
ANALISA MEKANISME SWING REDUCER PADA ...
25
ANALISA MEKANISME SWING REDUCER PADA EXCAVATOR EXCAVA 200 (Studi Kasus: PT.PINDAD BANDUNG) Disusun sebagai salah satu syarat menyelesaikan Program Studi Sastra I pada Jurusan Teknik Mesin Fakultas Teknik Oleh: FATHUR ROHMAN D200150184 PROGRAM STUDI TEKNIK MESIN FAKULTAS TEKNIK UNIVERSITAS MUHAMMADIYAH SURAKARTA 2020
-
Upload
khangminh22 -
Category
Documents
-
view
7 -
download
0
Transcript of ANALISA MEKANISME SWING REDUCER PADA ...

ANALISA MEKANISME SWING REDUCER PADA
EXCAVATOR EXCAVA 200
(Studi Kasus: PT.PINDAD BANDUNG)
Disusun sebagai salah satu syarat menyelesaikan Program Studi Sastra I pada
Jurusan Teknik Mesin Fakultas Teknik
Oleh:
FATHUR ROHMAN
D200150184
PROGRAM STUDI TEKNIK MESIN
FAKULTAS TEKNIK
UNIVERSITAS MUHAMMADIYAH SURAKARTA
2020


1
ANALISA MEKANISME SWING REDUCER PADA
EXCAVATOR EXCAVA 200
ABSTRAK
Swing reducer merupakan komponen yang menggunakan sistem planetary gear,
dimana planetary gear akan menghasilkan torsi yang besar namun putaran yang
kecil. Analisa ini bertujuan untuk mengetahui mekanisme dari komponen pada
swing reducer, mengetahui hubungan antara gear ratio dengan torque pada
planetary gear swing reducer dan berapa speed ratio planetary gear single pinion
type pada swing reducer. Hasil analisa perhitungan planetary gear pada swing
reducer seperti nilai gear ratio pada susunan roda gigi tingkat pertama sebesar 3,16
dan pada susunan roda gigi tingkat kedua sebesar 3 dengan hasil perhitungan input
torque sebesar 447,23 Nm maka didapatkan hasil perhitungan output torque pada
susunan roda gigi tingkat pertama sebesar 1413,25 Nm dan pada susunan roda gigi
tingkat kedua sebesar 1341,69 Nm. Nilai speed ratio dari single pinion type pada
susunan roda gigi tingkat pertama sebesar 633,3 rpm dan pada susunan roda gigi
tingkat kedua sebesar 666,7 rpm.
Kata Kunci : Swing Reducer, Planetary gear, dan Speed Ratio.
ABSTRACT
Swing reducer is a component that uses a planetary gear system, where planetary
gear will produce large torque but a small rotation. This analysis aims to determine
the mechanism of the components in the swing reducer, determine the relationship
between the gear ratio with the torque on the planetary gear swing reducer and what
is the speed ratio of the single pinion type planetary gear on the swing reducer. The
results of the analysis of planetary gear calculations on the swing reducer such as
the value of the gear ratio in the arrangement of the first level gear is 3,16 and in
the second level gear arrangement is 3 with the results of the calculation of the
input torque of 447,23 Nm the results obtained by calculating the output of the
torque on the level of gear arrangement first amounted to 1413.25 Nm and in the
second level gear arrangement of 1341.69 Nm. The speed ratio value of the single
pinion type in the first level gear arrangement is 633.3 rpm and the second level
gear arrangement is 666.7 rpm.
Keywords : Swing Reducer, Planetary gear, and Speed Ratio

2
1. PENDAHULUAN
1.1 Latar Belakang
Alat berat merupakan salah satu alat yang sangat dibutuhkan untuk mempercepat suatu
pekerjaan. Alat berat biasanya digunakan dalam industri konstruksi, pertambangan,
pertanian dan kehutanan. Salah satu unit alat berat yaitu excavator. Excavator yaitu unit
alat berat yang paling sering digunakan karena mempunyai fleksibilitas yang tinggi. Fungsi
dari excavator yaitu untuk menggali tanah (digging), memuat material ke dump truck
(loading), mengangkat material (lifting), mengikis tebing (scrapping), memecah batu
(breaker) dan meratakan (grading). Excavator sendiri mempunyai 2 tipe roda yatiu crawler
excavator (roda dari rantai besi) digunakan untuk memudahkan berjalan di jalanan yang
tidak padat atau mendaki dan wheel excavator (roda dari ban biasa) digunakan untuk
jalanan padat dan rata.
Dilihat dari strukturnya, excavator terdiri dari tiga bagian, yaitu : upperstructure,
attachment, dan undercarriage. Upperstructure merupakan tempat dudukan dari
attachment pada excavator, sehingga fungsi dari attachment sangat dipengaruhi oleh
kondisi dan gerakan dari upperstructure dimana upperstructure dapat melakukan gerakan
berputar pada (swing) sebesar 360°.
Pergerakan swing pada unit tidak lepas dari swing system dari excavator yang
menggunakan swing device. Swing device pada excavator adalah komponen yang berguna
untuk menggerakan upperstructur pada unit untuk berputar sebesar 360°. Supaya swing
device dapat memutar upperstructur dari excavator dengan mengurangi putaran dari swing
motor namun meningkatkan torsi, maka dari itu penulis mengambil judul untuk tugas akhir
“Analisa Mekanisme Swing Reducer Pada Excavator Excava 200 PT. Pindad.
1.2 Tujuan Penelitian
Adapun tujuan dari penulisan laporan tugas akhir ini adalah :
1. Mengetahui mekanisme dari swing reducer pada excavator excava 200 PT. Pindad.
2. Mengetahui hubungan antara gear ratio dengan torque pada planetary gear swing
reducer excavator excava 200 PT. Pindad.
3. Mengetahui berapa speed ratio planetary gear single pinion type pada swing reducer
excavator excava 200 PT. Pindad.
3
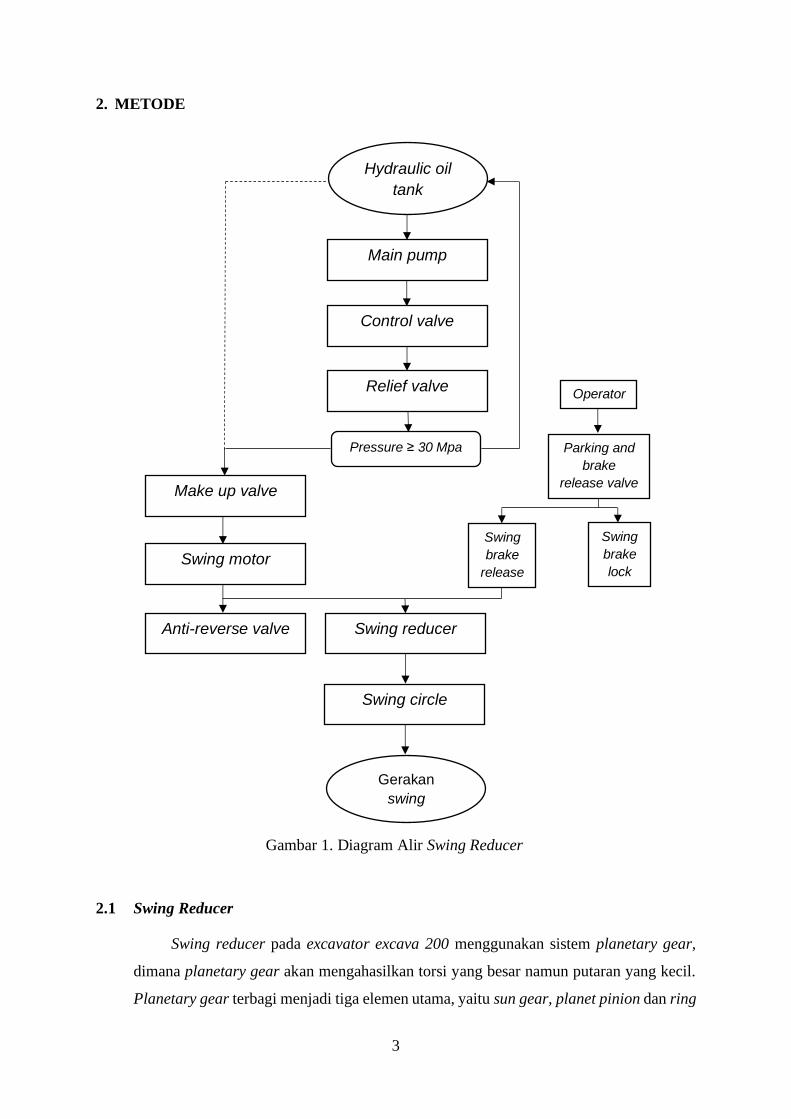
2. METODE
Gambar 1. Diagram Alir Swing Reducer
2.1 Swing Reducer
Swing reducer pada excavator excava 200 menggunakan sistem planetary gear,
dimana planetary gear akan mengahasilkan torsi yang besar namun putaran yang kecil.
