Journal of Multimedia - CiteSeerX
148
Journal of Multimedia ISSN 1796-2048 Volume 9, Number 2, February 2014 Contents REGULAR PAPERS Beef Marbling Image Segmentation Based on Homomorphic Filtering Bin Pang, Xiao Sun, Deying Liu, and Kunjie Chen Semantic Ontology Method of Learning Resource based on the Approximate Subgraph Isomorphism Zhang Lili and Jinghua Ding Trains Trouble Shooting Based on Wavelet Analysis and Joint Selection Feature Classifier Yu Bo, Jia Limin, Ji Changxu, Lin Shuai, and Yun Lifen Massive Medical Images Retrieval System Based on Hadoop YAO Qing-An, ZHENG Hong, XU Zhong-Yu, WU Qiong, LI Zi-Wei, and Yun Lifen Kinetic Model for a Spherical Rolling Robot with Soft Shell in a Beeline Motion Zhang Sheng, Fang Xiang, Zhou Shouqiang, and Du Kai Coherence Research of Audio-Visual Cross-Modal Based on HHT Xiaojun Zhu, Jingxian Hu, and Xiao Ma Object Recognition Algorithm Utilizing Graph Cuts Based Image Segmentation Zhaofeng Li and Xiaoyan Feng Semi-Supervised Learning Based Social Image Semantic Mining Algorithm AO Guangwu and SHEN Minggang Research on License Plate Recognition Algorithm based on Support Vector Machine Dong ZhengHao and FengXin Adaptive Super-Resolution Image Reconstruction Algorithm of Neighborhood Embedding Based on Nonlocal Similarity Junfang Tang and Xiandan Xu An Image Classification Algorithm Based on Bag of Visual Words and Multi-kernel Learning LOU Xiong-wei, HUANG De-cai, FAN Lu-ming, and XU Ai-jun Clustering Files with Extended File Attributes in Metadata Lin Han, Hao Huang, Changsheng Xie, and Wei Wang Method of Batik Simulation Based on Interpolation Subdivisions Jian Lv, Weijie Pan, and Zhenghong Liu Research on Saliency Prior Based Image Processing Algorithm Yin Zhouping and Zhang Hongmei A Novel Target-Objected Visual Saliency Detection Model in Optical Satellite Images Xiaoguang Cui, Yanqing Wang, and Yuan Tian A Unified and Flexible Framework of Imperfect Debugging Dependent SRGMs with Testing-Effort Ce Zhang, Gang Cui, Hongwei Liu, Fanchao Meng, and Shixiong Wu A Web-based Virtual Reality Simulation of Mounting Machine Lan Li 189 196 207 216 223 230 238 245 253 261 269 278 286 294 302 310 318
-
Upload
khangminh22 -
Category
Documents
-
view
1 -
download
0
Transcript of Journal of Multimedia - CiteSeerX

Journal of Multimedia
ISSN 1796-2048
Volume 9, Number 2, February 2014
Contents
REGULAR PAPERS
Beef Marbling Image Segmentation Based on Homomorphic Filtering
Bin Pang, Xiao Sun, Deying Liu, and Kunjie Chen
Semantic Ontology Method of Learning Resource based on the Approximate Subgraph Isomorphism
Zhang Lili and Jinghua Ding
Trains Trouble Shooting Based on Wavelet Analysis and Joint Selection Feature Classifier
Yu Bo, Jia Limin, Ji Changxu, Lin Shuai, and Yun Lifen
Massive Medical Images Retrieval System Based on Hadoop
YAO Qing-An, ZHENG Hong, XU Zhong-Yu, WU Qiong, LI Zi-Wei, and Yun Lifen
Kinetic Model for a Spherical Rolling Robot with Soft Shell in a Beeline Motion Zhang Sheng, Fang Xiang, Zhou Shouqiang, and Du Kai
Coherence Research of Audio-Visual Cross-Modal Based on HHT
Xiaojun Zhu, Jingxian Hu, and Xiao Ma
Object Recognition Algorithm Utilizing Graph Cuts Based Image Segmentation
Zhaofeng Li and Xiaoyan Feng
Semi-Supervised Learning Based Social Image Semantic Mining Algorithm
AO Guangwu and SHEN Minggang
Research on License Plate Recognition Algorithm based on Support Vector Machine Dong ZhengHao and FengXin
Adaptive Super-Resolution Image Reconstruction Algorithm of Neighborhood Embedding Based on
Nonlocal Similarity
Junfang Tang and Xiandan Xu
An Image Classification Algorithm Based on Bag of Visual Words and Multi-kernel Learning
LOU Xiong-wei, HUANG De-cai, FAN Lu-ming, and XU Ai-jun
Clustering Files with Extended File Attributes in Metadata
Lin Han, Hao Huang, Changsheng Xie, and Wei Wang
Method of Batik Simulation Based on Interpolation Subdivisions
Jian Lv, Weijie Pan, and Zhenghong Liu
Research on Saliency Prior Based Image Processing Algorithm
Yin Zhouping and Zhang Hongmei
A Novel Target-Objected Visual Saliency Detection Model in Optical Satellite Images
Xiaoguang Cui, Yanqing Wang, and Yuan Tian
A Unified and Flexible Framework of Imperfect Debugging Dependent SRGMs with Testing-Effort
Ce Zhang, Gang Cui, Hongwei Liu, Fanchao Meng, and Shixiong Wu
A Web-based Virtual Reality Simulation of Mounting Machine
Lan Li
189
196
207
216
223
230
238
245
253
261
269
278
286
294
302
310
318

Improved Extraction Algorithm of Outside Dividing Lines in Watershed Segmentation Based on PSO
Algorithm for Froth Image of Coal Flotation Mu-ling TIAN and Jie-ming Yang
325

Beef Marbling Image Segmentation Based on
Homomorphic Filtering
Bin Pang, Xiao Sun, Deying Liu, and Kunjie Chen* College of Engineering, Nanjing Agricultural University, Nanjing 210031, China
*Corresponding author, Email: [email protected]
Abstract—In order to reduce the influence of uneven
illumination and reflect light for beef accurate segmentation,
a beef marbling segmentation method based on
homomorphic filtering was introduced. Aiming at the beef
rib-eye region images in the frequency domain,
homomorphic filter was used for enhancing gray, R, G and
B 4 chroma images. Then the impact of high frequency /low
frequency gain factors on the accuracy of beef marbling
segmentation was investigated. Appropriate values of gain
factors were determined by the error rate of beef marbling
segmentation, and the results of error rate were analyzed
comparing to the results without homomorphic filtering.
The experimental results show that the error rates of beef
marbling segmentation was remarkably reduced with low
frequency gain factor of 0.6 and high frequency gain factor
of 1.425; Compared with other chroma images, the average
error rate (5.38%) of marbling segmentation in G chroma
image was lowest; Compared to the result without
homomorphic filtering, the average error rate in G chroma
image has decreased by 3.73%.
Index Terms—Beef; Marbling; Homomorphic Filter; Image
Segmentation
I. INTRODUCTION
Beef color, marbling and surface texture are key
factors used by trained expert graders to classify beef
quality [1]. Of all factors, the beef marbling score is
regarded as the most important indicator [2]. The
Ministry of Agriculture of the People's Republic of China
has defined four grades of beef marbling and correspondingly published standard marbling score
photographs. Referring to the standard photographs,
graders determine the abundance of intramuscular fat in
rib-eye muscle and then label the marbling score [3].
Since the classification of beef marbling score largely
depends on the subjective visual sensory of graders, the
estimation on the same beef region may differ. Therefore,
developing an objective system of beef marbling grading independent on subjective estimation is imperative in
beef industry.
Beef marbling, which is an important evaluation
indicator in the existing beef quality classification criteria,
is usually determined by the abundance of intramuscular
fat in beef rib-eye region. Machine vision and image
processing technology are considered as the most
effective methods in automatic identification of beef marbling grades [4]. In automatic identification, the first
thing is to precisely segment beef marbling. Numerous
methods for beef marbling image segmentation have been
reported in the past 20 years. For the first time, Ref. [5]
segments the image of beef rib-eye section into fat and
muscle areas by image processing, and then calculates the
total area of fat, and obtains the relationship between fat area and the sensory evaluation results of beef quality.
Ref. [3] proposes a beef marbling image segmentation
method based on grader's vision thresholds and automatic
thresholding to correctly separate the fat flecks from the
muscle in the rib-eye region and then compares the
proposed segmentation method to prior algorithms. Ref.
[6] proposes an algorithm for automatic beef marbling
segmentation according to the marbling features and color characteristics, which uses simple thresholding to
remove background and then uses clustering and
thresholding with contrast enhancement via a customized
grayscale to remove marbling. And the algorithm is
adapted to different environments of image acquisition.
Due to complex and changeable beef marbling, no clear
boundary can be discerned between muscle and fat areas.
Therefore, marbling can hardly be precisely segmented. The results of Ref. [7] show that fuzzy c-mean (FCM)
algorithm functioned well in the segmentation of beef
marbling image with high robustness. On this basis, Ref.
[8] uses a sequence of image processing algorithm to
estimate the content of intramuscular fat in beef
longissimus dorsi and then uses a kernel fuzzy c-means
clustering (KFCM) method to segment the beef image
into lean, fat, and background. Ref. [9] presents a fast modified FCM algorithm for beef marbling segmentation,
suggesting that FCM is highly effective. Ref. [10, 11]
introduces a kind of method to segment the area of
longissimus dorsi and marbling from rib-eye image by
using morphology filter, dilation, erosion and logical
operation. Ref. [12] uses computer image processing
technologies to segment the lean tissue region from beef
rib-eye cross-section image and to extract color features of each image, and then uses BP neural network to
predict the color grade of beef lean tissue. Ref. [13, 16]
establish a kind of predicting models for beef marbling
grading, indicating that beef marbling grades could be
determined by using fractal dimension and image
processing method. Ref. [14] developed a beef image
online acquisition system according to the requirements
of beef automatic grading industry. In order to reduce the calculating time of the system, only Cr chroma image are
JOURNAL OF MULTIMEDIA, VOL. 9, NO. 2, FEBRUARY 2014 189
© 2014 ACADEMY PUBLISHERdoi:10.4304/jmm.9.2.189-195

considered to extract the effective rib-eye region by using
image processing methods. Ref. [15] uses machine vision
and support vector machine (SVM) to determine color
scores of beef fat. And the fat is separated from the rib-
eye by using a sequence of image processing algorithms,
boundary tracking, thresholding and morphological
operation, etc. Then twelve features of fat color are used as inputs to train SVM classifiers. As machine vision
technology aims to objectively assess marbling grades, a
machine vision system will first collect the entire rib-eye
muscle image of a beef sample. Then the sample image
can be segmented into exclusively marbling region and
rib-eye region images with the image processing
algorithm. As a result, marbling features can be computed
according to the processed images, which are more prone to objectively and consistently determine beef marbling
grading compared with visual sensory. However, in
collection of beef rib-eye images, the unfavorable light
and acquisition conditions will unavoidably cause
problems, such as overall darkness, local shadow, and
local reflection, which increase the difficulty in
subsequent marbling segmentation and reduce the
segmentation precision. Homomorphic filtering is a special method that is often
used to remove multiplicative noise. Illumination and
reflectance are not separable, but their approximate
locations in the frequency domain may be located. Since
illumination and reflectance combine multiplicatively, the
components are made additive by taking the logarithm of
the image intensity, so that these multiplicative
components of the image can be separated linearly in the frequency domain. Illumination variations can be thought
of as a multiplicative noise, and can be reduced by
filtering in the log domain. To make the illumination of
an image more even, the high-frequency components are
increased and low-frequency components are decreased,
because the high-frequency components are assumed to
represent mostly the reflectance in the scene (the amount
of light reflected off the object in the scene), whereas the low-frequency components are assumed to represent
mostly the illumination in the scene. That is, high-pass
filtering is used to suppress low frequencies and amplify
high frequencies, in the log-intensity domain. As a result,
the uneven illumination of color images can be
effectively corrected [17-25]. In this paper, homomorphic
filtering is used to correct the non-uniform illumination in
the beef rib-eye region, and thereby the effects of filtering gain factors and 4 chroma images on marbling
segmentation precision are analyzed. Based on this, a
beef marbling segmentation method based on
homomorphic filtering with G chroma image was
introduced.
This paper proposes an accurate beef marbling
segmentation method based on homomorphic filtering
theory, and the specific work is as follows: (a) Homomorphic filtering is a generalized technique
for signal and image processing, involving a nonlinear
mapping to a different domain in which linear filter
techniques are applied, followed by mapping back to the
original domain. Homomorphic filter is sometimes used
for image enhancement. It simultaneously normalizes the
brightness across an image and increases contrast. In
order to find out the optimal chroma image to extract beef
marbling area accurately, homomorphic filtering in this
paper is used respectively to enhance gray, R, G and B 4
chroma images in beef rib-eye region in the frequency
domain and then the beef marbling areas are extracted by Otsu method.
(b) Homomorphic filtering is used to correct the
illumination and reflection variations of beef rib-eye
images, which will affect the beef marbling extraction to
some extent. In order to select appropriate high/low gain
factor values of homomorphic filter to enhance the
contrast ratio in the beef rib-eye region, the impact of
high /low frequency gain factors on the accuracy of beef marbling segmentation is investigated. Corresponding to
different high/low frequency gain factor values of
homomorphic filter, the error rate curves of marbling
segmentation in gray, R, G and B chroma images are
plotted. Then the minimum error rate curves of the 4
chroma images are plotted and the trends of the minimum
error rates corresponding to high/low frequency gain
factors are discussed. (c) In order to achieve the optimal beef marbling
segmentation effect, the segmentation error rates with
different chroma images are analyzed and compared. The
average values of high/low frequency gain factors are
selected to segment marbling. Then the error rate results
with homomorphic filtering are compared to those
without homomorphic filtering.
The rest of paper is organized as follows. The materials and proposed methods are presented in Section
2. Then the impact of homomorphic filter gain factors
and different chroma images on the accuracy of beef
marbling segmentation is discussed in Section 3. Finally,
the conclusions are given in Section 4.
II. PROPOSED METHOD
Under natural illumination, 10 beef rib-eye images
(640×480 pixels) were collected by using a Minolta Z1 digital camera and stored as JPG format in PC. The PC
has a Pentium(R) Daul-Core CPU (basic frequency 2.6
GHz), a memory of 2.0 GB, and an operating system of
Windows XP. Image processing and data analysis are
performed on Matlab software.
Before segmentation, preprocessing is needed to
separate the rib-eye region for subsequent marbling
segmentation. The separation includes threshold setting, regional growth, and morphological processing (details in
Ref. [11]).
Homomorphic filtering is used to correct the uneven
illumination in beef images and thus reduce the effects of
darkness and reflection on subsequent image processing.
This provides a favorable foundation for accurate
segmentation of beef marbling. The principle is as
follows.
In the illumination-reflection model, image ( , )f x y
can be expressed as the product of the illumination
component ( , )i x y and the reflection component ( , )r x y :
190 JOURNAL OF MULTIMEDIA, VOL. 9, NO. 2, FEBRUARY 2014
© 2014 ACADEMY PUBLISHER

( , ) ( , ) ( , )f x y i x y r x y (1)
where 0 ( , )i x y , and 0 ( , ) 1r x y .
First, the logarithm of ( , )f x y is obtained:
( , ) ln ( , )
ln ( , ) ln ( , )
z x y f x y
i x y r x y
(2)
By using Fourier transform, then
[ ( , )] [ln ( , )] [ln ( , )]F z x y F i x y F r x y (3)
or
( , ) ( , ) ( , )Z u v I u v R u v (4)
The filter's transfer function ( , )H u v is designed as:
( , ) ( , ) ( , )
( , ) ( , ) ( , ) ( , )
S u v H u v Z u v
H u v I u v H u v R u v
(5)
By using inverse Fourier transform on ( , )S u v , then:
1
1 1
( , ) [ ( , )]
[ ( , ) ( , )] [ ( , ) ( , )]
s x y F S u v
F H u v I u v F H u v R u v
(6)
Let
1( , ) [ ( , ) ( , )]i x y F H u v I u v (7)
and
1( , ) [ ( , ) ( , )]r x y F H u v R u v (8)
Then equation (6) can be expressed as:
( , ) ( , ) ( , )s x y i x y r x y (9)
Finally, because ( , )z x y is the logarithm of the original
image ( , )f x y , the inverse operation (exponential) can be
used to generate a satisfactory enhanced image, which
can be expressed by ( , )g x y as:
( , )
( , ) ( , )
0 0
( , )
( , ) ( , )
s x y
i x y r x y
g x y e
e e
i x y r x y
(10)
where
( , )
0 ( , ) i x yi x y e
(11)
( , )
0 ( , ) r x yr x y e
(12)
are the illumination component and reflection component
of the output image respectively.
A Gaussian high-pass filter ( , )H u v is selected as the
homomorphic filter's function:
2 2
0( ( , ))/( , ) ( )[1 ]
c D u v D
H L LH u v r r e r
(13)
where 0 ( , )D u v is cut-off frequency, ( , )D u v is the
frequency at point ( , )u v ; c is a constant; (0, )Hr is
high frequency gain factor; (0,1]Lr is low frequency
gain factor. Appropriate values of high/low gain factors
should selected, so as to enhance the contrast ratio of the
image in the beef rib-eye region, sharpen the image edges
and details, and make marbling segmentation more effectively.
The processed beef rib-eye images undergo gray-scale
transformation; then the gray and R, G and B 4 chroma
images undergo the above homomorphic filtering. Otsu
automatic threshold method is used for dividing the rib-
eye region into the target (muscle) and the background
(fat). With the optimal threshold, image ( , )g x y is
binaryzed:
0 ( ( , ) )
( , )255 ( ( , ) )
g x y Tg x y
g x y T
(14)
In order to evaluate the effects of beef marbling
segmentation, the precision of segmentation should be
analyzed. Marbling segmentation error rate Q is defined
as the error ratio of pixel counts between the extracted marbling region after processing and the marbling region
manually segmented from the original image [14]. The
pixel count in the manually segmented marbling region is
expressed as ( , )q x y ; the pixel count in the extracted
marbling region after processing is expressed as ( , )q x y ;
then the beef marbling extraction error rate is calculated
as:
| ( , ) ( , ) |
100%( , )
q x y q x yQ
q x y
(15)
Manual segmentation is performed on Photoshop. The
pixel count in the marbling region is summarized. In
order to reduce manual extraction error, each image is
repeated 3 times to obtain the average value, which is
used as the marbling pixel count by deleting decimal part.
III. RESULTS AND DISCUSSION
A. Beef Marbling Extraction Based on Homomorphic filtering
One image (Fig. 1) is randomly selected from the
collected beef images. After preprocessing as described
in Section 2, the rib-eye image is obtained (Fig. 2). Then the rib-eye image undergoes gray-scale transformation
(Fig. 3) for homomorphic filtering with different
frequency gain factors, and the rib-eye image is showed
in Fig. 4.
Figure 1. Original beef sample image
JOURNAL OF MULTIMEDIA, VOL. 9, NO. 2, FEBRUARY 2014 191
© 2014 ACADEMY PUBLISHER

Figure 2. Beef rib-eye image
Figure 3. Rib-eye gray image
As showed in Fig. 2 and Fig. 3, because of light
insufficiency, the rib-eye image lacks brightness, so the
contrast between marbling and muscle is small and some
tiny marbling is unclear. After homomorphic filtering, the
brightness is improved (Fig. 4a), especially the edges are
sharpened, so the tiny marbling fragments are enhanced.
However, when different values of Lr and Hr are used,
the filtering effects are different. When a small gain
factor is used, the image brightness is too large, while the
contrast between marbling and muscle is significantly
reduced (Fig. 4b), which is unfavorable for subsequent
segmentation. When a large gain factor is used, the high frequency part will be excessively enhanced, so the
brightness decreases (Fig. 4c), which is also unfavorable
for subsequent segmentation. Therefore, appropriate
values of gain factors should be selected to improve beef
marbling segmentation precision.
(a) rL=0.8, rH=1.2
(b) rL=0.2, rH=0.2
(c) rL=0.9, rH=1.8
Figure 4. Rib-eye gray image
(a) R chroma image
(b) G chroma image
(c) B chroma image
(d) Gray chroma image
Figure 5. Rib-eye gray image
192 JOURNAL OF MULTIMEDIA, VOL. 9, NO. 2, FEBRUARY 2014
© 2014 ACADEMY PUBLISHER

B. Selection of Homomorphic Filtering Gain Factors and
Their Effects on Beef Marbling Segmentation Precision
Homomorphic filtering is used to correct the
illumination and reflection components of rib-eye images, which will affect the beef marbling segmentation to some
extent. Appropriate values of homomorphic filtering gain
factors Lr and
Hr are selected, so as to enhance the
contrast ratio in the beef rib-eye region. One image is selected from the 10 images, then the rib-
eye region is segmented as described in Section 2;
different values of Lr and
Hr are selected to construct
different filters. Then the gray, R, G and B 4 chroma
images undergo homomorphic filtering separately. Finally, the marbling is extracted as described in Section
2 and the error rates are calculated as described in Section
2. The results are listed in Fig. 5.
Fig. 5 shows that when Lr is constant, the beef
marbling extraction error rates in the 4 chroma images all slowly decrease firstly and then sharply increase with the
increasing Hr . Each beef marbling segmentation error
rate curve corresponding to each value of Lr shows a
minimum error rate. For instance, in gray chroma image,
when Lr =0.4 and
Hr =0.8, the beef marbling error rate is
minimized to 0.08%.
Then the minimum error rates of the 4 chroma images
under both Lr and Hr are used for obtaining the changing
curves (Fig. 6 and Fig. 7).
Figure 6. Effects of low frequency gain factor on minimum error rate
in beef marbling segmentation
Figure 7. Effects of high frequency gain factor on minimum error rate
in beef marbling segmentation
Fig. 6 shows that with the increase of Lr , the minimum
error rate firstly decreases and then increases, and
concentrates within Lr =0.4-0.8. Fig. 7 shows that with
the increase of Hr , the minimum error rate also firstly
decreases and then increases, and concentrates within
Hr =0.8-1.8. Specifically, for gray chroma image, the
minimum error rate is 0.08% when Lr =0.4 and
Hr =0.8;
for R chroma image, the minimum error rate is 0.05%
when Lr =0.6 and
Hr =1.7; for G throma image, the
minimum error rate is 0.27% when Lr =0.7 and
Hr =1.4;
for B chroma image, the minimum error rate is 0.64%
when Lr =0.7 and
Hr =1.8.
C. Analysis and Comparison of Marbling Segmentation
Error Rates Based on Homomorphic Filtering
The above analysis shows that within Lr =0.4-0.8, and
Hr =0.8-1.8, the gray, R, G and B chroma images after
homomorphic filtering show the minimum error rates,
and therefore, Lr and
Hr are arithmetically averaged to
Lr =0.6 and rH=1.425. The 10 images are preprocessed as
described in Section 2 to segment the beef rib-eye regions;
then a homomorphic filter with Lr of 0.6 and Hr of 1.425
is used for filtering the gray, R, G and B 4 chroma image
and thereby for segmenting marbling area. Finally
equation (15) is used to calculate the error rates of the 4
chroma images for each beef image, and the results are
listed in Table 1.
TABLE I. ERROR RATE IN BEEF MARBLING SEGMENTATION WITH
HOMOMORPHIC FILTERING
Image
No.
Chroma Image
Gray R G B
1 10.97 16.62 6.91 15.59
2 10.24 21.05 0.40 14.41
3 3.38 13.86 7.44 2.97
4 6.56 17.82 4.46 10.91
5 1.41 13.29 10.27 5.99
6 15.02 25.26 4.95 18.97
7 6.85 22.38 5.82 12.57
8 12.77 17.42 9.25 9.86
9 4.45 16.12 1.71 10.36
10 8.48 18.69 2.56 20.03
Mean 8.01 18.25 5.38 12.17
TABLE II. ERROR RATE IN BEEF MARBLING SEGMENTATION
WITHOUT HOMOMORPHIC FILTERING
Image
No.
Chroma Image
Gray R G B
1 11.71 19.87 8.82 15.29
2 20.53 23.29 7.12 15.13
3 13.30 10.83 5.65 14.27
4 22.47 27.82 14.46 20.91
5 12.39 16.48 12.72 10.63
6 14.11 16.37 9.53 22.12
7 17.41 22.56 6.98 16.94
8 12.99 14.78 14.32 13.57
9 9.67 15.96 6.61 18.59
10 14.82 20.16 4.84 23.79
Mean 14.94 18.81 9.11 17.12
Table 1 shows that after homomorphic filtering, the
error rates of all the 4 chroma images are different. The
JOURNAL OF MULTIMEDIA, VOL. 9, NO. 2, FEBRUARY 2014 193
© 2014 ACADEMY PUBLISHER

minimum error rate is from G chroma images, which is
5.38%, significantly lower than gray chroma image
(8.01%), R chroma image (18.25%) and B chroma image
(12.17%), indicating that G image can be used to obtain
the optimal segmentation effect.
Table 2 shows the error rates of beef marbling
extraction without homomorphic filtering (only with Otsu method).
Table 2 shows that without homomorphic filtering, the
minimum error rate is also from G chroma image (9.11%),
significantly lower than the average error rate of gray, R,
or B images. However, the error rates without
homomorphic filtering are all higher than those with
homomorphic filtering. The average error rate in G
chroma images is 3.73% higher than that after filtering, indicating that the beef marbling error rate decreases
significantly after homomorphic filtering.
IV. CONCLUSIONS
(1) After homomorphic filtering, beef rib-eye images
are improved and much tiny marbling is enhanced.
Appropriate values of frequency gain factors should be
selected, which is favorable for precise segmentation of
beef marbling. (2) High/low frequency gain factors both significantly
affect the error rate of beef marbling segmentation. With
the increase of either factor, the minimum error rate
firstly decreases and then increases. When high frequency
gain factor Hr is within 0.8-1.8, and when low frequency
gain factor Lr is within 0.4-0.8, the beef marbling error
rate could get the minimum value.
(3) Lr =0.6 and Hr =1.425 are selected to build a
homomorphic filter to process the beef rib-eye images;
the minimum error rate is from G chroma images, which
is 5.38%, about 3.73% lower than that without
homomorphic filtering. This indicates that with this gain
factor, G images after homomorphic filtering can achieve
the optimal beef marbling segmentation effect.
ACKNOWLEDGMENT
This work was supported by the National Science
Foundation of China under Grant No.31071565 and the
Funding of the Research Program of China Public
Industry under Grant No.201303083.
REFERENCES
[1] P. Jackman, D. W. Sun, et al, “Prediction of beef eating quality from colour, marbling and wavelet texture features,” Meat Science, vol. 80, no. 4, pp. 1273-1281, 2008.
[2] Y. N. Shen, S. H. Kim, et al, “Proteome analysis of bovine longissimus dorsi muscle associated with the marbling score,” Asian-Australasian Journal of Animal Sciences, vol. 25, no. 8, pp. 1083-1088, 2012.
[3] K. Chen, C. Qin, “Segmentation of beef marbling based on vision threshold,” Computers and Electronics in Agriculture, vol. 62, no. 2, pp. 223-230, 2008.
[4] K. Chen, C. Ji, “Research on Techniques for Automated Beef Steak Grading,” Transactions of the Chinese Society
of Agricultural Machinery, vol. 37, no. 3, pp. 153-156, 159, 2006.
[5] T. P. Mcdonald, Y. R. Chen, “Separating connected muscle tissues in images of beef carcass ribeyes,” Transactions of the Asae, vol. 33, no. 6, pp. 2059-2065, 1990.
[6] P. Jackma, D. W. Sun, P. Allen, “Automatic segmentation of beef longissimus dorsi muscle and marbling by an adaptable algorithm,” Meat Science, vol. 83, no. 2, pp. 187-194, 2009.
[7] J. Subbiah, N. Ray, G. A. Kranzler, S. T. Acton, “Computer vision segmentation of the longissimus dorsi for beef quality grading,” Transactions of the ASAE, vol. 47, no. 4, pp. 1261-1268, 2004.
[8] C. J. Du, D. W. Sun, et al, “Development of a hybrid image processing algorithm for automatic evaluation of intramuscular fat content in beef M-longissimus dorsi,” Meat Science, vol. 80, no. 4, pp. 1231-1237, 2004.
[9] J. Qiu, M. Shen, et al. “Beef marbling extraction based on modified fuzzy C-means clustering algorithm,” Transactions of the Chinese Society of Agricultural Machinery, vol. 41, no. 8, pp. 184-188, 2010.
[10] J. Zhao, M. Liu and H. Zhang, “Segmentation of longissimus dorsi and marbling in ribeye imaging based on mathematical morphology,” Transactions of the Chinese Society of Agricultural Engineering, vol. 20, no. 1, pp.
143-146, 2004. [11] K. Chen, C. Qin and C. Ji, “Segmentation Methods Used in
Rib-eye Image of Beef Carcass,” Transactions of the Chinese Society of Agricultural Machinery, vol. 37, no. 6, pp. 155-158, 2006.
[12] K. Chen, X. Sun and Q. Lu, “Automatic color grading of beef lean tissue based on BP neural network and computer vision,” Transactions of the Chinese Society for Agricultural Machinery, vol. 40, no. 4, pp. 173-178, 2009.
[13] K. Chen, G. Wu, M. Yu and D. Liu, “Prediction model of beef marbling grades based on fractal dimension and image
features,” Transactions of the Chinese Society for Agricultural Machinery, vol. 43, no. 5, pp. 147-151, 2012.
[14] B. Pang, X. Sun and D. Liu, “On-line Acquisition and Real-time Segmentation System of Beef Rib-eye Image,” Transactions of the Chinese Society of Agricultural Machinery, vol. 44, no. 6, pp. 190-193, 2013.
[15] K. Chen, X. Sun, C. Qin, X. Ting, “Color grading of beef fat by using computer vision and support vector machine,” Computers and Electronics in Agriculture, vol. 70, no. 1, pp. 27-32, 2010.
[16] K. Chen, “Determination of the box-counting fractal
dimension and information fractal dimension of beef marbling, ” Transactions of the Chinese Society of Agricultural Engineering, vol. 23, no. 7, pp. 145-149, 2007.
[17] X. Zhang, S. Hu, “Video segmentation algorithm based on homomorphic filtering inhibiting illumination changes,” Pattern Recognition and Artificial Intelligence, vol. 26, no. 1, pp. 99-105, 2013.
[18] Z. Jiao, B. Xu, “Color image illumination compensation based on homomorphic filtering,” Journal of Optoelectronics Laser, vol. 21, no. 4, pp. 602-605, 2010.
[19] X. Wang, F. Hu and Y. Zhao, “Corner extraction based on homomorphic filter,” Computer Engineering, vol. 32, no.
11, pp. 211-212, 264, 2006. [20] J. Xiao, S. Song, and L. Ding, “Research on the fast
algorithm of spatial homomorphic filtering, ” Journal of Image and Graphics, vol. 13, no. 12, pp. 2302-2306, 2008.
[21] Z. Jiao, B. Xu, “Color image illumination compensation based on HSV transform and homomorphic filtering,” Computer Engineering and Applications, vol. 46, no. 30, pp. 142-144, 2010.
194 JOURNAL OF MULTIMEDIA, VOL. 9, NO. 2, FEBRUARY 2014
© 2014 ACADEMY PUBLISHER

[22] J. Xiong , X. Zou, H. Wang, H. Peng, M. Zhu and G. Lin, “Recognition of ripe litchi in different illumination
conditions based on Retinex image enhancement,” Transactions of the Chinese Society of Agricultural Engineering, vol. 29, no. 12, pp. 170-178, 2013.
[23] J. Li, X. Rao and Y. Ying, “Detection of navel surface defects based on illumination—reflectance model,” Transactions of the Chinese Society of Agricultural Engineering, vol. 27, no. 7, pp. 338-342, 2011.
[24] J. Qian, X. Yang, X. Wu, Chen Meixiang and Wu Baoguo, “Mature apple recognition based on hybird color space in
natural scene,” Transactions of the Chinese Society of Agricultural Engineering, vol. 28, no. 17, pp. 137-142, 2012.
[25] J. Tu, C. Liu, Y. Li, J. Zhou and J. Yuan, “Apple recognition method based on illumination invariant graph,” Transactions of the Chinese Society of Agricultural Engineering, vol. 26, no. 2, pp. 26-31, 2010.
JOURNAL OF MULTIMEDIA, VOL. 9, NO. 2, FEBRUARY 2014 195
© 2014 ACADEMY PUBLISHER

Semantic Ontology Method of Learning Resource
based on the Approximate Subgraph
Isomorphism
Zhang Lili College English Teaching & Researching Department, Qiqihar University Qiqihar Heilongjiang 161006 China
Jinghua Ding
College of Information and Communication Engineering, Sungkyunkwan University, Suwon, Korea
Email: [email protected]
Abstract—Digital learning resource ontology is often based
on different specification building. It is hard to find
resources by linguistic ontology matching method. The
existing structural matching method fails to solve the
problem of calculation of structural similarity well. For the
heterogeneity problem among learning resource ontology,
an algorithm is presented based on subgraph approximate
isomorphism. First of all, we can preprocess the resource of
clustering algorithm through the semantic analysis, then
describe the ontology by the directed graph and calculate
the similarity, and finally judge the semantic relations
through calculating and analyzing different resource
between the ontology of different learning resource to
achieve semantic compatibility or mapping of ontology. This
method is an extension of existing methods in ontology
matching. Under the comprehensive application of features
such as edit distance and hierarchical relations, the
similarity of graph structures between two ontologies is
calculated. And, the ontology matching is determined on the
condition of subgraph approximate isomorphism based on
the alternately mapping of nodes and arcs in the describing
graphs of ontologies. An example is used to demonstrate this
ontology matching process and the time complexity is
analyzed to explain its effectiveness.
Index Terms—Digital Learning; Ontology Matching; Digital
Resource Ontology; Graph Similarity
I. INTRODUCTION
In the 1990s, the development of computer network
and multimedia technology provides the education
development with new energy. education mode, method,
scope experience astonishing change and global excellent
education resources sharing and communication is
realized. The mode of education supported by the
computer network technology is often referred to as
digital learning [1]. However, because the Internet is a
highly open, heterogeneous and distributed information
space, and the real meaning is hard to be understood when we use URL technology to search the learning
resources, target learning resources are often submerged
in a large number of useless redundancy information, so
the digital learning resources cannot be found efficiently.
To strengthen information semantic characteristics, the
inventor of the URL technology Tim Berners-lee
proposed to represent mutual recognized commonly and
shared knowledge through Ontology and give strict
definition of the concept and the relations between
concepts to determine the meaning of the concept [2].The digital learning supported by ontology technique
describes the learning resources according to the learning
resource metadata standards, establishing a learning
resource ontology, apply similarity calculation and
matching of ontology to support digital learning resource
discovery, which can prevent the learners from losing
direction in network learning environment and improve
the learning efficiency and accuracy.
Similarity is two the basic condition of digital learning
resources ontology matching, however, in the present
digital learning environment, learning resource ontology
often consists of different creators who apply different data specification, modeling method and the technology
to create, learning resource ontology of the same topic in
a field of often differ greatly, which has a direct impact
on the efficiency of digital learning resources discovery.
how to effectively solve the matching problem of
heterogeneous ontology learning resources, or the
ontology matching in the semantic Web, is a challenge
the digital learning is facing. At present, the domestic and
foreign scholars have proposed many ontology matching
methods, mainly based on linguistics, the structure, the
instance, and so on, and developed all kinds of ontology matching tools, such as the ONION created by American
Stanford university, GLUE [4] created by American
Washington University, FAOM created by German
Karlsruhe University and so on. Among them, the
PROMPT is based on the linguistics, GLUE and QOM is
based on machine learning methods. However, when we
apply the existing ontology matching methods to learning
resource ontology matching, it still have problems as
follows: (1) It is difficult for the method based on
linguistic to solve the problem of learning resource
ontology matching. The reason: the current learning
resource ontology metadata standards and specifications
196 JOURNAL OF MULTIMEDIA, VOL. 9, NO. 2, FEBRUARY 2014
© 2014 ACADEMY PUBLISHERdoi:10.4304/jmm.9.2.196-206

are different, such as LOM proposed by the Learning
Technology Standards Committee (LTSC) subordinate to
IEEE, Dublin core metadata set (DCMS) proposed by
Online Computer Library Center (OCLC), LRM released
by IMS Global Learning Consortium, etc. Different
metadata specification determines different learning
resource ontology description language. It is hard to
define scientific semantic distance and can't solve the
problem of learning resource ontology matching. (2) The
existing structural matching method can't meet the
demand of learning resource ontology matching. The existing ontology matching methods based on the
structure mostly focus only on the hierarchical structure
of the ontology itself, and pay little attention to other
relations’ influence on ontology matching. Digital
learning resources ontology matching should consider the
similarity of the overall structure made up of all kinds of
relationships, so we cannot use the tree structure
similarity matching methods. (3) The matching methods
based on the example are limited by the complexity,
computing performance, correctness, optimization
problems of the machine learning technology and the effectiveness in the practical ontology matching
application need to be tested, so it is not a learning
resource ontology matching scheme that can be used as
the optimization technology. (4) The extracted sentences
of multi-document summarization usually come from
different documents. It is necessary to sort the extracted
sentences to improve the readability of the summarization.
The available ways to sort the extracted sentences are
most methods [2] [3], [12] time sorting method [2] [3],
probability sorting method [4], machine learning method
[6] [7] [9], and their improved algorithm, etc. Most sorting method gets the order of the theme according to
the successive relationship, so it is easy to interrupt
sentence topic; The time information extracted by using
the time sorting method is not necessarily accurate;
Probability sorting method is likely to lead to imbalance
of the subject; Machine learning method is comparatively
complex to realize in the process of sorting and rely
heavily on training corpus; Subsequent improved
algorithm makes some difference in improving the
abstract readability.
In this type of ontology matching technology, the
extract of structure similar characteristic set extraction and similarity calculation is one of the key elements. To
extract the information of different structure feature, we
use different similarity measure and calculation methods.
For example, SF (Similarity Flooding) [8] structure
matching method does not consider the pattern
information and judge the ontology matching based on
the transitivity of graph nodes’ similarity, namely: if two
elements’ adjacency nodes in different mode are similar,
so does the two similar elements’ node. The structure of
the matching period of Cupid [9], the leaf nodes
similarities depend on similarity of linguistics, data types and neighboring nodes, the non-leaf nodes similarities are
got by calculating similarity with the similarity of the
subtree of its root. In the Anchor - PROMPT [10], the
ontology is seen as a directed labeled graph, with fixed
length of anchors path as structural characteristics of
extraction and subgraph path limited by anchors through
traverse. Semantic similarity was represented by tagging
node similar values in the same location. In the ASCO,
nodes’ adjacent relations and concept hierarchy paths are
extracted as ontology structural characteristic. Structural
similarity is similar proportion in adjacent structure and
path in measurement and calculation and get the weighted
sum then. In the above ontology matching methods based
on structure, the similarity propagation of ontology
structural characteristic is an important factor to judge matching, but the present methods rely on the similarity
of adjacent nodes too much in the calculation of structural
similarity. Similarity propagation usually requires
traversing the total graph, with large amounts of
calculation and blindness. It needs further study in depth.
Research on Ontology Matching: now, many
universities and research institutions at home and abroad
have studied in this area and invented a lot of tools. The
ontology mapping based on semantic Web is the key
technology of ontology study. It is the basis of
completing ontology finding, aligning, learning and capturing. Ontology mapping and merging tools has been
developed abroad, such as PROMPT, Cupid, Similarity
Flooding, GLUE, etc.. They measure the similarity of
terminology of concepts from different angles. There are
element level, structural level and instance level, etc., but
the following problems are still existed: (1) versatility is
not high: These tools are mostly of the more obvious
effects for ontology of specific area or different versions,
and if it replaced with ontology of other areas, the effect
is not very obvious; (2) It is difficult to ensure the
effectiveness and efficiency of mapping: In order to obtain a more accurate similarity, calculation method will
be more. In this way, the efficiency is bound to be
affected, so a balance point between the effectiveness and
efficiency in mapping need to be found; (3) calculation
method is not comprehensive enough : While the existing
calculation methods can reflect the similarity of physical
layer, semantic network layer, description logical layer
and etc., there are no similarity calculation standards for
the presentation layer and the rule layer at present
because that the restriction and rule of ontology still don't
have mature theory; (4) automatic level is not high : now,
most methods still in semi-automatic mode. After the mapping is calculated, the same ontology may be
involved in a number of physical mapping. Due to the
deficiencies of the existing calculation method, the
mapping with the highest similarity is not necessarily
accurate, which requires users to manually select the
choice and decide the result.
The innovation points of this paper:
(1) Digital learning resource ontology is often based on
different specification building. It is hard to find
resources by linguistic ontology matching method. The
existing structural matching method fails to solve the problem of calculation of structural similarity well. After
studying and analyzing of existing ontology matching
methods, this paper puts forward a method of digital
learning resources ontology matching. The method in
JOURNAL OF MULTIMEDIA, VOL. 9, NO. 2, FEBRUARY 2014 197
© 2014 ACADEMY PUBLISHER

Ontology matching methods
Element level Structure level
Sring-based
name
similarity
Description
Similarity
Comment
Synonyms
Language-
based
Tokenization
Lemmatisation
Morphology
elimination
Linguistic
Resources
Lexicons
thesaurus
Constrain
t
-based
Type
Similarity
Key
properties
Alignment
Reuse
Entire
Schema or
Ontology
fragment
Upper level
Domain
Specific
Ontologies
SUMO
DOLCE
UMLS
FMA
Data analysis
and
statistics
Frequency
distribution
Griph-based
Graph
Homomorphi
Sm
Path
Children
leaves
Taxonomy
-based
Taxonomy
structure
Repository
of
structures
Structure
metadata
Model-
based
SAT
Solvers
DL
reasoners
Particle size
The basic technology
The term structure epitaxial The semantic
Input type
Figure 1. Method for classification of ontology matching
comprehensive concept of edit distance and similarity
based hierarchical architecture and other relations,
alternates point of ontology of directed graph, edge
matching, thus to determine approximate subgraph
isomorphism ontology matching. As the judgment
standard, the method to structure the overall similarity
helps strengthen the efficiency of digital learning
resources ontology matching, improve the ability of
resource discovery, found efficient similarity subgraph,
improve the precision and efficiency of ontology matching.
(2) In view of the two difficulties that the subject is
interrupted and the extracted sentences are incoherent,
this paper analyses the application of clustering algorithm
of the latent semantic analysis in sentence sorting in order
to improve the quality of the generation of
summarizations. We use the clustering algorithm of latent
semantic analysis to cluster the extracted sentence to a
topic set, achieving the goal of solving the topic interrupt.
Through calculating the ability of exhibition of the
document, we will pick out the best document as a template, and then make a twice sorting of the extracted
sentence according to the template.
II. ONTOLOGY MATCHING METHOD AND FRAME
Digital learning resources ontology matching is the key
technology to find the mapping relationship between
different learning resources, which plays an important
supportive role in the retrieval, integration and reuse and
so on of digital learning resource ontology. Foreign
scholars began to research on ontology matching since
the 90 s and have formed many famous ontology
matching systems. On ontology matching method,
document [6] summarizes the classification map of ontology matching methods as shown in the figure 1
according to the information granularity and type of input
at matching. Among them, element level refers to the
information of the single entity based on the ontology
without considering the correlation between entities while
structure level refers to take the information of each
entity of the ontology as a whole structure.
On the matching technology, there are:
(1) Based on the matching technology of character
string, the writing style of the ontology is handled as the
character string. We use the string matching method to
calculate the similarity between ontology texts, use edit
distance to measure similarity between strings S1 and
S2.The formula is:
1 2
1 2
1 2
(| , )
( , )(| , )
i
i
Edit
Max S S oper
Sim S SMax S S
(1)
Among them, 1S and 2S are separately is the
length of the character string S1 and S2, iiper means
insert, delete, replace, and character exchange operation,
etc.
(2) The matching technology based on the upper
ontology or field ontology. The upper ontology has
nothing to do with field. It can be used as the external
knowledge with a common recognition and to discover
the semantic relations among await matching ontology.
There are common upper ontology such as ycC ontology,
SUMO, DOLCE, etc. Field ontology includes common
background knowledge. It can be used to eliminate the
phenomenon of polysemy, such as FMA, UMLS, OBO,
in the field of biomedical, etc.
(3) The matching technology based on the structure.
Usually, the ontology is represented as a tree hierarchy
structure or directed labeled graph structure. Similarity
measure is calculated with the help of Tversky model or
the structural relations of objects. In general, ontology
matching system architecture based on the similarity can be summarized as the following figure 2.
198 JOURNAL OF MULTIMEDIA, VOL. 9, NO. 2, FEBRUARY 2014
© 2014 ACADEMY PUBLISHER

Interactive interface
Match the controller
Pretreatment of ontology and
parsing
Similarity calculation method 1 Matches the
stored
Similarity calculation method 2
Similarity calculation method n
Similar seats combination
Matching extraction Match the tuning
Ontology B
Matching results
Ontology A
Figure 2. Similarity based on ontology matching system architecture diagram
III. PROPOSED SCHEME
A. The Semantic Analysis of Clustering Algorithm
According to the size of the corpus, the vector of
document clustering is often high-dimensional. It is a
sparse matrix and just estimate the frequency of words.
Sometimes, it can't depict the semantic association
between the words. The synonyms are liable to reduce the
clustering accuracy. YuHui [13] put forward a kind of
document clustering algorithm based on improving latent semantic analysis. This paper use the document clustering
as a source of reference, try to reduce the size of the
clustering granularity, regarding the extracted sentences
as miniature document and using clustering algorithm of
latent semantic analysis to make a topic cluster of
selected extracted sentence collection.
This article make a word segmentation processing
firstly to remove related stop words, trying to reduce the
space dimension and reduce the complexity of calculation.
Multiplying the contribution factor of word distribution
when characteristics are extracted in order to describe words characteristics better. If P is the probability
distribution of the extracted sentences including
characteristic words in each document collection, then the
entropy ( )iI p of the words’ distribution can be
calculated by the following formula:
1
( ) ( )*log ( )k
i i
i
I X P x P x
The weight of characteristic words can be calculated
according to the following formula:
,
1( , ) (1 log( ))*log( / 5)*log( 5)
( ) 0.8i j i
i
weight i j tf N dfI p
In this paper, constructed word – matrix of the
extracted sentence: A = ij m na
, ija means the thi
word’s appearance weight in the thj document. The
word corresponds to the matrix while the extracted
sentence corresponds to the matrix column. Turning ija
into log( ija +1), then divided by its entropy, so we can
take consideration to context, getting a new word –
matrix of the extracted sentence: '' ij m nA a
, among the
formula, 'log( 1)
log
ij
ij
ij ij
l j ij ij
l j l j
aa
a a
a a
Making the latent semantic analysis to the new word -
matrix of the extracted sentence 'A , this paper uses the
singular value decomposition algorithm for dimension
reduction and exchange the characteristic space
transformation, so that we can get k rank approximate
matrix kA .Specific means is: as for the equivalent
formula ' '
* * * ** *n m n n n m m mA U D V , we’d get k rank at
beginning after making a descending sort k rank to
singular value, replacing 'A with kA approximately
and converting the characteristic space to strengthen the
semantic relations between word and the extracted sentence. For the set of the extracted sentence
1 2{ , , }nD d d d , set of word 1 2{ , , }mW w w w and
the k rank approximation matrix after singular value
decomposition, ija represent the weight value of
different words in the extracted sentence id ; Behind the
probability ( , ) ( )* ( | )i j i j ip d w p d p w d lies the latent
semantic space 1 2{ , , }kZ z z z . Assuming that the
word – the extracted sentence is of conditional
independence and the distribution of the latent semantic
on extracted sentence or words is of conditional
independence, then conditional probability formula of the
word – the extracted sentence is as follows:
1
( | ) ( | ) ( | )k
j i j k k i
k
p w d p w z p z d
Than ( , ) ( )* ( | )* ( | )i j i j k k ip d w p d p w z p z d
In the formula, |j kp w z is the distribution
probability of latent semantic on word, the latent
semantic can get visual representation through sorting
|j kp w z . |k ip z d is the distribution probability of
the latent semantic in the extracted sentence.
JOURNAL OF MULTIMEDIA, VOL. 9, NO. 2, FEBRUARY 2014 199
© 2014 ACADEMY PUBLISHER

Then the maximum expected EM algorithm is adopted
to make latent semantic model fitting, implementing step
E and step M alternately to make iterative calculation.
Calculate the conditional probability in the step E:
1
( | ) ( | )( | , )
( | ) ( | )
j k k i
k i j k
j l l i
l
P w z P z dP z d w
P w z P z d
In step M, the calculation formula is as follows:
1
1 1
( , ) ( | , )
( | )
( , ) ( | , )
n
i j k i j
i
j k m n
i j k i j
j i
a d w P z d w
P w z
a d w P z d w
1
( , ) ( | , )
( | )( )
m
i j k i j
j
k i
i
a d w P z d w
P z da d
Making iterative calculation of step E and step M, and
stop it until raising range of expectation of likelihood
function L is less than the threshold, so we can get a
optimal solution as follows:
1 1 1
( ) ( , ) ( | , ) log[ ( | ) ( | )]n m k
i j l i j j k k i
i j l
E L a d w P z d w P w z P z d
After clustering the extracted sentence, we will get the
topic collection. In each topic, there are all closely
connected extracted sentence in semantic.
B. Graph Representation and Similarity of the Ontology
1) The Representation of the Directed Graph of
Ontology There are a lot of formalized definition of ontology.
We’d like to adopt the definition of document [12] in this
paper.
Definition 1: Ontology can be defined as five-element
group, among them, C is the concept set, I is the instance
set, P is the concept set of attribute, cH is the set of
hierarchical relationships among concepts, R is the set of
the other relations among concepts, 0A is ontology
axiom set.
For r R , the domain of definition and range are
separately recorded as .r dom , .r ran :
. { | }r
i i ir dom c c C c ,
. { | }r
j j jr dom c c C c c .
Definition 2: If the directed labeled graph of ontology 0( , , , , , )O C I P Hc R A is represented as
( ) ( , , , , , )V EG O V E L L , among them:
1) The node set V C , the edge set E V V ;
2) : VV L is the mapping function from node set
to node tag set;
3) : EE L is the mapping from edge set to edge
marking set.
For example, when : VV L is assigned to the
concept of ontology for the node, : EE L is
assigned to the hierarchical relationships among concepts
for solid arc, and the R relations among concepts for the
dotted line arc, the following figure 3 can be regarded as
a description of the ontology.
Figure 3. The directed graph representation of ontology
2) Similarity Ontology semantic similarity is an important index of
similarity, such as the edit distance of concept, the
distance of node base, the similarity of probability and
structure of examples. Field scholars have proposed many
semantic similarity calculation method, such as edit
distance calculation as it shows in the above formula (1),
so no more explanation. The calculation formula base
distance among nodes is as follows:
1 2
2( , ) 1
mDist A B
n n
(2)
Among them, 1n , 2n are separately the number of
node A in ontology 1O , and node B in ontology
2O , m
is the number of overlapping word.
Probability similarity of instance can be represented as:
( ) ( , )( , )
( ) ( , ) ( , ) ( , )
P A B P A BSim A B
P A B P A B P A B P A B
(3)
Among them, ( , )P A B is the probability of the
instance that belongs to concept A and B at the same time,
( , )P A B is the probability of instance that belongs to
concept B but not concept A, and ( , )P A B is the
probability of the instance of concept A but not concept
B.
Based on the structure of ontology matching, map matching is a NP complete problem It is difficult to
directly use the application of graph structure matching to
solve ontology matching, so this kind of method is often
achieved through calculate and match the similarity of
ontology structure. The general guiding ideology is: to
speculate the elements’ similarity through the similarity
of the adjacent elements in the graph. In the other word, if
the adjacent nodes of a node are similar, then the nodes
are similar. The core is the similarity spread. The two
most typical ontology matching algorithm based on
structure, SF and GMO, its core idea is: the concepts with similar concept of parent/child may be similar and
concepts with similar attribute. Among them, the
similarity propagation of the Similarity of Flooding
algorithm Similarity just considers the spread to adjacent
nodes of matched concept while GMO is the similarity
spread to overall situation.
200 JOURNAL OF MULTIMEDIA, VOL. 9, NO. 2, FEBRUARY 2014
© 2014 ACADEMY PUBLISHER

Ontology PDF
diagram
Step 1Anchor point selection and graph extraction
Step 2Similarity computation
and communication
1.1 the candidate anchors
1.2 the anchor filtering
1.3 based on the anchor subgraph extraction
2.1 structure similarity propagation graph
2.2 structural similarity calculation
2.3 structure similarity
2.4 to extract candidate approximate isomorphism subgraph
4.1 based on the approximate isomorphism subgraph integrated ontology similarity calculation
3.1 subgraph isomorphism approximation is calculated
3.2 approximate subgraph isomorphism
4.2 based on the approximate isomorphism subgraph of ontology matching
Based on the ontology matching of approximate subgraph isomorphism
Ontology B
Ontology A
Ontology B
Ontology A
Step 3Approximate
subgraph isomorphism
Step 4Based on the approximate
isomorphism subgraph ontology matching
Figure 4. Ontology matching based on the approximate subgraph isomorphism
B. Learning Resource Ontology Matching Problem
Ontology matching is an effective way to solve
ontology heterogeneity of digital learning resources. It
judges the semantic relations through calculating and
analyzing the similarity among different learning
resource ontology to achieve semantic compatibility or mapping of ontology. In matching granularity there are
matching of concept - concept, attribute- attribute,
concept-attribute, and so on. To two ontology A and B, as
for the concept in A, we can find a corresponding concept
that share the same or similar semantic in B. As for the
concept in B, we can do it, too. So A and B is the
concept-concept matching. In this paper, the matching of
digital learning resource ontology refers to the process of
discovering of the whole semantic corresponding among
different entities (concept, attribute, relation and so on).
Making a description as: Definition 3: The Ontology Matching of digital
learning resource is a semantic correspondence,
represented as four-element groups:
Among them, 1e , 2e are separately entities(concept,
attribute, instance, axiom and so on) of ontology A and B,
{ , , , }rel is the collection of semantic relations
among entities, ( , , , respectively refers to
inclusion, non-inclusion, independence and equivalent of
semantic, [0,1]sim is a semantic equivalent degree
measurement in the entities.
1) Ontology Matching Method based on Approximate
Subgraph Isomorphism The overall framework of e - Learning resource
Ontology Matching method (SIOM) based on
approximate Subgraph Isomorphism is shown in figure 4.
The figure shows that SIOM is a sequential adapter,
mainly including four steps: anchor selection and graph
extraction, similarity calculation of graph structure,
judgment of approximate subgraph isomorphism and
ontology matching based on similar isomorphism
subgraph.
2) Anchor Selection and Graph Extraction The anchor, in this article, refers to match the first pair
of similar concepts that can be sure between candidate
ontology A, B, presenting in the directed labeled graph of
ontology as the first pair of determined matching node.
The definition is as follows:
Defining 4: (Anchor) provides two candidate matching
ontology A and B, and the corresponding graph structure
are respectively is ( )G A , ( )G B , If there is a node
By C for the node Ax C in ( )G A , then:
( , )OM x y , namely: concept x can match concept y
(1) 0 0( ) , ( ) , ( ) , ( ) , ( )A A A A A AI x I P x P Hc x Hc R x R A x A ,
(2) 0 0( ) , ( ) , ( ) , ( ) , ( )B B B B B BI y I P y P Hc y Hc R y R A y A ,
there is
0 0
( ( ), ( )) ( ( ), ( )) ( ( ), ( ))
( ( ), ( )) ( ( ), ( ))A B
OM I x I y OM P x P y OM R x R y
OM Hc x Hc y OM A x A y
(4)
So we call ,x y is a pair of anchor of A,B, while
x and y is the anchor concept.
According to the different location of anchors in
hierarchical structure of ontology, there are 9 situations as follows:
x and y were the root node ( )G A , ( )G B ;
x as the intermediate node ( )G A , y as the root
node in the ( )G B ;
x is the root node in the ( )G A , y as the
intermediate node ( )G B ;
x as the intermediate node ( )G A , y as the root
node in the ( )G B ;
x as the intermediate node ( )G A , y is the root
node in the ( )G B ;
x as the intermediate node ( )G A , y as the leaf
nodes of ( )G B ;
x as the leaf nodes of ( )G A , y as the intermediate
node ( )G B ;
x as the leaf nodes of ( )G A , y as the root node in
the ( )G B ;
x as the leaf nodes of ( )G A , y as the leaf nodes of
( )G B .
JOURNAL OF MULTIMEDIA, VOL. 9, NO. 2, FEBRUARY 2014 201
© 2014 ACADEMY PUBLISHER

Defining 5: Provide an ontology O and x is the anchor
concept of O, then the ontology derive from anchor can
be represented as five-element group 0( , , , , , )x x X x x x
xO C I P Hc R A , in which:
(1) { | ( ) ( ) ( ) ( )}xC c C c Hc x x Hcc c R x x Rc
is concept set.
(2) { { }}x xP P C , { { }}x xI I C is Attribute
set and instance set.
(3) { { }}x xHc Hc C is the set of hierarchy
relationship between Concept.
(4) { { }}x xR R C is the set of other relationship
between concept.
Reference 1: provide the ontology O and ontology xO
derived from its anchor concept x . If the directed graph
( )G O , ( )xG O is represented respectively as their
corresponding graph structure representation, so there is:
( ) ( )xG O G O (5)
Proof: We can learn that the inference 1 is right from
definition1, 2, 7.
Reference 2: To the ontology O and ontology xO
derived from its anchor concept x , as for its directed
graph representation ( )G O , ( )xG O , there is:
(1) If x is the root node of ( )G A , then
( ) ( )xG O G O
(2) X is not the root node of ( )G A , then
( ) ( )xG O G O
In particular, when x is the leaf node of ( )G A ,
( )xG O degenerates to be a node in ( )G O .
Proof: According to the analysis of anchor concept’s
location in hierarchical structure of ontology and
reference 1,reference 2 is right.
3) The Calculation of Structural Similarity of the
Directed Graph of Ontology For candidate ontology matching A,B and their
directed graph representation ( )G A , ( )G B , the
similarity calculation of ( )G A and ( )G B consist of
four parts: (1) the similarity of node edit distance; (2)
similarity of hierarchical relationships between nodes; (3)
the similarity of other relationships between nodes; (4)
the similarity of graph structure.
Details are as follows:
(1) The similarity calculation of edit distance: it is get
through comprehensive calculation of concept similarity and attribute similarity represented by node. The specific
method is as follows: provided that x and y respectively
is the node in ( )G A , ( )G B , ( , )c
eS x y is the edit
distance of concept of x and y, and
2 | |( , ) ( ( ), ( ))
| | | |
A Bp P Pp
e A Bp
pS x y S p x p x
P P
is edit distance
of the common attribute of x and y. We use the formula
(1) to calculate, so the formula of similarity calculation
between node x and y is as follows:
( , ) ( , ) ( , )c p
e e eS x y S x y S x y (6)
, is the weight adjustment coefficient, and
0 , 1 1
(2) The similarity of hierarchy relationship between
nodes: provided that the in-degree set of hierarchy
relationship of x in ( )G A , the out-degree set of
hierarchy relationship is { ( ) | }out j jx x V A x Hc x ,
and the in-degree set and the out-degree set of hierarchy
relationship in ( )G B of the similar y separately is
iny , outy , then the calculation formula of the similarity
of hierarchy relationship is as follows:
( , )in in out out
Hc
in out in out in out in out
x y x yS x y
x x y y x x y y
(7)
{ | , : ( , ) ( , )}in in in in ex y x x x y y S x y OM x y
is the node set that can be matched in the father node
which has hierarchy relationship with x, y.
{ | , : ( , ) ( , )}out out out out ex y x x x y y S x y OM x y
is the node set that can be matched in the son node which has hierarchy relationship with x, y.
(3) The similarity of the other relations between nodes:
we record the node sets that have relations with ,x y as
respectively : ' ' '{ ( ) | : ( ) ( )}R Ax x V A r R x r x x r x
' ' '{ ( ) | : ( ) ( )}R By y V B r R y r y y r y
If 1 2,A Br R r R , then
' ' ' '
1 2
' ' ' '
1 2
(( ) ( ) ( , ))
(( ) ( ) ( , ))
x r x y r y OM x y
x r x y r y OM x y
(8)
We record the node set satisfying the formula 10 as R Rx y , with the help of weight adjustment coefficient,
then the formula of the similarity of other relations
between nodes can be shown as:
The weight adjustment parameter i , i satisfy
0 , 1 1 1i i i i
i i
r
( , )
( )
A B
A B
r r r r
R i ir r r rr R r R
r r
i i r rr R R
x y x yS x y
x y x y
x y
x y
(9)
The similarity of graph structure: the candidate
ontology A, B and its directed graph is a pair of anchor of
A, B, then the formula of similarity between the directed
graph ( )G x , ( )G y of ontology derived from x and y
can be shown as :
( ( ), ( )) ( , ) ( , ) ( , )e Hc RS G x G y S x y S x y S x y (10)
1 is weight adjustment coefficient
202 JOURNAL OF MULTIMEDIA, VOL. 9, NO. 2, FEBRUARY 2014
© 2014 ACADEMY PUBLISHER
Ontology matching algorithm based on approximate
subgraph isomorphism
Definition 6: if there is one-to-one correspondence
between the point and point, the edge and the edge of the
directed graph G and 'G , and the correspondent point
and the correspondent edge keep the same relation, then
we call G and 'G is isomorphism, recorded as 'G G .
Because it’s difficult to achieve strict one-to-one
correspondence in the ontology matching in general, we
can judge the match as long as the similarity in ontology
satisfy the threshold. It’s why the paper propose the
concept of approximate isomorphism of the ontology
graph structure
Definition 7: we provide the tag ontology A and
candidate matching ontology B. Its directed graph
representation is ( )G A , ( )G B . If
(1) For the root node a of ( )G A , there is a node b
in and ,a b is a pair of anchor of A,B
(2) For ( )G A and the directed graph ( )bG B derived
from ontology b , there is
( ) ( ), ( ) ( )b bV A V B E A E B ;
( ) : ( ) : ( , )bx V A y V B OM x y ;
' '( ) : ( ) : ( , )be E A e E B OM e e
To the setting matching threshold , there is
( ( ), ( ))bS G A G B
Then we call A and B is approximate graph
isomorphism, recorded as ( ) ( )G A G B
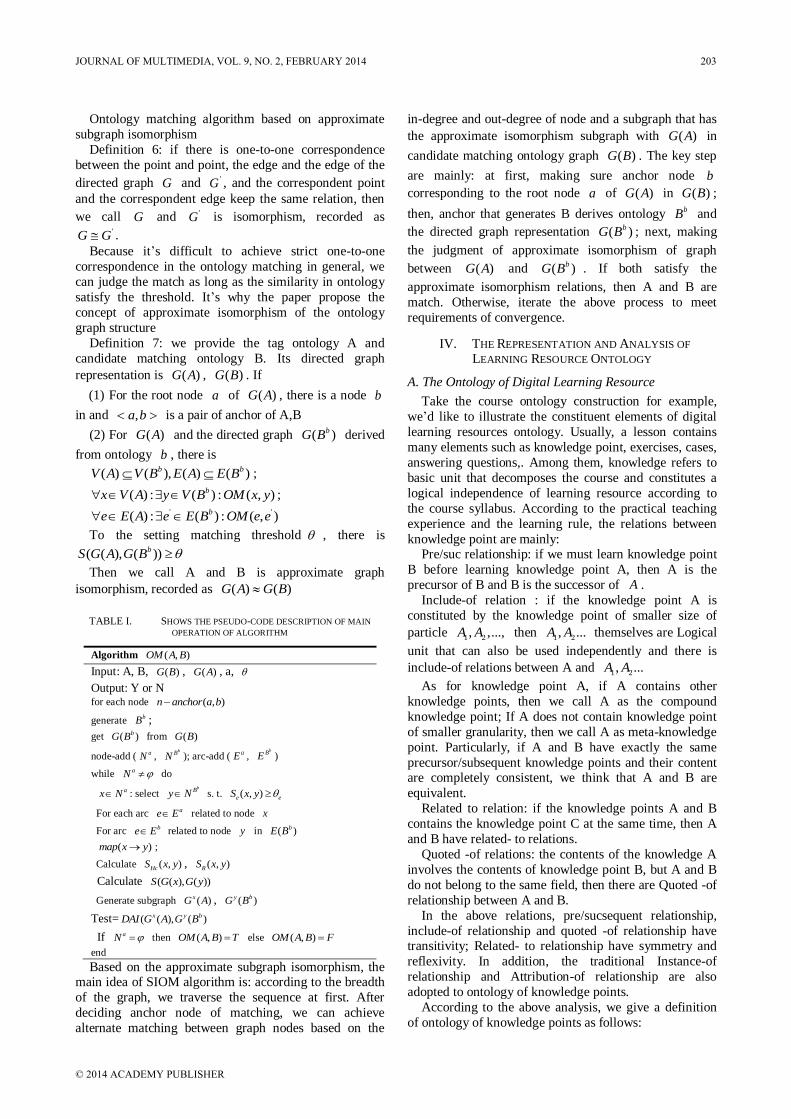
TABLE I. SHOWS THE PSEUDO-CODE DESCRIPTION OF MAIN
OPERATION OF ALGORITHM
Algorithm ( , )OM A B
Input: A, B, ( )G B , ( )G A , a,
Output: Y or N for each node ( , )n anchor a b
generate bB ;
get ( )bG B from ( )G B
node-add ( aN , bBN ); arc-add (
aE , bBE )
while aN do
ax N : select bBy N s. t. ( , )e eS x y
For each arc ae E related to node x
For arc be E related to node y in ( )bE B
( )map x y ;
Calculate ( , )HcS x y , ( , )RS x y
Calculate ( ( ), ( ))S G x G y
Generate subgraph ( )xG A , ( )y bG B
Test= ( ( ), ( )x y bDAI G A G B
If aN then ( , )OM A B T else ( , )OM A B F
end
Based on the approximate subgraph isomorphism, the main idea of SIOM algorithm is: according to the breadth
of the graph, we traverse the sequence at first. After
deciding anchor node of matching, we can achieve
alternate matching between graph nodes based on the
in-degree and out-degree of node and a subgraph that has
the approximate isomorphism subgraph with ( )G A in
candidate matching ontology graph ( )G B . The key step
are mainly: at first, making sure anchor node b
corresponding to the root node a of ( )G A in ( )G B ;
then, anchor that generates B derives ontology bB and
the directed graph representation ( )bG B ; next, making
the judgment of approximate isomorphism of graph
between ( )G A and ( )bG B . If both satisfy the
approximate isomorphism relations, then A and B are
match. Otherwise, iterate the above process to meet
requirements of convergence.
IV. THE REPRESENTATION AND ANALYSIS OF
LEARNING RESOURCE ONTOLOGY
A. The Ontology of Digital Learning Resource
Take the course ontology construction for example,
we’d like to illustrate the constituent elements of digital
learning resources ontology. Usually, a lesson contains
many elements such as knowledge point, exercises, cases,
answering questions,. Among them, knowledge refers to
basic unit that decomposes the course and constitutes a
logical independence of learning resource according to
the course syllabus. According to the practical teaching
experience and the learning rule, the relations between
knowledge point are mainly: Pre/suc relationship: if we must learn knowledge point
B before learning knowledge point A, then A is the
precursor of B and B is the successor of A .
Include-of relation : if the knowledge point A is
constituted by the knowledge point of smaller size of
particle 1 2, ,...,A A then 1 2, ...A A themselves are Logical
unit that can also be used independently and there is
include-of relations between A and 1 2, ...A A
As for knowledge point A, if A contains other
knowledge points, then we call A as the compound
knowledge point; If A does not contain knowledge point
of smaller granularity, then we call A as meta-knowledge
point. Particularly, if A and B have exactly the same
precursor/subsequent knowledge points and their content are completely consistent, we think that A and B are
equivalent.
Related to relation: if the knowledge points A and B
contains the knowledge point C at the same time, then A
and B have related- to relations.
Quoted -of relations: the contents of the knowledge A
involves the contents of knowledge point B, but A and B
do not belong to the same field, then there are Quoted -of
relationship between A and B.
In the above relations, pre/sucsequent relationship,
include-of relationship and quoted -of relationship have transitivity; Related- to relationship have symmetry and
reflexivity. In addition, the traditional Instance-of
relationship and Attribution-of relationship are also
adopted to ontology of knowledge points.
According to the above analysis, we give a definition
of ontology of knowledge points as follows:
JOURNAL OF MULTIMEDIA, VOL. 9, NO. 2, FEBRUARY 2014 203
© 2014 ACADEMY PUBLISHER

