
SOR1311 LINEAR PROGRAMMING - IS MUNI
77
1 SOR1311 LINEAR PROGRAMMING Lecturers : Ms. Natalie Attard, Dr. Jaroslav Sklenar Credits : 2 Prerequisites : Pure or Applied Mathematics at the level requested for entry to engineering and technology courses Lectures : 1 hour per week for 14 hours + tutorials and computer lab sessions Course held during : Semester 2 CONTENT Problem formulation Simplex Method Duality Sensitivity Analysis Network Problems (Transportation and Assignment) Integer Linear Programming Modelling and LP Software Packages The emphasis during this study unit will be on the practical aspects of the linear programming problem. More time will be dedicated to problem formulation and numerical solution rather than the mathematical background. Method of Assessment: Test Suggested Texts: 1. Bazaraa, M.S., Jarvis, J.J. and Sherali, H.D. ( 1990 ) Linear Programming and Network Flows, John Wiley & Sons. 2. Ahuja, R.K., Magnanti, T.L., Orlin, J.B. ( 1993 ) Network Flows - Theory, Algorithms, and Applications, Prentice-Hall. 3. Nemhauser, G.L., Wolsey,L.A. ( 1999 ) Integer and Combinatorial Optimization, John Wiley & Sons. 4. Williams, H.P. ( 1999 ) Model Building in Mathematical Programming, John Wiley & Sons. 5. Lucey, T. ( 1996 ) Quantitative Techniques, DP Publications. 6. Lofti, V., Pegels, C.C ( 1996 ) Decision Support Systems for Operations Management and Management Science, IRWIN. 7. Eppen, G.D., Gould, F.J. and Schmidt, C.P. ( 1996 ) Introductory Management Science, Prentice-Hall.
-
Upload
khangminh22 -
Category
Documents
-
view
3 -
download
0
Transcript of SOR1311 LINEAR PROGRAMMING - IS MUNI
1
SOR1311 LINEAR PROGRAMMING
Lecturers: Ms. Natalie Attard, Dr. Jaroslav Sklenar
Credits: 2
Prerequisites: Pure or Applied Mathematics at the level requested for entry to engineering and technology courses
Lectures: 1 hour per week for 14 hours + tutorials and computer lab
sessions
Course held during: Semester 2
CONTENT
� Problem formulation
� Simplex Method
� Duality
� Sensitivity Analysis
� Network Problems (Transportation and Assignment) � Integer Linear Programming
� Modelling and LP Software Packages
The emphasis during this study unit will be on the practical aspects of the linear programming problem. More time will be dedicated to problem formulation and
numerical solution rather than the mathematical background.
Method of Assessment: Test
Suggested Texts:
1. Bazaraa, M.S., Jarvis, J.J. and Sherali, H.D. ( 1990 ) Linear Programming and
Network Flows, John Wiley & Sons. 2. Ahuja, R.K., Magnanti, T.L., Orlin, J.B. ( 1993 ) Network Flows - Theory,
Algorithms, and Applications, Prentice-Hall.
3. Nemhauser, G.L., Wolsey,L.A. ( 1999 ) Integer and Combinatorial Optimization,
John Wiley & Sons. 4. Williams, H.P. ( 1999 ) Model Building in Mathematical Programming, John
Wiley & Sons.
5. Lucey, T. ( 1996 ) Quantitative Techniques, DP Publications.
6. Lofti, V., Pegels, C.C ( 1996 ) Decision Support Systems for Operations
Management and Management Science, IRWIN. 7. Eppen, G.D., Gould, F.J. and Schmidt, C.P. ( 1996 ) Introductory Management
Science, Prentice-Hall.

2
Chapter 1: Introduction to Mathematical Programming
Mathematical programming refers to a set of procedures which deal with the analysis
of optimization problems. Optimization problems are generally those in which a
decision maker wishes to optimize some measure(s) of satisfactions by selecting
values for a set of variables. Thus, a mathematical programming model answers the
question “What’s best?” rather than “What happened?” or “What if?” or “What will happen?” or “Why it happened?”
Before moving on, it is important to point out that the word "programming" has nothing to do with “computer programming”. A “program” here is referred to a
“decision program”, that is, a strategy or a rule. In fact, the term "mathematical
programming" was coined before the word "programming" became closely
associated with computer software. The origin of the term “programming” in this
context comes from the fact that the technique of linear programming (see later) has been used for the first time for optimization of military training programmes.
A number of applications have been translated into mathematical programming
terms. The following is a typical example:
Suppose a furniture company manufactures four models of desks. Each desk is first
constructed in the carpentry shop, then is sent to the finishing shop, where it is
varnished, waxed and polished. The number of labor-hours required in each shop
and the number of hours available in each shop are known. The company wants to determine the quantities to make of each type of desk in order to maximize profit.
In other words an optimization problem is essentially about finding the best solution
to a given problem from a set of feasible solutions. It consists of three components:
1. a solution (decision) vector, that is, how can we achieve an optimal objective
(how much do we need to produce of each type of desk)?
2. the objective or objectives, that is, what do we want to optimize (maximize
profit in the above example)?
3. the set of all feasible solutions, that is, among which possible options may we
choose to optimize (constraints – labor hours)?
Mathematically an optimization problem is one in which the value of a given
function : nf →� � is to be maximized or minimized over a given set nS ⊆ � . The
function f is called the objective function, and the set S the constraint set or
feasible set. The following notation will be used:

3
max{ ( ) }f S∈x
x x
or
min{ ( ) }f S∈x
x x
A solution to the above problems is a vector x called the vector of decision
variables.
When the constraint set nS = � , the optimization problem is referred to as
“unconstrained optimization”. In other words, unconstrained optimization deals with
the maximization/minimization of a function without any restrictions. On the other
hand, when nS ⊂ � , the problem is referred to as “constrained optimization”.
Example
Suppose that on a particular island, there are two power stations A and B. Suppose
that at a particular time of the day, the demand for electricity amounts to 2
megawatts (MW). Let us denote by x the amount of electricity generated by A,
which implies that the remaining amount of electricity generated by B must be 2-x.
There are various ways in which the demand can be met. For example the Electricity
Company can produce x=2 so that A produces all the power or x=0, so that B
produces all the power, or x to have some other value, so that both A and B
contribute.
Suppose that the cost CB of running power station B is proportional to its output i.e.
2BC x= − , and the cost CA of running power station A in relation to the amount of
electricity generated is: 2
2 2A
x xC = + . Adding these two cost functions yields:
2
( ) 22 2
A B
x xC C f x+ = = − +
The Company wants to find that value of x for which this total cost is minimized.
Since there are no specified restrictions, this unconstrained optimization problem can
be solved by applying the differential calculus:
2
min min
. . ( ) 2 02 2
0.5 , ( ) 1.875
A B
x xi e C C
x x
x MW f x
∂ ∂+ = − + = ∂ ∂
⇒ = =
The following figure shows the graph of the cost function f(x).

4
-5 -4 -3 -2 -1 0 1 2 3 4 50
2
4
6
8
10
12
14
16
18
Examples of other applications
• Airline companies schedule crews and aircraft to minimize their costs
• Investors create portfolios to avoid the risks and achieve the maximum profits
• Manufacturers minimize the production costs and maximize the efficiency
• Bidders optimize their bidding strategies to achieve best results
• Physical system tends to a state of minimum energy
Various types of mathematical programming problems
Mathematical programming encompasses many different types of problems:
1. When the objective function and the constraints are linear, the problem is called a
linear programming problem (LP). If in addition some decision variables require
taking on integer values only, then the problem is called a mixed integer linear
programming problem (MILP). If all the variables must take integer values only,
the problem is referred to as integer linear programming problem (ILP).
2. When the objective function is a quadratic function and the constraints are linear,
the problem is called a quadratic programming problem (QP).
3. If the objective function and the constraints are general nonlinear functions, the
problem is a nonlinear programming problem (NLP).
Different types of optima
As already pointed out, an optimization problem involves finding the maxima or
minima of a real-valued function. However, there are various types of optima. We
shall discuss here minimization problems. Results are similar for maximization.
xmin=0.5
f(x)
x

5
Global unconstrained minimum: xmin is a global unconstrained minimum of a
function f(x) if for all values of x in the feasible set S, f(x) ≥ f(xmin). For example, the
function f(x) = x2 has a global minimum at xmin = 0 for all x∈� .
Global constrained minimum: xmin is a global constrained minimum of a function f(x)
if for all values of x in the feasible set S, f(x) ≥ f(xmin), and xmin lies on the boundary
of S.
Local unconstrained minimum: xmin is said to be a local unconstrained minimum of a
function f(x) if for all x in the feasible set, sufficiently close to xmin, f(x) ≥ f(xmin). A
local minimum may not be a global minimum unless the function being optimized is
of a special form (i.e. convex in the case of minimization and concave in the case of
maximization).
Local constrained minimum: xmin is said to be a local constrained minimum of a
function f(x) if for all x in the feasible set, sufficiently close to xmin, f(x) ≥ f(xmin), and
xmin lies on the boundary of S.
Example
• Points 1 and 7: These are called the boundary points of S and represent local
constrained maximum and local constrained minimum respectively.
• Point 2: Global unconstrained minimum
• Point 4: Local unconstrained maximum
• Point 5: Local unconstrained minimum
• Point 6: Global unconstrained maximum

6
A fundamental question which arises when dealing with optimization problems is the
question of existence, i.e. under what conditions on the objective function f and the
constraint set S are we guaranteed that a minimum/maximum will always exist in the
problem max{ ( ) }f S∈x
x x or min{ ( ) }f S∈x
x x ?
The following theorem provides sufficient conditions for the existence of optima,
which is credited to the mathematician Karl Weierstrass:
Theorem
Let nS ⊂ � be a closed and bounded set, and :f S → � a continuous function on S.
Then the problem max{ ( ) }f S∈x
x x or min{ ( ) }f S∈x
x x attains its global optimum on S.
Note: This theorem says nothing about what happens when some of the conditions
are violated. Thus it is important not to assume that if some of the conditions are
not satisfied then a maximum/minimum is not achieved. The theorem provides only
sufficient but not necessary conditions.
Examples
i. Let S = (0,1) and f(x) = x for all x S∈ . Then f is continuous, but S is not closed. f
attains neither a maximum nor a minimum on S.
ii. Let S = � and f(x) = x3 for all x S∈ . Then f is continuous, but S is not bounded.
Clearly f attains neither a maximum nor a minimum on S.
iii. Let S = [-1,1] and let f be given by
0 -1 1
( ) -1 1
for x or xf x
x for x
= ==
< <
S is closed and bounded, but f is not continuous at -1 and 1. f fails to attain either
a maximum or a minimum on S.

7
Chapter 2: Introduction to Linear Programming
Linear Programming is a mathematical optimization technique concerned typically
with allocation of scarce (limited) resources. It is a procedure to optimize the value
of some linear objective function when the factors involved are subject to some
constraints expressed as linear inequalities and/or equalities.
Assumptions of using Linear Programming:
1. The problem must be stated in numeric terms.
2. All factors involved must have linear relationships.
3. The problem must permit choices between alternatives.
4. There must be restrictions on the factors involved.
Expressing LP problems
LP problem in standard form = Objective Function + Constraints (Limitations)
Objective function = linear function of decision variables called also activities. It
represents the results required (typically: maximize profit, minimize costs).
Constraints (Limitations) = quantified restrictions expressed
mathematically by linear inequalities. Typical constraints are:
Maximizing problems: ≤≤≤≤ limited resources like:
- labor hours
- machine hours
- material available
- quota constraints (maximum production).
Minimizing problems: ≥≥≥≥ minimum possible quantities like:
- contract constraints
- minimum required weight, production
- packing or transport minimum.
Notes: - there may be limitations of both types in some problems.
- limitations can have a form of equalities.
- constant known figures like for example fixed costs should not be included
(word “contribution” used instead of “total profit”).

8
Example 1: A certain manufacturer produces 2 products called A and B. The product
A has a contribution 4 per unit, the product B has a contribution 5 per unit. To
produce the products the following resources are required:
Decision
variable
Machine hours Labour hours Material
[kg]
Product A x1 4 3 1
Product B x2 2 5 1
Resources available per week: 100 machine hours, 150 labor hours and 50
kilograms of material. There are no other limitations.
The manufacturer wants to establish the weekly production plan that maximizes the
total contribution.
Linear Programming Model:
Objective function: Maximize 4x1 + 5x2
Constraints: 4x1 + 2x2 ≤ 100
3x1 + 5x2 ≤ 150
x1 + x2 ≤ 50
x1 ≥ 0 , x2 ≥ 0
Note that there is no requirement to produce only integer amounts (fractions may for
example represent partially finished products) and also note that any combination of
the two products is acceptable including producing only one of the two products. If
these facts were not true, there would be other limitations like x1 ≥ 5 - produce at
least 5 units of the product A, x1 - x2 ≤ 3 - production of A must not exceed
production of B by more than 3, etc. Problems with integer requirements are solved
by special methods called Integer Linear Programming.

9
Example 2: Unable to hire new police officers because of budget limitations, a
police commissioner is trying to utilize the force better. The minimum requirements
for police patrols for weekdays are noted below:
Time Period Minimum number of patrol officers
8 A.M. – 12 P.M. 23
12 P.M. – 4 P.M. 18
4 P.M. – 8 P.M. 32
8 P.M. – 12 A.M. 16
12 A.M. – 4 A.M. 8
4 A.M. – 8 A.M. 10
The next table shows the shift times of the police officers.
Shift Start End
1 8 A.M. 4 P.M.
2 12 P.M. 8 P.M.
3 4 P.M. 12 A.M.
4 8 P.M. 4 A.M.
5 12 A.M. 8 A.M.
6 4 A.M. 12 P.M.
The police commissioner wants to know the minimum number of police officers
required to satisfy these requirements.
Let xi be the number of police officers working on shift i for i = 1,2,…6.
Linear Programming Model:
Objective function: Minimize x1 + x2 + x3 + x4 + x5 + x6
Constraints: x1 + x6 ≥ 23
x1 + x2 ≥ 18
x2 + x3 ≥ 32
x3 + x4 ≥ 16
x4 + x5 ≥ 8 x5 + x6 ≥ 10
x1, x2,…x6 ≥ 0

10
Graphical Solution
When an LP model contains only two variables, the problem can be solved
graphically. The steps required in order to solve problems of this type are:
Step 1: Formulate the standard LP model.
Step 2: Draw axes for variables x1 and x2. Scales may be different, but both
must start at zero and both must be linear.
Step 3: Draw each limitation as a separate line on the graph. The lines define
the Feasible Region (set of acceptable solutions). If not stated
explicitly, assume that x1 ≥ 0 and x2 ≥ 0.
Step 4: Draw a line (called also iso-profit line) that represents a certain value of
the objective function. Then draw a parallel line that touches the
feasible region to maximize/minimize the value of the objective
function.
Step 5: Compute the exact values of the decision variables in the corner of the
feasibility region and the optimum value of the objective function. The
corner of the feasible region defines the binding constraints (limiting
factors).
Note: There may be more optimal solutions if the iso-profit lines are parallel with a
limitation line.
Typical graphical solutions:
Maximization Minimization

11
Sensitivity Analysis
Sensitivity analysis deals with examining the effect on the optimal solution when
changing the parameters of the model, so that the need to work out the problem from
the beginning can be avoided. There are five things that can be singled out as subject
to change in defining a linear programming problem:
1. One or more of the objective function coefficients can change
2. One or more of the resources (RHS of the constraints) can change
3. One or more of the constraint coefficients can change
4. A variable might need to be added to the problem
5. Addition of a constraint might be necessary
In this credit, we shall only consider the following changes:
1. an increase/decrease on the right hand side of each constraint (keeping other
RHS values fixed)
• idea is to find the range in which a single RHS of a constraint can vary
(keeping other RHS values fixed) such that the binding constraints
remain the same.
2. a change in each objective coefficient (keeping other coefficients fixed)
• idea is to find the range in which a single objective coefficient can vary
(keeping the other coefficient fixed) such that the optimal solution
values of the variables will not change. Obviously the objective function
value changes since the objective coefficient is changed.

12
Chapter 3: Linear Programming - Basic Theory
Most real life LP models consist of more than just two variables, which cannot be
solved graphically. So we need a method to solve LPs with more than two variables.
The technique to solve problems involving thousands of variables and constraints is
called Simplex Method.
In the previous section we have seen that an optimal solution to the LP model is
associated with a corner point (or extreme point) of the feasible region (i.e. a point in
the feasible region that occurs at the intersection of the boundary lines). The
transition from the solution obtained geometrically to the simplex method, lies in
identifying the extreme points algebraically. However, in order to achieve this, we
first need to convert the LP model into the so-called standard form. An LP model is
said to be in standard form if:
1. All the constraints (with the exception of the nonnegativity restrictions of the
variables) are equality constraints involving nonnegative RHS values.
2. All the variables are nonnegative.
3. The objective function may be of a maximization or a minimization type.
a) Conversion of minimization to maximization (similarly from max to min)
Min f(x) = Max -f(x)
Example: Max 4x1 + 5x2 = Min -4x1 - 5x2
b) Conversion of inequalities into equalities
An inequality of the form ≤ can be converted into equality by adding what is
called a slack variable.
Example: 4x1 + 5x2 ≤ 150 → 4x1 + 5x2 + y1 = 150 , y1 ≥ 0
y1 = slack variable which represents the amount of the resource not used
(y1 = 150 - amount used ≥ 0).
An inequality of the form ≥ can be converted into equality by subtracting a slack
variable y1 ≥ 0. Such slack is sometimes called negative slack or surplus.
Example:: 4x1 + 5x2 ≥ 130 → 4x1 + 5x2 - y1 = 130 , y1 ≥ 0
y1 = excess over the minimum (y1 = LHS actual value - 130).

