Lung3
117
CHAPTER I INTRODUCTION 1.1 GENERAL The term digital image refers to processing of a two dimensional picture by a digital computer. In a broader context, it implies digital processing of any two dimensional data. A digital image is an array of real or complex numbers represented by a finite number of bits. An image given in the form of a transparency, slide, photograph or an X-ray is first digitized and stored as a matrix of binary digits in computer memory. This digitized image can then be processed and/or displayed on a high-resolution television monitor. For display, the image is stored in a rapid-access buffer memory, which refreshes the monitor at a rate of 25 frames per second to produce a visually continuous display. 1
Transcript of Lung3
CHAPTER I
INTRODUCTION
1.1 GENERAL
The term digital image refers to processing of a
two dimensional picture by a digital computer. In
a broader context, it implies digital processing
of any two dimensional data. A digital image is an
array of real or complex numbers represented by a
finite number of bits. An image given in the form
of a transparency, slide, photograph or an X-ray
is first digitized and stored as a matrix of
binary digits in computer memory. This digitized
image can then be processed and/or displayed on a
high-resolution television monitor. For display,
the image is stored in a rapid-access buffer
memory, which refreshes the monitor at a rate of
25 frames per second to produce a visually
continuous display.
1
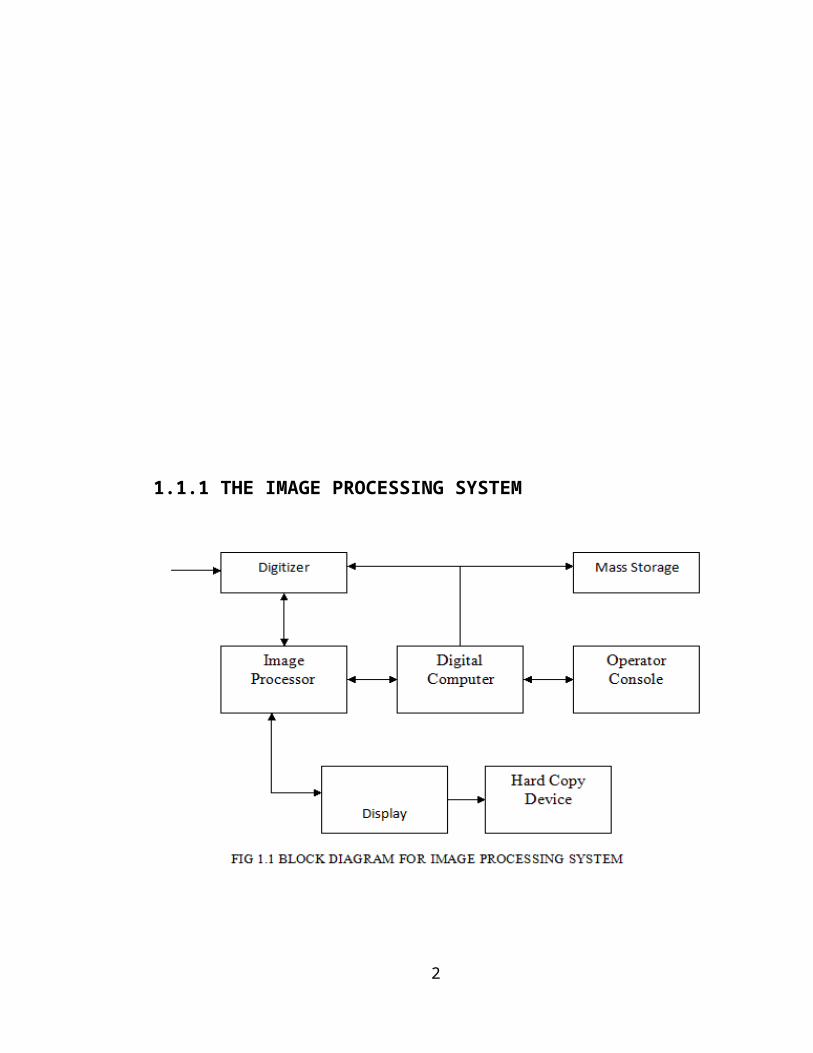
1.1.1 THE IMAGE PROCESSING SYSTEM
2
DIGITIZER:
A Digitizer converts an image into a numerical
representation suitable for input into a digital
computer. Some common digitizers are
1.Microdensitometer
2.Flying spot scanner
3.Image dissector
4.Videocon camera
5.Photosensitive solid- state arrays.
IMAGE PROCESSOR:
An image processor does the functions of image
acquisition, storage, preprocessing, segmentation,
representation, recognition and interpretation and
finally displays or records the resulting image.
The following block diagram gives the fundamental
sequence involved in an image processing system.
3
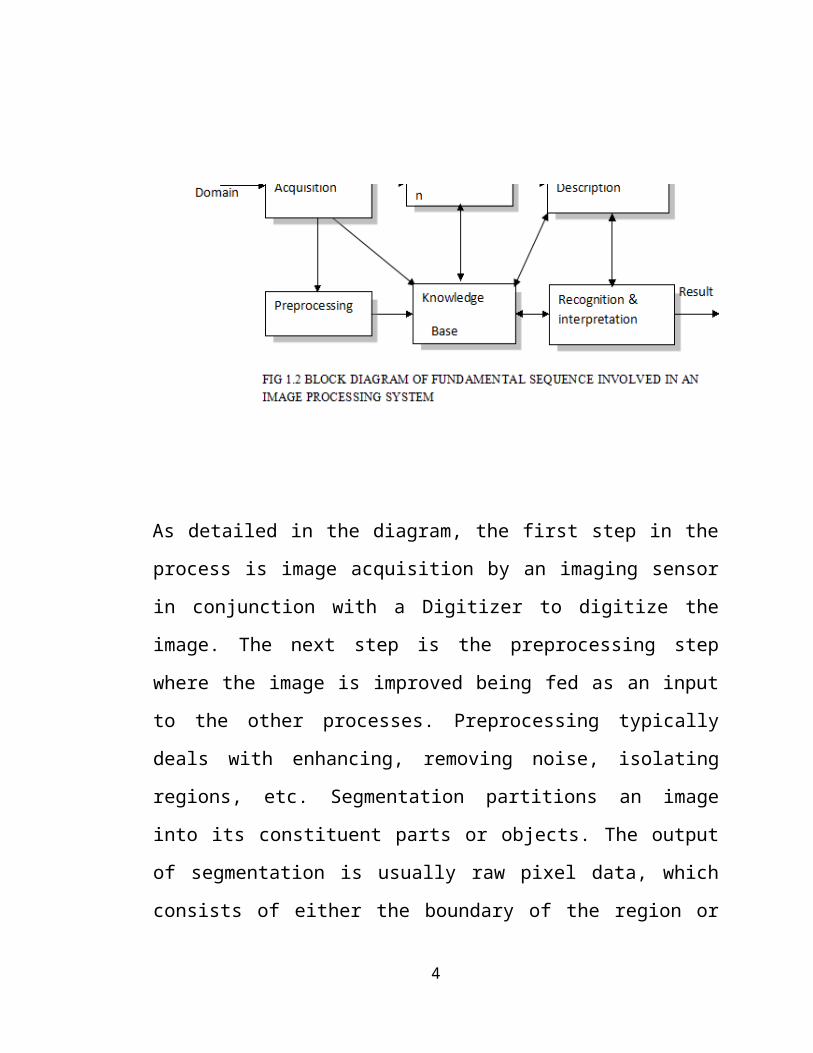
As detailed in the diagram, the first step in the
process is image acquisition by an imaging sensor
in conjunction with a Digitizer to digitize the
image. The next step is the preprocessing step
where the image is improved being fed as an input
to the other processes. Preprocessing typically
deals with enhancing, removing noise, isolating
regions, etc. Segmentation partitions an image
into its constituent parts or objects. The output
of segmentation is usually raw pixel data, which
consists of either the boundary of the region or
4
the pixels in the region themselves.
Representation is the process of transforming the
raw pixel data into a form useful for subsequent
processing by the computer. Description deals with
extracting features that are basic in
differentiating one class of objects from another.
Recognition assigns a label to an object based on
the information provided by its descriptors.
Interpretation involves assigning meaning to an
ensemble of recognized objects. The knowledge
about a problem domain is incorporated into the
knowledge base. The knowledge base guides the
operation of each processing module and also
controls the interaction between the modules. Not
all modules need be necessarily present for a
specific function. The composition of the image
processing system depends on its application. The
frame rate of the image processor is normally
around 25 frames per second.
DIGITAL COMPUTER:
5
Mathematical processing of the digitized image
such as convolution, averaging, addition,
subtraction, etc. are done by the computer.
MASS STORAGE:
The secondary storage devices normally used
are floppy disks, CD ROMs etc.
HARD COPY DEVICE:
The hard copy device is used to produce a
permanent copy of the image and for the storage of
the software involved.
OPERATOR CONSOLE:
The operator console consists of equipment and
arrangements for verification of intermediate
results and for alterations in the software as and
when require. The operator is also capable of
checking for any resulting errors and for the
entry of requisite data.
6
1.1.2 IMAGE PROCESSING FUNDAMENTAL:
Digital image processing refers processing of
the image in digital form. Modern cameras may
directly take the image in digital form but
generally images are originated in optical form.
They are captured by video cameras and
digitalized. The digitalization process includes
sampling, quantization. Then these images are
processed by the five fundamental processes, at
least any one of them, not necessarily all of
them.
IMAGE PROCESSING TECHNIQUES:
This section gives various image processing
techniques.
7
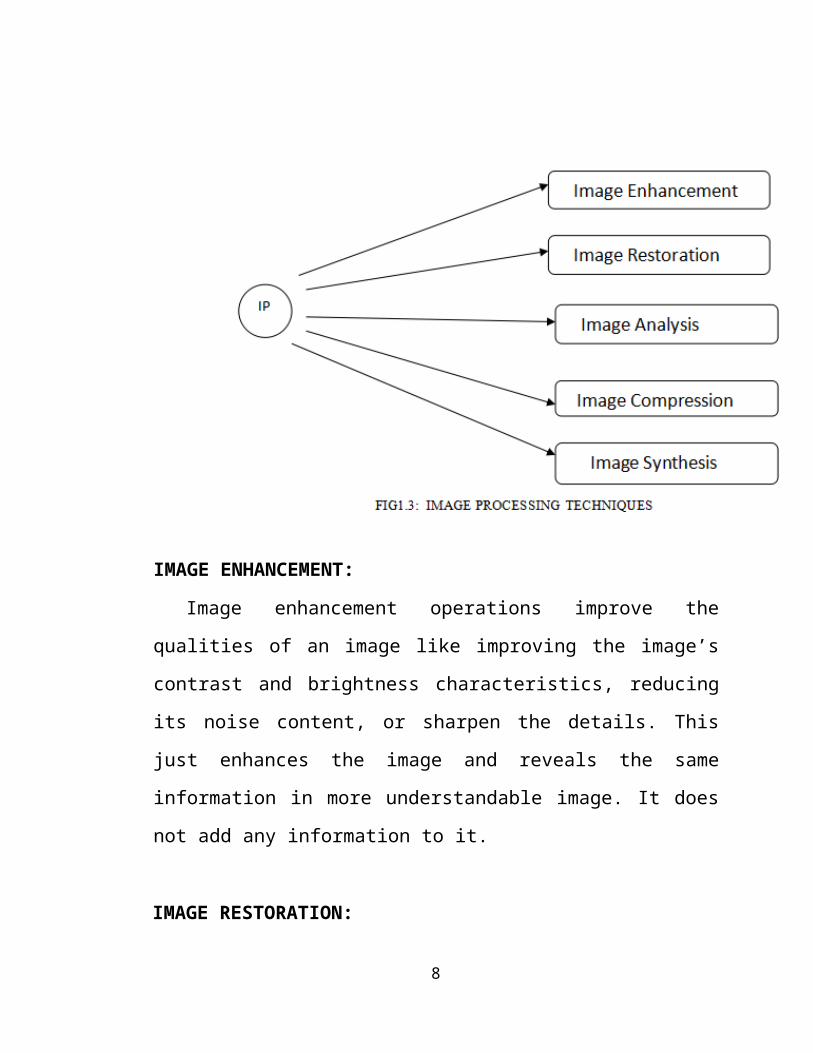
IMAGE ENHANCEMENT:
Image enhancement operations improve the
qualities of an image like improving the image’s
contrast and brightness characteristics, reducing
its noise content, or sharpen the details. This
just enhances the image and reveals the same
information in more understandable image. It does
not add any information to it.
IMAGE RESTORATION:
8
Image restoration like enhancement improves the
qualities of image but all the operations are
mainly based on known, measured, or degradation of
the original image. Image restorations are used to
restore images with problems such as geometric
distortion, improper focus, repetitive noise, and
camera motion. It is used to correct images for
known degradations.
IMAGE ANALYSIS:
Image analysis operations produce numerical or
graphical information based on characteristics of
the original image. They break into objects and
then classify them. They depend on the image
statistics. Common operations are extraction and
description of scene and image features, automated
measurements, and object classification. Image
analyze are mainly used in machine vision
applications.
IMAGE COMPRESSION:
9
Image compression and decompression reduce the
data content necessary to describe the image. Most
of the images contain lot of redundant
information, compression removes all the
redundancies. Because of the compression the size
is reduced, so efficiently stored or transported.
The compressed image is decompressed when
displayed. Lossless compression preserves the
exact data in the original
Image, but Loss compression do not represent the
original image but provide excellent
compression.
IMAGE SYNTHESIS:
Image synthesis operations create images from
other images or non-image data. Image synthesis
operations generally create images that are either
physically impossible or impractical to acquire.
