Mechanics - African Virtual University
165
Prepared by Tendayi CHIHAKA African Virtual university Université Virtuelle Africaine Universidade Virtual Africana Mechanics Mechanics
-
Upload
khangminh22 -
Category
Documents
-
view
0 -
download
0
Transcript of Mechanics - African Virtual University

Prepared by Tendayi CHIHAKA
African Virtual universityUniversité Virtuelle AfricaineUniversidade Virtual Africana
Mechanics Mechanics

African Virtual University �
Notice
This document is published under the conditions of the Creative Commons http://en.wikipedia.org/wiki/Creative_Commons Attribution http://creativecommons.org/licenses/by/2.5/ License (abbreviated “cc-by”), Version 2.5.

African Virtual University �
Table of ConTenTs
I. Mechanics________________________________________________ 3
II. PrerequisiteCourseorKnowledge_____________________________ 3
III. Time____________________________________________________ 3
IV. Materials_________________________________________________ 3
V. ModuleRationale __________________________________________ 3
VI. Content__________________________________________________ 4
6.1 Overview___________________________________________ 4 6.2 Outline_____________________________________________ 4 6.3 GraphicOrganizer_____________________________________ 6
VII. GeneralObjectives _________________________________________ 7
VIII. SpecificLearningObjective(s)_________________________________ 7
IX. TeachingandLearningActivities_______________________________ 8
X. LearningActivities_________________________________________ 14
XI. GlossaryofKeyConcepts__________________________________ 141
XII. ListofCompulsoryReadings_______________________________ 147
XIII. CompiledListof(Optional)MultimediaResources_______________ 148
XIV. CompiledlistofUsefullinks________________________________ 149
XV. SynthesisoftheModule___________________________________ 151
XVI. SummativeEvaluation_____________________________________ 152
XVII.References _____________________________________________ 163
XVIII.MainAuthoroftheModule________________________________ 164

African Virtual University �
I. MechanicsBy Mr. Tendayi Chihaka
II. Prerequisite Courses or KnowledgeLinear Algebra 1 and Calculus 3 is prerequisite.
III. TimeThe total time for this module is 120 study hours.
IV. MaterialStudents should have access to the core readings specified later. Also, they will need a computer to gain full access to the core readings and web links in the materials.
V. Module RationaleThis topic of mechanics has been treated as that branch of mathematics that mathema-tically attempts to explain our physical environment. It is that branch of mathematics that spans the divide between our natural sciences and mathematics.
The module has infused as its basis, both modern mathematics and traditional mathematics as it explores the basic concepts of Kinematics – which is the study of motion without referrence to forces which cause motion of particles; Kinetics which relates the action of forces on particles and bodies to their resulting motions; Dynamics – the study of the general causes of motion; and Statics – the equillibrium mechanics of stationary bodies
Practical examples and their implications for classroom practice have been suggested whenever and wherever appropriate in the module in order to help the teacher to impart the knowledge of mechanics to pupils.

African Virtual University �
VI. Content
6.1 Overview
This module is a first degree course in Mechanics. The module starts with a treatment of vectors and vector calculus and attempts to explain all the topics in mechanics from this basis. It is hoped that the students enrolling for this course will acquaint themselves with the basic notions of force and the resultant motion of its application. Four areas of mechanics: Statics, Dynamics, Kinetics and Kinematics of particles and rigid bodies have been treated in this module.
The student is strongly advised to consult Physics sources on Mechanics in conjunc-tion with this module for practical examples which are mathematically modelled in the module.
6.2 Outline:Syllabus
Unit1:Force,EnergyandMotion
Level 1. Priority A. Linear Algebra 1 and Calculus 3 is prerequisite. (Note over-lap with Vector Analysis)
Vectors, Velocity and Acceleration: Dot product, cross product, triple products. Deri-vatives of vectors, Integrals of vectors. Relative velocity and acceleration. Tangential and normal acceleration, Circular motion. Gradient, divergence and curl. Line integrals and independent of path.
Newton’s Law of Motion - Work, Energy and Momentum: Work, power, kinetic energy. Conservative force fields, potential, conservation of energy. Impulse, Torque and angular momentum, conservation of momentum.
Motion in a Uniform Force Field. Falling bodies and projectiles. Potential and po-tential energy in a uniform force field. Projectiles, motion in a resisting medium. Constrained motion. Friction. Because of the volume of content in this unit, we have seen it prudent to divide this unit into two parts – 1a and 1b.

African Virtual University �
Unit2:Oscillations
Level 1. Priority A. Mechanics 1 is prerequisite.
The Simple Harmonic Oscillator and the Simple Pendulum: Energy of a simple har-monic oscillator. Over-damped, critically-damped and under-dumped motion. Simple pendulum. The two and three dimensional harmonic oscillator.
Unit3:Dynamics
Level 2. Priority B. Mechanics 2 is prerequisite.
Central Forces and Planetary Motion: Equations of motion for a particle in a central field; Potential energy of a particle in a central field; Conservation of energy. Kepler’s laws of planetary motion.
Moving Coordinate Systems: Rotating coordinate systems, Derivative Operations, Velocity, and Acceleration in a moving system. Coriolis and centripetal acceleration (and force). Motion of a particle relative to the earth.
Systems of Particles: Conservation of momentum, angular momentum, external tor-que. Kinetic energy, work, potential energy. Principle of virtual work; D’ALembert’s principle.
Rockets and Collisions: Problems involving changing mass. Rockets, Collisions (direct and Oblique).
Unit4:RigidBodiesandEnergy
Level 3. Priority C. Mechanics 3 is prerequisite.
Plane Motion of Rigid Bodies: Euler’s Theorem. Chasle’s Theorem. Moment of inertia. Radius of gyration. Parallel axis theorem. Perpendicular axis theorem. Cou-ples. Kinetic energy and angular momentum about a fixed axis. Principle of angu-lar momentum. Principle of conservation of energy. Principle of virtual work and D’Alembert’s principle. Principle of minimum potential energy.

African Virtual University �
6.3 GraphicOrganiser
4
DYNAMICS
VECTOR ALGEBRA
PLANE AND CURVI-LINEAR MOTION
OSCILLATIONS
RIGID BODIES
NEWTON’S LAWS OF MOTION

African Virtual University �
VII. General objective(s)By the end of the module, the trainee should be able to:
o Relate mathematical notions to physical quantities such as force and mo-tion.
o Model some physical phenomena mathematically as required for effective teaching of mechanics in the secondary school.
o Relate traditional mechanics operations to vector calculus and vice-versa.
VIII. specific learning objectives
You should be able to:
1. Be equipped as a student and as a teacher with vector operations.2. Be infused with the basic tools of analysis into vector quantities.3. Infuse the basic tools of analysis into various types of motion e.g. Simple
Harmonic Motion.

African Virtual University �
IX. Teaching and learning activities
BasicAlgebraicIdeasTest
Rationale: To check learner’s familiarity with some concepts assumed in the mo-dule.
Questions
1. Velocity is the :
a. rate of change of displacement;b. rate of change of speed;c. rate of change of distance;d. rate of change of time.
2. Which of the following is group of vectors?
a. speed, acceleration and time;b. displacement, velocity and acceleration;c. direction, displacement and velocity;d. force, velocity and time.
3. The resultant of velocities 8ms-1 and 6ms-1 at right angles is :
a. 12ms-1;b. 10ms-1;c. 7ms-1;d. 9ms-1.
4. The momentum of a body is the :
a. mass of a body times its speed;b. weight of a body times its velocity;c. mass of a body times its velocity;d. weight of a body times its speed.

African Virtual University �
5. Newton’s first law of motion states that :
a. If a body is at rest it might remain at rest or if it is in motion it moves with a speed until it stops;
b. If a body is at rest it remains at rest or remains in motion until it is acted on by a resultant force;
c. If a body is at rest it remains at rest or if it is in motion it moves with uniform velocity until it is acted on by a resultant force;
d. If a body a body is at rest it remains at rest.
6. A car of mass 1.0 ×103 kg travelling at 72 km h-1 on a horizontal road is brought to rest in a distance of 40 m by the action of the brakes and frictional forces. Find the average stopping force.
a. 5.0 ×102 N ;
b. 5.0 ×103 N ;
c. 5.0 ×104 N ;
d. 5.0 ×101 N .
7. A scalar quantity has :
a. direction only;b. magnitude only;c. direction and magnitude;d. none of the above.
8. A train which is moving with uniform acceleration is observed to take 20 s and 30 s to travel successive 400 metres. How much farther will it travel before coming to rest if the acceleration remains uniform?
a. 163.3 m;b. 963.3 m;c. 800 m;d. 663.3 m.

African Virtual University �0
9. The following is NOT an equation of motion in a straight line.
a. v = u+ at ;
b. x = ut + 1
2at2
;c. v
2 = u2 + 2ax ;
d v = u+ at2.
10. Power :
a. is the ability to have energy;b. is the ability to run;c. is the ability to have speed;d. is the ability to do work.
11. A mass of 5 kg moves on smooth horizontal plane with a speed of 8 m/s, being attached to a fixed point on the plane by a string of length 4 m. find. The tension in the string is :
a. 16 N;b. 40 N;c. 80 N;d. 20 N.
12. Impulse is defined as :
a. the product of force and distance;b. the product of force and mass;c. the product of force and time ;d. the product of force and velocity.
13. The angular velocity of the particle is :
a. radius of a circle over the speed of a particle;b. radius of a circle over the velocity of a particle;c. speed of a particle over the radius of a circle;d. velocity of a particle over the radius of a circle.
African Virtual University ��
14. The force that must be exerted by the rails towards the centre of the circle is :
a. the moment about that axis of the internal forces acting on the body.b. the moment about that axis of the external forces acting on the body.c. the moment about that axis of the speed of the body.d. the moment about that axis of the acceleration of the body.
15. A particle of mass 3 kg, resting on a smooth table and attached to a fixed point on the table by a rope 1.2 m long, is making 300 rev/min. Find The angular velocity of the particle is :
a. 10 rev/s;b. 10π rad/s;c. 5 rev/s;d. 5π rad/s.
16. An engine, of mass 80 Mg, is moving in arc of a circle of radius 240 m, with a speed of 48 km/h. The force that must be exerted by the rails towards the centre of the circle is
a. 0.59×105 N;b. 0.59×104 N;c. 0.59×103 N;d. 0.59×102 N.
17. A particle is said to move with simple harmonic motion if:
a. the particle moves so that its acceleration along its path is directed towards a fixed point in that path, and varies inversely as its distance from this fixed point;
b. the particle moves so that its acceleration along its path is directed towards a fixed point in that path, and varies directly as its distance from this fixed point;
c. the particle moves so that its speed along its path is directed towards a fixed point in that path, and varies directly as its distance from this fixed point;
d. the particle moves so that its acceleration along its path is directed towards a fixed point in that path, and varies directly as its velocity from this fixed point.
18. A simple pendulum:
a. consists of a heavy paticle or bob attached to a fixed point by a heavy string and swinging in a vertical plane;
b. consists of a heavy paticle or bob attached to a fixed point by a weightless string and swinging in all directions;
c. consists of a heavy paticle or bob attached to a fixed point by a heavy string and swinging in all directions;
d. consists of a heavy paticle or bob attached to a fixed point by a weightless string and swinging in a vertical plane.

African Virtual University ��
19. Which of the following does not typically denote a vector:
(a) -5 (b) (1, 2, 3) (c) A (d)
4
8
−3
⎡
⎣
⎢⎢⎢
⎤
⎦
⎥⎥⎥
20. A Subspace of a vector space:
(a) Is also a vector space;(b) Is not a vector space;(c) Is not a linear space;(d) Is half of a vector space.
AnswerKey
1. a ((b),(c),(d) have scalar quantities speed, distance and time respectively. So since velocity is a vector quantity a is correct)
2. b (for (a) speed and time are not vectors, for (c) direction is not a vector, for (d) time is not a vector )
3. b (using the pythagorus theorem take 8ms-1 to be on the opposite side and 6ms-1 to be on the adjacent side then the resultant side is 10ms-1 )
4. c (momentum is the product of mass and velocity since the particle is moving in a particular direction. So (a), (b) and (d) are not correct)
5. c ((c) is correct because the body is moving in a particular direction and only stops when a force e.g. friction is applied on it)
6. b (The initial velocity is 72 km h-1 or 20 m/s and final velocity 0 m/s and so acceleration is 5 ms-2. thus force is mass times acceleration giving the answer in (b))
7. b (a vector quantity is the one with magnitude and direction so (b) is correct)
8. a
9. d ((d) is not the equation of a sraight line because of the t2 in the equation. The other equations are correct)
10. d (power is force times velocity or the rate of doing work so (d) is correct)
11. c (here we are looking at motion in a circle so acceleartion towards the fixed point is (velocity)2/radius=64/4=16 ms-2. therefore tension is mass times acceleration= 5×16= 80 N)

African Virtual University ��
12. c
13. d
14. b
15 b ( motion is in a circle so we multiply the revolutions made per second by 2π since each revolution is made up of 2π )
16. a (48 km/h= 40/3 ms-1 and force exerted is mv2/r= 80 000×(40/3)2/240)
17. b
18. d
19. a ((c) normally denotes a vector or matrix, (b) and (d) denote vectors )
20. a
PedagogicalCommentForLearners
The pre-assessment has been designed in such a way that it introduces the student to basic notions of kinetics and kinematics. It covers such concepts as identifying the equations of motion in a straihgt line,basic notions familiarity with basic algrebraic processes .A score of 50 % or less should be a cause for concern and will require the student to revisit his “O” level work on Algebra and its processes. It is essential that the student reads widely on that content they are not familiar with as it is important to have this prior knowledge before embarking on the following units.

African Virtual University ��
X. learning activities
Unit1a:Vectors,VectorCalculus,VelocityandAcceleration
Specificlearningobjectives
At the end of these activities you should be able to:
• Define vectors and perform operations on vectors.• Differentiate and Integrate vector valued functions.• Define velocity and acceleration in terms of vectors and describe the rela-
tionships between velocity and acceleration.• Given appropriate situations, define and calculate the relative velocities and
accelerations of bodies in motion.• Describe circular motion and calculate tangential and normal acceleration of
particles moving in circular motion.• Define and apply the concepts of gradient, divergence and curl.• Define and evaluate line integrals and independence of paths.
Summaryofthelearningactivity
In this activity you will familiarise yourself with elementary vector calculus and its application to motion in two and three dimensions.
CompulsoryReading
Fitzpatrick, R. (2001). Classical Mechanics: An Introductory Course. Austin, Texas.UTP
RelevantLinksandResources
Vectors http://en.wikipedia.org/wiki/Vector_(spatial)
Vector-valued function http://en.wikipedia.org/wiki/Vector-valued_function
Acceleration http://en.wikipedia.org/wiki/Acceleration

African Virtual University ��
Velocity http://en.wikipedia.org/wiki/Velocity
Divergence http://en.wikipedia.org/wiki/DIVERGENCE
Curl http://en.wikipedia.org/wiki/CURL
Gradient http://en.wikipedia.org/wiki/Gradient
Gradient http://hyperphysics.phy-astr.gsu.edu/hbase/gradi.html
KeyWords(fordescription/definitionsseeglossary)
• Scalar
• Vector
• Velocity
• Acceleration
• Function
BridgingTheGap
An army sergeant gives the following order to one group of new army recruits on parade.
“Walk for five hours.”
To another group he orders:
“Run for five kilometres”
To a third he barks:
“On- the- double at ten kilometres per hour!”
As you may well be aware, army recruits are not allowed to question orders given by a senior.
Describe the situation at the parade ground immediately after these orders and the possible questions each recruit might be asking himself/herself.
What would happen if the sergeant had given similar instructions to a group of pilots with the appropriate terminology and figures?

African Virtual University ��
Detaileddescriptionoftheactivities
In this activity, we revisit the ideas of vectors and vector valued functions with the intention of exploring vector calculus. We then use the results of vector calculus to define velocity acceleration force and in Activity 2 finally discuss the motion of particles and bodies in various settings in Activity 3. You will have opportunity to examine various problem and solution situations as well as opportunities to solve problems on your own..
1a.1 VectorsandScalars
http://en.wikipedia.org/wiki/Vector_(spatial)
1a.1.1 Examples of Scalar Quantities
Vectors are quantities that require not only a magnitude, but a direction to specify them completely. Let us illustrate by first citing some examples of quantities that are not vectors. The number of litres of petrol in the fuel tank of your car is an example of a quantity that can be specified by a single number---it makes no sense to talk about a «direction» associated with the amount of petrol in a tank. Such quantities, which can be specified by giving a single number (in appropriate units), are called scalars. Other examples of scalar quantities include the temperature, your weight, or the population of a country; these are scalars because they are completely defined by a single number (with appropriate units).
1a.1.2 Examples of Vector Quantities
However, consider a velocity. If we say that a car is going 70 km/hour, we have not completely specified its motion, because we have not specified the direction that it is going. Thus, velocity is an example of a vector quantity. A vector generally requires more than one number to specify it; in this example we could give the magnitude of the velocity (70km/hour), a compass heading to specify the direction (say 30 degrees from North), and an number giving the vertical angle with respect to the Earth’s surface (zero degrees except in chase scenes from action movies!). The adjacent figure shows a typical coordinate system for
specifying a vector in terms of a length r and two angles, θ and ϕ

African Virtual University ��
1a.1.3 Vectorsinin2-dand3-d
Definition: The component forms of a vector v in 2-d and 3-d whose initial point
is the origin and whose terminal points are
x1, x
2( ) and
x1, x
2, x
3( ) respectively are given by
v =
x1, x
2( )
v =
x1, x
2, x
3( ) Definition: The length of a vector v will be defined as
v = x12 + x2
2 for 2-d and
v = x12 + x2
2 + x32 for 3-d
Definition: If v is a non-zero vector in the 2-d or 3-d space, then the vector
u = vv
=1v
v
has length 1 in the direction of v.
Definition: The standard unit vectors (1, 0) and (0, 1) in 2-d and
1,0,0( ), 0,1,0( )and 0,0,1( ) in 3-d are
i = (1, 0) and j = (0, 1) and
i = 1,0,0( ) , j = 0,1,0( ) and k = 0,0,1( )It is the assumption here that you have done work on vector addition and scalar multiplication and the only operations we will discuss here are the dot product and cross product Your core text, however, has sections that treat these operations as indicated below. .

African Virtual University ��
CompulsoryReading
Fitzpatrick, R. (2001). Classical Mechanics: An Introductory Course. Austin, Texas.UTP pp 34-38
N.B. You will have recognized that the vector addition described is the component wise addition that you are familiar with.
Vector magnitude P. 35
Pythagoras Theorem (3.6) P. 35
N.B. Note that the vector magnitude is also called the modules of the vector.
Equation (3.6) and (3.7)
Scalar Multiplication P. 35
Component wise scalar multiplication 3.8 P. 36
Diagonals of a parallelogram P. 36 – 38
N.B. Equations 3.9 – 3.13
TeachingTip
This gives a geometrical interpretation of vector addition and scalar multiplication which is a very useful tool when teaching secondary school students.
1a.1.4 TheDotProduct
The Dot product of u = v1 ,v2( ) and v = v1 ,v2( ) is
u• v = u1v1 + u2 v2( )
The Dot product of u = u1 ,u2 ,u( ) and v = v1 ,v2 ,v3( ) is
u• v = u1v1 + u2 v2 + u3v3( )
N.B. v• v = v 2
Theorem: If θ is the angle between two non-zero vectors u and v, then
cosθ =u• vu v

African Virtual University ��
Definition: The work done, W, by a force acting along the line of motion of an object is given by
W= Force × distance = F PQ
CompulsoryReading
Fitzpatrick, R. (2001). Classical Mechanics: An Introductory Course. Austin, Texas.UTP pp 40
N.B. The scalar product is also referred to as the “DOT” product. The geometrical figure given in Figure 15 explains this vector operation very well.
1a.1.5 Thecrossproduct
Definition: The cross product of vectors u= v1i + v2 j + v3k and v= v1i + v2 j + v3k
is u × v = (u2 v3 − u3v2 )i − u1v3 − u3v1 ) j + (u1v2 − u2 v1 )k( )A more convenient way is to write it as
u × v =
i j ku1 u2 u3
v1 v2 v3
which is the determinant of a 3x3 matrix. Remember to refer to your module on linear algebra to refresh yourself on properties of determinants.