The DNS server configuration
DNS common terms
DNS domain name resolution
DNS resource allocation
DNS lookups configuration
Private DNS configuration experiment
DNS backup and restore test
DNS assigned experimental
DNS is applied to network management
experiment
The DNS configuration
example
Distributed DNS
Centralized DNS
A forward lookup zone configuration A reverse
lookup zone configuration
DNS resource records format
functiondefine
Contains the relationship
The property relationship
Precursor relationship
The subsequent relationship
Correlation between the
Instance relationship
Reference relationship
Knowledge point ID
Algorithm number
The algorithm name
The theme
Property list
The content description
Subordinate to the subject
The difficulty coefficient
The importance of
The instance
Precursor knowledge
The subsequent knowledge
Contains the knowledge
The relevant knowledge
Reference points
Number
string
String
String
Txt
Txt
String
Float
Float
Object
Ontology
Ontology
Ontology
Ontology
ontology
Figure 5. The ontology of knowledge point of DNS sever configuration
Contains the relationship
Correlation between the
Chapter five commonly used configuration server
The certificate server
configuration
Video server configuration
The FTP server configuration knowledge
E - mail server configuration
WWW server configuration
The DHCP server configuration
The DNS server configuration
Figure 6. The configuration of the ontology model of learning resource of common server
Definition 8: a knowledge ontology (KO) can be
represented as a 7-element group:
( ) , , , , , , KOKO name id name define function content includedKO R (11)
And id , name , define , function , content ,
includedKO , KOR are respectively the number, name,
definition, function, content description, relation set of
KO of knowledge point. According to definition 8, we take the lesson “network
management” for an example, we build correspondent
ontology of knowledge point as it shows in figure 5. It is
the knowledge point “DNS server configuration” in
chapter5 from “network management from entry to
master” written by Cui Beiliang and so on.
Provided that the ontology of the knowledge point
contained in the chapter is build on sound base, then
figure 6 shows the framework of correspondent learning
resource ontology.
B. The Representation of Ontology Matching Process of
Knowledge Point:
To represent conveniently, we simplify the ontology of
knowledge point as it shows in figure 5, and then abstract
to be the directed graph as it shows in 7, recording as tag
ontology Q . The mark number in node represent
attribute. The mark number on the directed are represent
the requirement of other relations in node. We give a
candidate ontology 'Q as it shows in figure 7.
The first step of algorithm: selecting and matching a
pair of node of anchor concept ,c B , as it shows in
following figure 8.
204 JOURNAL OF MULTIMEDIA, VOL. 9, NO. 2, FEBRUARY 2014
© 2014 ACADEMY PUBLISHER

d
e
c
f
a b
1315
22
16
18
20
17
6 4
12
9
9 7
A
B C
F
D E
H
J
30 40
30
60
60
50
50
5060
4050
4040
60
30
20
25
40 3
0
25
50
55
Figure 7. 1) the representation of tag ontology Q 2) the
correspondent representation of tag ontology B
d
e
c
f
a b
1315
22
16
18
20
17
6 4
12
9
9 7
A
B C
F
D E
H
J
30 40
30
60
60
50
50
5060
4050
4040
60
30
20
25
40 3
0
25
50
55
(ⅰ)
d
e
c
f
a b
1315
22
16
18
20
17
6 4
12
9
9 7
A
B C
F
DE
H
J
30 40
60
60
50
50
5060
4050
40
40
60
30
20
25
40 3
0
25
50
55
15
13
18
22
(ⅱ)
d
e
c
f
a b
1315
22
16
18
20
17
6 4
12
9
9 7
A
B C
F
DE
H
J
30 40
30
60
60
50
50
50
60
4050
40
40
60
30
2025
4030
25
50
55
15
13
18
22
16
20
17
(ⅲ)
Figure 8. (i) The matching of the first pair of anchor concept (ii) Based
on the ,c B anchor Q and 'Q spanning graph (iii) The
complete matching of Q and 'Q
To begin with anchor concept node, we can generate
the first subgraph of Q and 'Q in order, showing in
figure. We can calculate and judge the matching of node,
edge and structure of subgraph and achieve the first
matching of Q and 'Q .
In matched ontology subgraph, we’d like to match a
pair of node of anchor concept. Repeating the above
process until overall graph matching or no matching, the
algorithm stops, as it shows in figure 8
In the above process, the graph representation of
ontology Q achieved approximate isomorphism in the
graph representation of ontology 'Q , so we think that
ontology 'Q can match ontology Q .
C. The Analysis of Algorithm Time Complexity
In the description of the pseudo code given in the table
1, the scale of operation amount of approximate subgraph isomorphism of 3 layers of nested loop decides the time
complexity of the algorithm.
Provided that in the graph representation ( )G Q of
ontology Q , ( )V Q n , ( )E Q m and in the graph
representation '( )G Q of ontology 'Q , '( )V Q N ,
'( )E Q M , so in order to finish the matching of
ontology 'Q and Q , the unit time needed for the main
calculation is respectively: (1) The amount of time needed for the matching of the
first pair of anchor node is n N
(2) For the node ,x y , the amount of time needed
for the matching of the edge is ( ) ( )E x E y
(3) For the isomorphism judgment of subgraph ( )G x
and ( )G y and enjoys, the amount of time needed is
2 2
( ( )) ( ( ))( ) ( )
V G x V G YC C E x E y
When the number of node and edge is respectively n ,
N , m , M , the scale of the amount of time of the main
operation is
( 1) ( 1)
2 2
n n N Nm M
As a result, the complexity of the algorithm time is 6( )O n level. It is an effective algorithm.
V. CONCLUSION
Digital learning resource ontology is often based on
different specification building. It is hard to find
resources by linguistic ontology matching method. The existing structural matching method fails to solve the
problem of calculation of structural similarity well So the
paper propose a kind of ontology matching method based
on the subgraph isomorphism. It makes a alternate
matching of the point and the edge in the directed graph
of ontology representation based on calculating the
overall similarity of graph structure to achieve ontology
matching by the judgment of subgraph isomorphism. The
method aims to find efficient approximate subgraph,
improving the accuracy and efficiency of the ontology
matching.
ACKNOWLEDGEMENTS
Thanks for the support of fund, which is the Study and
Practice of the Targeted Public English Educational
Pattern under the Concept of Outstanding Talents
Education (G2012010681).
JOURNAL OF MULTIMEDIA, VOL. 9, NO. 2, FEBRUARY 2014 205
© 2014 ACADEMY PUBLISHER

REFERENCES
[1] Rifaieh R, Benharkat N A. Query-based data warehousing tool, 2002. Proc of the 5th ACM International Workshop
on Data Warehousing and OLAP. New York: ACM, 2002 pp. 35-42.
[2] S. ALIREZA HASHEMI GOLPAYEGANI, BAHARM EMAMIZADEH. "Designing work breakdown structures using modular neural networks". Decision Support Systems. 2007, 44(11) pp. 202-222.
[3] A. K. M ZAHIDUL QUAIUM AHMED LATIFSHAHRIAR, M. ROKONUZZAMAN, "Process
Centric Work Breakdown Structure of Software Coding for Improving Accuracy of Estimation, Resource Loading and Progress Monitoring of Code Development", Proceedings of 2009 12th International Conference on Computer and Information Technology (ICCIT 2009)21-23 December, Dhaka, Bangladesh, 2009
[4] NÚÑEZ S M, DE ANDRÉS SUÁREZ J, GAYO J E L, et al. A semantic based collaborative system for the interoperability of XBRL accounting information//
Emerging technologies and information systems for the knowledge society. Springer Berlin Heidelberg, 2008 pp. 593-599.
[5] GARCÍA R, GIL R. Publishing xbrl as linked open data// CEUR Workshop Proceedings. 2009, 538.
[6] SPIES M. An ontology modelling perspective on business reporting. Information Systems, 2010, 35(4) pp. 404-416.
[7] O'RIAIN S, CURRY E, HARTH A. XBRL and open data
for global financial ecosystems: A linked data approach. International Journal of Accounting Information Systems, 2012, 13(2) pp. 141-162.
[8] HODGE F D, KENNEDY J J, MAINES L A. Does search-facilitating technology improve the transparency of financial reporting. The Accounting Review, 2004, 79(3) pp. 687-703.
[9] BARTLEY J, CHEN A Y S, TAYLOR E Z. A comparison
of XBRL filings to corporate 10-Ks-Evidence from the voluntary filing program. Accounting Horizons, 2011, 25(2) pp. 227-245.
[10] Barzily, R N. Elhadad, K. McKeown. Sentence Ordering in Multidocument Summarization. Human Language Technology Conference, Proceedings of the first international conference on Human language technology research. San Diego. 2001, pp. 79-82.
[11] Barzily, R N. Elhadad, K. McKeown. Inferring strategies for sentence ordering in multidocument news summarization. Journal of Artificial Intelligence Research, 2002, 17(2) pp. 35-55.
[12] Lapata, M. Probabilistic text structuring: experiments with sentence ordering. In proceedings of the annual meeting of ACL2003, 2003, pp. 545-552.
[13] Naoaki Okazaki, Yutaka Matsuo, Mitsuru Ishizuka. Improving Chronological Sentence Ordering by
Precedence Relation. In Proc. 20th Internaional Conference on Computational Linguistics (COLING 04),
Geneva, Swiss, August 2004, pp. 750-756. [14] Danushka Bollegala, Naoaki Okazaki, Mitsuru Ishizuka. A
bottom-up approach to sentence ordering for multi-document summarization. In Proceedings of ACL-COLING 2006. 2006, pp. 134-137.
[15] Danushka Bollegala, Naoaki Okazaki, Mitsuru Ishizuka. A Machine Learning Approach to Sentence Ordering for Multi Document. Proceedings of the Annual Meeting of the
Association for Natural Language Processing. 2005, pp. 1381-1384.
[16] Zhuli Xie, Xin Li, Barbara Di Eugenio, Weimin Xiao, Thomas M. Tirpak and Peter C. Nelson Using Gene Expression Programming to Construct Sentence Ranking Functions for Text Summarization. In 20th International Conference on Computational Linguistics. 2004, pp. 1381-1384.
[17] ZHANG J, ACKERMAN M S, ADAMIC L. Expertise networks in online communities: Structure and algorithms// Proceedings of the 1 6th International World-wide Web Conference. 2007.
[18] ABDUL-RAHMAN A, HAILES S. Supporting trust in virtual communities// Proceedings of the Hawai’i International Conference on System Sciences. 2000.
[19] Bongwon Suh, Peter L. Pirolli, Finding Credible
Information Sources in Social Networks Based on Content and Social Structure// Kevin R. Canini, 2011 IEEE International Conference on Privacy, Security, Risk, and Trust, and IEEE International Conference on Social Computing, 2011 pp. 978-985.
[20] A. Ritter, C. Cherry, and B. Dolan. Unsupervised Modeling of Twitter Conversations. // NAACL, 2010.
[21] Alonso, Omar, Carson, Chad, Gerster, David, Ji, Xiang,
and Nabar, Shubha. Detecting Uninteresting Content in Text Streams// SIGIR Crowdsourcing for Search Evaluation Workshop, 2010
[22] GIRVAN M, NEWMAN M. Community structure in social and biological networks// National Academic Science. Vol. 99. 2002 pp. 7821-7826.
Zhang Lili was born in Sichuan province of China at 2th May, 1976. He received his bachelor degree from Southwest Petroleum University, China in 2000, received his master degree in University of Electronic Science and Technology of China in 2008.
Jinghua Ding is a graduating doctoral students in Sungkyunkwan University. He regularly reviews papers for
some well-known journals and conferences. His research interests are in M2M communications, cloud computing, machine learning and wireless networks.
206 JOURNAL OF MULTIMEDIA, VOL. 9, NO. 2, FEBRUARY 2014
© 2014 ACADEMY PUBLISHER

Trains Trouble Shooting Based on Wavelet
Analysis and Joint Selection Feature Classifier
Yu Bo Beijing Jiaotong University, School of Traffic and Transportation, Beijing China
Email: [email protected]
Jia Limin*, Ji Changxu, and Lin Shuai
Beijing Jiaotong University, State Key Laboratory of Rail Traffic Control and Safety Beijing, China
*Corresponding author, Email: [email protected], [email protected], [email protected]
Yun Lifen Mississippi State University, Civil and Environmental Engineering, Mississippi State, USA
Email: [email protected]
Abstract—According to urban train running status, this
paper adjusts constraints, air spring and lateral damper
components running status and vibration signals of vertical
acceleration of the vehicle body, combined with
characteristics of urban train operation, we build an
optimized train operation adjustment model and put
forward corresponding estimation method-- wavelet packet
energy moment, for the train state. First, we analyze
characteristics of the body vertical vibration, conduct
wavelet packet decomposition of signals according to
different conditions and different speeds, and reconstruct
the band signal which with larger energy; we introduce the
hybrid ideas of particle swarm algorithm, establish fault
diagnosis model and use improved particle swarm algorithm
to solve this model; the algorithm also gives specific steps
for solution; then calculate features of each band wavelet
packet energy moment. Changes of wavelet packet energy
moment with different frequency bands reflect changes of
the train operation state; finally, wavelet packet energy
moments with different frequency band are composed as
feature vector to support vector machines for fault
identification.
Index Terms—Wavelet Packet Energy Moments;
Supporting Vector Machine; Train Operation Adjustment;
Monitoring Data; Urban Trains
I. INTRODUCTION
With increased speed, the train running stability and
comfort needs to be improved. When trains are running at
high speed, the impact of track irregularities input will
make train body produces sliding, rolling and shaking his
head and will laterally accelerate through the body
synthesis, affecting the lateral stability and reducing the
comfort of the train. Lateral active and semi-active
suspension transverse are often used to reduce lateral
vibration. Therefore, the study of the relation between the
train track irregularity and lateral vibration has important theoretical and practical value for improving lateral
stability train and suspension damping effect and
estimating transform law of lateral vibration [1]. Train
Operation Adjustment issues are non-linear
multi-objective combinatorial optimization problem,
which has been known as NP-hard [2] (Nondeterministic
Polynomial Problem).
As the urban rail transit train speeds increase, driving
density increases, the train operation adjustment is also
more complicated. Therefore, the study of adjustment method which fits the characteristics of urban rail transit
train operation has significance for optimal operation in
order to improve the quality of train operator. Domestic
and foreign experts and scholars had done a lot of
research on train operation adjustment, simulation,
operations research, fuzzy decision making, expert
systems and other methods have been applied in the
solution process [3], and achieved certain results. Urban
rail transit train operation adjustment as the core of the
work vehicle dispatching, determines the merits of the
train running order [4]. For vehicle acceleration track
irregularity relationship between inputs, many researchers have been studied and achieved certain results. For
example, the literature [5] studies of vehicle-orbit
coupling system random vibration characteristics of the
train based on the establishment of the vehicle-track
vertical cross-coupling model, proving that lateral
vibration signal energy is concentrated in 1 ~ 2Hz.
Literature [6] uses the power spectral density to study the
effects of the track level and direction of the irregularity
to the vehicle random vibration, the results show that the
train is mainly influenced by rail vehicle direction and the
level of irregularity and the performance is low-frequency vibration. In order to extract the low-frequency signal
track irregularity, the literature [7-9] use wavelet
transform to analyze the track irregularity signal.
Literature [10] uses wavelet transform method to process
the signal of track irregularity and vertical acceleration
collected by the comprehensive test car, and analyze a
certain band to determine relationship between the track
irregularity and the vertical acceleration. But there are
JOURNAL OF MULTIMEDIA, VOL. 9, NO. 2, FEBRUARY 2014 207
© 2014 ACADEMY PUBLISHERdoi:10.4304/jmm.9.2.207-215

sliding lateral vibration, shaking head and rolling, while
relative track irregularities inputs include level and
direction, so we need to further explore relationship
between the vibration components and input irregularity
[11]. Meanwhile, the cross-correlation function reflects
the relationship between signals, so we can combine the
wavelet transformation and the cross-correlation function
method. Thus, firstly use Simulink software to build 17
degrees of freedom transverse suspension model to
produce vibration signals of sliding, rolling and shaking
head, and then use wavelet transformation and cross-correlation function to analyze the relationship
between this three kinds of vibration components and
orbital level, direction and unsmooth inputs[12].
Sensors can monitor a large number of vibration data
when the high-speed train is running, different train
running status will show different characteristics of the
data, the way based on characteristics of the monitoring
data has important significance to characterize high-speed
train security state and state estimation [13]. In recent
years, many scholars have proposed some optimization
algorithm to solve with train operation adjustment problems. Mainly using genetic optimization algorithm
and particle swarm algorithm (PSO) [14]. Although the
applicability of genetic algorithms is great, shortcomings
exist in solving the optimal solution, such as complex
coding process ,time-consuming, slow convergence and
poor local search capability; because constraints of train
running are many, the search space is great, standard
particle groups convergence algorithm are susceptible to
premature, it is difficult to obtain the optimal solution
[15]. Based on the PSO algorithm, Angeline proposed
hybrid particle swarm algorithm, an improved algorithm, which introduce the idea of hybrid of genetic algorithm to
PSO algorithm, making the searching capacity of
algorithm enhance and it is not easy to fall into local
optimum. Therefore, it is urgent to propose a fast
optimization method based on a hybrid particle swarm
algorithm to solve the problem of urban rail transit train
operation adjustment. Therefore, train fault diagnosis
simulation, includes two key elements-feature selection
and classifier design. Besides useful features, there are
redundant features and useless features during extraction
of train status feature set, which increase the learning
time of classifiers and adversely affect the diagnostic results [16]. To this end, a number of trains
troubleshooting feature selection algorithms are put
forwarded, such as association rule selection algorithm,
genetic algorithm, simulated annealing algorithm, particle
swarm optimization and rough sets algorithm [17]. In
addition to feature selection, the simulation results of
train fault diagnosis are also associated with fault
classifier. The current analog fault diagnosis model trains
are mainly Bayesian network, K-nearest neighbor method,
neural networks and support vector machines [18]. The
neural network nonlinear approximation ability is superior, but the complexity of network structure is great,
so it has defects such as it is easy to fall into local
minimum value [19]. Least squares support vector
machine classifier, LSSVM, better overcomes defects
such as the over-fitting of neural network, the slow
standard SVM training and it is used broadly in simulated
fault diagnosis. So we need to choose LSSVM as the
classifier of train fault diagnosis, however the
classification performance of LSSVM is closely related
with the parameters, there are mainly genetic algorithms,
simulated annealing algorithm, particle swarm
optimization algorithm to select LSSVM parameters [20].
When the train is running, its key components [21]
may be faulty, the vibration signal [22] of the sensor
monitors as an information factor directly whether the operating state is normal or not. While the vibration
signal is majorly nonlinear and non-stationary signals,
and wavelet analysis has strong local analysis capabilities,
and it have more significant advantages [23] compared to
short time Fourier analysis and Fourier transform.
Through expansion and translation of the wavelet
function, time-frequency window can be adjusted
according to the signal frequency, and continuation on
wavelet packet decomposition has no further
decomposition of the high-frequency band, improving
frequency resolution [24]. The main innovations are the following:
(a) Compared to the normal state, when critical
components of train fails , the main frequency is changed,
and the performance is that some bands energy increases,
while some bands’ energy decreases, mapping
relationship exists between the energy band and fault
condition. Based on the monitoring data, evaluate the
running status of high-speed train’s air springs and shock
absorbers and other key components, aim at the body
vertical acceleration vibration signal, this paper propose
wavelet packet energy moments method which estimates the train state. Use the feature of the wavelet packet
energy moments to extract the method, and use support
vector machines for state estimation. Experimental results
show that this method can extract the train key
components of the initial fault characteristics and the
fault recognition rate is high.
(b) First, analyzes characteristics of the body vertical
vibration, conduct wavelet packet decomposition for
signals under the different conditions and different speeds
and reconstruct the band signal with larger energy, and
then calculate each band’s features of wavelet packet
energy moment. Changes of wavelet packet energy moment of different frequency bands reflect changes of
the train running. Compose wavelet packet energy
moments of different band as feature vectors, and
simulation analysis of experimental data shows that the
loss of gas train air springs and fault identification lateral
damper failure’s recognition rate is high ,which shows
that this method can well estimate the fault condition of
high-speed train .
(c) Considered that train operation adjustment
constraints are a lot and difficulty of solving problems is
great and other such problems, this paper combine with the characteristics of urban rail transit train operation to
establish of an optimized train operation adjustment
model. In order to improve the accuracy of fault
diagnosis, this paper takes feature selection and the
208 JOURNAL OF MULTIMEDIA, VOL. 9, NO. 2, FEBRUARY 2014
© 2014 ACADEMY PUBLISHER

intrinsic link method of LSSVM parameters into
consideration and proposes a model with joint selection
feature and LSSVM parameters fault diagnosis. The
simulation results show that the proposed model
improves the accuracy of fault diagnosis and efficiency, It
can meet the requirements of simulative train fault
diagnosis.
II. PROPOSE METHOD
A. Adjustment Model for Train Running Status
1) Wavelet Packet Energy Moment The actual operation of the vehicle is mainly affected
by the incentive track irregularity, which is a major
source of various generated vibration. And with increased
speed, vertical acceleration increases and affects the
vehicle body through frame, excite elastic vibration of the
vehicle body with a higher frequency. And in turn, the
body train affects the frame through the spring, affecting
the dynamic performance of the train. Air spring and
horizontal absorber as the second line and the first line
suspension are the key components of train system,
abnormal vibration generated when failure occurs. It can be known by the actual knowledge the that body vibration
frequency is mainly concentrated in the low frequency
range, the main vertical vibration is generally less than
4Hz.In order to extract the subtle characteristics under
different faults, wavelet packet decomposition has a great
advantage, and this paper also proposes that wavelet
packet energy moment algorithm can reflect energy
changes of different faults in different bands. The
so-called wavelet packet is a family of functions which
construct their orthonormal base library 2( )L R , after the
wavelet packet decomposition, the signal can be
decomposed to the neighbour frequency band without
leakage, overlapping, and the frequency range of each
band is 1 1[( 1)2 , 2 ], 1,2, 8j j
s sn f n f n ,
where in, sf is sampling frequency. Most vertical
vibration generated when high-speed train runs are
nodding and rolling and pendulum and other complex
vibration of typical vibration combination. The
acceleration sensor mounted on the bogie train can
monitor different frequency band energy distribution
characteristics when signals are under different conditions. The traditional wavelet energy methods do
not consider energy distribution of each band
decomposition on the timeline, so that the extracted
feature parameters can not accurately reflect the nature of
fault, so this paper introduces the energy [8,9] parameters
sf , the energy moment ijM of each band signal ijS is:
2
1
( ) | ( ) |n
ij ij
k
M k t S k t
where in, t is the sampling interval n is the total
number of samples, k is the sampling point, and the
energy matrix algorithm steps are:
(1) Conduct wavelet packet decomposition for the
body vertical vibration signal, let S represent the original
signal, jkX be the wavelet packet decomposition
coefficients of signal of j scale in k time.
(2) Reconstruct coefficients of the wavelet packet
decomposition to obtain the frequency range jkS of the
signal.
(3) Find wavelet packet energy moment jM of each
band signal jkS .
(4) Structure feature vector to obtain a normalized
feature vector T :
2
1 2
1
[ , , ] /n
n j
j
T M M M M
2) Fault Diagnosis Model According to changes of the proportion of each
frequency band energy moment, train running status can
be monitored. Train operation adjustment is that when the running train is disturbed, actual operation of the train
deviates from the scheduled chart. Through re-adjustment
of train operation plan, so far the actual train running
route is as possible close to the scheduled chart [5]. Train
operation adjustment is a multi-constrained combinatorial
optimization problem, this kind of problem is usually
expressed by using the following abstract form [6]:
Equation of state:
( 1) ( ) ( )G j G j T G j (1)
Optimization objectives set:
(1)Object and (2)Object ...and ( )Object n
Set of constraints:
(1)Restraint and (2)Restraint ...and ( )Restraint n
Among them, ( )G j is the train running status of time
j , T is the state transition operator decided by the
adjust strategy of the running train.
For the given set of features of analog train state
1 2, , ,
nS s s s , 0,1
is , 1, 2, ,i n , where in n
is the size of the feature set , 1 and 0 denote whether the
corresponding feature is selected or not. Ultimate goal of feature selection is to improve the simulation train fault
diagnostic accuracy (G), therefore, simulate the
mathematical model of feature selection:
1 2
max ( )
. .
, , ,
0,1
1,2, ,
S
n
i
G S
s t
S s s s
s
i n
(2)
Using particle swarm optimization algorithm to
simulate the solving problem of train multi-feature
combinatorial selection optimization, particle bit string
representing the selected feature subset (S), PSO fitness
function is the analog train fault diagnostic accuracy. In
calculating the fitness value of each particle, first learn
the training set according to the selection feature S,
calculate the accuracy (G) of fault diagnosis of the
JOURNAL OF MULTIMEDIA, VOL. 9, NO. 2, FEBRUARY 2014 209
© 2014 ACADEMY PUBLISHER

classifier of analog train, but the classifier (LSSVM)
parameters needs to be given before calculating G.
In the designing of train fault classifier based on
LSSVM, we shall determine the kernel function and its
parameters. Currently there are several LSSVM kernel
function, a large number of studies have shown that when
there is absence of a prior knowledge of the process, in
the general case, LSSVM based on radial basis function
(RBF) outperforms other kernel function, so we choose
RBF kernel, which is defined as follows:
22( , )
u v
RBFK u v e
(3)
In the formula, u , v represents the two vectors of
input space, is the width of the kernel function.
Besides RBF kernel function parameters σ, LSSVM
classification performance is also related to the
regularization parameter γ. Combined kernel function and
related parameters, classifier parameter selection model
based on LSSVM is:
,M (4)
Take analog train fault diagnostic accuracy (G) as the
classification parameters electing target, classifier
parameters mathematical model based on LSSVM is:
max min
min max
max ( )
. .
,
( , )
( , )
MG M
s t
M
(5)
Like Train simulator troubleshooting features with
combinatorial optimization, formula (4) uses PSO to seek
solution. Particle bit string represents parameter (M) of
LSSVM, the fitness function is the analog train fault
diagnostic accuracy. In calculating the particle fitness
value, LSSVM demands to study the training set
according to the parameter (M), then calculate the
simulated train fault diagnosis accuracy of classifier
(LSSVM), but the feature subset (S) needs to be given
before calculating G .
In the current modeling process of train simulator fault diagnosis, the feature selection and LSSVM parameters
intrinsic link between the two has not been considered,
the two are independent to choose, so there are some
drawbacks: firstly, it can not be determined should
feature selection or LSSVM parameters [11] selection
goes first. Secondly, if one process be carried out, then
the other will be randomly determined, so even taking
turns we can not guarantee that both are optimal.
B. Model Solving Process
1) Particle Swarm Optimization Diagnostic Model Particle swarm optimization (PSO) finds the optimal
solution by following their historic P best and throughout
the history of particle swarm optimal solution g best. PSO
algorithm has the advantage of fast convergence, without
regulation of many parameters, change impacts of the
dimension is minor, and so on, so it is easy to implement
[12]. In each iteration, the particle’s velocity and position
updating equation is:
1
2
( 1) ( ) () (
( ) () ( ( ))
id id best
id best id
v i v i c rand P
x i c rand g x i
(6)
( 1) ( ) ( 1)id id idx i x i v i (7)
where in, ( )idv i and ( 1)idv i respectively represents
the current particle velocity and the updated particle
velocity; ( )idx i and ( 1)idx i respectively represents
the current position of the particle and the updated
position of particles; w is the inertia weight; c1, c2 represents the acceleration factor; rand () indicates the
number of random function. Location of individual
particles is composed of three parts. The first part
characterize the analog train status information, using the
binary coding, in which each bit is respectively
corresponding to a given feature, "1" indicates that the
corresponding feature selection subset, and when this bit
is "0", it indicates that the corresponding feature is not in
the selected subset of features; second and third parts
respectively represent and , the code length can be
adjusted according to the required accuracy (8).
max min
min2 1
p p
p lp d
(8)
In this formula, p represents the converted value of the
parameter; l represents the length of the bit string of
corresponding parameters; max p and min p denote the
minimum and maximum of parameter; d represent
representative accuracy of binary.
Train fault feature and classification parameters selection goal is to improve train fault diagnostic
accuracy while ensuring fault feature as little as possible,
so the fitness function is defined as:
1
1
fN
a f i
i
f Acc f
(9)
where in, if denotes the feature selection status; f
N
indicates total number of features; a indicates feature
weights, f means the weights of the number of
features with respect to the accuracy of the validation set ;
Acc validates set diagnostic accuracy.
LSSVM is for two classification problems, however,
train simulator includes a variety of fault types of fault,
thus train simulator troubleshooting essentially is a
multi-classification problem, currently there are "1 to 1"
and "1 to many" which construct multiple classifiers. In
this paper, we use the "1 to 1" way to build a
multi-intended classifier for stimulating train fault.
2) Analog Troubleshooting Steps (1) Collect information of train simulator status and
use wavelet packet to extract candidate feature.
210 JOURNAL OF MULTIMEDIA, VOL. 9, NO. 2, FEBRUARY 2014
© 2014 ACADEMY PUBLISHER

(2) To prevent that too large a difference of
characteristic values will adversely affect the training
process, the characteristic values needs to be normalized.
(3) Initialize PSO. Randomly generate m particles to
compose the initial particle swarm, each particle is
composed by a subset of features, LSSVM parameters (γ,
σ).
(4) According to the coding scheme of the particle, the
binary representation of each particle is changed into the
selected subset of features, LSSVM parameters γ and σ,
then calculate the fitness value of the particle according to formula (8).
(5) For each particle, it should compare the fitness
function value with of its own optimal value, and if the
fitness function value is better than the optimal value,
then the fitness value replace the historic optimal value,
and uses the position best of the current particle.
(6) For each particle, it should compare the fitness
function value with of its group optimal value, and if the
fitness function value is better than the group optimal
value, then the fitness value replace the historic optimal
value, and uses the position best of the current particle. (7) Update the particle velocity and position according
to equation (6) and (7), and adjust the inertia weight.
(8) When the maximum number of iterations is
reached, then output corresponding feature subset of
optimal particles, LSSVM parameters; otherwise go to
step (4) and continue the iteration.
(9) Simplify the training set and test set according to
the optimal feature subset, and then use the optimal
parameters of LSSVM to learn the training set to build a
simulation model train fault diagnosis and diagnose test
set, then output the diagnosis.
III. EXPERIMENTS AND ANALYSIS
A. Effectiveness of Experimental Wavelet Analysis
In order to verify the effectiveness of the method,
install a sensor, which monitors the vertical acceleration,
on the motor car test rig floor-mounted pillow beam of
front body, collecting working conditions signals of EMU
original car (normal condition), EMU front spring loses
gas (air spring fails), EMU yaw full demolition (yaw
damper failure conditions) and transverse damper motor
car full demolition (lateral damper failure conditions).The sampling frequency is 243Hz, the sampling time is1
minute. Figure 1 and 2 are the time domain and frequency
domain of the four conditions at 200Km / h.
Many of the train vibration is low frequency vibration,
so we first chose the Butterworth filter filters out signals
above 15Hz and zero mean processing, so that we can
eliminate the low-frequency-high-peak interference
signals in the frequency domain. It is conducive to feature
extraction. Figure 3 and 4 is a time-frequency domain
after pretreatment. The figure shows that the vertical
acceleration of EMU front springs is the biggest, and vibration energy at the fault characteristic frequency
reaches maximum. It contains a lot of pulse-pounding
ingredients, EMU yaw full demolition fault performance
is not obvious, EMU lateral damper fully demolished has
sensitive vibration frequency around 1Hz. In order to
further analyze the characteristics of all conditions for
fault identification, we select db14 wavelet according to
the main characteristics of the signal frequency range,
taking into account that because we analyze the signal
within 15Hz , we only reconstruct the preceding 8-band
wavelet packet coefficients decomposed by the layer
6.The corresponding frequency range is: 0-1.875Hz,
1.875-3.75 Hz, 3.75-5.625 Hz, 5.625-7.5 Hz, 7.5-9.375
Hz, 9.375-11.25 Hz, 11.25-13.125 Hz, 13.125-15 Hz.
Corresponding figure of frequency band and energy
moment can be obtained under different speeds ,as shown from figure 3 to figure 6.
0 50
-0.1
0
0.1
time/s
The
ver
tica
l ac
cele
rati
on
of
m/s
2
Train the original car
0 10 200
20
40
60
80am
pli
tud
e
0 50
-0.1
0
0.1
Move the front overhead spring loss of air pressure
0 10 200
20
40
60
80
time/s
Frequency/Hz
amp
litu
de
Frequency/Hz
The
ver
tica
l ac
cele
rati
on
of
m/s
2
Figure 1. Frequency motor vehicle and air spring air
0 50
-0.1
0
0.1
Train all resist sinusoidal
0 10 200
20
40
60
80
0 50
-0.1
0
0.1
Train all transverse shock absorber
0 10 200
20
40
60
80
time/s
Th
e v
erti
cal
acce
lera
tio
n o
f m
/s 2
amp
litu
de
time/s
Frequency/Hz
amp
litu
de
Frequency/Hz
Th
e v
erti
cal
acce
lera
tio
n o
f m
/s 2
Figure 2. Frequency domain anti hunting around buildings and lateral
damper fully
In the figure, the letters A-D respectively denotes the
original car EMU, EMU loss of gas spring before
overhead, yaw full EMU demolition and EMU lateral
damper demolition. Brackets after the letters indicates
failure state when the train runs at certain speed.
Instability occurs when EMU is at yaw full demolition
220Km / h , so 250Km / h without the condition, it is
know from the figure that the same conditions has the
same trend at different speeds, front overhead spring loss of gas failure, energy is concentrated in a second band, i.e.
There is sensitive vibration sequency within the 2-4Hz
and there are many responsive impulse .Known from the
train model, the air spring is mounted and supported on
JOURNAL OF MULTIMEDIA, VOL. 9, NO. 2, FEBRUARY 2014 211
© 2014 ACADEMY PUBLISHER

the bogie of the rubber base body, the compressed air
inside the rubber balloon is took as the elastic restoring
force of the reaction force, this can reduce the vibration
and shock. The air spring failure just relies on the rubber
buffer alone to reduce damping and this will make the
acceleration vibration of the vehicle increase. Energy of
the other two faults and normal condition is concentrated
in the first and second bands, as the speed increases, the
torque difference between the energy band increases.
When lateral damper fully removed excite instability, the
energy is mainly in the first frequency band. Above analysis indicates that under different conditions and
different speeds, energy changes according to the
respective conditions of frequency and time distribution.
0 2 4 6 80
0.2
0.4
0.6
0.8
1
Eight before 6 layer decomposition of
wavelet packet frequency band
En
erg
y m
om
ent
160Km/h
A
BC(micro sway)
D
Figure 3. 160 Km/h wavelet packet energy moment
0 2 4 6 8
200Km/h
A
BC(shakes, HuanShou)
D
0
0.2
0.4
0.6
0.8
1
Eight before 6 layer decomposition of
wavelet packet frequency band
Ener
gy m
om
ent
Figure 4. 200 Km/h wavelet packet energy moment
0 2 4 6 80
0.2
0.4
0.6
0.8
1220Km/h
A
BC (buckling)D (vibration, shaking, HuanShou)
Eight before 6 layer decomposition of
wavelet packet frequency band
Ener
gy m
om
ent
Figure 5. 220 Km/h wavelet packet energy moment
B. Fault Diagnosis Test
SVM is advantageous for the small sampling,
nonlinear and high dimensional pattern recognition
[10-12], so we use support vector machines for fault
identification. We extract 30 sample groups for each
group of these four kinds of working conditions, there are
120 groups of samples in total, wherein 60 groups are for
training and 60 groups for testing. Each group is a dimensional feature vector which is composed of the
energy moment of the 8 preceding frequency band of the
last layer wavelet packet. The experiment has four
conditions of the vibration signal, so it needs to establish
three second-class SVM. The fault identification topology
structure is shown in Figure 7, four kinds of conditions of
the correct recognition rate results are shown in Table 1.
0 2 4 6 80
0.2
0.4
0.6
0.8
1250Km/h
Eight before 6 layer decomposition of
wavelet packet frequency band
En
erg
y m
om
ent
A
BD(turbulence instability )
Figure 6. 250 Km/h wavelet packet energy moment
From table 1, we know, as the speed increases in each
case, the correct recognition rate is 100% when EMU gas
spring failure speed is 200Km / h; when the motor car full
demolition fault yaw rate reached 220Km / h, meandering
instability occurs and when the speed is 200Km / h, the
recognition rate is the highest; excitation instability
occurs when EMU lateral damper fully dismantle is at 250Km / h , then the vibration frequency is very small
and the correct identification rate is 100 %.
C. Fault Identification
In order to verify the effectiveness of high-speed train
bogie mechanical fault signal extract wavelet entropy
features, we use support vector machine to classify and recognize characteristic data. The data used is the
simulation data under single fault condition, select the
responding data collected by the 58 sensors as a group
when the speed is 200km / h, under four kinds of fault
state. In order to achieve classification, take each group’s
data under the same conditions and the same position into
a 3 seconds of data segments, each segment as a sample,
then a single failure has 70 samples an the four faults
have 280 samples. As previous description, these samples
needs to do de-noising preprocessing and feature
extraction wavelet entropy, wherein we abandon the distance rounding wavelet entropy, each sample has a
feature vector with five of five-dimensional wavelet
entropy .Put these five-dimensional feature vectors which
are extracted by 280 samples into the input support vector
machine to recognise. Wherein, 60% of the samples were
randomly selected as the training samples, and the
remaining 40% as test samples.
Figure 8 is a three-dimensional features figure of
lateral acceleration signal of the central frame and
acceleration signal plot of longitudinal axis gearbox. It
can be seen from the figure that there is a little overlap phenomenon of two-dimensional wavelet entropy under
four kinds of conditions, the same conditions feature is
not very concentrated, but some characteristics of the
particular condition has a good degree of differentiation,
so when we select five-dimensional wavelet entropy
features to form a high-dimensional feature, we are able
to get a satisfactory recognition effect.
212 JOURNAL OF MULTIMEDIA, VOL. 9, NO. 2, FEBRUARY 2014
© 2014 ACADEMY PUBLISHER

SVM 1
F ( x )= 1 ?
SVM 2
F ( x )= 1 ?
Train normal signal
The input
The feature vectors
SVM 3
F ( x )= 1 ?
No
Yes
Move the front overhead spring loss
of air pressure
Train of serpentine complete
Train all transverse shock absorber
Yes
Yes
No
No
Figure 7. The fault identification topology structure is shown
TABLE I. DIFFERENT SPEEDS UNDER FOUR CONDITIONS OF THE RATE OF CORRECT RECOGNITION
speed(Km/h) Motor
car
Before starting the overhead
spring loss of gas
Train anti hunting around
buildings
Vehicle lateral damper around
buildings
160 20% 93.3% 40% 60%
200 60% 100% 73.3% 66.7%
220 80% 100% 53.3%(unstability) 46.7%
250 66.7% 100% - 100%(Excitation instability)
280 93.3% 100% - -
300 93.3% 100% - -
330 100% 100% - -
The average recognition rate 73.3% 99% 55.5% 68.4%
TABLE II. THE RECOGNITION SENSOR CHANNEL RATE
Wavelet entropy feature discrimination %
1—10 66.9 66.9 67.8 30.3 58.0 66.0 91.9 51.7 83.9 59.8
11—20 94.6 79.4 92.8 44.6 90.1 47.3 70.5 54.4 74.1 96.4
21—30 48.2 93.6 76.7 29.4 97.3 98.2 24.1 91.9 61.6 33.9
31—40 91.0 84.8 90.2 83.0 93.7 85.7 62.5 64.3 67.8 58.9
41—50 70.5 59.8 71.4 56.2 66.9 75.9 75.0 71.4 59.8 60.7
51—58 71.4 65.1 95.5 92.8 75.0 69.6 62.5 61.6
TABLE III. THE EXPERIMENTAL RESULTS ARE SHOWN
discrimination % 40 km/h 80 km/h 120 km/h 140 km/h 160 km/h 200 km/h
wavelet energy feature 34.4 41.3 70.1 79.6 81.0 84.9
Wavelet entropy feature 26.7 38.3 69.6 81.2 85.7 96.4
Data signal recognition results of each channel
(different sensor) are shown in Table 2. Experimental
data were collected from 58 channels, distributed in
various parts of the bogie. But the theory is not clear about which parts of the vibration signal acquisition is
more conducive to the identification of a fault condition,
the experimental results show that the recognition
performance is uneven between different sensors. As can
be seen from table 2, a high recognition rate of the
channel is the channel 11, 20, 25, 26 and 53. They are
respectively corresponding to the mounting position of
the sensor lateral acceleration of the central frame, one
axle lateral acceleration, longitudinal axis gear box
accelerometer, three-axis gearbox lateral acceleration and
a series a relative displacement.
In order to verify the validity of feature extraction, this paper compares the proposed method with the traditional
wavelet energy feature extraction methods, and
respectively calculate the fault recognition rate when the
train is running at 40km / h, 80 km / h, 120 km / h, 160
km / h and 200 km / h , the experimental results are
shown in table 3.
It can be concluded from table 3 that compared to
traditional wavelet energy feature, the wavelet entropy features can get higher fault recognition rates, especially
in the high state. As the train speeds increase gradually
the recognition rate increases and when the speed is 200
km / h the wavelet entropy feature recognition rate can
reach 90% or a more satisfactory result. It is believed that
the higher the speed, the greater the difference between
the law of the vibration signal bogie caused by different
failure. The more obvious the fault feature are the greater
the impact on train mechanical systems and this
conclusion is consistent with the kinetic theory.
IV. CONCLUSION
According to high-speed train running status, this paper adjusts constraints, air spring and the running status
of lateral damper components and vibration signals of
vertical acceleration of the vehicle body. Combined with
operation characteristics of urban train, the paper
JOURNAL OF MULTIMEDIA, VOL. 9, NO. 2, FEBRUARY 2014 213
© 2014 ACADEMY PUBLISHER

establishes an optimized train operation adjustment
model, and proposes the train state estimation method of
corresponding wavelet packet energy moment. Besides,
as for the problem that the features of the current analog
fault diagnosis does not match the classification
parameter selection, this paper also proposes an analog
train fault diagnosis model with joint selection
characteristics and classifier parameters. As for the
vertical acceleration vibration signals based on
monitoring front beam floor, we propose using the feature
extraction method of wavelet packet energy moments, and use SVM to estimate the running state. Experimental
results show that the is the signal is most sensitive to air
spring failure and has sensitive vibration frequency
within 2-4Hz; lateral damper fully removed is relatively
more sensitive when excitation instability occurs around
1Hz, and the accurate recognition rate is 100%.It
indicates that vertical acceleration monitoring data is
effective for air spring losing of gas and lateral damper
excitation instability. The next step needs to be done is:
the train running from normal to abnormal is a gradual
process, the shown signs are fuzzy and random in many cases. This article just makes a preliminary discussion,
further study of the high-speed train safety warning and
health maintenance needs to be carried out.
00.2
0.40.6
0.8
0
0.2
0.40.2
0.3
0.4
0.5
0.6
0.7
WEEWTFE
WS
E
The original car
Air spring loss of air pressure
Coil resistance failure
Lateral damper failure
a) 11 channel architecture the central lateral acceleration signal
0.10.2
0.30.4
0.50.6
0
0.2
0.40.45
0.5
0.55
0.6
0.65
0.7
WEEWTFE
WS
E
The original car
Air spring loss of air pressure
Coil resistance failure
Lateral damper failure
b) 25 channel three axle gear box longitudinal acceleration signal
Figure 8. Three dimensional feature pictures of different position
signal
ACKNOWLEDGMENT
This work was supported in part by The National High
Technology Research and Development Program of
China (Grant No. 2011AA110506).
REFERENCES
[1] Kuihe Yang, Ganlin Shan, Lingling Zhao. Application of Wavelet Packet Analysis and Probabilistic Neural Networks in Fault Diagnosis, Proceedings of the 6th World
Congress on Intelligent Control and Automation. 2006 pp. 4378-4381.
[2] Jiang Zhao, Feng Sun, Huapeng Wang. Pipeline leak fault feature extraction based on wavelet packet analysis and application, IEEE 2011 International Conference on Electrical and Control Engineering, 2011 pp. 1148-1151.
[3] Alexios. D. Spyronasios, Michael. G. Dimopoulos. Wavelet Analysis for the Detection of Parametric and Catastrophic Faults in Mixed-Signal Circuits. IEEE Transactions on Instrumentation and Measurement, 2011,
60(6) pp. 2025-2038 [4] Shengchun Wang, Qing Zhang, Study on The Fault
Diagnosis Based on Wavelet Packet and Support Vector Machine, International Congress on Image and Signal Processing. 2010, (3) pp. 3457-3461.
[5] Urmil. B. Parikh, Biswarup. Das, Combined Wavelet-SVM Technique for Fault Zone Detection in a Series Compensated Transmission Line. IEEE Transactions on
Power Delivery, 2008, 23(4) pp. 1789-1794. [6] CHO Chan-Ho, CHOI Dong-Hyuk, QUAN Zhong-Hua, et
al. Modeling of CBTC Carborne ATO Functions using SCADE. //Proc of 11th International Conference on Control, Automation and Systems. Korea: IEEE Press, 2011 pp. 1089-1093.
[7] CHENG Yun, LI Xiao-hui, XUE Song, et al. The position and speed detection sensors based on electro-magnetic
induction for maglev train. //Proc of the 29th Chinese Control Conference Beijing: IEEE Press, 2010 pp. 5463-5468.
[8] HOU Ming-xin, NI Feng-lei, JIN Ming-he. The application of real-time operating system QNX in the computer modeling and simulation. //Proc of 2nd International Conference on Artificial Intelligence, Management Science and Electronic Commerce. Deng Leng: IEEE Press, 2011
pp. 6808–6811. [9] ESTEREL Technologies. SCADE Suite. (2012-11-1)
[2013-03-07]. http: //www. esterel-technologies. com/ products/ scade-suite/.
[10] WANG Hai-feng, LIU Shuo, GAO Chun-hai. Study On Model-based Safety Verification of Automatic Train Protection System. //Proc of 2nd Asia-Pacific Conference on Computational Intelligence and Industrial Applications. Wuhan : IEEE Press, 2009 pp. 467-470.
[11] DH Wang, WH Liao. Semi-Active Suspension Systems for Railway Vehicles Using Magnetorheological Dampers. Vehicle System Dynamics, 2009, 47(11): pp, 1130-1135
[12] Guangjun Li, Weidong Jin, Cunjun Chen. Fuzzy Control Strategy for Train Lateral Semi-active Suspension Based on Particle Swarm Optimization//System Simulation and Scientific Computing Communications in Computer and Information Science 2012, pp. 8-16
[13] Camacho J, Picó J. Online monitoring of batch processes using multi-phase principal component analysis. Journal of Process Control, 2006, 16(10) pp. 1021-1035.
[14] Hua Kun-lun, Yuan Jing-qi. Multivariate statistical process control based on multiway locality preserving projectio- ns. Journal of Process Control, 2008, 18(7-8) pp. 797-807.
[15] Yu Jie, Qin S J. Multiway Gaussian mixture model based multiphase batch process monitoring. Industrial &
Engineering Chemistry Research, 2009, 48 (18) pp. 8585-8594.
[16] Guo Jin-yu, Li Yuan, Wang Guo-zhu, Zeng Jing. Batch Process monitoring based on multilinear principal component analysis//Proc of the 2010 International Conference on intelligent systems and Design and Engineering Applications, 2010, 1 pp. 413-416.
214 JOURNAL OF MULTIMEDIA, VOL. 9, NO. 2, FEBRUARY 2014
© 2014 ACADEMY PUBLISHER

[17] Chang Yu-qing, Lu Yun-song, Wang Fu-Li, et al. Sub-stage PCA modelling and monitoring method for
uneven-length batch processes. The Canadian Journal of Chemical Engineering, 2012, 90(1) pp. 144-152.
[18] Kassidas A, MacGregor J F, Taylor P A. Synchronization of batch trajectories using dynamic time warping. AIChE Journal, 1998, 44(4) pp. 864-875.
[19] Rothwell S G, Martin E B, Morris A J. Comparison of methods for dealing with uneven length batches//Proc of the 7th International Conference on Computer Application
in Biotechnology (CAB7), 1998 pp. 387-392. [20] Lu Ning-yun, Gao Fu-rong, Yang Yi, et al. PCA-Based
modeling and on-line monitoring strategy for uneven-length batch processes. Industrial & Engineering Chemistry Research. 2004, 43(13) pp. 3343-3352.
[21] Yao Yuan, Dong Wei-wei, Zhao Lu-ping, Gao Fu-rong. Multivar -iate statistical monitoring of multiphase batch processes with uneven operation durations. The Canadian
Journal of Chemical Engineering, 2012, 90(6) pp. 1383-1392.
[22] Zhao Chunhui, Mo Shengyong, Gao Furong, et al. Statistical analysis and online monitoring for handling multiphase batch processes with varying durations. Journal of Process Control, 2011, 21(6) pp. 817-829.
[23] Wang Jin, Peter He Q. Multivariate statistical process monitoring based on statistics pattern analysis. Industrial
& Engineering Chemistry Research, 2010, 49 (17) pp. 7858-7869.
[24] Garcia-Alvarez D, Fuente M J, Sainz G. I. Fault detection and isolation in transient states using principal component analysis. Journal of Process Control, 2012, 22(3) pp. 551-563.
[25] Wise B M, Gallagher N B, Butler S W, et al. A comparison of principal component analysis, multiway principal
component analysis, trilinear decomposition and parallel factor analysis for fault detection in a semiconductor etch process. Chemomotrics, 1999, 13(3-4) pp. 379-396.
Yu Bo (1985-), he is currently pursuing the Ph.D. degree in traffic and transportation at Beijing Jiaotong
University. He is currently working on real-time monitoring and safety warning technology of urban rail trains. His main research directions are train safety, train fault diagnoses, train networks and etc.
Jia Limin (1963-), received Ph.D. degree from China Academy of Railway
Sciences 1991 and EMBA from Peking University 2004. He is now a chair Professor at the State Key Lab of Rail Traffic Control and Safety, Beijing Jiaotong University. His research interests include Intelligent Control, System Safety, Fault Diagnosis and their applications in a variety of fields such as
Rail Traffic Control and Safety, Transportation and etc.
Ji Changxu (1960-), received Ph.D. degree from Jilin university of technology. He is now a Professor at school of traffic and transportation, Beijing Jiaotong Univesity. His research interests include train safety, train fault
diagnoses, traffic planning and management, network optimization of the comprehensive passenger transport
hub service and etc.
Lin Shuai (1987-), she is currently pursuing the Ph.D. degree in traffic and transportation at Beijing Jiaotong
University. She is currently working on reliability assessment of urban rail trains. Her main research directions are train safety, train reliability and etc.
Yun Lifen (1984-), she is pursuing the Ph.D. degree in traffic and transportation at Beijing Jiaotong University and
currently as exchange students in Mississippi State University. Her main research directions are traffic planning and management, network optimization of the comprehensive passenger transport hub service and etc.
JOURNAL OF MULTIMEDIA, VOL. 9, NO. 2, FEBRUARY 2014 215
© 2014 ACADEMY PUBLISHER

Massive Medical Images Retrieval System Based
on Hadoop
YAO Qing-An 1, ZHENG Hong
1, XU Zhong-Yu
1, WU Qiong
2, LI Zi-Wei
2, and Yun Lifen
3
1. College of Computer Science and Engineering, Changchun University of Technology, Changchun, China
2. College of Humanities and Information, Changchun University of Technology, Changchun, China
3. Mississippi State University, Civil and Environmental Engineering, Mississippi State, USA
Abstract—In order to improve the efficiency of massive
medical images retrieval, against the defects of the
single-node medical image retrieval system, a massive
medical images retrieval system based on Hadoop is put
forward. Brushlet transform and Local binary patterns
algorithm are introduced firstly to extract characteristics of
the medical example image, and store the image feature
library in the HDFS. Then using the Map to match the
example image features with the features in the feature
library, while the Reduce to receive the calculation results of
each Map task and ranking the results according to the size
of the similarity. At the end, find the optimal retrieval
results of the medical images according to the ranking
results. The experimental results show that compared with
other medical image retrieval systems, the Hadoop based
medical image retrieval system can reduce the time of image
storage and retrieval, and improve the image retrieval
speed.
Index Terms—Medical Image Retrieval; Feature Library;
Brushlet Transform; Local Binary Patterns; Distributed
System
I. INTRODUCTION
The development of digital sensor technology and
storage device leads to the rapid expansion of the digital
image library, and all kinds of digital equipment produce
vast amounts of images every day. So how to effectively
organize the management and access of these images
becomes a hot research direction in recent years. The
traditional text-based image retrieval system uses the key
words to retrieve the marked images. But owing to the
limitations that artificial marking causes large workload,
the content of the images cannot be completely described
by words, and the understanding of images is different
from person to person and so on, the text-based image
retrieval system cannot meet the requirements for
massive images retrieval. And how to carry on the
effective management and organization of these medical
images to provide services to clinical diagnosis becomes
a problem faced by medical workers [1]. The
content-based medical image retrieval (CBMIR) has the
advantages of high retrieval speed and high precision and
so on, and has been widely applied in the fields such as
medical teaching, aided medical diagnosing, medical
information management, etc [2].
The content-based image retrieval [3] is a kind of
technology which makes use of the visual features of the
images to carry on the image retrieval. Under the premise
of a given query image, and according to the information
of the image content or the query standard, it searches
and finds out the images that meet the query requirements
in the image library. There are mainly three key steps:
first, selecting the appropriate image characteristics;
second, adopting the effective feature extraction method;
third, using the effective feature matching algorithm.
Features that can be extracted from an image include
color, texture, shape, flat space corresponding relation,
etc. Color can be presented by color moment, histogram,
etc. Texture can extract the Tamura feature, Gabor and
wavelet transform of image. Shape can be divided into
area-based method and edge-based method. Flat space
corresponding relation can be described through
two-dimensional string [4].
At present, many institutions have further studied
CBMIR, and developed systems that went into practice.
Such as the earliest commercial QBIC system [5]
developed by IBM, WebSeek system [6] by Columbia
University, Photobook system [7] by Massachusetts
Institute of Technology and so on. There are also many
outstanding works in the content-based image retrieval
direction in recent years, for example, literature [8], based
on the clustering of unsupervised learning, are the typical
examples of CBMIR technology, literature [8][9] use the
semi-supervised learning method, literature [9] carry on
image retrieval with the method of relevance feedback,
and a lot of works also improve the quality of image
retrieval by improving the method of feature extraction,
such as literature [11, 12]. The CBMIR algorithm needs
to calculate the similarity between the features of sample
medical images and the features in the feature library. It
is a typical data-intensive computing process [13]. When
the number of the features in the library is large, the
efficiency of the single-node retrieval in the traditional
browser/server mode (B/S) is difficult to meet the
real-time requirements of the images, and the system has
a poor stability and extensibility [14]. Cloud computing
can assign the tasks to each work node to complete the
tasks together, and with a distributed and parallel
processing ability, it provides a new research idea for
medical image retrieval [15].
216 JOURNAL OF MULTIMEDIA, VOL. 9, NO. 2, FEBRUARY 2014
© 2014 ACADEMY PUBLISHERdoi:10.4304/jmm.9.2.216-222

Hadoop is an open-source project under the Apache
Software Foundation organization, which provides the
reliable and scalable software under distributed
computing environment. It is a framework that allows
users easily using and distributing computing platform,
and it can support thousands of computing with PB-level
nodes data [11, 12]. Hadoop distributed computing
platform is suitable for all kinds of resources, data and
other deployed on inexpensive machines for distributed
storage and distributed management. It is with high
reliability, scalability, efficiency and high fault tolerance,
etc., and it can effectively improve the image the speed of
retrieval. The text on the basis of reaching open-source
framework Hadoop, analyzing the traditional image
retrieval system and combining the content-based image
retrieval technology and MapReduce computing
framework [13] stores the image feature in database
HDFS and developers the realized Hadoop-based mass
image Retrieval System.
Hadoop Distributed File System (HDFS) is a scalable
distributed file system. For it can be run on a cheap and
ordinary hardware, it is supported by many companies,
such as Google, Amazon, Yahoo! and so on. Under the
circumstance that the underlying details is unknown,
using the Map/Reduce functions to realize the parallel
computing easily has been widely applied in the field of
mass data processing [16]. Making use of the advantages
of Hadoop, the problem that the retrieval efficiency is
low in the process of medical image retrieval can be
better solved, and there is no related research in the
domestic presently [17]. Content-based image retrieval
CBIR is the underlying objective retrieval by using global
and local features of the image. Global features include
color, shape, texture and so on; local features include
SIFT, PCA-SIFT, SURF and so on [14]. As an automatic
objective reflection image content-based retrieval method,
CBIR is suitable for mass image retrieval. Semantic
retrieval is the direction of development of CBIR image,
but the image semantic has the characteristics of
complexity, subjectivity, etc., and it is difficult in the
extraction, expression and application of technical exist
[15]. There are two main aspects of development of
parallel image processing system; one is for some
algorithms. It is searching the efficient parallel algorithm
and development of high-performance parallel computer
to achieve specific purposes, but such system is limited to
the scope of application. The other is developed for
general-purpose parallel image processing system, which
is the mainstream of the parallel image processing system
[16]. Image parallel computing generally are divided into
two kinds: pipelined parallel and data parallel. Pipelined
parallel is with the handling unit sequentially connected
in series, that is, the output of a processing unit and the
input of the next processing unit is connected. Data
parallelism is composed of a plurality of processing units
in parallel arrays, and each processing unit can perform
its tasks independently [17]. With the increasing of the
image data, the mass of the image retrieval process has
become a very time consuming process.
To improve the efficiency of medical image retrieval,
aiming at the shortage of the B/S single-node system, a
medical image retrieval system based on the distributed
Hadoop is put forward. And the experimental results
show that the Hadoop-based medical image retrieval
system not only reduces the time of image retrieval,
improves the efficiency of image retrieval, but also
presents a more apparent advantage for massive medical
images retrieval.
Main innovations of this paper:
(a) With the continuous development of digital
technology, there is a sharp increase in the amount of
image data for the image data. For the mass interested in
image retrieval problem of low efficiency, as well as the
deficiencies of B / S single-node system, the efficiency of
medical image retrieval is further improved and Medical
Image Retrieval system based on Hadoop Distributed is
proposed. It is based on Hadoop cloud computing
platform, adopts the parallel retrieval technology and uses
the SIFT Scale Invariant Feature Transform algorithm to
solve the problem of massive image retrieval.
(b) Medical Image Retrieval system based on the
Hadoop Distributed improves the efficiency of image
storage and retrieval, which get better search results.
They are mainly showing in the following aspects:
medical image retrieval can meet real-time requirements
of medical image retrieval, especially when dealing with
large-scale medical image. It has the unparalleled
advantages compared to traditional B / S single-node, and
at the same time it reduces the image retrieval time and
improves the efficiency of image retrieval, especially for
massive medical image retrieval.
II. HADOOP DISTRIBUTED MEDICAL IMAGE
RETRIEVAL
A. Hadoop Platform
Hadoop platform is the most widely used open source
cloud computing programming platform nowadays. It is
an open source framework which runs large database to
deal with application programs on the cluster, and it
supports the use of MapReduce distributed scheduling
model to implement the virtualization management,
scheduling and sharing of resources [10].
The structure of HDFS is that a HDFS cluster consists
of a master server (NameNode) and multiple chunk
servers (DataNode), and accessed by multiple clients. The
NameNode is responsible for managing the namespace of
the file system and the access of the clients to the files,
while DataNode manages the storage of the data of its
node, handles the client’s reading and writing requests of
the file system, as well as carries on the creation, deletion
and copy of the data block under the unified scheduling
of NameNode [11]. HDFS cuts the files into pieces, then
stores them in different DataNode dispersedly, and each
piece can be copied and stored in different DataNode.
Therefore, HDFS has high fault tolerance and high
throughout of data reading and writing.
MapReduce is a programming model, which is used
for the calculation of large amount of data. For the
calculation of large amount of data, the usually adopted
JOURNAL OF MULTIMEDIA, VOL. 9, NO. 2, FEBRUARY 2014 217
© 2014 ACADEMY PUBLISHER

processing technique is parallel computing. First of all,
breaking a logically complete larger task into subtasks,
then according to the information of the tasks, using
appropriate strategies, the system assigns the different
tasks to different resource nodes for their running. When
all the subtasks have been finished, the processing of the
whole large task is finished. Finally, the processing result
is sent to the user [12]. In the Map phase, each Map task
calculates the data assigned, and then maps the result data
to the corresponding Reduce task, according to the key
value output by Map.
In the Reduce phase, each Reduce task carries on the
further gathering processing of the data received and
obtains the output results. To make the data processing
cycle of MapReduce more visual, the calculation process
of the MapReduce model is shown in Figure 1. Map
Map
…
Map
Map
Reduce
Service Get Results
User1
StartJob1
Tasks
User2
StartJob2
Stop Job1
Store status
and results
Combine
Map
Map
…
Map
Map
Reduce
Tasks
Stop Job2
Combine
Figure 1. Data processing cycle of map reduce
1
2
3
4
567891011121314
15
16
1718
19
20
21
22
23 24 25 26 27 28 29 30 31 32
33
34
35
36
Figure 2. Level three decomposition direction of brushlet
B. Feature Extraction of Brushlet Domain
Brushlet transform is the image multi-scale geometric
analysis tool which aims at solving the problem of
angular resolution. The two-dimensional Brushlets has
certain direction structure and vibration frequency range,
and can be reconstructed perfectly. The structure size of
its basic function is inversely proportional to the size of
the analysis window. The two-dimensional Brushlet with
phase parameters shows its direction, thus better reflects
the direction information of the image, and can conduct
the decomposition of the Fourier domain [13]. Level one
of Brushlet transform will divide the Fourier plane into
four quadrants, and the coefficient is divided into four
sub-bands, the corresponding direction is / 4 / 2k ,
0,1,2,3k . Level two further divides each quadrant into
four parts on the basis of level one, and the whole twelve
directions respectively are /12 / 6k , 0,1, 11k .
There are sixteen coefficients after the decomposition,
among which the four sub-bands around the center are
with low frequency component, and the rest are with high
frequency component. And so on in a similar fashion.
Figure 2 is the decomposition direction graph of level
three.
Given an image f , and conducts level l
decomposition of Brushlet to it, there are will be two
parts after the decomposition, which are the real part ˆrf
and the imaginary part ˆif . Each part has 4l sub-bands,
and each sub-band reflects the direction information of its
corresponding decomposition direction. The place where
the energy focused is exactly the parts where the texture
image mutations. For each sub-band, its energy
information can choose to be shown by the mean value
and the standard deviation of the module value. Because
Brushlet is a complex function, the corresponding
sub-band coefficient of the real part and the imaginary
part after the decomposition is used to calculate the
module value at the same time. After the decomposition,
the n sub-bands of the real part and the imaginary part
respectively are marked to be ˆnrf and ˆ
nif
1,2, 4ln . The mean value n and the standard
deviation n of the n sub-band’s module value
respectively are:
1 1
2 2
1 1
1| ( , ) |
1 [ ( , )] [ ( , )]
M N
n n
i j
M N
nr ni
i j
f i jMN
f i j f i jMN
(1)
^
2
1 1
1(| ( , ) | )
M N
n n n
i j
f i jMN
(2)
In the above equation, 1,2, ,i M , 1,2, ,j N .
M and N respectively represents the line number and the
column number of each sub-band. The feature vector of
image f is:
1 1 2 2[ , , , , ]F (3)
C. Feature Extraction of LBP
LBP can depict the changes relative to the center of the
pixel’s gray level within the territory. It pays attention to
the changes of the pixel’s gray level, which is in
accordance with human’s visual perception features of
the image, and the histogram is treated as the airspace
characteristics of the image.
7
3203
( )2 , ( ) 2
256,
i
i cui
s g g U LBPLBP
otherwise
(4)
Among which:
218 JOURNAL OF MULTIMEDIA, VOL. 9, NO. 2, FEBRUARY 2014
© 2014 ACADEMY PUBLISHER

1, 0
( )0, 0
i c
i c
i c
g gs g g
g g
(5)
3 7 0
7
1
1
( ) ( ) ( )
| ( ) ( ) |
c c
i c i c
i
U LBP s g g s g g
s g g s g g
(6)
In the above equation, cg is the pixel’s gray value of
a neighborhood center, and ig means each pixel’s gray
value of the neighborhood in clockwise, which is within
the range of 3×3, and cg as the center.
D. The Similarity Matching
To measure the feature similarity of Brushlet domain,
the average distance is used:
6
Brushlet
1
, Pi Qi
i
Sim P Q E E
(7)
Among which, P is the medical image waiting to be
retrieved, and Q is the image of the medical image
library.
For the LBP features of the image, firstly the
characteristics are being unanimously processed, and then
the Euclidean distance is used to calculate the similarity.
32 2
LBP
1
, Pi Qi
i
Sim P Q
W W (8)
In the above equation, W represents the
characteristic vector after the normalization.
Because the value range of '
BrushletSim and LBPSim is
different, the external normalization is being processed to
them. The specific process is as follows:
Brushlet Brushlet'
Brushlet
Brushlet
,1,
2 6
Sim P QSim P Q
(9)
'
,1,
2 6
LBP LBP
LBP
LBP
Sim P QSim P Q
(10)
In the above equation, Brushlet , Brushlet
, LBP and
LBP respectively represents the standard deviation and
the mean value of '
BrushletSim and '
LBPSim .
The distance between the two medical images is as
follows:
' '
1 Brushlet 2, , ,LBPSim P Q w Sim P Q w Sim P Q (11)
In the equation, 1w and
2w are for the weight, and
meet the formula that 1w +
2w =1.
E. The Algorithm of Medical Image Retrieval
1) The Medical Image Storage of MapReduce
Image storage is the foundation of the automatic
medical image retrieval, and it is a data-intensive
computing process. The using of the traditional method to
put the image into HDFS is very time-consuming, thus
the distributed processing method of MapReduce is
applied to upload the image to HDFS. The specific
situation is as follows:
(1) In the Map phase, using the Map function to read a
medical image every time, and extract the color and
texture feature of the image.
(2) In the Reduce phase, the extracted feature data of
medical image is stored in HDFS. HBase is a
column-oriented distributed database, thus the table form
of it is used for the medical image of HDFS. The specific
process is shown in Figure 3.
HDFS took a picture of a medical image as
the Map input
Extract the image feature
The image and characteristics
into HBase
Finish the HDFS image processing
Collect the output of each Map
Medical images uploaded to the HDFS
N
Y
Figure 3. Storage process of medical image
Upload the medical images to HDFS→Take a medical
image from HDFS and input it as Map→Extract the
image features→Write the image and features in HBase
→Complete the image processing in HDFS→Collect the
output of Map
2) Medical Image Retrieval of MapReduce
The medical image and its features are all stored in
HBase, when the data set of HBase is very large, the scan
and search of the entire table will take a relatively long
time. To reduce the time of image retrieval and improve
the retrieval efficiency, the MapReduce calculation model
is used to conduct the parallel computing of medical
image retrieval. The specific framework is shown in
Figure 4.
Reduce
Map
HDFS (and features to retrieve image)
Map
Medical image retrieval
Map
Medi
cal
imag
e ID
Medi
cal
imag
e up
load
Medical image ID set
HDFS (images)
feature
Figure 4. Work diagram of image retrieval
The steps of MapReduce based medical image retrieval
are as follows:
JOURNAL OF MULTIMEDIA, VOL. 9, NO. 2, FEBRUARY 2014 219
© 2014 ACADEMY PUBLISHER

