Load governor for fuel cell oxygen starvation protection: a robust nonlinear reference governor...
10
IEEE TRANSACTIONS ON CONTROL SYSTEMS TECHNOLOGY, VOL. 13, NO. 6, NOVEMBER 2005 911 Load Governor for Fuel Cell Oxygen Starvation Protection: A Robust Nonlinear Reference Governor Approach Jing Sun, Fellow, IEEE, and Ilya V. Kolmanovsky, Senior Member, IEEE Abstract—The fuel cell oxygen starvation problem is addressed in this paper using a robust load governor. By regulating the cur- rent drawn from the fuel cell, the pointwise-in-time constraints on the oxygen excess ratio and on the oxygen mass inside the cathode are strictly enforced to protect the fuel cells from oxygen starva- tion. The load governor is designed using a nonlinear reference governor approach. Parameter uncertainties such as those due to imperfect controls of temperature and humidity are handled in the load governor design using a novel approach based on sensitivity functions. Simulation results are included to demonstrate the ef- fectiveness of the proposed scheme. The results are compared with those of a linear filter which has been proposed in the prior litera- ture to achieve similar goals. Index Terms—Constrained optimization, fuel cells, load man- agement, observer, reference governors. I. INTRODUCTION F UEL cell research has recently received a great deal of attention because of its strategic importance in global energy conservation and its positive impact on the environment. Successful and wide-spread commercial applications of fuel cell systems in transportation and power generation industries will alleviate the dependence of human society on fossil fuels and make the renewable resource a reality. However, chal- lenging problems in the areas of material, manufacturing, fuel processing and distribution, and control need to be resolved before the cars propelled with fuel cells can be driven on the road. Major control problems for fuel cell systems are highlighted in [1] and [2]. In this paper, we consider the load control of the fuel cells with the main focus on preventing oxygen starvation. Power generation in fuel cells relies on the continuous supply of oxygen to the cathode side and hydrogen to the anode side, when proper temperature and humidity conditions are main- tained. The amount of power the fuel cells system delivers is controlled by the amount of current drawn from the system, if the proper conditions for cell operation are maintained. When a large load is applied to the cells, the sudden increase in the Manuscript received June 28, 2004; revised December 9, 2004. Manuscript received in final form May 20, 2005. Recommended by Associate Editor A. Stefanopoulou. J. Sun is with the Naval Architecture and Marine Engineering De- partment, University of Michigan, Ann Arbor, MI 48109 USA (e-mail: [email protected]). I. V. Kolmanovsky is with Powertrain Control Systems Department, Ford Research and Advanced Engineering, Dearborn, MI 48121 USA (e-mail: [email protected]). Digital Object Identifier 10.1109/TCST.2005.854323 current can cause the system to stall if the depleted oxygen or hydrogen cannot be replenished immediately and sufficiently. The cell starvation can lead to system stall or permanent cell damage or reduced cell lifetime [2]. To protect the fuel cells from overloading and starvation, es- pecially during the transient conditions, one can supply exces- sive oxygen and hydrogen to the cells during the steady-state operation, thus, increasing the reserve of available power in an- ticipation of the load increase. This strategy, however, is conser- vative, and it leads to increased parasitic losses, decreased air utilization and, thus, a compromised system performance. An- other approach is to modify the load demand with a first-order or other slew-type filter [3], so that the application of the load is delayed to give time for the air and fuel supplies to catch up. While a filter can mitigate the problem and is easy to implement, it cannot guarantee that cell starvation is eliminated. When the filter is tuned for the worst-case scenario, it often leads to a con- servative design with slow response. Other approaches, such as the model predictive control (MPC) [4], have also been pro- posed to address the issues. In this paper, we formulate the fuel cells starvation protection as a constraint-enforcement problem. The reference governor [5], a mechanism effective in guaranteeing pointwise-in-time state and input constraints being satisfied, is explored for the load (current) governance. A load governor is designed to min- imize the load tracking error while at the same time checking conditions for constraint violation. If constraint violation is pre- dicted, the load will be reduced until all the constraints are satis- fied. The computations involved in implementing the load gov- ernor include the simulations of the plant model over a finite time horizon and bisectional search for determining the optimal gain. Although the performance of the reference governor can be suboptimal as compared to more flexible MPC controllers, the computational implementation of the reference governor can be much simpler, which is a significant advantage for chrono- metrics and memory constrained automotive microcontrollers. In dealing with the load control for the oxygen starvation pro- tection problem, we first assume the temperature and humidity of the fuel cells are controlled around its setpoint with good ac- curacy. This allows us to use a nominal model for the load gov- ernor design and implementation. Given that the temperature and humidity controls represent some of the toughest challenges in fuel cell system management, this assumption most likely will be violated in real application. To mitigate the problems associated with model uncertainties, especially those caused by temperature and humidity fluctuation, we propose a robust load 1063-6536/$20.00 © 2005 IEEE
Transcript of Load governor for fuel cell oxygen starvation protection: a robust nonlinear reference governor...

IEEE TRANSACTIONS ON CONTROL SYSTEMS TECHNOLOGY, VOL. 13, NO. 6, NOVEMBER 2005 911
Load Governor for Fuel Cell Oxygen StarvationProtection: A Robust NonlinearReference Governor Approach
Jing Sun, Fellow, IEEE, and Ilya V. Kolmanovsky, Senior Member, IEEE
Abstract—The fuel cell oxygen starvation problem is addressedin this paper using a robust load governor. By regulating the cur-rent drawn from the fuel cell, the pointwise-in-time constraints onthe oxygen excess ratio and on the oxygen mass inside the cathodeare strictly enforced to protect the fuel cells from oxygen starva-tion. The load governor is designed using a nonlinear referencegovernor approach. Parameter uncertainties such as those due toimperfect controls of temperature and humidity are handled in theload governor design using a novel approach based on sensitivityfunctions. Simulation results are included to demonstrate the ef-fectiveness of the proposed scheme. The results are compared withthose of a linear filter which has been proposed in the prior litera-ture to achieve similar goals.
Index Terms—Constrained optimization, fuel cells, load man-agement, observer, reference governors.
I. INTRODUCTION
FUEL cell research has recently received a great deal ofattention because of its strategic importance in global
energy conservation and its positive impact on the environment.Successful and wide-spread commercial applications of fuelcell systems in transportation and power generation industrieswill alleviate the dependence of human society on fossil fuelsand make the renewable resource a reality. However, chal-lenging problems in the areas of material, manufacturing, fuelprocessing and distribution, and control need to be resolvedbefore the cars propelled with fuel cells can be driven on theroad.
Major control problems for fuel cell systems are highlightedin [1] and [2]. In this paper, we consider the load control of thefuel cells with the main focus on preventing oxygen starvation.Power generation in fuel cells relies on the continuous supplyof oxygen to the cathode side and hydrogen to the anode side,when proper temperature and humidity conditions are main-tained. The amount of power the fuel cells system delivers iscontrolled by the amount of current drawn from the system, ifthe proper conditions for cell operation are maintained. Whena large load is applied to the cells, the sudden increase in the
Manuscript received June 28, 2004; revised December 9, 2004. Manuscriptreceived in final form May 20, 2005. Recommended by Associate EditorA. Stefanopoulou.
