
SKRIPRA
37
1 1 n-1 m 2 = (X -X) 2 1 m 2 2 p n 8 f 8 n 8 i 1.Поступак дефинисања методе мерења Метода мерења се дефинише пројектом. Циљ нам је да добијемо резултате мерења високе или највише тачности. Због тога неопходно је: 1) Предходно добро проучити објекат мерења, који током времена може бити нека константа или променљива величина, процес, појава и сл; 2) Предходно добро изучити све утицајене величине ( изворе грешака) које изазивају грешке у резултатима мерења и за сваку такву грешку одредити распоред и параметре распореда, са посебним освртом на математичко очекивање и стандардно одступање, као и за одступање дефинитивне оцене мерене величине одредити распоред и параметре распореда; 3) Дефинисати услове при мерењу, као и инструменте и прибор за мерење; 4) Дефинисати функционалне моделе којима се адекватно описују поправке које је неопходно унети у необрађене резултате мерења; 5) Одредити главне компоненте дисперзије резултата мерења којима се описује укупна дисперзија резултата мерења и главне компоненте дисперзије мерене величине; 6) Дефинисати мере и критеријуме прецизности и поузданости резултата мерења; 7) Дефинисати модел којим се оцењује мерна величина и модел оцене тачности те оцене; 8) Одредити горњу границу тачности оцене мерене величине. До дефинисања методе долазимо итеративно. По тачности методе се деле на: Методе обичне тачности, прецизне методе и методе високе тачности. Тачност оцене мерене величине добијене применом одрежене методе мерења називамо тачност методе. Она је променљива и зависи од више чинилаца: броја мерења, од тачности уведених поправака, од променљивости атмосферских услова при мерењу и слично.Врсте тачности методе су горња, доња и стандардна тачност методе мерења. Границе тачности мерења зависе од : тачности еталона, тачности обичног -радног инструмента, пројектоване тачности мерења и променљивости мерене величине. 2.Одређивање стандарда из директних мерења Стандардна одступања или грешке тј. стандарди, резултата мерења су најбитнији фактор у дефинисању методе мерења и у анализи величина и закључака добијених на основу резултата мерења, а у фази планирања су неопходна. Стандард је уопште посматрано могуће одредити на 5 начина: из директних мерења односне величине, из искуства или општег знања о својствима материјала, односно из знања о понашању разматраног објекта, из изравнања резултата мерења, методом компоненти дисперзија и из теста линеарних хипотеза у случају задате толеранције величине која је подвргнута тестирању. Нека су Х 1 , Х 2 ,...,Х n резултати мерења једне величине добијени у истим условима, онда значи да су резултати са истим математичким очекивањима и са истом дисперзијом. Емпиријска диспе , f = n - 1 ће бити непомерена оцена дисперзије појединог резултата мерења σ 2 , тј. биће M[m 2 ] = σ 2 , односно важиће стохастички лимес: ; .
Transcript of SKRIPRA
1
1n-1
m2= (X -X)21
m2 2p
n 8
f 8n 8i
1.Поступак дефинисања методе мерења Метода мерења се дефинише пројектом. Циљ нам је да добијемо резултате мерења високе или највише тачности. Због тога неопходно је:
1) Предходно добро проучити објекат мерења, који током времена може бити нека константа или променљива величина, процес, појава и сл;
2) Предходно добро изучити све утицајене величине ( изворе грешака) које изазивају грешке у резултатима мерења и за сваку такву грешку одредити распоред и параметре распореда, са посебним освртом на математичко очекивање и стандардно одступање, као и за одступање дефинитивне оцене мерене величине одредити распоред и параметре распореда;
3) Дефинисати услове при мерењу, као и инструменте и прибор за мерење;
4) Дефинисати функционалне моделе којима се адекватно описују поправке које је неопходно унети у необрађене резултате мерења;
5) Одредити главне компоненте дисперзије резултата мерења којима се описује укупна дисперзија резултата мерења и главне компоненте дисперзије мерене величине;
6) Дефинисати мере и критеријуме прецизности и поузданости резултата мерења;
7) Дефинисати модел којим се оцењује мерна величина и модел оцене тачности те оцене;
8) Одредити горњу границу тачности оцене мерене величине.
До дефинисања методе долазимо итеративно.
По тачности методе се деле на: Методе обичне тачности, прецизне методе и методе високе тачности.
Тачност оцене мерене величине добијене применом одрежене методе мерења називамо тачност методе. Она је променљива и зависи од више чинилаца: броја мерења, од тачности уведених поправака, од променљивости атмосферских услова при мерењу и слично.Врсте тачности методе су горња, доња и стандардна тачност методе мерења.
Границе тачности мерења зависе од : тачности еталона, тачности обичног -радног инструмента, пројектоване тачности мерења и променљивости мерене величине.
2.Одређивање стандарда из директних мерења Стандардна одступања или грешке тј. стандарди, резултата мерења су најбитнији фактор у дефинисању методе мерења и у анализи величина и закључака добијених на основу резултата мерења, а у фази планирања су неопходна. Стандард је уопште посматрано могуће одредити на 5 начина: из директних мерења односне величине, из искуства или општег знања о својствима материјала, односно из знања о понашању разматраног објекта, из изравнања резултата мерења, методом компоненти дисперзија и из теста линеарних хипотеза у случају задате толеранције величине која је подвргнута тестирању.
Нека су Х1, Х2,...,Хn резултати мерења једне величине добијени у истим условима, онда значи да су резултати са истим математичким очекивањима и са истом дисперзијом.
Емпиријска диспе , f = n - 1
ће бити непомерена оцена дисперзије појединог резултата мерења σ2 , тј. биће M[m2] = σ2 , односно важиће стохастички лимес: ; .
2
То значи да емпиријску дисперзију м2, при довољно великом броју мерења, можемо прихватити као дисперзију мерења.
qσ = ∆σ / σ
Грешку ∆σ оцене стандарда m бирамо тако да је релативна грешка qσ мала. Основни захтев је
да релативна грешка qσ буде што мања. За горњу границу релативне грешке qσ, у применама се најчешће усвајају вредности од 0,05 до 0,01.
Компромис између цене коштања одређивања стандарда σ и релативне грешке qσ је
прихватање решења за qσ у границама од 0,01 до 0,05 тј. за 0,01 ≤ qσ ≤ 0,05, одакле следе приближне границе за оптималан број мерења n : 103 ≤ n ≤ 105 , ( � 103 ≤ n ≤ 105 ).
Тада оцену m проглашавамо стандардом σ ( са f = ∞ степени слободе ).
С обзиром да се мора спроводити тест грубих грешака, поступак мора бити итеративан.
4.Одређивање стандарда из изравнања резултата мерења Нека је I n-димензионални вектор резултата мерења истородних величина l1, l2,..., ln изведених под истим условима. Тада су дисперзије резултата мерења међусобно једнаке, тј. σ2
1=...σ2n ≡ σ2
па коваријациона матрица К1 вектора I гласи К1 = σ2
Е.
Тада, из посредног изравнања резултата мерења добијамо оцену за σ2:
m = 20
1f V VT
, f = n - r , при чему је r ранг матрице нормалних једначина. Ако је f велико онда m2
0 можемо прогласити дисперзијом σ
2.
7.Појам и подела метрологије: поглавља 5.1 до 5.4 Метрологија је наука о мерењима и обухвата све теоријске и практичне аспекте мерења, независно од њихове области и области у којој се користе. Има три главна задатка:
� Дефинисање интернационално прихваћених мерних јединица
� Реализација мерних јединица коришћењем научних метода
� Успостављање поступака у документовању тачности мерења
У Европској унији издвајају се три категорије различитих нивоа сложености и тачности:
� Научна метрологија (највиши ниво) - стандарди и њихово очување
� Индустријска - обезбеђује адекватно функционисање мерних инструмената који се користе у индустрији, производњи и тестирању процеса
� Законска која треба да обезбеди тачност мерења која утичу на транспарентност економских трансакција, здравље и безбедност.
Предмети главних области метрологије су:
� мерне јединице и њихови еталони;
� мерња ( методе, спровођење, оцена тачности и сл.);
� мерни инструменти ( са гледишта примене );
� опажачи.
3
У односу на посматрану величину метрологија се дели на: метрологију дужина, времена итд, а у односу на област примене на: индустријску, техничку, геодетску, законску итд. Метрологија такође обухвата одређивање физичких константи и својстава материјала и материја. Општа метрологија - бави се проблемима заједничким свим метролошким питањима, независно од мерне величине. Примењена метрологија - бави се мерењима за одређене примене ( дужине, угла...). Техничка метрологија - бави се проблемима мерења у техници. Посебно имамо геодетску метрологију. Теоријска метрологија - бави се теоријским проблемима мерења. Метрологија квалитета - бави се питањима везаним за контролу квалитета. Законска метрологија - односи се на мерне јединице, методе мерења и мерне инструменте, у погледу техничких захтева и правних прописа ради обезбеђења јавне гаранције у смислу сигурности одговарајуће тачности мерења. Метролошко обезбеђење је скуп правила, техничких средстава и неопходних мера преузетих за обезбеђење потребне тачности мерења. Савремена метролошка организација осим државних служби законске метрологије обухвата и међунаро. организацију за тегове и мере и међународну организацију за законску метрологију.
Делатност службе законске метрологије обухвата: метролошку контролу метода и средстава за мерење, контролу мерила, типско испитивање мерила, одобрење, преглед мерила, метролошки преглед, инспекцијски преглед и еталонирање. Закон о законској метрологији доноси се ради утврђивања законских мерних јединица, установљавања организације државне службе законске метрологије, као и ради прописивања обавезне контроле мерила. Прописи о оверавању мерила доносе се ради утврђивања услова за оверавање мерила.
9.Дефиниција методе мерења хоризонталних углова (ХУ) Хоризонтални угао је онај угао чији краци леже у хоризонталној равни. При мерењу теме тог угла налази се на главној осовини теодолита која треба да стоји вертикално и да пролази кроз стајну тачку - станицу изнад које је теодолит центрисан. Хоризонталну раван у којој се мери хоризонталан угао материјализује издељени круг - лимб теодолита. Хоризонталне углове меримо по гирусној методи, тако што се при једној оријентацији лимба мери редом са лева на десно сваки правац у првом положају дурбина, тј. при КЛ, а затим сваки правац редом са десна на лево у другом положају дурбина, тј. при КД. Време мерења у једном гирусу морамо ограничити на 10 минута у ведрим данима и на 20 минута у облачним данима и ноћу. Код мерења највише тачности број мерених праваца у једном гирусу треба ограничити на 15 у ведрим данима и на 25 у облачним данима. Гирусну методу мерења углова скраћено дефинишемо овако:Стабилизација тачака - Стубови, бетонске белеге фундиране Атмосферски услови - Стабилни Струјање ваздуха - Мирно, поветарац Теодолити електронски - Резолуција ≤ 0,5'' Увећање дурбина - Приближно 30х Компензатор - Тачности 0,1'' Метода мерења - Гирусна Број праваца r на станици - r ≤ 15 ( ведро ); r ≤ 25 ( облачно ) Број гируса n - n ≥ 2 Центрисање тодолита и сигнала - Присилно, оптички висак Сигнали за визирање - Маркице, специјални Температурна адаптација теодолита - > 60 минута Заштита теодолита - сунцобран

4
12. МЕТРОЛОШКО ОБЕЗБЕЂЕЊЕ МЕРЕЊА УГЛОВА,(Либеле и компензатори) Ради обезбеђења потребне тачности мерења,користе се прописана правила,техничка средства и неопходне мере.Електронска мерења су полуаутоматска јер визирање и унос података врши опажач.Правила се односе на довођење делова инструмента у међусобан теоријски положај,као и центрисање инструмента и сигнала. Да би се главна оса инструмента довела у вертикални положај постављају се либеле(цеваста и сферна),на хоризонталној алхидади,а за одржање непомичности индекса ветикалног круга постављају се компензатори.Када мехур либеле врхини у сваком положају алхидаде,главна оса је вертикална,под условом да је оса либеле управна на главну осу теодолита.Ректификација цевасте либеле се врши тако што доведемо главну осовину у приближно вертикалан положај,а затим цевасту либелу поставимо у правац два положајна завртња,и деловањем на њих доведемо либелу да врхуни,затим окренемо алхидаду за 180 степени и ако мехур одступи од врхуњења,корективним завртњима на либели вратимо половину одступања.Поступак треба поновити ради контроле. Компензатор је уређај којим се индекс за очитавање вертикалног круга одржава непомичан,за компензациони елемент користи се површина живе прекривена силиконским уљем,затворена у посудици са планпаралелном плочом.Стандардна грешка компензације је 0,1 секунда.Због нестабилности инструмента,вибрација и других утицаја,компензатори су подложни грешкама. 13. МЕТРОЛОШКО ОБЕЗБЕЂЕЊЕ МЕРЕЊА УГЛОВА,(Центрисање , Теодолита, испитивање вискова) За мерење углова неопходно је извршити хоризотирање и центрисање инструмента изнад стајне тачке.Довођење главне осовине у вертикалу врши се цевастим и центричним либелама на хоризонталној алхидади,када мехур либеле врхуни у свим положајима алхидаде.Најпрецизније довођење главне осовине у вертикалу је могуће помоћу компензатора вертикалног круга. Помоћу либеле на алхидади доведемо приближно главну осовину у вертикалу,а дурбин усмеримо у правцу једног положајног завртња,закочимо алхидаду и очитамо вертикални круг,окренемо алхидаду за 180 степени и очитамо вертикални круг,ако постоји разлика онда ћемо положајним завртњем половину одступања поправити,а затим алхидаду окренути за 90 степени и положајним завртњима наместити исто читање вертикалног круга.Поступак треба поновити ради контроле. Центрисање теодолита можемо извршити уз помоћ обичног(2-3 мм),крутог(0,5-1 мм),ласерског(0,8 мм) и оптичког виска(0,3 мм) или присилног центрисања(0,03-0,1 мм). Ректификација крутог виска се врши постављањем два инструмента под углом од 90 степени у односу на крути весак који се доводи у вертикалу,а корекционим завртњима се ректификује либела на виску.Оптички висак се ректификује довођењем главне осе у вертикалу и постављањем белог папира на земљу испод виска,при окретању алхидаде на по 120 степени обележе се све три тачке на папиру које представљају троугао на коме се обележи тежиште,корекционим завртњима доведемо да да пресек конаца оптичког виска погађа тежиште троугла на папиру. У мере за обезбеђење потребне тачности мерења углова спада следећи поступак:обавезно се унапред изврши провера и ректификација теодолита и прибора,затим центишемо инструмент изнад станице и заштитимо га сунцобраном,и оставимо га да се адаптира око један час,у међувремену центришемо сигнале за визирање,остваримо догледање визурних тачака ,уочимо маркантне објекте ради лакше идентификације праваца,и извршимо мерења у пробном гирусу.Затим почињемо мерења у гирусима која морају тећи равномерно и без застоја,као и без ратговора у току мерења.У записник се уписује тип и број инструмента и сигнала,временске прилике,име опажача,час почетка и завршетка мерења,пре почетка мерења врши се намештање угла од 0 – 5 0 секунди,затим се фино навизира прва тачка и врше мерења у првом положају дурбина у смеру казаљке на сату,а затим у другом положају дурбина у супротном смеру,с десна на лево.Стативи и сигнали спадају у техничка средства за обезбеђење мерења,и пре почетка мерења морају се прегледати. Сигнали за визирање могу се користити оригионални или специјално израђени,а сигнали који одступају од верикале визиране тачке узимамо елементе ексцентрицитета.Велики утицај на мерења имају систематске грешке,чији утицај морамо елиминисати или свести на занемарљиву
5
вредност.Неке се могу смањити испитивањем и ректификацијом,а грешке се појављују због саме конструкције израде инструмента,траспорта,ректификацују можемо урадити само са одређеном тачношћу,и утицај спољних услова при мерењу. Грешке можемо исправити елиминацијом ,методом рада,увођењем поправки и свођењем на занемарљиву вредност.Аутоматско увођење поправки,има и недостатке,јер неке се могу ректификовати на терену а друге само у сервису.Грешке теодолита можемо сврстати у три групе:грешке осовина теодолита,грешке ексцентрицитета и грешке лимба. 14. КОЛИМАЦИЈА (С) - Испитивање и ректификација,утицај (С) на грешку визурног правца Колимација је угао одступања визуре од управне на обртну осу дурбина.Испитивање вршимо при вертикалној главној осовини,визирајући далеку приближно хоризонталну добро видљиву тачку и региструјемо читање у првом положају дурбина,затим окренемо дурбин у други положај и навизирамо исту тачку и региструјемо и то читање.Из разлике та два читања проомењена за 180 степени добијамо двоструку колимациону грешку 2С.Ректификацију вршимо ако је 2С већа од дозвољеног одступања (5 секунди),тако што половину 2С додамо на прво читање и у том случају кончаница ће одступити од визиране тачке, завртњима на кончаници померамо кончаницу док не погађа визирану тачку. Утицај колимације на опажани правац зависи од зенитне даљине,ако мерења вршимо у два положаја дурбина, средина из два читања биће ослобођена колимације,и то ако мерења првог и другог положаја вршимо одмах,јер променом температуре јављају се и други утицаји на мерења. 15. ГРЕШКА ОБРТНЕ ОСЕ ДУРБИНА И ЊЕН УТИЦАЈ НА ГРЕШКУ ВИЗУРНОГ ПРАВЦА Грешка обртне осовине је угао одступања од управне обртне осовине на главну осовину која је доведена у вертикалу.Испитивање се врши визирањем високе добро уочљиве тачке.коју пројектујемо на размерник постављен управно на инструменат у хризонтали испред инструмента,и на том правцу очитамо при првом азатим и при другом положају дурбина.Та разлика очитана на размернику представља грешку обртне осовине.При мерењу углова у првом положају дурбина обртна осовина је нагнута на једну страну,а при мерењу углова у другом положају дурбина биће нагнута на другу страну,па ће у том случају читања из два положаја бити ослобођено ове утицаја ове грешке ако су мерења у оба положаја извршена одмах једно за другим. 21. РАСПОРЕДИ И ПАРАМЕТРИ РАСПОРЕДА ГРЕШАКА(Невертикалност алхидадине осовине,грешка центрисања инструмента,Нестабилност инструмента) Сваки од ових извора грешака представља елементарну појединачну грешку која збирно утиче на укупну грешку мерења угла.Утицај нагнутости алхидадине осе изазива директно и нагнутост обртне осе дурбина,а то утиче на резултат мерења правца.Ова грешка је најмања када се визура налази у равни хоризонта(зенитне даљине око 90 степени = 0),а све што је визура стрмија утицај невертикалности је већи,и грешка на мерени правац је већа,овај утицај настаје случајноали на опажани правац делује систематски и неможе се елиминисати опажањем у два положаја дурбина,зато треба избегавати стрме визуре.Утицај ове грешке на мерени угао,за зенитна одстојања блиска 90 степени је мали.