African Virtual University �0
DO THIS
Verify that the two definitions are indeed the same
N.B. The cross product is not defined for vectors in 2-d
Theorem: Algebraic properties of the cross product
Let u and v be vectors and c be a scalar:
1. u × v = v × u2. u × (v + w) = (u × v) + (u × w)3. c(u × v)= cu × v= u × cv4. u × 0 = 0 × u = 05. u × u =0
6. u •(v + w) = (u × v)• w
Theorem: Geometric properties of the cross product
Let u and v be non-zero vectors and θ be the angle between them.
1. u x v is orthogonal to both u and v.
2. u × v = u v sinθ3. u x v = 0 if and only if one is a scalar multiple of the other
4. u × v = area of parallelogram of sides u and vN.B. The cross product can be used torque- the moment M of a force F about a point P.
Example: If the point of application of the force is Q, the moment of F about P is
M= PQ × F
The magnitude of the moment F measures the tendency of the vector PQ to rotate counter clockwise about an axis directed along the vector M

African Virtual University ��
DO THIS
Exercise: Prove that u x v = u v sinθ , where u and v are vectors, θ the angle between them and x is the cross product.
(Answer): Hint. Remember that
sinθ = 1− cosθ and thatcosθ =(u• v)2
u2
v2
1a.1.6 TheTripleScalarProduct
Definition: The triple scalar product is the dot product of u and v + w
u •(v + w)
Theorem: For u = u1i + u2 j + u3k , v= v1i + v2 j + v3k and w= w1i + w2 j + w3k
u •(v + w) =
u1 u2 u3
v1 v2 v3
w1 w2 w3
DO THIS
Prove the theorem
1a.1.7 VectorValuedFunctions
Definition: A vector valued function is a function where the domain is a subset of the real numbers and the range is a vector In other words, vector valued functions assign a vector to a number.
More specifically,
In 2-d
r(t) = x(t)i + y(t)j or r(t) = (x(t) , y(t)), or
In 3-d
r(t) = x(t)i + y(t)j + z(t)k or r(t) = (x(t) ,y(t) ,z(t))
African Virtual University ��
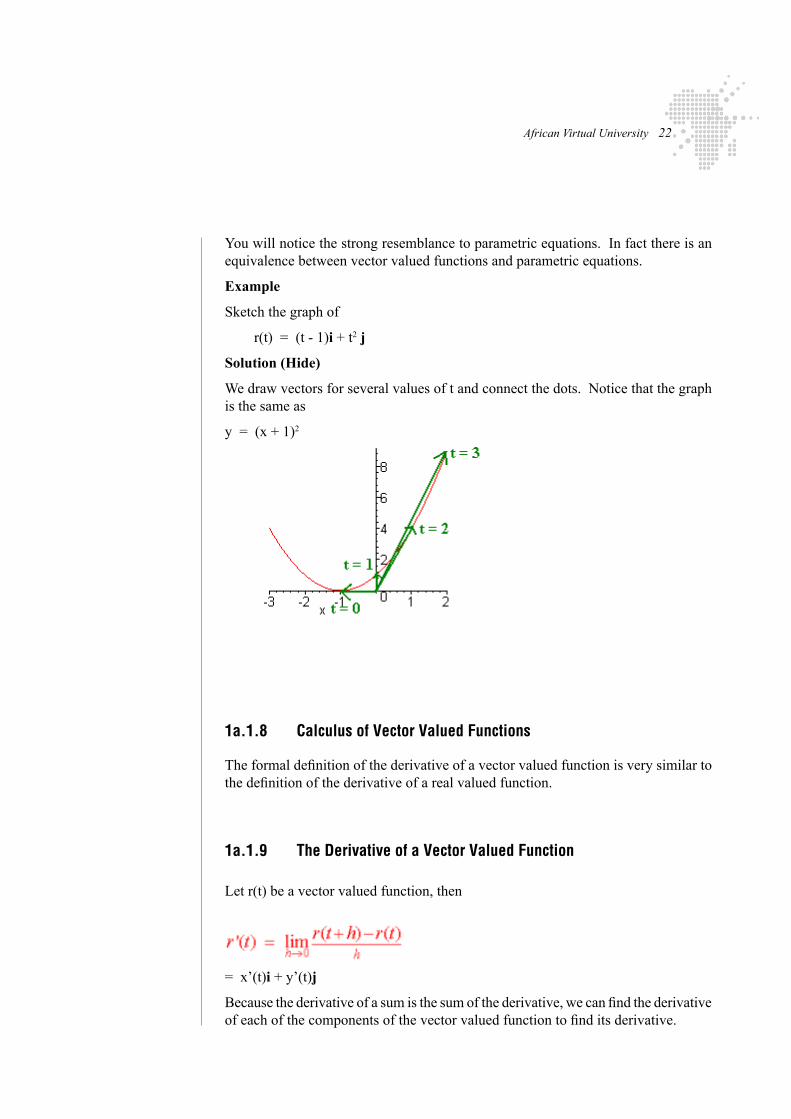
You will notice the strong resemblance to parametric equations. In fact there is an equivalence between vector valued functions and parametric equations.
Example
Sketch the graph of
r(t) = (t - 1)i + t2 j
Solution (Hide)
We draw vectors for several values of t and connect the dots. Notice that the graph is the same as
y = (x + 1)2
1a.1.8 CalculusofVectorValuedFunctions
The formal definition of the derivative of a vector valued function is very similar to the definition of the derivative of a real valued function.
1a.1.9 TheDerivativeofaVectorValuedFunction
Let r(t) be a vector valued function, then
= x’(t)i + y’(t)j
Because the derivative of a sum is the sum of the derivative, we can find the derivative of each of the components of the vector valued function to find its derivative.

African Virtual University ��
Go to this link: http://en.wikipedia.org/wiki/Vector-valued_function
Examples
d/dt (3i + sintj) = costj
d/dt (3t2 i + cos(4t) j + tet k) = 6t i -4sin(t)j + (et + tet) k
1a.1.10 PropertiesofdifferentiationofVectorValuedFunctions
All of the properties of differentiation still hold for vector values functions. Moreover because there are a variety of ways of defining multiplication, there is an abundance of product rules.
Suppose that v(t) and w(t) are vector valued functions, f(t) is a scalar function, and c is a real number then
1. d/dt(v(t) + w(t)) = d/dt(v(t)) + d/dt(w(t)) 2. d/dt(cv(t)) = c d/dt(v(t)) 3. d/dt(f(t) v(t)) = f ‘(t) v(t) + f(t) v’(t) 4. (v(t) . w(t))’ = v’(t) . w(t)+ v(t) . w’(t) 5. (v(t) × w(t))’ = v’(t) × w(t)+ v(t) x w’(t) 6. d/dt(v(f(t))) = v’(f(t)) f ‘(t)
1a.1.11 Integrationofvectorvaluedfunctions
Definition: We define the integral of a vector valued function as the integral of each component. This definition holds for both definite and indefinite integrals.
1.If r(t) = x(t)i +y(t)j, where x and y are continuous on [a , b] then
r (t)dt = x(t)dt∫⎡⎣ ⎤⎦ i + y(t)dt∫⎡⎣ ⎤
⎦ j∫ and
r (t)dt = x(t)dta
b
∫⎡
⎣⎢
⎤
⎦⎥
a
b
∫ i + y(t)dta
b
∫⎡
⎣⎢
⎤
⎦⎥ j
2. If r(t) = x(t)i + y(t)j + z(t)k, and x, y, and z are continuous on [a , b] then
r (t) = x(t)dt∫⎡⎣ ⎤⎦ i + y(t)dt∫⎡⎣ ⎤
⎦ j + z(t)dt∫⎡⎣ ⎤⎦k∫

African Virtual University ��
Example
Evaluate
∫(sin t)i + 2t j - 8t3 k dt
Solution
Just take the integral of each component
(∫ (sin t)dt i) + ( ∫2t dt j) - ( ∫8t3 dt k)
= (-cost + c1)i + (t2 + c
2)j + (2t4 + c
3)k
Notice that we have introduce three different constants, one for each component and that the three scalar constants produce one vector constant
Activity1a.2 VelocityandAcceleration
• Define velocity and acceleration in terms of vectors and describe the relationships between velocity and acceleration.
• Given appropriate situations, define and calculate the relative velocities and accelerations of bodies in motion
1a.2.1 Velocity
Go to this link: http://en.wikipedia.org/wiki/Velocity
Definition: Velocity and Speed
In single variable calculus the velocity is defined as the derivative of the position func-tion. For vector calculus, we make the same definition for both 2-2 and 3-d space.
Let r(t) be a differentiable vector valued function representing the position vector of a particle at time t. Then the velocity vector is the derivative of the position vector.
In 2-space:
r(t) = ×(t)i + y(t)j and Velocity = v(t) = r'(t) = ×'(t)i + y'(t)j
Speed = v(t) = r '(t) = x '(t)[ ]2+ y '(t)[ ]2
In 3-space: r(t) = ×(t)i + y(t)j + z(t)k and velocity = v(t) = r’(t) = ×’(t)i + y’(t)j + z’(t)k
Speed = v(t) = r '(t) = x '(t)[ ]2+ y '(t)[ ]2
+ z '(t)[ ]2
Example
African Virtual University ��
Find the velocity vector v(t) if the position vector is
r(t) = 3ti + 2t2j - sin t k
We just take the derivative
v(t) = 3i + 4tj + cos t k
N.B. When we think of speed, we think of how fast we are going. Speed should not be negative. In one variable calculus, speed was the absolute value of the velocity. For vector calculus, it is the magnitude of the velocity.
1a.2.2 Motioninonedimension
Compulsoryreading
Fitzpatrick, R. (2001). Classical Mechanics: An Introductory Course. Austin, Texas.UTP pp18-31
This section introduces the concepts of displacement, velocity and acceleration and the motion of a particle varying velocities such as constant, uniform and so on
You should be able to relate the ideas of the position vector to the important concept of displacement
Discussion: Are the two concepts of displacement and position vector the same?
1a.2.3Motioninthreedimensions
Compulsoryreading
Fitzpatrick, R. (2001). Classical Mechanics: An Introductory Course. Austin, Texas.UTP p 33-52
N.B. You should note hear the introduction of the three dimensional Cartesian plane to provide a suitable frame of reference to describe motion in three dimensions.
For practical examples you can use the idea of an aircraft taking off from an airport. At any given time, its position with reference to the airport can be described by asking the questions:
How far north of the airport is the plane?
How far east?

African Virtual University ��
1a.2.4 Acceleration
Go to this link: http://en.wikipedia.org/wiki/Acceleration
In one variable calculus, we defined the acceleration of a particle as the second deri-vative of the position function. Nothing changes for vector calculus.
1a.2.5 DefinitionofAcceleration
Let r(t) be a twice differentiable vector valued function representing the position vector of a particle at time t. Then the acceleration vector is the second derivative of the position vector.
In 2-space, r(t) = ×(t)i + y(t)j and acceleration = a(t) = r’’(t) = ×’’(t)
In 3- Space r(t) = ×(t)i + y(t)j + z(t)k
and acceleration =a(t) = r’’(t) = x’’(t)i + y’’(t)j + z’’(t)k
Example
Find the velocity and acceleration of the position function
r(t) = 4t i + t2 j
when t = -1. Then sketch the vectors.
Solution
The velocity vector is
v(t) = r’(t) = 4 i + 2t j
Plugging in -1 for t gives
v(-1) = 4 i - 2j
Take another derivative to find the acceleration.
a(t) = v’(t) = 2j
Below is a picture of the vectors.

African Virtual University ��
DO THIS
Sketch the path of motion of an object whose position vector is
r(t) = (t2 − 4)i + j
DO THIS
An object starting from rest at P(1, 2, 0) has acceleration
a(t) = j + 2k
where a(t) is measured in m s−2 Find the location of the object after 2seconds
Donotlookoverthepageuntilyouarefinished!

African Virtual University ��
Answer
We have initial conditions as v(0) = 0 and r(0) = x(0)i + y(0)j + z(0) k
i.e. r(0) = 1i + 2j + 0k = i + 2j
v(t) = a(t)dt = ( j + 2k)∫ dt = tj + 2tk + CwhereC = C1i + C 2 j + C 3k∫When t = 0, v(0) = C1i + C 2 j j + C 3k = 0 ⇒ C1 = C 2 = C 3 = 0Thus the velocity at any time t is
v(t) = tj + 2tk
Now r (t) = v(t)dt = ( j + 2k)dt =12
t2 + t2 k + CwhereC = C 4 i + C j + C 6 k∫∫Also r (0) = C 4 i + C 5 j + C 6 k = i + 2 j ⇒ C 4 = 1,C 5 = 2,C 6 = 0
Thus r (t) = i +12
t2 + 2⎛⎝⎜
⎞⎠⎟
j + t2 k
CompulsoryReading
Fitzpatrick, R. (2001). Classical Mechanics: An Introductory Course. Austin, Texas.UTP
• Motion with constant velocity.p23• Motion with constant acceleration p24• Equations of motion in a straight line p26

African Virtual University ��
1a.2.6 MotionofFallingBodies
Aristotelian Physics tell us that the speed of falling of a body depends completely on its weight, so a one Kilogramme stone will fall faster than a half-kilogramme stone. Galileo denied this, arguing that everybody falls down with the same speed and acceleration, for example, if you have got a stone in your hand, and you suddenly stop holding it, it will fall to the ground with speed V. And now, you have a paper, and you throw it to the ground, its falling speed will be now v (a smaller speed), but if you make a little «ball» with the paper, its speed will be V. (the same than the stone). From here he postulated that the speed does not depend on the weight, every time the acceleration is the same, but in the case of the plain paper the air has more resistance and that’s the cause of the smaller speed. This experiment was done by Galileo in Pisa’s Tower.
1a.2.7 Experiment
Purpose
In this experiment you’ll be able to see the acceleration of different objects and compare them such as Galileo (the precursor of Einstein) did.
Materials
• A tennis ball • A football • A notebook • A sheet
Procedure
1. Take both balls. 2. Hold them at the same level, as high as you can (shoulder, face, etc.) 3. Drop them to the ground at the same time 4. Both reach the soil at the same time. 5. Do you think this only happens because they have the same shape. Next try
this with the notebook and tennis ball.6. Both reach the soil at the same time! 7. Now, try with the notebook and the sheet of paper. What happens? Why do
you think this happens? 8. Now make a little «ball» with the sheet of paper and repeat the experiment. 9. They should reach the ground at the same time. Why

African Virtual University �0
CompulsoryReading
Fitzpatrick, R. (2001). Classical Mechanics: An Introductory Course. Austin, Texas.UTP
Free fall under gravity p 26-28
Examples p28-31
DO THIS
Exercise
A child leans out of a window of a building from a height 10m above the ground. She throws a ball vertically upwards with an initial velocity of 12m/s. What is the maximum height above the ground reached by the ball and the total amount of time it takes to strike the ground.
Answer : You should come up with these answers.
Maximum height = 17.4m and total time elapsed = 3.11s
1a.2.8 ProjectileMotion
N.B. This should be read together with the section on Newton’s laws in Activity 2.
As mentioned earlier it will be assumed that the only force acting on the projectile after its launching is the force of gravity. Thus the motion occurs in a vertical plane. For a projectile of mass m, the foce due to gravity is
F = - mgj
Comparing this with
F = ma (from Newton’s second law of motion) we have
a = -gj which becomes our acceleration vector.

African Virtual University ��
Now, as shown in the diagram above, if the projectile is launched with initial velocity
v0 from a position r0 then
v(t) = a(t)dt = −gjdt =∫∫ − gtj + C1
r(t) = v(t)dt = (−gtj + C1 )dt =∫∫ −12
gt2 j + C1t + C 2
Now, v(0) = v0 ands(0) = s0 and this gives rise to
C1 = v0 andC 2 = r0
And therefore
r(t)=12
gt2 j + tv0 + r0 which gives our position vector.
Recall that
v0 = xi + yj = ( v0 cosθ)i + ( v0 sinθ) j = v0 cosθi + v0 sinθ j

African Virtual University ��
Substituting into the above, we have
r(t) =−12
gt2 j + tv0 cosθi + tv0 sinθ j + hj h being the initial height above the ground
Rearranging , we have The position Function of a Projectile as
r(t) = (v0 cosθ)ti + h+ (v0 sinθ)t − 12
gt2⎡
⎣⎢⎤
⎦⎥j
DO THIS
A catapult throws a stone from 3m above the ground at an angle of 45o from the horizontal at 100m per second. Find the stone’s maximum height. Will the stone go over a 10m wall located 300m from the point of projection
Donotlookoverthepageuntilyouarefinished!

African Virtual University ��
Answer
We are given h=3, v0 = 100,andθ = 450 =π
4. Using g = 9.8 m s−2
r(t) = (100cosπ4
)ri + 3+ (100sinπ4
)t − 4.9t2⎡
⎣⎢⎤
⎦⎥j
= (50 2t)i + (3+ 50 2t − 4.9t2 ) j .
The maximum height occurs when the vertical component of v is 0.
That is:
y '(t) = 50 2 − 9.8t = 0 which means that t=25 2
4.9seconds.
Maximum height is y = 3+ 50 2(25 24.9
) − 4.9 25 24.9
⎛
⎝⎜⎞
⎠⎟
2
DO THIS
Simplify the above equation and find the actual value of y
For the wall, x(t) = 300 = 50 2t
Which means t = 3 2 and
y = 3+ 50 2(3 2) − 4.9(3 2)2 = 3 + 300 -88.2 = 214.8This means that the stone clears the wall.

African Virtual University ��
CompulsoryReading
Fitzpatrick, R. (2001). Classical Mechanics: An Introductory Course. Austin, Texas.UTP
Projectile motion P41-44
1a.2.9 CircularMotion
In general, circular motion is rotation along a circle, a circular path or a circular orbit. The rotation around a fixed axis of a three-dimensional body involves circular motion of its parts. We can talk about circular motion of an object if we ignore its size, so that we have the motion of a point mass in a plane.
Examples of circular motion are: an artificial satellite orbiting the Earth in geosynchro-nous orbit, a stone which is tied to a rope and is being swung in circles (cf. hammer throw), a racing car turning through a curve in a racetrack, an electron moving per-pendicular to a uniform magnetic field, a gear turning inside the gearbox of a car.
A special kind of circular motion is when an object rotates around its own center of mass. This can be called spinning motion, or rotational motion and will be discussed in later module. I am sure you can come up with your own examples of motion in a circle.
Circular motion involves acceleration of the moving object by a centripetal force which pulls the moving object towards the center of the circular orbit. Without this acceleration, the object would move inertially in a straight line the tangent the circle, according to Newton’s first law of motion. Circular motion is accelerated even though the speed is constant, because the object’s velocity vector is constantly changing direction. You should deduce from this that the acceleration vector and the velocity vector are orthogonal
Compulsoryreadings
Fitzpatrick, R. (2001). Classical Mechanics: An Introductory Course. Austin, Texas.UTP
• Introduction P. 136• Uniform Circular Motion P. 136 – 138• N.B. Equations 7.1 – 7.11 • Centripetal Acceleration P. 138 – 141• N.B. Equations 7.12 – 7.17• Definition : Centripetal Acceleration (7.15) p139• The Conical Pendulum p 141 – 142• N.B. Equations 7.18 – 7.25 • Non uniform circular motion P. 143 – 147 • Explanations: Radial unit vector P. 143• Tangential unit vector P. 143

African Virtual University ��
• Radial velocity and tangential velocity P. 144• Radial acceleration and tangential acceleration P. 144• N.B. Equations to note(7.26) – (7.45)• The Vertical Pendulum P. 148 – 150• N.B. Equations to note 7.46 – 7.53• Animated picture)• N.B. Equations 7.54 – 7.64
You need to note the different approach that is not based on vector algebra and the traditional equations that are employed in your compulsory reading text
Example
Find the velocity vector, speed, acceleration vector of the circle
r (t) = 2sin t2
i + 2cos t2
j
And sketch the circle.
Solution.
The velocity vector is
v(t) = r / (t) = 2cos t2
i − 2sin t2
j
The speed at any time is:
r / (t) = cos2 t2+ sin2 t
2= 1
The acceleration vector is
a(t) = r / / (t) = −12
sin t2
i −12
cos t2
j
N.B. The parametric equations for the curve are
x = 2sin t2
and
y = 2cos t2

African Virtual University ��
DO THIS
Exercise
Verify that the rectangular equation of the circle is
x2 + y2 = 4
DO THIS
Exercise
A particle starts from rest at point P(1,2,0) with acceleration
a(t) = j + 2k
in the usual units. Find the position of the particle after 2 seconds.
Donotlookoverthepageuntilyouarefinished!

African Virtual University ��
Answer
You should be able to deduce thatv(0) = 0andr (0) = x(0)i + y(0) j + z(0)k= 1i + 2 j + 0k= i + 2 j
To find the position function, you have to integrate twice, each time using one of the initial conditions to find the constants of integration. Thus
v(t ) = a∫ (t )dt = (j +∫ 2k)dt = tj +2tk +C
Where
C = C1i +C2 j +C3k
W hen t = 0 and v(0) = 0 you getv(0) = C1i +C2 j +C3k = o ⇒ C1 = C 2= C3 = 0
Thus the velocity at any time t is
v(t ) = t(j)+2t(k)
When we integrate once more we produce
r (t ) = v(t )dt = (tj +2tk)dt =t 2
2j + t 2k +C∫∫
Where C = C 4i +C5 j +C6k
When t = 0 and r (0) = i +2j we have
r (0) = C 4i +C5 j +C6k = i +2j ⇒ C 4 =1,C5 = 2,C6 = 0
Thus the position vector is
r (t ) = i +t 2
2+2
⎛
⎝⎜⎞
⎠⎟j + t 2k
The position of the particle after 2 seconds is
r (2) = i + 4 j + 4k given by the coordinates (1,4,4)

African Virtual University ��
CompulsoryReading
Fitzpatrick, R. (2001). Classical Mechanics: An Introductory Course. Austin, Texas.UTP p 136-160
Note that in our compulsory reading we introduce notions of angular velocity, cen-tripetal acceleration and so on. This section should be read in conjunction with the sections on curvilinear motion below and you should be able to draw parallels between circular motion and curvilinear motion which is an extension of secular motion.
1a.2.10 RelativeVelocity
We have been able to describe the position of a body and its velocity with reference to the origin of a given co-ordinate system. Ordinarily, this origin is taken to be fixed in some other body may be in motion relative to a third and so on. For example, when we speak of the velocity of a car, we usually mean the velocity of the car relative to the earth… But the earth is in motion relative to the sun… the sun is in motion relative to some other star…. And so on…..
Suppose a long train is moving towards the right along a straight level track and an athlete is running on the train towards the right.
Diagram of a flat car train with man running on the train. In the diagram,
uTE represents the velocity of the train T relative to the earth E
uAT represents the velocity of the athlete A relative to the trainT
The velocity of the athlete relative to the earth, uAE ,
is evidently equal to the sum of uAT and uTE :
uAE = uAT +uTE
N.B. The velocity uAE is the algebraic sum of uATand u
T Eand when combining
relative velocities
• Write each velocity with a double subscript in the proper order meaning “ve-locity of (first subscript) relative to (second subscript)
• When velocities are added, the first letter of any subscript is to be the same as the last letter of the second subscript
• The first letter of the subscript of the first velocity in the sum, and the second letter of the subscript of the last velocity, are the subscripts, in that order, of the relative velocity represented by the sum.

African Virtual University ��
These three lengthy and cumbersome statements are very important to consider when teaching vector addition in general where the subscripts actually represent the vectors themselves.
CompulsoryReading
Fitzpatrick, R. (2001). Classical Mechanics: An Introductory Course. Austin, Texas.UTP pp 44-48 (Relative velocity)
Workedexamples
Fitzpatrick, R. (2001). Classical Mechanics: An Introductory Course. Austin, Texas.UTP pp 48
1a.2.11 CurvilinearMotion
1a.2.12 TangentVectorsandNormalVectors
We have in the last section shown that the velocity vector always points\in the direction of motion. In this section we use this observation to extend this to a concept which applies to any smooth curve which is not necessarily described in terms of time
1a.2.13 TheUnitTangentVector
The derivative of a vector valued function gives a new vector valued function that is a tangent to the defined curve. The analogue to the slope of the tangent line is the direction of the tangent line. Since a vector contains a magnitude and a direction, the velocity vector contains more information than we need. We can strip a vector of its magnitude by dividing by its magnitude.
1a.2.14 DefinitionoftheUnitTangentVector
Let r(t) be a differentiable vector valued function and v(t) = r’(t) be the velocity vector. Then we define the unit tangent vector as the unit vector in the direction of the velocity vector.
v(t) T(t) = , v(t) ≠ 0 ||v(t)||

African Virtual University �0
Example
Let
r(t) = t i + et j - 3t2 k
Find the T(t) and T(0).
Solution
We have
v(t) = r’(t) = i + et j - 6t k
and
To find the unit tangent vector, we just divide
To find T(0) plug in 0 to get
DO THIS
Show that the unit tangent vector to the curve given by
r (t) = ti + t2
j when t = 1 is given by
1
5(i + 2 j)
N.B. In this exercise the direction of the unit tangent vector is determined by the orientation of the curve. Sketch the curve and verify that the unit tangent vector to the curve
r (t ) = −(t −2)i + (t −2)2 j at point (1,1)
would still be the same but will point in the opposite direction.

