Short-term prediction of influent flow in wastewater treatment plant
9
ORIGINAL PAPER Short-term prediction of influent flow in wastewater treatment plant Xiupeng Wei • Andrew Kusiak Published online: 8 May 2014 Ó Springer-Verlag Berlin Heidelberg 2014 Abstract Predicting influent flow is important in the management of a wastewater treatment plant (WWTP). Because influent flow includes municipal sewage and rainfall runoff, it exhibits nonlinear spatial and temporal behavior and therefore makes it difficult to model. In this paper, a neural network approach is used to predict influent flow in the WWTP. The model inputs include historical influent data collected at a local WWTP, rainfall data and radar reflectivity data collected by the local weather sta- tion. A static multi-layer perceptron neural network per- forms well for the current time prediction but a time lag occurs and increases with the time horizon. A dynamic neural network with an online corrector is proposed to solve the time lag problem and increase the prediction accuracy for longer time horizons. The computational results show that the proposed neural network accurately predicts the influent flow for time horizons up to 300 min. Keywords Influent flow Radar reflectivity Rainfall Wastewater treatment plant Neural networks 1 Introduction The influent flow to a wastewater treatment plant (WWTP) has a significant impact on the energy consumption (Wei et al. 2013). To maintain the required water level in the wet well, the number of running raw wastewater pumps should be scheduled according to the influent rate to the plant. The optimal selection and scheduling of pumps can greatly reduce electricity usage. In addition, the pollutants in the wastewater, including the total suspended solids (TSS) and biochemical oxygen demand (BOD), are also correlated with the influent flow (Bechmann et al. 1999). The treat- ment process should be adjusted based on the pollutant concentration in the influent. For example, a high BOD concentration requires a longer aeration time and greater oxygen supply (Qasim 1998). Therefore, it is important to predict the influent flow in the near future in order to improve the process efficiency and save energy use. The accurate prediction of the influent flow remains a challenge in the wastewater processing industry. Several studies have focused on developing models to predict influent flow (Kim et al. 2006; Kurz et al. 2009; Beraud et al. 2007; Keyser et al. 2010; Djebbar and Kadota 1998; Gernaey et al. 2010). Hernebring et al. (2002) presented an online system for short-term sewer flow forecasts that optimized the effects of the received wastewater. A more complex phenomenological model was built in (Gernaey et al. 2005) based on 1 year of full-scale WWTP influent data. It included diurnal phenomena, a weekend effect, seasonal phenomena, and holiday periods. Carstensen et al. (1998) reported prediction results for the hydraulic load of storm water. Three models, a simple regression model, adaptive grey-box model, and complex hydrological and full dynamic wave model, represented three different levels of complexity and showed different abilities to predict water loads 1 h ahead. Although these models accounted for temporal correlations of the influent flow, they ignored its spatial feature. The wastewater processing industry has used physics- based deterministic models to estimate the influent flow. X. Wei (&) A. Kusiak Department of Mechanical and Industrial Engineering, The University of Iowa, 3131 Seamans Center, Iowa City, IA 52242, USA e-mail: [email protected] A. Kusiak e-mail: [email protected] 123 Stoch Environ Res Risk Assess (2015) 29:241–249 DOI 10.1007/s00477-014-0889-0
Transcript of Short-term prediction of influent flow in wastewater treatment plant

ORIGINAL PAPER
Short-term prediction of influent flow in wastewater treatmentplant
Xiupeng Wei • Andrew Kusiak
Published online: 8 May 2014
� Springer-Verlag Berlin Heidelberg 2014
Abstract Predicting influent flow is important in the
management of a wastewater treatment plant (WWTP).
Because influent flow includes municipal sewage and
rainfall runoff, it exhibits nonlinear spatial and temporal
behavior and therefore makes it difficult to model. In this
paper, a neural network approach is used to predict influent
flow in the WWTP. The model inputs include historical
influent data collected at a local WWTP, rainfall data and
radar reflectivity data collected by the local weather sta-
tion. A static multi-layer perceptron neural network per-
forms well for the current time prediction but a time lag
occurs and increases with the time horizon. A dynamic
neural network with an online corrector is proposed to
solve the time lag problem and increase the prediction
accuracy for longer time horizons. The computational
results show that the proposed neural network accurately
predicts the influent flow for time horizons up to 300 min.
