Model predictive control-based power dispatch for distribution system considering plug-in electric...
7
Electric Power Systems Research 106 (2014) 29–35 Contents lists available at ScienceDirect Electric Power Systems Research jou rn al hom e page: www.elsevier.com/locate/epsr Model predictive control-based power dispatch for distribution system considering plug-in electric vehicle uncertainty Wencong Su a,∗ , Jianhui Wang b , Kuilin Zhang b , Alex Q. Huang c a Department of Electrical and Computer Engineering, University of Michigan-Dearborn, Dearborn, MI 48128, USA b Argonne National Laboratory, Argonne, IL 60439, USA c Future Renewable Electric Energy Delivery and Management (FREEDM) Systems Center, North Carolina State University, Raleigh, NC 27606, USA a r t i c l e i n f o Article history: Received 28 June 2013 Received in revised form 1 August 2013 Accepted 2 August 2013 Keywords: Smart Grid Microgrid Plug-in electric vehicle Model predictive control a b s t r a c t As an important component of Smart Grid, advanced plug-in electric vehicles (PEVs) are drawing much more attention because of their high energy efficiency, low carbon and noise pollution, and low opera- tional cost. Unlike other controllable loads, PEVs can be connected with the distribution system anytime and anywhere according to the customers’ preference. The uncertain parameters (e.g., charging time, initial battery state-of-charge, start/end time) associated with PEV charging make it difficult to predict the charging load. Therefore, the inherent uncertainty and variability of the PEV charging load have com- plicated the operations of distribution systems. To address these challenges, this paper proposes a model predictive control (MPC)-based power dispatch approach. The proposed objective functions minimize the operational cost while accommodating the PEV charging uncertainty. Case studies are performed on a modified IEEE 37-bus test feeder. The numerical simulation results demonstrate the effectiveness and accuracy of the proposed MPC-based power dispatch scheme. © 2013 Elsevier B.V. All rights reserved. 1. Introduction Advanced PEVs are drawing much more attention because of their relatively higher energy efficiency, lower carbon and noise pollution, and higher fuel economy (Miles per Gallon of Gasoline Equivalent) [1]. The U.S. Department of Energy projects that about 1 million PEVs will be on the road by 2015 and 425,000 PEVs will be sold in 2015 alone. At this rate, plug-in vehicles would account for 2.5% of all new vehicle sales in 2015 [2]. Using a moderate market penetration scenario, the Electric Power Research Institute (EPRI) projects that 62% of the entire U.S. vehicle fleet will consist of PEVs by 2050 [3]. However, the increasing market penetration of those plug-in vehicles has significantly complicated the oper- ations on the distribution system. Unlike any other controllable loads, these vehicles can be connected with a distribution system anywhere and anytime, bringing more spatial and temporal diver- sity and uncertainty [4]. As a result, the PEV charging load profile is highly uncertain and unpredictable. In last decade, a large number of literature [5–9] examined the impact of PEV charging load on power grids. They are based on a complete set of predefined data (e.g., when to charge and where to charge), which requires perfect ∗ Corresponding author. Tel.: +1 315 528 3344. E-mail addresses: [email protected] (W. Su), [email protected] (J. Wang), [email protected] (K. Zhang), [email protected] (A.Q. Huang). forecasting PEV profiles over the entire energy scheduling horizon (e.g., next 24 h). Unfortunately, the perfect forecasting data is gen- erally not available in real-world power system operations. Even a small PEV charging load forecasting error may result in great uncer- tainties for the real-time operation for a distribution system. To the best of the authors’ knowledge, to date, the uncertainty issues of PEVs have not been well-discussed in any published literature work. Hence, a sophisticated power dispatch is highly needed to take these unique factors of PEVs into consideration. MPC is an advanced method for process control, which has been widely used in a variety of industries demonstrating the promising results for the complex dynamic systems [10–12]. The focus on this paper is to apply MPC-based methods to achieve optimal power dispatch for distribution systems with high pen- etration of renewable energy resources and PEVs. The proposed MPC-based methods incorporate the uncertainty of PEV charging loads by combining the updated current PEV charging informa- tion (e.g., number of PEVs connected to charging stations, instant PEV battery state-of-charge (SOC), and battery capacity) with the short-term forecasting model. Although the uncertainty modeling of renewable energy output is not within the scope of this paper, the proposed MPC-based approach provides a framework to address a wide range of uncertainties and variability (e.g., renewable energy, and customer preference) for the power dispatch of distribution systems. The major contributions of this paper include the following four aspects: 0378-7796/$ – see front matter © 2013 Elsevier B.V. All rights reserved. http://dx.doi.org/10.1016/j.epsr.2013.08.001
Transcript of Model predictive control-based power dispatch for distribution system considering plug-in electric...

