Measurements of acoustic attenuation at 38kHz by wind-induced air bubbles with suggested correction...
10
Fisheries Research 151 (2014) 47–56 Contents lists available at ScienceDirect Fisheries Research jo u r n al homep age: www.elsevier.com/locate/fishres Measurements of acoustic attenuation at 38 kHz by wind-induced air bubbles with suggested correction factors for hull-mounted transducers Fannie W. Shabangu a,∗ , Egil Ona b , Dawit Yemane a a Department of Agriculture, Forestry and Fisheries, Fisheries Branch, Private Bag X2, Roggebaai, 8012 Cape Town, South Africa b Institute of Marine Research, PO Box 1870, Nordnes, N-5817 Bergen, Norway a r t i c l e i n f o Article history: Received 4 March 2013 Received in revised form 26 November 2013 Accepted 8 December 2013 Keywords: Air bubbles Acoustic signal attenuation Correction factor a b s t r a c t Rising research vessel costs and limited sea time have led many research institutes worldwide to con- duct fisheries research in moderate to bad weather conditions. In this paper, correction factors and the magnitude of acoustic signal attenuation in bad weather were investigated experimentally by com- paring acoustic backscattering from a conventional hull-mounted transducer with that from a drop keel-mounted transducer. Mean acoustic backscattering from corrugated and flat bottoms was mea- sured on both transducers, triggered alternately by a 38 kHz Simrad EK60 split-beam echosounder. Mean backscattering ratios between the transducers were relatively stable during periods of low to moderate wind speeds (0–10 m s −1 ), whereas at high wind speeds (>15 m s −1 ), multiplicative correction factors of up to 2.3 had to be applied to data collected from hull-mounted transducer to obtain comparable results. The regression between mean correction factor and wind speed estimated for RV “Johan Hjort” (LOA: 64.4 m) depicted an exponential increase at low wind speeds but stabilized at high wind speeds. Correc- tion factors were also found to be dependent on wind direction relative to the course of the vessel, and on transducer mounting position. Suggested correction factors provide guidelines for use on vessels with conventional hull-mounted transducers, where they may improve estimates of acoustic fish density that utilize data collected under unfavourable weather conditions, and they may also be useful for identifying conditions for both hull- and keel-mounted transducers under which surveys should be suspended. © 2014 Elsevier B.V. All rights reserved. 1. Introduction High survey costs and increased demands for resource abun- dance data essential to fisheries management have not only led research organizations to conduct acoustic biomass surveys in sub- optimal weather conditions, but have also compelled them to use commercial fishing vessels (FVs) to supplement or even substitute for research vessels as acoustic data collection platforms. Unfortu- nately, not all FVs are suitable for this kind of task. The level of low frequency propeller noise that is typically associated with FVs is often well above the ICES 209 recommended noise level for survey- ing fish, and may potentially result in increased fish avoidance and a low signal-to-noise ratio (ICES, 2007; Simmonds and MacLennan, 2005). Furthermore, the echosounder transducers of FVs are normally mounted in a conventional blister on the hull or directly on the keel, ∗ Corresponding author. Tel.: +27 21 402 3553; fax: +27 21 402 3694. E-mail addresses: [email protected], [email protected] (F.W. Shabangu). with both positions being vulnerable to acoustic attenuation caused by air bubbles generated in bad weather conditions (Pe˜ na, 2005). Acoustic signal attenuation is generally defined as the loss of acous- tic energy from a sound beam due to the compounded effects of radiation, shear viscosity and thermal conductivity (Lurton, 2002). Air bubbles, trapped just below the surface, increase the attenu- ation and scattering of sound waves. Although keel-mounted and deep-towed transducers are less susceptible to air bubble attenu- ation, survey abundance estimates may be biased negatively by up to 90% (Simmonds and MacLennan, 2005). Ocean surface mixing is crucial for numerous physical processes such as heat and gas stratification (Smith, 1992). Surface mixing is usually caused by downwelling and/or mechanical disturbance of the surface layer by the prevailing wind (Smith, 1992; Novarini et al., 1998). Although bubble plumes are generally forced to greater depths by downwelling than by wind, mixing tends to be induced more frequently by wind (Smith, 1992). Surface wind causes grav- ity waves in the water column to break, resulting in whitecaps that tend to be wind-parallel; the behaviour and quantity of air bubbles entrapped by this process are dependent on bubble size and local currents (Monahan and Lu, 1990; Smith, 1992; Leighton, 0165-7836/$ – see front matter © 2014 Elsevier B.V. All rights reserved. http://dx.doi.org/10.1016/j.fishres.2013.12.008
Transcript of Measurements of acoustic attenuation at 38kHz by wind-induced air bubbles with suggested correction...

