
Parallel and distributed implementation of a multilayer ...
244
e University of Toledo e University of Toledo Digital Repository eses and Dissertations 2013 Parallel and distributed implementation of a multilayer perceptron neural network on a wireless sensor network Zhenning Gao e University of Toledo Follow this and additional works at: hp://utdr.utoledo.edu/theses-dissertations is esis is brought to you for free and open access by e University of Toledo Digital Repository. It has been accepted for inclusion in eses and Dissertations by an authorized administrator of e University of Toledo Digital Repository. For more information, please see the repository's About page. Recommended Citation Gao, Zhenning, "Parallel and distributed implementation of a multilayer perceptron neural network on a wireless sensor network" (2013). eses and Dissertations. Paper 79.
-
Upload
khangminh22 -
Category
Documents
-
view
0 -
download
0
Transcript of Parallel and distributed implementation of a multilayer ...

The University of ToledoThe University of Toledo Digital Repository
Theses and Dissertations
2013
Parallel and distributed implementation of amultilayer perceptron neural network on a wirelesssensor networkZhenning GaoThe University of Toledo
Follow this and additional works at: http://utdr.utoledo.edu/theses-dissertations
This Thesis is brought to you for free and open access by The University of Toledo Digital Repository. It has been accepted for inclusion in Theses andDissertations by an authorized administrator of The University of Toledo Digital Repository. For more information, please see the repository's Aboutpage.
Recommended CitationGao, Zhenning, "Parallel and distributed implementation of a multilayer perceptron neural network on a wireless sensor network"(2013). Theses and Dissertations. Paper 79.

A Thesis
entitled
Parallel and Distributed Implementation of A Multilayer Perceptron Neural Network
on A Wireless Sensor Network
by
Zhenning Gao
Submitted to the Graduate Faculty as partial fulfillment of the requirements for the
Master of Science Degree in Engineering
_________________________________________ Dr. Gursel Serpen, Committee Chair _________________________________________ Dr. Mohsin Jamali, Committee Member _________________________________________ Dr. Ezzatollah Salari, Committee Member _________________________________________
Dr. Patricia R. Komuniecki, Dean College of Graduate Studies
The University of Toledo
December 2013

Copyright 2013, Zhenning Gao
This document is copyrighted material. Under copyright law, no parts of this document may be reproduced without the expressed permission of the author.

iii
An Abstract of
Parallel and Distributed Implementation of A Multilayer Perceptron Neural Network on A Wireless Sensor Network
by
Zhenning Gao
Submitted to the Graduate Faculty as partial fulfillment of the requirements for the
Master of Science Degree in Engineering
The University of Toledo
December 2013
This thesis presents a study on implementing the multilayer perceptron neural network on
the wireless sensor network in a parallel and distributed way. We take advantage of the
topological resemblance between the multilayer perceptron and wireless sensor network.
A single neuron in the multilayer perceptron neural network is implemented on a wireless
sensor node, and the connections between neurons are achieved by the wireless links
between nodes. While the computation of the multilayer perceptron benefits from the
massive parallelism and the fully distribution when the wireless sensor network is serving
as the hardware platform, it is still unknown whether the delay and drop phenomena for
message packets carrying neuron outputs would prohibit the multilayer perceptron from
getting a decent performance.
A simulation-based empirical study is conducted to assess the performance profile of the
multilayer perceptron on a number of different problems. Simulation study is performed
using a simulator which is developed in-house for the unique requirements of the study

iv
proposed herein. The simulator only simulates the major effects of wireless sensor
network operation which influence the running of multilayer perceptron. A model for
delay and drop in wireless sensor network is proposed for creating the simulator. The
setting of the simulation is well defined. Back-Propagation with Momentum learning is
employed as the learning algorithms for the neural network. A formula for the number of
neurons in the hidden layer neuron is chosen by empirical study. The simulation is done
under different network topology and condition of delay and drop for the wireless sensor
network. Seven data sets, namely Iris, Wine, Ionosphere, Dermatology, Handwritten
Numerical, Isolet and Gisette, with the attributes counts up to 5000 and instances counts
up to 7797 are employed to profile the performance.
The simulation results are compared with those from the literature and through the
non-distributed multilayer perceptron. Comparative performance evaluation suggests that
the performance of multilayer perceptron using wireless sensor network as the hardware
platform is comparable with other machine learning algorithms and as good as the
non-distributed multilayer perceptron. The time and message complexity have been
analyzed and it shows the scalability of the proposed method is promising.

v
Acknowledgements
First and foremost, I would like to express my sincere gratitude to my advisor Dr. Gursel
Serpen for the continuous support of my study and research, for his wisdom, motivation,
patience and immense knowledge, for his guidance which helped me in all the time of
research and writing of this thesis. His great enthusiasm for his research works would
inspire me forever.
I would also like to thank my other committee members, Dr. Mohsin Jamali, Dr.
Ezzatollah Salari for their knowledge and support throughout my study.
Many thanks to my fellow labmates: Jiakai Li, Lingqian Liu and Chao Dou for their
assistance for my research work and the enjoyable time we had. Also thank them for the
great research work they did, which motivate me during this thesis work.
At last, I would like to give my special thanks to my family: my parents Xiaomin Gao
and Baofeng Xu, for their continuous support throughout my graduate and undergraduate
study. I know they would always stand by me whenever and wherever. Thanks to my
girlfriend Qi He for her understanding and support. I really cherish her three years of
waiting.

vi
Table of Contents
Abstract ..........................................................................................................................iii
Acknowledgements ......................................................................................................... v
Table of Contents ........................................................................................................... vi
List of Tables .............................................................................................................. x
List of Figures ..............................................................................................................xiii
1 Introduction ......................................................................................................... 1
2 Background ......................................................................................................... 6
2.1 Artificial Neural Networks ........................................................................ 6
2.1.1 Neuron Computational Model ....................................................... 7
2.1.2 Multilayer Perceptron Neural Network ......................................... 8
2.1.3 Learning for ANNS...................................................................... 10
2.2 Parallel and Distributed Processing for ANNs ........................................... 12
2.2.1 Supercomputer-based Systems .................................................... 13
2.2.2 GPU-based Systems ..................................................................... 14
2.2.3 Circuit-based Systems .................................................................. 15
2.2.4 WSN-based Systems .................................................................... 16
2.3 Scalability of MLP-BP ................................................................................ 16
2.4 Wireless Sensor Networks .......................................................................... 19
2.4.1 Single Node (Mote) Architecture................................................. 20

vii
2.4.2 Network Protocols ....................................................................... 22
2.5 WSN Simulators ......................................................................................... 25
2.5.1 Bit Level Simulators .................................................................... 25
2.5.2 Packet Level Simulators .............................................................. 26
2.5.3 Algorithm Level Simulators ........................................................ 27
2.5.4 Proposed Approach of Simulation for WSN-MLP Design.......... 28
3 Probabilistic Modeling of Delay and Drop Phenomena for Packets Carrying
Neuron Outputs in WSNs ................................................................................ 29
3.1 Neuron Outputs and Wireless Communication Delay ................................ 29
3.2 Modeling the Probability Distribution for Packet Drop and Delay Phenomena
............................................................................................................... 31
3.2.1 Literature Survey ......................................................................... 32
3.2.2 Dataset for Building the Drop Model .......................................... 32
3.2.3 Empirical Model as an Equation for Packet Delivery Ratio vs. Node
Count ............................................................................................. 34
3.2.4 The number of transmission hops ................................................ 36
3.3 Neuron Outputs and Wireless Communication Delay ................................ 40
3.3.1 Delay and Delay Variance ........................................................... 40
3.3.2 Delay Generation using Truncated Gaussian distribution ........... 42
3.4 Modeling the Neuron Output Delay (NOD) ............................................... 45
3.4.1 Distance Calculation .................................................................... 45
3.4.2 Model of the Delay for Transmission of Neuron Outputs ........... 47
4 Simulation Study: Preliminaries ....................................................................... 54

viii
4.1 Data Sets ..................................................................................................... 54
4.1.1 Iris Data Set.................................................................................. 55
4.1.2 Wine Data Set .............................................................................. 55
4.1.3 Ionosphere Data Set ..................................................................... 56
4.1.4 Dermatology Data Set .................................................................. 57
4.1.5 Handwritten Numerals Data Set .................................................. 57
4.1.6 Isolet Data Set .............................................................................. 58
4.1.7 Gisette Data Set............................................................................ 58
4.2 Data Preprocessing...................................................................................... 59
4.2.1 Data Normalization ...................................................................... 59
4.2.2 Balance of Classes ....................................................................... 60
4.2.3 Data Set Partitioning for Training and Testing ............................ 64
4.3 MLP Neural Network Parameter Settings .................................................. 66
4.3.1 Training Algorithm ...................................................................... 66
4.3.1.1 Back-Propagation with Adaptive Learning Rate ............ 67
4.3.1.2 Resilient Back-Propagation ............................................ 68
4.3.1.3 Conjugate Gradient Back-Propagation ........................... 69
4.3.1.4 Levenberg-Marquardt Algorithm.................................... 69
4.3.1.5 Back-Propagation with Momentum ................................ 70
4.3.2 Learning Rate, Momentum and Hidden Layer Neuron Count .... 71
5 Simulation Study ............................................................................................... 82
5.1 The Simulator.............................................................................................. 82
5.2 Parameter Value Settings ............................................................................ 84

ix
5.3 Simulation Results ...................................................................................... 85
5.3.1 Iris Dataset ................................................................................... 86
5.3.2 Wine Dataset ................................................................................ 89
5.3.3 Ionosphere Dataset ....................................................................... 92
5.3.4 Dermatology Dataset ................................................................... 95
5.3.5 Numerical Dataset ........................................................................ 99
5.3.6 Isolet Dataset .............................................................................. 102
5.3.7 Gisette Dataset ........................................................................... 106
5.3.8 Summary and Discussion ........................................................... 110
5.4 Performance Comparison with Studies Reported in Literature ......................... 111
5.5 Time and Message Complexity ................................................................ 115
5.5.1 Time Complexity of WSN-MLP ............................................... 115
5.5.2 Message Complexity of WSN-MLP .......................................... 118
5.6 Weights of Neurons in Output Layer ........................................................ 121
6 Conclusions ..................................................................................................... 126
6.1 Research Study Conclusions ..................................................................... 126
6.2 Recommendations for Future Study ......................................................... 128
References ................................................................................................................... 130
A Data from Literature Survey for Drop and Delay ........................................... 148
B Time and Message Complexity ...................................................................... 154
C C++ Code for WSN-MLP Simulator .............................................................. 159

x
List of Tables
3.1 Coefficients �� and �� of the Linear Model for Each Case in Figure 3-1 ..... 36
3.2 Empirical Models of ����� in Terms of Parameter ��� .............................. 38
4.1 Characteristics of Data Sets ............................................................................... 55
4.2 Sample Patterns for Iris Dataset ......................................................................... 55
4.3 Sample Patterns (in columnar format) for Wine Dataset ................................... 56
4.4 Instance Statistics for Each Class of Dermatology Dataset ............................... 58
4.6 Options for Hidden Neuron Counts for Each Data Set ...................................... 75
5.1 Classification Accuracy Results for Iris Data Set .............................................. 86
5.2 Training Iterations for Iris Data Set ................................................................... 87
5.3 MSE for Iris Data Set ......................................................................................... 87
5.4 Percentage of Neuron Output Delay for Iris Data Set ....................................... 87
5.5 Classification Accuracy for Wine Data Set ....................................................... 90
5.6 Training Iterations for Wine Data Set ................................................................ 90
5.7 MSE for Wine Data Set ..................................................................................... 90
5.8 Percentage of Neuron Output Delay for Wine Data Set .................................... 91
5.9 Classification Accuracy for Ionosphere Data Set .............................................. 93
5.10 Training Iterations for Ionosphere Data Set....................................................... 93
5.11 MSE for Ionosphere Data Set ............................................................................ 93
xi
5.12 Percentage of Neuron Output Delay for Ionosphere Data Set ........................... 94
5.13 Classification Accuracy for Dermatology Data Set ........................................... 96
5.14 Training Iterations for Dermatology Data Set ................................................... 97
5.15 MSE for Dermatology Data Set ......................................................................... 97
5.16 Percentage of Neuron Output Delay for Dermatology Data Set........................ 97
5.17 Classification Accuracy for Numerical Data Set ............................................. 100
5.18 Training Iterations for Numerical Data Set ..................................................... 100
5.19 MSE for Numerical Data Set ........................................................................... 100
5.20 Percentage of Neuron Output Delay for Numerical Data Set .......................... 101
5.21 Classification Accuracy for Isolet Data Set ..................................................... 103
5.22 Training Iterations for Isolet Data Set ............................................................. 103
5.23 MSE for Isolet Data Set ................................................................................... 104
5.24 Percentage of Neuron Output Delay for Isolet Data Set .................................. 104
5.25 Classification Accuracy for Gisette Data Set ................................................... 107
5.26 Training Iterations for Gisette Data Set ........................................................... 107
5.27 MSE for Gisette Data Set ................................................................................. 107
5.28 Percentage of Neuron Output Delay for Gisette Data Set ............................... 108
5.29 Comparison of Classification Accuracy for Iris Data Set ................................ 112
5.30 Comparison of Classification Accuracy for Wine Data Set ............................ 112
5.31 Comparison of Classification Accuracy for Ionosphere Data Set: .................. 113
5.32 Comparison of Classification Accuracy for Dermatology Data Set ................ 113
5.33 Comparison of Classification Accuracy for Numerical Data Set .................... 113
5.34 Comparison of Classification Accuracy for Isolet Data Set ............................ 114

xii
5.35 Comparison of Classification Accuracy for Gisette Data Set .......................... 114
5.36 Simulation Parameter Values Affecting Time Complexity for WSN-MLP .... 117
5.37 Simulation Parameter Values Affecting Message Complexity for WSN-MLP120
5.38 Average Values for Magnitudes of Weights over Different Hop Distances vs.
Neuron Output Delays for Iris Data Set ......................................................... 122
5.39 Average Values for Magnitudes of Weights over Different Hop Distances vs.
Percentage of Neuron Output Delays for Wine Data Set .............................. 122
5.40 Average Values for Magnitudes of Weights over Different Hop Distances vs.
Percentage of Neuron Output Delays for Ionosphere Data Set ..................... 123
5.41 Average Values for Magnitudes of Weights over Different Hop Distances vs.
Percentage of Neuron Output Delays for Dermatology Data Set .................. 123
5.42 Average Values for Magnitudes of Weights over Different Hop Distances vs.
Percentage of Neuron Output Delays for Numerical Data Set ...................... 124
5.43 Average Values for Magnitudes of Weights over Different Hop Distances vs.
Percentage of Neuron Output Delays for Isolet Data Set .............................. 124
5.44 Average Values for Magnitudes of Weights over Different Hop Distances vs.
Percentage of Neuron Output Delays for Gisette Data Set ............................ 125

xiii
List of Figures
2-1 Diagram of a neuron mathematical model ...............................................................7
2-2 Diagram of a three-layer MLP neural network ......................................................10
3-1 Plots for Probability of Drop vs. Node Count for Various Routing Protocols ......35
3-2 Example Illustrating Relationship between ��� and ��� � ............................37
3-3 Histogram of Delay for Survey Data .....................................................................41
3-4 Function for Generating the Truncated Normal Distribution ................................44
3-5 Histogram of Truncated Gaussian Distribution as Generated by MATLAB Code
in Figure 3-4 ...........................................................................................................44
3-6 Basic Flow Chart for the Calculation of NOD.......................................................45
3-7 Deployment for MLP neural network within WSN topology ...............................46
3-8 MATLAB Code for the Calculation of Pairwise Distance between Neurons .......47
3-9 Pseudo-code for Implementation of Delay and Drop (NOD) Model ....................50
3-10 An example for the Implementation of the Delay and Drop Modeling .................52
3-11 MATLAB code for the Delay and Drop (NOD) Model ........................................53
4-1 MATLAB Code for SMOTE Preprocessing Procedure ........................................62
4-2 Original Proportion of Classes for Dermatology Data Set ....................................63
4-3 Proportion of Classes for Dermatology Data Set after Application of SMOTE
Class Balancing Procedure ....................................................................................63

xiv
4-4 Comparison of Incorrectly Classified Instances for Dermatology Data Set for
SMOTE vs. No SMOTE ........................................................................................64
4-5 MATLAB code for Splitting the Data Set into Training and Testing ...................66
4-6 MLP Performance on Iris Data Set for Different Hidden Layer Neurons (a)MSE
(b)Training Iterations .............................................................................................76
4-7 MLP Performance on Wine Data Set for Different Hidden Layer Neurons (a)
MSE (b) Training Iterations ...................................................................................77
4-8 MLP Performance on Ionosphere Data Set for Different Hidden Layer Neurons
(a)MSE (b) Training Iterations ..............................................................................78
4-9 MLP Performance on Dermatology Data Set for Different Hidden Layer Neurons
(a)MSE (b) Training Iterations ..............................................................................79
4-10 MLP Performance on Numeral Data Set for Different Hidden Layer Neurons
(a)MSE (b) Training Iterations ..............................................................................80
4-11 MLP Performance on Isolet Data Set for Different Hidden Layer Neurons (a)
MSE (b) Training Iterations ...................................................................................81
5-1 Classification Accuracy vs. Percentage of NOD for Iris Data Set ........................88
5-2 MSE vs. Percentage of NOD for Iris Data Set.......................................................88
5-3 Training Iterations vs. Percentage of NOD for Iris Data Set .................................89
5-4 Classification Accuracy vs. Percentage of NOD for Wine Data Set .....................91
5-5 MSE vs. Percentage of NOD for Wine Data Set ...................................................92
5-6 Training Iterations vs. Percentage of NOD for Wine Data Set ..............................92
5-7 Classification Accuracy vs. Percentage of NOD for Ionosphere Data Set ............94
5-8 MSE vs. Percentage of NOD for Ionosphere Data Set ..........................................95

xv
5-9 Training Iterations vs. Percentage of NOD for Ionosphere Data Set ....................95
5-10 Classification Accuracy vs. Percentage of NOD for Dermatology Data Set .........98
5-11 MSE vs. Percentage of NOD for Dermatology Data Set .......................................98
5-12 Training Iterations vs. Percentage of NOD for Dermatology Data Set .................99
5-13 Classification Accuracy vs. Percentage of NOD for Numerical Data Set ...........101
5-14 MSE vs. Percentage of NOD for Numerical Data Set .........................................102
5-15 Training Iterations vs. Percentage of NOD for Numerical Data Set ...................102
5-16 Classification Accuracy vs. Percentage of NOD for Isolet Data Set ...................105
5-17 MSE vs. Percentage of NOD for Isolet Data Set .................................................105
5-18 Training Iterations vs. Percentage of NOD for Isolet Data Set ...........................106
5-19 Classification Accuracy vs. Percentage of NOD for Gisette Data Set ................108
5-20 MSE vs. Percentage of NOD for Numerical Data Set .........................................109
5-21 Training Iterations vs. Percentage of NOD for Gisette Data Set .........................109

1
Chapter 1
Introduction
A truly parallel and distributed hardware implementation of artificial neural network
algorithms has been a leading and on-going quest of researchers for decades. Artificial
neural network (ANN) algorithms inherently possess fine-grain parallelism and offer the
potential for fully distributed computation. A scalable hardware computing platform
that can fully takes advantage of such a massive parallelism and distributed computation
attributes of artificial neural networks will be well-poised to compute real-time solutions
of complex and large-scale problems. Solving complex and very large-scale problems
in real time is likely to have radical and ground-breaking impact on the entire spectrum of
scientific, technological, economic and industrial endeavors enabling many solutions that
were simply not feasible, except in specialized circumstances where supercomputing type
platforms could be afforded, due to the computational cost or complexity.
As a recent and constantly evolving technology, wireless sensor networks offer a very
promising option for a truly parallel and distributed processing (PDP) platform for
artificial neural network implementations. There have been fundamental and significant
technological advancements for the wireless sensor networks (WSN) during the past
decade. More and more WSNs are being deployed for a very diverse set of applications.

2
First the micro electromechanical systems (MEMS) and then the Nano technology
facilitated devices to dramatically shrink in size and to be manufactured in mass which
resulted in the cost to reduce at an accelerated pace to an affordable level. It is now
possible to deploy a WSN with 10,000 motes at a cost of $50,000 US while the size of a
mote can be made as small as a US dime. It is therefore not unrealistic to project that
the future will bring even more increases in the mote count and more shrinkage in the
mote size.
A WSN mote can be considered as a basic computer with a built-in microcontroller and a
radio trans-receiver as a wireless communication device as well as a number of sensors as
the application needs dictate. There is sufficient computational power in each mote to
implement the computations associated with neuron dynamics very fast or in real time for
most, if not all, applications. In fact, as time passes and technology brings about further
progress, it is conceivable that a single mote will be able to satisfy the computation
requirements of tens or hundreds of neurons. Consequently, in light of the current
technology, it is possible to prototype a WSN with thousands of motes where each mote
can compute dynamics of one or more neurons in real time. This conjecture leads to a
new parallel and distributed computing platform for neurocomputing.
A WSN and an ANN possess structural resemblance that makes it easy to map an ANN
algorithm to be computed in parallel and distributed fashion using a WSN as a computing
platform. Wireless sensor networks are topologically similar to artificial neural networks.
In fact there is a one-to-one correspondence, in that, a sensor mote can represent and

3
implement computations associated with a neural network neuron or node, while
(typically multi-hop) wireless links among the motes are analogous to the connections
among neurons. Sensors and associated circuitry on motes are not needed for
implementation of artificial neural network computations. Accordingly it is sufficient for
the nodes or motes in the wireless network to possess the microcontroller (or similar) and
wireless communication radio to be able to serve as a PDP hardware platform for ANN
computations. Additionally since this modified version of motes and the associated
wireless sensor network will not need to be deployed in the field, the batteries may be
replaced with the grid or line power and hence eliminating the most significant
disadvantage (e.g., limited power storage or capacity) associated with the operation of
wireless sensor networks.
We are proposing to employ a WSN as computer architecture for fine-grain and
massively parallel and distributed hardware realization of the multi-layer perceptron
(MLP) artificial neural network algorithm with the objective of achieving computations
of solutions for problems of larger-scale and complexity. The technology that has been
emerging for the wireless sensor networks (WSN) will be leveraged to conceptualize,
design and develop the proposed WSN computer architecture for the MLP ANN.
There is notable prior work relevant to the proposed study [20, 21]. Li [20] considered
embedding artificial neural networks in a distributed and parallel mode to infuse
capability for adaptation and intelligence into wireless sensor networks. He studied a
recurrent Hopfield neural network as an optimization algorithm for topology adaptation

4
of the wireless sensor network. Liu [21] considered the wireless sensor networks as
parallel and distributed computers for Neurocomputing and demonstrated successful
training of Kohonen’s self-organizing maps for clustering in a smaller dimension space.
In a way, the work reported in this thesis is a continuation of these earlier efforts by Li
and Liu.
We will define the new parallel and distributed processing (PDP) and computing
architecture and its application for MLP artificial neural network computations. Next,
we will demonstrate mapping an MLP artificial neural network algorithm configured for
a comprehensive set of classification or function approximation problems to the proposed
WSN architecture. We will then present a simulation platform that was developed
in-house for the unique requirements of the study proposed herein. Finally, we will
perform an extensive simulation study to assess the performance profile of and
demonstrate the proposed computing architecture, with respect to scalability and for
solution of larger-scale problems.
The methodology to be employed can be summarized as follows. The underlying
architectural principles and structure of the proposed parallel and distributed computing
platform hardware and software will be formulated and defined. Procedures for
mapping the MLP artificial neural network configured for a larger-scale problem to the
proposed parallel and distributed WSN-based hardware platform will be developed for a
representative and comprehensive set of domain problems. A wireless sensor network
simulator appropriate for large-scale simulations will be custom developed to perform a

5
comprehensive simulation study for validation and performance assessment of the
proposed computational framework.

6
Chapter 2
Background
2.1 Artificial Neural Networks
An artificial neural network (ANN) is a biologically inspired mathematical model of
computation in the neural circuitry of animal brains. ANNs attempt to reproduce some of
the flexibility and power of animal brains. They mimic the real life behavior of neurons
and the electrical messages they produce between input processing by the animal brain
and the final output from the brain. They are known for their ability to model highly
complicated input-output relationships that are difficult for conventional techniques [1].
ANNs are widely used in areas such as classification, prediction, function approximation,
dynamic system controls, associative memory and etc. [2].
The basis of most modern artificial neural networks is the model proposed by McCulloch
and Pitts in 1943 [3]. Their model presented a simple threshold-based logic unit that
would fire either an inhibitory or an excitatory signal based on the input received, and
computations would occur in discrete time intervals. In 1949, Donald Hebb further
reinforced McCulloch-Pitts’s model and proposed a learning mechanism for neurons,

7
which is known as Hebbian learning [4]. In 1986, the back propagation algorithm
originally discovered by Werbos in 1974 was rediscovered [5]. It makes multi-layer
perceptron (MLP) capable of solving nonlinear separation problems. Since then, ANNs
have been widely applied in solving countless real life problems.
2.1.1 Neuron Computational Model
The basic component of an ANN is the neuron whose model is based on the proposal by
McCulloch and Pitts. A neuron is the fundamental computational unit within an ANN.
The computational model of a neuron consists of two components: a summing function
and an activation function. Data is transmitted into a neuron via n inputs, �� , j = 1,2,…,n.
The neuron initially calculates a weighted sum of its inputs, and then the output is
computed according to the activation function. An example for the computational model
of a neuron is shown in Figure 2.1.
Figure 2.1: Diagram of a neuron mathematical model
Output
�� Σ
���
��
��
...
��
�
��
…
Inputs Weights
Summing Function
Activation Function
��

8
The mathematical model of the computation is given by the Equation 2.1 as
� = ���∑ �� × ������� − ��, (2.1)
where the summing function simply combines each input multiplied by the respective
weight �� ; the neuron’s threshold is given by θ and can be treated as a weight with a
constant input of -1. The sum is represented by y.... The activation function � acts as a
squashing function for the weighted sum, limiting the permissible amplitude range of the
output signal. Typical activation functions [6] used for continuous or discrete output
values, respectively, are given by
�� � = ��! "#$, (2.2)
and
�� � = %+1, > 0−1, < 0 , (2.3)
where +>0 in Equation 2.2 is proportional to the neuron gain determining the
steepness of the continuous function �( ) near = 0. Notice that as+ → ∞, the
limit of the continuous function becomes the function defined in Equation 2.3.
2.1.2 Multilayer Perceptron Neural Network
While a single neuron can only perform the basic computation, a collection or network of
neurons can exhibit emergent computational properties. An artificial neural network can
be viewed as a directed graph with neurons as the nodes and weighted connections
between neurons acting as edges. Outputs of neurons become inputs for other neurons.

9
This study is focused on the most common type of ANN, namely the multilayer
perceptron (MLP) neural network.
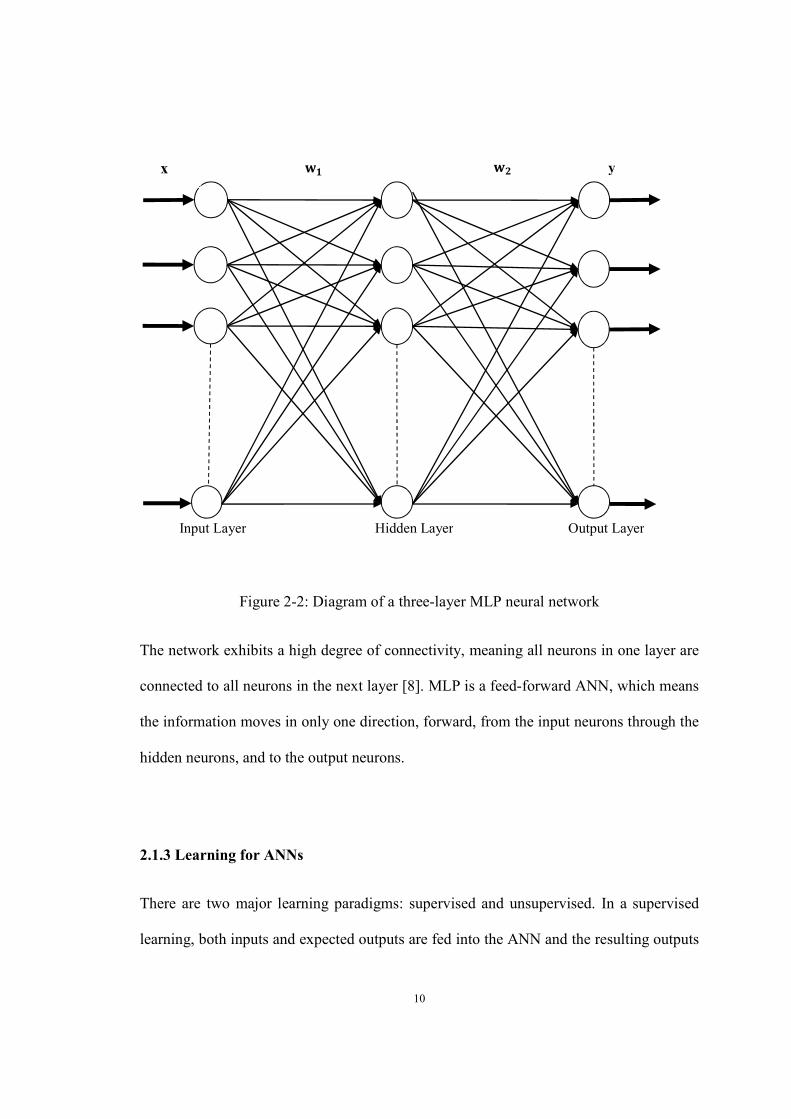
Figure 2.2 shows a typical three-layer MLP. An MLP consist of at least 3 layers, an input
layer, one or more hidden layer(s) and an output layer. The input layer is not considered a
“true” layer because no computation is performed by it. It receives problem-specific
inputs from the outside world. An MLP contains one or more hidden layers, which
receive inputs from preceding layers (input or hidden layers) and their outputs connect to
the next layers (output or hidden layers). Each neuron in a hidden layer employs a
nonlinear activation function that is differentiable [8]. The output layer presents the final
result of the computation performed by the network to the outside world.
10
Figure 2-2: Diagram of a three-layer MLP neural network
The network exhibits a high degree of connectivity, meaning all neurons in one layer are
connected to all neurons in the next layer [8]. MLP is a feed-forward ANN, which means
the information moves in only one direction, forward, from the input neurons through the
hidden neurons, and to the output neurons.
2.1.3 Learning for ANNs
There are two major learning paradigms: supervised and unsupervised. In a supervised
learning, both inputs and expected outputs are fed into the ANN and the resulting outputs
y
Hidden Layer Input Layer Output Layer
./ x .0

11
are then compared to the expected outputs to calculate the error. Using this error a
learning algorithm is then used to compute weight adjustments in order to lower the
network’s total error. After many pattern presentations and weight adjustments, the
network exhibits the learning behavior. That means the output of the ANN should
converge towards the desired output as additional training inputs are provided.
In an unsupervised learning, there is no target output data. The goal of these networks is
not to achieve high accuracy but to apply induction principles to organize data. The
learning behavior exhibits through supplying substantial data so that the network can
observe similarities and therefore use clusters to generalize its input data.
In its most basic form, an MLP neural network utilizes a supervised learning technique
called back-propagation for training the network. The training consists of two phases of
operation: a forward phase and a backward phase. During the forward phase, the
in-network processing or computation takes place, where input data are propagated
forward through the ANN from the input layer to the output layer while the weights
remain unaltered. At the start of the backward phase an error signal vector for output
layer neurons is calculated based on the difference between the desired and the computed
output values. Then the error signal vector is propagated back to the hidden layers. The
error signal vector for hidden layers is next calculated. The weights are updated based on
the error signal and the input value. The back-propagation performs a gradient descent
search in the weight space for the lowest error function value. There are several

12
variations on gradient descent back-propagation error correction. Further information for
these variations of back-propagation is documented in Section 3.1.1 of this thesis
manuscript.
2.2 Parallel and Distributed Processing for ANNs
It is well known that the training of or learning by an artificial neural network can be very
time consuming [9]. Meanwhile, ANNs possess inherent parallel processing capability, as
the neurons in the same layer can compute simultaneously. Therefore, a parallel
computing system is desirable to speed-up the computations needed for training an ANN.
Often, the challenge however is figuring out a mapping the parallel tasks associated with
the neuro-computing aspect with the parallel computing hardware or the processors of the
parallel system [10].
Nordstrom et al. suggested that parallelism for a typical ANN can be achieved in five
different ways [11]:
� Training session parallelism (simultaneously execution of different sessions).
� Training example parallelism (simultaneously learning of different training patterns).
� Layer and forward-backward parallelism (simultaneously processing of each layer).
� Neuron parallelism (simultaneously processing of each neuron in a layer).

13
� Weight parallelism (simultaneously multiplication of each weight with the
corresponding input in a neuron).
They also mentioned that since high degree of connectivity and large data flows are
characteristic features of neural networks, the structure and bandwidth of internal and
external communication in the computer to be used is of great importance.
In general, there are three different ways to implement the parallelism of ANNs:
Supercomputer-based systems, GPU-based systems and VLSI circuit-based systems.
Each of them has been under development for decades and still draws attention from
researchers. Supercomputer-based systems are known for their huge computation power,
which could be used to implement ANNs consisting of up to billions of neurons [15].
GPU-based systems take advantage of the availability through common PC and the
GPU’s highly parallel structure [17]. Circuit-based systems are powered by VLSI
architectures which offer massive parallelism that naturally suits the neural computational
paradigm of arrays of simple elements computed in tandem [19]. Recently, wireless
sensor network (WSN) based systems have been also proposed as parallel and distributed
processing hardware platforms. The similarity between the topologies of wireless sensor
networks and ANNs makes WSN a good candidate for implementing the parallel and
distributed processing of ANNs.

