Qualitative simulation over two-parameter bifurcation diagrams
7
Qualitative Simulation over Two-Parameter Bifurcation Diagrams Jos´ e Ortiz Bejar Division de Estudios de Posgrado Facultad de Ingenier´ ıa El´ ectrica Universidad Michoacana de San Nicol´ as de Hidalgo Email: job@dep.fie.umich.mx Juan J. Flores Romero Division de Estudios de Posgrado Facultad de Ingenier´ ıa El´ ectrica Universidad Michoacana de San Nicol´ as de Hidalgo Email: [email protected] Garibaldi Pineda Garc´ ıa School of Computer Science The University of Manchester Email: [email protected] Abstract— This work proposes a qualitative representation for bifurcation diagrams with two varying parameters. We start from a previous defined representation for a single parameter bifurcation diagram and add the neccesary definitions/constraints to extend it. In order to give sense to our proposed representation for bifurcation diagrams an algoritmh to perform qualitative simulations is given; this algorithm is based on behavioural inference rules for a system going through dynamic events. The developed algorithm is capable to generated all possible qualitative behaviours under a user defined sequence of qualitative events and parameters changes. Index Terms—Bifurcation Diagram, Qualitative Simulation, Fall-out, Derailment, Perturbation, Stability. I. I NTRODUCTION It is not always possible to obtain exact solutions for dynamical systems but, it is not always necessary, sometimes it is enough only to retain some qualitative characteristics. For instance, in an economical system, it could be enough to maintain the profit positive and avoid losses or in an electrical system it could be enough to maintain it in a stable region to prevent a voltage collapse. The previous problem could be solved using fuzzy techniques as described in [3], [4] or using Qualitative Reasoning [5], [6]. Models based on qualitative information/representation pretend to mimic the way that humans perform inferences. In a dynamical system the variables that change slowly in relation to the rest of systems variables are called parameters (e.g. load in a electrical system, price rising, etc.). It has been proven that dynamical systems are sensible to parameter changes; even small changes can provoke modifications in the system’s topology and possible catastrophic events like voltage collapses [7], [8]. Such changes can lead to new solutions appearing, some other might disappear, or even present stability changes [9], [2]. The parameter values where these alterations occur are called bifurcation points. The knowledge of bifurcation points can aid control and design processes. The resulting relation between one or more of the system’s parameters and its solution’s topology is called a Bifurcation Diagram (BD) [2]. In this work we extend the previous work developed in [1] to create a novel representation for a qualitative two parameter bifurcation diagram, furthermore we define an algorithm to perform qualitative simulations over our proposed model. The rest of this paper is organized as follow: at Section II the work in [1] is describe. In Section III our two parameters for bifurcation diagrams is introduced. In Section IV the proposed algorithm is presented. At Section V the results of simulation using the proposed representation and algorithm is depicted and finally some conclusion are given II. ONE PARAMETER QUALITATIVE BIFURCATION DIAGRAMS Flores and Proskurowski [1] take the qualitative schemes created by Kuipers (QSIM)[5], [10], [11] and propose a qualitative representation for Bifurcation Diagrams, they then give a qualitative description for the events that can occur over a BD and develop an algorithm to perform qualitative simulation using BD and dynamical events. This section recalls the qualitative representation proposed in [1] for one parameter. In this paper we assume that the bifurcation diagram has been previously computed using any of the numerical techniques described in [12], or using numerical software like the ones presented in [13] or [14]. The proposed qualitative representation of a BD is defined based on the system’s state (i.e. x), a parameter r (for the one dimensional case), and the stability type. The transaction events that generate state changes are determined by dynamical events and perturbations. In any time the system’s state can be specified in terms of a quantitative space using limit points and landmarks. The limit points are defined in terms of the derivative direction and stability changes, i.e. a limit point is defined each time that the derivative direction or the stability changes. The landmarks have the same meaning that in QSIM but, additionally they can be used as points where a perturbation might occur. The quantitative value a variable can take on at limit point or within an interval, between two limit points. In the last case it is not known the exact value of the variable; it is only known that the variable is in the interval. The qualitative direction of the variable is determined by the sign of the derivative, i.e. the change rate of x with respect to r. A BDS is a region where the direction of change in x remains fixed but, the rate of change is not specified. In other words, the qualitative representation does not give enough information to draw curves. As a result, the obtained Qualitative Bifurcation Diagram (QBD) is built only using straight lines, without implying that the relationship between x and y is linear. Another important feature of the QBD is that the quantitative spaces do not include quantitative information about their elements, this implies that distances between limit points are relative. This situation may cause the qualitative version of a bifurcation diagrams look different from the quantitative one. 978-1-4799-5683-8/14/$31.00 ©2014 IEEE
Transcript of Qualitative simulation over two-parameter bifurcation diagrams

Qualitative Simulation over Two-ParameterBifurcation Diagrams
Jose Ortiz BejarDivision de Estudios de PosgradoFacultad de Ingenierıa Electrica
Universidad Michoacana deSan Nicolas de Hidalgo
Email: [email protected]
Juan J. Flores RomeroDivision de Estudios de PosgradoFacultad de Ingenierıa Electrica
Universidad Michoacana deSan Nicolas de HidalgoEmail: [email protected]
Garibaldi Pineda GarcıaSchool of Computer Science
The University of ManchesterEmail: [email protected]
Abstract—This work proposes a qualitative representation for bifurcation
diagrams with two varying parameters. We start from a previousdefined representation for a single parameter bifurcation diagramand add the neccesary definitions/constraints to extend it. Inorder to give sense to our proposed representation for bifurcationdiagrams an algoritmh to perform qualitative simulations isgiven; this algorithm is based on behavioural inference rulesfor a system going through dynamic events. The developedalgorithm is capable to generated all possible qualitativebehaviours under a user defined sequence of qualitative eventsand parameters changes.