Mbt
Fa
b
a
ARR2A
KAAC
1
drocfnfoia2
m
(
0h
Fisheries Research 151 (2014) 47– 56
Contents lists available at ScienceDirect
Fisheries Research
jo u r n al homep age: www.elsev ier .com/ locate / f i shres
easurements of acoustic attenuation at 38 kHz by wind-induced airubbles with suggested correction factors for hull-mountedransducers
annie W. Shabangua,∗, Egil Onab, Dawit Yemanea
Department of Agriculture, Forestry and Fisheries, Fisheries Branch, Private Bag X2, Roggebaai, 8012 Cape Town, South AfricaInstitute of Marine Research, PO Box 1870, Nordnes, N-5817 Bergen, Norway
r t i c l e i n f o
rticle history:eceived 4 March 2013eceived in revised form6 November 2013ccepted 8 December 2013
eywords:ir bubblescoustic signal attenuationorrection factor
a b s t r a c t
Rising research vessel costs and limited sea time have led many research institutes worldwide to con-duct fisheries research in moderate to bad weather conditions. In this paper, correction factors and themagnitude of acoustic signal attenuation in bad weather were investigated experimentally by com-paring acoustic backscattering from a conventional hull-mounted transducer with that from a dropkeel-mounted transducer. Mean acoustic backscattering from corrugated and flat bottoms was mea-sured on both transducers, triggered alternately by a 38 kHz Simrad EK60 split-beam echosounder. Meanbackscattering ratios between the transducers were relatively stable during periods of low to moderatewind speeds (0–10 m s−1), whereas at high wind speeds (>15 m s−1), multiplicative correction factors ofup to 2.3 had to be applied to data collected from hull-mounted transducer to obtain comparable results.The regression between mean correction factor and wind speed estimated for RV “Johan Hjort” (LOA:
64.4 m) depicted an exponential increase at low wind speeds but stabilized at high wind speeds. Correc-tion factors were also found to be dependent on wind direction relative to the course of the vessel, andon transducer mounting position. Suggested correction factors provide guidelines for use on vessels withconventional hull-mounted transducers, where they may improve estimates of acoustic fish density thatutilize data collected under unfavourable weather conditions, and they may also be useful for identifyingconditions for both hull- and keel-mounted transducers under which surveys should be suspended.. Introduction
High survey costs and increased demands for resource abun-ance data essential to fisheries management have not only ledesearch organizations to conduct acoustic biomass surveys in sub-ptimal weather conditions, but have also compelled them to useommercial fishing vessels (FVs) to supplement or even substituteor research vessels as acoustic data collection platforms. Unfortu-ately, not all FVs are suitable for this kind of task. The level of low
requency propeller noise that is typically associated with FVs isften well above the ICES 209 recommended noise level for survey-ng fish, and may potentially result in increased fish avoidance and
low signal-to-noise ratio (ICES, 2007; Simmonds and MacLennan,
005).Furthermore, the echosounder transducers of FVs are normallyounted in a conventional blister on the hull or directly on the keel,
∗ Corresponding author. Tel.: +27 21 402 3553; fax: +27 21 402 3694.E-mail addresses: [email protected], [email protected]
F.W. Shabangu).
165-7836/$ – see front matter © 2014 Elsevier B.V. All rights reserved.ttp://dx.doi.org/10.1016/j.fishres.2013.12.008
© 2014 Elsevier B.V. All rights reserved.
with both positions being vulnerable to acoustic attenuation causedby air bubbles generated in bad weather conditions (Pena, 2005).Acoustic signal attenuation is generally defined as the loss of acous-tic energy from a sound beam due to the compounded effects ofradiation, shear viscosity and thermal conductivity (Lurton, 2002).Air bubbles, trapped just below the surface, increase the attenu-ation and scattering of sound waves. Although keel-mounted anddeep-towed transducers are less susceptible to air bubble attenu-ation, survey abundance estimates may be biased negatively by upto 90% (Simmonds and MacLennan, 2005).
Ocean surface mixing is crucial for numerous physical processessuch as heat and gas stratification (Smith, 1992). Surface mixingis usually caused by downwelling and/or mechanical disturbanceof the surface layer by the prevailing wind (Smith, 1992; Novariniet al., 1998). Although bubble plumes are generally forced to greaterdepths by downwelling than by wind, mixing tends to be inducedmore frequently by wind (Smith, 1992). Surface wind causes grav-
ity waves in the water column to break, resulting in whitecapsthat tend to be wind-parallel; the behaviour and quantity of airbubbles entrapped by this process are dependent on bubble sizeand local currents (Monahan and Lu, 1990; Smith, 1992; Leighton,
48 F.W. Shabangu et al. / Fisheries Research 151 (2014) 47– 56
f RV “
1rLdfoethd(
p(fictdt1
fiacIwt(dtoatt2kb
o
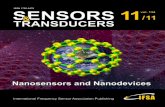
Fig. 1. Layout of transducers in both hull (A) and drop keel (B) mountings o
994). Parallel “white” convergence lines visible on the sea surfaceepresent a pattern of alternating horizontal roll-vortices calledangmuir circulation (Smith, 2001). Roll-vortices are effective inistributing momentum, energy and matter throughout the sur-ace layer (Smith, 1992; Novarini et al., 1998). A continuous layerf bubbles will start forming below the surface when wind speedsxceed 7 m s−1 (Smith, 1992; Leighton, 1994). Bubbles formed inhis way do not generally penetrate to depths greater than 20 m,owever, even in extreme weather, as the pressure gradient overepth limits the quantity of bubbles that will be entrained at depthDalen and Løvik, 1981; Lurton, 2002).
Echosounder transducers towed below the bubble layer havereviously been used to overcome the problem of attenuationDalen and Løvik, 1981), but the towed bodies were regarded as dif-cult to operate and cumbersome, particularly during the so-calledombined acoustic/trawl surveys (Knudsen, 2006). The introduc-ion of modern research vessels with drop keels that allowed for theeployment of transducers below the bubble layer largely solvedhe problem of air bubble acoustic attenuation (Ona and Traynor,990).
There has been increased collaboration in recent years betweensheries scientists and fishing vessel owners to optimize the designnd construction of fishing vessels that, when not actively fishing,an be used as suitable alternative research platforms (Godø, 2004;CES, 2007). The Norwegian FV “Libas” (94 m, 8000 HP), for example,
as built with a drop keel, multifrequency acoustic instrumen-ation, laboratories and hydrological data collection equipmentGodø, 2004). However, although some fishing vessels now haverop keel installations (Pena, 2005; ICES, 2007), most vessels char-ered from the fishing industry do not, and hence the problemf attenuation persists. Direct comparisons between vessels withnd without drop keels have indicated large differences in acous-ic biomass estimates (Pena, 2005, 2009), although the extent ofhe bias due to this platform limitation is generally uncertain (ICES,007). In addition, many research vessels are also still without drop
eels, further necessitating the quantification of this systematicias during acoustic surveys.Several attempts have been made to address the problemf acoustic attenuation in bad weather conditions. These have
Johan Hjort”. The 38 kHz (ES38B) transducers only were used in this study.