14
2.2.1 Supercomputer-based Systems
Blue Brain Project is a well-known supercomputer-based neural computation system [15].
The project began in 2005. Researchers used an IBM Blue Gene/L supercomputer to
simulate the mammalian brain. By July 2011 a cellular microcircuit of 100 neocortical
columns with a million cells was built. A cellular rat brain is planned for 2014 with 100
microcircuit totaling a hundred million cells [15].
Ananthanarayanan et al. from IBM Almaden Research Center pursued a similar project.
The ANN consisted of 900 million neurons and 6.1 trillion synapses. The supercomputer
they used is a Blue Gene/P with 147,456 CPUs and 144 TB of total memory. Their scale
for the neuron count has reached the level of a cat cortex which is 4.5% of the human
cortex.
2.2.2 GPU-based Systems
A graphics processing unit or GPU is known for its parallel computation power
achieved through highly parallel computing structure. GPU is capable of running up to
thousands of threads per thread block in parallel. Ciresan et al. implemented MLPs on
GPUs to running the MNIST handwritten digits benchmark [17]. Their system consists
of 2 x GTX 480 and 2 x GTX580 GPUs. In their implementation a tread is assigned to
one neuron. The result shows the GPU implementation is more than 60 times faster
than a compiler-optimized CPU version. Cai et al. designed a matrix-based training

15
algorithm of Conditional Restricted Boltzmann Machine (CRBM) and implemented on
GPU directly by using the library CUBLAS [18]. Their results show that the
computation of CRBM is accelerated by almost 70 times by employing their GPU
implementation.
2.2.3 Circuit-based Systems
An example for this realization is the REMAP (Real-time, Embedded, Modular, Adaptive,
Parallel processor) which was designed by Nordstrom et al [12]. The project is aimed at
obtaining a massively parallel computer architecture put together by modules in a way
that allows the architecture to be adjusted to a specific application. The prototype was
built using the FPGA technology. It mainly uses bit-serial processing elements (PEs)
which are organized as a linear processor array. They have implemented different kinds
of ANNs on the REMAP, such as Sparse Distributed Memory (SDM) [13],
self-organizing maps (SOM) [14], multilayer perceptron neural network with
back-propagation (BP) learning, and the Hopfield network [15].
Basu have developed a neuromorphic analog chip that is capable of implementing
massively parallel neural computations [19]. They showed measurements from neurons
with Hopf bifurcation and integrate and fire neurons, excitatory and inhibitory
synapses, passive dendrite cables, excitatory and inhibitory synapses, passive dendrite
cables, coupled spiking neurons, and central pattern generators implemented on the

16
chip. Using floating-gate transistors, the topology of the networks and the parameters
of the individual blocks can both be modified.
2.2.4 WSN-based Systems
WSN-based systems are relatively recent and only have been in existence starting with
the last decade ([20], [21]). Although a really large scale ANN could be trained and
executed on a super computer or a VLSI (GPU would still be unable to train because of
the technology limits), they are still not accessible for the typical user. Thanks to the
recent advances in micro-electro-mechanical systems technology, WSN nodes have
become low cost (some even below $1 US). Each WSN mote has sufficient
computation power to implement one or more neurons. The wireless link between
motes can be treated as the synapses, and weights could be stored in the memory of
motes. Thus, parallelism at the level of neuron processing is possible. Such a system
can be implemented to perform neural network computations in a truly parallel and
distributed manner.
2.3 Scalability of MLP-BP
The scalability of MLP-BP is affected by the complexity of the network topology and
structure, and the cost to train it. The network structure depends on the problem being
solved. For instance, considering the classification problems, the number of attributes
and classes directly translate into the number of neurons in the input layer and output
layer, respectively. The number of neurons in the hidden layer is affected by several
factors, such as the training algorithm and the activation functions used in the neurons,

17
but still is tightly related to the problem being solved. The number of attributes, classes
and patterns of the problem, the category of the problem and the percentage of noise in
the data would all affect the choice of an efficient structure of the MLP-BP network. If
the structure is chosen improperly the network would not achieve a good performance
and even fail to learn. For instance, if the network is too complex (have too many
hidden layer neurons) then it would probably cost too much time to train and won’t be
able to generalize since it would potentially over fit the training data [22].
The training time and the memory cost, which are measures for the time complexity
and space complexity, respectively, are prohibitively high for large-scale problems.
The primary part of the memory cost is the storage of the weights. In a MLP-BP
network each neuron in the hidden layer maintains weights for all the neurons in the
input layer, and each neuron in the output layer maintains weights for all the neurons in
the hidden layer. The weight count for a network would be given by
(1� ×1�) + (1� × �23), (2.4)
where1�, 1� and 4�23 are number of neurons in the input layer, hidden layer and
output layer, respectively.
The topology of an MLP-BP network typically has the most of the neurons in the input
layer, much less number of neurons in the hidden layer, and several neurons in the
output layer. Accordingly, the memory cost is not a primary source of
computational complexity for an MLP-BP network.

18
The projections for the time cost however are dramatically different. During training
the number of iterations to convergence, which will be represented by13 � , depends
on the properties of the specific problem being solved and the topology of the network.
During any given iteration, each pattern of the problem, piϵP for i=1, 2…|P|, is
propagated through the network, so there are |P| pattern presentations. Let’s denote
the number of addition operations, multiplication operations, and function evaluation
operations as78��, 792: and7;2�<, respectively. There are two phases for a single
pattern presentation to a typical MLP-BP. The first phase is the forward propagation.
In this phase, for each hidden layer neuron, computation for neuron output requires
1� × 792: (multiplication of inputs and weights) + (1� × 78��) − 1 (sum of
weighted inputs) + 7;2�< (function evaluation for neuron output) operations. For each
output layer neuron, computation of neuron output requires, 1� × 792:
(multiplication of inputs and weights) + (1� × 78��) + 1(sum of weighted inputs) +
7;2�< (error signal function evaluation) operations.
The second phase is back propagation of the signals. In this phase, for each hidden
layer neuron, computation for weights update requires �23 × 78�� (sum of output
layer errors) + 7;2�< (error signal function evaluation) + 1� × (78�� + 2 × 792:)
(adjustment of weights) operations. For each output layer neuron, computation for
weight update requires 1� × 792: (calculation of output layer errors) + 7;2�<
(error signal function evaluation) + 1� × (78�� + 2 × 792:) (adjustment of
weights) operations.

19
Overall, the total number of operations needed for a pattern presentation is
1� × �1� × (3 × 792: + 2 ×78��) + �23 × 78�� + 2 × 7;2�<�
+�23 × �1� × (4 × 792: + 2 ×78��) + 2 × 7;2�<�, (2.5)
where the significant or dominant term is given by
1� × (5 × 1� + 6 × �23) × 7;�, (2.6)
floating point operations (ofp) assuming that 78��, 792: and7;2�<all take the same
amount of time. From above the total floating point operations it may take to train a
MLP-BP network is on the order of
13 � × |P| × 1� × �5 × 1� + 6 × �23�, (2.7)
which will depend on the number of iterations, the size of the training data set, and the
number of neurons in each of the three layers (assuming a single hidden layer
topology). In the worst case, where the data set size is very large, the training
iterations count is also large, so the time cost can be significant. Therefore the time
complexity is the dominant cost factor for training an MLP-BP neural network.
2.4 Wireless Sensor Networks
Wireless sensor networks (WSN) are a recently emerging technology owing to
advancements in miniaturization of microcontrollers, radio devices and high density
storage and sensors. A WSN consists of spatially distributed motes (nodes with sensors)
that are able to interact with their environment by sensing or controlling physical
parameters. The network size may vary from a few to thousands, and these motes have
to collaborate to fulfill their task as a single mote is incapable of doing so. Motes use
wireless communication to enable their collaboration. WSNs can be used in a variety
20
of applications. Area monitoring is a common application of WSNs, in which case
the WSN is deployed to monitor some phenomenon such as enemy intrusion. WSNs
are also highly relevant for precision agriculture, as the sensors can be used to monitor
the crop and the environment to determine, for instance, the amount of irrigation and
time to harvest. Another application for which WSNs can be used in is smart building
monitoring, where a WSN can monitor the human movement to adjust the facilities in
the building. Structural health monitoring of bridges, highways, overpasses etc.,
another area of application. In transportation, embedded vehicles with a wireless
sensor network to develop ability to sense a wide array of phenomena is of interest.
The potential applications list appears to be very long.
2.4.1 Single Node (Mote) Architecture.
The majority of the applications for the WSNs require the motes to be small, cheap and
energy efficient. A sensor node or mote could be smaller than 1 cm, weight less than
100 g, cheaper than $1 US, and dissipate less than 100μW. The sensor nodes
possess processing and computing resources through utilization of a technologically
low-end microcontroller. A sensor node is capable of performing collecting of sensory
information and communicating with other nodes. A basic sensor node comprises five
main components: controller, memory, sensors, communication device, and power
supply. A brief description of each component follows.
Controller--The core of a mote is the controller which collects data from sensors,
processes the data, controls the transceiver to send and receive data and decides on the

21
actuator’s behavior. The controller has the ability of executing various programs,
ranging from the time-critical signal processing and communication protocols to
application programs. The clock speed of the controller for different kinds of nodes
ranges from less than 1 MHz to 16 MHz and beyond. The clock speed for the most
common nodes, such as Mica 2, T-Mote Sky, TelosB, Iris mote etc., is around 16 MHz.
The performance for the microcontroller on board the TelosB motes is 8 MIPS, Mica
motes is 1 MIPS, and Egs motes is 90 MIPS.
Memory—Memory subsystem of sensor node is used to store intermediate sensor
readings, packets from other nodes and so on. The memory system consists of RAM
and flash/external memory. Currently the size of RAM ranges from 512 bytes to 512
KB, and the size of flash/external memory ranges from 4 KB to 4 MB.
Sensors-- Sensors are the devices which make it possible for the motes to sense its
environment. Typical sensors measure temperature, light, vibration, sound, humidity,
chemical structure or makeups, video, and ultrasound to list a select few among many
other options.
Communication device-- The communication device is a wireless radio and used to
exchange data between individual nodes. A wireless radio device combines a
transmitter and a receiver called transceiver. The frequency of transceiver ranges from
433 MHz to 2.4 GHz given the current technology.

22
Power supply-- The common power supply for sensor nodes is batteries. Batteries
might be for one-time use or rechargeable. In the latter case, energy harvesting
mechanisms can be incorporated into a mote platform to charge batteries or supply
different electronics or sensors onboard.
2.4.2 Network Protocols
A WSN is distinguished from other types of wireless or wired networks by its
characteristics of energy efficiency, data centricity, scalability, distributed processing,
and self-organization. These characteristics lead to protocols that must be custom
developed and designed for WSNs. Energy efficiency is the most significant
characteristic for WSNs, which limits the radio transmission range and requires the
motes to sleep most of the time. Data-centric characteristic implies the network
protocols to be designed with a clear focus on the transactions of data instead of node
identities (id-centric). A WSN may consist of thousands of motes, so the protocols
need to consider its scalability for truly large networks. Distributed sensing and
processing implies that often the data to be sensed is collected by a larger number of
spatially spread sensors and processed in part and progressively by motes concurrently.
Self-organization means once the motes are deployed the network is left unattended,
then the network must adapt in the presence of environmental stimulus, conditions,
changes to topology, destruction or damage to motes or sub-networks, which are
typically unpredictable.

23
Medium Access Control Protocols -- The goal of medium access control (MAC)
protocols is controlling when to send a packet and when to receive a packet. MAC
protocols can be classified roughly into three categories [23]: contention-based
protocols, contention-free (schedule-based) protocols, and hybrid protocols. In
contention-based MAC protocols, sensor nodes that want to communicate with others
compete for access to the medium. IEEE 802.11, PAMAS, S-MAC and T-MAC are
common contention-based protocols. This kind of protocols inherits good scalability
and adaptability, but the idle listening, collision, overhearing, and control-packet
overhead lead to energy inefficiency. Contention-free protocols can be implemented
based on time-division multiple-access (TDMA), frequency-division multiple-access
(FDMA), and code-division multiple-access (CDMA) techniques. TRAMA, FLAMA,
SRSA, R-MAC and SMACS belong to this kind of MAC protocols. The advantage for
this kind of protocols is their energy efficiency, but the disadvantage is their lack of
scalability or adaptability. Hybrid MAC protocols combine the strengths of
contention-based and schedule-based protocols. Examples for this kind of protocols are
Funneling-MAC, HYMAC, AS-MAC and Z-MAC. A switching mechanism is
designed to let a hybrid MAC protocol switch itself between contention-based and
schedule-based protocols, so it can take advantage of each one while offsetting their
disadvantages. However, the disadvantage of this kind of protocols is the relatively
high protocol complexity.
Routing Protocols -- Routing is the act of moving information or data across a
network from a source to a destination. The routing protocols designed for WSNs can

24
be classified as data-centric, hierarchical and location-based [24]. Data centric
protocols are based on query and depend on the naming of desired data, which can
eliminate many redundant transmissions. SPIN, Directed Diffusion, Rumor routing and
CADR are common data-centric routing protocols [111,112,113,114]. Hierarchical
protocols cluster the whole network into several clusters so that the cluster heads can
do some aggregation and reduction of data in order to save energy. LEACH, TEEN
and PEGASIS belong to this kind of routing protocols [115,116,117]. The
location-based routing protocols use the position information to relay the data to the
destination. Examples for location-based protocols are GAF, GEAR and MECN
[118,119,120].
Time Synchronization Protocols -- Time plays an important role in WSNs. The
accuracy of time can influence many applications and protocols assigned to the
network. Because of random phase shifts and drift rates of oscillators, the local time
reading of motes will start to differ without correction. Time synchronization protocols
for WSNs need to guarantee the accuracy while keeping the energy consumption low.
These protocols could be divided into sender-receiver and receiver-receiver protocols.
In the sender-receiver protocols, a receiver synchronizes to the clock of a sender. For
the sender-sender protocols, the receivers synchronize to each other by the
time-stamped packet sent from another mote.
Localization and Positioning Protocols -- Location is necessary for the nodes to
know for many functions: location stamps, coherent signal processing, tracking and

25
locating objects, cluster formation, efficient querying and routing. Equipping every
node with a GPS receiver is not a feasible option because of cost, energy and
deployment limitations. An example of localization protocol is the APIT [121], which
locates a node by deciding whether it is within or outside of a triangle formed by any
three anchors. DV-Hop is another positioning protocol relevant for WSNs [122].
2.5 Wireless Sensor Network Simulators
Recently, there has been growing interest in implementing WSNs for wide variety of
applications and designing protocol-level or application-level algorithms for WSNs.
Since running real experiments is very costly and time consuming, simulation is
essential to study WSNs. New applications and protocols for WSNs are implemented
on simulators to verify the feasibility and to test the performance. Although simulation
models are usually not able to represent the real environments with the desired level of
completeness and accuracy, compared to the cost and time involved in setting up an
entire testbed, simulators are still relatively fast and inexpensive.
Simulators can be classified into three major categories based on the level of
complexity: bit level, packet level and algorithm level. As the complexity goes up, the
time and memory consumption of the simulation grows. It is desirable to select the
level of simulation based on the rigor requirements of the experiment. For instance, a
timing-sensitive MAC protocol would probably need a bit level simulation while an
algorithm level simulation is sufficient to test the prototype developed for an
agriculture management application.

26
2.5.1 Bit Level Simulators
Bit-level simulators model the CPU execution at the level of instructions or even
cycles, they are often regarded as emulators. TOSSIM [25] is a both bit and package
level simulator for detailed simulation of TinyOS based motes. TOSSIM simulates the
entire TinyOS execution by replacing components with simulation implementations. It
uses the same code as is used on real motes. The programming language for it is nesC,
a dialect of C. TOSSIM simulates the nesC code running on actual hardware by
mapping hardware interrupts to discrete events. TOSSIM can handle simulations up to
around a thousand motes. Avrora [26] is another bit-level simulator that is open source
and built using the Java programming language. It has language and operating system
independence. It simulates a network of motes by running the actual microcontroller
programs, and accurate simulations of the devices and the radio communication.
Avrora is capable of running a complete sensor network simulation with high timing
accuracy.
2.5.2 Packet Level Simulators
Packet level simulators implement the data link and physical layers in a typical OSI
network stack. The most widely used simulator is ns-2 [27]. ns-2 is an object-oriented
discrete event network simulator built in C++. ns-2 can simulate both wired and
wireless network. ns-2 possesses great extensibility, and its object-oriented design
allows for straightforward creation and use of new protocols. Due to its popularity and
ease of protocol development, there are many protocols that are available for it.
J-Sim[28] is a simulator that adopts loosely-coupled, component-based programming

27
model, and supports real-time process-driven simulation. OPNET [29] is a commercial
simulator, which provides a simulation environment with powerful standard modules.
OPNET is a good choice to simulate Zigbee based networks.
2.5.3 Algorithm Level Simulators
Algorithm level simulators focus on the logic, data structure and presentation of
algorithms. They do not consider detailed communication models, and they normally
rely on some form of a graph data structure to illustrate the communication between
nodes. Shawn [30] is a simulator implemented in C++ that has its own application
development model or framework based on so called processors. The nodes in Shawn
simulator are containers of processors, which process incoming messages, run
algorithms and emit messages. The motivation of Shawn is as follows: there is no
difference between a complete simulation of the physical environment (or lower-level
networking protocols) and the alternative approach of simply using well-chosen
random distributions on message delay and drop for algorithm design on a higher level,
such as localization algorithms. From their point of view, the common simulators
spend much processing time on producing results that are of no interest at all, thereby
actually hindering productive research on the algorithm. The framework of Shawn
replaces low-level effects with abstract and exchangeable models. Shawn simulates the
effects caused by a phenomenon instead of the phenomenon itself. For example,
instead of simulating a complete MAC layer including the radio propagation model, its
effects (packet drop and delay) are modeled in Shawn. The simulation time of Shawn

28
is significantly reduced compare to other simulators, and the choice of the
implementation model is more flexible.
2.5.4 Proposed Approach of Simulation for WSN-MLP Design
As discussed in Section 2.5, the simulation of MLP-BP network for large problems is
potentially time consuming. Simulation of a WSN is another source of complexity if
not done properly as earlier discussion indicated. MLP-BP algorithm can be
implemented at the application level with respect to the WSN context. Simulation of
WSN can be therefore realized for the effects of events occurring below the application
layer or levels such as physical layer and the wireless protocol layer. Accordingly,
inspired by the design philosophy of Shawn wireless sensor network simulator, we
decided to simulate the WSN for its effects at the application level. In our approach,
only the major effects, namely packet delay and drop, of WSN operation, which have
influence on the execution of ANN are modeled.

29
Chapter 3
Probabilistic Modeling of Delay and Drop Phenomena
for Packets Carrying Neuron Outputs in WSNs
Neuron outputs will need to be communicated to other neurons through wireless
communication channels or over the air for a wireless sensor network (WSN) that is
embedded with an artificial neuron network where each mote houses one or more
neurons. Packets are subject to delay and drop during wireless transmission due to
medium access (such as channel being busy or collision of packets), outgoing or
incoming message processing, multi-hop communications, and routing algorithms among
many other factors in a wireless communications medium. Meaningful simulation of a
wireless sensor network (WSN) computations and communications with an artificial
neural network (ANN) embedded into it requires that such delay and drop be modeled as
accurately as reasonably possible. In response to this requirement, a probabilistic model
for delay and drop has been developed and employed in the simulation study, which will
be presented in this chapter.

30
3.1 Neuron Outputs and Wireless Communication Delay
Consider a multilayer perceptron (MLP) type artificial neural network (NN) with at least
three layers of neurons, namely an input layer, one or more hidden layers, and an output
layer. The input layer is not considered as a “true” layer since no computation is
performed by the neurons in that layer. Neurons in the input layer simply distribute the
components of an input pattern vector to neurons in the hidden layer without any other
processing. Distribution of training patterns can be accomplished by either a multi-hop
routing scheme or by a gateway or clusterhead mote that can reach all the WSN motes
directly. In our simulations, we assumed that there is a gateway mote which can
communicate with each mote in the WSN directly through a single-hop transmission: also
potential delays or drop for the communications originating from the gateway mode were
not considered.
Outputs of neurons in one layer must be communicated to inputs of neurons in the other
layer during training and following the deployment. Since the wireless communication of
such packets that carry neuron output values is accomplished through multi-hop routing,
it is reasonable to assert that the delay due to medium access, packet processing, and the
hop-count among others will be mainly affected by the distance (or the equivalently the
number of hops) between the sending and receiving neurons or motes. Although it may
depend on the actual routing protocol chosen, the distance for the routing path for a
packet can be approximated (or underestimated) by the hop count, which is measurable
through various approximation schemes [1]. As an another factor that plays a significant

31
role in the overall communications and computation process, the likelihood of packet
drop carrying a neuron output increases as the number of hops increases between the
sender-receiver neuron or the corresponding mote pair.
Accordingly, the hop count will be employed as the primary factor affecting the amount
of delay and the likelihood of drop for packets carrying neuron outputs. When delay
occurs and its value varies and, in the worst case, the drop happens, a procedure needs to
be developed to make available past values of the output for the neuron whose output is
delayed.
3.2 Modeling the Probability Distribution for Packet Drop and Delay Phenomena
The probability of packet drop during transmission in WSNs is highly dependent on the
specific implementation of the network and its protocol stack. There are many factors at
play, such as topology of the network, routing and MAC protocols, network traffic load,
etc.
It is not desirable to have the model for the probability distribution for drop or delay
limited to a certain scenario (using certain protocols, set a number of nodes, set a
topology, etc.) since the results of such a study would not be applicable in general terms.
The model to be developed instead should be generalized enough to be applicable for the
widest variety of WSN realizations, implementations and applications possible. One
readily available option to develop or formulate a model for packet delay and drop is to

32
leverage the empirical data reported in the literature, which is the venue pursued in our
study.
3.2.1 Literature survey
We conducted a survey to compile the empirical data of delay and drop reported in the
literature [1-22]. We studied the simulation scenarios and compiled a record of the
simulation settings and results. The simulation settings included routing protocols, MAC
protocols, simulator type, number of motes, field size, radio range and other settings
(traffic, source count, dead node count etc.). The simulation results included delivery
ratio and delay, which were extracted from tables and figures in the surveyed literature.
The detailed data can be found in Appendix A.
3.2.2 Data set for building the drop model
In order to build an empirical model for the drop probability distribution, a literature
survey was performed to collect and compile simulation data for different WSN designs,
with variations in the topology and the protocol stack, and applications. The data used
for building the empirical delay or drop model was compiled from the studies reported in
[1-22]. The packet delivery ratio that was recorded in each study is considered as the
main variable. Denoting the packet delivery ratio as B� :1C �D , the probability of drop
as given byB����, can be calculated through B���� = 1 −B� :1C �D. Specific values
for the packet delivery ratio versus node count for a number of WSN topologies and

33
protocol stack implementations, which were used as the data to build the empirical model
for the probability of drop, are retrieved from the same studies cited herein.
The data points are chosen based on the following specifications:
1) The node count is one of the primary independent variables, which means the
data is collected for different node count values.
2) The density of nodes within the WSN topology will stay “approximately” the
same although the node count may vary. This means that the area of
deployment for the network or the transmission range should change to keep
the node distribution density the same.
3) No other significant factors are considered to affect the probability of drop,
such as the changing network traffic load or the static or time-varying
percentage of dead nodes.
Establishing the above specifications is intended to ensure that packet drop probability is
fundamentally affected by the number of hops only, which is assumed to approximate the
distance between the sender and receiver mote pair. When the density is kept the same,
the hop count from the source to the destination is increased with the number of nodes in
the network: further elaboration on this statement will be presented in the upcoming
sections.

34
3.2.3 Empirical Model as an Equation for Packet Delivery Ratio vs. Node Count
In this section, we investigate the relationship between the probability of drop and node
count using the studies reported in literature [31-52]. The tool we use for handling these
data is the statistical computing and graphics software package called R. After importing
the empirical data into R, we use the “xyplot” function in R to plot the data. The plots for
different routing protocols for the probability of drop versus node count are shown in
Figure 3-1. The routing protocols included QoS Routing [40], Speed [40], GBR [31],
LAR [42], LBAR [42], Opportunistic Flooding [38], AODVjr [42], BVR [34], DD [47],
and EAR [31].

35
Figure 3-1: Plots for Probability of Drop vs. Node Count for Various Routing Protocols
The x-axis is the node count, while the y-axis is the probability of drop. Each individual
plot is specific to a “routing protocol”. Denoting the node count as ��� �, Figure 3-1
shows that B� :1C �D decreases when the value of ��� � increases. The relationship
appears to be linear in general. Since these data are due to specific experiments, in order
to generalize, it may not be a good idea to make the model fit the data precisely.
Therefore the linear regression (versus a polynomial which is a more tight fit) for fitting
these data points is a reasonable option. Then the resultant empirical model is given by

36
(EF!EG�HIJKL)��� , (3.1)
where coefficients �� and �� are real numbers for the linear model. The
probability of drop is then calculated as
B���� = 1 − (EF!EG×�HIJKL)��� , (3.2)
The linear model for each plot shown in Figure 3-1 is obtained through the linear
regression and the coefficients �� and �� calculated for each case is shown in Table 3.1.
In the case for the opportunistic flooding routing protocol, a special scenario arises: it can
guarantee a successful delivery, which means the probability of drop is zero.
Table 3.1: Coefficients �� and �� of the Linear Model for Each Case in Figure 3-1
Routing Protocol �� ��
EAR 100.82 -0.0107
GBR 94.50 -0.1130
BVR 94.44 -0.0760
QoS 97.00 -0.0980
Speed 97.40 -0.0840
LBAR 95.79 -0.0198
LAR 92.57 -0.0154
AODVjr 90.57 -0.0154
DD 89.60 -0.0440
Opportunistic Flooding 100.00 0.0000
3.2.4 The number of transmission hops
The number of hops will be used as the primary factor affecting the probability of drop,
therefore it is necessary to establish its definition. For a two-dimensional deployment
topology for a WSN, let ��� denote the hop count between a source and a destination

37
mote pair. Defining the B���� in terms of ��� is of interest. Given that we know
the value for ��� �, which is the number of motes in the WSN, a relationship between
��� � and ��� needs to be derived for a given specific deployment topology.
For instance, as shown in Figure 3-2, ��� � nodes are uniformly randomly distributed
in a square deployment area. Consequently, the number of motes along any edges will be
approximatelyM��� �. Assume the sink mote is located at the center, while the source
node is close to one of the corners. Average hops count for any given message, ���,
can be approximated by the length of the diagonal in terms of number of hops divided by
two. Then the relationship of ��� � and ��� is given by��� � = 2���� .
Figure 3-2 Example Illustrating Relationship between ��� and ��� �
Source
Sink
M��� �
motes

38
In the worst case for a source and sink mote pair where the motes are located at the
terminal points of a given diagonal, the relationship between these two variables becomes
��� � = �NIOLP
� , while also noting that the minimum hop distance is 1. Consequently,
the hop count values changes as follows: 1≤ ��� ≤ M2��� �.
The square topology assumed for the above analysis is a reasonable approximation to
many of the deployment realizations. If necessary, other topologies can also be readily
analyzed following a similar approach. In somewhat general terms then, the relationship
between ��� � and ��� can be represented as
��� � = R × ����, (3.3)
where τ is the coefficient whose value is positive and will vary based on a number of
WSN-related parameter settings including the shape of the topology and the density of
mote deployment. In the linear regression curves obtained for each routing protocol
earlier, the coefficients �� and �� and the parameter ��� � values are substituted to
yield the models shown in Table 3.2.

39
Table 3.2 Empirical Models of ����� in Terms of Parameter ���
Routing
Protocol
TU T/ Empirical Model
EAR 100.82 -0.0107 B���� = �−0.82 + 0.043 × �����/100
GBR 94.50 -0.1130 B���� = �5.5 + 0.45 × �����/100
BVR 94.44 -0.0760 B���� = �5.6 + 0.076 × �����/100
QoS 97.00 -0.0980 B���� = �3 + 0.049 × �����/100
Speed 97.40 -0.0840 B���� = �2.6 + 0.042 × �����/100
LBAR 95.79 -0.0198 B���� = �4.21 + 0.020 × �����/100
LAR 92.57 -0.0154 B���� = �7.43 + 0.015 × �����/100
AODVjr 90.57 -0.0154 B���� = �9.43 + 0.015 × �����/100
DD 89.60 -0.0440 B���� = �10.4 + 0.088 × �����/100
Opportunistic Flooding
100.00 0.0000 B���� = 0
The calculations ofR are done based on a specific topology implemented in the literature.
As an example, consider the QoS-based routing protocol implementation in the study
reported in [24]. The topology is a unit square and the two sink nodes are placed in the
lower corners of the square deployment area. The nodes in the upper right report to the
sink in the bottom left and the nodes in the upper left report to the sink in the bottom right.
The distance between the source and the sink nodes is approximately the diagonal of the
square area. Accordingly, the coefficient τ has a value of√2.

40
The empirical models in Table 3.2 indicate that the models for GBR and Opportunistic
Flooding routing are exceptions as their performance vary significantly when compared
to the performances of the other cases. The GBR protocol would not be appropriate for a
large network, and the Opportunistic Flooding would incur too much delay to guarantee
the delivery. Therefore, the models for GBR and Opportunistic Flooding are not
considered any further. We consider all the remaining models in Table 3.2 to set a
range for �8and �\ parameters in Equation 3.3. Accordingly, the empirical model for
����� is defined in general terms as
B���� = ��� +�� × �����/100 , (3.4)
where the range of values for �� is (-1, 11), and the range of values for �� is (0.013,
0.09). When this model is employed in the simulation study,��and��values are
generated randomly using a uniform distribution in their corresponding ranges.
3.3 Modeling the Delay
3.3.1 Delay and Delay Variance
Delay is an inherent property of WSN operation with respect to wireless communications.
According to a literature survey we did, the length of delay varies from 10 ms to 3000 ms
for different implementations (such as variations in number of nodes, routing protocol,
MAC protocol, packet length, traffic load etc.) [31-52]. Figure 3-3 shows the histogram
for the delay based on the survey data.

41
Figure 3-3 Histogram of Delay for Survey Data
In a real scenario where one or more neurons are embedded into a given mote, the
exchange of neuron outputs among motes will be subject to certain delay that is inherent
in wireless communications. This delay, which will dictate the duration of a waiting
period by a given neuron for its inputs to arrive from other neurons on other motes is not
a fixed value but rather a random variable. The delay-induced wait time will be denoted
as]^813. Note that ]^813 is both application dependent and network dependent: its value
was found to vary from 10 ms to 3000 ms per the literature survey which was presented
in Figure 3-3 indicated. For a specific network the delay between for a pair of motes
from one pair to another varies substantially, and even for the same pair of motes the
delay variance is significant. Additionally, the maximum delay could be much larger than

42
the mean delay [53, 59]. In simulating a neural network embedded across motes of a
wireless sensor network, the ]^813 is set according to the mean delay value and the
specific network topology to make sure that a good number of inputs successfully arrive
for any given neuron to be able to calculate its own output.
Per the surveyed literature, a specific delay distribution is highly dependent on many
factors such as the MAC protocol, traffic, queue capacity, channel quality, back-off time
setting in MAC protocol, etc. [53, 54, 55, 57 and 59]. It is impossible to get a highly
accurate model of delay distribution considering so many factors play a role in affecting
its value. A reasonably good but approximate model however can be formulated by using
the Gaussian distribution which have been used in the literature to model the delay
distribution [54, 55], and has also been shown to be relevant in other literature studies [56,
57, 58]. Empirical evidence suggests that the delay distribution is truncated and
heavy-tailed [57, 59]. Consequently, a truncated Gaussian distribution for modeling the
delay variance is chosen, which is elaborated upon in the next section.
3.3.2 Delay Generation using Truncated Gaussian distribution
The truncated Gaussian distribution is the probability distribution of a normally
distributed random variable whose value is bounded. Suppose X~N(μ, c�) has a
normal distribution and lies within a range of (a, b), then x conditional on a<x<b has a
truncated normal distribution. Its probability density function � is given by

43
�(�; e, c, f, g) =Ghi(j"kh )
lmn"oh pql(r"oh ), (3.6)
where x is the random variable, e represents the mean, c represents the standard
deviation, a represents the minimum value, b represents the maximum value, s(∙) is the
probability density function of the standard normal distribution, and u(∙) is the
cumulative distribution function.
The overall delay for a given neuron output is positive integer valued and quantified to
indicate the number of pattern presentations. This parameter value, namely overall delay,
is computed by summing per hop delays for the total number of hops between the
sending-receiving neuron pair and dividing their sum by the ]^813 parameter value.
Truncated Gaussian distribution is used as the model for the per hop delay parameter. In
other words, the computation employs the following steps:
OverallDelay = �~77�(∑ � ���� :8DHNIOLG
3�r��) (3.6)
Where the floor () function get the largest integer not greater than the variable. The
parameter ]^813 is defined in terms of three other parameters which are multiplied to
yield
t���� = ϑ × μ × l���, (3.7)
where ϑ is a coefficient to be set in the simulator, μ is the mean value of the Truncated
Gaussian distribution, and l��� is the max hop count of the topology being considered.
For ease of computation, the mean value of Truncated Gaussian distribution will be

44
normalized to relocate it to the value of 1. Based the empirical studies in the literature [53,
54], other parameters of the Truncated Gaussian distribution are set as a=0.3, b=5, and
σ=0.6. The MATLAB code for generating the truncated Gaussian distribution is
presented in Figure 3-4. A histogram of the truncated Gaussian distribution generated by
the code in Figure 3-4 is shown in Figure 3-5.
Figure 3-4 Function for Generating the Truncated Normal Distribution
Figure 3-5 Histogram of Truncated Gaussian Distribution as Generated by MATLAB
Code in Figure 3-4.
function x = trimnormrnd(mu,sigma,a,b,m,n) A = (a-mu)/sigma; B = (b-mu)/sigma; delta = normcdf(B)-normcdf(A); x = sigma*norminv(delta*rand(m,n)+normcdf(A)) + mu;

45
3.4 Modeling the Neuron Output Delay (NOD)
The Neron output delay is the delay for the output of neuron. It emerges when the packet
contain the output got delayed or drop. For each packet transmission between two motes,
the NOD was modeled by combining the drop and delay values. The basic flow chart for
the model is shown in Figure 3-6. The entire process will be discussed in the following
paragraphs.
Figure 3-6: Basic Flow Chart for the Calculation of NOD
3.4.1 Distance Calculation
Calculate the Distance between
the Pair of Motes
Calculate the Drop Probability
of the Packet
Calculate the Delay of the
Packet
Generate the NOD

46
For each pair of nodes, the distance needs to be calculated as follows. We randomly
deploy the nodes in a 2-D field. The size of the field is determined in relationship to the
number of nodes in the hidden layer and output layer of the multilayer perceptron neural
network. The output-layer nodes are in a smaller square field in the middle of the larger
square field of hidden-layer nodes as shown in Figure 3-7. This deployment arrangement
facilitates the average of distances between node pairs to be minimized, and also keeps
the variance of distance as small as possible.
Figure 3-7 Deployment for MLP neural network within WSN topology
Let ��� and ��� represent the number of neurons for the hidden layer and the output
layer, respectively. The entire deployment area is determined according to the node count.
Corresponding to the case shown in Section 3.2.4, the length of larger square area is
given byf = M��� + ���. The hidden layer neurons are deployed uniformly randomly in
this square. The output layer neurons are deployed in the inner square and its length
(denoted as b) is given byg = M���. For each neuron, its coordinates are generated
randomly in the corresponding square area. The Euclidian distance between a pair of
Hidden Layer
a Output
Layer
b

47
motes (neurons) with coordinates (��� , ���) and (���, ���) would be ��� =
M(��� − ���)� + (��� − ���)�. Since the metric is the number of nodes, this distance
would also correspond roughly to the distance in terms of the number of (transmission)
hops. The MATLAB code that positions each mote-neuron pair in the concentric squares
based on MLP layer association of neurons is shown in Figure 3-8.
Figure 3-8: MATLAB Code for the Calculation of Pairwise Distance between Neurons.
3.4.2 Model of the Delay for Transmission of Neuron Outputs
%Calculate the dimensions of squares lengthHid = sqrt(m+n); %m and n are the node counts in hidden and output layers lengthOut = sqrt(n);
%Randomly assign the coordinates for each neuron-mote pair xHid = lengthHid * rand(1,m);%the x coordinates for hidden layer nodes yHid = lengthHid * rand(1,m); xOut = (lengthHid - lengthOut)/2 + lengthOut * rand(1,n); yOut = (lengthHid - lengthOut)/2 + lengthOut * rand(1,n); %The extremum coordinates of the inner square for the output layer point1 = (lengthHid - lengthOut)/2; point2 = (lengthHid + lengthOut)/2; %Generate hidden layer neuron coordinates outside the output layer square for i = 1:m while(xHid(i)>point1&&xHid(i)<point2&&yHid(i)>point1&&yHid(i)<point2)
xHid(i) = lengthHid * rand(); yHid(i) = lengthHid * rand(); end;
nodeDist = zeros(m,n);%the node distance matrix %Calculate the distance for each pair of neurons for i2 = 1:m for j2 = 1:n nodeDist(i2,j2) = int16(sqrt((xHid(i2)-xOut(j2))^2+(yHid(i2)-
yOut(j2))^2)+0.5); end end

48
Each MLP neuron is embedded into a separate WSN mote. For each pair of motes, the
probability of drop B���� for a packet is calculated based on the hop count between them
using Equation 3.3. The value of ]^813is application specific and set by Equation 3.7. In
our experiments, we change the value of the coefficient ϑ to observe the neural network
performance under different conditions. Then the delay amount for each transmission is
generated using Equation 3.6.
Let the following definitions hold for the delay and drop model under the assumption that
each mote is embedded with a single neuron of an MLP neural network:
�: a uniformly-distributed random number in the range [0,1].
i: index for sending mote;
j: index for receiving mote;
�1 , ��: labels for sending and receiving motes or neurons;
�1�: delay (positive integer-valued) for the packet sent by mote (neuron) �1 to mote
(neuron)��;
�1�: one-dimensional array of integers for communication between motes �1 and
�� , where the array index corresponds to pattern presentation number (or the
sequence number for the number of patterns presented in a single training epoch),
and contents hold the most recent pattern presentation number when the output

49
from mote (neuron) �1 arrives at mote (neuron) �� at the this pattern
presentation;
��: one-dimensional array of integers for neuron j where each element holds the
pattern presentation number in which the most recently generated output from the
corresponding neuron (mote) arrived at mote �� . ��[�] holds the pattern
presentation number for the most recently generated packet among the packets
which arrived at mote �� from mote�1;
��: one-dimensional array of integers where ��[�] holds the value of output for
neuron �� computed at pattern presentation �.
The pseudo-code in Figure 3-9 defines the model of neuron output delay (NOD) between
motes �1 and��. Mote �1 transmits a packet carrying its output value to mote��
after each pattern presentation unless there is delay. At a given pattern presentation
iteration k, the first step is to update the array�1�. Initial decision is to determine if the
packet should be dropped or not. The packet is considered as “not dropped” if the
randomly generated number � is greater than the probability of drop (B��7B). Then the
delay amount �1� is generated by the delay model. The presentation sequence number
for the current pattern k is stored in the array �1� at the position indexed by� + ���; this
means the packet that carries the neuron output value and destined from mote �1 to
mote �� during pattern presentation k would arrive at mote �� during pattern
presentation � + ��� . If the random number z is not larger than the probability of
dropB��7B, then the packet is considered as “dropped.” Then �1� won’t be updated which

50
means the packet from mote �1 to mote �� at pattern presentation k won’t arrive at all.
The second step is to update��[�], which holds the pattern presentation sequence number
for the most recently generated packet among the packets which arrived at neuron ��
from �1 (an example is given in the following paragraph). If �1�[�] is larger
than��[�],��[�] value is updated to that of the�1�[�]. This means that there is a packet
that arrived during pattern presentation k which is more recent compared to any other
output which arrived from that same sending neuron. The content of��[��[�]] is used for
the updating neuron’s outputs or weights on mote��.
Figure 3-9: Pseudo-code for Implementation of Delay and Drop (NOD) Model.
An illustrated example demonstrating the use and the realization of the delay and drop
modeling is presented next. Corresponding to Figure 3-10, the example shows the
Step 0: a. Initialize the array�1�[] to 0. b. Initialize ��[�] to 0. At a given pattern presentation k, where k=1,2,3,a
Step 1: If � > B ¡¢£ Generate the ��� value using the delay model. Update the array�¤¥[]: �1�[��� + �] = k. Else do nothing.
Step 2: If �1�[�] > ��[�] Update��[�]: ��[�] =�1�[�]. Else do nothing.