Вредност ове грешке зависи од нагнутости главне осовине теодолита(а за ту вредност је нагнута и раван лимба), и нагиба визуре,и ове величине нам нису познате.Да би смо их срачунали користимо средњу квадратну вредност систематског утицаја,и за математичко очекивање једнако нули.Вредности ових систематских утицаја добијају се преко двоструких интеграла,чиме се добијају константе к1 и к2 за мерени угао. Грешку правца и угла изазвану невертикалношћу главне осе можемо свести на занемарљиву вредност постављањем ограничења за нагиб алхидадине осе (употребом осетљивијих либела),и ограничењем зенитних даљина.Стандард за прецизне инструменте је око 0,02 секунде (за зенитни угао од 80 степени). Грешка центрисања инструмента:Потребно је одредити поступак одређивања распореда и параметара распореда грешке.А то се може одредити ако графички представимо ексцентрично постављен инструменат који одступа од стајне тачке.Тиме можемо уочити две утицајне грешке,једна је линеарна,а друга угловна,грешка угла између опажаних праваца се може
6
изразити преко ових случајних величина(угла и ексцентрицитета),и добија се као математичко очекивање квадрата те грешке,решавањем двостуког интеграла,чиме се може закључити да грешка угла због грешке центрисања теодолита има математичко очекивање нула а то је случајна елементарна грешка.Из напред наведеног можемо закључити да се центрисање теодолита при прецизним мерењима врши присилно или центрисање са статива оптичким или крутим виском. Нестабилност инструмента:Ова грешка се јавља збох рада статива (стуба),на коме је постављен теодолит,и овај утицај је исти као грешка центрисања инструмента,само су параметри зависности различити.Стандарди нестабилности стуба и статива су: Стуб фундиран у стени-0.1 мм,статив на бетону 0.2 мм,статив са јако набијеним папучицама у мекано тло 0.3 мм,статив на меканом тлу 0.5 мм.Грешка стабилности инструмента делује систематски на грешку мереног правца. 26. Распореди и параметри распореда грешака: Локална рефракција, треперење ваздуха, Грешка визирања, Грешка интерполације. За сваку елементарну грешку која се јавља у резултату мерења потребно је одредити распоред и параметре распореда те грешке. У том циљу треба одредити математичко очекивање и дисперзију сваке елементарне грешке. Локална рефракција има утицаја на мерење праваца при краћим визурама. Зависи од градијента температуре и влажности ваздуха изнад терена преко кога иде правац визуре. Стандард локалне бочне рефракције је око 0,5". Локална рефракција углавном утиче услед формирања квазистационарних блокова и то углавном изнад падина, долина, ливада, шума , у близини објеката и сл. Треперење ваздуха утиче на грешку мерења правца тако што лик који посматрамо титра. Зато је утицај ове грешке случајног карактера а њен стандард је око 0,6". Треперење ваздуха је најмање ујутру и увече кад су дани сунчани па тада треба и мерити. Са порастом температуре повећава се и треперење ваздуха. Грешка визирања зависи од ока опажача, увећања дурбина, неравномерног притезања завртња за кочење алхидаде и замућености ваздуха. Углавном је случајног карактера мада постоји и систематска грешка визирања код неких опажача која може износити и до 0,5". За стандард грешке визирања се узима 0.9". Грешка интерполације при детекцији круга је случајна са стандардом 0.1" али се код динамичких лимбова ова грешка не узима у обзир. 27. Модели оцена тачности оцена правца и угла (главне компоненте грешке). При моделу оцене тачности оцене правца и угла полазимо од претпоставке да извори грешака делују на резултат мерења међусобно независно. Када одредимо математичко очекивање неке грешке и то прогласимо дисперзијом грешке, онда поређамо све грешке по величини њиховог утицаја од већег ка мањем. Потом извршимо раздвајање дисперзије мерене величине на главне компоненте грешке и на грешке остатка, по принципу занемарљивости
2 2 2A Bσ = + Aσ − ≤ α
σ где је алфа коефицијент занемарљивости, а за
који се најчешће узима вредност 0.05 и у том случају 2 21
9B A≤ а
2 2.Aσ ≈
Дакле у део дисперзије А2 улазе главне компоненте грешака а у Б2 су грешке остатка које се методом рада или увођењем поправака могу свести на жељено малу вредност. Код мерења хоризонталних углова при одређивању главних компоненти грешака битна је подела мрежа према дужинама страна, па тако у мрежама група А и Б главне компоненте су: рефракција, треперење ваздуха, грешка визирања, грешка детекције, грешка интерполације, грешка услед температуре и грешке центрисања и нестабилности инструмента и сигнала, док у мрежи из Ц групе у главне компоненте не улазе грешке центрисања и нестабилности инструмента и сигнала, већ оне улазе у грешке остатка заједно са грешком невертикалности главне осовине теодолита.
7
29. Горња граница тачности мерења праваца и углова. Познато нам је које све грешке утичу на мерење праваца и углова. Велики број њих можемо методом рада елиминисати или бар довести на жељено малу вредност. Тако при мерењу углова инструментима са динамичким лимбовима у потпуности елиминишемо грешке детекције и интерполације. Са повећањем броја гируса и узимањем средњих вредности из свих гируса, елиминишу се и грешке треперења ваздуха и грешка визирања јер су случајног карактера. На релативно кратким растојањима (до 3 км) елиминише се и утицај регионалне рефракције. Тако произилази да нам на тачност мерења праваца и углова утичу само грешке које ни на који начин не можемо елиминисати, а то су: локална рефракција, стабилност тачака и центрисање инструмента и сигнала. Горња граница тачности мерења углова и праваца тако зависи од дужина страна мерених праваца, па ако су стране дуже то је мања грешка меренја праваца и обратно.
Стандарди угла и правца – горња граница тачности методе :
, =0 0,7σu " , , =0 0,5σ p " . 32. Границе интервала поверења за двоструку колимацију. Стандардна грешка за двоструку колимацију износи 2,1". На основу оваквог стандарда могу се срачунати границе интервала поверења за
распон двоструке колимације по формули 22 ,1 1 , 2 2, ( )
CC s C C dR R−α −α= σ σ ≡ σ Анализом двоструких колимација и контролом да ли оне улазе у интервал поверења можемо доћи до квалитета наших мерења. Постоје и табеле у којима су већ срачунате границе интервала поверења па се практично могу користити.
35. ДЕФИНИСАЊЕ МЕТОДЕ МЕРЕЊА ДУЖИНА ЕОД – ИМА
Овде је реч о мерењу 2 тачке на површи земље. Тачка је материјализована рупицом у металној плочи на стубу или рупицом у болцни на стубу или белеги.На једној се тачки центрише ЕОД а на другој рефлектор тако да се мери растојање од прекрета дурбина до тачке ротације рефлектора.
Методу мерења дужина ЕОД-има кратко дефинишемо овако:
1) Стабилизација тачака 1) Стубови; бет. белеге фундиране
2) Атмосферски услови 2) Без падавина
3) ЕОД са стандардном грешком
3) (1 3)mm+ (1 2)mm/kmL L
4) Отклон казаљке галванометра
4) Максималан (у зеленом пољу)
5) Број независних мерења 5) 2 до 4 - (један смер) 6) Поузданост резултата 6) Мерење напред и назад 7) Центрисање даљиномера и сигнала 7) Присилно, оптички висак 8) Сигнали за визирање 8) Рефлектори произвођача ЕОД-а 9) Мерење t , P и e ваздуха у току мерења дужине
9) На обе тачке истовремено
10) Температурна адаптација ЕОД-а 10) 60 минута 11) Заштита ЕОД-а од инсолације 11) Сунцобрани, и сл. 12) Удаљеност ЕОД-а од ел. водова 12) Више од 10 m ; и
13) Удаљеност визуре од далековода 13) Више од 10 m .
8
37. МЕТРОЛОШКО ОБЕЗБЕЂЕЊЕ МЕРЕЊА ДУЖИНА ЕОД-ИМА: ИНСТРУМЕНТАЛНЕ ГРЕШКЕ И КОНСТАНТЕ ЕОД-А: АДИЦИОНА КОНСТАНТА, ПЕРИОДИЧНЕ ГРЕШКЕ, ФАКТОР ЈЕДИНИЦЕ МЕРЕ 1. Инструменталне грешке и константе ЕОД-а Главне грешке и константе ЕОД-а морају бити познате кориснику како би константе периодично проверавао, а о грешкама водио рачуна да не превазиђу одређену тачност. 2. Адициона константа (АК). Као што смо код рефлектора увели референтну раван призме 0 0R R исто тако је можемо увести и код ЕОД-а, тј. за предајник (Emitter), пошто се виртуелни електрооптички почетак или нула ЕОД-а не налази на главној („вертикалној“) оси алхидаде. Ово растојање је адициона константа ЕОД-а Ia . Адициона константа, a , резултата мерења дужина ЕОД-има: = АК ЕОД-а + АК рефлектора : = +I Ra a a .
� Константа = Поправкa = Тачно минус Стварно, � Дужина коригована за константу a :
0 ( )2
vN
fD
na= + ∆ϕ + .
Вредност (7.5.3) ће бити аутоматски обрачуната ако претходно унесемо константу a у рачунар ЕОД-а. Адициону константу a одређује произвођач инструмента са тачношћу око 20% до 30% од максималне унутрашње тачности. 3.Периодичне (цикличне) грешке. Проузроковане су електричним мешањем основног и мерног сигнала пошто се предајник и пријемник налазе у истом кућишту, као и мешањем двају сигнала при заједничком пролазу оптичких делова предајника и пријемника, а и другим узроцима. Ове грешке зависе од јачине повратног сигнала. Код даљиномера малог домета, амплитуде ових грешака не прелазе 5 mm.
Електрично стање инструмента, после довођења интензитета сигнала на одређену меру, понавља се после сваке мерне јединице (половина таласне дужине) модулисаног таласа, стога циклична грешка има управо ту периоду. Периодична грешка се јавља код даљиномера са електронским мерењем фазе Зависе од растојања и могу се приказати као синусоида у функцији растојања, а могу бити краткоталасне и дуготаласне. Таласна дужина краткоталасних периодичних грешака првог реда једнака је таласној дужини основне мерне фреквенције, док је код дуготаласних периодичних грешака већа од мерне јединице. Периодичне грешке се могу испитати и одредити мерењем дужина на калибрационој бази.Оне су ограничавајући фактор тачности мерења дужина фазним даљиномерима. 4.Фактор јединице мере (енгл.: Сcale Factor) Количник номиналне и стварне вредности јединице мере или подељка скале, У геодезији га називамо и мултипликационом константом коју код ЕОД-а обично дефинишемо као количник номиналне Nf и актуелне ACTf (која овде игра улогу
тачне) модулационе фреквенције N
ACT
fq
f= .
предност одређивању мултипликационе константе на основицама помоћу познатих (условно тачних) дужина: N
UT
Dq
D= ,
- ND номинална дужина, срачуната помоћу номиналне фреквенције Nf , а

9
- UTD - условно тачна (актуелна) дужина из основичке мреже.
Ово одређивање има предност зато што ће очекиване вредности резултата мерења дужина у реалним (пољским) условима, са тако одређеном мултипликационом константом даљиномера, која је често одлучујућа за тачност мерења дужина, бити ближе правим вредностима тих дужина.
Узроци:Грешка модулационе фреквенције,Недовољно тачне поправке за метеоролошке утицаје ,Грешке дате таласне дужине носећег таласа.
