
Robust stability of complex polynomials with annular uncertainties
13
Multidimensional Systems and Signal Processing, 5, 203-215 (1994) © 1994 Kluwer Academic Publishers, Boston. Manufactured in The Netherlands. Robust Stability of Complex Polynomials with Annular Uncertainties E PI~REZ AND D. DOCAMPO BSP Group, Departamento de Tecnologias de las Comunicaciones, ETSI Telecomunicacion, Universidad de Vigo, 36200-Vigo, Spain C. ABDALLAH BSP Group, Department of EECE, University of New Mexico, Albuquerque, NM 87131 Received October 15, 1992; Revised June 7, 1993 Abstract. In this paper, we find necessary and sufficient conditions for the stability of a family of annular, com- plex polynomials with the possibility of including a center polynomial. The proposed results can be modified to solve the disk problem by simply equating the inner radius of the annuli to zero. These results have applica- tions in the communications arena and some signal processing problems. Key Words: Complex polynomials, annular sets, winding number 1. Introduction The seminal work of Kharitonov [1] has inspired considerable research in the study of robust stability of polynomial sets. As is well known, Kharitonov's original theorem is restricted to real and independently perturbed coefficients. This result was later extended to include families of complex interval polynomials [2]. Many proofs for Kharitonov's theorems are now available. In particular, Minnichelli et al., used a frequency domain approach and simple geometric arguments to obtain a particularly simple proof. The frequency domain interpretation is due to Dasgupta [3] and has been widely used since then (see, for exam- ple, Keel and Battacharyya [4] and Tsypkin and Polyak [5], [6]). Most of the work on the stability analysis for uncertain polynomials has been developed for real uncertain polynomials. While this is useful for many practical systems, it is sometimes imperative to consider complex interval polynomials. Chapellat et al. [8] and Li et al. [7] have studied the stability problem of (complex) disk polynomials. These studies model the situation in which the coefficient perturbations are in a complex neighborhood of their nominal value (center polynomial). In many practical situations, it is reasonable to consider independent uncertainties in the modulus and the phase of each complex coefficient. We then model the phase as a random variable uniformly distributed in [0, 27r] and the modulus as a uniformly distributed random variable in some confidence interval. In this context, every complex coefficient is contained in an annular region. Such a problem appears, for instance, in the analysis of minimum-phase equalizers for communications channels [9]. In this paper, we fmd necessary and sufficient conditions for the stability of a family of annual polynomials with the possibility of including a fixed center polynomial to account
Transcript of Robust stability of complex polynomials with annular uncertainties
Multidimensional Systems and Signal Processing, 5, 203-215 (1994) © 1994 Kluwer Academic Publishers, Boston. Manufactured in The Netherlands.
Robust Stability of Complex Polynomials with Annular Uncertainties
E PI~REZ AND D. DOCAMPO BSP Group, Departamento de Tecnologias de las Comunicaciones, ETSI Telecomunicacion, Universidad de Vigo, 36200-Vigo, Spain
C. ABDALLAH BSP Group, Department of EECE, University of New Mexico, Albuquerque, NM 87131
Received October 15, 1992; Revised June 7, 1993
Abstract. In this paper, we find necessary and sufficient conditions for the stability of a family of annular, com- plex polynomials with the possibility of including a center polynomial. The proposed results can be modified to solve the disk problem by simply equating the inner radius of the annuli to zero. These results have applica- tions in the communications arena and some signal processing problems.
Key Words: Complex polynomials, annular sets, winding number
1. Introduction
The seminal work of Kharitonov [1] has inspired considerable research in the study of robust stability of polynomial sets. As is well known, Kharitonov's original theorem is restricted to real and independently perturbed coefficients. This result was later extended to include families of complex interval polynomials [2]. Many proofs for Kharitonov's theorems are now available. In particular, Minnichelli et al., used a frequency domain approach and simple geometric arguments to obtain a particularly simple proof. The frequency domain interpretation is due to Dasgupta [3] and has been widely used since then (see, for exam- ple, Keel and Battacharyya [4] and Tsypkin and Polyak [5], [6]).
Most of the work on the stability analysis for uncertain polynomials has been developed for real uncertain polynomials. While this is useful for many practical systems, it is sometimes imperative to consider complex interval polynomials. Chapellat et al. [8] and Li et al. [7] have studied the stability problem of (complex) disk polynomials. These studies model the situation in which the coefficient perturbations are in a complex neighborhood of their nominal value (center polynomial).