Keywords Influent flow � Radar reflectivity � Rainfall �Wastewater treatment plant � Neural networks
1 Introduction
The influent flow to a wastewater treatment plant (WWTP)
has a significant impact on the energy consumption (Wei
et al. 2013). To maintain the required water level in the wet
well, the number of running raw wastewater pumps should
be scheduled according to the influent rate to the plant. The
optimal selection and scheduling of pumps can greatly
reduce electricity usage. In addition, the pollutants in the
wastewater, including the total suspended solids (TSS) and
biochemical oxygen demand (BOD), are also correlated
with the influent flow (Bechmann et al. 1999). The treat-
ment process should be adjusted based on the pollutant
concentration in the influent. For example, a high BOD
concentration requires a longer aeration time and greater
oxygen supply (Qasim 1998). Therefore, it is important to
predict the influent flow in the near future in order to
improve the process efficiency and save energy use.
The accurate prediction of the influent flow remains a
challenge in the wastewater processing industry. Several
studies have focused on developing models to predict
influent flow (Kim et al. 2006; Kurz et al. 2009; Beraud
et al. 2007; Keyser et al. 2010; Djebbar and Kadota 1998;
Gernaey et al. 2010). Hernebring et al. (2002) presented an
online system for short-term sewer flow forecasts that
optimized the effects of the received wastewater. A more
complex phenomenological model was built in (Gernaey
et al. 2005) based on 1 year of full-scale WWTP influent
data. It included diurnal phenomena, a weekend effect,
seasonal phenomena, and holiday periods. Carstensen et al.
(1998) reported prediction results for the hydraulic load of
storm water. Three models, a simple regression model,
adaptive grey-box model, and complex hydrological and
full dynamic wave model, represented three different levels
of complexity and showed different abilities to predict
water loads 1 h ahead. Although these models accounted
for temporal correlations of the influent flow, they ignored
its spatial feature.
The wastewater processing industry has used physics-
based deterministic models to estimate the influent flow.
X. Wei (&) � A. Kusiak
Department of Mechanical and Industrial Engineering, The
University of Iowa, 3131 Seamans Center, Iowa City, IA 52242,
USA
e-mail: [email protected]
A. Kusiak
e-mail: [email protected]
123
Stoch Environ Res Risk Assess (2015) 29:241–249
DOI 10.1007/s00477-014-0889-0

Online sensors are used to provide flow data at sub-
pumping stations. Based on empirical data such as the
distance between the sub-station and WWTP, and the
sewer piping size, the influent flow could be roughly esti-
mated and calibrated using the historical data to improve
the estimation accuracy (Pons et al. 1998). Such simple
models did not fully consider the temporal correlations of
the influent flow. In the case of a large rainfall or a lack of
sensors covering large areas, the predicted influent flow
involves a significant error.
A WWTP usually receives municipal sewer and storm
water from different areas around the plant (Vesillind
2003). The quantity of the generated wastewater or pre-
cipitation may vary in space and time. In fact, to accurately
predict the influent flow to a WWTP, the spatial and
temporal characteristics should be considered simulta-
neously. To authors’ knowledge no such research has been
done. Therefore, the short-term prediction (300 min ahead)
of influent flow is presented in this paper taking into
account the spatial–temporal characteristics discussed
above. Rainfall data measured at different tipping buckets,
radar reflectivity data covering the entire area handled by
the WWTP, and the historical influent data to the plant are
used as input parameters to build prediction models. The
rainfall data provided by tipping buckets offers valuable
precipitation measurements containing spatial information.
However, this kind of point based data has limitations due
to physical location of tipping buckets. The actual precip-
itation of the whole area usually cannot be simply summed
up by measurements of all tipping buckets. As weather
radar offers spatial–temporal data covering a large area,
including the places not covered by the tipping buckets,
Kusiak et al. (2013) obtained more accurate rainfall pre-
diction using tipping bucket data together with radar
reflectivity data than only tipping bucket data. In addition,
the high frequency of the radar data makes it useful for
forecasting rainfall several hours ahead. The historical
influent time series data contains temporal influent infor-
mation that is useful for predicting the influent flow. There
are other data resources, e.g., substation influent flows.