Planetary gear terbagi menjadi tiga elemen utama, yaitu sun gear, planet pinion dan ring
Make up valve
Swing motor
Anti-reverse valve Swing reducer
Swing circle
Gerakan
swing
Hydraulic oil
tank
Main pump
Control valve
Relief valve
Pressure ≥ 30 Mpa
Swing
brake
release
Swing
brake
lock
Parking and
brake
release valve
Operator
4
gear. Apabila mencoba untuk memutarkan dua elemen dari ketiganya atau satu diputar
sedangkan satu lagi ditahan maka akan menghasilkan putaran yang bervariasi pada
elemen output-nya, lebih cepat atau lebih lambat.
Speed ratio dari gear penggerak dengan gear yang digerakkan adalah tergantung
jumlah gigi dari masung-masing gear. Kebanyakan pemakaian dari planetary gear
system terdapat pada sistem yang membutuhkan torsi yang besar dimana untuk torsi dan
putarannya dapat diubah bervariasi dalam berbagai tingkatan pada planetary gear system.
Macam-macam planetary gear system :
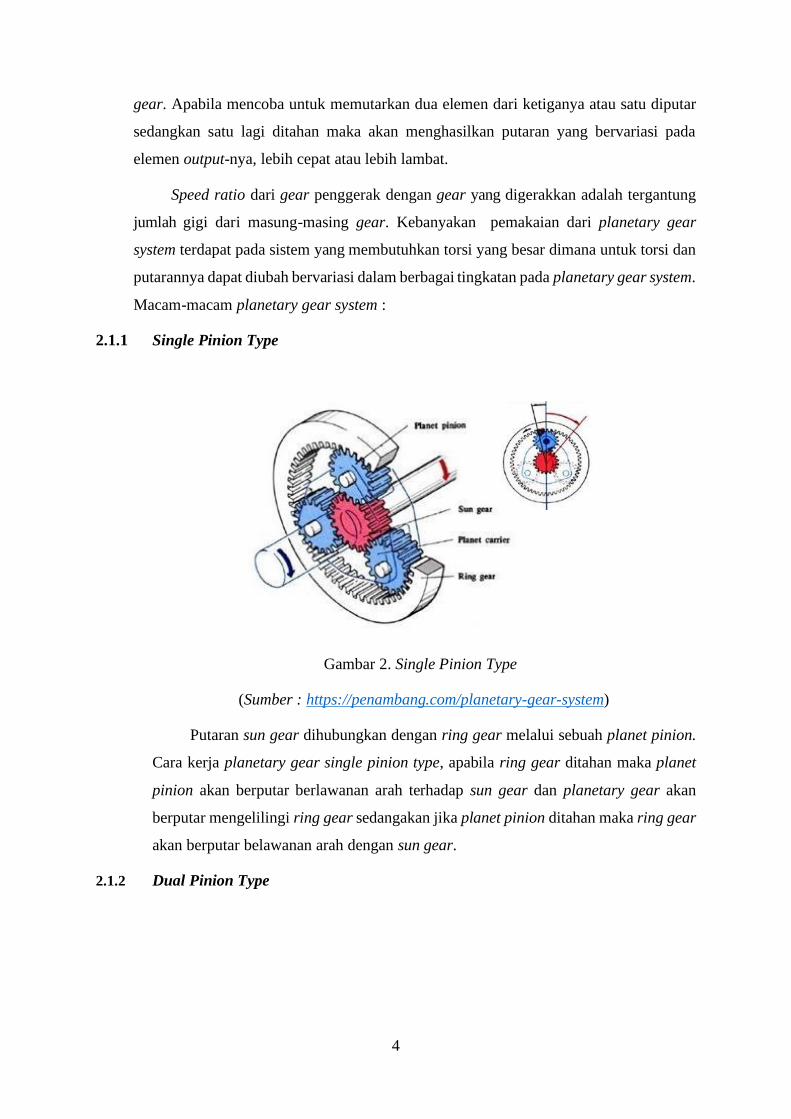
2.1.1 Single Pinion Type
Gambar 2. Single Pinion Type
(Sumber : https://penambang.com/planetary-gear-system)
Putaran sun gear dihubungkan dengan ring gear melalui sebuah planet pinion.
Cara kerja planetary gear single pinion type, apabila ring gear ditahan maka planet
pinion akan berputar berlawanan arah terhadap sun gear dan planetary gear akan
berputar mengelilingi ring gear sedangakan jika planet pinion ditahan maka ring gear
akan berputar belawanan arah dengan sun gear.
2.1.2 Dual Pinion Type

5
Gambar 3. Dual Pinion Type
(Sumber : https://penambang.com/planetary-gear-system)
Pada gambar menunjukkan dual pinion type, yang mempunyai 3 pasang pinion
(6 Buah). Pada sistem ini apabila ring gear yang ditahan maka planet pinion akan
berlawan dengan sun gear. Aplikasi dari planetary gear ini digunakan untuk gerak
mundur (reverse), yaitu sun gear sebagai input putaran berputar kekanan, planet
pinion akan berputar kekiri apabila ring gear ditahan, sedangkan jika planet pinion
ditahan maka ring gear akan berputar searah dengan sun gear.
2.1.3 Planetary Gear pada Swing Reducer
Excavator Excava 200 menggunakan 2 buah single pinion type yang disusun
bertingkat. Sun gear tingkat pertama yang berhubungan dengan output shaft dari
hydraulic motor (swing motor) akan menggerakan planet pinion yang berjumlah 3
dimana pada masing- masing planet pinion bersatu dengan carrier-nya, pada carrier
tingkat pertama terdapat gear yang bersinggungan dengan sun gear kedua, sehingga
putaran yang sudah direduksi pada tingkat pertama akan diteruskan menuju sun gear
tingkat kedua, pada tingkat ini putaran yang direduksi ditingkat pertama mengalami
reduksi kembali. Carrier pada planet pinion tingkat kedua ini berhubungan dengan
output shaft dari swing device dan ring gear yang ditahan (housing swing reducer).
Putaran yang telah direduksi pada tingkat pertama dan tingkat kedua kemudian
diteruskan oleh output shaft pada swing device yang terdapat pada main gear.