13
All LP models can thus be transformed into the following standard form:
( )
T
11 12 1 1 1
21 22 2 2 2
1 2
1 2
Find a vector that minimizes (or maximizes) = ,
such that and where
, ,
,
n
n
m m mn n m
n
z
a a a x b
a a a x b
a a a x b
c c c m n
= ≥
= = =
= <T
x c x
Ax b x 0
A x b
c
�
�
� � � �
�
�
Note that the vector x contains original solution variables together with all slacks
and/or surpluses used to convert the original constraints into equalities. b is the m
vector of right hand sides, and c is the n vector of objective coefficients that includes
zeros for slacks/surpluses.
Classification of Models
This section shows the various outcomes that can be obtained, when attempting to
solve an LP model.
a) Unboundedness can apply both to the feasible region and to the objective value.
Unbounded feasible region means that at least one variable is not limited in the
value (always assuming nonnegativity). This is typical for minimization
problems. Unbounded objective value means that the objective value can grow to
+∞ (maximization) or -∞ (minimization) respectively. Clearly a bounded feasible
region implies bounded objective value (obviously we assume finite objective
coefficients). For unbounded feasible region there can be both bounded and
unbounded objective value. So unbounded model means a model with
unbounded objective value.
b) Feasibility means whether there is a solution or not. So an infeasible model
does not have any feasible solution - no vector exists that would satisfy all
(in)equalities. Feasible model is a model that has at least one feasible solution.
Often this adjective is used for models that are both feasible and bounded (it
means models that have at least one optimal solution).
So there are three types of models: Feasible
Unbounded
Infeasible

14
Next we shall mostly assume that the model is feasible, because for practical
problems infeasibility and/or unboundedness are caused by wrong model
specification.
Classification of solutions (of a feasible LP model)
The Simplex Method for solving LP problems is based on the information given by a
theorem called “The Fundamental Theorem of Linear Programming”.
The Fundamental Theorem of Linear Programming
Definition: A feasible solution of a Linear Programming problem is a solution which
satisfies all constraints, including nonnegativity (i.e. it lies within the feasible
region).
Theorem: Suppose that A is an m x n matrix of rank m (i. e., A has m linearly
independent columns). If the linear programming problem LP has a feasible
solution, then it has a basic feasible solution and if it has an optimal solution, then it
has a basic optimal solution.
Let us first explain what is meant by a basic feasible solution:
Consider the general standard LP problem:
Minimize z = cT x
Subject to Ax = b, x ≥≥≥≥ 0
Now let's assume that the matrix A has the rank m, so there are m linearly
independent columns. Then A can be re-arranged in this way:
A = (B N), where B is an m x m invertible matrix and N is an m x (n-m) matrix.
B is called the basic matrix (shortly the base) of A, N is called the nonbasic matrix.
Vector x can be decomposed accordingly: x = (xB xN) where xB = (x1, x2, ... xm) and
xN = (xm+1, xm+2, ... xn). Then:
(after multiplying the last equality by B-1 from left). The solution x = (xB, xN) such
that xN = 0 and xB = B-1b is called a basic solution of the system Ax = b. So a basic
solution has m basic variables (components of xB) and n-m zero nonbasic variables
(components of xN). If xB ≥ 0, than x is called a basic feasible solution. If the
bNxBxx
xNBAx =+=
= NB
N
B)( NB NxBbBx 11 −− −=

15
solution has less than m nonzero variables, it is called a basic degenerate solution, if
all basic variables are positive than x is called basic nondegenerate solution. The
term basic feasible solution covers both cases provided the basic variables are
nonnegative. The simplex method is based on repetitive replacing of basic variables
in such a way that each iteration improves the objective value until an optimum is
reached (see later).
Geometrically, a basic feasible solution represents a corner (extreme point) in the n-
dimensional feasible region. A nondegenerate corner represents a nondegenerate
basic solution, while a degenerate corner represents a degenerate basic solution that
can also be viewed as several different basic solutions.
Example:
Consider the following system of inequalities
4
2
2
, 0
x y
x
y
x y
+ ≤
≤
≤
≥
Converting the problem into standard form yields:
x + y + s1 = 4
x + s2 = 2
y + s3 = 2
x, y, s1, s2, s3 ≥ 0
The projection of this 5-dimensional problem into the x-y plane is shown
in the following figure.

16
Clearly from the figure, there four corners, three of them nondegenerate - (0,0), (0,2),
(2,0) (corner point occurs at the intersection of two lines) and one degenerate (2,2)
(corner point occurs at the intersection of more than two lines – 3 in this case). The
following table shows the correspondence between the basic feasible solutions to the
LP and the extreme points of the feasible region.
Corner (x,y) Basic variables Nonbasic variables Corresponds to
Corner Point
(0,0) s1 = 4, s2 = 2, s3 = 2 x, y A
(2,0) x = 2, s1 = 2, s3 = 2 s2, y B
(2,2)
x = 2, y = 2, s3 = 0
x = 2, y = 2, s2 = 0
x = 2, y = 2, s1 = 0
s1, s2
s1, s3
s2, s3
C
(0,2) y = 2, s1 = 2, s2 = 2 x, s3 D
Note that the degenerate corner has three zero variables (s1, s2, s3), so it is possible to
select three different pairs of nonbasic variables. Recall that the above picture is in
fact a projection into the x-y plane, because after converting inequalities into
equalities the feasible region is a 5-dimensional object (called polyhedron).
The geometrical concept says, that an optimal solution exists always at a corner
(there can be more optimal solutions, for example a line connecting two corners).
This is another way how to express the basic idea of the simplex method: moving
along the edges of the n-dimensional polyhedron until an optimal corner is found.

17
Chapter 4: The Simplex Method
Simplex Algorithm informally:
Find an initial basic feasible solution
While (there is a possible improvement)
Find the most promising improvement direction
Move as much as possible in this direction to the next corner
Adjust the model accordingly
EndWhile
So there are several problems involved in the simplex method. The next paragraphs
explain the basic ideas, for details see examples. Practical implementation of the
method is based on the so-called Simplex Table that contains all LP model
parameters arranged in a way that supports the operations. Note also, that there are
several modifications, how to arrange and use the simplex table.
1. The way how to find an initial basic feasible solution (IBFS) depends on the type
of constraints. Typical example for maximization problems with all constraints ≤, the so-called all slack model, are zero solution variables (the ones that are used in
the original inequality model) and positive slacks representing the unused
resources. Note that there is exactly one basic variable for each constraint. For
problems with ≥ constraints and/or equalities we need the so-called artificial
variables – see later.
2. The most promising improvement can be found from the coefficients of the
objective function (OF). Let’s assume that in a certain maximization model the
initial point has all the activities nonbasic (equal to zero). Improving in the first
step means inserting a certain activity as a basic one. That will force one of the
current basic variables (slacks) out of the basic set - see the next paragraph. The
most promising variable has the maximum positive coefficient in the OF (because
the OF is linear, these coefficients are partial derivatives of the objective function
with respect to particular variables). The column that contains the maximum
coefficient is called pivot column. If there is no positive coefficient, the optimum
(maximum) has been found. Note that this is true for the first iteration. In fact the
simplex table is (typically) created in such a way that its objective row (z - row)
always contains the so-called negative reduced costs (negative partial derivatives
of the objective with respect to particular nonbasic variables) and zeros in basic
columns.
3. Selecting a nonbasic variable to be inserted as a basic one defines the direction of
the move in the n-dimensional space. The maximum distance of the move is given

18
by the natural requirement to keep feasibility - it is not possible to go out of the
feasible region. A certain constraint will thus stop the movement, so the
corresponding slack will become zero that means it will change from a basic into a
nonbasic variable. The constraint involved can be found by using the coefficients
of the constraint matrix, namely in the pivot column, and the right hand side
(RHS) values. The ratio of the RHS value and the pivot column coefficient defines
the maximum possible increase of the nonbasic variable allowed by this particular
constraint. Obviously the minimum value is chosen. The row that contains the
minimum value (the pivot row) thus defines the distance of the move (the ratio)
and the basic variable that becomes nonbasic. The intersection of the pivot row
and the pivot column is called pivot element.
4. To introduce a nonbasic variable it is necessary to take the amounts of all
resources needed by this variable. This is performed by making zeros in the pivot
column, except the pivot element, that is 1. The zero in the last row represents the
fact, that the variable is basic. The values in the OF row have been changed, but
they always represent the change of the objective caused by introducing one unit
of the nonbasic variable into the solution.
Formal justification of the ideas outlined above is given in Appendix A. The
following paragraph gives the algorithm of the simplex method that covers most
practical cases.
The Simplex Algorithm:
1. Create the initial (possibly inconsistent) simplex table:
BV xN xB RHS
xB
N
I
b
z - cN - cB 0
Where (N I) = A is the matrix of coefficients with unity matrix in last m
columns.
b = vector of right-hand sides
cN = objective coefficients of nonbasic variables
cB = objective coefficients of basic variables
xB = basic variables
xN = nonbasic variables
2. Make the table consistent by performing such row operations, that the values in
the z-row in basic columns are zero. This is not necessary for all slack models.

19
3. Use Optimality test to check whether the table is optimal:
Minimization: All negative reduced costs (z-row entries) must be negative or
zero.
Maximization: All negative reduced costs (z-row entries) must be positive or
zero.
If the table is optimal go to the step 6. If not, select the entering variable:
Minimization: Select variable with the greatest positive value.
Maximization: Select variable with the most negative value.
Entering variable defines the pivot column.
4. Use Feasibility test to find the leaving variable:
Compute the ratios of right-hand sides and positive coefficients in the
pivot column. Ignore rows with non-positive coefficients. If there are no
positive coefficients, the problem is unbounded. Select the row with the
minimum ratio to find the pivot row and the leaving variable.
5. Pivot on pivot element: perform such row operations to create zeros in the pivot
column except the pivot element that has to be 1. Go to the step 3.
6. Interpret the optimal simplex table that contains (among others):
- The objective value
- Values of basic variables (nonbasic ones are zero)
- Shadow costs of resources in slack columns
- Penalties caused by introducing nonbasic variables
Note: To find fast an initial basic feasible solution for ≥ inequalities, subtract a surplus variable and
add an artificial variable.
Ex: 4x1 + 5x2 ≥ 150 → 4x1 + 5x2 - y1 = 130 → 4x1 + 5x2 - y1 + a1 = 130 , y1, a1 ≥ 0 a1 = mathematical tool without practical (model) interpretation
Initial basic feasible solution: x1 = 0, x2 = 0, y1 = 0, a1 = 130
To find fast an initial basic feasible solution for an equality constraint, add an artificial variable.
Ex: 4x1 + 5x2 = 130 → 4x1 + 5x2 + a1 = 130 , a1 ≥ 0
a1 = mathematical tool without practical (model) interpretation
Initial basic feasible solution: x1 = 0, x2 = 0, a1 = 130

20
Though it is used only rarely in linear programming, we can convert an equality into two
inequalities.
Ex: 4x1 + 5x2 = 150 → 4x1 + 5x2 ≤ 150
4x1 + 5x2 ≥ 150
If one of these two inequalities is multiplied by -1, we get two inequalities with the same signs.
Now we can summarize. To use the simplex method, all inequalities are first converted to equalities
and also there must be trivial initial basic feasible solution. To do it we follow these rules:
1. Add a slack variable in each ≤ inequality constraint.
2. Subtract a surplus variable in each ≥ inequality constraint and add an artificial variable.
3. Add an artificial variable in each equality constraint.
Ex: The constraints x1 ≤ 4
x2 ≥ 3
x1 + x2 = 10
x1 , x2 ≥ 0
Can be converted into these equalities:
x1 + s1 = 4
x2 - y2 + a1 = 3
x1 + x2 + a2 = 10
x1 , x2 , s1 , y2 , a1 , a2 ≥ 0
With the following trivial initial basic feasible solution:
x1 = x2 = y2 = 0, s1 = 4, a1 = 3, a2 = 10
In the objective function the coefficients of slack and surplus variables are zero, because the only
use of these variables is to balance inequalities. They do not affect the objective value.
During the solution process it is necessary to force the artificial variables out of the optimum
solution (they are just used as a tool to start the optimization process). There are two methods to do
so:
M-method penalizes artificial variables by such coefficients in the objective function that the
optimization process will eliminate them automatically. Namely use a certain very big value M for
minimization and -M for maximization respectively.
Two Phase method first minimizes the sum of artificial variables. When zero is reached, the
second phase continues from the solution reached by the first phase (without artificial variables) to
optimize the original objective.

21
Example: Find the optimum production plan for the following problem:
Product Quantity Machine
Hours Components Alloy Limits Contribution
A x1 2 1 2 - 8
B x2 3 - - ≤50 5
C x3 1 1 4 - 10
Amount Available 400 150 200
1. Express the problem in standardized format
1 2 3
1 2 3
1 3
1 3
2
1 2 3
max 8 5 10
subject to
2 3 400
150
2 4 200
50
, , 0
x x x
x x x
x x
x x
x
x x x
+ +
+ + ≤
+ ≤
+ ≤
≤
≥
2. Convert inequalities into equalities by adding the slack variables
1 2 3 4
1 3 5
1 3 6
max
subject to
2 3 400
+ 150
2 4 +
z
x x x x
x x x
x x x
+ + + =
+ =
+ =
2 7
1 2 3 4 5 6 7
1 2 3 4 5 6 7
200
50
8 5 10 0 0 0 0 0
, , , , , , 0
x x
z x x x x x x x
x x x x x x x
+ =
− − − − − − − =
≥
Interpretation of Slack variables:
x4 - unused machine hours
x5 - unused components
x6 - unused alloy
x7 - amount of product B not produced

22
3. Set up the initial simplex table:
Products Slack Variables Solution
Variable x1 x2 x3 x4 x5 x6 x7
Solution
Quantity
x4 2 3 1 1 0 0 0 400
x5 1 0 1 0 1 0 0 150
x6 2 0 4 0 0 1 0 200
x7 0 1 0 0 0 0 1 50
z -8 -5 -10 0 0 0 0 0
IBFS: 4 5 6 7 1 2 3
BV
= ( , , , , , , ) = (400,150, 200,50,0,0,0)
NBV
x x x x x x x����� �����
Tx
Initial Objective function value: 0z =
4. Optimality Test: Is the current BFS optimal? – No (since values in z row are not
all positive – maximization)
i. Select the highest negative contribution in the z row (i.e. –10
corresponding to x3) ⇒ x3 is the entering variable (x3 becomes a BV,
pivot column = column 3)
ii. Ratio Test: Which current BV has to be reduced to zero (i.e. become a
NBV)?
3
400
1
150
1min 50
200
4
50
0
x
⇒ = =

23
The product of x3 can be increased by 50 (pivot row = row 3), hence x6 must be
reduced to 0, and thus becomes a NBV.
Interpretation: instead of x6 the basic variable will be x3 (no unused alloy, all alloy
used to produce 50 units of product C).
Consequence: production of 50 units of product C will also affect other resources.
Thus, we need to find the new values of the other BV.
5. Ring the element in both the pivot row and pivot column (pivot element = 4).
Divide all the elements in the identified row (x6) by the pivot element (4) and
change the solution variable (i.e. x6 x3)
New Row 3 is:
x3 0.5 0 1 0 0 0.25 0 50
New Simplex Table is:
Products Slack Variables Solution
Variable x1 x2 x3 x4 x5 x6 x7
Solution
Quantity
x4 2 3 1 1 0 0 0 400
x5 1 0 1 0 1 0 0 150
x3 0.5 0 1 0 0 0.25 0 50
x7 0 1 0 0 0 0 1 50
z -8 -5 -10 0 0 0 0 0
6. Make all other elements in the pivot column equal to zero by repetitive row by
row operations:
i. New Row 1 = Old Row 1 – Row 3
x4 2 3 1 1 0 0 0 400
- x3 0.5 0 1 0 0 0.25 0 50
New
Row 1
1.5 3 0 1 0 -0.25 0 350
ii. New Row 2 = old row 2 – Row 3
iii. Row 4 = already zero
iv. Row 5 = old row 5 + 10(Row 3)

24
New table is:
Products Slack Variables Solution
Variable x1 x2 x3 x4 x5 x6 x7
Solution
Quantity
x4 1.5 3 0 1 0 -0.25 0 350
x5 0.5 0 0 0 1 -0.25 0 100
x3 0.5 0 1 0 0 0.25 0 50
x7 0 1 0 0 0 0 1 50
z -3 -5 0 0 0 2.5 0 500
New BFS is:
3 4 5 7 1 2 6
BV
= ( , , , , , , ) = (50,350,100,50,0,0,0)
NBV
x x x x x x x����� �����
Tx
New objective function value z = 500.
7. Repeat steps 4, 5 and 6 until there are no negative values in the z row. (i.e. no
improvement is possible).
Simplex Table after next step:
Products Slack Variables Solution
Variable x1 x2 x3 x4 x5 x6 x7
Solution
Quantity
x4 1.5 0 0 1 0 -0.25 -3 200
x5 0.5 0 0 0 1 -0.25 0 100
x3 0.5 0 1 0 0 0.25 0 50
x2 0 1 0 0 0 0 1 50
z -3 0 0 0 0 2.5 5 750
New BFS is:
2 3 4 5 1 6 7
BV
= ( , , , , , , ) = (50,50,200,100,0,0,0)
NBV
x x x x x x x����� �����
Tx
New Objective function value z = 750.
Interpretation: Produce maximum possible quantities of product B (since x1 and x6
are zero) and product C (since x7 is zero).