In many practical situations, it is reasonable to consider independent uncertainties in the modulus and the phase of each complex coefficient. We then model the phase as a random variable uniformly distributed in [0, 27r] and the modulus as a uniformly distributed random variable in some confidence interval. In this context, every complex coefficient is contained in an annular region. Such a problem appears, for instance, in the analysis of minimum-phase equalizers for communications channels [9].
In this paper, we fmd necessary and sufficient conditions for the stability of a family of annual polynomials with the possibility of including a fixed center polynomial to account

204 F. PI~REZ, D. DOCAMPO AND C. ABDALLAH
for the known part of the system. The proposed results can be modified into the disk prob- lem, by simply equating the inner radius of the annuli to zero. Even though the main results of the paper can be proven using the so-called zero exclusion principle [3] we follow an approach based on Rouchd's theorem, which allows us to obtain simple necessary condi- tions as byproducts of the lemmas presented throughout the paper. Moreover, this approach leads to graphical tests in the spirit of Tsypkin and Polyak [5], as described in the examples at the end of the paper.
In Section 2, we describe the uncertainty sets and give some useful lemmas. Section 3 contains the solution for the Schur case, and Section 4 that of the Hurwitz case. To illus- trate our theorems we present some graphical examples in Section 5. Our conclusions and comments for future research are given in Section 6.
2. Preliminaries
Throughout this paper, we will deal with annular sets in the complex coefficient space C. In the sequel, we let R + denote the set of all nonnegative real numbers. Therefore, the annulus Si, centered at 0, and with inner radius r i E R + and outer radius R i E R +, is described by
Si<ri, gi) = {z E C : ri <- Izl --- Ri}. (1)
We will use Si to denote the set S/(ri, Ri) for simplicity, and def'me the sum of two sets in the usual way, i.e.,
S 1 -~- S 2 = {z E C : :t Zl E S 1, z2 E S 2, z = Zl -~ z2}. (2)
The following lemma will be fundamental in deriving our robust stability results. It states that the sum of annular sets is an annulus.
LEMMA 1. Given the annular sets Si(ri, Ri) C C and a complex constant K, then the set
$ = K + ~ Si(ri, Ri) (3) i=0
is an annulus in the complex plane, centered at K and with outer radius Rou t = v.n0 Ri and inner radius Rin = max{r/ - ~n R i, 0}, where r l - maxo<_i<_n{ri}. i=o,i~l
Proof The proof, based on geometric considerations can be found in Appendix A.
Remark 1. It is very important to note the fact that given any point be jo, b E [Rin, Rout], q~ E [0, 270 it is always possible to find zi, zi E Si(ri, Ri), for all i = 0, . . . , n, for which
be j¢' = K + ~ zi. (4) i=0

ROBUST STABILITY OF COMPLEX POLYNOMIALS WITH ANNULAR UNCERTAINTIES 205
DEFINITION 1. (Winding number). Let a: [a, b] ~ C be any closed curve such that Zo a. We define the winding number of ¢r about Zo, N(~r, Zo), by
N(a, Zo) -- [arg{tr(b) - Zo} - a rg{a(a) - Zo}]/27r. (5)
The winding number represents the number of times that a point z encircles Zo as it moves from tr(a) to o(b) along ~.
LEMrnA 2. Let 7: [a, b] ~ C and a: [a, b] ~ C be two closed curves in the complex plane, such that I~(t) - ~r(t)[ < [~(t) - z01, a < t <_ b. Then, N(~, Zo) = N(a, Zo)
Proof. This is a modified version of Rouch~'s theorem. See Marden [10] for example.
3. D i s c r e t e - t i m e case
The discrete-time robust stability analysis is easier than its continuous-time counterpart because, as we will see, the coefficient annuli are mapped onto the complex plane to an- nuli with radii that are independent of the frequency considered. We will consider annular families of polynomials of the type
3t2 = {H(z) = C(z) + ~ aieJ*iz i : 0 < a? <_ a i < a/+, ~b i E [0, 27r)}, i=O
(6)
where i = 0, . . . , n, C(z) is a given complex-coefficients polynomial in z and the family has a constant degree. Next, we specify the region of stability and the specific definition of stability that will be used throughout the text.
DEFINITION 2. The polynomial H(z) = C(z) + r,~= o aieJ*iz/, with 0 <_ af- <_ a i <_ a~-, ~bi E [0, 2a-), i = 0 . . . . , n, is stable i ff all its zeros lie in the region ~D, defined as
5) = {zE C : Iz[ < r < 1}. (7)
We are now ready to state and prove the following lemmas.