J. Sun is with the Naval Architecture and Marine Engineering De-partment, University of Michigan, Ann Arbor, MI 48109 USA (e-mail:[email protected]).
I. V. Kolmanovsky is with Powertrain Control Systems Department, FordResearch and Advanced Engineering, Dearborn, MI 48121 USA (e-mail:[email protected]).
Digital Object Identifier 10.1109/TCST.2005.854323
current can cause the system to stall if the depleted oxygen orhydrogen cannot be replenished immediately and sufficiently.The cell starvation can lead to system stall or permanent celldamage or reduced cell lifetime [2].
To protect the fuel cells from overloading and starvation, es-pecially during the transient conditions, one can supply exces-sive oxygen and hydrogen to the cells during the steady-stateoperation, thus, increasing the reserve of available power in an-ticipation of the load increase. This strategy, however, is conser-vative, and it leads to increased parasitic losses, decreased airutilization and, thus, a compromised system performance. An-other approach is to modify the load demand with a first-orderor other slew-type filter [3], so that the application of the loadis delayed to give time for the air and fuel supplies to catch up.While a filter can mitigate the problem and is easy to implement,it cannot guarantee that cell starvation is eliminated. When thefilter is tuned for the worst-case scenario, it often leads to a con-servative design with slow response. Other approaches, such asthe model predictive control (MPC) [4], have also been pro-posed to address the issues.
In this paper, we formulate the fuel cells starvation protectionas a constraint-enforcement problem. The reference governor[5], a mechanism effective in guaranteeing pointwise-in-timestate and input constraints being satisfied, is explored for theload (current) governance. A load governor is designed to min-imize the load tracking error while at the same time checkingconditions for constraint violation. If constraint violation is pre-dicted, the load will be reduced until all the constraints are satis-fied. The computations involved in implementing the load gov-ernor include the simulations of the plant model over a finitetime horizon and bisectional search for determining the optimalgain. Although the performance of the reference governor canbe suboptimal as compared to more flexible MPC controllers,the computational implementation of the reference governor canbe much simpler, which is a significant advantage for chrono-metrics and memory constrained automotive microcontrollers.
In dealing with the load control for the oxygen starvation pro-tection problem, we first assume the temperature and humidityof the fuel cells are controlled around its setpoint with good ac-curacy. This allows us to use a nominal model for the load gov-ernor design and implementation. Given that the temperatureand humidity controls represent some of the toughest challengesin fuel cell system management, this assumption most likelywill be violated in real application. To mitigate the problemsassociated with model uncertainties, especially those caused bytemperature and humidity fluctuation, we propose a robust load
1063-6536/$20.00 © 2005 IEEE
912 IEEE TRANSACTIONS ON CONTROL SYSTEMS TECHNOLOGY, VOL. 13, NO. 6, NOVEMBER 2005
governor by taking into account explicitly the parametric uncer-tainties in our design. In particular, we incorporate three param-eters in the model to represent uncertainties in: 1) the supplymanifold relative humidity; 2) the vapor saturation pressure inthe cathode due to temperature deviation, 3) the vapor diffusionacross the membrane. In addition to the computations involvedwith the nominal load governor, i.e., the simulation of the nom-inal plant model and bisectional search, the robust load governoruses sensitivity functions for the linearized model and an esti-mate for the error bound for linearization to guarantee the robustperformance.
The paper is organized as follows. A control oriented modelbased on [6] will be briefly presented in Section II, followed by adiscussion on the control design objectives. Section III describesthe load governor, which is based on the reference governor con-cept, for the fuel cell current control. A state observer, whichprovides the state estimation for the load governor, is also pre-sented in Section IV. The robust load governor, aimed at guar-anteeing constraint satisfaction under parametric uncertainties,is delineated in Section V. Section VI highlights the simulationresults, where the performance of the robust load governor iscompared with that of a regular reference governor and with thesystem that uses a first-order filter. Section VII concludes thepaper with a brief summary.
For the sake of clarity, we limit the scope of this paper topreventing oxygen starvation by regulating the fuel cell cur-rent, with constraints imposed on the oxygen excess ratio andthe amount of oxygen left in the cathode. For the fuel cell sys-tems considered in this paper, the oxygen subsystem has slowerdynamics compared with the hydrogen supply system, there-fore oxygen starvation is the more obstinate problem duringfast transient operation. However, the same scheme and designprocess can be extended to include additional constraints in-volving the conditions on the anode side with hydrogen star-vation, or other conditions on the cathode side with compressorstall and surge. The robust load governor developed in this papercan also be extended to general cases which involve multiple un-certain parameters.
II. CONTROL DESIGN MODEL AND PROBLEM FORMULATION
A. Control-Oriented Model
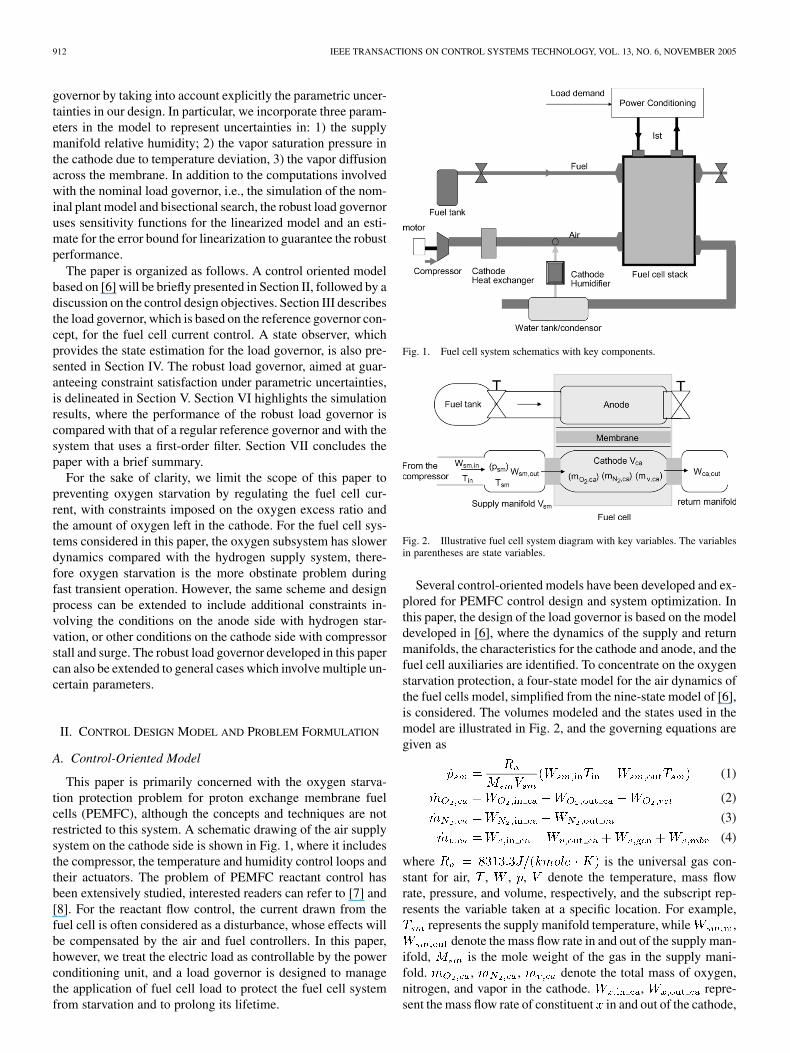
This paper is primarily concerned with the oxygen starva-tion protection problem for proton exchange membrane fuelcells (PEMFC), although the concepts and techniques are notrestricted to this system. A schematic drawing of the air supplysystem on the cathode side is shown in Fig. 1, where it includesthe compressor, the temperature and humidity control loops andtheir actuators. The problem of PEMFC reactant control hasbeen extensively studied, interested readers can refer to [7] and[8]. For the reactant flow control, the current drawn from thefuel cell is often considered as a disturbance, whose effects willbe compensated by the air and fuel controllers. In this paper,however, we treat the electric load as controllable by the powerconditioning unit, and a load governor is designed to managethe application of fuel cell load to protect the fuel cell systemfrom starvation and to prolong its lifetime.