25
Optimal Simplex Table
Products Slack Variables Solution
Variable x1 x2 x3 x4 x5 x6 x7
Solution
Quantity
x4 0 0 -3 1 0 -1 -3 50
x5 0 0 -1 0 1 -0.5 0 50
x1 1 0 2 0 0 0.5 0 100
x2 0 1 0 0 0 0 1 50
z 0 0 6 0 0 4 5 1050
Interpretation of the optimal simplex table:
Contribution z = 1050
Production: 100 units of product A (x1)
50 units of product B (x2)
no units of product C (x3)
Unused (abundant) resources: 50 machine hours (x4)
50 components (x5)
Scarce resources: Alloy (x6 = 0). All alloy is used.
Limitation on product B is exhausted (x7 = 0)
Shadow prices:
i. 4 (contributing to alloy (x6))
ii. 5 (contributing to B limitation (x7))
iii. 6 (contributing to x3)
Interpretation of shadow prices:
i. If RHS of alloy constraint is increased/decreased by 1 the total contribution
would increase/decrease by 4.
ii. If RHS of B limitation constraint is increased/decreased by 1 the total
contribution, will increase/decrease by 5.
iii. If production of product C (x3) is increased by 1 the contribution will be 6
units less.

26
Chapter 5: Duality
Every LP model (primal) has its dual model, that can be created by conversion rules
that in case of canonical models (all inequalities of the same type) are like that:
Min cTx Max bTw
ST Ax ≥ b ST ATw ≤ c
x ≥ 0 w ≥ 0
Note that:
1. Maximization becomes minimization and vice versa.
2. RHS values of the primal are OF coefficients of the dual.
3. Primal OF coefficients are RHS values of the dual.
4. Transpose of the primal constraint coefficients matrix makes the dual
constraint matrix. It is also possible to express this by changing order of
multiplication in the dual model.
5. Change the inequality signs of constraints ( ≥ → ≤ , ≤ → ≥ ).
Applying the same rules to the dual model creates the primal one (so the names just
show which was the original one from the application point of view).
Example:
Primal : Min 3x1 + 4x2 Dual : Max 3w1 + 10w
ST 3x1 + 4x2 ≥ 3 ST 3w1 + 6w2 ≤ 3
6x1 + 9x2 ≥ 10 4w1 + 9w2 ≤ 4
x1,2 ≥ 0 w1,2 ≥ 0
The so-called basic theorem of duality limits the number of possible combinations
of primal and dual models. Actually only four out of nine combinations are possible:
Theorem: For any pair of dual models only these possibilities can occur:
1. Both have optimal solution with the same objective value.
2. Both are infeasible.
3. One is unbounded, the other is infeasible.
27
Practically the only relevant combination is the first one, because infeasible and
unbounded models are caused by an error in model specification. For this case there
is another important result:
Dual solution = Primal shadow costs
Dual shadow costs = Primal solution
Because both models have the same optimal objective value and there is a simple
way how to convert dual optimal solution into the primal one and vice versa, it is
possible to solve either primal or the dual model. The rule of thumb says that the
model with fewer constraints (fewer basic variables) should be solved.
Dual models have also practical interpretation that is not trivial, but that offers
additional insight into the nature of the problem. The most straightforward case is the
one with maximizing (all slack, production) primal and minimizing dual:
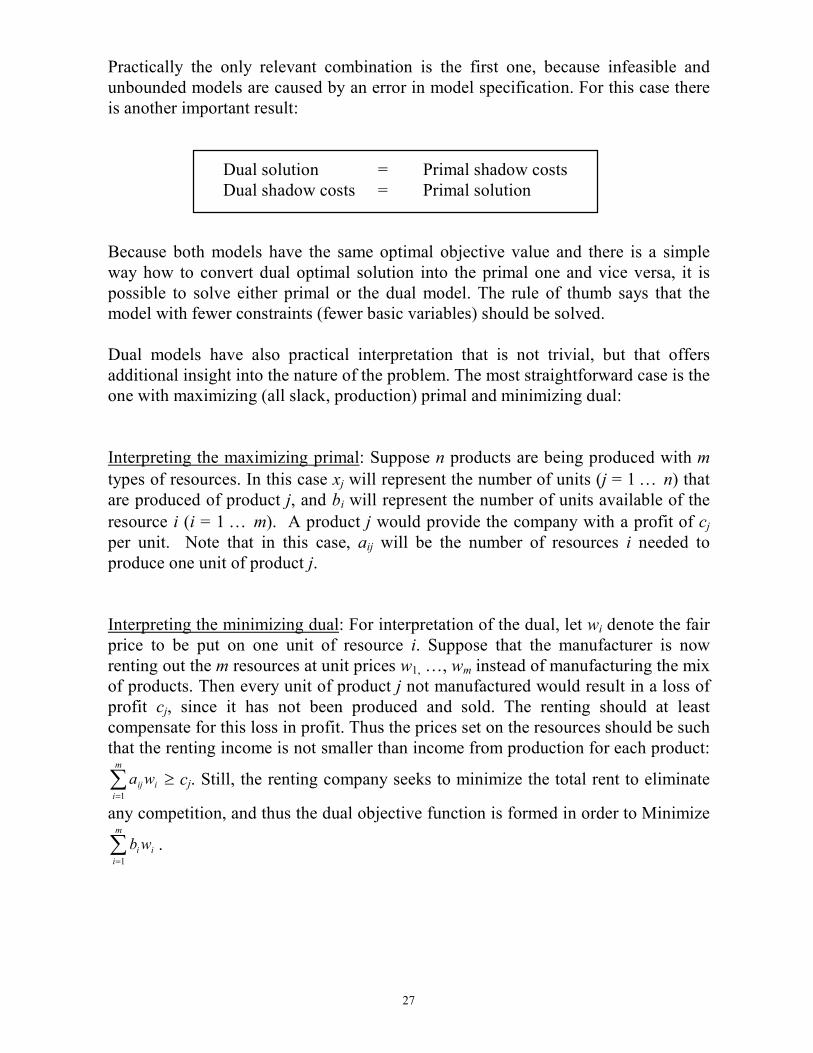
Interpreting the maximizing primal: Suppose n products are being produced with m
types of resources. In this case xj will represent the number of units (j = 1 … n) that
are produced of product j, and bi will represent the number of units available of the
resource i (i = 1 … m). A product j would provide the company with a profit of cj
per unit. Note that in this case, aij will be the number of resources i needed to
produce one unit of product j.
Interpreting the minimizing dual: For interpretation of the dual, let wi denote the fair
price to be put on one unit of resource i. Suppose that the manufacturer is now
renting out the m resources at unit prices w1, …, wm instead of manufacturing the mix
of products. Then every unit of product j not manufactured would result in a loss of
profit cj, since it has not been produced and sold. The renting should at least
compensate for this loss in profit. Thus the prices set on the resources should be such
that the renting income is not smaller than income from production for each product:
∑=
m
i
iijwa1
≥ cj. Still, the renting company seeks to minimize the total rent to eliminate
any competition, and thus the dual objective function is formed in order to Minimize
∑=
m
i
iiwb1
.

28
Example: Maximizing Primal – Minimizing Dual Interpretation: A company
produces two types of paints: paint A and paint B. Production of both paints is made
by the use of two raw materials M1 and M2. The production involves mixing
specific quantities of each material for every ton of either paint A or B. These
quantities in tons are summarized in the following table:
Paint A (x1) Paint B (x2) Available Resources
M1 6 4 24
M2 1 2 6
Profit/ton of paint in
Lm 1000
5 4
In addition, the maximum production of paint B should not exceed 2 tons, and the
production of paint B should not exceed the production of paint A by more than 1
ton. The company wants to maximize profit.
The primal model:
1 2
1 2
1 2
1 2
2
1 2
max 5 4
. .
6 4 24
2 6
1
2
, 0
z x x
s t
x x
x x
x x
x
x x
= +
+ ≤
+ ≤
− + ≤
≤
≥
The dual model:
1 2 3 4
1 2 3
1 2 3 4
1 2 3 4
min 24 6 2
. .
6 5
4 2 4
, , , 0
v w w w w
s t
w w w
w w w w
w w w w
= + + +
+ − ≥
+ + + ≥
≥
`
Suppose now that the company instead of manufacturing the paints wants to sell the
resources. Then w1,w2,w3 and w4 will denote the unit prices that are decided by the
company for the selling. Now, if one unit of paint A say (x1) is not manufactured
then this would results in a loss of Lm5,000 per ton of profit (since z = 5x1 + 4x2).
Thus, not to run at a loss, the cost of selling should not result in a diminishing profit
compared with manufacturing i.e. 1 2 36 5w w w+ − ≥ (×Lm1000), because the

29
coefficients 6, 1 and –1 represent the amount of resources needed to produce one
unit of paint A (one unit of x1). Similarly for paint B.
Since the company’s target is to eliminate competition, it should aim to minimize the
price of selling the resources i.e. min 1 2 3 424 6 2z w w w w= + + +` but at the same time
without producing any loss in profit. This justifies the dual LP model.
Note that the last two resources are not the material ones. The third resource can be
described as “possibility to produce more paint B than paint A”. Each additional ton
of the paint A in fact decreases the “use” of this resource. That’s why the value -1 in
the matrix. Each additional ton of the paint B makes use of one unit of this resource, that’s why the value +1 in the matrix. The fourth resource can be described as
“possibility to produce paint B”. By each ton of B we are utilizing one unit of that
resource, that’s why the matrix value is 1. RHS values are availability of these
resources: 1 as the maximum difference B-A, 2 as the maximum production of B.
Example: Minimizing Primal – Maximizing Dual Interpretation:
Suppose that a family is trying to make a minimal cost diet from six available primary foods (called 1,2,3,4,5,6) so that the diet contains at least 9 units of vitamin
A and 19 units of vitamin C. The following table shows the data on the foods.
Number of Units of
Nutrients per kg of Food
Minimum Daily Requirement of
Nutrient
Nutrient 1 2 3 4 5 6
Vitamin A 1 0 2 2 1 2 9
Vitamin C 0 1 3 1 3 2 19
Cost of food (c/kg) 35 30 60 50 27 22
The primal model:
1 2 3 4 5 6
1 3 4 5 6
2 3 4 5 6
1 6
min 35 30 60 50 27 22
. .
+2 +2 + +2 9
+3 + +3 +2 19
,... 0
z x x x x x x
s t
x x x x x
x x x x x
x x
= + + + + +
≥
≥
≥

30
Now suppose that a manufacturer proposes to make synthetic pills of each nutrient
and to sell them to this family. The manufacturer has to persuade the family to meet
all the nutrient requirements by using the pills instead of the primary foods. However, the family will not use the pills unless the manufacturer can convince them
that the prices of the pills are competitive when compared with each of the primary
foods. This forces several constraints on the prices the manufacturer can charge for
the pills. Let w1 and w2 be the prices of vitamin A and Vitamin C respectively in pill form. Consider say primary food 5. One kg of this food contains one unit of vitamin
A and 3 units of vitamin C and costs 27 cents. Thus the family will not buy the pills
unless w1 + 3w2 ≤ 27. Similarly for the other primary foods.
Also, since the family is cost conscious, if they decide to use the pills instead of the
primary foods, they will buy just as many pills as are required to satisfy the minimal nutrient requirements exactly. Hence, the manufacturer’s sales revenue will be v =
9w1+19w2, and the manufacturer wants to maximize his revenue. Thus the prices
that the manufacturer can charge for the pills are obtained by solving the following
dual LP model.
1 2
1
2
1 2
1 2
1 2
1 2
1 2
max 9 19
. .
35
30
2 3 60
2 50
3 27
2 2 22
, 0
v w w
s t
w
w
w w
w w
w w
w w
w w
= +
≤
≤
+ ≤
+ ≤
+ ≤
+ ≤
≥
The price w1 is associated with the nonnegative primal slack variable
7 1 3 4 5 6+2 +2 + +2 9x x x x x x= − while the price w2 is associated with the
nonnegative primal slack variable 8 2 3 4 5 6+3 + +3 +2 19x x x x x x= − .
The following are the results obtained by solving the primal and the dual models by the package LINDO.

31
Results:
PRIMAL:
OBJECTIVE FUNCTION VALUE
1) 179.0000
VARIABLE VALUE REDUCED COST
X1 0.000000 32.000000 X2 0.000000 22.000000
X3 0.000000 30.000000
X4 0.000000 36.000000
X5 5.000000 0.000000
X6 2.000000 0.000000
SLACK OR SURPLUS SHADOW COSTS/PRICES
X7 0.000000 -3.000000 X8 0.000000 -8.000000
DUAL:
OBJECTIVE FUNCTION VALUE
1) 179.0000
VARIABLE VALUE REDUCED COST W1 3.000000 0.000000
W2 8.000000 0.000000
SLACK OR SURPLUS SHADOW COSTS/PRICES W3 32.000000 0.000000
W4 22.000000 0.000000
W5 30.000000 0.000000
W6 36.000000 0.000000 W7 0.000000 5.000000
W8 0.000000 2.000000

32
Recall that in an LP model, the rate of change in the optimal objective function value
per unit change in the Right Hand Side values of each constraint (keeping other
values fixed) is known as the shadow costs.
Thus in this case, the shadow costs of the primal LP problem represents the amount
of extra money the family has to spend by using an optimum diet, per unit increase in
the requirement of that vitamin i.e. 3 cents for vitamin A and 8 cents for vitamin C. Thus, the price charged by the manufacturer, per unit of vitamin, is acceptable to the
family if the price of each vitamin is less than or equal to the shadow cost of that
vitamin in the primal problem. Therefore, in order to maximize his revenue, the
manufacturer must price the vitamins 3 and 8 cents per unit respectively.
Hence, in an optimum solution of the dual problem, the prices w1 and w2 correspond
to the shadow costs of vitamins A and C respectively. Similarly, in any LP, the dual
variables are the shadow costs/prices of the resources associated with the constraints
in the primal problem.

33
Chapter 6: Network Problems
There is a group of linear programming problems defined on networks (directed
graphs) that have many special properties. These properties enable some fast special
algorithms and also an efficient version of simplex method called network simplex
method. This chapter introduces the basic ideas, some special practically important versions of network problems (transportation, assignment) and presents selected
algorithms. Knowledge of graph theory is not a precondition; all used terms are
defined here. Examples and drawings will be added during lectures.
General minimum cost network flow problem
Definition: Network is a simple directed graph (digraph) N = (V, A) made of a finite
non-empty set V = {v1, v2, ... vm} of vertices (nodes) and a set A ⊆ V × V of directed
arcs where each arc is an ordered pair of vertices (i, j) ,i,j = 1 … m. Note that
between two vertices in one direction there can be mostly one arc – simple graph.
Example: Let V = {1,2,3,4,5,}, A = {(1,2),(1,3),(2,3),(2,4),(2,5),(3,4),(3,5),(4,5)}.
The network representing the above data is shown below.
In this text we shall assume that loops do not exist: (i, i) ∉ A, i = 1 … m. Also let n
be the number of arcs. Note that in graph theory n usually means the number of
vertices. Here we shall have one variable for each arc, so to keep compatibility with linear programming notation (n = number of variables) the meaning of symbols is
reversed.
A common scenario of a minimum cost network flow problem arising in industrial
logistics concerns the distribution of a product from plants (origins) to consumer markets (destinations). The total number of units produced at each plant and the total
number of units required at each market are assumed to be known. The product need
not be sent directly from source to destination, but may be routed through
intermediary points reflecting warehouses or distribution centers. Further, there may
be capacity restrictions that limit some of the shipping links. The objective is to minimize the cost of producing and shipping the products to meet the consumer
demand.
Thus, the minimum cost network flow problem is based on these assumptions: Let
flow (movement of any commodity through an arc – for example tons of oil per hour in an oil pipeline network, cubic meters of water per minute in a city water system,
1 3 5
2 4

34
pulses per second in a communications network, or the number of vehicles per hour
on a regional highway system) in the arc (i, j) connecting vertices i and j (in this
direction) be represented by xij. Then, for each arc, there is generally:
- A lower bound on the flow lij ≤ xij (mostly 0 – nonnegativity)
- An upper bound on the flow uij ≥ xij (interpreted as the arc’s capacity)
- A certain cost cij paid for unit flow through the arc (i, j). The total cost that we pay for the flow through the arc (i, j) is then cijxij.
Flow is in a certain way inserted into the network and somehow removed. This can
be generalized by introducing for each vertex i:
- An external input flow bi+
- An external output flow bi-.
Let Pi be the set of predecessors of the vertex i (the set of vertices where arcs ending in i start) and similarly let Si be the set of successors of i. Graphically:
Pi i Si
bi
+ bi-
The general condition that is supposed to be satisfied with all network problems is
flow conservation stating that flow must neither originate, nor vanish in a vertex. In other words, for each vertex the total flow out must be equal to the total flow in:
, 1...i i
ij i ki i
j S k P
x b x b i m− +
∈ ∈
+ = + =∑ ∑
Simple rearrangement gives:
, 1...i i
ij ki i i i
j S k P
x x b b b i m+ −
∈ ∈
− = − = =∑ ∑
According to the value of bi there are three types of vertices:
- Source with bi > 0 that adds flow to the network,
- Sink with bi < 0 that removes flow from the network,
- Transshipment vertex with bi = 0.