51
execution during pattern presentations 17 and 18. The original value of the array �1� and
§�[�] are assumed as shown in Figure 3-10. In the first step of pattern presentation
iteration 17, assume � is larger thanB��7B, and the generated delay amount �1� is 1.
This means the packet generated during this pattern presentation would arrive at the next
pattern presentation, namely during pattern presentation sequence number 18. The
content of �1�[18] is updated to 17. In the second step of pattern presentation 17, the
packet arrived at this pattern presentation is from pattern presentation 15 (the content of
�1�[17] is 15). It is older than the packet that arrived during pattern presentation 16.
Since 15 is less than 16 where the latter is stored in��[�], ��[�] is not updated. The
neuron output value (from�1) stored in��[16] is used for updating the output or weights
of the neuron on mote�� . Next, consider the pattern presentation sequence 18. During
the first step of pattern presentation 18, assume � is larger thanB����, and the delay
amount �1� is determined to be 0. This means the packet arrived on time (it arrived
during the current pattern presentation). The content of �1�[18] is updated to 18 (18
replaces 17). In the second step of pattern presentation 18, the packet that arrived during
this pattern presentation is from pattern presentation 18 (the content of �1�[18] is 18). 18
is greater than the content of ��[i] which is equal to 16, so ��[�] is updated to be 18. The
output value stored in��[18] is used for updating the output or weights of the neuron on
mote��.

52
Figure 3-10: Example for the Implementation of the Delay and Drop Modeling
14 16 15 0 0 0
16 17 19 15
20 18
�1�[]:
��[�]: 16
Step 1: z >B���� ; �1� = 1
14 16 15 17 0 0
16 17 19 15 20 18
�1�[]:
��[�]:::: 16 ��[�]:::: 16
Step 2
14 16 15 17 0 0
16 17 19 15 20 18
�1�[]:
��[�]: 16
Step 1: z > B���� and �1� =0
14 16 15 18 0 0
16 17 19 15 20 18
�1�[]:
��[�]:::: 16 ��[�]:::: 18
Step 2
17th
pattern presentation
18th
pattern presentation

53
The code in MATLAB for implementing the delay and drop (NOD) model is shown in
Figure 3-11. For the memory purpose, the length of array�¤¥ is set to be the potential
maximum delay pattern presentations. The actual index of the array is calculated by the
desired index mod the array length.
Figure 3-11: MATLAB code for the Delay and Drop (NOD) Model
% Generate the NOD for the pair of neurons % c is a variable and holds the sequence number % i and j are indices for neuron identification % Initialize the Sequence Array to zero sequenceArray = zeros(m,n,dmax); % mem is a 2D array to store the sequence number of the most recent output % received by a neuron mem = zeros(m,n); %Update the NOD model in each pattern presentation for each pair of neurons. function r = updateOutput(pDrop,tDelay, i, j, c) a = rand(); %Determine if the packet should be dropped if a > pDrop %Calculate the index of the sequence array outInd = rem(c + tDelay,dmax)+1; %Store the sequence number sequenceArray(i,j,outInd) = c; end mem(i,j)=max(sequenceArray(i,j, (rem(c,dmax)+1)), mem(i,j)); r = c - mem(i,j); end

54
Chapter 4
Simulation Study: Preliminaries
This section describes and defines the conceptualization of the simulation study. It
starts with the data sets employed in the simulation study and details the preprocessing
implemented for utilization on the proposed wireless sensor network and multilayer
perceptron (WSN-MLP) platform. Next, it discusses parameter settings for the
MLP-BP algorithm including the number of hidden layer neurons, the training algorithm
selection rationale, and partitioning of the data set for training and testing and others.
4.1 Data Sets
The simulation study is conceived to assess the scalability of the WSN-MLP design as
the number of attributes, instances, and classes of a problem domain increase. Six data
sets are used for the simulation study. They differ for their number of attributes, number
of classes, number of instances, and the domain. As Equation 2.3 indicates, the effect of
packet drop would be significant only when the nodes count is large enough. Due to this
reason, the attribute count of data sets which are used in the simulation study is up to
5000, which requires the MLP to have hundreds of hidden layer neurons. The

55
characteristics of datasets are presented in the Table 4.1. The data sets are from the UCI
Machine Learning Repository (UCI) [60] and discussed in the following subsections.
Table 4.1: Characteristics of Data Sets
Dataset Attribute
Count
Instance
Count
Class
Count
Class Distribution
Problem
Domain
Iris 4 150 3 1:1:1 Life
Wine 13 175 3 1:1.2:0.8 Physical
Ionosphere 34 351 2 1.3:0.7 Physical
Dermatology 34 358 6 1.9:1:1.2:0.8:0.8:0.3 Life
Handwritten numerals 240 2000 10 1:1:1:….1 Word
Isolet 617 7797 26 1:1:1:….1 Speech
Gisette 5000 7000 2 1:1 Word
4.1.1 Iris Data Set
This is one of the best known data sets in the pattern recognition field. This data set
contains 3 classes of 50 instances each, where each class refers to a type of Iris plant [60].
It contains 4 attributes as sepal length, sepal width, petal length, and petal width. Three
arbitrarily chosen sample patterns, one from each of three classes, are shown for
illustration purposes in Table 4.2.
Table 4.2: Sample Patterns for Iris Dataset
Pattern # Sepal length Sepal Width Petal length Petal Width Class
1 4.9 3.1 1.5 0.1 Setosa
2 6.5 2.8 4.6 1.5 Versicolor
3 7.2 3.6 1.0 2.5 Virginica

56
4.1.2 Wine Data Set
The wine data set is the result of a chemical analysis of wines grown in the same region
in Italy but derived from three different cultivars [60] or classes. The 13 attributes relate
to the quantities of 13 constituents found in each of the tree types of wines. Three classes
(namely Class 1, Class 2, and Class 3) have 58, 71, and 48 instances, respectively. A
sample pattern or instance from each of the three classes is shown in Table 4.3.
Table 4.3: Sample Patterns (in columnar format) for Wine Dataset
Attribute Name Class
1 2 3
Alcohol 13.20 12.33 14.13
Malic Acid 1.78 1.10 4.10
Ash 2.14 2.28 2.74
Alcalinity of Ash 11.20 16.00 24.5
Magnesium 100.00 101.00 96.00
Total Phenols 2.65 2.05 2.05
Flavanoids 2.76 1.09 0.76
Nonflavanoid Phenols 0.26 0.63 0.56
Proanthocyanins 1.28 0.41 1.35
Color Intensity 4.38 3.27 9.20
Hue 1.05 1.25 0.61
OD280/OD315 of Diluted Wines 3.40 1.67 1.60
Proline 1050.00 680.00 560.00
4.1.3 Ionosphere Data Set

57
The ionosphere data set contains radar data collected by a system in Goose Bay, Labrador
[60]. This system consists of a phased array of 16 high-frequency antennas with a total
transmitted power on the order of 6.4 kilowatts. The classes are “good” and “bad” radar
returns. "Good" radar returns are those showing evidence of some type of structure in the
ionosphere. "Bad" returns are those that do not; their signals pass through the
ionosphere. Received signals were processed using an autocorrelation function whose
arguments are the time of a pulse and the pulse number. There were 17 pulse numbers for
the Goose Bay system. Instances in this database are described by 2 attributes per pulse
number, corresponding to the complex values returned by the function resulting from the
complex electromagnetic signal. There are 126 instances for “good” class and 225
instances for “bad” class.
4.1.4 Dermatology Data Set
This data set is for the diagnosis of the family of erythemato-squamous diseases which
pose a serious problem in dermatology [60]. They all share the clinical features of
erythema and scaling, with very little differences. The diseases in this group are psoriasis,
seboreic dermatitis, lichen planus, pityriasis rosea, cronic dermatitis, and pityriasis rubra
pilaris. The instance count for each class is shown in Table 4.4. The attributes in this data
set consist of 12 clinical attributes and 22 histopathological features.

58
Table 4.4: Instance Statistics for Each Class of Dermatology Dataset
Class Instance Count Instance Percentage
Psoriasis 111 31.0%
Seboreic dermatitis 60 16.8%
Lichen planus 71 19.8%
Pityriasis rosea 48 13.4%
Cronic dermatitis 48 13.4%
Pityriasis rubra pilaris 20 5.6%
4.1.5 Handwritten Numerals Data Set
This data set consists of a set of handwritten numerals as used on Dutch utility maps.
They were scanned in 8 bits using 400 dpi. The grey value images were sharpened and
normalized for size resulting in 30 by 48 binary pixels. The 30 by 48 pixels were divided
into 15 by 16 tiles of 2 by 3 pixels. All these tiles were averaged, resulting in 240 features.
For each of the 10 classes, namely represented by single decimal digits ‘0’through ‘9’,
200 instances are available.
4.1.6 Isolet Data Set
The Isolet data set contains 7797 instances of spoken letters. The dataset was recorded
from 150 speakers balanced for gender and representing many different accents and
dialects. Each speaker spoke each of the 26 letters twice (except for a few cases). A
total of 617 features were computed for each utterance. Spectral coefficients account for
59
352 of the features. The features include spectral coefficients; contour features
pre-sonorant features, and post-sonorant features [61].
4.1.7 Gisette Data Set
Gisette is a dataset for the handwritten digit recognition problem domain. The problem is
to separate the highly confusable digits ‘4’ and ‘9’ [60]. The digits have been
size-normalized to a fixed-size image of the dimensions 28×28. Pixels of the original
data were sampled at random in the middle top part where containing the information
necessary to disambiguate 4 from 9. Higher order features were created as products of
these pixels to plunge the problem into a higher dimensional feature space. The data set
contains 13500 instances and 5000 attributes. There are reportedly 2500 probe attributes,
which have no predictive power.
4.2 Data Preprocessing
Preprocessing the data improves the efficiency of neural network training [62, 63].
Classes in data sets are represented in distributed binary format: for instance, class 3 is
represented by the binary sequence “001”. Patterns in the training data set were
randomly selected for presentation to the neural network to improve the performance.
Further preprocessing details are discussed in the following sections.
4.2.1 Data Normalization

60
Normalization is a "scaling down" transformation of the features. Input data
normalization prior to training process is crucial to obtain good results [64]. Within a
feature there is often a large difference between the maximum and minimum values, e.g.
0.01 and 1000. When normalization is performed the value magnitudes are scaled to
appreciably small values. The two common methods are min-max normalization and
z-score normalization [65]. Assuming that for a particular feature x, x’ is the value after
normalization, computation for min-max normalization is shown in Equation 4.1 where
min(x) is the minimum value of x and max(x) is the maximum value:
�′ = ¬q��(¬)���(¬)q��(¬) (4.1)
The z-score normalization is shown in Equation 4.2 where the mean(x) is the mean value
of x and variance(x) represents the variance:
�® = ¬q9 8�(¬)C8�18�< (¬) (4.2)
In our simulation study, we use the min-max normalization for its lower computational
cost. The computational complexity of variance calculation, which is required for the
z-score normalization, is too high for it to be feasible for a wireless sensor network
computing framework. Consequently, attributes or features for every data set are
normalized to the range of [-1, 1] for the simulation study reported herein.
4.2.2 Balance of Classes
It has been observed that class imbalance (that is, significant differences in class prior
probabilities) may result in substantial deterioration of the performance achieved by
existing learning and classification algorithms [65, 66]. In our data sets, as shown in
Table 4.1, the classes for the Dermatology data set are unbalanced. A common way to
61
deal with imbalance is resampling. There are two different ways of resampling the
original data set, either by over-sampling the minority class or under-sampling the
majority class.
The simplest way to over-sampling is to increase the class count by random replication of
the class instances. However this method can increase the likelihood of over fitting, since
it makes exact copies of the minority class instances. The major problem of
under-sampling is that it can discard data potentially important for the classification
process. Chalwa et al. proposed a technique called SMOTE [67]. The SMOTE method
generates new synthetic data along the lines between the minority examples and their
selected nearest neighbors. Each new data point is created as follows:
1. Find the k nearest neighbors of a minority class to the existing minority class
example;
2. Randomly select one of the k nearest neighbors; and
3. Extrapolate between that example and its chosen neighbors to create a new
example.
This method allows the classifier to build larger decision regions and generalize better
[68]. The effect of SMOTE has been presented in a study in the literature [69]. We chose
to use SMOTE to balance the classes in our data set for its desirable characteristics for
training. We implemented the SMOTE pseudo code in MATLAB [70]. The MATLAB
code is shown in Figure 4.1. The proportion of classes for the Dermatology data set
before and after apply SMOTE is shown in Figures 4.2 and 4.3.

62
Figure 4-1 MATLAB Code for SMOTE Preprocessing Procedure
function [final_features, final_mark] = SMOTE(original_features, original_mark,class) %final_features and final_mark are the data set after apply SMOTE. Original_features and original_mark are the %original data set, class is the class to be sampled ind = find(original_mark(:,class) == 1); %locate the class n=2; %times to sample % P = candidate points P = original_features(ind,:); T = P'; % X = Complete Feature Vector X = T; % Finding the 5 positive nearest neighbors of all the positive blobs I = nearestneighbour(T, X, 'NumberOfNeighbours', 4); I = I'; %compute the new instance [r c] = size(I); S = []; th=0.3; for i=1:r for k=2:n j=int8(2+rand()*(c-2)); index = I(i,j); new_P=(1-th).*P(i,:) + th.*P(index,:); S = [S;new_P]; end end %attach the new instances to the data set original_features = [original_features;S]; [r c] = size(S); [r1 c1] = size(original_mark); mark = zeros(r,c1); mark(:,class) = ones(r,1); original_mark = [original_mark;mark]; final_features = original_features; final_mark = original_mark; end

63
Figure 4-2 Original Proportion of Classes for Dermatology Data Set
Figure 4-3 Proportion of Classes for Dermatology Data Set after Application of SMOTE Class Balancing Procedure
Class 1
31.01%
Class 2
16.76%Class 3
19.83%
Class 4
13.41%
Class 5
13.41%
Class 6
5.59%Classes
Class 1
29.37%
Class 2
15.87%Class 3
18.78%
Class 4
12.7 %
Class 5
12.7 %
Class 6
10.58%
Classes

64
To validate the effect of SMOTE algorithm, we performed a comparison of
performances using the Weka MLP classifier by training on the original Dermatology
data set and the modified one. For all simulation cases, the learning rate is set to 0.1;
momentum is set to 0; hidden layer neuron count is set to be the Weka default; and
training time is set to 30. We ran the experiment for 5 times by changing the random
seed each time. The misclassified instance rate (in %) is shown in Figure 4-4. The
results show that the classification performance significantly increased for the
modified data set for which the SMOTE algorithm was applied for addressing the
class imbalance.
Figure 4-4 Comparison of Incorrectly Classified Instances for Dermatology Data Set
for SMOTE vs. No SMOTE.
0%
1%
2%
3%
4%
5%
6%
7%
8%
1 2 3 4 5
Mis
clas
sifi
cati
on R
ate
Trial Number
SMOTE EFFECT
NO SMOTE
SMOTE

65
4.2.3 Data Set Partitioning for Training and Testing
We split the data sets into two subsets as the training and the testing data. The training
data subset is used for training the network, while the testing data subset is used for
testing the performance of the trained network. Two-thirds or roughly 66% of the
instances are selected as the training data, and one-third or 33% as the testing data.
The data sets are split according to the proportions of each class in order to make the
testing results impartial. The MATLAB code for splitting the data sets is shown in
Figure 4-5.

66
Figure 4-5 MATLAB code for Splitting the Data Set into Training and Testing
function [out,numTrain, numTest] = splitData(in,classes)
%randomize the data set in case of it is sorted by some order
[m,n]=size(in);
k = rand(1,m);
[a,b] = sort(k);
in = in(b,:);
classInd = n - classes + 1; %Index to class position in data set
count = zeros(1,classes);
testCount = zeros(1,classes);
for i = 1 : classes
%get the total count and test data count for each class
count(i) = histc(in(:,classInd + i - 1),1);
testCount(i) = ceil (count(i)/4);
%number of test instance is a quarter of total, at least 1
End
%get the training data set and the test data set
temp = in(in(:,classInd)==1,:);
test = temp(1:testCount(1),:);
train = temp(testCount(1)+1:count(1),:);
for i = 2:classes
temp = in(in(:,classInd + i - 1)==1,:);
test = [test;temp(1:testCount(i),:)];
train = [train;temp(testCount(i) + 1: count(i),:)];
end
%number of train instance and test instance
numTest = sum(testCount);
numTrain = m - numTest;
%randomize the train data and test data
k = rand(1,numTest);
[a,b] = sort(k);
test = test(b,:);
k = rand(1,numTrain);
[a,b] = sort(k);
train = train(b,:);
%merge the train data and test data together
out = [train;test];
end

67
4.3 MLP Neural Network Parameter Settings
4.3.1 Training Algorithm
It is a well-established fact in the literature that the basic back-propagation algorithm
can be very slow for training even a simple multilayer perceptron neural network [88,
89]. What is needed is a fast learning algorithm for the MLP, which projects minimal
computational cost, requires minimal centralized coordination if any, realizable
through incremental learning (vs. batch learning), and can be implemented in a
parallel and distributed manner.
4.3.1.1 Back-Propagation with Adaptive Learning Rate
In the standard back-propagation algorithm, the learning rate is held constant
throughout the training. Performance of the algorithm is very sensitive to the proper
setting of the learning rate. If the learning rate is set too high, the algorithm can
oscillate and become unstable. If the learning rate is too small, the algorithm takes too
long to converge. The back-propagation with Adaptive Learning Rate algorithm [71]
was proposed to solve this problem. The main idea is when the error decreases, then
the changes of weights are accepted and the learning rate is increased by a factor. If
the error increases by more than a factor, the changes of weights are canceled and the
learning rate is decreased by a factor.

68
Although this algorithm is simple it calls for a centralized control in the training
procedure. The error for each epoch is compared with the previous epoch error and
the learning rate is modified accordingly. The centralized control makes this
algorithm not suitable for the MLP NN distributed over a WSN, since the training of
the neural network should be distributed and in parallel.
4.3.1.2 Resilient Back-Propagation
This is a local adaptive learning scheme performing supervised batch learning in
feed-forward neural networks [72]. The basic principle of this algorithm is to
eliminate the harmful influence of the size of the partial derivative on the weight
updates. Only the sign of the derivative can determine the direction of the weight
update; the magnitude of the derivative has no effect on the weight update. The size of
the weight change is determined by a separate update value. The update value for
each weight and bias is increased by a factor whenever the derivative of the
performance function with respect to that weight has the same sign for two successive
iterations. The update value is decreased by a factor whenever the derivative with
respect to that weight changes sign from the previous iteration.
This algorithm could be an alternative learning algorithm for the MLP on WSN. In
the further study, this learning algorithm is worth to be implemented. This algorithm
maintains an update-value for each weight. The adaptive update-value evolves during

69
the training process based on its gradient change. However, it must be noted that this
algorithm would consume more memory and computation time compared to
back-propagation with momentum. Therefore, an algorithm with reduced
computational complexity but with equal performance would be preferable.
4.3.1.3 Conjugate Gradient Back-Propagation
Like standard back-propagation, conjugate gradient back-propagation iteratively tries
to get closer to the minimum of the error or performance function. But while standard
back-propagation always proceeds down the gradient of the error function, a
conjugate gradient method will proceed in a direction which is conjugate to the
directions of the previous steps. Thus the minimization performed in one step is not
partially undone by the next. The algorithm is not susceptible to the possible
instabilities and oscillatory behavior associated with the use of a fixed step size as in
the conventional back propagation method. The search direction is periodically reset
to the negative of the gradient. The reset point is determined by certain methods. This
algorithm has many versions [90, 91, 92]. In all cases, this series of algorithms are
applied in batch-learning mode. The WSN context dictates an online or incremental
learning algorithm for error backpropogation. Therefore, conjugate gradient
back-propogation algorithms are not appropriate for the WSN-MLP design.
70
4.3.1.4 Levenberg-Marquardt Algorithm
The Levenberg-Marquardt algorithm [73] blends the standard back-propagation and
the Gauss-Newton algorithms. It inherits the speed advantage of the Gauss-Newton
algorithm and the stability of the standard back-propagation algorithm. This algorithm
doesn’t need to compute the Hessian matrix, instead it approximates it by the Jacobian
matrix that contains the first derivatives of the network errors with respect to weights
and biases.
The Levenberg-Marquardt algorithm is perhaps the fastest back-propagation
algorithm. However the Jocobian matrix has to be stored, and there needs to be a
matrix inversion at each iteration. The computation and memory cost might be large
even for a desktop computer. It is obvious that this algorithm would be impractical on
the distributed computing platform like the WSN.
4.3.1.5 Back-Propagation with Momentum
The rationale for the use of the momentum term [74] is that the steepest descent is
particularly slow when there is a long and narrow valley in the error function surface.
Momentum allows a network to respond not only to the local gradient, but also to
recent trends in the error surface. The momentum term helps average out the
oscillation along the short axis while at the same time adds up contributions along the
long axis [75]. It is well known that such a term greatly improves the speed of
learning. Momentum is added to back propagation learning by making weight

71
changes equal to the sum of a fraction of the last weight change and the new change
suggested by the gradient descent rule. When using the back propagation with
momentum, the i-th update value for a weight �¯ is given by
∆�¯(�) = −±²¯ + ³∆�¯(� − 1) (4.3)
where γ is the learning rate, ³ is the momentum rate, ²¯ is gradient of the error
with respect to the weight vector, and ∆�¯(� − 1) is the former update value for
the�¯. During training of each node, all that is needed is to store the previous local
weight update values. This makes the algorithm very economical to implement for the
MLP on a WSN.
4.3.2 Learning Rate, Momentum and Hidden Layer Neuron Count
The context within which the MLP NN will be deployed is one where the tasks need
to be accomplished autonomously to the extent possible and feasible. Accordingly,
the WSN will need to be provided guidelines, heuristics, rules of thumb, bounds or
formulas to help aid in the process or initializing or setting its parameter values
including the learning rate, momentum and the hidden layer neuron count among
others. The primary focus of study is to demonstrate the feasibility of MLP NN
training in a fully distributed and parallel framework on a WSN. As such, establishing
specific values for the learning rate, momentum and the hidden layer neuron count
that would be applicable for a wide variety of problem domains is of interest.
Therefore, following the lead by Weka Machine Learning workbench, we will explore

72
feasibility of default settings as suggested by the Weka for the parameters mentioned.
We set the learning rate and momentum rate to be 0.3 and 0.8 respectively, same as
the default settings of Weka for the MLP classifier [76]. The only exception to these
settings are that the learning rate is set to be 0.03 for the datasets Isolet and Gisette,
which is based on the fact that Weka default settings did not lead to successful
training results for our in-house simulations.
The hidden layer plays a vital role in the performance of MLP NN: it can directly
affect the learning and convergence processes. Deciding the number of neurons in the
hidden layer is a very important part for setting up an MLP NN [77]. Many
researchers have put their best efforts in finding a well-defined procedure or criterion
to decide this number (of hidden layer neurons) over the past several decades.
Although there has been some progress, it is not possible to state that one can
formulate a number for the hidden layer neuron count readily without a need for
empirical exploration. In the current literature there are empirical formulas [78, 79 ,80
and 81] which suggest good heuristics to determine the number of hidden layer
neurons. There is also evidence [77, 81] that shows that the number of hidden layer
neurons should be determined by training several networks and estimating the
generalization error of each. In the case of implementing the MLP NN on a WSN,
determining the hidden layer neurons by trial-and-error is obviously improper since it
would be too costly or unpredictable. It is desirable however to provide at least certain

73
guidelines to make this search or task easier. Ideally, a formula that sets a range of
values on the hidden layer neuron counts such that the MLP NN delivers good (but
not necessarily superb) performance is the goal.
There are currently some bounds on the hidden layer neuron count which may serve a
reasonably good starting point for the ongoing discussion. As it is well-established,
input layer and output layer neuron counts are the same as the number of attributes
and classes of the data set, respectively. Boger [78] proposed the following formula
for the number of hidden layer neurons
1� = �µ (1� +�23), (4.4)
where 1� denotes the hidden layer neuron count, 1� represents the input layer
neuron count, and �23 is for the output neuron count.
According to the Kolmogorov theorem [79], the number of hidden neurons should be
1� = 2 × 1� + 1 (4.5)
Daqi and Shouyi [80] determined the “best” number of hidden neurons as
1� =M1� ∗ (�23 + 2) (4.6)
The default setting for the number of hidden neurons in Weka [76] is given by
1� = (1� +�23)/2 (4.7)
In order to determine which formula is better for our datasets, we conducted an
exploratory simulation study to compare the performance of MLP generated by each

74
formula on the first six data sets presented in Table 4.1. We didn’t conduct simulation
on the Gisette data set since the time cost is prohibitively high for multiple
simulations on that data set. For further comparison, we also adopted hidden neuron
counts for the same data sets as reported in literature [82-87]. Table 4.4 shows the
hidden neuron counts for each data set. During the experiment each MLP NN instance
is trained with the training data set and evaluated by the test data set. The training
stops when the test (validation) data error begins to increase. The training for each
MLP was repeated for several times with different initial weights. We compared the
mean squared error (MSE) values due to the testing data and the iteration count it took
to train the network. For Numeral and Isolet datasets, we repeated the training for
each MLP instance for 5 times rather than 10 due to the potentially very long traning
times for these two large data sets. Another point of exception is that the MLP NN
generated by the Equation 4.5 for the Isolet dataset would be too large, which would
cost too much time to train. In conjunction with the poor performance of the MLP NN
instance generated through Equation 4.5 for other data sets, it is reasonable to
conclude that hidden layer neuron count through this equation would not be suitable
for the Isolet dataset either.
Results of the simulation study are presented in Figures 4.6 through 4.11. Figure 4-6
shows that, for the Iris data set, performance of MLP NN instances with different
hidden neuron counts is similar to each other. From Figure 4-7, the MLP generated
by Equation 4.5 demonstrated the best performance for the Wine data set, while

75
MLPs due to Equations 4.6 and 4.7 performed the worst. However, the differences in
performances are negligible. In Figure 4-8, the MLPs generated by Equations 4.6 for
the Ionosphere data set perform better than the others. For the Dermatology data set,
the MLP through the Equation 4.6 delivered the best performance as shown in Figure
4-9. As Figure 4-10 shows, for the Numeral data set, the MLP generated by Equation
4.6 projected the best performance which is also much better than the rest. In the case
of the Isolet data set, the MLP generated by Equation 4.6 again delivered the best
performance as detailed in Figure 4-11: not only this performance is better than the
others, but it is also comparable to the performance reported in the literature for the
same dataset.
In general, MLP NN instances generated by Equation 4.6, which prescribes a
consistently smaller number of hidden layer neurons, always delivered a descent
performance while being remarkably good for the large data sets. As a result we chose
to use Equation 4.6 as the formula to determine the number of hidden layer neurons
for the simulation study.
Table 4.3: Options for Hidden Neuron Counts for Each Data Set
Dataset Eq 3.4 Eq 3.5 Eq 3.6 Eq 3.7 Literature Literature
Iris 4 9 4 3 6 [82] 3 [83]
Wine 10 27 8 8 9 [84]
Ionosphere 24 69 11 18 22 [85] 10 [86]
Dermatology 26 69 16 20
Numerals 166 481 53 125
Isolet 428 1235 131 321 156 [68]

76
(a)
(b)
Figure 4-6 MLP Performance on Iris Data Set for Different Hidden Layer Neurons (a)MSE
(b)Training Iterations
0.019
0.0195
0.02
0.0205
0.021
0.0215
0.022
0.0225
0.023
1 2 3 4 5 6 7 8 9 10
Te
stin
g
Me
an
Sq
ua
red
Err
or
(MS
E)
Trial Number
Iris
4
9
42
3
6
34
Number of
Hidden Neurons
0
5
10
15
20
25
30
35
40
1 2 3 4 5 6 7 8 9 10
Tra
inin
g I
tera
tio
ns
Trial Number
Iris
4
9
4 (2)
3
6
3 (2)
Number of
Hidden Neurons

77
(a)
(b)
Figure 4-7 MLP Performance on Wine Data Set for Different Hidden Layer Neurons (a) MSE
(b) Training Iterations
0
0.002
0.004
0.006
0.008
0.01
0.012
1 2 3 4 5 6 7 8 9 10
Te
stin
g
Me
an
Sq
ua
red
Err
or
(MS
E)
Trial Number
Wine
10
27
8
8 (2)
9
Number Of
Hidden Neurons
9.4
9.6
9.8
10
10.2
10.4
10.6
10.8
11
11.2
1 2 3 4 5 6 7 8 9 10
Tra
inin
g I
tera
tio
ns
Trial Number
Wine
10
27
8
8 (2)
9 (2)
Number of
Hidden Neurons

78
(a)
(b)
Figure 4-8 MLP Performance on Ionosphere Data Set for Different Hidden Layer Neurons
(a)MSE (b) Training Iterations
0
0.02
0.04
0.06
0.08
0.1
0.12
0.14
0.16
0.18
1 2 3 4 5 6 7 8 9 10
Te
stin
g
Me
an
Sq
ua
red
Err
or
(MS
E)
Trial Number
Ionosphere
24
69
11
18
22
10
Number of
Hidden Neurons
0
20
40
60
80
100
120
140
160
1 2 3 4 5 6 7 8 9 10
Tra
inin
g I
tera
tio
ns
Trial Number
Ionosphere
24
69
11
18
22
10
Number of
Hidden Neurons

79
(a)
(b)
Figure 4-9 MLP Performance on Dermatology Data Set for Different Hidden Layer Neurons
(a)MSE (b) Training Iterations
0
0.005
0.01
0.015
0.02
0.025
1 2 3 4 5 6 7 8 9 10
Te
stin
g
Me
an
Sq
ua
red
Err
or
(MS
E)
Trial Number
Dermatology
26
69
16
20
Number of
Hidden Neurons
0
100
200
300
400
500
600
1 2 3 4 5 6 7 8 9 10
Tra
inin
g I
tera
tio
ns
Trial Number
Dermatology
26
69
16
20
Number of
Hidden Neurons

80
(a)
(b)
Figure 4-10 MLP Performance on Numeral Data Set for Different Hidden Layer Neurons
(a)MSE (b) Training Iterations
0
0.02
0.04
0.06
0.08
0.1
0.12
0.14
0.16
0.18
0.2
1 2 3 4 5
Te
stin
g
Me
an
Sq
ua
red
Err
or
(MS
E)
Trial Number
Numeral
166
481
53
125
Number of
Hidden Neurons
0
50
100
150
200
250
300
350
1 2 3 4 5
Tra
inin
g I
tera
tio
ns
Trial Number
Numeral
166
481
53
125
Number of
Hidden Neurons

81
(a)
(b)
Figure 4-11 MLP Performance on Isolet Data Set for Different Hidden Layer Neurons (a) MSE
(b) Training Iterations
0
0.0005
0.001
0.0015
0.002
0.0025
0.003
0.0035
0.004
1 2 3 4 5
Te
stin
g
Me
an
Sq
ua
red
Err
or
(MS
E)
Trial Number
Isolet
428
1235
131
321
156
Number of
Hidden Neurons
0
20
40
60
80
100
120
140
160
1 2 3 4 5
Tra
inin
g I
tera
tio
ns
Trial Number
Isolet
428
1235
131
321
156
Number of
Hidden Neurons
82
Chapter 5
Simulation Study
The simulation study is conceived to profile the performance of the proposed
WSN-MLP design for a set of problem domains or data sets in pattern classification.
Classification rate, message complexity and time complexity measures will be
employed to establish the perimeters of performance. The simulation study will
further explore the comparative performance of the proposed design with those
reported in the literature on the same problem domains or data sets.
5.1 The Simulator
The simulator was custom developed in-house and implemented in C++. It simulates
the delay and drop effects on the transmission of neuron outputs as described in an
earlier chapter, thus provides a highly computationally efficient simulation bypassing
the details not relevant for performance assessment associated with application
development within a wireless sensor network context.
The simulator implements several phases of data access, initialization, delay and drop
instantiation, neural network training, and performance recording. For each dataset,

83
the simulator first needs to execute the data access phase. During data access, the
simulator reads the configuration file and the data set into the memory. The simulator
first reads the configuration file, and then allocates array data structures dynamically
for the data set. Afterwards, the simulator reads the entire data set into the system
memory, parses and stores it into arrays. The dataset is further partitioned into
training and testing data subsets.
During initialization, the simulator allocates and initializes the resources for the MLP
network and the delay and drop models instantiation. For the MLP network, arrays for
neurons and weights are allocated, and then the weight are initialized. For the delay
and drop model generation, the arrays for implementing the models for delay and drop
associated with the packets carrying neuron outputs are allocated and initialized. Next,
the coordinates of WSN motes are initialized.
After the simulator initialization phase, the training of the MLP neural network begins.
Training of the MLP network entails forward propagation, back propagation, and
weights update. After each complete iteration over the entire training dataset the MLP
performance is validated on the testing data. The delay and drop affects transmission
of outputs from the hidden layer neurons in the forward propagation step, and the
error signals generated at the output layer and communicated back to hidden layer
neurons in the backward propagation step. In the end, the monitored data recorded
during simulation is saved in text files. This data includes classification accuracy on
84
the test data, mean squared error computed on the test data, number of training
iterations, the confusion matrix on the test data, percentage of drop and delay of
packets, and the weight matrix of output layer (which is recorded to observe the
phenomenon in Section 5.6).
5.2 Parameter Value Settings
In this study, we simulated on seven data sets from the UCI machine learning
repository [51]: these data sets are Iris, Wine, Ionosphere, Dermatology, Numerical,
Isolet and Giesette. The baseline performance for each data set is established through
a simulation using the same code with no delay or drop. In the WSN-MLP case,·̂ 813
which is discussed in Section 2.4 is set to different values to vary the delay and drop
probabilities. More specifically, the parameter ·̂ 813 is set as in Equation 5.1:
·���� = ϑ × μ × ¸���, (5.1)
where ϑ is an empirically determined constant, μ is the mean of the truncated
Gaussian distribution for generating the delay, and ¸��� is the max distance between
the node pairs in the WSN topology. In order to exclude the cases where motes are
positioned in outlying or extreme areas, the parameter ¸��� is set to a value, which
covers approximately 90% of node pairs. The coefficient ϑ is set to different number
to make the percentage of NOD vary. The value of ϑ should be positive. A too small
ϑ value results in nearly all the packets to be dropped, while a very large value for
this parameter will result in no dropped packets. By experimentation, we determined
that (0.3, 2.1) is a reasonable range forϑ which make the percentage of NOD range

85
from 0.4% to 99%. Consequently, in this study, we equally divided the range of
values for ϑ and therefore set it to 0.3, 0.6, 0.9, 1.2, 1.5, 1.8 and 2.1.
Simulation on each data set is repeated five times with different initial weights. The
only exception is the case of Giesette dataset due to its high computational cost. The
packets carrying neuron outputs and error signals are subject to delay and drop during
the training phase only and not during the testing phase.
5.3 Simulation Results
The simulation study reports classification accuracy, training iteration count, mean
squared error (MSE), and the percentage of NOD (probabilities of delay and drop).
All tables in this subsection, namely Tables 5.1 through 5.28 have the same format: a
specific run is repeated for seven different values of the parameter ϑ and the
corresponding ·���� value is shown in the first column. The topology varies for the
5 runs, therefore, for some datasets ¸��� in the Equation 5.1 is not consistant. This
leads to a range of ·���� value. Furthermore, the same initial weights are employed
for different values of ϑ during a given run. The first seven rows of in these tables
are the results due to simulation of WSN-MLP for different values of the parameterϑ.
The last row in each table is the result of simulation of MLP with no delay or drop.
The figures present the classification accuracy, MSE, and training iteration count
versus different percentage values of NOD.

