
Robust Adaptive Identification of Fuzzy Systems with Uncertain Data
22
Robust Adaptive Identification of Fuzzy Systems with Uncertain Data A Fuzzy Expert System for Physical Fitness Approxi- mation with Real World Medical Data: An Application MOHIT KUMAR 1 [email protected] Institute of Occupational and Social Medicine, Faculty of Medicine, University of Rostock, D-18055 Rostock, Germany REGINA STOLL [email protected] Institute of Occupational and Social Medicine, Faculty of Medicine, University of Rostock, D-18055 Rostock, Germany NORBERT STOLL [email protected] Institute of Automation, Department of Electrical Engineering and Information Technology, University of Rostock, D-18119 Rostock-Warnemnde, Germany Abstract. This study presents a method of adaptive identification of parameters describing Sugeno fuzzy inference system in presence of bounded disturbances while maintaining the readability and interpretability of the fuzzy model during and after identification. This method do not require any a priori knowledge of a bound on the disturbance and noise and of a bound on the unknown parameters values. The method can be used for the robust and adaptive identification of slowly time varying nonlinear systems using fuzzy inference systems. The suggested method was used to build a fuzzy expert system that approximates the functional relationship between physical fitness and some of the measurable physiological parameters by their real measurements and opinion (human-experiences) of a medical expert. Keywords: fuzzy-modelling, identification, robustness, nonlinear least squares 1. Introduction The capability of fuzzy systems paradigm for not only learning complex input– output mappings but also to interpret these mappings with linguistic terms stim- ulates the study of approximating ill-defined and complex processes using a fuzzy inference system. Fuzzy modelling is based on set of fuzzy if-then rules derived from expert domain knowledge to handle uncertainty. However, in some situations this expert domain knowledge may not be sufficient to design fuzzy model due to lack of knowledge or problems due to different biases of human experts, so there is a need of learning of fuzzy inference system from data. Hence we need to develop some fuzzy parameters identification methods for approximating the complex process to a desired level of accuracy. The techniques based on Genetic algorithms (Tan and Hu, (1996)) or treating fuzzy systems as artificial neural networks (Jang Fuzzy Optimization and Decision Making, 3, 195–216, 2004 Ó 2004 Kluwer Academic Publishers. Printed in The Netherlands.
Transcript of Robust Adaptive Identification of Fuzzy Systems with Uncertain Data

Robust Adaptive Identification of Fuzzy Systems
with Uncertain Data
A Fuzzy Expert System for Physical Fitness Approxi-mation with RealWorldMedical Data: An Application
MOHIT KUMAR1 [email protected]
Institute of Occupational and Social Medicine, Faculty of Medicine, University of Rostock, D-18055
Rostock, Germany
REGINA STOLL [email protected]
Institute of Occupational and Social Medicine, Faculty of Medicine, University of Rostock, D-18055
Rostock, Germany
NORBERT STOLL [email protected]
Institute of Automation, Department of Electrical Engineering and Information Technology, University of
Rostock, D-18119 Rostock-Warnemnde, Germany
Abstract. This study presents a method of adaptive identification of parameters describing Sugeno
fuzzy inference system in presence of bounded disturbances while maintaining the readability and
interpretability of the fuzzy model during and after identification. This method do not require any a
priori knowledge of a bound on the disturbance and noise and of a bound on the unknown
parameters values. The method can be used for the robust and adaptive identification of slowly time
varying nonlinear systems using fuzzy inference systems. The suggested method was used to build a
fuzzy expert system that approximates the functional relationship between physical fitness and some of
the measurable physiological parameters by their real measurements and opinion (human-experiences)
of a medical expert.
Keywords: fuzzy-modelling, identification, robustness, nonlinear least squares
1. Introduction
The capability of fuzzy systems paradigm for not only learning complex input–output mappings but also to interpret these mappings with linguistic terms stim-ulates the study of approximating ill-defined and complex processes using a fuzzyinference system. Fuzzy modelling is based on set of fuzzy if-then rules derivedfrom expert domain knowledge to handle uncertainty. However, in some situationsthis expert domain knowledge may not be sufficient to design fuzzy model due tolack of knowledge or problems due to different biases of human experts, so there isa need of learning of fuzzy inference system from data. Hence we need to developsome fuzzy parameters identification methods for approximating the complexprocess to a desired level of accuracy. The techniques based on Genetic algorithms(Tan and Hu, (1996)) or treating fuzzy systems as artificial neural networks (Jang
Fuzzy Optimization and Decision Making, 3, 195–216, 2004
� 2004 Kluwer Academic Publishers. Printed in The Netherlands.

1993, Nauck and Kruse, 1997, Nauck and Kruse, 1998) have been well developedfor the automatic construction of fuzzy sets and rules. As the data used in iden-tification contains generally vagueness and ambiguity, so there is need of devel-oping robust algorithms for learning from imprecise data. Since, the process maybe time varying, so the learning mechanism should be adaptive enough to cope upwith the time varying characteristics of the process. Automatic construction ortuning of Sugeno type fuzzy inference systems from example data allows qualita-tive insight into the relationships (Babuska, 2000, Bodenhofer and Bauer, 2000,Espinosa and Vandewalle, 2000, Setnes et al., 1998). Also, they are supposed toideally combine simplicity with good analytical properties (Takagi and Sugeno,1985). The identification problem for Sugeno fuzzy systems comes out to be linearin consequent parameters but nonlinear in antecedent parameters. For the tuningof linear in parameters, numerous adaptive estimation algorithms are available.These algorithms can be broadly classified as: recursive least-squares algorithmsand gradient algorithms. In order to render more robustness, different modifica-tions have been introduced like fixed or switching r-modification, e1-modifications,parameter projections and dead-zones (Ioannou and Sun, 1996). Parameter pro-jections, r modifications and e1 modifications keep the parameter estimatesbounded.Fixed r-modifications and e1-modifications do not require a prior knowledge, but
do not guarantee the desired properties of estimation algorithms in the ideal case,when there is no perturbation and parameters are constant. The ideal properties canbe achieved with switching r-modifications and parameter projections with a priorknowledge of the bound on parameters. However, parameter projections, r-modi-fications and e1-modifications do not eliminate the parameter drift (inside a ball) dueto the noise and perturbation when the regressor vector is not persistency of exci-tation (PE). The introduction of a dead-zone with a prior knowledge can eliminatethe parameter drift due to noise and perturbations. So all of these recursive esti-mation algorithms has robustness limitations. In reference Mathelin and Lozano,1997, a particular algorithm which dramatically improves the robustness to boundeddisturbances, noise and slowly time-varying parameters at the cost of performing anon-line eigenvalue decomposition on a symmetric semidefinite positive matrix hasbeen suggested.In this paper, we start with the problem of estimation of parameters of a Sugeno
type fuzzy inference system from noisy data to approximate the time-varying processbased on the minimization of certain cost criteria. This optimization problem is anonlinear programming problem which is hard to solve without a great computa-tional complexity. So we consider two alternative sub problems of linear parametersestimation and nonlinear parameters estimation. The problem of antecedentparameters estimation comes out to be a nonlinear constrained regularized optimi-zation problem, which is solved using Gauss–Newton method. After the antecedentparameters have been adapted with Gauss–Newton method, adaptation of conse-quent parameters is followed using the algorithm suggested in reference Mathelinand Lozano, 1997. Afterwards, we provide the proof of robustness of the proposed
KUMAR, STOLL AND STOLL196

estimation scheme in the sense that estimation error is always bounded and con-verges to true value in ideal case. Then we provide the simulation results for anumerical example to show the feasibility of our approach and compare it with othermethods.The latter part of the paper deals with the identification of a fuzzy expert
system which models the notion (opinion) of a medical expert about physicalfitness based on the measurements of a set of various physiological parameters.As the opinion used for identification (tuning of expert system) contains generallyvagueness and ambiguity due to different experiences and different biases ofdifferent medical experts, so there is need of robust identification scheme. Furtherthis complex functional relation of physical fitness with various physiologicalparameters may differ from patient to patient, therefore requiring the constantadaptation of expert system with time as the new patients are tested for physicalfitness with time.
