
Multiuser detection in mismatched multiple-access channels
10
3080 IEEE TRdSACTIONS ON COMMUNICATIONS, VOL 43, NO. 12, DECEMBER 1995 , Multiuser Detecti nl in Mismatched ccesb Channels Steven D. Gray, Student Member, IEEE, Marko I&5c, and David Brady, Member, ~ Abstract-In this paper we consider an additive white Gauss- ian noise multiple-access channel and investigate the perfor- mance degradation of several multiuser detectors due to im- perfect knowledge of channel parameters, induced by either estimation errors or samplinglquantization of the receiver’s suf- ficient statistics. The symbol error rates and the asymptotic multiuser efficiencies (AME’s) of these detectors are examined as functions of both true and approximated channel parameters for 2 asynchronoususers. The results quantify the loss of near-far resistance due to parameter estimation errors and demonstrate that detectors which are optimal for ideal conditions are often more sensitive to parameter mismatch. Examples are given which illustrate a reverse ordering of the symbol error rates for these de- tectors in the high signal-to-noise regime, and aIso illustrate cases when the conventional matched-filter detector exhibits superior performance over multiuser detectors. I. INTRODUCTION ULTIUSER detection is an active area of research, with the primary goal of developing techniques to demod- ulate reliably a subset of cochannel and asynchronous users while controlling the algorithm’s complexity and decoding de- lay. Previous work in the AWGN channel proposed centralized multiuser detectors which utilized perfect knowledge of the received signal set, including complex amplitude and symbol synchronization for all users. Results using this assumption have indicated that in all but pathological examples the so- called “near-far problem” is eliminated with a well-designed multiuser detector. However, even in the very idealized chan- nel presented in this work, a multiuser receiver has precise knowledge only of the transmitted signature sequence set, and must approximate all other channel parameters from a noisy observation of the aggregate signal from all active users. Due to the effects of multiple-access interference (MAI) and additive thermal noise, these channel parameter estimates will deviate from the true values. Other common, nonlinear, and unavoidable effects, such as AD conversion and quantization of the observation at the receiver front end, will render even precise channel knowledge inaccurate when applied to the sampled and quantized observation. The ramification of these facts is an unavoidable mismatch between the true multiple- access channel and the receiver’s estimate thereof. Manuscript received August 31, 1993; revised December 12, 1994 Paper approved by B. Aazhang, the Editor for Spread Spectrum Networks of the IEEE Communications Society This work was presented in part at the 1993 Conference on Information Science and Systems, The Johns Hophns Uni- versity, Baltimore, MD, March 1993 and at the 1993 MILCOM Conference, Bedford, MA, October 1993 The authors are with the Department of Electncal and Computer Engmeer- ing Northeastern University, Boston, MA 021 15 USA. IEEE Log Number 9414797 de sensitivity to channel mismatch has been gated prejiously for likelihood-based detectors in single-user, inter- symbol interference (ISI) channels [ 11. Mismatch conditions condidered include phase or synchronization mismatch in distdrtion-free channels or a more general channel impulse respbnse mismatch for both linear and nonlinear channels. Miishatch arises in this channel due to imperfect carrier recobery, timing jitter in synchronization, or the intentional intrqduction of mismatch (channel truncation) in order to redqce the complexity of a detector. An upper bound to the error rate of a mismatched MLS detector in this channel was obtained 111. This mismatch was also related to a decrease of the io-called “minimum distance” in the equalization literature, and 1khe loss of minimum distance as a function of channel trunkation was quantified. The performance of a detector con- sistihg of a zero-forcing equalizer (ZFE) followed by a MLS detektor with an incorrect distance measure has been analyzed for Single-user IS1 channels [2]. The channel mismatch was intehtionally introduced in order to reduce the complexity of the kletection algorithm. The dependence of error probability on particular choice of the suboptimal distance measure was ~ demonstrated and quantified the effect of mismatch and symbol error probability for constant SNR. The increase in me& squared error (MSE) due to channel mismatch has also1 been investigated for inaccurate signal parameters [3] or therind noise levels [4] in single-user IS1 channels. It was sho$n that for c e d n mismatch conditions the linear equalizer ou@erforms the decision feedback equalizer (DFE). A para- medic study of mismatch for IS1 channels was conducted by [5]. /Under mismatch free conditions, the ordering by bit error rate l(BER) performance from lowest to highest for three equal- ized was as follows: maximum likelihood equalizers (MLE s), Dd7s and ZFE’s. Where ordering by BER performance of the threk equalizers also matched the ordering by computational lexity. For sufficient mismatch, the ordering by BER of the three equalizers was reversed such that q’s exceeded DFE’s and MLE’s. In this work we shall quantify the sensitivity of the symbol errok rate to channel mismatch for two well-known multiuser detektors: the maximum likelihood sequence (MLS) detector 161, ~ and the 2-stage detector with hard tentative decisions (H2S) [7]. As in all the cited works on mismatch sensitivity in IS1 yhannels, we shall consider a deterministic offset between the true channel for each user and the receiver’s estimate thereof. In this sense, we provide a sensitivity analysis of the symbol error rate of a particular detection algorithm as a function of an “estimation error” and compare the sensitivity 0090-6778/95$04.00 0 1995 IEEE
-
Upload
independent -
Category
Documents
-
view
0 -
download
0
Transcript of Multiuser detection in mismatched multiple-access channels

3080 IEEE TRdSACTIONS ON COMMUNICATIONS, VOL 43, NO. 12, DECEMBER 1995 ,
Multiuser Detecti nl in Mismatched ccesb Channels
Steven D. Gray, Student Member, IEEE, Marko I&5c, and David Brady, Member,
~
Abstract-In this paper we consider an additive white Gauss- ian noise multiple-access channel and investigate the perfor- mance degradation of several multiuser detectors due to im- perfect knowledge of channel parameters, induced by either estimation errors or samplinglquantization of the receiver’s suf- ficient statistics. The symbol error rates and the asymptotic multiuser efficiencies (AME’s) of these detectors are examined as functions of both true and approximated channel parameters for 2 asynchronous users. The results quantify the loss of near-far resistance due to parameter estimation errors and demonstrate that detectors which are optimal for ideal conditions are often more sensitive to parameter mismatch. Examples are given which illustrate a reverse ordering of the symbol error rates for these de- tectors in the high signal-to-noise regime, and aIso illustrate cases when the conventional matched-filter detector exhibits superior performance over multiuser detectors.