Fig. 1. Fuel cell system schematics with key components.
Fig. 2. Illustrative fuel cell system diagram with key variables. The variablesin parentheses are state variables.
Several control-oriented models have been developed and ex-plored for PEMFC control design and system optimization. Inthis paper, the design of the load governor is based on the modeldeveloped in [6], where the dynamics of the supply and returnmanifolds, the characteristics for the cathode and anode, and thefuel cell auxiliaries are identified. To concentrate on the oxygenstarvation protection, a four-state model for the air dynamics ofthe fuel cells model, simplified from the nine-state model of [6],is considered. The volumes modeled and the states used in themodel are illustrated in Fig. 2, and the governing equations aregiven as
(1)
(2)
(3)
(4)
where is the universal gas con-stant for air, , , , denote the temperature, mass flowrate, pressure, and volume, respectively, and the subscript rep-resents the variable taken at a specific location. For example,
represents the supply manifold temperature, while ,denote the mass flow rate in and out of the supply man-
ifold, is the mole weight of the gas in the supply mani-fold. , , denote the total mass of oxygen,nitrogen, and vapor in the cathode. , repre-sent the mass flow rate of constituent in and out of the cathode,

SUN AND KOLMANOVSKY: LOAD GOVERNOR FOR FUEL CELL OXYGEN STARVATION PROTECTION 913
respectively. represents the rate at which oxygen is con-sumed due to reaction, which is dictated by the stack currentthrough the relation
(5)
where is the number of cells in the stack andis the Faraday number. , are the rates at whichwater (vapor) is generated due to reactions and trans-ported across the membrane, respectively; their expressions canbe found in [6].
Assuming the flows from the supply-to-cathode andcathode-to-return manifolds are controlled by linear noz-zles, the flow rates of different constituents in and out ofthe cathode are calculated using their partial pressures or molefractions and orifice model. For example, with the relativehumidity and temperature in the supply manifold controlledat and , respectively, the total mass flow rate and theoxygen mass flow rate from the supply manifold to the cathodeare given as
where , are the mole weight of oxygen and gas mix-ture in the supply manifold, respectively, and is the partialpressure of the constituent in the supply manifold. The partialpressure of the oxygen in the supply manifold can be expressedas
where is the vapor saturation pressure which is a functionof the temperature. Similar expressions can be obtained for allother terms in the model (1)–(4).
In addition to the plant model, we also assume that a Pro-portional+Integral (PI) feedback control, in combination withfeedforward scheduling, is used to regulate the oxygen excessratio, defined as
(6)
to a setpoint. We, thus, augment the plant model with the con-troller state to include the following dynamics
(7)
where is the oxygen excess ratio regulation error,and is the feedforward term that will be scheduled basedon the stack current . The , are constant gains of thePI controller. The parameters , , are fixed from theoutset for the load governor design. When these values change,only the underlying model used in the load governor implemen-tation needs to be updated. All other algorithms and implemen-tation for the load governor will remain the same, since they donot use the parameters in the model explicitly.
For the purpose of providing a self-contained description ofthe fuel cell model, all the equations implemented in the fuel cell
model simulation, including those for the PI feedback controller,are summarized as follows:
The temperature in the supply manifold and cathode are as-sumed to be the same as the inlet, i.e.,
. The partial pressure of the vapor in the supply mani-fold is calculated as where
for and a constant relative humidityis used. The mole weights for different species are
, , . Other physics and geometry re-lated parameters used in (8) are from [6], i.e., 0.028 m ,
0.0006 m , 0.0018 m , ,, 0.01 m , 0.02 m , 2, 381.
B. Design Objectives
At steady-state conditions, a fuel cell is operated at a fixedoxygen excess ratio ( 2 is used in this study) where anoverall optimal system efficiency is achieved [9]. The regulationof is assumed to be achieved by the controller (7). During
914 IEEE TRANSACTIONS ON CONTROL SYSTEMS TECHNOLOGY, VOL. 13, NO. 6, NOVEMBER 2005
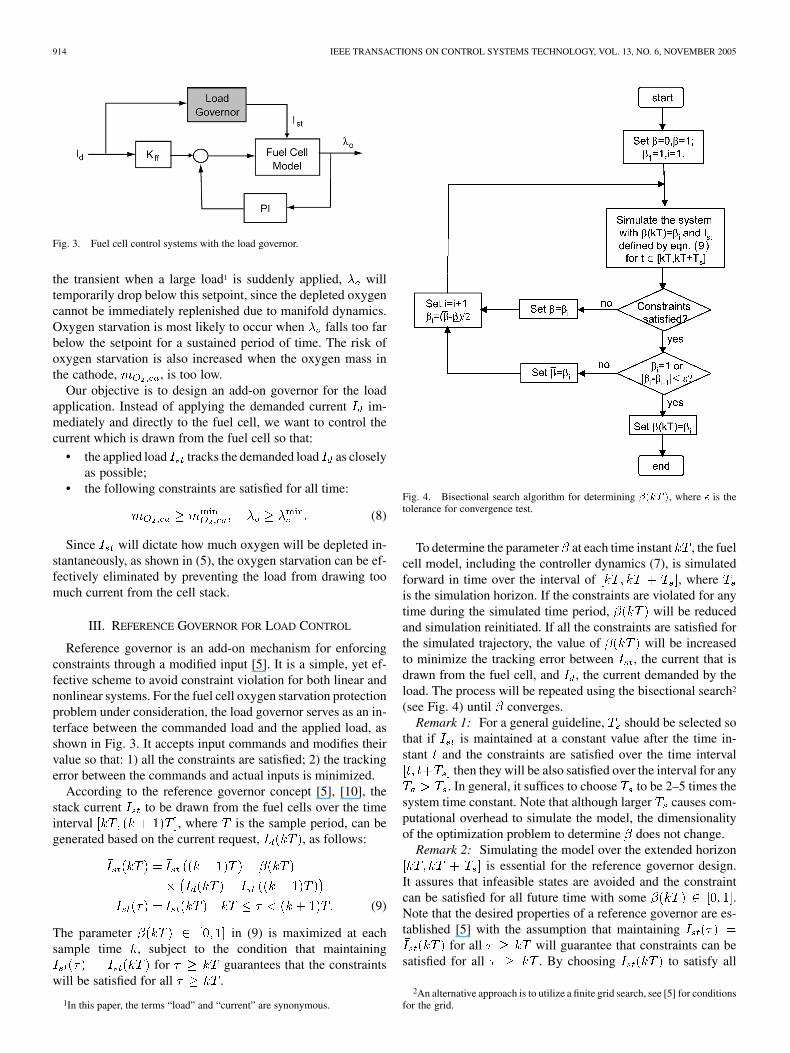
Fig. 3. Fuel cell control systems with the load governor.
the transient when a large load1 is suddenly applied, willtemporarily drop below this setpoint, since the depleted oxygencannot be immediately replenished due to manifold dynamics.Oxygen starvation is most likely to occur when falls too farbelow the setpoint for a sustained period of time. The risk ofoxygen starvation is also increased when the oxygen mass inthe cathode, , is too low.
