










Perencanaan dan pembuatan mekanisme rol untuk produksi ...
51
2. TEORI DASAR Urutan produksi mi basah dimulai dengan pencampuran bahan baku berupa air, tepung terigu, garam dan kuning telur dengan perbandingan tertentu. Hasil pencampuran bahan baku tersebut adalah adonan mi yang berbentuk gumpalan- gumpalan yang dimensinya tidak beraturan. Adonan mi ini kemudian akan dimasukkan ke mekanisme melalui hopper untuk dibentuk menjadi mi. Pada dasarnya proses yang terjadi di dalam mekanisme adalah melewatkan adonan mi melalui sejumlah pasangan rol. Adonan mi dilewatkan pasangan-pasangan rol supaya terjadi efek penekanan dan penarikan yang menyebabkan glutine pada adonan mi menjadi sejajar. Setelah glutine menjadi sejajar, akan didapatkan adonan mi yang berbentuk lembaran dengan permukaan halus dan bersifat ulet. Adonan mi yang berbentuk lembaran ini kemudian akan dipotong dengan cara melewatkan lembaran melalui sepasang rol pemotong. Mekanisme untuk produksi mi basah yang dirancang terdiri dari beberapa komponen yang digerakkan oleh satu motor listrik. Komponen-komponen mekanisme yang dirancang adalah: aRol. b. Roda gigi lurus (spurr gear). c. Poros. d. Bantalan. e. V-belt dan puli. f. Mekanisme pendorong pada hopper. h. Ulir Pendorong. Secara garis besar cara kerja mekanisme untuk produksi mi basah dapat dilihat pada gambar berikut ini:
-
Upload
khangminh22 -
Category
Documents
-
view
3 -
download
0
Transcript of Perencanaan dan pembuatan mekanisme rol untuk produksi ...

2. TEORI DASAR
Urutan produksi mi basah dimulai dengan pencampuran bahan baku berupa
air, tepung terigu, garam dan kuning telur dengan perbandingan tertentu. Hasil
pencampuran bahan baku tersebut adalah adonan mi yang berbentuk gumpalan-
gumpalan yang dimensinya tidak beraturan. Adonan mi ini kemudian akan
dimasukkan ke mekanisme melalui hopper untuk dibentuk menjadi mi.
Pada dasarnya proses yang terjadi di dalam mekanisme adalah melewatkan
adonan mi melalui sejumlah pasangan rol. Adonan mi dilewatkan pasangan-pasangan
rol supaya terjadi efek penekanan dan penarikan yang menyebabkan glutine pada
adonan mi menjadi sejajar. Setelah glutine menjadi sejajar, akan didapatkan adonan
mi yang berbentuk lembaran dengan permukaan halus dan bersifat ulet. Adonan mi
yang berbentuk lembaran ini kemudian akan dipotong dengan cara melewatkan
lembaran melalui sepasang rol pemotong.
Mekanisme untuk produksi mi basah yang dirancang terdiri dari beberapa
komponen yang digerakkan oleh satu motor listrik. Komponen-komponen
mekanisme yang dirancang adalah:
aRol .
b. Roda gigi lurus (spurr gear).
c. Poros.
d. Bantalan.
e. V-belt dan puli.
f. Mekanisme pendorong pada hopper.
h. Ulir Pendorong.
Secara garis besar cara kerja mekanisme untuk produksi mi basah dapat dilihat pada
gambar berikut ini:

Gambar 2.1. Cara Kerja Mekanisme
2.1. Dasar-dasar teori proses rol
Dasar-dasar teori proses rol yang akan dibahas adalah:
a. Kecepatan aliran material pada saat masuk celah rol dan pada saat keluar celah rol.
b. Syarat jangkauan {gripping condition), sehingga material dapat masuk celah rol.
c. Analisa tegangan rol.
d. Analisa gaya rol.
e. Analisa momen torsi rol.
f. Analisa daya rol.
2.1.1. Kecepatan Aliran Material
Pada proses rol, sebagian permukaan benda mengalami suatu tekanan dari
rol, yang akan diteruskan ke dalam, sehingga menyebabkan material yang berada di
daerah pembentukannya berubah bentuk. Jika benda kerja yang dirol berbentuk
gumpalan-gumpalan dan alirannya kontinu pada celah masukkan, maka akan
terbentuk benda pipih yang alirannya kontinu pada celah keluaran. Jika benda kerja
yang dirol berbentuk benda pipih, dengan ketinggian tertentu dan alirannya kontinu
pada celah masukkan, maka akan terbentuk benda pipih, mempunyai ketinggian yang
berkurang, alirannya kontinu dan serat-serat materialnya tidak terputus. Pada proses

rol serat-serat materialnya menjadi tidak terputus karena ada efek penekanan dan
penarikan yang berlangsung bersamaan.
Selisih tinggi yang dapat dicapai pada proses rol dapat dianalisa seperti
berikut:
dimana a= sudut rol
h= selisih tinggi.
ho- tinggi masukkan
hi- tinggi keluaran
Gambar 2.2. Hubungan Sudut Rol dengan Ketinggian Benda Kerja

10
Benda kerja saat berada di dalam celah rol memiliki kecepatan berbeda-
beda. Pada saat benda kerja masuk ke dalam celah rol sampai bidang netral (neutral
plane) benda kerja akan memiliki kecepatan yang lebih lambat dibandingkan
kecepatan keliling rol. Sebaliknya benda kerja akan memiliki kecepatan yang lebih
cepat dibandingkan kecepatan keliling rol setelah melewati bidang netral. Tepat pada
bidang netral, benda keija akan memiliki kecepatan yang sama dengan kecepatan
keliling rol.
Perbedaan kecepatan benda kerja di dalam celah rol disebabkan karena pada
saat benda kerja masuk ke dalam celah rol sampai pada saat benda kerja keluar dari
celah rol akan bersinggungan dengan permukaan rol, sehingga timbul gaya gesek
antara keduanya. Pada saat benda kerja masuk ke dalam celah rol sampai benda kerja
mencapai bidang netral, gaya gesek yang terjadi antara benda kerja dan permukaan
rol bekerja berlawanan dengan arah aliran material. Sebaliknya gaya gesek yang
terjadi antara benda kerja dan permukaan rol setelah benda kerja melalui bidang
netral akan berabah arahnya, yaitu berlawanan arah terhadap gaya gesek yang timbul
pada saat benda kerja masuk kedalam celah rol. Perubahan ini terjadi pada bidang
netral.
2.1.2. Syarat Jangkauan {Gripping Condition)
Supaya benda kerja dapat masuk ke dalam celah rol, ukuran benda kerja
harus memenuhi syarat jangkauan (gripping condition). Syarat jangkauan supaya
benda kerja dapat masuk ke dalam celah rol digambarkan seperti berikut:
Gambar 2.3. Syarat Jangkauan (Gripping Conditiori)

