Modeling of the vulnerability related to the dynamic road traffic
Upload
khangminh22Category
view
3download
0
- i -
THAI NGUYEN UNIVERSITY
THAI NGUYEN UNIVERSITY OF TECHNOLOGY
NGUYEN THI HOA
MODELING AND DYNAMIC ANALYSIS
OF THE HORIZONTAL WASHING MACHINE
MAJOR: MECHANICAL ENGINEERING
CODE: 9520103
SUMMARY OF DOCTORAL THESIS IN
MECHANICAL ENGINEERING
THAI NGUYEN- 2021
- ii -
The thesis is completed at Thai Nguyen University of Technology
Supervior: Assoc. Prof. Dr. Ngo Nhu Khoa
Reviewer 1:………………………………………………
Reviewer 2:………………………………………………
Reviewer 3:………………………………………………
The thesis will be presented in front of the grading committee of the Thai Nguyen
university doctoral thesis at Thai Nguyen University of
Technology, 3/2 street, Tich Luong ward, Thai Nguyen city.
at .... hour ..... date .... month .... year ......
The thesis can be found at:
- National Library
- Thai Nguyen University Library
- Thai Nguyen University of Technology’s Library
- 3 -
INTRODUCTION
The motivation of the research
Rotating objects are common objects in mechanical systems that can be seen in
cutting machine tools, the rotor of the motor, mandrel of the mill, the drum of the
washing machine and etc. During operation, the rotating objects create vibrations of
the system.
In this research, the specific rotating object of the washing machine's drum
is selected because it is a best-selling household electrical appliance in the world
as well as in Vietnam.
The main excitation force causing vibration for the washing machine is the
distribution of clothes in the drum which creates an unbalanced mass. The washing
machine cycle is divided into two main stages: washing and spinning. During the
wash cycle, the machine rotates at a low speed to move the clothing around the tub,
so the vibration occurs with a small amplitude. However, in the spin cycle, the
vibration occurs powerfully and changes continuously because the drum rotates at
high speed causing the laundry to move against the inner edge of the drum, leading
to a large unbalanced mass until the spinning completes. Especially for front-loading
washing machines, the unbalance of clothes happens easily due to the influence of
gravity.
To solve such problem of the vibration characteristics analysis of the washing
machine, as a basis for solving the problems of designing as well as how to operate
the washing machine better, firstly it is necessary to build a simulation modeling of
the machine operation. Therefore, the author decides on the problem “modeling and
dynamic analysis of the horizontal washing machine” as the research project.
Objectives
The objectives are to build the dynamic model for the horizontal washing
machine in both the planar and spatial coordinates and to evaluate the effect of the
system parameters on the machine vibration. Thus, some suggestions are proposed to
control and to reduce the vibration of horizontal washing machines while remaining
the origiral working mode and characteristics of the horizontal washing machines.
Research subjects
The object of the study is the dynamics and vibration of the horizontal washing
machine. This project uses the suspended system of the LG-WD 8990TDS horizontal
the horizontal washing machine as a real object for developing a dynamic model and
evaluating such model.
Methodology

- 4 -
The study uses the theory of modeling, numerical simulations combined with
experimental research. Concretely, modeling problem are solved by using the
fundamental knowledge of mechanics and dynamics to establish differential
equations of motion of the suspended system. Numerical simulation’s method is used
by using Matlab/Simulink software. The experimental results are used to verify the
theoretical model.
Scientific significance and practical meaning
• Scientific significance
The study contributes a part of knowledge about the vibration of rotating objects
including suspended system, especially modeling problem and vibration analysis of
horizontal the horizontal washing machine, in particular:
- To clarify the characteristics of the relationship between force and velocity in
friction damper device used in the suspended system of the horizontal washing
machinethe horizontal washing machine.
- To develop the computational model which describes the nonlinear
relationship between the quantities of spring stiffness, the resistance characteristics
of damper, the mass of eccentric load, the coordinate points of flexible connection of
the front-loading the horizontal washing machine in both two-dimensional and three-
dimensional space.
The results of this project form a theoretical and empirical basis for the further
projects which is about the washing machine. They can be used as a reference for
teaching and scientific research that belongs to the vibration of the mechanical
system.
• Practical meaning
The study built the computational model of dynamics for the horizontal washing
machine. The results apply directly to creating problems of control or reducing
vibration for the machine by semi-active or active suspended system.
Proposing an improved suspended system to reduce vibrations for horizontal
washing machines the horizontal washing machinein the same working mode.
Contributions of the research
1- Modeling a vibrational-controlled and suspended system of the horizontal
drum washing machine (HWM). Concretely, modeling of such a system is based on
real objects including evaluation and analysis of parameters to determine planar and
spatial models. In addition, the characteristics of all components in the system are
determined by experimental methods. The obtained models include the planar model
with 02 and 03 degrees of freedom, the spatial model with 06 degrees of freedom.
The obtained result is a system of nonlineal differential equations, including
- 5 -
geometric nonlinear and nonlinear of the friction force-velocity relationship of the
dampers which are used in the suspended system.
2- Setting up the experimental system based on the horizontal washing machine
LG-WD 8990TDS. Such experimental system can simultaneously measure the
following quantities: (1) 05 reaction forces at positions attached between the washing
drum and the frame by using loadcells; (2) displacements in x and y directions of
washing drum by using LVDTs and (3) acceleration at 04 arbitrary points by using
accelerator sensors. A computer running NI Signal Express were used for real-time
computation and interfacing with the experimental hardware via the data acquisition
card. The measurement application built on the NI Signal Express software allows
direct observation and evaluation of displacement as well as the force at the links in
the spin modes.
3- Performing calculations, simulations, solving the system of obtained
nonlineal different differential equations by using numerical methods. The dynamic
models are solved in Simulink environment in Matlab/R2014a. The computer
program calculates the reaction forces of springs and dampers, displacement in x and
y directions, velocity acceleration, the trajectory of points on the suspended system
and etc. These numerical results of the vibration model are verified with the
experimental results to evaluate the reliability of each model.
4- Based on the correctness and reliability of the dynamic models, the study
presents a good accuraccy configuration of the suspended system in the horizontal
washing machine which is even better than those for other models available in the
literature. The proposed configuration is both highly feasible in reducing vibrations
for HWM (up to 14.5% reduction is possible) without significantly increasing costs.
The results and findings in this research are published on 07 science articles,
including 04 articles index in Scopus, Q4 and 03 papers in national conferecences,
which is scored by The State Council for Professor.
The contents of the research
The research’s contents contains: Introduction, 4 chapters and Conclusion. In
the Section Introduction, it presents the rationale, objectives, subjects, and
methodology of the research. Its contributions are shown briefly in this part.
Chapter 1 An overview of documents on building a mathematical model and
how to control vibrations for the horizontal washing machines.
Chapter 2 The characteristics of each component of the front-loading the
horizontal washing machine’s suspended system; setting dynamic model for this in
- 6 -
both two-dimensional and three-dimensional space case; building simulation
program in Matlab/Simulink environment.
Chapter 3 Buiding a vibration measurement system of the horizontal washing
machines working in in real-time mode, determining the reaction force at the
connection points of the suspended system with the the horizontal washing
machinewashing machine’s body in real-time mode. Verifying and evaluating the
deviation of the simulation results of the built mathematical model compared with
the experimental results.
Chapter 4 Applying dynamic model for evaluating the impact of parameters
of suspended system on vibration of the horizontal washing machine’s body and
referring to solutions to reduce the vibrations. Finally, Section Conclusion suggests
the further research which need to be considerd.
CHAPTER 1
LITERATURE REVIEW
1.1. INTRODUCTION ABOUT THE WASHING MACHINE
1.2. LITTERATURE REVIEW
1.2.1. Domestic researchers
1.2.2. Foreign researchers
1.2.2.1. On deleloping of dynamic model of suspended system
1.2.2.2. On the ways to control the vibration
1.3. THE CONCLUSION OF CHAPTER 1
The findings obtained from the research has announced
Through the general analysis of the modeling, it can be seen that each published
project has a different approach. The available models mainly describe the vibrations
of the vibration group (including the washing drum and container drum), the vibration
of the cabinet, the relative motion of the washing drum and the container drum, etc.
With the 2D models, the study is only interested in the movement in one or two
directions of the drum system, not in the shaking motion of the drum. For the 3D
model, the system has reduced the complex components so that the mathematical
model can be linear, thereby analyzing vibration reduction for HWM. Some spatial
models of HWM have just stopped at theoretical research and have not been
experimentally verified. The project will carry out experimental studies on real
subjects to further contribute to the research field.
Through an overview survey on how to control vibration, it can be found that
using a semi-active suspended system is remarkably effective in reducing vibrations
for washing machines. However, because of the integrated control system, the
structure is complicated and high production and maintenance costs, so passive
- 7 -
suspended system is still mainly used. Therefore, the improvement of the passive
suspended system, proposing a plan to increase the efficiency of vibration reduction
for this suspended system in the HWM has practical significance and is the directed
study of the project.
The issues should be continued to research
After reviewing the published papers on the suspended system of the horizontal
the horizontal washing machine, it can be assumed that the potential factors affecting
the vibration characteristics of the suspended system in the washing machine can be
listed as follows: (i) response of springs and dampers; (ii) geometrical parameters of
the components in the system such as the correlation of the connection position
(direction) of the spring, damper, size of the drum/container drum, etc. in which the
study affects the total of these factors (parameters) has not been performed in available
studies. Therefore, the problem for the study is to build an appropriate mathematical
model to be able to investigate the influence of these factors on the vibration of the
suspended system.
Objectives of the thesis
From the above analysis, this research aims so to solve the following main issues:
1- Develop a vibration model of six-degrees of freedom (3D) for the horizontal
the horizontal washing machine suspended system, including the nonlinear in the
geometry of suspended system, and in springs and dampers.
2- Develop experimental equipment model to define the practical characteristics
(nonlinear) of the components in suspended system and verify, evaluate the reliability
of the mathematical model.
To complete this research, the research process is concretized in the following
steps:
• Build a mathematical model for suspended system according to the structure
of the typical horizontal the horizontal washing machine’s one.
• Build an imitated program to perform input-ouput factors of mathematical
models.
• The numerical solution is specified based on the actual input of machine,
including the technical characteristic of each part of suspended system such as spring
stiffness, resistance coefficient of damper, moment inertia, etc of the typical LG
horizontal washing machine. All of these quantities were determined from an
experimental measurement system which is set up for the own research.
• Verify simulation results by directly comparing them with experimental
ones. The obtained results are the basis of reference to evaluate the mathematical
model in terms of reliability and practical applications.

- 8 -
• Select the suitable dynamic model.
• According to the selected model, evaluate the impact of the parameters to
find out solutions for reducing the suspended system of the horizontal washing
machines.
