
Modeling and analysis of 4 DOF elastic shaft and rotor system
52
i İÇİNDEKİLER ÇİZELGELERİN LİSTESİ .......................................................................................... ii ŞEKİLLERİN LİSTESİ .............................................................................................. iii SİMGELER VE KISALTMALAR ............................................................................. iv 1. GİRİŞ ....................................................................................................................... 1 2. ROTOR SİSTEMLERİ ............................................................................................ 2 2.1. Rotor Sistemlerinin Sınıflandırılması ............................................................... 2 3. ÖNCEDEN YAPILMIŞ ÇALIŞMALAR ................................................................ 4 4. KÜTLESİZ ŞAFT VE RİJİT DİSKLERİN TİTREŞİMLERİ ................................. 9 4.1 Rotor Dengesizlikleri ....................................................................................... 10 5. 4 SERBESTLİK DERECELİ ROTOR SİSTEMİNİN MODELLENMESİ ......... 12 5.1 Hareket Denklemleri ............................................................................................ 12 5.1.1. Yanal Hareket Denklemleri.......................................................................... 13 5.1.2. Eğilim Hareket Denklemleri ........................................................................ 16 5.1.3. Atalet Ekesenleri Ve Atalet Momentleri ...................................................... 26 6. ANALİTİK ÇÖZÜM ............................................................................................. 28 7. SONUÇ VE ÖNERİLER ....................................................................................... 40 KAYNAKLAR .......................................................................................................... 41 EKLER ....................................................................................................................... 45 Ek 1. 300rad/sn ve 1000 Ns/m parametreleri için Matlab kodu ............................ 45 Ek 2. Matlab fft kodu ............................................................................................. 46
Transcript of Modeling and analysis of 4 DOF elastic shaft and rotor system
i
İÇİNDEKİLER
ÇİZELGELERİN LİSTESİ .......................................................................................... ii
ŞEKİLLERİN LİSTESİ .............................................................................................. iii
SİMGELER VE KISALTMALAR ............................................................................. iv
1. GİRİŞ ....................................................................................................................... 1
2. ROTOR SİSTEMLERİ ............................................................................................ 2
2.1. Rotor Sistemlerinin Sınıflandırılması ............................................................... 2
3. ÖNCEDEN YAPILMIŞ ÇALIŞMALAR ................................................................ 4
4. KÜTLESİZ ŞAFT VE RİJİT DİSKLERİN TİTREŞİMLERİ ................................. 9
4.1 Rotor Dengesizlikleri ....................................................................................... 10
5. 4 SERBESTLİK DERECELİ ROTOR SİSTEMİNİN MODELLENMESİ ......... 12
5.1 Hareket Denklemleri ............................................................................................ 12
5.1.1. Yanal Hareket Denklemleri.......................................................................... 13
5.1.2. Eğilim Hareket Denklemleri ........................................................................ 16
5.1.3. Atalet Ekesenleri Ve Atalet Momentleri ...................................................... 26
6. ANALİTİK ÇÖZÜM ............................................................................................. 28
7. SONUÇ VE ÖNERİLER ....................................................................................... 40
KAYNAKLAR .......................................................................................................... 41
EKLER ....................................................................................................................... 45
Ek 1. 300rad/sn ve 1000 Ns/m parametreleri için Matlab kodu ............................ 45
Ek 2. Matlab fft kodu ............................................................................................. 46
ii
ÇİZELGELERİN LİSTESİ
Çizelge Sayfa
Çizelge 5.1. MK , MZ ve 1MZ için doğrultman kosinüsleri ....................................... 16
Çizelge 5.2. X , Y ve Z eksenleri için doğrultman kosinüsleri ................................ 19
iii
ŞEKİLLERİN LİSTESİ
Şekil Sayfa
Şekil 2.1. Kritik hız ve “support stiffness” .................................................................. 3
Şekil 3.1. Rotor dinamiğinin tarihsel gelişimi ............................................................. 8
Şekil 4.1. “lumped parameter” rotor modelleri (a) Yanal değişime uğramış 2
serbestlik dereceli model (b) Eğikliğe maruz kalmış 2 serbestlik dereceli model (c) 4
serbestlik dereceli model .............................................................................................. 9
Şekil 4.2. Statik dengesizlik ....................................................................................... 10
Şekil 4.3. Moment dengesizliği .................................................................................. 11
Şekil 4.4. Dinamik dengesizlik .................................................................................. 11
Şekil 5.1. 4 serbestlik dereceli rotor sistemi (a) Dikey rotor sisteminin parametreleri
(b) Koordinat sistemi.................................................................................................. 12
Şekil 5.2. Euler açıları; 1 , 1φ ve 1ψ .......................................................................... 15
Şekil 5.4. Açısal momentum değişimleri ................................................................... 17
Şekil 5.5. Doğrultman kosinüslerinin türetilmesi ...................................................... 20
Şekil 5.6. 1x , 1y ve x ,
y arasındaki ilişkiler ......................................................... 24
Şekil 5.3. Katı bir silindir için kütle atalet eksenleri ve parametreleri ....................... 27
Şekil 6.1. 300rad/sn_1000Ns/m_x_ve_zaman ........................................................... 29
Şekil 6.2. 300rad/sn_1000Ns/m_y_ve_zaman ........................................................... 29
Şekil 6.3. 300rad/sn_1000Ns/m_orbit ....................................................................... 30
Şekil 6.5. 350rad/sn_1000Ns/m_y_ve_zaman ........................................................... 31
Şekil 6.6. 350rad/sn_1000Ns/m_orbit ....................................................................... 31
Şekil 6.7. 380rad/sn_1000Ns/m_x_ve_zaman ........................................................... 32
Şekil 6.9. 380rad/sn_1000Ns/m_orbit ....................................................................... 33
Şekil 6.11. 400rad/sn_1000Ns/m_y_ve_zaman ......................................................... 34
Şekil 6.13. 420rad/sn_1000Ns/m_x_ve_zaman ......................................................... 35
Şekil 6.15. 420rad/sn_1000Ns/m_orbit ..................................................................... 36
Şekil 6.17. 460rad/sn_1000Ns/m_y_ve_zaman ......................................................... 37
Şekil 6.22. 200rad/sn ve 1800rad/sn aralığı için waterfall diyagramı........................ 39

iv
SİMGELER VE KISALTMALAR
Bu çalışmada kullanılmış bazı simgeler ve kısaltmalar, açıklamaları ile birlikte aşağıda
sunulmuştur.
Simgeler Kısaltmalar
r yanal yerdeğiştirme
şaftın eğikliği
a diskin yukarı destek noktasına olan uzaklığı
b diskin aşağı destek noktasına olan uzaklığı
l şaftın boyu
0I şaftın kesit alanının eylemsizlik momentini
1 zenit açısı
1φ presesyon açısı
1ψ dönme açısı
Gx
G ağırlık merkezinin x koordinat
Gy G ağırlık merkezinin y koordinatı
XL x eksenindeki açısal momentum
YL y eksenindeki açısal momentum
ZL z eksenindeki açısal momentum
v
XH x eksenindeki açısal momentum değişimi
YH y eksenindeki açısal momentum değişimi
ZH z eksenindeki açısal momentum değişimi
1l X ekseni için 1X eksenine göre doğrultman kosinüsü
1m
Y ekseni için 1X eksenine göre doğrultman kosinüsü
1nZ Z ekseni için 1X eksenine göre doğrultman kosinüsü
2l X ekseni için 1Y eksenine göre doğrultman kosinüsü
2m Y ekseni için 1Y eksenine göre doğrultman kosinüsü
2n Z ekseni için 1Y eksenine göre doğrultman kosinüsü
3l X ekseni için 1Z eksenine göre doğrultman kosinüsü
3m Y ekseni için 1Z eksenine göre doğrultman kosinüsü
3n Z ekseni için 1Z eksenine göre doğrultman kosinüsü
a 1X yönünde birim vektör
xzM
xz ekseninde geri çağırıcı moment
yzM
yz ekseninde geri çağırıcı moment
G yatay XMY düzlemindeki G noktasının izdüşümü
yatay XMY düzlemindeki noktasının izdüşümü
1 yatay XMY düzlemindeki 1 noktasının izdüşümü

vi
dinamik denngesizlikten doğan faz farkı açısı
pI
Z eksenine göre kütle atalet momenti
I X veY eksenlerine göre kütle atalet momentleri
R diskin yarıçapı
H diskin yüksekliği yada kalınlığı
m diskin kütlesi