They are not considered as input parameters as they are
somehow redundant to above mentioned data. Data con-
taining weather information such as temperature and
humidity are not considered either due to low relevancy
with the plant influent flow.
The remainder of this paper is organized as follows.
Section 2 describes the data collection, preparation, and
preprocessing, as well as the metrics used to evaluate the
accuracy of models. Section 3 presents the static multi-
layer perceptron (MLP) neural network that is employed to
build a prediction model for the influent flow. In Sect. 4, a
data-driven dynamic neural network (DNN) is proposed to
solve the time lag problem appearing in the models by the
static MLP neural network. The neural network structure
and computational results are discussed. Section 5 presents
the conclusions.
2 Data preparation
The Wastewater Reclamation Facility (WRA) studied in
this paper is located in Des Moines, Iowa. It treats the
collected sewage and rainfall runoff from the surrounding
areas. To build an influent flow prediction model for this
WRA, historical influent data, rainfall data, and radar
reflectivity data are considered. The influent flow data were
collected at 15-s intervals at WRA. The data are prepro-
cessed to find 15-min averages to match the frequency of
the rainfall data.
The rainfall data were measured at six tipping buckets
(blue icons in Fig. 1) in the vicinity of WRA (red icon in
Fig. 1). As WRA receives wastewater from a large area,
including rainfall data in the model inputs satisfies the
spatial characteristic of the influent flow. Figure 2 illus-
trates the rainfall rates at the tipping buckets over time. It
shows that the rainfall is location dependent and may vary
despite the proximity of the tipping buckets. This indicates
the importance of the rainfall data in building the influent
flow prediction model.
The rainfall graphs in Fig. 2 illustrate the runoff
amounts at several locations, rather than completely reflect
the precipitation over the entire area covered by WRA.
Therefore, the use of radar reflectivity data is proposed to
provide additional input for influent flow prediction. By
doing this the limitations of tipping bucket based models
will be overcome due to high spatiotemporal characteristics
of radar reflectivity data. The NEXRAD-II radar data used
in this paper are from weather station KDMX in Des
Moines, Iowa, which is located approximately 32 km from
WRA. KDMX uses Doppler WSR-88D radar to collect
high resolution data for each full 360� scan at 5-min
intervals with a range of 230 km and a spatial resolution of
about 1 by 1 km. The radar reflectivity data were collected
at 1, 2, 3, and 4 km Wastewater Reclamation Facility
(CAPPIs). As shown in Fig. 3, the reflectivity may be quite
different at different heights for the same scanning time.
The terrain and flocks of birds may produce errors in the
radar readings. In addition, the reflectivity at one height
may not fully describe a storm occurring at a different
height. To deal with these issues, it is necessary to use
radar reflectivity data from different CAPPIs.
The radar reflectivity data at nine grid points sur-
rounding each tipping bucket are selected and averaged
with the center data to be the reflectivity for that tipping
bucket. Null values are treated as missing values and are
filled using the reflectivity at the surrounding gird points.
242 Stoch Environ Res Risk Assess (2015) 29:241–249
123

The NEXRAD radar data were collected at 5-min intervals
and then processed to find 15-min averages by averaging 3
radar data reflectivity values.
Table 1 summarizes the dataset used in this paper. In
addition to 4 historical influent flow inputs at 15, 30, 45, and
60 min ahead, 6 rainfall and 24 radar reflectivity inputs
Fig. 1 Location of tipping buckets and WRA
Stoch Environ Res Risk Assess (2015) 29:241–249 243
123

provide temporal and spatial parameters for the model. The
data were collected from January 1, 2007, through March 31,
2008. The data from January 1, 2007, through November 1,
2007, containing 32,697 data points, are used to train the
neural networks. The remaining 11,071 data points are used
to test the performance of the constructed models.
Three commonly used metrics, the mean absolute
error (MAE), mean squared error (MSE), and correlation
coefficient (R2) are used to evaluate the performance of
the prediction models (Eq. (1)–(3)).