included the suspension of acoustic surveys when wind speedexceeds a certain threshold, empirically derived bubble attenuationcorrections (Ona and Mamylov, 1988), use of towed bodies (Dalenand Løvik, 1981; Dalen et al., 2003), implementation of a “bubbleattenuation estimator” (Dalen and Løvik, 1981; Berg et al., 1983)and, lastly, use of drop keels (Ona and Traynor, 1990). Only the useof drop keels has been found to be an effective solution that does notrequire either a substantial reduction in the average vessel surveyspeed or abandonment of the survey, particularly during combinedtrawl-acoustic surveys (Ona and Traynor, 1990). The objectives ofthis research were to establish a correction factor for air bubbleacoustic attenuation for a typical hull-mounted system by usingdrop keel data as a reference, and to further evaluate the benefitsand potential limitations of a drop keel in alleviating attenuationeffects in extreme weather conditions.
2. Materials and methods
2.1. Acoustic instrumentation
A Simrad EK60 38 kHz split-beam echosounder transducer, witha nominal beam width of 7◦, was mounted on the hull and anotheron the drop keel of RV “Johan Hjort” (LOA: 64.4 m, Beam: 13.0 m,Engine: Wärtsilä Wichmann diesel, 3264 HP). RV “Johan Hjort” wasbuilt in 1990 and has a v-shaped hull, typical of older vessels, that“ploughs” or removes aerated water ahead of the transducer blisteras the vessel moves forward (Knudsen, 2006). This design results inan improved quality of acoustic data from hull-mounted transduc-ers. Our experience from surveying indicates that RV “Johan Hjort”likely represents a best-case scenario for hull-mounted transduc-ers.
The hull-mounted transducer was housed with another trans-ducer in a standard blister (0.5 m long) (Fig. 1A), located 5.5 m belowthe sea surface. The 38 kHz (ES38B) transducer on the drop keel
was installed near three other Simrad transducers (Fig. 1B). Thekeel-mounted transducers were positioned 8 m below the sea sur-face when the keel was fully extended. The horizontally orientedsonar system of the vessel was turned off throughout the use of the
F.W. Shabangu et al. / Fisheries Research 151 (2014) 47– 56 49
F ttom
( pings.
vedntapGMmG
ihcHts
2
tcwvaasWptfi1oatttc
during data collection, resulted in a transmission pulse that waszigzag-shaped rather than a straight line. The bottom echo categoryconsisted only of the integrated bottom backscattering strength,
ig. 2. Set-up for alternate pinging (A) and LSSS screen snapshot (B) showing the bosA) during data post-processing. The resultant black vertical stripes are the empty
ertical echosounding system in order to avoid potential interfer-nce (Pena, 2005, 2009; ICES, 2007). The collection of comparableata from the two transducers was achieved by employing an alter-ate pinging method. A multiplexer (MUX) system was connectedo one EK60 General Purpose Transceiver (GPT) which served as
commander between the two transducers (Fig. 2A). The multi-lexer system was controlled remotely by the ER60 through thePT; the GPT transducer terminals were therefore connected to theUX, which was connected to the transducers. This is a standardethod for multiplexing several transducers from the same EK60PT.
The above set-up ensured that a similar volume of water wasnsonified by each of the two transducers. The alternate pinging,owever, resulted in a reduced ping repetition frequency (PRF)ompared with that used routinely during normal fish survey mode.ence the multiplexer was not used during normal survey opera-
ions but only during trawl experiments, CTD stations and whenteaming back and forth between survey areas.
.2. Data collection
Data were collected in the Barents Sea during three consecu-ive surveys (Fig. 3) which were conducted under various weatheronditions. The vessel steamed at varying speeds in accordanceith prevailing wind speeds. Survey dates were as follows: Sur-
ey 1, 17–27 October 2008; Survey 2, 4 and 5 February 2009;nd Survey 3, 20 and 25 February 2009. Collection of compar-tive acoustic data was a secondary objective of each of theseurveys, the primary objective being fish biomass estimation.
eather datasets were categorized according to sea states, whichrovided insight into typical correction factors required for par-icular wind speeds. Prevailing wind conditions were sorted intove categories: 0–5; 5–10; 10–15; 15–20; and 20–25 m s−1, where
m s−1 = 1.94 knots. Both echosounder systems were calibrated
n 7 February 2009 in Skogsfjord, Ringvassøy, northern Norway,ccording to standard target sphere procedures for split beamransducers (Foote et al., 1987; Ona, 1999). Water depths encoun-ered during the surveys ranged from 67 to 564 m and bottomopography was largely flat throughout the survey area, with feworrugated grounds.echo integration channel and the resultant nautical area backscattering coefficients
2.3. Data post-processing
Acquired ER60 raw data files were scrutinized and post-processed in the Large Scale Survey System (LSSS), version 1.2.4,post-processing software (Korneliussen et al., 2006). There wasone empty ping between each real transmission, due to reducedPRF (Fig. 2B). Initially it was envisaged that the scrutiny shouldbe split between bubble layer and bottom echo categories. It wasnot possible to evaluate the bubble layer component separately,however, because the vessel heave compensator, which was active
Fig. 3. Geographical positions of the vessel tracks during the three surveys in theBarents Sea.
Map drawn by Karen Gjertsen, IMR, Bergen.

50 F.W. Shabangu et al. / Fisheries R
basacpgfw
rb
S
faiaDrasap
g(asaetpa
2
mbO(awI
Fig. 4. Wind direction categories relative to the heading of the vessel.
ecause contributions from other sound scatterers such as fishnd zooplankton were considered negligible in comparison. Fishpecies such as cod (Gadus morhua), capelin (Mallotus villosus),nd redfish (Sebastes mentella) were, however, reported from trawlatches in the surveyed area. Data were post-processed in theelagic mode with a Sv threshold set at −60 dB and a time variedain (TVG) of 20 log r + 2˛r applied. To exclude propeller noise inter-erence, only data collected at vessel speeds in excess of 6 knotsere considered for analysis.
