
Concentration and Lack of Observability¶of Waves in Highly Heterogeneous Media

Observability analysis and restoration for systems with conventionaland phasor measurements
George N. Korres*,† and Nikolaos M. Manousakis
School of Electrical and Computer Engineering, National Technical University of Athens, 9, Iroon Polytechneiou Street,Zografou 15780, Athens, Greece
SUMMARY
This paper presents an efficient and fast method, using topological and numerical procedures, forobservability analysis in state estimation with phasor measurement units as well as conventional (SCADA)measurements. Power and current flow measurements are used to build topologically flow islands that, inturn, are used to construct a reduced network and an associated gain matrix. To build this reduced order gainmatrix, boundary power injections, and voltage phasors at flow islands are considered. Observabilitychecking is carried out analyzing the pivots encountered during the triangular factorization of the gain ma-trix, and the observable islands are identified in a noniterative manner, by performing back substitutionswith its triangular factors. Additional measurements that will render the system barely observable aredirectly provided, using the triangular factors of a reduced Gram matrix associated with existing andcandidate power injections and candidate phasor measurements at boundary buses of observable islands.The dimension of the gain and Gram matrix is equal to the number of flow islands and boundarymeasurements, respectively, which is relatively low even for very large systems, and that makes theproposed algorithms fast and computationally efficient. The IEEE 14 and 30-bus systems are used toillustrate the steps of the proposed algorithms. Copyright © 2012 John Wiley & Sons, Ltd.
key words: observability analysis; phasor measurement units; conventional measurements; flow islands;observability restoration; Gram matrix
1. INTRODUCTION
The ability to perform state estimation depends on the measurement system observability. When there areadequate measurements well distributed throughout the network, so that the state of the whole system canbe obtained by a static state estimator, the system is considered to be observable. Traditional stateestimators process measurements provided by SCADA (power flows and injections, and bus voltagemagnitudes). If a power system is unobservable, observable islands are identified and a minimal set ofmeasurements that make the entire network observable has to be provided.Observability algorithms for power system state estimation can be classified as topological, [1–6],
numerical, [7–21], and hybrids, [22–24]. The topological algorithm [1] is based on building a spanningtree of full rank. In [2], the largest observable subsystems of an unobservable system are obtained byextending the procedure of [1]. A combined observability/measurement placement algorithm is pre-sented in [3], based on concepts of [1]. A unified topological approach is proposed in [4] to identifythe pseudo measurements which restore observability, while safeguarding the reliability of the finaldatabase against the introduced pseudo measurement errors. Reference [5] identifies an observablespanning tree using an algorithm based on matroid intersections. An algorithm based on building amaximal forest of full rank is presented in [6]. The numerical algorithms in [7,8] are based on thetriangular factorization of the gain matrix. Observable islands are determined by an iterative scheme.
*Correspondence to: George N. Korres, School of Electrical and Computer Engineering, National Technical Universityof Athens, 9, Iroon Polytechneiou Street, Zografou 15780, Athens, Greece.†E-mail: [email protected]
Copyright © 2012 John Wiley & Sons, Ltd.
EUROPEAN TRANSACTIONS ON ELECTRICAL POWEREuro. Trans. Electr. Power (2012)Published online in Wiley Online Library (wileyonlinelibrary.com). DOI: 10.1002/etep.1684

For measurement placement, one candidate boundary injection is placed at a time, each time updatingthe observable islands, until enough candidates are placed to merge all observable islands together.The above numerical approach is extended to state estimation with equality constraints [9] and theHachtel’s based methods [10]. A direct (noniterative) numerical algorithm, using the triangular factorsof the gain matrix, is presented in [11] to determine the observable islands and in [12] for multiplemeasurement placement to restore observability. Reference [13] presents numerical algorithms to de-termine observable islands and restore observability, transforming the measurement Jacobian matrixby Gaussian elimination. In [14], the procedure of [12] is extended for Hachtel’s based state estima-tion. In [15], a direct numerical method is presented for observability analysis and restoration usingthe Gram matrix factorization. In [16,17], a pivoting algorithm is proposed to calculate the null spaceof the Jacobian matrix. A technique for observability checking, based on Gaussian elimination and bi-nary arithmetic, is provided in [18]. An algebraic approach to observability checking and restoration isproposed in [19], based on transferring rows to columns and vice versa in the Jacobian measurementmatrix. An iterative numerical method placing multiple measurements in each iteration is developed in[20]. Furthermore, binary integer programming is implemented as part of the algorithm to optimize theselection of the measurements. The noniterative multiple measurement placement algorithm [21],which allows the identification of measurements for observability restoration in a single step, relieson the Cholesky factors of a Gram matrix associated with a reduced order Jacobian. The low dimen-sionality of the Gram matrix makes the method fast and computationally efficient. In [22], a hybrid to-pological/numerical method is proposed for network observability, where flow measured branchesform flow islands that determine a reduced network and numerical techniques are then applied for ob-servability purposes. In [23,24] hybrid observability analysis procedures are presented, based on graphproperties of the entire and a reduced network, respectively, and echelon forms of corresponding testmatrices.More recently, phasor measurement units (PMU) have started to become available. A PMU, unlike
traditional measurements, can measure the voltage phasor at its associated bus and the current phasorsat all incident branches to that bus. Several algorithms have been published in the literature for PMUplacement, with or without the presence of traditional measurements. These methods are mainly usedfor measurement system planning purposes. Algorithm [25] finds the minimal set of PMUs for place-ment, by using graph theory and simulated annealing method. Simulated annealing method is used in[26] to solve the problem of communication-constrained PMU placement, based on incomplete ob-servability. A minimum number of strategically located PMUs is selected in [27] to improve the baddata processing capability of state estimation. Α generalized ILP formulation under full and incompleteobservability, considering situations with and without zero injections, is presented in [28]. A method todetermine the minimum number of PMUs that make a system topologically observable for normal op-erating conditions, as well as for single branch outages, is presented in [29]. Besides the placement ofmere PMUs, algorithm [30] also considers the placement of PMUs when conventional measurementsare present in the system.In this paper, a direct numerical method is proposed for observability checking, identification of ob-
servable islands, and observability restoration, in a system including PMUs as well as conventionalmeasurements. The paper is organized as follows. Section 2 presents the measurement Jacobian andobservability checking algorithm. Section 3 presents the basics of the reduced model theory. Section 4presents a noniterative algorithm, based on the gain matrix of the reduced network, to identify theobservable islands. Section 5 presents a multiple measurement placement algorithm for observabilityrestoration, based on the Gram matrix of a reduced order Jacobian. In Section 6, the IEEE 14 and30-bus systems are used to demonstrate the steps of the proposed method, and Section 7 concludesthe paper.
2. MEASUREMENT JACOBIAN AND OBSERVABILITY CHECKING
Network observability analysis can be carried out using the linearized measurement model:
Δz ¼ HΔxþ e (1)
G. N. KORRES AND N. M. MANOUSAKIS
Copyright © 2012 John Wiley & Sons, Ltd. Euro. Trans. Electr. Power (2012)DOI: 10.1002/etep