MAE ¼ 1
n
Xn
i¼1
jfi � yij ð1Þ
MSE ¼ 1
n
Xn
i¼1
jfi � yij2 ð2Þ
R2 ¼ 1�
Pi
ðfi � yiÞ2
Pi
ðfi � yiÞ2 þP
i
ðfi � �yiÞ2ð3Þ
where fi is the predicted value produced by the model, yi is
the observed value, �yi is the mean of the observed value,
and n represents the number of test data points.
Table 1 Data set description
Inputs Description Unit
x1 - x6 Rainfall at 6 tipping buckets Inch
x7 - x30 Radar reflectivity at 6 tipping
buckets at 4 CAPPI
Number
x31 - x34 Historical influent flow MGD
Fig. 2 Rainfall at six tipping
buckets
0
5
10
15
20
25
30
35
1 11 21 31 41 51 61 71 81 91
Ref
lect
ivit
y
Time (15min)
CAPPI1
CAPPI2
CAPPI3
CAPPI4
Fig. 3 Radar reflectivity at
different CAPPIs
244 Stoch Environ Res Risk Assess (2015) 29:241–249
123

3 Modeling by static multi-layer perceptron neural
network
Successful applications of neural networks (NNs) based
prediction models have been reported in the literature.
Singh and Borah (2013) used feed-forward back-propaga-
tion (BP) NN to forecast of Indian summer monsoon
rainfall and obtained more accurate results than the existing
model. Two models using NN (Paleologos et al. 2013)
were developed to simulate spring flow. The results
showed less 3 % of under/over of the observed values. Wu
et al. (2008) found that BP-NN showed an advantage in
heavy snow risk evaluation compared to the conventional
method of evaluation criteria equation. As neural network
based models are capable of forecasting with satisfactory
prediction results, NNs are applied in the research reported
in this paper to build prediction models.
To build the influent flow prediction model, a static
MLP neural network is developed. The MLP neural net-
work has been one of the most widely used network
topologies since its introduction in 1960 (Gurney 1997). It
overcomes the limitations of the single-layer perceptron to
handle model nonlinearity. Prediction and classification
applications of MLP neural networks have been reported in
a variety of scientific and engineering fields. Kusiak and
Wei (2012) employed MLP NNs to model and predict
methane production during sludge treatment and obtained
better accuracy rather than other data-mining algorithms.
In addition, MLP NN has been showing good performance
in non-linear prediction. Verma et al. (2013) had similar
conclusion that MLP NN outperforming other algorithms
when predicting TSSs in wastewater. Therefore, MLP NN
has been selected to build the influent flow prediction
models in this paper.
The structure of the MLP neural network reported in this
paper is shown in Fig. 4. It is a supervised BP network with
three layers. Each layer has one or more neurons, which are
interconnected to each neuron of the previous and next
layers. The connections between two neurons are param-
eterized using a weight and bias. Different activation
functions, including the logistic, hyperbolic tangent, iden-
tity, sine, and exponential functions, are used for the hid-
den and output layers.
In the MLP in Fig. 4, output y1 is calculated as shown in
Eq. (4):
y1 ¼ foX
j
fhX
i
xiwij þ bj
!wj1 þ b1
!ð4Þ
where i denotes the ith neuron in the input layer, j is the jth
neuron in the hidden layer, and fo and fh are the activation
functions for output layer and hidden layer, respectively.
wij is the weight connecting the ith neuron to the jth
neuron, and wj1 is the weight between the jth neuron in the
hidden layer and the neuron in the output layer. bj and b1
are the bias values of neuron j and the output neuron.
Weights wij are calculated in the training process based
on Eq. (5), minimizing the target output,
eðnÞ ¼ 1
2
X
k
ðTðnÞ � y1ðnÞÞ2 ð5Þ
where e is the mean of the square error, n denotes the nth
data point, k is the kth output neuron (in this paper k ¼ 1),
and T represents the targeted output value.
