Human-machine interfaces based on EMG and EEG applied to robotic systems
Upload
independentCategory
view
1download
0
Exp Brain Res (2007) 181:627–637
DOI 10.1007/s00221-007-0959-3RESEARCH ARTICLE
Parallels in control of voluntary and perturbation-evoked reach-to-grasp movements: EMG and kinematics
William H. Gage · Karl F. Zabjek · Stephen W. Hill · William E. McIlroy
Received: 15 July 2006 / Accepted: 12 April 2007 / Published online: 9 May 2007© Springer-Verlag 2007
Abstract To determine the potential diVerences in con-trol underlying compensatory and voluntary reach-to-graspmovements the current study compared the kinematic andelectromyographic proWles associated with upper limbmovement. Postural perturbations were delivered to evokecompensatory reach-to-grasp in ten healthy young adultvolunteers while seated on a chair that tilted as an invertedpendulum in the frontal plane. Participants reached to graspa laterally positioned stable handhold and pulled (orpushed) to return the chair to vertical. The distinguishingcharacteristic between the two behaviors was the onsetlatency and speed of movement. Consistent with compensa-tory balance reactions, the perturbation-evoked reachresponse was initiated very rapidly (137 vs. 239 ms for vol-untary). As well the movement time was shorter, and peak
velocity was greater for PERT movements. In spite of theprofound diVerences in timing, the sequence of muscleactivity onsets and the order of speciWc kinematic eventswere not diVerent between maximum velocity voluntary(VOL) and perturbation-evoked (PERT) reach-to-graspmovements. Peak velocity and grasp aperture occurredprior to hand contact with the target for PERT and VOLmovements, and wrist trajectory was inXuenced by thedirection of perturbation relative to the target. To achievesuch target speciWc control for responses initiated within100 ms of the perturbation, and when characteristics ofbody movement were unpredictable, the perturbation-evoked movements would need to incorporate sensory cuesassociated with body movement relative to the target intothe earliest aspects of the movement. This suggests relianceon an internal spatial map constructed prior to the onset ofperturbation. Parallels in electromyographic and kinematicproWles between compensatory and voluntary reach-to-grasp movements, in spite of temporal diVerences, lead to theview they are controlled by common neural mechanisms.
Keywords Voluntary reaching · Aperture control · Compensatory balance control · Postural perturbation
Introduction
Both upper and lower limb use for stepping and/or graspingto reestablish stability following balance perturbations hasbeen recognized as an essential class of behaviours used tomaintain upright stability, and referred to as change-in-supportreactions (Maki and McIlroy 1997; Maki et al. 2003).While previous research has explored the control of thelower limbs and the trunk in the temporal and spatialorganization of the balance response (Maki et al. 1996;
W. H. Gage · K. F. Zabjek · S. W. Hill · W. E. McIlroyToronto Rehabilitation Institute, 550 University Avenue, Toronto, ON Canada, M5G 2A2
K. F. Zabjek · W. E. McIlroyGraduate Department of Rehabilitation Science and Department of Physical Therapy, University of Toronto, 500 University Avenue, Toronto, ON Canada, M5G 2A2
W. H. Gage · K. F. Zabjek · S. W. Hill · W. E. McIlroyHeart and Stroke Centre for Stroke Recovery, Sunnybrook and Womens’ College Health Sciences Centre, 2075 Bayview Avenue, Toronto, ON Canada, M4N 3M5
W. H. Gage (&)School of Kinesiology and Health Science, York University, 4700 Keele Street, Toronto, ON Canada, M3J 1P3e-mail: [email protected]
W. E. McIlroyDepartment of Kinesiology, University of Waterloo, 200 University Avenue, Waterloo, ON Canada, N2L 3G1
123

628 Exp Brain Res (2007) 181:627–637
Bothner and Jensen 2001; Carpenter et al. 2001; Gruneberget al. 2005), the control of the upper limbs in maintaining,or recapturing balance control has received only limitedattention. Upper limb movements are commonly observedin response to disturbances to the control of upright stabil-ity (McIlroy and Maki 1995; Maki et al. 2000; Allum et al.2002), and parallels have been revealed between the controlof lower and upper limb responses (Maki and McIlroy1997; Elger et al. 1999). However, certain complexitiesexist in successful execution of upper limb movements inresponse to a balance perturbation, which distinguish thecontrol of upper limbs. For example, the individual may beholding an item at the time of the perturbation, which hasbeen shown to elicit the unexpected result that the individ-ual’s grasp is maintained on the item in the face ofincreased risk of falling (Bateni et al. 2004). Target loca-tions and characteristics deWning reach-to-grasp reactionsrequire more complex trajectories and limb orientationsthan are typical of lower limb stepping behaviour. Focaltargets, such as handholds, demand precise control in threedimensional space and coordination of hand movementwith upper limb movement (reach and grasp) but at speedsof execution paralleling the most rapid balance recoveryresponses of lower limb and trunk muscles. The overallfocus of the present work was to determine whether thecontrol of such rapid perturbation-evoked balance reactionsparallels the control of voluntarily initiated reach-to-graspmovements or whether it represents control that is uniquedue to the speed of processing requirements associated withbalance recovery reactions.
The control of voluntary upper limb reach-to-graspmovements has been well described in the literature. It isgenerally accepted that prehension movements have twocomponents and that these components are tightly coupled:transport of the hand to the object of interest, and formationof the appropriate shape of the hand (i.e., hand orientation,grip aperture). Transport of the limb is characterized by abell-shaped velocity proWle (Fan et al. 2005), and both peakgrasp aperture and peak wrist velocity occur between 60and 70% of the transport phase duration (Jeannerod 1984;Castiello 2005; Hu et al. 2005). Changes in grasp apertureduring the transport phase have been shown to inXuence thekinematics of the transport component, suggesting tightintegration between the two components (Timmann et al.1996). The size and orientation of objects, as well as thepresence of obstacles alters the kinematics of the voluntaryreach-to-grasp movement (Mon-Williams et al. 2001). Theunderlying control of the temporal and spatial aspects of thereach and grasp components of a voluntarily initiatedmovement is thought to be importantly governed by spe-ciWc cortical networks (Burnod et al. 1999). The location ofthe target in the environment is transformed from gaze-cen-tered co-ordinates to hand-centered co-ordinates. It is
believed that such transformations are made by networkswithin the frontal and parietal regions of the cortex, whichintegrate sensory information from visual, vestibular, andproprioceptive sources, and furthermore, that such a net-work is responsible for the transformation of the exterocep-tive representation of target location (and other characteristics,such as size and orientation) into the coordinated reach andgrasp components of the upper limb movement (Crawfordet al. 2004; Castiello 2005).