Ms
Wa
b
c
a
ARRA
KSMPM
1
tpE1bfm(ooalashop(
ja
0h
Electric Power Systems Research 106 (2014) 29– 35
Contents lists available at ScienceDirect
Electric Power Systems Research
jou rn al hom e page: www.elsev ier .com/ locate /epsr
odel predictive control-based power dispatch for distributionystem considering plug-in electric vehicle uncertainty
encong Sua,∗, Jianhui Wangb, Kuilin Zhangb, Alex Q. Huangc
Department of Electrical and Computer Engineering, University of Michigan-Dearborn, Dearborn, MI 48128, USAArgonne National Laboratory, Argonne, IL 60439, USAFuture Renewable Electric Energy Delivery and Management (FREEDM) Systems Center, North Carolina State University, Raleigh, NC 27606, USA
r t i c l e i n f o
rticle history:eceived 28 June 2013eceived in revised form 1 August 2013ccepted 2 August 2013
eywords:
a b s t r a c t
As an important component of Smart Grid, advanced plug-in electric vehicles (PEVs) are drawing muchmore attention because of their high energy efficiency, low carbon and noise pollution, and low opera-tional cost. Unlike other controllable loads, PEVs can be connected with the distribution system anytimeand anywhere according to the customers’ preference. The uncertain parameters (e.g., charging time,initial battery state-of-charge, start/end time) associated with PEV charging make it difficult to predict
mart Gridicrogrid
lug-in electric vehicleodel predictive control
the charging load. Therefore, the inherent uncertainty and variability of the PEV charging load have com-plicated the operations of distribution systems. To address these challenges, this paper proposes a modelpredictive control (MPC)-based power dispatch approach. The proposed objective functions minimizethe operational cost while accommodating the PEV charging uncertainty. Case studies are performed ona modified IEEE 37-bus test feeder. The numerical simulation results demonstrate the effectiveness and
MPC
accuracy of the proposed. Introduction
Advanced PEVs are drawing much more attention because ofheir relatively higher energy efficiency, lower carbon and noiseollution, and higher fuel economy (Miles per Gallon of Gasolinequivalent) [1]. The U.S. Department of Energy projects that about
million PEVs will be on the road by 2015 and 425,000 PEVs wille sold in 2015 alone. At this rate, plug-in vehicles would accountor 2.5% of all new vehicle sales in 2015 [2]. Using a moderate
arket penetration scenario, the Electric Power Research InstituteEPRI) projects that 62% of the entire U.S. vehicle fleet will consistf PEVs by 2050 [3]. However, the increasing market penetrationf those plug-in vehicles has significantly complicated the oper-tions on the distribution system. Unlike any other controllableoads, these vehicles can be connected with a distribution systemnywhere and anytime, bringing more spatial and temporal diver-ity and uncertainty [4]. As a result, the PEV charging load profile isighly uncertain and unpredictable. In last decade, a large number
f literature [5–9] examined the impact of PEV charging load onower grids. They are based on a complete set of predefined datae.g., when to charge and where to charge), which requires perfect∗ Corresponding author. Tel.: +1 315 528 3344.E-mail addresses: [email protected] (W. Su),
[email protected] (J. Wang), [email protected] (K. Zhang),[email protected] (A.Q. Huang).
378-7796/$ – see front matter © 2013 Elsevier B.V. All rights reserved.ttp://dx.doi.org/10.1016/j.epsr.2013.08.001
-based power dispatch scheme.© 2013 Elsevier B.V. All rights reserved.
forecasting PEV profiles over the entire energy scheduling horizon(e.g., next 24 h). Unfortunately, the perfect forecasting data is gen-erally not available in real-world power system operations. Even asmall PEV charging load forecasting error may result in great uncer-tainties for the real-time operation for a distribution system. Tothe best of the authors’ knowledge, to date, the uncertainty issuesof PEVs have not been well-discussed in any published literaturework. Hence, a sophisticated power dispatch is highly needed totake these unique factors of PEVs into consideration.
MPC is an advanced method for process control, which hasbeen widely used in a variety of industries demonstrating thepromising results for the complex dynamic systems [10–12]. Thefocus on this paper is to apply MPC-based methods to achieveoptimal power dispatch for distribution systems with high pen-etration of renewable energy resources and PEVs. The proposedMPC-based methods incorporate the uncertainty of PEV chargingloads by combining the updated current PEV charging informa-tion (e.g., number of PEVs connected to charging stations, instantPEV battery state-of-charge (SOC), and battery capacity) with theshort-term forecasting model. Although the uncertainty modelingof renewable energy output is not within the scope of this paper, theproposed MPC-based approach provides a framework to address awide range of uncertainties and variability (e.g., renewable energy,
and customer preference) for the power dispatch of distributionsystems.The major contributions of this paper include the following fouraspects:

3 ystem
1
2
3
4
pdrttipmr
2
dStdtwasinhccwccttvtMtiaatto
2
epl
m
0 W. Su et al. / Electric Power S
. Formulate power dispatch model for distribution systems inorder to minimize the operational cost, the power losses, andthe risk of energy transaction with the utility grid.
. Propose a MPC-based on-line power dispatch method to accom-modate the uncertainty and variability of the PEV charging load.