where, Δz is the mismatch between the measured and calculated data, Δx is the incremental change inthe state vector, H is the measurement Jacobian matrix, and e is a Gaussian error vector, with zeromean and diagonal covariance matrix. The state vector components are the bus voltage phase anglesand magnitudes. The measurement vector consists of active and reactive power flows and injections,and bus voltage magnitudes, provided by SCADA, as well as bus voltage and branch current phasors,provided by PMUs. A PMU located at any bus can measure the phasor voltage of that bus (magnitudeand angle) and as many as needed phasor currents (magnitude and angle) of branches emanating fromthat bus. The linearized decoupled measurement Jacobian can be written as [1]:
H ¼ HPd 00 HQV
� �(2)
where sub-JacobiansHPd and HQV of the P� d and Q�V subproblems, respectively, have the followingform:
HPd ¼ HPd;e
HPd;v
� �¼
@Pij
@d@Pi
@d@Iij;r@d@di@d
0BBBBBBBB@
1CCCCCCCCA
¼
⋯ di ⋯ dj ⋯ dk ⋯⋮ ⋮ ⋮�bij ⋯ bij� bij þ bik þ⋯� �
⋯ bij ⋯ bik�bij ⋯ bij⋮ ⋮ ⋮⋮1⋮
0BBBBBBBBBBBB@
1CCCCCCCCCCCCA
⋮Pij
Pi
Iij;r⋮⋮di⋮
(3)
HQV ¼ HQV;e
HQV;v
� �¼
@Qij
@V@Qi
@V@Iij;i@V@Vi
@V
0BBBBBBBB@
1CCCCCCCCA
¼
⋯ Vi ⋯ Vj ⋯ Vk ⋯⋮ ⋮ ⋮bij ⋯ �bijbij þ bik þ⋯� �
⋯ �bij ⋯ �bikbij ⋯ �bij⋮ ⋮ ⋮⋮1⋮
0BBBBBBBBBBBB@
1CCCCCCCCCCCCA
⋮Qij
Qi
Iij;i⋮⋮Vi
⋮
(4)
where, bij is the susceptance of branch i� j, Pij (Qij) is the active (reactive) power flow at end i of branchi� j, Pi (Qi) is the active (reactive) power injection at bus i, Iij,r (Iij,i) is the real (imaginary) part of thecurrent phasor at end i of branch i� j, di (Vi) is the phase angle (magnitude) of voltage phasor atbus i, and j, k, . . . are the buses connected with bus i. Since the system observability is independentof the branch parameters, we assume that bij=� 1 for all branches i� j.If no PMUs exist in the system, then an artificial zero phase angle measurement is introduced at the
reference bus, without excluding that bus from problem formulation. In order to simplify the notation,we will drop the distinction between the equivalent P� d and Q�V observability subproblems and willuseH to refer to eitherHPd orHQV. The measured power system is said to be observable iffH has full rank.
rank Hð Þ ¼ n , nullity Hð Þ ¼ 0 (5)
3. THE REDUCED MODEL CONCEPT
Assume that a measured power system S is divided in r non-overlapping observable subsystems Sispanning the entire system and the measurements are classified accordingly as internal and boundary,as shown in Figure 1.
OBSERVABILITY ANALYSIS FOR SYSTEMS WITH PMU AND SCADA MEASUREMENTS
Copyright © 2012 John Wiley & Sons, Ltd. Euro. Trans. Electr. Power (2012)DOI: 10.1002/etep

The Jacobian matrix H can be written in singly block bordered form as:
H ¼
H1
H2
⋱Hr
Hb
0BBB@
1CCCA ¼
H1
H2
⋱Hr
Hb1 Hb2 ⋯ Hbr
0BBBB@
1CCCCA (6)
where the rows of Hb are associated with boundary power flows, power injections, and current phasors,and the rows of Hi correspond to voltage phasors, internal power flows, power injections, and currentphasors in subsystem Si.Consider a reduced order network, whose “supernodes” i are represented by subsystems Si and
“branches” i� j by unobservable branches between subsystems Si and Sj, and a reduced order Jacobianmatrix Wb, containing the boundary measurements as well as all the voltage measurements. Aboundary injection (2Hb) at a subsystem Si connected to boundary buses of subsystems Sj(j 6¼ i) istransformed to the sum of flows on “branches” i� j. A power or current flow (2Hb) on an unobserv-able branch connecting subsystems Si and Sj is transformed to power or current flow on “branch” i� j.All voltage measurements (2Hi) in observable subsystem i are transformed to one equivalent voltagemeasurement at “supernode” i. The rank deficiency of the Jacobian matrix H can be decided by therank deficiency of the reduced r� r Jacobian matrix Wb (APPENDIX A):
nullity Hð Þ ¼ nullity Wbð Þ (7)
The procedure of [3] is used to build topologically the flow islands, which are the maximalconnected subgraphs formed by power and current flow measured branches. If two neighbouring flowislands have both voltage measurements, their union is also observable according to Lemma A.1 inAPPENDIX A. By applying this procedure to all voltage measured flow islands, a minimum initialset of observable subsystems is formed. The rank deficiency of matrix Wb is computed by checkingthe number of pivots in the Cholesky factors of the positive semi-definite gain matrix:
Gb ¼ WTb Wb ¼ LDLT (8)
Figure 1. Power system partitioning in observable subsystems.
G. N. KORRES AND N. M. MANOUSAKIS
Copyright © 2012 John Wiley & Sons, Ltd. Euro. Trans. Electr. Power (2012)DOI: 10.1002/etep

where D is a diagonal matrix and L is a unit lower triangular matrix. The number p of zero diagonals inD is equal to the rank deficiency of Wb [31]. If p= 0 (p> 0), the system is observable (unobservable).Example: The IEEE 14 bus system and the mixed conventional and phasor measurement configuration of
Figure 2 is used to illustrate the detection of the observable subsystems for observability checking. Themeasurement system consists of power flows at branches 1–2, 2–5, 3–4, 6–13, power injections at buses7, 9, and PMUs at buses 1, 10, 12. The PMU at bus 1 measures voltage phasor of bus 1 and current phasorsat branches 1–2, 1–5, PMU at bus 10 measures voltage phasor of bus 10 and current phasors atbranches 10–9, 10–11, and PMU at bus 12 measures voltage phasor of bus 12 and current phasorsat branches 12–6, 12–13. By topological processing of power and current flow measured branches1–2, 1–5, 2–5, 3–4, 6–13, 10–9, 10–11, 12–6, 12–13, seven flow islands are formed, as shown inFigure 2: {6, 12, 13}, {1, 2, 5}, {9, 10, 11}, {14}, {8}, {7}, and {3, 4}. Neighbouring flow islands1, 2, and 3, have voltage measurements at buses 12, 1, and 10, respectively, and they are merged intoone observable subsystem. Thus, five observable subsystems (r=5) will be considered for observabilitychecking: {1, 2, 5, 6, 9, 10, 11, 12, 13}, {14}, {8}, {7}, and {3, 4}.
4. IDENTIFICATION OF MAXIMAL OBSERVABLE ISLANDS
After having computed the LDLT factors of Gb, we can determine the maximal observable islands bycomputing the kth column ck of L
� T through back substitutions for those k ’ s for which dkk= 0:
LTck ¼ ek (9)
where ek is a vector with all entries zero except for a 1.0 as its kth entry.Form the matrix C composed of column vectors ck and compute the product AC, where A is the
branch-to-node incidence matrix. If at least one entry in a row of AC is not zero, then the
Figure 2. Power system divided in flow islands and observable subsystems.
OBSERVABILITY ANALYSIS FOR SYSTEMS WITH PMU AND SCADA MEASUREMENTS
Copyright © 2012 John Wiley & Sons, Ltd. Euro. Trans. Electr. Power (2012)DOI: 10.1002/etep

