
Phys Osc An Interactive Physics based environment that controls Sound Synthesis
51
Phys-Osc: An Interactive Physics based environment that controls Sound Synthesis Jason Doyle 10048464 Faculty of Science and Engineering Department of Computer Science & Information Systems University of Limerick BSc in Music Media and Performance Technology Submitted on 17th April 2014
Transcript of Phys Osc An Interactive Physics based environment that controls Sound Synthesis

Phys-Osc: An Interactive Physics based
environment that controls Sound Synthesis
Jason Doyle
10048464
Faculty of Science and Engineering
Department of Computer Science & Information Systems
University of Limerick
BSc in Music Media and Performance Technology
Submitted on 17th April 2014

1. Supervisor: Dr. Kerry Hagan
Department of Computer Science & Information Systems
University of Limerick
Ireland
Supervisor’s signature:
2. Second Reader: Mr. Nicholas Ward
Department of Computer Science & Information Systems
University of Limerick
Ireland
Second Reader’s signature:
ii

Abstract
The project’s aim is to find new mediums for controlling sound synthe-
sis, transforming the the desktop paradigm of point and click. It aims
to provide sonification alongside visualization of systems commonly
seen in nature such as the flocking behavior of birds. Implementation
of these systems will allow for the acquisition of control data which is
to be sent to the host Granular Synthesis engine over the Open Sound
Control (OSC) network protocol creating a dynamic audiovisual ex-
perience for the user.

Declaration
I herewith declare that I have produced this paper without the pro-
hibited assistance of third parties and without making use of aids
other than those specified; notions taken over directly or indirectly
from other sources have been identified as such. This paper has not
previously been presented in identical or similar form to any other
Irish or foreign examination board.
The thesis work was conducted under the supervision of Dr. Kerry
Hagan at University of Limerick.
Limerick, 2014

Acknowledgements
I wish to acknowledge the knowledge and guidance provided by my
advisor Dr. Kerry Hagan throughout the development of this project.
I would also like to thank the faculty of the Computer Science de-
partment for their time and assistance throughout the course of my
studies. I also wish to acknowledge my colleagues in the MMPT class
of 2014 for their assistance and encouragement throughout.

For my parents Michael and Loretta, my sister Lisa, and my partner
Sara for their support and encouragement throughout the course of
my studies.

Contents
List of Figures v
1 Introduction 1
1.1 Background . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1
1.2 Motivation . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3
1.3 Thesis Outline . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5
2 Research 6
2.1 The Nature of Code & Indeterministic Algorithms . . . . . . . . . 7
2.2 Granular Synthesis . . . . . . . . . . . . . . . . . . . . . . . . . . 8
2.3 Mapping . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 9
2.4 Existing Products . . . . . . . . . . . . . . . . . . . . . . . . . . . 10
2.4.1 Konkreet Performer . . . . . . . . . . . . . . . . . . . . . . 10
2.4.2 GBoids . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 12
3 Overview of Technology 14
3.1 Android Development Tools . . . . . . . . . . . . . . . . . . . . . 14
3.2 Processing . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 15
3.2.1 oscP5 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 15
3.2.2 controlP5 . . . . . . . . . . . . . . . . . . . . . . . . . . . 15
3.2.3 Ketai . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 16
3.2.4 APWidgets . . . . . . . . . . . . . . . . . . . . . . . . . . 16
3.3 Max MSP . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 16
3.4 CSound . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 17
iii

CONTENTS
4 Implementation 19
4.1 Early Android Prototypes . . . . . . . . . . . . . . . . . . . . . . 19
4.1.1 Prototype 1 . . . . . . . . . . . . . . . . . . . . . . . . . . 20
4.1.2 Prototype 2 . . . . . . . . . . . . . . . . . . . . . . . . . . 22
4.2 Final Android Implementation . . . . . . . . . . . . . . . . . . . . 24
4.3 Audio Engine Implementation . . . . . . . . . . . . . . . . . . . . 24
4.3.1 Max MSP . . . . . . . . . . . . . . . . . . . . . . . . . . . 24
4.3.2 CSound . . . . . . . . . . . . . . . . . . . . . . . . . . . . 25
4.4 Mapping . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 25
4.4.1 Strategies . . . . . . . . . . . . . . . . . . . . . . . . . . . 26
5 Conclusions and Future Directions 27
5.1 Summary . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 27
5.2 Conclusions . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 27
5.3 Future Work . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 28
Appendix A: Application Screenshots 31
Appendix B: Java Implementation of the Boids Algorithm 35
Appendix C: Max MSP GUI 37
Appendix D: Granular Implementation in CSound 40
References 41
iv

List of Figures
2.1 Konkreet Performer . . . . . . . . . . . . . . . . . . . . . . . . . . 11
2.2 Gboids Max Msp Interface . . . . . . . . . . . . . . . . . . . . . . 13
4.1 Android OSC Settings . . . . . . . . . . . . . . . . . . . . . . . . 21
4.2 Boids Visualisation . . . . . . . . . . . . . . . . . . . . . . . . . . 23
1 Nexus 7 Tablet . . . . . . . . . . . . . . . . . . . . . . . . . . . . 30
2 Nexus 4 Phone . . . . . . . . . . . . . . . . . . . . . . . . . . . . 31
3 Max MSP Router . . . . . . . . . . . . . . . . . . . . . . . . . . . 36
v
1
Introduction
The project investigates the application of the Boids algorithm to sound synthe-
sis. The type of Boids algorithm used is Daniel Shiffman’s processing port of
Craig Reynold’s original algorithm. In this report I will describe the process of
developing an Android application that sends the Boids location and accelerom-
eter data over Open Sound Control (OSC) to a host audio synthesizer that has
been constructed in Max and Csound. The audio synthesizer utilises synchronous
granular synthesis techniques to granulate sampled sound. Synthesis parameters
are updated in real-time across a wireless network creating audiovisual synchrony
between the visual and audio algorithms.
1.1 Background
Mobile Processors have come a long way since the early days of the Android
platform, but some problems do still exist. Peter Kirn (2013) discussed Android
latency in–dept stating that “Google has deserved some criticism. Years of subse-
quent updates saw the company remain silent or unresponsive about critical audio
issues.” The critical audio issues Peter discusses are namely related to latency.
The Dalvik runtime system that Android employs has issues with threading when
it comes to audio performance. While this has certainly improved over time, it
1
1.1 Background
still has a long way to go to compared to the iOS model.
LibPD seemed like a good place to start from, rather than dealing with the
complexities of building an audio system that when fine tuned may still have issues
with latency. After testing some basic functionality from Peter Brinkman’s book,
Mapping Musical Apps Brinkman (2012), it was decided that implementations of
granular synthesis would require too much polyphony to operate efficiently as an
android application. A simple Wavetable, Additive, FM or AM synthesis method
can be easily built because polyphony is not really a problem when using two
to five voices at any one time. Problems would most certainly arise when using
one hundred instances of the patch which would be a requirement for an effective
granular synthesis patch.
Upon consultation with my advisor it was decided that a more effective so-
lution was to create a granular synthesis patch in Max and use the Open Sound
Control protocol to send data from the mobile device to the granular engine.
Discussions also took place as to suitable visual algorithms to drive the granular
engine. It was decided that the Boids algorithm would be a good match since
it can generate a large amount of dynamic data that a granular implementation
requires.
The Boids algorithm was created by Craig Reynolds in 1987, it sought to
simulate systems found in nature such as the behaviour and flocking patterns of
birds and shoals of fish. Reynolds (1987) based the algorithm on three dimen-
sional computational geometry of the sort normally used in animation. Each Boid
uses three basic forces, Separation, Cohesion and Alignment to define its position
in a three dimensional space. The flocking animation that occurs shifts dynami-
cally across the screen updating each Boids location. The algorithm, which is an
implementation of Daniel Shiffman’s Foundation (2013) Boids algorithm, which
in itself is an implementation of the Reynolds (1987) model that provides the
visual feedback component of the application. Modification of Shiffman’s imple-
mentation occurred to make it more suitable for a mobile device’s screensize and
2