CHAPTER 2
BUILDING DYNAMIC MODEL FOR THE SUSPENDED SYSTEM OF
HORIZONTAL WASHING MACHINE
2.1. THEORETICAL BASIS
2.1.1. Dynamics of multibody systems
2.1.1.1. Determining the position of a rigid body in space
2.1.1.2. Determining angular velocity of rigid body
2.1.1.3. Determining the position, velocity, acceleration of a random point’s object
2.1.1.4. Differential equations of motion of the rigid body
The Newton-Euler equation of motion for a rigid body in space is used to derive
in the differential equation of the system [57]:
1
1
( ) ( )
nC
k
k
n
C C C k
k
dM
dt
I I
=
=
=
+ =
vF
ω ω ω m F
(2.16)
Where M is mass of the body, CI is inertia tensor of a rigid body about the center of
mass, vC is the velocity of the center of mass, ω is the angular velocity of the body,
Fk is the total force acting on the center of mass và mC(Fk) is the moment of inertia
about the center of mass C.
2.1.2. Friction force
To perform the force-velocity relation of damper, an exponential function model
combined with Coulomb friction and lubricated friction are shown as follows [61]:
( / )( ) sgn( ) ( ) sx x
C x s CF x F x F x F F e−
= + + − (2.21)
Where ,sx is experimental parameters, CF là Coulomb friction, sF is the value of
static resistance và xF is the parameter of lubricated friction. If 1 = , equation (2.21)
is known to correspond with the Tustin model [62] and is described by the following
expression: ( / )
( ) sgn( ) ( ) sx x
C x s CF x F x F x F F e−
= + + − (2.22)
In the next part, the study uses the Tustin model to determine the force-velocity
regression line from empirical data.
- 9 -
2.2. STRUCTURE AND WORKING PRINCIPLES OF SUSPENDED
SYSTEM OF HORIZONTAL WASHING MACHINE
2.2.1. Structure of suspended system of horizontal washing machine
2.2.2. Working principles
2.3. PHYSICAL MODEL OF SUSPENDED SYSTEM
2.3.1. Characteristic of elastic element
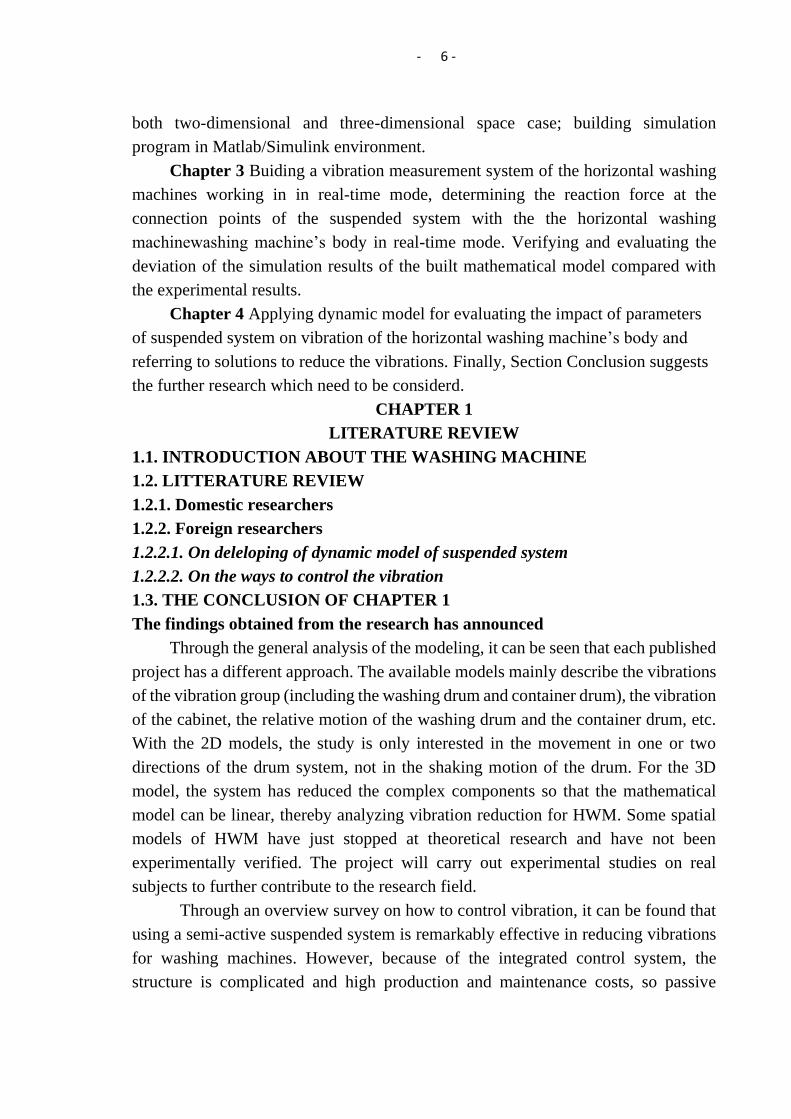
Figure 2.6.Measuring the characteristic of spring
The graph describes the result of the measurement of the experiment of the real
spring used in the HWM suspended system shown in Figure 2.6. With 99.7%
determination, the obtained results pointed that the elasticity characteristic of the
spring is linear and the magnitude of the stiffness coefficient (k) can be taken as 5652
N/m.
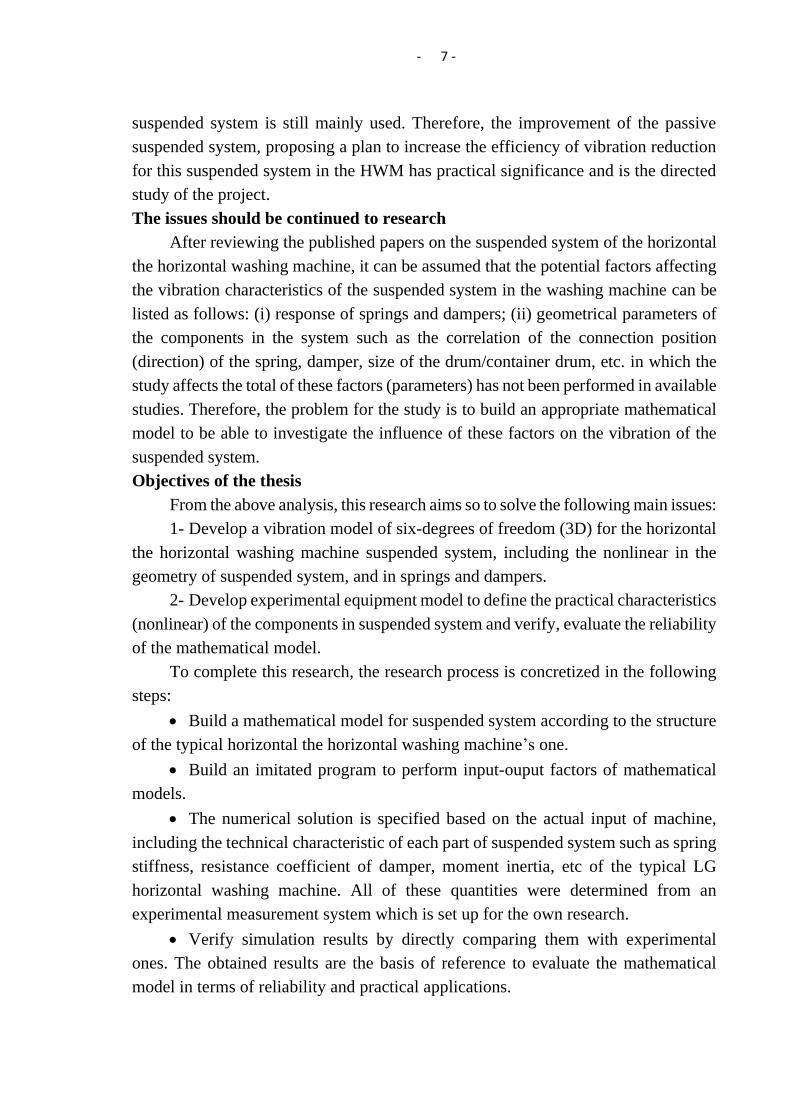
2.3.2. Characteristic of damper element
The real image of the damper used in the horizontal washing machine in Figure
2.8.
Figure 2.8. Damper in horizontal washing machine’s suspended system
1- The outer tube, 2- Piston shaft, 3- Lubrication, 4- oil soaked sponge
To determine the characteristics of the device, the working principle diagram of
the experimental device is shown in Figure 2.9 and the experimental diagram of
measuring drag against the velocity of the damper is shown in Figure 2.10.