Ово су такође разлози за калибрацију даљиномера. 38 Одређивање адиционе константе (АК) Одређивање АК :
- Помоћу мерења познатих дужина, - Из изравнања резултата мерења непознатих дужина основице за адициону константу, - Из заједничког одређивања са параметрима функционалне зависности за периодичне грешке изравнањем резултата мерења познатих дужина основице за ово одређивање, - Из заједничког одређивања са мултипликационом константом изравнањем резултата мерења познатих дужина на основици.
1. Одређивање АК из познатих растојања Меримо n кратких датих растојања - условно тачних (UT )
, , 1, 2, ,UT iD i n= L
a - Поправка адиционе константе,
iD - Резултат мерења дужине,
iv - Поправка тог резултата,
,i CORR iD D a= + - Кориговани резултат за a ;
Ф-ја везе: Тачно = Поправљено ⇒ ,UT i i iD D a v= + + ; ⇒
Математички модел:
,
2
( ) : , ,
( ) : ~ [0, ], 1, 2, ,
i i i UT i i
i
Линеарни
С
a v a f f D
тохасти
D
b v N iч nки
= − + = −
σ = L
;
Примена МНК доводи до оцена:
¶
22
,
2 2 20
1( ), ,
1ˆ , 1
UT i i a
i
a D Dn n
m v f nf
σ= − σ = σ = = = −
∑
∑
где је i iv a f= − + - оцена поправке iv .
Нека је aG гранична вредност грешке адиционе константе, коју при овом
одређивању морамо „гарантовати“; (Ово „гарантовати“ је у смислу високе моћи критеријума ). Њу ћемо добити на основу теста хипотезе: 0 : [ ] , : [ ]T a TH a a против H a a= ≠M M
где је [ ]aM математичко очекивање од a и Ta - тачна вредност адиционе константе.
Користећи моћ критеријума 1− β долазимо до израза за оптимизацију тачности
(види, нпр., поглавље 4.14.7, Перовић, 1989): ( )
2 22 21 1 / 22
,aa
a
Gt t
n−β −α σ= + σ =
σ
,

10
где су 1t −β и 1 / 2t −α квантили нормалног распореда за вероватноће 1− β и 1 / 2− α ,
одакле налазимо неопходан број дужина које треба мерити:
( )2 2
1 1 / 22a
n t tG
−β −ασ= + .
41. МЕТЕОРОЛОШКА ПОПРАВКА МЕРЕЊА ДУЖИНА ЕОД-ИМА
Потребно је одредити средњу брзину v ЕМ таласа дуж мереног растојања D ради рачунања дужине D . 0 /v v n= , треба средњи индекс рефракције дуж тог мереног
растојања.Сваки ЕОД баждарен је на одређену радну брзину за референтни индекс
рефракције 0n (индекс референтне атмосфере) .Стање реалне (локалне) тамо ДУЖ:
Метеоролошка поправка мерења дужина ЕОД-има сфере одступа од референтне, што проузрокује грешку у мерењу дужине. Стога одређивањем индекса преламања зрака n реалне атмосфере у којој меримо (локални n ) морамо увести поправку за брзину простирања ЕМ таласа.
Према (7.2.4) је / 2D v t′= ∆ , а према (3.6) 0 /v v n= , па је 0
2
v tD
n
′∆= ⋅ .
одакле налазимо ( / )dD D n dn= − . Али, како је 1n = , с тачношћу 43 10−⋅ , то је
dD Ddn= − , па ће корекција дужине због брзине простирања ЕМ таласа у (реалној) атмосфери бити
1 0 0( ) ( )K n n D n n D= − − = − .
Формулу за ову корекцију даје произвођач ЕОД-а, а она се аутоматски обрачунава у микрорачунару ЕОД-а или уношењем параметара атмосфере t , P и e, или уношењем срачунатог фактора јединице мере (може и као фреквенције f ) који одговара овим
параметрима, или се у ЕОД-у аутоматски мере параметри атмосфере t , P и e и аутоматски коригују резултати мерења дужина за утицај ових параметара. Иначе, корисник ЕОД-а мора знати ову формулу ради одређивања тачности мерења ових
параметара. Тако за ЕОД са 860 nmCARRλ =
формула за метеоролошку корекцију гласи
1, [mm] [km]
0,2906 0,0413282,1
1 s
P eK D
t
−= − + α
,
где је: 0,000662 ( )s ve E P t t′= − −
парцијални притисак водене паре у mbar,
P - притисак ваздуха у mbar,
1/ 273,16α = , st - температура сувог ваздуха у [ C]° ,
vt - температура влажног ваздуха у [ C]° ,
E′ - притисак засићене водене паре који се рачуна према (3.24'):
7,510 , 0,7858
237,3F v
v
tE F
t′′ ′= = +
+.
Коригована дужина 1 1D D K= + .
Анализа корекције (7.6.3) даје
11
1,[mm] [km]2
0,29065 0,0413 0,2065 0,0413
1 1(1 )s
s ss
P edK dt dP de D
t tt
−= − + ⋅ + α + α+ α
што за 9 5 0 m b a rP = , 2 0 Cst = ° и 3 0 m b a re = даје
[ ]1,[mm] [km]239,01 0,192 0,384sdK dt dP de D= − + ⋅ . (7.6.7')
У (7.6.7') очигледно је највећи температурни утицај, одакле следи глобални закључак да температуру морамо прецизније мерити од притиска и влажности ваздуха.
Због начина одређивања метеоролошких параметара, који се добијају као аритметичка средина два мерења на крајњим тачкама мерног растојања, у реалним условима компонента стандардне грешке која делује пропорционално дужини повећава се са 1 mm/km на 1,5mm/km до 2 mm/km.
43.DUŽ: Rasporedi i parametri rasporeda grešaka merenja dužina: Promena frekvencije tokom vremena, Greška odreñivanja adicione konstante, Periodična greška Za svaku elementarnu grešku koja se javlja u rezultatu merenja neophodno je odredimo raspored i parametre rasporeda te greške. Od parametara rasporeda neophono je odrediti matematičko očekivanje i disperziju greške.To isto je neophodno uraditi za ukupnu grešku rezultata merenja i za grešku definitivne ocene merene veličine. Promena frekvencije tokom vremena je greška koja potiče od jedinice mere i greška brzine svetlosti u vakumu.Javlja se usled starenja kvarca pa je neophodno odreñivanje frekvencije u odreñenim konstantnim vremenskim intervalima,a svakako jednom godišnje.Ona je sistematska. Greška odreñivanja adicione konstante je greška koja potiče od instrumenta.Po karakteru svog nastanka je slučajna, a po načinu delovanja na rezultate merenja dužine sistematska. Periodična greška je greška koja potiče od instrumenta.Po svom nastanku je sistematska i na rezultate merenja dužine deluje sistematski i za nju se može uvoditi popravka u rezultat merenja.Pouzdanost odreñivanja popravke nije visoka.Ona spada u one greške koje ograničavaju tačnost merenja. 44.DUŽ: Rasporedi i parametri rasporeda grešaka merenja dužina: Aperiodična greška, Refleksija talasa, Greška centrisanja EOD-a i reflektora Za svaku elementarnu grešku koja se javlja u rezultatu merenja neophodno je odredimo raspored i parametre rasporeda te greške. Od parametara rasporeda neophono je odrediti matematičko očekivanje i disperziju greške.To isto je neophodno uraditi za ukupnu grešku rezultata merenja i za grešku definitivne ocene merene veličine. Aperiodična greška je greška koja potiče od instrumenta.U rezultatu merenja dužine deluje kao slučajna greška.Merenjem iste dužine više puta njen uticaj se može samo neznatno smanjiti ali se izborom rezultata bližih aritmetičkoj sredini mogu odstraniti rezultati sa grubim greškama.Spada u grupu grešaka koje ograničavaju tačnost merenja. Refleksija talasa je greška koja potiče od spoljnih uslova.Nastaje tako što neki zraci poslatih elektromagnatnih talasa nailaze na prepreke od kojih se odbijaju.Oni su izvor gršaka merenja.Greške dužine izazvane refleksijom talasa sastoje se iz dve komponente-slučajne i sistematske.Merenjem dužina u jednom smeru greške se mogu delimično umanjiti, za slučajne uticaje,meñutim merenjem u suprotnom smeru i sistematski uticaj se smanjuje.Disperzija ove greške nije poznata.Ove greške spadaju u grupu grešaka koje ograničavaju tačnost merenja. Greška centrisanja EOD-a i reflektora –ove greške potiču od instrumenta odn. reflektora.

12
cosD′ε = ξ η greška u merenju dužine 48.DUŽ: Modeli ocena tačnosti ocena merene dužine - glavne komponente greške U zavisnosti od metode merenja dužina možemo formirati dva modela ocena merene dužine 1.Srednja vrednost n nezavisnih merenja sa stanice i 2.Srednja vrednost merenja ”napred” i ”nazad”. Kada odredimo matematičko očekivanje neke greške i to proglasimo disperzijom greške, onda poreñamo sve greške po veličini njihovog uticaja od većeg ka manjem. Potom izvršimo razdvajanje disperzije merene veličine na glavne komponente greške i na greške ostatka, po principu zanemarljivosti
222 BA +=σ ασ
σ ≤− A
gde je α koeficijent zanemarljivosti,
a za koji se najčešće uzima vrednost 0.05 i u tom slučaju ≤2B 2
9
1A i 22 A≈σ
Glavne komponente disperzije svrstane su u grupu A2 ,a ostatak u grupu B2 Za merenu dužinu imamo tri modela ocene tačnosti: 1.Ocena tačnosti jednog merenja dužine; 2.Ocena tačnosti srednje vrednosti n nezavisnih merenja sa stanice (merenja u jednom smeru) 3. Ocena tačnosti srednje vrednosti merenja „napred“ i „nazad“ 50.DUŽ: Gornja granica tačnosti merenja dužine
За велике дужине Горњу границу тачности опредељује тачност брзине светлости у ваздуху vv /σ ,
За врло мале дужине – периодична грешка фазе δϕσ , и грешке центрисања и
стабилности инструмента и сигнала, које тада не могу бити у групи B2.
gornja granica tačnosti dužina odreñuje se
21,0 2
2,0
2 2 2 22 2
,0
222
, 2CI CS STI S fTS v
D v fDϕ δ
σσ
σ σ σ +
+ σ +
σ + σσ = σ + + 1 4 4 4 4 4 2 4 4 4 4 4 3 1 4 44 2 4 4 43
13
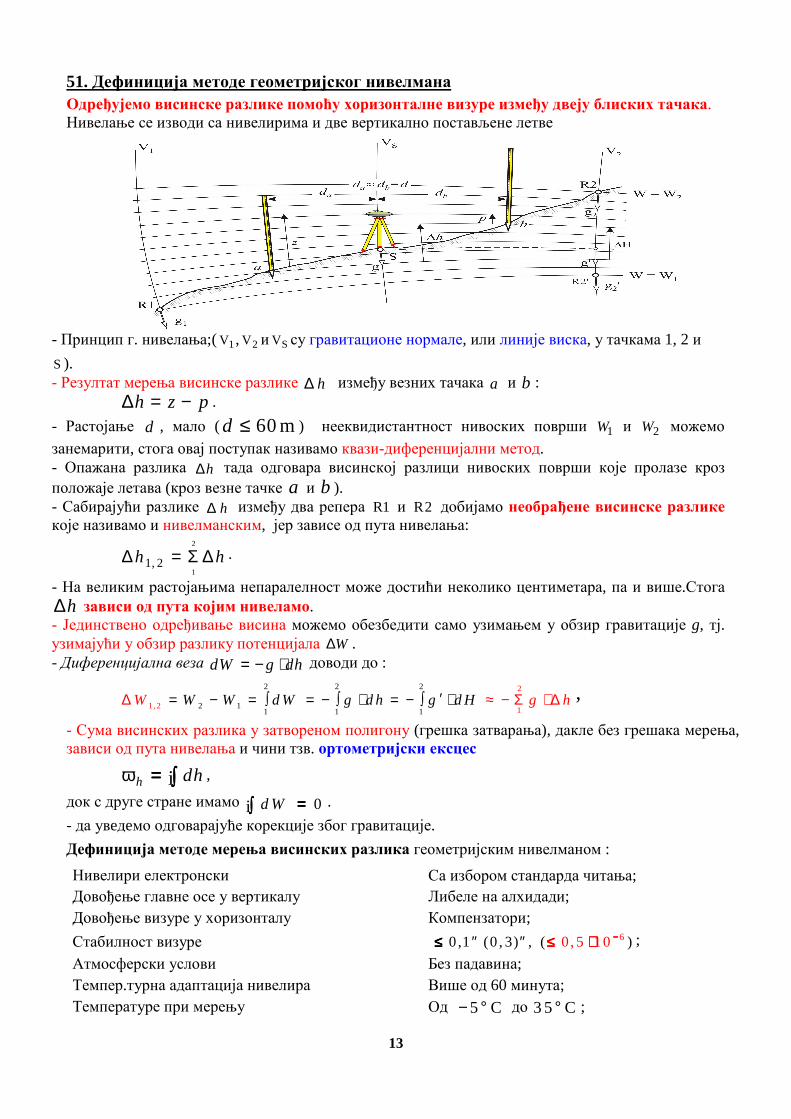
51. Дефиниција методе геометријског нивелмана Одређујемо висинске разлике помоћу хоризонталне визуре између двеју блиских тачака. Нивелање се изводи са нивелирима и две вертикално постављене летве
- Принцип г. нивелања;( 1V , 2V и SV су гравитационе нормале, или линије виска, у тачкама 1, 2 и
S). - Резултат мерења висинске разлике h∆ између везних тачака a и b : h z p∆ = − .
- Растојање d , мало ( 60 md ≤ ) нееквидистантност нивоских површи 1W и 2W можемо
занемарити, стога овај поступак називамо квази-диференцијални метод. - Опажана разлика h∆ тада одговара висинској разлици нивоских површи које пролазе кроз положаје летава (кроз везне тачке a и b ). - Сабирајући разлике h∆ између два репера R1 и R2 добијамо необрађене висинске разлике које називамо и нивелманским, јер зависе од пута нивелања:
2
11, 2h h∆ = Σ ∆ .
- На великим растојањима непаралелност може достићи неколико центиметара, па и више.Стога h∆ зависи од пута којим нивеламо.
- Јединствено одређивање висина можемо обезбедити само узимањем у обзир гравитације g, тј. узимајући у обзир разлику потенцијала W∆ . - Диференцијална веза dW g dh= − ⋅ доводи до :
2 2 2
2 11 1 1
2
1,2 1W W d W g gW g hd h d H′∆ ≈ −= − = ∫ = − ∫ ⋅ = − ∫ ⋅ Σ ⋅ ∆ ,
- Сума висинских разлика у затвореном полигону (грешка затварања), дакле без грешака мерења, зависи од пута нивелања и чини тзв. ортометријски ексцес
h dhω i==== ∫∫∫∫ ,
док с друге стране имамо 0d Wi ====∫∫∫∫ .
- да увeдeмо одговарајуће корекције због гравитације.