1
1. GİRİŞ
Birçok mühendislik uygulaması, rotor veya disk taşıyan yataklanmış dönen miller
(şaftlar) barındırmaktadır. Şaft-rotor sisteminde montaj, imalat ve malzeme kaynaklı
kütle kaçıklıkları sebebi ile, şaft dönüşü sırasında özellikle yüksek hızlarda şaftın
eğilmesi ve titreşimi söz konusu olmaktadır. Bu dönüş hareketi sırasında yatak
(bearing) ekseni ile mil ekseni arasında sapmalar oluşmaktadır. Mil-rotor sisteminde,
kütle merkezi ile rotor geometrik merkezi arasındaki kaçıklık dikkate alındığında
belirli bir açısal hızla dönen bir mil üzerinde etkili olan santrifüj kuvvet; mil
direngenliği tarafından karşılanmaktır. Türbin, kompresör, jeneratör ve içten yanmalı
motorlar gibi dönen elemanlara sahip makinalar esnek yapıda olduklarından titreşim
analizi tasarımlarının zorunlu bir parçası haline gelmiştir. Sözkonusu makinalarda
güç ve hareket iletmek amacıyla şaftların oldukça yaygın olarak kullanıldıkları
bilinmektedir. Dönme hızlarının artması şaftların titreşim analizinde jiroskopik
etkinin de sistemin dinamik davranışına dahil edilmesini gerekli kılmıştır. Şaftların
kararsız bölgede çalışmaması için kritik hızlarının ve mod şekillerinin belirlenmesi
de oldukça önemlidir. Çünkü titreşimin genliği, şaftın dönüş hızının kritik hızına
yakın olduğu durumda sonsuza yaklaşmaktadır, yani rezonans durumu oluşmaktadır.
Şaft hızlarının artması savrulma sorununu beraberinde getirmektedir. Bu sorunla
bağlantılı olarak geçmişte kritik hızın üzerindeki hızlarda şaftın kararlı
çalışamayacağı düşünülmüştür. Ancak şaftın esnek olarak ele alınması ve jiroskopik
etkinin analize dahil edilmesiyle birlikte bu düşüncenin yanlış olduğu anlaşılmıştır.
Bu bağlamda, esnek şafta bağlı rijit diskten kaynaklanan jireskopik etkinin de analize
dahil edilmesi ile dinamik sistemin kritik hızın üstünde davranacağı doğru olarak
belirlenebilmiştir.
2
2. ROTOR SİSTEMLERİ
Rotor sistemleri çeşitli geometrilere sahip disklerden, uzunluğuna bağlı olarak
değişen değişik yarıçaplardaki şaftlardan ve farklı pozisyonlarda olabilen
rulmanlardan oluşmaktadır. Rotorların dinamik analizleri için hangi parametrelerin
sisteme ne kadar etkisinin olduğunu bilmek şarttır.
2.1. Rotor Sistemlerinin Sınıflandırılması
Rotor sistemleri, karakteristik özelliklerine göre 2 grupta incelenmektedir. Bunlar,
”rigid rotor” ve “flexible rotor” dur. Şaftda meydana gelen deformasyonlar ihmal
ediliyorsa sistem “rigid rotor”, şaftta meydana gelen deformasyonlar ihmal
edilmiyorsa “flexible rotor” olarak değerlendirilir. Rotor sistemlerini sınıflandırırken
sadece boyutlara bakarak analiz yapamayız. Rotor dinamiğinde dönme hızları kütle
kaçıklıkları sebebiyle rezonans durumyla karşılaşılabilir. Buna “critical speed” yani
kritik hız denir. Rotor sistemlerindeki hasarlar genellikle kritik hız dolaylarında
meydana gelmektedir. Kritik hızlar sitemin “rigid” yada “flexible” olmasına göre
belirlenir.
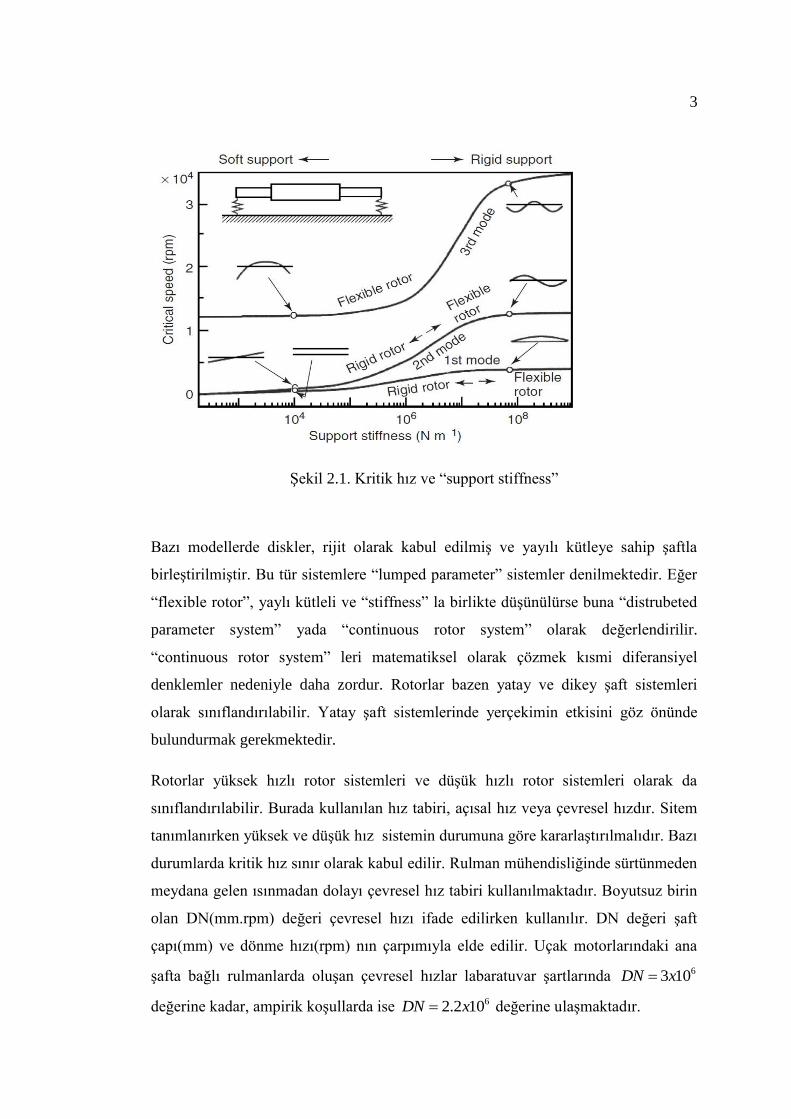
Şekil 2.1.’de simetrik rotor için kritik hızların ve titreşim modlarının “stiffness”
yataklarla olan ilişkisini göstermektedir. Şeklin solunda kalan alanda rotorların “soft”
desteklerle desteklendiği durumlar gösterilmiştir. 1. ve 2. modlarda, rotor deforme
olmazken, destek kısımları deforme olmaktadır. Bu durumda rotor “rigid rotor”
olarak ele alınmıştır. Yataklardaki “stiffness” azaldıkça 1. ve 2. modun doğal
frekansları sıfıra yaklaşmaktadır. 3. modda ise durum farklılık göstermektedir. 3.
modda rotor “flexible rotor” olarak düşünülecektir. Şeklin sağında kalan alanda ise
yani yatak “stiffness” değeri arttıkça her üç mod içinde rotor deforme olmaktadır ve
rotor “flexible rotor” olarak değerlendirilecektir.
3
Şekil 2.1. Kritik hız ve “support stiffness”
Bazı modellerde diskler, rijit olarak kabul edilmiş ve yayılı kütleye sahip şaftla
birleştirilmiştir. Bu tür sistemlere “lumped parameter” sistemler denilmektedir. Eğer
“flexible rotor”, yaylı kütleli ve “stiffness” la birlikte düşünülürse buna “distrubeted
parameter system” yada “continuous rotor system” olarak değerlendirilir.
“continuous rotor system” leri matematiksel olarak çözmek kısmi diferansiyel
denklemler nedeniyle daha zordur. Rotorlar bazen yatay ve dikey şaft sistemleri
olarak sınıflandırılabilir. Yatay şaft sistemlerinde yerçekimin etkisini göz önünde
bulundurmak gerekmektedir.
Rotorlar yüksek hızlı rotor sistemleri ve düşük hızlı rotor sistemleri olarak da
sınıflandırılabilir. Burada kullanılan hız tabiri, açısal hız veya çevresel hızdır. Sitem
tanımlanırken yüksek ve düşük hız sistemin durumuna göre kararlaştırılmalıdır. Bazı
durumlarda kritik hız sınır olarak kabul edilir. Rulman mühendisliğinde sürtünmeden
meydana gelen ısınmadan dolayı çevresel hız tabiri kullanılmaktadır. Boyutsuz birin
olan DN(mm.rpm) değeri çevresel hızı ifade edilirken kullanılır. DN değeri şaft
çapı(mm) ve dönme hızı(rpm) nın çarpımıyla elde edilir. Uçak motorlarındaki ana
şafta bağlı rulmanlarda oluşan çevresel hızlar labaratuvar şartlarında 63 10DN x
değerine kadar, ampirik koşullarda ise 62.2 10DN x değerine ulaşmaktadır.
4
3. ÖNCEDEN YAPILMIŞ ÇALIŞMALAR
Rotordinamiği Rankine[1]’in 1869 da yaptığı rotor hareketi ile ilgili çalışmalarla
başlayıp ve halen devam eden bir süreci kapasamaktadır. Bundan sonraki önemli ilk
gelişme de Laval ve arkadaşları[2] tarafından sağlanmıştır.
Gustaf de Laval[2] icat ettiği tek kademeli buhar türbininde rijit bir rotor kullandı.
Yani şaft herhangi bir deformasyon özelliği göstermemekteydi. Daha sonra elsatik
rotor kullandı yani şaft değişime uğrayabiliyor, şekil değiştirebiliyordu. Elastik rotor
kullandığın gördü ki rotoru kritik dönme hızından 7 kat daha hızlı çalıştırabiliyor.
Daha sonraki zamanlarda araştırmacıların ilgi odağı kritik hız olmuştur. Bunun
nedeni o zamanlar rotor sistemleri tasarlanırken ilk akla gelen konunun rezonans ve
etkileriydi. Dunkerley[3] 1894 yılında çoklu rotor sistemleri için en küçük kritik hızı
veren bir empirik denklem türetti. Dunkerley rezonans kritik hızı için kritik hız
terimini kullanan ilk bilim adamıydı.
Holzer [4] 1921 yılında dönel titreşimler için sistemin doğal frekanslarını ve mod
şekillerini hesaplamak için yaklaşık çözümler önermiştir.
Rotor dinamiği teorisi ile ilgili kayıtlı ilk temel dökümanlar 1919 yılında
Jeffcott[5]’un yazdığı dökümanlardır. Jeffcott’un rotor dinamiğine kattığı
emeklerden dolayı bizler bir şaft, ve diskten oluşan sisteme Jeffcott rotoru diyoruz.
20. yüzyılda yapılan en büyük kaynaklardan birisi 1924 yılında Stodola[6]’nın
yaptığı çalışmaları ve kitabıdır. Bu kitapta Stodola buhar tribünlerini tam olarak
incelemiştir. Kitap diğer yandan, elsatik şaft ve disk içeren bir sistemin dinamiğini,
jiroskop etkisini ihmal ederek devamlı rotorların dinamiğini ve değişik kesitlerin
rotor kritik hızlarını yaklaşık olarak hesaplamıştır.
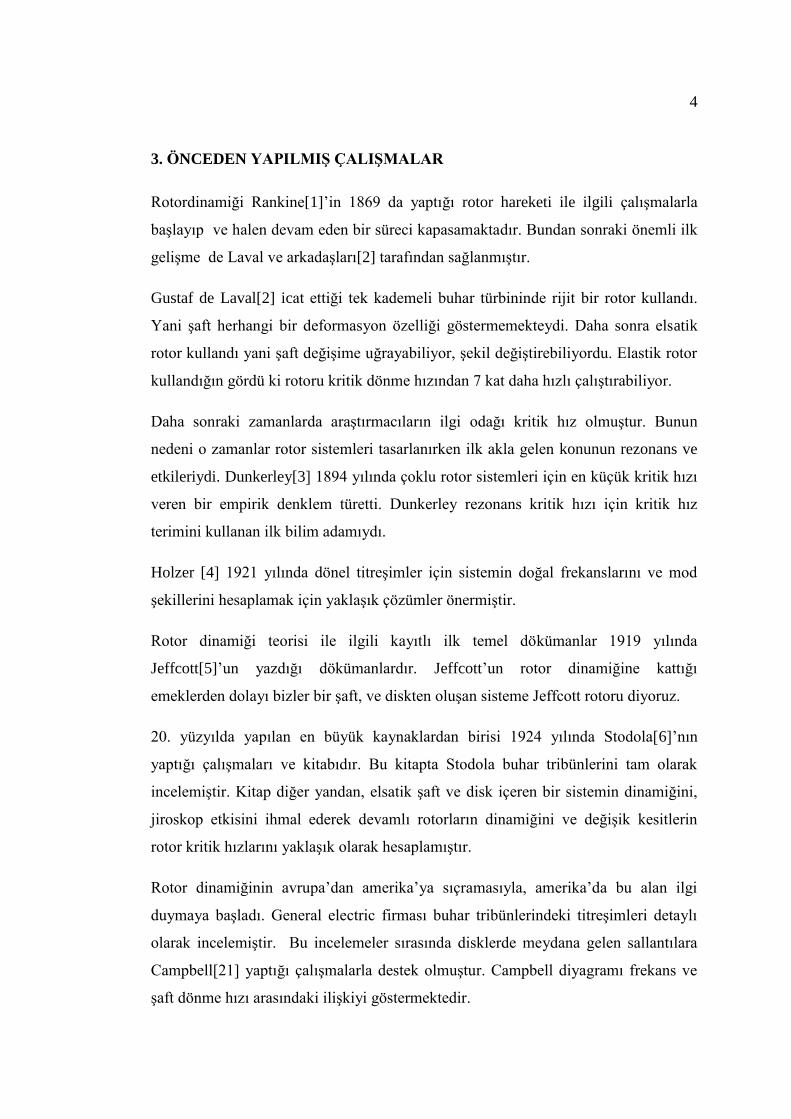
Rotor dinamiğinin avrupa’dan amerika’ya sıçramasıyla, amerika’da bu alan ilgi
duymaya başladı. General electric firması buhar tribünlerindeki titreşimleri detaylı
olarak incelemiştir. Bu incelemeler sırasında disklerde meydana gelen sallantılara
Campbell[21] yaptığı çalışmalarla destek olmuştur. Campbell diyagramı frekans ve
şaft dönme hızı arasındaki ilişkiyi göstermektedir.

5
Daha sonraları rotor dinamiği daha değişik etkilerin incelenmesine konu olmuştur.
Dönme hızı ilk kritik hızın üzerine çıktığında oluşan aşırı titreşimlerin oluşması
araştırma konusu olmuştur. Newkirk ve Kimball[7] 1924 yılında şaft
malzemesindeki iç sürtünmelerin, stabil olmayan savurma hareketlerine neden
olduğunu farketmişlerdir. Newkirk ve Taylor[8] 1925 senesinde stabil olmayan
titreşimlerin rulmanlardaki yağ filminden kaynaklandığını bulmuşlar. Ve buna “oil
whip” denilmiştir. Rulmanlardaki sürtünme sebebiyle oluşan bu sönümleme
fenomeni araştırmacıların ilgisini çekmiştir.
Bundan sonraki 10 yıl içinde smetrik olmayan şaft ve rotor sistemleri üzerinde
çalışmalar yapılmaya başlanmıştır. Simetrik sistemler elsatiklik yönünden fark
gösterirken, simetrik olmayan rotor ve şaft sistemleri rotor ataleti yönünden farklılık
göstermekteydi. Jeneratör motorları ve pervane rotorları simetrik olmayan sistemlere
örnek gösterilebilir. Dönen şaft sistemlerinde olduğu gibi, zamanla değişen
katsayılara türetilen denklemlerde kariılaşılır. Bu tür sistemler paramtrik tahrik
edilmiş sistemler olarak kategori edilir. Simetrik olmayan sistemlerin en karakteristik
özelliği stabiil olmayan titreşimlerin belli dönüş hızı aralıklarında meydana
gelmesidir. Smith[1]’ in raporu bu konuya öncülük etmektedir. Simetrik olmayan
rotorlarla ilgili çeşitli fenomenler 20. Yüzyılın ortalarında; 1940 yılında Taylor[9],
1943 yılında Foote[10], 1961 yılında Brosens ve Crandall[11], 1963-1964 yılları
arasında ise Yamamoto ve Ota[12,13,14] tarafından öne sürülmüştür.
Kritik hız geçişi sırasında durağansızlık fenomeni, Lewis[15] tarafından 1932
senesinde yapılan Jeffcott rotor incelemesinde geçmektedir. Bu konudaki sayısız
konu 2 grupta irdelenmektedir. İlk grup durağansızlık fenomeninin sabit
ivmelenmeden doğduğu ifade eder. İkinci grup ise, limitli hareketlendiren torkdan
ileri geldiğini ifade eder. İkinci grupta, hareketlendirici torkla şaft titreşimi arasında
karşılıklı etkileşim olduğu düşünülmüştür. Kritik hız geçiş problemlerinin analizi
durağan titreşim analizlerinden daha karmaşıktır. Bu konuda araştırmacılar nümerik
entegrasyonları kabul etmişlerdir. 1965 senesinde Mitropol’skii[16] asimptotik
metodla çıtayı biraz daha yükseğe taşımıştır.