APPLICATIONS OF DIGITAL IMAGE PROCESSING:
10
Digital image processing has a broad spectrum of
applications, such as remote sensing via
satellites and other spacecrafts, image
transmission and storage for business
applications, medical processing, radar, sonar and
acoustic image processing, robotics and automated
inspection of industrial parts.
MEDICAL APPLICATIONS:
In medical applications, one is concerned with
processing of chest X-rays,
cineangiograms, projection images of trans-axial
tomography and other medical images that occur in
radiology, nuclear magnetic resonance (NMR) and
ultrasonic scanning. These images may be used for
patient screening and monitoring or for detection
of tumors’ or other disease in patients.
SATELLITE IMAGING:
Images acquired by satellites are useful in
tracking of earth resources; geographical mapping;
11
prediction of agricultural crops, urban growth and
weather; flood and fire control; and many other
environmental applications. Space image
applications include recognition and analysis of
objects contained in image obtained from deep
space-probe missions.
COMMUNICATION:
Image transmission and storage applications occur
in broadcast television, teleconferencing, and
transmission of facsimile images for office
automation communication of computer networks,
closed-circuit television based security
monitoring systems and in military communications.
RADAR IMAGING SYSTEMS:
Radar and sonar images are used for detection and
recognition of various types of targets or in
guidance and maneuvering of aircraft or missile
systems.
DOCUMENT PROCESSING:
12
It is used in scanning, and transmission for
converting paper documents to a digital image
form, compressing the image, and storing it on
magnetic tape. It is also used in document reading
for automatically detecting and recognizing
printed characteristics.
DEFENSE/INTELLIGENCE:
It is used in reconnaissance photo-interpretation
for automatic interpretation of earth satellite
imagery to look for sensitive targets or military
threats and target acquisition and guidance for
recognizing and tracking targets in real-time
smart-bomb and missile-guidance systems.
1.2 OBJECTIVE AND SCOPE OF THE PROJECT:
A supervised classifier was designed through
combining level-nodule probability and level
context probability. The results from the
experiments on the ELCAP dataset showed promising
performance of our method. We also suggest that
13
the proposed method can be generally applicable to
other medical or general imaging domains.
1.3 EXISTING SYSTEM
In the existing system, we present our preliminary
study on the development of an advanced multiple
thresholding method for the automated detection of
small lung nodules. The method uses a three-step
approach. The first step is to automatically
extract the lungs from MSCT images by analyzing
the volumetric density histogram, thresholding the
original images, and subsequently applying a
morphological operation to the resultant images.
The second step is to identify higher density
structures e.g., nodules, vessels spread
throughout the extracted lungs using a local
density maximum LDM algorithm. The last step is to
reduce false-positive results from the detected
nodule candidates using a priorknowledge of the
lung nodules. The detection method has been
14
validated with computer simulated small lung
nodules.
1.3.1 DISADVANTAGES OF EXISTING SYSTEM
Direct classification from these would still be
problematic.
Contextual information surrounding the lung
nodules could be incorporated to improve nodule
classification is complicated segmentation
process.
Image segmentation is quite hard because of
noise interference.
Overlapped or over placed lung nodules are
difficult to find.
1.3.2 LITERATURE SURVEY
1. AUTOMATIC DETECTION OF SMALL LUNG NODULES ON CT
UTILIZING A LOCAL DENSITY MAXIMUM ALGORITHM,
15
BINSHENG ZHAO*, GORDON GAMSU, MICHELLE S.
GINSBERG, LI JIANG, AND LAWRENCE H. SCHWARTZ-2003
Increasingly, computed tomography (CT) offers
higher resolution and faster acquisition times.
This has resulted in the opportunity to detect
small lung nodules, which may represent lung
cancers at earlier and potentially more curable
stages. However, in the current clinical practice,
hundreds of such thin-sectional CT images are
generated for each patient and are evaluated by a
radiologist in the traditional sense of looking at
each image in the axial mode. This results in the
potential to miss small nodules and thus
potentially miss a cancer. In this paper, we
present a computerized method for automated
identification of small lung nodules on multi
slice CT (MSCT) images. The method consists of
three steps: (i) separation of the lungs from the
other anatomic structures, (ii) detection of
nodule candidates in the extracted lungs, and
16
~iii! Reduction of false-positives among the
detected nodule candidates. A three-dimensional
lung mask can be extracted by analyzing density
histogram of volumetric chest images followed by a
morphological operation. Higher density structures
including nodules scattered throughout the lungs
can be identified by using a local density maximum
algorithm. Information about nodules such as size
and compact shape are then incorporated into the
algorithm to reduce the detected nodule candidates
which are not likely to be nodules. The method was
applied to the detection of computer simulated
small lung nodules (2 to 7 mm in diameter) and
achieved a sensitivity of 84.2% with, on average,
five false-positive results per scan. The
preliminary results demonstrate the potential of
this technique for assisting the detection of
small nodules from chest MSCT images.
2. QUANTIFICATION OF NODULE DETECTION IN CHEST CT:
A CLINICAL INVESTIGATION BASED ON THE ELCAP STUDY
17
AMAL A. FARAG, SHIREEN Y. ELHABIAN, SALWA A.
ELSHAZLY AND ALY A. FARAG– 2008
This paper examines the detection step in
automatic detection and classification of lung
nodules from low-dose CT (LDCT) scans. Two issues
are studied in detail: nodule modeling and
simulation, and the effect of these models on the
detection process. From an ensemble of nodules,
specified by radiologists, we devise an approach
to estimate the gray level intensity distribution
(Hounsfield Units) and a figure of merit of the
size of appropriate templates. Hence, a data-
driven approach is used to design the templates.
The paper presents an extensive study of the
sensitivity and specificity of the nodule
detection step, in which the quality of the nodule
model is the driving factor. Finally, validation
of the detection approach on labeled clinical data
set from the Early Lung Cancer Action Project
(ELCAP) screening study is conducted. Overall,
18
this paper shows a relationship between the
spatial support of the nodule templates and the
resolution of the LDCT, which can be used to
automatically select the template size. The paper
also shows that isotropic templates do not provide
adequate detection rate (in terms of sensitivity
and specificity) of vascularized nodules. The
nodule models in this paper can be used in various
machine learning approaches for automatic nodule
detection and
classification.
3. PARAMETRIC AND NON-PARAMETRIC NODULE MODELS:
DESIGN AND EVALUATION AMAL A. FARAG, JAMES GRAHAM,
ALY A. FARAG, SALWA ELSHAZLY AND ROBERT FALK*-
2007
Lung nodule modeling quality defines the success
of lung nodule detection. This paper presents a
novel method for generating lung nodules using
19
variational level sets to obtain the shape
properties of real nodules to form an average
model template per nodule type. The texture
information used for filling the nodules is based
on a devised approach that uses the probability
density of the radial distance of each nodule to
obtain the maximum and minimum Hounsfield density
(HU). There are two main categories that lung
nodule models fall within; parametric and non-
parametric. The performance of the new nodule
templates will be evaluated during the detection
step and compared with the use of parametric
templates and another non-parametric Active
Appearance model to explain the advantages and/or
disadvantages of using parametric vs. non-
parametric models as well as which variation of
non-parametric template design, i.e., shape based
or shape-texture based yields better results in
the overall detection process.
20
4. COMPUTER ANALYSIS OF COMPUTED TOMOGRAPHY SCANS
OF THE LUNG: A SURVEY INGRID SLUIMER, ARNOLD
SCHILHAM, MATHIAS PROKOP, AND BRAM VAN GINNEKEN *,
MEMBER, IEEE– 2005
In this paper, Current computed tomography (CT)
technology allows for near isotropic, sub
millimeter resolution acquisition of the complete
chest in a single breath hold. These thin-slice
chest scans have become indispensable in thoracic
radiology, but have also substantially increased
the data load for radiologists. Automating the
analysis of such data is, therefore, a necessity
and this has created a rapidly developing research
area in medical imaging. This paper presents a
review of the literature on computer analysis of
the lungs in CT scans and addresses segmentation
of various pulmonary structures, registration of
chest scans, and applications aimed at detection,
classification and quantification of chest
abnormalities. In addition, research trends and
21
challenges are identified and directions for
future research are discussed.
5. EVALUATION OF GEOMETRIC FEATURE DESCRIPTORS FOR
DETECTION AND CLASSIFICATION OF LUNG NODULES IN
LOW DOSE CT SCANS OF THE CHEST AMAL FARAG, ASEM
ALI, JAMES GRAHAM, ALY FARAG, SALWA ELSHAZLY AND
ROBERT FALK*– 2011
This paper examines the effectiveness of geometric
feature descriptors, common in computer vision,
for false positive reduction and for
classification of lung nodules in low dose CT
(LDCT) scans. A data-driven lung nodule modeling
approach creates templates for common nodule
types, using active appearance models (AAM); which
are then used to detect candidate nodules based on
optimum similarity measured by the normalized
cross-correlation (NCC). Geometric feature
descriptors (e.g., SIFT, LBP and SURF) are applied
to the output of the detection step, in order to
22
extract features from the nodule candidates, for
further enhancement of output and possible
reduction of false positives. Results on the
clinical ELCAP database showed that the
descriptors provide 2% enhancements in the
specificity of the detected nodule above the NCC
results when used in a k-NN classifier. Thus
quantitative measures of enhancements of the
performance of CAD models based on LDCT are now
possible and are entirely model-based most
importantly; our approach is applicable for
classification of nodules into categories and
pathologies.
1.4 PROPOSED SYSTEM
This paper presents a novel image classification
method for the four common types of lung nodules.
We suggest that the major contributions of our
work are as follows: i) a patch-based image
representation with multilevel concentric
partition, ii) a feature set design for image
patch description, and iii) a contextual latent
23
semantic analysis-based classifier to calculate
the probabilistic estimations for each lung nodule
image. More specifically, a concentric level
partition of the image is designed in an adaptive
manner with: (1) an improved super pixel
clustering method based on quick shift is designed
to generate the patch division; (2) multilevel
partition of the derived patches is used to
construct level-nodule (i.e., -patches containing
the nodules), and level-context (i.e., patches
containing the contextual structures).A concentric
level partition is thus constructed to tackle the
rigid partitioning problem.
Second, a feature set of three components is
extracted for each patch of the image that are as
follows: (1) a SIFT descriptor, depicting the
overall intensity, texture, and gradient
information; (2) a MR8+LBP descriptor,
representing a richer texture feature
incorporating MR8 filters before calculating LBP
histograms; (3) a multi orientation HOG
24
descriptor, describing the gradients and
accommodating rotation variance in a multi
coordinate system.
Third, the category of the lung nodule image is
finally determined with a probabilistic estimation
based on the combination of the nodule structure
and surrounding anatomical context: (1) SVM is
used to compute the classification probability
based on level-nodule; (2) pLSA with contextual
voting is employed to calculate the classification
probability based on level-context. The designed
classifier can obtain better classification
accuracy, with SVM capturing the differences from
various nodules, and pLSA further revising the
decision by analyzing the context.
25
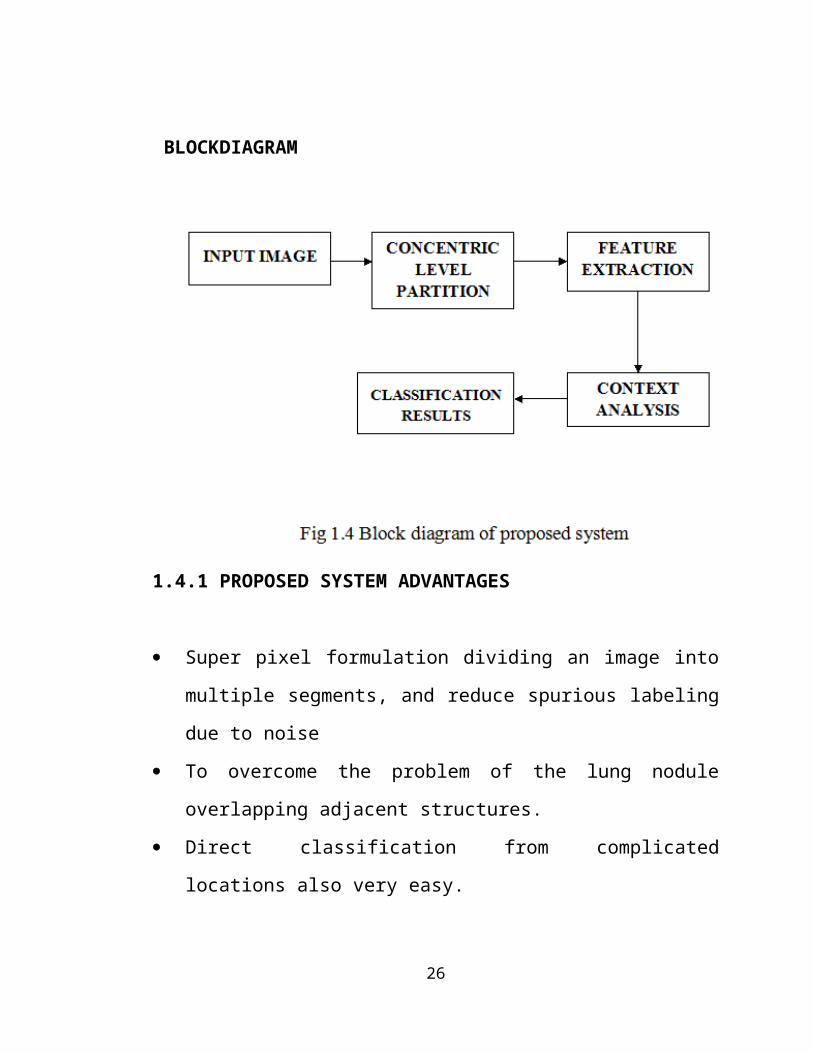
BLOCKDIAGRAM
1.4.1 PROPOSED SYSTEM ADVANTAGES
Super pixel formulation dividing an image into
multiple segments, and reduce spurious labeling
due to noise
To overcome the problem of the lung nodule
overlapping adjacent structures.