2. Problem Formulation
Let us consider a Sugeno type fuzzy inference system (Fs : X ! Y), mapping n-dimensional input space (X ¼ X1 � X2 � � � � � Xn) to one-dimensional real line,consisting of K different rules. The ith rule is in the form:If x1 is Ai1 and x2 is Ai2; . . . ; and xn is Ain then y ¼ ai; for all i ¼ 1; 2; . . . ;K, where
Ai1;Ai2; . . . ;Ain are nonempty fuzzy subsets of X1;X2; . . . ;Xn, respectively such thatmembership function lAij
: Xj ! ½0; 1� fulfillPK
i¼1
Qnj¼1 lAij
ðxjÞ > 0 for all xj � Xj.The values a1; a2; . . . ; aK are real numbers. So we have
Fsðx1; x2; . . . ; xnÞ ¼PK
i¼1 aiQn
j¼1 lAijðxjÞPK
i¼1
Qnj¼1 lAij
ðxjÞ: ð1Þ
We assume that xj belongs to a non-empty real intervals, i.e. xj � [aj; bj] for allj ¼ 1; . . . ; n.The various classes of membership functions could be formulated in a common
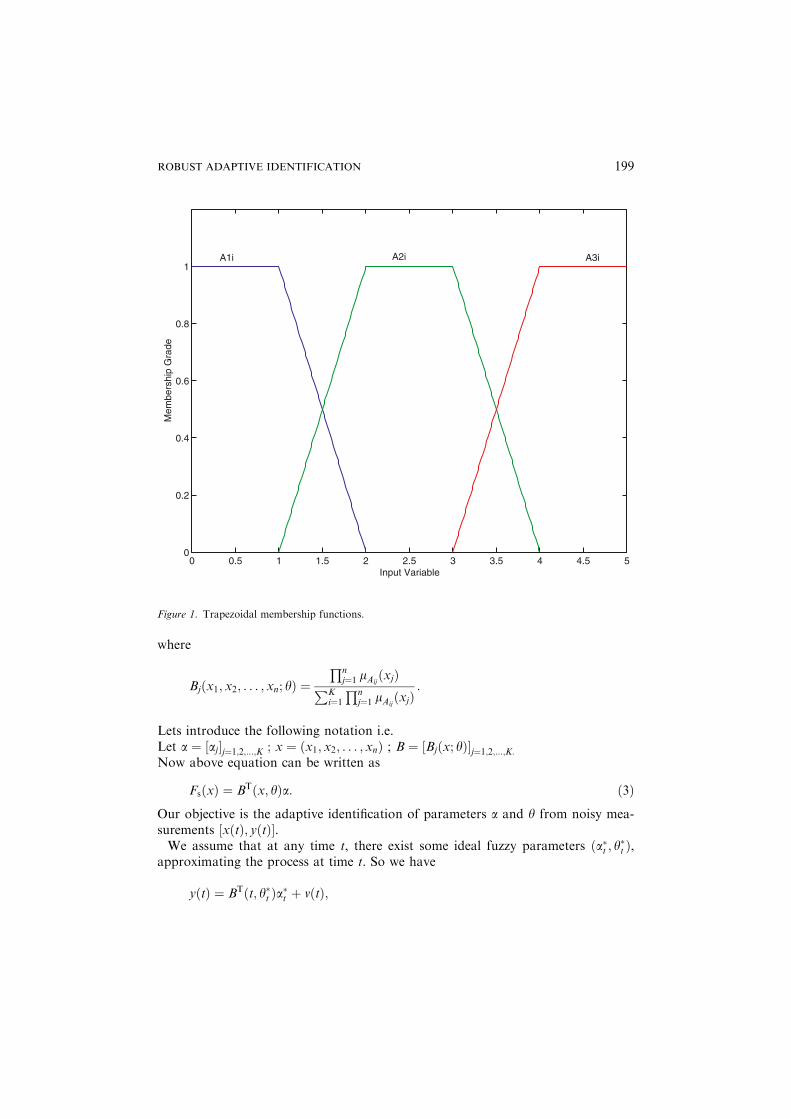
mathematical frame by considering a knot vector h consisting of real elements, suchthat shape of membership function depends on the elements of vector h whichpartition the universe of each input variable (xi � ½ai; bi�) in to Pi linguistic terms. Toelaborate the construction of membership functions based on knot vector (h), twoexamples one for trapezoidal and other for gaussian membership functions areprovided below.Trapezoidal membership function: let h = ðt11; . . . ; t2P1�2
1 ; t12; . . . ; t2P2�22 ; . . . ; t1n; . . . ;
t2Pn�2n Þ �RL, such that for ith input, ai � t1i � � � � � t2Pi�2
i � bi holds for alli ¼ 1; . . . ; n. So Pi trapezoidal membership functions for ith input (A1i;A2i; . . . ;APii)can be defined as
ROBUST ADAPTIVE IDENTIFICATION 197

A1iðxi; hÞ ¼1 if xi � ½ai; t1i �,
�xiþt2it2i�t1
i
if xi � ½t1i ; t2i �,0 otherwise.
8<:
Ajiðxi; hÞ ¼
xi�t2j�3i
t2j�2i
�t2j�3i
if xi � ½t2j�3i ; t2j�2
i ],
1 if xi � ½t2j�2i ; t2j�1
i ],�xiþt2j
i
t2ji�t2j�1
i
if xi � ½t2j�1i ; t2ji ],
0 otherwise.
8>>>><>>>>:
APiiðxi; hÞ ¼xi�t
2Pi�3
i
t2Pi�2
i�t
2Pi�3
i
if xi � ½t2Pi�3i ; t2Pi�2
i ],
1 if xi � ½t2Pi�2i ; bi�,
0 otherwise.
8><>:Figure 1 shows an example with the choice of antecedent parameters as: ai ¼ 0,
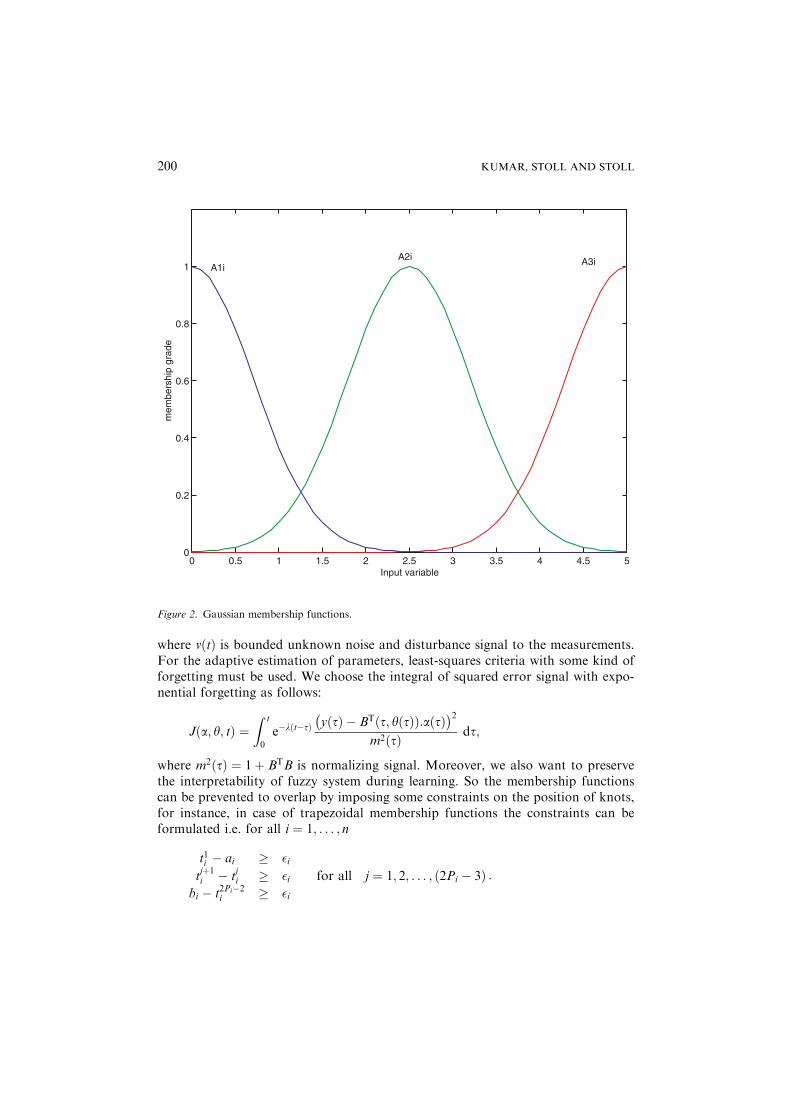
t1i ¼ 1, t2i ¼ 2, t3i ¼ 3, t4i ¼ 4 and bi ¼ 5.Gaussian membership functions with unit dispersion: let h = ( t11; . . . ; t
P1�21 ; t12; . . . ;
tP2�22 ; . . . ; t1n; . . . ; t
Pn�2n ) � RL, such that for ith input, ai � t1i � � � � � tPi�2
i � bi, holdsfor all i ¼ 1; . . . ; n. So Pi Gaussian membership functions assuming unit dispersionfor ith input (A1i;A2i; . . . ;APii) can be defined as:
A1iðxiÞ ¼ e�ðxi�aiÞ2 ;
Ajiðxi; hÞ ¼ e�ðxi�tjiÞ2 ;
APiiðxiÞ ¼ e�ðxi�biÞ2 :
Figure 2 shows an example with the choice of antecedent parameters as: ai ¼ 0,t1i ¼ 2:5 and bi ¼ 5.Total number of possible K rules depends on the number of membership curves for
each input i.e. K ¼ Pni¼1Pi, where Pi is the number of membership curves defined
over ith input. Depending upon the choice of membership curves equation (1) can berewritten as function of h.