I. INTRODUCTION ULTIUSER detection is an active area of research, with the primary goal of developing techniques to demod-
ulate reliably a subset of cochannel and asynchronous users while controlling the algorithm’s complexity and decoding de- lay. Previous work in the AWGN channel proposed centralized multiuser detectors which utilized perfect knowledge of the received signal set, including complex amplitude and symbol synchronization for all users. Results using this assumption have indicated that in all but pathological examples the so- called “near-far problem” is eliminated with a well-designed multiuser detector. However, even in the very idealized chan- nel presented in this work, a multiuser receiver has precise knowledge only of the transmitted signature sequence set, and must approximate all other channel parameters from a noisy observation of the aggregate signal from all active users. Due to the effects of multiple-access interference (MAI) and additive thermal noise, these channel parameter estimates will deviate from the true values. Other common, nonlinear, and unavoidable effects, such as AD conversion and quantization of the observation at the receiver front end, will render even precise channel knowledge inaccurate when applied to the sampled and quantized observation. The ramification of these facts is an unavoidable mismatch between the true multiple- access channel and the receiver’s estimate thereof.
Manuscript received August 31, 1993; revised December 12, 1994 Paper approved by B. Aazhang, the Editor for Spread Spectrum Networks of the IEEE Communications Society This work was presented in part at the 1993 Conference on Information Science and Systems, The Johns Hophns Uni- versity, Baltimore, MD, March 1993 and at the 1993 MILCOM Conference, Bedford, MA, October 1993
The authors are with the Department of Electncal and Computer Engmeer- ing Northeastern University, Boston, MA 021 15 USA.
IEEE Log Number 9414797
d e sensitivity to channel mismatch has been gated prejiously for likelihood-based detectors in single-user, inter- symbol interference (ISI) channels [ 11. Mismatch conditions condidered include phase or synchronization mismatch in distdrtion-free channels or a more general channel impulse respbnse mismatch for both linear and nonlinear channels. Miishatch arises in this channel due to imperfect carrier recobery, timing jitter in synchronization, or the intentional intrqduction of mismatch (channel truncation) in order to redqce the complexity of a detector. An upper bound to the error rate of a mismatched MLS detector in this channel was obtained 111. This mismatch was also related to a decrease of the io-called “minimum distance” in the equalization literature, and 1khe loss of minimum distance as a function of channel trunkation was quantified. The performance of a detector con- sistihg of a zero-forcing equalizer (ZFE) followed by a MLS detektor with an incorrect distance measure has been analyzed for Single-user IS1 channels [2]. The channel mismatch was intehtionally introduced in order to reduce the complexity of the kletection algorithm. The dependence of error probability on particular choice of the suboptimal distance measure was ~ demonstrated and quantified the effect of mismatch and symbol error probability for constant SNR. The increase in me& squared error (MSE) due to channel mismatch has also1 been investigated for inaccurate signal parameters [3] or therind noise levels [4] in single-user IS1 channels. It was sho$n that for c e d n mismatch conditions the linear equalizer ou@erforms the decision feedback equalizer (DFE). A para- medic study of mismatch for IS1 channels was conducted by [5]. /Under mismatch free conditions, the ordering by bit error rate l(BER) performance from lowest to highest for three equal- ized was as follows: maximum likelihood equalizers (MLE s), D d 7 s and ZFE’s. Where ordering by BER performance of the threk equalizers also matched the ordering by computational
lexity. For sufficient mismatch, the ordering by BER of the three equalizers was reversed such that
q ’ s exceeded DFE’s and MLE’s. In this work we shall quantify the sensitivity of the symbol
errok rate to channel mismatch for two well-known multiuser detektors: the maximum likelihood sequence (MLS) detector 161, ~ and the 2-stage detector with hard tentative decisions (H2S) [7]. As in all the cited works on mismatch sensitivity in IS1 yhannels, we shall consider a deterministic offset between the true channel for each user and the receiver’s estimate thereof. In this sense, we provide a sensitivity analysis of the symbol error rate of a particular detection algorithm as a function of an “estimation error” and compare the sensitivity
0090-6778/95$04.00 0 1995 IEEE

GRAY et al.: MULTIUSER DETECTION IN MISMATCHED MULTIPLE-ACCESS CHANNELS 3081
of several detectors to the same deterministic offset. No particular estimation strategy is envisioned in this approach. Since most channel estimation errors depend on the MA1 as well as the thermal noise, we should motivate this deterministic approach with at least one practical example. Any realizable multiuser detector samples the observation uniformly before subsequent processing, usually at a rate of a few samples per chip. Consider a real-time multiuser detector, which for speed considerations, stores presampled signature sequences (sampled once at the receiver sampling rate) [8]. While the true relative delay between any two users is real valued, this receiver’s estimate must be modulo-Ts, where T, is the sample period, and may deviate from the actual value (even with perfect knowledge of the true relative delay) by a substantial fraction of a chip period. Similar arguments may be made for deterministic amplitude and phase offsets due to course quantization and other nonlinear effects.
