karakterisasi sensor kapasitif touchless menggunakan plat ...
67
KARAKTERISASI SENSOR KAPASITIF TOUCHLESS MENGGUNAKAN PLAT ALUMUNIUM BERBASIS ARDUINO Skripsi Diajukan untuk Memenuhi Persyaratan Memperoleh Gelar Sarjana Sains (S.Si) LUTHFI RIZKI RAMADHAN 11150970000004 PROGRAM STUDI FISIKA FAKULTAS SAINS DAN TEKNOLOGI UNIVERSITAS ISLAM NEGERI SYARIF HIDAYATULLAH JAKARTA 1441 H/2020 M
-
Upload
khangminh22 -
Category
Documents
-
view
0 -
download
0
Transcript of karakterisasi sensor kapasitif touchless menggunakan plat ...

KARAKTERISASI SENSOR KAPASITIF TOUCHLESS
MENGGUNAKAN PLAT ALUMUNIUM BERBASIS ARDUINO
Skripsi
Diajukan untuk Memenuhi Persyaratan Memperoleh Gelar Sarjana Sains
(S.Si)
LUTHFI RIZKI RAMADHAN
11150970000004
PROGRAM STUDI FISIKA
FAKULTAS SAINS DAN TEKNOLOGI
UNIVERSITAS ISLAM NEGERI SYARIF HIDAYATULLAH
JAKARTA
1441 H/2020 M

KARAKTERISASI SENSOR KAPASITIF TOUCHLESS
MENGGUNAKAN PLAT ALUMUNIUM BERBASIS ARDUINO
Skripsi
Diajukan untuk Memenuhi Persyaratan Memperoleh Gelar Sarjana Sains (S.Si.)
Oleh
LUTHFI RIZKI RAMADHAN
NIM: 1115097000004
PROGRAM STUDI FISIKA
FAKULTAS SAINS DAN TEKNOLOGI
UNIVERSITAS ISLAM NEGERI SYARIF HIDAYATULLAH
JAKARTA
1441 H/2020 M
i
LEMBAR PERSETUJUAN PEMBIMBING

ii
LEMBAR PENGESAHAN

iii
LEMBAR PERNYATAAN

iv
ABSTRAK
Dewasa ini teknologi dalam beberapa tahun belakangan berkembang begitu pesat,
terutama pada perkembangan gadget yang menggunakan teknologi layar sentuh
maupun Touchless User Interface. Dengan teknologi Touchless User Interface,
kita tidak perlu menyentuh layar tersebut secara langsung cukup dengan
mengarahkan jari pada saat mengoperasikan aplikasi perangkat lunak pada
komputer atau gadget. Penelitian ini merancang bangun prototype system sensor
kapasitif touchless dari plat alumunium. Adapun metode karakterisasi statik
sensor adalah pengaruh suhu, daerah kerja sensor (linieritas), pengulangan
(repeatability) dan resolusi spasial. Hasil penelitian ini menunjukan bahwa system
sensor bekerja pada rentang suhu (25-30) ᵒC. Daerah kerja sensor secara umum
sekitar (2-6) cm. Luas plat 10 inch dan 8 inch berturut-turut memiliki daerah kerja
(2-12) cm dan (2-15) cm. Hal ini menunjukan semakin kecil luas plat semakin
besar daerah kerja sensor. Sedangkan hasil pengujian repeatability dan resolusi
spasial sangat baik. Secara umum dapat disimpulkan bahwa system sensor
kapasitif touchless layak untuk dikembangkan aplikasinya.
Kata kunci : Sensor, Touchless User Interface, Kapasitif, Arduino, sensor DHT22, sensor HC-
SR04

v
ABSTRACT
Nowadays technology in recent years is developing so rapidly, especially in the
development of gadgets that use touch screen technology or Touchless User
Interface. With Touchless User Interface technology, we don't need to touch the
screen directly just by pointing a finger when operating a software application on
a computer or gadget. This research designed to build a prototype touchless
capacitive sensor system from an aluminum plate. The static sensor
characterization method is the effect of temperature, sensor working area
(linearity), repetition (repeatability) and spatial resolution. The results of this
study indicate that the sensor system works in the temperature range (25-30) ᵒC.
The working area of the sensor is generally around (2-6) cm. The 10-inch and 8-
inch plate areas have work areas (2-12) cm and (2-15) cm, respectively. This
shows that the smaller the plate area, the greater the working area of the sensor.
While the results of repeatability testing and spatial resolution are very good. In
general it can be concluded that the touchless capacitive sensor system is suitable
for application development.
Keywords: Sensor, Touchless User Interface, Capacitive, Arduino, DHT22 sensor, HC-SR04
sensor

vi
KATA PENGANTAR
Assalamu’alaikum wr wb.
Alhamdulillah, hanya itu yang saya dapat ungkapkan, segala puji dan
syukur penulis panjatkan kepada Allah SWT yang Maha Pengasih lagi Maha
Penyayang, atas semua rahmat dan karunia-Nya, sehingga penulis dapat
menyelesaikan proses penyusunan skripsi yang berjudul “Karakterisasi Sensor
Kapasitif Touchless Menggunakan Plat Alumunium Berbasis Arduino”.
Untuk memenuhi persyaratan memperoleh gelar Sarjana Sains Universitas Islam
Negeri Syarif Hidayatullah Jakarta. Sholawat serta salam semoga senantiasa
tercurahkan kepada Nabi Muhammad SAW beserta keluarga dan para sahabatnya
sampai kepada kita para umatnya hingga akhir zaman.
Pada kesempatan kali ini, Penulis menyadari bahwa pada saat penelitian
dan penyusunan skripsi ini tidak dengan mudah terselesaikan tanpa adanya
bimbingan dan bantuan dari berbagai pihak, baik dukungan moril maupun
materil,sehingga dalam kesempatan kali ini penulis ingin mengucapkan
terimakasih kepada:
1. Kedua orang tua tercinta dan keluarga, Papah dan Mamah yang tidak
pernah bosan memberikan dukungan moril dan materil serta doa yang
tulus kepada penulis, agar penulis dapat cepat menyelesaikan
perkuliahannya.
2. Ibu Prof. Dr. Lily Surraya Eka Putri, M.Env.Stud. selaku Dekan Fakultas
Sains dan Teknologi UIN Syarif Hidayatullah Jakarta.
3. Ibu Tati Zera, M.Si selaku Ketua Program Studi Fisika.
4. Ibu Elvan Yuniarti, M.Si selaku Sekretaris Program Studi Fisika.
5. Bapak Dr. Sutrisno Dipl.Seis. selaku dosen penasihat akademik yang telah
memberikan arahan seputar perkuliahan kepada penulis.
6. Bapak Edi Sanjaya, M.Si selaku pembimbing I yang telah membimbing
penulis dan memberikan pengarahan terkait penelitian skripsi ini, dan
memberikan solusi dalam permasalahan pada saat pengujian.

vii
7. Bapak Nizar Septian, M.Si selaku pembimbing 2 yang telah membimbing
penulis dan memberikan masukan dan ide-ide baru kepada penulis
sehingga dapat membantu penyusunan skripsi ini.
8. Seluruh Dosen Program Studi Fisika, atas ilmu yang telah diberikan
kepada penulis selama melakukan studi.
9. Teman seperjuangan : Andri Kurniawan, Dimas Alifta, Bayu Rukmana
Jati, Fadhurrahman, Ilham Pahlevi yang telah menjadi teman diskusi bagi
penulis.
10. Sahabat-sahabat bang adi, bang jamal, bang aziz, syahril, sri, terimakasih
telah menjadi pendengar yang baik dan memberikan dukungan bagi
penulis.
11. Teman-teman Fisika UIN Jakarta, khususnya Instrumentasi 2015,
terimakasih atas dukungannya dan sudah berjuang bersama penulis dalam
menyelesaikan studi di Universitas Islam Negeri Syarif Hidayatullah
Jakarta.
12. Semua pihak yang terlibat dalam pelaksanan penelitian dan penyusunan
skripsi ini.
13. Pusat Laboratorim Terpadu Universitas Islam Negeri Syarif Hidayatullah
Jakarta yang telah memberikan fasilitas untuk melakukan penelitian.
Semoga semua pihak yang telah membantu penulis mendapatkan limpahan
berkah dari Allah SWT.
Penulis menyadari bahwa penyusunan skripsi ini mungkin masih jauh dari
sempurna dan masih terdapat banyak kekurangan di dalamnya. Hal tersebut
dikarenakan terbatasnya kemampuan dan pengetahuan yang dimiliki penulis.
Akhir kata penulis mengharapkan segala bentuk saran serta masukan bahkan
kritik yang membangun kepada penulis. Semoga skripsi ini dapat bermanfaat bagi
pembaca khususnya dalam bidang instrumentasi dan berguna bagi penelitian
selanjutnya.
Jakarta, 26 Juli 2020
Penulis

viii
DAFTAR ISI
LEMBAR PERSETUJUAN PEMBIMBING .......................................................... i
LEMBAR PENGESAHAN .................................................................................... ii
LEMBAR PERNYATAAN ................................................................................... iii
ABSTRAK ............................................................................................................. iv
ABSTRACT ............................................................................................................ v
KATA PENGANTAR ........................................................................................... vi
DAFTAR ISI ........................................................................................................ viii
DAFTAR GAMBAR .............................................................................................. x
DAFTAR TABEL .................................................................................................. xi
BAB 1 ..................................................................................................................... 1
PENDAHULUAN .................................................................................................. 1
1.1. Latar Belakang ......................................................................................... 1
1.2. Rumusan Masalah .................................................................................... 4
1.3. Batasan Masalah ....................................................................................... 4
1.4. Tujuan Penelitian ...................................................................................... 5
1.5. Manfaat Penelitian .................................................................................... 5
1.6. Sistematika Penulisan ............................................................................... 6
BAB II ..................................................................................................................... 8
DASAR TEORI ...................................................................................................... 8
2.1. Medan listrik ............................................................................................. 8
Hukum Coloumb.............................................................................................. 8
2.2. Dielektrik .................................................................................................. 9
2.3. Kapasitor ................................................................................................ 11
2.3.1. Kapasitansi ........................................................................................... 12
2.3.2. Kapasitor dua plat sejajar ..................................................................... 12
2.4. Sensor Ultrasonik HC-SR04 .................................................................. 14
2.5. Mikrokontroler Arduino UNO ............................................................... 16
2.6. DHT-22 Humidity and Temperatur Sensor ............................................ 18
2.7. Alumunium ............................................................................................. 19
2.7.1. Alumunium Paduan ............................................................................. 20
2.7.2. Paduan Aluminium-Seng ..................................................................... 20

ix
BAB III ................................................................................................................. 23
METODE PENELITIAN ...................................................................................... 23
3.1. Waktu dan Tempat Penelitian ................................................................ 23
3.2. Alat dan Bahan ....................................................................................... 23
3.3. Tahap dan Alur Penelitian ...................................................................... 23
3.3.1. Persiapan Penelitian ............................................................................. 24
3.3.2. Perancangan dan Pembuatan Alat Penelitian....................................... 24
3.3.4. Pengujian Alat...................................................................................... 28
3.3.5. Analisis Data ........................................................................................ 29
3.4. Metode Pengambilan Data ..................................................................... 29
BAB IV ................................................................................................................. 30
HASIL DAN PEMBAHASAN ............................................................................. 30
4.1. Hasil Rancangan Bangun Sistem Sensor Kapasitif Touchless Hardware
30
Hasil Rancangan Bangun Hardware ................................................................ 30
Hasil Rancang Bangun Software ...................................................................... 32
4.2. Hasil Pengujian Respon Sensor Terhadap Temperatur .......................... 33
4.3. Hasil Pengamatan Nilai Kapasitif Terhadap Pengaruh Jarak ................. 34
4.3.1. Hasil Pengaruh Jarak Terhadap Luas Plat 13 Inch.......................... 34
4.3.2. Hasil Pengaruh Jarak Terhadap Luas Plat 12 Inch.......................... 36
4.3.3. Hasil Pengaruh Jarak Terhadap Luas Plat 10 Inch.......................... 37
4.3.4. Hasil Pengaruh Jarak Terhadap Luas Plat 8 Inch............................ 38
4.4. Grafik Dimensi Setiap Plat (1/jarak) ...................................................... 41
4.5.1. Grafik Resolusi Spasial Plat 13 Inch ................................................... 42
4.5.2. Grafik Resolusi Spasial Plat 12 Inch ................................................... 43
4.5.3. Grafik Resolusi Spasial Plat 10 Inch ................................................... 44
4.5.4. Grafik Resolusi Spasial Plat 8 Inch ..................................................... 44
BAB V ................................................................................................................... 45
KESIMPULAN DAN SARAN ............................................................................. 45
5.1. Kesimpulan ............................................................................................. 45
5.2. Saran ....................................................................................................... 46
DAFTAR PUSTAKA ........................................................................................... 47
LAMPIRAN .......................................................................................................... 49

x
DAFTAR GAMBAR
Gambar 2.1
Gambar 2.2
Gambar 2.3
Gambar 2.4
Gambar 2.5
Gambar 2.6
Gambar 2.7
Gambar 3.1
Gambar 3.2
Gambar 3.3
Gambar 3.4
Gambar 3.5
Gambar 4.1
Gambar 4.2
Ganbar 4.3
Grafik 4.3
Grafik 4.4
Grafik 4.5
Grafik 4.6
Grafik 4.7
Grafik 4.8
Grafik 4.9
Grafik 4.10
Grafik 4.11
Grafik 4.12
Kapasitor
Kapasitor dua buah plat sejajar
Sensor Ultrasonik HCSR04
Cara kerja Sensor Ultrasonik HCSR04
Arduino UNO
Sensor DHT-22
Arduino Lilypad
Diagram Alir Penelitian
Rangkaian Sensor Kapasitif
Rangkain Pembaca Ultrasonik dan DHT22
Proses kerja program sensor kapasitif
Proses kerja program sensor ultrasonik dan sensor DHT-22
Rangkaian Sensor Kapasitif
Rangkain Sensor Ultrasonik dan DH-T22
Hasil Rancang Bangun System Sensor Kapasitif Touchless
(a) Pengaruh jarak terhadap luas plat 13 Inch; (b) Hasil
fitting regresi untuk luas plat 13 Inch
(a) Pengaruh jarak terhadap luas plat 12 Inch; (b) Hasil
fitting regresi untuk luas plat 12 Inch
(a) Pengaruh jarak terhadap luas plat 10 Inch; (b) Hasil
fitting regresi untuk luas plat 10 Inch
(a) Pengaruh jarak terhadap luas plat 8 Inch; (b) Hasil
fitting regresi untuk luas plat 8 Inch
Hasil Pengujian Repeatability (a) luat plat 13 inch; (b) luat
plat 12 inch; (c) luat plat 10 inch; (d) luat plat 8 inch;
Grafik Dimensi Setiap Plat (1/cm)
Grafik Resolusi Spasial Plat 13 Inch
Grafik Resolusi Spasial Plat 12 Inch
Grafik Resolusi Spasial Plat 10 Inch
Grafik Resolusi Spasial Plat 8 Inch
11
13
15
15
17
18
21
23
24
25
26
27
29
30
30
33
35
37
38
40
41
42
42
43
44

xi
DAFTAR TABEL
Tabel 2.1
Tabel 2.2
Tabel 2.3
Tabel 2.4
Tabel 2.5
Tabel 2.6
Tabel 2.7
Tabel 2.8
Tabel 3.1
Tabel 4.2
Permitivitas relatif beberapa dielektrik
Kekuatan dielektrik dari beberapa jenis isolator
Aplikasi sensor berdasarkan prinsip kapasitif
Spesifikasi Sensor Ultrasonik HCSR04
Sepesifikasi Arduino UNO V3
Spesifikasi Sensor DHT-22
Sifat alumunium
Spesifikasi Arduino Lilypad
Alat dan bahan penelitian
Respon Sensor Terhadap Temperatur
10
11
14
16
17
19
20
21
22
32