tub
tub and damper pin
connection
Friction damper
- 10 -
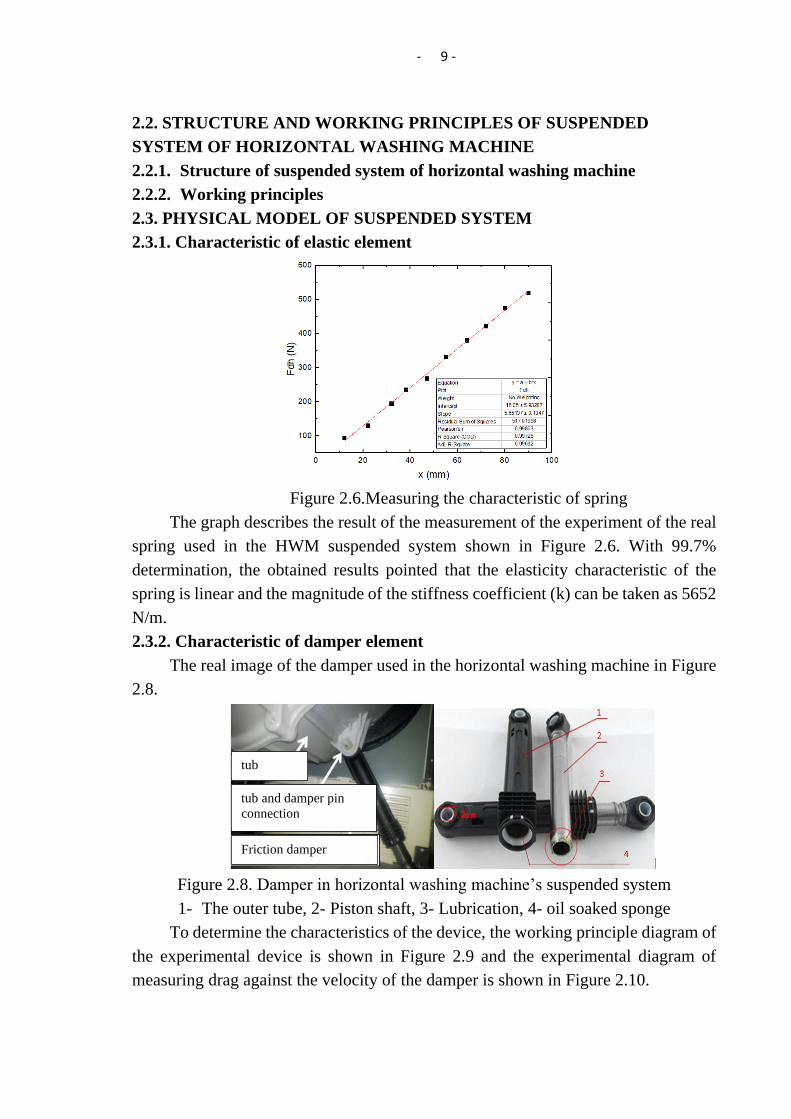
Figure 2.9.The working principle of experimental device [5]
Figure 2.10.The experimental diagram of measuring drag characteristic
of damper [5]
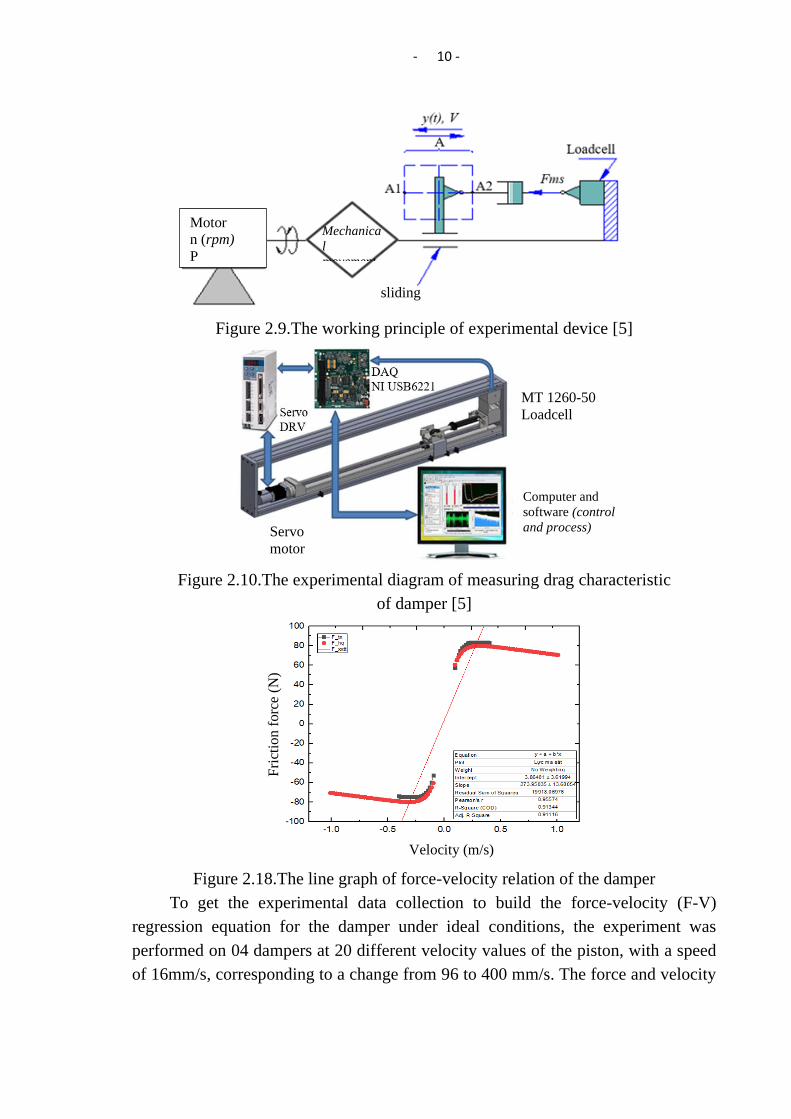
Figure 2.18.The line graph of force-velocity relation of the damper
To get the experimental data collection to build the force-velocity (F-V)
regression equation for the damper under ideal conditions, the experiment was
performed on 04 dampers at 20 different velocity values of the piston, with a speed
of 16mm/s, corresponding to a change from 96 to 400 mm/s. The force and velocity
Motor
n (rpm)
P
(capacity)
Mechanica
l
movement
sliding
bearing
Servo
motor
MT 1260-50
Loadcell
Computer and
software (control
and process)
Velocity (m/s)
Fri
ctio
n f
orc
e (N
)
(m/s
)
- 11 -
nonlinear relationship of the damper in force and extension cycles can be
approximated by the equation:
(2.26)
including: C0 = 85.73, C1 = - 15.00, C2 = -93.50, C3 = 0.07.
The comparison results between the force-velocity curve calculated according
to equation ( figure 2.26) (red line F_hq) with experimental results (black line F_tn)
shown in Figure 2.18 proved the authentication of the proposed theoretical model.
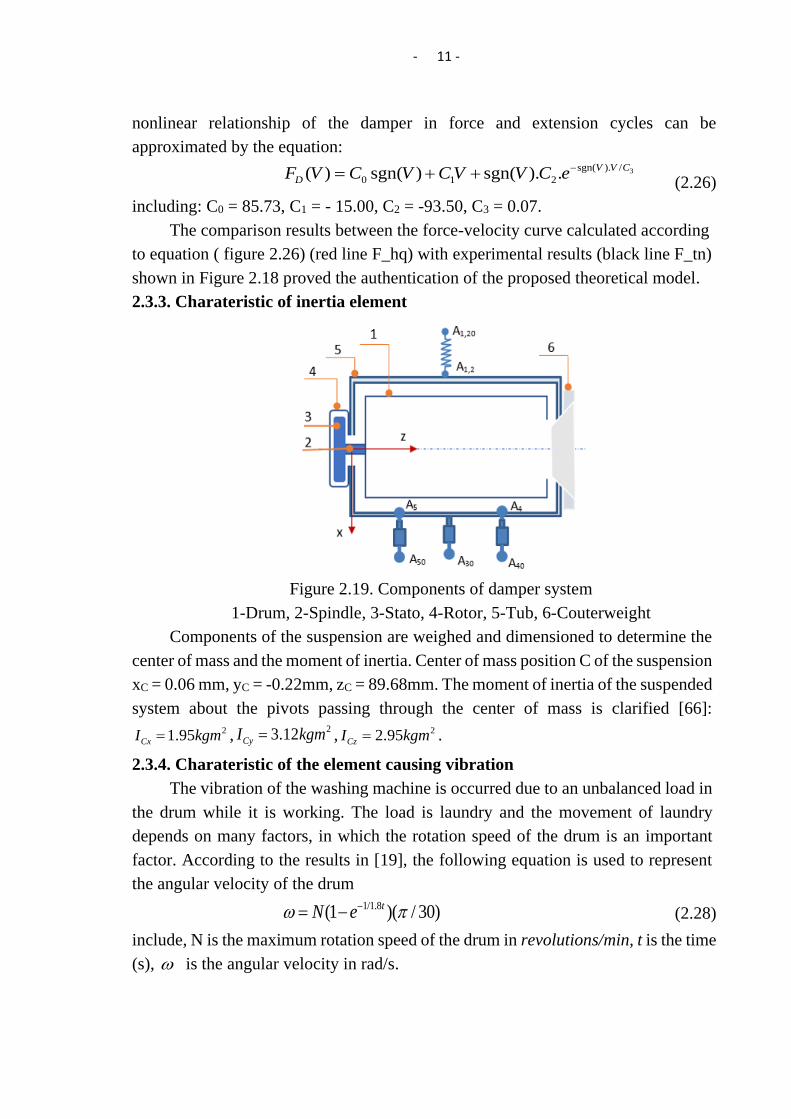
2.3.3. Charateristic of inertia element
Figure 2.19. Components of damper system
1-Drum, 2-Spindle, 3-Stato, 4-Rotor, 5-Tub, 6-Couterweight
Components of the suspension are weighed and dimensioned to determine the
center of mass and the moment of inertia. Center of mass position C of the suspension
xC = 0.06 mm, yC = -0.22mm, zC = 89.68mm. The moment of inertia of the suspended
system about the pivots passing through the center of mass is clarified [66]:21.95CxI kgm= ,
23.12CyI kgm= , 22.95CzI kgm= .
2.3.4. Charateristic of the element causing vibration
The vibration of the washing machine is occurred due to an unbalanced load in
the drum while it is working. The load is laundry and the movement of laundry
depends on many factors, in which the rotation speed of the drum is an important
factor. According to the results in [19], the following equation is used to represent
the angular velocity of the drum
1/1.8(1 )( / 30)tN e −= − (2.28)
include, N is the maximum rotation speed of the drum in revolutions/min, t is the time
(s), is the angular velocity in rad/s.
3sgn( ). /
0 1 2( ) sgn( ) sgn( ). .V V C
DF V C V C V V C e−
= + +

- 12 -
From equation (2.28), the integration with the time variable will get the
expression for the rotation angle and with one derivative will get the angular
acceleration of the drum, from which the inertia force caused by the unbalanced
mass is determined.
2.4. BUILDING DYNAMIC MODEL OF SUSPENDED SYSTEM MODEL
2.4.1. Building space model (Model 1)
Figure 2.22. Space model of HWM suspended system
1-springs, 2-tub, 3-drum, 4-laundry, 5-dampers
Assuming ignoring the high order infinitesimal quantities, we can get a system
of 06-second order differential equations to determine the displacement and rotation
angle of the washing machine suspended system as follows:
3
2 3
1 1
2 3sgn( ) /
0 1 2
1 1
2
2 3
1 1
2
0 1
1
( )cos ( sgn( ) sgn( ) ) os
( cos sin )
( )cos ( sgn( )
r rjD jD
iSx jDx mx
i j
V V Cr r r
iS iSx jD jD jD jDx
i j
iSy jDy my
i j
r
iS iSy jD
i
M x F F F
k L C V C V V C e c
mr mr
M y F F F
k L C V C V
= =
−
= =
= =
=
= + +
= − + − + +
+ +
= + +
= − + − +
3
3
3sgn( ) /
2
1 3,4,5
2
2 3
1 1
2 3sgn( ) /
0 1 2
1 1
sgn( ) ) os
( sin cos )
( )cos ( sgn( ) sgn( ) ) os
r rjD jD
r rjD jD
V V Cr r
jD jD jDy
j j
iSz jDz mz
i j
V V Cr r r
iS iSz jD jD jD jDz
i j
V C e c
mr mr
M z F F F
k L C V C V V C e c
−
= =
= =
−
= =
+
+ −
= + +
= − + − + +
(2.53)
1
2
3
4
5

- 13 -
3
2 3
1 1
2
1
3sgn( ) /
0 1 2
1
( ) ( ) ( ) ( )
( ) ( )cos ( )cos
( sgn( ) sgn( ) ) ( ) os ( ) os
(
r rjD jD
Cx Cz Cy Cx iS Cx jD Cx mu
i j
iS iS iSz iS iSy
i
V V Cr r r
jD jD jD jD jDz jD jDy
j
u
I I I m m m
k L y y z z
C V C V V C e y y c z z c
z mr
= =
=
−
=
+ − = + +
= − − − −
+ − + + − − −
−
F F F
2 sin cos )mr −
3
2 3
1 1
2
1
3sgn( ) /
0 1 2
1
( ) ( ) ( ) ( )
( ) ( )cos ( )cos
( sgn( ) sgn( ) ) ( ) os ( ) os
(
r rjD jD
Cy Cx Cz Cy iS Cy jD Cy mu
i j
iS iS iSx iS iSz
i
V V Cr r r
jD jD jD jD jDx jD jDz
j
u
I I I m m m
k L z z x x
C V C V V C e z z c x x c
z mr
= =
=
−
=
+ − = + +
= − − − −
+ − + + − − −
+
F F F
2cos sin )mr +
3
2 3
1 1
2
1
3sgn( ) /
0 1 2
1
2
( ) ( ) ( ) ( )
( ) ( )cos ( )cos
( sgn( ) sgn( ) ) ( ) os ( ) osr rjD jD
Cz Cy Cx Cz iS Cz jD Cz mu
i j
iS iS iSy iS iSx
i
V V Cr r r
jD jD jD jD jDy jD jDx
j
I I I m m m
k L x x y y
C V C V V C e x x c y y c
mr
= =
=
−
=
+ − = + +
= − − − −
+ − + + − − −
−
F F F
2.4.2. Building dynamic model to suspended system with direct motion
(Model 2)
When the eccentric load and the center of mass of the suspended system are in
the same plane, the six-degrees-of-freedom space model is converted to a three-
degree-of-freedom plane model.