We focus on a slowly time-varying, distortionless, 2-user, asynchronous channel for conciseness and ease of analysis.’ We provide bounds or exact expressions for the symbol error rate, as well as the exponential rate of decay for these error rates with the inverse noise level. This latter quantity is proportional to the AME, which is conceptually identical to the “minimum distance” in the equalization literature [9]. The AME is more tractable than the symbol error rate expression and yields information on the dominating error events for particular mismatch conditions. In Section I1 we present a channel model in which a detector works with incorrect estimates of the amplitude, phase and delays of the two users. In Section 111 we describe the operation of the MLS and H2S detectors and present expressions for the probability of symbol error. In Section IV we derive an upper bound for the AME of the mismatched MLS detector and the AME of the mismatched H2S detector. Finally, in Section V we present several numerical examples illustrating the erosion of the AME for both detectors with imperfect channel knowledge. The numerical examples show that mismatch causes the MLS and H2S detectors to become near-far limited. In addition, this section shows that the MLS detector is more sensitive to mismatch than the H2S detector and examples are given which show a reverse ordering of detectors’ performance, relative to perfect channel knowledge. We also demonstrate narrowband conditions in which conventional matched-filter detection rivals more sophisticated detection strategies.
11. MISMATCHED CHANNEL MODEL
Consider two active, asynchronous users sharing a slowly time-varying Gaussian multiple-access channel. User k em- ploys binary phase-shift keying modulation with a preassigned waveform s k ( t ) with support [O,T]. We denote the received version of these waveforms by
‘For the approach considered in this work, extension to U: users proved to be very tedious. However, we believe that two users capture an important aspect of the mismatch problem.
Fig. 1. Multiple-access channel and receiver.
where Zk(t) = Ak(t)exp(-jOk(t)) and s k ( t ) are the com- plex amplitude and the unit-energy waveform of user k , respectively. The relative delay between the two users is arbitrarily assumed to be ordered such that ~ 1 ( t ) 5 ~ ( t ) . In this notation the channel may be parameterized by six real functions. We shall assume that the amplitude, phase and relative delay for each user may be modeled as constant over the whole data block, and shall drop their dependency on time for conciseness. However, the symbol error rates derived in this work shall apply to any slowly time-varying channel in which both the approximated and true parameters for the users are roughly constant during the two consecutive symbols closest to the particular symbol of concern. This slowly-time varying assumption has been shown to be valid, for example, in the underwater acoustic telemetry channel [8].
The signal observed by the multiuser receiver { r ( t ) , t E [ - M T + q , (Ad+l)T+~z]} is a superposition of the 2M+1 data block transmitted by each user and a white Gaussian noise process with variance 2,
T ( t ) = S t ( b ) + n(t) +M 2
= 2 2 b k ( i ) S k ( t - iT - T k ) + n(t) (1) a=-M k=l
where b k ( i ) E 411 is the symbol transmitted by user k at time iT and ~k is the delay (function) of user k relative to a common reference (see Fig. 1). It is assumed that all transmitted sequences are equiprobable. The sufficient statistics for the entire data block for both users with perfect channel knowledge for the two users are given by matched- filter outputs
~~yrc(i) = ~ ( t ) ~ ; ( t - iT - ~ k ) d t
k = 1,2; i = - M , . . * , M . (2) J’
By ordering all matched-filter outputs in a vector accord- ing to their sampling instant, the sufficient statistics for the detection of b are given by
Y,= = RcZb + nc = [ Y l ( - M ) , Y 2 ( - M ) , . . . , Y l ( i ) , Y z ( i ) , . . . ,
Y l ( M ) , y z ( W 1 (3)
b = [ h ( - M ) , b z ( - M ) , .. . , b l ( i ) , b 2 ( i ) , .. . , bl(M),bZ(M)I.
where

3082 IEEE TRANkACTIONS ON COMMUNICATIONS, VOL. 43, NO. 12, DECEMBER 1995
P k l ( 7 ) A S l ( t ) S E ( t - 7 ) d t .I and D[a, b] signifies a diagonal matrix with diagonal elements a and b. When the receiver has perfect channel knowledge, the zero-mean noise vector n, has covariance matrix 0~72,.
In the presence of mismatch the situation is altered sub- stantially. Here, the receiver operates with incorrect estimates of amplitude, phase or signal delays, and the matched-filter outputs are improperly sampled. We denote the timing es- timators of the two users by and & respectively where ?k - 7-k E [0, T).2 Also, in order to limit the possible time mismatch scenarios and make the analysis more tractable, we constrain the timing mismatch to ?I 5 7 2 and +2 5 71 + T. The approximated phase and amplitude for each user at the ith symbol are represented by the complex constants 2, (i), k = 1 , 2 and i = -M, . . . , M . As before, we drop the explicit dependency of these estimates on time and assume that the estimates are constant over the whole data block.