6
Gambar 4. Sketsa Swing Reduction Gear pada Swing Device
(Sumber : https://docplayer.info/53816577-Analisa-mekanisme-swing-device-pada-
excavator-keihatsu-921-c.html)
3. HASIL DAN PEMBAHASAN
3.1 Spesifikasi Poros dan Roda Gigi Planetary Gear
➢ Bahan poros :
Bahan poros = S55C − D
Kekuatan tarik (𝜎𝑏) = 72 𝑘𝑔/𝑚𝑚2
𝑆𝑓1 = 6.0
𝑆𝑓2 = 2.3
➢ Bahan pasak :
Bahan pasak = S55C − D
Kekuatan tarik (𝜎𝑏) = 72 𝑘𝑔/𝑚𝑚2
𝑆𝑓1 = 6.0
𝑆𝑓2 = 2.3
➢ Daya = 170.31 𝐻𝑃
= 127 𝑘𝑊
➢ Jumlah putaran input (𝑁𝐴) = 2000 𝑟𝑝𝑚
➢ Susunan roda gigi tingkat pertama :
Roda gigi sun gear (𝑍𝑍) = 19 gigi
Main gear
Shaft

7
Roda gigi planet pinion (𝑍𝑃) = 22 gigi
Roda gigi ring gear (𝑍𝐻) = 60 gigi
Diameter sun gear (𝑑𝑍) = 85 𝑚𝑚
Diameter planet pinion (𝑑𝑃) = 105 𝑚𝑚
Diameter ring gear (𝑑𝐻) = 370 𝑚𝑚
➢ Susunan roda gigi tingkat kedua :
Roda gigi sun gear (𝑍𝑍) = 20 gigi
Roda gigi planet pinion (𝑍𝑃) = 21 gigi
Roda gigi ring gear (𝑍𝐻) = 60 gigi
Diameter sun gear (𝑑𝑍) = 100 𝑚𝑚
Diameter planet pinion (𝑑𝑃) = 95 𝑚𝑚
Diameter ring gear (𝑑𝐻) = 380 𝑚𝑚
3.2 Poros
3.2.1 Perhitungan Poros
a) Daya rencana (𝑃𝑑)
𝑃𝑑 = 𝐹𝑐 × 𝑃 ........................................................................................................1
𝑃𝑑 = 1.5 × 127 = 190.5 𝑘𝑊
b) Momen puntir pada poros (𝑇)
𝑇 = 9,74 × 105 𝑃𝑑
𝑛1 ..............................................................................................2
𝑇 = 9,74 × 105 190.5
2000= 92773.5 𝑘𝑔𝑚𝑚
c) Tegangan geser pada poros yang diizinkan (𝜏𝑎)
𝜏𝑎 =𝜎𝑏
𝑆𝑓1×𝑆𝑓2 .........................................................................................................3
𝜏𝑎 =𝜎𝑏
𝑆𝑓1×𝑆𝑓2=
72
6.0 × 2.3= 5.2
𝑘𝑔𝑚𝑚2⁄
d) Diameter poros (𝑑𝑠)
𝑑𝑠 = (5.1
𝜏𝑎× 𝑘𝑡 × 𝑐𝑏 × 𝑇)
1
3 ...................................................................................4
𝑑𝑠 = (5.1
5.2× 1.5 × 2.0 × 92773.5)
1
3 = 64.9 𝑚𝑚
𝑑𝑠 diambil = 65 𝑚𝑚
1 Rumus pada bab III footnote 1 2 Rumus pada bab III footnote 2 3 Rumus pada bab III footnote 3 4 Rumus pada bab III footnote 4

8
e) Tegangan geser pada poros (𝜏)
𝜏 =5.1× 𝑇
𝑑𝑠3 .............................................................................................................5
𝜏 =5.1 × 𝑇
𝑑𝑠3=
5.1 × 92773.5
(65)3 = 1.72 𝑘𝑔
𝑚𝑚2⁄
𝜏𝑎 = 5.2 𝑘𝑔
𝑚𝑚2⁄ ≥ 𝜏 = 1.72 𝑘𝑔
𝑚𝑚2⁄ → 𝑝𝑜𝑟𝑜𝑠 𝑎𝑚𝑎𝑛
Syarat keamanannya adalah jika 𝜏𝑎 ≥ 𝜏 maka poros aman.
f) Gaya tangensial pada permukaan poros (𝐹)
𝐹 =𝑇
𝑑𝑠/2 ..............................................................................................................6
𝐹 =𝑇
𝑑𝑠/2=
92773.5
65/2= 2854.6 𝑘𝑔
g) Tegangan geser pada pasak yang diizinkan (𝜏𝑘𝑎)
𝜏𝑘𝑎 =𝜎𝑏
𝑆𝑓1×𝑆𝑓2 .......................................................................................................7
𝜏𝑘𝑎 =𝜎𝑏
𝑆𝑓𝑘1× 𝑆𝑓𝑘2=
72
6.0 ×2.3= 5.2
𝑘𝑔𝑚𝑚2⁄
h) Panjang pasak
Didapatkan dari persamaan tegangan geser 𝜏𝑘 =𝐹
𝑏×𝑙 .........................................8
𝜏𝑘 =𝐹
𝑏×𝑙=
2854.6
19.5 × 𝑙≤ 5.2
𝑘𝑔𝑚𝑚2⁄
(𝑑𝑠 = 65 𝑚𝑚 × 0.9 𝑚𝑚 = 58.5 𝑚𝑚)
𝑙 = 58.5 𝑚𝑚
i) Tegangan geser pada pasak (𝜏𝑘)
𝜏𝑘 =𝐹
𝑏×𝑙 ..............................................................................................................9
𝜏𝑘 =𝐹
𝑏 × 𝑙=
2854.6
19.5 × 58.5=
2854.6
1140.75= 2.5
𝑘𝑔𝑚𝑚2⁄
𝜏𝑘𝑎 = 5.2 𝑘𝑔
𝑚𝑚2⁄ ≥ 𝜏𝑘 = 2.5 𝑘𝑔
𝑚𝑚2⁄ → 𝑝𝑎𝑠𝑎𝑘 𝑎𝑚𝑎𝑛
j) Tekanan permukaan (𝑝)
𝑝 =𝐹
𝑙 × (𝑡1 𝑎𝑡𝑎𝑢 𝑡2) ................................................................................................10
𝑝 =𝐹
𝑙 × (𝑡1 𝑎𝑡𝑎𝑢 𝑡2)=