Index Terms—Bifurcation Diagram, Qualitative Simulation,Fall-out, Derailment, Perturbation, Stability.
I. INTRODUCTION
It is not always possible to obtain exact solutions for dynamicalsystems but, it is not always necessary, sometimes it is enoughonly to retain some qualitative characteristics. For instance, inan economical system, it could be enough to maintain the profitpositive and avoid losses or in an electrical system it could beenough to maintain it in a stable region to prevent a voltagecollapse. The previous problem could be solved using fuzzytechniques as described in [3], [4] or using Qualitative Reasoning[5], [6]. Models based on qualitative information/representationpretend to mimic the way that humans perform inferences.
In a dynamical system the variables that change slowly inrelation to the rest of systems variables are called parameters(e.g. load in a electrical system, price rising, etc.). It hasbeen proven that dynamical systems are sensible to parameterchanges; even small changes can provoke modifications in thesystem’s topology and possible catastrophic events like voltagecollapses [7], [8]. Such changes can lead to new solutionsappearing, some other might disappear, or even present stabilitychanges [9], [2]. The parameter values where these alterationsoccur are called bifurcation points. The knowledge of bifurcationpoints can aid control and design processes. The resultingrelation between one or more of the system’s parameters and itssolution’s topology is called a Bifurcation Diagram (BD) [2].
In this work we extend the previous work developed in [1]to create a novel representation for a qualitative two parameterbifurcation diagram, furthermore we define an algorithm toperform qualitative simulations over our proposed model. Therest of this paper is organized as follow: at Section II thework in [1] is describe. In Section III our two parameters forbifurcation diagrams is introduced. In Section IV the proposed
algorithm is presented. At Section V the results of simulationusing the proposed representation and algorithm is depictedand finally some conclusion are given
II. ONE PARAMETER QUALITATIVE BIFURCATION DIAGRAMS
Flores and Proskurowski [1] take the qualitative schemescreated by Kuipers (QSIM)[5], [10], [11] and propose aqualitative representation for Bifurcation Diagrams, they thengive a qualitative description for the events that can occurover a BD and develop an algorithm to perform qualitativesimulation using BD and dynamical events. This section recallsthe qualitative representation proposed in [1] for one parameter.
In this paper we assume that the bifurcation diagram has beenpreviously computed using any of the numerical techniquesdescribed in [12], or using numerical software like the onespresented in [13] or [14].
The proposed qualitative representation of a BD is definedbased on the system’s state (i.e. x), a parameter r (for the onedimensional case), and the stability type. The transaction eventsthat generate state changes are determined by dynamical eventsand perturbations. In any time the system’s state can be specifiedin terms of a quantitative space using limit points and landmarks.The limit points are defined in terms of the derivative directionand stability changes, i.e. a limit point is defined each time thatthe derivative direction or the stability changes. The landmarkshave the same meaning that in QSIM but, additionally theycan be used as points where a perturbation might occur.
The quantitative value a variable can take on at limit pointor within an interval, between two limit points. In the last caseit is not known the exact value of the variable; it is only knownthat the variable is in the interval. The qualitative direction ofthe variable is determined by the sign of the derivative, i.e. thechange rate of x with respect to r.
A BDS is a region where the direction of change in xremains fixed but, the rate of change is not specified. In otherwords, the qualitative representation does not give enoughinformation to draw curves. As a result, the obtained QualitativeBifurcation Diagram (QBD) is built only using straight lines,without implying that the relationship between x and y is linear.Another important feature of the QBD is that the quantitativespaces do not include quantitative information about theirelements, this implies that distances between limit points arerelative. This situation may cause the qualitative version of abifurcation diagrams look different from the quantitative one.