Direct classification from complicated
locations also very easy.
26
Contextual information surrounding the lung
nodules will be more useful to improve nodule
classification in segmentation process.
27
CHAPTER 2
PROJECT DESCRIPTION
2.1 INTRODUCTION:
LUNG cancer is a major cause of cancer-related
deaths in humans worldwide. Approximately 20% of
cases with lung nodules represent lung cancers;
therefore, the identification of potentially
malignant lung nodules is essential for the
screening and diagnosis of lung cancer. Lung
nodules are small masses in the human lung, and
are usually spherical; however, they can be
distorted by surrounding anatomical structures,
such as vessels and the adjacent pleura.
Intraparenchymal lung nodules are more likely to
be malignant than those connected with the
surrounding structures, and thus lung nodules are
divided into different types according to their
relative positions. At present, the classification
from Diciotti et al. is the most popular approach and
it d
28
vides nodules into four types: well-circumscribed
(W) with the nodule located centrally in the lung
without any connection to vasculature;
vascularized (V) with the nodule located centrally
in the lung but closely connected to neighboring
vessels; juxta-pleural (J) with a large portion of
the nodule connected to the pleural surface; and
pleural-tail (P) with the nodule near the pleural
surface connected by a thin tail.
Computed tomography (CT) is the most accurate
imaging modality to obtain anatomical information
about lung nodules and the surrounding structures.
In current clinical practice, however,
interpretation of CT images is challenging for
radiologists due to the large number of cases.
This manual reading can be error-prone and the
reader may miss nodules and thus a potential
cancer. Computer-aided diagnosis (CAD) systems
would be helpful for radiologists by offering
initial screening or second opinions to classify
lung nodules. CAD s provide depiction by
29
automatically computing quantitative measures, and
are capable of analyzing the large number of small
nodules identified by CT scans.
Increasingly, computed tomography (CT) offers
higher resolution and faster acquisition times.
This has resulted in the opportunity to detect
small lung nodules, which may represent lung
cancers at earlier and potentially more curable
stages. However, in the current clinical practice,
hundreds of such thin-sectional CT images are
generated for each patient and are evaluated by a
radiologist in the traditional sense of looking at
each image in the axial mode. This results in the
potential to miss small nodules and thus
potentially miss a cancer. In this paper, we
present a computerized method for automated
identification of small lung nodules on multi
slice images.
2.2 BASIC OPERATORS:
The basic operations are shift-invariant
(translation invariant) operators strongly related
30
to Minkowski addition. Let E be a Euclidean space
or an integer grid, and A binary image in E.
EROSION:
The erosion of the dark-blue square by a disk,
resulting in the light-blue square. The erosion of
the binary image A by the structuring element B is
defined by: where Bz is the translation of B by the
vector z, i.e., ,.When the structuring element B
has a center (e.g., B is a disk or a square), and
this center is located on the origin of E, then
the erosion of A by B can be understood as the
locus of points reached by the center of B when B
moves inside A. For example, the erosion of a
square of side 10, centered at the origin, by a
disc of radius 2, also centered at the origin, is
a square of side 6 centered at the origin. The
erosion of A by B is also given by the expression:
Example application: Assume we have received a fax
of a dark photocopy. Everything looks like it was
written with a pen that is bleeding. Erosion
31
process will allow thicker lines to get skinny and
detect the hole inside the letter "o".
DILATION:
The dilation of the dark-blue square by a disk,
resulting in the light-blue square with rounded
corners. The dilation of A by the structuring
element B is defined by: The dilation is
commutative, also given by: If B has a center on
the origin, as before, and then the dilation of A
by B can be understood as the locus of the points
covered by B when the center of B moves inside A.
In the above example, the dilation of the square
of side 10 by the disk of radius 2 is a square of
side 14, with rounded corners, centered at the
origin. The radius of the rounded corners is 2.The
dilation can also be obtained by, where Bs denotes
the symmetric of B, that.
Example application: Dilation is the dual
operation of the erosion. Figures that are very
lightly drawn get thick when "dilated". Easiest
32
way to describe it is to imagine the same fax/text
is written with a thicker pen.
OPENING:
The opening of the dark-blue square by a disk,
resulting in the light-blue square with round
corners. The opening of A by B is obtained by the
erosion of A by B, followed by dilation of the
resulting image by B:
The opening is also given by, which means that
it is the locus of translations of the structuring
element B inside the image A. In the case of the
square of side 10, and a disc of radius 2 as the
structuring element, the opening is a square of
side 10 with rounded corners, where the corner
radius is 2.
Example application: Let's assume someone has
written a note on a non-soaking paper and that the
writing looks as if it is growing tiny hairy roots
all over. Opening essentially removes the outer
33
tiny "hairline" leaks and restores the text. The
side effect is that it rounds off things. The
sharp edges start to disappear.
CLOSING:
The closing of the dark-blue shape (union of two
squares) by a disk, resulting in the union of the
dark-blue shape and the light-blue areas. The
closing of A by B is obtained by the dilation of A
by B, followed by erosion of the resulting
structure by B:
The closing can also be obtained by, where Xc
denotes the complement of X relative to E (that
is,). The above means that the closing is the
complement of the locus of translations of the
symmetric of the structuring element outside the
image A.
34
PROPERTIES OF THE BASIC OPERATORS:
Here are some properties of the basic binary
morphological operators (dilation, erosion,
opening and closing):
They are translation invariant.
They are increasing, that is, if, then, and,
etc.
The dilation is commutative.
If the origin of E belongs to the structuring
element B, then.
The dilation is associative, i.e. moreover,
the erosion satisfies.
Erosion and dilation satisfy the duality.
Opening and closing satisfy the duality.
The dilation is distributive over set union
The erosion is distributive over set
intersection
The dilation is a pseudo-inverse of the
erosion, and vice-versa, in the following
sense: if and only if.
35
Opening and closing are idempotent. Opening is
anti-extensive, i.e., , whereas the closing is
extensive, i.e.,.
GRAYSCALE MORPHOLOGY:
Watershed of the gradient of the cardiac image In
gray scale morphology, images are functions
mapping a Euclidean space or grid E into, where is
the set of reals, is an element larger than any
real number, and is an element smaller than any
real number. Gray scale structuring elements are
also functions of the same format, called
"structuring functions". Denoting an image by f(x)
and the structuring function by b(x), the gray
scale dilation of f by b is given by where "sup"
denotes the supremum. Similarly, the erosion of f
by b is given by, where "inf" denotes the
Infamous. Just like in binary morphology; the
opening and closing are given
respectively.
36
FLAT STRUCTURING FUNCTIONS:
It is common to use flat structuring elements in
morphological applications. Flat structuring
functions are functions b(x) in the form where. In
this case, the dilation and erosion are greatly
simplified, and given respectively by in the
bounded, discrete case (E is a grid and B is
bounded), the supremum and infimum operators can
be replaced by the maximum and minimum. Thus,
dilation and erosion are particular cases of order
statistics filters, with dilation returning the
maximum value within a moving window (the
symmetric of the structuring function support B),
and the erosion returning the minimum value within
the moving window B.
In the case of flat structuring element, the
morphological operators depend only on the
relative ordering of pixel values, regardless
their numerical values, and therefore are
especially suited to the processing of binary
37
images and gray scale images whose light transfer
function is not known.
By combining these operators one can obtain
algorithms for many image processing tasks, such
as feature detection, image segmentation, image
sharpening, image filtering, and classification.
Along this line one should also look into
Continuous Morphology.
MATHEMATICAL MORPHOLOGY ON COMPLETE LATTICES:
Complete lattices are partially ordered sets,
where every subset has an infimum and a supremum.
In particular, it contains a least element and a
greatest element (also denoted "universe").
ADJUNCTIONS (DILATION AND EROSION):
Let be a complete lattice, with infimum and
supremum symbolized by and, respectively. Its
universe and least element are symbolized by U
38
and, respectively. Moreover, let be a collection
of elements from L. Dilation is any operator that
distributes over the supremum, and preserves the
least element. I.e. Erosion is any operator that
distributes over the infimum, and preserves the
universe. I.e. Dilations and erosions form Galois
connections. That is,for every dilation there is
one and only one erosion that satisfies for all.
Similarly, for every erosion there is one and only
one dilation satisfying the above connection.
Furthermore, if two operators satisfy the
connection, then must be dilation, and erosion.
Pairs of erosions and dilations satisfying the
above connection are called "adjunctions", and the
erosion is said to be the ad joint erosion of the
dilation, and vice-versa.
OPENING AND CLOSING:
For every adjunction, the morphological opening
and morphological closing are defined as follows:
39
The morphological opening and closing are
particular cases of algebraic opening (or simply
opening) and algebraic closing (or simply
closing). Algebraic openings are operators in L
that are idempotent, increasing, and anti-
extensive. Algebraic closings are operators in L
that are idempotent, increasing, and extensive.
PARTICULAR CASES:
Binary morphology is a particular case of lattice
morphology, where L is the power set of E
(Euclidean space or grid), that is, L is the set
of all subsets of E, and is the set inclusion. In
this case, the infimum is set intersection, and
the supremum is set union.
2.3 IMAGE SEGMENTATION BY CLUSTERING PIXELS
Clustering is a process whereby a data set is
replaced by clusters, which are collections of
data points that “belong together”. It is natural
to think of image segmentation as clustering; we
40
would like to represent an image in terms of
clusters of pixels that “belong together”. The
specific criterion to be used depends on the
application. Pixels may belong together because
they have the same colour and/or they have the
same texture and/or they are nearby, etc.
2.3.1 SIMPLE CLUSTERING METHODS:
It is relatively easy to take a clustering method
and build an image segmenter from it. Much of the
literature on image segmentation consists of
papers that are, in essence, papers about
clustering (though this isn’t always
acknowledged). The distance used depends entirely
on the application, but measures of color
difference and of texture are commonly used as
clustering distances. It is often desirable to
have clusters that are “blobby”; this can be
achieved by using difference in position in the
clustering distance. The main difficulty in using
41
either agglomerative or divisive clustering
methods directly is that there are an awful lot of
pixels in an image. There is no reasonable
prospect of examining a dendrogram, because the
quantity of data means that it will be too big.
Furthermore, the mechanism is suspect; we don’t
really want to look at a dendrogram for each
image, but would rather have the segmenter produce
useful regions for an application on a long
sequence of images without any help. In practice,
this means that the segmenters decide when to stop
splitting or merging by using a set of threshold
tests — for example, an agglomerative segmenter
may stop merging when the distance between
clusters is sufficiently low, or when the number
of clusters reaches some value. The choice of
thresholds is usually made by observing the
behavior of the segmenter on a variety of images,
and choosing the best setting. The technique has
largely fallen into disuse except in specialized
applications, because in most cases it is very
42
difficult to predict the future performance of the
segmenter tuned in this way.
Another difficulty created by the number of pixels
is that it is impractical to look for the best
split of a cluster (for a divisive method) or the
best merge (for an agglomerative method). The
variety of tricks that have been adopted to
address this problem is far too large to survey
here, but we can give an outline of the main
strategies.
2.3.1.1 K-MEANS CLUSTERING METHOD
Simple clustering methods use greedy interactions
with existing clusters to come up with a good
overall representation. For example, in
agglomerative clustering we repeatedly make the
best available merge. However, the methods are not
explicit about the objective function that the
methods are attempting to optimize. An alternative
approach is to write down an objective function
that expresses how good a representation is, and
43
then build an algorithm for obtaining the best
representation. A natural objective function can
be obtained by assuming that we know there are k
clusters, where k is known. Each cluster is
assumed to have a center; we write the center of
the i’th cluster as ci. The j’th element to be
clustered is described by a feature vector xj .
For example, if we were segmenting scattered
points, then x would be the coordinates of the
points; if we were segmenting an intensity image,
x might be the intensity at a pixel.
We now assume that elements are close to the
center of their cluster, yielding
the objective function
.
Notice that if the allocation of points to
clusters is known, it is easy to compute the best
center for each cluster. However, there are far
too many possible allocations of points to
44
clusters to search this space for a minimum.
Instead, we define an algorithm which iterates
through two activities:
Assume the cluster centers are known, and
allocate each point to the closest cluster
center.
Assume the allocation is known, and choose a
new set of cluster centers. Each center is the
mean of the points allocated to that cluster.
2.3.1.2 GRAPH-THEORETIC CLUSTERING METHOD
Clustering can be seen as a problem of cutting
graphs into “good” pieces. In effect, we associate
each data item with a vertex in a weighted graph,
where the weights on the edges between elements
are large if the elements are “similar” and small
if they are not. We then attempt to cut the graph
into connected components with relatively large
interior weights — which correspond to clusters —
by cutting edges with relatively low weights. This
view leads to a series of different, quite
successful, segmentation algorithms.
45
2.3.1.3 QUICK SHIFT CLUSTERING METHOD
Quick shift is a kernelized version of a mode
seeking algorithm similar in concept to mean shift
or medoid shift Given N data points x1; : : : ;
xN, it computes a Parzen density estimate around
each point using, for example, an isotropic
Gaussian window:
Once the density estimate P(x) has been computed,
quick shift connects each point to the nearest
point in the feature space which has a higher
density estimate. Each connection has a distance
dx associated with it, and the set of connections
for all pixels forms a tree, where the root of the
tree is the point with the highest density
estimate.
