
Reduced Order Modeling of a Turbulent Three Dimensional Cylinder Wake
19
American Institute of Aeronautics and Astronautics 1 Reduced Order Modeling of a Turbulent Three Dimensional Cylinder Wake Jürgen Seidel 1 , Kelly Cohen 2 , Selin Aradag 3 , Stefan Siegel 4 , and Thomas McLaughlin 5 United States Air Force Academy, USAF Academy, CO, 80840 The aim of this research program is flow state based feedback control of a circular cylinder wake flow at a Reynolds number of Re=20,000. CFD simulations were performed with an unstructured grid of 4 diameters span and periodic boundary conditions. In addition, wind tunnel experiments were performed to validate the Strouhal number, surface pressures, drag coefficient and velocity profiles in the cylinder wake. The simulation results were compared to both experiments in literature and the experimental results obtained in this study. POD was performed on the surface pressure data and Double Proper Orthogonal Decomposition (DPOD) was performed on the wake velocity field obtained from the CFD results. A low dimensional model was developed based on the DPOD mode amplitudes. For flow field observation, a four sensor configuration of surface mounted pressure sensors was heuristically selected based on the POD spatial Eigenfunctions of the surface pressure. Then an artificial neural network estimator was designed to estimate the mode amplitudes of the 6 dominant DPOD wake velocity modes from the sensor data. For the validation data set, the estimation errors are relatively small and remain bounded. Also, it appears that all 6 DPOD modes are observable at each of the nine spanwise planes that were analyzed. Nomenclature A = Frontal area a k = POD mode amplitude () , ˆ t ij = Estimate of POD mode amplitude * , ˆ ij = Regression matrix c d = Drag coefficient c p = Pressure coefficient t = Time step D = Cylinder diameter k = Spatial POD mode f = Mapping function = Viscosity P = Pressure () P t s = Filtered sensor signal * s P = Regression matrix = Density Re = UD/, Reynolds number St = Strouhal number t = Time t = Dimensional time T = Temperature 1 Visiting Researcher, Department of Aeronautics, Senior Member AIAA. 2 Visiting Researcher, Department of Aeronautics, Associate Fellow AIAA. 3 Visiting Researcher, Department of Aeronautics, Member AIAA. 4 Visiting Researcher, Department of Aeronautics, Senior Member AIAA. 5 Director, Aeronautics Research Center, Department of Aeronautics, Associate Fellow AIAA. . 37th AIAA Fluid Dynamics Conference and Exhibit 25 - 28 June 2007, Miami, FL AIAA 2007-4503 This material is declared a work of the U.S. Government and is not subject to copyright protection in the United States. Downloaded by UNIVERSITY OF CINCINNATI on November 24, 2014 | http://arc.aiaa.org | DOI: 10.2514/6.2007-4503
Transcript of Reduced Order Modeling of a Turbulent Three Dimensional Cylinder Wake
American Institute of Aeronautics and Astronautics
1
Reduced Order Modeling of a Turbulent Three Dimensional
Cylinder Wake
Jürgen Seidel1, Kelly Cohen
2, Selin Aradag
3, Stefan Siegel
4, and Thomas McLaughlin
5
United States Air Force Academy, USAF Academy, CO, 80840
The aim of this research program is flow state based feedback control of a circular cylinder wake flow at a
Reynolds number of Re=20,000. CFD simulations were performed with an unstructured grid of 4 diameters
span and periodic boundary conditions. In addition, wind tunnel experiments were performed to validate the
Strouhal number, surface pressures, drag coefficient and velocity profiles in the cylinder wake. The
simulation results were compared to both experiments in literature and the experimental results obtained in
this study. POD was performed on the surface pressure data and Double Proper Orthogonal Decomposition
(DPOD) was performed on the wake velocity field obtained from the CFD results. A low dimensional model
was developed based on the DPOD mode amplitudes. For flow field observation, a four sensor configuration
of surface mounted pressure sensors was heuristically selected based on the POD spatial Eigenfunctions of
the surface pressure. Then an artificial neural network estimator was designed to estimate the mode
amplitudes of the 6 dominant DPOD wake velocity modes from the sensor data. For the validation data set,
the estimation errors are relatively small and remain bounded. Also, it appears that all 6 DPOD modes are
observable at each of the nine spanwise planes that were analyzed.
Nomenclature
A = Frontal area
ak = POD mode amplitude
( ),ˆ ti j = Estimate of POD mode amplitude
*
,ˆ
i j = Regression matrix
cd = Drag coefficient
cp = Pressure coefficient
t = Time step
D = Cylinder diameter
k = Spatial POD mode
f = Mapping function
= Viscosity
P = Pressure
( )P ts = Filtered sensor signal
*
sP = Regression matrix
= Density
Re = UD/, Reynolds number
St = Strouhal number
t = Time
t = Dimensional time
T = Temperature
1 Visiting Researcher, Department of Aeronautics, Senior Member AIAA.
2 Visiting Researcher, Department of Aeronautics, Associate Fellow AIAA.
3 Visiting Researcher, Department of Aeronautics, Member AIAA.
4 Visiting Researcher, Department of Aeronautics, Senior Member AIAA.
5 Director, Aeronautics Research Center, Department of Aeronautics, Associate Fellow AIAA.
.
37th AIAA Fluid Dynamics Conference and Exhibit25 - 28 June 2007, Miami, FL
AIAA 2007-4503
This material is declared a work of the U.S. Government and is not subject to copyright protection in the United States.
Dow
nloa
ded
by U
NIV
ER
SIT
Y O
F C
INC
INN
AT
I on
Nov
embe
r 24
, 201
4 | h
ttp://
arc.
aiaa
.org
| D
OI:
10.
2514
/6.2
007-
4503

American Institute of Aeronautics and Astronautics
2
= Angular coordinate measured counter clockwise from rear stagnation point
U = Free stream velocity
' 'u u = Reynolds stress
u = Streamwise velocity
x = Streamwise direction
y = Spanwise direction
y+ = Wall normal distance in wall units
z = Cross stream direction
I. Introduction
HE phenomenon of vortex shedding behind bluff bodies has been a subject of extensive research. Many
flows of engineering interest produce this phenomenon and the associated periodic lift and drag response.
Applications include aircraft and missile aerodynamics, marine structures, underwater acoustics, civil and
wind engineering1. The control of the wake behind bluff bodies has been crucial in several engineering applications
during the past few decades. Especially, active feedback control to reduce the drag on vehicles has been a very
important area of research since drag reduction is directly related to energy saving. In order to be able to control the
vortex shedding behind bluff bodies, it is first important to predict the flow structure accurately both experimentally
and computationally and to create a valid low dimensional model of the flow since feedback of flow fields using low
dimensional modeling has been shown to be much more effective than ad-hoc approaches.2-4
A circular cylinder is a well-studied and documented benchmark for a bluff body wake problem. The near wake
for the flow past a circular cylinder determines the dominant instability in the flow which leads to the vortex street
formation5. It is also responsible for the secondary instability and the subsequent bifurcations that lead to a turbulent
state, as found both computationally6 and experimentally
7. There is no established way to define the near wake;
however it was defined as the region up to ten diameters downstream from the cylinder by Ma et al.8
There are several experimental and computational studies in the literature dealing with the instability and
transition in the near wake of a circular cylinder. Norberg9, Zdravkovich
10 and Lin et al.
11 are some of the theoretical
and experimental studies that give insight to the instability and transition in the near wake. Simulations have also
been performed by several researchers. Most of the current CFD approaches use Reynolds-Averaged Navier-Stokes
equations (RANS) for the prediction of turbulent flows. Although RANS models are sufficient for predicting time
averaged flow quantities, they are not adequate in predicting flows with large separation and the resulting
unsteadiness. These massively separated flows include geometry dependent and three dimensional turbulent eddies
which cannot be simulated by RANS turbulence models12
. Direct Numerical Simulations (DNS), on the other hand,
makes no modeling assumption but is the most expensive approach since all turbulent motions must be resolved by
the grid. Since the smallest scales of turbulence (the Kolmogorov length scale) decrease rapidly with increasing
Reynolds number, this approach is limited to relatively low Reynolds number flows. Large Eddy Simulations (LES)
is less expensive than DNS since it models only the small subgrid scales of motion and resolves the rest of the
turbulent motions. However, since the “large” scales in the boundary layer are on the order of the boundary layer
thickness (which is quite thin for high Reynolds number flows), this method is cost prohibitive at high Reynolds
numbers for wall bounded flows.
The flow at a Reynolds number of Re=3900 has been most extensively studied computationally in the transition
range since there are several experimental studies in literature for comparison purposes at this Reynolds number.
Beaudan and Moin13
performed LES of flow at this Reynolds number and they assessed the performance of the
dynamic subgrid-scale eddy viscosity model for the turbulent wake behind a circular cylinder. Mittal and Moin14
and
Kravchenko and Moin15
also numerically studied the flow over a circular cylinder at Re=3900 using LES. Direct
numerical simulations (DNS) of flow at Re= 3900 were performed by Ma et al.8 and Dong et al.
16 Jordan
17 studied a
higher Reynolds number of Re=8000 in the transitional range using LES. However, he collected only a short time
history which may affect the results. There are also two-dimensional simulations in the literature18
. However,
Beaudan and Moin13
performed both two and three dimensional computations and showed that the near wake is
highly three dimensional at transitional Reynolds numbers and it contains pairs of counter-rotating streamwise
vortices, the effect of which cannot be reproduced in two-dimensional computations and three-dimensional
computations are essential for predicting flow statistics of engineering interest.
Flow control aims to improve aerodynamic characteristics of air vehicles by bringing about increased mission
performance. It can be categorized into two main approaches, namely active and passive flow control, depending on
whether energy is added to the flow in order to modify the flow structure. Passive control methods are inexpensive
and simple; but once they are implemented, no geometry changes can easily be made. Active control methods are
T
Dow
nloa
ded
by U
NIV
ER
SIT
Y O
F C
INC
INN
AT
I on
Nov
embe
r 24
, 201
4 | h
ttp://
arc.
aiaa
.org
| D
OI:
10.
2514
/6.2
007-
4503

American Institute of Aeronautics and Astronautics
3
usually more effective and can be modified according to the flight conditions. They can further be divided into two
sub-categories: open-loop and closed-loop techniques. Gad-el-Hak19
discusses the advances in the field of flow
control. Closed-loop flow control methods have become more popular over the past two decades as researchers
developed an increased awareness of its potential. Closed-loop flow control has several advantages over other
techniques, including lowering the amount of energy required to manipulate the flow to induce the desired behavior,
effectively addressing fluid dynamic instabilities, enabling adaptability to a wider operating envelope and providing
design flexibility and robustness.