978-1-4799-5683-8/14/$31.00 ©2014 IEEE

The QBD exhibits, in terms of limit points and landmarks,how the parameter r and the state x behave in each BifurcationDiagram Segment (BDS). For instance, Figure 1 shows thequantitative and qualitative version for the quintic equationx=rx+x3−x5 where the stable segments are represented bysolid lines and the unstable ones by dashed lines.
�� r0 r1 ri r2 �
��
x4
x3
x2
x1
�
(a) Qualitative
-1
-0.5
0
0.5
1
X
-0.8 -0.6 -0.4 -0.2 0 0.2 0.4r
(b) Quantitative
Figure 1. Bifurcation Diagrams for x=rx+x3−x5
A. Dynamical Events
It is necessary to define a qualitative representation that allowsto reason over a dynamical system based on its BD. Since we aredealing with two time scales, the transient response of the systemis considered instantaneous when compared to the time taken fora parameter to change. Stated differently, when the response ofthe system is observed, a parameter can be considered as constant.
With those considerations in mind, when we talk about asystem’s dynamics, we are referring to the set of changes inparameters and perturbations present throughout the analysisof the system. We also consider the changes of state variablesof the system as a part of the system’s dynamics,
B. Parameter Changes
Changes in the parameters are represented as a sequenceof qualitative states of each parameter. In [1] these changesare defined for a single parameter r (Section III presentsan extension for two parameters). This list of changes mayrepresent any qualitative continuous function of r with respectto time. Such function does not have to be monotonic, and mayhave as many extrema as necessary. Turning points of r in time(values for r where dr/dt is zero) establish landmarks for r.
C. Perturbations
The perturbations induced to the system for one varyingparameter can be represented as a list of single perturbations;a perturbation is a pair formed by the qualitative value of rwhere the perturbation occurs, and the qualitative direction ofthe perturbation itself. The domain of the qualitative directionof a perturbation is limited to {+,−}.
Now, perturbations occur at a given instant of time, so wecannot associate them to a given value of r, but to a value of rat that point in time. In order to avoid the explicit introductionof time in our representation, we include perturbations in thedescription of the behaviour of r, which implicitly contains time.
D. Dynamical Inference Rules
In terms of the system’s dynamics, a first-order system mayexhibit a limited set of features. If the system starts at a stablefixed point, and a perturbation is induced, the system will returnto the same stable fixed point (an attractor).
On the other hand, if the system starts at an unstable fixedpoint and a perturbation is produced, the system will be drivenaway from the fixed point, either to another stable fixed pointor to infinity.
In order to establish a limited set of precise rules for predictingbehaviour of the system under the presence of perturbations,Theorem 1 as previously defined in [1] is necessary.
Theorem 1 (Alternation of Fixed Points): Consider the first-order ODE x=f(x,r), where f is a continuously differentiablefunction, and r is a parameter. For a given value of r, the nature(i.e. the stability type) of the corresponding fixed points alternates.
Based on Theorem 1, we can define the following casesfor behaviour prediction in the presence of a perturbation. Ifthe system is at an unstable fixed point, a positive perturbationoccurs, and there is a stable fixed point above it, the system willstabilize at that fixed point; see Figure 2(a). If the system is atan unstable fixed point, a positive perturbation occurs, and thereis no fixed point above it, the system will “blow up” (i.e. it willtend to infinity); see Figure 2(b). If the system is at a stablefixed point, and a positive perturbation occurs, the system willreturn to the same attracting fixed point no matter whether thereis or there is not a fixed point above it; see Figures 2(c) and2(d). Similar cases occur for negative perturbations. Sub-figuresof Figure 2 show the state of the system before and after theperturbation, and the symbols we will use for each event ingraphical displays of the simulation.
Other types of events that may occur are what we call fallingoff on a bifurcation diagram. When the system is at a stablefixed point, and parameter r varies, the system will travel alongthe BDS that is lying at that point. If the BDS ends and there isno other BDS that places a fixed point at that state of the system,the system will be attracted by the nearest attracting fixed point.
Theorem 2 (describe in [1]) allows us to constrain the numberof cases that may occur in our simulation, and provides a moresolid background for the development of the algorithm.
Theorem 2 (No ambiguity on fall-offs): If a dynamic systemis found in the conditions described as fall-off, then the systemwill transit into exactly one stable fixed point.
Given Theorem 2, Figure 3 shows the possible cases fordecreasing r. Other two mirror cases are possible for increasing
978-1-4799-5683-8/14/$31.00 ©2014 IEEE

i+1x
ix
i+1x
ix
(a)
ix ix
(b)
i+1x
ix
i+1x
ix
(c)
ix ix
(d)
Figure 2. Predicting behavior caused by a perturbation
r. The thick line represents the behavior of x through time,moving along with r.