86
5.3.1 Iris Dataset
Figure 5-1 shows the classification accuracy versus the percentage of NOD of the
WSN-MLP and the MLP on the test data for the Iris dataset. The classification
accuracy of WSN-MLP is close to MLP except for the cases when percentage of
NOD goes above 64.5%. The highest accuracy of 96% is achieved by both the
WSN-MLP and the MLP. Figure 5-2 plots the training iteration under different
percentages of NOD. The training iteration count for the WSN-MLP varies greatly
while the MLP demonstrates very stable and small values for the training iterations
and the mean value for the WSN-MLP is significantly more than that of the MLP. The
training iterations for the WSN-MLP shows no trend when the percentage of NOD
increases towards the upper bound value. Figure 5-2 shows the MSE under different
percentage of NOD. The MSE shows no significant difference for the percentage of
NOD less than 42.5%, while growing very rapidly beyond that value. The WSN-MLP
can hardly learn when the percentage of NOD is larger than 80%.
Table 5.1: Classification Accuracy Results for Iris Data Set
·���� Run #1 Run #2 Run #3 Run #4 Run #5
[39, 58.5] 76.0% 34.0% 66.0% 34.0% 82.0%
[78, 117] 88.0% 34.0% 96.0% 54.0% 74.0%
[117, 175.5] 96.0% 94.0% 94.0% 94.0% 96.0%
[156, 234] 94.0% 96.0% 96.0% 94.0% 96.0%
[195, 292.5] 96.0% 96.0% 96.0% 96.0% 96.0%
[234, 351] 94.0% 96.0% 94.0% 94.0% 96.0%
[273, 409.5] 94.0% 96.0% 94.0% 96.0% 96.0%
0 96.0% 96.0% 96.0% 96.0% 96.0%

87
Table 5.2: Training Iterations for Iris Data Set
·���� Run #1 Run #2 Run #3 Run #4 Run #5
[39, 58.5] 71 33 79 83 199
[78, 117] 203 14 134 340 295
[117, 175.5] 114 191 56 98 213
[156, 234] 95 239 12 144 355
[195, 292.5] 370 147 330 385 238
[234, 351] 131 147 223 45 392
[273, 409.5] 85 147 202 406 63
0 31 31 29 30 36
Table 5.3: MSE for Iris Data Set
·���� Run #1 Run #2 Run #3 Run #4 Run #5
[39, 58.5] 0.1998 0.2221 0.2188 0.2235 0.2029
[78, 117] 0.0840 0.2221 0.0954 0.1800 0.1328
[117, 175.5] 0.0242 0.0286 0.0958 0.0618 0.0630
[156, 234] 0.0292 0.0228 0.0392 0.0293 0.0290
[195, 292.5] 0.0215 0.0231 0.0219 0.0218 0.0220
[234, 351] 0.0264 0.0233 0.0265 0.0230 0.0233
[273, 409.5] 0.0220 0.0233 0.0275 0.0239 0.0215
0 0.0214 0.0214 0.0213 0.0212 0.0206
Table 5.4: Percentage of Neuron Output Delay for Iris Data Set
·���� Run #1 Run #2 Run #3 Run #4 Run #5
[39, 58.5] 82.9% 95.8% 90.9% 97.6% 96.9%
[78, 117] 53.1% 80.5% 64.0% 87.8% 82.7%
[117, 175.5] 38.1% 39.7% 60.1% 47.8% 64.5%
[156, 234] 16.0% 20.3% 36.9% 28.6% 42.5%
[195, 292.5] 8.7% 12.3% 19.5% 17.4% 25.0%
[234, 351] 6.9% 10.0% 10.6% 12.0% 15.5%
[273, 409.5] 6.8% 9.7% 7.0% 10.9% 11.9%
0 0.0% 0.0% 0.0% 0.0% 0.0%

88
Figure 5-1 Classification Accuracy vs. Percentage of NOD for Iris Data Set
Figure 5-2 MSE vs. Percentage of NOD for Iris Data Set
0%
20%
40%
60%
80%
100%
0 0 0
6.9
%
8.7
%
10
.0%
10
.9%
12
.0%
15
.5%
17
.4%
20
.3%
28
.6%
38
.1%
42
.5%
53
.1%
64
.0%
80
.5%
82
.9%
90
.9%
96
.9%
Cla
ssif
ica
tio
n A
ccu
racy
Percentage of NOD
Iris
0
0.05
0.1
0.15
0.2
0.25
0 0 0
6.9
%
8.7
%
10
.0%
10
.9%
11
.9%
15
.5%
17
.4%
20
.3%
28
.6%
38
.1%
42
.5%
53
.1%
64
.0%
80
.5%
82
.9%
90
.9%
96
.9%
MS
E
Percentage of NOD
Iris

89
Figure 5-3 Training Iterations vs. Percentage of NOD for Iris Data Set
5.3.2 Wine Dataset
Figure 5-4 shows the classification accuracy versus the percentage of NOD of the
WSN-MLP and the MLP on the test data for the Wine dataset. The classification
accuracy achieved by the WSN-MLP is similar to that of the MLP when the
corresponding percentage of NOD is below 66.6%. The highest accuracy is 98.3%
and achieved by both the WSN-MLP and the MLP. Figure 5-4 shows the training
iteration count versus percentage of NOD, which appears very similar to that the for
Iris data set. The training iteration count of the WSN-MLP appears unstable and the
mean value is significantly higher than that of the MLP. Figure 5-3 presents the MSE
against the percentage of NOD. From the figure, when the percentage of NOD is less
than 72.3% the MSE value for both designs are comparable while the WSN-MLP
tends to generate more MSE compared to those by the MLP. The MSE for the
WSN-MLP significantly increases at the percentage of NOD value of 72.3% and the
0
100
200
300
400
500
0 0 0
6.9
%
8.7
%
10
.0%
10
.9%
12
.0%
15
.5%
17
.4%
20
.3%
28
.6%
38
.1%
42
.5%
53
.1%
64
.0%
80
.5%
82
.9%
90
.9%
96
.9%
Tra
inin
g I
tera
tio
ns
Percentage of NOD
Iris

90
learning capability becomes very low once the percentage of NOD is more than
78.5%.
Table 5.5: Classification Accuracy for Wine Data Set
·���� Run #1 Run #2 Run #3 Run #4 Run #5
58.5 56.7% 70.0% 86.7% 40.0% 71.7%
117 61.7% 83.3% 98.3% 63.3% 98.3%
175.5 98.3% 98.3% 96.7% 98.3% 98.3%
234 98.3% 96.7% 96.7% 98.3% 98.3%
292.5 96.7% 96.7% 98.3% 98.3% 96.7%
351 98.3% 96.7% 96.7% 96.7% 98.3%
409.5 96.7% 98.3% 96.7% 98.3% 98.3%
0 96.7% 96.7% 98.3% 96.7% 98.3%
Table 5.6: Training Iterations for Wine Data Set
·���� Run #1 Run #2 Run #3 Run #4 Run #5
58.5 187 398 419 56 398
117 500 132 78 342 287
175.5 334 301 206 229 29
234 197 241 40 172 10
292.5 46 87 226 452 83
351 122 46 134 344 27
409.5 23 209 134 127 172
0 10 11 11 10 11

91
Table 5.7: MSE for Wine Data Set
·���� Run #1 Run #2 Run #3 Run #4 Run #5
58.5 0.1729 0.1517 0.1527 0.2181 0.1524
117 0.1381 0.0872 0.0989 0.1856 0.0160
175.5 0.0157 0.0165 0.0161 0.0135 0.0127
234 0.0145 0.0135 0.0151 0.0140 0.0095
292.5 0.0166 0.0176 0.0130 0.0114 0.0160
351 0.0133 0.0120 0.0157 0.0158 0.0096
409.5 0.0131 0.0140 0.0171 0.0126 0.0155
0 0.0111 0.0098 0.0101 0.0093 0.0096
Table 5.8: Percentage of Neuron Output Delay for Wine Data Set
·���� Run #1 Run #2 Run #3 Run #4 Run #5
58.5 96.6% 91.2% 94.8% 99.5% 93.1%
117 78.5% 72.3% 74.4% 81.9% 68.0%
175.5 40.9% 66.6% 42.9% 46.0% 65.2%
234 16.4% 46.3% 21.9% 24.8% 42.5%
292.5 5.9% 24.5% 12.7% 13.5% 22.4%
351 3.2% 12.0% 9.9% 10.2% 11.2%
409.5 2.8% 8.4% 9.3% 9.7% 7.1%
0 0.0% 0.0% 0.0% 0.0% 0.0%
Figure 5-4 Classification Accuracy vs. Percentage of NOD for Wine Data Set
0.0%
20.0%
40.0%
60.0%
80.0%
100.0%
0 0 0
3.2
%
7.1
%
9.3
%
9.9
%
11
.2%
12
.7%
16
.4%
22
.4%
24
.8%
42
.5%
46
.0%
65
.2%
68
.0%
74
.4%
81
.9%
93
.1%
96
.6%
Cla
ssif
ica
tio
n A
ccu
racy
Percentage of NOD
Wine

92
Figure 5-5 MSE vs. Percentage of NOD for Wine Data Set
Figure 5-6 Training Iterations vs. Percentage of NOD for Wine Data Set
5.3.3 Ionosphere Dataset
Figure 5-7 shows the classification accuracy versus the percentage of NOD of the
WSN-MLP and the MLP on the test data for the Ionosphere dataset. For
approximately 90% percent of the trials, the classification accuracy achieved by the
WSN-MLP is lower than that of the MLP. The highest accuracy is 94% and achieved
0
0.05
0.1
0.15
0.2
0.25
0 0 0
3.2
%
7.1
%
9.3
%
9.9
%
11
.2%
12
.7%
16
.4%
22
.4%
24
.8%
42
.5%
46
.0%
65
.2%
68
.0%
74
.4%
81
.9%
93
.1%
96
.6%
MS
E
Percentage of NOD
Wine
0
100
200
300
400
500
600
0 0 0
3.2
%
7.1
%
9.3
%
9.9
%
11
.2%
12
.7%
16
.4%
22
.4%
24
.8%
42
.5%
46
.0%
65
.2%
68
.0%
74
.4%
81
.9%
93
.1%
96
.6%
Tra
inin
g I
tera
tio
ns
Percentage of NOD
Wine

93
by the MLP. Figure 5-5 plots the relationship between MSE and the percentage of
NOD. It shows that the WSN-MLP tends to generate more MSE as the percentage of
NOD increases. Figure 5-6 presents the plot of training iteration count against the
percentage of NOD. The training iteration count of the WSN-MLP tends to increase
and fluctuate more as the percentage of NOD exceeds 35.4%.
Table 5.9: Classification Accuracy for Ionosphere Data Set
·���� Run #1 Run #2 Run #3 Run #4 Run #5
[39, 58.5] 80.3% 64.1% 76.1% 64.1% 79.5%
[78, 117] 82.1% 80.3% 84.6% 81.2% 83.8%
[117, 175.5] 82.1% 82.9% 88.0% 83.8% 83.8%
[156, 234] 86.3% 87.2% 82.1% 93.2% 83.8%
[195, 292.5] 90.6% 83.8% 91.5% 82.9% 83.8%
[234, 351] 90.6% 88.9% 88.0% 90.6% 87.2%
[273, 409.5] 84.6% 86.3% 90.6% 86.3% 85.5%
0 94.0% 90.6% 90.6% 90.6% 90.6%
Table 5.10: Training Iterations for Ionosphere Data Set
·���� ϑ Run #1 Run #2 Run #3 Run #4 Run #5
[39, 58.5] 0.3 141 48 96 4 143
[78, 117] 0.6 217 344 191 235 133
[117, 175.5] 0.9 14 500 313 167 279
[156, 234] 1.2 46 45 7 69 37
[195, 292.5] 1.5 157 181 96 104 6
[234, 351] 1.8 57 94 169 69 106
[273, 409.5] 2.1 24 70 121 31 106
0 No NOD 45 34 38 41 45

94
Table 5.11: MSE for Ionosphere Data Set
·���� Run #1 Run #2 Run #3 Run #4 Run #5
[39, 58.5] 0.1764 0.2273 0.1841 0.2281 0.1735
[78, 117] 0.1491 0.1409 0.1411 0.1467 0.1329
[117, 175.5] 0.1506 0.1551 0.1229 0.1367 0.1451
[156, 234] 0.1100 0.1098 0.1464 0.0674 0.1561
[195, 292.5] 0.0848 0.1346 0.0763 0.1228 0.1419
[234, 351] 0.0728 0.1067 0.0959 0.0848 0.1034
[273, 409.5] 0.1258 0.1036 0.0821 0.1177 0.1154
No NOD 0.0511 0.0754 0.0730 0.0698 0.0753
Table 5.12: Percentage of Neuron Output Delay for Ionosphere Data Set
·���� Run #1 Run #2 Run #3 Run #4 Run #5
[39, 58.5] 96.2% 95.3% 93.0% 93.6% 92.9%
[78, 117] 77.7% 78.1% 69.4% 71.9% 70.1%
[117, 175.5] 42.2% 55.8% 38.7% 41.4% 42.8%
[156, 234] 18.3% 35.3% 16.1% 19.3% 22.0%
[195, 292.5] 9.0% 20.5% 6.4% 9.9% 12.9%
[234, 351] 6.2% 11.4% 4.0% 6.7% 9.9%
[273, 409.5] 5.9% 7.5% 3.6% 6.3% 9.6%
0 0.0% 0.0% 0.0% 0.0% 0.0%
Figure 5-7 Classification Accuracy vs. Percentage of NOD for Ionosphere Data Set
0.0%
20.0%
40.0%
60.0%
80.0%
100.0%
0 0 0
4.0
%
6.2
%
6.4
%
7.5
%
9.6
%
9.9
%
12
.9%
18
.3%
20
.5%
35
.4%
41
.4%
42
.8%
69
.4%
71
.9%
78
.1%
93
.0%
95
.3%
Cla
ssif
ica
tio
n A
ccu
racy
Percentage of NOD
Ionosphere

95
Figure 5-8 MSE vs. Percentage of NOD for Ionosphere Data Set
Figure 5-9 Training Iterations vs. Percentage of NOD for Ionosphere Data Set
5.3.4 Dermatology Dataset
Figure 5-10 shows the classification accuracy versus the percentage of NOD of the
WSN-MLP and the MLP on the test data for the Dermatology dataset. For the
percentage of NOD lower than 73%, the classification accuracy of the WSN-MLP is
0
0.05
0.1
0.15
0.2
0.25
0 0 0
4.0
%
6.2
%
6.4
%
7.5
%
9.6
%
9.9
%
12
.9%
18
.3%
20
.5%
35
.3%
41
.4%
42
.8%
69
.4%
71
.9%
78
.1%
93
.0%
95
.3%
MS
E
Percentage of NOD
Ionosphere
0
100
200
300
400
500
600
0 0 0
4.0
%
6.2
%
6.4
%
7.5
%
9.6
%
9.9
%
12
.9%
18
.3%
20
.5%
35
.4%
41
.4%
42
.8%
69
.4%
71
.9%
78
.1%
93
.0%
95
.3%
Tra
inin
g I
tera
tio
ns
Percentage of NOD
Ionosphere

96
similar to those of the MLP. For half of the trials the WSN-MLP scores better in
terms of the classification accuracy when compared to the MLP. The highest accuracy
is 96.9% and achieved by the WSN-MLP. Figure 5-7 depicts the MSE versus
different percentages of NOD. The MSE is close to each other at low percentages of
NOD but suddenly begins to increase at or above 73% of NOD. When the percentage
of NOD is lower than 73%, in 12 trials out of 28, MSE of the WSN-MLP is less than
the MSE of the MLP. The lowest MSE is achieved by the WSN-MLP, which is
0.0120. Performance of WSN-MLP becomes poor when the percent of NOD is over
76.7%. Figure 5-8 indicates that the training iteration count for the dermatology
dataset tends to be fluctuating with a larger spread between extreme values when the
percentage of NOD increases.
Table 5.13: Classification Accuracy for Dermatology Data Set
·���� Run #1 Run #2 Run #3 Run #4 Run #5
78 48.0% 75.6% 51.2% 78.7% 74.0%
156 76.4% 91.3% 96.9% 95.3% 89.8%
234 96.1% 96.1% 95.3% 94.5% 95.3%
312 94.5% 94.5% 95.3% 95.3% 96.1%
390 95.3% 96.1% 94.5% 94.5% 94.5%
468 96.1% 94.5% 93.7% 96.1% 95.3%
546 94.5% 94.5% 95.3% 92.9% 93.7%
0 94.5% 94.5% 94.5% 93.7% 95.3%

97
Table 5.14: Training Iterations for Dermatology Data Set
·���� Run #1 Run #2 Run #3 Run #4 Run #5
78 500 259 62 138 176
156 38 63 88 312 89
234 500 133 98 45 247
312 89 37 76 74 51
390 120 208 197 48 72
468 20 91 200 20 112
546 73 235 212 111 60
0 22 81 19 34 79
Table 5.15: MSE for Dermatology Data Set
·���� Run #1 Run #2 Run #3 Run #4 Run #5
78 0.1035 0.0697 0.1082 0.0644 0.0852
156 0.0643 0.0416 0.0258 0.0120 0.0332
234 0.0137 0.0147 0.0156 0.0208 0.0147
312 0.0159 0.0157 0.0143 0.0154 0.0114
390 0.0165 0.0143 0.0153 0.0167 0.0154
468 0.0132 0.0173 0.0175 0.0127 0.0152
546 0.0164 0.0160 0.0158 0.0202 0.0166
0 0.0150 0.0168 0.0143 0.0169 0.0150
Table 5.16: Percentage of Neuron Output Delay for Dermatology Data Set
·���� Run #1 Run #2 Run #3 Run #4 Run #5
78 97.0% 93.9% 96.1% 93.4% 96.7%
156 76.7% 69.8% 73.0% 70.8% 74.5%
234 39.5% 45.2% 37.9% 41.7% 42.9%
312 13.8% 21.3% 17.0% 16.3% 20.8%
390 3.7% 11.4% 8.7% 6.3% 11.2%
468 1.2% 9.5% 7.0% 3.4% 9.0%
546 0.9% 9.3% 6.8% 3.0% 8.6%
0 0.0% 0.0% 0.0% 0.0% 0.0%

98
Figure 5-10 Classification Accuracy vs. Percentage of NOD for Dermatology Data Set
Figure 5-11 MSE vs. Percentage of NOD for Dermatology Data Set
0.0%
20.0%
40.0%
60.0%
80.0%
100.0%
0 0 0
1.2
%
3.5
%
6.3
%
7.0
%
8.7
%
9.3
%
11
.2%
13
.8%
17
.0%
21
.3%
39
.5%
42
.9%
69
.8%
73
.0%
76
.7%
93
.9%
96
.7%
Cla
ssif
ica
tio
n A
ccu
racy
Percentage of NOD
Dermatology
0
0.02
0.04
0.06
0.08
0.1
0.12
0 0 0
1.2
%
3.4
%
6.3
%
7.0
%
8.7
%
9.3
%
11
.2%
13
.8%
17
.0%
21
.3%
39
.5%
42
.9%
69
.8%
73
.0%
76
.7%
93
.9%
96
.7%
MS
E
Percentage of NOD
Dermatology

99
Figure 5-12 Training Iterations vs. Percentage of NOD for Dermatology Data Set
5.3.5 Numerical Dataset
Figure 5-10 shows the classification accuracy versus the percentage of NOD of the
WSN-MLP and the MLP on the test data for the Numerical dataset. The classification
accuracy values achieved by the WSN-MLP and the MLP are compatible when the
percentage of NOD is less than 76.4%. The difference in performance is within
2.5%. The highest accuracy is 97.2% and achieved by the WSN-MLP. Figure 5-9
shows the MSE is generally increasing slightly with the percentage of NOD increases
before it goes higher than 94.2%, then the MSE suddenly goes up. The learning
capability of WSN-MLP appears highly diminished when the percentage of NOD is
higher than 94.2%. In Figure 5-10, the training iteration count of the WSN-MLP
appears to be fluctuating with a relatively large variation and is generally more than
that of the MLP. The training iteration count does not indicate a definitive trend when
the percentage of NOD increases.
0
100
200
300
400
500
600
0 0 0
1.2
%
3.5
%
6.3
%
7.0
%
8.7
%
9.3
%
11
.2%
13
.8%
17
.0%
21
.3%
39
.5%
42
.9%
69
.8%
73
.0%
76
.7%
93
.9%
96
.7%
Tra
inin
g I
tera
tio
ns
Percentage of NOD
Dermatology

100
Table 5.17: Classification Accuracy for Numerical Data Set
·���� Run #1 Run #2 Run #3 Run #4 Run #5
117 65.5% 79.1% 75.8% 47.3% 66.6%
234 96.7% 95.2% 96.0% 94.5% 95.7%
351 94.5% 94.6% 95.8% 96.1% 95.2%
468 96.3% 95.5% 96.4% 95.4% 95.7%
585 95.8% 96.1% 96.4% 96.4% 96.3%
702 96.1% 96.3% 96.3% 97.2% 96.1%
819 96.4% 95.5% 96.7% 94.5% 96.6%
0 96.9% 96.6% 96.6% 96.7% 96.6%
Table 5.18: Training Iterations for Numerical Data Set
·���� Run #1 Run #2 Run #3 Run #4 Run #5
117 34 35 61 78 194
234 65 212 258 364 87
351 10 11 206 241 51
468 121 65 141 13 46
585 37 82 168 29 71
702 37 13 92 106 65
819 46 235 201 4 471
0 47 52 100 26 40

101
Table 5.19: MSE for Numerical Data Set
·���� Run #1 Run #2 Run #3 Run #4 Run #5
117 0.05852 0.04796 0.05469 0.07148 0.04926
234 0.00712 0.00925 0.00729 0.01039 0.00714
351 0.00957 0.00920 0.00899 0.00741 0.00852
468 0.00550 0.00812 0.00714 0.00813 0.00678
585 0.00600 0.00637 0.00644 0.00623 0.00627
702 0.00601 0.00803 0.00644 0.00466 0.00552
819 0.00527 0.00631 0.00690 0.01067 0.00592
0 0.00484 0.00585 0.00540 0.00518 0.00607
Table 5.20: Percentage of Neuron Output Delay for Numerical Data Set
·���� Run #1 Run #2 Run #3 Run #4 Run #5
117 96.3% 95.4% 95.5% 97.4% 94.2%
234 69.4% 71.3% 71.0% 76.4% 65.4%
351 36.2% 35.3% 37.2% 38.8% 34.1%
468 9.2% 11.6% 17.2% 17.0% 11.6%
585 1.5% 5.6% 12.0% 9.6% 4.3%
702 0.6% 5.0% 11.7% 9.0% 3.1%
819 0.4% 4.8% 11.2% 8.7% 2.8%
0 0.0% 0.0% 0.0% 0.0% 0.0%
Figure 5-13 Classification Accuracy vs. Percentage of NOD for Numerical Data Set
0.0%
20.0%
40.0%
60.0%
80.0%
100.0%
0 0 0
0.4
%
2.8
%
4.3
%
4.8
%
8.7
%
9.2
%
11
.2%
11
.6%
12
.0%
17
.2%
35
.3%
37
.2%
65
.4%
71
.0%
76
.4%
95
.4%
96
.3%
Cla
ssif
ica
tio
n A
ccu
racy
Percentage of NOD
Numerical

102
Figure 5-14 MSE vs. Percentage of NOD for Numerical Data Set
Figure 5-15 Training Iterations vs. Percentage of NOD for Numerical Data Set
5.3.6 Isolet Dataset
Figure 5-10 shows the classification accuracy versus the percentage of NOD of the
WSN-MLP and the MLP on the test data for the Isolet dataset. The classification
accuracy for the WSN-MLP is very similar to that of the MLP except for those trials
0
0.01
0.02
0.03
0.04
0.05
0.06
0.07
0.08
0 0 0
0.4
%
2.8
%
4.3
%
4.8
%
8.7
%
9.2
%
11
.2%
11
.6%
12
.0%
17
.2%
35
.3%
37
.2%
65
.4%
71
.0%
76
.4%
95
.4%
96
.3%
MS
E
Percentage of NOD
Numerical
0
100
200
300
400
500
0 0 0
0.4
%
2.8
%
4.3
%
4.8
%
8.7
%
9.2
%
11
.2%
11
.6%
12
.0%
17
.2%
35
.3%
37
.2%
65
.4%
71
.0%
76
.4%
95
.4%
96
.3%
Tra
inin
g I
tera
tio
ns
Percentage of NOD
Numerical

103
when percentage of NOD is higher than 94.8%. Otherwise, the difference in
performance is within 1%. The highest accuracy is 96.3% and achieved by the
WSN-MLP. From Figure 5-11, the MSE of the WSN-MLP shows no difference with
the MLP when the percentage of NOD is less than 74.8%. Table 5.22 lists the training
iterations of the WSN-MLP and the MLP for the Isolet data set. When the percentage
of NOD exceeds 94.8% the performance of WSN-MLP suffers dramatically. Figure
5-12 depicts the training iteration count against the percentage of NOD. The training
iterations of the WSN-MLP are significantly higher than those for the MLP and start
fluctuating greatly once the percentage of NOD exceeds 9%.
Table 5.21: Classification Accuracy for Isolet Data Set
·���� Run #1 Run #2 Run #3 Run #4 Run #5
175.5 76.2% 59.5% 71.2% 74.8% 61.2%
351 95.1% 95.6% 94.9% 95.2% 95.2%
526.5 95.5% 96.0% 95.4% 96.0% 95.7%
702 95.7% 95.8% 96.0% 95.8% 96.0%
877.5 95.9% 96.2% 95.9% 96.0% 95.8%
1053 96.0% 95.5% 96.0% 96.3% 95.9%
1228.5 96.0% 95.9% 96.0% 96.3% 95.9%
0 95.4% 95.6% 95.8% 95.7% 95.3%
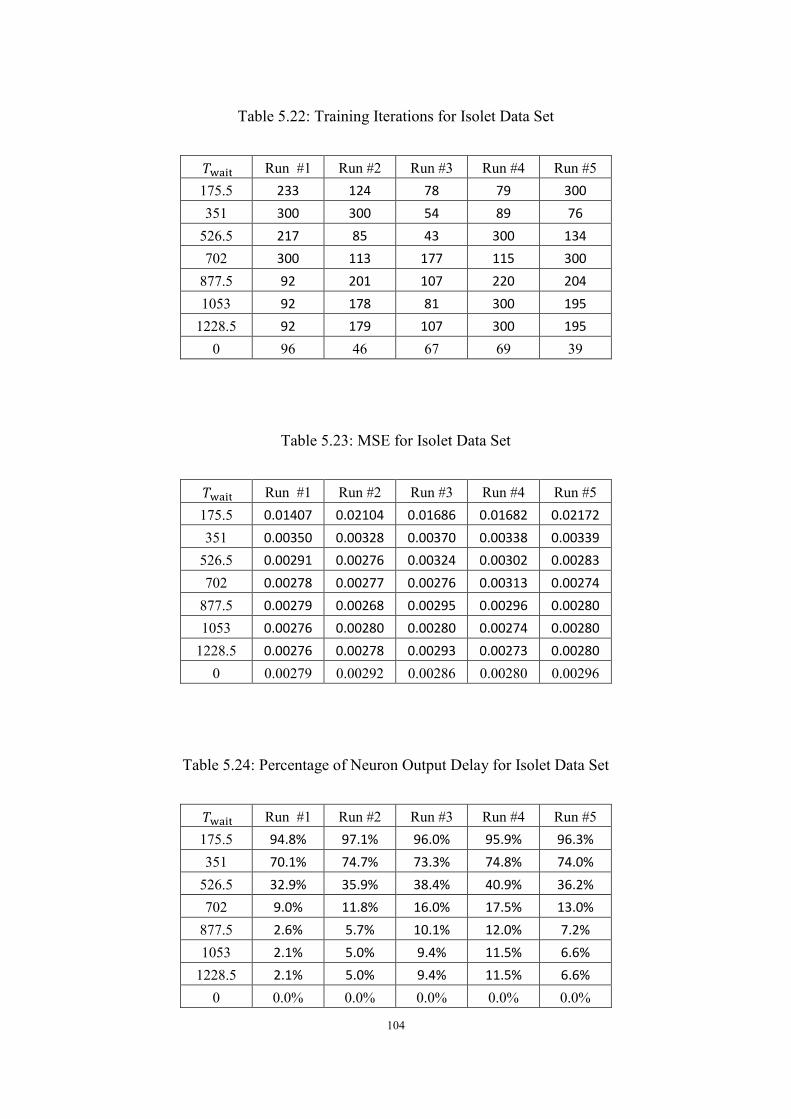
104
Table 5.22: Training Iterations for Isolet Data Set
·���� Run #1 Run #2 Run #3 Run #4 Run #5
175.5 233 124 78 79 300
351 300 300 54 89 76
526.5 217 85 43 300 134
702 300 113 177 115 300
877.5 92 201 107 220 204
1053 92 178 81 300 195
1228.5 92 179 107 300 195
0 96 46 67 69 39
Table 5.23: MSE for Isolet Data Set
·���� Run #1 Run #2 Run #3 Run #4 Run #5
175.5 0.01407 0.02104 0.01686 0.01682 0.02172
351 0.00350 0.00328 0.00370 0.00338 0.00339
526.5 0.00291 0.00276 0.00324 0.00302 0.00283
702 0.00278 0.00277 0.00276 0.00313 0.00274
877.5 0.00279 0.00268 0.00295 0.00296 0.00280
1053 0.00276 0.00280 0.00280 0.00274 0.00280
1228.5 0.00276 0.00278 0.00293 0.00273 0.00280
0 0.00279 0.00292 0.00286 0.00280 0.00296
Table 5.24: Percentage of Neuron Output Delay for Isolet Data Set
·���� Run #1 Run #2 Run #3 Run #4 Run #5
175.5 94.8% 97.1% 96.0% 95.9% 96.3%
351 70.1% 74.7% 73.3% 74.8% 74.0%
526.5 32.9% 35.9% 38.4% 40.9% 36.2%
702 9.0% 11.8% 16.0% 17.5% 13.0%
877.5 2.6% 5.7% 10.1% 12.0% 7.2%
1053 2.1% 5.0% 9.4% 11.5% 6.6%
1228.5 2.1% 5.0% 9.4% 11.5% 6.6%
0 0.0% 0.0% 0.0% 0.0% 0.0%

105
Figure 5-16 Classification Accuracy vs. Percentage of NOD for Isolet Data Set
Figure 5-17 MSE vs. Percentage of NOD for Isolet Data Set
0.0%
20.0%
40.0%
60.0%
80.0%
100.0%
0 0 0
2.1
%
5.0
%
5.7
%
6.6
%
9.0
%
9.4
%
11
.5%
11
.9%
13
.0%
17
.5%
35
.9%
38
.4%
70
.1%
74
.0%
74
.8%
95
.9%
96
.3%
Cla
ssif
ica
tio
n A
ccu
racy
Percentage of NOD
Isolet
0
0.005
0.01
0.015
0.02
0.025
0 0 0
2.1
%
5.0
%
5.7
%
6.6
%
9.0
%
9.4
%
11
.5%
11
.8%
13
.0%
17
.5%
35
.9%
38
.4%
70
.1%
74
.0%
74
.8%
95
.9%
96
.3%
MS
E
Percentage of NOD
Isolet