1.2 Motivation
to supply accelerometer data alongside the data being gathering from the Boids
flocking pattern.
1.2 Motivation
There were numerous motivations to build this product. The first one being that
this type of product doesn’t exist on the Android Platform. There are many
products that use the OSC protocol such as TouchOSC, Touch Daw, Control,
QuickOSC, and Kontrolleur, but none of these products offer the use of inde-
terministic algorithms to generate control data in order to send over a wireless
network. The aforementioned programs merely respond to touch activities in the
interface and send that data to the host computer. PhysOsc generates its own
control data which then can be tailored or modified to the user’s needs. The idea
of continuous sonic and visual variation also appealed to me. Granular Synthesis
provides a very rich timbral backdrop to the algorithm’s visual complexities. The
synthesis parameters benefit from a wide range of control data that an algorithm
like Boids can provide.
Implementing a higher level control scheme such as Boids takes the focus from
data creation and shifts the focus to controlling geometric shapes. I wanted to
create an interface that allowed for the attention of the user to be focused on
the animations movements and their correlation with the sonic output, Most mu-
sical interfaces concentrate on one-to one mappings, whereby the user touches
the screen and creates a direct response in the interface that usually changes one
parameter at a time.
The project was born from the idea that the equal temperament scale coupled
with one-to-one mappings does not provide adequate control over the many pa-
rameters a granular synthesis engine needs. Higher level control of musical data
is not a new concept having being explored in the Serialist works of Karlheinz
Stockhausen and Stochastic work of Iannis Xenakis. Although different in con-
cept the principles stay the same, to leave the creation aspect of musical data to
3

1.2 Motivation
a pre-defined set of rules.
Another motivation to build this product is the use of audiovisual synchrony
through the algorithm. The application displays the visual feedback of the al-
gorithm on a mobile device whilst the sonification occurs through Max MSP on
a desktop computer. Keeping the visualization and sonification algorithms sep-
arate holds many advantages in that the user can use this software to control
any program that uses the OSC protocol, This includes Reaktor, Pure Data,
Supercollider, Csound, Iannix, Processing and vvvv. The number of programs
increases by the month, leading to OSC becoming a standard for communication
in audio and visual programs since its inception in 2001.
4

1.3 Thesis Outline
1.3 Thesis Outline
The remaining chapters of this dissertation are as follows:
Chapter Two Research
Chapter Three Overview Of Technology
Chapter Four Implementation
Chapter Five Conclusions and Future Directions
A series of documents have been included in the Appendix section of this
dissertation. These are:
• Appendix A includes application screenshots from an android phone and
tablet
• Appendix B presents the Java code from the Android application
• Appendix C includes application screenshots from the Max MSP GUI
Attached to this dissertation is a CD containing the following items:
• folder 1 : Android Application
• folder 2 : Max MSP and CSound files
5

2
Research
In the four years since our college course commenced, Mobile Technologies have
become an integral part of everyday life. These devices offer huge potential for fur-
ther development. With that in mind, research was carried out on many different
libraries and tools with a view to the construction of an audiovisual application.
During this period of development many tools were road-tested through tutorials.
The development tools in question include Processing, Android SDK, Max MSP,
Phonegap, and also many web technologies such as the WebAudio API. These
cross platform tools can allow for rapid prototyping of applications which then
can be scaled up in a professional grade IDE such as Android’s Eclipse or Apple’s
Xcode.
The end goal of this period was to transfer the knowledge learned from the
course alongside the extra curricular activities and apply that to mobile technol-
ogy development. Research began on the audio capabilities of the current crop
of Mobile Devices in the summer of 2013. LibPD, Csound, and Processing offer
cross platform visual and audio capabilities. All three are ideal prototyping plat-
forms as the same code will work on both desktop and mobile which makes all
three very valuable when working with multiple platforms and hardware devices.
6
2.1 The Nature of Code & Indeterministic Algorithms
2.1 The Nature of Code & Indeterministic Al-
gorithms
Coding systems seen in nature using algorithms has been an area of particular
interest to me throughout the course of my studies. Daniel Shiffman calls this
The Nature of Code, he has been one of the leading proponents of this type
of programming in the last decade. His self–published book of the same name
Shiffman (2012), detailed ways to simulate the physical world with the program-
ming library Processing. His book covers many aspects of the systems of nature
recreated through computational media. Of particular interest to me is his work
with Physics libraries such as Toxilibs or Box 2D. There are also many excellent
chapters on Forces, Fractals, Particle Systems and Genetic Algorithms. I plan
to use these algorithms to generate control data for the granular synthesis engine.
My research began with an implementation of the Boids algorithm. The algo-
rithm exhibits fascinating life–like patterns from nature with its creator Reynolds
(1987) stating “A flock exhibits many contrasts. It is made up of discrete birds
yet overall motion seems fluid; it is simple in concept yet is so visually com-
plex.”These complexities that are contained within the algorithm have generated
many avenues for research, specifically the sonification of each boids movements
within the flock. Reynolds defined three forces which determined the behavior of
each flock member. These forces are Alignment, Separation, and Cohesion. Each
force provides a unique opportunity to transform each component’s data into a
useable stream of information for sonification purposes.
Reynolds (1987) states “the simulation of the flock is an elaboration of a par-
ticle system.” He defines the flock as having many contrasts and that“it is made
up of discrete birds yet overall motion seems fluid.” This seemed a familiar con-
cept to that of Granular Synthesis. In the case of Granular Synthesis thousands
of simple grains combine to create a fluid motion. Truax (1990) put it best when
he made the analogy of granular synthesis to that of a river whose power is based
on accumulation of countless droplets of water. The common ground between
both paradigms already seemed useful for mapping to each other.
7
2.2 Granular Synthesis
2.2 Granular Synthesis
British physicist Denis Gabor (1946) first proposed the idea of sound grains in
1946. His work proved very influential to Iannis Xenakis who proposed an ex-
pansion on that theory in his book Formalized Music. Opie (2003) hypothesized
that Xenakis set out to “design ways he could arrange grains of sound to cre-
ate complex and beautiful textures.” Iannis Xenakis hypothesized the theory of
granular synthesis and laid the framework for future research in this area. Xe-
nakis (1992) states, “All sound is an integration of grains, of elementary sonic
particles, of sonic quanta. Each of these elementary grains has a threefold na-
ture: duration, frequency, and intensity. All sound, even all continuous sonic
variation, is conceived as an assemblage of a large number of elementary grains
adequately disposed in time”. He was particularly interested in spatialisation, in
three dimensional soundscapes composed of sonic clouds all with 3D trajectories.
He integrated his vast mathematical knowledge to associate this elementary grain
idea with stochastic methods for arrangement. Moving on from this lineage, Cur-
tis Roads and Barry Traux have provided extraordinary insight into Granular
Synthesis techniques for the last three decades and remain the leading opinions
on the subject.
Research was carried out to understand the concepts of Granular Synthesis, to
determine which method would be the most useful to implement in the prototype.
The classic text on the theory side of this is Curtis Road’s book Mircrosound. In
the book Roads (2001) describes a grain as “a brief microacoustic event, with a
duration near the threshold of human auditory perception, typically between one
thousandth of a second and one tenth of a second (from 1 to 100 ms). Each grain
contains a waveform shaped by an amplitude envelope.” Each of these individual
grains has an amplitude envelope, Commonly used envelopes are Gaussian, Han-
ning, Trapezoidal and Triangular. The Gaussian curve is the classic described
in Gabor’s text. Roads states that this is the “smoothest from a mathematical
point of view.” The typical parameters of granular synthesis include grain size,
grain shape, envelope shape, grain spacing over time and grain density. When
these thousands of sonic events get assimilated and are combined, we can hear
8
2.3 Mapping
an animated texture at play.
There are many granular synthesis methods. The methods focused on are
Synchronous Streams, Quasi-Synchronous Streams and Asynchronous Clouds.
Roads (2001) defines the Synchronous Granular Synthesis method as grains that
“follow each other at regular intervals,” He also notes that “density parameter
controls the frequency of grain emission, so grains per second can be interpreted
as a frequency value in Hertz.” When emitting grains at regular intervals, lower
densities lead to a rhythmic, metric feel. This repetition at a constant rate leads
to what Scavone (2013) calls “an audible frame rate,” He also notes that “Vi-
brato can be created by slowly by varying the time spacing between grains.” An
effective mapping method would need to be employed from the Boids Algorithm
to ensure that the data’s not changing too quickly to achieve this effect in my
implementation.
Asynchronous Granular Clouds does away with the idea of linear streams.
Roads (2001) states the Asynchronous method “scatters the grains over a spec-
ified duration within regions inscribed on the time-frequency plane.” The Asyn-
chronous method certainly has benefits when using an algorithm like Boids to
control it. The major difference in this method as opposed to the Sychronous one
is that this method uses a stochastic or chaotic algorithm to control the grain
streams and also produces irregular stream as opposed to the constant stream for
the Synchronous method. Asynchronous granular synthesis has many benefits
in terms of precision control and more variety in the sonic output. However, I
plan to use the Synchronous form because it’s better suited to real-time granular
implementations.
2.3 Mapping
The link that exists when mapping electronic devices, such as computers, to one
another can be defined as active. An active link provides for two way communi-
cation between both devices. Chadabe (2002) states “the link can be a computer
9