The output of the "mismatched" filter for user 2 at time iT is
~ Z ( Z ) ~ ( t ) ~ a ( t - ZT - 7 2 ) d t .I = b2(z + 1)Z2P22(S=2 - 772 + T ) + b2(i)Z2P22(+2 - 72)
+ bl(@lPT2(71 - +2)
+ b l ( i + 1 ) Z l P 2 l ( T + 71 - +2)
+ n 2 ( i ) (5)
where the signs in the first term are the same and depend on the sign of the mismatch in relative delay of user 2. (Since we will not refer to the aligned matched-filter outputs a g m , we use the same notation for the mismatched components without confusion.) Due to channel mismatch, the contribution from user 2 in y2(i) is split into two parts, of which only one, p22(?2 - 72), corresponds to the desired symbol, while
interfering bit, but does not alter the effect of synchronization error. We arbitrarily chose the interval [0, T ) The interval (-T, 01 changes the
I
I pzz(?z - 7-2 + T ) corresponds to the mismatch-in for user 2. n e crosscorrelation coefficients p;l (T1
p 1 2 ( T + TI - ?z) are now a function of the timin for user 2. Similarly, the output for the mismatche user 11 is
=h(i + 1)ZIPll(?l - 71 + T ) + bl(i)ZlP11(?1
+ b2(4Z2/321(+1 - 72)
+ b2(i - 1 ) Z 2 & ( T + ?l - 72)
In order to implement most multiuser detec the C I- osscorrelation, phase, and amplitude func users~ must be known at the receiver me yhannel parameters are unknown to
y = R Z b + n (7)
2 = [Z,(-M), 2 2 ( - M )
cov4ance matrix is identical to and invariant to mismatch. I
DETECTOR STRUCTURE AND S W B O I A. MLS Detector
I n ~ t h e absence of channel mismatch, the MLS receiver selects the transmitted sequence which maximizes the condi- tional probability of receiving the interval observation of T ( t )

GRAY et al.: MULTIUSER DETECTION IN MISMATCHED MULTIPLE-ACCESS CHANNELS 3083
where b is an admissible data vector, C is a positive scalar constant independent of b and
R(b) = ,Re{ IT S*(b)T(t) di}
is the log-likelihood function for b. expressed in vector notation as
~ ( b ) = 2 ~ e { b ~ ~ ~ y , ) -
In case of channel mismatch, the receiver uses the observation y instead of yc and an improper metric
A(b) = 2 R e { b T Z H y } - bTSH7i,Zb (13)
in order to decide on the most likely sequence. The method for the lower bound on the symbol error prob-
ability follows identically from [6], and will be sketched here only to provide continuity. Here we consider the probability of demodulation error for the ith component of b, P,,, which is bounded from below using side information from a genie in a beneficial way. If b denotes the transmitted symbol sequence, a genie informs the receiver that the transmitted sequence is either b or b - 2 ~ * , where E* is chosen randomly from the set
A, = { E : ~ ( i ) = b ( i ) , ~ ( i + 1) E (0, b ( i + I)}, E ( 2 + j ) = 0, Ijl > l}.
It follows that the detector is reducyd to a binary hypothesis test between the equally likely candidate sequences, and selects the sequence which maximizes the R-metric. The error rate for this decision process is given by
P,, 2 + E [ Pr [fi(b - 2c) - fi(b) 2 Olb]
where the expectation is over the transmitted data sequence b. The above expression may be simplified using
1
] (14)
€EA,
Pr [fi(b - 2E) - fi(b) >0lb1
+ €Tn 5 01 = Pr [ R e { E T ( R Z - 7i,Z)b} + c ~ Z ~ 7 i , Z e
R e { e T ( R Z - 7icZ)b} + ~ . P 7 i , Z t = Q [
where R and 2 are defined in (8) and (9) respectively, 6, is the receiver's estimate of the channel correlation matrix R defined in (4) and E is any sequence in A,.
The lower bound to P,, is a weighted sum of Q functions and it will be dominated by the summand with the smallest argument proportional to
where (bmm, emin)
= argmin R e { e T ( R Z - 7i,Z)b} + c ~ Z ~ 7 i , Z e
{b,EEA, } Jz5G This minimization problem can be simplified in a way which still allows us to demonstrate the deterioration of the perfor- mance of the MLS receiver due to channel mismatch. This shall be illustrated in Section IV.
B. 112s Detector
A suboptimal and practical detection scheme in the multiple- access channel is two-stage detection. As shown in Fig. 2, two-stage detection for two users consists of two conventional matched-filter receivers for each user followed by subtractive interference cancellation and threshold detection. The matched filters provide statistics for tentative decisions of interfering symbols. Because the estimates for the interfering bits are hard decisions, this technique is called hard decision two-stage detection. Due to antipodal signaling and the formation of hard tentative decisions in this structure, tentative decision errors double the corresponding interference term. (Soft-decision structures have been analyzed elsewhere [ 131.)
In determining the performance of the H2S detection with mismatch in timing, phase, and amplitude we will focus our attention on user 1. The H2S detector for user 1 at time i makes final decisions in a three-step process:
1) form tentative decisions for the interfering symbols for user 1 at time i caused by user 2
h ( i ) = sgn [ ~ e { 2 , * ~ z ( i ) ) I b z ( i - 1) =sgn [ R e { i , * y z ( i - I)}] (16)

3084 IEEE 'ITV
Fig. 2. Hard decision two-stage detector.
2) form an estimate of the interference for the symbol of user 1 at time i, using tentative decisions and chamel estimates,
Note that b k ( i ) denotes tentative decisions for user k at time i. In order to see the effects of mismatch, the decision statistic may be expanded as
Y l ( Z ) - I l ( i ) = h ( i ) & P l l ( f l - 7 1 ) + b l ( i + 1) . Z l P l l ( f 1 - 7 1 - T ) + b z ( i - l ) [ Z 2 P T , ( T + 9 1 - 7 2 )
- 2 2 & ( T + ?1 - ?2)]
+ b Z ( i ) [ Z 2 P 2 1 ( f l - 7 2 ) - & 2 l ( f l - +2)1
+ 22&(T + ?1 - ?2)
. [b2(2 - 1) - b 2 ( i - l)]
+ 2 2 P Z l ( ? l - ? 2 ) [ b z ( i ) - b 2 ( i ) ] + n 1 ( i ) .