11
Dari gambar di atas, dapat dituliskan persamaan:
Gambar 2.4. Segmen Kecil ABCD Di Dalam Celah Rol

12
Gambar 2.5. Tegangan-Tegangan yang Terjadi Pada Segmen Kecil ABCD Di Dalam
Celah Rol
Dari gambar di atas dapat ditulis persamaan:

14
Secara teori persamaan ini sulit dipecahkan, sehingga dalam aplikasinya digunakan
metode pendekatan yang dilakukan oleh Siebel, Bland dan Ford, yaitu:
Karena proses rol merupakan proses satu sumbu, tnaka syarat dari Tresca untuk
perubahan bentuk bentuk benda kerja elastis ke plastis atau syarat benda kerja mulai
mengalir pada proses ini dapat digunakan, yaitu tegangan yang bekerja:

15
Sehingga untuk daerah yang "mendahului", yaitu daerah setelah sumbu netral dapat
dituliskan:

1S
2.2. Analisa Poros
Poros adalah suatu elemen mesin yang berputar yang digunakan untuk
mentransmisikan daya. Pada poros dapat dipasang elemen-elemen mesin yang lain
seperti roda gigi dan pulli. Tegangan-tegangan yang bekerja pada poros dapat berupa
tegangan geser yang disebabkan oleh momen torsi, tegangan bending yang

19
disebabkan oleh momen bending, atau tegangan gabungan yang disebabkan oleh
momen torsi dan momen bending.
Dalam desain poros kasus-kasus yang terjadi antara lain poros hanya
dibebani oleh momen torsi saja, poros dibebani oleh momen bending saja, poros
dibebani oleh kombinasi momen torsi dan momen bending. Selanjutnya pembahasan
masing-masing kasus akan dilakukan seperti berikut ini.
2.2.1. Desain Poros Yang Dikenai Momen Torsi
Poros yang dikenai momen torsi saja disebut spindle. Bentuk poros ini pada
pendek, sehingga momen bending yang terjadi dapat diabaikan. Jika poros hanya
dikenai momen torsi saja, maka diameter poros dapat diperoleh dengan menggunakan
persamaan torsi.

22
Selanjutnya dengan mengganti yJmax dengan tegangan bending yang
diizinkan/Z>, persamaan (2.28) menjadi:
23
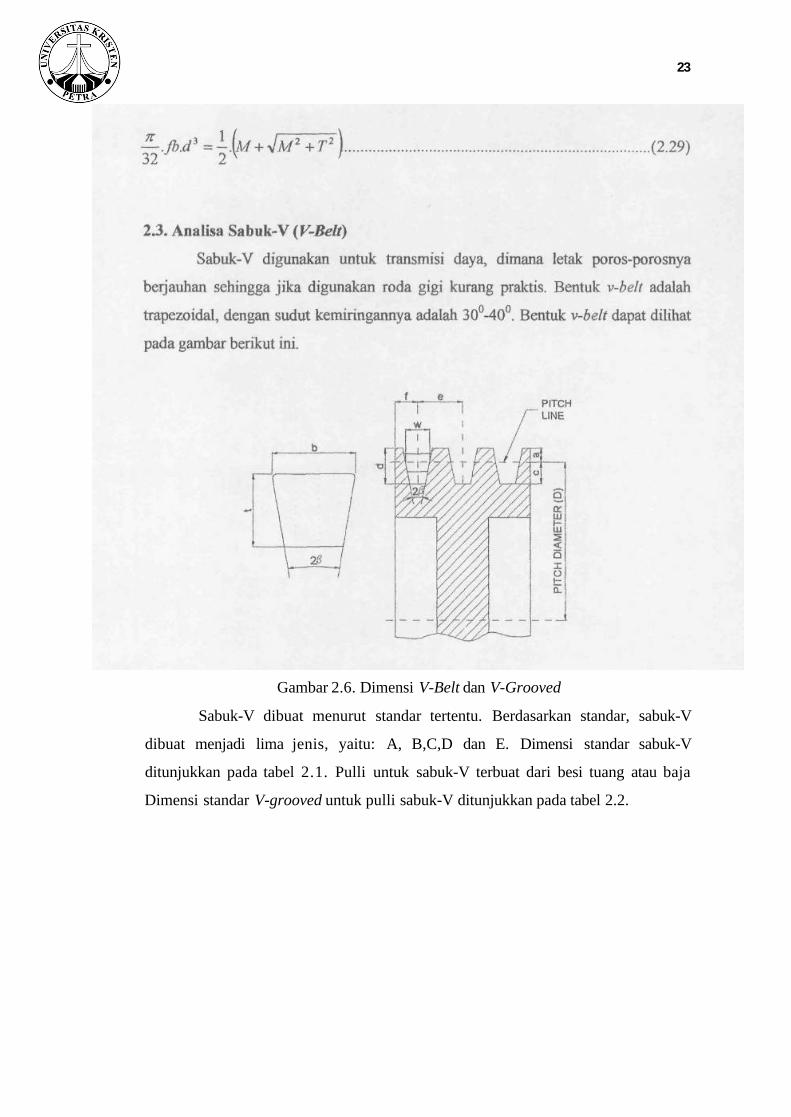
Gambar 2.6. Dimensi V-Belt dan V-Grooved
Sabuk-V dibuat menurut standar tertentu. Berdasarkan standar, sabuk-V
dibuat menjadi lima jenis, yaitu: A, B,C,D dan E. Dimensi standar sabuk-V
ditunjukkan pada tabel 2.1. Pulli untuk sabuk-V terbuat dari besi tuang atau baja
Dimensi standar V-grooved untuk pulli sabuk-V ditunjukkan pada tabel 2.2.
24
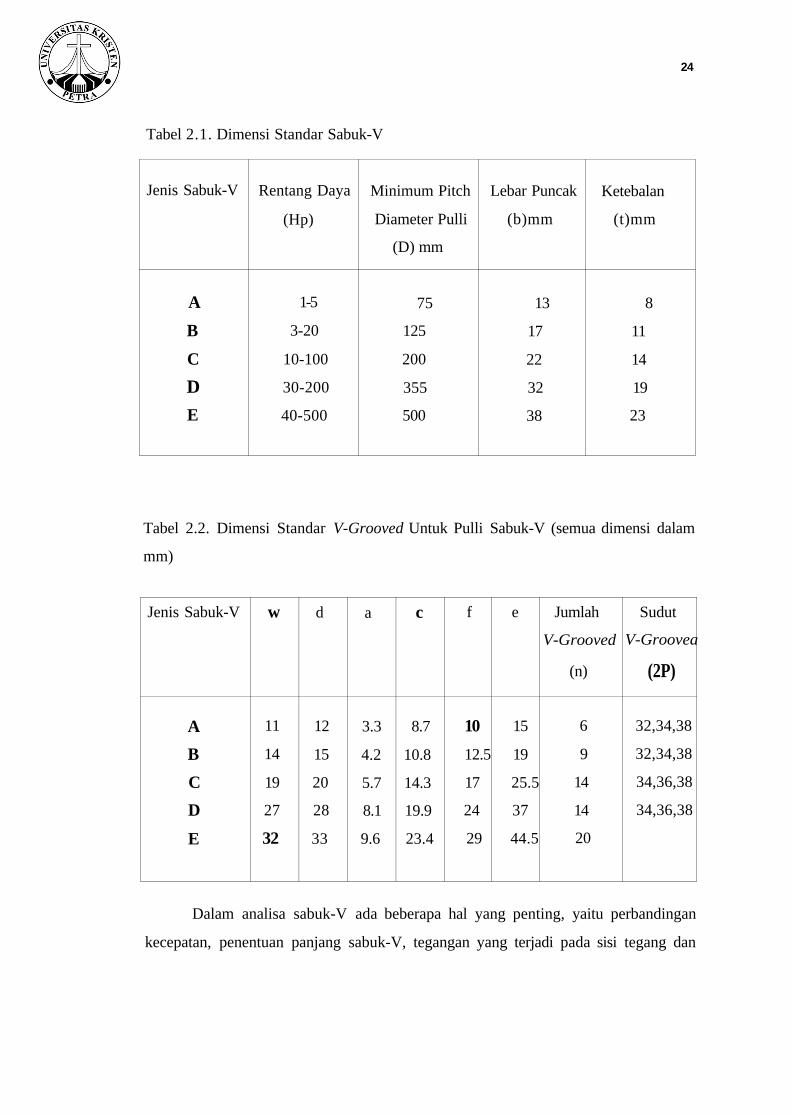
Tabel 2.1. Dimensi Standar Sabuk-V
Jenis Sabuk-V
A
B
C
D
E
Rentang Daya
(Hp)
1-5
3-20
10-100
30-200
40-500
Minimum Pitch
Diameter Pulli
(D) mm
75
125
200
355
500
Lebar Puncak
(b)mm
13
17
22
32
38
Ketebalan
(t)mm
8
11
14
19
23
Tabel 2.2. Dimensi Standar V-Grooved Untuk Pulli Sabuk-V (semua dimensi dalam
mm)
Jenis Sabuk-V
A
B
C
D
E
w
11
14
19
27
32
d
12
15
20
28
33
a
3.3
4.2
5.7
8.1
9.6
c
8.7
10.8
14.3
19.9
23.4
f
10
12.5
17
24
29
e
15
19
25.5
37
44.5
Jumlah
V-Grooved
(n)
6
9
14
14
20
Sudut
V-Groovea
(2P)
32,34,38
32,34,38
34,36,38
34,36,38
Dalam analisa sabuk-V ada beberapa hal yang penting, yaitu perbandingan
kecepatan, penentuan panjang sabuk-V, tegangan yang terjadi pada sisi tegang dan