Automated network search was employed to create a
variety of different networks and choose the network with
the best performance in all networks. In total, 200 MLP
neural networks were trained to obtain a generalized net-
work structure. The number of neurons in the hidden layer
varied from 3 to 30. The weights were randomly initialized
between -1 and 1 and iteratively improved by minimizing
the mean of the square error. Different hidden and output
activation functions were used, including logistic, expo-
nential, tanh, identity, hyperbolic, etc. To improve the
convergence speed of the training process, the BFGS
(Broyden-Fletcher-Goldfarb-Shanno) algorithm (Saini
2002) was used.
The influent flow prediction model at current time t was
built first. The dataset described in Sect. 2 was used to train
and test the MLP neural networks. The best MLP had 25
neurons in the hidden layer with the logistic hidden acti-
vation function and the exponential output activation
function. The calculated MAE, MSE, and correlation
coefficient were 1.09 MGD, 4.21 MGD2, and 0.988,
respectively. These metrics indicate that the prediction
model is accurate. The first 300 observed and predicted
influent flow values from the test dataset are shown in
Fig. 5. Most of the predicted values are very close to the
observed ones, and the predicted influent flow follows the
trend of the observed flow rate.
Fig. 4 Structure of MLP neural network
Stoch Environ Res Risk Assess (2015) 29:241–249 245
123

MLP neural network models were also built at
t ? 15 min, t ? 30 min, t ? 60 min, t ? 90 min,
t ? 120 min, t ? 150 min, and t ? 180 min with the same
procedure as the model built at time t. As shown in Fig. 6,
the predicted influent flow is similar to the observed value,
and the predicted trend is the same as the observed one.
However, a small time lag appears between the predicted
and observed influent flows. This lag increases over time
and can be clearly observed in Fig. 7, which shows the
predicted influent flow at t ? 180 min ahead.
Table 2 summarizes the accuracy of the prediction
results at current time t through t ? 180 min. The predic-
tion accuracy decreases with longer time horizon. The
MAE and MSE increase quickly after t ? 30 min, while
the correlation decreases as well. The prediction models for
horizons smaller than t ? 150 min have acceptable accu-
racy when the threshold of the correlation coefficient is set
at 0.85 which is still more accurate than the estimations by
WWTP. However, the time lag is too large to provide a
useful real-time influent flow rate even though the trend
can be well predicted.
4 Modeling by dynamic neural network
The computational results in Sect. 3 indicated that a static
MLP neural network is unable to capture the dynamics in the
