’expression (2.3.3)) par des matrices Φ de dimensions k×k, cela permet en consequence
un plus large eventail de donnees initiales.
La seconde difference resulte des conditions (4.1.3) et (4.1.8) faites sur les champs
vectoriels γs et λs, et qui assurent la solvabilite du probleme par la methode generale

167
des caracteristiques, ne sont plus necessaires dans le contexte de la methode des
symetries conditionnelles. Cela nous permet de considerer des configurations plus
complexes pour les ondes simples qui entrent en interactions.
Pour tester l’efficacite de notre approche, nous l’avons employee pour construire des
solutions de rang deux admises par le systeme MHD. Les resultats trouves sont tres
similaires a ceux deja obtenus par la methode generale des caracteristiques. Toutes nos
solutions de rang deux sont en faites des ondes doubles (dans le sens de la definition
(4.1.1)). Cela est largement du aux simplifications aditionnelles qui ont ete faites pour
simplifier les calculs : on a pose certaines configurations particulieres pour les vecteurs
d’ondes λs. La plupart des solutions trouvees sont deja traitees dans la litterature:
cf. [3] [24]. En outre, certaines solutions comme (2.4.63)-(2.4.65), (2.4.69)-(2.4.70), (2.4.80)-
(2.4.82) sont nouvelles. Mentionnons, qu’au moins dans le cas des equations MHD,
notre methode s’avere etre plus commode a utiliser que la MGC. En particulier, les
conditions d’invariance (2.3.14) nous fournissent un choix de coordonnees qui facilite
grandement l’integration du systeme reduit (2.3.17).
Il existe une extension de la methode generale des caracteristiques, discutee
dans [34] et [20]. Celle-ci permet de decrire d’autres types de superposition non-
lineaire d’ondes simples qui ne peuvent s’exprimer en termes d’invariants de Riemann.
La condition necessaire pour l’existence de telles classes de solutions du systeme (4.1.1)
se pose comme suit
[γs, γp] = Clsp γl ∀ s 6= p ∈ 1, . . . , k (4.1.10)
Lγs λp ∈ span λs, λp , (4.1.11)
ou les coefficients Clsp ne sont plus necessairement des constantes (ils peuvent en
generale dependre de u), et Lγsλp represente la derivee de Lie d’une forme λp le long
du champ vectoriel γs. Il s’ensuit des equations (4.1.10) et (4.1.11) que l’ensemble des
champs vectoriels γ1, . . . , γk genere le module de Lie |γ1, . . . , γk| (i.e. ces champs
168
sont fermes par rapport a leurs commutateurs). Il est prouve que si la condition
(4.1.10) est satisfaite alors il existe des sous-systemes d’equations (appeles systemes
reduits) relies a un module de Lie donne qui possedent les proprietes suivantes.
(i) Les sous-systemes obtenus sont fortement hyperboliques.
(ii) Les sous-systemes contiennent k equations pour k variables. Cela signifie qu’il
existe une certaine parametrisation de la surface integrale S du systeme de depart
(2.1.3) donnee par
u = f ( τ1, . . . , τk ) , (4.1.12)
telle que
∂f
∂τ s= α1
sγ1 + . . . + αksγ(s) , s = 1, . . . , k . (4.1.13)
(iii) Chaque solution d’un systeme reduit mene a une solution du systeme d’equations
de depart.
L’interpretation physique de ces classes de solutions recouvre egalement les cas ou de
nouveaux types d’onde sont produits lors des superpositions d’ondes simples d’autres
types. Par exemple, la generation d’ondes peut se manifester quand les commuta-
teurs (4.1.10) des champs vectoriels γs et γp sont des combinaisons lineaires de ces
deux champs mais aussi d’autres champs vectoriels γl, . . . , γt. Cela implique que les
ondes associees aux champs vectoriels γl, . . . , γt prennent part dans le processus de
superposition.
