Reorientation of asymmetric rigid body using two controls
9
Hindawi Publishing Corporation Mathematical Problems in Engineering Volume 2013, Article ID 708935, 8 pages http://dx.doi.org/10.1155/2013/708935 Research Article Reorientation of Asymmetric Rigid Body Using Two Controls Donghoon Kim, 1 James D. Turner, 1 and Henzeh Leeghim 2 1 Texas A&M University, College Station, TX 77843-3141, USA 2 Chosun University, Gwangju 501-759, Republic of Korea Correspondence should be addressed to Henzeh Leeghim; [email protected] Received 9 May 2013; Accepted 25 July 2013 Academic Editor: Mufid Abudiab Copyright © 2013 Donghoon Kim et al. is is an open access article distributed under the Creative Commons Attribution License, which permits unrestricted use, distribution, and reproduction in any medium, provided the original work is properly cited. Most spacecraſts are designed to be maneuvered to achieve pointing goals. is is accomplished usually by designing a three-axis control system, which can achieve arbitrary maneuvers, where the goal is to repoint the spacecraſt and match a desired angular velocity at the end of the maneuver. New control laws are required, however, if one of the three-axis control actuators fails. is paper explores suboptimal maneuver strategies when only two control torque inputs are available. To handle this underactuated system control problem, the three-axis maneuver strategy is transformed to two successive independent submaneuver strategies. e first maneuver is conducted on one of the available torque axes. Next, the second maneuver is conducted on the torque available plane using two available control torques. However, the resulting control law is more complicated than the general three-axis control law. is is because an optimal switch time needs to be found for determining the end time for the single-axis maneuver or the start time for the second maneuver. Numerical simulation results are presented that compare optimal maneuver strategies for both nominal and failed actuator cases. 1. Introduction is work addresses the problem of finding suboptimal spacecraſt maneuver control laws for handling underactu- ated system, with only two control torques available. Many researchers have considered controlling the attitude of rigid and flexible spacecraſts when all actuators are available. Many different control strategies have been introduced for handling the nominal three-axis control case [1–3]. For underactuated system control application, more limited literatures exist. For example, Tsiotras and Longuski [4] have considered the case designing control strategies for handling situations in which sensor and actuator failures limit the control options available for carrying out the original mission objectives. Kera¨ ı[5] has considered a more extreme case in which only a single control actuator is available but is shown to be uncontrollable, which is intuitively reasonable. Brockett [6] has shown that two controls can be made asymptotically stable about the origin. Tsiotras et al. [7–14] have further addressed the problem of stabilization of axis-symmetric spacecraſt including tracking control laws. Others [15, 16] have presented approximate strategies that switch between two different control laws. Much of the later work has con- sidered complex mathematical approaches for overcoming the underactuated spacecraſt control problem. Recently, Kim and Turner [17] have suggested a simple way to handle the failure control problem by introducing a sequential maneuver approach that avoids exciting nonlinear coupling interaction effects in the equation of motion and attitude kinematics during suboptimal maneuvers. Analytically the problem leads to a high-dimensional optimization problem, where it is very important to specify accurate starting guesses [18]. e problem becomes computationally challenging, because of increased number of unknowns and constraints [19]. A major contribution to this work is the reduction of the number of unknowns and constraints through two successive maneuver strategies. Reducing three submaneuvers to two submaneuvers confirms that the suggested strategy requires less torque than the three-successive-maneuver strategy. In this work, we address the problem of formulating and solving a rigorous nonlinear optimal control problem for- mulation for handling spacecraſt maneuvers where actuator failures limit the number of control inputs to two axes. First, a single-axis maneuver is conducted to move the given attitude
-
Upload
st-andrews -
Category
Documents
-
view
1 -
download
0
Transcript of Reorientation of asymmetric rigid body using two controls

Hindawi Publishing CorporationMathematical Problems in EngineeringVolume 2013 Article ID 708935 8 pageshttpdxdoiorg1011552013708935
Research ArticleReorientation of Asymmetric Rigid Body Using Two Controls
Donghoon Kim1 James D Turner1 and Henzeh Leeghim2
1 Texas AampM University College Station TX 77843-3141 USA2Chosun University Gwangju 501-759 Republic of Korea
Correspondence should be addressed to Henzeh Leeghim hleeghimgmailcom
Received 9 May 2013 Accepted 25 July 2013
Academic Editor Mufid Abudiab
Copyright copy 2013 Donghoon Kim et alThis is an open access article distributed under the Creative CommonsAttribution Licensewhich permits unrestricted use distribution and reproduction in any medium provided the original work is properly cited
Most spacecrafts are designed to be maneuvered to achieve pointing goals This is accomplished usually by designing a three-axiscontrol system which can achieve arbitrary maneuvers where the goal is to repoint the spacecraft and match a desired angularvelocity at the end of the maneuver New control laws are required however if one of the three-axis control actuators fails Thispaper explores suboptimal maneuver strategies when only two control torque inputs are available To handle this underactuatedsystem control problem the three-axis maneuver strategy is transformed to two successive independent submaneuver strategiesThe first maneuver is conducted on one of the available torque axes Next the secondmaneuver is conducted on the torque availableplane using two available control torques However the resulting control law ismore complicated than the general three-axis controllaw This is because an optimal switch time needs to be found for determining the end time for the single-axis maneuver or thestart time for the second maneuver Numerical simulation results are presented that compare optimal maneuver strategies for bothnominal and failed actuator cases
1 Introduction
This work addresses the problem of finding suboptimalspacecraft maneuver control laws for handling underactu-ated system with only two control torques available Manyresearchers have considered controlling the attitude of rigidand flexible spacecrafts when all actuators are availableManydifferent control strategies have been introduced for handlingthe nominal three-axis control case [1ndash3] For underactuatedsystem control application more limited literatures existFor example Tsiotras and Longuski [4] have considered thecase designing control strategies for handling situations inwhich sensor and actuator failures limit the control optionsavailable for carrying out the original mission objectivesKeraı [5] has considered a more extreme case in which onlya single control actuator is available but is shown to beuncontrollable which is intuitively reasonable Brockett [6]has shown that two controls can be made asymptoticallystable about the origin Tsiotras et al [7ndash14] have furtheraddressed the problem of stabilization of axis-symmetricspacecraft including tracking control laws Others [15 16]have presented approximate strategies that switch between
two different control laws Much of the later work has con-sidered complex mathematical approaches for overcomingthe underactuated spacecraft control problem Recently Kimand Turner [17] have suggested a simple way to handle thefailure control problemby introducing a sequentialmaneuverapproach that avoids exciting nonlinear coupling interactioneffects in the equation of motion and attitude kinematicsduring suboptimal maneuvers Analytically the problemleads to a high-dimensional optimization problem where itis very important to specify accurate starting guesses [18]The problem becomes computationally challenging becauseof increased number of unknowns and constraints [19] Amajor contribution to this work is the reduction of thenumber of unknowns and constraints through two successivemaneuver strategies Reducing three submaneuvers to twosubmaneuvers confirms that the suggested strategy requiresless torque than the three-successive-maneuver strategy
In this work we address the problem of formulating andsolving a rigorous nonlinear optimal control problem for-mulation for handling spacecraft maneuvers where actuatorfailures limit the number of control inputs to two axes First asingle-axis maneuver is conducted to move the given attitude
2 Mathematical Problems in Engineering
to a torque available plane Then the general simultaneousmaneuver is conducted for reorienting the spacecraft attitudeThe necessary conditions are developed for two cases suchas control torque minimization and control torque-rate min-imization Unless the closed-loop control is considered thesecond approach provides continuous control time historiesto avoid an unexpected flexible body response [20 21] Thenonlinear necessary conditions are handled by introducinga multiple shooting method [22] which enforces both theterminal and interior boundary conditions that define theoptimal solution
An asymmetric rigid spacecraft math model with twocontrol inputs is assumed The control design objective isto avoid the axis where the actuator failure has occurredWith only two control inputs available our strategy consistsof carrying out two successive submaneuvers of unknownduration For obtaining a suboptimal solution an optimalswitch time must be found Provided numerical examplesdemonstrate that if one fails to determine the optimalswitch time then the impact on the integrated value of theperformance index is very significant The full nonlinear setof necessary conditions is solved by introducing a multipleshooting method that is found to require sim80 iterations forconvergence
2 Dynamics and Kinematics for a Rigid Body
In general the rotational dynamics equation of a rigidspacecraft is given by [1ndash3]
= 119869
minus1
(minus [120596times
] 119869120596 + U) (1)
where 119869 isin R3times3 is the moment of inertia tensor for thespacecraft which is assumed to be diagonal 120596 isin R3 isthe angular velocity vector of the spacecraft and U isin R3 isthe control torque vector and the cross-product matrix witha generic variable k isin R3 is define as
[ktimes] ≜ [
[
0 minus119896
3
119896
2
119896
3
0 minus119896
1
minus119896
2
119896
1
0
]
]
(2)
For describing an actuator failure condition (1) is modi-fied as [21]
≜ f (u120596) = 119869
minus1
(minus [120596times
] 119869120596 + 119875u) (3)
where u isin R2 is the available control torque vector and thecontrol mapping matrix 119875 is defined as
119875 ≜
[
[
1 0
0 1
0 0
]
]
(4)
There are various parameters to describe attitude such asthe quaternion Euler angles direction cosine matrix modi-fiedRodrigues parameters (MRPs) and so forth Consideringthe number of parameters to describe the attitude andsingularity issues the MRPs are selected to define kinematic
equations The MRPs are defined in terms of the quaternionor the principal rotational elements as [23]
120590 =
120588
1 + 119902
4
(5a)
120590 = e tan Φ
4
(5b)
where the MRPs have a geometric singularity at Φ = plusmn2120587
radians from (5b)The kinematic differential equations for the MRPs can be
expressed as
≜ r (120590120596) = 1
4
[119861 (120590)]120596 (6)
where
[119861 (120590)] ≜ (1 minus 120590119879
120590) 1198683times3
+ 2 [120590times
] + 2120590120590119879
(7)
3 Problem Formulation for Normal Control
Two quadratic performance indices are introduced for defin-ing the optimal control problem for the actuator mechanicalfailure maneuver case Both the nominal and failed con-trol actuator maneuvers are designed to achieve the three-dimensional rigid body boundary conditions Two relatedcontrol formulations are presented (i) quadratic penalties oncontrol leading to discontinuous control time histories and(ii) quadratic penalties on control rate leading to continuouscontrol time histories Both performance indices are definedas follows
Ju≜
1
2
int
119905119891
1199050
u119879u d119905 (8a)
Ju≜
1
2
int
119905119891
1199050
u119879u d119905 (8b)
where the time derivative of control torque is defined as
u ≜ g (u) isin R2
(9)
As shown in the numerical results section (8a) leadsto a discontinuous control solution whereas (8b) leads to acontinuous control solution With only two control inputsavailable for the failed actuator case one defines first single-axis maneuver to move given attitude to controllable planeBy introducing two successive submaneuvers one mustdefine an unknown switch time between the first single-axismaneuver and the following maneuver
31 Optimal Control Formulation We seek a solution of (3)and (6) satisfying the prescribed terminal boundary condi-tions
120590 (1199050
) = 1205900
120596 (1199050
) = 1205960
120590 (119905119891
) = 120590119891
120596 (119905119891
) = 120596119891
(10)
Mathematical Problems in Engineering 3
where the 12 members of (10) are prescribed constantscharacterizing the attitude and angular velocity at the initialand final times Defining the Hamiltonian for the system
H = L + 120585119879r + 120583119879f (11)
where the loss function L = u119879u2 and the Lagrangemultipliers are 120585 isin R3 and 120583 isin R3 one obtains thefollowing first-order nonlinear necessary conditions
State Equations Are
= H120585 = r (12a)
= H120583 = f (12b)
where (sdot)120577 ≜ 120597(sdot)120597120577 for a generic variable 120577
Costate Equations Are
120585 = minusH120590 = minusr119879120590120585 (13a)
= minusH120596 = minusr119879120596120585 minus f119879120596120583 (13b)
where
f120596 =
[
[
[
[
[
[
[
[
[
0
119869
2
minus 119869
3
119869
1
120596
3
119869
2
minus 119869
3
119869
1
120596
2
119869
3
minus 119869
1
119869
2
120596
3
0
119869
3
minus 119869
1
119869
2
120596
1
119869
1
minus 119869
2
119869
3
120596
2
119869
1
minus 119869
2
119869
3
120596
1
0
]
]
]
]
]
]
]
]
]
r120596 =1
4
[119861 (120590)]
r120590 =1
2
[
[
120590
1
120596
1
+ 120590
2
120596
2
+ 120590
3
120596
3
120596
3
minus 120590
2
120596
1
+ 120590
1
120596
2
120590
1
120596
3
minus 120590
3
120596
1
minus 120596
2
120590
2
120596
1
minus 120596
3
minus 120590
1
120596
2
120590
1
120596
1
+ 120590
2
120596
2
+ 120590
3
120596
3
120596
1
minus 120590
3
120596
2
+ 120590
2
120596
3
minus120590
1
120596
3
+ 120590
3
120596
1
+ 120596
2
120590
3
120596
2
minus 120596
1
minus 120590
2
120596
3
120590
1
120596
1
+ 120590
2
120596
2
+ 120590
3
120596
3
]
]
(14)
Stationarity Condition Is
0 = Hu = Lu + f119879u 120583 = u + 119875119879119869minus1120583 (15)
Given the fixed initial time 1199050
and final time 119905119891
the initialstates 120590(119905
0
) and 120596(1199050
) and the final states 120590(119905119891
) and 120596(119905119891
)there are no extra boundary conditions These fixed terminalboundary conditions define a classical two-point boundary-value problem
32 Optimal Control-Rate Formulation We seek a solution of(3) (6) and (9) satisfying the terminal boundary conditionsin (10) and
u (1199050
) = u0
u (119905119891
) = u119891
(16)
where the 16 members of (10) and (16) are prescribedconstants characterizing the attitude angular velocity andcontrol torque at the initial and final times Defining theHamiltonian for the system
H = L + 120585119879r + 120583119879f + 120578119879g (17)
where the loss function L = u119879u2 and the Lagrangemultiplier is 120578 isin R2 one obtains the following first-ordernonlinear necessary conditions
State Equations Are = H120585 = r (18a)
= H120583 = f (18b)
u = H120578 = g (18c)
Costate Equations Are
120585 = minusH120590 = minusr119879120590120585 (19a)
= minusH120596 = minusr119879120596120585 minus f119879120596120583 (19b)
= minusHu = minusf119879u 120583 = minus119875
119879
119869
minus1
120583 (19c)Stationarity Condition Is
0 = Hu = Lu + g119879u120578 = u + 120578 (20)As described in optimal control formulation no addi-
tional boundary conditions exist
4 Problem Formulation for Failure Control
For the underactuated system a concept of sequential controlis introduced to avoid a control input about the failed controlaxis A sequential Euler angle transformation [23] is usedfor determining the MRPs at the switch time Assumingthat an Euler angle rotation sequence is selected that avoidsthe failed actuator axis one seeks to design two successivesubmaneuvers where the maneuver times are unknown Atthe interior switch time the angular velocity is set to zeroto avoid cross-coupling termrsquos effect These control designassumptions guarantee that the constraints for the states atthe interior switch time are perfectly known