Our objective is to design an add-on governor for the loadapplication. Instead of applying the demanded current im-mediately and directly to the fuel cell, we want to control thecurrent which is drawn from the fuel cell so that:
• the applied load tracks the demanded load as closelyas possible;
• the following constraints are satisfied for all time:
(8)
Since will dictate how much oxygen will be depleted in-stantaneously, as shown in (5), the oxygen starvation can be ef-fectively eliminated by preventing the load from drawing toomuch current from the cell stack.
III. REFERENCE GOVERNOR FOR LOAD CONTROL
Reference governor is an add-on mechanism for enforcingconstraints through a modified input [5]. It is a simple, yet ef-fective scheme to avoid constraint violation for both linear andnonlinear systems. For the fuel cell oxygen starvation protectionproblem under consideration, the load governor serves as an in-terface between the commanded load and the applied load, asshown in Fig. 3. It accepts input commands and modifies theirvalue so that: 1) all the constraints are satisfied; 2) the trackingerror between the commands and actual inputs is minimized.
According to the reference governor concept [5], [10], thestack current to be drawn from the fuel cells over the timeinterval , where is the sample period, can begenerated based on the current request, , as follows:
(9)
The parameter in (9) is maximized at eachsample time , subject to the condition that maintaining
for guarantees that the constraintswill be satisfied for all .
1In this paper, the terms “load” and “current” are synonymous.
Fig. 4. Bisectional search algorithm for determining �(kT ), where � is thetolerance for convergence test.
To determine the parameter at each time instant , the fuelcell model, including the controller dynamics (7), is simulatedforward in time over the interval of , whereis the simulation horizon. If the constraints are violated for anytime during the simulated time period, will be reducedand simulation reinitiated. If all the constraints are satisfied forthe simulated trajectory, the value of will be increasedto minimize the tracking error between , the current that isdrawn from the fuel cell, and , the current demanded by theload. The process will be repeated using the bisectional search2
(see Fig. 4) until converges.Remark 1: For a general guideline, should be selected so
that if is maintained at a constant value after the time in-stant and the constraints are satisfied over the time interval
then they will be also satisfied over the interval for any. In general, it suffices to choose to be 2–5 times the
system time constant. Note that although larger causes com-putational overhead to simulate the model, the dimensionalityof the optimization problem to determine does not change.
Remark 2: Simulating the model over the extended horizonis essential for the reference governor design.
It assures that infeasible states are avoided and the constraintcan be satisfied for all future time with some .Note that the desired properties of a reference governor are es-tablished [5] with the assumption that maintaining
for all will guarantee that constraints can besatisfied for all . By choosing to satisfy all
2An alternative approach is to utilize a finite grid search, see [5] for conditionsfor the grid.

SUN AND KOLMANOVSKY: LOAD GOVERNOR FOR FUEL CELL OXYGEN STARVATION PROTECTION 915
TABLE ILINEARIZED MODEL FOR OBSERVER DESIGN
the constraints in the time horizon and for alltime as implied by Remark 1, it guarantees that at leastone feasible solution 0 exists for the next sampling time
.Remark 3: The implementation of the load governor re-
quires simulating the plant model multiple times at each sampletime instant so that to optimize a single scalar parameter.Compared to other constraint-enforcing algorithms, such asthe MPC, this computational demand is less stringent and canbe more easily satisfied. The number of simulations can becontrolled by changing the bisections stopping tolerance, whilethe time available to complete the simulations can be affectedby the choice of (which can be longer, if necessary, than thesampling period utilized for the PI controller updates). With adifferent implementation of the reference governor reliant onoffline functional characterization of safe and strongly return-able sets [5], the online model simulations can be avoided. Thisapproach can be particularly effective when the underlyingmodel is linear [11], in which case the optimal solution for
is computed by an explicit formula and the number offlops is known in advance.
IV. LOAD GOVERNOR WITH AN OBSERVER
The implementation of the load governor discussed in Sec-tion III requires that the states of the plant are accessible. Ateach sampling time , the state in the simulation model isreset to the value of the plant state, and then the simulation isperformed forward in time over the interval .
Given that the gas constituent mass , , inside thecathode cannot be measured, a state observer is constructed toprovide the information necessary to implement the load gov-ernor. For the observer design, we assume that the supply man-ifold pressure and the fuel cell voltage are the mea-sured outputs. As the following analysis shows, includingas a measured variable is essential for the observability of thesystem.
