
Reduced Order Model Based Controller Design for Feedback-Controlled Cylinder Wake
14
American Institute of Aeronautics and Astronautics 1 Reduced Order Model Based Controller Design for Feedback-Controlled Cylinder Wake Kelly Cohen * , Stefan Siegel † , Jürgen Seidel ‡ , Selin Aradag § , and Thomas McLaughlin ** Department of Aeronautics, United States Air Force Academy, CO, 80840 Feedback flow control is an emerging discipline which aims at applying the methods of closed loop feedback control to problems in fluid dynamics. A challenging area for application, which has drawn considerable academic research, concerns the control of absolute instabilities associated with the von Kármán vortex street that develops in the wake of a circular cylinder. The need for meaningful real-time control leads to the requirement of developing an appropriate low order model. A two dimensional, high resolution simulation is used to develop a neural network based low-dimensional model for controller design. Actuation is implemented as displacement of the cylinder normal to the flow. This control approach uses a low dimensional model based on a 15 mode Double Proper Orthogonal Decomposition (DPOD) applied to the velocity field. The truncated DPOD modes, used to construct a dynamic mathematical model of the wake, accurately predict the wake flow dynamics within the lock-in region at low forcing amplitudes. This low- dimensional model, derived using non-linear artificial neural network based system identification methods, is robust and accurate and can be used to simulate the dynamic behaviour of the wake flow. The control strategy involves the estimation of the DPOD modes and a respective feedback command based on these estimates. The control approach is based on both the Kármán fluctuating DPOD mode as well as the Kármán shift mode. The shift mode provides corrections for spatial variations in the POD Eigenfunctions which are caused by the feedback control induced modification of the wake. Using the reduced-order model, numerical investigations are conducted to determine effective controller gains. High resolution simulation having 63,700 nodes show that the developed control law stabilizes all 15 modes, the controller succeeds in substantially reducing drag and fluctuating lift. While the reduced order model is shown to be a very useful tool for controller development, major issues are identified and suggested remedies are discussed. I. Introduction he main idea of flow control is the improvement of aerodynamic characteristics of air vehicles and munitions to increase mission performance. Flow control can either be passive or active depending on whether energy is added to the flow. Furthermore, active flow control may be characterized by open-loop or closed-loop techniques. Since most fluid dynamics problems involve local or global flow instabilities, closed loop flow control holds great promise to significantly improve flow quantities of technical importance with moderate control inputs by exploiting these instabilities, e.g., substantially reducing drag and unsteadiness of loads imposed by the flow field onto structures exposed to the flow. An important area of flow control research involves the phenomenon of vortex shedding in the wake behind bluff bodies where the flow separates from the bluff body’s surface. Shedding of counter-rotating vortices is observed in the wake of a two-dimensional cylinder above a critical Reynolds number of Re c ~47, non-dimensionalized with respect to freestream velocity and cylinder diameter. This phenomenon is often referred to as the von Kármán vortex street, shown schematically in Figure 1. The vortex shedding is often undesirable and the ability to control the wake of a bluff body could be used to improve mission performance such as drag reduction 1-4 . The biggest challenge to be overcome in order to make progress in the field of feedback flow control is in the area of modeling the dynamics of the flow field. There have been various different approaches to modeling as detailed by Cohen et al 5 . We believe that real-time feasible feedback flow control for practical applications is achievable using an approach which employs low dimensional modeling. This technique has been applied with great success to control problems in structural dynamics. The goal is to describe the relevant dynamics of the system, be it a mechanical structure or a flow field, using a small number of spatial modes. The state of the system is characterized by these modes, and an observer or state estimator is usually employed to derive the state of the * Associate Professor, Dept. of Aerospace Engineering, University of Cincinnati and AIAA Associate Fellow. † Visiting Researcher, Department of Aeronautics, USAF Academy, and AIAA Senior Member. ‡ Visiting Researcher, Department of Aeronautics, USAF Academy, and AIAA Senior Member. § Visiting Researcher, Department of Aeronautics, USAF Academy, and AIAA Member. ** Director of Research, Department of Aeronautics, USAF Academy, and AIAA Associate Fellow. T 46th AIAA Aerospace Sciences Meeting and Exhibit 7 - 10 January 2008, Reno, Nevada AIAA 2008-556 This material is declared a work of the U.S. Government and is not subject to copyright protection in the United States. Downloaded by UNIVERSITY OF CINCINNATI on December 3, 2014 | http://arc.aiaa.org | DOI: 10.2514/6.2008-556
Transcript of Reduced Order Model Based Controller Design for Feedback-Controlled Cylinder Wake

American Institute of Aeronautics and Astronautics
1
Reduced Order Model Based Controller Design for Feedback-Controlled Cylinder Wake
Kelly Cohen *, Stefan Siegel†, Jürgen Seidel‡, Selin Aradag§, and Thomas McLaughlin**
Department of Aeronautics, United States Air Force Academy, CO, 80840
Feedback flow control is an emerging discipline which aims at applying the methods of closed loop feedback control to problems in fluid dynamics. A challenging area for application, which has drawn considerable academic research, concerns the control of absolute instabilities associated with the von Kármán vortex street that develops in the wake of a circular cylinder. The need for meaningful real-time control leads to the requirement of developing an appropriate low order model. A two dimensional, high resolution simulation is used to develop a neural network based low-dimensional model for controller design. Actuation is implemented as displacement of the cylinder normal to the flow. This control approach uses a low dimensional model based on a 15 mode Double Proper Orthogonal Decomposition (DPOD) applied to the velocity field. The truncated DPOD modes, used to construct a dynamic mathematical model of the wake, accurately predict the wake flow dynamics within the lock-in region at low forcing amplitudes. This low-dimensional model, derived using non-linear artificial neural network based system identification methods, is robust and accurate and can be used to simulate the dynamic behaviour of the wake flow. The control strategy involves the estimation of the DPOD modes and a respective feedback command based on these estimates. The control approach is based on both the Kármán fluctuating DPOD mode as well as the Kármán shift mode. The shift mode provides corrections for spatial variations in the POD Eigenfunctions which are caused by the feedback control induced modification of the wake. Using the reduced-order model, numerical investigations are conducted to determine effective controller gains. High resolution simulation having 63,700 nodes show that the developed control law stabilizes all 15 modes, the controller succeeds in substantially reducing drag and fluctuating lift. While the reduced order model is shown to be a very useful tool for controller development, major issues are identified and suggested remedies are discussed.
I. Introduction he main idea of flow control is the improvement of aerodynamic characteristics of air vehicles and munitions to increase mission performance. Flow control can either be passive or active depending on whether energy is added to the flow. Furthermore, active flow control may be characterized by open-loop or closed-loop
techniques. Since most fluid dynamics problems involve local or global flow instabilities, closed loop flow control holds great promise to significantly improve flow quantities of technical importance with moderate control inputs by exploiting these instabilities, e.g., substantially reducing drag and unsteadiness of loads imposed by the flow field onto structures exposed to the flow. An important area of flow control research involves the phenomenon of vortex shedding in the wake behind bluff bodies where the flow separates from the bluff body’s surface. Shedding of counter-rotating vortices is observed in the wake of a two-dimensional cylinder above a critical Reynolds number of Rec~47, non-dimensionalized with respect to freestream velocity and cylinder diameter. This phenomenon is often referred to as the von Kármán vortex street, shown schematically in Figure 1. The vortex shedding is often undesirable and the ability to control the wake of a bluff body could be used to improve mission performance such as drag reduction1-4.
The biggest challenge to be overcome in order to make progress in the field of feedback flow control is in the area of modeling the dynamics of the flow field. There have been various different approaches to modeling as detailed by Cohen et al5. We believe that real-time feasible feedback flow control for practical applications is achievable using an approach which employs low dimensional modeling. This technique has been applied with great success to control problems in structural dynamics. The goal is to describe the relevant dynamics of the system, be it a mechanical structure or a flow field, using a small number of spatial modes. The state of the system is characterized by these modes, and an observer or state estimator is usually employed to derive the state of the
* Associate Professor, Dept. of Aerospace Engineering, University of Cincinnati and AIAA Associate Fellow. † Visiting Researcher, Department of Aeronautics, USAF Academy, and AIAA Senior Member. ‡ Visiting Researcher, Department of Aeronautics, USAF Academy, and AIAA Senior Member. § Visiting Researcher, Department of Aeronautics, USAF Academy, and AIAA Member. ** Director of Research, Department of Aeronautics, USAF Academy, and AIAA Associate Fellow.