Fsðx1; x2; . . . ; xnÞ ¼XKj¼1
ajBjðx1; x2; . . . ; xn; hÞ; ð2Þ
KUMAR, STOLL AND STOLL198
where
Bjðx1; x2; . . . ; xn; hÞ ¼Qn
j¼1 lAijðxjÞPK
i¼1
Qnj¼1 lAij
ðxjÞ:
Lets introduce the following notation i.e.Let a ¼ ½aj�j¼1;2;...;K ; x ¼ ðx1; x2; . . . ; xnÞ ; B ¼ ½Bjðx; hÞ�j¼1;2;...;K:
Now above equation can be written as
FsðxÞ ¼ BTðx; hÞa: ð3ÞOur objective is the adaptive identification of parameters a and h from noisy mea-surements ½xðtÞ; yðtÞ�.We assume that at any time t, there exist some ideal fuzzy parameters ða�t ; h�t Þ,
approximating the process at time t. So we have
yðtÞ ¼ BTðt; h�t Þa�t þ vðtÞ;
0 0.5 1 1.5 2 2.5 3 3.5 4 4.5 50
0.2
0.4
0.6
0.8
1
Input Variable
Mem
bers
hip
Gra
de
A1i A2i A3i
Figure 1. Trapezoidal membership functions.
ROBUST ADAPTIVE IDENTIFICATION 199
where vðtÞ is bounded unknown noise and disturbance signal to the measurements.For the adaptive estimation of parameters, least-squares criteria with some kind offorgetting must be used. We choose the integral of squared error signal with expo-nential forgetting as follows:
Jða; h; tÞ ¼Z t
0
e�kðt�sÞ yðsÞ � BTðs; hðsÞÞ:aðsÞ� �2
m2ðsÞ ds;
where m2ðsÞ ¼ 1þ BTB is normalizing signal. Moreover, we also want to preservethe interpretability of fuzzy system during learning. So the membership functionscan be prevented to overlap by imposing some constraints on the position of knots,for instance, in case of trapezoidal membership functions the constraints can beformulated i.e. for all i ¼ 1; . . . ; n
t1i � ai � �itjþ1i � tji � �i for all j ¼ 1; 2; . . . ; ð2Pi � 3Þ
bi � t2Pi�2i � �i
:
0 0.5 1 1.5 2 2.5 3 3.5 4 4.5 50
0.2
0.4
0.6
0.8
1
Input variable
mem
bers
hip
grad
e
A1i A2i A3i
Figure 2. Gaussian membership functions.
KUMAR, STOLL AND STOLL200

These constraints can be formulated in term of a matrix inequality C:h � h, similarto the constrained problem formulated in reference Burger et al., 2002. So theoptimal parameter aðtÞ; hðtÞð Þ at any time t could be computed by solving followingconstrained optimization problem
aðtÞ; hðtÞð Þ ¼ arg min ða; HÞ ½ Jða; h; tÞ ; C:h � h �: ð4Þ
The optimization problem (4) is a large scale nonlinear programming problem,which could be solved using sequential quadratic programming (SQP) or by recentdeveloped interior point Methods but with great computational efforts. So we arerequired to look for alternative approaches for the adaptive estimation of theparameters.
3. Recursive Solution to Adaptive Estimation Problem
Instead of solving problem (4) as such, we consider the problems of linear param-eters adaptation (a) and nonlinear parameters adaptation (h) separately. For theadaptation of antecedent parameters a criteria other than suggested in Eq. (4) ischosen, then the problem comes out to be a nonlinear constrained regularizedoptimization problem, which is solved using Gauss–Newton method. After theantecedent parameters have been adapted with Gauss–Newton method, adaptationof consequent parameters is followed by minimizing the cost criteria given by Eq. (4).The optimal value of antecedent parameters at any time t is defined based on theminimization of following cost function
arg minh½ðyðtÞ � BTðt; hÞaðt� 1ÞÞ2 þ bðtÞkh� hðt� 1Þk2 ; C:h � h�;
where b > 0 is a regularization parameter added to the approximation problem. Let
UðhÞ ¼ ðyðtÞ � BTðt; hÞaðt� 1ÞÞ2 þ bðtÞkh� hðt� 1Þk2;
ZðhÞ ¼ ½yðtÞ; ðbðkÞÞ1=2ðh� hðt� 1ÞÞ�;
GðhÞ ¼ ½BTðt; hÞ; ð0ÞLxK�:
Then we can write
UðhÞ ¼ kZðhÞ � GðhÞaðt� 1Þk2:
Let rðhÞ ¼ ½ZðhÞ � GðhÞaðt� 1Þ� and r0ðhÞ is the Jacobian matrix of vector r withrespect to h, determined by the method of finite-differences which is a full rank
ROBUST ADAPTIVE IDENTIFICATION 201

matrix, as a result of regularization and s� be the unique solution of followingconstrained optimization problem solved by the algorithm suggested by Lawson andHanson, 1995.