35
Practically, source nodes may represent plants for example, which supply bi units of
desalinated water say. Sink node may then represent a number of cities, which
require bi units as will be indicated by the negative signs. The remaining nodes have no net supply or demand bi = 0; they are intermediate points, referred to as
transshipment nodes, for example special pumping stations used to transmit water
from origin to destination.
From the linear programming point of view the above equations represent
restrictions. The objective is to find the minimum-cost flow pattern to fulfil
demands. All these can now be expressed in matrix form in usual way:
Min z = cTx
ST Ax = b
L ≤ x ≤ U
Where c, L and U are n - vectors of unit costs, lower bounds and upper bounds
respectively. The matrix A has m rows (each row represents one vertex) and n
columns (one column for each arc). Compared with other LP problems, there are few
differences. First there are double subscripts of the vectors x, c, L, U and columns of
A. This is just a formal difference in notation to avoid separate indexing of vertices
and arcs. Lower and upper bounds represent generally additional 2n constraints.
Lower bounds are mostly zero – usual nonnegativity requirement. If not, a simple
change of variables can be used to replace l ≤ x by 0 ≤ x-l = x*. Also upper bounds
can be eliminated if necessary by replacing a bounded variable by two variables: x ≤ u can be replaced by x1 – x2 ≤ u, where x1 and x2 are nonnegative and unbounded. Of course in the model x is replaced by x1 – x2 and we need to add additional
constraints. So without loss of generality (and with some modifications in the model)
the bounds can be ignored.
1 4
3
2 5
[40]
[50]
[-50]
[-60]
Source
Plant 1
Source
Plant 2
Transshipment
Node – pumping
station
Sink
City 1
Sink
City 2
Supplly Demand
Lm 5
Lm 3
Lm 2
Lm 7
Lm 1
Lm 8 Lm 4
Unit Cost
(20,35)
(4,10)
(0,∞ )
(10,30)
(30,60) (0,∞ )
(0,∞ )
Lower bound Upper bound (Capacity)

36
Example: Consider the following network:
The above network yields the following LP problem:
x12 x13 x14 x23 x25 x34 x35 x46 x56 bi
Min 3 4 1 5 6 1 2 2 4
Node 1 1 1 1 100
Node 2 -1 1 1 200
Node 3 -1 -1 1 1 50
Node 4 -1 -1 1 -150
Node 5 -1 -1 1 -80 Node 6 -1 -1 -120
lij 0 0 50 0 0 70 0 100 0
uij ∞ ∞ ∞ ∞ ∞ ∞ ∞ ∞ ∞
(3 4 1 5 6 1 2 2 4)
1 1 1 0 0 0 0 0 0
1 0 0 1 1 0 0 0 0
0 -1 0 -1 0 1 1 0 0
0 0 -1 0 0 -1 0 1 0
0 0 0 0 -1 0 1 0 1
0 0 0 0 0 0 0 1 1
100
200
50
150
80
120
T =
− = − − −
− − −
c
A
b =
Consider for example the flow x14, which must satisfy 1450 x≤
The lower bound 50 is changed to 0 as follows:
1 4
6
2 5
3
Lm 5 Lm 3
Lm 4
Lm 6
Lm 1
Lm 2 Lm 4
Lm 2 Lm 1
[100] [-150]
[-120]
[50]
[200] [-80]
(50,∞ )
(0,∞ ) (70,∞ ) (100,∞ )
(0,∞ ) (0,∞ ) (0,∞ )
(0,∞ )
(0,∞ )

37
14
14
* *
14 14 14
50
50 0
0 where = 50
x
x
x x x
≥
− ≥
⇒ ≥ −
This results in the following table:
x12 x13 *
14x x23 x25 x34 x35 x46 x56 bi
Min 3 4 1 5 6 1 2 2 4
Node 1 1 1 1 50
Node 2 -1 1 1 200
Node 3 -1 -1 1 1 50
Node 4 -1 -1 1 -100 Node 5 -1 -1 1 -80
Node 6 -1 -1 -120
lij 0 0 0 0 0 70 0 100 0
uij ∞ ∞ ∞ ∞ ∞ ∞ ∞ ∞ ∞
Repeating the same procedure for x34 and x46, the following LP problem is obtained:
x12 x13 *
14x x23 x25 *
34x x35 *
46x x56 bi
Min 3 4 1 5 6 1 2 2 4
Node 1 1 1 1 50
Node 2 -1 1 1 200 Node 3 -1 -1 1 1 -20
Node 4 -1 -1 1 -130
Node 5 -1 -1 1 -80
Node 6 -1 -1 -20
lij 0 0 0 0 0 0 0 0 0
uij ∞ ∞ ∞ ∞ ∞ ∞ ∞ ∞ ∞
What makes the networks problems special are the properties of A and b (in
balanced case). Note that the feasibility condition suggests that for A there is in each
row (vertex):
- +1 for starting arcs
- -1 for ending arc
- Zeros otherwise.
Similarly in each column (arc) there is:
100 - 50
-150 + 50

38
- +1 for the starting vertex
- -1 for the ending vertex
- Zeros otherwise.
Especially columns are very special: once +1, once –1, m-2 zeros. The sum of rows
is thus 0, so the rows are linearly dependent. It means that the maximum rank of A is
m-1 (in fact it is exactly m-1). Here we assume that n ≥ m that is satisfied for all
connected networks that are not trees – see later. For a balanced network (supply =
demand) where the total inserted flow is equal to the total flow removed we have:
1
0m
i
i
b=
=∑
Unbalanced networks can be balanced by adding artificial vertices and arcs that
make the difference. Let S be the total supply to the network and D the total demand:
: 0 : 0i i
i i
i b i b
S b D b> <
= = −∑ ∑
A balanced network has S = D. This is the balancing algorithm:
- If S > D (excess supply) then add an artificial vertex with demand S-D, and
add artificial arcs connecting all sources to this artificial vertex. These new
arcs have costs that correspond to the cost (if any) of excess production.
- If D > S (excess demand) then add an artificial vertex with supply D-S, and
add artificial arcs connecting this artificial vertex to all sinks. These new arcs
have costs that correspond to the cost (if any) of unmet demand.
Without loss of generality we shall assume that a network is balanced. Obviously flow through artificial arcs represents excess supply or unmet demand respectively.
During optimization there is no difference between real and artificial arcs and
vertices.
Special cases of network flow problems
The general minimum cost network flow problem defined above is also called
Transshipment problem, because there can be all three types of vertices.
Transportation problem has only sources and sinks and every arc goes from a
source to a sink. Conservation constraints have one of two forms:
ij i
j
x b=∑ for a source with bi > 0, and

39
ki i
k
x b− =∑ for a sink with bi < 0.
Transportation problems model direct movement of goods from suppliers to
customers with cij coefficients interpreted as the unit cost of transportation from a
particular supplier to a particular customer. The objective is to determine the amounts to be shipped from the origins (sources) to the sinks (destinations) at
minimum cost, while satisfying the supply and demand limitations.
Assignment problem is a special case of the transportation problem, where bi = 1
for a source and bi = -1 for a sink. For a balanced problem there are the same number
m/2 of sources and sinks. Assignment typically models assigning people to jobs with
cij coefficients interpreted as the value of a person if assigned to a particular job (a
job that matches a worker’s skill costs less than a job in which the operator is not as skillful). Objective value is then interpreted as total profit (maximization) or total
cost (minimization) of all assignments. Later we shall see that the integrity of flows
is guaranteed, so the only possible values are 1 and 0. There is a special fast
algorithm for assignment.
Shortest path problem determines the shortest (fastest) path between an origin and
a destination. There are efficient shortest path algorithms in graph theory, but linear
programming can also solve the problem. Shortest path problem can be represented as a minimum cost network flow problem with one source (the origin) with supply
equal to 1, and one sink (the destination) with demand equal to 1. There are typically
many transshipment vertices. The cij coefficients are interpreted as lengths of arcs
(that can be generalized as time required to traverse an arc, or cost of using an arc).
Unlike in graph theory algorithms, the coefficients need not be nonnegative.
Maximum flow problem determines the maximum amount of flow that can be
moved through a network from the source to the sink. Because the external flow is
not known a-priori, a slight modification of the general problem is necessary. Probably the simplest one adds an artificial arc with infinite capacity from sink to
source that returns the flow back to the source. Then all vertices are transshipment
and the model maximizes the flow through the artificial arc. Let s be the source and
let t be the sink. This is then the model: Max xts, ST Ax=0, 0≤x≤U where U are the
capacities of arcs. Note that costs are not used in this model.
Note: The maximum flow problem has an interesting dual problem (knowledge of duality is
assumed here) that deals with cuts. A cut is defined as a division of the vertices into two disjoint
sets V1 and V2, the first V1 containing the source s, the second V2 containing the sink t:
V1 ∪ V2 = V, V1 ∩ V2 = ∅, s ∈ V1, t ∈ V2.
The capacity of the cut is the sum of the capacities of the arcs that lead from V1 to V2.

40
Now let’s first rewrite the primal maximum flow problem:
Max z = xts
ST
0 , 1...
0 , ( inequalities)
i i
ij ki
j S k P
ij ij
x x i m
x u n
∈ ∈
− = =
≤ ≤
∑ ∑
The dual problem has one variable for each primal constraint, so there will be m+n dual variables.
Let’s call them yi , i = 1 … m for the first m flow conservation equalities and vij for the second
group of n capacity limitation inequalities. The dual objective coefficients are the RHS of primal
constraints, so the dual objective is
Min ij ijw u v=∑
Now let’s create dual constraints. There is one for each primal variable, it means one for each arc
(including the artificial one from t to s). Also note that the only non-zero primal objective
coefficient 1 corresponds to this arc. The capacity of this arc is infinite, so it is not included in the
second group of n capacity limitation inequalities. So we have these dual constraints:
yt – ys = 1 for the artificial arc
yi – yj + vij ≥ 0 for all the other arcs (i, j)
vij ≥ 0
The interpretation of the dual is the following: let yi=0 if vertex i is in the set V1, and let yi=1 if
vertex i is in the set V2. So the dual variables y define a cut. The first dual constraint guarantees
that s ∈ V1 and t ∈ V2. Let vij=1 if arc (i, j) connects V1 with V2 (the dual constraints guarantee this
fact) and let vij=0 otherwise. Then the dual objective is the capacity of the cut and the dual optimum
is the minimum capacity cut. Using the strong duality, we can formulate the famous max-flow min-
cut theorem: “maximum flow in a network is equal to the minimum of the capacities of all cuts in
the network”.
Maximum flow problem can be expanded to Minimum cost maximal flow
problem. To avoid possibly conflicting criteria, one way to solve this problem is the
following: first find the maximum flow without costs. Then minimize the total cost
provided the flow in the artificial arc is kept at maximum value (additional constraint). A modification of this problem is Minimum cost flow with given value
(or Minimum cost flow with given minimum acceptable value). Both can be solved by
the general minimum cost flow algorithm with one more constraint (= or ≥) on the
flow through the artificial arc.
There are other practically less significant special cases of the general minimum cost
network flow problem. Note that all network problems can be solved by the standard simplex method, so any LP solver can generally be used. There are two points to
mention. First network problems are mostly degenerate (many zero basic variables).
So there can be problems. On the other hand special properties of the matrix A of
network problems make it possible to use special algorithms faster than the standard simplex algorithm. Some will be presented even though with today’s fast computers
their use is justified only for very big models.

41
Transportation
Problem: minimization of total transportation costs of a certain commodity from n
sources to m destinations, based on known unit transportation costs from each
source to each destination and known amounts available (supplies) at each source and known demands of all destinations.
Note: The problem is balanced if the total supply is equal to the total demand.
Unbalanced problems can be balanced by adding a dummy row (dummy source)
or a dummy column (dummy destination) with zero costs and the supply or
demand that makes the balance. Interpretation: allocations to dummy cells
represent the fact, that the commodity is not transported (no satisfied demand for
a dummy row, or commodity left at source for a dummy column respectively). Next only balanced models are considered.
Example: Balance the next table.
Destinations A B C D
Sources Supply/Demand 20 30 15 5
I 40 2 4 1 6
II 20 4 3 3 3
III 20 1 2 5 2
LP model of a balanced transportation problem
1 j m
1 . cij = Unit cost of the i to j transportation
. si = Supply at i
i … cij xij dj = Demand at j
xij = Solution variable (amount transported from i to j) n
xij ≥ 0
∑∑= =
n
i
m
j
ijij xcMin1 1
∑=
==n
i
jij mjdx1
,2,1, �
∑=
==m
j
iij nisx1
,2,1, �
42
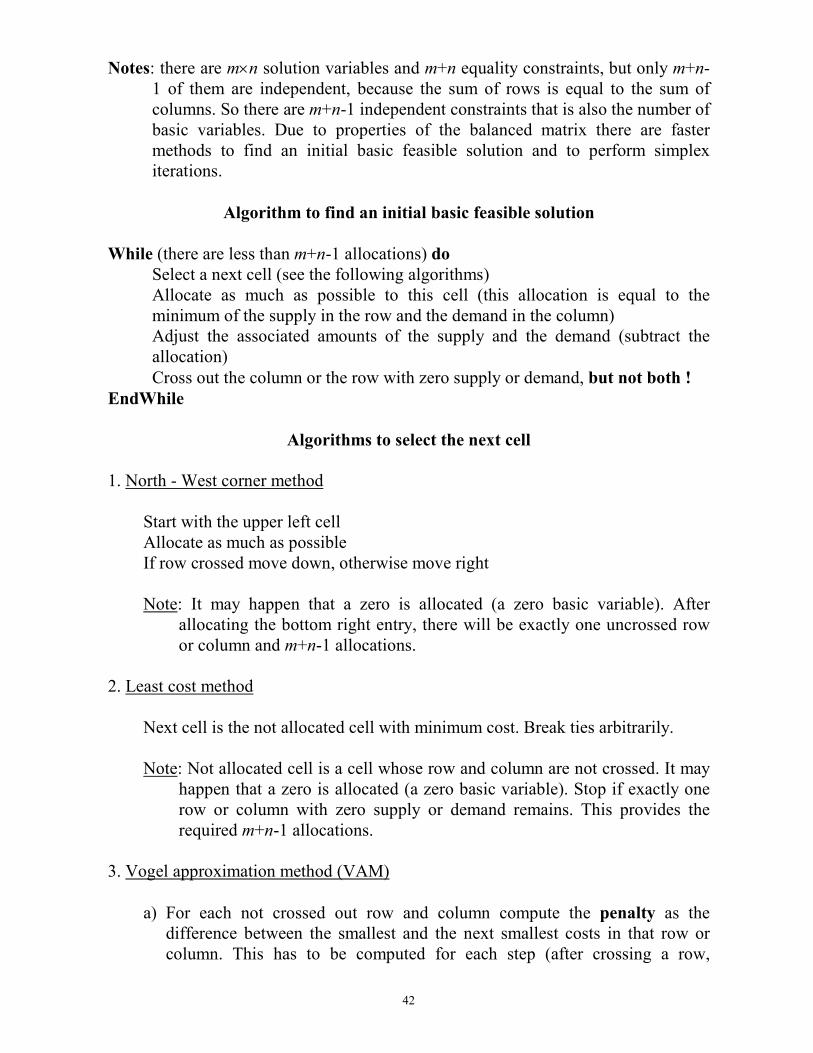
Notes: there are m×n solution variables and m+n equality constraints, but only m+n-
1 of them are independent, because the sum of rows is equal to the sum of
columns. So there are m+n-1 independent constraints that is also the number of
basic variables. Due to properties of the balanced matrix there are faster
methods to find an initial basic feasible solution and to perform simplex iterations.
Algorithm to find an initial basic feasible solution
While (there are less than m+n-1 allocations) do
Select a next cell (see the following algorithms)
Allocate as much as possible to this cell (this allocation is equal to the
minimum of the supply in the row and the demand in the column) Adjust the associated amounts of the supply and the demand (subtract the
allocation)
Cross out the column or the row with zero supply or demand, but not both !
EndWhile
Algorithms to select the next cell
1. North - West corner method
Start with the upper left cell
Allocate as much as possible
If row crossed move down, otherwise move right
Note: It may happen that a zero is allocated (a zero basic variable). After
allocating the bottom right entry, there will be exactly one uncrossed row
or column and m+n-1 allocations.
2. Least cost method
Next cell is the not allocated cell with minimum cost. Break ties arbitrarily.
Note: Not allocated cell is a cell whose row and column are not crossed. It may
happen that a zero is allocated (a zero basic variable). Stop if exactly one
row or column with zero supply or demand remains. This provides the
required m+n-1 allocations.
3. Vogel approximation method (VAM)
a) For each not crossed out row and column compute the penalty as the difference between the smallest and the next smallest costs in that row or
column. This has to be computed for each step (after crossing a row,

43
recalculate penalties in columns, after crossing a column, recalculate
penalties in rows).
b) Select a row or a column with the highest penalty. Break ties arbitrarily.
c) Allocate as much as possible to the cell with the minimum cost in the
selected row or column.
Note: If all uncrossed out rows and columns have zero remaining supply and
demand, determine the zero basic variables by the Least cost method. Stop
if exactly one row or column with zero supply or demand remains. This
provides the required m+n-1 allocations.
Comparison: All methods provide the m+n-1 allocations (basic variables), some of
them may be zero. Vogel's method often provides an optimum. The Least cost
method is probably a good compromise between complexity and the number of improvement steps (for manual solutions). NW corner method is simple, but may
require many improvement steps. So it is the usual choice for computerized
solutions.
Transportation - worksheet for basic feasible allocation methods
Destinations A B C D X
Sources Supply/Demand 20 30 15 5 10
I 40 2 4 1 6 0
II 20 4 3 3 3 0
III 20 1 2 5 2 0
Destinations A B C D X
Sources Supply/Demand 20 30 15 5 10
I 40 2 4 1 6 0
II 20 4 3 3 3 0
III 20 1 2 5 2 0
Destinations A B C D X
Sources Supply/Demand 20 30 15 5 10
I 40 2 4 1 6 0
II 20 4 3 3 3 0
III 20 1 2 5 2 0

44
Algorithm to find an optimal solution: Stepping - Stone method
Idea: Repeatedly try all not allocated cells to improve the total cost until no
improvement exists. In particular do for each not allocated cell the following:
Create a closed loop starting and ending at this empty cell marked by + that is made of already allocated (basic) cells, that are marked repeatedly by - and + . The loop
can be made of horizontal and vertical segments only - not diagonal ones.
(Degenerate allocations with zero entry can be used in the loop). There is exactly one
such loop for a given nonbasic variable. For justification see the Lemma 3 of the
Appendix B that contains the summary of Graph Theory result that are important in the context of network LP models.
Optimality test: Sum costs of cells marked by + , subtract from this sum costs of cells
marked by - . If the result is negative, the solution is not optimum. Entering the variable associated with this empty cell will improve the solution. This can be
applied immediately or the variable with maximum cost decrease can be selected.
Feasibility test: To allocate as much as possible to the new cell, find the cell in the
loop marked by - with minimum allocation. Add this value to the cells in the loop marked by +, subtract this value from the cells in the loop marked by - . This will
enter a new solution variable with maximum possible value, the variable that
changed to zero leaves the solution. If more than one variables reach zero value (the
so-called temporary degeneracy), only one of them can leave the solution. It can be chosen arbitrarily. So there will always be m+n-1 basic allocations, some of them
may be zero. For a degenerate solution it may happen that a zero is moved.
Notes:
1) Stepping - Stone method is simple but it involves many steps. If for some not allocated cells the cost difference is zero and for all the others it is positive, there are
alternative optima. To find them, enter such a variable. The total cost remains the
same, but allocations will change.
2) There is an implementation of the network simplex method called MODI
(Modified Distribution). The simplex operations are performed directly in the
transportation table, so the number of variables is smaller compared with the
standard simplex method and the operations are also much simpler. For details see
the Appendix C.