An effective way of suppressing the self-excited flow oscillations, without making changes to the geometry or
introducing vast amounts of energy, is by the incorporation of closed-loop flow control2. A closed-loop flow control
system is comprised of a set of sensors, a controller that determines the feedback, and a set of actuators. During the
past five years, the closed-loop flow control program at the United States Air Force Academy (USAFA) focused on
developing a suite of low-dimensional flow control tools based on the low Reynolds numbers (Re < 180) laminar
cylinder wake.20-24
Energy is introduced into the flow via actuators and the wake of a cylinder may be influenced using several
different forcing techniques. For low Reynolds numbers, the wake response is similar for various types of forcing.2
External acoustic excitation of the wake, longitudinal, lateral or rotational vibration of the cylinder, and alternating
blowing and suction at the separation points are some of the actuation methods employed in the literature.2
Low-dimensional modeling is a building block of a structured model-based closed-loop flow control strategy.
For control purposes, a practical procedure is needed to represent the complete flow field, governed by the Navier
Stokes equations, and to separate the space and time dependence of the flow variables. A common method used to
substantially reduce the order of the model is Proper Orthogonal Decomposition (POD). This method is an optimal
approach in that it will capture the largest amount of the flow energy in the fewest modes of any decomposition of
the flow.25
The two dimensional POD method was used to identify the characteristic features, or modes, of a
cylinder wake at Reynolds number of 100 as demonstrated by Gillies.2
The major building blocks of the structured approach are a reduced-order POD model, a state estimator and a
controller. The desired POD model contains an adequate number of modes to enable accurate modeling of the
temporal and spatial characteristics of the large scale coherent structures inherent in the flow. A common approach
referred to as the method of “snapshots” introduced by Sirovich26
is employed to generate the basis functions of the
POD spatial modes from flowfield information obtained using either experiments or numerical simulations. This
approach to controlling the global wake behavior behind a circular cylinder was effectively employed by Gillies2
and Noack et al.27
Recently, Siegel, Cohen, Seidel and McLaughlin28
developed an extension to the POD approach,
referred to as „Double Proper Orthogonal Decomposition‟ (DPOD), in which shift modes have been added to
account for the changes in the flow due to transient forcing.
For practical applications, it is important to estimate the state of the flow, i.e. the relevant POD mode amplitudes,
using body mounted sensors. The advantages of body mounted sensors are that they are simple, relatively
inexpensive and reliable, and they enable collocation of sensors and actuators. This eliminates substantial phase
delays affecting controller design and performance.
There are two main objectives of this study. The first objective is to perform the unforced simulations and
experiments of the three-dimensional flow over a circular cylinder at a Reynolds number of 20,000 and compare the
results for validation purposes. The second aim is to construct a low dimensional model of the turbulent cylinder
wake. This includes application of Double Proper Orthogonal Decomposition (DPOD) on wake velocity data
obtained from the CFD simulations to develop reduced order dynamical models and designing an Artificial Neural
Network Estimator (ANNE). The ultimate aim is feedback control in order to stabilize the wake of a circular
cylinder at turbulent Reynolds numbers. This should result in a significant reduction of drag as well as unsteady lift
force.
II. Computational Methodology
For the computations, the solver Cobalt from Cobalt Solutions, LLC, was used.30
In Cobalt, the compressible
Navier-Stokes equations are solved using a cell-centered finite volume approach applicable to arbitrary cell
topologies (e.g. prisms, tetrahedra). In order to provide second order accuracy in space, the spatial operator utilizes
the exact Riemann solver of Gottlieb and Groth30
and least squares gradient calculations use QR factorization. It also
employs TVD flux limiters to limit extremes at cell faces. A point implicit method using analytic first-order inviscid
and viscous Jacobians is used for advancement of the discretized system. Newton sub-iterations are employed to
achieve second order accuracy in time.
Dow
nloa
ded
by U
NIV
ER
SIT
Y O
F C
INC
INN
AT
I on
Nov
embe
r 24
, 201
4 | h
ttp://
arc.
aiaa
.org
| D
OI:
10.
2514
/6.2
007-
4503
American Institute of Aeronautics and Astronautics
4
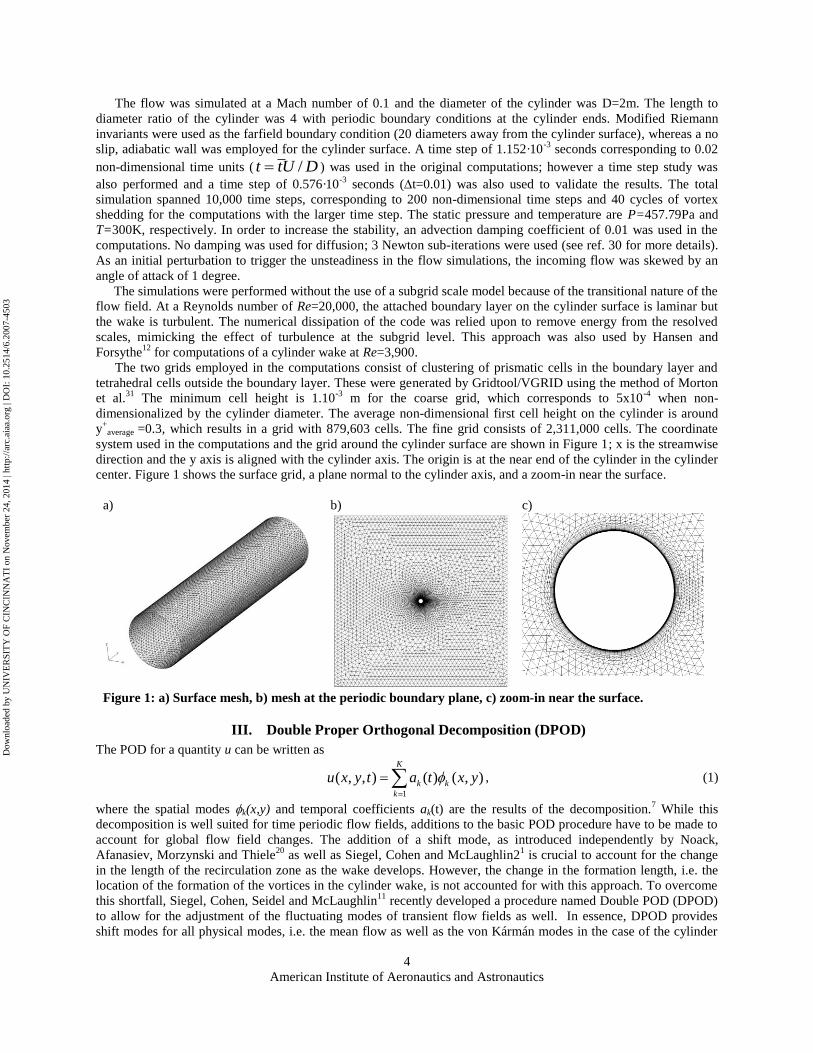
The flow was simulated at a Mach number of 0.1 and the diameter of the cylinder was D=2m. The length to
diameter ratio of the cylinder was 4 with periodic boundary conditions at the cylinder ends. Modified Riemann
invariants were used as the farfield boundary condition (20 diameters away from the cylinder surface), whereas a no
slip, adiabatic wall was employed for the cylinder surface. A time step of 1.152·10-3
seconds corresponding to 0.02
non-dimensional time units ( /t tU D ) was used in the original computations; however a time step study was
also performed and a time step of 0.576·10-3
seconds (t=0.01) was also used to validate the results. The total
simulation spanned 10,000 time steps, corresponding to 200 non-dimensional time steps and 40 cycles of vortex
shedding for the computations with the larger time step. The static pressure and temperature are P=457.79Pa and
T=300K, respectively. In order to increase the stability, an advection damping coefficient of 0.01 was used in the
computations. No damping was used for diffusion; 3 Newton sub-iterations were used (see ref. 30 for more details).
As an initial perturbation to trigger the unsteadiness in the flow simulations, the incoming flow was skewed by an
angle of attack of 1 degree.
The simulations were performed without the use of a subgrid scale model because of the transitional nature of the
flow field. At a Reynolds number of Re=20,000, the attached boundary layer on the cylinder surface is laminar but
the wake is turbulent. The numerical dissipation of the code was relied upon to remove energy from the resolved
scales, mimicking the effect of turbulence at the subgrid level. This approach was also used by Hansen and
Forsythe12
for computations of a cylinder wake at Re=3,900.
The two grids employed in the computations consist of clustering of prismatic cells in the boundary layer and
tetrahedral cells outside the boundary layer. These were generated by Gridtool/VGRID using the method of Morton
et al.31
The minimum cell height is 1.10-3
m for the coarse grid, which corresponds to 5x10-4
when non-
dimensionalized by the cylinder diameter. The average non-dimensional first cell height on the cylinder is around
y+
average =0.3, which results in a grid with 879,603 cells. The fine grid consists of 2,311,000 cells. The coordinate
system used in the computations and the grid around the cylinder surface are shown in Figure 1; x is the streamwise
direction and the y axis is aligned with the cylinder axis. The origin is at the near end of the cylinder in the cylinder
center. Figure 1 shows the surface grid, a plane normal to the cylinder axis, and a zoom-in near the surface.
a)
b)
c)
Figure 1: a) Surface mesh, b) mesh at the periodic boundary plane, c) zoom-in near the surface.
III. Double Proper Orthogonal Decomposition (DPOD)
The POD for a quantity u can be written as
1
( , , ) ( ) ( , )K
k k
k
u x y t a t x y
, (1)
where the spatial modes k(x,y) and temporal coefficients ak(t) are the results of the decomposition.7 While this
decomposition is well suited for time periodic flow fields, additions to the basic POD procedure have to be made to
account for global flow field changes. The addition of a shift mode, as introduced independently by Noack,
Afanasiev, Morzynski and Thiele20
as well as Siegel, Cohen and McLaughlin21 is crucial to account for the change
in the length of the recirculation zone as the wake develops. However, the change in the formation length, i.e. the
location of the formation of the vortices in the cylinder wake, is not accounted for with this approach. To overcome
this shortfall, Siegel, Cohen, Seidel and McLaughlin11
recently developed a procedure named Double POD (DPOD)
to allow for the adjustment of the fluctuating modes of transient flow fields as well. In essence, DPOD provides
shift modes for all physical modes, i.e. the mean flow as well as the von Kármán modes in the case of the cylinder
Dow
nloa
ded
by U
NIV
ER
SIT
Y O
F C
INC
INN
AT
I on
Nov
embe
r 24
, 201
4 | h
ttp://
arc.
aiaa
.org
| D
OI:
10.