After developing a strategy for carrying out two succes-sive submaneuvers the switch timemust be specified Failureto solve the optimal switch time leads to large penaltiesin performance indices which indicates poor maneuverperformance
4 Mathematical Problems in Engineering
41 Switch-Time Boundary Conditions A free interior switchtime 119905
119904
is introduced for changing the control actuatorbeing used the following unknown boundary conditions areintroduced
H (119905
119904
) = H(119905) = constant (21)
since the Hamiltonian is not an explicit function of timeBecause the unknown switch time is defined a multiple
shootingmethod [22] is applied to find a suboptimal solutionwhere the interior point condition [24] is given by
119873(z (119905119904
)) = 0 (22)
where z is the total states The interior point condition yieldsthe following two additional boundary conditions that definethe suboptimal solution
120581119879
(119905
+
119904
) = 120581119879
(119905
minus
119904
) minus 120572119879
119873z1003816
1003816
1003816
1003816
1003816119905119904
(23a)
H (119905
+
119904
) = H (119905
minus
119904
) (23b)
where 120581 is the total Lagrange multipliers associated withthe total states and 120572 is the another Lagrange multiplierdescribing the maneuver switch-time jump conditions
42 Optimal Control Formulation for Failure Control AnEuler angle transformation algorithm [23] is used to definethe boundary conditions for the MRPs Unlike the normalcontrol the MRPs at the switch time need to be determinedThe boundary conditions for the MRPs are handled by usingan Euler angle rotation sequence that avoids the failed controlactuator axis
To formulate themathematical structure for the problemone now collects all the problem unknowns and constraintconditions as follows
19 Unknowns Are
119905
0
120585 (1199050
) isin R3
120583 (1199050
) isin R3
(24a)
119905
119904
1205721
isin R3
1205722
isin R3
119905
119904
isin R1
(24b)
119905
119891
120585 (119905119891
) isin R3
120583 (119905119891
) isin R3
(24c)
19 Constraints Are119905
119904
120590 (119905minus119904
) = 120590119905119904 120596 (119905
minus
119904
) = 120596119905119904
120590 (119905+
119904
) = 120590119905119904 120596 (119905
+
119904
) = 120596119905119904
120585 (119905minus
119904
) = 120585 (119905+
119904
) + 1205723
120583 (119905minus
119904
) = 120583 (119905+
119904
) + 1205724
H (119905
minus
119904
) = H (119905
+
119904
)
(25)
The constraints in (25) are particularly challengingbecause jump conditions govern the optimality of the result-ing solutions The problem is characterized by both highdimension and nonlinearity which makes it critically impor-tant to develop useful approximate starting solutions Theunknowns in (24a) (24b) and (24c) and the constraints in(25) are enforced by iteratively solving (12a) (12b) (13a)(13b) and (15)
Table 1 Numerical simulation parameters
Parameter Value UnitInertia of the spacecraft diag [142 173 203] kgsdotm2
Initial angular velocity [0 0 0]119879 degsInitial control torque [0 0]119879 NmInitial Euler angles (1-2-1 set) [15 30 45]119879 degInitial MRPs [0263 01361 minus0037]119879 mdashInterior angular velocity [0 0 0]119879 degsInterior control torque [0 0]119879 NmInterior Euler angles (1-2-1 set) [15 30 0]119879 degInterior MRPs [0064 0131 0017]119879 mdashFinal angular velocity [0 0 0]119879 degsFinal control torque [0 0]119879 NmFinal Euler angles (1-2-1 set) [0 0 0]119879 degFinal MRPs [0 0 0]119879 mdash
43 Optimal Control-Rate Formulation for Failure ControlTo formulate the mathematical structure for the problemone now collects all the problem unknowns and constraintconditions as follows
25 Unknowns Are
119905
0
120585 (1199050
) isin R3
120583 (1199050
) isin R3
120578 (1199050
) isin R2
(26a)
119905
119904
1205721
isin R3
1205722
isin R3
1205723
isin R2
119905
119904
isin R1
(26b)
119905
119891
120585 (119905119891
) isin R3
120583 (119905119891
) isin R3
120578 (119905119891
) isin R2
(26c)
25 Constraints Are
119905
119904
120590 (119905minus119904
) = 120590119905119904 120596 (119905
minus
119904
) = 120596119905119904
u (119905minus119904
) = u119905119904
120590 (119905+
119904
) = 120590119905119904 120596 (119905
+
119904
) = 120596119905119904
u (119905+119904
) = u119905119904
120585 (119905minus
119904
) = 120585 (119905+
119904
) + 1205724
120583 (119905minus
119904
) = 120583 (119905+
119904
) + 1205725
120578 (119905minus
119904
) = 120578 (119905+
119904
) + 1205726
H (119905
minus
119904
) = H (119905
+
119904
)
(27)
The unknowns of (26a) (26b) and (26c) and the con-straints of (27) are enforced by iteratively solving (18a) (18b)(18c) (19a) (19b) (19c) and (20)
5 Numerical Results
Thenumerical simulation parameters are listed in Table 1 Forasymmetric rigid spacecraft a diagonal moment of inertia
Mathematical Problems in Engineering 5
n1
b1b3
n3b2
wΩ
i
n2
n1
b1
n3
w
Ω
i
n2
b9984003
b9984002
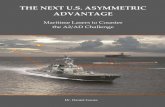
Figure 1 Initial attitude movement to torque available plane using torque available axis rotation
Table 2 Comparison between guesses and found values (torque-rate minimization)
Parameter Guess Found value120583 (1199050
) [0 0 0]119879 [2040 0 0]119879
120585 (1199050
) [0 0 0]119879 [1117 minus0001 minus0310]119879
120578 (1199050
) [0 0]119879 [0310 0]119879
120583 (119905119891
) [0 0 0]119879 [minus2898 minus0710 minus115523]119879
120585 (119905119891
) [0 0 0]119879 [2528 3429 minus7982]119879
120578 (119905119891
) [0 0]119879 [0310 minus0003]119879
1205721
[0 0 0]119879 [minus5286 minus1983 148211]119879
1205722
[0 0 0]119879 [minus3354 minus2203 6941]119879
1205723
[0 0]119879 [0146 minus0263]119879
119905
119904
15 12930
tensor is assumed to model the spacecraft where all valuesof the inertia are different
Numerical simulations are performed for both nominal(3-axis controls) and failure control cases (2-axis controls)For the failure control simulation case 119906
1
and 119906
2
are onlyavailable Using the Euler transformation the given initialattitude can be transformed into two possible sets of expres-sion such as (1-2-1) and (2-1-2) In this paper the (1-2-1) setis studied and a trend of first single-axis maneuver is shownin Figure 1 Future workwill develop algorithms for optimallyselecting the Euler angle rotation sequence
The unknown Lagrange multipliers are selected arbitrar-ily and the unknown switch times are initialized by assuminghalf of the total simulation time With this initial guesses theLagrange multipliers and switch time are found and listed inTables 3 and 2
The simulation results for minimizing control torquesare shown in Figures 2ndash5 Figure 2 shows that all the statesmeet the terminal and interior conditions using only twocontrol torques Since a single-axis maneuver is conducteduntil the switch time we observe linear control time historiesThen two control torques are utilized for reorientationNote that discontinuous control time histories are obtained fortorque minimization case Figure 3 presents time histories ofLagrange multipliers associated with the states
The results among the normal control failure controlusing two successive maneuvers and failure control using
0 130079 30minus01
0002
0 130079 30minus01
0010203
0 130079 30minus04
0
04
Time (s)
Time (s)
Time (s)
120596(r
ads
)
120590
u(N
m)
u1u2
120590112059021205903
1205961
1205962
1205963
Figure 2 Time trajectory of states (torque minimization)
three successive maneuvers are compared Figure 4 presentsthe Hamiltonian and performance index time histories Asdefined in (21) it shows that Hamiltonian is constant overtime regardless of normal and failure controls For the normalcontrol the performance index value at final time indicatesthe torque consumption For the failure control the sumof the performance index value at switch times and finaltime indicates the torque consumption Figure 5 presents theprincipal angle time histories We observe that the principalangle path using three successive submaneuvers is the longestThus we can expect that the two-successive-submaneuverstrategy has better performance than the three-successive-submaneuver strategy
6 Mathematical Problems in Engineering
0 130079 30minus350
minus150
50
0 130079 30minus20
minus10
0
10
Time (s)
Time (s)
120583
120583
1
12058321205833
120585
120585
1
12058521205853
Figure 3 Time trajectory of costates (torque minimization)
Table 3 Comparison between guesses and found values (torqueminimization)
Parameter Guess Found value120583 (1199050
) [0 0 0]119879 [5616 0 0]119879120585 (1199050
) [0 0 0]119879 [3056 minus0004 minus0849]119879
120583 (119905119891
) [0 0 0]119879 [minus5549 minus1053 minus285835]119879
120585 (119905119891
) [0 0 0]119879 [5929 6798 minus10628]119879
1205721
[0 0 0]119879 [minus8389 minus5949 329183]1198791205722
[0 0 0]119879 [minus5322 minus4968 8416]119879
119905
119904
15 13008
The simulation results for minimizing control torquerates are shown in Figures 6ndash9 Figure 6 shows that all thestates meet the terminal and interior conditions using onlytwo control torques Even though a single-axis maneuver isconducted until the switch time different control time histo-ries are obtainedThis is because control rates are minimizedinstead of control torques Also it leads to continuous controltime histories Figure 7 presents time histories of Lagrangemultipliers associated with the state
Similarly constant Hamiltonian time histories areobtained in Figure 8 Like the control torque minimizationresults of the principal angle path the three-successive-submaneuver result has the longest path in Figure 9 Forcomparing torque consumptions according to the usage ofcontrol rate as a performance index Gu
≜ (12) int
119905119891
1199050u119879u d119905
is calculated For both torque and torque-rate minimizationcases torque consumptions are compared and listed inTable 4
0 5 10 15 20 25 30
minus01
minus005
0
ℋ
Normal2 man3 man
0 5 10 15 20 25 300
025
05
Time (s)
Time (s)
ℐ
Normal2 man3 man
Figure 4 Time trajectory of Hamiltonian and performance index(torque minimization)
0 5 10 15 20 25 300
10
20
30
40
50
60
70
Time (s)
Normal2 man3 man
Φ(d
eg)
Figure 5 Time trajectory of principal angle (torque minimization)
As shown in Table 4 the two-successive-submaneuverstrategy requires less torque than the three-successive-submaneuver one
6 Conclusion
The classic spacecraft maneuver problem is generalized tohandle the special case that an actuator failure alters the
Mathematical Problems in Engineering 7
0 1293 30minus012
0 1293 30
0 1293 30Time (s)
Time (s)
Time (s)
minus010
010203
minus04
0
04
0002
120596(r
ads
)
120590
u(N
m)
u1u2
120590112059021205903
1205961
1205962
1205963
Figure 6 Time trajectory of states (torque-rate minimization)
0 1293 30minus150
minus50
50
0 1293 30minus10
0
10
0 1293 30minus05
0
05
Time (s)
Time (s)
Time (s)
120583
120583
1
12058321205833
120585
120585
1
12058521205853
120578
120578
1
1205782
Figure 7 Time trajectory of costates (torque-rate minimization)
0 5 10 15 20 25 30minus012
minus006
0
ℋ
0 5 10 15 20 25 300
015
03
Time (s)
Time (s)
ℐ
Normal2 man3 man
Normal2 man3 man
Figure 8 Time trajectory of Hamiltonian and performance index(torque-rate minimization)
0 5 10 15 20 25 300
10
20
30
40
50
60
70
Time (s)
Normal2 man3 man
Φ(d
eg)
Figure 9 Time trajectory of principal angle (torque-rate minimiza-tion)
Table 4 Torque consumption comparison
Observation Normal 2 man (ratio) 3 man (ratio)Ju 00671 07820 (116502) 10432 (155414)Gu 00959 10525 (109700) 15348 (159965)
hardware capabilities available for repointing the vehicle Akey objective is to maintain a suboptimal solution strategy
8 Mathematical Problems in Engineering
even during the degraded hardware environment A solutionstrategy is presented that enables two control inputs tocomplete the originally defined three-dimensional rigid bodymaneuver Nonlinear necessary conditions are defined forcarrying out a sequence of maneuvers For a single-axisand simultaneous submaneuver an unknown switch timemust be recovered switching between the remaining controlactuators Two control formulations are presented The firstapproach penalizes the control torques but is shown to leadto discontinuous control time historiesThe second approachpenalizes the control torque rates but is shown to eliminatethe discontinuous control time histories which is importantfor flexible body applications The problem is defined bya nonlinear high-dimensional set of necessary conditionswhich are iteratively solved by introducing a multiple shoot-ing method On comparing the performance indices for thenominal and failed actuator cases it is demonstrated that thefailed actuator case requires sim20-fold increase in computa-tional cost The proposed method is expected to be broadlyuseful for spacecraft applications that must deal with actuatorfailures on orbit where optimized approaches are requiredfor maintaining vehicle pointing goals Future research willinvestigate developing more accurate starting guess solutionsfor reducing the number of nonlinear optimization iterationsrequired
References
[1] J L Junkins and J D Turner ldquoOptimal continuous torque atti-tude maneuversrdquo Journal of Guidance Control and Dynamicsvol 3 no 3 pp 210ndash217 1980
[2] J D Turner and J L Junkins ldquoOptimal large-angle singleaxis rotational maneuvers of flexible spacecraftrdquo Journal ofGuidance Control and Dynamics vol 3 no 6 pp 578ndash5851980
[3] J L Junkins and J D Turner Optimal Spacecraft RotationalManeuvers vol 3 of Studies in Astronautics Elsevier Amster-dam The Netherlands 1986
[4] P Tsiotras and J M Longuski ldquoA new parameterization of theattitude kinematicsrdquo Journal of the Astronautical Sciences vol43 no 3 pp 243ndash262 1995
[5] E-Y Keraı ldquoAnalyis of small time local controllability of therigid bodymodelrdquo in Proceedings of the 3rd IFAC Symposium onSystem Structure and Control pp 597ndash602 Oxford UK 1995
[6] R W Brockett ldquoAsymptotic stability and feedback stabiliza-tionrdquo in Differential Geometric Control Theory pp 181ndash191Birkhauser Cambridge Mass USA 1983
[7] P Tsiotras M Corless and J M Longuski ldquoA novel approachto the attitude control of axisymmetric spacecraftrdquo Automaticavol 31 no 8 pp 1099ndash1112 1995
[8] P Tsiotras ldquoOptimal regulation and passivity results for axisym-metric rigid bodies using two controlsrdquo Journal of GuidanceControl and Dynamics vol 20 no 3 pp 457ndash463 1997
[9] P Tsiotras and J Luo ldquoReduced effort control laws for under-actuated rigid spacecraftrdquo Journal of Guidance Control andDynamics vol 20 no 6 pp 1089ndash1095 1997
[10] P Tsiotras and J Luo ldquoStabilization and tracking of under-actuated axisymmetric spacecraft with bounded controlrdquo inProceedings of the 4th IFAC Symposium on Nonlinear Control
Systems Design pp 800ndash806 Pergamon Press Enschede TheNetherlands 1998
[11] H Shen and P Tsiotras ldquoTime-optimal control of axisymmetricrigid spacecraft using two controlsrdquo Journal of Guidance Con-trol and Dynamics vol 22 no 5 pp 682ndash694 1999
[12] P Tsiotras and J Luo ldquoControl of underactuated spacecraft withbounded inputsrdquoAutomatica vol 36 no 8 pp 1153ndash1169 2000
[13] P Tsiotras and V Doumtchenko ldquoControl of spacecraft subjectto actuator failures stateof-the-art and open problemsrdquo in TheRichardH BattinAstrodynamics Conference pp 1ndash21 AmericanAstronautical Society San Diego Calif USA No 00-264
[14] P Tsiotras and A Schleicher ldquoDetumbling and partial attitudestabilization of a rigid spacecraft under actuator failurerdquo inProceedings of the AIAA Guidance Navigation and ControlConference and Exhibit AIAA Denver Colo USA August2000 No 2000-4044
[15] P Morin C Samson J-B Pomet and Z-P Jiang ldquoTime-varying feedback stabilization of the attitude of a rigid space-craft with two controlsrdquo Systems amp Control Letters vol 25 no5 pp 375ndash385 1995
[16] J-M Coron and E-Y Keraı ldquoExplicit feedbacks stabilizingthe attitude of a rigid spacecraft with two control torquesrdquoAutomatica vol 32 no 5 pp 669ndash677 1996
[17] D Kim and J D Turner ldquo3D spacecraft attitude control usingtwo control inputsrdquo in Proceedings of the Annual TechnicalSymposium p 26 AIAA May 2012 No A-33
[18] D Kim and J D Turner ldquoSpacecraft attitude control using twocontrol torquesrdquo in Proceedings of the Jer-Nan Juang Astrody-namics Symposium American Astronautical Society CollegeStation Tex USA June 2012 NoAAS 12-640
[19] D Kim and J D Turner ldquoSuboptimal spacecraft maneuversusing two controlsrdquo Journal of Guidance Control and Dynam-ics
[20] J L Junkins Z H Rahman and H Bang ldquoNear-minimum-time control of distributed parameter systems Analyticaland experimental resultsrdquo Journal of Guidance Control andDynamics vol 14 no 2 pp 406ndash415 1991
[21] D Kim 3Dmaneuvers for asymmetric under-actuated rigid body[PhD thesis] Texas AampM University 2013
