
Optimising frame structures by different strategies of genetic algorithms
22
Finite Elements in Analysis and Design 37 (2001) 381}402 Optimising frame structures by di!erent strategies of genetic algorithms D. Greiner*, G. Winter, J.M. Emperador Centro de Aplicaciones Nume & ricas en Ingeniern & a (CEANI), Campus de Taxra Baja, 35017, Universidad de Las Palmas de Gran Canaria, Spain Abstract Two frame structure optimisation problems are handled. Firstly, the constrained minimum-mass problem, for which both continuous and discrete cases with ideal (without buckling e!ect and its own gravitational load) and real (with buckling e!ect and its own gravitational load) models are solved with several types of genetic algorithms. Results for the continuous case (ideal model) are compared with referenced solutions of traditional optimisation methods. From state of the art, the chosen strategies include a generational genetic algorithm, a steady-state genetic algorithm and the CHC algorithm. Moreover, we suggest one elitist strategy linked to the non-dominated sorting genetic algorithm (NSGA) to solve the multiobjective problem of minimising simultaneously the number of di!erent cross-section types and the mass with several con- straints. 2001 Elsevier Science B.V. All rights reserved. Keywords: Continuous and discrete frame optimisation; Multiobjective optimisation; Elitist NSGA; CHC algorithm; Buckling e!ect 1. Preliminary considerations It is well known that the optimisation problem of determining the minimum-mass frame is a problem that has many local minima, so a global optimisation method is necessary to be applied. Genetic algorithms are iterative adaptive global search algorithms, that di!er from more standard search algorithms (e.g. gradient methods, controlled random search, hill-climbing, simulated annealing, etc.) in that the search is conducted using the information of a population of structures instead of a direction of a single structure. * Corresponding author. E-mail addresses: davidg@baal.ulpgc.es (D. Greiner), gwinter@cicei.ulpgc.es (G. Winter), emperador@cicei.ulpgc.es (J.M. Emperador). 0168-874X/01/$ - see front matter 2001 Elsevier Science B.V. All rights reserved. PII: S 0 1 6 8 - 8 7 4 X ( 0 0 ) 0 0 0 5 4 - 8
Transcript of Optimising frame structures by different strategies of genetic algorithms

Finite Elements in Analysis and Design 37 (2001) 381}402
Optimising frame structures by di!erent strategiesof genetic algorithms
D. Greiner*, G. Winter, J.M. Emperador
Centro de Aplicaciones Nume& ricas en Ingeniern&a (CEANI), Campus de Taxra Baja, 35017,Universidad de Las Palmas de Gran Canaria, Spain
Abstract
Two frame structure optimisation problems are handled. Firstly, the constrained minimum-mass problem,for which both continuous and discrete cases with ideal (without buckling e!ect and its own gravitationalload) and real (with buckling e!ect and its own gravitational load) models are solved with several types ofgenetic algorithms. Results for the continuous case (ideal model) are compared with referenced solutions oftraditional optimisation methods. From state of the art, the chosen strategies include a generational geneticalgorithm, a steady-state genetic algorithm and the CHC algorithm.Moreover, we suggest one elitist strategylinked to the non-dominated sorting genetic algorithm (NSGA) to solve the multiobjective problem ofminimising simultaneously the number of di!erent cross-section types and the mass with several con-straints. � 2001 Elsevier Science B.V. All rights reserved.
Keywords: Continuous and discrete frame optimisation; Multiobjective optimisation; Elitist NSGA; CHC algorithm;Buckling e!ect
1. Preliminary considerations
It is well known that the optimisation problem of determining the minimum-mass frame isa problem that has many local minima, so a global optimisation method is necessary to be applied.Genetic algorithms are iterative adaptive global search algorithms, that di!er from more
standard search algorithms (e.g. gradient methods, controlled random search, hill-climbing,simulated annealing, etc.) in that the search is conducted using the information of a population ofstructures instead of a direction of a single structure.
*Corresponding author.E-mail addresses: [email protected] (D. Greiner), [email protected] (G. Winter), [email protected]
(J.M. Emperador).
0168-874X/01/$ - see front matter � 2001 Elsevier Science B.V. All rights reserved.PII: S 0 1 6 8 - 8 7 4 X ( 0 0 ) 0 0 0 5 4 - 8

