
PROTÓTIPO DE UMA INTERFACE HOMEM-COMPUTADOR ...
144
PROTÓTIPO DE UMA INTERFACE HOMEM-COMPUTADOR BASEADA EM INTERAÇÃO POR VOZ, GESTOS, MULTITOQUE E TRANSPARÊNCIA PARA AUTOMAÇÃO PREDIAL Altemar Sales de Oliveira Tese de Doutorado apresentada ao Programa de Pós-graduação em Engenharia Civil, COPPE, da Universidade Federal do Rio de Janeiro, como parte dos requisitos necessários à obtenção do título de Doutor em Engenharia Civil. Orientadores: Luiz Landau Gerson Gomes Cunha Rio de Janeiro Julho de 2014
-
Upload
khangminh22 -
Category
Documents
-
view
0 -
download
0
Transcript of PROTÓTIPO DE UMA INTERFACE HOMEM-COMPUTADOR ...
PROTÓTIPO DE UMA INTERFACE HOMEM-COMPUTADOR BASEADA EM
INTERAÇÃO POR VOZ, GESTOS, MULTITOQUE E TRANSPARÊNCIA PARA
AUTOMAÇÃO PREDIAL
Altemar Sales de Oliveira
Tese de Doutorado apresentada ao Programa
de Pós-graduação em Engenharia Civil,
COPPE, da Universidade Federal do Rio de
Janeiro, como parte dos requisitos necessários
à obtenção do título de Doutor em Engenharia
Civil.
Orientadores: Luiz Landau
Gerson Gomes Cunha
Rio de Janeiro
Julho de 2014
PROTÓTIPO DE UMA INTERFACE HOMEM-COMPUTADOR BASEADA EM
INTERAÇÃO POR VOZ, GESTOS, MULTITOQUE E TRANSPARÊNCIA PARA
AUTOMAÇÃO PREDIAL
Altemar Sales de Oliveira
TESE SUBMETIDA AO CORPO DOCENTE DO INSTITUTO ALBERTO LUIZ
COIMBRA DE PÓS-GRADUAÇÃO E PESQUISA DE ENGENHARIA (COPPE) DA
UNIVERSIDADE FEDERAL DO RIO DE JANEIRO COMO PARTE DOS REQUISITOS
NECESSÁRIOS PARA A OBTENÇÃO DO GRAU DE DOUTOR EM CIÊNCIAS EM
ENGENHARIA CIVIL.
Examinada por:
_____________________________________________
Prof. Luiz Landau, D.Sc.
_____________________________________________
Prof. Gerson Gomes Cunha, D.Sc.
_____________________________________________
Prof. José Luis Drummond Alves, D.Sc.
_____________________________________________
Prof. Antônio Carlos de Abreu Mol, D.Sc.
_____________________________________________
Prof. Francisco Jose de Castro Moura Duarte, D.Sc.
_____________________________________________
Prof. Saulo Barbara de Oliveira, D.Sc.
.
RIO DE JANEIRO, RJ - BRASIL
JULHO DE 2014

iii
Oliveira, Altemar Sales de
Protótipo de uma interface homem-computador
baseada em interação por voz, gestos, multitoque e
transparência para automação predial/Altemar Sales de
Oliveira. – Rio de Janeiro: UFRJ/COPPE, 2014.
XV, 129 p.: il.; 29,7 cm.
Orientadores: Luiz Landau
Gerson Gomes Cunha
Tese (doutorado) – UFRJ/ COPPE/ Programa de
Engenharia Civil, 2014.
Referências Bibliográficas: p. 107-123.
1. Automação Predial. 2. Computação Ubíqua. 3.
Interface Natural. I. Luiz Landau et al. II. Universidade
Federal do Rio de Janeiro, COPPE, Programa de
Engenharia Civil. III. Titulo.

iv
‘...para explorar novos mundos, para pesquisar novas vidas, novas civilizações...
Audaciosamente indo onde nenhum homem jamais esteve !’
Gene Roddenberry

v
Dedico este trabalho,
primeiramente ao Senhor Jesus e a
Deus que escolheu as coisas
loucas deste mundo para confundir
as sábias.
À minha esposa Rosa Amelita, por
ter incentivado, suportado e
acreditado na realização dele.
vi
AGRADECIMENTOS
Agradeço a Deus,
por intermédio do seu filho Jesus, porque Ele me concedeu
graça e misericórdia até aqui.
À minha mãe,
que por suas virtudes completa a tarefa de ser
simplesmente mãe, principalmente nos momentos difíceis.
À minha esposa Rosa Amelita,
pelo amor, paciência e dedicação, que demonstrou durante
esse e tantos outros períodos.
Ao meu orientador Gerson Cunha,
por sua longanimidade aliada à simplicidade múltipla,
encorajando sempre a irmos mais longe.
À professora Cristina Haguenauer,
que me indicou os primeiros degraus a serem trilhados na
academia, desde a faculdade de educação da UFRJ.
Ao meu orientador professor Luiz Landau,
pelo apoio, pela colaboração, pela parceria, por estar
sempre disponível e pela sua confiança.
A Elizabeth Cornélio e Jairo A. Leite, secretaria acadêmica,
pela competência e parceria na orientação de todo processo
burocrático.
Ao CNPq pelo patrocínio financeiro.
vii
Resumo da Tese apresentada à COPPE/UFRJ como parte dos requisitos necessários
para a obtenção do grau de Doutor em Ciências (D.Sc.)
PROTÓTIPO DE UMA INTERFACE HOMEM-COMPUTADOR BASEADA EM
INTERAÇÃO POR VOZ, GESTOS, MULTITOQUE E TRANSPARÊNCIA PARA
AUTOMAÇÃO PREDIAL
Altemar Sales de Oliveira
Julho/2014
Orientadores: Luiz Landau
Gerson Gomes Cunha
Programa: Engenharia Civil
Interação mais ajustada, natural, flexível e adequada ao usuário tem sido
campo de estudo, na tentativa de criar interfaces de dispositivos mais próximas da
comunicação humana, inclusive em aplicações baseadas em voz e gestos.
Desenvolver essas interfaces, com o objetivo de atestar sua usabilidade no ambiente
de trabalho, faz-se necessário, visto que a tecnologia computacional está presente no
cotidiano profissional.
Este trabalho tem como objetivo projetar uma interface baseada em gestos, no
reconhecimento de voz e projeção em superfícies transparentes para automação
predial. Para isso, foram realizados estudos sobre interfaces gestuais, conceitos,
métricas, medidas, atributos e critérios de usabilidade. Posteriormente, procedeu-se
ao levantamento das necessidades, tendo em vista a visualização de apresentações,
controle de dispositivos e a escolha de gestos e comandos de voz, a serem utilizados
pelos usuários durante a interação com essas apresentações e o controle de
dispositivos prediais.
Para validar a interface em questão, foi construído um protótipo totalmente
funcional. Quanto aos resultados obtidos pela aplicação desse protótipo pode-se
perceber positivamente que a interação baseada em gestos e o reconhecimento de
voz atendeu aos usuários em relação a eficiência, a facilidade de aprender, a
facilidade de memorizar e de satisfação em usá-la. Pode-se constatar também que se
trata de uma inovação a baixo custo na área de domótica.

viii
Abstract of Thesis presented to COPPE/UFRJ as a partial fulfillment of the
requirements for the degree of Doctor of Science (D.Sc.)
PROTOTYPE OF AN INTERFACE BASED HUMAN-COMPUTER INTERACTION BY
VOICE, GESTURES, MULTI-TOUCH AND TRANSPARENCY FOR BUILDING
AUTOMATION
Altemar Sales de Oliveira
July/2014
Advisors: Luiz Landau
Gerson Gomes Cunha
Department: Civil Engineering
Interact more adjusted, natural, flexible and appropriate to the user has been a
study area in an attempt to create nearest devices of human interaction, including
voice-based applications, poses and gestures. Evaluate these interfaces in order to
attest to its usability on the desktop, it is necessary, since the computational
technology is present in the everyday professional.
This work aims to design a gesture-based, speech recognition and transparent
projection surfaces for building automation interface. For this reason, studies on
gestural interfaces, concepts, metrics, measures, attributes and usability criteria were
performed. Subsequently, we proceeded to assess the needs in order to visualize
presentations, control devices and the choice of gestures and voice commands, to be
used by users during interaction with these presentations and control of building
devices.
To validate the interface in question, we built a fully functional prototype, using
the methodology of developing object-oriented systems. As for the results obtained
from the application of this prototype can be perceived positively that interaction based
on gestures and voice recognition users answered regarding the efficiency, ease of
learning, ease to memorize and satisfaction in using it. One can also see that it is a low
cost innovation in the field of domotics.
ix
SUMÁRIO
LISTA DE FIGURAS .................................. ................................................................. xi
LISTA DE TABELAS .................................. ................................................................ xii
LISTA DE GRÁFICOS ................................. .............................................................. xiii
LISTA DE SIGLAS E ABREVIAÇÕES ..................... ................................................. xiv
CAPÍTULO 1 ........................................ ........................................................................ 1
1. Introdução ..................................... .......................................................................... 1
1.1. O PROBLEMA ....................................................................................................................... 1 1.2. OBJETIVO ............................................................................................................................. 5 1.3. JUSTIFICATIVA ...................................................................................................................... 5 1.4. ORGANIZAÇÃO DO TRABALHO................................................................................................ 8
CAPÍTULO 2 ........................................ ........................................................................ 9
2. Interfaces não Convencionais e Trabalhos Relacio nados ................................... 9
2.1. INTERFACES DE USUÁRIOS (IU): HISTÓRIA E CONCEITOS ENVOLVIDOS ................................... 9 2.2. INTERFACES GESTUAIS ....................................................................................................... 23 2.3. INTERFACES MULTI-TOUCH ................................................................................................. 28 2.4. INTERFACES CONTROLADAS POR VOZ ................................................................................. 34 2.5. MICROSOFT KINECT ............................................................................................................ 35 2.7. ARDUINO ............................................................................................................................ 40
CAPÍTULO 3 ........................................ ...................................................................... 44
3. Usabilidade de Interfaces ...................... ............................................................... 44
3.1. CONCEITOS E CONSIDERAÇÕES .......................................................................................... 44 3.2. MÉTODOS E MEDIDAS DE AVALIAÇÃO .................................................................................. 47
CAPÍTULO 4 ........................................ ...................................................................... 57
4. Metodologia .................................... ....................................................................... 57
4.1. TIPO DA PESQUISA ............................................................................................................. 57 4.2. CENÁRIO ............................................................................................................................ 57 4.3. SUJEITOS ........................................................................................................................... 58 4.4. INSTRUMENTOS E TÉCNICAS DE COLETA E DE TRATAMENTO DE DADOS................................. 59 4.5. ETAPAS .............................................................................................................................. 59
CAPÍTULO 5 ........................................ ...................................................................... 61
5. Automação de Ambientes ......................... ........................................................... 61
5.1. CONCEITOS E CONSIDERAÇÕES .......................................................................................... 61 5.1.1. Edifícios Inteligentes ................................................................................................. 61 5.1.2. Domótica ................................................................................................................... 65
5.2. TRABALHOS RELACIONADOS ............................................................................................... 66
CAPÍTULO 6 ........................................ ...................................................................... 75
6. A Construção do Protótipo - inOctopus .......... .................................................... 75
6.1. LEVANTAMENTO DAS NECESSIDADES DO USUÁRIO ............................................................... 75 6.2. A ESCOLHA DO HARDWARE E SOFTWARE ............................................................................ 78 6.3. DESENVOLVIMENTO E DESCRIÇÃO DO PROTÓTIPO ............................................................... 80 6.4. ANALISANDO OS ASPECTOS MUTI-TOUCH, TRANSPARÊNCIA E CUSTO ................................... 86 6.5. LIMITAÇÕES ........................................................................................................................ 89
CAPÍTULO 7 ........................................ ...................................................................... 91

x
7. Validação da Interface ......................... ................................................................. 91
7.1. INSTRUMENTOS DE VALIDAÇÃO ........................................................................................... 91 7.2. DINÂMICA DE USO DA SOLUÇÃO .......................................................................................... 92 7.3. DESCRIÇÃO DOS RESULTADOS DA APLICAÇÃO DO QUESTIONÁRIO DE VALIDAÇÃO.................. 93 7.5. DISCUSSÃO SOBRE OS RESULTADOS................................................................................... 96
CAPÍTULO 8 ........................................ ...................................................................... 98
8. Conclusões, Contribuições e Perspectivas Futura s ......................................... 98
APÊNDICE 1 ............................................................................................................ 104
ENTREVISTA PARA LEVANTAMENTO DAS NECESSIDADES DO USUÁRIO .................. 104
APÊNDICE 2 ............................................................................................................ 105
QUESTIONÁRIO DE AVALIAÇÃO DO INOCTOPUS ............................................................... 105
REFERÊNCIAS BIBLIOGRÁFICAS ........................ ................................................. 107
ANEXO 1 .................................................................................................................. 124
GRÁFICOS DO CONTROLE DE APRESENTAÇÃO POR GESTOS ....................................................... 124
Gráfico 6 - Resultado da validação do inOctopus para o atributo Facilidade de Aprender .......................................................................................................................................... 124 Gráfico 7 - Resultado da validação do inOctopus para o atributo Facilidade de Memorizar .......................................................................................................................................... 124 Gráfico 8 - Resultado da validação do inOctopus para o atributo Feedback ................... 124 Gráfico 9 - Resultado da validação do inOctopus para o atributo Erros .......................... 125 Gráfico 10 - Resultado da validação do inOctopus para o atributo Efiência .................... 125 Gráfico 11 - Resultado da validação do inOctopus para o atributo Satisfação ................ 125
GRÁFICOS DO CONTROLE DO MOVIMENTO DAS CÂMERAS POR GESTOS ....................................... 126 Gráfico 12 - Resultado da validação do inOctopus para o atributo Facilidade de Aprender .......................................................................................................................................... 126 Gráfico 13 - Resultado da validação do inOctopus para o atributo Facilidade de Memorizar .......................................................................................................................................... 126 Gráfico 14 - Resultado da validação do inOctopus para o atributo Feedback ................. 126 Gráfico 15 - Resultado da validação do inOctopus para o atributo Erros ........................ 127 Gráfico 16 - Resultado da validação do inOctopus para o atributo Efiência .................... 127 Gráfico 17 - Resultado da validação do inOctopus para o atributo Satisfação ................ 127
GRÁFICOS DO CONTROLE DE DISPOSITIVOS POR RECONHECIMENTO DE VOZ ............................... 128 Gráfico 18 - Resultado da validação do inOctopus para o atributo Facilidade de Aprender .......................................................................................................................................... 128 Gráfico 19 - Resultado da validação do inOctopus para o atributo Facilidade de Memorizar .......................................................................................................................................... 128 Gráfico 20 - Resultado da validação do inOctopus para o atributo Feedback ................. 128 Gráfico 21 - Resultado da validação do inOctopus para o atributo Erros ........................ 129 Gráfico 22 - Resultado da validação do inOctopus para o atributo Efiência .................... 129 Gráfico 23 - Resultado da validação do inOctopus para o atributo Satisfação ................ 129

xi
LISTA DE FIGURAS
FIGURA 1 - PROJEÇÃO SOBRE VIDRO ................................................................................................ 3
FIGURA 2 - UBI DISPLAYS: PROJETADA EM SUPERFÍCIE ...................................................................... 3
FIGURA 3 - SENSEBOARD ............................................................................................................... 18
FIGURA 4 - SURFACE UMA MESA INTERATIVA ................................................................................... 18
FIGURA 5 - PAPERWINDOWS .......................................................................................................... 20
FIGURA 6 - PAPERPHONE ............................................................................................................... 20
FIGURA 7 - GUMMI DA SONY ........................................................................................................... 21
FIGURA 8 - TOSHIBA QOSMIO COM TECNOLOGIA HAND GESTURE CONTROL ..................................... 28
FIGURA 9 - PRIMEIRO SISTEMA MULTI-TOUCH DESENVOLVIDO POR BILL BUXTON ............................... 29
FIGURA 10 - SISTEMA MULTI-TOUCH - DIAMOND TOUCH ................................................................... 30
FIGURA 11 - SISTEMA MULTI-TOUCH SMART SKIN. ........................................................................... 31
FIGURA 12 - O SISTEMA MULTI-TOUCH TOUCHLIGHT ........................................................................ 31
FIGURA 13 - MÉTODO FTIR ........................................................................................................... 32
FIGURA 14 - MÉTODO ILUMINAÇÃO DIFUSA ...................................................................................... 33
FIGURA 15 - RECONHECIMENTO SUBVOCAL ..................................................................................... 34
FIGURA 16 - KINECT....................................................................................................................... 36
FIGURA 17 - REPRESENTAÇÃO DOS COMPONENTES DO KINECT PARA WINDOWS ............................... 37
FIGURA 18 - CAMPO DE VISÃO DO KINECT ....................................................................................... 37
FIGURA 19 - ESQUELETIZAÇÃO DAS ARTICULAÇÕES RECONHECIDAS PELO KINECT ............................ 38
FIGURA 20 – APLICAÇÃO FREAK’N GENIUS, GESTSURE ................................................................... 39
FIGURA 21 – APLICAÇÃO IKKOS .................................................................................................... 39
FIGURA 22 - ARDUINO UNO R3 ....................................................................................................... 40
FIGURA 23 - ARDUINO MEGA .......................................................................................................... 41
FIGURA 24 - ARDUINO NANO .......................................................................................................... 41
FIGURA 25 - ARDUINO FIO .............................................................................................................. 41
FIGURA 26 - ARDUINO LILYPAD ...................................................................................................... 42
FIGURA 27 - MÓDULO ETHERNET SHIELD ........................................................................................ 42
FIGURA 28 - UM LABORATÓRIO DO LAMCE .................................................................................... 58
FIGURA 29 - TRANSPARÊNCIA EM SUPERFÍCIE NÃO PLANA ................................................................ 70
FIGURA 30 - GPS COM PROJEÇÃO NO VIDRO DO CARRO .................................................................. 70
FIGURA 31 - DREAMWALL .............................................................................................................. 71
FIGURA 32 - DREAMSCREEN3000 .................................................................................................. 71
FIGURA 33 - DREAMWINDOW ......................................................................................................... 72
FIGURA 34 - ADAPTADOR PARA USO NO PC .................................................................................... 78
FIGURA 35 - MINI ROTEADOR SEM FIO ............................................................................................. 79
FIGURA 36 - FM MÓDULO .............................................................................................................. 79
FIGURA 37 - CÂMERA DE SEGURANÇA ............................................................................................. 79
FIGURA 38 - TELA TOUCH SCREEN FLEXÍVEL E FIGURA 39 - PROJETOR DE BOLSO PHILIPS ................. 80
FIGURA 40 - QUADRO SEQUENCIAIS DO GESTO ACENO .................................................................... 83
FIGURA 41 - TELA DE PRINCIPAL DO INOCTOPUS ............................................................................. 85
FIGURA 42 - INOCTOPUS PROJETADO EM SUPERFÍCIE TRANSPARENTE .............................................. 85
FIGURA 43 - PROJEÇÃO EM PELÍCULA TRANSLÚCIDA, VISTA POR TRÁS .............................................. 87
FIGURA 44 - PROJEÇÃO EM PELÍCULA TRANSLÚCIDA, VISTA PELA FRENTE ......................................... 87
FIGURA 45 - PROJEÇÃO EM PELÍCULA TRANSLÚCIDA COMPLETA ....................................................... 88

xii
LISTA DE TABELAS
TABELA 1 - CUSTOS DE PELÍCULAS ................................................................................................. 89
TABELA 2 - PERCENTUAIS DE RESPOSTAS FAVORÁVEIS E DESFAVORÁVEIS PARA O INOCTOPUS-APRESENTAÇÃO POR GESTOS ................................................................................................ 94
TABELA 3- PERCENTUAIS DE RESPOSTAS FAVORÁVEIS E DESFAVORÁVEIS PARA O INOCTOPUS- CÂMERA POR GESTOS ......................................................................................................................... 95
TABELA 4 - PERCENTUAIS DE RESPOSTAS FAVORÁVEIS E DESFAVORÁVEIS PARA O INOCTOPUS- DISPOSITIVOS POR VOZ .......................................................................................................... 95

xiii
LISTA DE GRÁFICOS
GRÁFICO 1 - PERCENTUAIS DE ACEITAÇÃO PARA CONTROLE DOS DISPOSITIVOS POR GESTOS E VOZ .. 76
GRÁFICO 2 - PERCENTUAIS DE ACEITAÇÃO PARA CONTROLE DOS DISPOSITIVOS POR SENSORES ........ 77
GRÁFICO 3 - PERCENTUAIS DE ACEITAÇÃO PELOS ENTREVISTADOS POR COMANDOS DO POWERPOINT ............................................................................................................................................ 77
GRÁFICO 4 - PERCENTUAL DE EXPERIÊNCIA NA UTILIZAÇÃO DE INTERAÇÃO POR VOZ E POR GESTOS .. 96
GRÁFICO 5 - RESULTADOS COM RELAÇÃO À QUESTÃO SOBRE AO USO DA TRANSPARÊNCIA TER SIDO PRAZEROSA .......................................................................................................................... 96
GRÁFICO 6 - RESULTADO DA VALIDAÇÃO DO INOCTOPUS PARA O ATRIBUTO FACILIDADE DE APRENDER .......................................................................................................................................... 124
GRÁFICO 7 - RESULTADO DA VALIDAÇÃO DO INOCTOPUS PARA O ATRIBUTO FACILIDADE DE MEMORIZAR .......................................................................................................................................... 124
GRÁFICO 8 - RESULTADO DA VALIDAÇÃO DO INOCTOPUS PARA O ATRIBUTO FEEDBACK ................... 124
GRÁFICO 9 - RESULTADO DA VALIDAÇÃO DO INOCTOPUS PARA O ATRIBUTO ERROS ........................ 125
GRÁFICO 10 - RESULTADO DA VALIDAÇÃO DO INOCTOPUS PARA O ATRIBUTO EFIÊNCIA ................... 125
GRÁFICO 11 - RESULTADO DA VALIDAÇÃO DO INOCTOPUS PARA O ATRIBUTO SATISFAÇÃO .............. 125
GRÁFICO 12 - RESULTADO DA VALIDAÇÃO DO INOCTOPUS PARA O ATRIBUTO FACILIDADE DE APRENDER .......................................................................................................................................... 126
GRÁFICO 13 - RESULTADO DA VALIDAÇÃO DO INOCTOPUS PARA O ATRIBUTO FACILIDADE DE MEMORIZAR ........................................................................................................................ 126
GRÁFICO 14 - RESULTADO DA VALIDAÇÃO DO INOCTOPUS PARA O ATRIBUTO FEEDBACK ................. 126
GRÁFICO 15 - RESULTADO DA VALIDAÇÃO DO INOCTOPUS PARA O ATRIBUTO ERROS ...................... 127
GRÁFICO 16 - RESULTADO DA VALIDAÇÃO DO INOCTOPUS PARA O ATRIBUTO EFIÊNCIA ................... 127
GRÁFICO 17 - RESULTADO DA VALIDAÇÃO DO INOCTOPUS PARA O ATRIBUTO SATISFAÇÃO .............. 127
GRÁFICO 18 - RESULTADO DA VALIDAÇÃO DO INOCTOPUS PARA O ATRIBUTO FACILIDADE DE APRENDER .......................................................................................................................................... 128
GRÁFICO 19 - RESULTADO DA VALIDAÇÃO DO INOCTOPUS PARA O ATRIBUTO FACILIDADE DE MEMORIZAR ........................................................................................................................ 128
GRÁFICO 20 - RESULTADO DA VALIDAÇÃO DO INOCTOPUS PARA O ATRIBUTO FEEDBACK ................. 128
GRÁFICO 21 - RESULTADO DA VALIDAÇÃO DO INOCTOPUS PARA O ATRIBUTO ERROS ...................... 129
GRÁFICO 22 - RESULTADO DA VALIDAÇÃO DO INOCTOPUS PARA O ATRIBUTO EFIÊNCIA ................... 129
GRÁFICO 23 - RESULTADO DA VALIDAÇÃO DO INOCTOPUS PARA O ATRIBUTO SATISFAÇÃO .............. 129

xiv
LISTA DE SIGLAS E ABREVIAÇÕES
ASL Linguagem Americana de Sinais
AURESIDE Associação Brasileira de Automação Residencial
AVC Acidente Vascular Cerebral
ELA Esclerose Lateral Amiotrófica
BCI Interfaces Cérebro-Computador
CFTV Circuito Fechado de TV
CLI Interação por Linhas de Código
CMOS Sensor Complementary Metal–Oxide–Semiconductor
CNPq Conselho Nacional de Desenvolvimento Científico e Tecnológico
CRT Tubo de Raios Catódicos
DI Diffused Illumination
ECoG Eletrocorticografia
EEG Eletroencefalografia
EI Edifício Inteligente
EIBG European Intelligent Builiding Group
EM Esclerose Múltipla
Finep Financiadora de Estudos e Projetos
FOLED Flexible Organic Light-Emitting Diode
FTIR Frustrated Total Internal Reflection
GPS Sistema de Posicionamento Global
GUI Interface Gráfica do Usuário
IBI Intelligent Buildings Institute
IBSC Intelligent Building Study Committee
IDE Ambiente Integrado de Desenvolvimento
IG Interface Gestual
IHC Interação Homem-Computador
ISO Organização Internacional para Padronização
JSL Linguagem Japonesa de Sinais
KUI Interface Cinética do Usuário
LabCog Laboratório de Pesquisa e Desenvolvimento em Interfaces
Humano-Computador
LAMCE Laboratório de Métodos Computacionais em Engenharia
LCD Display de Cristal Líquido
NBR Normas Brasileiras
NUI Interface Natural do Usuário
xv
OLED Diodo Emissor de Luz Orgânico
OUI Interface Orgânica do Usuário
QUIS Questionnaire for User Interaction Satisfaction
RA Realidade Aumentada
RGB Vermelho (Red), Verde (Green) e Azul (Blue)
RV Realidade Virtual
SAPI Speech Application Programming Interface Microsoft
SUMI Software Usability Measurement Inventory
TUI Interface Tangíveis do Usuário
UC Computação Ubíqua
UFRJ Universidade Federal do Rio de Janeiro
WHAS Sistema de Automação Residencial sem Fio
WIMP Window, Icon, Menu e Pointing
PDA Assisente Pessoal Digital
WYSIWYG What You See Is What You Get
1
Capítulo 1
1. Introdução
Neste capítulo são apresentadas as considerações iniciais do trabalho, a situação-
problema, a relevância, os objetivos e a composição deste trabalho, envolvendo
conceitos e fatos relacionados à interação dos seres humanos com o computador e à
automação de ambientes residenciais e prediais.
1.1. O Problema
Cada vez mais a tecnologia computacional vem sendo empregada nas mais
variadas atividades do cotidiano dos seres humanos, envolvendo aplicações e
interfaces cada vez mais sofisticadas.
Pode-se afirmar que, por um lado, as interfaces vêm tornando possível, maior e
melhor a Interação Homem-Computador (IHC). Claramente, percebe-se uma trajetória
partindo da Interação por Linhas de Comando (CLI) indo em direção a paradigmas que
implicam em maneiras mais intuitivas e naturais de interação. De acordo com Yonck
(2010), a evolução da IHC avançou de cartões perfurados para a Interface Gráfica do
Usuário (GUI), atingindo um novo modelo: a Interface Natural do Usuário (NUI) e
caminhando para Interface Orgânica do Usuário (OUI). É possível perceber que a
Computação Ubíqua (UC) tem concorrido para que a IHC, a cada dia, ganhe um
aspecto mais natural. A UC (muitas vezes abreviado para "ubicomp") refere-se a um
novo gênero de computação no qual o computador permeia completamente a vida do
usuário. Na UC, os computadores tornam-se úteis, mas vigorosamente invisíveis,
auxiliando o usuário no atendimento às suas necessidades, sem ficar no caminho
(KRUMM, 2009).
Em outras palavras, a UC busca tornar implícita a integração entre dispositivos
computacionais e usuários, por meio de um caminho natural, semelhante a outras
tecnologias, como escrita, eletricidade, entre outras, que estão incorporadas ao
cotidiano das pessoas (BUTT et al., 2012). Para Krumm (2009), a ideia por trás da
interação natural é que o computador forneça serviços, recursos ou informações para
um usuário, sem que o usuário precise pensar sobre as regras de como usar o
computador para obtê-los. Dessa forma, a tendência deve ser que o usuário esteja
focado em como sua tarefa será realizada e não em aprender a interagir com o
computador. Segundo Ghalwash e Nabil (2013), sob a UC encontram-se as interfaces

2
NUI, OUI e Interface Tangíveis do Usuário (TUI), definida no Capítulo 2 deste trabalho.
Em Buxton (2010), NUI é referenciada como uma interface de usuário desenvolvida
para reusar habilidades existentes na interação direta do usuário com o conteúdo alvo.
A palavra natural é usada porque a maioria das interfaces de computador usam
dispositivos de controle artificial cuja operação tem de ser aprendida. Multitoque1,
gestos, comandos por voz são apenas algumas das muitas abordagens diferentes
para a implementação de uma interface natural (WIGDOR e WIXON, 2011) e
(NUIGROUP, 2011). Concentra-se em habilidades humanas tradicionais, como o
toque, visão, fala, escrita, movimento e processos mais importante de nível superior,
como a cognição, criatividade e exploração.
Quando se trata de UC, deve-se pensar que a informática se torne cada vez
mais “onipresente” dia-a-dia. E, que seja possível falar em dispositivos mais
intimamente integrados aos corpos humanos, fazendo-se, então, referência a OUI. Em
(NABIL e GHALWASH, 2013), esse tipo de interface é definida como um grupo de
interfaces que têm telas não planas, que podem, ativa ou passivamente, mudar de
forma, por meio de entradas físicas analógicas. Exposições orgânicas são
caracterizadas por dois fatores principais: elas podem alterar ou assumir qualquer
forma e serem utilizadas como um dispositivo de entrada.
1 O termo multitoque e multi-touch são usados com o mesmo sentido. A palavra multi-touch permaneceu neste estudo, pois as interfaces fazem menção a ela para que não haja confusão com os toques sobre outros dispositivos que não sejam sobre a tela.
3
OUI não é apenas um subconjunto de NUI, mas o herdeiro legal de NUI, ou
seja, o seu sucessor (WIGDOR e WIXON, 2011). Sensores biométricos, displays de
pele e, eventualmente, as interfaces cérebro-computador são apenas algumas
possibilidades de implementações desse tipo de interface (YONCK, 2010). E, nesse
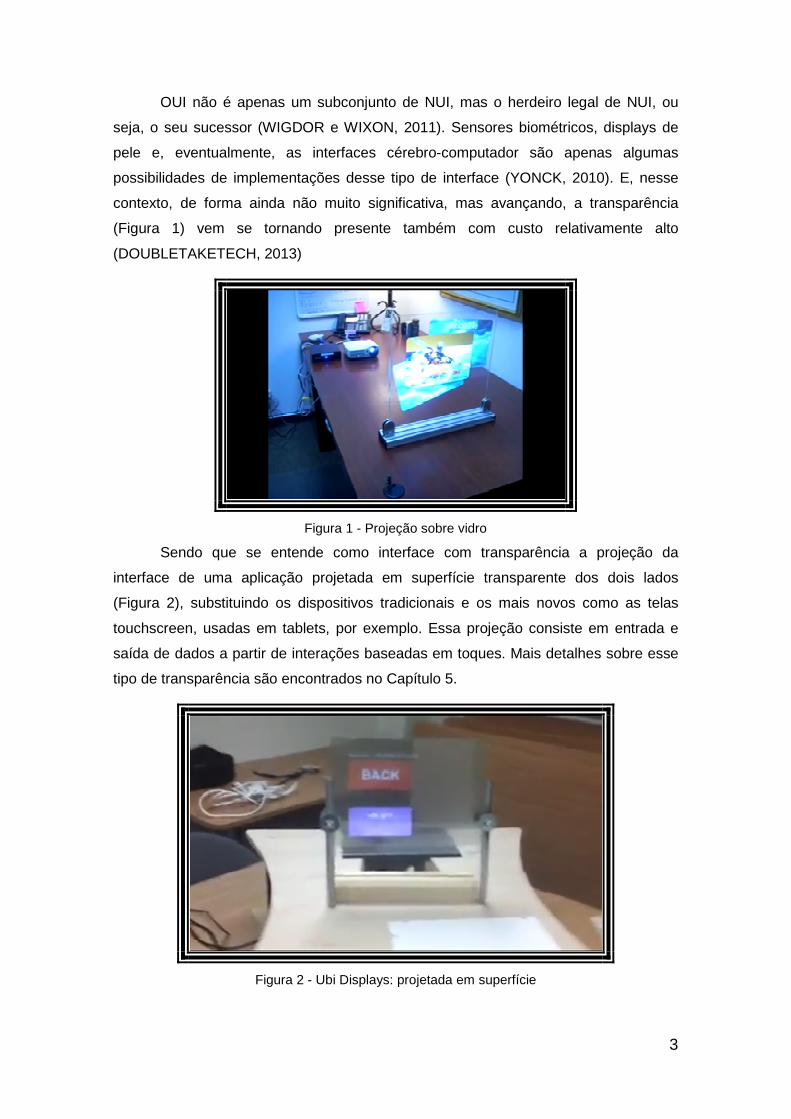
contexto, de forma ainda não muito significativa, mas avançando, a transparência
(Figura 1) vem se tornando presente também com custo relativamente alto
(DOUBLETAKETECH, 2013)
Figura 1 - Projeção sobre vidro
Sendo que se entende como interface com transparência a projeção da
interface de uma aplicação projetada em superfície transparente dos dois lados
(Figura 2), substituindo os dispositivos tradicionais e os mais novos como as telas
touchscreen, usadas em tablets, por exemplo. Essa projeção consiste em entrada e
saída de dados a partir de interações baseadas em toques. Mais detalhes sobre esse
tipo de transparência são encontrados no Capítulo 5.
Figura 2 - Ubi Displays: projetada em superfície
4
Por outro lado, aplicações para o controle e automação de prédios e
residências compreendem uma área emergente de pesquisas dentro da IHC
(CORREIA et al., 2013).
Dentre muitos investimentos nessa direção, tem-se explorado a interação por
gestos (CORREIA et al., 2013), por toques (KLEINDIENST et al., 2008)
(AUTOMAÇÃO RESIDENCIAL SEM FIO COM IPAD, IPHONE E ANDROID 2012) e
por comando de voz ou reconhecimento de fala (LÓPEZ et al., 2011; GEMMEKE et al.,
2013; BAIG et al., 2012; BUTT M. et al., 2012; VACHER et al., 2011; RAMLEE et al,
2013), envolvendo tecnologias de rede sem fio, dispositivos móveis (PU et al., 2013;
DEVI e TECH, 2012), arduíno (MIGUEL, 2011; SANTOS, 2012; MAHENDRAN et al.,
2013) e kinect (“Domotica con Microsoft Kinect (Kinect Home Automation)”, 2011)
(RIVAS-COSTA et al., 2013; WILSON e BENKO, 2010). E, também, de forma ainda
não muito significativa, mas avançando, a transparência (KOPPELHUBER e BIMBER,
2013; SCHROEDER, 2013; DOUBLETAKETECH, 2013). Sendo que a automação
residencial e predial vem, cada vez mais, integrando-se à tecnologia da informação e
comunicação em busca de mais conforto no ambiente doméstico (ELOY et al., 2010),
o que pode ser estendido para o de trabalho também.
Nesse contexto, existem prédios corporativos ou aqueles destinados a
pesquisas ou outras finalidades, que devem especificamente materializar suas
características futurista e natural, combinando-as à necessidade de melhorar a
qualidade de vida e a otimização do uso de recursos com um custo consideravelmente
baixo. O LabCog (Figura 28 do capítulo 4), detalhado no Capítulo 4 deste trabalho,
doravante a ser chamado de LAMCE, está situado no Parque Tecnológico do Rio e é
um empreendimento da UFRJ em parceria com várias instituições, tais como a
Prefeitura do Rio de Janeiro, Ministério de Ciência e Tecnologia, Finep, CNPq, Sebrae
e Petrobrás. Seu objetivo é desenvolver soluções em IHC, baseadas na interseção de
três áreas tecnológicas: realidade virtual, aumentada e computação ubíqua. Como em
qualquer edificação corporativa, os profissionais, que nela trabalham, precisam de
uma aplicação de automação predial que lhes proporcione mais conforto e condições
para manter a produtividade, com um tipo de IHC personalizada conforme as
características e objetivos do prédio, que é futurista em termos de arquitetura,
propósitos, decoração e categorias de equipamentos contidos em seu interior.
Tendo em vista preencher uma lacuna em oferecimento de interface que
combine com o caráter futurista dessa construção, esse trabalho pretendeu realizar a
construção de uma IHC que combine voz, gestos, multitoque e transparência em uma
aplicação, destinada a controlar, de forma otimizada e confortável, os recursos e
5
dispositivos desse tipo de prédio ou construções voltadas a pesquisas, baseando-se
em interação natural e de custo baixo.
1.2. Objetivo
Geral
Desenvolver uma interface que combine voz, gestos, multitoque e transparência
em uma aplicação, que controle, de maneira otimizada e confortável, os recursos e
dispositivos de prédios ou construções voltadas a pesquisas cujo caráter futurista,
natural e de custo baixo devam ser contemplados.
Específicos
Revisar a literatura sobre os conceitos relacionados às interfaces abordadas (por
toque, voz, gestos e transparência) nesta pesquisa, sobre as ferramentas
apropriadas, destinadas ao desenvolvimento da aplicação em questão, sobre
fundamentos da automação residencial e predial e as possiblidades de métodos e
técnicas relativas à usabilidade, as quais possam ser aplicadas neste caso.
Construir o protótipo para a aplicação proposta.
Validar o protótipo.
1.3. Justificativa
Com o progresso, os edifícios tornaram-se o cerne das atividades da vida urbana.
Eles evoluíram em instalações técnicas. No começo da década de 70, a divulgação
dos microprocessadores contribuiu para alargar o domínio de aplicação dos sistemas
de controle, os quais davam suporte à automação e a supervisão de equipamentos
mais sofisticados e em maior quantidade em prédios (ELOY et al., 2010). Nesse
contexto, começou-se o realce na ideia de se tirar o máximo proveito desses sistemas
e dos recursos que estavam disponíveis (NEVES, 2004). E, de acordo com o autor
dessa última citação, pode-se, então, afirmar que todos os aspectos referidos e,
também, a transformação da sociedade industrial na sociedade informática, a qual
ofereceu flexibilidade e direcionou para a adaptação a novas tecnologias e a novos
requisitos, deram origem ao conceito de Edifício Inteligente (EI).
Os EIs auxiliam seus proprietários, gestores e ocupantes a chegarem aos seus
objetivos, tendo em vista os fatores: custo, conforto, adequação, segurança,
flexibilidade em longo prazo e valor comercial (NEVES, 2004; ELOY et al., 2010). No
ano de 1985, apareceu a definição de: “um edifício inteligente combina inovações
tecnológicas ou não, com capacidade de controle, para maximizar o retorno do
6
investimento”. Segundo a Associação Brasileira de Automação Residencial
(AURESIDE), esse conceito engloba mais que a parte relativa ao projeto elétrico,
constituindo-se, por si só, um estudo rigoroso que alcança desde a localização do
edifício aos seus impactos ambientais, contemplando todas as variáveis técnicas,
existentes nos projetos elétricos e hidráulicos. Há outras referências, as quais
procuram utilizar novos conceitos para melhorar ou incrementar a inteligência num
edifício (WONG et al., 2005). Valendo, além disso, dizer que o conceito de EI não se
restringe a edifícios de escritórios, podendo (e devendo) ser aplicado a outros edifícios
tais como: hospitais, edifícios educacionais, hotéis, espaços comerciais, campi
universitários, etc.
Os conceitos relacionados aos EIs são aplicados na automação residencial ou na
domótica. Também são utilizadas outras denominações sinônimas como home control,
connected home, entre outras. Semelhante a qualquer área de inovação, a domótica,
inicialmente, é entendida como um símbolo de status e modernidade pelo cliente. Em
prosseguimento, a conveniência e o conforto, por ela proporcionados, tornam-se
decisivos. E, finalmente, ela passa a ser uma necessidade e um fator de economia e
produtividade (AURESIDE, 2014). Autores como Dewsburry et al. (2001) consideram
que a introdução de soluções e serviços tecnológicos na habitação possibilitará, cada
vez mais, a supressão de barreiras, aumentando a independência e a autonomia dos
habitantes. Em Eloy et al. (2010) é abordada a instalação de controles digitais e
sistemas de comunicação, os quais representam o passo que se segue à retirada de
barreiras arquitetônicas, nas mudanças realizadas e que ainda serão realizadas no
ambiente doméstico, abrangendo prédios em geral.
De forma resumida, é apropriado afirmar que os sistemas residenciais são
implementados para executar, dentre outras, as seguintes rotinas automatizadas:
iluminação, segurança, climatização e acionamento de cargas diversas
(SMARTHOME, 2012). De acordo com Eloy et al. (2010), uma instalação domótica
precisa de uma infraestrutura que contenha rede de comunicação (com fios ou sem
fios), controlador do sistema, sensores, atuadores e os elementos externos que irá
automatizar. Os sistemas de automação usados comumente se concentram nos
seguintes propósitos: gestão energética, segurança (de bens), proteção (situações de
emergência), conforto, informação e comunicação, entretenimento, gestão dos
eletrodomésticos e, além disso, na gestão integrada de todo o sistema. A
segurança/proteção, por exemplo, engloba: controle de acessos, detecção de intrusão,
sistemas de vigilância e monitorização, detecção de incêndio, detecção de fugas de

7
gás, detecção de inundação, detecção de falta de eletricidade e alarme pessoal. Mais
detalhes sobre cada uma dessas partes são abordados no Capítulo 5 deste trabalho.
Como já foi abordada, a ideia central da UC consiste em cercar os seres humanos
de computadores e software cada vez mais discretos e destinados a dar assistência
durante as atividades humanas do dia-a-dia (KRUMM, 2009). Vários trabalhos,
detalhados no Capítulo 5 deste documento, no contexto da automação predial e
residencial são apresentados, constituindo-se assim o estado da arte da interação por
gestos, voz e toques baseados em redes sem fio, kinect e arduíno (UbiComp ’12,
2012; UbiComp ’13, 2013). Tendo sido encontrada uma brecha ou lacuna em termos
de trabalhos que combinem voz, gestos, multitoque e projeção em transparência a um
baixo custo para prédios , que tenham como característica o fato de serem futuristas
e dedicados à pesquisa tecnológica, como é proposto neste estudo para automação
de construções.
Assim, os motivos que justificam e evidenciam a relevância desta pesquisa estão
expostos a seguir.
Tornar disponível o protótipo de uma solução de interface baseada em gestos,
voz, multitoque e projeção em vidro ou em superfícies transparentes não plana
(podendo ser curva), que pode compor, de forma mais adequada, o ambiente
de trabalho de um prédio que tenha um caráter futurista e voltado à pesquisa
em tecnologia, para uma aplicação da área de automação de construções. Tal
solução pode contribuir para que os profissionais dessa instalação tenham
acesso aos recursos com uma interação mais confortável e a baixo custo,
podendo favorecer ainda mais a produção desses indivíduos. Ela contemplará
as seguintes funções de controle: ligar e desligar datashow e
ar condicionado; acender e apagar luzes, controlar câmera de segurança, do
áudio, visualizar dados de sensores, como o de temperatura, e controlar
recursos para apresentações em reuniões realizadas no prédio.
Trata-se de um trabalho relevante, porque vem contribuir para preencher uma
lacuna existente em estudos de usabilidade de interfaces que combinem
gestos, voz, multitoque e transparência a baixo custo, para aplicações da área
de automação de construções em prédios destinados à pesquisa tecnológica,
que tenham caráter futurista.
Contribui com estudos acadêmicos futuros para outros estudiosos, que venham
a desenvolver trabalhos sobre o tema desta pesquisa, deixando à disposição
uma documentação, a qual relata um caminho que pode ser adotado, em se
8
tratando de desenvolvimento, implementação e validação da usabilidade de
uma solução de interface baseada em gestos, voz, multitoque e transparência,
que ainda é considerada uma interação sofisticada ou fora do usual na área de
automação de construções.
1.4. Organização do Trabalho
Além deste capítulo, este trabalho possui outros sete. No segundo capítulo, é
apresentada uma breve evolução das interfaces de usuários, focando especialmente
os paradigmas. No terceiro, são explorados conceitos, métodos e técnicas
relacionadas à usabilidade de IHC. No quarto, a metodologia da pesquisa está
exposta. O quinto capítulo apresenta conceitos relativos à EI e à domótica,
ressaltando os trabalhos relacionados a IHC na área de automação residencial e
predial. O sexto expõe uma descrição da solução construída por esta pesquisa,
detalhando a construção de um protótipo para o tipo de aplicação abordada. O sétimo
trata dos resultados da aplicação do protótipo e, por fim, são apresentadas as
conclusões, recomendações e perspectivas futuras.
9
Capítulo 2
2. Interfaces não Convencionais e Trabalhos Relacionados
Este capítulo apresenta o rumo das interfaces de usuários, focando especialmente os
paradigmas da interação natural, englobando também detalhamentos sobre o Kinect e
o Arduino, ferramentas que tem sido significativamente úteis na implementação de
soluções computacionais ubíqua. Além disso, nesse contexto, estão em pauta a
classificação dessas interfaces, algumas dificuldades e desafios.
2.1. Interfaces de Usuários (IU): História e Conceit os Envolvidos
O início de uma breve trajetória sobre IU pode ser apresentado com base em
Cardoso (2013). Até por volta de 1960, os primeiros computadores de grande porte
(mainframes) não tinham interface interativa e executavam apenas em modo de
processamento em lotes, chamado batch processing, sendo usadas as fitas
magnéticas e os cartões perfurados. Esse processamento acontecia sem a
interferência humana até que fosse completado, a partir de suas entradas pré-
estabelecidas. Esse mecanismo atendia a maioria das necessidades de cálculo,
porém a comunicação interativa entre seres humanos e computadores não era muito
apropriada às necessidades humanas de interação.
Durante os anos 1970, esses computadores começaram também a adotar
interfaces, que possibilitassem interatividade com o usuário, permitindo a digitação de
comandos e operando em sistema time-sharing (ou de tempo compartilhado),
tornando possível que diversos usuários e tarefas processassem simultaneamente,
usando um único processador, com sistemas dotados de multiprogramação e
multitarefas.
Desse modo, é pertinente afirmar que a evolução das interfaces parte, então,
de Interação por Linhas de Comandos (CLI), avançando para interações mais visuais
e físicas, sendo que aquelas por linha de comando permaneceram.
Pode-se afirmar que uma Graphical User Interface (GUI) começou a substituir
por manipulação direta (apontamento e seleção) comandos arbitrários, os quais
precisariam ser memorizados. Nesse caso, ações são realizadas ao se mover objetos
em uma tela e selecionando-os em menus. Assim, com esse paradigma, os seres
humanos podem criar e modificar um documento por meio de uma interface e também
10
o visualizar similarmente à maneira impressa. O que significa uma interação
denominada WYSIWYG (What You See Is What You Get: "O que você vê é o que
você obtém", e que era no início relacionada a editores de texto, tornando-se
posteriormente mais abrangente. E, o estilo de interação WIMP (Window, Icon, Menu,
Pointing device, (Janela, Ícone, Menu, Cursor)), desenvolvido na Xerox Palo Alto
Research Center em 1973, alcançou popularização em máquinas voltadas para o
mercado de massa com o Macintosh da Apple em 1984, consolidando a era dos
computadores pessoais.
Nesse caso, a interação é realizada a partir de um mouse, um dispositivo físico
de entrada, que controla a posição de um cursor, e mostra a informação distribuída em
janelas, as quais são representadas por ícones. Os comandos são apresentados em
menus e, então, selecionados e ativados com o uso do mouse. Comparando com a
CLI, não é preciso memorizar uma variedade de comandos, sendo que o ambiente
transformou-se em algo mais familiar e fácil de operar, tratando-se assim de sistema
multitarefa. Além disso, isso contribuiu para que o uso do computador se estendesse
para pessoas sem amplo conhecimento técnico e iniciantes, aumentando-se a
inclinação da curva da taxa de aprendizagem.
Durante os anos 1970 e 1980, vários estudos surgiram sobre telas sensíveis ao
toque (touchscreens), que sinalizavam a não utilização do mouse, em especial no
caso de dispositivos portáteis. Essas telas evoluíram em direção a uma busca pela
melhora no feedback para o usuário, por intermédio de resposta háptica
(realimentação física, relativa ao tato. ex.: realimentação de força em um joystick,
característica vibratória de um celular, resposta tátil de uma touchscreen e outras) e na
melhora na precisão. O que permite melhor interface em se tratando da escrita e do
desenho, em PDAs (personal data assistant) e em tablets gráficos, por exemplo.
Norman (2007) afirma que a GUI torna-se menos eficaz à medida que o
número de itens e de alternativas que devem ser manipulados na interface aumentam,
como é comum em sistemas operacionais e aplicativos complexos. Vem-se
fortalecendo a ideia de que as técnicas tradicionais de GUI não são apropriadas às
plataformas interativas emergentes. Myers et al. (2000) fornecem exemplo disso. Eles
afirmam que há limitações da GUI convencional em aplicações com uma grande
amplitude de dimensões de displays, desde telas portáteis a enormes como as de
projeções em paredes, em se tratando de dispositivos de computação ubíqua (que se
refere à “onipresença” da tecnologia da informação no cotidiano dos seres humanos),
incluindo aquelas baseadas em reconhecimento de gesto e de fala.

