Menggunakan Motor Stepper
9
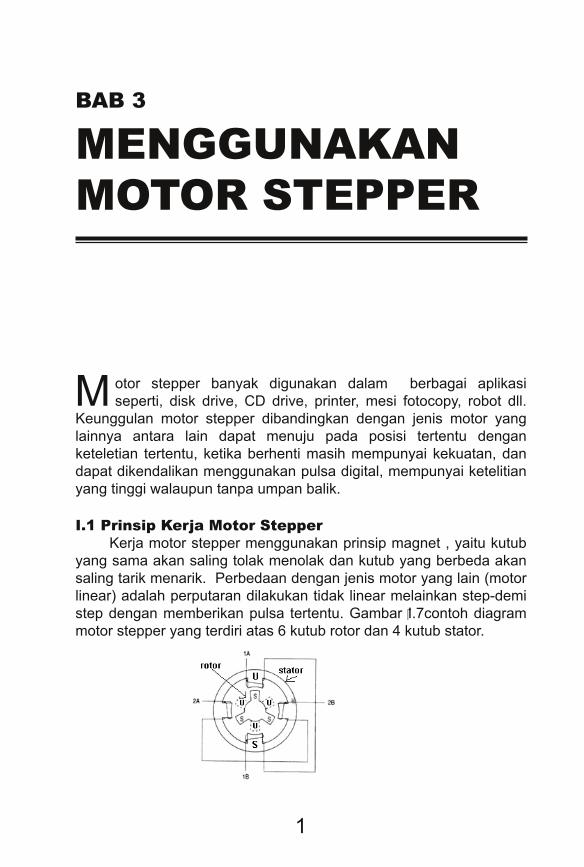
1 M otor stepper banyak digunakan dalam berbagai aplikasi seperti, disk drive, CD drive, printer, mesi fotocopy, robot dll. Keunggulan motor stepper dibandingkan dengan jenis motor yang lainnya antara lain dapat menuju pada posisi tertentu dengan keteletian tertentu, ketika berhenti masih mempunyai kekuatan, dan dapat dikendalikan menggunakan pulsa digital, mempunyai ketelitian yang tinggi walaupun tanpa umpan balik. I.1 Prinsip Kerja Motor Stepper Kerja motor stepper menggunakan prinsip magnet , yaitu kutub yang sama akan saling tolak menolak dan kutub yang berbeda akan saling tarik menarik. Perbedaan dengan jenis motor yang lain (motor linear) adalah perputaran dilakukan tidak linear melainkan stepdemi step dengan memberikan pulsa tertentu. Gambar I.7contoh diagram motor stepper yang terdiri atas 6 kutub rotor dan 4 kutub stator. BAB 3 MENGGUNAKAN MOTOR STEPPER
Transcript of Menggunakan Motor Stepper
1
M otor stepper banyak digunakan dalam berbagai aplikasiseperti, disk drive, CD drive, printer, mesi fotocopy, robot dll.
Keunggulan motor stepper dibandingkan dengan jenis motor yanglainnya antara lain dapat menuju pada posisi tertentu denganketeletian tertentu, ketika berhenti masih mempunyai kekuatan, dandapat dikendalikan menggunakan pulsa digital, mempunyai ketelitianyang tinggi walaupun tanpa umpan balik.
I.1 Prinsip Kerja Motor StepperKerja motor stepper menggunakan prinsip magnet , yaitu kutub
yang sama akan saling tolak menolak dan kutub yang berbeda akansaling tarik menarik. Perbedaan dengan jenis motor yang lain (motorlinear) adalah perputaran dilakukan tidak linear melainkan stepdemistep dengan memberikan pulsa tertentu. Gambar I.7contoh diagrammotor stepper yang terdiri atas 6 kutub rotor dan 4 kutub stator.