A critical diVerence in compensatory balance correctingmovements, when compared with traditional prehensionlaboratory tasks is that the act of reach-to-grasp and secur-ing a stable handhold only precedes a second importantphase, i.e., stabilization. Therefore the characteristics of theupper limb movement are necessarily shaped in consider-ation of the entire task, which includes the demands of thatwhich follows securing a stable grasp. While voluntaryupper-limb movement has been examined extensively,understanding of the underlying control of the perturbation-evoked reach-to-grasp is less clear. A further distinguishingcharacteristic between voluntary and perturbation-evokedreach-to-grasp is the rapid onset of perturbation-evokedmovements and the speculation that the CNS relies on apre-constructed spatial map (established prior to the onsetof perturbation) to ensure that the initial trajectory of thetransport phase is directed to the target without delay (Makiand McIlroy 1997; Ghafouri et al. 2004). While Day andLyon (2000) demonstrated that the trajectory of a voluntaryreach movement can be modiWed as early as 125 ms afterthe onset of a visual perturbation (shift in target location),this time delay is too long to account for the online use ofvision in the rapid initial onset associated with perturba-tion-evoked responses. Beyond this potential diVerence inthe role of visual information prior to or following the onsetof perturbation, there is relatively little information aboutthe underlying coordination of the perturbation-evokedreach-to-grasp behaviour and the extent to which it paral-lels voluntary reaching.
The focus of the current research is to compare the tem-poral and spatial organization of perturbation-evoked andvoluntary reach-to-grasp movements. The overall predic-tion is that the characteristics fundamental to the control ofvoluntary reach-to-grasp will be evident in the control ofperturbation-evoked reach-to-grasp in spite of the veryrapid initiation and movement speed. Such evidence wouldprovide support for the view that perturbation-evoked bal-ance reactions of the upper limb may share common neuralpathways with that of voluntary reach-to-grasp. The spe-ciWc hypotheses were that: (1) distal to proximal musclesequencing would be common to both voluntary and pertur-bation-evoked movements, (2) trajectory of wrist move-ment in the direction of the target and grasp aperturechanges will occur in the initial phases of the movement
123

Exp Brain Res (2007) 181:627–637 629
(reXecting pre-planning based on target characteristics)during perturbation-evoke movements, and (3) peak veloc-ity of hand movement and peak aperture will occur prior toonset of hand contact for both task conditions (reXectingpre-planning of hand contact). It is anticipated, given themore rapid velocity and shorter latency, that the perturba-tion-evoked responses will be characterized by diVerencesin absolute temporal characteristics though the relative pro-Wle of the perturbation-evoked reach-to-grasp will comparewith voluntary movement. Determination of the relativeparallels between the perturbation-evoked and voluntaryreach-to-grasp may have an inXuence on development ofdiagnostic methods and possible interventions to inXuenceage-related changes in compensatory balance control.
Methods
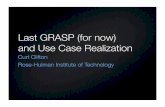
Ten healthy adults (7 male, 3 female) volunteered to partic-ipate in this study. The average age of the participants was31 years (§ 5.7 years). None had any musculoskeletal orneurological disease or injury, which may aVect balance ormovement control. Each participant provided informedconsent prior to testing, and ethics approval was providedby the local research ethics board. Participants were seatedthroughout the testing. A custom designed chair wasmounted on a hinge, which allowed the chair to move as aninverted pendulum in the frontal plane (see Fig. 1). Thechair was held in the initial vertical position by an electro-magnet. When the magnet was released, elastic preloadattached to either side of the chair caused the chair to tilteither to the right or left. A stable target handhold consist-ing of an instrumented vertical pole (approximately 2 cmdiameter) was positioned approximately 0.5 m to the rightof the participant.
Participants completed two reach-to-grasp tasks: (1)perturbation-evoked reach-to-grasp movements in responseto rapid tilting of the chair (PERT), and (2) voluntary reach-to-grasp movements elicited in response to an auditorycue (VOL). In the PERT condition, the timing and direc-tion of the chair movement was unpredictable. The chairtilted either to the participant’s right or left, TOWARDor AWAY from the handhold, respectively. Participantswere instructed to reach with their right upper limb fol-lowing release of the chair, grasp the handhold, andpush (or pull) themselves away from (or toward) thehandhold to return themselves to the initial vertical position.A hard-stop limited the movement of the chair to approxi-mately 25° in the event that the participant missed thetarget. In the VOL condition, the initial starting position ofthe chair was inclined slightly (approximately 5°) TOWARDor AWAY from the handhold in order to approximate thereach distance that occurred during perturbation-evoked
reactions (executed after the tilt of the chair). Participantswere instructed to reach and grasp the handhold as quicklyas possible following the onset of the auditory cue andreturn the chair to upright position. Participants completedone block of the PERT condition, consisting of 30 trials,and two blocks of the VOL condition, each consisting often trials. In the PERT condition, the direction of chair tiltmovement (TOWARD or AWAY) was randomized. In theVOL condition, ten trials were completed, in which thechair was initially inclined TOWARD the handhold, fol-lowed by ten trials, in which the chair was initially inclinedAWAY. A subgroup of participants (n = 3) did not performthe VOL reach-to-grasp task with the chair initially inclinedAWAY from the handhold, but did complete all otherconditions. As well, these three participants completed agreater number of trials; they completed a total of 60 trialsin the PERT condition, and 30 trials in the VOL TOWARDcondition.