corresponding branch is unobservable [11]. Notice that if a row of A is associated with a branch be-tween supernodes i and j, the corresponding row of product Ack is equal to ck,i� ck,j, where ck,i(ck,j)is the ith(jth) entry of vector ck; if ck,i� ck,j 6¼ 0 the branch i� j is unobservable. Thus, we need notto explicitly compute and store matrices A and AC: once a column vector ck is obtained, comparethe entries ck,i and ck,j of ck, for every branch i� j; if ck,i 6¼ ck,j then the branch i� j is unobservableand is eliminated from the set of branches. By repeating this procedure for each of the p zero pivots,all unobservable branches are defined and removed, and the resulting connected subnetworks will bethe maximal observable islands.It is to be noted that for a measured system composed of PMUs only, the maximal observable
islands coincide with the r observable subsystems obtained topologically for observability checking.
5. OBSERVABILITY RESTORATION
The objective of the observability restoration problem is to select a set of measurements to restore theglobal observability of the system without modifying the estimated state of the observable islands. Thiscan be achieved only if all the placed measurements are nonredundant with respect to the existing mea-surements. The type of measurements having such property are the so-called critical measurements[20]. The number of added measurements will be exactly equal to the rank deficiency p of the measure-ment Jacobian H.Although a PMU can be installed at any bus in an observable island, instead of just the boundaries,
to merge that island to the rest of the system, it is not fully exploited since the current phasors along allthe branches incident to the bus are redundant with the internal measurements of that island and cannotcontribute to observability restoration. Thus, only measurements that are at unmeasured boundarybuses of observable islands can be efficiently used for placement. It is to be noted that different setsof nonredundant measurements are provided by changing the order in which they are processed. Can-didate conventional pseudo measurements are typically bus injections, and they are chosen from the setof forecasted loads and/or scheduled outputs of generators. The order by which candidate boundaryinjections will be processed is according to their accuracy. For a candidate boundary PMU, only thebus voltage and the current flows along the incident unobservable branches (branches that connectobservable islands) will be processed for placement, since the current flows at branches incident tointernal buses are redundant with the existing internal measurements. The individual nonredundantvoltage or current measurements chosen for restoration may belong to one or more PMUs. One mayalso add some or all the unused measurements of the associated PMUs to increase the measurementredundancy. Note that the order in which the candidate PMUs and the associated voltage and currentmeasurements are processed affects the number of placed PMUs but not the total number of individualphasor measurements. In order to minimize the number of required PMUs, the PMUs which are notadjacent to existing PMU-buses and have the maximum number of adjacent unobservable branchesare ordered first in the candidate list.Let t be the number of maximal observable islands in an unobservable system. If H is the Jacobian
matrix of the existing measurements and Hc is the Jacobian matrix of the candidate measurements, wehave:
nullityHHc
� �¼ nullity
Wb
Wc
� �(10)
where Wb is the reduced Jacobian corresponding to existing measurements (voltages and boundaryinjections at maximal observable islands) and Wc is the reduced Jacobian corresponding to candidatemeasurements (voltage phasors and current phasors at unobservable branches associated withboundary PMUs and boundary injections). Equation (10) implies that all information about observability
restoration can be obtained from the reduced JacobianWb
Wc
� �. Let Mbc be the Gram matrix [32] associ-
ated with matrixWb
Wc
� �:
G. N. KORRES AND N. M. MANOUSAKIS
Copyright © 2012 John Wiley & Sons, Ltd. Euro. Trans. Electr. Power (2012)DOI: 10.1002/etep