African Virtual University ��
DO THIS
FindT (t ) to the curve given by
r (t ) = 2costi +2sintj + tk at the pointwhen t =π4
and
show that the parametric equations for the tangent line are:
x = x1 + as = 2 − 2s
y = y1 + bs = 2 + 2s
z = z1 + cs =π4+ s
using the point (x1,y1,z1) = ( 2, 2,π4
)
1a.2.15 ThePrincipalUnitNormalVector
A normal vector is a perpendicular vector. Given a vector v in space, there are infini-tely many perpendicular vectors. Our goal is to select a special vector that is normal to the unit tangent vector. Geometrically, for a non straight curve, this vector is the unique vector that points into the curve or, in other words, the one that points towards the concave side of the curve. Algebraically we can compute the vector using the following definition.
Definition: Let r(t) be a differentiable vector valued function and let T(t) be the unit tangent vector. Then the principal unit normal vector N(t) is defined by
T’(t) N(t) = ||T’(t)||
Comparing this with the formula for the unit tangent vector, if we think of the unit tangent vector as a vector valued function, then the principal unit normal vector is the unit tangent vector of the unit tangent vector function. You will find that finding the principal unit normal vector is almost always cumbersome. The quotient rule of differentiation usually appears to complicate this process!.
Example
Find the unit normal vector for the vector valued function
r(t) = ti + t2 j
and sketch the curve, the unit tangent and the principal unit normal vectors when t = 1.

African Virtual University ��
Solution
First we find the unit tangent vector
Now use the quotient rule to find T’(t)
Since the unit vector in the direction of a given vector will be the same after multi-plying the vector by a positive scalar, we can simplify by multiplying by the factor:
The first factor gets rid of the denominator and the second factor gets rid of the fractional power. We have
Now we divide by the magnitude (after first dividing by 2) to get
Now plug in 1 for both the unit tangent vector to get

African Virtual University ��
The picture below shows the graph and the two vectors.
DO THIS (with a colleague)
Given the curve
r (t ) = 3ti +2tjFind N (t ).
What is the value of N (t ) when t =1
Donotturnthepageuntilyouhavefinishedtheproblem!

African Virtual University ��
Solution
r /(t ) = 3i + 4 j and r /(t ) = 9 +16t 2
⇒T (t ) =r /(t )
r /(t )=
1
9 +16t 2(3i + 4tj)
⇒T /(t ) =1
9 +16t 2(4 j)−
16t
(9 +16t 2)3
2
(3i + 4tj)
=12
(9 +16t 2)3
2
(−4ti +3j)
T /(t ) =129 +16t 2
(9 +16t 2)3 =12
9 +16t 2
⇒ N (t ) =T /(t )
T /(t )=
1
9 +16t 2(−4ti +3j)
Substituting for t =1
N (1) =15
(−4i +3j)
1a.2.16 TangentandNormalComponentsofAcceleration
Imagine yourself driving down the hill along a curving road towards and having your brakes fail. As you are riding you will experience two forces (other than the force of terror) that will change the velocity. The force of gravity will cause the car to in-crease in speed. A second change in velocity will be caused by the car going around the curve. The first component of acceleration is called the tangential component of acceleration and the second is called the normal component of acceleration. As you may guess the tangential component of acceleration is in the direction of the unit tangent vector and the normal component of acceleration is in the direction of the principal unit normal vector. Once we have T and N, it is straightforward to find the two components.
Definition: The tangential component of acceleration is
a
T= a •T =
v • a
v

African Virtual University ��
and the normal component of acceleration is
a
N= a × N =
v × a
v
and a = aNN + a
TT
N.B. The normal component of the acceleration is also called the centripetal com-ponent of the acceleration
Example
Prove that the acceleration vector a(t) is in the plane that contains T(t) and N(t)
Proof
First notice that
v = ||v|| T and T’ = ||T’|| N
(N.B.We have simplified notation here and used, for example, T for T (t) and so on)
Taking the derivative of both sides gives
a = v’ = ||v||’ T + ||v|| T’ = ||v||’ T + ||v|| ||T’ || N
This tells us that the acceleration vector is in the plane that contains the unit tangent vector and the unit normal vector.
Example
Find the tangential and normal components of acceleration for the prior example
r(t) = ti + t2 j
Solution
Taking two derivatives, we have
a(t) = r’’(t) = 2j
We dot the acceleration vector with the unit tangent and normal vectors to get

African Virtual University ��
DO THIS
Exercise: Show that
If r (t ) = 3ti − tj + t 2k then aT =
4t
10 + 4t 2and aN =
2 10
10 + 4t 2
Exercise
The position function for a projectile is given by:
r (t) = (50 2t)i + (50 2t −16t2 ) j
Find the tangent component of acceleration when:
t = 0,1, and
25 2
16
Donotturnthepageuntilyouhavefinishedtheproblem!

African Virtual University ��
Solution
v(t) = 50 2i + (50 2 − 32t) j
v(t) = 2 502 −16(50) 2t +162
Activity1a.3 Gradient,DivergenceAndCurl
This section is fully covered in the analysis one module of this course. Students can refresh their understanding of this work by referring to the compulsory readings given in the analysis one module.
1a.3.1 Divergence
In vector calculus, the divergence is an operator that measures a vector field’s ten-dency to originate from or converge upon a given point. For instance, for a vector field that denotes the velocity of air expanding as it is heated, the divergence of the velocity field would have a positive value because the air is expanding. Conversely, if the air is cooling and contracting, the divergence would be negative.
A vector field which has zero divergence everywhere is called solenoidal.
Let x, y, z be a system of Cartesian coordinates on a 3-dimensional Euclidean space, and let i, j, k be the corresponding basis of unit vectors.
The divergence of a continuously differentiable vector field F = F� i + F
� j + F
� k
is defined to be the scalar-valued function:
Although expressed in terms of coordinates, the result is invariant under orthogonal transformations, as the physical interpretation suggests.
The common notation for the divergence ∇·F is a convenient mnemonic, and an abuse of notation, where the dot denotes something just reminiscent of the dot product: take the components of ∇, apply them to the components of F, and sum the results.

African Virtual University ��
Physicalinterpretation
In physical terms, the divergence of a three dimensional vector field is the extent to which the vector field flow behaves like a source or a sink at a given point. Indeed, an alternative, but logically equivalent definition, gives the divergence as the deri-vative of the net flow of the vector field across the surface of a small sphere relative to the volume of the sphere. (Note that we are imagining the vector field to be like the velocity vector field of a fluid (in motion) when we use the terms flow, sink and so on.) Formally,
where S(r) denotes the sphere of radius r about a point p in R3, and the integral is a surface integral taken with respect to n, the normal to that sphere.
In light of the physical interpretation, a vector field with constant zero divergence is called incompressible – in this case, no net flow can occur across any closed sur-face.
The intuition that the sum of all sources minus the sum of all sinks should give the net flow outwards of a region is made precise by the divergence theorem.
Go to this link
http://en.wikipedia.org/wiki/DIVERGENCE
1a.3.2 Curl
http://en.wikipedia.org/wiki/CURL
1a.3.3 Gradient
In vector calculus, the gradient of a scalar field is a vector field which points in the direction of the greatest rate of increase of the scalar field, and whose magnitude is the greatest rate of change.
Consider a room in which the temperature is given by a scalar field φ, so at each point (x,y,z) the temperature is φ(x,y,z) (we will assume that the temperature does not change in time). Then, at each point in the room, the gradient at that point will show the direction in which the temperature rises most quickly. The magnitude of the gradient will determine how fast the temperature rises in that direction.
Consider a hill whose height above sea level at a point (x,y) is H(x,y). The gradient of H at a point is a vector pointing in the direction of the steepest slope or grade at that point. The steepness of the slope at that point is given by the magnitude of the gradient vector.

African Virtual University ��
The gradient can also be used to measure how a scalar field changes in other di-rections, rather than just the direction of greatest change, by taking a dot product. Consider again the example with the hill and suppose that the steepest slope on the hill is 40%. If a road goes directly up the hill, then the steepest slope on the road will also be 40%. If instead, the road goes around the hill at an angle with the uphill direction (the gradient vector), then it will have a shallower slope. For example, if the angle between the road and the uphill direction, projected onto the horizontal plane, is 60°, then the steepest slope along the road will be 20% which is 40% times the cosine of 60°.
This observation can be mathematically stated as follows. If the hill height function H is differentiable, then the gradient of H dotted with a unit vector gives the slope of the hill in the direction of the vector. More precisely, when H is differentiable the dot product of the gradient of H with a given unit vector is equal to the directional derivative of H in the direction of that unit vector.
Gotothelinksbelow
http://en.wikipedia.org/wiki/Gradient
Worked Examples
Fitzpatrick, R. (2001). Classical Mechanics: An Introductory Course. Austin, Texas.UTP pp154 – 159
Exercise
DO THIS
Find the magnitude of the acceleration a sfrom the diagram below. What will be the
magnitude and direction of a sif r = 100 m and v = 15.0 m/s (about 34 mph)?
as
Donotturnthepageuntilyouhavefinishedtheproblem!

African Virtual University �0
Solution
Since the car moving on a properly banked road is equivalent to the bob of a conical
pendulum, the conditions governing the vector a s, are the same as those governing
the equivalent vector a s for the conical pendulum. That is, the horizontal and vertical
components of a s must be given by
a
sx=
v2
r and
a
sy= g .
To find the magnitude of the vector a
s, you use the Pythagorean theorem:
as= (a
sx
2 + asy
2 )1/ 2
=v2
r
⎛
⎝⎜⎞
⎠⎟
2
+ g2⎡
⎣
⎢⎢
⎤
⎦
⎥⎥
1/ 2
=v4
r 2+ g2
⎛
⎝⎜⎞
⎠⎟
1/ 2
For the numbers given, you have the magnitude
a
s=
(15.0 m/ s)4
(100 m)2+ (9.80 m/ s2 )2
⎡
⎣⎢
⎤
⎦⎥
1/ 2
= 10.1 m/ s2
or about 3 percent more than the acceleration of gravity. Using the equation tanθ =
v2
rg
you can solve for θ to calculate the ideal banking angle. You have
θ = tan−1 v2
rg
θ = tan−1 (15.0 m/ s)2
100 m× 9.80 m/ s2= 12.90
Thus the direction of a
s is about 130 from the vertical. This is a relatively steep
angle of bank under ordinary roadway conditions.

African Virtual University ��
UNIT1B:Newton’sLawsofMotion
Specificlearningobjectives
By the end of this activity you should be able to:
• State Newton’s Laws of motion and apply them.• Define the concepts Work, Energy, Power and Momentum, and use them to
solve related problems.• State the Laws of conservation of energy and momentum• Define the terms impulse and torque.• Describe the motion of falling bodies and projectiles in a uniform force
field.• Describe the motion of bodies in a resting medium.• Define Friction and describe the motion of a body subject to given
constraints.• Describe potential energy as energy due to position and derive potential energy
as mgh • Describe kinetic energy as energy due to motion and derive kinetic energy as
mv�/� • State conservation of energy laws and solve problems where energy is conser-
ved• Define power as rate of energy transfer • Define couple, torque and calculate work done by a variable force or torque • Solve problems where energy is lost due to friction
Summaryofthelearningactivity
In this activity you will acquaint yourself with Newton’s three laws of motion and their application in the related fields of energy and momentum
CompulsoryReading
Fitzpatrick, R. (2001). Classical Mechanics: An Introductory Course. Austin, Texas.UTP

African Virtual University ��
RelevantLinksandResources
Friction http://en.wikipedia.org/wiki/Friction
Newton’s Laws of Motion http://en.wikipedia.org/wiki/Newton’s_laws_of_motion
Newton’s Laws of Motion http://hyperphysics.phy-astr.gsu.edu/hbase/newt.html http://www.waukesha.k12.wi.us/South/physics1/1.4/notes.html
Work http://en.wikipedia.org/wiki/Work
Work http://hyperphysics.phy-astr.gsu.edu/hbase/work.html
Kinetic Energy http://en.wikipedia.org/wiki/Kinetic_energy
Kinetic Energy http://hyperphysics.phy-astr.gsu.edu/hbase/ke.html
Power http://en.wikipedia.org/wiki/Power
Potential Energy http://en.wikipedia.org/wiki/Potential_energy
Potential Energy http://hyperphysics.phy-astr.gsu.edu/hbase/pegrav.html
ListofrelevantMULTIMEDIAresources
Hyper physics Link http://hyperphysics.phy-astr.gsu.edu/hbase/hframe.html This link has introductory content very good diagrams on Newton’s laws and
their applications which will provide you with the required insights for your progression through the activity.
Simulations and Experiments on Newton’s Laws www.compadre.org/precollege/static/unit.cfm?sb=3
http://www.glenbrook.k12.il.us/gbssci/phys/Class/newtlaws/newtltoc.html

African Virtual University ��
KeyWords
ImpulseTorqueMomentumEnergyPowerWork

African Virtual University ��
1b.LearningActivity:Newton’sLawsofMotion
Introduction
In this activity, you will familiarise yourself with three laws that generally govern the motion of particles and bodies in space- Newton’s three laws of motion and be able to apply them to real life situations. Through related questions, exercises and experiments, you will then be taken through the central theme that runs through all the concepts in this activity- the fundamental notion of force. The relationships between force, motion, energy, momentum and other related notions will be dealt with through your involvement with everyday examples and their mathematical models.
BridgingTheGap
• Bedside Wallet example;
You go to sleep at night and place your wallet on the bed side table. All things being equal, you should be able to find your wallet on the same bedside table. If on the other hand, you find the wallet in the bathroom what would have hap-pened? Obviously the wallet cannot move on its own!
• What would happen if, when approaching a bus stop, on a straight road, the brakes of the bus failed?
o What effect do the brakes of the bus have on its motion?
• A driver wakes up in the morning to find his car battery flat – he requires a push:
o One person gives him a push and the car won’t move. o Two persons give him a push, the car moves, coughs but won’t start o Three persons give him a push and the vehicle starts.
Describe the effect of the three situations on the movement of the car with the help of a colleague.
♦ Here is an interesting scenario: you and your friend want to collect fruit from a tree but you are too short and need something to stand on. You get a stool and succeed in obtaining the fruit. Your friend tries the same thing but is unsuccessful as the stool breaks.
What could be the possible reasons for your success and your friend’s failure? The stool does not break in your case but does so in your friend’s.
♦ You need to feed in order to do work. Why?
♦ You place a book on a table. What makes the book to stay on the table and not fall through the table top?

African Virtual University ��
♦ Two vehicles collide and there is minimal damage. What happens immediately after the collisions? What would an investigating police officer ask about the movement of the cars?
If you have not been able to answer or explain these scenarios then go through the activity and attempt to answer them.
1b.1 Newton’sLawsofMotion
Visit the links below
http://en.wikipedia.org/wiki/Newton’s_laws_of_motion
http://hyperphysics.phy-astr.gsu.edu/hbase/newt.html
1b.1.1 Newton’sFirstLaw
Consider the section on bridging the gap above and this time the motion, of a cart driven by a span of two oxen. If the cart is detached from the oxen that were pul-ling it would quickly come to rest because there is no tractive force pulling it along. However, other forces also act on the cart such as the force of friction, which helps slow down the cart.
Newton’s first law summarizes these ideas and is stated thus.
Every object continues in a state of rest, or of uniform motion in a straight line, unless it is compelled to change that state by forces acting on it.
The implications of this law are that.
• an object at rest remains at rest, and• an object in motion continues to move with constant velocity.
Inertia - the tendency of an object to maintain its current state of motion, whether at rest or in motion.
Because of inertia, only external forces can alter an object’s state of motion; internal forces cannot.

African Virtual University ��
Internal force - forces generated by one part of a system of objects on another part of the same system.
Example. Your left hand pushes on your right hand. The engine of a car pushes on the transmission which pushes on the wheels.
External force - forces generated by something outside the system of objects.
Example. A tennis racket hits a tennis ball. Your foot kicks a chair.
The key point to remember is that no change of motion can occur unless a force from outside the object causes it to change.
N.B. Care must be taken when applying this law as it only holds for measurements made in an absolute frame of reference but are subject to correction depending on the relative position of the observer.
1b.1.2 Newton’sSecondLawofMotion
The acceleration of a particle is proportional to the resultant force acting on it and is in the direction of the force.
Other interpretations are
• When there is a net force acting on an object the object undergoes acceleration in the same direction as the force.
• The acceleration and the force are proportional in magnitude.
The amount of inertia an object possesses is indicated by its mass.
Mass - A measure of an object’s resistance to change in motion.
The larger the mass of an object, the more it resists a change in its motion. Smaller masses have less resistance to change in motion. This is an operational definition of mass, it requires direct measurement of an object’s change in motion to determine its value.

African Virtual University ��
If an object experiences an external force, not equal to zero, it will accelerate propor-tional to the magnitude of the force, but inversely proportional to its own mass.
In equation form: FT = Ma where Force (F) is in Newtons,
mass (M) is in Kg, and acceleration (a) in m/s2
This means that the acceleration of an object depends on the ratio of the total force to the mass of the object. The direction of the acceleration is the same as that of the total force which caused it.
Newton’s second law is the work horse of our mechanical world; it connects the changes in motion of all objects with the forces needed to make that change. Its a simple equation to work, but its application can become complicated as you will see in the next section.
Some examples:
a) If a total force of 10 N is placed on 2 Kg ball, what is its acceleration?

African Virtual University ��
b) If you push with a force of 25 N on a 2 Kg box to slide it across the floor, what is the acceleration of the box if the frictional force is 10 N?
This law led to the equation;
F = ma , F = Force , a = acceleration , m= mass of object
Another way of stating this law is:
The rate of change of momentum of a body is proportional to the resultant force and occurs in the direction of the force.
Mathematically modelling this law we have, if the body changes velocity from u to v in t seconds
changeof momentum= mv − mu
rate of change of momentum =mv − mu
t
=m(v − u)
tThus F α ma ⇒ F = kma
and it follows, by defining the unit of Force as the Newton,
F = ma

African Virtual University ��
1b.1.3 Newton’sThirdLawofmotion
The forces of action and reaction between interacting bodies are equal in magnitude, opposite in direction and are co-linear.
Simply put, forces are social beings, they always operate in pairs. It is not possible to have an isolated, or single force. Isaac Newton expressed it a bit more formally:
If an object expresses a force upon another object, then the latter of the two exerts a force of equal magnitude back upon the first. We call these action and reaction forces. It doesn’t make any difference which you call the action and which the reaction since they happen concurrently and are reversible.
Example. Your body pushes on the chair, the chair pushes on your body. A tennis racket hits the ball, the ball hits the racket.
Point to remember: Although these two forces are equal, but oppositely directed, they do not cancel each other out. They operate on different objects so they cannot be added together.
If you kick a chair, your foot exerts a force on the chair. The chair exerts a force on your foot.
See, one force is on the chair, the other force is on your foot; two different objects.
The only force which can cancel any applied force is another force on the same object. The only force which can cancel your foot’s force on the chair is another force on the chair, like friction between the chair and the floor.

African Virtual University �0
Remember inertia? How an internal force cannot cause a change in motion? Here’s how it works in the real world.
Stand up and jump straight up into the air. If you think about what you did you bent your knees, pushed on the floor, and went up into the air. We say “I jumped”.
Actually, you cannot do anything to yourself to make you go into the air from rest on the floor. There has to be a force on your from outside of you to make you go into the air.
Why do you push on the floor? To get the floor to push on you! That’s the action/reac-tion part of the operation. The floor’s force on you is what’s needed to make you go up. Pretty tricky, huh? That’s why it took you a while to learn to walk and jump.
More simply put, if body A exerts a force on body B, then body B an equal and op-posite force on body A.
Thus forces never occur singly but in pairs as a result of the interaction between the bodies.

African Virtual University ��
N.B. You will note that in all the systems in which we will study Newton’s Second Law, we will also be implicitly and explicitly studying and using Newton’s Third Law.
WorkedExamples
Two shot put balls, one weighing 0.70 kg and the other 7.0 kg both fall towards the
grant with the same downward acceleration of magnitude 9.8m/ s2 . Find the force, w, exerted by gravity on each ball.
M = 0.7 M = 7.0
W
W
Fig: Two masses with the force of gravity acting on them
By Newton’s Second Law,
For the smaller shot
w= mg = 0.20 × 9.8
= 6.9Newtons
and for the larger shot-put
W = Mg = 7.0 × 9.8
= 69 Newtons
Example
A Block slides down a long frictionless plane which is at an angle of 690 with respect to the horizontal. Find the acceleration of the block and the distance the block has moved 3 seconds from rest.

African Virtual University ��
Solution
The components of W parallel and perpendicular to the plane are
Wx= mgsinθ
and
W
y= mgcosθ
Since the place is frictionless then N x= 0
And N
y= N (when N x
and N
yare the reactions of the plane to the block parallel
and perpendicular to the plane).
And therefore, the only force that is working on the block is Wx= ma
x
⇒ mgsinθ = ma
⇒ a = gsinθ
= gsin69°
Using S = ut + 1
2at2
and putting u = 0 and S = x
Then
x = 1
2ax(30)2
=
1
2gsin69 ⋅9
=
9
2gsin69 metres

African Virtual University ��
DO THIS
Exercice
A block of mass m slides down a plane supported from the earth at an incline the
angleθ between the plane and the horizontal is adjusted until the block slides with constant speed. Find the co-efficient of friction between the block and the slope. If
θ is 350, what is the value of μ.
Donotturnthepageuntilyouhavecompletedthesolution!