Kinematic data were collected using a 3D optoelectroniccamera system (OPTOTRAK, Northern Digital). Infraredlight emitting diodes (IREDs) were placed at the following
Fig. 1 Schematic of perturbation equipment. The chair was allowed torotate as an inverted pendulum in the frontal plane. An electromagnetwas used to hold the chair in the vertical position. Release of the mag-net was triggered by the data collection computer. Data were synchedto the release of the magnet. Participants were secured into the chair bya lap belt and a chest belt. The legs where secured using a Velcro straparound the thighs, proximal to the knees
123

630 Exp Brain Res (2007) 181:627–637
sites: distal end of the thumb and index Wnger of the righthand, right radial styloid process, lateral aspect of theelbow of the right arm, right and left acromion processes,jugular notch of the sternum, and chin. IREDs were alsoplaced on the chair and the handhold to track their locationand movement. Kinematic data were collected at a sam-pling rate of 64 Hz, and low-pass Wltered at a cut-oV fre-quency of 6 Hz using a dual-pass fourth order ButterworthWlter (99% of wrist marker signal power was below 6 Hz inthree representative trials from diVerent participants). Kine-matic measures of interest included: (1) onset latency ofgrip aperture change, (2) peak grip aperture, (3) velocity ofaperture change at the time of contact with the handhold,(4) onset latency of wrist movement, (5) peak lateral andvertical velocity wrist movement, (6) lateral and verticalvelocity of wrist movement at the time of contact with thehandhold, and (7) movement time (determined as the timefrom onset of wrist movement to handhold contact). Gripaperture was determined as the three dimensional distancebetween the markers of the Wnger and thumb. EMG datawere collected using a Bortec EMG ampliWer (Bortec Bio-medical), from the following muscles of the right upperlimb: forearm Xexors, forearm extensors, biceps, triceps,and middle head of deltoid. EMG data were later full waverectiWed and low pass Wltered at a cut-oV frequency of100 Hz to yield linear envelope wave forms. The onsetlatency of each muscle was determined as the time at whichthe EMG signal exceeded the resting level of activity bythree standard deviations and remained above threshold forat least 20 ms. For perturbation-evoked reactions all kine-matic and muscle activity onset latencies were determinedwith respect to the onset of chair movement. For voluntaryresponses, onset latencies were determined with respect tothe onset of the auditory tone. During visual examination ofthe EMG signals, it was noted that a second deltoid burstwas commonly observed just prior to contact with the hand-hold; the onset time of this second burst was also deter-mined. The handhold was instrumented using a forcesensing resistor (FSR) to record the time of initial handcontact with the handhold. EMG and FSR signals were col-lected at a sampling rate of 512 Hz. Movement of the chairwas determined from the movement of the IRED mountedon the chair. The onset of movement was considered as theWrst deXection in the velocity of the IRED. All signal pro-cessing was completed using custom software (Matlab, TheMathworks). All signals were visually inspected and onsetlatencies were visually conWrmed. DiVerences in eachdependent measure between conditions (PERT, VOL) anddirection (TOWARD, AWAY) were assessed using ananalysis of variance followed by Tukey’s post-hoc test toexplore diVerences in interaction eVects. Each participantperformed ten initial practice trials. These data are notpresented here.
Results
Seven of the ten participants grasped the handhold success-fully on every PERT trial. Three participants missed thehandhold once, on a single trial; no participant missedthe handhold more than once. The success rate of grasping thehandhold and returning the chair to the upright position wasgreater than 99%. If the participant missed the handhold,the trial was repeated. Expectedly, no participant missedthe handhold at any time during VOL trials. Anecdotally,participants reported that the movement of the chair duringperturbation trials was disturbing eliciting a “natural” reac-tion to preserve stability. Data from a representative pertur-bation trial is presented in Fig. 2; the chair tilted AWAYfrom the handhold in this particular PERT trial. The tempo-ral organization of the movement is evident in Fig. 2, from
Fig. 2 Sample data from a representative trial. The onset of the pertur-bation (i.e., movement of the chair) is indicated with the solid verticalline; one second of data is presented following the onset of chair tilt.Deltoid activity preceded the onset of activity for any other measure,and occurred approximately 120 ms after the onset of chair tilt. Wristmovements and change in grasp aperture followed the onset of deltoidactivity. Contact with the handhold occurred after the time of peakwrist velocity and peak aperture. Wrist velocity was reduced prior tocontact. Negative velocity of the grasp aperture indicated that the handwas closing on the handhold at the time of contact
123

Exp Brain Res (2007) 181:627–637 631
perturbation onset up to, and beyond hand–target contact. Itis important to note the large diVerences between the per-turbation-evoked and voluntarily initiated movements inthe measures of muscle activity onset latency, wrist move-ment onset timing, and movement execution time (Fig. 3).These diVerences are striking in part because of the similar-ities in the instructions to the participants (e.g., “reach asquickly as you can and grasp the handhold, and return your-self and the chair to an upright position”). Additionally,these timing diVerences are striking because, despite theeVorts of the participants for maximal speed in the volun-tary reach-to-grasp movements, each participant performedthe perturbation-evoked movements substantially faster.For example, the onset of deltoid activity occurred 102 ms(43%) earlier in the perturbation-evoked condition, compared
with the voluntary condition (perturbation, 137 ms; voluntary,239 ms). The onset of wrist movement occurred 110 ms(39%) earlier (perturbation, 174 ms; voluntary, 284 ms).Movement time was 73 ms (24%) faster in the perturbation-evoked condition (perturbation, 232 ms; voluntary, 305 ms).Collectively from the onset of stimulus to hand contact theperturbation-evoked reactions were 176 ms (30%) fasterthan the rapid voluntary reactions (perturbation, 408 ms;voluntary, 584 ms).