11
Embora grande parte das ferramentas ainda forneça suporte aceitável usando
menus, caixas de diálogo, teclados e mouses, é percebido que há a tendência de que
esses mecanismos liberem espaço, pelo menos em parte, para o reconhecimento de
gestos, escrita manual e reconhecimento de fala. Em (BUXTON, 2010) é definida
como natural uma interface de usuário que seja desenvolvida para reusar habilidades
existentes na interação direta do usuário com o conteúdo alvo.
Em outras palavras, esse autor quis dizer que uma Natural User Interface
utiliza-se das habilidades, não elencadas como computacionais, e sim daquelas já
pertencentes ao usuário, ditas inatas ou adquiridas por meio da prática e vivência de
comunicação (que pode ser verbal ou não) com outros seres humanos e pela
interação com o ambiente ao seu redor. Dessa forma, a interação ocorre usando-se de
diversos tipos de dispositivos de entrada intuitivos, seja por toque, gestos ou por fala,
em um ambiente que remeta o usuário a experiências do mundo real do usuário,
lançando mão de metáforas. NUIs são mais fáceis de aprender que as GUIs, pois se
baseiam em comportamento natural e cotidiano da pessoa, ressaltando ou enfocando
a experiência do usuário.
É possível perceber que os sistemas multitoques podem adequar a sua
maneira de interação para diferentes aplicações, substituindo um joystick, mouse,
teclado e, assim, permitindo a utilização de linguagem natural de uma maneira flexível
e customizável. PDAs, leitores de e-books são exemplos de aplicação desse tipo de
sistema. Mesmo para pessoas com necessidades especiais, esses sistemas são
aplicáveis, contribuindo para o desenvolvimento de habilidades motoras. Seu uso
também é recomendado em caso de computador esterilizável para manipulação por
médicos em cirurgias, na interação com mapas interativos para finalidades militares,
de desenho e modelagem tridimensional em tablets e para manuseio de uma
infinidade de widgets (um componente de uma GUI, o que inclui janelas, botões,
menus, ícones, barras de rolagem, etc.).
A Teoria da Carga Cognitiva (TCC) de Sweller (1988) explica que cada pessoa
possui uma capacidade de memória de trabalho, que limita o número de tarefas a
serem realizadas ao mesmo tempo. Ele sugere que algumas atividades de
aprendizagem exigem o uso de uma porção significativa da memória de trabalho de
uma pessoa, que esta memória é limitada e que a aprendizagem pode tornar-se
ineficiente por causa da falta de memória necessária.
Com base nos estudos de Sweller et al. (1998), há três tipos diferentes de
carga cognitiva: a) carga cognitiva intrínseca, que consiste na dificuldade e
12
complexidade inerentes ao assunto ou tarefa; b) carga cognitiva natural, que é a carga
gerada pelas atividades de ensino, as quais beneficiam a aprendizagem no uso da
interface; e c) carga cognitiva externa, que é a carga gerada pela forma com que a
informação é apresentada ao usuário, isto é, pelas habilidades utilizadas na interação
com uma interface. Os referidos autores defendem que durante a produção de uma
interface, a carga cognitiva deve ser controlada de forma a maximizar a carga
cognitiva natural e minimizar a carga cognitiva externa, enquanto se mantém a carga
cognitiva intrínseca em um nível razoável.
Diante disso, exemplificando, habilidades simples, como utilizar um comando
por fala para inicializar um aplicativo, possuem pequena carga cognitiva, e habilidades
compostas, que englobam outras habilidades, mostram-se mais difíceis de aprender e
possuem maior carga cognitiva externa, já que há a necessidade de um pensamento
conceitual por parte do usuário. O que contribui para a redução da memória de
trabalho disponível para ambas as cargas intrínseca e natural como, por exemplo, no
caso de navegar por pastas com um mouse para inicializar um aplicativo.
Então, é possível perceber que se deve procurar o emprego de habilidades
simples em detrimento do uso das compostas em se tratando do desenvolvimento de
uma interface, evitando que o usuário tenha de pensar sobre o uso da interface, ao
invés de dedicar-se à tarefa em si, ou principal que está sendo executada.
Assim, significativamente uma NUI pode ser útil quando os ambientes são
hostis, os quais exigem grande parte da atenção e memória de trabalho do usuário
voltada para a tarefa em si, como o Sistema de Posicionamento Global (GPS) de um
veículo, um controle para operação de máquinas pesadas no chão de fábrica, ou um
dispositivo para comunicação em um campo de batalha. Nesses casos, minimizar a
carga cognitiva do uso da interface contribui para que reduza o risco inerente à
execução da tarefa também.
A curva de aprendizagem comum em aplicação com NUI faz com que o usuário
obtenha um alto nível de interação e sua satisfação é atingida rapidamente. Da
mesma maneira que a interação das pessoas com o mundo real, as interfaces naturais
têm características, as quais proporcionam uma sensação de fluidez e naturalidade.
São elas: interação direta, interação de alta frequência e a interação contextual.
A interação direta ocorre, pela proximidade física da ação do usuário com o
elemento com o qual interage, ou pela proximidade temporal em que a interface reage
ao mesmo tempo em que o usuário ou, ainda, pela ação paralela do mapeamento
entre uma ação do usuário e um elemento da interface. Bruegger e Hirsbrunner (2009)

13
afirmam que quando uma interface permite usuários interagirem com computadores
por movimento de seu corpo, ou partes dele, e objetos, ela é uma interface cinética ou
uma Kinetic User Interface (KUI), elucidada mais adiante. Exemplificando, na interação
direta, ter-se-ia uma tela multitoque, por meio da qual o usuário tocaria a tela
diretamente e a interface reagiria imediatamente, sendo que a movimentação e gestos
dos dedos seriam mapeados nas coordenadas da tela.
A interação de alta frequência acontece por meio de diversas pequenas
interações rápidas, resultados de uma interação direta, e feedback constante, que
contribuem para um maior realismo. Exemplificando, um tablet pode realizar várias
interações rápidas de cada ponto, durante o momento em que um usuário o usa para
desenhar, reproduzindo os traços simultaneamente à ação do usuário.
Numa interação contextual, opções adequadas de tarefas a serem realizadas
são procuradas e recuperadas prioritariamente, conforme a tarefa executada pelo
usuário, tornando possível a tomada de decisão mais rápida e de forma fácil.
Em se tratando de NUI, a conjunção da possibilidade de diminuição da carga
cognitiva, a aprendizagem progressiva e a interação direta, evitando metáforas
artificiais, atraem usuários ainda não incluídos, que poderiam usar com dificuldades
uma interface gráfica e também aqueles insatisfeitos com ela.
A produção de touchscreens surgiu como uma alternativa para se tentar
contornar a limitada interação permitida por um mouse ou por um sistema de tela
sensível ao toque com somente um ponto de interação. Essas telas são capazes de
registrar diversos toques distintos simultaneamente, inclusive alguns tipos de gestos,
popularizados pelo sucesso do iPhone, os multi-touch displays. Mais detalhes sobre
essa produção e sobre interfaces multitoques são apresentados na Seção 2.3.
Telas multitoques tornam possível a interação de vários usuários
simultaneamente em uma só tela e, além disso, permite interpretações de gestos,
como é o caso do movimento de pinça (zoom), tornando possível a característica de
interface natural.
Em Brewster et al. (2007) existe uma análise da resposta háptica em
interações portáteis, por meio da qual se pode concluir que o feedback tátil contribui
para redução dos erros de entrada de dados em 20%, além de aumentar a velocidade
de entrada de dados em 20% e reduzir a carga cognitiva em 40%. Dessa forma, o
feedback háptico permite que a interface exija menos do usuário fisicamente e
mentalmente, possibilitando uma interação menos irritante e frustrante ao usuário.
Valendo ainda realçar que o emprego de uma stylus, uma caneta utilizada para

14
interação em touchscreens, pode atenuar a dificuldade de reconhecimento do que o
usuário deseja que seja realizada pela interface relacionada ao “dedo gordo”.
Existe uma busca significativa na combinação de displays 3D com
possibilidades multitoque, ocasionando uma imersão apropriada do usuário tanto
visualmente, como para o controle da interface. Nesse caso, trata-se do chamado
“toque imersivo 3D”. Sendo que com os tabletops 3D se enfrenta a tarefa complexa de
manipulação de dados tridimensionais, como seleção, movimento, rotação e
dimensionamento de objetos na tela. Nesse caso, o emprego de uma interação
multitoque se dá de maneira que a mão não dominante do usuário pode atuar como
um seletor do modo de navegação, ao mesmo tempo em que a mão dominante
quantifica a ação da função selecionada.
Uma vantagem explorada significativamente quando se trata de interfaces
naturais é a possibilidade de combinação com a realidade misturada, ou seja, de
misturar objetos do mundo real com objetos virtuais em um mesmo ambiente de
interação. Dentre os conceitos englobados nesse tipo de realidade, há a Realidade
Aumentada (RA), que possibilita a sensação de que objetos virtuais estejam presentes
no mundo real pelo uso de software que combina elementos de realidade virtual com o
mundo real. Uma das definições da RA é a de Azuma (2001), que considera a RA um
sistema suplementar ao mundo real com objetos virtuais produzidos por computador,
os quais parecem coexistir no mesmo espaço. Já a Realidade Virtual (RV), de acordo
com Kirner (1997) é "uma técnica avançada de interface, em que o usuário pode
realizar imersão, navegação e interação em um ambiente sintético tridimensional,
gerado por computador, usando canais multissensoriais". Nesse caso, é produzida a
sensação para o usuário de que ele realmente está ali presente, interagindo com o
mundo virtual, por meio de seus sentidos, recebendo feedback visual, auditivo, tátil, de
força e, talvez, até mesmo usando o sentido olfativo e gustativo.
Para obter-se eficiência de uma interface de RA são necessários o controle da
posição do usuário e de outros atributos do sistema como ativação de ações, seleção
e maneiras de interação do usuário com objetos. A existência de câmeras em
dispositivos portáteis, displays translúcidos e dispositivos vestíveis possibilitam que o
usuário tenha uma nova percepção do mundo em seu entorno.
Maior realismo e uma expansão das utilidades que sistemas de RA tem sido
com base na evolução da capacidade computacional, dos dispositivos de visualização,
dos dispositivos de entrada com novos métodos de aquisição e novos materiais, além
15
do refinamento contínuo de algoritmos de reconhecimento e de geração de imagens.
Isso em ambos os meios: no acadêmico e no cotidiano.
Colaborando para essa evolução da IHC, existe uma orientação para que os
equipamentos eletrônicos se tornem cada vez menores, sendo aumentada a sua
capacidade de processamento e de integração de serviços e com outros
equipamentos. Isso, cumprindo as necessidades da Computação Ubíqua (UC), que foi
vista como uma tendência por Weiser (1991). Como já foi exposto anteriormente, esse
conceito se refere ao fato de que os equipamentos e dispositivos computacionais se
misturam ao mundo real do usuário, tornando-o rico. Na verdade, a ideia é que a
informática se torne “onipresente” no dia-a-dia das pessoas e que a interação entre
humanos e máquinas seja invisível, tendo em vista integrar ações e comportamentos
naturais das pessoas a essa interação. Weiser (1991) previu o melhoramento da
tecnologia utilizada na sua programação e construção, tornando-se esses
equipamentos cada vez mais portáteis ou vestíveis e, assim, favorecendo a chamada
RA ubíqua.
O emprego de elementos reais e virtuais misturados é também observado de
forma bastante significativa em situações de simulação e treinamento, as quais
precisam de maior realismo. Nesse caso, pode estar incluída a sensação de toque,
sustentada pelos dispositivos de feedback háptico, em simulação e treinamento de
médicos e enfermeiras em centros cirúrgicos, por exemplo. Além de em telecirurgias
em situações críticas de aplicação, tornando possível que mesmas sensações de
toque nos tecidos reais sejam sentidas pelo cirurgião em relação os tecidos virtuais.
Dessa maneira, essa mistura permeia o mundo real e se tornam potente ferramenta
didática e pedagógica. A RA também contribui para o diagnóstico por imagens,
usando-se equipamentos de ultrassom, ressonância magnética e tomografia
computadorizada, os quais permitem reconstrução de modelos tridimensionais a partir
da interpolação das imagens obtidas.
Observa-se que é bastante significativo o emprego da tecnologia no setor de
entretenimento, acarretando a construção de cenários e comportamentos mais
realistas em jogos, por exemplo. Os jogos eletrônicos, sejam de uso portátil ou
doméstico, têm explorado mais os sentidos do usuário, ocasionando maior imersão e
proximidade ao conteúdo. A sensação de imersão multissensorial ocorre por sensores
de posicionamento e movimento, tais como acelerômetro e giroscópio do Nintendo Wii,
Nintendo 3DS, iPhone e rastreamento por câmera e sensor como no caso do
PlayStation Move e do Microsoft Kinect (Seção 2.5). Além do mais, são usados
microfones para comandos por voz, sistema de som estéreo, telas estereoscópicas
16
como o PlayStation 3 e autoestereoscópicas como do Nintendo 3DS, incluindo
feedback háptico por vibrações no controle ou pelo próprio dispositivo.
A função desse rastreamento é identificar a posição da mão, da cabeça, dos
olhos e mapear diversos pontos para produzir, dependendo do tipo de aplicação, um
modelo do próprio usuário ou de algum equipamento ou marcação atrelada ao
usuário, elementos do ambiente ou objetos.
O reconhecimento e o rastreamento ópticos tornaram-se mais viáveis e
passaram a representar uma realidade, até mesmo em função da disponibilidade do
hardware para aquisição de recursos de vídeo em tempo real e do seu baixo custo,
devido à maior capacidade de miniaturização e popularização de câmeras, ao avanço
das técnicas de visão computacional, do poder de processamento dos computadores.
No entanto, o rastreamento, além de ser realizado pela captação de luz por câmeras,
pode ser feito mecanicamente, sendo atrelado fisicamente ao usuário. Isso lhe
possibilita pouca mobilidade, ou por emissão de ondas ultrassônicas, como no caso de
um sonar que possibilita maior liberdade de movimentos, mas possui menor precisão.
Em se tratando de rastrear movimento dos olhos, para navegação em uma
interface destinada a indivíduos com dificuldades motoras. A aplicação deve ter
precisão fina, tanto quanto uma interface que deve mapear os dedos do usuário
individualmente e, então, identificar, por exemplo, linguagem de sinais. Essa mesma
precisão não é necessária no rastreamento da cabeça do usuário para um monitor
autoestereoscópico.
A integração de serviços, o acesso às bases de dados na Internet e a outros
equipamentos permitem que objetos e localizações sejam reconhecidos pelos
dispositivos de entrada, como um vídeo do ambiente aonde o usuário se encontra em
tempo real de uma câmera ou uma foto de um produto ou até mesmo de uma pessoa.
Esses dados são, então, comparados com aqueles obtidos nos bancos de dados, de
maneira a recuperar e fornecer maiores informações ao usuário sobre o ambiente que
o envolve. Há a possibilidade, por exemplo, de usar um aparelho celular com acesso à
Internet, dotado de câmera, para visualização de um código de barras, um qrcode, um
código de barras matricial ou até mesmo a imagem de um produto, cenário ou
logomarca, e receber detalhes sobre a imagem reconhecida, por comparar dados
contidos em bases de dados.
As aplicações de RA têm dado suporte a deficiências e à reabilitação motora e
cognitiva de pessoas. É possível, por exemplo, usar near-eye displays, dotados de
câmeras, as quais mostram ao olho do usuário uma imagem corrigida, que supra as

17
deficiências da sua retina. Isso é feito com a utilização do mesmo tipo de displays
próximos aos olhos do usuário, que pode ser translúcido, para navegação de um
aplicativo, com o uso dos movimentos dos olhos em situações em que os usuários
possuem deficiências motoras.
Outro tipo de interface de usuário, que vem sendo explorado que tem base em
recursos tangíveis, são as chamadas interfaces tangíveis ou Tangible User Interface.
TUI é inclusive uma KUI, que se trata de um conceito mais abrangente, permitindo o
manuseio de objetos virtuais, utilizando a manipulação de objetos reais. Usando
interfaces tangíveis, as pessoas manipulam objetos físicos, ferramentas, superfícies
ou espaços do seu dia-a-dia para interagir com as aplicações. Essa manipulação
também é natural e intuitiva. Cada objeto físico real é mapeado de modo a
corresponder a um objeto virtual.
No que diz respeito ao termo tangível refere-se ao fato de um dado sistema
“computacional” interagir por intermédio de dispositivos e objetos físicos do dia a dia
pessoal. Numa TUI, o tipo do objeto e as respostas realizadas sob o mesmo que
devem estar atreladas com o resultado esperado pelo usuário. Essa interação tem
sua foram de comunicação no uso de objetos reais para controlar as informações
digitais. Comumente, esse tipo de interface se apropria de estruturas simples e
transparentes, de maneira que permite que seu usuário imagine seu modo de
utilização e seus significados (COSTANZA et al., 2003). Mais especificamente, uma
TUI refere-se à manipulação de objetos reais como uma forma mais natural de
interagir com o computador em detrimento a apontar ou referenciar objetos, exibidos
sobre vídeo-projeção ou sobre o próprio objeto (ISHII e ULLMER, 1997). Várias
soluções ou protótipos foram pioneiros e importantes para o desenvolvimento das
TUIs. São elas: Senseboard (JACOB et al., 2002), Surface (TECNOLOGIA, 2007),
SandScape (MOTTA, 2008), Bricks, metaDESK e ambientROOM.
18
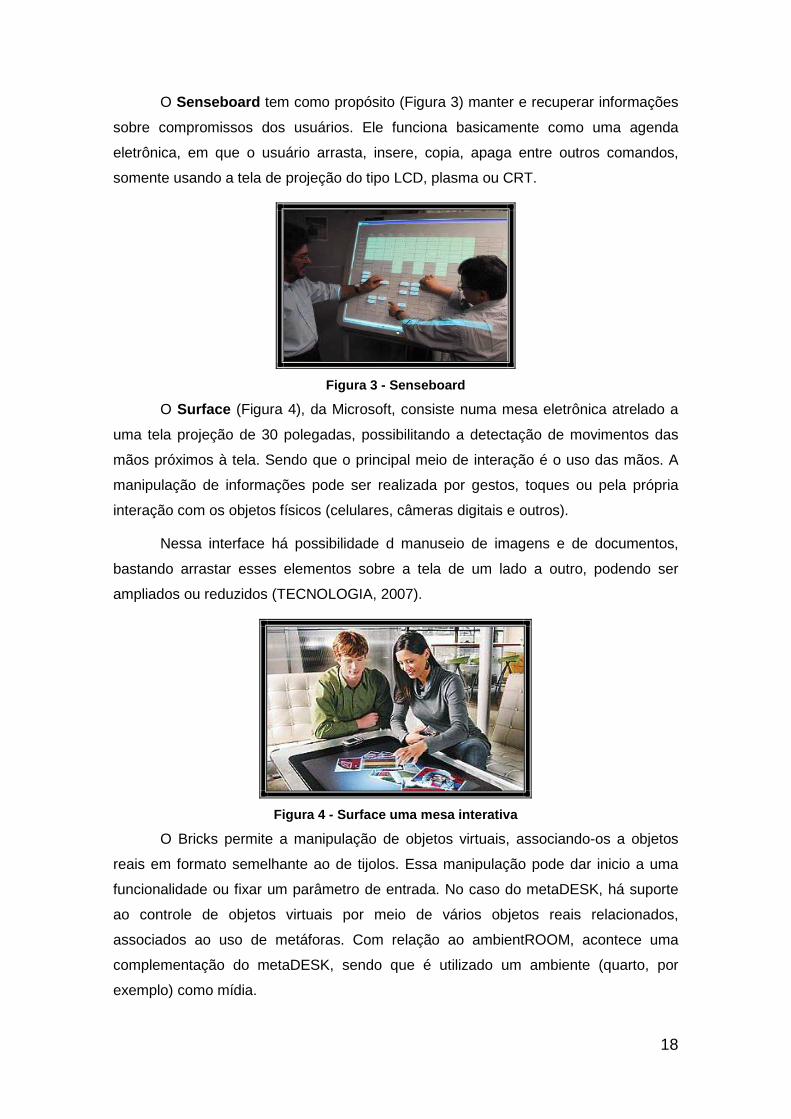
O Senseboard tem como propósito (Figura 3) manter e recuperar informações
sobre compromissos dos usuários. Ele funciona basicamente como uma agenda
eletrônica, em que o usuário arrasta, insere, copia, apaga entre outros comandos,
somente usando a tela de projeção do tipo LCD, plasma ou CRT.
Figura 3 - Senseboard
O Surface (Figura 4), da Microsoft, consiste numa mesa eletrônica atrelado a
uma tela projeção de 30 polegadas, possibilitando a detectação de movimentos das
mãos próximos à tela. Sendo que o principal meio de interação é o uso das mãos. A
manipulação de informações pode ser realizada por gestos, toques ou pela própria
interação com os objetos físicos (celulares, câmeras digitais e outros).
Nessa interface há possibilidade d manuseio de imagens e de documentos,
bastando arrastar esses elementos sobre a tela de um lado a outro, podendo ser
ampliados ou reduzidos (TECNOLOGIA, 2007).
Figura 4 - Surface uma mesa interativa
O Bricks permite a manipulação de objetos virtuais, associando-os a objetos
reais em formato semelhante ao de tijolos. Essa manipulação pode dar inicio a uma
funcionalidade ou fixar um parâmetro de entrada. No caso do metaDESK, há suporte
ao controle de objetos virtuais por meio de vários objetos reais relacionados,
associados ao uso de metáforas. Com relação ao ambientROOM, acontece uma
complementação do metaDESK, sendo que é utilizado um ambiente (quarto, por
exemplo) como mídia.

19
SandScape é um sistema, que utiliza uma TUI, simulando diferentes paisagens
topográficas. No SandScape, uma paisagem projetada pode sofrer alterações, de
forma interativa, pelo manuseio do seu componente tangível a areia. Os resultados
são analisados e geram uma variedade de simulações computacionais, as quais
podem ser vistas pelo usuário, em tempo real, sobre a superfície da areia. A
manipulação da areia, em recipientes cobertos por raios infravermelhos,
simultaneamente reflete os efeitos resultantes. Ou seja, da imagem do modelo de
areia capturada pela máquina fotográfica infravermelha, pode-se determinar a
geometria de superfície em questão. Com base na projeção dessa imagem é possível
calcular a altura, declive, contornos, sombras, drenagem e aspecto do modelo. A areia
funciona como um objeto, no qual a entrada e a saída estão refletidas no mesmo
conjunto.
O paradigma de TUI foi abordado no filme de ficção científica, “A Ilha” (The
Island) do diretor Michael Bay lançado em 2005. Nesse filme, o diretor de uma
organização, interpretado pelo ator Sern Bern, cujo negócio era clonagem humana,
usava um sistema de informação para mostrar os dados dos seus pacientes, utilizando
a própria superfície de sua mesa de trabalho como entrada e saída de informações,
manuseando um cristal em formato de pirâmide. O usuário ao mover a pirâmide, ao
girar ou ao posicioná-la em uma dada posição geográfica sobre a mesa, o sistema
respondia com uma ação especifica sobre as informações requeridas. A pirâmide e os
outros componentes dessa interface harmonizavam-se com o ambiente, parecendo
“peças de adorno” do consultório. O que demonstrava uma IHC bem simples e
próxima do cotidiano humano (OLIVEIRA, 2007).
Continuando a abordar tipos de interfaces não convencionais, percebe-se que
está se tornando cada vez mais presente a Interface Orgânica ou Organic User
Interfaces (OUI) que, de acordo com Holman e Vertegaal (2008), é "uma interface de
computador que usa um display não-planar como dispositivo de saída primário, assim
como dispositivo de entrada.” Quando são flexíveis, essas interfaces possuem a
habilidade de se tornarem os próprios dados de exibição por meio de sua deformação,
por serem manipuladas. PaperWindows (HOLMAN et al., 2005) é um dos primeiros
exemplos de um OUI, a qual aborda a interação não-planar, por simular o potencial
interativo de telas de papel digital.

20
Utilizando uma combinação de rastreamento de movimento e projeção, janelas
ou telas do Windows são processadas em um pedaço de papel (Figura 5),
proporcionando a ilusão de que o papel é, na verdade, um display interativo.
Figura 5 - PaperWindows
Posteriormente, essa metáfora é usada num telefone de papel (LAHEY et al.,
2011), o PaperPhone, um computador interativo de papel flexível, no qual o usuário
dobra a ponta da folha de papel, como uma forma de navegar, expressando uma
interação. A interface, então, demonstra que está deformada, isto é, que a ponta do
papel está realmente dobrada (Figura 6). Ambas as interfaces se estendem para um
cenário explorado em exibição de pilhas (GIROUARD et al., 2012), onde
computadores de papel (papéis computacionais) bem finos são lançados, empilhados
e manipulados, à semelhança de pilhas de papéis reais.
Figura 6 - Paperphone
Fonte: (LAHEY et al., 2011)
A forma, com que essas interfaces se moldam aos seus contextos de
utilização, possibilita apreensibilidade satisfatória e rápida, ergonomia e,
consequentemente, a satisfação do usuário, estimulando o seu uso de maneira

21
criativa, não apenas produtiva. Nesse caso, sensores pequenos e de custo baixo
capturam uma variedade de entradas físicas analógicas: gesto, pressão, deformação,
orientação, localização, múltiplos toques etc.
A tecnologia denominada Flexible Organic Light-Emitting Diode (FOLED), que é
uma tela de OLED (diodo emissor de luz orgânico) construída em um substrato flexível
como plástico ou uma folha metálica, atribui vantagens como maior leveza,
flexibilidade, espessura fina e a falta de backlight volumosa, em comparação com um
LCD (cristal de display líquido), que é construída em substrato de vidro. Aliás, a
flexibilidade representa um marco significante no avanço de interfaces para
dispositivos portáteis vestíveis e computação ubíqua, já que é possível torcer, enrolar
ou dobrar um display leve e de pouco volume.
Convém afirmar que a invenção de materiais flexíveis como displays de
FOLED, o aumento da velocidade de processamento em dispositivos portáteis e
displays de alta resolução, todos esses têm sinalizado a direção para a produção de
computadores flexíveis. Esses possuem eventos, que tenham a capacidade de
perceberem os seus formatos, integrando o dispositivo de entrada e a sua interface
gráfica em um só elemento da interface, e de agirem com as sutilezas e detalhes da
natureza analógica da interação física.
Figura 7 - Gummi da Sony
O uso de sensores analógicos foi estudado, por exemplo, no conceito de
interface Gummi, da Sony (SCHWESIG et al., 2004) (Figura 07), que trata a integração
de componentes eletrônicos orgânicos e flexíveis em camadas como, por exemplo,
em: circuitos de memória e de processamento flexíveis, bateria flexível, sensores
flexíveis de posição e de dobra. Por não haver botões ou função de toque
convencional, o usuário interage por entortar o dispositivo, fazendo gestos pré-
programados, inclinando-o e tocando os sensores.
22
Existem vários tipos de movimentos, que podem ser realizados por
componentes físicos de um sistema, de maneira que sejam detectados pelo usuário e
ele interaja, respondendo ao estímulo. Dentre esses estão incluídos: a mudança de
formato; os movimentos (linear, rotacional e variáveis de direção e velocidade), os
quais possam ser percebidos visualmente; a percepção háptica, como formato de
superfície; textura e feedback de força, ou mesmo, auditivamente, pelo som produzido
durante um movimento.
Com a esperança das interfaces fornecerem opções de comunicação e de
movimento para pessoas com suas habilidades cognitivas intactas, mas que tenham
dificuldades motoras severas que as impedem de usar tecnologias assistivas
convencionais, as quais exigem o controle muscular voluntário, esforços concentram-
se na pesquisa e desenvolvimento de interfaces mais adequadas. Há estudos nas
áreas de neurociência, engenharia e ciência da computação para melhoria da
qualidade de vida dos pacientes que se utilizam de canais de controle que não
dependem dos canais de saída mais usuais do cérebro: nervos periféricos e músculos
(WOLPAW, 2000).
Em decorrência disso, as denominadas Brain-Computer Interface (BCI), ou
interfaces cérebro-computador, detectam e traduzem a atividade neural do usuário em
sequências de comandos para computadores e próteses, segundo as intenções do
cérebro do usuário. O propósito desse tipo de interação é restabelecer funções
motoras em pacientes, por exemplo, que sofrem com amputação de membro e com
lesões neurológicas, Esclerose Múltipla (EM), Acidente Vascular Cerebral (AVC), lesão
medular e Esclerose Lateral Amiotrófica (ELA) (LEUTHARDT et al., 2006). Com base
na plasticidade cortical do cérebro, é viável reorganizar as áreas acometidas após a
lesão em sistema de aprendizagem baseado em exercícios de imaginação motora, o
que pode melhorar a funcionalidade dos membros afetados.
De certa maneira, é apropriado mencionar que os sistemas com BCI
substituem nervos, músculos e os movimentos que eles produzem por sinais
eletrofisiológicos, captados por eletrodos no usuário, traduzindo-os em ações do
dispositivo, que irá atuar em sistemas motores, linguísticos ou fisiológicos do usuário.
Como esse meio é entendido como um novo canal de saída de informações para o
usuário, ele deve receber feedback do sistema, para que possa melhorar o
desempenho da interação, adaptando a resposta do seu cérebro de como ele deve
modificar o envio de seus sinais eletrofisiológicos e alcançar, dinamicamente,
melhores resultados. Do mesmo jeito, a interface deve se adequar conjuntamente com
o cérebro, para aperfeiçoar o seu funcionamento e a interação. A adequação por
23
ambas as partes exige treinamento para que haja uma sintonia fina, com o propósito
de atingir uma boa resposta do sistema.
O funcionamento de uma BCI inicia-se a partir da aquisição do sinal do estado
eletrofisiológico do cérebro do usuário, o qual é feito em tempo real e, geralmente, por
intermédio de eletrodos, invasivos ou não. As formas de aquisição de sinais são
variadas. Podem acontecer mediante uma Eletroencefalografia (EEG), com o
posicionamento de eletrodos no couro cabeludo, ou uma Eletrocorticografia (ECoG),
com o posicionamento de utilização de uma grade de eletrodos abaixo do crânio, além
da possibilidade de utilização de microelétrodos, para monitorar atividades neurais
individuais (single units), e da medição dos neurônios. Quando a obtenção do sinal é
realizada, ele é então digitalizado e segue para o processamento. O processamento
do sinal perpassa por fazer a análise estatística, a fim de estimar a probabilidade de
um evento eletrofisiológico registrado correlacionar-se com uma atividade motora ou
cognitiva.
E, nesse contexto, é necessário reconhecer quando uma alteração elétrica no
sinal é significativa e traduzi-la em movimento mecânico ou de um cursor
dinamicamente, tendo em vista o ajuste às alterações, para melhorar a tradução e
fornecer feedback para o usuário poder adaptar-se melhor à interface. Exemplificando,
ações que podem ser tomadas com base no processamento dos sinais são: mover um
cursor em uma tela, escolher letras em um sistema para comunicação, controlar uma
prótese robótica, dirigir uma cadeira de rodas e controlar processos fisiológicos, como
intestinos e bexiga.
A ideia é que neurocirurgiões passem a adotar tecnologias, que apoiem o
sistema nervoso na recuperação de habilidades, as quais foram perdidas ou afetadas,
não somente utilizando suas habilidades na remoção de aneurismas, tumores e
hematomas na prevenção de futura debilidade de funções motoras. No entanto,
neurocirurgiões devem ter algumas precauções e analisar as relações de custo-
benefício antes de utilizar um sistema com BCI em pacientes. Devem ser levantados
em conta os itens: segurança, durabilidade, confiabilidade, consistência,
complexidade, usabilidade, adequação e eficácia de um sistema com BCI. A seguir
são apresentados mais detalhes sobre as interfaces gestuais.
2.2. Interfaces Gestuais
Os seres humanos utilizam o corpo ou partes dele como forma natural de
linguagem, podendo usar uma grande variedade de gestos para expressar o que não
24
pode ser expresso também pela fala. A interação pelo uso das mãos é muito comum
em um diálogo (HONGO et al. e ZHU et al., 2000). Os gestos exprimem ou dão ênfase
às ideias durante o uso da fala (GURALNIK, 1994).
Uma maneira de comunicação sem a necessidade da fala, usando apenas
gestos para representar comandos, é a ASL (American Sign Language), a linguagem
americana de sinais (EISENHAUER et al., 2002). No Brasil, também, existe uma
linguagem, sem uso de palavras sonoras, a LIBRAS (Língua Brasileira de Sinais). As
Línguas de Sinais não são universais. Elas sofrem influências da própria cultura
(VASCONCELOS et al., 2007). No Brasil foi sancionada a lei nº 10.436, reconhecendo
a LIBRAS como meio de comunicação por gestos (BRASIL, 2002).
Gestos foram considerados uma solução de sucesso por introduzir um método
natural e intuitivo para as IHCs (CHAN e RANGGANATH, 2002; WACHS et al.,
2008a). Os primeiros gestos que foram aplicados a interações de computador foram
abordados em Sutherland (1963). Nesse caso, foi enfocada a interação por gestos de
forma manipulada, usando dispositivo em formato de caneta luminosa. Daí por diante
o uso dos gestos, para facilitar um estilo mais expressivo e intuitivo nas interações de
usuários, alcançou popularidade entre os estudiosos de IHC (KARAM, 2006).
O propósito de uma Interface Gestual (IG) é estabelecer a troca de informação
do homem com o computador por gestos ou gestos pré-definidos. Para que essa troca
aconteça, é necessária a utilização de um gesto associado a uma ação por
computador e, em seguida, a interpretação desse gesto computacionalmente, a fim de
que a tarefa automatizada seja realizada. O gesto usado deve conter um significado
previamente armazenado (KARAM, 2006).
Quek et al. (2002) aborda as seguintes categorias de gestos: manipulações,
semáforos, gesticulação (combinação de gestos e fala), deictic2 (demonstrar, focalizar)
e linguagem de sinais (Quirologia). As três últimas categorias estão descritas em
detalhes em Karam (2006). Os gestos manipulativos consistem numa proposta, tem a
pretensão do controle de algum objeto físico, por aplicar uma associação estreita entre
os movimentos de gestos das mãos ou dos braços a esse objeto que está sendo
manipulado. O foco do trabalho citado consiste na aplicação de semáforos, que são
2 O termo dêitico vem do grego dêixis e apresenta como significado: ‘indicar’, ‘apontar’, ‘demonstrar’ e ‘focalizar’. O uso do dêitico está relacionado ao sentido, à referência, que se constrói na interação face a face, pois, para que haja o entendimento dos participantes do contexto de comunicação, é necessário perceber, de forma mútua, as convenções lingüísticas e paralingüísticas negociadas. A capacidade de correlação ligando-se as pessoas de uma interação, ou de referir-se ao tempo e espaço dos interlocutores (CAVALCANTE, 2002).
25
sistemas de sinais, utilizando flags (marcos), lights (luzes), arms (braços) ou hands
(mãos).
Segundo Quek et al. (2002), esses gestos são sistemas, os quais empregam
um dicionário de estilos de gestos estáticos ou dinâmicos das mãos ou dos braços.
Em propostas desse tipo, os gestos servem como um conjunto de símbolos destinado
à interação com a máquina. Embora sejam consideradas de serem consideradas uma
das mais aplicadas, na prática, ainda não o são, sendo um método prático para dar
suporte a interações a distância em ambientes inteligentes (CAO e BALAKRISHNAN,
2003; LENMAN et al., 2002; WILSON e SHAFER, 2003).
Quek et al. (2002) expõe que o uso de gestos semáforos na IHC tem sido
enfatizado como tema de vários estudos. Embora esse autor e Wexelblat (1997)
defenderem que gestos semáforos não são naturais para IHC e representarem uma
parte pequena da comunicação humana, Karam e Schraefel (2005) afirmam que essa
parcela tem potencial de escolha para ser usada em interações secundárias.
Exemplificando, a seleção do menu, em um editor de textos, para a escolha de
uma opção qualquer, é uma tarefa secundária. Sendo que a edição do texto é a tarefa
principal. Vários autores defendem o uso de gestos semáforos em tarefas
secundárias. São eles: (BAUDEL e BEAUDOUIN-LAFON, 1993; CAO e
BALAKRISHNAN, 2004; LENMAN et al., 2002; WILSON e SHAFER, 2003; STREITZ
et al., 1999; ALPERN e MINARDO, 2003; PICKERING, 2005; KARAM e SCHRAEFEL,
2005).
Esses gestos podem ser estáticos, dinâmicos e stroke (golpe). Para efeito
deste trabalho são considerados os gestos semáforos estáticos e dinâmicos, já que
são usadas posturas estáticas e movimentos dinâmicos das mãos (ALPERN e
MINARDO, 2003; REKIMOTO, 2002). E os gestos são realizados utilizando mãos
livres (hands-free), então, a categoria stroke não é considerada, sendo que os gestos
não estão combinados a objetos físicos (MOYLE e COCKBURN, 2002; SMITH e
SCHRAEFEL, 2004; LENMAN et al., 2002; ZHAO e BALAKRISHNAN, 2004;
BARRIENTOS e CANNY, 2002; WU e BALAKRISHNAN, 2003; OU et al., 2003;
PASTEL e SKALSKY, 2004; PIRHONEN et al., 2002).
Visão Computacional (VC) é uma técnica utilizada para o reconhecimento de
gestos, que consiste em capturar e reconhecer objetos, imagens e gestos, inclusive os
gestos das mãos (BUXTON et al., 2002). O seu uso possibilita o desenvolvimento de
IHC, inclusive sem o uso de dispositivos fixados ao usuário, sendo apenas necessária
uma câmera. Assim, essa técnica permite produzir uma interface, de uma forma mais
26
natural e intuitiva por meio de gestos. Sem necessidade de quaisquer dispositivos
atrelados às mãos, o usuário foca-se somente na aplicação. A câmera é a única fonte
de captura de informação, portanto, é possível que o mecanismo de interação é
baseado em VC (OKA et al., 2002), permitindo o uso de gestos como forma de
interação (BINH et al., 2005).
A VC tem evoluído, entretanto, existem ainda diversos desafios a serem
superados. Segundo Truyenque (2005), muitos dos problemas da VC recorrem do fato
de que o reconhecimento de objetos é, na realidade, produto de um complexo
processo realizado pelo cérebro humano. Exemplificando, algo, que o ser humano
parece fazer com tanta facilidade, é detectar uma mão em movimento sobre um fundo
relativamente constante.
Um dos grandes problemas consiste no armazenamento de uma quantidade de
informação de entrada disponível. A retina tem cerca de 125 milhões de células
receptivas para capturar informações visuais, mesmo que as câmeras possuíssem a
mesma capacidade de captura, os computadores não são dotados do grandioso poder
de processamento em paralelo que o nosso cérebro. Logo, apenas alguns processos
básicos são implementados na maior parte dos sistemas em tempo real com base em
VC.
Outro problema consiste na baixa confiabilidade e a instabilidade, resultantes,
entre outros eventos, das mudanças de iluminação, oclusão, movimento e ruído nos
equipamentos de captura. O sistema de visão dos humanos integra diversas
propriedades, que são observadas em paralelo (ex. cor, movimento, contornos),
juntamente com o seu conhecimento do mundo, para tratar com esses problemas.
Alcançar essa perfeição usando um computador não é uma tarefa simples nem fácil.
Percebe-se que as capacidades humanas são resultado da integração do
conhecimento do mundo, isto é, da experiência humana formada ao longo da vida.
Esse fato deve ser considerado importante nos algoritmos de VC, se o propósito for
atingir respostas mais robustas. Essa é uma das razões por que é difícil construir um
sistema de VC de propósito geral, o qual tenha a capacidade de tratar com toda classe
de objetos e em todos os ambientes ou situações. É necessário restringir o campo de
ação e construir sistemas mais específicos.
Nos últimos anos, diversos trabalhos de pesquisa relacionados à IHC baseada
em visão têm sido elaborados (WACHS et al., 2008a). Em se tratando de interação
baseada usando as mãos, muitos sistemas computacionais desenvolvidos têm se
dedicado ao reconhecimento de gestos e posturas. O que significa que a IHC é
27
baseada no reconhecimento de diferentes posturas e gestos das mãos. O HandVu é
um deles, o qual usa método (algoritmo) Viola-Jones (VIOLA e JONES, 2003).
Também há o Very Nervous System (EL-NASR e VASILAKOS, 2008), o Eyesweb
(CAMURRI et al., 2003), Soft Remocon (DO et al., 2006), Toshiba Qosmio (IKE et al.,
2007b), SAVI (HERPERS et al., 2001), JSL (TANIBATA et al., 2002) e Gestix (WACHS
et al., 2008b).
O Very Nervous System é um sistema constituído por uma ou duas câmeras, o
qual reconhece a velocidade, a posição e os gestos de dançarinos em uma
visualização 3D. Depois do reconhecimento, são enviados ao sistema os dados
necessários para a reprodução de músicas. Sendo que a música, gerada com base
nesses dados, tem timbres, frequências, tons e parâmetros específicos para cada um
dos movimentos do dançarino. O Eyesweb permite que se extraia informação dos
movimentos do corpo de um performer (um músico, um bailarino, ou de um público) e
use essa informação para controlar e gerar os sons. Isto é, a partir do movimento do
corpo, um som é tocado.
O Soft Remocon é um sistema que apoia o controle de eletrodomésticos e
serviços, em uma “casa inteligente”, ativados por intermédio de gestos, possibilitando
aumentar o volume e trocar de canal da televisão, abrir e fechar cortinas. Ele
reconhece o usuário e os gestos realizados, por intermédio de três câmeras presas ao
teto e, após o reconhecimento da posição da mão e da direção, o sistema certifica-se
do comando com a emissão de um som, a fim de evitar possíveis erros.
A Toshiba incorporou em seus notebooks, precisamente no Qosmio (Figura 8 ),
a tecnologia Hand Gesture Control. Ela permite ao usuário interagir com o sistema por
meio de gestos das mãos, os quais são capturados por uma web-câmera integrada ao
console. Reconhece em tempo real objetos cinéticos, tridimensionais e posturas das
mãos em um PC. Exemplificando, o drive de DVD Player pode ser controlado por
gestos com a proposta de ativar os comandos iniciar, parar, pausar, avançar e voltar
um vídeo. O coprocessador SpursEngine™ fica responsável pelo processamento do
reconhecimento dos gestos, liberando a máquina para outras tarefas concorrentes.
Assim, o tempo de processamento é robusto e paralelo (IKE et al., 2007a). O SAVI é
um sistema cujo objetivo consiste em controlar vídeo, usando gestos das mãos à
distância, podendo ser utilizado em vídeo conferências. O usuário realiza gestos
específicos para a execução de determinadas tarefas. O JSL (JAPANESE SIGN
LANGUAGE) é um sistema para o reconhecimento da linguagem de sinais japonesa
em qualquer ambiente.
28
Nesse caso, é necessário somente que o usuário realize os gestos específicos
da JSL e o sistema os reconhece.
Figura 8 - Toshiba Qosmio com tecnologia Hand Gesture Control
Com relação ao Gestix, é uma interface de computador que é acionada à
distância e controlada por gestos das mãos livres. Ela foi desenvolvida para área da
saúde, permitindo que os médicos possam controlar as imagens digitais, realizando
alguns comandos. São eles: girar, ampliar determinadas áreas e selecionar novas
imagens. Não havendo necessidade de qualquer contato físico com dispositivos
eletrônicos. Esse aplicativo funciona em duas etapas: primeiramente, a máquina
reconhece o cirurgião, localiza e rastreia os gestos de suas mãos. Anteriormente, os
médicos devem aprender a fazer oito gestos de navegação definidos para manipular o
sistema. Há, também, uma área neutra, possibilitando que os médicos baixem as
mãos sem que o sistema continue a rastreá-las (WACHS et al., 2008a).
Os gestos das mãos, no contexto da IHC, geralmente podem ser apresentados
como posturas estáticas diferentes. Tecnicamente, em se tratando de VC, pode-se
distinguir gesto e postura do seguinte modo (PAVLOVIC et al., 1997): gesto está
associado ao movimento e postura à estática. Neste estudo, quando se trata de
gestos das mãos, o termo gesto refere-se ao aspecto estático do gesto.
Os gestos também podem ser associados a interfaces multitoques, as quais
são detalhadas a seguir.
2.3. Interfaces Multi-touch
O projeto da tecnologia multitoque começou na década de 1980 na
Universidade de Toronto, contudo foi só cerca de 20 anos depois que esta tecnologia
conseguiu a atenção do público.
As interfaces multitoque admitem diversas movimentações espaciais sobre um
objeto virtual. Exemplificando, com dois dedos, os indivíduos podem transladar,
rotacionar e escalar um objeto ao mesmo tempo. O usuário também pode realizar