1
BAB 1
PENDAHULUAN
1.1. Latar Belakang
Dewasa ini teknologi dalam beberapa tahun belakangan berkembang begitu
pesat, terutama pada perkembangan gadget yang menggunakan teknologi layar
sentuh maupun yag menggunakan teknologi proximity. Perangkat input alternatif
yaitu teknologi layar sentuh dan perangkat keras yang menggunakan teknologi itu
sangat populer selama beberapa tahun terakhir dan sering digunakan oleh kita
dalam kehidupan sehari-hari. Hal itu tentunya tidak lepas dari penerapan
teknologi perangkat input penunjuk dan pointing tradisional pada era sebelumnya,
yaitu penggunaan mouse dan keyboard yang sudah dua dekade menemani dan
membantu kita dalam mengoperasikan perangkat lunak. Layar sentuh sendiri
sudah mulai dikembangkan sejak paruh kedua tahun 1960-an yang dilakukan oleh
IBM University of Illinois, Ottawa Kanada [1].
Layar Sentuh adalah sebuah kemajuan teknologi pada perangkat input
pointing dan kontrol yang digunakan untuk memudahkan kita pada saat
mengoperasikan aplikasi perangkat lunak pada komputer atau gadget. Layar
sentuh merupakan tampilan visual elektronik yang dapat mendeteksi keberadaan
dan lokasi sentuhan pada area tampilan, dengan cara menyentuh sebuah layar
dengan jari atau tangan manusia, selain menggunakan jari atau tangan manusia,
layar sentuh juga dapat merasakan benda pasif lainnya yaitu seperti stylus.
Teknologi layar sentuh dapat ditemukan dan digunakan pada informasi publik,
sistem ritel dan restoran, mesin ATM, sistem kontrol dan otomasi, smartphone,

2
tablet, smartwacht, smart tv, konsol game, dan akan terus muncul teknologi baru
yang akan hadir dikemudian hari.
Kemudian munculah beberapa teknologi pada layar sentuh dan gadget yaitu
menggunakan teknologi Touchless user interface (TUI) yaitu proses untuk
berinteraksi dengan perangkat tanpa menyentuhnya secara fisik melalui gerakan
tubuh tanpa menyentuh keyboard, mouse, atau bahkan layar [2].
Kemudian teknologi Natural User Interface (NUI) yang dibuat berdasarkan
dari desain interaksi yang akan terasa alami bagi manusia, dengan tujuan untuk
membuat antarmuka (interface) yang sedemikian rupa sehingga dapat terasa lebih
nyata, dan selanjutnya adalah teknologi Gesture Recognition yaitu sebuah
kemampuan untuk memahami dan menafsirkan gerakan tubuh manusia yang
bertujuan untuk mengendalikan maupun berinteraksi dengan objek lain seperti
pada penggunaan (Nintendo Wii, Microsoft Kinect, Sony Playstation Move, atau
bahkan Leap Motion) yang mampu menciptakan sebuah proses komunikasi baru
dengan perangkat tanpa bersentuhan fisik secara langsung dengan alat input. Hal
tersebut akan menimbulkan sebuah sensasi pengalaman yang baru [3].
Penelitian sebelumnya tentang Applying Electric Field Sensing to Human-
Computer Interface bertujuan untuk melihat interaksi seseorang dengan medan
listrik untuk antarmuka manusia-komputer. Penelitian ini menggunakan elektroda
alumunium, dengan kombinasi tangan dan lengan pengganti adalah tabung
aluminium dengan diameter 7,6 cm dan panjang 48,3 cm yang dihubungkan
melalui kabel untuk mode shunt dan terhubung ke osilator untuk mode
pengiriman. Serta elektroda transmiter yang digunakan berukuran 2,5 cm x 2,5

3
cm, berjarak 15,2 cm di tengah sehingga mampu mendeteksi kontak konduktif
langsung dengan kulit membutuhkan area elektroda yang jauh lebih kecil kurang
dari 5 cm persegi [4].
Fatemeh Aezinia et. all, melakukan penelitian tentang sistem pelacakan gerakan
kapasitif yang bertujuan untuk mendeteksi gerakan tangan atau jari pengguna
pada saat berinteraksi dengan perangkat seperti ponsel dan tablet. Penelitin ini
menggunakan diagram rangkaian kapasitif ke konverter tegangan, kemudian
dengan menggunakan Synchronous Demodulator, dan terakhir menggunakan Low
Pass Filter. Adapun manfaat utama pada penelitian penginderaan kapasitif ini
yaitu mendapatkan disipasi daya yang rendah, kemudahan integrasi yang luas,
efektivitas biaya, dan kekebalan kebisingan. Penginderaan diferensial bertujuan
untuk meningkatkan ketahanan dan meningkatkan akurasi kapasitansi. Hasil
penelitian menunjukkan bahwa pada penerapan sistem dapat melacak jari
pengguna dalam jarak 10cm dari bidang sensor[5].
Penelitian lain dengan judul, Multi-Functional Capacitive Proximity
Sensing System for Industrial Safety Applications bertujuan untuk menghindari
tabrakan dalam lingkungan industri yang akan dibantu oleh robot melalui
pengukuran jarak objek, pelacakan gerak, dan deteksi profil permukaan.
Penelitian ini, menggunakan elektroda, modul kontrol digital, kapasitansi ke
konverter digital, dan modul pemrosesan data. Penelitian ini menggunakan 16
buah kotak logam sebagai sensor matriks kapasitor dengan dimensi 4 × 4.
Elektroda matriks tersebut dikonfigurasi dan dijalankan oleh logika kontrol
digital. Regresi statistik untuk memperoleh jarak dan melacak gerakan.
Sedangkan pada algoritma mesin (Support Vector Machine, atau SVM) bertujuan

4
untuk mengklasifikasikan profil permukaan pada sensor. Sistem ini menunjukan
mampu mendeteksi objek hingga jarak 20 cm dari sensor, dan memiliki akurasi
lebih dari 90%[6].
Berdasarkan uraian di atas, penelitian ini merancang bangun istem sensor
menggunakan plat alumunium berbasis Arduino. Adapun karakterisasi yang
digunakan adalah karakterisasi statik, seperti pengaruh suhu, luat plat aluminium,
daerah kerja sensor dan pengulangan dengan kondisi dan input yang sama.
1.2. Rumusan Masalah
Berdasarkan latar belakang yang telah dijabarkan di atas, maka dapat
diperoleh beberapa rumusan masalah, yaitu:
1. Bagaimana merancang sensor kapasitif yang terbuat dari plat
alumunium sehingga menghasilkan akurasi yang diharapkan?
2. Bagaimana membuat program dengan menggunakan dua buah
mikrokontroler berbasis Arduino Uno dan Arduino Lilypad sehingga
menghasilkan suatu sistem yang diinginkan?
3. Bagaimana hasil uji karakterisasi dari sensor kapasitif yang terbuat
dari plat alumunium tersebut?
1.3. Batasan Masalah
Adapun batasan masalah pada penelitian ini adalah sebagai berikut :
1. Pada penelitian ini menggunakan dua buah mikrokontroler yaitu
dengan Arduino UNO dan Arduino Lilypad yang akan diprogram
menggunakan software Arduino IDE.

5
2. Bahan yang digunakan sebagai sensor kapasitif adalah plat
alumunium.
3. Alat Pengukuran suhu lingkungan pengujian menggunakan sensor
DHT-22.
4. Sensor Ultrasonik HC-SR04 digunakan sebagai alat pengukur jarak
respon antara tangan penulis dengan plat alumunium.
5. Melakukan karakterisasi dengan menggunakan suhu ruang berkisar
pada 25ᵒC - 30ᵒC.
1.4. Tujuan Penelitian
Penelitian ini memiliki tujuan sebagai berikut :
1. Merancang bangun prototype system sensor kapasitif touchless dari
plat alumunium.
2. Menganalisis kinerja sensor kapasitif touchless pengaruh temperatur
lingkungan pada saat pengujian.
3. Menganalisis pengaruh jarak respon tangan terhadap plat alumunium
sebagai daerah kerja sensor.
1.5. Manfaat Penelitian
Hasil dari penelitian ini diharapkan dapat memberikan informasi mengenai
proses pembuatan sensor kapasitif tanpa sentuhan dari plat alumunium. Disisi lain
dapat mengetahui kakateriasi statik dari sensor kapasitif dengan menggunkan plat
aluminium berbasis andriuino. Hasil karakterisasi statik sebagai dasar untuk
pengembangan karakterisasi dinamik serta aplikasinya.

6
1.6. Sistematika Penulisan
Untuk memberikan gambaran ringkasan pada penyusunan skripsi ini,
penulis akan menyajikan dalam bentuk sistematika skripsi yang berisi lima bab
dengan uraian sebagai berikut:
BAB I PENDAHULUAN
Pada bab ini berisi tentang latar belakang dari penelitian ini,
kemudian perumusan masalah, batasan masalah, tujuan penelitian, manfaat
penelitian, hingga sistematika penelitian.
BAB II DASAR TEORI
Pada bab ini berisi teori tentang penelitian sensor kapasitif dan
komponen pendukung lainnya, adapun informasi yang didapat nantinya
akan menjadi acuan pada saat penelitian berlangsung.
BAB III METODOLOGI PENELITIAN
Pada bab ini berisi tentang langkah-langkah penelitian, waktu dan
tempat penelitian, alat dan bahan yang digunakan, tahapan peneltian,
sampai dengan perancangan dan metode analisis.
BAB IV HASIL DAN PEMBAHASAN
Pada bab ini menyajikan hasil penelitian berupa hasil perancangan
pada perangkat keras (hardware), maupun perangkat lunak (software)
yang digunakan, selanjutnya akan menampilkan hasil pengujian yang telah
dilakukan, serta pembahasan mengenai hasil perancangan tersebut.
7
BAB V KESIMPULAN DAN SARAN
Pada bab ini berisi tentang kesimpulan yang diperoleh dari
penelitian yang telah dilakukan, dan memberikan saran untuk penelitian
selanjutnya agar lebih baik lagi.
8
BAB II
DASAR TEORI
2.1. Medan listrik
Medan listrik adalah efek yang ditimbulkan oleh sebuah keberadaan muatan
listrik seperti elektron, ion, atau bahkan proton didalam sebuah ruangan yang
berada disekitarnya. Medan listrik memiliki satuan N/C atau biasa dikenal dengan
Newton/Coloumb. Medan listrik umumnya dipelajari di dalam bidang fisika dan
secara tidak langsung juga dipelajari dalam bidang elektronika yang telah
memanfatkan medan listrk ini didalam sebuah kawat konduktor [7].
Hukum Coloumb
Hukum Coloumb berkaitan dengan gaya elektrostatik antara dua titik
muatan yang nilainya akan berbanding lurus dengan perkalian kedua muatan dan
berbanding terbalik dengan kuadrat jarak kedua titik bermuatan [8]. Medan listrik
(E) di setiap titik pada ruang didefinisikan sebagai gaya (F) yang diberikan pada
muatan positif pada titik tersebut, kemudian dibagi dengan besar muatan (q) :
E = 𝐹
𝑞 2-1
(E) didefinisikan sebagai limit sehingga pada 𝐹
𝑞 menunjukan (q) lebih kecil
sehingga mendekati nol, agar (E) tidak bergantung pada besar muatan (q) yang
berarti (E) hanya dapat mendeskripsikan efek muatan yang menimbulkan medan
listrik. Medan listrik disemua titik dapat diukur berdasarkan definisi diatas, kita
dapat menghitung berapa besaran (E) [9].
E = 𝐾𝑞𝑄/𝑟2
𝑞 2-2
9
E = k 𝑄
𝑟2 2-3
Dimana :
E = kuat medan listrik
k = konstanta (9. 109𝑁𝑚2/𝐶2)
q = muatan listrik
r = jarak muatan
2.2. Dielektrik
Dielektrik adalah sebuah isolator yang berada di antara kedua buah plat
konduktor pada sebuah kapasitor. Pembuatan kapasitor untuk rentang kapasitansi
dipilih berdasarkan dari geometri kapasitor atau jenis dielektrik yang digunakan.
Dielektrik pada kapasitor memiliki keterbatasan, karena kuat medan listrik yang
besar akan menyebabkan ionisasi pada dielektrik yang akan membuat perubahan
dielektrik yang semula isolator dapat berubah menjadi konduktor dan
menyebabkan dielektrik breakdown [10].
Permitivitas (konsanta dielektrik) akan merepresentasikan rapatan fluks
elektrostatik pada saat benda dilewati oleh arus listrik. Konstanta dielektrik relatif
untuk ruang hampa atau vakum adalah 𝜖0 ≈ 8,854 × 10−12𝐹. 𝑚−1. Dan ꜫ𝑟
merupakan permitivitas relatif (konstanta) untuk bahan dielektrik. Permitivitas
relatif sendiri adalah besaran tanpa dimensi dari suatu bahan dielektrik juga dapat
didefinisikan untuk perbandingan antara nilai kapasitas di dalam bahan dielektrik
[11].
ꜫ = ꜫ0ꜫ𝑟 2-4
10
dimana :
ꜫ = permitivitas bahan (F/m)
ꜫᵒ = permitivitas vakum (F/m)
ꜫ𝑟 = permitivitas relatif bahan (F/m)
Tabel 2.1 Permitivitas relatif beberapa dielektrik [11].
Kuat medan listrik maksimum (Ē𝑚𝑎𝑘) dapat digunakan pada sebuah
dielektrik kapasitor yang biasa disebut dengan kekuatan dielektrik. Kekuatan
dielektrik tersebut sangat bergantung pada struktur dari fisis isolator. Medan
listrik maksimum (Ē𝑚𝑎𝑘) biasa disebut dengan medan listrik dadal (breakdown)
(Ē𝑏𝑑) pada saat beda potensial antar plat maksimum (𝑉𝑚𝑎𝑘). Beda potensial
disebut juga tegangan dadal (breakdown voltage) yang dilambangkan dengan
(𝑉𝑏𝑑) yaitu jika pada plat sejajar jarak antar plat (d) maka (Ē𝑏𝑑) dinyatakan dalam
satuan Kv/mm [10].
Ē𝑏𝑑 = 𝑉𝑏𝑑
𝑑 2-5
dimana :
Ē𝑏𝑑 = medan listrik breakdown
𝑉𝑏𝑑 = tegangan breakdown
d = jarak antar plat
Tabel 2.2 Kekuatan dielektrik dari beberapa jenis isolator [11].
Medium permitivitas relatif
Vakum 1,00000
Udara kering 1,00059
Air 78
Mika 6,0
Kaca 3,8-6,8
Karet 2-3,5
Kertas 3,5
Polietilen 2,3
Teflon 2,1
Titanium oksida 100