2514
/6.2
007-
4503
American Institute of Aeronautics and Astronautics
5
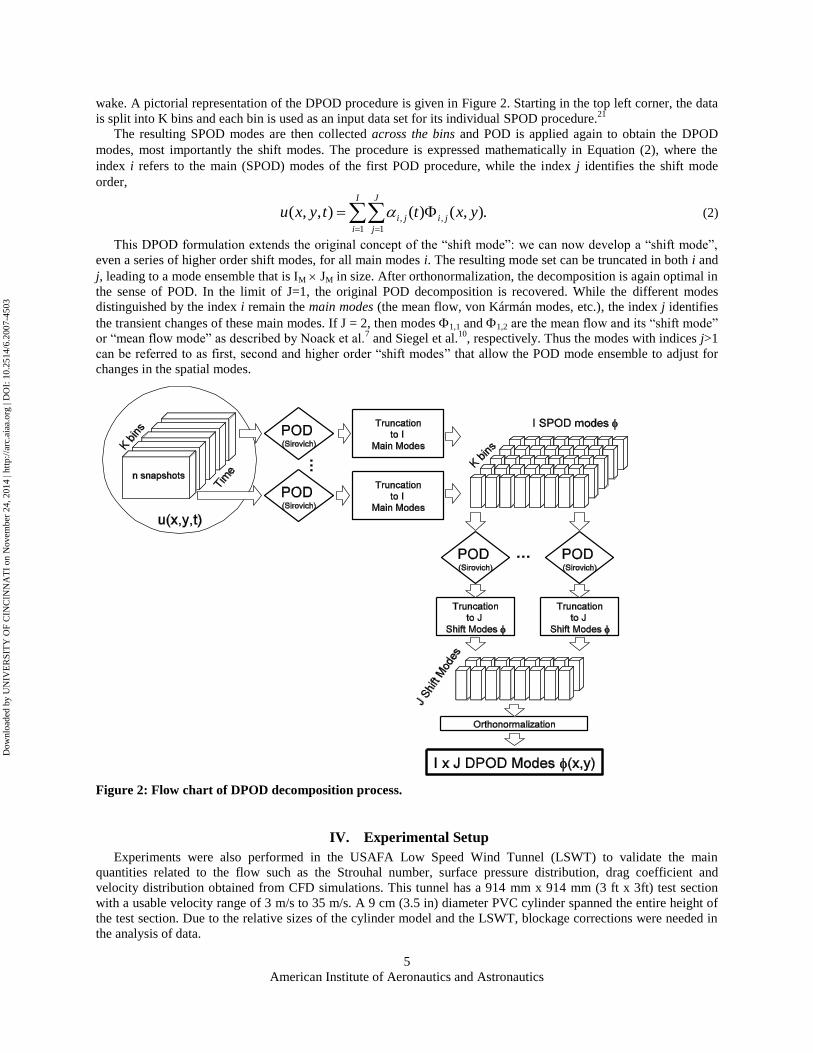
wake. A pictorial representation of the DPOD procedure is given in Figure 2. Starting in the top left corner, the data
is split into K bins and each bin is used as an input data set for its individual SPOD procedure.21
The resulting SPOD modes are then collected across the bins and POD is applied again to obtain the DPOD
modes, most importantly the shift modes. The procedure is expressed mathematically in Equation (2), where the
index i refers to the main (SPOD) modes of the first POD procedure, while the index j identifies the shift mode
order,
, ,
1 1
( , , ) ( ) ( , ).I J
i j i j
i j
u x y t t x y
(2)
This DPOD formulation extends the original concept of the “shift mode”: we can now develop a “shift mode”,
even a series of higher order shift modes, for all main modes i. The resulting mode set can be truncated in both i and
j, leading to a mode ensemble that is IM JM in size. After orthonormalization, the decomposition is again optimal in
the sense of POD. In the limit of J=1, the original POD decomposition is recovered. While the different modes
distinguished by the index i remain the main modes (the mean flow, von Kármán modes, etc.), the index j identifies
the transient changes of these main modes. If J = 2, then modes 1,1 and 1,2 are the mean flow and its “shift mode”
or “mean flow mode” as described by Noack et al.7 and Siegel et al.
10, respectively. Thus the modes with indices j>1
can be referred to as first, second and higher order “shift modes” that allow the POD mode ensemble to adjust for
changes in the spatial modes.
Figure 2: Flow chart of DPOD decomposition process.
IV. Experimental Setup
Experiments were also performed in the USAFA Low Speed Wind Tunnel (LSWT) to validate the main
quantities related to the flow such as the Strouhal number, surface pressure distribution, drag coefficient and
velocity distribution obtained from CFD simulations. This tunnel has a 914 mm x 914 mm (3 ft x 3ft) test section
with a usable velocity range of 3 m/s to 35 m/s. A 9 cm (3.5 in) diameter PVC cylinder spanned the entire height of
the test section. Due to the relative sizes of the cylinder model and the LSWT, blockage corrections were needed in
the analysis of data.
Dow
nloa
ded
by U
NIV
ER
SIT
Y O
F C
INC
INN
AT
I on
Nov
embe
r 24
, 201
4 | h
ttp://
arc.
aiaa
.org
| D
OI:
10.
2514
/6.2
007-
4503
American Institute of Aeronautics and Astronautics
6
In order to verify the computational approach used in this study, surface pressure data around the cylinder was
obtained using two different types of sensors, Validyne and Baratron. The Validyne pressure sensor has a pressure
range of ±0.03 psid, an analog output of ±10Vdc, and accuracy of 0.25% of full scale. The sensors were connected
to two different ports on the cylinder surface on centerplane and the cylinder was rotated with an increment of 10
degrees to obtain pressure data along the whole circumference of the cylinder. Using two different sensors enabled
checking the validity of the results by correlating readings from each instrument.
Single wire hot film probes were placed along the span of the model, the sensor axis parallel with the cylinder
axis. The hot film probes were positioned in line with the side of the cylinder, where the amplitude of the Kármán
Vortex Street induced oscillations is largest. They were initially placed 0.5 diameters downstream of the cylinder to
measure the frequency of the flow to compare to the CFD simulation data. Further data was taken to analyze the
lateral velocity profile in the wake of the cylinder. The four hotwire probes were placed 3D downstream of the
cylinder and moved laterally from z/D = +2.0 to -2.0 in increments of 0.2 diameters.
V. DPOD based low order modeling
A. Development of Effective Sensor Configuration
For low-dimensional control schemes to be implemented, a real-time estimation of the DPOD modes present in
the wake is necessary, since it is not realistic to measure the modes directly and be able to close the loop. Velocity
field data, provided by the CFD simulation, is fed into the DPOD procedure as described in the previous section.
Then, the estimation of the low-dimensional DPOD mode amplitudes is provided using an appropriate estimator.
Sensor measurements may take the form of wake measurements such as velocity, or, as in this effort, of body
mounted pressure measurements. This process leads to the identification of the measurement equation, required for
design of the control system. For practical applications it is desirable to reduce the sensors required for estimation to
the minimum.
The requirement for the estimation scheme is to behave as a modal filter that “combs out” the higher modes. The
main aim of this approach is to thereby circumvent the destabilizing effects of observation “spillover” as described
by Balas.32
Spillover has been the cause for instability in the control of flexible structures and modal filtering was
found to be an effective remedy.34
The intention of the proposed strategy is that the signals, provided by a certain
configuration of sensors placed in the wake, are processed by the estimator to provide the estimates of the first six
DPOD mode amplitudes across 9 x-z planes (y=0,0.5,1,…,4). An estimation scheme, often used in flow control
studies is the linear stochastic estimation (LSE) procedure introduced by Adrian.35
The LSE of low dimensional
mode amplitudes was successfully applied to the unforced Ginzburg-Landau wake model22
and the unforced circular
cylinder wake at low Reynolds numbers.23
A major challenge lies in finding an appropriate number of sensors and
determining locations that best enable the desired modal filtering.
The intent of the proposed strategy is that the surface pressure measurements provided by the body mounted
pressure sensors are processed by the estimator to provide the estimates of the first six DPOD mode amplitudes. All
the measurements were taken after ensuring that the simulation of the cylinder wake flow regime converges to
physically reasonable unforced behavior. The DPOD mode amplitudes, αi,j (i=1,2,3 & j=1,2) will be mapped onto
the extracted sensor signals from the pressure sensors, Ps, as follows:
* *
, ,ˆ ˆ( ) ( ( ), , )i j s i j st f P t P (1)
where ( ),ˆ ti j is the estimate of the 6 DPOD modes for i=1,2,3 and j=1,2; ( )P ts is the filtered sensor signal from „s‟
number of surface pressure sensors; *
,ˆ
i j and *
sP are the regression matrices of past DPOD estimates and filtered
pressure signals respectively; f is the non-linear mapping between the present and past sensor readings and past
DPOD estimates.
The issue of sensor placement and number has been dealt with in an ad-hoc manner in published studies
concerning closed-loop flow control.22,23
For effective closed-loop control system, the following questions need to
be answered:
How many sensors are required?
Where will the sensors be placed?
What are the criteria for judging an effective sensor configuration?
What are the robustness characteristics of a given sensor configuration?
In this effort, an attempt will be made to emulate some of the proven successes from the field of structural control.
Dow
nloa
ded
by U
NIV
ER
SIT
Y O
F C
INC
INN
AT
I on
Nov
embe
r 24
, 201
4 | h
ttp://
arc.
aiaa
.org
| D
OI:
10.
2514
/6.2
007-
4503
American Institute of Aeronautics and Astronautics
7
Heuristically speaking, when some very fine dust particles are placed on a flexible plate, excited at one of its
natural frequencies, after a short while the particles arrange themselves in a certain pattern typical of those
frequencies. The particles will be concentrated in the areas that do not experience any motion (the nodes). On the
other hand, the areas where the motion is large (the internodes) will be clean of particles. It is at the internodes that
the vibrational energy of a particular mode is at a maximum and sensors placed at these locations are extremely
effective in estimating that particular mode.36
The above heuristic approach has been used by Bayon de Noyer36
in finding effective sensor placements for
acceleration feedback control to alleviate tail buffeting of a high performance twin tail aircraft. Note the usage of the
term “effective sensor placements” as it is based on validated heuristics as opposed to “optimal sensor configuration”
that results from a mathematically optimal pattern search for a sensor configuration. What needs to be done to
determine an effective sensor configuration is to find the areas of the most energetic modal activity.