29
apenas um subconjunto dessas ações, e outros movimentos ocorrerem
acidentalmente, por conta da imprecisão nos movimentos dos dedos. Essas
dificuldades podem ser reduzidas com o emprego de várias técnicas como, por
exemplo, a de separabilidade, conforme abordado em (NACENTA et al., 2009).
Acrescenta-se a isso o fato de que a interação ser realizada pelo uso dos dedos traz
como resultante que o tamanho da área de contato é maior, comparado ao cursor do
mouse. O que pode dificultar o reconhecimento do comando desejado, porque o dedo
representa uma área grande, resultando no que se chama oclusão. As mãos e os
braços também podem causar esse problema em algumas circunstâncias.
Um dos primeiros trabalhos sobre dispositivos sensíveis a multitoque está
descrito em (BUXTON et al., 1985; BUXTON e MYERS, 1986), no qual é proposto e
apresentado um tablet, que tinha a capacidade de identificar múltiplos toques de
dedos feitos em uma superfície (Figura 9).
Figura 9 - Primeiro sistema multi-touch desenvolvido por Bill Buxton
No intervalo de 1992 e 1995, apareceram os primeiros protótipos de sistemas
multi-touch com imagem projetada na tela (FITZMAURICE et al., 1995, BUXTON,
1997). Tais sistemas usavam um tablet sensível a apenas um toque para rastrear uma
das mãos do usuário e de técnicas de visão computacional para identificar a posição e
orientação da outra mão sobre a tela. Os principais sistemas que marcaram a
evolução da interação por multitoques estão descritos a seguir.
A Mitsubishi, em 2001, lançou o Diamond Touch (DIETZ e LEIGH, 2001), que é
formado por uma superfície de projeção frontal sobre uma mesa. Ele podia ser
manipulado simultaneamente por até quatro usuários (Figura 10). Para tanto, a sua
superfície era constituída por um grupo de antenas finas, ocultas debaixo da tela de
projeção que revestia o topo da mesa. As cadeiras dos usuários eram conectadas a
um computador por meio de um fio. Assim que um usuário desse um toque em um
30
determinado ponto da tela, um sinal era gerado no fio ligado à cadeira daquele
usuário, por causa do acoplamento capacitivo entre o seu dedo e as antenas
distribuídas na tela. O computador, então, processava esse sinal, para determinar a
localização do ponto na mesa que fora acometido pelo toque.
Figura 10 - Sistema multi-touch - Diamond Touch
No ano de 2002, surgiu o SmartSkin (REKIMOTO, 2002). Esse sistema tinha a
capacidade de estimar a distância entre o dedo do usuário e a superfície da tela. O
seu funcionamento era baseado em uma grade retangular de fios de cobre, em que os
fios verticais e horizontais operavam, respectivamente, semelhante a transmissores e
receptores de sinais. Nesse caso, um sinal senoidal era gerado nos transmissores e,
por indução, os receptores recebiam o sinal em cada ponto de intercessão da grade.
O funcionamento do par transmissor/receptor era como se fosse de um capacitor
fraco. Assim, quando um dedo aproximava-se dessa grade, ele drenava parte do sinal
constituído.

31
A velocidade de descarga do sinal era dada em função da distância entre o
ponto da grade e o dedo do usuário. Por medição do sinal em cada ponto da grade e
pela interpolação das coordenadas, era possível descobrir a proximidade e a posição
do dedo sobre a tela (Figura 11).
Figura 11 - Sistema multi-touch Smart Skin.
Em 2004, iniciou-se o surgimento dos projetos multi-touch baseados nas
técnicas de visão computacional. O TouchLight (WILSON, 2004), produzido pela
Microsoft Research, usava duas câmeras sensíveis ao espectro de luz infravermelho e
uma fonte de luz infravermelha, localizada na parte de trás de um vidro recoberto com
um material holográfico translúcido (HALL JR. e PFILE, 2000). Isso possibilitava que a
câmera captasse objetos expostos na frente da tela, mesmo na presença de imagens
exibidas pelo projetor, o qual fica localizado na parte de trás da estrutura. Esse
processo consiste na retificação das imagens obtidas pelas câmeras, utilizando uma
matriz de homografia (convergência de regimes de codificação diferentes em um
mesmo símbolo) e, depois as somando, era possível estimar a posição de múltiplos
objetos próximos da tela. O Touch Light foi um dos pioneiros no uso de back projection
(Figura 12).
Figura 12 - O sistema multi-touch TouchLight
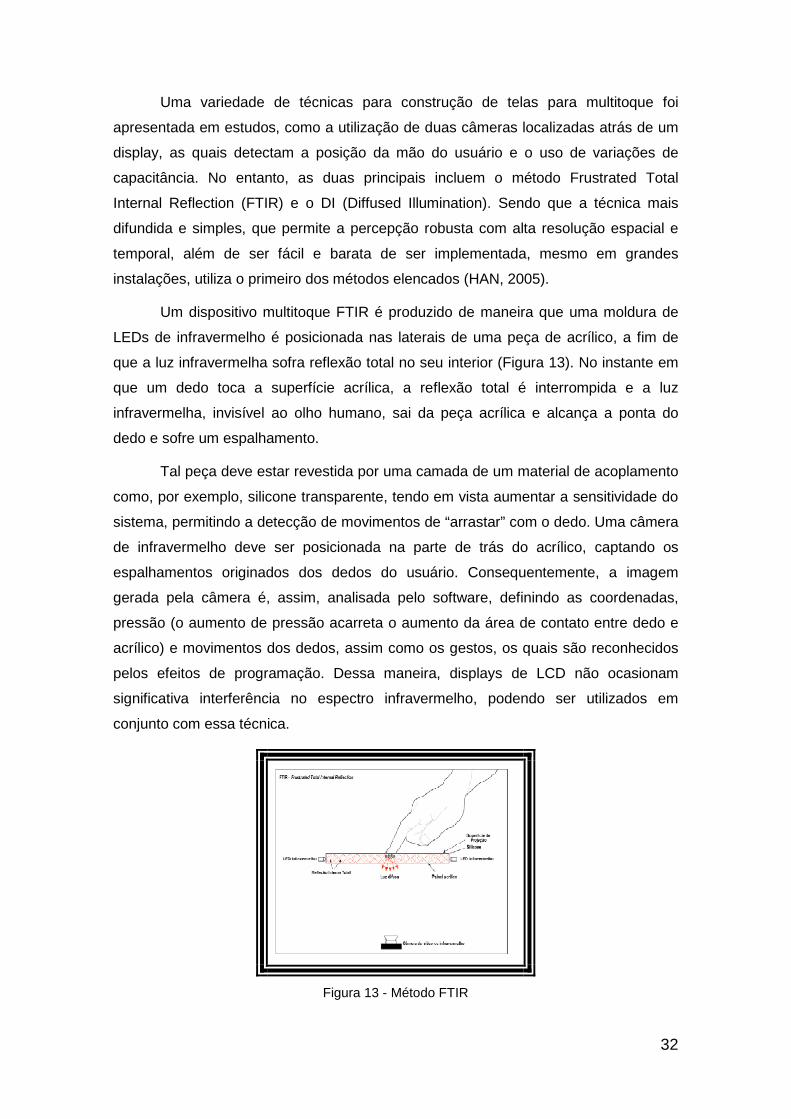
32
Uma variedade de técnicas para construção de telas para multitoque foi
apresentada em estudos, como a utilização de duas câmeras localizadas atrás de um
display, as quais detectam a posição da mão do usuário e o uso de variações de
capacitância. No entanto, as duas principais incluem o método Frustrated Total
Internal Reflection (FTIR) e o DI (Diffused Illumination). Sendo que a técnica mais
difundida e simples, que permite a percepção robusta com alta resolução espacial e
temporal, além de ser fácil e barata de ser implementada, mesmo em grandes
instalações, utiliza o primeiro dos métodos elencados (HAN, 2005).
Um dispositivo multitoque FTIR é produzido de maneira que uma moldura de
LEDs de infravermelho é posicionada nas laterais de uma peça de acrílico, a fim de
que a luz infravermelha sofra reflexão total no seu interior (Figura 13). No instante em
que um dedo toca a superfície acrílica, a reflexão total é interrompida e a luz
infravermelha, invisível ao olho humano, sai da peça acrílica e alcança a ponta do
dedo e sofre um espalhamento.
Tal peça deve estar revestida por uma camada de um material de acoplamento
como, por exemplo, silicone transparente, tendo em vista aumentar a sensitividade do
sistema, permitindo a detecção de movimentos de “arrastar” com o dedo. Uma câmera
de infravermelho deve ser posicionada na parte de trás do acrílico, captando os
espalhamentos originados dos dedos do usuário. Consequentemente, a imagem
gerada pela câmera é, assim, analisada pelo software, definindo as coordenadas,
pressão (o aumento de pressão acarreta o aumento da área de contato entre dedo e
acrílico) e movimentos dos dedos, assim como os gestos, os quais são reconhecidos
pelos efeitos de programação. Dessa maneira, displays de LCD não ocasionam
significativa interferência no espectro infravermelho, podendo ser utilizados em
conjunto com essa técnica.
Figura 13 - Método FTIR
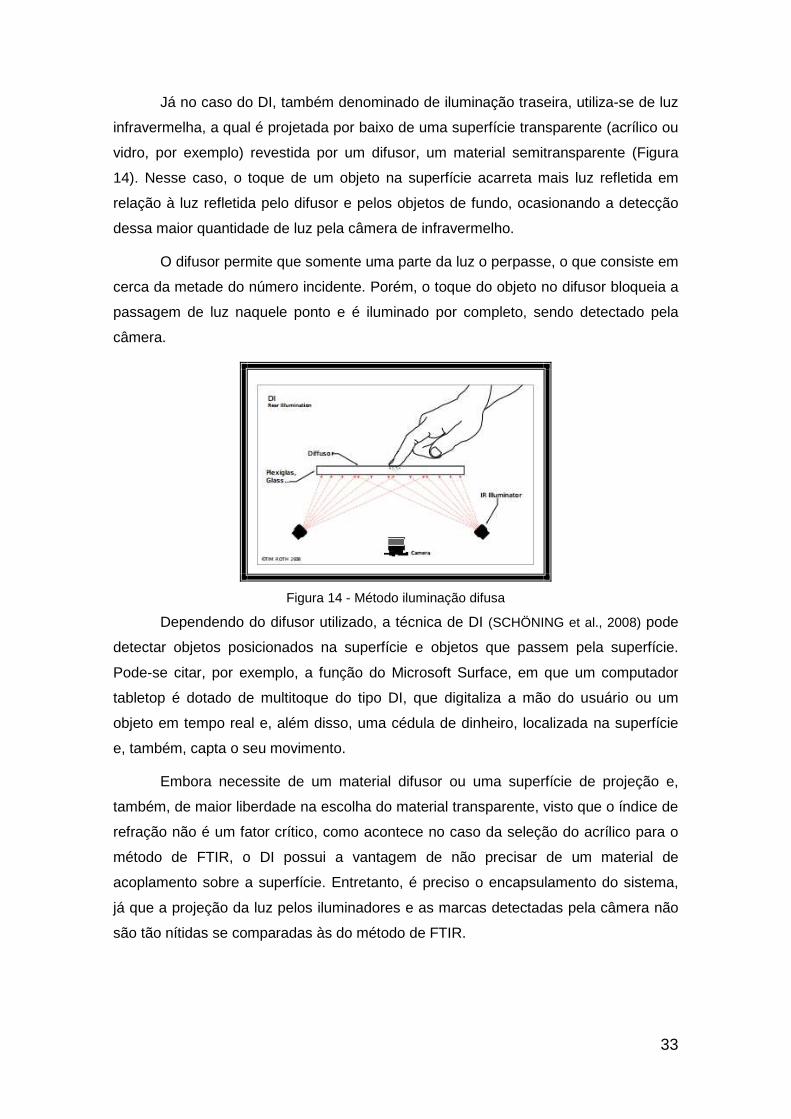
33
Já no caso do DI, também denominado de iluminação traseira, utiliza-se de luz
infravermelha, a qual é projetada por baixo de uma superfície transparente (acrílico ou
vidro, por exemplo) revestida por um difusor, um material semitransparente (Figura
14). Nesse caso, o toque de um objeto na superfície acarreta mais luz refletida em
relação à luz refletida pelo difusor e pelos objetos de fundo, ocasionando a detecção
dessa maior quantidade de luz pela câmera de infravermelho.
O difusor permite que somente uma parte da luz o perpasse, o que consiste em
cerca da metade do número incidente. Porém, o toque do objeto no difusor bloqueia a
passagem de luz naquele ponto e é iluminado por completo, sendo detectado pela
câmera.
Figura 14 - Método iluminação difusa
Dependendo do difusor utilizado, a técnica de DI (SCHÖNING et al., 2008) pode
detectar objetos posicionados na superfície e objetos que passem pela superfície.
Pode-se citar, por exemplo, a função do Microsoft Surface, em que um computador
tabletop é dotado de multitoque do tipo DI, que digitaliza a mão do usuário ou um
objeto em tempo real e, além disso, uma cédula de dinheiro, localizada na superfície
e, também, capta o seu movimento.
Embora necessite de um material difusor ou uma superfície de projeção e,
também, de maior liberdade na escolha do material transparente, visto que o índice de
refração não é um fator crítico, como acontece no caso da seleção do acrílico para o
método de FTIR, o DI possui a vantagem de não precisar de um material de
acoplamento sobre a superfície. Entretanto, é preciso o encapsulamento do sistema,
já que a projeção da luz pelos iluminadores e as marcas detectadas pela câmera não
são tão nítidas se comparadas às do método de FTIR.

34
2.4. Interfaces Controladas por Voz
A capacidade para falar diretamente com dispositivos é uma grande promessa
para qualquer área do conhecimento. Embora ninguém quisesse estar em uma grande
conferência onde todos estivessem conversando com seus smartphones, há muitas
situações em que seria apropriada a interação por voz. Dirigir um carro, cozinhar uma
refeição, consertar um motor e realizar cirurgia são todas as atividades que poderiam
se beneficiar dessa interação, deixando as mãos livres para a realização de outras
tarefas.
Essa interação já está sendo usada para execução de diversas tarefas, como
por exemplo, desvio de chamadas, automação residencial, discagem por voz e
entrada dados. Em viagens internacionais, os tradutores estão começando a fazer
parte do mercado. Yonck (2010) previu um tradutor universal em tempo real para
meados da próxima década.
Ainda relacionado com o reconhecimento de voz, mas muito incipiente ou em
estágios iniciais de desenvolvimento, tem-se o reconhecimento subvocal (Figura 15).
Tratando-se da conversão dos sinais elétricos emitidos pela garganta em discurso,
mas sem que o operador necessite proferir sons. O sistema lê os sinais nervosos da
garganta do usuário e os transmite para um computador que os traduz em palavras.
Essa tecnologia pode um dia ser usada em ambientes com muitos ruídos ou
agressivos, debaixo d´água e, até mesmo, no espaço. O dispositivo também tem sido
testado como um modo de controle para o motor de cadeiras de rodas, podendo,
então, ser um meio eficiente no dia a dia dos portadores de necessidades especiais
(YONCK, 2010).
Figura 15 - Reconhecimento subvocal

35
Na seção 5.2, são encontradas aplicações da interação por voz, à automação
residencial ou predial, que é assunto deste estudo. O próximo capítulo aborda
métodos e técnicas que podem ser usados para avaliação das interfaces tratadas até
o momento.
A seguir estão descritos equipamentos importante para implementação de
interações apoiadas pela computação ubíqua.
2.5. Microsoft Kinect
O Kinect, desenvolvido pela Microsoft e apresentado em 2010, inicialmente
projetado para console de jogos Xbox 360, é um sensor de movimento, a aperfeiçoado
para o sistema operacional Windows. Sua função principal consiste na produção de
dados tridimensionais (WEBB e ASHLEY, 2012). Ele veio introduzir no mundo dos
jogos a possibilidade de um controle mais natural, com gestos, voz e movimentos
corporais do usuário. Existem quatro tipos diferentes de Kinect, diferenciados pelos
seguintes nomes: Kinect, Kinect for Windows, Kinect for Xbox 360 e Kinect One.
Tendo em vista evitar, então, o uso de qualquer tipo de dispositivo físico da IHC
atrelado ao corpo do usuário, o Kinect permite ao computador descobrir e tratar
parâmetros relativos à profundidade, reconhecer a fala e os movimentos
(aproximação, afastamento e outros) do usuário. Ele entende os seus movimentos,
traduzindo-os de tal maneira que possam ser interpretados pelos ambientes virtuais
(ZHANG, 2012).
A construção do Kinect (Figura 16 ) veio revolucionar a forma como as pessoas
jogam e as suas experiências de entretenimento (ZHANG, 2012), introduzindo a
interação natural para o dia a dia e criando um mundo de possibilidades para a área
da computação e da multimídia. Ele trouxe, assim, um avanço para a IHC e para a
área de processamento de imagem, por oferecer dados de natureza diferente à que
existia até o momento de sua criação, associando geometria com atributos visuais
(CRUZ et al., 2012).
36
Sua aplicação tem-se estendido para várias áreas, como a ciência
computacional, a engenharia eletrotécnica e a robótica.
Figura 16 - Kinect
Ele adicionou, também, um nível de complexidade bastante elevado ao
processamento computacional, uma vez que inicialmente é necessário o computador
perceber o que o usuário está a fazer antes de poder apresentar uma resposta
(ZHANG, 2012). De uma forma geral, o Kinect é constituído por uma câmara RGB, um
sensor de profundidade, um conjunto de microfones e um acelerômetro (Figura 17 ),
de maneira a captar o movimento tridimensional e realizar reconhecimento facial e
vocal (MICROSOFT, 2012).
Em uma visão mais detalhada (WEBB e ASHLEY, 2012), pode-se afirmar que,
a câmara RGB incluída suporta uma resolução até 1280 × 960 pixels, com um filtro de
cor Bayer e é usada para a captação das imagens de cor. Sendo que a câmara
utilizada para medição de profundidade, de infravermelhos, suporta uma resolução
máxima de 640 × 480 pixels. O sensor de profundidade é constituído por um projetor
de luz infravermelha, associado com uma câmara de infravermelhos. Ele consiste num
sensor Complementary Metal–Oxide–Semiconductor (CMOS) monocromático, capaz
de capturar imagens tridimensionais em todas as condições de luz ambiente. O feixe
de luz, que é emitido pelo projetor de infravermelhos, é transmitido por uma grade de
difração, a responsável em fazer com que a luz emitida se transforme em pequenos
pontos, os quais são posteriormente captados pela câmara.
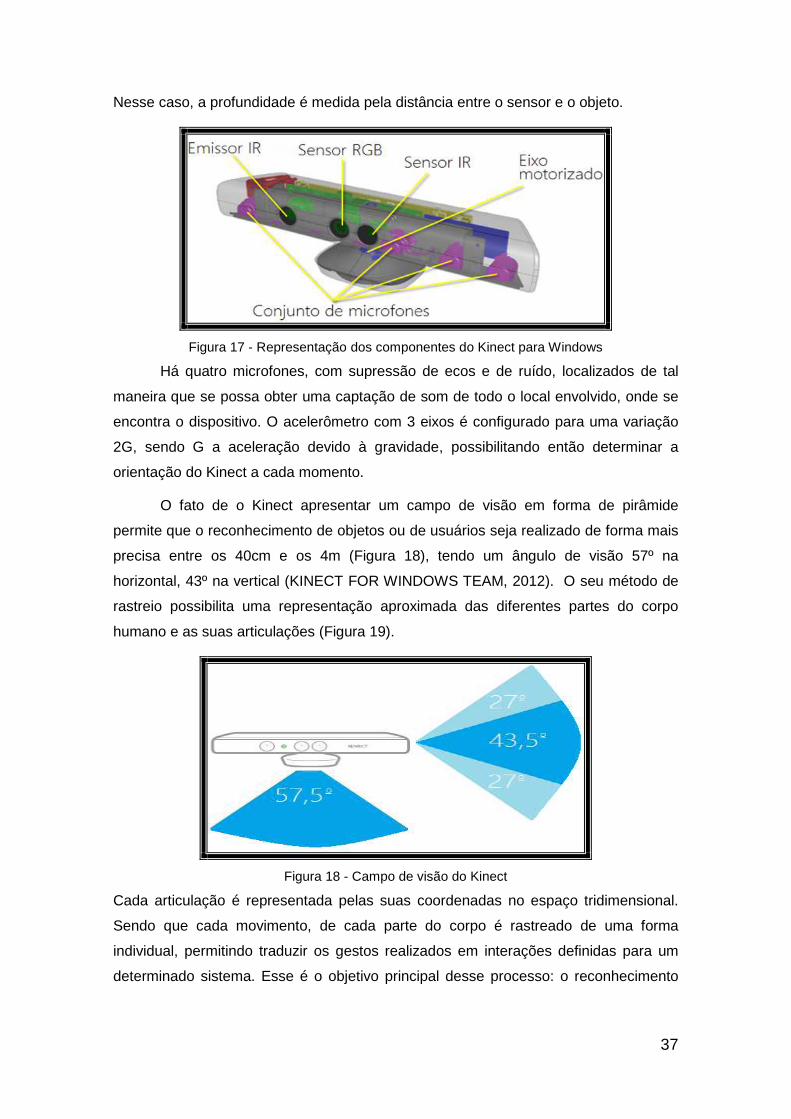
37
Nesse caso, a profundidade é medida pela distância entre o sensor e o objeto.
Figura 17 - Representação dos componentes do Kinect para Windows
Há quatro microfones, com supressão de ecos e de ruído, localizados de tal
maneira que se possa obter uma captação de som de todo o local envolvido, onde se
encontra o dispositivo. O acelerômetro com 3 eixos é configurado para uma variação
2G, sendo G a aceleração devido à gravidade, possibilitando então determinar a
orientação do Kinect a cada momento.
O fato de o Kinect apresentar um campo de visão em forma de pirâmide
permite que o reconhecimento de objetos ou de usuários seja realizado de forma mais
precisa entre os 40cm e os 4m (Figura 18), tendo um ângulo de visão 57º na
horizontal, 43º na vertical (KINECT FOR WINDOWS TEAM, 2012). O seu método de
rastreio possibilita uma representação aproximada das diferentes partes do corpo
humano e as suas articulações (Figura 19).
Figura 18 - Campo de visão do Kinect
Cada articulação é representada pelas suas coordenadas no espaço tridimensional.
Sendo que cada movimento, de cada parte do corpo é rastreado de uma forma
individual, permitindo traduzir os gestos realizados em interações definidas para um
determinado sistema. Esse é o objetivo principal desse processo: o reconhecimento
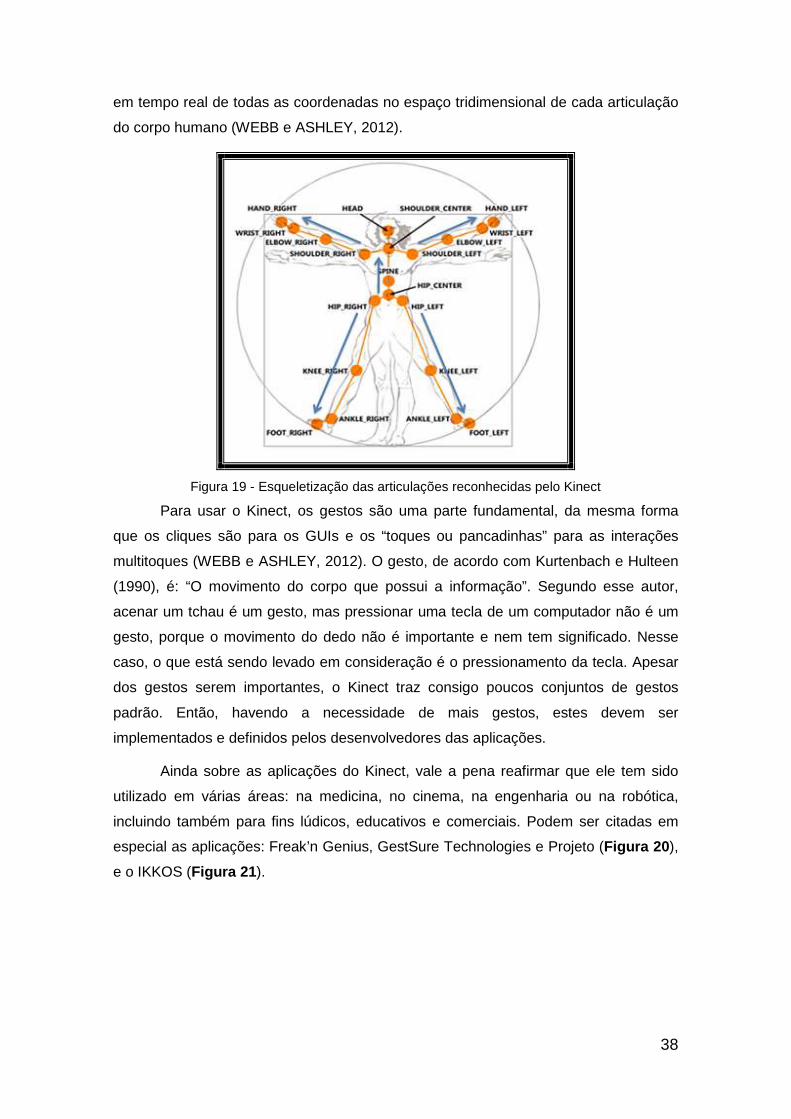
38
em tempo real de todas as coordenadas no espaço tridimensional de cada articulação
do corpo humano (WEBB e ASHLEY, 2012).
Figura 19 - Esqueletização das articulações reconhecidas pelo Kinect
Para usar o Kinect, os gestos são uma parte fundamental, da mesma forma
que os cliques são para os GUIs e os “toques ou pancadinhas” para as interações
multitoques (WEBB e ASHLEY, 2012). O gesto, de acordo com Kurtenbach e Hulteen
(1990), é: “O movimento do corpo que possui a informação”. Segundo esse autor,
acenar um tchau é um gesto, mas pressionar uma tecla de um computador não é um
gesto, porque o movimento do dedo não é importante e nem tem significado. Nesse
caso, o que está sendo levado em consideração é o pressionamento da tecla. Apesar
dos gestos serem importantes, o Kinect traz consigo poucos conjuntos de gestos
padrão. Então, havendo a necessidade de mais gestos, estes devem ser
implementados e definidos pelos desenvolvedores das aplicações.
Ainda sobre as aplicações do Kinect, vale a pena reafirmar que ele tem sido
utilizado em várias áreas: na medicina, no cinema, na engenharia ou na robótica,
incluindo também para fins lúdicos, educativos e comerciais. Podem ser citadas em
especial as aplicações: Freak’n Genius, GestSure Technologies e Projeto (Figura 20 ),
e o IKKOS (Figura 21 ).
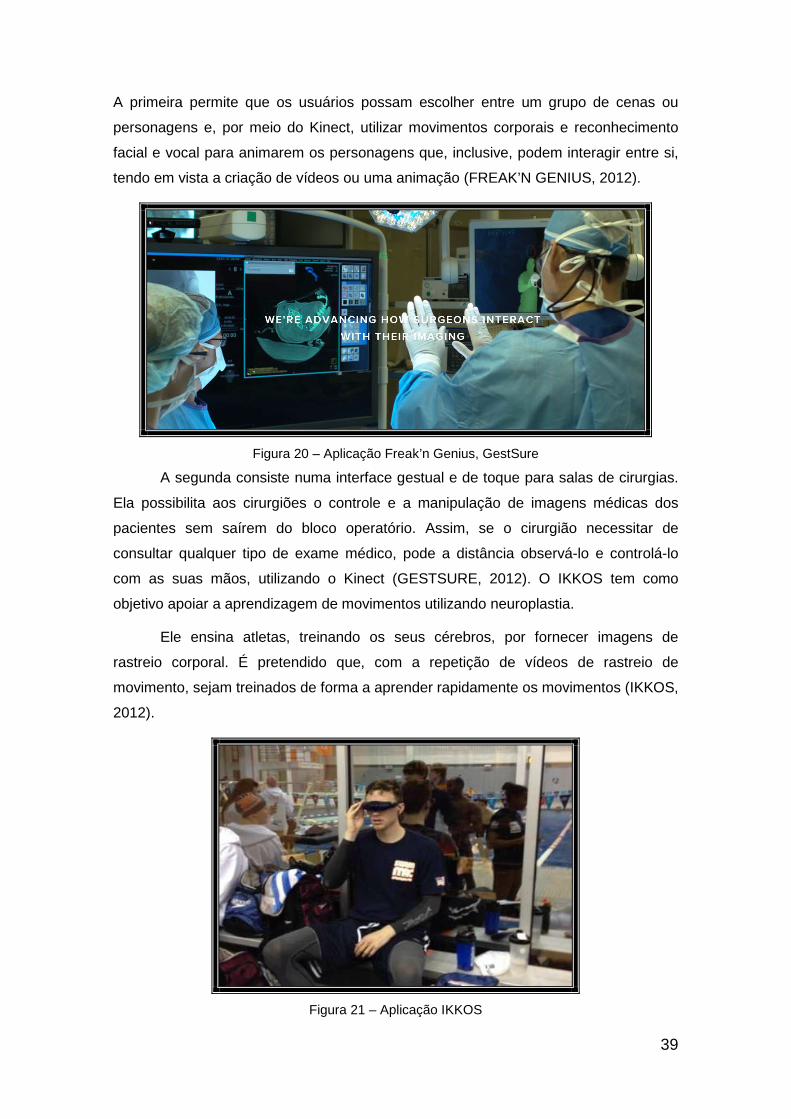
39
A primeira permite que os usuários possam escolher entre um grupo de cenas ou
personagens e, por meio do Kinect, utilizar movimentos corporais e reconhecimento
facial e vocal para animarem os personagens que, inclusive, podem interagir entre si,
tendo em vista a criação de vídeos ou uma animação (FREAK’N GENIUS, 2012).
Figura 20 – Aplicação Freak’n Genius, GestSure
A segunda consiste numa interface gestual e de toque para salas de cirurgias.
Ela possibilita aos cirurgiões o controle e a manipulação de imagens médicas dos
pacientes sem saírem do bloco operatório. Assim, se o cirurgião necessitar de
consultar qualquer tipo de exame médico, pode a distância observá-lo e controlá-lo
com as suas mãos, utilizando o Kinect (GESTSURE, 2012). O IKKOS tem como
objetivo apoiar a aprendizagem de movimentos utilizando neuroplastia.
Ele ensina atletas, treinando os seus cérebros, por fornecer imagens de
rastreio corporal. É pretendido que, com a repetição de vídeos de rastreio de
movimento, sejam treinados de forma a aprender rapidamente os movimentos (IKKOS,
2012).
Figura 21 – Aplicação IKKOS

40
2.7. Arduino
Pode-se afirmar, conforme Bayle (2013), que o Arduino (Figura 22 ) é uma
plataforma de prototipagem eletrônica open-source (código aberto) baseada no uso de
hardware e software flexível e fácil de usar. Seu projeto iniciou-se na cidade de Ivrea,
Itália, em 2005. É destinado a artistas, designers, entusiastas e qualquer pessoa
interessada em criar objetos ou ambientes interativos.
Figura 22 - Arduino Uno R3
Exemplificando, um uso simples desse hardware seria para acender uma luz
por 30 segundos, assim que um botão fosse pressionado. Nesse exemplo, uma
lâmpada e um botão estariam conectados a ele. É possível que ele seja utilizado para
desenvolver objetos interativos independentes ou, então, conectado a um computador,
a uma rede, ou até mesmo à Internet, a fim de recuperar e remeter dados, com
perspectivas de atuar sobre eles. Isto é, ele poderia enviar um grupo de dados
fornecidos por alguns sensores para um site. E, assim, esses dados serviriam para
serem exibidos, por exemplo, em formato de gráfico. Na verdade, ele pode ser
conectado a uma variedade de dispositivos, como: LEDs, displays (mostradores) de
matriz de pontos, botões, interruptores, motores, sensores de temperatura, sensores
de pressão, sensores de distância, receptores GPS, módulos Ethernet, etc. Ou seja, a
qualquer dispositivo que emita dados ou sob o qual se queira algum controle. Os
campos de atuação para o controle de sistemas são imensos, podendo ter aplicações
na área de impressão 3D, robótica, engenharia de transportes, engenharia
agronômica e musical. Em Leitner et al. (2009) são relatadas aplicações na área de
automação de construções ou residencial (domótica).
Um fator que torna o arduino uma plataforma atraente é a sua filosofia de
hardware livre. As pessoas podem usá-lo para criar diversos projetos sem custo algum
de direitos para sua utilização, sendo assim distribuído gratuitamente, se for desejável.