Mbc ¼ Wb
Wc
� �Wb
Wc
� �T
(11)
From linear algebra [31], we have that:
rank Mbcð Þ ¼ rankWb
Wc
� �¼ t � nullity
Wb
Wc
� �(12)
From Equations (10) and (12) we conclude that the network becomes globally observable if
nullityWb
Wc
� �¼ 0 and consequently if Mbc has full rank:
rank Mbcð Þ ¼ t (13)
By triangular factorization, we obtain the LDLT factors of Mbc. If the kth diagonal entry of D is zero(nonzero), then the kth row ofMbc is linearly dependent (independent) from the set of rows 1, . . ., k� 1of Mbc [32] and the kth measurement is redundant (non-redundant) with respect to the previous k� 1measurements. Candidates associated with nonzero diagonals of D are chosen for placement, untilthe number of selected measurements reaches p. In [21], a comparison of the proposed restorationprocedure with existing direct numerical methods [12,13,15] shows that fewer arithmetic operationsare needed and that leads to significant savings in computational effort.
6. NUMERICAL RESULTS
The proposed algorithms are tested with the IEEE 14 and 30 bus systems.
6.1. IEEE 14 bus system
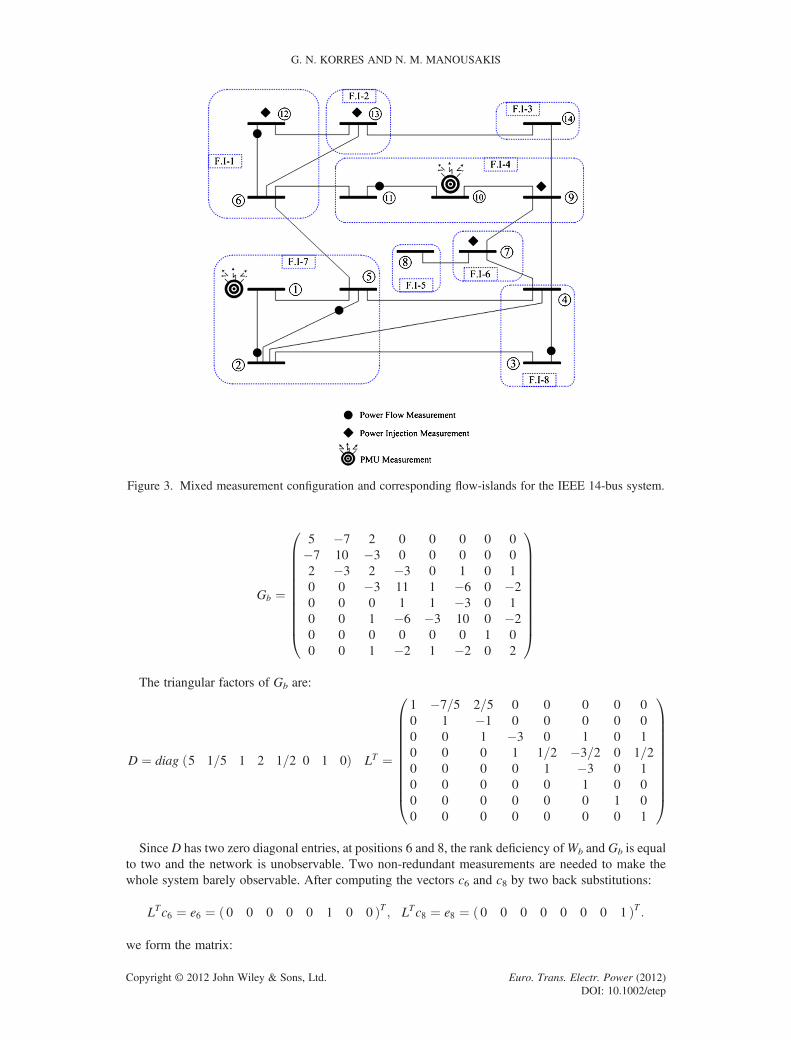
The IEEE 14 bus system and a mixed conventional and phasor measurement configuration are shownin Figure 3. Conventional power flows are located at branches 2–1, 3–4, 5–2, 11–10, and 12–6, con-ventional power injections at buses 7, 9, 12, and 13, and PMUs at buses 1 and 10. The PMU at bus 1measures the voltage phasor of bus 1 and the current phasors of branches 1–2, and 1–5 and the PMU atbus 10 measures the voltage phasor of bus 10 and the current phasors of branches 10–9 and 10–11. Bytopological processing of the branch power flows and currents, eight flow islands (r = 8) are formed, asshown in Figure 3: {6, 12}, {13}, {14}, {9, 10, 11}, {8}, {7}, {1, 2, 5}, and {3, 4}. No further unionsof flow-islands into larger observable subsystems are possible, since there is no direct interconnectionbetween the voltage measured flow islands 4 and 7. Based on the flow islands, we form the reducedJacobian matrix Wb(6� 8), associated with boundary injections P7, P9, P12, P13 and phase anglesd1, d10.
Wb ¼
I1 I2 I3 I4 I5 I6 I7 I80 0 0 �1 �1 3 0 �10 0 �1 3 0 �1 0 �11 �1 0 0 0 0 0 0�2 3 �1 0 0 0 0 00 0 0 0 0 0 1 00 0 0 1 0 0 0 0
0BBBBBBBB@
1CCCCCCCCA
P7
P9
P12
P13
d1d10
where, I1, I2, I3, I4, I5, I6, I7, and I8 denote the flow islands. The corresponding gain matrixGb ¼ WTb Wb
is:
OBSERVABILITY ANALYSIS FOR SYSTEMS WITH PMU AND SCADA MEASUREMENTS
Copyright © 2012 John Wiley & Sons, Ltd. Euro. Trans. Electr. Power (2012)DOI: 10.1002/etep
Gb ¼
5 �7 2 0 0 0 0 0�7 10 �3 0 0 0 0 02 �3 2 �3 0 1 0 10 0 �3 11 1 �6 0 �20 0 0 1 1 �3 0 10 0 1 �6 �3 10 0 �20 0 0 0 0 0 1 00 0 1 �2 1 �2 0 2
0BBBBBBBBBB@
1CCCCCCCCCCA
The triangular factors of Gb are:
D ¼ diag ð5 1=5 1 2 1=2 0 1 0Þ LT ¼
1 �7=5 2=5 0 0 0 0 00 1 �1 0 0 0 0 00 0 1 �3 0 1 0 10 0 0 1 1=2 �3=2 0 1=20 0 0 0 1 �3 0 10 0 0 0 0 1 0 00 0 0 0 0 0 1 00 0 0 0 0 0 0 1
0BBBBBBBBBB@
1CCCCCCCCCCA
Since D has two zero diagonal entries, at positions 6 and 8, the rank deficiency ofWb and Gb is equalto two and the network is unobservable. Two non-redundant measurements are needed to make thewhole system barely observable. After computing the vectors c6 and c8 by two back substitutions:
LTc6 ¼ e6 ¼ 0 0 0 0 0 1 0 0ð ÞT ; LTc8 ¼ e8 ¼ 0 0 0 0 0 0 0 1ð ÞT :
we form the matrix:
Figure 3. Mixed measurement configuration and corresponding flow-islands for the IEEE 14-bus system.
G. N. KORRES AND N. M. MANOUSAKIS
Copyright © 2012 John Wiley & Sons, Ltd. Euro. Trans. Electr. Power (2012)DOI: 10.1002/etep

C ¼ c6 c8ð Þ ¼
�1 �1�1 �1�1 �10 03 �11 00 00 1
0BBBBBBBBBB@
1CCCCCCCCCCA
I1I2I3I4I5I6I7I8
The branch-to-node incidence matrix A of the reduced network, associated with the flow-islands,and the corresponding matrix AC are given as:
A ¼
I1 I2 I3 I4 I5 I6 I7 I80 0 0 0 0 0 1 �10 0 0 0 0 0 1 �10 0 0 0 0 0 �1 10 0 0 0 0 �1 0 10 0 0 �1 0 0 0 1�1 0 0 0 0 0 1 01 0 0 �1 0 0 0 01 �1 0 0 0 0 0 00 0 0 0 �1 1 0 00 0 0 �1 0 1 0 00 0 �1 1 0 0 0 01 �1 0 0 0 0 0 00 1 �1 0 0 0 0 0
0BBBBBBBBBBBBBBBBBBBBBB@
1CCCCCCCCCCCCCCCCCCCCCCA
Br 2-3Br 2-4Br 4-5Br 4-7Br 4-9Br 5-6Br 6-11Br 6-13Br 7-8Br 7-9Br 9-14Br 12-13Br 13-14
AC ¼
0 �10 �10 1�1 10 11 1�1 �10 0�2 11 01 10 00 0
0BBBBBBBBBBBBBBBBBBBB@
1CCCCCCCCCCCCCCCCCCCCA
Br 2-3Br 2-4Br 4-5Br 4-7Br 4-9Br 5-6Br 6-11Br 6-13Br 7-8Br 7-9Br 9-14Br 12-13Br 13-14
Since rows 1, 2, 3, 4, 5, 6, 7, 9, 10, and 11 of AC have at least one nonzero entry, thecorresponding branches 2–3, 2–4, 4–5, 4–7, 4–9, 5–6, 6–11, 7–8, 7–9, and 9–14, respectively,are unobservable. Removing all the unobservable branches, we obtain six (t= 6) maximal observ-able islands: {6, 12, 13, 14}, {9, 10, 11}, {8}, {7}, {1, 2, 5}, and {3, 4}, as shown in Figure 4.Based on the maximal observable islands, we form the reduced Jacobian matrix Wb(4� 6)associated with the existing boundary injection measurement P7, P9 and the phase angle measure-ments d1, d10.
Wb ¼
I1 I2 I3 I4 I5 I60 �1 �1 3 0 �1�1 3 0 �1 0 �10 0 0 0 1 00 1 0 0 0 0
0BBBB@
1CCCCA
P7
P9
d1d10
where, I1, I2, I3, I4, I5, and I6 denote the maximal observable islands.If only power injections are used for placement, candidates will be those at the non-measured
boundary buses 2, 3, 4, 5, 6, 8, 11, and 14. The corresponding reduced Jacobian matrix Wc(8� 6)
and Gram matrix Mbc ¼ Wb
Wc
� �Wb
Wc
� �T
will be:
OBSERVABILITY ANALYSIS FOR SYSTEMS WITH PMU AND SCADA MEASUREMENTS
Copyright © 2012 John Wiley & Sons, Ltd. Euro. Trans. Electr. Power (2012)DOI: 10.1002/etep