Quick shift may be used for any feature space, but
for the purpose of this paper we restrict it to
one we can use for image segmentation: the raw RGB
46
values augmented with the (x; y) position in the
image. So, the feature space is -ve dimensional:
(r; g; b; x; y).
To adjust the trade-o_ between the importance of
the color and spatial components of the feature
space, we simply pre-scale the (r; g; b) values by
a parameter, which for these experiments we x at =
0:5. To obtain segmentation from a tree of links
formed by quick shift, we choose a threshold and
break all links in the tree with dx. The pixels
which are a member of each resulting disconnected
tree form each segment.
47
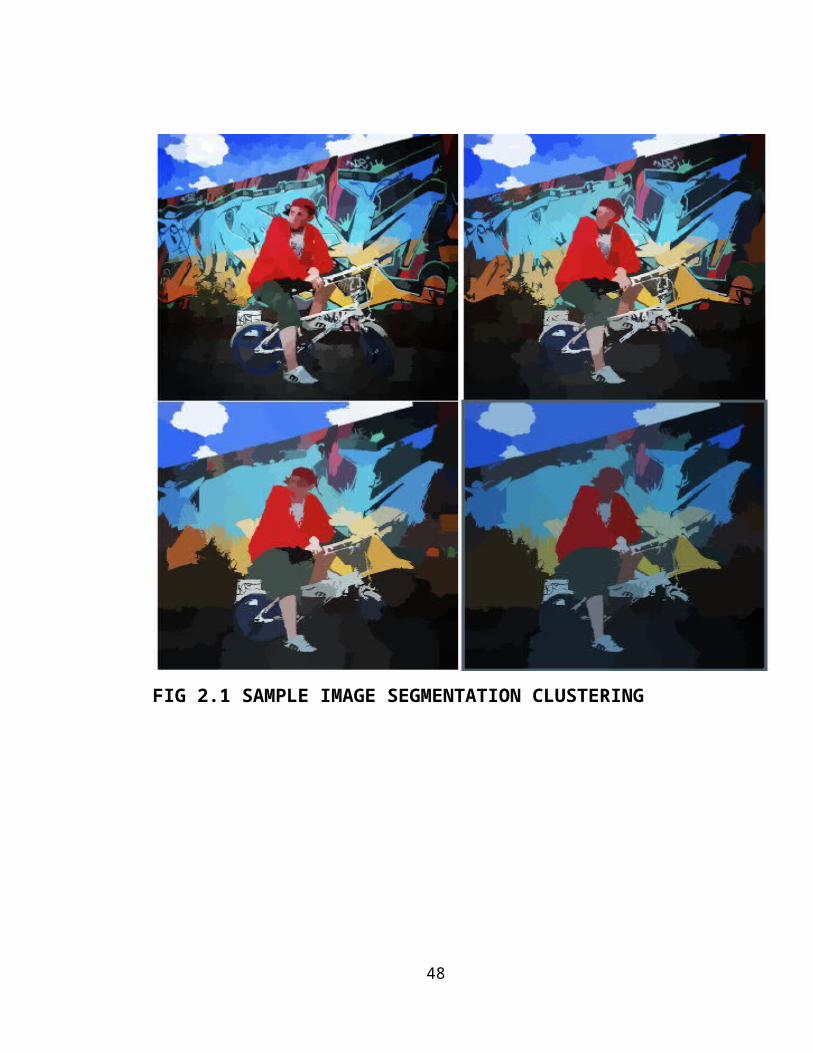
FIG 2.1 SAMPLE IMAGE SEGMENTATION CLUSTERING
48
2.4 FEATURE EXTRACTION
In pattern recognition and in image
processing, feature extraction is a special
form of dimensionality reduction. When the input
data to an algorithm is too large to be processed
and it is suspected to be very redundant (e.g. the
same measurement in both feet and meters, or the
repetitiveness of images presented as pixels),
then the input data will be transformed into a
reduced representation set of features (also named
features vector). Transforming the input data into
the set of features is called feature extraction.
If the features extracted are carefully chosen it
is expected that the features set will extract the
relevant information from the input data in order
to perform the desired task using this reduced
representation instead of the full size input.
2.4.1 SCALE-INVARIANT FEATURE TRANSFORM
49
For any object in an image, interesting points on
the object can be extracted to provide a "feature
description" of the object. This description,
extracted from a training image, can then be used
to identify the object when attempting to locate
the object in a test image containing many other
objects. To perform reliable recognition, it is
important that the features extracted from the
training image be detectable even under changes in
image scale, noise and illumination. Such points
usually lie on high-contrast regions of the image,
such as object edges.
Another important characteristic of these features
is that the relative positions between them in the
original scene shouldn't change from one image to
another. For example, if only the four corners of
a door were used as features, they would work
regardless of the door's position; but if points
in the frame were also used, the recognition would
fail if the door is opened or closed. Similarly,
features located in articulated or flexible
50
objects would typically not work if any change in
their internal geometry happens between two images
in the set being processed. However, in practice
SIFT detects and uses a much larger number of
features from the images, which reduces the
contribution of the errors caused by these local
variations in the average error of all feature
matching errors.
SIFT can robustly identify objects even among
clutter and under partial occlusion, because the
SIFT feature descriptor is invariant to uniform
scaling, orientation, and partially invariant
to affine distortion and illumination changes.
This section summarizes Lowe's object recognition
method and mentions a few competing techniques
available for object recognition under clutter and
partial occlusion.
SIFT key points
SIFT key points of objects are first extracted
from a set of reference images and stored in a
51
database. An object is recognized in a new image
by individually comparing each feature from the
new image to this database and finding candidate
matching features based on Euclidean distance of
their feature vectors. From the full set of
matches, subsets of key points that agree on the
object and its location, scale, and orientation in
the new image are identified to filter out good
matches. The determination of consistent clusters
is performed rapidly by using an efficient hash
table implementation of the generalized Hough
transform. Each cluster of 3 or more features that
agree on an object and its pose is then subject to
further detailed model verification and
subsequently outliers are discarded. Finally the
probability that a particular set of features
indicates the presence of an object is computed,
given the accuracy of fit and number of probable
false matches. Object matches that pass all these
tests can be identified as correct with high
confidence.
52
Scale-invariant feature detection
Lowe's method for image feature generation
transforms an image into a large collection of
feature vectors, each of which is invariant to
image translation, scaling, and rotation,
partially invariant to illumination changes and
robust to local geometric distortion. These
features share similar properties with neurons in
inferior temporal cortex that are used for object
recognition in primate vision. Key locations are
defined as maxima and minima of the result
of difference of Gaussians function applied
in scale space to a series of smoothed and
resampled images. Low contrast candidate points
and edge response points along an edge are
discarded. Dominant orientations are assigned to
localized keypoints. These steps ensure that the
keypoints are more stable for matching and
recognition. SIFT descriptors robust to local
affine distortion are then obtained by considering
pixels around a radius of the key location,
53
blurring and resampling of local image orientation
planes.
Comparison of SIFT features with other local
features
There has been an extensive study done on the
performance evaluation of different local
descriptors, including SIFT, using a range of
detectors. The main results are summarized below:
SIFT and SIFT-like GLOH features exhibit the
highest matching accuracies (recall rates) for
an affine transformation of 50 degrees. After
this transformation limit, results start to
become unreliable.
Distinctiveness of descriptors is measured by
summing the eigenvalues of the descriptors,
obtained by the Principal components
analysis of the descriptors normalized by
their variance. This corresponds to the amount
of variance captured by different descriptors,
54
therefore, to their distinctiveness. PCA-SIFT
(Principal Components Analysis applied to SIFT
descriptors), GLOH and SIFT features give the
highest values.
SIFT-based descriptors outperform other
contemporary local descriptors on both
textured and structured scenes, with the
difference in performance larger on the
textured scene.
For scale changes in the range 2-2.5 and image
rotations in the range 30 to 45 degrees, SIFT
and SIFT-based descriptors again outperform
other contemporary local descriptors with both
textured and structured scene content.
Introduction of blur affects all local
descriptors, especially those based on edges,
like shape context, because edges disappear in
the case of a strong blur. But GLOH, PCA-SIFT
and SIFT still performed better than the
55
others. This is also true for evaluation in
the case of illumination changes.
The evaluations carried out suggests strongly that
SIFT-based descriptors, which are region-based,
are the most robust and distinctive, and are
therefore best suited for feature matching.
However, most recent feature descriptors such
as SURF have not been evaluated in this study.
SURF has later been shown to have similar
performance to SIFT, while at the same time being
much faster. Another study concludes that when
speed is not critical, SIFT outperforms SURF.
Recently, a slight variation of the descriptor
employing an irregular histogram grid has been
proposed that significantly improves its
performance. Instead of using a 4x4 grid of
histogram bins, all bins extend to the center of
the feature. This improves the descriptor's
robustness to scale changes.
56
The SIFT-Rank descriptor was shown to improve the
performance of the standard SIFT descriptor for
affine feature matching. A SIFT-Rank descriptor is
generated from a standard SIFT descriptor, by
setting each histogram bin to its rank in a sorted
array of bins. The Euclidean distance between
SIFT-Rank descriptors is invariant to arbitrary
monotonic changes in histogram bin values, and is
related to Spearman's rank correlation
coefficient.
2.5 FILTER BANKS
We describe the rotationally invariant MR filter
sets that are used in the algorithm
for classifying textures with filter banks. We
also describe two other filter sets (LM and S)
that will be used in classification comparisons.
The aspects of interest are the dimension of the
filter space, and whether the filter set is
rotationally invariant or not.
57
The Leung-Malik (LM) Filter Bank
The LM set is a multi scale, multi orientation
filter bank with 48 filters. It consists of first
and second derivatives of Gaussians at 6
orientations and 3 scales making a total of 36; 8
Laplacian of Gaussian (LOG) filters; and 4
Gaussians.
We consider two versions of the LM filter bank.
In LM Small (LMS), the filters occur at basic
scales . .The first and
second derivative filters occur at the first three
scales with an elongation factor of 3 (i.e.
and ). The Gaussians occur at the
four basic scales while the 8 LOG filters occur
at and . For LM Large (LML), the filters occur
at the basic scales .
58
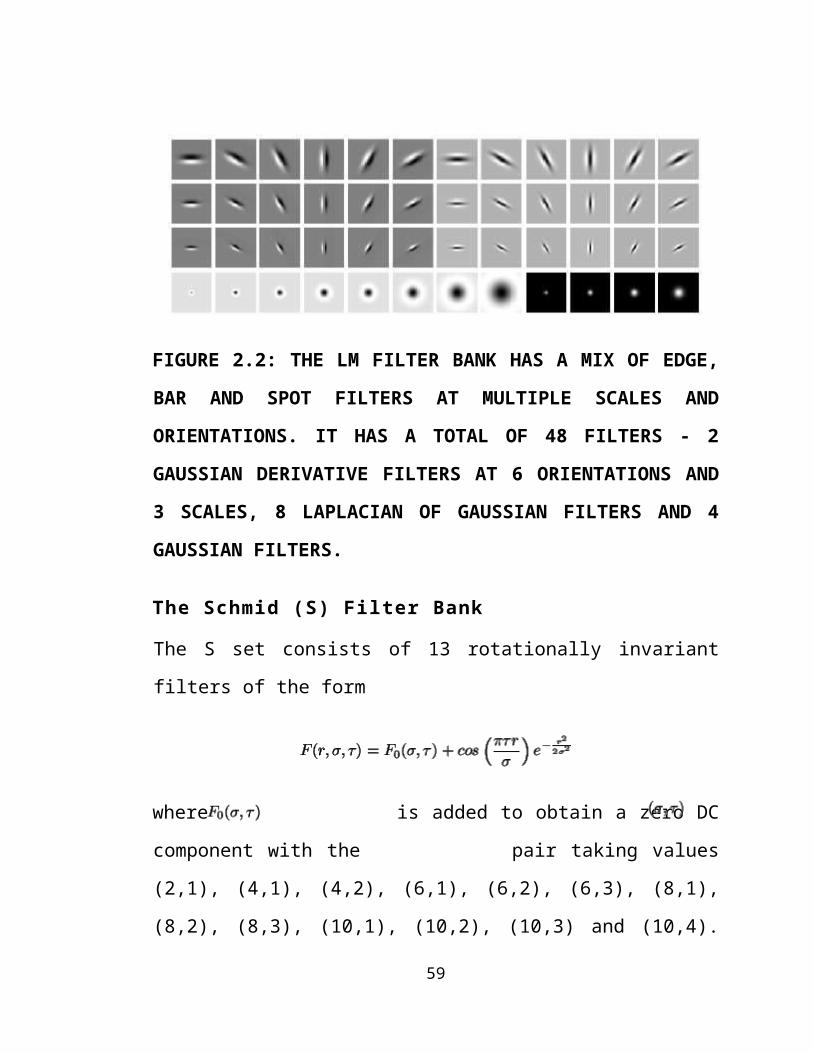
FIGURE 2.2: THE LM FILTER BANK HAS A MIX OF EDGE,
BAR AND SPOT FILTERS AT MULTIPLE SCALES AND
ORIENTATIONS. IT HAS A TOTAL OF 48 FILTERS - 2
GAUSSIAN DERIVATIVE FILTERS AT 6 ORIENTATIONS AND
3 SCALES, 8 LAPLACIAN OF GAUSSIAN FILTERS AND 4
GAUSSIAN FILTERS.