(1) Collect the medical images, extract the
corresponding features and store the features into HDFS.
(2) With the user’s submission of search requests,
extract the Brushlet features and LBP features of the
medical images waiting for retrieval.
(3) In the Map phase, conduct the similarity matching
between the features of the medical images waiting for
retrieval and the features of images in HBase. The output
of the map is the key value of <similarity, image ID>.
(4) Conduct the ranking and redistricting of the whole
key value of <similarity, image ID > output by map,
according to the size of the similarity, and then input
them into the reducer.
(5) In the Reduce phase, collect all the key-value pairs
of <similarity, image ID >, then conduct the similarity
sorting of these key values, and write the first N keys into
the HDFS.
(6) Output the ID of those images that are the most
similar to the medical images waiting for retrieval, and
the user gets the final result of the medical retrieval.
The function of Map and Reduce is as follows:
,Map key value
Begin
//read the features of the medical images waiting for
retrieval
ReCsearch ad SearchCharact ;
// read the data in the feature library
Cdatabase value ;
// read the image path in the image library
Path Get Figure Path value ;
// calculate the similarity between the features of
Brushlet domain and the features of LBP
,
SimByBrushlet Compare By Brushlet
Csearch Cdatabase
;
,SimByLBP CompareByLBP Csearch Cdatabase ;
// calculate the similarity of matching, among which
1w and 2w respectively represents the similarity weight
of the Brushlet domain features and LBP features.
1 2* *Sim w SimByBrushlet w SimByLBP ;
,Commit Sim Path ;
End
Re ,duce key value
Begin
// conduct the ranking of the medical images
,Sort key value ;
// key refers to the similarity value, value refers to the
path of the similar medical images
,Commit key value ;
End
III. THE SIMULATION TEST
A. Experimental Environment
Under the Linux environment, one master node (Name
Node) and three work nodes (Data Node) form a Hadoop
distributed system. The specific configuration is shown in
table 1.In the Hadoop distributed system, by conducting
the test of medical image retrieval with different number
of nodes, compare its test results with the test results of
the traditional image retrieval system in literature [15]
and the image retrieval system under the B/S structure.
The system performance evaluation criteria use the
storage efficiency, retrieval speed, precision ratio (%) and
recall ratio (%), and analysis the performance of the
Hadoop distributed image retrieval system.
TABLE I. CONFIGURATION OF EACH NODE IN THE DISTRIBUTED
SYSTEM
Node CPU RAM IP
NameNode Intel Core i7-3770K 4.5GHz 8G 192.168.0.1
DataNode1 AMD Athlon II X4 631 2.8GHz 2G 192.168.0.21 DataNode2 AMD Athlon II X4 631 2.8GHz 2G 192.168.0.22
DataNode3 AMD Athlon II X4 631 2.8GHz 2G 192.168.0.23
B. Load Performance Testing of the System
For Hadoop medical image retrieval system, the CPU
usage rate of each node in 400000 medical images is
shown in Figure 5. From Figure 5 it is known that due to
there are only two Map tasks, the tasks are respectively
assigned to DataNode1 and DataNode3. In the t1 and t2
moment, the Map tasks of the two nodes are in the
execution; in t3 moment, the Map task in DataNode3 has
been completed and the Reduce task is started in this
node, while the Map task in DataNode1 is still in the
complementation; in t4 moment, the Map task in
DataNode1 is completed, and DataNode1 transfers the
intermediate result generated from the Map task to
DataNode3 to conduct the processing of Reduce; in t5
moment, only DataNode3 is processing the Reduce task,
while DataNode1 and DataNode2 are idle; in t6 moment,
the whole retrieval task is finished, each node is in the
idle state. For 800000 and one million medical images,
the CPU usage rate of each node is shown in Figure 6 and
Figure 7. From Figure 6 and 7 it is known that the
loading condition of each node is similar to that of
400000 medical images.
C. Result of the Medical Image Retrieval
After uploading a medical image, and using the
Hadoop medical image system to retrieve, the results are
shown in Figure 8. From Figure 8 it is known that the
retrieval results are relatively better. The results show that
the Hadoop distributed medical image system is based on
Hadoop, and uses the Map/Reduce method to decompose
the tasks, which transforms the traditional single-node
working mode into the teamwork between all the nodes in
the cluster, and splits the parallel tasks to the spare nodes
for processing, improves the retrieval efficiency of the
medical image.
D. Performance Comparison with the Traditional Method
1) Contrast of Storage Performance
With different number of medical images, and under
the situation of different nodes, the storage time of the
images is shown in Figure 9. From Figure 9 it is known
that, when the number of the medical image is less than
200000, the difference of the storage performance
between the two systems is little. But with the increasing
220 JOURNAL OF MULTIMEDIA, VOL. 9, NO. 2, FEBRUARY 2014
© 2014 ACADEMY PUBLISHER
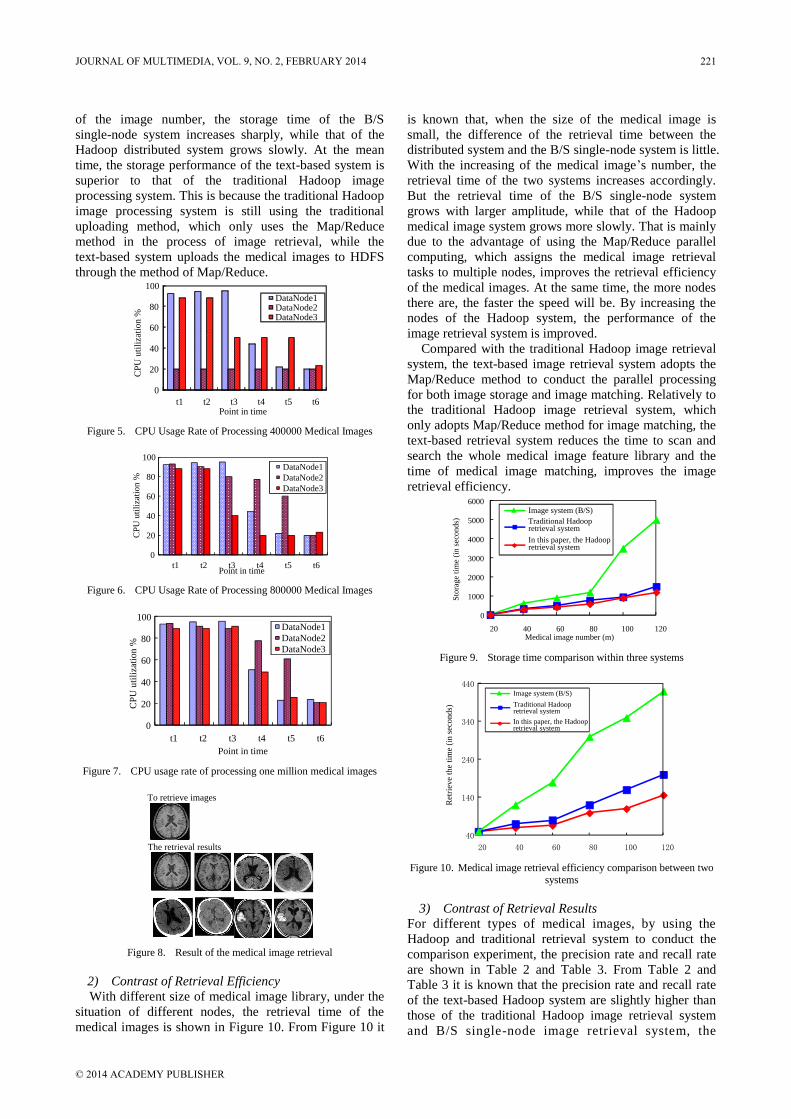
of the image number, the storage time of the B/S
single-node system increases sharply, while that of the
Hadoop distributed system grows slowly. At the mean
time, the storage performance of the text-based system is
superior to that of the traditional Hadoop image
processing system. This is because the traditional Hadoop
image processing system is still using the traditional
uploading method, which only uses the Map/Reduce
method in the process of image retrieval, while the
text-based system uploads the medical images to HDFS
through the method of Map/Reduce.
0
20
40
60
80
100
t1 t2 t3 t4 t5 t6Point in time
DataNode1DataNode2DataNode3
CP
U u
tili
zati
on %
Figure 5. CPU Usage Rate of Processing 400000 Medical Images
0
20
40
60
80
100
t1 t2 t3 t4 t5 t6
DataNode1
DataNode2
DataNode3
Point in time
CP
U u
tili
zati
on
%
Figure 6. CPU Usage Rate of Processing 800000 Medical Images
0
20
40
60
80
100
t1 t2 t3 t4 t5 t6
DataNode1
DataNode2
DataNode3
Point in time
CP
U u
tili
zati
on
%
Figure 7. CPU usage rate of processing one million medical images
To retrieve images
The retrieval results
Figure 8. Result of the medical image retrieval
2) Contrast of Retrieval Efficiency
With different size of medical image library, under the
situation of different nodes, the retrieval time of the
medical images is shown in Figure 10. From Figure 10 it
is known that, when the size of the medical image is
small, the difference of the retrieval time between the
distributed system and the B/S single-node system is little.
With the increasing of the medical image’s number, the
retrieval time of the two systems increases accordingly.
But the retrieval time of the B/S single-node system
grows with larger amplitude, while that of the Hadoop
medical image system grows more slowly. That is mainly
due to the advantage of using the Map/Reduce parallel
computing, which assigns the medical image retrieval
tasks to multiple nodes, improves the retrieval efficiency
of the medical images. At the same time, the more nodes
there are, the faster the speed will be. By increasing the
nodes of the Hadoop system, the performance of the
image retrieval system is improved.
Compared with the traditional Hadoop image retrieval
system, the text-based image retrieval system adopts the
Map/Reduce method to conduct the parallel processing
for both image storage and image matching. Relatively to
the traditional Hadoop image retrieval system, which
only adopts Map/Reduce method for image matching, the
text-based retrieval system reduces the time to scan and
search the whole medical image feature library and the
time of medical image matching, improves the image
retrieval efficiency.
0
1000
2000
3000
4000
5000
6000
20 40 60 80 100 120
Sto
rag
e ti
me
(in
sec
on
ds)
Image system (B/S)
Traditional Hadoop retrieval system
In this paper, the Hadoop retrieval system
Medical image number (m)
Figure 9. Storage time comparison within three systems
40
140
240
340
440
20 40 60 80 100 120
Ret
riev
e th
e ti
me
(in
sec
on
ds)
Image system (B/S)
Traditional Hadoop retrieval system
In this paper, the Hadoop retrieval system
Figure 10. Medical image retrieval efficiency comparison between two systems
3) Contrast of Retrieval Results
For different types of medical images, by using the
Hadoop and traditional retrieval system to conduct the
comparison experiment, the precision rate and recall rate
are shown in Table 2 and Table 3. From Table 2 and
Table 3 it is known that the precision rate and recall rate
of the text-based Hadoop system are slightly higher than
those of the traditional Hadoop image retrieval system
and B/S single-node image retrieval system, the
JOURNAL OF MULTIMEDIA, VOL. 9, NO. 2, FEBRUARY 2014 221
© 2014 ACADEMY PUBLISHER

TABLE II. PRECISION RATE (%) COMPARISON WITHIN MULTIPLE TYPES OF MEDICAL IMAGES
Different Types of Medical Images Text-based Retrieval System Traditional Retrieval System B/S Single-node Retrieval System
Images of Brain CT 95.04 94.98 94.63 Images of Brain MRI 91.61 91.58 91.28
Images of Skin-micro 93.67 92.93 92.26
Images of X-ray Breast 91.46 91.09 90.67 HRCT of Lung 93.52 92.93 92.53
TABLE III. RECALL RATE (%) COMPARISON WITHIN MULTIPLE TYPES OF MEDICAL IMAGES
Different Types of Medical Images Text-based Retrieval System Traditional Retrieval System B/S Single-node Retrieval System
Images of Brain CT 92.21 91.26 91.59
Images of Brain MRI 90.32 89.84 90.94
Images of Skin-micro 90.38 90.32 90.33 Images of X-ray Breast 90.82 90.04 89.60
HRCT of Lung 91.10 90.57 89.31
advantages over the precision rate and recall rate is not
obvious. But for the large-scale medical image retrieval
system, the merits of the system performance are mainly
measured by the image retrieval efficiency. Through
Figure 10 it is known that the text-based Hadoop
distributed system effectively reduces the retrieval time
of the medical image, improves the retrieval efficiency of
the medical image, which better solves the problem that
the massive medical images retrieval has a low efficiency,
obtains a relatively satisfactory retrieval results.
IV. CONCLUSION
CBMIR medical image retrieval is a data-intensive
computing process, the traditional B/S single-node
retrieval system has the defects of low efficiency and
poor reliability and so on. Thus, a kind of Hadoop
medical image retrieval system is put forward. The results
of the simulation test show that the Hadoop medical
image retrieval system improves the efficiency of the
image storage and image retrieval, obtains a better
retrieval result, and can satisfy the real-time requirements
of the medical image retrieval. Especially when deals
with the massive medical images, it has the advantages
the traditional B/S single-node system cannot compared
with. Therefore, the working focuses in the future are
improving the transmission speed of data between the
Map task and the Reduce task, reducing more time
consumption which is due to the transfer of information,
to further improve the execution efficiency of the existing
image retrieval system.
REFERENCES
[1] Song ZHen, Yan Yongfeng. Interest points in images
integrated retrieval features of the. 2012 based on
computer applications, 32 (10) pp. 2840-2842.
[2] Zhang Quan, Tai Xiaoying. Relevance feedback Bayesian
in medical image retrieval based on. Computer
Engineering, 2008, 44 (17) pp. 158-161.
[3] Yu Sheng, Xie Li, CHeng Yun. Image color and primitive
features of computer application based on. 2013, 33 (6) pp.
1674-1708.
[4] FAY C, JEFFREY D, SANYJAY G, et al. Bigtable: A
distributed storage system for structured data// Proceedings
of the 7th Symposium on Operating Systems Design and
Implementat. Seattle: WA, 2006, 276-290.
[5] KEKRE H B, THEPADE S, SANAS S. Improving
performance of multileveled BTC based CBIR using
sundry color spaces. International Journal of Image
Processing, 2010, 4(6) pp. 620-630.
[6] Liye Da, Lin Weiwei. A Hadoop data replication method
of computer engineering and applications, 2012, 48 (21) pp.
58-61.
[7] Wang Xianwei, Dai Qingyun, Jiang Wenchao, Cao
Jiangzhong. Design patent image retrieval methods for
MapReduce. Mini micro system based on 2012, 33 (3,
626-232.).
[8] SANJAY G, HOWARD G, SHUNTAK L. The Google
File System// Proceedings of the 19th ACM Symposium on
Operating Systems Principles. Bolton Landing: ACM,
2003 pp. 29-43.
[9] Liang Qiushi, Wu Yilei, Feng Lei. MapReduce micro-blog
user search ranking algorithm of computer application
based on. 2012, 32 (11) pp. 2989-2993.
[10] JEFFREY D, SANJAY G. Mapreduce: a flexible data
processing tool. Communications of the ACM 2010, 53(1)
pp. 72-77.
[11] KONSTANTIN S, HAIRONG K, SANJAY R, et al.
Hadoop distributed file system for the Grid// Proceedings
of the Nuclear science Symposium Conference Record
(NSS/MIC). IEEE: Orlando, 2009 pp. 1056-1061.
[12] JEFFREY D, SANJAY G. Mapreduce: simplified data
processing on large clusters // Proceedings of the 6th
Symposium on Operating Systems Design and Implementat.
IEEE: San Francisco, 2004 pp. 107-113.
[13] Lian Qiusheng, Li Qin, Kong Lingfu. The texture image
retrieval combining statistical features of the circular
symmetric contourlet and LBP. Chinese Journal of
computers, 2007, 30 (12) pp. 2198-2204.
[14] Wang Zhongye, Yang Xiaohui, Niu Hongjuan. Brushlet
domain retrieval algorithm based on complex computer
simulation of. image texture characteristics, 2011, 28 (5)
pp. 263-266, 282
[15] ZHANG J, LIU X L, LUO J W, BO L T N. DIRS:
Distributed image retrieval system based on MapReduce//
The Network Security and Soft Computing Technologies.
IEEE: Maribor, 2010 pp. 93-98.
222 JOURNAL OF MULTIMEDIA, VOL. 9, NO. 2, FEBRUARY 2014
© 2014 ACADEMY PUBLISHER
Kinetic Model for a Spherical Rolling Robot with
Soft Shell in a Beeline Motion
Zhang Sheng, Fang Xiang, Zhou Shouqiang, and Du Kai PLA Uni. of Sci & Tech/Engineering Institute of Battle Engineering, Nanjing, China
Email: [email protected], [email protected]
Abstract—A simplified kinetic model called Spring
Pendulum is developed for a spherical rolling robot with soft
shell in order to meet the needs of attitude stabilization and
controlling for the robot. The elasticity and plasticity of soft
shell is represented by some uniform springs connected to
the bracket in this model. The expression of the kinetic
model is deduced from Newtonian mechanics principles.
Testing data of the driving angle acquired from a prototype
built by authors indicate that testing data curve accords to
the theoretic kinetic characteristic curve, so the kinetic
model is validated.
Index Terms—Soft Shell; Spherical Rolling Robot; Kinetic
Model
I. INTRODUCTION
Spherical robot is a kind of robots which can roll by
themselves. More and more researchers are focusing on
spherical robot due to their many advantages on moving
and their hermetical structure. More than 10 species
spherical robots and their accessories are advanced as
well [1-4]. These robots are preliminarily applied in many
domains. All these robots are mainly constructed by hard
shell. Soft-shell spherical robot has many advantages like
good cross ability, changeable bulk and good impact
resistance comparing to the hard-shell robots. Li Tuanjie
and his group researched the light soft-shell spherical
robot driven by wind power and founded the equation to
describe the ability of the robot to cross the obstacle
without deeply research about how much would the soft-
shell influence the spherical robot [5]. Sugiyama Y, Irai S
and other people researched the transformation-driven
spherical robot. It uses several shape memory alloys to
support and control the reduction by change the amount
of the voltage to make the robot roll like crawling. It
moves slowly and now still stays at the stage of checking
the principle [6]. Fang Xiang and Zhou Shouqiang have
gained the patent of automatically aerating and
discharging soft-shell spherical robot [7].
On the modeling of spherical robot, Ref. [8, 9] began
with the principle of kinematics, found the dynamic
model of the hard-shell spherical robot walking along a
straight line driven by pendulum. Since they ignored the
quadratic items, there would be some errors in the
dynamic model when the robot moves in high speed. In
order to make the robot start and stop steady and speed
controllable, Ref. [10] researched the kinematic model of
a kind of spherical robot driven by two masses deflected
from the centre of the sphere moving straight in order to
control the robot starting and stopping smoothly.
According to the description of Euler angles, Ref. [11]
found a kinematic model of the spherical robot. Ref. [12,
13] found the dynamic model of a hard-shell spherical
robot from the angle of Newton mechanics. They
simplified the model of a straight moving spherical robot
to a single pendulum hung on the centre of the ball
connected to the shell through the drive motor. They all
had a simulation experiment on the dynamic model of
their spherical robot respectively, but didn’t check the
data from the experiment to prove the correctness of the
model. So this paper will deeply analyze the
characteristics of the soft-shell spherical robot on
kinematics and dynamics to establish its mechanic model
and use the experimental sample to check the correctness
of the model.
In this paper we consider a class of spherical rolling
robots actuated by internal rotors. Under a proper
placement of the rotors the center of mass of the
composite system is at the geometric center of the sphere
and, as a result, the gravity does not enter the motion
equations. This facilitates the dynamic analysis and the
design of the control system.
The idea of such a rolling robot and its design was first
proposed in [14], and later on studied in [15]. Also
relevant to our research is the study [16] in which the
controllability and motion planning of the rolling robots
with the rotor actuation were analyzed.
A spherical robot is a new type of mobile robot that
has a ball-shaped outer shell to include all its mechanisms,
control devices and energy sources inside it.
Thisstructural characteristic of a spherical robot helps
protect the internal mechanisms and the control system
from damage. At the same time, the appearance of a
spherical robot brings a couple of challenging problems
in modeling, stabilization and position tracking (path
following). Two difficulties hinder the progress of the
control of a spherical robot. One is the highly coupled
dynamics between the shell and inner mechanism, and
another is that although different spherical robots have
different inner mechanism including rotor type, car type,
slider type, etc (Joshi, Banavar and Hippalgaonka, 2010),
most of them have the underactuation property, which
means they can control more degrees of freedom (DOFs)
than drive inputs. There are still no proven general useful
control methodologies for spherical robots, although
JOURNAL OF MULTIMEDIA, VOL. 9, NO. 2, FEBRUARY 2014 223
© 2014 ACADEMY PUBLISHERdoi:10.4304/jmm.9.2.223-229

researchers attempted to develop such methodologies. Li
and Canny (Li and Canny, 1990) proposed a three‐step
algorithm to solve the motion planning problems of a
sphere, the position coordinates of the sphere can
converge to the desired values in three steps. That method
is complete in theory, but it can only be applied to
spherical robots capable of turning a zero radius as the
configurations are constrained. Mukherjee and Das et al.
(Das and Mukherjee, 2004), (Das and Mukherjee, 2006)
proposed a feedback stabilization algorithm for four
dimensional reconfiguration of a sphere. By considering a
spherical robot as a chained system Javadi et al. (Javadi
and Mojabi, 2002) established its dynamic model with the
Newton method and discussed its motion planning with
experimental validations. As compared to other existing
motion planners, this method requires no intensive
numerical computation, whereas it is only applicable for
their specific spherical robot. Bhattacharya and Agrawal
(Bhattacharya and Agrawal, 2000) deduced the first‐order mathematical model of a spherical robot from the
non‐slip constraint and angular momentum conservation
and discussed the trajectory planning with minimum
energy and minimum time. Halme and Suomela et al.
(Halme, Schonberg and Wang, 1996) analyzed the rolling
ahead motion of a spherical robot with dynamic equation,
but they did not consider the steering motion. Bicchi, et al.
(Antonio B. et. al., 1997), (Antonio and Alessia, 2002)
established a simplified dynamic model for a spherical
robot and discussed its motion planning on a plane with
obstacles. Joshi and Banavar et al. (Joshi, Banavar and
Hippalgaonka, 2009) proposed a path planning algorithm
for a spherical mobile robot. Liu and Sun et al. (Liu, Sun
and Jia, 2008) deduced a simplified dynamic model for
the driving ahead motion of a spherical robot through
input ‐ state linearization and derived the angular
velocity controller and angle controller respectively with
full feedback linearized form [17].
It should be noted the even though the gravitational
term is not presented; the motion planning for the system
under consideration is still a very difficult research
problem.
In fact, no exact motion planning algorithm has yet
been reported for the case of the actuation by two rotors.
In [18], the motion planning problem was posed in the
optimal control settings using an approximation by the
Phillip Hall system [19]. However, since the robot
dynamics are not nilpotent, this is not an exact
representation of the system and it results to inaccuracies.
An approximate solution to the motion planning problem
using Bullo’s series expansion was constructed in [19],
but that has been done for the case of three rotors. An
exact motion planning algorithm is reported only in [6],
but as we will see it later it is not dynamically realizable.
Thus, the motion planning in dynamic formulation for the
robot under consideration is still an open problem and a
detailed analysis of the underlying difficulties is
necessary.
This constitute the main goal of our paper. The paper is
organized as follows. First, in Section II we provide a
geometric description and a kinematic model of the
system under consideration and then, in Sections III
derive its dynamic models. A reduced dynamic model is
then furnished in Section IV, and conditions of dynamic
realizability of kinematically feasible trajectories of the
rolling sphere are established in Section V. A case study,
dealing with the dynamic realizability of tracing circles
on the surface of the sphere, is undertaken in Section VI.
Finally, conclusions are drawn in Section VII.
II. DYNAMICS MODEL OF SOFT-SHELLED SPHERICAL
ROBOT
A. Constitution
The soft-shelled spherical robot developed by PLA Uni.
of Sci & Tech is shown in fig. 1. There are 3
electromotors inside the spherical shell to provide
moment of force input. One steering motor is connected
to a bevel gear rolling in a gear circle. The battery and
load are connected to the bevel gear as well in order to
control the rotation direction. The other two drive motors
in-phase and their shells are fixed on the bracket, while
the armatures of them are on the shell of the spherical
robot to provide drive moment of force.
Fig. 1 illustrates the overview of the internal
drivingmechanism. The internal driving mechanism is
composed of two rotors with their axes perpendicular to
each other. Each axis is called Yaw axis and Pitch axis,
respectively. An actuator is put at the bottom of each axis
and a rotor is put at the both ends of Pitch axis. The
spherical shell is driven by the reaction torque generated
by actuators. The internal driving device is fixed to the
spherical shell at a point P. The point P is at the
geometric center of the sphere. The gravity point of the
internal driving device does not lie at the center of the
sphere.Due to this asymmetry, the robot tends to be stable
when the weights are beneath the center, while it tends to
be unstable when they are above the center. This is
important to realize both the stand-still stability and quick
dynamic behavior by a single mechanism.
Figure 1. Planform for inner machines of the spherical soft shell robot
Figure 2. Appearance & planform for inner machines of the spherical soft shell robot
B. Exterior Structure
Fig. 2 illustrates the overview of the exterior structure.
The exterior part is composed of two hemispheres and
224 JOURNAL OF MULTIMEDIA, VOL. 9, NO. 2, FEBRUARY 2014
© 2014 ACADEMY PUBLISHER

circular board that divides the sphere in half. All
electronic components such as sensors, motor drivers, and
a microcomputer are put on the circular board. Weight of
electronic components are large enough that we can not
neglect them when we construct the dynamic model.
Moreover, distribution of weight on the circular board is
inequable. Therefore, the gravity point of exterior
structure does not lie at the center of sphere. By
considering this asymmetry property in the dynamic
model, we can construct more accurate model and
simulate the effects of distribution of weight on motions
of the robot.
C. System Models in a Beeline Motion
Without considering the viscous friction on robot
produced by air resistance, the robot can be decomposed
into two subsystems: one is the bracket and spherical
shell, another is the single pendulum, then we make the
following assumptions:
a. The spherical shell is equivalent to a rigid and thin
spherical shell which quality is mb and radius is R. There
is no deformation of the spherical shell when it is contact
with the ground, the soft and elastic properties of the
spherical shell is reflected by the relative displacement of
different directions between spherical shell and bracket.
b. The component inside the ball equivalent to a solid
ball which quality is M and radius is r beside the storage
battery and load; They are equivalent to the connection
through the radial light spring, known as the model called
spring pendulum (Fig. 3).In Figure 3, the distance offset
centre affected by the spring force is △R which becomes
△X and △Y when it decomposed into horizontal and
vertical displacement.(Fig. 4).
Figure 3. The model called spring pendulum
c. The battery and load equivalent to a particle which
quality is m and hinged with solid ball in center by
massless connecting rod which length is L.
Figure 4. Mechanics analysis for the bracket & shell and the pendulum
Establishing the inertial coordinate system XOY on the
ground and decomposing the spherical shell robot into
two subsystems: spherical shell and “frame + pendulum”.
The two subsystems connected by the bearing force and
the bearing countermoment associated with each other.
The positive direction of every parameter shows in Fig. 4.
When the system is pure rolling in the horizontal plane
in a straight line, the displacement of spherical and
pendulum on the direction of X and Y is Xb, Yb, Xp, Yp
respectively according to kinematic law:
0
sin
cos
b
b
p bx
p
X R
Y
X X L X
Y L L Y
(1)
Taking the above equation second derivative with
time,then we can get the acceleration of spherical and
pendulum on the direction of X and Y is abx, aby, apx, apy :
2
2
0
cos sin
sin cos
bx
by
px
py
a R
a
a R L L X
a L L Y
(2)
The force and moment balace of vector mechanics and
moment of momentum theorem for spherical shell and
pendulum can be presented as two equations: (3) and (4)
=
2 22 20 3 5
0 0
0
+
=
0 X b bx
Y b N
X Y b
N
F F m M a
F m M g F
T F R F Y F X m R Mr
F F
(3)
2cos sin
X px
Y py
F ma
F mg ma
T m RL mgL mL
(4)
where the static friction is F0 caused by the ground. The
orthogonal component force is FX, FY when the bracket
forces on shell in the plane; The supportive force is FN,
the angle that rotated relative to the ground by the shell is
φ and the angle that relative to the vertical direction by
the pendulum is θ; The friction of static coefficient is μ0.
When considering about the constraint when the ball is
pure rolling and assuming that the motor is rotating in
constant angular velocity as ωi, we can get the equation
(5):
it (5)
Dates of manuscript submission, revision and
acceptance should be included in the first page footnote.
Remove the first page footnote if you don’t have any
information there. Taking equations (1), (2) and (5) into
equations (3) and (4) and sorting, then omitting the
quadratic term of △X and △Y as small high-end quantity,
where sinθ≈θ, cosθ≈1.
JOURNAL OF MULTIMEDIA, VOL. 9, NO. 2, FEBRUARY 2014 225
© 2014 ACADEMY PUBLISHER

2 2 2 2 25 7
3 5
2 2 2 22 20 0 0 03 5
0
0
b
b b
mLR mL m R Mr mR mgL mR X
m LR mL mLR m R Mr m LR mgL m M g R m R Y
(6)
III. CALCULATION AND ANALYSIS OF DYNAMIC
MODEL OF SOFT SHELL SPHERICAL ROBOT
Equation (4) is composed of two order nonlinear
differential equation. Generally it is hard to get the
analytical solution. So this paper used the method of
difference approximation for the numerical solution. The
values of X and Y are relevant to θ. First of all,
omitting the related items of X and Y , it can get the
dynamic equation of hard spherical robot. Substituting
relative parameters: the mass of spherical mb=0.62kg,
radius R=0.39m, the mass of internal mechanism and
support M=3.12㎏, equivalent radius r=0.07m; the mass
of battery and load m=6.29kg, L=0.28m, μ0 =0.5.
Defining the initial conditions: the 0 time, θ(0)= (0)=0.
Substituting relative parameters, difference discretization
of the two differential equations, taking 0.05 as steps,it
can get the numerical solutions of hard shell spherical
robot driving angle θ, which was shown by solid line in
figure 4. By determination, the values of X and Y
were less than 10-2
, it may be assumed as constants,
X = Y =0.02m/s2. Substituting equation (6), it can get
dynamic equation on soft spherical robot; the numerical
solution of the equations was shown in dotted line in
figure 4.
0 0.5 1 1.5 2 2.5 3 3.5 4-1
0
1
2
3
4
5
6
t/s
θ/rad
Hard Shell
Soft Shell
Figure 5. Driving angle curve from theoretic kinetic model for the robot with hard shell & soft shell
As can be seen from Fig. 5, in the case of a constant
speed of drive motor, The change of horizontal line pure
rolling soft shell spherical robot driven angle has
consistent trend with hard shell spherical robot of the
same parameters: firstly, the maximum swing angle
appeared in a relatively short time, and then decreased
rapidly, finally, kept in a certain angle oscillation. Soft
shell spherical robot driven angular oscillation amplitude
was bigger than the hard shell spherical robot, but the
maximum swing angle was smaller, the impact was
relatively small.
IV. PROTOTYPE TEST
A. Test Conditions
To demonstrate the feasibility of the new driving
mechanism shown in Sec. II, we make the spherical
rolling robot move with a desired translational velocity
by a simple feedback controller. Based on the observed
state shown in the above subsection, the driving torque τ
in (5) is given by a state feedback law. It should be noted
that the counter torque -τ is applied to the inner
subsystem composed of the gyro case and the gyro as
shown in (3). Since the gyro has a large angular
momentum, nutation of the subsystem may be caused by
the angular momentum. However, the nutation was not
seen in the results of preliminary experiments. It seems
that the nutation is quickly damped by the frictional
torque between the outer shell and the gyro case.
In this paper, we adopt Strategy A and use the
feedback law (6) in the experiments. In Strategy A, the
rotational motion of the outer shell around the vertical
axis would not be controlled by (6). However, the
rotation around horizontal axes would approach the
desired horizontal rotation, and the experimental results
in the next section will show that the spherical rolling
robot can achieve a translational motion by the feedback
law (6).
The experimental prototype quality, size and other
parameters are the same to the last chapter, the filled
pressure of spherical shell is 1.8×105Pa and the battery
voltage is 12V. Using photoelectric encoder to control the
speed of driving motor should be maintained in the π
rad/s and the robot starts from rest. PID is used to control
the steering angle of steering motor so that to keep the
robot lateral stability and the robot can keep a horizontal
linear to move. What’s more, it also makes use of the
three axis accelerometer and a three axis gyro sensors to
measure the three axis acceleration and angular velocity
at the same time. The sampling frequency is 20Hz.
Through data processing, we can get the change trend of
driven angle θ, which is shown in dotted line in Fig. 6.
0 0.5 1 1.5 2 2.5 3 3.5 4-1
0
1
2
3
4
5
6
t/s
θ/rad
Hard Shell
Soft Shell
Figure 6. Driving angle curve from testing result & theoretical result
V. CASE STUDY
Spherical rolling robots have a unique place within the
pantheon of mobile robots in that they blend the
efficiency over smooth and level substrates of a
traditional wheeled vehicle with the maneuverability in
the holonomic sense of a legged one. This combination of
normally exclusive abilities is the greatest potential
226 JOURNAL OF MULTIMEDIA, VOL. 9, NO. 2, FEBRUARY 2014
© 2014 ACADEMY PUBLISHER

benefit of this kind of robot propulsion. An arbitrary path
that contains discontinuities can be followed (unlike in
the case of most wheeled vehicles) without the need for
the complex balancing methods required of legged robots.
However, spherical rolling robots have their own set of
challenges, not the least of which is the fact that all of the
propulsive force must somehow be generated by
components all of whom are confined within a spherical
shape.
This general class of robots has of late earned some
notoriety as a promising platform for exploratory
missions and as an exoskeleton. However, the history of
this type of device reveals that they are most common as
a toy or novelty. Indeed, the first documented device of
this class appears to be a mechanical toy dating to 1909
with many other toy applications following in later years.
Many efforts have been made to design and construct
spherical rolling robots and have produced many methods
of actuation to induce self-locomotion. With a few
exceptions, most of these efforts can be categorized into
two classes.
The first class consists of robots that encapsulate some
other wheeled robot or vehicle within a spherical shell.
The shell is then rolled by causing the inner device to
exert force on the shell. Friction between the shell and its
substrate propels the assembly in the same direction in
which the inner device is driven. Early examples of this
class of spherical robot had a captured assembly whose
length was equal to the inner diameter of the spherical
shell, such as Halme et al. and Martin, while later
iterations included what amounts to a small car that
dwells at the bottom of the shell, such as Bicchi et al.
The second major class of spherical robots includes
those in which the motion of the sphere is an effect of the
motion of an inner pendulum. The center of mass of the
sphere is separated from its centroid by rotating the arm
of the pendulum. This eccentricity of the center of mass
induces a gravitational moment on the sphere, resulting in
rolling locomotion. Examples of these efforts are those of
Michaud and Caron, Jia et al. Javadi and Mojabi [16] as
well as Mukherjee et al. have devised systems that work
using an eccentric center of mass, but each moves four
masses on fixed slides within the spherical shell to
achieve mass eccentricity instead of tilting an inner mass.
Little work has been done outside these two classes.
Jearanaisilawong and Laksanacharoen and Phipps and
Minor each devised a rendition of a spherical robot.
These robots can achieve some rolling motions when
spherical but are capable of opening to become a wheeled
robot and a legged walking robot respectively. Sugiyama
et al. created a deformable spherical rolling robot using
SMA actuators that achieves an eccentric center of mass
by altering the shape of the shell. Finally, Bart and
Wilkinson and Bhattacharya and Agrawal each developed
spherical robots where the outer shell is split into two
hemispheres, each of which may rotate relative to each
other in order to effect locomotion.
The condition of dynamic realizability (4) imposes a
constraint on the components of the vector of the angular
velocity ω0, and this constraint needs to be embedded
into the motion planning algorithms. If the motion
planning is based on the direct specification of curves on
the sphere or on the plane, as is the case in many
conventional algorithms [10], [12], the embedding can be
done as follows.
Assume that the path of the rolling carrier is specified
by spherical curves, and the structure of the functions u0(t)
and v0(t) up to some certain constant parameters is known.
The kinematic equations (3) can now be casted as
0 0sin cos cosav Ru Rv (7)
0 0cos cos sinau Ru Rv (8)
In [6] the rotors are mounted on the axes n1 and n3, so
the condition of dynamic realizability becomes n2·Jcω 0 =
0. However, the motion planning algorithm in [6] is
designed under the setting n2·ω0 = 0, which is not
equivalent to the condition of dynamic realizability.
To guarantee the dynamic realizability, express ω z in
the last formula through ω x and ω y. In doing so, we first
need to express ω x, ω y as well as n3x, n3y, n3z in terms of
the contact coordinates. From the definition of the
angular velocity T
0 = RR , one obtains
0 0 0cos sin cosx u v v (9)
0 0 0cos cos siny u v v (10)
while n3 is simply the last column of the orientation
matrix R. Therefore,
3 0 0 0sin cos cos sin sinxn u u v (11)
3 0 0 0sin sin cos sin cosyn u u v (12)
3 0 0cos coszn u v (13)
Having expressed everything in terms of the contact
coordinates, one can finally replace in (13) by
0
0 0 0
0
tan1 sin
cos
uk u v kv
v
If we, formally, set here k = 0 the variable will be
defined as in the pure rolling model. However, in our
case k > 1.
Consider a maneuver when one traces a circle of radius
a on the spherical surface. This maneuver is a component
part of many conventional algorithms (see, for instance
[6], [10], [13], [14]). Tracing the circle results to the non-
holonomic shift Δ h(a) of the contact point on the plane
and to the change of the holonomy (also called as the
geometric phase), Δ φ(a). By concatenating two circles of
radii a and b, one defines a spherical figure eight. By
using the motion planning strategy [13], based on tracing
an asymmetric figure eight n times, one can, in principle,
fabricate an exact and dynamically realizable motion
planning algorithm.
A detailed description of the circle-based motion
planning algorithm is not presented in this paper due to
JOURNAL OF MULTIMEDIA, VOL. 9, NO. 2, FEBRUARY 2014 227
© 2014 ACADEMY PUBLISHER

the page limitation. However, in the remaining part of his
section we illustrate under simulation an important
feature of this algorithm—the dependance of the non-
holonomic shift on the inertia distribution specified by
the parameters k.
B. Results Analysis
The most apparent behavior that the spherical robot
prototype displayed was a tendency to wobble or rock
back and forth with little damping. For example, when
the sphere was at rest with the pendulum fixed inside,
bumping the sphere would cause it to oscillate back and
forth about a spot on the ground. The sphere also
wobbled if a constant pendulum drive torque was
suddenly applied to the sphere starting from rest. In this
case, it would accelerate forward while the angle between
the pendulum and the ground would oscillate. Since the
pendulum was oscillating, the forward linear velocity of
the sphere also appeared to oscillate as it accelerated.
When traveling forward and then tilting the pendulum a
fixed angle to the side to steer, the radius of the turn
would oscillate as well.
Another behavior that was observed but not found to
be discussed in the literature was the tendency of the
primary drive axis to nutate when the sphere was
traveling at a reasonable forward velocity. Specifically,
the primary drive axis (the axis of the main drive shaft
attached to the spherical shell) would incur some angular
misalignment from the axis about which the sphere was
actually rolling. When traveling slowly (estimated to be
less than 0.5 m/s) this nutating shaft behavior, which
could be initiated by a bump on the ground, would damp
out quickly. When traveling at a moderate speed, the
nutation would persist causing the direction of the sphere
to oscillate back and forth.
When attempting to travel at high speed (estimated to
be above 3 m/s) the angular misalignment between the
axes would go unstable until the primary drive axis was
flipping end over end. Even during a carefully controlled
test on a level, smooth surface
The angle of inclination of the gyro increased rapidly
from 0 [deg] to about 10 [deg] by t = 0.25 [s], and kept
increasing slowly to about 20 [deg] for 0.25 ≤ t ≤ 3 [s]. It
seems that the increase after t = 0.25 [s] was caused by
the rolling friction at the contact point between the outer
shell and the floor surface that was covered with carpet
tiles. The rolling friction may change the total angular
momentum of the robot.
The friction torque about the vertical may also
decrease the total angular momentum, when ω(0) 10z is
not zero. We will examine the behavior of the inclination
angle for other types of floor surfaces and for Strategy B
in future works.
Moreover, due to the limited power of the DC motors,
the maximum angular speed of the outer shell that was
achieved in the experiments was about 1.5πrad/s.
Comparing with the driven angle measured curve
(dashed line) and the results of theoretical calculations
(solid line) of the soft shell spherical robot in Fig. 5, we
can see that the measured curve is basically agree with
the theoretical calculation results, which can prove the
correctness of the dynamics model of “spring pendulum”
of soft shell spherical robot in this paper. The theoretical
and experimental curves calculated difference: (1) the
final angular oscillation amplitude is smaller than the
theoretical analysis, probably because the theoretical
model does not consider the energy loss of internal
movement; (2) the measured maximum pendulum angle
is bigger than the theoretical results, which is probably
caused by the modeling error. For example, the
parameters of support quality equivalent radius r is
difficult to be precise enough, and the other reason to
result in modeling errors is that the support eccentric
displacement acceleration X and Y are
approximately regarded as constant.
VI. CONCLUSIONS
A dynamic model named spring pendulum of the soft-
shell spherical robot is advanced in this paper. The
theoretic curve of drive angle for time is educed in the
condition of invariable drive motor rev from this dynamic
model. The test result on a soft-shell prototype is
identical to the theoretic result which proves the validity
of the spring pendulum model. The rules of drive angle
fluctuation and the influence characteristics will be
proposed by means of numerical research on the spring
pendulum model in order to stabilize and control the
attitude of soft-shell spherical robot.
ACKNOWLEDGMENT
This work was supported in part by a grant from
Chinese postdoctoral fund.
REFERENCES
[1] Jiang Jie, Wang Hai-sheng, Su Yan-ping. Structural design
of the internal and external driven spherical Robots.
Machinery, 2012, 03 pp. 42-44. G. Eason, B. Noble, and I.
N. Sneddon, “On certain integrals of Lipschitz-Hankel type
involving products of Bessel functions,” Phil. Trans. Roy.
Soc. London, vol. A247, pp. 529–551, April 1955.
[2] Sang Shengju, Zhao Jichao, Wu Hao, Chen Shoujun, and
An Qi. Modeling and Simulation of a Spherical Mobile
Robot. ComSIS, 2010, 7(1), Special Issue: 51-61J. Clerk
Maxwell, A Treatise on Electricity and Magnetism, 3rd ed.,
vol. 2. Oxford: Clarendon, 1892, pp. 68–73.
[3] Mattias Seeman, Mathias Broxvall, Alessandro Saffiotti,
Peter Wide. An Autonomous Spherical Robot for Security
Tasks IEEE International Conference on Computational
Intelligence for Homeland Security and Personal Safety,
Alexandria, USA, 2007 pp. 51 - 55 I. S. Jacobs and C. P.
Bean, “Fine particles, thin films and exchange anisotropy,”
in Magnetism, vol. III, G. T. Rado and H. Suhl, Eds. New
York: Academic, 1963, pp. 271–350.
[4] S. Chaplygin, “On rolling of a ball on a horizontal plane,”
Mathematical Collection, St. Petersburg University, vol. 24,
pp. 139–168, 1903, (In Russian; English transl. : Regular
& Chaotic Dynamics, Vol. 7, No. 2, 2002, pp. 131–148).
[5] Li Tuanjie, Liu Weigang. Dynamics of the Wind-driven
Spherical Robot. Acta Aeronautica Et Astronautica Sinica,
2010, 31(2) pp. 426-430. R. Nicole, “Title of paper with
only first word capitalized”, J. Name Stand. Abbrev, in
press.
228 JOURNAL OF MULTIMEDIA, VOL. 9, NO. 2, FEBRUARY 2014
© 2014 ACADEMY PUBLISHER

[6] Sugiyama Y. Circular / Spherical Robots for Crawling and
Jumping. Proceedings of the 2005 IEEE lntemational
Conference on Robotics and Automation, Barcelona, Spain,
2005 pp. 3595-3600. Y. Yorozu, M. Hirano, K. Oka, and Y.
Tagawa, “Electron spectroscopy studies on magneto-
optical media and plastic substrate interface, “IEEE Transl.
J. Magn. Japan, vol. 2, pp. 740–741, August 1987 [Digests
9th Annual Conf. Magnetics Japan, p. 301, 1982].
[7] China Patent, CN202243763U. 2012-05-30M.
[8] Zhao Kai-liang, Sun Han-xu, Jia Qing-xuan, et al. Analysis
on acceleration characteristics of spherical robot based on
ADAMS. Journal of Machine Design, 2009, 26(7) pp. 24-
25.
[9] ZHENG Yi-li1, SUN Han-xu. Dynamic modeling and
kinematics characteristic analysis of spherical robot.
Journal of Machine Design, 2012, 02 pp. 25-29.
[10] ZHAO Bo, WANG Pengfei, SUN Lining, et al. Linear
Motion Control of Two-pendulums-driven Spherical Robot.
Journal of Mechanical Engineering, 2011, 11 pp. 1-6.
[11] FENG Jian-Chuang, ZHAN Qiang, LIU Zeng-Bo. The
Motion Control of Spherical Robot Based on Sinusoidal
Input. Development & Innovation of Machinery &
Electrical Products, 2012, 04 pp. 7-9.
[12] YUE Ming, LIU Rong-qiang, DENG Zong-quan. Research
on the effecting of coulomb friction constraint to the
Spherical robot. Journal of Harbin Institute of Technology,
2007, 39(7) pp. 51.
[13] YUE Ming, DENG Zong-quan, LIU Rong-qiang.
Quasistatic Analysis and Trajectory Design of Spherical
Robot. Journal of Nanjing University of Science and
Technology (Natural Science), 2007, 31(5) pp. 590-594.
[14] V. A. Joshi, R. N. Banavar, and R. Hippalgaonkar, “Design
and analysisof a spherical mobile robot, “ Mech. Mach.
Theory, vol. 45, no. 2, pp. 130–136, Feb. 2010.
[15] E. Kayacan, Z. Y. Bayraktaroglu, and W. Saeys,
“Modeling and controlof a spherical rolling robot: A
decoupled dynamics approach,” Robotica, vol. 30, pp.
671–680, 2011.
[16] M. Ahmadieh Khanesar, E. Kayacan, M. Teshnehlab, and
O. Kaynak, “Extended Kalman filter based learning
algorithm for type-2 fuzzy logic systems and its
experimental evaluation, “IEEE Trans. Ind. Electron. vol.
59, no. 11, pp. 4443–4455, Nov. 2012. [17] Haiyan Hu, Pengfei Wang, Lining Sun. Simulation
Platform of Monitoring and Tracking Micro System for
Dangerous Chemicals Transportation. Journal of Networks,
Vol 8, No 2 (2013), 477-484, Feb 2013.
[18] J. -C. Yoon, S. -S. Ahn and Y. -J. Lee, “Spherical Robot
with NewType of Two-Pendulum Driving Mechanism,
“ Proc. 15th Int. Conf. on Intelligent Engineering Systems,
pp. 275-279, 2011.
[19] Q. Zhan, Y. Cai and C. Yan, “Design, Analysis and
Experiments of an Omni-Directional Spherical Robot,
“Proc. IEEE Int. Conf. on Robotics and Automation, pp.
4921-4926, 2011.
Zhang Sheng was born in Jiangsu Province, China on Nov. 13,
1979. He was in PLA Ordnance College, Shi Jiazhuang, Hebei
Province, China from 1998 to 2005 and earned his bachelor
degree and master degree in ammunition engineering and
weapon system application engineering respectively. The
author’s major field of study is cannon, autoweapon &
amunnition engineering.
He was a Lecturer from 2005 to 2013 in PLA International
Relationships University. His current and research interests are
smart ammunitions.
JOURNAL OF MULTIMEDIA, VOL. 9, NO. 2, FEBRUARY 2014 229
© 2014 ACADEMY PUBLISHER

Coherence Research of Audio-Visual Cross-
Modal Based on HHT
Xiaojun Zhu*, Jingxian Hu, and Xiao Ma College of Computer Science and Technology, Taiyuan University of Technology, Taiyuan, China
*Corresponding author, Email: [email protected],{hjxocean, tyut2010cstc}@163.com
Abstract—Visual and aural modes are two main manners
that human utilize to senses the world. Their relationship is
investigated in this work. EEG experiments involving mixed
aural and visual modes are designed, utilizing Hilbert-
Huang Transform (HHT) and electroencephalogram (EEG)
signal processing techniques. During EEG data processing,
I-EEMD method of similar weighted average waveform
extension is proposed to decompose the EEG signals,
specifically accounting for the problem of end effects and
mode mixing existing in the traditional HHT. The main
components of are obtained after decomposing the signals
including mixed modes with I-EEMD respectively. The
correlation coefficient of consistent and inconsistent mixed
signal is calculated, and the comparison is made.
Investigation on the comparison condition of the correlation
coefficient indicates that there is coherence in both the
visual and aural modes.
Index Terms—EEG; Audio-visual; Coherence; HHT;
EEMD
I. INTRODUCTION
Human obtain information from the outside world with
different sensory channels such as vision, hearing, touch,
smell and taste. However, the role of different sensory
modalities for human memory and learning are not independent of each other. The encouraging research
results” Cross modal learning interaction of Drosophila”
of Academician Aizeng Guo and Dr. Jianzeng Guo of
Chinese Academy of Sciences proves that there are
mutually reinforcing effects between modal of visual and
olfactory in drosophila’s learning and memory [1]. Then,
whether the human’ visual and auditory are able to
produce a similar cross-modal collaborative learning effect? Can we take advantage of this learning effect to
strengthen the information convey efforts, and then
produce the effect of synergistic win - win and mutual
transfer on memory? Human beings obtain and
understand the information of the outside world by
multiple sensory modals [2] [3]. However, the
information from multiple modals sometimes may be
consistent, and sometimes may be inconsistent. So that it requires the brain to treat and integrate the information
and form a unified one. Since vision and hearing are the
primary ways to percept the outside world for human [4],
the coherence research for the information in the visual
and audio channels is particularly important, and it also
has the extraordinary significance for discovering the
functional mechanism of the brain. Therefore, the
coherence research of audio-visual information and its
function in knowing the world and perceiving the
environment will contribute to improving the lives of the
handicapped whose visual or audio channel is defective,
and make the reconstruction of some functions in their cognitive system come true [5].
Meanwhile, it will also give the active boost to
improve the visual and audio effect of the machine and
further develop the technology of human-computer
interaction. Human brains’ integration to the visual and
auditory stimuli of the outside world is a very short but
complicated non-linear process [6] [7]. In recent years,
EEG is widely used in the visual and audio cognitive domain. EEG is the direct reflection of the brain electrical
physiological activity, of which the transient cerebral
physiological activities are included [8] [9] [10].
Accordingly, some researchers consider the transient
process of the brain integrating the visual information and
audio information mutually can cause the electric
potential on the scalp surface to change [11]. Event-
Related Potential (ERP) is the brain potential extracted from EEG and related to the stimulation activities. It can
establish the relations between the brain responses and
the events (visual or auditory stimulus), and capture the
real-time brain information processing and treating
process. Thus, in recent years, when the researchers in the
brain science field and artificial intelligence field are
studying the interaction in multiple sensory and crossing
modals, the technology for analyzing ERP has be paid attention to unprecedentedly.
In this article, we will discuss the coherence between
the visual EEG signal and the audio EEG signal from the
perspective of signal processing based on Hilbert-Huang
Transform (HHT) [12], and then investigate the mutual
relations between the visual and audio modals. Firstly,
this paper designs a visual and auditory correlation test
experiment; evoked potential data under the single visual stimulus, the single audio stimulus, and the stimulus of
audio-visual consistence and the stimulus of audiovisual
inconsistence were collected respectively. Then, he main
IMF components of single visual signal and single audio
signal are decomposed by HHT, and analysis the
coherence of visual and audio modals by calculating the
correlation coefficient between these components and
ERP signal under the stimulus of visual & audio modals. Our paper is organized as follows. Section II describes
230 JOURNAL OF MULTIMEDIA, VOL. 9, NO. 2, FEBRUARY 2014
© 2014 ACADEMY PUBLISHERdoi:10.4304/jmm.9.2.230-237

Experiment and Records of Audio-visual Evoked. Section
III describes Data Treatment Method in detail. We
analyze the I-EEMD Processing and Analysis of
Experimental Data, and provide the simulation results in
Section IV. In Section V, We conclude this paper.
II. EXPERIMENT AND RECORDS OF AUDIO-VISUAL
EVOKED EEG
A. Design of Experiment
The experiment contents include single visual
experiment (experiment A), single audio experiment
(experiment B) and stimulus experiment of audio-visual modals (experiment C). The stimulation experiment of
audio-visual modals is also divided into experiment of
consistent audio-visual modals (experiment C1) and
experiment of inconsistent audio-visual modals
(experiment C2). The materials for visual stimulus
include seven elements in total, namely Chinese
characters “ba”, “ga”, “a”, the letters “ba”, “ga”, “a” and
a red solid circle. The size and lightness of presented Chinese characters or the letters are consistent, and
appeared by pseudorandom fashion; the materials for
audio stimulus include four sound elements, namely the
sound “ba”, “ga”, “a” and a short pure sound “dong”. The
sound file is edited by use of Adobe audition with the
unified attribute of two-channel stereo, sampling rate of
44100 and resolution ratio of 16-bit. In the experiment of
visual evoked potentials, the red solid cycle is the target stimulus, the pictures of other Chinese characters or
letters are the non-target stimuli; In the experiment of
audio evoked potentials, the short pure sound “tong” is
the target stimulus, the other sounds are the non-target
stimuli; In the audio-visual dual channels experiment, the
visual pictures and the audio sounds combine randomly.
When the picture is red solid cycle and the sound is short
pure sound “dong”, it is target stimulus, and other combinations are non-target stimuli. The experiment
requires the subject to pushing a button to indicate their
reactions for the tested target stimuli. This experiment
model investigates the ERP data under the non-note
model. Three groups of experiment stimulus are all OB
(Oddball Paradigm) with the target stimulus rate of 20%.
The lasting time for every stimulus is 350ms with the
interval of 700ms. Three groups of experiments all include 250 single stimuli, of which 50 are target
stimulus (trials). The software E-prime is used to
implement this experiment.
B. Conditions to be Tested
20 healthy enrolled postgraduates with no history of
mental illness (including 10 males and 10 females, right-
handed, and their age from 22 to 27 years old) were
selected as the subjects. All of them have normal
binocular vision or corrected vision and normal hearing.
Before the experiment, all of them have signed the
informed consent form of the experiment to be tested
voluntarily. Before the experiment, scalp of the subjects was kept clean. After the experiment, certain reward was
given. Every subject participated in the experience for
about one hour, including the experiment preparation and
formal experiment process. In the process of the
experiment, it was arranged that every subject had three
minutes for resting, to prevent the data waveform of ERP
being affected because of the subjects’ overfatigue.
C. Requirements of Experiment and Electrode Selection
This EEG experiment was arranged to be completed in
an independent sound insulation room. The subject faces
toward the computer monitor and pronunciation speaker.
The subject was 80cm away from the screen, the
background color was black. In the process of experiment,
the subjects were required to be relax, not nervous, keep the sitting posture well, concentrate, not to twist the head,
stare at the computer screen with eyes, press the key
“space” when the target stimulus appeared, and not to
react to the non-target stimulus. EEG data was recorded
by NEUROSCAN EEG system with 64-lead. The
electrode caps with the suitable size were worn by the
subjects. The electrode caps were equipped with Ag-
AgCl electrodes. 10-20 system which is used internationally was employed for the electrode placement.
Its schematic diagram is shown as figure 1. The
conductive paste is placed between electrode and
subject’s scalp. It is required that the impedances of all
leads should be lower than 5K .
F3F7 Fz F4 F8
C3T3 Cz C4 T4
Pz P4 T6P3T5 A2A1
O1 O2
Fp2Fp1
Figure 1. 10-20 Electrode Lead System
In this experiment, 64-lead EEG acquisition system of
NEUROSCAN is adopted. However, according to the
needs of the experiment, we only use 12 leads among
them for analysis. According to the human brain scalp
structure partitions and their functions, the visual
activities mainly occur in occipital region, and the leads
O1, O2 are chosen for analysis; The audio region is located at temporal lobe, and the leads T3, T4, F7, F8
related to the audio activities are chosen for analysis; In
addition, the leads F3, F4, Fp1, Fp2 related to the
stimulation classification at frontal lobe and the leads C3,
C4 related to the whole brain information treatment
process are chosen for analysis.
D. Records and Pre-treatment of EEG Signal
The process of EEG experiment is safe and harmless to
human body, the time resolution ratio is also extremely
high. Therefore, it plays a more and more important role
in the field of cognitive science. The parts contained in
EEG experiment designed by this paper include lead, electrode cap, signal amplifier, stimulation presentation
computer, data recording computer and ERP
JOURNAL OF MULTIMEDIA, VOL. 9, NO. 2, FEBRUARY 2014 231
© 2014 ACADEMY PUBLISHER

synchronization software. The details are shown in figure
2:
Figure 2. Experimental system equipment
In the experiment, 64-lead EEG equipment of
NEUROSCAN is used and the storing data is collected.
Quik-Cap of NEUROSCAN is employed for the
electrode cap, and the caps of all electrodes are marked.
The location of electrodes is simple and fast. The data
collection is realized by AC. The reference electrodes are
placed at the nose tip. Bilateral mastoid is the recorded
electrode. The data sampling rate is set as 1000Hz. Before performing HTT analysis treatment to EEG, it is
necessary to pre-treat the recorded and stored EEG data.
The general methods include several procedures, namely,
eliminating electro-oculogram (EOG), digital filtering,
dividing EEG into epochs, baseline correction,
superposition average and group average [13].
III. DATA TREATMENT METHOD
In the process of the EEG signal processing with traditional HHT, the problems such as end effect [14] and
mode mixing [15] may be caused, so very great affect
will be brought to the experiment results. Therefore,
based on a great number of researches which are
implemented for the existing solutions, this paper puts
forth an end extension algorithm of similar waveform
weighted average to restrain the end effect. Meanwhile,
EEMD is used to replace EMD to eliminate the mode mixing. The combination of these two methods is named
as I-EEMD (Improved-EEMD). The relevant methods are
described in details below.
A. Extension Algorithm of Similar Waveform Weighted
Average
So far, EMD method has been widely applied in
several fields of signal analysis. Although this method
has the advantage which is not possessed by other
methods, the problem of end effect will bring great
obstacles to the application in practical uses. For the
problem of end effect, the researchers have brought
forward some solutions, such as mirror extension method [16], envelope extension method [17], cycle extension
method [18] and even continuation [19] etc. These
methods can reduce the influence of end effect in some
extent. However, EEG signal is a typical nonlinear and
non-stationary signal and it has high requirements for the
detail feature of the signal [20] during analysis and
treatment. Therefore, these methods still need to be
improved. For the end extension, the continued signal must be maintained with the variation trend inside the
original signal. After analyzing all kinds of end extension
methods, this paper puts forth a method of similar
waveform weighted matching to extend the ends.
Definitions 1( )S t ,
2 ( )S t are set as two signals on the
same time axis, 1 1 1 1( , ( ))P t S t and
2 2 2 2( , ( ))P t S t are two
points on 1( )S t and
2 ( )S t respectively. The condition of
1 2t t is satisfied but 1 1 2 2( ) ( )S t S t . Here the condition
of 1 2t t is set. The signal
1( )S t is moved right with the
length of (2 1t t ) horizontally along the time axis t, to
make the points 1P and
2P coincide. Along the
coincident point 1P takes the wave form section with the
length of L on the left (or right), and the waveform
matching degree m of the signals 1( )S t and
2 ( )S t for the
point 1P (or
2P ) can be defined as:
2
2 1
1
[ ( ) ( )]L
i
S i S i
mL
. (1)
Apparently, the more 1( )S t
and
2 ( )S t are matching,
the less the m value will be.
According to the signal analysis theory we know that,
the similar waveform will appear in the same signal
repeatedly, so that we can choose a number of matching
waves similar to the waveform at the end. Moreover,
weighted averaging is performed to them, then, the obtained average wave is used to extend the signal ends.
The extension for the signal ends generally includes two
ends on the left and right. In the following, the left end of
the signal is taken as the example. The original signal is
set as ( )x t , the leftmost end of ( )x t is 0( )x t , the
rightmost end is '( )x t , and the signal contains n
samplings points.
Starting from the left end 0( )x t of the signal, part of
the curved section of ( )x t is taken from the right, and
this curved section is set as ( )w t , which needs to only
contain an extreme point (either the maximum value or
the minimum value) and a zero crossing point. The length
of ( )w t is l .The right end of the curved section ( )w t
can be set as one zero crossing point, and it is recorded as
1( )x t . The intermediate point 1( )mx t in the horizontal
axis of ( )w t is taken, of which 1 0 1( ) / 2mt t t . Taking
1( )
mx t as the reference point, the sub-wave ( )w t is moved
to the right horizontally along the time axis t. When some
point ( )x t on the signal ( )x t coincides with 1( )mx t , the
sub-wave with the same length of ( )w t and the point
( )ix t as the central point is taken and recorded as ( )iw t .
The wave form matching degree im of ( )iw t and ( )w t is
calculated, and the wave form matching degree im as
well as a small section of data wave (the wave form
length of this section is set as 0.1 l ) in the front of ( )iw t
are stored. Move it to the right horizontally with the same
process, and successively record these adjacent data
232 JOURNAL OF MULTIMEDIA, VOL. 9, NO. 2, FEBRUARY 2014
© 2014 ACADEMY PUBLISHER

waves on the left with the length of 0.1 l as 1( )v t ,
2 ( )v t ...
( )kv t . Finally, a data pair collection comprised of the
wave form matching degree and corresponding sub-
waves in the adjacent part on the left of the matching
waves is obtained:
1 1 2 2[ , ] ( ( ), ) ( ( ), ),( ( ), ) ( ( ), )k kV m v t m v t m v t m v t m (2)
If the collection [ , ]V m is null, it indicated that the
wave form of the original signal is extremely irregular. It
is not suitable to adopt the theory of similar wave form,
and the extension is not performed to it. The extreme
value point method is used to solve it. If the collection
[ , ]V m is not null, all the obtained value of wave form
matching degree is ranked in sequence from small one to
large one. Obtain [ ', ']V m and the first j data pair of
[ ', ']V m is taken out, of which 3[ ]j k . The weighted
average pv of all sub-waves in these j data pairs is
calculated, and then pv is used to extend the left end
point of ( )x t of the signal.
The end extension algorithm for similar wave form
weighted matching is as follows. Input: signal ( )x t .
Output: matching wave of weighted average pv
Steps:
(1) For 0t t to 't ;
(2) Calculate the waveform matching degree im according to the
formula (1), and take part of sub-waves iv on the left of the
matching wave iw . L(
iv )=0.1*L(iw );
(3) End for;
(4) Rank the collection ['
im , '
iv ] in sequence from small one to large
one according to the value of im , and obtain the new collection
['
im , '
iv ] with the length of k ;
(5) Take the first j data pairs of ['
im , '
iv ] of which 3[ ]j k ;
(6) Calculate the weighted average wave pv .
(7) Use pv to extend the left end of signal ( )x t .
B. Eliminating Mode Mixing Problem
The problem of mode mixing is often coming out in
the process of EEG signal decomposition with EMD
method, and its reason is relatively complex. Not only the
factors of EEG itself can cause it, such like the frequency
components, sampling frequency and so on, but also the
algorithms and screening process of EMD. Once mode
mixing problem is appearing, the obtained IMF
components would lose the physical meanings they should have, and would bring negative influence to the
correct analysis of the signals.
N.E. Huang did a lot of research on the EMD of white
noise [21], and he found that the energy spectrum of
white noise is uniform over the frequency band, and its
scale performance in time-frequency domain is evenly
distributed. At the same time, a French scientist, Flandrin,
after doing a lot of EMD decompositions to white noise and in the base on statistics, also found that all the
various frequency components it contains can be isolated
regularly. That is to say, for white noise, EMD method
acts as a binary filter, and each IMF component from
decomposition has a characteristic of similar band pass in
the power spectrum [22]. Based on the characteristics of
white noise in EMD method and in order to better solve
mode mixing problem, Z.Wu and NEHuang have proposed a noise-assisted empirical mode decomposition
method on the basis of original EMD decomposition. And
this new method is called as “EEMD”, which means
ensemble empirical mode decomposition [23].
The specific steps of EEMD algorithm are as follows:
1) Add a normal distributed white noise x(t) to the
original signal s(t), and then obtain an overall S(t):
( ) ( ) ( )S t s t x t (3)
2) Use standard EMD method to decompose S(t),
which is the signal with white noise, and then decompose
it into a plurality of IMF components ic , and a surplus
component of nr :
1
( )n
i n
j
S t c r
(4)
3) Repeat step 1), 2) and add the different white noises
to the to-be-analyzed signals:
( ) ( ) ( )i iS t s t x t . (5)
4) Decompose the superposed signals from the
previous step in EMD method, and then obtain:
1
( )n
i ij in
j
S t c r
. (6)
5) The added several white noises are random and
irrelevant, and their statistical mean value must be zero.
And do the overall average for each component to offset the influence of Gaussian white noise, and then obtain the
final decomposition results:
1
1 n
j ij
i
c cN
. (7)
In the formula, N means the number of added white
noises.
IV. I-EEMD PROCESSING AND ANALYSIS OF
EXPERIMENTAL DATA
A. I-EEMD Processing and Analysis of Experimental Data
In the following, the evidence of existing coherence of
audio-visual modals would be discussed from the
perspective of EEG signals processing. So, it is needed to extract the main components of audio-visual evoked
potentials and analyze them. We choose C3 and C4 leads,
which related to the whole-brain information processing
to analyze. The C3 lead is taken for example, and its ERP
waveforms of single visual stimulus, single auditory
stimulus, consistent visual & auditory data and
JOURNAL OF MULTIMEDIA, VOL. 9, NO. 2, FEBRUARY 2014 233
© 2014 ACADEMY PUBLISHER

inconsistent visual & auditory data are obtained shown as
Fig. 3:
Figure 3. C3 Lead ERP Waveform
In Fig. 3 it shows four kinds of ERP data waveforms on the length of one epoch. Among them the selected
stimulating text for the visual stimulation is the screen
text letter "ba"; the selected stimulating material for the
auditory stimulus is the sound "ba" from the audio; the
stimulating material for the audio-visual consistent is the
letter "ba" and sound "ba"; and the selected stimulating
material for audio-visual inconsistent is the letter "ba"
and sound "ga". After decomposing the above four kinds of ERP data
in the I-EEMD method, all the IMF components are
obtained as Fig. 4 shown. Every component is distributed
according to the frequency from high to low. For the
point of decomposition effect, each component is
relatively stable at the end, and there was also no flying
wing phenomenon, and producing no significant mode
mixing problem. Each component has a complete physical meaning, and through these components it could
examine the advantages and disadvantages of
decomposition effects. And the fact that Res, the surplus
component is close to zero, once again proves the validity
of the proposed method in this paper.And from that figure
it can be seen, through the I-EEMD decomposition the
VEP data of C3 lead decomposed into 7 IMF components
and a surplus component. Among these seven IMF components, there may be some pseudo-components,
which could be screened out by the method of correlation
coefficients calculation. Through the I-EEMD
decomposition the AEP data of the C3 leads turned into
seven IMF components and a surlpus component. The
audio-visual consistent data of C3 leads through I-EEMD
decomposition turned into seven IMF components and a
surplus component. The audio-visual inconsistent data of C3 lead through I-EEMD decomposition turned in six
IMF components and a surplus component.
Among the seven IMF components of the VEP data
through I-EEMD decomposition, there usually are some
pseudo-components, which should be screened out and
not taked into consideration. Through the relavent theory
of signals, the varity of IMF components could be judged.
The dicision threhold value of the pseudo-component is
one-tenth of the biggest correlation coefficient [24].
Caculate the correlation coefficients between these seven
IMF componnets and original signal, and they are shown
in Table 1.
(a) visual modal
(b) auditory modal
(c) audio-visual consistent modal
(d) audio-visual inconsistent modal
Figure 4. I-EEMD Decomposition of ERP Data
234 JOURNAL OF MULTIMEDIA, VOL. 9, NO. 2, FEBRUARY 2014
© 2014 ACADEMY PUBLISHER