Дефиниција методе мерења висинских разлика геометријским нивелманом :
Нивелири електронски Са избором стандарда читања; Довођење главне осе у вертикалу Либеле на алхидади; Довођење визуре у хоризонталу Компензатори;
Стабилност визуре 60,1 (0, 3) , 0, 5 10( )″ ″ −−−−≤ ⋅≤ ⋅≤ ⋅≤ ⋅≤≤≤≤ ;
Атмосферски услови Без падавина; Темпер.турна адаптација нивелира Више од 60 минута; Температуре при мерењу Од 5 C− ° до 3 5 C° ;
14
Траке нивелманске летве Инварске, кодиране; Подметачи за летве Гвоздене папуче или клинови;
10) Довођење летве у вертикалу 10) Либеле; 11) Заштита нивелира од инсолације 11) Сунцобран; 12) Дужина визуре 12) 1 0 m 5 0 md≤ ≤ ;
13) Поузданост мерења на станици 13) Два мерења са променом висине инструмента;
14) Поузданост мерења у влаку 14) Мерење напред и назад; 15) Умањење утицаја грешака
компензатора 15) Ослободити компензатор пре читања.
За мерења се могу користити оптичко-механички нивелири са компензатором са стабилношћу визуре 0,1′′≤ , или нивелири са либелом са осетљивошћу 2′′≤ , али о овим нивелирима овде неће бити речи. 53.Одступање визурне осе од хоризонтале, код нивелира са компензатором : угао i .
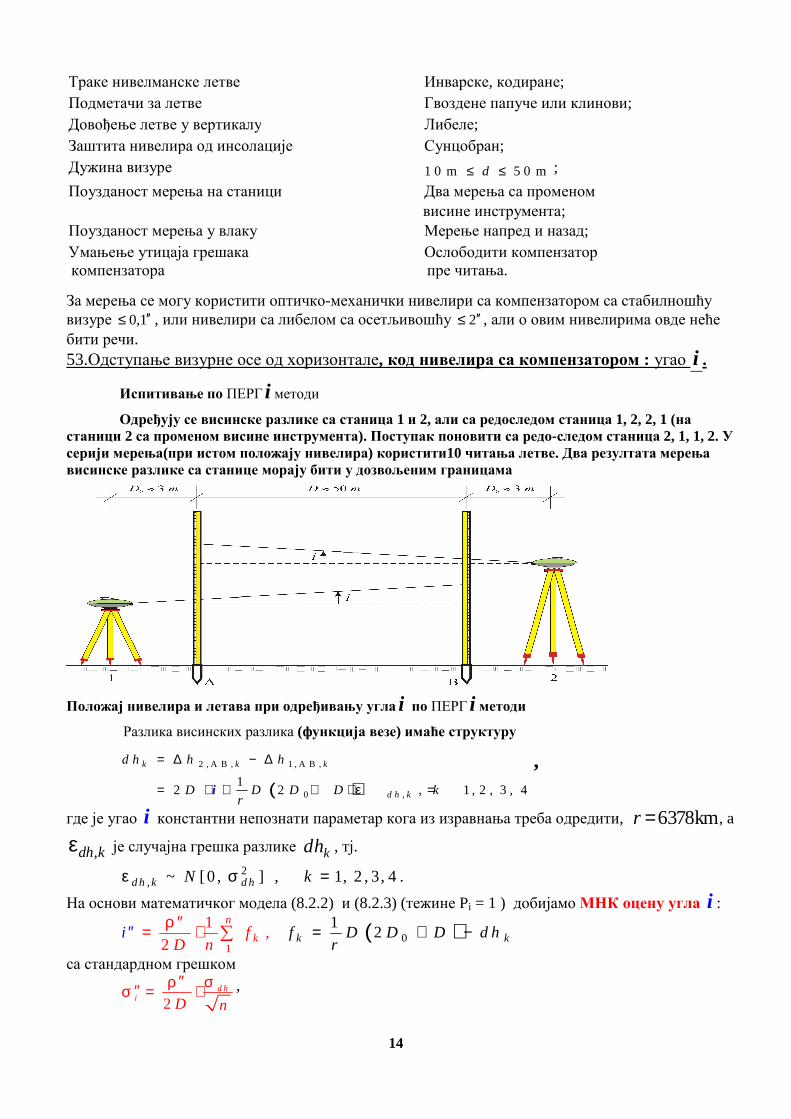
Испитивање по ПЕРГ i методи
Одређују се висинске разлике са станица 1 и 2, али са редоследом станица 1, 2, 2, 1 (на станици 2 са променом висине инструмента). Поступак поновити са редо-следом станица 2, 1, 1, 2. У серији мерења(при истом положају нивелира) користити10 читања летве. Два резултата мерења висинске разлике са станице морају бити у дозвољеним границама
Положај нивелира и летава при одређивању угла i по ПЕРГ i методи
Разлика висинских разлика (функција везе) имаће структуру
( )
2 , A B , 1 , A B ,
0 ,1
2 2 , 1 , 2 , 3 , 4k
k k k
d h k
d h h h
D D D D khr
d
= ∆ − ∆
= ⋅ + + + ε =i
,
где је угао i константни непознати параметар кога из изравнања треба одредити, 6378kmr = , a
,dh kε је случајна грешка разлике kdh , тј.
2, ~ [0 , ] , 1, 2 , 3, 4 .d h k d hN kε σ =
На основи математичког модела (8.2.2) и (8.2.3) (тежине Pi = 1 ) добијамо МНК оцену угла i :
( )1
01
,2
12k k
n
ki f D dD n
D D hr
fρ ″= +″ −⋅ =∑
са стандардном грешком
2d h
i D n
′′ σρ′′σ = ⋅ ,
15
и оцену дисперзије 2dhσ :
¶ ( )22 2
1
1, 1 . .
1
n
d h d h kk
m d h d f n ст с лn =
σ = = − = −−
Σ
При тесту хипотезе 0 0:H i i< према 0:aH i i≥ - за 0i > , или
0 0:H i i> према 0:aH i i≤ - за 0i < ,
где је 0i унапред усвојена вредност (обично: 0 5i = ″ ), користећи моћ теста на основи кога
добијамо
2
0 21 122
( )( )
( / 2 ) /dh
i it t
D n− β − α
−= +
′′ρ ⋅ σ
можемо оптимално планирати експеримент. На пример ако усвојимо да је D фиксно, стандард
dhσ такође, онда из (8.2.7) налазимо оптималан број n одређивања угла i . 55. Распореди и параметри распореда грешака мерења висинских разлика: Грешка успостављања хориз. визуре, грешка референтне слике поделе летве у нивелиру, Грешка детекције (очитавања) летве, Невертикалност главне осовине нивелира У поступку мерења висинских разлика h∆ на станици можемо издвојити изворе грешака везане за инструмент, грешака везане за летву, грешке настале од спољних услова, грешке поправака и грешка заокруживања Неке од грешака везане за инструмент су и: 1. Грешка успостављања хоризонталне визуре: настаје од два извора, од невертикалности главне осе нивелира и од могућности компензатора за довођење визуре у хор. положај. Грешка од невертикалности је систематска, а грешка од компензатора случајна.Стандарди ових грешака су непознати а случајна грешка компезатора може се одредити понављањем мерења при истом положају главне осе нивелира. Стандардна грешка успостављања
визуре, SETσ (SET – од енгл.: setting), високо тачних нивелира је
0 ,1 0 , 2S E T′′ ′′≤ σ ≤ . (8.3.1)
2. Грешка референтне слике поделе летве у нивелиру манифестује се као грешка размере референтне слике. Значи, систематска је. О величини ове грешке нема података а испитивањем се може установити само сагласност двеју размера, референтне слике и слике летава са CCD сензорима Пошто је случајне грешке поделе летве мање од 5 10 m− µ (Torge 2001), то се може узети
да је стандардна грешка референтне слике, укључујући и систематски део, реда 2 mµ , тј.
62 1 0R E F−σ = × . (8.3.2)
3. Грешка детекције летве је грешка упоређења слике летве при мерењу са референтном сликом летве. Случајног је карактера и, према истраживањима стручњака, стандард јој је 0, 002 m m.
4. Невертикалност главне осе нивелира на станици има систематску и случајну компоненту при чему је систематска компонента доминантна. (На успостављање визуре делује систематски али са смањеном компонентом при чему на смеровима различитим за 180о, те компоенте су са различитим знаком и приближно истом апсолутном вредности). У нивелманском влаку, тј. на различитим станицама, утицај невертикалности главне осе на визуру је случајног карактера. Дејством компензатора утицај ове грешке се скоро потпуно искључује.
16
56. Распореди и параметри распореда грешака мерења висинских разлика: Померање статива, Утицај места опажача, Неправилан ход сочива за фокусирање, Вибрирање (″рад″) терена; У поступку мерења висинских разлика h∆ на станици можемо издвојити изворе грешака везане за инструмент, грешака везане за летву, грешке настале од спољних услова, грешке поправака и грешка заокруживања Неке од грешака везане за инструмент су и: - Нестабилност инструмента. Померање статива се дешава у скоро свим теренским условима а највеће је у току првих 20 секунди од постављања статива, а затим се постепено смањује и за неколико минута престаје.Зависи одстабилности терена и од начина како је постављен инструмент Померање, нестабилност инструмента и летава (STIL) је реда 0 , 0 1 - 0 ,1 m m по
станици тако да је стандардна грешка 0 , 0 2 5 m m /s tS T I
σ =
Поступци против нестабилности инструмента: - мерења изводити равномерно и без прекида, - за станицу бирати чврст терен, а у меканом терену статив постављати на побијене гвоздене клинове или, у крајњем, ногаре статива јако забити у земљу, а мерити тек после 2 до 3 минута, и - летве читати редоследом: а) на непарној станици:
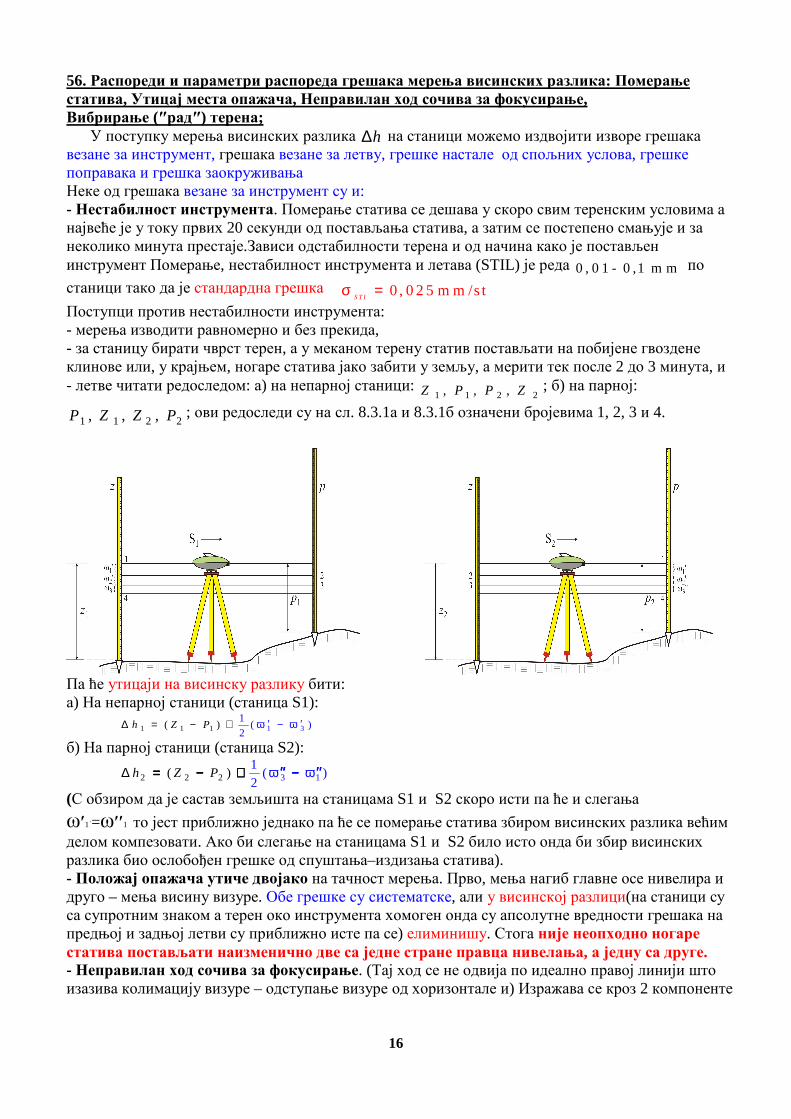
1 1 2 2, , ,Z P P Z ; б) на парној:
1 1 2 2, , ,P Z Z P ; ови редоследи су на сл. 8.3.1а и 8.3.1б означени бројевима 1, 2, 3 и 4.
Па ће утицаји на висинску разлику бити: а) На непарној станици (станица S1):
1 1 1 311
( )(2
)h Z P∆ = − + ′ ′ω − ω
б) На парној станици (станица S2):
2 12 321
( )2
( )h Z P∆ ω ω′′′′==== ′ ′′′ ′′′ ′′′ ′′−−−−− +− +− +− +
(С обзиром да је састав земљишта на станицама S1 и S2 скоро исти па ће и слегања
ω׳ 1׳=ω1׳׳ то јест приближно једнако па ће се померање статива збиром висинских разлика већим делом компезовати. Ако би слегање на станицама S1 и S2 било исто онда би збир висинских разлика био ослобођен грешке од спуштања–издизања статива).
- Положај опажача утиче двојако на тачност мерења. Прво, мења нагиб главне осе нивелира и друго – мења висину визуре. Обе грешке су систематске, али у висинској разлици(на станици су са супротним знаком а терен око инструмента хомоген онда су апсолутне вредности грешака на предњој и задњој летви су приближно исте па се) елиминишу. Стога није неопходно ногаре статива постављати наизменично две са једне стране правца нивелања, а једну са друге. - Неправилан ход сочива за фокусирање. (Тај ход се не одвија по идеално правој линији што изазива колимацију визуре – одступање визуре од хоризонтале и) Изражава се кроз 2 компоненте
17
и то одступање по висини и кроз (вертикалну) колимацију визуре. На станици обе компоненте су систематске, али се у разлици читања летава поништавају. - Вибрирање терена настаје при пролазу тешких возила поред инструмената и летава. Грешка од овог утицаја је систематска, а елиминише се мерењем у периоду када не пролазе возила поред места за нивелање. При мерењу преко мостова и сличних објеката мора се обуставити саобраћај возилима, јер није могуће мерити нивелирима са компензаторима. У тим случајевима могуће је мерење нивелирима са либелом. Исти закључак важи за мерења у близини машина које производе
вибрације терена. 57. Распореди и параметри распореда грешака мерења висинских разлика: Грешка поделе летве, Грешка снимања (scanning) поделе летве, Неуправност равни пете летве на подужну осу летве, Неравност пете летве У поступку мерења висинских разлика h∆ на станици можемо издвојити следеће изворе грешака везане за летву: 1. Грешка поделе летве, 2. Грешка снимања (scanning) поделе летве, 3. Неуправност равни пете летве на подужну осу летве, 4. Наравност пете летве, 5. Неједнакост адиционих константи летви, 6. Температурне промене летве, 7.Невертикалност летве, 8. Неједнака осветљеност летава, 9. Промена силе затезања пантљике, 10. Спуштање/издизање подметача за летву; - Грешка поделе летве. Постоје систематске и случајне грешке наношења поделе летве. Случајне су, генерално, мање од 0,01mm. Систематске грешкесе могу одређивати и уносити поправке.