(a) (b)
Figure 3. Predicting behavior caused by fall-offs
If the system undergoes perturbations while at an unstablestate, or finds itself in a fall-off situation, the resulting changes inmagnitude may be dramatic. Those are called catastrophes, sincesuch changes in magnitude may take the system to states outsidethe operating region of the device. A catastrophe may make thedevice blow up, or if it is protected, to switch off. An exampleof such situation can be found in electrical systems, wherechanges (typically increases) in the load of a power system, maytake it to a state that makes the voltage drop, currents increase,and protections operate, producing the well known black-outs.Additionally to the rules defined in [1], here we consider thecase where a systems is operating in an unstable fixed point; thederivative of the BDS is zero and there is not a perturbation, thesystem can remain at that point (see Figure 4(a)). On the otherhand, r is infinitesimally modified and the derivative is differentfrom zero, this leads to the event described in Figure 4; the systemstate will be repelled from the unstable fixed point and attractedby the nearest stable fixed point. As consequence of Theorem 2,the system only can have one possible next state, above or belowfrom the current state. We call this event a derailment (this eventis first defined in [15]). The system can only go to infinity or toa stable fixed point. The direction of the change depends on thestate’s after the change, i.e. if the state ends above or below of
the current BDS. Therefore, in a derailment the direction of theparameter change and the sign of the derivative determine thenext system’s state. Figures 4(b) and 4(c) shows the case wherethe derivative is positive and the parameter r is decreased. It canbe observed that the state is floating above the BDS and as a resultthe states goes to the upper adjacent BDS (figure 4(c)) or ∞ (fig-ure 4(b)). In Figures 4(d) and 4(e) shows the cases where the stateis floating below the current segment when the parameter r isincreased. Mirrored events occurs when the derivative is negative.
R
X
R
(a)
ix ixR R
(b)
Rix ix
i+1x
R
(c)
x
RR
i
(d)
x
ix
RRi+1
(e)
Figure 4. Predicting behaviour caused by a derailment
E. Simulation
Using the previous rules it is possible to define a qualitativesimulation algorithm for a single system parameter. Given thatthe qualitative simulation algorithm was presented in([1]), anddue to space constraints we will concentrate on the qualitativesimulation algorithm using two parameter for a bifurcationdiagram and proceed to describe the qualitative description for3D bifurcations diagrams.
III. TWO PARAMETER BIFURCATION DIAGRAMS
In the previous section we defined a QBD for a one parameterbifurcation diagram. Now this is extended to generate a new repre-sentation which allows to perform inferences over two parametersBD, i.e. the parameters r and h. The bifurcation diagramsgenerated using two parameters results in a three dimensional BD.
The straightforward approach to create a representation fortwo parameters bifurcation diagrams is by mapping the previousdefined single parameter representation and adding the necessaryfeatures to any new cases.
978-1-4799-5683-8/14/$31.00 ©2014 IEEE

A. Using Two Parameters
In the single parameter case the BD is built using a two dimen-sional spatial representation; when a second parameter is consid-ered one must add another dimension to the BD. As a result, weneed to define a three dimensional representation (i.e. x, r and h).
In the two dimensional case, the BDS are defined as pointsor lines with a direction of change (derivative). For the 3Dcase it is necessary to add regions, e.i now the BDS can bepoints, lines o regions (rectangles). Adding to this definition,a quantitative space for h is enough to formulate a qualitativerepresentation for 3D bifurcation diagrams.
Each BDS is defined using a triplet〈qv(r, h), qstate(x), nature〉, where qv(r, h) can be anycombination of interval-point for each parameter, for exampleqv(r,h)=(r0,(h0,h1)) the BDS is a point for parameter r andan interval for parameter h; nature remains as in the case forone parameter; qstate(x) is a tuple (qv(x),qdirx), where q(x)can be a point, an interval or a region. The cases where q(x)is a point or an interval are the same as in the one parameterBD. While qdirx is a tuple (dr,dh) where dr is a change ofdirection in the r dimension and dh in the h dimension; and(dr,dh)∈{{−,+,0,?}×{−,+,0,?}}. Due to the definition forqv(r,h) the regions are constrained to be rectangular in theplane (r,h). As in the one parameter case, each BDS will bea region where the direction of change in x, r, and h does notchange and the stability type remains constant.
To represent a rectangular surface we useq(x) = (xa,xb,xc,xd) where the elements in q(x) determinethe height in each corner of the surface. The relation (r,h,x)is inferred using qdirx). For instance, consider that therelation is as in Figure 5 and qdirx = (0,0) this implies thatxa = xb = xc = xd. If qdirx = (+,−), it holds that in the rdirection that xa ≤ xc and xb < xd or xa < xc and xb ≤ xd.While in the h direction the conditions will be that xb≤xc andxd<xc or xb<xa and xd<xc. From the previous restrictioncan be deduced that xb≤xa≤xc≤xd. Using this reasoning itis always possible to infer the correspondence between qv(r,h)and q(x). This can be achieved by ordering the elements in q(x)and assigning them to each corner in order to satisfy qdirx.