. Investigate the PEV uncertainty under various charging schemesand operational conditions.
. Evaluate the performance of a variety of power dispatch modelsat the distribution level considering the PEV uncertainty.
Section 2 proposes the problem formulation of the proposedower dispatch model. Section 3 introduces the MPC-based powerispatch methods and discusses the details on the solution algo-ithms as well as the simulation test platform. Section 4 introduceshe case configuration of the proposed distribution test feeder andhe simulation data. The numerical simulation results are presentedn Section 4 also provides a detailed analysis and discussion on theroposed non-MPC and MPC-based power dispatch. Section 5 sum-arizes the paper’s main findings and briefly discusses the future
esearch trends.
. Materials and methods
The successful deployment of the proposed energy and powerispatch model needs a reliable communication infrastructure inmart Grid [13–15]. The smart meters and sensors can monitorhe electric energy consumption at every single node of a poweristribution system and exchange the real-time information withhe control center through a reliable two-way communication net-ork. The control center can also send back control signals to
variety of dispatchable load, distributed generators and energytorage devices. Since the proposed power dispatch scheme is ded-cated to a power distribution system, the needed communicationetwork infrastructure is related to field area network (FAN) andome area network (HAN) [16]. The detailed discussion on spe-ific communication requirement for PEV charging applicationsan be found in [1]. Each electric vehicle is equipped with a two-ay communication module. For example, dedicated short range
ommunication (DSRC) is a short-range wireless protocol dedi-ated for automotive applications. Once a vehicle is plugged-in,he corresponding aggregator (e.g., parking deck operator) receiveshe battery state information (e.g., state-of-charge, state-of-health,oltage, and current) as well as customer information (e.g., cus-omer identification, customer preference, and billing information).
ultiple aggregators serve as middleware between the central con-roller (e.g., distribution company, and microgrid operator) andndividual vehicles. Given the real-time information from multipleggregators, the central controller performs the energy schedulingnd sends back control signals periodically. This paper is to achievehe optimal power dispatch for a distribution system and reducehe financial risk of energy transactions from a distribution systemperator’s perspective.
.1. Objective function
The objective function F is responsible for the most cost-ffective operation of distribution systems. In this paper, theroduction cost of wind and solar energy is assumed to be neg-
igible.
in F =∑∑
cj(Pj(t)) +∑∑
ck(Pk(t)) +∑
cgrid(Pgrid(t))
t j t k t+∑
t
∑j
cUj (t), (1)
s Research 106 (2014) 29– 35
where cj, ck and cgrid are the power production cost functions forthe jth distributed generator, the kth distributed energy storage,and main utility grid, respectively; Pj, Pk and Pgrid are the poweroutput (kW) for the jth distributed generator, the kth distributedenergy storage, and main utility grid, respectively; cU is the start-up/shut-down cost for distributed generator.
To prolong the distributed energy storage device (DESD) life, theadditional cost by frequent charging and discharging has to be takeninto consideration. The battery degradation cost can be expressedas a function of the actual battery cycle life [17]. The depth of dis-charging (DoD) of the kth DESD (e.g., battery bank) is defined as:
DoDk = EMG,k
�invEk(2)
where EMG,k is the energy delivered or absorbed by the kth batterybank (DC, kWh); Ek is the rated energy capacity of the kth batterybank (DC, kWh); all the battery chargers are assumed to be identicalwith the same charging/discharging efficiency �inv.
The relationship between battery cycle life (L) can be formulatedas a function of DoD depending on the type of battery [17]. Therelationship between battery cycle life (L) can be formulated as afunction of DoD depending on the type of battery.
L = f (DoD) (3)
L = · DoD + (4)
where ˛, are the battery cycle life coefficients.Then the actual battery life LE-DoD (DC, kWh) is expressed as:
LE−DoD = E · L (5)
where E is the rated energy capacity of battery bank (DC, kWh).The unit battery degradation cost CDegradation ($/kWh) is deter-
mined by the battery capital cost CBattery and the actual battery lifeLE-DoD.
CDegradation = CBattery
LE−DoD. (6)
Therefore, the battery degradation cost ($) for the kth batterybank is formulated as:
ck = EMG,k · CDegradation,k. (7)
For distributed generators, the cost function can be formulatedas:
cj(Pj(t)) = aj + bj · Pj(t) + cj · P2j (t) (8)
where a, b, and c are the production cost function coefficients.For the main utility grid, the energy transaction payment can be
formulated as:
cgrid(P, t) = Pgrid(t) · d(t) (9)
where d is the grid electricity price ($/kW).