41
Existem diversos modelos de Arduino para se utilizar dependendo do que se
deseja criar, com diferentes formatos e configurações de hardware. O arduino Uno é
um dos mais utilizados. O Arduino Mega (Figura 23 ) possui muito mais portas de
entrada, possibilitando a criação de dispositivos maiores e mais complexos.
Figura 23 - Arduino Mega
O Arduino Nano (Figura 24 ), como o nome já expressa, é uma versão
reduzida, para a criação de objetos eletrônicos menores (ou ocupação de menos
espaço, dependendo do projeto).
Figura 24 - Arduino Nano
Pode-se citar, ainda, o Arduino Fio (Figura 25) e o LilyPad (Figura 26 ). Cada
um possui uma funcionalidade diferente.
Figura 25 - Arduino Fio
O LilyPad, por exemplo, foi criado para ser aplicado a vestimentas, podendo
ser costurado diretamente sobre tecidos. Mais detalhes sobre os modelos estão em
(BAYLE, 2013). As novas placas usam um novo bootloader, o Optiboot, que dentre
várias características, libera mais 1,5kB de memória flash e possibilita uma
inicialização mais veloz. Permite esboços de códigos maiores.
42
Optiboot é um quarto do tamanho do bootloader padrão, liberando 1.5k de
espaço extra.
Figura 26 - Arduino LilyPad
Em termos de componentes eletrônicos, o arduíno é composto de fios,
potenciômetros, capacitores, chaves ou interruptores, LEDs (diodos emissores de luz),
protoboard, que serve para conectar todos estes componentes de forma a termos um
circuito funcional, unindo as suas entradas e saída de alguma forma, de modo que a
corrente que passe por uma peça continue se propagando para a próxima; sensores
(de luz, de temperatura e outros) e displays, que são interfaces gráficas usadas para
representar informações visualmente.
Quando se trata de desenvolvimento de aplicações utilizando o arduino, é
necessário instalar uma versão do software IDE (Ambiente Integrado de
Desenvolvimento), para sistemas operacionais Linux ou Windows ou MAC OS X. A
programação é feita usando-se linguagem C ou C++. As portas podem ser digitais e
analógicas. Se houver necessidade de controlar os componentes do arduíno por meio
de computador, tem-se disponível o conceito de comunicação serial, que é
materializado pelo uso da USB. Para estender o arduíno, tendo em vista o seu
emprego em vários tipos de projetos, existem os Shields, dentre eles: o Ethernet
Shield (Figura 27 ), que permite que o arduino possa se conectar à internet pelo uso
de um cabo ethernet; o Gameduino, com a possibilidade da criação de jogos; o LCD
Shield, o qual adiciona uma tela LCD integrada, com uma resolução e capacidade
superiores aos displays comuns; e o Joystick Shield e o Evil Mad Science Googly Eyes
Shield, que acrescenta “olhos” como funcionalidade.
Figura 27 - Módulo Ethernet Shield
43
O Arduino Uno é uma placa de microcontrolador baseado no ATmega328
(folha de dados). Possui 14 pinos digitais de entrada / saída (dos quais 6 podem ser
usados como saídas PWM), 6 entradas analógicas, um ressonador cerâmico de 16
MHz, uma conexão USB, um conector de alimentação, um cabeçalho ICSP (protocolo
de comunicação), e um botão de reset. Ele contém tudo que é necessário para apoiar
o microcontrolador, bastando conectá-lo a um computador com um cabo USB ou ligá-
lo com um adaptador AC a rede elétrica ou uma bateria 9v para começar. Ele é
diferente de todas as placas anteriores, as quais não usam o chip controlador USB.
Em vez disso, ele apresenta o Atmega16U2 (Atmega8U2 até a versão R2),
programado como um conversor USB para serial. Os detalhes sobre as modificações
realizadas a partir de revisões podem ser consultados no site oficial. Vale acrescentar
que a palavra “Uno” significa 1 (um) em italiano, usada para marcar o lançamento do
arduino 1.0. O Uno é o mais recente em uma série de placas arduino USB.
Para programar o arduino realize as instruções desejadas, utiliza-se a IDE do
arduino, um software livre no qual você escreve o código na linguagem que ele
compreende, a qual é baseada na linguagem C. Sendo que o IDE permite que se
escreva um conjunto de instruções passo a passo, as quais, então, serão executadas
no arduíno. São considerados programas conhecidos como sketches (rascunho, ou
esboço). O hardware e o software do Arduino são open source, sendo possível assim
que o código, os esquemas, o projeto e outros sejam utilizados livremente por
qualquer indivíduo e com qualquer finalidade.
44
Capítulo 3
3. Usabilidade de Interfaces
Este capítulo trata o tema usabilidade de interfaces do usuário, abordando conceitos
associados, medidas, métodos e critérios relativos à avaliação de interfaces,
direcionando para validação da IHC proposta neste trabalho.
3.1. Conceitos e Considerações
Segundo Nielsen e Loranger (2006), a usabilidade é um atributo de qualidade
relativo à quão fácil um sistema pode ser utilizado. Mais especificamente, refere-se a
quão rápido os usuários podem aprendê-lo; quão eficiente e fácil de memorizar esse
sistema é; quão resistente a erros se apresenta; e, finalmente, a quantos usuários
gostariam de usá-lo (NIELSEN e BUDIU, 2013).
Jensen e Tonies (1979) defenderam que, sob a ótica da Engenharia de
Software (FAIRLEY, 1985), um produto podia ter sua qualidade avaliada com base em
um conjunto de requisitos essenciais. Dentre os quais, ainda não havia um que
indicasse uma efetiva preocupação com a facilidade de utilização (MEDEIROS, 1998).
Então, com o passar do tempo e experimentações humanas com o computador, a
usabilidade veio a ser um termo especificado claramente para a qualidade do
software. Sendo que, nesse caso, o funcionamento do software deve ser adaptado a
maneiras de utilização mais satisfatória ao usuário, obedecendo a normas e padrões
estabelecidos. Podem ser citadas a NBR 9241-11 (2002), a ISO 9241-400 (2007) e a
ISO 9241-410 (2008).
Segundo Pressman (2011), a usabilidade é uma propriedade do software, que
está relacionada à facilidade de aprender. Para esse autor, se ele não é fácil de usar,
está na maioria das vezes fadado ao fracasso. Nielsen (1993) chama a atenção para
o fato de que a usabilidade de interfaces não pode ser traduzida por uma só
propriedade. Ao contrário disso, ela está tradicionalmente associada a cinco atributos,
que são: facilidade de aprender, facilidade de memorizar, erros, eficiência e
satisfação. Sendo que primeiro atributo consiste em que o sistema seja fácil de
aprender, de maneira que o usuário realize com agilidade as atividades almejadas.
Em termos da eficiência, o sistema deve oferecer ao usuário um nível alto de
produtividade durante a realização de suas tarefas. Isto é, refere-se aos esforços
necessários e exigidos pelo sistema, para que o usuário atinja seus objetivos. Esse

45
esforço pode ser medido, por exemplo, em tempo gasto para que uma pessoa
complete determinada tarefa ou em função da quantidade de erros armazenados
antes de completá-la. É esperado que se obtenha melhores resultados com menos
esforço.
A facilidade de memorizar é refletida no fato de que o usuário lembre
facilmente de como as tarefas devem ser executadas, não sendo necessário passar
de novo pela aprendizagem de comandos necessários a realização dessas atividades.
Quando trata de erros, o sistema deve possuir uma baixa taxa de erro, de maneira que
os usuários cometam poucos erros, durante a sua utilização. Além disso, os erros
cometidos devem ser recuperados com facilidade. Acrescenta-se a isso o fato de que
os erros, gerados de algum tipo de catástrofe, não devem acontecer.
Em relação à satisfação, o sistema deve ser agradável, de maneira que o
usuário se sinta satisfeito em utilizá-lo. Satisfação refere-se ao nível de conforto que
os usuários sentem, quando usam o sistema e o quanto o consideram apropriado
como meio para atingir seus objetivos.
Por ser mais subjetivo que os dois anteriores, esse aspecto torna-se mais difícil
de ser medido. Blythe et al. (2003) defendem uma extensão da usabilidade focada na
satisfação, tendo em vista que essa categoria não pode ser traduzida como “ausência
de dor” e que o prazer na utilização não pode estar relacionado apenas a sistemas de
entretenimento, mas a tarefas de trabalho e a simples diversões domésticas também,
assim como ouvir músicas e ver álbum de fotografias. Pode-se fazer uma extensão da
ideia desses autores para tratar a usabilidade de interfaces não convencionais, como
é no caso deste estudo.
Realizar a medição da usabilidade de uma interface não é apenas considerar o
quanto ela é amigável ou não ao usuário. É necessário levar em consideração os
atributos anteriormente mencionados e, também, o grupo de usuários e as tarefas que
são executadas por eles (SHACKEL, 1991; NIELSEN e LORANGER, 2006).
Exemplificando, um conjunto de pessoas, que utilize fórmulas matemáticas, pode
gostar muito de interfaces voltadas para esse fim, e outros usuários, não pertencentes
a esse clã, podem odiá-las. Um mesmo sistema pode ser medido como tendo
propriedades de usabilidade diferentes, se utilizado por diferentes usuários para
tarefas diferentes (NIELSEN, 1993).
É possível que nem todos os critérios de usabilidade sejam igualmente
considerados no desenvolvimento de um projeto de interface. Exemplificando,
facilidade de aprender seria de especial importância em se tratando de um projeto que
46
é executado numa empresa com alta rotatividade de empregados. Então, antes de
iniciar um projeto de interface nova, é essencial discutir a métrica de usabilidade de
interesse para o projeto, sendo que para cada atributo de usabilidade de interesse,
vários graus diferentes de desempenho podem ser especificados.
No caso da análise do atributo erro, pode-se especificar que a medida entre 1 e
3 erros de usuários por hora seja uma meta de um projeto de interface. Assim, caso o
usuário alcançou uma média de 4,5 erros por hora, a meta não foi atingida. Caso o
atributo interessante seja facilidade de aprender, a medida de usabilidade consiste
numa análise da evolução de aprendizagem do usuário. Em se tratando do projeto de
interfaces para sistemas de informação de museus, deve-se considerar o atributo
facilidade de aprender, devido ao pouco tempo que o usuário possui para aprender a
usá-lo. Nesse contexto, o tempo de aprendizagem do usuário é zero (NIELSEN e
LORANGER, 2006).
Considerando a ISO 9241-11 (1998), a usabilidade é definida como "a
capacidade que um sistema interativo oferece ao seu usuário, em um determinado
contexto de operação, para a realização de tarefas de maneira eficaz, eficiente e
agradável". Podendo-se concluir que os atributos de usabilidade são: eficácia,
eficiência e satisfação.
Para Preece et al. (2007), a usabilidade é caracterizada por: efetividade, que se
traduz assim: ”que o sistema realize o que ele tem que realizar”; eficiência, que
consiste em o quão rápida uma tarefa pode ser desempenhada pelo sistema;
segurança, que é referente à proteção que o sistema oferece ao usuário a respeito de
relação a danos e frustrações, quando se trata da execução da tarefa desejada,
evitando situações danosas, prevenindo erros e permitindo recuperá-los; utilidade
refere-se ao provimento de ferramentas poderosas; facilidade de aprender, que
propicia a avaliação de o quanto é fácil aprender a utilizar o sistema; e, finalmente,
facilidade de recordar, que permite a medição de o quanto é fácil recordar como o
sistema funciona, depois de ter sido treinado a usá-lo uma vez.
Shneiderman e Plaisant (2004) a base para a avaliação da qualidade de uma
interface está relacionada a: tempo de aprendizagem, que consiste no tempo em que
um usuário demora a aprender os comandos necessários para execução do conjunto
de atividades a serem realizadas; velocidade de uso, que se refere ao tempo que
usuário demora a executar as atividades; taxa de erros do utilizador, que aponta para
o número e o tipo de erros provocados pelos utilizadores; retenção ao longo do tempo,
que se trata da maneira como os utilizadores operam o sistema; e, por último, a
47
satisfação, que indica o nível de satisfação dos indivíduos a várias características da
interface e do seu modo de operação. Esse último aspecto pode ser avaliado, usando-
se questionários com escalas ou de comentários contendo textos livres.
Nielsen (1993) e Shneiderman (1998) propõem, com denominações diferentes,
os mesmos atributos de usabilidade. Sendo que a eficiência e a satisfação,
referenciadas pela ISO 9241-11 (1998), estão inseridas no conjunto proposto por
esses dois autores. Dessa maneira então, considerando os fundamentos desses
autores, estabeleceram-se para este estudo os atributos de usabilidade contemplados
no Capítulo 7. Logo a seguir são apresentados métodos e medidas de avaliação de
IHC.
3.2. Métodos e Medidas de Avaliação
A avaliação, no que diz respeito ao uso de interfaces, pode ser classificada
como formativa ou somativa, de acordo com a época ou momento em que ocorre. A
avaliação formativa é realizada antes da implementação e é considerada na
construção do sistema, tendo em vista influenciar nas características do produto em
produção, já que auxilia o projetista a modelar o projeto. A avaliação somativa
acontece depois da implementação, com o propósito de verificar o funcionamento
adequado do sistema finalizado (BOOTH, 1989). Esta pesquisa realiza a avaliação
somativa, que está sendo tratada no Capítulo 7.
Baseada na ISO 9241 parte 11, a Norma Brasileira 9241-11 (NBR 9241-11,
2002), determina normalmente que seja necessário fornecer, pelo menos, uma medida
para eficácia, eficiência e satisfação.
Já que a importância associada aos componentes de usabilidade está em
função do contexto de utilização e das propostas para as quais a usabilidade está
sendo descrita, convém que não haja regra geral de como as medidas sejam
selecionadas ou combinadas. A seleção e o grau de detalhamento de cada medida
estão em função dos objetivos das partes envolvidas na medição, sendo conveniente
levar em conta a importância relativa de cada medida para esses objetivos.
Exemplificando, nas situações em que a utilização do sistema não é frequente, pode
ser dada importância bem expressiva, para as medidas relativas à facilidade de
aprender e à facilidade de memorizar.
Caso não seja possível obter medidas objetivas de eficácia e eficiência,
medidas subjetivas, baseadas na percepção dos usuários, podem ser usadas. As
medidas objetivas oferecem indicações diretas de eficácia e eficiência e as subjetivas

48
podem estar vinculadas diretamente à satisfação. Sendo que a satisfação pode
também ser calculada de medidas objetivas do comportamento das pessoas usuárias
e, além disso, as estimativas calculadas de eficácia e eficiência podem ser oriundas de
opiniões subjetivas que os usuários expressam sobre a realização de suas tarefas e
seus resultados.
A eleição de valores de critério de medidas de usabilidade é determinada pelos
requisitos para o produto e as necessidades da organização ditam os critérios. Pode
ser preciso estabelecer critérios tanto para o nível mínimo aceitável quanto para o
nível esperado de usabilidade. Quando se determina valores de critério para um grupo
de usuários, os critérios podem ser estabelecidos como uma média (exemplificando:
tempo médio para completar uma tarefa não ser mais que 10 minutos), para indivíduos
(exemplificando: todos os usuários podem completar a tarefa em 10 minutos), ou,
então para uma porcentagem de usuários (p.ex. 90% dos usuários podem completar a
tarefa em 10 minutos). Determinando critérios, deve-se ter cautela para que seja dado
o peso adequado para cada item de medida. Para determinar critérios para erros,
pode ser preciso atribuir pesos que traduzam a importância relativa de tipos diferentes
de erros.
A escolha de medidas e do ambiente para teste irá depender dos propósitos da
atividade de medidas e seus relacionamentos com o ciclo de projeto.
A eficácia pode ser definida como a acurácia e completude com que os
usuários alcançam objetivos específicos. Para a medição da acurácia e da
completude, é preciso produzir uma especificação operacional de critérios para
alcançar de forma satisfatória os objetivos. Isso pode ser calculado em função da
qualidade e quantidade de saídas. Exemplificando, a especificação de um formato
desejado para documentos de saídas, juntamente com a quantidade e extensão de
documentos a serem processados.
E a acurácia pode ser obtida pela extensão com que a qualidade da saída
corresponde com o critério determinado e a completude pode ser calculada como a
proporção da quantidade alvo que foi atingida. Caso uma única medida de eficácia
seja requerida, há a possibilidade de combinar medidas de acurácia e completude.
Exemplificando, completude e acurácia podem ser obtidas como porcentagens e
multiplicadas entre si, tendo como resultado um percentual para eficácia. Em situações
em que não seja adequado nivelar acurácia com completude, ambas as medidas
devem ser levadas em conta de forma independente.
49
A eficiência é calculada relacionando o nível de eficácia alcançada com os
recursos usados. Exemplificando, a eficiência temporal pode ser determinada como a
proporção entre a medida de eficiência em alcançar um objetivo específico e o tempo
para alcançar tal objetivo. Cálculos semelhantes podem ser realizados em termos da
eficiência no uso de energias físicas ou mentais, custos materiais ou financeiros (ISO
9241-11, 1998). A satisfação pode ser medida de maneira subjetiva ou objetiva.
Medidas objetivas podem ter como base a observação do comportamento do usuário
(postura corporal, movimento do corpo, frequência de distração, etc.) ou pode estar
fundamentada no monitoramento de respostas psicológicas do usuário.
As medidas subjetivas de satisfação são resultantes da quantificação da
intensidade das reações, atitudes ou opiniões expressadas por um usuário. Esse
processo pode ser feito de muitas formas, inclusive, solicitando ao usuário a atribuição
de uma nota correspondente à intensidade de seu sentimento em um determinado
momento, ou pedindo-lhe para categorizar produtos em ordem de preferência, ou
utilizando uma escala de atitudes baseadas em um questionário. Em se tratando
desse tipo de escala, quando desenvolvidas adequadamente, há a vantagem de
serem rápidas para utilizar, terem confiabilidade, e não requisitarem habilidades
especiais para aplicações. Questionários de atitudes, desenvolvidos utilizando
técnicas psicométricas3, possuirão estimativas de confiança, validade reconhecida e
quantificáveis e, além disso, poderão ter resistência aos fatores: falsificação,
conveniência social e preconceitos de respostas positivas e negativas. Elas também
admitem que resultados sejam comparados a normas estabelecidas para respostas
calculadas anteriormente.
As medidas para eficiência, eficácia e satisfação até o momento expostas
estão fundamentadas na NBR 9241. Em se tratando de uma complementação, com
base em Nielsen (1993), seguem as medidas relativas à facilidade de aprender, à
facilidade de memorizar e a erros. Acrescenta-se que, de acordo com Hornbaek
(2006), há poucos trabalhos que consideram esses dois primeiros atributos. O atributo
mais fácil de ser medido é provavelmente a facilidade de aprender. Comumente, a
forma de medir esse atributo consiste em estabelecer que os usuários sejam capazes
de completar uma tarefa específica com sucesso, num determinado intervalo de
tempo.
3 Psicometria é a área da psicologia que trata do desenvolvimento e da aplicação de técnicas de mensuração aos fenômenos psíquicos. Técnicas psicométricas consistem em medições que se fazem mediante a atribuição de valores numéricos aos comportamentos, de maneira que as diferenças de comportamento sejam representadas por variações nesses valores numéricos (KAPLAN e SACCUZZO, 2012).
50
No caso da facilidade de memorização, sua avaliação é completada raramente
como acontece com os demais atributos de usabilidade. Há duas maneiras principais
de fazer sua medição: a primeira consiste em submeter usuários casuais, os quais no
momento não usam o sistema, a testes padrões, tendo em vista calcular o tempo
preciso para fazer as atividades tarefas constantes desses testes. A segunda
contempla a aplicação de questões aos usuários, após a interação com o sistema,
relativas aos efeitos dos comandos, com o propósito de contabilizar a quantidade de
respostas certas. Embora essa alternativa seja mais fácil de ser realizada, a primeira é
mais significativa, porque leva em conta a existência de interfaces dotadas de
recursos automatizados ou não (assistentes e ajudas), não sendo necessário que o
usuário memorize os comandos ao ponto de responder com sucesso a perguntas
sobre eles.
Em relação ao atributo erros, os usuários deveriam realizar menos erros quanto
possível, ao utilizar um sistema computacional. Em geral, um erro é conceituado como
ação qualquer não completada para atingir um propósito desejado. Já a taxa de erros
de um sistema é calculada pela contagem do número de tais ações dos usuários, ao
executarem alguma tarefa especifica. Essas taxas de erros podem ser úteis para
medir outros atributos de usabilidade.
Como há diversas abordagens de avaliação de usabilidade, Shneiderman
(1998) fornece a sugestão de que a adoção de um método apropriado dependa dos
seguintes fatores:
estágio em que o projeto se encontra, revelando se os trabalhos estão nas fases
mais elementares, em pleno andamento ou em fase de conclusão;
nível de inovação do projeto, mostrando se o domínio do assunto ou da solução
possui natureza bem especificada ou se é de caráter exploratório;
quantidade de usuários potenciais;
criticidade da interface, considerando que a interface de um sistema de controle de
tráfego aéreo possui papel muito mais crítico se comparado com a interface de um
quiosque de informações turísticas;
custos do produto e dos recursos destinados a testes. Pode-se afirmar que
existem métodos de inspeção de custos e precisão variados. A criticidade do
produto e o nível de precisão dos resultados esperados dos testes serão
significativos para a procura do equilíbrio entre os custos de elaboração do produto
e os de inspeção da usabilidade;
51
possibilidade de tempo e de especialistas em usabilidade disponíveis (KOYANI et
al., 2004); e a
experiência da equipe de projeto e avaliação.
Este estudo levou em consideração os fatores: grau de inovação, custos e
disponibilidade de tempo.
Segundo Nielsen (1994) os métodos de avaliação de usabilidade são classificados
em quatro categorias:
automática, caso em que a usabilidade é avaliada por programas de computador,
os quais estabelecem a comparação entre a interface propriamente dita e suas
especificações;
empírica, quando a usabilidade é medida, a partir da observação dos testes feitos
com usuários reais. É a maneira de avaliação mais usada regularmente, com
alguns impedimentos. Geralmente, é caro e difícil realizar a reunião de usuários
reais, a fim de testar todos os aspectos de cada nova versão do projeto;
formal, em que a usabilidade é medida com base em modelos e fórmulas. Nesse
caso, a avaliação é de difícil aplicação, sendo particularmente problemática
quando aplicada a interfaces altamente interativas e complexas;
informal, quando a avaliação da usabilidade acontece baseada em regras
heurísticas e em experiências, conhecimentos ou habilidades pessoais ou de
grupos.
Apesar da classificação, sugerida por Nielsen (1994), poder contar com
considerável aceitação junto à comunidade relativa à usabilidade de software, adotou-
se, para esta pesquisa, a classificação sugerida por Shneiderman (1998), que divide
os métodos de avaliação considerando, além da maneira de condução (assim como o
faz Nielsen), o espaço em que acontece a avaliação e os envolvidos (especialistas,
usuários ou ambos). Essa classificação consiste em: revisões especializadas; testes e
estudos laboratoriais; pesquisas de opinião; testes de aceitação; avaliação durante o
uso ativo e experimentação psicologicamente orientada.
As revisões especializadas, em se tratando de interfaces altamente
especializadas, requerem a participação de um especialista com domínio das
questões de usabilidade, do assunto ou da interface em questão. Mas Shneiderman
(1998) chama a atenção para o fato de que a reação da equipe de desenvolvimento
contra recomendações externas ao grupo tende sempre a ser maior. Em particular,
52
Nielsen (1994) denomina essa categoria de avaliação como Inspeção de Usabilidade,
e a insere na classe de avaliações informais.
De acordo com Shneiderman (1998), quando se trata dos testes de usabilidade
e estudos laboratoriais, o teste de usabilidade parecia, até bem pouco tempo atrás,
uma boa ideia, porém era inviabilizada pelas tradicionais dificuldades de recursos e
cronogramas alocados aos projetos. Sendo que a importância desses laboratórios
reside na abordagem científica dos aspectos relacionados à usabilidade.
A reunião e combinação de técnicas de teste e avaliação proporcionaram a
revisão de conceitos e elaboração de novas ferramentas, num ciclo de evolução, que
possui muito a oferecer aos fornecedores de programas e usuários de computador. De
forma básica, o funcionamento desse tipo de laboratório não difere de outros. Existe
um ambiente adequado para ensaios de interação, local aonde o usuário pode ser
observado, tendo suas reações armazenadas por meio de câmeras, recursos de
captura de ações de teclado e mouse, e, também, são consideradas as próprias
expressões faciais e corporais. Os usuários, que participam dos experimentos são
informados das condições, em que se darão os ensaios e, de maneira explícita,
consentem que todos os fatores da interação possam ser guardados.
Há autorização, ainda, para que as condições da interação sejam controladas
pelo grupo de avaliação, tendo em vista observar as reações do usuário, sendo que
erros podem ser, de forma proposital, incluídos na interação. Além disso, interrupções
constantes podem ser feitas (telefone, ruídos, conversação no ambiente de ensaio) e
atividades incoerentes podem ser solicitadas. O propósito dos ensaios laboratoriais é
medir a usabilidade oferecida em condições controladas, seja em situações normais
de interação, ou em situações extremas (HIX e HARTSON, 1993). Esse tipo de
avaliação foi aplicada em uma interface de dispositivo móvel por Ferreira (2007), em
um sistema (SiFEUP) da Universidade do Porto, em Portugal, por Guerreiro (2005).
Em se tratando dos testes de aceitação, é possível afirmar que a produção
tradicional de software estabelece que devam ser definidos os requisitos funcionais e
operacionais do produto em questão, já nas etapas mais elementares do projeto. E, a
esses requisitos devem ser associados valores ou características, as quais irão servir
como critérios de aceitação do produto por parte do cliente. Geralmente, esses
critérios são estabelecidos por meio da determinação de tempos de resposta para a
recuperação ou armazenamento dos dados, para a emissão de relatórios e outros
aspectos afins. A aceitação do sistema permanece condicionada ao cumprimento dos
limites pré-fixados. Antes da entrega propriamente dita, os ensaios com os usuários,
53
propiciam medir as variáveis definidas e compará-las com os valores prévios. Se
esses limites não forem apropriadamente observados, a equipe de produção precisa
fazer os ajustes necessários, até que os limites de aceitação sejam alcançados.
Com frequência, o estabelecimento de critérios de aceitação, relativo à
interface de utilização é caracterizado por uma significativa ambiguidade. A sugestão
de Shneiderman (1998) é de que os critérios como interface amigável ou user friendly
sejam substituídos por parâmetros mensuráveis efetivamente. Dentre eles há: tempo
de aprendizagem; tempo de resposta para determinada função; taxa de erros por
usuário; e grau de satisfação subjetivo do usuário.
Quando se trata do método de avaliação durante o uso ativo, o apoio à efetiva
utilização por parte dos usuários, seja por intermédio de centrais de atendimento,
programas de treinamento ou, ainda, suporte local ou remoto, leva ao estreitamento
dos laços de afinidades com as comunidades que usam o sistema. Nesse contexto, as
impressões obtidas dos próprios usuários, a partir do uso real do sistema em seu
ambiente de produção, proporcionam o aprimoramento e correção dos aspectos da
interface. Maiores detalhamentos sobre esse método e as sugestões de algumas
maneiras de avaliação relacionadas são relatadas por Shneiderman (1998).
No referente à experimentação psicologicamente orientada, a avaliação de
usabilidade baseada em experimentos de interação fundamentados em aspectos
psicológicos constitui uma importante abordagem científica. Considerando os aspectos
cognitivos, são propostas atividades de interação aos usuários e observadas reações
e apreciações do usuário. Shneiderman (1998) reúne algumas preocupações comuns
nesses experimentos, dentre as quais há: lidar com um problema prático e considerar
a estrutura teórica; estabelecer hipóteses lúcidas e passíveis de teste; tomar os
devidos cuidados com os fatores que possam influenciar as análises estatísticas; e
generalizar as conclusões.
Quando se trata da pesquisa de opinião, segundo Shneideman (1998), ela
constitui-se uma técnica significativamente comum de avaliação. Comparando-as,
pode-se afirmar que são baratas e podem servir como um bom complemento para os
testes de usabilidade e revisões especializadas. O sucesso dessas pesquisas
acontece em função da objetividade do instrumento de coleta escolhido. Ele deve ser
o quanto possível, mais dirigido para os dados que se deseja analisar, e quanto
menos ambíguo. Assim, melhor será a eficácia de aplicação do instrumento. As
entrevistas e os questionários são instrumentos muito usados para esse fim.

54
Conforme Santos e Fialho (1995), a entrevista dirigida é, geralmente, efetuada
com base num rol de perguntas objetivas prévias, a serem respondidas pelo
entrevistado. A diferença entre essa entrevista e o questionário está no fato de que a
primeira é realizada a partir do contato direto entre entrevistado e entrevistador. O
questionário pode ser aplicado de maneira que dispense essa relação. As informações
obtidas dessas entrevistas podem ser comparadas e analisadas usando-se estatística.
Sendo que na entrevista informal, não há um protocolo definido com questões prévias.
O entrevistado é solicitado a falar livremente sobre algumas questões direcionadas
pelo entrevistador. Nesse caso, não haverá obrigação de uma amostra representativa,
nem de uma análise estatística das informações. Uma decisão importante é a seleção
da amostra ou utilização ou não da população.
O uso dessa forma de avaliação é encontrado nos trabalhos de: Shneiderman
e Norman (1989), que relata o desenvolvimento do QUIS (Questionnaire for User
Interaction Satisfaction); Oppermann e Reiterer (1997), que referencia o SUMI
(Software Usability Measurement Inventory) desenvolvido como parte do Projeto
MUSIC (Metrics for Usability Standards in Computing); Prümper (1999), que descreve
brevemente o ISONORM 9241/10, baseado na norma ISO 9241-10; e finalmente,
Reiterer (1993) que apresenta o EVADIS II (Evaluation of User Interfaces), uma versão
aprimorada do questionário voltado para especialistas.
Este trabalho utilizou a pesquisa de opinião para a validação do protótipo
descrito neste estudo, abordada e descrita no Capítulo 7. Contudo, não escolheu ou
adaptou nenhum desses questionários, já que eles contêm questões, as quais não são
apropriadas à avaliação ao uso do tipo de interface em foco. Algumas questões que
apontaram para que esses questionários não fossem usados são: no QUIS, o
tamanho do menu e das letras é adequado?; no SUMI, às vezes gostaria de saber se
estou usando o botão certo; e no ISONORM, possui questões relacionadas a entrada
de dados. Tendo como esses exemplos e outras questões, foi elaborado o próprio
questionário, considerando que a solução de interface proposta neste estudo é não
convencional.
O levantamento da literatura sobre usabilidade, que está sendo apresentado,
não objetivou esgotar o tema ou fazer um overview. O propósito foi procurar a base
teórica para decidir sobre a seleção dos atributos, das medidas, dos métodos, dos
critérios e dos objetivos de usabilidade a serem utilizados neste estudo. Uma revisão
detalhada sobre esse assunto pode ser encontrada em (HORNBAEK, 2006).
55
Hornbaek (2006) realizou uma revisão da literatura sobre avaliação da
usabilidade, contemplando medidas de usabilidade usadas em 180 estudos
publicados em periódicos especializados em IHC. Essa revisão sobre usabilidade
trouxe as seguintes conclusões:
1. alguns estudos abordam a medida de como os usuários interagem com as
interfaces como sendo sinônimo de qualidade em utilização, embora seja fraca
a relação de padrão de uso e qualidade em uso;
2. medidas da qualidade de interação, realizadas por peritos de domínio, somente
são utilizadas em algumas pesquisas;
3. cerca de um quarto dos estudos não avalia o que resulta da interação dos
usuários, não dando assim suporte em alguns propósitos amplos sobre
usabilidade;
4. medidas sobre aprender e memorizar são com raridade empregadas, embora
sejam recomendadas em literatura especializada;
5. medidas da satisfação de usuários com as interfaces estão em desacordo, já
que, na prática a maior parte dos estudos elaboram questões, sendo que os
questionários validados prontamente disponíveis são ignorados; e
6. muitas pesquisas confundem critérios com medidas.
Ainda alguns trabalhos sobre a avaliação da usabilidade da interação com o
usuário podem ser citados, dentre os quais, estão: (FERREIRA, 2007; BARROS,
2003; HORNBAEK, 2006; GUERREIRO, 2005; BETIOL e CYBIS, 2004; DAWSON et
al., 2005). Quanto à validação da interface em questão, há poucos trabalhos na
literatura levantada.
Assim, sobre esta pesquisa especificamente, pode-se fazer as afirmações que
estão a seguir.
• Os atributos de usabilidade escolhidos para a execução deste trabalho são
aqueles propostos por Nielsen (1993) e Shneiderman (1998).
• Avaliação escolhida foi a somativa, adequada ao desenvolvimento de um
protótipo evolutivo funcional de uma interface não convencional;
• Levou-se em consideração para a escolha das medidas e dos métodos de
avaliação os fatores: inovação, custos e disponibilidade de tempo.
• Escolheram-se medidas subjetivas para validar a interface quanto aos
atributos eficiência, erros, facilidade de aprender e facilidade de memorizar

56
em detrimento das objetivas. Isso se deveu ao fator inovação, já que a
interface, sendo não usual, dependeria muito mais da opinião de seus
utilizadores do que de cálculos de fórmulas. Acrescenta-se a isso o fato de
que ainda não se têm estabelecido para esse tipo de interface as medidas
que seriam mais adequadas. Além do mais, embora seja comum a
utilização de medida objetiva para medir a eficiência, que pode ser
mensurada pelo quociente entre o sucesso na realização da tarefa e o
tempo gasto, Gabbard (1997) afirma que, em se tratando de interfaces que
não sejam tradicionais, nem sempre o tempo é significativo, entretanto, o
controle do dispositivo de entrada o é.
• Os fatores disponibilidade de tempo e custos conduziram à adoção do
método, categorizado por Nielsen (1994) como pesquisa de opinião, que é
menos dispendioso em relação aos demais e requer pouco tempo de
envolvimento dos usuários. Quanto aos objetivos e aos critérios, foram
definidos após o levantamento das necessidades do usuário, expostos na
Seção 6.1.

57
Capítulo 4
4. Metodologia
Neste capítulo, é apresentada a metodologia adotada neste trabalho. São descritos o
tipo da pesquisa, os sujeitos, o cenário, as etapas de desenvolvimento, os
instrumentos e as técnicas de coleta e de tratamento de dados, utilizados durante a
execução deste estudo.
4.1. Tipo da Pesquisa
Baseado em Chizzotti (2006) e Gil (2010), é apropriado afirmar que esta
pesquisa é um estudo de caso. Uma das vantagens do uso do estudo de caso é o
incentivo a descobertas. Devido à flexibilidade do seu planejamento ou da sua
organização, durante o seu desenvolvimento, há possibilidade neste tipo de pesquisa
que a investigação disponha de um plano inicial e, com o decorrer do tempo, o
interesse seja inclinado por aspectos, os quais não foram previstos. Esta é uma das
razões pela qual o estudo de caso é recomendado para a execução de estudos
exploratórios (GIL, 2010).
Segundo Chizzotti (2006), por outro lado, uma pesquisa pode ser classificada
como quantitativa, de acordo com a seleção dos instrumentos e procedimentos
técnicos usados na coleta e na análise de dados. Gil (2010) expõe outras
classificações, utilizando esse mesmo critério. Para Yin (2006), a diferença entre
pesquisa qualitativa e quantitativa não é estabelecida com base nas fontes de coleta
de dados, e sim, na filosofia adotada pelo investigador.
Então, levando em conta a categorização de pesquisa de Chizzotti (2006), este
estudo é quantitativo, devido ao fato de estar envolvida a aplicação de questionário
com questões fechadas, entrevista diretiva ou estruturada e observação sistemática
ou estruturada.
4.2. Cenário
O cenário deste estudo é o LAMCE, inicialmente chamado LabCog4 (Figura
28), que está situado no Parque Tecnológico do Rio, um empreendimento da UFRJ
em parceria com várias instituições, tais como a Prefeitura do Rio de Janeiro,
4 Fonte: O projeto LabCog. Disponivel em: <http://grva.lamce.coppe.ufrj.br/labcogsdk/?go=projLabcog.htm>. Acessado em: fev. de 2014.
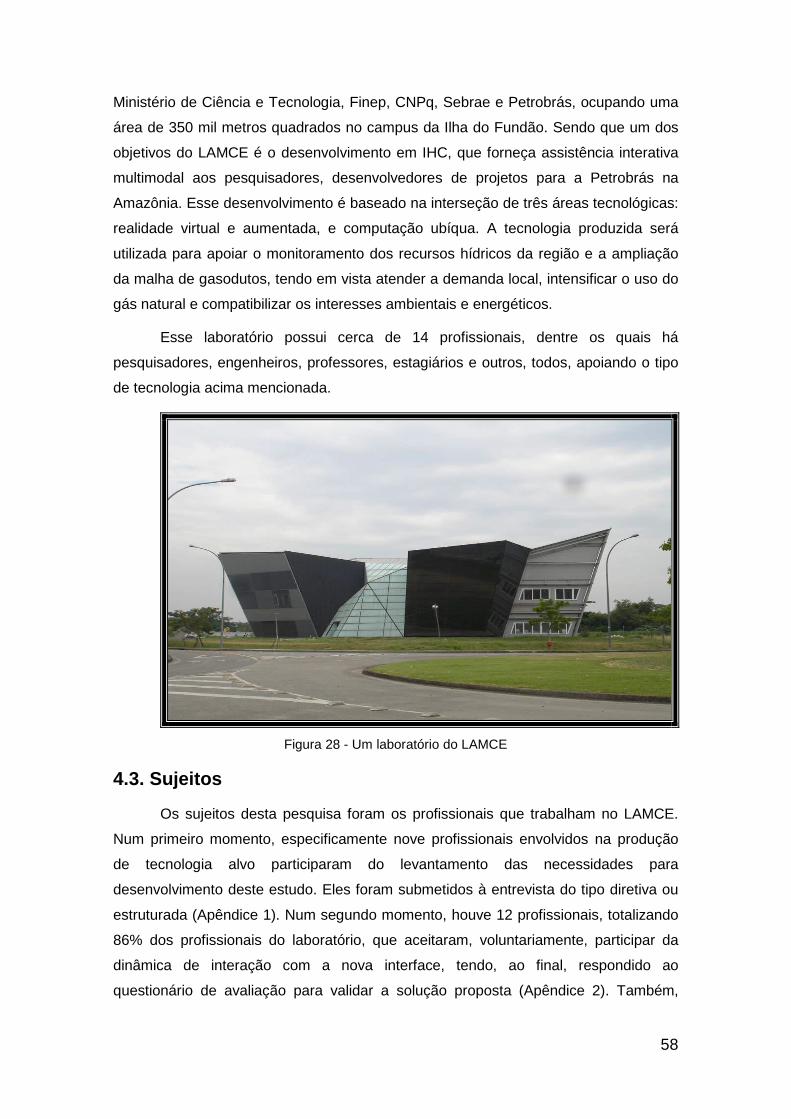
58
Ministério de Ciência e Tecnologia, Finep, CNPq, Sebrae e Petrobrás, ocupando uma
área de 350 mil metros quadrados no campus da Ilha do Fundão. Sendo que um dos
objetivos do LAMCE é o desenvolvimento em IHC, que forneça assistência interativa
multimodal aos pesquisadores, desenvolvedores de projetos para a Petrobrás na
Amazônia. Esse desenvolvimento é baseado na interseção de três áreas tecnológicas:
realidade virtual e aumentada, e computação ubíqua. A tecnologia produzida será
utilizada para apoiar o monitoramento dos recursos hídricos da região e a ampliação
da malha de gasodutos, tendo em vista atender a demanda local, intensificar o uso do
gás natural e compatibilizar os interesses ambientais e energéticos.
Esse laboratório possui cerca de 14 profissionais, dentre os quais há
pesquisadores, engenheiros, professores, estagiários e outros, todos, apoiando o tipo
de tecnologia acima mencionada.
Figura 28 - Um laboratório do LAMCE
4.3. Sujeitos
Os sujeitos desta pesquisa foram os profissionais que trabalham no LAMCE.
Num primeiro momento, especificamente nove profissionais envolvidos na produção
de tecnologia alvo participaram do levantamento das necessidades para
desenvolvimento deste estudo. Eles foram submetidos à entrevista do tipo diretiva ou
estruturada (Apêndice 1). Num segundo momento, houve 12 profissionais, totalizando
86% dos profissionais do laboratório, que aceitaram, voluntariamente, participar da
dinâmica de interação com a nova interface, tendo, ao final, respondido ao
questionário de avaliação para validar a solução proposta (Apêndice 2). Também,
59
durante a dinâmica, os participantes foram observados pelo autor desta pesquisa,
tendo sido considerados e anotados valores para a variável de completude da tarefa.
4.4. Instrumentos e Técnicas de Coleta e de Tratame nto de Dados
Os instrumentos de coleta de dados usados nesta pesquisa foram:
1. entrevista diretiva, elaborada com o objetivo de levantar as necessidades dos
profissionais, descrita no Capítulo 6 deste trabalho e cujas questões fechadas
estão no Apêndice 1;
2. observação sistemática ou estruturada, aplicada aos profissionais participantes
com a solução proposta. Nesse caso, a variável completude da tarefa foi
considerada e seus valores estão descritos no Capitulo 7.
3. questionário, com questões fechadas, que pode ser visualizado no Apêndice 2, e
está descrito na Seção 7.1, cuja aplicação implica em resultados sobre a
usabilidade do protótipo desenvolvido neste estudo, descritos na Seção 7.3.
Com relação ao tratamento e a análise dos dados, foram usados cálculos
estatísticos, englobando os resultados traduzidos ou representados em percentuais,
formatados em gráficos e tabelas, a partir dos dados coletados das entrevistas
estruturadas, do questionário de validação e da observação.
4.5. Etapas
Para que o objetivo deste trabalho fosse atingido, estabeleceram-se as
seguintes etapas:
1. Revisão da literatura;
2. Construção do protótipo da nova interface baseada em gestos das mãos;
3. Validação da interface;
4. Documentação da tese.
Na primeira etapa, foi realizado um estudo sobre os seguintes assuntos:
interfaces não convencionais, ferramentas de visão computacional, usadas na
construção dessas interfaces destinadas aos propósitos da pesquisa, medidas e
métodos relacionados à validação da usabilidade de IHC, interfaces e tecnologias da
domótica e prédios inteligentes.
A segunda consistiu em realizar o levantamento das necessidades dos
usuários da nova interface por intermédio dos instrumentos descritos na Seção 6.2

60
desta pesquisa; selecionar tecnologias adequadas para desenvolvimento do protótipo;
projetar a solução computacional proposta, a partir dos resultados do levantamento
das necessidades do usuário e construir propriamente o protótipo.
Na terceira, os seguintes procedimento foram realizados:
a) selecionou-se os atributos de usabilidade de IHCs, que foram usados na
validação do protótipo, com base na revisão da literatura;
b) construiu-se uma ferramenta de avaliação ou questionário (Apêndice 2) de
avaliação com questões fechadas, que está descrito na Seção 7.1, com base
nos critérios de usabilidade selecionados anteriormente;
c) realizou-se o treinamento do grupo de sujeitos da pesquisa a fim de que
interagirem com a interface nova, conforme relatado na Seção 7.2;
d) submeteu-se a nova interface aos sujeitos participantes, solicitando a eles que
executassem tarefas de uma dinâmica de interação, as quais estão detalhadas
na Seção 7.2 e, posteriormente, usassem o questionário mencionado no item b,
para validar interface;
e) realizou-se o tratamento dos dados obtidos, a partir da aplicação de
instrumentos mencionados na Seção 7.1.
A quarta etapa consistiu em fazer um relato de toda a experiência desta
pesquisa em formato de tese (monografia), seguindo, em partes, as normas da ABNT
e da Instituição de ensino (COPPE/UFRJ).
É importante ainda acrescentar que os procedimentos metodológicos relativos
à avaliação do uso da interface, como forma de validação, estão em concordância
com Miranda e Moraes (2006), os quais ressaltam que se deve colocar em primeiro
lugar o recrutamento dos participantes para validar uma interação. Orientam também
que esses participantes devem estar o mais próximo possível da população que usará
a interface. E que, quanto às tarefas que serão realizadas, devem ser o próximo
passo, as quais devem ser selecionadas com o propósito de permitir que o avaliador
explore as áreas da interface consideradas relevantes. Sendo que finalmente se
realiza a análise dos resultados.