Temporal organization of reach-to-grasp movements
EMG onset latencies for each muscle are presented inFig. 3a. Onset of muscle activity for each of the Wve mus-cles occurred earlier in the PERT condition (main eVect ofcondition: F(1,9) = 21.49, p = 0.0012). However, thesequence of recruitment was the same for both the PERTand VOL conditions: deltoid, forearm extensors, biceps,forearm Xexors, triceps (Wrst to last; main eVect of muscle:F(4,36) = 4.13, p = 0.007), and post-hoc tests revealed thatthe onset latency of each muscle was signiWcantly diVerentfrom every other muscle. The sequence of muscle activityonset was not aVected by the direction of chair tilt (or direc-tion of initial chair inclination in the VOL condition). Asdeltoid was the Wrst muscle activated, deltoid onset wasincluded in the examination of speciWc kinematic events asa marker of the initial response to the movement of thechair (PERT) or the auditory tone (VOL). Similar to muscleonset latencies, the onsets of grip aperture change, wristmovement, and handhold contact, and a second deltoidburst prior to FSR contact occurred earlier in the PERTcondition (Fig. 3b). The timing of grip aperture change andwrist movement onset were not diVerent in the VOL condi-tion, while grip aperture change preceded wrist movementin the PERT condition (interaction eVect of condition andevent: F(4,36) = 20.58, p < 0.0001). It should be noted,however, that while not signiWcantly diVerent in the VOLcondition, wrist onset did occur 13 ms after aperturechange, which was similar to the absolute diVerence of16 ms observed during compensatory movements. Theonset latency of grip aperture change, wrist movement, sec-ond deltoid burst, and FSR contact were not aVected by thedirection of chair movement (or direction of chair tilt in theVOL condition).
Wrist movement
Representative mean wrist trajectories for one participantare presented in Fig. 4 (a: frontal plane, posterior projec-tion; b: transverse plane, superior projection). TrajectoryproWles are presented for three conditions: when the chairtilted away from the target, when the chair tilted toward thetarget, and for voluntarily initiated movements when the
Fig. 3 a Muscle activity onsets. Onset of activity for each muscle oc-curred earlier in the perturbation (PERT) condition than in the volun-tary (VOL) condition (p = 0.0012). Muscle onset latency was notaVected by chair tilt direction. b Event onsets. Onset of each event oc-curred earlier in the PERT condition than in the VOL condition; thetiming of grip aperture change and wrist movement were not diVerentin the VOL condition, while grip aperture change preceded wristmovement in the PERT condition (p < 0.0001). Note that the diVerencebetween grip aperture and wrist movement onsets was 13 ms in theVOL condition, and 16 ms in the PERT condition. Event onset latencywas not aVected by chair tilt direction
123

632 Exp Brain Res (2007) 181:627–637
initial inclination of the chair was toward the target.Ensemble averaged displacement data for each conditionwere calculated after removing the initial 3D position of thewrist marker. Open diamonds mark the location of the wrist100 ms after the initiation of the movement of the wrist(Wgure inset). Wrist trajectories were similar in the frontalplane between the perturbation-evoked conditions (panel a:solid dark and dashed lines). In the transverse plane (panelb), wrist movements in the TOWARD PERT and VOLconditions were similar and were primarily laterallydirected with little posterior displacement. In the AWAYPERT condition the wrist also moved posteriorly, divergentfrom the path of the wrist in the other conditions. For allparticipants, peak posterior wrist displacement was greaterin the PERT condition (30.1 § 9.7 mm) than in the VOLcondition (1.7 § 12.2 mm; main eVect of condition:F(1,8) = 9.88, p = 0.0138), and greater in the AWAY con-dition (43.2 § 9.5 mm) than in the TOWARD condition(5.3 § 12.0 mm; main eVect of direction: F(1,7) = 27.02,p = 0.0013). As well, peak posterior wrist displacementwas greater in the PERT AWAY condition(49.2 § 10.1 mm) than in the PERT TOWARD condition(13.6 § 11.1 mm; main eVect of direction: F(1,7) = 20.88,p = 0.0026). DiVerences in wrist trajectory in the transverseplane appeared early in the movement, and were substantialwithin the Wrst 100 ms of wrist movement (Fig. 4b insert).DiVerences in the end position of the wrist in both the trans-verse and frontal planes were associated with the observedtendency among all participants to assume diVerent handorientations in the PERT TOWARD and AWAY condi-tions prior to and at the time of contact. DiVerences in handorientation following contact with the handhold and havingestablished a secure grasp were evident on visual inspectionof the trials as they were performed. During TOWARD tri-als, participants tended to contact the handhold between thethumb and index Wnger with the hand oriented such that theindex Wnger was superior to the other Wngers, and the hand-hold was contacted by the palmar surface of the hand. Dur-ing AWAY trials, participants tended to make a sweeping“hook” movement (as evidenced by increased posterior dis-placement of the wrist) and contact the handhold with theWngers, hooking the handhold. The thumb was extendedand rotated toward the dorsum of the hand.