11
Medium Kekuatan dielektrik (kV/mm)
Udara 1,00059
N2 3,30
O2 2,90
C2 2,90
Mika 5,0
Kaca 10-50
Karet 40
H2 1,90
He 1,00
2.3. Kapasitor
Kapasitor merupakan sebuah komponen elektronika yang mempunyai
kemampuan untuk menyimpan muatan. Pengertian lain dari Kapasitor adalah
sebuah komponen elektronika yang dapat menyimpan dan melepaskan muatan
listrik. Cara kerja pada kapasitor sangat berbeda dengan akumulator karena dalam
proses penyimpanan muatan listrik tidak terjadi proses perubahan secara kimia
pada bahan kapasitor tersebut, adapun besarnya nilai kapasitansi dari sebuah
kapasitor akan dinyatakan dalam satuan farad (F).
Pada umumnya kapasitor terbuat dari dua buah plat elektroda sejajar yang
akan diletakan berdekatan pada jarak tertentu yang dipisahkan oleh suatu bahan
dielektrik. Kapasitor mempunyai nilai kapasitansi (C), yaitu besaran yang akan
menunjukan kemampuan dari kapasitor tersebut dalam menyimpan suatu muatan
atau energi, sehingga semakin besar nilai kapasitansi (C) maka akan semakin
besar pula muatan atau energi yang dapat tersimpan di dalam nya [10].
Gambar 2.1 Kapasitor [12]
12
2.3.1. Kapasitansi
Kapasitas kapasitor atau yang biasa disebut dengan nilai kapasitansi
(C), merupakan ukuran kemampuan dari kapasitor untuk menyimpan
muatan (Q) pada beda potensial listrik (V). Maka dinyatakan dalam :
C = 𝑄
𝑉 2-6
di mana :
C = Kapasitas dalam satuan farad (F)
Q = Muatan listrik dalam satuan Coulomb
V = Tegangan kapasitor dalam satuan Volt
Bahwa C merupakan tetapan kesebandingan antara Q dan V. Maka
nilai C dari sebuah kapasitor dapat diperbesar dengan memperkecil beda
potensial listrik V, sedangkan pada Q yang tetap. Hal ini dapat dilakukan
dengan cara meletakan isolator atau dielektrik yang berada diantara dua
buah konduktor. Nilai C pada sebuah konduktor sangat bergantung pada
geometri plat konduktor, jenis dielektrik, dimensi kapasitor, dan jarak antara
kedua konduktor [10].
2.3.2. Kapasitor dua plat sejajar
Sebuah kapasitor dua buah plat sejajar terbuat dari dua buah plat
konduktor yang diletakan dengan jarak tertentu sehingga permukaan kedua
plat konduktor itu sejajar. Kedua plat konduktor mempunyai luas (A) yang
sama, jarak antar plat konduktor (d), dan masing –masing plat konduktor
bermuatan Q+ dan Q- pada kerapatan yang sama (σ). medam listrik yang

13
diberikan diantara kedua plat (Ē) adalah 𝜎
ꜫ0 dan Q = σA maka didapat nilai
kapasitas dari kapasitor itu yaitu :
C = ꜫ0𝐴
𝑑 2-7
di mana :
C = Kapasitas dalam satuan farad (F)
ꜫᵒ = permitivitas vakum (F/m)
d = jarak antar lempeng elektroda (m)
A = luas setiap lempeng elektroda (𝑚2)
Jadi, didapat bahwa nilai C dari kapasitor plat sejajar dapat diatur
dengan melakukan variasi terhadap jarak antar plat konduktor (d) atau
dengan luas plat konduktor (A) [10].
Gambar 2.2 Kapasitor dua buah plat sejajar [13].
Kapasitansi juga dapat ditemukan dengan cara mengetahui geometri
konduktor dan sifat dielektrik yang berada diantara konduktor tersebut.
C = ꜫ𝑟ꜫ0𝐴
𝑑 2-8

14
di mana :
C = Kapasitas dalam satuan farad (F)
ꜫᵒ = permitivitas vakum (F/m)
ꜫ𝑟 = permitivitas relatif bahan (F/m)
d = jarak antar lempeng elektroda
A = luas setiap lempeng elektroda
Tabel 2.3 Aplikasi sensor berdasarkan prinsip kapasitif
No. Aplikasi sensor
kapasitif
Keterangan
1.
Sensor tekanan
menggunakan sebuah membran sehingga tekanan
dapat dideteksi dengan menggunakan sensitif
detektor.
2.
Sensor berat
menggunakan perubahan nilai kapasitansi diantara
dua plat yang berjarak, sehingga niai berubah sesuai
dengan beban yang diterima.
3.
Ketinggian cairan
menggunakan perubahan nilai kapasitansi antara
kedua plat konduktor yang dicelupkan kedalam
cairan.
4.
Jarak
sensor akan bekerja jika ada sebuah objek metal
yang mendekati elektroda kapasitor,maka akan
didapatkan hasil yang berubah-ubah.
5.
Layar sentuh
layar sentuh dengan menggunakan koordinat x dan
y.
6.
linear position
dengan menggunakan metode multiplat, sehingga
sensor kapasitif dapat mengukur posisi yang di
inginkan.
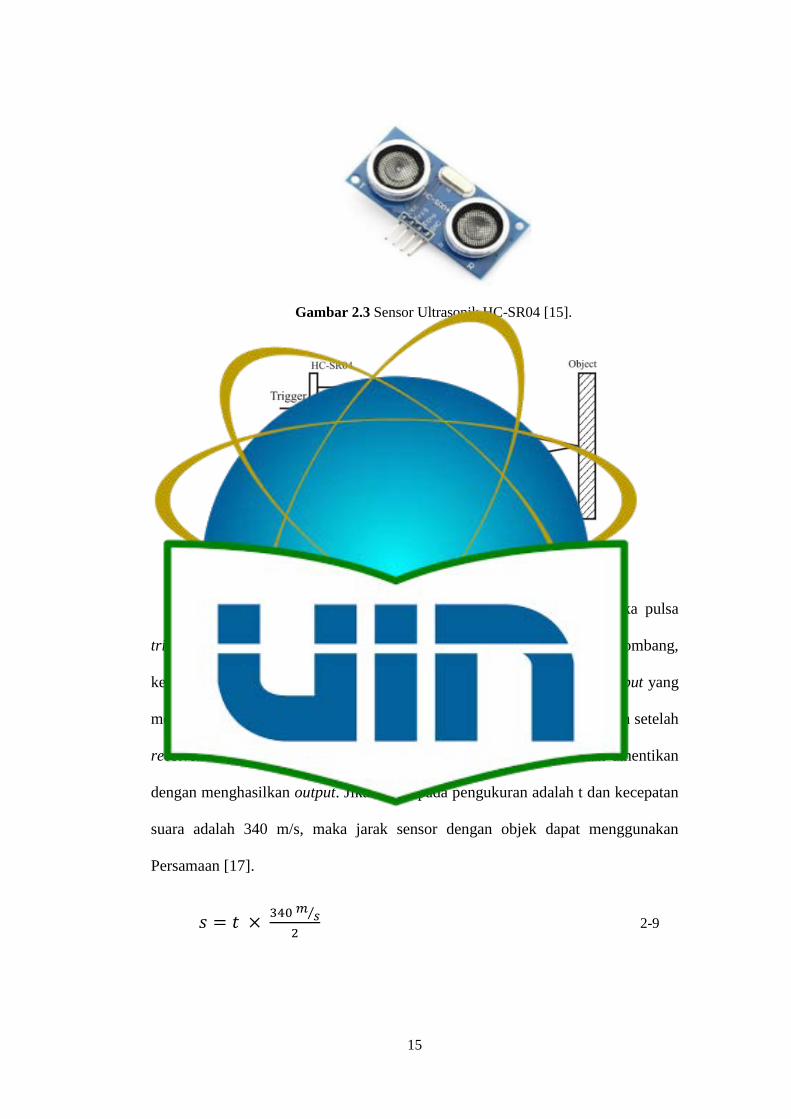
2.4. Sensor Ultrasonik HC-SR04
Sensor jarak ultrasonik HC-SR04 adalah sebuah sensor yang bekerja pada
frekuensi 40KHz berdasarkan prinsip dari pantulan gelombang, yang digunakan
untuk menentukan jarak terhadap sebuah objek yang cukup jauh, ultrasonik tidak
seperti sensor inframerah atau bahkan dengan laser sekalipun. Sensor ultrasonik
memiliki jangkauan deteksi yang cukup luas yaitu memiliki jangkauan minimum
2 cm dan jangkauan maksimum sampai 400 cm [14].
15
Gambar 2.3 Sensor Ultrasonik HCSR04 [15].
Gambar 2.4 Cara kerja Sensor Ultrasonik HCSR04 [16].
Pengukuran jarak menggunakan sensor ultrasonik HC-SR04 ketika pulsa
trigger diberikan pada sensor, maka transmitter akan memancarkan gelombang,
kemudian pada saat yang sama maka sensor akan menghasilkan nilai output yang
menandakan bahwa sensor mulai melakukan waktu pengukuran, kemudian setelah
receiver menerima pantulan oleh suatu objek maka pengukuran akan dihentikan
dengan menghasilkan output. Jika waktu pada pengukuran adalah t dan kecepatan
suara adalah 340 m/s, maka jarak sensor dengan objek dapat menggunakan
Persamaan [17].
𝑠 = 𝑡 × 340 𝑚 𝑠⁄
2 2-9

16
Dimana (s) merupakan jarak di antara sensor dengan objek (m) dan t adalah
waktu tempuh gelombang ultrasonik transmitter menuju ke receiver (s). Adapun
jenis objek yang dapat terbaca oleh sensor ultrasonik berupa zat padat, dan zat
cair. Sensor ultrasonik dapat dengan mudah dihubungkan dengan mikrokontroller
arduino cukup dengan menggunakan pin I/O [14].
Tabel 2.4 Spesifikasi Sensor Ultrasonik HCSR04 [18].
Tegangan Kerja DC 5V
Arus kerja 15mA
Frekuensi kerja 40Hz
Jarak maksimal 4 meter
Jarak minimal 2 cm
Sudut pengukuran 15 derajat
Trigger input 10 μS TTL
Echo output proposional
Dimensi 45x20x15 mm
2.5. Mikrokontroler Arduino UNO
Mikrokontroler merupakan sebuah chip berupa IC (Integrated Circuit) yang
dapat menerima sinyal input, mengolahnya dan memberikan sinyal output sesuai
dengan program yang di berikan ke dalamnya. Secara sederhana mikrokontroler
diibaratkan sebagai otak dari sebuah perangkat yang dapat berinteraksi dengan
sekitar. Mikrokontroler adalah sebuah komputer yang di dalamnya terdapat
mikroprosesor, memori, jalur Input atau Output (I/O) dan perangkat pelengkap
lainnya. Kecepatan pengolahan data pada mikrokontroler lebih rendah jika
dibandingkan dengan PC (Personal Computer).
Adapun kecepatan operasi mikrokontroler pada umumnya berkisar antara 1
– 16 MHz, kapasitas RAM dan ROM hanya berkisar pada byte/Kbyte. Meskipun
kecepatan pengolahan data dan kapasitas memori pada mikrokontroler jauh lebih
kecil. Mikrokontroler sering digunakan pada sistem yang tidak terlalu kompleks

17
dan tidak memerlukan kemampuan komputasi tinggi. Mikrokontroler sering
disebut sebagai embedded system. Embeded system merupakan sebuah sistem
pengendali tertanam pada suatu produk [14].
Arduino Uno merupakan sebuah board yang menggunakan mikrokontroler
ATmega328. Arduino Uno memiliki 14 buah pin digital (6 pin biasa digunakan
sebagai output PWM), 6 pin input analog, satu buah 16 MHz osilato kristal, satu
buah koneksi USB, satu buah konektor sumber tegangan, header ICSP, dan
sebuah tombol reset. Arduino Uno dapat memuat semua yang dibutuhkan, dengan
menghubungkannya ke sebuah komputer melalui port USB atau bahkan dengan
menggunakan tegangan DC dari baterai atau adaptor AC ke DC.
Gambar 2.5 Arduino UNO [19].
Memori data pada ATMega328 terbagi menjadi 4 bagian, yaitu 32 pin untuk
register umum, 64 pin untuk register I/O, 160 pin untuk register I/O tambahan dan
sisanya 2048 pin untuk data SRAM internal. Atmega328 ini menyediakan UART
TTL (5V) komunikasi serial, yang tersedia pada pin digital 0 (RX) dan 1 (TX).
Firmware Arduino menggunakan USB driver standar [14].
18
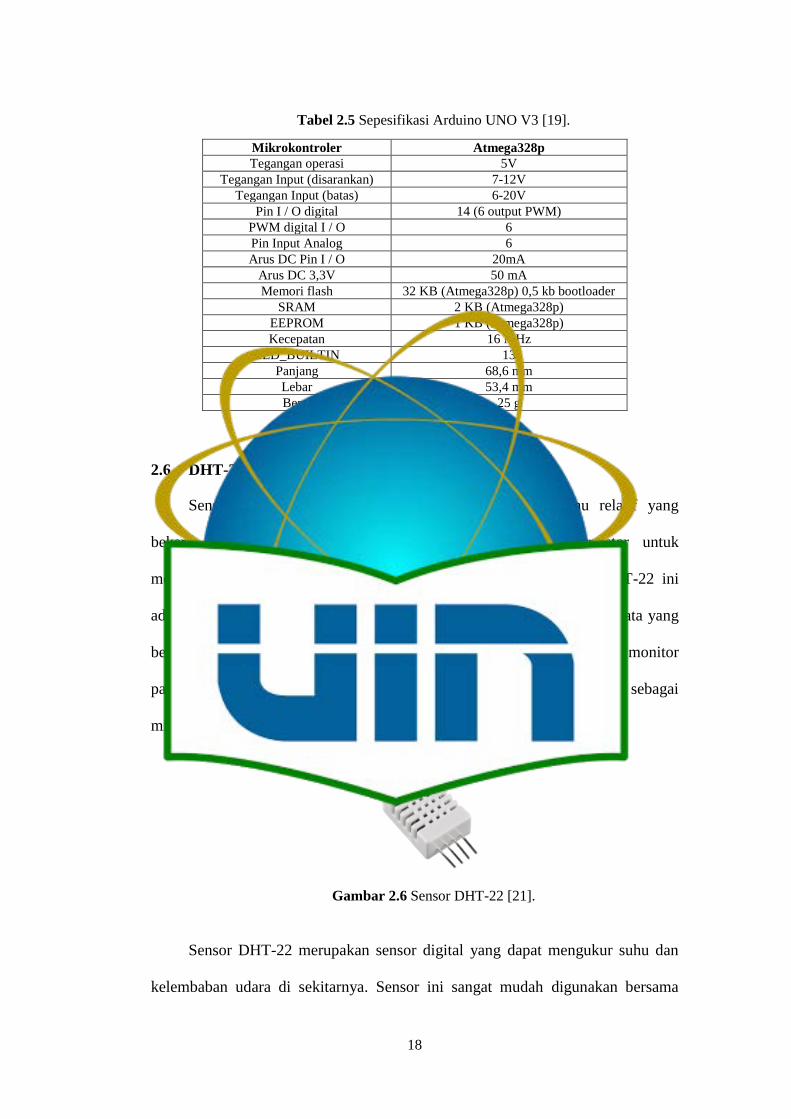
Tabel 2.5 Sepesifikasi Arduino UNO V3 [19].
Mikrokontroler Atmega328p
Tegangan operasi 5V
Tegangan Input (disarankan) 7-12V
Tegangan Input (batas) 6-20V
Pin I / O digital 14 (6 output PWM)
PWM digital I / O 6
Pin Input Analog 6
Arus DC Pin I / O 20mA
Arus DC 3,3V 50 mA
Memori flash 32 KB (Atmega328p) 0,5 kb bootloader
SRAM 2 KB (Atmega328p)
EEPROM 1 KB (Atmega328p)
Kecepatan 16 MHz
LED_BUILTIN 13
Panjang 68,6 mm
Lebar 53,4 mm
Berat 25 g
2.6. DHT-22 Humidity and Temperatur Sensor
Sensor DHT-22 merupakan sensor kelembaban dan suhu relatif yang
bekerja menggunakan sensor kelembaban kapasitif dan thermistor untuk
mengukur udara di sekitarnya. Adapun proses pembacaan sensor DHT-22 ini
adalah dengan membaca hasil keluaran sinyal (output) digital pada pin data yang
berupa Suhu kamar dan kelembaban kemudian akan dicetak pada serial monitor
pada Arduino IDE dengan menggunakan perangkat keras Arduino uno sebagai
mikrokontroller [20].
Gambar 2.6 Sensor DHT-22 [21].
Sensor DHT-22 merupakan sensor digital yang dapat mengukur suhu dan
kelembaban udara di sekitarnya. Sensor ini sangat mudah digunakan bersama