61
Capítulo 5
5. Automação de Ambientes
Este capítulo trata o tema automação de ambientes, abordando brevemente conceitos
associados à automação de prédios e residências. Seu propósito não se aplica ao
aprofundamento sobre o assunto, ou seja, não se trata de abordar conceituação de
níveis de automação (sistemas autônomos, integrados e complexos), de arquiteturas
(baseadas em automação ou em comportamento, por exemplo), de protocolos,
classificações específicas e polêmicas sobre definições. Mas sim, apresentar termos e
explicações que contribuam para que o leitor possa entender o objetivo e a relevância
do trabalho proposto, e compreender a solução computacional, descrita no Capítulo 6,
dentro do contexto do tipo de automação abordada.
5.1. Conceitos e Considerações
5.1.1. Edifícios Inteligentes
Com o progresso, os edifícios tornaram-se o centro das atividades da vida
urbana. A partir daí, os edifícios foram evoluindo nas suas diversas vertentes, com
destaque em suas instalações técnicas. Inicialmente, os vários equipamentos técnicos
eram controlados individualmente. Mas, já no início dos anos 60 sugiram os primeiros
sistemas de controle centralizado nos edifícios, especialmente em se tratando dos
equipamentos de climatização. Nos anos iniciais da década de 70, a divulgação dos
microprocessadores alargou o domínio de aplicação dos sistemas de controle, que
começaram a dar suporte à automação e a supervisão de equipamentos mais
sofisticados e em maior quantidade.
Em meados dessa mesma década, houve a crise petrolífera, que contribuiu, de
forma decisiva, para a implantação desses sistemas, de maneira que todos os
aspectos relacionados com uma gestão energética mais racional foram colocados em
evidência e, porque não, em primeiro plano. Na década de 80, apareceram novos
requisitos relativos a conforto, à segurança, à flexibilidade dos locais de trabalho e,
além disso, a novas e maiores necessidades de serviços de telecomunicações e de
processamento de informação. O que deu origem ao surgimento de três sistemas
fundamentais nos edifícios, os quais foram: o sistema de automação e gestão de
edifícios, responsável pelo controle das instalações técnicas, pela detecção de
incêndios, pela gestão energética, pelo controle da iluminação, pela climatização etc.;

62
sistema de telecomunicações, englobando comunicações de voz e de dados, a
comunicação com o exterior dos edifícios, etc.; e o sistema computacional, incluindo
sistemas de informação, escritório eletrônico, sistemas de apoio à decisão, automação
de procedimentos administrativos etc.
Nesse contexto, começou-se a realçar o grande custo dos edifícios e, então, a
necessidade de gerir bem o dispendioso património que os edifícios representavam,
de forma a tirar o máximo proveito deles e dos recursos que estavam disponíveis
(MURATORI; PO, 2011). Pode-se, então, afirmar que todos os aspectos referidos e,
também, a transformação da sociedade industrial na sociedade informática oferecendo
flexibilidade e apontando para a adaptação a novas tecnologias e a novos requisitos,
deram origem ao aparecimento do conceito de edifício inteligente (EI). Os EIs ajudam
os seus proprietários, gestores e ocupantes a atingirem os seus objetivos,
considerando os fatores: custo, conforto, adequação, segurança, flexibilidade em
longo prazo e valor comercial (NEVES e CAMARGO, 2004).
Em Toronto no ano de 1985, apareceu a definição de Gomazako (2007): “um
edifício inteligente combina inovações tecnológicas ou não, com capacidade de
controle, para maximizar o retorno do investimento”. De acordo com a Associação
Brasileira de Automação Residencial (AURESIDE), o conceito de EI abrange mais que
a parte relativa ao projeto elétrico, tratando-se de um estudo rigoroso que engloba
desde a localização do edifício aos seus impactos ambientais, cobrindo todas as
variáveis técnicas, que existem nos projetos elétricos e hidráulicos. Há referências
outras, as quais procuram utilizar novos conceitos para melhorar ou incrementar a
inteligência num edifício. Exemplificando, Cavalvante (2007) e Wong, Li e Wang
(2005) defendem que o conceito de inteligência predial acentua a multidisciplinaridade
exigida para integrar e aperfeiçoar as estruturas, os sistemas e os serviços
necessários na constituição do ambiente ocupado e usado. Valendo ainda dizer que o
conceito de EI não se restringe a edifícios de escritórios, podendo (e devendo) ser
aplicado a outros edifícios tais como: hospitais, edifícios educacionais, hotéis, espaços
comerciais, campus universitários etc.
Até hoje não existe um concenso, mas algumas propostas, as quais são
apresentadas. O termo “prédio inteligente” (ou edifício inteligente – EI) começou a ser
usado de acordo com Arkin (1977), provavelmente para induzir os conceitos de alta
qualidade e possibilidade de retorno rápido do dinheiro investido. Era, portanto, um
termo vago que ficava sujeito a interpretações pessoais tanto dos construtores e
proprietários quanto dos usuários. Posteriormente duas definições passaram a ser

63
bastante aceitas no mercado da Construção Civil. A primeira é dada pelo Intelligent
Buildings Institute e a segunda pelo European Intelligent Builiding Group (EIBG).
O Intelligent Buildings Institute (IBI) dos Estados Unidos da América definiu um
edifício inteligente como sendo o que oferece um ambiente com viabilidade de custo e
produção, por intermédio da otimização dos seus elementos básicos, que são:
estruturas (componentes estruturais do edifício, elementos de arquitetura,
acabamentos de interiores e móveis), sistemas (controle de ambiente, aquecimento,
ventilação, ar-condicionado, luz, segurança e energia eléctrica), serviços
(comunicação de voz, dados, imagens, limpeza) e gestão (ferramentas para controlar
o edifício), além da interação entre todos esses componentes. Para European
Intelligent Builiding Group (EIBG) do Reino Unido, uma definição fornecida consistiu
em que o EI é aquele que faz um ambiente, que permite às empresas atingirem seus
propósitos de negócios e, paralelamente, a aumentarem ao máximo a produtividade
de seus usuários, proporcionando um eficiente controle dos recursos, otimizando
gastos. Depois veio a definição do Intelligent Building Study Committee (IBSC) do
Japão, estabelecendo que um EI deva possuir: (a) um bom ambiente para as pessoas
e os equipamentos, (b) bom suporte para alta produtividade dos trabalhadores de
escritório e, (c) boa segurança patrimonial, individual e contra incêndio; e operação
com alta economia (MAEDA, 1993).
E, de acordo com Bolzani (2004), um EI difere dos tradicionais por duas
razões: (a) utiliza dispositivos que desenvolvem funções extras, contribuindo para a
gestão da residência, substituindo ou complementando os tradicionalmente usados e
(b) usa conceitos modernos de arquitetura e de construção, possibilitando o uso mais
apropriado de fontes naturais de energia, reduzindo a taxa de utilização de
equipamentos de iluminação, ventilação, aquecimento e arrefecimento, diminuindo por
consequência, o consumo de energia elétrica.
Discorrendo sobre uma breve análise das definições expostas, pode-se afirmar
que a definição apresentada pelos norte-americanos conduz que o aspecto
significativamente relevante da construção dos EIs está associado principalmente com
aspectos econômicos e de organização. O conceito sugerido pelos japoneses está
pautado nos aspectos relativos à segurança da edificação e no uso racional de
energia. No contexto europeu EI não está ligado somente a objetivos econômicos e
técnicos, mas também a saúde e bem-estar de seus usuários, além de possuírem um
propósito ecológico embutido nas aplicações tecnológicas.

64
Neste trabalho, os EI, serão observados como aqueles que fazem o uso dos
novos conceitos tecnológicos relativo à computação ubíqua e à NUI para criar um
ambiente produtivo com um custo viável, tendo em vista os aspectos como conforto,
segurança e economia de energia, potenciando aumentos de produtividade dos seus
usuários. O grau de "inteligência" de um edifício não deve ser encarado como algo
absoluto. A "inteligência" de um edifício está intimamente associada à forma como são
satisfeitas as necessidades e os requisitos das organizações nele instaladas
(MONTEBELLER, 2012).
Nesse contexto, é essencial a noção de integração. Ela está relacionada à
capacidade dos vários sistemas, que dão suporte à IE, de poder comunicar-se,
trocarem informação e colaborarem para atingir os mesmos propósitos. Levando em
conta os principais domínios tecnológicos do edifício (automação, computação e
comunicações), a noção de integração necessita ser aplicada dentro de cada domínio
e entre eles. Ou seja, a integração deve ser o mais abrangente possível. A noção de
integração assume uma importância vital no contexto dos edifícios inteligentes. Isso se
deve ao importante conjunto de vantagens e potencialidades que permite oferecer, de
que se destacam, por exemplo, a capacidade de correlacionar informação, de
processar e de otimizar decisões e o acesso aos vários sistemas através de um
mesmo ponto, o que se traduz numa utilização mais simplificada, flexível e eficaz. Um
aprofundamento sobre essa integração pode ser encontrado em (ELOY et al., 2010 e
HEALEY, 2011).
As capacidades dos sistemas presentes num edifício são validadas pelas
funções que executam, as quais que podem ser bastante diversificadas, mas
possuindo, no entanto, características (tais como a sua natureza, o seu âmbito, ou os
seus objetivos) que permitam agrupá-las. Assim, é possível que se introduza a noção
de serviço, correspondendo, então, a um conjunto de funções agrupadas pela
natureza. Sendo esse conjunto formado pela sua íntima interrelação e/ou
dependência, pela sua partilha ou intervenção sobre informação comum ou, ainda,
pela sua associação a um mesmo tipo de equipamento físico. Vale afirmar que as
funções desempenhadas por um serviço não necessitam de estar, forçosamente,
relacionadas a dispositivos físicos, de forma, por exemplo, que envolva interações com
sensores e atuadores. Um serviço pode ser formado apenas por funções de software.
Assim, uma base de dados ou um determinado programa específico podem também
ser considerados serviços. Isto é, a noção de serviço pode ser bastante genérica,
sendo aplicada aos mais variados domínios e não se restringindo somente à área da
automação e gestão de edifícios.
65
Os conceitos relacionados à EI são contemplados em se tratando de
automação residencial ou domótica.
5.1.2. Domótica
A domótica pode ser considerada uma tecnologia, ou a junção de tecnologias
recentes, que permitem a gestão de todos os recursos habitacionais, de forma a se ter
em edifícios inteligentes. O termo domótica origina-se do seu correspondente em
Francês domotique, tendo surgido na segunda metade da década de 80 na França,
local em que houve as experiências iniciais associadas à domótica (DOMÓTICA,
2014). Usa-se também outras denominações sinônimas como home control,
connected home, entre outras.
Como qualquer inovação, a domótica inicialmente, é percebida como um
símbolo de status e modernidade pelo cliente. Posteriormente, a conveniência o
conforto por ela proporcionados tornam-se decisivos. E, finalmente, ela passa a ser
uma necessidade e um fator de economia (AURESIDE, 2014).
Resumidamente, com base em (SMARTHOME, 2014), os sistemas
residenciais são implementados para executar, dentre outras, as seguintes as rotinas
automatizadas: iluminação, segurança, climatização e acionamento de cargas
diversas. No primeiro caso, trata-se do sistema mais comumente implantados em
residências automatizadas. Dentre os possíveis recursos de automação a serem
instalados estão: a dimerização, o acionamento remoto por meio de computadores
e/ou celulares, o acionamento automático por intermédio de rotinas ou horários pré-
definidos ou por dispositivos como sensores de presença ou ainda relés fotoelétricos.
Em se tratando do segundo, são sistemas comumente mais robustos que os de
iluminação e que podem incluir recursos como controle de acesso, que é
expressivamente difundido em sistemas de automação industrial, pela utilização de
leituras biométricas (impressões digitais, reconhecimento de voz e/ou da palma da
mão, etc.), uso de cartões magnéticos ou inserção de códigos/senhas pessoais. Além
disso, há os recursos: sensores de presença/movimento para sinalizar as possíveis
presenças indesejadas na residência ou prédio, CFTV (Circuito Fechado de TV),
munido de câmeras instaladas na residência e conectadas com uma central ou com a
internet, por meio das quais é possível monitorar remotamente as atividades e, ainda,
os além de sensores para detecção de incêndio e vazamentos de gás.
No caso da climatização, por intermédio da automação residencial,
equipamentos como ventiladores, aquecedores e ar-condicionado podem ser
remotamente acionados ou programados para executar determinadas rotinas de
maneira a prover um maior conforto aos utilizadores. Quanto ao acionamento de
66
cargas diversas, além dos sistemas mencionados anteriormente, usando a automação
é possível controlar o carregamento e controle de eletrodomésticos, E, também,
equipamentos de áudio e vídeo, como home-theater, DVD, rádio e receptor de TV a
cabo.
Além do mais, a automação do sistema de áudio e vídeo pode ser integrada à
iluminação, tendo em vista a criação de ambientes apropriados para cada atividade
que se deseja executar (ver um jornal, assistir a um filme ou jogar vídeo game, por
exemplo). Sendo, também, possível automatizar bombas (de piscina, hidromassagem
ou para pressurização hidráulica), regadores (através da programação de uma rotina
diária de acionamento sem o comando do usuário), portões automáticos (através do
comando via internet ou celular, dispensando o uso de controle), dentre outros.
5.2. Trabalhos Relacionados
Como já foi abordada, a ideia por trás da computação ubíqua (KRUMM, 2009)
consiste em cercar os seres humanos de computadores e software cada vez mais
discretos e destinados a dar assistência durante as atividades humanas do dia-a-dia.
Segundo Weiss e Craiger (2002), a tendência é que eles permeiem a vida humana,
sem ficar no caminho, proporcionando uma interação mais natural. O panorama
recente de estudos e pesquisas sobre esse tema, relacionados a essa ideia, mostram
a crescente preocupação na produção de aplicações para atender às necessidades da
automação residencial e predial (UBICOMP, 2012; 2013).
Em 2001, essa linha de pensamento já estava sendo prevista para emplacar no
mercado da automação (MURATORI, 2001). Nesse sentido, podem ser citados vários
trabalhos relacionados ao que está sendo proposto neste estudo. Aplicações para o
controle e automação de prédios e residências compreendem uma área emergente de
pesquisas dentro da HCI (CORREIA et al., 2013). Dentre muitos investimentos nessa
direção, tem-se explorado a interação por gestos, por toques e por comando de voz ou
reconhecimento de fala, envolvendo tecnologias de rede sem fio, dispositivos móveis,
Arduíno e Kinect. A Privus é uma empresa especializada em integração de sistemas
de Automação Residencial sem fio, com controle por iPad, iPhone, Android e PC
(AUTOMAÇÃO RESIDENCIAL SEM FIO COM IPAD, IPHONE E ANDROID 2012).
Correia et al. (2013) relataram o estado da arte em interação natural por gestos
no contexto da automação predial e residencial. Panger (2012) estudou como poderia
resolver o problema de pessoas que querem folhear um livro de receitas ou selecione
uma música para ouvir, enquanto estão realizando atividades na cozinha, mesmo com
dedos gordurosos ou oleosos, ou as mãos ocupadas com utensílios. Ele propôs uma
aplicação usando o Kinect, que capta as articulações do usuário para o
67
reconhecimento de movimentos que sirvam para estabelecer uma interação mais
natural e útil nesse contexto. Outro aplicativo que usa o Kinect é o Wall ambiente (KIM
et al., 2011), que utiliza uma interface projetada na parede, a qual permite aos
usuários monitorar o que está acontecendo em sua casa num piscar de olhos, e
controlar seu ambiente (temperatura, TV, etc.), por meio de gestos simples, sem
qualquer dispositivo de interface física.
Hands-Up (OH et al., 2012) mostra uma nova maneira de utilizar o teto para
exibir informações e interagir por meio de movimentos mínimos com as mãos. Nesse
caso, quando as pessoas se cansam de seus trabalhos, muitas vezes deitam-se na
cama ou sofá e olham para o teto. Então, nesse momento a interface dessa aplicação
seria ativada e permitiria que tudo na casa pudesse ser controlado por meio desse tipo
de interação. Sendo que o kinect também é usado nesse caso.
Rahman et al. (2011) descrevem uma aplicação que pode ser adaptada para
as necessidades da domótica. O protótipo foi desenvolvido para controlar uma série
de funções contidas no painel de um carro, as quais controladas somente por
interfaces de toque contribuiriam para aumentar o risco e distração dos motoristas nas
estradas. Para minimizar esse problema, a interação é feita puramente por gestos,
com retorno de áudio. Assim, dentre várias funções, por exemplo, o som do carro pode
ser controlado. Em (KLEINDIENST et al., 2008) é apresentada a plataforma
HomeTalk, que auxilia os usuários em alguns serviços domésticos via interação
multimodal. O núcleo da plataforma é um gateway residencial, que atua como um
centro de comunicação da família. Por meio da interação direta com um
eletrodoméstico, é possível automatizar diferentes serviços e monitorar seu progresso
em um PDA. Essa aplicação permite um maior nível de segurança para os moradores
da residência, fornecendo informações sobre os diferentes locais da casa, bem como
de controlar o cozimento de alimentos, temperatura e tempo, evitando, assim,
possíveis incêndios.
A necessidade de prescindir do uso de um controle remoto na mão para
interagir com os dispositivos foi a principal motivação encontrada em (SOLANKI e
DESAI, 2011). Nesse caso, foi desenvolvido o Handmote, uma aplicação que
reconhece movimentos gestuais para a interação com vários dispositivos que usavam
um controle remoto. A solução baseada em Arduino reconhece imagens da mão do
usuário e os processa, em tempo real. Sendo desse modo é possível, por exemplo,
desligar o aparelho de TV, usando o gesto da cruz e alterar o nível de volume ou de
canal de TV, virando a mão no sentido horário ou anti-horário. Vários outros trabalhos
nessa linha podem ser citados, dentre eles: (FAILS e JR., 2002; IRIE et al., 2004;
YAMAMOTO et al., 2004; KIM e KIM, 2006; PU et al., 2013).
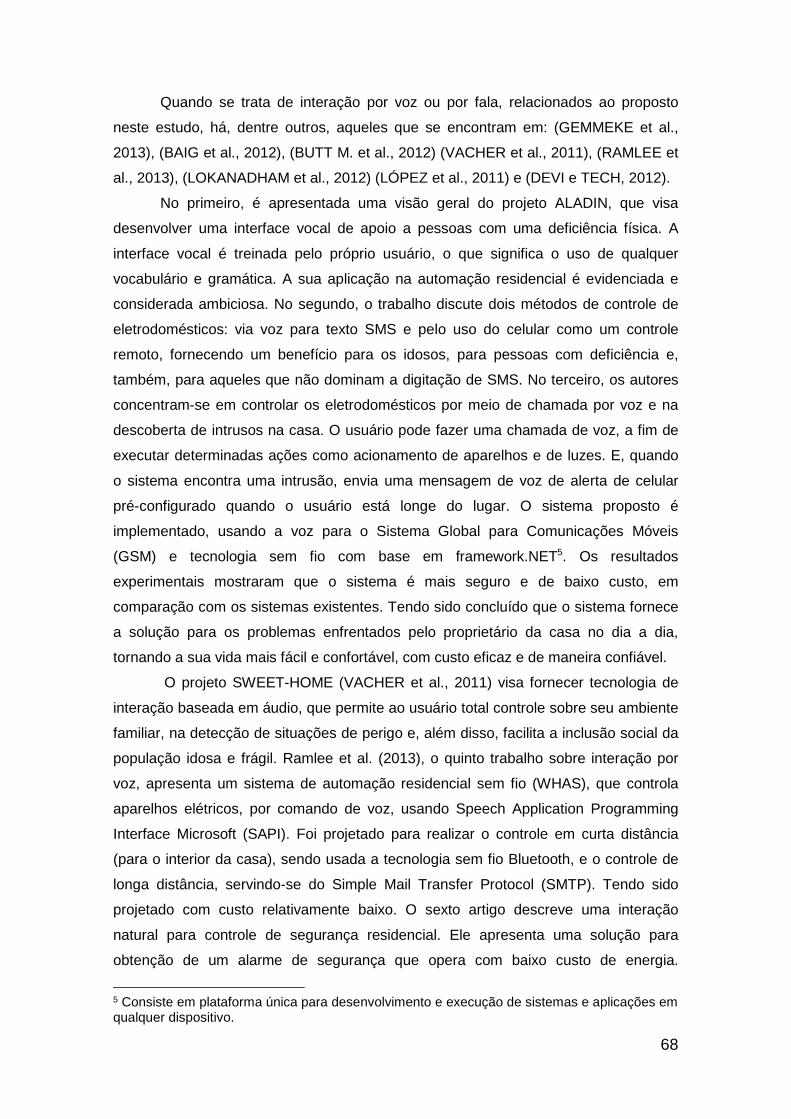
68
Quando se trata de interação por voz ou por fala, relacionados ao proposto
neste estudo, há, dentre outros, aqueles que se encontram em: (GEMMEKE et al.,
2013), (BAIG et al., 2012), (BUTT M. et al., 2012) (VACHER et al., 2011), (RAMLEE et
al., 2013), (LOKANADHAM et al., 2012) (LÓPEZ et al., 2011) e (DEVI e TECH, 2012).
No primeiro, é apresentada uma visão geral do projeto ALADIN, que visa
desenvolver uma interface vocal de apoio a pessoas com uma deficiência física. A
interface vocal é treinada pelo próprio usuário, o que significa o uso de qualquer
vocabulário e gramática. A sua aplicação na automação residencial é evidenciada e
considerada ambiciosa. No segundo, o trabalho discute dois métodos de controle de
eletrodomésticos: via voz para texto SMS e pelo uso do celular como um controle
remoto, fornecendo um benefício para os idosos, para pessoas com deficiência e,
também, para aqueles que não dominam a digitação de SMS. No terceiro, os autores
concentram-se em controlar os eletrodomésticos por meio de chamada por voz e na
descoberta de intrusos na casa. O usuário pode fazer uma chamada de voz, a fim de
executar determinadas ações como acionamento de aparelhos e de luzes. E, quando
o sistema encontra uma intrusão, envia uma mensagem de voz de alerta de celular
pré-configurado quando o usuário está longe do lugar. O sistema proposto é
implementado, usando a voz para o Sistema Global para Comunicações Móveis
(GSM) e tecnologia sem fio com base em framework.NET5. Os resultados
experimentais mostraram que o sistema é mais seguro e de baixo custo, em
comparação com os sistemas existentes. Tendo sido concluído que o sistema fornece
a solução para os problemas enfrentados pelo proprietário da casa no dia a dia,
tornando a sua vida mais fácil e confortável, com custo eficaz e de maneira confiável.
O projeto SWEET-HOME (VACHER et al., 2011) visa fornecer tecnologia de
interação baseada em áudio, que permite ao usuário total controle sobre seu ambiente
familiar, na detecção de situações de perigo e, além disso, facilita a inclusão social da
população idosa e frágil. Ramlee et al. (2013), o quinto trabalho sobre interação por
voz, apresenta um sistema de automação residencial sem fio (WHAS), que controla
aparelhos elétricos, por comando de voz, usando Speech Application Programming
Interface Microsoft (SAPI). Foi projetado para realizar o controle em curta distância
(para o interior da casa), sendo usada a tecnologia sem fio Bluetooth, e o controle de
longa distância, servindo-se do Simple Mail Transfer Protocol (SMTP). Tendo sido
projetado com custo relativamente baixo. O sexto artigo descreve uma interação
natural para controle de segurança residencial. Ele apresenta uma solução para
obtenção de um alarme de segurança que opera com baixo custo de energia.
5 Consiste em plataforma única para desenvolvimento e execução de sistemas e aplicações em qualquer dispositivo.

69
Baseado em ZigBee (LOKANADHAM et al., 2012) e tecnologia GSM, ele pode
detectar o roubo, vazamento de gás e fogo e enviar mensagem de alarme à distância
ao usuário, o qual controla remotamente qualquer dispositivo. Essa proposta chamada
de homeThis foi projetada para garantir que os serviços prestados sejam acessados
somente por um usuário legítimo, e não qualquer outra pessoa. Utilizando voz e a
face, é possível confirmar ou estabelecer a identidade de um indivíduo. A posição
recente da biometria no campo de segurança foi retratada também nesse trabalho,
além de ter sido delineado opções sobre a usabilidade de sistemas de voz e de
autenticação face. Uma mensagem de alarme é enviada usando a tecnologia GSM.
Em (LÓPEZ et al., 2011) é descrita uma solução computacional via voz para
controlar ambientes inteligentes, voltadas principalmente para ambientes domésticos.
Para esses autores, um ambiente inteligente é entendido como sendo um espaço
ubíquo equipado com dispositivos incorporados. A solução proposta por eles baseia-
se nas principais normas em matéria de tecnologias de voz (VoiceXML, CPRM, SRGS
e SISR), dinamicamente adaptáveis a mudanças estruturais no sistema de automação
residencial e escalável para o número de quartos e dispositivos em casa. A solução
final foi validada em uma instalação real, utilizando o reconhecimento de voz a
distância e uma abordagem de detecção de palavras-chave do tipo Key Word Spotting
(KWS), que funciona como um filtro de entrada para o sistema de diálogo, tornando-o
mais robusto contra o ruído. Os resultados dos testes mostraram a viabilidade técnica
da solução e aceitação do usuário. Devi e Tech (2012) descrevem um sistema de
automação residencial sem fio (WHAS), cuja interação é realizada por voz em ZigBee.
Destina-se a controlar todas as luzes e eletrodomésticos de uma casa ou de um
escritório.
O uso do arduíno na automação residencial e predial pode ser encontrado em
detalhes em: (MIGUEL, 2011), (SANTOS, 2012) e (MAHENDRAN et al., 2013). E,
especificamente sobre a aplicação do Kinect nessa área, pode-se consultar:
(“Domotica con Microsoft Kinect (Kinect Home Automation)”, 2011) e (RIVAS-COSTA
et al., 2013). De acordo com Wilson e Benko (2010), o Kinect é uma tecnologia barata
e amplamente disponível para captação de profundidade e está, por esse motivo,
sendo usada nesta pesquisa.

70
Quando se trata de transparência com o significado adotado nesta pesquisa,
pode-se citar o trabalho descrito em (KOPPELHUBER e BIMBER, 2013). Nesse caso,
uma câmera (Figura 29), sem componentes mecânicos e circuito eletrônico,
transparente, fina e flexível como uma folha de plástico, responde em tempo real aos
movimentos que alguém faz à sua frente. Segundo esses autores, essa tecnologia
origina um novo tipo de interface.
Figura 29 - Transparência em superfície não plana
A Garmin, que produz aparelhos de navegação por GPS, desenvolveu um
modelo (Figura 30), que mostra informações sobre qual caminho seguir projetadas ao
vidro dianteiro, usando uma película transparente (SCHROEDER, 2013), para que o
usuário tenha acesso às informações sem tirar os olhos da estrada. Ele pode projetar
as setas de navegação, distância para as próximas curvas, velocidade atual, limite de
velocidade da via, tempo estimado de chegada, recomendações sobre a melhor faixa,
lentidão de tráfego e locais com possíveis radares fotográficos. Podendo se afirmar
que se trata de uma interface que recebe os dados processados pelo aplicativo do
smartphone e projeta no vidro, mas com um preço ainda dispendioso (US$ 129,99 em
2013).
Figura 30 - GPS com projeção no vidro do carro
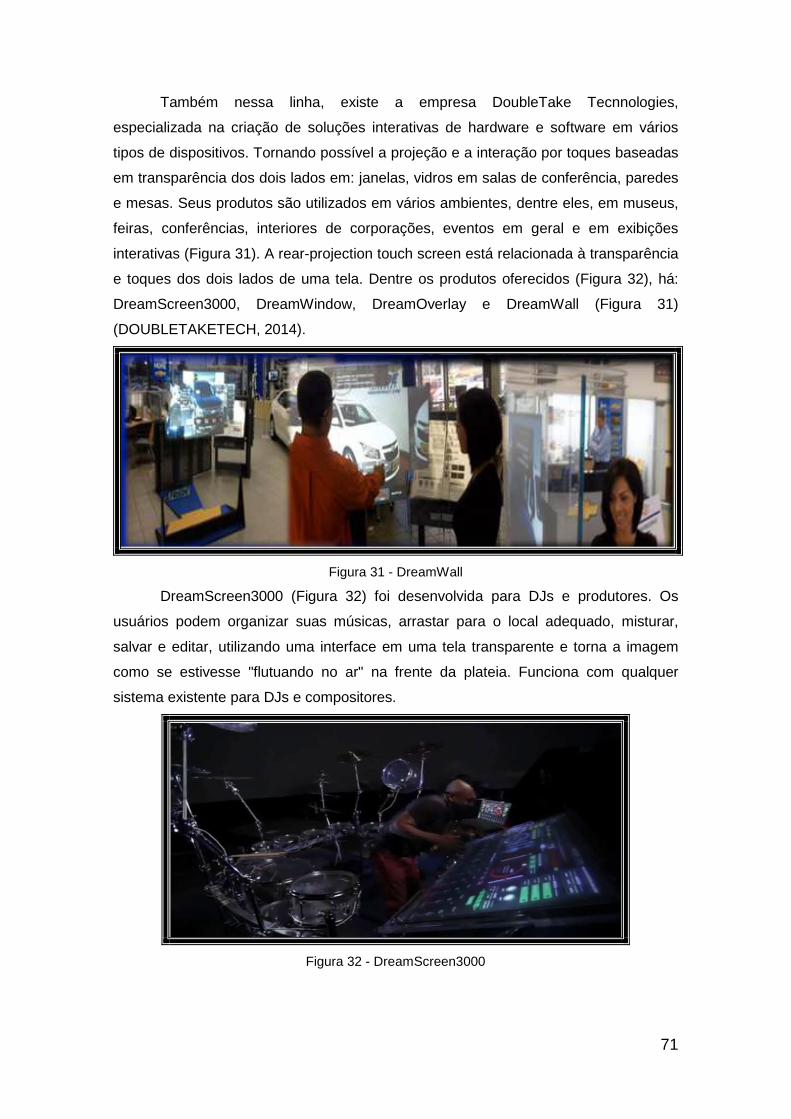
71
Também nessa linha, existe a empresa DoubleTake Tecnnologies,
especializada na criação de soluções interativas de hardware e software em vários
tipos de dispositivos. Tornando possível a projeção e a interação por toques baseadas
em transparência dos dois lados em: janelas, vidros em salas de conferência, paredes
e mesas. Seus produtos são utilizados em vários ambientes, dentre eles, em museus,
feiras, conferências, interiores de corporações, eventos em geral e em exibições
interativas (Figura 31). A rear-projection touch screen está relacionada à transparência
e toques dos dois lados de uma tela. Dentre os produtos oferecidos (Figura 32), há:
DreamScreen3000, DreamWindow, DreamOverlay e DreamWall (Figura 31)
(DOUBLETAKETECH, 2014).
Figura 31 - DreamWall
DreamScreen3000 (Figura 32) foi desenvolvida para DJs e produtores. Os
usuários podem organizar suas músicas, arrastar para o local adequado, misturar,
salvar e editar, utilizando uma interface em uma tela transparente e torna a imagem
como se estivesse "flutuando no ar" na frente da plateia. Funciona com qualquer
sistema existente para DJs e compositores.
Figura 32 - DreamScreen3000
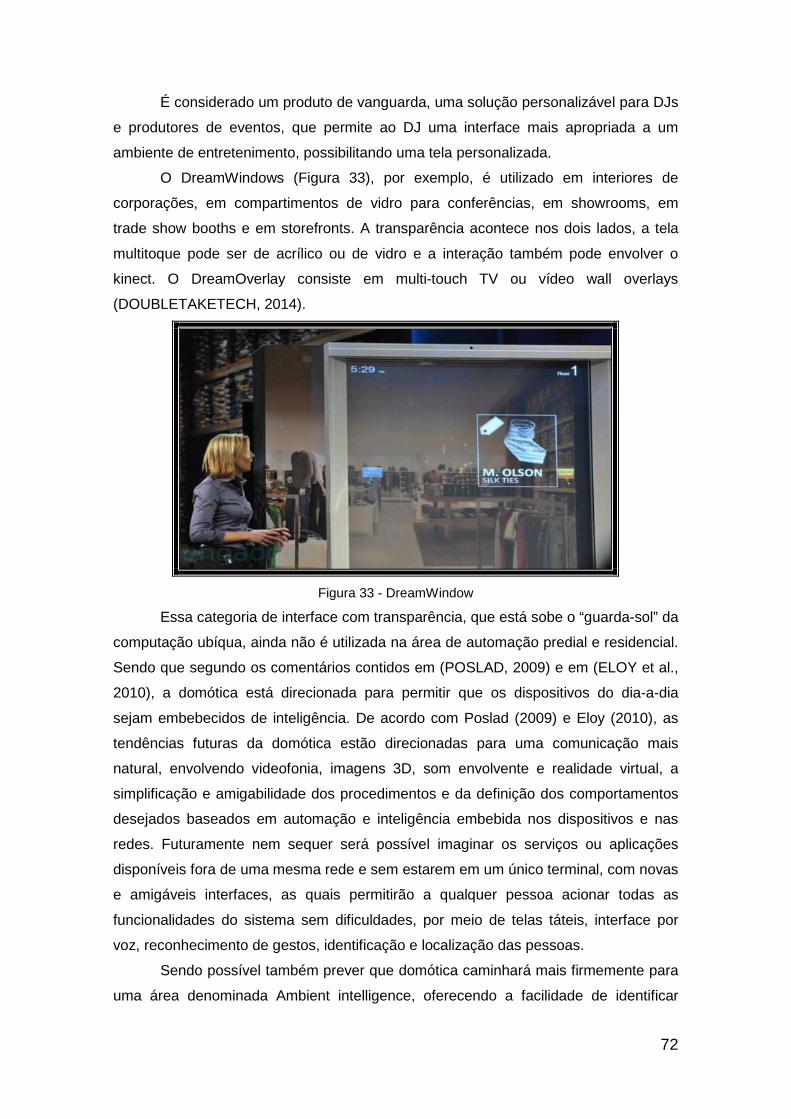
72
É considerado um produto de vanguarda, uma solução personalizável para DJs
e produtores de eventos, que permite ao DJ uma interface mais apropriada a um
ambiente de entretenimento, possibilitando uma tela personalizada.
O DreamWindows (Figura 33), por exemplo, é utilizado em interiores de
corporações, em compartimentos de vidro para conferências, em showrooms, em
trade show booths e em storefronts. A transparência acontece nos dois lados, a tela
multitoque pode ser de acrílico ou de vidro e a interação também pode envolver o
kinect. O DreamOverlay consiste em multi-touch TV ou vídeo wall overlays
(DOUBLETAKETECH, 2014).
Figura 33 - DreamWindow
Essa categoria de interface com transparência, que está sobe o “guarda-sol” da
computação ubíqua, ainda não é utilizada na área de automação predial e residencial.
Sendo que segundo os comentários contidos em (POSLAD, 2009) e em (ELOY et al.,
2010), a domótica está direcionada para permitir que os dispositivos do dia-a-dia
sejam embebecidos de inteligência. De acordo com Poslad (2009) e Eloy (2010), as
tendências futuras da domótica estão direcionadas para uma comunicação mais
natural, envolvendo videofonia, imagens 3D, som envolvente e realidade virtual, a
simplificação e amigabilidade dos procedimentos e da definição dos comportamentos
desejados baseados em automação e inteligência embebida nos dispositivos e nas
redes. Futuramente nem sequer será possível imaginar os serviços ou aplicações
disponíveis fora de uma mesma rede e sem estarem em um único terminal, com novas
e amigáveis interfaces, as quais permitirão a qualquer pessoa acionar todas as
funcionalidades do sistema sem dificuldades, por meio de telas táteis, interface por
voz, reconhecimento de gestos, identificação e localização das pessoas.
Sendo possível também prever que domótica caminhará mais firmemente para
uma área denominada Ambient intelligence, oferecendo a facilidade de identificar

73
quem e o que está presente em cada divisão da casa, conhecer os perfis dessas
pessoas e automaticamente e adaptar os compartimentos as suas preferências
pessoais, em termos de iluminação, som, segurança e climatização. Isso
proporcionará maior conforto e segurança, uma utilização racional da energia,
evolução nas comunicações, nas redes domésticas e de acesso, além de uma
infraestrutura de comunicações comum, contendo grande largura de banda e suporte
para dados de voz e vídeo. Sendo realidade ainda um panorama de maior integração
e interoperação entre os vários sistemas presentes na casa, de forma a que estes
sejam o mais transparente (significando amigável e natural) possível para as pessoas.
Imagina-se como conforto que seja possível, por exemplo, acionar aparelhos e
dispositivos que permitam a realização de tarefas automaticamente, com redução de
gastos e de tempo, em termos de ligar o aspirador e manda-lo aspirar determinadas
áreas da casa; regar o jardim; ligar automaticamente um som ambiente, quando
alguém entra em casa; quando o morador chegar a casa, acionar a banheira com
água quente para tomar banho; ao sair de casa, fechar todas as portas e janelas e
ativar o alarme. Quanto à climatização, o conforto aplica-se em poder programar os
horários para ativar e desativar equipamentos de aquecimento, ventilação ou ar
condicionado, tendo em vista poupar energia, incluindo para além de funcionalidades
avançadas como, por exemplo, realizar uma chamada para casa com o propósito de
certificar-se de que realmente desligou o sistema de aquecimento.
Ainda com base nos trabalhos anteriormente citados, a domótica tem-se
apoiado nas telecomunicações para oferecer ainda mais vantagens. Sendo que a
"omnipresença" da tecnologia ao estar distribuída (aparelhagem de som, internet e até
televisão) nas várias divisões de uma casa, possibilita também a comunicação dos
vários aparelhos de uma casa entre si e com o usuário. Dessa forma, em férias, uma
pessoa poderá controlar os vários aparelhos da sua casa (verificar se a televisão ficou
desligada ou ligar o ar-condicionado mais cedo antes de chegar a casa).
Além disso, as telecomunicações são de expressiva importância no que se
refere à segurança da casa ou de pessoas com necessidades especiais, já que podem
permitir vigiar uma propriedade ou uma pessoa (como um recém-nascido). Torna-se
também importante o acesso ou o controle de várias partes da casa por pessoas com
deficiência.
Quando se trata de Iluminação, tem sido possível facilitar a gestão de energia,
diminuindo os gastos, por intermédio de funções de regulação de intensidade. Para tal
função, é preciso que entre sensores de movimento, identificação e sensores solares
interajam, incluindo programação para a abertura de persianas ao acordar, desta
74
forma evitando ligar as luzes. O controle da intensidade da luz também contribui para
a diminuição dos custos energéticos.
Entre outras, está incluída a possibilidade de evitar que precisemos procurar o
interruptor, quando as luzes de um compartimento estiverem apagadas. Também é
possível que, ao cair a noite, as luzes exteriores acenderem-se automaticamente.
Sendo útil, além disso, que de noite, quando a casa está vazia, programar as luzes
para simular a presença de pessoas. A fim de executar algumas destas tarefas é
necessário temporizadores, controladores inteligentes de persianas e cortinas,
controladores da intensidade da luz, sensores de movimento e presença, sensores
solares etc. Existem cada vez mais opções de escolha e padrões para a seleção
desses dispositivos.
Em termos de segurança, a domótica pode atuar a diversos níveis.
Exemplificando, os sistemas auxiliados por sensores permitem detectar fugas de gás,
inundações, incêndios em fase inicial e detecção de intrusos. Sendo possível até
mesmo tomar conta das crianças que brincam no quarto ou no jardim.
O próximo capítulo descreve uma solução computacional baseada em
interação natural destinada à automação residencial.
75
Capítulo 6
6. A Construção do Protótipo - inOctopus
Este capítulo aborda aspectos relativos à construção de um protótipo e a origem do
termo inOctopus, englobando o levantamento das necessidades dos usuários,
profissionais do LAMCE; a escolha do Kinect como hardware de reconhecimento de
gestos e de voz e do Arduino para automação; a seleção dos comandos e dos
dispositivos a serem usados neste estudo; a projeção em superfícies transparentes; os
detalhes do desenvolvimento do protótipo; a descrição do mesmo; e as limitações
desta pesquisa.
6.1. Levantamento das Necessidades do Usuário
Com o propósito de realizar o levantamento das necessidades dos profissionais
do LAMCE, foi feita, num primeiro momento, uma entrevista estruturada (Apêndice 1)
com duração aproximada de quinze minutos, para nove funcionários do laboratório em
grupo.
Dessa forma, cada profissional expôs a suas experiências em utilizar o
computador para elaborar suas tarefas profissionais. Como resultado dessa entrevista,
pode-se constatar que: dos nove entrevistados, todos afirmaram já ter usado o Adobe
Reader ou o Power Point para visualização, em forma de apresentação, de
documentos.
Essa entrevista foi dividida em duas partes. A primeira com objetivo de coletar
quais os itens devem compor o cenário da nova interface, enfatizando os controles por
gestos, por voz e por sensores (descritos a seguir neste capítulo). A segunda parte
teve a finalidade de obter a informação sobre a familiaridade do questionado, com
respeito ao uso do Adobe Reader XI ou do Microsoft Powerpoint 2013 e quais os
comandos mais utilizados durante o seu uso.

76
Nesse caso, para a análise dos dados coletados, utilizou-se a análise
estatística por percentuais e com base no (Gráfico 1), para cada resposta apontada
(ex. 9 votos para Datashow equivale a 100% e um voto totaliza aproximadamente
11%), pode-se afirmar que:
Gráfico 1 - Percentuais de aceitação para controle dos dispositivos por gestos e voz
• o uso por gestos para controlar câmeras de segurança e visualizações de
apresentações atingiu 100% de assentimento;
• o reconhecimento de voz para acionar os dispositivos data-show (projetor),
iluminação interna , câmera e ar condicionado também ficou com 100% de
concordância; enquanto que o controle do som e da impressora obtiveram,
respectivamente, 67% e 11%;
• No que diz respeito a ligar e desligar os dispositivos por sensores (Gráfico 2),
como é o caso do aquecimento de água e da regagem de água, obteve-se 11%
cada uma; enquanto a porcentagem para persianas e alarme sonoro/email
atingiu 44% em ambos os casos.