LEM~A 3. The image of H(z) onto the complex plane is, for a fixed z = re j°, an annulus centered at C(re jO) with outer radius, Rout, given by
Rou t -- ~ a + r i (8) i=0
and inner radius, Rt~, given by
Rin=max~Trl-~a+ri'O~i=oict (9)

206 F. PI~.REZ, D. DOCAMPO AND C. ABDALLAH
where aT r I "-- maxosi<_n{a? ri}.
Proof Substituting z = re j° in (6), we obtain
n
H( re j°) = C( re j°) + ~a ai riejo~eji°, (10) i=O
and since the factor e jiO implies only a rotation, we have that the family ~ , for a fixed z = re j°, is the sum of annuli Si(a7 r i, a + r i) so the problem satisfies the conditions of Lemma 1, and the set
C(re j°) + ~ Si(aT r i, a + r i) (11) i=0
is an annulus with the specified radii.
Remark 2. The condition for the annulus to degenerate into a disk for every frequency 0 < O < 2a- is that r laf <_ F,~=o,i, e ria +. In this case, we let Rin = 0.
LEMMA 4. If
IC(reJ°)] < Rin, 0 < 0 < 27r, (12)
then the polynomial C(z) + ~n i=0 ai ej¢iz; is stable if and only if the polynomial £" i=O aieJ6'z i is stable and deg C(z) <- n.
Proof Since
Rm <- n
Z aieJq'ieJiOri i=o
0 <_ 0 < 27r, (13)
it is clear from (12) that
IC(reJ°)l < ~-] aieJ4~eJi°ri ] ' i=o
0 <_ 0 < 2a-. (14)
Then, from Lemma 2, the winding numbers about 0 for Y~=0 ai ej~iejiOri and C(re jO) + ~ n i=0 ai eJ¢Jiej'or~ must be equal. Since ~'=0 ai ej~i~ will only be stable if its winding number for z = re j° equals n, we need to ensure that deg{C(z) + ~n=0 aieJ~iz J } = n, so stability for this polynomial implies having a winding number equal to n. The proof is then complete.
LEMMA 5. If some polynomial in 3£ is stable and IC(reJ°)l < Rm, then rna~ > F,n,z~ a + r i.

ROBUST STABILITY OF COMPLEX POLYNOMIALS WITH ANNULAR UNCERTAINTIES 207
Proof We have already shown that if Rin > 0 then, for some l, 0 ___ l _< n,
rla[ > Z a + r i. (15) i=0
i¢l
We will proceed by contradiction assuming that l in (15) is such that l < n. Since there is one stable polynomial in the family, it follows that there exist ai'~ [ai-, a+], dpi' E [0, 2~-), 0 _< i < n, such that the polynomial
n
Ho(Z) = C(Z) + Z ai 'ej4~i'zi (16) i=0
is stable. Using Lemma 4, the stability of Ho(z) is then equivalent to that of Z~=o ai 'ejvi~. Now, we can write
~ ai'eJ6[eJiOri = ~ ai'eJOieJi°ri + al'eJ¢ieJl°rl. i=0 i=0
i~l
(17)
Since
~-~j ai'eJ4~/eJiOr i i=0 i;al
<- ~ a + ri < rlaF <_ la:eJO[eJt°rl I. i=0
(18)
Noting that the polynomial at'eJ4';z 1 encircles the origin l times, it is possible to apply Lemma 2 to determine that the polynomial ~n= 0 ai'eJ¢[~ encircles the origin exactly l times as z travels around the circle of radius r. Therefore, the proof is completed by con- tradiction, since this last polynomial must encircle the origin n times in order to be stable.
TnEO~M 1. The family 3C is stable if and only if the following two conditions hold:
(i) The family contains at least one stable polynomial. (ii) IC(reJ°)/Ri, I < 1 or IC(reJ°)/Rout[ > 1 for all 0 E [0, 2~r) where Rm and Rou t were
given in (9) and (8), respectively.
Proof Sufficiency. Suppose that IC(reJ°)l > Rou t for every 0 _< 0 < 27r. From Lemma 3, we have that for every 0, the coefficient set is mapped onto an annulus in the complex plane. We then have that
IC(reJ°),>Rout > _ ~aieJ¢irieJi° I . ,(19) i=0 !
208 E PI~.REZ, D. DOCAMPO AND C. ABDALLAH
Then, a direct application of Lemma 2 shows that the winding number of C(re j°) is iden- tical to that of C(re j°) + F, n . . . . i=0 ai e~¢ir'el'°. Since there exists some stable polynomial belonging to 5C, the same argument can be applied to show that the polynomial C(z) is stable and therefore, every other polynomial in the family must also be stable.