25
sisi longgar sabuk-V. Selanjutnya akaii dibahas beberapa hal penting pada analisa
sabuk- V yang telah disebutkan.
2.3.1. AnalisaPerbandinganKecepatan Pada Transmisi Sabuk-V
Perbandingan kecepatan menyatakan perbandingan kecepatan antara
penggerak (driver) dan yang digerakkan (follower). Secara matematis dinyatakan
seperti berikut ini:
dl = diameter penggerak
d2 — diameter yang digerakkan
Nl= kecepatan penggerak dalam rpm
N2= kecepatan yang digerakkan dalam rpm
Panjang sabuk-V yang melalui driver dalam satu menit = mdl.Nl
Panjang sabuk-V yang melalui follower dalam satu menit = 7cd2.N2
Jika panjang sabuk-V yang melalui driver dalam satu menit sama dengan
panjang sabuk-V yang melalui follower dalam satu menit, maka:
Persamaan (2.30) menyatakan perbandingan kecepatan driver dan follower
berbanding terbalik dengan diameternya.
2.3.2. Penentuan Panjang Sabuk-V
Penentuan sabuk-V dapat dilakukan secara analitis, tetapi hasilnya harus
disesuaikan dengan panjang sabuk-V yang ada di pasaran. Jika panjang sabuk hasil
perhitungan secara analitis tidak sesuai dengan yang ada di pasaran, maka panjang
sabuk-V akan dipilih yang paling mendekati ukuran panjang sabuk-V yang ada di
pasaran. Selanjutnya dalam pemasangannya akan dilakukan dengan cara raengubah
jarak antara poros.

26
Gambar 2.7. Geometri V-Belt
Dari gambar di atas dapat dilihat kedua pulli akan berotasi pada arah yang
sama. Jika:
01 dan 02 = titik pusat kedua puli
Rl dan r2 = jari-jari puli besar dan puli kecil
x= jarak antara 01 dan 02
L = panjang sabuk secara keseluruhan
Sabuk-V akan masuk ke puli besar di G dan meninggalkan puli besar di E, sebaliknya
sabuk-V akan masuk puli kecil di F dan meninggalkan puli kecil di H. Dari titik 02
digambar garis 02M yang paralel FE. Dari geometri gambar, didapatkan 02M akan
tegak lurus OIE. Sudut M0201 = a radian. Dari pengamatan dapat diketahui
panjang belt adalah:

27
Kemudian persamaan (2.32) disubstitusikan ke dalam persamaan (2.37) didapatkan:
28
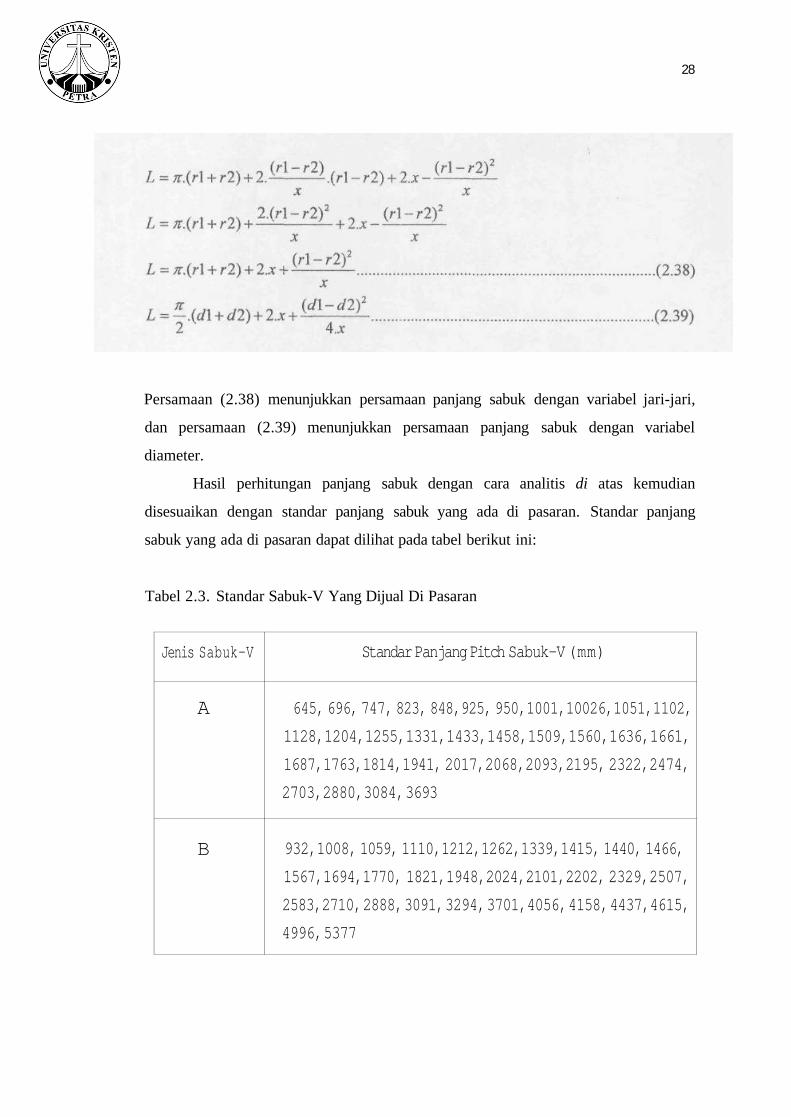
Persamaan (2.38) menunjukkan persamaan panjang sabuk dengan variabel jari-jari,
dan persamaan (2.39) menunjukkan persamaan panjang sabuk dengan variabel
diameter.
Hasil perhitungan panjang sabuk dengan cara analitis di atas kemudian
disesuaikan dengan standar panjang sabuk yang ada di pasaran. Standar panjang
sabuk yang ada di pasaran dapat dilihat pada tabel berikut ini:
Tabel 2.3. Standar Sabuk-V Yang Dijual Di Pasaran
Jenis Sabuk-V
A
B
Standar Panjang Pitch Sabuk-V (mm)
645, 696, 747, 823, 848,925, 950,1001,10026,1051,1102,
1128,1204,1255,1331,1433,1458,1509,1560,1636,1661,
1687,1763,1814,1941, 2017,2068,2093,2195, 2322,2474,
2703,2880,3084, 3693
932,1008, 1059, 1110,1212,1262,1339,1415, 1440, 1466,
1567,1694,1770, 1821,1948,2024,2101,2202, 2329,2507,
2583,2710, 2888, 3091, 3294, 3701,4056, 4158, 4437,4615,
4996, 5377

29
Tabel 2.3. Standar Sabuk-V Yang Dijual Di Pasaran (lanjutan)
c
D
E
1275,1351, 1453,1580, 1681, 1783,1834,1961,2088,2113,
2215,2342, 2494, 2723,2901,3104,3205,3307, 3459, 3713,
4069,4171,4450,4628, 5009, 5390,6101, 68863,7625,
8387,9149
3127,3330,3763,4092,4194,4473,4651, 5032, 5413,
6124,6886,7648, 8410,9172,9934,10696,12220,
13744, 15268,16792
5426, 6137,6899, 7661, 8423,9185,9947,10709,12233,
13757,15283,16805
2.3.3. Analisa Tegangan Sabuk-V
Analisa tegangan sabuk-V dilakukan untuk mengetahui perbandingan antara
sisi tegang dan sisi longgar pada sabuk-V. Untuk mengawali analisa, akan dipelajari
dahulu gaya-gaya yang bekerja pada sabuk-V melalui gambar-gambar berikut ini.
32
Persamaan (2.45) di atas merapakan persamaan yang menyatakan perbandingan
tegangan sabuk-V pada sisi yang tegang dan sisi yang longgar.
2.4. Analisa Roda Gigi Lurus (Spurr Gear)
Gerakan dan transmisi daya yang dilakukan oleh roda gigi secara kinematika
sama dengan transmisi yang oleh roda gesek. Agar transmisi daya dapat dipahami,
perhatikan gambar berikut.
Gambar 2.9. Roda Gesek
33
Perhatikan dua roda gesek A dan B yang terpasang pada poros. Kedua roda
gesek mempunyai kekasaran permukaan yang memadai dan saling menekan. Roda
gesek A terpasang pada poros pemutar dan roda gesek B terpasang pada poros yang
diputar. Roda gesek A akan memutar roda gesek B dalam arah yang berlawanan.
Roda gesek B akan diputar oleh roda gesek A sepanjang gaya tangensial yang
ditimbulkan oleh roda gesek A tidak melebihi tahanan gesek maksimum antara kedua
roda. Jika gaya tangensial melebihi tahanan gesek, akan terjadi slip antara kedua roda.
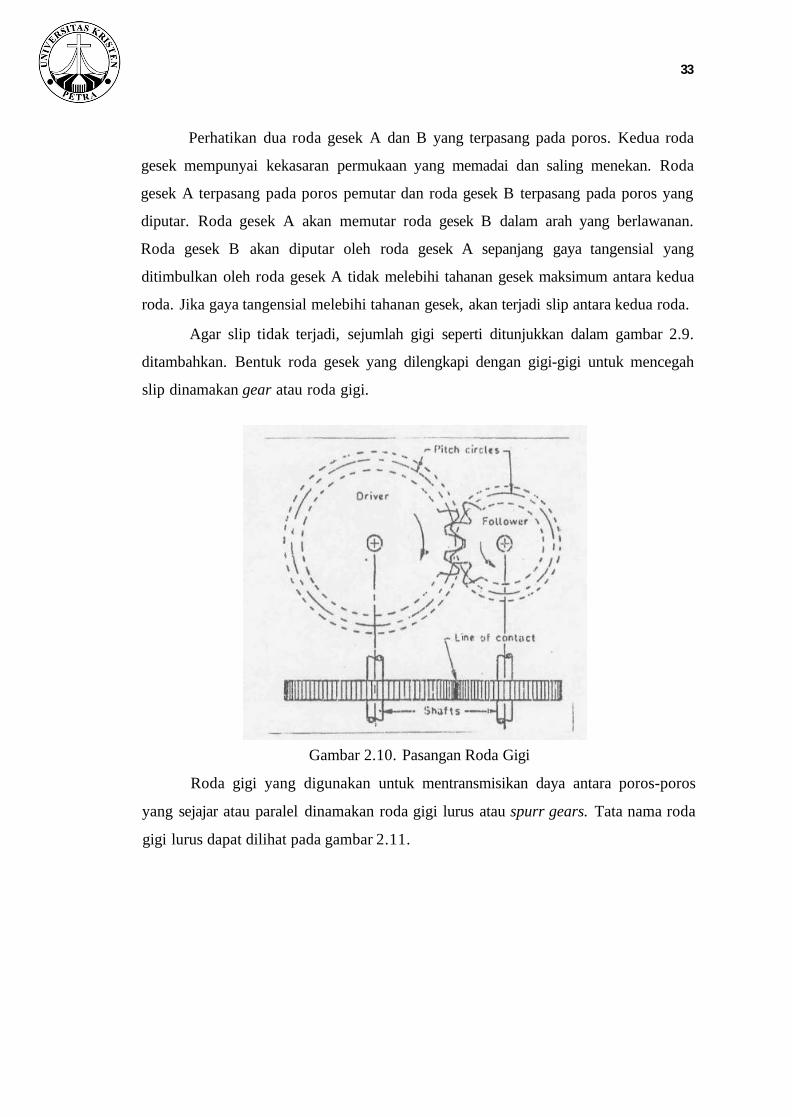
Agar slip tidak terjadi, sejumlah gigi seperti ditunjukkan dalam gambar 2.9.
ditambahkan. Bentuk roda gesek yang dilengkapi dengan gigi-gigi untuk mencegah
slip dinamakan gear atau roda gigi.
Gambar 2.10. Pasangan Roda Gigi
Roda gigi yang digunakan untuk mentransmisikan daya antara poros-poros
yang sejajar atau paralel dinamakan roda gigi lurus atau spurr gears. Tata nama roda
gigi lurus dapat dilihat pada gambar 2.11.