CFD data provided pressure signals at 151 x 201 locations distributed in a structured fashion along the entire
surface of the simulated cylinder (see the cylinder surface grid in Figure 1a). A three-step procedure is proposed for
determining sensor placement and number as follows:
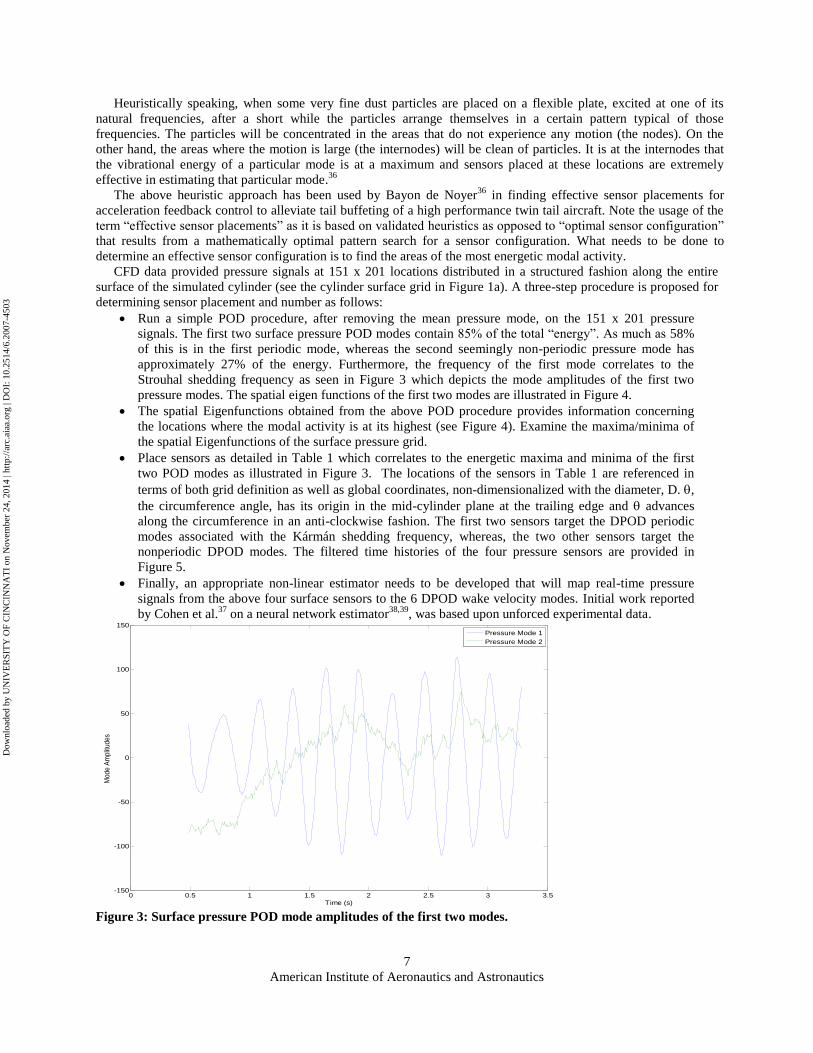
Run a simple POD procedure, after removing the mean pressure mode, on the 151 x 201 pressure
signals. The first two surface pressure POD modes contain 85% of the total “energy”. As much as 58%
of this is in the first periodic mode, whereas the second seemingly non-periodic pressure mode has
approximately 27% of the energy. Furthermore, the frequency of the first mode correlates to the
Strouhal shedding frequency as seen in Figure 3 which depicts the mode amplitudes of the first two
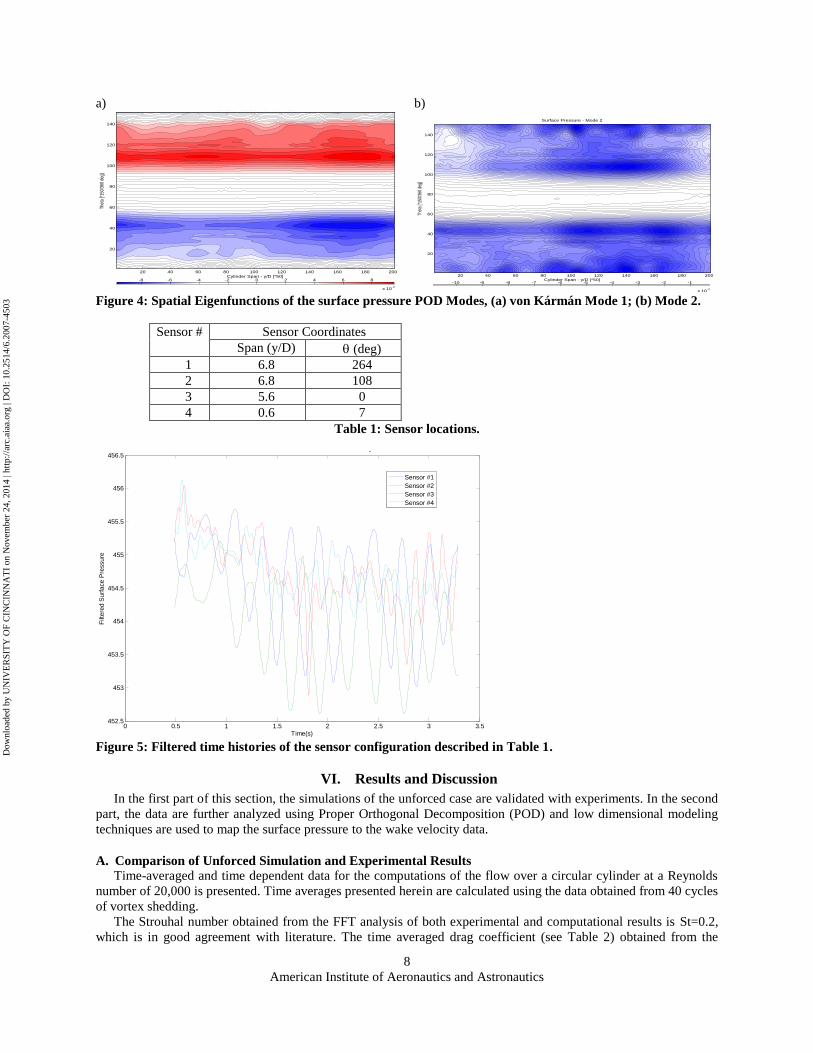
pressure modes. The spatial eigen functions of the first two modes are illustrated in Figure 4.
The spatial Eigenfunctions obtained from the above POD procedure provides information concerning
the locations where the modal activity is at its highest (see Figure 4). Examine the maxima/minima of
the spatial Eigenfunctions of the surface pressure grid.
Place sensors as detailed in Table 1 which correlates to the energetic maxima and minima of the first
two POD modes as illustrated in Figure 3. The locations of the sensors in Table 1 are referenced in
terms of both grid definition as well as global coordinates, non-dimensionalized with the diameter, D. ,
the circumference angle, has its origin in the mid-cylinder plane at the trailing edge and advances
along the circumference in an anti-clockwise fashion. The first two sensors target the DPOD periodic
modes associated with the Kármán shedding frequency, whereas, the two other sensors target the
nonperiodic DPOD modes. The filtered time histories of the four pressure sensors are provided in
Figure 5.
Finally, an appropriate non-linear estimator needs to be developed that will map real-time pressure
signals from the above four surface sensors to the 6 DPOD wake velocity modes. Initial work reported
by Cohen et al.37
on a neural network estimator38,39
, was based upon unforced experimental data.
0 0.5 1 1.5 2 2.5 3 3.5-150
-100
-50
0
50
100
150Time Coefficients of POD on Surface Pressure
Time (s)
Mod
e A
mpl
itude
s
Pressure Mode 1
Pressure Mode 2
Figure 3: Surface pressure POD mode amplitudes of the first two modes.
Dow
nloa
ded
by U
NIV
ER
SIT
Y O
F C
INC
INN
AT
I on
Nov
embe
r 24
, 201
4 | h
ttp://
arc.
aiaa
.org
| D
OI:
10.
2514
/6.2
007-
4503
American Institute of Aeronautics and Astronautics
8
a)
Cylinder Span - y/D [*50]
Thet
a [*
150/
360
deg]
Surface Pressure - Karman Mode
20 40 60 80 100 120 140 160 180 200
20
40
60
80
100
120
140
-8 -6 -4 -2 0 2 4 6 8
x 10-3
b)
Cylinder Span - y/D [*50]
Thet
a [*
150/
360
deg]
Surface Pressure - Mode 2
20 40 60 80 100 120 140 160 180 200
20
40
60
80
100
120
140
-10 -9 -8 -7 -6 -5 -4 -3 -2 -1
x 10-3
Figure 4: Spatial Eigenfunctions of the surface pressure POD Modes, (a) von Kármán Mode 1; (b) Mode 2.
Sensor # Sensor Coordinates
Span (y/D) (deg)
1 6.8 264
2 6.8 108
3 5.6 0
4 0.6 7
Table 1: Sensor locations.
0 0.5 1 1.5 2 2.5 3 3.5452.5
453
453.5
454
454.5
455
455.5
456
456.5Filtered Surface Pressure Sensors - Time History
Time(s)
Filt
ere
d S
urf
ace P
ressu
re
Sensor #1
Sensor #2
Sensor #3
Sensor #4
Figure 5: Filtered time histories of the sensor configuration described in Table 1.
VI. Results and Discussion
In the first part of this section, the simulations of the unforced case are validated with experiments. In the second
part, the data are further analyzed using Proper Orthogonal Decomposition (POD) and low dimensional modeling
techniques are used to map the surface pressure to the wake velocity data.
A. Comparison of Unforced Simulation and Experimental Results
Time-averaged and time dependent data for the computations of the flow over a circular cylinder at a Reynolds
number of 20,000 is presented. Time averages presented herein are calculated using the data obtained from 40 cycles
of vortex shedding.
The Strouhal number obtained from the FFT analysis of both experimental and computational results is St=0.2,
which is in good agreement with literature. The time averaged drag coefficient (see Table 2) obtained from the
Dow
nloa
ded
by U
NIV
ER
SIT
Y O
F C
INC
INN
AT
I on
Nov
embe
r 24
, 201
4 | h
ttp://
arc.
aiaa
.org
| D
OI:
10.