Now, suppose that IC(rd°)l < Rm for every 0 < 0 < 2a'. From Lemma 5, we have that rnan > I2n-li=0 a+ri. Following an argument similar to the proof of the lemma 5, the polynomial ~ i=0 aieJ¢i~ encircles the origin n times. But from Lemma 4 this fact is equivalent to the stability of the polynomial C(z) + ~,~ aieJ(~iz i i=0
Necessity. Note first that (i) follows trivially. Now suppose the family 5C is stable, we need to check (ii). For every frequency the coefficient set is mapped onto the complex plane as an annulus centered at C(reJ°). Now, suppose that
Rin < I C(reJ°)l ~ Rout. (20)
Then it would be possible to find some unstable polynomial in the family with a root on the circle z = re j°. This contradiction results in the validity of (ii).
Remark 3. Only one of the two conditions present in (ii) can hold in any particular case. For instance, suppose that for some 01 the first condition holds, i.e., Ic(rdel)l < Rm, then, only checking the validity of I C(rd°)l < Rm, for all 0 E [0, 270 is necessary. The same can be said for the second condition. In order to prove this claim, we suppose that each of the two conditions hold at one of two different frequencies; that is, there exist 01 and 02 such that IC(reJ°l)l < Rin and Ic(rd%l > Rout. Without loss of generality, assume that 01 < 02. Since C(re j°) moves continuously as 0 varies, it is clear that there must exist 0"~ 01 < 0* < 02, for which Rin <- IC(reJ°*)l <- Rout. Then the point C(re j°*) belongs to the annulus with radii Ri~ and Rou t so it is possible (Remark 1) to find a'e j4[ ~ Si, for ~1 i = 0, . . . . n such that
C(re j°*) = ~ ai'eJ¢;ri e jiO*. (21) i=0
Therefore,
n
C(re j°*) - ~ a'eJ~';rie ji°* = 0, (22) i=0
which implies that there is a point in the coefficient space for which the polynomial H(z) has a root on the boundary circle of radius r and, thus, is unstable. This would contradict the fact that the whole family is stable.
For the case of disks of polynomials considered in Chapellat et al. [7] and [8] we have the following corollary.

ROBUST STABILITY OF COMPLEX POLYNOMIALS WITH ANNULAR UNCERTAINTIES 209
COROLLARY 1. Consider the family 3£ of polynomials given by
= {H(z) = C(z) + ~ aieJO~zi: 0 <_ ai <- a +, ~i ~ [0, 27r)}, i=0
(23)
where i = 0 . . . . , n, C(z) is a given complex-coefficients polynomial and the family is of constant degree. Then, the family ~ is stable iff the following two conditions hold:
(i) The family contains at least one stable polynomial. (ii) I C(reJ°)/]cn= o a+r i] > 1 for all 0 fi [0, 270.
Proof From the definition of the family, it is clear that Rin defined in (9) equals 0. The proof is completed by Remark 3.
Remark 4. There is no restriction on the degree of C(z) for condition (ii) to hold. If the first condition is needed, the degree of C(z) can be at most n. Also, if C(z) = 0 condition (ii) transforms into Rin ~ 0.
4. Cont inuous- t ime case
Here, we will consider annular families of polynomials of the form
= {H(s) = C(s) + ~aieJO~s i :O < aF <- ai <- a +,(~iE [0,27r)}, (24) i=0
where i = 0 . . . . , n, C(s) is a given complex polynomial and the degree of all members in the family is constant. The stability region will be the open left-half complex plane (Hur- witz stability).
LEM~A 6. The image of H(s) onto the complex plane, obtained for a fixed s = jw, is an annulus centered at C(jo~) with outer radius
n
Rout(~) = ~ a~l~l i (25) i=0
and inner radius
Rin(c° )=max~7]wl~-~a+[~l ; '0~ i=0i~ (26)

210 F. PI~REZ, D. DOCAMPO AND C. ABDALLAH
where
al-Io~1 z - max {a, 7 I 01i}, (27) O<_i<_n
Proof Letting s = j~0 in (24), we obtain
H(jco) = C(j¢o) + ~a aieJ#'i(Jc°) i. (28) i=0
With a simple identification of terms, we can see that the family 3e is, for a fixed o~,
n 3E = C(jo~) + ~_a Si(a? [o~l i, a + Iwli), (29)
i=0
which, according to Lemma 1, is an annulus in the complex plane with the specified radii. Prior to the statement of the main result of this section, we need the following lemma.
L E ~ A 7. There exists oa* fi R, for which Ri~(~0*) = 0.