6
Rotor ve sürekli yayılı kütle ilişkisi de incelenmiştir. Basit şekliyle sürekli dönen
rotor modeli Euler kirişini esas alarak ilk kez 1924 senesinde Stodola[6]’nın
kitabında yer almıştır. 1959 sensinde Bishop[17], yine 1959 senesinde Bishop ve
Gladwell[18], 1965 senesinde Bishop ve Parkinson[19] devamlı dönen rotor ve
dengesizlik yanıtlarıyla ilgili bir takım çalışmalar yapmışlardır. 1969 senesinde
Eshleman ve Eubanks[20] dönme ataleti, kayma deformasyonu, jiroskopik etkiyi de
içine alan genel denklemler elde etmişler ve bunların etkilerini araştırmışlardır.
İstenmeyen titreşimleri sönümlemek için en genel yöntem geometrik
dengesizliklikleri gidermekle olmaktadır. Balans tekniği oldukça öncelerde tespit
edilmişti. Geometrik dengesizlikleri yok etmeye dayanan ilk balans makinası 1907
senesinde Lawaczeck[22] tarafından yapılmıştır. 1925 senesinde Suehiro[23] kritik
hızdan sonraki hızlar için bir balans makinası üretmiştir. 1934 senesinde Thearle[24]
2 düzlemde balansı geliştirmiştir. Yüksek hızlı rotorların gelişmesi esnek rotorların
balans edilmesini öenmli hale getirmiştir. Bununla ilgili 2 tipik teori önerildi. İlki
1957 senesinde Federn[25] ve 1959 senesinde Bishop ve Gladwell[18] tarafından
öne sürülen modal balans tekniğiydi. İkincisi ise 1960 larda Amerika’da
bilgisayarların gelişmesiyle geliştirilen, “influence coefficient” metoduydu.
Yukarıda belirtilen “oil whip”, akış kaynaklı titreşime tipik bir örnek
oluşturmaktadır. 1959 yılında Hori[26] “oil whip” in çeşitli karakteristik
özelliklerini inceledi ve bunun yağ tabakasındaki basınç kuvvetlerinden dolayı
meydana geldiğini düşündü. Hemen hemen aynı zamanlarda akış kaynaklı tireşimler
araştırmacıları cezbetmiştir. Bu titreşimlerin türbinlerdeki etkilerinin açıklanmasını
1958 yılında Thomas[27], kompesörlerdeki etkilerinin açıklanmasını ise 1965
senesinde Alford[28] yapmıştır. Bu konu halen bazı araştırmacıların pratikteki önemi
bakımında ilgisini çekmektedir. “hollow rotor containing fluid” akış kaynaklı
titreşimler bakımından yeni bir problem olarak ortaya çıkmıştır. 1967 senesinde
Ehrich[29] motor şaftına sıvı sıkışmasınının eş zamanlı olmayan titreşimlere neden
olduğunu ve rezonans eğrilerinin şekillerini değiştirdiğini rapor etmiştir. 1968
senesinde Wolf[30], sonrası kritik bu bu rejim için stabil olmayan hız aralığındaki bu
değişimin rotor sistemindeki viskoz olmayan akışkandan kaynaklandığını gösterdiği
çalışmalarında gösterdi.
7
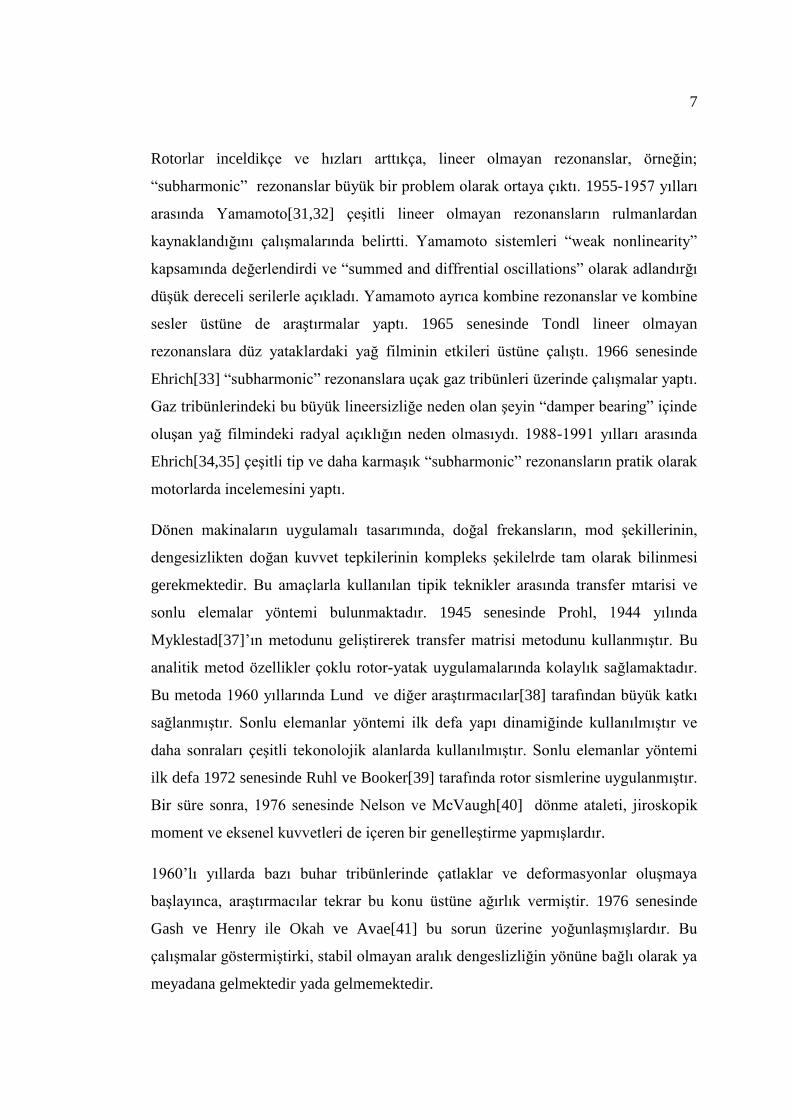
Rotorlar inceldikçe ve hızları arttıkça, lineer olmayan rezonanslar, örneğin;
“subharmonic” rezonanslar büyük bir problem olarak ortaya çıktı. 1955-1957 yılları
arasında Yamamoto[31,32] çeşitli lineer olmayan rezonansların rulmanlardan
kaynaklandığını çalışmalarında belirtti. Yamamoto sistemleri “weak nonlinearity”
kapsamında değerlendirdi ve “summed and diffrential oscillations” olarak adlandırğı
düşük dereceli serilerle açıkladı. Yamamoto ayrıca kombine rezonanslar ve kombine
sesler üstüne de araştırmalar yaptı. 1965 senesinde Tondl lineer olmayan
rezonanslara düz yataklardaki yağ filminin etkileri üstüne çalıştı. 1966 senesinde
Ehrich[33] “subharmonic” rezonanslara uçak gaz tribünleri üzerinde çalışmalar yaptı.
Gaz tribünlerindeki bu büyük lineersizliğe neden olan şeyin “damper bearing” içinde
oluşan yağ filmindeki radyal açıklığın neden olmasıydı. 1988-1991 yılları arasında
Ehrich[34,35] çeşitli tip ve daha karmaşık “subharmonic” rezonansların pratik olarak
motorlarda incelemesini yaptı.
Dönen makinaların uygulamalı tasarımında, doğal frekansların, mod şekillerinin,
dengesizlikten doğan kuvvet tepkilerinin kompleks şekilelrde tam olarak bilinmesi
gerekmektedir. Bu amaçlarla kullanılan tipik teknikler arasında transfer mtarisi ve
sonlu elemalar yöntemi bulunmaktadır. 1945 senesinde Prohl, 1944 yılında
Myklestad[37]’ın metodunu geliştirerek transfer matrisi metodunu kullanmıştır. Bu
analitik metod özellikler çoklu rotor-yatak uygulamalarında kolaylık sağlamaktadır.
Bu metoda 1960 yıllarında Lund ve diğer araştırmacılar[38] tarafından büyük katkı
sağlanmıştır. Sonlu elemanlar yöntemi ilk defa yapı dinamiğinde kullanılmıştır ve
daha sonraları çeşitli tekonolojik alanlarda kullanılmıştır. Sonlu elemanlar yöntemi
ilk defa 1972 senesinde Ruhl ve Booker[39] tarafında rotor sismlerine uygulanmıştır.
Bir süre sonra, 1976 senesinde Nelson ve McVaugh[40] dönme ataleti, jiroskopik
moment ve eksenel kuvvetleri de içeren bir genelleştirme yapmışlardır.
1960’lı yıllarda bazı buhar tribünlerinde çatlaklar ve deformasyonlar oluşmaya
başlayınca, araştırmacılar tekrar bu konu üstüne ağırlık vermiştir. 1976 senesinde
Gash ve Henry ile Okah ve Avae[41] bu sorun üzerine yoğunlaşmışlardır. Bu
çalışmalar göstermiştirki, stabil olmayan aralık dengeslizliğin yönüne bağlı olarak ya
meyadana gelmektedir yada gelmemektedir.

8
Rotor dinamiği ile ilgili yapılan son çalışmalardan biri 1975 yılında
Schweitzer[42]’in manyetik rulmanlar üzerine olan çalışmasıdır. Bu çalışmada rotor,
herhangi bir temas ve “active bearing” olmadan desteklenmiştir.
Şekil 3.1. Rotor dinamiğinin tarihsel gelişimi