106
Figure 5-18 Training Iterations vs. Percentage of NOD for Isolet Data Set
5.3.7 Gisette Dataset
Figure 5-10 shows the classification accuracy versus the percentage of NOD of the
WSN-MLP and the MLP on the test data for the Gisette dataset. In general, the
classification accuracy achieved by WSN-MLP is very similar to that of the MLP.
The difference for all the trials is within 1.5%. The highest accuracy is 97.2% and
achieved by the WSN-MLP. Figure 5-13 shows that the training iteration count for
this data set is unstable. From Figure 5-14, the MSE of the WSN-MLP does not
change even when the percentage of NOD becomes very high. For instance, for 97%
NOD, the MSE of 0.034 for the WSN-MLP is very close to the MSE of the MLP
which is 0.0247. It shows that the WSN-MLP is capable of learning this data set even
when the probability of NOD is very large.
0
50
100
150
200
250
300
350
0 0 0
2.1
%
5.0
%
5.7
%
6.6
%
9.0
%
9.4
%
11
.5%
11
.9%
13
.0%
17
.5%
35
.9%
38
.4%
70
.1%
74
.0%
74
.8%
95
.9%
96
.3%
Tra
inin
g I
tera
tio
ns
Percentage of NOD
Isolet

107
Table 5.25: Classification Accuracy for Gisette Data Set
·���� Run #1 Run #2 Run #3
[136.5, 156] 95.6% 95.4% 96.1%
[273, 312] 96.0% 96.0% 95.5%
[409.5, 468] 95.5% 94.2% 96.4%
[546, 624] 97.2% 96.5% 96.6%
[682.5, 780] 96.8% 97.1% 96.3%
[819, 936] 96.7% 95.3% 96.8%
[955.5, 1092] 96.9% 96.2% 96.7%
0 97.0% 96.9% 96.7%
Table 5.26: Training Iterations for Gisette Data Set
·���� Run #1 Run #2 Run #3
[136.5, 156] 39 153 20
[273, 312] 159 112 71
[409.5, 468] 16 89 23
[546, 624] 73 300 172
[682.5, 780] 36 300 65
[819, 936] 54 8 90
[955.5, 1092] 55 227 162
0 145 53 70
Table 5.27: MSE for Gisette Data Set
·���� Run #1 Run #2 Run #3
[136.5, 156] 0.0330 0.0340 0.0401
[273, 312] 0.0251 0.0257 0.0290
[409.5, 468] 0.0334 0.0436 0.0272
[546, 624] 0.0250 0.0293 0.0276
[682.5, 780] 0.0271 0.0256 0.0311
[819, 936] 0.0275 0.0376 0.0274
[955.5, 1092] 0.0250 0.0326 0.0258
0 0.0234 0.0247 0.0261

108
Table 5.28: Percentage of Neuron Output Delay for Gisette Data Set
·���� Run #1 Run #2 Run #3
[136.5, 156] 96.3% 97.0% 96.5%
[273, 312] 76.6% 75.8% 77.7%
[409.5, 468] 48.4% 41.8% 44.9%
[546, 624] 23.0% 13.8% 18.2%
[682.5, 780] 12.1% 3.5% 7.7%
[819, 936] 10.5% 1.5% 6.4%
[955.5, 1092] 10.4% 1.4% 6.4%
0 0.0% 0.0% 0.0%
Figure 5-19 Classification Accuracy vs. Percentage of NOD for Gisette Data Set
0.0%
20.0%
40.0%
60.0%
80.0%
100.0%
0 0 0
1.4
%
1.5
%
3.5
%
6.4
%
6.4
%
7.7
%
10
.4%
10
.5%
12
.1%
13
.8%
18
.2%
23
.0%
41
.8%
44
.9%
48
.4%
75
.8%
76
.6%
77
.7%
96
.3%
96
.5%
97
.0%
Cla
ssif
ica
tio
n A
ccu
racy
Percentage of NOD
Gisette

109
Figure 5-20 MSE vs. Percentage of NOD for Numerical Data Set
Figure 5-21 Training Iterations vs. Percentage of NOD for Gisette Data Set
0
0.01
0.02
0.03
0.04
0.05
0 0 0
1.4
%
1.5
%
3.5
%
6.4
%
6.4
%
7.7
%
10
.4%
10
.5%
12
.1%
13
.8%
18
.2%
23
.0%
41
.8%
44
.9%
48
.4%
75
.8%
76
.6%
77
.7%
96
.3%
96
.5%
97
.0%
MS
E
Percentage of NOD
Gisette
0
50
100
150
200
250
300
350
0 0 0
1.4
%
1.5
%
3.5
%
6.4
%
6.4
%
7.7
%
10
.4%
10
.5%
12
.1%
13
.8%
18
.2%
23
.0%
41
.8%
44
.9%
48
.4%
75
.8%
76
.6%
77
.7%
96
.3%
96
.5%
97
.0%
Tra
inin
g I
tera
tio
ns
Percentage of NOD
Gisette
110
5.3.8 Summary and Discussion
The simulation study clearly demonstrated that the proposed WSN-MLP distributed
processing architecture is able to learn all the tasks at a level of classification
performance at par with the MLP neural network algorithm implemented in a
non-distributed framework. The WSN-MLP generally performs well on all the
datasets except for the trials when the percentage of NOD becomes very high. There
is a sudden deterioration in the performance of WSN-MLP when the percentage of
NOD reaches a certain high threshold value, which happens to differ from one data
set to another.
The training time as measured by the iteration count appears to be sensitive to the
existence of any delay amount. The typical behavior is the large swings in the value
of this parameter as noise is introduced. While for some datasets the amplitude of
this swing stays constant and for others it tends to increase or decrease slightly. It is
important to note again one important difference between the distributed WSN-MLP
and non-distributed MLP for stopping criterion. The testing patterns are subject to
delay and drop for validation of the WSN-MLP, which is not the case for the MLP.
This must be one main reason for the marked increase in the iteration count value for
the WSN-MLP compared to the MLP for datasets considered in this study.
The classification accuracy should become lower and MSE should increase when the
percentage of NOD increases. This behavior is observable in all MSE vs. Percentage

111
of NOD charts with one interesting deviation. For most datasets, the MSE stays
within a small range of values for notable increases in the value of delay and drop as
indicated by the NOD parameter: this indicates that the WSN-MLP has tolerance to
noise. Others researchers also confirmed this attribute [109, 110], who reported of
adding a controlled amount of noise during training which appeared to increase the
generalization ability of the MLP. During the simulation study, we found a notable
behavior of the MLP implemented in WSN. The connections between the neurons
which affected by noise tends to be weakened during training. This behavior of MLP
reduces the impact of noise. Section 5.6 shows the detail study of this observation.
5.4 Performance Comparison with Studies Reported in Literature
In this section, the classification accuracy performance of the WSN-MLP on all seven
datasets are compared to the performances of various algorithms as reported in the
machine learning literature on the same datasets [93-108]. The purpose of this
comparison is to evaluate the performance of WSN-MLP within the larger context of
machine learning approaches. In the Tables 5.29 through 5.35, the max and min
performance of WSN-MLP as well as the performance of the non-distributed MLP
(through in-house implementation) are reported for comparison. The minimum values
are chosen for the smallest possible value of the NOD percentage such that the
classification accuracy plot does not exhibit the sudden decrease in Figures 5.1, 5.4,
5.7, 5.10, 5.13, 5.16, and 5.19. The maximum values are the 60% of the values
achived for the cases when the NOD does not exceed the corresponding threshold.

112
These tables show the classification accuracy values ordered in a descending manner
with the value for our simulation results in bold. Results across all the tables show
that the WSN-MLP has a competitive performance with a very diverse and large set
of machine learning classifiers. The maximum performance for the WSN-MLP is
among the upper-middle tier of the entire set of classifier included in these tables. It
is also worth noting that the WSN-MLP performance even surpasses those of the
entire set of machine learning classification algorithms for the Dermatology dataset.
Table 5.29: Comparison of Classification Accuracy for Iris Data Set
Algorithm Full Name/Percentage of NOD Threshold Reference Accuracy
QNN Quantum Neural Network [93] 98.0%
C&S SVM Crammer and Singer Support Vector Machine [94] 97.3%
SVM Support Vector Machine [95] 96.7%
WSN-MLP (max) Percentage of NOD Threshold = 42.5% 96.0%
MLP 96.0%
C4.5 C4.5 Tree [95] 96.0%
NBC Naive Bayes Classifier [95] 94.0%
LBR Logitboost Bayes Classifier [96] 93.2%
WSN-MLP (min) Percentage of NOD Threshold = 64.5% 88.0%
Table 5.30: Comparison of Classification Accuracy for Wine Data Set
Algorithm Full Name/ Percentage of NOD Threshold Reference Accuracy
SVM Support Vector Machine [94] 99.4%
LBR Logitboost Bayes Classifier [96] 98.7%
WSN-MLP (max) Percentage of NOD Threshold = 42.5% 98.3%
MLP 98.3%
Bayesian Network Bayesian Network [96] 98.2%
WSN-MLP (min) Percentage of NOD Threshold = 68.0% 96.7%
M-SVM Multiclass Support Vector Machine [97] 96.6%
C4.5 C4.5 Tree [98] 92.8%
M-RLP Multicategory Robust Linear Programming [97] 91.0%

113
Table 5.31: Comparison of Classification Accuracy for Ionosphere Data Set:
Algorithm Full Name/Percentage of NOD Threshold Reference Accuracy
SVM Support Vector Machine [99] 95.2%
MLP 94.0%
Refined GP Refined Genetic Programming Evolved Tree [100] 92.3%
C4.5 C4.5 Tree [100] 91.1%
WSN-MLP (max) Percentage of NOD Threshold = 9.0% 90.6%
Bayesian network Bayesian Network [96] 89.5%
FSS Forward Sequential Selection [101] 87.5%
WSN-MLP (min) Percentage of NOD Threshold = 96.2% 80.3%
Table 5.32: Comparison of Classification Accuracy for Dermatology Data Set
Algorithm Full Name/Percentage of NOD Threshold Reference Accuracy
WSN-MLP (max) Percentage of NOD Threshold = 45.2% 95.3%
MLP 95.3%
C4.5+GA C4.5 Tree with Genetic Algorithm [102] 94.5%
VFI5 Voting Feature Intervals [103] 93.2%
FSS Forward Sequential Selection [101] 90.4%
WSN-MLP (min) Percentage of NOD Threshold =74.5% 89.8%
C4.5 C4.5 Tree [101] 86.0%

114
Table 5.33: Comparison of Classification Accuracy for Numerical Data Set
Algorithm Full Name/Percentage of NOD Threshold Reference Accuracy
MLP with feature
selection method
MLP with feature selection method [103] 98.5%
MLP 96.6%
WSN-MLP (max) Percentage of NOD Threshold = 17.2% 96.4%
KNN K-Nearest Neighbor [103] 95.8%
LVQ Learning Vector Quantization [104] 94.9%
WSN-MLP (min) Percentage of NOD Threshold = 76.4% 94.5%
kNN(PCA) K-Nearest Neighbor with Principal component
analysis [105] 80.4%
kNN(LDA) K-Nearest Neighbor with Linear discriminant
analysis [105] 78.9%
Table 5.34: Comparison of Classification Accuracy for Isolet Data Set
Algorithm Full Name/Percentage of NOD Threshold Reference Accuracy
SVM Support Vector Machine [106] 97.0%
kLOGREG Kernelized logistic regression [106] 97.0%
WSN-MLP (max) Percentage of NOD Threshold = 40.9% 95.9%
MLP 95.8%
WSN-MLP (min) Percentage of NOD Threshold = 73.3% 94.9%
NBC Naive Bayes [107] 84.4%
C4.5 C4.5 Tree [107] 80.2%
kNN(LDA) K-Nearest Neighbor with Principal component
analysis [105] 71.2%
kNN(PCA) K-Nearest Neighbor with Linear discriminant
analysis [105] 59.9%

115
Table 5.35: Comparison of Classification Accuracy for Gisette Data Set
Algorithm Full Name/Percentage of NOD Threshold Reference Accuracy
LeNet Convolutional Neural Network [108] 99.2%
MLP (deskewing) Deskewing Multilayer Perceptron [108] 98.4%
MLP 97.0%
WSN-MLP (max) Percentage of NOD Threshold = 76.6% 96.7%
MLP Multilayer Perceptron [108] 96.4%
kNN K-Nearest Neighbor [108] 95.0%
WSN-MLP (min) Percentage of NOD Threshold = 97.0% 94.2%
Linear Classifier Logitboost Bayes Classifier [108] 88.0%
5.5 Time and Message Complexity
This section presents time and message complexity analysis for the WSN-MLP
architecture. It is important to note that this analysis is subject to a large number of
assumptions in regards to the WSN modeling and simulation as described in the prior
chapters.
5.5.1 Time Complexity of WSN-MLP
Assume that there are |PT| patterns in the training set and |PV| patterns in the
validation or testing set, respectively. Patterns in the training set PT are provided to
the MLP network (with two layers: one hidden and one output) one at a time.
Processing of each pattern is realized in parallel at the level of individual neuron
through distributed (and asynchronous) computation. Processing time by individual
neurons can be incorporated into the cumulative delay, Twait, which is mainly affected
by the delays originating due to MAC and routing protocols related requirements.

116
This delay parameter is a random variable and its value depends on numerous factors
as detailed earlier for its formulation and definition. Number of iterations,13 � ,
needed for convergence to a solution is a random variable also and its value depends
on the initial weight and parameter values, the stopping criterion, the data set
characteristics and its presentation order among other factors.
The time complexity, TC, for a WSN-MLP architecture can be estimated by the
following equation:
TC = 13 � × (|PT| +|PV|) × E{·̂ 813}, (5.2)
where E{} is the expected value operator. ·̂ 813 value is set in the simulation
according to the Equation 5.1. The mean value of truncated Gaussian distributionμ is
relocated to be 1 in the simulation. To get the actual value for time, μ need to be
multiplied by the value of per hop delay. From the literature survey [31-52], the range
of per hop delay is 2 ms to 226 ms and the expected value is 65 ms. The TC for all
the experiments in section 5.2 is shown in the Appendix B. TC calculation utilized
the parameter value set or obtained through the simulation study. For instance, the
mean value for the iteration count was calculated as the average of all values in Table
5.2 for the Iris dataset. Mean values for the other datasets used corresponding tables
for the iteration count parameter. Similarly, mean value for the simulation duration
was calculated by average all the entries in corresponding tables in Appendix B.
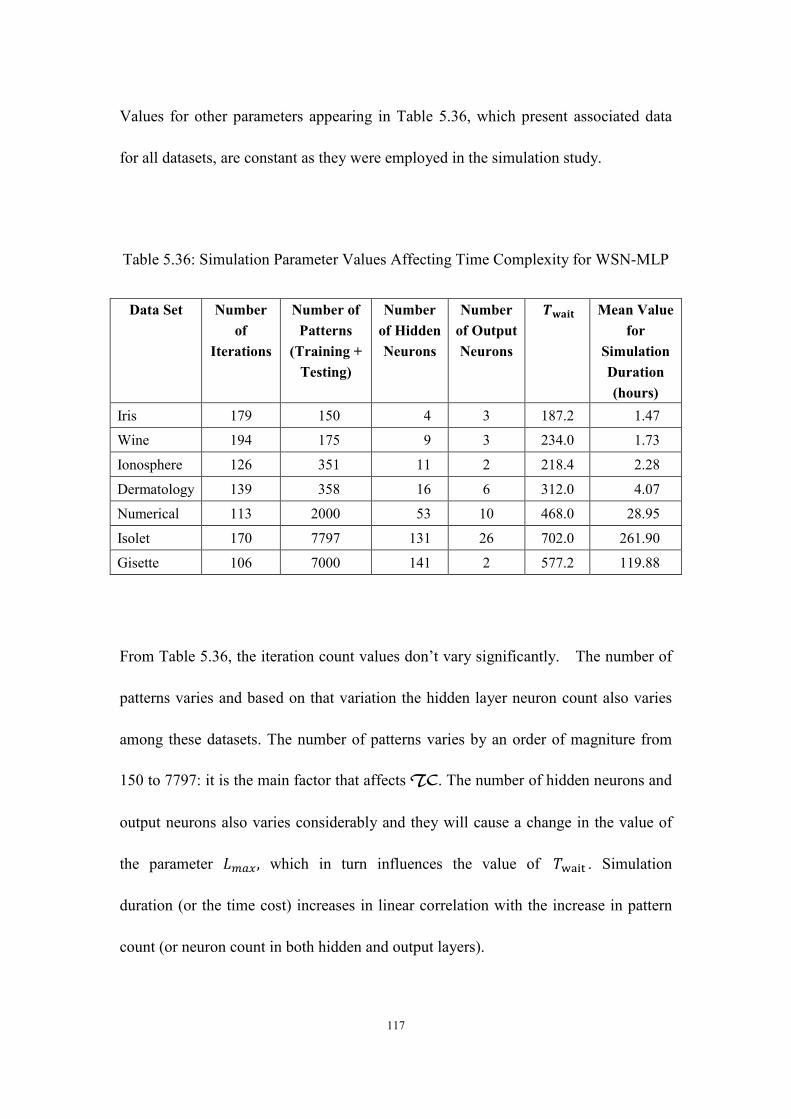
117
Values for other parameters appearing in Table 5.36, which present associated data
for all datasets, are constant as they were employed in the simulation study.
Table 5.36: Simulation Parameter Values Affecting Time Complexity for WSN-MLP
Data Set Number
of
Iterations
Number of
Patterns
(Training +
Testing)
Number
of Hidden
Neurons
Number
of Output
Neurons
¹.º»¼ Mean Value
for
Simulation
Duration
(hours)
Iris 179 150 4 3 187.2 1.47
Wine 194 175 9 3 234.0 1.73
Ionosphere 126 351 11 2 218.4 2.28
Dermatology 139 358 16 6 312.0 4.07
Numerical 113 2000 53 10 468.0 28.95
Isolet 170 7797 131 26 702.0 261.90
Gisette 106 7000 141 2 577.2 119.88
From Table 5.36, the iteration count values don’t vary significantly. The number of
patterns varies and based on that variation the hidden layer neuron count also varies
among these datasets. The number of patterns varies by an order of magniture from
150 to 7797: it is the main factor that affects TC. The number of hidden neurons and
output neurons also varies considerably and they will cause a change in the value of
the parameter ¸98¬, which in turn influences the value of ·���� . Simulation
duration (or the time cost) increases in linear correlation with the increase in pattern
count (or neuron count in both hidden and output layers).

118
5.5.2 Message Complexity of WSN-MLP
Message complexity will be measured by estimating the number of messages sent
which carry neuron output values. More specifically, each original or retransmission
of a given message that carries a neuron output value will be counted as a basic unit
of measurement.
During forward propagation cycle of the MLP training phase, 1� hidden neurons
send their outputs on the average to �23 neurons in the output layer. Each hop
requires retransmission of a given message. The hop distance between hidden neuron
i and output neuron j is denoted byℎ1�. Therefore, the total number of message
transmissions (including retransmissions) for a single training patter during forward
propagation cycle as represented by �;� is given by
��B =∑ ∑ ℎ��74]���
ℎ��1�� (5.3)
This cost is incurred for each training pattern in the training and validation sets,
namely PT and PV. The message complexity, MC, for the entire training episode
will depend on the size of the data set as well as problem properties, which, in
conjunction with other factors such as the initial values of weights and learning
parameters to name a few, will dictate the number of iterations to convergence.
Accordingly, the message complexity for the entire forward propagation phase is
estimated by the following equation:

119
MCFP = 13 �×(|PT| +|PV|)×��B, (5.4)
During the backward propagation phase, �23 output-layer neurons transmit their
outputs through 1� hidden-layer neurons, which result in the same amount of
messages as�;�. Assuming that online or incremental learning is implemented, the
above cost is incurred for each pattern in the training set for the duration of training
which will continue for a number of iterations to convergence. Hence the message
complexity for the backward propagation phase is estimated by
MCBP = 13 �×|PT|×��B, (5.5)
The overall message complexity for the training and validation combined is given by
MC = MCFP + MCBP = 13 �×(2|PT|+|PV|)×∑ ∑ ℎ��74]���
ℎ��1�� , (5.6)
The message complexity measurements for all the simulation experiments in Section
5.2 is presented in Appendix B. Table 5.37 presents the mean value of message
complexity measure for each data set. The message complexity depends on number of
iterations,number of training and testing patterns and the sum of hop distances
between every node pairs.
In Table 5.37, as the number of neurons (which is calculated as a function of pattern
count) in the hidden and output layers increases, the sum of distances (as measured by
the number of hops) between any two neurons (motes) also increases as does the
number of messages (packets). For a hundred-fold increase in the neuron count, the

120
total hop count increases thousand-fold, and the number of messages increases on the
order of thousand-fold as well. Therefore the message complexity results in the
dominant bound for the scalability of the WSN-MLP algorithm compared to the time
and space complexities.
Table 5.37: Parameters Affecting Message Complexity for WSN-MLP
Data Set Number
of
Iterations
Number
of
Training
Patterns
Number
of
Testing
Patterns
Number
of
Hidden
Neurons
Number
of
Output
Neurons
¾¾ ℎ��74]
���
ℎ��
1��
Number of
Packets
Transmitted
Iris 179 100 50 4 3 22 985,671
Wine 194 117 58 9 3 52 2,858,248
Ionosphere 126 234 117 11 2 45 3,260,205
Dermatology 139 239 119 16 6 269 23,755,353
Numerical 113 2000 666 53 10 2128 804,279,201
Isolet 170 5198 2599 131 26 20724 2,549,444,060
Gisette 106 4667 2333 141 2 1446 1,381,217,200

121
5.6 Weights of Neurons in Output Layer
We have noticed that the hop distance associated with a particular weight for the
connection between two neurons has an important effect on the value of that weight
during training. In more specific terms, those weights over multiple hops tend to
smaller magnitudes: the larger the hops distance is, the closer the weight magnitude to
the value of zero. In order to substantiate this observation, we conducted further
simulation work and results are presented in Tables 5.38 through 5.44. Each table
shows average value of the magnitudes of all the weights over a certain hop distance
for a particular percentage of NOD. Each column label in a table corresponds to a
certain hop distance.
Table 5.38: Average Values for Magnitudes of Weights over Different Hop Distances
vs. Neuron Output Delays for Iris Data Set
Hop Count
NOD 1 2 3
96.7% 0.902 0.326 0.552
77.9% 6.325 0.327 0.476
43.4% 6.084 2.002 0.632
18.4% 2.484 2.778 0.827
6.2% 1.853 3.151 2.247
3.1% 1.691 3.365 3.225
2.8% 1.627 3.331 3.318
0% 1.384 4.019 4.232

122
Table 5.39: Average Values for Magnitudes of Weights over Different Hop Distances
vs. Percentage of Neuron Output Delays for Wine Data Set
Hop Count
NOD 1 2 3
96.7% 1.097 0.278 0.550
77.1% 6.781 0.799 0.870
40.9% 4.932 1.906 0.521
16.5% 3.488 1.992 0.340
5.9% 2.787 1.496 1.247
3.2% 3.226 1.899 2.233
2.8% 3.270 1.990 2.447
0% 2.677 1.416 1.900
Table 5.40: Average Values for Magnitudes of Weights over Different Hop Distances
vs. Percentage of Neuron Output Delays for Ionosphere Data Set
Hop Count
NOD 1 2 3
97.8% 0.955 0.322 0.385
78.5% 5.168 0.364 0.319
39.0% 5.644 1.098 0.572
14.1% 1.965 1.137 0.598
3.4% 1.647 1.154 1.285
0.9% 3.259 2.677 3.604
0.4% 1.179 0.853 1.447
0% 1.163 0.853 1.451

123
Table 5.41: Average Values for Magnitudes of Weights over Different Hop Distances
vs. Percentage of Neuron Output Delays for Dermatology Data Set
Hop Count
NOD 1 2 3 4 5
95.8% 3.480 0.727 0.506 0.741 0.301
75.3% 4.140 1.508 0.469 0.425 0.348
39.5% 2.387 2.151 0.546 0.211 0.235
13.8% 1.915 2.081 1.428 0.359 0.178
3.7% 1.449 1.572 1.482 0.872 0.347
1.2% 1.103 1.191 1.128 0.805 0.551
0.9% 1.098 1.180 1.128 0.808 0.606
0% 1.021 1.098 1.068 0.755 0.565
Table 5.42: Average Values for Magnitudes of Weights over Different Hop Distances
vs. Percentage of Neuron Output Delays for Numerical Data Set:
Hop Count
NOD 1 2 3 4 5 6 7
96.1% 5.880 1.003 0.517 0.389 0.388 0.496 0.445
73.9% 8.923 8.361 2.172 0.660 0.821 0.586 0.629
36.2% 1.423 1.968 1.574 0.559 0.184 0.218 0.191
9.2% 0.746 0.756 0.790 0.749 0.585 0.186 0.161
1.5% 0.869 0.767 0.826 0.793 0.813 0.624 0.306
0.5% 0.725 0.620 0.692 0.665 0.680 0.652 0.635
0.4% 0.714 0.611 0.683 0.657 0.673 0.650 0.670
0% 0.752 0.649 0.724 0.700 0.719 0.708 0.724

124
Table 5.43: Average Values for Magnitudes of Weights over Different Hop Distances
vs. Percentage of Neuron Output Delays for Isolet Data Set
Hop Count
NOD 1 2 3 4 5 6 7 8 9 10 11
96.6% 3.499 1.657 0.256 0.220 0.140 0.113 0.098 0.100 0.095 0.098 0.098
72.8% 1.483 1.468 1.546 0.687 0.175 0.135 0.155 0.141 0.109 0.096 0.087
34.5% 0.642 1.071 0.939 0.912 0.812 0.364 0.139 0.128 0.176 0.161 0.169
9.7% 0.603 0.765 0.697 0.644 0.625 0.588 0.517 0.307 0.161 0.138 0.136
4.1% 0.570 0.716 0.646 0.610 0.590 0.570 0.533 0.503 0.383 0.246 0.109
3.6% 0.525 0.683 0.619 0.584 0.569 0.548 0.514 0.491 0.422 0.399 0.283
3.5% 0.525 0.683 0.619 0.584 0.569 0.548 0.514 0.491 0.422 0.400 0.309
0% 0.432 0.546 0.514 0.491 0.501 0.508 0.498 0.493 0.459 0.472 0.410
Table 5.44: Average Values for Magnitudes of Weights over Different Hop Distances
vs. Percentage of Neuron Output Delays for Gisette Data Set:
Hop Count
NOD 1 2 3 4 5 6 7 8 9
95.0% 5.270 0.176 0.168 0.135 0.112 0.099 0.101 0.098 0.086
74.9% 2.754 1.901 0.693 0.172 0.156 0.159 0.159 0.120 0.060
48.4% 1.217 0.624 0.535 0.513 0.133 0.112 0.139 0.141 0.030
23.0% 1.096 0.654 0.622 0.647 0.522 0.237 0.131 0.137 0.107
12.1% 0.895 0.552 0.510 0.484 0.366 0.450 0.370 0.236 0.010
10.5% 0.675 0.573 0.536 0.624 0.474 0.472 0.530 0.317 0.357
10.4% 0.796 0.486 0.456 0.511 0.440 0.404 0.505 0.341 0.127
0% 0.856 0.568 0.699 0.772 0.486 0.683 0.544 0.622 0.053

125
Simulation results in Tables 5.38 through 5.44 show that the weights for the
connection of the long hop distance node pairs tend to become smaller under high
percentage of NOD. For example, in Table 5.43, when the percentage of NOD is 96.6%
the magnitudes of weights for connections of the node pairs whose hop distance are 3
to 11 are significantly lower than the remaining two. When the percentage of NOD is
34.5% the magnitudes of weights for connections of the node pairs whose hop
distance are 6 to 11 are significantly lower than those of the rest. When the percentage
of NOD is 1.5% the magnitudes of weights for connection of the node pairs whose
hop distance is 7 is significantly lower than those of the others. When the percentage
of NOD is 5%, 4% and 0%, the weights for connections are similar to each other.
Under a certain percentage of NOD, the connection of a long hop distance node pairs
is affected by a larger amount of noise compare to a short hop distance node pairs. In
conclusion, the WSN-MLP training process tends to reduce the weights for the
connections depending on the amount of noise they are subjected to.

126
Chapter 6
Conclusions
6.1 Research Study Conclusions
The study reported in this thesis explored the feasibility, cost and scalability of
parallel and distributed neurocomputing on wireless sensor networks (WSN) as the
computational hardware-software platform. More specifically, the parallel and
distributed implementation of a multilayer perceptron neural network on a wireless
sensor network has been evaluated for feasibility, computational complexity and
scalability.
The research study employed a specially-developed simulation environment where
the “effects” of wireless sensor network operation were modeled. The delay and
drop phenomena for message packets carrying neuron outputs in WSNs have been
modeled empirically based on a comprehensive survey of the literature. A
probability distribution function for the delay and drop phenomena was defined and
employed in the simulation to model the effects of wireless communication protocol
stack and the distributed and parallel nature of computations and processing by the
WSN motes.

127
The multilayer perceptron neural network (MLP NN) was trained, and tested in an
entirely distributed and maximally parallel manner for several classification problems
from the machine learning literature. The MLP NN was trained with the
back-propagation with momentum learning and a validation procedure was employed
for the stopping criterion of the training process. An exploratory empirical simulation
study was performed to determine an appropriate value for the hidden layer neuron
count for each problem considered. Seven datasets with highly varied pattern (or
instance) and feature (or attribute) counts were employed for the simulation study.
The performance was evaluated through the measures of classification accuracy, and
total number of training iterations. For each dataset, a series of simulations were
completed for different values of mean values for the random variables delay and
drop. The WSN-MLP platform was able to tolerate the message delay and drop for
relatively significant increases in the values of these parameters and still learn the
classification function for all seven datasets tested. However, there was a gradual
but not dramatic deterioration in the classification accuracy and total training
iterations as the mean value for these parameters increased. Furthermore, there was
a sudden and substantial drop in the classification rate and equivalent jump in the
training iterations count once the amount of delay reached a threshold value, which
was different for each problem domain.

128
For comparative evaluation purposes, a non-distributed or centralized implementation
of the exact same MLP NN algorithm with parameter settings identical to those for
the WSN-MLP distributed versions was accomplished. The simulations show that, for
all datasets, the WSN-MLP was able to learn and perform as good as the MLP
implemented in a non-distributed framework. A performance comparison with other
studies reported in the machine learning literature had also been done. It shows that
the performance of WSN-MLP is comparable to those using numerous other
machine-learning algorithms, which practically included a very comprehensive set of
approaches proposed in the literature. In conclusion, this study demonstrated the using
of MLP on a WSN is feasible and the classification accuracy is competitive with other
prominent machine learning algorithms in that respect.
The analyses of space, time and message complexities have been done. Space
complexity of the proposed WSN-MLP design is constant or minimal due to
distributed storage of required algorithm or process memory space. The analysis of
time complexity shows it changes for different datasets. It is mainly affected by the
number of patterns in a particular dataset as well as the number of neurons in the
hidden and output layers. The message complexity, on the other hand, is primarily
affected by the number of hidden neurons and output neurons, and the total hop
distances in the WSN. The message complexity increases much faster than the time
complexity. Overall, the scalability for the WSN-MLP is promising but bounded
above by the communication cost or the message complexity.

129
6.2 Recommendations for Future Study
Hardware prototyping through actual motes need to be performed to validate the
feasibility of using the MLP on a WSN. The time and message complexity is worth to
be noted. More accurate data need to be acquired to refine the model of delay and
drop phenomena for packets carrying neuron outputs in WSNs. Larger data sets which
required more hidden neurons (up to thousands) should be employed to
comprehensive profile the performance of WSN-MLP. A new stopping criteria need
to be invented for WSN-MLP which is compensate for the noise caused by the drop
and delay of packets in WSN. Batch learning is worth to be tested in the further
simulation. The batch learning updates the weights after presentation of all the
instances, which could minimize the influence of delay for packets carrying the
neuron output. However, the memory cost for batch learning might be a problem for
WSN motes. More effective learning algorithm should be tested on WSN-MLP such
as the Resilient Back-Propagation algorithm, which mentioned in the study. Data
aggregation should be applied in the WSN to reduce the message complexity.