dataset at long time horizons. As DNN is an effective and
suitable method to predict dynamic system and has been
successful applied in scientific and engineering problems
(Chiang et al. 2010; Shaw et al. 1997; Hussain et al. 2009), it
is then used in this research to improve the prediction
accuracy. Considering the increasing time lag issue which
has not appeared in DNN applications, a DNN with an online
corrector is proposed and tested in this section.
A DNN involves a memory structure and predictor. As
the memory captures the past time series information, it
can be used by the predictor to learn the temporal patterns
of the time series. This paper uses a focused time-delay
Table 2 Prediction accuracy
Prediction
horizon
MAE
(MGD)
MSE
(MGD2)
Correlation
coefficient
t 1.09 4.21 0.98
t ? 15 1.48 5.83 0.98
t ? 30 1.89 8.20 0.97
t ? 60 2.75 14.59 0.95
t ? 90 3.61 22.95 0.93
t ? 120 4.46 33.21 0.90
t ? 150 5.26 44.88 0.87
t ? 180 6.02 57.39 0.83
Fig. 5 Predicted and actual influent flows at current time t
Fig. 7 Predicted and actual influent flows at time t ? 180 min
Fig. 6 Predicted and actual influent flows at time t ? 30 min
246 Stoch Environ Res Risk Assess (2015) 29:241–249
123
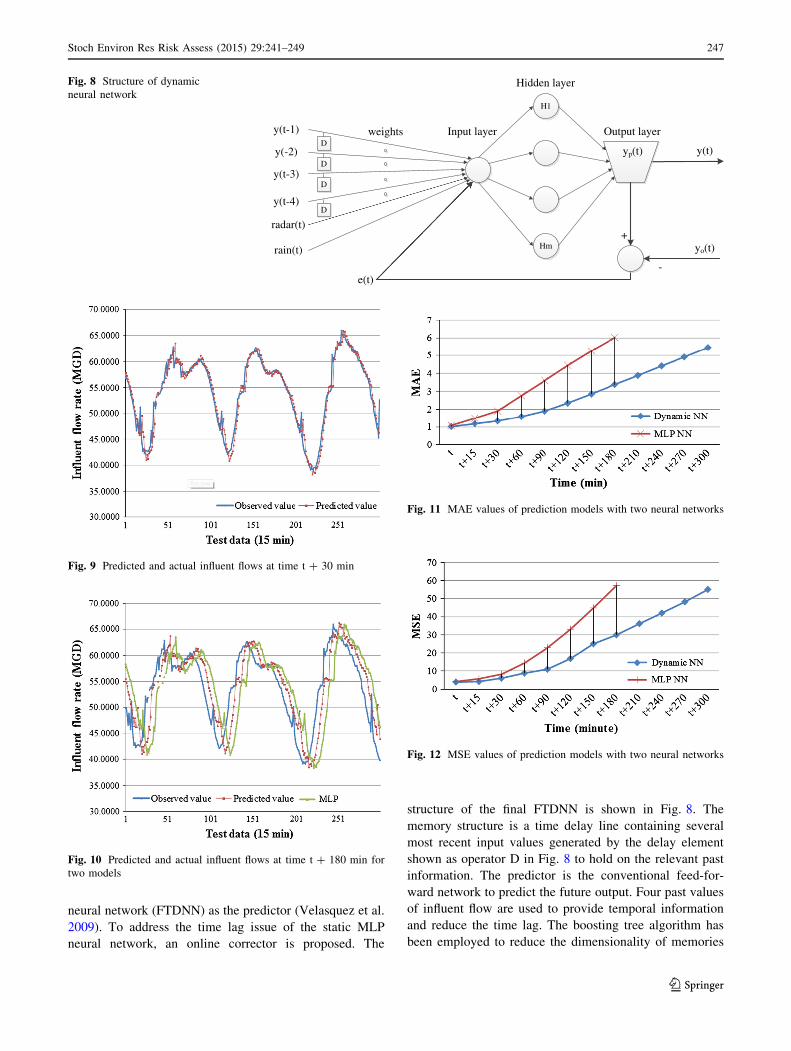
neural network (FTDNN) as the predictor (Velasquez et al.
2009). To address the time lag issue of the static MLP
neural network, an online corrector is proposed. The
structure of the final FTDNN is shown in Fig. 8. The
memory structure is a time delay line containing several
most recent input values generated by the delay element
shown as operator D in Fig. 8 to hold on the relevant past
information. The predictor is the conventional feed-for-
ward network to predict the future output. Four past values
of influent flow are used to provide temporal information
and reduce the time lag. The boosting tree algorithm has
been employed to reduce the dimensionality of memories
y(t-1)
y(-2)
y(t-3)
y(t-4)
radar(t)
rain(t)
y(t)
yo(t)
yp(t)
+
-e(t)
H1
Hm
D
D
D
D
weights Input layer Output layer
Hidden layerFig. 8 Structure of dynamic
neural network
Fig. 9 Predicted and actual influent flows at time t ? 30 min
Fig. 10 Predicted and actual influent flows at time t ? 180 min for
two models
Fig. 11 MAE values of prediction models with two neural networks
Fig. 12 MSE values of prediction models with two neural networks
Stoch Environ Res Risk Assess (2015) 29:241–249 247
123

by identifying the appropriate number of past values. It has
been found that the prediction accuracy could not be
improved but the computation time would significantly
increase when more than five past influent flows are used as
memories. The most recent four past values also have the
highest rankings that contribute to the prediction accuracy.