2854.6
58.5 ×6= 8.13
𝑘𝑔𝑚𝑚2⁄
5 Rumus pada bab III footnote 5 6 Rumus pada bab III footnote 6 7 Rumus pada bab III footnote 7 8 Rumus pada bab III footnote 8 9 Rumus pada bab III footnote 9 10 Rumus pada bab III footnote 10

9
k) Tekanan permukaan yang di izinkan (𝑝𝑎)
Dikarenakan (𝑑𝑠) merupakan diameter besar, maka 𝑝𝑎 = 10 𝑘𝑔
𝑚𝑚2⁄
𝑝𝑎 ≥ 𝑝 =𝐹
𝑙 × (𝑡1 𝑎𝑡𝑎𝑢 𝑡2) ......................................................................................11
𝑝𝑎 = 10 𝑘𝑔
𝑚𝑚2⁄ ≥ 𝑝 = 8,13 𝑘𝑔
𝑚𝑚2⁄ → 𝑝𝑎𝑠𝑎𝑘 𝑎𝑚𝑎𝑛
3.3 Planetary Gear
3.3.1 Hubungan Antara Gear Ratio Terhadap Torque
a) Gear Ratio (𝑹𝒎)
𝑅𝑚 =Jumlah gear output
Jumlah gear input .......................................................................................12
➢ Planetary gear satu :
𝑅𝑚 =Jumlah gear output
Jumlah gear input=
60
19= 3.16
b) Input Torque (𝑻)
𝑇𝐴 =5252 × 𝑝
𝑁𝐴 ......................................................................................................13
𝑇𝐴 =(5252 × 170.31)
2000=
894468.12
2000= 447.23 𝑁𝑚
c) Output Torque
𝑇 = 𝑅𝑚 × 𝑇𝐴 ....................................................................................................14
➢ Planetary gear satu :
𝑇 = 𝑅𝑚 × 𝑇𝐴 = 3.16 𝑥 447.23 = 1413.25 𝑁𝑚
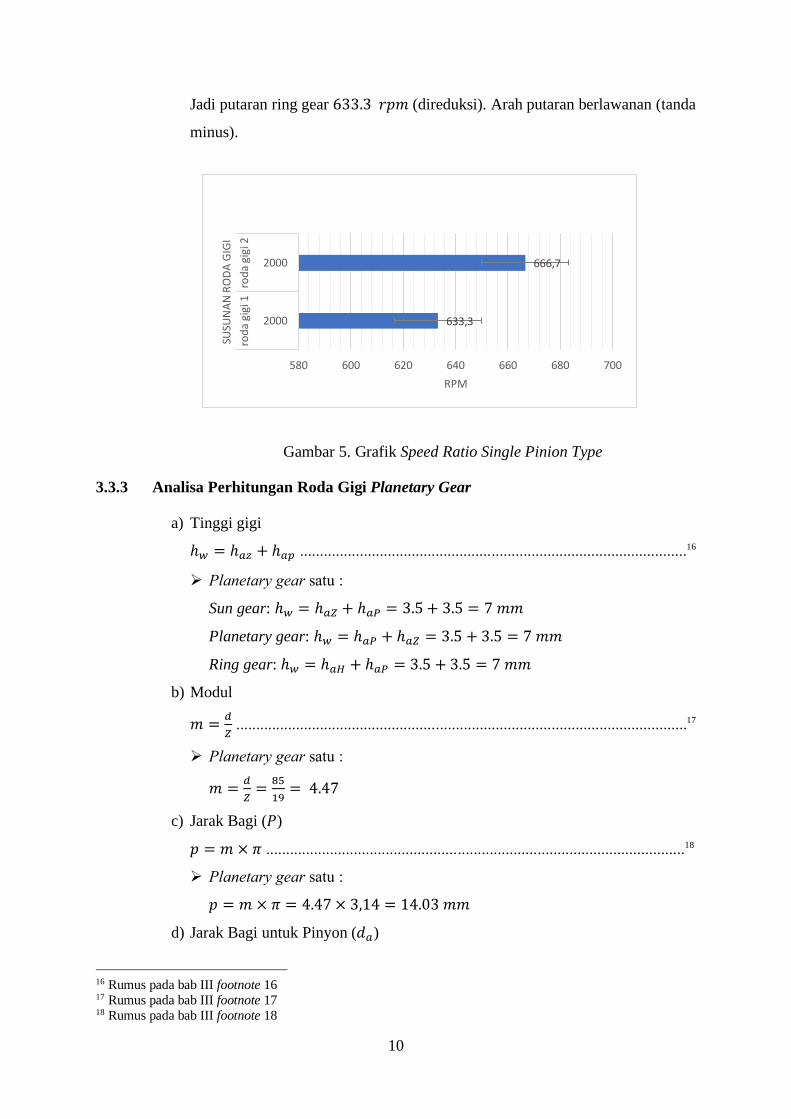
3.3.2 Speed Ratio Single Pinion Type
S. Ns + R. Nr = ( S + R ) Nc ……....................................................................15
➢ Planetary gear satu :
S. Ns + R. Nr = ( S + R ) Nc
19 𝑥 2000 + 60. 𝑁𝑟 = ( 19 + 60 ). 0
60𝑁𝑟 = −38000
𝑁𝑟 = −633.3 𝑟𝑝𝑚
11 Rumus pada bab III footnote 11 12 Rumus pada bab III footnote 12 13 Rumus pada bab III footnote 13 14 Rumus pada bab III footnote 14 15 Rumus pada bab III footnote 15
10
Jadi putaran ring gear 633.3 𝑟𝑝𝑚 (direduksi). Arah putaran berlawanan (tanda
minus).
Gambar 5. Grafik Speed Ratio Single Pinion Type
3.3.3 Analisa Perhitungan Roda Gigi Planetary Gear
a) Tinggi gigi
ℎ𝑤 = ℎ𝑎𝑧 + ℎ𝑎𝑝 .................................................................................................16
➢ Planetary gear satu :
Sun gear: ℎ𝑤 = ℎ𝑎𝑍 + ℎ𝑎𝑃 = 3.5 + 3.5 = 7 𝑚𝑚
Planetary gear: ℎ𝑤 = ℎ𝑎𝑃 + ℎ𝑎𝑍 = 3.5 + 3.5 = 7 𝑚𝑚
Ring gear: ℎ𝑤 = ℎ𝑎𝐻 + ℎ𝑎𝑃 = 3.5 + 3.5 = 7 𝑚𝑚
b) Modul
𝑚 =𝑑
𝑍 .................................................................................................................17
➢ Planetary gear satu :
𝑚 =𝑑
𝑍=
85
19= 4.47
c) Jarak Bagi (𝑃)
𝑝 = 𝑚 × 𝜋 .........................................................................................................18
➢ Planetary gear satu :
𝑝 = 𝑚 × 𝜋 = 4.47 × 3,14 = 14.03 𝑚𝑚
d) Jarak Bagi untuk Pinyon (𝑑𝑎)
16 Rumus pada bab III footnote 16 17 Rumus pada bab III footnote 17 18 Rumus pada bab III footnote 18
633,3
666,7
580 600 620 640 660 680 700
2000
2000
rod
a gi
gi 1
rod
a gi
gi 2
RPM
SUSU
NA
N R
OD
A G
IGI

11
𝑑𝑎 = 𝑧 × 𝑚 .......................................................................................................19
➢ Planetary gear satu :
𝑑𝑎 = 𝑧 × 𝑚 = 19 × 4.47 = 84.93 𝑚𝑚
e) Jarak sumbu roda gigi (𝑎)
𝑎 = 𝑚 ×(𝑧𝑍+𝑧𝑃)
2 .................................................................................................20
➢ Planetary gear satu :
𝑎 = 𝑚 ×(𝑍𝑍+𝑍𝑃)
2= 4.47 ×
(19+22)
2= 91.63 𝑚𝑚
f) Jari-jari cagak (𝑟𝑠)
𝑟𝑆 = 𝑟𝑍 + 𝑟𝑃 .......................................................................................................21
➢ Planetary gear satu :