19
dengan mkrokontroller. Sensor DHT-22 termasuk sensor yang memiliki kualitas
terbaik karena memiliki tingkat stabilitas yang sangat baik dan mendapatkan fitur
kalibrasi yang sangat akurat sehingga ketepatan saat pembacaan tidak dapat
diragukan, kemudian dinilai dari respon pembacaan data yang cepat, dan dimensi
sensor DHT-22 yang ukurannya kecil, dan dibekali dengan transmisi sinyal
hingga 20 meter, akan membuat sensor DHT-22 ini cocok digunakan sebagai
aplikasi dalam penelitian pengukuran suhu dan kelembaban [21].
Tabel 2.6 Spesifikasi Sensor DHT-22 [22].
2.7. Alumunium
Alumunium merupakan logam yang memiliki kekuatan yang relatif rendah
dan bersifat lunak. Alumunium ditemukan pada tahun 1825 oleh Hans Christian
Oersted. Dan baru diakui secara pasti oleh F. Wohler pada tahun 1827 [23].
Aluminium merupakan logam yang bersifat ringan dan memiliki ketahanan korosi
yang baik, dan dapat menghantarkan listrik yang baik. Walau alumunium dapat
menghantarkan listrik, konduktivitas listriknya berkisar 60% dari logam tembaga,
sehingga alumunium juga dapat digunakan untuk peralatan listrik [24].
Model DHT22
Power supply 3.3-6V DC
Sinyal keluaran sinyal digital
Bahan sensor Kapasitor polimer
Rentang pengoperasian kelembaban 0-100% RH ; suhu -40 ~ 80Celsius
Akurasi kelembaban + -2% RH; suhu <+ - 0,5Celsius
Resolusi sensitivitas Kelembaban 0,1% RH; suhu 0,1Celsius
pengulangan Kelembaban + -1% RH; suhu + -0,2Celsius
Kelembaban hysteresis + -0,3% RH
Stabilitas JangkaPanjang + -0,5% RH / tahun
Periode penginderaan 2s
Dapat digunakan dimana saja Dapat dipertukarkan
Dimensi 14x18x5.5mm

20
Umumnya logam aluminium biasa dicampurkan dengan beberapa logam
lainnya sehingga dapat membentuk jenis aluminium paduan yang di inginkan baik
untuk mendapatkan kekuatan atau mendapatkan sifat alumunium yang lebih baik
untuk penggunaan dalam kehidupan sehari-hari. Penggunaan Alumunium antara
lain untuk proses pembuatan kabel, rangka pesawat terbang, rangka mobil dan
berbagai produk peralatan rumah tangga lainnya. sifat penting yang dimiliki oleh
Alumunium sehingga banyak digunakan sebagai Material Teknik, diantaranya:
Tabel 2.7 Sifat alumunium
No. Sifat Alumunium
1. Ringan
2. Mudah difabrikasi
3. Tahan korosi dan tidak beracun
4. Penghantar listrik dan panas yang baik (konduktor).
5. Mempunyai kekuatannya rendah, dengan Aluminium paduan bisa
meningkatkan sifat mekanisnya.
2.7.1. Alumunium Paduan
Alumunium paduan biasa nya terdiri dari elemen paduan atau
campuran yang umum digunakan pada campuran aluminium berupa silikon,
magnesium, tembaga, seng, mangan, dan juga lithium. Secara umum proses
penambahan logam paduan atau campuran hingga konsentrasi tertentu akan
meningkatkan kekuatan tensil dan kekerasan, serta menurunkan titik lebur
pada alumunium. [24]
2.7.2. Paduan Aluminium-Seng
Paduan atau campuran logam aluminium dengan logam seng
merupakan paduan yang paling terkenal dan umum kita jumpai disekitar
kita, biasanya disebut dengan seri 7xxx yang merupakan paduan antara
alumunium dengan seng dengan penomoran 7070 hingga 7079 [25]. karena

21
biasa digunakan sebagai bahan pembuat rangka pesawat terbang. Paduan
antara alumunium dan seng sendiri dapat memiliki kekuatan tertinggi jika
dibandingkan dengan paduan alumunium dengan logam lainnya, adapun
dengan rincian paduan, aluminium murni ditambahkan dengan 5,5% logam
seng dapat memiliki kekuatan tensil sebesar 580 MPa dengan elongasi
sebesar 11% dalam setiap 50 mm bahan [24].
2.7. Arduino Lilypad
Gambar 2.7 Arduino Lilypad [26].
Arduino Lilypad merupakan mikrontroller single-board yang bersifat open
source sama seperti Arduino UNO hanya berbeda pada dimensinya saja, Melihat
dari dimensi nya, Arduino Lilypad yang berbentuk lingkaran dan memiliki
dimensi yang kecil sehingga dapat digunakan dalam pembuatan robot-robot yang
berdimensi kecil. Arduino Liliypad dirancang untuk memudahkan pada
penggunaan dalam berbagai bidang. Dapat dilihat pada tabel merupakan
spesifikasi dari Arduino Lilypad [26].
Tabel 2.8 Spesifikasi Arduino Lilypad [26].
Mikrokontroler Atmega168 atau Atmega328V
Tegangan operasi 2,7 – 5,5 v
Tegangan input 2,7 – 5,5 v
Pin I / O 14 Pin
Saluran PWM 6 Pin
Saluran input analog 6 Pin

22
Arus DC pin I/O 40 mA
Memori flash 16 KB (2 KB untuk bootloader)
SRAM 1 KB
EEPROM 512 byte
Kecepatan 8 MHz

23
BAB III
METODE PENELITIAN
3.1. Waktu dan Tempat Penelitian
Penelitian “Karakterisasi Sensor Kapasitif Touchless Menggunakan Plat
Alumunium Berbasis Arduino” ini mulai dilaksanakan selama 3 bulan terhitung
dari November 2019 – Januari 2020, yang bertempat di Laboratorium Fisika,
Pusat Laboratorium Terpadu Universitas Islam Negeri Syarif Hidayatullah
Jakarta, Ir. H. Juanda No.95, Ciputat, Cempaka Putih, Kota Tangerang Selatan,
15412.
3.2. Alat dan Bahan
Alat dan bahan yang digunakan pada penelitian ini adalah sebagai berikut :
Tabel 3.1 Alat dan bahan penelitian
No Alat dan Bahan Jumlah
1 Laptop 2 Unit
2 Arduino UNO 1 Buah
3 Arduino Lilypad 1 Buah
4 Papan Alumunium 4 Buah
5 Ultrasonik HC-SR04 1 Buah
6 DHT-22 1 Buah
7 Resistor 10 MΩ 1 Buah
8 Kabel Jumper Secukupnya
9 Papan PCB 2 Buah
10 Arduino IDE 1 Buah
11 Windows 10 1 Buah
12 Fritzing 1 Buah
3.3. Tahap dan Alur Penelitian
Tahapan penelitian tersebut terdiri dari perancangan alat, pembuatan
program, hingga pengujian alat. Adapun tahapan keseluruhan dapat dilihat dari
gambar berikut ini:

24
Gambar 3.1 Diagram Alir Penelitian
3.3.1. Persiapan Penelitian
Pada tahap persiapan ini terjadi proses studi pustaka yang dilakukan
untuk mencari informasi terkait sensor kapasitif touchless yang dapat
digunakan sebagai bahan referensi dari beberapa buku, dan jurnal ilmiah
yang berhubungan dengan penyusunan alat penelitian.
3.3.2. Perancangan dan Pembuatan Alat Penelitian
Pada bagian perancangan dan pembuatan alat penelitian ini terdapat
dua buah proses perancangan untuk melakukan “karakterisasi sensor
kapasitif touchless (tanpa sentuhan) dengan menggunakan plat alumunium”,
yaitu perancangan perangkat keras (hardware), perancangan perangkat lunak
(software).
Pada proses perancangan perangkat keras menggunakan beberapa
komponen perangkat keras yang akan saling terhubung untuk dapat berjalan
dengan baik, penulis menggunakan dua buah Arduino sebagai
Mulai Studi LiteraturPerancangan
AlatPembuatan
Alat
Pembuatan Program
Uji Coba Program
Pengkondisian Lingkungan
Pengujian Alat
Pengambilan Data
Pengolahan Data
Penulisan Skripsi
Selesai

25
mikrokontroler yang digunakan untuk melakukan pembacaan dan
mengendalikan komponen yang terhubung, yaitu mengunakan Arduino
UNO untuk menjalankan proses pada pembacaan sensor kapasitif dari plat
alumunium, kemudian mengunakan Arduino Lilypad untuk menjalankan
sensor DHT-22 untuk mendapatkan variable suhu dan kelembaban,
kemudian sensor ultrasonik HC-04 untuk melakukan pengujian respon jarak
tangan untuk mengetahui nilai kapasintansi pada sensor kapasitif, dapat
dilihat pada gambar berikut.
Gambar 3.2 Rangkaian Sensor Kapasitif
26
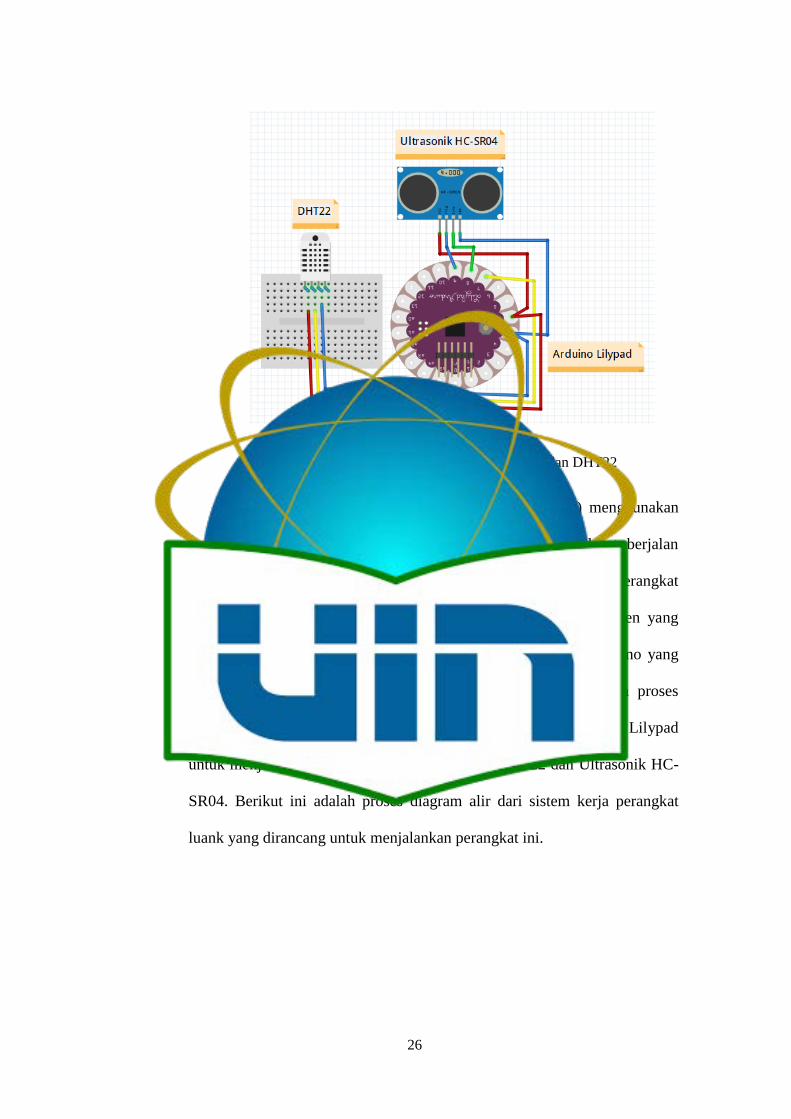
Gambar 3.3 Rangkain Pembaca Ultrasonik dan DHT22
Pada proses perancangan perangkat lunak (software) menggunakan
komponen perangkat lunak yang saling terhubung untuk dapat berjalan
dengan baik, maka proses ini dirancang menggunakan sebuah perangkat
lunak Arduino IDE untuk membaca dan mengendalikan komponen yang
terhubung kepada mikrokontroler untuk membaca dua buah Arduino yang
digunakan, yaitu mengunakan Arduino UNO untuk menjalankan proses
pada sensor kapasitif plat alumunium dan mengunakan Arduino Lilypad
untuk menjalankan proses pembacaaan sensor DHT-22 dan Ultrasonik HC-
SR04. Berikut ini adalah proses diagram alir dari sistem kerja perangkat
luank yang dirancang untuk menjalankan perangkat ini.

27
Gambar 3.4 Proses kerja program sensor kapasitif
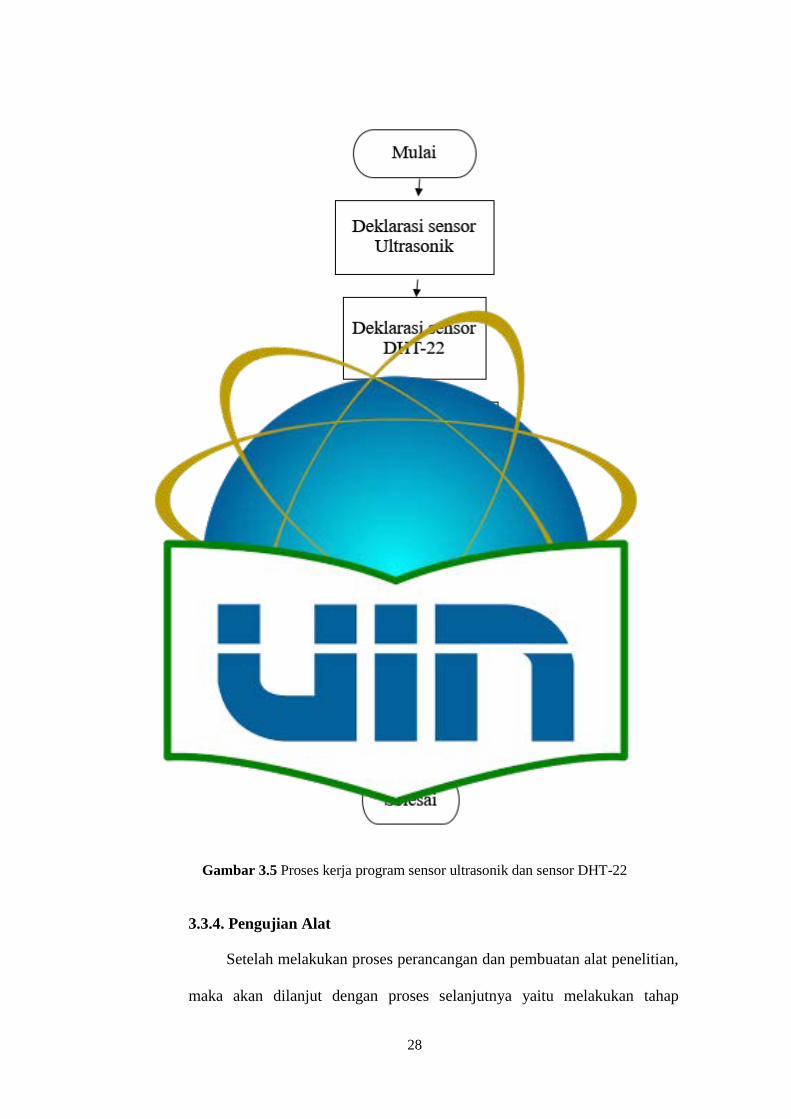
28
Gambar 3.5 Proses kerja program sensor ultrasonik dan sensor DHT-22
3.3.4. Pengujian Alat
Setelah melakukan proses perancangan dan pembuatan alat penelitian,
maka akan dilanjut dengan proses selanjutnya yaitu melakukan tahap
29
pengujian yang dilakukan secara keseluruhan yang memiliki tujuan untuk
mengetauhi karakteristik dan nilai dari sensor kapasitif plat alumunium yang
dibuat.
3.3.5. Analisis Data
Pada proses ini merupakan proses mengetahui bagaimana cara kerja
dari sensor kapasitif plat alumunium sebagai sensor tanpa sentuhan. Analisa
yang dapat dilakukan yaitu dengan cara menganalisa nilai kapasitansi yang
tertera pada serial monitor, yang dikeluarkan oleh sensor kapasitif yang
menerima respon dari tangan penulis pada saat melakukan pengujian,
kemudian mengetahui jarak respon yang ideal terhadap sensor kapasitif plat
alumunium, dan mengetahui temperatur optimal agar sensor kapasitif plat
alumunium dapat berkerja dengan baik.
3.4. Metode Pengambilan Data
Pada metode pengambilan data pada “uji karakterisasi sensor kapasitif
touchless” ini diperoleh dengan cara melakukan beberapa tahapan pengujian,
tahapan pertama yaitu dengan cara melakukan pengujian Temperatur lingkungan
terhadap sensor kapasitif plat alumunium, kemudian pengujian jarak respon
tangan terhadap plat alumunium, dan pengujian terhadap dimensi plat alumunium.