С обзиром да је и систематски део грешке истог реда, тј. мањи од 0,01mm, то ће укупна
стандардна грешка поделе летве - као радне мере (RM) бити 0,003mmRMσ = .
- Грешка снимања поделе летве сензорима CCD камере манифестује се као грешка размере те слике поделе летве (која се упоређује са референтном сликом у нивелиру). Испитивањем се одређује несагласност размера двеју слика, референтне и снимљене са CCD камером и уносе поправке. Са старошћу CCD сензора неједнакост двеју размера се све више повећава, стога је ова грешка систематска. (Долази до изражаја код великих вис. разлика) - Неуправност равни пете летве на подужну осу летве обрадом у фабрици произвођача своди се на занемарљиву величину, а евентуална деректификација се отклања постављањем специјалног прстена на пету летве при држању летве на папучама или клиновима. - Неравност равни пете летве произвођач такође своди на занемарљиву величину. 59. Распореди и параметри распореда грешака мерења висинских разлика: Промена силе затезања пантљике, Спуштање/издизање подметача за летву; Вертикална рефракција, Смањена јасноћа ликова У поступку мерења висинских разлика h∆ на станици грешака везане за летву су: - Промена силе затезања пантљике, - Спуштање/издизање подметача за летву; - Промена силе затезања инварске пантљике летве настаје из два разлога: 1) због различите температурне промене инварске пантљике и основе летве, и 2) због температурног утицаја на опругу којом је затегнута инварска пантљика. Постављањем услова при мерењу грешка ће бити занемарљива.
18
- За нестабилност летава принципијелно важи исто што и за нестабилност статива, па се истим редоследом читања летава као за спуштање/издизање статива и овај утицај своди скоро на нулу. Стандард нестабилности летве (STL) : Папуче тону више од клинова и да конусни клинови тону мање од цилиндричних али да се више издижу. Овај утицај се може умањити на следеће начине: - коришћењем клинова уместо папуча, - побијањем клинова испред нивелања бар за једну станицу, - бирањем стабилнијег терена за везне тачке. Грешке настале од спољних услова су: вертикална рефракција и смањена видљивост - Вертикална рефракција највише зависи од вертикалног градијента температуре, (3.12), делује пропорционално квадрату растојања летве од нивелира и пропорционално висинској разлици. Има две систематске компоненте, регуларну и ирегуларну. Регуларна рефракција је иста на свим станицама између два репера са приближно истим карактеристикама терена, а ирегуларна се не много мења од станице до станице и она ограничава тачност мерења. Неки аутори ирегуларну рефракцију називају случајном, али се тај израз не може користити јер је она променљива систематска, тј. нема карактер случајне грешке. Међутим, разлика рефракција на станици
Z Pr rr∆ = δ − δ , за задњу и предњу летву, је случајна са стандардом
0 , 2 1r∆σ = ″ .
Систематски утицај регуларне рефракције нарочито се дешава у мерењима по мокром нагнутом терену или близу терена. Ефекти регуларне рефракције крећу се од 0,01mm до 0,1 m m
по 1m висинске разлике. Пошто се овај ефекат може моделисати (видети (3.12)) то је могуће
уводити корекције за регуларну рефракцију. Стандард ирегуларне рефракције је реда 0, 0 1 m m за време облачног неба.
Ефекте рефракције можемо смањити на следеће начине: - смањењем (ограничењем) дужине визуре, - повећањем висине визуре (везано са претходним), - мерењем назад када је температурни градијент супротног знака, и - нивелањем при малим температурним градијентима. - Смањена видљивост се обично јавља у спарним данима без ветра. Грешка је случајног карактера, а може бити и груба. Ова грешка се отклања нивелањем при јасним ликовима.
62. Главне компоненте грешке висинске разлике нивелманске станице
У групу 2A главних компоненти дисперзија грешке висинске разлике нивелманске
станице h∆ спадају:
1. Грешка успостављања визуре SETε ;
2. Грешка референтне слике поделе летве REFδ ;
5. Грешка услед нестабилности инструмента (STI) STIε ;
6. Утицај места опажача*)
*)STIε ;
9. Грешка поделе летве (радне мере; RM) RMε ;
14. Температурне промене пантљике летве tδ ;
18. Грешка стабилности летве STLε ;
20. Разлика вертикалне рефракције на везним тачкама rδ ;
*) Улази у грешку 5.

19
22. Треперења ваздуха tvε ;
25. Стабилност репера/тачака STRε .
26. Грешка фактора јединице мере Eδ ;
Сада ће укупна грешка висинске разлике sh∆ из једне серије на станици као
аритметичке средине из čn читања бити
( ) ( ), ,
[ ] [ / ] [ ] ( ) ,
s s s s
s
s s
Z P Z Ph SET SET REF STIL RM RM
Z PZ Pm m C C r r tv tv E
č čr
d d h
d dh t d h
n n
∆ ε ε
° °
∆
∆ = ε − ε + ∆ ⋅ δ + ε + ε − ε
+∆ γ ∆ + δ − δ + ε − ε + ∆ δ
∑ ∑14 2 43
(8.5.1)
где је I, IIs ==== ознака серије, а
, , , , , , ,s sZ PSTIL s STI s STL s STL s s I IIε = ε + ε − ε = , (8.5.2)
заједнички утицај нестабилности инструмента и летава у серији.
Средњу квадратну грешку висинске разлике из једне серије на станици са čn
читања, 0h∆ , добићемо као математичко очекивање квадрата грешке (8.5.1), тј.
( )0
2 2 22,
22 21,0 0
2 23,0/] ,[ , ,
sh h d s I IIh∆ ∆ ′σ σ ′σ= = =σ+ ∆∆ +′ ρM (8.5.3)
са
2 2
2
21,0 ,
2 2 2 22,0
2 2 2 23,0
( )
( )
( )
2 2
22
RM STIL
S
R
ET r tvč
EF t E
a
b
c
n
∆
ε
∆
′σ = σ + σ
′σ = σ + σ +
′
σ
σ = σ + γ
σ +
σ
. (8.5.4)
Укупна грешка висинске разлике h∆ на станици, као средине из две серије мерења, биће
(((( )))) (((( ))))
(((( )))), , , ,
1 1
2 21 1
( )2 2
1.
2
I I II II I I II II
I I II II
I I II II
Z P Z P Z P Z Ph SET SET SET SET REF STIL STIL STIL STIL
Z P Z PRM RM RM RM I II
Z P Z Ptv tv tv tv E
č č č č
d d d d h
h t d r r
d d d dh
n n n n
∆
ε ε ε ε
∆ ε ε ε ε ∆ δ ε ε ε ε
ε ε ε ε ∆ γ ∆ ∆ ∆
ε ε ε ε ∆ δ
= − + − + ⋅ + − + −= − + − + ⋅ + − + −= − + − + ⋅ + − + −= − + − + ⋅ + − + −
+ − + − + ⋅ ⋅ + ++ − + − + ⋅ ⋅ + ++ − + − + ⋅ ⋅ + ++ − + − + ⋅ ⋅ + +
+ − + − + ⋅+ − + − + ⋅+ − + − + ⋅+ − + − + ⋅
∑ ∑ ∑ ∑∑ ∑ ∑ ∑∑ ∑ ∑ ∑∑ ∑ ∑ ∑
(8.5.5)
Сада ће средња квадратна грешка висинске разлике h∆ на станици, као средине
из две серије мерења, свака са čn читања, бити
22 2
,0 1,2 23,0 0
2 22,0( ,/ )h d h∆ σ σ= σ + ∆+σ ρ са (8.5.6)
20
2 2
2 2 2 2 23,0
21,0 ,
2 2 2 22,0
1 1
( )
( )
( )
2
RM STIL
SET
REF t E
r tvčn
a
b
c
ε
∆
∆
σ = σ + σ
σ = σ + σ
σ = σ + γ
σ
σ
+
+ σ
(8.5.7)
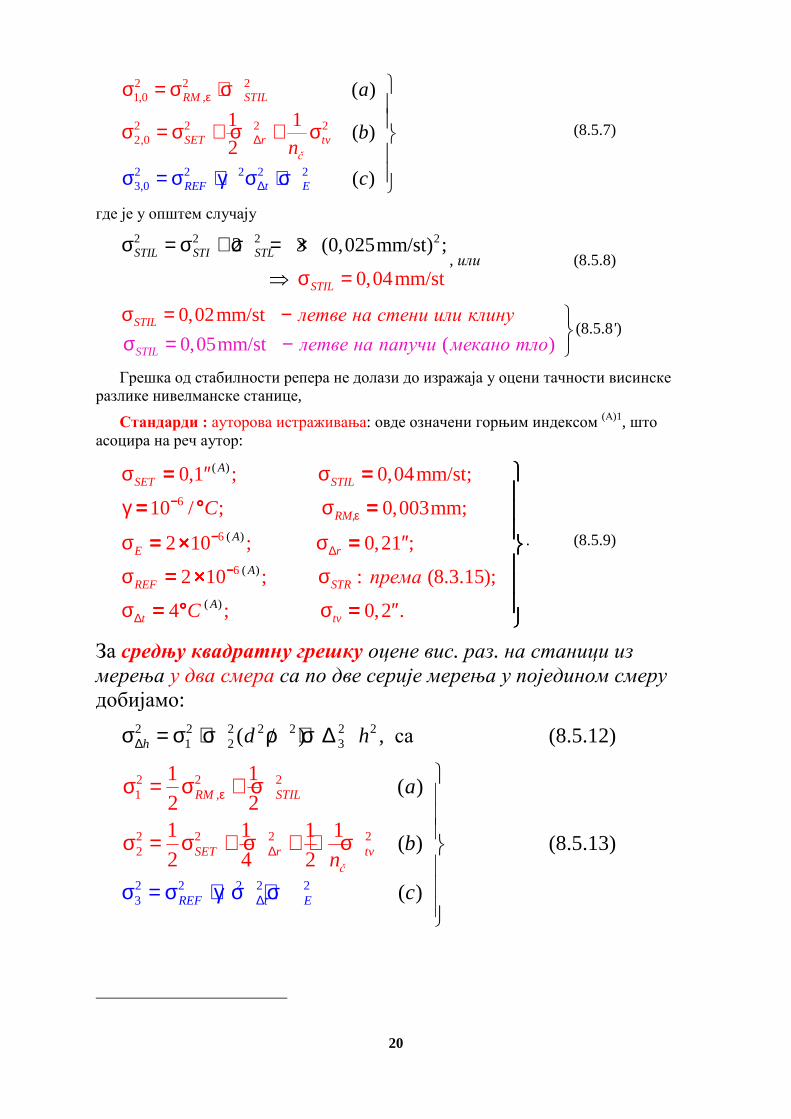
где је у општем случају
2 2 2 22 3 (0,025mm/s
0,04mm
t
/st
) ;S
STI
TIL STI STL
Lσ =
σ = σ + σ = ×
⇒, или (8.5.8)
0,02mm/st
0,05mm/st ( )STI
TI
L
S L
летве на папучи мекано тло
летве на стени или клину
σ = −σ = −
(8.5.8')
Грешка од стабилности репера не долази до изражаја у оцени тачности висинске разлике нивелманске станице,
Стандарди : ауторова истраживања: овде означени горњим индексом (А)1, што асоцира на реч аутор:
( )
(
6
)
( )6
( )
6
0,1 ; 0,04mm/st;
10 / ; 0,003mm;
2 10 ; 0,21 ;
2 10 ; : (8.3.15);
4 ; 0,2 .
A
A
SET STIL
RM,
E r
REF STR
t t
A
Av
C
према
C
ε
∆
∆
σ ″ σ
γ σ
σ σ ″
σ σ
σ σ ″
−−−−
−−−−
−−−−
= == == == =
= ° == ° == ° == ° =
= × == × == × == × =
= ×= ×= ×= ×
====
° =° =° =° =
. (8.5.9)
За средњу квадратну грешку оцене вис. раз. на станици из мерења у два смера са по две серије мерења у поједином смеру добијамо:
2 2 2 2 2 2 21 2 3( / )h d h∆σ = σ + σ ρ + σ ∆ , са (8.5.12)
2 2
2 2 21 ,
2 2 23
2 2 2 22
1 12 21 1 1 12 4 2
( )
( )
( )REF t E
RM STIL
SET r tvčn
a
b
c∆
ε
∆
σ = σ + σ
σ = σ + σ
σ =
+ ⋅ σ
σ + γ σ + σ
(8.5.13)
21
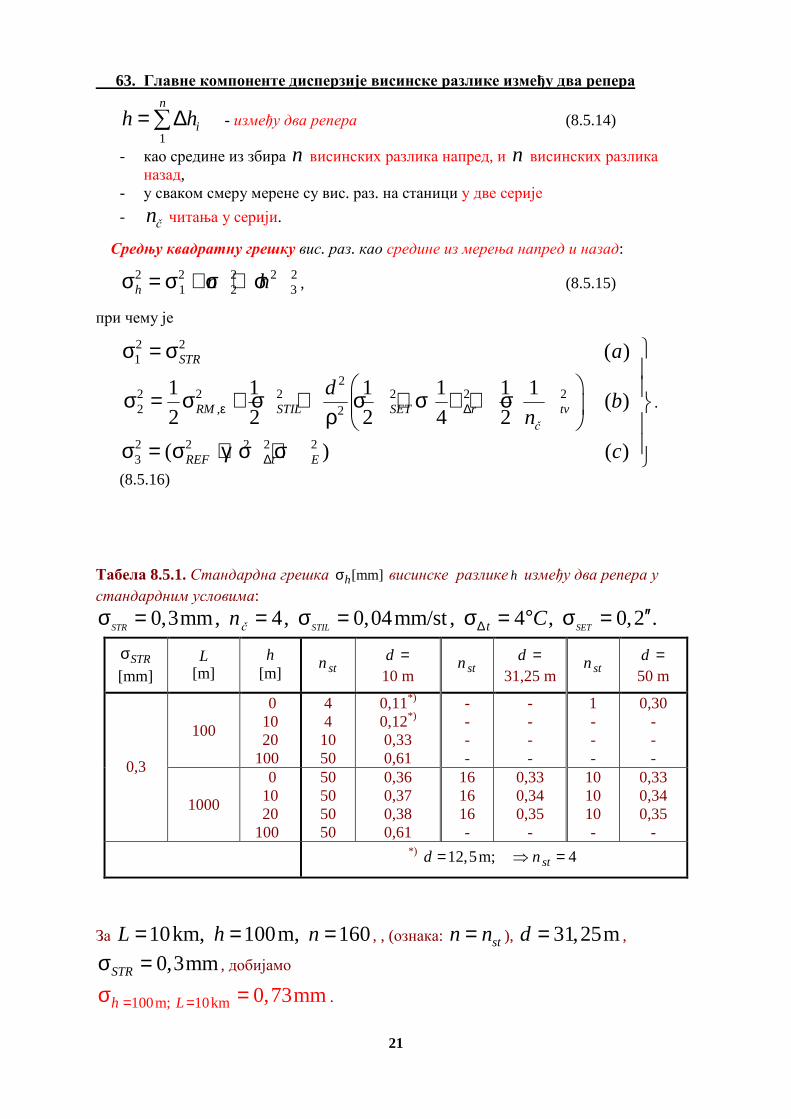
63. Главне компоненте дисперзије висинске разлике између два репера
1
n
ih h= ∆∑ - између два репера (8.5.14)
- као средине из збира n висинских разлика напред, и n висинских разлика назад,
- у сваком смеру мерене су вис. раз. на станици у две серије
- čn читања у серији.