The radar reflectivity data and tipping bucket data are also
used to provide spatial–temporal information to the net-
work. Therefore, the inputs of the prediction model include
four past values of influent flow (as memory values), radar
reflectivity, rainfall, and the online corrector, eðtÞ (Eq. 6),
at current time t.
eðtÞ ¼ jypðtÞ � yoðtÞj ð6Þ
where ypðtÞ and yoðtÞ are the predicted and actual influent
flows at current time t. In fact, the online corrector provides
the time lag information back to the input layer to calibrate
the prediction results during training. Similar to MLP
neural network, therefore, the output of the neuron in
hidden layerHi is calculated by
Hi ¼ fh
�X4
k
yiðt � kÞwiðkÞ þ radarðtÞwið5Þ
þrainðtÞwið6Þ þ bj þ eðtÞ�
ð7Þ
where k means the synaptic weight for neuron i, t means
current time, radarðtÞ and rainðtÞ are the input radar
reflectivity and rainfall tipping bucket data at time t. Other
symbols in above formula have the same meaning as
described in Eq. 4. The final output of the FTDNN can be
given in Eq. 8. j is the neuron in output layer, aj is the
output bias.
yjðtÞ ¼ fo
Xm
i¼1
Hiwji þ aj
!ð8Þ
The same approach presented in Sect. 3 was applied to
train the FTDNN. As shown in Fig. 9, the influent flow is
well predicted at time t ? 30. There is a slight time lag. Fig-
ure 10 shows the predicted influent flow and the observed
values at time t ? 180 min for the dynamic and static net-
works. It clearly shows that the time lag of the predictions by
the DNN is much smaller than that of the predictions by the
static MLP neural network. The values of MAE, MSE, and the
correlation coefficient for the results produced by the two
neural networks are illustrated in Figs. 11, 12, and 13,
respectively. The prediction model constructed using the
DNN outperforms the model with the static MLP neural net-
work. Its MAE and MSE values increase slowly with longer
time horizons. The correlation coefficient decreases slowly
and is still acceptable at time t ? 300 min (R2 [ 0.85).
The results indicate that the DNN is capable of model-
ing the influent flow. The static MLP neural network is
effective at handling complex non-linear relationships
rather than a temporal time series. On the other hand, a
DNN is suitable for temporal data processing. The online
corrector provides additional time series information as an
input to correct the time lag generated in the model. The
accuracy gain comes at the cost of the additional compu-
tation time needed to construct the DNN.
Because knowing the future values of influent flow is
important for the management of WWTPs, the 300-min-
ahead predictions provided by the DNN offer ample time to
schedule the pumps and adjust the parameters of the treat-
ment process. However, even the 150-min-ahead predictions
offered by the static MLP neural network are acceptable for
lower precipitation seasons (for example, spring and winter)
because it need shorter computational time.
5 Conclusion
This paper focused on predicting the influent flow to a
wastewater processing plant using two data-driven neural
networks. To satisfy the spatial and temporal characteristics
of the influent flow, rainfall data collected at six tipping
buckets, radar data measured by a radar station, and histor-
ical influent data were used as model inputs. The static MLP
neural network provided good prediction up to 150 min
ahead with 85 % accuracy. The MAE and MSE increased
quickly while the correlation decreased as well with longer
time horizon. The increasing time lag generated the problem
of providing a useful real-time influent flow.
To solve this issue and extend the time horizon of the
predictions, to 300 min, a DNN with an online corrector
was proposed. The online corrector provided additional
time series information as an input to correct the time lag
generated in the model. The time lag that appeared in the
MLP neural network model was significantly reduced. The
proposed method could provide good prediction up to
300 min ahead with 85 % accuracy. This extended time
Fig. 13 Correlation coefficient of prediction models with two neural
networks
248 Stoch Environ Res Risk Assess (2015) 29:241–249
123

horizon would be useful for managing the energy effi-
ciency of wastewater processing plants.
Acknowledgments This research was supported by funding from
the Iowa Energy Center Grant No. 10-1.