2.2. System constraints
The system constraints considered in this paper are the samein the above three approaches. The system constraints include thefollowing:
(1) Power balanceAt any given time step, the left-hand term is the power gen-
eration from wind, solar, utility grid, DG and DES, respectively.The right-hand term includes the power loss, base load, and PEV

ystem
W. Su et al. / Electric Power Scharging load, respectively.∑m
Pm(t) +∑
n
Pn(t) + Pgrid(t) +∑
j
Pj(t) +∑
k
Pk(t)
= PLoss(t) + Dbase(t) + DEV(t), ∀t (10)
where Pm and Pn are the power output (kW) for the mth windgenerator and the nth solar generator, respectively; PLoss is thepower loss of the entire distribution system; Dbase is the baseload of the entire distribution system; and DEV is the aggregatePEV charging load.
This paper focuses on PEV charging at public charging facil-ities (e.g., municipal parking decks). Two types of chargingschemes are considered in this paper to evaluate the impactof PEV charging. In both charging schemes, all vehicles have tobe fully recharged upon departure.• Uncontrolled charging: The charging process starts immedi-
ately upon vehicles arrival. Vehicles are recharged at the ratedpower level until they are fully charged. Once the vehiclebattery SOC reaches 100%, the corresponding battery chargerswitches to a stand-by mode.
• Constrained charging: The required charging load demand isequally distributed over the entire period of parking timewhen the vehicles are available for charging.In this paper, the authors use a simplified load estimation
and prediction model. One of our ongoing research work is toinvestigate a robust real-time estimation of PEV charging loadunder real world traffic conditions and traveler choice behavior[4].
The day-ahead aggregate PEV charging modelDEVH
is a func-tion of x = [H, SOC, Cap, Tin, Tout]:
DEVH = f (H, SOC, Cap, Tin, Tout) (11)
where H is the maximum number of PEVs battery chargers;SOC is the estimated battery state-of-charge; Cap is the esti-mated battery capacity; G(·) ≤0 is the estimated plug-in time;
Tout is the estimated plug-out time.DEVH
is a 1 by 24 vector. Thefour parameters, namely, SOC, Cap, Tin, Tout are 1 by H vectors,respectively. They are sampled from a series of probabilisticdistribution models. The detailed description of the PEV dataestimation can be found in [18]. In this paper, Plevel follows thelevel 2 charging, which is typically described as the “primary”and “standard” methods [1] for both private and public chargingfacilities.
The remaining charging time Tout is defined as:
TR = Tout − Tin (12)
where Tin, Tout, TR are 1 by H vectors, respectively.Let DM be an H by 24 matrix that represents the fore-
casting hourly PEV charging demand over the next 24 h. Therow/column of DM is corresponding to PEV battery charger IDand time index, respectively.
row = 1,2,. . ., H
column = 1,2,. . .,24(13)
Let � � � � be the floor and ceiling functions that map a realnumber to the largest previous or the smallest following inte-ger.
For the uncontrolled charging, once the rowth PEV batteryis connected to the charger, it is recharged at the maximum
power level Plevel, as shown in (14). At the last time step of theentire charging process, the rowth PEV battery is recharged ata desired power level to reach SOC requirements, as shown in(15). After that, the corresponding battery charger switches tos Research 106 (2014) 29– 35 31
the stand-by mode, as shown in (16).
DM(row, column) = Plevel, ∀row; column
∈[
Tin(row), Tin(row) +⌊
[1 − SOC(row)] × Cap(row)Plevel
⌋](14)
DM(row, column) = [1 − SOC(row)] × Cap(row)
−⌊
[1 − SOC(row)] × Cap(row)Plevel
⌋× Plevel,
∀row; column =⌈
[1 − SOC(row)] × Cap(row)Plevel
⌉(15)
DM(row, column) = 0, ∀row; column /∈[
Tin(row), Tin(row)
+⌈
[1 − SOC(row)] × Cap(row)Plevel
⌉](16)
For the constrained charging, the rowth PEV battery isrecharged at the fixed power level all the time, as shown in(17), such that the required charging load demand is equallydistributed over the entire period of parking time when thevehicles are available for charging.
DM(row, column) = [1 − SOC(row)] × Cap(row)
TR(row),
∀row; column ∈ [Tin(row), Tout(row)] (17)
DM(row, column) = 0, ∀row; column /∈ [Tin(row), Tout(row)]
(18)
Therefore, Eq. (11) can be further expressed as:
DEVH
(column) =H∑
row=1
DM(row, column), ∀column (19)
(2) Technical limits of DGAt any given time step, the operating range of the jth DG is
formulated as:
Pj,min ≤ Pj(t) ≤ Pj,max ∀t. (20)
(3) Technical limits of DESDAt any given time step, the operating range of the kth DES
(i.e., battery bank) is formulated as:
Pk,min ≤ Pk(t) ≤ Pk,max. ∀t (21)
To avoid any overcharging and overdischarging, once SOCkreaches the upper/lower bounds [SOCk,min, SOCk,max], the kthDES (e.g., battery bank) switches to a stand-by mode.