s�ðhÞ ¼ arg mins ½krðhÞ þ r0ðhÞsk2Cs � h� Ch�:
So the antecedent parameters can be adapted by following equation;
hðtÞ ¼ hðt� 1Þ þ s�ðhðt� 1ÞÞ: ð5Þ
After the antecedent parameters have been adapted by Eq. (5), the optimal value ofconsequent parameters at any time t is defined as
aðtÞ ¼ arg mina Jða; hðtÞ; tÞ: ð6Þ
Define RðtÞ, QðtÞ and qðtÞ as follows:
_R ¼ �kRþ BBT
m2; Rð0Þ ¼ ð0ÞKxK;
_Q ¼ �kQþ By
m2; Qð0Þ ¼ ð0ÞKx1;
_q ¼ �kqþ y2
m2; qð0Þ ¼ 0:
The cost function J can be written as
J ¼ q� 2aTQþ aTRa:
The cost function J is convex function of a, so any local minimum is also global andis given by
aðtÞ ¼ RyðtÞQðtÞ;
where RyðtÞ is the pseudo-inverse of RðtÞ. However, optimal solution may not beimplementable when matrix RðtÞ tend to be singular, in that case the RyðtÞ will growarbitrarily large. So as suggested by Mathelin and Lozano 1997, a threshold value �0is chosen for the smallest eigenvalue of RðtÞ. Let us consider the following eigenvaluedecomposition of matrix RðtÞ
½U1 U2�TR½U1 U2� ¼K1 00 K2
� �¼ K
KUMAR, STOLL AND STOLL202

with K ¼ diag½ki�; ki � kj � 0 8 i < j and such that
K1 ¼
k1 0 � 00 k2 � �� � � �0 � 0 kp
26643775 > ðkpþ1 þ �0ÞI;
K2 ¼
kpþ1 0 � 0� � � �� � kK�1 �0 � 0 kK
26643775 �
ðK� pÞ�0 0 � 0� � � �� � 2�0 00 � 0 �0
26643775 � ðK� pÞ�0I;
K2 contains the eigenvalues of R no greater than �0 and the ones that are sufficientlyclose to them by increment �0, K1 contains the larger eigenvalues of R such thatkmin½K1� > kmax½K2� þ �0. This difference is required to guarantee the piece-wisecontinuity of aðtÞ. Now the optimal solution is defined as
aðtÞ ¼
R�1ðtÞQðtÞ if pðtÞ ¼ K;
ðU1ðtÞK�11 ðtÞUT
1 ðtÞþ 1
ðK�pðtÞÞ�0 U2ðtÞUT2 ðtÞÞQðtÞ if 0 < pðtÞ < K;
1K�0
QðtÞ if pðtÞ ¼ 0:
8>>>>><>>>>>:ð7Þ
4. Robustness Properties
This section deals with the robustness properties of proposed estimation scheme(using Eqs. (5) and (7)). We see that hðtÞ is unique and solution of nonlinear adaptivefiltering problem and depends on data in a continuous and stable manner as a resultof using regularization. Also, aðtÞ is unique and piece-wise continuous with dis-continuities at the time instances when pðtÞ changes value (Mathelin and Lozano,1997). We have ðaðtÞ; hðtÞÞ as the estimate of the time-varying unknown parametersða�t ; h
�t Þ at the time instant t. So we define parameter estimation errors asea ¼ aðtÞ � a�t , eh ¼ hðtÞ � h�t and nhðtÞ ¼ BTðt; h�t Þa�t � BTðt; hðtÞÞa�t . We have
yðtÞ ¼ BTðt; h�t Þa�t þ vðtÞ¼ BTðt; hðtÞÞa�t þ nhðtÞ þ vðtÞ:
The QðtÞ is defined as
ROBUST ADAPTIVE IDENTIFICATION 203

QðtÞ ¼Z t
0
e�kðt�sÞ yðsÞBðs; hðsÞÞm2ðsÞ ds
¼ Z t
0
e�kðt�sÞ BBT
m2ds
!a�t �
Z t
0
Z s
0
e�kðt�sÞ BBT
m2ds
!_a�s � ds
þZ t
0
e�kðt�sÞ Bv
m2dsþ
Z t
0
e�kðt�sÞ Bnhm2
ds:
Let
S ¼Z t
0
e�kðt�sÞ Bv
m2dsþ
Z t
0
e�kðt�sÞ Bnhm2
ds
�Z t
0
Z s
0
e�kðt�sÞ BBT
m2ds
!_a�s � ds:
Then, assuming S is properly defined
QðtÞ ¼ Ra�t þ S:
So
aðtÞ ¼
a�t þ R�1S if pðtÞ ¼ K;ðU1U
T1 þ 1
ðK�pÞ�0 U2K2UT2 Þa�t
þðU1K�11 UT
1 þ 1ðK�pÞ�0 U2U
T2 ÞS if 0 < pðtÞ < K;
1K�0
ðRa�t þ SÞ if pðtÞ ¼ 0:
8>>><>>>:
ea ¼ aðtÞ � a�t ¼
R�1S if pðtÞ ¼ K;ð 1ðK�pÞ�0 U2K2U
T2 �U2U
T2 Þa�t
þðU1K�11 UT
1 þ 1ðK�pÞ�0 U2U
T2 ÞS if 0 < pðtÞ < K;
ð 1K�0
R� IÞa�t þ 1K�0
S if pðtÞ ¼ 0:
8>>><>>>: ð8Þ
It could be seen that
keak � ka�t k1 þ 1
�0kSk1 � ka�t k1 þ
kvk1 þ knhk1 þ k _a�t k1k
k�0:
So
keak � ka�t k1 þ cokvk1 þ c1knhk1 þ c2k _a�t k1; c1; c2; c3 > 0:
KUMAR, STOLL AND STOLL204

Each element of vector B corresponds to the normalized firing strength of a rule(Eq. 2), having any nonnegative value less than one. So it is easy to see thatkBðt; h�t Þ � Bðt; hðtÞÞk �
ffiffiffiffiK
pand jnhðtÞj �
ffiffiffiffiK
pka�t k. Therefore above inequality is
reduced as
keak � ka�t k1 þ cokvk1 þ c1ffiffiffiffiK
pka�t k1 þ c2k _a�t k1:
We see that estimation error ea is always bounded if rate of change ofparameter a�t (i.e. _a�t ) is bounded, since signals vðtÞ is bounded. Further, eh isalways bounded and regularization provided robustness against noise present inthe measurements. Therefore, we state that the proposed estimation scheme isrobust against noise signal and time variations of the process. In case, if there isno noise and disturbance signal and the process in not time-varying i.e. v ¼ 0 and_a�t ¼ 0 then
keak � ka�t k1 þ c1ffiffiffiffiK
pka�t k1:
If the regressor vector is PE and �0 is sufficiently small then 9 T > 0 such thatpðtÞ ¼ K 8 t > T and from Eq. (8) we have
keak � c1knhk1 � c1ffiffiffiffiK
pka�t k1:
In the ideal case when knhk1 ¼ 0, then keak ¼ 0.Hence we conclude that if a�t ¼ a� (i.e. time-invariant process), v ¼ 0 (i.e. without
noise), regressor vector is PE and �0 is sufficiently small then 9 T > 0 such that8t > T, then
aðtÞ ¼ a�; when knhk1 ¼ 0; otherwise;
kaðtÞ � a�t k � ka�t k1 þ cokvk1 þ c1ffiffiffiffiK
pka�t k1 þ c2k _a�t k1:
5. Simulation Studies
To show the feasibility of our approach we consider the problem of adaptive iden-tification of a time-varying process from noisy measurements using a fuzzy inferencesystem. Let the function to be identified is described by following nonlinear equa-tion:
y ¼ fðx; pÞ ¼ �10x
2pþ x2þ tanhðxÞ; x � ½�0:5; 2:5�;
ROBUST ADAPTIVE IDENTIFICATION 205
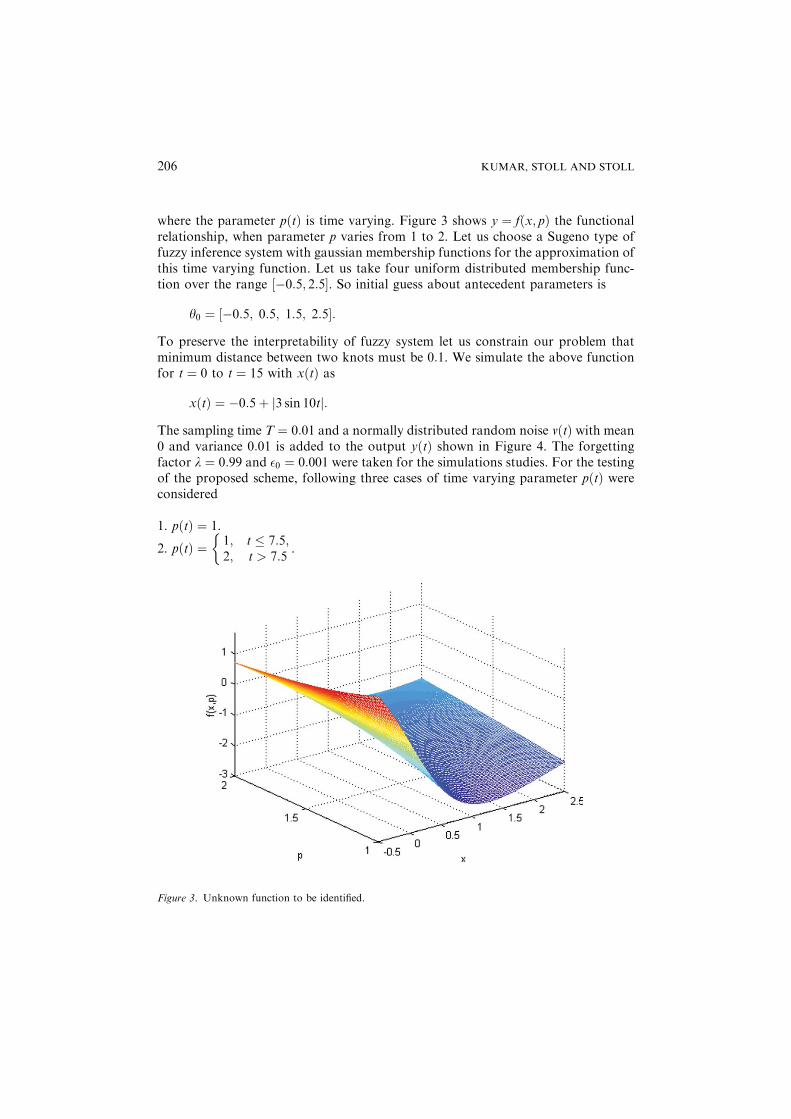
where the parameter pðtÞ is time varying. Figure 3 shows y ¼ fðx; pÞ the functionalrelationship, when parameter p varies from 1 to 2. Let us choose a Sugeno type offuzzy inference system with gaussian membership functions for the approximation ofthis time varying function. Let us take four uniform distributed membership func-tion over the range ½�0:5; 2:5�. So initial guess about antecedent parameters is
h0 ¼ ½�0:5; 0:5; 1:5; 2:5�:
To preserve the interpretability of fuzzy system let us constrain our problem thatminimum distance between two knots must be 0:1. We simulate the above functionfor t ¼ 0 to t ¼ 15 with xðtÞ as
xðtÞ ¼ �0:5þ j3 sin 10tj:
The sampling time T ¼ 0:01 and a normally distributed random noise vðtÞ with mean0 and variance 0:01 is added to the output yðtÞ shown in Figure 4. The forgettingfactor k ¼ 0:99 and �0 ¼ 0:001 were taken for the simulations studies. For the testingof the proposed scheme, following three cases of time varying parameter pðtÞ wereconsidered
1. pðtÞ ¼ 1.