Figure 2.26. Suspended system model with direct motion

- 14 -
The Newton-Eulerian equations describing the suspended system is written as
follows:
1 2 1 2
1 2 1 2
1 2 1 2
1
( ) ( ) ( ) ( ) ( ) ( )
kx Sx Sx Dx Dx mx
k
ky Sy Sy Dy Dy my
k
n
Cz Cz k Cz S Cz S Cz D Cz D Cz mu
k
M x F F F F F F
M y F F F F F F
I m m m m m m=
= = + + + +
= = + + + +
= = + + + +
F F F F F F
(2.54)
Where, the components of the excitation force caused by the inertia force of the
eccentric load and its moment about the center of mass C are the same as in the spatial
model. For the expression of the components of the elastic force of the spring and the
drag of the damper, there is a change (in the system of equations (2.54), index 1
corresponds to the spring and right damper, index 2 corresponds to the spring and left
damper).
2.4.3. Planar two-degrees-of-freedom model (Model 3)
Besides the assumptions stated in model no. 2, if constraint condition of the
circular motion of the container around the z-axis is added, , the mechanical system
has only two degrees of freedom, the motion of the drum is considered as translational
motion. Then the system of Newton - Euler equation is expressed as follows:
1 2 1 2
1 2 1 2
Sx Sx Dx Dx mx
Sy Sy Dy Dy my
M x F F F F F
M y F F F F F
= + + + +
= + + + + (2.64)
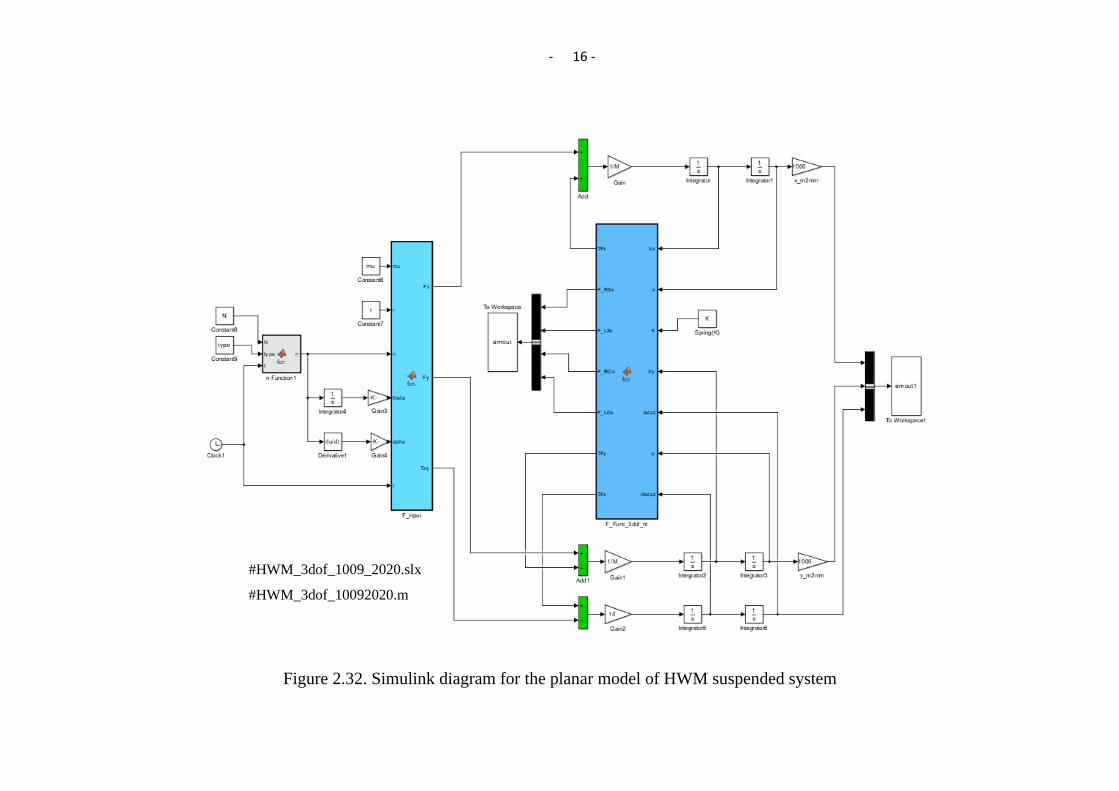
2.4.4. Simulink representation of models
2.4.4.1. Simulink diagram
To solve the system of nonlinear differential equations of the suspended system,
the numerical solution program is written in the Matlab/Simulink environment by
using the function blocks available in Simulink combined with M-file in Matlab. The
solution diagram for the system of equations representing the suspended system in
space is shown in Figure (2.31), for the planar suspended system is shown in Figure
(2.32). The main calculation is in the F_Func function block in the center of the
diagram. The input parameters of the block diagram are the parameters of the mass,
the geometrical characteristics of the system, the coordinates of the positions of the
points connecting the springs and dampers to the tub and cabinet, the rotation speed
of the drum, mass and position of the eccentric mass, spring stiffness coefficient (k),
coefficients of expression of drag's damper. The output parameters (simulation
results) are the displacement, the shaking angle of the system and the dynamic,
reaction forces at the spring and damper connections to the cabinet.

- 15 -
Figure 2.31. Simulink diagram for the spacial mechanics system of HWM suspended system
#HWM_6dof_1209_2020.slx
#HWM_6dof_12092020.m
- 16 -
Figure 2.32. Simulink diagram for the planar model of HWM suspended system
#HWM_3dof_1009_2020.slx
#HWM_3dof_10092020.m
- 17 -
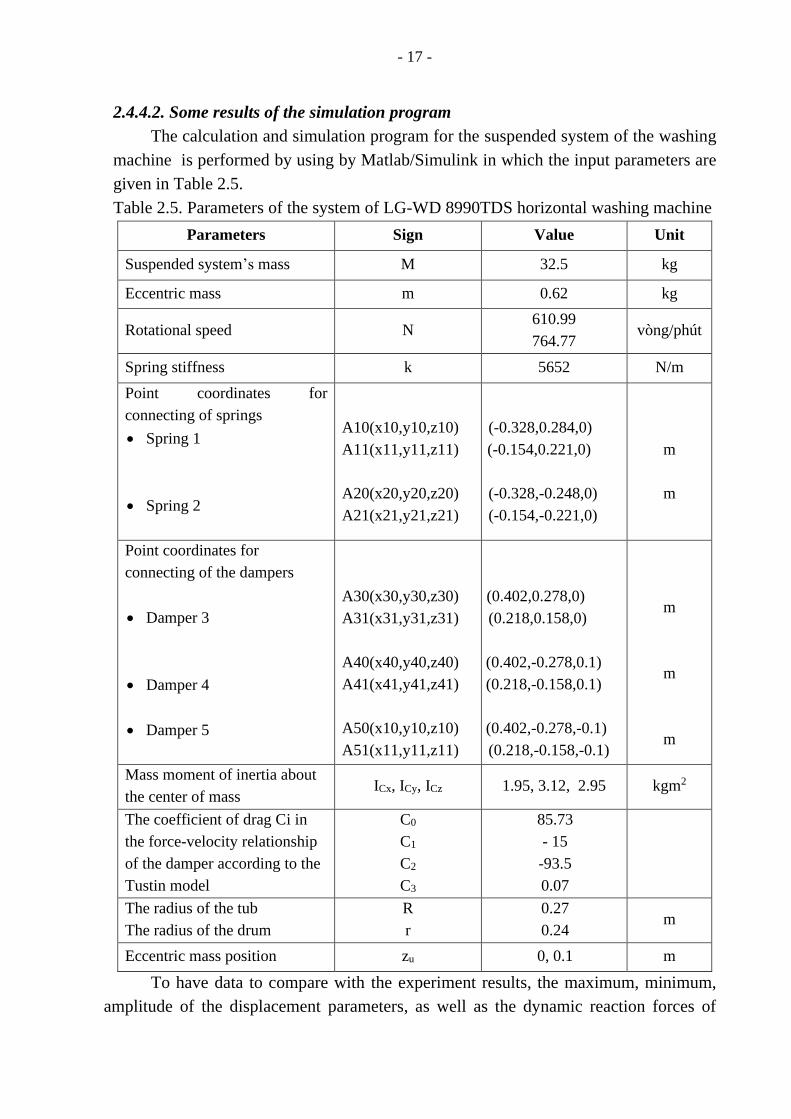
2.4.4.2. Some results of the simulation program
The calculation and simulation program for the suspended system of the washing
machine is performed by using by Matlab/Simulink in which the input parameters are
given in Table 2.5.