9
4. KÜTLESİZ ŞAFT VE RİJİT DİSKLERİN TİTREŞİMLERİ
Dönen makinalarda titreşim analizi yapılırken sistemler, matematiksel olarak
kolaylık sağlaması amacıyla “lumped parameter systems” lere rijit bir rotor ve
kütlesiz elastik şaft yerleştirilmiş olarak düşünülür. Şekil 3. de bazı rotor sistemleri
gösterilmiştir. Eğer rotor elastik şaftın merkezine yerleştirilmiş ve iki ucundan
yataklanmışsa; yanal yer değiştirmeyi r, rotorun eğikliği θ birbirinden bağımısız
değişkenlerdir ve sistem iki farklı koordinatta tanımlanabileceğinden dolayı sistem 2
serbestlik dereceli(2DOF) olmaktadır. Şekil 3.(a) 2 serbestlik dereceli rotor
sisteminde yanal yerdeğiştirmeyi göstermektedir. Bu model Jeffcott rotor olarak
bilinmektedir ve matematiksel olarak kolaylık sağladığı için bir temel
oluşturmaktadır. Şekil 4.1.(b) 2 serbestlik dereceli sistemde rotorun eğikliğini
göstermektedir. Şekil 4.1.(a)’dan farklı olarak sisteme jiroskop moment etki
kalmaktadır. Jiroskop momentlerinin etki etmesi sonucunda sitemin doğal frekansları
dönme hızının fonksiyonu olarak değişmektedir. Şekil 4.1.(c) 4 serbestlik dereceli
rotor sistemini yani rotor eğikliğini ve yanal yerdeğiştirmeyi bir arada içeren bir
sistemi temsil etmektedir.
Şekil 4.1. “lumped parameter” rotor modelleri (a) Yanal değişime uğramış 2
serbestlik dereceli model (b) Eğikliğe maruz kalmış 2 serbestlik dereceli model (c) 4
serbestlik dereceli model
10
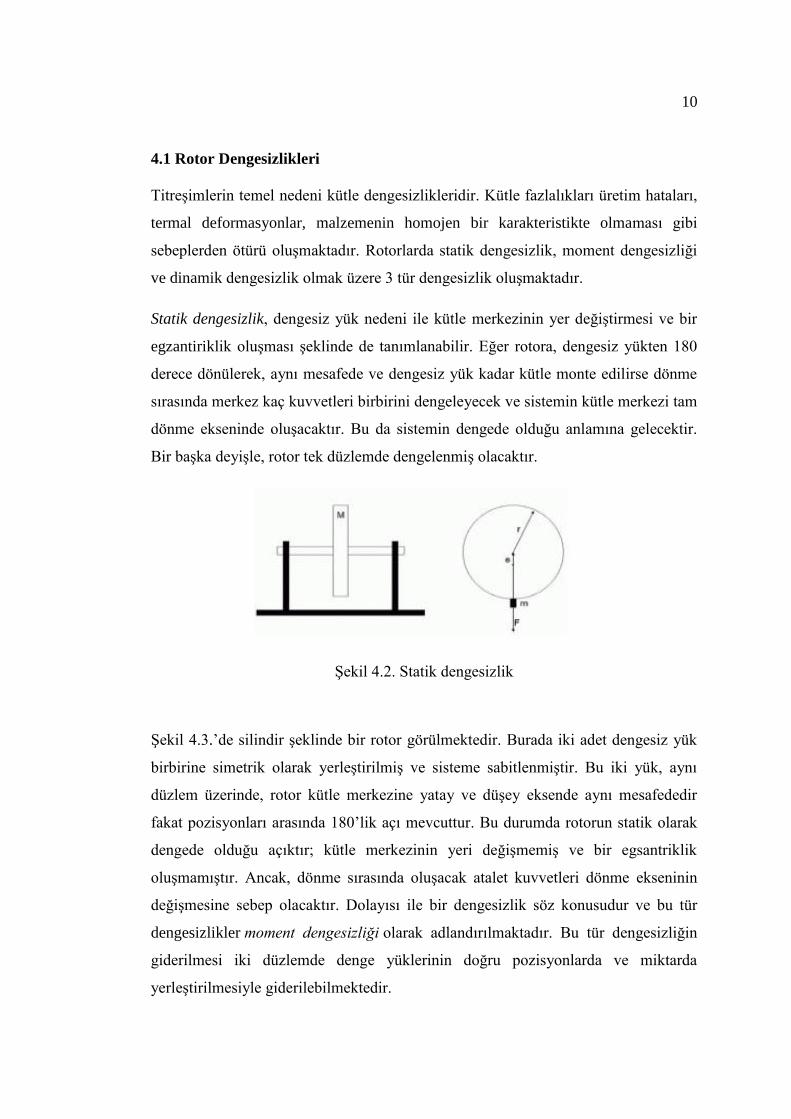
4.1 Rotor Dengesizlikleri
Titreşimlerin temel nedeni kütle dengesizlikleridir. Kütle fazlalıkları üretim hataları,
termal deformasyonlar, malzemenin homojen bir karakteristikte olmaması gibi
sebeplerden ötürü oluşmaktadır. Rotorlarda statik dengesizlik, moment dengesizliği
ve dinamik dengesizlik olmak üzere 3 tür dengesizlik oluşmaktadır.
Statik dengesizlik, dengesiz yük nedeni ile kütle merkezinin yer değiştirmesi ve bir
egzantiriklik oluşması şeklinde de tanımlanabilir. Eğer rotora, dengesiz yükten 180
derece dönülerek, aynı mesafede ve dengesiz yük kadar kütle monte edilirse dönme
sırasında merkez kaç kuvvetleri birbirini dengeleyecek ve sistemin kütle merkezi tam
dönme ekseninde oluşacaktır. Bu da sistemin dengede olduğu anlamına gelecektir.
Bir başka deyişle, rotor tek düzlemde dengelenmiş olacaktır.
Şekil 4.2. Statik dengesizlik
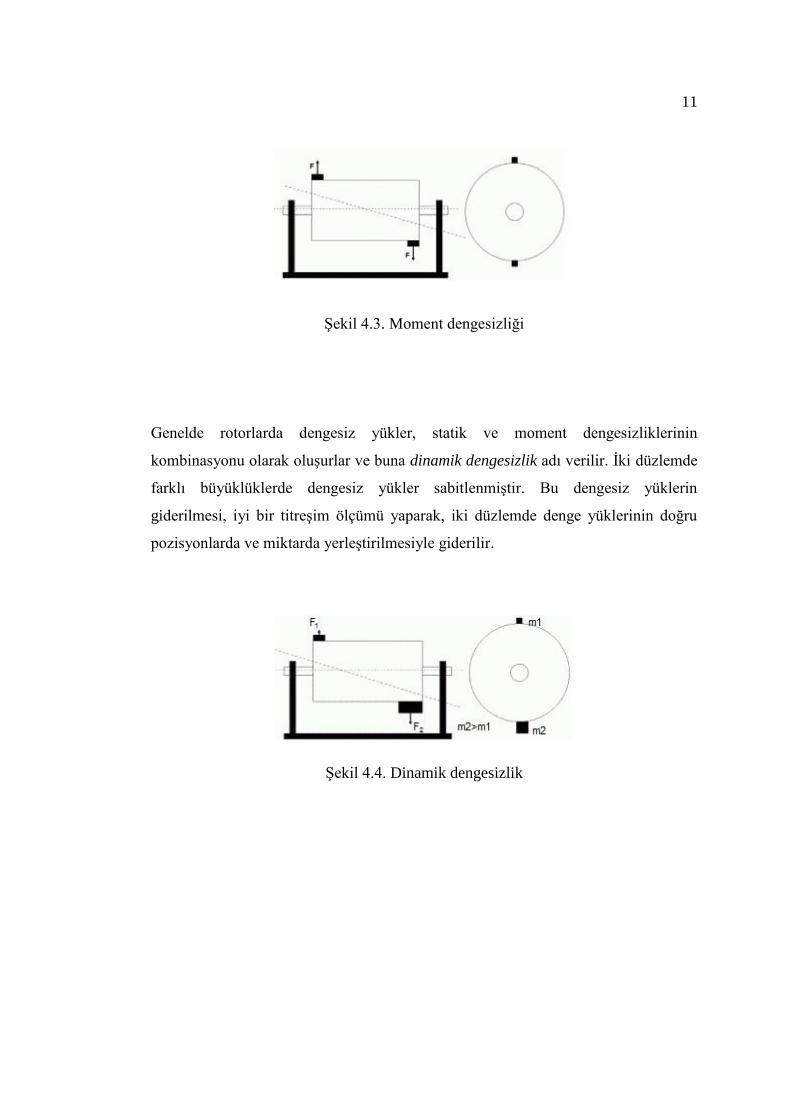
Şekil 4.3.’de silindir şeklinde bir rotor görülmektedir. Burada iki adet dengesiz yük
birbirine simetrik olarak yerleştirilmiş ve sisteme sabitlenmiştir. Bu iki yük, aynı
düzlem üzerinde, rotor kütle merkezine yatay ve düşey eksende aynı mesafededir
fakat pozisyonları arasında 180’lik açı mevcuttur. Bu durumda rotorun statik olarak
dengede olduğu açıktır; kütle merkezinin yeri değişmemiş ve bir egsantriklik
oluşmamıştır. Ancak, dönme sırasında oluşacak atalet kuvvetleri dönme ekseninin
değişmesine sebep olacaktır. Dolayısı ile bir dengesizlik söz konusudur ve bu tür
dengesizlikler moment dengesizliği olarak adlandırılmaktadır. Bu tür dengesizliğin
giderilmesi iki düzlemde denge yüklerinin doğru pozisyonlarda ve miktarda
yerleştirilmesiyle giderilebilmektedir.
11
Şekil 4.3. Moment dengesizliği
Genelde rotorlarda dengesiz yükler, statik ve moment dengesizliklerinin
kombinasyonu olarak oluşurlar ve buna dinamik dengesizlik adı verilir. İki düzlemde
farklı büyüklüklerde dengesiz yükler sabitlenmiştir. Bu dengesiz yüklerin
giderilmesi, iyi bir titreşim ölçümü yaparak, iki düzlemde denge yüklerinin doğru
pozisyonlarda ve miktarda yerleştirilmesiyle giderilir.
Şekil 4.4. Dinamik dengesizlik

12
5. 4 SERBESTLİK DERECELİ ROTOR SİSTEMİNİN MODELLENMESİ
Şekil 5.1.’ de görüldüğü gibi dikey rotor sisteminde disk kütlesiz elastik şafta monte
tesbit edilmiştir. Disk pozisyon olarak şaftın merkezinde değildir. Yanal
yerdeğiştirme ve rotor eğikliğinin hareketleri birbiriyle hareket çifti oluşturmaktadır.
Genellikle rijit bir cisim uzayda 6 serbestlik derecelidir. Dönen sistemlerde ise disk
sabit bir açısal ω açısal hızıyla dönerken bir düzlem hareketi meydana getirmektedir.
Rulman ve yataklardaki yanal yerdeğiştirmeler rotor ve şafta göre çok küçük olduğu
için bunlar ihmal edilmiştir. Bu sebepten ötürü rotor sistemi 4 serbestlik derecesi
olarak değerlendirilmektedir. 4 serberstlik dereceli rotor modellenirken karmaşık
rotor sistemlerinde kolay kullanılabilirliği bakımından Euler açıları kullanılacaktır. 4
serbestlik dereceli rotor sistemlerinin hareket denklemleri Newton kanunları ve
d'Alembert prensibi kullanılarak hesaplanacağı gibi Lagrange denklemleriyle yani
enerji eşitliklerinden yararlanılanarak da elde edilebilir. Ama biz buradaki
hesaplamalarımızda Newton’un hareket denklemlerini kullanacağız.
5.1 Hareket Denklemleri
Şekil 5.1. 4 serbestlik dereceli rotor sistemi (a) Dikey rotor sisteminin parametreleri
(b) Koordinat sistemi
13
Şekil 5.1.’ de görülen sistem yani 4 serbestlik dereceli rotor modelimiz statik ve
dinamik dengesizliğe sahiptir. Dik koordinat sistemi yani O xyz üzerinde olan z
ekseni rulman ekseniyle çakışmaktadır. Elastik şaftın merkez ekseni, diskin
geometrik merkezinden geçmektedir. Şaft dönme hareketi yapmazken yani
olduğu zaman, M noktası O orjiniyle çakışmaktadır. Savrulma hareketi sırasında M
noktası ( , )r x y kadar saparken, ( , )x y kadar eğilir. Ve disk dinamik
dengesizlikten dolayı τ kadar eğilir.
5.1.1. Yanal Hareket Denklemleri
Sisteme ( , )x yF F F kuvvetleri pozitif x ve y eksenleri doğrultusunda ve
( , )xz yzM M M momenti ise xz ve yz eksenlerinde ve pozitif x vey
doğrultularında etki ettiği zaman, sistemde yani rotorda r kadar yerdeğiştirme
olurken kadarlık da bir eğilme meydana gelecektir. Kuvvet ve moment eşitlikleri
aşağıda verilmiştir.
αx+γx xF (5.1)
αy+γy yF (5.2)
γx+δxz xM (5.3)
γy+δyz yM (5.4)
Kuvvet ve moment eşitliklerinde α , γ ve δ yay sabitlerini ifade etmektedir. Bu yay
sabitleri mukavemet teorilerinden türetilmiştir. Şekil 5.1.’ de gösterildiği gibi rotor
sistemindeki şaft iki ucundan desteklenmişse, yay sabitleri aşağıdaki gibi olur. Bu
yay sabitleri mukavemet hesaplarıyla hesaplanmaktadır.