Proof We will consider here the annuli Si (a/- [~l i, a+lw] i) which appeared in Lemma 6. First note that for o~ = 0 the inner radius of every Si is 0, except for So. Then, for this frequency, the set ~ is an annulus centered at C(0) with inner radius ao and outer radius a~-. For those frequencies at which
ao >- a/- I O)[ i, for all i = 1, . . . , n, (30)
which follows f rom condition (27), the inner radius is zero or
Rin(o~) = ao - ~ a + Ico[ i. (31) i=1
The expression above becomes 0 for some ~0" at which
ao = ~ a + (32) ,=1
But this expression will be valid only if (30) holds for w*. Substituting (32) into (30) we see that the condition verifies for every i, i = 1, . . . , n, and then Ri~(~*) = 0.

ROBUST STABILITY OF COMPLEX POLYNOMIALS WITH ANNULAR UNCERTAINTIES 211
T r ~ o ~ r a 2. The family 3C is stable if and only if the following two conditions hold:
(i) The family contains at least one stable polynomial. (ii) [C(jw)/Rout(o~)[ > 1, Vw E R where Rout(6~ ) was defined in (25).
Proof. The proof is similar to the proof of Theorem 1. Note that the only difference is that coal i t ion [C(jo~)] < Rtn(w) is not needed here. We will then concentrate on showing why this condition is not necessary. To see this, suppose that every member in 3C is stable and there exists some frequency oJ 1 E R such that Ic(j~)l < Rin(o~0. Following an argument similar to Remark 3, we conclude that
]c(j~)l < Rin(~), vo~ E R. (33)
Otherwise, assumption (i) would be violated. On the other hand, from Lernma 7, Rin(~0*) = 0 which obviously contradicts (33). The proof is now complete.
Remark 5. The previous theorem is valid for the case in which the region of variation for every coefficient is a disk [7], [8], i.e., a/-- = 0, i = 0, o . . , n in (24).
Remark 6 When ~ goes to infinity, f rom condition (ii), it is necessary that m - deg + C(s) >_ n. Where m = n, the coefficient o f s n in C(s), c n, must be such that !cnl > an.
5. Examples
To show how the theorems can be transformed into simple graphical tests in the spirit of the work by Tsypkin and Polyak [5], [6], we present some examples. First, we con- centrate on the discrete-time case.
Consider the family 312 of third-order uncertain polynomials
2
3~ = {H(z) = C(z) + Xz~ aieJOiz i, ~bi E [0, 270, i = 1, . . . , 3}, (34) i=0
where a 0 E [1, 1.5], a 1 E [0, 0.5], a 2 E [8, 10], and C(z) is the complex polynomial
C(z) = 6eJ~r/4z3 + 3eJ~r/3z2 + 2eJ3~r/4z + 5, (35)
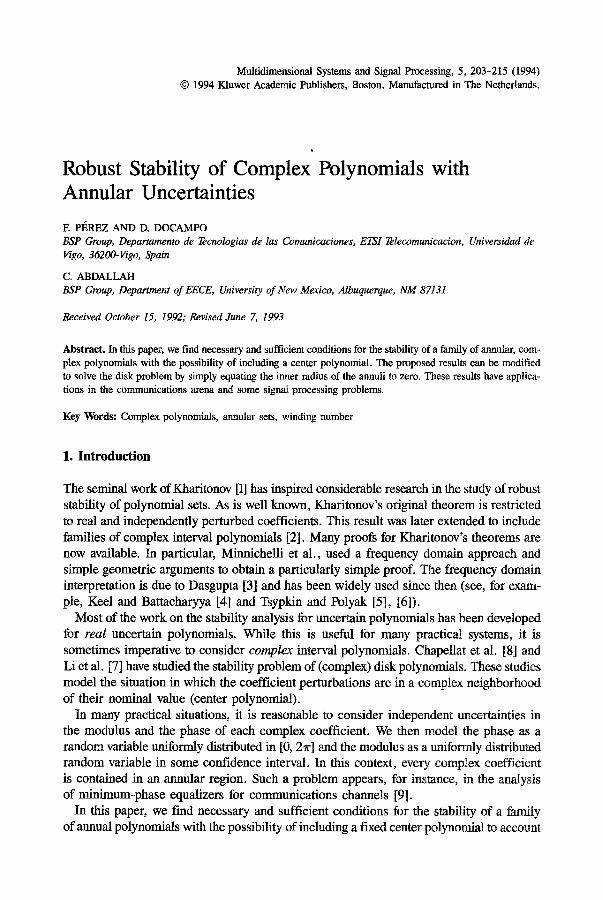
and let us determine whether the family 3C is Schur stable (r = 1). Applying Lemma 3, we obtain that Rin = 6 and Rou t = 12. The conditions in Theorem
1 for the stability of 3C can be checked as follows. First, we choose any polynomial in the family and check its stability. In case it is stable we plot C(e/°) with 0 varying from 0 to 2Ir. This plot must lie outside the annulus with radii Ri~ and Rou t. In Figure 1, we plot C(e/°). As we can see, the plot crosses the annulus, so the family ~ is not stable.