45
Transportation: maximization problems
Maximization is necessary if the table entries are interpreted as contribution
associated with transporting unit commodity through the cell. There are only minor
modifications to the methods described above. Note that instead of costs the table
contains contributions.
Initial basic feasible allocation:
NW corner: no change.
Least cost method: select not allocated cells with maximum contribution.
VAM: compute penalty as the difference between two maximum contributions in the
row or the column. Select the row or the column with maximum penalty,
allocate the cell with maximum contribution in that row or column.
Stepping - Stone method: enter nonbasic cells with positive contribution difference.

46
Assignment
Problem: minimization (maximization) of total cost (contribution) of an assignment
of n sources to m destinations based on known costs (contributions) for each
combination. This is a special case of transportation with all supplies and all demands equal to one.
Note: The problem is balanced if the number of sources is equal to the number of destinations. Unbalanced problems can be balanced by adding dummy rows
(dummy sources) or dummy columns (dummy destinations) with zero costs.
Interpretation: assignments to dummy cells represent the fact, that the
assignment is in fact not done (no satisfied destinations for dummy rows, or sources left not assigned for dummy columns respectively). Next only balanced
models are considered.
Example:
Sources/Destinations A B C D
I 9 12 7 15
II 13 14 15 10
III 8 10 20 6
IV 11 15 13 10
LP model of a balanced assignment problem
(Minimization)
1 j n
1 . cij = Cost of the i-j assignment .
i … cij xij xij = Solution variable (1 = i assigned to j, 0 = i not assigned to j)
n
xij ≥ 0
∑∑= =
n
i
n
j
ijij xcMin1 1
∑=
==n
j
ij nix1
,2,1,1 �
∑=
==n
i
ij njx1
,2,1,1 �

47
Note: There is exactly one cell with value 1 in each row and each column, the other
cells have value 0. Due to this property of a balanced matrix there are fast methods to find an initial basic feasible solution and to perform simplex
iterations. The so-called Hungarian method reduces the matrix that is possible
due to the following theorem:
Theorem: The optimal solution to a balanced assignment model remains unchanged
if a constant is subtracted from (or added to) any row or column of the cost matrix.
Proof: Let pi be the constant subtracted from the row i and let qj be the constant
subtracted from the column j. This also represents addition because addition means
subtracting a negative constant. Then the cij entry of the cost matrix changes to:
dij = cij - pi - qj
The new value of the objective function is:
The difference between the new and the modified objective values is constant, so the
optimum solution is not changed.
Assignment algorithm (Hungarian method)
If (number of sources ≠ number of destinations) then add dummy row(s)
or dummy column(s) with zero cost entries to get a square matrix
If (maximization) then reduce columns by the largest number in the column:
New entry = Largest number in the column - Old entry
Else reduce each column by the smallest number in the column for minimizing
Reduce each row by the smallest number in the row
Repeat
Cover all zeros by the minimum number of lines
If (number of lines < number of assignments) then Find the smallest not covered value x
Subtract x from all not covered cells
Add x to all cells covered twice
EndIf
Until (number of lines = number of assignments)
Make assignments to zeros unique in columns or rows (taking into account only
rows or columns so far not assigned)
∑∑∑∑∑ ∑ ∑ ∑ ∑ ∑ ∑∑
∑ ∑∑ ∑∑ ∑∑∑∑∑
= === = = = = = = ==
= = = = = = === =
−=−−=−−
=−−=−−=
n
i
n
j
ijij
n
j
j
n
i
n
j
n
i
n
j
n
j
n
i
n
i
n
i
i
n
j
ijijijjijiijij
n
i
n
i
n
j
n
i
n
j
n
i
n
j
ijjijiijij
n
j
ijjiij
n
i
n
j
ijij
Cxcqpxcxqxpxc
xqxpxcxqpcxd
1 111 1 1 1 1 1 1 11
1 1 1 1 1 1 111 1
)1()1()()(
)(
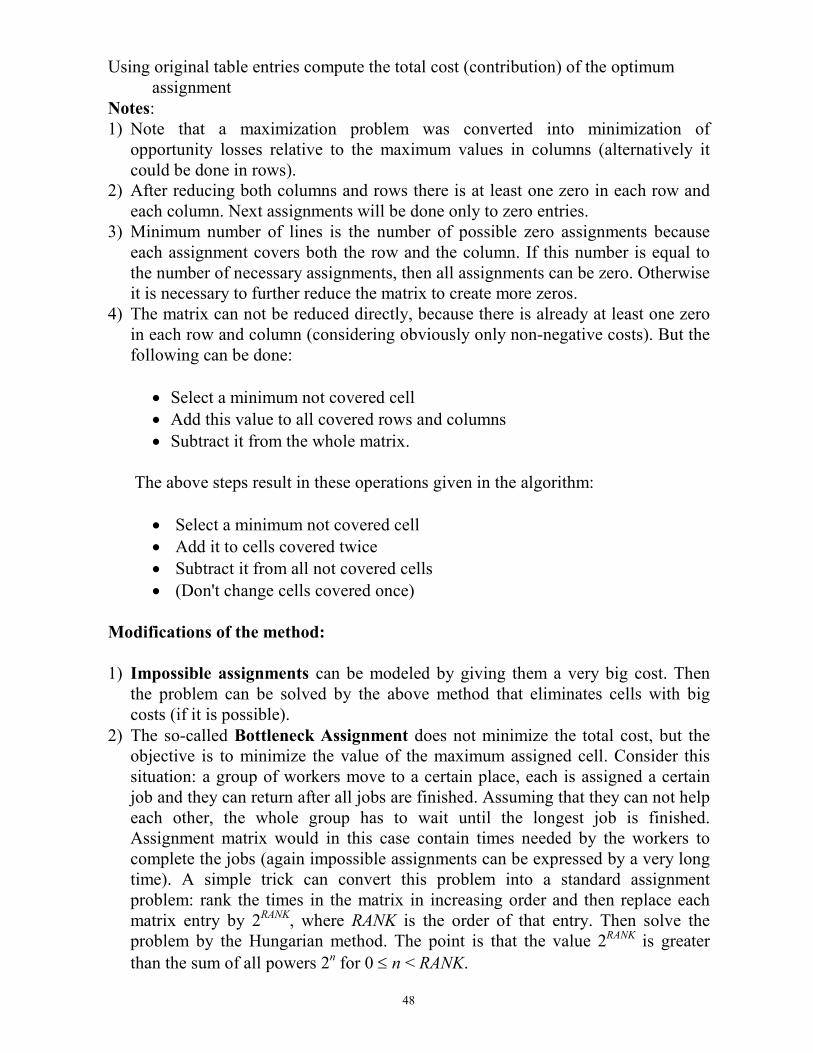
48
Using original table entries compute the total cost (contribution) of the optimum
assignment
Notes:
1) Note that a maximization problem was converted into minimization of
opportunity losses relative to the maximum values in columns (alternatively it
could be done in rows). 2) After reducing both columns and rows there is at least one zero in each row and
each column. Next assignments will be done only to zero entries.
3) Minimum number of lines is the number of possible zero assignments because
each assignment covers both the row and the column. If this number is equal to
the number of necessary assignments, then all assignments can be zero. Otherwise it is necessary to further reduce the matrix to create more zeros.
4) The matrix can not be reduced directly, because there is already at least one zero
in each row and column (considering obviously only non-negative costs). But the
following can be done:
• Select a minimum not covered cell
• Add this value to all covered rows and columns
• Subtract it from the whole matrix.
The above steps result in these operations given in the algorithm:
• Select a minimum not covered cell
• Add it to cells covered twice
• Subtract it from all not covered cells
• (Don't change cells covered once)
Modifications of the method:
1) Impossible assignments can be modeled by giving them a very big cost. Then
the problem can be solved by the above method that eliminates cells with big
costs (if it is possible).
2) The so-called Bottleneck Assignment does not minimize the total cost, but the objective is to minimize the value of the maximum assigned cell. Consider this
situation: a group of workers move to a certain place, each is assigned a certain
job and they can return after all jobs are finished. Assuming that they can not help
each other, the whole group has to wait until the longest job is finished. Assignment matrix would in this case contain times needed by the workers to
complete the jobs (again impossible assignments can be expressed by a very long
time). A simple trick can convert this problem into a standard assignment
problem: rank the times in the matrix in increasing order and then replace each
matrix entry by 2RANK, where RANK is the order of that entry. Then solve the problem by the Hungarian method. The point is that the value 2RANK is greater
than the sum of all powers 2n for 0 ≤ n < RANK.

49
The Hungarian method was developed by H.W.Kuhn in 1955. It is based on
theories of Hungarian mathematicians Konig and Egervary from about 1931.
That's why its name.

50
Chapter 7: Integer Linear Programming
Types of Integer Linear Programming (ILP) models:
1. Pure ILP - all decision variables required to be integer.
2. Mixed ILP (MILP) - some decision variables need not be integer.
3. Zero - One ILP (also called 0-1 or Binary ILP models) - all decision variables
must have values either 0 or 1.
LP relaxation of an ILP model is a Linear Programming (LP) model obtained from
ILP by dropping all integer constraints. Binary variables are replaced by continuous
variables such that 0 ≤ x ≤ 1.
Methods of solution
1. Rounding can be used especially if the nature of the problem is well known.
Generally rounding does not work because:
• Even after intelligent rounding the solution may be infeasible
• Integer optimum can be far away from the rounded optimum.
2. Complete Enumeration is not acceptable for large models. The next two methods are based on eliminating large numbers of possible solutions to decrease
the number of steps.
Solving ILP model - General Method
Step 1: Create the LP relaxation of the ILP model.
Step 2: Solve the LP relaxation to get the continuous optimum.
Step 3: Starting from the continuous optimum point, add repeatedly additional
constraints that modify the LP solution space (by possibly creating more LP
problems) until the integer optimum is reached.
3. Cutting Plane Method (Gomory 1958) is based on systematic addition of extra
constraints (cutting planes) that are satisfied by integer solutions but not by some
continuous solutions. Cuts are added until the integer optimum is found.
4. Branch & Bound Method (Land, Doig 1960)

51
General Idea:
• Using branching variables to break the feasible space into smaller and smaller
parts by additional integer constraints until integer optima are found.
• Keeping the lower (maximization) or upper (minimization) bound to eliminate
entire sub-problems whose continuous optima are worse than the bound.
Branch & Bound Method Algorithm (maximization):
LPi = i-th LP sub-problem
LB = lower bound (so far best objective value of some integer feasible solution)
Create the LP relaxation LP0 to the original ILP problem;
LB := -∞; i := 0;
While (not all sub-problems terminated) do Select a not terminated sub-problem LPi ;
Solve LPi ;
If (LPi has no feasible solution) or (LPi optimum ≤ LB) or (LPi has integer
optimum)
terminate LPi
EndIf;
If (LPi terminated)
If (LPi has better integer optimum than LB)
Update LB; Keep the so far optimum integer solution;
EndIf
Else
Try to find a better LB by (intelligent) rounding of LPi optimum; Select an integer variable xj whose optimum value xj
* in LPi is not
integer;
Let [xj*] be the largest integer smaller than xj
*;
Eliminate the region [xj*] < xj < [xj
*] + 1 by replacing LPi by two sub-
problems with additional constraints
xj ≤ [xj*] and xj ≥ [xj
*] + 1
EndIf; i := i + 1;
EndWhile;
Return LB and its associated solution (if any);

52
Notes:
1) There are various modifications of this algorithm regarding selection of the
branching variable and the way the lower/upper bound is obtained.
2) It is very convenient to keep a tree of sub-problems such that the two new sub-problems replacing LPi are its successors.
3) Integer solution is such that all integer variables have integer values. For MILP
problems some variables can still be continuous.
4) Note that binary variables are integer variables not greater than 1, so the
algorithm can be applied to all types of ILP problems. Branching on a binary
variable creates two subproblems where the branching variable is fixed to values
0 and 1 respectively. Other efficient algorithms for binary models exist.