2.4 Existing Products
that can generate information, run algorithms, or act in any way as an interme-
diary between a performer’s controls and the variables of a sound generator.”The
performer’s controls in this case are controlled by the Boids algorithm running
on an Android tablet, with an exception being the accelerometer data, which is
determined by the user’s movement. The tablet is the intermediary that controls
the variables of my sound generator.
Phys-Osc takes the generative approach to mapping. Hunt and Wanderly
(2002) state, “Mapping using neural networks can allow the designer to benefit
from the self-organising capabilities of the model.”The Flock will act as the model
with Separation, Alignment, and Cohesion driving each Boid’s acceleration points
to new locations within the Flock. It is envisaged that Separation, Alignment,
and Cohesion parameters will have dedicated sliders. This element of the GUI will
utilise a one-to-many mapping strategy, with simple parameter changes resulting
in directional changes in each Boids movement. Mapping strategies in the audio
engine will involve positional data from each Boid being mapped to frequency and
playback position in the Boids corresponding Granular instrument. A one-to-one
mapping is used to reinforce the synchronicity between both audio and visual
data streams.
2.4 Existing Products
2.4.1 Konkreet Performer
Konkreet Performer is closely related related to Phys-Osc in that it uses a physics
engine to control data that is sent over an OSC network to a host computer. The
performance interface is designed to use the device’s multi–touch capability to
shape the control data output. The program allows the user to alter shapes on
screen to dynamically control the type of OSC data sent to it’s local host. The
user merely alters the existing indeterministic algorithm to shape the sound ex-
perience accordingly.
10

2.4 Existing Products
It takes a non traditional approach to interface design. Historically controllers
relied on midi knobs in a skeuomorphic design that mimics real world constraints.
It implements a physics engine that allows for inertia control of individual control
nodes. The inertia can be sped up to allow for smooth musical transitions. It
proved an inspiration to my design because it uses an unconventional approach to
control data. It provides the mechanisms that allow the user to interact with the
software using different gestural movements to shape the resulting data stream
in new ways.
Figure 2.1: Konkreet Performer - OSC Performance interface with nodes that
are controlled by inertia and the users touch. [Source: (Visnjic 2013)]
11

2.4 Existing Products
2.4.2 GBoids
Gboids is a Max MSP patch that uses an implementation of Craig Reynolds
Boids algorithm to drive a granular synthesis engine. Each agent represents a
grain scrubbing an audio sample as it moves in a two dimensional space. The
Boids algorithm in this implementation, is written in Javascript. It is used to
scrub areas of a pre-recorded sampled sound. The algorithm drives change to the
synthesis implementation, with its position changing parameters such as inertia,
alignment and separation. Parameter controls can define the number of agents
that scrub the audio, size and velocity of those agents, and the classic Boids pa-
rameters Separation, Alignment, and Cohesion. In this implementation the Boids
algorithm also introduces Friction and Gravity parameters.
The important aspect of this application with regard to my own design was
that it used the Boids algorithm to scrub a preloaded audio sample which en-
ables the granulator to play the sample at different points both backwards and
forwards in time. It allows for an interesting rhythmic variation to occur with
separate Boids playing the same sample with varying frequencies to create a dense
animated texture.
12

2.4 Existing Products
Figure 2.2: Gboids Max Msp Interface - A granular synthesizer thats con-
trolled by a javascript implementation of the Boids algorithm, which scrubs the
audio sample. [Source: (Angelo 2010)]
13

3
Overview of Technology
I chose to develop the application for the Android platform because of its open
source nature and all the tools I needed, including libraries, were freely available.
Using this platform also allows me to have a wider reach of potential users with
Business-Insider (2013) claiming the operating system has exceeded one billion
activations as of this year. Android is built upon the Java framework, which
I studied in first year at college. We also used the open source programming
language Processing for animating visuals in second year. This library is based
on Java so it can be used as a library within the Eclipse environment. It has
pre-built methods which simplifies the animation process and cuts down on large
amounts of code needed to do simple functions.
3.1 Android Development Tools
The Android Developer tools provide a fully professional grade environment to
construct Android Applications. Included in the software suite is the Eclipse
IDE, along with Google’s Software Development Kit, and Emulator. Eclipse in
itself is a powerful code editor allowing one to build complex Java programs with
features like error protection and Lint warnings, which can prove invaluable to a
novice Android programmer.
14

3.2 Processing
3.2 Processing
Processing is a visual programming framework developed in MIT during the
2000s. It was conceived to enable artists to easily create interesting computational
media without having to learn the Java programming language from scratch. It is
based on the Java programming language and therefore can be easily integrated
into my Android development suite as a Java library.
3.2.1 oscP5
The application will use the Open Sound Control (OSC) messaging transfer pro-
tocol to relay information over a wireless network. The reason for using this
protocol is that it will enable me to use the substantial computing power of a
desktop computer. This is necessary because of the limited processing power in-
herent on mobile devices. There are other Android related issues such as buffering
audio to take into account as well. After some initial research I discovered that
the Android platform does not have API related to the Open Sound Control for-
mat.
It became clear that I needed to use a third-party library in order to send
the data in the format I needed. After some initial research with the libraries
LusidOSC and javaOSC, I chose the Oscp5 library from Andreas Schlegel (2011).
It has added benefits in that its code base is small and it can also query an
IP address without having to call the Android Wifi Manager within an activity.
It was built for Processing so it can be used as a Java library alongside the
Processing core and the Ketai sensor library. Initial tests with sending sensor
data and touchscreen activities proved successful.
3.2.2 controlP5
Controlp5 is a library created for Processing to enable the use of UI elements like
sliders, knobs and check boxes. When using Processing as an activity, one major
disadvantage is that the program cannot access Android’s UI elements such as
the action bar or menu buttons. Controlp5 can be used as a replacement. Its sole
15

3.3 Max MSP
purpose is to provide UI objects to enable GUI interactions to change parameters
within the program. Control elements include Flock Speed, switching on and off
sensors, and controlling Separation, Alignment, and Cohesion parameters.
3.2.3 Ketai
The Ketai Sensor library was created to work in Android mode in the Processing
IDE. Ketai (2012) can be used to detect sensor activity on a mobile device. The
library can detect data from mobile devices humidity, proximity, accelerometer,
orientation and light sensors. The code base is light, enabling me to program an
Android’s device sensors and use that data and send it over oscP5 in a few lines
of code. The library allows me to program extra features into the app which will
control parameters in the Granular Synthesis Engine.
3.2.4 APWidgets
A major downside in using the Processing platform for Android Development is
that one does not get access to the Android UI framework. This doesn’t help
applications wanting to conform to Android best practice UI guidelines. Research
was carried out as to a suitable alternative. APWidget provides all Androids
UI Widgets like text boxes, and buttons in one simple and easy to use library.
I’m using a textedit box widget and a button to set a new IP address within
Processing.
3.3 Max MSP
Max MSP is a graphical programming language created by Miller Puckette in IR-
CAM. The Max paradigm can be described as a way of combining pre-designed
building blocks into configurations useful for real time computer music (Puckette,
2002). The program has proved an invaluable learning tool for computer music
and computer vision paradigms with its in-built Jitter objects. It was a natural
choice for the granular synthesis implementation in that throughout the college
term it was used in teaching fundamental concepts in Amplitude Modulation,
16