SOCk,min ≤ SOCk(t) ≤ SOCk,max. (22)
(4) Technical limits of the PEV chargerAt any given time step, the operating range [0,Plevel] of the zth
PEV is formulated as:
0 ≤ Pz(t) ≤ Plevel, ∀t (23)
Certain power flow constraints have to be taken into consid-
eration.(5) Power flow constraints are formulated as a set of equations:
G(·) ≤ 0. (24)

32 W. Su et al. / Electric Power System
(
3
3
damttsmttmrrasTtvevp
p
(
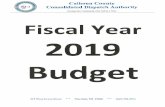
Fig. 1. Flowchart of MPC-based power dispatch considering PEV uncertainty.
Eq. (24) is a general mathematical formulation which is nor-mally used to represent the power flow constraints. In thispaper, since AC power flow is calculated by the embeddedsolver in OpenDSS (Open-source Distribution System Simulatordeveloped by ERPI), we use this equation to implicitly representa variety of power flow constraints.
6) Voltage limit at the yth bus is defined as:
Vmin ≤ Vy ≤ Vmax ∀y. (25)
. Theory
.1. Model predictive control (MPC)-based approach
The proposed MPC-based power dispatch model can accommo-ate the forecasting errors by combining the real-time observationnd the short-term prediction. MPC determines the series of opti-al control operations over a receding finite horizon [19]. At each
ime step, a deterministic optimization problem is solved based onhe look-ahead finite-horizon prediction and the updated currenttate/measurement. But only the first step of the open-loop opti-al control sequences is performed accordingly. At each time step,
he initial condition over the prediction horizon is determined byhe real-time measurement of the actual system. The online opti-
ization process repeats until the last time step. Essentially, theeal-time PEV charging load prediction problem is similar to theeal time vehicle origin-destination (OD) estimation problem for
real-time dynamic traffic assignment system [20] by iterativelyolving the optimization problems in a rolling horizon framework.his real-time OD estimation and prediction model can be appliedo the proposed MPC-based model, because it provides the dynamicehicle travel pattern and vehicle trip information, which are thessential inputs for determining the charging load of an individualehicle. Fig. 1 illustrates the procedure of the proposed MPC basedower dispatch method.
The general principal of the proposed MPC-based power dis-atch method is described as follow:
1) In real-time operations, the PEV states (i.e., x = [SOC, TR, Cap,h]) can be monitored and collected by the distribution systemoperator periodically (e.g., on an hourly base) through a com-munication network. Then the system operator is able to obtain
s Research 106 (2014) 29– 35
the actual PEV charging load at every current time step t0. Thecharging load of the zth vehicle at the current time step t0 canbe calculated as:
Pz(t0) = [1 − SOCz(t0)] × Capz
TRz. (26)
The real-time measurement of the aggregate PEV chargingload at the current time step t0 can be calculated by:
DEVh(t0) =h∑
z=1
Pz(t0). (27)
(2) The real measurement of PEV states at the current time periodfrom step 1 is used as the initial state in a predictive modelto estimate the trajectory of state variables over the recedinghorizon. For the sake of simplicity, each vehicle is assumed to berecharged only once a day. This paper does not consider mul-tiple charging scenarios. A receding finite-horizon i period isselected to obtain the most updated forecasting model of the
aggregate PEV charging loadDEVH
MPC from the current time stept0 to t0 + i.
DEVH
MPC (t) =DEVH−h
(t) + DEVh(t),
h ≤ H, t = t0, t0 + 1, . . ., t0 + i (28)
(3) Solve the optimization problems in Eq. (1) subject to constraintsin Eqs. (10)–(25) for the receding periods from t0 to t0 + i by
usingDEVH
MPC . Determine the optimal control variable u for thereceding periods from t0 to t0 + i.
u(t) = [Pgrid(t), Pj(t), Pk(t)]. t = t0, t0 + 1, ..., t0 + i (29)
(4) Only implement the first period solution u(to) as the currentmove.
(5) Update the predictive model of the aggregate PEV charging loadand move to the next time period. Repeat the MPC-based pro-cess from step 1 until t = 24.
3.2. Solution algorithm
A co-simulation framework is used to achieve the optimal powerdispatch for distribution systems. Fig. 2 illustrates the proposedsoftware-based simulation testbed architecture.
After initialization, the principal procedure is described asfollow:
(1) The formulation of the optimization objective functions J1 andthe system constraints are implemented in Matlab. Matlabroutes the optimization model to the solver – IBM ILOG CPLEXOptimizer 12.2 [21] to solve the mixed integer quadratic pro-gramming problems J1 and returns the optimal solutions toMatlab for next iteration.
(2) Matlab passes the optimal control variables u(t) = [Pgrid(t), Pj(t),Pk(t)] to OpenDSS (Open-source Distribution System Simula-tor), which is dedicated to the advanced analysis of distributionsystems [22]. OpenDSS runs the sequential power flow of theproposed distribution system over successive time intervalsand calculates the power loss while satisfying bus voltage andpower balance requirements in Eqs. (24) and (25).