BAB 3
MENGGUNAKANMOTOR STEPPER

Terampil Membuat Aplikasi Mikrokontroler AT89S51/52
2 TrifaMedia
Hanya satu pasang kumparan saja yang diberi catu dayasehingga satu menjadi kutub utara (U) dan yang lainnya menjadikutub selatan (S). Misalnya pasangan kumparan vetikal dialiri aruslistrik sehingga kutup atas menjadi kutub utara sedangkan kutubbawah menjadi kutub selatan sehingga posisi rotor seperti padaGambar I.7 a. Agar motor stepper bergerak searah jarum jamkumparan horisontal dialiri arus sehingga kutub kanan menjadi kutubselatan dan kutb kiri menjadi kutb utara. Pemilihan kutub inididasarkan pada kutub rotor yang paling dekat dengan kutub statorhorisontal yaitu utara pada sisi kanan dan selatan pada sisi kiri(Gambar I.7 b). Step selanjutnya adalah dengan mengaliri kumparanvertikal sehingga kutub atas menjadi kutub selatan dan yang lainnyamenjadi kutub utara (Gambar I.7 c). Terakhir adalah mengaliriklumparan horisontal sehingga kutub kanan stator menjadi kutubutara dan yang lainnya kutub selatan Gambar I.7 d). Nampak bahwaempat step ini baru menggerakkan motor stepper sejauh 90 derajat,oleh karena itu untuk menggerakkan motor stepper sejauh 360derajat atau satu putaran maka empat step di atas perlu diulangsebanyak tiga kali.
Motor stepper yang beredar di pasaran biasanya gerakan satustep sebesar 3,6 derajat atau 1,8 derajat full step, sehingga untukmendapatkan satu putaran penuh dibutuhkan masingmasing 100step dan 200 step.
Bab 3. Menggunakan Motor Stepper
3TrifaMedia
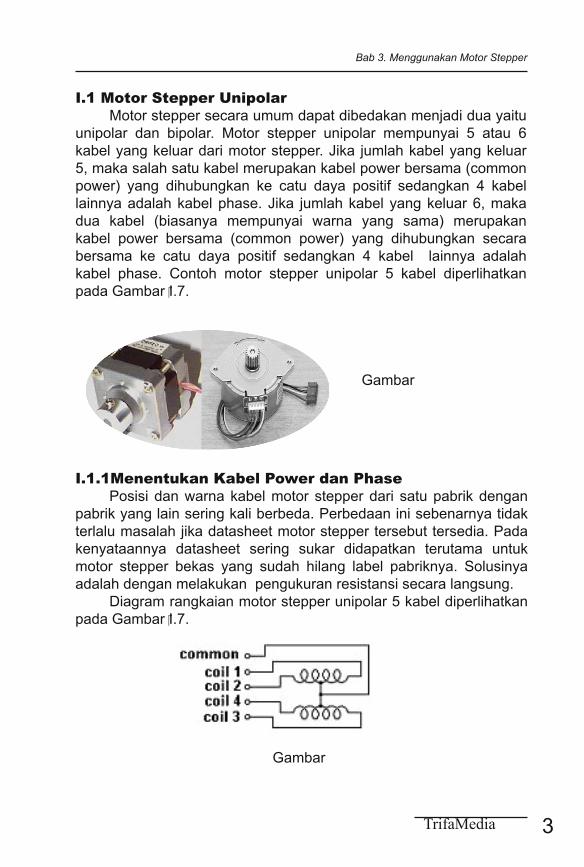
I.1 Motor Stepper UnipolarMotor stepper secara umum dapat dibedakan menjadi dua yaitu
unipolar dan bipolar. Motor stepper unipolar mempunyai 5 atau 6kabel yang keluar dari motor stepper. Jika jumlah kabel yang keluar5, maka salah satu kabel merupakan kabel power bersama (commonpower) yang dihubungkan ke catu daya positif sedangkan 4 kabellainnya adalah kabel phase. Jika jumlah kabel yang keluar 6, makadua kabel (biasanya mempunyai warna yang sama) merupakankabel power bersama (common power) yang dihubungkan secarabersama ke catu daya positif sedangkan 4 kabel lainnya adalahkabel phase. Contoh motor stepper unipolar 5 kabel diperlihatkanpada Gambar I.7.
Gambar
I.1.1Menentukan Kabel Power dan PhasePosisi dan warna kabel motor stepper dari satu pabrik dengan
pabrik yang lain sering kali berbeda. Perbedaan ini sebenarnya tidakterlalu masalah jika datasheet motor stepper tersebut tersedia. Padakenyataannya datasheet sering sukar didapatkan terutama untukmotor stepper bekas yang sudah hilang label pabriknya. Solusinyaadalah dengan melakukan pengukuran resistansi secara langsung.