T
46th AIAA Aerospace Sciences Meeting and Exhibit7 - 10 January 2008, Reno, Nevada
AIAA 2008-556
This material is declared a work of the U.S. Government and is not subject to copyright protection in the United States.
Dow
nloa
ded
by U
NIV
ER
SIT
Y O
F C
INC
INN
AT
I on
Dec
embe
r 3,
201
4 | h
ttp://
arc.
aiaa
.org
| D
OI:
10.
2514
/6.2
008-
556
American Institute of Aeronautics and Astronautics
2
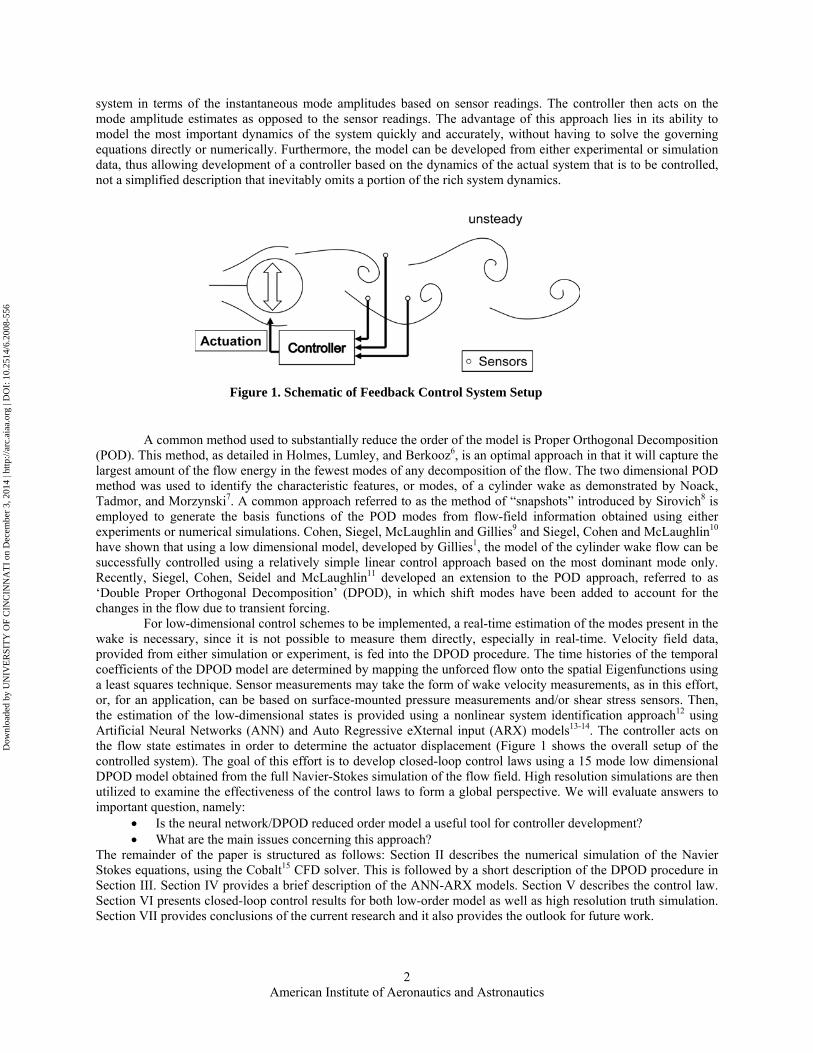
system in terms of the instantaneous mode amplitudes based on sensor readings. The controller then acts on the mode amplitude estimates as opposed to the sensor readings. The advantage of this approach lies in its ability to model the most important dynamics of the system quickly and accurately, without having to solve the governing equations directly or numerically. Furthermore, the model can be developed from either experimental or simulation data, thus allowing development of a controller based on the dynamics of the actual system that is to be controlled, not a simplified description that inevitably omits a portion of the rich system dynamics.
A common method used to substantially reduce the order of the model is Proper Orthogonal Decomposition
(POD). This method, as detailed in Holmes, Lumley, and Berkooz6, is an optimal approach in that it will capture the largest amount of the flow energy in the fewest modes of any decomposition of the flow. The two dimensional POD method was used to identify the characteristic features, or modes, of a cylinder wake as demonstrated by Noack, Tadmor, and Morzynski7. A common approach referred to as the method of “snapshots” introduced by Sirovich8 is employed to generate the basis functions of the POD modes from flow-field information obtained using either experiments or numerical simulations. Cohen, Siegel, McLaughlin and Gillies9 and Siegel, Cohen and McLaughlin10 have shown that using a low dimensional model, developed by Gillies1, the model of the cylinder wake flow can be successfully controlled using a relatively simple linear control approach based on the most dominant mode only. Recently, Siegel, Cohen, Seidel and McLaughlin11 developed an extension to the POD approach, referred to as ‘Double Proper Orthogonal Decomposition’ (DPOD), in which shift modes have been added to account for the changes in the flow due to transient forcing.
For low-dimensional control schemes to be implemented, a real-time estimation of the modes present in the wake is necessary, since it is not possible to measure them directly, especially in real-time. Velocity field data, provided from either simulation or experiment, is fed into the DPOD procedure. The time histories of the temporal coefficients of the DPOD model are determined by mapping the unforced flow onto the spatial Eigenfunctions using a least squares technique. Sensor measurements may take the form of wake velocity measurements, as in this effort, or, for an application, can be based on surface-mounted pressure measurements and/or shear stress sensors. Then, the estimation of the low-dimensional states is provided using a nonlinear system identification approach12 using Artificial Neural Networks (ANN) and Auto Regressive eXternal input (ARX) models13-14. The controller acts on the flow state estimates in order to determine the actuator displacement (Figure 1 shows the overall setup of the controlled system). The goal of this effort is to develop closed-loop control laws using a 15 mode low dimensional DPOD model obtained from the full Navier-Stokes simulation of the flow field. High resolution simulations are then utilized to examine the effectiveness of the control laws to form a global perspective. We will evaluate answers to important question, namely:
• Is the neural network/DPOD reduced order model a useful tool for controller development? • What are the main issues concerning this approach?
The remainder of the paper is structured as follows: Section II describes the numerical simulation of the Navier Stokes equations, using the Cobalt15 CFD solver. This is followed by a short description of the DPOD procedure in Section III. Section IV provides a brief description of the ANN-ARX models. Section V describes the control law. Section VI presents closed-loop control results for both low-order model as well as high resolution truth simulation. Section VII provides conclusions of the current research and it also provides the outlook for future work.
Figure 1. Schematic of Feedback Control System Setup
Dow
nloa
ded
by U
NIV
ER
SIT
Y O
F C
INC
INN
AT
I on
Dec
embe
r 3,
201
4 | h
ttp://
arc.
aiaa
.org
| D
OI:
10.