(3) We calculate the power losses PLoss of the feasible solutionsobtained from the Step (2). The most updated power loss PLoss
is fed back to the master problem and used to update the totalpower loss in Eq. (10) as long as the change of power loss �PLoss
is noticeable. If the results W(Iter1) from the previous step doesnot meet power flow constriants, we add a small random vector

W. Su et al. / Electric Power Systems Research 106 (2014) 29– 35 33
(
4
Maatcdaett
F
Fig. 2. Framework of co-simulation platform.
�W to the last feasible solution W(Iter1 − 1) to recalculate theloss. This kind of local search method can help the algorithmconverge to at least a local optimal solution.
4) After several iterations, the system converges to a new steady-state condition in which the optimal power dispatch solutionsare found (Fig. 3).
. Results and discussion
All simulations were run on an Intel(R) CoreTM i5 [email protected] GHz computer with a 6.00 GB memory. Given the scale
nd complexity of the test system, the proposed approach canchieve the optimal solution during a relatively short period ofime. As the power distribution system is becoming more compli-ated with a large number of Smart Grid devices (e.g., DG, DESD, andispatchable loads), the computational cost should be taken into
ccount seriously for various power system operations [22]. Somenabling technologies such as distributed computing and decen-ralized control could be helpful. However, due to the page limit ofhis paper, we may not be able to discuss it in details.ig. 3. Flowchart of solving the power dispatch problems for distribution systems.
Fig. 4. Hourly load profile and grid electricity price.
In this section, we compare the proposed MPC-based approachwith two others, namely: (1) perfect forecasting and (2) non-MPCbased.
(1) Perfect forecastingThis ‘ideal’ and ‘unrealistic’ approach assumes that the real-
time data over the next 24-h is available with the perfectforecasting models. It will be only used as a reference model toevaluate the impact of PEV uncertainty under various scenarios.
(2) Non-MPC basedThe deterministic optimization problem is solved for the next
hour horizon to clear the power mismatch in real-time powersystem operations.
4.1. Case study configuration
For the sake of simplicity, the hourly profiles of all the loadsexcluding PEV charging load follow the same pattern, as shown inFig. 4. In the following section, it is assumed that all loads can beserved by the utility grid and the local generators. Fig. 4 also showsthe hourly electricity price of the utility power grid. The electricitydemand is assumed to be inelastic in this paper. Again, it should benoted that the uncertainty modeling of renewable energy resourceis not within the scope of this paper. One set of the day-aheadtime-stapled forecasting data of wind power generation outputis obtained from the NREL’s Eastern Wind Integration and Trans-mission Study (EWITS) [23]. Similarly, one set of the day-aheadtime-stapled forecasting data of solar power generation outputis extracted from the System Advisor Model (SAM) developed byNational Renewable Energy Laboratory (NREL) [24]. Fig. 5 presents
hourly wind and solar generation output profiles.Fig. 6 illustrates a modified IEEE 37-bus distribution testfeeder [25] that is used to evaluate the proposed power dispatch
Fig. 5. Hourly wind and solar power output.

34 W. Su et al. / Electric Power Systems Research 106 (2014) 29– 35
ac
4
sncl8tacsAdotcop
bo
Fs
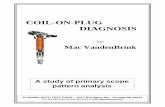
Fig. 8. Total operational costs under constrained PEV charging scheme over 30 trials.
Fig. 6. A modified IEEE 37 node distribution test feeder.
pproaches. DG, wind generator, solar generator, DES, and PEV areonnected with nodes 701, 722, 730, 720, and 737, respectively.
.2. Simulation results and discussion
Fig. 7 shows how the power dispatch problems are successivelyolved. Fig. 7 shows the hourly power losses at each iteration in theon-MPC based day-ahead power dispatch under the constrainedharging scheme. Each curve is corresponding to the hourly powerosses. Since 24 curves exhibit a similar tendency, Fig. 7 only shows
of them. Initially, the power losses are assumed to be zero. Takehe 13th hour for example, the power loss changes to 181.59 kWt the first iteration. The new PLoss is updated in the power balanceonstraint in Eq. (25). Gradually, the power loss converge to theteady state 55.41 kW, as �PLoss is becoming smaller and smaller.fter the first 4 iterations, the hourly optimal operational cost of aistribution system is found. The multiple power loss curves andperational cost curves exhibit the similar tendency in all the men-ioned approaches (non-MPC, MPC and perfect forecasting) and PEVharging schemes, demonstrating the effectiveness of solving theptimal power dispatch. Due to the limited space, only Fig. 7 is
resented.Since the proposed non-MPC and MPC based approaches areased on the probabilistic forecasting model, there exists a chancef finding different solutions at each trial. To fully evaluate the
ig. 7. Power losses at each iteration (non-MPC under constrained PEV chargingcheme).
Fig. 9. Total power losses under constrained PEV charging scheme over 30 trials.
performance, 30 trials are performed randomly subject to a vari-ety of system conditions. Fig. 8 shows the total operational costwith the proposed power dispatch approaches over 30 trials. Fig. 8also shows the power dispatch with perfect forecasting data canachieve the least operational cost, indicating the additional costcaused by the forecasting error of PEV uncertainty. Fig. 9 showsthe total power losses over 24 h with the proposed power dis-patch approaches over 30 trials. The proposed MPC-based approacheffectively compensates the PEV load forecasting error by incor-porating the most updated real-time information at each timestep.