In order to design and analyze the load governor using es-timated states, we need to incorporate the polarization curvegiven by (10) into the fuel cell model. The expression is simpli-fied from the general model developed in [6], where , ,
are the total pressure, partial pressure, and vapor satu-ration pressure on the cathode side, in bars. is the current den-sity defined as , with being the fuel cell activearea. These coefficients are derived for a specific 5 kW fuel cellsystem [6], but the structure of the model is more generic
(10)
The linearized models of the fuel cell system with, at
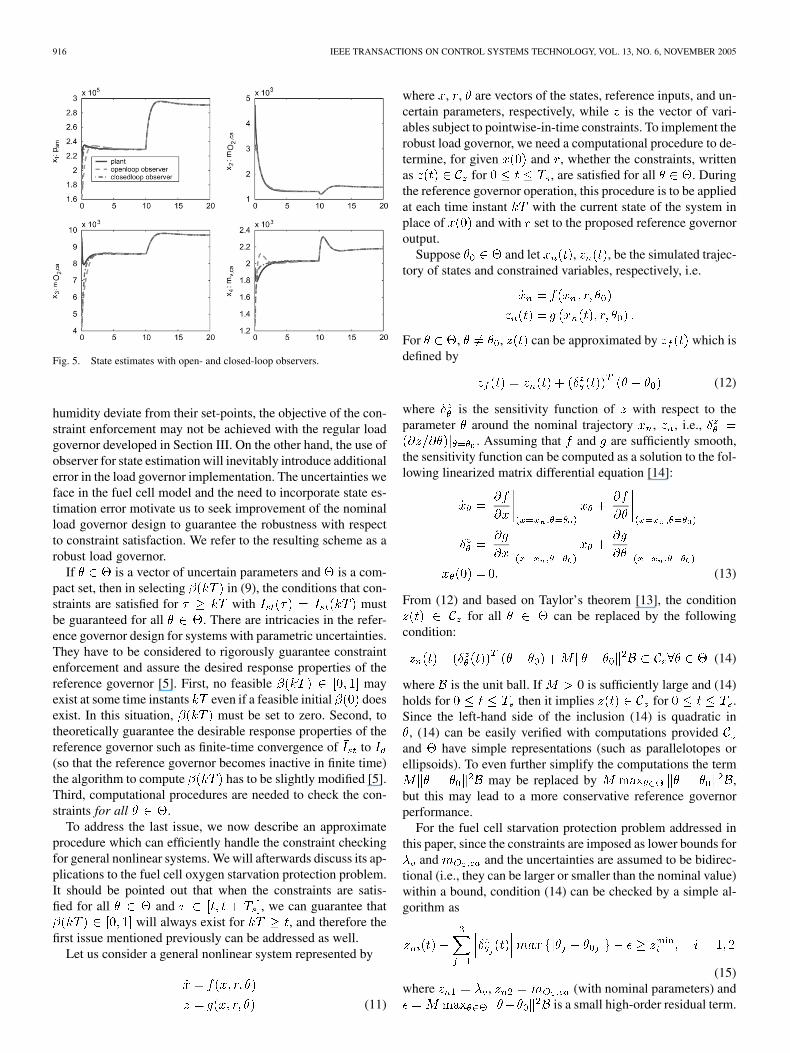
two different operating points are shown in Table I. It canbe shown that the system is not observable with as theonly output. On the other hand, by including as one of theoutputs, the system is observable for all operating conditions.Given that the open-loop system is stable (as shown in Table Ifor two representative operating points), open-loop state ob-server can be incorporated to provide the state informationneeded for implementing the load governor. In this study, aclosed-loop Luenberger observer with fixed gain is used toimprove the performance of the state estimation. The observeris designed using the linear model at 250 and thenvalidated for other operating conditions. As shown in Fig. 5,the closed-loop Luenberger observer can reduce the observererror and provide the required information for the referencegovernor implementation.
More detailed analysis of fuel cell observer design can befound in [9] and [12].
V. ROBUST LOAD GOVERNOR
The difficulties in precisely controlling the temperature andhumidity of the fuel cell air delivery system are well appreci-ated by the fuel cell control community. When temperature and
916 IEEE TRANSACTIONS ON CONTROL SYSTEMS TECHNOLOGY, VOL. 13, NO. 6, NOVEMBER 2005
Fig. 5. State estimates with open- and closed-loop observers.
humidity deviate from their set-points, the objective of the con-straint enforcement may not be achieved with the regular loadgovernor developed in Section III. On the other hand, the use ofobserver for state estimation will inevitably introduce additionalerror in the load governor implementation. The uncertainties weface in the fuel cell model and the need to incorporate state es-timation error motivate us to seek improvement of the nominalload governor design to guarantee the robustness with respectto constraint satisfaction. We refer to the resulting scheme as arobust load governor.
If is a vector of uncertain parameters and is a com-pact set, then in selecting in (9), the conditions that con-straints are satisfied for with mustbe guaranteed for all . There are intricacies in the refer-ence governor design for systems with parametric uncertainties.They have to be considered to rigorously guarantee constraintenforcement and assure the desired response properties of thereference governor [5]. First, no feasible mayexist at some time instants even if a feasible initial doesexist. In this situation, must be set to zero. Second, totheoretically guarantee the desirable response properties of thereference governor such as finite-time convergence of to(so that the reference governor becomes inactive in finite time)the algorithm to compute has to be slightly modified [5].Third, computational procedures are needed to check the con-straints for all .
To address the last issue, we now describe an approximateprocedure which can efficiently handle the constraint checkingfor general nonlinear systems. We will afterwards discuss its ap-plications to the fuel cell oxygen starvation protection problem.It should be pointed out that when the constraints are satis-fied for all and , we can guarantee that
will always exist for , and therefore thefirst issue mentioned previously can be addressed as well.
Let us consider a general nonlinear system represented by
(11)
where , , are vectors of the states, reference inputs, and un-certain parameters, respectively, while is the vector of vari-ables subject to pointwise-in-time constraints. To implement therobust load governor, we need a computational procedure to de-termine, for given and , whether the constraints, writtenas for , are satisfied for all . Duringthe reference governor operation, this procedure is to be appliedat each time instant with the current state of the system inplace of and with set to the proposed reference governoroutput.
Suppose and let , , be the simulated trajec-tory of states and constrained variables, respectively, i.e.
For , , can be approximated by which isdefined by
(12)
where is the sensitivity function of with respect to theparameter around the nominal trajectory , , i.e.,
. Assuming that and are sufficiently smooth,the sensitivity function can be computed as a solution to the fol-lowing linearized matrix differential equation [14]:
(13)
From (12) and based on Taylor’s theorem [13], the conditionfor all can be replaced by the following
condition:
(14)
where is the unit ball. If 0 is sufficiently large and (14)holds for then it implies for .Since the left-hand side of the inclusion (14) is quadratic in
, (14) can be easily verified with computations providedand have simple representations (such as parallelotopes orellipsoids). To even further simplify the computations the term
may be replaced by ,but this may lead to a more conservative reference governorperformance.
For the fuel cell starvation protection problem addressed inthis paper, since the constraints are imposed as lower bounds for
and and the uncertainties are assumed to be bidirec-tional (i.e., they can be larger or smaller than the nominal value)within a bound, condition (14) can be checked by a simple al-gorithm as
(15)where , (with nominal parameters) and
is a small high-order residual term.
SUN AND KOLMANOVSKY: LOAD GOVERNOR FOR FUEL CELL OXYGEN STARVATION PROTECTION 917
The robust reference governor based on (14) is applied to theoxygen starvation protection problem with ,where , , and is the multiplier to themembrane vapor diffusion term ( in (4)). The relativehumidity in the supply manifold, is assumed to have uncer-tainty up to 50%; the vapor saturation pressure, which is highlydependent on the temperature, can vary up to 25 kPa (this cor-responds to about 10 C change in the temperature if the stackis operating around 80 C); the membrane vapor diffusion co-efficient is assumed to vary up to 50%.
The implementation of the robust load governor requires sim-ulating the original plant model with the nominal parameters(for and ) and the four sensi-tivity functions of , , ,
over the time horizon of 5 s. Thesensitivity functions are generated around the nominal tra-jectory and using the linearized model (13).The linearized model for the fuel cells system was obtainedusing automated symbolic differentiation programmed withMATLAB.3 The error between the nonlinear and the linearizedsystem is taken into account through the incorporation of the
-term in (14).Remark 4: The constant in (14) can be estimated ana-
lytically or numerically. Analytical estimation of requiresthe evaluation of the second-order sensitivity functions, and itcould be very tedious when multiple uncertain parameters areinvolved. In our implementation, was treated as a calibrat-able parameter, and was tuned until the constraints were satis-fied for the worst case.