2. pðtÞ ¼ 1; t � 7:5;2; t > 7:5
�.
Figure 3. Unknown function to be identified.
KUMAR, STOLL AND STOLL206

3. pðtÞ ¼ 1þ sinð0:1tÞ.
For the first case when function to be identified is not time-varying, Figure 5 showsthe simulations results and Figure 6 shows the approximation error(differencebetween yðtÞ and model output) surface over the time span of simulation. For thesecond case when function to be identified follows a step change at t ¼ 7:5, Figure 7shows the simulations results and Figure 8 shows the approximation error surfaceover the simulation time. We note that approximation error is maximum at t ¼ 7:5,when pðtÞ changes from 1 to 2. For the third case when function to be identifiedchanges continuously in a sinusoidal manner, Figure 9 shows the simulations resultsand Figure 10 shows the approximation error surface over the simulation time.The interpretability of fuzzy systems remain preserved during approximation, as a
result of putting constraints on the membership curves.
5.1. Comparison with other Estimators
The various existing methods of fuzzy modelling, for example AN-FIS proposed byJang, 1993, are based on recursive least squares estimation (LSE) with some for-getting factor for the learning of consequent parameters and antecedent parametersare adapted using steepest descent method. However, the proposed method uses
Figure 4. Random noise added to the measurements.
ROBUST ADAPTIVE IDENTIFICATION 207
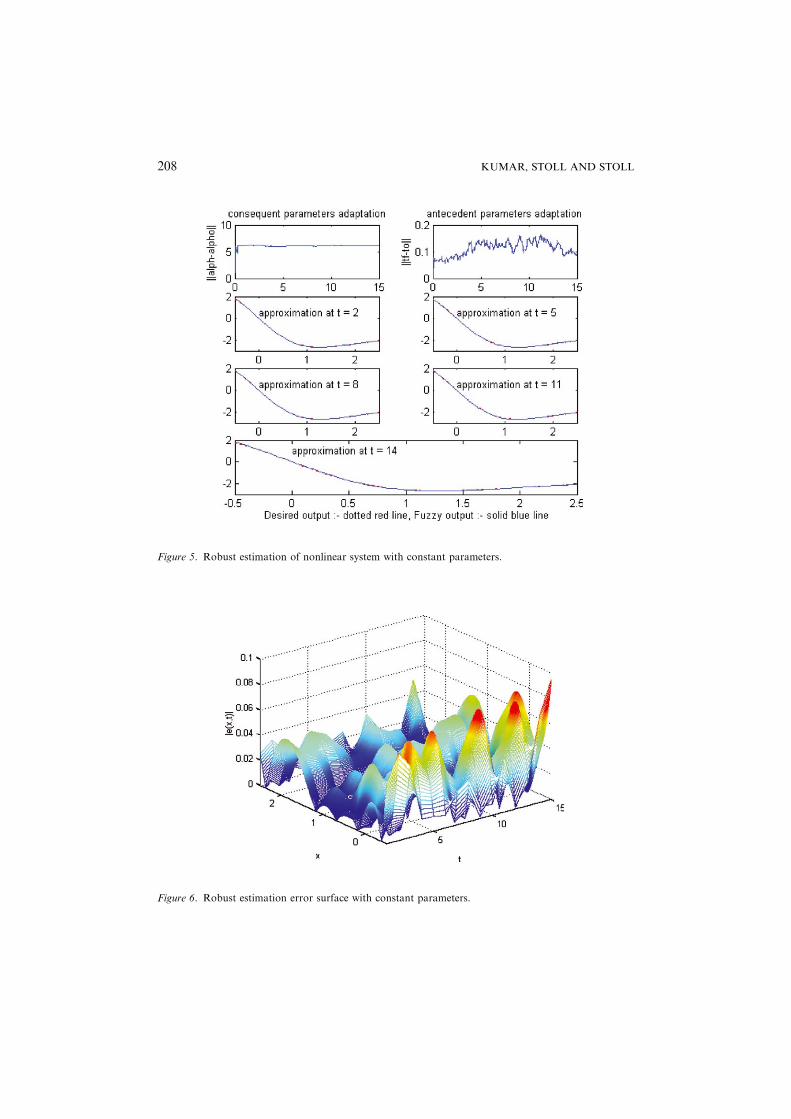
Figure 5. Robust estimation of nonlinear system with constant parameters.
Figure 6. Robust estimation error surface with constant parameters.
KUMAR, STOLL AND STOLL208
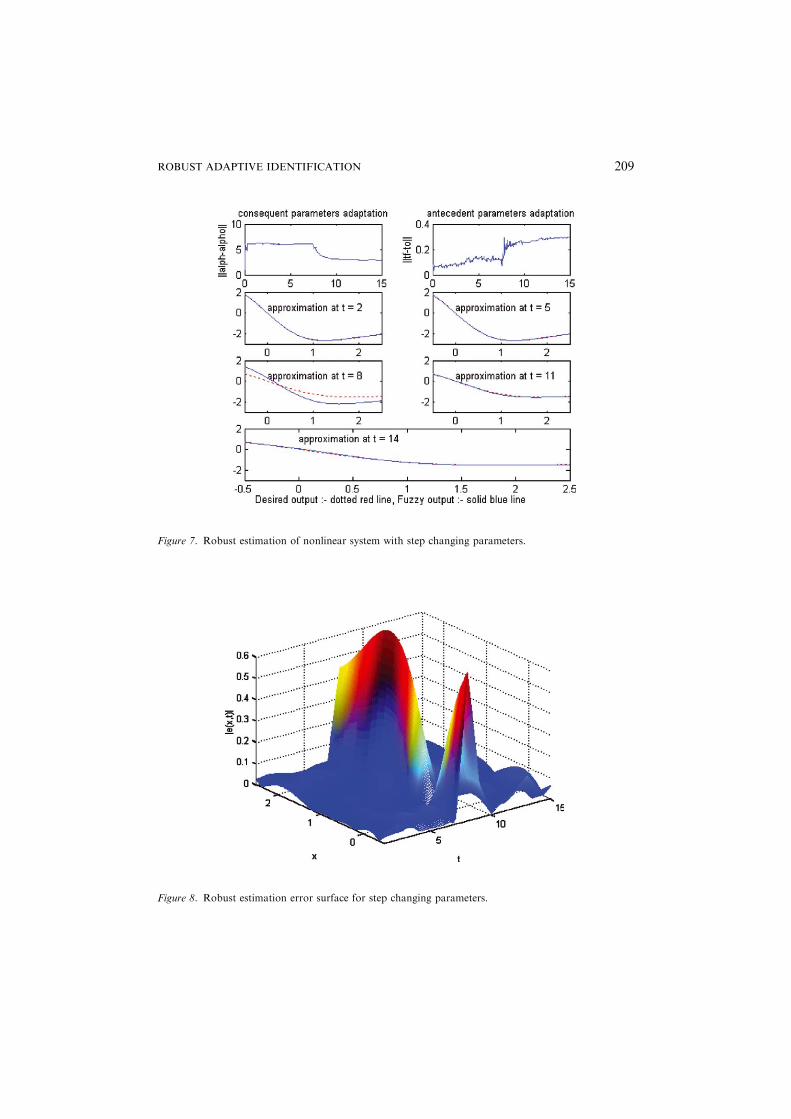
Figure 7. Robust estimation of nonlinear system with step changing parameters.