𝑟𝑠 = 𝑟𝑍 + 𝑟𝑃 = 42.5 + 52.5 = 95 𝑚𝑚
g) Perbandingan Transmisi (𝑖)
𝑖 =𝑍𝑍 + 𝑍𝐻
𝑍𝑍 ...........................................................................................................22
➢ Planetary gear satu :
𝑖 =𝑍𝑍 + 𝑍𝐻
𝑍𝑍=
19 +60
60= 1.32
h) Jumlah sumbu sun gear (𝑖𝑜𝑧)
𝑖𝑜𝑍 =𝑧𝐻
𝑧𝑍 .............................................................................................................23
➢ Planetary gear satu :
𝑖𝑜𝑍 =𝑧𝐻
𝑧𝑍=
60
19= 3.16
i) Jumlah sumbu ring gear (𝑖𝑜𝐻)
𝑖𝑜𝐻 =1
𝑖𝑜𝑍 ............................................................................................................24
➢ Planetary gear satu :
𝑖𝑜𝐻 =1
𝑖𝑜𝑍=
1
3.16= 0.32
j) Perbandingan sun gear dengan cagak (𝑖𝑍𝑆)
𝑖𝑍𝑆 = 1 − 𝑖𝑜𝑍 .....................................................................................................25
19 Rumus pada bab III footnote 19 20 Rumus pada bab III footnote 20 21 Rumus pada bab III footnote 21 22 Rumus pada bab III footnote 22 23 Rumus pada bab III footnote 23 24 Rumus pada bab III footnote 24 25 Rumus pada bab III footnote 25
12
➢ Planetary gear satu :
𝑖𝑍𝑆 = 1 − 𝑖𝑜𝑍 = 1 − 3.16 = −2.16
k) Kecepatan sudut terhadap sun gear (𝜔𝑍)
𝑣𝑍 = 𝑛2×𝜋×𝑟𝑍
60 ....................................................................................................26
𝜔𝑍 =𝑣𝑍
𝑟𝑍 ..............................................................................................................27
➢ Planetary gear satu :
𝑣𝑍 = 𝑛2×𝜋×𝑟𝑍
60= 2000
2×3,14×42.5
60= 8896.7 𝑚𝑚
𝑠⁄
𝜔𝑍 =𝑣𝑍
𝑟𝑍=
8896.7
42.5= 209.3 𝑟𝑎𝑑
𝑠⁄
l) Kecepatan sudut cagak (𝜔𝑆)
𝜔𝑆 =𝑣𝑆
𝑟𝑆 ..............................................................................................................28
𝑣𝑠 =𝑣𝑍
2 ...............................................................................................................29
➢ Planetary gear satu :
𝑣𝑠 =𝑣𝑍
2=
8896.7
2 = 4448.35 𝑚𝑚
𝑠⁄
𝜔𝑠 =𝑣𝑆
𝑟𝑆=
4448.35
95= 46.82 𝑟𝑎𝑑
𝑠⁄
m) Kecepatan sudut ring gear (𝜔𝐻)
𝜔𝐻 = 0 ..............................................................................................................30
➢ Planetary gear satu :
𝜔𝐻 = 0
n) Kecepatan sudut planet pinion terhadap cagak (𝜔𝑃𝑆)
𝜔𝑃𝑆 =𝜔𝑆×𝑟𝐻
𝑟𝑃 .....................................................................................................31
➢ Planetary gear satu :
𝜔𝑃𝑆 =𝜔𝑆×𝑟𝐻
𝑟𝑃=
46.82 ×185
52.5= 164.98 𝑟𝑎𝑑
𝑠⁄
o) Kecepatan gelinding planet pinion terhadap ring gear (𝑣𝑃𝐻)
𝑣𝑃𝐻 = 𝜔𝑆 × 𝑟𝐻 ..................................................................................................32
26 Rumus pada bab III footnote 26 27 Rumus pada bab III footnote 27 28 Rumus pada bab III footnote 28 29 Rumus pada bab III footnote 29 30 Rumus pada bab III footnote 30 31 Rumus pada bab III footnote 30 32 Rumus pada bab III footnote 31

13
➢ Planetary gear satu :
𝑣𝑃𝐻 = 𝜔𝑆 × 𝑟𝐻 = 46.82 × 185 = 8661.7 𝑚𝑚𝑠⁄
p) Kecepatan gelinding planet pinion terhadap sun gear (𝑣𝑃𝑍)
𝑣𝑃𝑍 = 𝑟𝑍(𝜔𝑍 − 𝜔𝑆) ...........................................................................................33
➢ Planetary gear satu :
𝑣𝑃𝑍 = 𝑟𝑍(𝜔𝑍 − 𝜔𝑆) = 42.5(209.3 − 46.82) = 6905.4 𝑚𝑚𝑠⁄
q) Kecepatan kopling (𝑣𝐾)
𝑣𝐾 = 𝜔𝑆 × 𝑟𝑍 .....................................................................................................34
➢ Planetary gear satu :
𝑣𝐾 = 𝜔𝑆 × 𝑟𝑍 = 46.82 × 42.5 = 1989.85 𝑚𝑚𝑠⁄
r) Momen sun gear (𝑇𝑍)
𝑇𝑍 =−𝑇𝐻
𝑖𝑂𝑍=