Remark 5: If the set has a large diameter, it may be par-titioned as , . Given ,
, the condition (14) can be replaced by the followingconditions:
(16)
Here is the th nominal trajectory of the constrained vari-ables corresponding to , is the sensitivity alongthe state trajectory corresponding to , and 0 is aconstant. If the sets have small diameters then small suf-fice so that the conservatism of the reference governor based on(14) can be mitigated. On the other hand, multiple online sim-ulations of the nominal model and of the linearized system areneeded, which increases the computational overhead.
Remark 6: If the state of the fuel cells system can only beestimated with a known error bound (e.g., it is only known that
), (14) can be modified to
(17)
where is the initial condition sensitivity function com-puted using matrix differential equations similar to (13), while
0 and 0 are sufficiently large and .Remark 7: Other uncertainties, such as that in the flow coef-
ficient, also exist in the fuel cell model and need to be properly
3MATLAB is a registered trademark of the Mathworks, Inc., Natick, MA.
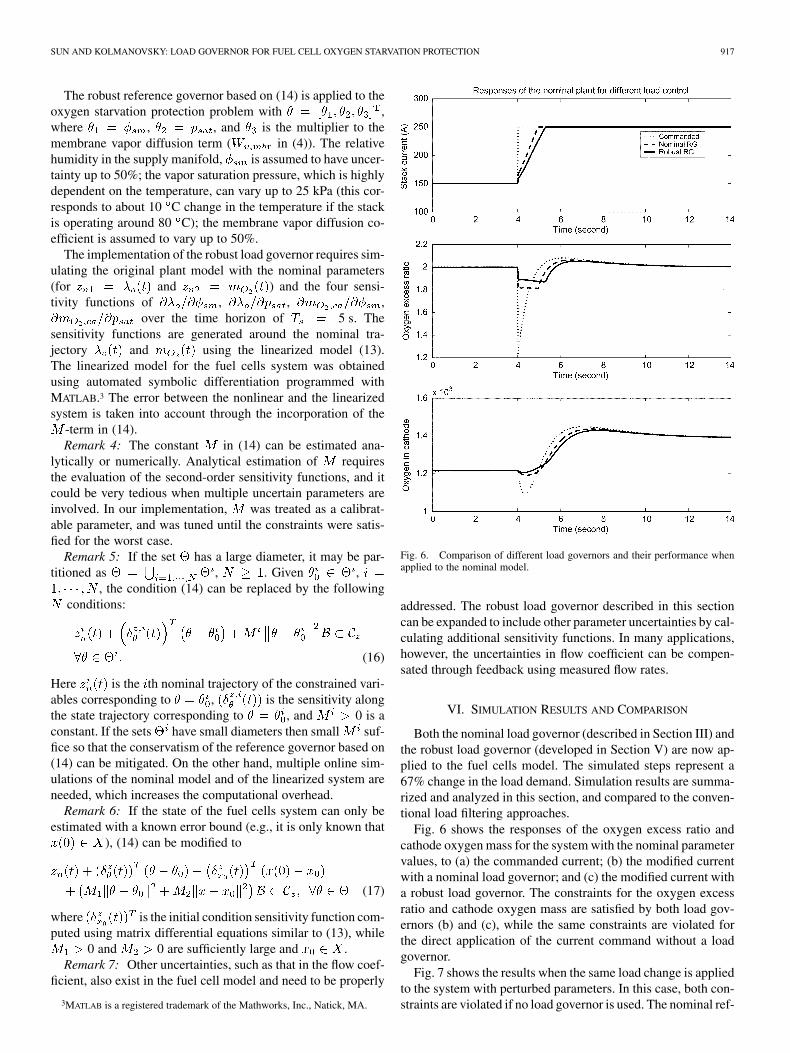
Fig. 6. Comparison of different load governors and their performance whenapplied to the nominal model.
addressed. The robust load governor described in this sectioncan be expanded to include other parameter uncertainties by cal-culating additional sensitivity functions. In many applications,however, the uncertainties in flow coefficient can be compen-sated through feedback using measured flow rates.
VI. SIMULATION RESULTS AND COMPARISON
Both the nominal load governor (described in Section III) andthe robust load governor (developed in Section V) are now ap-plied to the fuel cells model. The simulated steps represent a67% change in the load demand. Simulation results are summa-rized and analyzed in this section, and compared to the conven-tional load filtering approaches.
Fig. 6 shows the responses of the oxygen excess ratio andcathode oxygen mass for the system with the nominal parametervalues, to (a) the commanded current; (b) the modified currentwith a nominal load governor; and (c) the modified current witha robust load governor. The constraints for the oxygen excessratio and cathode oxygen mass are satisfied by both load gov-ernors (b) and (c), while the same constraints are violated forthe direct application of the current command without a loadgovernor.
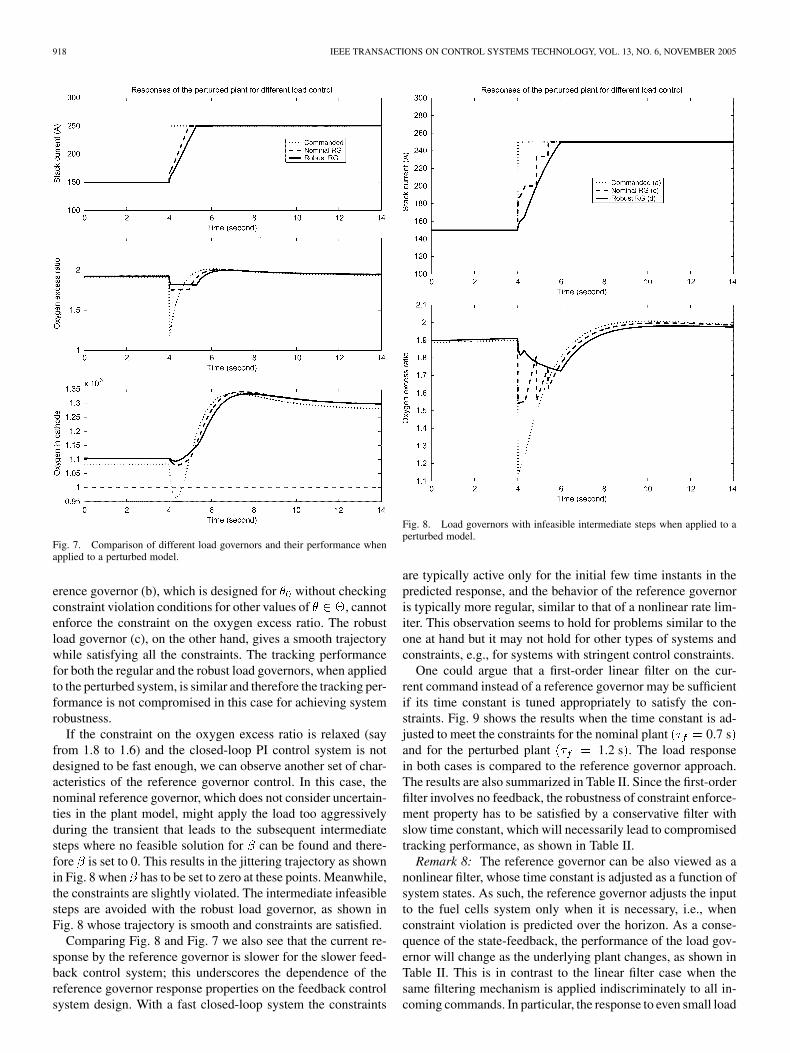
Fig. 7 shows the results when the same load change is appliedto the system with perturbed parameters. In this case, both con-straints are violated if no load governor is used. The nominal ref-
918 IEEE TRANSACTIONS ON CONTROL SYSTEMS TECHNOLOGY, VOL. 13, NO. 6, NOVEMBER 2005
Fig. 7. Comparison of different load governors and their performance whenapplied to a perturbed model.
erence governor (b), which is designed for without checkingconstraint violation conditions for other values of , cannotenforce the constraint on the oxygen excess ratio. The robustload governor (c), on the other hand, gives a smooth trajectorywhile satisfying all the constraints. The tracking performancefor both the regular and the robust load governors, when appliedto the perturbed system, is similar and therefore the tracking per-formance is not compromised in this case for achieving systemrobustness.