2514
/6.2
008-
556
American Institute of Aeronautics and Astronautics
3
II. Computational Methodology Numerical simulations were conducted with Cobalt Solutions’ COBALT15 solver V.2.02 for direct numerical
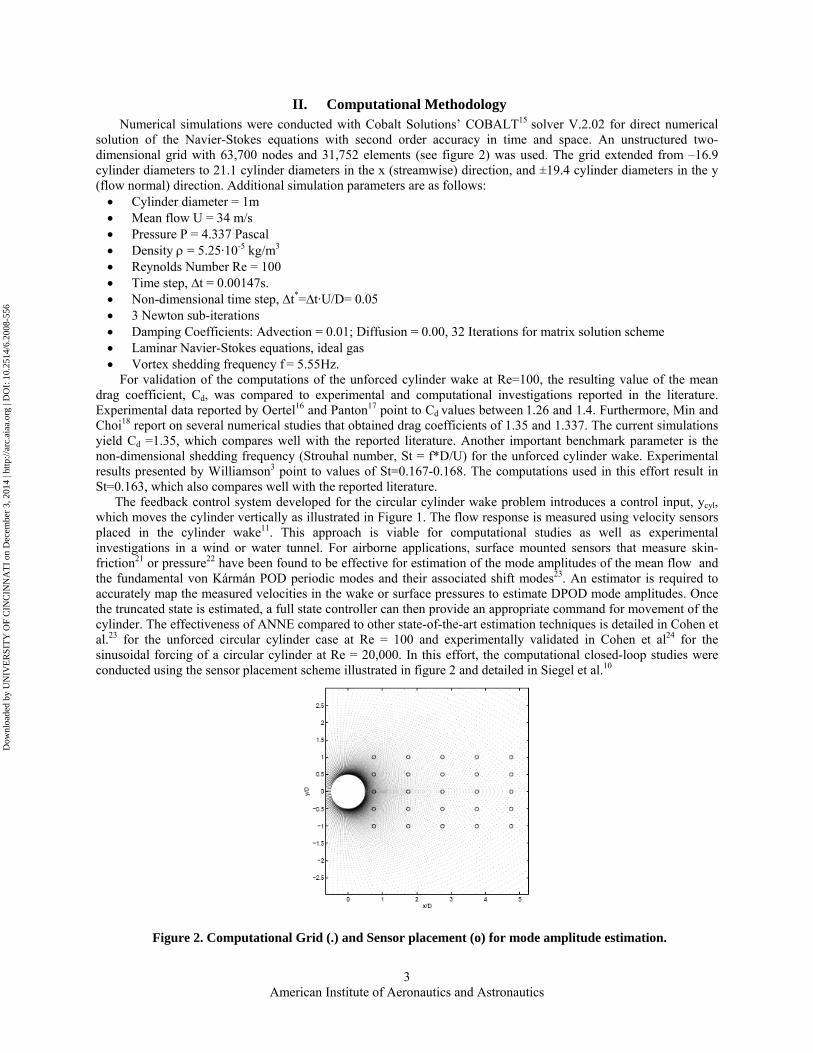
solution of the Navier-Stokes equations with second order accuracy in time and space. An unstructured two-dimensional grid with 63,700 nodes and 31,752 elements (see figure 2) was used. The grid extended from –16.9 cylinder diameters to 21.1 cylinder diameters in the x (streamwise) direction, and ±19.4 cylinder diameters in the y (flow normal) direction. Additional simulation parameters are as follows:
• Cylinder diameter = 1m • Mean flow U = 34 m/s • Pressure P = 4.337 Pascal • Density ρ = 5.25·10-5 kg/m3 • Reynolds Number Re = 100 • Time step, ∆t = 0.00147s. • Non-dimensional time step, ∆t*=∆t·U/D= 0.05 • 3 Newton sub-iterations • Damping Coefficients: Advection = 0.01; Diffusion = 0.00, 32 Iterations for matrix solution scheme • Laminar Navier-Stokes equations, ideal gas • Vortex shedding frequency f = 5.55Hz.
For validation of the computations of the unforced cylinder wake at Re=100, the resulting value of the mean drag coefficient, Cd, was compared to experimental and computational investigations reported in the literature. Experimental data reported by Oertel16 and Panton17 point to Cd values between 1.26 and 1.4. Furthermore, Min and Choi18 report on several numerical studies that obtained drag coefficients of 1.35 and 1.337. The current simulations yield Cd =1.35, which compares well with the reported literature. Another important benchmark parameter is the non-dimensional shedding frequency (Strouhal number, St = f*D/U) for the unforced cylinder wake. Experimental results presented by Williamson3 point to values of St=0.167-0.168. The computations used in this effort result in St=0.163, which also compares well with the reported literature. The feedback control system developed for the circular cylinder wake problem introduces a control input, ycyl, which moves the cylinder vertically as illustrated in Figure 1. The flow response is measured using velocity sensors placed in the cylinder wake11. This approach is viable for computational studies as well as experimental investigations in a wind or water tunnel. For airborne applications, surface mounted sensors that measure skin-friction21 or pressure22 have been found to be effective for estimation of the mode amplitudes of the mean flow and the fundamental von Kármán POD periodic modes and their associated shift modes23. An estimator is required to accurately map the measured velocities in the wake or surface pressures to estimate DPOD mode amplitudes. Once the truncated state is estimated, a full state controller can then provide an appropriate command for movement of the cylinder. The effectiveness of ANNE compared to other state-of-the-art estimation techniques is detailed in Cohen et al.23 for the unforced circular cylinder case at Re = 100 and experimentally validated in Cohen et al24 for the sinusoidal forcing of a circular cylinder at Re = 20,000. In this effort, the computational closed-loop studies were conducted using the sensor placement scheme illustrated in figure 2 and detailed in Siegel et al.10
Figure 2. Computational Grid (.) and Sensor placement (o) for mode amplitude estimation.
Dow
nloa
ded
by U
NIV
ER
SIT
Y O
F C
INC
INN
AT
I on
Dec
embe
r 3,
201
4 | h
ttp://
arc.
aiaa
.org
| D
OI:
10.
2514
/6.2
008-
556

American Institute of Aeronautics and Astronautics
4
III. Proper Orthogonal Decomposition (POD) Modeling POD is an efficient means to reduce spatially highly complex flow fields by representing them by a small
number of spatial modes and their mode amplitudes7. Equation 1 shows this decomposition,
1
( , , ) ( ) ( , ),K
k kk
u x y t a t x yφ=
= ∑ (1)
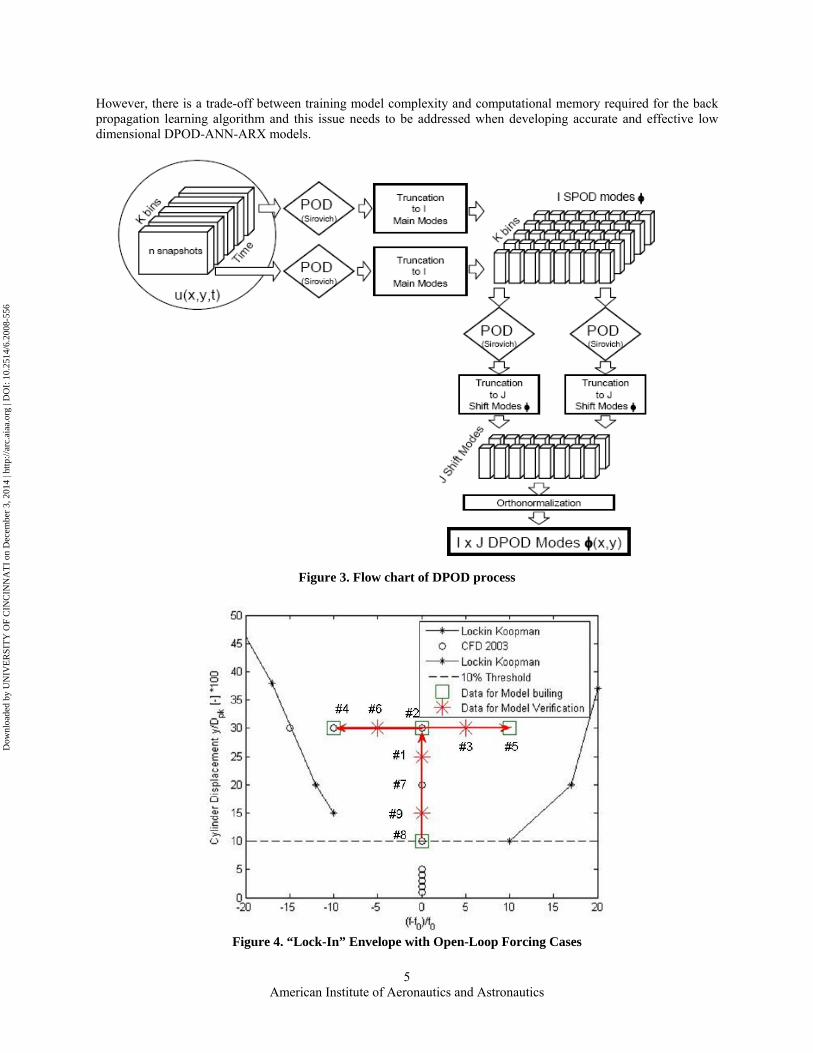
where a flow quantity u is represented by the spatial modes φk(x,y) and mode amplitudes ak(t). While this decomposition is well suited to time periodic flow fields, it faces problems for transient flows (see Siegel et al.19). Different additions to the basic POD procedure have been proposed, most notably the addition of a shift mode as introduced independently by Noack, Afanasiev, Morzynski and Thiele20 as well as Siegel, Cohen and McLaughlin.10 This shift mode originally only addressed changes to the mean flow, but the concept has been extended recently by Siegel, Cohen, Seidel and McLaughlin11 to adjust the fluctuating modes of transient flows as well. This modified POD procedure, referred to as Double POD (DPOD), provides shift modes for all main modes of a transient flow field. A pictorial representation of the DPOD procedure is given in figure 3. Starting in the top left corner, the data is split into K bins and each bin is used as an input data set for its individual POD procedure. The resulting SPOD (Short Time POD) modes are then collected across the bins and POD is applied again to obtain the shift modes. The procedure is expressed mathematically in Equation (2), where the index i refers to the main (SPOD) modes of the first POD procedure, while the index j identifies the shift mode order,
, ,1 1
( , , ) ( ) ( , ).I J
i j i ji j
u x y t t x yα= =
= Φ∑∑ (2)
The mean flow mode M1,1 contains most of the energy, followed by the unsteady von Kármán modes, M2,1 and M3,1,. This DPOD formulation extends the original concept of the “shift mode”: we can now develop a “shift mode”, even a series of higher order shift modes, for all main modes i. The resulting mode set can be truncated in both i and j, leading to a mode ensemble that is IM × JM in size. After orthonormalization, the decomposition is again optimal in the sense of POD. In the limit of J=1, the original POD is recovered. While the different modes distinguished by the index i remain the main modes described above, the index j identifies the transient changes of these main modes: For J >1, the energy optimality of the POD decomposition in that direction leads to modes that are the optimum decomposition of a given main mode as it evolves throughout a transient data set. If J = 2, then modes Φ1,1 and Φ1,2 are the mean flow and its “shift mode” or “mean flow mode” as described by Noack et al.7 and Siegel et al.10, respectively. Thus the modes with indices j>1 can be referred to as first, second and higher order “shift” modes that allow the POD mode ensemble to adjust for changes in the spatial modes. We will refer to all of these additional modes obtained by the DPOD as shift modes, since they modify a given main mode to match a new flow state due to either a recirculation zone length or formation length change. These changes may be due to effects of forcing, a different Reynolds number, feedback or open loop control or similar events. Thus, in the truncated DPOD mode ensemble for each main mode, one or more shift modes may be retained based on inspection of energy content or spatial structure of the mode.