14
2 2
0 3 3
( )α=3EI
a ab b l
a b
(5.5)
0 2 2
( )γ=3EI
a b l
a b
(5.6)
0δ=3EIl
ab (5.7)
Bu yay sabiti eşitliklerinde; a ve b , M noktasının aşağı ve yukarı rulmanlara olan
mesafesini gösterirken, l şaft boyunu, E elastisite modülünü, 0I ise şaftın kesit
alanının eylemsizlik momentini temsil etmektedir. Rotor sistemi modellenirken
kullanılan koordinat sistemi Şekil 5.1.’ de gösterilmiştir. M XYZ statik koordinat
sisteminde X ,Y ve Z eksenleri sırasıyla x , y ve z eksenlerine pararleldir. Gölgeli
A düzlemi şaftla dönen ve şafta dik sanal bir diski ifade etmektedir. 0 0 0 0M X Y Z
dönme koordinat sisteminde 0X ekseni M ve E nodları arasında uzanan çizgi
yönünde ve ME çizgisi, A düzlemi ve diskin kesişimidir. 0Z ekseni ise elastik şafta
teğet durumdadır. 1 1 1 1M X Y Z dönme koordinat sisteminde ise 1Z ekseni diskin
dönme eksenidir ve 1X ekseni yine M ve E nodları arasında uzanan çizgi yönünde
ve ME çizgisi, A düzlemi ve diskin kesişimidir.
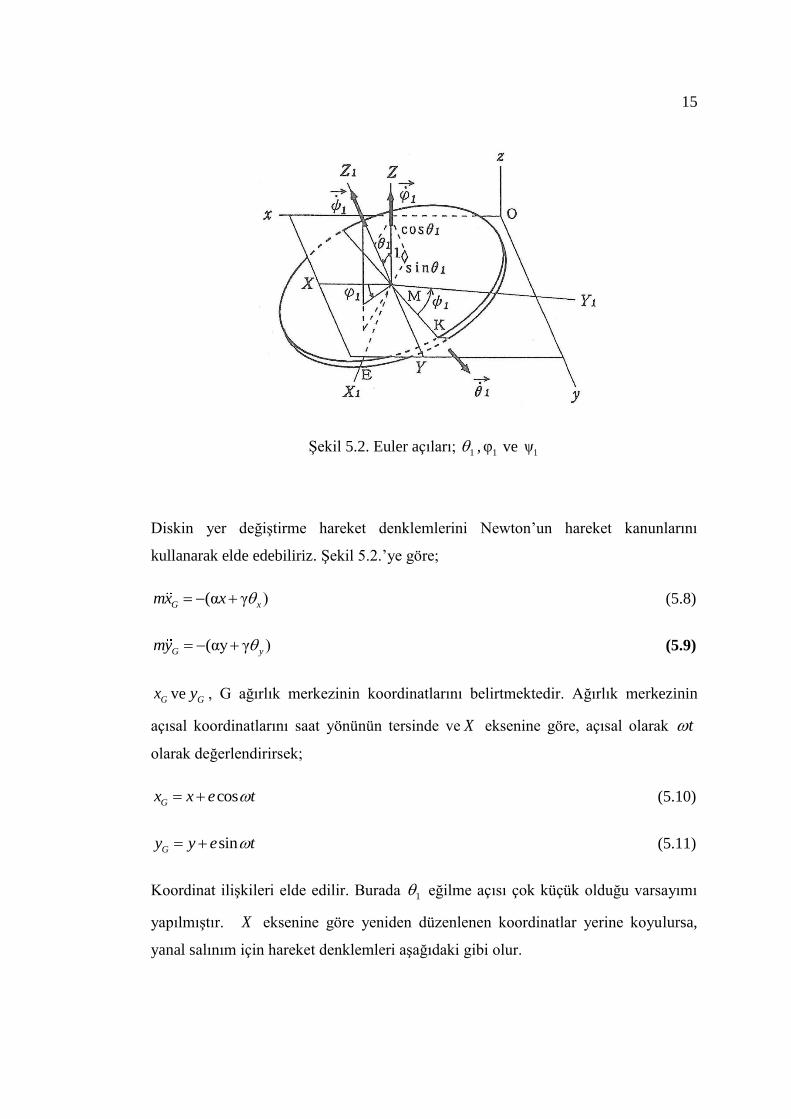
A düzlemi ve disk arasında olan ilişkiyi kurabilmek için Şekil 7. de tanımlanan Euler
açılarını kullanmak gerekir. 1 1 1M X Y Z koordinat sistemindeki 1 , 1φ ve 1ψ Euler
açılarını tanımlamak gerekirse; 1 yani zenit açısı ve 1φ açısı yani presesyon açısı
cismin ana ekseninin doğrultusunu, 1ψ ise dönme açısı olarak adlandırılır ve ana
cismin 1Z ekseni etrafında ne kadar döndüğünü belirtir.
15
Şekil 5.2. Euler açıları; 1 , 1φ ve 1ψ
Diskin yer değiştirme hareket denklemlerini Newton’un hareket kanunlarını
kullanarak elde edebiliriz. Şekil 5.2.’ye göre;
(α γ )G xmx x
(5.8)
(αy γ )G ymy (5.9)
Gx ve Gy , G ağırlık merkezinin koordinatlarını belirtmektedir. Ağırlık merkezinin
açısal koordinatlarını saat yönünün tersinde ve X eksenine göre, açısal olarak t
olarak değerlendirirsek;
cosGx x e t
(5.10)
sinGy y e t (5.11)
Koordinat ilişkileri elde edilir. Burada 1 eğilme açısı çok küçük olduğu varsayımı
yapılmıştır. X eksenine göre yeniden düzenlenen koordinatlar yerine koyulursa,
yanal salınım için hareket denklemleri aşağıdaki gibi olur.
16
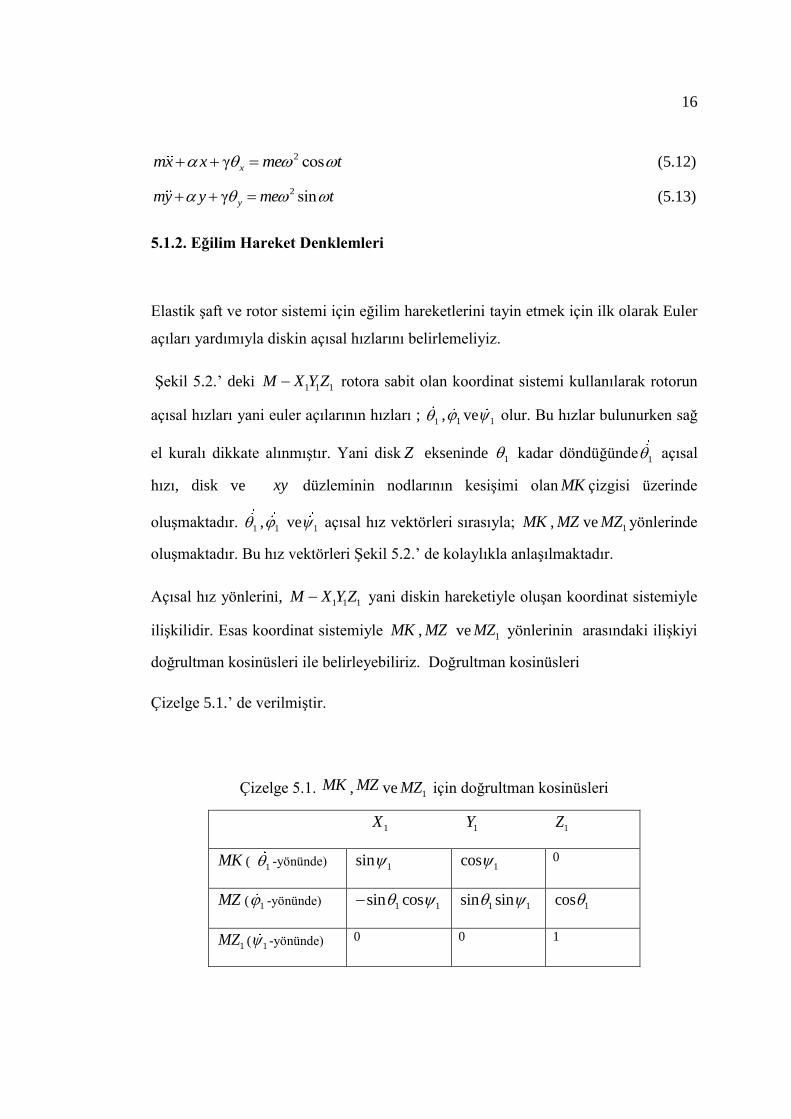
2γ cosxmx x me t (5.12)
2γ sinymy y me t (5.13)
5.1.2. Eğilim Hareket Denklemleri
Elastik şaft ve rotor sistemi için eğilim hareketlerini tayin etmek için ilk olarak Euler
açıları yardımıyla diskin açısal hızlarını belirlemeliyiz.
Şekil 5.2.’ deki 1 1 1M X Y Z rotora sabit olan koordinat sistemi kullanılarak rotorun
açısal hızları yani euler açılarının hızları ; 1 , 1 ve 1 olur. Bu hızlar bulunurken sağ
el kuralı dikkate alınmıştır. Yani disk Z ekseninde 1 kadar döndüğünde1 açısal
hızı, disk ve xy düzleminin nodlarının kesişimi olan MK çizgisi üzerinde
oluşmaktadır. 1 , 1 ve 1 açısal hız vektörleri sırasıyla; MK , MZ ve 1MZ yönlerinde
oluşmaktadır. Bu hız vektörleri Şekil 5.2.’ de kolaylıkla anlaşılmaktadır.
Açısal hız yönlerini, 1 1 1M X Y Z yani diskin hareketiyle oluşan koordinat sistemiyle
ilişkilidir. Esas koordinat sistemiyle MK , MZ ve 1MZ yönlerinin arasındaki ilişkiyi
doğrultman kosinüsleri ile belirleyebiliriz. Doğrultman kosinüsleri
Çizelge 5.1.’ de verilmiştir.
Çizelge 5.1. MK , MZ ve 1MZ için doğrultman kosinüsleri
1X 1Y 1Z
MK (1 -yönünde) 1sin 1cos 0
MZ ( 1 -yönünde) 1 1sin cos 1 1sin sin 1cos
1MZ ( 1 -yönünde) 0 0 1

17
Diskin açısal hızlarını doğrultman kosinüsleri yardımıyla, 1MX , 1MY ve 1MZ
eksenlerinde tekrar tanımlanmıştır ve aşağıda verilmiştir.
1 1 1 1 1 1sin sin cosX (5.14)
1 1 1 1 1 1cos sin sinY (5.15)
1 1 1 1cosZ (5.16)
Rotor sistemleri dönel sistemler oldukları için açısal momentum değişklikleri bizim
için çok önemlidir. Açısal momentumlar her eksenin atalet momenti eksenine göre
sırasıyla, 1XL , 1YL ve 1ZL olarak tanımlanırsa aşağıdaki eşitlikler elde edilir.
1 1X XL I (5.17)
1 1Y YL I (5.18)
1 1Z p ZL I (5.19)
Şekil 5.4. Açısal momentum değişimleri
Momentum eşitlikleri ve Şekil 5.4. yardımıyla açısal momentumlardaki değişimler
1X , 1Y ve 1Z eksenlerinde tanımlanırsa aşağıdaki momentum değişimi eşitlikleri elde
edilir.
18
1 1 1 1( )X X p Y ZH I I I (5.20)
1 1 1 1( )Y Y p Z XH I I I (5.21)
1 1Z p ZH I (5.22)
Daha önceden 1X , 1Y ve 1Z eksenlerinde tanımlanan açısal hızlar, momentum
değişimi eşitliklerinde yerine koyulursa;
1 1 1 1 1 1 1 1 1 1 1 1 1 1( sin sin cos ) ( )( cos sin sin )( cos )X p
dH I I I
dt
(5.23)
1 1 1 1 1 1 1 1 1 1 1 1 1 1( cos sin cos ) ( )( sin sin cos )( cos )Y p
dH I I I
dt
(5.24)
1 1 1 1( cos )Z p
dH I
dt
(5.25)
eşitlikleri elde edilir.
1X , 1Y ve 1Z eksenlerinde tanımlanan 1XH , 1YH ve 1ZH açısal momentum
değişimlerini statik x , y ve z eksenlerinde tanımlamamız için yine doğrultman
kosinüslerini kullanmamız gerekmektedir. 1X , 1Y ve 1Z eksenlerinde gerçeklerşen
momentum değişimleri, X , Y ve Z eksenlerinde olan monemtum değişimleriyle
yani XH , YH ve ZH ile aynıdır.
1XH , 1YH ve 1ZH momentum değişimlerini, C
momentum değişimlerine
dönüştürmek için 1l , 1m 1n , 2l , 2m , 2n , 3l , 3m ve 3n doğrultman kosinüslerini
kullanmak gerekir. Bu doğrultman kosinüsleri Çizelge 5.2. de verilmiştir.
X , Y ve Z eksenleri için doğrultman kosinüsleri türetilirken 1X yönünde, Şekil
5.5.’de görüleceği üzere a birim vektörü tanımlanmıştır. Bu vektör;
1 1cosa (5.26)
2 1sina (5.27)

19
olarak 1X ve 1Y eksenlerinde tanımlanan 1P düzleminde iki bileşene ayrılmıştır.
Bileşenlerden 1a bileşeni;
3 1 1 1 1cos cos cosa a (5.28)
1 1 1 1 1sin cos sinZa a (5.29)
olarak Z ve 1Z eksenlerinden oluşan 1ZZ düzleminde,
2a bileşeni;
2 2 1 1 1cos sin cosYa a (5.30)
2 2 1 1 1sin sin sinXa a (5.31)
olarak P yani XY düzleminde,
3a bileşeni;
3 3 1 1 1 1cos cos cos cosXa a (5.32)
3 3 1 1 1 1sin cos cos sinYa a (5.33)
olarak P düzleminde tekrar bileşenlerine ayrılmıştır. X , Y ve Z yönlerindeki
bileşenlerin toplamı ve doğrultman kosinüsleri Çizelge 5. 2.’ de verilmiştir.
Çizelge 5.2. X , Y ve Z eksenleri için doğrultman kosinüsleri
1X 1Y 1Z
X 1 1 1 1 1 1cos cos cos sin sinl
2 1 1 1 1 1cos cos sin sin cosl
3 1 1sin cosl
Y 1 1 1 1 1 1cos sin cos cos sinm
2 1 1 1 1 1cos sin sin cos cosm
3 1 1sin sinm
Z 1 1 1sin cosn
2 1 1sin sinn 3 1cosn
20
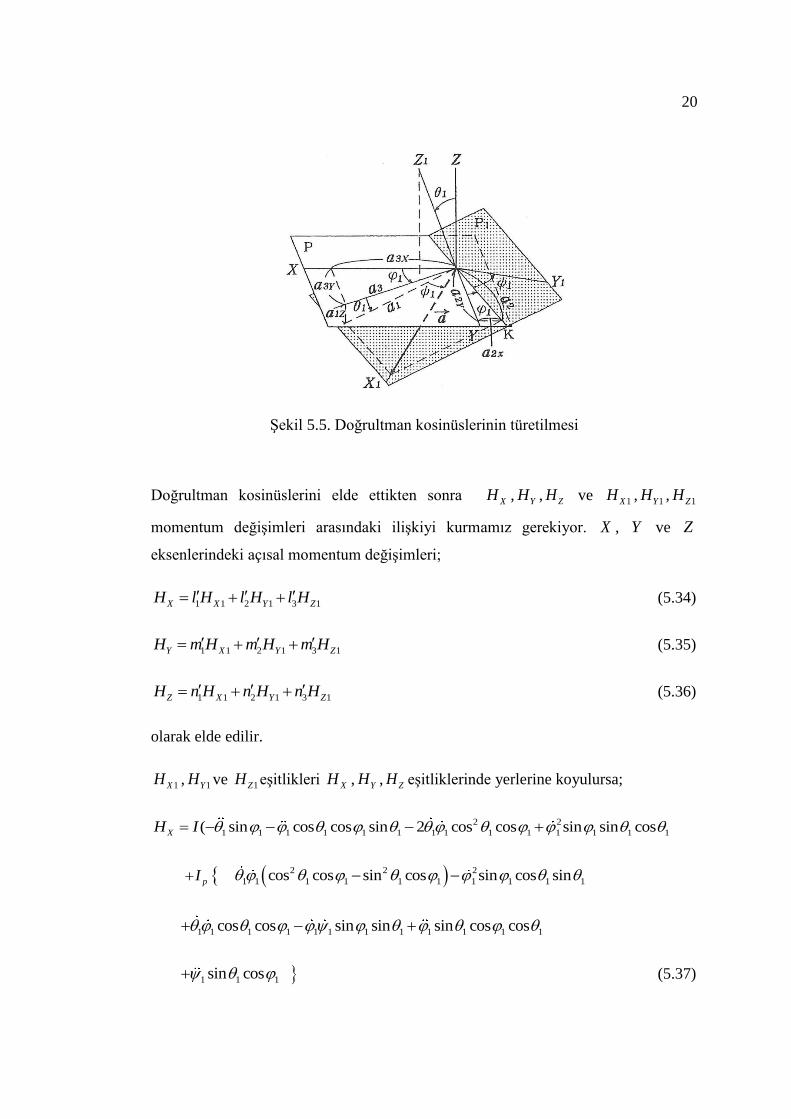
Şekil 5.5. Doğrultman kosinüslerinin türetilmesi
Doğrultman kosinüslerini elde ettikten sonra XH , YH , ZH ve 1XH , 1YH , 1ZH
momentum değişimleri arasındaki ilişkiyi kurmamız gerekiyor. X , Y ve Z
eksenlerindeki açısal momentum değişimleri;
1 1 2 1 3 1X X Y ZH l H l H l H
(5.34)
1 1 2 1 3 1Y X Y ZH m H m H m H
(5.35)
1 1 2 1 3 1Z X Y ZH n H n H n H (5.36)
olarak elde edilir.
1XH , 1YH ve 1ZH eşitlikleri XH , YH , ZH eşitliklerinde yerlerine koyulursa;
2 2
1 1 1 1 1 1 1 1 1 1 1 1 1 1( sin cos cos sin 2 cos cos sin sin cosXH I
pI 2 2 2
1 1 1 1 1 1 1 1 1 1cos cos sin cos sin cos sin
1 1 1 1 1 1 1 1 1 1 1 1cos cos sin sin sin cos cos
1 1 1sin cos
(5.37)
21
2 2
1 1 1 1 1 1 1 1 1 1 1 1 1 1( cos cos sin sin 2 cos sin cos sin cos )YH I
pI 2 2 2
1 1 1 1 1 1 1 1 1 1cos sin sin sin cos sin cos
1 1 1 1 1 1 1 1cos sin cos sin
1 1 1 1 1 1 1sin sin cos sin sin (5.38)
2 2
1 1 1 1 1 1( sin 2 sin cos )ZH I
2
1 1 1 1 1 1 1 1 1 1 12 sin cos sin cos cospI (5.39)
XH , YH ve ZH açısal momentum değişim denklemleri elde edilirken 1 açısının
çok küçük olduğu varsayımı yapılmıştır. 1X ve 1Y açıları 1 açısının XZ ve YZ
düzlemlerindeki izdüşümleridir ve aşağıdaki şekilde verilmiştir;
1 1 1cosx (5.40)
1 1 1siny (5.41)
1x ve 1y ’nin ikinci türevleri alınarak,
1 1sin ve 1cos 1 varsayımları yapıldığı zaman, XH , YH ve ZH açısal
momentum değişimleri daha basit hale gelmektedir. 1 1 değişken
değiştirmesi yapılırken yani dönme hızları bir değişken altında birleştirilirse açısal
momentum değişimleri,
1 1( )x y p x
dH I I
dt (5.42)
1 1( )y x p y
dH I I
dt (5.43)
z pH I (5.44)