77
Ninguém assinalou a opção extração de ar ; já para os demais dispositivos, 100% dos
respondentes assinalarem os itens iluminação interna , aquecimento do ambiente e
ar condicionado .
Gráfico 2 - Percentuais de aceitação para controle dos dispositivos por sensores
O Gráfico 3Erro! Fonte de referência não encontrada. permite visualizar os
percentuais obtidos nas respostas no que diz respeito aos comandos para
visualização no Adobe Reader/Power Point, permitindo garantir que: ir para a
próxima página e a opção ir para a página anterior alcançaram, cada uma, 100% de
aceitação; 78% foi o percentual assinalado para as 2 opções a seguir: ir para a última
página , ir para primeira página, rotar uma página foi assinalada com um total de
33% juntamente com a aumentar (zum) a página de visualização e ativar o recurso
de leitura de texto , caso exista texto; os itens usar a ajuda do aplicativo ,
apresentar comentários da página , exibir automaticamente uma página de cada
vez, exibir as propriedades (autor, data e hora de criação, por exemplo da página) e
exibir grades na página , cada um, recebeu uma aceitação de 11%.
Gráfico 3 - Percentuais de aceitação pelos entrevistados por comandos do PowerPoint

78
A partir desse resultado, dentre as opções mais assinaladas, foram escolhidas
para serem implementadas 1 a 7, 9, 10 e 16 a 20 do formulário que se encontra no
Apêndice 1.
6.2. A Escolha do Hardware e Software
Conforme afirmado no Capítulo 2 deste trabalho, não é fácil construir um
sistema de VC de propósito geral. A seguir estão descritos alguns sistemas de VC
recentes.
Dentre os aplicativos que dão suporte à VC, no que diz respeito ao
reconhecimento de gestos, escolheu-se o Kinect da Microsoft versão XBOX 360
porque, além desse hardware oferecer mecanismo para o reconhecimento de voz, de
poses e de gestos corporais (no caso deste estudo, especificamente das mãos e
cabeça), ele possui uma SDK, arquivos completos com código fonte e documentação
acessível, todos gratuitos. Outro ponto decisivo para essa escolha foi a
compatibilidade com a linguagem orientada a objetos, linguagem C++ e C#, Developer
Toolkit (ferramenta do desenvolvedor com vários aplicativos) e com o Microsoft
Speech Platform SDK, que são pacotes de idiomas, os quais permitem o
reconhecimento de voz ou de texto-para-fala em um idioma específico, podendo ser
redistribuído com o aplicativo criado.
O Kinect versão XBOX foi projetado incialmente para o console de jogo, mas
com um adaptador (Figura 34) é possível utiliza-lo no computador. Ele oferece
diversos recursos como: emissor de luz infravermelho, sensor RGB, sensor
infravermelho, eixo motorizado e um conjunto de microfones dispostos ao longo do
sensor.
Figura 34 - Adaptador para uso no PC
Quanto ao Arduino, a sua escolha foi baseada nos seguintes pontos: consiste
numa plataforma open-souce; possui custo mais baixo se comparado ao seu

79
concorrente direto; há disponibilidade de arquivos completos com código fonte e
documentação acessível, todos gratuitos; e como no caso do Kinect, exposto
anteriormente, existe a compatibilidade com o software e a plataforma utilizada. Neste
trabalho foi adotada a versão Mega, pois contém a maior quantidade de portas digitais
e analógicas em comparação com as outras versões.
Para o acesso remoto a aplicação foi usado o módulo Ethernet Shied (Figura
27) conectado ao mini roteador (Figura 35) com acesso à internet (opcional) sem fio.
Figura 35 - Mini roteador sem fio
Em termos de som ambiente, foi adotado o módulo FM Radio (Figura 36), que
é conectado ao Arduino.
Figura 36 - FM Módulo
Em se tratando da seleção da câmera de segurança (Figura 37), utilizou-se um
modelo sem fio e com base giratória, que permite a conexão ao roteador mencionado
anteriormente.
Figura 37 - Câmera de segurança
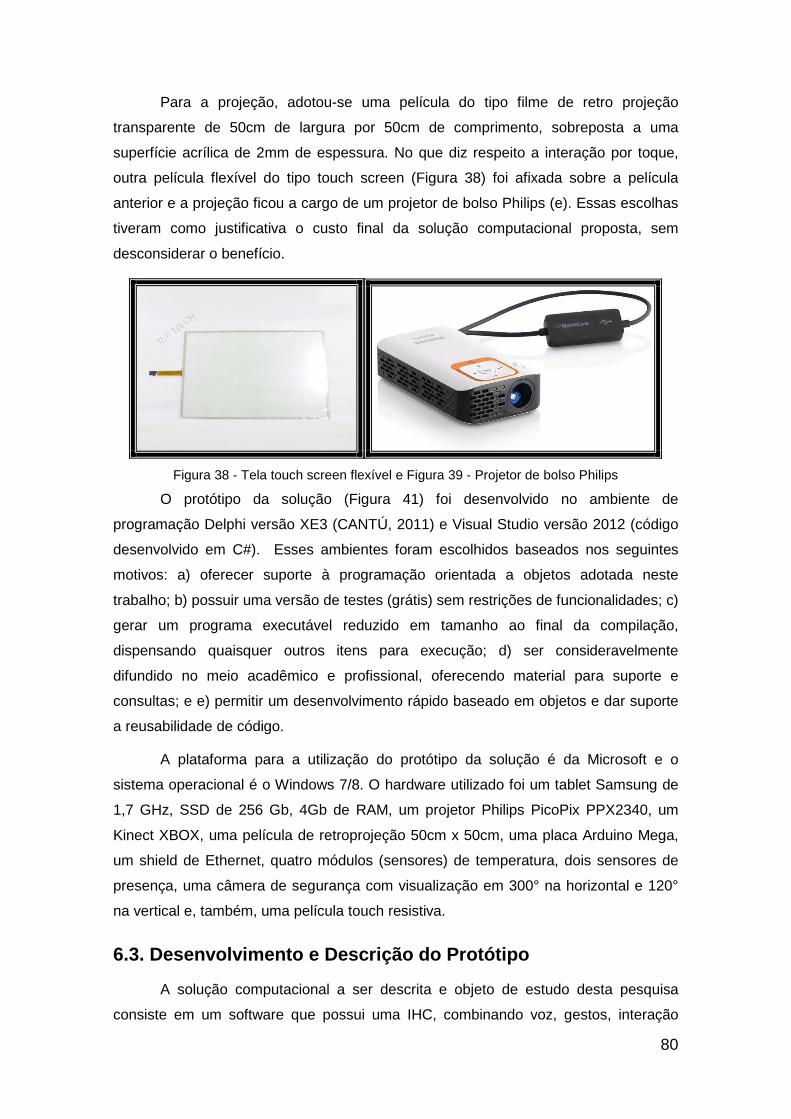
80
Para a projeção, adotou-se uma película do tipo filme de retro projeção
transparente de 50cm de largura por 50cm de comprimento, sobreposta a uma
superfície acrílica de 2mm de espessura. No que diz respeito a interação por toque,
outra película flexível do tipo touch screen (Figura 38) foi afixada sobre a película
anterior e a projeção ficou a cargo de um projetor de bolso Philips (e). Essas escolhas
tiveram como justificativa o custo final da solução computacional proposta, sem
desconsiderar o benefício.
Figura 38 - Tela touch screen flexível e Figura 39 - Projetor de bolso Philips
O protótipo da solução (Figura 41) foi desenvolvido no ambiente de
programação Delphi versão XE3 (CANTÚ, 2011) e Visual Studio versão 2012 (código
desenvolvido em C#). Esses ambientes foram escolhidos baseados nos seguintes
motivos: a) oferecer suporte à programação orientada a objetos adotada neste
trabalho; b) possuir uma versão de testes (grátis) sem restrições de funcionalidades; c)
gerar um programa executável reduzido em tamanho ao final da compilação,
dispensando quaisquer outros itens para execução; d) ser consideravelmente
difundido no meio acadêmico e profissional, oferecendo material para suporte e
consultas; e e) permitir um desenvolvimento rápido baseado em objetos e dar suporte
a reusabilidade de código.
A plataforma para a utilização do protótipo da solução é da Microsoft e o
sistema operacional é o Windows 7/8. O hardware utilizado foi um tablet Samsung de
1,7 GHz, SSD de 256 Gb, 4Gb de RAM, um projetor Philips PicoPix PPX2340, um
Kinect XBOX, uma película de retroprojeção 50cm x 50cm, uma placa Arduino Mega,
um shield de Ethernet, quatro módulos (sensores) de temperatura, dois sensores de
presença, uma câmera de segurança com visualização em 300° na horizontal e 120°
na vertical e, também, uma película touch resistiva.
6.3. Desenvolvimento e Descrição do Protótipo
A solução computacional a ser descrita e objeto de estudo desta pesquisa
consiste em um software que possui uma IHC, combinando voz, gestos, interação
81
multitoque e transparente destinado a controlar, de forma otimizada e confortável, os
recursos e dispositivos de prédios ou construções voltadas a pesquisas, cujo caráter
futurista, natural e de custo baixo foram considerados. Esse software foi denominado
inOctopus. As letras “in” significam interface natural e a palavra “Octopus”, cuja
tradução é polvo, transmitindo a ideia da existência de vários “braços independentes”,
fazendo assim analogia com a solução proposta, porque ela oferece a possibilidade do
controle de várias interações combinadas para o controle de vários dispositivos
independentes. Outra analogia ao polvo é a possibilidade que ele tem de se adaptar,
mudando de cores, para se camuflar e tornando-se “invisível” aos seus predadores.
Essa característica, também é observada no inOctopus no que diz respeito a UC.
O inOctopus foi projetado para oferecer as seguintes funcionalidades:
controle da visualização de apresentações, no formato da aplicação Power Point,
usando os gestos das mãos direita, esquerda, ambas e o gesto aceno, que são
exibidos no Quadro 1;
ativação/desativação dos equipamentos Data-show (Projetor), Ar condicionado,
Luzes internas, Câmera de segurança, Sensor de presença e Som ambiente por
reconhecimento de voz, controlados pela pronúncia das palavras Datashow ou
Projetor , Ar condicionado ou Air , Luzes ou Ligth , Sensor , Som ou Sound
respectivamente. A palavra Voz ou Voice ativa o reconhecimento e a palavra
Cancela ou Cancel desativa o reconhecimento de voz. Os comandos de voz
podem ser visualizados no Quadro 2 ;
movimentação da câmera em sua base de giro, direcionando para cima, para
baixo, para esquerda e para direita, pelo deslocamento da mão do usuário na
horizontal para cima, na horizontal para baixo, na vertical para esquerda e na
vertical para direita respectivamente;
controle automático da temperatura, por intermédio de quatro termômetros,
acionando sequencialmente os aparelhos de ar condicionados. Essa ativação
acontece quando a temperatura atinge o nível máximo, definido pelo usuário,
ativando o próximo aparelho de ar desligado, sucessivamente, até o último. O
mesmo acontece de forma inversa, desligando-os conforme a temperatura mínima;
e
desativação dos equipamentos, tendo como base a leitura dos sensores de
presença de pessoas. Caso não seja detectado movimento, por parte do sensor
num intervalo de 30 minutos, o inOctopus aciona o módulo verde de racionamento
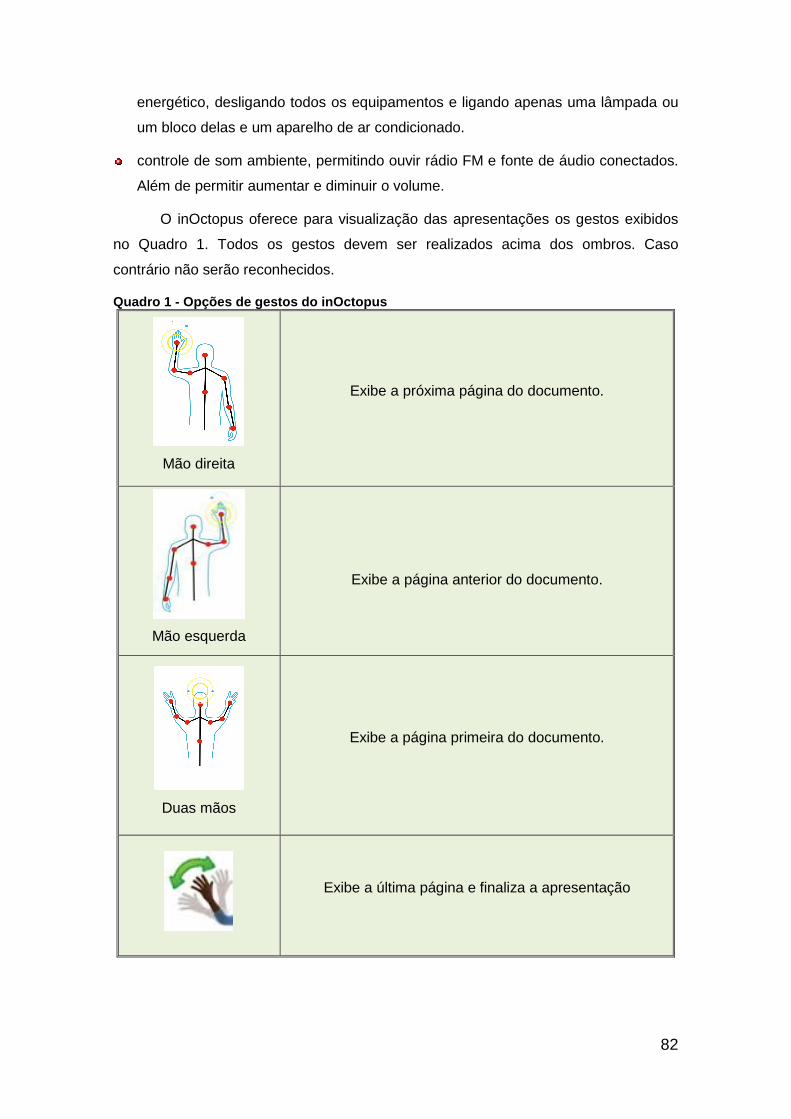
82
energético, desligando todos os equipamentos e ligando apenas uma lâmpada ou
um bloco delas e um aparelho de ar condicionado.
controle de som ambiente, permitindo ouvir rádio FM e fonte de áudio conectados.
Além de permitir aumentar e diminuir o volume.
O inOctopus oferece para visualização das apresentações os gestos exibidos
no Quadro 1. Todos os gestos devem ser realizados acima dos ombros. Caso
contrário não serão reconhecidos.
Quadro 1 - Opções de gestos do inOctopus
Mão direita
Exibe a próxima página do documento.
Mão esquerda
Exibe a página anterior do documento.
Duas mãos
Exibe a página primeira do documento.
Exibe a última página e finaliza a apresentação

83
A sequência para a realização do gesto Aceno pode ser visualizado na Figura
40 (CARDOSO, 2013).
Figura 40 - Quadro sequenciais do gesto Aceno
O Quadro 2 permite visualizar os comandos de voz e as respectivas ações
computacionais do protótipo. A voz do usuário pode ser masculina e/ou feminina e não
há necessidade de prévio treinamento da voz para a adaptação do comando de voz
do usuário. Pode-se comandar com o vocabulário na língua portuguesa ou na língua
inglesa.
Quadro 2 - Comandos de Voz e ação computacional correspondente
Voz/Cancela
Acionar o comando de voz e cancelar o
reconhecimento de voz respectivamente
Ar condicionado
Ativar/Desativar os aparelhos de ar condicionados
Luzes
Ligar/Desligar as luzes internas
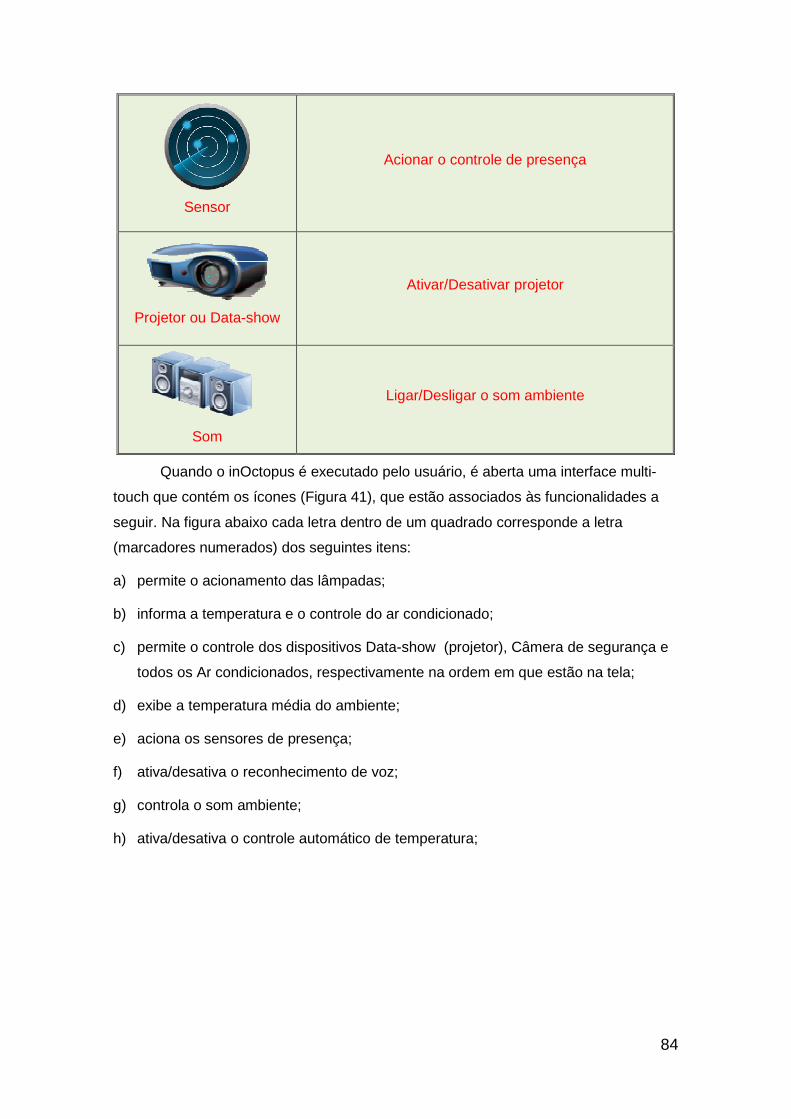
84
Sensor
Acionar o controle de presença
Projetor ou Data-show
Ativar/Desativar projetor
Som
Ligar/Desligar o som ambiente
Quando o inOctopus é executado pelo usuário, é aberta uma interface multi-
touch que contém os ícones (Figura 41), que estão associados às funcionalidades a
seguir. Na figura abaixo cada letra dentro de um quadrado corresponde a letra
(marcadores numerados) dos seguintes itens:
a) permite o acionamento das lâmpadas;
b) informa a temperatura e o controle do ar condicionado;
c) permite o controle dos dispositivos Data-show (projetor), Câmera de segurança e
todos os Ar condicionados, respectivamente na ordem em que estão na tela;
d) exibe a temperatura média do ambiente;
e) aciona os sensores de presença;
f) ativa/desativa o reconhecimento de voz;
g) controla o som ambiente;
h) ativa/desativa o controle automático de temperatura;
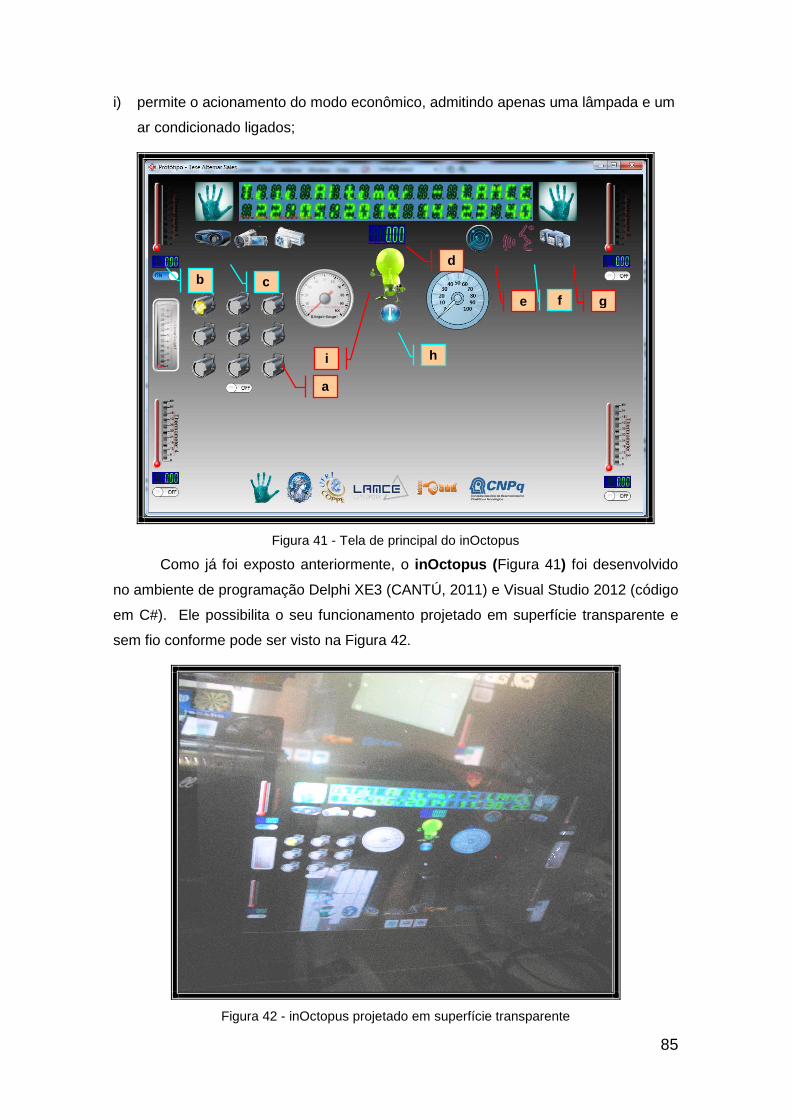
85
i) permite o acionamento do modo econômico, admitindo apenas uma lâmpada e um
ar condicionado ligados;
Figura 41 - Tela de principal do inOctopus
Como já foi exposto anteriormente, o inOctopus ( Figura 41) foi desenvolvido
no ambiente de programação Delphi XE3 (CANTÚ, 2011) e Visual Studio 2012 (código
em C#). Ele possibilita o seu funcionamento projetado em superfície transparente e
sem fio conforme pode ser visto na Figura 42.
Figura 42 - inOctopus projetado em superfície transparente
i
g f e
d b
h
a
c
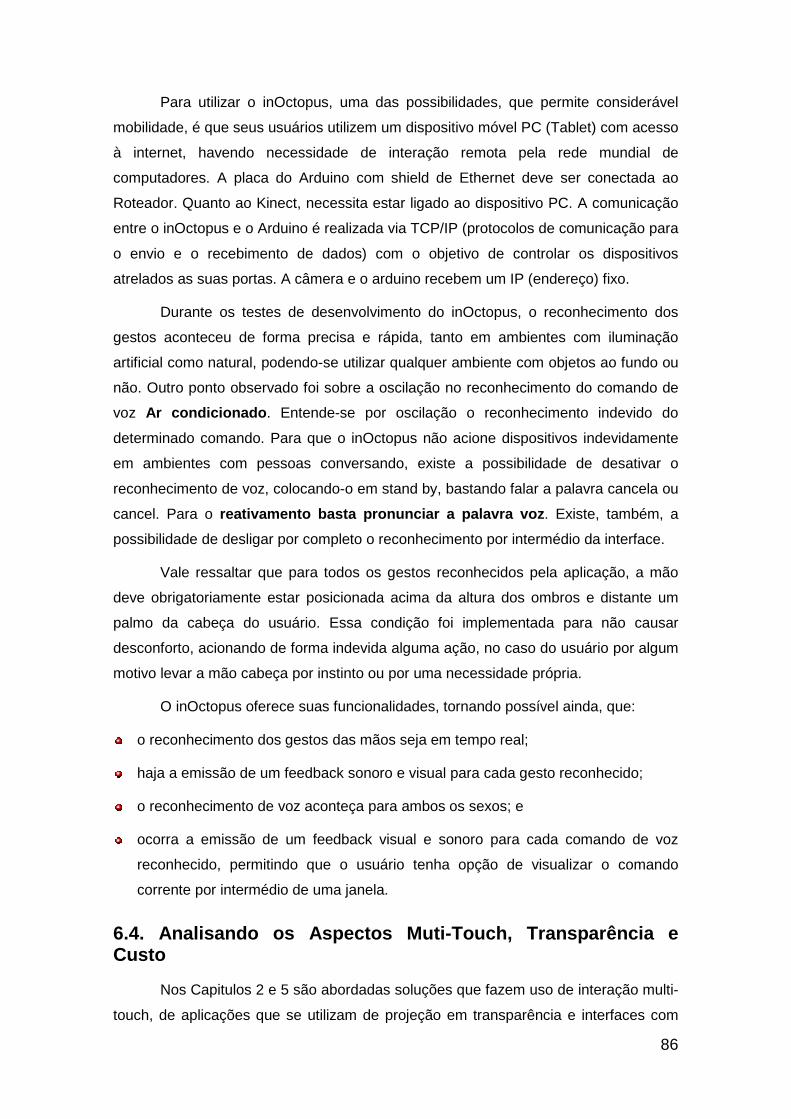
86
Para utilizar o inOctopus, uma das possibilidades, que permite considerável
mobilidade, é que seus usuários utilizem um dispositivo móvel PC (Tablet) com acesso
à internet, havendo necessidade de interação remota pela rede mundial de
computadores. A placa do Arduino com shield de Ethernet deve ser conectada ao
Roteador. Quanto ao Kinect, necessita estar ligado ao dispositivo PC. A comunicação
entre o inOctopus e o Arduino é realizada via TCP/IP (protocolos de comunicação para
o envio e o recebimento de dados) com o objetivo de controlar os dispositivos
atrelados as suas portas. A câmera e o arduino recebem um IP (endereço) fixo.
Durante os testes de desenvolvimento do inOctopus, o reconhecimento dos
gestos aconteceu de forma precisa e rápida, tanto em ambientes com iluminação
artificial como natural, podendo-se utilizar qualquer ambiente com objetos ao fundo ou
não. Outro ponto observado foi sobre a oscilação no reconhecimento do comando de
voz Ar condicionado . Entende-se por oscilação o reconhecimento indevido do
determinado comando. Para que o inOctopus não acione dispositivos indevidamente
em ambientes com pessoas conversando, existe a possibilidade de desativar o
reconhecimento de voz, colocando-o em stand by, bastando falar a palavra cancela ou
cancel. Para o reativamento basta pronunciar a palavra voz . Existe, também, a
possibilidade de desligar por completo o reconhecimento por intermédio da interface.
Vale ressaltar que para todos os gestos reconhecidos pela aplicação, a mão
deve obrigatoriamente estar posicionada acima da altura dos ombros e distante um
palmo da cabeça do usuário. Essa condição foi implementada para não causar
desconforto, acionando de forma indevida alguma ação, no caso do usuário por algum
motivo levar a mão cabeça por instinto ou por uma necessidade própria.
O inOctopus oferece suas funcionalidades, tornando possível ainda, que:
o reconhecimento dos gestos das mãos seja em tempo real;
haja a emissão de um feedback sonoro e visual para cada gesto reconhecido;
o reconhecimento de voz aconteça para ambos os sexos; e
ocorra a emissão de um feedback visual e sonoro para cada comando de voz
reconhecido, permitindo que o usuário tenha opção de visualizar o comando
corrente por intermédio de uma janela.
6.4. Analisando os Aspectos Muti-Touch , Transparência e Custo
Nos Capitulos 2 e 5 são abordadas soluções que fazem uso de interação multi-
touch, de aplicações que se utilizam de projeção em transparência e interfaces com
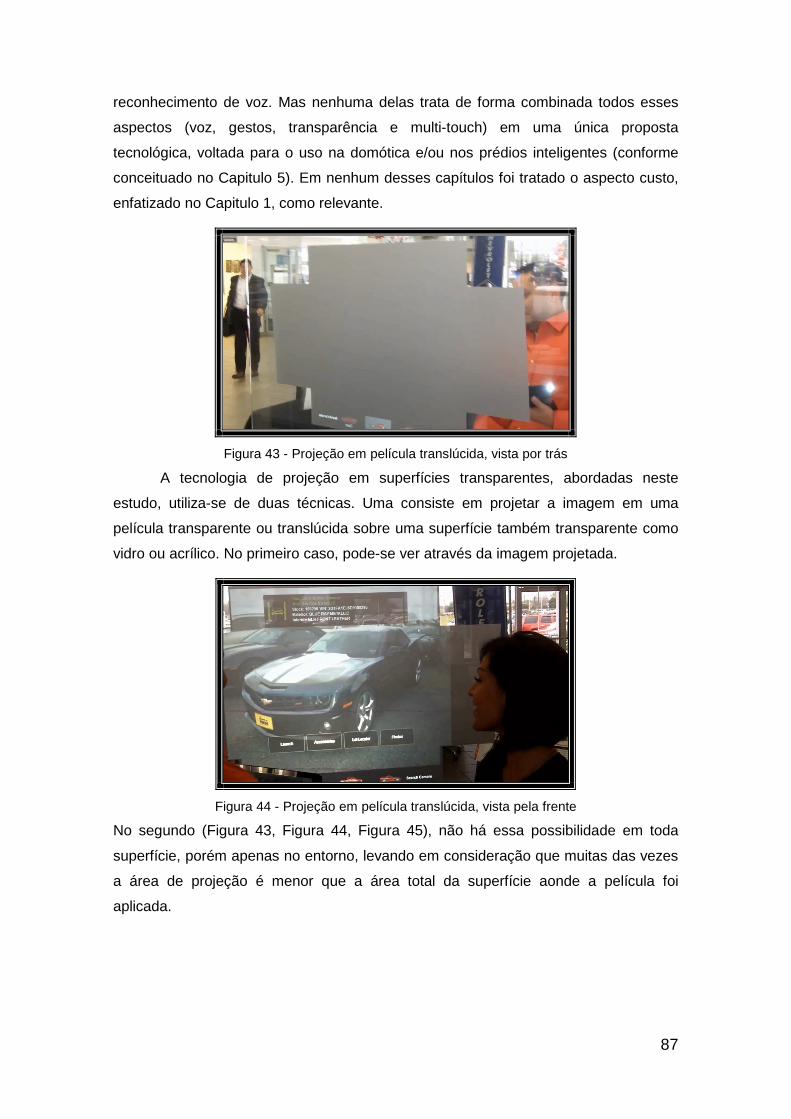
87
reconhecimento de voz. Mas nenhuma delas trata de forma combinada todos esses
aspectos (voz, gestos, transparência e multi-touch) em uma única proposta
tecnológica, voltada para o uso na domótica e/ou nos prédios inteligentes (conforme
conceituado no Capitulo 5). Em nenhum desses capítulos foi tratado o aspecto custo,
enfatizado no Capitulo 1, como relevante.
Figura 43 - Projeção em película translúcida, vista por trás
A tecnologia de projeção em superfícies transparentes, abordadas neste
estudo, utiliza-se de duas técnicas. Uma consiste em projetar a imagem em uma
película transparente ou translúcida sobre uma superfície também transparente como
vidro ou acrílico. No primeiro caso, pode-se ver através da imagem projetada.
Figura 44 - Projeção em película translúcida, vista pela frente
No segundo (Figura 43, Figura 44, Figura 45), não há essa possibilidade em toda
superfície, porém apenas no entorno, levando em consideração que muitas das vezes
a área de projeção é menor que a área total da superfície aonde a película foi
aplicada.

88
O inOctopus utiliza a primeira opção.
Figura 45 - Projeção em película translúcida completa
Então, a solução de transparência usada no inOctopus assemelha-se
funcionalmente à primeira opção de películas transparentes exposta na Tabela 1, visto
que possui uma estrutura e é multi-touch. Sendo, no entanto, a de custo mais elevado.
Em soluções de mercado para automação, pode-se utilizar tablets como recurso para
interação por toques e visualização de informações. Contudo, estão limitados a
projetos empacotados, ou seja, que não permitem customização por parte do usuário
em contraste com a solução proposta neste estudo, que combina várias interações
com transparência, as quais foram personalizadas de acordo com a necessidade dos
usuários.
Já que não foi encontrada no mercado solução semelhante neste estudo, para
analisar o aspecto custo, algumas considerações foram necessárias. Primeiro,
considerou-se o custo de uma solução de mercado usando tablets com o mínimo de
controles e nenhuma possibilidade de customização ou projeção em transparência.
Esse custo seria cerca de $ 1,100.00. Segundo, estabeleceu-se que a melhor opção
de película para complementar a solução anterior, seria a primeira da Tabela 1 , no
valor de $ 10,900.00, sem englobar o preço do projetor, do Kinect e da mão de obra
para instalação e a customização. Dessa forma, o custo total seria por volta de $
12,000.00. Em contrapartida, no caso do inOctopus, o valor estaria, aproximadamente,
em $ 5,060.00, incluindo Arduino Mega, placa ethernet, sensores, kinect, película de
retroprojeção transparente, película multi-touch, projetor e mão de obra, cujos valores,
respectivamente, estariam em torno de $ 50, $ 25, $ 50, $ 100, $ 30, $ 50, $ 200 e $
3,600.

89
O que auxilia na elucidação da conclusão de que o inOctopus tem um custo baixo em
comparação com a solução mais simples encontrada no mercado.
Tabela 1 - Custos de películas
Empresa Fabricante Tipo Multi -touch Estrutura Tamanho
Preço
DoubleTake Technologies Própria Transparente Sim Sim 60 $
10,900.00 Specialty Projector Screens 3M Translúcida Não Sim 60
$ 4,200.00
IFOHA Própria Transparente Não Não 60 $ 620.00
Shop3M 3M Translúcida Não Não 60 $
1,320.00
6.5. Limitações
As limitações do inOctopus podem ser divididas em quatro categorias: oriundas
do Kinect, do Arduino, da visão computacional e próprias. No primeiro caso, podem
ser citadas as seguintes limitações:
reconhecimento de voz oficial, por parte da Microsoft, não disponível na língua
portuguesa. O que pode gerar oscilações no reconhecimento em virtude do
sotaque de cada indivíduo, do pronunciamento das palavras e da dicção do
usuário;
As limitações consideradas na segunda categoria foram:
a quantidade de 54 portas digitais da placa. O que limita o tamanho do projeto, no
que diz respeito a possibilidade de aumentar o escopo de controle de mais
dispositivos em futuros trabalhos.
Quanto a terceira categoria, podem ser citadas as limitações:
a memorização dos gestos e dos comandos de voz podem ocasionar um
desconforto para o usuário;
Por último, as limitações próprias do inOctopus são:
a velocidade de resposta foi codificada em 2 segundos entre os gestos
reconhecidos durante as apresentações. Essa medida foi tomada para não
ocasionar uma ação não desejada pelo usuário (por exemplo disparar várias vezes
o próximo slide de uma apresentação, em virtude do braço direito estar acima do
ombro). Para evitar essa oscilação, foi criado um temporizador cujo funcionamento
consiste em reconhecer o mesmo gesto durante dois segundos, disparando a ação
desejada, pelo usuário, em seguida;
a velocidade do controle na movimentação da câmera de segurança foi limitada a
0,25 segundos em qualquer direção. Essa implementação deveu-se ao fato, do
90
momento em que o usuário interage, levantando ou abaixando a mão por exemplo,
em uma velocidade “rápida”, a ação computacional era realizada várias vezes,
ocasionando uma resposta talvez não desejada;
o aparecimento da sombra do usuário na projeção frontal, o que pode ocasionar o
desvio da sua atenção e/ou dificultar a visualização, que deveria estar focada
somente nas tarefas a serem realizadas durante o uso do inOctopus. Essa
limitação foi contornada até o momento, possibilitando ao usuário uma projeção
oriunda da parte traseira da superfície transparente e uma inversão da imagem; e
o reconhecimento do gesto pode ser comprometido pela presença de uma outra
pessoa, na área de captura do Kinect, realizando os mesmos gestos acima do
ombro.
O próximo capítulo descreve os resultados da avaliação da usabilidade do
inOctopus.

91
Capítulo 7
7. Validação da Interface
Este capítulo aborda a construção de um instrumento de validação, necessário para
atestar o inOctopus, após a interação dos profissionais do LAMCE, cenário desta
pesquisa; o treinamento para utilização do inOctopus; a descrição da dinâmica de
aplicação do inOctopus, envolvendo o relato sobre a execução das tarefas realizadas
pelos participantes, durante a interação com o protótipo da interface, inclusive a
descrição dos resultados relativos à aplicação do questionário de validação (Apêndice
2) e à observação sistemática aplicada.
7.1. Instrumentos de Validação
Os instrumentos utilizados para validação do protótipo ou da solução proposta
por esse trabalho foram o questionário (Apêndice 2), construído com base nos
conceitos de usabilidade defendidos por Nielsen e Loranger (2006) e Shneiderman
(1998), abordados no Capítulo 3, e a observação sistemática.
A observação sistemática pretendeu coletar se as tarefas realizadas no
momento da interação com o protótipo foram efetivadas ou completadas. Nesse caso,
a variável completude da tarefa poderia ser preenchida pelo autor deste trabalho com
os seguintes valores: completada, completada com dificuldade e não completada, com
registro em texto sucinto do tipo de dificuldade.
O questionário, por sua vez, divide-se em duas partes. A primeira refere-se à
coleta de perfil, tendo em vista investigar a familiaridade dos participantes com
dispositivos controlados por gestos e por voz. A segunda engloba a validação
propriamente dita, contendo um quadro composto de uma coluna de atributos de
usabilidade escolhidos com base na revisão da literatura sobre usabilidade abordada
no Capítulo 3 deste trabalho, para os quais o respondente deve atribuir um conceito
numa escala (LIKERT, 1967) de um a cinco (5=Excelente ; 4=Muito Bom ; 3=Regular ;
2=Ruim ; 1=Insuficiente ).
Em concordância com o Nielsen e Loranger (2006), autores consagrados pelos
seus estudos sobre IHC, e com Cabral et al. (2005), que abordam a usabilidade de
uma interface baseada em gestos das mãos livres (hand-free), resolveu-se que os
atributos acima mencionados seriam: facilidade de aprender, eficiência, facilidade
de memorizar, erros e satisfação. A facilidade de aprender implica na ausência de
obstáculos para usar o que foi proposto. Eficiência consiste na agilidade para a