African Virtual University ��
Solution
Since the block is sliding down the plane, then
FR
N= μ , where FR
is the Frictional force and N the normal reaction
We know that N = mgcosθ
and since
FR= μN
then
FR= μmgcosθ
Since motion is down the slope, when the block begins to move
mgsinθ = μmgcosθ
⇒ μ = tanθ
⇒ μ = tan35°
= 0.70
1b.1.4 ApplicationOfNewtonsLaws
The most widely applied Newton’s Law is the Second Law of motion,
F = ma
which is applied in the study of motion of bodies in a variety of systems.
N.B. The quantity F in the equation is the Net force of all the forces acting on the parts of the system and thus F is the vector sum of all the forces acting on the part. The question then to answer is:
What are the magnitude and directions of all the forces?

African Virtual University ��
1b.2 MotionofConnectedbodies
The contraption consists of two bodies of mass m1 and m2
attached to the ends of weightless and inextensible string which runs over a smooth, weightless
pulley. If m1 and m2
are not equal the system will begin to move as soon as it is released.
If T1 and T2
are the forces exerted by the pulley on the weights and, m1g and m2
g
are the gravitational forces exerted on the two then, if m1> m
2
m1g − T
1= m
1a
1and T2
− m2g = m
2a
2
But surely
T1= T
2and a1
= a2
then
T1− m
2g = m
2a
1
and
m1g − T
1= m
1a
1
Adding
(m1− m
2)g = (m
1+ m
2)a
1
Thus
a
1=
m1− m
2
m1+ m
2
g
and this gives us the equation of motion for the system.

African Virtual University ��
DO THIS
Exercice
In the diagram, the string and the pulley have negligible mass and the friction in the pulley system is negligible. If the two bodies are initially at rest at the same level, how long will it be before the vertical separation between them is 1,5m? How fast will they be moving?
Donotturnthepageuntilyouhavecompletedthesolution!

African Virtual University ��
Answer
t = 2.5s and v = 0.60s
1b.3 Work
Visit the links below:
• http://en.wikipedia.org/wiki/Work• http://hyperphysics.phy-astr.gsu.edu/hbase/work.html
Definition
The work done, dU , by a force F during a small displacement ds of its point of application is given by
dU = F ⋅ds
which is the dot product between F and ds.
The magnitude of the work is given by
dU = F ⋅dscosα
From the equation
dU = F ⋅ds
Then
U = F ⋅ds = F
xdx + F
ydy + F
zdz∫∫∫( )∫
= F
tds∫
Example
The most common example of work done on a body is the action of a body on a spring to which it is attached.
If the spring constant is K then
F = −kx
The force exerted on the spring whether it is tension or compression is opposite to the displacement and so does negative work on the body

African Virtual University ��
Thus
U = − F dx = −
x1
x2
∫ kxdx = −x1
x2
∫ 1
2k(x
2
2 − x1
2 )
Next we consider the work done on a particle of mass m moving along a curved path
under the action of the Force, F. The resultant force is F∑ .
• the position of m is described by the position vector r.• the displacement during time dt is given by the change dr in its position vec-
tor.now
dU = F ⋅dv
and
U = F ⋅dv = F
tdx
x1
x2
∫∫
Given that F = ma
then
U = F ⋅dv = ma ⋅dv∫∫
but
a ⋅dv = atds
and
atds = v ⋅dv
thus
U = F ⋅dv = mv ⋅dv∫∫
=
1
2m(v
2
2 − v1
2 )
which is the integration carried out between the change v1to v2
in the velocity.

African Virtual University ��
1b.4 KineticEnergy
Visit the links below:
• http://en.wikipedia.org/wiki/Kinetic_energy• http://hyperphysics.phy-astr.gsu.edu/hbase/ke.html
The Kinetic Energy of a particle is defined as
K .E . = T = 1
2mv2
and is the work done on a particle to bring it to a velocity V from rest and is always a positive quantity.
The unit is the Joule.
thus the equation
U = 1
2m(v
2
2 − v1
2 )
may be written as
U = Δ J
N.B. This is called the Work- Energy equation of a particle and states that
the total work done by all forces acting on a particle during an interval of its motion i.e. equal to the change in the Kinetic energy of the particle.
Another way of putting it is that the Final K.E., T2, is the sum of the Initial K.E., T
1
and the work done U.
T2= U + T
1
The application of the work-energy equations requires an isolation of the particle or system under consideration.
1b.5 Power
Visit the link below:
• http://en.wikipedia.org/wiki/Power
Definition: Power is the capacity of a machine to do work and is measured by the time rate in which it can do the work or derive energy.

African Virtual University �0
P =
dUdt
= F ⋅dxdt
= F ⋅ v
and is measured in watts.
Worked Example
In the diagram m= 50kg , μ = 0.30 , θ = 15 , u1= 4m/ s . Calculate the velocity
of the crate at B.
N.B. Can you explain each step of the solution?
U = F s = 50(9.81)sin15−142⎡⎣ ⎤⎦10
= −152J
Change in K .E . = T2− T
1= ΔT .
T = 1
2mv2 ,
ΔT = 1
250(v2 − 42 ) , U = ΔT
∴−152J = 1
250(v2 − 42 )
∴v = 3.15m/ s2
African Virtual University ��
DO THIS
Exercise
1. A truck, carrying a concrete block of 80kg, starts from rest and attains a speed of 72km/h after travelling for 75m on a road with constant acceleration. Find the work done by the Friction working on the block during this motion if the static and kinetic coefficients of friction between the block and truck bed are:
(a) 0.30 and 0.28 respectively, and (b) 0.25 and 0.20 respectively
2. The position vector r, of a particle is given by r = 8ti +1.2t2 j − 0.5(t3 −1)k , t is time in seconds from the start of motion. Determine the power P developed by
the force F = 10i − 5 j − 9k Newtons which acts on the particle when t = 6s .
Donotturnthepageuntilyouhavecompletedthesolution!

African Virtual University ��
Answers
(a) 16.0 KJ
(b) 8.66 KJ
1b.6 PotentialEnergy
Visit the links below:
• http://en.wikipedia.org/wiki/Potential_energy• http://hyperphysics.phy-astr.gsu.edu/hbase/pegrav.html
Definition: The Potential Energy of a system is the energy the system has because of the relative positions of its points and, that is, due to its configuration.
It arises when a body experiences a force in a field such as the earth’s gravitational field and the potential energy is regarded as the joint property of the body-earth system and not of either body separately.
1b.7 ConservationofEnergy
The full definition of conservation of energy is given in the link below:
http://en.wikipedia.org/wiki/Conservation_of_energy
1b.8 ImpulseandTorque
CompulsoryReading
Fitzpatrick, R. (2001). Classical Mechanics: An Introductory Course. Austin, Texas.UTP pp 271-272
For information on Torque also see the link below:
http://en.wikipedia.org/wiki/Angular_momentum
1b.9 Friction
Definition: Friction is the force that opposes the relative motion or tendency toward such motion of two surfaces in contact. It is not a fundamental force, as it is made up of electromagnetic forces between atoms. When contacting surfaces move rela-tive to each other, the friction between the two objects converts kinetic energy into

African Virtual University ��
thermal energy, or heat. Friction between solid objects and fluids (gases or liquids) is called drag.
For further reading please refer to the following link:
http://en.wikipedia.org/wiki/Friction
Note that in our reading we use the traditional rather than the vector approach in the treatment of the topic and that we rely very heavily on adaptations of equations of uniform motion in a straight line to come up with projectile motion equations. Of particular importance are the derivations of equations such as the range, the maximum range, the greatest height attained and so-on…
It is advisable that you DO NOT memorize these equations and that you should be able to work from first principles through given situations

African Virtual University ��
Unit2:Oscillations
Specificlearningobjectives
By the end of the unit you should be able to:
o Describe Simple Harmonic Motiono Model motion that is Over-damped, Under-damped and Critically-dampedo Describe the Simple pendulumo Derive the two and three dimensional oscillator
Summary
In this unit we look at the motion of a body when the resultant force acting on it is not constant, but varies during the motion. Naturally, there is an infinite number of ways in which a force may vary; hence no general expressions can be given for the motion of a body when acted on by a variable force, except that the acceleration at each instant must equal the force at that instant divided by the mass of the body. We will look at motion which is oscillatory or periodical using examples like simple pendulums and masses suspended on a string to illustrate this motion.
RequiredReading
Fitzpatrick, R. (2001). Classical Mechanics: An Introductory Course. Austin, Texas.UTP
RelevantLinksandResources
Simple harmonic motion
http://en.wikipedia.org/wiki/Simple_harmonic_motion
Simple harmonic motion
www.phy.ntnu.edu.tw/java/shm/shm.html
Simple harmonic motion
http://hyperphysics.phy-astr.gsu.edu/hbase/shm.html
Simple harmonic motion
www.kettering.edu/~drussell/Demos/SHO/mass.html
Simple harmonic motion
http://theory.unwinnipeg.ca/physics/shm/nodes2.html

African Virtual University ��
Classical Mechanics Lecture notes
http://farside.ph.utexas.edu/teaching/301/lectures/lectures.html
Classical Mechanics: An Introductory Course
http://www.lulu.com/content/159798
KeyWords
• Harmonic Oscillator• Simple Pendulum• Natural Circular frequency• Angular Harmonic Motion• Damped Motion• Hooke’s Law

African Virtual University ��
LearningActivity2:Oscillations
2.1 BridgingtheGap
Two children are playing on a swing- one in the sit and the other ‘pushing’ And waiting for her turn on the seat. Have you ever wondered why
• After the hardest push, the swing always continues with its usual motion of coming back to its resting place and through it until it reaches its highest backward position and returns. Why does the swing not coil itself on the horizontal support or, worse still , go off its supports ?
• If the ‘pusher’ stops and the child on the seat stops ‘kicking’ what happens to the motion of the swing ?
Fig 2.1 Parents with smiling child on swing
Take a spiral spring, fix one end of the spring, pull the free end slightly and then release it.
• Describe the action of the spring.
Introduction
Consider the motion of the child on the swing above. Before she is pushed or «kicks» herself in the swing, the swing hangs vertically downwards. In this position, we say that the swing is in its equilibrium position. When the swing is pushed, then it is displaced from its equilibrium position but the tendency has always been to return back to its equilibrium position. What causes this tendency?
There surely must be some force that causes it to go back-and forth motion past the equilibrium position and this force has been aptly named the restoring force.

African Virtual University ��
DO THIS
Try it yourself!
• Tie a stone on one end of the string• Suspend the stone from the open door frame by fixing one end of the stone
to the top of the door frame• In the equilibrium position the stone hangs straight down• Give it a little displacement from this position by pushing it, say, to the left • What happens to the stone?
The stone does not simply return to the equilibrium position but instead swings back and forth, past the equilibrium position in a regular repetitive manner.
Can you give other examples of this motion which is defined as periodic or oscilla-tory motion?
2.1 TheSimpleHarmonicOscillator
Fig 2.2 Simple harmonic Oscillator
Consider the movement of a mass m attached to the end of a spring, the other end which is held stationary at A. We will describe the position of the body with the co-ordinate x, where x denotes the displacement from the equilibrium position O, the position of zero spring deflection. We will restrict our discussion to a linear spring. Such a spring exerts a restoring force -kx, on the mass which means that when the mass is displaced to the right, the spring force is to the left and vice versa.
k is known as the spring constant or modulus or stiffness of the spring
Thus:
F = −kx

African Virtual University ��
Note here that the magnitude of the restoring force is directly proportional to the displacement of the system from equilibrium.
That is Fαx .
From Newton’s 2nd Law
F =ma
and this implies that
– KX or +KX = 0
This differential equation is known as the Simple Harmonic Equation
Readthislink
http://en.wikipedia.org/wiki/Simple_harmonic_motion
DO THIS
Exercice
Show that the solution of the equation is
x = a cos(ωt − ϕ) whereϕ,ω , a are constants andω =
km
Hint: We are solving a Second Order Differential Equation which is Homoge-neous.
Alternatively, and with the same conditions,
ω is called the natural circular frequency and has units in radians per second
+ kx=0 is normally written as + ω2x = 0
2

African Virtual University ��
Note that the displacement x oscillates between
x = − a and x = + a, where a is the amplitude of the oscillation
the number of complete cycles per minute, the natural frequency f =
ω2π
n
and the time required for one complete motion’s cycle is given by
τ =
1f=
2πω
is the period of the motion
CompulsoryReading
Fitzpatrick, R. (2001). Classical Mechanics: An Introductory Course. Austin, Texas.UTP
pp 237-238

African Virtual University �0
DO THIS
Exercice
Fig 2.3 Model for Periodic motion
A spring is mounted as shown in the diagram above. Through the attachment of a spring balance to the free end, it is determined that the force is proportional to the displacement, a force of 4 N causing a displacement of 0.02 m. A body of 2 kg mass is then attached to the free end, pulled for a distance of 0.04 m and released.
a) Find the force constant of the springb) Find the period and frequency of vibrationc) Compute the maximum velocity attained by the oscillating bodyd) Compute the maximum acceleratione) Compute the velocity and acceleration when the body has moved halfway in
towards the centre from its initial positionf) How much time is required for the body to move halfway in to the centre from
its initial position
Donotturnthepageuntilyouhavecompletedthesolution!

African Virtual University ��
Solution
Before we answer this question, we need to establish the basic equations of simple harmonic motion.
We know from above that
&&x = a = −
km
x
That is, the acceleration at each instant is proportional to the negative of the ins-tant.
When x has its maximum positive value A, the acceleration has its maximum negative
value −k
Am
and at the instant the particle passes the equilibrium position x = 0, the
acceleration is zero. However, its velocity at this position is not zero at this point.
Looking back, we can use the Conservation of Energy Principle to analyze some aspects of simple Harmonic Motion. In a spring, the restoring force is a conservative force (Remember this from previous activities) and the work done can be stated in terms of potential energy.
P.E. of Conservative Force =
1
2kx2
The Kinetic Energy at any point x is again =
1
2mv2 and by the Principle of Conser-
vation of Energy, the total Energy.
E =
1
2mv2 +
1
2kx2 is a constant
Also, when the particle reaches its maximum displacement ±A it stops and turns back to its equilibrium position. At the instant of timing, V = 0 and there is no Kinetic Energy and total Energy
E =
1
2kA2
thus we have
=

African Virtual University ��
1
2mv2 +
1
2kx2 =
1
2kA2
v = ±
km
A2 − x2
DO THIS
Exercice
When does the speed have its maximum value vmax
(Discuss with a friend)
Donotturnthepageuntilyouhavecompletedthesolution!

African Virtual University ��
Answer
The speed has its maximum value at the mid-point because at the mid-point the energy is all Kinetic and at the end point the energy is all Potential.
Thus:
1
2mv
max
2 = E
⇒ vmax
=2Em
1
2kA2 =
1
2mv
max
2 = E
⇒ vmax
=km
A
Looking at the equation
v = ±
km
A2 − x2 = ±ω A2 − x2
We cannot tell where the particle is at any given time and to be able to have a com-plete description of motion we need to know the position, velocity, and acceleration at any given time.
We can enliken the simple harmonic motion of the particle at the end of the spring to a circle of reference given in the Diagram below.
Fig 2.4 Uniform circular motion

African Virtual University ��
Suppose point Q moves anticlockwise around a circle of radius A with constant an-
gular velocity (remember this?) W. The vector OQu ruu
represents the position of point Q relative to O and θ is the angle this vector makes with the positive x- axis.
The horizontal component represents the actual movement depicted by the spring and particle. You will realize that as Q moves, P represents the actual movement of the particle and spring.
The displacement OP at any time t is x and
x = Acosθ
and if Q is at the extreme right of the diameter at time t = 0, then
θ = ωt
and hence
x = Acosωt
Thus, the velocity at any time t
And acceleration
You will notice that what we have done here is to assume that when t = 0, x = A, is positive maximum displacement.
At a different initial position, say, if t = 0 OQ makes and angle θ0 while the posi-
tive
x-axis then θ at time t is given by
θ = θ0+ωt
And the equations become
x = Acos(θ0+ωt)
v = −ω Asin(θ0+ωt)
a = −ω 2 Acos(θ0+ωt) = −ω 2 x

African Virtual University ��
By using these results you should be able to verify that the answers to the question above are
(a) k = 200 Nm-1
(b) τ = 0.628 s, f = 1.59 Hz and ω = 10 s-1
(c) vmax
= ± 0.4 ms-1
(d) amax
= 4.0 ms-2
(e) v = -0.346 ms-1, a = -2.0 ms-2
(f) t = π/30 s
2.2 TheTorsionPendulum(AngularHarmonicMotion)
Fig 2.5 A torsion pendulum
CompulsoryReading
Fitzpatrick, R. (2001). Classical Mechanics: An Introductory Course. Austin, Texas.UTP
p241-242
The system shown in the compulsory reading is quite self-explanatory. In other instances Angular Harmonic motion results when a body that is pivoted about an axis experiences a restoring torque proportional to the angular displacement from its equilibrium position. The balance wheel from a kinematic watch (obviously not a battery operated watch) is a very good example of angular harmonic motion.
Note that in this case the restoring force becomes the restoring torque
The Restoring torque is proportional to angular displacement and is given by
Γ = − ʹk θ
where k’ is the torque constant

African Virtual University ��
The moment of inertia I of the pivoted body corresponds to the mass of a body in linear motion. Thus the period of angular Harmonic motion is
τ = 2π
Iʹk
and angular frequency is
ω =
ʹkI
with the period of oscillation being
τ =
2π
ω= 2π
Iʹk
2.3 TheSimplePendulum
CompulsoryReading
Fitzpatrick, R. (2001). Classical Mechanics: An Introductory Course. Austin, Texas.UTP
p242-244.
Fig 2.6 Simple Pendulum

African Virtual University ��
The simple pendulum is a simplified model of a more complex system. It consists of a mass suspended by a weightless rod or a weightless and inextensible string in a uniform gravitation field. When pulled to one side of its equilibrium position and released, the rod (mass) vibrates about this position.
DoesthemotionconstitutesimpleHarmonicmotion?
We need to establish whether the restoring force is directly proportional to the coor-dinate x and oppositely directed. The path of the rod is not a straight line but an arc of a circle of radius L, the length of the string or rod. The coordinate x refers to distances measured along this arc.
Then if F = -kx the motion will be simple harmonic.
The tangential components of the net force acting on the pendulum bob is given by
F = −mgsinθ
This means that the restoring force is proportional to sin θ and not to θ and therefore the motion is not simple harmonic.
How do we get around this problem?
DO THIS
Exercice
Demonstrate that if θ is small, then sin θ is very nearly equal to θ.
If you have demonstrated this then
Lθ = x and θ =
xL
and therefore
F = −mgθ = −mg
xL= −
mgL
x

African Virtual University ��
Thus the restoring force is proportional to the coordinate for small displacements and
the force constant k is represented by
mgL
leading to the following results
Period = τ = 2π
mk= 2π
mLmg
= 2π
Lg
The frequency relations are f =
1
2TgL
and ω =
gL
Thus the period of oscillation is entirely determined by the length 2 of the pendulum and only for small oscillations does the motion of the pendulum approximate Simple Harmonic Motion.
A more analytical way to describe pendulum motion is to obtain an expression for a
T, the tangential component of the acceleration of the pendulum
Fig 2.7 Motion of Simple Pendulum
If we use a small displacement vector ds in a corresponding small interval of time dt
then v =
dsdt
But, from the diagram above
ds = ldφ

African Virtual University ��
Therefore
v =
dsdt
=ldφdt
= ldφdt
The rate of change of speed is
dvdt
=
d ldφdt
⎛
⎝⎜⎞
⎠⎟
dt
= lddt
dφdt
⎛
⎝⎜⎞
⎠⎟
= ld2φ
dt2
Which gives the tangential acceleration aT of the bob
Thus
a
T= l
d2φ
dt2
Now, from Newton’s second law, the tangential component of the force is
FT = ma
T
but, from above
Ft= F = −mgsinφ
Thus
−mgsinφ = ml
d2φ
dt2

African Virtual University �0
Thus
d2φ
dt2= −
gl
sinφ
Compare this with (equation 11.23) Fitzpatrick, R. (2001). Clas-sical Mechanics: An Introductory Course. Austin, Texas.UTP on page 244]
Taking α = −
gl
then the pendulum equation is
d2φ
dt2= α sinφ
The argument goes on to say that, for small angles, sinφ is the approximately the
same asφ if φ is small compared to 1 radian.
Thus
d2φ
dt2= −αφ
2.4 TheDampedOscillator
In classical mechanics, a harmonic oscillator is a system which, when displaced from its equilibrium position, experiences a restoring force F proportional to the displacement x according to Hooke’s law:
where k is a positive constant.
If F is the only force acting on the system, the system is called a simple harmonic oscillator, and it undergoes simple harmonic motion: sinusoidal oscillations about the equilibrium point, with a constant amplitude and a constant frequency (which does not depend on the amplitude).
If a frictional force (damping) proportional to the velocity is also present, the harmo-nic oscillator is described as a damped oscillator. In such situation, the frequency of the oscillations is smaller than in the non-damped case, and the amplitude of the oscillations decreases with time.

African Virtual University ��
If an external time-dependent force is present, the harmonic oscillator is described as a driven oscillator.
Mechanical examples include pendula (with small angles of displacement), masses connected to springs, and acoustical systems.
Gotothislink
http://hyperphysics.phy-astr.gsu.edu/hbase/oscda2.html
DO THIS
Set up a simple pendulum as in an earlier activity and set it in motion: Does the pen-dulum continue oscillating? If it does eventually stop, why does it stop?
A vehicle hits a hump on the road. It is quiet safe to say that the spring will perform oscillations which would continue if there was no opposing force to stop then, where, what provides this force?
In the two cases cited above, the amplitude of the oscillations of the pendulum and the springs of the car gradually decreases to zero due to the sensitive force that ari-ses from the act, for the pendulum, and that is provided by the shock-absorber. The motion is therefore not a perfect Simple Harmonic Motion and is said to be damped by a resistance, friction or the shock absorber.
The behaviour of any mechanical system depends on the extent of damping. Under-damped oscillations are said to be free and perform near Simple Harmonic Motion. The graph of this motion is
Fig 2.8 A lightly –Damped or Under-Damped motion
However, every mechanical system possesses some inherent degree of friction, which acts as a consumer of mechanical energy.