22
haline gelmektedir.
Eğer şaft sabit açısal hızıyla dönerse, ve 0 olmaktadır. Bu değerler
açısal momentum değişim ifadelerinde yerine koyulursa;
1 1x y p xH I I (5.45)
1 1y x p yH I I (5.46)
0zH (5.47)
denklemleri elde edilir.
Şafta xzM veyzM momentleri uygulandığı zaman xzM ve
yzM geri çağırıcı
momentleri ortaya çıkmaktadır. Bu reaksiyon momentlerini ;
xz xzM M
(5.48)
yz yzM M (5.49)
şeklinde yazabiliriz. Bu reaksiyon momentleri savrulma yada dönme hareketi
süresince ortaya çıkmaktadır. Bu geri çağırıcı momentler diskte meydana gelen x
ve y açılarını küçültmeye çalışmaktadır. xzM pozitif y ekseni doğrultusunda
pozitif, yzM negatif x ekseni doğrultusunda pozitif olmaktadır.
Geri çağırıcı momentleri, x y zM M i M j M k şeklinde vektörel olarak ifade
edebiliriz. Burada i ve j , x ve y eksenlerindeki birim vektörlerdir. Moment
bileşenleri ise;
x y yzM y M (5.50)
y x xzM x M (5.51)
şeklindedir.

23
Hareket denklemlerini elde etmek için aşağıdaki eşitlikler kullanılmıştır.
x xH M (5.52)
y yH M (5.53)
z zH M (5.54)
x xH M ve y yH M eşitliklerinden aşağıdaki eğilim hareket denklemlerini elde
ederiz.
1 1y p x yI I y
(5.55)
1 1x p y xI I x (5.56)
Hareket denklemlerini statik koordinat sisteminde tanımlamak gerekmektedir. Bunun
için Şekil 5.6.’ da 1x , 1y ve x ,
y arasındaki ilişkiler kullanılacaktır. Şekil 5.6.’
da 1MZ , 0MZ , 1MY düzlemlerindeki G , , 1 , a , b ve c noktaları, yatay XMY
düzlemindeki G , , 1 , a , b ve c noktalarının izdüşümleridir. Disk hafif şekilde
eğildiği zaman ağırlık merkezi G ,
XMG 1 90 KMG 1 190
1 190
1 90 (5.57)
biçiminde yazılabilir. 1 ve 1 açıları yerine önceden tanımlanmış olan 1
yazılmıştır. 1 şeklinde sabit kalırsa, zaman orjini uygun bir şekilde seçilerek
XMG t (5.58)
ifadesini yazabiliriz. Şekil 5.6.’ da görüleceği üzere MP ve Mc çizgileri yaklaşık
olarak düz bir çizgi oluşturmaktadır. Dinamik dengesizliğin yönü olan MP çizgisi ve
X eksenleri arasında kalan açı aşağıdaki gibi yazılabilir;
180 180XMG t (5.59)

24
1x , 1y ve x ,
y arasındaki ilişkiler yukarıdaki bilgilerle tekrar düzenlenirse;
1 cos cosx x x t (5.60)
1 sin siny y y t (5.61)
biçiminde yazılabilir.
Şekil 5.6. 1x , 1y ve x ,
y arasındaki ilişkiler
Eğilim hareket denklemlerini tekrar düzenlersek aşağıdaki hareket denklemlerini
elde ederiz.
2 cosx p x pI I x I I t (5.62)
2 siny p y pI I y I I t (5.63)
Sönüm içermeyen 4 serbestlik dereli rotor sistemi için genel hareket denklemleri
yanal hareket denklemleri ve eğilim hareket denklemlerinin birleşimidir. Toplamda 4
tane hareket denklemimiz vardır. Bunlardan ilk ikisi yanal hareket denklemleri ve
son 2 denklem ise eğilim hareket denklemleridir. Bu denklem takımları aşağıda
verilmiştir.
25
2γ cosxmx x me t (5.64)
2γ sinymy y me t (5.65)
2 cosx p y x pI I x I I t (5.66)
2 siny p x y pI I y I I t (5.67)
Hareket denklemlerini vektörel formda aşağıda verilmiştir.
MX GX KX F
Genelleştirilmiş durum vektörü,
x
y
x
yX
(5.68)
Kütle matrisi,
0 0 0
0 0 0
0 0 0
0 0 0
m
mM
I
I
(5.69)
Jiroskopik matris,
0 0 0 0
0 0 0 0
0 0 0
0 0 0
p
p
GI
I
(5.70)

26
Yay matrisi,
0 0
0 0
0 0
0 0
K
(5.71)
Kuvvet matrisi,
2
2
2
2
cos
sin
cos
sin
p
p
me t
me tF
I I t
I I t
(5.72)
4 serbestlik dereceli rotor sisteminin hareket denkelmleri tanımlanırken sönümleme
hesaba katılmamıştır. Eğer sönümlemeyi hareket denklemlerine dahil edersek
aşağıdaki denklemleri elde ederiz.
2
11 12 γ cosx xmx c x c x me t (5.73)
2
11 12 γ siny ymy c y c y me t (5.74)
2
21 22 cosx p y x x pI I c x c x I I t (5.75)
2
21 22 siny p x y y pI I c y c y I I t (5.76)
5.1.3. Atalet Ekesenleri Ve Atalet Momentleri
Kütlesel atalet momenti, hareketin çeşitli koordinat sistemlerinde( kartezyen
koordinat sistemi, yarı kutupsal koordinat sistemi, doğal koordinat
sistemi) vektörel olarak tanımlanmasıyla, yer vektörünün zamana göre iki kez türevi
27
alınmasıyla ivmenin vektörel olarak büyüklüğü belirlenmiş olur. Yani, kütle atalet
momenti cismin açısal ivmeye direncinin bir ölçüsüdür. Birimi 2.kg m dir.
Alan atalet momenti, sabit bir elemana gelen yükün oluşturacağı gerilimlere karşı
cismin direncidir. Bir yüzeyin veya bir hacmin ağırlık merkezinin dönmeye
zorlandığı eksene(dönme eksenine) olan uzaklığı ve kesitlerine bağlı olarak
hesaplanır. Birimi 4m dür.
Rotor sistemleri dönen sistemler oldukları için kütle atalet momentleri önem
taşımaktadır. Dönen rotor bir disk ise dönme eksenin kütle ataleti daha büyük
olurken, rotor silindir gibi bir cisimse boyutlarına göre kütle atalet momentinin hangi
eksende daha büyük olacağı değişecektir.
Şekil 5.3.’e göre; yarıçarı R , yüksekliği H ve kütlesi m olan katı bir silindir için
kütle atalet momentleri;
2
2p
mRI (5.77)
2 2
( )4 12
R HI m
(5.78)
Şekil 5.3. Katı bir silindir için kütle atalet eksenleri ve parametreleri