92
realização da tarefa pelo usuário durante a interação. A facilidade de memorizar
revela a respeito de quão fácil é recordar como o sistema funciona, depois de já ter
aprendido a utilizá-lo. A categoria Erros trata dos níveis aceitáveis de falhas ou
nenhum (no caso de catástrofe), durante a interação e que na ocasião de erros
possam ser facilmente tratados e recuperados. Um erro, durante a interação com o
inOctopus, pode ser, por exemplo, a leitura indevida de um gesto, disparando uma
ação indesejada. Também faz parte de erros o fornecimento de feedback, destacado
em separado no instrumento, apenas para enfatizar a sua importância. Satisfação diz
respeito ao grau ou quantidade de sentimento ou sensação agradável o usuário sinta,
ou seja, que o usuário fique em harmonia em utilizar a aplicação. Nesse caso uma
questão foi incluída com relação ao prazer que o usuário pode sentir por interagir
usando uma tela transparente, sendo a transparência tratada neste trabalho como
uma inovação (inexistência no mercado) aplicada à domótica, resultado da aplicação
do conceito de computação ubíqua.
É importante ressaltar que o método de validação do protótipo, selecionado
para ser utilizado neste capítulo, foi a pesquisa de opinião descrita no Capítulo 3,
enfatizando, como defendido por Shneiderman (1998), ao atributo satisfação do
usuário.
7.2. Dinâmica de Uso da Solução
Para utilizar a solução proposta, foram convidados os profissionais do LAMCE, cuja
descrição está no Capítulo 4 deste trabalho. A porcentagem de 85,7% desses
profissionais participou no uso do inOctopus. Uma breve explicação sobre esta
pesquisa foi fornecida aos voluntários no momento do convite. Esta seção apresenta a
dinâmica de interação dos sujeitos da pesquisa com o inOctopus. Essa dinâmica
englobou o treinamento e a interação propriamente dita, destinada à validação do
inOctopus.
a) Treinamento
O treinamento foi dado a 12 (doze) profissionais (85,7%) do LAMCE, os sujeitos da
pesquisa caracterizados no Capítulo 4, durante o total de 15 minutos em 1 dia, com
base no conjunto de atividades, relacionadas às funcionalidade e requisitos do
software em questão, descritos mais detalhadamente no Capítulo 6, relativo ao
controle de equipamentos de um dos prédios do LAMCE, os quais estão expostas a
seguir.
93
Controlar os dispositivos (Datashow, luzes internas, ar condicionado, sensor de
presença e som ambiente).
Controlar apresentações (software de apresentação em termos da exposição de
slides).
b) Interação dos Pesquisados com a Interface
Durante a interação, foram feitas as mesmas tarefas consideradas no
treinamento (Item a), seguindo a sequência de questões, distribuídas por atributos e
contidas no questionário de avaliação do software (Apêndice 2). Cada participante
interagiu durante o total de dez minutos, englobando todas as funções com esse
tempo.
O pesquisador permaneceu disponível para prestar esclarecimentos sobre
possíveis dúvidas e dificuldades, prosseguindo também à observação sistemática,
anotando valores relativos à variável observada acerca da completude da tarefa,
relativo a cada controle e tipo de interação considerada.
7.3. Descrição dos Resultados da Aplicação do Quest ionário de Validação
Depois da interação com o software, os participantes responderam a um
questionário apresentado anteriormente neste capítulo. E, alguns minutos antes dessa
aplicação, o autor deste trabalho explicou como os participantes deveriam prosseguir
ao preenchimento desse instrumento de validação. Esta seção aborda os resultados
da pesquisa (com os gráficos expostos no Anexo 3 ), em se tratando da aplicação
dos questionários de validação aos participantes nos casos de interação com o
inOctopus.
No caso do controle de apresentações por gestos , com relação ao atributo
facilidade de aprender (Gráfico 6), pode-se afirmar que: 92% dos respondentes
atribuíram o conceito excelente, 8% optaram por muito bom, sendo que nenhum dos
participantes assinalou regular, ruim ou insuficiente. O mesmo ocorreu com respeito à
facilidade de memorizar (Gráfico 7). No referente a feedback (Gráfico 8), 75% dos
entrevistados escolheram o conceito excelente, 25% apontou muito bom, e nenhum
dos pesquisados anotou regular, ruim ou insuficiente. No que tange a erros (Gráfico 9)
houve uma distribuição de porcentagens entre excelente (50%), muito bom (33%) e
regular (17%). A eficiência (Gráfico 10) recebeu excelente de 67% dos respondentes
e muito bom dos demais. E o atributo satisfação (Gráfico 11) obteve 92% de
respostas atribuídas a excelente e 8% a regular.
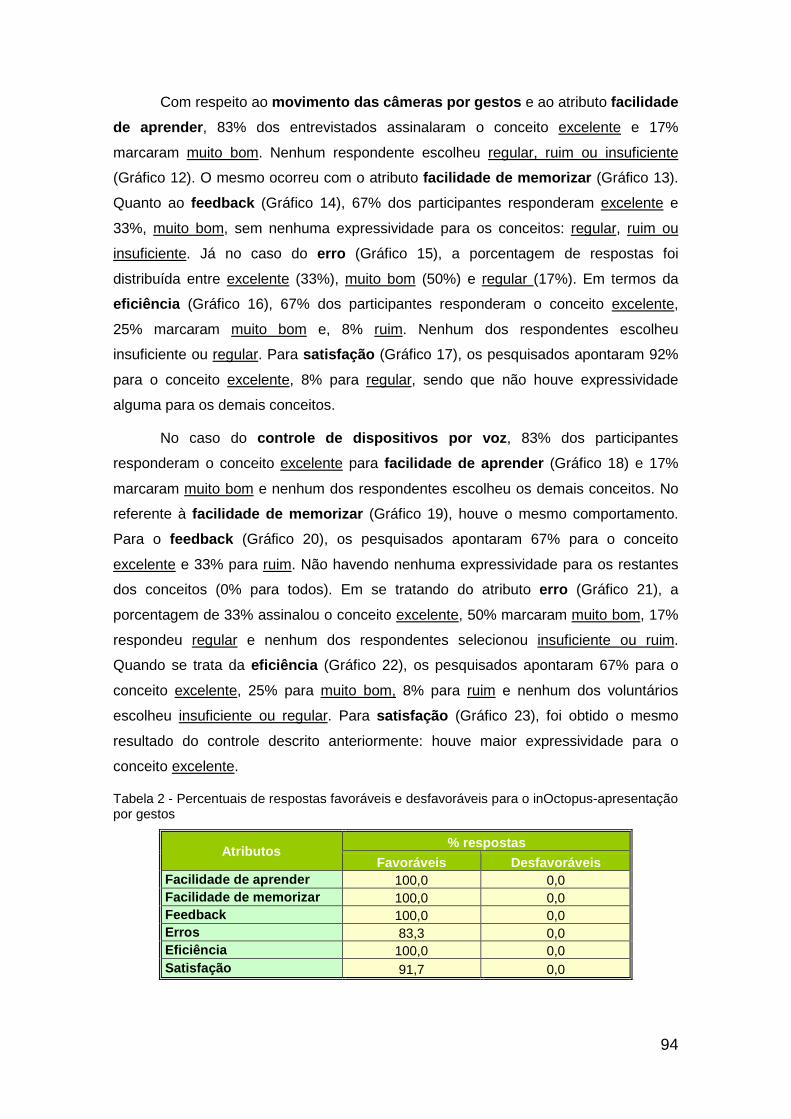
94
Com respeito ao movimento das câmeras por gestos e ao atributo facilidade
de aprender , 83% dos entrevistados assinalaram o conceito excelente e 17%
marcaram muito bom. Nenhum respondente escolheu regular, ruim ou insuficiente
(Gráfico 12). O mesmo ocorreu com o atributo facilidade de memorizar (Gráfico 13).
Quanto ao feedback (Gráfico 14), 67% dos participantes responderam excelente e
33%, muito bom, sem nenhuma expressividade para os conceitos: regular, ruim ou
insuficiente. Já no caso do erro (Gráfico 15), a porcentagem de respostas foi
distribuída entre excelente (33%), muito bom (50%) e regular (17%). Em termos da
eficiência (Gráfico 16), 67% dos participantes responderam o conceito excelente,
25% marcaram muito bom e, 8% ruim. Nenhum dos respondentes escolheu
insuficiente ou regular. Para satisfação (Gráfico 17), os pesquisados apontaram 92%
para o conceito excelente, 8% para regular, sendo que não houve expressividade
alguma para os demais conceitos.
No caso do controle de dispositivos por voz , 83% dos participantes
responderam o conceito excelente para facilidade de aprender (Gráfico 18) e 17%
marcaram muito bom e nenhum dos respondentes escolheu os demais conceitos. No
referente à facilidade de memorizar (Gráfico 19), houve o mesmo comportamento.
Para o feedback (Gráfico 20), os pesquisados apontaram 67% para o conceito
excelente e 33% para ruim. Não havendo nenhuma expressividade para os restantes
dos conceitos (0% para todos). Em se tratando do atributo erro (Gráfico 21), a
porcentagem de 33% assinalou o conceito excelente, 50% marcaram muito bom, 17%
respondeu regular e nenhum dos respondentes selecionou insuficiente ou ruim.
Quando se trata da eficiência (Gráfico 22), os pesquisados apontaram 67% para o
conceito excelente, 25% para muito bom, 8% para ruim e nenhum dos voluntários
escolheu insuficiente ou regular. Para satisfação (Gráfico 23), foi obtido o mesmo
resultado do controle descrito anteriormente: houve maior expressividade para o
conceito excelente.
Tabela 2 - Percentuais de respostas favoráveis e desfavoráveis para o inOctopus-apresentação por gestos
Atributos % respostas
Favoráveis Desfavoráveis Facilidade de aprender 100,0 0,0 Facilidade de memorizar 100,0 0,0 Feedback 100,0 0,0 Erros 83,3 0,0 Eficiência 100,0 0,0 Satisfação 91,7 0,0
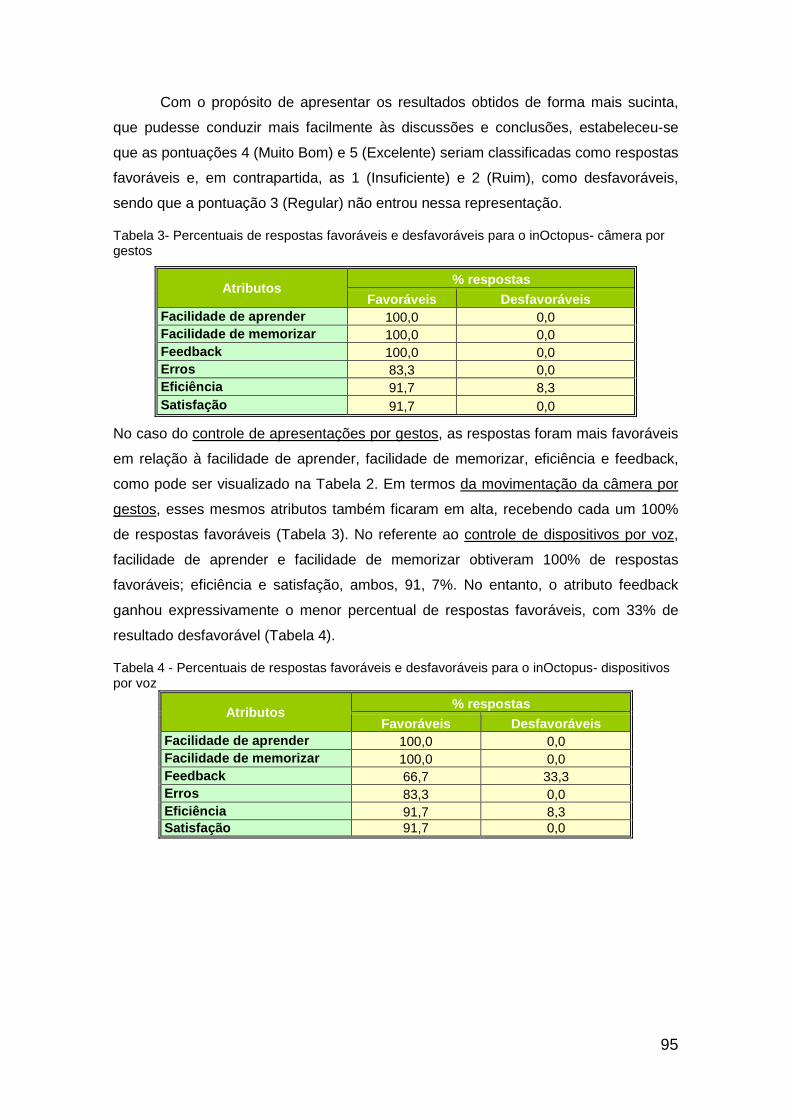
95
Com o propósito de apresentar os resultados obtidos de forma mais sucinta,
que pudesse conduzir mais facilmente às discussões e conclusões, estabeleceu-se
que as pontuações 4 (Muito Bom) e 5 (Excelente) seriam classificadas como respostas
favoráveis e, em contrapartida, as 1 (Insuficiente) e 2 (Ruim), como desfavoráveis,
sendo que a pontuação 3 (Regular) não entrou nessa representação.
Tabela 3- Percentuais de respostas favoráveis e desfavoráveis para o inOctopus- câmera por gestos
Atributos % respostas
Favoráveis Desfavoráveis Facilidade de aprender 100,0 0,0 Facilidade de memorizar 100,0 0,0 Feedback 100,0 0,0 Erros 83,3 0,0 Eficiência 91,7 8,3 Satisfação 91,7 0,0
No caso do controle de apresentações por gestos, as respostas foram mais favoráveis
em relação à facilidade de aprender, facilidade de memorizar, eficiência e feedback,
como pode ser visualizado na Tabela 2. Em termos da movimentação da câmera por
gestos, esses mesmos atributos também ficaram em alta, recebendo cada um 100%
de respostas favoráveis (Tabela 3). No referente ao controle de dispositivos por voz,
facilidade de aprender e facilidade de memorizar obtiveram 100% de respostas
favoráveis; eficiência e satisfação, ambos, 91, 7%. No entanto, o atributo feedback
ganhou expressivamente o menor percentual de respostas favoráveis, com 33% de
resultado desfavorável (Tabela 4).
Tabela 4 - Percentuais de respostas favoráveis e desfavoráveis para o inOctopus- dispositivos por voz
Atributos % respostas
Favoráveis Desfavoráveis Facilidade de aprender 100,0 0,0 Facilidade de memorizar 100,0 0,0 Feedback 66,7 33,3 Erros 83,3 0,0 Eficiência 91,7 8,3 Satisfação 91,7 0,0
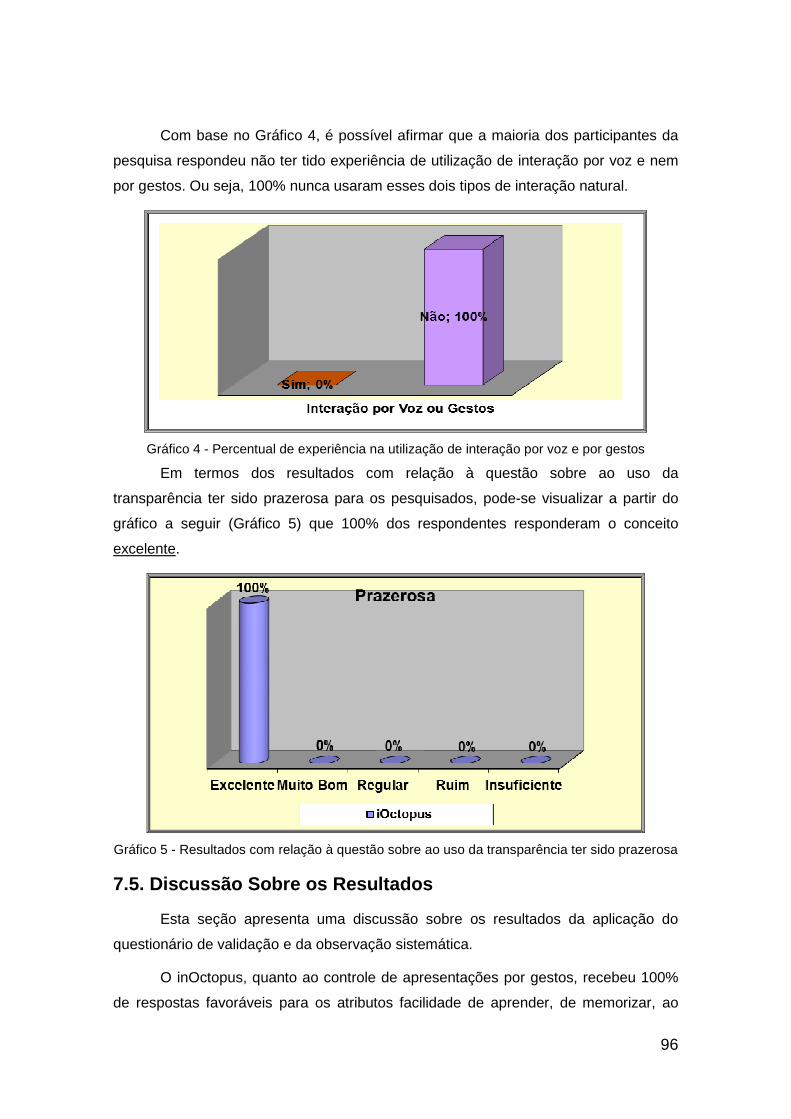
96
Com base no Gráfico 4, é possível afirmar que a maioria dos participantes da
pesquisa respondeu não ter tido experiência de utilização de interação por voz e nem
por gestos. Ou seja, 100% nunca usaram esses dois tipos de interação natural.
Gráfico 4 - Percentual de experiência na utilização de interação por voz e por gestos
Em termos dos resultados com relação à questão sobre ao uso da
transparência ter sido prazerosa para os pesquisados, pode-se visualizar a partir do
gráfico a seguir (Gráfico 5) que 100% dos respondentes responderam o conceito
excelente.
Gráfico 5 - Resultados com relação à questão sobre ao uso da transparência ter sido prazerosa
7.5. Discussão Sobre os Resultados
Esta seção apresenta uma discussão sobre os resultados da aplicação do
questionário de validação e da observação sistemática.
O inOctopus, quanto ao controle de apresentações por gestos, recebeu 100%
de respostas favoráveis para os atributos facilidade de aprender, de memorizar, ao

97
feedback e à eficiência. Sendo que as porcentagens de respostas favoráveis para,
ambos, erros e satisfação foram mais de 80% em cada caso. Ou seja, pode-se
considerar esse tipo de interação natural aceita pelos profissionais do LAMCE. No
entanto, em detalhes, pode-se observar que, no que tange a erros, houve uma
distribuição de porcentagens entre excelente (50%), muito bom (33%) e regular (17%).
Resultado esse que é confirmado, tendo em vista os resultados da observação
sistemática. A situação observada no contexto do atributo erros pode ser resultado da
postura incorreta dos participantes (2 indivíduos) na execução das tarefas. Além disso,
existem as limitações descritas no Capitulo 6, próprias da visão computacional e
aquela referente à velocidade de respostas no controle de apresentações por gestos.
Em termos da movimentação da câmera por gestos, para os atributos feedback
e erros houve uma distribuição de porcentagem diferente daquela ocorrida para os
demais atributos. Anotou-se um valor bem menor da porcentagem de excelente (33%)
em comparação aos outros atributos considerados. O mesmo aconteceu para erros,
com 67% apenas de respondentes tendo assinalado o conceito excelente. Nesses
dois casos, pode-se questionar, com base nos resultados da observação sistemática,
que talvez isso se deva ao fato de que 25% dos respondentes tiveram dificuldades em
terminar as tarefas. Essas dificuldades estão relacionadas com as limitações relatadas
no Capitulo 6, especificamente sobre a velocidade no controle de movimentação da
câmera.
No caso do controle de dispositivos por voz, excetuando a categoria feedback,
houve respostas favoráveis a partir de 80%, o que indica que inOctopus, para
interação por voz, é fácil de aprender, de memorizar é eficiente, há aceitação favorável
em relação a erros e os profissionais do laboratório ficaram satisfeitos em utilizá-lo. No
entanto, a porcentagem de respostas favoráveis foi de 66,7% para feedback, o que
talvez seja resultado da limitação descrita no Capítulo 6, referente ao reconhecimento
de voz oficial. Oscilações podem ser geradas em virtude do sotaque de cada
indivíduo, do seu pronunciamento das palavras e da sua dicção. Nesse caso, foi
observado (variável completude da tarefa) que 8% dos indivíduos não conseguiu
completar a tarefa.
Com relação à satisfação com a transparência, houve aceitação completa, o
que indica uma aprovação não somente do software em questão, mas também da
computação ubíqua na automação residencial.
As conclusões, contribuições e perspectivas futuras desta pesquisa encontram-
se no próximo capítulo.
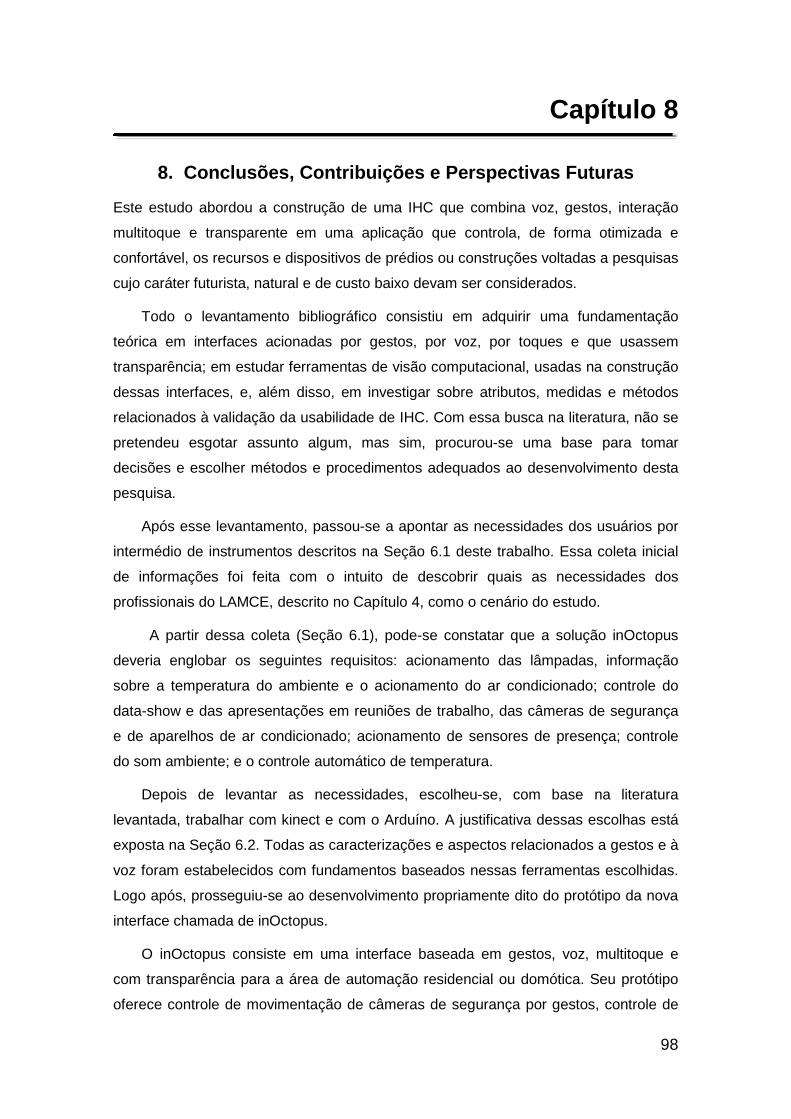
98
Capítulo 8
8. Conclusões, Contribuições e Perspectivas Futura s
Este estudo abordou a construção de uma IHC que combina voz, gestos, interação
multitoque e transparente em uma aplicação que controla, de forma otimizada e
confortável, os recursos e dispositivos de prédios ou construções voltadas a pesquisas
cujo caráter futurista, natural e de custo baixo devam ser considerados.
Todo o levantamento bibliográfico consistiu em adquirir uma fundamentação
teórica em interfaces acionadas por gestos, por voz, por toques e que usassem
transparência; em estudar ferramentas de visão computacional, usadas na construção
dessas interfaces, e, além disso, em investigar sobre atributos, medidas e métodos
relacionados à validação da usabilidade de IHC. Com essa busca na literatura, não se
pretendeu esgotar assunto algum, mas sim, procurou-se uma base para tomar
decisões e escolher métodos e procedimentos adequados ao desenvolvimento desta
pesquisa.
Após esse levantamento, passou-se a apontar as necessidades dos usuários por
intermédio de instrumentos descritos na Seção 6.1 deste trabalho. Essa coleta inicial
de informações foi feita com o intuito de descobrir quais as necessidades dos
profissionais do LAMCE, descrito no Capítulo 4, como o cenário do estudo.
A partir dessa coleta (Seção 6.1), pode-se constatar que a solução inOctopus
deveria englobar os seguintes requisitos: acionamento das lâmpadas, informação
sobre a temperatura do ambiente e o acionamento do ar condicionado; controle do
data-show e das apresentações em reuniões de trabalho, das câmeras de segurança
e de aparelhos de ar condicionado; acionamento de sensores de presença; controle
do som ambiente; e o controle automático de temperatura.
Depois de levantar as necessidades, escolheu-se, com base na literatura
levantada, trabalhar com kinect e com o Arduíno. A justificativa dessas escolhas está
exposta na Seção 6.2. Todas as caracterizações e aspectos relacionados a gestos e à
voz foram estabelecidos com fundamentos baseados nessas ferramentas escolhidas.
Logo após, prosseguiu-se ao desenvolvimento propriamente dito do protótipo da nova
interface chamada de inOctopus.
O inOctopus consiste em uma interface baseada em gestos, voz, multitoque e
com transparência para a área de automação residencial ou domótica. Seu protótipo
oferece controle de movimentação de câmeras de segurança por gestos, controle de
99
apresentações por gestos e controle de dispositivos (data-show, ar condicionado,
luzes internas, câmera de segurança e som) por voz, conforme descrito em detalhes
no Capítulo 6. Foi construído em ambiente DELPHI XE3 e Visual Studio 2012, com
código em C#. Demais informações e mais detalhes sobre a sua elaboração e
recursos oferecidos podem ser obtidos na Seção 6.4 deste trabalho.
Após a construção do protótipo, passou-se à validação do seu uso junto aos
usuários. Elegeu-se os atributos de usabilidade com base no levantamento da ISO,
da NBR e de trabalhos de estudiosos como Nielsen (1993) e Shneiderman (1998).
Assim, os atributos escolhidos foram: facilidade de aprender, facilidade de memorizar,
erros, eficiência e satisfação. Sendo que para mapear com mais precisão as
dificuldades e sucessos da categoria erro, destacou-se feedback como um atributo em
separado. E, além disso, como se trata de interação através de recurso multitoque
com transparência, considerada ainda uma inovação para domótica, criou-se uma
questão específica para tratar o prazer ou a satisfação relativa à transparência. Essa
questão foi englobada na categoria satisfação.
Também, optou-se, dentre os métodos e medidas existentes para avaliação, pela
pesquisa de opinião junto aos profissionais do LAMCE. A justificativa para a escolha
desse método consistiu em três fatores: custo, visto que é barato em comparação com
os outros; quantidade de tempo disponível dos sujeitos da pesquisa e ênfase à
satisfação do usuário. Foram usados questionários, entrevista estruturada e
observação sistemática, conforme descrito no Capítulo 4. As medidas usadas foram às
subjetivas, já que se tratou de uma interface não convencional.
Antes da aplicação da pesquisa de opinião, houve a dinâmica de uso da nova
interface, que consistiu em duas partes: um treinamento e a interação propriamente,
englobando tarefas relativas ao controle de recursos do prédio e de apresentações em
reuniões pelos profissionais do LAMCE. Mais detalhes sobre essa dinâmica estão
apresentados no Capítulo 7.
Com base nos resultados dos questionários e das observações, além disso, tendo
em vista o tratamento dos dados obtidos por intermédio do uso de cálculos
estatísticos, representados por percentuais em gráficos e em tabelas, pode-se
constatar que:
1. 100% dos participantes nunca tinham usado interação por voz e por gestos;
2. quanto aos atributos facilidade de aprender e de memorizar , houve 100% de
respostas favoráveis no caso de todos os tipos de interação e de controles
considerados.
100
3. no caso do atributo feedback , 100% de respostas favoráveis foram obtidas em
termos do controle das apresentações por gestos e da movimentação das câmeras
por gestos. No entanto, em relação ao controle de dispositivos por voz, houve 66,7%
de respostas favoráveis contra 33% de desfavoráveis. Isso se deveu a limitação
relacionada ao reconhecimento de voz oficial, não sendo em si uma limitação própria
da solução computacional proposta e produzida.
4. com relação a erros , vale lembrar que no inOctopus é a não concretização da
tarefa desejada. Prosseguindo, foi revelado que o inOctopus obteve um percentual de
respostas favoráveis de 83,3%, em todos os tipos de interação e controles. No
entanto, em se tratando da apresentação por gestos, houve uma distribuição de
porcentagens entre excelente (50%), muito bom (33%) e regular (17%). Resultado
esse que é confirmado pelos resultados da observação sistemática. Observou-se,
nesse contexto, que o atributo erros pode ser resultado da realização incorreta do
gesto dos participantes (2 indivíduos - 17%) na execução das tarefas. Além disso, há
as limitações descritas no Capitulo 6, relativas à VC e aquela referente à velocidade
de respostas no controle de apresentações por gestos, tratadas no inOctopus. Ainda
detalhando, mas agora sobre a movimentação das câmeras, 67% apenas de
respondentes tendo assinalado o conceito excelente para erros. É possível pressupor,
com base nos resultados da observação sistemática, que talvez isso se deva ao fato
de que 25% dos respondentes tiveram dificuldades em terminar as tarefas. Essas
dificuldades também estão relacionadas com as limitações (Capitulo 6),
especificamente sobre a velocidade no controle de movimentação da câmera.
5. com respeito à eficiência , com base na pesquisa de opinião, houve 100% de
respostas favoráveis para o controle de apresentação por gestos. Já com relação ao
movimento das câmeras e dos dispositivos por voz, a porcentagem de 8,3% foi de
respostas desfavoráveis em ambos os casos. Mesmo esse valor sendo pouco
expressivo, se detalhados os resultados, é verificado uma queda do conceito
excelente para 67%. Podendo-se assim cogitar, com base na observação direta
realizada, que esse comportamento para essas duas situações se deveu à limitação
descrita no Capítulo 6 sobre a velocidade de resposta no inOctopus.
6. quanto à satisfação , a maioria das respostas foram favoráveis, inclusive, em se
tratando da transparência , todos os respondentes a consideraram prazerosa (100%
de resposta com conceito excelente).
101
Vale ainda ressaltar que a maioria dos participantes conseguiram realizar as suas
tarefas, sendo que um número pouco expressivo não as realizou porque teve uma
postura inadequada.
As limitações do inOctopus podem ser divididas em quatro categorias: oriundas do
kinect, do Arduíno, da visão computacional e próprias. No primeiro caso, trata-se do
reconhecimento de voz oficial, por parte da Microsoft, não disponível na língua
portuguesa. Podendo, então, gerar oscilações no reconhecimento em virtude do
sotaque de cada indivíduo, do pronunciamento das palavras e da dicção dos usuários.
No segundo, consiste na quantidade de 54 portas digitais da placa. O que limita o
tamanho do projeto, no que diz respeito à possibilidade de aumentar o escopo de
controle de mais dispositivos futuramente. Na terceira categoria, as limitações incluem
a memorização dos gestos e dos comandos de voz, que pode ocasionar em ambos os
casos um desconforto para o usuário. Em se tratando da quarta, é pertinente os
comentários a seguir.
i. No caso das apresentações, a velocidade de resposta foi codificada em 2
segundos entre os gestos reconhecidos. Essa medida foi tomada para não
ocasionar uma ação não desejada pelo usuário (por exemplo disparar várias
vezes o próximo slide de uma apresentação, em virtude do braço direito estar
acima do ombro). Para reduzir essa oscilação, foi criado um temporizador cujo
funcionamento consiste em reconhecer o mesmo gesto, durante dois
segundos, disparando a ação pretendida pelo usuário.
ii. No controle na movimentação da câmera de segurança, a velocidade foi
limitada a 0,25 segundos em qualquer direção. Essa implementação deveu-se
ao fato, do momento em que o usuário interage, levantando ou abaixando a
mão, por exemplo, em uma velocidade “rápida”, a ação computacional era
realizada várias vezes, ocasionando uma resposta talvez não desejada; e
iii. O surgimento da sombra do usuário na projeção frontal. Esse fato pode
acarretar o desvio da sua atenção e/ou dificultar a visualização, que deveria
estar focada somente nas tarefas a serem realizadas durante o uso do
inOctopus. Essa limitação foi contornada até o momento, por tornar possível ao
usuário uma projeção oriunda da parte traseira da superfície transparente e
uma inversão da imagem.
iv. O reconhecimento do gesto pode ser comprometido pela presença de uma
outra pessoa, realizando os mesmos gestos.
102
Com base nessas limitações, as perspectivas futuras podem ser as seguintes:
Diminuir a oscilação na movimentação da câmera, modificando a lógica do
temporizador;
Utilizar circuitos integrados conhecidos como “Multiplexers“ para aumentar a
quantidade de portas ou reprogramar o inOctopus para trabalhar com mais de uma
placa de arduino;
Possibilitar que o tempo entre as apresentações por gestos sejam definidos pelo
usuário;
Acrescentar melhorias com relação ao feedback no reconhecimento de voz e com
respeito a erros durante a apresentação por gestos; e
Permitir o reconhecimento de vários usuários para fazer uso do mesmo controle.
Além disso, como há perspectiva de continuidade do projeto, pretende-se
aumentar a quantidade de dispositivos a serem controlados, de gestos e de comandos
de voz, implementar gestos padronizados ou personalizados pelo usuário; e estender
os métodos e procedimentos da usabilidade, por aplicar medidas objetivas aos
atributos escolhidos, adequadas ao tipo de interface em questão e aumentar a
amostra, envolvendo mais sujeitos e outros cenários, de modo que se possa partir
para uma generalização dos resultados.
Quanto às contribuições e relevância desta pesquisa, é possível fazer as colocações a
seguir.
Tornou disponível o protótipo de uma solução de interface baseada em gestos,
voz, multitoque e projeção em vidro ou em superfícies transparentes não plana
(podendo ser curva), que pode compor, de forma mais adequada, o ambiente de
trabalho de um prédio que tenha um caráter futurista e voltado à pesquisa em
tecnologia, para uma aplicação da área de automação de construções. Tal solução
pode contribuir para que os profissionais tenham acesso aos recursos com uma
interação mais confortável e a baixo custo, podendo favorecer ainda mais a
produção desses indivíduos. Ela contemplará as seguintes funções de controle:
ligar e desligar data-show e ar condicionado; acender e apagar luzes, controlar
câmera de segurança, do áudio, visualizar dados de sensores, como o de
temperatura, e controlar recursos para apresentações em reuniões realizadas no
prédio;
Consistiu num trabalho relevante, porque vem contribuir para preencher uma
lacuna existente em estudos sobre a utilização de interfaces que combinem
103
gestos, voz, multitoques e transparência a baixo custo, para aplicações da área de
automação de construções em prédios destinados à pesquisa tecnológica, que
tenham caráter futurista. Sendo que o aspecto custo foi evidenciado na seção 6.4;
e
Contribuiu com estudos acadêmicos futuros de outros estudiosos, que venham a
desenvolver trabalhos sobre o tema desta pesquisa, deixando à disposição uma
documentação, a qual relata um caminho (ou uma estratégia) que pode ser
adotado, em se tratando de desenvolvimento, implementação e validação junto
aos usuários de uma solução de interface baseada em gestos, voz, multitoque e
transparência, que ainda é considerada uma interação sofisticada ou fora do usual
na área de automação de construções.
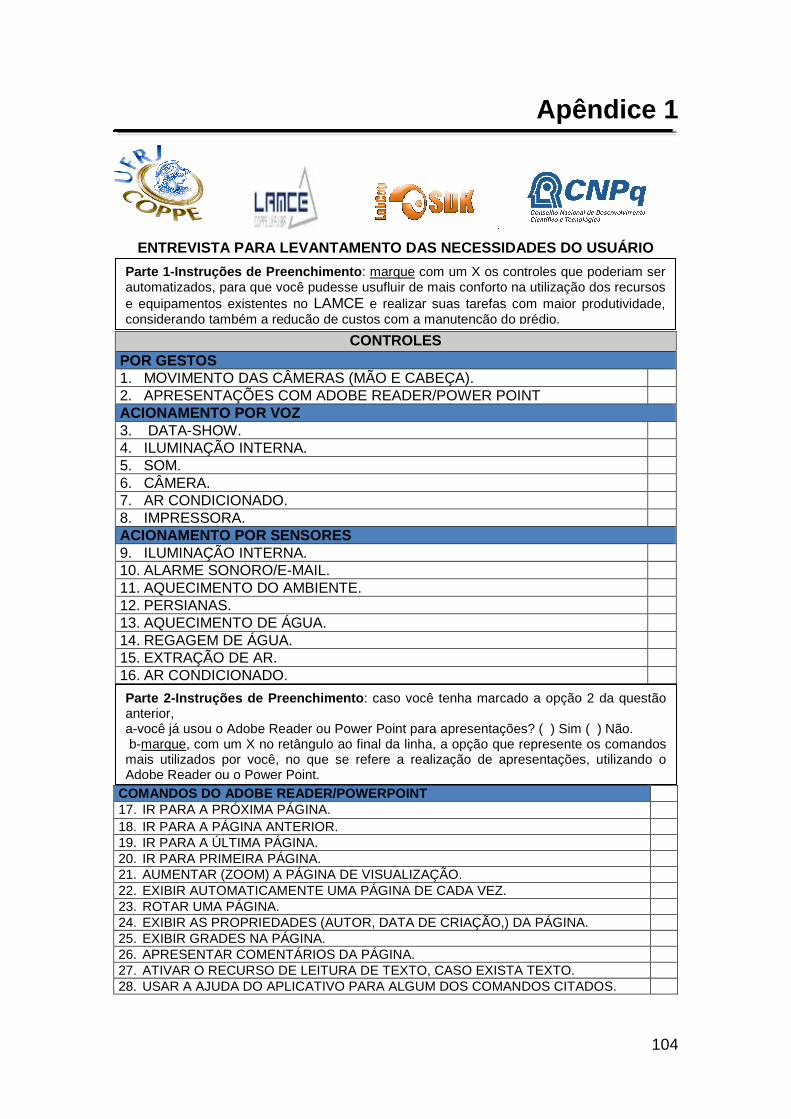
104
Apêndice 1
ENTREVISTA PARA LEVANTAMENTO DAS NECESSIDADES DO US UÁRIO
CONTROLES POR GESTOS 1. MOVIMENTO DAS CÂMERAS (MÃO E CABEÇA). 2. APRESENTAÇÕES COM ADOBE READER/POWER POINT ACIONAMENTO POR VOZ 3. DATA-SHOW. 4. ILUMINAÇÃO INTERNA. 5. SOM. 6. CÂMERA. 7. AR CONDICIONADO. 8. IMPRESSORA. ACIONAMENTO POR SENSORES 9. ILUMINAÇÃO INTERNA. 10. ALARME SONORO/E-MAIL. 11. AQUECIMENTO DO AMBIENTE. 12. PERSIANAS. 13. AQUECIMENTO DE ÁGUA. 14. REGAGEM DE ÁGUA. 15. EXTRAÇÃO DE AR. 16. AR CONDICIONADO.
COMANDOS DO ADOBE READER/POWERPOINT 17. IR PARA A PRÓXIMA PÁGINA. 18. IR PARA A PÁGINA ANTERIOR. 19. IR PARA A ÚLTIMA PÁGINA. 20. IR PARA PRIMEIRA PÁGINA. 21. AUMENTAR (ZOOM) A PÁGINA DE VISUALIZAÇÃO. 22. EXIBIR AUTOMATICAMENTE UMA PÁGINA DE CADA VEZ. 23. ROTAR UMA PÁGINA. 24. EXIBIR AS PROPRIEDADES (AUTOR, DATA DE CRIAÇÃO,) DA PÁGINA. 25. EXIBIR GRADES NA PÁGINA. 26. APRESENTAR COMENTÁRIOS DA PÁGINA. 27. ATIVAR O RECURSO DE LEITURA DE TEXTO, CASO EXISTA TEXTO. 28. USAR A AJUDA DO APLICATIVO PARA ALGUM DOS COMANDOS CITADOS.
Parte 1-Instruções de Preenchimento : marque com um X os controles que poderiam ser automatizados, para que você pudesse usufluir de mais conforto na utilização dos recursos e equipamentos existentes no LAMCE e realizar suas tarefas com maior produtividade, considerando também a redução de custos com a manutenção do prédio.
Parte 2-Instruções de Preenchimento : caso você tenha marcado a opção 2 da questão anterior, a-você já usou o Adobe Reader ou Power Point para apresentações? ( ) Sim ( ) Não. b-marque, com um X no retângulo ao final da linha, a opção que represente os comandos mais utilizados por você, no que se refere a realização de apresentações, utilizando o Adobe Reader ou o Power Point.
105
Apêndice 2
QUESTIONÁRIO DE AVALIAÇÃO DO inOctopus
PERFIL
Você já utilizou, alguma vez, profissionalmente algum dispositivo de gestos ou de voz? ( ) Sim ( ) Não
AVALIAÇÃO Avalie o inOctopus, com relação à facilidade de aprender, à facilidade de memorização, ao tratamento dos erros , a sua eficiência, concretização da tarefa (meta), intuição em realizar as tarefas solicitadas e ao fato de oferecer uma interação natural que proporcione satisfação ao usuário. Para isso, você deve atribuir um conceito (conforme a legenda a seguir), a cada um dos atributos expostos abaixo, marcando um X na coluna que corresponde ao conceito a ser atribuído.
Legenda : 5=Excelente ; 4=Muito Bom ; 3=Bom ; 2=Regular ; 1=Insuficiente . Atributos/Conceitos 5 4 3 2 1 1. Facilidade de aprender 1.1 Você achou fácil aprender a movimentar as câmeras usando gestos das mãos e da cabeça em? Posicionar a câmera para cima Posicionar a câmera para baixo Posicionar a câmera para direita Posicionar a câmera para esquerda 1.2 Foi fácil aprender a controlar as apresentações usando gestos para? Ir para o próximo slide Ir para o anterior slide Ir para o primeiro slide Ir para o último slide Encerrar a apresentação 1.3 Aprender a controlar os dispositivos usando a voz foi fácil para controlar? Data-show (Projetor) Ar condicionado Luzes internas Câmera de segurança Sensor de presença Som ambiente 2. Facilidade de memorizar 2.2 Você conseguiu recordar como movimentar as câmeras usando os gestos das mãos e da cabeça em? Posicionar a câmera para cima Posicionar a câmera para baixo Posicionar a câmera para direita Posicionar a câmera para esquerda
106
Continuação do questionário de avaliação do inOctopus 2.3 Foi fácil lembrar dos gestos das mãos para controlar as apresentações para? Ir para o próximo slide Ir para o anterior slide Ir para o primeiro slide Ir para o último slide 2.4 Para você, houve facilidade em recordar os comandos de voz para controlar os dispositivos ? Data-show (Projetor) Ar condicionado Luzes internas Câmera de segurança Sensor de presença Som ambiente 3. Recuperação de erros 3.2 Ao perceber um erro, se existiu, movimentando a câmera por gestos foi possível recuperar o controle da tarefa que estava sendo executado?
3.3 No caso de erro, durante o controle da apresentação por gestos, houve a possiblidade de retornar ao ponto em que a aplicação se encontrava?
3.4 Em se tratando de erro, ao controlar os dispositivos por voz a aplicação proporcionou retomada ao momento anterior ao erro?
4. Feedback 4.1 Ao acontecer um erro movimentando a câmera por gestos, a aplicação forneceu retorno (mensagem, aviso etc.) compreensível acerca do erro?
4.2 No caso de erro, durante a apresentação controlada por gestos, o inOctopus propiciou alguma resposta compreensível acerca do erro?
4.3 Ao perceber um erro, no quesito comando de voz, a interface se portou, apresentando mensagens inteligíveis ao fato?
5. Eficiência. 5.1 A aplicação permitiu que você realizasse a movimentação da câmera com agilidade?
5.2 O inOctopus se comportou de forma que você executasse as apresentações por gestos com agilidade?
5.3 A interface contemplou de forma eficiente o reconhecimento de voz no controle dos dispositivos?
Satisfação. 6.1 O que se deseja saber é o se a aplicação foi agradável de usar. Ou seja, você sentiu alguma sensação agradável em usá-lo na interação com a câmera utilizando gestos?
6.2 Quanto às apresentações por gestos a aplicação foi aprazível? 6.3 Em se tratando do reconhecimento de voz, o inOctopus permitiu alguma sensação de deleite para controlar os dispositivos ?
6.4 O inOctopus foi prazeroso no que diz respeito a projeção em superfície transparente?
107
Referências Bibliográficas
ALPERN, M., MINARDO, K., “Developing a car gesture interface for use as a secondary task”,
Conference on Human Factors in Computing (CHI´03), 932-933, Abril 2003.
ARKIN, H., PACIUK, M., “Evaluating intelligent Building Acoording to Level of Service Systmes
Integration”, Automation in Construction , v.6, pp. 471-479, 1997.
AURESIDE (Associação Brasileira de Automação Residencial), Temas técnicos: Conceitos
Básicos, Benefícios da automação . Brasil, 2014. Disponível em:
<http://www.aureside.org.br/temastec/default.asp?file=concbasicos.asp>. Acesso em: 15
fev. 2014.
AUTOMAÇÃO RESIDENCIAL SEM FIO COM IPAD, IPHONE E ANDROID. www.privus.com.
[S.l.], 2012. Disponível em: <http://www.youtube.com/watch?v=Fslqbvq7G20>. Acesso
em: 02 fev. 2014.
AZUMA, R., BAILLOT, Y., BEHRINGER, R., FEINER, S., et al., “Recent Advances in
Augmented Reality”, IEEE Computer Graphics and Applications , v. 21, n. 6, pp. 34-
47, Nov. 2001.
BAIG, F., BEG, S., FAHAD, K., “Controlling Home Appliances Remotely through Voice
Command”, International Journal of Computer Applications , v. 48, n. 17, pp. 1–4,
Jun. 2012.
BARRIENTOS, F. A., CANNY, J.F., “Cursive: controlling using pen gesture”, CVE '02
Proceedings of the 4th international conference on Collaborative virtual
environments , pp. 113–119, 2002.
BARROS, V. T. O., Avaliação da Interface de Um Aplicativo Computacion al Através de
Teste de Usabilidade, Questionário Ergonômico e Aná lise Gráfica do Design .
Dissertação de M.Sc., Universidade Federal de Santa Catarina, Santa Catarina, Brasil,
2003.
BAUDEL, T., BEAUDOUIN-LAFON, M., “Charade: Remote Control of Objects Using Free-Hand
Gestures”, Communications of the ACM , v. 36, n. 3, pp. 28-35, Jul. 1993.
BAYLE, J. C., Programming for Arduino . 5 ed. UK, Packt Publishing Ltd, 2013.
BETIOL, A. H., CYBIS, W. A., “Avaliação de usabilidade para os computadores de mão: um
estudo comparativo entre três abordagens para ensaios de interação”, In. Anais do VI
108
Simpósio sobre Fatores Humanos em Sistemas Computac ionais , v. 1, pp. 19-26,
Curitiba, Paraná, 2004.
BINH, N. D., SHUICHI, E., EJIMA, T., “Real-Time Hand Tracking and Gesture Recognition
System”. In: International Conference on Graphics, Vision and Im age, v. 7, pp. 19-
21, Cairo, Egito, 2005.
BLYTHE, M. A., OVERBEEKE, K., MONK, A. F., et al., Funology From Usability to
Enjoyment . USA, Springer, 2003.
BOLZANI, C. A. M., Desenvolvimento de um simulador de controle de disp ositivos
residenciais inteligentes: uma introdução aos siste mas domóticos . Dissertação de
M.Sc., Universidade de São Paulo, São Paulo, 2004.
BOOTH, P., An Introduction To Human-Computer Interaction . 1 ed. Psychology Press,
1989.
BRASIL. Lei Nº 10.436, de 24 de abril de 2002. Língua Brasileira de Sinais (LIBRAS) ,
Brasília, DF, 2002.
BREWSTER, S., CHOHAN, F., BROWN, L., “Tactile Feedback for Mobile Interactions”, CHI '07
Proceedings of the SIGCHI Conference on Human Facto rs in Computing Systems,
pp. 159-162.
BRUCE, G. D., TAYLOR, B., EDGE, M. “The Process of Designing Appropriate Smart Homes:
Including the User in the Design”, The 1st Equator IRC Workshop on Ubiquitous
Computing in Domestic , pp. 131-146, 2001.
BRUEGGER, P.; HIRSBRUNNER, B., 2009. “Kinetic User Interface: Interaction through Motion
for Pervasive Computing Systems. Lecture Notes in Computer Science - Universal
Access”, Human-Computer Interaction. Intelligent and Ubiquit ous Interaction
Environments , v.5615, pp. pp 297-306, Jul. 2009.
BUTT, M., KHANAM M., KHAN, A., KHIYAL, M. S. H. “Controlling Home Appliances Remotely
Through Voice Command”, International Journal of Advanced Computer Science
and Applications , v. 48, n. 17, pp. 35-39, Jun. 2012.
BUXTON, B., CES 2010: NUI with Bill Buxton . Las Vegas, USA, 2010. Disponível em:
<http://channel9.msdn.com/blogs/larrylarsen/ces-2010-nui-with-bill-buxton>. Acesso em:
21 Mar. 2012.