130
References
[1] Kangas LJ, Keller PE, Hashem S, Kouzes RT, Allen PA (1995) Adaptive life
simulator: A novel approach to modeling the cardiovascular system. Proc Am
Control Conf, Evanston, IL pp 796-800.
[2] Jeff Heaton, “Introduction to Neural Networks with Java Second Edition”, Heaton
Research Inc., pp. 46 – 47
[3] Warren S. McCulloch and Walter Pitts. 1943. A logical calculus of the ideas
immanent in nervous activity. In The bulletin of mathematical biophysics James
A. Anderson and Edward Rosenfeld (Eds.). 5: 115-133.
[4] Donald O. Hebb. 1949. The Organization of Behavior: A Neuropsychological
Theory
[5] D. E. Rumelhart, G. E. Hinton, and R. J. Williams. 1986. Learning internal
representations by error propagation. In Parallel distributed processing:
explorations in the microstructure of cognition, vol. 1, David E. Rumelhart,
James L. McClelland, and CORPORATE PDP Research Group (Eds.). MIT
Press, Cambridge, MA, USA 318-362.
[6] Jacek M. Zurada. 1999. Introduction to Artificial Neural Systems (1st ed.). PWS
Pub. Co., Boston, MA, USA.
131
[7] Jain, A.K., Mao, J. (1996, March). Artificial neural networks: a tutorial.
Computer, 29, 31-44.
[8] Haykin, S. (2009). Neural networks and learning machines (3rd ed.). Upper
Saddle River, NJ: Pearson Education
[9] [1] Y.Boniface, F.Alexandre, S.Vialle, “A Bridge between two Paradigms for
Parallelism: Neural Networks and General Purpose MIMD Computers”, in
Proceedings of International Joint Conference on Neural Networks, (IJCNN'99),
Washington, D.C.
[10] I. Foster, “Designing and Building Parallel Programs”, Addison-Wesley
Publishing Company, 1st edition, 1995.
[11] Nordström, T. and B. Svensson (1992). Using and designing massively parallel
computers for artificial neural networks. Journal of Parallel and Distributed
Computing, Vol. 14, No. 3, pp. 260-285.
[12] Bengtsson, L., A. Linde, B. Svensson, M. Taveniku and A. Åhlander, “The
REMAP massively parallel computer platform for neural computations,” in
Third International Conference on Microelectronics for Neural Networks
(MicroNeuro '93), Edinbur gh, Scotland, UK, pp. 47-62, 1993.
[13] Nordström, T., “Sparse distributed memory simulation on REMAP3,” Res. Rep.
TULEA 1991:16, Luleå University of Technology, Sweden, 1991.
[14] Nordström, T., “Designing parallel computers for self-organizing maps,” in
DSA-92, Fourth Swedish Workshop on Computer System Architecture,
Linköping, Sweden, 1992,

132
[15] Svensson, B. and T. Nordström. "Execution of neural network algorithms on an
array of bit-serial processors." In 10th International Conference on Pattern
Recognition, Computer Architectures for Vision and Pattern Recognition, Vol.
II, pp. 501-505, Atlantic City, New Jersey, USA, 1990.
[16] “The BLUE BRAIN PROJECT EPFL”. Internet:
http://jahia-prod.epfl.ch/page-56882-en.html. May. 16, 2013.
[17] D. C. Ciresan, U. Meier, J. Masci, L. M. Gambardella, and J. Schmidhuber,
“High-performance neural networks for visual object classification,” Istituto
Dalle Molle di Studi sull’Intelligenza Artificiale (IDSIA), Tech. Rep. IDSIA-01-
11, 2011.
[18] Xianggao Cai, Guoming Lai, and Xiaola Lin. 2013. Forecasting large scale
conditional volatility and covariance using neural network on GPU. J.
Supercomput. 63, 2 (February 2013), 490-507.
[19] Basu, A.; Ramakrishnan, S.; Petre, C.; Koziol, S.; Brink, S.; Hasler, P.E., "Neural
Dynamics in Reconfigurable Silicon," Biomedical Circuits and Systems, IEEE
Transactions on , vol.4, no.5, pp.311,319, Oct. 2010
[20] Jiakai Li, Gursel Serpen, TOSSIM simulation of wireless sensor network serving
as hardware platform for Hopfield neural net configured for max independent
set, Procedia Computer Science, Volume 6, 2011, Pages 408-412, ISSN
1877-0509
[21] Linqian Liu, A Parallel and Distributed Computing Platform for Neural
Networks Using Wireless Sensor Networks. Thesis, 2012

133
[22] Teoh, E.J.; Tan, K.C.; Xiang, C., "Estimating the Number of Hidden Neurons in
a Feedforward Network Using the Singular Value Decomposition," Neural
Networks, IEEE Transactions on , vol.17, no.6, pp.1623,1629, Nov. 2006
[23] Yi Zhi Zhao, Chunyan Miao, Maode Ma, Jing Bing Zhang, and Cyril Leung.
2012. A survey and projection on medium access control protocols for wireless
sensor networks. ACM Comput. Surv.45, 1, Article 7 (December 2012), 37
pages.
[24] Kemal Akkaya, Mohamed Younis, A survey on routing protocols for wireless
sensor networks, Ad Hoc Networks, Volume 3, Issue 3, May 2005, Pages
325-349, ISSN 1570-8705, 10.1016/j.adhoc.2003.09.010.
[25] B. Titzer, D.K. Lee, J. Palsberg, Avrora: scalable sensor network simulation with
precise timing, in: Proceedings of the Fourth International Symposium on
Information Processing in Sensor Networks (IPSN 2005), UCLA, Los Angeles,
California, USA, April, 2005.
[26] P. Levis, N. Lee, M. Welsh, D.E. Culler, Tossim: accurate and scalable
simulation of entire Tinyos applications, in: Proceedings of ACM Sensys 2003,
Los Angeles, USA, November, 2003.
[27] The Network Simulator - ns-2, http://www.isi.edu/nsnam/ns/, Internet, May 27,
2013.
[28] J-SIM, http://www.physiome.org/jsim/, Internet, May 27, 2013.
[29] OPNET, http://www.opnet.com/, Internet. May 27, 2013.

134
[30] Fekete, S.P.; Kroller, A.; Fischer, S.; Pfisterer, D., "Shawn: The fast, highly
customizable sensor network simulator," Networked Sensing Systems, 2007.
INSS '07. Fourth International Conference on , vol., no., pp.299,299, 6-8 June
2007
[31] Loh, P.K.K.; Pan, Y.; Hsu Jing; "Performance evaluation of efficient and reliable
routing protocols for fixed-power sensor networks," Wireless Communications,
IEEE Transactions on , vol.8, no.5, pp.2328-2335, May 2009
[32] Fan Ye, Gary Zhong, Songwu Lu, and Lixia Zhang. 2005. GRAdient broadcast: a
robust data delivery protocol for large scale sensor networks. Wirel. Netw. 11, 3
(May 2005), 285-298.
[33] Bacco, G.D., T. Melodia and F. Cuomo (2004). A MAC protocol for
delay-bounded applications in wireless sensor networks. In: Proc. Med-Hoc-Net.
pp. 208-220.
[34] L. Alazzawi , A. Elkateeb, Performance evaluation of the WSN routing protocols
scalability, Journal of Computer Systems, Networks, and Communications, 2008,
p.1-9, January 2008
[35] Felemban, E.; Chang-Gun Lee; Ekici, E.; , "MMSPEED: multipath
Multi-SPEED protocol for QoS guarantee of reliability and. Timeliness in
wireless sensor networks," Mobile Computing, IEEE Transactions on , vol.5,
no.6, pp. 738- 754, June 2006

135
[36] BLUM, B., HE, T., SON, S., AND STANKOVIC, J. 2003. IGF: A state-free
robust communication protocol for wireless sensor networks. Tech. rep.
CS-2003-11
[37] Z. Ke, X. Guo, Y. Weng, and Z. Li, "DDGR: A Directed Diffusion Game
Routing Protocol for Wireless Multimedia Sensor Networks", ;in Proc. ICAIC
(2), 2011, pp.700-707.
[38] Zhang, L., Ferrero, R., Sanchez, E. R. and Rebaudengo, M. (2012), Performance
analysis of reliable flooding in duty-cycle wireless sensor networks. Trans
Emerging Tel Tech. doi: 10.1002/ett.2556
[39] Rezayat, P.; Mahdavi, M.; GhasemZadeh, M.; AghaSarram, M.; , "A novel
real-time routing protocol in wireless sensor networks," Current Trends in
Information Technology (CTIT), 2009 International Conference on the , vol.,
no., pp.1-6, 15-16 Dec. 2009
[40] Fonoage, M.; Cardei, M.; Ambrose, A.; "A QoS based routing protocol for
wireless sensor networks," Performance Computing and Communications
Conference (IPCCC), 2010 IEEE 29th International , vol., no., pp.122-129, 9-11
Dec. 2010
[41] S. Ganesh and R. Amutha, “Efficient and Secure Routing Protocol for Wireless
Sensor Networks through Optimal Power Control and Optimal Handoff-Based
Recovery Mechanism,” Journal of Computer Networks and Communications,
vol. 2012, Article ID 971685, 8 pages, 2012

136
[42] X. Li, S.H. Hong, and K. Fang, "Location-Based Self-Adaptive Routing
Algorithm for Wireless Sensor Networks in Home Automation", ;presented at
EURASIP J. Emb. Sys., 2011.
[43] Shu L, Zhang Y, Yang LT, Wang Y, Hauswirth M, Xiong NX: TPGF:
geographic routing in wireless multimedia sensor networks. Telecommun
Syst 2010,44(1–2):79–95.
[44] Shuo Guo, Yu Gu, Bo Jiang, and Tian He. 2009. Opportunistic flooding in
low-duty-cycle wireless sensor networks with unreliable links. In Proceedings of
the 15th annual international conference on Mobile computing and
networking (MobiCom '09). ACM, New York, NY, USA, 133-144.
[45] Pei Huang, Hongyang Chen, Guoliang Xing, and Yongdong Tan. 2009. SGF: A
state-free gradient-based forwarding protocol for wireless sensor networks. ACM
Trans. Sen. Netw. 5, 2, Article 14 (April 2009), 25 pages
[46] Li Zhiyu; Shi Haoshan; , "Design of Gradient and Node Remaining Energy
Constrained Directed Diffusion Routing for WSN," Wireless Communications,
Networking and Mobile Computing, 2007. WiCom 2007. International
Conference on , vol., no., pp.2600-2603, 21-25 Sept. 2007
[47] Chalermek Intanagonwiwat, Ramesh Govindan, Deborah Estrin, John
Heidemann, and Fabio Silva. 2003. Directed diffusion for wireless sensor
networking. IEEE/ACM Trans. Netw. 11, 1 (February 2003), 2-16
[48] Xuedong Liang; Balasingham, I.; Leung, V.C.M.; , "Cooperative
Communications with Relay Selection for QoS Provisioning in Wireless Sensor

137
Networks," Global Telecommunications Conference, 2009. GLOBECOM 2009.
IEEE , vol., no., pp.1-8, Nov. 30 2009-Dec. 4 2009
[49] Xuedong Liang; Min Chen; Yang Xiao; Balasingham, I.; Leung, V.C.M.; , "A
novel cooperative communication protocol for QoS provisioning in wireless
sensor networks," Testbeds and Research Infrastructures for the Development of
Networks & Communities and Workshops, 2009. TridentCom 2009. 5th
International Conference on , vol., no., pp.1-6, 6-8 April 2009
[50] Lanny Sitanayah, Kenneth N. Brown, and Cormac J. Sreenan. 2012.
Fault-Tolerant relay deployment based on length-constrained connectivity and
rerouting centrality in wireless sensor networks. In Proceedings of the 9th
European conference on Wireless Sensor Networks(EWSN'12), Gian Pietro
Picco and Wendi Heinzelman (Eds.). Springer-Verlag, Berlin, Heidelberg,
115-130
[51] Zhengming Bu, Bing Wang, Zhijie Shi. Delay Measurement in Sensor Networks
Using Passive Air Monitoring. UCONN CSE Technical Report
BECAT/CSE-TR-07-07. Oct 2007
[52] Lin Zhang, Manfred Hauswirth, Lei Shu, Zhangbing Zhou, Vinny Reynolds, and
Guangjie Han. 2008. Multi-priority Multi-path Selection for Video Streaming in
Wireless Multimedia Sensor Networks. In Proceedings of the 5th international
conference on Ubiquitous Intelligence and Computing (UIC '08),.
Springer-Verlag, Berlin, Heidelberg, 439-452

138
[53] Yunbo Wang; Vuran, Mehmet C.; Goddard, S., "Cross-Layer Analysis of the
End-to-End Delay Distribution in Wireless Sensor Networks," Networking,
IEEE/ACM Transactionson , vol.20, no.1, pp.305, 318, Feb. 2012.
[54] Jeremy Elson. Lewis Girod. and Deborah Estrin. 2002. Fine-grained network
time synchronization using reference broadcasts. SIGOPS Oper. Syst. Rev. 36,
SI (December 2002), 147-163.
[55] Mei Leng; Yik-Chung Wu, "On Clock Synchronization Algorithms for Wireless
Sensor Networks Under Unknown Delay," Vehicular Technology, IEEE
Transactions on , vol.59, no.1, pp.182,190, Jan. 2010
[56] Mei Leng; Yik-Chung Wu, "On joint synchronization of clock offset and skew
for Wireless Sensor Networks under exponential delay," Circuits and Systems
(ISCAS), Proceedings of 2010 IEEE International Symposium on, vol., no.,
pp.461,464, May 30 2010-June 2 2010
[57] Min Xie; Haenggi, M., "Delay performance of different MAC schemes for
multihop wireless networks," Global Telecommunications Conference, 2005.
GLOBECOM '05. IEEE , vol.6, no., pp.5 pp.,3427, 2-2 Dec. 2005
[58] Jang-Sub Kim, Jaehan Lee, Erchin Serpedin, and Khalid Qaraqe. 2009. A robust
estimation scheme for clock phase offsets in wireless sensor networks in the
presence of non-Gaussian random delays. Signal Process. 89, 6 (June 2009),
1155-1161.
[59] Sakurai, T.; Vu, H.L., "MAC Access Delay of IEEE 802.11 DCF," Wireless
Communications, IEEE Transactions on , vol.6, no.5, pp.1702,1710, May 2007

139
[60] “UCI Machine Learning Repository”. Internet: http://archive.ics.uci.edu/ml/.
March. 22, 2013.
[61] Fanty, M., Cole, R. Spoken letter recognition. Advances in Neural Information
Processing Systems 3. San Mateo, CA: Morgan Kaufmann. 1991.
[62] S. B. Kotsiantis and et al. Data Preprocessing for Supervised Learning.
International Journal of Computer Science, vol.1, No. 2 2006.
[63] Krystyna, Kuźnia; Maciej, Zając. Data pre-processing in the neural network
identification of the modified walls natural frequencies. Computer Methods in
Mechanics. MS12, 9 - 12. May 2011.
[64] Sola, J.; Sevilla, J., "Importance of input data normalization for the application of
neural networks to complex industrial problems," Nuclear Science, IEEE
Transactions on , vol.44, no.3, pp.1464,1468, Jun 1997
[65] Garcia V; Sánchez, J.S; Mollineda R.A; Alejo R; Sotoca J.M, The class
imbalance problem in pattern classification and learning. In proceeding of
TAMIDA 2007, vol.1, Jan 2007
[66] Nathalie Japkowicz; and Shaju Stephen, The class imbalance problem: A
systematic study.Intell. Data anal.6, 5, Oct 2002, 429-449.
[67] Nitesh V. Chawla, Kevin W. Bowyer, Lawrence O. Hall, and W. Philip
Kegelmeyer. 2002. SMOTE: synthetic minority over-sampling technique. J.
Artif. Int. Res. 16, 1 June 2002, 321-357.

140
[68] Huang, De-Shuang; Zhang, Xiao-Ping; Huang, Guang-Bin, Borderline-SMOTE:
A New Over-Sampling Method in Imbalanced Data Sets Learning. Advances in
Intelligent Computing (2005), pp. 878-887
[69] Julia Bondarenko. Oversampling under Statistical Criteria: Example of Daily
Traffic Injuries Number. Contemporary Engineering Sciences, Vol. 2, 2009, no.
6, 249 - 264
[70] Manohar. SMOTE (Synthetic Minority Over-Sampling Technique) code.
Internet:
http://www.mathworks.com/matlabcentral/fileexchange/38830-smote-synthetic-
minority-over-sampling-technique. March 16, 2013.
[71] Martin T. Hagan, Howard B. Demuth and Mark H. Beale, Neural Network
Design, Martin Hagan, 2002, pp. 12-12.
[72] Riedmiller, M.; Braun, H., "A direct adaptive method for faster backpropagation
learning: the RPROP algorithm," Neural Networks, 1993., IEEE International
Conference on , vol., no., pp.586-591 vol.1, 1993
[73] Hagan, M.T.; Menhaj, M.-B., "Training feedforward networks with the
Marquardt algorithm," Neural Networks, IEEE Transactions on , vol.5, no.6,
pp.989-993, Nov 1994
[74] Rumelhart, D.E., Hinton, G.E., & Williams, R.J. (1986). Learning internal
representations by error propagation. In D.E. Rumelhart, & J.L. McClelland
(Eds.), Parallel distributed processing .Vol. 1, pp. 318-362.

141
[75] Yan-jing SUN, Shen ZHANG, Chang-xin MIAO, Jing-meng LI, Improved BP
Neural Network for Transformer Fault Diagnosis, Journal of China University of
Mining and Technology, Volume 17, Issue 1, March 2007, Pages 138-142
[76] Machine Learning Group at the University of Waikato, Weka 3: Data Mining
Software in Java. Internet: http://www.cs.waikato.ac.nz/ml/weka/. March 10,
2013.
[77] Gaurang Panchal; Amit Ganatra; Y P Kosta; Devyani Panchal, “Behaviour
Analysis of Multilayer Perceptrons with Multiple Hidden Neurons and Hidden
Layers” International Journal of Computer Theory and Engineering, Vol. 3, No.
2, April 2011.
[78] Boger, Z., and Guterman, H., "Knowledge extraction from artificial neural
network models," IEEE Systems, Man, and Cybernetics Conference, 1997
[79] Kurkova, V. (1992). Kolmogorov's thorem and multilayer neural networks.
Neural Networks , 5 (3), 501-506.
[80] Daqi, G., & Shouyi, W. (1998). An optimization method for the topological
structures of feed-forward multi-layer neural networks. Pattern Recognition ,
1337-1342.
[81] Steve Lawrence and C. Lee Giles and Ah Chung Tsoi, “What size neural network
gives optimal generalization? convergence properties of backpropagation” April
1996.
[82] Ismail Taha and Joydeep Ghosh. Symbolic Interpretation of Artificial Neural
Networks. IEEE Trans. Knowl. Data Eng, 11. 1999

142
[83] Wl/odzisl/aw Duch and Rafal Adamczak and Geerd H. F Diercksen. Neural
Networks from Similarity Based Perspective. In: New Frontiers in
Computational Intelligence and its Applications. Ed. M. Mohammadian,
IOS.2000, 93-108
[84] Perry Moerland and E. Fiesler and I. “Ubarretxena-Belandia. Incorporating
LCLV Non-Linearities in Optical Multilayer Neural Networks” Preprint of an
article published in Applied Optics. 1996, 26-35
[85] Chun-nan Hsu and Dietrich Schuschel and Ya-ting Yang, “The
ANNIGMA-Wrapper Approach to Neural Nets Feature Selection for Knowledge
Discovery and Data Mining” Institute of Information Science. June 5, 1999
[86] Stavros J. Perantonis and Vassilis Virvilis, Input Feature Extraction for
Multilayered Perceptrons Using Supervised Principal Component
Analysis. Neural Process. Lett. 10, 3, December 1999, 243-252
[87] Thomas G. Dietterich and Ghulum Bakiri, Solving multiclass learning problems
via error-correcting output codes. J. Artif. Int. Res. 2, 1 ,January 1995, 263-286
[88] Hung-Han Chen, Michael T. Manry, Hema Chandrasekaran, A neural network
training algorithm utilizing multiple sets of linear equations, Neurocomputing,
Volume 25, Issues 1–3, April 1999, Pages 55-72
[89] Bello, M.G., "Enhanced training algorithms, and integrated training/architecture
selection for multilayer perceptron networks," Neural Networks, IEEE
Transactions on , vol.3, no.6, pp.864,875, Nov 1992

143
[90] E.M. Johansson, F.U. Dowla, and D.M. Goodman, "Backpropagation
Learning for Multilayer Feed-Forward Neural Networks Using the Conjugate
Gradient Method", ;presented at Int. J. Neural Syst., 1991, pp.291-301.
[91] N. M. Nawi; R. S. Ransing; M. R. Ransing, An Improved Conjugate Gradient
Based Learning Algorithm for Back Propagation Neural Networks, International
Journal of Computational Intelligence; 2008, Vol. 4 Issue 1, p46
[92] Martin Fodslette Møller, A scaled conjugate gradient algorithm for fast
supervised learning, Neural Networks, Volume 6, Issue 4, 1993, Pages 525-533
[93] Bob Ricks and Dan Ventura. Training a Quantum Neural Network. NIPS. 2003
[94] Chih-Wei Hsu; Chih-Jen Lin, "A comparison of methods for multiclass support
vector machines," Neural Networks, IEEE Transactions on , vol.13, no.2,
pp.415,425, Mar 2002
[95] Anthony Quinn, Andrew Stranieri, and John Yearwood. 2007. Classification for
accuracy and insight: a weighted sum approach. In Proceedings of the sixth
Australasian conference on Data mining and analytics - Volume 70 (AusDM
'07), Peter Christen, Paul Kennedy, Jiuyong Li, Inna Kolyshkina, and Graham
Williams (Eds.), Vol. 70. Australian Computer Society, Inc., Darlinghurst,
Australia, Australia, 203-208.
[96] Sotiris B. Kotsiantis and Panayiotis E. Pintelas , “Logitboost of Simple Bayesian
Classifier”, Informatica 2005(Slovenia) vol 29, pages 53

144
[97] Erin J. Bredensteiner and Kristin P. Bennett. 1999. Multicategory Classification
by Support Vector Machines. Comput. Optim. Appl. 12, 1-3 (January 1999),
53-79
[98] Mukund Deshpande and George Karypis. 2002. Using conjunction of attribute
values for classification. In Proceedings of the eleventh international conference
on Information and knowledge management (CIKM '02). ACM, New York, NY,
USA, 356-364.
[99] Hyunsoo Kim and Haesun Park and Hyunsoo Kim and Haesun Park, Data
Reduction in Support Vector Machines by a Kernelized Ionic Interaction Model,
SDM, 2004
[100] Jeroen Eggermont, Joost N. Kok, and Walter A. Kosters. 2004. Genetic
Programming for data classification: partitioning the search space.
In Proceedings of the 2004 ACM symposium on Applied computing (SAC '04).
ACM, New York, NY, USA, 1001-1005.
[101] A. Lofti, J. Garibaldi, and R. John, editors, A multiobjective genetic algorithm
for attribute selection, 4th Int. Conf. on Recent Advances in Soft Computing
(RASC-2002), pages 116-121. Nottingham Trent University, December 2002.
[102] Gisele L. Pappa, Alex Alves Freitas, and Celso A. A. Kaestner. 2002. Attribute
Selection with a Multi-objective Genetic Algorithm. In Proceedings of the 16th
Brazilian Symposium on Artificial Intelligence: Advances in Artificial
Intelligence (SBIA '02), Guilherme Bittencourt and Geber Ramalho (Eds.).
Springer-Verlag, London, UK, UK, 280-290.
145
[103] H. Altay Gfivenir, A Classification Learning Algorithm Robust to Irrelevant
Features, Bilkent University, Department of Computer Engineering and
Information Science
[104] Cordello, L., De Stefano, C., Fontanella, F., & Marrocco, C. (2008). A Feature
Selection Algorithm for handwritten character recognition. ICPR, (pp. 1-4).
[105] Peltonen, J., & Kaski, S. (2005). Discriminative Components of Data. IEEE
Trans. Neural Networks , 68-83.
[106] Roth, V. (2001). Probabilistic Discriminative Kernel Classifiers for Multi-class
Problems. Proc. DAGM Symposium on Pattern Recognition, (pp. 246-253).
[107] Fernando, F., & Isasi, P. (2009). Nearest Prototype Classification of Nosity
Data. Artificial Intelligence Review , 53-66.
[108] Y. LeCun, L. Bottou, Y. Bengio, and P. Haffner. "Gradient-based learning
applied to document recognition." Proceedings of the IEEE, 86(11):2278-2324,
November 1998.
[109] Kam-Chuen Jim; Giles, C.L.; Horne, B.G., "An analysis of noise in recurrent
neural networks: convergence and generalization," Neural Networks, IEEE
Transactions on , vol.7, no.6, pp.1424,1438, Nov 1996
[110] Hayakawa Y, Marumoto A, Sawada Y. Effects of the chaotic noise on the
performance of a neural network model for optimization problems. Phys Rev
E,vol.51,pp.R2693,R2696.1995 Apr;51(4)
[111] Joanna Kulik, Wendy Rabiner, and Hari Balakrishnan. Adaptive Protocols for
Information Disseminationn in Wireless Sensor Networks. In Proceedings of the

146
Fifth Annual International Conference on Mobile Computing and Networks
(MobiCom 1999), Seattle, WA, 1999.
[112] C. Intanagonwiwat, R. Govindan, D. Estrin, J. Heidemann, and F. Silva.
Directed Diffusion for Wireless Sensor Networks. IEEE/ACM Transactions on
Networking, 11(1): 2–16, 2003.
[113] D. Braginsky and D. Estrin. Rumour Routing Algorithm for Sensor Networks.
In Proceedings of the 1st Workshop on Sensor Networks and Applications,
Atlanta, GA, September 2002.
[114] J. Liu, F. Zhao, and D. Petrovic. Information-Directed Routing in Ad Hoc
Sensor Networks. In Proceedings of the 2nd ACM International Workshop on
Wireless Sensor Networks and Applications (WSNA), San Diego, CA,
September 2003.
[115] W. B. Heinzelman, A. P. Chandrakasan, and H. Balakrishnan. An
Application-Specific Protocol Architecture for Wireless Microsensor Networks.
IEEE Transactions on Wireless Networking, 1(4): 660–670, 2002.
[116] Arati Manjeshwar; Agrawal, D.P., "TEEN: a routing protocol for enhanced
efficiency in wireless sensor networks," Parallel and Distributed Processing
Symposium., Proceedings 15th International , vol., no., pp.2009,2015, 23-27
April 2000
[117] S. Lindsey and K. M. Sivalingam. Data Gathering Algorithms in Sensor
Networks Using Energy Metrics. IEEE Transactions on Parallel and Distributed
Systems, 13(9): 924–934, 2002.

147
[118] Y. Xu, J. Heidemann, and D. Estrin. Geography-Informed Energy Conservation
for Ad Hoc Routing. In Proceedings of the 7th Annual International Conference
on Mobile Computing and Networking (Mobi- Com), pages 70–84, Rome, Italy,
July 2001. ACM.
[119] Y. Yu, R. Govindan, and D. Estrin. Geographical and Energy Aware Routing:
A Recursive Data Dissemination Protocol for Wireless Sensor Networks.
Technical Report UCLA/CSD-TR-01-0023, University of California at Los
Angeles, May 2001.
[120] V. Rodoplu and T. H. Meng. Minimum energy mobile wireless networks. IEEE
J. Selected Areas in Communications, 17(8):1333–1344, August 1999
[121] T. He, C. Huang, B. M. Blum, J. A. Stankovic, and T. Abdelzaher. Range-Free
Localization Schemes for Large Scale Sensor Networks. Proceedings of the 9th
Annual International Conference on Mobile Computing and Networking, pages
81–95. ACM Press, 2003.
[122] D. Niculescu and B. Nath. Ad Hoc Positioning System (APS). In Proceedings
of IEEE GlobeCom, San Antonio, AZ, November 2001.

148
Appendix A
Data from Literature Survey for Drop and Delay
Routing Mac Simulator Nodes: Field size, Radio
range
Other: Deliver
ratio(%)
Delay (ms)
EAR[31] GloMoSim 100:
150:
200:
250:
300:
350:
400:
50% source 100
99
98
98
99
97
96
75
130
170
390
350
1100
2300
GBR[31] GloMosim 100:
150:
200:
250:
300:
350
400:
50% source 88
72
72
66
60
56
50
75
140
130
225
225
310
310
GRAB[32] CSMA Parsec 900:
1200:
1600:
150*150, same
f=15% e=15%
Hops 80 e=0.3
140
200
91
97
97
99
97
96
Bellman-Ford*
[33]
DB-MAC For CSMA* 200:
600:
900:
200:
500:
900:
25*25m 8m
5*80m 8m
Sour: 60% 28
35
39
70
180
260

149
BVR[34] prowler 100:
200:
300:
400:
450:
500:
,10 units 86
79
74
63
60
56
400
700
800
850
900
1000
MMSPEED[35] 802.11e EDCF J-Sim 100 200*200m, 40m Flows:20
12
2
70
87
100
600
330
110
IGF[36] IGF GloMoSim 100 150*150m, 40m Traffic:
2:
4:
6
8:
100
100
98
92
100
100
200
2000
DD [37] 802.15.4 INETMANET 50
60
70
120
80
60
DDGR [37] 802.15.4 INETMANET 100
120
120
220
190
60
Opportunistic
flooding[38]
Omnet++ 200
400
600
800
1000
99.8
99.6
99.3
100
99.8
730
1000
1120
1210
1500
PATH[39] B-mac prowler 200 200*200m Delay Deadline 79
90
92
96
97
1000
1200
1400
1600
1800
THVR[39] B-mac Prowler 200 200*200 Delay Deadline 65
86
1000
1200

150
90
93
97
1400
1600
1800
QoS
Routing[40]
JistSwans 100
150
200
250
300
2000*2000m 110m 88
82
76
73
68
91
94
92
93
93
Speed[40] JistSwans 100
150
200
250
300
2000*2000m 110m 89
85
80
77
72
78
78
78
81
82
ESRP[41] DCF Glomosim 100
200
300
400
500
1000*1000m 377m 2000
650
700
1800
1000
LBAR[42] 802.15.4 NS2 16
100
256
150
200
20*20 10m
50*50m
80*80m
50*50m
50*50m
96
93
91
88
87
12
56
61
89
123
LAR[42] 802.15.4 NS2 16
100
256
150
200
20*20 10m
50*50m
80*80m
50*50m
50*50m
93
90
89
87
82
10
37
56
27
86
AODVjr[42] 802.15.4 NS2 16
100
256
150
200
20*20 10m
50*50m
80*80m
50*50m
50*50m
91
88
87
82
71
12ms
33
68
99
244
TPGF[43] NetTopo 800 600*400 100
90
80
70
60
11*20=220
12.5*20=250
15*20=300
17.5*20=350
21*20=420

151
GPSR[43] NetTopo 800 600*400 54*20=1080
60*20=1200
62*20=1240
66*20=1320
70*20=1400
Opportunistic
Flooding[44]
200
400
600
800
1000
800
200*200 – 400*400
Same density
300*300
Depend on size
Delay – delivery
5% duty-cycle
80
85
90
95
96
97
98
99
500
750
950
1000
1100
210
400
490
640
700
760
850
1030
SGF[45] SGF NS2 210 1000*500 Node dead: 5%
15%
30%
50%
75%
100
100
99
95
85
GRE-DD[46] s-mac NS2 50
60
70
80
90
100
670*670 20 50
60
90
120
140
190
DD[47] TDMA NS2 50
100
150
200
250
160*160m 40
Same density
88
85
82
81
79
220
350
450
540
510
QoS-RSCC[48] 802.15.4 Castalia
(OMnet++)
100 200*200m 50m Traffic 0 flow
2
4
6
97
96
94
91
700
720
750
780

152
8
10
87.5
81
830
1000
CRP[48] 802.15.4 Castalia
(OMnet++)
100 200*200m 50m Traffic 0 flow
2
4
6
8
10
96
94
92.5
88
83
73
725
750
780
860
1010
1280
MRL-CC[49] 802.15.4 Castalia
(OMnet++)
200 400*200m 50m Link failure = 0.2
Traffic 10 kbps
25
35
Packet arrival rate
5p/s
86
88
87
94
92
93
1070
1000
930
720
810
1100
MMCC[49] 802.15.4 Castalia
(OMnet++)
200 400*200m 50m Link failure = 0.2
Traffic 10 kbps
25
35
Packet arrival rate
5p/s
85
87
91
91
88
91
1090
1220
1150
740
860
1300
STR(using
GRASP-ABP)
[50]
802.11 NS-2 100 Dead node 10
15
20
25
30
35
93
88
85
83
80
76
90
120
125
130
130
128

153
[51] B-MAC Real Mote Single source
Parallel sources
11(per hop)
17(per hop)
TPGF [52] NetTopo 399 500*500m 48 240ms
260ms
320ms
260ms
240ms
300ms

154
Appendix B
Time and Message Complexity
Time Complexity
The tables of time complexity for each data set are list below. The time
complexity is measured for the simulations in section 5.3. The unit of
time complexity is hours.
Iris Data Set:
ϑ Run #1 Run #2 Run #3 Run #4 Run #5
0.3 0.17 0.05 0.19 0.13 0.32
0.6 0.99 0.05 0.65 1.11 0.96
0.9 0.83 1.40 0.27 0.48 1.04
1.2 0.93 2.33 0.08 0.94 2.31
1.5 4.51 1.79 2.68 3.13 1.93
1.8 1.92 2.15 2.17 0.44 3.82
2.1 1.45 2.51 2.30 4.62 0.72
Wine Data Set:
ϑ Run #1 Run #2 Run #3 Run #4 Run #5
0.3 0.53 1.13 1.19 0.16 1.13
0.6 2.84 1.71 0.44 1.95 1.63
0.9 2.85 0.75 1.76 1.95 0.16
1.2 2.24 1.83 0.46 1.96 0.08
1.5 0.65 0.82 3.21 6.43 0.79
1.8 2.08 0.52 2.29 5.87 0.31
2.1 0.46 2.77 2.67 2.53 2.28

155
Ionosphere Data Set:
ϑ Run #1 Run #2 Run #3 Run #4 Run #5
0.3 0.80 0.18 0.55 0.02 0.82
0.6 2.48 2.62 2.18 2.68 1.52
0.9 0.24 5.70 5.36 2.86 4.77
1.2 1.05 0.68 0.16 1.57 0.84
1.5 4.48 3.44 2.74 2.97 0.17
1.8 1.95 2.14 5.78 2.36 3.63
2.1 0.96 1.86 4.83 1.24 4.23
Dermatology Data Set:
ϑ Run #1 Run #2 Run #3 Run #4 Run #5
0.3 4.10 2.12 0.51 1.13 1.44
0.6 0.62 1.03 1.44 5.11 1.46
0.9 12.29 3.27 2.41 1.11 6.07
1.2 2.92 1.21 2.49 2.42 1.67
1.5 4.91 8.52 8.07 1.97 2.95
1.8 0.98 4.47 9.83 0.98 5.50
2.1 4.19 13.47 12.15 6.36 3.44
Numerical Data Set:
ϑ Run #1 Run #2 Run #3 Run #4 Run #5
0.3 5.07 29.84 15.41 0.65 1.43
0.6 17.94 17.03 13.78 19.24 8.19
0.9 1.95 2.15 40.17 47.00 9.95
1.2 31.46 16.90 36.66 3.38 11.96
1.5 12.03 26.65 54.60 9.43 23.08
1.8 14.43 5.07 35.88 41.34 25.35
2.1 20.93 106.93 91.46 1.82 214.31
Isolet Data Set:
ϑ Run #1 Run #2 Run #3 Run #4 Run #5
0.3 88.56 47.13 29.65 30.03 114.03
0.6 228.06 228.06 41.05 67.66 57.78

156
0.9 247.45 96.93 49.03 342.09 152.80
1.2 456.12 171.81 269.11 174.85 456.12
1.5 174.85 382.01 203.36 418.11 387.71
1.8 209.82 405.95 184.73 684.19 444.72
2.1 244.79 476.27 284.70 798.22 518.84
Gisette Data Set:
ϑ Run #1 Run #2 Run #3
0.3 10.35 40.61 5.31
0.6 84.40 59.45 37.69
0.9 12.74 70.87 18.31
1.2 77.50 318.50 182.61
1.5 47.78 398.13 86.26
1.8 86.00 12.74 143.33
2.1 102.19 421.75 300.98
Message Complexity
The tables of message complexity for each data set are list below. The
message complexity is measured for the simulations in section 5.3. The
unit of message complexity is message sent.
Iris Data Set:
ϑ Run #1 Run #2 Run #3 Run #4 Run #5
0.3 355,000 173,250 454,250 477,250 1,094,500
0.6 1,015,000 73,500 770,500 1,955,000 1,622,500
0.9 712,500 1,146,000 308,000 441,000 1,171,500
1.2 593,750 1,434,000 66,000 648,000 1,952,500
1.5 2,312,500 882,000 1,815,000 1,732,500 1,309,000
1.8 818,750 882,000 1,226,500 202,500 2,156,000
2.1 531,250 882,000 1,111,000 1,827,000 346,500