2514
/6.2
007-
4503
American Institute of Aeronautics and Astronautics
9
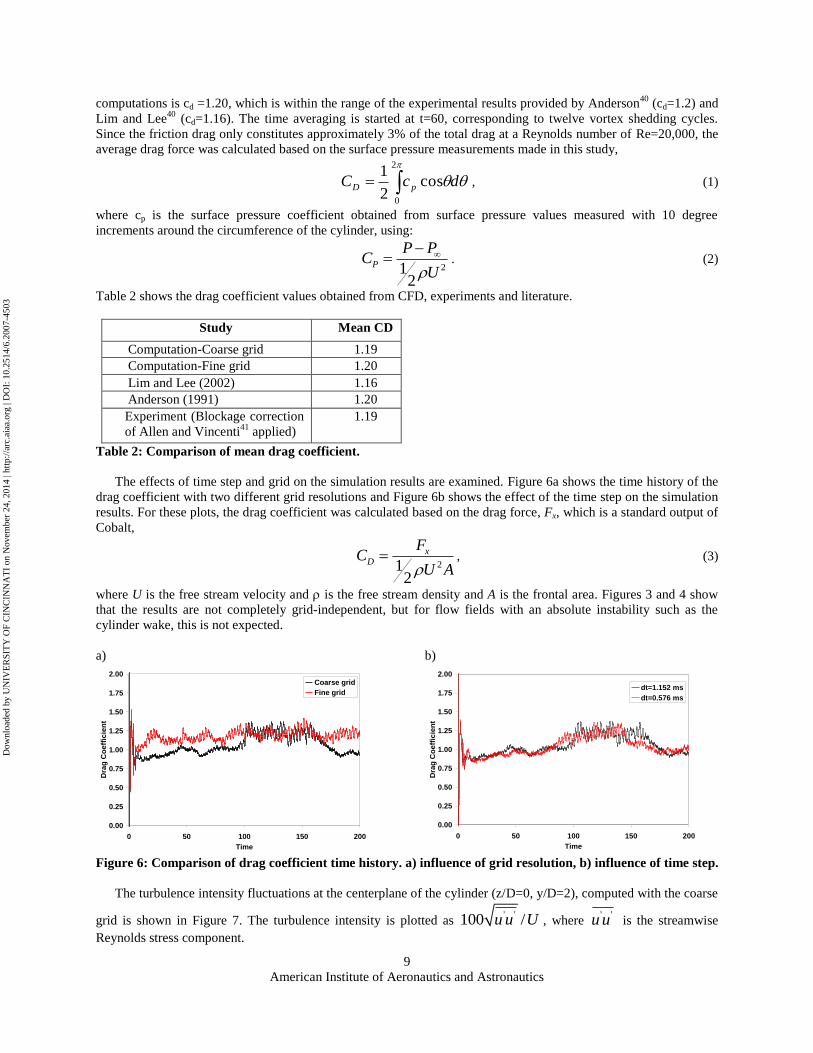
computations is cd =1.20, which is within the range of the experimental results provided by Anderson40
(cd=1.2) and
Lim and Lee40
(cd=1.16). The time averaging is started at t=60, corresponding to twelve vortex shedding cycles.
Since the friction drag only constitutes approximately 3% of the total drag at a Reynolds number of Re=20,000, the
average drag force was calculated based on the surface pressure measurements made in this study,
2
0
cos2
1dcC pD , (1)
where cp is the surface pressure coefficient obtained from surface pressure values measured with 10 degree
increments around the circumference of the cylinder, using:
21
2
P
P PC
U
. (2)
Table 2 shows the drag coefficient values obtained from CFD, experiments and literature.
Study Mean CD
Computation-Coarse grid 1.19
Computation-Fine grid 1.20
Lim and Lee (2002) 1.16
Anderson (1991) 1.20
Experiment (Blockage correction
of Allen and Vincenti41
applied)
1.19
Table 2: Comparison of mean drag coefficient.
The effects of time step and grid on the simulation results are examined. Figure 6a shows the time history of the
drag coefficient with two different grid resolutions and Figure 6b shows the effect of the time step on the simulation
results. For these plots, the drag coefficient was calculated based on the drag force, Fx, which is a standard output of
Cobalt,
21
2
xD
FC
U A , (3)
where U is the free stream velocity and is the free stream density and A is the frontal area. Figures 3 and 4 show
that the results are not completely grid-independent, but for flow fields with an absolute instability such as the
cylinder wake, this is not expected.
a)
0.00
0.25
0.50
0.75
1.00
1.25
1.50
1.75
2.00
0 50 100 150 200
Time
Dra
g C
oe
ffic
ien
t
Coarse grid
Fine grid
b)
0.00
0.25
0.50
0.75
1.00
1.25
1.50
1.75
2.00
0 50 100 150 200
Time
Dra
g C
oe
ffic
ien
t
dt=1.152 ms
dt=0.576 ms
Figure 6: Comparison of drag coefficient time history. a) influence of grid resolution, b) influence of time step.
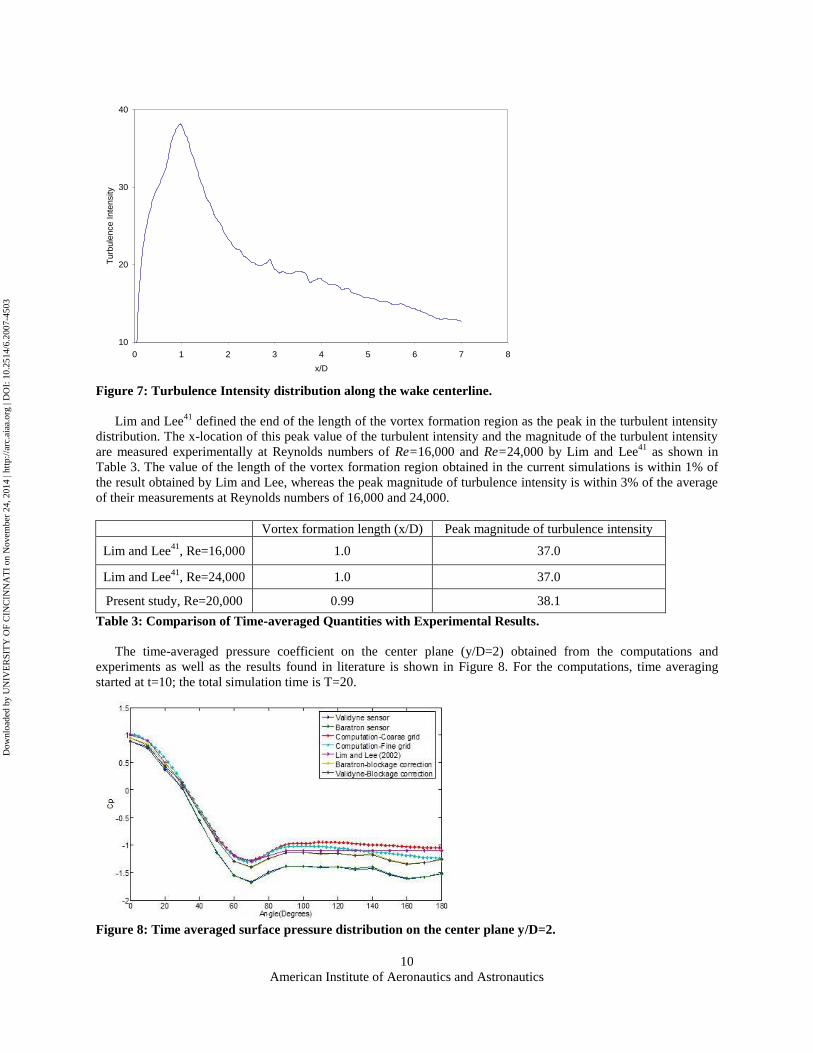
The turbulence intensity fluctuations at the centerplane of the cylinder (z/D=0, y/D=2), computed with the coarse
grid is shown in Figure 7. The turbulence intensity is plotted as ' '100 /u u U , where
' 'u u is the streamwise
Reynolds stress component.
Dow
nloa
ded
by U
NIV
ER
SIT
Y O
F C
INC
INN
AT
I on
Nov
embe
r 24
, 201
4 | h
ttp://
arc.
aiaa
.org
| D
OI:
10.
2514
/6.2
007-
4503
American Institute of Aeronautics and Astronautics
10
10
20
30
40
0 1 2 3 4 5 6 7 8
x/D
Turb
ule
nce Inte
nsity
Figure 7: Turbulence Intensity distribution along the wake centerline.
Lim and Lee41
defined the end of the length of the vortex formation region as the peak in the turbulent intensity
distribution. The x-location of this peak value of the turbulent intensity and the magnitude of the turbulent intensity
are measured experimentally at Reynolds numbers of Re=16,000 and Re=24,000 by Lim and Lee41
as shown in
Table 3. The value of the length of the vortex formation region obtained in the current simulations is within 1% of
the result obtained by Lim and Lee, whereas the peak magnitude of turbulence intensity is within 3% of the average
of their measurements at Reynolds numbers of 16,000 and 24,000.
Vortex formation length (x/D) Peak magnitude of turbulence intensity
Lim and Lee41
, Re=16,000 1.0 37.0
Lim and Lee41
, Re=24,000 1.0 37.0
Present study, Re=20,000 0.99 38.1
Table 3: Comparison of Time-averaged Quantities with Experimental Results.
The time-averaged pressure coefficient on the center plane (y/D=2) obtained from the computations and
experiments as well as the results found in literature is shown in Figure 8. For the computations, time averaging
started at t=10; the total simulation time is T=20.
Figure 8: Time averaged surface pressure distribution on the center plane y/D=2.
Dow
nloa
ded
by U
NIV
ER
SIT
Y O
F C
INC
INN
AT
I on
Nov
embe
r 24
, 201
4 | h
ttp://
arc.
aiaa
.org
| D
OI:
10.