53
Linear Programming
Worksheet
1. A small manufacturer of high-fidelity components currently manufactures power amplifiers and
preamplifiers. It has the facilities to produce only one type of amps or both in any combination.
Because of limited production resources it is critical for the company to produce the appropriate
number of power amps and/or preamps in order to maximize profit. Currently power amp is
contributing Lm20 profit, preamp contributes Lm50 profit. We assume, that the firm can sell all
components that it can produce and that plant equipment and labor skills are interchangeable
between both types of amps. To find the daily production plan, we assume only three resources.
Preamps need scarce high-quality transistors, so not more than 40 preamps can be manufactured
on a daily basis. Each day there are only 240 hours of work time available. Power amp requires
1.2 hours for assembly, preamp requires 4 hours for assembly. Finally there are 81 hours
available for inspection and testing each day from which a power amp requires 0.5 hours, a
preamp requires 1 hour. The manufacturer wants to establish the daily production plan that
maximizes the contribution.
2. AZZOPARDI GLASS Co. Ltd. has decided to launch two new products: an 8-foot glass door
with aluminium framing, and a 4x6 foot double-hung wood-framed window. Both are produced
in batches of 20. There are three plants with limited capacity, doors need processing in plants 1
an 3, windows are processed in plants 2 and 3. Processing times in hours and the total time
available per week are summarized in the following table that also contains profits per batch:
Plant Production time per batch Production time
Doors Windows available per week
1 1 0 4
2 0 2 12
3 3 2 18
Profit per batch in
Lm1000
3 5
The company wants to determine the weekly production plan that maximizes the total profit
assuming that the plant 3 can produce any mix of the two types of products.
3. A certain aviation fuel manufacturer sells two types of fuel, A and B. Fuel is produced by mixing
various sorts of gasoline. Type A fuel is made of 25% grade1 gasoline, 25% grade 2 gasoline,
and 50% grade 3 gasoline. Type B fuel is made of 50% grade 2 gasoline and 50% grade 3
gasoline. Available for production are 500 gal/hour of grade 1 and 200 gal/hour of grades 2 and 3
gasoline. Costs are 30 cents/gal for grade 1, 60 cents/gal for grade 2, and 50 cents/gal for grade 3
gasoline. Type A fuel can be sold for 75 cents/gal, while type B for 90 cents/gal. The
management wants to know the hourly production plan that brings maximum total profit.
4. An auto company manufactures cars and trucks. Each vehicle must be processed in the paint shop
and body assembly shop. In the paint shop trucks are painted in 12 minutes intervals, cars are
painted in 8 minutes intervals. In the body assembly shop both trucks and cars are assembled in
10 minutes intervals. Each truck contributes $300 to profit, and each car contributes $250 to
profit. The management wants to find the shift production plan that maximizes the total profit
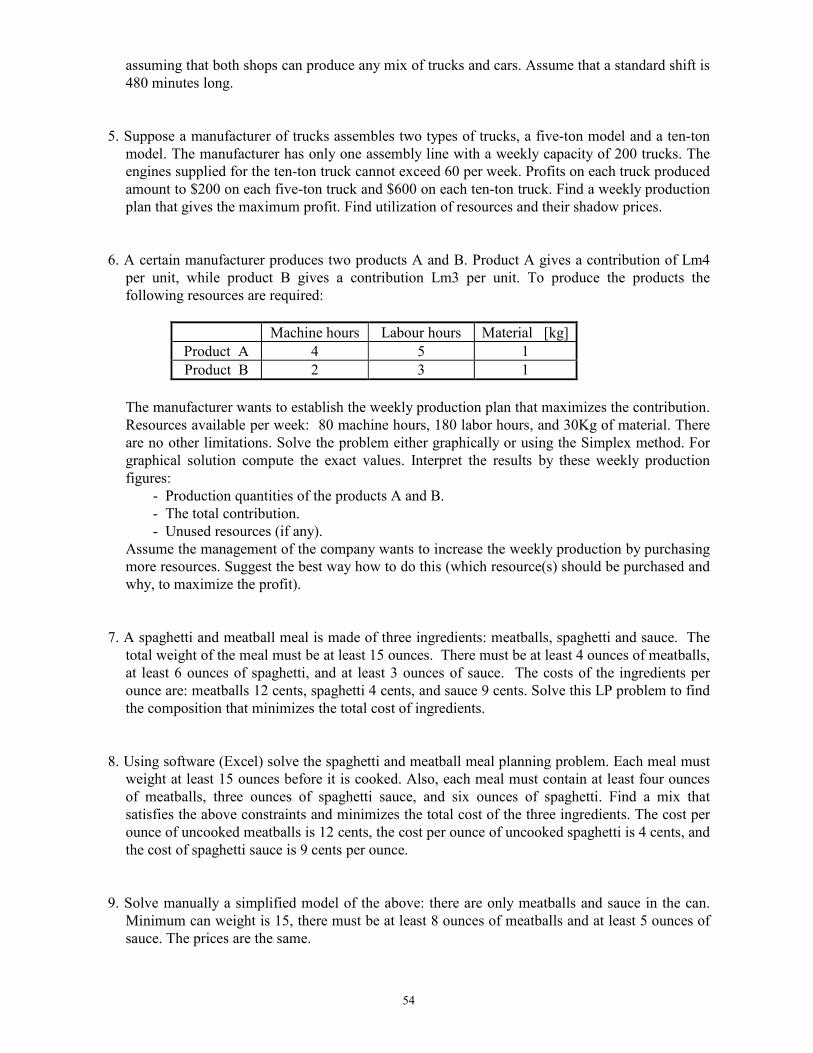
54
assuming that both shops can produce any mix of trucks and cars. Assume that a standard shift is
480 minutes long.
5. Suppose a manufacturer of trucks assembles two types of trucks, a five-ton model and a ten-ton
model. The manufacturer has only one assembly line with a weekly capacity of 200 trucks. The
engines supplied for the ten-ton truck cannot exceed 60 per week. Profits on each truck produced
amount to $200 on each five-ton truck and $600 on each ten-ton truck. Find a weekly production
plan that gives the maximum profit. Find utilization of resources and their shadow prices.
6. A certain manufacturer produces two products A and B. Product A gives a contribution of Lm4
per unit, while product B gives a contribution Lm3 per unit. To produce the products the
following resources are required:
Machine hours Labour hours Material [kg]
Product A 4 5 1
Product B 2 3 1
The manufacturer wants to establish the weekly production plan that maximizes the contribution.
Resources available per week: 80 machine hours, 180 labor hours, and 30Kg of material. There
are no other limitations. Solve the problem either graphically or using the Simplex method. For
graphical solution compute the exact values. Interpret the results by these weekly production
figures:
- Production quantities of the products A and B.
- The total contribution.
- Unused resources (if any).
Assume the management of the company wants to increase the weekly production by purchasing
more resources. Suggest the best way how to do this (which resource(s) should be purchased and
why, to maximize the profit).
7. A spaghetti and meatball meal is made of three ingredients: meatballs, spaghetti and sauce. The
total weight of the meal must be at least 15 ounces. There must be at least 4 ounces of meatballs,
at least 6 ounces of spaghetti, and at least 3 ounces of sauce. The costs of the ingredients per
ounce are: meatballs 12 cents, spaghetti 4 cents, and sauce 9 cents. Solve this LP problem to find
the composition that minimizes the total cost of ingredients.
8. Using software (Excel) solve the spaghetti and meatball meal planning problem. Each meal must
weight at least 15 ounces before it is cooked. Also, each meal must contain at least four ounces
of meatballs, three ounces of spaghetti sauce, and six ounces of spaghetti. Find a mix that
satisfies the above constraints and minimizes the total cost of the three ingredients. The cost per
ounce of uncooked meatballs is 12 cents, the cost per ounce of uncooked spaghetti is 4 cents, and
the cost of spaghetti sauce is 9 cents per ounce.
9. Solve manually a simplified model of the above: there are only meatballs and sauce in the can.
Minimum can weight is 15, there must be at least 8 ounces of meatballs and at least 5 ounces of
sauce. The prices are the same.

55
Linear Programming - Tutorial
1) Ozark Farms uses at least 800 lb of special feed daily. The special feed is a mixture of corn and
soybean meal with the following composition:
lb per lb of feedstuff
Feedstuff Protein Fiber Cost [$/lb]
Corn .09 .02 .30
Soybean meal .60 .06 .90
The dietary requirements of the special feed stipulate at least 30% protein and at most 5% fiber.
Ozark Farms wishes to determine the daily minimum-cost feed mix. © Taha, H.M. (1997)
Operations Research An Introduction, Prentice-Hall, Inc.
2) PROTRAC, Inc. produces heavy equipment parts, among others the part E-9 of earth-moving
equipment and the part F-9 of forestry equipment. The marketing manager believes that next month
it will be possible to sell as many E-9s or F-9s as the firm can produce. Each product is put through
machining operations in both department A and department B whose monthly capacities are 150
and 160 hours respectively. Also in order to honor an agreement with the union, the total labor
hours used in next month’s testing can not fall below 135 hours. Machining and testing
requirements of the two parts together with the limits are summarized in the following table:
Department Hours Total available
per one E-9 per one F-9 (required) monthly
A 10 15 150
B 20 10 160
Testing 30 10 135
In order to maintain the current market position, senior management has decreed the operating
policy that it is necessary to build at least one F-9 for every three E-9s produced. A major dealer has
ordered a total of at least five E-9s and F-9s (in any combination). Find the next month’s production
plan that would maximize next month’s profit contribution provided the unit contribution margin is
$5000 on each E-9 that is sold and $4000 on each F-9. © Eppen, Gould, Moore, Weatherford
(1998) Introductory Management Science, Prentice-Hall, Inc.
3) A pharmaceutical company is creating a tablet for a new drug. Each tablet is to contain a binder,
a disintegrant and a filler in addition to the active drug ingredient, which is to be 14% of the weight
of each tablet. Chemical and physical considerations mean that the weight of the disintegrant
should not exceed 25% of the combined weights of the binder and the active ingredient, and that
there should be at most 10 times as much filler as binder. Also, there must be at least 2%
disintegrant of the total weight of the tablet. The disintegrant costs Lm15, the binder Lm50 and
filler Lm2 per kg. Determine the formulation of the tablet, which minimizes its cost.

56
4) A bank makes four kinds of loans to its customers, and these loans yield the following annual
interest rates to the bank:
• 1st mortgage 14%
• 2nd mortgage 20%
• Home improvement 20%
• Personal Overdraft 10%
The bank has a maximum foreseeable lending capability of Lm250 million and is further
constrained by the following policies:
• First mortgages must be at least 55% of all mortgages issued and at least 25% of all loans
issued (in Lm terms)
• Second mortgages cannot exceed 25% of all loans issued (in Lm terms)
• The interest on all loans must not exceed 15%.
Formulate and solve the bank’s loan LP problem so as to maximize the interest income whilst
satisfying the policy limitations.
5) A wine producer is planning on blending two new wines for the upcoming year. Blend 1, called
Table Burgundy, contains 50% Pinot Noir, 25% Zinfandel and 25% Thompson Seedless. Blend 2,
called Estate Burgundy, contains 60% Pinot Noir and 40% Cabarnet Sauvignon. The table
burgundy sells for Lm2 a bottle (1/5 of a gallon) while the Estate Burgundy sells for Lm3 a bottle.
The availability of the various ingredient wines is given in the table below:
WINE AMOUNT AVAILABLE IN
GALLONS
PRICE PER GALLON
Pinot Noir 5000 Lm5
Zinfandel 3000 Lm4
Thompson Seedless 7000 Lm3
Cabarnet Sauvignon 2000 Lm8
Assuming that the wine producer can sell all bottles of either blend, formulate and solve an LP to
maximize the total profit.
6) McNaughton Inc, produces two steak sauces, Spicy Diablo (SD) and mild Red Baron (RB).
These sauces are both made by blending two ingredients: A and B. A certain level of flexibility is
permitted in the formulae for these products. The allowable percentages along with revenue and
cost data, are given in the following table. Up to 40 quarts of A and 30 quarts of B could be
purchased. McNaughton can sell as much of these sauces as it produces. Formulate and solve this
LP problem whose objective is to maximize the net profit from the sale of the sauces.
Ingredient
Sauce A B Sales price/quart
SD At least 25% At least 50% Lm3.35
RB At most 75% At least 50% Lm2.85
Cost/quart Lm1.60 Lm2.59

57
Assignment Worksheet
1. An advertising agency is trying to decide which of four account executives to assign to each of
four major clients. The estimated cost of each assignment for each executive is presented in the
following table (executive A assigned to client 1 costs 15, etc.):
Executive/Client 1 2 3 4
A 15 19 20 18
B 14 15 17 14
C 11 15 15 14
D 21 24 26 24
Find the optimum solution to this problem. State the minimum value of total costs.
2. Assume, that the above table contains profit associated with assignment of an executive to the
client. Find the solution that maximizes the total profit and its value.
3. There are four repair bays in the maintenance shop and three jobs to assign to them. Because of
differences in equipment and people assigned to each bay, each job requires a different amount of
time in each bay. The estimated times for each job in each bay are given in the following table (Job
1 assigned to Bay A takes 15 time units, etc.):
Bay/Job 1 2 3
A 15 19 20
B 14 15 17
C 11 15 15
D 21 24 26
Find the solution that minimizes the total time. What is the total time? Are there alternative optimal
solutions?
4. Assume, that the above table contains profit associated with assignment of a Job to the Bay. Find
the solution that maximizes the total profit and its value.

58
Transportation Worksheet
1. Consider the following transportation tableau that contains transportation costs per unit, supply
available at origins and demands at destinations. The company wants to minimize total
transportation costs.
Destination A B C
Origin Supply/Demand 90 30 50
I 45 10 8 4
II 50 9 5 7
III 45 3 6 9
IV 30 5 7 6
a) Find any initial feasible solution.
b) Find the optimum solution and minimum total transportation costs.
c) What is the additional cost if management insists on sending 10 units from III to B?
2. Assume, that the above table contains profit associated with transporting units of certain goods.
Find the solution that maximizes the total profit and the value of the profit.
3. Solve the minimization and the maximization problem for the following transportation tableau:
Destination 1 2 3
Origin Supply/Demand 500 800 200
A 600 41 45 40
B 300 31 29 38
C 600 46 36 35
4. Solve the minimization and the maximization problem for the following transportation tableau:
Destination 1 2 3 4
Origin Supply/Demand 15 10 10 20
A 15 9 3 7 4
B 25 5 6 4 2
C 10 4 4 6 6
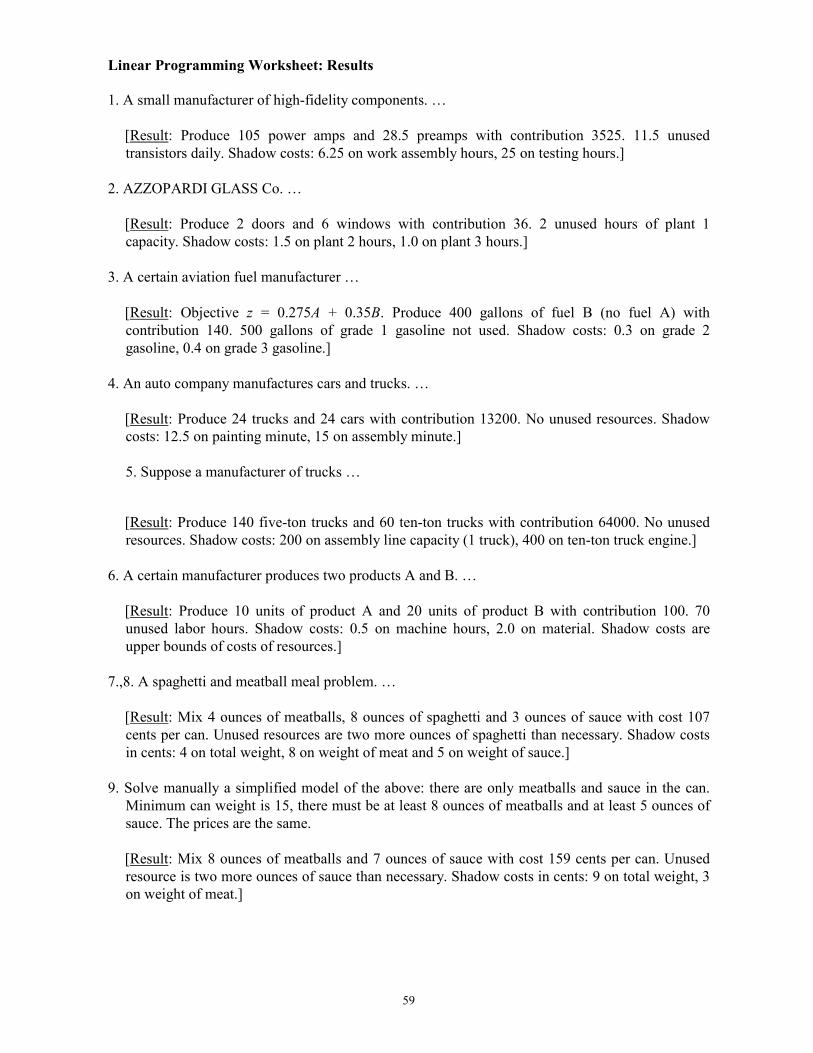
59
Linear Programming Worksheet: Results
1. A small manufacturer of high-fidelity components. …
[Result: Produce 105 power amps and 28.5 preamps with contribution 3525. 11.5 unused
transistors daily. Shadow costs: 6.25 on work assembly hours, 25 on testing hours.]
2. AZZOPARDI GLASS Co. …
[Result: Produce 2 doors and 6 windows with contribution 36. 2 unused hours of plant 1
capacity. Shadow costs: 1.5 on plant 2 hours, 1.0 on plant 3 hours.]
3. A certain aviation fuel manufacturer …
[Result: Objective z = 0.275A + 0.35B. Produce 400 gallons of fuel B (no fuel A) with
contribution 140. 500 gallons of grade 1 gasoline not used. Shadow costs: 0.3 on grade 2
gasoline, 0.4 on grade 3 gasoline.]
4. An auto company manufactures cars and trucks. …
[Result: Produce 24 trucks and 24 cars with contribution 13200. No unused resources. Shadow
costs: 12.5 on painting minute, 15 on assembly minute.]
5. Suppose a manufacturer of trucks …
[Result: Produce 140 five-ton trucks and 60 ten-ton trucks with contribution 64000. No unused
resources. Shadow costs: 200 on assembly line capacity (1 truck), 400 on ten-ton truck engine.]
6. A certain manufacturer produces two products A and B. …
[Result: Produce 10 units of product A and 20 units of product B with contribution 100. 70
unused labor hours. Shadow costs: 0.5 on machine hours, 2.0 on material. Shadow costs are
upper bounds of costs of resources.]
7.,8. A spaghetti and meatball meal problem. …
[Result: Mix 4 ounces of meatballs, 8 ounces of spaghetti and 3 ounces of sauce with cost 107
cents per can. Unused resources are two more ounces of spaghetti than necessary. Shadow costs
in cents: 4 on total weight, 8 on weight of meat and 5 on weight of sauce.]
9. Solve manually a simplified model of the above: there are only meatballs and sauce in the can.
Minimum can weight is 15, there must be at least 8 ounces of meatballs and at least 5 ounces of
sauce. The prices are the same.
[Result: Mix 8 ounces of meatballs and 7 ounces of sauce with cost 159 cents per can. Unused
resource is two more ounces of sauce than necessary. Shadow costs in cents: 9 on total weight, 3
on weight of meat.]