[22] H G Bock and K J Plitt ldquoA multiple shooting algorithmfor direct solution of optimal problemsrdquo in Proceeedings ofthe 9th IFAC World Congress pp 242ndash247 IEEE PublicationsBudapest Hungary 1984
[23] H Schaub and J L Junkins Analytical Mechanics of SpaceSystems AIAA Reston Va USA 2nd edition 2009
[24] H J Pesch ldquoA practical guide to the solution of real-life optimalcontrol problemsrdquo Control and Cybernetics vol 23 no 1-2 pp7ndash60 1994
Submit your manuscripts athttpwwwhindawicom
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttpwwwhindawicom
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
CombinatoricsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Decision SciencesAdvances in
Discrete MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014 Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Stochastic AnalysisInternational Journal of

2 Mathematical Problems in Engineering
to a torque available plane Then the general simultaneousmaneuver is conducted for reorienting the spacecraft attitudeThe necessary conditions are developed for two cases suchas control torque minimization and control torque-rate min-imization Unless the closed-loop control is considered thesecond approach provides continuous control time historiesto avoid an unexpected flexible body response [20 21] Thenonlinear necessary conditions are handled by introducinga multiple shooting method [22] which enforces both theterminal and interior boundary conditions that define theoptimal solution
An asymmetric rigid spacecraft math model with twocontrol inputs is assumed The control design objective isto avoid the axis where the actuator failure has occurredWith only two control inputs available our strategy consistsof carrying out two successive submaneuvers of unknownduration For obtaining a suboptimal solution an optimalswitch time must be found Provided numerical examplesdemonstrate that if one fails to determine the optimalswitch time then the impact on the integrated value of theperformance index is very significant The full nonlinear setof necessary conditions is solved by introducing a multipleshooting method that is found to require sim80 iterations forconvergence
2 Dynamics and Kinematics for a Rigid Body
In general the rotational dynamics equation of a rigidspacecraft is given by [1ndash3]
= 119869
minus1
(minus [120596times
] 119869120596 + U) (1)
where 119869 isin R3times3 is the moment of inertia tensor for thespacecraft which is assumed to be diagonal 120596 isin R3 isthe angular velocity vector of the spacecraft and U isin R3 isthe control torque vector and the cross-product matrix witha generic variable k isin R3 is define as
[ktimes] ≜ [
[
0 minus119896
3
119896
2
119896
3
0 minus119896
1
minus119896
2
119896
1
0
]
]
(2)
For describing an actuator failure condition (1) is modi-fied as [21]
≜ f (u120596) = 119869
minus1
(minus [120596times
] 119869120596 + 119875u) (3)
where u isin R2 is the available control torque vector and thecontrol mapping matrix 119875 is defined as
119875 ≜
[
[
1 0
0 1
0 0
]
]
(4)
There are various parameters to describe attitude such asthe quaternion Euler angles direction cosine matrix modi-fiedRodrigues parameters (MRPs) and so forth Consideringthe number of parameters to describe the attitude andsingularity issues the MRPs are selected to define kinematic
equations The MRPs are defined in terms of the quaternionor the principal rotational elements as [23]
120590 =
120588
1 + 119902
4
(5a)
120590 = e tan Φ
4
(5b)
where the MRPs have a geometric singularity at Φ = plusmn2120587
radians from (5b)The kinematic differential equations for the MRPs can be
expressed as
≜ r (120590120596) = 1
4
[119861 (120590)]120596 (6)
where
[119861 (120590)] ≜ (1 minus 120590119879
120590) 1198683times3
+ 2 [120590times
] + 2120590120590119879
(7)
3 Problem Formulation for Normal Control
Two quadratic performance indices are introduced for defin-ing the optimal control problem for the actuator mechanicalfailure maneuver case Both the nominal and failed con-trol actuator maneuvers are designed to achieve the three-dimensional rigid body boundary conditions Two relatedcontrol formulations are presented (i) quadratic penalties oncontrol leading to discontinuous control time histories and(ii) quadratic penalties on control rate leading to continuouscontrol time histories Both performance indices are definedas follows
Ju≜
1
2
int
119905119891
1199050
u119879u d119905 (8a)
Ju≜
1
2
int
119905119891
1199050
u119879u d119905 (8b)
where the time derivative of control torque is defined as
u ≜ g (u) isin R2
(9)
As shown in the numerical results section (8a) leadsto a discontinuous control solution whereas (8b) leads to acontinuous control solution With only two control inputsavailable for the failed actuator case one defines first single-axis maneuver to move given attitude to controllable planeBy introducing two successive submaneuvers one mustdefine an unknown switch time between the first single-axismaneuver and the following maneuver
31 Optimal Control Formulation We seek a solution of (3)and (6) satisfying the prescribed terminal boundary condi-tions
120590 (1199050
) = 1205900
120596 (1199050
) = 1205960
120590 (119905119891
) = 120590119891
120596 (119905119891
) = 120596119891
(10)
Mathematical Problems in Engineering 3
where the 12 members of (10) are prescribed constantscharacterizing the attitude and angular velocity at the initialand final times Defining the Hamiltonian for the system
H = L + 120585119879r + 120583119879f (11)
where the loss function L = u119879u2 and the Lagrangemultipliers are 120585 isin R3 and 120583 isin R3 one obtains thefollowing first-order nonlinear necessary conditions
State Equations Are
= H120585 = r (12a)
= H120583 = f (12b)
where (sdot)120577 ≜ 120597(sdot)120597120577 for a generic variable 120577
Costate Equations Are
120585 = minusH120590 = minusr119879120590120585 (13a)
= minusH120596 = minusr119879120596120585 minus f119879120596120583 (13b)
where
f120596 =
[
[
[
[
[
[
[
[
[
0
119869
2
minus 119869
3
119869
1
120596
3
119869
2
minus 119869
3
119869
1
120596
2
119869
3
minus 119869
1
119869
2
120596
3
0
119869
3
minus 119869
1
119869
2
120596
1
119869
1
minus 119869
2
119869
3
120596
2
119869
1
minus 119869
2
119869
3
120596
1
0
]
]
]
]
]
]
]
]
]
r120596 =1
4
[119861 (120590)]
r120590 =1
2
[
[
120590
1
120596
1
+ 120590
2
120596
2
+ 120590
3
120596
3
120596
3
minus 120590
2
120596
1
+ 120590
1
120596
2
120590
1
120596
3
minus 120590
3
120596
1
minus 120596
2
120590
2
120596
1
minus 120596
3
minus 120590
1
120596
2
120590
1
120596
1
+ 120590
2
120596
2
+ 120590
3
120596
3
120596
1
minus 120590
3
120596
2
+ 120590
2
120596
3
minus120590
1
120596
3
+ 120590
3
120596
1
+ 120596
2
120590
3
120596
2
minus 120596
1
minus 120590
2
120596
3
120590
1
120596
1
+ 120590
2
120596
2
+ 120590
3
120596
3
]
]
(14)
Stationarity Condition Is
0 = Hu = Lu + f119879u 120583 = u + 119875119879119869minus1120583 (15)
Given the fixed initial time 1199050
and final time 119905119891
the initialstates 120590(119905
0
) and 120596(1199050
) and the final states 120590(119905119891
) and 120596(119905119891
)there are no extra boundary conditions These fixed terminalboundary conditions define a classical two-point boundary-value problem
32 Optimal Control-Rate Formulation We seek a solution of(3) (6) and (9) satisfying the terminal boundary conditionsin (10) and
u (1199050
) = u0
u (119905119891
) = u119891
(16)
where the 16 members of (10) and (16) are prescribedconstants characterizing the attitude angular velocity andcontrol torque at the initial and final times Defining theHamiltonian for the system
H = L + 120585119879r + 120583119879f + 120578119879g (17)
where the loss function L = u119879u2 and the Lagrangemultiplier is 120578 isin R2 one obtains the following first-ordernonlinear necessary conditions
State Equations Are = H120585 = r (18a)
= H120583 = f (18b)
u = H120578 = g (18c)
Costate Equations Are
120585 = minusH120590 = minusr119879120590120585 (19a)
= minusH120596 = minusr119879120596120585 minus f119879120596120583 (19b)
= minusHu = minusf119879u 120583 = minus119875
119879
119869
minus1
120583 (19c)Stationarity Condition Is
0 = Hu = Lu + g119879u120578 = u + 120578 (20)As described in optimal control formulation no addi-
tional boundary conditions exist
4 Problem Formulation for Failure Control
For the underactuated system a concept of sequential controlis introduced to avoid a control input about the failed controlaxis A sequential Euler angle transformation [23] is usedfor determining the MRPs at the switch time Assumingthat an Euler angle rotation sequence is selected that avoidsthe failed actuator axis one seeks to design two successivesubmaneuvers where the maneuver times are unknown Atthe interior switch time the angular velocity is set to zeroto avoid cross-coupling termrsquos effect These control designassumptions guarantee that the constraints for the states atthe interior switch time are perfectly known
After developing a strategy for carrying out two succes-sive submaneuvers the switch timemust be specified Failureto solve the optimal switch time leads to large penaltiesin performance indices which indicates poor maneuverperformance
4 Mathematical Problems in Engineering
41 Switch-Time Boundary Conditions A free interior switchtime 119905
119904
is introduced for changing the control actuatorbeing used the following unknown boundary conditions areintroduced
H (119905
119904
) = H(119905) = constant (21)
since the Hamiltonian is not an explicit function of timeBecause the unknown switch time is defined a multiple
shootingmethod [22] is applied to find a suboptimal solutionwhere the interior point condition [24] is given by
119873(z (119905119904
)) = 0 (22)
where z is the total states The interior point condition yieldsthe following two additional boundary conditions that definethe suboptimal solution
120581119879
(119905
+
119904
) = 120581119879
(119905
minus
119904
) minus 120572119879
119873z1003816
1003816
1003816
1003816
1003816119905119904
(23a)
H (119905
+
119904
) = H (119905
minus
119904
) (23b)
where 120581 is the total Lagrange multipliers associated withthe total states and 120572 is the another Lagrange multiplierdescribing the maneuver switch-time jump conditions
42 Optimal Control Formulation for Failure Control AnEuler angle transformation algorithm [23] is used to definethe boundary conditions for the MRPs Unlike the normalcontrol the MRPs at the switch time need to be determinedThe boundary conditions for the MRPs are handled by usingan Euler angle rotation sequence that avoids the failed controlactuator axis
To formulate themathematical structure for the problemone now collects all the problem unknowns and constraintconditions as follows
19 Unknowns Are
119905
0
120585 (1199050
) isin R3
120583 (1199050
) isin R3
(24a)
119905
119904
1205721
isin R3
1205722
isin R3
119905
119904
isin R1
(24b)
119905
119891
120585 (119905119891
) isin R3
120583 (119905119891
) isin R3
(24c)
19 Constraints Are119905
119904
120590 (119905minus119904
) = 120590119905119904 120596 (119905
minus
119904
) = 120596119905119904
120590 (119905+
119904
) = 120590119905119904 120596 (119905
+
119904
) = 120596119905119904
120585 (119905minus
119904
) = 120585 (119905+
119904
) + 1205723
120583 (119905minus
119904
) = 120583 (119905+
119904
) + 1205724
H (119905
minus
119904
) = H (119905
+
119904
)
(25)
The constraints in (25) are particularly challengingbecause jump conditions govern the optimality of the result-ing solutions The problem is characterized by both highdimension and nonlinearity which makes it critically impor-tant to develop useful approximate starting solutions Theunknowns in (24a) (24b) and (24c) and the constraints in(25) are enforced by iteratively solving (12a) (12b) (13a)(13b) and (15)
Table 1 Numerical simulation parameters
Parameter Value UnitInertia of the spacecraft diag [142 173 203] kgsdotm2
Initial angular velocity [0 0 0]119879 degsInitial control torque [0 0]119879 NmInitial Euler angles (1-2-1 set) [15 30 45]119879 degInitial MRPs [0263 01361 minus0037]119879 mdashInterior angular velocity [0 0 0]119879 degsInterior control torque [0 0]119879 NmInterior Euler angles (1-2-1 set) [15 30 0]119879 degInterior MRPs [0064 0131 0017]119879 mdashFinal angular velocity [0 0 0]119879 degsFinal control torque [0 0]119879 NmFinal Euler angles (1-2-1 set) [0 0 0]119879 degFinal MRPs [0 0 0]119879 mdash
43 Optimal Control-Rate Formulation for Failure ControlTo formulate the mathematical structure for the problemone now collects all the problem unknowns and constraintconditions as follows
25 Unknowns Are
119905
0
120585 (1199050
) isin R3
120583 (1199050
) isin R3
120578 (1199050
) isin R2
(26a)
119905
119904
1205721
isin R3
1205722
isin R3
1205723
isin R2
119905
119904
isin R1
(26b)
119905
119891
120585 (119905119891
) isin R3
120583 (119905119891
) isin R3
120578 (119905119891
) isin R2
(26c)
25 Constraints Are
119905
119904
120590 (119905minus119904
) = 120590119905119904 120596 (119905
minus
119904
) = 120596119905119904
u (119905minus119904
) = u119905119904
120590 (119905+
119904
) = 120590119905119904 120596 (119905
+
119904
) = 120596119905119904
u (119905+119904
) = u119905119904
120585 (119905minus
119904
) = 120585 (119905+
119904
) + 1205724
120583 (119905minus
119904
) = 120583 (119905+
119904
) + 1205725
120578 (119905minus
119904
) = 120578 (119905+
119904
) + 1205726
H (119905
minus
119904
) = H (119905
+
119904
)
(27)
The unknowns of (26a) (26b) and (26c) and the con-straints of (27) are enforced by iteratively solving (18a) (18b)(18c) (19a) (19b) (19c) and (20)
5 Numerical Results
Thenumerical simulation parameters are listed in Table 1 Forasymmetric rigid spacecraft a diagonal moment of inertia
Mathematical Problems in Engineering 5
n1
b1b3
n3b2
wΩ
i
n2
n1
b1
n3
w
Ω
i
n2
b9984003
b9984002
Figure 1 Initial attitude movement to torque available plane using torque available axis rotation
Table 2 Comparison between guesses and found values (torque-rate minimization)
Parameter Guess Found value120583 (1199050
) [0 0 0]119879 [2040 0 0]119879
120585 (1199050
) [0 0 0]119879 [1117 minus0001 minus0310]119879
120578 (1199050
) [0 0]119879 [0310 0]119879
120583 (119905119891
) [0 0 0]119879 [minus2898 minus0710 minus115523]119879
120585 (119905119891
) [0 0 0]119879 [2528 3429 minus7982]119879
120578 (119905119891
) [0 0]119879 [0310 minus0003]119879
1205721
[0 0 0]119879 [minus5286 minus1983 148211]119879
1205722
[0 0 0]119879 [minus3354 minus2203 6941]119879
1205723
[0 0]119879 [0146 minus0263]119879
119905
119904
15 12930
tensor is assumed to model the spacecraft where all valuesof the inertia are different
Numerical simulations are performed for both nominal(3-axis controls) and failure control cases (2-axis controls)For the failure control simulation case 119906
1
and 119906
2
are onlyavailable Using the Euler transformation the given initialattitude can be transformed into two possible sets of expres-sion such as (1-2-1) and (2-1-2) In this paper the (1-2-1) setis studied and a trend of first single-axis maneuver is shownin Figure 1 Future workwill develop algorithms for optimallyselecting the Euler angle rotation sequence
The unknown Lagrange multipliers are selected arbitrar-ily and the unknown switch times are initialized by assuminghalf of the total simulation time With this initial guesses theLagrange multipliers and switch time are found and listed inTables 3 and 2
The simulation results for minimizing control torquesare shown in Figures 2ndash5 Figure 2 shows that all the statesmeet the terminal and interior conditions using only twocontrol torques Since a single-axis maneuver is conducteduntil the switch time we observe linear control time historiesThen two control torques are utilized for reorientationNote that discontinuous control time histories are obtained fortorque minimization case Figure 3 presents time histories ofLagrange multipliers associated with the states
The results among the normal control failure controlusing two successive maneuvers and failure control using
0 130079 30minus01
0002
0 130079 30minus01
0010203
0 130079 30minus04
0
04
Time (s)
Time (s)
Time (s)
120596(r
ads
)
120590
u(N
m)
u1u2
120590112059021205903
1205961
1205962
1205963
Figure 2 Time trajectory of states (torque minimization)
three successive maneuvers are compared Figure 4 presentsthe Hamiltonian and performance index time histories Asdefined in (21) it shows that Hamiltonian is constant overtime regardless of normal and failure controls For the normalcontrol the performance index value at final time indicatesthe torque consumption For the failure control the sumof the performance index value at switch times and finaltime indicates the torque consumption Figure 5 presents theprincipal angle time histories We observe that the principalangle path using three successive submaneuvers is the longestThus we can expect that the two-successive-submaneuverstrategy has better performance than the three-successive-submaneuver strategy