Wc ¼
I1 I2 I3 I4 I5 I60 0 0 0 2 �20 0 0 0 �1 10 �1 0 �1 �2 4�1 0 0 0 2 �12 �1 0 0 �1 00 0 1 �1 0 0�1 1 0 0 0 01 �1 0 0 0 0
0BBBBBBBBBBBB@
1CCCCCCCCCCCCA
P2
P3
P4
P5
P6
P8
P11
P14
Mbc ¼
12 �5 0 �1 2 �1 �6 1 1 �4 �1 1�5 12 0 3 2 �1 �6 2 �5 1 4 �40 0 1 0 2 �1 �2 2 �1 0 0 0�1 3 0 1 0 0 �1 0 �1 0 1 �12 2 2 0 8 �4 �12 6 �2 0 0 0�1 �1 �1 0 �4 2 6 �3 1 0 0 0�6 �6 �2 �1 �12 6 22 �8 3 1 �1 11 2 2 0 6 �3 �8 6 �4 0 �3 31 �5 �1 �1 �2 1 3 �4 6 0 �3 3�4 1 0 0 0 0 1 0 0 2 0 0�1 4 0 1 0 0 �1 1 �3 0 2 �21 �4 0 �1 0 0 1 �1 3 0 �2 2
0BBBBBBBBBBBBBBBBBB@
1CCCCCCCCCCCCCCCCCCA
P7
P9
d1d10P2
P3
P4
P5
P6
P8
P11
P14
The triangular factors D and LT of Mbc are:
D ¼ diag 12 9:917 1 0:244 1 0 1 0 0 0 0 0ð Þ
Figure 4. Maximal observable islands for the mixed measurement configuration in the IEEE 14-bus system.
G. N. KORRES AND N. M. MANOUSAKIS
Copyright © 2012 John Wiley & Sons, Ltd. Euro. Trans. Electr. Power (2012)DOI: 10.1002/etep

The candidate injections at bus 2 and 4 are nonredundant with respect to existing injections at buses7 and 9 and phase angles at buses 1 and 10, since they correspond to nonzero diagonal entries of D, andhence they are chosen as the minimal measurement set to restore observability.If only PMUs are used for placement, candidates will be those at the non-measured boundary
buses 2, 3, 4, 5, 6, 8, 11, and 14. The eligible buses for PMU placement are ordered accordingto the number of adjacent unobservable branches, by giving lower priority to buses connected toexisting PMU-buses:
• PMU#4 {3}, PMU#6 {2}, PMU#3 {1}, PMU#14 {1}, PMU#8 {1} (not connected to existingPMU-buses)
• PMU#5 {2}, PMU#2 {1}, PMU#11 {1} (connected to existing PMU-buses).
The corresponding reduced Jacobian matrix Wc(22� 6) will be:
I1 I2 I3 I4 I5 I60 0 0 0 0 10 0 0 0 �1 10 0 0 0 �1 10 0 0 �1 0 10 �1 0 0 0 11 0 0 0 0 01 0 0 0 �1 01 �1 0 0 0 00 0 0 0 0 10 0 0 0 �1 11 0 0 0 0 01 �1 0 0 0 00 0 1 0 0 00 0 1 �1 0 00 0 0 0 1 00 0 0 0 1 �1�1 0 0 0 1 00 0 0 0 1 00 0 0 0 1 �10 0 0 0 1 �10 0 1 0 0 0�1 0 1 0 0 0
0
0BBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBB@
1CCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCA
d4I4�2
I4�5
I4�7
I4�9
d6I6�5
I6�11
d3I3�2
d14I14�9
d8I8�7
d5I5�4
I5�6
d2I2�3
I2�4
d11I11�6
After forming the 26� 26 Gram matrix Mbc ¼ Wb
Wc
� �Wb
Wc
� �T
, the diagonal matrix D of its LDLT
factors will be:
D ¼ diag 12 9:917 1 0:244 1 0 0 1 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0ð ÞThe diagonal entries 5 and 8 of D are nonzero, which means that rows 5 and 8 of Mbc are linearly
independent from rows 1, 2, 3, and 4. Hence, the phase angle d4 and branch current I4� 7 are nonre-dundant with respect to existing measurements P7, P9, d1, and d10, and thus the PMU at bus 4 is chosento make the network globally observable.Next, we use a different measurement configuration containing only PMUs at buses 6 and 7, as
shown in Figure 5. By topological processing of the current flow-measured branches 6–5, 6–12,6–11, 6–13 associated with the PMU at bus 6 and branches 7–4, 7–8, 7–9 associated with the PMU atbus 7, seven flow islands are formed: flow island {5, 6, 11, 12, 13} of PMU#6, flow island {4, 7, 8,9} of PMU#7, and flow-islands {10}, {14}, {1}, {2}, {3} consisting of single buses. Flow islandsof PMUs 6 and 7 are neighbouring, hence they are merged into a larger observable island. Finally,six maximal observable islands are formed, as shown in Figure 5: {4, 5, 6, 7, 8, 9, 11, 12, 13},{10}, {14}, {1}, {2}, and {3}.
OBSERVABILITY ANALYSIS FOR SYSTEMS WITH PMU AND SCADA MEASUREMENTS
Copyright © 2012 John Wiley & Sons, Ltd. Euro. Trans. Electr. Power (2012)DOI: 10.1002/etep