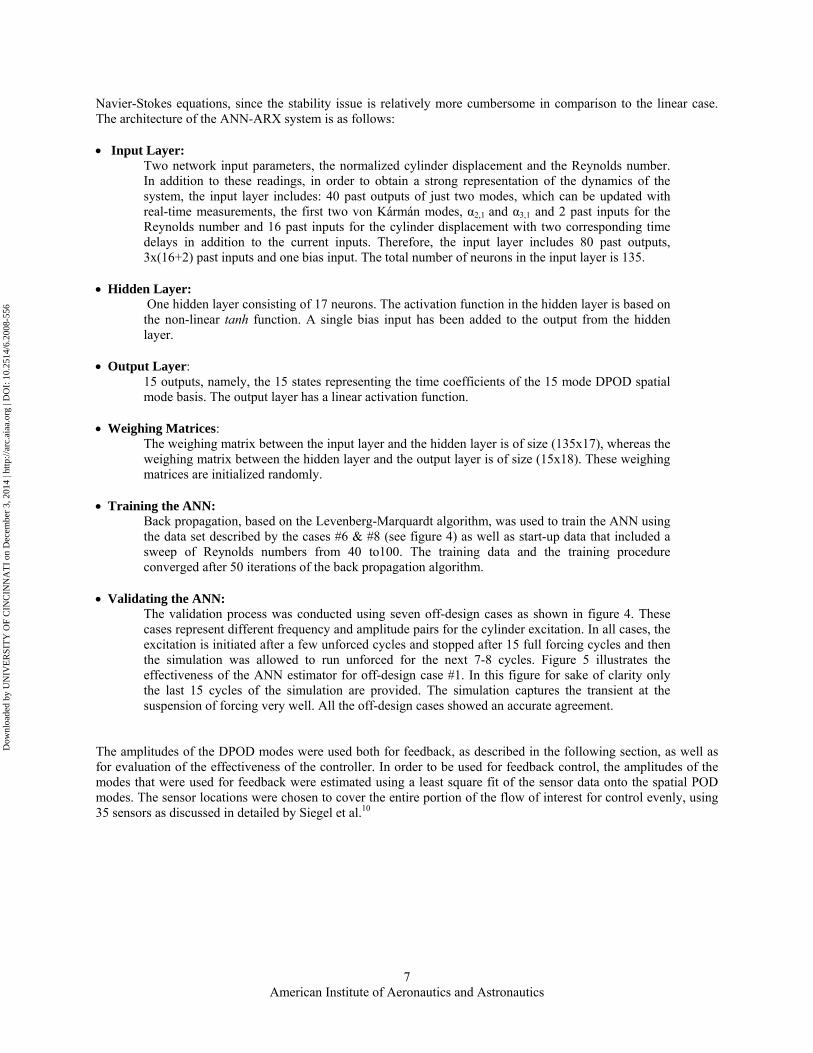
The development of an effective low dimensional model is based upon flow-field velocity readings when subject to various forcing inputs within the lock-in region, where the frequency of the vortex shedding is identical to the forcing frequency. Nine different data sets for the open loop forced cases, as illustrated in figure 4, were obtained using forcing amplitudes of 10, 15, 20, 25 and 30 percent cylinder displacement. Some of the cases use a 5-10% lower or higher frequency at 30% displacement, which is still within the lock-in region. Lock-in is defined as the flow developing a fixed phase relationship between the actuation and the vortex shedding. For ANN training purposes, three cases were utilized. The start-up case, which employs the ramping of the Reynolds number from 40 to 100 for the unforced system, was used in conjunction with two open-loop forced cases described in figure 4. By starting a CFD simulation at a Reynolds number below the critical Reynolds number (Rec=47 for the cylinder wake), and subsequently ramping up the flow speed to the target Reynolds number of 100, one can study the details of the development of the limit cycle. The ramping was done smoothly using a constant acceleration, and no numerical artefacts during the transition were observed. During this transient start-up, both the shedding frequency and the strength of the shed vortices change. The two open-loop forcing design points used for training were:
• The 30 percent cylinder displacement sinusoidal forcing at f=0.95fo (Design Case #6) • The 10 percent cylinder displacement sinusoidal forcing at f=fo (Design Case #8)
On the other hand, the other 7 cases (#1, #2, #3, #4, #5, #7, #9) serve as off-design cases and are utilized for model validation. Compared to previous ANN_ARX models developed by Cohen et al22 , which were based only on the above start-up case and Case#1, the model obtained in this effort by using richer training data is more accurate.
Dow
nloa
ded
by U
NIV
ER
SIT
Y O
F C
INC
INN
AT
I on
Dec
embe
r 3,
201
4 | h
ttp://
arc.
aiaa
.org
| D
OI:
10.
2514
/6.2
008-
556
American Institute of Aeronautics and Astronautics
5
However, there is a trade-off between training model complexity and computational memory required for the back propagation learning algorithm and this issue needs to be addressed when developing accurate and effective low dimensional DPOD-ANN-ARX models.
Figure 3. Flow chart of DPOD process
Figure 4. “Lock-In” Envelope with Open-Loop Forcing Cases
Dow
nloa
ded
by U
NIV
ER
SIT
Y O
F C
INC
INN
AT
I on
Dec
embe
r 3,
201
4 | h
ttp://
arc.
aiaa
.org
| D
OI:
10.
2514
/6.2
008-
556

American Institute of Aeronautics and Astronautics
6
IV. ANN-ARX System Identification Universal approximators, such as artificial neural networks (ANN), were investigated for their inherent
robustness and capability to approximate any nonlinear function to any arbitrary degree of accuracy14. The ANN employed in this effort, in conjunction with the ARX model, is the mechanism with which the dynamic model is developed using the DPOD time coefficients extracted from the high resolution CFD simulation. Nonlinear optimization techniques, based on the back propagation method, are used to minimize the difference between the extracted DPOD time coefficients and the ANN while adjusting the weights of the model. The ANN-ARX approach adopted in this effort was based upon the algorithms of Nørgaard, O. Ravn, N. K. Poulsen and L.K. Hansen13. The developed low dimensional model based on a 15 mode DPOD reduction applied to the velocity field. The control strategy involves the estimation of the DPOD modes and a respective feedback command based on these estimates.