212 E PEREZ, D. DOCAMPO AND C. ABDALLAH
20
15
10
5
0
-5
-10
-15
-20 -20
I I I / [ I
-15 -10 -5 0 5 10 15 20
Figure 1. C(re j0) and the forbidden annulus.
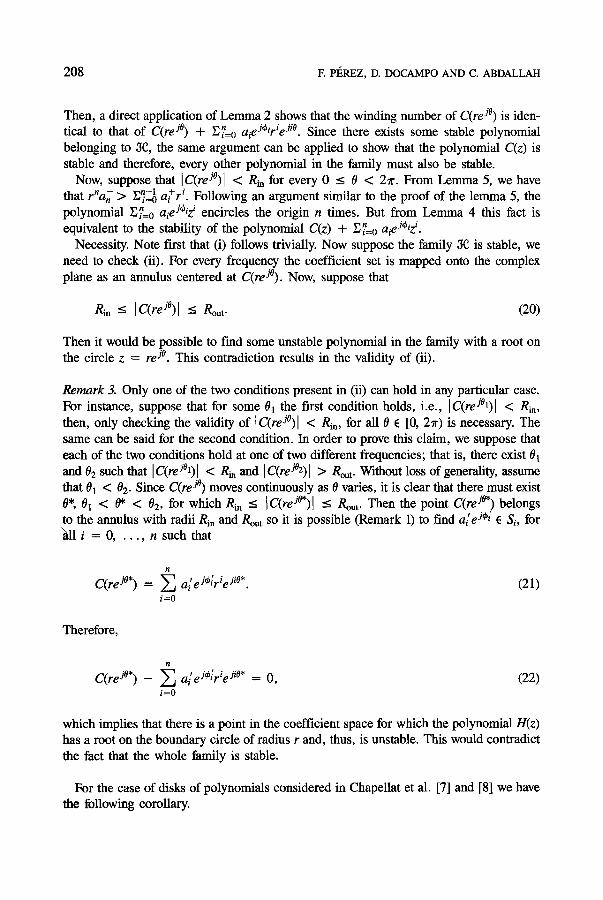
Now we consider the continuous-time case. Suppose that p is the common degree of the members of the family of polynomials. The test given by Theorem 2 is as follows. If the plot of C(jco)/Rout(,,, ) goes through 2p quadrants counterclockwise and does not in- tersect the closed unit disk when co goes from -oo to +oo, then the family is stable. Now consider the second-order family
2
3~ = {H(s ) = C(s) + Z ai ej4~isi, ~i (: [0, 2 7 0 , i = 0, . . . , 2}, i=0
(36)
where a0 E [0.5, 1.25], al E [0, 0.75], a2 E [1, 2], and C(s) is the real polynomial
C(s) = 9.6s 5 + 41.11s 4 + 44.51s 3 + 34.46s 2 + 12.95s + 3.45. (37)
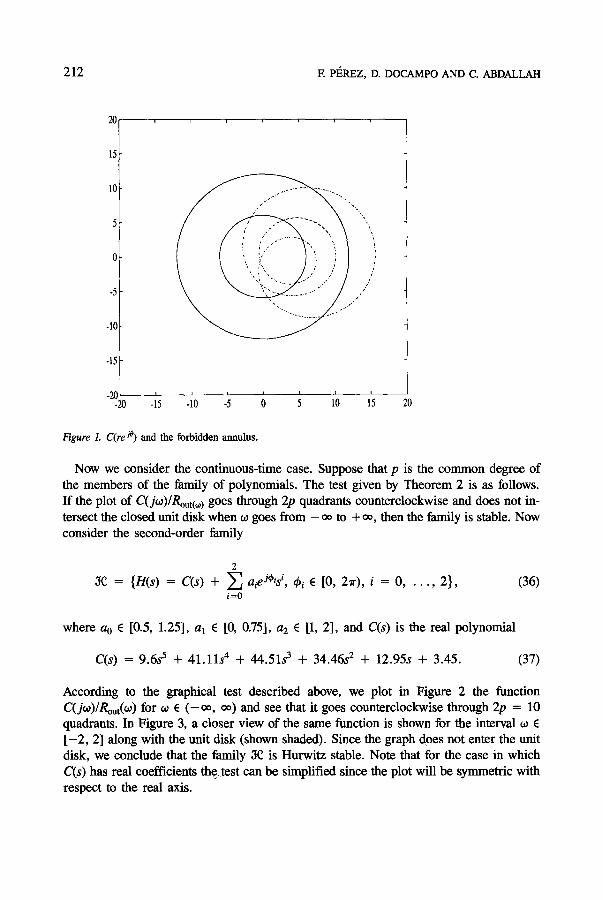
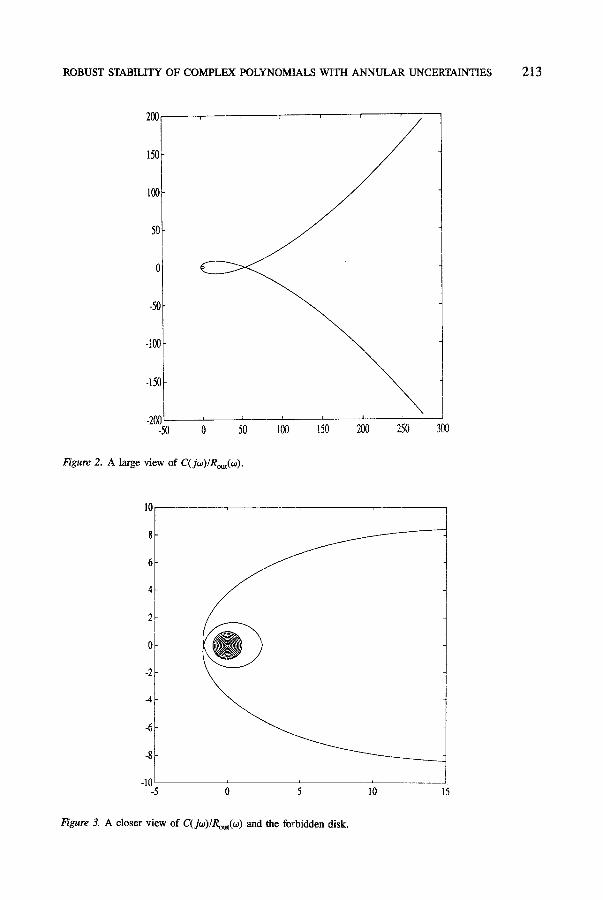
According to the graphical test described above, we plot in Figure 2 the function C(jco)/Rout(co) for co E ( -oo, oo) and see that it goes counterclockwise through 2p = 10 quadrants. In Figure 3, a closer view of the same function is shown for the interval co E [ - 2 , 2] along with the unit disk (shown shaded). Since the graph does not enter the unit disk, we conclude that the family ~2 is Hurwitz stable. Note that for the case in which C(s) has real coefficients the~test can be simplified since the plot will be symmetric with respect to the real axis.
ROBUST STABILITY OF COMPLEX POLYNOMIALS WITH ANNULAR UNCERTAINTIES 2 1 3
2 0 0 ~ ,
150 l
100
50
0
-50
-100[
-150
-200 ' -50 0 50
Figure 2. A large view of C(j¢o)/Rout(OJ ).
100 150 2~ 250 300
10
-6
-8
-10 -5
i i i
0 5 10
Figure 3. A closer view of C(jco)/Rout(¢o ) and the forbidden disk.
214 F. PI~REZ, D. DOCAMPO AND C. ABDALLAH
6. C o n c l u s i o n s
We have presented a frequency domain criterion for analyzing the stability of complex polynomials with annular uncertainties. The criterion applies to both Hurwitz and Schur stability.
The tests so obtained are easily transformed into a one-plot problem which facilitates the graphical computation of the common margin of perturbations. The main result of this paper shows that for the Hurwitz and Schur cases,the admissible set is transformed into a complex annulus for every frequency. Of course, this idea can be easily extended to deal with other ff)-stability problems.
The analysis here presented can be extended to the more general case of linear dependen- cies on annular sets of parameters. The results of this line of research will be reported shortly. The tests given have already found application in the analysis and design of com- munications equalizers [9].