The Schmid (S) Filter Bank
The S set consists of 13 rotationally invariant
filters of the form
where is added to obtain a zero DC
component with the pair taking values
(2,1), (4,1), (4,2), (6,1), (6,2), (6,3), (8,1),
(8,2), (8,3), (10,1), (10,2), (10,3) and (10,4).
59
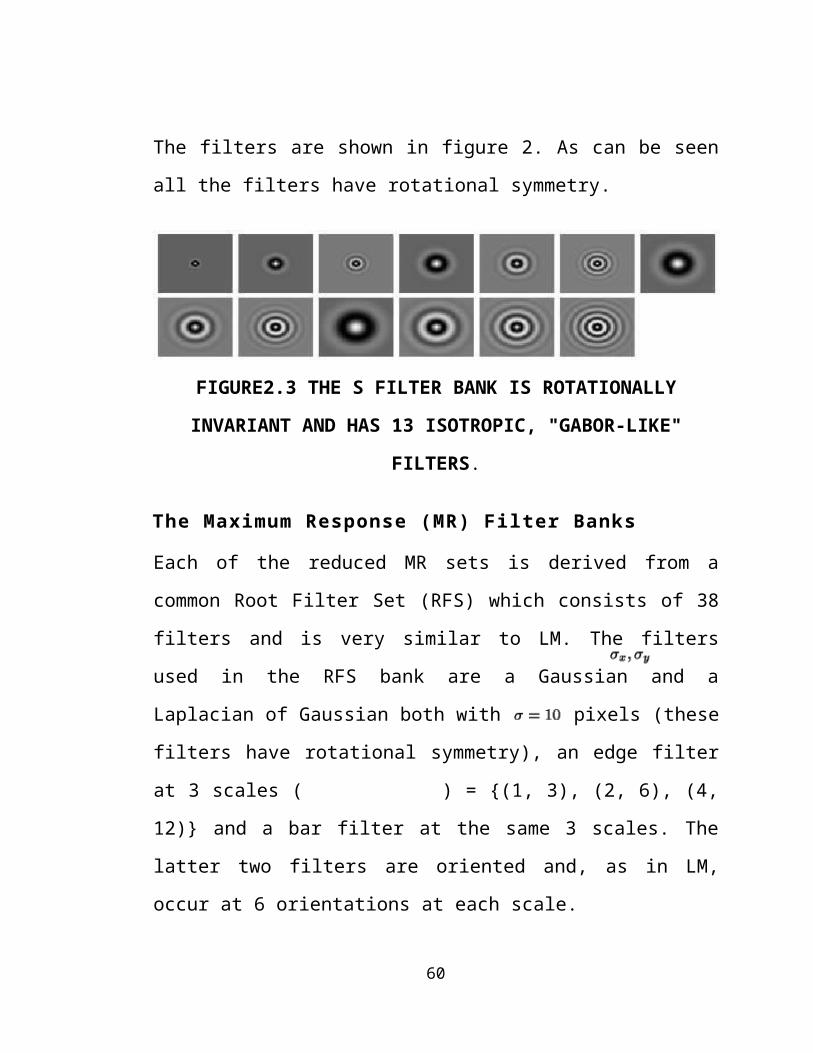
The filters are shown in figure 2. As can be seen
all the filters have rotational symmetry.
FIGURE2.3 THE S FILTER BANK IS ROTATIONALLY
INVARIANT AND HAS 13 ISOTROPIC, "GABOR-LIKE"
FILTERS.
The Maximum Response (MR) Filter Banks
Each of the reduced MR sets is derived from a
common Root Filter Set (RFS) which consists of 38
filters and is very similar to LM. The filters
used in the RFS bank are a Gaussian and a
Laplacian of Gaussian both with pixels (these
filters have rotational symmetry), an edge filter
at 3 scales ( ) = {(1, 3), (2, 6), (4,
12)} and a bar filter at the same 3 scales. The
latter two filters are oriented and, as in LM,
occur at 6 orientations at each scale.
60
To achieve rotational invariance, we derive the
Maximum Response 8 (MR8) filter bank from RFS by
recording only the maximum filter response across
all orientations for the two anisotropic filters.
Measuring only the maximum response across
orientations reduces the number of responses from
38 (6 orientations at 3 scales for 2 oriented
filters, plus 2 isotropic) to 8 (3 scales for 2
filters, plus 2 isotropic). Thus, the MR8 filter
bank consists of 38 filters but only 8 filter
responses.
61
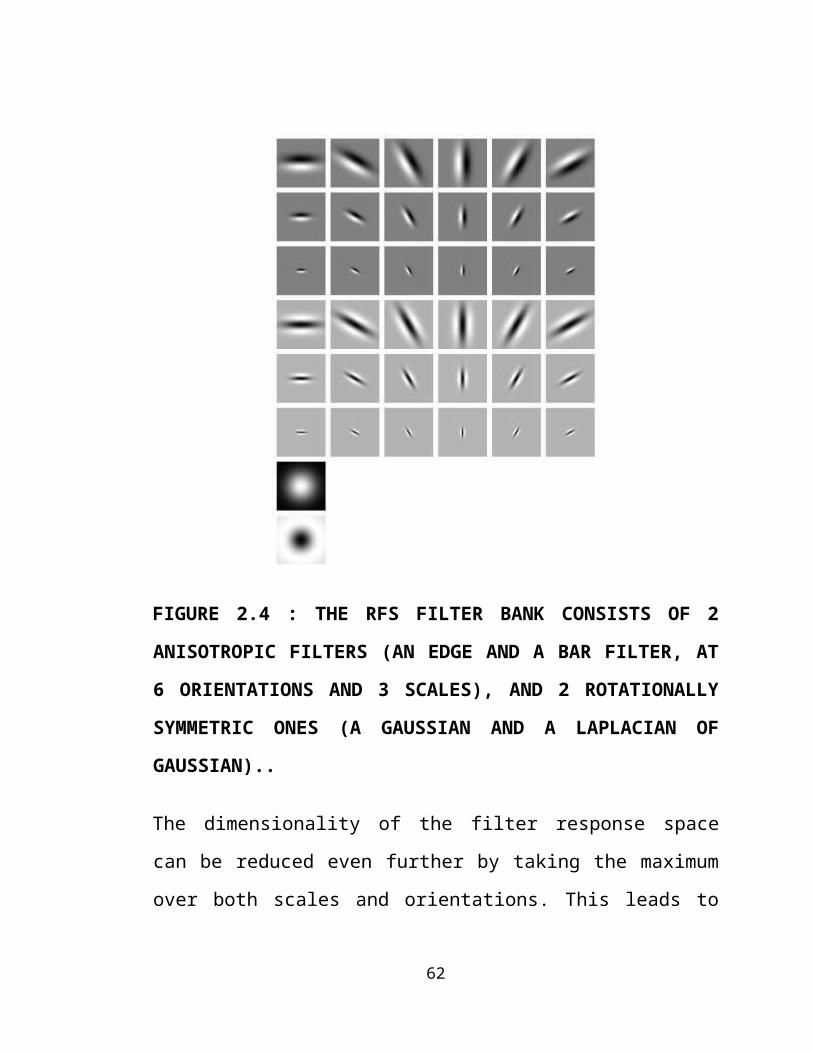
FIGURE 2.4 : THE RFS FILTER BANK CONSISTS OF 2
ANISOTROPIC FILTERS (AN EDGE AND A BAR FILTER, AT
6 ORIENTATIONS AND 3 SCALES), AND 2 ROTATIONALLY
SYMMETRIC ONES (A GAUSSIAN AND A LAPLACIAN OF
GAUSSIAN)..
The dimensionality of the filter response space
can be reduced even further by taking the maximum
over both scales and orientations. This leads to
62
the MRS4 filter bank. In it, each of the 4
different types of filters contributes only a
single response. As in MR8, the responses of the
two isotropic filters (Gaussian and LOG) are
recorded directly. However, for each of the
anisotropic filters, the maximum response is taken
over both orientations and scale again giving a
single response per filter type. With proper
normalization, MRS4 is both rotation and scale
invariant.
Finally, we also consider the MR4 filter bank
where we only look at filters at a single scale.
Thus, the MR4 filter bank is a subset of the MR8
filter bank where the oriented edge and bar
filters occur at a single fixed scale
( ) = (4, 1 2).
The motivation for introducing these MR filters
sets is twofold. The first is to overcome the
limitations of traditional rotationally invariant
filters which do not respond strongly to oriented
63
image patches and thus do not provide good
features for anisotropic textures. However, since
the MR sets contain both isotropic filters as well
as anisotropic filters at multiple orientations
they are expected to generate good features for
all types of textures. Additionally, unlike
traditional rotationally invariant filters, the MR
sets are also able to record the angle of maximum
response. This enables us to compute higher order
co-occurrence statistics on orientation and such
statistics may prove useful in discriminating
textures which appear to be very similar.
The second motivation arises out of a concern
about the dimensionality of the filter response
space. Quite apart from the extra processing and
computational costs involved, the higher the
dimensionality, the harder the clustering problem.
In general, not only does the number of cluster
centers needed to cover the space rise
dramatically, so does the amount of training data
64
required to reliably estimate each cluster centre.
This is mitigated to some extent by the fact that
texture features are sparse and can lie in lower
dimensional sub spaces. However, the presence of
noise and the difficulty in finding and projecting
onto these lower dimensional sub spaces can
counter these factors. Therefore, it is expected
that the MR filter banks should generate more
significant textons not only because of improved
clustering in a lower dimensional space but also
because rotated features are correctly mapped to
the same textons.
Histogram of oriented gradients
The essential thought behind the Histogram of
Oriented Gradient descriptors is that local object
appearance and shape within an image can be
described by the distribution of intensity
gradients or edge directions. The implementation
of these descriptors can be achieved by dividing
the image into small connected regions, called
65
cells, and for each cell compiling a histogram of
gradient directions or edge orientations for the
pixels within the cell. The combination of these
histograms then represents the descriptor. For
improved accuracy, the local histograms can be
contrast-normalized by calculating a measure of
the intensity across a larger region of the image,
called a block, and then using this value to
normalize all cells within the block. This
normalization results in better invariance to
changes in illumination or shadowing.
The HOG descriptor maintains a few key advantages
over other descriptor methods. Since the HOG
descriptor operates on localized cells, the method
upholds invariance to geometric and photo metric
transformations, except for object orientation.
Such changes would only appear in larger spatial
regions. Moreover, as Dalal and Triggs discovered,
coarse spatial sampling, fine orientation
sampling, and strong local photo metric
normalization permits the individual body movement
66
of pedestrians to be ignored so long as they
maintain a roughly upright position. The HOG
descriptor is thus particularly suited for human
detection in images.
Gradient computation
The first step of calculation in many feature
detectors in image pre-processing is to ensure
normalized color and gamma values. As Dalal and
Triggs point out, however, this step can be
omitted in HOG descriptor computation, as the
ensuing descriptor normalization essentially
achieves the same result. Image pre-processing
thus provides little impact on performance.
Instead, the first step of calculation is the
computation of the gradient values. The most
common method is to simply apply the 1-D centered,
point discrete derivative mask in one or both of
the horizontal and vertical directions.
Specifically, this method requires filtering the
color or intensity data of the image with the
following filter kernels:
67
[-1; 0; 1] and [-1; 0; 1]T
Dalal and Triggs tested other, more complex masks,
such as 3x3 Sobel masks (Sobel operator) or
diagonal masks, but these masks generally
exhibited poorer performance in human image
detection experiments. They also experimented with
Gaussian smoothing before applying the derivative
mask, but similarly found that omission of any
smoothing performed better in practice.
Orientation binning
The second step of calculation involves creating
the cell histograms. Each pixel within the cell
casts a weighted vote for an orientation-based
histogram channel based on the values found in the
gradient computation. The cells themselves can
either be rectangular or radial in shape, and the
histogram channels are evenly spread over 0 to 180
degrees or 0 to 360 degrees, depending on whether
the gradient is “unsigned” or “signed”. Dalal and
Triggs found that unsigned gradients used in
68
conjunction with 9 histogram channels performed
best in their human detection experiments. As for
the vote weight, pixel contribution can either be
the gradient magnitude itself, or some function of
the magnitude; in actual tests the gradient
magnitude itself generally produces the best
results.
Descriptor blocks
In order to account for changes in illumination
and contrast, the gradient strengths must be
locally normalized, which requires grouping the
cells together into larger, spatially connected
blocks. The HOG descriptor is then the vector of
the components of the normalized cell histograms
from all of the block regions. These blocks
typically overlap, meaning that each cell
contributes more than once to the final
69
descriptor. Two main block geometries exist:
rectangular R-HOG blocks and circular CHOG blocks.
R-HOG blocks are generally square grids,
represented by three parameters: the number of
cells per block, the number of pixels per cell,
and the number of channels per cell histogram. In
the Dalal and Triggs human detection experiment,
the optimal parameters were found to be 3x3 cell
blocks of 6x6 pixel cells with 9 histogram
channels. Moreover, they found that some minor
improvement in performance could be gained by
applying a Gaussian spatial window within each
block before tabulating histogram votes in order
to weight pixels around the edge of the blocks
less. The R-HOG blocks appear quite similar to the
scale-invariant feature transform descriptors;
however, despite their similar formation, R-HOG
blocks are computed in dense grids at some single
scale without orientation alignment, whereas SIFT
descriptors are computed at sparse, scale-
invariant key image points and are rotated to
70
align orientation. In addition, the RHOG blocks
are used in conjunction to encode spatial form
information, while SIFT descriptors are used
singly C-HOG blocks can be found in two variants:
those with a single, central cell and those with
an angularly divided central cell. In addition,
these C-HOG blocks can be described with four
parameters: the number of angular and radial bins,
the radius of the center bin, and the expansion
factor for the radius of additional radial bins.