Figure 8. Robust estimation error surface for step changing parameters.
ROBUST ADAPTIVE IDENTIFICATION 209

Figure 9. Robust estimation of nonlinear system with continuously varying parameters.
Figure 10. Robust estimation error surface for continuously varying parameters.
KUMAR, STOLL AND STOLL210

Gauss–Newton method for the adaptation of antecedent parameters by solving anon-linear adaptive filtering problem. Further, manually designed constraints couldbe put on the shape of membership functions during adaptation. So the modellingperformance may become sensitive to the choice of constraints on the membershipfunctions. Therefore, for the fair comparison of the proposed method with existingtechniques, we choose the same fuzzy model (Sugeno type) with same number ofadjusting consequent parameters and same fixed shape of membership functions forall the methods. The function to be identified is described by following nonlinearequation
y ¼ fðx; pÞ ¼ �10x
2pþ x2þ p2 tanhðxÞ; x � ½�0:5; 2:5�;
where xðtÞ ¼ �0:5þ j3 sin 10tj and pðtÞ ¼ 1þ sinð0:1tÞ. The function is simulatedfor t ¼ 0 to t ¼ 15 with sampling time T ¼ 0:01. We consider a Sugeno type of fuzzyinference system with Gaussian membership functions with four uniform distributedmembership function over the range ½�0:5; 2:5�. So hðtÞ ¼ h0 ¼ ½�0:5; 0:5; 1:5; 2:5�,a0 ¼ ½0 0 0 0�T, and fuzzy system consist of four rules.The proposed method is compared with well known recursive least-squares
estimation (RLSE) with forgetting factor and H1-optimal NormalizedLeast-Mean squares (NLMS) algorithm for adaptive estimation of consequentsparameters. NLMS algorithm is H1-optimal in the sense that the energy offiltered error will never exceed the energy of disturbances (Hassibi et al., 1996).The measurements yðtÞ were corrupted with noise by adding random numbers,chosen from a uniform distribution on the interval ½�1; 1�. The simulationsparameters were tuned experimentally to k ¼ 3, forgetting factor forRLSE = 0.9, and step size for NLMS = 1, to minimize the approximation error.Figure 11 shows the results obtained in the identification of unknown functionand filtering noise from the measurements. We find that root mean square offiltering error is minimum in case of proposed method (0.1480) and maximum forRLSE based ANFIS (0.2638) and H1-optimal NLMS has intermediate value(0.2592). We repeat the experiment for various levels of noise present in themeasurements to study the performance of the methods. The noise is added bychoosing a random number from uniform distribution on some fixed interval.Figure 12 shows the results obtained. We find that ANFIS performs best at lowerlevels of noise but at higher levels of noise above stated method has bestperformance.
6. A Fuzzy Expert System for Physical Fitness Approximation
The classical problem in the field of occupational health is to estimate the physicalfitness of a patient based on the interpretation of various physiological parameters.These parameters could be interpreted by a medical expert for the estimation and
ROBUST ADAPTIVE IDENTIFICATION 211
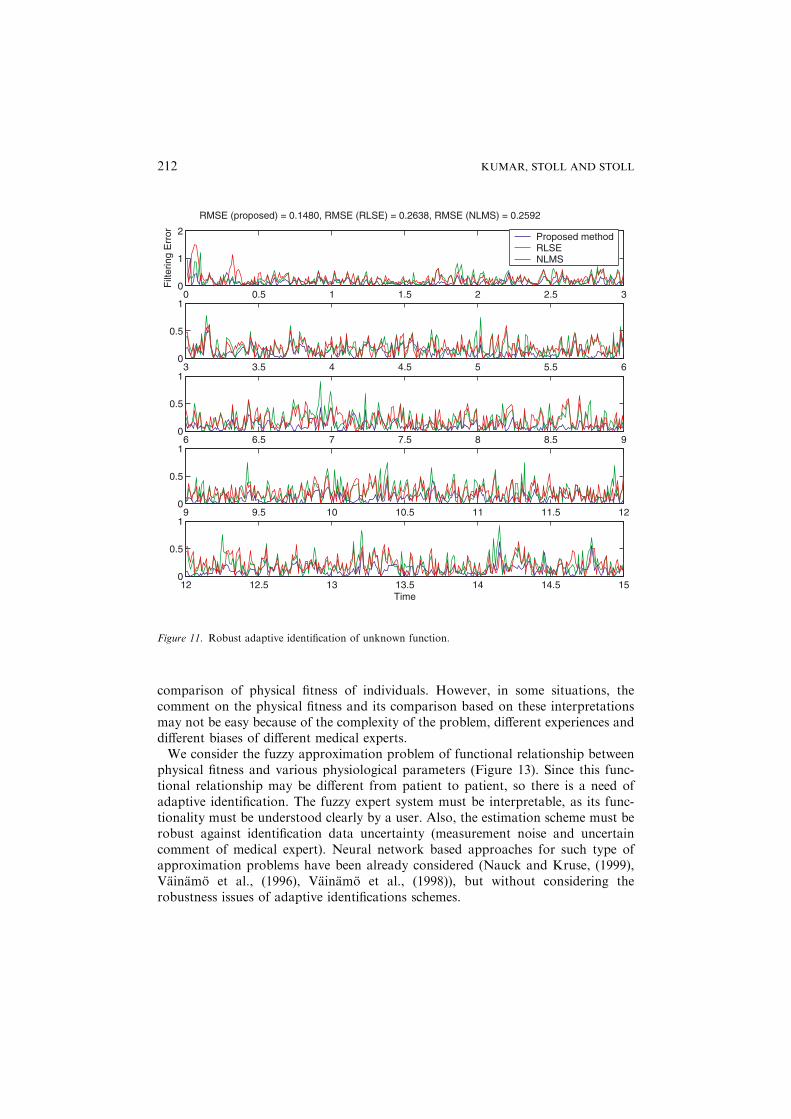
comparison of physical fitness of individuals. However, in some situations, thecomment on the physical fitness and its comparison based on these interpretationsmay not be easy because of the complexity of the problem, different experiences anddifferent biases of different medical experts.We consider the fuzzy approximation problem of functional relationship between
physical fitness and various physiological parameters (Figure 13). Since this func-tional relationship may be different from patient to patient, so there is a need ofadaptive identification. The fuzzy expert system must be interpretable, as its func-tionality must be understood clearly by a user. Also, the estimation scheme must berobust against identification data uncertainty (measurement noise and uncertaincomment of medical expert). Neural network based approaches for such type ofapproximation problems have been already considered (Nauck and Kruse, (1999),Vainamo et al., (1996), Vainamo et al., (1998)), but without considering therobustness issues of adaptive identifications schemes.
0 0.5 1 1.5 2 2.5 30
1
2
Filt
erin
g E
rror
3 3.5 4 4.5 5 5.5 60
0.5
1
6 6.5 7 7.5 8 8.5 90
0.5
1
9 9.5 10 10.5 11 11.5 120
0.5
1
12 12.5 13 13.5 14 14.5 150
0.5
1
Time
Proposed methodRLSENLMS
RMSE (proposed) = 0.1480, RMSE (RLSE) = 0.2638, RMSE (NLMS) = 0.2592
Figure 11. Robust adaptive identification of unknown function.