30
BAB IV
HASIL DAN PEMBAHASAN
Hasil dan pembahasan akan diuraikan tentang hasil perancangan sistem
sensor kapasitif touchless serta karakterisasi statik, seperti: pengaruh suhu,
pengaruh jarak sensor kapasitif terhadap plat, pengaruh luas plat aluminium,
pengulangan (repeatability), linearitas, dan resolusi. Adapun hasil dan
pembahasan karakterisasi sensor kapasitif touchless akan dijelaskan lebih detail
dalam sub bab di bawah ini.
4.1. Hasil Rancangan Bangun Sistem Sensor Kapasitif Touchless Hardware
Hasil Rancangan Bangun Hardware
Telah berhasil dibuat sistem sensor kapasitif touchless dengan
menggunakan plat alumunium berbasis andriuno, seperti yang ditunjukan dalam
gambar 4.1 di bawah ini :
Gambar 4.1 Rangkaian Sensor Kapasitif
31
Gambar 4.2 Rangkain Sensor Ultrasonik dan DH-T22
Ganbar 4.3 Hasil Rancang Bangun System Sensor Kapasitif Touchless
Sistem sensor kapasitif touchless menggunakan tiga buah sensor untuk
melakukan proses pembacaan, yaitu sensor kapasitif, sensor ultrasonik dan sensor
DHT22.

32
Prinsip kerja dari system sensor kapasitif touchless adalah plat alumunium
diletakkan pada meja datar dengan tujuan bagian plat memiliki ketinggian yang
sama agar dapat menentukan tingkat akurasinya. Sedangkan, sensor ultrasonik
diletakkan pada telapak tangan yang menghadap ke arah plat kapasitif dengan
tujuan untuk menentukan jarak yang presisi sesuai dengan gerakan tangan pada
saat melakukan proses pengambilan data. Terakhir sensor DHT22 diletakkan
berada dibagian lengan dengan tujuan untuk mengukur temperatur dan
kelembaban lingkungan realtime pada saat melakukan pengambilan data.
Hasil Rancang Bangun Software
Perancangan software berfungsi sebagai perintah untuk menentukan kerja
otomatisasi sensor kapasitif touchless. Ada tiga proses yang terdapat didalam
program ini, yaitu: pertama; proses pembacaan sensor kapasitif touchless saat
diberikan respon jarak oleh tangan. Kedua; proses pembacaan pada sensor
ultrasonik. Sensor ultrasonik dilakukan kalibrasi terlebih dahulu untuk
menentukan tingkat akurasi yang sesuai dengan alat ukur yang ada. Adapun
proses pembacaan sensor ultrasonik pada saat pergerakan tangan dengan jarak 2
cm sampai dengan 16 cm di atas plat kapasitif. Ketiga; proses pembacaan pada
sensor DHT22. Sensor DHT22 dilakukan kalibrasi terlebih dahulu dengan
membandingkan data temperatur dan kelembaban dengan alat ukur thermometer
untuk menentukan tingkat akurasi. Adapun proses pembacaan Sensor DHT22
pada saat pengambilan data dengan mengukur temperatur dan kelembaban
lingkungan secara realtime. Jadi, Penggunaan sensor DHT22 bertujuan untuk
mengetahui temperatur dan kelembaban lingkungan secara realtime pada saat
melakukan proses pengambilan data.

33
4.2. Hasil Pengujian Respon Sensor Terhadap Temperatur
Setelah berhasil membuat system sensor kapasitif touchless, selanjutnya
malakukan proses pengambilan data pengaruh temperatur lingkungan terhadap
nilai kapasitansi. Pengambilan data ini bertujuan untuk dapat menentukan
temperatur dan kelembaban lingkungan percobaan yang sesuai untuk sensor
kapasitif toucheless.
Pengambilan data dilakukan sebanyak lima kali dengan luas plat tetap (12
Inch), jarak plat terhadap tangan tetap (5 cm) dan variable temperatur lingkungan
percobaan (21oC - 30oC) serta dalam waktu dan tempat yang sama. Hasil
pengukuran nilai kapasitansi terhadap perubahan temperature ditunjukan pada
tabel 4.1 ditunjukan di bawah ini.
Tabel 4.1 Respon Sensor Terhadap Temperatur
Lplat
(Inch)
Tr
(ᵒC)
Tp
(ᵒC)
Humidity
(%)
Kec Resp
(ms)
Jarak
(cm)
Kapasitansi
(a.u)
12 30 30 82.86 461 5 7965.88 12 29 29 79.78 524 5 6097.514 12 28 28 77.20 503 5 4438.166 12 27 27 73.32 420 5 3282.366 12 26 26 69.13 520 5 2590.115 12 25 25 67.50 416 5 2458.57 12 24 24 65.48 366 5 2123.9 12 23 23 63.52 300 5 2060.322 12 22 22 61.61 246 5 1998.369 12 21 21 56.68 228 5 1838.461
Berdasarkan tabel 4.1 menunjukan bahwa temperatur sangat berpengaruh
terhadap kinerja sensor kapasitif touchless, dimana semakin tinggi suhu
lingkungan maka semakin tinggi juga nilai kapasitansi yang dihasilkan oleh
sensor kapasitif touchless tersebut. Sedangkan waktu yang dibutuhkan sensor
untuk ditampilkan ke laptop yang biasa disebut kecepatan respon menunjukan
34
data yang fluktuatif. Terlihat pada table 4.1 dari suhu (21 – 26) oC menunjukan
kecepatan respon menaik, dan pada suhu 27 oC mengalami penurunan, selanjutnya
pada suhu (28-29) oC mengalami kenaikan kembali dan pada suhu 30 oC
mengalami penurunan kecepatan respon. Hal ini diduga akibat salah satu
komponen elektronik yang ada di andriuno mengalami panas yang berakibat
penurunan kinerja andriuno sendiri.
4.3. Hasil Pengamatan Nilai Kapasitif Terhadap Pengaruh Jarak
Bagaian ini akan di jelaskan hasil pengujian pengaruh jarak sensor terhadap
plat aluminium. Berdasarkan hasil pengujian respon sensor terhadap pengaruh
temperatur menunjukan bahwa sensor kapasitif bekerja pada temperatur (25 – 30)
oC. Jadi, pengamatan pengaruh jarak terhadap plat menggunakan tempertur sekitar
28 oC. Dengan memvariasikan luas plat (A), yaitu: (13 Inch = 551,61 cm), (12
Inch = 466,55 cm), (10 Inch = 311,6 cm), dan (8 Inch = 187 cm). Serta
memvariasikan jarak respon (d) sensor terhadap plat kapasitif masing-masing (2 –
16) cm. Hasil Pengamatan akan dijelaskan lebih detail pada sub bab di bawah ini.
4.3.1. Hasil Pengaruh Jarak Terhadap Luas Plat 13 Inch
Hasil pengamatan nilai kapasitansi dengan luas plat 13 Inch, pada
temperature 28 oC dan variasi jarak (2 cm - 16 cm) dengan penambahan jarak
sensor terhadap plat sebesar 1 cm. Hasil pengamatan ditunjukan dalam tabel 4.4
di bawah ini :
35
y = 11066x + 1718.3R² = 0.7488
0
1000
2000
3000
4000
5000
6000
7000
8000
9000
0 0.2 0.4 0.6
Kap
asit
ansi
Jarak (cm)
Fitting Regresi Linear 1/x
(a) (b)
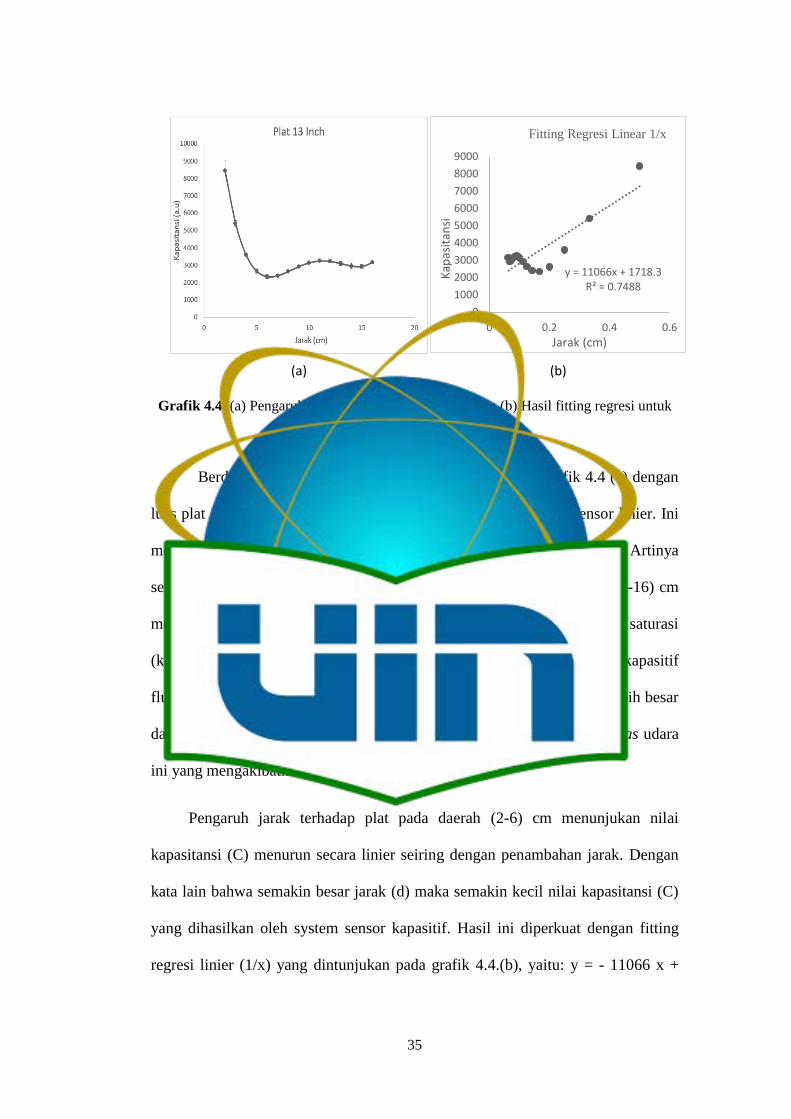
Grafik 4.4 (a) Pengaruh jarak terhadap luas plat 13 Inch; (b) Hasil fitting regresi untuk
luas plat 13 Inch
Berdasarkan hasil pengamatan yang ditunjukan pada grafik 4.4 (a) dengan
luas plat 13 inch menunjukan bahwa pada jarak (2-6) cm respon sensor linier. Ini
menunjukan bahwa daerah kerja sensor berada pada rentang tersebut. Artinya
sensor memberikan respon pada jarak (2-6) cm. Sedangkan pada jarak (6-16) cm
menunjukan nilai kapaistif fluktuasi disini bisa dikatakan terjadi saturasi
(konstan), artinya sensor tidak dapat bekerja pada daerah tersebut. Nilai kapasitif
fluktuasi pada daerah (7-16) cm diduga kuat disebabkan oleh luas plat lebih besar
dari luas tangan sehingga ada pengaruh permaebilitas udara. Permaebilitas udara
ini yang mengakibatkan nilai kapasitansi naik turun.
Pengaruh jarak terhadap plat pada daerah (2-6) cm menunjukan nilai
kapasitansi (C) menurun secara linier seiring dengan penambahan jarak. Dengan
kata lain bahwa semakin besar jarak (d) maka semakin kecil nilai kapasitansi (C)
yang dihasilkan oleh system sensor kapasitif. Hasil ini diperkuat dengan fitting
regresi linier (1/x) yang dintunjukan pada grafik 4.4.(b), yaitu: y = - 11066 x +
36
y = 10074x + 1189.4R² = 0.8861
0
1000
2000
3000
4000
5000
6000
7000
0 0.2 0.4 0.6
Kap
asit
ansi
Jarak (cm)
Fitting Regresi Linear 1/x
1718,3 dengn tingkat kepercayaan 0,7488. Hal ini juga sesuai dengan persamaan
2-7 bahwa kapasitif sama dengan luas plat dibagi dengan jarak (𝐶 =𝐴
𝑑 ) makna
fisisnya adalah nilai kapasitansi berbanding terbalik terhadap jarak, yaitu semakin
besar jarak (d) maka semakin kecil nilai kapasitansi (C).
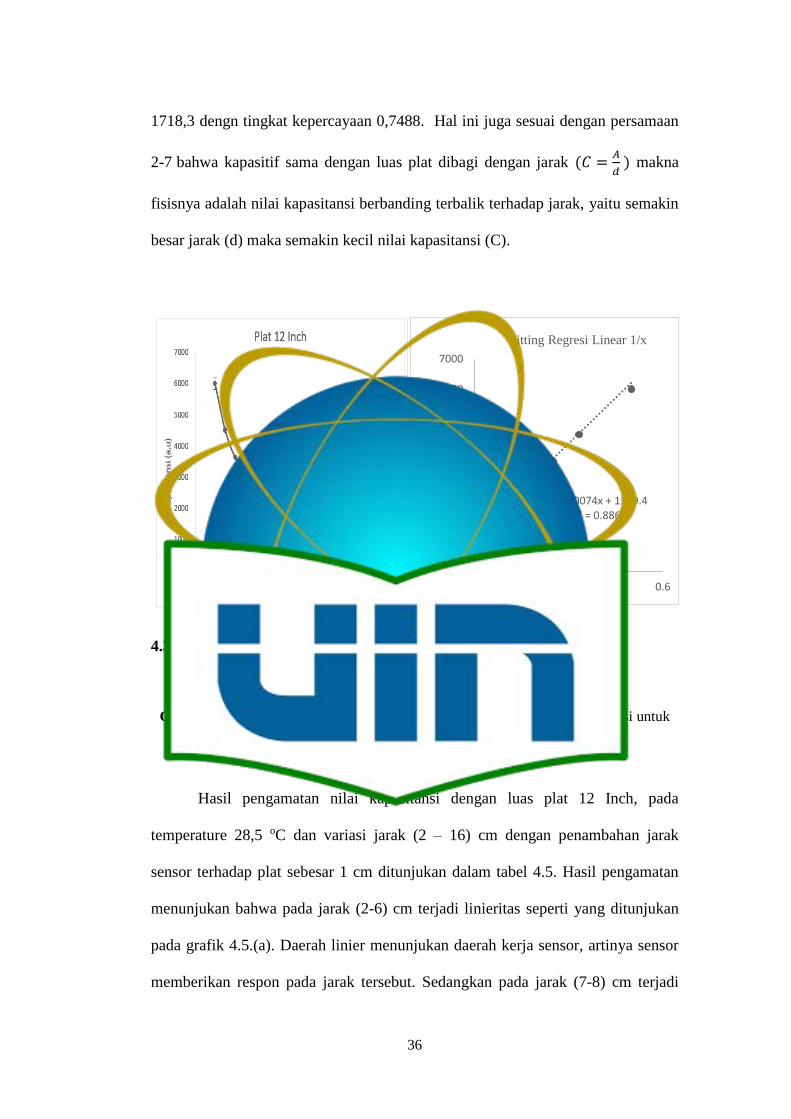
4.3.2. Hasil Pengaruh Jarak Terhadap Luas Plat 12 Inch
(a) (b)
Grafik 4.5 (a) Pengaruh jarak terhadap luas plat 12 Inch; (b) Hasil fitting regresi untuk
luas plat 12 Inch
Hasil pengamatan nilai kapasitansi dengan luas plat 12 Inch, pada
temperature 28,5 oC dan variasi jarak (2 – 16) cm dengan penambahan jarak
sensor terhadap plat sebesar 1 cm ditunjukan dalam tabel 4.5. Hasil pengamatan
menunjukan bahwa pada jarak (2-6) cm terjadi linieritas seperti yang ditunjukan
pada grafik 4.5.(a). Daerah linier menunjukan daerah kerja sensor, artinya sensor
memberikan respon pada jarak tersebut. Sedangkan pada jarak (7-8) cm terjadi