When the estimates for timing, phase and amplitude are perfect, Z ~ P T ~ ( T + ~1 A- 7 2 ) - Z ~ ~ T ~ ( T + ?l - f2) = 0 and &p21(?1 - 7 2 ) - Z 2 p z l ( f l - f2) = 0 and the residual interference is eliminated for perfect tentative decisions. On the other hand, when all estimates are not perfect (even when &(i) = b z ( z ) and b 2 ( ~ - 1 ) = b z ( i - l)), the residual interference due to mismatch is present. We find it convenient to define the errors in the conventional tentative decisions as ~ ( 2 ) = [ b z ( s ) - ; 2 ( 2 ) ] / 2 . In this case the final decision staustic is given by
Y l ( i ) - Il(2) = b l ( i ) Z l P 1 l ( + l - 71)
+ bl(Z + 1)ZlPl l ( f l - 7 1 - T ) + 2 2 2 p T 2 ( T + f 1 - f 2 ) E Z ( i - 1 )
+ 2522P21( f l - f 2 ) 4 i )
+ b2(Z - 1 ) [ Z 2 p T 2 ( T + f l - 7 2 )
- 2 2 & ( T + f 1 - f z ) ] + b 2 ( Z ) [ m 2 l ( f l - 72) - 2 Z P Z l ( + l - +2)1
+ nl(i) . (19)
Thi the
P pro1 stra noiz VeC
r .
is II Whi
of t
whc firs1 (CO1
I
whf
t
The fun( that
ACTIONS ON COMMUNICATIONS, VOL 43, NO 12, DECEMBER 1995
,xpression is key to finding a closed form expression for mbol error rate for two-stage detection. lough tedious, the technique for determining the error
for user 1 at time i for the H2S detector is itforward. An important observation is that the Gaussian vector, N ( i ) = [n2(i - l ) n l ( i ) n 2 ( 2 ) ] has a zero mean and covariance matrix
ually independent of the transmitted data where o2 is the noise level. Assuming equally likely bits, the probability or for user 1 may be computed as
pel = E{Pr [&( i ) = ~ l b l ( i ) = -1, (W)E{0,*112
N(z ) , E Z ( i - 1 ) = j , Q( i ) = 21
Pr [ ~ 2 ( i - 1) = j, E ~ ( Z ) = z l b l ( i ) = -1, N ( i ) ] } (21)
E is an expectation over the distribution of N ( i ) . The wtor in each expectation is an indicator function in the itioned) noise component nl (i) ,
[&(i) = l l b l ( i ) = - l , N ( i ) , € 2 ( i - 1) = j , 4 i ) = z]
= l {Re[Z;nl ( i ) ] >t(i - l , j , i ,z)}, (22)
from (22)
- l , j , i , Z ) =Re[z : ; {Z lp , l ( f l - 7-1)
- b l ( i + l ) Z l P l l ( f l - 7 1 - T ) - 2&p,,(f, - +2)
- 2 j 2 2 p ; z ( T + ?1 - ?2)
- Z [ Z 2 P 2 1 ( f l - 72) - ~ " 1 - +2)1
- j [ Z Z P T Z ( T + f 1 - 7 2 )
- 52pTz(T + f1 - e!)]}].
:cond factor from (21) is given by a product of indicator ons in each of the remaining two noise components such
Pr [ E Z ( ~ - 1) = j , ~ z ( i ) = z l b l ( i ) = -1,N(i)] = l{X(i - l,j)R&nz(i - l ) ] > X ( i - l , j ) a ( i - l,j)}
. ~ { X ( Z , ~)Re[Zlnz( i )] > X ( i , z)o!(~, z ) } (23)

GRAY et al.: MULTIUSER DETECTION IN MISMATCHED MULTIPLE-ACCESS CHANNELS 3085
where
and A(., .) = f l depending on the errors, E Z ( ~ - 1) and ~ 2 ( i )
and the symbols, b 2 ( i - 1) and b 2 ( i ) . The expression shown in (21) can be expressed succinctly as in
IV. ASYMPTOTIC MULTIUSER EFFICIENCY The asymptotic multiuser efficiency is a tractable and accu-
rate criterion for evaluation and design of multiuser demodu- lation schemes. In the absence of channel mismatch, definition for asymptotic multiuser efficiency is well-known and defined with reference to the error rate expression for equally likely binary antipodal signaling and optimal demodulation of an isolated user k in Gaussian noise. The result is the exact exponential rate of decay of the symbol error rate for user k and multiuser detector, expressed as an attenuation in signal- to-noise ratio q k due to MA1 suppression.
When a multiuser detector is mismatched to the channel, we choose to define the AME with reference to optimal (but mis- matched) demodulation for isolated transmission. This change in reference permits us to examine the loss in performance due to interferers in the channel, and does not penalize the detector for mismatch in the particular user of concern. It follows that the AME for user k , v k is given by
Note that the denominator includes the limiting symbol error rate exponent for the matched-filter detector for isolated trans- mission, and reflects the attenuation due to phase mismatch as well as mismatch-induced ISI. The AME m remesents the
effective attenuation of the signal energy for user k , relative to isolated transmission and optimum demodulation (with the same mismatch), required to eliminate MAI. Note that when q k is positive the error rate for user k decays exponentially fast as the noise level vanishes. If q,+ is zero for any relative signal strength, then the receiver has a near-far resistance of zero. In those circumstances the receiver expends all of the energy of a given user to suppress the corresponding MAI. Alternatively, when q k is unity the receiver wastes no energy in resolving collisions.
A. AME for Mismatched MLS Detection
that the AME for the mismatched MLS receiver is Following a derivation similar to that in [lo] we can show
where dmin denotes the smallest argument of a Q function in (13).
+ &i%z} while d$n,k is the value of this argument due to mismatched optimal transmission in isolation. Equivalently this is the value in (26) obtained by setting all crosscorrelations to zero.