28
6. ANALİTİK ÇÖZÜM
4 serbestlik dereceli rotor sistemi Matlab programı kullanılarak yapılmıştır. Matlab
ortamında çözüm yapabilmek için konum ve hızları içeren X matrisi
tanımlanmıştır. Bu matris Matlab ortamında Runge-Kutta metodu kullanılarak simüle
edilmiştir. Hareket denklemleri Matlab ortamında çözülmüştür ve genlik değerleri
bulunmuştur. Son olarak fft analizi yapılarak waterfall grafiği elde edilmiştir.
x
x
y
y
x
x
y
yX
(5.79)
1
2
3
4
5
6
7
8
x
x
x
xX
x
x
x
x
(5.80)
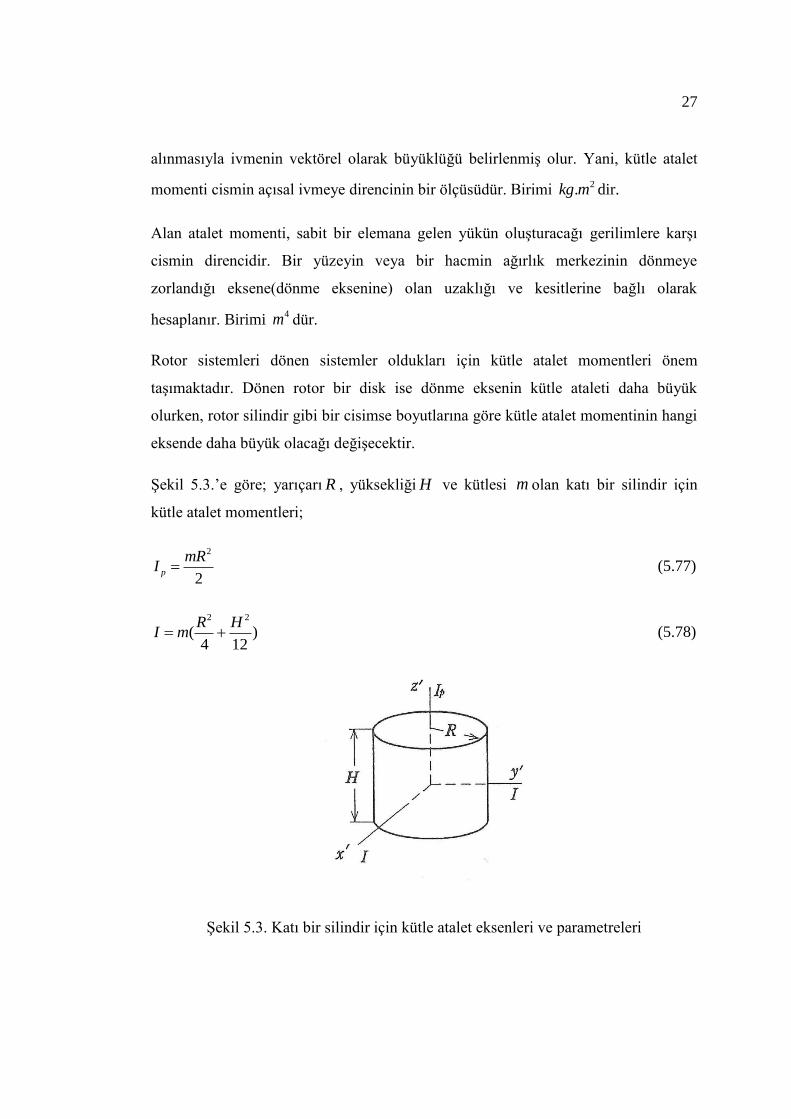
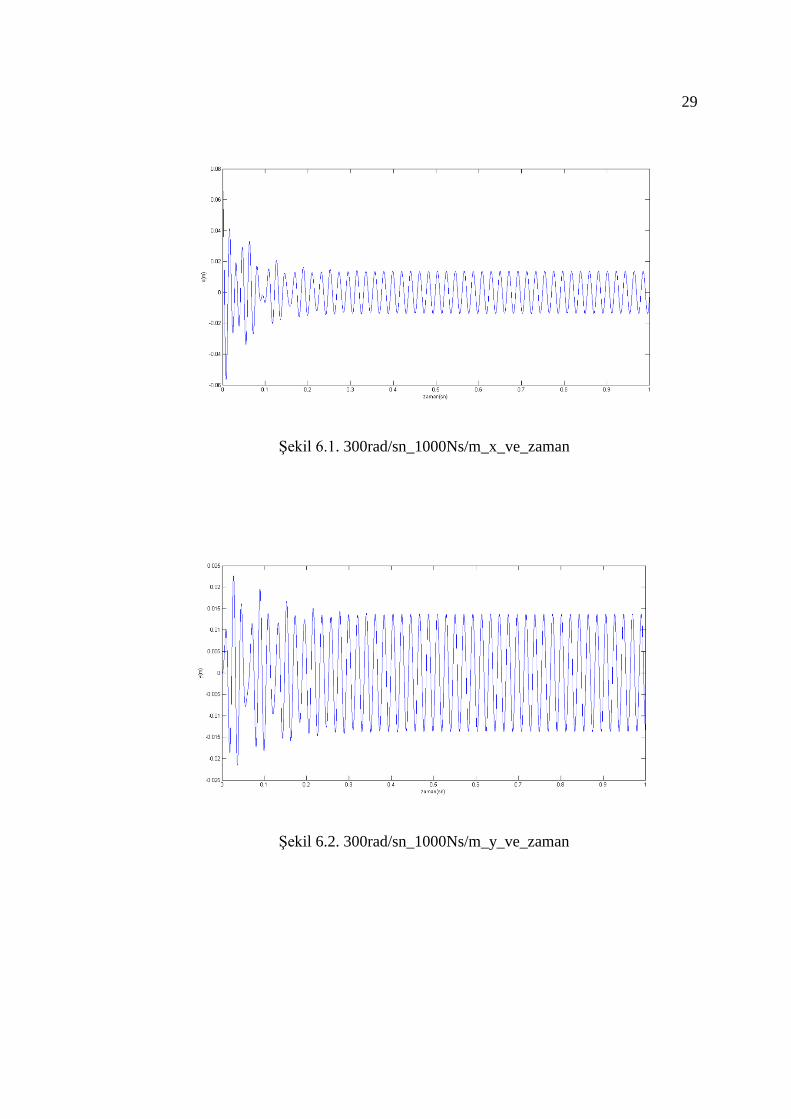
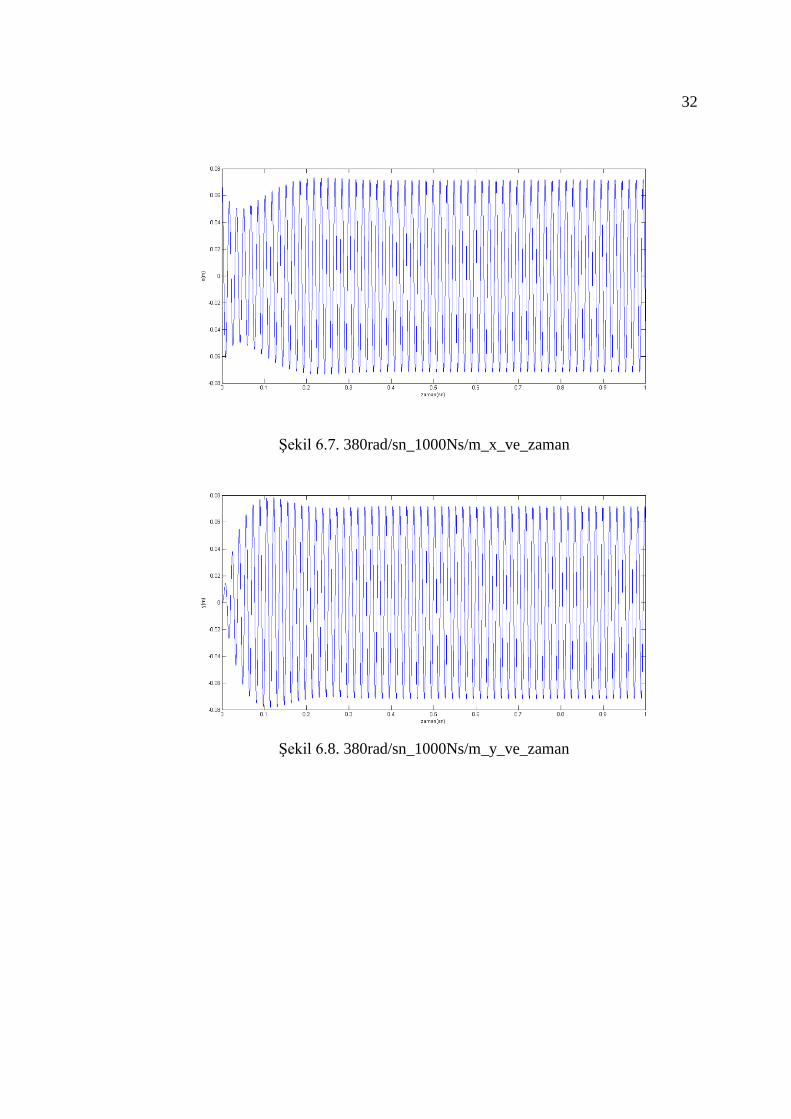
Matlab’dan alınan çeşitli açısal hız değerleri ve farklı sönüm oranları için, genlik-
zaman, orbit grafikleri aşağıda verilmiştir.
29
Şekil 6.1. 300rad/sn_1000Ns/m_x_ve_zaman
Şekil 6.2. 300rad/sn_1000Ns/m_y_ve_zaman

30
Şekil 6.3. 300rad/sn_1000Ns/m_orbit
Şekil 6.4. 350rad/sn_1000Ns/m_x_ve_zaman

31
Şekil 6.5. 350rad/sn_1000Ns/m_y_ve_zaman
Şekil 6.6. 350rad/sn_1000Ns/m_orbit
32
Şekil 6.7. 380rad/sn_1000Ns/m_x_ve_zaman
Şekil 6.8. 380rad/sn_1000Ns/m_y_ve_zaman
33
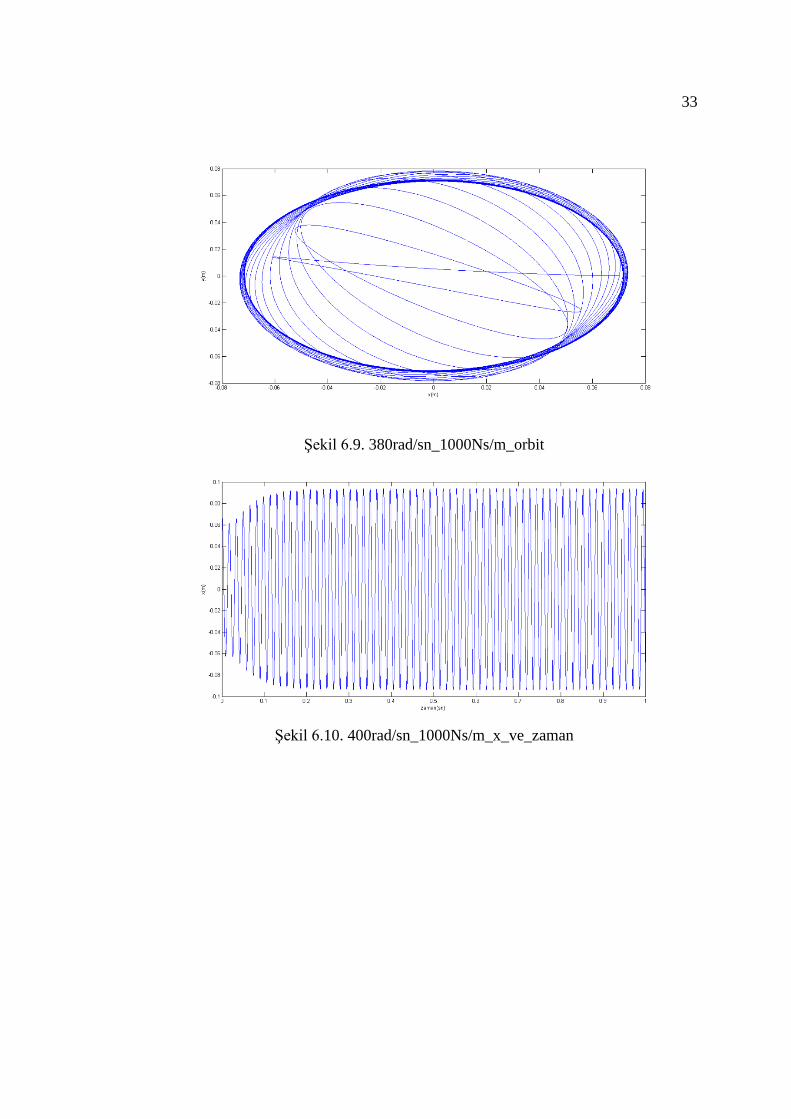
Şekil 6.9. 380rad/sn_1000Ns/m_orbit
Şekil 6.10. 400rad/sn_1000Ns/m_x_ve_zaman

34
Şekil 6.11. 400rad/sn_1000Ns/m_y_ve_zaman
Şekil 6.12. 400rad/sn_1000Ns/m_orbit
35
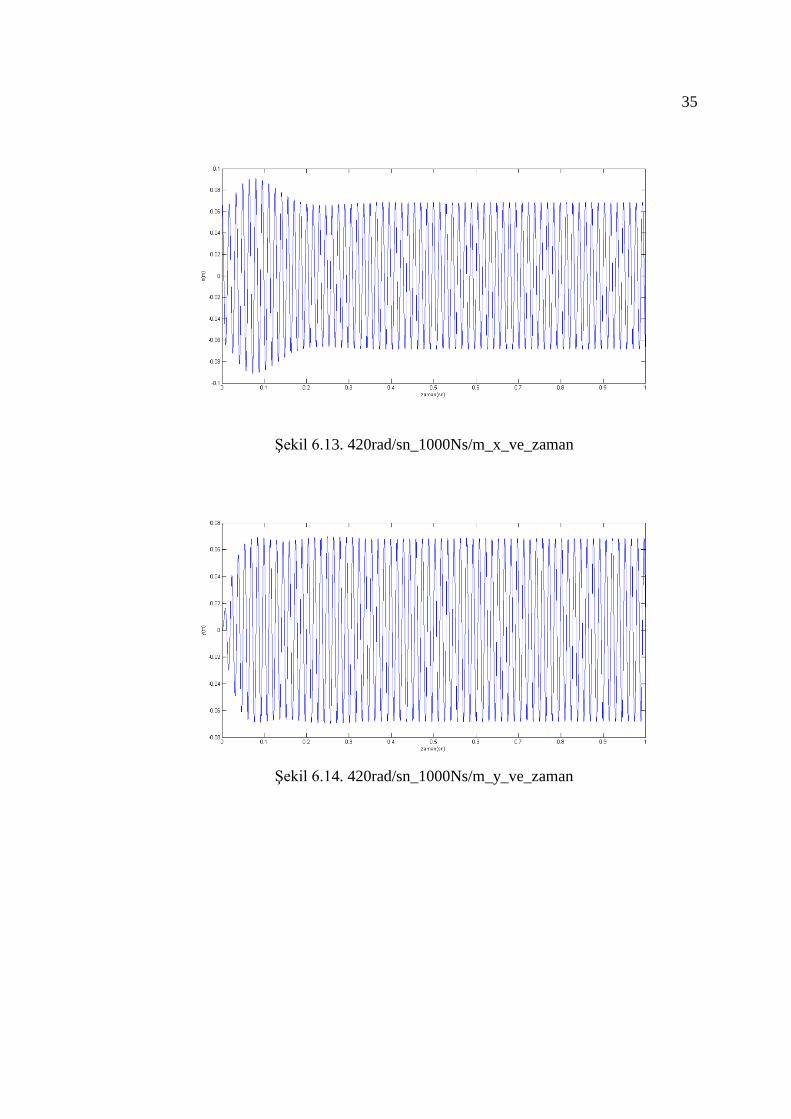
Şekil 6.13. 420rad/sn_1000Ns/m_x_ve_zaman
Şekil 6.14. 420rad/sn_1000Ns/m_y_ve_zaman
36
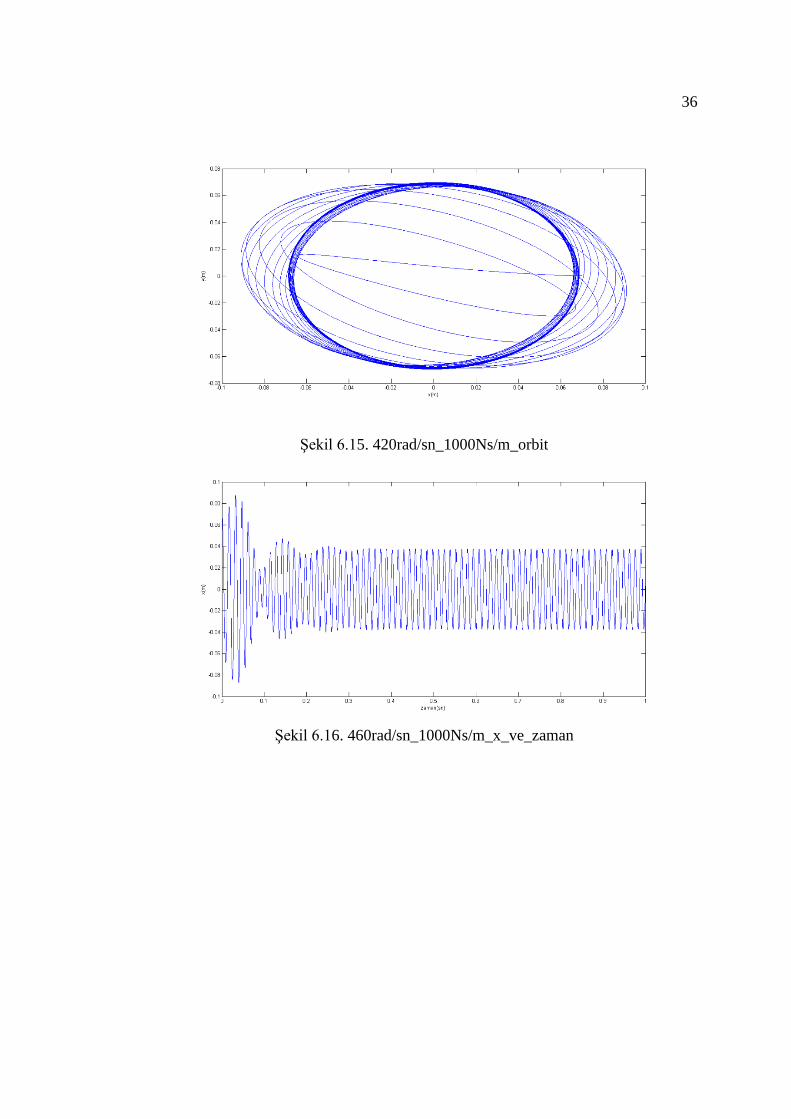
Şekil 6.15. 420rad/sn_1000Ns/m_orbit
Şekil 6.16. 460rad/sn_1000Ns/m_x_ve_zaman