If the constraint on the oxygen excess ratio is relaxed (sayfrom 1.8 to 1.6) and the closed-loop PI control system is notdesigned to be fast enough, we can observe another set of char-acteristics of the reference governor control. In this case, thenominal reference governor, which does not consider uncertain-ties in the plant model, might apply the load too aggressivelyduring the transient that leads to the subsequent intermediatesteps where no feasible solution for can be found and there-fore is set to 0. This results in the jittering trajectory as shownin Fig. 8 when has to be set to zero at these points. Meanwhile,the constraints are slightly violated. The intermediate infeasiblesteps are avoided with the robust load governor, as shown inFig. 8 whose trajectory is smooth and constraints are satisfied.
Comparing Fig. 8 and Fig. 7 we also see that the current re-sponse by the reference governor is slower for the slower feed-back control system; this underscores the dependence of thereference governor response properties on the feedback controlsystem design. With a fast closed-loop system the constraints
Fig. 8. Load governors with infeasible intermediate steps when applied to aperturbed model.
are typically active only for the initial few time instants in thepredicted response, and the behavior of the reference governoris typically more regular, similar to that of a nonlinear rate lim-iter. This observation seems to hold for problems similar to theone at hand but it may not hold for other types of systems andconstraints, e.g., for systems with stringent control constraints.
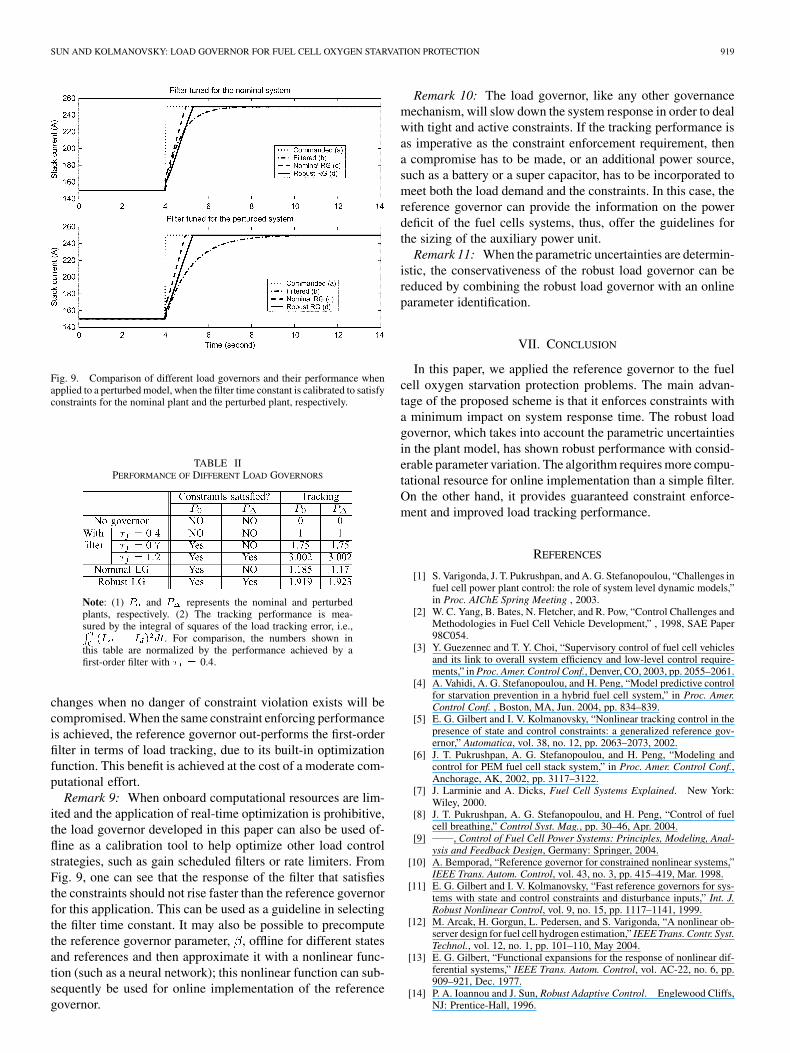
One could argue that a first-order linear filter on the cur-rent command instead of a reference governor may be sufficientif its time constant is tuned appropriately to satisfy the con-straints. Fig. 9 shows the results when the time constant is ad-justed to meet the constraints for the nominal plant 0.7 sand for the perturbed plant 1.2 s . The load responsein both cases is compared to the reference governor approach.The results are also summarized in Table II. Since the first-orderfilter involves no feedback, the robustness of constraint enforce-ment property has to be satisfied by a conservative filter withslow time constant, which will necessarily lead to compromisedtracking performance, as shown in Table II.
Remark 8: The reference governor can be also viewed as anonlinear filter, whose time constant is adjusted as a function ofsystem states. As such, the reference governor adjusts the inputto the fuel cells system only when it is necessary, i.e., whenconstraint violation is predicted over the horizon. As a conse-quence of the state-feedback, the performance of the load gov-ernor will change as the underlying plant changes, as shown inTable II. This is in contrast to the linear filter case when thesame filtering mechanism is applied indiscriminately to all in-coming commands. In particular, the response to even small load
SUN AND KOLMANOVSKY: LOAD GOVERNOR FOR FUEL CELL OXYGEN STARVATION PROTECTION 919
Fig. 9. Comparison of different load governors and their performance whenapplied to a perturbed model, when the filter time constant is calibrated to satisfyconstraints for the nominal plant and the perturbed plant, respectively.
TABLE IIPERFORMANCE OF DIFFERENT LOAD GOVERNORS
Note: (1) P and P represents the nominal and perturbedplants, respectively. (2) The tracking performance is mea-sured by the integral of squares of the load tracking error, i.e.,
(I � I ) dt. For comparison, the numbers shown inthis table are normalized by the performance achieved by afirst-order filter with � = 0.4.
changes when no danger of constraint violation exists will becompromised. When the same constraint enforcing performanceis achieved, the reference governor out-performs the first-orderfilter in terms of load tracking, due to its built-in optimizationfunction. This benefit is achieved at the cost of a moderate com-putational effort.