34
1 Gambar 2.11. Tata Nama Roda Gigi Lurus
Pitch circle atau lingkaran puncak adalah suatu lingkaran teoritis terhadap
mana semua perhitungan biasanya didasarkan. Pitch circle diameter (D) adalah
diameter lingkaran puncak. Lingkaran puncak dari sepasang roda gigi yang
berpasangan adalah saling bersinggungan satu terhadap yang lain. Pirtion adalah roda
gigi yang terkecil di antara dua roda gigi yang berpasangan. Yang lebih besar sering
disebut gear.
Circular pitch (pc) atau jarak: lengkung puncak adalah jarak yang diukur
pada lingkaran puncak, dari satu titik pada sebuah gigi ke suatu titik yang berkaitan
pada gigi di sebelahnya. Jadi jarak lengkung puncak sama dengan jumlah tebal gigi
(tooth thickness) dan lebar antara {width ofspace).
Module (m) atau modul adalah perbandingan antara diameter puncak dengan
jumlah gigi. Satuan panjang yang biasa dipakai adalah milimeter. Modul adalah
indeks dari ukuran gigi pada standar SI.
Pitch diametral (pd) atau puncak diametral adalah perbandingan antara
jumlah gigi pada roda gigi dengan diameter puncak. Jadi ini adalah kebah'kan dari

35
modul. Karena puncak diametral hanya digunakan dalam satuan Tnggris, ini
dinyatakan dalam jumlah gigi per inci.
Addendum (a) adalah jarak radial antara bidang atas (top land) dengan
lingkaran puncak. Dedendum (b) adalah jarak radial dari bidang bawah (bottom land)
ke lingkaran puncak. Tinggi keseluruhan (ht) atau whole depth adalah jumlah
addendum dan dedendum.
Clearance circle atau lingkaran kebebasan adalah lingkaran yang
bersinggungan dengan lingkaran addendum dari pasangan roda gigi tersebut.
Kebebasan (clearance) adalah besaran yang disediakan dedendum bagi addendwn
dari roda gigi pasangannya. Kibasan punggung {backlash) adalah besaran yang
diberikan oleh lebar antara dari suatu roda gigi kepada tebai gigi dari roda gigi
pasangannya diukur pada lingkaran puncak.
Berdasarkan definisi-defmisi di atas dapat dibentuk beberapa persamaan
untuk roda gigi lurus, yaitu:

36
Gambar 2.12. Kondisi Putaran Konstan Pada Pasangan Roda Gigi
Garis TT adalah garis tangen dan garis MN adalah garis normal pada titik
kontak Q. Dari pusat-pusat 01 dan 02 digambar 01M dan 02N tegak lurus MN.
Dengan sedikit pengamatan dapat diiihat bahwa titik Q akan bergerak dalam arah QC
jika diamati sebagai bagian dari titik pada roda 1 dan bergerak dalam arah QD jika
diamati sebagai bagian dari titik pada roda 2.

37
Jika vl dan v2 adalah kecepatan titik Q pada roda 1 dan roda 2, maka
komponen-komponen kecepatan vl dan v2 sepanjang garis normal MN harus sama
selama kedua gigi saling kontak.
Dari persamaan (2.55) dapat dilihat bahwa perbandingan kecepatan sudut
akan berbanding terbalik dengan perbandingan jarak P dengan pusat 01 dan pusat
02. Sehingga jika diinginkan perbandingan kecepatan sudut yang konstan untuk
setiap posisi, titik P harus merupakaii titik yang tetap untuk kedua roda. Titik ini
disebut titik puncak atau pitch point. Dengan kata lain garis normal pada titik kontak
sepasang gigi harus selalu melalui titik puncak atau pitch point. Jika D\ dan D2
adalah diameter lingkaran puncak dari roda gigi 1 dan roda gigi 2 yang mempunyai
gigi sebanyak M dan N2, maka persamaan (2.55) menjadi:

38
2.4.2. Gigi Involut
Kondisi yang telah dijabarkan pada subbab 2.4.1. dapat terpenuhi jika gigi-
gigi yang digunakan adalah bentuk gigi involut. Bentuk gigi involut dapat diperoleh
seperti gambar 2.13.
, Gambar 2 J 3. Konstruksi Gigi Involut
Pada gambar 2.13. titik A adalah awal titik involut. Lingkaran dasar (base
circle) dibagi menjadi beberapa bagian yang sama yaitu APl, P1P2, P2P3. Garis
tangen pada titik P l , P2, P3 digambar dan panjang P lAl , P2A2, P3A3 adalah sama
dengan panjang busur APl, AP2, AP3. Dengan menghubungkan A, Al, A2, A3
didapatkan kurva involut AR. Dengan sedikit pengamatan pada titik A3, garis tangen
A3T pada involut adalah tegak lurus P3A3, sehingga P3A3 adalah garis normal
involut di titik A3. Dengan kata lain garis normal pada setiap titik dari suatu involut
adalah membentuk tangen dengan lingkaran dasar.