Средњу квадратну грешку вис. раз. као средине из мерења напред и назад:
2 2 2 2 2
1 2 3h n hσ = σ + σ + σ , (8.5.15)
при чему је
2 21
22 2 2 2 2 22 , 2
2 2 2 2 23
( )
1 1 1 1 1 1( )
2 2 2 4 2
( ) ( )
STR
RM STIL SET r tvč
REF t E
a
db
n
c
ε ∆
∆
σ = σ
σ = σ + σ + σ + σ + ⋅ σ ρ σ = σ + γ σ + σ
.
(8.5.16)
Табела 8.5.1. Стандардна грешка [mm]hσ висинске разлике h између два репера у стандардним условима:
0,3mm, 4, 0,04mm/st , 4 , 0,2 .STR STIL SETč tn C∆ ′′σ = = σ = σ = ° σ =
STRσ
[mm] L
[m] h
[m] stn d = 10 m
stn d = 31,25 m
stn d = 50 m
100
0 10 20
100
4 4 10 50
0,11*)
0,12*) 0,33 0,61
- - - -
- - - -
1 - - -
0,30 - - - 0,3
1000
0 10 20
100
50 50 50 50
0,36 0,37 0,38 0,61
16 16 16 -
0,33 0,34 0,35
-
10 10 10 -
0,33 0,34 0,35
-
*) 12,5m; 4std n= ⇒ =
За 10km, 100m, 160L h n= = = , , (ознака: stn n= ), 31,25md = ,
0,3mmSTRσ = , добијамо
100m; 10km 0,73mmh L= =σ = .
22
65. Горња граница тачности мерења висинске разлике
Најбољу тачност можемо добити при :
• максималној стабилн. репера (стубова), ( 0,1mm)STRσ = ,
• минималној рефракцији ( 0,1 )r∆ ′′σ = ,
• макс. тачности успостављања хор. визуре ( 0,1 )SET ′′σ = ,
• максималном броју читања летве (25),
• макс. стабилности инстр. и летви ( 0,02mmSTILσ = ),
• минималној темпер. промени пантљике летве ( 1 Ct∆ = ° ), оптималној
дужини визуре ( 31,25md =opt i mal no ) и
• оптималном броју станица ( 16)n =opt i mal no .
Сада, према (8.5.13) добијамо горњу границу тачности висинске разлике између два репера
2 2
2 2 21 ,
2 2 23
2 2 2 22
1 12 21 1 1 12 4 2
( )
( )
( )REF t E
RM STIL
SET r tvčn
a
b
c∆
ε
∆
σ = σ + σ
σ = σ + σ
σ =
+ ⋅ σ
σ + γ σ + σ
(8.5.13)
за− =σ = 0,14mm 1kmh L . (8.7.1)
8.8 Границе интервала поверења (ИП) (Дозв. одступања) у генералном нивелману
Границе ИП (дозв. одступања) зависе од услова при мерењу што треба имати у
виду. Овде највише долази до изражаја нестаб. инструмента и летава, STILσ
А) Границе интервала поверења разлика висинских разлика на станици
У разликама вис. раз. на станици не долазе до изражаја грешке треће компоненте
дисперзија мерења из (8.5.6), па дисперзија разлике 0d h∆ гласи

23
0
22 2 2
1,0 2,0 22 2d h
d∆σ = σ + σ
′′ρ, (8.8.1)
па је дозвољено одступање:
00; 1 1 / 2 d hd h t−α −α ∆∆ = σ , (8.8.2)
где је 1 / 2t −α коефицијент обухвата, (квантил нормалног распореда за вероватноћу
поверења 1− α ), али при обостраном ограничењу. У табели 8.8.1 дате су границе
интервала поверења за неке дужине визура, при 4čn = :
Tabela 8.8.1. Границе интервала поверења разлика вис. раз. на станици.
Дужина визуре [m] :d 2 5 10 15 20 25 30 35 40 50
; [mm] :0 0,95∆d h 0,11 0,11 0,11 0,12 0,12 0,13 0,14 0,15 0,16 0,18
; [mm] :0 0,99∆d h 0,15 0,15 0,15 0,16 0,16 0,17 0,18 0,19 0,21 0,23
Б) Границе интервала поверења разлика висинских разлика ''напред - назад'' у нивелманском влаку
Дисперзија разлике ''напред - назад'' у нивелманском влаку је:
0
2 2 2 2 21 2 0 3dh n hσ = σ + σ + σ , (8.8.3)
при чему је
2 21
22 2 2 2 2 22 , 2
2 2 2 2 23
2 ( )
22 2 2 ( )
( ) ( )
STR
RM STIL SET r tvč
REF t E
a
db
n
c
ε ∆
∆
σ = σ
σ = σ + σ + σ + σ + σ ρ σ = σ + γ σ + σ
.(8.8.4)
Сада ће границе интервала поверења разлика ''напред - назад'' бити
; = ⋅00 1-α 1-α/2 σdhdh t , (8.8.5)
где је
• 1 / 2 0,975 1,960 1 0,95 .t t за обостр ограничење−α = = − α = −
• 1 / 2 0,995 2,576 1 0,99 . .t t за обостр ограничење−α = = − α = −
За 0,2 mm, 0,04 mm, 4STR STIL čnσ = σ = = , добијамо:
24
( )
0
22 2 2 2mm
2
2 11mm
0,08mm 0,003218mm 0,0841
2,4 10
dh
dn "
h −
σ = + + ⋅ ′′ρ
+ ⋅ ⋅
.(8.8.3')
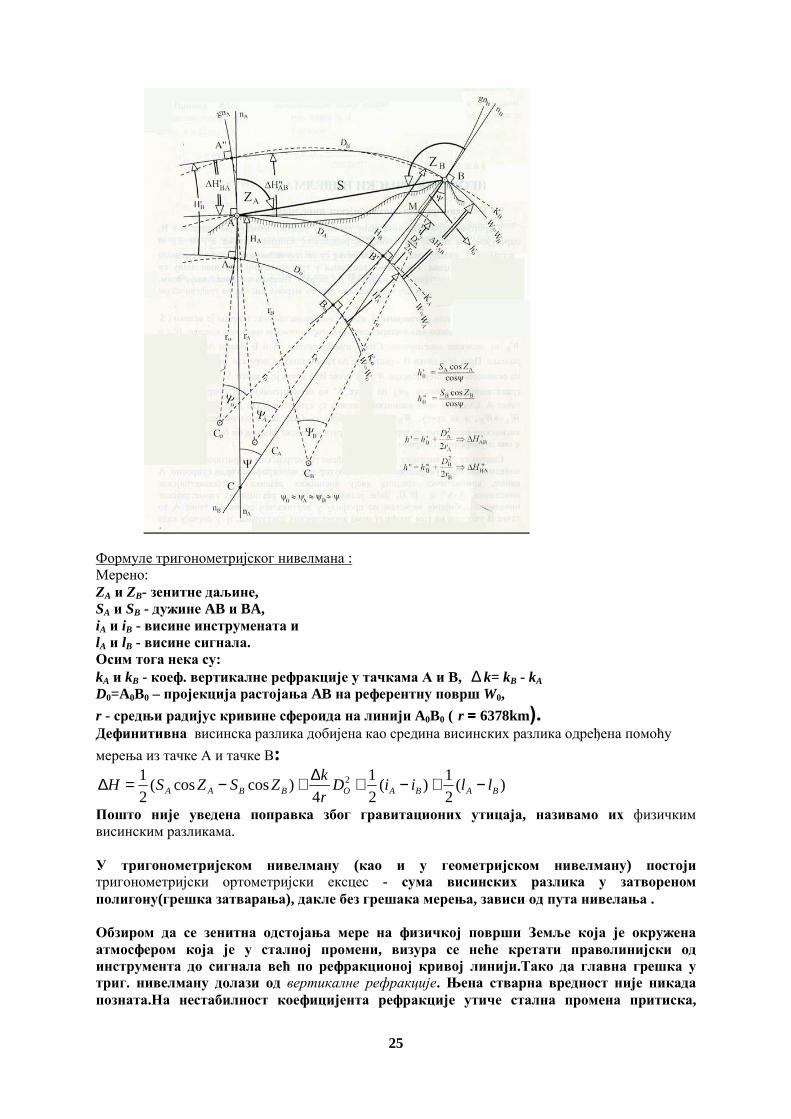
66. ТРИГНОМЕТРИЈСКИ НИВЕЛМАН : Концепција ТН
Тригонометријски нивелман- одређивање висинске разлике између две тачке А и В на
основу измерених астрономских зенитних углова Z A и Z B или вертикалних углова и растојања S између тачака. Растојања су много већа од растојања од нивелира до летве у ген. нивелману. За мерење зенитних даљина служи нам теодолит са вертикалним кругом(лимбом) . Помоћу цевасте либеле или аутоматски (помоћу компензатора) доводимо главну осовину теодолита у вертикалу тачке мерења, са тачношћу 0.1''. Тачност мерења зенитне даљине из два положаја дурбина креће се од 0,5" до 2". Астрономски зенитни угао је угао у вертикалној равни од правца гравитационе нормале (правац зенита) у тачки мерења до правца циљне тачке.
Вертикални угао : 90° минус зенитна даљина. Примењује се у брдовитим и тешко приступачним теренима и када су одстојања већа.
Када су одстојања дужа и терен раван, ТН не даје добре резултате, већ се користи геометријски нивелман.Користи се у инжењерској геодезији : при трасирању саобраћајница, одређивање висина објеката, праћењу слегања итд.
S- растојање између нивовских површи AW i BW
AW - нивовска површ тачке А (нивовска површ која пролази кроз тачку А и управна је на правац силе земљине теже)
BW - нивовска површ тачке В (нивовска површ која пролази кроз тачку В и управна је на правац силе земшине теже)
WO-нулата нивовска површ (површ која се поклапа са површи идеално мирних мора и океана).
nА, nB- нормала на елипсоид gnA- гравитациона нормала тачке А (крива линија која пролази кроз тачку А и управна
је на све нивовске површи) Обзиром да је растојање S велико (неколико km). AW i BW нису еквидистантне па
између тачака А и В имамо две висинске разлике: - Prva visinska razlika- u tački B : AB∆H` -rastojanje po gnB od tačke B’ na evipotencijalnoj
površi AW do B. Druga visinska razlika- u tački A: BA∆H` -rastojanje po gnA od tačke A’’ na
ekvipotencijalnoj površi BW do A. Smer ovih visinskih razlika je suprotan - odreñen strelicama (da bi odgovarali visinskim
razlikama na terenu) Резултати мерења су потврдили да су висинске разлике одређене геометријским и
тригонометријским нивелманом упоредиве, јер аритметичка средина двеју висинских разлика тригоном.нивелмана је једнака висинској разлици из геометријског нивелмана добијеној мерењем по профилу у вертикалној равни од тачке А до тачке В.Ово важи у случају када је дужина S до неколико км.
)''(21
)'''(21
BAHABHABHABHHABH ∆−∆=∆+∆=∆≡∆
25
Формуле тригонометријског нивелмана : Мерено: ZA и ZB- зенитне даљине, SA и SB - дужине AB и BA, iA и iB - висине инструмената и lA и lB - висине сигнала. Осим тога нека су: kA и kB - коеф. вертикалне рефракције у тачкама А и B, ∆ k= kB - kA D0=A0B0 – пројекција растојања AB на референтну површ W0,
r - средњи радијус кривине сфероида на линији A0B0 ( r ==== 6378km). Дефинитивна висинска разлика добијена као средина висинских разлика одређена помоћу
мерења из тачке А и тачке В:
)(21
)(21
4)coscos(
21 2
BABAOBBAA lliiDr
kZSZSH −+−+∆+−=∆
Пошто није уведена поправка због гравитационих утицаја, називамо их физичким висинским разликама. У тригонометријском нивелману (као и у геометријском нивелману) постоји тригонометријски ортометријски ексцес - сума висинских разлика у затвореном полигону(грешка затварања), дакле без грешака мерења, зависи од пута нивелања . Обзиром да се зенитна одстојања мере на физичкој површи Земље која је окружена атмосфером која је у сталној промени, визура се неће кретати праволинијски од инструмента до сигнала већ по рефракционој кривој линији.Тако да главна грешка у триг. нивелману долази од вертикалне рефракције. Њена стварна вредност није никада позната.На нестабилност коефицијента рефракције утиче стална промена притиска,
26
температуре , влажност ваздуха, конфигурације терена, дужине визуре,висине визуре, доба дана.
Ефекат ове грешке у вис. раз. расте са квадратом дужине стране. Две методе прецизног тригонометријског нивелмана : - Са истовременим обостраним одређивањем вис. разлика -Са једностраним одређивањем висинске разлике
67. ТН. Дефиниција методе истовременог одређивања висинских разлика Метода је заснована на истовременом мерењу зенитних даљина у тачкама А и В,
које се мере у q серија са s мерења у серији (обично 5 или 10 мерења), у циљу контроле и повећане тачности одређивања висинских разлика.
Серија мерења –средњим концем се мери у I и II положају дурбина. Сесија- састоји из више серија мерења. Дужине се мере прецизним ЕОД-има са обе тачке пре почетка и после завршетка
мерења зенитне даљине. Висине инструмената и сигнала се, такође, мере пре и после мерења зенитне даљине, до на 0,1mm; Дефиниција методе симултаног одређивања висинских разлика: Стабилизација тачака Стубови; изизетно без стубова
Профили страна Симетрични Временске прилике за мерења Облачно; изотермија ваздуха Теодолити Електронски прецизни (0,5") Индекс "вертикалног" круга Стабилност: 0,1" Мерења са друге тачке Истовремено са обе тачке Сесије мерења Две; изузетно једна Постава у другој сесији Замена екипа, инстр. и прибора Број серија q у сесији Из оптим. тачности; али: q ≥ 2 Маркице за визирање Специјалне, или из комплета Растојања Специјалне, или из комплета Даљиномери ЕОД прецизни
Мерење дужина Пре и после зенитних даљина Поправке за дужине Атмосф. и за конст. ЕОД-а Температурна адптација инструмената и прибора
Атмосф. и за конст. ЕОД-а
Заштита инструмента Сунцобран Висине инструмента и сигнала Прецизно мерене (на 0,1 mm),
пре и после зен. даљина Закривљеност геоида на про- филу управном на изолиније (Буге)
Друге, или прве разлике по km да су константне.
Маркицу за визирање постављамо у прекрет дурбина тако да меримо само висину инструмента и узимамо да је l=i
Висинску разлику између тачака A и B оцењујемо по формули,али без члана са ∆ k .