3.4 CSound
Ring Modulation, and Frequency Modulation synthesis techniques.
The program really excels in its handling of multiple types of data be that
integers, floats, UDP messages and can convert that data in to almost any other
kind. An example of this is how the program is used to read in the OSC data
that’s being transferred from the Android application and apply it through clever
mapping strategies to the granular synthesis engine. The Max external Open-
soundcontrol from CNMAT is used to read in the different message addresses and
data. The data from the CNMAT object allows me to map data to my sound
engine within the Max environment and has many advantages over the in-built
UDP object allowing one to add time tags for certain functions.
It was decided that Csound would be a more viable alternative to Max MSP
for the audio engine. Max MSP can also be used to implement a granular syn-
thesis engine, but its implementation is difficult and it can get quiet confused
visually because of the sheer amount of objects it takes to construct the granular
synthesizer, especially an implementation that needs a great deal of polyphony.
In order to make Max MSP adaptable enough for a granular synthesis implemen-
tation a max external would need to be created in the C programming language,
In the end Csound was chosen for the task.
3.4 CSound
CSound was chosen as my sound engine because of the history it has with Granu-
lar Synthesis. Many opcodes have been written on the platform for the purpose of
granularization of sound, these include Partikkle, Syncgrain, Granule and many
others. CSound can be defined as “a sound design, music synthesis and signal
processing system, providing facilities for composition and performance over a
wide range of platforms”(Csounds.com, 2013). The ability to use CSound on
many platforms such as iOS, Android, Linux, Windows and OSX makes it a ver-
satile choice for rapid development of prototypes.
17

3.4 CSound
CSound’s ability to interface directly with Max MSP through the use of an
external has proved very useful to a multi–platform project such as PhysOsc. Its
sound engine is capable of producing better sound quality than its counterpart
Max MSP.
18
4
Implementation
4.1 Early Android Prototypes
The first steps in this project trace back to the summer of 2012 when I was trying
to get the Visual Language Processing, which is based on Java, to work within
the Android Developer tools as a library. Processing’s own IDE offers an Android
Mode, but this does not allow for extensive modification of the Android services
available in the Eclipse IDE. My goal at this time was to use Processing in com-
bination with the Android SDK to create the animations and UI for the look and
feel of the application. I found Processing’s forum very beneficial and gained the
knowledge there on how to run Processing as a library. This involves finding the
processing-core.jar file in Processing application and adding it to the build path
of your Android Application.
At the beginning of my project I wanted to implement the sound synthesis
on the mobile device itself. I quickly learned that Granular Synthesis is very
processor intensive. Therefore, a mobile device’s limited CPU might cause issues
when running intensive patches. Roads (2001) states “If n is the number of pa-
rameters per grain, and d is the density of grains per second, it takes n times d
parameter values to specify one second of sound. Since n is usually greater than
ten and d can exceed one thousand, it is clear that a global unit of organization
is necessary for practical work.” Each type of Granular Synthesis organizes the
19

4.1 Early Android Prototypes
grains differently according to different algorithms.
After consultation with my advisor, we decided that a better option for my
project would be to build the Granular Synthesis engine in Max Msp whilst let-
ting OSC (Open Sound Control) handle the data transmission from my Android
Application to the desktop Granular Patch. Androids own developer tools does
not include an OSC library so embedding the oscp5 library is a prerequisite.
4.1.1 Prototype 1
My first Android prototype began development in September. The first task was
to build a multi-page application that could navigate to a page by selecting a
button. I created the main screen, called an Activity which in turn would trigger
two further Activities. One screen for the Boids algorithm and another for OSC
Settings. I created two buttons on the home screen which allows for the user to
click into another aspect of the program. These buttons trigger a chosen Activity
through the use of intents. The Android Developer website defines intents as “a
facility for performing late runtime binding between the code in different appli-
cations. Its most significant use is in the launching of activities. It is basically
a passive data structure holding an abstract description of an action to be per-
formed”(Google, 2013).
In Android 4.0 and above the menu structure has changed. The UI guidelines
require an implementation of an action bar at the top of the application screen.
This housed all top level functions such as a Done button which saves data upon
exit and an option to get back to the home page. The return to home page button
is used as the application icon (Google, 2013). The Android Developer website
states “Icons need to be supplied in different sizes to support multiple screen
densities.” Google have implemented it in this way so that a tablet or phone can
choose which icons resolution suits the screen size best. The early prototype icons
were created with the open-source picture editor Gimp.
20
4.1 Early Android Prototypes
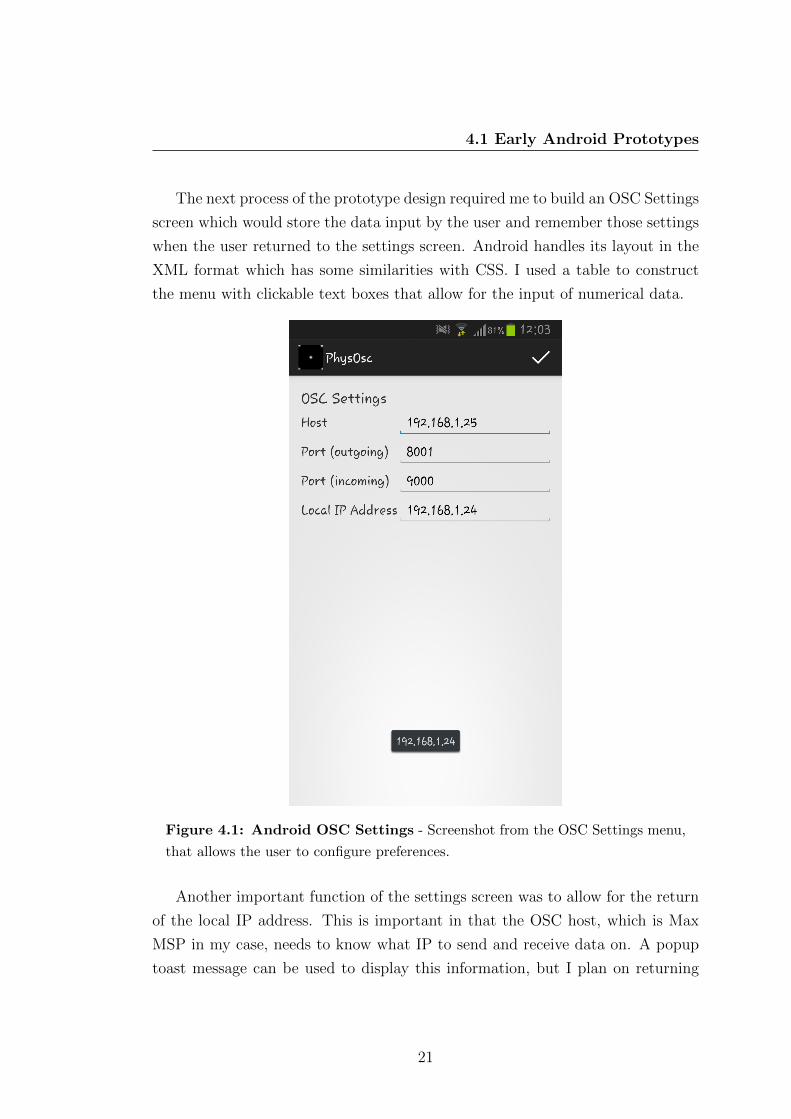
The next process of the prototype design required me to build an OSC Settings
screen which would store the data input by the user and remember those settings
when the user returned to the settings screen. Android handles its layout in the
XML format which has some similarities with CSS. I used a table to construct
the menu with clickable text boxes that allow for the input of numerical data.
Figure 4.1: Android OSC Settings - Screenshot from the OSC Settings menu,
that allows the user to configure preferences.
Another important function of the settings screen was to allow for the return
of the local IP address. This is important in that the OSC host, which is Max
MSP in my case, needs to know what IP to send and receive data on. A popup
toast message can be used to display this information, but I plan on returning
21
4.1 Early Android Prototypes
this data to the local IP text box from the menu in a future revision. This ensures
the user does not have to use a third party tool to ascertain their local address
on the network.
The in-built Android API Wifi Info was used to gather this information. When
this data was displayed via Toast message it was displayed in Little Endian for-
mat, this format then needed to be converted to a readable one for ease of use.
After some initial research I stumbled upon a blog post by Damien Flannery
(2010) which detailed an efficient way to translate the returned Wifi Info data
into its component string IP address. A requirement of the Android operating
system is that permissions are required in the xml file of the program. In this
case, main.xml was altered to allow it to access data from the network.
4.1.2 Prototype 2
The next requirement needed to be the visualization of the Boids algorithm. I
used Processing as a library within the Eclipse environment and added this to the
applications build path (Doyle, 2013). When an Android project initializes an
activity it extends the Main Activity class. When using Processing you need to
extend the Papplet class so that the Processing library can communicate with the
base Java code and understand the methods being called. The next step of the
process required me to to use import statements for the libraries that I intended
on using. In the PhysOsc program, I implement Oscp5 for Wifi, Processing-Core
for visuals, Controlp5 for UI elements, and the Ketai library for grabbing sen-
sor data. I chose to use an implementation of the Boids algorithm by Daniel
Shiffman Foundation (2013) which in turn is an implementation of the original
Boids algorithm (Reynolds, 1987). When the algorithm was first imported into
my Eclipse workspace, I needed to alter the algorithm so that it would compile
in a correct manner.
Within the Processing IDE, methods generally do not need to be public. Most
methods start with the void declaration which means the method does not return
any data. In Android all of these methods need to be modified to include public
22