2514
/6.2
007-
4503
American Institute of Aeronautics and Astronautics
11
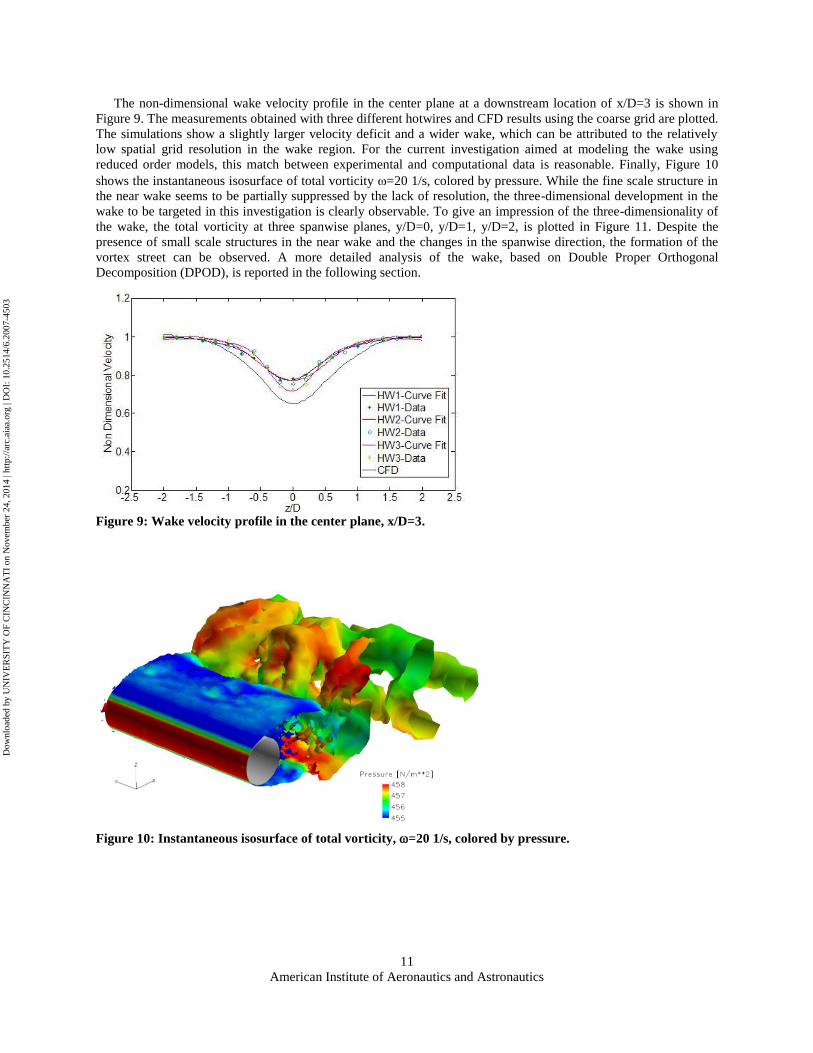
The non-dimensional wake velocity profile in the center plane at a downstream location of x/D=3 is shown in
Figure 9. The measurements obtained with three different hotwires and CFD results using the coarse grid are plotted.
The simulations show a slightly larger velocity deficit and a wider wake, which can be attributed to the relatively
low spatial grid resolution in the wake region. For the current investigation aimed at modeling the wake using
reduced order models, this match between experimental and computational data is reasonable. Finally, Figure 10
shows the instantaneous isosurface of total vorticity =20 1/s, colored by pressure. While the fine scale structure in
the near wake seems to be partially suppressed by the lack of resolution, the three-dimensional development in the
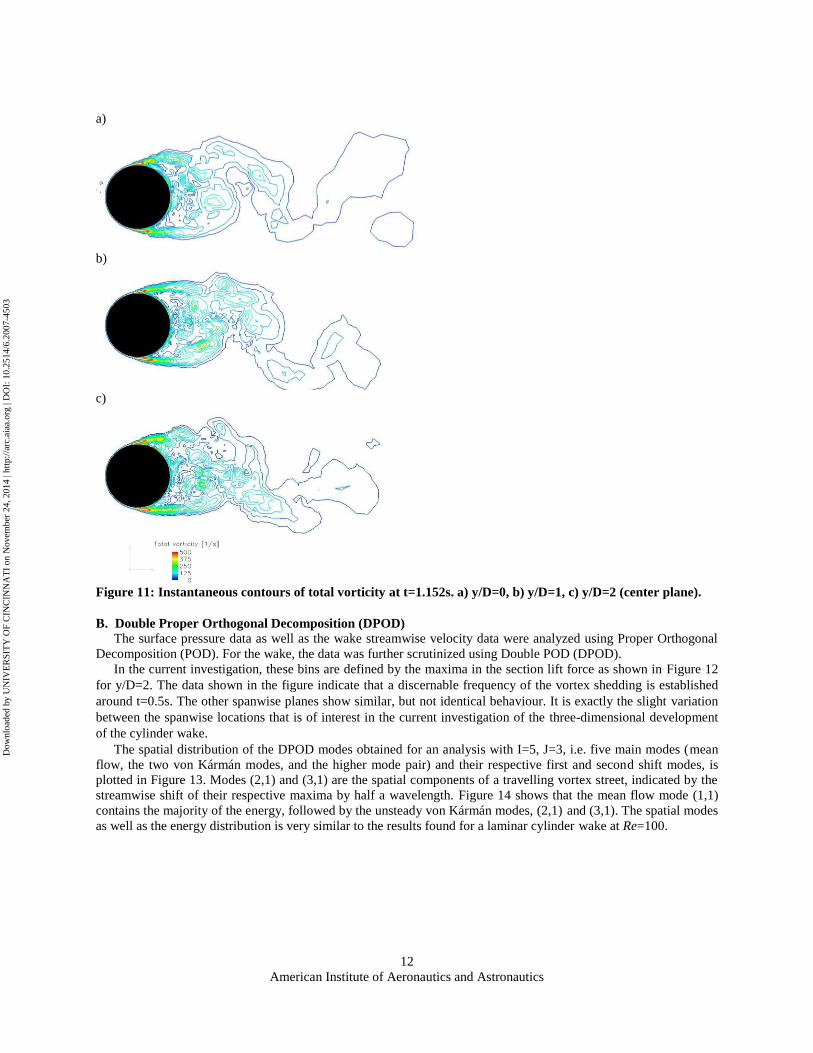
wake to be targeted in this investigation is clearly observable. To give an impression of the three-dimensionality of
the wake, the total vorticity at three spanwise planes, y/D=0, y/D=1, y/D=2, is plotted in Figure 11. Despite the
presence of small scale structures in the near wake and the changes in the spanwise direction, the formation of the
vortex street can be observed. A more detailed analysis of the wake, based on Double Proper Orthogonal
Decomposition (DPOD), is reported in the following section.
Figure 9: Wake velocity profile in the center plane, x/D=3.
Figure 10: Instantaneous isosurface of total vorticity, =20 1/s, colored by pressure.
Dow
nloa
ded
by U
NIV
ER
SIT
Y O
F C
INC
INN
AT
I on
Nov
embe
r 24
, 201
4 | h
ttp://
arc.
aiaa
.org
| D
OI:
10.
2514
/6.2
007-
4503
American Institute of Aeronautics and Astronautics
12
a)
b)
c)
Figure 11: Instantaneous contours of total vorticity at t=1.152s. a) y/D=0, b) y/D=1, c) y/D=2 (center plane).
B. Double Proper Orthogonal Decomposition (DPOD)
The surface pressure data as well as the wake streamwise velocity data were analyzed using Proper Orthogonal
Decomposition (POD). For the wake, the data was further scrutinized using Double POD (DPOD).
In the current investigation, these bins are defined by the maxima in the section lift force as shown in Figure 12
for y/D=2. The data shown in the figure indicate that a discernable frequency of the vortex shedding is established
around t=0.5s. The other spanwise planes show similar, but not identical behaviour. It is exactly the slight variation
between the spanwise locations that is of interest in the current investigation of the three-dimensional development
of the cylinder wake.
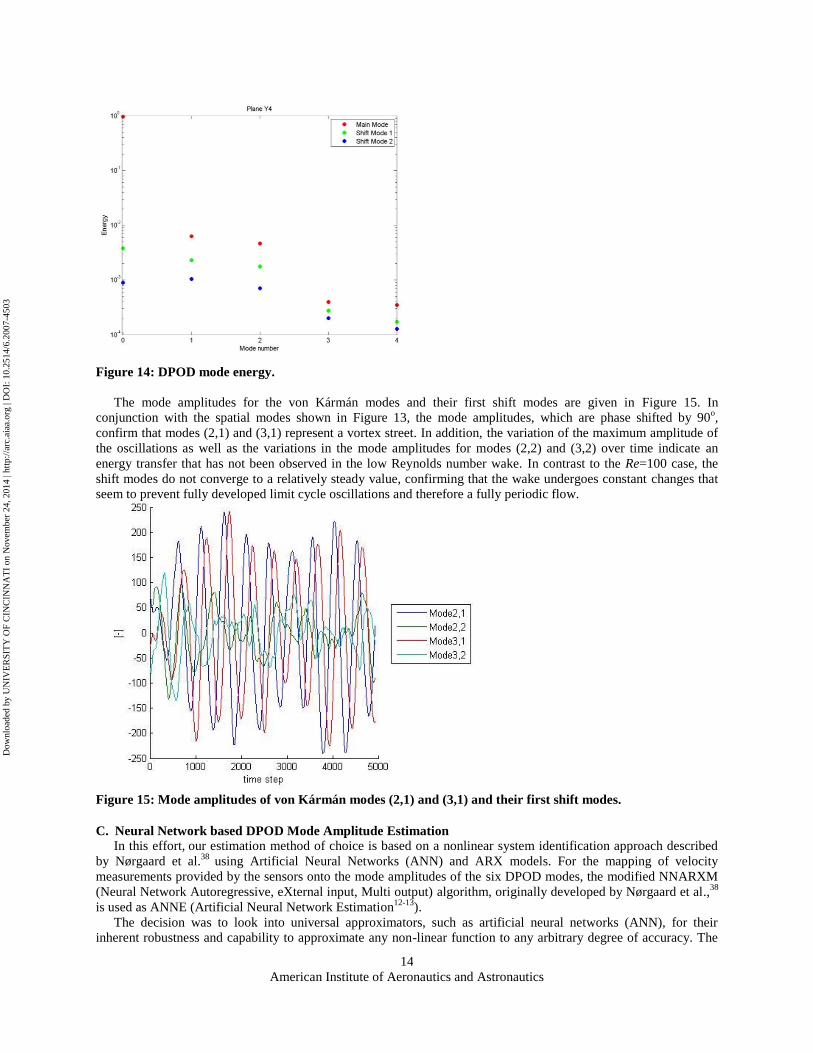
The spatial distribution of the DPOD modes obtained for an analysis with I=5, J=3, i.e. five main modes (mean
flow, the two von Kármán modes, and the higher mode pair) and their respective first and second shift modes, is
plotted in Figure 13. Modes (2,1) and (3,1) are the spatial components of a travelling vortex street, indicated by the
streamwise shift of their respective maxima by half a wavelength. Figure 14 shows that the mean flow mode (1,1)
contains the majority of the energy, followed by the unsteady von Kármán modes, (2,1) and (3,1). The spatial modes
as well as the energy distribution is very similar to the results found for a laminar cylinder wake at Re=100.
Dow
nloa
ded
by U
NIV
ER
SIT
Y O
F C
INC
INN
AT
I on
Nov
embe
r 24
, 201
4 | h
ttp://
arc.
aiaa
.org
| D
OI:
10.
2514
/6.2
007-
4503

American Institute of Aeronautics and Astronautics
13
Figure 12: Section lift force at center plane y/D=2.