KUMAR, STOLL AND STOLL212
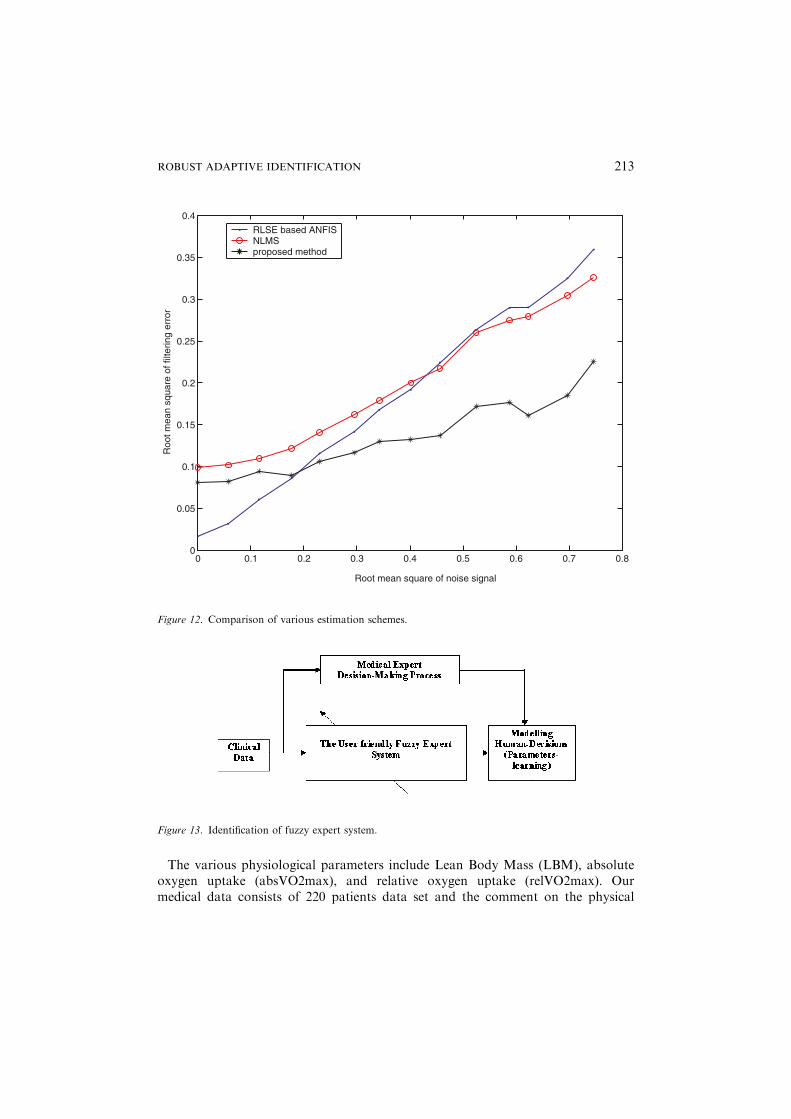
The various physiological parameters include Lean Body Mass (LBM), absoluteoxygen uptake (absVO2max), and relative oxygen uptake (relVO2max). Ourmedical data consists of 220 patients data set and the comment on the physical
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.80
0.05
0.1
0.15
0.2
0.25
0.3
0.35
0.4
Roo
t mea
n sq
uare
of f
ilter
ing
erro
r
Root mean square of noise signal
RLSE based ANFISNLMSproposed method
Figure 12. Comparison of various estimation schemes.
Figure 13. Identification of fuzzy expert system.
ROBUST ADAPTIVE IDENTIFICATION 213
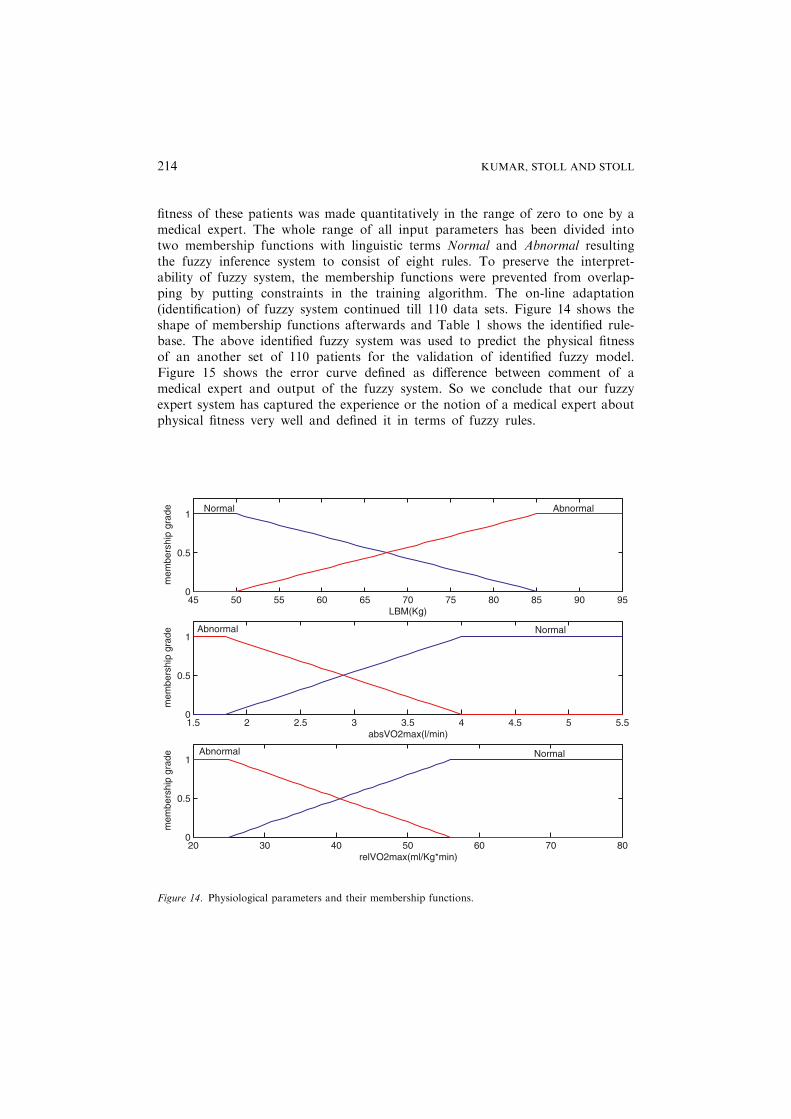
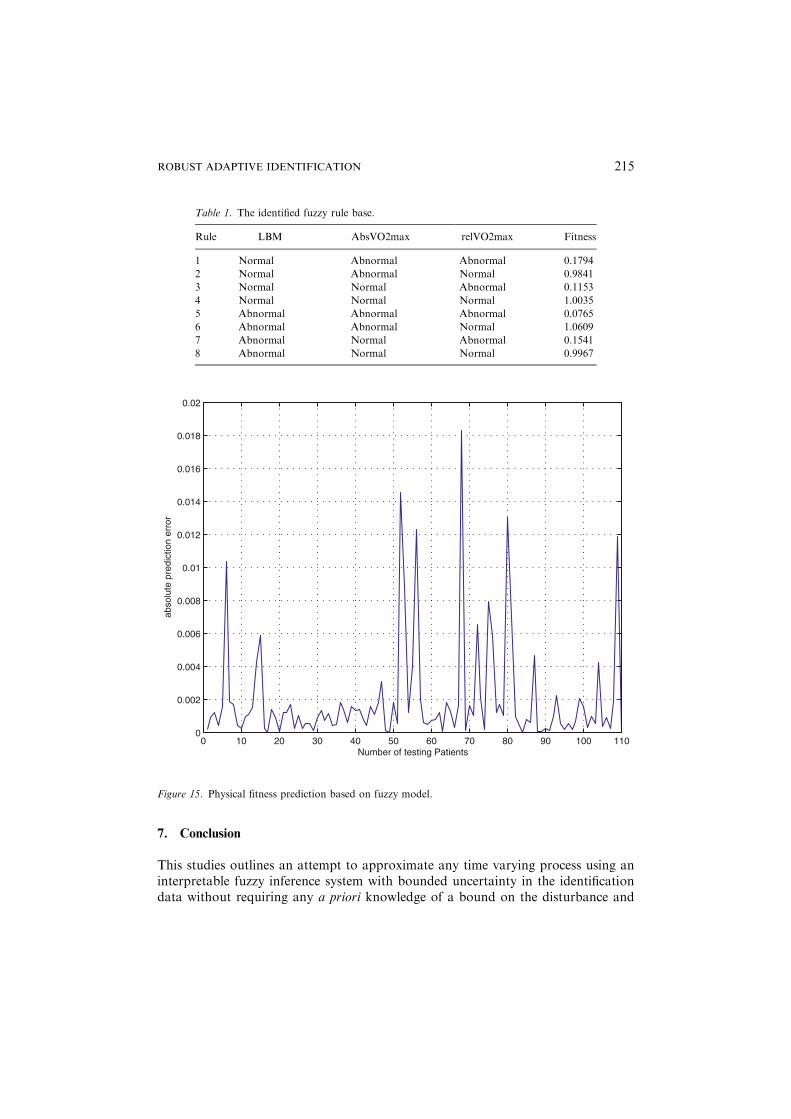
fitness of these patients was made quantitatively in the range of zero to one by amedical expert. The whole range of all input parameters has been divided intotwo membership functions with linguistic terms Normal and Abnormal resultingthe fuzzy inference system to consist of eight rules. To preserve the interpret-ability of fuzzy system, the membership functions were prevented from overlap-ping by putting constraints in the training algorithm. The on-line adaptation(identification) of fuzzy system continued till 110 data sets. Figure 14 shows theshape of membership functions afterwards and Table 1 shows the identified rule-base. The above identified fuzzy system was used to predict the physical fitnessof an another set of 110 patients for the validation of identified fuzzy model.Figure 15 shows the error curve defined as difference between comment of amedical expert and output of the fuzzy system. So we conclude that our fuzzyexpert system has captured the experience or the notion of a medical expert aboutphysical fitness very well and defined it in terms of fuzzy rules.