Based on the maximal observable islands, we form the corresponding reduced Jacobian matrix Wb
(2� 6), associated with the two existing phase angles d6 and d7,
Wb ¼I1 I2 I3 I4 I5 I61 0 0 0 0 01 0 0 0 0 0
0@
1A d6
d7
where, I1, I2, I3, I4, I5, and I6 denote the observable islands.Candidate PMUs for placement are those at non-measured boundary buses in the following
order: 2, 9, 10, 14, 1, 3, 4, 5, 11, and 13, according to the rules of Section 5. Then, we compute
the 32� 32 Gram matrix Mbc ¼ Wb
Wc
� �Wb
Wc
� �T
and the diagonal matrix D of its LDLT factors:
D ¼ diag 1 0 1 1 1 0 0 0 1 1 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0ð Þ
The candidate measurements for placement, d2, I2� 1, I2� 3, I9� 10 and I9� 14, which corre-spond to nonzero diagonals in D, are non-redundant with respect to existing measurements d6and d7, and hence they are chosen as the minimal set of measurements to make the wholesystem observable. The PMUs at buses 2 and 9 are associated with the above selected phasormeasurements.
6.2. IEEE 30 bus system
The IEEE 30 bus system and a mixed conventional and phasor measurement configuration areshown in Figure 6. Based on the branch power flows and currents, ten (r= 10) flow islands areformed, as shown in Figure 6. The same procedure as above leads to seven (t= 7) maximal
Figure 5. PMU only configuration and corresponding flow and maximal observable islands for the IEEE14-bus system.
G. N. KORRES AND N. M. MANOUSAKIS
Copyright © 2012 John Wiley & Sons, Ltd. Euro. Trans. Electr. Power (2012)DOI: 10.1002/etep
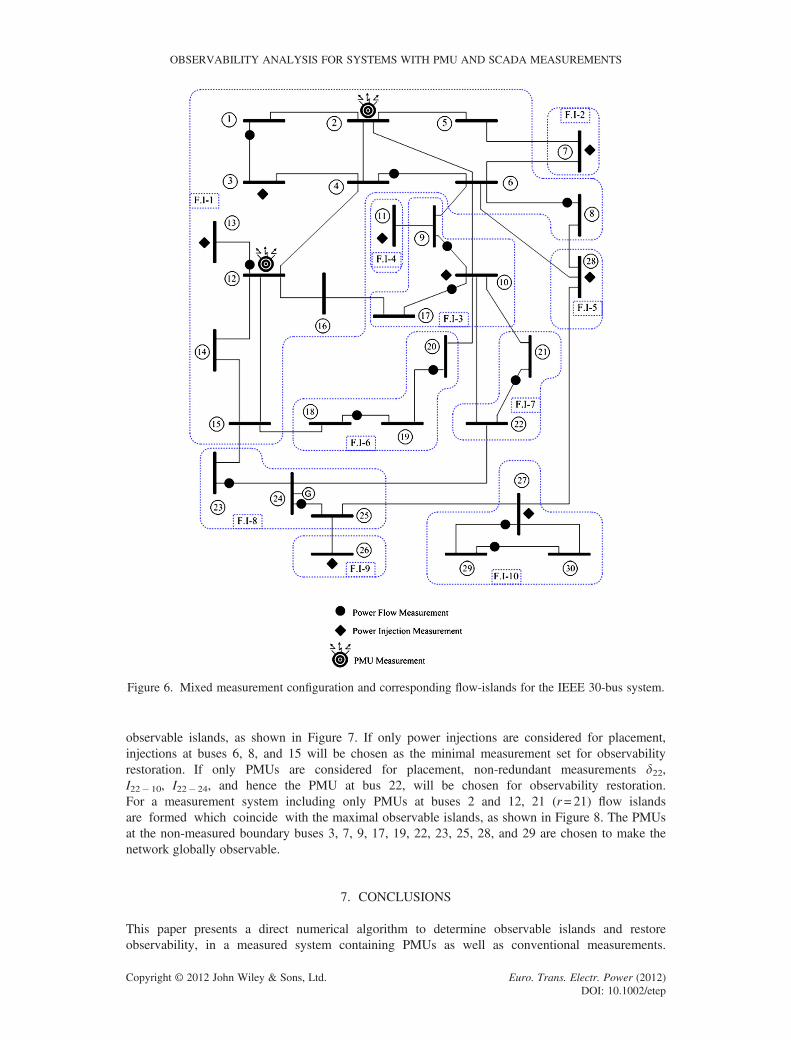
observable islands, as shown in Figure 7. If only power injections are considered for placement,injections at buses 6, 8, and 15 will be chosen as the minimal measurement set for observabilityrestoration. If only PMUs are considered for placement, non-redundant measurements d22,I22� 10, I22� 24, and hence the PMU at bus 22, will be chosen for observability restoration.For a measurement system including only PMUs at buses 2 and 12, 21 (r= 21) flow islandsare formed which coincide with the maximal observable islands, as shown in Figure 8. The PMUsat the non-measured boundary buses 3, 7, 9, 17, 19, 22, 23, 25, 28, and 29 are chosen to make thenetwork globally observable.
7. CONCLUSIONS
This paper presents a direct numerical algorithm to determine observable islands and restoreobservability, in a measured system containing PMUs as well as conventional measurements.
Figure 6. Mixed measurement configuration and corresponding flow-islands for the IEEE 30-bus system.
OBSERVABILITY ANALYSIS FOR SYSTEMS WITH PMU AND SCADA MEASUREMENTS
Copyright © 2012 John Wiley & Sons, Ltd. Euro. Trans. Electr. Power (2012)DOI: 10.1002/etep
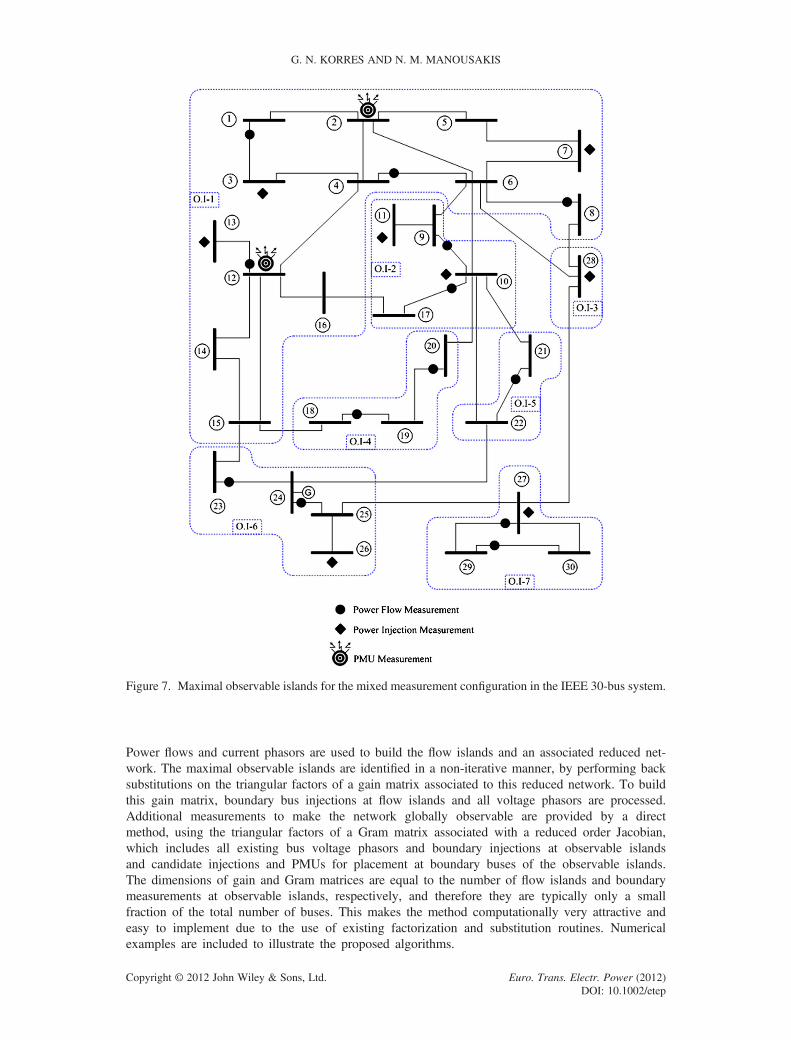
Power flows and current phasors are used to build the flow islands and an associated reduced net-work. The maximal observable islands are identified in a non-iterative manner, by performing backsubstitutions on the triangular factors of a gain matrix associated to this reduced network. To buildthis gain matrix, boundary bus injections at flow islands and all voltage phasors are processed.Additional measurements to make the network globally observable are provided by a directmethod, using the triangular factors of a Gram matrix associated with a reduced order Jacobian,which includes all existing bus voltage phasors and boundary injections at observable islandsand candidate injections and PMUs for placement at boundary buses of the observable islands.The dimensions of gain and Gram matrices are equal to the number of flow islands and boundarymeasurements at observable islands, respectively, and therefore they are typically only a smallfraction of the total number of buses. This makes the method computationally very attractive andeasy to implement due to the use of existing factorization and substitution routines. Numericalexamples are included to illustrate the proposed algorithms.
Figure 7. Maximal observable islands for the mixed measurement configuration in the IEEE 30-bus system.
G. N. KORRES AND N. M. MANOUSAKIS
Copyright © 2012 John Wiley & Sons, Ltd. Euro. Trans. Electr. Power (2012)DOI: 10.1002/etep