4.1 Early Android Prototypes
Figure 4.2: Boids Visualisation - An early implementation of the Boids algo-
rithm with the Processing library.
23

4.2 Final Android Implementation
methods so that different parts of the program can access those methods, numbers
and data types also needed to cast, so that, Eclipse could understand what type
of data it was handling.
4.2 Final Android Implementation
In order to run the Processing library as an all encompassing Android applica-
tion, extra libraries were needed. To this end, Controlp5 was used to implement
UI features such as text, sliders, and checkboxes. They allow for the Boids al-
gorithm parameters to be modified by touching the appropriate area on screen.
The graphics were configured to grayscale to ensure the colour scheme remained
consistent with the desktop application. The Ketai library was used to grab ac-
celerometer info. When the sensor is initialised it sends that data to CSound and
is mapped to global reverb frequency.
4.3 Audio Engine Implementation
An active link between the mobile application and desktop application was estab-
lished to change granular synthesis parameters in real-time. To this end I used
Max MSP as an OSC hub to route information from the Android application
in real-time to CSound. All granular synthesis implementations were created in
CSound.
4.3.1 Max MSP
Max MSP was chosen as the intermediary between the visual engine of the An-
droid application and the sound synthesis engine in CSound. It allowed for con-
struction of UI features and acts as a frontend for my CSound program. It
assumes the important function of parsing the OSC packets received from the
Android application into K-rate CSound variables. Max also provides UI func-
tions to act as a transport bar for the CSound score. It allows for the starting,
stopping, resetting, and the recording of CSounds audio output. Its UI features
also provide a visual feedback mechanism from the resulting CSound audio signal.
24

4.4 Mapping
4.3.2 CSound
Csound was chosen as the synthesis engine because of its long association with
Granular Synthesis methods. Opcodes are the basic building blocks of CSound
and they provide many uses such as time based effects, and signal generators.
Many granular opcodes exist such as Partikkel, Granule, and the Grain family.
For the purposes of my research I chose to use Syncrain. Syncgrain employs a
synchronous granular method and is adaptable and extendable because most of
its parameters allow for the use of K-rate variables meaning that parameters can
change in real-time. Its also not processor intensive, allowing for the stacking of
20 such Syncgrain instruments, allowing them to be operated simultaneously.
Each Boid has a corresponding granular instrument created in CSound. All
instruments preload the same source sample into an f–table. A particularly short
sample of the Spanish phoneme U was chosen in order to create an interesting
rhythmic dynamic in the resulting audio output. A Hanning windowing function
was chosen and implemented in the CSound score file and global reverb was
applied to overall audio output with individual send levels from each CSound
instrument. Accelerometer data from the host tablet is mapped to control the
global CSound reverb cut off rate, this facilitates the creation of filtering effects
when the tablet is moved in 3D space.
4.4 Mapping
Information from each Boids on screen location is sent as data packets over a
wireless network to a host computer. Two separate OSC message streams are
employed, one for the y information of each Boid and one for the x information.
OSC message streams are received by Max and translated into readable informa-
tion for the purposes of mapping to sonic parameters. The Max MSP external
OSC-Route deciphers the messages into floating point and string information.
String information is then converted to a symbol and back into an integer in
order to separate each Boid’s information stream and trigger a bang to send its
location data to CSound as a K-rate variable.
25

4.4 Mapping
4.4.1 Strategies
When a Flock is born each Flock member accelerates away from each other in
a multitude of directions. It was decided that from a perception perspective
pitch would resonate most with movement on the y axis. Although a one-to-one
mapping can often yield limited results in this case it helped initialise audiovisual
synchrony between the visual and sonic algorithms. Often when the Flock is left
in a static state the entire Flock movement appears to move along the x axis
and for this reason it was decided that this data set could be best utilised for
traversing the sample moving forward and backward in time from a range of -1 to
1. X data is unpacked from the OSC message and reads in the range of 0 to 1280
which then needs to be scaled from -1 - 1 to ensure CSounds K-Rate variable
receives the correct data.
26