Dans le cas d’une superposition de deux ondes simples, on obtient de nouvelles ondes
de differents types qui ne sont pas initialement presentes a l’instant t = 0. Si ces
nouvelles ondes ne disparaissent pas asymptotiquement lorsque t → ∞, l’effet est
permanent. Selon la terminologie employee, ce phenomene est interprete comme une
“superposition non elastique”.
Les resultats de l’analyse des equations MHD nous donnent que les commutateurs des
champs vectoriels γl, . . . , γ8 generent des modules de Lie dans les deux cas suivants
[34].

169
1. Quand ~H = (H1,H2, 0)
|F−, A−, S−, S+, A+, F+|
,
|F−, S−, E, S+, F+|
,
|F−, S−, S+, F+|
. (4.1.14)
2. Quand ~H = (0, 0,H3)
|F−, A−, E, A+, F+|
,
|E, A−, A+, F+|
,
|F−, E, F+|
. (4.1.15)
Ceci nous permet de determiner quel type d’onde est associe a l’ensemble des champs
generes durant le processus de superposition. Par exemple, quand ~H = (H1, H2, 0) le
resultat de la superposition de deux ondes magnetoacoustiques rapides F+ et F− peut
se representer symboliquement par
F+ + F− −→ F ′+ + S′+ + S′− + F ′− . (4.1.16)
Dans ce cas particulier, le module de Lie contient les deux champs vectoriels γF+ et γF−
mais aussi les deux champs γS+ et γS− . Cela signifie que les ondes magnetoacoustiques
lentes S+ et S− associees aux champs γS+ et γS− participent au processus de superposi-
tion. Donc, lorsque deux ondes magnetoacoustiques rapides F+ et F− se superposent;
deux nouvelles magnetoacoustiques lentes S+ et S− en resultent (i.e. un autre type
d’onde que celui present a l’instant initial t = 0). Si cet effet est permanent, c’est-a-
dire que les ondes produites ne sont pas evanescentes pour t →∞, alors ce phenomene
correspond a une superposition non-elastique d’ondes magnetoacoustiques rapides F+
et F− et lentes S+ et S−. Cet exemple illustre pourquoi la superposition de deux ondes
magnetoacoustiques lentes et rapides ne peut s’expliquer, de maniere generale, a par-
tir des invariants de Riemann tels que decrits dans le Chapitre 2: seules certaines
solutions ont ete y obtenues sous certaines conditions particulieres.
La MRS nous a fournit plusieurs classes particulieres de solutions qui sont donnees
sous des formes explicites et dans certains cas sous une forme implicite. Selon la sous-
algebre M3,i a laquelle elles sont associees, nous resumons ces solutions de la maniere
suivante :
170
• Les solutions MHD dont le champ magnetique ~H n’a que deux composantes. Pour
cela, on se refere au tableau (3.2) dans lequel il faut distinguer deux types de solutions
exprimees sous une forme explicite. A l’exception des solutions M3,18, M3,28, M3,29,
M3,48−49, M3,51, M3,85−88, qui s’expriment en termes de fonctions elementaires, toutes
les autres solutions s’expriment a l’aide des fonctions trigonometriques. Notons que
pour toutes ces solutions, la force de Lorentz est conservatrice et ~Fm · ~v 6= 0 : les effets
magnetiques et hydrodynamiques sont couples. La circulation du fluide est conservee
selon le theoreme de Kelvin.
• Les solutions MHD donnees dans le tableau (3.3) s’expriment sous des formes im-
plicites. Notons qu’elles sont des fonctions de t et ~x. Elles decrivent un flot non
stationnaire et compressible qui est soumis a un champ magnetique ~H produisant une
force de Lorentz de direction constante et dont la norme ne depend que du temps. La
circulation du fluide est donc conservee. Egalement, nous avons que ~Fm · ~v 6= 0 donc
les effets magnetiques et hydrodynamiques sont couples.