African Virtual University ��
The viscous damper (or dashpot), used as a basis for shock absorbers in vehicles and related machines is a device in intentionally added to system for the purposes of limiting or reducing vibratory oscillations. The basic compounds are a cylinder filled with a viscous fluid and a piston which allows the fluid to flow from one side of the piston to the other.
Schematically, the diagram below illustrates this system.
Fig 2.9 Viscous Damper
The dashpot exerts a force F whose magnitude is proportional to the velocity of the mass. The constant of proportionally c
v is known as viscous damping co-efficient.
The direction of the damping force as applied to the mass is opposite to that of the velocity . Hence the force on the mass is .
From Newton’s Second Law, the equation of motion of the mass is
Alternatively
−kx − c
v
dxdt
= md2 xdt2
If we substitute w
n=
km
and introduce a constant
ζ =
cv
2mwn
. The quantity ζ
(Zeta) is called the Viscous damping factor damping ratio and is a measure of the severity of the damping.

African Virtual University ��
Example
Fig 2.12 Viscous Damping
An 8 kg body is moved 0.2 m to the right of the equilibrium body, from rest at time t = 0 s. Determine its displacement at time t = 2 s. The viscous damping co-efficient c is 20 Nsm-1 and the spring co-efficient K is 32 Nm-1
Solution
We must first determine the degree of damping by computing the damping ratio ζ
ωn=
km
=32
8= 2 radians / s
ζ =c
2mωn
=20
16 ⋅2= 0.625
Since ζ is less than 1 then the system is underdamped. The damped natural fre-quency is
ωn
1−ζ 2 = 2 1− (0.625)2 = 1.561 rad / s
The motion is given by
When t =0,

African Virtual University ��
x0= E sinψ = 0.2
x0= −1.25E sinψ +1.561cosψ = 0
Solving for E and ψ we have
E = 0.256 mand ψ = 0.896 rad
Therefore Displacement
x = 0.256 me−1.25t sin(1.561t + 0.896)
When t=2
x = -0.0162
DO THIS
Exercice
Verify that ζ is non-dimensional.
Thus the equation becomes
Alternatively
d2 xdt2
+ 2ζwn
dxdt
+ wn
2 x = 0
Hint: This is a Second Order Homogeneous Differential Equation
Donotturnthepageuntilyouhavecompletedthesolution!

African Virtual University ��
Solution
This is a differential equation with a possible solution of
x = Aeλ t
Substituting we have
λ2 + 2ζw
nλ + w
n
2 = 0
giving
λ1= w
n[−ζ + ζ 2 −1] or λ2
= wn[−ζ − ζ 2 −1]
By inspection, the general solution is
x = Aeλ1t + Beλ2t
= Ae−ζ + ζ 2 −1⎛
⎝⎜⎞⎠⎟ω nt
+ Be−ζ − ζ 2 −1⎛
⎝⎜⎞⎠⎟ω nt
The discriminant ζ2 −1 determines the extent of the damping by considering the
values it can take.
(i) If ζ > 1: Remember from your school days that the roots λ1 and λ2
are real and distinct negative numbers and the motion depicted below delays so that x approaches zero at t = ∞ for large value of t. There is no oscillation and no period associated with the motion. The motion is OVERDAMPED (HEAVILY DAMPED).
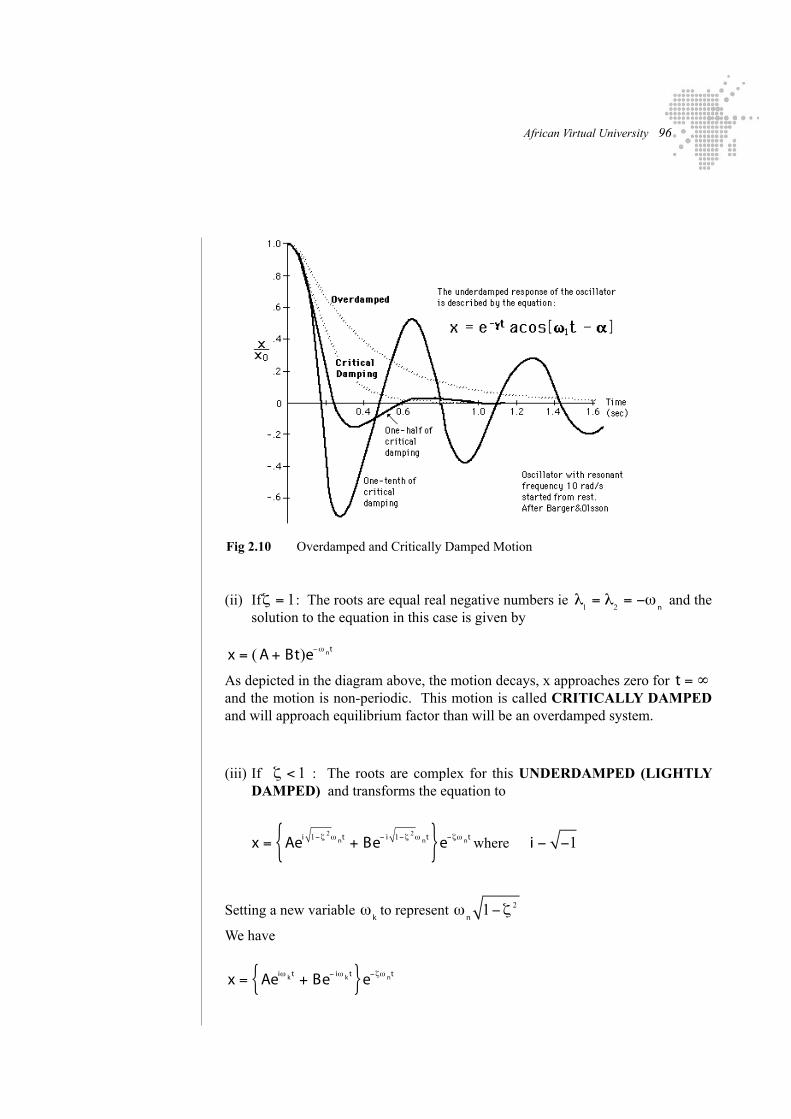
African Virtual University ��
Fig 2.10 Overdamped and Critically Damped Motion
(ii) If ζ = 1: The roots are equal real negative numbers ie λ1= λ
2= −ω
n and the
solution to the equation in this case is given by
x = ( A+ Bt)e−ω nt
As depicted in the diagram above, the motion decays, x approaches zero for t = ∞ and the motion is non-periodic. This motion is called CRITICALLY DAMPED and will approach equilibrium factor than will be an overdamped system.
(iii) If ζ < 1 : The roots are complex for this UNDERDAMPED (LIGHTLY DAMPED) and transforms the equation to
x = Aei 1−ζ 2ω nt + Be− i 1−ζ 2ω nt{ }e−ζω nt where i − −1
Setting a new variable ω kto represent ω n
1−ζ 2
We have
x = Aeiω k t + Be− iω k t{ }e−ζω nt

African Virtual University ��
Employing Euler’s formula
e± ix = cos x ± i sin x
We have
x = A(cosω
kt + i sinω
kt) + B(cosω
kt − i sinω
kt){ }e−ζω nt
= ( A+ B)cosω
kt + i( A− B)sinω
kt⎡⎣ ⎤⎦e−ζω nt
= C cosωkt + D sinω
kt⎡⎣ ⎤⎦e−ζω k t
= E sin(ωkt +ψ ){ }e−ζω k t
= E e−ζω k t sin(ωkt +ψ )
DO THIS
Exercice
Show that
C cosωkt + D sinω
kt can be written as E sin(ω
kt +ψ )

African Virtual University ��
2.5 UnderdampedOscillator
When a damped oscillator is underdamped, it approaches zero faster than in the case of critical damping, but oscillates about that zero.
Fig 2.11 Underdamped Oscillator
The frequency ω k= ω
n1−ζ 2 and the damped period is given by
τd=
2π
ωk
=2π
ωn
1−ζ 2
DO THIS
Exercise
Which of the motions discussed above best describes the action of shock absorbers on a vibrating vehicle?

African Virtual University ��
Unit3 Dynamics
Specificlearningobjectives
By the end of this unit you should be able to:
o Derive the equation of motion for a particle in a central field.o Find the potential energy of a particle in a central field.o State the laws of conservation of energy.o State, derive and apply Kepler’s laws of planetary motion in solving related
problems.o Find velocity and acceleration of moving systems.o Define conservation of momentum and angular momentum.o Solve problems involving changing mass.
Summary
In this module you will familiarize yourself with historical developments concerning planetary motion beginning with early attempts to explain this phenomenon. You will also acquaint yourself with early and modern mathematical models that exemplified this phenomenon resulting in the famous Kepler’s Laws.
RequiredReading
Fitzpatrick, R. (2001). Classical Mechanics: An Introductory Course. Austin, Texas.UTP
RelevantLinksandResources
Classical Mechanics Lecture notes http://farside.ph.utexas.edu/teaching/301/lectures/lectures.html
Newtonian Physics http://www.lightandmatter.com/arealbook1.html
Planetary motion http://galileoandeinstein.physics.virginia.edu/more_stuff/flashlets/kepler6.html
Planetary motion http://www-istp.gsfc.nasa.gov/stargaze/kep3laws.htm
Planetary motion http://en.wikipedia.org/wiki/Kepler’s_laws_of_planetary_motion

African Virtual University �00
Planetary motion www.windows.ucar.edu/tour/link=/the_universe/uts/planets.html
Coriolis Effect http://en.wikipedia.org/wiki/Coriolis_effect
Coriolis Force http://hyperphysics.phy-astr.gsu.edu/hbase/corf.html
Centripetal Force http://en.wikipedia.org/wiki/Centripetal_force
Angular Momentum http://en.wikipedia.org/wiki/Angular_momentum
D’Alembert’s Principle http://en.wikipedia.org/wiki/D%27Alembert%27s_principle
KeyWords
• Central forces• Planetary motion• Central field• Kepler’s laws• Coriolis

African Virtual University �0�
LearningActivity3 Dynamics
3.1 BridgingtheGap
What stories were you told when you were young about
• the rising and setting of the sun• the rising and setting of the moon • the general movement of the sun, moon and the earth ?
Consult some of the elders in your local community and hear their views in these issues.
Have you ever wondered why, when you look at the diagrams of thr planetary system why
• the planets don’t just ‘fall off, into space• The planets and the sun maintain their distance apart and do not collide
Fig 3.1 Solar system

African Virtual University �0�
3.2 CentralForcesandPlanetaryMotion
CompulsoryReading
Fitzpatrick, R. (2001). Classical Mechanics: An Introductory Course. Austin, Texas.UTP
Page 262-275
3.2.1 Theconceptofcentralforce
It is with Kepler that we see the beginning of the concept of central force, that is a force which acts continuously on the planets to keep them moving in closed, stable paths from one orbit to the next. It was apparent to Kepler that the force was directed towards the focus of the ellipse, but he could not describe the nature of the force.
3.2.2 Motioninageneralcentralforce-field
Go to this link
http://farside.ph.utexas.edu/teaching/336k/lectures/node53.html
3.3 Kepler’sLawsOfPlanetaryMotion
CompulsoryReading
Fitzpatrick, R. (2001). Classical Mechanics: An Introductory Course. Austin, Texas.UTP
Page 260
3.3.1 Law1
The orbit of a planet/comet about the Sun is an ellipse with the Sun’s center of mass at one focus

African Virtual University �0�
This is the equation for an ellipse:
x2
a2+
y2
b2= 1
3.3.2 LAW 2: A line joining a planet/comet and the Sun sweeps out equal areas in equal intervals of time
3.3.3 LAW 3: The squares of the periods of the planets are proportional to the cubes of their semimajor axes:
Ta2 / T
b2 = R
a3 / R
b3
• Square of any planet's orbital period (sidereal) is proportional to cube of its mean distance (semi-major axis) from Sun
• Mathematical statement: T = kR3/2 , where T = sideral period, and R = semi-major axis
• Example - If a is measured in astronomical units (AU = semi-major axis of Earth's orbit) and sidereal period in years (Earth's sidereal period), then the constant k in mathematical expression for Kepler's third law is equal to 1, and the mathematical relation becomes T2 = R3
3.3.4 ExamplesofKepler’sThirdLaw
Planet P (yr) a (AU) T2 R3
Mercury 0.24 0.39 0.06 0.06Venus 0.62 0.72 0.39 0.37Earth 1.00 1.00 1.00 1.00Mars 1.88 1.52 3.53 3.51
Jupiter 11.9 5.20 142 141Saturn 29.5 9.54 870 868
In simple terms Kepler’s laws are stated as follows:
1. The motion of planets and other bodies subject to the same force is in orbits that are «conic sections»: ellipses or hyperbolae or in very special circums-tances parabolas (all with the sun as a focus), or straight lines.
2. The area swept out per unit time in any orbit is constant.3. There is a certain specific relation between the period of an elliptical orbit
and a measure of its radius, which relation we will not discuss further.

African Virtual University �0�
GravitationalPotentialEnergy
Definition
The Gravitational potential energy is the work done by raising a mass of m Kg, h above a reference point where the work done is taken to be zero.
Potential Energy is then written as
V
g= mgh
This work is taken as energy because the work done may be converted to energy if the body was allowed to work on a supporting body to return to its original position.
Thus change in potential energy for a body moving from initial height h1to height
h2 is
ΔV
g= mg(h
2− h
1) = mgΔh
The attendant work done by the gravitational force is
−mgΔh
which is the negative of the change in potential energy.
Newton’s Law of Gravitational governing the attraction between two bodies of mass m
1, m
2 is given by
F = G
m1m
2
r 2
where F = force of attraction between two particles
G =Universal Constant of gravitation
= 6.673×10−11 m3 / kg ⋅ s2
r =distance between the centres of the particles.
3.3.5 Examples
Fitzpatrick, R. (2001). Classical Mechanics: An Introductory Course. Austin, Texas.UTP
Page 275-278

African Virtual University �0�
3.3.6 Example
Consider a particle of mass m, moving under the action of the central gravitational attraction.
F = G
mm0
r 2
Where m0 is the mass of the attracting assumed to be fixed, G is the universal gravi-
tational constant, and r is the distance between the centers of the masses. The particle of mass m could represent the earth moving about the sun, the moon moving about the earth, or a satellite in its orbital motion about the earth above the atmosphere. The most convenient coordinate system to use is polar coordinates in the plane of motion since F will always be in the negative r-direction and there is no force in the
θ − direction . This implies that
The second of the two equations when multiplied by r/m is seen to be the same as
, which is integrated to give
, a constant
This is reduced to
And
Or

African Virtual University �0�
After substitution we get
−Gm
0u2 = −h2u2 d2u
dθ 2−
1
uh2u4
Or
d2udθ 2
+ u =Gm
0
h2
Which is a non-homogeneous linear differential equation.
3.3.7
DO THIS
3.3.7.1 Exercise
Verify that the solution of this familiar second-order equation is
u =
1
rC cos(θ + δ ) +
Gm0
h2
3.3.7.2 Exercise
An artificial satellite is launched from point B on the equator by its carrier rocket and inserted into an elliptical orbit with a perigee altitude of 2000 km. if the apogee altitude is to be 4000 km, compute (a) the necessary perigee velocity v
p and the cor-
responding apogee velocity vA, (b) the velocity at point C where the altitude of the
satellite is 2500 km, and (c) the period τ for a complete orbit.
Donotturnthepageuntilyouhavecompletedthesolution!

African Virtual University �0�
Solution
(a) The perigee and apogee velocities for specified altitudes are given by
vP= R
ga
1+ e1− e
= Rga
rmax
rmin
vA= R
ga
1− e1+ e
= Rga
rmin
rmax
Where
rmax
= 6371+ 4000 = 10371km
rmin
= 6371+ 2000 = 8371km
a = (rmin
+ rmax
) / 2 = 9371km
Thus
vP= R
ga
rmax
rmin
= 6371(103 )9.825
9371(103 )
10371
8371
= 7261 m/ s or 26140km/ h
vA= R
ga
rmin
rmax
= 6371(103 )9.825
9371(103 )
8371
10371
= 5861 m/ s or 21099 km/ h

African Virtual University �0�
(b) For an altitude of 2500 km the radial distance from the earth’s center is r = 6371 + 2500 = 8871 km. The velocity at point C becomes
vC
2 = 2gR 2 1
r−
1
2a⎛
⎝⎜⎞
⎠⎟= 2(9.825)[(6371)(103 )]2 1
8871−
1
18742
⎛
⎝⎜⎞
⎠⎟1
103
= 47.353(106 )(m/ s)2
vC= 6881 m/ s or 24773 km/ h
(c) The period of the orbit is given by
τ = 2π
a3 / 2
R g
= 2π[(9371)(103 )]3/ 2
(6371)(103 ) 9.825= 9026 s
or τ = 2.507 h
3.4 MovingCo-OrdinateSystems
3.4.1 TheCoriolisEffect
The Coriolis effect is the apparent deflection of objects from a straight path if the objects are viewed from a rotating frame of reference.
See link below http://en.wikipedia.org/wiki/Coriolis_effect
To get more information on the Coriolis Force visit this site http://hyperphysics.phy-astr.gsu.edu/hbase/corf.html

African Virtual University �0�
3.4.2 CentripetalAcceleration(andForce)
CompulsoryReading
Fitzpatrick, R. (2001). Classical Mechanics: An Introductory Course. Austin, Texas.UTP
Page 138
The rate of change of the object’s velocity vector is the centripetal acceleration. The centripetal force is the external force required to make a body follow a circular path at constant speed.
Seelinkbelow
http://en.wikipedia.org/wiki/Centripetal_force
3.4.3 Examples
Fitzpatrick, R. (2001). Classical Mechanics: An Introductory Course. Austin, Texas.UTP
Page 155-157
3.4.4 Relativevelocityinamovingcoordinatesystem
A man walking at a rate of 4 km per hour toward the forward car of a train when the latter is traveling at a speed of 50 km per hour is actually traveling at the speed of 54 km per hour over the round. His relative speed with respect to a fixed point on the moving train is 4 km per hour. This simple concept of superposition of speeds can be extended readily to the case of differing directions making use of the reference system velocity and the relative velocity by use of vector addition.
3.4.4.1 Example
The compass of an aircraft indicates that it is headed due north, and its air speed indicator shows that it is moving through the air at 200 km/h. If there is a wind of 80 km/h from west to east, what is the velocity of the aircraft relative to the earth?

African Virtual University ��0
Solution
Let A refer to the aircraft, and F to the moving air. E refers to the earth. We have given
VAF
= 240 km/h, due north
VFE
= 100 km/h, due east
and we wish to find the magnitude and direction of VAE
:
vAE= v
AF
2 + vF E
2
vAE= 2402 +1002
= 260 km/ h , 22.60 North East
More exemples
Fitzpatrick, R. (2001). Classical Mechanics: An Introductory Course. Austin, Texas.UTP
Page 48-52
DO THIS
3.4.4.2 Exercice
Consider the first example above, in what direction should the pilot head in order to travel due north? What will then be his velocity relative to the earth?
N.B. The magnitude of his airspeed, and the wind velocity, are the same as in the first example.
Donotturnthepageuntilyouhavecompletedthesolution!

African Virtual University ���
Solution
We now have given:
VAF
= 240 km/h, direction unknown
VFE
= 100 km/h, due east,
and we wish to find VAE
, whose magnitude is unknown but whose direction is due north.
We find
vAE= 2402 −1002
= 218.2 km/ h
℘= sin−1 100
240= 24.60
Thus , the pilot should head 24.60 North West, and his ground speed will be 218.2 km/h.
3.5 SystemsofParticles
3.5.1 Angularmomentum
In physics, the angular momentum of an object rotating about some reference point is the measure of the extent to which the object will continue to rotate about that point unless acted upon by an external torque.

African Virtual University ���
CompulsoryReading
Fitzpatrick, R. (2001). Classical Mechanics: An Introductory Course. Austin, Texas.UTP
Page 204-214
For more information visit the site below
http://en.wikipedia.org/wiki/Angular_momentum
3.5.2 Examples
Fitzpatrick, R. (2001). Classical Mechanics: An Introductory Course. Austin, Texas.UTP
Page 214-216
3.5.3 ConservationofangularmomentumandTorque
CompulsoryReading
Fitzpatrick, R. (2001). Classical Mechanics: An Introductory Course. Austin, Texas.UTP
Page 271-272
For information on Conservation of angular momentum and Torque also see the link below:
http://en.wikipedia.org/wiki/Angular_momentum
3.5.4 D’Alembert’sPrinciple
The principle states that the sum of the differences between the generalized forces acting on a system and the time derivative of the generalized momenta of the system itself along an infinitesimal displacement compatible with the constraints of the system (a virtual displacement), is zero.
That is, at equilibrium,
Since , where Fiare generalized forces and are generalized momenta
See link http://en.wikipedia.org/wiki/D%27Alembert%27s_principle»

African Virtual University ���
3.5.5 Example
Each of three balls has a mass m and is welded to the rigid equi-angular frame of negligible mass. The assembly rests on a smooth horizontal surface. If a force F is suddenly applied to the one bar determine (a) the acceleration of point O and (b) the angular acceleration of the frame.
Solution
(a) Point O is the mass center of the system of the three balls, so that its acceleration is given by
F∑ = ma F i = 3ma a = a0=
F3m
i
(b) We determine from the moment principle . To find H G we note
that the velocity of each ball relative to the mass center O as measured in the
non-rotating axes x-y is where is a common angular velocity of the spokes. The angular momentum of the system about O is the sum of the moments of the relative linear momenta as shown by the expression below.
And from we have
So
DO THIS
3.5.6 Exercise
Consider the same conditions as for the example above except that the spokes are freely hinged at O and so do not constitute a rigid system. Explain the difference between the two problems.
Donotturnthepageuntilyouhavecompletedthesolution!

