Presentation of work
24
Visualization And Characterization of Real Life Motion Presented By: Abu Farzan Mitul Roll:0603020 & Muhammad Rakeeb Roll:0603039 Supervised By: Dr. Md. Shahjahan Associate Professor Dept. of Electrical & Electronic Engineering Khulna University of Engineering & Technology Department of Electrical & Electronic Engineering Khulna University of Engineering & Technology
Transcript of Presentation of work
Visualization And Characterization of Real Life Motion
Presented By:Abu Farzan Mitul
Roll:0603020&
Muhammad RakeebRoll:0603039
Supervised By:Dr. Md. ShahjahanAssociate ProfessorDept. of Electrical & Electronic EngineeringKhulna University of Engineering & Technology
Department of Electrical & Electronic Engineering
Khulna University of Engineering & Technology

OutlineVision of WorkPrevious WorkSystem Architecture
Moving Object TrackingChaos AnalysisObject Classification
Future WorkConclusion
2
Vision of Work
To Track a Moving Object in Real Time.
To Evaluate the Motion of Object in Chaos Analysis.
To Classify Different Objects according to their Motion.
3
Previous WorkMoving Object Tracking
Multiple Features (e.g. Color, Shape, Motion, Edge etc.) were used
In Case of Chaos Analysis The Motion of Magneto tactic Bacterium was shown
Chaotic.Motion of the fish was shown Chaotic using Lorenz
Chaos Equation etc.In Case of Object Classification
A FFNN was utilized to distinguish between human and Vehicle.
4

System Architecture
Object TrackingModule
Chaos Analysi
s
Data Storage
Object Classificat
ionusingNeural Network
Hurst Exponent
Lyapunov Exponent
Correlation
Dimension
5
1. Moving Object TrackingBased on the following Steps…
Image Capturing Module
Image Processing Server (IPS)
6
Image Capturing Module
Consist of a Static Web-Cam.
Captures image stream in .jpg format
Frame size of 320×240
Passes the Image stream to the IPS
7
Image Processing Server (IPS)Functions of the IPS are…
To Receive Image Stream from Web CamTo Process the Image & Track ObjectTo Generate The Time Series of the Object
8