• Pour les solutions donnees dans les tableaux (3.4) et (3.5) nous avons reduit le systeme
MHD de depart (1.1.17) a un systeme compose de deux equations integro-differentielles
qui dans certains cas particuliers nous avons pu les resoudre (voir l’exemple base sur
la sous-algebre M3 ; Po +αH,P1 +βH, P2 +βH). Certaines proprietes qualitatives com-
munes a toutes ces solutions. Le flot est tridimensionnel compressible et stationnaire,
la force de Lorentz ~Fm n’est pas conservatrice (les forces de tension sont presentes) et
~Fm · ~v 6= 0. De maniere explicite, nous constatons que les composantes de la vitesse ~v
sont couplees aux composantes du champ magnetique ~H.
• Pour les solutions donnees dans le tableau (3.6) se caracterisent par le fait qu’elles
soient stationnaire (a part M3,2) et que les composantes de la vitesse et celles du
champ magnetique possedent la meme polarisation dans le plan xOy. Le systeme
reduit se resume a deux equations integro-differentielles. L’ecoulement du fluide est
compressible et tridimensionnel. La force de Lorentz n’est pas conservatrice et les
effets magnetiques et hydrodynamiques sont couples car ~Fm · ~v 6= 0.
171
Pour la plupart des sous-algebres dont la variable de symetrie est du type cylin-
drique, conique et spirale logarithmique (voit tableau (3.1)), les systemes reduits qui
leurs sont associes n’ont pu etre completement resolus du fait de la grande complexite
des equations reduites. Neanmoins pour chaque type de variable de symetrie, nous
avons obtenu certaines solutions particulieres : solutions cylindriques ; M3,1 ; J3+K3+
αH, Po + βH,P3, solutions coniques ; M3,64 ; J3 + αH,F + βH, P3 et M3,65 ; J3 + αH, F +
βH,P3, solutions du type spirale logarithmique ; M3,30; J3 + α1F + α2G + α3H, Po, P3,
M3,75; J3 +Po +αH, F +G+β1 Po +β2 H, P3 et M3,82; J3 +α1 F +α2H, F +β1 G+β2 H, P3.
Pour le reste des sous-algebres, nous nous sommes limites a certains cas parti-
culiers auxquels nous avons pu resoudre le syteme reduit. Par exemple la sous-algebre
M3,24 pour laquelle nous avons obtenu un systeme d’equations algebriques en imposant
que la force de Lorentz soit nulle.
En ce qui concerne le cas des solutions partiellement invariantes, dans le cas
de la sous-algebre M3,16, on a obtenu une solution invariante (a symetrie spherique) a
partir de la methode de la transversalite faible [18]. Cette these demontre le potentiel
d’application des differentes techniques basees sur l’approche de Lie aux equations de
la MHD.
172
References
[1] A. I. Akhiezer et al, Plasma Electrodynamics, Vol. 1, Pergamon Press, Oxford, 1975.
[2] H. Alfven, Cosmic Electrodynamics, Oxford University Press, 1950.
[3] G. Boillat,La Propagation des Ondes, Gauthier-Villars, Paris, 1965.
[4] M. Burnat, Bull. Acad. Polon. Sci., Ser. Sci. Techn., 17, 11-12, 37 (1969).
[5] B. Champagne, W. Hereman et P. Winternitz , Comp. Phys. Commun., 66, 319
(1991).
[6] P. A. Clarkson, P. Winternitz, Symmetry reduction and exact solutions of nonlinear
partial differential Equations, edit.: R. Conte, Springer-Verlag, Berlin, 591-660, 1999.
[7] R. Courant, D. Hilbert, Methods of Mathematical Physics, Vol.2, Interscience, New
York. 1962.
[8] S. V. Coggeshall, J. Phys. Fluids A., 3(5), 757 (1991).
[9] G. W. Bluman, J. D. Cole, J. Math. Mech., 18, 1025 (1969).
[10] P.A. Davidson, An Introduction to Magnetohydodynamics, Cambridge press, Cam-
bridge, 2001.
[11] W.D. D’haeseler, W.N.G Hitchon, J.D. Callen, J.L. Shohet, Flux Coordinates and
Magnetic Field Structure, Springer-Verlag, Berlin, 1991.
[12] J. C. Fuchs, J. Math. Phys., 32, 1703 (1991).