𝑇𝑆
(𝑖𝑂𝑍−1) ............................................................................................35
Karena data – 𝑇𝐻 dan 𝑇𝑆 belum diketahui, maka 𝑇𝑍 di cari menggunakan rumus
keseimbangan momen.
𝑇𝑆
(𝑟𝑍+𝑟𝑃)=
−2𝑇𝑍
𝑟𝑍 ....................................................................................................36
➢ Planetary gear satu :
𝑇𝑆
(𝑟𝑍+𝑟𝑃) =
−2𝑇𝑍
𝑟𝑍
𝑇𝑍(𝑖𝑂𝑍−1)
(𝑟𝑍+𝑟𝑃) =
−2𝑇𝑍
42.5
𝑇𝑍(3.16−1)
(42.5 +52.5) =
−2𝑇𝑍
42.5
𝑇𝑍(2.16)
(95) =
−2𝑇𝑍
42.5
2.16𝑇𝑍
95+
2𝑇𝑍
42.5 = 0
42.5(2.16𝑇𝑍)+95(2𝑇𝑍)
4037.5 = 0
91.8𝑇𝑍 + 190𝑇𝑍 = 4037.5
281.8𝑇𝑍 = 4037.5
𝑇𝑍 =4037.5
281.8 = 14.327 𝑁𝑚𝑚
s) Momen ring gear (𝑇𝐻)
33 Rumus pada bab III footnote 32 34 Rumus pada bab III footnote 33 35 Rumus pada bab III footnote 34 36 Rumus pada bab III footnote 35

14
𝑇𝐻 = −𝑖𝑂𝑍 × 𝑇𝑍 .................................................................................................37
➢ Planetary gear satu :
𝑇𝐻 = −𝑖𝑂𝑍 × 𝑇𝑍 = (−3.16) × 14.327 = (−45.264) 𝑁𝑚𝑚
t) Momen cagak (𝑇𝑆)
𝑇𝑆 = 𝑇𝑍(𝑖𝑂𝑍 − 1) ...............................................................................................38
➢ Planetary gear satu :
𝑇𝑆 = 𝑇𝑍(𝑖𝑂𝑍 − 1) = 14.327 (3.16 − 1) = 30.946 𝑁𝑚𝑚
u) Gaya keliling pada sun gear (𝐹𝑡𝑧)
𝐹𝑡𝑧 =𝑇𝑍
𝑟𝑍 .............................................................................................................39
➢ Planetary gear satu :
𝐹𝑡𝑧 =𝑇𝑍
𝑟𝑍=
14.327
42.5= 0.337 𝑁
v) Gaya keliling pada ring gear (𝐹𝑡𝐻)
𝐹𝑡𝐻 =−𝑇𝐻
𝑟𝐻 ..........................................................................................................40
➢ Planetary gear satu :
𝐹𝑡𝐻 =−𝑇𝐻
𝑟𝐻=
−(−45.264)
52.5= 0.862 𝑁
w) Cagak (gaya bantalan planet) (𝐹𝑡𝑆)
𝐹𝑡𝑆 =𝑇𝑆
(𝑟𝑍+𝑟𝑃) ......................................................................................................41
➢ Planetary gear satu :
𝐹𝑡𝑆 =𝑇𝑆
(𝑟𝑍+𝑟𝑃)=
30.946
(42.5 + 52.5)= 0.326 𝑁
x) Daya gelinding pada kaitan sun gear terhadap planet pinion (𝑃𝑤𝑃𝑍)
𝑃𝑤𝑃𝑍 = 𝑣𝑃𝑍 × 𝐹𝑡𝑍 .............................................................................................42
➢ Planetary gear satu :
𝑃𝑤𝑝𝑍 = 𝑣𝑝𝑍 × 𝐹𝑡𝑍 = 6905.4 × 0.337 = 2327.12 𝑘𝑊
y) Daya kopling (𝑃𝐾)
𝑃𝐾 = 𝑣𝐾 × 𝐹𝑡𝑍 ...................................................................................................43
➢ Planetary gear satu :
37 Rumus pada bab III footnote 36 38 Rumus pada bab III footnote 37 39 Rumus pada bab III footnote 38 40 Rumus pada bab III footnote 39 41 Rumus pada bab III footnote 40 42 Rumus pada bab III footnote 41 43 Rumus pada bab III footnote 42

15
𝑃𝐾 = 𝑣𝐾 × 𝐹𝑡𝑍 = 1989.85 × 0.337 = 670.58 𝑘𝑊
z) Daya yang ditransmisikan dari sun gear kepada planet pinion(𝑃𝑍)
𝑃𝑍 = 𝑃𝑤𝑃𝑍 + 𝑃𝐾 ................................................................................................44
➢ Planetary gear satu :
𝑃𝑍 = 𝑃𝑤𝑝𝑧 + 𝑃𝐾 = 2327.12 + 670.58 = 2997.7 𝑘𝑊
aa) Daya gelinding pada kaitan planet pinion terhadap ring gear (𝑃𝑊𝑃𝐻)
𝑃𝑊𝑃𝐻 = 𝑣𝑃𝐻 × 𝐹𝑡𝐻 ...........................................................................................45
➢ Planetary gear satu :
𝑃𝑊𝑃𝐻 = 𝑣𝑃𝐻 × 𝐹𝑡𝐻 = 8661.7 × 0.862 = 7466.38 𝑘𝑊
bb) Daya rugi gigi (𝑃𝑉𝑍)
𝑃𝑉𝑍 =2,1𝜇𝑚(
1
𝑍𝑍+
2
𝑍𝑃+
1
𝑍𝐻)𝑃𝑍𝑖𝑂𝑍
(𝑖𝑂𝑍−1) ..............................................................................46
➢ Planetary gear satu :
𝑃𝑉𝑍 =2,1𝜇𝑚(
1
𝑍𝑍 +
2
𝑍𝑃 +
1
𝑍𝐻)𝑃𝑍𝑖𝑂𝑍
(𝑖𝑂𝑍−1)
𝑃𝑉𝑍 =2,1 × 0.1 × (
1
19 +
2
22 +
1
60) × 2997.7 × 3.16