Tracking Algorithm
BackgroundSubtraction
Gray Scaling
Binarizing
Deleted
Ref. Image
Image Stream
(Filtered)Image Stream
(Black & White)
NextFrame
Image Stream(Binariz
ed)
Webcam
1st Frame
2nd Frame
Object Location Detected
Image Stream(Color)
Euclidean
Color Filtering
Data Storage
Time Series 9
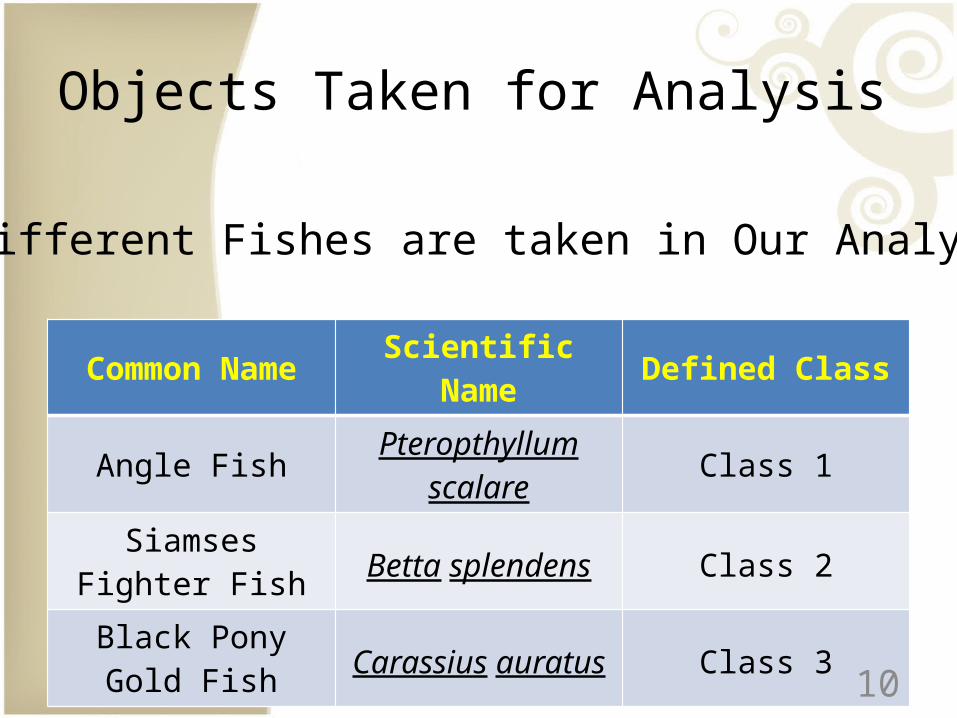
Objects Taken for Analysis
Common Name Scientific Name Defined Class
Angle Fish Pteropthyllum scalare Class 1
Siamses Fighter Fish Betta splendens Class 2
Black Pony Gold Fish Carassius auratus Class 3
3 Different Fishes are taken in Our Analysis
10
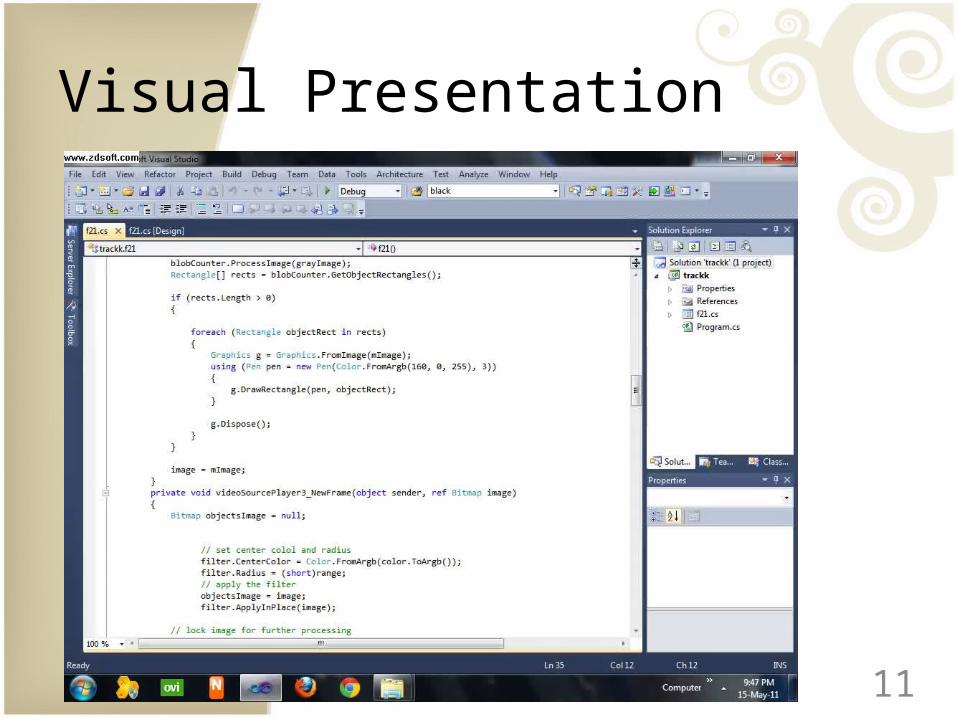
Visual Presentation
11

2. Chaos Analysis• What Is Chaos?
– An Irregular Behavior of Dynamic System.
• Why Chaos Analysis?– To Study Complex Dynamical Behavior(e.g. Motion of Living Beings)
12
Methods for Analysis
– Auto Correlation– Hurst Exponent– Lyapunov Exponent– Correlation Dimension– Complexity etc.
13
Methods UsedHurst Exponent
• 0 ≤ HE<0.5 (Non-Chaotic )• 0.5 < HE ≤ 1 (Chaotic)
Lyapunov Exponent• Positive Value of Exponent indicates Chaos
14
Analytical ResultsFor Class 1
Minimum HE = 0.5849 (≥ 0.5)For Class 2
Minimum HE = 0.7431 (≥ 0.5)For Class 3
Minimum HE = 0.7135 (≥ 0.5)
Chaotic Nature in Motion of These fishes is Proved
15

3. Object Classification
Object TrackingModule
Time Series
Classifier
ObjectRecognition
Data Storage
16
ANN as Classifier• What Is ANN?
– A Computational Method– Inspired from nervous System of biological Organisms
• Why ANN?– Advanced – Commonly Used– More Tolerance to Noise Input– Allows Supervised Learning
17

Artificial Neural Network
18
Time Series
Neural Network including
Connections (Called weights) betn
Neurons
Compare
Target
Output
Adjust Weights

Visual Presentation
19

Performance Analysis
Class 1Class 2
Class 3
93.33%86.66%
73.33%
20
Performance Improvement
Larger Time SeriesMore Training Data for Each Class
Faster Frame Sequence
21
Future Work
Chaos Analysis using…– Lyapunov Exponent– Correlation Dimension
Improvement of NN performance using…– Multiple Camera
22

Conclusion• Simulation results show that the proposed system is successful in tracking the moving fishes and in classifying them
• This system can be implemented on every real life motions
23

Thank You All