157
Wine Data Set:
ϑ Run #1 Run #2 Run #3 Run #4 Run #5
0.3 2,819,960 5,655,580 6,561,540 909,440 5,655,580
0.6 7,540,000 4,277,210 1,221,480 5,554,080 4,078,270
0.9 5,133,580 1,837,440 3,046,740 3,386,910 378,450
1.2 3,027,890 3,354,720 591,600 2,543,880 130,500
1.5 707,020 1,211,040 3,342,540 6,685,080 1,083,150
1.8 1,875,140 640,320 1,981,860 5,087,760 352,350
2.1 353,510 2,909,280 1,981,860 1,878,330 2,244,600
Ionosphere Data Set:
ϑ Run #1 Run #2 Run #3 Run #4 Run #5
0.3 3,959,280 1,067,040 2,583,360 109,980 3,848,130
0.6 6,093,360 7,647,120 5,139,810 6,461,325 3,579,030
0.9 393,120 11,115,000 8,422,830 4,591,665 7,507,890
1.2 1,291,680 1,000,350 188,370 1,897,155 995,670
1.5 4,408,560 4,023,630 2,583,360 2,859,480 161,460
1.8 1,600,560 2,089,620 4,547,790 1,897,155 2,852,460
2.1 673,920 1,556,100 3,256,110 852,345 2,852,460
Dermatology Data Set:
ϑ Run #1 Run #2 Run #3 Run #4 Run #5
0.3 87,745,500 41,705,216 10,685,452 23,610,144 29,336,560
0.6 6,668,658 10,144,512 15,166,448 53,379,456 14,834,965
0.9 87,431,000 23,256,646 15,965,278 7,925,400 43,190,914
1.2 15,562,718 6,469,894 12,381,236 13,032,880 8,917,962
1.5 20,983,440 36,371,296 32,093,467 8,453,760 12,590,064
1.8 3,497,240 15,912,442 32,582,200 3,522,400 19,584,544
2.1 12,764,926 41,092,570 34,537,132 19,549,320 10,491,720
Numerical Data Set:
ϑ Run #1 Run #2 Run #3 Run #4 Run #5
0.3 551,168,280 3,321,365,310 1,651,816,530 73,426,500 149,889,960
0.6 975,143,880 947,927,790 738,787,140 1,086,712,200 429,230,340

158
0.9 74,159,100 78,021,900 1,435,756,140 1,732,662,270 364,115,520
1.2 897,325,110 461,038,500 982,726,290 93,463,110 328,417,920
1.5 274,388,670 581,617,800 1,170,907,920 208,494,630 506,905,920
1.8 274,388,670 92,207,700 641,211,480 762,083,820 464,068,800
2.1 341,131,860 1,666,831,500 1,400,907,690 28,757,880 3,362,713,920
Isolet Data Set:
ϑ Run #1 Run #2 Run #3 Run #4 Run #5
0.3 1,747,293,91 3,654,966,80 3,763,340,63 4,197,126,73 3,666,332,17
0.6 2,360,334,67 4,270,599,67 1,614,243,37 2,608,108,28 3,333,985,83
0.9 1,793,208,09 1,639,499,97 2,955,681,07 3,869,054,17 1,809,427,06
1.2 2,360,334,67 663,699,738 280,335,874 1,053,640,70 3,666,332,17
1.5 2,957,218,96 3,118,999,81 2,959,984,05 3,696,299,85 3,523,898,02
1.8 2,957,218,96 1,159,499,60 273,881,410 3,869,054,17 1,094,625,72
2.1 2,957,218,96 1,431,432,97 2,959,984,05 3,869,054,17 1,094,625,72
Gisette Data Set:
ϑ Run #1 Run #2 Run #3
0.3 656,583,759 2,588,323,950 338,576,340
0.6 2,676,841,479 1,894,720,800 1,201,946,007
0.9 269,367,696 1,505,626,350 389,362,791
1.2 1,228,990,113 780,177,704 2,911,756,524
1.5 606,077,316 780,177,704 1,100,373,105
1.8 909,115,974 135,337,200 1,523,593,530
2.1 925,951,455 3,840,193,050 2,742,468,354

159
Appendix C
C++ code for WSN-MLP simulator
The whole simulator has eight files. The header file is used to set the dataset and the
main settings of simulation. The mlpnet head and source file contain the main
function and the implementation of MLP neural networl. The nodmodel head and
source file contain the implementation of the model of Delay and Drop Phenomena
for Packets Carrying Neuron Outputs in WSNs. The wiretofile head and source file
provide the overload functions for recording the simulation results. The ran head file
provides the random generator.
The simulator is implemented on Windows platform. However, the code is easy to be
ported to other platform. The only thing need to be changed is the directory structure.
The simulator takes 2 file as input which are data file and configure file. The directory
and name is set in the Header.h file. Each row in the data file corresponds to a pattern.
The elements in front are the inputs, and the last few elements are the expected
outputs. The input and output value could be arbitrary in principle, but it is suggested
to be norminlized between -1 and 1. The data file for Iris dataset is like:

160
The configure file contains the configuration for the MLP and the information for the
dataset. The value, in order, were number of layers, number of neurons in each layer,
sigmoid polarity for the activation function, sigmoid slope coefficient for the
activation function, learning rate, minimum MSE, number of training patterns,
number of testing patterns, dimension of input patterns and dimension of output
patterns. The configure file sample for the Iris data set is:
The simulation pattern (for instance, simulate MLP or WSN-MLP) is set in the
Header.h file. The detailed simulation setting (such as the ϑ value for the·���� and the
stopping criteria) could be changed in the mlpNet.cpp file. By default, the results of the
simulation are stored in the files in a folder named “result” under the simulator folder.
This could be changed in the mlpNet.cpp file.
-0.666667 -0.083333 -0.830508 -1 1 0 0
0.444444 -0.083333 0.389831 0.833333 0 0 1
-0.888889 -0.750000 -0.898305 -0.833333 1 0 0
-0.611111 0.250000 -0.898305 -0.833333 1 0 0
-0.666667 -0.666667 -0.220339 -0.250000 0 1 0
3 4 3 3
0 1 0.3 0.001
100 50 4 3

161
1. Header.h
#ifndef Header_H
#define Header_H
#define DATAFILE "..\\finaldata\\iris.txt" //the directory of data file
#define CONFILE "..\\finaldata\\iris_conf.txt" //the directory of configure file
#define NOD 1 //disable NOD when set to 0
#define E 1 //E is the number of experiment
#define MAXIT 500 //max iteration per training
#define SEED 257 //random seed
#define SHOWWEIGHTS 0 //record the weights if set to 1
#define SHOWCONFUSIONMATRIX 0 //record the confusion matrix if set to 1
#endif
2. mlpNet.h
// This is C-style, class-free implementation of multilayer perceptron network in C++ syntax
// Version: 1.0 Developed by Gursel Serpen as a non-distributed MLP implementation
// Version: 2.0 Revised to include “delay and drop” model for distributed computation simulation
#ifndef MLPNET_H

162
#define MLPNET_H
#include <stdlib.h>
#include <time.h>
#include <math.h>
#include <iostream>
#include <fstream>
#include <windows.h>
#include <string.h>
#include "Header.h"
#include "nodModel.h"
#include "writeToFile.h"
//the N times output memory struct
struct outputMem{
unsigned long memIndex; //the calculated output index
unsigned long currentIndex;//the current output index
double mem[10]; //mem for N times output. Pay attention to this!!!
void initMem() {
currentIndex = 0;
memIndex = 0;
//set all the N times output to be 0 initially
for(int i = 0;i < 10;i++)

163
mem[i] = 0;
}
//update the memory when the neuron got a new output.
inline void updateMem(double output) {
currentIndex++;
mem[currentIndex % 10] = output;
}
//generate the memIndex
inline void calMemIndex(int back) {
memIndex = currentIndex - back;
}
//get the current memIndex
inline void curMemIndex() {
memIndex = currentIndex;
}
inline double memOut() {
return mem[memIndex % 10];
}
};
struct Neuron {
double weightedInput;
double output;

164
double lastOutput;
outputMem outputOld;
outputMem *outputDeltaAndWeight;
outputMem testOutputOld;
double delta;
unsigned int *inputIndex;
unsigned int *testInIndex;
};
struct MLP {
Neuron *neuronArray1D;
unsigned long int netNeuronCount;
};
MLP *MLPnet;
double **weightMatrix; //pointer to a pointer of doubles
double **updateWeightMatrix;
struct WeightMatrixInfo {
unsigned short int rowSize;
unsigned short int colSize;
};

165
WeightMatrixInfo *weightMatrixDimensionArray;
struct Pattern {
double *inputVector;
double *desiredOutputVector;
};
struct PatternSet {
Pattern *trainingPatternSet;
Pattern *testingPatternSet;
unsigned long int numOfTrainPatterns;
unsigned long int numOfTestPatterns;
unsigned short int dimOfInpPatterns;
unsigned short int dimOfOutPatterns;
};
PatternSet *dataSet;
//function declarations
void runExperiments(int);
int trainMLP(double*,double*,double*,double*,long long*);
void updateNeuronInput();
void updateNeuronOutput(unsigned short int);
void accessData();

166
void initWeights();
void initNod();
void initConfusionMatrix();
void releaseNod();
void initParameters();
void propogateSignals(int,long, int);
double computeError(long, bool);
bool computeClassifyError(long, bool);
void updateConfusionMatrix(long);
void computeErrorSignalVectors(int,long);
void adaptOutputLayerWeights();
void adaptHiddenLayerWeights();
bool convergenceCriterionSatisfied(double,int,int,int,int);
void accessTestingData();
void createMLPnetResources();
void processPatterns();
void collectStats();
void releaseDynamicallyAllocatedMemory();
void releaseFinalMemory();
void testingHid(int);
#endif
3. mlpNet.cpp

167
// C++ implementation file for C-style MLP/BP network in WSN
//Dynamic memory allocation for variable number of hidden layers, variable number of nodes in each
//layer, and variable number of weight matrices and elements in each matrix.
#include "mlpNet.h"
using namespace std;
Ran mlpran(SEED);
// declare data variables to exist in the DATA and not STACK stkorage space with file scope and yet
// no external modules can access these variables/data structures
static unsigned short int numberOfLayers = 3; //default value
static unsigned short int *layerwiseNodeCount;
static unsigned short int numberOfWeightMatrices = 2;
static unsigned short int sigmoidPolarity = 0;
static double sigmoidSlope = 1.0;
static double learningRate = 0.1;
static double momentumeValue = 0.8; //set momentume value
static bool trainingModeFlag;
static double minMSEValue = 0.01;
static double tWaitFactor = 0.3; //set twait factor
static int noDrop = 0;
static int randSeed = 0;
int **confusionMatrix;
void main() {

168
DWORD start_time=GetTickCount();
accessData(); //read the datafile
layerwiseNodeCount[1] = (int)(sqrt(layerwiseNodeCount[0] * (layerwiseNodeCount[2] + 2)));
if(NOD) {
for(int i = 0; i < 7; i++)
{
runExperiments(E);
tWaitFactor += 0.3;
}
/*if(SHOWWEIGHTS) {
tWaitFactor = 5;
noDrop = 1;
runExperiments(1);
}*/
}
else
runExperiments(E);
//testingHid(E);
releaseFinalMemory();
DWORD end_time = GetTickCount();
cout<<"The run time is:"<<(end_time-start_time)<<"ms!"<<endl;//输出运行时间
system("pause");
}
void runExperiments(int epoches) {

169
//define the result measurments
int sumOfIteration = 0;
int resultIteration[E];
double classifyError[E];
double resultError[E];
double meanOfIteration[1];
double nodSt[E];
double timeTaken[E];
long long msgSent[E];
//running experiments under different random seeds
for (int j = 0; j < epoches;j++) {
randSeed = (j+1)*SEED;
mlpran = Ran(randSeed);
createMLPnetResources();
resultIteration[j] =
trainMLP(&resultError[j],&classifyError[j],&nodSt[j],&timeTaken[j],&msgSent[j]);
if (SHOWCONFUSIONMATRIX)
saveToFile(confusionMatrix,dataSet->dimOfOutPatterns,".\\result\\confusionMatrix.txt");
sumOfIteration += resultIteration[j];
releaseDynamicallyAllocatedMemory();
std::cout<<"continue"<<std::endl;
}
//meanOfIteration[0] = sumOfIteration/E;
//save the experiments results to corresponding files

170
if (!NOD) {
//saveToFile(meanOfIteration,1,".\\result\\nmeanIteration.txt",layerwiseNodeCount[1]);
saveToFile(resultIteration,E,".\\result\\nIteration.txt",layerwiseNodeCount[1]);
saveToFile(resultError,E,".\\result\\nmse.txt",layerwiseNodeCount[1]);
saveToFile(classifyError,E,".\\result\\nclassify.txt",layerwiseNodeCount[1]);
} else {
//saveToFile(meanOfIteration,1,".\\result\\ymeanIteration.txt",layerwiseNodeCount[1]);
saveToFile(resultIteration,E,".\\result\\yIteration.txt",layerwiseNodeCount[1]);
saveToFile(resultError,E,".\\result\\ymse.txt",layerwiseNodeCount[1]);
saveToFile(classifyError,E,".\\result\\yclassify.txt",layerwiseNodeCount[1]);
saveToFile(nodSt,E,".\\result\\ynodstats.txt",layerwiseNodeCount[1]);
saveToFile(timeTaken,E,".\\result\\ytimeTaken.txt",layerwiseNodeCount[1]);
saveToFile(msgSent,E,".\\result\\ymsgSent.txt");
}
}
void accessData() { //load the data file
DWORD start_time = GetTickCount();
unsigned int numOfTrainingPatterns = 5;
unsigned int numOfTestingPatterns = 3;
unsigned int dimOfInpPatterns = 2;
unsigned int dimOfOutPatterns = 2;
ifstream inputConfigureFile( CONFILE, ios::in );
if ( !inputConfigureFile ) {

171
cerr << "Configure file could not be open\n";
system("pause");
exit (1);
}
inputConfigureFile >> numberOfLayers;
layerwiseNodeCount = new unsigned short int[numberOfLayers];
unsigned short int index = 0;
while (index < numberOfLayers) {
inputConfigureFile >> layerwiseNodeCount[index];
index++;
}
inputConfigureFile >> sigmoidPolarity >> sigmoidSlope >> learningRate >> trainingModeFlag >>
minMSEValue;//default value
inputConfigureFile >> numOfTrainingPatterns >> numOfTestingPatterns >> dimOfInpPatterns >>
dimOfOutPatterns;
//dynamically allocate memory for training/testing pattern set
dataSet = new PatternSet;
dataSet->trainingPatternSet = new Pattern[numOfTrainingPatterns];
dataSet->testingPatternSet = new Pattern[numOfTestingPatterns];
dataSet->numOfTrainPatterns = numOfTrainingPatterns;
dataSet->numOfTestPatterns = numOfTestingPatterns;
dataSet->dimOfInpPatterns = dimOfInpPatterns;
dataSet->dimOfOutPatterns = dimOfOutPatterns;

172
//read the whole data file into memory
char *dataBuffer;
FILE *inputDataFile;
unsigned long dataFileSize;
size_t resultSize;
//open the file
inputDataFile = fopen (DATAFILE, "rb" );
if (inputDataFile == NULL) {
fputs ("File error",stderr);
system("pause");
exit (1);
}
//get the length of the data file
fseek(inputDataFile,0,SEEK_END);
dataFileSize = ftell(inputDataFile);
rewind(inputDataFile);
//allocate memory to store the data
dataBuffer = (char*) malloc(sizeof(char)*dataFileSize);
if (dataBuffer == NULL) {
fputs("MEMORY ERROR",stderr);
exit(2);
}
//copy the data file into buffer
resultSize = fread(dataBuffer,1,dataFileSize,inputDataFile);
if (resultSize != dataFileSize) {
fputs("Reading error",stderr);
173
exit(3);
}
fclose(inputDataFile);
//load values into data structures
unsigned int patternInd = 0;
char *dataPointer = dataBuffer;
char tmpData[20] = "";
int tmpIndex = 0;
while (patternInd < dataSet->numOfTrainPatterns) {
dataSet->trainingPatternSet[patternInd].inputVector = new double[dimOfInpPatterns]; // externally
supplied data
for (unsigned int ind = 0; ind < dimOfInpPatterns;ind++) {
while (true) {
if (*dataPointer == ' '|| *dataPointer == '\t' || *dataPointer == '\n' || *dataPointer == '\r')
{
tmpData[tmpIndex] = '\0';
tmpIndex = 0;
dataPointer++;
if (tmpData[0] != '\0') {
dataSet->trainingPatternSet[patternInd].inputVector[ind] = atof(tmpData); //externally
supplied
//cout<<dataSet->trainingPatternSet[patternInd].inputVector[ind]<<" ";
break;
}
} else {
tmpData[tmpIndex++] = *dataPointer;

174
}
dataPointer++;
}
}
dataSet->trainingPatternSet[patternInd].desiredOutputVector = new double[dimOfOutPatterns];
for (unsigned int ind = 0; ind < dimOfOutPatterns;ind++) {
while (true) {
if (*dataPointer == ' ' || *dataPointer == '\t' || *dataPointer == '\n' || *dataPointer == '\r')
{
tmpData[tmpIndex] = '\0';
tmpIndex=0;
dataPointer++;
if (tmpData[0] != '\0') {
dataSet->trainingPatternSet[patternInd].desiredOutputVector[ind] =atof(tmpData);
//externally supplied
//cout<<dataSet->trainingPatternSet[patternInd].desiredOutputVector[ind]<<" ";
break;
}
} else {
tmpData[tmpIndex++]=*dataPointer;
}
dataPointer++;
}
}
patternInd++;

175
}
patternInd = 0;
while (patternInd < dataSet->numOfTestPatterns) {
dataSet->testingPatternSet[patternInd].inputVector = new double[dimOfInpPatterns]; // externally
supplied data
for (unsigned int ind = 0; ind < dimOfInpPatterns;ind++) {
while (true) {
if (*dataPointer == ' ' || *dataPointer == '\t' || *dataPointer == '\n' || *dataPointer == '\r')
{
tmpData[tmpIndex] = '\0';
tmpIndex=0;
dataPointer++;
if (*tmpData != '\0') {
dataSet->testingPatternSet[patternInd].inputVector[ind] =atof(tmpData); //externally
supplied
break;
}
} else {
tmpData[tmpIndex++] = *dataPointer;
}
dataPointer++;
}
}
dataSet->testingPatternSet[patternInd].desiredOutputVector = new double[dimOfOutPatterns];

176
for (unsigned int ind = 0; ind < dimOfOutPatterns;ind++) {
while (true) {
if (*dataPointer == ' ' || *dataPointer == '\t' || *dataPointer == '\n' || *dataPointer == '\r')
{
tmpData[tmpIndex] = '\0';
tmpIndex = 0;
dataPointer++;
if(*tmpData!='\0')
{
dataSet->testingPatternSet[patternInd].desiredOutputVector[ind] =atof(tmpData);
//externally supplied
break;
}
} else
{
tmpData[tmpIndex++] = *dataPointer;
}
dataPointer++;
}
}
patternInd++;
}
free(dataBuffer);
dataBuffer = NULL;
DWORD end_time = GetTickCount();

177
cout<<"The run time is:"<<(end_time-start_time)<<"ms!"<<endl;
}
int trainMLP(double *MSE, double *classifyErr, double *nodSt,double *time,long long *msg) {
//declare SSE MSE and classify error
double cumulTrainingErr = 0.0;
double cumulTestingErr = 0.0;
double meanSquaredTrainingError = 0.0;
double meanSquaredTestingError = 0.0;
int cumulClassifyErr = 0;
int cumulClassifyTrainingErr = 0;
initWeights();
initParameters();
if (SHOWCONFUSIONMATRIX)
initConfusionMatrix();
if (NOD)
initNod();
//process training patterns to adjust weights
static long int patternToProcess;
unsigned long int patternInd = 0;
int iterationCount = 0, propogateIteration = 1;
double lastCumulTestingErr = 1;
int flag = 0;
int flagflag = 0;

178
do {
cumulTrainingErr = 0.0;
cumulClassifyErr = 0;
patternInd = 0;
cumulTestingErr = 0.0;
cumulClassifyTrainingErr = 0;
// Training the MLP and get the training errors
while (patternInd < dataSet->numOfTrainPatterns) {
patternToProcess = patternInd;
propogateSignals(iterationCount,patternToProcess, 0); //Propagate the training data through the
network
//Calculate Error signal and adapt weights
if (NOD && propogateIteration > 1) adaptHiddenLayerWeights();//The weight change of hidden neurons
take place at the next iteration when implemented In WSN,
//delta and input used here are from the former
iteration.
computeErrorSignalVectors(iterationCount,patternToProcess);
adaptOutputLayerWeights();
if (!NOD) adaptHiddenLayerWeights();
//Calculate errors
cumulTrainingErr += computeError(patternToProcess, 0);
cumulClassifyTrainingErr += computeClassifyError(patternToProcess,0);
patternInd++;
propogateIteration++;

179
}
// Testing the MLP and get the testing errors
patternInd = 0;
while (patternInd < dataSet->numOfTestPatterns) {
patternToProcess = patternInd;
if(NOD)
//propogateSignals(iterationCount,patternToProcess, 1);//Propagate the testing data through the
network
propogateSignals(iterationCount,patternToProcess, 2);
else
propogateSignals(iterationCount,patternToProcess, 1);
//Calculate errors
cumulTestingErr += computeError(patternToProcess, 1);
cumulClassifyErr += computeClassifyError(patternToProcess, 1);
patternInd++;
}
meanSquaredTrainingError = cumulTrainingErr / (dataSet->numOfTrainPatterns *
dataSet->dimOfOutPatterns);
meanSquaredTestingError = cumulTestingErr / (dataSet->numOfTestPatterns * dataSet->dimOfOutPatterns);
if(cumulTestingErr >= lastCumulTestingErr) {
flag++;
flagflag++;
}

180
else
flag = 0;
lastCumulTestingErr = cumulTestingErr;
iterationCount++;
//cout<<learningRate<<": "<<iterationCount<<" "<<cumulClassifyErr<<" "<<meanSquaredTestingError<<"
"<<cumulClassifyTrainingErr<<" "<<meanSquaredTrainingError<<endl;
} while (convergenceCriterionSatisfied(cumulTestingErr,cumulClassifyErr,iterationCount,flag,flagflag) ==
false);
//cout<<learningRate<<": "<<iterationCount<<" "<<cumulClassifyErr<<" "<<meanSquaredTestingError<<"
"<<cumulClassifyTrainingErr<<" "<<meanSquaredTrainingError<<endl;
if (SHOWWEIGHTS) {
int **nodeDistance = getNodeDistance();
saveToFile(weightMatrix[1],nodeDistance,layerwiseNodeCount[1],weightMatrixDimensionArray[1].colSize*we
ightMatrixDimensionArray[1].rowSize,".\\result\\weightMatrix.txt");
}
patternInd = 0;
cumulTestingErr = 0.0;
cumulClassifyErr = 0;
while (patternInd < dataSet->numOfTestPatterns) {
propogateSignals(iterationCount,patternInd, 1);//Propagate the training data through the network
if (SHOWCONFUSIONMATRIX)
updateConfusionMatrix(patternInd);
//Calculate errors
cumulTestingErr += computeError(patternInd, 1);

181
cumulClassifyErr += computeClassifyError(patternInd, 1);
patternInd++;
}
meanSquaredTestingError = cumulTestingErr / (dataSet->numOfTestPatterns * dataSet->dimOfOutPatterns);
cout<<learningRate<<": "<<iterationCount<<" "<<cumulClassifyErr<<" "<<meanSquaredTestingError<<endl;
if (NOD) {
*nodSt = stats();
int ddd = numOfMsgs();
*time = iterationCount * (dataSet->numOfTrainPatterns + dataSet->numOfTestPatterns) * twaitValue();
*msg = iterationCount * (dataSet->numOfTrainPatterns * 2 * numOfMsgs() + dataSet->numOfTestPatterns *
numOfMsgs());
} else {
*nodSt = 0;
*time = 0;
*msg = 0;
}
releaseNod();
*MSE = meanSquaredTestingError;
*classifyErr = 1 - (double)cumulClassifyErr / dataSet->numOfTestPatterns;
return iterationCount;
}
void createMLPnetResources() {
//get number of layers, node count in each layer, learning rate, sigmoid slope from a file
//dynamically allocate memory for neurons

182
int totalNeuronCount = 0;
for (unsigned short int index = 0; index < numberOfLayers; index++)
totalNeuronCount += layerwiseNodeCount[index];
MLPnet = new MLP;
MLPnet->neuronArray1D = new Neuron[totalNeuronCount];
unsigned short int globalLinearIndex = layerwiseNodeCount[0];
//The inputIndex denote the input from which iteration the neuron get
if (NOD) {
for(unsigned short int index = 0;index < layerwiseNodeCount[1];index++) {
MLPnet->neuronArray1D[globalLinearIndex].outputOld.initMem();
MLPnet->neuronArray1D[globalLinearIndex].testOutputOld.initMem();
//set the inputIndex array in hidden layer
//the length of each array is equal to the number of neurons in output layer
MLPnet->neuronArray1D[globalLinearIndex].inputIndex = new unsigned int[layerwiseNodeCount[2]];
MLPnet->neuronArray1D[globalLinearIndex].testInIndex = new unsigned int[layerwiseNodeCount[2]];
//init the array to all 0
for (int i = 0; i<layerwiseNodeCount[2];i++) {
MLPnet->neuronArray1D[globalLinearIndex].inputIndex[i] = 0;
MLPnet->neuronArray1D[globalLinearIndex].testInIndex[i] = 0;
}
globalLinearIndex ++;
}
for(unsigned short int index = 0;index < layerwiseNodeCount[2];index++) {

183
MLPnet->neuronArray1D[globalLinearIndex].outputDeltaAndWeight = new
outputMem[layerwiseNodeCount[1]];
for (unsigned short int neuronIndex = 0; neuronIndex < layerwiseNodeCount[1]; neuronIndex++) {
MLPnet->neuronArray1D[globalLinearIndex].outputDeltaAndWeight[neuronIndex].initMem();
}
//set the inputIndex array in output layer
//the length of each array is equal to the number of neurons in hidden layer
MLPnet->neuronArray1D[globalLinearIndex].inputIndex = new unsigned int[layerwiseNodeCount[1]];
MLPnet->neuronArray1D[globalLinearIndex].testInIndex = new unsigned int[layerwiseNodeCount[1]];
//init the array to all 0
for(int i=0; i<layerwiseNodeCount[1];i++) {
MLPnet->neuronArray1D[globalLinearIndex].inputIndex[i] = 0;
MLPnet->neuronArray1D[globalLinearIndex].testInIndex[i] = 0;
}
globalLinearIndex ++;
}
}
MLPnet->netNeuronCount = totalNeuronCount;
//dynamically allocate memory for weight matrices
numberOfWeightMatrices = numberOfLayers - 1;
weightMatrix = new double*[numberOfWeightMatrices];
updateWeightMatrix = new double*[numberOfWeightMatrices];
int index = 0;
unsigned short int rowDimension = 0, colDimension = 0;

184
long int numberOfElementsInWeightMatrix = 0;
//create an array of structs to store row & col dimensions for each weight matrix
weightMatrixDimensionArray = new WeightMatrixInfo[numberOfWeightMatrices];
while (index != numberOfWeightMatrices) {
rowDimension = layerwiseNodeCount[index+1];
colDimension = layerwiseNodeCount[index] + 1; //additional one for the threshold
numberOfElementsInWeightMatrix = rowDimension * colDimension;
weightMatrixDimensionArray[index].rowSize = rowDimension;
weightMatrixDimensionArray[index].colSize = colDimension;
//create weight matrices
weightMatrix[index] = new double[numberOfElementsInWeightMatrix];
updateWeightMatrix[index] = new double[numberOfElementsInWeightMatrix];
//2D weight matrix is represented as a 1D array/vector
index++;
}
if (SHOWCONFUSIONMATRIX) {
confusionMatrix = new int*[dataSet->dimOfOutPatterns];
for(int i = 0; i < dataSet->dimOfOutPatterns; i++)
confusionMatrix[i] = new int[dataSet->dimOfOutPatterns];
}
}
void initWeights() {

185
unsigned short int rowDimension = 0, colDimension = 0;
unsigned long int numberOfElementsInWeightMatrix = 0;
unsigned short int index = 0;
while (index != numberOfWeightMatrices){
rowDimension = layerwiseNodeCount[index+1];
colDimension = layerwiseNodeCount[index] + 1; //+1 for threshold
numberOfElementsInWeightMatrix = rowDimension * colDimension;
weightMatrixDimensionArray[index].rowSize = rowDimension;
weightMatrixDimensionArray[index].colSize = colDimension;
//init weight matrix entries to small values in the range -0.2 to +0.2
for (unsigned long int index2 = 0; index2 < numberOfElementsInWeightMatrix; index2++)
weightMatrix[index][index2] = ((float)mlpran.doub()*0.4 - 0.2);
for (unsigned long int index2 = 0; index2 < numberOfElementsInWeightMatrix; index2++)
updateWeightMatrix[index][index2] = 0;
index++;
}
}
void initConfusionMatrix() {
for(int i = 0; i < dataSet->dimOfOutPatterns; i++)
for(int j= 0; j < dataSet->dimOfOutPatterns; j++)
confusionMatrix[i][j] = 0;
}

186
void initNod() {
nodInit(layerwiseNodeCount[1],layerwiseNodeCount[2],tWaitFactor,noDrop,randSeed);
}
void releaseNod() {
nodRelease();
}
void initParameters() {
}
void releaseDynamicallyAllocatedMemory() {
//free all dynamically allocated memory
delete [] MLPnet;
delete [] weightMatrix;
delete [] weightMatrixDimensionArray;
delete [] confusionMatrix;
}
void releaseFinalMemory() {
delete [] dataSet;
delete [] layerwiseNodeCount;
}
void propogateSignals(int iteration,long patternInd, int opModeFlag) {

187
unsigned short int globalLinearIndex = layerwiseNodeCount[0]; // points to elements of 1D array MLPnet;
starting with the first element of the first hidden layer
unsigned short int cumulNeuronCountPL = 0; //starting with the first element of the first hidden layer
//training mode operation
if (opModeFlag == 0) {
//go over output layer
for (unsigned short int index = 0; index < layerwiseNodeCount[0]; index++) {
MLPnet->neuronArray1D[index].weightedInput =
dataSet->trainingPatternSet[patternInd].inputVector[index];
MLPnet->neuronArray1D[index].lastOutput = MLPnet->neuronArray1D[index].output; //use for the
further execution
MLPnet->neuronArray1D[index].output = MLPnet->neuronArray1D[index].weightedInput;
}
unsigned short int currentLayerIndex = 1;
//go over hidden layer(s)
while (currentLayerIndex < numberOfLayers-1) {
for (unsigned short int neuronIndex = 0; neuronIndex < layerwiseNodeCount[currentLayerIndex];
neuronIndex++) {
// point to neurons in previous layer in linear 1D array MLPnet
unsigned short int linearNeuronIndPL = 0;
//point to elements of 1D weight array
unsigned short int linearWeightIndexForNeuronInPL = 0;
//initialize neuron input to 0.0
MLPnet->neuronArray1D[globalLinearIndex].weightedInput = 0.0;

188
for (unsigned short int neuronIndPL = 0; neuronIndPL < layerwiseNodeCount[currentLayerIndex-1];
neuronIndPL++) {
linearNeuronIndPL = cumulNeuronCountPL + neuronIndPL;
linearWeightIndexForNeuronInPL = neuronIndex * (layerwiseNodeCount[currentLayerIndex-1] + 1)
+ neuronIndPL;
MLPnet->neuronArray1D[globalLinearIndex].weightedInput +=
MLPnet->neuronArray1D[linearNeuronIndPL].output
* weightMatrix[currentLayerIndex - 1][linearWeightIndexForNeuronInPL];
}
MLPnet->neuronArray1D[globalLinearIndex].weightedInput += -1 * weightMatrix[currentLayerIndex -
1][linearWeightIndexForNeuronInPL + 1]; //plus threshold
updateNeuronOutput(globalLinearIndex);
if (NOD)
MLPnet->neuronArray1D[globalLinearIndex].outputOld.updateMem(MLPnet->neuronArray1D[globalLinearIndex].
output);
//point to the next neuron in MLPnet
globalLinearIndex++;
}
cumulNeuronCountPL += layerwiseNodeCount[currentLayerIndex - 1];
currentLayerIndex++;
}
//go over the output layer
// currentLayerIndex = numberOfLayers - 1; cumulNeuronCountPL and globalLinearIndex are inherited from
the while loop above

189
for (unsigned short int neuronIndex = 0; neuronIndex < layerwiseNodeCount[currentLayerIndex];
neuronIndex++) {
unsigned short int linearWeightIndexForNeuronInPL = 0;
MLPnet->neuronArray1D[globalLinearIndex].weightedInput = 0.0;
for (unsigned short int neuronIndPL = 0; neuronIndPL < layerwiseNodeCount[currentLayerIndex - 1];
neuronIndPL++) {
linearWeightIndexForNeuronInPL = neuronIndex * (layerwiseNodeCount[currentLayerIndex-1] + 1) +
neuronIndPL;
if (!NOD)
MLPnet->neuronArray1D[globalLinearIndex].weightedInput +=
MLPnet->neuronArray1D[cumulNeuronCountPL + neuronIndPL].output
* weightMatrix[currentLayerIndex - 1][linearWeightIndexForNeuronInPL];
else {
long int nodIt = iteration * dataSet->numOfTrainPatterns + patternInd; //calculate the total
iterations for the nod use
MLPnet->neuronArray1D[cumulNeuronCountPL +
neuronIndPL].outputOld.calMemIndex(nod1(nodIt,neuronIndPL,neuronIndex));//generate an index to decide which
output it get.
MLPnet->neuronArray1D[globalLinearIndex].inputIndex[neuronIndPL] =
MLPnet->neuronArray1D[cumulNeuronCountPL + neuronIndPL].outputOld.memIndex;
MLPnet->neuronArray1D[globalLinearIndex].weightedInput +=
MLPnet->neuronArray1D[cumulNeuronCountPL + neuronIndPL].outputOld.memOut()
* weightMatrix[currentLayerIndex - 1][linearWeightIndexForNeuronInPL];
}
}

190
MLPnet->neuronArray1D[globalLinearIndex].weightedInput += -1 * weightMatrix[currentLayerIndex -
1][linearWeightIndexForNeuronInPL + 1]; //plus threshold
updateNeuronOutput(globalLinearIndex);
globalLinearIndex++;
}
}
else // opModeFlag = 1 testing mode operation opModeFlag = 2 testing with NOD
{
//go over input layer
for (unsigned short int index = 0; index < layerwiseNodeCount[0]; index++) {
MLPnet->neuronArray1D[index].weightedInput =
dataSet->testingPatternSet[patternInd].inputVector[index];
MLPnet->neuronArray1D[index].output = MLPnet->neuronArray1D[index].weightedInput;
}
//go over hidden layer(s)
unsigned short int currentLayerIndex = 1;
while (currentLayerIndex < numberOfLayers-1) {
for (unsigned short int neuronIndex = 0; neuronIndex < layerwiseNodeCount[currentLayerIndex];
neuronIndex++) {
// point to neurons in previous layer in linear 1D array MLPnet
unsigned short int linearNeuronIndPL = 0;
//point to elements of 1D weight array
unsigned short int linearWeightIndexForNeuronInPL = 0;
//initialize neuron input to 0.0
MLPnet->neuronArray1D[globalLinearIndex].weightedInput = 0.0;

191
for (unsigned short int neuronIndPL = 0; neuronIndPL <
layerwiseNodeCount[currentLayerIndex-1]; neuronIndPL++) {
linearNeuronIndPL = cumulNeuronCountPL + neuronIndPL;
linearWeightIndexForNeuronInPL = neuronIndex*(layerwiseNodeCount[currentLayerIndex-1] +
1)+neuronIndPL;
MLPnet->neuronArray1D[globalLinearIndex].weightedInput +=
MLPnet->neuronArray1D[linearNeuronIndPL].output
* weightMatrix[currentLayerIndex - 1][linearWeightIndexForNeuronInPL];
}
MLPnet->neuronArray1D[globalLinearIndex].weightedInput += -1 *
weightMatrix[currentLayerIndex - 1][linearWeightIndexForNeuronInPL + 1]; //plus threshold
updateNeuronOutput(globalLinearIndex);
if (NOD)
MLPnet->neuronArray1D[globalLinearIndex].testOutputOld.updateMem(MLPnet->neuronArray1D[globalLinearInd
ex].output);
//point to the next neuron in MLPnet
globalLinearIndex++;
}
cumulNeuronCountPL += layerwiseNodeCount[currentLayerIndex - 1];
currentLayerIndex++;
}
//go over output layer
// currentLayerIndex = numberOfLayers - 1; cumulNeuronCountPL and globalLinearIndex are inherited
from the while loop above