6 Mathematical Problems in Engineering
0 130079 30minus350
minus150
50
0 130079 30minus20
minus10
0
10
Time (s)
Time (s)
120583
120583
1
12058321205833
120585
120585
1
12058521205853
Figure 3 Time trajectory of costates (torque minimization)
Table 3 Comparison between guesses and found values (torqueminimization)
Parameter Guess Found value120583 (1199050
) [0 0 0]119879 [5616 0 0]119879120585 (1199050
) [0 0 0]119879 [3056 minus0004 minus0849]119879
120583 (119905119891
) [0 0 0]119879 [minus5549 minus1053 minus285835]119879
120585 (119905119891
) [0 0 0]119879 [5929 6798 minus10628]119879
1205721
[0 0 0]119879 [minus8389 minus5949 329183]1198791205722
[0 0 0]119879 [minus5322 minus4968 8416]119879
119905
119904
15 13008
The simulation results for minimizing control torquerates are shown in Figures 6ndash9 Figure 6 shows that all thestates meet the terminal and interior conditions using onlytwo control torques Even though a single-axis maneuver isconducted until the switch time different control time histo-ries are obtainedThis is because control rates are minimizedinstead of control torques Also it leads to continuous controltime histories Figure 7 presents time histories of Lagrangemultipliers associated with the state
Similarly constant Hamiltonian time histories areobtained in Figure 8 Like the control torque minimizationresults of the principal angle path the three-successive-submaneuver result has the longest path in Figure 9 Forcomparing torque consumptions according to the usage ofcontrol rate as a performance index Gu
≜ (12) int
119905119891
1199050u119879u d119905
is calculated For both torque and torque-rate minimizationcases torque consumptions are compared and listed inTable 4
0 5 10 15 20 25 30
minus01
minus005
0
ℋ
Normal2 man3 man
0 5 10 15 20 25 300
025
05
Time (s)
Time (s)
ℐ
Normal2 man3 man
Figure 4 Time trajectory of Hamiltonian and performance index(torque minimization)
0 5 10 15 20 25 300
10
20
30
40
50
60
70
Time (s)
Normal2 man3 man
Φ(d
eg)
Figure 5 Time trajectory of principal angle (torque minimization)
As shown in Table 4 the two-successive-submaneuverstrategy requires less torque than the three-successive-submaneuver one
6 Conclusion
The classic spacecraft maneuver problem is generalized tohandle the special case that an actuator failure alters the
Mathematical Problems in Engineering 7
0 1293 30minus012
0 1293 30
0 1293 30Time (s)
Time (s)
Time (s)
minus010
010203
minus04
0
04
0002
120596(r
ads
)
120590
u(N
m)
u1u2
120590112059021205903
1205961
1205962
1205963
Figure 6 Time trajectory of states (torque-rate minimization)
0 1293 30minus150
minus50
50
0 1293 30minus10
0
10
0 1293 30minus05
0
05
Time (s)
Time (s)
Time (s)
120583
120583
1
12058321205833
120585
120585
1
12058521205853
120578
120578
1
1205782
Figure 7 Time trajectory of costates (torque-rate minimization)
0 5 10 15 20 25 30minus012
minus006
0
ℋ
0 5 10 15 20 25 300
015
03
Time (s)
Time (s)
ℐ
Normal2 man3 man
Normal2 man3 man
Figure 8 Time trajectory of Hamiltonian and performance index(torque-rate minimization)
0 5 10 15 20 25 300
10
20
30
40
50
60
70
Time (s)
Normal2 man3 man
Φ(d
eg)
Figure 9 Time trajectory of principal angle (torque-rate minimiza-tion)
Table 4 Torque consumption comparison
Observation Normal 2 man (ratio) 3 man (ratio)Ju 00671 07820 (116502) 10432 (155414)Gu 00959 10525 (109700) 15348 (159965)
hardware capabilities available for repointing the vehicle Akey objective is to maintain a suboptimal solution strategy
8 Mathematical Problems in Engineering
even during the degraded hardware environment A solutionstrategy is presented that enables two control inputs tocomplete the originally defined three-dimensional rigid bodymaneuver Nonlinear necessary conditions are defined forcarrying out a sequence of maneuvers For a single-axisand simultaneous submaneuver an unknown switch timemust be recovered switching between the remaining controlactuators Two control formulations are presented The firstapproach penalizes the control torques but is shown to leadto discontinuous control time historiesThe second approachpenalizes the control torque rates but is shown to eliminatethe discontinuous control time histories which is importantfor flexible body applications The problem is defined bya nonlinear high-dimensional set of necessary conditionswhich are iteratively solved by introducing a multiple shoot-ing method On comparing the performance indices for thenominal and failed actuator cases it is demonstrated that thefailed actuator case requires sim20-fold increase in computa-tional cost The proposed method is expected to be broadlyuseful for spacecraft applications that must deal with actuatorfailures on orbit where optimized approaches are requiredfor maintaining vehicle pointing goals Future research willinvestigate developing more accurate starting guess solutionsfor reducing the number of nonlinear optimization iterationsrequired
References
[1] J L Junkins and J D Turner ldquoOptimal continuous torque atti-tude maneuversrdquo Journal of Guidance Control and Dynamicsvol 3 no 3 pp 210ndash217 1980
[2] J D Turner and J L Junkins ldquoOptimal large-angle singleaxis rotational maneuvers of flexible spacecraftrdquo Journal ofGuidance Control and Dynamics vol 3 no 6 pp 578ndash5851980
[3] J L Junkins and J D Turner Optimal Spacecraft RotationalManeuvers vol 3 of Studies in Astronautics Elsevier Amster-dam The Netherlands 1986
[4] P Tsiotras and J M Longuski ldquoA new parameterization of theattitude kinematicsrdquo Journal of the Astronautical Sciences vol43 no 3 pp 243ndash262 1995
[5] E-Y Keraı ldquoAnalyis of small time local controllability of therigid bodymodelrdquo in Proceedings of the 3rd IFAC Symposium onSystem Structure and Control pp 597ndash602 Oxford UK 1995
[6] R W Brockett ldquoAsymptotic stability and feedback stabiliza-tionrdquo in Differential Geometric Control Theory pp 181ndash191Birkhauser Cambridge Mass USA 1983
[7] P Tsiotras M Corless and J M Longuski ldquoA novel approachto the attitude control of axisymmetric spacecraftrdquo Automaticavol 31 no 8 pp 1099ndash1112 1995
[8] P Tsiotras ldquoOptimal regulation and passivity results for axisym-metric rigid bodies using two controlsrdquo Journal of GuidanceControl and Dynamics vol 20 no 3 pp 457ndash463 1997
[9] P Tsiotras and J Luo ldquoReduced effort control laws for under-actuated rigid spacecraftrdquo Journal of Guidance Control andDynamics vol 20 no 6 pp 1089ndash1095 1997
[10] P Tsiotras and J Luo ldquoStabilization and tracking of under-actuated axisymmetric spacecraft with bounded controlrdquo inProceedings of the 4th IFAC Symposium on Nonlinear Control
Systems Design pp 800ndash806 Pergamon Press Enschede TheNetherlands 1998
[11] H Shen and P Tsiotras ldquoTime-optimal control of axisymmetricrigid spacecraft using two controlsrdquo Journal of Guidance Con-trol and Dynamics vol 22 no 5 pp 682ndash694 1999
[12] P Tsiotras and J Luo ldquoControl of underactuated spacecraft withbounded inputsrdquoAutomatica vol 36 no 8 pp 1153ndash1169 2000
[13] P Tsiotras and V Doumtchenko ldquoControl of spacecraft subjectto actuator failures stateof-the-art and open problemsrdquo in TheRichardH BattinAstrodynamics Conference pp 1ndash21 AmericanAstronautical Society San Diego Calif USA No 00-264
[14] P Tsiotras and A Schleicher ldquoDetumbling and partial attitudestabilization of a rigid spacecraft under actuator failurerdquo inProceedings of the AIAA Guidance Navigation and ControlConference and Exhibit AIAA Denver Colo USA August2000 No 2000-4044
[15] P Morin C Samson J-B Pomet and Z-P Jiang ldquoTime-varying feedback stabilization of the attitude of a rigid space-craft with two controlsrdquo Systems amp Control Letters vol 25 no5 pp 375ndash385 1995
[16] J-M Coron and E-Y Keraı ldquoExplicit feedbacks stabilizingthe attitude of a rigid spacecraft with two control torquesrdquoAutomatica vol 32 no 5 pp 669ndash677 1996
[17] D Kim and J D Turner ldquo3D spacecraft attitude control usingtwo control inputsrdquo in Proceedings of the Annual TechnicalSymposium p 26 AIAA May 2012 No A-33
[18] D Kim and J D Turner ldquoSpacecraft attitude control using twocontrol torquesrdquo in Proceedings of the Jer-Nan Juang Astrody-namics Symposium American Astronautical Society CollegeStation Tex USA June 2012 NoAAS 12-640
[19] D Kim and J D Turner ldquoSuboptimal spacecraft maneuversusing two controlsrdquo Journal of Guidance Control and Dynam-ics
[20] J L Junkins Z H Rahman and H Bang ldquoNear-minimum-time control of distributed parameter systems Analyticaland experimental resultsrdquo Journal of Guidance Control andDynamics vol 14 no 2 pp 406ndash415 1991
[21] D Kim 3Dmaneuvers for asymmetric under-actuated rigid body[PhD thesis] Texas AampM University 2013
[22] H G Bock and K J Plitt ldquoA multiple shooting algorithmfor direct solution of optimal problemsrdquo in Proceeedings ofthe 9th IFAC World Congress pp 242ndash247 IEEE PublicationsBudapest Hungary 1984
[23] H Schaub and J L Junkins Analytical Mechanics of SpaceSystems AIAA Reston Va USA 2nd edition 2009
[24] H J Pesch ldquoA practical guide to the solution of real-life optimalcontrol problemsrdquo Control and Cybernetics vol 23 no 1-2 pp7ndash60 1994
Submit your manuscripts athttpwwwhindawicom
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttpwwwhindawicom
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
CombinatoricsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Decision SciencesAdvances in
Discrete MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014 Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Stochastic AnalysisInternational Journal of

Mathematical Problems in Engineering 3
where the 12 members of (10) are prescribed constantscharacterizing the attitude and angular velocity at the initialand final times Defining the Hamiltonian for the system
H = L + 120585119879r + 120583119879f (11)
where the loss function L = u119879u2 and the Lagrangemultipliers are 120585 isin R3 and 120583 isin R3 one obtains thefollowing first-order nonlinear necessary conditions
State Equations Are
= H120585 = r (12a)
= H120583 = f (12b)
where (sdot)120577 ≜ 120597(sdot)120597120577 for a generic variable 120577
Costate Equations Are
120585 = minusH120590 = minusr119879120590120585 (13a)
= minusH120596 = minusr119879120596120585 minus f119879120596120583 (13b)
where
f120596 =
[
[
[
[
[
[
[
[
[
0
119869
2
minus 119869
3
119869
1
120596
3
119869
2
minus 119869
3
119869
1
120596
2
119869
3
minus 119869
1
119869
2
120596
3
0
119869
3
minus 119869
1
119869
2
120596
1
119869
1
minus 119869
2
119869
3
120596
2
119869
1
minus 119869
2
119869
3
120596
1
0
]
]
]
]
]
]
]
]
]
r120596 =1
4
[119861 (120590)]
r120590 =1
2
[
[
120590
1
120596
1
+ 120590
2
120596
2
+ 120590
3
120596
3
120596
3
minus 120590
2
120596
1
+ 120590
1
120596
2
120590
1
120596
3
minus 120590
3
120596
1
minus 120596
2
120590
2
120596
1
minus 120596
3
minus 120590
1
120596
2
120590
1
120596
1
+ 120590
2
120596
2
+ 120590
3
120596
3
120596
1
minus 120590
3
120596
2
+ 120590
2
120596
3
minus120590
1
120596
3
+ 120590
3
120596
1
+ 120596
2
120590
3
120596
2
minus 120596
1
minus 120590
2
120596
3
120590
1
120596
1
+ 120590
2
120596
2
+ 120590
3
120596
3
]
]
(14)
Stationarity Condition Is
0 = Hu = Lu + f119879u 120583 = u + 119875119879119869minus1120583 (15)
Given the fixed initial time 1199050
and final time 119905119891
the initialstates 120590(119905
0
) and 120596(1199050
) and the final states 120590(119905119891
) and 120596(119905119891
)there are no extra boundary conditions These fixed terminalboundary conditions define a classical two-point boundary-value problem
32 Optimal Control-Rate Formulation We seek a solution of(3) (6) and (9) satisfying the terminal boundary conditionsin (10) and
u (1199050
) = u0
u (119905119891
) = u119891
(16)
where the 16 members of (10) and (16) are prescribedconstants characterizing the attitude angular velocity andcontrol torque at the initial and final times Defining theHamiltonian for the system
H = L + 120585119879r + 120583119879f + 120578119879g (17)
where the loss function L = u119879u2 and the Lagrangemultiplier is 120578 isin R2 one obtains the following first-ordernonlinear necessary conditions
State Equations Are = H120585 = r (18a)
= H120583 = f (18b)
u = H120578 = g (18c)
Costate Equations Are
120585 = minusH120590 = minusr119879120590120585 (19a)
= minusH120596 = minusr119879120596120585 minus f119879120596120583 (19b)
= minusHu = minusf119879u 120583 = minus119875
119879
119869
minus1
120583 (19c)Stationarity Condition Is
0 = Hu = Lu + g119879u120578 = u + 120578 (20)As described in optimal control formulation no addi-
tional boundary conditions exist
4 Problem Formulation for Failure Control
For the underactuated system a concept of sequential controlis introduced to avoid a control input about the failed controlaxis A sequential Euler angle transformation [23] is usedfor determining the MRPs at the switch time Assumingthat an Euler angle rotation sequence is selected that avoidsthe failed actuator axis one seeks to design two successivesubmaneuvers where the maneuver times are unknown Atthe interior switch time the angular velocity is set to zeroto avoid cross-coupling termrsquos effect These control designassumptions guarantee that the constraints for the states atthe interior switch time are perfectly known
After developing a strategy for carrying out two succes-sive submaneuvers the switch timemust be specified Failureto solve the optimal switch time leads to large penaltiesin performance indices which indicates poor maneuverperformance
4 Mathematical Problems in Engineering
41 Switch-Time Boundary Conditions A free interior switchtime 119905
119904
is introduced for changing the control actuatorbeing used the following unknown boundary conditions areintroduced
H (119905
119904
) = H(119905) = constant (21)
since the Hamiltonian is not an explicit function of timeBecause the unknown switch time is defined a multiple
shootingmethod [22] is applied to find a suboptimal solutionwhere the interior point condition [24] is given by
119873(z (119905119904
)) = 0 (22)
where z is the total states The interior point condition yieldsthe following two additional boundary conditions that definethe suboptimal solution
120581119879
(119905
+
119904
) = 120581119879
(119905
minus
119904
) minus 120572119879
119873z1003816
1003816
1003816
1003816
1003816119905119904
(23a)
H (119905
+
119904
) = H (119905
minus
119904
) (23b)
where 120581 is the total Lagrange multipliers associated withthe total states and 120572 is the another Lagrange multiplierdescribing the maneuver switch-time jump conditions
42 Optimal Control Formulation for Failure Control AnEuler angle transformation algorithm [23] is used to definethe boundary conditions for the MRPs Unlike the normalcontrol the MRPs at the switch time need to be determinedThe boundary conditions for the MRPs are handled by usingan Euler angle rotation sequence that avoids the failed controlactuator axis
To formulate themathematical structure for the problemone now collects all the problem unknowns and constraintconditions as follows
19 Unknowns Are
119905
0
120585 (1199050
) isin R3
120583 (1199050
) isin R3
(24a)
119905
119904
1205721
isin R3
1205722
isin R3
119905
119904
isin R1
(24b)
119905
119891
120585 (119905119891
) isin R3
120583 (119905119891
) isin R3
(24c)
19 Constraints Are119905
119904
120590 (119905minus119904
) = 120590119905119904 120596 (119905
minus
119904
) = 120596119905119904
120590 (119905+
119904
) = 120590119905119904 120596 (119905
+
119904
) = 120596119905119904
120585 (119905minus
119904
) = 120585 (119905+
119904
) + 1205723
120583 (119905minus
119904
) = 120583 (119905+
119904
) + 1205724
H (119905
minus
119904
) = H (119905
+
119904
)
(25)
The constraints in (25) are particularly challengingbecause jump conditions govern the optimality of the result-ing solutions The problem is characterized by both highdimension and nonlinearity which makes it critically impor-tant to develop useful approximate starting solutions Theunknowns in (24a) (24b) and (24c) and the constraints in(25) are enforced by iteratively solving (12a) (12b) (13a)(13b) and (15)
Table 1 Numerical simulation parameters
Parameter Value UnitInertia of the spacecraft diag [142 173 203] kgsdotm2
Initial angular velocity [0 0 0]119879 degsInitial control torque [0 0]119879 NmInitial Euler angles (1-2-1 set) [15 30 45]119879 degInitial MRPs [0263 01361 minus0037]119879 mdashInterior angular velocity [0 0 0]119879 degsInterior control torque [0 0]119879 NmInterior Euler angles (1-2-1 set) [15 30 0]119879 degInterior MRPs [0064 0131 0017]119879 mdashFinal angular velocity [0 0 0]119879 degsFinal control torque [0 0]119879 NmFinal Euler angles (1-2-1 set) [0 0 0]119879 degFinal MRPs [0 0 0]119879 mdash
43 Optimal Control-Rate Formulation for Failure ControlTo formulate the mathematical structure for the problemone now collects all the problem unknowns and constraintconditions as follows