Figure 5. Relation (r,h,x)
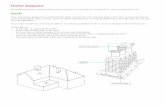
To illustrate how the QBD can be built using the proposedrepresentation, a BD for the biological system x=h+rx−x3
is used . First the numerical BD is generated using a softwarebased on an hybrid particle swarm optimization method([14]).The software builds Figure 6 by finding all the system solutions(fixed points) for a given pair of parameter values and varyingthem in a two dimensional range. In Figure 6 red points areunstable fixed points and green represents the stable ones.
R H
X nstable
table
X
Figure 6. Bifurcation diagram for the biological system
The variables, the quantitative spaces and the set of BDSare shown in Table I. The graphical representation for the BDis shown in Figure 7.
Figure 7. Bifurcation Diagram for Figure 6
Table IQUALITATIVE REPRESENTATION FOR THE SYSTEM x=h+rx−x3
Variables:{r,h,x}
Quantitative spaces:QS(x)=(x0,x1,x2,x3,x4,x5,x6,x7,x7)QS(r)=(r0,r1,r2,r3,0,r4,r5,r6,r7,r8)QS(h)=(0,h1,h2,h3,h4,h5)
Qualitative representation for a two parameters BD:x R r HR={〈((r0,r4),(h2,h5)),((x0,x0,x2,x3,),(+,0)),s〉,
〈((r1,r4),(h2,h5)),((x2,x3,x3,x3),(−,−)),us〉,〈((r0,r4),(h2,h5)),((x3,x3,x3,x4),(+,0)),s〉,〈((r4,r8),(h2,h5)),((x3,x4,x6,x7),(+,+)),s〉,〈((r0,r4),(0,h2)),((x0,x0,x3,x3,),(+,+)),s〉,〈((r4,r8),(0,h2)),((x3,x3,x5,x6,),(+,+)),s〉}
In this work the BDS are defined by hand. The BDS in theplane (r,h) were chosen as is seen in Figure 8, this Figureis a top view of the BD for the biological system. The areasA, C, and D match with one BDS each. While the area B ismapped to the folded zone of Figure 7, there is a BDS for eachone of the three layers in that area, for that a total of six BDSare defined for this BD. In area B in Figure 8, the uncertaintyintroduced by the model can be observed. Due to the fact thatthe model only allows rectangular areas, the layers in the areaare forced to be joined by a line, while in the original one theywere joined at a single point. Even though one could suppose
978-1-4799-5683-8/14/$31.00 ©2014 IEEE

that the system could be lead to the wrong layer during asimulation, this is not true at all; since that point is a bifurcationpoint and if the system is there and a parameter is increased, bydefinition the system’s state could evolve to any of the layers.This is exactly what our simulation algorithm does; it performsmultiple simulations, one for each possible system state.
Figure 8. Regions selection
B. Parameter Changes
The changes in parameters are represented as a sequenceof qualitative states. They are given in a list that represents acontinuous function of (r,h) with respect to time. Each point ofchange occurs at a limit point or landmark in the plane (r,h).
The behaviour in (r,h), B(r,h) is a qualitative descriptionof how (r,h) evolves over time. For two parameter case aqualitative state contains a pair of magnitude and a qualitativedirection for each parameter. B(r, h) is given by qstaterh.Where qstaterh is a tuple 〈(qv(r), qdirr), (qv(h), qdirh)〉,where qv(r)=(r1,r2) and qv(h)=(h1,h2) represent a changefrom point 1 to point 2 in each parameter. While qdirr, qdirhgive the direction of change an can be anyone from the set{0,+,−} (e.g., qdirr=0 when r1=r2).
C. Perturbations
A perturbation is defined as a tuple (qstaterh,qdirx, whereqstaterh is the qualitative value (r,h) where the perturbationoccurs and qdirx) is the perturbation’s direction, which canby any of the set {−,+}.
D. Dynamic Simulation for two-parameter BD
In this section we describe how the system evolves underthe presence of a dynamical event (i.e. perturbation, fall-off,and derailment).
Perturbations always occurs at landmarks or limit points.During a perturbation r and h are punctual, therefore theycan be considered constant during the perturbation. After aperturbation, if the system is at a stable segment, it will remainthere. On the other hand if the system is at an unstable segment,it will be attracted by the nearest stable region using rule definedat Figure 2 (according to Theorem 1, this region is unique).