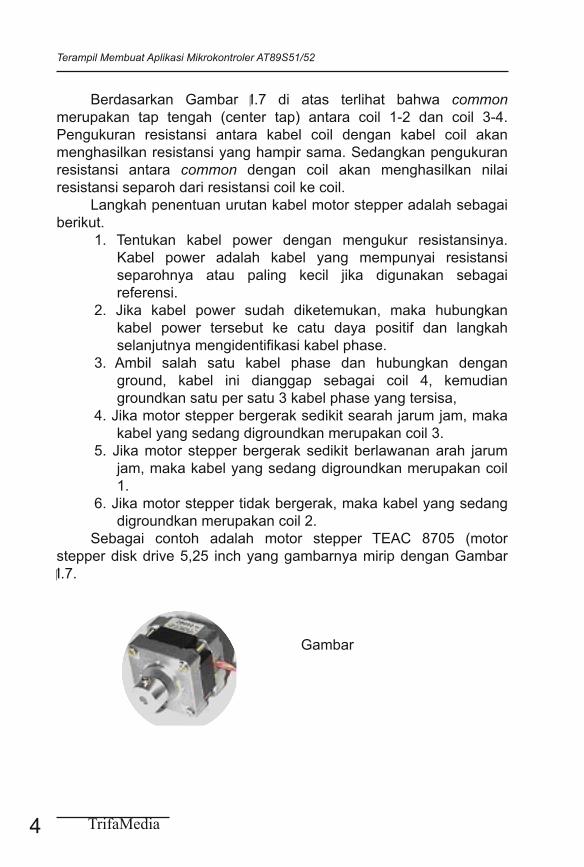
Diagram rangkaian motor stepper unipolar 5 kabel diperlihatkanpada Gambar I.7.
Gambar
Terampil Membuat Aplikasi Mikrokontroler AT89S51/52
4 TrifaMedia
Berdasarkan Gambar I.7 di atas terlihat bahwa commonmerupakan tap tengah (center tap) antara coil 12 dan coil 34.Pengukuran resistansi antara kabel coil dengan kabel coil akanmenghasilkan resistansi yang hampir sama. Sedangkan pengukuranresistansi antara common dengan coil akan menghasilkan nilairesistansi separoh dari resistansi coil ke coil.
Langkah penentuan urutan kabel motor stepper adalah sebagaiberikut.
1. Tentukan kabel power dengan mengukur resistansinya.Kabel power adalah kabel yang mempunyai resistansiseparohnya atau paling kecil jika digunakan sebagaireferensi.
2. Jika kabel power sudah diketemukan, maka hubungkankabel power tersebut ke catu daya positif dan langkahselanjutnya mengidentifikasi kabel phase.
3. Ambil salah satu kabel phase dan hubungkan denganground, kabel ini dianggap sebagai coil 4, kemudiangroundkan satu per satu 3 kabel phase yang tersisa,
4. Jika motor stepper bergerak sedikit searah jarum jam, makakabel yang sedang digroundkan merupakan coil 3.
5. Jika motor stepper bergerak sedikit berlawanan arah jarumjam, maka kabel yang sedang digroundkan merupakan coil1.
6. Jika motor stepper tidak bergerak, maka kabel yang sedangdigroundkan merupakan coil 2.
Sebagai contoh adalah motor stepper TEAC 8705 (motorstepper disk drive 5,25 inch yang gambarnya mirip dengan GambarI.7.
Gambar

Bab 3. Menggunakan Motor Stepper
5TrifaMedia
Susunan kabel pada konektornya adalah:1. coklat2. kuning3. merah4. biru5. putih
Tabel
Berdasarkan Tabel I.5 di atas terlihat bahwa kabel powernyaadalah warna coklat karena nilai resistansi ketika dihubungkandengan kabel yang lainnya adalah separoh dari nilai resistansi hasilpengukuran selain kabel coklat. Kemudian kabel coklat tersebutdihubungkan ke positif (mis. 12V) dan kabel kuning dihubungkan keground. Gerakan motor stepper jika kabel yang tersisa digroundkansatu per satu diperlihatkan pada Tabel I.5.
Tabel
Dengan demikian susunan coil motor stepper di atas adalah sebagaiberikut:
1.coklat = kabel power bersama,2.kuning = kabel coil 1,3.merah = kabel coil 2,4.biru = kabel coil 3, dan5.putih = kabel coil 4.