The bottom mean nautical area backscattering strength, SA [dBe 1 (m2 nmi−2)], can be computed from the bottom nautical areaackscattering coefficients (sA) as:
A = 10 log10(sA) (1)
Corresponding wind speed and wind direction were extractedrom weather files using common time as a reference. The nauticalrea scattering coefficient (NASC) of the bottom echo was measuredn a layer extending over the entire bottom echo, and averaged overn elementary sampling distance unit (ESDU) of 0.1 nmi (Fig. 2B).uring the merging of acoustic and weather data files, only those
ecords of wind speed and wind direction that were closely associ-ted in time with the acoustic ESDU were extracted. Due to the largeize of the dataset, wind data and mean bottom SA were furtherveraged over 5 nmi intervals. This resulted in more meaningfulresentation of bottom backscattering as a function of wind speed.
Data were further sorted and separated into four wind cate-ories, depending on the vessel course relative to the wind directionFig. 4). This categorization was used to evaluate whether air bubblecoustic attenuation of the signal generated by the hull-mountedystem was dependent on wind direction and vessel heading rel-tive to wind speed. Similar categorizations, that attempted tolucidate patterns of vessel heave and roll movement in relationo wind direction, showed little interaction and therefore are notresented. Measurements of reverberation from air bubble plumest the sea surface were not undertaken.
.4. Vessel movement and weather determination
Ona (1991) investigated previously the effect of vessel heaveovement on the extent of air bubble acoustic attenuation in
ad weather conditions. Vessel movement was recorded using anctans III-Fibre-Optic Gyrocompass with Integral Motion Sensor
iXSea, Marly-le-Roi-France) and logged to the ER60. Wind speednd wind direction were measured using a Thies Clima AMS 07eather station on board the vessel, and logged every second to the
MR “Survey Logger” software. Vessel movement data were later
esearch 151 (2014) 47– 56
extracted from the ER60 using custom designed software known asER60LPHTR (Log, Position, Heave, Tilt, and Roll); these two applica-tions ran simultaneously and communicated via Ethernet broadcastmode.
All heave (metres) and roll (degree) values extracted usingER60LPHTR were either positive or negative. For heave, a posi-tive value indicated an upward movement and a negative value adownward movement. Negative vessel roll values indicated a portroll and positive values a starboard roll. For computational pur-poses, however, all heave and roll values were considered absolute.Heave and roll data were integrated over 0.1 nautical miles. Com-puted mean vessel heave and roll data were later merged with theacoustic and weather data over 5 nmi intervals.
2.5. Data analyses
Data analyses were performed in the R-environment software,version 3.0.1 (R Development Core Team, 2013), using script edi-tor Tinn-R GUI for R Language and Environment, version 2.4.1.7,for writing and saving the commands. The calibration results wereimplemented before performing the comparative analysis thatused backscattering from the bottom as a “reference target” (Footeet al., 1992). To verify the sphere calibrations, an intercalibra-tion was conducted between the two 38 kHz EK60 transducers.The intercalibration was aimed explicitly at comparing the per-formance of the two transducers in various weather conditions.A linear regression analysis between bottom sA of the two 38 kHztransducers was performed and took the following form:
sA(H) = a + b · sA(K) (2)
where sA = 4�(1852)2sa (m2 nmi−2), a and b are the regressioncoefficients and H and K refer to hull- and keel-mounted trans-ducers respectively.
The ratio (R) between the bottom sA of the two 38 kHz systemswas computed as:
R = sA(K)sA(H)
(3)
Under good weather conditions, and after implementation ofechosounder calibration results, R should be close to unity. Dataon wind speed, wind direction, and vessel movement collectedover the same time intervals as the bottom data formed the basisof the analysis. Evaluation of ratios is ordinarily conducted eitherto intercalibrate the two systems (in calm weather) or to deter-mine the effects of air bubble acoustic attenuation (in moderate torough weather conditions). Mean ratios were used to establish acorrection factor for air bubble acoustic attenuation in the hull-mounted transducer, with the initial assumption being that thekeel-mounted system was unaffected by such attenuation.
Sample variability was evaluated by means of a nonparametricbootstrap prior to establishing correction factors. Each boot-strapped sample comprised 1000 resampled values per wind speedcategory. Weak bottom backscattering with NASC < 106 m2 nmi−2
was not considered for use during the statistical comparisons, asmost data points of this type were collected from areas where thebottom sloped steeply. Appropriate mean and standard error (SE)values were calculated because our data were found to be auto-correlated. Two types of analysis of covariance (ANCOVA) modelwere fitted to the correction factors as a function of wind speed andsurvey number, and the best was found to be the separate slope andintercept model. Model selection was based on comparison of thechange in residual sums of squares (RSS) between the two models
and also by comparing Akaike’s Information Criterion (AIC) values(Akaike, 1974; C etin and Erar, 2002). ANCOVA was also used todetermine the effect of wind speed on the response of the hull andkeel transducers.
F.W. Shabangu et al. / Fisheries Research 151 (2014) 47– 56 51
erall d
3
fbe2dftttasTdusifaw(t
ib(htltwhoeiabsb
Fig. 5. The frequency of occurrence (A) and ov
. Results
Weather conditions (i.e. wind speed and wind direction) wereound to be the main factors determining the magnitude of bub-le attenuation. Weather conditions varied substantially betweenach survey but were dominated by wind speeds between 15 and0 m s−1, with rough weather of a similar nature being experienceduring surveys 2 and 3 (Fig. 5). As expected, the paired resultsrom post-processing indicated significant correlations betweenhe hull and keel SA when sampling the same target with tworansducers of the same frequency (Fig. 6). There was a posi-ive relationship between the keel and hull measurements acrossll five wind speed categories and surveys. ANCOVA indicatedtrong interactions between transducer system and wind speed.he ratios of mean bottom backscattering between the two trans-ucer systems within each wind speed category were very close tonity, particularly in good to moderate weather conditions (windpeeds 0–10 m s−1) (Table 1). For data collected under conditions ofncreasing wind speed, especially above 15 m s−1, the ratio variedrom one to greater than two, indicating that air bubble attenu-tion on the hull-mounted transducer was >3 dB. No correlationsere found between depth and SA, with correlation coefficients
r) of −0.22, −0.17 and −0.219 for surveys 1, 2 and 3, respec-ively.