Representative mean wrist velocity proWles for one par-ticipant are presented in Fig. 5 (a, lateral; b, vertical).Velocity proWles are presented for three conditions: whenthe chair tilted away from the target, when the chair tiltedtoward the target, and for voluntarily initiated movementswhen the initial inclination of the chair was toward the tar-get. Closed circles indicate the time of hand contact withthe target. For all conditions, wrist velocity in both the ver-tical and lateral directions peaked prior to handhold contact.Importantly, as a percentage of movement time (from the
onset of wrist movement until target contact), though peaklateral wrist velocity occurred earlier in the AWAY condi-tion (62%) than in the TOWARD condition (71%) and ear-lier than peak vertical wrist velocity in either the AWAY(72%) or TOWARD (72%) conditions (interaction of wristdirection and chair direction: F(1,4) = 5.67, p = 0.0411),the timing of peak wrist velocity in both the lateral and ver-tical directions was not diVerent between the perturbation-evoked and voluntarily initiated movements (Fig. 5c).Despite no diVerences in the relative timing of the peakwrist velocity, maximum wrist velocity was greater for theperturbation-evoked movements than for voluntary move-ments. Furthermore, for voluntary movements, peak wrist
Fig. 4 Mean wrist trajectories in the frontal plane a and transverseplane b for perturbation trials when the chair tilted away from the tar-get (solid black line), when the chair tilted toward the target (dashedblack line), and for voluntarily initiated movements when the initialinclination of the chair was toward the target (solid gray line) for a rep-resentative participant (initial position of wrist marker was removedprior to constructing ensemble average of marker displacement in eachdirection across trials, for each condition). Inset is an expansion of themean initial transverse plane wrist trajectory; diVerences in wrist tra-jectory between each condition were evident very early in the move-ment (open diamond markers indicate the wrist marker position100 ms after the initiation of wrist movement). Peak posterior wristdisplacement was greater in the PERT condition (30.1 § 9.7 mm) thanin the VOL condition (1.7 § 12.2 mm; p = 0.0138), and greater in theAWAY condition (43.2 § 9.5 mm) than in the TOWARD condition(5.3 § 12.0 mm; p = 0.0013). Within the PERT condition, peak pos-terior wrist displacement was greater in the AWAY direction(49.2 § 10.1 mm) than in the TOWARD direction (13.6 § 11.1 mm;p = 0.0026). Thin lines represent 95% conWdence intervals
600
500
400
300
200
100
0
-100
Ver
tical
Dis
plac
emen
t
A
-100 0 500100 200 300 400
Lateral Displacement
100
0
-100
Dis
plac
emen
tP
oste
rior
Ant
erio
r
B120600
-20
600-200
AwayTowardVoluntary
123

Exp Brain Res (2007) 181:627–637 633
velocity was lower during AWAY trials (1,505 § 97.1 mm/s)than during TOWARD trials (1,672 § 83.4 mm/s), whilepeak wrist velocity did not diVer between the chair tiltdirections during perturbation-evoked movements (2,071 §106 mm/s, interaction of condition and direction: F(1,9) =59.69, p < 0.0001). At the time of hand contact with thetarget, during perturbation-evoked movements, wristvelocity was reduced by approximately 30% relative topeak wrist velocity; during voluntary movements, wristvelocity was reduced by approximately 40% at the time of
hand contact. DiVerences in movement time reXected thediVerences in both peak wrist velocity and reduction inwrist velocity prior to hand contact; average movementtime for perturbation-evoked and voluntary movementswere 232 (§ 8.9) and 305 (§ 14.3) ms, respectively(F(1,9) = 34.87, p = 0.0002).
Grasp aperture
Peak grasp aperture (134.6 § 3.4 mm) was greater thangrasp aperture at the time of hand contact with the target(122.3 § 4.0 mm) for all conditions (F(1,9) = 84.89,p < 0.0001), though peak aperture occurred late in themovement regardless of condition. Peak aperture occurredat 94% of movement time (from onset of aperture change totarget contact), and the relative timing of peak aperture wasnot diVerent for any of the conditions (p > 0.05). Graspaperture at the time of contact with the target also was notdiVerent for any of the conditions (p > 0.05). Representa-tive mean aperture velocity proWles for one participant, forthree conditions (when the chair tilted away from the target,when the chair tilted toward the target, and for voluntarilyinitiated movements when the initial inclination of the chairwas toward the target) are presented in Fig. 6a. Closed cir-cles represent the time of hand contact with the target.Mean aperture velocity was negative for each condition(Fig. 6b), indicating that the hand was closing on the targetat the time of contact. An interaction between the conditionand direction factors, which approached statistical signiW-cance (F(1,30) = 3.49, p = 0.0716) suggested that, whileaperture velocity did not diVer between the two directionsof the initial chair inclination in the VOL condition(AWAY ¡219 § 23 mm/s, TOWARD ¡215 § 70), aper-ture velocity was larger (more negative) in the PERT condi-tion when the chair moved AWAY from the handhold(¡367 § 72 mm/s) compared to chair movementsTOWARD the handhold (¡84 § 73 mm/s). A preplannedcomparison of aperture velocity at hand contact with thetarget within the PERT condition revealed that aperturevelocity was greater in the AWAY condition than in theTOWARD condition at the time of hand contact(F(1,30) = 7.56, p = 0.0137).
Discussion
The purpose of this study was to explore the control ofupper limb movements during perturbation-evoked reach-to-grasp responses, and to compare perturbation-evoked tomaximum velocity voluntarily initiated reach-to-grasp move-ments. The results of this study suggest strong similaritiesbetween perturbation-evoked and voluntary movementswith respect to relative spatiotemporal muscle activity and
Fig. 5 Mean lateral (a) and vertical (b) wrist velocity proWles for per-turbation trials when the chair tilted away from the target (solid blackline), when the chair tilted toward the target (dashed black line), andfor voluntarily initiated movements when the initial inclination of thechair was toward the target (solid gray line) for a representative partic-ipant. Filled circle markers indicate the wrist velocity at the time ofhand contact with the target. Peak wrist velocity was greater in thePERT condition than in the VOL condition; peak wrist velocity waslower during VOL AWAY trials (1,505 § 97.1 mm/s) than duringVOL TOWARD trials (1,672 § 83.4 mm/s), peak wrist velocity didnot diVer between the chair tilt directions during perturbation-evokedmovements (2,071 § 106 mm/s; p < 0.0001). Average movement timefor perturbation-evoked and voluntary movements was 232 (§ 8.9)and 305 (§ 14.3) ms, respectively (p = 0.0002). Wrist velocity in boththe vertical and lateral directions peaked prior to handhold contact; rel-ative to peak wrist velocity, wrist velocity was 30 and 40% lower in thePERT and VOL conditions, respectively, at the time of hand contact.The timing of peak wrist velocity (percent of movement time) was notdiVerent between the perturbation-evoked and voluntarily initiatedmovements (c)
123

634 Exp Brain Res (2007) 181:627–637
kinematic measures, in spite of the clear absolute diVer-ences in response latency and speed of movement. Therapid onset of the perturbation-evoked responses (latency137 ms) and rapid movement time (232 ms) clearly dissoci-ate from the average latency (239 ms) and movement time(305 ms) for the rapid voluntary reaction. Such distincttemporal diVerences have commonly distinguished com-
pensatory perturbation-evoked reactions from even themost rapid voluntary movements (McIlroy and Maki 1993).In light of such temporal diVerences many have oftenthought the compensatory reactions reXected “automated”or “triggered” reactions potentially of unique central ner-vous system control compared to volitionally initiated reac-tions. In spite of this very rapid onset of movement duringperturbation-evoked movements the characteristics of theperturbation and the target location were shown to inXu-ence the initial trajectory of the reach-to-grasp movement.This responsiveness suggests a complex and sophisticatedcontrol in the execution of perturbation-evoked move-ments, and implications for integration of sensory informa-tion about body position and the surrounding environmentinto the control of the initial phases of the movement andthe capacity to plan for possible events following hand-tar-get contact.