Fall-offs in two dimensional BD presents three cases (seeFigure 9). Fall-off has three cases: in subfigure 9(a) it occurswhen the current BDS ends in the r direction; the case wherethe BDS ends in the h direction is exhibited by figure 9(b),finally, the case (Figure 9(c)) where the fall-off is occurs ata corner, i.e. the BDS ends in both directions (r and h). Aftera fall-off as in the perturbation case, the system will go to thenearest stable BDS (see Figure 3).
h
r
(a)
h
r
(b)
h
r
(c)
Figure 9. Fall off in two dimension
During a derailment, to determine the next state of thesystem could result in an ambiguous solution. When only oneparameter is varied we can use the rule in Figure 4 withoutcomplication. Ambiguity appears when the two parameters arevaried simultaneously.
Since it is difficult to illustrate graphically why the solution isambiguous, it will be explained using Table II. The table showsthe evolution direction in function of the derivative direction andthe direction change of the parameter, i.e. in what direction thesystem will evolve after a derailment (for one parameter BD). Forexample, row two gives the same information than Figure 4(b), i.e.if the parameter is decreased and the derivative is positive; the di-rection of the next BDS will be positive. In table II it can be seenthat when the sign of the derivative and the parameter change areequal the evolution’s direction is negative and positive otherwise.
Table IIDERAILMENT CHOICE TABLE
Parameter Derivative Evolution1 − − −2 − + +3 + − +4 + + −
To find an ambiguous solution during a derailment, in twoparameters BD it is only necessary to identify a case where thedirection of evolution determined for one parameter is inverse tothe dictated by the other. For instance, let qdirr=+, qdirh=+and the BDS’s derivative dirx=(+,−); by using Table II thedirection of evolution determined using the table for parameterr is negative, while the direction using h is positive.
To deal with this ambiguity, the proposed simulation algorithmwill fork and perform one simulation for each possible solution. Itis important to stress that this case only can occur if an unstablefixed point is given as an initial condition and results in at mosttwo possible next states, one for each parameter (see Theorem 1).
E. Ambiguity at bifurcation pointsAmbiguity also is present at bifurcation points. This
ambiguity is not due to the qualitativization, since by definitionat bifurcation points it is not possible to determine the systemstability [9]. To exhibit how ambiguity takes place, we useFigure 10. It is supposed that the system is at point P and stillover region B. The possible system evolution cases are:• Remains in B. If h decreases while r is constant, r increases
while h is constant or r increases and h decreases.• Goes to A. h and r are increased simultaneously.• Goes to F. Decreasing r and keeping h constant, or decreasingr and h simultaneously.
• Ambiguity. If h is increased and/or r is decreased. Thesystem could go to C or D.
978-1-4799-5683-8/14/$31.00 ©2014 IEEE

Figure 10. Ambiguity at bifurcation points
IV. QUALITATIVE SIMULATION
In this section an algorithm to perform qualitative simulationover 3D bifurcation diagrams will be defined. The inference ruleswill be defined using the concepts stated in sections II and III. Thealgorithm uses a sequence of parameter changes P , where at eachqualitative step srh in P the next system’s state is inferred. Theseis achieved by determining if one of the previous revised dynami-cal events took place and its occurrence provokes a BDS change.
As we already stated at derailments events and bifurcationpoints, may lead to more than one next system state. To takeinto account this situation, the proposed algorithm will becapable of performing a simulation for each possible next state.
The Algorithm for Qualitative Simulation (BDQSim2P,Algorithm 1) performs a simulation using two bifurcationparameters. This algorithm uses a stack (branches) to store andprocess ambiguous solutions. For instance, if during a simulationthe list of qualitative states visited by the system is {E1,E2}and an ambiguous solution is found (e.g. the next possible stateswere {Ei,Ej ,Ek}) the lists {E1,E2,Ej} and {E1,E2,Ek} willbe stored in branches . And the simulation continues using thelist {E1,E2,Ei}, the simulation will recursively evaluate thesolutions in the stack.