(3.16 − 1)
𝑃𝑉𝑍 = 147.544 𝑘𝑊
cc) Efisiensi gigi
𝜂 = 1 −𝑃𝑉𝑍
𝑃𝑍 .......................................................................................................47
➢ Planetary gear satu :
𝜂 = 1 −𝑃𝑉𝑍
𝑃𝑍
𝜂 = 1 −147.544
2997.7
𝜂 = 0,951 𝑘𝑊
dd) Kondisi jumlah gigi
(𝑍𝑍−𝑍𝐻)
𝑝= 𝑏𝑖𝑙𝑎𝑛𝑔𝑎𝑛 𝑏𝑢𝑙𝑎𝑡 ...............................................................................48
➢ Planetary gear satu :
(𝑍𝑍−𝑍𝐻)
𝑝=
19 − 60
3= −13.7
44 Rumus pada bab III footnote 43 45 Rumus pada bab III footnote 44 46 Rumus pada bab III footnote 45 47 Rumus pada bab III footnote 46 48 Rumus pada bab III footnote 47

16
3.4 Pelumasan
Jenis pelumasan yang digunakan adalah oli Meditran SX Plus dengan tipe SAE
15W-40 dan diganti setiap 250 jam kerja.
Gambar 6. Spesifikasi Oli Meditran SX Plus
17
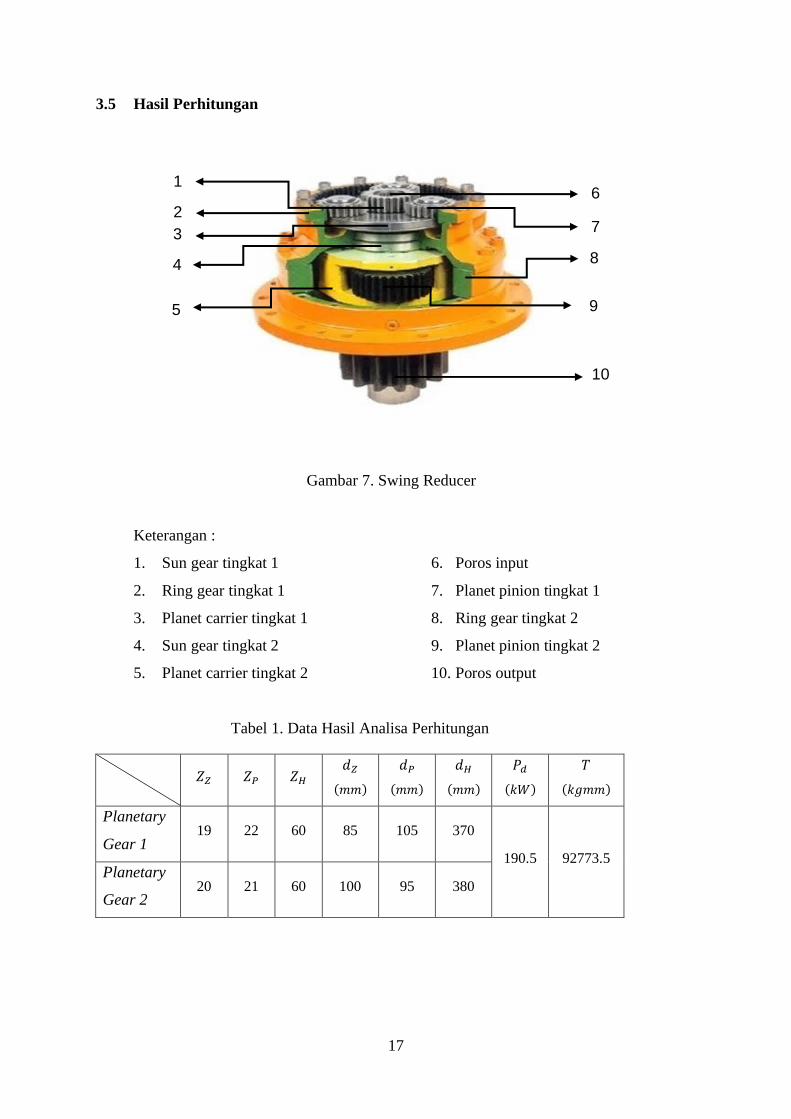
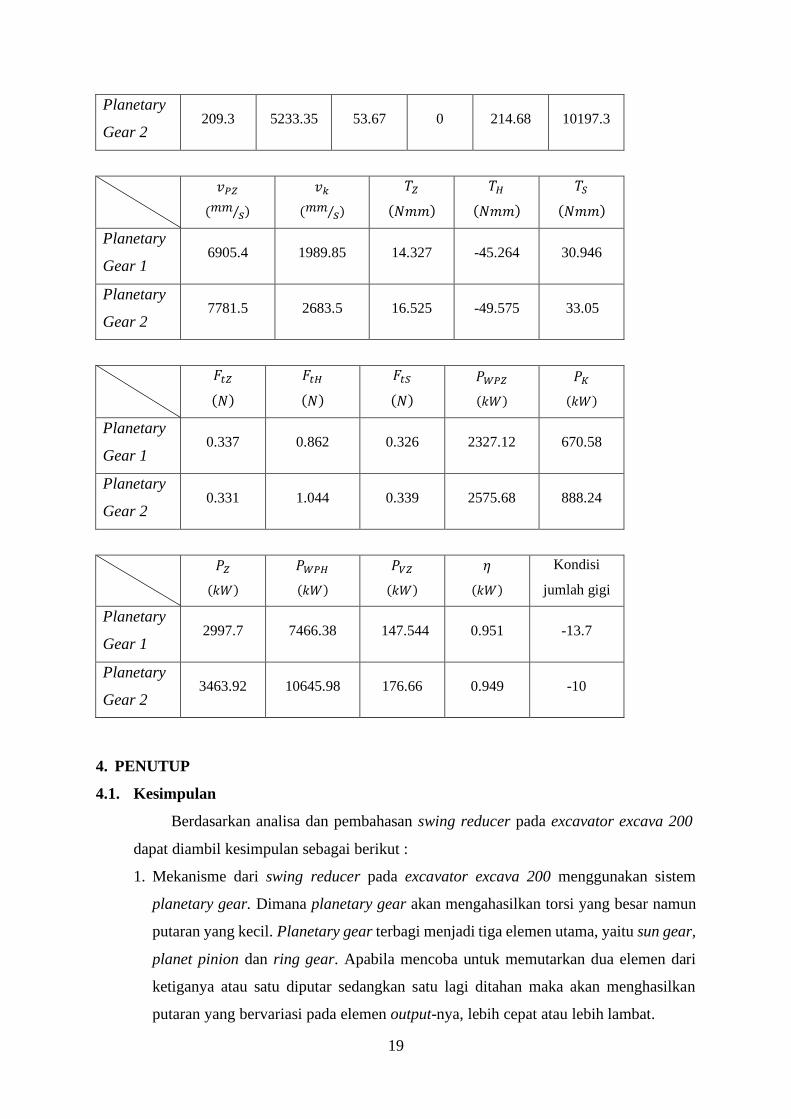
3.5 Hasil Perhitungan
Gambar 7. Swing Reducer
Keterangan :
1. Sun gear tingkat 1 6. Poros input
2. Ring gear tingkat 1 7. Planet pinion tingkat 1
3. Planet carrier tingkat 1 8. Ring gear tingkat 2
4. Sun gear tingkat 2 9. Planet pinion tingkat 2
5. Planet carrier tingkat 2 10. Poros output
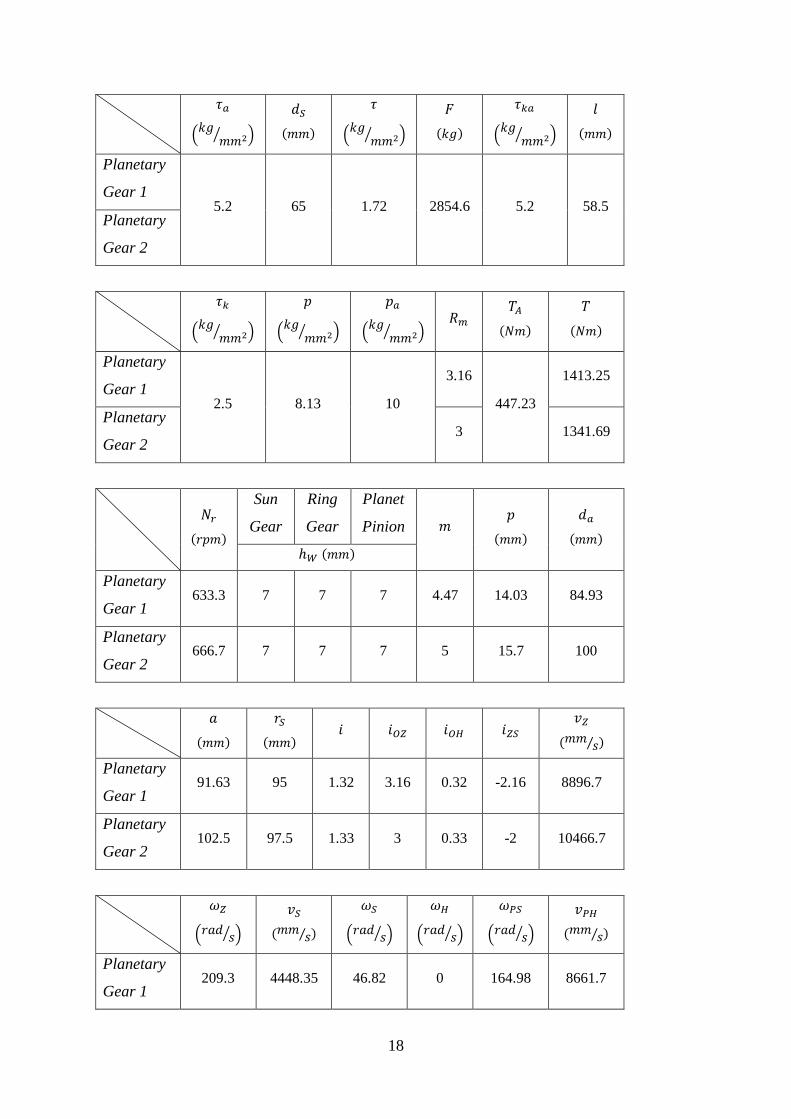
Tabel 1. Data Hasil Analisa Perhitungan
𝑍𝑍 𝑍𝑃 𝑍𝐻 𝑑𝑍
(𝑚𝑚)
𝑑𝑃
(𝑚𝑚)
𝑑𝐻
(𝑚𝑚)
𝑃𝑑
(𝑘𝑊)
𝑇
(𝑘𝑔𝑚𝑚)
Planetary
Gear 1 19 22 60 85 105 370
190.5 92773.5 Planetary
Gear 2 20 21 60 100 95 380
6
5
2
1
10
9
7 3
4 8
18
𝜏𝑎
(𝑘𝑔
𝑚𝑚2⁄ )
𝑑𝑆
(𝑚𝑚)
𝜏
(𝑘𝑔
𝑚𝑚2⁄ )
𝐹
(𝑘𝑔)
𝜏𝑘𝑎
(𝑘𝑔
𝑚𝑚2⁄ )
𝑙
(𝑚𝑚)
Planetary
Gear 1 5.2 65 1.72 2854.6 5.2 58.5
Planetary
Gear 2
𝜏𝑘
(𝑘𝑔
𝑚𝑚2⁄ )
𝑝
(𝑘𝑔
𝑚𝑚2⁄ )
𝑝𝑎
(𝑘𝑔
𝑚𝑚2⁄ ) 𝑅𝑚
𝑇𝐴
(𝑁𝑚)
𝑇
(𝑁𝑚)
Planetary
Gear 1 2.5 8.13 10
3.16
447.23
1413.25
Planetary
Gear 2 3 1341.69
𝑁𝑟
(𝑟𝑝𝑚)
Sun
Gear
Ring
Gear
Planet
Pinion 𝑚 𝑝
(𝑚𝑚)
𝑑𝑎
(𝑚𝑚) ℎ𝑊 (𝑚𝑚)
Planetary
Gear 1 633.3 7 7 7 4.47 14.03 84.93
Planetary
Gear 2 666.7 7 7 7 5 15.7 100
𝑎
(𝑚𝑚)
𝑟𝑆
(𝑚𝑚) 𝑖 𝑖𝑂𝑍 𝑖𝑂𝐻 𝑖𝑍𝑆
𝑣𝑍
(𝑚𝑚𝑠⁄ )
Planetary
Gear 1 91.63 95 1.32 3.16 0.32 -2.16 8896.7
Planetary
Gear 2 102.5 97.5 1.33 3 0.33 -2 10466.7
𝜔𝑍
(𝑟𝑎𝑑𝑠⁄ )
𝑣𝑆
(𝑚𝑚𝑠⁄ )
𝜔𝑆
(𝑟𝑎𝑑𝑠⁄ )
𝜔𝐻
(𝑟𝑎𝑑𝑠⁄ )
𝜔𝑃𝑆
(𝑟𝑎𝑑𝑠⁄ )
𝑣𝑃𝐻
(𝑚𝑚𝑠⁄ )
Planetary
Gear 1 209.3 4448.35 46.82 0 164.98 8661.7
19
Planetary
Gear 2 209.3 5233.35 53.67 0 214.68 10197.3
𝑣𝑃𝑍
(𝑚𝑚𝑠⁄ )
𝑣𝑘
(𝑚𝑚𝑠⁄ )
𝑇𝑍
(𝑁𝑚𝑚)
𝑇𝐻
(𝑁𝑚𝑚)
𝑇𝑆
(𝑁𝑚𝑚)
Planetary
Gear 1 6905.4 1989.85 14.327 -45.264 30.946
Planetary
Gear 2 7781.5 2683.5 16.525 -49.575 33.05
𝐹𝑡𝑍
(𝑁)
𝐹𝑡𝐻
(𝑁)
𝐹𝑡𝑆
(𝑁)
𝑃𝑊𝑃𝑍
(𝑘𝑊)
𝑃𝐾
(𝑘𝑊)
Planetary
Gear 1 0.337 0.862 0.326 2327.12 670.58
Planetary
Gear 2 0.331 1.044 0.339 2575.68 888.24
𝑃𝑍
(𝑘𝑊)
𝑃𝑊𝑃𝐻
(𝑘𝑊)
𝑃𝑉𝑍
(𝑘𝑊)
𝜂
(𝑘𝑊)
Kondisi
jumlah gigi
Planetary
Gear 1 2997.7 7466.38 147.544 0.951 -13.7
Planetary
Gear 2 3463.92 10645.98 176.66 0.949 -10
4. PENUTUP
4.1. Kesimpulan
Berdasarkan analisa dan pembahasan swing reducer pada excavator excava 200
dapat diambil kesimpulan sebagai berikut :
1. Mekanisme dari swing reducer pada excavator excava 200 menggunakan sistem
planetary gear. Dimana planetary gear akan mengahasilkan torsi yang besar namun
putaran yang kecil. Planetary gear terbagi menjadi tiga elemen utama, yaitu sun gear,
planet pinion dan ring gear. Apabila mencoba untuk memutarkan dua elemen dari
ketiganya atau satu diputar sedangkan satu lagi ditahan maka akan menghasilkan
putaran yang bervariasi pada elemen output-nya, lebih cepat atau lebih lambat.

20
2. Nilai gear ratio sangat mempengaruhi nilai output torque. Hasil perhitungan gear