Consider a linear ARX (Auto Regressive eXternal input) model as follows:
)t(e)q(D
1)t(f)q(D)q(Bq)t( 11
1d
−−
−− +=α (3)
where α(t) is the state vector representing the POD time coefficients αj(t) shown in (2) and f(t) describes the external input, which in the current effort is the vertical displacement of the cylinder, and e(t) is the white noise vector. For the above case, B and D are matrix polynomials in q-1. The time delay operator is defined as: )dt()t(q d −α=α− (4) where d is a multiple of the sampling period. The parameter matrix, θ, and the regression vector, φ(t), are respectively defined as θ = [dij bij]T (5) φ(t) = [α(t-1),…, α(t-n), f(t-d),…..,f(t-d-m)]T. (6)
As can be see in (6), the vector φ(t) is comprised of past states and past inputs. The ARX predictor may be written as: )t()]q(D1[)t(f)q(Bq)|t(ˆ 11d α−+=θα −−− θϕ= )t(T (7)
Equation (7) represents an algebraic relationship between the prediction, given on the left hand side of the
equation, and past inputs and states, depicted by φ(t). The parameter matrix, θ, is determined during the estimation process. The main advantage of the ARX predictor is that it will always be stable, even when the dynamic plant being estimated is unstable. This feature is of utmost importance when modelling an unstable system such as the absolutely unstable cylinder wake.
The main drawback of this approach is that it is limited to modelling of linear systems for the cylinder wake problem a nonlinear estimation scheme is required. A general representation of the non-linear system identification, based on a hybrid ANN-ARX approach [13] may be written as: )t(e]),t([g)|t( +θϕ=θα (8) where θ is the matrix containing the weights of the ANN which are estimated by a back propagation algorithm using a training data set and g is the nonlinear mapping realized by the feed-forward structure of the ANN. The ANN-ARX predictor can then be expressed as: ]),t([g)|t(ˆ θϕ=θα (9)
After the DPOD time coefficients were extracted as described in the previous section, the single hidden layer ANN-ARX architecture is selected. The ANN-ARX predictor is inherently stable because, although the modeling approach is non-linear, the algebraic relationship between the prediction and past states and inputs is preserved. This is extremely important when dealing with nonlinear systems of partial differential equations (PDE), such as the
Dow
nloa
ded
by U
NIV
ER
SIT
Y O
F C
INC
INN
AT
I on
Dec
embe
r 3,
201
4 | h
ttp://
arc.
aiaa
.org
| D
OI:
10.
2514
/6.2
008-
556
American Institute of Aeronautics and Astronautics
7
Navier-Stokes equations, since the stability issue is relatively more cumbersome in comparison to the linear case. The architecture of the ANN-ARX system is as follows:
• Input Layer:
Two network input parameters, the normalized cylinder displacement and the Reynolds number. In addition to these readings, in order to obtain a strong representation of the dynamics of the system, the input layer includes: 40 past outputs of just two modes, which can be updated with real-time measurements, the first two von Kármán modes, α2,1 and α3,1 and 2 past inputs for the Reynolds number and 16 past inputs for the cylinder displacement with two corresponding time delays in addition to the current inputs. Therefore, the input layer includes 80 past outputs, 3x(16+2) past inputs and one bias input. The total number of neurons in the input layer is 135.
• Hidden Layer:
One hidden layer consisting of 17 neurons. The activation function in the hidden layer is based on the non-linear tanh function. A single bias input has been added to the output from the hidden layer.
• Output Layer:
15 outputs, namely, the 15 states representing the time coefficients of the 15 mode DPOD spatial mode basis. The output layer has a linear activation function.
• Weighing Matrices:
The weighing matrix between the input layer and the hidden layer is of size (135x17), whereas the weighing matrix between the hidden layer and the output layer is of size (15x18). These weighing matrices are initialized randomly.
• Training the ANN:
Back propagation, based on the Levenberg-Marquardt algorithm, was used to train the ANN using the data set described by the cases #6 & #8 (see figure 4) as well as start-up data that included a sweep of Reynolds numbers from 40 to100. The training data and the training procedure converged after 50 iterations of the back propagation algorithm.
• Validating the ANN:
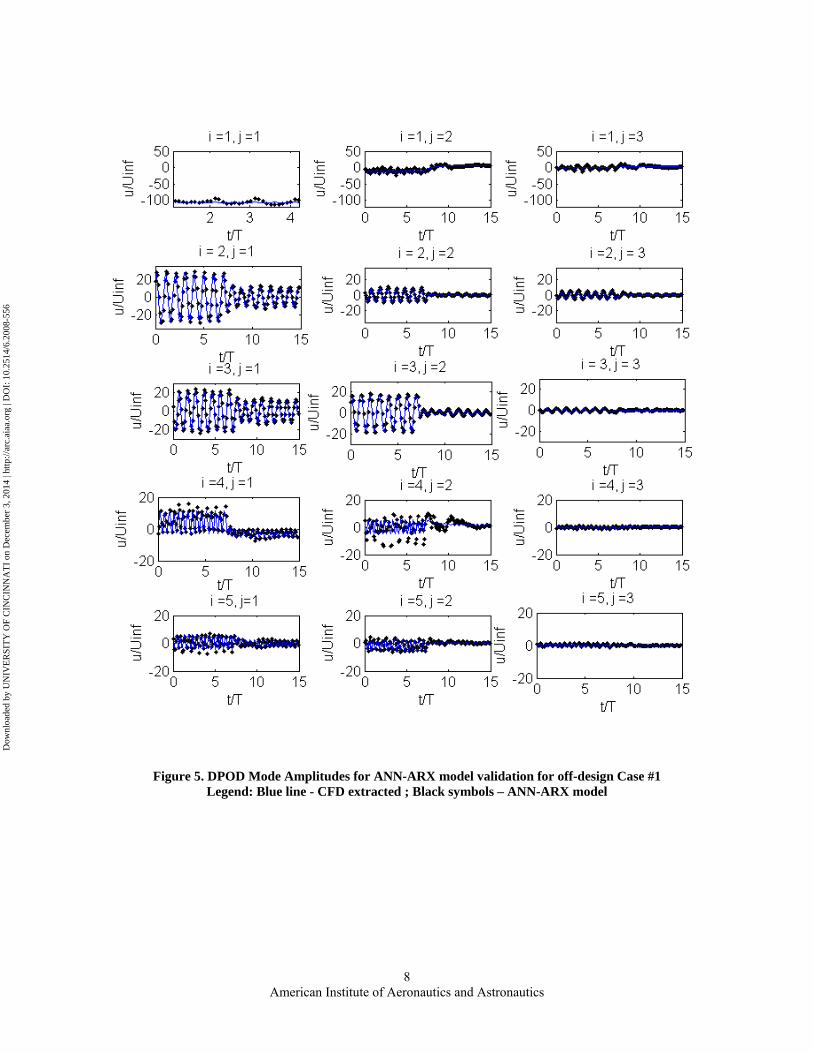
The validation process was conducted using seven off-design cases as shown in figure 4. These cases represent different frequency and amplitude pairs for the cylinder excitation. In all cases, the excitation is initiated after a few unforced cycles and stopped after 15 full forcing cycles and then the simulation was allowed to run unforced for the next 7-8 cycles. Figure 5 illustrates the effectiveness of the ANN estimator for off-design case #1. In this figure for sake of clarity only the last 15 cycles of the simulation are provided. The simulation captures the transient at the suspension of forcing very well. All the off-design cases showed an accurate agreement.
The amplitudes of the DPOD modes were used both for feedback, as described in the following section, as well as for evaluation of the effectiveness of the controller. In order to be used for feedback control, the amplitudes of the modes that were used for feedback were estimated using a least square fit of the sensor data onto the spatial POD modes. The sensor locations were chosen to cover the entire portion of the flow of interest for control evenly, using 35 sensors as discussed in detailed by Siegel et al.10
Dow
nloa
ded
by U
NIV
ER
SIT
Y O
F C
INC
INN
AT
I on
Dec
embe
r 3,
201
4 | h
ttp://
arc.
aiaa
.org
| D
OI:
10.
2514
/6.2
008-
556
American Institute of Aeronautics and Astronautics
8
Figure 5. DPOD Mode Amplitudes for ANN-ARX model validation for off-design Case #1 Legend: Blue line - CFD extracted ; Black symbols – ANN-ARX model
Dow
nloa
ded
by U
NIV
ER
SIT
Y O
F C
INC
INN
AT
I on
Dec
embe
r 3,
201
4 | h
ttp://
arc.
aiaa
.org
| D
OI:
10.