The variable Etmp (starts as an empty list) is used to savepartial results and k to remember in which step the ambiguitytook place (before first iteration k=0 and branches is an emptystack). In lines 5 to 8 it is verified if a perturbation or fall-offoccurred, the function nextState looks for all stable BDS whichcontain the point (r,h), where the event took place and by usingthe defined rules for a perturbation decided the next system’sstate. At line 9 the algorithm checks if a derailment exist or if thecurrent BDS ends. Function BDSends verifies if the system leftthe current BDS and goes to another without a dynamical eventoccurring, this situation could happen when the direction of thederivative changes but, the stability remains constant while thesystem is in a stable segment. If an event is found at lines 10 to14 the next states are calculated and stored in BDS list ; one ofthem is assigned to the variable BDS i, if there is more than onethe rest is added to branches and the list of visited qualitativestates are recorded by the time where the ambiguous eventwas found. In lines 18 and 19 the values for BDS0 (current
Algorithm 1 BDQSim2P(BDS 0,BD,P,k,branches,Etmp)
1: Etmp← add(x0,Pk)2: x0← valcx(BDS 0)3: for i=k to k=Length(P ) do4: srh←Pi
5: if perturbation?(BDS 0,srh) then6: BDS i← nextState(BDS 0, pert(srh), srh)7: else if fall-off?(BDS 0,srh) then8: BDS i← nextState(BDS 0,srh)9: else if derailment?(x0,srh) or BDSends?(x,srh) then
10: BDS list← nextState(BDS 0, srh)11: BDS i← pop(BDS list)12: if != empty?(BDS list) then13: for all BDSn in BDS list do14: branches← push({Etmp,BDSn,k})15: end for16: end if17: end if18: BDS 0←BDS i
19: k←k+120: Etmp← add(BDS i,srh)21: end for22: Er← add(Etmp)23: if emtyp(branches) then24: return Er
25: else26: Etmp,BDS 0,k← pop(branches)27: BDQSim2P(BDS 0,BD,P,k,branches,Er,Etmp)28: end if
state) and k are updated. At line 19 the result of the currentiteration is stored in Etmp, as the triplet (BDS0,srh,event)where srh are the qualitative values for parameters r, h andevent is the event that take place at that point. At line 22 thelist for a full simulation branch is stored in variable Er . In lines23 to 25 we test whether there exist any solution branches toexplore. If there is none, then the list Er (all possible system’sbehaviours) is returned. If there are remaining branches in thestack, the first is retrieved and the values for Etmp and BDS 0
are updated to continue the simulation. The simulation endswhen there are no more values in P and branches .
V. EXAMPLE OF 3D QUALITATIVE SIMULATION
In this section we will show the results of performing aqualitative simulation over the bifurcation diagram for thebiological system previously mentioned in section III. In orderto run the simulation we need to define the qualitative pathP for the parameters r and h. For our example, that path isrespresented by the data in Table III. This table shows how theparameters r and h are changed through the simulation. Eachelement contains initial and final values for r and h as wellas their respective changes in directions.
To start the simulation it the system is at landmark (r6,h1) overregion A from Figure 6. As a first variation, the parameter r isdecreased from r6 to r4 and, simultaneously, h is increased fromh1 to h2. The system remains in A. But when r is decrementedinfinitesimally from r4 towards r1 and h from h2 towards h4
the system can go to two possible next states. As a result a
978-1-4799-5683-8/14/$31.00 ©2014 IEEE

Table IIILIST OF QUALITATIVE CHANGES FOR PARAMETERS r AND h
P ={(((r6,r4),(h1,h2)),(−,+),{}),(((r4,r1),(h2,h4)),(−,+),{}}),(((r1,r0),h4),(−,0),{}}),((r0,(h2,h4)),(0,−),{}}),(((r0,r2),(h4,h2)),(+,−),{}})}}
simulation branch is generated for both regions D and C (seeFigure 10). The branch that evolves over D remains there untilthe point (r0,h2). At that point region D finishes and the systemchanges to region F and remains there for the rest of simulation.
On the other hand, for the case where the system changedto region C, the system remains in C until the system reachesthe point (r1,h4); when r is decreased from r1 to r0 a fall-offtakes place and the system goes to region D. For the rest ofthe points in P the behaviour of the system is the same thatthe one for the first branch.
From the results two possible behaviours can be observed forthe defined sequence of parameter variation. The first branchis described by Figure 11(a), where the system exhibits asmooth evolution from the point (r6,h1) to (r4,h2). While inthe second case (see Figure 11(b)), when the system’s evolutionreaches the point (r1,h4) and as soon as r is increased, thesystem suffers a fall-off, with its associated catastrophic. Theresults for the two possible behaviours are shown graphicallyin figure 11 and in tabular form in tables IV and V.