The way operators are de"ned, the parameter settings they take, and the representation of thesearch space all contribute to the likely success of the algorithm. Many factors have in#uence onthe convergence rate, such as the population size, the parent selection scheme, crossover operatorapplying, mutation rate, forbidding of replicates, scaling procedures, etc [17].What is less well documented is the role the GA operators play in de"ning the nature of
a particular search space. Moreover, if by coincidence the structure imposed by the operatorshappens to align with some underlying features in the "tness landscape, then the algorithmperforms well. Conversely, a mismatch between operators and "tness landscape can produce poorresults. This fact has been shown to be true for all search methods: NFL Theorem. This result goesas far as to show that all search techniques are equivalent in terms of "nding a global optimumwhen viewed across the entire space of possible "tness functions. Once more this result serves toemphasise the importance of "nding a search algorithm that "ts a given search problem if goodresults are to be achieved.It is important to understand how each of these choices a!ects the genetic algorithm search, and
how each introduces some form of bias into the search trajectory favoured by a given algorithm.Testing the search problem from a number of views, will it be possible to gauge the relative successof results?Anyway some general considerations have been commonly accepted by genetic community from
theoretical studies and from solving many problems in di!erent "elds. To continue, we highlightsome of them to select and propose e$cient strategies.Firstly, about the encoding, if a good representation is chosen for the problem to be solved then
the algorithm e$ciency in terms of the search is improved dramatically. The most commonly usedrepresentations among evolutionary algorithms that use bit representations are standard binaryand standard binary re#ected Gray encodings. A &Gray code' is any bit representation that has theproperty that adjacent integers are also adjacent neighbours in the bit-neighbourhood hyper-cubegraph de"ned over the set of bit strings of length ¸, removing Hamming cli!s. Empirically, Graycoding usually results in better performance than using a standard binary coding when applyingvarious forms of genetic algorithms and neighbourhood search algorithms using common testfunctions [12].About selection, elitist strategies are based on copying the best individual of each generation into
the next one, where some/all parents are allowed to reproduce; thus, reducing the possibility thatthe best individual of the population may fail to produce o!spring in the next generation.GENITOR [15] was the "rst of the steady-state genetic algorithms, using a (�, 2) selection
strategy in terms of evolution strategies instead of (�, �) of the canonical genetic algorithm.O!spring replace the worse individuals in the population and "tness is assigned to rank, helping tomaintain a more constant selective pressure over the course of the search.As a small population can quickly be dominated by one member, CHC [14] stands for
cross-generational elitist selection having very aggressive search, heterogeneous recombinationand cataclysmic mutation. In the context of using small population, CHC selection uses randomselection, but restrictions are imposed on which strings are allowed to mate. Strings with binaryencodings must be a certain Hamming distance away from one another before they are allowed toreproduce. This form of &incest prevention' is designed to promote diversity. CHC explicitlyborrows from (�#�) strategy of evolution strategies: after recombination the � best uniqueindividuals are drawn from the parent population and o!spring population to create the next
382 D. Greiner et al. / Finite Elements in Analysis and Design 37 (2001) 381}402

generation. CHC is used for small populations. Eshelman uses HUX recombination (as uniformcrossover with exactly half of the di!erent bits being swapped during crossover). At the point wherethe population converges reproducing similar strings, CHC uses cataclysmic mutation, except thatthe best string is preserved intact.Uniform crossover is unbiased with respect to de"ning length; it is more disruptive than
one-point crossover. Their use with respect to one-point or two-point crossover is for smallpopulation helping to overcome the limited information capacity of smaller populations and thetendency for more homogeneity.Finally, the roulette wheel selection (RWS) scheme is a noisy one, existing other schemes with
lower variance, but with the same or approximately expectation, such as stochastic remainderselection with replacement or stochastic universal selection [16].
2. Proposed strategies of genetic algorithms
We propose the following three strategies to establish a comparative study of performanceaccording to the speci"c characteristic of the structural problem considered here. As a case ofsingle-objective algorithm, it is the optimisation problem of minimum-mass of frame structures.Weuse a small-intermediate population size of 50 individuals and a mutation rate of 3% as globalparameters. An MWC [5] random generator of 32 bits is used. The "tness function is scaledthrough ranking, in order to avoid premature domination of a possible superindividual andpremature stagnation and also to bene"t the evolution in the last generations. A relation betweenthe best and mean "tness of the population of two is done, according to Goldberg's proposal[7,18,2,3].
2.1. A generational genetic algorithm
As the "rst developed, in the generational strategy, the parent population as a whole, issubstituted by their children. With elitism, the two best individuals of each generation areconserved and inserted directly in the next generation. A one-point crossover is used, where thecross-position in the bit chromosome is selected through a uniform random variable. Selection isdone by the roulette wheel selection according to the selection probability of the individuals. Thecrossover probability is 0.8.
2.2. A steady-state genetic algorithm
In a steady-state genetic algorithm, only a few individuals are inserted in the populationsubstituting some of the parents } usually one or two } in each generation (two in this casesubstituting the worst individuals). Duplicates are not allowed in the population, so they areavoided in the initial population and also during the insertion in the evolving population across theexecution of the algorithm. A uniform crossover is used, where each bit position in the chromosomehas a uniform random probability to be crossed. Selection is done by the stochastic universalselection, according to the selection probability of the individuals. The crossover probability is 1.0.
D. Greiner et al. / Finite Elements in Analysis and Design 37 (2001) 381}402 383