2514
/6.2
008-
556

American Institute of Aeronautics and Astronautics
9
V. Control Law Design For all investigations, only displacement of the cylinder in flow normal (y) direction was employed for
forcing the flow. The control approach is based on both the Kármán fluctuating DPOD mode as well as the Kármán shift mode. The shift mode provides corrections for spatial variations in the POD Eigenfunctions which are caused by the feedback control induced modification of the wake. This design decision was made based on our recent investigations controlling the cylinder wake flow as shown by Siegel et al25.
The controller development is based on a Proportional and Differential (PD) controller. As mentioned earlier, active forcing is introduced into the wake by displacement of the cylinder in the flow normal direction as shown in Figure 1. As shown by Cohen et al23, an artificial neural network estimator (ANNE) provides estimates for the 6 important DPOD mode amplitudes which may then be used in designing an appropriate controller. Since a neural network model of the flow has been developed, several indirect control designs can be employed13. The indirect design is very flexible and applicable in real-time for the problem at hand. Relevant concepts include approximate pole placement, minimum variance and predictive control. The approximation is based on instantaneous linearization, which is a popular method for control of ANN models13.
Following the effort by Siegel, Cohen and McLaughlin25, a similar PD feedback control strategy is employed for the multi mode feedback control law:
21 2221 21 21 22 22 22cyl p d p d
d dy K K K Kdt dtα αα α= ⋅ + ⋅ + ⋅ + ⋅ (10)
Instead of directly specifying the Kpand Kd gains, these can be expressed in terms of an overall gain K and a phase
advance ϕ for mode i:
cos( )
sin( )2
pi i i
i idi
K K
KKf
ϕ
ϕπ
= ⋅
⋅=
⋅
(11)
where f is the natural vortex shedding frequency.
0 5 10 15-0.8
-0.6
-0.4
-0.2
0
0.2
0.4
0.6
t/T
d(A
/D)/d
t
Figure 6. Cylinder input, d(A/D)/dt, for MISO feedback of modes [21 22] with gains K1[1 0.85] and phases
phi=[330 25] degrees (Controller switched on at t/T=0.5).
Dow
nloa
ded
by U
NIV
ER
SIT
Y O
F C
INC
INN
AT
I on
Dec
embe
r 3,
201
4 | h
ttp://
arc.
aiaa
.org
| D
OI:
10.
2514
/6.2
008-
556
American Institute of Aeronautics and Astronautics
10
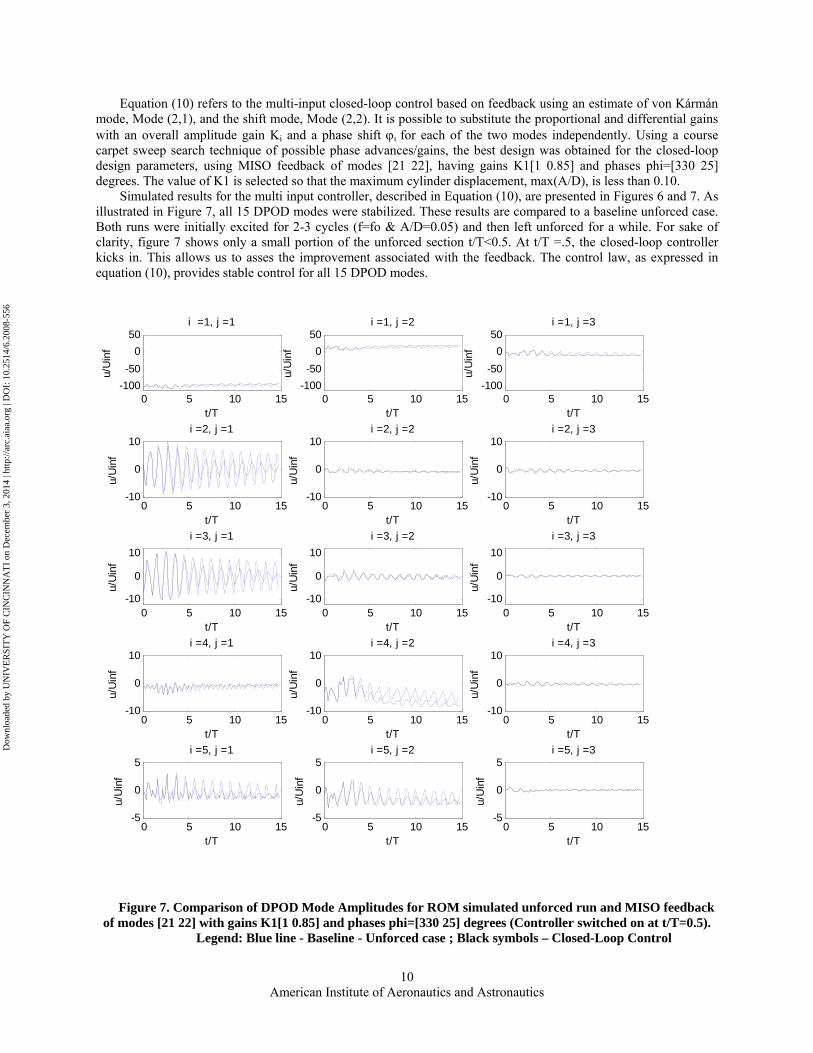
Equation (10) refers to the multi-input closed-loop control based on feedback using an estimate of von Kármán mode, Mode (2,1), and the shift mode, Mode (2,2). It is possible to substitute the proportional and differential gains with an overall amplitude gain Ki and a phase shift ϕι for each of the two modes independently. Using a course carpet sweep search technique of possible phase advances/gains, the best design was obtained for the closed-loop design parameters, using MISO feedback of modes [21 22], having gains K1[1 0.85] and phases phi=[330 25] degrees. The value of K1 is selected so that the maximum cylinder displacement, max(A/D), is less than 0.10.
Simulated results for the multi input controller, described in Equation (10), are presented in Figures 6 and 7. As illustrated in Figure 7, all 15 DPOD modes were stabilized. These results are compared to a baseline unforced case. Both runs were initially excited for 2-3 cycles (f=fo & A/D=0.05) and then left unforced for a while. For sake of clarity, figure 7 shows only a small portion of the unforced section t/T<0.5. At t/T =.5, the closed-loop controller kicks in. This allows us to asses the improvement associated with the feedback. The control law, as expressed in equation (10), provides stable control for all 15 DPOD modes.
0 5 10 15-100-50
050
t/T
u/U
inf
i =1, j =1
0 5 10 15-100-50
050
t/T
u/U
inf
i =1, j =2
0 5 10 15-100-50
050
t/T
u/U
inf
i =1, j =3
0 5 10 15-10
0
10
t/T
u/U
inf
i =2, j =1
0 5 10 15-10
0
10
t/T
u/U
inf
i =2, j =2
0 5 10 15-10
0
10
t/T
u/U
inf
i =2, j =3
0 5 10 15-10
0
10
t/T
u/U
inf
i =3, j =1
0 5 10 15-10
0
10
t/T
u/U
inf
i =3, j =2
0 5 10 15-10
0
10
t/T
u/U
inf
i =3, j =3
0 5 10 15-10
0
10
t/T
u/U
inf
i =4, j =1
0 5 10 15-10
0
10
t/T
u/U
inf
i =4, j =2
0 5 10 15-10
0
10
t/T
u/U
inf
i =4, j =3
0 5 10 15-5
0
5
t/T
u/U
inf
i =5, j =1
0 5 10 15-5
0
5
t/T
u/U
inf
i =5, j =2
0 5 10 15-5
0
5
t/T
u/U
inf
i =5, j =3
Figure 7. Comparison of DPOD Mode Amplitudes for ROM simulated unforced run and MISO feedback
of modes [21 22] with gains K1[1 0.85] and phases phi=[330 25] degrees (Controller switched on at t/T=0.5). Legend: Blue line - Baseline - Unforced case ; Black symbols – Closed-Loop Control
Dow
nloa
ded
by U
NIV
ER
SIT
Y O
F C
INC
INN
AT
I on
Dec
embe
r 3,
201
4 | h
ttp://
arc.
aiaa
.org
| D
OI:
10.