[13] W.I. Fushchych, Ukr. Math. J., 43, 1456 (1991).
[14] A. M. Grundland, J. Tafel, J. Math. Anal. Appl., 198, 879 (1996).
[15] A. M. Grundland, J. Tafel, J. Math. Phys., 36,3, 1426 (1995).
[16] A. M. Grundland, L. Lalague, Can. J. Phys., 72, 362 (1994).
173
[17] A. M. Grundland, L. Lalague, Can. J. Phys., 73, 463 (1995).
[18] A. M. Grundland, P. Tempesta, et P. Winternitz, J. Math. Phys. 44,6, 2704, (2003).
[19] A. M. Grundland, R. Zelazny, J. Math. Phys., 24,9, 2305 (1983).
[20] A. M. Grundland, R. Zelazny, Simple Waves and their Interactions in Quasilinear
Hyperbolic Systems, Publ. Inst. Geoph. A-14, 162, Polish Scientific Publ. Ed. R.
Teisseyre, Warsaw, (1982).
[21] W. Hereman, CRC Handbook of Lie Group Analysis of Differential Equations, vol. 3,
367, CRC Press, Boca Raton, 1996.
[22] Nail H. Ibragimov, Elementary Lie Group Analysis and Ordinary Differential Equa-
tions, Wiley, New York, 1999.
[23] E. Infeld, G. Rowlands, Nonlinear Waves, Solitons and Chaos, Cambridge press,
Cambridge, 2000.
[24] A. Jeffrey, T. Tanuiti, Non-Linear Wave Propagation. Academic Press, New York,
1964.
[25] L. Landau, E. Lifshitz, Electrodynamique des Milieux Continus, MIR, Moscou, 1989.
[26] L. Gagnon, Can. J. Phys., 67, 1 (1989).
[27] P. J. Olver, Applications of Lie Groups to Differential Equations, Springer-Verlag,
New York, 1993.
[28] P. J. Olver, P. Rosenau, SIAM J. Appl. Math., 47,2, 263 (1987).
[29] P. J. Olver, E.M. Vorobev, Nonclassical and Conditional Symmetries, CRC Handbook
of Lie Group Analysis, Editeur: N H Ibragimov, CRC Press, Londre, 1995, Vol. 3,
Chapt XI.
[30] P. J. Olver, Applied Numerical Math., 10, 307 (1992).
174
[31] J. Patera, P. Winternitz et H. Zassenhauss, J. Math. Phys., 15, 1318 (1974); J.
Math. Phys., 15, 1932 (1974); J. Math. Phys., 16, 1615 (1975); J. Math. Phys., 17,
717 (1976).
[32] J. Patera, P. Winternitz , R. T. Sharp et H. Zassenhauss, Can J. Phys., 54, 950
(1976); J. Math. Phys., 18, 2259 (1977).
[33] Z. Peradzynski, Bull. Acad. Pol. Sci, Ser. Sci. Tech., 19, 59 (1969).
[34] Z. Peradzynski, Geometry of interactions of Riemann waves, Research Notes in Math.
111, Ed. L. Debnath. Advances in Nonlinear Waves, Vol. 2, Pitman Adv. Publ.,
Boston, 1985.
[35] B. Rozdestvenskii, N. Yanenko, System of Quasilinear Equations and their Applica-
tions to Gaz Dynamics, AMS, vol. 55, Providence, 1983.
[36] I. L. Ryhming, Dynamique des Fluides, Presses Polytechniques et Universitaires Ro-
mandes, Lausanne (1991).
[37] P.Shih-I,Magnetogasdynamics and Plasma Dynamics, Springer-Verlag, Wein, 1962.
[38] D.G Swanson, Plasma Dynamics, Academic Press, New York (1989).
[39] P. Winternitz, Lie groups and solutions of nonlinear partial differential equations,
CRM, 1841 (1993).
[40] P. Winternitz, A. M. Grundland, J. A. Tuszynski, J. Phys. C, 21, 4931 (1988).




