Comparisons of mean backscattering per wind category/groupn all surveys indicated that there was a significant differenceetween backscattering of hull- and keel-mounted transducersKolmogorov–Smirnov test, p < 0.05). For example, in Survey 1, theull-mounted transducer recorded higher bottom backscatteringhan the keel-mounted transducer during low wind speeds, butower backscattering at higher wind speeds (Fig. 7). It is evidenthat the bottom backscattering of both systems gradually decreasedith increasing wind speeds (r = 0.99; Fig. 7). This phenomenon,owever, is not necessarily always due to air bubble attenuationnly, since some reduction in mean bottom backscattering is alsoxpected when sound beams move away from a normal angle ofncidence with increased roll. In good weather conditions, such
s that experienced during Survey 1, no correlation was foundetween the bottom SA values and heave movement. Linear regres-ion computations suggested only weak correlations between theottom SA values and heave movement for all 3 surveys (r = −0.2,istribution (B) of wind speeds for all surveys.
−0.4 and −0.3 for surveys 1, 2, and 3 respectively) but weakerbottom echoes coincided mainly with increased heave recordings.
Wind and wave action had a strong influence on overall ves-sel movement, both vertically and horizontally. During Survey 1,vessel heave showed some correlation with wind speed (r2 = 0.49),first increasing but then decreasing at higher speeds (Fig. 8). Ves-sel roll, however, responded differently, remaining almost uniform(r2 = 0.02) at wind speeds <10 m s−1, increasing rapidly at 15 m s−1
and then declining again at higher speeds (Fig. 8). In Survey 2, vesselheave decreased with increasing wind speed (r2 = 0.99), whereasroll increased (r2 = 0.36) with speeds between 10 and 15 m s−1
but then decreased at higher speeds (Fig. 8). In Survey 3, vesselheave was positively correlated with wind speed (r2 = 0.74; Fig. 8),whereas roll first decreased then increased in response to increasedwind speed (r2 = 0.39). Wind speed and wind direction relative tothe heading of the vessel were the main factors determining vesselheave and roll movement during all surveys (ANCOVA, p < 0.001,n = 6706).
3.1. Air bubble attenuation correction factors
Correction factors generally increased with wind speed;r2 = 0.96 for Survey 1, r2 = 0.95 for surveys 2 and 3. The mean cor-rection factors per wind speed category were generally less thanthe upper limit correction factor of 1.5 for the first two surveys,but were higher for Survey 3 (Fig. 9). Furthermore, at wind speeds>25 m s−1 the standard errors of the mean correction factors werelarge for all surveys. Attenuation was particularly low at windspeeds between 0 and 10 m s−1 during surveys 1 and 2. The upperlimit correction factor of 1.5, as depicted in Fig. 9, corresponds toa ping loss of 30–35% and is consistent with absorption level crite-ria recommended by Ona and Mamylov (1988) for fisheries echointegration. In addition, above this limit the appearance of differ-ent targets on the echogram began to become distorted, makingspecies separation more difficult. Given the high levels of attenua-tion experienced during Survey 3, survey data collected would notbe suitable for estimation of fish stock abundance.
A significant interaction term between wind speed and surveynumber (Table 2) suggested that correction factors derived fromdifferent surveys could not be averaged. Furthermore, there wasa significant interaction between vessel heading, wind direction,

52 F.W. Shabangu et al. / Fisheries Research 151 (2014) 47– 56
F hull-m( egres
wesh
TR(
ig. 6. Nautical area backscattering strength (SA) linear regressions of the keel- and
0–5; 5–10; 10–15; 15–20; 20–25 m s−1). Solid lines represent the fit from a linear r
ind speed and the correction factor (Fig. 10). Fore and portncounter angles produced higher correction factors than aft andtarboard encounters. Given vessel safety considerations at veryigh wind speeds, not all encounter angles could be investigated.
able 1esults of analysis of the mean sA ratio (� ratio) as a function of wind speeds (WS) categoSEAM), 95% lower and upper confidence limit (LCL and UCL), coefficient of variation (CV
Survey no. WS � ratio SD SEAM
1 0–5 0.954 0.578 0.019
1 5–10 1.039 0.827 0.016
2 5–10 1.055 0.271 0.059
1 10–15 1.278 0.748 0.022
2 10–15 1.257 0.359 0.015
3 10–15 1.806 0.591 0.058
1 15–20 1.483 0.523 0.025
2 15–20 1.341 0.400 0.018
3 15–20 2.433 2.184 0.130
1 20–25 1.537 0.511 0.084
2 20–25 1.433 0.414 0.138
3 20–25 2.347 1.015 0.192
ounted transducer systems plotted according to survey and wind speed categoriession.
4. Discussion
Wind-induced air bubbles are known to significantly reduce thequality of acoustic data collected from hull-mounted transducers
ries, including the standard deviation (SD), standard error of the arithmetic mean) and the minimum (Min.) and maximum (Max.) values for each survey.
95% LCL 95% UCL CV Min. Max.