37
y = 9623.1x - 9.1109R² = 0.8949
0
1000
2000
3000
4000
5000
6000
0 0.2 0.4 0.6
Kap
asit
ansi
Jarak (cm)
Fitting Regresi Linear 1/x
saturasi (konstan). Sementrar untuk jarak (9-15) terjadi linieritas kedua dan jarak
(15-16) cm terjadi saturasi (konstan). Nilai kapasitif pada jarak (7-16) cm
menunjukan ada daerah yang linieritas kedua, akan tetapi daerah ini bukan daerah
kerja sensor. Nilai kapasistif pada jarak tersebut dipengaruhi oleh permaebilitas
udara yang tidak tertutup oleh tangan.
Pengaruh jarak terhadap plat pada jarak (2-6) cm menunjukan nilai
kapasitansi (C) menurun secara linier seiring dengan penambahan jarak. Dengan
kata lain bahwa semakin besar jarak (d) maka semakin kecil nilai kapasitansi (C)
yang dihasilkan. Hal ini sesuai dengan persamaan 2.7 bahwa kapasitif sama
dengan luas plat dibagi dengan jarak (𝐶 =𝐴
𝑑 ) makna fisisnya adalah nilai
kapasitansi berbanding terbalik terhadap jarak, yaitu semakin besar jarak (d) maka
semakin kecil nilai kapasitansi (C). Oleh karena itu, Hasil tersebut dilakukan
fitting regresi linier (1/x) yang dintunjukan pada grafik 4.5.(b). Hasil fitting
regresi linier memperkuat hasil eksperimen, yaitu: y = 10074 x + 1189,4 dengn
tingkat kepercayaan 0,8861.
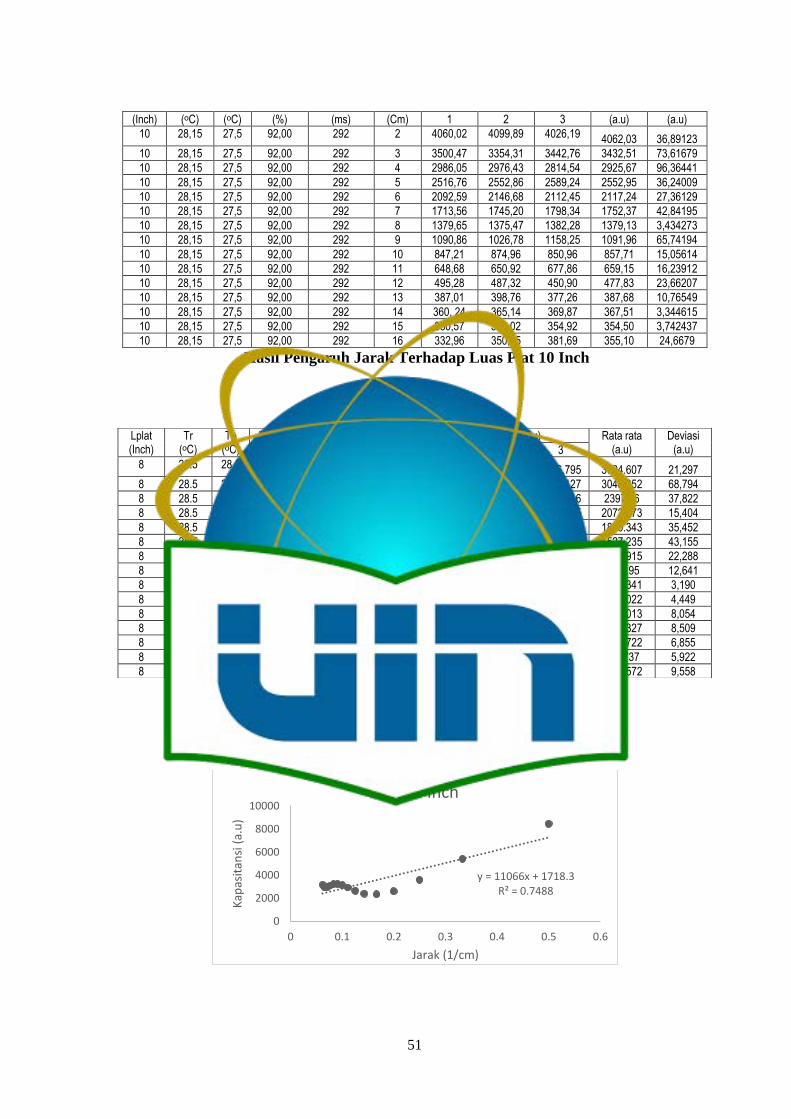
4.3.3. Hasil Pengaruh Jarak Terhadap Luas Plat 10 Inch
(a)
(b)
Grafik 4.6 (a) Pengaruh jarak terhadap

38
luas plat 10 Inch; (b) Hasil fitting regresi untuk luas plat 10 Inch
Hasil pengamatan nilai kapasitansi dengan luas plat 10 Inch, pada
temperature 28,15 oC dan variasi jarak (2-16) cm dengan penambahan jarak
sensor terhadap plat sebesar 1 cm. Hasil pengamatan menunjukan bahwa pada
jarak (2-10) cm terjadi linieritas seperti yang ditunjukan pada grafik 4.6.(a).
Daerah ini merupakan daerah kerja sensor, artinya sensor memberikan respon
pada daerah tersebut. Sedangkan pada jarak (11-16) cm menunjukan terjadi
saturasi (konstan), ini artinya sensor tidak dapat bekerja pada daerah tersebut.
Pengaruh jarak terhadap plat pada daerah (2–10) cm menunjukan nilai
kapasitansi (C) menurun secara linier seiring dengan penambahan jarak. Dengan
kata lain bahwa semakin besar jarak (d) maka semakin kecil nilai kapasitansi (C)
yang dihasilkan. Hasil ini diperkuat dengan fitting regresi linier (1/x) yang
dintunjukan pada grafik 4.6.(b), yaitu: y = 9623 x + 9,1109 dengn tingkat
kepercayaan 0,8949. Hal ini sesuai dengan persamaan 2-7 bahwa kapasitif sama
dengan luas plat dibagi dengan jarak (𝐶 =𝐴
𝑑 ) makna fisisnya adalah nilai
kapasitansi berbanding terbalik terhadap jarak, yaitu semakin besar jarak (d) maka
semakin kecil nilai kapasitansi (C).
4.3.4. Hasil Pengaruh Jarak Terhadap Luas Plat 8 Inch
Hasil pengamatan nilai kapasitansi dengan luas plat 8 Inch, pada
temperature 28,20 oC dan variasi jarak (2 cm - 16 cm) dengan penambahan jarak
sensor terhadap plat sebesar 1 cm. Hasil pengamatan ditunjukan dalam gambar
4.7 di bawah ini :

39
0
500
1000
1500
2000
2500
3000
3500
4000
0 5 10 15 20
Kap
asit
ansi
(a.
u)
Jarak (cm)
Plat 8 Inch
(a) (b) Grafik 4.7 (a) Pengaruh jarak terhadap luas plat 8 Inch; (b) Hasil fitting regresi untuk
luas plat 8 Inch
Berdasarkan hasil pengamatan yang ditunjukan pada gambar 4.7.(a) bahwa
pada jarak (2-15) cm terjadi linieritas. Daerah ini merupakan daerah kerja sensor,
artinya sensor memberikan respon pada daerah tersebut. Sedangkan pada jarak
(15-16) cm terjadi saturasi (konstan), yang artinya sensor tidak dapat bekerja pada
daerah tersebut.
Pengaruh jarak terhadap plat aluminium pada daerah (2-15) cm
menunjukan nilai kapasitansi (C) menurun secara linier seiring dengan
penambahan jarak. Dengan kata lain bahwa semakin besar jarak (d) maka semakin
kecil nilai kapasitansi (C) yang dihasilkan. Hasil ini diperkuat dengan fitting
regresi linier (1/x) yang dintunjukan pada gambar 4.7.(b), yaitu: y = 8899,4 x +
244,45 dengn tingkat kepercayaan 0,8352. Hal ini sesuai dengan persamaan 2-7
bahwa kapasitif sama dengan luas plat dibagi dengan jarak (𝐶 =𝐴
𝑑 ) makna
y = 7999.6x + 163.41R² = 0.9491
0
500
1000
1500
2000
2500
3000
3500
4000
4500
0 0.2 0.4 0.6
Kap
asit
ansi
(a.
u)
Jarak (cm)
Fitting Regresi Linear 1/x
40
fisisnya adalah nilai kapasitansi berbanding terbalik terhadap jarak, yaitu semakin
besar jarak (d) maka semakin kecil nilai kapasitansi (C).
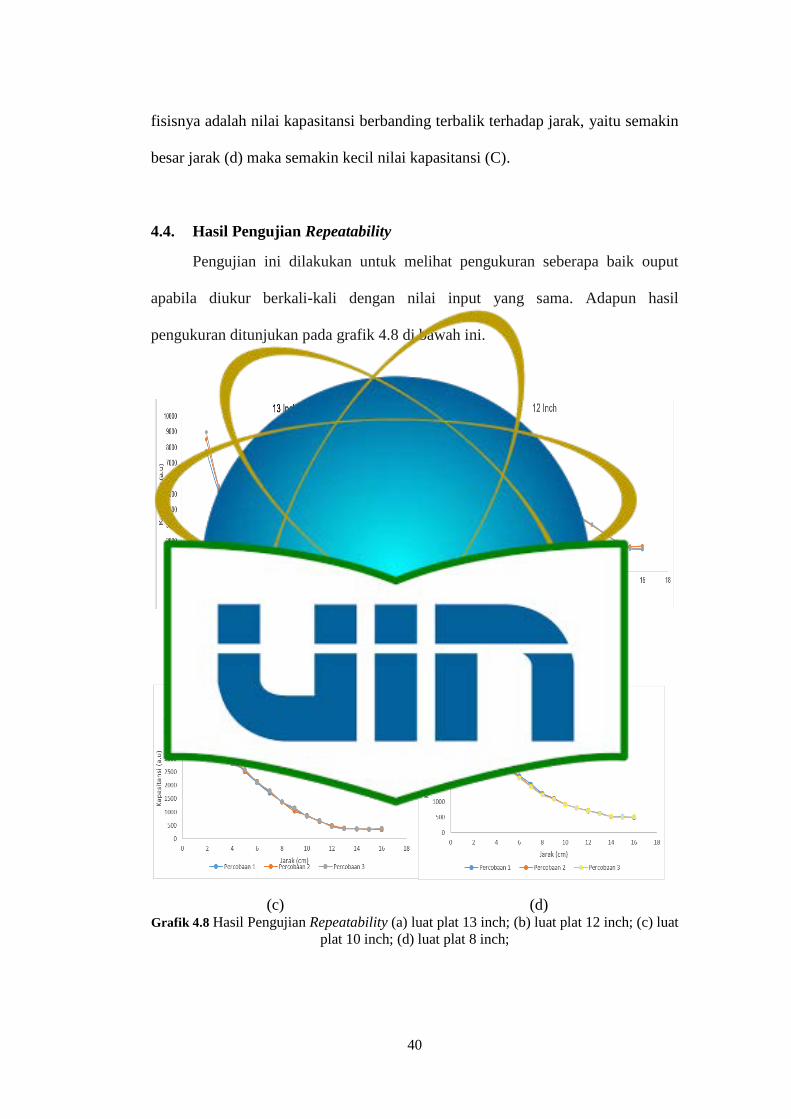
4.4. Hasil Pengujian Repeatability
Pengujian ini dilakukan untuk melihat pengukuran seberapa baik ouput
apabila diukur berkali-kali dengan nilai input yang sama. Adapun hasil
pengukuran ditunjukan pada grafik 4.8 di bawah ini.
(a) (b)
(c) (d) Grafik 4.8 Hasil Pengujian Repeatability (a) luat plat 13 inch; (b) luat plat 12 inch; (c) luat
plat 10 inch; (d) luat plat 8 inch;