The problem of finding dmln,k is fairly complicated for arbitrary channel mismatch. However an upper bound to the AME follows from the lower bound to the symbol error rate by considering only a subset of admissible E . We choose to consider E equal to one of the nine sequences which minimize the argument for perfect channel knowledge and 2 asynchronous users [lo],
E ( i ) = f l E ( i - 1) = (+l, - 1 , O ) €(i + 1) = (+l, - l , O ) ,
and then to find the admissible b,,, for each choice. There are 2 important observations to make,h,ere. First, this bound is tight for vanishing mismatch since RZ -+ R,Z in this case. Secondly, these nine sequences require only the approximated and true channel parameters local to the symbol of concern. The relevance of this statement is that even for time-varying channels and/or estimators, we may consider these parameters to be fixed for slowly time-varying situations, whenever the estimate remains approximately constant over at least two consecutive symbol periods.
For each E considered, we may find b which minimizes
argmin bmin = b R e { P ( R Z - kCZ)b}.

3086 IEEE TRAQISACTIONS ON COMMUNICATIONS, VOL. 43, NO 12, DECEMBER 1995
bmin may easily be obtained if we note that bmin(i) = t(i) if t ( i ) # 0 and bmin(i) = -sgn (Re (p))t(k) when t(i) = 0, for
It is also easy to show that the error in approximation of channel parameters of an interfering user always produces a loss of AME for fixed relative energies and a zero near-far resistance. The general expression for dmin will contain the
7'))- abs(Ap12(q-.il))- abs(Ap21(q---il)), duetononzero mismatch. For fixed relative energies, the value of mismatched d,,, is always smaller than that of dmin with no mismatch, resulting in a loss of AME. Also, since the magnitude of the last two terms in the expression for dmin is proportional to the energy of the interfering user, it will always eventually become larger than ZkPkk(?k - 7 k ) and bring AME to zero. Any amount of mismatch in the parameters of the interfering user will produce a loss of near-far resistance. In general, this is true of any optimal strategy for perfect channel knowledge. However it is not true for the H2S detector, as illustrated in the next section.
f0kWing terms: zkpkk((fj - '&) - abs(Zjpje(fj - 'Tk +
B. AME for Mismatched H2S Detection
The AME for the H2S detector is found by examining the error rate exponent for (24). The noise vector N ( i ) = [n2(i - 1 ) , 7 ~ ~ ( i ) , n 2 ( i ) ] ~ E C3 is Gaussian with a zero mean vector and an autocovariance matrix c21' = c2SSh. The transformation g = S-lN(i) produces independent compo- nents (provided S is positive definite) where g = [g1,gz,g3lT. This transformation allows a geometric interpretation for the events defined by the indicator functions in (24), which may be expressed as the intersection of three half spaces
where ST is the ith row of S and S, . g denotes a vector inner product.
The AME is determined by the error rate exponent of Pel in the limit as crz --f 0. The Lemma below offers a concise way of describing the limiting behavior of the error rate exponent for a single term in (24) as a minimum Euclidean norm problem u11.
4"a: Consider a colored Gaussian random vector N with autocovariance matrix oZr and a linear transformation S sdch that g = S-IN is a white Gaussian random vector. For !fin event X C , ~ , ~ , ~ , with nonzero probability on g ,
whe?;" q is the vector which satisfies I
I I q = argmin jISgII.
g ~ X l , n , w > "
i e Lemma relates the search for the AME of the H2S 1 tor to minimizing the norm of Sg subject to three linear
ineq "3 ality constraints imposed by the known constants t , a , and A. The solution of this minimum norm problem is the error rate exponent for a term in the symbol error rate expression (24) and the minimum of these nine exponents determine the AME for the given channel parameters and mismatch. The soludion to this constrained minimum n knob [12], and candidate solutions li edgd or a face of the region defined by exte@al norm I lqminI I is found, the AM givea by (29), shown at the bottom of the page
N+te that if the region in C3 contai errod rate exponent (and the AME) is zero.
I
, I v. NUMERICAL RESULTS
Td illustrate the effect mismatch plays in a realisti nicadion environment, we selected the user's wave an e*isting underwater communication system (see Fig. 3) @I. The maximum crosscorrelation between 1/3. he modest spreading of the users per JymboliTlg interval) was selected because amohnt of available bandwidth in the unde c h d e l . The values for mismatch used in are kharacteristic for the underwater acoustic channel with secobd order phase lock loop [SI. Since the typical values for @match will depend on the particular communication scenho the numerical examples in this section should be taken as 9 illustration of possible effects of the mismatch on the perfdmance of the MLS and H2S detectors.
d e first numerical example shown in Fig. 4 is the AME for user ~1 as the relative energy per symbol for user 2 is increased
W k = ( Z k l 2 is the energy for the kth user. The first set f curves are the AME's for MLS and H2S whe? with perfect channel knowledge. The second set repr d sents a mismatch in the estimate of the relative delay for uber 1, ?I- 71 of 1/10 of a chip, a mismatch in the relative delay for user 2, F2 - 7 2 of 3/10 of a chip and no mismatch in the +owledge of the phase and the amplitude for both users.