0.918 0.991 0.606 0.105 5.7921.007 1.071 0.777 0.071 9.7850.932 1.178 0.257 0.484 1.6351.234 1.321 0.586 0.292 10.1051.229 1.286 0.285 0.403 3.4961.691 1.921 0.327 1.011 4.5561.434 1.532 0.353 0.495 3.9261.306 1.375 0.298 0.599 3.6522.178 2.688 0.898 0.617 33.3751.367 1.708 0.322 0.788 2.6271.115 1.751 0.289 0.848 2.3051.953 2.741 0.433 1.204 5.530

F.W. Shabangu et al. / Fisheries Research 151 (2014) 47– 56 53
Table 2Analysis of covariance (ANCOVA) applied to correction factors modelled as a function of survey type and wind speed. Where Df = degree of freedom, Sum Sq = sum of squares,and Mean Sq = mean squares.
Df Sum Sq Mean Sq F value Pr (>F)
Survey 2 628.5 314.2 478.840 <2.2e−16Wind speed 1 201.2 201.2 306.566 <2.2e−16
iBttavao
Survey:wind speed 2 18.3
Residuals 6701 4397.4
f correction factors are not implemented (Dalen and Løvik, 1981;erg et al., 1983; ICES, 2007). The results of this study indicated thathe 38 kHz hull-mounted transducer performed reasonably well inerms of bottom SA in good to moderate weather conditions, beforettenuation and vessel movement became a problem. It has pre-
iously been suggested that, when measuring deep targets, it iscceptable for the echo to be received from a different angle to thatf the transmission (Stanton, 1982; Simmonds and MacLennan,Fig. 7. Comparison of the bottom SA of the hull- and keel-mounted
Fig. 8. Observed mean pitch ± SE and roll ± SE averaged ove
9.1 13.918 9.29e−070.7
2005), as would occur when the ship rolls. This is not applicableto this study which was conducted over a relatively shallow area.
At wind speeds ≤15 m s−1 vessel captains and navigators areusually willing to survey into the prevailing wind if required,because vessel movements are moderate. At wind speeds
>15 m s−1, however, there is a tendency to change heading to a safeand more comfortable direction that will impose less vessel move-ment. As a result, at speeds >15 m s−1, the vessel heading is usuallytransducers in various weather conditions from all surveys.
r a minute per wind speed groups during all surveys.

54 F.W. Shabangu et al. / Fisheries R
Fig. 9. Bootstrapped average correction factors (±SE) plots for various weather con-ditions. Horizontal broken lines at 1 and 1.5 on the y-axis refer to the lower limit(LL) and upper limit (UL) at which corrections should be implemented. The verticalbw
sl(uorc(
flat hull designs, which have increased hull displacement. The RV
roken line (STOP) at 20 m s−1 (∼38 knots) represents the suggested wind speed athich the survey should be suspended.
imilar to the wind direction. Hence vessel heave movements areow even at high wind speeds when the wind blows from asternDalen and Løvik, 1981). Stern winds also result in less bubble atten-ation, even at high wind speed and large wave heights. That partf the bubble layer created by the pounding motion of the hull is
emoved (Knudsen, 2006), and all that remains are bubble plumesaused by external wave and wind action like Langmuir circulationSmith, 1992; Leighton, 1994).Fig. 10. Correction factor according t
esearch 151 (2014) 47– 56
For our study, in which the hull-mounted transducer waslocated on the starboard side of the vessel, more bubbles wereproduced when the vessel was headed into the wind (i.e. foreencounter) and the hull bounced through the waves. When thevessel was headed downwind (i.e. aft encounter), however, fewerbubbles were produced, resulting in lower correction factors. Windfrom the starboard side, where the hull-mounted transducer waslocated, led to greater bubble generation on that side, and hencegreater variability in backscattering measured by that transducer.By contrast, the keel-mounted transducer, although located on theport side, was less susceptible to bubbles generated by winds fromthe port side because it was deployed at a greater depth. Hencecorrection factors were lower during winds from the port sidethan from the starboard side, an observation similar to that of Onaand Traynor (1990). Improved correlations between the hull- andkeel-mounted transducers were found at increased wind speeds(surveys 2 and 3) but were based on smaller sample sizes than wereobtained at lower wind speeds. The limited sample size also pre-cludes effective comparison within wind categories between thesurveys, and this highlights the need to collect more data underconditions of high wind speed.
In very bad weather, normal cruising speed is usually reducedfrom 10 knots to about 6 knots. This increases comfort levels onboard as the vessel is better able to absorb the shock impactfrom large waves. In some large FVs, either vessel ballast tanksor fish holding tanks can be filled with seawater to increase thegross weight of the vessel, which reduces vertical movementand promotes passage through the waves (Pena, 2009). Knudsen(2006) suggests that the older v-shaped vessel hull design leadsto increased heave and roll movements compared with modern
“Johan Hjort”, used during this study, has a moderate v-shaped hull.It is strongly recommended, therefore, that two or more platformswith different hull designs be used in future studies of this nature.
o ship’s wind encounter angle.

eries Research 151 (2014) 47– 56 55
IbvfllcA
erGfiseiiifb1
redLtstbtsds
4
utrcalosoa
tsbthcfi
cadCamkbp
Fig. 11. Comparison of the mean correction factor (CF) for air bubble attenuationestablished in the current study with that previously established by Berg et al.
F.W. Shabangu et al. / Fish
n addition, given that small vessels are affected to a greater extenty wind and wave action than larger ones, we recommend thatessels of different sizes be used in future experiments. The dif-erence between the seabed SA values of the FRS “Africana” (88 mong, 6.3 m transducer depth) and a small research boat “Echo” (5 mong, 1 m transducer depth) was significantly larger in bad weatheronditions than in calm conditions (South African Department ofgriculture, Forestry and Fisheries, unpublished data).
Variability in the bottom SA values between the two transduc-rs is usually considered to be either due to calibration error or aesult of air bubble acoustic energy attenuation (Knudsen, 2009).iven the dual calibration procedure employed during this study,rst the sphere calibration and later the inter-calibrated bottom
A ratio method, whereby the hull- and keel-mounted transduc-rs performed similarly in good to moderate weather conditions;t is unlikely that the observed variability in bottom backscatter-ng can be attributed to calibration error. The observed differencesn the bottom SA could potentially, however, be linked to the dif-erent types of seabed surveyed during this study, since differentottom types have different acoustic scattering properties (Foote,999; Lurton, 2002).