41
Pengukuran sebanyak 3 kali dengan nilai input yang sama menghasilkan
nilai kapasitansi yang sama seperti ditunjukan pada grafik 4.8. Hal ini
menunjukan bahwa system sensor yang telah dibangun memiliki repeatability
yang sangat baik.
4.4. Grafik Dimensi Setiap Plat (1/jarak)
Perhitungan 1/jarak ini untuk memperkuat hasil pengamatan pengaruh jarak
terhadap plat. Hasil perhitungan ditunjukan pada grafik 4.9 di bawah ini:
Grafik 4.9 Grafik Dimensi Setiap Plat (1/cm)
Grafik 4.9 menunjukan bahwa untuk luas plat 13 Inch memiliki nilai rata-
rata kapasitansi terbesar 8450,68 a.u, luas plat 12 Inch memiliki rata-rata nilai
kapasitansi terbesar 6002,42 a.u, luas plat 10 Inch memiliki nilai rata-rata
kapasitansi terbesar 4062,03 a.u dan luas plat 8 Inch memiliki rata-rata nilai
kapasitansi terbesar 3724,60 a.u. Jadi, dapat disimpulkan bahwa semakin besar
luas plat kapasitif (A) maka semakin besar pula nilai kapasitansi (C).
0
1000
2000
3000
4000
5000
6000
7000
8000
9000
0 0.1 0.2 0.3 0.4 0.5 0.6
Kap
asit
ansi
(a.
u)
Jarak (1/cm)13 Inch 12 Inch 10 Inch 8 Inch
42
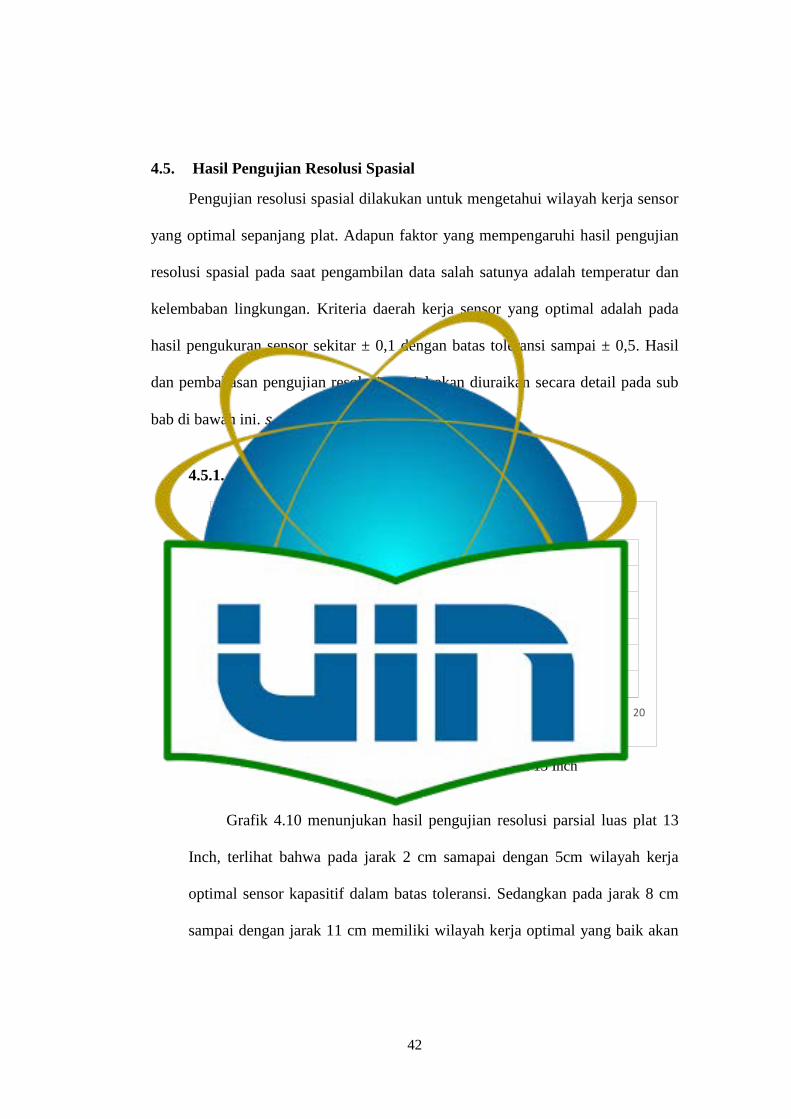
4.5. Hasil Pengujian Resolusi Spasial
Pengujian resolusi spasial dilakukan untuk mengetahui wilayah kerja sensor
yang optimal sepanjang plat. Adapun faktor yang mempengaruhi hasil pengujian
resolusi spasial pada saat pengambilan data salah satunya adalah temperatur dan
kelembaban lingkungan. Kriteria daerah kerja sensor yang optimal adalah pada
hasil pengukuran sensor sekitar ± 0,1 dengan batas toleransi sampai ± 0,5. Hasil
dan pembahasan pengujian resolusi spasial akan diuraikan secara detail pada sub
bab di bawah ini. 𝑠𝑛(𝑑)
4.5.1. Grafik Resolusi Spasial Plat 13 Inch
Grafik 4.10 Grafik Resolusi Spasial Plat 13 Inch
Grafik 4.10 menunjukan hasil pengujian resolusi parsial luas plat 13
Inch, terlihat bahwa pada jarak 2 cm samapai dengan 5cm wilayah kerja
optimal sensor kapasitif dalam batas toleransi. Sedangkan pada jarak 8 cm
sampai dengan jarak 11 cm memiliki wilayah kerja optimal yang baik akan
0
0.5
1
1.5
2
2.5
3
0 5 10 15 20
Pen
guku
ran
sen
sor 𝑠𝑛
(𝑑)
Jarak (cm)
Plat 13 Inch

43
tetapi daerah ini bukan daerah kerja sensor. Jadi, system sensor kapasitif
tetap dapat digunakan dengan hasil dan presisi yang baik.
4.5.2. Grafik Resolusi Spasial Plat 12 Inch
Grafik 4.11 Grafik Resolusi Spasial Plat 12 Inch
Grafik 4.11 menunjukan hasil pengujian resolusi parsial luas plat 12
Inch, terlihat bahwa pada jarak 2 cm samapai dengan 10 cm wilayah kerja
optimal sensor kapasitif. Sedangkan jarak sekitar 12 cm memiliki nilai
resolusi spasial diluar batas toleransi, akan tetapi jarak 12 cm sampai
dengan jarak 16 cm memiliki wilayah kerja optimal yang baik akan tetapi
daerah ini bukan daerah kerja sensor. Berdasarkan hasil tersebut, sistem
sensor kapasitif dapat digunakan dengan hasil dan presisi yang baik.
0
0.5
1
1.5
2
2.5
3
0 5 10 15 20
Pen
guku
ran
sen
sor 𝑠𝑛
(𝑑)
Jarak (cm)
Plat 12 Inch

44
4.5.3. Grafik Resolusi Spasial Plat 10 Inch
Grafik 4.12 Grafik Resolusi Spasial Plat 10 Inch
Grafik 4.12 menunjukan hasil pengujian resolusi parsial luas plat 10
Inch, terlihat bahwa pada jarak 2 cm samapai dengan 12 cm wilayah kerja
optimal sensor kapasitif. Sedangkan pada jarak 13 cm sampai dengan jarak
16 cm memiliki wilayah kerja diluar batas toleransi. Hasil tersebut
menunjukan bahwa sistem sensor kapasitif dapat digunakan dengan hasil
dan presisi yang baik.
4.5.4. Grafik Resolusi Spasial Plat 8 Inch
0
0.5
1
1.5
2
2.5
3
0 5 10 15 20
Pen
guku
ran
sen
sor 𝑠𝑛
(𝑑)
Jarak (cm)
Plat 10 Inch
0
0.5
1
1.5
2
2.5
3
0 5 10 15 20
Pen
guku
ran
sen
sor
sn(d
)
Jarak (cm)
Plat 8 Inch
45
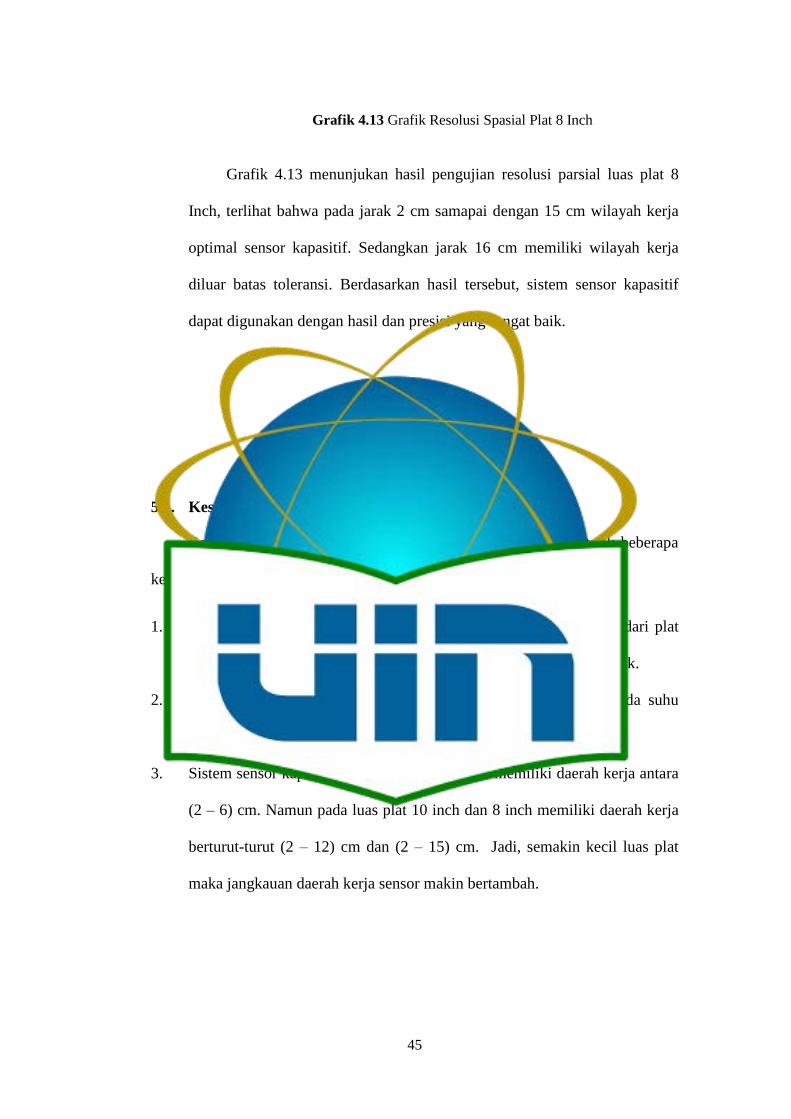
Grafik 4.13 Grafik Resolusi Spasial Plat 8 Inch
Grafik 4.13 menunjukan hasil pengujian resolusi parsial luas plat 8
Inch, terlihat bahwa pada jarak 2 cm samapai dengan 15 cm wilayah kerja
optimal sensor kapasitif. Sedangkan jarak 16 cm memiliki wilayah kerja
diluar batas toleransi. Berdasarkan hasil tersebut, sistem sensor kapasitif
dapat digunakan dengan hasil dan presisi yang sangat baik.
BAB V
KESIMPULAN DAN SARAN
5.1. Kesimpulan
Berdasarkan hasil yang didapat pada penelitian ini, dapat ditarik beberapa
kesimpulan sebagai berikut :
1. Telah berhasil dibuat prototype system sensor kapasitif touchless dari plat
alumunium dengan hasil repeatability dan resolusi spasial sangat baik.
2. Sistem sensor kapasitif touchless secara umum dapat bekerja pada suhu
lingkungan antara 25 oC sampai dengan 30 oC.
3. Sistem sensor kapasitif touchless secara umum memiliki daerah kerja antara
(2 – 6) cm. Namun pada luas plat 10 inch dan 8 inch memiliki daerah kerja
berturut-turut (2 – 12) cm dan (2 – 15) cm. Jadi, semakin kecil luas plat
maka jangkauan daerah kerja sensor makin bertambah.

46
5.2. Saran
Adapun saran untuk pengembangan penelitian selanjutnya terkait sensor
kapasitif touchless adalah sebagai berikut :
1. Ukuran luas plat agar dibuat blok-blok kecil dan disusun seperti lantai.
2. Ada pengembangan lebih lanjut, seperti karakterisasi dinamik dan
aplikasinya.

47
DAFTAR PUSTAKA
[1] "Touchscreen," 3 September 2019. [Online]. Available:
https://en.m.wikipedia.org/wiki/Touchscreen. [Accessed 16 Desember 2019].
[2] "Touch user interface," 13 desember 2019. [Online]. Available:
https://en.wikipedia.org/wiki/Touch_user_interface. [Accessed 20 januari 2020].
[3] Dapartement of Applied I.T. CHALMERS UNIVERSITY OF TECHNOLOGY
Gothenburg, Sweden, "A Natural User Interface and Touchless Interaction
Approach on Web Browsing," 2013.
[4] Thomas G. Zimmerman et. all, "Applying Electric Field Sensing to Human-
Computer Interface," 1995.
[5] Fatemeh Aezinia et. all, "Three Dimensional Touchless Tracking of Objects Using
Integrated Capacitive Sensors," vol. 58, 2012.
[6] Fan Xia and Behraad Bahreyni, "Multi-Functional Capacitive Proximity Sensing
System for Industrial Safety Applications," 2016.
[7] "Medan Listrik," 6 September 2019. [Online]. Available:
http://id.wikipedia.org/wiki/medan_listrik . [Accessed 10 februari 2020].
[8] D. E. Umar, Buku Pintar Fisika, Jakarta: Media Pusindo, 2008.
[9] D. C. Giancoli, Fisika Edisi Kelima, Jakarta: Erlangga, 2001.
[10] B. M. E. J. &. T. K. Priyambodo, Fisika Dasar Listrik, Magnet, Optika Fisika
Modern, Yogyakarta: C.V ANDI OFFSET, 2010.
[11] A. Pramanik, ELECTROMAGNETISM : THEORY AND APPLICATION, 2nd
Ed, New Delhi: Asoke K. Ghosh. PHI Learning Private Limited, 2009.
[12] "Kondensator," 16 Oktober 2019. [Online]. Available: [12
48
https://id.wikipedia.org/wiki/Kondensator. [Accessed 5 Februari 2020].
[13] "Capacitor," 5 Juni 2004. [Online]. Available:
https://en.m.wikipedia.org/wiki/Capacitor. [Accessed 10 Februari 2020].
[14] “Ultrasonik,” [Online]. Available: https://eprints.polsri.ac.id]. [Diakses 10 Februari
2020].
[15] "Sensor Ultrasonik hc-sr04," 2016. [Online]. Available:
http://www.google.com/sensorultrasonikhc-sr04. [Accessed 10 Februari 2020].
[16] “cara-kerja-dan-karakteristik-sensor-ultrasonic-hcsr04,” [Online]. Available:
https://www.andalanelektro.id/2018/09/cara-kerja-dan-karakteristik-sensor-
ultrasonic-hcsr04.html.. [Diakses 10 Februari 2020].
[17] A. M. A. S. V. P. T. Krishnamohan, "Human following Trolley - Auto Walker,"
2016.
[18] “hc-sr04-datasheet,” [Online]. Available: https://www.electroschematics.com/hc-
sr04-datasheet/. [Diakses 10 februari 2020].
[19] “arduino-uno-rev3,” [Online]. Available: https://store.arduino.cc/usa/arduino-uno-
rev3. [Diakses 15 februari 2020].
[20] “DHT-22,” [Online]. Available: https://repository.usu.ac.id. [Diakses 15 febuari
2020].
[21] “dht22-sensors-temperature-and-humidity-tutorial-using-arduino,” [Online].
Available: https://howtomechatronics.com/tutorials/arduino/dht11-dht22-sensors-
temperature-and-humidity-tutorial-using-arduino/. [Diakses 15 februari 2020].
[22] “datasheets Sensors Temperature DHT22,” [Online]. Available:
www.sparkfun.com/datasheets/Sensors/Temperature/DHT22.pdfAosongElectronic
sCo.,Ltd. [Diakses 16 februari 2020].
[23] H. N. Holmes, “The story of aluminum,” 1930.
[24] emira eldina ihsan, gusdikal candra, nandi firdaus, setri delvita sari, ananda
outra/kimia universitas negeri padang, “Aluminium”.
[25] "paduan alumunium," [Online]. Available: https://repository.untag-sby.ac.id].
[Accessed 16 februari 2020].
[26] "Arduino Board LilyPad," [Online]. Available:
https://www.arduino.cc/en/Main/ArduinoBoardLilyPad/]. [Accessed 16 februari
2020].