2514
/6.2
008-
556
American Institute of Aeronautics and Astronautics
11
VI. Closed-Loop Control Truth Simulation The next logical step for this research program is to validate the developed methods in a high resolution
simulation and in experiments. Based on the results, the control laws may need to be further modified to ensure that their activity is restricted to the lock-in region where the ANN model is valid. The Cobalt CFD solver, used for truth simulation verification, has the ability to perform rigid body motion of a given grid. This feature was used to perform both time periodically forced and feedback controlled simulations with one degree of freedom. For the high resolution simulations, a filter is required to avoid feeding back of small amounts of noise. Physically, the control algorithm was implemented in MATLAB on a separate PC running Windows. It interfaced to the Beowulf cluster running Cobalt using Windows file sharing through Samba in order to read the sensor information and update the cylinder displacement
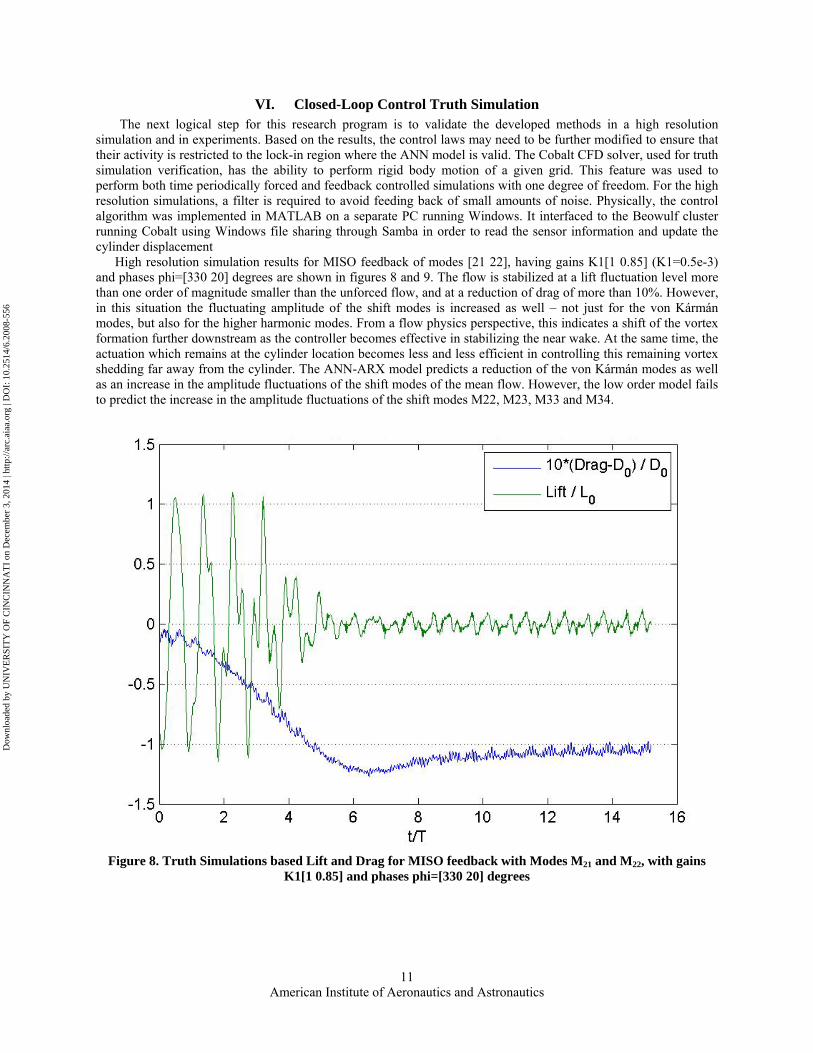
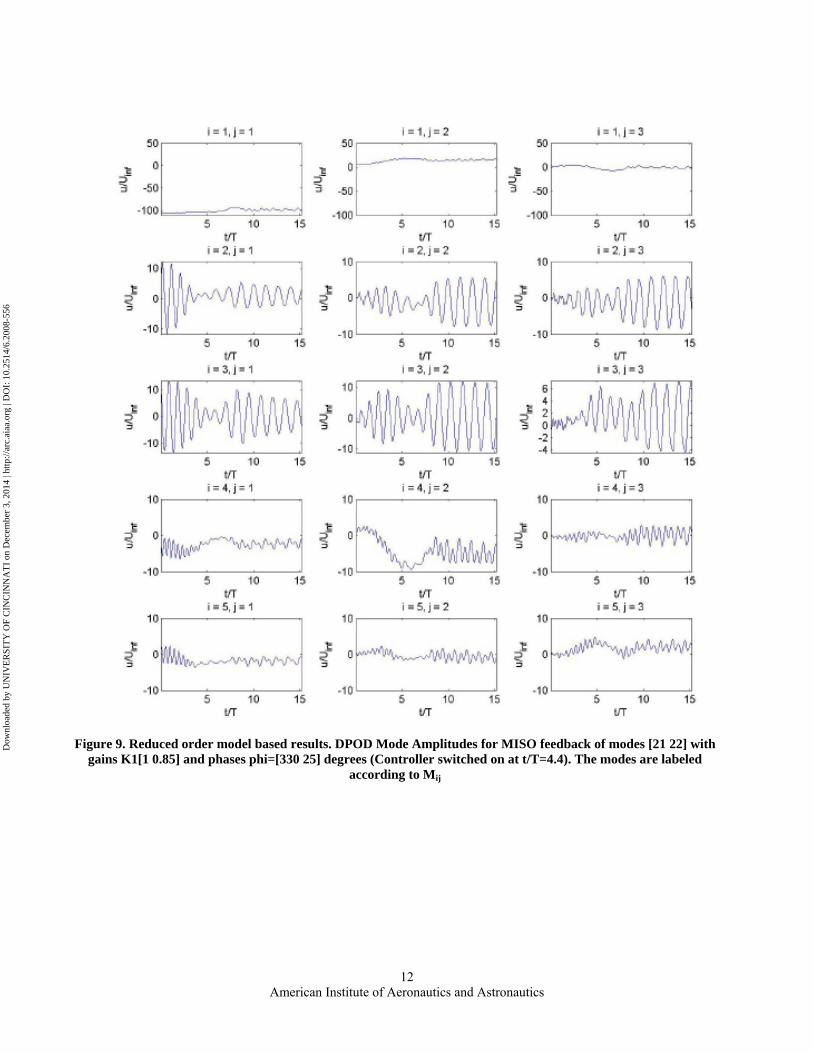
High resolution simulation results for MISO feedback of modes [21 22], having gains K1[1 0.85] (K1=0.5e-3) and phases phi=[330 20] degrees are shown in figures 8 and 9. The flow is stabilized at a lift fluctuation level more than one order of magnitude smaller than the unforced flow, and at a reduction of drag of more than 10%. However, in this situation the fluctuating amplitude of the shift modes is increased as well – not just for the von Kármán modes, but also for the higher harmonic modes. From a flow physics perspective, this indicates a shift of the vortex formation further downstream as the controller becomes effective in stabilizing the near wake. At the same time, the actuation which remains at the cylinder location becomes less and less efficient in controlling this remaining vortex shedding far away from the cylinder. The ANN-ARX model predicts a reduction of the von Kármán modes as well as an increase in the amplitude fluctuations of the shift modes of the mean flow. However, the low order model fails to predict the increase in the amplitude fluctuations of the shift modes M22, M23, M33 and M34.
Figure 8. Truth Simulations based Lift and Drag for MISO feedback with Modes M21 and M22, with gains
K1[1 0.85] and phases phi=[330 20] degrees
Dow
nloa
ded
by U
NIV
ER
SIT
Y O
F C
INC
INN
AT
I on
Dec
embe
r 3,
201
4 | h
ttp://
arc.
aiaa
.org
| D
OI:
10.
2514
/6.2
008-
556
American Institute of Aeronautics and Astronautics
12
Figure 9. Reduced order model based results. DPOD Mode Amplitudes for MISO feedback of modes [21 22] with gains K1[1 0.85] and phases phi=[330 25] degrees (Controller switched on at t/T=4.4). The modes are labeled
according to Mij
Dow
nloa
ded
by U
NIV
ER
SIT
Y O
F C
INC
INN
AT
I on
Dec
embe
r 3,
201
4 | h
ttp://
arc.
aiaa
.org
| D
OI:
10.