The depth of the seabed can also affect the amount of energyeceived from the bottom echo, since the transmitted intensity isxpected to decrease exponentially with distance from the trans-ucer (Dalen and Løvik, 1981; Leighton, 1994; Novarini et al., 1998;urton, 2002; Simmonds and MacLennan, 2005). However, sincehere was no evidence of variation in the property and slope of theeabed surveyed during each of the three surveys to equally affecthe two transducers, it is likely that the bubble layer influenced theottom echo differently in the two transducers. The inverse rela-ionship between wind speed and bottom backscattering strengthuggests that the variability in bottom SA between the two trans-ucers observed here is primarily related to the prevailing windpeed, which, in turn, affects bubble generation.
.1. Application of the method
Correction factors established in this study can potentially besed as a guideline for other vessels equipped with hull-mountedransducers by comparing wind speeds encountered, and the cor-esponding heave movements, with those observed here. Thisould be refined by further categorizing the prevailing wind speedccording to vessel-wind encounter angle and thereafter extrapo-ating correction factors based on wind speed and ping loss. Eachf the three surveys conducted for this study provide a differentcenario of potential air bubble attenuation, the most appropriatef which can be selected according to observed weather conditionsnd vessel behaviour.
A comparison of correction factors obtained from this study withhose previously calculated by Dalen and Løvik (1981) from in situea measurements, and by Berg et al. (1983) using an empirical bub-le estimator (Fig. 11), suggests that ours are much lower, despitehe fact that they were estimated from data collected at relativelyigh wind speeds. We know of no published correction factors cal-ulated at wind speeds >15 m s−1 (30 knots; Fig. 11), and ours is therst in situ study to establish a correction factor at such speeds.
Though Dalen and Løvik (1981) and Berg et al. (1983) bothollected data at wind speeds >15 m s−1, they did not establish
correction factor at such speeds due to the tediousness of theerivation process at the time of publication (J. Dalen, pers. comm.).orrection factors calculated from this study were derived based on
modern and relatively new technique facilitated by the use of a
ultiplexer which allowed alternate pinging between the hull- andeel-mounted transducers. Determination of the ratio between theottom echo backscattering of the two transducer systems was aractical and robust method for establishing a correction factor.
(1983). In the current study the RV “Johan Hjort” (mean S1, S2 and S3) was usedfor data collection while Berg et al. (1983) used RV “Sarsen” and RV “Johan Ruud”.The vertical dashed line indicates stop conditions.
This technique, however, may not be appropriate in conditionsrough enough to cause air bubble attenuation below the keel-mounted transducer. In such cases, repeated measures over thesame section of seabed under different conditions may be insight-ful.
In situ correction factors established in this study are in gen-eral agreement, at low to moderate wind speeds, with theoreticalexpectations that correction factors should increase exponentiallywith increased wind speeds (Dalen and Løvik, 1981; Berg et al.,1983; Ona, 1991). Also, our results are well within the expectedrange for transducers operating at 38 kHz and positioned at 5.5 and8 m depth (Novarini and Bruno, 1982). We therefore suggest thatcorrection factors are lower than previously stated.
At wind speeds >15 m s−1, keel-mounted transducers are alsoknown to experience air bubble acoustic attenuation (Ona andTraynor, 1990), and hence correction factors derived from the sAratio tend to stabilize rather than increase exponentially as pre-viously suggested. This implies that the method of setting thecorrection factor by using a mean SA ratio is biased at high windspeeds because bubbles are entrained to greater depths. Under con-ditions where correction factors start to stabilize it is recommendedthat the survey be suspended, otherwise the data collected fromsuch surveys will be prone to error and fish abundance will beunderestimated (Ona and Mamylov, 1988; Foote, 1990). The overallobjective of correcting recorded backscattering strength estimatesfor attenuation is to derive the best possible animal abundance esti-mates. Results from the RV “Johan Hjort” hull-mounted transducerindicate that there is potential, in good-to-moderate weather con-ditions, to collect acoustic research data using commercial vesselsthat are equipped only with hull-mounted transducers (ICES, 2007).At wind speeds >15 m s−1, however, data from such vessels shouldbe used with caution.
The increased use of FVs in scientific surveys appears to be ageneral trend in several regions of the world, and the installationof drop keels and other modern scientific equipment in these FVs ispivotal to ensuring that good quality data are collected from thesevessels (ICES, 2007). When surveying fish stocks in deep water,
where the problem of fish avoidance is less, high quality surveydata may undoubtedly be collected using such vessels. Since nodata from commercial vessels were used in this particular study,however, our results should be considered only as exploratory. It is
5 eries R
rbwttfrv
A
sawtsJtlsad
R
A
B
C
D
D
F
F
F
F
G
Smith, J.A., 2001. Observations and theories of Langmuir circulation: a story of mix-ing. In: Lumley, J.L. (Ed.), Fluid Mechanics and the Environment: Dynamical
6 F.W. Shabangu et al. / Fish
ecommended that further experiments should be conducted usingoth fishing and research vessels simultaneously, during similareather conditions. In bad weather conditions, the performance of
he keel-mounted transducer in our study was much better thanhat of the hull-mounted transducer. The established correctionactors, if applied correctly, may significantly improve the accu-acy of data collected using commercial fishing vessels and researchessels that are equipped only with hull-mounted transducers.