109
BUXTON, W., “Living in Augmented Reality: Ubiquitous Media and Reactive Environments”. In
Finn, K., Sellen, A., Wilber, S. (eds). Video Mediated Communication . Hillsdale, N.J.,
Erlbaum, pp. 363-384, 1997.
BUXTON, W., BILLINGHURST, M., GUIARD, Y., et al., Human input to computer systems:
theories, techniques and technology . 2002 (Manuscrito de livro em andamento, sem
editora), Disponível em: <http://www.billbuxton.com/inputManuscript.html>. Acesso em:
28 Abr. 2012.
BUXTON, W., HILLl, R., ROWLEY, P. “Issues and techniques in touch-sensitive tablet input,
Computer Graphics”, SIGGRAPH '85 Proceedings of the 12th annual confere nce on
Computer graphics and interactive techniques , v. 19, n. 3, pp. 215-224, Jul. 1985.
BUXTON, W., MYERS, B. “A study in two-handed input”, CHI '86 Proceedings of the SIGCHI
Conference on Human Factors in Computing Systems, v. 17, n. 4, pp. 321-326, Abr.
1986.
CABRAL, M. C., MORIMOTO, C. H., ZUFFO, M. K., “On the usability of gesture interfaces in
virtual reality environments”, Proceedings of the 2005 Latin American conference o n
Human-computer interaction (CLIHC´05) , v. 124, pp. 100-108, 2005.
CAMURRI, A., MAZZARINO, B., VOLPE, G., “Analysis of Expressive Gesture: The EyesWeb
Expressive Gesture Processing Library”, Proceedings the 5th International
GestureWorkshop (GW´03) , v. 2915, pp. 469-470, Abril. 2003.
CANTÚ, M., Delphi 2010 Handbook . Itália, Wintech Italia Srl, 2011.
CAO, X., BALAKRISHNAN, R., “VisionWand: interaction techniques for large displays using a
passive wand tracked in 3D”, Proceedings of ACM Symposium on User Interface
Software & Technology (UIST´04) , pp. 173-182, 2003.
CARDOSO, G. S., Microsoft Kinect: Crie aplicações interativas. São Paulo, Casa do
Código, 2013.
CAVALCANTE, Flávia Castro Temóteo. Três proposições sobre arquitetura inteligente no
contexto sustentável . Dissertação de M.Sc., Universidade de Brasília, Brasília, 2007.
CAVALCANTE, M. M., “O demonstrativo e seus usos”, Revista Perspectiva, Florianópolis, v.
20, n. 1, pp. 159-184, 2002.
CHAN, W. N., RANGGANATH, S., “Real-time gesture recogntition system and application”,
Image and Vision , v. 20, n. 3, pp. 993-1007, 2002.
110
CHIZZOTTI, A., Pesquisa em ciências humanas e sociais . 3 ed. São Paulo, Cortez, 2006.
CORREIA, A. C. C., MIRANDA, L. C., HORNUNG, H. H., “Gesture-Based Interaction in
Domotic Environments: State of the Art and HCI Framework Inspired by the Diversity”,
14th IFIP TC 13 International Conference , v. 8118, pp. 300-317, 2013.
COSTANZA, E., SHELLEY, S. B., ROBINSON, J., “Introducing audio d-touch: A tangible user
interface for music composition and performance”, Proceedings International
Conference on Digital Audio Effects (DAFX´03), pp. 118-122, 2003.
CRUZ, L., LUCIO, D., VELHO, L., “Kinect and rgbd images: Challenges and applications”,
SIBGRAPI-T '12 Proceedings of the 2012 25th SIBGRAP I Conference on Graphics,
Patterns and Images Tutorials , pp. 36-49, Ago. 2012.
DAWSON, J. W., CHEN, P., ZHU, Y., “Usability Study of The Virtual Test Bed and Distributed
Simulation”, Winter Simulation Conference (WICSA´05), pp. 1298-1305, 2005.
DIETZ, P. H., LEIGH, D. L., “DiamondTouch: A Multi-User Touch Technology”, UIST
'01 Proceedings of the 14th annual ACM symposium on User interface software
and technology , pp. 219-226, 2001.
DO, J. H., JUNG, J. W., JUNG, S. H., et al., “Advanced Soft Remote Control System Using
Hand Gesture”, Proceedings 5th Mexican International Conference on Artificial
Intelligence (MICAI´05) , v. 4293, pp. 745–755, 2006.
DOMÓTICA. In: Dicionário da Língua Portuguesa . Porto Editora, 2014.
Domotica con Microsoft Kinect (Kinect Home Automation), www.sitzia.it. Itália, 2011.
Disponível em: <https://www.youtube.com/watch?v=giG6JZ7rvfE>. Acesso em: 15 fev.
2014.
DOUBLETAKETECH, “DoubleTake Technologies,” www.DoubleTake.com , USA, 2013-2014.
Disponível em <http://doubletaketech.com/>. Acesso em: 21 mar. 2013.
DOUBLETAKETECH, Dreamscreen3000 . USA, 2013. Disponível em
<http://doubletaketech.1freecart.com/i/278980/dreamscreen3000.htm>. Acesso em: 21
Mar. 2012.
DOUBLETAKETECH, Dreamwall . USA, 2013. Disponível em
<http://doubletaketech.1freecart.com/i/278979/dreamwall.htm>. Acesso em: 21 de mar.
2012.
111
EISENHAUER, M., HOFFMAN, B., KRETSCHMER, D., State of the Art Human-Computer
Interaction . GigaMobile, 2002.
EL-NASR, M. S., VASILAKOS, A.V., “DigitalBeing - using the environment as an expressive
medium for dance”, Information Sciences: an International Journal , v. 178, n. 3, pp.
663-678, 2008.
ELOY, S., PLÁCIDO, I., DUARTE, J. P., et al., Utilização de domótica na estratégia de
sustentabilidade social e ambiental . 2010. Disponível em:
<http://www.academia.edu/321822/Utilizacao_de_domotica_na_estrategia_de_sustenta
bilidade_social_e_ambiental>. Acesso em: 15 jun. 2014.
FAILS, J. A., JR., D. O., “Light Widgets: Interacting in Every-day Spaces”, Proceeding IUI '02
Proceedings of the 7th international conference on Intelligent user interfaces , pp.
63-69, 2002. Disponível em: <http://doi.acm.org/10.1145/502716.502729>. Acesso em:
28 Fev. 2014.
FAIRLEY, R., Software engineering concepts . New York, USA, Mc Graw-Hill, 1985.
FERREIRA, A., JOTA, R., CEREJO, M., et al., “Recognizing Hand Gestures with CALI”, Ibero-
American Symposium in Computer Graphics (SIACG´06), 2006.
FERREIRA, D. S., Abordagem Híbrida para Avaliação da Usabilidade de Dispositivos
Móveis . Dissertação de M.Sc., Universidade Federal de Campina Grande. Paraíba,
2007.
FITZMAURICE, G. W., ISHII, H., BUXTON, W., “Bricks Laying the foundations for graspable
user interfaces”, Proceeding CHI '95 Proceedings of the SIGCHI Confer ence on
Human Factors in Computing Systems , pp. 442–449. 1995.
FREAK’N GENIUS. Freak’n genius , 2012. Disponível em: <http://www.freakngenius.com/>.
Acesso em: 05 Fev. 2013.
GABBARD, J., A taxonomy of Usability characteristics of virtual environments . Thesis of
M.Sc., Faculty of the Virginia, USA, 1997.
GEMMEKE, J., NOS, B., TESSEMA, N., et al., “Self-taught assistive vocal interfaces: An
overview of the ALADIN project”, Proceedings of Interspeech , pp. 2038-2043, 2013.
GESTSURE, GestSure Technologies , 2012. Disponível em: <http://www.gestsure.com/>.
Acesso em: 05 Fev. 2013.
112
GHALWASH, A. Z., NABIL, S. K., “Organic User Interfaces: Framework, Interaction Model and
Design Guidelines”, In: International Journal of Ad hoc, Sensor & Ubiqu itous
Computing (IJASUC) , v. 4, n. 4, University Cairo, Egypt, Ago. 2013.
GIL, A. C., Como elaborar projetos de pesquisa . 5 ed. São Paulo, Atlas, 2010.
GIROUARD, A., TARUN, A., VERTEGAAL, R., “DisplayStacks: Interaction Techniques for
Stacks of Flexible Thin-film Displays”, Proc. ACM CHI 2012 , pp. 2431–2440. 2012.
GOMAZAKO, M. S., Conservação de energia em edifícios comerciais atra vés da
implementação de dispositivos de automação . Campinas, São Paulo, 2007.
GUERREIRO, J. P. G., Usabilidade do SiFEUP . Monografia, Universidade do Porto, Portugal,
2005.
GURALNIK, D. B., Webster’s New World Dictionary of the American Lang uage, Macmillan
General Reference . 3 ed. Macmillan General Reference, 1994.
HALL JR., E. T., PFILE, W. R., Holographic projection screen having a rear-facing fresnel
lens . USA, Nov. 2000. Disponível em:
<http://www.freepatentsonline.com/6151163.html>. Acesso em: 8 mar. 2013.
HAN, J. Y., “Low-Cost Multi-Touch Sensing through Frustrated Total Internal Reflection”,
Proceeding UIST '05 of the 18th annual ACM symposiu m on User interface
software and technology , pp. 115-118, 2005.
HEALEY, G., Intelligent Buildings: Integrated systems and contr ols. International
Specialised Skills Institute, 2011.
HERPERS, R., DERPANIS, K., MACLEAN, W. J., et al., “SAVI: an actively controlled
teleconferencing system”, Journal Image and Vision Computing , v. 19, n. 11, pp. 793–
804, 2001.
HIX, D., HARTSON, H. R., Developing User Interfaces, Ensuring Usability Thro ugh
Product & Process . New York, John Wiley & Sons Inc, 1993.
HOLMAN, D., et al., “PaperWindows: Interaction Techniques for Digital Paper”, CHI '05
Proceedings of the SIGCHI Conference on Human Facto rs in Computing Systems,
pp. 591–599, 2005.
113
HOLMAN, D., VERTEGAAL, R., “Organic user interfaces: designing computers in any way,
shape, or form”, Communications of the ACM - Organic user interfaces , v. 51, n. 6,
pp. 48-55, Jun. 2008.
HONGO, H., OHYA, M., YASUMOTO, M., et al., “Face and hand gesture recognition for
human-computer interaction”, Proceedings International Conference on Pattern
Recognition (ICPR´00) , v. 2, pp. 2921-2924, 2000.
HORNBAEK, K., “Current practice in measuring usability: Challenges to usability studies and
research”, International Journal of Human-Computer Studies , v. 64, pp. 79–102,
2006.
IKE, T., KISHIKAWA, N., STENGER, B., “A Real-Time Hand Gesture Interface Implemented on
a Multi-Core Processor”, Machine Vision and Application (MVA´07), pp. 9-12, 2007a.
IKE, T., STENGER, B., KISHIKAWA, N., et al., “Hand Gesture User Interface Implemented on
Cell Broadband EngineTM”. Toshiba Review . v. 62 n. 6, 2007b.
IKKOS, Ikkos training . [S.l.], 2012. Disponível em: <http://www.ikkostraining.com/>.
Acesso em: 05 fev. 2013.
IRIE, K., WAKAMURA, N., UMEDA, K., “Construction of an intelligent room based on gesture
recognition: operation of electric appliances with hand gestures”, International
Conference on Intelligent Robots and Systems , v. 1, pp. 193-198, Set. 2004.
ISHII, H., ULLMER, B., “Tangible bits: towards seamless interfaces between people, bits and
atoms”, CHI '97 Proceedings of the ACM SIGCHI Conference on Human factors in
computing systems , pp. 234-241, 1997.
ISO 9241-11, Ergonomic requirements for office work with visual display terminals, Part
11 Usability Statements. Draft International Standard ISO, Brasil, 1998.
ISO 9241-400, Ergonomics of human-system interaction. Part 400: P rinciples and
requirements for physical input devices . Draft International Standard ISO, Brasil,
2007.
ISO 9241-410, Ergonomics of human-system interaction Part 410: De sign criteria for
physical input devices . Draft International Standard ISO, Brasil, 2008.
JACOB, R. J. K., ISHII, H., PANGARO, G., et al., “A tangible interface for organizing information
using a grid”, Proceedings of the SIGCHI conference on Human facto rs in
114
computing systems: Changing our world, changing our selves (CHI’02) , pp. 339-
346, 2002.
JENSEN, R. W., TONIES, C. C., Software. Engineering. Englewood Cliffs, NJ, Prentice-Hall,
1979.
KAPLAN, R. M., SACCUZZO, D. P., Psychological Testing: Principles, Applications, an d
Issues . 8 ed. USA, Wadsworth Publishing Co Inc, 2012.
KARAM, M. A., A framework for research and design of gesture-base d human computer
interactions . Thesis of D.Sc., School of Electronics and Computer Science, United
Kingdom, 2006.
KARAM, M., SCHRAEFEL, M. C., “A study on the use of semaphoric gestures to support
secondary task interactions”, CHI’05 extended abstracts on Human factors in
computing systems , pp. 1961–1964, 2005.
KIM, D., KIM, D., “An Intelligent Smart Home Control Using Body GesturesInternational
Conference on Hybrid Information Technology”, ICHIT '06 Proceedings of the 2006
International Conference on Hybrid Information Tech nology , v. 2, pp. 439-446, Nov.
2006.
KIM, H. J., HO, K., KIM, S. K., HAN, T. D., et al., “Ambient Wall: Smart Wall Display
Interface Which Can Be Controlled by Simple Gesture for Smart Home”, SIGGRAPH
Asia 2011 Sketches , n. 1, 2001. Disponível em:
<http://doi.acm.org/10.1145/2077378.2077380>. Acesso em: 7 fev. 2014
KINECT FOR WINDOWS TEAM, Near mode: What it is (and isn’t) . Rio de Janeiro,
2012. Disponível em:
<http://blogs.msdn.com/b/kinectforwindows/archive/2012/01/20/near-mode-what-it-is-
and-isn-t.aspx>. Acesso em: 28 jan. 2013.
KIRNER, C., PINHO, M. S., Introdução à Realidade Virtual . 1997.
KLEINDIENST, J., MACEK, T., SERÉDI, L., et al., Vision-Enhanced Multi-Modal Interactions
in Domotic Environments . [S.l.], 2008. Disponível em:
<http://ui4all.ics.forth.gr/workshop2004/files/ui4all_proceedings/adjunct/interactive_applic
ations/103.pdf>. Acesso em: 28 jan. 2013.
KOPPELHUBER, A., BIMBER, O., “Towards a transparent, flexible, scalable and disposable
image sensor using thin-film luminescent concentrators”, Optics Express , v. 21, n. 4, p.
4796, Fev. 2013.

115
KOYANI, S. J., BAILEY, R. W., NALL, J. R., Research-Based Web Design & Usability
Guidelines . USA, Computer Psychology, 2004.
KRUMM, J., Ubiquitous Computing Fundamentals . Chapman and Hall/CRC, 2009.
KURTENBACH, G., HULTEEN, E. A., Gestures in human-computer communication. The
art of human-computer interface design . Adison Wesley, 1990.
LAHEY, B., GIROUARD, A., BURLESON, W., VERTEGAAL, R., et al., “PaperPhone:
Understanding the Use of Bend Gestures in Mobile Devices with Flexible Electronic
Paper Displays”, CHI '11 Proceedings of the SIGCHI Conference on Hum an Factors
in Computing Systems , pp. 1303-1312, 2011.
LEE, H., KIM, J., “An HMM-based threshold model approach for gesture recognition”, IEEE
Transactions on Pattern Analysis and Machine Intell igence , v. 21, n. 10, Out. 1999.
LEITNER, J., HALLER M., YUN, K., WOO, W., et al. “Physical interfaces for tabletop games”,
Computers in Entertainment (CIE) - SPECIAL ISSUE: G ames , v. 7, n. 4, Article 61,
2009.
LENMAN, S., BRETZNER, L., THURESSON, B., “Using marking menus to develop command
sets for computer vision based hand gesture interfaces”, Proceedings of the Second
Nordic Conference on Human-Computer interaction (No rdiCHI '02) , v. 31, pp. 239-
242, 2002.
LEUTHARDT, E. C., SCHALK, G., MORAN, D., et al., “The Emerging World of Motor
Neuroprosthetics: A Neurosurgical Perspective”, Neurosurgery , v. 59, n. 1, pp. 1-14,
2006.
LIKERT, R., The Human Organization: Its Management and Value . USA, McGraw-Hill, 1967.
LOKANADHAM, C., SUBBARAO, B. P. V., SANTHISRI, V., “Implementation of Integrity of
Voice and face Recognition for Home Security by using GSM AND ZIGBEE”, IJCER, v.
1, n. 2, pp. 76–80, Ago. 2012.
LÓPEZ, G., PELÁEZ, V., GONZÁLEZ, R., LOBATO, R., et al. “Voice Control in Smart Homes
Using Distant Microphones: A VoiceXML-Based Approach”, AmI'11 Proceedings of the
Second international conference on Ambient Intellig ence , pp. 172-181,
2011. Disponível em: <http://dx.doi.org/10.1007/978-3-642-25167-2_21>. Acesso em: 28
fev. 2014
116
MAEDA, S., Intelligent Buildings: a key solution for the 21 st century office , Thesis of
D.Sc, Civil Engineering Department, Stanford University, Stanford, 1993.
MAHENDRAN, N., MATHAI, G. J., VEENESH, M.U., "Multiple Sensor Feeding Supported Bui
lding Automation System Using Arduino Platform With Exposure o f 802.15.4
Functionalities", International Journal of Engineering Trends and Tec hnology , v. 4,
n. 2, pp. 77-80, Fev. 2013.
MEDEIROS, M., “Ferramentas de Concepção de Interfaces Homem-Máquina”, CTAIRevista , v.
1, n. 1, Florianópolis, 1998.
MICROSOFT, Kinect for windows sensor components and specificati ons. [S.l.], 2012.
Disponível em: <http://msdn.microsoft.com/en-us/library/jj131033.aspx>. Acesso em: 02
fev. 2013.
MIGUEL, M. V., Instalaciones domóticas . Editorial Paraninfo, 2011.
MIRANDA, F. M. P., MORAES, A., “Ergonomic study of electronic commerce websites: the
process of purchase”, 16th congress of the International Ergonomics Associati on
(IEA´06), 2006.
MIT (Massachusetts Institute of Technology), SandsCape . USA, 2002. Disponível em:
<http://www.aec.at/en/archives/center_projekt_ausgabe.asp?iProjectID=11024>.
Acessado em: 12 out. 2012.
MO, Z., NEUMANN, U. A., “Framework for Gesture Interface Design”, Journal of Multimedia ,
v. 2, pp. 1-9, 2007.
MONTEBELLER, S.J., Sensores sem fios: Avaliação e Emprego na Automaçã o de
Sistemas Prediais . 1 ed. Biblioteca 24horas, 2012.
MOTTA, Rosa Amelita Sá, OLIVEIRA, Altemar Sales de, CUNHA, Gerson Gomes, “Interação
por Objetos Tangíveis em uma Discoteca Virtual”, Simpósio de Iniciação Científica
(SICT´08), v. 25, pp. 52-53, 2008.
MOYLE, M., COCKBURN, A., “Gesture navigation: an alternative 'back' for the future”. In:
Conference on Human Factors in Computing Systems (C HI'02), pp. 822-823, 2002.
MURATORI, J. R., BO, P.H.D., “Automação residencial: Histórico, definições e conceitos”, O
Setor Elétrico , pp. 70-76, 2011.

117
MURATORI, José Roberto. “Mercado de automação residencial, os próximos passos”, In:
Congresso BICSI 2001 , São Paulo, 2001. Disponível em:
<http://www.estoke.com.br/downloads/automacao.pdf>. Acesso em: 02 fev. 2014.
MYERS, B., HUDSON, S. E., PAUSCH, R., “Past, Present and Future of User Interface
Software Tools”, ACM Transactions on Computer-Human Interaction (TOC HI) -
Special issue on human-computer interaction in the new millennium, Part 1, v. 7 n.
1, pp. 3-28, 2000.
NACENTA M., BAUDISCH, P., BENKO H., WILSON, A., “Separability of spatial manipulations
in multi-touch interfaces”, GI '09 Proceedings of Graphics Interface 2009 , pp. 175-182,
2009.
NBR 9241-11, Requisitos ergonômicos para trabalho de escritório com computadores:
parte 11-orientação sobre usabilidade , Rio de Janeiro, ABNT, 2002.
NEVES, R. P. A., CAMARGO, A., R., “Gerenciamento de facilidades em edifícios inteligentes”,
Workshop Brasileiro de Gestão do Processo de Projec to na Construção de
Edifícios , pp. 6-11, 2004.
NIELSEN, J., “Heuristic evaluation”. In: Nielsen, J., Mack, R. L. (eds.), Usability Inspection
Methods, New York, NY, John Wiley & Sons, 1994.
NIELSEN, J., BUDIU, R., Mobile Usability . Berkeley, CA, New Riders, 2013.
NIELSEN, J., LORANGER, H., Prioritizing Web Usability . New Riders Press, Berkeley, 2006.
NIELSEN, J., Usability Engineering . Califórnia, Morgan Kaufmann, 1993.
NORMAN, D. A., “The next UI breakthrough: command lines” . Interactions, v. 14, n. 3, 2007.
NUIGROUP, Natural User Interface . USA, 2011. Disponível em:
<http://wiki.nuigroup.com/Natural_User_Interface>. Acesso em: 21 mar. 2012.
OH, J., JUNG, Y., CHO, Y., et al., “Hands-up: Motion Recognition Using Kinect and a Ceiling to
Improve the Convenience of Human Life”, CHI EA '12 CHI '12 Extended Abstracts on
Human Factors in Computing Systems , pp. 1655–1660, 2012.
OKA, K., SATO, Y., KOIKE, H., “Real-time Tracking of Multiple Fingertips and Gesture
Recognition for Augmented Desk Interface Systems”, FGR '02 Proceedings of the Fifth
IEEE International Conference on Automatic Face and Gesture Recognition , pp.
429, 2002.

118
OLIVEIRA, Altemar Sales de, MOTTA, R.A.S., CUNHA, G. G., “Interação Tangível em uma
Discoteca Virtual”. Simpósio de Iniciação Científica (SICT´07) , 2007.
OPPERMANN, R., REITERER, H., “Software evaluation using iso 9241 evaluator”, Behaviour
& Information Technology , v. 16, pp. 232-245, 1997.
OU, J., FUSSELL, S. R., CHEN, X., et al., “Gestural communication over video stream:
supporting multimodal interaction for remote collaborative physical tasks”, Proceedings
of the 5th international conference on Multimodal i nterfaces , pp. 242–249, 2003.
PANGER, G., “Kinect in the Kitchen: Testing Depth Camera Interactions in Practical Home
Environments”, CHI EA '12 CHI '12 Extended Abstracts on Human Fact ors in
Computing Systems , pp. 1985–1990, 2012.
PASTEL, R., SKALSKY, N., “Demonstrating information in simple gestures”, Proceedings of
the 9th international Conference on intelligent Use r interfaces (IUI'04), pp. 360-361,
2004.
PAVLOVIC, V. I., SHARMA, R., HUANG, T. S., “Visual Interpretation of Hand Gestures for
Human-Computer Interaction: A Review”, IEEE Transaction on Pattern Analysis and
Machine Intelligence , v. 19, pp. 677-695, 1997.
PICKERING, C. A., “Gesture recognition driver controls”, IEE Journal of Computing and
Control Engineering, v. 16, pp. 27–40, 2005.
PIRHONEN, A., BREWSTER, S., HOLGUIN, C., “Gestural and audio metaphors as a means of
control for mobile devices”, Proceedings of the SIGCHI conference on Human facto rs
in computing systems (CHI’02), pp. 291–298, 2002.
POSLAD, S., Ubiquitous Computing: Smart Devices, Environment s and Interactions . Jon
Wiley & sons, 2009.
PREECE, J., SHARP, H., ROGERS, Y., Interaction Design: Beyond Human-Computer
Interaction . John Wiley & Sons, 2007.
PRESSMAN, R. S., Software Engineering - A Practitioner’s Aproach . 7 ed. USA, McGraw-
Hill, 2011.
PRÜMPER, P., “Test it: ISONORM 9241/10”, Proceedings of HCI International , pp. 1028-
1032, 1999.

119
PU, Q., GUPTA, S., GOLLAKOTA, S., et al. “Whole-home Gesture Recognition Using Wireless
Signals”, MobiCom '13 Proceedings of the 19th annual internat ional conference on
Mobile computing & networking , pp. 27-38, 2013. Disponível em:
<http://doi.acm.org/10.1145/2500423.2500436>. Acesso em: 3 mar. 2014
QUEK, F., MCNEILL, D., BRYLL, R., et al., “Multimodal human discourse: gesture and speech”,
ACM Transactions on Computer-Human Interaction , v. 9, pp. 171–193, 2002.
RAHMAN, A. S. M. M., SABOUNE, J., SADDIK, A. E., “Motion-Path Based in Car Gesture
Control of the Multimedia Devices”, DIVANet’11, pp. 69–76, 2011.
RAMLEE, R. A., AZIZ, K. A. A., LEONG, M. H., et al., “Wireless Controlled Methods via Voice
and Internet (e-mail) for Home Automation System”, International Journal of
Engineering and Technology , v. 5, n. 4, pp. 3580-3587.
REITERER, H., “EVADIS II: A new method to evaluate user interfaces”, Proceedings of the
conference on People and computers VII , pp. 103–115, 1993.
REKIMOTO, J., “SmartSkin: An Infrastructure for Freehand Manipulation on Interactive
Surfaces”, CHI '02 Proceedings of the SIGCHI Conference on Hum an Factors in
Computing Systems , pp. 113-120, 2002.
REKIMOTO, J., “SmartSkin: an infrastructure for freehand manipulation on interactive surfaces”,
Proceedings of the SIGCHI Conference on Human Facto rs in Computing Syst ems
(CHI '02), pp. 113-120, 2002.
RIVAS-COSTA, C., GÓMEZ-CARBALLA, M., ANIDO-RIFÓN, L., FERNANDEZ-IGLESIAS,
M.J., et al., Controlling your Home from your TV . Cambridge, MA, USA, WSEAS
Press, 2013.
SANTOS, D., Introduçao ao Arduino e Domótica. Latinoware 2012, 2012. Disponível em:
<http://pt.slideshare.net/desisant/introduao-ao-arduino-e-domtica-latinoware-2012>.
Acesso em: 4 mar. 2014.
SANTOS, N., FIALHO, F. A. P., Manual de análise ergonômica no trabalho . Curitiba,
GENESIS, 1995.
SCHÖNING, J., BRANDL, P., DAIBER, F., ECHTLER, F., et al. Multi-Touch Surfaces : A
Technical Guide . Technical Report TUM-I0833, 2008.

120
SCHROEDER, S., “Garmin’s Portable Head-Up Display Adds a High-Tech Touch to Cars”,
www.wn.com , 2013. Disponível em: <http://mashable.com/2013/07/08/garmin-portable-
hud/>. Acesso em: 4 mar. 2014.
SCHWESIG, C., POUPYREV, I., MORI, E., ”Gummi: A Bendable Computer”, CHI '04
Proceedings of the SIGCHI Conference on Human Facto rs in Computing Systems ,
pp. 263-270, 2004. Disponível em: <http://doi.acm.org/10.1145/985692.985726>.
Acesso em: 9 mar. 2014.
SHACKEL, B., Human Factors for Informatics Usability . University Press, Cambridge, 1991.
SHNEIDERMAN, B., NORMAN, K., “Questionnaire for user interaction satisfaction (quis 5.0)”,
HCI-Lab , 1989.
SHNEIDERMAN, B., PLAISANT, C., Designing the User Interface: Strategies for Effect ive
Human-Computer Interaction. 4 ed. Boston, MA, Addison Wesley Publishers, 2004.
SMARTHOME. Smarthome, Home Automation Store . Irvine, California, Estados Unidos,
2012. Disponível em <http://www.smarthome.com/_/index.aspx>. Acesso em 22 set.
2012.
SMITH, G. M., SCHRAEFEL, M. C., “The radial scroll tool: scrolling support for stylus- or touch-
based document navigation”, Proceedings of the 2004 ACM Symposium on User
Interface Software and Technology , pp. 53–56, 2004.
SOLANKI, U. V.; DESAI, N. H. Hand gesture based remote control for home appliances:
Handmote”, World Congress On Information And Communication Tec hnologies
(WICT), pp. 419 – 423, Dez. 2011
STREITZ, N. A., GEILER, J., HOLMER, T., et al., “i-land: an interactive landscape for creativity
and innovation”, Proceedings of the SIGCHI conference on Human facto rs in
computing systems , pp. 120-127, 1999.
SUTHERLAND, I., “Sketchpad: a man-machine graphical communications system”,
Proceedings of the AFIPS Spring Joint Computer Conf erence , pp. 329-346, 1963.
SWELLER, J., “Cognitive Load During Problem Solving: Effects on Learning”, Cognitive
Science , v. 12, n. 2, 1988.
SWELLER, J.; VAN MERRIENBOER, J. J. G.; PAAS, F. G. W. C., “Cognitive Architecture and
Instructional Design” , Educational Psychology Review , v. 10, n. 3, 1998.
121
TANIBATA, N., SHIMADA, N., SHIRAI, Y., “Extraction of hand features for recognition of sign
language words”, Proceedings of the International Conference on Visi on Interface
(VI´02), pp. 391-398, 2002.
TECNOLOGIA, “Tendências para os próximos dez anos”, Revista Veja , Edição especial, São
Paulo, Ago. 2007. Disponível em:
<http://veja.abril.com.br/especiais/tecnologia_2007/p_068.html>. Acesso em: abr. 2012.
TRUYENQUE, M. A. Q., Uma aplicação de visão computacional que utiliza ge stos da mão
para interagir com o computador . Dissertação de M.Sc, Pontifícia Universidade
Católica do Rio de Janeiro, Rio de Janeiro, 2005.
UbiComp’12, “UbiComp’12: Proceedings of the 2012”, ACM Conference on Ubiquitous
Computing , 2012.
UbiComp’13, “UbiComp’13: Proceedings of the 2013”, ACM International Joint Conference
on Pervasive and Ubiquitous Computing , 2013.
VACHER, M., ISTRATE, D., PORTET, F., et al. “The sweet-home project: audio technology in
smart homes to improve well-being and reliance”, 33rd Annual International
Conference of the IEEE EMBS , v. 2011, pp. 5291–5294, 2011.
VASCONCELOS, S. P., SANTOS, F. S., SOUZA, G. R., “LIBRAS: língua de sinais”, Nível 1.
AJA, Programa Nacional de Direitos Humanos, Ministé rio da Justiça, Secretaria de
Estado dos Direitos Humanos CORDE , 2007.
VIOLA, P., JONES, M., “Fast Multi-view Face Detection”. In: Technical Report TR2003-96 ,
MERL, Cambridge, Massachusetts, 2003.
WACHS, J., STERN, H. I., EDAN, Y., et al., “A hand gesture sterile tool for browsing MRI
images in the OR”, Journal of the American Medical Informatics Associa tion. v. 15,
pp. 321-323, 2008a.
WACHS, J. P., STERN, H. I., EDAN, Y., et al., “A Gesture-based Tool for Sterile Browsing of
Radiology Images”, Journal of the American Medical Informatics Associa tion , v. 15,
pp. 321-323, 2008b.
WEBB, J., ASHLEY, J., Beginning Kinect Programming with the Microsoft Kin ect SDK .
Apress, 2012.

122
WEISER, M., The computer for the twenty-first century . 1991. Disponível em:
<http://www.stanford.edu/class/cs344a/papers/computer-for-21-century.pdf>. Acesso em
22 set. 2012.
WEISS, R. J., CRAIGER, J. P., Ubiquitous Computing . 2002. Disponível em:
<http://www.siop.org/TIP/backissues/TIPApr02/pdf/394_044to052.pdf>. Acesso em: 5 de
set. 2012.
WEXELBLAT, A., “Research challenges in gesture: Open issues and unsolved problems”,
Proceedings of the International Gesture Workshop o n Gesture and Sign
Language in Human-Computer Interaction , v. 1371, pp. 1-11, 1997.
WIGDOR, D., WIXON, D., Brave NUI world: designing natural user interfaces for touch
and gesture . Elsevier, 2011.
WILSON, A. D., BENKO, H., “Combining Multiple Depth Cameras and Projectors for
Interactions on, Above and Between Surfaces”, UIST '10 Proceedings of the 23nd
annual ACM symposium on User interface software and technology , pp. 273-282,
2010. Disponível em: <http://doi.acm.org/10.1145/1866029.1866073>. Acesso em: 4
mar. 2014.
WILSON, A., “TouchLight: An Imaging Touch Screen and Display for Gesture-Based
Interaction”, In: Proceedings of the 6th international conference on Multimodal
interfaces , pp. 69-76, New York, NY, USA, 2004.
WILSON, A., SHAFER, S., “XWand: UI for intelligent spaces”, Proceedings of the SIGCHI
Conference on Human Factors in Computing Systems (CHI'03), pp. 545-552, 2003.
WOLPAW, J. R., BIRBAUMER, N. ; HEETDERKS, W. J., et al., “Brain–Computer Interface
Technology: A Review of the First International Meeting”, IEEE Transactions on Neural
Systems and Rehabiliation Engineering , v. 8, n. 2, pp. 164 – 173, 2000.
WONG, J. K .W., LI, H., WANG, S. W., “Intelligent building research: a review. Automation in
Construction”, Elsevier , v. 14 n. 1, pp. 143-159, Jan. 2005.
WU, M., BALAKRISHNAN, R., “Multi-finger and whole hand gestural interaction techniques for
multi-user tabletop displays”, Proceedings of the Annual ACM Symposium on User
interface Software and Technology (UIST'03), pp. 193-202, 2003.
YAMAMOTO, Y., YODA, I., SAKAUE, K. “Arm-pointing gesture interface using surrounded
stereo cameras system”, Proceedings of the 17th International Conference on
Pattern Recognition , v. 4, pp. 965 – 970, Ago. 2004.

123
YIN, R. K., Estudo de Caso-Planejamento e Métodos . 3 ed. Porto Alegre, Bookman, 2006.
YONCK, R., “The Age of the Interface”. The Futurist . Maio 2010. Disponível em:
<http://www.wfs.org/Jul-Aug2010/MAy-Junebkis.htm>. Acesso em: 21 mar. 2012.
ZHANG, Z., “Microsoft kinect sensor and its effect. Multimedia”, IEEE MultiMedia , v. 19, n. 2,
pp. 4–10, Abr. 2012.
ZHAO, S., BALAKRISHNAN, R., “Simple vs. compound mark hierarchical marking menus”,
Proceedings of the Annual ACM Symposium on User int erface Software and
Technology (UIST '04) , pp. 33-44, 2004.
ZHU, Y., REN, H., XU, G., et al., “Toward real-time human-computer interaction with continuous
dynamic hand gestures”, Proceedings of the IEEE International Conference on
Automatic Face and Gesture Recognition , pp. 544-549, 2000.

124
Anexo 1
Gráficos do controle de apresentação por gestos Gráfico 6 - Resultado da validação do inOctopus para o atributo Facilidade de Aprender
Gráfico 7 - Resultado da validação do inOctopus para o atributo Facilidade de Memorizar
Gráfico 8 - Resultado da validação do inOctopus para o atributo Feedback
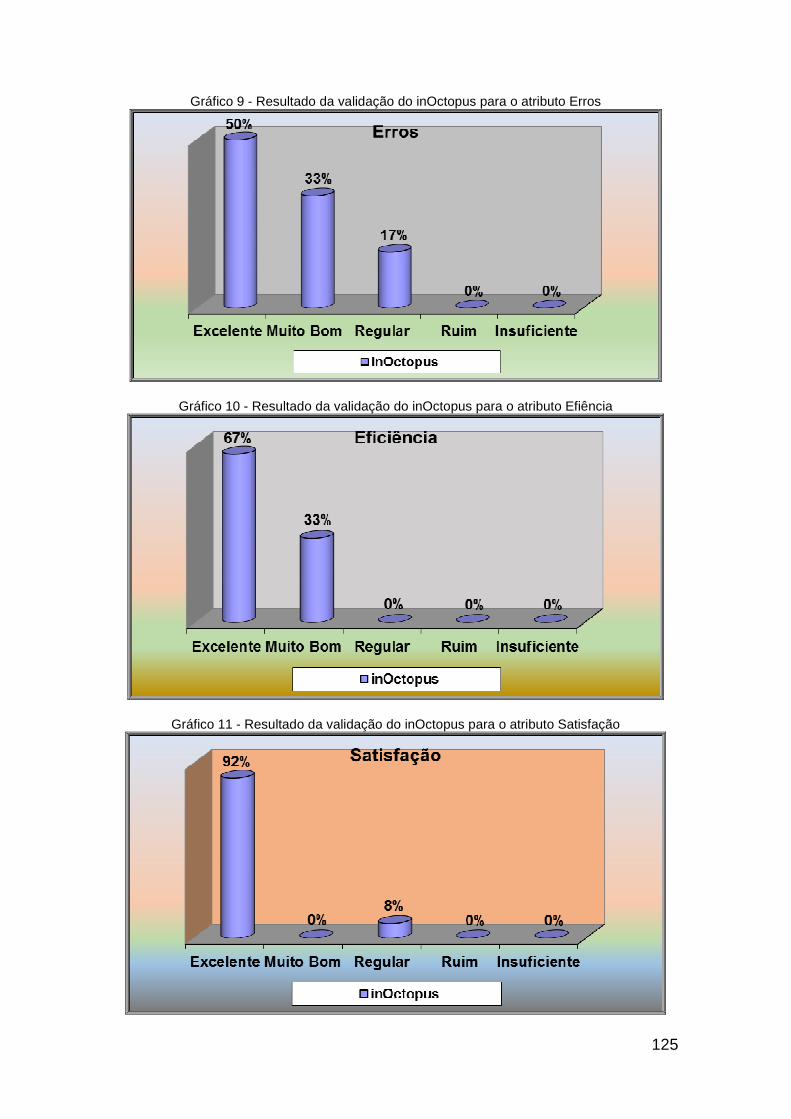
125
Gráfico 9 - Resultado da validação do inOctopus para o atributo Erros
Gráfico 10 - Resultado da validação do inOctopus para o atributo Efiência
Gráfico 11 - Resultado da validação do inOctopus para o atributo Satisfação

126
Gráficos do controle do movimento das câmeras por g estos Gráfico 12 - Resultado da validação do inOctopus para o atributo Facilidade de Aprender
Gráfico 13 - Resultado da validação do inOctopus para o atributo Facilidade de Memorizar
Gráfico 14 - Resultado da validação do inOctopus para o atributo Feedback

127
Gráfico 15 - Resultado da validação do inOctopus para o atributo Erros
Gráfico 16 - Resultado da validação do inOctopus para o atributo Efiência
Gráfico 17 - Resultado da validação do inOctopus para o atributo Satisfação
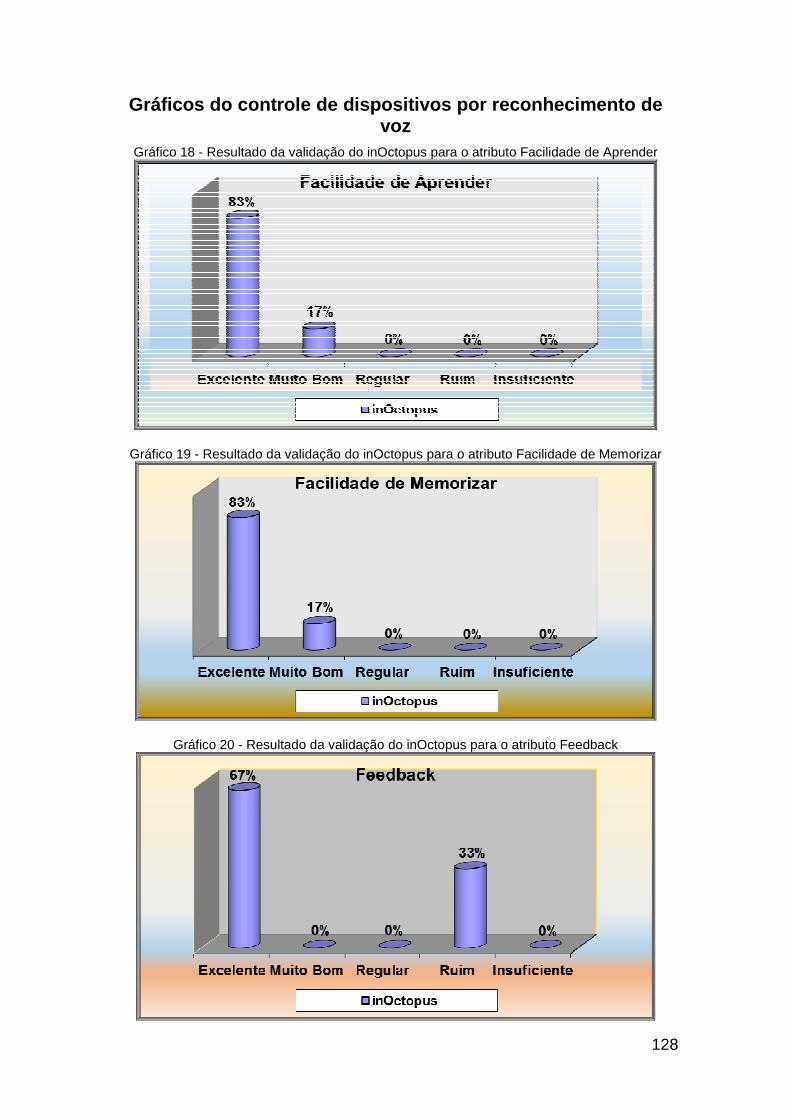
128
Gráficos do controle de dispositivos por reconhecim ento de voz
Gráfico 18 - Resultado da validação do inOctopus para o atributo Facilidade de Aprender
Gráfico 19 - Resultado da validação do inOctopus para o atributo Facilidade de Memorizar
Gráfico 20 - Resultado da validação do inOctopus para o atributo Feedback
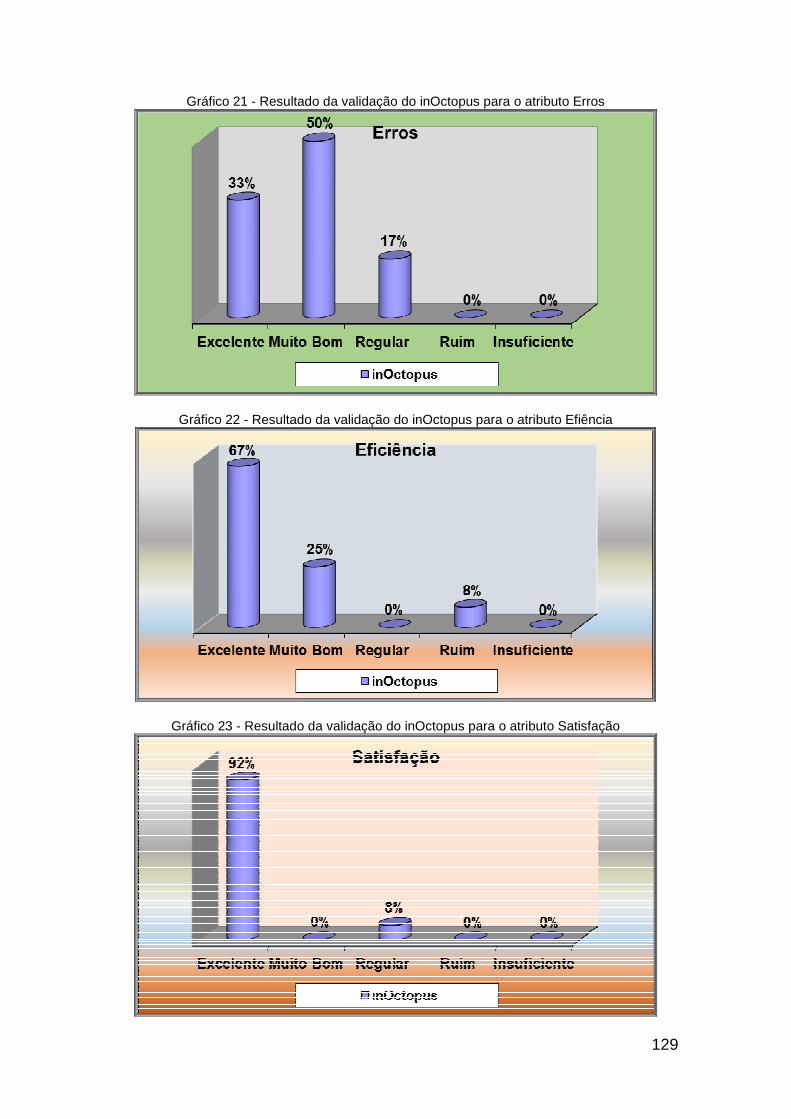
129
Gráfico 21 - Resultado da validação do inOctopus para o atributo Erros
Gráfico 22 - Resultado da validação do inOctopus para o atributo Efiência
Gráfico 23 - Resultado da validação do inOctopus para o atributo Satisfação



