8. LIST OF ABBREVIATIONS AND SYMBOLS
N(A) null space of matrix AR(A) range space of matrix Adim A dimension of vector space AIkxk identity matrix of dimension kD diagonal matrixdkk kth diagonal entry of matrix DL unit lower triangular matrixck kth column of L�T
ck,i ith component of vector ckek vector with all entries zero except for a 1.0 as its kth entryΔz vector of mismatches between measured and calculated dataΔx correction of state variables vectore measurement Gaussian noise vectorbij susceptance of branch i�jPij active power flow at end i of branch i�j
Figure 8. PMU only configuration and corresponding flow and maximal observable islands for the IEEE30-bus system.
OBSERVABILITY ANALYSIS FOR SYSTEMS WITH PMU AND SCADA MEASUREMENTS
Copyright © 2012 John Wiley & Sons, Ltd. Euro. Trans. Electr. Power (2012)DOI: 10.1002/etep
Qij reactive power flow at end i of branch i�jPi active power injection at bus iQi reactive power injection at bus iIij,r real part of current flow at end i of branch i�jIij,i imaginary part of current flow at end i of branch i�jdi phase angle at bus iVi voltage magnitude at bus in number of buses of power system SSi ith subsystem of a decomposed power system Sni number of buses in subsystem Simb number of boundary measurements at a decomposed power system SH Jacobian matrix of existing measurements in power system SHpd sub-Jacobian of H for the P�d subproblemHpd,v sub-Jacobian of Hpd associated with voltage phase angle measurementsHpd,e sub-Jacobian of Hpd excluding phase angle measurementsHQV sub-Jacobian of H for the Q�V subproblemHQV,v sub-Jacobian of HQV associated with voltage magnitude measurementsHQV,e sub-Jacobian of HQV excluding voltage magnitude measurementsHc Jacobian matrix of candidate measurements for placementWb reduced Jacobian matrix associated with HWc reduced Jacobian matrix associated with Hc
Hb sub-Jacobian of H associated with all boundary measurements (mb� n)Hi sub-Jacobian of H associated with measurements in subsystem Si (mi� ni)Hi,v sub-Jacobian of Hi associated with voltage phasor measurements (mi,v� ni)Hi,e sub-Jacobian of Hi excluding voltage phasor measurements (mi,e� ni)
REFERENCES
1. Krumpholz GR, Clements KA, Davis PW. Power System Observability: A Practical Algorithm Using NetworkTopology. IEEE Transactions on Power Apparatus and Systems 1980; 99:1534–1542.
2. Clements KA, Krumpholz GR, Davis PW. Power System State Estimation with Measurement Deficiency: AnAlgorithm that Determines the Maximal Observable Subnetwork. IEEE Transactions on Power Apparatus andSystems 1982; 101:3044–3052.
3. Clements KA, Krumpholz GR, Davis PW. Power System State Estimation with Measurement Deficiency: AnObservability / Measurement Placement Algorithm. IEEE Transactions on Power Apparatus and Systems 1983;102:2012–2020.
4. Van Cutsem Th. Power system observability and related functions Derivation of appropriate strategies andalgorithms. International Journal of Electrical Power & Energy Systems 1985; 7:175–187.
5. Quintana VH, Simoes-Costa A, Mandel A. Power system topological observability using a direct graph-theoreticapproach. IEEE Transactions on Power Apparatus and Systems 1982; 101:617–626.
6. Nucera RR, Gilles ML. Observability analysis: A new topological algorithm. IEEE Transactions on Power Systems1991; 6:466–475.
7. Monticelli A, Wu FF. Network Observability: Theory. IEEE Transactions on Power Apparatus and Systems 1985;104(5):1042–1048.
8. Monticelli A, Wu FF. Network Observability: Identification of Observable Islands and Measurement Placement.IEEE Transactions on Power Apparatus and Systems 1985; 104(5):1035–1041.
9. Wu FF, Liu W-HE, Lun S-M. Observability Analysis and Bad Data Processing for State Estimation with EqualityConstraints. IEEE Transactions on Power Systems 1988; 3:541–548.
10. Wu FF, Liu W-HE, Holten L, Gjelsvik A, Aam S. Observability Analysis and Bad Data Processing for StateEstimation using Hachtel’s Augmented Matrix Method. IEEE Transactions on Power Systems 1988; 3:604–611.
11. Gou B, Abur A. A Direct Numerical Method for Observability Analysis. IEEE Transactions on Power Systems2000; 15(2):625–630.
12. Gou B, Abur A. An Improved Measurement Placement Algorithm for Network Observability. IEEE Transactionson Power Systems 2001; 16(4):819–824.
13. Gou B. Jacobian Matrix-Based Observability Analysis for State Estimation. IEEE Transactions on Power Systems2006; 21(1):348–356.
14. Gou B. Observability analysis for state estimation using Hachtel’s augmented matrix method. Electric PowerSystems Research 2007; 77:865–875.
G. N. KORRES AND N. M. MANOUSAKIS
Copyright © 2012 John Wiley & Sons, Ltd. Euro. Trans. Electr. Power (2012)DOI: 10.1002/etep

15. de Almeida MC, Asada EN, Garcia AV. Power System Observability Analysis Based on Gram Matrix andMinimum Norm Solution. IEEE Transactions on Power Systems 2008; 23(4):1611–1618.
16. Castillo E, Conejo AJ, Pruneda RE, Solares C. State estimation observability based on the null space of themeasurement Jacobian matrix. IEEE Transactions on Power Systems 2005; 20:1656–1658.
17. Castillo E, Conejo AJ, Pruneda RE, Solares C. Observability analysis in state estimation: A unified numericalapproach. IEEE Transactions on Power Systems 2006; 21:877–886.
18. Solares C, Conejo AJ, Castillo E, Pruneda RE. Binary-arithmetic approach to observability checking in stateestimation. IET Generation, Transmission and Distribution 2009; 3:336–345.
19. Pruneda RE, Solares C, Conejo AJ, Castillo E. An efficient algebraic approach to observability analysis in stateestimation. Electric Power Systems Research 2010; 80:277–286.
20. Dönmez B, Abur A. A Computationally Efficient Method to Place Critical Measurements. IEEE Transactions onPower Systems 2011; 26(2):924–931.
21. Korres GN. A Gram matrix-based method for observability restoration. IEEE Transactions on Power Systems 2011;26(4):2569–2571.
22. Contaxis GC, Korres GN. A Reduced Model for Power System Observability Analysis and Restoration. IEEETransactions on Power Systems 1988; 3(4):1411–1417.
23. Korres GN, Katsikas PJ, Clements KA, Davis PW. Numerical observability analysis based on network graph theory.IEEE Transactions on Power Systems 2003; 18:1035–1045.
24. Korres GN, Katsikas PJ. A hybrid method for observability analysis using a reduced network graph theory. IEEETransactions on Power Systems 2003; 18:295–304.
25. Baldwin TL, Mili L, Boisen, Jr. MB, Adapa R. Power system observability with minimal phasor measurementplacement. IEEE Transactions on Power Systems 1993; 8(2):707–715.
26. Nuqui RF, Phadke AG. Phasor measurement unit placement techniques for complete and incomplete observability.IEEE Transactions on Power Delivery 2005; 20(4):2381–2388.
27. Chen J, Abur A. Placement of PMUs to enable bad data detection in state estimation. IEEE Transactions on PowerSystems 2006; 21(4):1608–1615.
28. Gou B. Generalized Integer Linear Programming Formulation for Optimal PMU Placement. IEEE Transactions onPower Systems 2008; 23(3):1099–1104.
29. Chakrabarti S, Kyriakides E. Optimal Placement of Phasor Measurement Units for Power System Observability.IEEE Transactions on Power Systems 2008; 23(3):1433–1440.
30. Gou B. Optimal placement of PMUs by integer linear programming. IEEE Transactions on Power Systems 2008; 23(3):1525–1526.
31. Stewart GW, Introduction to Matrix Computations. Academic Press: New York, 1973.32. Pursell L, Trimble SY. Gram-Schmidt orthogonalization by Gauss elimination. The American Mathematical
Monthly 1991; 98(6):544–549.33. Meyer CD. Matrix Analysis and Applied Linear Algebra. SIAM Publisher: Philadelphia, 2000.
APPENDIX AThe rank properties of the reduced Jacobian
Let a system be divided in r non-overlapping observable subsystems Si, as shown in Figure 1. Each
subsystem is assumed to have ni buses and n ¼ Pri¼1
ni. The Jacobian matrix H can be written in
the following block form:
H ¼
H1
H2
⋱Hr
Hb
0BBB@
1CCCA ¼
H1
H2
⋱Hr
Hb1 Hb2 ⋯ Hbr
0BBBB@
1CCCCA (A1)
where,
Hi ¼ Hi;e
Hi;v
� �(A2)
The mb� n sub-Jacobian Hb corresponds to boundary measurements at observable subsystems (buspower injections, line power flows, and line current flows), the mi,e� ni sub-Jacobian Hi,e correspondsto internal measurements in subsystem Si (bus power injections, line power flows, and line currentflows), and the mi,v� ni sub-Jacobian Hi,v corresponds to bus voltages in subsystem Si. The totalnumber of measurements in subsystem Si is mi=mi,e +mi,v. A subsystem Si will be observable iff:
OBSERVABILITY ANALYSIS FOR SYSTEMS WITH PMU AND SCADA MEASUREMENTS
Copyright © 2012 John Wiley & Sons, Ltd. Euro. Trans. Electr. Power (2012)DOI: 10.1002/etep