)(21
)(21
4)coscos(
21 2
BABAOBBAA lliiDr
kZSZSH −+−+∆+−=∆
68. ТН. Дефиниција методе једностраног одређивања висинских разлика Метода се користи за прецизно одређивање висинских разлика на инжењерским објектима, са мерењем зенитне даљине при КЛ.(Зенитно одстојање опажа само са једне тачке). Утицај рефракције зависи од дужине S. Уколико је одстојање између тачака дуже, рефракција има већи утицај на мерење зенитних одстојања. (S<990m- не води се рачуна о утицају рефракције).
27
Дефиниција методе симултаног одређивања висинских разлика: Прецизни нивелман тачака/репера геодетске мреже у једном смеру Теодолити (у тоталној станици)
са две независне висинске разлике на станици; Електронски прец. (0,5"- 1")
Компенз. индекса "вертик." круга 0,1"- 0,3" Температурна адаптација теодол. Најмање 30 минута Временске прилике Сви атмосферски услови Мерење зенитне даљине При KL Контрола 2VV Сваких пола сата Увођење поправке за VV Сваких пола сата Трајање мерења са станице Око 0,5 сати Дужине визура Максимално 250 m Рефракција Не узима се у обзир ЕОД Прецизни (из тоталне стан.) Маркице и призме Из комплета са инструм. Висина инструмента и сигнала Ручном пантљ. 3 пута између
ногара статива на 0,1 mm и редукција за косо мерење
Формуле за висинску разлику (9.1.2') са k = 0 . Висинску разлику између тачака A и B оцењујемо по формули , али без члана са рефракцијом.
BaA
AAAB lidr
kZSH −+−+=∆ 2
02
1cos'
70. ТН.Симуланти ТН.-Распореди грешака: Грешка поделе радне мере – грешке''вертикалног лимба'',Деректификација теодолита под утицајем спољних услова, Вертикална рефракција. Грешка поделе радне мере – грешке''вертикалног лимба''- јављају се при изради поделе круга као и због деформације круга услед утицаја температуре где цртице неће пасти у положај номиналне угловне вредности. Укупна грешка сваке црте поделе састоји се од систематске и случајне грешке. Стандард систематских грешака лимба је 0,5'', а случајних 0,1''. Редукција систематских грешака лимба биће боља ако пре мерења у другом положају дурбина лимб окренемо за 90.Испитивање грешака лимба изводи се хелијум – неонским ласерским интерферометрима са резолуцијом 0,03''. Обзиром да је збир грешака поделе круга једнак 0, следи да н мерења једног угла треба равномерно распоредити по кругу, односно да се ове грешке у аритметичкој средини збира углова компензују скоро потпуно. Деректификација теодолита под утицајем спољних услова- ова грешка може бити врло велика и може довести до великих грешака у мерењу праваца. Првенствено из разлога промене температуре. Треба водити рачуна да се приликом транспорта теодолит темературно адаптира и да се не мери при високом засићењу ваздуха воденом паром.Највећи утицаји су преко промене колимације и грешака у систему детекције лимба. Грешка правца од деректификације теодолита је систематска.Не може се елиминисати али се може смањити поштовањем одређених правила приликом мерења.
28
Вертикална рефракција- делује као случајна грешка. Обзиром да се зенитна одстојања мере на физичкој површи Земље која је окружена атмосфером која је у сталној промени, визура се неће кретати праволинијски од инструмента до сигнала већ по рефракционој кривој линији.Тако да главна грешка у триг. нивелману долази од вертикалне рефракције. Њена стварна вредност није никада позната.На нестабилност коефицијента рефракције утиче стална промена притиска, температуре , влажност ваздуха, конфигурације терена, дужине визуре,висине визуре, доба дана(најбоље је мерити у јутарњим и вечерњим часовима). Ефекат ове грешке у вис. раз. расте са квадратом дужине стране. Тачнији резултати се могу добити при истовременом мерењу са обе тачке из разлога само утицаја разлика коефицијената рефракције BA kkk −=∆ на тачкама А и В. На основу мерења, стандард разлике рефракције износи
10.0=∆kσ за S=1 км, што даје стандард променљивости разлике зенитних даљина :
"6.1, =∆ rZσ
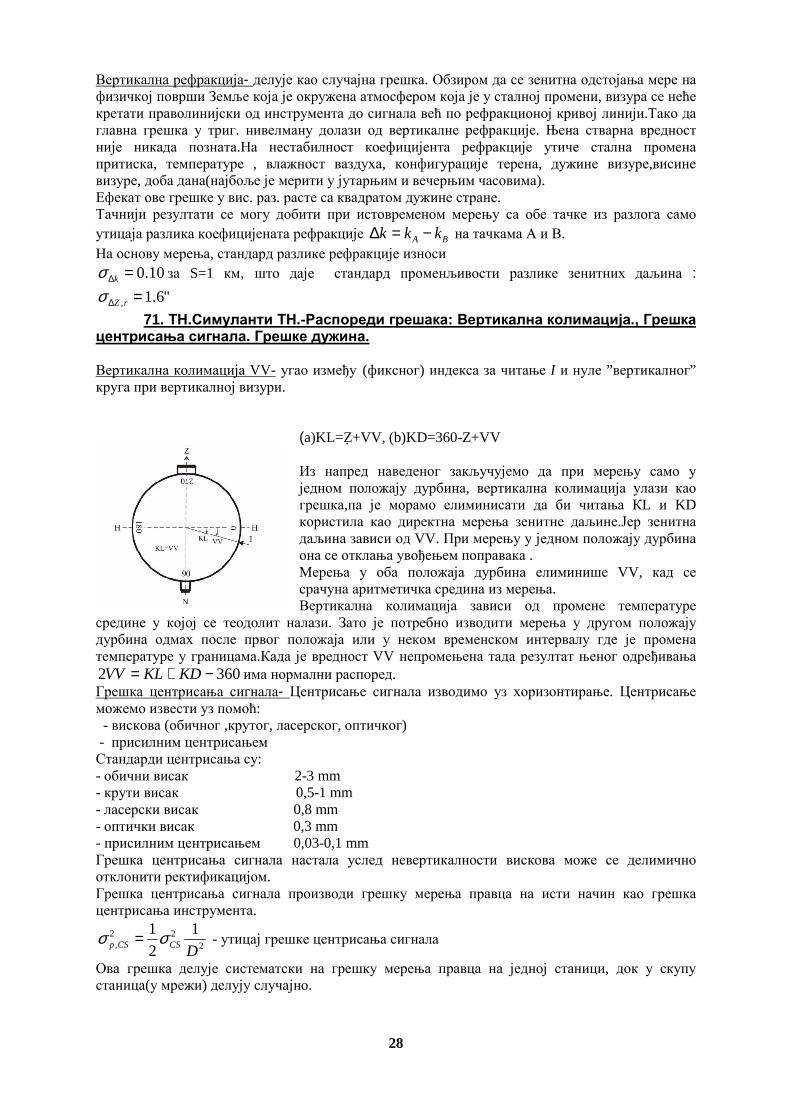
71. ТН.Симуланти ТН.-Распореди грешака: Вертикална колимација., Грешка центрисања сигнала. Грешке дужина. Вертикална колимација VV- угао између (фиксног) индекса за читање I и нуле ”вертикалног” круга при вертикалној визури.
(a)KL=Z+VV, (b)KD=360-Z+VV Из напред наведеног закључујемо да при мерењу само у једном положају дурбина, вертикална колимација улази као грешка,па је морамо елиминисати да би читања КL и KD користила као директна мерења зенитне даљине.Јер зенитна даљина зависи од VV. При мерењу у једном положају дурбина она се отклања увођењем поправака . Мерења у оба положаја дурбина елиминише VV, кад се срачуна аритметичка средина из мерења. Вертикална колимација зависи од промене температуре
средине у којој се теодолит налази. Зато је потребно изводити мерења у другом положају дурбина одмах после првог положаја или у неком временском интервалу где је промена температуре у границама.Када је вредност VV непромењена тада резултат њеног одређивања
3602 −+= KDKLVV има нормални распоред. Грешка центрисања сигнала- Центрисање сигнала изводимо уз хоризонтирање. Центрисање можемо извести уз помоћ: - вискова (обичног ,крутог, ласерског, оптичког) - присилним центрисањем Стандарди центрисања су: - обични висак 2-3 mm - крути висак 0,5-1 mm - ласерски висак 0,8 mm - оптички висак 0,3 mm - присилним центрисањем 0,03-0,1 mm Грешка центрисања сигнала настала услед невертикалности вискова може се делимично отклонити ректификацијом. Грешка центрисања сигнала производи грешку мерења правца на исти начин као грешка центрисања инструмента.
222
,
121
DCSCSp σσ = - утицај грешке центрисања сигнала
Ова грешка делује систематски на грешку мерења правца на једној станици, док у скупу станица(у мрежи) делују случајно.
29
Грешке дужина при великим нагибима мерене стране може значајно утицати на тачност висинскеразлике. Претежно је случајног карактера, а избором инструмената и поступка мерења на терену можемо утицати на њено смањење. а) Грешка јединице мере и грешка брзине светлости у вакууму 1. Грешка одређивања брзине светлости у вакууму - (случајна грешка, а на резултате мерења
делује систематски, стандард 9104 −⋅=voσ , спада у групу безначајних грешака)
2. Грешка одређивања фактора јединице мере- (случајна грешка, а на резултате мерења делује систематски, стандард : - ако јединицу мере одређујемо помоћу мерења фреквенције 10 -8
и 10 -7
- ако јединицу мере одређујемо помоћу мерења на основици kmmmmm /11 +
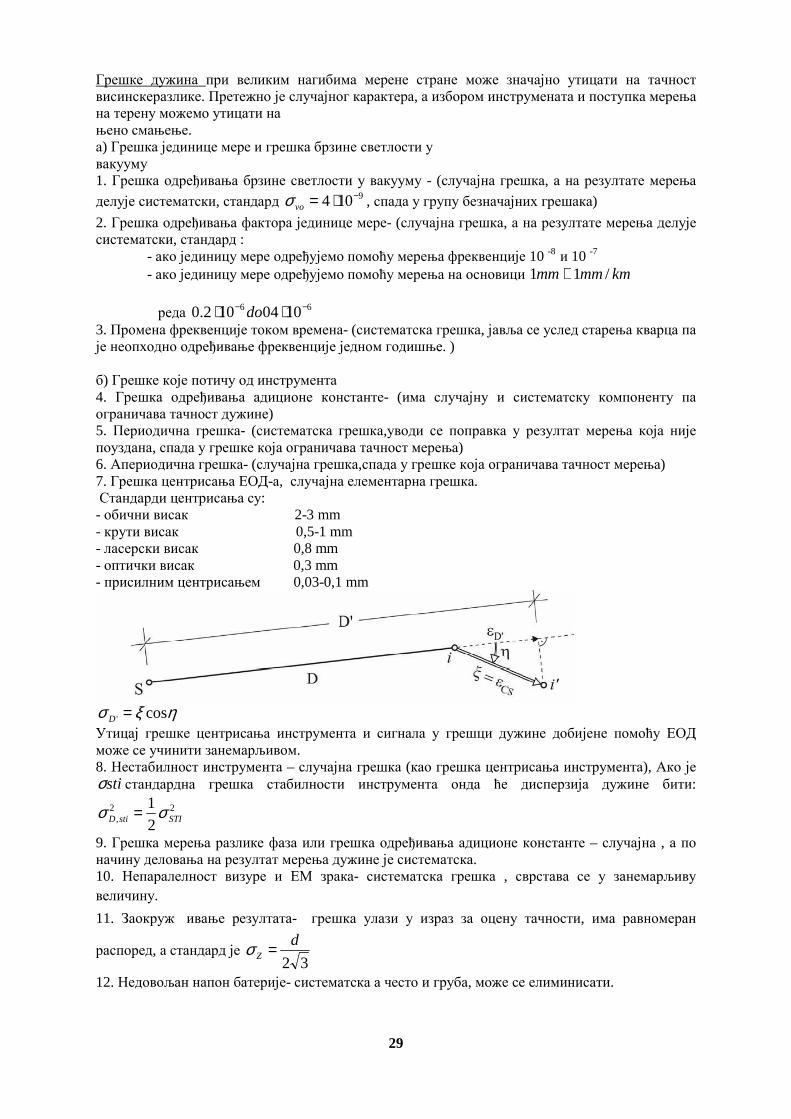
реда 66 1004102.0 −− ⋅⋅ do 3. Промена фреквенције током времена- (систематска грешка, јавља се услед старења кварца па је неопходно одређивање фреквенције једном годишње. ) б) Грешке које потичу од инструмента 4. Грешка одређивања адиционе константе- (има случајну и систематску компоненту па ограничава тачност дужине) 5. Периодична грешка- (систематска грешка,уводи се поправка у резултат мерења која није поуздана, спада у грешке која ограничава тачност мерења) 6. Апериодична грешка- (случајна грешка,спада у грешке која ограничава тачност мерења) 7. Грешка центрисања ЕОД-а, случајна елементарна грешка. Стандарди центрисања су: - обични висак 2-3 mm - крути висак 0,5-1 mm - ласерски висак 0,8 mm - оптички висак 0,3 mm - присилним центрисањем 0,03-0,1 mm
ηξσ cos' =D
Утицај грешке центрисања инструмента и сигнала у грешци дужине добијене помоћу ЕОД може се учинити занемарљивом. 8. Нестабилност инструмента – случајна грешка (као грешка центрисања инструмента), Ако је
stiσ стандардна грешка стабилности инструмента онда ће дисперзија дужине бити:
22, 2
1STIstiD σσ =
9. Грешка мерења разлике фаза или грешка одређивања адиционе константе – случајна , а по начину деловања на резултат мерења дужине је систематска. 10. Непаралелност визуре и ЕМ зрака- систематска грешка , сврстава се у занемарљиву величину.
11. Заокруж ивање резултата- грешка улази у израз за оцену тачности, има равномеран
распоред, а стандард је 32
dZ =σ
12. Недовољан напон батерије- систематска а често и груба, може се елиминисати.
30
в) Грешке које потичу од рефлектора 13. Грешка центрисања рефлектора – делује као грешка центрисања инструмента, дисперзија
дужине: 2
22
,CS
CSiD
σσ =
14. Нестабилност рефлектора – делује као грешка центрисања, дисперзија
дужине22
, 21
STSSTSD σσ = , где је STSσ стандардна грешка стабилности сигнала.