5
Conclusions and Future
Directions
5.1 Summary
The aim of the project was to develop a sound synthesizer based on the Boids
algorithm. Detailed background research into both the Boids algorithm and gran-
ular synthesis techniques was carried out as well as research into the necessary
tools and processes required to complete a multi–platform project such as this.
A number of different approaches were investigated for the android application
and audio engine before a final product was decided upon.
5.2 Conclusions
There were many reasons to undertake a project of this nature. I saw this project
as the perfect vehicle to show my knowledge of the curriculum taught through-
out the four years. Programming concepts in Java, Max MSP, Processing, and
CSound were of great benefit throughout the curriculum. The aim was to take
the methodologies thaught forward to produce a product that posed many chal-
lenges both from a coding and conceptual point of view.
Indeterministic algorithms such as Boids provide a rich source of data that can
27
5.3 Future Work
be used to create compelling sonic narratives. PhysOsc applies this methodology
to control a granular synthesis implementation so that the user doesnt have to
change each of the many parameters required to create the sonic output. This
has many advantages in that the user of the software has the option to use a
macroscopic approach rather than microscopic.
The higher level of control allows the user to concentrate on the creative
aspects of music creation rather than getting bogged down at the microscopic level
with the vast array of parameter changes needed to create a dense granular sound.
In this regard, the point and click paradigm of music creation with granular
synthesis can be seen as a counter intuitive process. A conscious decision was
made at the start of the development cycle to keep the sound engine and graphical
user interface separate allowing the user to concentrate on moving shapes to
different locations on screen, which takes the focus off the underlying granular
synthesis process.
5.3 Future Work
Ultimately the android application could be refined further with many new fea-
tures added. Accelerometer data can be easily obtained using the Ketai Java
library, this data could be further refined and scaled with x, y, and z controlling
cohesion, separation and alignment parameters of the Boids algorithm. Further
automatization of parameters could be utilised through various other sensors such
as the promixity sensor for grain size.
The sonic output from the granular implementation would benefit from the
use of surround sound. This would allow the movement of the Flock to be better
sonically realized in a three dimensional space. It would also allow for the signal
of each Boid to have better separation so that panning movements would become
more apparent in a 360 degree listening space. The use of an attractor with the
Boids algorithm could function as a flock positioner within the 360 degree field
adding another level of control to the android application.
28
5.3 Future Work
In a future revision I plan to use Javascript in Max MSP to actively create
and delete audio channels when Boids are added and subtracted in the Android
application. This would allow the user to have control over how many sound
objects are on screen.
29
Appendix A
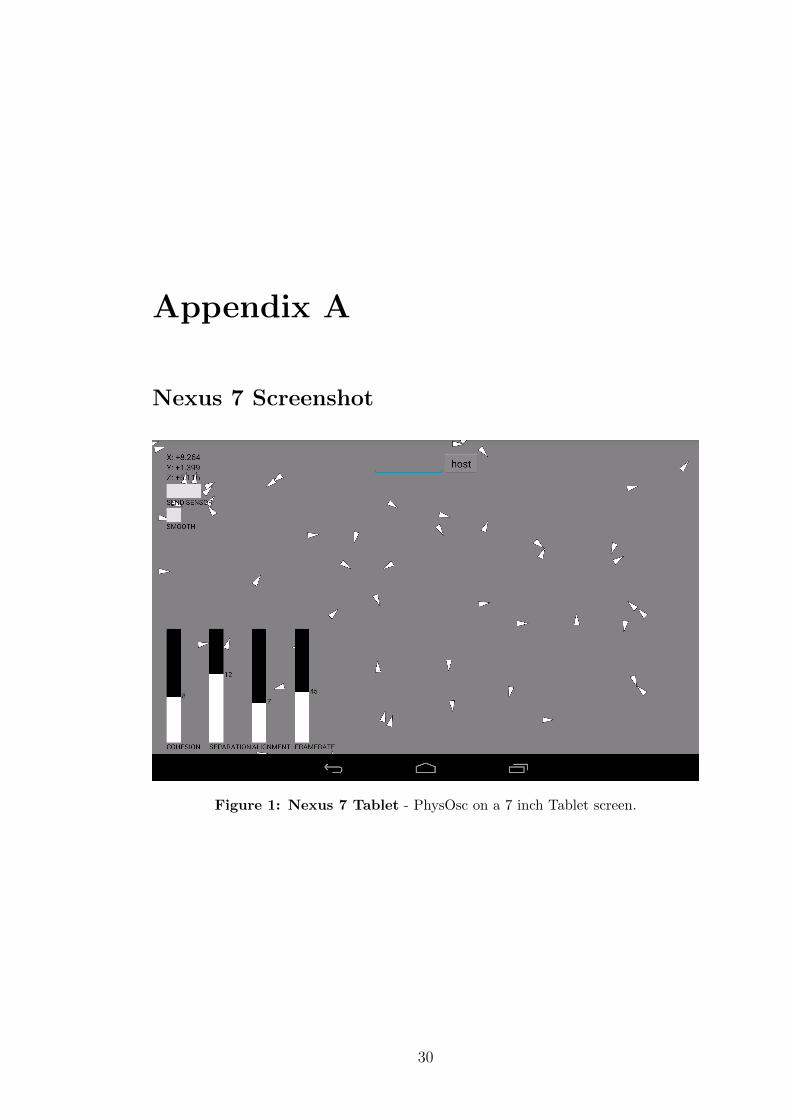
Nexus 7 Screenshot
Figure 1: Nexus 7 Tablet - PhysOsc on a 7 inch Tablet screen.
30

Nexus 4 Screenshot
Figure 2: Nexus 4 Phone - PhysOsc on a 4.65 inch Mobile Screen. The Pro-
cessing library does not allow for the loading of multiple XML files for layout, so a
design that complements both tablet and phone needed to be implemented.
31
Appendix B
Java Implementation of the Boids Algorithm
ThirdActivity.java
package com . example . physosc ;
//−−−−− Library Imports −−−−−−−−−−−−−−
import java . u t i l . ArrayList ;
import k e t a i . s en so r s . KetaiSensor ;
import oscP5 . ∗ ;import netP5 . NetAddress ;
import p ro c e s s i ng . core . ∗ ;import contro lP5 . ∗ ;import android . u t i l . Log ;
import apwidgets . ∗ ;
//−−−−− Main Act iv i ty −−−−−−−−−−−−−−−−
pub l i c c l a s s ThirdAct iv i ty extends PApplet
{// Object Dec l a ra t i ons
OscP5 oscP5 ;
KetaiSensor s enso r ;
ControlP5 contro lP5 ;
NetAddress remoteLocation ;
Flock f l o c k ;
PFont p ;
S t r ing ip=” 192 . 168 . 43 . 141 ” ; //My laptops address on the route r
APEditText t ex tF i e l d ;
APWidgetContainer widgetContainer ;
APButton button1 ;
// Global Var iab l e s
i n t cohFactor = 8 ;
i n t sepFactor = 12 ;
i n t a l l i g nFac t o r = 7 ;
i n t v i s i b l eBo i d s = 20 ;
f l o a t accelerometerX , accelerometerY , acce le rometerZ ;
boolean smooth = true ;
boolean a c c e l e r = true ;
boolean ValidIP = true ;
// Creat ing o f the f l o c k
@SuppressWarnings ( ” deprecat ion ” )
pub l i c void setup ( )
{// Screen dimensions
s i z e (720 , 1280) ;
32

Appendix
// Set t h i s so the sketch won ’ t r e s e t as the phone i s ro tated :
o r i e n t a t i o n (LANDSCAPE) ;
// Sketch Frame Rate
frameRate (45) ;
smooth ( ) ;
// noStroke ( ) ;
f i l l (255) ;
t e x tS i z e (28) ;
// Adding Android Core Widgets
// These are not a v a i l a b l e whi le us ing the PApplet , im us ing apwidgets as a work
around
widgetContainer = new APWidgetContainer ( t h i s ) ;
t e x tF i e l d = new APEditText (775 ,43 ,250 ,80) ;
button1 = new APButton (1020 ,43 ,130 ,80 , ” host ” ) ;
widgetContainer . addWidget ( t ex tF i e l d ) ;
widgetContainer . addWidget ( button1 ) ;
// Ca l l i ng an in s tance o f the Flock Class
f l o c k = new Flock ( ) ;
// Add an i n i t i a l s e t o f bo ids in to the system
f o r ( i n t i = 0 ; i < v i s i b l eBo i d s ; i++)
{f l o c k . addBoid (new Boid ( width /2 , he ight /2 , i ) ) ;
}
// s t a r t oscP5 :
oscP5 = new OscP5( th i s , 8000) ; //App l i s t e n e r l i s t e n on port 8000
// ”192 . 168 . 1 . 19” i s my laptop ip4 address ’
// 8001 i s the port number Max i s l i s t e n i n g on
remoteLocation = new NetAddress ( ip , 8001) ;
s ensor = new KetaiSensor ( t h i s ) ; // Turn on Ketai
s ensor . enableAcce lerometer ( ) ; // I n i t i a l i z e Acce lerometer
// Create Control p5 GUI
contro lP5 = new ControlP5 ( t h i s ) ;
// change the de f au l t font to Verdana
PFont p = createFont ( ”Verdana” ,24) ;
contro lP5 . setContro lFont (p) ;
contro lP5 . se tCo lorLabe l ( c o l o r (0 ) ) ;
contro lP5 . setColorForeground ( c o l o r (255) ) ;
contro lP5 . setColorBackground ( c o l o r (0 ) ) ;
contro lP5 . setColorValue ( c o l o r (0 ) ) ;
contro lP5 . s e tCo lo rAct ive ( c o l o r (224) ) ;
contro lP5 . addS l ide r ( ” setCohFactor ” ,0 ,20 , cohFactor , 50 , height −440 ,50 ,400) . s e tLabe l ( ”
Cohesion” ) ;
contro lP5 . addS l ide r ( ” setSepFactor ” ,0 ,20 , sepFactor , 200 , height −440 ,50 ,400) . s e tLabe l ( ”
Separat ion ” ) ;
contro lP5 . addS l ide r ( ” s e tA l l i gnFac to r ” , 0 ,20 , a l l i gnFac to r , 350 , height −440 ,50 ,400) .
s e tLabe l ( ”Alignment” ) ;
contro lP5 . addS l ide r ( ” setFrameRate” , 1 ,100 ,45 ,500 , height −440 ,50 ,400) . s e tLabe l ( ”
Framerate” ) ;
contro lP5 . addToggle ( ” t ogg l eAcc e l e r ” , true ,50 ,155 ,120 ,50) . s e tLabe l ( ”Send Sensor ” ) ;
contro lP5 . addToggle ( ” toggleSmooth” , true ,50 ,240 ,50 ,50 ) . s e tLabe l ( ”Smooth” ) ;
}
// Se t t ing data from con t r o l p5 UI to g l oba l v a r i a b l e s
void setFrameRate ( i n t ra t e )
{frameRate ( ra t e ) ;
}
void s e tA l l i gnFac to r ( i n t f a c t o r )
{a l l i g nFac t o r = f a c t o r ;
33