Terampil Membuat Aplikasi Mikrokontroler AT89S51/52
6 TrifaMedia
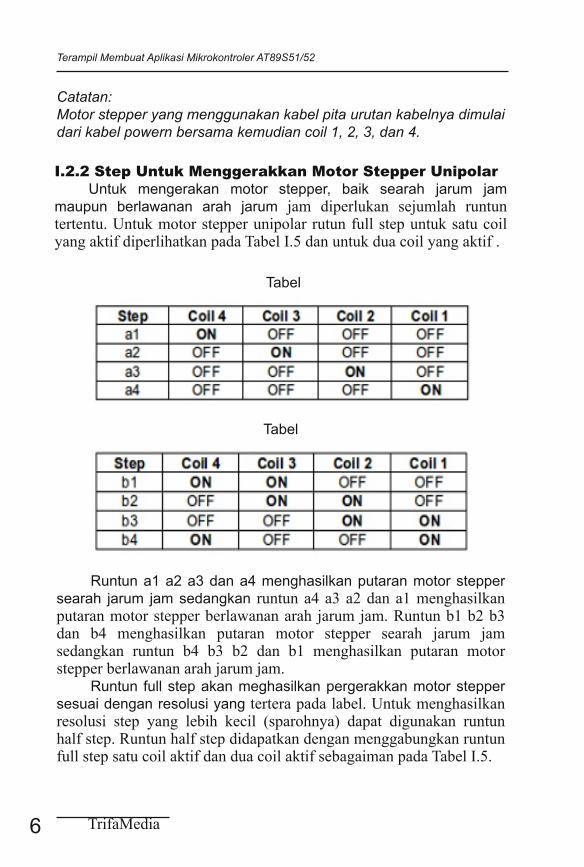
Catatan:Motor stepper yang menggunakan kabel pita urutan kabelnya dimulaidari kabel powern bersama kemudian coil 1, 2, 3, dan 4.
I.2.2 Step Untuk Menggerakkan Motor Stepper UnipolarUntuk mengerakan motor stepper, baik searah jarum jam
maupun berlawanan arah jarum jam diperlukan sejumlah runtuntertentu. Untuk motor stepper unipolar rutun full step untuk satu coilyang aktif diperlihatkan pada Tabel I.5 dan untuk dua coil yang aktif .
Tabel
Tabel
Runtun a1 a2 a3 dan a4 menghasilkan putaran motor steppersearah jarum jam sedangkan runtun a4 a3 a2 dan a1 menghasilkanputaran motor stepper berlawanan arah jarum jam. Runtun b1 b2 b3dan b4 menghasilkan putaran motor stepper searah jarum jamsedangkan runtun b4 b3 b2 dan b1 menghasilkan putaran motorstepper berlawanan arah jarum jam.
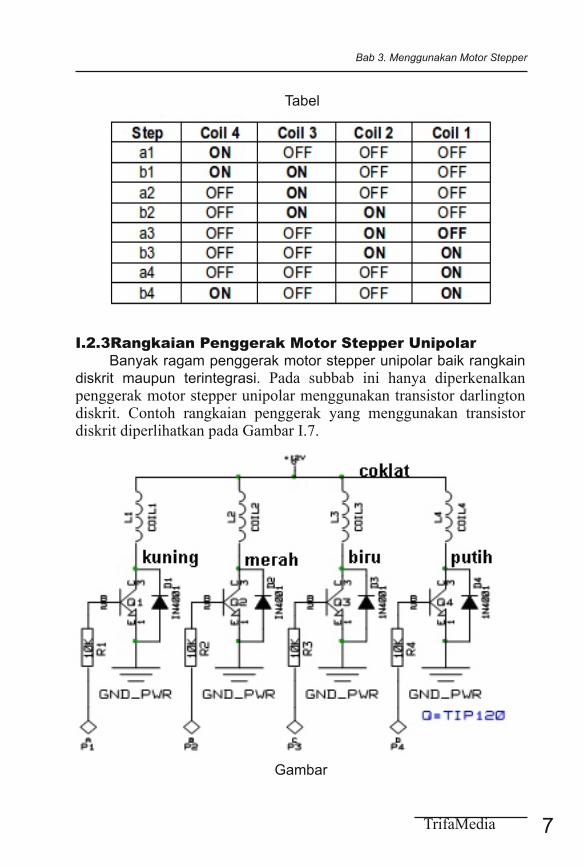
Runtun full step akan meghasilkan pergerakkan motor steppersesuai dengan resolusi yang tertera pada label. Untuk menghasilkanresolusi step yang lebih kecil (sparohnya) dapat digunakan runtunhalf step. Runtun half step didapatkan dengan menggabungkan runtunfull step satu coil aktif dan dua coil aktif sebagaiman pada Tabel I.5.