2.3. The CHC algorithm
In the CHC algorithm, in each generation a children population is generated through a randomselection of the parents to be crossed and without mutation. Afterwards, truncation selection isapplied (it can be viewed as a (�#�) selection of evolution strategies). The crossover includesdynamic incest prevention, where it is allowed only if more than 25% of the bits of the parents aredi!erent, and can be diminished if the evolution is not satisfactory. A HUX crossover is used, whereexactly 50% of the reduced surrogated bits are crossed. A massive mutation is applied when thepopulation does not evolve, duplicating the best chromosome and 37% of the bits randomly#ipped (even completely random if it does not evolve).
3. Numerical results for the single-objective optimisation problem
The "tness function is evaluated through the direct sti!ness method and the following con-straints are applied (with 6% of structure mass penalty for each 10% violation, as Goldbergrecommends [7,18]): stresses of the bars, displacements of joints or middle points of bars, anda compressive slenderness limit of 200 to include the buckling e!ect. The evaluation of the � factor,is based on the Julian and Lawrence criteria applied in the EA-95 Spanish code.To compare the performance of genetic algorithms with other classical methods of optimisation,"rst we consider a continuous approximation of the problem, encoding the area of the bars andextracting the rest of the problem variables through a least-square evaluation that "ts the followingrelations of the IPE cross-section type de"ned in the EA-95 Spanish code [1]. (Interval encodingbetween 7.64�10�� and 155�10��m�).A continuous approximation of the relations for the IPE cross-section types among the area (A)
and moment of inertia (I), modulus of section (=), web area (A�) and the relation of beam height
(h1/h) has been considered using a least-squares approximation. The optimal are the exponentialones except in the case of h1/h which is a logarithmic one, with the following correlations: 0.99986,0.99987, 0.99887, respectively for I,=,A
�and h1/h: 0.95382 (versus the exponential approximation
correlation: 0.95161).The obtained relations are the following
I"0.78824A�������, ="0.72515A�������, A�
"0.24454A��,
h1/h"0.68749#0.03353 ln(A), versus the exponential one:0.69509A�����.
The relations founded in the referenced optimisation problem [4] are similar, but the web area is ofthe cross-section type that di!ers from a suitable one. Our newly obtained relations are generallymore unfavourable than the following referenced in [4]: I"0.7918A����; ="0.727A�����;A
�"0.0297A�����; h1/h"0.69541A����. The used coe$cients are "nally the last printed ones,
except for the web area, because it di!ers clearly from the own calculus. The referenced problem [4]considered here is shown in Fig. 1.In the "gure the distances are expressed in meters and there exists a constraint of maximal
displacement in the middle point of bar 2 of length/300"6.�
6 �10�� m. Its referenced solution [4],obtained after trying multiple starting points and considered as the optimal one is: by means of the
384 D. Greiner et al. / Finite Elements in Analysis and Design 37 (2001) 381}402

Fig. 1. Test case.
Table 1
Bar Referenced FD Own FD Referenced YC Own YC
1 192.08 189.43 227.36 227.162 105.84 106.82 70.56 105.643 234.22 233.24 235.2 235.494 195.02 195.41 213.64 219.52
feasible direction method (FD), mass of 3217 kg. improved with the yield criteria (YC) to a mass of3213kg.Where the comparing stresses have taken into account the axial and the shearing stresses by the
shear e!ort, supposed to be uniformly distributed along the cross-section type and also the bendinge!ort.The referenced solution has the following areas and comparing stresses for each one of the bars,
showing them with the comparing stresses of our direct sti!ness evaluation method for 200intermediate sections per bar (yield stress"235.2MPa) (See Table 1).The slight di!erences seen in the table could be caused by the least-squares approximation
coe$cients or by our stress hypothesis, where two critical points per section have been taken intoaccount: the intersection of the web and #ange planes; top face of the #ange and bottom face of the#ange.The values of medium span displacement obtained by our direct sti!ness method are:
6.6134�10��m for FD and 6.7072�10��m for YC (remember that the maximum limit ofl/300"6.
�
6 �10�� m.)The best solution achieved, without considering buckling e!ect and without its own gravi-
tational load (called ideal model) and respecting all the imposed constraints by the geneticalgorithm optimisation is a mass of 3118.27 kg (3% below the previous solutions). The detailedsections of each solution are described in Table 2.The Figs. 2}6, show the statistic results over 90 di!erent runs.The buckling e!ect has been considered taking into account the Spanish code EA-95 and based
on the calculations of Julian and Lawrence. Considering the frame sidesway permitted with
D. Greiner et al. / Finite Elements in Analysis and Design 37 (2001) 381}402 385