TABLE I. THE CORRELATION COEFFICIENT BETWEEN IMF COMPONENTS AND ORIGINAL SIGNAL
IMF1 IMF2 IMF3 IMF4 IMF5 IMF6 IMF7 Res
0.0153 0.9435 0.5221 0.0275 0.7433 0.7028 0.0649 0.0032
TABLE II. THE CORRELATION COEFFICIENT BETWEEN IMF COMPONENTS AND ORIGINAL SIGNAL
IMF1 IMF2 IMF3 IMF4 IMF5 IMF6 IMF7 Res
0.0211 0.6541 0.9022 0.5728 0.0325 0.0411 0.0353 0.0049
As Table 1 shown, the correlation coefficients of IMF1,
IMF4, IMF7 with the original signal are relatively low,
which are 0.0153, 0.0275 and 0.0649. From that we could
say that these three components are pseudo-components
obtained from the decomposition. And the correlation
coefficient between surplus component and the original
signal is 0.0032. So these four decomposition components don’t have real physical meanings and don’t
deserve deeper analysis. The correlation coefficents of
IMF2, IMF3, IMF5, IMF6 with the original signal are
relatively high, so they are the effective components from
decomposition.
Similarly, do the same process to the IMF components
from AEP data and obtain Table 2
It could be seen from Table 2 that the correlation coefficients of IMF1, IMF5, IMF6 and IMF7 with
original signal are relatively low, which are 0.0211,
0.0325, 0.0411 and 0.0353. From that we could say that
these four components are pseudo-components coming
from decomposition and don’t have real physical
meanings. The correlation coefficients of IMF2, IMF3,
IMF4 with orignal signal are relatively high, which
means they are the effecitve components from decomposition.
B. Analysis of Experiment Result
It could analyze the coherence of audio-visual modals
by comparing the correlation coefficients of ERP signal in single visual or auditory modal with the ERP signal in
audio-visual modals. Due to the sound is “ga” when
audio-visual are inconsistent, it should choose the sound
as “ga” when considering compare the ERP data in single
auditory modal and audio-visual inconsistent modal. The
other situations should take the sound “ba”. The
comparison situation of correlation coefficient calculating
from the above experiment data is shown in Table 3:
TABLE III. COMPARISON OF THE CORRELATION COEFFICIENT
Correlation coefficient value Single visual
ERP data
Single auditory
ERP data
Audio-visual consistent ERP data 0.5331 0.4519
Audio-visual inconsistent ERP data 0.2379 0.2022
It could be seen from Table 3 that the signal
correlation coefficient of ERP data between single visual
modal and audio-visual consistent modal is 0.5331, while
the signal correlation coefficient of ERP data between it
and audio-visual inconsistent is 0.2379; the signal
correlation coefficient between the ERP data of single
auditory stimuli and that of audio-visual consistent is 0.4519, while the signal correlation coefficient of ERP
data between it and audio-visual inconsistent is 0.2022.
So from that we could say, when the information in
audio-visual modal is consistent, it could improve the
information in single modal; while, when the information
in audio-visual modal is not consistent, it could have
inhibitory effect on single-modal state information.
In addition, could also find some evidence to support
the above points when considering the main compositions
of ERP signal in single audio or visual stimulus and the correlation of ERP signal in audio-visual modals mixing
stimuli.
From the principle of EMD decomposition, we could
know that the IMF components got from decomposition
have complete physical meaning. So it could inspect the
coherence of audio-visual modals through the main
compositions of single visual stimulus, single auditory
stimulus and the correlation coefficient of the ERP data of audio-visual consistent and inconsistent.
To compare the valid components of single visual
evoked potentials and single auditory evoked potentials,
and compare the correlation coefficients of ERP data of
audio-visual consistent and inconsistent, we could get the
data in Table 4:
TABLE IV. VISUAL COMPOSITION'S COMPARISON OF THE
CORRELATION COEFFICIENT
Correlation coefficient IMF2 IMF3 IMF5 IMF6
Audio-visual consistent data 0.5111 0.3853 0.5037 0.4202
Audio-visual consistent data 0.2195 0.1528 0.3001 0.2673
From Table 4 we could see that the correlation
coefficients between the main compositions of single visual stimulus evoked potentials and the ERP signal in
audio-visual consistent are obviously greater than the
correlation coefficients between it and ERP signal in
audio-visual inconsistent. And that also shows that when
the audio-visual information is consistent, it could help
people to prompt information-controlling power of
outside world. Then let’s look at the corresponding data
in audio modal. Because in experiment under the situation of audio-visual inconsistent, we select sound
“ga” and letter “ba” as the to-be-analyzed data. In order
to get a better comparability of the experiment results,
here we choose the sound “ga” in the auditory modal to
compare with the data in audio-visual cross-modal data,
and get the results shown as Table 5:
TABLE V. AUDIO COMPOSITION'S COMPARISON OF THE
CORRELATION COEFFICIENT
Valid auditory components IMF2 IMF3 IMF4
Correlation coefficient of audio-
visual consistent
0.6232 0.7869 0.5466
Correlation coefficient of audio-
visual inconsistent
0.2752 0.3456 0.0387
From Table 5 it could be seen that the comparison is
similar to what in the visual modal, which is to say that,
JOURNAL OF MULTIMEDIA, VOL. 9, NO. 2, FEBRUARY 2014 235
© 2014 ACADEMY PUBLISHER

the correlation coefficients between the main
compositions of single auditory evoked potentials and the
ERP signal in audio-visual consistent modal are
apparently greater than what of ERP signal in audio-
visual inconsistent modal. And what could also show that
when the information in audio-visual is consistent, the
EEG signal will be stronger than single modal auditory information in the brain.
V. CONCLUSIONS
This paper discusses the theory evidence of audio-
visual modals’ coherence from the perspective of EEG
signal processing. And the experiment is designed based
on the EEG in audio-visual cross-modal and then collect,
process and analyze the experiment data. During the
process of EEG signal, it uses EEMD, which combined the similar waveform average end continuation
algorithms, which is called in paper as I-EEMD,
considering the need to restrain the effects of mode
mixing and end point effect. And try to describe the
collected ERP data through two perspectives based on the
theory of signal coherence. First, investigated the
correlation of the data in single visual modal, single
auditory modal and the data in audio-visual cross-modal. From the calculated correlation coefficient it could be
found that, when audio-visual is consistent, the
correlation coefficient of it with any single modal is
relatively great. Second, form the main valid
compositions in single visual or audio modal, the
comparison situation of the calculated correlation
coefficient is similar. From these two points we could
find that, when the informations in audio & visual modals are consistent, it could help the brain promptly handle
outside environment, and that is to say, it could improve
each other’s information under the condition of audio-
visual consistent; when the informations in these two
modals are not consistent, it could restrain each other’s
information and the brain could get a combined result
after integrated, which is consistent with the famous
McGulk effect.
ACKNOWLEDGMENT
This work was supported by the National Science
Foundation for Young Scientists of Shanxi Province,
China (GrantNo.2013021016-3).
REFERENCES
[1] Guo, Jianzeng and Guo, Aike. Cross modal interactions between olfactory and visual learning in Drosophila, Science, vol. 309, no. 5732, pp. 307–310, 2005.
[2] Suminski, Aaron J and Tkach, Dennis C and Hatsopoulos, Nicholas G. Exploiting multiple sensory modalities in brainmachine interfaces, Neural Networks, vol. 22, no. 9, pp. 1224–1234, 2009.
[3] Ohshiro, Tomokazu and Angelaki, Dora E and DeAngelis,
Gregory C. A normalization model of multisensory integration. Nature Neuroscience, vol. 14, no. 5, pp. 775–782, 2011.
[4] Nishibori, Kento and Takeuchi, Yoshinori and Matsumoto, Tetsuya and Kudo, Hiroaki and Ohnishi, Noboru. ”Finding the correspondence of audio-visual events by object
manipulation. in IEEJ Transactions on Electronics, Information and Systems, 2008, pp. 242–252.
[5] Mitchell, T. AI and the Impending Revolution in Brain Sciences. in Eighteenth National Conference on Artificial Intelligence, July 28-August 1, 2002, Menlo Park, United States.
[6] Ethofer, Thomas and Pourtois, Gilles and Wildgruber, Dirk. Investigating audiovisual integration of emotional signals in the human brain” in Progress in Brain Research, vol. 156, pp. 345–361, 2006.
[7] Gonzalo-Fonrodona, Isabel. Functional gradients through the cortex. multisensory integration and scaling laws in brain dynamics. in Neurocomputing, vol. 72, no. 4C6, pp.
831-838, 2009. [8] Liu, Baolin and Meng, Xianyao and Wang, Zhongning and
Wu, Guangning. An ERP study on whether semantic integration exists in processing ecologically unrelated audio-visual information. in Neuroscience Letters, vol. 505, no. 2, pp. 119-123, 2011.
[9] Lee, TienWen and Wu, YuTe and Yu, Younger WY and Chen, Ming-Chao and Chen, Tai-Jui. The implication of functional connectivity strength in predicting treatment response of major depressive disorder: A resting EEG study. In Psychiatry Research-Neuroimaging, vol. 194, no. 3, pp. 372-377, 2011.
[10] Blankertz, Benjamin and Tomioka, Ryota and Lemm, Steven and Kawanabe, Motoaki and Muller, K-R. Optimizing spatial filters for robust EEG single-trial analysis. in IEEE Signal Processing Magazine, vol. 25, no. 1, pp. 41-56, 2008.
[11] Molholm, Sophie and Ritter, Walter and Murray, Micah M and Javitt, Daniel C and Schroeder, Charles E and Foxe, John J. Multisensory auditory-visual interactions during early sensory processing in humans: a high-density electrical mapping study. Cognitive brain research, vol. 14, no. 1, pp. 115-128, 2002.
[12] Yuan, Ling and Yang, Banghua and Ma, Shiwei. Discrimination of movement imagery EEG based on HHT and SVM. ”Chinese Journal of Science Instrument, vol. 31, no. 3, pp. 649-654, 2010.
[13] Coyle, Damien and McGinnity, T Martin and Prasad, Girijesh. Improving the separability of multiple EEG features for a BCI by neural-time-series-prediction preprocessing. Biomedical Signal Processing and Control, vol. 5, no. 3, pp. 649-654, 2010.
[14] He, Zhi and Shen, Yi and Wang, Qiang. Boundary extension for Hilbert-Huang transform inspired by gray
prediction model.” Signal Processing, vol. 92, no. 3, pp. 685-697, 2012.
[15] Lee, Ray F and Xue, Rong. A transmit/receive volume strip array and its mode mixing theory in MRI. Magnetic Resonance Imaging, vol. 25, no. 9, pp. 1312-1332, 2007.
[16] Jin Ping, ZHAO and Da ji, Huang. Mirror extending and circular spline function for empirical mode decomposition method. Journal of Zhejiang University, vol. 2, no. 3, pp. 247-252, 2001.
[17] Gai, Q. Research and Application to the Theory of Local Wave Time-Frequency Analysis Method. PHD, Dalian University of Technology, Dalian, 2001.
[18] Hamilton, James Douglas. Time Series Analysis; Cambridge Univ Press, vol. 2, 2001.
[19] Qiao Shijie. The Symmetric Extension Method for Wavelet Transform Image Coding.” Journal of Image and Graphics, vol. 5, no. 9, pp. 725-729, 2005.
[20] Pigorini, Andrea and Casali, Adenauer G and Casarotto, Silvia and Ferrarelli, Fabio and Baselli, Giuseppe and Mariotti, Maurizio and Massimini, Marcello and Rosanova,
236 JOURNAL OF MULTIMEDIA, VOL. 9, NO. 2, FEBRUARY 2014
© 2014 ACADEMY PUBLISHER

Mario. Time-frequency spectral analysis of TMS-evoked EEG oscillations by means of Hilbert-Huang transform.
Journal of Neuroscience Methods, vol. 192, no. 2, pp. 236-245, 2011.
[21] Huang, Norden E. Review of empirical mode decomposition. In Proceedings of SPIE - The International Society for Optical Engineering, Orlando, FL, United
States, March 26; SPIE: Bellingham WA, United States, 2001.
[22] Bao, Fei and Wang, Xinlong and Tao, Zhiyong and Wang, Qingfu and Du, Shuanping. “EMD-based extraction of modulated cavitation noise.” Mechanical Systems and Signal Processing, vol. 24, no. 7, pp. 2124-2136, 2010.
[23] Wu, Zhaohua and Huang, Norden E. Ensemble empirical mode decomposition: a noise assisted data analysis method.
Advances in Adaptive Data Analysis, vol. 1, no. 1, pp. 1-41,
2009. [24] Yu, Dejie and Cheng, Junsheng and Yang, Yu. Application
of Improved Hilbert-Huang Transform Method in Gear Fault Diagnosis.” Journal of Aerospace Power, vol. 41, no. 6, pp. 1899-1903, 2009.
Xiaojun Zhu was born in Jiangsu, China, in 1977. He received the Master degree in Computer Science in 2001, from Taiyuan
University of Technology, Taiyuan, China. He received the Doctor’s degree in 2012, from Taiyuan University of Technology, Taiyuan, China. His research interests include Intelligent Information processing, cloud computing, and audio-visual computing.
Jingxian Hu is currently a Graduate student and working towards his M.S. degree at Taiyuan University of Technology, China. Her current research interest includes wireless sensor network and Intelligent Information processing.
Xiao Ma is currently a Graduate student and working towards his M.S. degree at Taiyuan University of Technology, China. Hercurrent research interest includes cloud computing, and audiovisual computing.
JOURNAL OF MULTIMEDIA, VOL. 9, NO. 2, FEBRUARY 2014 237
© 2014 ACADEMY PUBLISHER

Object Recognition Algorithm Utilizing Graph
Cuts Based Image Segmentation
Zhaofeng Li and Xiaoyan Feng College of Information Engineering Henan Institute of Science and Technology, Henan Xinxiang, China
Email: [email protected], [email protected]
Abstract—This paper concentrates on designing an object
recognition algorithm utilizing image segmentation. The
main innovations of this paper lie in that we convert the
image segmentation problem into graph cut problem, and
then the graph cut results can be obtained by calculating the
probability of intensity for a given pixel which is belonged to
the object and the background intensity. After the graph cut
process, the pixels in a same component are similar, and the
pixels in different components are dissimilar. To detect the
objects in the test image, the visual similarity between the
segments of the testing images and the object types deduced
from the training images is estimated. Finally, a series of
experiments are conducted to make performance evaluation.
Experimental results illustrate that compared with existing
methods, the proposed scheme can effectively detect the
salient objects. Particularly, we testify that, in our scheme,
the precision of object recognition is proportional to image
segmentation accuracy.
Index Terms—Object Recognition; Graph Cut; Image
Segmentation; SIFT; Energy Function
I. INTRODUCTION
In the computer vision research field, image
segmentation refers to the process of partitioning a digital
image into multiple segments, which are made up of a set
of pixels. The aim of image segmentation is to simplify
and change the representation of an image into something that is more meaningful and easier for users to analyze.
That is, image segmentation is typically utilized to locate
objects and curves in images [1] [2]. Particularly, image
segmentation is the process of allocating a tag to each
pixel of an image such that pixels with the same tag
sharing specific visual features. The results of image
segmentation process can be represented as a set of
segments which totally cover the whole image [3]. The pixels belonged to the same region are similar either in
some characteristics or in some computed properties,
which refer to the color, intensity, or texture. On the other
hand, adjacent regions are significantly different with
respect to the same characteristics.
The problems of image segmentation are great
challenges for computer vision research field. As the time
of the Gestalt movement in psychology, it has been known that perceptual grouping plays a powerful role in
human visual perception. A wide range of computational
vision problems could in principle make good use of
segmented images, were such segmentations reliably and
efficiently computable. For instance intermediate-level
vision problems such as stereo and motion estimation
require an appropriate region of support for
correspondence operations. Spatially non-uniform regions
of support can be identified using segmentation
techniques. Higher-level problems such as recognition and image indexing can also utilize segmentation results
in matching, to address problems such as figure-ground
separation and recognition by parts [4-6].
As salient objects are important parts in images, hence,
if they can be effectively detected, the performance of
image segmentation can be promoted. Object recognition
refers to locate collections of salient line segments in an
image [7]. The object recognition systems are designed to correctly identify an object in a scene of objects, in the
presence of clutter and occlusion and to estimate its
position and orientation. Those systems can be exploited
in robotic applications where robots are required to
navigate in crowded environments and use their
equipment to recognize and manipulate objects [8].
In this paper, the image segmentation is regarded as a
graph cut problem, which is a basic problem in computer algorithm and theory. In computer theory, the graph cut
problem is defined on data represented in the form of a
graph ( , )G V E , where V and E represent the vertices
and edges of the graph respectively, such that it is
possible to cut G into several components with some
given constrains. Graph cut method is widely used in
many application fields, such as scientific computing,
partitioning various stages of a VLSI design circuit and
task scheduling in multi-processor systems [9] [10]. The main innovations of this paper lie in the following
aspects:
(1) The proposed algorithm converts the image
segmentation problem into graph cut problem, and the
graph cut results can be obtained by an optimization
process using energy function.
(2) In the proposed, the objects can be detected by
computing the visual similarity between the segments of the testing images and the object types from the training
images.
(3) A testing image is segmented into several segments,
and each image segment is tested to find if there is a kind
of object can match it.
The rest of the paper is organized as the following
sections. Section 2 introduces the related works. Section
3 illustrates the proposed scheme for recognizing objects
238 JOURNAL OF MULTIMEDIA, VOL. 9, NO. 2, FEBRUARY 2014
© 2014 ACADEMY PUBLISHERdoi:10.4304/jmm.9.2.238-244

from images utilizing graph cut policy. In section 4,
experiments are implemented to make performance
evaluation. Finally, we conclude the whole paper in
section 5.
II. RELATED WORKS
In this section, we will survey related works about this
paper in two aspects, including 1) image segmentation and 2) graph cut based image segmentation.
Dawoud et al. proposed an algorithm that fuses visual
cues of intensity and texture in Markov random fields
region growing texture image segmentation. The main
idea is to segment the image in a way that takes
EdgeFlow edges into consideration, which provides a
single framework for identifying objects boundaries
based on texture and intensity descriptors [11]. Park proposed a novel segmentation method based on
a hierarchical Markov random field. The proposed
algorithm is composed of local-level MRFs based on
adaptive local priors which model local variations of
shape and appearance and a global-level MRF enforcing
consistency of the local-level MRFs. The proposed
method can successfully model large object variations
and weak boundaries and is readily combined with well-established MRF optimization techniques [12].
Gonzalez-Diaz et al. proposed a novel region-centered
latent topic model that introduces two main contributions:
first, an improved spatial context model that allows for
considering inter-topic inter-region influences; and
second, an advanced region-based appearance
distribution built on the Kernel Logistic Regressor.
Furthermore, the proposed model has been extended to work in both unsupervised and supervised modes [13].
Nie et al. proposed a novel two-dimensional variance
thresholding scheme to improve image segmentation
performance is proposed. The two-dimensional histogram
of the original and local average image is projected to
one-dimensional space in the proposed scheme firstly,
and then the variance-based criterion is constructed for
threshold selection. The experimental results on bi-level and multilevel thresholding for synthetic and real-world
images demonstrate the success of the proposed image
thresholding scheme, as compared with the Otsu method,
the two-dimensional Otsu method and the minimum class
variance thresholding method [14].
Chen et al. proposes a new multispectral image texture
segmentation algorithm using a multi-resolution fuzzy
Markov random field model for a variable scale in the wavelet domain. The algorithm considers multi-scalar
information in both vertical and lateral directions. The
feature field of the scalable wavelet coefficients is
modelled, combining with the fuzzy label field describing
the spatially constrained correlations between
neighbourhood features to achieve more accurate
parameter estimation [15].
Han et al. presented a novel variational segmentation method within the fuzzy framework, which solves the
problem of segmenting multi-region color-scale images
of natural scenes. The advantages of the proposed
segmentation method are: 1) by introducing the PCA
descriptors, our segmentation model can partition color-
texture images better than classical variational-based
segmentation models, 2) to preserve geometrical structure
of each fuzzy membership function, we propose a
nonconvex regularization term in our model, and 3) to
solve the segmentation model more efficiently, the
authors design a fast iteration algorithm in which the augmented Lagrange multiplier method and the iterative
reweighting are integrated [16].
Souleymane et al. designed an energy functional based
on the fuzzy c-means objective function which
incorporates the bias field that accounts for the intensity
inhomogeneity of the real-world image. Using the
gradient descent method, the authors obtained the
corresponding level set equation from which we deduce a fuzzy external force for the LBM solver based on the
model by Zhao. The method is fast, robust against noise,
independent to the position of the initial contour,
effective in the presence of intensity inhomogeneity,
highly parallelizable and can detect objects with or
without edges [17].
Liu et al. proposed a new variational framework to
solve the Gaussian mixture model (GMM) based methods for image segmentation by employing the convex
relaxation approach. After relaxing the indicator function
in GMM, flexible spatial regularization can be adopted
and efficient segmentation can be achieved. To
demonstrate the superiority of the proposed framework,
the global, local intensity information and the spatial
smoothness are integrated into a new model, and it can
work well on images with inhomogeneous intensity and noise [18].
Wang et al. presented a novel local region-based level
set model for image segmentation. In each local region,
the authors define a locally weighted least squares energy
to fit a linear classifier. With level set representation,
these local energy functions are then integrated over the
whole image domain to develop a global segmentation
model. The objective function in this model is thereafter minimized via level set evolution [19].
Wang et al. presented an online reinforcement learning
framework for medical image segmentation. A general
segmentation framework using reinforcement learning is
proposed, which can assimilate specific user intention
and behavior seamlessly in the background. The method
is able to establish an implicit model for a large state-
action space and generalizable to different image contents or segmentation requirements based on learning in situ
[20].
In recent years, several researchers utilized the Graph
Cut technology to implement the image segmentation,
and the related works are illustrated as follows.
Zhou et al. present four technical components to
improve graph cut based algorithms, which are
combining both color and texture information for graph cut, including structure tensors in the graph cut model,
incorporating active contours into the segmentation
process, and using a "softbrush" tool to impose soft
constraints to refine problematic boundaries. The
integration of these components provides an interactive
JOURNAL OF MULTIMEDIA, VOL. 9, NO. 2, FEBRUARY 2014 239
© 2014 ACADEMY PUBLISHER

segmentation method that overcomes the difficulties of
previous segmentation algorithms in handling images
containing textures or low contrast boundaries and
producing a smooth and accurate segmentation boundary
[21].
Chen et al. proposed a novel synergistic combination
of the image based graph cut method with the model based ASM method to arrive at the graph cut -ASM
method for medical image segmentation. A multi-object
GC cost function is proposed which effectively integrates
the ASM shape information into the graph cut framework
The proposed method consists of two phases: model
building and segmentation. In the model building phase,
the ASM model is built and the parameters of the GC are
estimated. The segmentation phase consists of two main steps: initialization and delineation [22].
Wang et al. present a novel method to apply shape
priors adaptively in graph cut image segmentation. By
incorporating shape priors adaptively, the authors provide
a flexible way to impose the shape priors selectively at
pixels where image labels are difficult to determine
during the graph cut segmentation. Further, the proposed
method integrated two existing graph cut image segmentation algorithms, one with shape template and the
other with the star shape prior [23].
Yang et al. proposed an unsupervised color-texture
image segmentation method. To enhance the effects of
segmentation, a new color-texture descriptor is designed
by integrating the compact multi-scale structure tensor,
total variation flow, and the color information. To
segment the color-texture image in an unsupervised and multi-label way, the multivariate mixed student's t-
distribution is chosen for probability distribution
modeling, as MMST can describe the distribution of
color-texture features accurately. Furthermore, a
component-wise expectation-maximization for MMST
algorithm is proposed, which can effectively initialize the
valid class number. Afterwards, the authors built up the
energy functional according to the valid class number, and optimize it by multilayer graph cuts method [24].
III. THE PROPOSED SCHEME
A. Problem Statement
In this paper, the problem of image segmentation is converted into the problem of graph cut. Let an
undirected and connected graph ( , )G V E where
{1,2,..., }V n and {( , ),1 }E i j i j n are satisfied.
Let the edge weights ij jiw w be given such that 0ijw
for ( , )i j E , and in particular, let 0iiw . The graph cut
problem is to find a partition results 1 2( , , , )NV V V of V
where the condition 1 2 NV V V is satisfied.
In the problem image segmentation, the nodes in V
denotes the pixels of images and the edge weight is
estimated by computing the distance between two pixels.
Particularly, the graph cut based image segmentation
results can be obtained by a subset of the edges of the edge set E . There are several methods to calculate the
quality of image segmentation results. The main idea is
quite simple, that is, we want the pixels in a same
component to be similar, and the pixels in different
components to be dissimilar. Thai is to say that edge
between two nodes which are belonged to the same
component should have lower value of weights, and
edges which are located between nodes in different
components should have higher value of weights. Partition 1
Partition 2
Partition 3
Figure 1. Explaination of the graph cut problem
B. Graph Cut Based Image Segmentation
In the proposed, the main innovation lies in that we
regard the graph cut based image segmentation problem
as an energy minimization problem. Therefore, given a
set of pixels P and a set of labels L , the object is to seek
a label :l P L , which can minimize the following
equation.
,
( ) ( ) ( , )p
q
p p p p q
p P p P q N
E l R l C l l
(1)
where pN denotes the pixel set which is belonged to the
neighborhood of p , and ( )p pR l refers to the cost of
allocating the label pl to p . Moreover, ( , )q
p p qC l l
denotes the cost of allocate the label pl and ql to p and
q respectively. Afterwards, the proposed energy function
is defined in Eq. 2.
1 2 3
,
1 2 3
( ) ( ) ( , )
. . 1
p
p
p p p o q p q
p P p P q N
E D f S x C l l
s t
(2)
In Eq. 2, the parameters 1 , 2 and 3 denote the
weight of data stream pD , shape term pD , and the
boundary term respectively. Furthermore, the above
modules can be represented as the following forms.
( ),
( )( ),
p p
p p
p p
LogP I O l object labelD l
LogP I B l background label
(3)
2
2
( , ) ( )( , ) exp
( , ) 2
p q p qp
q p q
l l I IC l l
dis p q
(4)
240 JOURNAL OF MULTIMEDIA, VOL. 9, NO. 2, FEBRUARY 2014
© 2014 ACADEMY PUBLISHER
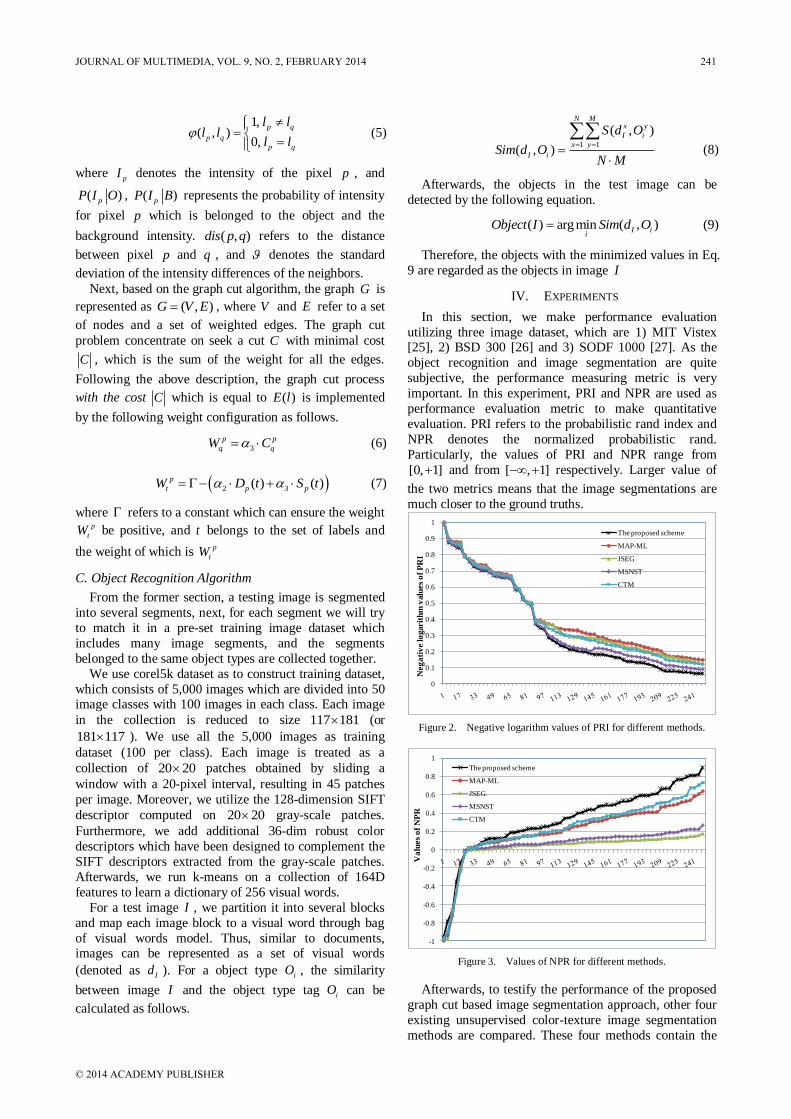
1,
( , )0,
p q
p q
p q
l ll l
l l
(5)
where pI denotes the intensity of the pixel p , and
( )pP I O , ( )pP I B represents the probability of intensity
for pixel p which is belonged to the object and the
background intensity. ( , )dis p q refers to the distance
between pixel p and q , and denotes the standard
deviation of the intensity differences of the neighbors.
Next, based on the graph cut algorithm, the graph G is
represented as ( , )G V E , where V and E refer to a set
of nodes and a set of weighted edges. The graph cut
problem concentrate on seek a cut C with minimal cost
C , which is the sum of the weight for all the edges.
Following the above description, the graph cut process
with the cost C which is equal to ( )E l is implemented
by the following weight configuration as follows.
3
p p
q qW C (6)
2 3( ) ( )p
t p pW D t S t (7)
where refers to a constant which can ensure the weight p
tW be positive, and t belongs to the set of labels and
the weight of which is p
tW
C. Object Recognition Algorithm
From the former section, a testing image is segmented
into several segments, next, for each segment we will try
to match it in a pre-set training image dataset which
includes many image segments, and the segments
belonged to the same object types are collected together.
We use corel5k dataset as to construct training dataset,
which consists of 5,000 images which are divided into 50 image classes with 100 images in each class. Each image
in the collection is reduced to size 117 181 (or
181 117 ). We use all the 5,000 images as training
dataset (100 per class). Each image is treated as a
collection of 20 20 patches obtained by sliding a
window with a 20-pixel interval, resulting in 45 patches
per image. Moreover, we utilize the 128-dimension SIFT
descriptor computed on 20 20 gray-scale patches.
Furthermore, we add additional 36-dim robust color
descriptors which have been designed to complement the
SIFT descriptors extracted from the gray-scale patches.
Afterwards, we run k-means on a collection of 164D
features to learn a dictionary of 256 visual words.
For a test image I , we partition it into several blocks
and map each image block to a visual word through bag
of visual words model. Thus, similar to documents, images can be represented as a set of visual words
(denoted as Id ). For a object type iO , the similarity
between image I and the object type tag iO can be
calculated as follows.
1 1
( , )
( , )
N Mx y
I i
x y
I i
S d O
Sim d ON M
(8)
Afterwards, the objects in the test image can be
detected by the following equation.
( ) argmin ( , )I ii
Object I Sim d O (9)
Therefore, the objects with the minimized values in Eq.
9 are regarded as the objects in image I
IV. EXPERIMENTS
In this section, we make performance evaluation
utilizing three image dataset, which are 1) MIT Vistex [25], 2) BSD 300 [26] and 3) SODF 1000 [27]. As the
object recognition and image segmentation are quite
subjective, the performance measuring metric is very
important. In this experiment, PRI and NPR are used as
performance evaluation metric to make quantitative
evaluation. PRI refers to the probabilistic rand index and
NPR denotes the normalized probabilistic rand.
Particularly, the values of PRI and NPR range from
[0, 1] and from [ , 1] respectively. Larger value of
the two metrics means that the image segmentations are
much closer to the ground truths.
0
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
The proposed scheme
MAP-ML
JSEG
MSNST
CTM
Neg
ati
ve lo
garit
hm
valu
es
of
PR
I
Figure 2. Negative logarithm values of PRI for different methods.
-1
-0.8
-0.6
-0.4
-0.2
0
0.2
0.4
0.6
0.8
1
The proposed scheme
MAP-ML
JSEG
MSNST
CTM
Va
lues
of
NP
R
Figure 3. Values of NPR for different methods.
Afterwards, to testify the performance of the proposed
graph cut based image segmentation approach, other four
existing unsupervised color-texture image segmentation
methods are compared. These four methods contain the
JOURNAL OF MULTIMEDIA, VOL. 9, NO. 2, FEBRUARY 2014 241
© 2014 ACADEMY PUBLISHER
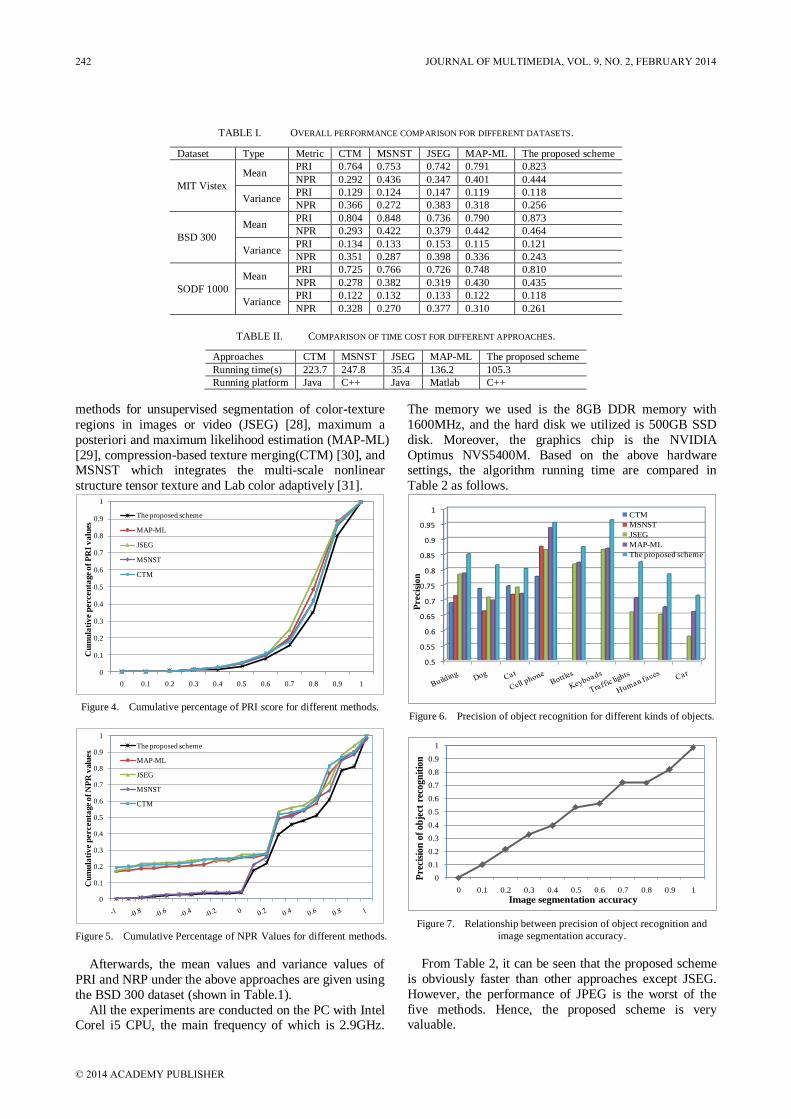
TABLE I. OVERALL PERFORMANCE COMPARISON FOR DIFFERENT DATASETS.
Dataset Type Metric CTM MSNST JSEG MAP-ML The proposed scheme
MIT Vistex
Mean PRI 0.764 0.753 0.742 0.791 0.823
NPR 0.292 0.436 0.347 0.401 0.444
Variance PRI 0.129 0.124 0.147 0.119 0.118
NPR 0.366 0.272 0.383 0.318 0.256
BSD 300
Mean PRI 0.804 0.848 0.736 0.790 0.873
NPR 0.293 0.422 0.379 0.442 0.464
Variance PRI 0.134 0.133 0.153 0.115 0.121
NPR 0.351 0.287 0.398 0.336 0.243
SODF 1000
Mean PRI 0.725 0.766 0.726 0.748 0.810
NPR 0.278 0.382 0.319 0.430 0.435
Variance PRI 0.122 0.132 0.133 0.122 0.118
NPR 0.328 0.270 0.377 0.310 0.261
TABLE II. COMPARISON OF TIME COST FOR DIFFERENT APPROACHES.
Approaches CTM MSNST JSEG MAP-ML The proposed scheme
Running time(s) 223.7 247.8 35.4 136.2 105.3
Running platform Java C++ Java Matlab C++
methods for unsupervised segmentation of color-texture
regions in images or video (JSEG) [28], maximum a
posteriori and maximum likelihood estimation (MAP-ML)
[29], compression-based texture merging(CTM) [30], and MSNST which integrates the multi-scale nonlinear
structure tensor texture and Lab color adaptively [31].
0
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1
The proposed scheme
MAP-ML
JSEG
MSNST
CTM
Cu
mu
lati
ve p
ercen
tage
of
PR
I v
alu
es
Figure 4. Cumulative percentage of PRI score for different methods.
0
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
The proposed scheme
MAP-ML
JSEG
MSNST
CTM
Cu
mu
lati
ve p
ercen
tage
of
NP
R v
alu
es
Figure 5. Cumulative Percentage of NPR Values for different methods.
Afterwards, the mean values and variance values of
PRI and NRP under the above approaches are given using
the BSD 300 dataset (shown in Table.1).
All the experiments are conducted on the PC with Intel Corel i5 CPU, the main frequency of which is 2.9GHz.
The memory we used is the 8GB DDR memory with
1600MHz, and the hard disk we utilized is 500GB SSD
disk. Moreover, the graphics chip is the NVIDIA
Optimus NVS5400M. Based on the above hardware settings, the algorithm running time are compared in
Table 2 as follows.
0.5
0.55
0.6
0.65
0.7
0.75
0.8
0.85
0.9
0.95
1CTM
MSNST
JSEG
MAP-ML
The proposed scheme
Pre
cisi
on
Figure 6. Precision of object recognition for different kinds of objects.
0
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1
Image segmentation accuracy
Pre
cisi
on
of
ob
ject
rec
og
nit
ion
Figure 7. Relationship between precision of object recognition and
image segmentation accuracy.
From Table 2, it can be seen that the proposed scheme
is obviously faster than other approaches except JSEG.
However, the performance of JPEG is the worst of the
five methods. Hence, the proposed scheme is very valuable.
242 JOURNAL OF MULTIMEDIA, VOL. 9, NO. 2, FEBRUARY 2014
© 2014 ACADEMY PUBLISHER

Figure 8. Example of the object recognition results by the proposed image segmentation algorithm
In the following parts, we will test the influence of
image segmentation accuracy to object recognition.
Firstly, experiments are conducted to show the precision
of object recognition for different kinds of objects, and
the results are shown in Fig. 6.
Secondly, the relationship between precision of object recognition and image segmentation accuracy is shown in
Fig. 7.
As is shown in Fig. 7, precision of object recognition is
proportional to image segmentation accuracy. Therefore,
image segmentation module in the proposed is very
powerful in the object recognition process.
From the above experimental results, it can be seen
that the proposed scheme is superior to other two schemes. The main reasons lie in the following aspects:
(1) The proposed scheme converts the image
segmentation problem into graph cut problem, and we
obtained the graph cut results by an optimization process.
Moreover, the objects can be detected by computing the
visual similarity between the segments of the testing
images and the object types from the training images.
(2) For the JSEG algorithm, there is a major problem which is caused the varying shades due to the
illumination. However, this problem is difficult to handle
because in many cases not only the illuminant component
but also the chromatic components of a pixel change their
values due to the spatially varying illumination.
(3) The MAP-ML algorithm should be extended to
segment image with the combination of motion
information, and the utilization of the model for specific
object extraction by designing more complex features to
describe the objects.
(4) The CTM scheme should be extended to supervised scenarios. As it is of great importance to better
understand how humans segment natural images from the
lossy data compression perspective. Such an
understanding would lead to new insights into a wide
range of important problems in computer vision such as
salient object detection and segmentation, perceptual
organization, and image understanding and annotation.
(5) The performance of MSNST is not satisfied, because the proposed method is the compromise between
high segmentation accuracy and moderate computation
efficiency. Particularly, the parameter setting in this
scheme is too complex and more discriminative
segmentation process should be studied in detail.
V. CONCLUSIONS
In this paper, we proposed an effective object
recognition algorithm based on image segmentation. The image segmentation problem is converted into the graph
cut problem, and then the graph cut results can be
computed by estimating the probability of intensity for a
given pixel which is belonged to the object and the
background intensity. In order to find the salient objects
JOURNAL OF MULTIMEDIA, VOL. 9, NO. 2, FEBRUARY 2014 243
© 2014 ACADEMY PUBLISHER

we compute the visual similarity between the segments of
the testing images and the object types deduced from the
Corel5K image dataset.
REFERENCES
[1] Peng Qiangqiang, Long Zhao, A modified segmentation approach for synthetic aperture radar images on level set, Journal of Software, 2013, 8(5) pp. 1168-1173
[2] Grady, Leo, Random walks for image segmentation, IEEE Transactions on Pattern Analysis and Machine Intelligence, 2006, 28(11) pp. 1768-1783
[3] Noble, J. Alison; Boukerroui, Djamal Ultrasound image segmentation: A survey, IEEE Transactions on Medical
Imaging, 2006, 25(8) pp. 987-1010 [4] Felzenszwalb, PF; Huttenlocher, DP, Efficient graph-based
image segmentation, International Journal of Computer Vision, 2004, 59(2) pp. 167-181
[5] Boykov, Yuri; Funka-Lea, Gareth Graph cuts and efficient N-D image segmentation, International Journal of Computer Vision, 2006, 70(2) pp. 109-131
[6] Lei Zhu, Jing Yang, Fast Multi-Object Image Segmentation Algorithm Based on C-V Model, Journal of Multimedia, 2011, 6(1) pp. 99-106
[7] Kang, Dong Joong and Ha, Jong Eun and Kweon, In So,
Fast object recognition using dynamic programming from combination of salient line groups, Pattern Recognition, 2003, 36(1) pp. 79-90
[8] Georgios Kordelas, Petros Daras, Viewpoint independent object recognition in cluttered scenes exploiting ray-triangle intersection and SIFT algorithms, Pattern Recognition, 2010, 43(11) pp. 3833-3845
[9] Andreev Konstantin, Räcke Harald, Balanced Graph Partitioning, Proceedings of the sixteenth annual ACM symposium on Parallelism in algorithms and architectures, 2004, pp. 120-124
[10] Shi, JB; Malik, J Normalized cuts and image segmentation, IEEE Transactions on Pattern Analysis and Machine Intelligence, 2000, 22(8) pp. 888-905
[11] Dawoud A., Netchaev A., Fusion of visual cues of intensity and texture in Markov random fields image segmentation, IET Computer Vision, 2013, 6(6) pp. 603-609
[12] Park Sang Hyun, Lee Soochahn, Yun Il Dong, Hierarchical MRF of globally consistent localized classifiers for 3D medical image segmentation, Pattern Recognition, 2013, 46(9) pp. 2408-2419
[13] Gonzalez-Diaz Ivan, Diaz-de-Maria Fernando, A region-
centered topic model for object discovery and category-based image segmentation, Pattern Recognition, 2013, 46(9) pp. 2437-2449
[14] Nie Fangyan, Wang Yonglin, Pan Meisen, Two-dimensional extension of variance-based thresholding for image segmentation, Multidimensional Systems and Signal Processing, 2013, 24(3) pp. 485-501
[15] Chen Mi, Strobl Josef, Multispectral textured image segmentation using a multi-resolution fuzzy Markov random field model on variable scales in the wavelet domain, International Journal of Remote Sensing, 2013,
34(13) pp. 4550-4569 [16] Han Yu, Feng Xiang-Chu, Baciu George, Variational and
PCA based natural image segmentation, Pattern Recognition, 2013, 46(7) pp. 1971-1984
[17] Balla-Arabe Souleymane, Gao Xinbo, Wang Bin, A Fast and Robust Level Set Method for Image Segmentation
Using Fuzzy Clustering and Lattice Boltzmann Method, IEEE Transactions on Cybernetics, 2013, 43(3) pp. 910-920
[18] Liu Jun, Zhang Haili, Image Segmentation Using a Local GMM in a Variational Framework, Journal of Mathematical Imaging and Vision, 2013, 46(2) pp. 161-176
[19] Wang Ying, Xiang Shiming, Pan Chunhong, Level set evolution with locally linear classification for image segmentation, Pattern Recognition, 2013, 46(6) pp. 1734-1746
[20] Wang Lichao, Lekadir Karim, Lee Su-Lin, A General Framework for Context-Specific Image Segmentation Using Reinforcement Learning, IEEE Transactions on Medical Imaging, 2013, 32(5) pp. 943-956
[21] Zhou Hailing, Zheng Jianmin, Wei Lei, Texture aware image segmentation using graph cuts and active contours, Pattern Recognition, 2013, 46(6) pp. 1719-1733
[22] Chen Xinjian, Udupa Jayaram K., Alavi Abass, GC-ASM: Synergistic integration of graph-cut and active shape model strategies for medical image segmentation, Computer Vision And Image Understanding, 2013, 117(5) pp. 513-524
[23] Wang Hui, Zhang Hong, Ray Nilanjan, Adaptive shape prior in graph cut image segmentation, Pattern Recognition, 2013, 46(5) pp. 1409-1414
[24] Yang Yong, Han Shoudong, Wang, Tianjiang, Multilayer graph cuts based unsupervised color-texture image segmentation using multivariate mixed student's t-distribution and regional credibility merging, Pattern Recognition, 2013, 46(4) pp. 1101-1124
[25] MIT VisTex texture database, http: //vismod. media. mit. edu/vismod/imagery/VisionTexture/vistex. htmls.
[26] D. Martin, C. Fowlkes, D. Tal, J. Malik, A database of
human segmented natural images and its application to evaluating segmentation algorithms and measuring ecological statistics, in: Proceedings of IEEE International Conference on Computer Vision, 2001, pp. 416-423.
[27] R. Achanta, S. Hemami, F. Estrada, S. Susstrunk, Frequency-tunedsalient region detection, in: Proceedings of IEEE Conference on Computer Vision and Pattern Recognition, 2009, pp. 1597-1604.
[28] Y. Deng, B. S Manjunath, Unsupervised segmentation of color–texture regions in images and video, IEEE Transactions on Pattern Analysis and Machine Intelligence,
2001, 23 pp. 800-810. [29] S. F. Chen, L. L. Cao, Y. M. Wang, J. Z. Liu, Image
segmentation by MAP-ML estimations, IEEE Transactions on Image Processing, 2010, 19 pp. 2254-2264.
[30] A. Y. Yang, J. Wright, Y. Ma, S. Sastry, Unsupervised segmentation of natural images via lossy data compression, Computer Vision and Image Understanding, 2008, 110 pp. 212-225.
[31] S. D. Han, W. B. Tao, X. L. Wu, Texture segmentation using independent-scale component-wise Riemannian-covariance Gaussian mixture model in KL measure based multi-scale nonlinear structure tensor space, Pattern Recog
nition, 2011, 44 pp. 503-518.
244 JOURNAL OF MULTIMEDIA, VOL. 9, NO. 2, FEBRUARY 2014
© 2014 ACADEMY PUBLISHER

Semi-Supervised Learning Based Social Image
Semantic Mining Algorithm
AO Guangwu School of Applied Technology, University of Science and Technology Liaoning, Anshan, China
SHEN Minggang School of Materials and Metallurgy, University of Science and Technology Liaoning, Anshan, China
Abstract—As social image semantic mining is of great
importance in social image retrieval, and it can also solve
the problem of semantic gap. In this paper, a novel social
image semantic mining algorithm based on semi-supervised
learning is proposed. Firstly, labels which tagged the images
in the test image dataset are extracted, and noisy semantic
information are pruned. Secondly, the labels are propagated
to construct an extended collection. Thirdly, image visual
features are extracted from the unlabeled images by three
steps, including watershed segmentation, region feature
extraction and codebooks construction. Fourthly, vectors of
image visual feature are obtained by dimension reduction.
Fifthly, after the process of semi-supervised learning and
classifier training, the confidence score of semantic terms
for the unlabeled image are calculated by integrating
different types of social image features, and then the
heterogeneous feature spaces are divided into several
disjoint groups. Finally, experiments are conducted to make
performance evaluation. Compared with other existing
methods, it can be seen than the proposed can effectively
extract semantic information of social images.
Index Terms—Semi-Supervised Learning; Social Image;
Semantic Mining; Semantic Gap; Classification Hyperplane
I. INTRODUCTION
In recent years, low-level features of images (such as
color, texture, and shape) have been widely used in content-based image retrieval and processing. While low-
level features are effective for some specific tasks, such
as “query by example”, they are quite limited for many
multimedia applications, such as efficient browsing and
organization of large collections of digital photos and
videos, which require advanced content extraction and
image semantic mining [1]. Hence, the ability to extract
semantic information in addition to low-level features and to perform fusion of such varied types of features would
be very beneficial for image retrieval applications [2].
Unfortunately, as the famous semantic gap exists, it is
hard to effectively extract semantic information from
low-level features of images. The semantic gap is the lack
of coincidence between the information that one can
extract from the visual data and the interpretation that the
same data have for a user in a given situation [3]. The number of Web photo is increasing fastly in recent
years, and retrieving them semantically presents a
significant challenge. Many original images are constantly uploaded with few meaningful direct
annotations of semantic content, limiting their search and
discovery. Although some websites allow users to
provide terms or keywords for images, however, it is far
from universal and applies to only a small proportion of
images on the Web. The related research of image
semantic information mining has reflected the dichotomy
inherent in the semantic gap and is divided between two main classes, which are 1) concept-based image retrieval
and 2) content-based image retrieval. The first class
concentrates on retrieval by image objects and high-level
concepts, and the second one focuses on the low-level
visual features of the image [4].
To detect salient objects in images, the image is
usually divided into several segments. Segmentation by
object is widely regarded as a difficult problem, which will be able to replicate and perform the object
recognition function of the human vision system.
Particularly, semantic information of images combined
with a region-based image decomposition is used, which
aims to extract semantic properties of images based on
the spatial distribution of color and texture properties.
All in all, direct extracting high-level semantic content
in images automatically is beyond the capability of current multimedia information processing technology.
Although there have been some efforts to combine low-
level features and regions to higher level perception,
these are limited to isolated words, and this process need
substantial training samples. These approaches have
limited effectiveness in finding semantic contents in
broad image domains [4-6]. The source of image
semantic information can be classified in two types, which are 1) the associated texts and 2) visual features of
images. If this information can be integrated together
effectively, image semantic information can be mined
with high accuracy.
For the research of image semantic mining, social
image semantic information is quite important. Currently,
Social image sharing websites have made great success,
which allow users to provide personal media data and allow them to annotate media data with the user-defined
tags. With the rich tags, users can more conveniently
retrieve image visual contents on these websites [7].
JOURNAL OF MULTIMEDIA, VOL. 9, NO. 2, FEBRUARY 2014 245
© 2014 ACADEMY PUBLISHERdoi:10.4304/jmm.9.2.245-252

Figure 1. An example of a social image photo with rich metadata
Online image sharing Websites, such as Flickr,
Facebook, Photobucket, Photosig, which are named as
social media, allow users to upload their personal photos on the web. As is shown in Fig. 1, social images usually
have rich metadata, such as “(1) photo”, “(2) other
people’s comments”, “(3) the description of the author
own”, “(4) Photo albums”, and “(5) Tags” and “(6)
Author information”. Regarding these rich tags as index
terms, user can conveniently retrieve these images. From
the above analysis, we can see that how to mine the
semantic information of social images has brought forth a lot of new research topics.
In this paper, the social image website we used is
Flickr. As is illustrated in Wikipedia, Flickr is an image
hosting and video hosting website, and web services suite
that was created by Ludicorp in 2004 and acquired by
Yahoo! in 2005. In addition to being a popular website
for users to share and embed personal photographs, and
effectively an online community, the service is widely used by photo researchers and by bloggers to host images
that they embed in blogs and social media. Yahoo
reported in June 2011 that Flickr had a total of 51 million
registered members and 80 million unique visitors. In
August 2011 the site reported that it was hosting more
than 6 billion images and this number continues to grow
steadily according to reporting sources. Photos and
videos can be accessed from Flickr without the need to register an account but an account must be made in order
to upload content onto the website. Registering an
account also allows users to create a profile page
containing photos and videos that the user has uploaded
and also grants the ability to add another Flickr user as a
contact. For mobile users, Flickr has official mobile apps
for IOS, Android, PlayStation Vita, and Windows Phone
operating systems.
The main innovations of this paper lie in the following aspects:
(1) Visual features of social images are extracted from
the unlabeled images by watershed segmentation, region
feature extraction and codebooks construction
(2) Using the semi-supervised learning algorithm, we
integrate the median distance and label changing rate
together to obtain the class central samples.
(3) The confidence score of semantic words of the unlabeled image is calculated by combining different
types of image features, and the heterogeneous feature
spaces are divided into several disjoint groups.
(4) The vector which represented the contents of
unlabeled image is embedded into Hilbert space by
several mapping functions.
The rest of the paper is organized as the following
sections. Section 2 introduces the related works. Section 3 illustrates the proposed scheme for social image
semantic information mining. In section 4, experiments
are conducted to make performance evaluation with
comparison to other existing methods. Finally, we
conclude the whole paper in section 5.
II. RELATED WORKS
Liu et al. proposed a region-level semantic mining
approach. As it is easier for users to understand image content by region, images are segmented into several
parts using an improved segmentation algorithm, each
with homogeneous spectral and textural characteristics,
and then a uniform region-based representation for each
image is built. Once the probabilistic relationship among
246 JOURNAL OF MULTIMEDIA, VOL. 9, NO. 2, FEBRUARY 2014
© 2014 ACADEMY PUBLISHER

image, region, and hidden semantic is constructed, the
Expectation Maximization method can be applied to mine
the hidden semantic [8].
Wang et al. tackle the problem of semantic gap by
mining the decisive feature patterns. Interesting
algorithms are developed to mine the decisive feature
patterns and construct a rule base to automatically recognize semantic concepts in images. A systematic
performance study on large image databases containing
many semantic concepts shows that the proposed method
is more effective than some previously proposed methods
[9].
Zhang et al. proposed an image classification approach
in which the semantic context of images and multiple
low-level visual features are jointly exploited. The context consists of a set of semantic terms defining the
classes to be associated to unclassified images. Initially, a
multiobjective optimization technique is used to define a
multifeature fusion model for each semantic class. Then,
a Bayesian learning procedure is applied to derive a
context model representing relationships among semantic
classes. Finally, this context model is used to infer object
classes within images. Selected results from a comprehensive experimental evaluation are reported to
show the effectiveness of the proposed approaches [10].
Abu et al. utilized the Taxonomic Data Working Group
Life Sciences Identifier vocabulary to represent our data
and defined a new vocabulary which is specific for
annotating monogenean haptoral bar images to develop
the MHBI ontology and a merged MHBI-Fish ontologies.
These ontologies are successfully evaluated using five criteria which are clarity, coherence, extendibility,
ontology commitment and encoding bias [11].
Wang et al. proposed a remote sensing image retrieval
scheme by using image scene semantic matching. The
low-level image visual features are first mapped into
multilevel spatial semantics via VF extraction, object-
based classification of support vector machines, spatial
relationship inference, and SS modeling. Furthermore, a spatial SS matching model that involves the object area,
attribution, topology, and orientation features is proposed
for the implementation of the sample-scene-based image
retrieval [12].
Burdescu et al. presented a system used in the medical
domain for three distinct tasks: image annotation,
semantic based image retrieval and content based image
retrieval. An original image segmentation algorithm based on a hexagonal structure was used to perform the
segmentation of medical images. Image’s regions are
described using a vocabulary of blobs generated from
image features using the K-means clustering algorithm.
The annotation and semantic based retrieval task is
evaluated for two annotation models: Cross Media
Relevance Model and Continuous-space Relevance
Model. Semantic based image retrieval is performed using the methods provided by the annotation models.
The ontology used by the annotation process was created
in an original manner starting from the information
content provided by the Medical Subject Headings [13].
Liu et al. concentrated on the solution from the
association analysis for image content and presented a
Bidirectional- Isomorphic Manifold learning strategy to
optimize both visual feature space and textual space, in
order to achieve more accurate comprehension for image
semantics and relationships. To achieve this optimization
between two different models, Bidirectional-Isomorphic Manifold Learning utilized a novel algorithm to unify
adjustments in both models together to a topological
structure, which is called the reversed Manifold mapping.
[14].
Wang presented a remote-sensing image retrieval
scheme using image visual, object, and spatial
relationship semantic features. It includes two main
stages, namely offline multi-feature extraction and online query. In the offline stage, remote-sensing images are
decomposed into several blocks using the Quin-tree
structure. Image visual features, including textures and
colours, are extracted and stored. Further, object-oriented
support vector machine classification is carried out to
obtain the image object semantic. A spatial relationship
semantic is then obtained by a new spatial orientation
description method. The online query stage, meanwhile, is a coarse-to-fine process that includes two sub-steps,
which are a rough image retrieval based on the object
semantic and a template-based fine image retrieval
involving both visual and semantic features [15].
Peanho et al. present an efficient solution for this
problem, in which the semantic contents of fields in a
complex document are extracted from a digital image. In
order to process electronically the contents of printed documents, information must be extracted from digital
images of documents. When dealing with complex
documents, in which the contents of different regions and
fields can be highly heterogeneous with respect to layout,
printing quality and the utilization of fonts and typing
standards, the reconstruction of the contents of
documents from digital images can be a difficult problem
[16]. On the other hand, semi-supervised learning is a
powerful computing tool in the field of intelligent
computing. In the following parts, we will introduce the
applications of semi-supervised learning algorithm.
Wang et al. proposed a bivariate formulation for graph-
based SSL, where both the binary label information and a
continuous classification function are arguments of the
optimization. This bivariate formulation is shown to be equivalent to a linearly constrained Max-Cut problem.
Finally an efficient solution via greedy gradient Max-Cut
(GGMC) is derived which gradually assigns unlabeled
vertices to each class with minimum connectivity [17].
Hassanzadeh et al. proposed a combined Semi-
Supervised and Active Learning approach for Sequence
Labeling which extremely reduces manual annotation
cost in a way that only highly uncertain tokens need to be manually labeled and other sequences and subsequences
are labeled automatically. The proposed approach reduces
manual annotation cost around 90% compare with a
supervised learning and 30% in contrast with a similar
fully active learning approach [18].
JOURNAL OF MULTIMEDIA, VOL. 9, NO. 2, FEBRUARY 2014 247
© 2014 ACADEMY PUBLISHER

Figure 2. Framework of the proposed algorithm of social image semantic information
Shang et al. proposed a novel semi-supervised learning
(SSL) approach, which is named semi-supervised
learning with nuclear norm regularization (SSL-NNR),
which can simultaneously handle both sparse labeled data
and additional pairwise constraints together with unlabeled data. Specifically, the authors first construct a
unified SSL framework to combine the manifold
assumption and the pairwise constraints assumption for
classification tasks. Then a modified fixed point
continuous algorithm to learn a low-rank kernel matrix
that takes advantage of Laplacian spectral regularization
is illustrated [19].
III. PROPOSED SCHEME
A. Framework of the Proposed Scheme
The Framework of the proposed algorithm of social
image semantic information is shown in Fig. 3. The
corpus we used is made up of a small amount of manually labeled images and a large number of unlabeled images.
For this framework, five modules are designed. In
module 1, labels which tagged the images in the given
dataset are extracted, and then to promote the accuracy of
image semantic mining, noisy terms in the label database
are deleted. In module 2, the labels obtained in the former
module are propagated to construct an extended
collection. Then, image visual features are extracted from the unlabeled images by three steps in module 3, of which
1) “Watershed segmentation”, 2) “Region feature
extraction” and 3) “Constructing codebooks” are included.
In module 4, vectors of image visual feature are obtained
by dimension reduction. Finally, after the process of
semi-supervised learning and classifier training, the
confidence score of semantic terms for the unlabeled
image can be calculated in module 5. After collecting the training images, it is of great
importance to choose a suitable learning model for social
image semantic information mining. As is well known,
the classification performance is better for supervised
learning algorithm than for unsupervised learning
algorithm. When the iteration process is initiated, there
are only a few labeled images which are available to train
the classifier for social image semantic information mining. Based on the above analysis, a semi-supervised
method is utilized to analyze the relationship between
visual feature of images and the semantic information by
considering labeled and unlabeled images.
To avoiding introduce extra manual labeling data when
utilizing class central samples, in this paper, we utilize the semi-supervised learning algorithm, we combine
median distance and label changing rate to obtain the
class central samples. For the problem of binary
classification, the unlabeled samples should be classified
to two classes, which are the positive class (denoted as P )
and the negative class (denoted as N ) as follows.
{ , ( ) 0}i i iP x x U f x (1)
{ , ( ) 0}i i iN x x U f x (2)
Afterwards, for each class the proposed semi-
supervised learning algorithm calculates the label
changing rate for all the unlabeled images, and then
chooses the centroid samples of the given class as follows. The unlabeled samples of which the label changing
rates is equal to 0 can be obtained by the following
equation.
{ , ( ) 0}P i i iU x x P x (3)
{ , ( ) 0}N i i iU x x N x (4)
where ( )ix refers to the label changing rates of the
sample ix . Then, using PU and NU , the samples which
has the median distance to the current classification
hyperplane to separate the positive class and the negative class can be obtained as follows.
( ( ) )i
P i i px
x median d x x U (5)
( ( ) )i
N i i Nx
x median d x x U (6)
However, an image cluster should not be separated if it
contains the images which have the same labels, whether
the labels are relevant or not. Furthermore, it is not
suitable to separate an image cluster which contains only
248 JOURNAL OF MULTIMEDIA, VOL. 9, NO. 2, FEBRUARY 2014
© 2014 ACADEMY PUBLISHER

a few images. Therefore, we defined a condition to
determine if the image cluster could be separated as
follows.
1 1
2
,
( )
,
i i
i i i ik
i
i i
d dtrue if or
d d d dStop N
or d d
false otherwise
(7)
where 1 and
2 refer to two pre-defined threshold, k
iN
is the ith node in the kth image cluster. Moreover, id and
id denote the number of images which are labeled and
not labeled with the given label in k
iN respectively.
Based on the above process, we will introduce how to
calculate the confidence score of semantic terms for the
unlabeled image. As the social images have rich heterogeneous metadata, different types of image features
can be extracted from social images, and then we can
divide the heterogeneous feature spaces into several
disjoint groups ( 1 2{ , , , }Ng g g ), and 1
1
N
i
G g
is
satisfied. Hence, the feature vector of the ith social image
ix can be represented as follows.
1 2, , ,( ) ( , , , )
N
T T T T
i i g i g i gV x x x x (8)
With the grouping structure of the original image
feature vectors, ( )iV x is embedded into Hilbert space by
G mapping functions as follows.
1
2
1 1
2 2
( ) :
( ) :
( ) : G
f
f
f
G G
x
x
x
(9)
Afterwards, the G distinct kernel matrixes M can be
obtained, and 1 2( , , )GM M M M , where jM refer to
the jth kernel matrix of ix . Then the confidence score of
semantic terms for the unlabeled image x is calculated
by the following equation.
1 1
( ) ( , )na nt M
i i m m
i m
CS x k x x M d k
(10)
where is equal to 1 2[ , , , ]a tn n and ( , )ik x x
refers to a kernel function, and ( , )ik x x is obtained by the
following equation.
1
1
( , ) ( ) ( ) ( ) ( )
( , )
MT T
i i j m i m j
m
M
m i j
m
k x x x x x x
k x x
(11)
Afterwards, the semantic terms with higher confidence score are regarded as semantic information mining results.
IV. EXPERIMENTS
A. Dataset and Performance Evaluation Metric
We choose two famous social images dataset to make
performance evaluation, which are NUS-WIDE and MIR
Flickr. In the following parts, the two dataset are
illustrated as follows.
NUS-WIDE is made up of 269,648 images with 5,018
unique tags which are collected from Flickr. We
downloaded the owner information according to the image ID and obtained the owner user ID of 247,849
images. The collected images belong to 50,120 unique
users, with each user owning about 5 images. Particularly,
we choose the users with at least fifty images and keep
their images to obtain our experimental dataset, which is
named as NUSWIDE- USER15. Moreover, The NUS-
WIDE provides ground-truth for 81 tags of the images
[20]. Another dataset we used in named as MIR Flickr
which consists of 25000 high-quality photographic
images of thousands of Flickr users, made available under
the Creative Commons license. The database includes all
the original user tags and EXIF metadata. Particularly,
detailed and accurate annotations are provided for topics
corresponding to the most prominent visual concepts in
the user tag data. The rich metadata allow for a wide variety of image retrieval benchmarking scenarios [21].
In this experiment, we utilize precision and recall and
F1 as metric. For each tag t , the precision and recall are
defined as follows.
( ) c
s
Nprecision t
N (12)
( ) c
r
Nrecall t
N (13)
where sN and rN refer to the number of retrieved
images and the number of true related images in the test
set. Moreover, cN denotes as the number of correctly
annotated images. To integrate these two metric together,
F1 measure is defined as follows.
2 ( ) ( )
1( )( ) ( )
precision t recall tF t
precision t recall t
(14)
Next, we will test the proposed algorithm on NUS-
WIDE and MIR Flickr dataset respectively.
B. Experimental Results and Analysis
To testify the effectiveness of the proposed approach,
other existing methods are compared, including 1) User-
supplied tags(UT), 2) Random walk with restart (RWR)
[22], 3) Tag refinement based on visual and semantic
consistency (TRVSC) [23], 4) Multi-Edge graph (MEG)
[24], 5) Low-Rank approximation (LR) [25]. F1 values for different methods for different concepts
using NUS-WIDE and MIR Flickr dataset are shown in
Fig. 3 and Fig. 4
JOURNAL OF MULTIMEDIA, VOL. 9, NO. 2, FEBRUARY 2014 249
© 2014 ACADEMY PUBLISHER

0.4
0.5
0.6
0.7
0.8
0.9
1
Airport Beach Birds Book Buildings Castle Cityscape Computer Cow Dog
UT RWR TRVSC MEG LR The proposed algorithm
F1
Figure 3. F1 value for different methods for different concepts using NUS_Wide dataset
0.5
0.55
0.6
0.65
0.7
0.75
0.8
0.85
0.9
0.95
1
UT RWR TRVSC MEG LR The proposed algorithm
F1
Figure 4. F1 value for different methods for different concepts using MIR Flickr dataset
Next, we will compare the performance of different
methods using precision-recall curves on several specific
concepts selected from NUS-WIDE and MIR Flickr
dataset (shown in Fig. 5-Fig. 8).
The average F1 value of different methods under
different dataset is given in Table 1, and in order to
shown the effectiveness of the proposed algorithm, some examples of semantic extraction of the MIR Flickr
dataset are illustrated in Table 2
From the above experimental results, it can be seen
that the proposed scheme is superior to other schemes.
The main reasons lie in the following aspects:
(1) Using the semi-supervised learning algorithm, we
integrate the median distance and label changing rate
together to obtain the class central samples. (2) The proposed semi-supervised learning algorithm
could compute the label changing rate for all the
unlabeled images.
(3) The confidence score of semantic words of the
unlabeled image is calculated by combining different
types of image features which are be extracted from
social images, and then the heterogeneous feature spaces
are divided into several disjoint groups. (4) The vector of the unlabeled image is embedded into
Hilbert space by several mapping functions.
(5) There are a lot of noisy information in user-
supplied tags in social images, hence, the performance of
UT is the worst among all the methods.
(6) Other methods are more suitable to mine the
semantic information for normal images. However, the
performance of social image semantic information mining using these methods is not satisfied, because these
methods can not integrate the rich heterogeneous
metadata of social images.
0.4
0.5
0.6
0.7
0.8
0.9
1
0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1
UT
RWR
TRVSC
MEG
LR
The proposed algorithm
Recall
Pre
cisi
on
Figure 5. Precision-recall curves on the concept “dog”
V. CONCLUSIONS
In this paper, we propose a novel social image
semantic mining algorithm utilizing semi-supervised
learning. Before the semantic information mining process,
labels which tagged the images in the test image dataset are extracted, and noisy semantic information are deleted.
Then, the labels are propagated to construct an extended
collection. Next, image visual features are extracted from
the unlabeled images and vectors of image visual feature
are obtained by dimension reduction. Finally, the process
of semi-supervised learning and classifier training are
implemented, and then the confidence score of semantic
terms for the unlabeled image are calculated. Particularly, the semantic terms with higher confidence score are
regarded as semantic information mining results.
250 JOURNAL OF MULTIMEDIA, VOL. 9, NO. 2, FEBRUARY 2014
© 2014 ACADEMY PUBLISHER