2514
/6.2
008-
556

American Institute of Aeronautics and Astronautics
13
VII. Conclusions and Outlook A low order ANN-ARX model is developed for control design and relatively simple real-time
implementation. The development of effective low order models requires painstaking examination of issues concerning the quality of the training data set, modes you need to remember & dynamic memory (time delays), and ANN architecture (e.g. number of neurons in the hidden layer). These issues were addressed and a successful design is presented. We demonstrate both ANN-ARX reduced order model and high resolution simulation results of feedback control of the two-dimensional circular cylinder at Re=100 based on one or two modes of a DPOD model developed using transient data truncated to 15 Modes. The objective of the control is stabilization of the von Kármán vortex street. The closed-loop controller was based on a Multi Input Single Output controller (MISO) design, feeding back the von Kármán mode and its shift mode. This comparison shows that the computational demands associated with a low order model makes it very attractive for control design as it addresses the first order issues concerning control design and significantly shrinks the solution space. In this study, we found that some further tweaking of controller within this smaller solution space improves results (small difference of 5% in one of the phase angles). The overall conclusion of this investigation when compared to the results achieved by Siegel et al.10 is that a DPOD model is able to greatly increase the stability and performance of the feedback controller. This demonstrates the importance of obtaining a model that covers the entire parameter range that the feedback controller covers, rather than a point design type of a model that is only valid for the time periodic uncontrolled flow. While demonstrated for the benchmark case of a laminar circular cylinder wake, we expect similar trend for more complex flows which we will investigate in the future.
In this publication, we developed simple PD controllers that perform multi mode feedback. The use of an accurate nonlinear dynamic model for flow state estimation enables mode based feedback. While the performance of these controllers are greatly improved over those using a less accurate POD or other models, the overall controller development method employed is empirical in nature. Although the developed approach appears to be effective for the current problem, more complex flows will probably require a structured MIMO (multi-input multi-output) control approach. Thus, our future research direction is towards nonlinear MIMO controllers. Further work will also investigate the use of dynamic non-linear estimators using smaller number of sensors in closed-loop truth simulations.
VIII. Acknowledgments The authors thank, Lt. Col. Scott Wells (AFOSR), and Dr. James Myatt (AFRL) for their support and assistance.
The authors acknowledge the assistance of Dr. Jim Forsythe of Cobalt Solutions, LLC.
References 1E. A. Gillies, “Low-dimensional control of the circular cylinder wake”, Journal of Fluid Mechanics, vol. 371, pp.157-178,
1998. 2K. Roussopoulos., “Feedback control of vortex shedding at low Reynolds numbers”, Journal of Fluid Mechanics, vol. 248,
pp. 267-296, 1993. 3C. H. K. Williamson, “Vortex dynamics in the cylinder wake”, Annu. Rev. Fluid Mech, vol. 8, pp. 477-539, 1996. 4Noack, B.R., Afanasiev, K., Morzynski, M. & Thiele, F. 2003 A hierarchy of low-dimensional models for the transient and
post-transient cylinder wake. J. Fluid Mech. 497, 335–363. 5Cohen, K., Siegel, S., and McLaughlin, T, "Control Issues in reduced-Order Feedback Flow Control", Invited Lecture at
session titled "Closed-Loop Flow Control: Algorithms and Applications", AIAA Paper 2004-0575, 42nd AIAA Aerospace Sciences Meeting, Reno, Nevada, January 5-8 2004.
6P. Holmes, J. L. Lumley, and G. Berkooz, Turbulence, Coherent Structures, Dynamical Systems and Symmetry. Cambridge: Cambridge University Press, 1996, ch. 3.
7B. R. Noack, G. Tadmor, and M. Morzynski, "Low-dimensional models for feedback flow control. Part I: Empirical Galerkin models", presented at the 2nd AIAA Flow Control Conference, Portland, Oregon, 28 Jun - 1 Jul 2004, AIAA Paper 2004-2408.
8L. Sirovich, “Turbulence and the dynamics of coherent structures Part I: Coherent structures”, Quarterly of Applied Mathematics, vol. 45, no., 3, pp.561-571, 1987.
9K. Cohen, S. Siegel, T. McLaughlin, and E. Gillies, “Feedback control of a cylinder wake low-dimensional model”, AIAA Journal, vol. 41, no. 7, pp. 1389-1391, July 2003.
10S. Siegel, K. Cohen and T. McLaughlin., "Numerical simulations of a feedback controlled circular cylinder wake", AIAA Journal, vol. 44, no. 6, pp.1266-1276, June 2006.
Dow
nloa
ded
by U
NIV
ER
SIT
Y O
F C
INC
INN
AT
I on
Dec
embe
r 3,
201
4 | h
ttp://
arc.
aiaa
.org
| D
OI:
10.
2514
/6.2
008-
556

American Institute of Aeronautics and Astronautics
14
11S. Siegel., K. Cohen., J. Seidel and T. McLaughlin, “State estimation of transient flow fields using double proper orthogonal decomposition (DPOD)”, presented at the International Conference on Active Flow Control, Berlin, Germany, September 27-29, 2006.
12Nelles, O., Nonlinear System Identification, Springer-Verlag, Berlin, Germany, 2001, Chap. 11. 13Nørgaard, M., Ravn., O., Poulsen, N.K., and Hansen, L.K., Neural Networks for Modeling and Control of Dynamic
Systems, 3rd printing, Springer-Verlag, London, U.K., 2003, Chap. 2. 14Ljung, L., System Identification: Theory for the User, 2nd Edition, Prentice Hall, Upper Saddle, NJ, USA, 1999, Chap.4. 15Cobalt CFD, Cobalt Solutions, LLC, Available: http://www.cobaltcfd.com. 16H. Oertel, Jr.., “Wakes behind blunt bodies”, Annual Review of Fluid Mechanics, vol. 22, pp. 539-564, 1990. 17R. L. Panton, Incompressible Flow. 2nd Edition, New York: John Wiley & Sons, 1996. 18C. Min and H. Choi, “Suboptimal feedback control of vortex shedding at low Reynolds numbers”, J Fluid Mechanics, vol.
401, pp.123-156, 1999. 19Siegel, S., Cohen, K., Seidel, J., McLaughlin, T., 'Short Time Proper Orthogonal Decomposition for State Estimation of
Transient Flow Fields', 43rd AIAA Aerospace Sciences Meeting, Reno, AIAA2005-0296, 2005 20B. R. Noack, K. Afanasiev, M. Morzynski and F. Thiele “A hierarchy of low dimensional models for the transient and
post-transient cylinder wake”, J. Fluid Mechanics, vol. 497, pp. 335–363, 2003. 21O. Stalnov, V. Palei, I. Fono, K. Cohen, and A. Seifert, "Experimental validation of sensor placement for control of a "D"
shaped cylinder wake", presented at the 35th AIAA Fluid Dynamics Conference and Exhibit, Toronto, Canada, June 6-9, 2005, AIAA Paper 2005-5260.
22Cohen, K., Siegel, S., Seidel, J., and McLaughlin, T., “Low dimensional modeling, estimation and control of a cylinder wake”, Invited lecture at Invited Session organized by Dr. James Myatt of AFRL/VA called "Order Reduction and Control for Aerodynamics", 45th IEEE Conference on Decision and Control, San Diego, 13-15 December 2006.
23Cohen, K., Siegel, S., Seidel, J., Aradag, S., and McLaughlin, T., “Nonlinear Estimation of Transient Flow Field Low Dimensional States Using Double Proper Orthogonal Decomposition”, AIAA-2007-2836, AIAA Infotech, Sonoma, CA, 2007.
24K. Cohen, S. Siegel, J. Seidel, and T. McLaughlin, “ "Reduced order modeling for closed-loop control of three dimensional wakes", Presented as an Invited lecture at the 3rd AIAA Flow Control Conference, San Francisco, California, 5 - 8 June 2006, AIAA Paper 2006-3356.
25Siegel, S., Cohen, K., Seidel, J., Aradag, S., and McLaughlin, T., “Simulation of a Feedback-Controlled Cylinder Wake Using Double Proper Orthogonal Decomposition”, AIAA Paper-2007-4502, 37th AIAA Fluid Dynamics Conference, Miami, FL, 2007.
Dow
nloa
ded
by U
NIV
ER
SIT
Y O
F C
INC
INN
AT
I on
Dec
embe
r 3,
201
4 | h
ttp://
arc.
aiaa
.org
| D
OI:
10.
2514
/6.2
008-
556




