37
Şekil 6.17. 460rad/sn_1000Ns/m_y_ve_zaman
Şekil 6.18. 460rad/sn_1000Ns/m_orbit

38
Şekil 6.19. 500rad/sn_1000Ns/m_x_ve_zaman
Şekil 6.20. 500rad/sn_1000Ns/m_y_ve_zaman

39
Şekil 6.21. 500rad/sn_1000Ns/m_orbit
Şekil 6.22. 200rad/sn ve 1800rad/sn aralığı için waterfall diyagramı

40
7. SONUÇ VE ÖNERİLER
Yapılan çalışmada elastik şaft-rotor sistemi 4 serbestlik dereceli olarak
modellenmiştir. Şaftın elastik olmasından ve diskin ufak miktarda eğilmesinden
dolayı zorlama kuvvetleri ve zorlama momentleri ortaya çıkmaktadır. Sistem Matlab
ortamında çözdürülmüştür ve waterfall diyagramında sistemin 50-100 Hz aralığında
rezonansa girdiği net olarak gözlemlenmiştir. Analitik çözüm bölümünde verilen
grafiklere bakılarak sisteminin 400 Hz civarında bir rezonans aralığı olduğu
görülmüştür. Bu aralıkta sistem kararsız hale gelmektedir ve genlikler maksismum
seviyeye ulaşmıştır. Sistem rezonans frekansını aştıktan sonra sistem belli bir
frekansla hareketine devam etmektedir. Genlikler rezonans frekansından önceki
frekanslarda daha küçük olmaktadır.

41
KAYNAKLAR
1. Rankine, W.J.M. (1869) On the centrifugal force of rotating shafts.
Engineering, 27, 249–249.
2. Stodola, A. (1924) Dampf und Gas-Turbinen, Verlag von Julius Springer,
Berlin. (English translation (1927) Steam and Gas Turbines, McGraw-Hill,
New York).
3. Dunkerley, S. (1894) On the whirling and vibration of shaft. Philos. Trans.
R. Soc. Lond., Ser. A, 185, 279–359.
4. Holzer, H. (1921) Die Berechnung der Drehschwingungen, Springer-Verlag,
Berlin.
5. Jeffcott, H.H. (1919) The lateral vibration of loaded shafts in the
neighborhood of a whirling speed: the effect of want of balance. Philos. Mag.
A, 37, 304–315.
6. Stodola, A. (1924) Dampf und Gas-Turbinen,Verlag von Julius Springer,
Berlin. (Englishtranslation (1927) Steam and GasTurbines, McGraw-Hill,
New York).
7. Newkirk, B.L. (1924) Shaft whipping. Gen.Electr. Rev., 27 (3), 169–178.
8. Newkirk, B.L. and Taylor, H.D. (1925) Shaft whirling due to oil action in
journal bear
9. Taylor, H.D. (1940) Critical speed behavior ofunsymmetrical shafts. J. Appl.
Mech., 7 (2),71–79.
10. Foote, W.R., Poritsky, H., and Slade, J.J.(1943) Critical speeds of a rotor with
unequal shaft flexibilities, mounted in bearings of unequal flexibility I.
Trans.ASME, J. Appl. Mech., 10 (2), 77–84.
11. Brosens, S.H. and Crandall, S.H. (1961) Whirling of unsymmetrical rotors.
Trans. ASME, J. Appl. Mech., 28 (3), 355–362.
12. Yamamoto, T. and Ota, H. (1963a) On the vibrations of a shaft carrying an
unsymmetrical rotating body. Bull. JSME, 6 (21), 29–36.
42
13. Yamamoto, T. and Ota, H. (1963b) Unstable vibrations of the shaft carrying
an unsymmetrical rotating body. Bull. JSME, 6 (23), 404–411.
14. Yamamoto, T. and Ota, H. (1964) On the dynamically unstable vibrations of
a shaft carrying an unsymmetrical rotating body. Bull. JSME, 31 (3), 515–
5522.
15. Lewis, F.W. (1932) Vibrations during acceleration through a critical speed.
Trans. ASME, 54 (3), 253–261.
16. Bogoliubov, N.N. and Mitropol’skii, Y.A. (1958) Asymptotic Methods in the
Theory of Nonlinear Oscillations, Gordon and Breath, New York. (English
translation, 1961, Gordon and Breath, New York), (in Russian).
17. Bishop, R.E.D. (1959) Vibration of rotating shafts. J. Mech. Eng. Sci., 1 (1),
50–65.
18. Bishop, R.E.D. and Gladwell, G.M.L. (1959) The vibration and balancing of
an unbalanced flexible rotor. J. Mech. Eng. Sci., 1 (l), 66–77.
19. Bishop, R.E.D. and Parkinson, A.G. (1965) Second order vibration of flexible
shafts. Philos. Trans.R. Soc. Lond., Ser. A, 259 (1095), 1–31.
20. Eshleman, R.L. and Eubanks, R.A. (1969) On the critical speeds of a
continuous rotor. Trans. ASME, J. Eng. Ind., 91 (4), 1180–1188.
21. Campbell, W. (1924) The Protection of steam-turbine disk wheels from axial
vibration. Trans. ASME, 46, 31–160.
22. İnternet: http://www.schenck-rotec.com/company/information/history.php
23. Miwa, S. and Shimomura, G. (1976) Balancing of Rotating Machinery,
Corona Publishing Co., Tokyo. (in Japanese).
24. Thearle, E.L. (1934) Dynamic balancing in the field. Trans. ASME, J. Appl.
Mech., 56 (10), 745–753.
25. Federn, K. (1957) Grundlagen einer systematischen Schwingungsentst¨orung
References 9 wellenelastischer Rotoren. VDI Ber., 24, 9–25.
26. Hori, Y. (1959) A theory of oil whip. Trans. ASME, J. Appl. Mech., 26 (2),
189–198.
27. Thomas, J.J. (1958) Instabile Eigenschwingungeri von Turbinenlaufern,
Angefacht durch die Spaltstromungen, in Stoptbuchsen und Beschauflungen,
AEG-Sonderdruck, pp. 1039–l063.
43
28. Alford, J.S. (1965) Protecting turbomachinery from self-excited rotor whirl.
Trans. ASME, J. Eng. Power, 87 (4), 333–344.
29. Ehrich, F.F. (1967) The influence of trapped fluids on high speed rotor
vibration. Trans. ASME, J. Eng. Ind., 89B (4), 806–812.
30. Wolf, J.A. (1968) Whirl dynamics of a rotor partially filled with liquid.
Trans. ASME, J. Appl. Mech., 35 (4), 676–682.
31. Yamamoto, T. (1955) On the critical speed of a shaft of sub-harmonic
oscillation. Trans. JSME, 21 (111), 853–858. (in Japanese).
32. Yamamoto, T. (1957a) On the vibrations of a rotating shaft. Chapter II: non-
linear and non-symmetrical spring characteristics of the shaft supported by
single-row radial ball bearings; Chapter III: On the critical speed of a shaft of
sub-harmonic oscillation and on sub-harmonic oscillation on rectilinear
vibrations. Mem. Fac. Eng., Nagoya Univ., 9 (1), 25–40.
33. Ehrich, F.F. (1966) Subharmonic Vibration of Rotors in Bearing Clearance,
ASME, New York, ASME paper 66-MD-I.
34. Ehrich, F.F. (1988) High order subharmonic response of high speed rotors in
bearing clearance. Trans. ASME, J. Vib. Acoust. Stress Reliab. Des., 113 (1),
50–56.
35. Ehrich, F.F. (1991) Some observations of chaotic vibration phenomena in
high-speed rotordynamics. Trans. ASME, J. Vib. Acoust. Stress Rehab. Des.,
113 (1), 50–56.
36. Prohl, M.A. (1945) A general method for calculating critical speeds of
flexible rotors. J. Appl. Mech., 12 (3), 142–148.
37. Myklestad, N.O. (1944) A new method for calculating natural modes of
uncoupled bending vibrations of airplane wings and other types of beams. J.
Aeronaut. Sci., II (2), 153–162.
38. Lund, J.W. and Orcutt, F.K. (1967) Calculation and experiments on the
unbalance response of a flexible rotor. Trans. ASME, J. Eng. Ind., 89 (4),
785–795.
39. Ruhl, R.L. and Booker, J.F. (1972) A finite element model for distributed
parameter turbo rotor system. Trans. ASME, J. Eng. Ind., 94 (1), 126–132.

44
40. Nelson, H.D. and McVaugh, J.M. (1976) The dynamics of rotor bearing
systems, using finite elements. Trans. ASME, J. Eng. Ind., 98 (2), 593–600.
41. Henry, T.A. and Okah-Avae, B.E. (1976) Proceedings of the International
Conference on Vibrations in Rotation Machinery, Institute of Mechanical
Engineers, New York, pp. 15–17.
42. Schweitzer, G. (1975) Stabilization of self-excited rotor vibrations by active
dampers, Dynamics of Rotors, Springer-Verlag, New York, pp. 472–493.
45
EKLER
Ek 1. 300rad/sn ve 1000 Ns/m parametreleri için Matlab kodu
function dx=alirotor(t,x) l=1; a=0.5; b=0.5; E=2e11; % şaft elastik modül d=0.05; A=(pi*d^2)/4; I0=pi*d^4/64; alfa=3*E*I0*(a^2-a*b+b^2)*l/((a^3)*(b^3)); %yay sabiti gama=3*E*I0*(a-b)*l/((a^2)*(b^2)); %yay sabiti delta=3*E*I0*l/(a*b); %yay sabiti
omeg= 300 %açısal hız, rad/sn
e=0.01; to=0.01;
h=0.02; % Diskin Kalınlığı R=0.4; % Diskin Yarı Çapı
rmass=(7855*((pi*(R^2)/4))*h);
I=rmass*(((R^2)/4)+h^2/12); IP=(rmass*R^2)/2;
c11=1000; c12=1000; c21=1000; c22=1000; bto=pi/179;
dx=zeros(8,1); dx(1)=x(2); dx(2)=(1/rmass)*(rmass*e*omeg^2*cos(omeg*t)-alfa*x(1)-gama*x(5)-
c11*x(2)-c12*x(6)); dx(3)=x(4); dx(4)=(1/rmass)*(rmass*e*omeg^2*sin(omeg*t)-alfa*x(3)-gama*x(7)-
c11*x(4)-c12*x(8)); dx(5)=x(6); dx(6)=(1/I)*((IP-I)*to*omeg^2*cos(omeg*t+bto)-IP*omeg*x(8)-
gama*x(1)-delta*x(5)-c21*x(2)-c22*x(6)); dx(7)=x(8); dx(8)=(1/I)*((IP-I)*to*omeg^2*sin(omeg*t+bto)+IP*omeg*x(6)-
gama*x(3)-delta*x(7)-c21*x(4)-c22*x(8));

46
Ek 2. Matlab fft kodu
NFFT = 2^nextpow2(L); % Next power of 2 from length of y
Y = fft(y,NFFT)/L;
f = Fs/2*linspace(0,1,NFFT/2+1);
% Plot single-sided amplitude spectrum.
plot(f,2*abs(Y(1:NFFT/2+1)))
title('Single-Sided Amplitude Spectrum of y(t)')
xlabel('Frequency (Hz)')
ylabel('|Y(f)|')




