25 Unknowns Are
119905
0
120585 (1199050
) isin R3
120583 (1199050
) isin R3
120578 (1199050
) isin R2
(26a)
119905
119904
1205721
isin R3
1205722
isin R3
1205723
isin R2
119905
119904
isin R1
(26b)
119905
119891
120585 (119905119891
) isin R3
120583 (119905119891
) isin R3
120578 (119905119891
) isin R2
(26c)
25 Constraints Are
119905
119904
120590 (119905minus119904
) = 120590119905119904 120596 (119905
minus
119904
) = 120596119905119904
u (119905minus119904
) = u119905119904
120590 (119905+
119904
) = 120590119905119904 120596 (119905
+
119904
) = 120596119905119904
u (119905+119904
) = u119905119904
120585 (119905minus
119904
) = 120585 (119905+
119904
) + 1205724
120583 (119905minus
119904
) = 120583 (119905+
119904
) + 1205725
120578 (119905minus
119904
) = 120578 (119905+
119904
) + 1205726
H (119905
minus
119904
) = H (119905
+
119904
)
(27)
The unknowns of (26a) (26b) and (26c) and the con-straints of (27) are enforced by iteratively solving (18a) (18b)(18c) (19a) (19b) (19c) and (20)
5 Numerical Results
Thenumerical simulation parameters are listed in Table 1 Forasymmetric rigid spacecraft a diagonal moment of inertia
Mathematical Problems in Engineering 5
n1
b1b3
n3b2
wΩ
i
n2
n1
b1
n3
w
Ω
i
n2
b9984003
b9984002
Figure 1 Initial attitude movement to torque available plane using torque available axis rotation
Table 2 Comparison between guesses and found values (torque-rate minimization)
Parameter Guess Found value120583 (1199050
) [0 0 0]119879 [2040 0 0]119879
120585 (1199050
) [0 0 0]119879 [1117 minus0001 minus0310]119879
120578 (1199050
) [0 0]119879 [0310 0]119879
120583 (119905119891
) [0 0 0]119879 [minus2898 minus0710 minus115523]119879
120585 (119905119891
) [0 0 0]119879 [2528 3429 minus7982]119879
120578 (119905119891
) [0 0]119879 [0310 minus0003]119879
1205721
[0 0 0]119879 [minus5286 minus1983 148211]119879
1205722
[0 0 0]119879 [minus3354 minus2203 6941]119879
1205723
[0 0]119879 [0146 minus0263]119879
119905
119904
15 12930
tensor is assumed to model the spacecraft where all valuesof the inertia are different
Numerical simulations are performed for both nominal(3-axis controls) and failure control cases (2-axis controls)For the failure control simulation case 119906
1
and 119906
2
are onlyavailable Using the Euler transformation the given initialattitude can be transformed into two possible sets of expres-sion such as (1-2-1) and (2-1-2) In this paper the (1-2-1) setis studied and a trend of first single-axis maneuver is shownin Figure 1 Future workwill develop algorithms for optimallyselecting the Euler angle rotation sequence
The unknown Lagrange multipliers are selected arbitrar-ily and the unknown switch times are initialized by assuminghalf of the total simulation time With this initial guesses theLagrange multipliers and switch time are found and listed inTables 3 and 2
The simulation results for minimizing control torquesare shown in Figures 2ndash5 Figure 2 shows that all the statesmeet the terminal and interior conditions using only twocontrol torques Since a single-axis maneuver is conducteduntil the switch time we observe linear control time historiesThen two control torques are utilized for reorientationNote that discontinuous control time histories are obtained fortorque minimization case Figure 3 presents time histories ofLagrange multipliers associated with the states
The results among the normal control failure controlusing two successive maneuvers and failure control using
0 130079 30minus01
0002
0 130079 30minus01
0010203
0 130079 30minus04
0
04
Time (s)
Time (s)
Time (s)
120596(r
ads
)
120590
u(N
m)
u1u2
120590112059021205903
1205961
1205962
1205963
Figure 2 Time trajectory of states (torque minimization)
three successive maneuvers are compared Figure 4 presentsthe Hamiltonian and performance index time histories Asdefined in (21) it shows that Hamiltonian is constant overtime regardless of normal and failure controls For the normalcontrol the performance index value at final time indicatesthe torque consumption For the failure control the sumof the performance index value at switch times and finaltime indicates the torque consumption Figure 5 presents theprincipal angle time histories We observe that the principalangle path using three successive submaneuvers is the longestThus we can expect that the two-successive-submaneuverstrategy has better performance than the three-successive-submaneuver strategy
6 Mathematical Problems in Engineering
0 130079 30minus350
minus150
50
0 130079 30minus20
minus10
0
10
Time (s)
Time (s)
120583
120583
1
12058321205833
120585
120585
1
12058521205853
Figure 3 Time trajectory of costates (torque minimization)
Table 3 Comparison between guesses and found values (torqueminimization)
Parameter Guess Found value120583 (1199050
) [0 0 0]119879 [5616 0 0]119879120585 (1199050
) [0 0 0]119879 [3056 minus0004 minus0849]119879
120583 (119905119891
) [0 0 0]119879 [minus5549 minus1053 minus285835]119879
120585 (119905119891
) [0 0 0]119879 [5929 6798 minus10628]119879
1205721
[0 0 0]119879 [minus8389 minus5949 329183]1198791205722
[0 0 0]119879 [minus5322 minus4968 8416]119879
119905
119904
15 13008
The simulation results for minimizing control torquerates are shown in Figures 6ndash9 Figure 6 shows that all thestates meet the terminal and interior conditions using onlytwo control torques Even though a single-axis maneuver isconducted until the switch time different control time histo-ries are obtainedThis is because control rates are minimizedinstead of control torques Also it leads to continuous controltime histories Figure 7 presents time histories of Lagrangemultipliers associated with the state
Similarly constant Hamiltonian time histories areobtained in Figure 8 Like the control torque minimizationresults of the principal angle path the three-successive-submaneuver result has the longest path in Figure 9 Forcomparing torque consumptions according to the usage ofcontrol rate as a performance index Gu
≜ (12) int
119905119891
1199050u119879u d119905
is calculated For both torque and torque-rate minimizationcases torque consumptions are compared and listed inTable 4
0 5 10 15 20 25 30
minus01
minus005
0
ℋ
Normal2 man3 man
0 5 10 15 20 25 300
025
05
Time (s)
Time (s)
ℐ
Normal2 man3 man
Figure 4 Time trajectory of Hamiltonian and performance index(torque minimization)
0 5 10 15 20 25 300
10
20
30
40
50
60
70
Time (s)
Normal2 man3 man
Φ(d
eg)
Figure 5 Time trajectory of principal angle (torque minimization)
As shown in Table 4 the two-successive-submaneuverstrategy requires less torque than the three-successive-submaneuver one
6 Conclusion
The classic spacecraft maneuver problem is generalized tohandle the special case that an actuator failure alters the
Mathematical Problems in Engineering 7
0 1293 30minus012
0 1293 30
0 1293 30Time (s)
Time (s)
Time (s)
minus010
010203
minus04
0
04
0002
120596(r
ads
)
120590
u(N
m)
u1u2
120590112059021205903
1205961
1205962
1205963
Figure 6 Time trajectory of states (torque-rate minimization)
0 1293 30minus150
minus50
50
0 1293 30minus10
0
10
0 1293 30minus05
0
05
Time (s)
Time (s)
Time (s)
120583
120583
1
12058321205833
120585
120585
1
12058521205853
120578
120578
1
1205782
Figure 7 Time trajectory of costates (torque-rate minimization)
0 5 10 15 20 25 30minus012
minus006
0
ℋ
0 5 10 15 20 25 300
015
03
Time (s)
Time (s)
ℐ
Normal2 man3 man
Normal2 man3 man
Figure 8 Time trajectory of Hamiltonian and performance index(torque-rate minimization)
0 5 10 15 20 25 300
10
20
30
40
50
60
70
Time (s)
Normal2 man3 man
Φ(d
eg)
Figure 9 Time trajectory of principal angle (torque-rate minimiza-tion)
Table 4 Torque consumption comparison
Observation Normal 2 man (ratio) 3 man (ratio)Ju 00671 07820 (116502) 10432 (155414)Gu 00959 10525 (109700) 15348 (159965)
hardware capabilities available for repointing the vehicle Akey objective is to maintain a suboptimal solution strategy
8 Mathematical Problems in Engineering
even during the degraded hardware environment A solutionstrategy is presented that enables two control inputs tocomplete the originally defined three-dimensional rigid bodymaneuver Nonlinear necessary conditions are defined forcarrying out a sequence of maneuvers For a single-axisand simultaneous submaneuver an unknown switch timemust be recovered switching between the remaining controlactuators Two control formulations are presented The firstapproach penalizes the control torques but is shown to leadto discontinuous control time historiesThe second approachpenalizes the control torque rates but is shown to eliminatethe discontinuous control time histories which is importantfor flexible body applications The problem is defined bya nonlinear high-dimensional set of necessary conditionswhich are iteratively solved by introducing a multiple shoot-ing method On comparing the performance indices for thenominal and failed actuator cases it is demonstrated that thefailed actuator case requires sim20-fold increase in computa-tional cost The proposed method is expected to be broadlyuseful for spacecraft applications that must deal with actuatorfailures on orbit where optimized approaches are requiredfor maintaining vehicle pointing goals Future research willinvestigate developing more accurate starting guess solutionsfor reducing the number of nonlinear optimization iterationsrequired
References
[1] J L Junkins and J D Turner ldquoOptimal continuous torque atti-tude maneuversrdquo Journal of Guidance Control and Dynamicsvol 3 no 3 pp 210ndash217 1980
[2] J D Turner and J L Junkins ldquoOptimal large-angle singleaxis rotational maneuvers of flexible spacecraftrdquo Journal ofGuidance Control and Dynamics vol 3 no 6 pp 578ndash5851980
[3] J L Junkins and J D Turner Optimal Spacecraft RotationalManeuvers vol 3 of Studies in Astronautics Elsevier Amster-dam The Netherlands 1986
[4] P Tsiotras and J M Longuski ldquoA new parameterization of theattitude kinematicsrdquo Journal of the Astronautical Sciences vol43 no 3 pp 243ndash262 1995
[5] E-Y Keraı ldquoAnalyis of small time local controllability of therigid bodymodelrdquo in Proceedings of the 3rd IFAC Symposium onSystem Structure and Control pp 597ndash602 Oxford UK 1995
[6] R W Brockett ldquoAsymptotic stability and feedback stabiliza-tionrdquo in Differential Geometric Control Theory pp 181ndash191Birkhauser Cambridge Mass USA 1983
[7] P Tsiotras M Corless and J M Longuski ldquoA novel approachto the attitude control of axisymmetric spacecraftrdquo Automaticavol 31 no 8 pp 1099ndash1112 1995
[8] P Tsiotras ldquoOptimal regulation and passivity results for axisym-metric rigid bodies using two controlsrdquo Journal of GuidanceControl and Dynamics vol 20 no 3 pp 457ndash463 1997
[9] P Tsiotras and J Luo ldquoReduced effort control laws for under-actuated rigid spacecraftrdquo Journal of Guidance Control andDynamics vol 20 no 6 pp 1089ndash1095 1997
[10] P Tsiotras and J Luo ldquoStabilization and tracking of under-actuated axisymmetric spacecraft with bounded controlrdquo inProceedings of the 4th IFAC Symposium on Nonlinear Control
Systems Design pp 800ndash806 Pergamon Press Enschede TheNetherlands 1998
[11] H Shen and P Tsiotras ldquoTime-optimal control of axisymmetricrigid spacecraft using two controlsrdquo Journal of Guidance Con-trol and Dynamics vol 22 no 5 pp 682ndash694 1999
[12] P Tsiotras and J Luo ldquoControl of underactuated spacecraft withbounded inputsrdquoAutomatica vol 36 no 8 pp 1153ndash1169 2000
[13] P Tsiotras and V Doumtchenko ldquoControl of spacecraft subjectto actuator failures stateof-the-art and open problemsrdquo in TheRichardH BattinAstrodynamics Conference pp 1ndash21 AmericanAstronautical Society San Diego Calif USA No 00-264
[14] P Tsiotras and A Schleicher ldquoDetumbling and partial attitudestabilization of a rigid spacecraft under actuator failurerdquo inProceedings of the AIAA Guidance Navigation and ControlConference and Exhibit AIAA Denver Colo USA August2000 No 2000-4044
[15] P Morin C Samson J-B Pomet and Z-P Jiang ldquoTime-varying feedback stabilization of the attitude of a rigid space-craft with two controlsrdquo Systems amp Control Letters vol 25 no5 pp 375ndash385 1995
[16] J-M Coron and E-Y Keraı ldquoExplicit feedbacks stabilizingthe attitude of a rigid spacecraft with two control torquesrdquoAutomatica vol 32 no 5 pp 669ndash677 1996
[17] D Kim and J D Turner ldquo3D spacecraft attitude control usingtwo control inputsrdquo in Proceedings of the Annual TechnicalSymposium p 26 AIAA May 2012 No A-33
[18] D Kim and J D Turner ldquoSpacecraft attitude control using twocontrol torquesrdquo in Proceedings of the Jer-Nan Juang Astrody-namics Symposium American Astronautical Society CollegeStation Tex USA June 2012 NoAAS 12-640
[19] D Kim and J D Turner ldquoSuboptimal spacecraft maneuversusing two controlsrdquo Journal of Guidance Control and Dynam-ics
[20] J L Junkins Z H Rahman and H Bang ldquoNear-minimum-time control of distributed parameter systems Analyticaland experimental resultsrdquo Journal of Guidance Control andDynamics vol 14 no 2 pp 406ndash415 1991
[21] D Kim 3Dmaneuvers for asymmetric under-actuated rigid body[PhD thesis] Texas AampM University 2013
[22] H G Bock and K J Plitt ldquoA multiple shooting algorithmfor direct solution of optimal problemsrdquo in Proceeedings ofthe 9th IFAC World Congress pp 242ndash247 IEEE PublicationsBudapest Hungary 1984
[23] H Schaub and J L Junkins Analytical Mechanics of SpaceSystems AIAA Reston Va USA 2nd edition 2009
[24] H J Pesch ldquoA practical guide to the solution of real-life optimalcontrol problemsrdquo Control and Cybernetics vol 23 no 1-2 pp7ndash60 1994
Submit your manuscripts athttpwwwhindawicom
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttpwwwhindawicom
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
CombinatoricsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Decision SciencesAdvances in
Discrete MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014 Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Stochastic AnalysisInternational Journal of

4 Mathematical Problems in Engineering
41 Switch-Time Boundary Conditions A free interior switchtime 119905
119904
is introduced for changing the control actuatorbeing used the following unknown boundary conditions areintroduced
H (119905
119904
) = H(119905) = constant (21)
since the Hamiltonian is not an explicit function of timeBecause the unknown switch time is defined a multiple
shootingmethod [22] is applied to find a suboptimal solutionwhere the interior point condition [24] is given by
119873(z (119905119904
)) = 0 (22)
where z is the total states The interior point condition yieldsthe following two additional boundary conditions that definethe suboptimal solution
120581119879
(119905
+
119904
) = 120581119879
(119905
minus
119904
) minus 120572119879
119873z1003816
1003816
1003816
1003816
1003816119905119904
(23a)
H (119905
+
119904
) = H (119905
minus
119904
) (23b)
where 120581 is the total Lagrange multipliers associated withthe total states and 120572 is the another Lagrange multiplierdescribing the maneuver switch-time jump conditions
42 Optimal Control Formulation for Failure Control AnEuler angle transformation algorithm [23] is used to definethe boundary conditions for the MRPs Unlike the normalcontrol the MRPs at the switch time need to be determinedThe boundary conditions for the MRPs are handled by usingan Euler angle rotation sequence that avoids the failed controlactuator axis
To formulate themathematical structure for the problemone now collects all the problem unknowns and constraintconditions as follows
19 Unknowns Are
119905
0
120585 (1199050
) isin R3
120583 (1199050
) isin R3
(24a)
119905
119904
1205721
isin R3
1205722
isin R3
119905
119904
isin R1
(24b)
119905
119891
120585 (119905119891
) isin R3
120583 (119905119891
) isin R3
(24c)
19 Constraints Are119905
119904
120590 (119905minus119904
) = 120590119905119904 120596 (119905
minus
119904
) = 120596119905119904
120590 (119905+
119904
) = 120590119905119904 120596 (119905
+
119904
) = 120596119905119904
120585 (119905minus
119904
) = 120585 (119905+
119904
) + 1205723
120583 (119905minus
119904
) = 120583 (119905+
119904
) + 1205724
H (119905
minus
119904
) = H (119905
+
119904
)
(25)
The constraints in (25) are particularly challengingbecause jump conditions govern the optimality of the result-ing solutions The problem is characterized by both highdimension and nonlinearity which makes it critically impor-tant to develop useful approximate starting solutions Theunknowns in (24a) (24b) and (24c) and the constraints in(25) are enforced by iteratively solving (12a) (12b) (13a)(13b) and (15)
Table 1 Numerical simulation parameters
Parameter Value UnitInertia of the spacecraft diag [142 173 203] kgsdotm2