15. Грешка орјентације рефлектора, систематска променљива.Може свести на занемарљиву вредност. г) Грешке од спољних услова 16. Грешка одређивања брзине светлости у ваздуху – случајна грешка, стандард јој је непознат. 17. Грешка рефракционог индекса- има случајну и систематску компоненту. Код кратких дужина доминантна је случајна, а код дужих (преко 1км) је више систематска. 18. Грешке поправака за атмосферске утицаје- делују систематски. Поправке за адициону и мултипликациону константу су занемарљиве, док грешка метеоролошке поправке ограничава тачност мерења. 19. Рефлексија таласа- има случајну и систематску компоненту. Ова грешка ограничава тачност мерења.Случајни утицаји се при мерењу дужина у једном смеру могу делимично умањити , мерењем у супротном смеру систематски утицај се смањује. 20. Недовољна јачина сигнала- случајна и може се свести на занемарљиву вредност. 76.Симултани ТН-Распоред грешака:Грешка израде сигнала,Остали температурни утицаји, Рад стубова/репера у вертикали. Један од главних елемената у постизању високе тачности ТН су сигнали за визирање. Морају бити израђени тако да у свим условима дају што је могуће бољу видљивост. Грешке везане за сигнал за визирање су: 1)Грешка израде сигнала за визирање 2)Грешка центрисања сигнала, 3)Грешка одређивања висине сигнала, 4)Нестабилност сигнала. -Грешка израде сигнала за визирање: Ова грешка је случајног карактера,у висинској разлици делује систематски,али у збиру и у разлици са другим сигналом делује случајно.
0,2mmlσ =
-Остали температурни утицаји: Осим директног утицаја температуре на теодолит,имамо индиректне утицаје који делују преко промене рефракције,треперања ваздуха,загревања тла,торзије стубова и сл. Ови утицаји на резултате мерења, могу се смањити мерењем при малим температурним разликама тј.у раним јутарњим и касним послеподневним сатима. -Рад стубова репера у вертикали: Ова грешка је неизбежна у епохи мерења. Производи случајну грешку висине репера /тачке (ФОРМУЛА) Међутим ако су репери фундирани у мекано тло постоји могућност систематског спуштања и издизања репера/тачке. Стандард стабилности репера /тачке у вертикали зависи од типа стабилизације и састава тла у који је репер/тачка фундиран и непознат је.
31
79.Оцена тачности обострано одређених висинских разлика:Отклоњиве,занемарљиве,главне компоненте грешке висинске разлике Како смо грешке разврстали по извору настајања тако их можемо разврстати по категоријама и то:
- отклоњиве, - занемарљиве - грешке главних компоненти и - грешке остатка
Елиминацију грешака изводимо методом рада или уношењем поправака. Методом рада отклањамо следеће грешке: -вертикалну колимацију и -ексцентрицитет центра „вертикалног“круга. Уношењем поправке за нагиб главне осовине теодолита,у смеру визирања поправљамо мерење зенитног растојања (све ово аутоматски ради микрорачунар у теодолиту) У групу занемарљивих грешака сврставамо оне грешке чији је утицај у укупној грешци практично безначајан.То су грешке: - Грешке поделе радне мере - Деректификација теодолита због спољних утицаја - Грешка центрисања инструмента - Грешка израде сигнала за визирање - Грешка центрисања сигнала - Остали температурни утицаји - Недовољна јасноћа ликова и - Грешка дужине
3º. Главне компоненте грешака су у трећој групи и разврстаћемо их по компонентама дисперзија.
3ºа). За вис. раз. одређену из две сесије мерења, дисперзија висинске разлике ће бити:
2 2 2 2
1 2 , ( ; )H HS Sу километрима у милиметрима∆ ∆σ = σ + σ σ ,
са компонентама дисперзија
1
4
2 2 2 2 21 , sin ,i STI V S иσ = σ + σ + σ α
212 122 2 2 2 2 202 2
10 10cos mm /km ,
324Z k
D
q rn∆
′′σ = α ⋅σ + σ ⋅ ′′ρ где је:
iσ - стандард висине инструмента и сигнала (9.6.4),
,STI Vσ - стандард стабилности инструмента у вертикали (8.3.12),
α - нагнутост стране AB,
Sσ - стандард мерења стране AB,

32
0D - пројекција стране S на референтну површ (можемо узети
хоризонтално D , или S - ако α није велико),
r - средњи полупречник сфероида линије AB ( 6378 kmr ≈ ),
S - коса дужина стране AB,
Zσ - стандард зенитне даљине,
k∆σ - стандард разлике рефракција у тачкама A и B , тј.
( )2 2 2 2 2 2 2, SET
1
2,Z vz tv dt itp Z tσ = σ + σ + σ + σ + σ + σ и
2 2
B Ak k k∆ −σ = σ ,
Стандард разлике рефракција k∆σ дат је у (9.5.11).
Грешка у вис. раз. 2 2( sin ) / 4Sσ α која потиче од грешке дужине може се сврстати у
грешке остатка.
3ºб). Ако је вис. раз. одређенa из једне сесије мерења, онда је:
2 2 2 2
1 2 , ( .; )H HS Sу килом у милиметрима∆ ∆σ = σ + σ σ ,
са компонентама дисперзија
12 2 2 2 2
1 , 22 2 sini STI V Sσ = σ + σ + σ α , и
212 122 2 2 2 2 202 2
10 10cos mm /km .
162Z k
D
q rn∆
′′σ = α ⋅σ + σ ⋅ ′′ρ
88.САТ: Фазна мерења, За одређивање фазних псеудодужина мере се фазе носећих таласа, изабраних са најкраћом таласном дужином. Метода има широку примену, а фаза се одређује упоређењем носећег таласа са референтним у пријемнику после издвајања кода. Примљени сигнал посебним техникама елиминише навигациону поруку, пошто одбаци ПРН код. Коначан резултат је доплерски померен носећи талас који служи за формирање резултата фазног мерења. Уз примену С/А кода, реконсруише се L1 носећи талас. Да би се реконструисао L2 носећи талас под АS условима развијене су многе технике, као квадрирање L2 сигнала. ( дорадићу ово питање после предавања)
89. САТ: Тропосферска рефракција, Тропосферска рефракција ефекат простирања ГПС сигнала у атмосферском слоју до висине 80 км, у ужем смислу обухвата најниже слојеве атмосфере до 11км – 17 км, са просечним температурним градијентом -65о
С/км.
33
Индекс преламања зависи од температуре, атмосферског притиска и парцијалног притиска водене паре. Рефракциони утицаји тропосфере се могу описати са више модела, као например, побољшани Саастамоинен-ов модел, где фигуришу два члана за побољшање, један који зависи од висине тачке са које се опажа, а други зависи од висине и зенитне даљине тачака путање електромагнетног таласа у тропосфери. Тачност овог модела је 2мм-3мм. Ова рефракција се не може елиминисати коришћењем мерења на двема фреквенцијама. Тропосферске корекције на тачкама врло малих међусобних растојања – до неколико километара су врло високо корелисане.
90. САТ: Јоносферска рефракција, Јоносфера се простире у различитим слојевима на висини од 50 до 1000 км изнад Земље. Та средина у односу на ГПС сигнал је дисперзивна и фазни индекс преламања зависи од густине електрона дуж путање таласа. Јоносферска рефракција се може елиминисати коришћењем два сигнала различитих фреквенција ( L1, L2 ) – двофреквентни метод. Моделом јоносферске поправке не може се у потпуности елиминисати утицај јоносфере јер модели не могу обухватити локалне јоносферске поремећаје а ни ефекте слабљења сигнала.
91.САТ: Дефиниција методе прецизног фазног мерења базног вектора, Статичка метода фазног прецизног мерења базних вектора у скраћеном облику се може дефинисати: 1. пријемници (антене) 1. истог типа 2. бр.електронских видљивих сателит 2. > 4 , добра електр. Видљивост 3. ефемерид 3. прецизне ( у накнадној обради) 4. интервал регистрације 4. 10с, 15с, 20с или 30с. 5. временски интервал 5. > 5ч, а према оптимизацији мерења – сесија тачности мерења 6. центрисање пријемника 6. присилно, оптички / ласер.висак 7. заштита од вишеструке 7. избор антене које унапређују рефлексије поларизацију сигнала,удаљеност од обј., антенски заштитник 8. заштита од ометања сигнала 8. Удаљеност од електронс.инстал. 9. оријентација антене 9. исте 10. аутокалибрација пријемника 10. опажање нулте базе 11. обрада података 11. накнадно 12. поправке 12. јоносферска, тропосферска 13. решавање фазних неодређености 13. статичке методе, комбинација кодних и носећих фаза 14. ГДОП 14. мањи од 6.

34
93. САТ: Распореди и параметри распореда грешака мерења базних вектора: Грешка мерења разлике фаза, Грешка висине инструмента, Резидуалне грешке тропосферске рефракције; Грешке се сврставају у 3 групе: у прву групу су сврстане грешке које делују независно од неког параметра ( коефицијент који множи грешку је 1), у другу групу су грешке променљиве у времену ( у сесији мерења ), а у трећу грешке које делују пропорционално дужини базног вектора. Упрву групу спадају грешке мерења разлике фаза, центрисања пријемника, фазног центра антене пријемника, разлике положаја фазних центара два пријемника (адициона константа), грешка стабилности инструмента (пријемника), грешка висине инструмента (пријемника). Удругу групу спадају грешке рефлексије сигнала, положаја сателита, ексцентрицитет фазног центра сателитске антене, резидуалне грешке јоносферске и тропосферске рефракције. Утрећу групу спадају грешке часовника у пријемнику, одређивања брзине светлости у ваздуху и вакууму и грешка фреквенције.
100.Модел оцене тачности оцене базног вектора (главне компоненте дисперзија, прва главна компонента дисперзија), У анализи утицаја случајних грешака на оцену базног вектора може се узети да је та
оцена добијена као аритметичка средина резултата мерења разлика фазних псеудо дужина (11.4.8), из ефективног броја тих резултата.
Грешка дужине b базног вектора у хоризонталној (X,Y) равни. Узимајући у обзир (11.4.8) из n фазних мерења за грешку оцене дужине базног
вектора добијамо:
где је:
,CI ABe ..............грешка од центрисања инструмента
,STI ABe - грешка од стабилности инструмента
,FC AB∆d - грешка разлике фазних центара
, , , , , .......................................ГРЕШКЕ КОЈЕ ДЕЛУЈУ НЕЗАВИСНО
1
,
1
1 1
n
CI AB STI AB FC AB AB ii
AB i
n
b Mn n
δ
∆=
+ +
= + +
∑ fe e d e
e, ,
1 1 1 var.......................ГРЕШКЕ КОЈЕ ДЕЛУЈУ ВАРИЈАБИЛНО
0, , .........................ГРЕШКЕ КОЈЕ ДЕЛУЈУ ПРОПОРЦИОНАЛНО
1 10
1
1 1
n n n
AB i AB ii i i
n ni
orb AB ii ii AB
I Tn
b b bn n
δ δ
ν ν δν ν
= = =
= =
+
+ ⋅ + ⋅ + ⋅
∑ ∑ ∑
∑ ∑d d

35
, ,1
1 n
AB iin =∑ fe - грешка мерења фазне разлике
,1
1 n
AB ii
Mn
δ=∑ - грешка вишеструке рефлексије сигнала
,1
1 n
AB ii
In
δ=∑ - грешка од резидуалне јоносферске рефракције
,1
1 n
AB ii
Tn
δ=∑ - грешке од резидуалне тропосферске рефракције
1
1 ni
i i AB
bn
νν=
⋅
∑
d- грешка од брзине светлости у ваздуху
0
0
bν
ν⋅d
- грешка од брзине светлости у вакуму
, ,1
1 n
orb AB ii
bn
δ=
⋅∑ - грешка од орбите сателита
Изостављене су грешке: часовника у тачкама А и Б, кашњења фаза носећих таласа у тачкама А и Б и грешка стабилности фреквенције сигнала пошто су све оне елиминисане у (11.4.8).
Главне компоненте дисперзија координатних разлика базног вектора Тачност базних вектора у општем случају креће се од 610− до 810− .Тако за дужине
базних вектора до 20км' са интервалом опажања од 0,5 до 12 часова тачност базних вектора кретаће се од 610− до 710− , док ће се за базне векторе дуже од 100км' тачност
кретати до 810− . Модел главних компоненти дисперзије биће изабран за највећу реалну тачност
базних вектора, 810− , која се добија за дужине базног вектора веће од 100км' и временски интервал мерења већи од 12 часова.У том случају ће грешка остатка задовољити:
2 21
9B A≤
2B - група-дисперзије са мањим вредностима или остатак дисперзије.У овој групи су оне грешке које се могу свести на жељену малу вредност,рецимо методом рада,избором услова при мерењу или уношењем поправака,
2A - група главних компоненти дисперзије. Компоненте дисперзије приказане за координатне разлике ∆X,∆Y и ∆h биће:
( )( )( )
2 2 2 21, 2, ,var 2
2 2 2 21, 2, ,var
2 2 2 21, 2, ,var
0,42
0,3 ,
2,3
X X X
Y Y Y
h h h
a k b
b k b kn
c k b
∆ ∆ ∆
∆ ∆ ∆
∆ ∆ ∆
= + + ⋅ ⋅ = + + ⋅ ⋅ = ⋅
= + + ⋅ ⋅
n
nn n
n
s s ss
s s sn
s s s
.................................( 11.10.2 )
72 10−= ⋅ns
n
36
Где су прве компоненте дисперзија:
( )
( )
( )
2 22 2 2 2 21, ; , ; ,
2 22 2 2 2 21, ; , ; ,
2 2 2 21, , ; ; ; ,
2 22 2
2 22 2
2 2 ;
CI STIX FC X Y CI STI FC X Y
CI STIY FC X Y CI STI FC X Y
h i STI h FC h FC h FC X Y
a
b
c
∆ ∆ ∆
∆ ∆ ∆
∆ ∆ ∆ ∆
= ⋅ + ⋅ + = + +
= ⋅ + ⋅ + = + + = ⋅ + ⋅
s ss s s s s
s ss s s s s
s s s +s s =s
...........................( 11.10.3 )
Стандарди центрисања инструмента - CIs одређени су по:
Обичан висак..........................2мм-3мм, Крути висак.............................0,5мм-1мм, Ласерски висак........................0,8мм, Оптички висак.........................0,3мм, Присилно центрисање............0,03мм-0,1мм. Стандарди нестабилности инструмента у хоризонталној равни одеђени су по:
0,1 - ST mm=s стуб фундиран у стени,
0,2 - ST mm=s стубови геополигона '' НОВО СЕЛО '' (епоха:'96 и '97 ),
0,2 - ST mm=s статив на бетону/асфалту ( за 2h ),
0,3 - ST mm=s стубови основице '' КОВИН '',
0,3 - ST mm=s са јако набијеним папучицама статива у мекано тло ( за 2h ),
0,5 - ST mm=s статив на меканом тлу ( за 2h ),
0,7 - ST mm=s стубови геополигона '' СЛАНЦИ '' ( мекано тло ).
Стандарди нестабилности инструмента у вертикалној равни - ,STI hs одређени су по:
20, , z ZRε ~ s са 0,003Z mm=s
Стандарди висине пријемника одређени су по:
101.Модел оцене тачности оцене базног вектора (главне компоненте досперзија, друга главна компонента дисперзија),
Грешке варијабиле у времену и грешка мерења фазе
,var , , , , ,1 1 1 1var
1 1 1 1, , ,
n n n n
k AB i AB i AB i AS ii i i i k
M I T k X Y hn n n n
δ δ δ= = = =
= + + + = ∆ ∆ ∆ ∑ ∑ ∑ ∑ fe e
Улазе у другу компоненту дисперзија 22, ,varks
2 22, ,var ,var , , ,k kM k X Y h = = ∆ ∆ ∆ s e

37



