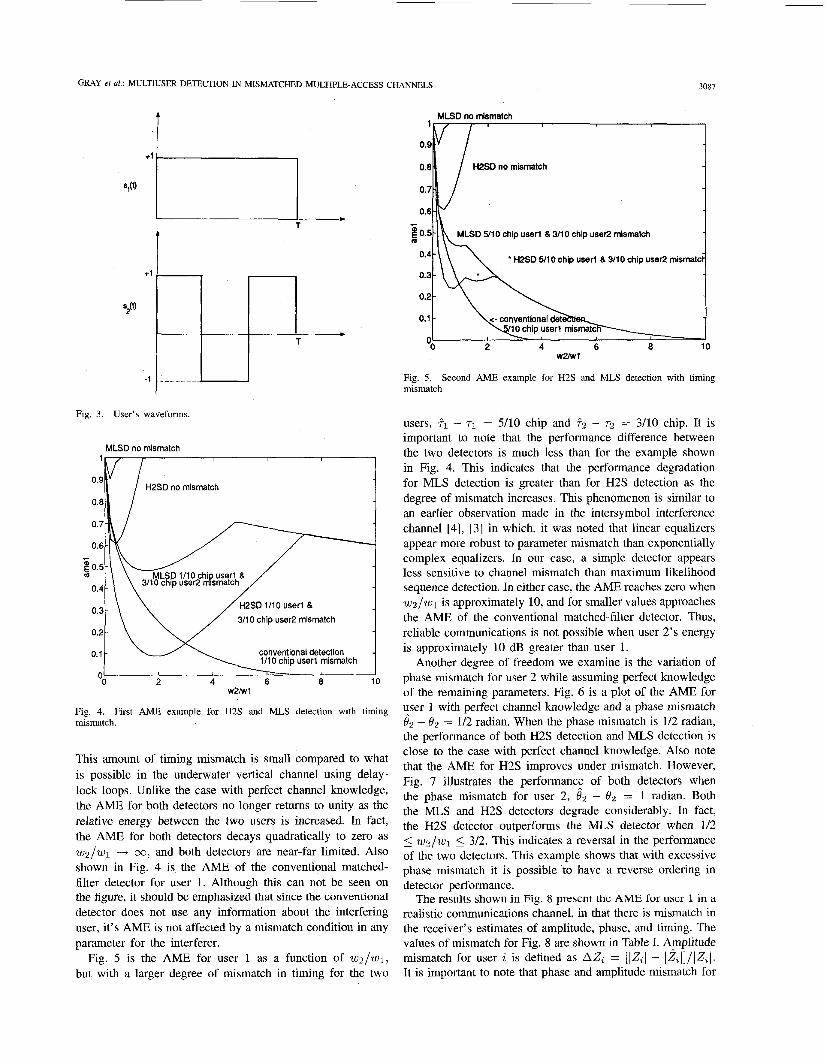
3087 GRAY et al.: MULTIUSER DETECTION IN MISMATCHED MULTPLE-ACCESS CHANNELS
Fig. 3. User’s waveforms.
MLSD no mismatch 1
0.9 HPSD no mismatch
3/10 chip user2 mismatch
w2/wl
Fig. 4. mismatch.
First AME example for H2S and MLS detection with timing
This amount of timing mismatch is small compared to what is possible in the underwater vertical channel using delay- lock loops. Unlike the case with perfect channel knowledge, the AME for both detectors no longer returns to unity as the relative energy between the two users is increased. In fact, the AME for both detectors decays quadratically to zero as wz/wl -+ CO, and both detectors are near-far limited. Also shown in Fig. 4 is the AME of the conventional matched- filter detector for user 1. Although this can not be seen on the figure, it should be emphasized that since the conventional detector does not use any information about the interfering user, it’s AME is not affected by a mismatch condition in any parameter for the interferer.
Fig. 5 is the AME for user 1 as a function of wz/wl, but with a larger degree of mismatch in timing for the two
MLSD no mismatch 1 b / , I I
’‘’[ 0.8 / HOSD no mismatch
0.6 0.7v I O . 5 1 l L U D 9 1 0 chip user1 & 3 1 0 chip user2 mismatch
W W l
Fig. 5. mismatch
Second AME example for H2S and MLS detection with timing
users, 61 - TI = 5/10 chip and ?z - 72 = 3/10 chip. It is important to note that the performance difference between the two detectors is much less than for the example shown in Fig. 4. This indicates that the performance degradation for MLS detection is greater than for H2S detection as the degree of mismatch increases. This phenomenon is similar to an earlier observation made in the intersymbol interference channel [4], [3] in which, it was noted that linear equalizers appear more robust to parameter mismatch than exponentially complex equalizers. In our case, a simple detector appears less sensitive to channel mismatch than maximum likelihood sequence detection. In either case, the AME reaches zero when wz/w1 is approximately 10, and for smaller values approaches the AME of the conventional matched-filter detector. Thus, reliable communications is not possible when user 2’s energy is approximately 10 dB greater than user 1.
Another degree of freedom we examine is the variation of phase mismatch for user 2 while assuming perfect knowledge of the remaining parameters. Fig. 6 is a plot of the AME for user 1 with perfect channel knowledge and a phase mismatch 02 - 02 = 112 radian. When the phase mismatch is 112 radian, the performance of both H2S detection and MLS detection is close to the case with perfect channel knowledge. Also note that the AME for H2S improves under mismatch. However, Fig. 7 illustrates the performance of both detectors when the phase mismatch for user 2, 02 - 02 = 1 radian. Both the MLS and H2S detectors degrade considerably. In fact, the H2S detector outperforms the MLS detector when 112 5 w2/w1 5 312. This indicates a reversal in the performance of the two detectors. This example shows that with excessive phase mismatch it is possible to have a reverse ordering in detector performance.
The results shown in Fig. 8 present the AME for user 1 in a realistic communications channel, in that there is mismatch in the receiver’s estimates of amplitude, phase, and timing. The values of mismatch for Fig. 8 are shown in Table I. Amplitude mismatch for user i is defined as AZ, = [ 12, I - 12, I] / 12% 1. It is important to note that phase and amplitude mismatch for

W2EHrl
Fig. 6. First AME example for H2S and MLS detection with phase mis- match.