Appendix
}
void setSepFactor ( i n t f a c t o r )
{sepFactor = f a c t o r ;
}
void setCohFactor ( i n t f a c t o r )
{cohFactor = f a c t o r ;
}// Sca l e i n t e g e r input in to f l o a t
f l o a t s c a l e ( i n t f a c t o r )
{f l o a t s ca l ed = ( f l o a t ) ( f a c t o r ) / 10 ;
re turn s ca l ed ;
}
// On / Off Switch f o r Smooth Animation
void toggleSmooth ( )
{i f ( smooth == true )
{smooth = f a l s e ;
noSmooth ( ) ;
}e l s e
{smooth = true ;
smooth ( ) ;
}}
//On / Off Switch f o r Acce lerometer
void t ogg l eAcc e l e r ( )
{i f ( a c c e l e r == f a l s e )
{a c c e l e r = true ;
s ensor . s t a r t ( ) ;
}e l s e
{a c c e l e r = f a l s e ;
s ensor . stop ( ) ;
}}
// Cl i ck ing ip address Widget to s t o r e i n f o
pub l i c void onClickWidget (APWidget widget )
{i f ( widget == button1 )
{ip = t ex tF i e l d . getText ( ) ;
remoteLocation = new NetAddress ( ip , 8001) ;
ValidIP = true ;
}}
// Draw Boids to the sc r een
pub l i c void draw ( )
{background (128 ,128 ,128) ;
widgetContainer . show ( ) ;
remoteLocation = new NetAddress ( ip , 8001) ;
f l o c k . run ( ) ;
f i l l ( c o l o r (0 , 0 , 0) ) ;
t ext (
”X: ” + nfp ( accelerometerX , 1 , 3) + ”\n” +
”Y: ” + nfp ( accelerometerY , 1 , 3) + ”\n” +
34
”Z : ” + nfp ( acce lerometerZ , 1 , 3) , 50 , 50 , width , he ight )
;
OscMessage acce l x = new OscMessage ( ”/ acce l x ” ) ;
a c c e l x . add ( acce lerometerX ) ;
a c c e l x . add ( ”AccelerometerX” ) ;
oscP5 . send ( acce lx , remoteLocation ) ;
OscMessage acce l y = new OscMessage ( ”/ acce l y ” ) ;
a c c e l y . add ( acce lerometerY ) ;
a c c e l y . add ( ”AccelerometerY” ) ;
oscP5 . send ( acce ly , remoteLocation ) ;
OscMessage a c c e l z = new OscMessage ( ”/ a c c e l z ” ) ;
a c c e l z . add ( acce le rometerZ ) ;
a c c e l z . add ( ”AccelerometerZ ” ) ;
oscP5 . send ( acce l z , remoteLocation ) ;
}
pub l i c void mousePressed ( )
{OscMessage myMessage = new OscMessage ( ”/ t e s t ” ) ;
myMessage . add ( ” r e c e i v i n g loud and c l e a r : ) ” ) ;
oscP5 . send (myMessage , remoteLocation ) ;
f l o c k . addBoid (new Boid (mouseX ,mouseY , −1) ) ;
}
pub l i c void onAccelerometerEvent ( f l o a t x , f l o a t y , f l o a t z )
{acce lerometerX = x ;
acce lerometerY = y ;
acce le rometerZ = z ;
}
//−−−−The Boids Class c reated by Danie l Shiffman−−−−−−−−−−−−// PhyOsc Ful l Java Code i s a v a i l a b l e on the attached DVD
35

Appendix C
Max MSP GUI
Figure 3: Max MSP Router - Max patch used as an OSC hub to receive
incoming messages and send them to CSound
36

Appendix D
Granular Implementation in CSound
SyncGrain2.csd
<CsoundSynthesizer>
<CsOptions>
; S e l e c t audio /midi f l a g s here accord ing to plat form
−odac ; ; ; r e a l t ime audio out
; −o syncgra in . wav −W ; ; ; f o r f i l e output any plat form
</CsOptions>
<CsInstruments>
s r = 44100
ksmps = 32
0 dbfs = 1
nchnls = 2
chn k ”boid0x” , 1
chn k ”boid0y” , 1
chn k ”boid1x” , 1
chn k ”boid1y” , 1
chn k ”boid2x” , 1
chn k ”boid2y” , 1
chn k ”boid3x” , 1
chn k ”boid3y” , 1
chn k ”boid4x” , 1
hn k ”boid4y” , 1
chn k ” acce l x ” , 1
; Zak I n i t i a l i z a t i o n − 1 a−ra t e and one k−ra t e va r i ab l e
z a k i n i t 1 , 1
i n s t r 1
i o l a p s = 2
i g r s i z e = 0.10
k f r eq = i o l a p s / i g r s i z e
kps = 1/ i o l a p s
k s t r chnget ”boid0x”
gks t r chnget ”boid0x”
gks t r = .3 /∗ t ime s ca l e ∗/kenv adsr p3 ∗ . 1 , p3 ∗ . 3 , . 4 , p3 ∗ . 4kp i tch chnget ”boid0y”
gkpitch chnget ”boid0y”
gkpitch = p4 /∗ p i t c h s c a l e ∗/
37