• rank(Hi) = ni and subsystem Si contains at least one bus voltage measurement (mi,v 6¼ 0 andHi,v 6¼∅);
• rank(Hi) = ni� 1 and subsystem Si contains no bus voltage measurements (mi,v= 0 and Hi,v=∅).
Let matrix B(n� r) be defined as:
B ¼
1 2 ⋯ r1n1�1
1n2�1
⋱1nr�1
0BBBB@
1CCCCA (A3)
where 1ni�1 is a vector composed of 1 ’ s. From (A1), (A2), and (A3), we have:
HB ¼
H1;e1n1�1
H1;v1n1�1
� �
H2;e1n2�1
H2;v1n2�1
� �
⋱Hr;e1nr�1
Hr;v1nr�1
� �
Hb11n1�1 Hb21n2�1 ⋯ Hbr1nr�1
0BBBBBBBBB@
1CCCCCCCCCA
¼
0m1;e�1
1m1;v�1
� �
0m2;e�1
1m2;v�1
� �
⋱0mr;e�1
1mr;v�1
� �
wb1 mb � 1ð Þ wb2 mb � 1ð Þ ⋯ wbr mb � 1ð Þ
0BBBBBBBBB@
1CCCCCCCCCA
(A4)
whereHi;e1ni�1 ¼ 0mi;e�1,Hi;v1ni�1 ¼ 1mi;v�1 for each subsystem Si, due to the form (3), (4) of Jacobianmatrix H, and wbi ¼ Hbi1ni�1 is the sum of columns of Hbi. From (A4), we obtain:
nullity HBð Þ ¼ nullity
1m1;v�1
1m2;v�1
⋱1mr;v�1
wb1 mb � 1ð Þ wb2 mb � 1ð Þ ⋯ wbr mb � 1ð Þ
0BBBB@
1CCCCA (A5)
We define the matrix Wb(mb� r) as:
Wb ¼
wv1
wv2
⋱wvr
wb1 wb2 ⋯ wbr
0BBBB@
1CCCCA (A6)
where wvi= 0 if subsystem Si includes no bus voltage measurements (mi,v= 0) and wvi= 1 if subsystemSi includes at least one bus voltage measurement (mi,v 6¼ 0). From (A5) and (A6), we have:
G. N. KORRES AND N. M. MANOUSAKIS
Copyright © 2012 John Wiley & Sons, Ltd. Euro. Trans. Electr. Power (2012)DOI: 10.1002/etep

nullity Wbð Þ ¼ nullity
wv1
wv2
⋱wvr
wb1 wb2 ⋯ wbr
0BBBB@
1CCCCA
¼ nullity
1m1;v�1
1m2;v�1
⋱1mr;v�1
wb1 mb � 1ð Þ wb2 mb � 1ð Þ ⋯ wbr mb � 1ð Þ
0BBBB@
1CCCCA ¼ nullity HBð Þ
(A7)
From linear algebra, we have [33]:
rank HBð Þ ¼ rank Bð Þ � dimN Hð Þ∩R Bð Þ (A8)
where N(H) is the null space of H, R(B) is the range space of B, and dimN(H) ∩R(B)is the dimension ofthe intersection of spaces N(H) and R(B). Since matrix B has r linearly independent columns, it has fullrank:
rank Bð Þ ¼ r (A9)
From (A8) and (A9), we derive:
nullity HBð Þ ¼ r � rank HBð Þ ¼ dimN Hð Þ∩R Bð Þ (A10)
For any n� 1vector a2N(H), we have:
Ha ¼ 0 (A11)
The vector a can be written as:
aT ¼ aT1 aT2 ⋯ aTr� �
(A12)
where subvector ai is of dimension ni. From (A1)–(A12), we have:
Hiai ¼ 0 (A13)
Hence ai2N(Hi) will be of the form [22]:
ai ¼ bi1 ¼ bi
11⋮1
0BB@
1CCA (A14)
where bi is a scalar. When mi,v 6¼ 0 then bi= 0. From (A3), (A12), and (A14), we have:
a ¼a1a2⋮ar
0BB@
1CCA ¼
b11b21⋮br1
0BB@
1CCA ¼ B
b1b2⋮br
0BB@
1CCA (A15)
Hence a2R(B), which implies that N(H)⊆R(B) and N(H) ∩R(B) =N(H). Then:dimN Hð Þ∩R Bð Þ ¼ dimN Hð Þ ¼ nullity Hð Þ (A16)
From (A7), (A10), and (A16), we have:
nullity Wbð Þ ¼ nullity Hð Þ (A17)
Lemma A1: If two observable subsystems have voltage measurements, then they are merged together intoone larger observable subsystem. Proof: Since r=2 and Wb= I2� 2, we have nullity(Wb) = nullity(H) = 0which indicates that the two observable subsystems are merged into one observable subsystem.
OBSERVABILITY ANALYSIS FOR SYSTEMS WITH PMU AND SCADA MEASUREMENTS
Copyright © 2012 John Wiley & Sons, Ltd. Euro. Trans. Electr. Power (2012)DOI: 10.1002/etep
Copyright © 2022 FDOKUMEN




