African Virtual University ���
Solution
The generalized Newton’s second law holds for any mass system, so that the accele-ration a of the mass center G is the same as with example above, namely,
a =
F3m
i
N.B. Although G coincides with O at the instant represented, the motion of the hinge O is not the same as the motion of G since O will not remain the center of mass as
the angles between the spokes change. Both have the same values from the two problems at the instant represented. However, the angular motions of the spokes in this problem are all different and are not easily determined.
3.6 RocketsAndCollisions
CompulsoryReading
Fitzpatrick, R. (2001). Classical Mechanics: An Introductory Course. Austin, Texas.UTP
Page 115-129
Now that people have begun exploration of space, rockets have become a subject of general interest. The central feature of the rocket, which underlies its unique capa-bilities, is its reaction engine. As the rocket engine operates, the mass of the rocket changes rapidly. Consequently, Newton’s second law of motion in its general form does not lead to F = ma. We therefore begin the analysis of the motion of a rocket from the basic principle of momentum conservation.
3.6.1 Examples
Fitzpatrick, R. (2001). Classical Mechanics: An Introductory Course. Austin, Texas.UTP
Page129-135

African Virtual University ���
Example
The ram of a pile driver has a mass of 800 kg and is released from rest 2 m above the top of the 2400 kg pile. If the ram rebounds to a height of 0.1 m after impact with
the pile, calculate (a) the velocity v
p
' of the pile immediately after impact. (b) the coefficient of restitution e, and (c) the percentage loss of energy due to the impact.
Solution
Conservation of energy during free fall gives the initial and final velocities of the ram
from v = 2gh . Thus
vr= 2(9.81)(2) = 6.26 m/ s vr
' = 2(9.81)(0.1) = 1.40 m/ s
(a) Conservation of momentum (ΔG
y= 0) for the system of the ram and pile
gives
800(6.26) + 0 = 800(−1.40) + 2400v
p
'
Thus
v
p
' = 2.55 m/ s
(b) The coefficient of restitution gives
e =
rel. vel. seperation
rel. vel. approach
e =
2.55+1.40
6.26 + 0= 0.63
(c) The kinetic energy of the system just before impact is the same as the potential energy of the ram above the pile and is
T = V
g= mgh = 800(9.81)(2) = 15700 J
The kinetic energy T' just after impact is
T
' = 1
2(800)(1.40)2 + 1
2(2400)(2.55)2 = 8620 J
The percentage loss of energy is therefore,
15700 − 8620
15700(100) = 45.1%

African Virtual University ���
N.B. The impulses of the weights of the ram and pile are very small compared with the impulses of the impact forces and thus are neglected during the impact.
DO THIS
3.6.2 Exercise
A cannon is mounted inside a railroad car, which is initially at rest but can move frictionlessly. It fires a cannonball of mass m = 5 kg with a horizontal velocity of
v = 15 ms-1 relative to the ground at the opposite wall. The total mass of the cannon and the railroad car is 15 000 kg. (Assume that the mass of the exhaust gases is negligible.)
(a) What is the velocity V of the car while the cannonball is in flight?
(b) If the cannonball becomes embedded in the wall, what is the velocity of the car and ball after impact?
Donotturnthepageuntilyouhavecompletedthesolution!

African Virtual University ���
Solution
When fired, the cannon exerts a force to the right on the ball. The ball exerts an equal and opposite force on the cannon, so the car and the cannon recoil to the left. The net momentum is conserved because there is no external frictional force. The momentum before firing is zero, so after firing the momentum of the ball to the right must be equal in magnitude to that of the car and the cannon to the left. Thus mv = MV and
V =mvM
=(5 kg)(15 ms−1 )
15000 kg
5×10−3 ms−1
This gives
N.B. The recoil speed of the car and the cannon is very small because of their large mass.
(b) As the ball becomes embedded in the wall, it exerts a force on the wall to the right. The wall, in turn, exerts a force to the left on the ball. The ball and car both stop moving when this happens, since the net momentum is still zero. Meanwhile the car will have rolled to the left as the ball traveled to the right.
DO THIS
3.6.3 Exercise
A baseball initially at rest is struck with a bat. The velocity of the 0.15-kg ball just after it is hit is 40 ms-1. If the impact time is 10-3s, what is the average force on the ball?
Donotturnthepageuntilyouhavecompletedthesolution!

African Virtual University ���
Answer
The initial momentum p of the ball is zero, since it starts from rest; the final momentum
is p’ = mv’. Thus, from F Δt = ʹp − p , the average force F on the ball is
F =
m ʹvΔt
=(0.15kg)(40ms−1 )
(10−3 s)= 6000N

African Virtual University ���
Unit4: RigidbodiesandEnergy
AssumedKnowledge
Unit 3 of this module is the prerequisite, particularly particle kinematics and kinetics of systems of particles.
Objectivesoftheunit
The student should be able to:
a) Write and explain the equations of rigid body motion and apply them to general planar motion of a rigid body.
b) Calculate relative velocity and relative acceleration for points on a rigid body, and also calculate the instantaneous centre of zero velocity for a rigid body.
c) Apply the equations of planar kinetics to analyze the motion of rigid bodies undergoing translation, rotation about a fixed and general plane motion.
d) Apply the work-energy principle as well as the conservation of energy prin-ciple to solve problems in planar kinetics.
e) Calculate both the linear and angular momentum of a rigid body and apply them to solve problems in planar kinetics.
Summaryofthelearningactivity
In this unit students will learn the equations of rigid body motion and apply them to general planar motion of a rigid body. The students will learn how to calculate relative velocity and relative acceleration for points on a rigid body, and also learn how to calculate the instantaneous centre of zero velocity for a rigid body.
The students will learn how to apply the equations of planar kinetics to analyze the motion of rigid bodies undergoing translation, rotation about a fixed point, and general plane motion.
The student will learn how to apply the work-energy principle as well as the conser-vation of energy principle to solve problems in planar kinetics. The student will learn how to calculate both the linear and angular momentum of a rigid body and apply them to solve problems in planar kinetics. Students will also learn other better methods of solving mechanical problems other than the Newton laws. They will look at other principles of mechanics like the D’Alembert’s principles.

African Virtual University ��0
SuggestedICTmethods
Use of the Internet to get more information on the relevant topic, Software and Ani-mations. Virtual Science laboratory,
http://www.smartscience.net/SmartScience/SmartScience.html
Content: Plane motion of rigid bodies: Moment of inertia. Radius gyration, Paral-lel axis theorem, Perpendicular axis theorem, Couples. Kinetic energy and angular momentum about a fixed axis, Principle of angular momentum, Principle of conser-vation of energy, Principle of virtual work and D’Alembert’s principle, Principle of minimum potential energy.
Compulsoryreadingtext
Fitzpatrick, Richard, Classical Mechanics: An Introductory Course, Austin, Texas.
RelevantLinksandResources
Our links are from Wikipedia.
Dynamics of Rigid Bodies
http://www.engin.brown.edu/courses/en4/notes/RigidKinematics/rigkin.htm
KeyWords
• Mechanical system• Inertia• Degrees of freedom• Kinematic constraints• Rectilinear translation • Curvilinear translation

African Virtual University ���
LearningActivity4:RigidbodiesandEnergy
4.1PlaneMotionOfRigidBodies
CompulsoryReading
Mariam J.L. and Kraige L.G. Engineering Mechanics Volume 2: Dynamics (page 291-459)
Ruina, A. and Pratap, R. Introduction to Statics and Dynamics
Dynamics of Rigid Bodies http://www.engin.brown.edu/courses/en4/notes/RigidKinematics/rigkin.htm.
http://en.wikipedia.org/wiki/Rigid_body_dynamics
Remark
On the topic plain motion of rigid bodies, I feel guilty not to recommend students to read Mariam J.L. and Kraige L.G. Engineering Mechanics Vo-lume 2: Dynamics. All other sources are heavily dependent on this book. http://www.engin.brown.edu/courses/en4/notes/RigidKinematics/rigkin.htm
Dynamics of Rigid Bodies http://www.engin.brown.edu/courses/en4/notes/RigidKinematics/rigkin.htm
4.1.1Introduction
Dynamics is the branch of mechanics which deals with the laws of motion of material bodies subjected to the action of forces. The motion of bodies from a purely geome-trical point of view is discussed in kinematics. Unlike in kinematics, in dynamics the motion of material bodies is investigated in connection with the acting forces and the inertia of the material bodies themselves. Inertia is the property of material bodies to resist change in their velocity under the action of an applied force. For example, the velocity of one body changes slower than that of another body subjected to the same force, the former is said to have a greater inertia.
A rigid body is an idealization of a body that does not deform or change shape. Formally it is defined as a collection of particles with the property that the distance between particles remains unchanged during the course of motions of the body. Like the approximation of a rigid body as a particle, this is never strictly true. All bodies deform as they move. However, the approximation remains acceptable as long as the deformations are negligible relative to the overall motion of the body.

African Virtual University ���
Schematic showing a planar rigid body.
In the following, we will restrict attention to the planar motion of rigid bodies. In particular, we will take all rigid bodies to be thin slabs with motion constrained to lie within the plane of the slab. Unless otherwise indicated, we will assume basis vectors of the form {i, j, k}, such that i and j lie in the plane, with k is the plane normal.
DO THIS
Exercise: Kinematics of Rigid Body Motion
1. What do you understand by kinematics of rigid bodies?
2. Explain the following types of motion
i) Rectilinear translation ii) curvilinear translation
2.2DynamicsOfASystemAndRigidBody
CompulsoryReading
Moment of inertia
http://en.wikipedia.org/wiki/Moment_of_inertia

African Virtual University ���
4.2.1 MechanicalSystems.ExternalandInternalForces
A mechanical system is defined as such a collection of material points (particles) or bodies in which the position or motion of each particle or body of the system depends on the position and motion of all the other particles or bodies. A classical example of a mechanical system is the solar system, all the component bodies of which are connected by the forces of their mutual attraction. Other examples of mechanical systems are machines or any mechanism whose members are connected with pins, rods, cables, belts, belts, etc. In this case the bodies of the system are subjected to the reciprocal compressive or tensile forces transmitted through the constraints.
A collection of bodies not connected by interacting forces does not comprise a me-chanical system (e.g, a group of lying aircraft). In this book we shall consider only mechanical systems, calling them just «systems» for short. It follows from the above that the forces acting on the particles or bodies of a system can be subdivided into external and internal forces.
External forces are defined as the forces exerted on the members of a system by particles or bodies not belonging to the given system.
Internal forces are defined as the forces of interaction between the members of the same system. We shall denote external forces by the symbol Fe , and internal forces by the symbol Fi .
Internal forces possess the following properties:
The geometrical sum (the principal vector) of all the internal forces of a system is zero. This follows from the third law of dynamics, which states that any two particles of a system (Fig . 15) act on each other with equal and oppositely directed forces Fi
12
and Fi21,
the sum of which is zero. Since the same is true for any pair of particles of a system,
Fk
i = 0∑
Fig 15

African Virtual University ���
The sum of the moments (the principal moment) of all the internal forces of a system with respect to any centre or axis is zero. For if we take an arbitrary centre O , it
is apparent from Fig. 15 that m0(F
12
i ) + m0(F
21
i ) = 0 . The same result holds for the moments about any axis. Hence, for the system as a whole we have:
m
0∑ (Fk
i ) = 0 or mx
Fk
i( )∑ = 0
It does not follow from the above, however, that the internal forces are mutually balanced and do not affect the motion of the system, for they are applied to different particles or bodies and may cause their mutual displacement. The internal forces will be balanced only when a given system is a rigid body.
4.2.2 MassofaSystem.CentreofMass
The motion of a system depends, besides the acting forces, on its total mass and the distribution of this mass. The mass of a system is equal to the arithmetical sum of the masses of all the particles or bodies comprising it.
M = mk∑
We shall conventionally denote mass by the same letter M as the moment of a force. Any possibility of confusion is precluded by the fact that when the symbol M denotes
moment of a force, it is always provided with a subscript (e.g. M c, M
x, M
t).
In a homogeneous field of gravity, where g = const., the weight of every particle of a body is proportional to its mass, hence the distribution of mass can be judged accor-ding to the position of the centre of gravity. The equations defining the coordinates of the centre of gravity can be written as
x
c=
mkx
k∑M
, yc=
mk
yk∑
M, z
c=
mkz
k∑M
(1)
The equations include only the masses mk of the material points (particles) of
the body and their coordinate (xk, y
k, z
k). Hence, the position of point C ( insert
equation) gives the distribution of mass in the body or in any mechanical system,
where mk and (x
k, y
k, z
k). are the masses and coordinates of the system’s res-
pective points.
The geometric point C whose coordinates are given b Eqs. (1) is called the centre

African Virtual University ���
of mass, or centre of inertia of a mechanical system. If the position of the centre of mass is defined by is radius vector r
c we can obtain from Eqs. (1) the following
expression:
r
c=
mkr
k∑M
where rk is the radius vector of particle k of the system.
Although in a homogenous gravitational field the Centres of mass and gravity coin-cide, the two concepts are not identical. The concept of centre of gravity, as the point through which the resultant of the forces of gravity passes, has meaning only for a rigid body in a uniform in field of gravity. The concept of centre of mass, as charac-teristic of the distribution of mass in a system, on the other hand, has meaning for any system of particles or bodies, regardless of whether a given system is subjected to the action of forces or not.
4.2.3 MomentofInertiaofaBodyaboutanAxis:RadiusofGyration
The position of centre of mass does not characterize completely the distribution of mass in a system. For if in the system in Fig.16a the distance h of each of the two identical spheres A and B from the axis Oz is increased by the same quantity, the location of the centre of mass will not change, though the distribution of mass will change and influence the motion of the system (all other conditions remaining the same, the rotation about axis Oz will be slower).
Fig 16a
Accordingly, another characteristic of the distribution of mass, called the moment of inertia, is introduced in mechanics. The moment of inertia of a body (system) with respect to a given axis Oz (or the axial moment of inertia) is defined as the quantity equal to the sum of the masses of the particles of the body (system) each multiplied by the square of its perpendicular distance from the axis:

African Virtual University ���
J z= m
kh
k
2∑ (2)
It follows from the definition that the moment of inertia of a body (or system) with respect to any axis is always positive.
It will be shown further on that axial moment of inertia plays the same part in the rotational motion of a body a mass does in translational motion, i.e. moment of inertia is a measure of a body’s inertia in rotational motion.
By Eq. (2), the moment f inertia of a body is equal to the sum of the moments of inertia of all its parts with respect to the same axis.
For a material point located at distance h from an axis, J z= mh2 . The unit for the
moment of inertia in the SI system is 1 kg-m2, and in the mkg(f) system 1 kgf-m-s.
In computing the axial moments of inertia the distances of the points from the axis
can be expressed in terms of their coordinates
xk, y
k, z
k( ) (e.g., the square of the
distance from axis Ox is yk
2 + zk
2 , etc.
Then the moments of inertia about the axes Oxyz will be given by the following equations:
J
x= m
k( y
k
2 + zk
2 ), Jy∑ = m
k(x
k
2∑ + zk
2 ), Jz= m
k( y
k
2 + xk
2 ).∑ (3)
The concept of the radius of gyration is often employed in calculations. The radius
of gyration of a body with respect to an axis Oz is a linear quantity ρ
g defined by
the equation
J
z= Mρ
g
2
(4)
where M is the mass of the body.
It follows from the definition that geometrically the radius of gyration is equal to the distance from the axis Oz to a point, such that if the mass of the whole body were concentrated in it, the moment of inertia of the point would be equal to the moment of inertia of the whole body.
Knowing the radius of gyration, we can obtain the moment of inertia of a body from Eq. (4) and vice versa.
Eqs. (2) and (3) are valid for both rigid bodies and systems of material points. In the case of a solid body, dividing it into elementary parts, we find that in the limit
the sum in Eq. (2) becomes an integral. Hence, taking into account that dm= ρdV

African Virtual University ���
, where ρ is the density and V the volume, we obtain:
J
z= h2 dm, or J
z= ρh2 dV∫∫
(5)
The integral extends over the whole volume V of the body, and the density and distance H depend on the coordinates of the points of the body. Similarly, for solid bodies Equations. (3) take the form:
J
x= ρ( y2 + z2 )dV , etc.∫ (5’)
Equations. (5) and (5’) are useful in calculating the moments on inertia of homo-geneous bodies of geometric shape. As in that case the density is constant, it can be taken out of the integral sign.
Let us determine the moments of inertia of some homogeneous bodies.
4.2.4 ThinHomogeneousRodofLengthLandMassM.
Fig. 16b
Let us find its moment of inertia with respect to an axis Az perpendicular to the rod (Fig. 16b). If we lay off a coordinate axis Ax along AB, for any line element of length
dx we have h = x and its mass dm= ρ1dx, where ρ
1= M / l , is the mass of a
unit length of the rod, and Eq. (5) gives.
J
A= x2 dm
0
l
∫ = ρ1
x2 dx0
l
∫ = ρ1
l 3
3.
Substituting the expression for ρ1 , we obtain finally
J
A=
1
3Ml 2
(6)

African Virtual University ���
(2) Thin Circular Homogeneous Ring of Radius R and Mass M.
Let us find its moment of inertia with respect to an axis Cz perpendicular to the plane of the ring through its centre.
Fig 17.
As all the points of the ring are at a distance from axis Cz, Eq. (2) gives
J c= m
kR 2 = ( m
k)R 2 = MR 2∑∑
Here and further on J denotes the moment of inertia with respect to an axis through A perpendicular to the plane of the cross section in the diagram.
Hence, for a ring J c= MR 2 (7)
It is evident that the same result is obtained for the moment of inertia of a cylindrical shell of mass M and radius R with respect to its axis.
4.2.5 CircularHomogeneousDiscorCylinderofRadiusRandMassM
Let us compute the moment of inertia of a circular disc with respect to an axis Cz perpendicular to it trough its centre (Fig. 17b).
Consider an elemental ring of radius r and width dr. Its area
2πrdr , and its mass dm= ρ
22πrdr , where ρ
2=
MπR 2
is the mass of a unit
area of the disc. From Eq. (7) we have for elemental ring

African Virtual University ���
dJc= r 2 dm= 2πρ
2r 3dr ,
and for the whole disc
J
c= 2πρ
2r 3
0
R
∫ dr =1
2πρ
2R 4
Substituting the expression for ρ2 we obtain finally
J
C=
1
2MR 2
(8)
It is evident that the same formula is obtained for the moment of inertia J of a homo-geneous circular cylinder of mass M and radius R with respect to its axis Cz (Fig. 17c)
4.2.6 RectangularLamina,Cone,andSphere.
Omitting the computations, here are the equations of the moments of inertia of several bodies (the students is invited to deduce these formulas independently).
(a) uniform rectangular lamina of mass M with sides of length a and b (axis x is coincident with side a, axis y with side b):
J
x=
1
3Mb2 , J
y=
1
3Ma2 ;
(b) uniform right circular cone of mass M and base radius R (axis z is coincident with the axis of the cone):
J z= 0.3MR 2
(c) uniform sphere of mass M and radius R (axis z is coincident with a diameter):
J z= 0.4 MR 2

African Virtual University ��0
4.2.7 MomentsofInertiaofaBodyaboutParallelAxes
The Parallel Axis (Huygens’) Theorem
In the most general case, the moments of inertia of the same body with respect to different axes are different. Let us see how to determine the moment of inertia of a body with respect to any axis if its moment of inertia with respect to a parallel axis through the body is known.
Fig 18
Draw through the centre of mass of a body C arbitrary axes Cx ' y ' z ' , and through
an arbitrary point 0 on axis Cx axes 0xyz, so that Oy / /Cy ' and Oz / /Cz ' (Fig. 18). Denoting the distance between axes Cz’ and 0z by d, from Eqs. (3)
JO C
= mk(x
k
2 + yk
2∑J
O Z ' = mk∑ (x '
k
2 + y 'k
2 )
But it is apparent from the drawing that for any point of the body
xk= x '
k− d, or x
k
2 = x 'k
2 + d2 − 2x 'k
d and yk= y '
k.Substituting these ex-
pressions for xk and y
k into the expression for J
OZ and taking the common
multipliers d and 2d outside the parentheses, we obtain:
J O Z= m
k(x '
k
2 + y 'k
2 ) + (∑ mk)d2 − 2d( m
kx '
k
2 ).∑∑
The first summation in the right member of the equation is equal to JCz’
, and the second to the mass M of the body. Let us find the value of the third summation. From Eq. (1)
we know that, for the coordinates of the centre of mass, m
kx '
k= Mx '
C∑ . But since
in our case point C is the origin, x 'C= 0, , and consequently
mkx '
k= 0∑

African Virtual University ���
We finally obtain
J oz= J
C z '+ Md2
(9)
Equation (9) expresses the parallel axis theorem enunciated by Huygens*: The mo-ment of inertia of a body with respect to any axis is equal to the moment of inertia of the body with respect to a parallel axis through the centre of mass of the body plus the product of the mass of the body and the square of the distance between the two axes.
It follows from Eq. (9) that Joz
= JCz’
. Consequently, of all the axes of the same direction, the moment of inertia is least with respect to the one through the centre of mass.
The parallel axis theorem can also be used to determine the moment of inertia of a body with respect to a given axis Oz
� if its moment of inertia with respect to any parallel
axis Az� and the distances d
� and d
� of each axis from the body’s centre of mass
are known. Hence, knowing J
Az2and d
2we obtained J
C z ' from Eq. (9) and,
applying the same formula, determine the required moment of inertia J
O z1
DO THIS
Exercise
1 Determine the moment of inertia of a thin rod with respect to an axis C perpen-dicular to it through its centre of mass.
2 Determine the moment of inertia of a cylinder with respect to an axis through its generator (see Fig. 16b).
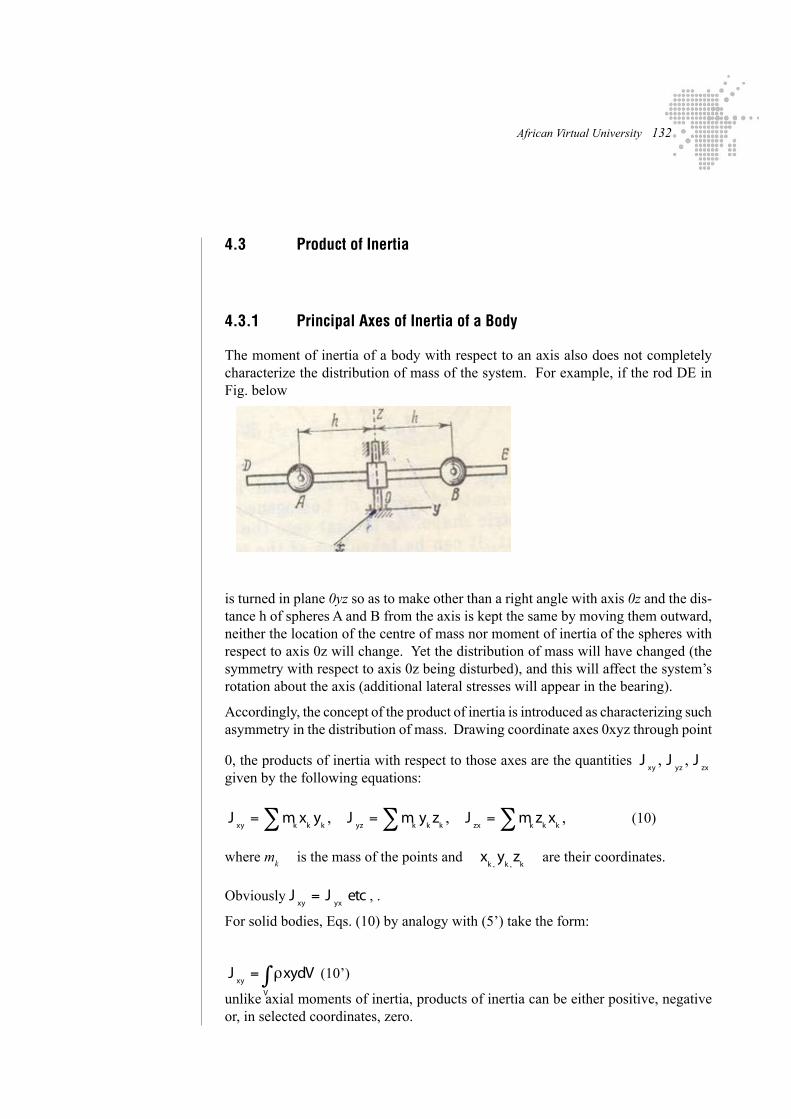
African Virtual University ���
4.3 ProductofInertia
4.3.1 PrincipalAxesofInertiaofaBody
The moment of inertia of a body with respect to an axis also does not completely characterize the distribution of mass of the system. For example, if the rod DE in Fig. below
is turned in plane 0yz so as to make other than a right angle with axis 0z and the dis-tance h of spheres A and B from the axis is kept the same by moving them outward, neither the location of the centre of mass nor moment of inertia of the spheres with respect to axis 0z will change. Yet the distribution of mass will have changed (the symmetry with respect to axis 0z being disturbed), and this will affect the system’s rotation about the axis (additional lateral stresses will appear in the bearing).
Accordingly, the concept of the product of inertia is introduced as characterizing such asymmetry in the distribution of mass. Drawing coordinate axes 0xyz through point
0, the products of inertia with respect to those axes are the quantities J
xy, J
yz, J
zx
given by the following equations:
J
xy= m
kx
ky
k,∑ J
yz= m
ky
kz
k,∑ J
zx= m
kz
kx
k,∑
(10)
where mk is the mass of the points and
x
k ,y
k ,z
k are their coordinates.
Obviously J
xy= J
yxetc , .
For solid bodies, Eqs. (10) by analogy with (5’) take the form:
J
xy= ρxydV
V
∫ (10’)
unlike axial moments of inertia, products of inertia can be either positive, negative or, in selected coordinates, zero.