References
Bechmann H, Nielsen MK, Madsen H, Poulsen NK (1999) Grey-box
modeling of pollutant loads from a sewer system. Urban Water
1:71–78
Beraud B, Steyer JP et al (2007) Model-based generation of
continuous influent data from daily mean measurements avail-
able at industrial scale. In: Proceedings 3rd international IWA
conference on automation in water quality monitoring, Septem-
ber 5–7, Gent, Belgium
Carstensen J, Nielsen MK, Strandbæk H (1998) Prediction of
hydraulic load for urban storm control of a municipal WWT
plant. Water Sci Technol 37:363–370
Chiang YM, Chang LC, Tsai MJ, Wang YF, Chang FJ (2010)
Dynamic neural networks for real-time water level predictions of
sewerage systems-covering gauged and ungauged sites. Hydrol
Earth Syst Sci 7:2317–2345
Djebbar Y, Kadota PT (1998) Estimating sanitary flows using neural
networks. Water Sci Technol 38:215–222
Gernaey KV, Rosen C, Benedetti L, Jeppsson U (2005) Phenome-
nological modeling of wastewater treatment plant influent
disturbance scenarios. In: Proceedings 10th international con-
ference on urban drainage (10ICUD), August 21–26, Copenha-
gen, Denmark
Gernaey KV, Rosen C, Jeppsson U (2010) BSM2: a model for
dynamic influent data generation, Technical Report, No. 8, IWA
Task Group on Benchmarking of Control Strategies for Waste-
water Treatment Plants
Gurney K (1997) An introduction to neural networks. CRC, London
Hernebring C, Jonsson LE, Thoren UB, Moller A (2002) Dynamic
online sewer modeling in Helsingborg. Water Sci Technol
45:429–436
Hussain AJ, Jumeily DA, Lisboa P (2009) Time series prediction
using dynamic ridge polynomial neural networks. In: Second
international conference on developments in eSystems Engi-
neering, pp. 354–363, Abu Dhabi, December 14–16
Keyser WD, Gevaert V et al (2010) An emission time series generator
for pollutant release modeling in urban areas. Environ Model
Softw 25:554–561
Kim JR, Ko JH et al (2006) Forecasting influent flow rate and
composition with occasional data for supervisory management
system by time series model. Water Sci Technol 53:185–192
Kurz GE, Ward B, Ballard GA (2009) Simple method for estimating
I/I using treatment plant flow monitoring reports—a self help
tool for operators. In: Proceedings of the water environment
federation, collection systems, vol 9, pp. 568–576
Kusiak A, Wei X (2012) A data-driven model for maximization of
methane production in a wastewater treatment plant. Water Sci
Technol 65:1116–1122
Kusiak A, Wei X, Verma A, Roz E (2013) Modeling and prediction of
rainfall using radar reflectivity data: a data-mining approach.
IEEE Trans Geosci Remote Sens 51:2337–2342
Paleologos EK, Skitzi I, Katsifarakis K, Darivianakis N (2013) Neural
network simulation of spring flow in Karst environments. Stoch
Environ Res Risk Assess 27:1829–1837
Pons MN, Lourenco MC, Bradford J (1998) Modeling of wastewater
treatment influent for WWTP benchmarks. In: Proceedings 10th
IWA conference on conference on instrumentation, control and
automation, June 14–17, Cairns, Australia
Qasim SR (1998) Wastewater treatment plants: planning, design, and
operation. CRC, Boca Raton
Saini LM (2002) Artificial neural network based peak load forecasting
using Levenberg–Marquardt and quasi-Newton methods. IEE
Proc Gener Transm Distrib 149:578–584
Shaw AM, Doyle FJ III, Schwaber JS (1997) A dynamic neural
network approach to nonlinear process modeling. Comput Chem
Eng 21:371–385
Singh P, Borah B (2013) Indian summer monsoon rainfall prediction
using artificial neural network. Stoch Environ Res Risk Assess
27:1585–1599
Velasquez JD, Rios SA, Howlett RJ, Jain LC (2009) Knowledge-
based and intelligent information and engineering systems.
Springer, Germany
Verma A, Wei X, Kusiak A (2013) Predicting the total suspended
solids in wastewater: a data-mining approach. Eng Appl Artif
Intell 26:1366–1372
Vesillind PA (2003) Wastewater treatment plant design. IWA,
Alexandria
Wei X, Kusiak A, Rahil H (2013) Prediction of influent flow rate: a
data-mining approach. J Energy Eng 139:118–123
Wu JD, Li N, Yang HJ, Li CH (2008) Risk evaluation of heavy snow
disasters using BP artificial neural network: the case of Xilingol
in Inner Mongolia. Stoch Environ Res Risk Assess 22:719–725
Stoch Environ Res Risk Assess (2015) 29:241–249 249
123