49
LAMPIRAN
Hasil Pengujian Respon Sensor Terhadap Temperatur
Lplat (Inch)
Tr (ᵒC)
Tp (ᵒC)
Humidity (%)
Kec Resp (ms)
Jarak (cm)
Kapasitansi (a.u)
12 30 30 82.86 461 5 7965.88
12 29 29 79.78 524 5 6097.514
12 28 28 77.20 503 5 4438.166
12 27 27 73.32 420 5 3282.366
12 26 26 69.13 520 5 2590.115
12 25 25 67.50 416 5 2458.57
12 24 24 65.48 366 5 2123.9
12 23 23 63.52 300 5 2060.322
12 22 22 61.61 246 5 1998.369
12 21 21 56.68 228 5 1838.461
Hasil Pengaruh Jarak Terhadap Luas Plat 13 Inch
50
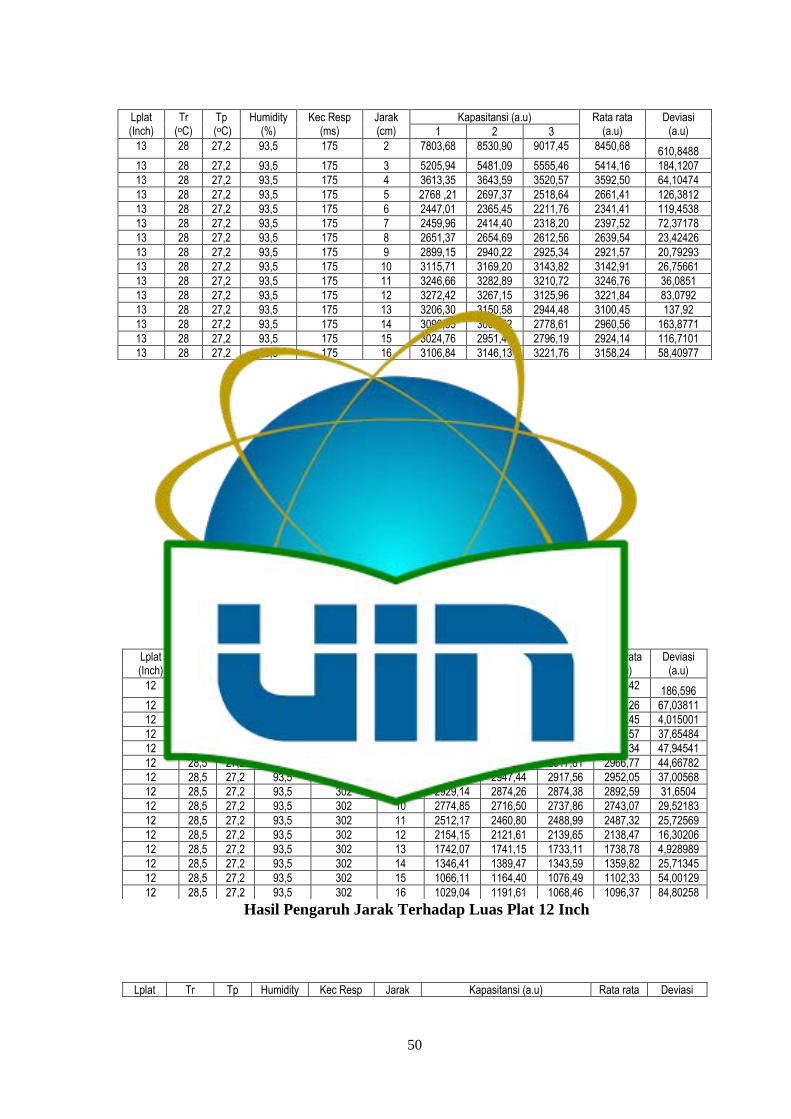
Hasil Pengaruh Jarak Terhadap Luas Plat 12 Inch
Lplat (Inch)
Tr (ᵒC)
Tp (ᵒC)
Humidity (%)
Kec Resp (ms)
Jarak (cm)
Kapasitansi (a.u) Rata rata (a.u)
Deviasi (a.u) 1 2 3
13 28 27,2 93,5 175 2 7803,68 8530,90 9017,45 8450,68 610,8488
13 28 27,2 93,5 175 3 5205,94 5481,09 5555,46 5414,16 184,1207
13 28 27,2 93,5 175 4 3613,35 3643,59 3520,57 3592,50 64,10474
13 28 27,2 93,5 175 5 2768 ,21 2697,37 2518,64 2661,41 126,3812
13 28 27,2 93,5 175 6 2447,01 2365,45 2211,76 2341,41 119,4538
13 28 27,2 93,5 175 7 2459,96 2414,40 2318,20 2397,52 72,37178
13 28 27,2 93,5 175 8 2651,37 2654,69 2612,56 2639,54 23,42426
13 28 27,2 93,5 175 9 2899,15 2940,22 2925,34 2921,57 20,79293
13 28 27,2 93,5 175 10 3115,71 3169,20 3143,82 3142,91 26,75661
13 28 27,2 93,5 175 11 3246,66 3282,89 3210,72 3246,76 36,0851
13 28 27,2 93,5 175 12 3272,42 3267,15 3125,96 3221,84 83,0792
13 28 27,2 93,5 175 13 3206,30 3150,58 2944,48 3100,45 137,92
13 28 27,2 93,5 175 14 3096,55 3006,52 2778,61 2960,56 163,8771
13 28 27,2 93,5 175 15 3024,76 2951,47 2796,19 2924,14 116,7101
13 28 27,2 93,5 175 16 3106,84 3146,13 3221,76 3158,24 58,40977
Lplat (Inch)
Tr (ᵒC)
Tp (ᵒC)
Humidity (%)
Kec Resp (ms)
Jarak (Cm)
Kapasitansi (a.u) Rata rata (a.u)
Deviasi (a.u) 1 2 3
12 28,5 27,2 93,5 302 2 5932,42 5860,94 6213,89 6002,42 186,596
12 28,5 27,2 93,5 302 3 4482,32 4458,08 4584,40 4508,26 67,03811
12 28,5 27,2 93,5 302 4 3638,47 3634,45 3630,44 3634,45 4,015001
12 28,5 27,2 93,5 302 5 3212,53 3210,06 3146,11 3189,57 37,65484
12 28,5 27,2 93,5 302 6 3045,08 3032,49 2956,46 3011,34 47,94541
12 28,5 27,2 93,5 302 7 3005,30 2977,20 2917,81 2966,77 44,66782
12 28,5 27,2 93,5 302 8 2991,14 2947,44 2917,56 2952,05 37,00568
12 28,5 27,2 93,5 302 9 2929,14 2874,26 2874,38 2892,59 31,6504
12 28,5 27,2 93,5 302 10 2774,85 2716,50 2737,86 2743,07 29,52183
12 28,5 27,2 93,5 302 11 2512,17 2460,80 2488,99 2487,32 25,72569
12 28,5 27,2 93,5 302 12 2154,15 2121,61 2139,65 2138,47 16,30206
12 28,5 27,2 93,5 302 13 1742,07 1741,15 1733,11 1738,78 4,928989
12 28,5 27,2 93,5 302 14 1346,41 1389,47 1343,59 1359,82 25,71345
12 28,5 27,2 93,5 302 15 1066,11 1164,40 1076,49 1102,33 54,00129
12 28,5 27,2 93,5 302 16 1029,04 1191,61 1068,46 1096,37 84,80258
Lplat Tr Tp Humidity Kec Resp Jarak Kapasitansi (a.u) Rata rata Deviasi
51
Hasil Pengaruh Jarak Terhadap Luas Plat 10 Inch
Hasil Pengaruh Jarak Terhadap Luas Plat 8 Inc
Grafik LeastSquare 1/Jarak Pada setiap plat
y = 11066x + 1718.3R² = 0.7488
0
2000
4000
6000
8000
10000
0 0.1 0.2 0.3 0.4 0.5 0.6
Kap
asit
ansi
(a.
u)
Jarak (1/cm)
Plat 13 Inch
(Inch) (ᵒC) (ᵒC) (%) (ms) (Cm) 1 2 3 (a.u) (a.u)
10 28,15 27,5 92,00 292 2 4060,02 4099,89 4026,19 4062,03 36,89123
10 28,15 27,5 92,00 292 3 3500,47 3354,31 3442,76 3432,51 73,61679
10 28,15 27,5 92,00 292 4 2986,05 2976,43 2814,54 2925,67 96,36441
10 28,15 27,5 92,00 292 5 2516,76 2552,86 2589,24 2552,95 36,24009
10 28,15 27,5 92,00 292 6 2092,59 2146,68 2112,45 2117,24 27,36129
10 28,15 27,5 92,00 292 7 1713,56 1745,20 1798,34 1752,37 42,84195
10 28,15 27,5 92,00 292 8 1379,65 1375,47 1382,28 1379,13 3,434273
10 28,15 27,5 92,00 292 9 1090,86 1026,78 1158,25 1091,96 65,74194
10 28,15 27,5 92,00 292 10 847,21 874,96 850,96 857,71 15,05614
10 28,15 27,5 92,00 292 11 648,68 650,92 677,86 659,15 16,23912
10 28,15 27,5 92,00 292 12 495,28 487,32 450,90 477,83 23,66207
10 28,15 27,5 92,00 292 13 387,01 398,76 377,26 387,68 10,76549
10 28,15 27,5 92,00 292 14 360, 24 365,14 369,87 367,51 3,344615
10 28,15 27,5 92,00 292 15 350,57 358,02 354,92 354,50 3,742437
10 28,15 27,5 92,00 292 16 332,96 350,65 381,69 355,10 24,6679
Lplat (Inch)
Tr (ᵒC)
Tp (ᵒC)
Humidity (%)
Kec Resp (ms)
Jarak (Cm)
Kapasitansi (a.u) Rata rata (a.u)
Deviasi (a.u) 1 2 3
8 28.5 28.5 74.40 427 2 3718.638 3748.387 3706.795 3724.607 21,297
8 28.5 28.5 74.40 427 3 3128.215 3006.215 3012.127 3048.852 68,794
8 28.5 28.5 74.40 427 4 2436.443 2395.023 2360.916 2397.46 37,822
8 28.5 28.5 74.40 427 5 2069.018 2089.708 2059.595 2072.773 15,404
8 28.5 28.5 74.40 427 6 1846.87 1808.086 1776.073 1810.343 35,452
8 28.5 28.5 74.40 427 7 1575.455 1514.012 1492.239 1527.235 43,155
8 28.5 28.5 74.40 427 8 1271.247 1242.008 1227.489 1246.915 22,288
8 28.5 28.5 74.40 427 9 1108.686 1109.795 1087.367 1101.95 12,641
8 28.5 28.5 74.40 427 10 912.042 916.6022 910.4581 913.0341 3,190
8 28.5 28.5 74.40 427 11 801.0276 803.4307 809.6483 804.7022 4,449
8 28.5 28.5 74.40 427 12 700.2436 716.3492 708.0111 708.2013 8,054
8 28.5 28.5 74.40 427 13 626.715 609.7937 616.6895 617.7327 8,509
8 28.5 28.5 74.40 427 14 514.7085 524.488 527.9202 522.3722 6,855
8 28.5 28.5 74.40 427 15 508.1358 496.4487 500.6265 501.737 5,922
8 28.5 28.5 74.40 427 16 487.221 503.7865 503.764 498.2572 9,558

52
Grafik Error Bar Pada Setiap Plat Kapasitif
y = 10074x + 1189.4R² = 0.8861
0
1000
2000
3000
4000
5000
6000
7000
0 0.1 0.2 0.3 0.4 0.5 0.6
Kap
asit
ansi
(a.
u)
Jarak (1/cm)
Plat 12 Inch
y = 9623.1x - 9.1109R² = 0.8949
0
1000
2000
3000
4000
5000
6000
0 0.1 0.2 0.3 0.4 0.5 0.6
Kap
asit
ansi
(a.
u)
Jarak (1/cm)
Plat 10 Inch
y = 7999.6x + 163.41R² = 0.9491
0
1000
2000
3000
4000
5000
0 0.1 0.2 0.3 0.4 0.5 0.6
Kap
asit
ansi
(a.
u)
Jarak (1/cm)
Plat 8 Inch
0
2000
4000
6000
8000
10000
0 5 10 15 20
kap
asit
ansi
(a.
u)
Jarak (cm)
Plat 13 Inch
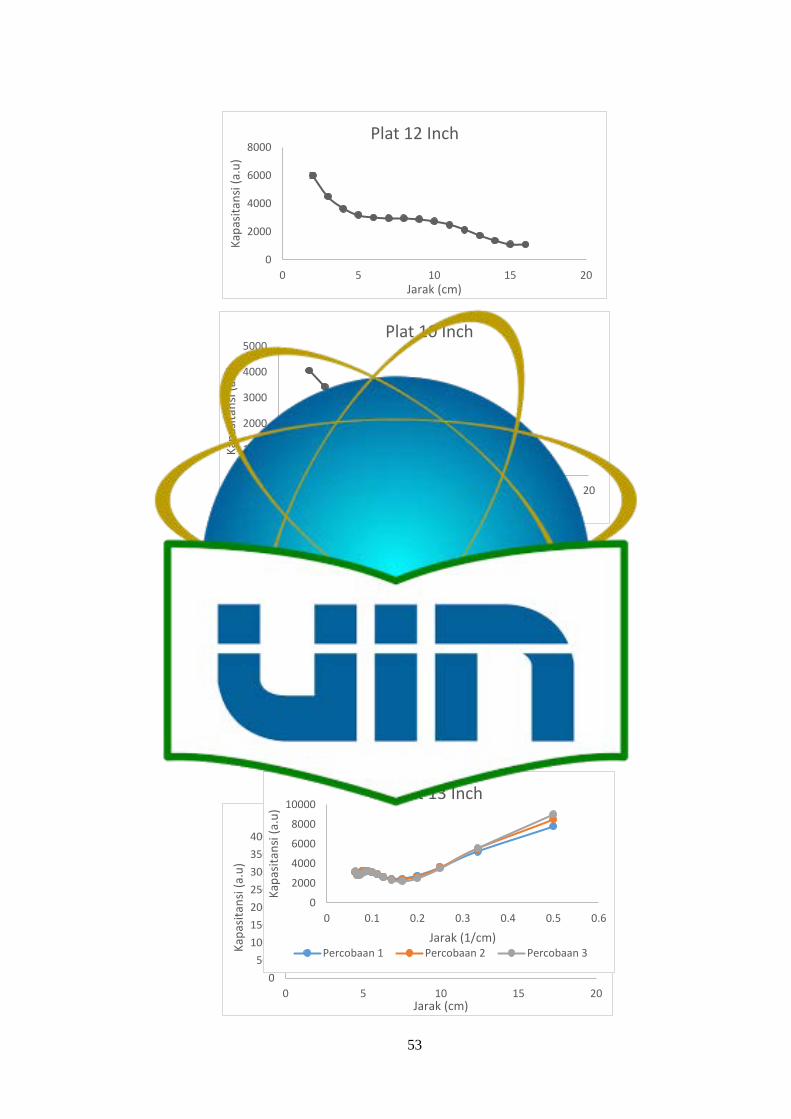
53
0
500
1000
1500
2000
2500
3000
3500
4000
0 5 10 15 20
Kap
asit
ansi
(a.
u)
Jarak (cm)
Plat 8 Inch
Grafik uji pengulangan (1/jarak)
0
2000
4000
6000
8000
0 5 10 15 20
Kap
asit
ansi
(a.
u)
Jarak (cm)
Plat 12 Inch
0
1000
2000
3000
4000
5000
0 5 10 15 20
Kap
asit
ansi
(a.
u)
Jarak (cm)
Plat 10 Inch
0
2000
4000
6000
8000
10000
0 0.1 0.2 0.3 0.4 0.5 0.6
Kap
asit
ansi
(a.
u)
Jarak (1/cm)
Plat 13 Inch
Percobaan 1 Percobaan 2 Percobaan 3

54
0
2000
4000
6000
8000
0 0.1 0.2 0.3 0.4 0.5 0.6
Kap
asit
ansi
(a.
u)
Jarak (1/cm)
Plat 12 Inch
Percobaan 1 Percobaan 2 Percobaan 3
0
2000
4000
6000
0 0.1 0.2 0.3 0.4 0.5 0.6
Kap
asit
ansi
(a.
u)
Jarak (1/cm)
Plat 10 Inch
Percobaan 1 Percobaan 2 Percobaan 3
0
1000
2000
3000
4000
0 0.1 0.2 0.3 0.4 0.5 0.6
Kap
asit
ansi
(a.
u)
Jarak (1/cm)
Plat 8 Inch
Percobaan 1 Percobaan 2 Percobaan 3