Initial angular velocity [0 0 0]119879 degsInitial control torque [0 0]119879 NmInitial Euler angles (1-2-1 set) [15 30 45]119879 degInitial MRPs [0263 01361 minus0037]119879 mdashInterior angular velocity [0 0 0]119879 degsInterior control torque [0 0]119879 NmInterior Euler angles (1-2-1 set) [15 30 0]119879 degInterior MRPs [0064 0131 0017]119879 mdashFinal angular velocity [0 0 0]119879 degsFinal control torque [0 0]119879 NmFinal Euler angles (1-2-1 set) [0 0 0]119879 degFinal MRPs [0 0 0]119879 mdash
43 Optimal Control-Rate Formulation for Failure ControlTo formulate the mathematical structure for the problemone now collects all the problem unknowns and constraintconditions as follows
25 Unknowns Are
119905
0
120585 (1199050
) isin R3
120583 (1199050
) isin R3
120578 (1199050
) isin R2
(26a)
119905
119904
1205721
isin R3
1205722
isin R3
1205723
isin R2
119905
119904
isin R1
(26b)
119905
119891
120585 (119905119891
) isin R3
120583 (119905119891
) isin R3
120578 (119905119891
) isin R2
(26c)
25 Constraints Are
119905
119904
120590 (119905minus119904
) = 120590119905119904 120596 (119905
minus
119904
) = 120596119905119904
u (119905minus119904
) = u119905119904
120590 (119905+
119904
) = 120590119905119904 120596 (119905
+
119904
) = 120596119905119904
u (119905+119904
) = u119905119904
120585 (119905minus
119904
) = 120585 (119905+
119904
) + 1205724
120583 (119905minus
119904
) = 120583 (119905+
119904
) + 1205725
120578 (119905minus
119904
) = 120578 (119905+
119904
) + 1205726
H (119905
minus
119904
) = H (119905
+
119904
)
(27)
The unknowns of (26a) (26b) and (26c) and the con-straints of (27) are enforced by iteratively solving (18a) (18b)(18c) (19a) (19b) (19c) and (20)
5 Numerical Results
Thenumerical simulation parameters are listed in Table 1 Forasymmetric rigid spacecraft a diagonal moment of inertia
Mathematical Problems in Engineering 5
n1
b1b3
n3b2
wΩ
i
n2
n1
b1
n3
w
Ω
i
n2
b9984003
b9984002
Figure 1 Initial attitude movement to torque available plane using torque available axis rotation
Table 2 Comparison between guesses and found values (torque-rate minimization)
Parameter Guess Found value120583 (1199050
) [0 0 0]119879 [2040 0 0]119879
120585 (1199050
) [0 0 0]119879 [1117 minus0001 minus0310]119879
120578 (1199050
) [0 0]119879 [0310 0]119879
120583 (119905119891
) [0 0 0]119879 [minus2898 minus0710 minus115523]119879
120585 (119905119891
) [0 0 0]119879 [2528 3429 minus7982]119879
120578 (119905119891
) [0 0]119879 [0310 minus0003]119879
1205721
[0 0 0]119879 [minus5286 minus1983 148211]119879
1205722
[0 0 0]119879 [minus3354 minus2203 6941]119879
1205723
[0 0]119879 [0146 minus0263]119879
119905
119904
15 12930
tensor is assumed to model the spacecraft where all valuesof the inertia are different
Numerical simulations are performed for both nominal(3-axis controls) and failure control cases (2-axis controls)For the failure control simulation case 119906
1
and 119906
2
are onlyavailable Using the Euler transformation the given initialattitude can be transformed into two possible sets of expres-sion such as (1-2-1) and (2-1-2) In this paper the (1-2-1) setis studied and a trend of first single-axis maneuver is shownin Figure 1 Future workwill develop algorithms for optimallyselecting the Euler angle rotation sequence
The unknown Lagrange multipliers are selected arbitrar-ily and the unknown switch times are initialized by assuminghalf of the total simulation time With this initial guesses theLagrange multipliers and switch time are found and listed inTables 3 and 2
The simulation results for minimizing control torquesare shown in Figures 2ndash5 Figure 2 shows that all the statesmeet the terminal and interior conditions using only twocontrol torques Since a single-axis maneuver is conducteduntil the switch time we observe linear control time historiesThen two control torques are utilized for reorientationNote that discontinuous control time histories are obtained fortorque minimization case Figure 3 presents time histories ofLagrange multipliers associated with the states
The results among the normal control failure controlusing two successive maneuvers and failure control using
0 130079 30minus01
0002
0 130079 30minus01
0010203
0 130079 30minus04
0
04
Time (s)
Time (s)
Time (s)
120596(r
ads
)
120590
u(N
m)
u1u2
120590112059021205903
1205961
1205962
1205963
Figure 2 Time trajectory of states (torque minimization)
three successive maneuvers are compared Figure 4 presentsthe Hamiltonian and performance index time histories Asdefined in (21) it shows that Hamiltonian is constant overtime regardless of normal and failure controls For the normalcontrol the performance index value at final time indicatesthe torque consumption For the failure control the sumof the performance index value at switch times and finaltime indicates the torque consumption Figure 5 presents theprincipal angle time histories We observe that the principalangle path using three successive submaneuvers is the longestThus we can expect that the two-successive-submaneuverstrategy has better performance than the three-successive-submaneuver strategy
6 Mathematical Problems in Engineering
0 130079 30minus350
minus150
50
0 130079 30minus20
minus10
0
10
Time (s)
Time (s)
120583
120583
1
12058321205833
120585
120585
1
12058521205853
Figure 3 Time trajectory of costates (torque minimization)
Table 3 Comparison between guesses and found values (torqueminimization)
Parameter Guess Found value120583 (1199050
) [0 0 0]119879 [5616 0 0]119879120585 (1199050
) [0 0 0]119879 [3056 minus0004 minus0849]119879
120583 (119905119891
) [0 0 0]119879 [minus5549 minus1053 minus285835]119879
120585 (119905119891
) [0 0 0]119879 [5929 6798 minus10628]119879
1205721
[0 0 0]119879 [minus8389 minus5949 329183]1198791205722
[0 0 0]119879 [minus5322 minus4968 8416]119879
119905
119904
15 13008
The simulation results for minimizing control torquerates are shown in Figures 6ndash9 Figure 6 shows that all thestates meet the terminal and interior conditions using onlytwo control torques Even though a single-axis maneuver isconducted until the switch time different control time histo-ries are obtainedThis is because control rates are minimizedinstead of control torques Also it leads to continuous controltime histories Figure 7 presents time histories of Lagrangemultipliers associated with the state
Similarly constant Hamiltonian time histories areobtained in Figure 8 Like the control torque minimizationresults of the principal angle path the three-successive-submaneuver result has the longest path in Figure 9 Forcomparing torque consumptions according to the usage ofcontrol rate as a performance index Gu
≜ (12) int
119905119891
1199050u119879u d119905
is calculated For both torque and torque-rate minimizationcases torque consumptions are compared and listed inTable 4
0 5 10 15 20 25 30
minus01
minus005
0
ℋ
Normal2 man3 man
0 5 10 15 20 25 300
025
05
Time (s)
Time (s)
ℐ
Normal2 man3 man
Figure 4 Time trajectory of Hamiltonian and performance index(torque minimization)
0 5 10 15 20 25 300
10
20
30
40
50
60
70
Time (s)
Normal2 man3 man
Φ(d
eg)
Figure 5 Time trajectory of principal angle (torque minimization)
As shown in Table 4 the two-successive-submaneuverstrategy requires less torque than the three-successive-submaneuver one
6 Conclusion
The classic spacecraft maneuver problem is generalized tohandle the special case that an actuator failure alters the
Mathematical Problems in Engineering 7
0 1293 30minus012
0 1293 30
0 1293 30Time (s)
Time (s)
Time (s)
minus010
010203
minus04
0
04
0002
120596(r
ads
)
120590
u(N
m)
u1u2
120590112059021205903
1205961
1205962
1205963
Figure 6 Time trajectory of states (torque-rate minimization)
0 1293 30minus150
minus50
50
0 1293 30minus10
0
10
0 1293 30minus05
0
05
Time (s)
Time (s)
Time (s)
120583
120583
1
12058321205833
120585
120585
1
12058521205853
120578
120578
1
1205782
Figure 7 Time trajectory of costates (torque-rate minimization)
0 5 10 15 20 25 30minus012
minus006
0
ℋ
0 5 10 15 20 25 300
015
03
Time (s)
Time (s)
ℐ
Normal2 man3 man
Normal2 man3 man
Figure 8 Time trajectory of Hamiltonian and performance index(torque-rate minimization)
0 5 10 15 20 25 300
10
20
30
40
50
60
70
Time (s)
Normal2 man3 man
Φ(d
eg)
Figure 9 Time trajectory of principal angle (torque-rate minimiza-tion)
Table 4 Torque consumption comparison
Observation Normal 2 man (ratio) 3 man (ratio)Ju 00671 07820 (116502) 10432 (155414)Gu 00959 10525 (109700) 15348 (159965)
hardware capabilities available for repointing the vehicle Akey objective is to maintain a suboptimal solution strategy
8 Mathematical Problems in Engineering
even during the degraded hardware environment A solutionstrategy is presented that enables two control inputs tocomplete the originally defined three-dimensional rigid bodymaneuver Nonlinear necessary conditions are defined forcarrying out a sequence of maneuvers For a single-axisand simultaneous submaneuver an unknown switch timemust be recovered switching between the remaining controlactuators Two control formulations are presented The firstapproach penalizes the control torques but is shown to leadto discontinuous control time historiesThe second approachpenalizes the control torque rates but is shown to eliminatethe discontinuous control time histories which is importantfor flexible body applications The problem is defined bya nonlinear high-dimensional set of necessary conditionswhich are iteratively solved by introducing a multiple shoot-ing method On comparing the performance indices for thenominal and failed actuator cases it is demonstrated that thefailed actuator case requires sim20-fold increase in computa-tional cost The proposed method is expected to be broadlyuseful for spacecraft applications that must deal with actuatorfailures on orbit where optimized approaches are requiredfor maintaining vehicle pointing goals Future research willinvestigate developing more accurate starting guess solutionsfor reducing the number of nonlinear optimization iterationsrequired
References
[1] J L Junkins and J D Turner ldquoOptimal continuous torque atti-tude maneuversrdquo Journal of Guidance Control and Dynamicsvol 3 no 3 pp 210ndash217 1980
[2] J D Turner and J L Junkins ldquoOptimal large-angle singleaxis rotational maneuvers of flexible spacecraftrdquo Journal ofGuidance Control and Dynamics vol 3 no 6 pp 578ndash5851980
[3] J L Junkins and J D Turner Optimal Spacecraft RotationalManeuvers vol 3 of Studies in Astronautics Elsevier Amster-dam The Netherlands 1986
[4] P Tsiotras and J M Longuski ldquoA new parameterization of theattitude kinematicsrdquo Journal of the Astronautical Sciences vol43 no 3 pp 243ndash262 1995
[5] E-Y Keraı ldquoAnalyis of small time local controllability of therigid bodymodelrdquo in Proceedings of the 3rd IFAC Symposium onSystem Structure and Control pp 597ndash602 Oxford UK 1995
[6] R W Brockett ldquoAsymptotic stability and feedback stabiliza-tionrdquo in Differential Geometric Control Theory pp 181ndash191Birkhauser Cambridge Mass USA 1983
[7] P Tsiotras M Corless and J M Longuski ldquoA novel approachto the attitude control of axisymmetric spacecraftrdquo Automaticavol 31 no 8 pp 1099ndash1112 1995
[8] P Tsiotras ldquoOptimal regulation and passivity results for axisym-metric rigid bodies using two controlsrdquo Journal of GuidanceControl and Dynamics vol 20 no 3 pp 457ndash463 1997
[9] P Tsiotras and J Luo ldquoReduced effort control laws for under-actuated rigid spacecraftrdquo Journal of Guidance Control andDynamics vol 20 no 6 pp 1089ndash1095 1997
[10] P Tsiotras and J Luo ldquoStabilization and tracking of under-actuated axisymmetric spacecraft with bounded controlrdquo inProceedings of the 4th IFAC Symposium on Nonlinear Control
Systems Design pp 800ndash806 Pergamon Press Enschede TheNetherlands 1998
[11] H Shen and P Tsiotras ldquoTime-optimal control of axisymmetricrigid spacecraft using two controlsrdquo Journal of Guidance Con-trol and Dynamics vol 22 no 5 pp 682ndash694 1999
[12] P Tsiotras and J Luo ldquoControl of underactuated spacecraft withbounded inputsrdquoAutomatica vol 36 no 8 pp 1153ndash1169 2000
[13] P Tsiotras and V Doumtchenko ldquoControl of spacecraft subjectto actuator failures stateof-the-art and open problemsrdquo in TheRichardH BattinAstrodynamics Conference pp 1ndash21 AmericanAstronautical Society San Diego Calif USA No 00-264
[14] P Tsiotras and A Schleicher ldquoDetumbling and partial attitudestabilization of a rigid spacecraft under actuator failurerdquo inProceedings of the AIAA Guidance Navigation and ControlConference and Exhibit AIAA Denver Colo USA August2000 No 2000-4044
[15] P Morin C Samson J-B Pomet and Z-P Jiang ldquoTime-varying feedback stabilization of the attitude of a rigid space-craft with two controlsrdquo Systems amp Control Letters vol 25 no5 pp 375ndash385 1995
[16] J-M Coron and E-Y Keraı ldquoExplicit feedbacks stabilizingthe attitude of a rigid spacecraft with two control torquesrdquoAutomatica vol 32 no 5 pp 669ndash677 1996
[17] D Kim and J D Turner ldquo3D spacecraft attitude control usingtwo control inputsrdquo in Proceedings of the Annual TechnicalSymposium p 26 AIAA May 2012 No A-33
[18] D Kim and J D Turner ldquoSpacecraft attitude control using twocontrol torquesrdquo in Proceedings of the Jer-Nan Juang Astrody-namics Symposium American Astronautical Society CollegeStation Tex USA June 2012 NoAAS 12-640
[19] D Kim and J D Turner ldquoSuboptimal spacecraft maneuversusing two controlsrdquo Journal of Guidance Control and Dynam-ics
[20] J L Junkins Z H Rahman and H Bang ldquoNear-minimum-time control of distributed parameter systems Analyticaland experimental resultsrdquo Journal of Guidance Control andDynamics vol 14 no 2 pp 406ndash415 1991
[21] D Kim 3Dmaneuvers for asymmetric under-actuated rigid body[PhD thesis] Texas AampM University 2013
[22] H G Bock and K J Plitt ldquoA multiple shooting algorithmfor direct solution of optimal problemsrdquo in Proceeedings ofthe 9th IFAC World Congress pp 242ndash247 IEEE PublicationsBudapest Hungary 1984
[23] H Schaub and J L Junkins Analytical Mechanics of SpaceSystems AIAA Reston Va USA 2nd edition 2009
[24] H J Pesch ldquoA practical guide to the solution of real-life optimalcontrol problemsrdquo Control and Cybernetics vol 23 no 1-2 pp7ndash60 1994
Submit your manuscripts athttpwwwhindawicom
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttpwwwhindawicom
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
CombinatoricsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Decision SciencesAdvances in
Discrete MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014 Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Stochastic AnalysisInternational Journal of

Mathematical Problems in Engineering 5
n1
b1b3
n3b2
wΩ
i
n2
n1
b1
n3
w
Ω
i
n2
b9984003
b9984002
Figure 1 Initial attitude movement to torque available plane using torque available axis rotation
Table 2 Comparison between guesses and found values (torque-rate minimization)
Parameter Guess Found value120583 (1199050
) [0 0 0]119879 [2040 0 0]119879
120585 (1199050
) [0 0 0]119879 [1117 minus0001 minus0310]119879
120578 (1199050
) [0 0]119879 [0310 0]119879
120583 (119905119891
) [0 0 0]119879 [minus2898 minus0710 minus115523]119879
120585 (119905119891
) [0 0 0]119879 [2528 3429 minus7982]119879
120578 (119905119891
) [0 0]119879 [0310 minus0003]119879
1205721
[0 0 0]119879 [minus5286 minus1983 148211]119879
1205722
[0 0 0]119879 [minus3354 minus2203 6941]119879
1205723
[0 0]119879 [0146 minus0263]119879
119905
119904
15 12930
tensor is assumed to model the spacecraft where all valuesof the inertia are different
Numerical simulations are performed for both nominal(3-axis controls) and failure control cases (2-axis controls)For the failure control simulation case 119906
1
and 119906
2
are onlyavailable Using the Euler transformation the given initialattitude can be transformed into two possible sets of expres-sion such as (1-2-1) and (2-1-2) In this paper the (1-2-1) setis studied and a trend of first single-axis maneuver is shownin Figure 1 Future workwill develop algorithms for optimallyselecting the Euler angle rotation sequence
The unknown Lagrange multipliers are selected arbitrar-ily and the unknown switch times are initialized by assuminghalf of the total simulation time With this initial guesses theLagrange multipliers and switch time are found and listed inTables 3 and 2
The simulation results for minimizing control torquesare shown in Figures 2ndash5 Figure 2 shows that all the statesmeet the terminal and interior conditions using only twocontrol torques Since a single-axis maneuver is conducteduntil the switch time we observe linear control time historiesThen two control torques are utilized for reorientationNote that discontinuous control time histories are obtained fortorque minimization case Figure 3 presents time histories ofLagrange multipliers associated with the states
The results among the normal control failure controlusing two successive maneuvers and failure control using
0 130079 30minus01
0002
0 130079 30minus01
0010203
0 130079 30minus04
0
04
Time (s)
Time (s)
Time (s)