Table 2.5. Parameters of the system of LG-WD 8990TDS horizontal washing machine
Parameters Sign Value Unit
Suspended system’s mass M 32.5 kg
Eccentric mass m 0.62 kg
Rotational speed N 610.99
764.77 vòng/phút
Spring stiffness k 5652 N/m
Point coordinates for
connecting of springs
• Spring 1
• Spring 2
A10(x10,y10,z10)
A11(x11,y11,z11)
A20(x20,y20,z20)
A21(x21,y21,z21)
(-0.328,0.284,0)
(-0.154,0.221,0)
(-0.328,-0.248,0)
(-0.154,-0.221,0)
m
m
Point coordinates for
connecting of the dampers
• Damper 3
• Damper 4
• Damper 5
A30(x30,y30,z30)
A31(x31,y31,z31)
A40(x40,y40,z40)
A41(x41,y41,z41)
A50(x10,y10,z10)
A51(x11,y11,z11)
(0.402,0.278,0)
(0.218,0.158,0)
(0.402,-0.278,0.1)
(0.218,-0.158,0.1)
(0.402,-0.278,-0.1)
(0.218,-0.158,-0.1)
m
m
m
Mass moment of inertia about
the center of mass ICx, ICy, ICz 1.95, 3.12, 2.95 kgm2
The coefficient of drag Ci in
the force-velocity relationship
of the damper according to the
Tustin model
C0
C1
C2
C3
85.73
- 15
-93.5
0.07
The radius of the tub
The radius of the drum
R
r
0.27
0.24 m
Eccentric mass position zu 0, 0.1 m
To have data to compare with the experiment results, the maximum, minimum,
amplitude of the displacement parameters, as well as the dynamic reaction forces of
- 18 -
springs and dampers are determined in when the suspended system is working stably.
(Obtained results shown in Table 3.2).
2.5. CHAPTER 2’S CONCLUSION
In Chapter 2, the study found out the following results:
- Build a data set to determine the characteristics of the damper by doing
experiments on 04 models of dampers, at 20 different velocity values, the measured
data is recorded and stored in real-time, processed and displayed on the computer.
- Build a dynamic model of the suspended system of HWM in both planar (2D)
and spatial (3D) cases, specifically: described the components of the actual HWM,
making assumptions to build a mathematical model, specify the output and input
quantities of the model, each system component is explained separately with the
specification of each part of the system being measured determined from
experiment, the time expression of elasticity, damping force and excitation force is
explained in detail. A special feature of the dynamic model of the suspended system
of HWM built in this study is that: the elasticity of the spring is a geometrical
nonlinear function, the viscosity resistance of the damper has a force-velocity
relation according to exponential function corresponds to the Tustin friction model.
Therefore, the system of differential equations obtained are nonlinear differential
equations.
- Build a numerical solution program for the system of nonlinear differential
equations in Matlab/Simulink environment.
CHAPTER 3
BUILDING EXPERIMENTAL MODEL OF VIBRATION MEASUREMENT
VERIFIED ASSESSMENT OF THE DYNAMICS MODEL OF HORIZONTAL
WASHING MACHINE SUSPENDED SYSTEM
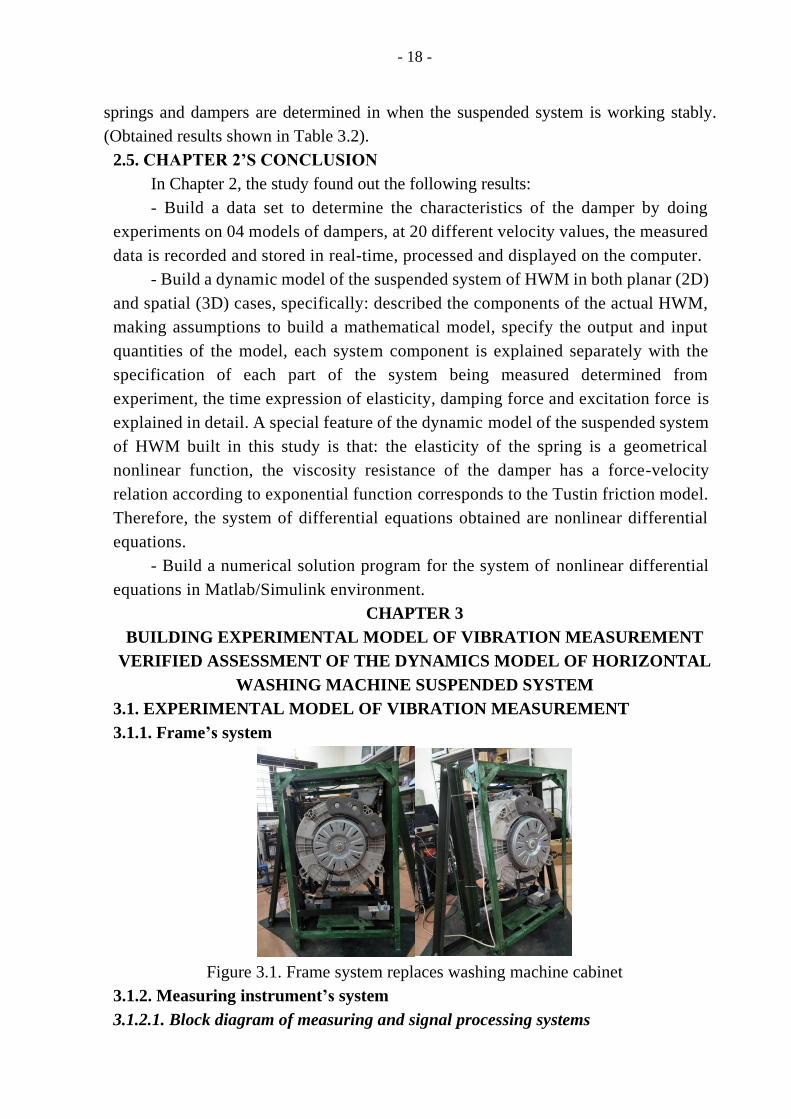
3.1. EXPERIMENTAL MODEL OF VIBRATION MEASUREMENT
3.1.1. Frame’s system
Figure 3.1. Frame system replaces washing machine cabinet
3.1.2. Measuring instrument’s system
3.1.2.1. Block diagram of measuring and signal processing systems
- 19 -
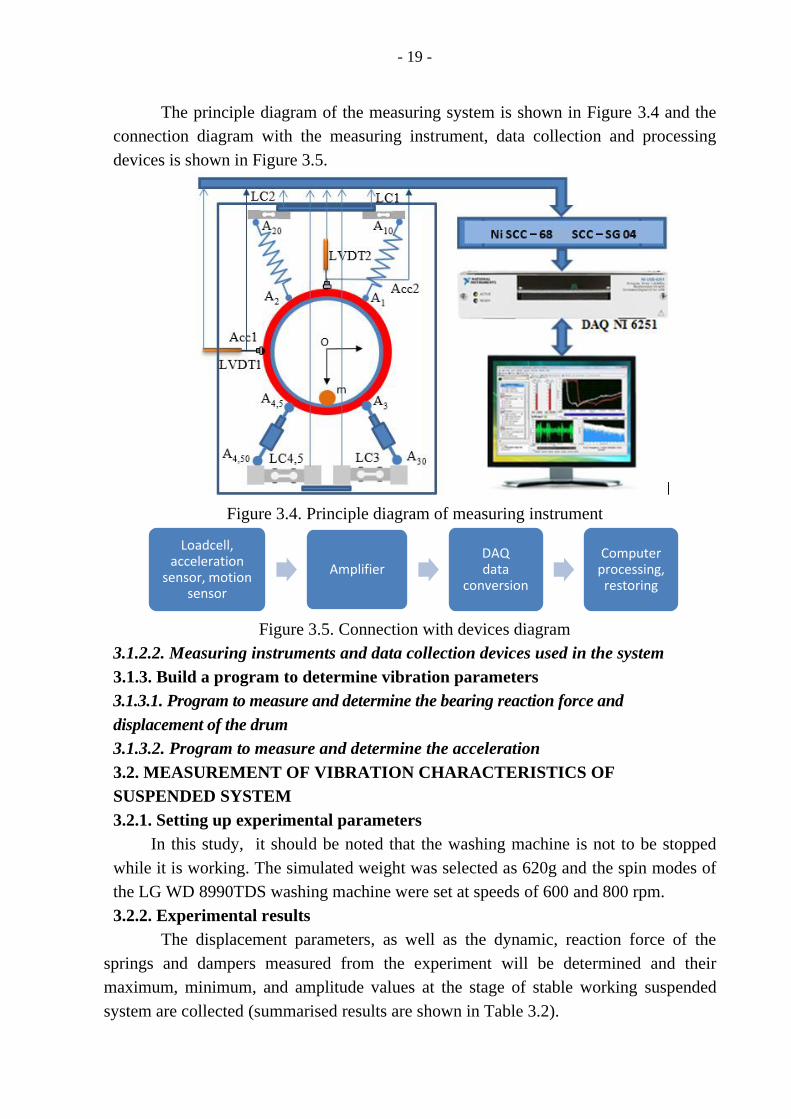
The principle diagram of the measuring system is shown in Figure 3.4 and the
connection diagram with the measuring instrument, data collection and processing
devices is shown in Figure 3.5.
Figure 3.4. Principle diagram of measuring instrument
Figure 3.5. Connection with devices diagram
3.1.2.2. Measuring instruments and data collection devices used in the system
3.1.3. Build a program to determine vibration parameters
3.1.3.1. Program to measure and determine the bearing reaction force and
displacement of the drum
3.1.3.2. Program to measure and determine the acceleration
3.2. MEASUREMENT OF VIBRATION CHARACTERISTICS OF
SUSPENDED SYSTEM
3.2.1. Setting up experimental parameters
In this study, it should be noted that the washing machine is not to be stopped
while it is working. The simulated weight was selected as 620g and the spin modes of
the LG WD 8990TDS washing machine were set at speeds of 600 and 800 rpm.
3.2.2. Experimental results
The displacement parameters, as well as the dynamic, reaction force of the
springs and dampers measured from the experiment will be determined and their
maximum, minimum, and amplitude values at the stage of stable working suspended
system are collected (summarised results are shown in Table 3.2).