Appendix A
Proof o f Lemma 1. To start, we will show that the sum of two circumferences is an annulus in the complex plane. Thus, consider the sets T 1 and T2, defined below
= {z c : Izl = ri} , i = 1 , 2. (38)
Denoting by 5 the sum (see (2))
3 = T1 + T2, (39)
assume, without loss of generality that r 2 > r 1. Our claim is that 3 is an annulus with inner and outer radii, respectively,
Rin = r2 - r l , Rou t = r 1 + r 2. ( 4 0 )
Let be j4, represent any point in 5. Then we can write
beJ~ = dleJ~l + d2eJ~°2, (41)
where di ej~i ~ T/, i = 1, 2. Noting that the maximum absolute value in (41) is attained when ~o 1 = ~02 and the minimum when ~o 1 = ~o2 + 7r, we conclude that 3 is contained in the annulus with radii defined in (40). Now, we need to show that given any point be j6 in this annulus, we can find a point (dl ej~'l, d2e j~'2) in T1 × T2, such that be j4, = dl ej~l + d2 ej~2. It is not difficult to show that provided that b E [Riu, Rout], the solution to this problem is
dl = rl, d 2 = rz, (42)
ROBUST STABILITY OF COMPLEX POLYNOMIALS WITH ANNULAR UNCERTAINTIES 215
2 _d22 + b 2 ~1 = ~ + a rccosd l
2bd2 ' (43)
2 _ d 2 + b 2 ~O 2 = q~ + arccos d2 2bdl (44)
Now suppose that we have annuli instead of circumferences, i.e., the sets Sl(r!, R0 and
$2(r2, R2), defined in (1), are given. Again, we make the assumption that r 2 > rl. If (dl ej~l, d2e j~2) is an element of St × $2, then the radii defined in (40) vary linearly with
d 1 and dE. Therefore, the set $ = $1 + $2 is in this case, an annulus with outer radius
Rout = R1 + R2 and inner radius Rt~ = r2 - R1, where it has been assumed that r 2 > R1. If this latter assumption does not hold, then Rin = 0. Even though every point in 8 corresponds to more then one point in S 1 × $2, it is always possible to obtain, given be j¢
8, some pair (die j¢l, d2 ej¢2) E S 1 >( S 2 so that be j4~ = die j~°l + d2 ej92. This can be
done in a way similar to the one described above that resullts in Equations (42-44). We proceed to the case of three uncertain coefficients where we make the assumption
that r 3 > r 2 > r 1 . It is then clear that 1"3 > r2 - R1. We showed above that the set $1 + $2 is an annulus with outer radius R1 + R2 and inner radius (if distinct of zero)
r 2 - R 1. Applying the same reasoning as before, we conclude that the set $ = $1 +
$2 + $3 is again an annulus with inner radius Ri~ = max{r3 - R 2 - R1, 0} and outer
radius Rou t = R3 + R2 + R1. The proof is extended easily to the sum of any number of annular sets.
References
1. V. Kharitonov, "Asymptotic Stability of an Equilibrium Position of a Family of Systems of Linear Dif- ferential Equations," Differential Equations, vol. 14, pp. 1483-1485, 1979.
2. V. Kharitonov, "On a Generalization of a Stability Criterion," Izv. Akad. Nauk. Kazach. SSR Ser. Fiz. Mat., vol. 1, pp. 53-57, 1978.
3. S. Dasgupta, P. Parker, B. Anderson, F. Kraus, and M. Mansour, "Frequency Domain Conditions for the Robust Stability of Linear and Nonlinear Dynamical Systems," IEEE Trans. Circ. Syst., vol. CAS-38, pp. 389-397, 1991.
4. L. Keel, and S. Battacharyya, "Frequency Domain Design of Interval Controllers," in Control of Uncer- tain Dynamic Systems, (S. Battacharyya and L. Keel, eds.), Boca Raton, FL: CRC Press, pp. 423-438, 1991.
5. Y.Z. Tsypkin, and B. Polyak, "Frequency Domain Criteria for lP-robust Stability of Continuous Linear Systems," IEEE Trans. Auto. Control, vol. AC-36, pp. 1464-1469, 1991.
6. Y.Z. Tsypkin, and B. Polyak, "Frequency Domain Criterion for Robust Stability of Polytope of Polynomials." in Control of Uncertain Dynamic Systems, (S. Battacharyya and L. Keel, exls.), Boca Raton, FL: CRC Press, 1991, pp. 491--499.
7. H. ChapeUat, S. Battacharyya, and M. Dahleh, "On the Robust Stability of a Family of Disk Polynomials," in Proc. IEEE Conf. Dec. and Control, Tampa, FL, pp. 37-42, 1989.
8. Y. Li, K. Nagpal, and E. Lee, "Stability Analysis of Polynomials with Coefficients in Disks," IEEE Trans. Auto. Control, vol. AC-37, pp. 509-513, 1992.
9. F. Pdrez, D. Docampo, and C. Abdallah, "Root Location and Confinement for Systems with Annular Uncer- tainties," in Proc. Conf. Mathematics in Signal Processing, Warwick, England, 1992. -
10. M. Marden, The Geometry of the Zeros, New York: Am. Mat. Soe., 1949.




