cknowledgements
The Institute of Marine Research (Project No. 11687) and Univer-ity of Bergen are thanked for sponsoring the field trips. Atle Totlandnd Reidar Johannesen are thanked for their invaluable assistanceith technical- and equipment-related matters. The authors thank
wo anonymous reviewers for their constructive comments anduggestions for improvements to this paper. We are very grateful toanet Coetzee and Dr Sheldon Duddley for editing and proofreadinghis manuscript. We also express our sincere gratitude to our col-eagues, especially those from IMR, for their helpful discussions anduggestions throughout the writing of the manuscript. The captainnd crew of RV “Johan Hjort” are thanked for their inputs duringata collection.
eferences
kaike, H., 1974. A new look at the statistical model identification. IEEE Transactionson Automatic Control 19, 716–723.
erg, T., Løvik, A., Dalen, J., 1983. Increased precision of echo integration recordingsunder various weather conditions. FAO Fisheries Review 300, 45–51.
etin, M.C., Erar, A., 2002. Variable selection with Akaike Information Criteria: acomparative study. Hacettepe Journal of Mathematics and Statistics 31, 89–97.
alen, J., Løvik, A., 1981. The influence of wind induced bubbles on echo integration.Journal of the Acoustical Society of America 69 (3), 1653–1659.
alen, J., Nedreaas, K., Pedersen, R., 2003. A comparative acoustic-abundance estima-tion of pelagic redfish (Sebastes mentella) from hull-mounted and deep-towedacoustic systems. ICES Journal of Marine Science 60, 472–479.
oote, K.G., Knudsen, H.P., Vestnes, G., MacLennan, D.N., Simmonds, E.J., 1987. Cal-ibration of acoustic instruments for fish density estimation: a practical guide.In: International Council for the Exploration of the Sea, Cooperative ResearchReport No. 144, 57 pp.
oote, K.G., 1990. Correcting acoustic measurements of scatterer density for extinc-tion. Journal of the Acoustical Society of America 88 (3), 1543–1546.
oote, K.G., Ona, E., Toresen, R., 1992. Determining the extinction cross-section of
aggregating fish. Journal of the Acoustical Society of America 91, 1983–1989.oote, K.G., 1999. Extinction cross-section of Norwegian spring-spawning herring.ICES Journal of Marine Science 56, 606–612.
odø, O.R., 2004. First fishing vessel to be built as a research platform. In: IMRInternal Marine Research News No. 7, 2 pp.
esearch 151 (2014) 47– 56
ICES, 2007. Collection of acoustic data from fishing vessels. In: ICES CooperativeResearch Report No. 287, 83 pp.
Knudsen, H.P., 2006. Design criteria for improved hydro acoustic performance onfisheries research vessels. In: Modernization of Fisheries Technology to Copewith Challenges and Profitability Proceedings, Nor-Fishing Technology Confer-ence 2006, Trondheim, Norway, 7–8 August, pp. 43–49.
Knudsen, H.P., 2009. Long-term evaluation of scientific-echosounder performance.ICES Journal of Marine Science 66, 1335–1340.
Korneliussen, R.J., Ona, E., Eliassen, I., Heggelund, Y., Patel, R., Godø, O.R., Giert-sen, C., Patel, D., Nornes, E., Bekkvik, T., Knudsen, H.P., Lien, G., 2006. TheLarge Scale Survey System – LSSS. In: Proceedings of the 29th ScandinavianSymposium on Physical Acoustics, Ustaoset, Norway, 29 January–1 February,2006.
Leighton, T.G., 1994. The Acoustic Bubble. Academic Press, San Diego, London, 640pp.
Lurton, X., 2002. An Introduction to Underwater Acoustics: Principles and Applica-tions. Springer, London, 347 pp.
Monahan, E., Lu, M., 1990. Acoustically relevant bubble assemblages and theirdependence on meteorological parameters. IEEE Journal of Oceanic Engineering15 (4), 340–349.
Novarini, J.C., Bruno, D.R., 1982. Effects of the sub-surface bubble layeron sound propagation. Journal of Acoustical Society of America 72 (2),510–514.
Novarini, J., Keiffer, R., Norton, G., 1998. A model for variations in the range and depthdependence of the sound speed and attenuation induced by bubble clouds underwind-drive seas. IEEE Journal of Oceanic Engineering 23, 423–438.
Ona, E., 1991. Vessel heave, an index for air bubble attenuation corrections. In: ICESDocument C.M. 1991/B: 37.
Ona, E., 1999. Methodology for target strength measurements. In: ICES CooperativeResearch Report 235, 62 pp.
Ona, E., Mamylov, V., 1988. Scientific Report on Cooperative Work Between Norwe-gian and Soviet specialists, May 19–June 2, 1988. PINRO, Murmansk, USSR, 22pp.
Ona, E., Traynor, J., 1990. Hull-mounted, protruding transducer for improving echointegration in bad weather. In: ICES Document CM 1990/B: 31., pp. 1–10.
Pena, H.A., (Unpublished Institute of Marine Research Internal Cruise Report,Bergen) 2005. Intercalibration of Three Commercial Vessels Equipped with Sci-entific Echosounders in the Norwegian Sea (MV Libas, MV Hardhaus and MVMøgsterbas).
Pena, H.A., (Dissertation for the degree of philosophiae doctor, Ph.D.) 2009. Compar-ison of scientific echo sounder data from commercial vessels in the NorwegianSea. In: Improving Acoustic Abundance Estimates of Pelagic Fish Using Commer-cial Fishing Vessels. University of Bergen, Norway.
R Development Core Team, 2013. R: A Language and Environment for Sta-tistical Computing. R Foundation for Statistical Computing, Vienna, Austriahttp://www.R-project.org/
Simmonds, E.J., MacLennan, D.N., 2005. Fisheries Acoustics: Theory and Practice, 2nded. Blackwell Publishing, Oxford, 437 pp.
Smith, J.A., 1992. Observed growth of Langmuir circulation. Journal of GeophysicalResearch 97, 5651–5664.
Approaches. Springer, New York, pp. 295–314.Stanton, T.K., 1982. Effects of transducer motion on echo-integration techniques.
Journal of the Acoustical Society of America 72 (3), 947–949.