120596(r
ads
)
120590
u(N
m)
u1u2
120590112059021205903
1205961
1205962
1205963
Figure 2 Time trajectory of states (torque minimization)
three successive maneuvers are compared Figure 4 presentsthe Hamiltonian and performance index time histories Asdefined in (21) it shows that Hamiltonian is constant overtime regardless of normal and failure controls For the normalcontrol the performance index value at final time indicatesthe torque consumption For the failure control the sumof the performance index value at switch times and finaltime indicates the torque consumption Figure 5 presents theprincipal angle time histories We observe that the principalangle path using three successive submaneuvers is the longestThus we can expect that the two-successive-submaneuverstrategy has better performance than the three-successive-submaneuver strategy
6 Mathematical Problems in Engineering
0 130079 30minus350
minus150
50
0 130079 30minus20
minus10
0
10
Time (s)
Time (s)
120583
120583
1
12058321205833
120585
120585
1
12058521205853
Figure 3 Time trajectory of costates (torque minimization)
Table 3 Comparison between guesses and found values (torqueminimization)
Parameter Guess Found value120583 (1199050
) [0 0 0]119879 [5616 0 0]119879120585 (1199050
) [0 0 0]119879 [3056 minus0004 minus0849]119879
120583 (119905119891
) [0 0 0]119879 [minus5549 minus1053 minus285835]119879
120585 (119905119891
) [0 0 0]119879 [5929 6798 minus10628]119879
1205721
[0 0 0]119879 [minus8389 minus5949 329183]1198791205722
[0 0 0]119879 [minus5322 minus4968 8416]119879
119905
119904
15 13008
The simulation results for minimizing control torquerates are shown in Figures 6ndash9 Figure 6 shows that all thestates meet the terminal and interior conditions using onlytwo control torques Even though a single-axis maneuver isconducted until the switch time different control time histo-ries are obtainedThis is because control rates are minimizedinstead of control torques Also it leads to continuous controltime histories Figure 7 presents time histories of Lagrangemultipliers associated with the state
Similarly constant Hamiltonian time histories areobtained in Figure 8 Like the control torque minimizationresults of the principal angle path the three-successive-submaneuver result has the longest path in Figure 9 Forcomparing torque consumptions according to the usage ofcontrol rate as a performance index Gu
≜ (12) int
119905119891
1199050u119879u d119905
is calculated For both torque and torque-rate minimizationcases torque consumptions are compared and listed inTable 4
0 5 10 15 20 25 30
minus01
minus005
0
ℋ
Normal2 man3 man
0 5 10 15 20 25 300
025
05
Time (s)
Time (s)
ℐ
Normal2 man3 man
Figure 4 Time trajectory of Hamiltonian and performance index(torque minimization)
0 5 10 15 20 25 300
10
20
30
40
50
60
70
Time (s)
Normal2 man3 man
Φ(d
eg)
Figure 5 Time trajectory of principal angle (torque minimization)
As shown in Table 4 the two-successive-submaneuverstrategy requires less torque than the three-successive-submaneuver one
6 Conclusion
The classic spacecraft maneuver problem is generalized tohandle the special case that an actuator failure alters the
Mathematical Problems in Engineering 7
0 1293 30minus012
0 1293 30
0 1293 30Time (s)
Time (s)
Time (s)
minus010
010203
minus04
0
04
0002
120596(r
ads
)
120590
u(N
m)
u1u2
120590112059021205903
1205961
1205962
1205963
Figure 6 Time trajectory of states (torque-rate minimization)
0 1293 30minus150
minus50
50
0 1293 30minus10
0
10
0 1293 30minus05
0
05
Time (s)
Time (s)
Time (s)
120583
120583
1
12058321205833
120585
120585
1
12058521205853
120578
120578
1
1205782
Figure 7 Time trajectory of costates (torque-rate minimization)
0 5 10 15 20 25 30minus012
minus006
0
ℋ
0 5 10 15 20 25 300
015
03
Time (s)
Time (s)
ℐ
Normal2 man3 man
Normal2 man3 man
Figure 8 Time trajectory of Hamiltonian and performance index(torque-rate minimization)
0 5 10 15 20 25 300
10
20
30
40
50
60
70
Time (s)
Normal2 man3 man
Φ(d
eg)
Figure 9 Time trajectory of principal angle (torque-rate minimiza-tion)
Table 4 Torque consumption comparison
Observation Normal 2 man (ratio) 3 man (ratio)Ju 00671 07820 (116502) 10432 (155414)Gu 00959 10525 (109700) 15348 (159965)
hardware capabilities available for repointing the vehicle Akey objective is to maintain a suboptimal solution strategy
8 Mathematical Problems in Engineering
even during the degraded hardware environment A solutionstrategy is presented that enables two control inputs tocomplete the originally defined three-dimensional rigid bodymaneuver Nonlinear necessary conditions are defined forcarrying out a sequence of maneuvers For a single-axisand simultaneous submaneuver an unknown switch timemust be recovered switching between the remaining controlactuators Two control formulations are presented The firstapproach penalizes the control torques but is shown to leadto discontinuous control time historiesThe second approachpenalizes the control torque rates but is shown to eliminatethe discontinuous control time histories which is importantfor flexible body applications The problem is defined bya nonlinear high-dimensional set of necessary conditionswhich are iteratively solved by introducing a multiple shoot-ing method On comparing the performance indices for thenominal and failed actuator cases it is demonstrated that thefailed actuator case requires sim20-fold increase in computa-tional cost The proposed method is expected to be broadlyuseful for spacecraft applications that must deal with actuatorfailures on orbit where optimized approaches are requiredfor maintaining vehicle pointing goals Future research willinvestigate developing more accurate starting guess solutionsfor reducing the number of nonlinear optimization iterationsrequired
References
[1] J L Junkins and J D Turner ldquoOptimal continuous torque atti-tude maneuversrdquo Journal of Guidance Control and Dynamicsvol 3 no 3 pp 210ndash217 1980
[2] J D Turner and J L Junkins ldquoOptimal large-angle singleaxis rotational maneuvers of flexible spacecraftrdquo Journal ofGuidance Control and Dynamics vol 3 no 6 pp 578ndash5851980
[3] J L Junkins and J D Turner Optimal Spacecraft RotationalManeuvers vol 3 of Studies in Astronautics Elsevier Amster-dam The Netherlands 1986
[4] P Tsiotras and J M Longuski ldquoA new parameterization of theattitude kinematicsrdquo Journal of the Astronautical Sciences vol43 no 3 pp 243ndash262 1995
[5] E-Y Keraı ldquoAnalyis of small time local controllability of therigid bodymodelrdquo in Proceedings of the 3rd IFAC Symposium onSystem Structure and Control pp 597ndash602 Oxford UK 1995
[6] R W Brockett ldquoAsymptotic stability and feedback stabiliza-tionrdquo in Differential Geometric Control Theory pp 181ndash191Birkhauser Cambridge Mass USA 1983
[7] P Tsiotras M Corless and J M Longuski ldquoA novel approachto the attitude control of axisymmetric spacecraftrdquo Automaticavol 31 no 8 pp 1099ndash1112 1995
[8] P Tsiotras ldquoOptimal regulation and passivity results for axisym-metric rigid bodies using two controlsrdquo Journal of GuidanceControl and Dynamics vol 20 no 3 pp 457ndash463 1997
[9] P Tsiotras and J Luo ldquoReduced effort control laws for under-actuated rigid spacecraftrdquo Journal of Guidance Control andDynamics vol 20 no 6 pp 1089ndash1095 1997
[10] P Tsiotras and J Luo ldquoStabilization and tracking of under-actuated axisymmetric spacecraft with bounded controlrdquo inProceedings of the 4th IFAC Symposium on Nonlinear Control
Systems Design pp 800ndash806 Pergamon Press Enschede TheNetherlands 1998
[11] H Shen and P Tsiotras ldquoTime-optimal control of axisymmetricrigid spacecraft using two controlsrdquo Journal of Guidance Con-trol and Dynamics vol 22 no 5 pp 682ndash694 1999
[12] P Tsiotras and J Luo ldquoControl of underactuated spacecraft withbounded inputsrdquoAutomatica vol 36 no 8 pp 1153ndash1169 2000
[13] P Tsiotras and V Doumtchenko ldquoControl of spacecraft subjectto actuator failures stateof-the-art and open problemsrdquo in TheRichardH BattinAstrodynamics Conference pp 1ndash21 AmericanAstronautical Society San Diego Calif USA No 00-264
[14] P Tsiotras and A Schleicher ldquoDetumbling and partial attitudestabilization of a rigid spacecraft under actuator failurerdquo inProceedings of the AIAA Guidance Navigation and ControlConference and Exhibit AIAA Denver Colo USA August2000 No 2000-4044
[15] P Morin C Samson J-B Pomet and Z-P Jiang ldquoTime-varying feedback stabilization of the attitude of a rigid space-craft with two controlsrdquo Systems amp Control Letters vol 25 no5 pp 375ndash385 1995
[16] J-M Coron and E-Y Keraı ldquoExplicit feedbacks stabilizingthe attitude of a rigid spacecraft with two control torquesrdquoAutomatica vol 32 no 5 pp 669ndash677 1996
[17] D Kim and J D Turner ldquo3D spacecraft attitude control usingtwo control inputsrdquo in Proceedings of the Annual TechnicalSymposium p 26 AIAA May 2012 No A-33
[18] D Kim and J D Turner ldquoSpacecraft attitude control using twocontrol torquesrdquo in Proceedings of the Jer-Nan Juang Astrody-namics Symposium American Astronautical Society CollegeStation Tex USA June 2012 NoAAS 12-640
[19] D Kim and J D Turner ldquoSuboptimal spacecraft maneuversusing two controlsrdquo Journal of Guidance Control and Dynam-ics
[20] J L Junkins Z H Rahman and H Bang ldquoNear-minimum-time control of distributed parameter systems Analyticaland experimental resultsrdquo Journal of Guidance Control andDynamics vol 14 no 2 pp 406ndash415 1991
[21] D Kim 3Dmaneuvers for asymmetric under-actuated rigid body[PhD thesis] Texas AampM University 2013
[22] H G Bock and K J Plitt ldquoA multiple shooting algorithmfor direct solution of optimal problemsrdquo in Proceeedings ofthe 9th IFAC World Congress pp 242ndash247 IEEE PublicationsBudapest Hungary 1984
[23] H Schaub and J L Junkins Analytical Mechanics of SpaceSystems AIAA Reston Va USA 2nd edition 2009
[24] H J Pesch ldquoA practical guide to the solution of real-life optimalcontrol problemsrdquo Control and Cybernetics vol 23 no 1-2 pp7ndash60 1994
Submit your manuscripts athttpwwwhindawicom
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttpwwwhindawicom
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
CombinatoricsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Decision SciencesAdvances in
Discrete MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014 Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Stochastic AnalysisInternational Journal of

6 Mathematical Problems in Engineering
0 130079 30minus350
minus150
50
0 130079 30minus20
minus10
0
10
Time (s)
Time (s)
120583
120583
1
12058321205833
120585
120585
1
12058521205853
Figure 3 Time trajectory of costates (torque minimization)
Table 3 Comparison between guesses and found values (torqueminimization)
Parameter Guess Found value120583 (1199050
) [0 0 0]119879 [5616 0 0]119879120585 (1199050
) [0 0 0]119879 [3056 minus0004 minus0849]119879
120583 (119905119891
) [0 0 0]119879 [minus5549 minus1053 minus285835]119879
120585 (119905119891
) [0 0 0]119879 [5929 6798 minus10628]119879
1205721
[0 0 0]119879 [minus8389 minus5949 329183]1198791205722
[0 0 0]119879 [minus5322 minus4968 8416]119879
119905
119904
15 13008
The simulation results for minimizing control torquerates are shown in Figures 6ndash9 Figure 6 shows that all thestates meet the terminal and interior conditions using onlytwo control torques Even though a single-axis maneuver isconducted until the switch time different control time histo-ries are obtainedThis is because control rates are minimizedinstead of control torques Also it leads to continuous controltime histories Figure 7 presents time histories of Lagrangemultipliers associated with the state
Similarly constant Hamiltonian time histories areobtained in Figure 8 Like the control torque minimizationresults of the principal angle path the three-successive-submaneuver result has the longest path in Figure 9 Forcomparing torque consumptions according to the usage ofcontrol rate as a performance index Gu
≜ (12) int
119905119891
1199050u119879u d119905
is calculated For both torque and torque-rate minimizationcases torque consumptions are compared and listed inTable 4
0 5 10 15 20 25 30
minus01
minus005
0
ℋ
Normal2 man3 man
0 5 10 15 20 25 300
025
05
Time (s)
Time (s)
ℐ
Normal2 man3 man
Figure 4 Time trajectory of Hamiltonian and performance index(torque minimization)
0 5 10 15 20 25 300
10
20
30
40
50
60
70
Time (s)
Normal2 man3 man
Φ(d
eg)
Figure 5 Time trajectory of principal angle (torque minimization)
As shown in Table 4 the two-successive-submaneuverstrategy requires less torque than the three-successive-submaneuver one
6 Conclusion
The classic spacecraft maneuver problem is generalized tohandle the special case that an actuator failure alters the
Mathematical Problems in Engineering 7
0 1293 30minus012
0 1293 30
0 1293 30Time (s)
Time (s)
Time (s)
minus010
010203
minus04
0
04
0002
120596(r
ads
)
120590
u(N
m)
u1u2
120590112059021205903
1205961
1205962
1205963
Figure 6 Time trajectory of states (torque-rate minimization)
0 1293 30minus150
minus50
50
0 1293 30minus10
0
10
0 1293 30minus05
0
05
Time (s)
Time (s)
Time (s)
120583
120583
1
12058321205833
120585
120585
1
12058521205853
120578
120578
1
1205782
Figure 7 Time trajectory of costates (torque-rate minimization)
0 5 10 15 20 25 30minus012
minus006
0
ℋ
0 5 10 15 20 25 300
015
03
Time (s)
Time (s)
ℐ
Normal2 man3 man
Normal2 man3 man
Figure 8 Time trajectory of Hamiltonian and performance index(torque-rate minimization)
0 5 10 15 20 25 300
10
20
30
40
50
60
70
Time (s)
Normal2 man3 man
Φ(d
eg)
Figure 9 Time trajectory of principal angle (torque-rate minimiza-tion)
Table 4 Torque consumption comparison
Observation Normal 2 man (ratio) 3 man (ratio)Ju 00671 07820 (116502) 10432 (155414)Gu 00959 10525 (109700) 15348 (159965)
hardware capabilities available for repointing the vehicle Akey objective is to maintain a suboptimal solution strategy
8 Mathematical Problems in Engineering
even during the degraded hardware environment A solutionstrategy is presented that enables two control inputs tocomplete the originally defined three-dimensional rigid bodymaneuver Nonlinear necessary conditions are defined forcarrying out a sequence of maneuvers For a single-axisand simultaneous submaneuver an unknown switch timemust be recovered switching between the remaining controlactuators Two control formulations are presented The firstapproach penalizes the control torques but is shown to leadto discontinuous control time historiesThe second approachpenalizes the control torque rates but is shown to eliminatethe discontinuous control time histories which is importantfor flexible body applications The problem is defined bya nonlinear high-dimensional set of necessary conditionswhich are iteratively solved by introducing a multiple shoot-ing method On comparing the performance indices for thenominal and failed actuator cases it is demonstrated that thefailed actuator case requires sim20-fold increase in computa-tional cost The proposed method is expected to be broadlyuseful for spacecraft applications that must deal with actuatorfailures on orbit where optimized approaches are requiredfor maintaining vehicle pointing goals Future research willinvestigate developing more accurate starting guess solutionsfor reducing the number of nonlinear optimization iterationsrequired
References
[1] J L Junkins and J D Turner ldquoOptimal continuous torque atti-tude maneuversrdquo Journal of Guidance Control and Dynamicsvol 3 no 3 pp 210ndash217 1980
[2] J D Turner and J L Junkins ldquoOptimal large-angle singleaxis rotational maneuvers of flexible spacecraftrdquo Journal ofGuidance Control and Dynamics vol 3 no 6 pp 578ndash5851980
[3] J L Junkins and J D Turner Optimal Spacecraft RotationalManeuvers vol 3 of Studies in Astronautics Elsevier Amster-dam The Netherlands 1986
[4] P Tsiotras and J M Longuski ldquoA new parameterization of theattitude kinematicsrdquo Journal of the Astronautical Sciences vol43 no 3 pp 243ndash262 1995
[5] E-Y Keraı ldquoAnalyis of small time local controllability of therigid bodymodelrdquo in Proceedings of the 3rd IFAC Symposium onSystem Structure and Control pp 597ndash602 Oxford UK 1995
[6] R W Brockett ldquoAsymptotic stability and feedback stabiliza-tionrdquo in Differential Geometric Control Theory pp 181ndash191Birkhauser Cambridge Mass USA 1983
[7] P Tsiotras M Corless and J M Longuski ldquoA novel approachto the attitude control of axisymmetric spacecraftrdquo Automaticavol 31 no 8 pp 1099ndash1112 1995
[8] P Tsiotras ldquoOptimal regulation and passivity results for axisym-metric rigid bodies using two controlsrdquo Journal of GuidanceControl and Dynamics vol 20 no 3 pp 457ndash463 1997
[9] P Tsiotras and J Luo ldquoReduced effort control laws for under-actuated rigid spacecraftrdquo Journal of Guidance Control andDynamics vol 20 no 6 pp 1089ndash1095 1997