39
Titik-titik 01 dan 02 adalah titik-titik pusat dari dua lingkaran dasar.
Involut-involut AB dan A'B' dalam keadaan saling kontak di titik Q. Garis MQ dan
garis NQ adalah garis-garis normal involut di titik Q dan garis-garis tersebut tangen
terhadap lingkaran dasar. Jika garis normal untuk suatu involut pada suatu titik adalah
tangen terhadap lingkaran dasar, maka garis normal MN pada titik Q juga merupakan
garis tangen terhadap kedua lingkaran dasar. Dari gambar 2.13. garis normal MN
berpotongan dengan garis yang menghubungkan pusat O1O2 pada suatu titik tetap P
(titik ini disebut titik puncak atau pitch point). Oleh karena itu gigi-gigi involut
memenuhi dasar kondisi perbandingan kecepatan konstan.
Dari segitiga02NP dan segitiga OIMP dapat dibentuk persamaan:
Berdasarkan gambar 2.13. serta persamaan-persamaan (2.57) dan (2.60)
dapat dilihat jika jarak pusat berabah, maka jari-jari lingkaran puncak juga berabah.
Tetapi perbandingan OIP dan O2P tetap. Garis normal pada titik kontak tetap melalui
titik puncak, sehingga kedua roda gigi tetap bekerja secara tepat. Sedangkan sudut
tekan akan bertambah seiring dengan penambahan jarak pusat.

40
2.4.3. Proporsi Standar Sistem Roda Gigi
Tabel berikut akan menunjukkan proporsi standar sistem roda gigi yang
digunakan dalam modul (m).
Tabel 2.4. Proporsi Standar Sistem Roda Gigi
2.4.4. Interferensi Pada Roda Gigi Involut
Suatu roda gigi dipasangkan dengan pinion seperti ditunjukkan pada gambar
2.14. Garis MN adalah garis tangen terhadap lingkaran dasar dan KL adalah jejak
kontak antara dua gigi yang berpasangan. Dari pengamatan dapat dilihat jika jari-jari
lingkaran addendum dari pinion bertambah hingga OIN, titik kontak L akan bergerak
dari L ke N. Ketika jari-jari addendum pinion ini terus bertambali, titik kontak L akan
berada di dalam lingkaran dasar dari roda gigi dan tidak berada pada involut profil
gigi dari roda gigi. Kontak gigi dari pinion akan memotong gigi roda gigi padabagian
dasar dan akan menghilangkan bagian dari profil gigi involut dari roda gigi. Keadaan
ini disebut interferensi.
Sama halnya jika jari-jari addendum dari roda gigi bertambah sebelum O2M,
maka kontak gigi dari roda gigi akan mengakibatkan interferensi gigi pinion. Titik-
titik M dan N disebut titik-titik interferensi. Interferensi dapat dihindari jika jejak

41
kontak ada di antara titik-titik M dan N. Nilai batas jari-jari lingkaran addendum
untuk pinion adalah OIN dan untuk roda gigi adalah O2M.
Untuk menghindari interferensi nilai batas jari-jari lingkaran addendum
pinion 01N dan jari-jari lingkaran addendwn roda gigi 02M dapat diperoleh seperti
berikut:
Gambar 2.14. Interferensi Pada Roda Gigi Involut
Untuk menghindari interferensi dapat dilakukan dengan cara menetapkan
jumlah gigi minimum pinion. Tabel 2.5. berikut akan didaftarkan jumlah gigi
minimum untuk pinion supaya tidak terjadi interferensi.
L_

42
Tabel 2.5. Jumlah Gigi Minimum Pinion Untuk Menghindari Interferensi
2,4,5, Analisa Gaya
Sebelum memulai analisa gaya dari rangkaian roda gigi akan disepakati dulu
notasi yang dipakai. Angka 1 digunakan untuk rangka mesin, roda gigi masukkan
akan dinyatakan sebagai roda gigi 2, dan kemudian nomor roda gigi berikutnya 3, 4,
dan seterusnya sampai roda gigi terakhir dalam rangkaian. Berikutnya ada poros
dimana roda gigi terpasang. Poros akan dinyatakan dengan notasi bawah a, b, c, dan
seterusnya.
Dengan notasi tersebut sekarang dapat dikatakan gaya yang dilakukan roda
gigi 2 terhadap roda gigi 3 adalah F'23. Gaya yang dilakukan roda gigi 2 terhadap
poros a adalah F^a. Selanjutnya dapat juga dituliskan Fa% sebagai gaya yang dilakukan
poros a pada roda gigi 2. Arah koordinat akan dinyatakan dengan koordinat x, y, z,
dan arah radial dan tangensial akan dinyatakan dengan notasi atas r dan /. Dengan
notasi ini P43 adalah komponen tangensial dari roda gigi 4 yang bekerja pada roda
gigi 3.
Pada gambar 2.15.a menunjukkan sebuah pinion yang dipasangkan pada
poros a berputar searah jarum jam pada n2 rpm dan menggerakkan sebuah roda gigi
pada poros b pada putaran n3 rpm. Reaksi antara gigi-gigi yang berpasangan terjadi
di sepanjang garis tekan. Pada gambar 2.15.b pinion dipisahkan dari roda gigi dan
dari poros, dan pengaruh-pengaruhnya digantikan oleh gaya. Fa2 dan Ta2 adalah gaya

43
dan momen puntir, dimana masing-masing dihasilkan oleh poros a terhadap pinion 2.
F32 adalah gaya yang diberikan oleh roda gigi 3 pada pinion. Dengan cara yang sama
akan didapatkan diagram benda bebas dari roda gigi seperti terlihat pada gambar
2.15.C.
Gambar 2.15. Diagram Benda Bebas Dari Dua Roda Gigi
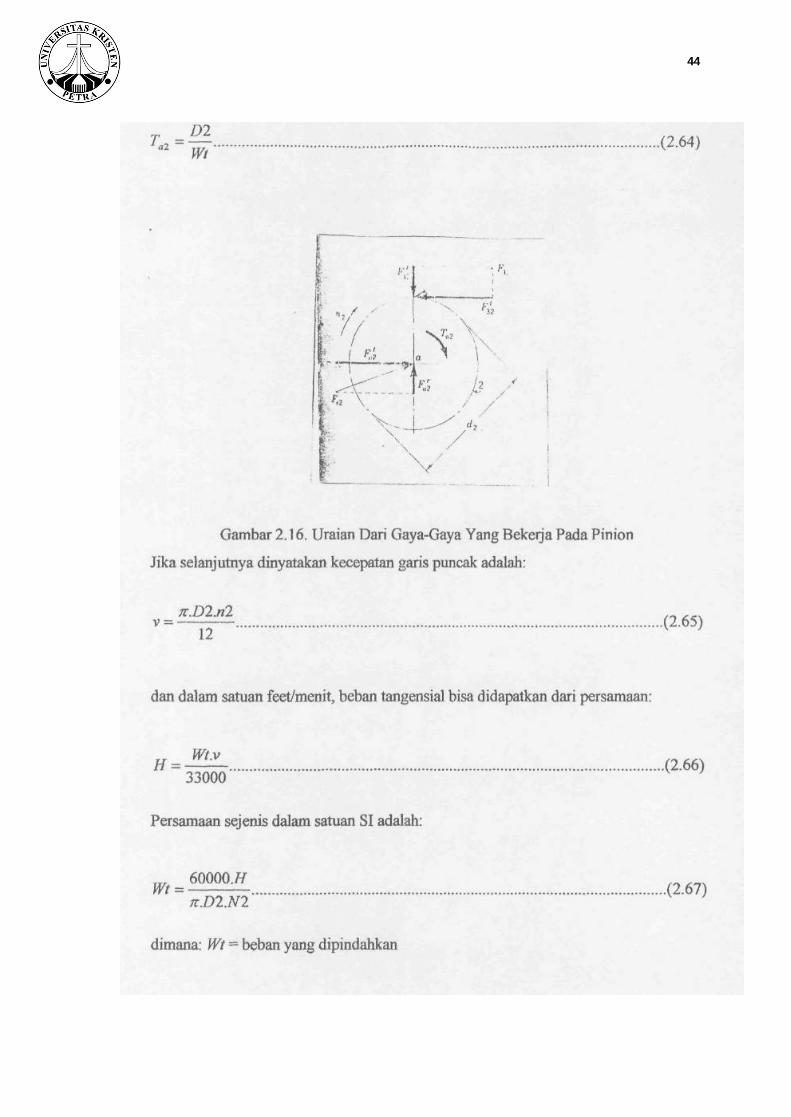
Pada gambar 2.16. diagram benda bebas dari pinion digambar kembali dan
gaya-gaya diuraikan dalam komponen tangensial dan radial. Sekarang dapat
ditetapkan:
sebagai beban yang dipindahkan. Sedangkan F32 tidak memindahkan daya
Hubungan antara momen puntir dengan beban yang dipindahkan adalah:

45
H =daya
D2 = diameter pinion
N2 = putaran, rpm
2.5. Perhitungan Massa Rol, Puli, dan Roda Gigi
2.5.1. MassaRol
Untuk menghitung massa rol secara teoritis, perlu diketahui macam-macam
bentuk rol yang digunakan. Pada mekanisme untuk produksi mi basah ini ada empat
macam bentuk rol yang digunakan, keempatnya dapat dilihat pada gambar 2.17 dan
gambar 2.18 berikut:
Gambar 2.17 Macam-Macam Bentuk Rol Yang Digunakan
Selanjutnya massa masing-masing bentuk rol dapat dicari dengan rumus-
rumus:

47
2.6. Bearing (Bantalan)
Bantalan berfungsi untuk menumpu poros dan memberi kemungkinan pada
poros untuk dapat berputar dengan leluasa dan dengan gesekan yang sekecil
mungkin.
Berbagai macam jenis bantalan yang ada, pada prinsipnya dapat digolongkan
menjadi:
• Bantalan luncur
• Bantalan gelinding (bantalan peluru dan bantalan rol)
• Bantalan dengan beban radial
• Bantalan dengan beban aksial
• Bantalan dengan beban campuran (aksial-radial)
Sedangkan pada pemilihan bantalan peluru dan rol harus diperhatikan hal-
hal sebagai berikut:
• Jenis bantalan (tahan beban radial-aksial atau gabungannya)
• Jenis beban
• Pemasangan, pelumasan dan service mudah
• Haras dapat terpasang dengan mudah dan kuat pada bloknya
• Daya tahan bantalan
• Jumlah putaran poros
2.7. Ulir Pendorong
Fungsi ulir pendorong digunakan untuk mengatur jarak celah rol. Untuk
menggerakkan ulir pendorong dilakukan dengan cara memutar dengan tangan.
Karena mekanisme ulir pendorong tidak digerakkan dengan motor, maka mekanisme
ini tidak menerima beban yang berasal dari putaran motor.
Bentuk-bentuk ulir yang dipakai pada ulir penggerak telah distandarkan,
yaitu:
1. Acme Screw Threads
2. Stub Acme Screw Threads

48
3. 60 Stub Acme Screw Threads
4. Modified Square Threads
5. Buttres Threads
Rancangan mekanisme ulir pendorong dapat dilihat pada gambar 2.18 dan
gambar2.19.
TAMPAK DEPAN
Gambar 2.18. Rancangan Mekanisme Ulir Pendorong Tampak Depan
Gambar 2.19 Rancangan Mekanisme Ulir Pendorong Tampak Samping
49
Pada gambar 2.18 dan gambar 2.19 dapat dilihat rancangan mekanisme ulir
pendorong yang sudah dipasang pada bodi mesin rol. Komponen-komponen
mekanisme ulir pendorong yaitu:
1. Pegangan untuk memutar mekanisme ulir pendorong.
2. Pegangan untuk memutar mekanisme ulir pendorong.
3. Sproket.
4. Sproket.
5. Sproket.
6. Rantai.
7. Rol.
8. Rol
9. Ulir pendorong.
10. Bodi mesin rol.
Urutan cara kerja rancangan mekanisme ulir pendorong pada gambar 2.18.
dan gambar 2.19. dapat dijelaskan seperti berikut:
1. Untuk memperkecil atau memperbesar jarak celah rol dapat dilakukan dengan cara
memutar pegangan 1 atau pegangan 2 searah atau berlawanan jarum jam.
2. Jika pegangan 1 atau pegangan 2 diputar maka rol 8 akan bergerak maju atau
mundur tergantung ke arah mana ulir diputar.
3. Fungsi rantai 6 adalah untuk menghubungkan sproket 3 dan sproket 4. Jika
pegangan 1 diputar, maka sproket 3 ikut berputar, dan berikutnya juga akan
memutar sproket 4. Demikian pula kebalikannya, jika pegangan 2 diputar, maka
sproket 4 ikut berputar, dan berikutnya juga akan memutar sproket 3.
4. Sproket 5 berfungsi sebagai penegang.
Pada gambar 2.18. dan gambar 2.19. dapat dilihat mekanisme ulir pendorong
dilekatkan pada bodi mesin. Supaya besarnya jarak celah rol dapat diatur dengan
menggunakan mekanisme ulir pendorong, maka pada perencanaan perlu diperhatikan
modul roda gigi yang digunakan.