Perturbation-evoked and voluntarily initiated reach-to-grasp movements share similarities
In spite of the diVerences in onset latency and movementspeed many characteristics of the control of perturbation-evoked reach-to-grasp movements were similar to thoseobserved during maximum speed voluntary reach-to-graspmovements. These similarities, including characteristics ofmuscle activity and kinematic measures, were observed attimes throughout the movement, from the initiation ofmovement until hand contact with the target. For example,the sequence in muscle activity recruitment at the initiationof movement was not diVerent between voluntary and per-turbation-evoked movements. With respect to speciWcmarkers of activity for both perturbation-evoked and volun-tary movements, deltoid activity onset preceded grip aper-ture change, which was followed by the initiation of wristmovement. During the transport phase of both the perturba-tion-evoked and voluntary movements, peak wrist velocityoccurred at approximately 70% of movement time and peakgrip aperture occurred at 94% of movement time. Finally,in the later phases of movement, onset of triceps activityoccurred approximately 180 ms prior to hand contact (com-pensatory 176 § 23 ms, voluntary 180 § 24 ms), followedby a second burst of deltoid activity (perturbation-evoked55 § 7 ms, voluntary 77 § 7 ms) also prior to contact.Muscle activity in triceps and deltoid (and biceps, in oppo-sition to triceps) may be related to “stiVening” of the upperlimb to create a stable link between the handhold and thebody in anticipation of hand contact and preparation forgenerating stabilizing forces. These later changes in muscleactivity, observed for both the voluntary and, importantly,the perturbation-evoked movements, may be preparatoryfor hand contact with the target, suggesting that the controlsystem is planning the timing of contact. That the control
Fig. 6 Mean grip aperture velocity proWles for perturbation trialswhen the chair tilted away from the target (solid black line), when thechair tilted toward the target (dashed black line), and for voluntarilyinitiated movements when the initial inclination of the chair was to-ward the target (solid gray line) for a representative participant (a).Filled circle markers indicate the wrist velocity at the time of handcontact with the target. Mean aperture velocity (b) did not diVer at thetime of contact between the two directions of the initial chair inclina-tion in the VOL condition (AWAY ¡219 § 23 mm/s, TOWARD¡215 § 70); aperture velocity was larger (more negative) in the PERTcondition when the chair tilted AWAY from the handhold(¡367 § 72 mm/s) in contrast to when the chair tilted TOWARD thehandhold (¡84 § 73 mm/s; p = 0.0716). Preplanned comparison ofaperture velocity at hand contact within the PERT condition revealedthat aperture velocity was greater in the AWAY condition than in theTOWARD condition (p = 0.0137). Peak grasp aperture (134.6 §3.4 mm) was greater than grasp aperture at the time of hand contactwith the target (122.3 § 4.0 mm) for all conditions (not shown in Wg-ure; p < 0.0001). Peak aperture occurred at 94% of movement time andwas not diVerent between any of the conditions (not shown in Wgure;p > 0.05). Grasp aperture at the time of contact with the target was notdiVerent for any of the conditions (not shown in Wgure; p > 0.05)
123

Exp Brain Res (2007) 181:627–637 635
system is planning for target contact during perturbation-evoked reach-to-grasp movements is in contrast to thenotion that due to the rapid speed of the movement, the armis advanced toward a target in hopes of establishing anycontact and regaining safe balance. Instead the results sug-gest a system as complex and sophisticated for compensa-tory movements as has been long established for voluntaryreach-to-grasp movements. Indeed, these spatial–temporalsimilarities suggest an underpinning of common neuralcontrol.
As noted, the only measured diVerences between theperturbation-evoked and voluntary movements were reX-ected in the absolute latency and speed of the movements,which itself is noteworthy given that the voluntary reach-to-grasp movements were executed as “rapidly as possi-ble”. All measures of latency (i.e., EMG, initial aperturechange, initial wrist displacement) occurred signiWcantlyearlier during perturbation-evoked movements; deltoid,wrist extensor, and biceps onsets occurred 102–135 ms ear-lier, and aperture change and wrist displacement occurredon average 111 ms earlier. These diVerences in onsetlatency between perturbation-evoked and voluntarily initi-ated movements are consistent with previous literature,which has examined the onset of compensatory lower limbstepping responses (Brauer et al. 2002; Maki et al. 2003).As well, the speed of execution of perturbation-evokedmovements was much greater than for voluntary move-ments. Overall, on the basis of the similarities in the EMGand kinematics, it would appear that the control of pertur-bation-evoked and voluntary reactions may share similarcontrol networks.