Table 2
Bar FD area(10��m�)
YC area(10��m�)
GA area(10��m�)
Comp. stressFD (MPa)
Comp. stressYC (MPa)
Comp. stressGA (MPa)
1 90.3 75.5 72.986 189.43 227.16 235.22 129.6 142.6 125.652 106.82 105.64 132.33 9.8 10.0 10.655 233.24 235.49 213.444 90.7 71.0 110.917 195.41 219.52 171.5Mass (kg) 3217 (1.032 of *1) 3213 (1.030 of *1) 3118.3 (*1)Control displace-ment (10��m)
6.6134 6.7072 6.66666
Fig. 2. Continuous optimisation, ideal model, mean of 90 cases (1).
buckling e!ect in all the bars, beams and columns, and considering its own gravitational load(called real model) the reached solution slightly di!ers with respect to the ideal model, as shown inTable 3.
3.1. Results for real model
Figs. 7}11 consider buckling e!ect and its own gravitational load (real model) in a sideswaypermitted frame and for all its bars.
386 D. Greiner et al. / Finite Elements in Analysis and Design 37 (2001) 381}402

Fig. 3. Continuous optimisation, ideal model, mean of 90 cases (2).
Fig. 4. Continuous optimisation, ideal model, best of 90 cases (1).
D. Greiner et al. / Finite Elements in Analysis and Design 37 (2001) 381}402 387
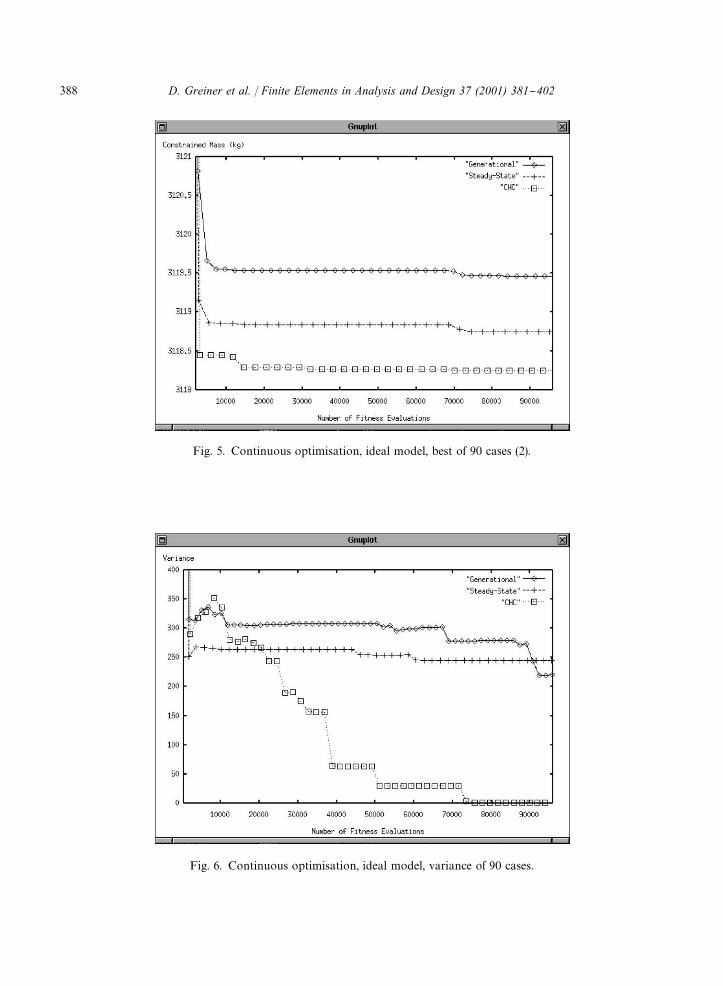
Fig. 5. Continuous optimisation, ideal model, best of 90 cases (2).
Fig. 6. Continuous optimisation, ideal model, variance of 90 cases.
388 D. Greiner et al. / Finite Elements in Analysis and Design 37 (2001) 381}402
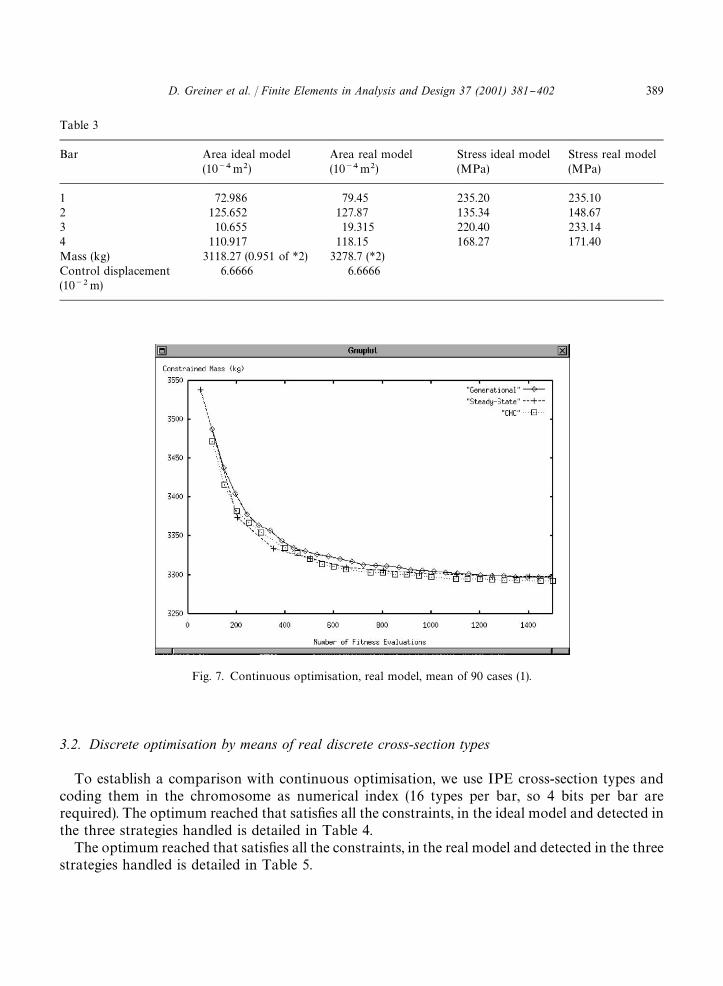
Table 3
Bar Area ideal model(10��m�)
Area real model(10��m�)
Stress ideal model(MPa)
Stress real model(MPa)
1 72.986 79.45 235.20 235.102 125.652 127.87 135.34 148.673 10.655 19.315 220.40 233.144 110.917 118.15 168.27 171.40Mass (kg) 3118.27 (0.951 of *2) 3278.7 (*2)Control displacement(10��m)
6.6666 6.6666
Fig. 7. Continuous optimisation, real model, mean of 90 cases (1).
3.2. Discrete optimisation by means of real discrete cross-section types
To establish a comparison with continuous optimisation, we use IPE cross-section types andcoding them in the chromosome as numerical index (16 types per bar, so 4 bits per bar arerequired). The optimum reached that satis"es all the constraints, in the ideal model and detected inthe three strategies handled is detailed in Table 4.The optimum reached that satis"es all the constraints, in the real model and detected in the three
strategies handled is detailed in Table 5.
D. Greiner et al. / Finite Elements in Analysis and Design 37 (2001) 381}402 389