African Virtual University ���
Consider a homogenous body having an axis of symmetry. Draw the coordinate axes 0xyz so that axis z is directed along the axis of symmetry. By virtue of sym-
metry, to each point of mass mk with coordinates
x
k, y
k, z
k( ) , there corresponds
another point of equal mass with coordinates −x
k,− y
k,−z
k( ) . Consequently,
mkx
kz
k= 0 and m
ky
kz
k= 0∑∑ , and taking into account Eqs. (10), we
obtain:
J
xz= 0, J
yz= 0
(11)
Thus, symmetry in the distribution of mass with respect to axis 0z is characterised by
two centrifugal moments of inertia, J
xzand J
yz, becoming zero. Axis 0z with
respect to which the products of inertia Jxz
whose subscripts contain the notation of that axis, are zero is called the principal axis of inertia of the body with respect to point 0
It follows from what has been said that if a body has an axis of symmetry, that axis is the principal axis of inertia with respect to any of its points.
The principal axis of inertia is not necessarily the axis of symmetry.
Consider a homogenous body having a plane of symmetry. Drawing axes 0xy in that plane and axis 0z perpendicular to them, by virtue of symmetry, to every point
of mass mk with coordinates
x
k, y
k, z
k( ) , there corresponds a point of same mass
with coordinates
xk, y
k,−z
k( ) ,. Consequently, as in the previous case, we find that
mkx
kz
k= 0 and m
ky
kz
k= 0∑∑ , or
J
xz= 0, J
yz= 0 .
Thus, if a body has a plane of symmetry, any axis perpendicular to that plane is the principal axis of inertia of the body with respect to the point 0 at which the axis intersects the plane.
Eqs. (11) express the conditions that axis 0z is the principal axis of inertia of a body with respect to point 0 (the origin of the coordinate system). Similarly, if
J
xy= 0, J
xz= 0 , axis 0x will be the principal axis of inertia with respect
to
point 0, etc. Consequently, if all the products of inertia are zero, i.e.,
J
xy= 0, J
yz= 0, J
zx= 0 , (12)
each of the coordinate axes 0xyz is a principal axis of inertia with respect to point 0 (the origin of the coordinate system).
African Virtual University ���
Let us show that principal axes of inertia exist at any point of a body. For this let us first prove the following theorem:
If the moment of inertia with respect to an axis 0z is greater or smaller than the mo-ment of inertia with respect to any neighboring axis through 0, that axis (0z) is the principal axis of inertia of the body with respect to 0.
4.4 D’alembert’sPrinciple
CompulsoryReading
Classical Mechanics Page 260
D’Alembert’s Principle http://www. en.wikipedia.org/wiki/D%27Alembert%27s_principle
4.4.1 ForcesActingontheAxisofaRotatingBody
D’Alembert’s Principle
All the methods of solving the problems of dynamics examined up till now were based on equations derived either directly from Newton’s laws or from the general theorems, which are corollaries of those laws. However, the equations of motion or equilibrium of other general propositions called the principles of mechanics. We shall see that in many cases application of those principles offers better methods of problem solutions. In this case we shall examine one of the general principles of mechanics known as D’ Alembert’s principle.
Let there be a system of n material particles. Selecting any particle of mass mk , assume
it to be acted upon by external and internal forces Fk
ext and Fk
int (which include both active forces and the reactions of constraints), which impart it an acceleration
ω k with respect to an inertial reference frame.
Let us introduce the quantity
Fk
i = −mkω
k(96)
with the dimension of force. The vector quantity equal in magnitude to the product of the particle’s mass and acceleration and directed in the opposite sense of the ac-celeration and directed in the opposite sense of the acceleration is called the force of inertia of that particle (sometimes the D’Alembert inertia force).

African Virtual University ���
The motion of a particle, we then find, satisfies the following D’Alembert’s principle
for a material particle: If, at any moment of time, to the effective forces Fk
ext and
Fk
int acting on the particle is added the inertia force Fk
i , the resultant force system will be in equilibrium, i.e.,
Fk
ext + Fk
int + Fk
i = 0 (97)
It will be readily observed that D’Alembert’s principle is equivalent to Newton’s second law, and vice versa. For Newton’s second law gives for this particle
mkω
k= F
k
ext + Fk
int . Transferring mkω
k to the right-hand side of the equation, and
taking into account the notation (96), we arrive at Eq. (97), we obtain the formula expressing Newton’s second law.
Reasoning similarly for all the particles of the system, we arrive at the following result, which expresses D’Alembert’s principle for a system: If, at any moment of time, to the effective external and internal forces acting on every particle of a system are added the respective inertia forces, the resultant force system will be in equilibrium, and the equations of statistics will apply to it.
Mathematically D’Alembert’s principle is expressed by a set of n simultaneous vec-tor equations of the form (97) which, apparently, are equivalent to the differential equations of motion of a system. D’Alembert’s principle can be used to derive all the general theorems of dynamics. The value of D’Alembert’s principle is that, when directly applied to the problems of dynamics, the equations of motion of a system can be written in the form of the well-known equations of equilibrium; this makes for uniformity in the approach to problem solutions and usually greatly simplifies the computations. Furthermore, when used in conjunction with the principle of virtual displacement, which will be examined in the next section, D’ Alembert’s principle yields a new general method of solution of problems of dynamics
In applying D’Alembert’s principle it should be remembered that, like the fundamental law of dynamics, it refers to motion considered with respect to an inertial frame of reference. That means that acting on the particles of the mechanical system whose motion is being investigated are only the external and internal forces that appear as a consequence of the interactions of the particles of the system among themselves and with bodies not belonging to a system; it is under the action of those forces that
the particles of the system are moving with their respective accelerations ω k . The
inertia forces mentioned in D’Alembert’s principle do not act on the moving particles [otherwise, by Eqs. (97), the points would be at rest or in uniform motion in which case, as is apparent from Eq. (96), there would be no inertia forces]. The introduc-tion of inertia forces is but a device making it possible to examine the equations of dynamics by the simpler methods of statics.
We know from Statics that the geometrical sum of balanced forces and the sum of their moments with respect to any centre 0 are zero; we know, further, from the principle

African Virtual University ���
of solidification that this holds not only for forces acting on a rigid body but for any deformable system. Thus, according to D’Alembert ‘s principle, we must
(Fk
ext + Fk
int + Fk
i = 0∑m
o(F
k
ext ) + mo(F
k
int ) + mo(F
k
i )⎡⎣ ⎤⎦ = 0∑
⎫⎬⎪
⎭⎪
(98)
let us introduce the following notation:
Ri = F
k
i , Mo
i = mo(F
k
i∑∑ ). (99)
The quantities Ri and M
o
i are respectively the principal vector of the inertia forces and their principal moment with respect to a centre 0. Taking into account that the sum of the internal forces and the sum of their moments are each zero we obtain:
Fk
ext + R i = 0, mo(F
k
ext )∑∑ + Mo
i
(100)
The use of Eqs. (100), which follow from D’Alembert’s principle, simplifies the process of problem solution because the equations do not contain the internal forces. Actually, Eqs. (100) are equivalent to the equations expressing the theorems of the change in the momentum of a system, differing from them only in form.
Eqs. (100) are especially convenient in investigating the motion of a rigid body or a system of rigid bodies. For the complete investigation of any deformable system these equations, however, are insufficient*).
For the projections on a set of coordinate axes, Eqs. (100) give equations analogous to the corresponding equations of statics. To use these equations for solving problems we must know the principal moment of the inertia forces.
4.4.2 ThePrincipalVectorandthePrincipalMomentoftheInertia ForcesofaRigidBody
It follows from Eqs. (99) that a system of inertia forces applied to a rigid body can be replaced by a single force equal to Ri and applied at the centre 0, and a couple of
moment M o
i . The principal vector of a system, it will be recalled, does not depend on
the centre of reduction and can be computed at once. As Fk
i = −mkω
k taking into
account the equation of motion of centre of mass mkω
k= Mω
c∑ we will have

African Virtual University ���
Ri = − m
kω
k= −Mω
c∑ (101)
Thus, the principal vector of inertia forces of a moving body is equal to the product of the mass of the body and the acceleration of its centre of mass, and is opposite in direction to the acceleration.
If we resolve the acceleration ω c into its tangential and normal components, then
vector Ri will resolve into components.
Rτ
i = −Mωcτ
and Rn
i = −Mωcn
Let us determine the principal moment of the inertia forces for particular types of motion.
Translational Motion. In this case a body has no rotation about its centre of mass
C, from which we conclude that m
C(F
k
ext )∑ = 0 and Eq. (100) gives M C= 0 .
Thus, in translational motion, the inertia forces of a rigid body can be reduced to a
single resultant Ri through the centre of mass of the body.
Plane Motion. Let a body have a plane of symmetry, and let it be moving parallel to the plane. By virtue of symmetry, the principal vector and the resultant couple of inertia forces lie, together with the centre of mass C, in that plane.
Therefore, placing the centre of reduction in point C, we obtain form Eq. (100)
M C
i = − mc(F
k
ext∑ ) (insert Eq.) On the other hand (see 156), from the last of Eqs.
(68) m
C(F
k
ext )∑ = JCε . We conclude from this that
M C
i = − JCε (102)
Thus, in such motion of a system of inertia forces can be reduced to a resultant force
Ri [Eq. (101)] applied at the centre of mass C (Fig. 22) and a couple in the plane of
symmetry of the body whose moment is given by Eq. (102). The minus sign shows
that the moment M C
i is in the opposite direction of the angular acceleration of the body.

African Virtual University ���
Fig 22
4.4.3 RotationAboutanAxisThroughtheCentreofMass.
Let a body have a plane of symmetry, and let the axis of rotation Cz be normal to the plane through the centre of mass. This case will thus be a particular case of the
previous motion. But here ωC= 0 and consequently R
i = 0 , Thus, in this case a system of inertia forces can be reduced to a resultant force couple in the plane of symmetry of the body of moment
M z
i = − Jzε (102’)
in applying Eqs. (101) and (102) to problem solutions, the magnitudes of the respective quantities are computed and the directions are shown in fig. 22
DO THIS
Exercise
Use D’Alembert’s principle to solve the following:
a) A load of weight P attached to a string of length I is displaced through an angle
α from the vertical to a position M 0 and released from rest ( see Fig below).
Determine the tension in the thread when the load is in the lowest position
M1

African Virtual University ���
Fig. 19 (a)
b) Two weights P1 and P
2 are connected by a thread and move along a horizontal
plane under the action of forces Q applied to the first weight. The coefficient of friction of the weights on the plane is f. Determine the accelerations of the weights and the tensions in the thread
Fig 20
c) Wound on a drum of weight P and radius r is a string carrying a load A of weight Q. Neglecting the mass of the string and friction, determine the angular accele-ration of the drum when the load falls, the radius of gyration of the drum with respect to its axis isρ. Also determine the tension in the thread.
d) A homogeneous rod bent at a right angle as shown in Fig 21 rotates in a horizontal plane about its end A with an angular velocity ω and angular accelerationε. The respective distances AB = a and BC = b; the mass of unit length of the rod is ρ
1. Determine the stresses at a cross section of the rod at point D at a distance h
from end B.

African Virtual University ��0
Fig. 21
References
Michon,G. P, Rigid Bodies http://home.att.net/~numericana/answer/rigid.htm
Ruina, A. and Pratap, R. Introduction to Statics and Dynamics
Targ, S. Theoretical Mechanics : A Short Course Mir Publishers Moscow (1988)
Mariam J.L. and Kraige L.G. Engineering Mechanics Volume 2: Dynamics.
D’Alembert’s Principle http://en.wikipedia.org/wiki/D%27Alembert%27s_principle
Moment of inertia http://en.wikipedia.org/wiki/Moment_of_inertia
Dynamics of Rigid Bodies http://www.engin.brown.edu/courses/en4/notes/RigidKinematics/rigkin.htm
African Virtual University ���
XI. Compiled list of all Key Concepts (Glossary)
Note: this glossary contains only those basic concepts that span the module. Most of the important concepts have been singularly defined and explained in the relaevant units. Should the student have any problem with the definitions, they are advised to visit the site Wikipedia [www.en.wikipedia.org]. If this is being viewed as a computer file, key words can be clicked to link with the relavent Wikipedia entry.
Central field
In atomic physics, the central field approximation for many-electron atoms takes the combined electric fields of the nucleus and all the electrons acting on any of the electrons to be radial and to be the same for all the electrons in the atom. That is, every electron sees an identical potential U(r) that is only a function of its distance from the nucleus. This facilitates an approximate analytical solution to the eigenvalue problem for the Hamiltonian operator.
Circular Motion
In physics, circular motion is rotation along a circle: a circular path or a circular orbit. The rotation around a fixed axis of a three-dimensional body involves circular motion of its parts. We can talk about circular motion of an object if we ignore its size, so that we have the motion of a point mass in a plane.
Examples of circular motion are: an artificial satellite orbiting the Earth in geosyn-chronous orbit, a stone which is tied to a rope and is being swung in circles (cf. hammer throw), a racecar turning through a curve in a racetrack, an electron moving perpendicular to a uniform magnetic field, a gear turning inside a mechanism.
Circular motion involves acceleration of the moving object by a centripetal force which pulls the moving object towards the center of the circular orbit. Without this acceleration, the object would move inertially in a straight line, according to New-ton’s first law of motion. Circular motion is accelerated even if the speed is constant, because the object’s velocity vector is constantly changing direction.
Coriolis Force and Effect
The Coriolis effect is an apparent deflection of moving objects from a straight path when they are viewed from a rotating frame of reference. The effect is named after Gaspard-Gustave Coriolis, a French scientist who described it in 1835, though the mathematics appeared in the tidal equations of Pierre-Simon Laplace in 1778. The Coriolis effect is caused by the Coriolis force, which appears in the equation of motion of an object in a rotating frame of reference. Sometimes this force is called a fictitious force (or pseudo force), because it does not appear when the motion is expressed in an inertial frame of reference, in which the motion of an object is explained by the real impressed forces, together with inertia. In a rotating frame, the Coriolis force, which depends on the velocity of the moving object, and centrifugal force, which does not, are needed in the equation to correctly describe the motion.

African Virtual University ���
Force: this is the vector action of one body upon another.
Harmonic Oscillator and Simple Harmonic Motion
In order for mechanical oscillation to occur, a system must posses two quantities: elasticity and inertia. When the system is displaced from its equilibrium position, the elasticity provides a restoring force such that the system tries to return to equilibrium. The inertia property causes the system to overshoot equilibrium. This constant play between the elastic and inertia properties is what allows oscillatory motion to occur. The natural frequency of the oscillation is related to the elastic and inertia properties by:
The simplest example of an oscillating system is a mass connected to a rigid foun-dation by way of a spring. The spring constant k provides the elastic restoring force, and the inertia of the mass m provides the overshoot. By applying Newton’s second law F=ma to the mass, one can obtain the equation of motion for the system:
where is the natural oscillating frequency. The solutions to this equation of motion takes the form
where x
m is the amplitude of the oscillation, and φ is the phase constant of the oscilla-
tion. Both xm and φare constants determined by the initial condition (intial displace-
ment and velocity) at time t=0 when one begins observing the oscillatory motion.
Kepler’s Three Laws
1. The orbit of every planet is an ellipse with the sun at one of the foci. An ellipse is characterized by its two focal points; see illustration. Thus, Kepler rejected the ancient Aristotelean, Ptolemaic,and Copernican belief in circular motion.
2. A line joining a planet and the sun sweeps out equal areas during equal intervals of time as the planet travels along its orbit. This means that the planet travels faster while close to the sun and slows down when it is farther from the sun. With his law, Kepler destroyed the Aristotelean astronomical theory that planets have uniform velocity.
3. The squares of the orbital periods of planets are directly proportional to the cu-bes of the semi-major axes (the «half-length» of the ellipse) of their orbits. This means not only that larger orbits have longer periods, but also that the speed of a planet in a larger orbit is lower than in a smaller orbit.
African Virtual University ���
Mass: this is defined as the quantitative measure of inertia or resistance to change in the motion of a body and also gives rise to Gravitational attraction.
Mechanical system A mechanical system is defined as such a collection of material points (particles) or bodies in which the position or motion of each particle or body of the system depends on the position and motion of all the other particles or bodies. A classical example of a mechanical system is the solar system, all the component bodies of which are connected by the forces of their mutual attraction. Other examples of mechanical systems are machines or any mechanism whose members are connected with pins, rods, cables, belts, belts, etc.
Natural Circular Frequency
The fundamental tone, often referred to simply as the fundamental and abbreviated f
o, is the lowest frequency in a harmonic series.
The fundamental frequency (also called a natural frequency) of a periodic signal is the inverse of the pitch period length. The pitch period is, in turn, the smallest repea-ting unit of a signal. One pitch period thus describes the periodic signal completely. The significance of defining the pitch period as the smallest repeating unit can be appreciated by noting that two or more concatenated pitch periods form a repeating pattern in the signal. However, the concatenated signal unit obviously contains redundant information.
In terms of a superposition of sinusoids (for example, fourier series), the fundamental frequency is the lowest frequency sinusoidal in the sum.
Newton’s Laws of Motion
Newton’s laws of motion are three physical laws which provide relationships between the forces acting on a body and the motion of the body. They were first compiled by Sir Isaac Newton in his work Philosophiae Naturalis Principia Mathematica (1687). The laws form the basis for classical mechanics and Newton himself used them to explain many results concerning the motion of physical objects. In the third volume of the text, he showed that these laws of motion, combined with his law of universal gravitation, explained Kepler’s laws of planetary motion.
Briefly stated, the three laws are:
1. A physical body will remain at rest, or continue to move at a constant velocity, unless an unbalanced net force acts upon it.
2. The net force on a body is equal to its mass multiplied by its acceleration. 3. For every action there is an equal and opposite reaction.
Particle: is a body of negligible dimensions. Also when the dimensions of a body are irrelevant to the description of its motion or the action of forces upon it, the body may be treated as a particle.

African Virtual University ���
Position: Position in space is determined relative to some geometric referrence system by means of linear and/or angular measurements. The absolute frame of referrence is an imaginary set of rectangular axes assumed to have no translation or rotation effect in space for other motions, such as rocket motion, relative motion of the earth has to be taken into account and relative corrections made to equations describing the laws of Newtonian mechanics
Rectilinear translation Motion in which every line in the body remains parallel to its original position. The motion of the body is completely specified by the motion of any point in the body. All points of the body have the same velocity and same acceleration.
Rigid Body
In physics, a rigid body is an idealization of a solid body of finite size in which de-formation is neglected. In other words, the distance between any two given points of a rigid body remains constant in time regardless of external forces exerted on it. In classical mechanics a rigid body is usually considered as a continuous mass distribu-tion, while in quantum mechanics a rigid body is usually thought of as a collection of point masses. For instance, in quantum mechanics molecules (consisting of the point masses: electrons and nuclei) are often seen as rigid bodies (see classification of molecules as rigid rotors). The position of a rigid body is determined by the position of its center of mass and by its orientation (at least six parameters in total).
Simple Pendulum
A pendulum is an object that is attached to a pivot which the pendulum can swing freely. This object is subject to a restoring motion that will accelerate it toward an equilibrium position. When the pendulum is displaced from its place of rest, the res-toring force will cause the pendulum to oscillate about the equilibrium position.
A basic example is the simple gravity pendulum or bob pendulum. This is a weight (or bob) on the end of a massless string, which, when initially displaced, will swing back and forth under the influence of gravity over its central (lowest) point.
The regular motion of pendulum can be used for time keeping, and pendulum are used to regulatee pendulum clocks.
Space: This is the geometric region occupied by bodies. Position in space is deter-mined relative to some geometric reference system by means of linear and angular measurements.
Time: time is the measure of the succesion of events which is considered to be an absolute quantity in Newtonian mechanics.
Vectors and Scalars
Scalars have magnitude only. Temperature, speed, mass, and volume are examples of scalars.