Dalal and Triggs found that the two main variants
provided equal performance, and that two radial
bins with four angular bins, a center radius of 4
pixels, and an expansion factor of 2 provided the
best performance in their experimentation.
Also, Gaussian weighting provided no benefit when
used in conjunction with the C-HOG blocks. CHOG
blocks appear similar to Shape Contexts, but
differ strongly in that C-HOG blocks contain cells
with several orientation channels, while Shape
71

Contexts only make use of a single edge presence
count in their formulation.
APPLICATION:
1. Computed Tomography and Dicom:
Computed Tomography, also known as computed axial
tomography or CAT scan is a medical technology
that uses X - rays and computers to produce three-
dimensional images of the human body. Unlike
traditional X rays, which highlight dense body
parts, such as bones, CT provides detailed views
of the body’s soft tissues, including blood
vessels, muscle tissue, and organs, such as the
lungs. While conventional X-rays provide flat two-
dimensional images, CT images depict a cross-
section of the body. A patient undergoing a CT
scan rests on a movable table at the center of a
Donut-shaped scanner, which is about 2.4 m (8ft)
tall. The CT scanner contains an X-ray source,
which radiates X- rays; an X-ray detector, that
72
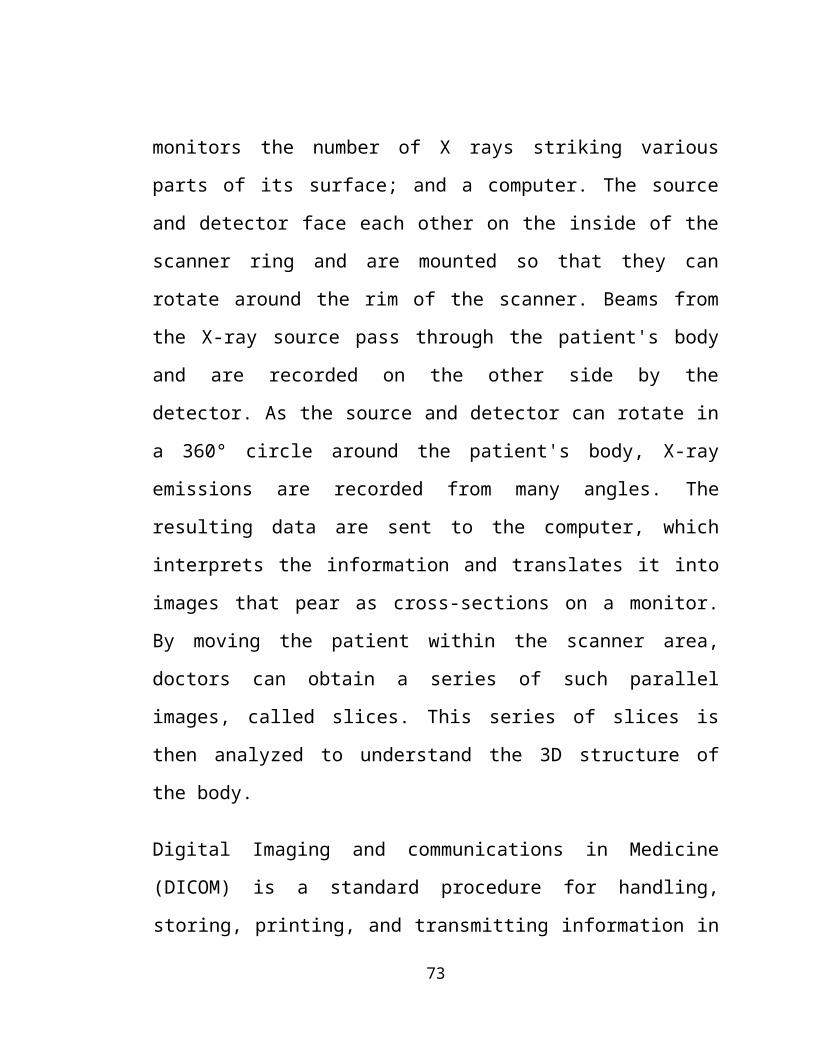
monitors the number of X rays striking various
parts of its surface; and a computer. The source
and detector face each other on the inside of the
scanner ring and are mounted so that they can
rotate around the rim of the scanner. Beams from
the X-ray source pass through the patient's body
and are recorded on the other side by the
detector. As the source and detector can rotate in
a 360° circle around the patient's body, X-ray
emissions are recorded from many angles. The
resulting data are sent to the computer, which
interprets the information and translates it into
images that pear as cross-sections on a monitor.
By moving the patient within the scanner area,
doctors can obtain a series of such parallel
images, called slices. This series of slices is
then analyzed to understand the 3D structure of
the body.
Digital Imaging and communications in Medicine
(DICOM) is a standard procedure for handling,
storing, printing, and transmitting information in
73
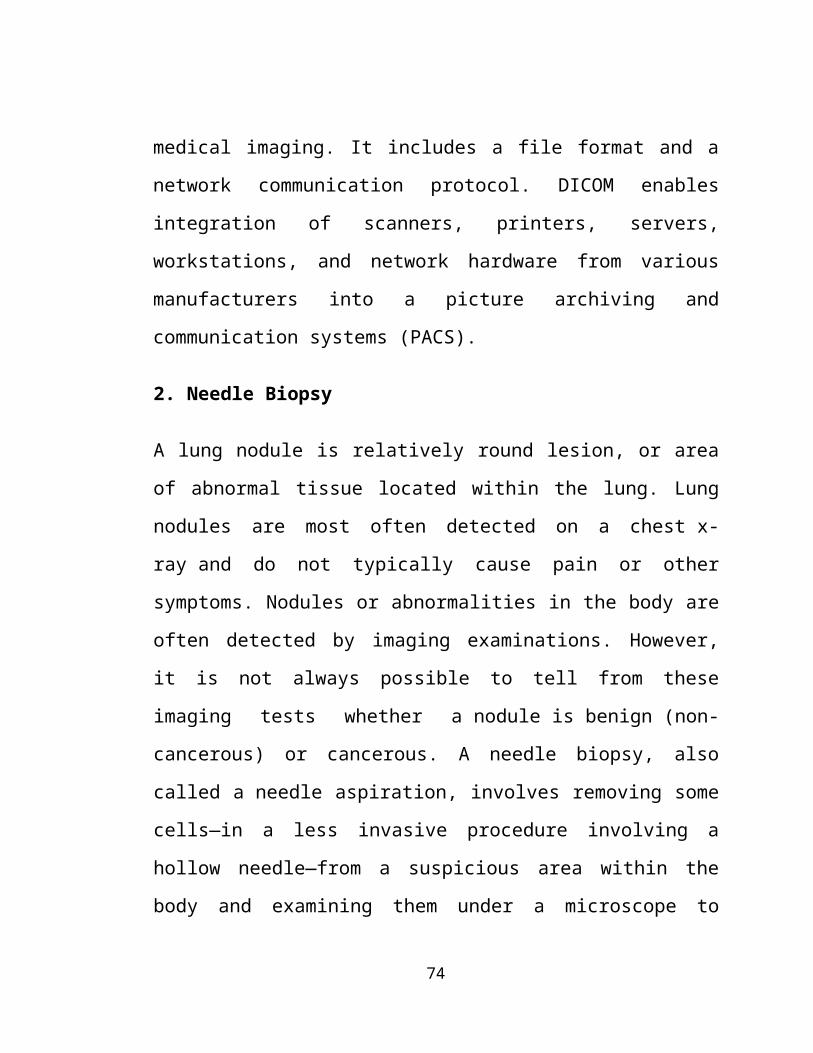
medical imaging. It includes a file format and a
network communication protocol. DICOM enables
integration of scanners, printers, servers,
workstations, and network hardware from various
manufacturers into a picture archiving and
communication systems (PACS).
2. Needle Biopsy
A lung nodule is relatively round lesion, or area
of abnormal tissue located within the lung. Lung
nodules are most often detected on a chest x-
ray and do not typically cause pain or other
symptoms. Nodules or abnormalities in the body are
often detected by imaging examinations. However,
it is not always possible to tell from these
imaging tests whether a nodule is benign (non-
cancerous) or cancerous. A needle biopsy, also
called a needle aspiration, involves removing some
cells—in a less invasive procedure involving a
hollow needle—from a suspicious area within the
body and examining them under a microscope to
74
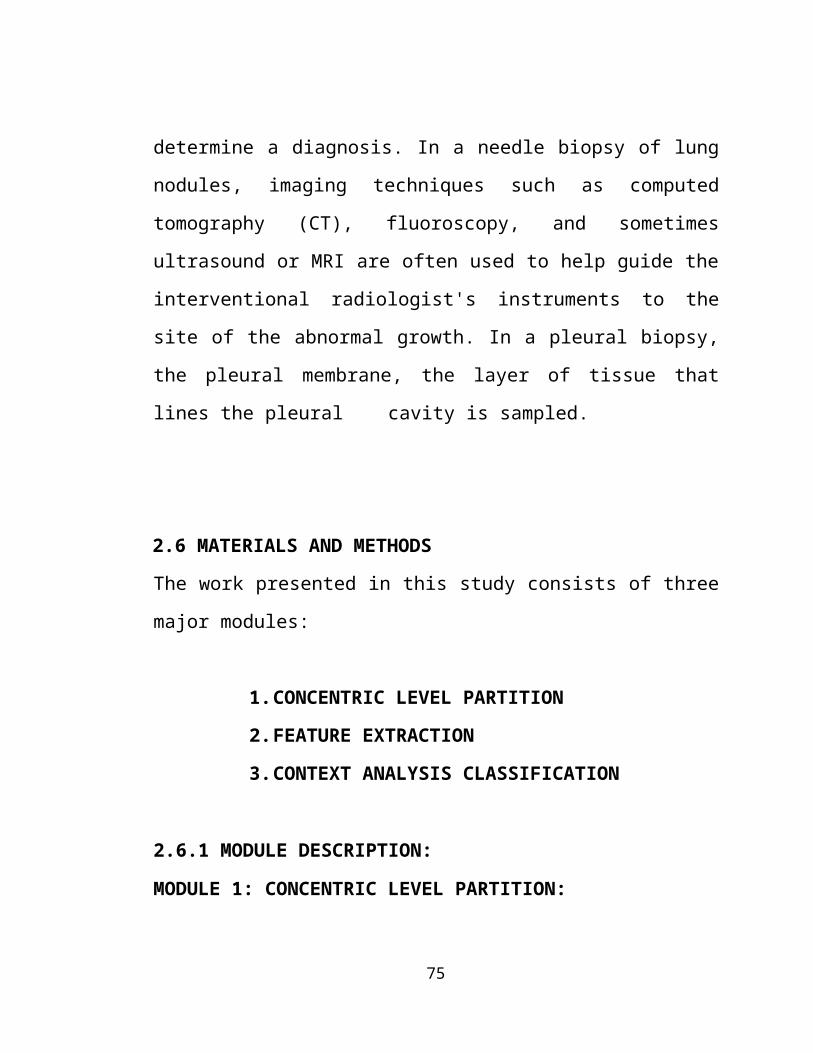
determine a diagnosis. In a needle biopsy of lung
nodules, imaging techniques such as computed
tomography (CT), fluoroscopy, and sometimes
ultrasound or MRI are often used to help guide the
interventional radiologist's instruments to the
site of the abnormal growth. In a pleural biopsy,
the pleural membrane, the layer of tissue that
lines the pleural cavity is sampled.
2.6 MATERIALS AND METHODS
The work presented in this study consists of three
major modules:
1.CONCENTRIC LEVEL PARTITION
2.FEATURE EXTRACTION
3.CONTEXT ANALYSIS CLASSIFICATION
2.6.1 MODULE DESCRIPTION:
MODULE 1: CONCENTRIC LEVEL PARTITION:
75
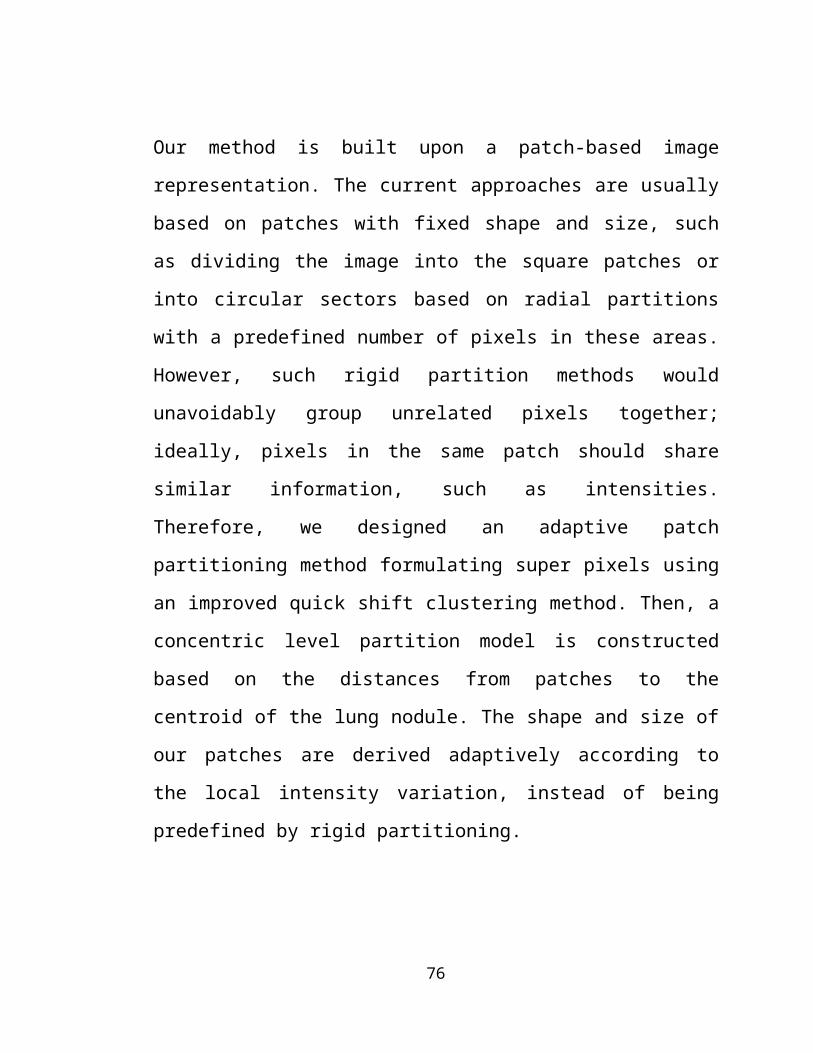
Our method is built upon a patch-based image
representation. The current approaches are usually
based on patches with fixed shape and size, such
as dividing the image into the square patches or
into circular sectors based on radial partitions
with a predefined number of pixels in these areas.