Fig. 8. Continuous optimisation, real model, mean of 90 cases (2).
Fig. 9. Continuous optimisation, real model, best of 90 cases (1).
390 D. Greiner et al. / Finite Elements in Analysis and Design 37 (2001) 381}402

Fig. 10. Continuous optimisation, real model, best of 90 cases (2).
Fig. 11. Continuous optimisation, real model, variance of 90 cases.
D. Greiner et al. / Finite Elements in Analysis and Design 37 (2001) 381}402 391

Table 4
Bar Cross-section type Comparative stress (MPa)
1 IPE } 330 233.24 Mass (kg) 3175.952 IPE } 500 160.43 Control displacement (10�2m) 6.6323 IPE } 400 138.384 IPE } 450 181.20
Table 5
Bar Cross-section type Comparative Stress (MPa)
1 IPE } 330 230.99 Mass (kg) 3324.32 (*3)2 IPE } 500 178.16 Control displacement (10�2m.) 6.6083 IPE } 450 132.594 IPE } 500 164.44
It should be remarked, that even this genetic algorithm discrete solution surpasses the continu-ous one of traditional optimisation referenced, which means the "nding of a local optimum notdetected in those cases. Moreover, if we approximate the genetic algorithm continuous solution (i.e.real model) with IPE discrete cross-section types by excess, it constitutes the 42nd discrete solutionthat satis"es the constraints by mass ordering (among a global set of solutions of65535"2� ����*� ��������"2��) with a mass of 3492.9 kg, (1.05 of *3) showing the need for an e$cientdiscrete optimisation method.Figs. 12}19 present the evolutionary comparison of the three strategies proposed, with and
without the use of Gray coding, for both ideal and real models.Comparing the statistical graphs between continuous and discrete cases, as a general remark it
should be noted that in the continuous case (with a greater search space), the capacity ofexploration of the CHC algorithm beats the other ones at the "nal stage. However, in the discretecase (where the search space is considerably smaller) the capacity of exploitation of the steady-statealgorithm, which reaches the optimum location "rst, wins.
4. Introduction to the multiobjective problem
The minimisation of the number of di!erent cross-section types in large structures is importantfor constructive requirements. Because of that, we propose to solve under a multiobjectivecontext both the minimum-mass problem and the minimisation of the number of cross-sectiontypes.The interaction among di!erent objectives leads to a set of compromised solutions, largely
known as the Pareto-optimal solutions [8]. Our objective is to "nd solutions close to the truePareto-optimal solutions and to "nd solutions that are di!erent from each other.
392 D. Greiner et al. / Finite Elements in Analysis and Design 37 (2001) 381}402