Loadcell, acceleration
sensor, motion sensor
AmplifierDAQdata
conversion
Computerprocessing, restoring
- 20 -
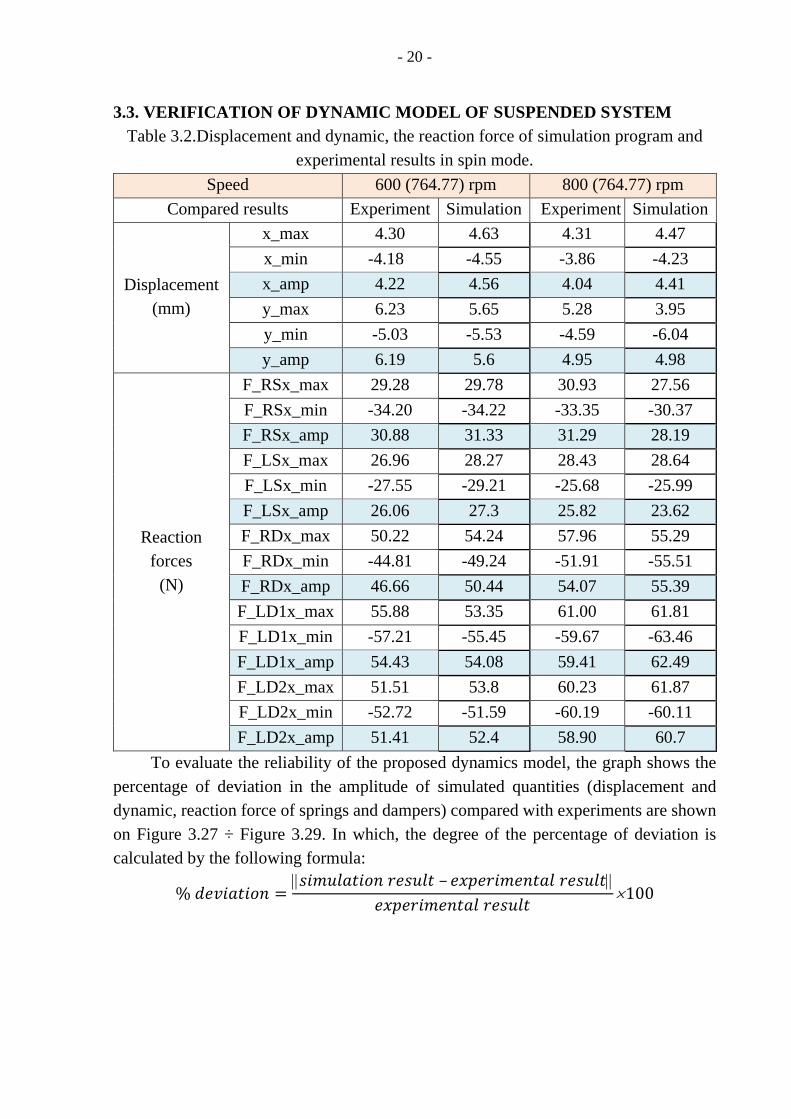
3.3. VERIFICATION OF DYNAMIC MODEL OF SUSPENDED SYSTEM
Table 3.2.Displacement and dynamic, the reaction force of simulation program and
experimental results in spin mode.
Speed 600 (764.77) rpm 800 (764.77) rpm
Compared results Experiment Simulation Experiment Simulation
Displacement
(mm)
x_max 4.30 4.63 4.31 4.47
x_min -4.18 -4.55 -3.86 -4.23
x_amp 4.22 4.56 4.04 4.41
y_max 6.23 5.65 5.28 3.95
y_min -5.03 -5.53 -4.59 -6.04
y_amp 6.19 5.6 4.95 4.98
Reaction
forces
(N)
F_RSx_max 29.28 29.78 30.93 27.56
F_RSx_min -34.20 -34.22 -33.35 -30.37
F_RSx_amp 30.88 31.33 31.29 28.19
F_LSx_max 26.96 28.27 28.43 28.64
F_LSx_min -27.55 -29.21 -25.68 -25.99
F_LSx_amp 26.06 27.3 25.82 23.62
F_RDx_max 50.22 54.24 57.96 55.29
F_RDx_min -44.81 -49.24 -51.91 -55.51
F_RDx_amp 46.66 50.44 54.07 55.39
F_LD1x_max 55.88 53.35 61.00 61.81
F_LD1x_min -57.21 -55.45 -59.67 -63.46
F_LD1x_amp 54.43 54.08 59.41 62.49
F_LD2x_max 51.51 53.8 60.23 61.87
F_LD2x_min -52.72 -51.59 -60.19 -60.11
F_LD2x_amp 51.41 52.4 58.90 60.7
To evaluate the reliability of the proposed dynamics model, the graph shows the
percentage of deviation in the amplitude of simulated quantities (displacement and
dynamic, reaction force of springs and dampers) compared with experiments are shown
on Figure 3.27 ÷ Figure 3.29. In which, the degree of the percentage of deviation is
calculated by the following formula:
% 𝑑𝑒𝑣𝑖𝑎𝑡𝑖𝑜𝑛 =𝑠𝑖𝑚𝑢𝑙𝑎𝑡𝑖𝑜𝑛 𝑟𝑒𝑠𝑢𝑙𝑡 – 𝑒𝑥𝑝𝑒𝑟𝑖𝑚𝑒𝑛𝑡𝑎𝑙 𝑟𝑒𝑠𝑢𝑙𝑡
𝑒𝑥𝑝𝑒𝑟𝑖𝑚𝑒𝑛𝑡𝑎𝑙 𝑟𝑒𝑠𝑢𝑙𝑡100
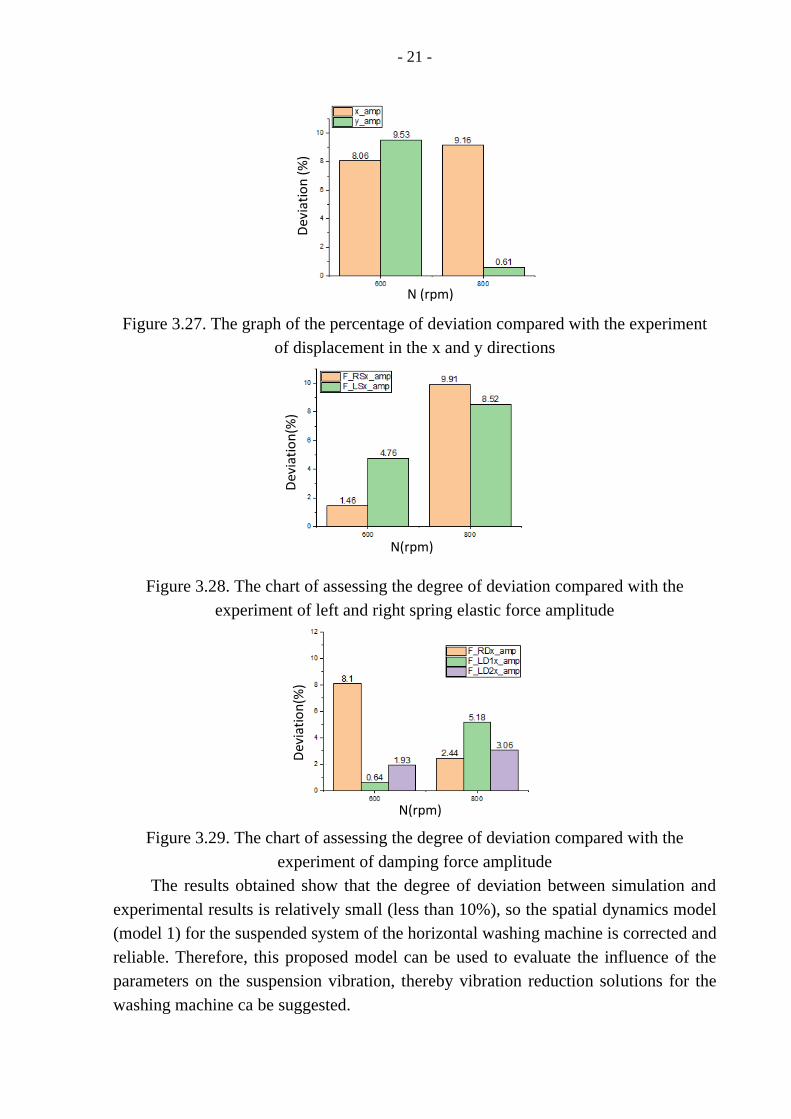
- 21 -
Figure 3.27. The graph of the percentage of deviation compared with the experiment
of displacement in the x and y directions
Figure 3.28. The chart of assessing the degree of deviation compared with the
experiment of left and right spring elastic force amplitude
Figure 3.29. The chart of assessing the degree of deviation compared with the
experiment of damping force amplitude
The results obtained show that the degree of deviation between simulation and
experimental results is relatively small (less than 10%), so the spatial dynamics model
(model 1) for the suspended system of the horizontal washing machine is corrected and
reliable. Therefore, this proposed model can be used to evaluate the influence of the
parameters on the suspension vibration, thereby vibration reduction solutions for the
washing machine ca be suggested.