TABLE I. AVERAGE F1 VALUE OF DIFFERENT METHODS UNDER DIFFERENT DATASET.
Method UT RWR TRVSC MEG LR The proposed algorithm
NUS-WIDE 0.576 0.661 0.676 0.657 0.666 0.747
MIR Flickr 0.667 0.728 0.758 0.738 0.788 0.858
TABLE II. EXAMPLES OF SEMANTIC EXTRACTION OF THE MIR FLICKR DATASET
Image
Semantic information Car, Corners Pad, Desk, Wire Woman, Face, Gazing City, Night, Building, Light
Image
Semantic information Camera, Girl, Olympus, Len Sky, Grass, Tree, Water Flower, White Dog, Puppy, Pet, Grass
0.3
0.35
0.4
0.45
0.5
0.55
0.6
0.65
0.7
0.75
0.8
0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1
UT
RWR
TRVSC
MEG
LR
The proposed algorithm
Recall
Pre
cisi
on
Figure 6. Precision-recall curves on the concept “Tree”
0.4
0.45
0.5
0.55
0.6
0.65
0.7
0.75
0.8
0.85
0.9
0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1
UT
RWR
TRVSC
MEG
LR
The proposed algorithm
Recall
Pre
cisi
on
Figure 7. Precision-recall curves on the concept “Vehicle”
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1
UT
RWR
TRVSC
MEG
LR
The proposed algorithm
Recall
Pre
cisi
on
Figure 8. Precision-recall curves on the concept “Rainbow”
ACKNOWLEDGEMENT
This study was financially supported by The Education
Department of Liaoning Province Key Laboratory of
China (Techniques Development of Heavy Plate by
Unidirectional Solidification with Hollow Lateral Wall
Insulation. Grant No. 2008S1222)
REFERENCES
[1] Smeulders AWM, Worring M, Santini S, “Content-based image retrieval at the end of the early years”, IEEE Transactions on Pattern Analysis and Machine Intelligence, 2000, 22(12) pp. 1349-1380.
[2] Luo JB, Savakis AE, Singhal A, “A Bayesian network-based framework for semantic image understanding”, Pattern Recognition, 2005, 38(6) pp. 919-934.
[3] Carneiro Gustavo, Chan Antoni B., Moreno, Pedro J., “Supervised learning of semantic classes for image annotation and retrieval”, IEEE Transactions on Pattern Analysis and Machine Intelligence, 2007, 29(3) pp. 394-
410. [4] Wong, R. C. F.; Leung, C. H. C. “Automatic semantic
annotation of real-world web images”, IEEE Transactions on Pattern Analysis and Machine Intelligence, 2008, 30(11) pp. 1933-1944.
[5] Djordjevic D., Izquierdo E., “An object- and user-driven system for semantic-based image annotation and retrieval”, IEEE Transactions on Circuits and Systems for Video Technology, 2007, 17(3) pp. 313-323.
[6] Tezuka Taro, Maeda Akira, “Image retrieval with generative model for typicality, Journal of Networks, 2011, 6(3) pp. 387-399.
[7] Fuming Sun, Haojie Li, Yinghai Zhao, Xueming Wang, Dongxia Wang, “Towards tags ranking for social images”, Neurocomputing, In Press.
[8] Liu Tingting, Zhang Liangpei, Li Pingxiang, “Remotely sensed image retrieval based on region-level semantic mining”, Eurasip Journal on Image and Video Processing, 2012, Article No. 4
JOURNAL OF MULTIMEDIA, VOL. 9, NO. 2, FEBRUARY 2014 251
© 2014 ACADEMY PUBLISHER
[9] Wang W, Zhang AD, “Extracting semantic concepts from images: a decisive feature pattern mining approach”,
Multimedia Systems, 2006, 11(4) pp. 352-366 [10] Zhang Qianni, Izquierdo Ebroul, “Multifeature Analysis
and Semantic Context Learning for Image Classification”, ACM Transactions on Multimedia Computing Communications and Applications, 2013, 9(2), Article No. 12
[11] Abu Arpah, Susan Lim Lee Hong, Sidhu Amandeep Singh, “Semantic representation of monogenean haptoral Bar image annotation”, BMC Bioinformatics, 2013, 14, Article No.48
[12] Wang Min, Song Tengyi, “Remote Sensing Image
Retrieval by Scene Semantic Matching,” IEEE Transactions on Geoscience and Remote Sensing, 2013, 51(5) pp. 2874-2886
[13] Burdescu Dumitru Dan, Mihai Cristian Gabriel, Stanescu Liana, “Automatic image annotation and semantic based image retrieval for medical domain”, Neurocomputing, 2013, 109 pp. 33-48.
[14] Liu Xianming, Yao Hongxun, Ji Rongrong, “Bidirectional-isomorphic manifold learning at image semantic understanding & representation”, Multimedia Tools and Applications, 2013, 64(1) pp. 53-76
[15] Wang M., Wan Q. M., Gu L. B., “Remote-sensing image
retrieval by combining image visual and semantic features”, International Journal of Remote Sensing, 2013, 34(12) pp. 4200-4223
[16] Peanho Claudio Antonio, Stagni Henrique, Correa da Silva, Flavio Soares, “Semantic information extraction from images of complex documents, Applied Intelligence, 2012, 37(4) pp. 543-557
[17] Wang Jun, Jebara Tony, Chang Shih-Fu, “Semi-Supervised Learning Using Greedy Max-Cut”, Journal of Machine Learning Research, 2013, 14 pp. 771-800.
[18] Hassanzadeh Hamed, Keyvanpour Mohammadreza, “A two-phase hybrid of semi-supervised and active learning
approach for sequence labeling”, Intelligent Data Analysis, 2013, 17(2) pp. 251-270
[19] Shang Fanhua, Jiao L. C., Liu Yuanyuan, “Semi-supervised learning with nuclear norm regularization”, Pattern Recognition, 2013, 46(8) pp. 2323-2336
[20] Tat-Seng Chua, Jinhui Tang, Richang Hong, Haojie Li, Zhiping Luo, and Yantao Zheng. “Nus-wide: a real-world web image database from national university of singapore”, Proceedings of the ACM International Conference on Image and Video Retrieval, 2009, pp.48-55.
[21] Huiskes Mark J, Thomee Bart, Lew Michael S, “New
trends and ideas in visual concept detection: the MIR flickr retrieval evaluation initiative”, Proceedings of the international conference on Multimedia information retrieval, 2010, pp. 527-536.
[22] Changhu Wang, Feng Jing, Lei Zhang, and HongJiang Zhang. “Image annotation refinement using random walk with restarts”, Proceedings of the 14th annual ACM international conference on Multimedia, 2006, pp. 647-650
[23] Dong Liu, Xian-Sheng Hua, Meng Wang, Hong-Jiang Zhang. “Image retagging”, Proceedings of the international conference on Multimedia, 2010, pp. 491-500, 2010.
[24] Dong Liu, Shuicheng Yan, Yong Rui, and Hong-Jiang Zhang. “Unified tag analysis with multi-edge graph”, Proceedings of the international conference on Multimedia, 2010, pp. 25-34, 2010.
[25] Guangyu Zhu, Shuicheng Yan, Yi Ma. “Image tag refinement towards low-rank, content-tag prior and error sparsity”, Proceedings of the international conference on Multimedia, 2010, pp. 461-470
252 JOURNAL OF MULTIMEDIA, VOL. 9, NO. 2, FEBRUARY 2014
© 2014 ACADEMY PUBLISHER

Research on License Plate Recognition Algorithm
based on Support Vector Machine
Dong ZhengHao 1 and FengXin 2 1. School of Economics and Management, Beijing University of Posts and Telecommunications, Beijing, P. R. China
2. Correspondence Author School of Economics and Management, Beijing University of Posts and Telecommunications, Beijing, P. R. China
Abstract—Support Vector Machine (SVM) as an important
theory of machine learning and patternrecognition has been
well applied to small sample clustering learning, nonlinear
problems, outlierdetection and so on. The license plate
automation recognition system has received
extensiveattention as an important application of machine
learning and pattern recognition in intelligent transport.The
license plate recognition system is composed of three parts,
license plate preprocessing and location, license plate
character segment, license plate character recognition. In
this paper, we mainly introduce the flow of license plate
recognition, related technology and support vector
machinetheory. Experimental results show the effectiveness
of our method.
Index Terms—Support Vector Machine; License Plate
Recognition; Intelligent Transportation; Character Segment
I. INTRODUCTION
License plate recognition, as an important research field used in computer vision, pattern recognition, image
processing and artificial intelligence, which is one of the
most important aspects of the intelligent transportation
system of human society in the 21st century. Recently,
license plate recognition can be widely used in road
traffic security monitoring, open tollbooth, road traffic
flow monitoring, the scene of the accident investigation,
vehicle mounted mobile check, stolen vehicle detection,
traffic violation vehicle-mounted mobile automatic
recording, parking lot automatic security management,
intelligent park management, access control management and etc. [1-6]. It has a very important position in the
modem traffic management and control system and has
good application value. Meanwhile, License plate
recognition can also be used in other identification field.
So it has become one of the key problems in modem
traffic engineering field [7-8].
With the rapid economic development and social
progress, number of cars in the city and urban traffic flow
are massive increases consequent on the highway and
urban traffic management difficulty increases rapidly,
however, as the world increasing levels of science and
technology, a variety of cutting-edge technology for traffic management also continue to emerge to enrich and
enhance traffic management level, so that more and more
intelligent modern traffic. License Plate Recognition is
comprised of four main sections: image preprocessing,
license plate location, character segment and character
recognition. Image processing based on pattern
recognition is one of the most important research
directions in the image recognition field. License plate
Recognition based on image is an important application
in computer vision and pattern recognition of the
intelligent transportation field. And it is also the core
technology in the intelligent transportation system. In this
paper, In 90s of the last century, a license plate
recognition system was designed by A.S. Johnson et.,
they used digital image processing technology and pattern recognition to implement license plate recognition [ 9].
This system uses the histogram method to count threshold
of plate images, and then use the template matching
license plate character recognition method. The accuracy
had made great breakthrough at time, but this system
could not meet the need of real-time. In 1994, M. Fahmy
realized the license plate recognition by BAM with neural
networks [10]. BAM neural networks are constituted by
the same neurons bidirectional associative single network,
using a matrix corresponds to a unique license plate
character template, template matching recognize license
plate characters, but this method is still a big drawback is that the system capacity can’t solve the contradiction
between recognition speed and system capacity. However,
further study of neural network development, which
gradually replaced by the template matching method led
license plate recognition, to avoid a large number of data
analysis and mathematical modeling work, after years of
technological development is increasingly concerned by
the majority of scholars [11-12].
The aim of this paper is to research license plate
recognition algorithm based on SVM. License plate
recognition system of all steps for implementing a complete system include image preprocessing, license
plate location, character segmentation and character
recognition, which are detailed in this paper. Then SVM
theory is detailed and extract license plate feature to
construct classifier by SVM. Experimental results show
the effectiveness of license plate recognition based on
SVM.
The license plate recognition system is composed of
three parts, license plate preprocessing and positioning,
licenseplate character segment, license plate character
recognition. In this paper, with vehicle imagesobtained
from the actual scene, a license plate recognition system
JOURNAL OF MULTIMEDIA, VOL. 9, NO. 2, FEBRUARY 2014 253
© 2014 ACADEMY PUBLISHERdoi:10.4304/jmm.9.2.253-260

is designed based on SVM. This research mainly consists
of the following parts:
(1) In the part of preprocessing and position, the gray-
scale, contrast enhancement, medianfiltering, canny edge
detection, and threshold binarization method were applied
in this research. Inthe positioning stage, the line scan
mode and vertical projection means were used to
effectivelydetermine the around borders for the followed
character segment.
(2) In the part of the segment stage, the plates are
detected and corrected with Houghtransform which can detect the tilt angle of the plate. With the inherent
characteristics of thecharacter and geometry, the
character segmentation boundaries are determined by the
verticalprojection and threshold value.
(3) In the part of character recognition, the features
were extracted by normalized charactertrait. A method of
SVM combined with Sequential Minimal Optimization
algorithm was used forclassification and prediction,
optimization parameter under small samples were
obtained bycross-validation.
This rest paper is organized as follows.Section2 concisely introduces license plate location and character
segmentation. This section includes image preprocessing
technology and license plate location technology. Then
we introduce the SVM theory and license plate character
recognition method based on SVM in Section 3.
Experimental resultsare drawn in Section4 and
conclusions are described inSection5.
II. LICENSE PLATE LOCATION AND CHARACTER
SEGMENTATION
A. License Plate Preprocessing Technology
1) Image Gray Processing Color image contains a lot of image information, but in
the license plate pretreatment grayscale image using only
part of it, so you can improve on the license plate image
processing speed and efficiency without disrupting
subsequent related operations. Subsequent plates
positioning, segmentation is based on grayscale images
up operation. In the need to obtain color images, you can
get the coordinates in grayscale image back to the color
image, to obtain the corresponding part of the color
image, so that both the pretreatment reduced the amount
of information but also improves the processing efficiency.
(a) Color image (b) Gray image
Figure 1. Gray-scale image processing
The aim of gray-scale image processing is to adjust the
three components with R, G and B for color image.
Assuming gray is the gray component of the image, so
the transform equation is expressed as following:
(1)
2) Image Enhancement and Denoising Image enhancement methods can be divided into two
categories: one is the direct image enhancement method;
the other is an indirect method of image enhancement.
Histogram stretching and histogram equalization are the
two most common indirect contrast enhancement methods. Histogram Stretching is the most basic kind of
gradation conversion, using the simplest function is
piecewise linear transformation, its main idea is to
improve the image processing grayscale dynamic range,
thereby increasing the prospects for grayscale and the
difference between background intensity, in order to
achieve the purpose of contrast enhancement, this method
can be linear or non-linear way to achieve; histogram
equalization is to use the cumulative function of the gray
value is adjusted to achieve the purpose of contrast
enhancement. Histogram equalization is a use of the image histogram to adjust the contrast method. Histogram
equalization is the core of the original image histogram
from a more concentrated into a gray zone change for the
entire range of gray uniform distribution. Its purpose is to
target image linear stretching redistribute image pixel
value, a grayscale range so that approximately the same
number of pixels. In license plate recognition system can
be carried out to improve the lighting poor contrast
enhancement in case of license plate image processing,
making the subsequent part of the process to be more
efficient and faster processing.
(a)Original image
(b)Median filteredg image
Figure 2. Median filtered image denoising
As due to the light and ambient interference to licenses
plate images, there may be a lot of noise, which has
254 JOURNAL OF MULTIMEDIA, VOL. 9, NO. 2, FEBRUARY 2014
© 2014 ACADEMY PUBLISHER

brought much high demands for the license plate location
and identification. Therefore, we need to implement
image denoising and ensure plate positioning stage not to
be effected in image processing stage. Common image
denoising methods have the following categories:
Mean filter. This filtering can also be called a linear
filter, which uses the core of the neighborhood average.
Its basic principle is to use means to replace the original
values of each pixel in the image, that is, the current pixel
to be treated select a template, and the template consists
of a number of its neighbor pixels, find the mean of all the pixels in the template, then this means assigned to the
current pixel, as the processed image on the gray value of
that point.As Fig. 2. Fig. 2 shows the results of median
filtered image denoising.
Median filtering is based on the theory of order
statistics and can effectively suppress image noise
nonlinear signal processing methods. Its basic principle is
the image with a pixel value in a neighborhood of the
point values of each point in pixel value to replace, so
that the surrounding pixel gray value changes relatively
large difference between the pixel values of the surrounding pixels taken and close to the value which can
eliminate isolated noise points.
Wavelet transform is a fixed window size, which can
change the shape of the window time-frequency
localization analysis method. Mostly due to noise, high
frequency information, so that, when the wavelet
transform, the noise information mostly concentrated in
the second low frequency sub-tuner, and high-frequency
sub-block, in particular high-frequency sub-block, based
almost the noise, then this high-frequency sub-block
when it is set to zero, and the second low frequency of sub-sub-block certain adjustments, you can achieve the
removal of noise or noise suppression effect.
3) Image Edge Detection For an image, the image edge is its most basic, is the
most obvious feature. Margin is the gray value within
certain regions discontinuity caused by a pixel if the
image pixel gray neighborhood has a step change, then to
meet this nature the composition of the set of pixels to
form the image edge, or may be the first order derivative
of the second edge detection and judgment. Changes of
the so-called step is the gray value of a point on both
sides of significantly different and changes in the larger
degree, the direction of its second derivative is zero. The main idea of image edge detection idea is to use
edge detection operator to locate the image of the local
edge position, and then define the pixels of the "edge
strength" and by setting the monitoring threshold to
locate the edge of the point of collection. Common edge
detection algorithms consist of Roberts, Sobel, Prewitt
and Canny [13-16].
Roberts is the gradient operator in the most simple
from all operators. It is mainly used to locate the position
of the edge partial differential, and it can obtain the better
detection performance for steep and low-noise image edge. This operator is expressed as following:
(2)
Sobel operator is with the size 3 × 3, to assume the
point as the center, and then the operator is
expressed as following:
(3)
There are similar detection principle between Prewitt
operator and Sobel operator. Each pixel is implemented convolution with two templates, and then what is
maximum value is as the output result. The differences
between the two operators are to select different
convolution templates. So, the template is selected as
follows:
(4)
Figure 3. Edge detection and license plate location
Canny operator is looking for an image to the local maximum gradient edge detection, and its gradient is the
first derivative of Gaussian function to calculate the
number, which is calculated as follows:
(5)
The magnitude and direction are computed as:
(6)
B. License Plate Location Technology
In order to accurately locate the license plate, license
plate recognition system generally includes coarse
location and fine location. The basic plate positioning
location process is showed as Fig. 4.
Candidate regions can be obtained after image
preprocessing, and then the real plate location is obtained
by judgment. If license plate exists skew after coarsely
JOURNAL OF MULTIMEDIA, VOL. 9, NO. 2, FEBRUARY 2014 255
© 2014 ACADEMY PUBLISHER

location, then to use Hough transform to detection the tilt
angle of the license plate, and then to implement angle
correction. Plate image finally can be obtained by vertical
projection to fine location. The plate image is segmented
into different patch to obtain characters.
Because there may be tilt problems in coarse location,
and therefore we need to be considered for tilt correction
for precise location. There are common three methods for
correct the plate image: one is based on Hough transform;
one is based on the corner with the projector; one is based
on the corner with the projection method. In this paper, we use the corrected method based on Hough transform
to correct plate. The traditional Hough transform is a
common method for detecting. The example of the image
line detection, Hough transform the graphics from the
image space to the parameter space, image space at any
point in the parameter space corresponds to a curve. Fig.
5 shows the correction results by Hough transform. Input image
Preprocessing
Candidate regions
Adjust regions
Coarse Location
No
Yes
Fine Location
No
Output plate Image
Correct by tilted angle
Yes
Figure 4. The basic flow of plate location
Figure 5. Coarse location
These points satisfy one line that they constituted all
curves should intersect at a point in the parameter space,
and coordinates of the point in image space is the
parameters of related line. This line equation is as follows:
(7)
For the vertical direction inclined plate image, we use
Hough transform method can effectively get the angle of
tilt, and for horizontal tilt plate image, we are using the
iterative least projection method. The basic idea is to use
this approach illumination model, license plate on the
vertical tilt of the light irradiation, the use of inter-
character gap size, to get the amount of each projection
vector. Only in the case of the character without tilting
the projector is minimal, in which case it acquired the
license plate tilt angle, and the plates of each row of
pixels in the image shift. This part of the license plate of
fine positioning with some coupling, so the thin plate
portion further introduction locate relevant content.
Figure 6. License plate correction
III. LICENSE PLATE CHARACTER RECOGNITION BASED
ON SVM
A. SVM Theory
Support vector machines (Support Vector Machine,
SVM) Vapnik et al [17] first proposed in 1995, SVM
classifier is a strong generalization ability, especially in
the optimization of the small sample size problem, multi-
linear, non-linear and high dimensional pattern
recognition problems demonstrate the unique advantage.
It can be well applied to the function fitting model
predictions other machine learning problem. VC theory
SVM method is based on statistical learning theory and based on structural risk minimization principle above,
through limited training sample information to seek the
best compromise between the model complexity and
generalization of learning ability, expect most good
generalization ability. SVM is proposed mainly used for
two types of classification problems in high-dimensional
space to find a hyper-plane to achieve the classification
ensures minimal classification error rate.
SVM is a new statistical learning theory part, and it is
mainly used to solve the case of a limited number of
samples pattern recognition problem. SVM is proposed from optimal hyperplane under linearly separable
condition, the so-called optimal classification plane is
required to be classified without error, and to obtain the
biggest distance between the two classes. Fig. 5 shows
the classification process by SVM.
Assume a linear separable sample set , where and . The general form of a linear discriminant function is expressed as
following:
(8)
The classification plane equation is:
(9)
256 JOURNAL OF MULTIMEDIA, VOL. 9, NO. 2, FEBRUARY 2014
© 2014 ACADEMY PUBLISHER

Figure 7. SVM classification
To normalize discriminant function between the two
classes of all samples to meet , and then to set
these samples that are close to the classification plane to
meet . So, classification interval is
, to
maximum interval is equivalent to minimize the . If all samples are required to classify correctly, there should
meet the following criterion:
(10)
Therefore, a classification plane that meets the above
criterion and it also can minimize , the plane will be
the best classification plane. Classification plane samples
from the two nearest point and parallel to the optimal
separating hyperplane face training samples, which is
these samples they can make the formula established, and they are called support vectors.
According to the above description, the optimal
classification surface problem can be further converted
into the following constrained optimization problem. To
minimize the following formula:
(11)
This is a quadratic programming problem, to define the
following Lagrange function:
(12)
where, and it is Lagrange coefficient. Under
constraint conditions and , to solve
the maximum of the following formula according to :
(13)
Optimal solution needs to be met:
(14)
Obviously, the coefficients of support vector are
non-zero, and only support vector will affect the final
classification result. So, can be expressed as:
(15)
where, weighted vector of optimal classification plane a
linear combination of the training sample vectors. If is
the optimal solution, after solving the above problem to
get the optimal classification function is as following:
(16)
where, represents sign function, is classification
threshold and it is obtained by any one support vector.
But for those of non-linear samples, if using SVM
classification and the minimum number of points to make
misclassification, we can add slack variable ( >0). So,
there is the following equation:
(17)
Under constrained conditions, to give the constant ,
then to solve and to minimize the following equation:
(18)
We can transform the above optimal problem.
Constraints can be expressed as:
(19)
In high-dimensional data transformation kernel
function to solve the non-linear data conversion issues, kernel function method is rewrite the decision function in
the above equation to be obtained as following:
(20)
We do not need to find a mapping function from low-dimensional to high-dimensional data mapping, only need
to know the output can be converted. For the common
linear inseparable, SVM can take advantage of the known
nuclear function mapping low-dimensional data from
low-dimensional to high-dimensional space, and can be
constructed in a high-dimensional space to be divided
into a linear hyper-plane. Since the original classic SVM
algorithm for the two types of classification and
recognition algorithm, achieved by a combination of two
types of facial expression recognition of multi-class
problems.
To briefly summarize SVM theory, its basic idea is to firstly to implement a nonlinear transformation by
converting the input space to a high dimensional space,
and the space in this new classification surface optimal
linear problem solving, and this linear transformation is
the inner product by selecting the appropriate function to
achieve. Fig. 6 shows that the optimal classification plane
is obtained by kernel function method.
Figure 8. Find the optimal classification plane by kernel function
method
Common kernel functions are described as following:
(21)
(22)
JOURNAL OF MULTIMEDIA, VOL. 9, NO. 2, FEBRUARY 2014 257
© 2014 ACADEMY PUBLISHER
(23)
(24)
How to choose the practical application of SVM
Parameters of this group? Currently several common
methods includes: grid method [18], bilinear method [19] and genetic algorithm [20]. This article uses the grid
method using a cross-check to get local optimum
parameters. Optimum penalty factor and nuclear function
parameters are needed in practical applications. Therefore,
in the experiment raw data can also be divided into more
groups, between the groups in training and cross-test
repeated.
B. Feature Extraction and Classifier Construction
After the license plate character segmentation, it is
necessary for character feature extraction, feature
extraction is a key step in the character recognition. How
to select features to improve efficiency and accuracy of
recognition is feature extraction problem to be solved.
License plate characters have a lot of features, such as the
character density characteristics, geometry, gray feature,
contour features, color features and so on. There are
many feature extraction methods, the main methods include of the skeleton refinement, 13 characteristics,
block statistical feature, pixel location characteristics, etc.
After license plate location, we can obtain the sizes of
license plate. The license plate with a larger size can be
determined as a close-range license plate, and the smaller
size of the vision of the license plate can be determined as
a far-view license plate. License plate characters are
segmented for feature extraction.
Pixel-by-pixel feature and block statistic feature are
used to describe the license plate characters in this paper.
We normalize the plate image with the size as , to obtain 48 features to count all pixels of each row.
Similarly, we can obtain 24 features to count all pixels of
each column. Then a plate image is segmented 16 blocks,
and the sum of all pixels from each block is as one
feature. So, we can obtain 88 features for a plate image.
For the common linear inseparable, SVM can take
advantage of the known nuclear function mapping low-
dimensional data from low-dimensional to high-
dimensional space, and can be constructed in a high-
dimensional space can be divided into a linear hyper-
plane. Since the original classic SVM algorithm for the
two types of classification and recognition algorithm, achieved by a combination of two types of facial
expression recognition of multi-class problems. There are
two methods to construct classifier:
(1) "One-to-one" strategy, training multiple classifiers
that separate each category twenty-two;
(2) One-to-many "strategy, that is training a classifier
which a separate class and all the rest of the class. This
paper used the principle of "one to many", and SVM
classifier with the nearest neighbor distance separation
combined to achieve optimal classification performance.
IV. EXPERIMENTAL RESULTS AND ANALYSIS
In this paper, a license plate recognition system based
on SVM is designed. The system is composed of three
parts, license plate preprocessing and positioning,
licenseplate character segment, license plate character
recognition. Fig. 9 shows the flow of license plate
recognition.
Input plate image
Preprocessing
Image gray processing
Enhancement && denoising
Coarse Location
Precise Location
Character segmentation
Character Recognition
Classifier
Figure 9. The flow of license plate recognition
In order to evaluate recognition algorithm, we define
the following indicators. Recognition rate is computed as
following:
(25)
where, is the number of that plates are corrected
recognition, and is the number of that plates are
correctly located. Recognition rate is the ration between
the number of plates that are correct recognition and the
number of palates that are correctly located. Then,
detection rate is defined as following:
(26)
where, is the number of that plates are correctly
located, and is the number of the total plates.
In the license plate character recognition experiments, we firstly select 500 images with a license plate. Then,
we use plate location method and recognition algorithm
to test the all plate images. Fig. 10 shows the partial of
plate images.
Figure 10. Partial of license plate images
258 JOURNAL OF MULTIMEDIA, VOL. 9, NO. 2, FEBRUARY 2014
© 2014 ACADEMY PUBLISHER

Figure 11. Results of license plate location and detection
Fig. 11 shows results of license plate location and
detection. From these experimental results, we can see
that our method can accurately locate and detect license
plate from plate images. Fig. 12 shows results of plate
detection on different angles. The plates are detected and corrected with Houghtransform which can detect the tilt
angle of the plate. From these experimental results, we
can see that our method can locate plate on different
angles. Especially, our method stilly locate plate when
big angles.
Figure 12. Plate detection results on different angles
From Table 1 and Table 2, we can see that the detection rate is 95.4% and recognition rate is 92.2%.
Correct rate reflects the effectiveness of recognition
algorithm, and detection rate reflects the effectiveness of
location algorithm. From experimental results, we can
also see that there are some errors in our experiments, as
there is 7.8% wrong rate in plate recognition. Because the
license plate image is sensitive to lighting, angle,
occlusion and other effects, the detection rate and
recognition rate will sharply reduce. Therefore, some
preprocessing for plate image is necessary to reduce these
factors, thus to improve detection rate and license plate
recognition rate in future.
TABLE I. LICENSE PLATE RECOGNITION RESULTS
Different operating The number of plates
Correctly locate license plate 477
Wrongly locate license plate 30
Correctly identify license plate 461
Wrongly identify license plate 60
TABLE II. CORRECT RATE AND WRONG RATE
Correct rate Wrong rate
Recognition rate 92.2% 7.8%
Detection rate 95.4% 4.6%
V. CONCLUSIONS
SVM as an important theory of machine learning and
pattern recognition has been well applied to small sample
clustering learning, nonlinear problems, outlier detection
and so on. The License Plate Automation Recognition
System has received extensive attention as an important
application of Machine Learning and Pattern Recognition in Intelligent Transport. Therefore, it is theoretically and
practically significant to research the license plate
character recognition technology based on SVM. The
plate recognition system is composed of three parts,
license plate preprocessing and positioning, license plate
character segment, license plate character recognition. In
this paper, we mainly introduce the flow of license plate
recognition, related technology and SVM theory.
Experimental results show the effectiveness of license
plate recognition using SVM
REFERENCES
[1] Broumandnia A, Fathy M, “Application of pattern
recognition for Farsi license plate recognition”, ICGST International Journal on Graphics, Vision and Image Processing, vol. 5, no. 2, pp. 25-31, 2005.
[2] Chang S L, Chen L S, Chung Y C, et al, “Automatic license plate recognition”, Intelligent Transportation Systems, IEEE Transactions on, vol. 5, no. 1, pp. 42-53, 2004.
[3] Yu M, Kim Y D, “An approach to Korean license plate
recognition based on vertical edge matching”, Systems, Man, and Cybernetics, IEEE International Conference on. IEEE, vol. 4, pp. 2975-2980, 2000.
[4] Hegt H A, De La Haye R J, Khan N A, “A high performance license plate recognition system”, Systems, Man, and Cybernetics, 1998 IEEE International Conference on. IEEE, pp. 4357-4362, 1998.
[5] Yan D, Hongqing M, Jilin L, et al. , “A high performance
license plate recognition system based on the web technique”, 2001 Proceedings of Intelligent Transportation Systems, pp. 325-329, 2001.
[6] Ren X, Jiang H, Wu Y, et al. , “The Internet of things in the license plate recognition technology application and design “, Business Computing and Global Informatization (BCGIN), 2012 Second International Conference on. IEEE, pp. 969-972, 2012.
JOURNAL OF MULTIMEDIA, VOL. 9, NO. 2, FEBRUARY 2014 259
© 2014 ACADEMY PUBLISHER

[7] Chang C J, Chen L T, Kuo J W, et al. , “Applying Artificial Coordinates Auxiliary Techniques and License
Plate Recognition System for Automatic Vehicle License Plate Identification in Taiwan”, World Academy of Science, Engineering and Technology, pp. 1121-1126, 2010.
[8] Robert K, “Video-based traffic monitoring at day and night vehicle features detection tracking”, Intelligent Transportation Systems, ITSC'09. 12th International IEEE Conference on. IEEE, pp. 1-6, 2009.
[9] Comelli P, Ferragina P, Granieri M N, et al. “Optical
recognition of motor vehicle license plates”, Vehicular Technology, IEEE Transactions on, vol. 44, no. 4, pp. 790-799, 1995.
[10] Sirithinaphong T, Chamnongthai K, “The recognition of car license plate for automatic parking system”, Signal Processing and Its Applications, 1999. ISSPA'99. Proceedings of the Fifth International Symposium on. IEEE, pp. 455-457, 1999.
[11] Kim K K, Kim K I, Kim J B, et al, “Learning-based approach for license plate recognition”, Proceedings of the 2000 IEEE Signal Processing Society Workshop, pp. 614-623, 2000.
[12] Wei D, “Application of License Plate Recognition Based on Improved Neural Network”, Computer Simulation, vol. 28, no. 8, pp. 2011.
[13] Maini R, Aggarwal H, “Study and comparison of various image edge detection techniques”, International Journal of
Image Processing (IJIP), vol. 3, no. 1, pp. 1-11, 2009. [14] Vincent O R, Folorunso O, “A descriptive algorithm for
sobel image edge detection”, Proceedings of Informing Science & IT Education Conference (InSITE), pp. 97-107, 2009.
[15] Sen A. Implementation of Sobel and Prewitt Edge Detection Algorithm, 2012.
[16] Wang B, Fan S S, “An improved CANNY edge detection
algorithm”, 2009. WCSE'09. Second International Workshop on. IEEE, pp. 497-500, 2009.
[17] Vapnik V, “The Nature of 6tatistical Learning Theory”, Data Mining and Knowledge Discovery, vol. 6, pp. 1-47, 2000.
[18] Osuna E, Freund R, Girosit F, “Training support vector machines: an application to face detection”, Proceedings 1997 IEEE Computer Society Conference on, pp. 130-136,
1997. [19] Kao W C, Chung K M, Sun C L, et al. “Decomposition
methods for linear support vector machines”, Neural Computation, vol. 16, no. 8, pp. 1689-1704, 2004.
[20] Hsu C W, Lin C J, “A comparison of methods for multiclass support vector machines”, Neural Networks, IEEE Transactions on, vol. 13, no. 2, pp. 415-425, 2002.
260 JOURNAL OF MULTIMEDIA, VOL. 9, NO. 2, FEBRUARY 2014
© 2014 ACADEMY PUBLISHER

Adaptive Super-Resolution Image Reconstruction
Algorithm of Neighborhood Embedding Based on
Nonlocal Similarity
Junfang Tang
Institute of Information Technology, Zhejiang Shuren University, Hangzhou 310015, Zhejiang, China
Email: [email protected]
Xiandan Xu New Century Design& Construction (NCDC Inc.), New York 10013, USA
Email: [email protected]
Abstract—Super resolution technology origins from the field
of image restoration. The increasing difficulties in the
resolution improvement by hardware prompts the super
resolution reconstruction that can solve this problem
effectively, but the general algorithms of super resolution
reconstruction model are unable to quickly complete the
image processing. Based on this problem, this paper studies
on adaptive super-resolution reconstruction algorithm of
neighbor embedding based on nonlocal similarity, in the
foundation of traditional neighborhood embedding super
resolution reconstruction method, using nonlocal similarity
clustering algorithm, classifying the image training sets,
which reduces the matching search complexity and speeds
up the algorithm; by introducing new characteristic
quantity and building a new calculation formula for solving
weights, the quality of reconstruction is enhanced. The
simulation test shows that the algorithm proposed in this
paper is superior to the traditional regularization method
and the spline interpolation algorithm no matter on the
objective index about statistic and structural features or
subjective evaluation.
Index Terms—Neighborhood Embedding; Super Resolution;
Image Restoration
I. INTRODUCTION
Super-resolution reconstruction refers to the
technology that constructs high-resolution images from
low-resolution ones [1]. It was first proposed with the
concept and method of the single frame image
reconstruction, which mainly resorts to resampling and
interpolation algorithm. However, these methods will
usually lead to some smoothing effects, and as a result,
the image edge details cannot be reconstructed very well.
And multi-frame image reconstruction can just solve this
problem [2]. This technology enhances the image
resolution by making full use of the different information
offered by low-resolution images of different frames.
Image resolution is an important index of image detail
appearance ability which describes the pixels image
contains, and put another way, is a measure of the amount
of image information [3]. In many cases, however, due to
the limit of hardware device in imaging system (such as
imaging sensor), people cannot observe image of high
resolution. It costs too much updating the hardware to
improve image resolution, and in the short term it is
difficult to overcome the technical problems of some
specific imaging system. The super resolution image
reconstruction instead utilizes the software on the premise
of existing hardware device to improve the resolution,
which is applicable in many fields [4].
Super-resolution reconstruction was first proposed in
the 1960s. In the following decades, many scholars still
haven’t got its ideal effects in the practical applications
although they studied a lot. At that time, it had been
called the “myth of super-resolution” for the super-
resolution was considered impossible with the effects of
noise. There has not been any breakthrough until the end
of 1980s with the efforts of Hunt, etc. In the 1980s,
researchers in the field of computer vision began to study
SR reconstruction technique [5]. Tsai and Huang first
proposed a multi-image SR reconstruction algorithm
based on Fourier domain [6]. Then, researchers improved
this algorithm to extend the application range. However,
this kind of SR algorithm is applicable only to the
degradation model of the global translational motion and
constant linear space. SR reconstruction gradually made
progress since 1990s. In 1995, Hunt firstly explained
from the theory the possibility of super resolution
reconstruction [7]. At the same time, researchers also
proposed some classical SR algorithms, for example,
iterative back projection method (IBP) [8], projection
onto convex sets (POCS) [9], the maximum likelihood
estimation method (ML) [10], maximum a posteriori
estimation method (MAP) and the hybrid
ML/MAP/POCS method [11]. In the late 1990s, SR
reconstruction became a hot international topic deriving a
variety of SR reconstruction algorithms. In 2004, Chang
[12] introduced the idea of Neighbor Embedding in
manifold learning into super-resolution reconstruction,
assuming that the low resolution image block and high
resolution image block have similar local manifold
JOURNAL OF MULTIMEDIA, VOL. 9, NO. 2, FEBRUARY 2014 261
© 2014 ACADEMY PUBLISHERdoi:10.4304/jmm.9.2.261-268

structure, getting the training sets of low resolution image
and high resolution image block through the image
training, then searching the K neighbor blocks in the
training set of low resolution image blocks to be
reconstructed and solving their neighbor coefficients, and
with the linear combination of the coefficient and K
corresponding high resolution neighbor blocks of high
resolution training set to obtain the high resolution image
block after matching reconstruction. The advantage of
this method is that the number of training sets is small
and the reconstruction time is relatively short, but the
reconstruction exists the over-fitting and under-fitting
phenomenon. In 2008, the compressed sensing [13] was
introduced into the super-resolution reconstruction, and
Yang et al. [14] used the linear programming and low
resolution dictionary to solve the sparse representation of
low resolution image block to be reconstructed, using
sparse representation coefficients and the corresponding
high resolution image block to finishing image
reconstruction. This algorithm was advantageous in its no
need to set the block number of a low resolution image
for the sparse representation, but the construction of the
dictionary is random and unpopular.
Super-resolution reconstruction algorithm can be
divided into two kinds, the way based on reconstruction
and based on study. Most super-resolution reconstruction
algorithms can be classified into the way based on
reconstruction according to the existing documents. It
also can be divided into frequency domain method and
spatial domain methods according to the reconstructed
super-resolution reconstruction algorithm. Frequency
domain methods improve the quality of images by
eliminating the frequency aliasing in the frequency
domain. Tsai and Huang proposed the image
reconstruction methods based on approaching frequency
domain according to the shifting properties of Fourier
transform. Kim and others extended Tsai and Huang’s
ideas and proposed the theory based on WRLS. In
addition, Rhee and Kang adopted DCT (Discrete Cosine
Transform) instead of DFT (Discrete Fourier Transform)
in order to decrease the operand and increase the
efficiency of algorithm. Also, they overcome the lack of
frames by LR sampling and the ill-conditioned
reconstruction of unknown sub-pixel motion information
by regularization parameter. The frequency domain
methods were with comparatively easy theories and low
computation complexity. However, this kind of methods
could only handle some conditions of global motion.
What’s more, the loss of data’s dependency in the
frequency domain made the application of prior
information in regularization ill-conditioned problem
difficult. So the recent studies are most in the spatial
domain methods. This essay lucubrated the relative
problems from the aspect of super-resolution methods,
proposing an algorithm to super-resolution reconstruct
images by non-local similarity, and improved algorithm
to present the high-speed algorithm. This essay presented
that the image super-resolution reconstruction algorithm
of non-local similarity could eliminate the man-made
effects such as marginal sawtooth in reconstructed image
by studying the super-solution image reconstruction
methods and analyzing its key problems. Intensify the
real margin by bilateral filter. And it could learn from the
low-resolution image by the non-local similarity of
natural image and guide to reconstruct image with the
relationship between similar structural pixels.
This paper proposes a neighbor embedding adaptive
super-resolution reconstruction algorithm based on
nonlocal similarity, using the K-means clustering
algorithm to classify the image training sets, which
reduces the calculation of search matching, speeds up the
algorithm, and then improves reconstruction quality by
introducing new features and new formula to solve the
weight. The simulation test shows that, compared to the
traditional regularization method and the spline
interpolation algorithm, the model proposed in this paper
is better in both the objective index of the statistic and
structure features and in subjective evaluation.
The basic idea of super resolution is the combination
of fuzzy image sequences of low resolution and noise to
produce an image or image sequence of high resolution
[15]. Most of the super-resolution image reconstruction
methods have three compositions, as shown in Figure 1:
motion compensation, including motion estimation and
image registration, interpolation and blur and noise
reduction [16]. These steps can be realized separately or
simultaneously according to the reconstruction methods.
SR reconstruction method based on frequency domain
contains only two links: the motion estimation and
interpolation, during which to solve the equations of
displacement in the frequency domain is equivalent to the
interpolation process. Spatial domain SR reconstruction
method contains these three links, and most of the spatial
domain methods, such as IBP, POCS, MAP and adaptive
filtering method, integrates the interpolation and blur and
noise reduction into a process. Some other spatial domain
methods synthesize the motion estimation, interpolation
and blur and noise reduction to only one step.
Figure 1. Super-resolution scheme
II. SUPER-RESOLUTION IMAGE RECONSTRUCTION
ALGORITHM
A. Frequency Domain
Frequency domain methods utilize the aliasing existing
in each low resolution image to reconstruct a high
262 JOURNAL OF MULTIMEDIA, VOL. 9, NO. 2, FEBRUARY 2014
© 2014 ACADEMY PUBLISHER

resolution image [17]. Tsai and Huang firstly derived a
systematic equation between a low resolution image and
a super resolution image expected by using the relative
movement between the low resolution images [18]. It is
based on three principles:
The displacement properties of Fourier transform;
The aliasing relationship between Continuous Fourier
transform (CFT) of the original high resolution image and
the discrete Fourier transform (DFT) of low resolution
observation image;
Original super resolution image is supposed to be
band-limited.
These properties make possible the formalism of
systematic equation which links the DFT coefficient of an
aliasing low resolution image with a CFT sample of
unknown image.
Suppose 1 2( , )f t t represents the continuous super
resolution image, and 1 2( , )F w w is the continuous
Fourier transform. The k th displacement image
1 2 1 1 2 2( , ) (( , )k k kf t t f t t after global translation
which is the only motion in frequency method, where 1k
and 2k are known arbitrary values, 1,2,...,k p . Then,
the CFT 1 2( , )kF w w of displacement image is noted by
these properties as:
1 2 1 1 2 2 1 2( , ) exp 2 ( ) ( , )k k kF w w j w w F w w (1)
This expression indicates the relationship between
CFT of displacement image and CFT of reference image.
Low resolution observation image 1 2( , )kg n n is
generated by taking samples to the displacement image
1 2( , )kf t t with sampling period 1T and
2T . From the
aliasing and band-limited assumption of 1 2( , )F w w ,
namely for 1 1 1( / )w L T 2 2 2( / )w L T , there
is 1 2( , )F w w , the relationship is noted between the CFT
of super resolution image and the DFT of the k th low
resolution image:
1 2
1 2
1 1
1 2
1 2 1 2
0 01 2 1 1 2 2
1 2 2( , ) ,
L L
k k
n n
G F n nTT T N T N
(2)
where 1 and
2 are the sampling points in discrete
Fourier transform domain of 1 2( , )kg n n , and
1 10 N ,
2 20 N .
Lexicographical Order is employed to the index 1 2,n n
on the right side of the equation and the k on the left side
to obtain a matrix vector form of (2):
G F (3)
Here, G is a 1p vector with elements of DFT
coefficient of 1 2( , )kg n n ; F is 1 2 1L L n vector with the
unknown samples as the elements through CFT of
1 2( , )x t t ; is 1 2p L L vector which links the DFT of
low resolution observation image with samples from
continuous super resolution image. Therefore, the
reconstruction of a super resolution image requires
definite to solve the inverse problem.
The simple theory is the main advantage of the
frequency domain method that the relationship of low
resolution image and super resolution image is explained
clear in the frequency domain. It is useful for the parallel
computing reducing the device complexity. But the
observation model is limited to the global translation
motion and the blur with constant linear space. In
addition, lack of data correlation in the frequency domain
makes difficult the application of prior knowledge about
spatial domain to regularization.
B. Regularized Super-Resolution Reconstruction Method
In the case of insufficient low resolution images and
non-ideal fuzzy operator, super resolution image
reconstruction methods usually tend to be ill-posed [19].
A method used for the stable inverse process of ill-posed
problem is known as regularization method. Following
we introduces the deterministic regularization and the
stochastic regularization method for super resolution
image reconstruction. Here highlights the constrained
least squares (CLS) and maximum a posteriori probability
(MAP) super-resolution image reconstruction method.
With the estimation of registration parameters, the
observation model in equation (2) can be determined
completely. Deterministic regularization super-resolution
method uses prior information about the solution to solve
the inverse problem in equation (2), which can make the
problem a well posed one.
CLS means choosing appropriate f to minimize the
Lagrange operator.
2 2
1
p
k k
k
g A f Cf
(4)
Here, operator C is usually a high-pass filter;
denotes the norm of 2L . In this equation, the prior
information of a reasonable solution is expressed by the
smooth constraint which means most of the images are
naturally smooth together with limited high frequency
motion. Therefore, the reconstruction image of the
minimum high-pass energy should be considered as the
solution of deterministic method. The Lagrange
multiplier , is usually called as regularization
parameter which controls the compromises of data
precision f and the smoothness of the solution 2
Cf .
More means more smooth solution. Larger is a
quite useful when there are few low resolution images or
the precision of observation data reduces because of the
registration error and noise while smaller is useful on
the opposite side. The cost function, a differential convex
function in (4) adopts a square regularized term in favor
of the global unique solution f . A basic deterministic
iteration method is to solve the following equation:
1 1
ˆp p
T T T
k k k k
k k
A A C C f A g
(5)
JOURNAL OF MULTIMEDIA, VOL. 9, NO. 2, FEBRUARY 2014 263
© 2014 ACADEMY PUBLISHER

Method of steepest descent taken to it, the iteration to
f̂ should be,
1
1
ˆ ˆ ˆ ˆ( )p
n n T n T n
k k k
k
f f A g A f C Cf
(6)
where is the convergence parameter, and T
kA contains
the sampling operator and blur and deformation operator.
Katsaggelos et al proposed a multi-channel
regularization super-resolution method where the
regularization functional was used to calculate the
regularization parameter without any prior knowledge at
each iteration step. Kang described the generalized multi-
channel deconvolution method including multi-channel
regularization super-resolution method. Hardie et al
proposed a super-resolution reconstruction method
minimizing regularized cost functional, defining an
observation model of the optical system and detector
array (a kind of sensor point spread function). They used
an iterative registration algorithm based on gradient, and
took into consideration two optimization processes
minimizing the cost functional, the gradient descent and
conjugate gradient optimization process. Bose et al
pointed out the importance of regularization parameter,
and put forward a constrained least squares super
resolution reconstruction method which obtains optimal
parameter by using the L curve method.
C. Random Method
Random super resolution image reconstruction is a
typical Bayesian method which provides a convenient
tool for the prior knowledge model of solution.
Bayesian estimation usually makes effect when a
posterior probability density functional (PDF) of original
images can be constructed. MAP estimator of f
maximizes the PDF ( )kP f g .
1 2argmax ( , ,..., )P
f P f g g g (7)
Bayesian theorem and logarithmic function are used
for conditional probability to show the MAP optimization
problem.
1 2arg max ln ( , ,..., ) ln ( )pf P g g g f P f (8)
Prior image model ( )P f and conditional density
1 2( , ,..., )pP g g g f is determined by the prior knowledge
and noise statistic information of the high resolution
image f . Due to its prior constraints, this MAP
optimization method can effectively provide a regularized
super-resolution estimation. Bayesian estimation usually
takes Markov random field prior model, a strong method
for image prior model. ( )P f can be described by a
equivalent Gibbs prior model, with the probability
density defined as:
1 1
( ) exp ( ) exp ( )c
c S
P f U f fZ Z
(9)
Z is a regularized constant, ( )U f is the energy
function, ( )c f is a potential function depending on the
pixel in the clique, and S signifies the clique set. ( )U f
can measure the cost of the irregularity of solution
through defining ( )c f as the function of image
derivative. Usually the image is thought as global smooth
and be combined into the estimation by Gaussian prior
model.
The advantage of the Bayesian frame is that it can use
the prior model of constant edge. Potential function is
expressed in a quadric form ( ) 2( ) ( )n
c f D f with
Gaussian prior model, where ( )nD is n order difference.
Although quadric potential function can form the linear
algorithm in the process of the derivation, it severely
punishes the high-frequency components. Thus, the
solution is an over smooth solution. However, if the
potential function model is weak in the punishment on
large difference f , then an edge-preserving image will
be obtained with high resolution. If the inter-frame error
is independent, and noise is the independent and
identically distributed zero mean Gaussian noise, then the
optimization problem can be compactly represented as
1
ˆ ˆ ˆarg max ( )p
k k c
k c S
f g A f f
(10)
Here, is regularization parameter. If the Gaussian
prior model is adopted in (10), then the estimation
defined by (4) is MAP estimation.
Maximum likelihood (ML) estimation is also used for
super resolution reconstruction. ML estimation is a
special case of the MAP estimation in the absence of
prior set. However, for the ill posed condition of inverse
problem of super resolution, MAP estimation is usually
better than ML estimation.
The stability and flexibility of the model on the noise
characteristics and a priori knowledge is the main
advantage of random super resolution method. If the
noise process is white Gaussian model, MAP estimation
with a convex energy function can guarantee the
uniqueness of the solution in the prior model. Therefore,
gradient descent method is not only able to estimate high
resolution images, but also used to estimate the motion
information and high resolution image at the same time.
Generally speaking, all of three kinds of super
resolution image reconstruction algorithms listed above
are sensitive to high frequency information, which is not
conducive to the edge preserving etc.
III. NEIGHBORHOOD EMBEDDING SUPER-RESOLUTION
RECONSTRUCTION ALGORITHM BASED ON NONLOCAL
SIMILARITY
Local linear embedding is to solve the linear
expression in a higher dimensional space, and map it into
a low dimensional space while neighborhood embedding
is to solve the linear relation in low dimensional space
and then map it to a high dimensional space [20].
Therefore, neighborhood embedding can be regarded as
264 JOURNAL OF MULTIMEDIA, VOL. 9, NO. 2, FEBRUARY 2014
© 2014 ACADEMY PUBLISHER

the inverse process of local linear embedding with the
same steps.
Super resolution reconstruction algorithm based on
neighborhood embedding is mainly divided into two steps:
the first step is to select some typical images as the
training images, simulating the process of degradation,
extracting corresponding high and low resolution image
block to establish image training set; the second step is to
search for matching high resolution characteristic image
and calculate the corresponding coefficients for
reconstruction.
We suppose tL is the low resolution image to be
reconstructed, tH is the output high resolution image
after reconstruction, sL is the low resolution training set
and sH is the high resolution training set.
Extracted from the tL firstly, the characteristic
quantity should keep well with the characteristic selected
from the image training set. Because the reconstruction
process aims at the image block, tL after extraction
should be blocked to reconstruct every low resolution
image if .
After characteristic extraction, matching searching
follows that requires K image blocks closest to the if .
This algorithm is based on the Euclidean, that is to say, it
finds K image blocks in the low resolution image set.
According to the premise of the algorithm, a low
resolution image block and a high resolution
characteristic image are similar in local manifold,
together with the consistency of the low and high
resolution training sets. Therefore, it is nature to find the
corresponding K high resolution characteristic image for
a linear combination.
Then follows the calculation of reconstruction weight
coefficient by finding out K low resolution neighbor
blocks with matching search method, writing out the
linear expression. It can be solved with the equation as
below:
2
arg min . . 1i
j i
i i ij j ijW
d N j
W f w d s t w
(11)
Here, if denotes the i th characteristic of low
resolution image block to be reconstructed; jd is the j
th neighbor block in the low resolution training set;iN is
the set of all the K low resolution blocks; iW is the
reconstruction weight coefficient. To solve the (11) is to
minimize the error and meet the requirements that the
sum of ijw is below 1 and ijw equals to 0 if block does
not belong to the set iN .
Finally, the high resolution characteristic image block
iy is obtained after the linear combination of the K
reconstruction weight coefficients and corresponding
high resolution image blocks, as shown in expression (12),
j i
i ij j
h N
y w h
(12)
jh is the high resolution characteristic image block
and ijw is the reconstruction weight coefficient. The high
resolution image blocks from the inverse process of
characteristic extraction make up the high resolution
image after reconstruction.
The similarity between pixel i and pixel j in an
image can be evaluated by selecting a fixed size square
window as a neighbor window and supposing iN is the
square area centering on i and jN is the area centering
on j . Their pixel similarity is determined by similarity of
the gray vector ( )iz N and ( )jz N .
Considering the structure feature of the neighbor
windows, the Gaussian Weighted Euclidean distance
between gray vectors is chosen as a measure, as shown in
equation (13).
2
2,( , ) ( ) ( )i j a
d i j z N z N (13)
a is the standard deviation of Gaussian Kernel
function.
Then the similarity is obtained with the calculated
Euclidean distance. There is a positive correlation
between them,
21( , ) exp( ( , ) / )
( )w i j d i j h
Z i (14)
2( ) exp( ( , ) / )j
Z i d i j h (15)
( )Z i , here, is a normalized constant, and h
determines the degree of attenuation and has a great
influence on similarity.
If the nonlocal similarity is used in the de-noising, the
formula for a pixel i is shown below:
( ) ( , ) ( )j I
NL v i w i j v j
(16)
( )NL v i is the value of pixel i after de-noising, I is
the set of pixel similar to i , ( , )w i j is the weight
coefficient which measured by the similarity between i
and j , and ( )v j is the pixel value of pixel j .
For a super-resolution reconstruction problem, the low
resolution image usually contains the noise which will
influence the extraction of image block. For example, an
image block to be reconstructed, ip , its characteristics is
formed by following expression,
ˆi if f n (17)
ˆif is the extracted characteristic, if is real
characteristic of image block, and n denotes the noise.
When the image block is a flat block, the influence of if
will be smaller than noise n , at this time, ˆif will show
more characteristics about noise and the neighbor block
JOURNAL OF MULTIMEDIA, VOL. 9, NO. 2, FEBRUARY 2014 265
© 2014 ACADEMY PUBLISHER

will be inaccurate. In order to remove the noise effect, we
refer to the de-noising method of nonlocal mean filtering,
through finding out the similar blocks and calculating
their weight, then combining them to search for K
neighbor block.
Firstly, similar block to be reconstructed should be
searched out with low resolution, as shown in figure 2.
Supposing the block as 1p with size 3×3, a 7×7 matching
block im is built centering on it with which similar
blocks are searched in a 21×21 searching window.
Nonlocal mean de-noising algorithm uses Euclidean
distance as a measure, different with the algorithm in this
paper that sets the sum of absolute deviation (SAD) value
as the measure between searching block and matching
block. Taking two 7×7 blocks with the minimum SAD,
recorded as SAD1 and SAD2, their corresponding center
place, two 3×3 small blocks 2p and
3p , then the weight
effect of the similar block can be solved by following
equation:
2
1
1
2
3
1
SAD
h
SAD
h
m
m e
m e
(18)
In this expression, parameter h controls the degree of
attenuation of the exponential function determined by the
searching window. Doing normalization to (18), we get
the weight coefficient:
1
1
1 2 3
2
2
1 2 3
3
3
1 2 3
m
m m m
m
m m m
m
m m m
(19)
where 1 ,
2 and 3 are the weight coefficients of the
similar blocks 1p 2p and
3p , respectively.
Figure 2. Non-local similarity search.
Then the characteristics 1f 2f and 3f are obtained
through the extraction of the similar block of low
resolution image block. Together with the weight
coefficients and Euclidean distance, K neighboring
blocks are searched out with the expression,
2 2 2
1 1 2 2 3 32 2 2min( )j j j
j Nf l f l f l
(20)
N is the low resolution characteristic image block
training set.
Through the introduction of nonlocal similarity
constraint, a joint search involving the search of similar
blocks and calculation of the weighted coefficient helps
find k neighborhood blocks in the low resolution training
set, effectively restraining the effect of noise on image
block.
In addition, this algorithm applying the nonlocal
similarity for image restoration in a sparse model presents
the same dictionary elements in a similar block in the
sparse decomposition, which can be used to solve the
joint sparse representation coefficients. According to this
theory, in this algorithm, the training set is similar to a
dictionary, and similar blocks benefit finding out the
exact K nearest neighbor coefficient. The weight
coefficient calculation formula is updated with the similar
block weights.
23
1
arg min . . 1j
k k j j jW
k d M j
W f w d s t w
(21)
1 , 2 and
3 is from the (19), M is the set of
K neighborhood blocks searched out by (20), w is the
reconstruction weight coefficient. The solution of (21)
makes the minimum error and meet the requirements that
the sum of jw is 1 and the jw of the block out of the set
M is zero.
Similar blocks have similar neighbor structures in the
training set. By introducing the constraint effect of
similar block, it is useful to estimate the neighbor
structure and calculate accurate weight coefficient.
IV. SIMULATION EXPERIMENT
In order to test the proposed non-local similarity
neighborhood embedded self-adaptive super-resolution
reconstruction algorithm model, the following two
experiments were carried out on it. The first experiment
tested its PSNR and image structure similarity. The
second experiment compared PSRN and run time on the
platform of Matlab. The analysis and comparison of the
two experiments tested the functionality of the non-local
similarity neighborhood embedded self-adaptive super-
resolution reconstruction algorithm model in detail
proposed in this essay.
Experiment 1: The Number image with size 256x256
and Lena image are selected as the original high-
resolution image. Then a sequence of low solution images,
totally 15, are generated after translation with the shift
range between 0-3 pixels, fuzzy with a Gauss operator in
a 3x3 window, and down sampling whose factor is 2.
Gauss noise with different noise variances are added into
low resolution image sequence to get the required data.
Compared with the spline interpolation method and the
266 JOURNAL OF MULTIMEDIA, VOL. 9, NO. 2, FEBRUARY 2014
© 2014 ACADEMY PUBLISHER

traditional regularization methods, this algorithm adopts
the peak signal to noise ratio and structure similarity to
measure the quality of image reconstruction.
From Figure 3 and Figure 4, it is obvious that the
algorithm this paper proposed has great improvement
compared with the regularization method and the spline
interpolation algorithm PSNR, an average improvement
of 0.5dB. This is because the algorithm takes into account
the local information of image, reducing the error
introduced by the regularization. It also can be seen from
(b), (d) that the algorithm has larger improvement in
SSIM, and for Number images, along with the change of
noise variance, corresponding curve of spline
interpolation algorithm and the traditional regularization
methods declines similar to the negative exponential
curve while that of this algorithm similar to the line.
Therefore, in a certain range, this algorithm is superior
obviously.
Figure 3. Image PSNR curve
Figure 4. Image structure similarity curve
From figure 3 and 4, this algorithm proposed is
superior no matter on the objective index about statistic
and structural features or subjective evaluation.
Experiment 2: The following experiments are carried
out on the Matlab platform. The simulation experiment is
to degrade the test image (Fig. 5) to get low resolution
image, and then to reconstruct it to get the reconstructed
high resolution image. The degradation process from high
resolution to low resolution images involve the Gauss
filtering to original image with Gauss filtering window
size 5 x 5 and the variance 1, and down sampling of the
image low-pass filtered with the sampling factor 2. The
bilateral filtering includes these parameters: filtering
window size 7 x 7; the variance of spatial distance
function 10( )c domain filtering ; the variance of pixel
similarity function 30( )s range filtering . The
parameters of nonlocal similarity are matching window
size 5 x 5, the search window size 9 x 9, and the number
of similar structure pixels 7.
Table I is the objective evaluation of PSNR
experiments. From the results, the former two methods
show barely difference in PSNR, but PSNR difference of
the method in this paper is relatively large, ranging from
0.3 to 0.5dB. This is because this algorithm will lose
basic image information during the degradation of image
block data, this algorithm is to reduce the dimensionality
of high-dimensional data, which means our algorithm
transforms the high dimension data into low dimensional
data space in the loss of a small amount of information,
and thus decreases the objective measurement of PSNR.
TABLE I. PSNR (DB) RESULTS
LR image Cman Bike Foreman House
Original algorithm 26.36 26.92 32.47 24.95
Edge detection algorithm 26.36 29.86 32.45 24.88
Algorithm 25.64 26.32 31.88 24.26
TABLE II. RUN TIME (S) RESULTS
LR image Cman (128×128)
Bike (256×174)
Foreman (176×144)
House (256×256)
Original
algorithm 19.5 58.4 29.7 77.0
Edge detection
algorithm
7.2 21.1 10.9 28.2
Algorithm 1.5 7.7 2.4 9.9
Table II shows the operation time of three kinds of
methods. It can be seen that the running time of the
method of adding the pixel classification is about one
fifth of that of the original algorithm. The running time of
different images by adding different image edge detection
method is different for the edge detection is in a positive
relationship with the image content. The more textured
edges the image has, the more time the image processing
consumes. Our algorithm incorporating the degradation
and edge detection runs the fastest because it greatly
reduces the dimensions, dealing with from 49
dimensional data to 16 dimensions data.
It could be seen that the PSNR of the non-local
similarity neighborhood embedded self-adaptive super-
resolution reconstruction algorithm model proposed by
this essay had more improvement as the change of noise
variance than that of the traditional regularization method
and the spline interpolation. The corresponding curve of
interpolation algorithm and traditional regularization
method which was similar to the negative exponent
decreased. However, the algorithm corresponding curve
in this essay was similar to straight-line decline, so in a
certain range, the advantage of the algorithm in this essay
was more obvious and the run speed of dimensionality
reduction with detection processed method was the fastest.
JOURNAL OF MULTIMEDIA, VOL. 9, NO. 2, FEBRUARY 2014 267
© 2014 ACADEMY PUBLISHER

V. CONCLUSION
Digital image is the foundation of image processing
and the spatial resolution of digital imaging sensor is an
important factor to image quality. With the progress of
information and the popularization of image processing,
scientific research and practical application demands high
on the quality of digital images, and thus poses a new
challenge to the manufacturing technology of the image
sensor. We can try a scheme of hardware to improve the
spatial resolution of the image, such as reducing the pixel
size or expanding photoreceptor chip to increase the
number of pixels of unit area, but reducing the pixel size
and increasing the size sensor chip exist technical
difficulties, and the expensive high precision sensor is not
suitable for popularization and application. Therefore,
super resolution reconstruction technique employing
signal processing method improves the image resolution
of existing low resolution imaging system, which attracts
great attention and in-depth study globally and has
important theoretical significance and application value.
REFERENCE
[1] SU Bing hua, JIN Wei qi, NIU Li hong, LIU Guang rong,
“Super resolution image restoration and progess”, Optical
Technology, vol. 27, no. 1, pp. 6-9, 2001.
[2] PARK S C, PARK M K, KANG M G, “Super-resolution
image reconstruction: a technical overv iew”, IEEE Signal
Processing Magazine, vol. 20, no. 3, pp. 21-36, 2003.
[3] WANG Liang, LIU Rong, ZHANG Li, “The
Meteorological Satellite Spectral Image Registration Based
on Fourier-Mellin Transform”, Spectroscopy and Spectral
Analysis, no. 3, pp. 855-858, 2013.
[4] GUO Tong, LAN Ju-long, HUANG Wan-wei, ZHANG
Zhen, “Analysis the self-similarity of network traffic in
fractional Fourier transform domain”, Journal on
Communications, vol. 34, no. 6, pp. 38-48, 2013.
[5] CHEN Huahua, JIANG Baolin, LIU Chao, “Image super-
resolution reconstruction based on residual error”, Journal
of Image and Graphics, vol. 16, no. 1, pp. 42-48, 2013.
[6] BAI Li ping, LI Qing hui, WANG Bing jian, ZHOU Hui
xin, “High Resolution Infraed Image Reconstruction Based
on Image Sequence”, Infrared Technology, vol. 24, no. 6,
pp. 58-61, 2002.
[7] ZENG Qiangyu, HE Xiaohai, CHEN Weilong,
“Compressed video super-resolution reconstruction based
on regularization and projection to convex set”, Computer
Engineering and Applications, vol. 48, no. 6, pp. 181-184,
2012.
[8] JIANG Yu-zhong, YING Wen-wei, LIU Yue-liang, “Fast
Maximum Likelihood Estimation of Class A Model”,
Journal of Applied Sciences, vol. 32, no. 2, pp. 165-169,
2013.
[9] XU Zhong-qiang, ZHU Xiu-chang, “Super-resolution
Reconstruction Technology for Compressed Video”,
Journal of Electronics & Information Technology, vol. 29,
no. 2, pp. 499-505, 2007.
[10] SU Heng, ZHOU Jie, ZHANG Zhi-Hao, “Survey of Super-
resolution Image Reconstruction Methods”, Acta
Automatica Sinica, vol. 39, no. 8, pp. 1202-1213, 2013.
[11] CHANGH, YEU NGDY, XIONGYM. “Super-resolution
th rough neighbor embedding”, Proceedings of the IEEE C
o mputer So ciety Conferenceon Computer Vision and
Patte rn Recognition, 2004, pp. 275-282.
[12] CANDES E J. “Compressive sampling” Proceedings of the
International Congress of Mathematicians, 2006, pp. 143-
145.
[13] CANDES E J, WAKIN M B, “An introduction to
compress ive sampling”. IEEE Signal Processing
Magazine, 2008, pp. 21-30.
[14] WRIGHT J, HUANG T, MA Y. Image super-resolution as
s parse representation of raw in IEEE Conference on
Computer Vision and Pattern Recognition, 2008, pp. 1-8.
[15] YANG J C, WRIGHT J, HUANG T, etal. Image super- re
solution via sparse representation on Image Processing,
2010, pp. 2861- 2873.
[16] XIE Kai, ZHANG Fen, “Efficient super resolution image
reconstruction parameter estimation algorithm”, Journal of
Chinese Computer Systems, 2013, pp. 2201-2204.
[17] YING Li-li, AN Bo-wen, XUE Bing-bin, “Research on
Super-resolution Reconstruction of Sub-pixel Images”,
Infrared Technology, 2013, pp. 274-278
[18] Zhang Yilun, Gan Zongliang, Zhu Xiuchang, “Video
super-resolution method based on similarity constraints”,
Journal of Image and Graphics, 2013, pp. 761-767.
[19] CAO Ming-ming, GAN Zong-liang, ZHU Xiu-chang, “An
Improved Super-resolution Reconstruction Algorithm with
Locally Linear Embedding”, Journal of Nanjing University
of Posts and Telecommunications (Natural Science), 2013,
pp. 10-15.
[20] JIANG Jing, ZHANG Xue-song, “A Review of Super-
resolution Reconstruction Algorithms”, Infrared
Technology, 2012, pp. 24-30.
Junfang Tang, born January 1977 in
Shangyu City, Zhejiang Province, China,
majored in management information
system during her undergraduate study in
Shanghai University of Finance and
Economics and got a master degree of
software engineering in Hangzhou Dianzi
University. She focuses her research
mainly on computer graphics and image
processing and has published several professional papers on the
international journals and been in charge of several projects,
from either the Zhejiang Province or Zhejiang provincial
education department.
268 JOURNAL OF MULTIMEDIA, VOL. 9, NO. 2, FEBRUARY 2014
© 2014 ACADEMY PUBLISHER