However, such rigid partition methods would
unavoidably group unrelated pixels together;
ideally, pixels in the same patch should share
similar information, such as intensities.
Therefore, we designed an adaptive patch
partitioning method formulating super pixels using
an improved quick shift clustering method. Then, a
concentric level partition model is constructed
based on the distances from patches to the
centroid of the lung nodule. The shape and size of
our patches are derived adaptively according to
the local intensity variation, instead of being
predefined by rigid partitioning.
76
MODULE 2: FEATURE EXTRACTION:
The effectiveness of image feature description
depends on: distinction and invariance, which
means that the descriptor needs to capture the
distinctive characteristics and be robust to adapt
to the various imaging conditions. Based on our
visual analysis the lung nodules, we suggest that
intensity, texture, and gradient can characterize
the various nodules and the diverse on textual
structures. We thus designed the feature set of
the combination of SIFT for overall description,
MR8+LBP for texture, and multi-orientation HOG for
gradient. For convenience, we refer to this
feature set as the FS3 feature.
77
MODULE 3: CONTEXT ANALYSIS CLASSIFICATION:
With the concentric level partition and feature
set, the next stage is to label each image with
one of the four nodule categories. Considering
that the morphology of lung nodules forms a
continuum, which means the structures of lung
nodules among different categories are similar,
even with the comprehensive feature design, it
remains difficult to classify the images
precisely. So to aid classification, we
incorporated the contextual information. The
proposed method involves SVM analysis for lung
nodule patches, and pLSA analysis for context
patches. In a supervised manner, besides the
explicit label information (with SVM), we also
extracted the implicit latent semantic information
hidden in the relationship between the images and
their categories (with pLSA). In this way, the
training data are used twofold, which acquires
much more information.
78
GIVEN INPUT AND EXPECTED OUTPUT
MODULE-1:
Input image is CT scan image and the output is
context patch images.
MODULE-2:
Input image is context patch images and output
image is feature extracted keypoints.
MODULE-3:
Input image is fusion image and output is latent
semantic topics discovery by using pLSA
79
CHAPTER 3
SOFTWARE SPECIFICATION
3.1 GENERAL
MATLAB (matrix laboratory) is a numerical
computing environment and fourth-generation
programming language. Developed by Math Works,
MATLAB allows matrix manipulations, plotting
of functions and data, implementation
of algorithms, creation of user interfaces, and
80
interfacing with programs written in other
languages, including C, C++, Java, and Fortran.
Although MATLAB is intended
primarily for numerical computing, an optional
toolbox uses the MuPAD symbolic engine , allowing
access to symbolic computing capabilities. An
additional package, Simulink, adds graphical
multi-domain simulation and Model-Based
Design for dynamic and embedded systems.
In 2004, MATLAB had around one
million users across industry and academia. MATLAB
users come from various backgrounds
of engineering, science, and economics. MATLAB is
widely used in academic and research institutions
as well as industrial enterprises.
MATLAB was first adopted by
researchers and practitioners in control
engineering, Little's specialty, but quickly
spread to many other domains. It is now also used
in education, in particular the teaching of linear
algebra and numerical analysis, and is popular
81
amongst scientists involved in image processing.
The MATLAB application is built around the MATLAB
language. The simplest way to execute MATLAB code
is to type it in the Command Window, which is one
of the elements of the MATLAB Desktop. When code
is entered in the Command Window, MATLAB can be
used as an interactive mathematical shell.
Sequences of commands can be saved in a text file,
typically using the MATLAB Editor, as a script or
encapsulated into a function, extending the
commands available.
MATLAB provides a number of features
for documenting and sharing your work. You can
integrate your MATLAB code with other languages
and applications, and distribute your MATLAB
algorithms and applications.
3.2 FEATURES OF MATLAB
High-level language for technical computing.
82
Development environment for managing code,
files, and data.
Interactive tools for iterative exploration,
design, and problem solving.
Mathematical functions for linear algebra,
statistics, Fourier analysis,
filtering, optimization, and numerical
integration.
2-D and 3-D graphics functions for
visualizing data.
Tools for building custom graphical user
interfaces.
Functions for integrating MATLAB based
algorithms with external applications and
languages, such as C, C++, FORTRAN, Java™,
COM, and Microsoft Excel.
MATLAB is used in vast area, including signal and
image processing, communications, control
design, test and measurement, financial modeling
and analysis, and computational. Add-on toolboxes
(collections of special-purpose MATLAB functions)
83
extend the MATLAB environment to solve particular
classes of problems in these application areas.
MATLAB can be used on personal
computers and powerful server systems, including
the Cheaha compute cluster. With the addition of
the Parallel Computing Toolbox, the language can
be extended with parallel implementations for
common computational functions, including for-loop
unrolling. Additionally this toolbox supports
offloading computationally intensive workloads
to Cheaha the campus compute cluster.MATLAB is one
of a few languages in which each variable is a
matrix (broadly construed) and "knows" how big it
is. Moreover, the fundamental operators (e.g.
addition, multiplication) are programmed to deal
with matrices when required. And the MATLAB
environment handles much of the bothersome
housekeeping that makes all this possible. Since
so many of the procedures required for Macro-
Investment Analysis involves matrices, MATLAB
84
proves to be an extremely efficient language for
both communication and implementation.
3.2.1 INTERFACING WITH OTHER LANGUAGES
MATLAB can call functions and subroutines written
in the C programming language or FORTRAN. A
wrapper function is created allowing MATLAB data
types to be passed and returned. The dynamically
loadable object files created by compiling such
functions are termed "MEX-files"
(for MATLAB executable).
Libraries written
in Java, ActiveX or .NET can be directly called
from MATLAB and many MATLAB libraries (for
example XML or SQL support) are implemented as
wrappers around Java or Active X libraries.
Calling MATLAB from Java is more complicated, but
can be done with MATLAB extension, which is sold
separately by Math Works, or using an undocumented
mechanism called JMI (Java-to-Mat lab
85
Interface), which should not be confused with the
unrelated Java that is also called JMI.
As alternatives to the MuPAD based
Symbolic Math Toolbox available from Math Works,
MATLAB can be connected to Maple or Mathematica.
Libraries also exist to import and export MathML.
Development Environment
Start up Accelerator for faster MATLAB
start up on Windows, especially on Windows
XP, and for network installations.
Spreadsheet Import Tool that provides more
options for selecting and loading mixed
textual and numeric data.
Readability and navigation improvements to
warning and error messages in the MATLAB
command window.
86
Automatic variable and function renaming in
the MATLAB Editor.
Developing Algorithms and Applications
MATLAB provides a high-level language and
development tools that let you quickly develop and
analyze your algorithms and applications.
The MATLAB Language
The MATLAB language supports the vector and matrix
operations that are fundamental to engineering and
scientific problems. It enables fast development
and execution. With the MATLAB language, you can
program and develop algorithms faster than with
traditional languages because you do not need to
perform low-level administrative tasks, such as
declaring variables, specifying data types, and
allocating memory. In many cases, MATLAB
eliminates the need for ‘for’ loops. As a result,
one line of MATLAB code can often replace several
lines of C or C++ code.
87
At the same time, MATLAB provides all
the features of a traditional programming
language, including arithmetic operators, flow
control, data structures, data types, object-
oriented programming (OOP), and debugging
features.
MATLAB lets you execute commands or
groups of commands one at a time, without
compiling and linking, enabling you to quickly
iterate to the optimal solution. For fast
execution of heavy matrix and vector computations,
MATLAB uses processor-optimized libraries. For
general-purpose scalar computations, MATLAB
generates machine-code instructions using its JIT
(Just-In-Time) compilation technology.
This technology, which is available
on most platforms, provides execution speeds that
rival those of traditional programming languages.
Development Tools
88
MATLAB includes development tools
that help you implement your algorithm
efficiently. These include the following:
MATLAB Editor
Provides standard editing and debugging features,
such as setting breakpoints and single stepping
Code Analyzer
Checks your code for problems and recommends
modifications to maximize performance and
maintainability
MATLAB Profiler
Records the time spent executing each line of code
Directory Reports
Scan all the files in a directory and report on
code efficiency, file differences, file
dependencies, and code coverage
89
Designing Graphical User Interfaces
By using the interactive tool GUIDE (Graphical
User Interface Development Environment) to layout,
design, and edit user interfaces. GUIDE lets you
include list boxes, pull-down menus, push buttons,
radio buttons, and sliders, as well as MATLAB
plots and Microsoft Active X® controls.
Alternatively, you can create GUIs pro-
grammatically using MATLAB functions.
3.2.2 ANALYZING AND ACCESSING DATA
MATLAB supports the entire data analysis process,
from acquiring data from external devices and
databases, through preprocessing, visualization,
and numerical analysis, to producing presentation-
quality output.
Data Analysis
MATLAB provides interactive tools and command-line
functions for data analysis operations, including:
90
Interpolating and decimating
Extracting sections of data, scaling, and
averaging
Thresholding and smoothing
Correlation, Fourier analysis, and filtering
1-D peak, valley, and zero finding
Basic statistics and curve fitting
Matrix analysis
Data Access
MATLAB is an efficient platform for accessing
data from files, other applications, databases,
and external devices. You can read data from
popular file formats, such as Microsoft Excel;
ASCII text or binary files; image, sound, and
video files; and scientific files, such as HDF and
HDF5. Low-level binary file I/O functions let you
work with data files in any format. Additional
91
functions let you read data from Web pages and
XML.
Visualizing Data
All the graphics features that are required to
visualize engineering and scientific data are
available in MATLAB. These include 2-D and 3-D
plotting functions, 3-D volume visualization
functions, tools for interactively creating plots,
and the ability to export results to all popular
graphics formats. You can customize plots by
adding multiple axes; changing line colors and
markers; adding annotation, Latex equations, and
legends; and drawing shapes.
2-D Plotting
Visualizing vectors of data with 2-D plotting
functions that create:
Line, area, bar, and pie charts.
Direction and velocity plots.
Histograms.
92
Polygons and surfaces.
Scatter/bubble plots.
Animations.
3-D Plotting and Volume Visualization
MATLAB provides functions for visualizing 2-D
matrices, 3-D scalar, and 3-D vector data. You can
use these functions to visualize and understand
large, often complex, multidimensional data.
Specifying plot characteristics, such as camera
viewing angle, perspective, lighting effect, light
source locations, and transparency.
3-D plotting functions include:
Surface, contour, and mesh.
Image plots.
Cone, slice, stream, and isosurface.
3.2.3 PERFORMING NUMERIC COMPUTATION
MATLAB contains mathematical, statistical, and
engineering functions to support all common
93
engineering and science operations. These
functions, developed by experts in mathematics,
are the foundation of the MATLAB language. The
core math functions use the LAPACK and BLAS linear
algebra subroutine libraries and the FFTW Discrete
Fourier Transform library. Because these
processor-dependent libraries are optimized to the
different platforms that MATLAB supports, they
execute faster than the equivalent C or C++ code.
MATLAB provides the following types of
functions for performing mathematical operations
and analyzing data:
Matrix manipulation and linear algebra.
Polynomials and interpolation.
Fourier analysis and filtering.
Data analysis and statistics.
Optimization and numerical integration.
CHAPTER 4
IMPLEMENTATION
4.1 GENERAL
94
Matlab is a program that was originally designed
to simplify the implementation of numerical linear
algebra routines. It has since grown into
something much bigger, and it is used to implement
numerical algorithms for a wide range of
applications. The basic language used is very
similar to standard linear algebra notation, but
there are a few extensions that will likely cause
you some problems at first.