��r0 r1 r2 r3 0 r4 r5 r6 r7 r8 �
r
��
0h1h2h3h4h5h6�h
��
x0
x1
x2
x3
x4
x5
x6
x7
�
x
(a) Branch A
��r0 r1 r2 r3 0 r4 r5 r6 r7 r8 �
r
��
0h1h2h3h4h5h6�
h
��
x0
x1
x2
x3
x4
x5
x6
x7
�
x
(b) Branch B
Figure 11. Graphical results for qualitative simulation
Table IVTABULAR FORM RESULTS FOR BRANCH A
RP ={(〈((r4,r8),(0,h2)),((x3,x3,x5,x6,),(+,+)),s〉,(r6,h1),Start),〈((r4,r8),(0,h2)),((x3,x3,x5,x6,),(+,+)),s〉,(r4,h2),Next),(〈((r0,r4),(h2,h5)),((x0,x0,x2,x3,),(+,0)),s〉,(r1,h4),Next),(〈((r0,r4),(h2,h5)),((x0,x0,x2,x3,),(+,0)),s〉,(r0,h4),Next),(〈((r0,r4),(h2,h5)),((x0,x0,x2,x3,),(+,0)),s〉,(r0,h2),Next),(〈((r0,r4),(0,h2)),((x0,x0,x3,x3,),(+,0)),s〉,(r2,h1),Next)}
VI. CONCLUSIONS
In this work, and in [1] ideas about geometric reasoning,mainly exposed in [2], are used to build a qualitative representa-tion for BD. We extended the representation defined in [1] to work
Table VTABULAR FORM RESULTS FOR BRANCH B
RP ={(〈((r4,r8),(0,h2)),((x3,x3,x5,x6,),(+,+)),s〉,(r6,h1),Start),〈((r4,r8),(0,h2)),((x3,x3,x5,x6,),(+,+)),s〉,(r4,h2),Next),(〈((r1,r4),(h2,h5)),((x3,x3,x3,x4,),(+,+)),s〉,(r1,h4),Next),(〈((r0,r4),(h2,h5)),((x0,x0,x2,x3,),(+,0)),s〉,(r1,h4),FallOff),(〈((r0,r4),(h2,h5)),((x0,x0,x2,x3,),(+,0)),s〉,(r0,h2),Next),(〈((r0,r4),(0,h2)),((x0,x0,x3,x3,),(+,0)),s〉,(r2,h1),Next)}
with two-parameter bifurcation diagrams and proposed an algo-rithm to perform qualitative simulation over our representation.
The proposed simulation algorithm is capable of, given aBD and a sequence of parameters changes/perturbations P (userproposed), finding a set of all possible sequences of qualitativestates. Those are the possible behaviours when P is appliedto the system.
We implemented a Mathematica [16] library to performqualitative simulation for one or two parameter bifurcationdiagrams using the described algorithm. The developed librarywas tested with multiple bifurcation diagrams and differentqualitative paths for each one (data not shown in this paper).
REFERENCES
[1] J. J. Flores and A. Proskurowski, “Resasoning about dynamic systemsand bifurcation,” ser. QR 2005, March 2005.
[2] S. H. Strogatz, Nonlinear Dynamics and Chaos with Applications toPhysics, Biology and Engineering. Westview Press, 1994.
[3] A. Bonarini and G. Bontempi, “A qualitative simulationapproach for fuzzy dynamical models,” Modeling and ComputerSimulation, vol. 4, no. 4, pp. 285–313, 1994. [Online]. Available:citeseer.ist.psu.edu/bonarini94qualitative.html
[4] R. Bellazzi, R. Guglielmann, and L. Ironi, “A qualitative-fuzzyframework for nonlinear black-box system identification,”in IJCAI, 1999, pp. 1041–1046. [Online]. Available:citeseer.ist.psu.edu/bellazzi99qualitativefuzzy.html
[5] B. J. Kuipers, “Commonsense reasonig about causality: Deriving behaviorfrom structura,” Cambrige, MA. MIT Press, 1984.
[6] H. Rodriguez, A. M. Farley, J. J. Flores, and A. Proskurowski, “Qualitativebifurcation diagrams,” in Expert Systems, 2013.
[7] V. Chin-Woo, T.; Matthew and V. Pravin, “Bifurcation, chaos, andvoltage collapse in power systems,” ser. Proceedings of the IEEE, vol. 83,November 1995, pp. 1484–1496.
[8] H. O. A. E. H. Wang and H. A. M. A., “Bifurcation, chaos and crisisin voltage collapse of a model power system,” ser. IEEE Transactionson circuits and systems, vol. 41, March 1994, pp. 294–302.
[9] A. H. Nayfhe and B. Balachandran, Applied Nonlinear Dynamics,Analytical, Computational and Experimental Methods. John Wiley &Sons, Inc., 1995.
[10] B. J. Kuipers and B. J. S., “Qualitative simulation,” vol. 29, 1986, pp.289–338.
[11] B. J. Kuipers, “Qualitative reasonig: Modelind and simulation withincomplete knowledge,” Cambrige, MA. MIT Press, 1994.
[12] H. B. Keller, “Numerical methods in bifurcation problems,” Cambrige,MA. Springer-Verlag, 1987.
[13] B. Ermentrout, Simulating, Analyzing, and Animating Dynamical Systems:A Guide to Xppaut for Researchers and Students. SIAM.
[14] J. Barrera and J. Flores, “Generating complete bifurcation diagrams usinga dynamic enviroment particle swarm optimization algorithm,” in ArtificialEvolution and Applications, 2008.
[15] J. Ortiz-Bejar, “Simulacion cualitativa sobre diagramas de bifurcacion,”Master’s thesis, Universidad Michoacan de San Nicolas de Hidalgo, 2008.
[16] Wolfram, The Mathematica Book. Cambridge University Press, 2007.
978-1-4799-5683-8/14/$31.00 ©2014 IEEE