Let FMPC be the optimal operational cost of the power dis-patch over a period of 24 h achieved by the MPC-based approach,while FNon-MPC is the optimal operational cost over a period of 24 hachieved by the non-MPC based approach. Similarly, let PMPC be thetotal power loss over a period of 24 h achieved by the MPC-basedapproach, while Pnon-MPC is the total power loss over a period of 24 hachieved by the non-MPC based approach.
The performance index of non-MPC and MPC-based power dis-patch approaches in losses and operating cost is defined as:
IndexF = FNon−MPC − FMPC
FMPC
% (30)
IndexP = PNon−MPC − PMPC
PMPC
% (31)
The statistical information obtained from Figs. 8 and 9 showthat, on the average, the MPC-based method improved the perfor-mance index IndexF and IndexP by 13.44% and 15.78%, respectively.Therefore, the final conclusion can be drawn that the MPC-basedpower dispatch outperforms non-MPC based one in terms of both
operational costs and power losses.Table 1 compares the objective values F (operational cost) underboth uncontrolled and constrained charging schemes. In general,the parking time is much longer than the actual charging time

W. Su et al. / Electric Power System
Table 1Simulation results under various PEV charging schemes.
Uncontrolled Constrained Difference
Non-MPC day-ahead F = $26,645 F = $25,688 $957
ico
5
tctpoaeMuiirs
fetbatpsCsnstvcplstlncbo
A
OD
[
[
[
[
[
[
[
[
[
[
[
[[
[
[[
[
[
[
MPC-based F = $25,807 F = $24,985 $822Perfect forecasting F = $23,838 F = $23,724 $114
n public charging facilities. As shown in Table 1, the constrainedharging has the potential to reduce the daily power losses andperational cost by taking full advantage of timing flexibility.
. Conclusion
Emerging technologies make it possible for distribution systemso generate and distribute reliable, sustainable electricity in a moreost-effective way than ever before. This paper first formulates cer-ain power dispatch problems for a distribution system with a highenetration of renewable energy resources and PEVs. The proposedptimization problems are to minimize the operational cost as wells the power losses by optimally generating and distributing thelectricity from the utility grid, DG, and DES. The proposed onlinePC-based power dispatch is able to accommodate the inherent
ncertainty and variability of the PEV charging loads. A case studys conducted to investigate the impact of PEVs charging under var-ous charging schemes and operational conditions. The simulationesults demonstrate that the proposed MPC-based power dispatchuccessfully incorporates the PEV uncertainty.
Due to the lack of the real-world utility data, the proposedramework has only been verified on a simulated testbed. How-ver, the simulation results show that the general framework ofhe proposed MPC-based energy and power dispatch approach cane easily extended and tailored to any distribution system with
high penetration of uncertain loads and local generators. Givenhe scale and complexity of the test distribution system, the pro-osed approach can achieve the optimal solution with a relativelymall amount of computational cost. The commercial software (e.g.,PLEX, Gurobi) is able to find the near-global solutions during ahort period of time. However, as a large number of heteroge-eous components (e.g., distributed generators, distributed energytorage storage device, and dispatchable loads) are plugged-intohe distribution system, the associated operation problems can beery high-dimensional, non-linear, and dynamic at all levels. Theonventional computational techniques may face substantial com-utational challenges [26]. The classical optimization tools (e.g.,
inear programing) may not be able to handle the adaptability andtochasticity of Smart Grid functions [27]. The growing power sys-em complexity requires more advanced approaches to replaceegacy methods of control and optimization. Some enabling tech-ologies such as distributed computing and decentralized controlould be helpful [28]. Additionally, the computational intelligence-ased tools can meet some needs of advanced power systemperations [29,30].
cknowledgment
This work was supported by the U.S. Department of Energy,ffice of Science, Basic Energy Sciences, under contract No.E-AC02-06CH11357.
[
[
s Research 106 (2014) 29– 35 35
References
[1] W. Su, H. Rahimi-Eichi, W. Zeng, M.-Y. Chow, A survey on the electrificationof transportation in a smart grid environment, IEEE Trans. Ind. Inform. 8 (1)(2012) 1–10.
[2] K. Sikes, T. Gross, Z. Lin, J. Sullivan, T. Cleary, J. Ward, Plug-in Hybrid ElectricVehicle Market Introduction Study: Final Report, U.S. Department of Energy(DOE), 2010.
[3] M. Duvall, E. Knipping, Environmental Assessment of Plug-In Hybrid ElectricVehicles, Electric Power Research Institute (EPRI), 2007 July.