60
Linear Programming Tutorial: Results
1. Ozark Farms. …
[Result: Mix 470.6 lb of corn with 329.4 lb of soybean meal with cost $437.64.]
2. PROTRAC. …
[Result: Produce 4.5 E-9s and 7 F-9s with contribution $50,500.]
3. A pharmaceutical company. …
[Result: Binder 7.64%, disintegrant 2%, filler 76.36%, cost 3.673.]
4. A bank makes four kinds of loans. …
[Result: Mortgage 208.33, home improvement 41.67, 0 to other two, income 37.5.]
5. A wine producer. …
[Result: Table Burgundy 4000, Estate Burgundy 5000, income 67000.]
6. McNaughton Inc, produces two steak sauces …
[Result: Produce only S.D. by mixing 30 quarts of A and 30 quarts of B, income 75.3.]
Assignment Worksheet: Results
1. A1, B4, C3, D2; cost 68
2. A3, B1, C2, D4; profit 73
3. A1, B2, C3, DX; cost 45
4. A2, B1, CX, D3; profit 59
Transportation Worksheet: Note
As the MODI method is not required and completion of the stepping stone iterations is too time-
consuming, use the worksheet as follows:
- find initial basic feasible solutions by all three methods
- perform some stepping-stone iterations on selected non-basic cells.
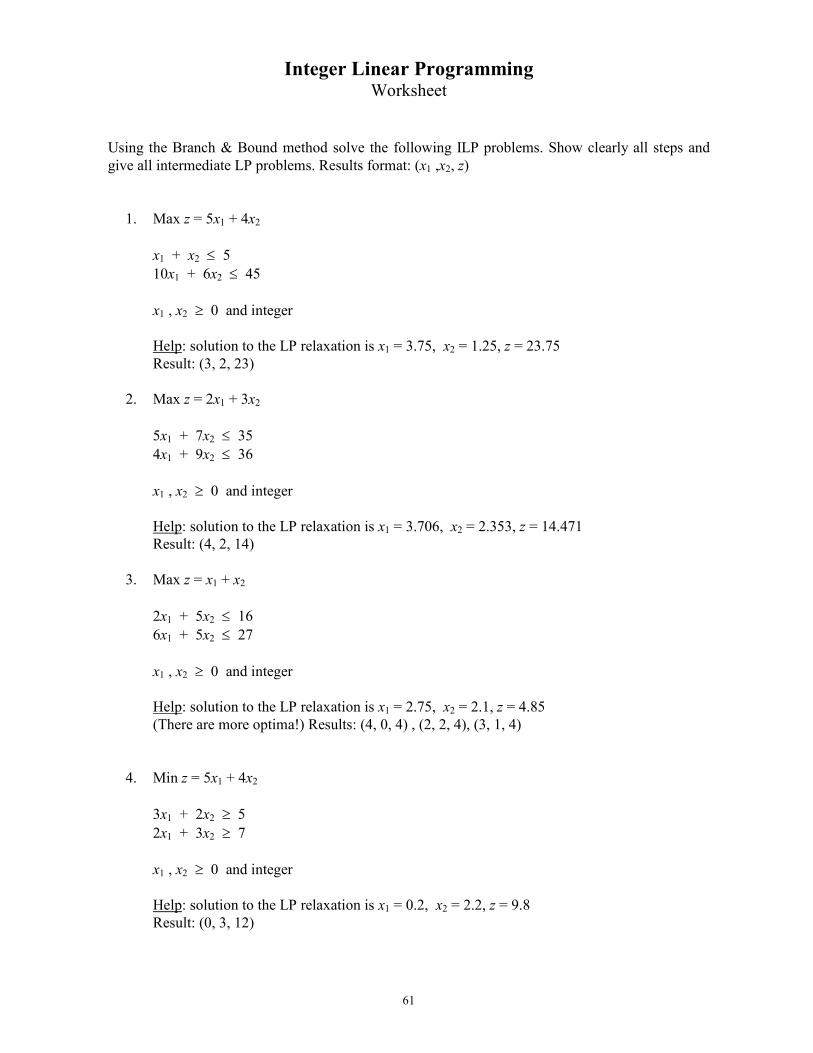
61
Integer Linear Programming Worksheet
Using the Branch & Bound method solve the following ILP problems. Show clearly all steps and
give all intermediate LP problems. Results format: (x1 ,x2, z)
1. Max z = 5x1 + 4x2
x1 + x2 ≤ 5
10x1 + 6x2 ≤ 45
x1 , x2 ≥ 0 and integer
Help: solution to the LP relaxation is x1 = 3.75, x2 = 1.25, z = 23.75
Result: (3, 2, 23)
2. Max z = 2x1 + 3x2
5x1 + 7x2 ≤ 35
4x1 + 9x2 ≤ 36
x1 , x2 ≥ 0 and integer
Help: solution to the LP relaxation is x1 = 3.706, x2 = 2.353, z = 14.471
Result: (4, 2, 14)
3. Max z = x1 + x2
2x1 + 5x2 ≤ 16
6x1 + 5x2 ≤ 27
x1 , x2 ≥ 0 and integer
Help: solution to the LP relaxation is x1 = 2.75, x2 = 2.1, z = 4.85
(There are more optima!) Results: (4, 0, 4) , (2, 2, 4), (3, 1, 4)
4. Min z = 5x1 + 4x2
3x1 + 2x2 ≥ 5
2x1 + 3x2 ≥ 7
x1 , x2 ≥ 0 and integer
Help: solution to the LP relaxation is x1 = 0.2, x2 = 2.2, z = 9.8
Result: (0, 3, 12)

62
Appendix A: The algebra of the Simplex Method
First let's recall the standard form of an LP minimization problem (results for maximization will
mostly differ only in signs and types of inequalities): find such x to
Minimize z = cx
Subject to Ax = b , x ≥ 0
where x and c are n-vectors, b is an m-vector, A is an m x n matrix (m ≤ n) and z is the scalar
objective value. Note that the set of equations Ax = b can be expressed as:
x1a1 + x2a2 + … + xnan = b (1)
where xi are elements of the vector x and ai are columns of the matrix A (1 ≤ i ≤ n ). Note also that
all LP problems can be converted into the above form by elementary operations and by adding
appropriate slack, surplus and artificial variables if necessary.
Now let's assume that the matrix A has the rank m, so there are m independent columns. Then A can
be re-arranged in this way:
A = (B N), where B is an m x m invertible matrix and N is an m x (n-m) matrix.
B is called the basic matrix (shortly the base) of A, N is called the nonbasic matrix. Vector x can be
decomposed accordingly: x = (xB xN) where xB = x1, x2, ... xm and xN = xm+1, xm+2, ... xn. Then:
or (2)
(after multiplying the last equality by B-1 from left). The solution x = (xB, xN) such that xN = 0 and
xB = B-1b is called a basic solution of the system Ax = b. So a basic solution has m basic variables
(components of xB) and n-m zero nonbasic variables (components of xN). If xB ≥ 0, than x is called a
basic feasible solution. If the solution has less than m nonzero variables, it is called a degenerate
basic solution. From the fundamental theorem of linear programming we know that if an LP
problem has an optimal feasible solution, then there is a basic feasible solution that is optimal.
The equation (2) shows how the basic variables would change if the nonbasic variables (currently
all zero) changed their values. Let's express this equation in terms of columns of the matrix B-1N
and corresponding nonbasic variables:
(3)
where R is the index set of the columns that make the nonbasic matrix N, aj are columns of the
matrix N (and the matrix A), yj are columns of the matrix B-1N and b* contains the current values of
basic variables.
Similarly let's find out how would the objective value change with respect to nonbasic variables:
bNxBxx
xNBAx =+=
= NB
N
B)(
NB NxBbBx11 −− −=
j
Rj
jj
Rj
jNB xx ∑∑∈
∗
∈
−−−− −=−=−= ybaBbBNxBbBx )( 1111

63
(4)
where zj = cBB-1aj is a scalar value for each nonbasic variable. We can use the equation (4) to find a
nonbasic variable that (if not zero) would improve the current objective value z0. If such a variable
does not exist, we know that the current basic feasible solution is optimal. To do it, let's optimize
with respect to nonbasic variables at the point x (the origin in the sub-space of nonbasic variables)
using the equations (3) and (4):
Minimize
Subject to
Note that in the above problem the current basic variables play the role of slacks. So the problem
can be rewritten as:
Minimize
Subject to
From the objective function of the above LP problems, we can directly state the optimality
condition:
If (zj - cj) ≤ 0 for all j ∈ R, then the current basic feasible solution is optimal.
The proof is simple: since xj ≥ 0 then for all nonpositive (zj - cj) z ≥ z0 for any other solution. But
currently z = z0 since xj = 0 for all j ∈ R.
If not all (zj - cj) ≤ 0, then we select one positive (zk - ck) - possibly but not necessarily the greatest
one - and we shall increase the corresponding xk as much as possible by holding the remaining n-m-
1 nonbasic variables at zero. The new objective value will be:
z = z0 - (zk - ck) xk (5)
Note: In geometry simplex is defined as an object in Rp defined by (p + 1) non-coplanar points. So
for example simplex in R3 is a tetrahedron. This explains the name "simplex method". At the
beginning of each iteration we are in the origin of the sub-space of nonbasic variables. Each
iteration represents a move along one axis of the nonbasic variables space to the neighboring
corner. So geometrically it is a move on one of the edges of the simplex.
From the equation (3) we can find new values of basic variables:
∑∑∑
∑
∈∈∈
−−
∈
−−
−−=+−=
=+−=+=
==
Rj
jjj
Rj
jj
Rj
jjBB
NN
Rj
jjBNNBB
N
B
NB
xczzxcx
xz
)(
)()(
0
11
11
aBcbBc
xcaBbBcxcxcx
xcccx
∑∈
−−=Rj
jjj xczzz )(0
0xbxy ≥∈≥=+ ∗
∈∑ BjBj
Rj
j Rjxx ,,0,
∑∈
−−=Rj
jjj xczzz )(0
Rjxx jj
Rj
j ∈≥≤ ∗
∈∑ ,0,by

64
xB = b* - ykxk (all other xj , j ∈ R - {k} are zero)
Expanded:
The indices Bi depend on the current basis. The value of xk can be found from the feasibility
requirement of the new solution:
xBi ≥ 0 or bi* - yikxk ≥ 0 , i = 1, 2, ... m
Feasibility is at danger only for positive yik for which it must hold:
So for yik ≤ 0 the corresponding xBi remains nonnegative. For
yik > 0 the corresponding xBi decreases. We can continue increasing xk until the first basic variable
drops to zero. Then we have to stop, otherwise the solution would become infeasible. This gives the
so called feasibility condition also called ratio test:
(6)
If r is the row with the minimum ratio, then the new solution is:
In this way we have reached new (better) basic feasible solution. This process must terminate
(unless there is cycling) because the number of corners (basic feasible solutions) is finite. Cycling
can occur in case of degeneracy and it represents a real problem in computer implementation of the
simplex method. There are method to cope with cycling that are beyond the scope of this material.
Commercial LP packages mostly ignore cycling because cycling prevention would slow down
considerably the computation.
Practical interpretation of (zk - ck)
After entering a so far nonbasic (zero) variable xk into the solution, the new value of the objective
function is:
z = z0 - (zk - ck) xk = cBb* - zkxk + ckxk
k
mk
k
k
mBm
B
B
x
y
y
y
b
b
b
x
x
x
−
=
∗
∗
∗
���
2
1
2
1
2
1
0,,2,1, >=≤∗
ik
ik
ik ymi
y
bx �
>=∗
≤≤0:
1ik
ik
i
mik y
y
bMinx
zero)remain variablesnonbasicother (}{,0
variable)entering the(
) variableleaving the- zerotodrops(,2,1,
kRjx
y
bx
xmiy
bybx
j
rk
r
k
Br
rk
rikiBi
−∈=
=
=−=
∗
∗∗ …

65
So ck = cost of entering one unit of xk
zk = saving caused by entering one unit of xk
That's why (ck - zk) is called reduced cost. We are working with its negative value (zk - ck) because
this is the value in the simplex table - see later. Now let's expand zk :
So cBi = unit cost of the i-th basic variable
yik = amount how the i-th basic variable will decrease
cBi yik = saving caused by decreasing the i-th basic variable
zk = total saving caused by decreasing all basic variables.
Cases of termination
So far we have assumed, that a unique optimal solution has been reached. This is in fact one of three
possible cases (we always assume a feasible problem):
1. zj - cj < 0 , j ∈ R There is a unique optimal solution.
2. zj - cj ≤ 0 , j ∈ R (some zk - ck = 0) There are alternative optima. Entering xk into the solution
would change the basic feasible solution, but not the value z.
3. zj - cj ≤ 0 , j ∈ R (some zk - ck > 0 and yk ≤ 0) The problem is unbounded. All items of the
column yk are non-positive, xk can be increased arbitrarily, so z → -∞.
Simplex Table
To use the simplex algorithm in practice we (and also the computer) need a table that would store
all information needed for tests and operations of the algorithm and that would eventually contain
the optimal solution together with its optimal objective value. Later we shall learn that there will be
in fact even more than that. Let's summarize what we need:
- current basic feasible solution
- current objective value
- information whether the solution is optimal and if not what variable should enter. We know that
for this purpose we need reduced costs of nonbasic variables
- information needed to find the values of entering variables that will also show which variable
leaves the solution. We need, that for that (ratio test) we need columns yj of nonbasic variables
and current basic feasible solution.
By using the equations (2) and (4) the original problem
Minimize z = cx
Subject to Ax = b , x ≥ 0
can be restated as:
∑=
===m
i
ikBi ycz1
kBk
1-
Bk ycaBc

66
Minimize z
Subject to NxN + BxB = b (7)
-cNxN - cBxB + z = 0
To get the current basic solution, we multiply the first equation by B-1 and then by cB from left:
B-1NxN + IxB = B-1
b
cBB-1NxN + cBxB = cBB
-1b (8)
To get the reduced costs, lets add the second equations in (7) and (8):
(cBB-1N - cN )xN + 0xB + z = cBB
-1b (9)
Finally let's express the first equation of (8) and (9) in this unified way, where the first term in (9)
has been replaced by zN - see the equation (4):
B-1NxN + IxB + 0z = B-1
b
(zN - cN )xN + 0xB + 1z = cBB-1b (10)
Note that currently xN = 0, so right hand sides are equal to xB and z respectively. The coefficients of
equations (10) can be stored in a table that has m + 1 rows, and columns corresponding to xN, xB, z
and the right hand sides. We shall label the columns accordingly. For practical reasons we can also
label the rows by the basic variables and by z. This makes a simplex table where BV means basic
variables:
BV xN xB z RHS
xB
B-1N
I
0
B-1b
z zN - cN 0 1 cBB-1b
This table contains all we need to carry out simplex iterations. The second equation of (10) shows
that the z-row contains negative reduced costs.
Notes:
1. Some authors describe a table with positive reduced costs and negative objective value (together
with the coefficient -1 in the z-column). This can be obtained by multiplying the second
equation of (10) by -1.
2. The z-column contains always the same, so it is in fact redundant. That's why it is omitted in
most books.
3. Some authors place the z-row as the first one.
4. The above table has the basic and nonbasic variables grouped together. This can always be done
by re-arranging columns of the table. Doing this after each iteration is time consuming and in
fact useless. That's why it is typical (for manual solution) that the above "nice" form of the table
exists only at the beginning, where the basic variables are slacks and/or artificial variables that

67
we are used to place at the right side in such an order to form directly the unity matrix. Note that
in this case the initial basis is unity: B = B-1 = I, so the initial simplex table contains directly the
coefficients of the constraint equations and the objective function:
BV xN xB z RHS
xB
N
I
0
b
z - cN 0 1 cBb
5. Slacks have zero coefficients in the objective function (cB = 0), so the so called all-slack LP
problems have directly zeros in the z-row in xB columns and also zero in the objective value
(bottom right) entry. So the initial simplex table contains directly the coefficients and no pre-
processing is necessary. If there are artificial variables, the initial table depends on the solution
method. The M-method penalizes artificial variables by a big coefficient M in the objective
function. So to get the initial simplex table it is necessary to perform some elementary matrix
operations to obtain zeros in the z-row in xB columns.
6. Note that after each iteration one basic variable leaves, one nonbasic variable enters. So
assuming we keep the heading labels fixed, after the first iteration one column of the unity
matrix moves to the place of the new basic variable and becomes the column of the variable that
is now nonbasic. After several iterations the columns of the unity matrix are "scattered" in the
table, but all of them are always present. So it is convenient to keep labels of basic variables in
the first (label) column.
7. Each solution has its basis that can be created by taking the appropriate columns of the original
matrix A (indices are the same as the basic variables). Note that at each iteration the table
contains the result of multiplying the original matrix A by B-1. So if there were originally the
unity matrix in A (typically at the right side), there is B-1 now.
Information found in the Simplex Table
In addition to the above requirements, the simplex table contains a lot of useful information:
a) Objective value (z) in terms of nonbasic variables
Apart from zeros in the columns of basic variables the z-row of the simplex table contains the
negative reduced costs. Using reduced costs let's once more express the objective value in terms of
nonbasic variables:
(11)
The rate of change of z as a function of a nonbasic variable xj is:
This is another justification that to minimize z, xj should be increased if cj - zj < 0 or zj - cj > 0
(because this value is stored in the simplex table).
∑∈
−−− −+=−−=Rj
jjjBNNBB xzcz )()( 111 bBcxcNBcbBc
jj
j
zcx
z−=
∂∂

68
b) Basic variables in terms of nonbasic variables
From the equation (10) we get for xB:
(12)
Vectors yj show how basic variables change in terms of nonbasic variables:
c) Objective value (z) in terms of the original right hand side values
From the equation (11) we can compute the partial derivative of z with respect to b:
These values are the so called shadow costs. Their interpretation depends on the type of inequality.
If bi represents availability of a certain resource ( ≤ inequality in a maximization problem) then
∂z/∂bi is the worth of one unit of the particular resource. If bi represents some minimum acceptable
amount ( ≥ inequality in a minimization problem like minimum production, minimum weight and
similar) then the derivative ∂z/∂bi is the cost that we pay for one unit of that limitation. Shadow
costs can also be found in the simplex table (actually for some nonbasic variables shadow costs are
equal to reduced costs). From the equation (9) we know that in the z-row the entries in nonbasic
variables columns are cBB-1N - cN or cBB
-1aj - cj for one particular nonbasic variable xj. Now lets
assume that the nonbasic variable xj is a zero slack of a certain scarce resource whose availability is
bi (i-th component of b). Such slacks have zero coefficients in the objective function, so cj = 0. Also
initially in the simplex table the slack was a basic variable with its associated column of a unity
matrix, so aj = ei (a column vector with i-th component equal to 1 and the remaining components
equal to zero):
cBB-1aj - cj = cBB
-1ei = (cBB
-1)i
Thus the z-row entry of xj is the i-th entry of cBB-1 that is the shadow cost ∂z/∂bi.
d) Basic variables in terms of the original right hand side values
From the equation (12) we can compute the partial derivatives of xB with respect to b:
∑∑∈
−
∈
−−−− −=−=−=Rj
jj
Rj
jjNB xx ybBaBbBNxBbBx11111
ij
j
Bi
j
j
B yx
x
x−=
∂
∂−=
∂
∂,y
x
1−=∂∂
Bcb
B
z
ij
j
BiB
b
x)(, 11 −− =
∂
∂=
∂
∂BB
b
x