An Image Classification Algorithm Based on Bag
of Visual Words and Multi-kernel Learning
LOU Xiong-wei 1, 3
, HUANG De-cai 2, FAN Lu-ming
3, and XU Ai-jun
3
1. College of Information Engineering, Zhejiang University of Technology, Hangzhou, Zhejiang, 310032, China 2. School of Computer Science & Technology, Zhejiang University of Technology, Hangzhou, Zhejiang, 310032,
China
3. College of Information Engineering, Zhejiang A & F University, Linan, Zhejiang, 311300, China
Abstract—In this article, we propose an image classification
algorithm based on Bag of Visual Words model and multi-
kernel learning. First of all, we extract the D-SIFT (Dense
Scale-invariant Feature Transform) features from images in
the training set. And then construct visual vocabulary via
K-means clustering. The local features of original images
are mapped to vectors of fixed length through visual
vocabulary and spatial pyramid model. At last, the final
classification results are given by generalized multiple
kernel proposed by this paper. The experiments are
performed on Caltech-101 image dataset and the results
show the accuracy and effectiveness of the algorithm.
Index Terms—BOVW; Image Classification; Spatial
Pyramid Matching; Kernel
I. INTRODUCTION
The image is always an important approach to convey
information and has penetrated into all aspects of our life.
In particular, with the development of the Internet and
multi-media technology nowadays, the digital image has
become an import media for modern information, and its
increasing rate makes traditional management method of
manual labeling more and more infeasible [1]. Thus, many researchers have started to work on automatic
image classification by computers to sort images into
different semantic classes according to people’s
comprehension. Problems in image classification,
including scene detection, object detection and so on, are
hot and difficult issues in modern computer vision and
multi-media information. Due to the wide application of
images and videos, we are in bad need of excellent and accurate image comprehension algorithms to address
problems in image classification. Computer vision aimed
at image comprehension emphasizes on the function of
computers to visually comprehend images. Vision is an
essential approach for human to observe and cognize the
world. According to statistics, a big portion of
information people obtained from the outside world stem
from the visual system. Narrowly speaking, the final target of vision is to reasonably explain and describe the
image to the observant. Generally speaking, vision even
includes action plan according to the explanation,
description, environment and the will of the observant.
Therefore, computer vision aimed at image
comprehension is the realization of human vision via
computers, and it is an important step for artificial
intelligence to accurately comprehend the world, which
can percept, cognize and comprehend the 2D scenes of
the world. For the time being, this research area mainly focuses
on object detection, object description and scene
comprehension. Therein, object detection serves for
accurate description of scene and is the basis of scene
description and comprehension. In turn, scene description
and comprehension provide priory knowledge for object
detection and guide the process by giving background
knowledge and context information. In the light of computers, image comprehension is to input the image
(mainly digital image) from vision via a series of
computational analysis and perceptive learning, which
outputs the detected objects in the scene and their
relations, while the overall description and
comprehension of the scene as well as the comprehensive
image semantic description. All in all, image content
detection and classification not only include the overall knowledge of an image, but also provide the context
under which the objects appear on it and thus lay the
foundation of further comprehension, which is widely
applicable to many aspects. When application is
considered, image classification techniques are nowadays
potentially applicable to a variety of areas, such as image
and video retrieval, computer vision and so on.
Image retrieval [2] based on content is the simplest and most direct application of object detection which can
provide effective aids and evidence for image information
retrieval and procession. With the popularization of
electronic digital cameras, the number of digital images
are increasing astonishingly and comprehension based on
objects is helpful to efficiently organize and browse
database, so the result of object detection is valuable to
image retrieval. Therefore, image classification and object detection have a promising application perspective.
Apart from the application on computer sciences such as
image engineering and artificial intelligence, its research
products can be applied to studies on human visual
system and its mechanism, the psychology and
physiology of human brain and so on. With the
development of interdisciplinary basic research and the
improvement of computer performance, image comprehension will be widely used in more complicated
JOURNAL OF MULTIMEDIA, VOL. 9, NO. 2, FEBRUARY 2014 269
© 2014 ACADEMY PUBLISHERdoi:10.4304/jmm.9.2.269-277

application. Image classification needs different kinds of
features to describe the image contents. Such
classification methods based on bottom features have
been studied for years in the area of image and video
retrieval. These works usually perform supervised
learning via images features such as colors, textures and
boundaries, and thus sort the images into different semantic classes.
The color [3] is an important feature of images and one
of the most widely used features in image retrieval. It is
usually highly emphasized and deeply studied. Compared
to geometric feature, the color is more stable and less
sensitive to the size and the orientation. In many cases, it
is the simplest feature to describe an image. Color
histogram is a widely used color feature in many studies on image content detection. The values in color histogram,
measured via statistics, show the numerical features about
colors in the image and reflect their statistical distribution
and the basic hues. The histogram only contains the
frequency that a certain color appears, but leaves out the
spatial information of a pixel. Each image corresponds to
a unique histogram, but different images may have the
same color distribution and therefore the same histogram. So there is a one-to-many relation between histograms
and images. Traditional color histogram only depicted the
ratio of the number of pixels of a certain color to that of
all pixels, which is only a global statistical relation. On
the other hand, color correlogram describes the
distribution of colors related to distances, which reflects
the spatial relations between pairs of pixels and the
distribution relations between local and global pixels. It is easy to calculate, restricted in range and well-performed,
so some researches use it as the key feature for describing
image content. The texture is also an important visual
feature for describing the homogeneity of images [4]. It is
used to depict the smoothness, coarseness and
arrangement of images and is not uniformly defined
currently. It is essentially the description of the spatial
distribution of pixels in neighboring grey space. The methods of texture description can be divided into four
classes: statistical, structural, modelling and frequency
spectral. Textures are often shown as locally irregular and
globally regular features, such as the highly textured
region on a tree and the vertical or horizontal boundary
information of a city. The texture reflects the structural
arrangement on the surface of an object and its relation
with the surrounding environment, which is also widely applied in content based image retrieval.
In the area of object detection, sometimes global
features such as colors and textures can not effectively
detect objects of the same kind. Objects with the same
semantic may have different colors, such as cars with
various colors. It is the same with cars of different
textures. Therefore, the shape has been paid more and
more attention. It is typically local feature that depict the shapes of objects in an image and generally are extracted
from the corners in the image, which keep important
information of the objects. And the features will not be
influenced by light and have important properties such as
spatial invariance and rotational invariance.
Due to the low accuracy of image object detection
based on global features, researchers have changed the
focus of research to local features of images recently.
There are three kinds of local features based on points,
boundaries and regions but most researches today focus
on those based on points. The extraction of local features
based on points is generally divided into two steps: 1) key point detection and 2) generation of feature descriptor.
Harris Corner Detector is a widely used method of key
point detection based on the eigenvalues of a two-order
matrix. However, it is not scale invariant. Lindeberg
forwarded the concept of automatic scale selection to
detect key points on the specific scale of the image. He
used Laplacian method of the determinant and trace of
Hessian matrix to detect the spotted structure in the image. Mikolajczyk [5] etc. improved this method by proposing
key points detector with robustness and scale invariance:
Harris-Laplace and Hessian-Laplace. They used Harris
method or the trace of Hessian matrix to select locations
and Laplacian method to select scales. Lowe [6]
employed a method similar to LOG operator, i.e.
Difference of Gaussians (DOG), to improve the detection
rate. Bay etc employed fast Hessian matrix for key points detection and further improved the detection rate.
Moment invariants and phased-based local features etc.
are the early feature descriptors, whose performances are
not satisfying. In later studies of descriptors, Lowe
proposed the famous scale invariant feature
transformation description. SIFT is proved to be the best
through literature. SIFT has many variants such as PCA-
SIFT [7], GLOH and so on, but their detective performances are not as good as SIFT. Bay etc. proposed
Speeded-up Robust Features (SURF) descriptor [8],
which describes Harris-wavelet responses with the key
point region. Although the detective performance of
SURF is slightly worse than SIFT, but it’s much faster
than the latter. SIFT and SURF are the most widely used
local features in researches on image content detection.
Bag of Visual Words model [9] is the most famous image classification method, which is derived from Bag
of Words model in text retrieval. Recently, Bag of Visual
Words model is extensively applied to quantitative local
features for image description and its performance is
good. However, it has two main limitations: one is that
this model leaves out the spatial information of images,
i.e. each block in an image is related to a visual word in
the word library, but its location in this image is neglected; the other is the method of presenting an image
block by one or several approximated visual words,
which is not accurate for image classification. Lazebnik
etc. proposed Spatial Pyramid Matching (SPM) [10]
algorithm to address the spatial limitation of Bag of
Visual Words model. This method divides an image into
several regions along three scales, and intertwines Bag of
Visual Words model with the local features of each regions, which in a way adds spatial information. Soft-
weighting method searches for several nearest words and
reduces greatly the increased value on each word, which
addresses the second limitation. However, the problems
270 JOURNAL OF MULTIMEDIA, VOL. 9, NO. 2, FEBRUARY 2014
© 2014 ACADEMY PUBLISHER

such as vocabulary generation and features coding still
confine the performance of image classification.
In the area of multi-kernel learning [11], many
researchers have applied this model to a variety of
algorithms, especially in the area of image object
detection. Bosch etc. described the shapes of objects in a
multi-kernel way under the frame of pyramid. Lampert etc. used multi-kernel method to automatically obtain a
strategy based sparse depending graph of a related object
class, which realized multi-object associative detection
and improved object detection rate. Considering the
strong distinguish ability of sparse classifier from multi-
kernel linear combination, Damoulas etc. performed fast
solution by combining multi object descriptors in feature
spaces. With the development of SVM theory, more attention
is paid to kernel method. It is an effective method to
solve problems in non-linear mode analysis. However, a
single kernel function often cannot meet complicated
application requirements for example image classification
and object recognition. It is also proved that multi-kernel
model performs better than sole-kernel models or their
combination. Multi-kernel model is a sort of kernel based on learning which is more flexible. The paper proposes a
weighed multi-kernel function, which is used in image
classification. Due to the weighted multi-kernel learning,
kernel function parameters can be better adjusted
according to images from different classes and the simple
BOVW histogram is substituted by pyramid histogram of
visual words (PHOW), which adds the ability of
distinguishing spatial distribution to the former. In this article, we research the popular algorithms in the area of
image classification and object recognition. And present
an image classification algorithm based on BOVW
models and multi-kernel. For feature extraction, we
employ D-SIFT which is robust, efficient and has more
extraction speed compared to traditional methods. For
feature coding, we using Bag of Words model and Spatial
Pyramid model, which is state-of-the-art method in the fields. For classifier, we are the first to forward the
weighed multi-kernel function. This function has
outperformed classification performance among multi-
kernel learning classifier based on Support Vector
Machine (SVM). The effectiveness of the methods in this
article is proved by experiments.
II. RELATED WORKS
A. SIFT Feature
In content based image classification, the principle
basis is the contents of the image. Results of
classification are given based on the similarity of image
contents, and image contents are described via image features. The extraction of visual features is the first step
to image classification and the basis of image content
analysis. It exists in all processing procedures in image
analysis and influences directly the ability of describing
image. Therefore, it makes a huge difference to the
quality of further analysis and the effectiveness of
application systems.
SIFT operator is an image local feature descriptor
forwarded by David G Lowe in 2004. It is one of the
most popular local features, based on scale space and
invariant to scaling, rotation and even affine
transformation. Firstly, SIFT algorithm detects features in
the scale space and confirms the location and scale of key
points. Then, it sets the direction of gradient as the direction of the point. Thus the scale and direction
invariance of the operator are realized. SIFT is a local
feature, which is invariant to rotation, scaling and change
of light and stable in a certain extent of changes in visual
angle, affine transformation and noise. It ensures
specificity and abundance, so it is applicable to fast and
accurate matching among mass feature data. Its large
quantity ensures that even a few objects can generate a number of SIFT features, high-speed satisfies the
requirement of real-time, and extensibility makes it easy
to combine with other feature vectors.
For an image, the general algorithm to calculate its
SIFT feature vector has four steps:
(1) The detection of extreme values in scale space to
tentatively determine the locations and scales of key
points. During this process, the candidate pixel need to be compared with 26 pixels, which are 8 neighboring pixels
in the same scale and 9×2 neighboring pixels around the
corresponding position of adjacent scales.
(2) Accurately determine the locations and scales of
key points via fitting three dimensional quadratic
functions, meanwhile delete the low-contrast key points
and unstable skirt response points (for DOG algorithm
will generate strong skirt responses). (3) Set the direction parameters for each key point via
the direction of gradient of its neighboring pixels to
ensure the rotation invariance of the operator. Actually,
the algorithm samples in the window centered at the key
point and calculate the direction of gradient in the
neighboring area via histogram. A key point may be
assigned to several directions (one principal and more
than one auxiliary), which can increase the robustness of matching. Up to now, the detection of key points is
completed. Each key point has three parameters: location,
scale and direction. Thus an SIFT feature region can be
determined.
(4) Generation of SIFT feature vector. First of all,
rotate the axis to the direction of key point to ensure
rotation invariance. In actual calculation, Lowe suggests
to describe each key point using 4×4 seed points to increase the stability of matching. Thus, 128 data points,
i.e. a 128-dimensional SIFT vector, are generated for one
key point. Now SIFT vector is free from the influence of
geometric transformations such as scale changes and
rotation. Normalize the length of the feature vector, and
the influence of light is eliminated.
B. Bag of Visual Words Model
With the widely application of local features in
computer vision, more attention is placed on methods of
local feature based image classification. When extracting
local features, the number of key point varies in different
images, so machine leaning is infeasible. To overcome these difficulties, researchers such as Li-feifei from
JOURNAL OF MULTIMEDIA, VOL. 9, NO. 2, FEBRUARY 2014 271
© 2014 ACADEMY PUBLISHER

Stanford University were the first to phase Bag of Words
model into computer image process as a sort of features
[12]. Using Bag of Words model in image classification
not only solves the problem brought by the disunity of
local features, but also brings the advantages of easy
expression. Now the method is extensively used in image
classification and retrieval [13]. The main steps are as following:
(1) Detect key points though image division or random
sampling etc.
(2) Extract the local features (SIFT) of the image and
generate the descriptor.
(3) Cluster these feature related descriptor (usually via
K-means) and generate visual vocabulary, in which each
clustering center is a visual word. (4) Summarize the frequency of each visual word in a
histogram.
Images are presented only by the frequency of visual
words, which avoids complicated calculation during
matching of image local features and shows obvious
superiority in image classification with a large number of
classes and requiring a lot of training. Despite the
effectiveness of image classification based on Bag of Words model, the accuracy of visual vocabulary directly
influences the precision of classification and the size of
vocabulary (i.e. the number of clusters) can only be
adjusted empirically by experiments. In addition, Bag of
Words model leaves out spatial relations of local features
and loses some important information, which causes the
incompleteness of visual vocabulary and poor results.
C. SVM and Multi-Kernel Learning Method
Support Vector Machine (SVM) was a major
achievement in machine learning proposed by Corte and
Vapnik in 1995 [14]. It was developed from VC
dimension theory and structural risk minimization in statistical learning, rather than empirical risk
minimization in traditional statistics. The excellence of
SVM is its ability to search for the optimal tradeoff
between complicated model and learning ability to reach
the best extensibility based on limited sample information.
With the development of researches, multi-kernel
learning has become a new focus in machine learning.
The so-called kernel method is effective to solve problems in non-linear mode analysis. However, in some
complicated situations, sole-kernel machine cannot meet
various and ever-changing application requirements, such
as data isomerism and irregularity, large size of samples
and uneven sample distribution. Therefore, it is an
inevitable choice to combine multiple kernel functions for
better results. In addition, up to now there is no complete
theory about the construction and selection of kernel functions. Moreover, when facing sample isomerism,
large sample, irregular high-dimensional data or uneven
data distribution in high-dimensional feature space, it is
inappropriate to employ a simple kernel to map all
samples. To solve these problems, there are a large
number of recent researches on kernel combination, i.e.
multi-kernel learning.
Multi-kernel model is a sort of kernel based learning which is more flexible. Recently the interpretability of
substitution of sole kernel by multi-kernel has been
proved by both theories and applications. It is also proved
that multi-kernel model performs better than sole-kernel
models or their combination. When constructing multi-
kernel model, the simplest and most common method is
to consider the convex combination if basic kernel
functions, as:
1 1
0, 1M M
j j j
j j
K k
(1)
In this formula, kj is a basic kernel function, M is the
total number of basic functions, βj is the weighing factor.
Therefore, under the frame of multi-kernel function, the
problem of presenting samples in the feature space is
converted to the selection of basic kernels and their
weighs. In this combined space constructed from multiple
spaces, the selection of kernels as well as parameters and
models related kernel target alignment (KTA) is addressed successfully because the feature mapping
ability of every kernel is utilized. Multi-kernel learning
overcomes the shortcomings in sole-kernel function, and
has become a focus in machine learning.
III. IMAGE CLASSIFICATION BASED ON MULTI-KERNEL
In this article, images are presented by Dense Scale-
invariant Feature Transformation (D-SIFT) combined
with Bag of Words model. Here BOVW word library is a visual word library constructed on the basis of D-SIFT.
Related library is trained according to each image
semantic to get the proper description. Then the features
are organized via Spatial Pyramid. Next the results are
given by the classifier in this article, which is generated
from the combination of general kernel and multi-kernel
learning. This method can commendably extract from
features the spatial information contained in the semantic and optimize the parameter selection in kernel functions.
The experiments are tested on Caltech-101 image dataset
and include the comparisons on operational speed, size of
Bag of Words and kernel functions. The final results
show that this classification method based on general
kernel function is effective in image classification and
performs better than present algorithms of the same kind.
A. Feature Extraction and Organization
The algorithm uses D-SIFT feature extracted from
grids. It is similar in properties with SIFT feature, except
for the key point detection method during feature
extraction. During key point detection, in SIFT the first step is to detect key point in scale space, which is usually
Gaussian Feature Space, then the location and scale of a
key points are determined, and finally the direction of a
key point is set as the principal direction of gradient in its
neighboring region, thus the scale and direction
invariance of the operator are realized. However, a large
amount of calculation is involved in this process, and
plenty of time is spent on searching and comparison during Gaussian difference space calculation and extreme
value detection in Gaussian difference space. These
calculations are costly in situations with low scale and
direction invariance. For example, when classifying
272 JOURNAL OF MULTIMEDIA, VOL. 9, NO. 2, FEBRUARY 2014
© 2014 ACADEMY PUBLISHER

Caltech-101 images, the images in this dataset are
preprocessed so that objects are rotated to the right
orientation. D-SIFT algorithm has two important features.
First of all, it is free from extreme detection in Gaussian
difference space because it is extracted from grids, so the
algorithm can skip a time-consuming step during
calculation. Secondary, rotational normalization is no longer needed owing to the lack of extreme detection.
Thus it is free of rotational calculation during direction
extraction, and only operations on the proper grids in the
original images are needed.
Generally, when extraction D-SIFT descriptor, features
are calculated on grids separated by M pixels (M is
typically 5 to 15) and calculations are performed on
several values respectively. For each SIFT grid, extract SIFT feature in the circle block centered on the grid with
the radius of r pixels (r is typically 4-16). Similar to
normal SIFT, a 128-dimensioanl SIFT feature is
generated. SIFT is a local feature, which is invariant to
rotation, scaling and change of light and stable in a
certain extent of changes in visual angle, affine
transformation and noise. It ensures specificity and
abundance, so it is applicable to fast and accurate matching among mass feature data. As a variant of SIFT,
D-SIFT can greatly increase the efficiency as well as
maintain the former invariance.
In traditional SIFT algorithm, massive features will be
extracted from each image after key point detection in
Gaussian feature space. In D-SIFT, although key point
detection is not needed and feature extraction is carried
out according to fixed intervals and scales, there are still a large number of SIFT features in an image, which are
even munch more than traditional SIFT algorithm. The
organization of these features is critical for the following
procedures such as machine learning and classification.
Bag of Words model at first appeared in text detection
and have achieved great success in text processing.
Probabilistic Latent Semantic Analysis model mines the
concentrated theme from the text via non-supervise methods, i.e. it can extracts semantic features from
bottom. Bag of Words model neglects the connections
and relative positions of features. Although this results in
the loss of some information, but it makes model
construction convenient and fast. Traditional
neighborhood feature extraction techniques in images and
videos mainly focus on the global distributions of colors,
textures, etc. from the bottom layer, such as color histogram and Gabor Filter. For a specific object, always
only one feature vector is generated, and Bag of Words
model is not necessary in such application. However,
recent works have showed that global features alone
cannot reflect some detailed features of images or videos.
So more and more researchers have proposed kinds of
local features, such as SIFT. This feature descriptor of
key points are effective in local region matching, but when applied to global classification, the weak coupled
features of each key points cannot effectively represent
the entire image or video. Therefore researchers have
phased Bag of Words model from text classification into
image description. The analysis of the relation between
text classification and image classification is helpful to
adapt all kinds of mature methods in the former to the
latter. Comparing text classification to image
classification, we assume that an image contains several
visual words, similar to a text containing several text
words. The values of key points in an image contain
abundant local information. A visual word is similar to a word in text detection. Clustering these features into
groups so that the difference between two groups is
obvious, and the clustering center of each group is a
visual word. In other images, group the extracted local
features according to the distance of words and a specific
feature vector of an image is generated based on a
particular group of words. Such descriptive method is
suitable to work with linear classifiers such as SVM. In this method, we at first summarize D-SIFT features
formerly extracted, and then obtain the centers of Bag of
Words via K-means, which reflect the spatial aggregation
of D-SIFT features and meanwhile serve as the Bag of
Words basis for training and test samples. According to
the algorithm in the article, the image features are shown
as the histogram vector of these Bags of Words.
B. Kernel Function and Classifier Designing
With the development of SVM theory, more attention
is paid to kernel method. It is an effective method to
solve problems in non-linear mode analysis. However, a
single kernel function often cannot meet complicated application requirements. Thus more people have started
to combine multiple kernel functions and multi-kernel
learning method has become a new focus in machine
learning. Multi-kernel model is a sort of kernel based
learning which is more flexible. Recently the
interpretability of substitution of sole kernel by multi-
kernel has been proved by both theories and applications.
It is also proved that multi-kernel model performs better than sole-kernel models or their combination. Kernel
learning can effectively solve the problems of
classification, regression and so on, and it has greatly
improved the performance of classifier. When
constructing multi-kernel model, the simplest and most
common method is to consider the convex combination if
basic kernel functions, as:
1
( , ) ( , )F
m m
m
k x y k x y
(2)
In this formula, km(x, y) is a basic kernel function, F is
the total number of basic functions, βm is the related
weighing factor and the object to be optimized. This
optimization process can be constructed via Lagrange
function.
Multi-kernel learning automatically works out the
combination of kernel function during the training stage.
It can optimize combinatory parameters of kernel function in SVM. First of all, extracting features from the
input data. Then perform spatial transformation to these
features by mapping them to the kernel function space,
which is the same as in traditional SVM kernel function.
The third step is to summarize all former features by
combinatory parameters β1, β2…βM and get the combined
JOURNAL OF MULTIMEDIA, VOL. 9, NO. 2, FEBRUARY 2014 273
© 2014 ACADEMY PUBLISHER

kernel through linear combination. At last, classification
or regression is complete by classifier and the final result
is given. In traditional SVM, the most common kernel
function is Radial Basic Kernel function, also called
Gaussian Kernel function, which is:
2
1
( , ) exp( ( ) )n
i i
i
k x y x y
(3)
Gaussian kernel function treats each dimension of feature x and y equally and often cannot represent the
inner structure of features. Multi-kernel learning theory
can solve this problem. For Multi-kernel learning,
suppose divide a pyramid feature into m blocks, each of
the length L so that n=ML. Here each block corresponds
to a block in certain layer of grid in the pyramid. Assign
the initial values d1, d2…dm to the blocks, then the
following Gaussian Kernel function is obtained:
2
1 ( 1) 1
( , ) exp( ( ) )m iL
i k k
i k i L
k x y d x y
(4)
In Gaussian Multi-kernel learning, sum of RBF and
product of RBF are two common kernel functions, they
are shown as following:
2
1
( , ) exp( ( ) )n
i i i
i
k x y d x y
(5)
2
1
( , ) exp( ( ) )n
i i i
i
k x y d x y
(6)
Due to the introduction of multi-kernel learning, image
classification can better adjust kernel function parameters according to different semantic of images. So in many
occasions, the simple BOW histogram is substituted by
Pyramid Histogram of Visual Words (PHOW), which
added the ability of distinguishing spatial distribution to
the former spatial disorder features in the histogram.
Meanwhile, the former ordinary kernel function is
substituted by corresponding Pyramid matching kernel
function during training, and training and test are performed by multi-kernel classifier. The histogram of
visual words in this method presents images as the
histogram of a series of visual key words, which are
extracted from D-SIFT features of training images via K-
means. Then a series of key words of different resolution
are extracted via pyramid method to get the structural
features of the images. In pyramid expression, an image
is presented in several layers, each containing some feature blocks. Therein, the feature block of the 0th layer
is the image itself, and in the latter layers until the Lth
layer, each block of the previous one is divided into four
non-overlapping parts. At last, join the features of each
block together as the final descriptor. In pyramid model,
the feature of the 0th layer is presented by a v-
dimensional vector, corresponding to V blocks in the
histogram, then that of the 1th layer is presented by a 4v-dimensional vector, and so forth. For the PHOW
descriptor of the Lth layer, the dimension of feature vector
is 0
4L
i
i
V
. To better reveal the pyramid features, the
sparse blocks at the bottom are assigned with larger
weights in Pyramid matching kernel function, and the
dense blocks at the top with smaller ones. Setting Hxl and
Hyl as the histogram of x and y in the Ith layer and
presenting the number of x and y in the ith block of the
histogram by sums, then the total number of matches of the histogram orthogonal kernel in D blocks is:
1
( , ) min( ( ), ( ))D
l l l l
x y x y
i
L H H H i H i
(7)
The matches found in the Ith layer are also found in the
I+1th layer, so the number of new matches should be Ll-
Ll+1. Simplify L(Hxl, Hy
l) as Ll and assign its weight as
1/2L, which is reciprocal to the width of this layer. All in
all, the final version of pyramid kernel matching function
is:
0
11
1 1( , )
2 2
LL l
L L li
k x y L L
(8)
By now, this article has proposed a generalized
Gaussian Combinatory kernel function on the basis of
present kernel function, according to the properties of
multi-kernel functions and the distinguish ability of
pyramid features in image spatial information. This
method provides traditional pyramid kernel function with fixed weight distribution and obtains the integration
parameters of each part automatically via multi-kernel
learning. The kernel function in Formula (4) has more
parameters than traditional function, but it leaves out the
inner structure of features and is determined only via the
relations between blocks. In Formula (5) and (6), the
weight of each dimension in the feature in considered in
the kernel function, but the structure of blocks are neglected. Integrating the advantages of both kernel
functions, we have proposed a generalized Gaussian
combinatory kernel function. It comprehensively takes
block relations and inner structures into consideration,
and the integration parameters are given automatically by
multi-kernel learning classifier. In this function, n+m
parameters are taken for optimization. Therein, d1, d2…dn
are the weights among each feature block, and dn+1, dn+2…dn+m are those between different blocks. The
function is shown as:
2
1
( , ) exp( ( ) )m
n i i i i
i
k x y d x y
(9)
As shown in the above formula, this kernel function
essentially combined Gaussian Sum and Gaussian
Product. Meanwhile, it takes the inner structure of
features into consideration and distinguishes geometric
presentations of images via blocks. The function has simplified calculation as well as observes Mercer
Condition.
274 JOURNAL OF MULTIMEDIA, VOL. 9, NO. 2, FEBRUARY 2014
© 2014 ACADEMY PUBLISHER

C. Image Classification Algorithm in This Article
In this section, we will introduce the overall
framework of image classification system. In this
framework, we extract D-SIFT feature from an image, organize it via BOW method and obtain the final blocked
histogram descriptor via Spatial Pyramid model. During
the training stage, generalized Gaussian Combinatory
Kernel function is employed and combined with Gaussian
Multi-kernel learning classifier for classification. The
procedure of the algorithm is:
1. Divide an image into grids and extract D-SIFT feature;
2. Obtain the vocabulary via K-means training;
3. Organize the statistical histogram of D-SIFT by
Spatial Pyramid model;
4. Process the former features via generalized Gaussian
Combinatory Kernel function;
5. Use GMKL as classifier, optimize kernel function
parameters and obtain the final classifier. In this method, the first step is to extract D-SIFT
feature. Compared to traditional SIFT feature, it is free
from key point detection and grids are drawn as
extraction regions, which is more efficient. During D-
SIFT extraction of our experiments, the sizes of grids are
set to 4, 8, 12 and 16 pixels, increasing 10 pixels each
time. Then, Bag of Words method is applied. In this
method, all previous image features are clustered via K-means to get the center of every cluster. There are c=300
centers, so in the end we obtain the feature vocabulary
with the length of 300. After the generation of the
vocabulary, we organize the features via Spatial Pyramid
model mentioned previously and assign corresponding
weights so that the histograms of large blocks are
assigned with large weights and that of small blocks with
small weights. In the experiments, set L to 2 so there are 3 layers and 21 feature blocks during classification. Next,
process the spatial pyramid histograms previously
generated via generalized Gaussian Combinatory Kernel
function. The parameters are undefined, so the calculated
kernel function needs optimization, which is combined
with GMKL classifier. Optimize the selected kernel
function by gradient descent algorithm step by step, and
finally obtain the optimal solution and corresponding SVM model. Up to now, the training process is
completed. The feature extraction step is the same in
testing process, and the same vocabulary is used in BOW
feature summarization. For different semantic, use
different kernel function parameters and SVM model for
judgment and get the final results.
IV. STIMULATORY EXPERIEMNTS AND ANALYSIS
The dataset used in these experiments is Caltech-101 collected by Professor feifei Li from Princeton University
in 2003. It contains 101 groups of objects, each consists
of 31 to 800 images and the resolution of most images is
300×200 pixels. This dataset features in big intergroup
difference and is used by many researchers to test the
effectiveness their algorithms. In experiments, we
analyze the time consumption of our algorithm at first.
Then, we test on the size of vocabulary and pick out a
proper size. Next, we compare the combinatory kernel
function we have proposed with the original one. Finally,
we test our algorithm on the entire Caltech-101 dataset,
selecting respectively 15 and 30 images from each group
for training and conducting the test.
In the experiments, we extract features via the open-
source library Vlfeat [15]. It is an open-source image processing library established by Andrea Vedaldi and
Brian Fulkerson and contains some common computer
vision algorithms such as SIFT, MSER, K-means and so
on. The library is realized in C and MATLAB, C
Language is more efficient and MATLAB more
convenient. Vlfeat 0.9.9 is used in the experiment and we
mainly use SIFT algorithm realized in MATLAB and K-
means algorithm for clustering. As mentioned before, we select GMKL (Generalized
Multiple Kernel Learning) open-source library written by
Marnik Varma as the multi-kernel classifier for
classification learning. This library is realized in
MATLAB and consists of two files. The most import part
of the algorithm is obtaining the optimal kernel function
by gradient projection descent method. It is called by
another top-layer file, which contains some kernel functions, such as Sum of Gaussian Kernel function,
Product of Gaussian Kernel Function, Sum of
Recomputed Kernel function, Product of Exponential
Kernel of Recomputed Distance Matrix. We add the self-
designed kernel function for better results. The libraries
used in this experiment are coded in MATLAB and
provided with interfaces, so we conduct the entire
experiment in MATLAB Version 7.12.0.635 (R2011a).
A. Calculating Speed Analysis
We compare our kernel function with existing ones in
same conditions. In this experiment, the CPU is Intel(R)
Core(TM) i5-2410M with dual cores of 2.30-2.80GHz, the Memory is 8.00GB and the OS is Windows 7
Ultimate. First of all, we measure and compare the
training duration of every group of images, and average
them to get the following data:
TABLE I. TIME CONSUMPTIONS OF DIFFERENT ALGORITHMS
Kernel function Training time(s)
GGC 63.4
Sum of RBF 45.5
Product of RBF 43.7
This tables shows that the time consumption of Sum of
RBF and Product of RBF is nearly the same, they are
45.5s and 43.7s respectively, while that of GGC, 63.4s, is
slightly higher than the former two but still in the same
level. To improve the accuracy, the algorithm proposed in
this article includes more weighting factors. It is shown in
Formula 12 that it has more weighting factors than other
two algorithms and the exceeding parameters are those
for feature blocks. The first two algorithms are merely the
exchange of addition and multiplication and the there is
no need of additional operation when calculating kernel
functions and gradients, so it consumes more time than the former. Even though, the time consumptions of these
algorithms are at the same level and stay stable to the
JOURNAL OF MULTIMEDIA, VOL. 9, NO. 2, FEBRUARY 2014 275
© 2014 ACADEMY PUBLISHER

introduction of more calculations. Because their
complexity is on the same level, we will compare their
effectiveness from accuracy of classification.
B. Relationship Between Size of Vocabulary and
Accuracy
Randomly select some image from the dataset and
calculate the D-SIFT feature vectors of all key points.
Cluster these vectors via k-means and get the clustering
centers as words. Each cluster center is a word, and the
size of Bag of Words is determined by the number of K-
means clusters. The number of words has a huge influence on the accuracy of final results, so in this
section we focus on the selection of proper size of
vocabulary. In this experiment, we randomly pick two
images from each of the first 10 groups in Caltech-101
for feature extraction. We test in small dataset and sum
up the D-SIFT features of these images in all scales as the
input for K-means clustering. Employing the
classification framework proposed in this article to different sizes, we test six different sizes of vocabularies
(50, 75, 150, 300, 500 and 800) and observe the influence
of size to the accuracy of results.
TABLE II. THE RELATION BETWEEN SIZE OF VOCABULARY AND
AVERAGE ACCURACY
Size of Vocabulary Average accuracy
50 84.65%
70 84.89%
150 85.77%
300 88.23%
500 87.60%
800 87.41%
The above table shows that the accuracy of
classification varies with the change in vocabulary size.
When the size is small, the accuracy increases as the size increases; when the size is large, the accuracy decrease as
the size increases. In this change that first increases then
decreases, it is shown that when the size reaches 300, we
can get the maximum accuracy of 88.23%. The data show
that generally speaking, the larger the vocabulary is, the
longer the histogram becomes, which will increase the
amount of calculation and slow down the operation.
Meanwhile, over large vocabulary will cause the over dense of clustering centers and assign the same sort of
key points into different groups, i.e. different words, thus
the images will not be well presented. In contrast, too
small vocabulary size will cause under fitting that many
features are not well separated but rather grouped in to
one BOVW block, which will influence the accuracy of
classification. Therefore, we select 300 as the size of
vocabulary to trade off efficiency and accuracy and reach the optimal classification results without too large amount
of calculation. The data show that only when the size of
vocabulary is 300, the accuracy is 88.23%, which is over
88%. The accuracies under other vocabulary sizes are all
less than 88%.
C. Comparing with the Existing Kernel Function
We compare GCC kernel proposed in this article with
Sum of Gaussian Kernel and Product of Gaussian Kernel
using the same overall framework and features. In this
experiment, we select the first 10 groups in Caltech-101
for comparison and focus on the groups on which our
kernel function has better optimization and classification
results. These 10 groups are: Background Google, Faces,
Faces Easy, Leopards, Motorbikes, Accordion, Airplanes,
Anchors, Ants and Barrels. The results are shown in
Table 3:
TABLE III. THE AVERAGE CLASSIFICATION ACCURACIES OF THREE
METHODS (%)
Kinds of classifier GGC Sum of RBF Product of RBF
Background Google 69.4 74 74.2
Faces 81.2 81.3 80.3
Faces_easy 90 86.3 86.7
Leopards 95 94.3 94.3
Motorbikes, 92.4 87.2 87.4
Accordion 99.4 98.6 98.6
Airplanes 95.8 91.7 91.7
Anchors 85 87.4 87.4
Ants 83.5 83.5 83.5
Barrels 87.6 87.6 87.6
The above table shows that the accuracies of kernel
function in proposed in this article is maintained in many groups, which proves that this method can maintain the
effectiveness of traditional methods (Sum of Gaussian
and Product of Gaussian). On the other hand, its
accuracies have been improved in many groups.
Regarding Faces Easy, Motorbikes and Airplanes,
experimental data show that our method of GGC Kernel
function has increased the accuracies greatly
from86.3%(86.7%) and87.2%(87.4%) to 92.4%, 91.7%(91.7%) to 95.8%. After observation on the three
groups of images, we can discover that the common
feature of them is that the objects in those images remain
at a certain position. In these cases, our kernel function
has certain advantages in region matching due to the
combination with pyramid model. So generalized
Gaussian Combinatory Kernel function has exceeding
advantage when deal with such problems. For other groups, the results of different kernel functions are
basically the same, except for the first group Background
Google, whose result of our method is slightly worse than
other two methods. Nevertheless, this group is typically
selected as reference and barely has classification value.
As to the overall accuracy, GGC is 87.79%, which is
higher than other two. The accuracy of Sum of Gaussian
is 86.97% and that of Product of Gaussian is 86.91%.
D. Comparing with the Existing Image Classification
Algorithm
Many researchers use Caltech-101 as the testing
dataset of their algorithms, so we can conveniently compare our algorithm to others. In [16] the author
designed an image presentation method with high
discovery rate and robustness, which integrated a number
of shape, color and texture feature. In the article, a variety
of classification models were compared, including basic
methods and some multi-kernel learning methods. This
method was aimed at searching for the combinations of
different training data features, in which Boosting reached the best result. In [12] the extraction of middle
layer features is divided in two steps, i.e. coding and
276 JOURNAL OF MULTIMEDIA, VOL. 9, NO. 2, FEBRUARY 2014
© 2014 ACADEMY PUBLISHER

pooling. In the article, the combination of several
methods was tested regarding the two parts, for example
Hard Vector Quantization, Soft Vector Quantization,
Sparse Coding, Average Pooling and Maximum Pooling.
The best result was reached under the combination of
Sparse Coding and Maximum Pooling. In [13] a method
derived from Spatial Pyramid Matching was proposed. It combined the Spatial Pyramid of images with the Sparse
Coding presenting the SIFT vector, which can eliminate
the base limitation of vectorization. We have compared
our method to those with best results in researches and
proved the effectiveness of our method. In this
experiment, we select respectively 15 and 30 images from
each group of Caltech-101 dataset, calculate the average
accuracy and compare it with other method. The results are shown as follows:
TABLE IV. THE COMPARISON OF AVERAGE DETECTION RATES
Algorithms 15 images per class 30 images per class
LP- 71% 78%
Sparse 73.3% 75.4%
ScSPM 70.8% 73.2%
GGC 81.9% 83.6%
V. CONCLUSIONS
In this article we have propose an image classification
algorithm based on Bag of Visual Words model and
Multi-kernel learning. It is relatively efficient during
classification and can well present the spatial information
contained in Spatial Pyramid features. We use D-SIFT
feature as an example to construct image word
vocabulary and form Bag of Words to describe the
images. It has been proved by experiments that our algorithm is not only highly efficient, but also more
accurate than previous algorithm during detection.
ACKNOWLEDGEMENT
The word was supported by the Foundation of National
Natural Science of China (30972361), Zhejiang province
department of major projects (2011C12047), Zhejiang
province natural science foundation of China (Y5110145).
REFERENCES
[1] Datta R, Joshi D, Li J, et al, “Image retrieval: Ideas,
influences, and trends of the new age”, ACM Computing Surveys, vol. 40, no. 2, pp. 1-60, 2008.
[2] Rui Y, Huang T S, Chang S F, “Image retrieval: Current techniques, promising directions, and open issues”,
Journal of Visual Communication and Image Representation, vol. 10, no. 1, pp. 39-62, 1999.
[3] Van de Sande, K. E. A, Gevers, T. & Snoek, C. G. M. Evaluation of color descriptors for object and scene recognition. In Proceedings of the IEEE conference on computer vision and pattern recognition, 2008.
[4] Frances J. M., Meiri A. Z., Porat B. A., Unified texture model based on a 2D world-like decomposition. In: IEEE Trans. On Signal Processing, vol. 41, no. 8, pp. 2995-2687, 1993.
[5] Kristina Mikolajczyk, Cordelia Schmid. “A Performance Evaluation of Local Descriptors”, IEEE Trans. on Pattern Analysis and Machine Intelligence (S0162-8828), vol. 27,
no. 10, pp. 1615-1630, 2005. [6] Lowe D. G. Distinctive image features from scale-invariant
keypoints, In: Proceedings of International journal of computer vision, vol. 60, no. 2, pp. 91-110, 2004.
[7] Ke Y. Sukthankar R. PCA-SIFT. A more distinctive representation of local image descriptors. In Proceedings of IEEE Conference on Computer Vision and Pattern Recognition, Washington DC, USA, pp. 506~513, 2004.
[8] Viola P, Jones M J. Robust Real-Time Face Detection, International Journal of Computer Vision, vol. 57, no. 2, pp. 137 -154, 2004.
[9] G. Csurka, C. R. Dance, L. Fan, J. Willamowski, and C.
Bray Visual categorization with bags of keypoints, In workshop on Statistical Learning in Computer Vision, ECCV, pp, 1-22, 2004.
[10] Lazebnik, S., Schmid, C., Ponce. J. Beyond bags of features: Spatial pyramid matching for recognizing natural scene categories, Proceedings of the IEEE Computer society Conference on Computer Vision and Pattern Recognition, pp. 2169-2178, 2006.
[11] Lanckriet, G. R. G., Cristianini, N., Bartlett, P. learning the kernel matrix with semidefinite programming, In: Journal of Machine Learning Research, JMLR. Org, 2004, 5.
[12] LI. Fei-fei, FERGUS R, PERONA P. Learning generative visual models from few training examples: an incremental Bayesian approach tested on 101 object categories, In IEEE Conference on Computer Vision and Pattern Recognition, 2004.
[13] E. Nowak, F. Jurie, B. Triggs. Sampling strategies for bag-of-features image classification, In Proceedings of European Conference on Computer Vision, pp. 490-503, 2006.
[14] Vanpik, V. N., The Nature of Statistical Learning Theory. Springer Verlag, New York. 2000.
[15] Vedaldi, A., and Fulkerson, B. VLFeat: An open and portable library of computer vision algorithms. http://www. vlfeat. org/, 2010.
[16] Gehler, P., Nowozin, S. On feature combination for multiclass object classification, In: 2009 IEEE 12th International Conference on Computer Vision, pp. 221-228, 2009.
JOURNAL OF MULTIMEDIA, VOL. 9, NO. 2, FEBRUARY 2014 277
© 2014 ACADEMY PUBLISHER

Clustering Files with Extended File Attributes in
Metadata
Lin Han 1, Hao Huang
2*, Changsheng Xie
2, and Wei Wang
1
1. School of Computer Science & Technology/Huazhong University of Science & Technology, Wuhan, P. R. China 2. Wuhan National Laboratory for Optoelectronics/Huazhong University of Science & Technology, Wuhan, P. R. China
*Corresponding Author, Email: [email protected], {thao, cs_xie}@hust.edu.cn, [email protected]
Abstract—Classification and searching play an important
role in modern file systems and file clustering is an effective
approach to do this. This paper presents a new labeling
system by making use of the Extended File Attributes [1] of
file system, and a simple file clustering algorithm based on
this labeling system is also introduced. By regarding
attributes and attribute-value pairs as labels of files,
features of a file can be represented as binary vectors of
labels. And some well-known binary vector dissimilarity
measures can be performed on this binary vector space, so
clustering based on these measures can be done also. This
approach is evaluated with several real-life datasets, and
results indicate that precise clustering of files is achieved at
an acceptable cost.
Index Terms—File Clustering; Extended File Attributes;
File System; Binary Vector; Dissimilarity Measure
I. INTRODUCTION
The cost of storage devices was decreased dramatically in recent years, and the highly extendable network
storage services, such as cloud storage services are
becoming more and more popular today. It's common to
find a PC with TBs of local storage and also TBs of
network storage attached. An individual can easily access
a massive storage space which was only available in
mainframe computers 10 years ago, and have millions of
documents, pictures, audio and video files stored in it. This leads to an increasing requirement of classification
and searching services in modern file system. Because
traditional directory based hierarchical file system was
not capable to organize more than millions of files
efficiently. People will easily forget the actual path of a
file which was saved months ago, unless the names of
files and directories which included these files are
carefully designed. So modern file systems provide classification and searching functions more or less, but
they are usually very simple, only basic functions are
built-in in these file systems, such as searching by file
name, type and modification time, etc. For example,
indexing and searching services in most modern
operating systems, such as Windows and Linux, will
index and search files by their file name, file type suffix
and last modification time, some higher version of these operating systems will even index full text of all text
based files. But for those digital media files, which
usually occupied most space of a file system, they can do
nothing more, because it is very hard to extract semantics
from digital media data.
Some sophisticated indexing and searching systems
were built to solve this problem, but they usually rely on
extended database or specified file formats. For example, some popular digital audio player software include a
media library function, which provide indexing and
searching service on all digital audio files in file system,
such as MP3, WMA and OGG files. This audio file
indexing and searching service usually rely on
information extracted from certain tags in head of
specified audio file format. These tags enhance semantics
of digital media files and make them easier to be indexed and searched. Chong-Jae Yoo and Ok-Ran Jeong
proposed a categorizing method for searching multimedia
files effectively while applying the most typical
multimedia file called podcast file [2]. Jiayi Pan and
Chimay J. Anumba presented a semantic-discovery
method of construction project by adopting semantic web
technologies, including extensible markup language
(XML), ontology, and logic rules [3]. This is proved to be helpful to manage tremendous amount of documents in a
construction project, and provide semantic based
searching interface. All these system need specified file
formats and external descriptive files to store and extract
semantics. Some recent researches are trying to improve
indexing and searching performance by implementing
semantic-aware metadata in new types of file systems. Yu
Hua and Hong Jiang proposed a semantic-aware metadata organization paradigm in next-generation file systems [4],
and performance evaluation shows that it has a promising
future. But as next-generation file systems need years to
be adopted by mainstream market, we still need a better
solution that can be applied in currently running file
systems.
This paper introduces an extended labeling system
(XLABEL) of files, and it can be applied in any modern file systems which supported Extended File Attributes
(XATTR) [1]. Classification and searching functions can
be realized in this labeling system by clustering files with
the labels in XATTR. XLABEL regards attributes and
attribute-value pairs in XATTR as labels of files, so the
presence of a certain label in the XATTR of a file is a
binary variable, and the features of a file can be
represented as a binary vector of labels. Some well-known binary vector dissimilarity measures can be
278 JOURNAL OF MULTIMEDIA, VOL. 9, NO. 2, FEBRUARY 2014
© 2014 ACADEMY PUBLISHERdoi:10.4304/jmm.9.2.278-285

performed in this binary vector space, such as Jaccard,
Dice, Correlation, etc., and clustering based on these
measures can be done also. This approach is evaluated
with some well-known real life datasets, and proven to be
precise to cluster files, although the algorithm is
somewhat time-intensive, and future optimization is
required. The rest of the paper is structured as follows: Section 2
introduces the labeling system in extended file attributes.
Section 3 presents a simple approach to clustering file
with the labeling system introduced in section 2 and
section 4 shows the evaluation experiments did on the
approach and the evaluation results is presented. Section
5 briefly concludes the work of the paper.
II. LABELING FILES WITH EXTENDED FILE
ATTRIBUTES
Classification and searching of data need features
extracted from data previously. For files in a file system,
properties such as file name, format, length, and creating
time are all features of files, and they are usually stored in
metadata of files. In most file systems, the metadata of a
file is called an "inode". It keeps all basic properties
which the operation system and users have to maintain for a file. It's very useful for file system and operation
system, but not enough for any meaningful classification
and searching operation. Because it lacks of properties of
file contents, and when a user wants to classify files or
search for a file, it is usually content based. So we need
additional content based features to classify and search
for files. These features are highly variable, so it's
impossible to store them in strictly structured "inode". Many sophisticated indexing systems rely on external
database or special format of files to store these content
based features.
Some modern file systems support a feature called
Extended File Attributes (XATTR), which allows user
defined properties associated with files. We can create a
labeling system by using this feature. And all content
based features extracted from files or given by user and user programs can be saved as labels in XATTR.
A. Extended File Attributes
Extended File Attributes is a file system feature that
allows user to attach user defined metadata which not interpreted by the file system, whereas regular metadata
or "inodes" of computer files have a strictly defined
purpose, such as permissions and modification times, user
defined attributes can not be added in it.
Extended File Attributes had been supported in some
mainstream modern file systems of popular operation
system. Such as ext3, ext4 and ReiserFS of Linux, HFS+
of Mac OS X and NTFS of Microsoft Windows. Extended File Attributes are usually constructed by
records of attribute-value pair, each attribute name is a
null-terminated string, and associated value can be data of
variable length, but usually also a null-terminate string.
For example, an extended attribute of the author of a file
can be expressed as a pair ("author", "John Smith").
B. Labels in XATTR
Using keywords is an efficient way to indexing a large
amount of files, and offers benefits on classification and
searching in a large file system. In traditional file systems, there is no space for user defined keywords except file
name [5]. But using file name to save keywords have a
lot of limitation. First, it misappropriates the function of
file name, which is supposed to be the title of a file. And
second, most file systems limited the length of file name,
which is usually no more than 256 bytes, it is not enough
for a detailed keyword set.
TABLE I. FORMAT OF LABELS
Keywords Type Category Label(attribute-value pair)
John Smith category author ("xlabel.author", "John Smith")
romantic standalone tags ("xlabel.tags", "romantic")
XATTR in most modern file systems offers more than
4KB storage spaces out of the file content. It's enough for
a detailed keyword set which describe the file in various
aspects. We created a new simple labeling system which
is called "Extended Labels" (XLABEL) in XATTR to
keep keywords defined by user or extracted automatically
from file content. It makes use of the attribute-value pair structure of XATTR, and classified keywords into two
types. One is category keywords, which can be classified
into categories, such as keyword "John Smith" in a
category "author". The category name will be an attribute
name in XATTR, and keywords belongs to this category
will be values associated with this attribute name.
Another is standalone keywords which can not be
classified into any category. It's just one word to describe the content of a file. For example, we can describe the
movie "Roman Holiday" with an adjective "romantic".
For all keywords of this kind, we associate them with a
specified category. We call this kind of keywords "tags",
and they will be values of an attribute named "tag". A
computer file can have only one instance of each category,
but with multiple "tags", and they will be all in the
namespace of "xlabel". Each attribute-value pair in XLABEL system is called a "label". Table I shows the
representation of category keywords and standalone
keywords in the format of labels in XLABEL system.
C. Automatic File Labeling
Although labeling in metadata of files is helpful to
enhance semantic of files, and provide benefit of accurate
indexing and searching, how to get proper labels of a file
in an easy way is still a key problem in a practical file
labeling system. Because the users are usually very lazy,
and won't take much time to add labels for a file
manually. The system must have the ability to
automatically extract features and semantics of a file, and create proper labels according to it.
There are several ways to automatically extract
features and semantics from a file. First, most files that
need to be indexed and searched in a file system are
created for editing or viewing, so there must be certain
software that will edit or view these files. This software
may have the ability to automatically extract features and
semantics from the file being edited or viewed. For
JOURNAL OF MULTIMEDIA, VOL. 9, NO. 2, FEBRUARY 2014 279
© 2014 ACADEMY PUBLISHER

example, a word processor is usually capable of
extracting titles and keywords from the text file it is
editing, and a picture viewer is usually capable of
extracting EXIF information from a digital photo. These
extracted features and semantics can be used as labels in
XLABEL system. And then, booming social network
systems in recent years provided a new aspect of automatic data semantic extraction. When content is
posted on social networks, the interactivities about this
content from social network users will provide abundant
resources about the semantics of this file, and mostly are
text based, which can be analyzed more easily and
efficiently. These extracted semantics can also be used as
labels in XLABEL system.
III. APPROACH OF CLUSTERING FILES
The labeling of files in XATTR provided the ability of
classifying files by categories and searching files by
labels or keywords. But in a file system with millions of
files, the ability of clustering files automatically and list
files which are related in content with the files that the
user is currently accessing is necessary. This will help
users to find a file from a long list of thousands files
without remembering the exact file name and deeply tracing down the hierarchical directories and sub-
directories.
Unlike the situation of most hierarchical clustering and
K-means clustering algorithm [6], clustering files in a file
system is without the complete set of vectors and
dimension of vectors known previously. Files are
continuously created, modified and deleted while the file
system is working. Clustering files in a file system is actually clustering feature vectors in a continual data
stream [7]. So the number of clusters can hardly been
determined before the clustering completed. But a
threshold distance can be designated to limit the distance
between the vectors in the same cluster, and thus
indirectly affect the total number of clusters generated.
To insert a feature vector into an existing cluster, we
expect that its distance with all other vectors in this cluster is less than the threshold diameter Dth. But directly
measure the distance between the new vector and all
other existed vectors in the cluster will cause too much
calculation. If the cluster size is n, the time complexity of
inserting a new vector to a existed cluster is O(n), not to
mention multiple cluster may be tried before the right
cluster is found, or even no existed cluster is suitable for
the vector, and a new cluster have to be created. The cost of inserting a new vector will be unacceptable if the
cluster size and file system size are very large.
To reduce the time and space complexity of clustering
operation, an alternative approximate approach was used.
We can find a suitable centroid to represent a cluster, and
a proper measure in vector space M. We will be able to
determine whether a new vector can be inserted in a
cluster by just measuring the distance between the new vector and the centroid of the cluster. The time
complexity of this operation is O(1), so a very large file
system can be handled efficiently. With this approach, we
can not ensure the distances between every two vectors
are less than Dth, but by carefully choosing the distance
measure of vectors, we can have a good enough
approximate clustering result as the strict clustering
method with Dth, while the efficiency of the algorithm
still maintained.
A. Labels of Files as Binary Vectors
Clustering files relies on features extracted from files,
and the labels in Extended File Attributes can be very
useful in file clustering. If we take every label as a feature
of the file, we can describe and represent a file with a set
of labels. And it will be a subset of the complete set of all labels. Let M be the complete set of all possible labels in
XLABEL system, each file in the file system will have a
subset of M in its Extended File Attributes. Let NA be the
subset of M for file A, we can define the features of file A
as a binary vector ZA as in (1) and (2):
1 2 3( ( ), ( ), ( ),..., ( )),A n nZ f z f z f z f z z M (1)
1,
( )0,
A
A
z Nf z
z M N
(2)
B. Centroid of Cluster
The centroid Xc of a finite set of k vectors xi
(i {1,2,3,...k}) is defined as the mean of all the points in
the set, as illustrated in (3):
1 2 ... k
c
x x xX
k
(3)
It will minimize the squared Euclidean distances
between itself and each point in the set. We can also use
this definition in a binary vector space to define the
centroid of a cluster. But the original definition of
centroid will produce decimal fraction components in the
centroid vector. So for calculation convenience of distance between the centroid and other vectors in the
cluster, we use an approximate definition of centroid Zc
as in (4), (5) and (6). Let Zi be a vector of a cluster C with
k vectors in n-dimension binary vector space , And Ij
be the unit vector of each dimension:
1
1{1,2,3,..., };
k
j i j
i
w Z I j nk
(4)
1 2 3{ ( ), ( ), ( ),..., ( )};c nZ g w g w g w g w (5)
11,
2( )
10,
2
w
g w
w
(6)
The centroid must be in vector space , and it have
not to be an actual vector in XLABEL system, it can be a
phony vector just for calculation and representing the
cluster.
280 JOURNAL OF MULTIMEDIA, VOL. 9, NO. 2, FEBRUARY 2014
© 2014 ACADEMY PUBLISHER

C. Measures of Similarity & Dissimilarity
Measures of similarity and dissimilarity of binary
vectors have been studied for decades, and some
measures were created based on binary vector space [8]. And comprehensive researches had also been done on the
properties of these measures [9]. Here we briefly
introduced some of the most popular measures on binary
vector space.
TABLE II. MEASURES OF BINARY VECTORS
Measure S(X,Y) D(X,Y)
Jaccard 11
11 10 01
S
S S S 10 01
11 10 01
S S
S S S
Dice 11
11 10 01
2
2
S
S S S 10 01
11 10 012
S S
S S S
Correlation 11 00 10 01S S S S
11 00 10 011
2 2
S S S S
Yule 11 00 10 01
11 00 10 01
S S S S
S S S S
10 01
11 00 10 01
S S
S S S S
Russell-Rao 11S
N 11n S
N
Sokal-Michener 11 00S S
N
10 01
11 00 10 01
2 2
2 2
S S
S S S S
Rogers-Tanimoto 11 00
11 00 10 012 2
S S
S S S S
10 01
11 00 10 01
2 2
2 2
S S
S S S S
Rogers-Tanimoto-a 11 00
11 00 10 012 2
S S
S S S S
11 00
11 00
2( )
2
N S S
N S S
Kulzinsky 11
10 01
S
S S 10 01 11
10 01
S S S N
S S N
10 11 01 00 11 01 00 10(( )( )( )( ))S S S S S S S S
Let be the set of all N-dimension binary vectors,
and give two vectors X and Y , let Sij (i, j∈{0,1}) be the number of occurrences of matches with i
in X and j in Y at the corresponding position. We can
define four basic operations on vector space as in (7)
and (8):
11( , )S X Y X Y , 00 ( , )S X Y X Y (7)
10 ( , )S X Y X Y , 01( , )S X Y X Y (8)
Based on these operations, let the similarity of two
feature vectors denoted by S(X,Y) and dissimilarity
denoted by D(X,Y), some well-known measures [8] can
be defined as in Table II. Considering that there will be
new labels generated in XLABEL system at any time, and the newly generated labels will change the S00 value
and the dimension number N of all existing feature
vectors. To avoid the similarity and dissimilarity of any
two feature vectors been re-calculated every time a new
label is generated, we must use a measure that is
independent of S00 and dimension number N.
Among these measures given in Table II, only Jaccard
and Dice are independent of S00 and dimension number N. Jaccard and Dice distance measures are very similar in
form, in fact they are only different on the sum of
cardinalities, where Jaccard use the union of two vectors,
but Dice use the sum of two vectors. And unlike the
Jaccard distance, Dice distance is not a proper metric in
binary vector space [10].
Both Jaccard and Dice distance is within a normalized
range [0, 1] and with a relatively low computational
complexity. In fact, Jaccard distance and Dice distance
of the same two vectors can be transformed to each other with the following equation in (9). Let's denote Jaccard
distance by DJaccard and denote Dice distance by DDice, we
have:
2
1
Dice
Jaccard
Dice
DD
D
,
2
Jaccard
Dice
Jaccard
DD
D
(9)
By observing these two equations, we will know that
Jaccard distance is more sensitive on dissimilarities of
two vectors than Dice distance, it will always output a
greater distance value than Dice when comparing two
vectors, and the disparity get greater while the similarity of two vectors is greater. To substantiate the difference,
three example label vectors X, Y and Z with 4-dimensions
are observed in Table III:
TABLE III. EXAMPLE LABEL VECTORS X, Y AND Z
Vector Name xlabel attributes
tag:started tag:important leader:James leader:John
X project1 1 1 0 0
Y project2 1 1 1 0
Z project3 1 1 0 1
Here we can find that, the leader attribute is a
categorical attribute, vector Y and Z are different on the
attribute leader while vector X missed this attribute. All
other labels are the same in vector X, Y and Z. We can
easily have the Jaccard distance and Dice distance
calculated as DJaccard(X,Y) = 0.3333, DJaccard(Y,Z) = 0.5, DDice(X,Y) = 0.2 and DDice(Y,Z) = 0.3333. Since the
difference of attribute xlabel.leader in vector Y and Z is
determined, and X just missed this attribute, the
difference is not determined between X and Y. So we
shall have a lesser distance between X and Y than distance
between Y and Z. Obviously we have DDice(X,Y)/
DDice(Y,Z) < DJaccard(X,Y)/ DJaccard(Y,Z), so Dice distance
shall be a better measure than Jaccard in our application.
D. Clustering Files with Dice Distance
Like K-means clustering algorithm, the centroid of
clusters are not known before the clustering started when
clustering a data stream, so random centroid are designated at the initialization of clustering. And K-
means algorithms can optimize the centroid with several
iterations, and finally get an approximate optimum cluster
sets. But clustering the file system operation stream can
only have one run, so the iteration and the optimization
process have to be taken at the runtime. When clustering
the file system operation stream, the centroid of a cluster
will be re-calculated every time a vector is inserted in or removed from the cluster. And every time when a
centroid is changed, its distance with other centroid will
also be re-calculated. If the distance between two
centroids is less than a designated threshold radius Rth,
vectors of the two clusters will be re-clustered until the
JOURNAL OF MULTIMEDIA, VOL. 9, NO. 2, FEBRUARY 2014 281
© 2014 ACADEMY PUBLISHER

distance of the two centroids is greater than Rth, or the
iteration count limitation is reached.
The detailed clustering algorithm is described with the
following pseudo codes in Fig. 1, Fig. 2 and Fig. 3:
Figure 1. Xlabel_clustering() algorithm for XLABEL system
Figure 2. Recluster() sub-algorithm for XLABEL system
IV. EVALUATION EXPERIMENTS
We evaluated the XLABEL system with three real-life
dataset, the Zoo dataset, the Mushroom dataset and the Congressional Votes dataset. They were all obtained from
the UCI Machine Learning Repository [11], and briefly
introduced here:
The Zoo dataset: It's a simple database with 101
instances of animals, and containing 18 attributes. The
first attribute is animal name. Here we use it as the file
name. And there is a "type" attribute which divided the
dataset into 7 classes. 15 out of the remaining 16 attributes are Boolean-valued, and the last one is a
numeric attribute with a set of values {0, 2, 4, 5, 6, 8},
which is the number of legs of the animal. Here we use
all the 16 attributes except the "animal name" and "type"
as the attributes of files, and labels were generated
accordingly for each file. The "type" attribute was
reserved for evaluating the result of clustering.
The Mushroom dataset: It's a database of mushroom records drawn from the Audubon Society Field Guide to
North American Mushrooms (1981). G. H. Lincoff
(Pres.), New York: Alfred A. Knopf. And it has 8124
instance of mushrooms with 22 categorical attributes. The
dataset was divided into 2 classes for the edibility of
mushroom. 4208(51.8%) out of 8124 samples are edible,
and 3916(48.2%) are poisonous. This information was
used for evaluating the result of clustering.
Figure 3. Insert_vector() sub-algorithm for XLABEL system
The Congressional Votes dataset: This dataset includes
votes for each of the U.S. House of Representatives
Congressmen on 16 key votes. It has 435 instances, and
with 16 Boolean-valued attributes for the votes of each congressmen. The dataset is divided into 2 classes for the
party affiliation of congressmen, 267 out of 435 are
democrats, and 168 are republicans. This was used for
evaluating the result of clustering.
Different from other clustering algorithm, these
datasets are not clustered separately, but mixed together
to simulate the actual usage of XLABEL in file system.
And they were mixed in sequence of the original order as in the dataset and other five pseudo random sequence.
This is intended to evaluate whether XLABEL system
will successfully cluster data from completely different
datasets into different classes, and whether the different
initial samples will affect the clustering result
dramatically.
A. Experiment Design
The samples of the datasets are fed into XLABEL
system one by one for one pass. After all the data is fed,
and the clustering completed, the clustering results are
read out, and evaluated with the class information of the
282 JOURNAL OF MULTIMEDIA, VOL. 9, NO. 2, FEBRUARY 2014
© 2014 ACADEMY PUBLISHER

original datasets. Let's denote the number of clusters by m,
the number of all records in a dataset by n, and ai is the
number of records with the class dominates cluster i. The
accuracy V and corresponding error rate E of the
clustering result [12] is defined as in (10):
1
m
i
i
a
Vn
, 1E V (10)
Different threshold radius Rth values are designated for
each run of the experiment. And all 6 datasets, including one original order dataset and 5 different pseudo random
sequences ordered dataset will be fed into XLABEL
system for each Rth value. The range of Rth value is [0.30,
0.85] with a 0.05 step, so totally 72 runs of the
experiment will be done. Besides the accuracy of each
run will be recorded, the final number of clusters of each
run will also be evaluated. The relationship between Rth,
number of clusters, and clustering accuracy will be revealed by analyzing these data.
The number of clusters and the accuracy of clustering
at the same Rth, but with different ordered datasets will
also be evaluated to conclude whether the XLABEL
system will output a stable clustering result when initial
vectors are different.
B. Evaluation Results
The experiment results shows that Zoo dataset,
Mushroom dataset and Congressional Votes dataset in the
mixed datasets are completely clustered into different
classes successfully in all cases. The results are the same
as clustering the three datasets separately. Fig. 4, Fig. 5 and Fig. 6 shows the error rate with different Rth. Fig. 7,
Fig. 8 and Fig. 9 shows the number of clusters with
different Rth.
0.000
0.100
0.200
0.300
0.400
0.500
0.600
0.700
0.3 0.35 0.4 0.45 0.5 0.55 0.6 0.65 0.7 0.75 0.8 0.85
Error Rate
Rth
Sequential Random 1 Random 2
Random 3 Random 4 Random 5
Figure 4. Error rate of clustering Zoo dataset
0.000
0.100
0.200
0.300
0.400
0.500
0.600
0.3 0.35 0.4 0.45 0.5 0.55 0.6 0.65 0.7 0.75 0.8 0.85
Error Rate
Rth
Sequential Random 1 Random 2
Random 3 Random 4 Random 5
Figure 5. Error rate of clustering Mushroom dataset
0.000
0.050
0.100
0.150
0.200
0.250
0.300
0.350
0.400
0.450
0.3 0.35 0.4 0.45 0.5 0.55 0.6 0.65 0.7 0.75 0.8 0.85
Rth
Error Rate
Sequential Random 1 Random 2 Random 3
Random 4 Random 5
Figure 6. Error rate of clustering Congressional Votes dataset
0
2
4
6
8
10
12
14
0.3 0.35 0.4 0.45 0.5 0.55 0.6 0.65 0.7 0.75 0.8 0.85
Rth
Number of Clusters
Sequential Random 1 Random 2 Random 3
Random 4 Random 5
Figure 7. Number of clusters of clustering Zoo dataset
0
5
10
15
20
25
30
0.3 0.35 0.4 0.45 0.5 0.55 0.6 0.65 0.7 0.75 0.8 0.85
Rth
Number of Clusters
Sequential Random 1 Random 2 Random 3
Random 4 Random 5
Figure 8. Number of clusters of clustering Mushroom dataset
0
10
20
30
40
50
60
0.3 0.35 0.4 0.45 0.5 0.55 0.6 0.65 0.7 0.75 0.8 0.85
Rth
Number of Clusters
Sequential Random 1 Random 2 Random 3
Random 4 Random 5
Figure 9. Number of clusters of clustering Congressional Votes
dataset
TABLE IV. DATA OF ERROR RATE AND NUMBER OF CLUSTERS ON
DIFFERENT RTH
(Error Rate, Number
of Clusters)
Rth
0.3 0.35 0.4 0.45 0.5 0.55 0.6
Datasets
Zoo (0.116,
12)
(0.142,
10)
(0.155,
9)
(0.170,
7)
(0.241,
6)
(0.295,
5)
(0.365,
4)
Mushroom (0.018,
27)
(0.044,
19)
(0.078,
15)
(0.102,
12)
(0.113,
7)
(0.124,
7)
(0.130,
4)
Congressional
Votes
(0.072,
45)
(0.078,
28)
(0.083,
19)
(0.107,
11)
(0.111,
8)
(0.132,
5)
(0.146,
4)
By observing these figures, we can conclude that the
error rate of clustering increases with the increasing of Rth, while the number of clusters decreases with the
JOURNAL OF MULTIMEDIA, VOL. 9, NO. 2, FEBRUARY 2014 283
© 2014 ACADEMY PUBLISHER

increasing of Rth. And our approach of clustering will
have a stable output when Rth<0.6.
Table IV shows the detailed error rate and number of
clusters on different Rth. With the new labeling system,
XLABEL is capable to cluster vectors which are not
uniform in dimension. For a balanced performance of
number of clusters and error rate, 0.4<Rth<0.5 is recommended for practical use.
We found that the performance of our clustering
algorithm is similar with the Squeezer algorithm [13]
which is also based on Dice measure, as illustrated in Fig.
10, Fig. 11 and Fig. 12.
0
0.1
0.2
0.3
0.4
0.5
2 3 4 5 6 7 8 9
The number of clusters
Error rate
XLABEL Squeezer
Figure 10. Performance compare of XLABEL and Squeezer in Zoo
dataset
0
0.1
0.2
0.3
0.4
2 3 4 5 6 7 8 9
The number of clusters
Error rate
XLABEL Squeezer
Figure 11. Performance compare of XLABEL and Squeezer in
Mushroom dataset
0
0.1
0.2
0.3
0.4
0.5
2 3 4 5 6 7 8 9
The number of clusters
Error rate
XLABEL Squeezer
Figure 12. Performance compare of XLABEL and Squeezer in
Congressional Votes dataset
Generally, our algorithm is with slightly higher error
rate compared with Squeezer algorithm, because our
algorithm is designed to cluster a continuous feature
vector stream, not a completely prepared dataset.
XLABEL algorithm can not perform multiple clustering
iteration in whole dataset to optimize the clustering result.
But when the number of clusters is very small, we get a better result than Squeezer, especially in the datasets with
many categorical attributes. It's also because we are
clustering vector stream, so there is a better chance to get
a better centroid before it was moved by many other
vectors to a mathematical optimized but not practical
optimized position. But both our algorithm and Squeezer
have a bad performance when cluster numbers is less than
5. So this advantage is actually not practical.
0
2000
4000
6000
8000
10000
12000
14000
16000
18000
0.3 0.35 0.4 0.45 0.5 0.55 0.6 0.65 0.7 0.75 0.8 0.85
Execution Time (ms)
Rth
Execution Time
Figure 13. Execution time of clustering in different Rth
As mentioned in Subsection D of Section III, the
distance between each newly inserted label vector and
centroid of every existing cluster have to be calculated
before the label vector can be inserted in any cluster. So
the execution time of inserting a label vector will increase when the amount of existing clusters increases. As we
discussed above, the Rth can be a scaler of clustering
accuracy and the final resulting amount of clusters, the
greater value of Rth, the less amount of clusters. So the Rth
can also be a scaler of calculation complexity of
XLABEL algorithm. Fig. 13 shows that the total
execution time decreases when Rth increases. The
execution time were recorded in a platform with one Intel(R) Core(TM) i3-2100 3.1GHz dual core CPU and
2GB DDR3-1600 DRAM running CentOS-5.6 Linux.
V. CONCLUSION
We discussed the subject of clustering files in a file
system at the runtime, and proposed a labeling system
which can store features of files as labels in Extended
File Attributes. A clustering approach based on this
labeling system is also introduced and performance evaluation is done on this approach with some well-
known real life datasets. Evaluation results shows that our
approach have a stable output when a proper threshold
radius is set, and precise clustering of files is achieved at
an acceptable cost.
ACKNOWLEDGMENT
Lin Han would like to extend sincere gratitude to
corresponding author, Hao Huang, for his instructive advice and useful suggestions on this research. And we
thank the anonymous reviewers for their valuable
feedback and suggestions. This work is supported in part
by the National Basic Research Program of China under
Grant No.2011CB302303, the NSF of China under Grant
No.60933002, and National High Technology Research
and Development Program of China (863 Program) under
Grant No.2013AA013203.
284 JOURNAL OF MULTIMEDIA, VOL. 9, NO. 2, FEBRUARY 2014
© 2014 ACADEMY PUBLISHER

REFERENCES
[1] J. Morris, "Filesystem labeling in SELinux," Linux Journal, Red Hat, Inc., 2004, pp. 3-4.
[2] C. J. Yoo, O. R. Jeong, "Category Extraction for
Multimedia File Search," Information Science and Applications (ICISA), 2013 International Conference on. IEEE, 2013, pp. 1-3.
[3] J. Pan, C. J. Anumba, "Semantic-Discovery of Construction Project Files," Tsinghua Science & Technology. 13, 2008, pp. 305-310.
[4] Y. Hua, H. Jiang, Y. Zhu, D. Feng, L. Tian, "Semantic-aware metadata organization paradigm in next-generation file systems," Parallel and Distributed Systems, IEEE Transactions on. 23(2), 2012, pp. 337-344.
[5] N. Anquetil, T. Lethbridge, "Extracting concepts from file names: a new file clustering criterion," Proc. ICSE '98.
IEEE Computer Society Washington, DC, 1998, pp. 84-93. [6] Z. Huang, "Extensions to the k-means algorithm for
clustering large data sets with categorical values," Data Mining and Knowledge. Discovery II, 1998, pp. 283-304.
[7] C. Ordonez, "Clustering Binary Data Streams with K-means," ACM DMKD03. San Diego, CA, 2003, pp. 12-19.
[8] S. S. Choi, S. H. Cha, C. C. Tappert, "A Survey of Binary Similarity and Distance Measures," Journal of Systemics, Cybernetics and Informatics. 8(1), 2010, pp. 43–48.
[9] B. Zhang, S. N. Srihari, "Properties of Binary Vector Dissimilarity Measures," Proc. JCIS Int'l Conf. Computer
Vision, Pattern Recognition, and Image Processing, 2003, pp. 26-30.
[10] AH. Lipkus, "A proof of the triangle inequality for the Tanimoto distance," Journal of Mathematical Chemistry. 26(1-3), Springer, 1999, pp. 263-265.
[11] A. Frank, A. Asuncion, "UCI Machine Learning Repository [http://archive.ics.uci.edu/ml]," University of California, School of Information and Computer Science. Irvine, CA, 2010.
[12] Z. Y. He, X. F. Xu, S. C. Deng, "A cluster ensemble method for clustering categorical data," Information Fusion. 6(2), 2005, pp. 143-151.
[13] Z. Y. He, X. F. Xu, S. C. Deng, "Squeezer: an efficient algorithm for clustering categorical data," Journal of Computer Science and Technology. 17(5), 2002, pp. 611–624.
[14] Z. Y. He, X. F. Xu, S. C. Deng, "Improving Categorical Data Clusterinq Algorithm by Weighting Uncommon Attribute Value Matches," Computer Science and Information Systems. 3(1), 2006, pp. 23-32.
[15] H. Finch, "Comparison of Distance Measures in Cluster Analysis with Dichotomous Data," Journal of Data Science. vol. 3, 2005, pp. 85-100.
[16] O. Fujita, "Metrics based on average distance between sets," Japan Journal of Industrial and Applied Mathematics. Springer, 2011.
Lin Han received the BS and MS
degrees in computer science from Huazhong University of Science and Technology (HUST), China, in 2005 and 2007, respectively. He is currently working toward the PhD degree in computer science at HUST. His research interests include computer architecture, storage system and embedded digital
media system. He is a student member of the IEEE and the IEEE Computer Society.
Hao Huang received the PhD degree in computer science from Huazhong University of Science and Technology (HUST), China, in 1999. Presently, He is an associate professor in the Wuhan National Laboratory for Optoelectronics, and School of Computer Science and Technology, HUST. He is also a member of the Technical Committee of Multimedia Technology in China
Computer Federation, and a member of the Technical Committee of Optical Storage in Chinese Institute of Electronics. His research interests include computer architecture, optical storage system, embedded digital media system and multimedia network technology.
Changsheng Xie received the BS and MS degrees in computer science from Huazhong University of Science and Technology (HUST), China, in 1982 and 1988, respectively. Presently, he is a professor and doctoral supervisor in the
Wuhan National Laboratory for Optoelectronics, and School of Computer Science and Technology at Huazhong University of Science and Technology.
He is also the director of the Data Storage Systems Laboratory of HUST and the deputy director of the Wuhan National Laboratory for Optoelectronics. His research interests include computer architecture, disk I/O system, networked data storage system, and digital media technology. He is the vice chair of the expert committee of Storage Networking Industry Association (SNIA), China.
Wei Wang received the BS and MS degrees in computer science from Huazhong University of Science and Technology (HUST), China, in 2005 and 2007, respectively. He is currently working toward the PhD degree in computer science at HUST. His research interests include computer architecture, embedded digital media system and digital copyright protection system. He
is a student member of the IEEE and the IEEE Computer Society.
JOURNAL OF MULTIMEDIA, VOL. 9, NO. 2, FEBRUARY 2014 285
© 2014 ACADEMY PUBLISHER