[4] W. Su, J. Wang, K. Zhang, M.-Y. Chow, Framework for investigating the impactof PHEV charging on power distribution and transportation networks, in: Proc.38th Annual Conference of the IEEE Industrial Electronics Society, October25–28, Montreal, Canada, 2012.
[5] J. Wang, C. Liu, D. Ton, Y. Zhou, J. Kim, A. Vyas, Impacts of plug-in hybrid electricvehicles on power systems with demand response and wind power, Energ.Policy 39 (7) (2011) 4016–4021.
[6] D.Q. Oliveira, A.C. Zambroni de Souza, D.Q. Oliveira, L.F.N Delboni, Optimal plug-in hybrid electric vehicles recharge in distribution power systems, Electr. Pow.Syst. Res. 98 (2013) 77–85.
[7] K. Clement-Nyns, E. Haesen, J. Driesen, The impact of vehicle-to-grid on thedistribution grid, Electr. Pow. Syst. Res. 81 (1) (2011) 185–192.
[8] W. Su, M.-Y. Chow, Computational intelligence-based energy management for alarge-scale PHEV/PEV enabled municipal parking deck, Appl. Energy 96 (2012)171–182.
[9] W. Su, M.-Y. Chow, Investigating a large-scale PHEV/PEV parking deck in a smartgrid environment, in: Proc. 43rd North American Power Symposium, Boston,MA, 2011 August.
10] E.F. Camacho, C. Bordons, Model Predictive Control, 2nd ed., Springer-Verlag,New York, USA, 2004, July 30.
11] A.M. Elaiw, X. Xia, A.M. Shehata, Application of model predictive control tooptimal dynamic dispatch of generation with emission limitations, Electr. Pow.Syst. Res. 84 (1) (2012) 31–44.
12] T. Amraee, A.M. Ranjbar, R. Feuillet, Adaptive under-voltage load sheddingscheme using model predictive control, Electr. Pow. Syst. Res. 81 (7) (2011)1507–1513.
13] J.D. Lennox, Automated meter reading: pilot study, Electr. Pow. Syst. Res. 23 (1)(1992) 47–50.
14] A. Mohamed, O. Mohammed, Real-time energy management scheme for hybridrenewable energy systems in smart grid applications, Electr. Pow. Syst. Res. 96(2013) 133–143.
15] V. Gungor, D. Sahin, T. Kocak, S. Ergut, C. Buccella, C. Cecati, G. Hancke, Smartgrid technologies: communications technologies and standards, IEEE Trans.Ind. Inform. 7 (4) (2011) 529–539.
16] W. Wang, Y. Xu, M. Khanna, A survey on the communication architecture insmart grid, Comput. Netw. 55 (15) (2011) 3604–3629.
17] K. Qian, C. Zhou, M. Allan, Y. Yuan, Modeling of load demand due to EVbattery charging in distribution systems, IEEE Trans. Power Syst. 26 (2011)802–810.
18] W. Su, M.-Y. Chow, Performance evaluation of an EDA-based large-scale plug-inhybrid electric vehicle charging algorithm, IEEE Trans. Smart Grid 3 (1) (2012)308–315.
19] L. Xie, M.D. Ilic, Model predictive economic/environmental dispatch of powersystems with intermittent resources, in: Proc. 2012 IEEE PES General Meeting,July 26–30, Pittsburgh, PA, USA, 2009.
20] H.S. Mahmassani, Dynamic network traffic assignment and simulation method-ology for advanced system management applications, Netw. Spat. Econ. 1 (2)(2001) 267–292.
21] IBM ILOG CPLEX Optimization Solver 12.2.22] Electric Power Research Institute (EPRI), Open-source Distribution System Sim-
ulator (OpenDSS).23] REL, Eastern Wind Integration and Transmission Study. Available:
www.nrel.gov/wind/systemsintegration/ewits.html24] NREL, Sysyem Advisor Model (SAM), 2012. Available: https://sam.nrel.gov/25] Distribution Test Feeders, IEEE Power and Energy Society. Available:
http://ewh.ieee.org/soc/pes/dsacom/testfeeders/index.html26] J.H. Eto, R.J. Thomas (Eds.), Proceedings of the April 2011 Computa-
tional Needs for the Next Generation Electric Grid Workshop, April 19–20,2011.
27] K.P. Birman, L. Ganesh, R. Renesse, Running smart grid control software on cloudcomputing architectures, in: Workshop on Computational Needs for the NextGeneration Electric Grid, April 19–20, Cornell University, Ithaca, NY, 2011.
28] J. Momoh, Computational Tools for Smart Grid Design, Smart Grid: Fundamen-
tals of Design and Analysis, Wiley, Hoboken, New Jersey, 2012, pp. 100–121.29] P.J. Werbos, Computational intelligence for the smart grid-history, challenges,and opportunities, IEEE Comput. Intell. Mag. 6 (3) (2011) 14–21.
30] G.K. Venayagamoorthy, Dynamic, stochastic, computational, scalable technolo-gies for smart grids, IEEE Comput. Intell. Mag. 6 (3) (2011) 22–35.