[10] P Tsiotras and J Luo ldquoStabilization and tracking of under-actuated axisymmetric spacecraft with bounded controlrdquo inProceedings of the 4th IFAC Symposium on Nonlinear Control
Systems Design pp 800ndash806 Pergamon Press Enschede TheNetherlands 1998
[11] H Shen and P Tsiotras ldquoTime-optimal control of axisymmetricrigid spacecraft using two controlsrdquo Journal of Guidance Con-trol and Dynamics vol 22 no 5 pp 682ndash694 1999
[12] P Tsiotras and J Luo ldquoControl of underactuated spacecraft withbounded inputsrdquoAutomatica vol 36 no 8 pp 1153ndash1169 2000
[13] P Tsiotras and V Doumtchenko ldquoControl of spacecraft subjectto actuator failures stateof-the-art and open problemsrdquo in TheRichardH BattinAstrodynamics Conference pp 1ndash21 AmericanAstronautical Society San Diego Calif USA No 00-264
[14] P Tsiotras and A Schleicher ldquoDetumbling and partial attitudestabilization of a rigid spacecraft under actuator failurerdquo inProceedings of the AIAA Guidance Navigation and ControlConference and Exhibit AIAA Denver Colo USA August2000 No 2000-4044
[15] P Morin C Samson J-B Pomet and Z-P Jiang ldquoTime-varying feedback stabilization of the attitude of a rigid space-craft with two controlsrdquo Systems amp Control Letters vol 25 no5 pp 375ndash385 1995
[16] J-M Coron and E-Y Keraı ldquoExplicit feedbacks stabilizingthe attitude of a rigid spacecraft with two control torquesrdquoAutomatica vol 32 no 5 pp 669ndash677 1996
[17] D Kim and J D Turner ldquo3D spacecraft attitude control usingtwo control inputsrdquo in Proceedings of the Annual TechnicalSymposium p 26 AIAA May 2012 No A-33
[18] D Kim and J D Turner ldquoSpacecraft attitude control using twocontrol torquesrdquo in Proceedings of the Jer-Nan Juang Astrody-namics Symposium American Astronautical Society CollegeStation Tex USA June 2012 NoAAS 12-640
[19] D Kim and J D Turner ldquoSuboptimal spacecraft maneuversusing two controlsrdquo Journal of Guidance Control and Dynam-ics
[20] J L Junkins Z H Rahman and H Bang ldquoNear-minimum-time control of distributed parameter systems Analyticaland experimental resultsrdquo Journal of Guidance Control andDynamics vol 14 no 2 pp 406ndash415 1991
[21] D Kim 3Dmaneuvers for asymmetric under-actuated rigid body[PhD thesis] Texas AampM University 2013
[22] H G Bock and K J Plitt ldquoA multiple shooting algorithmfor direct solution of optimal problemsrdquo in Proceeedings ofthe 9th IFAC World Congress pp 242ndash247 IEEE PublicationsBudapest Hungary 1984
[23] H Schaub and J L Junkins Analytical Mechanics of SpaceSystems AIAA Reston Va USA 2nd edition 2009
[24] H J Pesch ldquoA practical guide to the solution of real-life optimalcontrol problemsrdquo Control and Cybernetics vol 23 no 1-2 pp7ndash60 1994
Submit your manuscripts athttpwwwhindawicom
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttpwwwhindawicom
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
CombinatoricsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Decision SciencesAdvances in
Discrete MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014 Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Stochastic AnalysisInternational Journal of

Mathematical Problems in Engineering 7
0 1293 30minus012
0 1293 30
0 1293 30Time (s)
Time (s)
Time (s)
minus010
010203
minus04
0
04
0002
120596(r
ads
)
120590
u(N
m)
u1u2
120590112059021205903
1205961
1205962
1205963
Figure 6 Time trajectory of states (torque-rate minimization)
0 1293 30minus150
minus50
50
0 1293 30minus10
0
10
0 1293 30minus05
0
05
Time (s)
Time (s)
Time (s)
120583
120583
1
12058321205833
120585
120585
1
12058521205853
120578
120578
1
1205782
Figure 7 Time trajectory of costates (torque-rate minimization)
0 5 10 15 20 25 30minus012
minus006
0
ℋ
0 5 10 15 20 25 300
015
03
Time (s)
Time (s)
ℐ
Normal2 man3 man
Normal2 man3 man
Figure 8 Time trajectory of Hamiltonian and performance index(torque-rate minimization)
0 5 10 15 20 25 300
10
20
30
40
50
60
70
Time (s)
Normal2 man3 man
Φ(d
eg)
Figure 9 Time trajectory of principal angle (torque-rate minimiza-tion)
Table 4 Torque consumption comparison
Observation Normal 2 man (ratio) 3 man (ratio)Ju 00671 07820 (116502) 10432 (155414)Gu 00959 10525 (109700) 15348 (159965)
hardware capabilities available for repointing the vehicle Akey objective is to maintain a suboptimal solution strategy
8 Mathematical Problems in Engineering
even during the degraded hardware environment A solutionstrategy is presented that enables two control inputs tocomplete the originally defined three-dimensional rigid bodymaneuver Nonlinear necessary conditions are defined forcarrying out a sequence of maneuvers For a single-axisand simultaneous submaneuver an unknown switch timemust be recovered switching between the remaining controlactuators Two control formulations are presented The firstapproach penalizes the control torques but is shown to leadto discontinuous control time historiesThe second approachpenalizes the control torque rates but is shown to eliminatethe discontinuous control time histories which is importantfor flexible body applications The problem is defined bya nonlinear high-dimensional set of necessary conditionswhich are iteratively solved by introducing a multiple shoot-ing method On comparing the performance indices for thenominal and failed actuator cases it is demonstrated that thefailed actuator case requires sim20-fold increase in computa-tional cost The proposed method is expected to be broadlyuseful for spacecraft applications that must deal with actuatorfailures on orbit where optimized approaches are requiredfor maintaining vehicle pointing goals Future research willinvestigate developing more accurate starting guess solutionsfor reducing the number of nonlinear optimization iterationsrequired
References
[1] J L Junkins and J D Turner ldquoOptimal continuous torque atti-tude maneuversrdquo Journal of Guidance Control and Dynamicsvol 3 no 3 pp 210ndash217 1980
[2] J D Turner and J L Junkins ldquoOptimal large-angle singleaxis rotational maneuvers of flexible spacecraftrdquo Journal ofGuidance Control and Dynamics vol 3 no 6 pp 578ndash5851980
[3] J L Junkins and J D Turner Optimal Spacecraft RotationalManeuvers vol 3 of Studies in Astronautics Elsevier Amster-dam The Netherlands 1986
[4] P Tsiotras and J M Longuski ldquoA new parameterization of theattitude kinematicsrdquo Journal of the Astronautical Sciences vol43 no 3 pp 243ndash262 1995
[5] E-Y Keraı ldquoAnalyis of small time local controllability of therigid bodymodelrdquo in Proceedings of the 3rd IFAC Symposium onSystem Structure and Control pp 597ndash602 Oxford UK 1995
[6] R W Brockett ldquoAsymptotic stability and feedback stabiliza-tionrdquo in Differential Geometric Control Theory pp 181ndash191Birkhauser Cambridge Mass USA 1983
[7] P Tsiotras M Corless and J M Longuski ldquoA novel approachto the attitude control of axisymmetric spacecraftrdquo Automaticavol 31 no 8 pp 1099ndash1112 1995
[8] P Tsiotras ldquoOptimal regulation and passivity results for axisym-metric rigid bodies using two controlsrdquo Journal of GuidanceControl and Dynamics vol 20 no 3 pp 457ndash463 1997
[9] P Tsiotras and J Luo ldquoReduced effort control laws for under-actuated rigid spacecraftrdquo Journal of Guidance Control andDynamics vol 20 no 6 pp 1089ndash1095 1997
[10] P Tsiotras and J Luo ldquoStabilization and tracking of under-actuated axisymmetric spacecraft with bounded controlrdquo inProceedings of the 4th IFAC Symposium on Nonlinear Control
Systems Design pp 800ndash806 Pergamon Press Enschede TheNetherlands 1998
[11] H Shen and P Tsiotras ldquoTime-optimal control of axisymmetricrigid spacecraft using two controlsrdquo Journal of Guidance Con-trol and Dynamics vol 22 no 5 pp 682ndash694 1999
[12] P Tsiotras and J Luo ldquoControl of underactuated spacecraft withbounded inputsrdquoAutomatica vol 36 no 8 pp 1153ndash1169 2000
[13] P Tsiotras and V Doumtchenko ldquoControl of spacecraft subjectto actuator failures stateof-the-art and open problemsrdquo in TheRichardH BattinAstrodynamics Conference pp 1ndash21 AmericanAstronautical Society San Diego Calif USA No 00-264
[14] P Tsiotras and A Schleicher ldquoDetumbling and partial attitudestabilization of a rigid spacecraft under actuator failurerdquo inProceedings of the AIAA Guidance Navigation and ControlConference and Exhibit AIAA Denver Colo USA August2000 No 2000-4044
[15] P Morin C Samson J-B Pomet and Z-P Jiang ldquoTime-varying feedback stabilization of the attitude of a rigid space-craft with two controlsrdquo Systems amp Control Letters vol 25 no5 pp 375ndash385 1995
[16] J-M Coron and E-Y Keraı ldquoExplicit feedbacks stabilizingthe attitude of a rigid spacecraft with two control torquesrdquoAutomatica vol 32 no 5 pp 669ndash677 1996
[17] D Kim and J D Turner ldquo3D spacecraft attitude control usingtwo control inputsrdquo in Proceedings of the Annual TechnicalSymposium p 26 AIAA May 2012 No A-33
[18] D Kim and J D Turner ldquoSpacecraft attitude control using twocontrol torquesrdquo in Proceedings of the Jer-Nan Juang Astrody-namics Symposium American Astronautical Society CollegeStation Tex USA June 2012 NoAAS 12-640
[19] D Kim and J D Turner ldquoSuboptimal spacecraft maneuversusing two controlsrdquo Journal of Guidance Control and Dynam-ics
[20] J L Junkins Z H Rahman and H Bang ldquoNear-minimum-time control of distributed parameter systems Analyticaland experimental resultsrdquo Journal of Guidance Control andDynamics vol 14 no 2 pp 406ndash415 1991
[21] D Kim 3Dmaneuvers for asymmetric under-actuated rigid body[PhD thesis] Texas AampM University 2013
[22] H G Bock and K J Plitt ldquoA multiple shooting algorithmfor direct solution of optimal problemsrdquo in Proceeedings ofthe 9th IFAC World Congress pp 242ndash247 IEEE PublicationsBudapest Hungary 1984
[23] H Schaub and J L Junkins Analytical Mechanics of SpaceSystems AIAA Reston Va USA 2nd edition 2009
[24] H J Pesch ldquoA practical guide to the solution of real-life optimalcontrol problemsrdquo Control and Cybernetics vol 23 no 1-2 pp7ndash60 1994
Submit your manuscripts athttpwwwhindawicom
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttpwwwhindawicom
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
CombinatoricsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Decision SciencesAdvances in
Discrete MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014 Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Stochastic AnalysisInternational Journal of

8 Mathematical Problems in Engineering
even during the degraded hardware environment A solutionstrategy is presented that enables two control inputs tocomplete the originally defined three-dimensional rigid bodymaneuver Nonlinear necessary conditions are defined forcarrying out a sequence of maneuvers For a single-axisand simultaneous submaneuver an unknown switch timemust be recovered switching between the remaining controlactuators Two control formulations are presented The firstapproach penalizes the control torques but is shown to leadto discontinuous control time historiesThe second approachpenalizes the control torque rates but is shown to eliminatethe discontinuous control time histories which is importantfor flexible body applications The problem is defined bya nonlinear high-dimensional set of necessary conditionswhich are iteratively solved by introducing a multiple shoot-ing method On comparing the performance indices for thenominal and failed actuator cases it is demonstrated that thefailed actuator case requires sim20-fold increase in computa-tional cost The proposed method is expected to be broadlyuseful for spacecraft applications that must deal with actuatorfailures on orbit where optimized approaches are requiredfor maintaining vehicle pointing goals Future research willinvestigate developing more accurate starting guess solutionsfor reducing the number of nonlinear optimization iterationsrequired
References
[1] J L Junkins and J D Turner ldquoOptimal continuous torque atti-tude maneuversrdquo Journal of Guidance Control and Dynamicsvol 3 no 3 pp 210ndash217 1980
[2] J D Turner and J L Junkins ldquoOptimal large-angle singleaxis rotational maneuvers of flexible spacecraftrdquo Journal ofGuidance Control and Dynamics vol 3 no 6 pp 578ndash5851980
[3] J L Junkins and J D Turner Optimal Spacecraft RotationalManeuvers vol 3 of Studies in Astronautics Elsevier Amster-dam The Netherlands 1986
[4] P Tsiotras and J M Longuski ldquoA new parameterization of theattitude kinematicsrdquo Journal of the Astronautical Sciences vol43 no 3 pp 243ndash262 1995
[5] E-Y Keraı ldquoAnalyis of small time local controllability of therigid bodymodelrdquo in Proceedings of the 3rd IFAC Symposium onSystem Structure and Control pp 597ndash602 Oxford UK 1995
[6] R W Brockett ldquoAsymptotic stability and feedback stabiliza-tionrdquo in Differential Geometric Control Theory pp 181ndash191Birkhauser Cambridge Mass USA 1983
[7] P Tsiotras M Corless and J M Longuski ldquoA novel approachto the attitude control of axisymmetric spacecraftrdquo Automaticavol 31 no 8 pp 1099ndash1112 1995
[8] P Tsiotras ldquoOptimal regulation and passivity results for axisym-metric rigid bodies using two controlsrdquo Journal of GuidanceControl and Dynamics vol 20 no 3 pp 457ndash463 1997
[9] P Tsiotras and J Luo ldquoReduced effort control laws for under-actuated rigid spacecraftrdquo Journal of Guidance Control andDynamics vol 20 no 6 pp 1089ndash1095 1997
[10] P Tsiotras and J Luo ldquoStabilization and tracking of under-actuated axisymmetric spacecraft with bounded controlrdquo inProceedings of the 4th IFAC Symposium on Nonlinear Control
Systems Design pp 800ndash806 Pergamon Press Enschede TheNetherlands 1998
[11] H Shen and P Tsiotras ldquoTime-optimal control of axisymmetricrigid spacecraft using two controlsrdquo Journal of Guidance Con-trol and Dynamics vol 22 no 5 pp 682ndash694 1999
[12] P Tsiotras and J Luo ldquoControl of underactuated spacecraft withbounded inputsrdquoAutomatica vol 36 no 8 pp 1153ndash1169 2000
[13] P Tsiotras and V Doumtchenko ldquoControl of spacecraft subjectto actuator failures stateof-the-art and open problemsrdquo in TheRichardH BattinAstrodynamics Conference pp 1ndash21 AmericanAstronautical Society San Diego Calif USA No 00-264
[14] P Tsiotras and A Schleicher ldquoDetumbling and partial attitudestabilization of a rigid spacecraft under actuator failurerdquo inProceedings of the AIAA Guidance Navigation and ControlConference and Exhibit AIAA Denver Colo USA August2000 No 2000-4044
[15] P Morin C Samson J-B Pomet and Z-P Jiang ldquoTime-varying feedback stabilization of the attitude of a rigid space-craft with two controlsrdquo Systems amp Control Letters vol 25 no5 pp 375ndash385 1995
[16] J-M Coron and E-Y Keraı ldquoExplicit feedbacks stabilizingthe attitude of a rigid spacecraft with two control torquesrdquoAutomatica vol 32 no 5 pp 669ndash677 1996
[17] D Kim and J D Turner ldquo3D spacecraft attitude control usingtwo control inputsrdquo in Proceedings of the Annual TechnicalSymposium p 26 AIAA May 2012 No A-33
[18] D Kim and J D Turner ldquoSpacecraft attitude control using twocontrol torquesrdquo in Proceedings of the Jer-Nan Juang Astrody-namics Symposium American Astronautical Society CollegeStation Tex USA June 2012 NoAAS 12-640
[19] D Kim and J D Turner ldquoSuboptimal spacecraft maneuversusing two controlsrdquo Journal of Guidance Control and Dynam-ics
[20] J L Junkins Z H Rahman and H Bang ldquoNear-minimum-time control of distributed parameter systems Analyticaland experimental resultsrdquo Journal of Guidance Control andDynamics vol 14 no 2 pp 406ndash415 1991
[21] D Kim 3Dmaneuvers for asymmetric under-actuated rigid body[PhD thesis] Texas AampM University 2013
[22] H G Bock and K J Plitt ldquoA multiple shooting algorithmfor direct solution of optimal problemsrdquo in Proceeedings ofthe 9th IFAC World Congress pp 242ndash247 IEEE PublicationsBudapest Hungary 1984
[23] H Schaub and J L Junkins Analytical Mechanics of SpaceSystems AIAA Reston Va USA 2nd edition 2009
[24] H J Pesch ldquoA practical guide to the solution of real-life optimalcontrol problemsrdquo Control and Cybernetics vol 23 no 1-2 pp7ndash60 1994
Submit your manuscripts athttpwwwhindawicom
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttpwwwhindawicom
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
CombinatoricsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Decision SciencesAdvances in
Discrete MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014 Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Stochastic AnalysisInternational Journal of

Submit your manuscripts athttpwwwhindawicom
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttpwwwhindawicom
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
CombinatoricsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Decision SciencesAdvances in
Discrete MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014 Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Stochastic AnalysisInternational Journal of