Fig. 12. Discrete optimisation, ideal model, mean of 90 cases (1).
Fig. 13. Discrete optimisation, ideal model, mean of 90 cases (2).
D. Greiner et al. / Finite Elements in Analysis and Design 37 (2001) 381}402 393

Fig. 14. Discrete optimisation, ideal model, best of 90 cases.
Fig. 15. Discrete optimisation, ideal model, variance of 90 cases.
394 D. Greiner et al. / Finite Elements in Analysis and Design 37 (2001) 381}402

Fig. 16. Discrete optimisation, real model, mean of 90 cases (1).
Fig. 17. Discrete optimisation, real model, mean of 90 cases (2).
D. Greiner et al. / Finite Elements in Analysis and Design 37 (2001) 381}402 395

Fig. 18. Discrete optimisation, real model, best of 90 cases.
Fig. 19. Discrete optimisation, real model, variance of 90 cases.
396 D. Greiner et al. / Finite Elements in Analysis and Design 37 (2001) 381}402

The main problem in using classical search and optimisation methods is that these algorithmscannot "nd multiple solutions in a single run. However, evolutionary search algorithms haveproved in the last few years to be very e$cient due to the use of a population of solutions in theirsearch, thereby, multiple Pareto-optimal solutions can be found in one single run [11].The Srinivas and Deb [6] non-dominated sorting genetic algorithm, suggested in [7], varies from
a simple genetic algorithm only in the way the selection operator is used. The crossover and mutationoperators remain as usual. The classical "tness function is substituted by a ranking value. To all thenon-dominated members, a rank of one is assigned and then removed from the population. Thenon-dominated members in the remaining part of the population are then assigned a rank of two andthis process is continued until the entire population is ranked. To each individual is then assigneda "tness value based on its non-domination ranking (a solution x� is said to dominate the othersolution x� if both the following conditions are true: (a) The solution x� is no worse than x� in allobjectives and (b) the solution x� is strictly better than x� in at least one objective).At each ranked front a sharing process is applied to maintain diversity in the population. First,
for each i solution, a normalised phenotypic Euclidean distance measure is computed:
d��
"�������
x��!x�
�x��!x
��
�,
whereP is the number of variables in the problem and x��and x
�are the upper and lower bounds of
variable x�. The sharing function is computed then by comparing d
��with a pre-speci"ed parameter
�����
:
Sh(d��)"�
1!�d��
�����
��
if d��
)�����
,
0 otherwise..
This process is repeated until all the points in the front are taken into account and then, the nichecount for the ith solution is calculated as follows: m
�"���
���Sh(d
��). This count is used to rank the
solutions of the same front. The process continues for each solution of the front and for each front.The �
����parameter can be calculated as follows [9]: �
����"0.5/ �q, where in our case q"4
(number of optima to obtain) and P"6�4"24 (number of phenotypic variables, six per bar),then �
����"0.471937.
Inspired by Tsutsui and Fujimoto [10,13], the inclusion of some kind of elitism in the NSGAalgorithm is proposed. So the next generation is formed with the inclusion of the half best childrenin terms of ranking domination in the parental population, keeping its half bests in terms ofranking domination. Some kind of duplicates elimination in the process of populations merging isalso recommended. Moreover, the constraint term is multiplied by two in order to prevent theoptimal solutions from having non-zero constraints as happens in the previous case. The probabil-ity of crossover is therefore 1.0.
5. Numerical results for the multiple optimisation problem
With all that, results are improved in the optimal front of solutions, achieving the Pareto front,that is localised in its optimal points in all the "ve cases executed, both considering ideal or real
D. Greiner et al. / Finite Elements in Analysis and Design 37 (2001) 381}402 397