Appendix
a s i g syncgra in 0 .1∗ kenv , kfreq , kpitch , i g r s i z e , kps∗kstr , 1 , 2 , i o l a p s
outs as ig , a s i g
iRvbSendAmt = 0.3 ; reverb send amount (0−1)
; wr i t e to zak audio channel 1 with mixing
zawm as i g ∗iRvbSendAmt , 1
endin
i n s t r 2
i o l a p s = 2
i g r s i z e = 0.10
k f r eq = i o l a p s / i g r s i z e
kps = 1/ i o l a p s
k s t r chnget ”boid1x”
gks t r chnget ”boid1x”
gks t r = .3 /∗ t ime s ca l e ∗/kenv adsr p3 ∗ . 1 , p3 ∗ . 3 , . 4 , p3 ∗ . 4kp i tch chnget ”boid1y”
gkpitch chnget ”boid1y”
gkpitch = p4 /∗ p i t c h s c a l e ∗/
a s i g syncgra in 0 .1∗ kenv , kfreq , kpitch , i g r s i z e , kps∗kstr , 1 , 2 , i o l a p s
outs as ig , a s i g
iRvbSendAmt = 0.3 ; reverb send amount (0−1)
; wr i t e to zak audio channel 1 with mixing
zawm as i g ∗iRvbSendAmt , 1
endin
i n s t r 3
i o l a p s = 2
i g r s i z e = 0.10
k f r eq = i o l a p s / i g r s i z e
kps = 1/ i o l a p s
k s t r chnget ”boid2x”
gks t r chnget ”boid2x”
gks t r = .3 /∗ t ime s ca l e ∗/kenv adsr p3 ∗ . 1 , p3 ∗ . 3 , . 4 , p3 ∗ . 4kp i tch chnget ”boid2y”
gkpitch chnget ”boid2y”
gkpitch = p4 /∗ p i t c h s c a l e ∗/
a s i g syncgra in 0 .1∗ kenv , kfreq , kpitch , i g r s i z e , kps∗kstr , 1 , 2 , i o l a p s
outs as ig , a s i g
iRvbSendAmt = 0.3 ; reverb send amount (0−1)
; wr i t e to zak audio channel 1 with mixing
zawm as i g ∗iRvbSendAmt , 1
endin
i n s t r 4
i o l a p s = 2
i g r s i z e = 0.10
k f r eq = i o l a p s / i g r s i z e
kps = 1/ i o l a p s
k s t r chnget ”boid3x”
gks t r chnget ”boid3x”
k s t r = .3 /∗ t ime s ca l e ∗/
38
Appendix
kenv adsr p3 ∗ . 1 , p3 ∗ . 3 , . 4 , p3 ∗ . 4kp i tch chnget ”boid3y”
gkpitch chnget ”boid3y”
gkpitch = p4 /∗ p i t c h s c a l e ∗/
a s i g syncgra in 0 .1∗ kenv , kfreq , kpitch , i g r s i z e , kps∗kstr , 1 , 2 , i o l a p s
outs as ig , a s i g
iRvbSendAmt = 0.3 ; reverb send amount (0−1)
; wr i t e to zak audio channel 1 with mixing
zawm as i g ∗iRvbSendAmt , 1
endin
i n s t r 99 ; Reverb Always On
aInSig zar 1 ; read f i r s t zak audio channel
kFblvl i n i t 0 . 5 5 ; feedback l e v e l − i . e . reverb time
kFco chnget ” acce l x ”
gkFco chnget ” acce l x ”
gkFco i n i t 6000 ; c u t o f f f r e q . o f a f i l t e r with in the reverb
aRvbL , aRvbR reve rbsc aInSig , aInSig , kFblvl , kFco
outs aRvbL , aRvbR ; send audio to outputs
z a c l 0 , 1 ; c l e a r zak audio channe ls
endin
</CsInstruments>
<CsScore>
f 1 0 0 1 ”U.wav” 0 0 0 ; Deferred tab l e f o r source waveform
f2 0 8192 20 2 1 ; Hanning func t i on f o r Grain Envelope
i 1 0 2000 1
i 2 0 2000 1
i 3 0 2000 1
i 4 0 2000 1
i99 0 2010
e
</CsScore>
</CsoundSynthesizer>
<MacOptions>
Vers ion : 3
Render : Real
Ask : Yes
Functions : ioObject
L i s t i n g : Window
WindowBounds : −1072 −924 572 424
CurrentView : i o
IOViewEdit : On
Options : −b128 −A −s −m167 −R</MacOptions>
<MacGUI>
ioView background {32125 , 41634 , 41120}i o S l i d e r {266 , 7} {20 , 98} 0.000000 1.000000 0.173469 amp
i o S l i d e r {10 , 29} {239 , 22} 100.000000 1000.000000 258.158996 f r e q
ioGraph {8 , 112} {265 , 116} t ab l e 0 .000000 1.000000
i oL i s t i n g {279 , 112} {266 , 266}ioText {293 , 44} {41 , 24} l a b e l 0 .000000 0.00100 ”” l e f t ”Lucida Grande” 8 {0 , 0 , 0} {65280 ,
65280 , 65280} background noborder Amp:
ioText {333 , 44} {70 , 24} d i sp l ay 0.000000 0.00100 ”amp” l e f t ”Lucida Grande” 8 {0 , 0 , 0}{65280 , 65280 , 65280} background noborder 0 .1837
ioText {66 , 57} {41 , 24} l a b e l 0 .000000 0.00100 ”” l e f t ”Lucida Grande” 8 {0 , 0 , 0} {65280 ,
65280 , 65280} background noborder Freq :
ioText {106 , 57} {69 , 24} d i sp l ay 0.000000 0.00100 ” f r e q ” l e f t ”Lucida Grande” 8 {0 , 0 , 0}{65280 , 65280 , 65280} background noborder 261.9247
ioText {425 , 6} {120 , 100} l a b e l 0 .000000 0.00100 ”” l e f t ”Lucida Grande” 8 {0 , 0 , 0} {65280 ,
65280 , 65280} nobackground border
ioText {449 , 68} {78 , 24} d i sp l ay 0.000000 0.00100 ” freqsweep ” cente r ”DejaVu Sans” 8 {0 , 0 ,
0} {14080 , 31232 , 29696} background border 999.6769
ioButton {435 , 24} {100 , 30} event 1.000000 ”Button 1” ”Sweep” ”/” i 1 0 10
39

ioGraph {8 , 233} {266 , 147} scope 2.000000 −1.000000
</MacGUI>
<EventPanel name=”” tempo=”60.00000000 ” loop=”8.00000000 ” x=”0” y=”0” width=”596” he ight=”322
”>
</EventPanel>
40

References
Angelo, T. (2010), ‘Gboids’, in www.cycling74.com [online], available: http://bit.ly/
1hanw3Ul [accessed: 5 December 2013] .
Brinkman, P. (2012), Making Musical Apps: Real-time Audio Synthesis on Android
and iOS, O’Reilly Media.
Business-Insider (2013), Chart Of The Day [online], available: http://read.bi/
1ixMK1N [accessed: 4 September 2013].
Chadabe, J. (2002), The limitations of mapping as a structural descriptive in electronic
instruments, in ‘Proceedings of the 2002 Conference on New Interfaces for Musical
Expression’, NIME ’02, National University of Singapore, Singapore, pp. 1–5.
Csounds.com (2013), Granular Synthesis [online], available: http://bit.ly/Pt7FGB
[accessed: 20 December 2013].
Doyle, J. (2013), Using Processing In Eclipse [online], available: http://bit.ly/11g8lB9
[accessed: 5 August 2013].
Flannery, D. (2010), Obtaining you ip address on Android [online], available: http:
//bit.ly/dxIQLJ [accessed: 21 October 2013].
Foundation, P. (2013), Examples [online], available: http://bit.ly/1nLJwX8 [accessed:
14 September 2013].
Gabor, D. (1946), ‘Theory of Communication’, The Journal of the Institution Of Elec-
trical Engineers 3(93), 429–457.
Google (2013), Design [online], available: http://bit.ly/yROIVW [accessed: 23
September 2013].
41

REFERENCES
Hunt, A. and Wanderly, M. (2002), ‘Mapping performance parameters to synthesis
engines’, Organised Sound 2(7), 97–108.
Ketai (2012), Ketai [online], available: http://code.google.com/p/ketai/ [accessed:
16 November 2013].
Kirn, P. (2013), Why mobile low latency is hard [online], available: http://bit.ly/
MxNaXd [accessed: 5 August 2013].
Opie, T. (2003), Creation of a Real Time Granular Synthesis for Live Performance,
Master’s thesis, Queensland University of Technology, Australia.
Puckette, M. (2002), ‘Max at seventeen’, Computer Music Journal 4(26), 31–43.
Reynolds, C. (1987), ‘Flocks, Herds, and Schools: A Distributed Behavioural Model’,
Computer Graphics 4(21), 25–34.
Roads, C. (2001), Microsound, MIT Press.
Scavone, G. (2013), Granular Synthesis [online], available: http://bit.ly/Pt7FGB
[accessed: 20 December 2013].
Schlegel, A. (2011), Libraries [online], available: http://bit.ly/PpHKPW [accessed:
14 November 2013].
Shiffman, D. (2012), The Nature of Code Simulating Natural Systems with Processing,
Self Published.
Truax, B. (1990), ‘Composing with Real-Time Granular Sound’, Perspectives of New
Music 2(28), 120–134.
Visnjic, F. (2013), ‘Konkreet Performer’, in www.creativeapplications.net [online], avail-
able: http://bit.ly/1nMpKuNl [accessed: 13 November 2013] .
Xenakis, I. (1992), Formalised Music: thought and mathematics in composition, Pen-
dragon Press.
42




