The importance of planning in compensatory balance reactions
Important in the understanding of the control of rapid per-turbation-evoked balance control is the idea that the initiallimb trajectory, hand aperture and the contact time areplanned prior to the onset of execution. This interpretationis based on the observation that the direction of chair tilt,either TOWARD or AWAY from the target, was reXectedin target-speciWc hand trajectory and hand orientation aswell as slowing of trajectory and closing of aperture prior tohand contact. When the chair (and body) tilted away fromthe target the wrist followed a path that was signiWcantlymore posterior prior to target contact. Participants made a“sweeping” movement with the arm and hand and tended to“hook” the vertically-oriented handhold. The participantsalso adopted a diVerent hand orientation, in which thethumb was superior to the rest of the hand allowing the par-ticipant to hook the handhold with his or her Wngers. ThesediVerences were evident on visual inspection as trials wereperformed. The initiation of the divergence in the two wrist
trajectories occurred very early in the response to the per-turbation (the wrist trajectory was more linearly directed atthe handhold in the TOWARD condition; Fig. 4b), within100 ms after the onset of wrist movement, which suggeststhat the control system tunes the movement of the upperlimb based on the direction of body movement relative tothe target. This Wnding is striking since the direction ofchair tilt in response to the perturbation was unpredictableand could not be planned for prior to the onset of instabil-ity. We propose that in order to be able to incorporate targetinformation relative to the body motion in less than 100 msof the onset of perturbation that individuals incorporatedinformation related to the direction of movement into thepreformed visuospatial map. This “automatic” planningstrategy would permit a target speciWc response and a morerapid speed than would be possible if the planning of trajec-tory occurred only after the direction and amplitude of per-turbation was determined.
It is also important to note that such planning also incor-porates the amplitude of perturbation since the imposedinstability inXuences the association between the target andthe individual. As a result it may not be surprising that therewas evidence that the timing of hand contact, in additionthe initial trajectory and hand orientation, was also pre-planned. First, to establish contact with the target thechanging relationship induced by the perturbation betweenthe body and target must be accommodated. This eVectcould be predicted from the perturbation amplitude, anotion that is supported by the evidence of perturbation-evoked scaling of the response (Inglis et al. 1994; Szturmand Fallang 1998). The additional importance of planningcontact, rather than reacting to contact, is the need to rap-idly generate stabilizing forces once the support surface iscontacted. Planning for contact and the following action(i.e., to restore balance) is a critical aspect of the response,and is apparent even in perturbation-evoked movements.Additional support for the planning of contact comes fromevidence of preparatory EMG activity observed prior tocontact: forearm Xexors, triceps, and deltoid all turn on latein the movement prior to hand contact. This preparatoryactivity is important to note because it provides insight intothe complexity of the control of the action. Not only is thehand guided to the target very quickly, but by slowing themovement of the hand prior to contact, the probability ofsafe contact (i.e., hand injury is avoided) is increased. Byactivating forearm Xexors, triceps, and deltoid, a secure andstable link is provided between the target handhold and thebody. Overall, the capacity for the CNS to rapidly integratecharacteristics of sensed body motion with the preformedspatial map to guide the upper limb response in 3D space(and estimate time of hand contact), and to eVect appropri-ate muscular activity and limb geometry to facilitate resto-ration of postural control following contact reveals the
123

636 Exp Brain Res (2007) 181:627–637
remarkable capacity in the healthy system for complexreactions when rapid speed is an essential element ofcontrol.
Peak wrist velocity and grasp aperture are de-coupled to increase probability of success
It is important to note that the results of the current studywith respect to the measure of grasp aperture for both thevoluntary and perturbation-evoked movements diVer fromprevious literature. Previous examinations of prehensionhave generally looked at the situation, in which the subjectis asked to reach and grasp an object, implicitly to thenmanipulate the object. Modes of grasp have been manipu-lated (palmer vs. pinch grasp); environmental constraintssuch as obstacles have been used to disrupt the movement;velocity of movement has been manipulated. It has beenreported that tight coupling exists between grip apertureand wrist velocity during the transport phase of voluntaryreach-to-grasp movements. Peak aperture and wrist veloc-ity both occur between 60 and 70% of movement time, andboth velocity and aperture decrease prior to target contactduring self-paced reach-to-grasp movements. Experimentaldisruption in grip aperture has been shown to disrupt theclassical bell-shaped wrist velocity proWle (Fan et al. 2005;Jeannerod 1984; Castiello 2005; Hu et al. 2005; Timmannet al. 1996). It is critical to note that the current experimen-tal paradigm was fundamentally diVerent from that ofprevious prehension studies. The nature of the current taskdid not require the participant to manipulate the object (ortarget), which impacted on the required planning and natureof the reach-to-grasp. Of greater importance, however, wasthe demand of postural preservation in the response. Thisdemand highlighted the Xexible nature of the controlsystem, which allowed decoupling of the relationshipbetween peak wrist velocity and peak grip aperture. Wristvelocity peaked, and slowed, after approximately 70% ofmovement time; peak aperture occurred at 94% of move-ment time. Peak aperture did not occur until the movementwas almost completed, and at the time of contact with thetarget, the hand was closing on the target (grip aperturevelocity was negative for all conditions), further evidencethat the control system plans for contact with the target.Late peak aperture, and therefore widely open (though clos-ing) hand just prior to contact may represent a trade-oV tothe Wne control otherwise demonstrated. It is important thatthe hand reach the target quickly to arrest movement of thebody. Maintaining an open hand increases the probabilityof making contact with the target. Even in the event of apartial miss of the target (i.e., if the target is not contactedsquarely) the target may still be contacted by the out-stretched thumb or Wngers. Slowing the wrist in the latetransport phase might serve to reduce the risk of hand
injury at the time of target contact. Overall, there are likelyto be trade-oVs in target accuracy when the planning for ini-tial trajectory and time to contact is largely dependent onthe initial characteristics of the perturbation (linked to aninternal spatial map of the surrounding environment). As aresult, strategies to increase success of contact, such asmaintaining wider aperture later into the movement thanwould occur with slower targeted movements are likelyimportant compromises to ensure successful reach andgrasp.
Implications
The control of perturbation-evoked, or compensatory,responses has been largely considered to be of a subcorticalnature. However, demonstrated similarities between volun-tary and perturbation-evoked reach-to-grasp movements inWner aspects of control, particularly with respect to handorientation and changes in grasp aperture, generally consid-ered under cortical control, suggest the possibility of acommon neural control mechanism for voluntary and com-pensatory movements. The notion that control of voluntaryand compensatory movements share common neural ele-ments and processes seems ecologically valid. That the twomodes of movement share many behavioural characteristicsquestions the idea that two separate neural mechanismsexist, or that compensatory upper limb movements are per-formed in isolation of the inXuence of the cortex. However,the notion of a common neural control mechanism raisesthe question of why such dramatic diVerences between vol-untary and compensatory movements in latency and veloc-ity are observed. The suggestion of a common neuralcontrol mechanism will require a more deWnitive demon-stration through the use of techniques such as EEG (Quantet al. 2004; Adkin et al. 2006; Sibley et al. 2006) and trans-cranial magnetic stimulation. Better understanding of theparallels between voluntary and perturbation-evoked, orcompensatory, movements may lead to new insights intochanges in postural control that develop with aging, andinto therapeutic interventions related to the treatment ofcertain pathologies such as stroke.