Dev
iati
on
(%
) N (rpm)
N(rpm)
Dev
iati
on
(%)
N(rpm)
Dev
iati
on
(%)
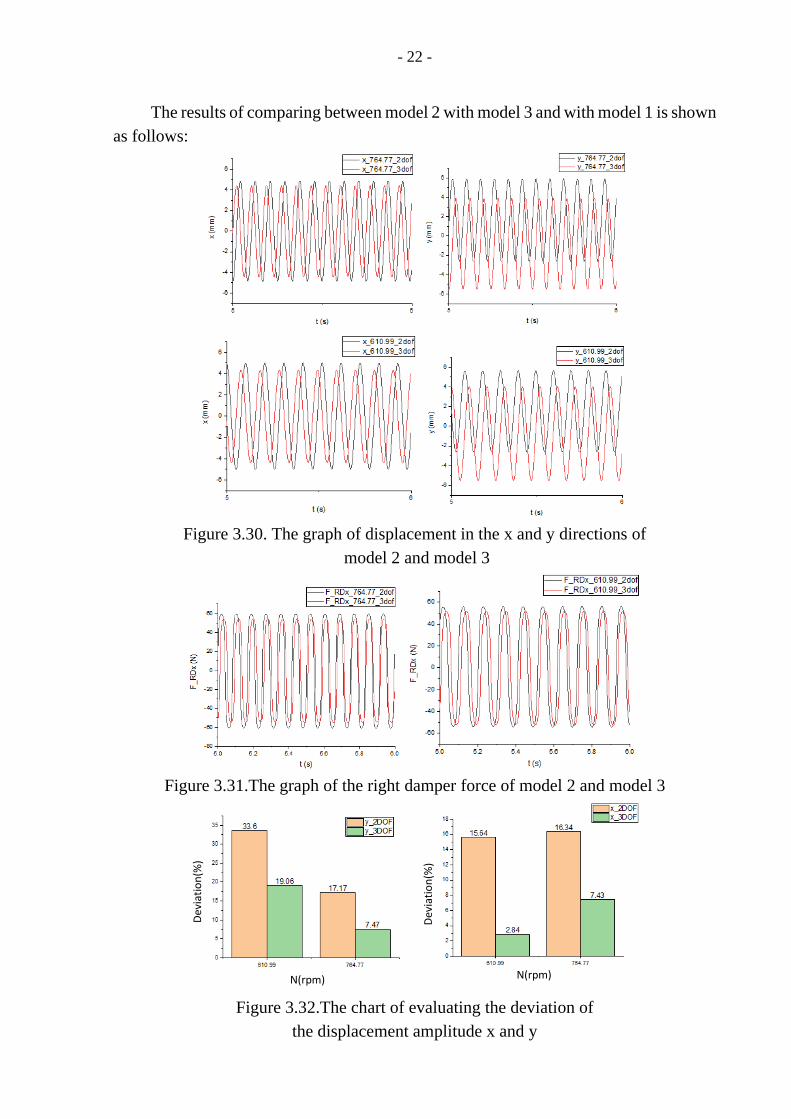
- 22 -
The results of comparing between model 2 with model 3 and with model 1 is shown
as follows:
Figure 3.30. The graph of displacement in the x and y directions of
model 2 and model 3
Figure 3.31.The graph of the right damper force of model 2 and model 3
Figure 3.32.The chart of evaluating the deviation of
the displacement amplitude x and y
N(rpm)
Dev
iati
on
(%)
Dev
iati
on
(%)
N(rpm)
- 23 -
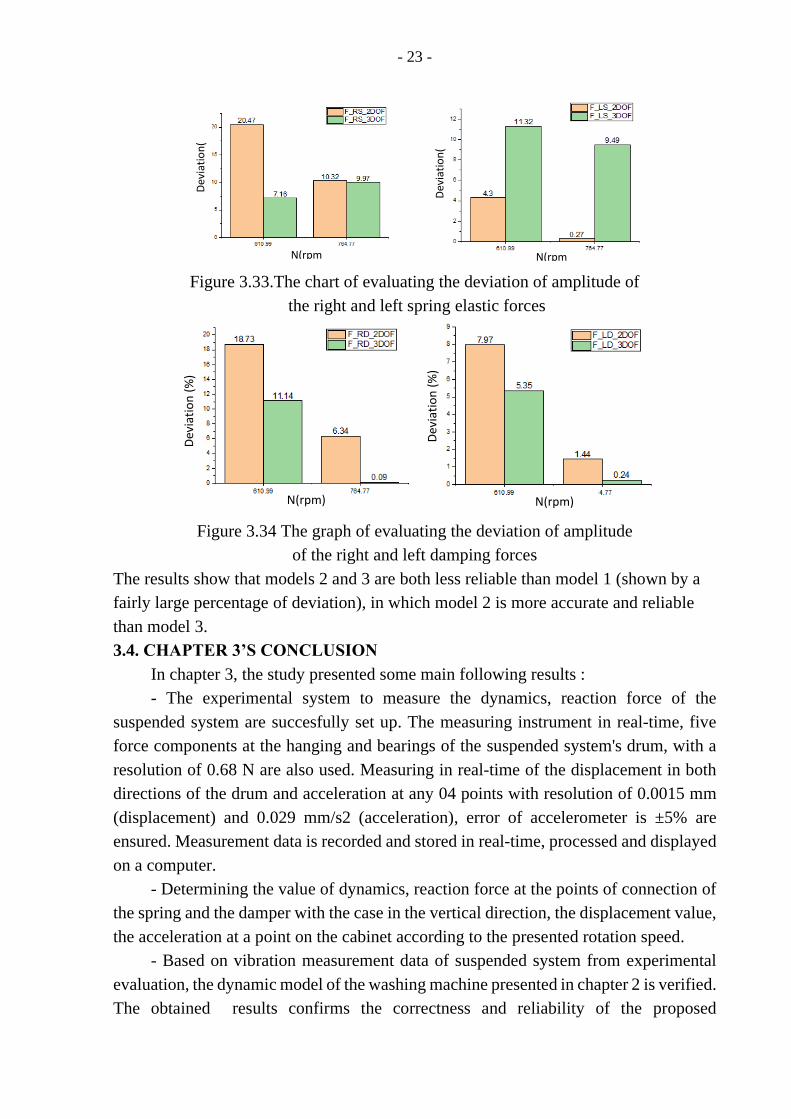
Figure 3.33.The chart of evaluating the deviation of amplitude of
the right and left spring elastic forces
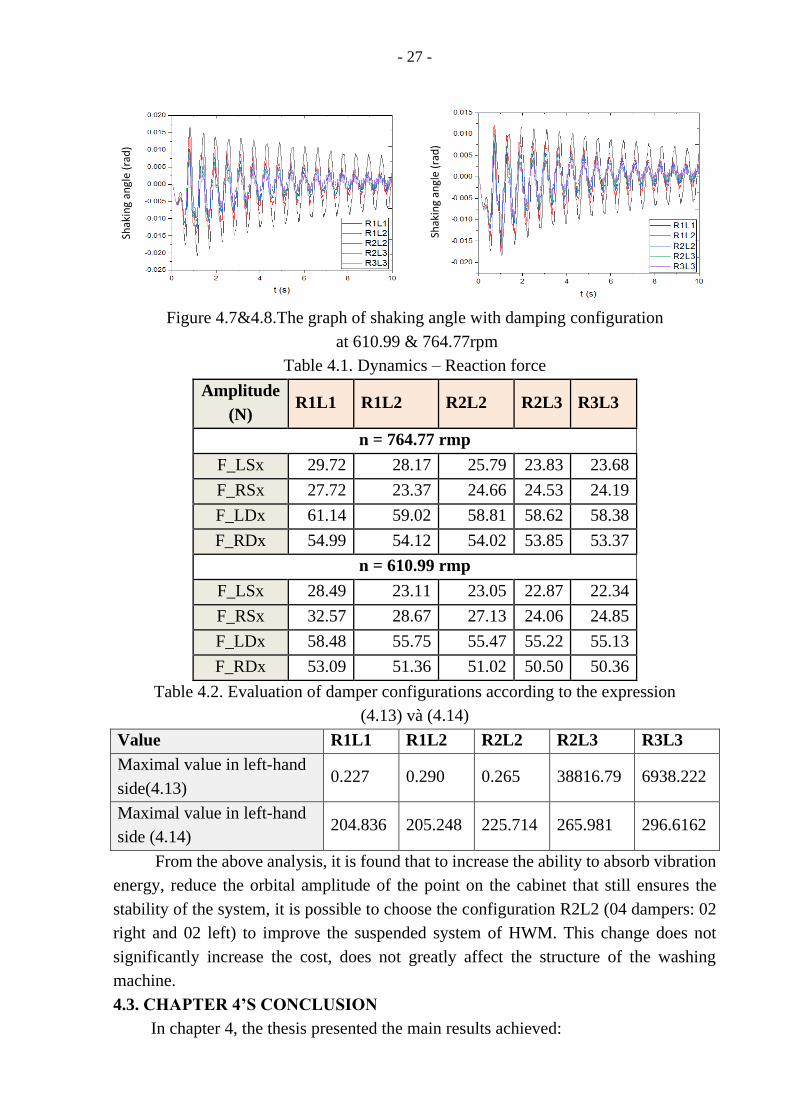
Figure 3.34 The graph of evaluating the deviation of amplitude
of the right and left damping forces
The results show that models 2 and 3 are both less reliable than model 1 (shown by a
fairly large percentage of deviation), in which model 2 is more accurate and reliable
than model 3.
3.4. CHAPTER 3’S CONCLUSION
In chapter 3, the study presented some main following results :
- The experimental system to measure the dynamics, reaction force of the
suspended system are succesfully set up. The measuring instrument in real-time, five
force components at the hanging and bearings of the suspended system's drum, with a
resolution of 0.68 N are also used. Measuring in real-time of the displacement in both
directions of the drum and acceleration at any 04 points with resolution of 0.0015 mm
(displacement) and 0.029 mm/s2 (acceleration), error of accelerometer is ±5% are
ensured. Measurement data is recorded and stored in real-time, processed and displayed
on a computer.
- Determining the value of dynamics, reaction force at the points of connection of
the spring and the damper with the case in the vertical direction, the displacement value,
the acceleration at a point on the cabinet according to the presented rotation speed.
- Based on vibration measurement data of suspended system from experimental
evaluation, the dynamic model of the washing machine presented in chapter 2 is verified.
The obtained results confirms the correctness and reliability of the proposed
N(rpmN(rpm
Dev
iati
on
(
%) Dev
iati
on
(
%)
N(rpm) N(rpm)
Dev
iati
on
(%
)
Dev
iati
on
(%
)

- 24 -
mathematical model. From there, conclusions are drawn about the application scope of
the built dynamic models of suspended system.
From confirming of the accuracy and reliability of the proposed mathematical
models, the next part of the study evaluates the influence of system parameters and
proposes solutions to improve the suspended system in the direction of reducing
vibration for washing machine cabinet.
CHAPTER 4
EFFECT OF SOME SUSPENDED SYSTEM PARAMETERS ON THE
VIBRATION OF HORIZONTAL WASHING MACHINE BODY
4.1. SYSTEM OF BALANCED EQUATIONS OF WASHING MACHINE BODY
The balanced equations for machine body is established as follows:
04 03 W 0LSx RSx LDx RDx GF F F F N N+ − − − − + = (4.1)
R 04 03 0LSy RSy LDy DyF F F F F F− + − − − = (4.2)
03( ) ( ) ( ) W 02
RDx LDx RSy LSy RSx G
LL N L d F dF hF hF L F+ − + + − − − = (4.3)
03 03 04 04,F fN F fN (4.4)
Where: h is altitude, L is the width of the washing machine, d is the distance from the
border of the machine to the position of connecting the damper with the case, f is the
coefficient of static sliding friction, the coefficient of friction between the rubber feet
and the concrete floor is usually taken in the range of 0.6 < f < 0.9 [66].
Conditions for the object not to tip over around the right leveling feet is given as
follows:
W( ) ( ) ( )
2
GLDx LSx LSy RSy RDx LDx
h dF F F F F F
L L− + − + − (4.7)
Similarly, to prevent the object from tipping around the left leveling feet:
W( ) ( ) ( )
2
GRDx RSx RSy LSy LDx RDx
h dF F F F F F
L L− + − + − (4.8)
Conditions for washing machine not to tip over is given as follows:
R
W
LSy RSy LDy Dy
G RSx LSx RDx LDx
F F F Ff
F F F F
− + −
+ + − − (4.10)
From the condition that the body does not tip around the frame’s feet and does not
slip sideways, the study considers the effect of the damper on the vibration of the
washing machine cabinet when the machine is operating.
4.2. THE EFFECTS OF SOME SYSTEM PARAMETERS ON CABINET'S
VIBRATION
4.2.1. The effect of the connection position of damper with the cabinet

- 25 -
Figure 4.2. The graph of FD function of connection position of the damper
The results obtained on the graph show that if we move the connection point of
the damper with the cabinet to the middle point (d=L/2), the FD function gives the
smallest result.
Because the connection point of the spring and damper to the cabinet is
symmetrical, the results obtained are the same as one when considering the
possibility of overturning around the left leveling feet.
To verify the inference about the effect of the connection position of the damper
with the body given above experimentally, the study is conducted to redesign the
damper system of the LG WD 8990TDS washing machine according to Figure 4.3.
Figure 4.3. Improved model when changing the damper connection position and layout
diagram of accelerometer sensors
The results are presented in Figure 4.4 and Figure 4.5, in which, Acc3_O, Acc4_O
lines (red line) are acceleration graphs at two points in the case of the original design;
Acc3_N, Acc4_N lines (gray lines) are acceleration graphs in case of the improved
system.