Table 6
Bar Cross-section type Comp. stress (MPa)
For N"41 IPE } 330 233.242 IPE } 500 160.433 IPE } 400 138.384 IPE } 450 181.20Mass (kg) 3175.95Control displacement (10��m) 6.632
For N"31 IPE } 360 224.222 IPE } 500 157.883 IPE } 300 150.234 IPE } 500 159.94Mass (kg) 3225.85Control displacement (10��m) 6.726
For N"21 IPE } 360 206.392 IPE } 500 153.273 IPE } 360 136.614 IPE } 500 155.33Mass (kg) 3280.67Control displacement (10��m) 6.392
For N"11 IPE } 500 105.252 IPE } 500 176.113 IPE } 500 84.084 IPE } 500 145.43Mass (kg) 3824.52Control displacement (10��m) 5.670
model, until the "nal population (without elitism the optimum if founded, could be lost during theevolutionary process). The population size is 100 individuals, the "nal generation is number 100,the probability of mutation is 0.8%, N being the number of di!erent cross-section types:Optional Pareto front for ideal model (see Table 6).Optional Pareto front for real model (see Table 7).Final fronts from "ve executions for ideal and real models, without and with elitism are shown in
Figs. 20}23.
6. Conclusions
It has been shown through the statistical "gures (di!erent mean, best and variance resultsfrom a set of independent executions of various evolutionary strategies), that the selection of
398 D. Greiner et al. / Finite Elements in Analysis and Design 37 (2001) 381}402
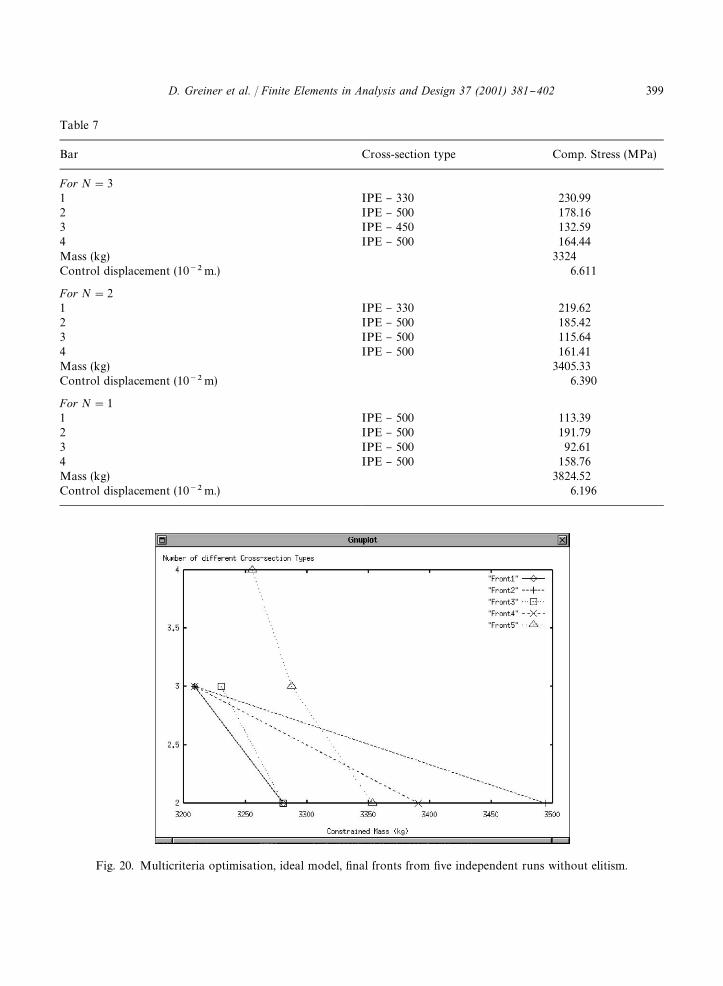
Table 7
Bar Cross-section type Comp. Stress (MPa)
For N"31 IPE } 330 230.992 IPE } 500 178.163 IPE } 450 132.594 IPE } 500 164.44Mass (kg) 3324Control displacement (10��m.) 6.611
For N"21 IPE } 330 219.622 IPE } 500 185.423 IPE } 500 115.644 IPE } 500 161.41Mass (kg) 3405.33Control displacement (10��m) 6.390
For N"11 IPE } 500 113.392 IPE } 500 191.793 IPE } 500 92.614 IPE } 500 158.76Mass (kg) 3824.52Control displacement (10��m.) 6.196
Fig. 20. Multicriteria optimisation, ideal model, "nal fronts from "ve independent runs without elitism.
D. Greiner et al. / Finite Elements in Analysis and Design 37 (2001) 381}402 399

Fig. 21. Multicriteria optimisation, real model, "nal fronts from "ve independent runs without elitism.
Fig. 22. Multicriteria optimisation, Ideal Model, "nal fronts from "ve independent runs with elitism.
400 D. Greiner et al. / Finite Elements in Analysis and Design 37 (2001) 381}402