69
So the i,j-th entry of B-1 shows how the i-th basic variable (the one in the i-th row, not the one that
is the i-th component of x) changes with the right hand side value bj.
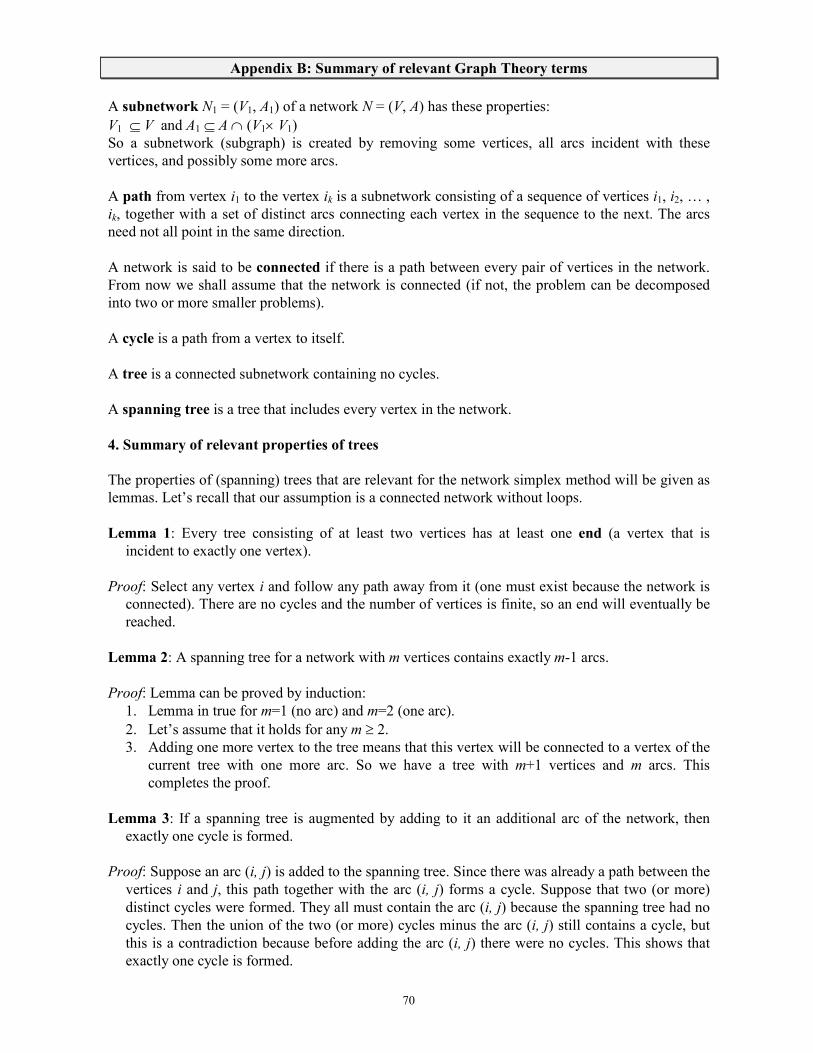
70
Appendix B: Summary of relevant Graph Theory terms
A subnetwork N1 = (V1, A1) of a network N = (V, A) has these properties:
V1 ⊆ V and A1 ⊆ A ∩ (V1× V1)
So a subnetwork (subgraph) is created by removing some vertices, all arcs incident with these
vertices, and possibly some more arcs.
A path from vertex i1 to the vertex ik is a subnetwork consisting of a sequence of vertices i1, i2, … ,
ik, together with a set of distinct arcs connecting each vertex in the sequence to the next. The arcs
need not all point in the same direction.
A network is said to be connected if there is a path between every pair of vertices in the network.
From now we shall assume that the network is connected (if not, the problem can be decomposed
into two or more smaller problems).
A cycle is a path from a vertex to itself.
A tree is a connected subnetwork containing no cycles.
A spanning tree is a tree that includes every vertex in the network.
4. Summary of relevant properties of trees
The properties of (spanning) trees that are relevant for the network simplex method will be given as
lemmas. Let’s recall that our assumption is a connected network without loops.
Lemma 1: Every tree consisting of at least two vertices has at least one end (a vertex that is
incident to exactly one vertex).
Proof: Select any vertex i and follow any path away from it (one must exist because the network is
connected). There are no cycles and the number of vertices is finite, so an end will eventually be
reached.
Lemma 2: A spanning tree for a network with m vertices contains exactly m-1 arcs.
Proof: Lemma can be proved by induction:
1. Lemma in true for m=1 (no arc) and m=2 (one arc).
2. Let’s assume that it holds for any m ≥ 2.
3. Adding one more vertex to the tree means that this vertex will be connected to a vertex of the
current tree with one more arc. So we have a tree with m+1 vertices and m arcs. This
completes the proof.
Lemma 3: If a spanning tree is augmented by adding to it an additional arc of the network, then
exactly one cycle is formed.
Proof: Suppose an arc (i, j) is added to the spanning tree. Since there was already a path between the
vertices i and j, this path together with the arc (i, j) forms a cycle. Suppose that two (or more)
distinct cycles were formed. They all must contain the arc (i, j) because the spanning tree had no
cycles. Then the union of the two (or more) cycles minus the arc (i, j) still contains a cycle, but
this is a contradiction because before adding the arc (i, j) there were no cycles. This shows that
exactly one cycle is formed.

71
Lemma 4: Every connected network contains a spanning tree.
Proof: If the network contains no cycles, then it is also a spanning tree since it is connected and
contains all the vertices. Otherwise, there exists a cycle. Deleting any arc from this cycle results
in a subnetwork that is still connected. This deleting can continue until there are no cycles.
Finally a subnetwork is obtained that contains no cycles, is connected, and contains all the
vertices, so it is a spanning tree.
Lemma 5: Let B be the submatrix of the constraint matrix A corresponding to a spanning tree with
m vertices. Then B can be rearranged to form a full-rank lower-triangular matrix of dimension m
× (m-1) with diagonal entries ±1.
Proof: By Lemma 2 a spanning tree consists of m vertices and m-1 arcs, so B is of dimension m ×
(m-1). The rest can be proved by induction:
1. If m=1 then B is empty. If m=2 then the spanning tree consists of one arc so there are two
possible forms of B that are both of the required form:
1 1or
1 1
− = = −
B B
2. Let’s assume that the Lemma holds for any m ≥ 2.
3. Let’s add one more vertex to the tree. This vertex will be connected to a vertex of the current
tree with one more arc. Let’s assume that in the new matrix the added vertex is in the row 1
and the new arc is in the column 1. Then the new matrix will have the following form:
1±
0
v B
where B is the original matrix. The rest of the row 1 is made of zeros because the newly
added vertex is an end (only the new arc starts or ends in this vertex: ±1 in the first position).
The vector v contains all zeros except ±1 at the position where the new arc is connected to
the tree. If B has the required form then the new matrix has also the required form.
A lower triangular matrix with nonzero diagonal entries has full rank. This completes the proof.
5. Basis of network problems
To show the relationship between a spanning tree and a basis of network problems we need two
more definitions:
Given a spanning tree for a network, a spanning tree solution x is a set of flow values that satisfy
the flow conservation constraints Ax = b for the network, and for which xij = 0 for any arc (i, j) that
is not part of the spanning tree.
A feasible spanning tree solution x is a spanning tree solution that satisfies the nonnegativity
constraints x ≥ 0.
Theorem: A flow x is a basic feasible solution for the network flow constraints
{ x : Ax = b, x ≥ 0 } if and only if it is a feasible spanning tree solution.

72
Proof: First let’s assume that x is a feasible spanning tree solution. Then by Lemma 2 it has mostly
m-1 nonzero components. Let B be the submatrix of A corresponding to the spanning tree. By
Lemma 5, B is full rank with linearly independent m-1 columns, and hence x is a basic feasible
solution.
For the second half of the proof let’s assume that x is a basic feasible solution, so it has mostly
m-1 nonzero components. Now we consider the set of arcs corresponding to the strictly positive
components of x. We shall prove that these arcs do not contain a cycle, so they either form a
spanning tree or they can be augmented with zero-flow arcs to form a spanning tree. To prove it,
let’s assume the opposite that these arcs contain a cycle. In this cycle we can add a small flow ε in one direction (flow in all arc with the same direction will be increased by ε, flow in all arcs
with the opposite direction will be decreased by ε). We can select ε small enough to keep all
flows positive. Let’s call this new flow x+ε. Similarly we can add the same small flow ε in the
opposite direction to get a new flow x-ε. For these two flows we have:
1 1
2 2ε ε+ −= +x x x
But this is a contradiction with the assumption that x is a basic feasible solution (an extreme
point) that cannot be expressed as a convex combination of two distinct points. This completes
the proof.
The constraint matrix A does not have full rank because rows are not linearly independent. That’s
why the basis B has only m-1 columns that correspond to the m-1 arcs of a spanning tree. Lemma 5
gives the properties of a basis that have very important consequence. Let’s suppose that having a
base B we want to compute the values of the basic variables. B has m rows and m-1 columns. We
can remove the last dependent row to get a set of equations:
B’xB = b’
where B’ is obtained from B by deleting the last row, b’ is similarly obtained by deleting the last
component from b, and xB is the (m-1) vector of basic flows. B’ is a square full rank lower
triangular matrix, so the solution can be found by forward substitution. Moreover we know that the
matrix entries Bij are either zeros or ±1. So we know directly the first component x1 of xB:
B11x1 = b1 → x1 = ±b1
Similarly for the second component and so on. Generally we get:
1
1
( ) , 2 1i
i i j
j
x b x i m−
=
= ± − ± = −∑ …
Or in other words xi is computed by adding or subtracting first i components of b. This guarantees
that for integer values of outer flows b the values of basic flows are also integer. This is a natural
requirement of many network problems (like assignment) that is thus automatically satisfied. This is
very important – integer solution is obtained by normal simplex method. There is no need to use a
time consuming integer programming algorithm.

73
6. Network Simplex Method
For convenience, let's repeat the basic facts about the simplex method. This is the content of the
simplex table of a feasible LP problem bounded in objective value:
BV xN xB z RHS
xB
B-1N
I
0
B-1b
z cBB-1N - cN 0 1 cBB
-1b
Note that the columns of basic and nonbasic variables are in fact scattered in the table because
usually the original column labels are not changed during simplex iterations. In the table, B is the
current basic matrix and N is the corresponding nonbasic matrix (both made of the columns of the
original m x n matrix A). The n vectors x and c are divided accordingly. b is the m vector of the
RHS values. Note also that the inverted basic matrix B-1 is available in the columns that originally
contained the unity matrix - typically the last m columns. The simplex algorithm is based on two
tests. The Optimality test checks whether optimum has been reached. It is based on negative
reduced costs in the z row:
cBB-1N - cN = yT
N - cN = z - cN
where yT = cBB-1 are the simplex multipliers. Individual negative reduced costs are given by:
cBB-1Aj – cj = yT
Aj – cj = zj – cj
where Aj is the j-th column of A. If the table is not optimal, the most negative value (maximization)
or the greatest positive value (minimization) defines the entering nonbasic variable. This means that
one column of the base (leaving variable) is replaced by the column of a selected so far nonbasic
(entering) variable.
The leaving variable is chosen by the Feasibility test (minimum ratio after dividing RHS values by
the values of the pivot column). The actual update is done by pivoting. This is repeated until
optimality is reached. After reaching the optimum, the simplex multipliers form the dual optimal
solution y equal to shadow prices of primal RHS values. y is available in the columns of the z row
corresponding to the slack variables of the primal model. Of course the primal and dual optimal
objective values are equal: cTx = y
Tb.
Network simplex method is based on special simplified form of the simplex operations. Note that we
have to change slightly the notation (double indexing of the variables).
Optimality test
Let's express directly the positive reduced cost: cij - zij = cij - yTAij where Aij is the particular column
of A. But we know that this column is made of zeros except +1 in the i-th row and -1 in the j-th
row. So the formula for the positive reduced cost (let's call it rij) simplifies to:
rij = cij - yi + yj

74
To evaluate it we need the simplex multipliers. From the above equations we get yT = cBB-1. After
multiplication by B from right we get yTB = cB. Again, column (i,j) of B is made of zeros except +1
in the i-th row and -1 in the j-th row. So the equations for the simplex multipliers simplify to:
yi - yj = cij for all basic variables xij
This makes m-1 equations for m variables, so one of them can be selected arbitrarily. The others are
then computed and used to compute positive reduced costs for the optimality test. Initially any value
of any variable can be chosen, but to simplify computation it is convenient to assign 0 to a
multiplier that corresponds to an end of the spanning tree. The other values are then computed by
traversing the spanning tree starting from the selected vertex. Initial assignment affects the values of
simplex multipliers but not the values of reduced costs because they are given by differences of the
particular multipliers.
Feasibility test
If the table is not optimal, the optimality test gives the entering variable xij. Using the network
terminology we are adding an arc to a spanning tree by increasing its flow from the current value 0.
Using Lemma 3, this will create exactly one cycle. To keep flow conservation, we have to increase
flow in all arcs of the newly created cycle. Unless the problem is unbounded, some arcs in the cycle
have opposite direction compared with the new arc. So increasing a flow in the cycle will actually
decrease the flow in these arcs with opposite direction. That's why we can increase the cycle flow
until the flow in one (or more) of these arcs drops to zero. Further increase is impossible to keep
feasibility - nonnegative flows. This will also restore the spanning tree because the arc whose flow
has dropped to zero can now be removed. If the flow drops to zero in more arcs, only one of them
can be removed (degeneracy).
We can now summarize the steps of the network simplex method:
1. The optimality test - compute the simplex multipliers y: Start at an end of the spanning tree and
set the associated simplex multiplier to zero. Following the arcs (i, j) of the spanning tree, use the
formula yi - yj = cij to compute the remaining simplex multipliers.
Compute the positive reduced costs. For each nonbasic arc (i, j) compute rij = cij - yi + yj. If rij ≥ 0
(minimization) or rij ≤ 0 (maximization) for all nonbasic arcs, then the current basis is optimal.
Otherwise select the entering arc (i, j).
2. The feasibility test. Identify the cycle created by entering the arc (i, j) to the spanning tree. Find
the arc(s) with opposite orientation compared with the arc (i, j) with minimum flow f. If no such
arcs exist, the flow in the arc (i, j) can be increased arbitrarily and the problem is unbounded.
3. The pivoting. Update the spanning tree. In the cycle subtract f from flows of opposite arcs and add
f to flows of same direction arcs. Remove the arc whose flow dropped to zero (if there are more,
select one arbitrarily).
To find an initial basic feasible solution there are various methods for different forms of network
problems. Generally it is possible to add artificial variables - arcs in such a way that an "obvious"
initial basic feasible solution can easily be found. Then the artificial variables have to be removed
like in the standard simplex method (M-method, II-phase method). For some problems there are
direct methods (like North-West corner method for transportation).

75
Appendix C: Modified Distribution (MODI) method
The MODI method (also called "method of multipliers") improves the search for entering variables.
Using the Duality Theory, it is possible to associate multipliers di with each row and multipliers rj
with each column of the matrix. They can be interpreted as unit dispatch and reception costs
respectively. Then for each basic variable xij the following holds:
di + rj = cij
So we have m+n-1 equations for m+n variables. By selecting any value for one of them (usually
d1=0), the values of the others can easily be computed directly in the table - see the worksheet. The
sum di + rj for nonbasic variables is their shadow cost ad the difference di + rj - cij is the entry in the
z-row of the simplex table. Because the model seeks to minimize the total cost, the presence of a
positive value shows that the solution is not optimal. Enter the variable with the maximum positive
difference, break ties arbitrarily. This difference (shadow cost - actual cost) can be interpreted as
cost saved by transporting one unit of the commodity through this cell.
After selecting the entering variable, the rest is done by creating the loop in the same way as in the
Stepping - Stone method. This will find the leaving variable. This is repeated until there is no
possible improvement. Zero difference (shadow cost - actual cost) indicates alternative optima.
Complete Transportation Algorithm (MODI method)
If (demands < supplies) then add a dummy destination (column) with zero transportation costs and
the demand that makes the balance
If (supplies < demands) then add a dummy source (row) with zero transportation costs and the
supply that makes the balance
Make an Initial basic feasible allocation (all demands must be satisfied, supplies must not be
exceeded). There must be m+n-1 allocations.
Repeat
Calculate dispatch and reception costs in the table by setting the first dispatch cost to zero
Calculate the difference shadow cost - actual cost =
(dispatch cost + reception cost) - actual cost of empty (nonbasic)cells
If (there is a positive difference) then reduce the total cost:
Select the nonbasic cell with maximum difference, break ties arbitrarily
Mark this cell by +
Mark other basic cells by - and + to keep row and column balances
This creates a loop that starts and ends in the selected nonbasic cell
Find the minimum allocation of the cells in the loop marked by -
Add this value to + cells in the loop, subtract this value from - cells in the loop
EndIf
Until (there is no positive difference)
Compute the Total Cost of the optimum solution

76
Transportation - worksheet for MODI method
Destinations: A B C D X
Sources: Demand: 20 30 15 5 10
Supply: D\R
I 40 2
4 1 6 0
II 20 4
3 3 3 0
III 20 1
2 5 2 0
Destinations: A B C D X
Sources: Demand: 20 30 15 5 10
Supply: D\R
I 40 2
4 1 6 0
II 20 4
3 3 3 0
III 20 1
2 5 2 0
Destinations: A B C D X
Sources: Demand: 20 30 15 5 10
Supply: D\R
I 40 2
4 1 6 0
II 20 4
3 3 3 0
III 20 1
2 5 2 0
Destinations: A B C D X
Sources: Demand: 20 30 15 5 10
Supply: D\R
I 40 2
4 1 6 0
II 20 4
3 3 3 0
III 20 1
2 5 2 0

77




