Remark 9: When onboard computational resources are lim-ited and the application of real-time optimization is prohibitive,the load governor developed in this paper can also be used of-fline as a calibration tool to help optimize other load controlstrategies, such as gain scheduled filters or rate limiters. FromFig. 9, one can see that the response of the filter that satisfiesthe constraints should not rise faster than the reference governorfor this application. This can be used as a guideline in selectingthe filter time constant. It may also be possible to precomputethe reference governor parameter, , offline for different statesand references and then approximate it with a nonlinear func-tion (such as a neural network); this nonlinear function can sub-sequently be used for online implementation of the referencegovernor.
Remark 10: The load governor, like any other governancemechanism, will slow down the system response in order to dealwith tight and active constraints. If the tracking performance isas imperative as the constraint enforcement requirement, thena compromise has to be made, or an additional power source,such as a battery or a super capacitor, has to be incorporated tomeet both the load demand and the constraints. In this case, thereference governor can provide the information on the powerdeficit of the fuel cells systems, thus, offer the guidelines forthe sizing of the auxiliary power unit.
Remark 11: When the parametric uncertainties are determin-istic, the conservativeness of the robust load governor can bereduced by combining the robust load governor with an onlineparameter identification.
VII. CONCLUSION
In this paper, we applied the reference governor to the fuelcell oxygen starvation protection problems. The main advan-tage of the proposed scheme is that it enforces constraints witha minimum impact on system response time. The robust loadgovernor, which takes into account the parametric uncertaintiesin the plant model, has shown robust performance with consid-erable parameter variation. The algorithm requires more compu-tational resource for online implementation than a simple filter.On the other hand, it provides guaranteed constraint enforce-ment and improved load tracking performance.
REFERENCES
[1] S. Varigonda, J. T. Pukrushpan, and A. G. Stefanopoulou, “Challenges infuel cell power plant control: the role of system level dynamic models,”in Proc. AIChE Spring Meeting , 2003.
[2] W. C. Yang, B. Bates, N. Fletcher, and R. Pow, “Control Challenges andMethodologies in Fuel Cell Vehicle Development,” , 1998, SAE Paper98C054.
[3] Y. Guezennec and T. Y. Choi, “Supervisory control of fuel cell vehiclesand its link to overall system efficiency and low-level control require-ments,” in Proc. Amer. Control Conf., Denver, CO, 2003, pp. 2055–2061.
[4] A. Vahidi, A. G. Stefanopoulou, and H. Peng, “Model predictive controlfor starvation prevention in a hybrid fuel cell system,” in Proc. Amer.Control Conf. , Boston, MA, Jun. 2004, pp. 834–839.
[5] E. G. Gilbert and I. V. Kolmanovsky, “Nonlinear tracking control in thepresence of state and control constraints: a generalized reference gov-ernor,” Automatica, vol. 38, no. 12, pp. 2063–2073, 2002.
[6] J. T. Pukrushpan, A. G. Stefanopoulou, and H. Peng, “Modeling andcontrol for PEM fuel cell stack system,” in Proc. Amer. Control Conf.,Anchorage, AK, 2002, pp. 3117–3122.
[7] J. Larminie and A. Dicks, Fuel Cell Systems Explained. New York:Wiley, 2000.
[8] J. T. Pukrushpan, A. G. Stefanopoulou, and H. Peng, “Control of fuelcell breathing,” Control Syst. Mag., pp. 30–46, Apr. 2004.
[9] , Control of Fuel Cell Power Systems: Principles, Modeling, Anal-ysis and Feedback Design, Germany: Springer, 2004.
[10] A. Bemporad, “Reference governor for constrained nonlinear systems,”IEEE Trans. Autom. Control, vol. 43, no. 3, pp. 415–419, Mar. 1998.
[11] E. G. Gilbert and I. V. Kolmanovsky, “Fast reference governors for sys-tems with state and control constraints and disturbance inputs,” Int. J.Robust Nonlinear Control, vol. 9, no. 15, pp. 1117–1141, 1999.
[12] M. Arcak, H. Gorgun, L. Pedersen, and S. Varigonda, “A nonlinear ob-server design for fuel cell hydrogen estimation,” IEEE Trans. Contr. Syst.Technol., vol. 12, no. 1, pp. 101–110, May 2004.
[13] E. G. Gilbert, “Functional expansions for the response of nonlinear dif-ferential systems,” IEEE Trans. Autom. Control, vol. AC-22, no. 6, pp.909–921, Dec. 1977.
[14] P. A. Ioannou and J. Sun, Robust Adaptive Control. Englewood Cliffs,NJ: Prentice-Hall, 1996.

920 IEEE TRANSACTIONS ON CONTROL SYSTEMS TECHNOLOGY, VOL. 13, NO. 6, NOVEMBER 2005
Jing Sun (S’87–M’89–SM’00–F’04) received thePh.D. degree from University of Southern California,Los Angeles, in 1989, and the B.S. and M.S. degreesfrom the University of Science and Technology,Hefei, China, in 1982 and 1984, respectively.
From 1989 to 1993, she was an Assistant Pro-fessor in the Electrical and Computer EngineeringDepartment, Wayne State University, Detroit, MI.She joined Ford Research Laboratory in 1993, whereshe worked in the Powertrain Control SystemsDepartment. After spending almost 10 years in
industry, she came back to academia and joined the faculty of the College ofEngineering, University of Michigan, Ann Arbor, in 2003, as an AssociateProfessor. Her research interests include system and control theory and itsapplications to marine and automotive propulsion systems. She holds over 30US patents and has coauthored a textbook on Robust Adaptive Control.
Dr. Sun is one of the three recipients of the 2003 IEEE Control System Tech-nology Award.
Ilya V. Kolmanovsky (S’94–M’95–SM’04) studiedas an undergraduate at Moscow Aviation Institute,Russia. He received the M.S. degree and the Ph.D.degree in aerospace engineering, in 1993 and 1995,respectively, and the M.A. degree in mathematics,in 1995, all from the University of Michigan,Ann Arbor.
He is currently a Technical Leader in PowertrainControl at Ford Research & Advanced Engineeringof Ford Motor Company, Dearborn, MI. In additionto expertise in the automotive engine and powertrain
control, his research interests include potential of advanced control techniquesas an enabling technology for advanced automotive systems, and several areasof control theory, which include constrained control, optimization-based andmodel-predictive control, and control of nonlinear mechanical, nonholonomic,and underactuated systems.
Dr. Kolmanovsky is the Chair of IEEE CSS Technical Committee onAutomotive Control. He has served as an Associate Editor of IEEE CSSConference Editorial Board (1997–1999), IEEE TRANSACTIONS ON CONTROL
SYSTEMS TECHNOLOGY (2002–2004), IEEE TRANSACTIONS ON AUTOMATIC
CONTROL (2005–present), and he was a Program Committee Member ofAmerican Control Conference in 1997, 1999, and 2004. He is the recipientof 2002 Donald P. Eckamn Award of American Automatic Control Councilfor contributions to nonlinear control and for pioneering work in automotiveengine control of powertrain systems and of 2002 IEEE TRANSACTIONS ON
CONTROL SYSTEMS TECHNOLOGY Outstanding Paper Award.