95
4.3 SNAP SHOTS:
ORIGINAL IMAGE
96
INTERPOLATED IMAGE
97
98

4X AMPLIFIED IMAGE
99
SEGMENTED IMAGE
100

DOWNSAMPLED IMAGE
101
102
LEVEL NODULE
103
LEVEL CONTEXT1
104
LEVEL CONTEXT2
105
SIFT DISCRIPTOR IMAGE
106
107
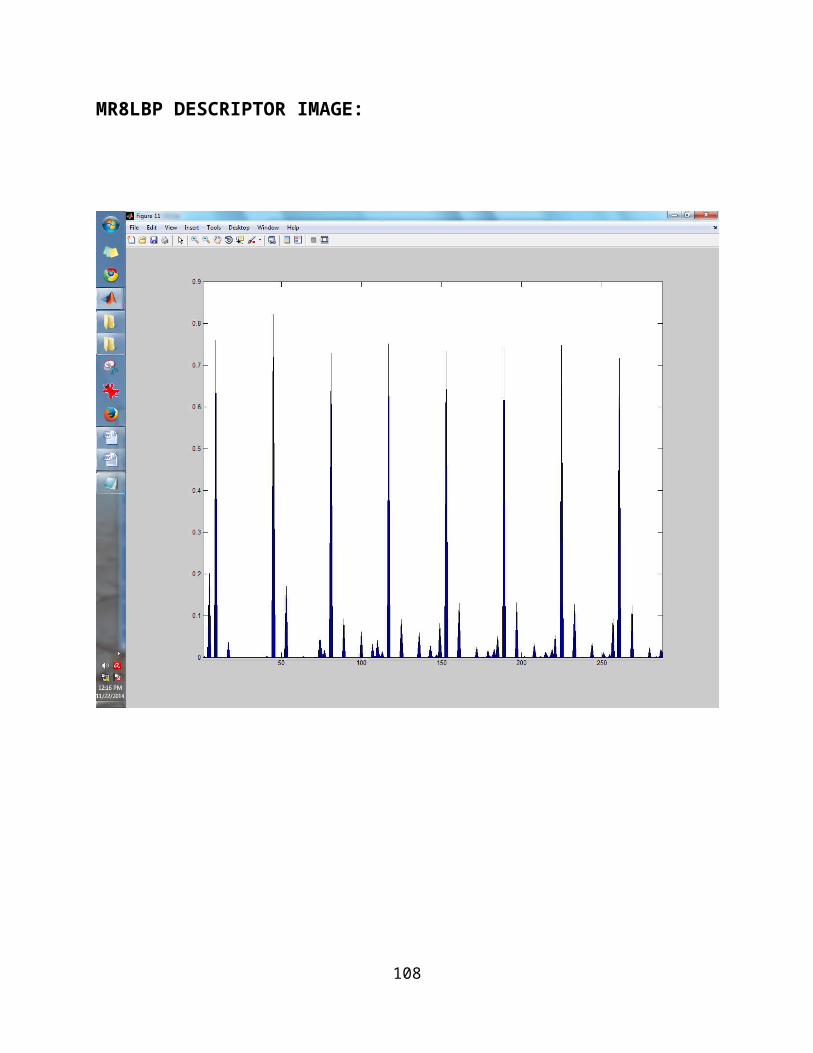
MR8LBP DESCRIPTOR IMAGE:
108
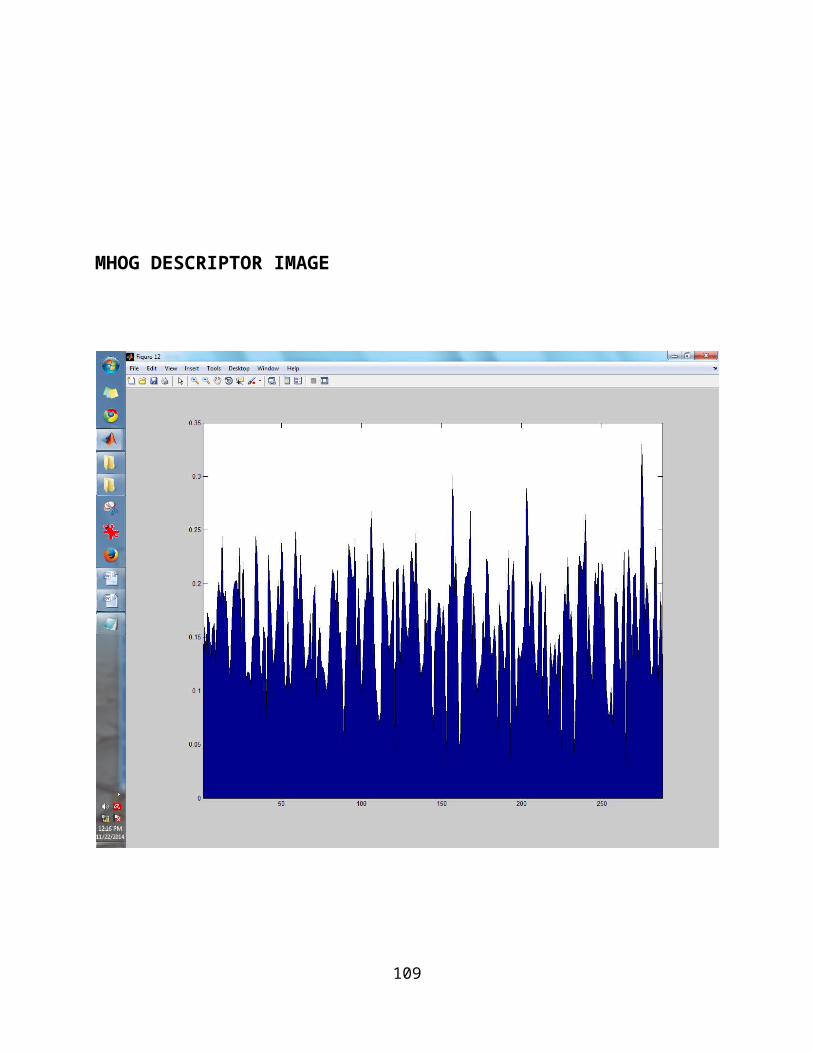
MHOG DESCRIPTOR IMAGE
109

OUTPUT
110
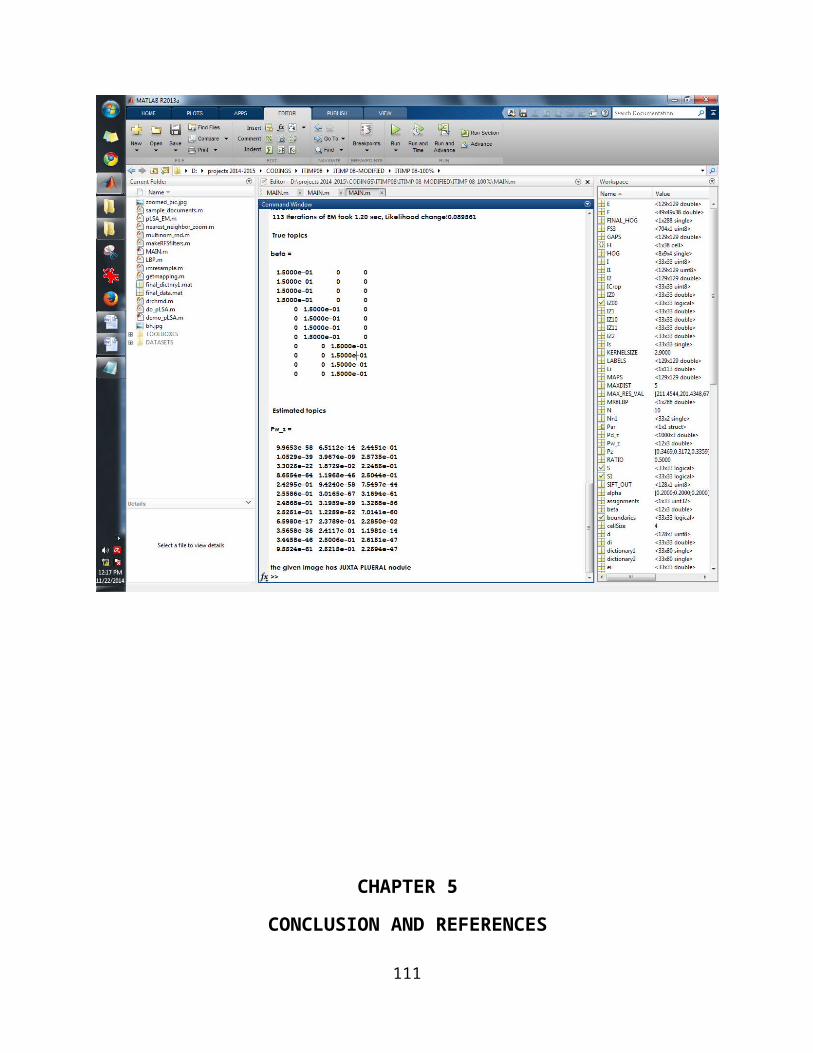
CHAPTER 5
CONCLUSION AND REFERENCES
111
5.1 CONCLUSION
To conclude, we present a supervised classification
method for lung nodule LDCT images in this paper. The
four main categories of lung nodules well-
circumscribed, vascularized, juxta-pleural, and
pleural-tail were the objects to be differentiated. We
designed a novel method to overcome the problem of the
lung nodule overlapping adjacent structures. Our method
had three components: concentric level partition,
feature extraction, and context analysis
classification. A concentric level partition was
constructed by an improved quick shift super pixel
formulation. Then, a FS3 feature set including SIFT,
MR8+LBP, and multi orientation HOG was generated to
describe the image patch from various perspectives.
Finally, a supervised classifier was designed through
combining level-nodule probability and level context
probability. The results from the experiments on the
ELCAP dataset showed promising performance of our
method. We also suggest that the proposed method can be
generally applicable to other medical or general
imaging domains. For instance, the improved quick shift
formulation process could be applied as the112
preprocessing stage for patch-based imaging analysis;
the extracted feature set could be employed as a
feature descriptor for other kinds of images; and the
latent semantic analysis with the voting process could
be used for analyzing hierarchical image patches.
5.2 REFERENCES
[1] J. J. Erasmus, J. E. Connolly, H. P. McAdams, and
V. L. Roggli, “Solitary pulmonary nodules: Part I.
morphologic evaluation for differentiation of benign
and malignant lesions,” Radiographics, vol. 20, no. 1,
pp. 43–58, 2000.
[2] D. Wu, L. Lu, J. Bi, Y. Shinagawa, K. Boyer, A.
Krishnan, and M. Salganicoff, “Stratified learning of
local anatomical context for lung nodules in CT
113
images,” in Proc. Comput. Vis. Pattern Recog., 2010,
pp. 2791–2798.
[3] R.A. Ochs, J.G. Goldin, F. Abtin, H. J. Kim, K.
Brown, P. Batra, D. Roback, M. F. McNitt-Gray, and M.
S. Brown, “Automated classification of lung
bronchovascular anatomy in CT using adaboost,” Med.
Image Anal., vol. 11, no. 3, pp. 315–324, 2007.
[4] A. Farag, S. Elhabian, J. Graham, A. Farag, and R.
Falk, “Toward precise pulmonary nodule descriptors for
nodule type classification,” in Proc. Med. Image
Comput. Comput.-Assisted Intervention Conf. Lecture
Notes Comput. Sci., 2010, vol. 13, no. 3, pp. 626–633.
[5] A. A. Farag, “A variational approach for small-size
lung nodule segmentation,” in Proc. Int. Symp. Biomed.
Imag., 2013, pp. 81–84.
[6] D. Xu, H. J. van der Zaag-Loonen, M. Oudkerk,
Y.Wang, R. Vliegenthart,E. T. Scholten, J.
Verschakelen,M. Prokop, H. J. de Koning, and R. J. van
Klaveren, “Smooth or attached solid indeterminate114
nodules detected at baseline CT screening in the NELSON
study: Cancer risk during 1 year of follow-up,”
Radiology, vol. 250, no. 1, pp. 264–272, 2009.
[7] S. Diciotti, G. Picozzi, M. Falchini, M. Mascalchi,
N. Villari, and G. Valli “3-D segmentation algorithm
of small lung nodules in spiral CT images,” IEEE Trans.
Inf. Technol. Biomed., vol. 12, no. 1, pp. 7–19, Jan.
2008.
[8] B. Zhao, “Automatic detection of small lung nodules
on CT utilizing alocal density maximum algorithm,” J.
Appl. Clin.Med. Phys., vol. 4, no. 3,pp. 248–260, 2003.
[9] Y. Lee, T. Hara,H. Fujita, S. Itoh, and T.
Ishigaki, “Automated detection of pulmonary nodules in
helical CT images based on an improved template
matching technique,” IEEE Trans.Med. Imag., vol. 20,
no. 7, pp. 595–604,Jul. 2001.
[10] A. A. Farag, S. Y. Elhabian, S. A. Elshazly, and
A. A. Farag, “Quantificationof nodule detection in
chest CT: A clinical investigation based onthe ELCAP115
study,” in Proc. 2nd Int. Workshop Pulmon. Image
Process.,2010, pp. 149–160.
[11] S. G. Armato III, M. L. Giger, and H. MacMahon,
“Automated detection of lung nodules in CT scans:
Preliminary results,” Med. Phys., vol. 28,no. 8, pp.
1552–1561, 2001.
[12] L. Fan, C. L. Novak, J. Qian, G. Kohl, and D.
Naidich, “Automatic detection of lung nodules from
multislice low-dose CT images,” in Proc. SPIE, Med.
Imag., 2001, vol. 4322, pp. 1828–1835.
[13] A. A. Farag, J. Graham, A. A. Farag, S. Elshazly,
and R. Falk, “Parametric and non-parametric nodule
models: Design and evaluation,” in Proc. 3rd Int.
Workshop Pulmon. Image Process., 2010, pp. 151–162.
[14] I. Sluimer, A. Schilham, M. Prokop, and B. van
Ginneken, “Computer analysis of computed tomography
scans of the lung: A survey,” IEEE Trans. Med. Imag.,
vol. 25, no. 4, pp. 385–405, Apr. 2006.
116

117