45 50 55 60 65 70 75 80 85 90 950
0.5
1
LBM(Kg)
mem
bers
hip
grad
e
1.5 2 2.5 3 3.5 4 4.5 5 5.50
0.5
1
absVO2max(l/min)
mem
bers
hip
grad
e
20 30 40 50 60 70 800
0.5
1
relVO2max(ml/Kg*min)
mem
bers
hip
grad
e
Normal Abnormal
Abnormal
Abnormal
Normal
Normal
Figure 14. Physiological parameters and their membership functions.
KUMAR, STOLL AND STOLL214
7. Conclusion
This studies outlines an attempt to approximate any time varying process using aninterpretable fuzzy inference system with bounded uncertainty in the identificationdata without requiring any a priori knowledge of a bound on the disturbance and
Table 1. The identified fuzzy rule base.
Rule LBM AbsVO2max relVO2max Fitness
1 Normal Abnormal Abnormal 0.1794
2 Normal Abnormal Normal 0.9841
3 Normal Normal Abnormal 0.1153
4 Normal Normal Normal 1.0035
5 Abnormal Abnormal Abnormal 0.0765
6 Abnormal Abnormal Normal 1.0609
7 Abnormal Normal Abnormal 0.1541
8 Abnormal Normal Normal 0.9967
0 10 20 30 40 50 60 70 80 90 100 1100
0.002
0.004
0.006
0.008
0.01
0.012
0.014
0.016
0.018
0.02
Number of testing Patients
abso
lute
pre
dict
ion
erro
r
Figure 15. Physical fitness prediction based on fuzzy model.
ROBUST ADAPTIVE IDENTIFICATION 215

noise and of a bound on the unknown parameters values. The feasibility of theproposed approach was verified by simulation studies and then used to identify afuzzy expert system for physical fitness approximation with real world medical data.
Notes
1. Corresponding author. Institut fur Arbeits- und Sozialmedizin, St.-Georg-Str. 108, D-18055 Rostock,
Germany. Tel.: +49-381-494-9956. Fax. +49-381-494-9952.
References
Babuska, R. (2000). ‘‘Construction of Fuzzy Systems-interplay between Precision and Transparency,’’ In
Proc. ESIT 2000, Aachen, pp. 445–452.
Bodenhofer, U. and P. Bauer. (2000). ‘‘Towards an Axiomatic Treatment of Inter-Pretability,’’ In Proc.
IIZUKA2000, Iizuka, pp. 334–339.
Burger, M., H. W. Engl, J. Haslinger, and U. Bodenhofer. (2002). ‘‘Regularized Data-Driven Construc-
tion of Fuzzy Controllers,’’ J. Inverse and Ill-posed Problems 10(2002), 319–344.
Espinosa, J. and J. Vandewalle. (2000). ‘‘Constructing Fuzzy Models with Linguistic Integrity from
Numerical Data-AFRELI Algorithm,’’ IEEE Trans. Fuzzy Systems 8(5): 591–600, October 2000.
Hassibi, B., Ali H. Sayed, and Thomas Kailath. (1996). ‘‘H1 Optimality of the LMS Algorithms’’, IEEE
Transactions on Signal Processing 44(2), 267–280.
Ioannou, P. A. and J. Sun. (1996). ‘‘Robust Adaptive Control’’, Prentic-Hall, Englewood Cliffs, NJ.
Jang, J.-S. Roger. (1993). ‘‘ANFIS: Adaptive-network-based Fuzzy Inference Systems,’’ IEEE Trans.Syst.
Man Cybern, 23(3), 665–685.
Lawson, C. L. and R. J. Hanson. (1995). ‘‘Solving Least Squares Problems’’, SIAM Publications, Phila-
delphia.
Mathelin, M. de. and R. Lozano. (1997). ‘‘Robust Adaptive Identification of Slowly Time Varying
Parameters with Bounded Disturbances,’’ In Proc. ECC97, Brussels.
Nauck, D. and R. Kruse. (1997). ‘‘Function Approximation by NEFPROX,’’ Proc. Second European
Workshop on Fuzzy Decision Analysis and Neural Networks for Management, Planning and Optimization
(EFDAN’97) Dortmund, pp. 160–169.
Nauck, D. and R. Kruse. (1998). ‘‘A Neuro-Fuzzy Approach to Obtain Interpretable Fuzzy Systems for
Function Approximation,’’ Proc. IEEE International Conference on Fuzzy Systems, 1998 (FUZZ-
IEEE’98), Anchorage, AK, May 4–9, pp. 1106–1111.
Nauck, D. and R. Kruse. (1999). ‘‘Obtaining Interpretable Fuzzy Classification Rules from Medical
Data,’’ Artificial Intelligence in Medicine, 16:149–169.
Setnes, M., R. Babuka, and H. B. Verbruggen. (1998). ‘‘Rule-based Modeling: Precision and Transpar-
ency,’’ IEEE Trans. Syst. Man Cybern.Part C: Applications and Reviews, 28:165–69.
Takagi, T. and M. Sugeno. (1985). ‘‘Fuzzy Identification of Systems and its Applications to Modeling and
Control,’’ IEEE Trans. Syst. Man Cybern 15(1): 116–132.
Tan, G. V. and X. Hu. (1996). ‘‘On Designing Fuzzy Controllers Using Genetic Algorithms,’’ In Proc.
Fuzz-IEEE96 volume II, 905–911.
Vainamo, K., T. Makikallio, M. Tulppo, and J. Roning. (1998). ‘‘A Neuro-fuzzy Approach to Aerobic
Fitness Classification: a Multistructure Solution to the Context-Sensitive Feature Selection Problem,’’
Proc. WCCI ’98, May 4–9, Anchorage, Alaska, USA, 797–802.
Vainamo, K., S. Nissila, T. Makikallio, M. Tulppo, and J. Roning. (1996). ‘‘Artificial Neural Network for
Aerobic Fitness Approximation,’’ International Conference on Neural Networks (ICNN96), Washington
DC, USA, June 3–6.
KUMAR, STOLL AND STOLL216




