Method of Batik Simulation Based on
Interpolation Subdivisions
Jian Lv, Weijie Pan, and Zhenghong Liu Guizhou University, Guiyang, China
Email: [email protected], {290008933, 328597789}@qq.com
Abstract—According to realized Batik Renderings, we
presented an algorithm for creating ice crack effects as
found in Batik wax painting and Batik techniques. This
method is based on Interpolation Subdivisions algorithm,
which can produce crackle effects similar to the natural
texture generated in the batik handcraft. In this method, the
natural distribution of ice crack is created by Random
distribution function, and then the creating of ice crack is
controlled by Interpolation Subdivisions algorithm and the
modified DLA algorithm, and the detail is associated with
those parameters: The number of growth point, noise,
direction, attenuation and so on. Then we blend Batik vector
graphics with the ice crack and Mix Color between them,
finally, such post processing realizes the visual effect. The
simulation results show that this method can create different
forms of ice crack effects, and this method can be used in
dyeing industry.
Index Terms—Ice Crack; Interpolation Subdivisions;
Segments Substitution; Batik
I. INTRODUCTION
Batik craft has a long history more than 3000 years,
and now it has been one of the world-intangible cultural
heritages. Batik craft is famous for its long history and
the civilization, which has occupies an important position
in the history of the modern textile in the world. Because
of the unique regional culture process characteristics, it
has been formed different styles of Batik which are
sought after people all over the world, such as Figure 1,
they come from these representative places: Bali and Java
in Indonesia, Guizhou in China, Japan and India.
a b c d
Figure 1. Image a. Batik in Indonesia, b. Batik in china, c. Batik in
Japan, d. Batik in India
With the speeding up of industrialization and
urbanization, the ancient Batik craft is dying. Owing to
the protection of World intangible cultural heritage, the
old craft bloom renascent vitality. The traditional Batik
creates abundant of cultural elements and symbols, which
provide vast resources for modern printing and dyeing
industry. Now, with the development of digital art and
design technology, the protection and creation for
traditional Batik has step a new way. There is a win-win
situation between traditional Batik and modern printing
and industry, and the Batik enters into modern life again.
Computer simulation of Batik involved in image
recognition, graphics vector quantization and ice crack
simulation. The most important of simulation is
expressing the esthetic of Batik. The graphics and
symbols of Batik have unique aesthetic value, which have
carried the history, culture, folk customs, myths and
legends. The ice crack is a texture which generate from
the process of naturally cracking on the wax coat. That's
exactly what people like. The ice crack is born with
abstraction, contingency and uniqueness, which is the key
feature what distinguish other printing and dyeing
technology from. So, computer simulation of Batik has a
profound impact for modern batik art creation and batik
industry. With the development of intangible cultural
heritage protection all over world, more and more people
are interested in researching this ancient art form by
computer. According to the visual characteristics and
aesthetic value of Batik, there are two research hotspots:
first, vector quantization of dermatoglyphic pattern in
Batik, that can generate a large number of basic shapes;
second, the creation of ice crack, which can simulate the
real texture of Batik. So far, some research results have
been widely used in modern printing and dyeing industry.
Currently, simulation of ice crack has been a research
hotspot in 3D animation, such as crack in ice, glass,
ceramic, and soil. Wyvill [1] first proposed an algorithm
to generate batik ice patterns which is based on Euclidean
Distance Transform Algorithm [2, 3].The method is to
get a pixel gradient image which is starting from skeleton
to edge in original pattern. Tang Ying [4] present an
improved algorithm of Voronoi [5], which is similar to
Craquelure. Besides, FEA [6, 7, 8, 9, 10] is another way
to simulate ice crack through setting up mechanics model.
The study in the field of fractal theory [11] is a hotspot,
such as are DAL [12, 13] and L - system [14, 15], and
both of them are suit for the growth model. Lightning
simulation [16] proposed a multiple subdivisions which
represents the fission model. Generally, most of those
algorithms can be used in 2D and 3D graphics, and the
crack simulation of different object has a high level sense
of reality, we present a method which is based on
Interpolation Subdivisions algorithm.
286 JOURNAL OF MULTIMEDIA, VOL. 9, NO. 2, FEBRUARY 2014
© 2014 ACADEMY PUBLISHERdoi:10.4304/jmm.9.2.286-293
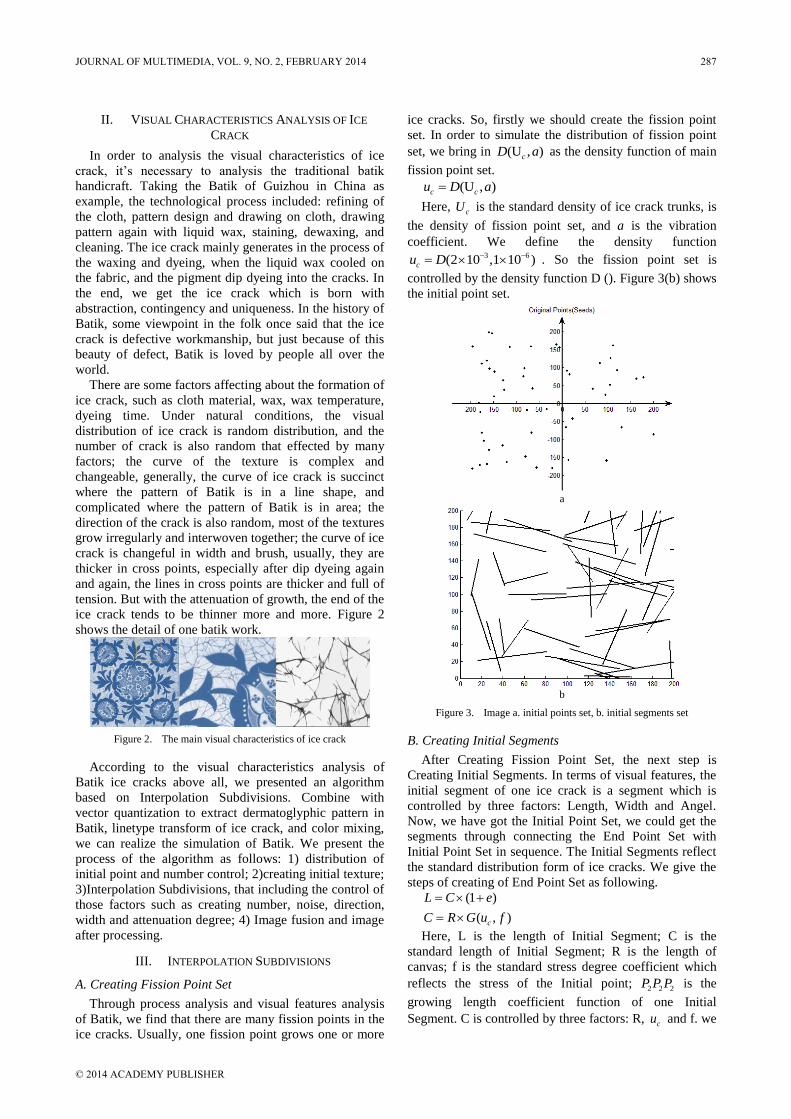
II. VISUAL CHARACTERISTICS ANALYSIS OF ICE
CRACK
In order to analysis the visual characteristics of ice
crack, it’s necessary to analysis the traditional batik
handicraft. Taking the Batik of Guizhou in China as
example, the technological process included: refining of
the cloth, pattern design and drawing on cloth, drawing
pattern again with liquid wax, staining, dewaxing, and
cleaning. The ice crack mainly generates in the process of
the waxing and dyeing, when the liquid wax cooled on
the fabric, and the pigment dip dyeing into the cracks. In
the end, we get the ice crack which is born with
abstraction, contingency and uniqueness. In the history of
Batik, some viewpoint in the folk once said that the ice
crack is defective workmanship, but just because of this
beauty of defect, Batik is loved by people all over the
world.
There are some factors affecting about the formation of
ice crack, such as cloth material, wax, wax temperature,
dyeing time. Under natural conditions, the visual
distribution of ice crack is random distribution, and the
number of crack is also random that effected by many
factors; the curve of the texture is complex and
changeable, generally, the curve of ice crack is succinct
where the pattern of Batik is in a line shape, and
complicated where the pattern of Batik is in area; the
direction of the crack is also random, most of the textures
grow irregularly and interwoven together; the curve of ice
crack is changeful in width and brush, usually, they are
thicker in cross points, especially after dip dyeing again
and again, the lines in cross points are thicker and full of
tension. But with the attenuation of growth, the end of the
ice crack tends to be thinner more and more. Figure 2
shows the detail of one batik work.
Figure 2. The main visual characteristics of ice crack
According to the visual characteristics analysis of
Batik ice cracks above all, we presented an algorithm
based on Interpolation Subdivisions. Combine with
vector quantization to extract dermatoglyphic pattern in
Batik, linetype transform of ice crack, and color mixing,
we can realize the simulation of Batik. We present the
process of the algorithm as follows: 1) distribution of
initial point and number control; 2)creating initial texture;
3)Interpolation Subdivisions, that including the control of
those factors such as creating number, noise, direction,
width and attenuation degree; 4) Image fusion and image
after processing.
III. INTERPOLATION SUBDIVISIONS
A. Creating Fission Point Set
Through process analysis and visual features analysis
of Batik, we find that there are many fission points in the
ice cracks. Usually, one fission point grows one or more
ice cracks. So, firstly we should create the fission point
set. In order to simulate the distribution of fission point
set, we bring in (U , )cD a as the density function of main
fission point set.
(U , )c cu D a
Here, cU is the standard density of ice crack trunks, is
the density of fission point set, and a is the vibration
coefficient. We define the density function 3 6(2 10 ,1 10 )cu D . So the fission point set is
controlled by the density function D (). Figure 3(b) shows
the initial point set.
a
b
Figure 3. Image a. initial points set, b. initial segments set
B. Creating Initial Segments
After Creating Fission Point Set, the next step is
Creating Initial Segments. In terms of visual features, the
initial segment of one ice crack is a segment which is
controlled by three factors: Length, Width and Angel.
Now, we have got the Initial Point Set, we could get the
segments through connecting the End Point Set with
Initial Point Set in sequence. The Initial Segments reflect
the standard distribution form of ice cracks. We give the
steps of creating of End Point Set as following.
(1 )
( , )c
L C e
C R G u f
Here, L is the length of Initial Segment; C is the
standard length of Initial Segment; R is the length of
canvas; f is the standard stress degree coefficient which
reflects the stress of the Initial point; 2 2 2P P P is the
growing length coefficient function of one Initial
Segment. C is controlled by three factors: R, cu and f. we
JOURNAL OF MULTIMEDIA, VOL. 9, NO. 2, FEBRUARY 2014 287
© 2014 ACADEMY PUBLISHER

get L by add vibration “e” to the standard length “C”. In
this paper, we define L as the standard distribution form:
(0.5~1.5) C.
We define as the direction angle of one Initial Segment.
Usually, in a Batik, it’s a great probability for global that
the ice crack along with the normal direction of the Batik
pattern. Define E as the Initial point; define F as the end
point, so the relational expression for them is as
following: jF L e E .
Here, we will not take special considerations for width
of ice crack, and just define a basic form;
(1 )sW W b ,
sW is the standard width of one ice crack, b is the
width coefficient. This definition of width is just a
temporary effect, and we will take a method of brush
replacing to realize the final effect for width. Based on
the definition above all, we can create Initial Segments in
a canvas. Figure 3(b) shows the initial segments set.
C. Interpolation Subdivisions Algorithm
Usually, one ice crack grows abundant details
characteristics including bifurcate, cross and so on. Ice
crack usually includes these characteristics forms in
Figure 4: one-way crack, mesh crack, clusters crack and
fission crack. Among them, clusters crack and fission
crack have a higher probability than others. Especially,
the fission crack born with abstraction, contingency and
uniqueness, and has a high aesthetic value. We mainly
research the simulation of fission crack by Interpolation
Subdivisions Algorithm. Now, there are some similar
algorithms such as L-system [12], DLA [14], Finite
Element [6], Voronoi [5], lightning simulation [16], and
so on. In the following, we will compare Interpolation
Subdivisions Algorithm with these similar algorithms.
a b
c d
Figure 4. Image a. One-way crack, b. Mesh crack, c. Clusters crack, d. Fission crack
Since we got the initial vertex and the end vertex,
connect them, and we got the initial segment.
Interpolation Subdivisions Algorithm is different from
the DLA or L-system algorithm. Generally accepted,
DLA [14] or L-system [12] algorithm follows the method
of plant growth model; Interpolation Subdivisions
Algorithm follows the method of succession subdivisions,
and they are two inverse processes in graphic visual. The
main method of Interpolation Subdivisions is as
following:
Define the initial vertex and the end vertex, insert one
or two vertex by linear interpolation; and then take the
two adjacent vertexes as the new initial vertex and end
vertex, repeat the above operation until the branch details
achieve the visual aim of ice crack. Finally, connect all
the adjacent vertexes.
According to the creating of growth cracks, we present
Interpolation Subdivisions Algorithm. In Figure 5, First,
define the two initial vertex 1 1 1(a ,b ,c )E ,
2 2 2F(a ,b ,c )
and make the coordinate of the inserted point as
(x, y,z)P . Point P' is got from E and F by linear
interpolation. Establish coordinate system as Figure 6,
which is based on point E and F. In this coordinate
system, define u , v and w as the unit vector of U, V,
and W direction in turn. The expression of point P is
listed as following and all the variable definition are list
in Table 1.
(D x,D y)
(D x,D y)
A
A
VP UP
D n
VP PV PV
D n
UP PU PU
P P D v D u
D e R
D e R
Figure 5. Initial vertex defining
Figure 6. Coordinate system based on EF
In Figure 5, segment EF is the initial segment which
decided by two initial point. When we got linear
interpolation point 'P and create point P, connect EP and
PF, and we get the initial curve. In the process of creating
ice crack, it’s important to generate abundant of branches
details. So, In addition to segment EP and PF, in Figure 7,
another segment PQ is required which generated from P
to Q. The following is the solving process of point Q and
all the variable definition are list in Table 1.
288 JOURNAL OF MULTIMEDIA, VOL. 9, NO. 2, FEBRUARY 2014
© 2014 ACADEMY PUBLISHER

(D D D )
(D x,D y)
(D x,D y)
(D x,D y)
(D x,D y)
B
B
B
B
PQ WQ VQ UQ
D m
WQ QW QW
D m
VQ QV QV
D m
UQ QU QU
D m
PQ L L
Q P D r w v u
D e R
D e R
D e R
D e R
Figure 7. The first fission of Q
Figure 8. Tagging rules
The symbols’ meanings are listed in TABLE I as
follow.
When point P and Q are created, connect PE, PF and
PQ. These segments structure the initial trunk and branch
of ice crack. In the following fission processes, we define
the trunk fission points as ijP , define the branch fission
points as ijQ , n is the number of fission process, i is the
sequence number of fission process, j is the sequence
number of fission point (1≤i≤n, 1≤j≤n). Figure 8 shows
the tagging rules of fission points. The fission process is
an iteration steps which based on the fission vertexes of
last step.
TABLE I. TABLE PARAMETERS
Symbol Meaning
, ,UP VP WPD D D P: decay degree of deviating initial segment at
U,V and W direction
, ,PU PV PWD D D P: limits of deviating initial segment at U,V
and W direction
, ,WQ VQ UQD D D Q: decay degree of deviating initial segment at
U,V and W direction
, ,QW QV QUD D D Q: limits of deviating initial segment at U,V
and W direction
PQD segment PQ after attenuation
,A BD D a basic decay degree
LD Limits of segment PQ
n, m number of subdivisions
()R a random value between two parameters
r() unit vector
When the number of fission process reaches n , define
the number of point P, Q as (P)NUM , ( )NUM Q , define
the number of total fission vertexes as (V)NUM and
define the number of segments as (Seg)NUM , the
relationship of them is as following.
1, 1 1, 1 1, 1
1, 1 1, 1
(V) (P) (Q)
3 1 3 13 1
2 2
( ) (V) 1
n n n
i j i j i j
n nn
n n
i j i j
NUM NUM NUM
NUM Seg NUM
Define the vertex density as vu , define the area of
fission process as vS , and
vu can be given by
1, 1
(V)n
i j
v
v
NUM
uS
a
b
c
Figure 9. Image a, b, c
Give the standard vertex density, and give the
constraint condition
v vu U .
End the fission process when it reaches the constraint
condition. In order to achieve abundant of details, we add
a fission probability q to vertex ijQ .
IV. SIMULATION AND ANALYSIS
A. Simulation of Ice Crack
The interpolation subdivisions algorithm is realized in
Matlab. This process mainly include: creating initial point
set, creating initial segment set, interpolation subdivisions,
JOURNAL OF MULTIMEDIA, VOL. 9, NO. 2, FEBRUARY 2014 289
© 2014 ACADEMY PUBLISHER

and post processing. Figure 10 shows the relationship of
these processes as following.
Generate initial point E
Generate initial segment
EF
frequency
factor
Number
control
angle
control
length
control
Generate linear interpolation point P'
Generate insertion point P
Generate branch point Q
Get sequence of points
constraint
condition
Connect sequence of point
Interpolation
Subdivisions
Algorithm
F
T
Repeat fission process
Post processing
Figure 10. Simulation processes
In order to realize the real simulation effect of Batik, it
is necessary to assign these parameters which related to
the Interpolation Subdivisions Algorithm. The main
parameters include: cU , the standard density of trunk;
vU , the standard density of fission point set; q , the
fission probability of branch; n , the fission number; W ,
the width of the fission segments. The following TABLE
II is the main parameters assignment.
TABLE II. THE MAIN PARAMETERS ASSIGNMENT
Figure cU
vU q n w
a 50 5 0.4 3 (0.5,1.5)
b 50 5 0.6 5 (0.5,1) c 100 10 0.8 7 (1,1.5)
Through comparing these three results in visual feature,
we chose Figure 11 (b) whose trunks and branches
created can realize the simulation of growth crack
naturally.
B. Post Process of Batik
1) Creating Batik vector graphics
Currently, vector graphics are widely used for creating
Batik graphics in printing and dyeing industry. We can
get vector graphics by CAD software. In order to
coordinate with Post Process, we extract vector graphics
rough Adobe Illustrator, assign color
(255,255,255)RGB and (0,0,0)RGB for vector
graphics, and assign color (29,32,136)RGB for
background.
2) Graphics Blending
Taking the vector graphics boundary as the growth
boundary of ice cracks, we give the appropriate
parameters assignment for cU and
vU , and adjust other
parameters to consummate the effect of ice cracks. Since
the ice cracks are created in the Batik vector graphics, we
have got the elementary simulation effect. Figure 13(b) is
the Graphics blending effect.
3) Segments Substitution
The width is a distinct feature of ice crack segment.
Distance Transforms [1, 2, 3] uses a Multiplicative Color
Model to generate the width effect where the
intersections of ice crack. We present a method of
segments substitution to simulate the width and color of
dip dyeing. From a visual perspective, each section of the
ice crack is not a single segment; it has multiple changes
at width, linetype and color, so define a brush which has
those features. Figure 12 is a brush we defined. We take
segment MN as the trunk, point M and N are the inside
endpoint but not the outside endpoint, so the intersections
of ice crack could be coherent and thickening. Reduce the
brush opacity gradually along with the direction where is
far away from the trunk. Then assign color
(29,32,136)RGB for the brush. In order to get more
changes of brush, we add Perlin noise to the brush.
Finally, we replace the segments generated above all with
the brush.
C. Result Analysis and Comparison
Through Figure 10, we can see that there are many
steps and parameters affecting the simulation result.
Firstly, we create initial point set and create initial
segment set, and we control the distribution of the fission
trunks by density function (U ,a)c cu D . When we
creating the initial segment EF, we control parameter L to
avoid too much intersection and realize discrete effect.
Interpolation Subdivisions is the key step in the
simulation, we realize various details through modifying
those parameters in Table 1, especially with the
increasing of fission times, and the details became more
and more. In the post process, comparing with the
Multiplicative Color Model, the method of segments
substitution reduces the complexity of the algorithm, and
it completes the thickness changes and the color dyeing
effect in the same time, so it the process is simpler and
more efficient than other method.
The following is the compare of some classic
algorithms. DLA model is a stochastic and dynamic
growth model, which has the characteristics of dynamics
and growth, so it always can be able to express the
growth of plant and other growth model. Similarly, L-
System is a fractal art. L system using string rewriting
mechanism for iteration through the formation of the
continuous production string to guide Guixing draws
graphics. And the following Figure 14 is the simulation
effect comparison of these three algorithms.
Through analysis of visual characteristics, DLA is
suitable for the clusters crack simulation; L-System is
suitable for the Growth Crack simulation; Interpolation
290 JOURNAL OF MULTIMEDIA, VOL. 9, NO. 2, FEBRUARY 2014
© 2014 ACADEMY PUBLISHER

a b c
Figure 11. Creating result for different parameters assignment inTab.2
Figure 12. Defining crack brush
a b c
Figure 13. Image a. Batik vector graphics, b. Graphics blending effect, c. Segments substitution effect
a b c d
Figure 14. Image a. Interpolation Subdivisions, b. DLA, c. Voronoi, d. L-system
TABLE III. CRACK TYPES, ALGORITHM AND PROBABILITY
Crack Form Clusters Crack Growth Crack Fission Crack One –Way Crack Mesh Crack …
Algorithms DLA L-System Interpolation Subdivisions Linear Interpolation Voronoi …
Probability 2P 2P
2P 4P
5P …
JOURNAL OF MULTIMEDIA, VOL. 9, NO. 2, FEBRUARY 2014 291
© 2014 ACADEMY PUBLISHER
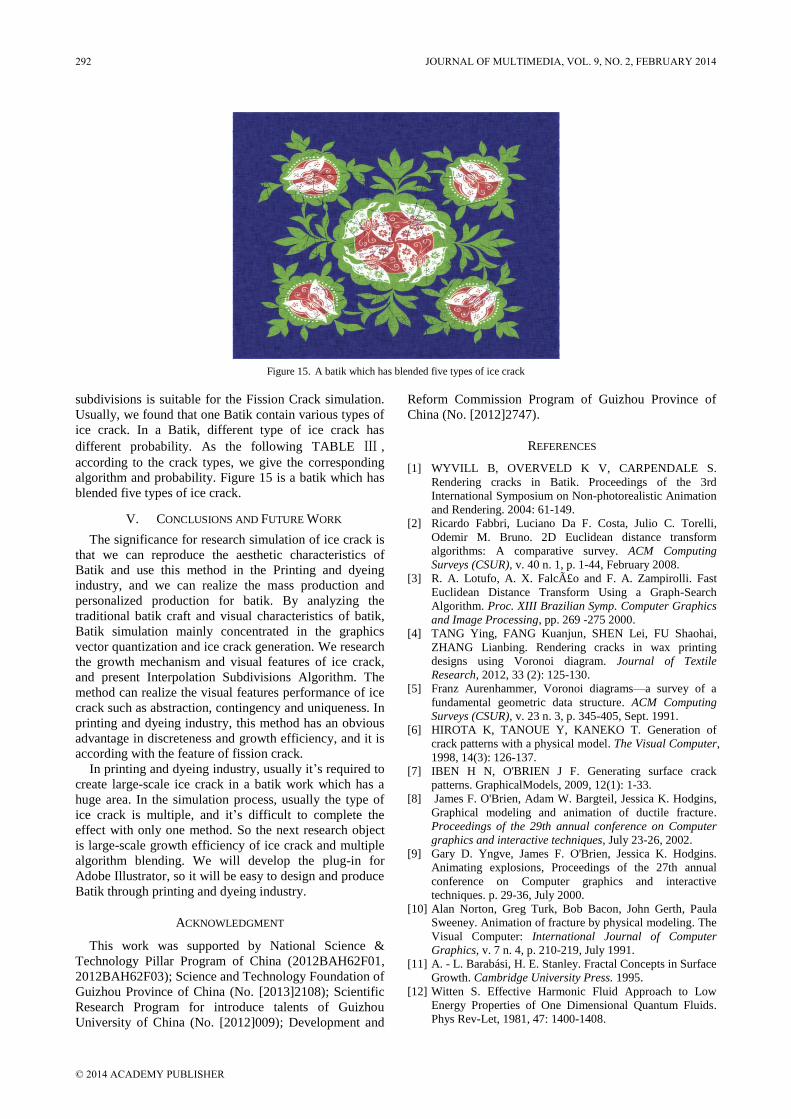
Figure 15. A batik which has blended five types of ice crack
subdivisions is suitable for the Fission Crack simulation.
Usually, we found that one Batik contain various types of
ice crack. In a Batik, different type of ice crack has
different probability. As the following TABLE Ⅲ ,
according to the crack types, we give the corresponding
algorithm and probability. Figure 15 is a batik which has
blended five types of ice crack.
V. CONCLUSIONS AND FUTURE WORK
The significance for research simulation of ice crack is
that we can reproduce the aesthetic characteristics of
Batik and use this method in the Printing and dyeing
industry, and we can realize the mass production and
personalized production for batik. By analyzing the
traditional batik craft and visual characteristics of batik,
Batik simulation mainly concentrated in the graphics
vector quantization and ice crack generation. We research
the growth mechanism and visual features of ice crack,
and present Interpolation Subdivisions Algorithm. The
method can realize the visual features performance of ice
crack such as abstraction, contingency and uniqueness. In
printing and dyeing industry, this method has an obvious
advantage in discreteness and growth efficiency, and it is
according with the feature of fission crack.
In printing and dyeing industry, usually it’s required to
create large-scale ice crack in a batik work which has a
huge area. In the simulation process, usually the type of
ice crack is multiple, and it’s difficult to complete the
effect with only one method. So the next research object
is large-scale growth efficiency of ice crack and multiple
algorithm blending. We will develop the plug-in for
Adobe Illustrator, so it will be easy to design and produce
Batik through printing and dyeing industry.
ACKNOWLEDGMENT
This work was supported by National Science &
Technology Pillar Program of China (2012BAH62F01,
2012BAH62F03); Science and Technology Foundation of
Guizhou Province of China (No. [2013]2108); Scientific
Research Program for introduce talents of Guizhou
University of China (No. [2012]009); Development and
Reform Commission Program of Guizhou Province of
China (No. [2012]2747).
REFERENCES
[1] WYVILL B, OVERVELD K V, CARPENDALE S.
Rendering cracks in Batik. Proceedings of the 3rd
International Symposium on Non-photorealistic Animation
and Rendering. 2004: 61-149.
[2] Ricardo Fabbri, Luciano Da F. Costa, Julio C. Torelli,
Odemir M. Bruno. 2D Euclidean distance transform
algorithms: A comparative survey. ACM Computing
Surveys (CSUR), v. 40 n. 1, p. 1-44, February 2008.
[3] R. A. Lotufo, A. X. Falcão and F. A. Zampirolli. Fast
Euclidean Distance Transform Using a Graph-Search
Algorithm. Proc. XIII Brazilian Symp. Computer Graphics
and Image Processing, pp. 269 -275 2000.
[4] TANG Ying, FANG Kuanjun, SHEN Lei, FU Shaohai,
ZHANG Lianbing. Rendering cracks in wax printing
designs using Voronoi diagram. Journal of Textile
Research, 2012, 33 (2): 125-130.
[5] Franz Aurenhammer, Voronoi diagrams—a survey of a
fundamental geometric data structure. ACM Computing
Surveys (CSUR), v. 23 n. 3, p. 345-405, Sept. 1991.
[6] HIROTA K, TANOUE Y, KANEKO T. Generation of
crack patterns with a physical model. The Visual Computer,
1998, 14(3): 126-137.
[7] IBEN H N, O'BRIEN J F. Generating surface crack
patterns. GraphicalModels, 2009, 12(1): 1-33.
[8] James F. O'Brien, Adam W. Bargteil, Jessica K. Hodgins,
Graphical modeling and animation of ductile fracture.
Proceedings of the 29th annual conference on Computer
graphics and interactive techniques, July 23-26, 2002.
[9] Gary D. Yngve, James F. O'Brien, Jessica K. Hodgins.
Animating explosions, Proceedings of the 27th annual
conference on Computer graphics and interactive
techniques. p. 29-36, July 2000.
[10] Alan Norton, Greg Turk, Bob Bacon, John Gerth, Paula
Sweeney. Animation of fracture by physical modeling. The
Visual Computer: International Journal of Computer
Graphics, v. 7 n. 4, p. 210-219, July 1991.
[11] A. - L. Barabási, H. E. Stanley. Fractal Concepts in Surface
Growth. Cambridge University Press. 1995.
[12] Witten S. Effective Harmonic Fluid Approach to Low
Energy Properties of One Dimensional Quantum Fluids.
Phys Rev-Let, 1981, 47: 1400-1408.
292 JOURNAL OF MULTIMEDIA, VOL. 9, NO. 2, FEBRUARY 2014
© 2014 ACADEMY PUBLISHER

[13] ArgoalF. Self Similarity of Diffusion limited Aggregates
and Electrod eposition Clusters. Phys Rev Let, 1988, 61:
2558.
[14] G Rozenberg and A Salomaa. Visual models of plant
development. Handbook of formal languages Springer-
Verlag, 1996.
[15] Przemyslaw Prusinkiewicz. Modeling of spatial structure
and development of plants: a review. Scientia
Horticulturae. 1998, 74, 113-149.
[16] KOU Yong, LIU Zhi-fang. Method of lightning simulation
based on multiple subdivisions. Computer Engineering and
Des, 2011, (10): 3522-3525+3569.
Lv Jian, Hebei Province of China, November
28, 1983. Guizhou university, Automation
and machinery manufacturing PH. D. Major
in Advanced manufacturing mode and
manufacture information system.
He works in Guizhou university of china,
Key laboratory of Advanced Manufacturing
Technology, Ministry of Education. He has
taken up a position of Director Assistant since 2010. He
attended IEEE Conference such as 2013 International
Conference on Mechatronic Sciences, Electric Engineering and
Computer, 2013 IEEE International Conference on Big Data.
Weijie Pan, Henan Province of China. Guizhou university,
Automation and machinery manufacturing. Associate professor,
Dr. Major in Advanced manufacturing mode and manufacture
information system.
Zhenghong Liu, Hunan Province of China. Guizhou university,
Automation and machinery manufacturing. Major in Advanced
manufacturing mode and manufacture information system.
JOURNAL OF MULTIMEDIA, VOL. 9, NO. 2, FEBRUARY 2014 293
© 2014 ACADEMY PUBLISHER

Research on Saliency Prior Based Image
Processing Algorithm
Yin Zhouping and Zhang Hongmei Anqing Normal University, Anqing 246011, Anhui, China
Abstract—According to high development of digital
technologies, image processing is more and more import in
various fields, such as robot navigator, images classifier.
Current image processing model still need large amount of
training data to tune processing model and can’t process
large images effectively. The recognition successful rate was
still not very satisfied. Therefore, this paper researched
saliency prior based image processing model, present the
Gaussian mixture process and design the feature point
based classifier, and then evaluate the model by supervised
learning process. Finally, a set of experiments were designed
to demonstrate the effectiveness of this paper designed
saliency prior based image processing model. The result
shows the model works well with a better performance in
accurate classification and lower time consumption.
Index Terms—Image Processing; Saliency Prior; Gaussian
Mixture.
I. INTRODUCTION
Recognition based on computer vision is based on the
theory of learning and discrimination classified and judge
images and video captured by cameras. The classic
computer vision is divided into three levels: Underlying
visual, Middle vision, High visual. The so-called
underlying vision refers to research about the input image
of the local metric information (Edge, Surface), such as
image SIFT descriptors, contour detection of Sober;
middle-visual including object segmentation, target
tracking and so on; senior visual tend to means that
rebuilding the underlying vision and middle visual
information gradually, integrated into the decision-
making process by ever-increasing complexity. With the
improvement of computer processing large-scale data, the
related technologies at all levels of computer vision has
been more widely used in the areas of industrial
production, security monitoring and others. Among these,
high visual closest intelligence requirements and has a
more promising practical and theoretical significance.
The perception of visual mainly in the identification of
objects and scenes. Scene mentioned here referred to a
real-world environment composition by a variety of
objects and their background in a meaningful way. Scene
recognition is to study the expression of the scene. The
definition of scenario corresponds to objects and textures.
When the observer distance concerned target from 1 to 2
meter, the image content is “object”, and when there is a
larger space between the observer and the fixed point
(Usually larger than 5 m),we began to say scenes rather
than field of view. That is to say, most of the object is a
hand distance but scenes usually means where we can
move in this space. The research on scene recognition is
similar to object classification and recognition research.
The scene is unlike objects, object is often tight and
works on it; but the scenario is extended in space and
function it.
However, visual recognition faces enormous
challenges on range of applications and processing
efficiency, illumination, covering, scale, changes within
the class and other problems all affect the visual
perception technology widely applications in practical
technology and life.
Throughout the theory and practice about the object
and scene recognition from a decade, basic framework
revolves around two core content: image expression and
classifier design. Since the essentially of image is a two-
dimensional matrix or a high-dimensional vector, the
number of original pixels is so huge that encounter
enormous difficulties in handling data even the ability of
current computer enhanced, meanwhile the original pixel
contains a large number of invalid information, so the
purpose of image expressing is obtaining low-
dimensional image vector expression with strong
judgment. The most classic image representation model is
Bag-of-features model or named codebook model, this
model is encode local descriptors of the image, quantified
the training samples, projection obtained, the principle of
this model is simple and easy to achieve, gained better
results in the scene and object recognition these years.
Commonly used classification comprises generative
model and discrimination model, LiFeiFei of Stanford
University practiced LDA technology appearing in the
text semantic into the visual field, achieving the self-
classification of objects, non-supervised learning has
been one of the most famous applications in the field of
computer vision, as discrimination model has used tag
information in the training process, so it always obtain
better classification results than the generative model, in
this chapter, we introduced the most important
background knowledge and theory in object and scene
recognition field.
As mentioned above, underlying visual information
such as edge, surface, detail and other information play
an important role in the identification, the description
based on the local structure is the underlying sub-visual
content, and it’s the most commonly used image
description method in senior visual. In this section, we
294 JOURNAL OF MULTIMEDIA, VOL. 9, NO. 2, FEBRUARY 2014
© 2014 ACADEMY PUBLISHERdoi:10.4304/jmm.9.2.294-301

will respectively introducing classic descriptors: SIFT
and give a short brief about SURF, DAISY and others.
Before SIFT description, Gaussian distribution and
directed acyclic graph first. Figure 1 shows the diagram
of image processing Gaussian function.
Scale(next
octave)
Scale (first
ovtave)
Difference of GaussianGaussian
Figure 1. Key deduction function in image processing of Gaussian
model
A long time ago, people had made use of directed
acyclic graph (DAG) to represent causal relationships
between events. Geneticists Sewall Wright proposed a
graphical approach indicates causal path analysis which is
called path analysi; later it became a fixed causal model
representation for the economics, sociology, and
psychology. Good once used a directed acyclic graph to
represent a causal relationship which is composed by
Distributed cause binary variables. Influence diagrams
represents another application for the decision analysis
and the development of directed acyclic, they include the
event nodes and decision nodes. In these applications, the
main role of directed acyclic graph is to provide a
description of a probability function effectively. Once the
network configuration is complete, all subsequent
calculations are all completed through operating
probabilistic expression symbols. Pearl began to notice
DAG the structure can be used as a structure of method of
calculating method, and it can be used as a cognitive
behavioral model. He updated concept of distributed
program by a tree network, purpose is modeling for
reading comprehension distributed processing and
combining the reason of Top-down and bottom-up to
form a consistent explanation. This dual reasoning model
is the core of update Bayesian network model and also
the central idea of Bayesian.
SIFT which is Scale Invariant Feature Transform, was
proposed by David Lowe in1999 and further improved in
2004, to detecting and describing the algorithms of the
local feature. Descriptor SIFT looking local extreme
value among adjacent scales by DOG(Difference-of-
Gauss) in scale space determine the salient points
position and scale in the image, then extracting region
gradient histogram in the finding significant point to
obtain the final SLFT local descriptors. This method has
the following features: 1) With a strong rotation, scale, brightness, etc.
invariance and better overcome the viewpoint changes,
affine transformation, noise;
2) Good discrimination description big difference in
different local area after quantification, can be matched
quickly and accurately;
3) Producing SIFT sufficient feature vector by
adjusting the parameters;
4) Fast and optimization SIFT matching algorithm can
even achieved real-time requirements;
5) Scalability can be very convenient joint with other
forms of feature vectors.
Figure 2. The calculation of SIFT descriptor
Because of the characteristics of SIFT local features
and descriptor, it has become a typical and a standard
meaning descriptor in the session of computer vision as
showed in figure 2. It has been widely applied in the field
of object recognition, robot path planning and navigation,
behavior recognition, video target tracking and so on. In
this study, by description SIFT descriptors as the basic
contrast characterization; make the test results better
descriptive and comparative.
LiFeiFei proposed a generation model based on LDA,
and applied this model into scene classification tasks.
This model does not require labeling of image, it can
greatly improve the classification efficiency. Framework
is based codebook model, obtaining the distribution of
code word and scene theme through unsupervised
training. This method is getting from improving LDA
proposed by Dabbled. Got probability distribution of the
local area and the intermediate subjects through an
automatic learning approach, training set do not need to
label anything other than the category labels.
Training
Pattern Detection
Images input
Feature Extract
Code generate
Express images
Model Learning
Best Model
Decision
Unknow images
Feature Detection
Figure 3. Algorithms working procedure
Literature mainly introduces the basic theory of
dynamic Bayesian network classifier; literature discussed
the active Bayesian network classifier based on genetic
algorithm, literature practice dynamic Bayesian network
classifier for speech recognition and speaker recognition,
literature research on time sequence recognition, graphic
tracing and macroeconomic Modeling of dynamic
Bayesian network methods. The algorithm working
procedure is showed in figure 3.
JOURNAL OF MULTIMEDIA, VOL. 9, NO. 2, FEBRUARY 2014 295
© 2014 ACADEMY PUBLISHER

Explain model structure in plain language, after
selected the class of the image, if known the category is
mountains, we can obtain the probability vector, this
vector pointed out each block image may have a certain
intermediate subjects. In order to obtain an image sub-
block, firstly you should define a particular subject topic
in all mixing. For example, if you choose “Rock” as your
subject, the associated code word about rock will appear
more frequencies (slanted line). So, after selected a more
inclined to the horizontal edge topics, selected a possible
code word of a horizontal partition. The process of
repeating select a theme and code words ultimately
generate an image of the scene patch which is created a
complete range of mountains. Chart is a graphical
illustration of this generation model. This model is called
the topic model as showed in figure 4.
θ
n
β
τ
C
X
Z
Figure 4. Topic model diagram
As previously mentioned, image recognition which
based on the classic machine learning theory is divided
into two parts: Feature description and Characteristic
judgment. This framework also applies to video object
recognition self-organization. However, video object has
its own unique and challenging:
Target characteristic in Video is often experienced
long-term and gradual process therefore its characteristics
go through this process of change inevitably. This
requires the analysis about the effectiveness of the
features must be a progressive process
The target in video is often appeared accompanied by
scenes, that is the target and the background has a strong
correlation. How to take advantage of this correlation,
improve recognition performance, is one of the
challenges.
As figure 5 shows, conventional saliency processing
model mainly consisted of two steps, which also can’t
handle current challenges. Step one is log the spectrum
and then smooth the logged spectrum or do spectral
residual, finally, a saliency image would showed as the
last two images shows.
Current research indicates that there is no evidence
shown human pattern recognition algorithm is
advantageous than standard machine learning algorithms,
and human beings not too dependent on the amount of
training data. Therefore the key effect of the human
cognitive accuracy may lie in the choice of characteristics.
In fact, relative to the learning methods of discrimination
characteristics, feature description plays a more important
role in the performance of the object recognition. For this
reason research focused on how to effectively description
target features in the video. On the one hand, the gradient
of target characteristics requires establish an online
evaluation mechanisms for target feature, Specific
features may only valid in a specific period of time, on
the other hand, the relevance of the objectives and the
scene, can achieved by mixing characterized of the global
scene and the local features of the target.
Log spectrum
Smoothed log spectrum Spectral residual
Figure 5. Saliency image processing model
II. SALIENCY PRIOR BASED IMAGE PROCESSING
MODEL
A. Feature Point Selection
One aim of study is to analysis the effectiveness of
different object characteristics in the course of recursive
cognitive. This study analyzes the soundness and change
in effectiveness of the target object characteristic in
spatial scale and practice in the process of people's
perception to the object, simulation the intensity changes
of the clustering characteristics in local descriptors to the
characteristic changes of target object which is perceived
by the human eye, and continue to screening on the target
object features, obtained robust through dimension
reduction and the increasing characteristics.
In the field of computer vision can achieved the analog
of statistical characteristics of the object through a
number of local descriptions. Compared to the overall
description of the image this method has a better
robustness and adaptability; the single local descriptor is
only characteristics collection in a small area around the
point of interesting, local structure can’t express the
general characteristics of the target object.
First, extracting descriptor by the samples of poly
library, secondly clustering and generates several code
word, and then, extract features description of the test
sample and the training sample in the same way and
projected onto the code word. Treat each code word as a
channel, in this way we can get the result of each channel
changes by the characterized projected in the timeline, get
distribution curve of feature projection on each channel.
Experiments under the framework of the information
entropy and mutual information criterion, two different
but related ways, reduce the dimension of the feature
channel. Finally, analyze the effects of dimensionality
reduction based on the code book and support vector
296 JOURNAL OF MULTIMEDIA, VOL. 9, NO. 2, FEBRUARY 2014
© 2014 ACADEMY PUBLISHER

machine identification system, to achieve robustness and
effectiveness of the characterized channel. In this report,
firstly, establish the word bags express of the image, then
information entropy and mutual information from the
perspective of the characteristics of the cognitive process
of analysis is divided into recursion, then divided the
feature recursive cognitive process analysis into
robustness analysis and impact analysis on decision-
making in the perspective of information entropy and
mutual information, illustrate the dimension reduction of
the characteristics channel from the implementation of
the next two-step.
At the pre-processing stage of the target image, this
study uses the codebook to express image (Bag-of-
Features). This article was extracted features from the test
library, training library, clustering library, and clustering
generated codeword of M, getting the projection on code
word from the test library image and clustering library
sample, Bag-of-Features for object recognition and
classification are divided into the following steps:
Extracted Local feature of image, common local
features include: SIFT, SURF, DAISY, Opponent-SIFT,
texture feature and so on.
Study the visual vocabulary. The learning process
achieved mainly through the clustering algorithm, the
cluster center from classical K-means and improved
methods K-means++ is the code word, the collection of
code word is called codebook.
Quantified, projected the Local features of the training
samples onto code word obtained code word frequency
each image can be expressed by histogram which is
composed from the code word.
Image classification and identification. After the Bag-
of-Features, learning a discrimination to distinguish
different types of goals. Commonly used classification
Includes: Neighbor classifier, Neighbor K classifier,
Linear classifier, SVM, Nonlinear SVM
B. Gaussian Mixture Model
Gaussian Mixture Model, this is linear combinations of
A plurality of single-Gaussian distribution, is the
promotion of Single Gaussian probability density
function. GMM can be smoothly approximate the
probability density distribution of any shape. Therefore, it
is often used in background modeling and speech
recognition in recent years, and achieved good results.
In this research, using Gaussian mixture model
distribution fitting projection vector of a series of video
frames in the same dimension data. The resulting of
Gaussian mixture model can show the distribution of
projection vectors in the dimension of the subject more
precisely. Furthermore, by calculating the projection
vector sequences from the training and projection vector
sequences from the testing, obtaining symmetry KL
divergence from the two corresponding fitted distribution
in same dimensional data, can determine the validity of
dimensional data where the performance of the object
characteristics, and exclude a certain lower validity
dimensional, which can make no damage or even
improve the ability to correctly identify the target to
system while reducing the amount of data processing.
For the single sample 1x in the observational data sets
1, 2, nX x x x ,
The density function of Gaussian mixture distribution
is:
1
/ /k k i k
k
i
P xi w p x
In this Formula, kw is Mixing coefficient, regarded as
the weight of each Gaussian distribution component:
1, 2, k is parameter space of each Gaussian
distribution, 1i
kk
represents the component of a
Gaussian distribution mean and variance in k. Generally
use maximum likelihood estimation method to determine
the parameters of the model:
1
/ / /N
i
P X P xi L X
argmax /L X
For a Gaussian mixture model, it is not feasible to
seeking its maximum value by directly the partial
derivative. And then consult online EM for estimating
Gaussian mixture model parameter. The related formula
of the algorithm as following:
,
,
1
' / '/ '
' / '
k k i
j j j i
ik
j
w p xp k x
w p x x
,
1
/ 'N
i
i
kd p k x
1' 'k kw
N
Getting a feature vector with higher dimensional after
clustering and characterization targets. To ensure the
correctness results of the matching, we should screen out
the dimension which represents the target information
stably, and removing unstable dimension. Analysis from
the timeline seeking the probability density function
through the distribution of each dimension, choosing a
distribution is more stable dimension.
Distance K-L is a degree to measure the similarity
between distribution kp p and the known distribution
kq q in statistical, which is defined as
2// logi
i
ii
KLp
D p q pq
In this 0KLD . Only when the two distributions are
identical until the distance K-L is equal to 0.Distance K-L
is not symmetric about p and q. Generally, the
distribution from p to q is not equal to the distribution
from q to p. the value of K-L distance is lager with the
difference of the two distributions. The details are
showed in tablet 1.
We use K-L distance to calculate the similarity of the
two mixed Gaussian distribution. After description the
feature of the measured image, fit the data for each
dimension of each feature, Get mixture Gaussian model
at each dimension, and calculate the K-L distance to the
corresponding dimension of the library. Select a certain
number dimensions which is close proximity to K-L
distance, achieved the purpose of reducing the feature
JOURNAL OF MULTIMEDIA, VOL. 9, NO. 2, FEBRUARY 2014 297
© 2014 ACADEMY PUBLISHER

dimension, improving stability of characterization,
improving matching accuracy.
TABLE I. GAUSSIAN MIXTURE MODEL FITTING RESULTS AT A
CERTAIN DIMENSION
Dimension Mean Variance Weight
1 0.007923 0.045144 1.000000
2 0.000000 12.500000 0.000000
3 0.000000 12.531255 0.000000
4 0.053632 0.2342323 1.000000
5 0.087521 0.3431683 1.000000
6 0.142327 0.5217323 1.000000
In the course of this research, we found the
characteristics for the same channel; Chart is the values
for fitted distribution of three Gaussian mixture models in
a certain dimension, wherein the 2.3 dimension is initial
value. But the eventually weight is 0. By comparing the
characteristics of all the dimensions, concluded that, the
fitting is subject to a single Gaussian distribution whether
for the test sample statistics or the training sample
statistics.
The projection value after normalizing the same
dimension, is also subject to a single Gaussian
distribution, this is also confirmed the correctness of the
conclusions from the side.
C. Evaluation Model Design
The effectiveness of characteristic in cognitive process:
the validity on object class descript as below:
Showing by the previous evidence, the effectiveness of
feature performed on the categories is the size of on the
mutual information with the category labels. As the
complexity of the conditional probability, design the
following experiment to simulate:
1. Estimated the training sample distribution between
each channel through Gaussian mixture models
2. Estimated the test sample frames image distribution
for each channel by Gaussian mixture models
3. Seeking the KL divergence according the
distribution between training and testing samples,
comparing the divergence value with a predetermined
threshold specified T, we define channel with no
performance or smaller effect to target as characteristic
channel which value is greater than the threshold.
This process can be expressed as follows flowchart.
As is shown in the flowchart, in the second process of
dimension reduction, respectively fitting the training and
test sets with Gaussian mixture model, then gather the KL
distance of each dimensions to a scatter plot. From the
figure, for the first one hundred dimensional SIFT feature,
the distance between two distributions is so small. A
greater part of distributions from the texture and color
histogram is far away the outliers. This is mainly due to
relatively large difference between the image scale in the
training and testing database, caused by lacking scale
invariance of color histogram.
Likewise, described by the former, they are
independent between the channels and features, so we can
compare the KL distances between the distributions
through threshold value T2. The channel greater than the
T2 threshold value is considered to be bad characterize
category information, and the channel smaller than the T2
threshold value is considered to be good characterize
category information, contribute to separate the different
types of objects in characteristics.
Through the feature extraction, get the most effective
feature to category determining, achieve an effective
result in dimensionality reduction, reducing the
complexity of the following model parameter estimation.
Target Video Frame
Training Video Frame
Extract Feature and
map to N dimension
Space
Calculate 2N Gaussian Mixture Model
Calculate N distribute KL divergence
Filter dimensional data according to size of divergence
Adjust character
vector
Figure 6. Schematic considering the difference between test sample and training sample
Classification decision refers to using statistical
methods classified these identified objects as a category.
Basic approach is set a judgment rules based on the
training sample, lower the identified objects error
recognition rate and loss caused by this rules, the decision
rule of Bayesian network pattern recognition model is
Bayesian network classifier, it’s obtained by learning the
structure and parameters of Bayesian networks.
Parameters usually determined by the structural and data
sets, therefore Bayesian network structure learning is the
core of Bayesian network learning.
In this research, simulate the human eye perceives
objects recursive process through targeted campaign on
the scale space, analysis the robustness of characterized
and effectiveness of objects cognition through the angle
of minimum information entropy and maximum mutual
information. Design a experiment, modeling on the
sample according Gaussian mixture model and cross-
entropy, present feature evaluation criteria to both cases.
Through the on-line self-organization recognition
experiments, we can verify dimensionality reduction
method is effective.
D. Supervised Learning Process
In order to generate high-quality code word, in the
clustering process using intersection kernel metrics K-
means method based on histogram. This is mainly
because HIK is able to effectively calculate the number of
points falling into the same collection at a given level;
and In the process of visual perception, the local
descriptors such as SIFT and DAISY are based on the
description of the histogram; in the process of comparing
the similarity of two local descriptor, using histogram
intersection is more appropriate than classical Euclidean
distance.
298 JOURNAL OF MULTIMEDIA, VOL. 9, NO. 2, FEBRUARY 2014
© 2014 ACADEMY PUBLISHER

Set 1, 2,i
ih h h h R
histogram, ih is the frequency
of codeword in codebook model. Histogram intersection
kernel HIK is defined as:
1, 2 1 , 2
1
min( )d
HI i i
i
K h h h h
Initial center can be obtained by K-MEANS ++
method, each local feature assigned to the corresponding
center, according to the following equation: 2
2 ij
jx i x
i
hh m h
= , ,
2
2
2j j
HI j k HI x jjk j
x
ii
K h h K h hh
If xh is a arbitrary partial description, im is the current
cluster centers, using histogram intersection kernel, when
calculating the similarity between the local features and
the current cluster center, the first item at this point does
not affect the results, the second term needs to be
calculated for different feature, each time a new element
added, the amount of calculate mainly spent in the last
one.
Figure 7. Supervised learning express code image
It is critical to select the appropriate classification for
specific issues. Linear support vector machine get good
results in the visual field for its efficient and high
accuracy. In actually, Pyramid GIST description can be
seen as image histogram description at multi-scale and
multi-up and the codebook model is can be viewed as a
histogram of the frequency for local significant structure,
Euclidean distance is not the best metrics to describing
the similarity of two descriptors from this point.
As previously mentioned, histogram intersection core
is better than the Euclidean distance in histogram metrics,
it can be predicted that in the field of visual cognition
using histogram intersection kernel support vector
machines can achieve better results under this framework.
Given labeled training set
,1
N
i ii
D y x
,
ix is the training data, 1,2,iy n corresponding to
ix categories. The dual form of SVM can be reduced to
optimization problem, that is,
,
1
1
2
N
i i j i j i j
i i
W y y k x y
Define:
0 , 0i i iC y
The Commonly linear kernel is defined as
,i j i jk x x x x
The framework for this topic, as mentioned previously,
codebook model and Pyramid global are all based
essentially on the expression of the histogram. Therefore
under this case, use the histogram intersection nuclear
may better express the similarity between the two
characterizes. However, histogram intersection kernel is
non-linear kernel, requiring more memory and computing
time than the linear kernel. Maji and some others have
researched this problem, decomposing formula in a
similar manner, accelerating the calculation, ultimately
required O n time complexity and memory. In the
experiment, using a modified LIBSVM to achieve multi-
class distinguish.
III. EXPERIMENT AND VALIDATION
A. Experiment Environment
In the test, according the experiments framework set
by Quattoni, testing on a standards outdoor image
database. For each category, select eighty images used for
training, twenty pictures for testing, for the convenience
and standardize, we directly use the name of the file they
offer, so, in this experiment, we used the same
experimental data with Quattoni. In order to train one to
many classifiers, sampling N positive samples and
sampling 3N negative samples in the same. Create three-
tier expression in accordance with the previously
described pyramid image, each layer using the Gabor
filter processing at three scales and eight directions,
tandem all images to obtaining the expression vector in
the end, totally 24192 dimensional vector. In order to
obtain description of the partial salient region, we
extracted dense SIFT descriptors at the respective three
pyramid images, then projected on the 500 cluster centers,
tandem the frequency of all the blocks descriptors
similarly, so in codebook model, each image marked by a
10500 dimensional vector. Finally, as tablet 2 shows,
tandem the two described to get the latest image
compositing expression. In the determination phase,
training in the histogram intersection kernel support
vector machine.
TABLE II. COMPARISON VECTORS OF DIFFERENT METHODS
dimensionality reduction Normal dimensional
HIK SVM 100% 100%
Liner SVM 25.173% 100%
Polynomial SVM 92.053% 94.325%
RBF SVM 73.249% 92.971%
In this model, the image is modeled as a collection of a
series of local block, these regions are a part of the
“subject”, each block is expressed by the code book, and
through training can be obtained scenes themes of each
class and code word distribution. For the test samples,
identify the code word firstly, and then finding class
model which is the best matching code word distribution.
JOURNAL OF MULTIMEDIA, VOL. 9, NO. 2, FEBRUARY 2014 299
© 2014 ACADEMY PUBLISHER

B. Test Results
Chart is the result of comparing the present method to
the other reference. Repeated experimental results of
Quattoni, include GIST of core RBF, Quattoni prototype
representation and space pyramid matching of Lazebnik.
In the experiment, take two layers of Pyramid, the size of
the dictionary is 400, primitive image is 50, matching the
two sides by histogram intersection kernel; in this paper,
support vector machine approach based on hybrid
expression and histogram intersection kernel (selected the
Number of code words are200 and 500). It is obviously
that, the proposed method achieved the best results,
reached an accuracy rate of 40%.
Figure 8. Comparison of different meyhods
Even pure pyramid GIST histogram intersection SVM
method get to 30%, this has exceeded 4% to the highest
accuracy rate of Quattoni. Finally, this method outstrips
about 4 percentage points beyond the spatial pyramid
matching of Lazebnik. From the figure, it has shown that,
using more code word can significantly improve the
accuracy.
Figure 9. Recognition result of same hybrid with different kernel of SVM
Figure 9 is using pyramid GIST express different
kernel support vector machine comparison and
verification: selected 50 pictures in each category
randomly, select another 20 images for testing, image
expressed by the GIST pyramid. It is shown in the
simplified framework, the results of histogram cross core
easily goes beyond others’. It is noteworthy that, better
performance in the usual kernel support vector machine
RBF was particularly bad in here, this may be due to this
metric is not applicable to express the characterization of
GIST based on histogram.
IV. CONCLUSION
In this part, proposed a mixing expression of images,
to test the effectiveness of hybrid expression, extend the
goal to indoor scene. In fact, the essential of general
object recognition and indoor scenes are the same, but the
interior scenes with greater within-class variance and the
similarity between classes. So much classical
identification of objects, scene understanding methods
have shown its weaknesses in processing the indoor
scenes. Inspired by the Devi Parikh study, focused the
first step of the design on the discrimination significance
of image expression, considered from the overall
expression of the image and local significant structures,
by the further excavation from the relationship between
the area of the overall expression and considering a more
suitable histogram intersection distance in the classic
codebook model, finally, got mixed image expression
after the series. After acquiring an image expression,
getting ultra-face of distinguish different types point in
high-dimensional space through the training. This
moment, compare the similarity between the image
expression has become one of the key issues, using the
histogram intersection kernel support vector machines,
through the experimental comparison, found that the
recognition rate under this framework enhance the
accuracy of Kurdish in a large extent.
ACKNOWLEDGEMENT
This research is funded by: Youth Research Fund
Anqing Normal University in 2011 Project: Domain
Decomposition Algorithm for Compact Difference
Scheme of the Heat Equation (Grant No. KJ201108).
REFERENCES
[1] Chikkerur, S., T. Serre, and T. Poggio, Attentive
processing improves object recognition. Journal of
Neuroscience, Vol. 20, No. 4, 2000.
[2] Fergus, R., P. Perona, and A. Zisserman, Object class
recognition by unsupervised scale-invariant learning, 2003
IEEE Computer Society Conference on Computer Vision
and Pattern Recognition, pp. 264-267, 2003..
[3] Jiang, Y., C. Ngo, and J. Yang. Towards optimal bag-of-
features for object categorization and semantic video
retrieval, Proceedings of the 6th ACM international
conference on Image and video retrieval, pp. 494-501,
2007.
[4] Niebles, J., H. Wang, and L. Fei-Fei, Unsupervised
learning of human action categories using spatial-temporal
words. International Journal of Computer Vision, vol. 79,
no. 3, pp. 299-316, 2008
[5] Grauman, K. and T. Darrell, The pyramid match kernel:
Efficient learning with sets of features, Journal of Machine
Learning Research, pp. 725-760, 2007.
[6] Cristianini, N. and J. Shawe-Taylor, An introduction to
support Vector Machines: and other kernel-based learning
methods, Cambridge Univ Pr, 2000.
[7] Gambetta D, Can we trust trust? In: Gambetta D, ed. Trust:
Making and Breaking Cooperative Relations. Basil
Blackwell: Oxford Press, pp. 213~ 237, 1990.
[8] Bouhafs F, Merabti M, Mokhtar H. A Semantic Clustering
Routing Protocol for Wireless Sensor Networks, IEEE
300 JOURNAL OF MULTIMEDIA, VOL. 9, NO. 2, FEBRUARY 2014
© 2014 ACADEMY PUBLISHER

Consumer Communications and Networking Conference,
pp. 351-355, 2006
[9] Avciba, I., et al., Image steganalysis with binary similarity
measures. EURASIP Journal on Applied Signal Processing,
pp. 2749-2757, 2005.
[10] Maji, S., A. Berg, and J. Malik. Classification using
intersection kernel support vector machines is efficient,
IEEE Conference on Computer Vision and Pattern
Recognition, pp. 1-8, 2008.
[11] Lazebnik, S., C. Schmid, and J. Ponce, A sparse texture
representation using local affine regions. IEEE
Transactions on Pattern Analysis and Machine Intelligence,
pp. 1264-1276, 2005.
[12] Manjunath, B. and W. Ma, Texture features for browsing
and retrieval of image data. Pattern Analysis and Machine
Intelligence, IEEE Transactions on, vol. 18, no. 8, pp. 836-
841, 2002.
[13] Bay, H., T. Tuytelaars, and L. Van Gool, Surf: Speeded up
robust features. Computer Vision CECCV 2006, pp. 402-
415, 2006.
[14] Nowak, E., F. Jurie, and B. Triggs, Sampling strategies for
bag-of-features image classification. Computer Vision
CECCV 2006, pp. 491-502, 2006.
[15] Fischler, M. and R. Elschlager, The representation and
matching of pictorial structures. Computers, IEEE
Transactions on, vol. 100, no. 1, pp. 68-93, 2006.
[16] Joubert, O, Processing scene context: Fast categorization
and object interference. Vision Research, vol. 47, no. 26,
pp. 3285-3295, 2007.
[17] Biederman, J., J. Newcorn, and S. Sprich, Comorbidity of
attention deficit hyperactivity disorder with conduct,
depressive, anxiety, and other disorders. American Journal
of Psychiatry, vol. 145, no. 5, pp. 563-577, 1991.
[18] Oliva, A. and A. Torralba, Modeling the shape of the scene:
A holistic representation of the spatial envelope.
International Journal of Computer Vision, vol. 42, no. 3,
pp. 144-174, 2001.
[19] Odone, F., A. Barla, and A. Verri, Building kernels from
binary strings for image matching. Image Processing, IEEE
Transactions on, vol. 14, no. 2, pp. 168-180, 2005.
[20] Maji, S., A. Berg, and J. Malik. Classification using
intersection kernel support vector machines is efficient. :
Computer Vision and Pattern Recognition, 2008. CVPR
2008. IEEE Conference on, pp. 1-8, 2008.
[21] Wu, J. and J. Rehg. Beyond the Euclidean distance:
Creating effective visual codebooks using the histogram
intersection kernel.: 2009 IEEE 12th International
Conference on Computer Vision, pp. 630-637, 2009
JOURNAL OF MULTIMEDIA, VOL. 9, NO. 2, FEBRUARY 2014 301
© 2014 ACADEMY PUBLISHER