1 MLSD 1 rad user2 mkmatch
2 HPSD 1 rad user2 mismatch
0 2 4 6 a 10 0
w m 1
Fig. 7. msmatch.
user 1 do not reduce the AME for user 1. Case ##2 represents a “larger” amount of mismatch in the knowledge of the channel than Case #1. For Case #I, the MLS detector is superior to the H2S detector only for 0 < W ~ / W I <2. For W Z / W ~ >2, there is no advantage in using MLS detection. For Case #2, we observe a reverse ordering in the performance of the two detectors. H2S detection is now the most advantageous technique for both error rate performance and computational complexity. Thus, the added complexity and decoding delay incurred by the MLS detector is only warranted when very close estimates of the channel parameters exist. Once again, the complexity inversion phenomenon noted by Gozzo in the IS1 channel [4], [3] is illustrated in this example.
Second AME example for H2S and MLS detection with phase
VI. CONCLUSIONS
Presented is a framework for quantifying the degradation in AME for MLS and H2S detection due to deterministic mis- match in timing, amplitude and phase at the multiuser detector in a Gaussian multiple-access channel. Mismatch in precise
, Fig. 81. mismatch.
AME for H2S and MLS detection with tlming, amplitude and phase
, , TABLE I
MISMATCH VALUES USED IN FIG. 8 I
causCs residual “interference” that increases as the relative diffekence between the user’s energies increases. this Interference reduces the AME’s for the tw to dro. Moreover, numerical results presented indichte that the A m ’ s of MLS detection and degrkde at different rates as the amount of increked. In many cases, the mismatch performa detedtors is identical when the relative energy between a strong and weak user is small. Under some mismatch conditi
for H2S detection exceeds MLS detection. Con the oomputational complexity and decoding delay of MLS detedtion, it appears that optimal detection, assuming perfect knowledge of the channel, can only be justified when the procdss used to estimate timing, amplitude and phase perfelct.
I REFERENCES
I . [l] J. Divsalar, “Performance of rmsmatched receivers in bandlirmted chan- e,” Ph.D. dissertation, UCLA, 1978. [2]
‘iew,” IEEE Trans. Inform. Theory, vol 35, no 2, Mar [3] $. Gozzo and J. B. Anderson, “New results on equalizer performance in
dhannel mismatch conditions,” in Proc. IEEE 1992 GLOEECOM Con$, Orlando, FL, 1992.
Barbosa, “Maximum likelihood sequence estimators
NY, May 1992. [6] S. Verdu, “Minimum probability of error for
multiole-access channels.’’ IEEE Trans. Inform. Theorv. vol. 32. no. 1. pp. 85-96, Jan. 1986.
[7] lyr. Varanasi and B. Aazhang, “Multistage detechon in asynchronous code-division multiple-access communications,” IEEE Trans. Commun., vol. 38, no. 4, pp. 509-519, Apr. 1990

GRAY et al.: MULTIUSER DETECTION IN MISMATCHED MULTIPLE-ACCESS CHANNELS 3089
[SI D. Brady and J. Catipovic, “Adaptive multiuser detection for underwater acoustic channels,” IEEE J. Oceanic Eng., vol. 19, no. 2, pp. 158-165, Apr. 1994.
[9] G. Forney, “Maximum-likelihood sequence estimation of digital se- quences in the presence of intersymbol interference,” IEEE Trans. Inform. Theory, vol. 18, no. 3, pp. 363-378, May 1972.
[ 101 S. Verdu, “Optimum multiuser asymptotic efficiency,” IEEE Trans. Commun., vol. COMM-34, no. 9, pp. 890-897, Sept. 1986.
[11] D. Stroock, An Introduction to the Theory of Large Deviations. New York Springer-Verlag, 1984.
[12] D. Luenberger, Optimization by Vector Space Methods. New York Wiley, 1969, pp. 134-137.
[13] X. Zhang and D. Brady, “Soft-decision multistage detectors for asyn- chronous AWGN channels,” in Proc. of the 31st Allerton C o f , Mon- ticello, IL, 1993.
Mark0 Kocic was born in 1967 in Belgrade, Yu- goslavia. He received the B.Eng. (Hons. 1) degree from King’s College, London, U.K., in 1990, and the M.S. degree from University College, London, U.K. in 1991. Since 1992, he has been working to- wards the Ph.D. degree at Northeastern University, Boston, MA.
His main research interests are in multiuser com- munications, low complexity underwater commu- nications, adaptive signal processing and satellite communications.
Steven D. Gray (S’92) was born in Kenosha, Wis- consin on April 3, 1962. He received the B.S. (with high honors) and M.S. degrees in electrical engineering from Texas A&M, in 1985 and 1986, respectively. He is currently pursuing a Ph.D. at Northeastern University under a MITRE sponsored degree program.
His industrial experience includes positions at Sandia National Laboratories, E-Systems Incorpo- rated and the MITRE Corporation. Since 1990 he has worked at the MITRE Corporation and since
1992 he has been a member of the Statistical Signal Processing Group. His research interests include: multiuser communication theory, information theory, adaptive spatial and temporal signal processing, detection theory and estimation theory.
Mr. Gray is a member of Eta Kappa Nu, Tau Beta Pi, and Phi Kappa Phi.
David Brady (M’90) received the B.S. degree from Camegie-MeIlon University with university honors, in 1982, the M.S. degree from the California Insti- tute of Technology, in 1983, and the Ph.D. degree from Princeton University, in 1990, all in electrical engineering.
His industrial experience includes positions as a Member of Technical Staff at AT&T Bell Labora- tories (1982-1984, 1986-1988) and Bell Commu- nications Research (1984-1986). He has been an assistant urofessor in the Electrical and Comuuter
Engineering Department at Northeastem University since 1990 and a Guest Investigator at the Woods Hole Oceanographic Institute since 1991. He is interested in the development of receivers for the optical multiple-access channel, the multipath fading channel and the underwater acoustic channel. He has published articles on spread-spectrum systems, information theory, and optical signal detection.




