192
for (unsigned short int neuronIndex = 0; neuronIndex < layerwiseNodeCount[currentLayerIndex];
neuronIndex++) {
unsigned short int linearWeightIndexForNeuronInPL = 0;
MLPnet->neuronArray1D[globalLinearIndex].weightedInput = 0.0;
for (unsigned short int neuronIndPL = 0; neuronIndPL < layerwiseNodeCount[currentLayerIndex-1];
neuronIndPL++){
linearWeightIndexForNeuronInPL = neuronIndex*(layerwiseNodeCount[currentLayerIndex-1] +
1)+neuronIndPL;
if (opModeFlag != 2)
MLPnet->neuronArray1D[globalLinearIndex].weightedInput +=
MLPnet->neuronArray1D[cumulNeuronCountPL + neuronIndPL].output
* weightMatrix[currentLayerIndex - 1][linearWeightIndexForNeuronInPL];
else {
long int nodIt = iteration * dataSet->numOfTestPatterns + patternInd; //calculate the total
iterations for the nod use
MLPnet->neuronArray1D[cumulNeuronCountPL +
neuronIndPL].testOutputOld.calMemIndex(nod3(nodIt,neuronIndPL,neuronIndex));//generate an index to decide
which output it get.
MLPnet->neuronArray1D[globalLinearIndex].testInIndex[neuronIndPL] =
MLPnet->neuronArray1D[cumulNeuronCountPL + neuronIndPL].testOutputOld.memIndex;
MLPnet->neuronArray1D[globalLinearIndex].weightedInput +=
MLPnet->neuronArray1D[cumulNeuronCountPL + neuronIndPL].testOutputOld.memOut()
* weightMatrix[currentLayerIndex - 1][linearWeightIndexForNeuronInPL];
}
}

193
MLPnet->neuronArray1D[globalLinearIndex].weightedInput += -1 * weightMatrix[currentLayerIndex -
1][linearWeightIndexForNeuronInPL + 1]; //plus threshold
updateNeuronOutput(globalLinearIndex);
globalLinearIndex++;
}
}
}
inline void updateNeuronOutput(unsigned short int linearIndex) {
double sigmoidOutput = 0.0;
if (sigmoidPolarity == 1) // 0 for unipolar sigmoid and 1 for bipolar sigmoid
sigmoidOutput = (1.0 - exp( -2 * sigmoidSlope * MLPnet->neuronArray1D[linearIndex].weightedInput )) /
(1.0 + exp( -2 * sigmoidSlope * MLPnet->neuronArray1D[linearIndex].weightedInput
));
else
sigmoidOutput = 1.0 / (1.0 + exp(- sigmoidSlope * MLPnet->neuronArray1D[linearIndex].weightedInput));
MLPnet->neuronArray1D[linearIndex].output = sigmoidOutput;
}
inline double computeError(long patternToProcess, bool opModeFlag)

194
{
//determine the linearIndex for the starting output layer node in 1D array MLPnet
unsigned short int linearIndex = 0;
for (unsigned short int index = 0; index < numberOfLayers - 1; index++)
linearIndex += layerwiseNodeCount[index];
//compute the pattern error.
double patternError = 0.0;
unsigned short int dimInd = 0;
while (dimInd < dataSet->dimOfOutPatterns) {
if (opModeFlag == 0)
patternError += (dataSet->trainingPatternSet[patternToProcess].desiredOutputVector[dimInd] -
MLPnet->neuronArray1D[linearIndex].output)*
(dataSet->trainingPatternSet[patternToProcess].desiredOutputVector[dimInd] -
MLPnet->neuronArray1D[linearIndex].output);
else
patternError += (dataSet->testingPatternSet[patternToProcess].desiredOutputVector[dimInd] -
MLPnet->neuronArray1D[linearIndex].output)*
(dataSet->testingPatternSet[patternToProcess].desiredOutputVector[dimInd] -
MLPnet->neuronArray1D[linearIndex].output);
dimInd++;
linearIndex++;
}
return patternError;

195
}
inline bool computeClassifyError(long patternToProcess, bool opModeFlag) {
//determine the linearIndex for the starting output layer node in 1D array MLPnet
unsigned short int linearIndex = 0;
for (unsigned short int index = 0; index < numberOfLayers - 1; index++)
linearIndex += layerwiseNodeCount[index];
//compute the output
unsigned short int dimInd = 0, outputMaxInd = 0, desiredMaxInd = 0;
double max = 0;
while(dimInd < dataSet->dimOfOutPatterns)
{
if(max < MLPnet->neuronArray1D[linearIndex].output)
{
outputMaxInd = dimInd;
max = MLPnet->neuronArray1D[linearIndex].output;
}
if (opModeFlag == 0)
{
if(dataSet->trainingPatternSet[patternToProcess].desiredOutputVector[dimInd] == 1)
desiredMaxInd = dimInd;
}
else
if(dataSet->testingPatternSet[patternToProcess].desiredOutputVector[dimInd] == 1)
desiredMaxInd = dimInd;

196
dimInd++;
linearIndex++;
}
if(outputMaxInd == desiredMaxInd)
return 0;
else
return 1;
}
void updateConfusionMatrix(long patternToProcess) {
unsigned short int linearIndex = 0;
for (unsigned short int index = 0; index < numberOfLayers - 1; index++)
linearIndex += layerwiseNodeCount[index];
//compute the output
unsigned short int dimInd = 0, outputMaxInd = 0, desiredMaxInd = 0;
double max = 0;
while(dimInd < dataSet->dimOfOutPatterns)
{
if(max < MLPnet->neuronArray1D[linearIndex].output)
{
outputMaxInd = dimInd;
max = MLPnet->neuronArray1D[linearIndex].output;
}
if(dataSet->testingPatternSet[patternToProcess].desiredOutputVector[dimInd] == 1)

197
desiredMaxInd = dimInd;
dimInd++;
linearIndex++;
}
confusionMatrix[desiredMaxInd][outputMaxInd]++;
}
void computeErrorSignalVectors(int iteration,long patternToProcess) {
//compute error signal terms of the output layer given the training pattern on hand
//first point to the output neuron in 1D array MLPnet
unsigned long int startingNeuronPtrForOutLayer = 0;
for (unsigned short int layerInd = 0; layerInd < numberOfLayers - 1; layerInd++) {
startingNeuronPtrForOutLayer += layerwiseNodeCount[layerInd];
}
unsigned long int outLayerInd = startingNeuronPtrForOutLayer;
for (unsigned short int dimenInd = 0; dimenInd < layerwiseNodeCount[numberOfLayers - 1]; dimenInd++) {
// this formula is valid for bipolar sigmoidal nonlinearity
if (sigmoidPolarity == 1)
MLPnet->neuronArray1D[outLayerInd].delta = 0.5 *
(dataSet->trainingPatternSet[patternToProcess].desiredOutputVector[dimenInd]
- MLPnet->neuronArray1D[outLayerInd].output) *
(1 - (MLPnet->neuronArray1D[outLayerInd].output *
MLPnet->neuronArray1D[outLayerInd].output) );

198
//if output linearity is unipolar
else
MLPnet->neuronArray1D[outLayerInd].delta =
(dataSet->trainingPatternSet[patternToProcess].desiredOutputVector[dimenInd]
- MLPnet->neuronArray1D[outLayerInd].output) * sigmoidSlope *
(1 - MLPnet->neuronArray1D[outLayerInd].output) *
MLPnet->neuronArray1D[outLayerInd].output ;
outLayerInd++;
}
//compute error signal terms of the hidden layer(s)
/* loop over hidden layers with the last one first
compute deltas using deltas of "next" layer */
unsigned short int hidLayerInd = numberOfLayers - 2;
unsigned short int startingNeuronPtrForCurrentHidLayer,
linearNeuronIndCHL,
linearNeuronIndNL,
linearWeightInd;
unsigned short int currentHidLayerInd = 0;
double cumulSumOfDeltaAndWeights = 0.0,
deltaAndWeight;
while (hidLayerInd > 0) {
//determine the linear index for the starting node in this hidden layer

199
startingNeuronPtrForCurrentHidLayer = 0;
for (unsigned short int layerInd = 0; layerInd < hidLayerInd; layerInd++)
startingNeuronPtrForCurrentHidLayer += layerwiseNodeCount[layerInd];
linearNeuronIndCHL = startingNeuronPtrForCurrentHidLayer;
linearNeuronIndNL = linearNeuronIndCHL + layerwiseNodeCount[hidLayerInd];
for (unsigned short int neuronIndCHL = 0; neuronIndCHL < layerwiseNodeCount[hidLayerInd];
neuronIndCHL++) {
for (unsigned short int neuronIndNL = 0; neuronIndNL < layerwiseNodeCount[hidLayerInd + 1];
neuronIndNL++) {
linearWeightInd = neuronIndNL * (layerwiseNodeCount[hidLayerInd] + 1) + neuronIndCHL;
deltaAndWeight = MLPnet->neuronArray1D[linearNeuronIndNL].delta *
weightMatrix[hidLayerInd][linearWeightInd];
long int nodIt = iteration * dataSet->numOfTrainPatterns + patternToProcess;
if(!NOD)
cumulSumOfDeltaAndWeights += deltaAndWeight;
else {
MLPnet->neuronArray1D[linearNeuronIndNL].outputDeltaAndWeight[neuronIndCHL].updateMem(deltaAndWeight);
MLPnet->neuronArray1D[linearNeuronIndNL].outputDeltaAndWeight[neuronIndCHL].calMemIndex(nod2(nodIt,neu
ronIndCHL,neuronIndNL));
MLPnet->neuronArray1D[linearNeuronIndCHL].inputIndex[neuronIndNL] =
MLPnet->neuronArray1D[linearNeuronIndNL].outputDeltaAndWeight[neuronIndCHL].memIndex;
cumulSumOfDeltaAndWeights +=
MLPnet->neuronArray1D[linearNeuronIndNL].outputDeltaAndWeight[neuronIndCHL].memOut();

200
}
linearNeuronIndNL++;
}
if (sigmoidPolarity == 1)
MLPnet->neuronArray1D[linearNeuronIndCHL].delta = cumulSumOfDeltaAndWeights * 0.5 * (1 -
MLPnet->neuronArray1D[linearNeuronIndCHL].output *
MLPnet->neuronArray1D[linearNeuronIndCHL].output);// +0.1 is fix for flat spot see
http://www.heatonresearch.com/wiki/Flat_Spot
else
MLPnet->neuronArray1D[linearNeuronIndCHL].delta = cumulSumOfDeltaAndWeights * (1 -
MLPnet->neuronArray1D[linearNeuronIndCHL].output) *
sigmoidSlope *
MLPnet->neuronArray1D[linearNeuronIndCHL].output;
linearNeuronIndCHL++;;
linearNeuronIndNL = startingNeuronPtrForCurrentHidLayer + layerwiseNodeCount[hidLayerInd];
cumulSumOfDeltaAndWeights = 0.0;
}
hidLayerInd--;
}
}
inline void adaptOutputLayerWeights() {
unsigned long int linearIndOL = MLPnet->netNeuronCount - layerwiseNodeCount[numberOfLayers - 1];
unsigned long int linearIndFHL = linearIndOL - layerwiseNodeCount[numberOfLayers - 2];//check

201
unsigned short int linearWeightInd = 0;
for (unsigned short int indexOL = 0; indexOL < layerwiseNodeCount[numberOfLayers - 1]; indexOL++) {
for (unsigned short int indexFHL = 0; indexFHL < layerwiseNodeCount[numberOfLayers - 2]; indexFHL++)
{
linearWeightInd = indexOL * (layerwiseNodeCount[numberOfLayers - 2] + 1) + indexFHL;
if(!NOD)
updateWeightMatrix[numberOfLayers - 2][linearWeightInd] = momentumeValue *
updateWeightMatrix[numberOfLayers - 2][linearWeightInd]
+ learningRate *
MLPnet->neuronArray1D[linearIndOL].delta * MLPnet->neuronArray1D[linearIndFHL].output;
else
updateWeightMatrix[numberOfLayers - 2][linearWeightInd] = momentumeValue *
updateWeightMatrix[numberOfLayers - 2][linearWeightInd]
+ learningRate *
MLPnet->neuronArray1D[linearIndOL].delta
* MLPnet->neuronArray1D[linearIndFHL]
.outputOld.mem[MLPnet->neuronArray1D[linearIndOL].inputIndex[indexFHL] % 10];
//check this; pay attention to delta; mem
weightMatrix[numberOfLayers - 2][linearWeightInd] += updateWeightMatrix[numberOfLayers -
2][linearWeightInd];
linearIndFHL++;
}
updateWeightMatrix[numberOfLayers - 2][linearWeightInd + 1] = momentumeValue *
updateWeightMatrix[numberOfLayers - 2][linearWeightInd + 1]
+ learningRate *
MLPnet->neuronArray1D[linearIndOL].delta * -1;

202
weightMatrix[numberOfLayers - 2][linearWeightInd + 1] += updateWeightMatrix[numberOfLayers -
2][linearWeightInd + 1]; //update threshould
linearIndFHL = MLPnet->netNeuronCount - layerwiseNodeCount[numberOfLayers - 1] -
layerwiseNodeCount[numberOfLayers - 2];
linearIndOL++;
}
}
inline void adaptHiddenLayerWeights() {
// point to neurons in previous layer in linear 1D array MLPnet
unsigned short int linearNeuronIndPL = 0;
unsigned short int linearNeuronIndCHL = 0;
//point to elements of 1D weight array
unsigned short int linearWeightIndexForNeuronInPL = 0;
unsigned short int ptrFirstNeuronInCHL = 0,
ptrFirstNeuronInPL = 0;
unsigned short int layerIndHL = 1;
//update weights for hidden layer(s)
while (layerIndHL < numberOfLayers-1) {
// point to current hidden layer neuron in linear 1D array MLPnet
ptrFirstNeuronInCHL += layerwiseNodeCount[layerIndHL - 1];
ptrFirstNeuronInPL += ptrFirstNeuronInCHL - layerwiseNodeCount[layerIndHL - 1];

203
linearNeuronIndCHL = ptrFirstNeuronInCHL;
linearNeuronIndPL = ptrFirstNeuronInPL;
// loop over neurons in current hidden layer
for (unsigned short int neuronIndCHL = 0; neuronIndCHL < layerwiseNodeCount[layerIndHL]; neuronIndCHL++)
{
//loop over neurons in previous layer
for (unsigned short int neuronIndPL = 0; neuronIndPL < layerwiseNodeCount[layerIndHL - 1];
neuronIndPL++){
linearWeightIndexForNeuronInPL = neuronIndCHL * (layerwiseNodeCount[layerIndHL - 1] + 1) +
neuronIndPL;
if(!NOD)
updateWeightMatrix[layerIndHL - 1][linearWeightIndexForNeuronInPL] = momentumeValue *
updateWeightMatrix[layerIndHL - 1][linearWeightIndexForNeuronInPL]
+ learningRate *
MLPnet->neuronArray1D[linearNeuronIndCHL].delta * MLPnet->neuronArray1D[linearNeuronIndPL].output;
else
updateWeightMatrix[layerIndHL - 1][linearWeightIndexForNeuronInPL] = momentumeValue *
updateWeightMatrix[layerIndHL - 1][linearWeightIndexForNeuronInPL]
+ learningRate *
MLPnet->neuronArray1D[linearNeuronIndCHL].delta * MLPnet->neuronArray1D[linearNeuronIndPL].lastOutput;
//The weight change of hidden neurons take
place at the next iteration when implemented In WSN
//delta and input are from the former
iteration.
204
weightMatrix[layerIndHL - 1][linearWeightIndexForNeuronInPL] += updateWeightMatrix[layerIndHL -
1][linearWeightIndexForNeuronInPL];
linearNeuronIndPL++;
}
updateWeightMatrix[layerIndHL - 1][linearWeightIndexForNeuronInPL + 1] = momentumeValue *
updateWeightMatrix[layerIndHL - 1][linearWeightIndexForNeuronInPL + 1]
+ learningRate *
MLPnet->neuronArray1D[linearNeuronIndCHL].delta * -1;
weightMatrix[layerIndHL - 1][linearWeightIndexForNeuronInPL + 1] += updateWeightMatrix[layerIndHL
- 1][linearWeightIndexForNeuronInPL + 1];//update threshould
linearNeuronIndPL = ptrFirstNeuronInPL;
linearNeuronIndCHL++;
}
layerIndHL++;
}
}
bool convergenceCriterionSatisfied(double testErr,int classifyErr, int iteration, int flag, int flagflag) {
bool MLPnetConverged = false;
double mse = testErr/(dataSet->numOfTestPatterns * dataSet->dimOfOutPatterns);
if (mse <= -minMSEValue)
{

205
MLPnetConverged = true;
cout<<mse<<endl;
cout<< iteration<<endl;
}
if(classifyErr <= -1)
{
MLPnetConverged = true;
cout<< iteration<<endl;
}
if(iteration >= MAXIT)
{
MLPnetConverged = true;
cout<<classifyErr<<endl;
}
if(flag > 3)
{
/*cout<<iteration<<endl;
cout<<mse<<endl;
cout<<classifyErr<<endl;*/
MLPnetConverged = true;
}
if (flagflag < 0) {

206
MLPnetConverged = true;
}
//cout << mse << endl;
return MLPnetConverged;
}
void testingHid(int epoches) //running experiments of different hidden layer settings
{
for (int i = 0; i < 4; i++)
{
switch(i)
{
case 0:
{
layerwiseNodeCount[1] = (int)((layerwiseNodeCount[0] + layerwiseNodeCount[2]) * 2/3 + 0.5);
break;
}
case 1:
{
layerwiseNodeCount[1] = (int)((2 * layerwiseNodeCount[0]) + 1 + 0.5);
break;
}
case 2:

207
{
layerwiseNodeCount[1] = (int)(sqrt(layerwiseNodeCount[0] * (layerwiseNodeCount[2] + 2)));
break;
}
case 3:
{
layerwiseNodeCount[1] = (int)((layerwiseNodeCount[0] + layerwiseNodeCount[2])/2 +0.5);
break;
}
case 4:
{
layerwiseNodeCount[1] = 22;
break;
}
case 5:
{
layerwiseNodeCount[1] = 10;
break;
}
}
runExperiments(epoches);
}
}
4. nodeModel.h

208
#ifndef NODMODEL_H
#define NODMODEL_H
#include <stdlib.h>
#include <iostream>
#include <random>
#include <math.h>
#include <time.h>
#include "ran.h"
#include "Header.h"
void createNodResource();
int genDistance();
void genDistribution();
int calcDelay(int, double);
void calcDelayArray();
void calcPDrop(int);
int updateOutput(double , int , int , int , int );
int updateTestOutput(double , int , int , int , int );
int updateHidden(double , int , int , int , int );
void nodInit(int,int,double,int,int);
int numOfMsgs();
double twaitValue();

209
int nod1(long,int,int);
int nod2(long,int,int);
int nod3(long,int,int);
double stats();
double nodStats1();
double nodStats2();
int **getNodeDistance();
void nodRelease();
#endif
5. nodModel.cpp
#include "nodModel.h"
using namespace std;
int mu = 1, dmax = 10 * mu,maxDistance,sumofDistance;
long long cd1,cd2,cd3,ct1,ct2,ct3,cn1,cn2,cn3;
double sigma = 0.6, dmin = 0.3 * mu, twait;
int hCount,oCount;
double **pDropArray, normDistribution[10000];
int **nodeDistance,*distDistri,**delayArray,***nodMatrix;
long **nodMem1, **nodMem2, **nodMem3, ***outputFlags1,***outputFlags2,***outputFlags3;
Ran myran(1);
void createNodResource() { //allocate resource for the nod model

210
outputFlags1 = new long**[dmax];
outputFlags2 = new long**[dmax];
outputFlags3 = new long**[dmax];
for (int i = 0; i < dmax ; i++) {
outputFlags1[i] = new long*[hCount];
outputFlags2[i] = new long*[hCount];
outputFlags3[i] = new long*[hCount];
for(int j = 0; j < hCount; j++) {
outputFlags1[i][j] = new long[oCount];
outputFlags2[i][j] = new long[oCount];
outputFlags3[i][j] = new long[oCount];
}
}
pDropArray = new double*[hCount];
nodMem1 = new long*[hCount];
nodMem2 = new long*[hCount];
nodMem3 = new long*[hCount];
for(int i = 0; i< hCount; i++) {
pDropArray[i] = new double[oCount];
nodMem1[i] = new long[oCount];
nodMem2[i] = new long[oCount];
nodMem3[i] = new long[oCount];
}
for(int i = 0; i < hCount; i++)
for(int j = 0; j < oCount; j++) {

211
nodMem1[i][j] = 0;
nodMem2[i][j] = 0;
nodMem3[i][j] = 0;
}
}
//return the diagonal length
int genDistance() {
double *xCoordinateHid = new double[hCount];
double *yCoordinateHid = new double[hCount];
double *xCoordinateOut = new double[oCount];
double *yCoordinateOut = new double[oCount];
nodeDistance = new int*[hCount]; //the minimum is 1 hop
for (int i = 0; i < hCount; i++) {
nodeDistance[i] = new int[oCount];
}
maxDistance = 1;
sumofDistance = 0;
int nodesCount = hCount * oCount;
double lengthH = sqrt(hCount + oCount);
double lengthO = sqrt(oCount);
double point1 = (lengthH - lengthO) / 2;
double point2 = (lengthH + lengthO) / 2;
for (int i = 0; i<hCount;i++) {
xCoordinateHid[i] = lengthH * myran.doub();

212
yCoordinateHid[i] = lengthH * myran.doub();
while(xCoordinateHid[i]>point1 && xCoordinateHid[i]<point2 && yCoordinateHid[i]>point1 &&
yCoordinateHid[i]<point2) {
xCoordinateHid[i] = lengthH * myran.doub();
yCoordinateHid[i] = lengthH * myran.doub();
}
//std::cout << "HID" << xCoordinateHid[i] << " " << yCoordinateHid[i] << std::endl;
}
for(int i = 0; i<oCount;i++){
xCoordinateOut[i] = point1 + lengthO*myran.doub();
yCoordinateOut[i] = point1 + lengthO*myran.doub();
//std::cout<< "OUT" <<xCoordinateOut[i] << " " << yCoordinateOut[i] << std::endl;
}
for (int rowIndex = 0;rowIndex < hCount;rowIndex++) {
for (int colIndex = 0;colIndex < oCount;colIndex++) {
nodeDistance[rowIndex][colIndex] =
(int)sqrt(pow(xCoordinateHid[rowIndex]-xCoordinateOut[colIndex],2)+pow(yCoordinateHid[rowIndex]-yCoordina
teOut[colIndex],2)) + 1;
if (nodeDistance[rowIndex][colIndex] > maxDistance)
maxDistance = nodeDistance[rowIndex][colIndex];
//sumofDistance += nodeDistance[rowIndex][colIndex];
//std::cout<<rowIndex<<" distance: " <<nodeDistance[rowIndex][colIndex]<<endl;
}
}
distDistri = new int[maxDistance + 1]; //distDistri[1] means the counts for distance 1

213
delayArray = new int*[maxDistance];
for (int i = 0; i < maxDistance; i++)
delayArray[i] = new int[1000];
for (int i = 0; i < maxDistance + 1; i++)
distDistri[i] = 0; //init to 0
//get the distance distribution of the network
for (int rowIndex = 0;rowIndex < hCount;rowIndex++)
for (int colIndex = 0;colIndex < oCount;colIndex++)
distDistri[nodeDistance[rowIndex][colIndex]]++;
/*for (int i = 0;i < maxDistance + 1;i++)
cout<<i<<": "<<(double)distDistri[i]/nodesCount<<endl;*/
int distThre = nodesCount * 0.08 + 1; // threshould of distance count
int distMax = maxDistance; //max distance been considered.
int flag = 0;
while (true) {
flag += distDistri[distMax];
if (flag > distThre) break;
else distMax--;
}
return distMax;
}
void genDistribution() {
std::default_random_engine generator;
std::normal_distribution<double> distribution(mu,sigma);
double number;

214
for (int i = 0; i < 10000; i++) {
number = distribution(generator);
while (number < dmin || number > dmax) {
number = distribution(generator);
}
normDistribution[i] = number;
}
}
int calcDelay(int hops) {
double sumDelay = 0;
int index = 0;
for (int i = 0; i < hops; i++) {
index = (int)(myran.doub()*10000);
sumDelay = sumDelay + normDistribution[index];
}
int sum = (int) (sumDelay / twait);
return sum;
}
void calcDelayArray() {
double sumDelay = 0;
int index = 0;
for(int i = 0; i < maxDistance; i++) {
for(int j = 0; j < 1000; j++) {
sumDelay = 0;

215
for(int k = 0; k < i + 1; k++) {
index = (int)(myran.doub()*10000);
sumDelay = sumDelay + normDistribution[index];
}
delayArray[i][j] = (int) (sumDelay / twait);
}
}
}
void calcPDrop(int noDrop) {
double constantb = myran.doub() * 12 - 1;
double constantm = myran.doub() * 0.077 +0.013;
for (int i = 0; i < hCount; i++) {
for(int j = 0; j < oCount; j++) {
if(noDrop)
pDropArray[i][j] = 0;
else
pDropArray[i][j] = (constantb + constantm*nodeDistance[i][j]*nodeDistance[i][j]) / 100;
}
}
}
int updateOutput(double pDrop, int tDelay, int h, int o, long int cInd) {
double r = myran.doub();
if (r > pDrop) {

216
int outInd = (cInd + tDelay) % dmax;
outputFlags1[outInd][h][o] = cInd;
}
if (outputFlags1[cInd % dmax][h][o] > nodMem1[h][o])
nodMem1[h][o] = outputFlags1[cInd % dmax][h][o];
int nod = cInd - nodMem1[h][o];
if (nod > 0) cn1++;
return nod;
}
int updateHidden(double pDrop, int tDelay, int h, int o, long int cInd) {
if (myran.doub() > pDrop) {
int outInd = (cInd + tDelay) % dmax;
outputFlags2[outInd][h][o] = cInd;
}
if (outputFlags2[cInd % dmax][h][o] > nodMem2[h][o])
nodMem2[h][o] = outputFlags2[cInd % dmax][h][o];
int nod = cInd - nodMem2[h][o];
if (nod > 0)
cn2++;
return nod;
}
int updateTestOutput(double pDrop, int tDelay, int h, int o, long cInd) {
double r = myran.doub();
if (r > pDrop) {

217
int outInd = (cInd + tDelay) % dmax;
outputFlags3[outInd][h][o] = cInd;
}
if (outputFlags3[cInd % dmax][h][o] > nodMem3[h][o])
nodMem3[h][o] = outputFlags3[cInd % dmax][h][o];
int nod = cInd - nodMem3[h][o];
if (nod > 0) cn3++;
return nod;
}
void nodInit(int m, int n,double t, int drop, int myranSeed) {
hCount = m;
oCount = n;
int distMax;
createNodResource();
myran = Ran(myranSeed);
distMax = genDistance();
twait = distMax * t * mu;
genDistribution();
calcDelayArray();
calcPDrop(drop);
cn1 = 0;
cn2 = 0;
cn3 = 0;
ct1 = 0;

218
ct2 = 0;
ct3 = 0;
cd1 = 0;
cd2 = 0;
cd3 = 0;
}
int numOfMsgs() {
int sum = 0;
for(int i = 0; i < hCount; i++) {
for(int j = 0; j < oCount; j++)
sum += nodeDistance[i][j];
}
return sum;
}
double twaitValue() {
return twait;
}
int nod1(long c, int i, int j) {
int index = (int)(myran.doub()*1000);
int delay = delayArray[nodeDistance[i][j] - 1][index];
ct1++;
if(ct1 < 0) {
cout<<"overflow"<<ct1<<endl;
cerr << "overflow!!\n";

219
system("pause");
}
if (delay > 0) cd1++;
return updateOutput(pDropArray[i][j],delay,i,j,c);
}
int nod2(long c, int i, int j) {
int index = (int)(myran.doub()*1000);
int delay = delayArray[nodeDistance[i][j] - 1][index];
ct2++;
if (delay > 0) cd2++;
return updateHidden(pDropArray[i][j],delay,i,j,c);
}
int nod3(long c, int i, int j) {
int index = (int)(myran.doub()*1000);
int delay = delayArray[nodeDistance[i][j] - 1][index];
ct3++;
if (delay > 0) cd3++;
return updateTestOutput(pDropArray[i][j],delay,i,j,c);
}
double stats() {
/*//output the details of nod
double min = pDropArray[0][0], max = pDropArray[0][0];
for (int i = 0; i < hCount; i++)

220
for (int j = 0;j < oCount; j++) {
if(min > pDropArray[i][j])
min = pDropArray[i][j];
if(max < pDropArray[i][j])
max = pDropArray[i][j];
}
//cout<< "cn1 is: "<<ct1<<endl;
//cout<< "cn2 is: "<<ct2<<endl;
cout << "The proportion of delay for ouput layer is: " <<(double)cd1/ct1<<endl;
cout << "The proportion of delay for ouput layer is: " <<(double)cd3/ct3<<endl;
//cout << "The proportion of delay for hidden layer is: " <<(double)maxD2/ct2<<endl;
cout << "The max and min drop is: " << max << "---" << min <<endl;
cout << "The propotion of NOD for output layer is: "<<(double)cn1/ct1<<endl;
cout << "The propotion of NOD for output layer is: "<<(double)cn3/ct3<<endl;
//cout << "The propotion of NOD for hidden layer is: "<<(double)cn2/ct2<<endl;*/
return ((double)cn1/ct1 + (double)cn2/ct2)/2;
}
double nodStats1() {
return (double)cn1/ct1;
}
double nodStats2() {
return (double)cn2/ct2;
}

221
int **getNodeDistance() {
return nodeDistance;
}
void nodRelease() {
delete [] outputFlags1;
delete [] outputFlags2;
delete [] outputFlags3;
delete [] pDropArray;
delete [] nodMem1;
delete [] nodMem2;
delete [] nodMem3;
delete [] nodMatrix;
delete [] nodeDistance;
}
6. writTofile.h
#ifndef WRITETOFILE_H
#define WRITETOFILE_H
#include <iostream>
#include <fstream>
#include "Header.h"

222
void saveToFile(int[], int, char*);
void saveToFile(long long[], int, char*);
void saveToFile(double[], int,char*);
void saveToFile(double[], int**, int, int, char*);
void saveToFile(int**,int,char*);
void saveToFile(int[], int,char*,int);
void saveToFile(double[], int,char*,int);
#endif
7. writToFile.cpp
#include "writeToFile.h"
using namespace std;
void saveToFile(int result[], int length,char *file) {
ofstream outputResultFile( file, ios::app );
if ( !outputResultFile ) {
cerr << "output file could not be opened\n";
exit (1);
}
outputResultFile<<DATAFILE<<" ";
for(int i = 0; i<length;i++)
{
outputResultFile<<result[i]<<" ";
}
outputResultFile<<"\n";
223
}
void saveToFile(long long result[], int length,char *file) {
ofstream outputResultFile( file, ios::app );
if ( !outputResultFile ) {
cerr << "output file could not be opened\n";
exit (1);
}
outputResultFile<<DATAFILE<<" ";
for(int i = 0; i<length;i++)
{
outputResultFile<<result[i]<<" ";
}
outputResultFile<<"\n";
}
void saveToFile(double result[], int length,char *file) {
ofstream outputResultFile( file, ios::app );
if ( !outputResultFile ) {
cerr << "output file could not be opened\n";
exit (1);
}
outputResultFile<<DATAFILE<<" ";
for(int i = 0; i<length;i++)
{
outputResultFile<<result[i]<<" ";
}

224
outputResultFile<<"\n";
}
//Save Weights
void saveToFile(double result[], int **dist, int row, int length,char *file) {
ofstream outputResultFile( file, ios::app );
if ( !outputResultFile ) {
cerr << "output file could not be opened\n";
exit (1);
}
outputResultFile<<DATAFILE<<" ";
int j1 = 0,j2 = 0,maxDist = 0;
double sumWeight[16] = {0};
double meanWeight[16] = {0};
int countWeight[16] = {0};
for(int i = 0; i<length;i++)
{
j1 = i % (row + 1);
j2 = i / (row + 1);
/* if (j1 != row)
outputResultFile<<dist[j1][j2]<<" ";
else
outputResultFile<<0<<" ";
outputResultFile<<result[i]<<" "; */

225
if (j1 != row) {
sumWeight[dist[j1][j2] - 1] += abs(result[i]);
countWeight[dist[j1][j2] - 1]++;
if (maxDist < dist[j1][j2])
maxDist = dist[j1][j2];
}
}
outputResultFile<<"\n";
for(int i = 0; i < maxDist; i++)
meanWeight[i] = sumWeight[i] / countWeight[i];
saveToFile(meanWeight, maxDist, ".\\result\\weightDistri.txt");
}
void saveToFile(int **result,int length,char *file) {
ofstream outputResultFile( file, ios::app );
if ( !outputResultFile ) {
cerr << "output file could not be opened\n";
exit (1);
}
outputResultFile<<DATAFILE<<"\n";
for(int i = 0; i < length; i++) {
for(int j = 0; j < length; j++)
{
outputResultFile<<result[i][j]<<" ";
}
outputResultFile<<"\n";
}

226
outputResultFile<<"\n";
}
void saveToFile(int result[], int length,char *file,int num) {
ofstream outputResultFile( file, ios::app );
if ( !outputResultFile ) {
cerr << "output file could not be opened\n";
exit (1);
}
outputResultFile<<DATAFILE<<" "<<num<<" ";
for(int i = 0; i<length;i++)
{
outputResultFile<<result[i]<<" ";
}
outputResultFile<<"\n";
}
void saveToFile(double result[], int length,char *file,int num) {
ofstream outputResultFile( file, ios::app );
if ( !outputResultFile ) {
cerr << "output file could not be opened\n";
exit (1);
}
outputResultFile<<DATAFILE<<" "<<num<<" ";
for(int i = 0; i<length;i++)
{
outputResultFile<<result[i]<<" ";

227
}
outputResultFile<<"\n";
}
8. ran.h
#ifndef RAN_H
#define RAN_H
typedef unsigned long long int Ullong;
struct Ran {
Ullong u, v, w;
Ran(Ullong j) : v(4101842887655102017LL), w(1) {
//Constructor. Call with any integer seed (except value of v above).
u = j ^ v; int64();
v = u; int64();
w = v; int64();
}
inline Ullong int64() {
u = u * 2862933555777941757LL + 7046029254386353087LL;
v ^= v >> 17; v ^= v << 31; v ^= v >> 8;
w = 4294957665U*(w & 0xffffffff) + (w >> 32);
Ullong x = u ^ (u << 21); x ^= x >> 35; x ^= x << 4;
return (x + v) ^ w;
}
inline double doub() { return 5.42101086242752217E-20 * int64(); }
inline unsigned int int32() { return (unsigned int)int64(); }

228
};
#endif



