Acknowledgments This research was supported by funding fromthe following agencies: NSERC (WE McIlroy), Ontario Ministry ofHealth and Toronto Rehabilitation Institute (WH Gage, SW Hill),Heart and Stroke Foundation Centre for Stroke Recovery (WE McIl-roy), and Fonds de la recherché en Santé Québec (Post-DoctoralFellowship, FRSQ; KF Zabjek).
References
Adkin AL, Quant S, Maki BE, McIlroy WE (2006) Cortical responsesassociated with predictable and unpredictable compensatory bal-ance reactions. Exp Brain Res (Epub ahead of print)
123

Exp Brain Res (2007) 181:627–637 637
Allum JH, Carpenter MG, Honegger F, Adkin AL, Bloem BR (2002)Age-dependent variations in the directional sensitivity of balancecorrections and compensatory arm movements in man. J Physiol542:643–663
Bateni H, Zecevic A, McIlroy WE, Maki BE (2004) Resolving con-Xicts in task demands during balance recovery: does holding anobject inhibit compensatory grasping? Exp Brain Res 157:49–58
Bothner KE, Jensen JL (2001) How do non-muscular torques contrib-ute to the kinetics of postural recovery following a support surfacetranslation? J Biomech 34:245–250
Brauer SG, Woollacott M, Shumway-Cook A (2002) The inXuence ofa concurrent cognitive task on the compensatory stepping re-sponse to a perturbation in balance-impaired and healthy elders.Gait Posture 15:83–93
Burnod Y, Baraduc P, Battaglia-Mayer A, Guigon E, Koechlin E, Fer-raina S, Lacquaniti F, Caminiti R (1999) Parieto-frontal coding ofreaching: an integrated framework. Exp Brain Res 129:325–346
Carpenter MG, Allum JH, Honegger F (2001) Vestibular inXuences onhuman postural control in combinations of pitch and roll planesreveal diVerences in spatiotemporal processing. Exp Brain Res140:95–111
Castiello U (2005) The neuroscience of grasping. Nat Rev Neurosci6:726–736
Crawford JD, Medendorp WP, Marotta JJ (2004) Spatial transforma-tions for eye-hand coordination. J Neurophysiol 92:10–19
Day BL, Lyon IN (2000) Voluntary modiWcation of automatic armmovements evoked by motion of a visual target. Exp Brain Res130:159–168
Elger K, Wing A, Gilles M (1999) Integration of the hand in posturalreactions to sustained sideways force at the pelvis. Exp Brain Res128:52–60
Fan J, He J, Tillery SI (2005) Control of hand orientation and armmovement during reach and grasp. Exp Brain Res (in press):1–14
Ghafouri M, McIlroy WE, Maki BE (2004) Initiation of rapid reach-and-grasp balance reactions: is a pre-formed visuospatial mapused in controlling the initial arm trajectory? Exp Brain Res155:532–536
Gruneberg C, Duysens J, Honegger F, Allum JH (2005) Spatio-tempo-ral separation of roll and pitch balance-correcting commands inhumans. J Neurophysiol 94:3143–3158
Hu Y, Osu R, Okada M, Goodale MA, Kawato M (2005) A model ofthe coupling between grip aperture and hand transport during hu-man prehension. Exp Brain Res 167:301–304
Inglis JT, Horak FB, Shupert CL, Jones-Rycewicz C (1994) Theimportance of somatosensory information in triggering and scal-ing automatic postural responses in humans. Exp Brain Res101:159–64
Jeannerod M (1984) The timing of natural prehension movements.J Mot Behav 16:235–254
Maki BE, McIlroy WE (1997) The role of limb movements in main-taining upright stance: the “change-in-support” strategy. PhysTher 77:488–507
Maki BE, McIlroy WE, Perry SD (1996) InXuence of lateral destabili-zation on compensatory stepping responses. J Biomech 29:343–353
Maki BE, Edmondstone MA, McIlroy WE (2000) Age-related diVer-ences in laterally directed compensatory stepping behavior. J Ger-ontol A Biol Sci Med Sci 55:M270–277
Maki BE, McIlroy WE, Fernie GR (2003) Change-in-support reactionsfor balance recovery. IEEE Eng Med Biol Mag 22:20–26
McIlroy WE, Maki BE (1993) Do anticipatory postural adjustmentsprecede compensatory stepping reactions evoked by perturba-tion? Neurosci Lett 164:199–202
McIlroy WE, Maki BE (1995) Early activation of arm muscles followsexternal perturbation of upright stance. Neurosci Lett 184:177–180
Mon-Williams M, Tresilian JR, Coppard VL, Carson RG (2001) TheeVect of obstacle position on reach-to-grasp movements. ExpBrain Res 137:497–501
Quant S, Adkin AL, Staines WR, McIlroy WE (2004) Cortical activa-tion following a balance disturbance. Exp Brain Res 155:393–400
Sibley KM, Zabjek KF, Camilleri JM, McIlroy WE (2006) EVects ofperturbation amplitude on cortical potentials evoked by whole-body perturbations. The international congress on gait and mentalfunction: book of abstracts, Madrid, Spain, pp 50
Szturm T, Fallang B (1998) EVects of varying acceleration of platformtranslation and toes-up rotations on the pattern and magnitude ofbalance reactions in humans. J Vestib Res 8:381–397
Timmann D, Stelmach GE, Bloedel JR (1996) Temporal control of thereach and grip components during a prehension task in humans.Neurosci Lett 207:133–136
123
Copyright © 2022 FDOKUMEN