- 26 -
Figure 4.4&4.5.The graph of acceleration comparison at points Acc3, Acc4 between
the original configuration and the improved one
From the above results, it shows that with the displacement of the bearings of the
damper to the center of the machine, the vibration of the body is reduced, respectively:
at Acc3 is 14.5%; at point Acc4 is 11.2%. Thus, with the results obtained, it is possible
to propose an improvement plan to reduce vibration for HWM based on changing the
position of the damper connection, the vibration reduction ability of the improved
suspended system is suitable on the theoretical and practical basis. In addition, the option
of changing the connection position of the damper with the body does not change the
structure of the prototype washing machine much, so the cost incurred is negligible.
4.2.2. Effect of damper quantity
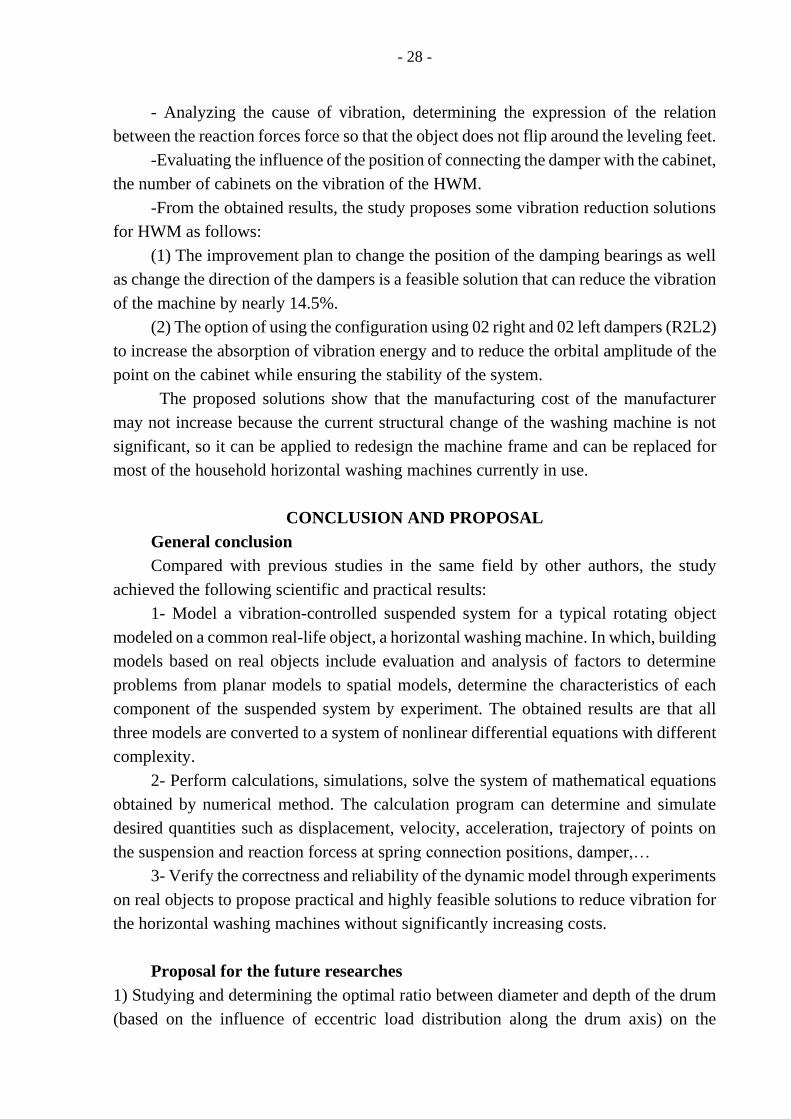
Consider and evaluate some HWM damper configurations. The graph of the orbital
amplitude function of the cabinet for the cases at the speeds of 610.99 rpm and 764.77
rpm is shown in Figure 4.6, the shaking angle is shown in Figure 4.7 and Figure 4.8.
The amplitude values of the reaction forces force of the spring and the damper in the
vertical direction corresponding to the damper configurations are shown in Table 4.1.
(a) (b)
Figure 4.6. Graph trajectory points at speed
(a) 610.99 rpm, (b) 764.77 rpm
Acc
eler
atio
n(m
/s2 )
Acc
eler
atio
n(m
/s2 )
- 27 -
Figure 4.7&4.8.The graph of shaking angle with damping configuration
at 610.99 & 764.77rpm
Table 4.1. Dynamics – Reaction force
Amplitude
(N) R1L1 R1L2 R2L2 R2L3 R3L3
n = 764.77 rmp
F_LSx 29.72 28.17 25.79 23.83 23.68
F_RSx 27.72 23.37 24.66 24.53 24.19
F_LDx 61.14 59.02 58.81 58.62 58.38
F_RDx 54.99 54.12 54.02 53.85 53.37
n = 610.99 rmp
F_LSx 28.49 23.11 23.05 22.87 22.34
F_RSx 32.57 28.67 27.13 24.06 24.85
F_LDx 58.48 55.75 55.47 55.22 55.13
F_RDx 53.09 51.36 51.02 50.50 50.36
Table 4.2. Evaluation of damper configurations according to the expression
(4.13) và (4.14)
Value R1L1 R1L2 R2L2 R2L3 R3L3
Maximal value in left-hand
side(4.13) 0.227 0.290 0.265 38816.79 6938.222
Maximal value in left-hand
side (4.14) 204.836 205.248 225.714 265.981 296.6162
From the above analysis, it is found that to increase the ability to absorb vibration
energy, reduce the orbital amplitude of the point on the cabinet that still ensures the
stability of the system, it is possible to choose the configuration R2L2 (04 dampers: 02
right and 02 left) to improve the suspended system of HWM. This change does not
significantly increase the cost, does not greatly affect the structure of the washing
machine.
4.3. CHAPTER 4’S CONCLUSION
In chapter 4, the thesis presented the main results achieved:
-0.04
-0.02
0
0.02
0 1000 2000 3000 4000 5000
Gó
c lắ
c (r
ad)
Bước thời gian
R1L1 R1L2 R2L2
R2L3 L3R3
Shak
ing
angl
e (r
ad)
-0.02
-0.01
0
0.01
0.02
0 1000 2000 3000 4000 5000
Gó
c lắ
c (r
ad)
Bước thời gian
R1L1 R1L2 R2L2
R2L3 L3R3
Shak
ing
angl
e (r
ad)
- 28 -
- Analyzing the cause of vibration, determining the expression of the relation
between the reaction forces force so that the object does not flip around the leveling feet.
-Evaluating the influence of the position of connecting the damper with the cabinet,
the number of cabinets on the vibration of the HWM.
-From the obtained results, the study proposes some vibration reduction solutions
for HWM as follows:
(1) The improvement plan to change the position of the damping bearings as well
as change the direction of the dampers is a feasible solution that can reduce the vibration
of the machine by nearly 14.5%.
(2) The option of using the configuration using 02 right and 02 left dampers (R2L2)
to increase the absorption of vibration energy and to reduce the orbital amplitude of the
point on the cabinet while ensuring the stability of the system.
The proposed solutions show that the manufacturing cost of the manufacturer
may not increase because the current structural change of the washing machine is not
significant, so it can be applied to redesign the machine frame and can be replaced for
most of the household horizontal washing machines currently in use.
CONCLUSION AND PROPOSAL
General conclusion
Compared with previous studies in the same field by other authors, the study
achieved the following scientific and practical results:
1- Model a vibration-controlled suspended system for a typical rotating object
modeled on a common real-life object, a horizontal washing machine. In which, building
models based on real objects include evaluation and analysis of factors to determine
problems from planar models to spatial models, determine the characteristics of each
component of the suspended system by experiment. The obtained results are that all
three models are converted to a system of nonlinear differential equations with different
complexity.
2- Perform calculations, simulations, solve the system of mathematical equations
obtained by numerical method. The calculation program can determine and simulate
desired quantities such as displacement, velocity, acceleration, trajectory of points on
the suspension and reaction forcess at spring connection positions, damper,…
3- Verify the correctness and reliability of the dynamic model through experiments
on real objects to propose practical and highly feasible solutions to reduce vibration for
the horizontal washing machines without significantly increasing costs.
Proposal for the future researches
1) Studying and determining the optimal ratio between diameter and depth of the drum
(based on the influence of eccentric load distribution along the drum axis) on the
- 29 -
vibration of the tub for the design of the drum to the large capacity washing machine,
optimally evaluating the system's parameters.
2) Determining the torque/rotation speed control function to reduce vibration or
eliminate the washing machine's overturning by an active method.
3) Developing a spatial model for the suspended system for inclined tub washing
machines.
- 30 -
PUBLISHED SCIENTIFIC PAPERS
1. Ngo Nhu Khoa, Nguyen Thi Hoa, and Nguyen Thi Bich Ngoc, The Effect of
Damper Configurations on the Vibration of Horizontal Washing Machines,
Proceedings of the International Conference, ICERA 2018, LNNS 63, pp. 298–308,
2019 (SCOPUS).
https://doi.org/10.1007/978-3-030-04792-4_40
2. Ngo Nhu Khoa, Nguyen Thi Hoa, and Nguyen Thi Bich Ngoc, Numerical
Modeling and Experimental Study on Vibration of a Horizontal Washing Machine,
Proceedings of the International Conference, ICERA 2018, LNNS 63, pp. 415–424,
2019 (SCOPUS).
https://doi.org/10.1007/978-3-030-04792-4_54
3. Nguyen Thi Hoa, Ngo Nhu Khoa, and Nguyen Thi Bich Ngoc, New Vibration
Model to Analyze the Correlation of Components in the Washing
Machine Suspended system, Proceedings of the International Conference, ICERA
2019, LNNS 104, pp. 500–511, 2020 (SCOPUS)
https://doi.org/10.1007/978-3-030-37497-6_58
4. Nguyen Thi Hoa, Ngo Nhu Khoa, Force-velocity relation of dampers in horizontal
washing machines, Advances in Engineering Research and Application - Proceedings
of the International Conference, ICERA 2020, K.-U. Sattler et al. (Eds.): ICERA 2020,
LNNS 178, pp. 469–477, 2021.
https://doi.org/10.1007/978-3-030-64719-3_52
5. Nguyễn Thị Hoa, Nguyễn Đại Phong, Mô hình và mô phỏng động lực của máy giặt
cửa ngang, Tạp chí Cơ khí Việt Nam, 3.2017, ISSN 0866 – 7056, trang 170-175.
6. Nguyễn Thị Hoa, Ngô Như Khoa, Giảm rung động cho máy giặt lồng ngang bằng
cách cải tiến thiết kế hệ thống treo, Tạp chí Cơ khí Việt Nam, 6.2019, ISSN 0866-7056,
trang 52 – 55.
7. Nguyễn Thị Hoa, Ngô Như Khoa, Sự ảnh hưởng của hệ số độ cứng lò xo tới rung
động của máy giặt trục ngang, Tạp chí Cơ khí Việt Nam, 6.2019, ISSN 0866-7056, trang
78-82.
Copyright © 2022 FDOKUMEN