Figure 13: Spatial DPOD modes of the 5x3 model. Mode (1,1) is the mean flow, modes (2,1) and (3,1)
represent the von Kármán vortex street.
Dow
nloa
ded
by U
NIV
ER
SIT
Y O
F C
INC
INN
AT
I on
Nov
embe
r 24
, 201
4 | h
ttp://
arc.
aiaa
.org
| D
OI:
10.
2514
/6.2
007-
4503
American Institute of Aeronautics and Astronautics
14
Figure 14: DPOD mode energy.
The mode amplitudes for the von Kármán modes and their first shift modes are given in Figure 15. In
conjunction with the spatial modes shown in Figure 13, the mode amplitudes, which are phase shifted by 90o,
confirm that modes (2,1) and (3,1) represent a vortex street. In addition, the variation of the maximum amplitude of
the oscillations as well as the variations in the mode amplitudes for modes (2,2) and (3,2) over time indicate an
energy transfer that has not been observed in the low Reynolds number wake. In contrast to the Re=100 case, the
shift modes do not converge to a relatively steady value, confirming that the wake undergoes constant changes that
seem to prevent fully developed limit cycle oscillations and therefore a fully periodic flow.
Figure 15: Mode amplitudes of von Kármán modes (2,1) and (3,1) and their first shift modes.
C. Neural Network based DPOD Mode Amplitude Estimation
In this effort, our estimation method of choice is based on a nonlinear system identification approach described
by Nørgaard et al.38
using Artificial Neural Networks (ANN) and ARX models. For the mapping of velocity
measurements provided by the sensors onto the mode amplitudes of the six DPOD modes, the modified NNARXM
(Neural Network Autoregressive, eXternal input, Multi output) algorithm, originally developed by Nørgaard et al.,38
is used as ANNE (Artificial Neural Network Estimation12-13
).
The decision was to look into universal approximators, such as artificial neural networks (ANN), for their
inherent robustness and capability to approximate any non-linear function to any arbitrary degree of accuracy. The
Dow
nloa
ded
by U
NIV
ER
SIT
Y O
F C
INC
INN
AT
I on
Nov
embe
r 24
, 201
4 | h
ttp://
arc.
aiaa
.org
| D
OI:
10.
2514
/6.2
007-
4503

American Institute of Aeronautics and Astronautics
15
ANN, employed in this effort, in conjunction with the ARX model is the mechanism with which the dynamic model
is developed using the POD mode amplitudes extracted from the CFD simulation. Non-linear optimization
techniques, based on the back propagation method, are used to minimize the difference between the extracted POD
mode amplitudes and the ANN while adjusting the weights of the model. In order to assure model stability, the ARX
dynamic model structure is incorporated. This structure is widely used in the system identification community. A
salient feature of the ARX predictor is that it is inherently stable even if the dynamic system to be modeled is
unstable. This characteristic of ARX models often lends itself to successful modeling of unstable processes.
ANNE, based on the Multilayer Perceptron Neural Network, uses an adequate training set which comprises of
300 time steps (approximately 5.5 shedding cycles). The ANNE procedure is developed separately for each for the 9
streamwise planes, which are equidistant at 0.5D and stretching 4D (the entire computational span). The ANN
network is designed using the identical sensor time histories and then the static ANN design with fixed weights, with
its associated weighing matrices, is validated with validation data that was not used for training comprising of 186
time steps (approximately 3.5 shedding cycles). The purpose is to obtain a robust and real-time estimator for as low
a number of sensors as possible for application to wake control.
The artificial neural network (ANN) has the following features:
Input Layer: Comprised of two types of data. One coming from the surface mounted pressure sensors and
the other from past DPOD estimates. Each of the four pressure sensors each being transformed into 8 inputs
(t, t-1, t-2…. t-7). Then, each of these inputs has 6 time delays (i.e ~ ¼ of a shedding cycle retained in the
regressor matrix comprising of past sensor information). This approach to manipulation of sensor input was
found to be effective by Nørgaard et al.37
Additionally, 8 past DPOD estimates (i.e. ~ 1/7 of a shedding
cycle) for all 6 DPOD modes are utilized. Therefore, the number of neurons in the input layer is:
Hidden Layer: One hidden layer consisting of 12 neurons. The activation function in the hidden layer is
based on the non-linear tanh function. A single bias input has been added to the output from the hidden
layer.
Output Layer: Six outputs, namely, the 6 DPOD mode amplitudes: the mean flow, α1,1, the two
fundamental von Kármán POD periodic modes, α2,1 and α3,1 and the three associated shift modes, namely,
α2,1, α2,2 and α3,2 . The output layer has a linear activation function.
Weighting Matrices: The weighting matrices between the input layer and the hidden layer (W1) and
between the hidden layer and the output layer (W2) depend on the number of sensors. For each of the 9
planes, a common ANN architecture is maintained, whereby, W1 is of the order of [24112] and W2 is of
the order of [136]. These weighting matrices are initialized randomly and the weighing matrices for each
of the nine planes are unique following the uniqueness in the DPOD modes per plane.
Training the ANN: Back propagation, based on the Levenberg-Marquardt algorithm, was used to train the
ANN using the toolbox by Nørgaard et al.38
The training procedure converged in approximately 30
iterations. The training set contained 300 snapshots.
Validating the ANN: The validation set contained 186 snapshots.
The resulting DPOD estimates for each of the nine planes look very good. Figure 16 and Figure 17 present the
ANNE estimates for the DPOD mode amplitudes for planes y/D=0.5 and y/D=3.5. The validation phase starts at
2.12 seconds. Although there are some errors for the estimates in the validation phase as compared with the training
phase, these errors are very small. The ANNE estimates for all 9 planes show errors of a similar order, although the
estimates of just two planes have been included in this paper for space considerations. Note that the periodic modes
have been captured exceedingly well with respect to frequency, phase and amplitude.
Dow
nloa
ded
by U
NIV
ER
SIT
Y O
F C
INC
INN
AT
I on
Nov
embe
r 24
, 201
4 | h
ttp://
arc.
aiaa
.org
| D
OI:
10.
2514
/6.2
007-
4503

American Institute of Aeronautics and Astronautics
16
0.5 1 1.5 2 2.5 3 3.5-300
-200
-100
0
100
200
300
Time [s]
Mode A
mplit
udes
DPOD Modes at Plane Y1
DNS-Mode 1,2
DNS-Mode 2,1
DNS-Mode 2,2
DNS-Mode 3,1
DNS-Mode 3,2
ANNE-Mode 1,2
ANNE-Mode 2,1
ANNE-Mode 2,2
ANNE-Mode 3,1
ANNE-Mode 3,2
0.5 1 1.5 2 2.5 3 3.5-1600
-1400
-1200
-1000
-800
-600
-400
-200
0
Time [s]
Mode A
mplit
udes
DNS-Mode 1,1
ANNE-Mode 1,1
Figure 16: DPOD Mode Amplitude Estimates using ANNE, plane y/D=0.5.
0.5 1 1.5 2 2.5 3 3.5-300
-200
-100
0
100
200
300
Time [s]
Mode A
mplit
udes
DPOD Modes at Plane Y7
DNS-Mode 1,2
DNS-Mode 2,1
DNS-Mode 2,2
DNS-Mode 3,1
DNS-Mode 3,2
ANNE-Mode 1,2
ANNE-Mode 2,1
ANNE-Mode 2,2
ANNE-Mode 3,1
ANNE-Mode 3,2
0.5 1 1.5 2 2.5 3 3.5-1600
-1400
-1200
-1000
-800
-600
-400
-200
0
Time [s]
Mode A
mplit
udes
DNS-Mode 1,1
ANNE-Mode 1,1
Figure 17: DPOD Mode Amplitude Estimates using ANNE, plane y/D=3.5.
Discussion and Conclusions
Three dimensional computations of the flow over a two dimensional circular cylinder at a Reynolds number of
Re=20,000 based on the cylinder diameter were performed using unstructured grids. Experiments were also
performed to validate the Strouhal number, surface pressures, drag coefficient and velocity profiles in the cylinder
wake. CFD results were validated with experiments performed in this study as well as the experiments in literature.
The CFD data was analyzed using the DPOD procedure. The data at nine spanwise planes was segmented using
the local lift force fluctuations and these SPOD data served as input for DPOD. The mode amplitudes of the first
Dow
nloa
ded
by U
NIV
ER
SIT
Y O
F C
INC
INN
AT
I on
Nov
embe
r 24
, 201
4 | h
ttp://
arc.
aiaa
.org
| D
OI:
10.
2514
/6.2
007-
4503

American Institute of Aeronautics and Astronautics
17
five main modes and their two shift modes were then utilized for the development of the low order model. The
model for the mean flow mode, von Kármán modes, and their shift modes, which was developed in this research
effort, matches the CFD simulations exceedingly well.
The implications of the research reported in this paper point to the fact that just 4 surface mounted sensors,
strategically placed, can provide accurate estimates of the DPOD mode amplitudes of the wake velocity. For the
validation data set, the estimation errors are relatively small and remain bounded. While we have not included
mathematical proof of observability, it appears that all 6 DPOD modes are observable at each of the nine spanwise
planes. The simulations will be continued to provide a longer time history for further testing and possible adaptation
of the developed model.
For future research, it will be interesting to see whether the above sensor configuration and ANN architecture
will provide a sufficiently accurate estimate or if other configurations need to be explored. For example, one might
consider a streamwise-spanwise plane on which to perform DPOD to obtain data for building a low dimensional
model of the wake.
As a next step, transient forcing needs to be introduced, within the actuation “lock-in” envelope, in order to
obtain the state equation which maps the behavior of the DPOD states as a result of control input. The ANNE
estimation process will have to be revisited with the introduction of control action since the plant is non-linear and
the separation principle, from linear time invariant systems no longer holds true. It may be reasonable to assume that
past control actions will have to be used as inputs to the regression matrix.
Acknowledgments
The authors would like to acknowledge funding by the Air Force Office of Scientific Research, Lt Col Scott
Wells, Program Manager. The authors would like to thank cadets Brian Brown-Dymkoski, Dan Helland and Lt Col
(Ret) Christopher Seaver for preparing the experimental aspects of this effort and collecting the experimental data in
the wind tunnel. We would like to thank Dr. Jim Forsythe and Mr. Bill Strang of Cobalt Solutions, LLC for their
support of the CFD simulations.The help of the technician SSgt Mary Church in set-up, tear-down, and everything
in between is also appreciated. The authors appreciate the contribution by Mr. Ken Ostasiewski in calibration of the
hot wires and the discussions concerning the experiment with Mr. Fred Porter and Dr. Tim Scully.