African Virtual University ���
Vectors have magnitude and direction. The magnitude of is written | | v . Posi-tion, displacement, velocity, acceleration and force are examples of vector quantities. Vectors have the following properties:
1. Vectors are equal if they have the same magnitude and direction. 2. Vectors must have the same units in order for them to be added or subtrac-
ted. 3. The negative of a vector has the same magnitude but opposite direction. 4. Subtraction of a vector is defined by adding a negative vector:
- = + (- )
5. Multiplication or division of a vector by a scalar results in a vector for which
(a) only the magnitude changes if the scalar is positive (b) the magnitude changes and the direction is reversed if the scalar is negative. 6. The projections of a vector along the axes of a rectangular co-ordinate system
are called the components of the vector. The components of a vector com-pletely define the vector.
Figure 3.1 Projections of a vector in 2-D.
cos =
Ax = Acos

African Virtual University ���
sin =
Ay = Asin
We can invert these equations to find A and as functions of Ax and A
y . By Pythagoras we have,
A =
and from the diagram,
tan =
=
.
7. To add vectors by components: = + + +...
(a) Find the components of all vectors to be added. (b) Add all x components to get R
x = A
x + B
x + C
x + ...
(c) Add all y components to get Ry = A
y + B
y + C
y +...
Then:
| | =
=
.

African Virtual University ���
XII. Compiled list of Compulsory Readings Fitzpatrick, R. (2001). Classical Mechanics: An Introductory Course. Austin, Texas.UTP
Rationale
Fitzpartrick has the traditional approach to mechanics and dwells only briefly on vector algebra and calculus which forms the modern basis for teaching mechanics. He has adequately covered some aspects of the content in our curriculum and will make very good basic reading for the student. However, there are no exercises for the student and only a few examples are given at the end of each chapter.
The student should also note the interchangeable use of Imperical Units and S.I. Units.
We have, however, supplemented this compulsory reading material by including those topics which are not found in the compulsory reading book.

African Virtual University ���
XIII. Compiled list of (optional) Multimedia Resources
Reading#1:WolframMathWorld (visited03.11.06)
Complete reference : http://mathworld.wolfram.com
Abstract : Wolfram MathWorld is a specialised on-line mathematical encyclopedia.
Rationale: It provides the most detailed references to any mathematical topic. Stu-dents should start by using the search facility for the module title. This will find a major article. At any point students should search for key words that they need to understand. The entry should be studied carefully and thoroughly.
Reading#2:Wikipedia(visited03.11.06)
Complete reference : http://en.wikipedia.org/wiki
Abstract : Wikipedia is an on-line encyclopedia. It is written by its own readers. It is extremely up-to-date as entries are contunally revised. Also, it has proved to be extremely accurate. The mathematics entries are very detailed.
Rationale: Students should use wikipedia in the same way as MathWorld. However, the entries may be shorter and a little easier to use in the first instance. Thy will, however, not be so detailed.
Reading#3:MacTutorHistoryofMathematics(visited03.11.06)
Complete reference :
http://www-history.mcs.standrews.ac.uk/Indexes
Abstract : The MacTutor Archive is the most comprehensive history of mathematics on the internet. The resources are organsied by historical characters and by historical themes.
Rationale: Students should search the MacTutor archive for key words in the topics they are studying (or by the module title itself). It is important to get an overview of where the mathematics being studied fits in to the hostory of mathematics. When the student completes the course and is teaching high school mathematics, the cha-racters in the history of mathematics will bring the subject to life for their students. Particularly, the role of women in the history of mathematics should be studied to help students understand the difficulties women have faced while still making an important contribution.. Equally, the role of the African continent should be studied to share with students in schools: notably the earliest number counting devices (e.g. the Ishango bone) and the role of Egyptian mathematics should be studied.

African Virtual University ���
XIV. Compiled list of Useful links A. Circular motion http://en.wikipedia.org/wiki/Circular_motion
Rationale : This link is useful because it gives the definition of circular motion and discusses on other related issues.
B. Circular motion http://hyperphysics.phy-astr.gsu.edu/HBASE/circ.html
C. Circular motion www.phy.ntnu.edu.tw/java/shm/shm.html
D. Planetary motion http://galileoandeinstein.physics.virginia.edu/more_stuff/flashlets/kepler6.html
Rationale : This link is useful because it give animations on planetary motion which help the learner to picture how the motion of planets occurs.
E. Planetary motion http://www-istp.gsfc.nasa.gov/stargaze/kep3laws.htm
F. Planetary motion http://en.wikipedia.org/wiki/Kepler’s_laws_of_planetary_motion
Rationale : This link is useful because it gives the definition of planetary motion and helps the learner to understand some issues related to planetary motion.
G. Planetary motion www.windows.ucar.edu/tour/link=/the_universe/uts/planets.html
H. Simple harmonic motion http://en.wikipedia.org/wiki/Simple_harmonic_motion
Rationale : This link is useful because it gives the definition of simple harmonic motion and goes on to explain some issues related to simple harmonic motion.
I. Simple harmonic motion www.phy.ntnu.edu.tw/java/shm/shm.html
J. Simple harmonic motion http://hyperphysics.phy-astr.gsu.edu/hbase/shm.html
K. Simple harmonic motion www.kettering.edu/~drussell/Demos/SHO/mass.html
L. Simple harmonic motion http://theory.unwinnipeg.ca/physics/shm/nodes2.html

African Virtual University ��0
M. Classical Mechanics Lecture notes
http://farside.ph.utexas.edu/teaching/301/lectures/lectures.html
N. Newtonian Physics http://www.lightandmatter.com/arealbook1.html
O. Classical Mechanics: An Introductory Course http://www.lulu.com/content/159798
P. Centripetal Force http://en.wikipedia.org/wiki/Centripetal_force
Q. Angular Momentum http://en.wikipedia.org/wiki/Angular_momentum
R. D’Alembert’s Principle http://en.wikipedia.org/wiki/D%27Alembert%27s_principle
T. Vectors and Scalars http://en.wikipedia.org/wiki/Vector_(spatial)

African Virtual University ���
XV. synthesis of The Module
In this module you familiarized yourself, initially, with an introduction to vector calculus which led to the vector definitions of the basic concepts of plane and curvili-near motion, position, vector and acceleration. In most of this section you considered kinematics, the motion particles /bodies without referring to the force producing the motion.
You should, by now be convercant with Newton’s laws of motion which has the concept of inertia as is concept and their applications to all the other sections of mechanics such as oscillations, rigid bodies and dynamics.
The crutial concept that runs through this module is that of force and the resultant sections of different forces.
By this time you should also be able to model real-life situations in mathematical terms and solve the equations thus produced. Whenever and wherever possible, we also tried to relate the content to high school mathematics and started with the section headed ‘’Bridging the gap’’ of common place situations that we should be able to explain mathematically. You should now be comfortable with the rubic of mechanics and be able to teach the relevant content to High School students.
Good Luck!

African Virtual University ���
XVI. summative evaluation
Dynamics
Question 1
A car travelling at 10ms-1 collides with a tree. (a) A passenger without a seat belt stri-kes the wind shield headfirst and comes to rest in 0.002 s. The contact area between
the head and the windshield is 6 ×10−4 m2 , and the mass of the head is 5 kg. Find the average force and the force per unit area exerted on the head. (b) A passenger of mass 70 kg wearing a shoulder harness comes to rest in 0.2 s. The area of the harness in contact with the passenger is 0.1 m2. Find the average force and the average force per unit area.
Question 2
A car of mass m = 1000 kg moving at 30 ms-1 collides with a car of mass M = 2000 kg travelling at 20 ms-1 in the opposite direction. Immediately after the collision, the 1000-kg car moves at right angles to its original direction at 15 ms-1. Find the velocity of the 2000-kg car right after the collision.
Oscillations
Question 3
An object is connected to one end of a horizontal spring whose other end is fixed.
The object is pulled to the right (in the positive x direction) by an externally applied force of magnitude 20 N causing the spring to stretch 1.000 cm.

African Virtual University ���
(a) Determine the value of the force constant.(b) If the mass of the object is 4 kg determine with which it oscillates if the applied
force is suddenly removed.(c) Determine the frequency of the oscillation.(d) Determine the angular frequency of the oscillation.(e) Determine the position of the object 0.75 s after it begins oscillating.(f) Determine the velocity of the object at t = 0.75 s.(g) Determine the acceleration at t = 0.75 s.(h) Determine the force exerted on the body by the spring at t = 0.75 s
ForceEnergyAndMotion
Question 4
Give the approximate value of the speed, in m/s, for each object listed below. Also
express each speed as a fraction of the speed of light, which is 3.0 ×108 ms−1 . In cases where full information is not provided, make reasoned estimates in order to obtain your results.
(a) An ant crawling (b) A person walking to work at a comfortable pace(c) An athlete running the mile(d) A car on a super highway(e) A cruising jet (650 miles/ hr, or about 90 % the speed of sound).(f) A satellite orbital radius of 7000 km, (orbital period of about 90 minutes).(g) The moon in its orbit around the earth (orbital radius of about 380 000 miles,
orbital period of 27.3 days).(h) The earth in its orbit around the sun (orbital radius of approximately 93 000
000 miles, orbital period of 365.3 days).
N.B. [1 inch = 2.54 cm, 1 mile = 1.61 km and 1 foot = 0.3048 m]

African Virtual University ���
Question 5
Two dormitory roommates, Hugh and Lou, decide to play an unusual game of catch. Hugh stands on a balcony, and Lou stands on the ground directly below. The balcony is 10 m above the ground. Hugh and Lou each through the ball directly towards each other with an initial speed of 15 m/s.
(a) How long does the ball take to travel from Lou up to Hugh? How fast is the ball travelling when Hugh catches it ?
(b) How long does it take for the ball to descend from Hugh to Lou? How fast is the ball travelling when Lou catches it ?
(c) Compare the round-trip travel time with the time that would be required if the ball traveled with a constant speed of 15 m/s in both directions.
(d) Alice, another resident at the dormitory, lives 15 m above the two roommates. She decides to douse Hugh and Lou with two water filled balloons. She watches them toss the ball back and forth several times and learns to anticipate when Hugh will release the ball. Alice wants to drop the balloons so that Hugh and Lou will be hit simultaneously, just as the ball is reaching Lou. When should Alice drop each balloon? Must she drop both the balloons before Hugh throws the ball downward? How long after Hugh throws the ball will the first balloon fall past him? How long after that will the second balloon strike him?
(e) Alice’s diabolical spot works perfectly. However, Hugh and Lou are accusto-med to Alice’s pranks, and each of them has rotten tomato handy. They hold the tomatoes , count to three, and simultaneously hurl the tomatoes at Alice. Each tomato has an initial speed of 30 m/s. How soon after the tomatoes are thrown does Alice need to be out of the way?
(f) Both tomatoes miss on the way up, but then Alice makes a mistake. She leans out to gloat at her wet victims. Both tomatoes strike her on the back of the head. Whose tomato hits Alice first? When does it hit her, and how fast is it travelling? When does the other tomato hit, and how fast is it travelling?
Question 6
A 3000-pound vehicle is negotiating a circular interchange of radius 300 feet at 30 miles per hour. Assuming the roadway to be level, find the force between the tires and the road so that the car stays on the circular path and does not skid. (Use F = ma, where m = 3000/32). Find the angle at which the roadway should be banked so that no lateral frictional force is exerted on the tires of the vehicle.

African Virtual University ���
Question 7
The path of a shot thrown at an angle θ is
r (t) = (v
0cosθ)ti + h+ (v
0sinθ)t −
1
2gt2⎡
⎣⎢
⎤
⎦⎥ j
where v0 is the initial speed, h is the initial height, t is the time in seconds, and g is the
acceleration due to gravity. Verify that the shot will remain in the air for a total of
t =
v0sinθ + v
0
2 sin2 θ + 2gh
g seconds
and will travel a horizontal distance of
v0
2 cosθ
gsinθ + sin2 θ +
2ghv
0
2
⎛
⎝⎜
⎞
⎠⎟ feet .
N.B. [1 inch = 2.54 cm, 1 mile = 1.61 km and 1 foot = 0.3048 m]
Question 8
Determine the moments of inertia of the homogeneous rectangular parallelepiped of
mass m about the centroidal x0 and z − axes and about the x − axis through one
end.

African Virtual University ���
Solutions
Solution Question 1
(a) Again we use F Δt = ʹp − p . The final momentum is zero, since the windshield is stationary, and the initial momentum is the head mass times the velocity. Thus the magnitude of the average force is
F =
pΔt
=(5kg)(10ms−1 )
(0.002s)= 25000N
The average force per unit area is
FA=
25000N6 ×10−4 m2
= 4.16 ×107 Nm−2
This is a very large force per unit area and is certain to cause serious injury.
(b) The average force is found from the change in momentum of the entire body as
the speed of the car changes from 10 ms-1 to zero. Thus the magnitude of F is
F =
pΔt
=(70kg)(10ms−1 )
(0.2s)= 3500N
This is much smaller than the force exerted on the head of the unrestrained passenger in part (a). The average force per unit area is
FA=
3500N0.1 m2
= 3.5×104 Nm−2
Since this is smaller than the force per unit area on the unrestrained passenger by a factor 1200, the chance of serious injury is much smaller for this passenger.

African Virtual University ���
Solution Question 2
Let us take the x and y axes where the x component of the total momentum of the two vehicles is conserved, so
mvx+ MV
x= mv
x
' + MVx
'
Since vx
' = 0 , we can solve for Vx
' and substitute:
V
x
' =mv
x+ MV
x
M=
mvx
M+V
x
=
1000 kg2000 kg
(30 ms−1 ) + (−20 ms−1 ) = −5 ms−1
The initial momentum components along the y axes were zero, so mv
y
' + MVy
' = 0 , and
V
y
' = −mv
y
'
M= −
1000 kg2000 kg
(−15 ms−1 ) = 7.5 ms−1
Solution Question 3
Solution
(a) the force constant is the k in Hooke’s law
F = −kx
The force F produced by the spring is F = −20.00 N , where the minus sign means
that the force acts to the left (in the negative x direction). Since x = 1.000 ×10−2 m, you have
k =
Fx= −
−20.00 N
1.000 ×10−2 m= 2.000 ×103 N / m
(b) The ratio α of the force constant to the mass determines the period T, which
α =
km
=2.000 ×103 N / m
4.000 kg= 5.000 ×102 N / (m⋅ kg)

African Virtual University ���
Thus the period is
T =
2π
α=
2π
5.000 ×102 N / (m⋅ kg)= 0.2810 s
(c) Since
ν =
1
T, you have
ν =
1
0.2810 s= 3.559 cycles / s = 3.559 Hz
(Since a cycle is simply a count, it is a dimensionless number and can be inserted at will in the units of the answer.)
(d) you have
ω = 2πν = 2π rad / cycle× 3.559 cycles / s = 22.36 rad / s
(e) the oscillation is described by
x = Acos(ωt + δ )
If A and δ are adjusted to fit the initial conditions and if the proper value of ω is
used. The initial conditions (dx / dt)0= 0 and x0
= 1.000 ×10−2 m require that
δ = 0 and A = 1.000 ×10−2 m
So x = 1.000 ×10−2 m× cos(22.36 rad / s × t)
where the value of the ω is that found in part d. the position at t = 0.7500 s is

African Virtual University ���
x = 1.000 ×10−2 m× cos(22.36 rad / s × 0.7500 s)
= 1.000 ×10−2 m× cos(16.77 rad)
= 1.000 ×10−2 m× (−0.4871) = −4.871× 10−3 m= −0.4871 cm
The argument of the cosine is larger than 2π rad because the oscillation has passed beyond its first cycle. The minus sign means that the body is to left of its equilibrium position, and the spring is compressed. Note that for the purpose of evaluation x it is most convenient to express the cosine in terms of the angular frequency ω rather than the frequencyν .
(f) evaluating the terms you have
dxdt
= −Asin(ωt)
= 1.000 ×10−2 m× 22.36 rad / s × sin(16.77 rad)
= −1.000 ×10−2 m× 22.36 rad / s × (−0.8733)
= 0.1953 m/ s = 19.53 cm/ s
(A radian is a dimensionless number, being defined as the ratio of two lengths, so it can be deleted at will from the units.) The positive velocity means the body is moving to the right. Thus although the spring is compressed, the compression is decreasing.
(g) the acceleration is
d2 xdt2
= −Aω 2 cos(ωt)
= 1.000 ×10−2 m× (22.36 rad / s)2 × cos(16.77 rad)
= −1.000 ×10−2 m× (22.36 rad / s)2 × (−0.4871)
= 2.435 m/ s2 = 243 cm/ s2
The body is accelerating to the right since the acceleration is positive.
(h) one way to do this is to apply Newton’s Second law:

African Virtual University ��0
F = md2 xdt2
= 4.000 kg × 2.435 m/ s2
= 9.740 N
where the value of
d2 xdt2
is that found in part g. the force has a positive value, and so
acts to the right since the acceleration is to the right.
Another way of finding F is to apply Hooke’s Law:
F = −kx
= −2.000 ×103 N / m× (4.871×10−3 m)
= 9.740 N
where the values of k and x are those found in part a and e .
Solution Question 4
Estimates
(a) 0.1 m/s = 3.3 × 10-10 c
(b) to (h) Many possible solutions.
Solution Question 5
(a) 0.981 s, 5.39 m/s(b) 0.563 s, 20.5 m/s(c) Actual round-trip time is 1.54 s, while constant-speed time would be 1.33 s(d) Balloon intended for Lou must be dropped 1.70 s before Hugh throws the
ball; balloon intended for Hugh must be dropped 1.19 s before Hugh throws the ball, Yes. 0.05 s, 0.51 s
(e) 0.55 s(f) Lou’s tomato strikes first, 5.13 s after it is thrown (and 4.13 s after missing
on the way up); it hits her at 20.3 m/s. Hugh’s tomato hits 0.44 s later (5.57 s after it is thrown); it hits at 24.6 m/s

African Virtual University ���
Solution Question 8
A transverse slice of thickness dz is selected as the element of volume. The moment of inertia of this slice of infinitesimal thickness equals the moment of inertia of the
area of the section times the mass per unit area ρdz . Thus the moment of inertia of
the transverse slice about the y '− axis is
dI
y ' y '= ρdz( ) 1
12ab3⎛
⎝⎜⎞
⎠⎟
and that about the x '− axis is
dI
x ' x '= ρdz( ) 1
12a3b
⎛
⎝⎜⎞
⎠⎟
As long as the element is a plate of differential thickness, we have
dI
zz= dI
x ' x '+ dI
y ' y '= ρdz( ) ab
12a2 + b2( )
where m is the mass of the block.
By interchanging symbols the moment of inertia about the x0− axis is
I
0x
0=
1
12m(a2 + l 2 )
The moment of inertia about the x − axis may be found by the Parallel-axis theo-rem.
Thus
I
xx= I
x0 x0+ m
l2
⎛
⎝⎜⎞
⎠⎟
2
=1
12m a2 + 4l 2( )
This last result may be obtained by expressing the moment of inertia of the elemental

African Virtual University ���
slice about the x − axis and integrating the expression over the length of the bar. Again by the parallel-axis theorem
dI
xx= dI
x ' x '+ z2 dm= ρdz( ) 1
12a3b
⎛
⎝⎜⎞
⎠⎟+ z2ρabdz = ρab
a2
12+ z2
⎛
⎝⎜⎞
⎠⎟dz
Integrating gives the result obtained previously
I
xx= ρab
a2
12+ z2
⎛
⎝⎜⎞
⎠⎟0
1
∫ dz =ρabl
3l 2 +
a2
4
⎛
⎝⎜⎞
⎠⎟=
1
12m a2 + 4l 2( )
The expression for I xx may be simplified for a long prismatical bar or slender rod
whose transverse dimensions are small compared with the length. In this case a2
may be neglected compared with 4l 2 , and the moment of inertia of such a slender
bar about an axis through one end normal to the bar becomes I =
1
3ml 2 . By the
same approximation the moment of inertia about a centroidal axis normal to the bar
is I =
1
12ml 2 .

African Virtual University ���
XVII. References
Duncan, T (1981) Advanced Physics, London. John Murray.
Edwards and Penney (1982) Calculus and Analytic Geometry, New Jersey. Pren-tice-Hall.
Eisberg, R.M and Lerner, L.S. Physics: Foundations and Applications, New York. McGraw Hill.
Fadell, E.R. Fadell, A.G. (1970) Calculus. New York .Van Nostrand Reinhold.
Kane, J.W. and Sternheim (1978) Physics (2nd Ed). New York ,John Wiley and Sons.
Learson, Hostetter and Edwards (1998) Calculus (6th Ed) ,Boston. Houghton Miflin.
Meriam, J.L. and Kraige L.G. (1987) Engineering Mechanics Vol 2 Dynamics, New York. John Wiley and sons.
Sears, F.W., Zemansky M.N. and Young, H.D. (1982) College Physics (5th Ed), Reading. Addison-Wesley.

African Virtual University ���
XVIII. Main author of the Module
Team
Mr. Tendayi Chihaka (main author)
Mr. Blessing Mufoya (co-author)
Mr. Admire Kurira (co-author)
This module is a product of collaborative work by a team of three members of the Department of Science and Mathematics Education, at the University of Zimbabwe. The main Author, Tendayi Chihaka, holds a Masters in Mathematics Education and has vast experience in pre-service teacher education, having trained pre-service secondary mathematics teachers from 1978 to 1997 – a period of twenty years. He joined the Department of Science and Mathematics Education in 2003 where he was elected chairman of Department in 2004, the position he currently holds. He is married and has three children.
Mr Kurira holds a Masters in Mathematics and Physics and a Post Graduate Certificate in Education. He has taught Engineering at Harare Polytechnic 1996-1999. He joined the University of Zimbabwe, Department of Science and Mathematics in August 1999 as an ICT and Mathematics lecturer. He is married with 3 children.
Mr Mufoya holds a Masters in Mathematics and a Post Graduate Diploma in Educa-tion. He joined the University of Zimbabwe, Department of Science and Mathematics in November 2005. He in currently single.