ratio pada susunan roda gigi tingkat pertama sebesar 3.16 dan pada susunan roda gigi
tingkat kedua sebesar 3 dengan hasil perhitungan input torque sebesar 447,23 𝑁𝑚
maka didapatkan hasil perhitungan output torque pada susunan roda gigi tingkat
pertama sebesar 1413,25 𝑁𝑚 dan pada susunan roda gigi tingkat kedua sebesar
1341,69 𝑁𝑚. Jadi, semakin besar nilai gear ratio maka semakin basar pula nilai
output torque.
3. Nilai speed ratio berbeda antara single pinion type dengan double pinion type. Dengan
nilai putaran input sebesar 2000 𝑟𝑝𝑚 didapatkan nilai speed ratio dari single pinion
type pada susunan roda gigi tingkat pertama sebesar 633,3 𝑟𝑝𝑚 dan pada susunan
roda gigi tingkat kedua sebesar 666,7 𝑟𝑝𝑚.
4.2. Saran
1. Sebelum melakukan analisa perhitungan, pastikan data yang dimiliki lengkap dan
sesuai.
2. Sebelum menghitung gaya-gaya pada swing reducer dibutuhkan ketelitian untuk
memahami komponen-komponennya.
3. Sebaiknya setiap komponen yang bersangkutan di foto terlebih dahulu untuk
dokumentasi.
PERSANTUNAN
Terima kasih kepada Bapak Wijianto, S.T.,M.Eng.Sc. selaku dosen pembimbing naskah
publikasi atas bimbingannya dalam penyelesaian naskah publikasi ini.
DAFTAR PUSTAKA
Niemann, G dan H Winter. 1992. Elemen Mesin Jilid 2. Jakarta:Erlangga.
Sularso dan Kiyokatsu Suga. 1997. Dasar Perencanaan dan Pemilihan Elemen Mesin.
Jakarta:PT. Pradnya Paramita.
Sulaeman, ade. 2018. “Ridwan Kamil Pesan Mesin Bikinan Pindad untuk Keruk Sampah di
Citarium”, https://intisari.grid.id, diakses pada tanggal 11 Oktober 2019 pukul 06:30
Penambang. 2014. “Planetary Gear System”, https://penambang.com/planetary-gear-system,
diakses pada tanggal 11 Oktober 2019 pukul 06:39
Hanif, Mahfuddin. 2017. “Analisa Swing Device Pada Excavator Keihatsu 921 C”,
https://docplayer.info/53816577-Analisa-mekanisme-swing-device-pada-excavator-
21
keihatsu-921-c.html, diakses pada tanggal 11 Oktober 2019 pukul 06:50
Hanif, Mahfuddin. 2017. “Analisa Swing Device Pada Excavator Keihatsu 921 C”,
https://docplayer.info/mahfuddin-hanif-Analisa-mekanisme-swing-device-pada-
excavator-keihatsu-921-c.html, diakses pada tanggal 11 Oktober 2019 pukul 07:15
Holding. 2016. “Prinsip Kerja Motor Hidrolik Beserta Macam-macamnya”, https://artikel-
teknologi.com/prinsip-kerja-motor-hidrolik-macam-macam/, diakses pada tanggal 11
Oktober 2019 pukul 09:06
Humphrey, Jeff. .2016. “What is difference between hydraulic pump and hydraulic motor”,
https://www.quora.com/What-is-difference-between-hydraulic-pump-and-hydraulic-
motor, diakses pada tanggal 11 Oktober 2019 pukul 09:41
Mraz, Stephen. 2015. “A hydraulic Pump for High-Pressure Applications”,
https://www.machinedesign.com/whats-inside/hydraulic-pump-high-pressure-
applications, diakses pada tanggal 11 Oktober 2019 pukul 10:11
Rundo, Massimo. 2017. “Models for Flow Rate Simulation in Gear Pumps: A
Review”,https://www.researchgate.net/figure/a-Example-of-a-lubricating-gerotor-
pump-b-detail-of-the-port-plate_fig1_319262636, diakses pada tanggal 11 Oktober 2019
pukul 14.24
Team Pengembang Vokasi. 2016. “Hydraulic System”. Surakarta : Sekolah Vokasi
Team Pengembang Vokasi. 2016. “Torqflow Drive System”. Surakarta : Sekolah Vokasi
http://unggah.eprints.ums.ac.id/assets/format-2016.pdf
http://unggah.eprints.ums.ac.id/pdf/sample.pdf




