References 1
Cohen, K., Siegel, S., McLaughlin, T., Gillies, E. and Myatt, J., “Closed-loop approaches to control of a wake
flow modeled by the Ginzburg–Landau equation”, Computers and Fluids, Vol. 34, pp. 927-949, 2005. 2
Gillies E. A., “Low-dimensional Control of the Circular Cylinder Wake”, Journal of Fluid Mechanics, 1998,
Vol. 371, pp. 157-78. 3
Cohen, K., Siegel, S., and McLaughlin, T, "Control Issues in reduced-Order Feedback Flow Control", AIAA
Paper 2004-0575, 42nd AIAA Aerospace Sciences Meeting, Reno, Nevada, January 2004. 4
Roussopoulos, K., “Feedback Control of Vortex Shedding at Low Reynolds Numbers”, Journal of Fluid
Mechanics, Vol. 248, pp.267-296, 1993. 5
Unal, M. and Rockwell, D., “On Vortex Shedding from a Cylinder, Part 1: The Initial Instability”, Journal of
Fluid Mechanics, Vol. 190, pp. 491-512, 1988. 6
Karniadakis, G. E. and Triantafyllou, “Three Dimensional Dynamics and Transition to Turbulence in the Wake
of Bluff Objects”, Journal of Fluid Mechanics, Vol. 238, pp. 1-30, 1992. 7
Williamson, C., “Three Dimensional Wake Transition”, Journal of Fluid Mechanics, Vol. 328, pp. 345-407,
1996. 8
Ma, X., Karamanos, G. S. and Karniadakis, G. E., “Dynamics and Low-Dimensionality of a Turbulent Near
Wake”, Journal of Fluid Mechanics, Vol. 410, pp. 29-65, 2000. 9
Norberg, C., “An Experimental Investigation of the Flow around a Circular Cylinder: Influence of Aspect
Ratio”, Journal of Fluid Mechanics, Vol. 258, pp. 287-316, 1994. 10
Zdravkovich, M. M., “Conceptual Overview of Laminar and Turbulent Flows Past Smooth and Rough Circular
Cylinders”, J. Wind Engineering Indust. Aero, Vol. 33, pp. 53-62, 1990. 11
Lin, J. C., Towfighi, J. and Rockwell, D., “Instantaneous Structure of a Near Wake of a Cylinder: On the
Effect of Reynolds Number”, J. Fluids Struct., Vol. 9, pp. 409-418. 12
Hansen, R., Forsythe, J., “Large and Detached Eddy Simulations of a Circular Cylinder Using Unstructured
Grids”, 41st Aerospace Sciences Meeting and Exhibit, Reno, Nevada, AIAA-2003-775, January 2003. 13
Beaudan, P. and Moin, P., “Numerical Experiments on the Flow past a Circular Cylinder at Subcritical
Reynolds Number”, Report TF-62, Department of Mechanical Engineering, Stanford University.
Dow
nloa
ded
by U
NIV
ER
SIT
Y O
F C
INC
INN
AT
I on
Nov
embe
r 24
, 201
4 | h
ttp://
arc.
aiaa
.org
| D
OI:
10.
2514
/6.2
007-
4503

American Institute of Aeronautics and Astronautics
18
14 Mittal, R. and Moin, P., “Stability of Upwind-Biased Finite Difference Schemes for Large- Eddy Simulation of
Turbulent Flows”, AIAA Journal, VOl. 35, No.8, pp. 1415-1417, 1997. 15
Kravchenko, A. G. and Moin, P., “Numerical Studies of Flow over a Circular Cylinder at ReD=3900”, Physics
of Fluids, Vol. 12, Issue 2, pp. 403-417. 16
Dong, S., Karniadakis, G. E., Ekmekci, A. and Rockwell, D., “A Combined Direct Numerical Simulation-
Particle Image Velocimetry Study of the Turbulent Near Wake”, Journal of Fluid Mechanics, Vol 569, pp. 185-207. 17
Jordan, S. A., “Investigation of the Cylinder Separated Shear-Layer Physics by Large Eddy Simulation”,
International J. Heat Fluid Flow, Vol. 23, pp 1-12, 2002. 18
Braza, M., Chaissaing, P. and Ha Minch, H., “Prediction of Large Scale Transition Features in the Wake of a
Circular Cylinder”, Physics of Fluids, Vol A2, pp.1461-1521. 19
Gad-el-Hak, M., "Modern Developments in Flow Control", Applied Mechanics Reviews, vol. 49, 1996, pp.
365–379.
20 Cohen, K., Siegel S., McLaughlin T., Gillies E., and Myatt, J. ,"Closed-loop approaches to control of a wake
flow modeled by the Ginzburg-Landau equation", Computers and Fluids, Volume 34, Issue 8 , September 2005, pp.
927-949. 21
Siegel, S., Cohen, K., Seidel, J., and McLaughlin, T., “Short Time Proper Orthogonal Decomposition for State
Estimation of Transient Flow Fields”, AIAA-2005-296 22
Cohen, K., Siegel, S., Wetlesen, D., Cameron, J., and Sick, A., “Effective Sensor Placements for the
Estimation of Proper Orthogonal Decomposition Mode Coefficients in von Kármán Vortex Street”, Journal of
Vibration and Control, Vol. 10, No. 12, 1857-1880, December 2004. 23
Cohen, K., Siegel S., and McLaughlin T.,"A Heuristic Approach to Effective Sensor Placement for Modeling
of a Cylinder Wake”, Computers and Fluids, Volume 35, Issue 1, January 2006, pp. 103-120. 24
Siegel S., Cohen, K. and McLaughlin T., 2003, "Feedback Control of a Circular Cylinder Wake in Experiment
and Simulation", AIAA Paper 2003-3569, June 2003. 25
Cohen K., Siegel S., McLaughlin T., and Gillies E., 2003, “Feedback Control of a Cylinder Wake Low-
Dimensional Model”, AIAA Journal, Vol. 41, No. 8, August 2003. 26
Holmes, P., Lumley, J.L., and Berkooz, G. “Turbulence, Coherent Structures, Dynamical Systems and
Symmetry”, Cambridge University Press, Cambridge, 1996. 27
Sirovich, L., “Turbulence and the Dynamics of Coherent Structures Part I: Coherent Structures”, Quarterly of
Applied Mathematics, Vol. 45, No. 3, 1987, pp. 561-571.
28
Noack, B.R., Tadmor, G., and Morzynski, M., "Low-dimensional models for feedback flow control. Part I:
Empirical Galerkin models", 2nd AIAA Flow Control Conference, 28 Jun - 1 Jul 2004, Portland, Oregon, AIAA-
2004-2408. 29
S. Siegel., K. Cohen., J. Seidel and T. McLaughlin, “State estimation of transient flow fields using double
proper orthogonal decomposition (DPOD)”, presented at the International Conference on Active Flow Control,
Berlin, Germany, September 27-29, 2006. 30
Strang, W. Z., Tomaro, R. F., Grismer, M. J., “The Defining Methods of Cobalt60: A Parallel, Implicit,
Unstructured Euler/Navier Stokes Flow Solver”, AIAA 99-0786, January 1999. 31
Gottlieb, J. J. and Growth, C. P. T., “Assessment of Riemann Solvers for Unsteady One-Dimensional Inviscid
Flows of Perfect Gases”, Journal of Computational Physics, pp. 437-458, 1988. 32
Morton, S. A., Forsythe, J. R., Squires, K. D., Wurtzler, K. E., “Assessment of Unstructured Grids For
Detached Eddy Simulation of High Reynolds Number Separated Flows”, Proceedings of the Eight International
Conference on Numerical Grid Generation in Computational Field Simulations, 2002. 33
Balas, M.J., “Active Control of Flexible Systems”, Journal of Optimization Theory and Applications, Vol. 25,
No. 3, 1978, pp. 217-236.
34 Meirovitch, L., “Dynamics and Control of Structures”, John Wiley & Sons, Inc., New York, 1990, pp. 313-
351. 35
Adrian, R.J., “On the Role of Conditional Averages in Turbulence Theory”, Proceedings of the Fourth Biennial
Symposium on Turbulence in Liquids, J. Zakin and G. Patterson (Eds.), Science Press, Princeton, 1977, pp. 323-332. 36
Bayon de Noyer, “Tail Buffet Alleviation of High Performance Twin Tail Aircraft using Offset Piezoceramic
Stack Actuators and Acceleration Feedback Control”, Ph.D. Thesis, Aerospace Engineering, Georgia Institute of
Technology, Atlanta, Georgia 30332, November 1999. 37
Cohen, K., Siegel, S., Seidel, J., and McLaughlin, T.,“ "Reduced Order Modeling for Closed-Loop Control of
Three Dimensional Wakes", Invited lecture at Invited Session organized by AIAA Fluid Dynamics TC, Emerging
Experiments Discussion Group, 3rd AIAA Flow Control Conference, San Francisco, California, 5 - 8 June 2006,
AIAA-2006-3356.
Dow
nloa
ded
by U
NIV
ER
SIT
Y O
F C
INC
INN
AT
I on
Nov
embe
r 24
, 201
4 | h
ttp://
arc.
aiaa
.org
| D
OI:
10.
2514
/6.2
007-
4503

American Institute of Aeronautics and Astronautics
19
38 Nørgaard, M., Ravn, O., Poulsen, N. K., and Hansen, L. K., “Neural Networks for Modeling and Control of
Dynamic Systems”, Springer-Verlag, London, UK, 2000. 39
Cohen, K., Siegel, S., Seidel, J., and McLaughlin, T., "Neural Network Estimator for Low-Dimensional
Modeling of a Cylinder Wake”, 3rd AIAA Flow Control Conference, San Francisco, California, 5 - 8 June 2006,
AIAA-2006-3491. 40
Anderson, J. D., “Fundamentals of Aerodynamics, Second Edition, McGraw-Hill, New York, 1991. 41
Lim, H. and Lee, S., “Flow Control of Circular Cylinders with Longitudinal Grooved Surfaces”, AIAA
Journal, Vol. 40, No:10, October 2002. 42
Allen, H. J. and W. G. Vincenti. “Wall interference in a two-dimensional-flow wind tunnel, with consideration
of the effect of compressibility”, NACA Report 782, 1944.
Dow
nloa
ded
by U
NIV
ER
SIT
Y O
F C
INC
INN
AT
I on
Nov
embe
r 24
, 201
4 | h
ttp://
arc.
aiaa
.org
| D
OI:
10.
2514
/6.2
007-
4503




