Bab 3. Menggunakan Motor Stepper
7TrifaMedia
Tabel
I.2.3Rangkaian Penggerak Motor Stepper UnipolarBanyak ragam penggerak motor stepper unipolar baik rangkain
diskrit maupun terintegrasi. Pada subbab ini hanya diperkenalkanpenggerak motor stepper unipolar menggunakan transistor darlingtondiskrit. Contoh rangkaian penggerak yang menggunakan transistordiskrit diperlihatkan pada Gambar I.7.
Gambar
Terampil Membuat Aplikasi Mikrokontroler AT89S51/52
8 TrifaMedia
Rangkaian penggerak motor stepper merupakan rangkaiansaklar transistor. Agar penguatannya besar digunakan transistor jenisDarlinton. Contoh perhitungan untuk menentukan resistor basisadalah sebagai berikut.
IC adalah arus kolektor maksimal yang akan dibangkitkandalam hal ini adalah arus motor stepper. Berdasarkan pengukuransekitar 250 mA. βDC atau HFE TIP 120 berdasarkan datasheet adalah1000
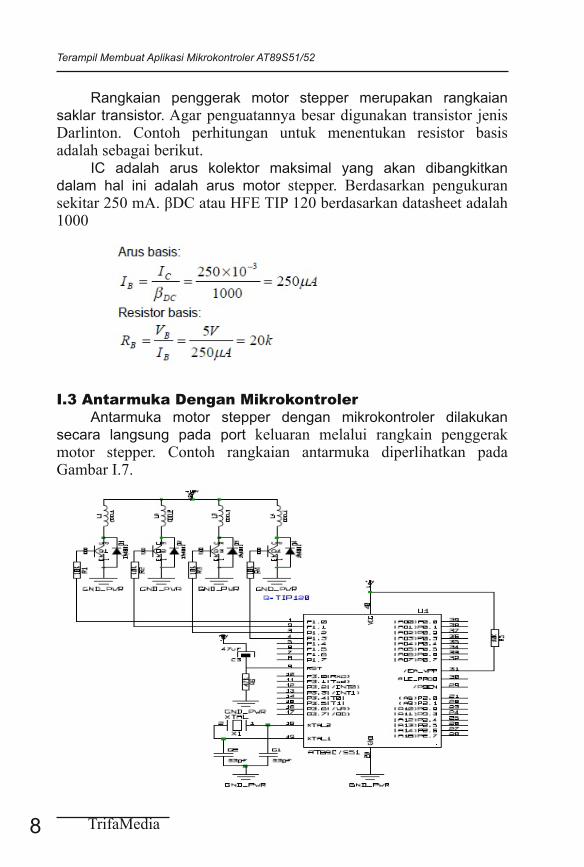
I.3 Antarmuka Dengan MikrokontrolerAntarmuka motor stepper dengan mikrokontroler dilakukan
secara langsung pada port keluaran melalui rangkain penggerakmotor stepper. Contoh rangkaian antarmuka diperlihatkan padaGambar I.7.
Bab 3. Menggunakan Motor Stepper
9TrifaMedia
I.4 PemrogramanUntuk menggerakkan motor stepper baik searah jarum jam
maupun berlawanan arah jarum jam maka harus diberikan runtundata step secara berurutan. Perlu diingat bahwa data step terakhirperlu dicatat agar pergerakan searah maupun berlawanan arah dapatdilakukan dengan halus disamping itu posisi terakhir juga dapatdiketahui.
Menggerakkan Motor Stepper Satu Step Mode Fullstep
//koneksi motor stepper ke port 1#define out_step P1//runtun full step satu coil yang aktif ( tabel 1.3)static code uchar One_Coil[]=0x08,0x04,0x02,0x01;//runtun full step dua coil yang aktif ( tabel 1.4)static code uchar Two_Coil[]=0x0C,0x06,0x03,0x09;//Ini baru fungsinyavoid One_FullStep(char arah)static Uchar posisi=0; //posisi step terakhir//searah jarum jamif(arah==1)posisi++;if(posisi==4) posisi=0;#ifndef TWO_COILout_step=One_Coil[posisi]; //satu coil aktif#elseout_step=Two_Coil[posisi]; //dua coil aktif#endif