50
2.8. Merencanakan Daya Motor
Sebelum merencanakan besamya daya motor, penulis akan melakukan
percobaan. Tujuan penulis melakukan percobaan adalah untuk menentukan besamya
gaya yang diperlukan untuk menekan benda kerja dari ketebalan 6 mm menjadi 1,5
mtn. Percobaan yang dilakukan penulis adalah dengan cara menekan benda kerja
yang memiliki ketebalan 6 mm dengan beban yang mempunyai berat tertentu,
kemudian mengukur ketebalan benda kerja setelah ditekan. Ketebalan benda kerja
akan dicatat oleh penulis.
Kegiatan ini akan dilakukan dengan menggimakaTi beberapa benda kerja
yang memiliki ketebalan 6 mm dan beberapa beban yang beratnya berbeda. Pada
percobaan ini luas penampang benda kerja sama dengan luas penampang beban
supaya dapat diketahui besarnya tegangan tekan per satuan luas. Analogi percobaan
dapat dilihat pada gambar 2.20.
Gambar 2.20. Analogi Percobaan Untuk Menentukan
Besarnya Tegangan Tekan

51
Selama melakukan percobaan, penulis akan menuliskan hasil-hasil
percobaan pada tabel tabel. Bentuk tabel yang akan digunakan penulis untuk mengisi
hasil-hasil percobaan dapat dilihat pada tabel 2.6.
Tabel 2.6. Percobaan Tekan
Luas penampang (A) = mm
Percobaan
1
2
3
4
5
Massa Beban
(kg)
Berat Beban
(N)
Ketebalan Akhir
(mm)
Tegangan
(N/mm2)
Hasil-hasil percobaan yang dituliskan pada tabel 2.6. akan digunakan
sebagai acuan untuk menghitung berapa besamya tegangan yang diperlukan untuk
mengubah ketebalan benda kerja dari ketebalan 6 mm menjadi 1,5 mm. Hasil-hasil
percobaan pada tabel 2.6. akan dicari regresi lineamya. Persamaan regresi linear
adalah:

52
Setelah melakukan regresi linier, besarnya konstanta A dan B dapat
diketahui. Selanjutnya dengan menggunakan kembali persamaan (2.76) dengan
konstanta A dan B yang sudah diketahui serta data masukkan berupa ketebalan akhir
benda kerja yang diinginkan yaitu x = 1,5 mm, besamya tegangan tekan yang
diperlukan dapat dicari.
Pada saat proses rol berlangsung, terjadi kontak antara benda kerja dengan
rol. Kontak teijadi sepanjang permukaan kontak rol dan benda kerja. Pada permukaan
kontak tersebut teijadi tegangan normal seperti gambar 2.2 i.
Gambar 2.21. Tegangan Tekan Pada Permukaan Kontak
Benda kerja dan Rol
Tegangan tekan pada rol merupakan tegangan tekan benda kerja pada rol. Sebaliknya
tegangan tekan pada benda kerja adalah tegangan tekan rol pada benda kerja
Sedangkan tegangan tekan yang didapatkan dari percobaan adalah oy jika dibagi
dengan luasan kontak akan didapatkan gaya tekan:
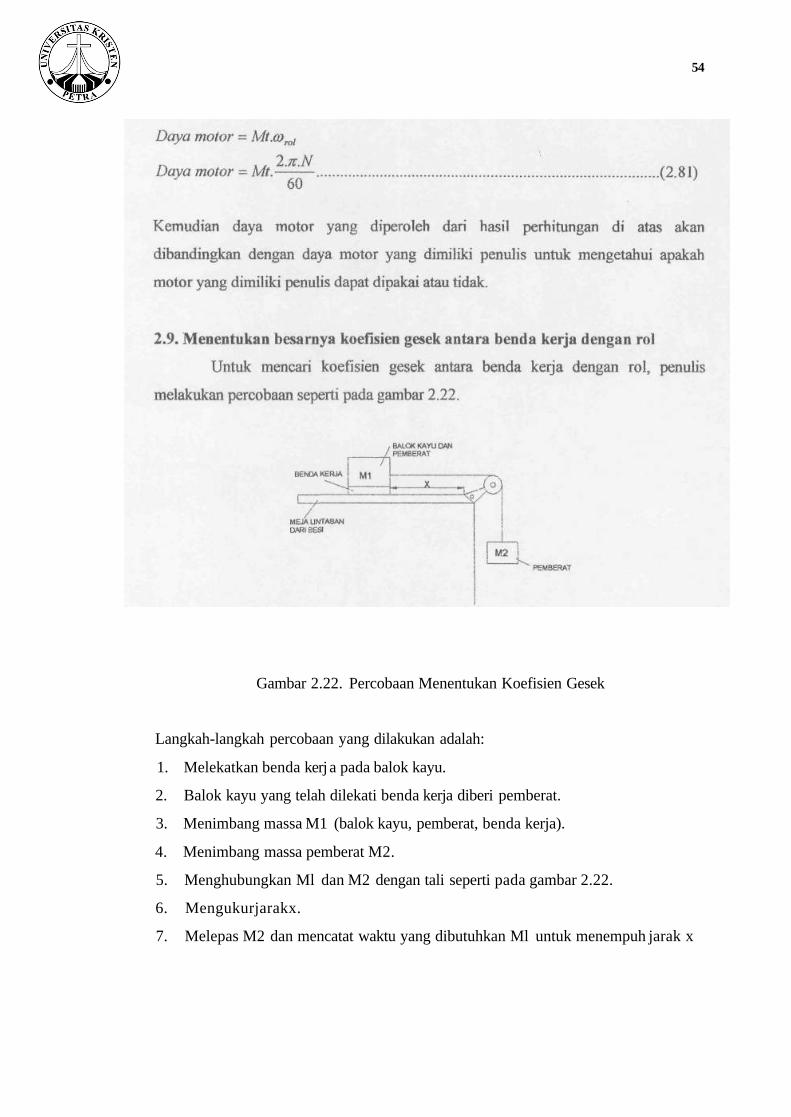
54
Gambar 2.22. Percobaan Menentukan Koefisien Gesek
Langkah-langkah percobaan yang dilakukan adalah:
1. Melekatkan benda kerj a pada balok kayu.
2. Balok kayu yang telah dilekati benda kerja diberi pemberat.
3. Menimbang massa M1 (balok kayu, pemberat, benda kerja).
4. Menimbang massa pemberat M2.
5. Menghubungkan Ml dan M2 dengan tali seperti pada gambar 2.22.
6. Mengukurjarakx.
7. Melepas M2 dan mencatat waktu yang dibutuhkan Ml untuk menempuh jarak x

55
8. Mengisi tabel 2.7.
9. Mengganti beban M2 dan mengisi tabel 2.7.
10. Mengulang langkah 7, 8, 9 sampai tabel terisi semua.
Tabel 2.7. Percobaan Koefisien Gesek
Ml= kg
Percobaan
1
2
3
4
5
Ml
(kg)
Wl
(N)
M2
(kg)
W2
(N)
t
(s)
a
(m/s2)
V
(m/s)
Tabel 2.7. dapat diisi dengan menganalisa diagram bodi bebas pada gambar
2.25. berikut ini.
Gambar 2.23. Diagram Bodi Bebas Percobaan
Koefisien Gesekan

57
Dengan demikian tabel 2.7. dapat diisi secara lengkap, kemudian dibuat
regresi liniernya seperti persamaan (2.76) dengan sumbu y adalah p dan sumbu x
adalah v, sehingga nilai A dan B dapat ditemukan. Jika kecepatan putaran rol adalah N
rpm, maka:




