Fig. 23. Multicriteria optimisation, real model, "nal fronts from "ve independent runs with elitism.
appropriated strategies of genetic algorithms according to the nature of the treated problem isimportant in order to reach high performance. In the continuous monocriteria optimisation case,with a larger search space, the high explorative capacity of the CHC algorithm in the "nal stagesbeats the other tested strategies. In the discrete monocriteria optimisation case, with a smallersearch space, the intense exploitative capacity in the initial stages of the steady-state strategy beatsthe other tested strategies.Even in small frames, genetic algorithms are an alternative to the traditional optimisation
methods. The characterisation of genetic algorithms as global optimizers allows them to "ndsolutions that for traditional methods (local optimizers) could be di$cult to achieve, which isdemonstrated in the continuous ideal model case: the GA continuous solution is about 3% betterthan the traditional ones.Moreover, the discrete upper approximation of the evolutionary continuous solution frame is
not a good discrete solution (i.e. there are 41 better solutions in the discrete real model case). So, itshows the need for a discrete optimisation method that the genetic algorithms can provide.About the encoding of the structural problem, "gures reveal that the use of Gray code seems to
be an improvement with respect to standard binary code in the discrete case of frame optimisation,allowing better convergence curves, particularly in its best strategy: the steady-state.The nondominated sorting genetic algorithm (NSGA) has been tested, showing its suitability to
solve the structural discrete multicriteria problem treated (optimising constrained mass andnumber of di!erent cross-section types). Its correct behaviour in a discrete problem has beenproved, forming multiple Pareto-optimal solutions in one single run. Results of the test caseshighlight how elitism with some duplicates elimination implies a drastic improvement tool in theNSGA e$ciency.
D. Greiner et al. / Finite Elements in Analysis and Design 37 (2001) 381}402 401

We can conclude that the properties of genetic algorithms as global, discrete and multicriteriaframe optimizers (shown through the results of the present paper), make them a powerful tool forthe engineering and design of frame structures.
References
[1] D. Greiner, G. Winter, J.M. Emperador, Genetic algorithm application in plane frame optimisation problems,P.F.C. E.T.S.I.Industriales ULPGC, 2000.
[2] M. Galante, Genetic algorithms as an approach to optimise real-world trusses, Int. J. Numer. Methods Eng. 39(1996) 361}382.
[3] M. Galante, Asimple genetic algorithm for plane trusses optimisation, Rev. Int. Met. Num. Para Calc. Disen� o Ing.9 (2) (1993) 179}199.
[4] S. Hernandez Iban� ez, Methods for optimum design of structures, ColeccioH n Seinor. Colegio de Ingenieros deCaminos, Canales y Puertos, Madrid, 1990.
[5] G. Winter, M. GalaH n, P. Cuesta, D. Greiner, Genetic algorithms: a stochastic improvement technique. Tools, skills,pitfalls and examples, Genetic Algorithms in Engineering and Computer Science (EUROGEN 1995), Wiley, NewYork.
[6] N. Srnivas, K. Deb, Multiobjective optimisation using non-dominated sorting in genetic algorithms, Evol. Compu.2 (3) (1995) 221}248.
[7] D.E. Goldberg, Genetic algorithms for Search, Optimisation, and Machine Learning, Addison-Wesley, Reading,MA, 1989.
[8] V. Chankong, Y. Haimes, Multiobjective Decision Making Theory and Methodology, North-Holland, New York,1983.
[9] K. Deb, D.E. Goldberg, An investigation of niche and species formation in genetic function optimisation,Proceedings of the Third International Conference on Genetic Algorithms, 1989.
[10] S. Tsutsui, Y. Fujimoto, Forking genetic algorithms with blocking and shrinking modes (fGA), Proceedings of the"fth International Conference on Genetic Algorithms, Morgan Kaufmann Publishers, Inc San Mateo, 1993, (pp.206}213).
[11] K. Deb, Evolutionary algorithms for multi-criterion optimisation in engineering design, Evolutionary Algorithmsin Engineering and Computer Science (EUROGEN 1999), Wiley, New York.
[12] D. Whitley, S. Rana, R. Heckendorn, Representation issues in neighbourhood search and evolutionary algorithms,Genetic Algorithms and Evolution Strategies in Engineering and Computer Science (EUROGEN 1997), WileyNew York.
[13] S. Obayashi, Pareto Genetic Algorithm for Aerodynamic Design Using the Navier-Stokes Equations GeneticAlgorithms and Evolution Strategies in Engineering and Computer Science (EUROGEN 1997), Wiley, New York.
[14] L. Eshelman, J.D. Scha!er, Preventing premature convergence in genetic algorithms by preventing incest, Proceed-ings of the Fourth International Conference on Genetic Algorithms, 1991, pp. 115}121.
[15] D. Whitley, The GENITOR algorithm and selection pressure: why rank-based allocation of reproductive trials isbest, Proceedings of the Third International Conference on Genetic Algorithms, 1989, pp. 116}121.
[16] S. W. Mahfoud, Niching methods for genetic algorithms, Illegal Report no. 95001, 1995.[17] L. Davis, Handbook of Genetic Algorithms, Van Nostrand Reinhold, New York, 1991.[18] D. Goldberg, M. P. Santani, Engineering optimization via genetic algorithm, Proceedings of the Ninth Conference
On Electronic Computation, ASCE, New York, 1986, pp. 471}482.
402 D. Greiner et al. / Finite Elements in Analysis and Design 37 (2001) 381}402




