A Novel Target-Objected Visual Saliency
Detection Model in Optical Satellite Images
Xiaoguang Cui, Yanqing Wang, and Yuan Tian Institute of Automation, Chinese Academy of Sciences, Beijing, China
Email: {xiaoguang.cui, yanqing,wang, yuan.tian}@ia.ac.cn
Abstract—A target-oriented visual saliency detection model
for optical satellite images is proposed in this paper. This
model simulates the structure of the human vision system
and provides a feasible way to integrate top-down and
bottom-up mechanism in visual saliency detection. Firstly,
low-level visual features are extracted to generate a
low-level visual saliency map. After that, an attention shift
and selection process is conducted on the low-level saliency
map to find the current attention region. Lastly, the original
version of hierarchical temporal memory (HTM) model is
optimized to calculate the target probability of the attention
region. The probability is then fed back to the low-level
saliency map in order to obtain the final target-oriented
high-level saliency map. The experiment for detecting
harbor targets was performed on the real optical satellite
images. Experimental results demonstrate that, compared
with the purely bottom-up saliency model and the VOCUS
top-down saliency model, our model significantly improves
the detection accuracy.
Index Terms—Visual Salience; Target-Oriented;
Hierarchical Temporal Memory
I. INTRODUCTION
With the development of remote sensing technology,
optical satellite images have been widely used for target
detection, such as harbors and airports. In recent years,
high spatial resolution satellite images provide more
details for shape, texture and context [1]. However, data
explosion for high resolution remote sensing images,
brings more difficulties and challenges on fast image
processing. Visual saliency detection aims at quickly
identifying the most significant region of interest in
images by means of imitating the mechanism of the
human vision system (HVS). In this way, significant
regions of interest can be processed with priority by the
limited computing resource, thus substantially improving
the efficiency of image processing [2]-[3].
There are two models for HVS information processing,
namely, bottom-up data driven model and top-down task
driven model. Bottom-up model often acts as the
unconscious visual processing in early vision and is
mainly driven by low-level cues such as color, intensity
and oriented filter responses. Currently, many bottom-up
saliency models have been proposed for computing
bottom-up saliency maps, by which we can predict
human fixations effectively. Several bottom-up models
are based on the well known biologist saliency model by
Itti et al [4]. In this model, an image is decomposed into
low-level feature maps across several spatial scales, and
then a master saliency map is formed by linearly or
non-linearly normalizing and combining these maps.
Different from the biological saliency models, some
bottom-up models are based on mathematical methods.
For instance, Graph-based Visual Saliency (GBVS) [5]
formed a bottom-up saliency map based on graph
computations; Hou and Zhang [6] proposed a Spectral
Residual Model (SRM) by extracting the spectral residual
of an image in spectral domain; Pulsed Cosine Transform
(PCT) based model [7] extended the pulsed principal
component analysis to a pulsed cosine transform to
generate spatial and motional saliency.
Although the bottom-up saliency models are shown to
be effective for highlighting the informative regions of
images, they are not reliable in target-oriented computer
vision tasks. When apply bottom-up saliency models in
optical satellite images, due to the lack of top-down prior
knowledge and highly cluttered backgrounds, these
models usually respond to numerous unrelated low-level
visual stimuli and miss the objects of interest. In contrast,
top-down saliency models learn from training samples to
generate probability maps for localizing the objects of
interest, and thus produce more meaningful results than
bottom-up saliency models. A well-known top-down
visual saliency model is Visual Object detection with a
CompUtational attention system (VOCUS) [8], which
takes the rate between an object and its background as the
weight of feature maps. The performance of VOCUS is
influenced by object background. Although it performs
well in nature images, it does not work reliably in the
complicated optical satellite images. Recently, several
top-down methods have been proposed based on learning
mappings from image features to eye fixations using
machine learning techniques. Zhao and Koch [9]-[10]
combined saliency channels by optimal weights learned
from eye-tracking dataset. Peters and Itti [11], Kienzle et
al. [12] and Judd et.al. [13] learned saliency using scene
gist, image patches, and a vector of features at each pixel,
respectively.
It is established that top-down models achieve higher
accuracy than bottom-up models. However, bottom-up
models often take much lower computational complexity
due to only taking into account of low-level visual stimuli.
In this case, an integrated method of combining
302 JOURNAL OF MULTIMEDIA, VOL. 9, NO. 2, FEBRUARY 2014
© 2014 ACADEMY PUBLISHERdoi:10.4304/jmm.9.2.302-309

bottom-up and top-down driven mechanisms is needed to
get benefits from both types of mechanisms.
How to effectively integrate bottom-up and top down
driven mechanisms is still an unsolved problem for the
visual saliency detection. According to the mechanism of
HVS, this paper proposes a target-oriented visual saliency
detection model, which is based on the integration of both
the two driven mechanisms. The proposed model consists
of three parts, namely pre-attention phase module,
attention phase module and post-attention module. Firstly,
a low-level saliency map is quickly generated by the
pre-attention phase module to highlight the regions with
low-level visual stimuli. Then the attention phase
conducts an attention shift and selection process in the
low-level saliency map to find the current attention
region. After obtaining the attention region, a target
probability of the region evaluated by the post-attention
module is fed back to the low-level saliency map to
generate a high-level saliency map where the suspected
target regions are emphasized meanwhile the background
interference regions are suppressed. The main
contributions of this paper are:
A new method is presented for combining top-down
and bottom-up mechanisms, i.e. revising the low-level
saliency map with target probability evaluation so that the
attention regions containing suspected targets are
enhanced, meanwhile inhibiting the non-target regions.
An effective method for focus shift and attention
region selection is proposed to focus on the suspected
target regions rapidly and accurately.
The original HTM model is improved in several
respects including the input layer, the spatial module and
the temporal module, leading to a robust estimation of the
target probability.
This paper is structured as follows: Section II describes
the framework of the proposed model. The details of the
three parts i.e. pre-attention phase module, attention
phase module and post-attention module are presented in
Section III, IV and V, respectively. Experimental results
are shown in Section VI. Finally, we give the concluding
remarks in Section VII.
II. FRAMEWORK OF THE PROPOSED MODEL
A new model is presented to simulate HVS attention
mechanism, and composed of three functional modules,
namely, pre-attention phase module, attention phase
module and post-attention phase module, as shown in Fig.
1. The pre-attention phase is a bottom-up data driven
process. It is employed to extract the lower features to
form the low-level saliency map. According to principles
of winner takes all, adjacent proximity and inhibition of
return [4], the attention phase module carries out the
focus of attention shift on the low-level saliency map and
proposes a self-adaptive region growing method to
rationally select the attentions regions. The post-attention
phase is a top-down data driven process, and its major
function is to apply the HTM model [14]-[15] to evaluate
the target probability of the selected attention regions.
The probability is then multiplied with the corresponding
attention region on the low-level saliency map, thus a
high-level saliency map which is more meaningful to
locate objects of interest is generated.
III. PRE-ATTENTION PHASE
In this phase, we first extract several low-level visual
features to give rise to feature maps, and then we
compute saliency map for each feature map using the
PCT-based attention model. Finally, saliency maps are
integrated to generate the low-level saliency map. The
block diagram of the pre-attention phase is shown in Fig.
2.
A. Feature Extraction
If a region in the image is salient, it should contain at
least one distinctive feature different from its
neighborhood. Therefore, visual features of the image
should be extracted first. For this, we extract three
traditional low-level visual features, i.e. color, intensity
and orientation.
1) Color and intensity: HSI color space describes a
color from the aspect of hue, saturation and intensity,
more consistent with human visual features than RGB
color space. Hence, we transfer the original image from
RGB to HIS in order to obtain the color feature map H ,
S and the intensity feature map I :
3
),,min(1
},180;,0{
)(3
2arctan90
360
1
BGRI
I
BGRS
BGBG
BG
BGR
H
(1)
2) Orientation: Artificial targets in optical satellite
images generally possess obvious geometrical
characteristics. Therefore, orientation feature is crucial to
identify the artificial targets. Here we adopt Gabor filters
)135,90,45,0( k
oooo to extract the orientation
feature. The kernel function of a 2-D Gabor wavelet is
defined as:
kk
iv
zv
k
k
k
k
k
v
eeev
z
sin,cos
)( 22
2
22
2
22
(2)
where ),(z yx denotes the pixel position, and the
parameter determines the ration between the width
of Gaussian window and the length of wave vector. We
set 47 in the experiment. Four orientation
feature maps can be obtained by convoluting the intensity
feature map I with k
:
)()()( zzIzOkk (3)
JOURNAL OF MULTIMEDIA, VOL. 9, NO. 2, FEBRUARY 2014 303
© 2014 ACADEMY PUBLISHER
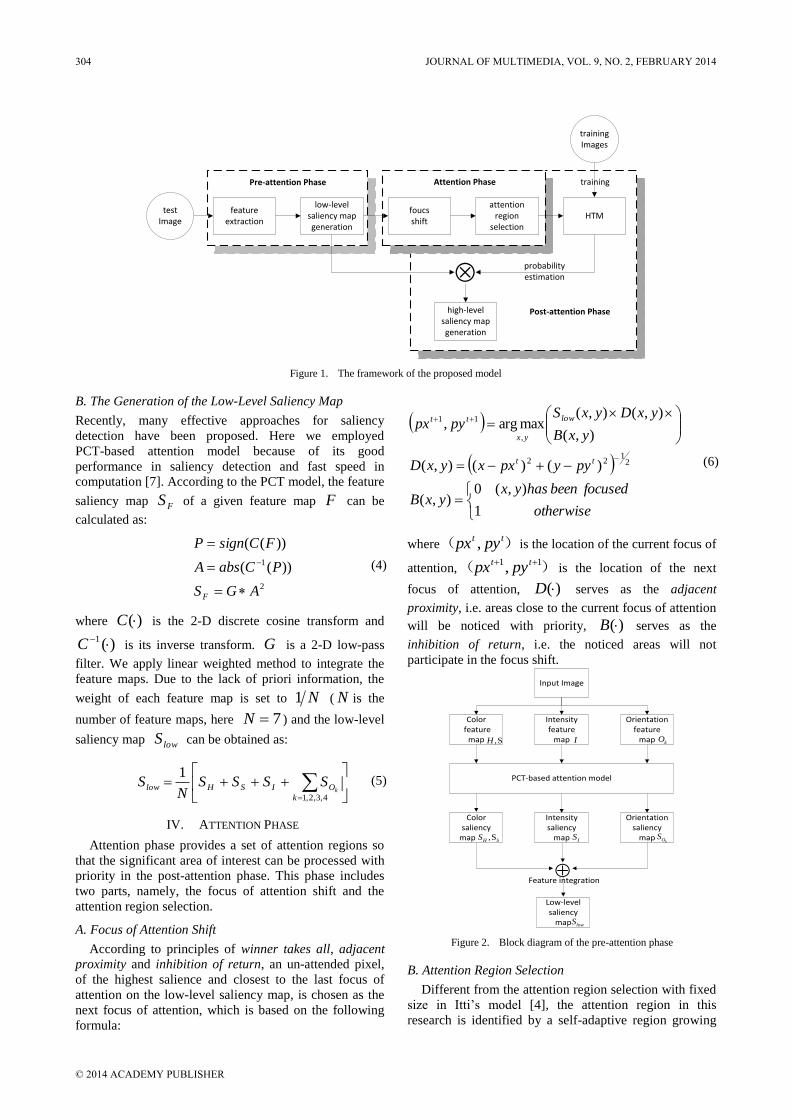
Attention Phase
featureextraction
low-level saliency mapgeneration
foucs shift
attention region
selectionHTM
trainingImages
training
high-level saliency mapgeneration
probability estimation
Pre-attention Phase
Post-attention Phase
testImage
Figure 1. The framework of the proposed model
B. The Generation of the Low-Level Saliency Map
Recently, many effective approaches for saliency
detection have been proposed. Here we employed
PCT-based attention model because of its good
performance in saliency detection and fast speed in
computation [7]. According to the PCT model, the feature
saliency map FS of a given feature map F can be
calculated as:
2
1 ))((
))((
AGS
PCabsA
FCsignP
F
(4)
where )(C is the 2-D discrete cosine transform and
)(1 C is its inverse transform. G is a 2-D low-pass
filter. We apply linear weighted method to integrate the
feature maps. Due to the lack of priori information, the
weight of each feature map is set to N1 ( N is the
number of feature maps, here 7N ) and the low-level
saliency map lowS can be obtained as:
4,3,2,1
1
k
OISHlow kSSSS
NS (5)
IV. ATTENTION PHASE
Attention phase provides a set of attention regions so
that the significant area of interest can be processed with
priority in the post-attention phase. This phase includes
two parts, namely, the focus of attention shift and the
attention region selection.
A. Focus of Attention Shift
According to principles of winner takes all, adjacent
proximity and inhibition of return, an un-attended pixel,
of the highest salience and closest to the last focus of
attention on the low-level saliency map, is chosen as the
next focus of attention, which is based on the following
formula:
otherwise
focusedbeenhasyxyxB
pyypxxyxD
yxB
yxDyxSpypx
tt
low
yx
tt
1
),(0),(
)()(),(
),(
),(),(maxarg,
21
22
,
11
(6)
where )( tt pypx , is the location of the current focus of
attention, )( 11, tt pypx is the location of the next
focus of attention, )(D serves as the adjacent
proximity, i.e. areas close to the current focus of attention
will be noticed with priority, )(B serves as the
inhibition of return, i.e. the noticed areas will not
participate in the focus shift.
Feature integration
Input Image
Color feature
map
Intensity feature
map
Orientation feature
map
PCT-based attention model
Color saliency
map
Intensity saliency
map
Orientation saliency
map
,SH I kO
,SH SS ISkOS
Low-levelsaliency
map lowS
Figure 2. Block diagram of the pre-attention phase
B. Attention Region Selection
Different from the attention region selection with fixed
size in Itti’s model [4], the attention region in this
research is identified by a self-adaptive region growing
304 JOURNAL OF MULTIMEDIA, VOL. 9, NO. 2, FEBRUARY 2014
© 2014 ACADEMY PUBLISHER

method: taking the focus of attention as seed point, the
region growing is conducted by computing the saliency
difference between the current growing area and its
surrounding areas according to a given step-size sequence.
Once the difference tends to be decreasing, the growth
will be terminated. Finally, the minimum area-enclosing
rectangle of the growing area is deemed to the attention
region. Here we define iR as the growing area obtained
in each growth, in as the number of pixels in iR , iA
as the saliency difference between iR and its
surrounding area. Given a step-size sequence
]),0[( TiNi , where T denotes the maximum times
of growing, the algorithm for the self-adaptive region
growing is as Algorithm 1. Algorithm 1 Self-adaption region growing
Input: ( [0, ])iN i T , 0 { }R f , where f is the present focus of
attention; 0 1n ; 1i .
Iteration:
while not reach the maximum growing time do
Initialize iR and
in : 1i in n ;
1i iR R .
while do
produce a new growing point p : arg max ( )j
jp
p S p , where
jp A , A is the adjacent pixel set of iR , ( )jS p is the saliency of
jp .
update iR and : { , }i iR R p ;
1 1i in n .
end while Calulate :
1
1 1( ) ( )j i j i
i j i j i
p R p R
A S p N S p N
when 1iA
tends to
decrease, the growth is
terminated:
if then the growth is terminated.
else
1i i ; growth continues.
end if
end while
Output:
the minimum area-enclosing rectangle of .
V. POST-ATTENTION PHASE
In the post-attention phase, we optimize the original
version of the HTM model [14] to estimate the target
probability of attention regions. The probability is then
fed back to the low-level saliency map, and finally the
target-oriented high-level saliency map is generated.
A. The Optimization of HTM
HTM model is the newest layering network model that
imitates the structure of the new human neocortex [14].
HTM model takes time and space factors which depict
samples into account in order to tackle with ambiguous
rule of inference, presenting strong generalization ability.
Thus, it has been gradually highlighted in the field of
pattern recognition [16]-[19].
Different from most HTM-based applications [15]-[18]
which apply the pixel’s grayscale as the input layer of
HTM, in this research, the low-level visual features
extracted in the pre-attention phase are taken as the input
layer for the purpose of improving the precision of the
model. Fig. 3 shows the structure of our HTM model,
where the notes in the second layer conduct the learning
and reasoning of the low-level visual features, meanwhile,
the notes above the third layer conduct the learning and
reasoning of the spatial position relationships. Notes in
different layers use the same mechanism to conduct the
learning and reasoning process, and they have the same
node structure which is formed by a spatial module and a
temporal module.
1) Spatial module: The main function of spatial
module is to choose the quantization centers of the input
samples, that is, to select a few representative samples in
the sample space. These centers should be carefully
selected to ensure that the spatial module will be able to
learn a finite quantization space from an infinite sample
space. It is assumed that the learned quantization space in
the spatial module of a node is ],...,,[ 21 nqqqQ ,
where iq is quantization center and N is the number
of the existing centers. All the Euclidean distances d
between these centers are calculated and their sum S is
considered as a distance metric of the quantization space:
N
i
N
j
ji qqdS ),( (7)
when a new input sample cq appears in the node, we
first add cq to Q , and the distance increment inc
caused by cq can be calculated as follows:
N
i
ci qqdinc ),( (8)
The change rate of the distance increment Sinc is
then examined against a given threshold . If
Sinc , cq is retained in Q otherwise, cq is
removed from Q . This algorithm ensures that input
samples which contain substantial information will be
considered as new quantization centers, whereas those
which do not contain representative information will be
discarded.
The learning of the spatial module is stopped when the
added quantization centers are sufficient to describe the
sample space. In practice, the learning is completed when
the rate of adding new centers falls bellow a predefined
threshold.
2) Temporal module: The temporal module proposed
in [14] is suitable in applications where the input samples
have obvious time proximity such as video images.
However, the input images for training the HTM model
rarely share any amount of time correlation in our
research. Therefore, instead of the time adjacency matrix
proposed in [14], we exploit a correlation coefficient
matrix C to describe the time correlation between
different samples. We adopt Pearson’s coefficient as the
JOURNAL OF MULTIMEDIA, VOL. 9, NO. 2, FEBRUARY 2014 305
© 2014 ACADEMY PUBLISHER

features extraction
1O 2O3O 4OH S I
class label
level 1
level 2
level 3
level 4
level 5 probability estimation
input space
Figure 3. The proposed HTM network structure
measure of correlation. The NN correlation matrix,
which contains the Pearson’s correlation coefficients
between all pairs of centers, is calculated as follows:
ji
ji
qjqi
ji
qqEqqC
)])([(),(
(9)
where E is the expected value operator, q and q
denotes the mean and the standard deviation of the
respective quantization center, respectively. The larger
the absolute value of correlation is the stronger the
association between the two centers.
A temporal grouping procedure is then utilized to
separate the quantization space Q into highly correlated
coherent subgroups. The major advantage of replacing
the time adjacency matrix with the correlation coefficient
matrix is that it enables the grouping procedure to be
irrelevant with the temporal sequence of sample images,
so as to improve the precision of the model.
In [14], a computationally efficient greedy algorithm is
introduced to the temporal grouping procedure. The
algorithm is briefly described as follows:
Select the quantization center with the greatest
connectivity.
Find the M quantization centers with greatest
connectivity to the selected quantization center, and
create a new group for the M centers.
Repeat step 1 and step 2 until all quantization centers
have been assigned.
The greedy algorithm requires the groups to be disjoint,
i.e., no quantization center can be part of more than one
group. However, in real applications, rarely groups can be
clearly identified. Some quantization centers usually lie
near the boundaries of two of more groups. As a result,
The greedy algorithm can lead to ambiguity because the
quantization centers are forced to be member of only one
group. To overcome shortcomings of the greedy
algorithm, here we propose a fuzzy grouping algorithm
that allows quantization centers to be member of different
groups according to the correlation.
We define a gq nn matrix PQG ( qn and gn
is the numbers of quantization centers and groups,
respectively), in which element [ , ] ( | )i jPQG i j p q g
denotes the conditional probability of quantization
centers iq given the group jg . ],[ jiPQG can be
obtained as follows:
jk
jl
gq
gq l
kjk
qp
qpqqCjiPQG
)(
)(),(],[ (10)
where )(p is the prior probability of quantization
centers. ],[ jiPQG shows the relative probability of
occurrence of coincidence iq in the context of group
jg , by which we design the fuzzy grouping algorithm, as
described bellow: We first use the greedy algorithm to
generate a initial grouping solution; then the groups with
less than a given threshold tn centers are removed
because they often bring limited generalization; the
quantization centers grouped by the greedy algorithm are
expected to be the most representative for the group,
however, other centers not belonging to the group could
have high correlation to centers in the group, we allow a
center iq to be added to a group jg if ],[ jiPQG
is high. The fuzzy grouping algorithm is shown in
Algorithm 2.
B. The Generation of High-Level Saliency Map
The low-level saliency map predicts interesting
locations merely based on bottom-up mechanism. By
means of introducing top-down mechanism to obtain
more meaningful results, simultaneously inspired by [14],
we multiply the probability (estimated by the HTM
model) with the according attention region on the
low-level saliency map to generate a high-level saliency
map. By this way, the suspected target regions are
emphasized in the high-level saliency map meanwhile the
background interference regions are suppressed.
Assuming tR is the present attention region, tP is the
306 JOURNAL OF MULTIMEDIA, VOL. 9, NO. 2, FEBRUARY 2014
© 2014 ACADEMY PUBLISHER

estimated probability of tR , Let lowhigh SS 0 , the
current high-level saliency map hightS can be obtained
as follows:
otherwise),(
),(if),(),(
1
1
yxS
RyxPyxSyxS
hight
tthigh
t
hight (11)
where hightS 1 is the corresponding high-level saliency
map of the last attention region. Algorithm 2 The fuzzy grouping algorithm
1. Create initial groups using the greedy algorithm.
2. Remove groups with less than tn (a given threshold)
quantization centers.
3. Compute the matrix PQG , each element [ , ]PQG i j is
calculated according to equation(10).
4. for each iq do
for each jg do
if [ , ]PQG i j (we set 0.8 in the experiment) then
j j ig g q
end if
end for
end for
VI. EXPERIMENT AND DISCUSSION
To verify the effectiveness of our model, the
experiment for detecting harbor targets is performed on
the real optical satellite images. There are 50 images used
in the experiment, all from Google Earth. Each image
contains 1 to 5 harbor targets. A total of 187 targets are
involved in the experiment, and 30 are chosen as the
training samples of HTM model. Related parameters in
the experiment are set as follows:
The step-size sequence is set according to the size
range of targets as:
}5050,4545,4040,3535
,3030,2525,2020,1515,1010,1{
N
The threshold value of Sinc is set to 0.08 according
to experiences, the learning of the spatial module is
completed when the rate of adding new centers falls
below 0.2, i.e. for every 10 new input vectors, when less
than 2 new centers are added, the learning procedure
should be stopped.
The focus of attention transition is stopped when the
transition times reach 20.
A. Accuracy Evaluation of the Optimized HTM
The original version of HTM [14] was implemented
for benchmarking against the optimized HTM. Both
versions used a 5-level network structure with the input
images of size 128 by 128 pixels. Firstly, the efficiency
of the original HTM and the optimized HTM were
examined. Then the input layer, spatial module and
temporal module of the original HTM was replaced
individually by the optimized version, and the resulting
efficiency was examined. The results are shown in
TABLE I.
Obviously, the optimized HTM shows much better
performances than the original HTM and both the
improvement in the input layer, spatial and temporal
module results in higher accuracy than the original
version.
The efficiency of the HTM could be further increased
with the utilization of a stronger classifier in the top layer
[15]. Therefore, we applied Support Vector Machine
(SVM) to estimate the probability in the top layer to get
higher accuracy results. To further verify the
effectiveness of the optimized HTM, a single SVM
classifier with a dimensionality reduction process via
Principal Component Analysis (PCA) was used as a
reference. TABLE II shows the detection accuracy of the
original HTM+SVM, the optimized HTM+SVM and
SVM+PCA. Obviously, by using a stronger classifier in
the top layer, both the original HTM and the optimized
HTM achieve higher accuracy than SVM+PCA.
TABLE I. DETECTION ACCURACY OF THE ORIGINAL HTM AND
THE OPTIMIZED HTM
Detection rate of
test set (%)
Detection rate of
train set (%)
Original HTM 72.51 81.63
Original HTM with feature
maps 77.42 85.17
Original HTM with the
proposed spatial module 75.12 83.42
Original HTM with the
proposed temporal module 79.74 87.94
Optimized HTM 81.34 89.28
TABLE II. DETECTION ACCURACY OF ORIGINAL HTM+SVM, THE
OPTIMIZED HTM+SVM AND SVM+PCA
Detection rate of test
set (%)
Detection rate of train
set (%)
Original
HTM+SVM 76.73 84.67
Original HTM +SVM
85.81 92.48
SVM+PCA 71.57 82.79
B. Saliency Detection Performance
Three methods are compared for accuracy evaluation,
including the low-level saliency map with the bottom-up
mechanism only, VOCUS, and the proposed model. Fig.
4 shows an experiment result and it can be seen that: 1)
the location of most harbors is significant on the
low-level saliency map. However, the most significant
regions are not harbors but other ground objects. 2) focus
of attention is shifted according to the order of the
declining intensity of significance. Moreover, the
selection of attention regions shows self-adaption (see Fig.
5 for an example), which is more consistent with the HVS
mechanism compared with the option of fixed size. 3) In
post-attention phase, the suspected target attention
regions on the low-level saliency map are enhanced while
the non-target regions are inhibited. 4) our model
performs better than VOCUS for it is more efficient to hit
target regions.
Fig. 6 shows the performance curve of the three
methods. The proposed model presents higher detection
precision than the other two methods, and can hit more
than 75% targets under 25% saliency ratio.
JOURNAL OF MULTIMEDIA, VOL. 9, NO. 2, FEBRUARY 2014 307
© 2014 ACADEMY PUBLISHER

1O2O 3O
4O
H S I
(a) ground truth image (b) feature maps
(c) low-level saliency map with the first 5 focus shifts. Target is hit in the 2th time.
(d) VOCUS saliency map with the first 5 focus shifts.Targets are hit in the 2th, 4th and 5th time.
(e) high-level saliency map with the first 5 focus shifts.All Targets are hit in the first 4 shifts. The probability of the 5 attention regions, in sequences, is 0.77, 0.86, 0.73, 0.69, 0.21.
Figure 4. Experiment results of low-level saliency map, VOCUS and high-level saliency map.
Figure 5. The self-adaption region growing of the first focus in Fig. 4(c). The growth is terminated in the downward inflection point
(marked as a red triangle in the figure).
In order to further assess the precision of our model,
we introduce three definitions: 1) hit number: the rank of
the focus that hits the target in order of saliency; 2)
average hit number: the arithmetic mean of the hit
numbers of all targets 3) detection rate: the ratio between
the hit target number in the precious 10 focus shifts and
the total target number. The accuracy analysis of the three
approaches is expressed in TABLE III and Fig. 7.
It can be seen from the experiment results that due to
the introduction of top-down mechanism, VOCUS and
our method are better than the low-level saliency map
with bottom-up mechanism only. At the same time, our
approach is excellent to VOCUS. This is mainly because
the top-down procedure of VOCUS only takes the weight
of lower feature into consideration while that of our
approach applies HTM model comprehensively took
account of the lower features and spatial location
relationship, possessing more effective target orientation.
Figure 6. The performance curve of low-level saliency map, VOCUS and high-level saliency map. Saliency ratio is the ratio between the size
of saliency area and of the total image.
TABLE III. AVERAGE HIT NUMBER AND DETECTION RATE OF THE
THREE METHODS.
Low-level saliency map
VOCUS The proposed model
Average hit number 11.67 8.46 3.75
Detection rate (%) 18.82 37.1 73.12
308 JOURNAL OF MULTIMEDIA, VOL. 9, NO. 2, FEBRUARY 2014
© 2014 ACADEMY PUBLISHER

the time of focus shift(a) low-level saliency map
the time of focus shift(b) VOCUS
the time of focus shift(c) the proposed model
the
num
ber o
f tar
gets
hit
in a
sin
gle
focu
s sh
ift
the
num
ber o
f tar
gets
hit
in a
sin
gle
focu
s sh
ift
the
num
ber o
f tar
gets
hit
in a
sin
gle
focu
s sh
ift
Figure 7. The number of targets hit in focus shifts. The total hit target number in the precious 10 focus shifts of the three methods is 35, 69, 136,
respectively. It is obviously that our model can hit more targets in the first few focus shifts.
VII. CONCLUSION
In this paper we propose a novel target-oriented visual
saliency detection model. Inspired by the structure of the
human vision system, we build the model with three
functional modules, i.e., pre-attention phase module,
attention phase module and post-attention phase module.
In the pre-attention phase module, a low-level bottom-up
saliency map is generated to locate attention regions with
low-level visual stimuli. In the attention phase module,
we propose an effective method for focus shift and
attention region selection to focus on the suspected target
regions rapidly and accurately. In the post-attention phase,
the original HTM is optimized in several respects
including the input layer, the spatial module and the
temporal module, leading to a robust probability
estimation. Experimental results demonstrate that our
model presents higher detection precision, compared with
models of both low-level bottom-up saliency map and
VOCUS model. It is proved that the proposed model
provides a feasible way to integrate top-down and
bottom-up mechanism in visual saliency detection.
ACKNOWLEDGMENT
This work was supported by the National Science
Foundation of China No. 61203239, No. 61005067 and
No. 61101222.
REFERENCES
[1] M. Li, L. Xu, and M. Tang, “An extraction method for
water body of remote sensing image based on oscillatory
network,” Journal of multimedia, vol. 6, no. 3, pp.
252–260, 2011.
[2] Q. Zhang, G. Gu, and H. Xiao, “Image segmentation based
on visual attention mechanism,” Journal of multimedia, vol.
4, no. 6, pp. 363–369, 2009.
[3] B. Yang, Z. Zhang, and X. Wang, “Visual
important-driven interactive rendering of 3d geometry
model over lossy wlan,” Journal of networks, vol. 6, no. 11,
pp. 1594–1601, 2011.
[4] L. Itti, C. Koch, and E. Niebur, “A model of saliency-based
visual attention for rapid scene analysis,” IEEE
Transactions on Pattern Analysis and Machine Intelligence,
vol. 11, no. 20, pp. 1254–1259, 1998.
[5] J. Harel, C. Koch, and P. Perona, “Graph-based visual
saliency,” in Advances in Neural Information Processing
Systems, 2007, pp. 542–552.
[6] X. Hou and L. Zhang, “Saliency detection: a spectral
residual approach,” in IEEE Computer Society Conference
on Computer Vision and Pattern Recognition, 2007, pp.
1–8.
[7] Y. Yu, B.Wang, and L.Zhang, “Bottom-up attention:
Pulsed pca transform and pulsed cosine transform,”
Cognitive Neurodynamics, vol. 5, no. 4, pp. 321-332, 2011.
[8] S. Frintrop, “Vocus: A visual attention system for object
detection and goal-directed search,” Lecture Notes in
Artificial Intelligence, Berlin Heidelberg, 2006.
[9] Q. Zhao and C. Koch, “Learning a saliency map using
fixated locations in natural scenes,” Journal of Vision, vol.
11, no. 3, pp. 1–15, 2011.
[10] ——, “Learning visual saliency,” in Information Sciences
and Systems Conference, 2011, pp. 1–6.
[11] R. Peters and L. Itti, “Beyond bottom-up: Incorporating
task dependent influences into a computational model of
spatial attention,” in IEEE Computer Society Conference
on Computer Vision and Pattern Recognition, 2007,
pp.1–8.
[12] B. Scholkopf, J. Platt, and T. Hofmann, “A nonparametric
approach to bottom-up visual saliency,” in Advances in
Neural Information Processing Systems, 2007, pp.
689–696.
[13] T. Judd, K. Ehinger, F. Durand, and A. Torralba,
“Learning to predict where humans look,” in International
Conference on Computer Vision, 2009, pp. 2106–2113.
[14] J. Hawkins and D. George, “Hierarchical temporal memory:
Concepts, theory and terminology,” Whitepaper, Numenta
Inc, 2006.
[15] I. Kostavelis and A. Gasteratos, “On the optimization of
hierarchical temporal memory,” Pattern Recognition
Letters, vol. 33, no. 5, pp. 670–676, 2012.
[16] A. Csap, P. Baranyi, and D. Tikk, “Object categorization
using vfa-generated nodemaps and hierarchical temporal
memories,” in IEEE International Conference on
Computational Cybernetics, 2007, pp. 257-262.
[17] W. Melis and M. Kameyama, “A study of the different
uses of colour channels for traffic sign recognition on
hierarchical temporal memory,” in Conference on
Innovative Computing, Information and Control, 2009, pp.
111–114.
[18] T. Kapuscinski, “Using hierarchical temporal memory for
vision-based hand shape recognition under large variations
in hands rotation,” in Artificial Intelligence and Soft
Computing, 2010, pp. 272–279.
[19] D. Rozado, F. B. Rodriguez, and P. Varona, “Extending
the bioinspired hierarchical temporal memory paradigm for
language recognition,” Neurocomputing, vol. 79, pp. 75–
86, 2012.
JOURNAL OF MULTIMEDIA, VOL. 9, NO. 2, FEBRUARY 2014 309
© 2014 ACADEMY PUBLISHER

A Unified and Flexible Framework of Imperfect
Debugging Dependent SRGMs with Testing-
Effort
Ce Zhang* School of Computer Science and Technology, Harbin Institute of Technology, Harbin, China
School of Computer Science and Technology, Harbin Institute of Technology at Weihai, Weihai, China
*Correspondence author, Email: [email protected]
Gang Cui and Hongwei Liu School of Computer Science and Technology, Harbin Institute of Technology, Harbin, China
Email: [email protected], [email protected]
Fanchao Meng and Shixiong Wu School of Computer Science and Technology, Harbin Institute of Technology at Weihai, Weihai, China
Email: [email protected], [email protected]
Abstract—In order to overcome the limitations of debugging
process, insufficient consideration of imperfect debugging
and testing-effort (TE) in software reliability modeling and
analysis, a software reliability growth model (SRGM)
explicitly incorporating imperfect debugging and TE is
developed. From the point of view of incomplete debugging
and introduction of new fault, software testing process is
described and a relatively unified SRGM framework is
presented considering TE. The proposed framework models
are fairly general models that cover a variety of the previous
works on SRGM with ID and TE. Furthermore, a special
SRGM incorporating an improved Logistic testing-effort
function (TEF) into imperfect debugging modeling is
proposed. The effectiveness and reasonableness of the
proposed model are verified by published failure data set.
The proposed model closer to real software testing has
better descriptive and predictive power than other models.
Index Terms—Software Reliability; Software Reliability
Growth Model (SRGM); Imperfect Debugging; Testing-
Effort
I. INTRODUCTION
Software reliability is important attribute and can be
measured and predicted by software reliability growth
models (SRGMs) which have already been extensively
studied and applied [1-2]. SRGM usually views software
testing as the unification of several stochastic processes.
Once a failure occurs, testing-effort (TE) can be
expended to carry out fault detection, isolation and
correction. In general, with the removal of faults in
software, software reliability continues to grow. SRGM
has become a main approach to measure, predict and
ensure software reliability during testing and operational
stage.
As software reliability is closely related to TE,
incorporating TE into software reliability model becomes
normal and imperative, especially in imperfect debugging
environment. As an important representative in sketching
the testing resource expenditure in software testing, TE
can be represented as the number of testing cases, CPU
hours and man power, etc. In software testing, when a
failure occurs, TE is used to support fault detection and
correction. A considerable amount of research on TE
applied in software reliability modeling has been done
during the last decade [3-8]. TE which has different
function expressions, can be used to describe the testing
resource expenditure [4]. The available TEFs describing
TE include constant, Weibull (further divided into
Exponential, Rayleigh and Weibull, and so on) [4], log-
logistic [5], Cobb-Douglas function (CDF) [7], etc.
Besides, against the deficiency of TEF in existence,
Huang presented Logistic TEF [3] and general Logistic
TEF [6] to describe testing-effort expenditure. Finally,
TE can also help software engineer to conduct optimal
allocation of testing resources in component-based
software [9].
In fact, software testing is very complicated stochastic
process. Compared with perfect debugging, imperfect
debugging can describe testing process in more detail. So,
in recent years, imperfect debugging draws more and
more attention [10-16]. Imperfect debugging is an
abstraction and approximation of real testing process,
considering incomplete debugging [12] and introduction
of new faults [10, 11]. It can also be studied by the
number of total faults in software [3, 4]. Reference [4]
combined Exponentiated Weibull TEF with Inflection S-
shaped SRGM to present a SRGM incorporating
imperfect debugging described by setting fault detecting
310 JOURNAL OF MULTIMEDIA, VOL. 9, NO. 2, FEBRUARY 2014
© 2014 ACADEMY PUBLISHERdoi:10.4304/jmm.9.2.310-317

rate ( )( ) 1
m tb t b r r
a . Obviously, when r=1,
the proposed model has evolved to exponential SRGM.
Likewise, Ahmad [13] also proposed an inflection S-
shaped SRGM considering imperfect debugging and had
Log-logistic TEF employed in his SRGM. Besides, there
is also research that suggests incorporating imperfect
debugging and TE into SRGM to describe software
testing process from the view of the variation of a(t). For
example, reference [14] presented * ( )( ) W ta t ae , and [3]
employed ( ) ( )a t a m t . Considering the fact that so-
called “peak phenomenon” occurs when m>3 in EW TEF
did not conform to real software testing [15], Huang
introduced imperfect debugging environment into
analysis by combining Logistic TEF with exponential and
S-shaped SRGM to establish reliability model, finally
obtaining a better effect. Kapur [16] proposed a unified
SRGM framework considering TE and imperfect
debugging, in which real testing process was divided into
failure detection and fault correction, and convolution of
probability distribution function was employed to
represent the delay between fault detection and correction
process. The imperfect debugging above is described by
complete debugging probability p and by introducing new
faults: ( ) ( )t ta W a m W . Compared to the others, the
proposed imperfect debugging in [16] is relatively
thorough. Actually these research efforts conducted from
different views and contents, lack thorough and accurate
description.
On the above basis, in the statistical literatures, some
studies have involved imperfect debugging and TE.
However, little research has been conducted to fully
incorporate ID and TE into SRGM, failing to describe the
real software testing. Thus, we come to know how
important and imperative it is to incorporate ID and TE
into software reliability modelling.
Obviously, in testing, the more real factors SRGM
considered, the more accurate the software testing
process would be. In this paper, a SRGM framework
incorporating imperfect debugging and TE is presented
and can be used to more accurately describe software
testing process on the basis of the existing research.
Unlike the earlier techniques, the proposed SRGM covers
two types of imperfect debugging including incomplete
debugging and introduction of new faults. It unifies
contemporary approaches to describe the fault detection
and correction process. Moreover, an improved Logistic
TEF with Not Zero Initialization is presented and verified
to illustrate testing resource consumption. Finally, a
special SRGM: SRGM-GTEFID is established. The
effectiveness of SRGM-GTEFID is demonstrated through
a real failure data set. The results confirm that the
proposed framework of imperfect debugging dependent
SRGMs with TE is flexible, and enables efficient
reliability analysis, achieving a desired level of software
reliability.
The paper is structured as follows: Sec.2 presents a
unified and flexible SRGM framework considering
imperfect debugging and TE. Next, an improved Logistic
TEF is illustrated to build a special SRGM in Sec.3. Sec.4
shows experimental studies for verifying the proposed
model. Sec.5 contains some conclusions plus some ideas
for future work.
II. THE UNIFIED SRGM FRAMEWORK CONSIDERING
IMPERFECT DEBUGGING AND TE
A. Basic Assumptions
In subsequent analysis, the proposed model and study
is formulated based on the following assumptions [3, 4,
17-21].
(1) The fault removal process follows a non-
homogeneous poisson process (NHPP);
(2) Let {N(t), t≥0} denote a counting process
representing the cumulative number of software failure
detected by time t, and N(t) is a NHPP with mean value
function m(t) and failure intensity function ( )t
respectively;
( )( )
Pr ( ) , 0,1,2....!
k m tm t eN t k k
k
. (1)
0
( ) ( )t
m t d . (2)
(3) The cumulative number of faults detected is
proportional to the number of faults not yet discovered in
the time interval (t, t+ t ) by the current TE expenditures,
and the proportion function is b(t) hereinafter referred to
as FDR;
(4) The fault removal is not complete, that is fault
correction rate function is p(t);
(5) New faults can be introduced during debugging,
fault introduction probability is proportional to the
number of faults corrected, and the probability function is
r(t) (r(t)<<p(t)).
B. General Imperfect Debugging Dependent Framework
Model Considering TE
Based on the above assumptions, the following
differential equations can be derived as:
( ) 1
( ) ( ) ( )( )
( ) ( )( )
( ) ( )( )
dm tb t a t c t
dt w t
dc t dm tp t
dt dt
da t dc tr t
dt dt
. (3)
where a(t) denotes the total number of faults in software,
c(t) the cumulative number of faults corrected in [0, t]
and w(t) TE consumption rate at t, that is
0( ) ( )
t
W t w x dx . Solving the differential equations
above with the boundary condition of m(0)=0, a(0)=a,
c(0)=0 yields
0( ) ( ) ( ) 1 ( )
0( ) ( ) ( ) ( )
u
w b p r dt
c t a w u b u p u e du
(4)
JOURNAL OF MULTIMEDIA, VOL. 9, NO. 2, FEBRUARY 2014 311
© 2014 ACADEMY PUBLISHER

0
( ) ( ) ( ) 1 ( )
0( ) 1 ( ) ( ) ( ) ( )
u
w b p r dt
a t a w u b u p u r u e du
(5)
0
0
( ) ( ) ( ) 1 ( )
0
( ) ( ) ( )
1 ( ) ( ) ( ) 1 ( )
u
t
w b p r dv
m t a w v b v
w u b u p u r u e du dv
(6)
Then the current failure intensity function ( )t can be
derived as:
0( ) ( ) ( ) 1 ( )
0
( )( ) ( ) ( )
1 ( ) ( ) ( ) 1 ( )
u
w b p r dt
dm tt aw t b t
dt
w u b u p u r u e du
(7)
Obviously, by setting the different values for b(t), p(t),
r(t) and w(t), we can obtain the several available models.
(1) If p(t)=1, r(t)=0 and regardless of TE, then the
proposed model has evolved into classical G-O model
[17];
(2) If p(t)=1, r(t)=0 and TEF is Yamada Weibull, Burr
type X, Logistic, generalized Logistic or Log-Logistic
respectively, then the proposed model has evolved into
the models in references [5,22];
(3) If p(t)=1, r(t)=0, b(t)=b [r+(1–r)m(t)/a] and TEF is
Weibull, then the proposed model has evolved into the
model in [4];
(4) In framework model, if p(t)=1, r(t)=1,
b(t)=b2t/(1+bt) and TEF is framework function, the
proposed model has evolved into the model in [3];
(5) If p(t)=1, r(t)=0, a(t) is increasing function versus
time t, and TEF is framework function, the proposed
model has evolved into the model in [14];
(6) If p(t)=1, r(t)=0 and TEF and b(t) are framework
functions, the proposed model has evolved into the
framework model in [15].
Thus, it can be seen that the proposed framework
model is a generalization over the previous works on
imperfect debugging and TEF and is more flexible
imperfect debugging framework model incorporating TE.
In a practical application, w(t), b(t), p(t) and r(t) can be
set to the proper functional forms as needed to accurately
describe real debugging environment. The proposed
model in this study incorporating imperfect debugging by
the current TE expenditures is more flexible and referred
to as SRGM-considering Generalized Testing-Effort and
Imperfect Debugging Model (SRGM-GTEFID).
III. THE IMPERFECT DEBUGGING DEPENDENT SRGM
WITH IMPROVED LOGISTIC TEF
Generally speaking, the most important factors
affecting reliability are the number of total faults: a(t),
fault detection rate (FDR): b(t) [21], and TE expenditure
rate: w(t). Hereon, we have obtained the expression of
a(t), and w(t) and b(t) will be discussed below.
Hereon, we present an improved Logistic TEF based
on Logistic TEF [6, 15, 23, 24].
1
( )1
t
t
e lW t W
e k
(8)
where W represents total TE expectation, k and l denote
the adjustment coefficient value, and is the
consumption rate of TE expenditure. At some point, TE
expenditure rate w(t) is:
2
( ) ( )( )
(1 )
t
t
dW t k l ew t W
dt ke
(9)
Obviously, 1
(0) 01
lW W
k
indicates that a
certain amount of TE needs to be expended before the
test begins. As w(t)>0, W(t) is an increasing function with
testing time t, and corresponds to the growing variation
trend of TE expenditure. When max
ln kt
, w(t) achieves
maximum: max
( )( )
4
k lw t W
k
. Obviously, w(t) first
rises then falls.
In a considerable amount of research, many research
studies suggest that b(t) is constant value [17], increasing
function or decreasing function versus time t. For
example, b(t)=btk [20], b(t)=b(0)+km(t)/a [15],
( )
1 bt
bb t
e
and b(t)=b(0) [1-m(t)/a] [15]. Actually,
these b(t) functions can only describe the varying of FDR
at some stage of software testing. Hereon, we present a
relatively flexible b(t) to comprehensively illustrate FDR.
( )1
t
t
eb t b
e
(10)
In our previous study, (10) has been verified to
describe the various changing trends of FDR.
For simplicity and tractability, let p(t)=p, and r(t)=r is
constant fault introduction rate due to r(t)<<p(t). If p≠0
and r≠0 obtained in experiment, the fault removal process
is imperfect, namely, there exist incomplete debugging
and introducing new faults phenomena. Below we
elaborate the SRGM obtained when W(t) and b(t) are set
to expressions in (8) and (10) respectively.
For convenience of exposition here, Let g(t)= w(t)b(t).
0
(1 ) ( )
0( ) ( )
u
p r g x dxv
f v g u e du
(11)
By integral transform, (11) can be converted to the
following form:
0
(1 ) ( )1( ) 1
(1 )
v
p r g x dx
f v ep r
(12)
Substitute (12) into (6), we can get:
0
(1 ) ( )
0( ) ( )
v
p r g x dxt
m t a g v e dv
(13)
312 JOURNAL OF MULTIMEDIA, VOL. 9, NO. 2, FEBRUARY 2014
© 2014 ACADEMY PUBLISHER

By the similar integral transform above, we can obtain:
0
(1 ) ( ) ( )
( ) 1(1 )
t
p r w x b x dxam t e
p r
(14)
where
1 21 2
0 0
20
( ) ( ) 20
( 1)
2
1 2
( ) ( ) ( ) ( )
( )
(1 ) 1
1( )
( )(1 )
( ) ( ) ( 1) 1( )
( 1)
t t
t tt
t t
t
n n tn n
G t g d w b d
k l e beW d
ke e
W b k l de e ke
k n eW b k l
n n
1 20 0n n
(15)
Substitute G(t) in (15) into (14), finally, m(t) is derived
as:
( 1)1 21 2
2
1 20 01 2
( ) ( ) ( 1) 1( )(1 )
( 1)
( )1
1
n n tn n
n n
k n ep bW k l r
n n
am t
p r
e
(16)
Accordingly, a(t) and c(t) can also be solved as follows:
( 1)1 21 2
2
1 20 01 2
( ) ( ) ( 1) 1(1 ) ( )
( 1)
( )1
1
n n tn n
n n
k n ep r bW k l
n n
ac t
r
e
(17)
( 1)1 21 22
1 20 01 2
( ) ( ) ( 1) 1(1 ) ( )
( 1)
2 1( )
1
1
n n tn n
n n
k n er p bW k l
n n
ra t a
r
e
(18)
IV. EXPERIMENTAL STUDIES AND PERFORMANCE
COMPARISONS
A. Criteria for Model Comparisons
Here, to assess the models, MSE, Variance, RMS-PE,
BMMRE and R-square are used to measure the curve
fitting effects and RE to measure the predictive abilities.
2
1
( )ki i
i
y m tMSE
k
(19)
2
1
21
1
( )1
,
k
i ki
iki
i
i
m t y
R square y yk
y y
(20)
( )qm t q
REq
(21)
2
1
( )
1
k
i i
i
y m t Bias
Variancek
(22)
1
( )k
i i
i
m t y
Biask
(23)
2 2-RMS PE Bias Variance (24)
1
( )1
min ( ),
ki i
i i i
m t yBMMRE
k m t y
(25)
where yi represents the cumulative number of faults
detected, m(ti) denotes the estimated value of faults by
time ti, and k is the sample size the real failure data set.
Obviously, the smaller the values of MSE, Variance,
RMS-PE, BMMRE, the closer to 1 of R-square, the
quickly closer to 0 of RE, which indicates better model
than the others.
TABLE I. THE SELECTED MODELS FOR COMPARISON
Model m(t)
SSRGM-
EWTEFID [4](S-shaped
SRGM-
considering the Exponentiated
Weibull TEF and Imperfect
Debugging)
( )
( )
1( )
1 (1 ) /
bW t
bW t
a em t
e
( ) (1 )tW t W e
DSSRGM-LTEFID
[3](Delay S-
shaped SRGM- considering
Logistic TEF and Imperfect
Debugging)
1 (1 ) ( )( ) 1 1 ( )1
r b r W tam t bW t e
r
( )1 1t
W WW t
Ae A
SRGM-GTEFID(the
proposed model)
0 01 2
1 21 2
( )(1 )
( 1)
2
1 2
( ) 1(1 )
( ) ( ) ( 1) 1
( 1)
n n
p bW k l r F
n n tn n
am t e
p r
Whre
k n eF
n n
B. Failure Data Set and the Selected Models for
Comparison
Hereon, in order to demonstrate the effectiveness and
validity of proposed model, we designate a failure data
set as an example which has been used and studied
extensively to illustrate the performance of SRGM [25].
In the meanwhile, three pre-eminent models considering
imperfect debugging and TE are also selected to be
compared with TEID-SRGM.
JOURNAL OF MULTIMEDIA, VOL. 9, NO. 2, FEBRUARY 2014 313
© 2014 ACADEMY PUBLISHER

C. Experimental Results and Comparative Studies
First, in order to verify the effectiveness of improved
Logistic TEF, we compared the proposed W(t) to that of
models in Table 1, Generalized Logistic TEF [6],
Rayleigh TEF [4], and Weibull TEF [4]. The goodness of
TE has been drawn to illustrate the fitting of TEFs in
Fig.1. From Fig.1, we can see that the models fit the real
TE well except Generalized Logistic TEF and Yamada
Rayleigh TEF.
a. Logistic TEF
b. Generalized Logistic TEF
c. Yamada Rayleigh TEF
d. Yamada Weibull TEF
e. Generalized Exponential TEF
f. Improved Logistic TEF
Figure 1. Observed/estimated cumulative testing-effort of failure data
set vs time
Furthermore, here we give the criteria values of W(t) as
shown in table 2. As indicated in Table 2, the values of
MSE, Variance, RMS-PE and BMMRE for W(t) of
SRGM-GTEFID are smallest, and the value of R-square
is closest to 1. Obviously, the results provide better
goodness of fit for failure data and proposed improved
Logistic TEF is suitable for modeling the testing
resources expenditure than the others.
TABLE II. COMPARISON RESULTS FOR DIFFERENT TEFS
TEF Model MSE R-square
Variance RMS-PE
BMMRE
Logistic
TEF
1.6271
9973
0.9680
3004
1.3221
8031
1.3103
6772
0.1066
9336
Generalized
Logistic
TEF
1.3361 2585
0.9784 7165
1.1915 0482
1.1875 1480
0.0857 7016
Yamada
Rayleigh
TEF
5.1476 9334
1.1757 0817
2.7599 0107
2.3227 9389
0.6374 1841
Yamada
Weibull
TEF
0.9022 4491
1.0126 3088
0.9845 0631
0.9757 4250
0.0842 3921
Generalized
Exponential
TEF
0.8502 8680
1.0071 5706
0.9512 0432
0.9473 1067
0.0720 7974
Improved
Logistic
TEF
.805117071 0.9945 2474
0.9479 3279
0.9478 6913
0.0496 6124
By calculating, n1=5 and n2=2 in (15) can satisfy the
requirements. The parameters of the models are estimated
based upon the failure data set and estimation results are
shown in Table 3.
314 JOURNAL OF MULTIMEDIA, VOL. 9, NO. 2, FEBRUARY 2014
© 2014 ACADEMY PUBLISHER

TABLE III. M(T) PARAMETER ESTIMATION RESULTS OF THE
MODELS
Model Estimation of model parameters
SSRGM-
EWTEFI
D
ˆ 392.41819765a , ˆ 0.05845694b , ˆ 0.39793805
, ˆ 67.3168W , ˆ 0.00000017 , ˆ 4.8380 ,
ˆ 0.231527
DSSRGM
-LTEFID
ˆ 181.415525a , ˆ 0.1393933b , ˆ 0.5076305r ,
ˆ 120.4042W , ˆ 3.1658A , ˆ 0.090
SRGM-
GTEFID
ˆ 265.81098261a , ˆ 0.00002672b , ˆ 0.8304480p ,
ˆ 0.03087796r , ˆ -0.00000895 , ˆ 0.5364128 ,
ˆ -0.57446398 , ˆ 67.2513W , ˆ 0.1425 ,
ˆ 5.0814u , ˆ 0.8969v
As can be seen from Table 3, the estimated value p and
r of SRGM-GTEFID are not equal to zero (p=0.8304480,
r=0.03087796, and r<<p). Therefore we can conclude
that the fault removal process is imperfect.
Next, the fitting curve of the estimated cumulative
number m(t) of failures is graphically illustrated in Fig. 2.
a. SSRGM-EWTEFID
b. DSSRGM-LTEFID
c. SRGM-GTEFID
Figure 2. Observed/estimated cumulative number of failures vs time
As seen from Fig. 2, it can be found that the proposed
model (SRGM-GTEFID) is very close to the real failure
data and fits the data excellently well. Furthermore, we
calculate comparison criteria results of all the models as
presented in Table 4. It is clear from the Table 4 that the
values of MSE, Variance, RMS-PE and BMMRE in
SRGM-GTEFID are the lowest in comparison with
models, and SRGM-GTEFID is followed by SSRGM-
EWTEFID, and DSSRGM-LTEFID. On the other hand,
in the R-square comparison, SRGM-GTEFID and
SSRGM-EWTEFID are the best, slightly differing in the
fourth decimal points of R-square value and closely
approximate to 1. Thus, R-square value of SRGM-
GTEFID is excellent. Moreover, the values of MSE,
Variance and BMMRE for SSRGM-EWTEFID are not
very close to the proposed model. Therefore, SRGM-
GTEFID provides better goodness of fit for failure data
set than the other three models, and can almost be
considered the best. The result can be explained in the
following. DSSRGM-LTEFID not only ignores
incomplete debugging but also sets FDR to b(t)=b2t/(1+bt)
form which are hard to describe different situations.
Likewise, SSRGM-EWTEFID also thinks debugging is
complete and sets ( ) [ (1 ) ( ) ]b t b m t a form which
cannot show accurately the variation trend of FDR. In
describing TE function W(t), SSRGM-EWTEFID
employs complicated Exponentiated Weibull distribution
TEF, but DSSRGM-LTEFID employ Logistic TEF.
These TEFs diverge from the real testing resources
expenditures. Due to all these insufficiencies, descriptive
powers of these two models are inferior to that of the
proposed one.
TABLE IV. COMPARISON CRITERIA RESULTS OF THE MODELS
Model MSE R-square Variance RMS-PE BMMRE
SSRGM-EWTEFID
85.963 38226
1.0177 8405
9.6015 4938
9.5243 7274
0.0642 1603
DSSRGM-
LTEFID
477.39
889056
1.2337
8026
25.569
67952
26.479
07462
0.5938
2104
SRGM-GTEFID
70.018 93565
1.0181 1856
8.6727 8321
8.5956 92178
0.0640 4033
In predictive capability, the relative error (RE) in
prediction is calculated and the results are shown
graphically in Fig. 3 respectively. It is noted that the RE
of the models approximate fast to zero. Furthermore, we
can see that SRGM-GTEFID is not close to zero most
quickly in all the models in the beginning. And for this,
we compute the REs in prediction for the models in Table
1 at the end of testing and the results are shown in Table
5. As indicated in Table 5, the minimums of RE in the
final four testing time (0.0625893076791,
0.02181151519274, 0.00866202271253 and
0.00502853969464, respectively) indicate the better
prediction ability than the others. Thus, predictive
capability of SRGM-GTEFID presents a gradually rising
tendency. The reason for this is that, due to involving
more parameters, predictive performance of SRGM-
GTEFID is modest when the failure data set is small, and
predictive performance is increasing and superior to the
other models when larger failure data set is employed.
JOURNAL OF MULTIMEDIA, VOL. 9, NO. 2, FEBRUARY 2014 315
© 2014 ACADEMY PUBLISHER

Figure 3. RE curve of the models
TABLE V. COMPARISON OF PREDICTIVE POWER (RE) OF THE
MODELS AT THE END OF TEST
Model 16th week 17th week 18th week 19th week
SSRGM-
EWTEFID
0.108543
8509796
0.071069
10995250
0.044780
78433134
0.027102
83884195
DSSRGM-LTEFID
-0.08418 3653131
-0.061996 76798341
-0.049032 80103292
-0.036132 5818587
SRGM-
GTEFID
0.062589
3076791
0.021811
51519274
0.008662
02271253
0.005028
53969464
Altogether, from Fig. 1-3 and Table 2, 4 and 5, we
conclude that the proposed model (SRGM-GTEFID) fits
well the observed failure data than the others and gives a
reasonable prediction capability in estimating the number
of software failures. Moreover, from Table 2, it can be
concluded that incorporating improved Logistic TEF into
SRGM-GTEFID yields a better fitting and can be used to
describe the real testing-effort expenditure.
V. CONCLUSIONS
A relatively unified and flexible SRGM framework
considering TE and ID is presented in this paper. By
incorporating the improved Logistic TEF into software
reliability models, the modified SRGM become more
powerful and more informative in the software reliability
engineering process. By the experimentation, we can
conclude that the proposed model is more flexible and fits
the observed failure data better and predicts the future
behavior better. Obviously, developing SRGM tailored to
diverse testing environment is main research direction in
view of imperfections in the real testing. Thus, change
point (CP) problem, the delay between fault detection
process (FDP) and fault correction process (FCP), and
dependence of faults should be incorporated to enlarge
the researching range of imperfect debugging. Further
research on these topics would be worthwhile.
ACKNOWLEDGMENT
This research was supported in part by the National
Key R&D Program of China (No.2013BA17F02), the
National Nature Science Foundation of China
(No.60503015), and the Shandong province Science and
Technology Program of China (No.2011GGX10108,
2010GGX10104).
REFERENCES
[1] E. A. Elsayed, “Ovewview of reliability testing,” IEEE
Trans on Reliability, vol. 61(2), pp. 282-291, 2012.
[2] Y. J. Long, J. Q, Ouyang, “Research on Multicast
Reliability in Distributed Virtual Environment,” Journal of
networks, vol. 8(5), 2013.
[3] C. Y. Huang, S. Y. Kuo, & M. R. Lyu, “An assessment of
testing-effort dependent software reliability growth
models,” IEEE Trans on Reliability, vol. 56, pp. 198-211,
2007.
[4] N. Ahmad, M. G. Khan, & L. S. Rafi, “A study of testing-
effort dependent inflection S-shaped software reliability
growth models with imperfect debugging,” International
Journal of Quality & Reliability Management, vol. 27, pp.
89-110, 2010.
[5] M. U. Bokhari, N. Ahmad, “Analysis of a software
reliability growth models: the case of log-logistic test-
effort function,” the 17th IASTED international conference
on Modelling and simulation. Montreal, Canada, pp. 540-
545, 2006.
[6] C. Y. Huang, & M. R. Lyu, “Optimal release time for
software systems considering cost, testing-effort, and test
efficiency,” IEEE Trans on Reliability, vol. 54, pp. 583-
591, 2005.
[7] S. N. Umar, “Software testing effort estimation with Cobb-
Douglas function: a practical application,” International
Journal of Research Engineering and Technology (IJRET),
vol. 2(5), pp. 750-754, 2013.
[8] H. F. Li, S. Q. Wang, C. Liu, J. Zheng, Z. Li, “Software
reliability model considering both testing effort and testing
coverage,” Ruanjian Xuebao/Journal of Software, 2013,vol.
24(4), pp. 749-760, 2013.
[9] Fiondella L, Gokhale SS. Optimal allocation of testing
effort considering software architecture. IEEE Trans on
Reliability, vol, 61(2), pp. 580-589, 2012.
[10] P. K. Kapur, H. Pham, S. Anand, & K. Yadav, “A unified
approach for developing software reliability growth models
in the presence of imperfect debugging and error
generation,” IEEE Trans on Reliability, vol. 60(1), pp.
331-340, 2011.
[11] O. Singh, R. Kapur, & J. Singh, “Considering the effect of
learning with two types of imperfect debugging in software
reliability growth modeling,” Communications in
Dependability and Quality Management., vol. 13, pp. 29-
39, 2010.
[12] P. K. Kapur, O. Shatnawi, A. G. Aggarwal, & R. Kumar,
“Unified framework for development testing effort
dependent software reliability growth models,” WSEAS
TRANSACTIONS on SYSTEMS, vol. 8, pp. 521-531, 2009.
[13] N. Ahmad, M. G. Khan, & L. S. Rafi, “Analysis of an
inflection S-shaped software reliability model considering
log-logistic testing-effort and imperfect debugging,”
International Journal of Computer Science and Network
Security, vol. 11, pp. 161-171, 2011.
[14] R. Peng, Q. P. Hu, S. H. Ng, & M. Xie, “Testing effort
dependent software FDP and FCP models with
consideration of imperfect debugging,” 4th International
Conference on Secure Software Integration and Reliability
Improvement, IEEE, pp. 141-146, 2010.
[15] S. Y. Kuo, C. Y. Huang, & M. R. Lyu, “Framework for
modeling software reliability, using various testing-efforts
and fault-detection rates,” IEEE Trans on Reliability, vol.
50, pp. 310-320, 2001.
[16] P. K. Kapur, O. Shatnawi, A. G. Aggarwal, & R. Kumar,
“Unified framework for developing testing effort
dependent software reliability growth models,” Wseas
Transactions on Systems, vol. 4, pp. 521-531, 2009.
[17] A. L. Goel, K. Okumoto, “Time-dependent error-detection
rate model for software reliability and other performance
316 JOURNAL OF MULTIMEDIA, VOL. 9, NO. 2, FEBRUARY 2014
© 2014 ACADEMY PUBLISHER

measures,” IEEE Trans on Reliability, vol. R-28, pp. 206-
211, 1979.
[18] M. Xie, B. Yang, “A study of the effect of imperfect
debugging on software development cost,” IEEE Trans on
Software Engineering, vol. 29, pp. 471-473, 2003.
[19] C. T. Lin, C. Y. Huang, “Enhancing and measuring the
predictive capabilities of testing-effort dependent software
reliability models,” The Journal of Systems and Software,
vol. 81, pp. 1025-1038, 2008.
[20] P. K. Kapur, V. B. Singh, S. Anand, & V. S. S. Yadavalli,
“Software reliability growth model with change-point and
effort control using a power function of the testing time,”
International Journal of Product Research, vol. 46, pp.
771-787, 2008.
[21] C. Y. Huang, “Performance analysis of software reliability
growth models with testing-effort and change-point,” The
Journal of Systems and Software, vol. 76, pp. 181-194,
2005.
[22] N. Ahmad, M. U. Bokhari, S. M. K. Quadri, & M. G. Khan,
“The exponentiated Weibull software reliability growth
model with various testing-efforts and optimal release
policy,” International Journal of Quality & Reliability
Management, vol. 25, pp. 211-235, 2008.
[23] H. F. Li, Q. Y. Li, M. Y. Lu, “A software reliability growth
model considering an S-shaped testing effort function
under imperfect debugging,” Journal of Harbin
Engineering University, vol. 32, pp. 1460-1467, 2011.
[24] Q. Y. Li, H. F. Li, M. Y. Lu, X. C. Wang, “Software
reliability growth model with S-shaped testing effort
function,” Journal of Beijing University of Aeronautics and
Astronautics, vol. 37(2), pp. 149-154, 2011.
[25] M. Ohbha, “Software reliability analysis models,” IBM
Journal of Research and Development, vol, 28, pp. 428-
443, 1984.
Ce Zhang, born in 1978, received Bachelor and Master degrees
of computer science and technology from Harbin Institute of
Technology (HIT) and Northeast University (NEU), China in
2002 and 2005, respectively. He has been a Ph.D. candidate of
HIT major in computer system structure since 2010. His
research interests include software reliability modeling, Fault-
Tolerant Computing (FTC) and Trusted Computing (TC).
Gang Cui was born in 1949 in China. He earned his M.S.
degree in 1989 and B.S. degree in 1976, both in
ComputerbScience and Technology from Harbin Institute of
Technology at Harbin. He is currently a professor and Ph.D.
supervisor in School of Computer Science and Technology at
Harbin Institute of Technology. He is a member of technical
committee of fault tolerant computing of the computer society
of China. His main research interests include fault tolerance
computing, wearable computing, software testing, and software
reliability evaluation. Prof. Cui has implemented several
projects from the National 863 High-Tech Project and has won
1 First Prize, 2 Second Prizes and 3 Third Prizes of the Ministry
Science and Technology Progress. He has published over 50
papers and one book.
HongWei Liu was born in1971 in China, is doctor, processor
and doctoral supervisor of HIT. His research interests include
software reliability modeling, FTC and mobile computing.
FanChao Meng was born in 1974 in China, is doctor and
associate processor of HIT. His research interests include
software architecture derived by model, software reliability
modeling software reconstruction and reuse, and Enterprise
Resource Planning (ERP).
JOURNAL OF MULTIMEDIA, VOL. 9, NO. 2, FEBRUARY 2014 317
© 2014 ACADEMY PUBLISHER

A Web-based Virtual Reality Simulation of
Mounting Machine
Lan Li* School of Mathematics and Computer Science, ShanXi Normal University, Linfen, China
*Corresponding author, Email: [email protected]
Abstract—Mounting machine is the most critical equipment
in the SMT (Surface Mounted Technology), the production
efficiency of which affects the entire assembly line's
productivity dramatically, and can be the bottleneck of the
assembly line if poorly designed. In order to enhance the
VM(Virtual Manufacturing) of mounting simulation for
PCB(Printed Circuit Board) circuit modular, the virtual
reality simulation of web-based mounting machine is
written in Java Applet as controlling core and
VRML(Virtual Reality Modeling Language) scenes as 3D
displaying platform. This system is data driven and
manufacturing oriented. System can dynamically generate
3D static mounting scene and interactively observe the
dynamic process from all angles. Simulation results prove
that the system has a high fidelity which brings good
practical significance to manufacturing analysis and
optimization for process design. It offers a new thought for
establishing a practical PCB circuit modular VM system in
unit production.
Index Terms—Virtual Reality; Virtual Manufacturing;
Vrml; Mounting; Simulation
I. INTRODUCTION
To accommodate the requirement for electronic
product with more varieties, variable batch, short cycle
and fast renewal, SMT assembly line has been widely
used. VM is the application of virtual reality technology
in the manufacturing field. The combination of SMT and
VM is ideal for promoting the design level of PCB board
circuit modular, guiding products to assemble correctly
for rapid manufacturing; thereby it is a hot topic for
research [1].
PCB virtual manufacturing technology has just begun
in both China and abroad. At present, researches on it
mainly focus on developing the VM system of the
Electronic Design and Manufacturing Integrated (EDMI)
established in Beijing by the Military Electronic Research
Institute of the former Electronic Division, which has led
to great research findings: it has established the
architecture of EDMI’s VM system from a point on
developing data-driven animation simulation technology;
and it has developed a virtual manufacturing system
orienting to the bottlenecks and efficiencies of the
production line. Huazhong University of Science and
Technology, and Wuhan Research Institute of Posts and
Telecommunications mainly engage in the research and
development of Computer Aided Process Planning
(CAPP) system for PCB Assembly in Computer
Integrated Manufacturing System (CIMS) [2]. Researches
on optimization problems were conducted in relevant
literatures and various resolution algorithms were given.
For instance, Guo et al proposed the optimization on
component allocation between placement machines in
surface mount technology assembly line [3]. Meanwhile,
Peng et al proposed an optimization based on scatter
search specific to the placement sequence for mounting
machine [4]. However, the researches mentioned above
mainly concentrate on the simulation in the production
line and the optimum allocation of manufacturing
technology. In addition, in spite of being quick and
effective, it is difficult for the development environment
to change the existing simulation software, which brings
some disadvantages. The virtual manufacturing
technology of PCB fails to reach some of its objectives
due to the limitations of the existing simulation software.
For instance, when taking SIMAN/CINEMA as the
virtual manufacturing development environment of
EDMI, it cannot simulate the manufacturing process of
some specific manufacturing units, such as mounting
machine and reflow machine.
Mounting machine is the most essential equipment in
the SMT, the production efficiency of which affects the
entire assembly line's productivity dramatically, and
could be the bottleneck of the entire assembly line if
poorly designed. However, there is little simulation on
the working process of the mounting machine. Hu et al
proposed five categories of mounting machines based on
their specification and operational methods [5]. By
combining software with programming, 3D simulation
system for SMT production line was designed and
implemented in [6]. Ma et al [7-9] proposed the way for
transferring model from the platform by OpenGL to
create scenes, designs an interface program to directly
transfer 3DS model documents, thus achieved the scene
simulation of mounting. The simulation environment
mentioned above uses high-level language (such as VC
++6.0) combined with 3D graphics library (such as
OpenGL), but programming is complex and it is difficult
for the system to satisfy the requirements of virtual reality
simulation.
Virtual reality simulation is the highest level of
simulation, which has the "dynamic, interactive,
immersive" characteristics. VRML is a standard
modeling language, which is easier than other high-level
318 JOURNAL OF MULTIMEDIA, VOL. 9, NO. 2, FEBRUARY 2014
© 2014 ACADEMY PUBLISHERdoi:10.4304/jmm.9.2.318-324
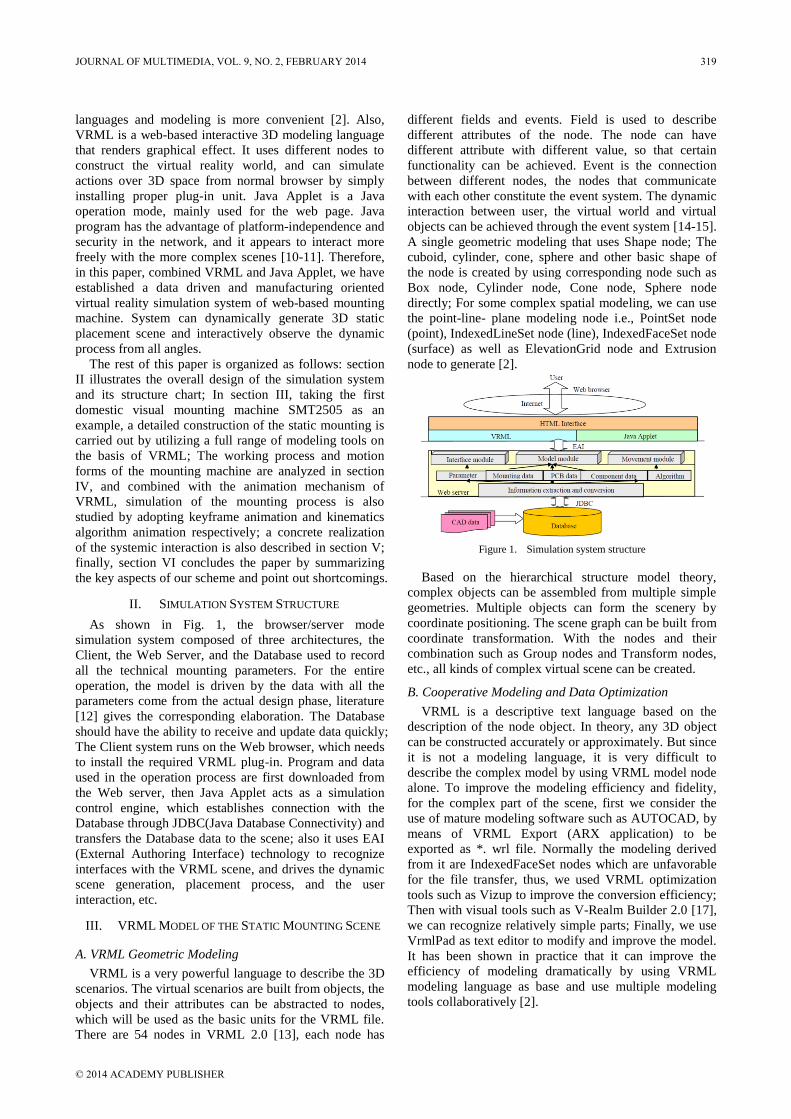
languages and modeling is more convenient [2]. Also,
VRML is a web-based interactive 3D modeling language
that renders graphical effect. It uses different nodes to
construct the virtual reality world, and can simulate
actions over 3D space from normal browser by simply
installing proper plug-in unit. Java Applet is a Java
operation mode, mainly used for the web page. Java
program has the advantage of platform-independence and
security in the network, and it appears to interact more
freely with the more complex scenes [10-11]. Therefore,
in this paper, combined VRML and Java Applet, we have
established a data driven and manufacturing oriented
virtual reality simulation system of web-based mounting
machine. System can dynamically generate 3D static
placement scene and interactively observe the dynamic
process from all angles.
The rest of this paper is organized as follows: section
II illustrates the overall design of the simulation system
and its structure chart; In section III, taking the first
domestic visual mounting machine SMT2505 as an
example, a detailed construction of the static mounting is
carried out by utilizing a full range of modeling tools on
the basis of VRML; The working process and motion
forms of the mounting machine are analyzed in section
IV, and combined with the animation mechanism of
VRML, simulation of the mounting process is also
studied by adopting keyframe animation and kinematics
algorithm animation respectively; a concrete realization
of the systemic interaction is also described in section V;
finally, section VI concludes the paper by summarizing
the key aspects of our scheme and point out shortcomings.
II. SIMULATION SYSTEM STRUCTURE
As shown in Fig. 1, the browser/server mode
simulation system composed of three architectures, the
Client, the Web Server, and the Database used to record
all the technical mounting parameters. For the entire
operation, the model is driven by the data with all the
parameters come from the actual design phase, literature
[12] gives the corresponding elaboration. The Database
should have the ability to receive and update data quickly;
The Client system runs on the Web browser, which needs
to install the required VRML plug-in. Program and data
used in the operation process are first downloaded from
the Web server, then Java Applet acts as a simulation
control engine, which establishes connection with the
Database through JDBC(Java Database Connectivity) and
transfers the Database data to the scene; also it uses EAI
(External Authoring Interface) technology to recognize
interfaces with the VRML scene, and drives the dynamic
scene generation, placement process, and the user
interaction, etc.
III. VRML MODEL OF THE STATIC MOUNTING SCENE
A. VRML Geometric Modeling
VRML is a very powerful language to describe the 3D
scenarios. The virtual scenarios are built from objects, the
objects and their attributes can be abstracted to nodes,
which will be used as the basic units for the VRML file.
There are 54 nodes in VRML 2.0 [13], each node has
different fields and events. Field is used to describe
different attributes of the node. The node can have
different attribute with different value, so that certain
functionality can be achieved. Event is the connection
between different nodes, the nodes that communicate
with each other constitute the event system. The dynamic
interaction between user, the virtual world and virtual
objects can be achieved through the event system [14-15].
A single geometric modeling that uses Shape node; The
cuboid, cylinder, cone, sphere and other basic shape of
the node is created by using corresponding node such as
Box node, Cylinder node, Cone node, Sphere node
directly; For some complex spatial modeling, we can use
the point-line- plane modeling node i.e., PointSet node
(point), IndexedLineSet node (line), IndexedFaceSet node
(surface) as well as ElevationGrid node and Extrusion
node to generate [2].
Figure 1. Simulation system structure
Based on the hierarchical structure model theory,
complex objects can be assembled from multiple simple
geometries. Multiple objects can form the scenery by
coordinate positioning. The scene graph can be built from
coordinate transformation. With the nodes and their
combination such as Group nodes and Transform nodes,
etc., all kinds of complex virtual scene can be created.
B. Cooperative Modeling and Data Optimization
VRML is a descriptive text language based on the
description of the node object. In theory, any 3D object
can be constructed accurately or approximately. But since
it is not a modeling language, it is very difficult to
describe the complex model by using VRML model node
alone. To improve the modeling efficiency and fidelity,
for the complex part of the scene, first we consider the
use of mature modeling software such as AUTOCAD, by
means of VRML Export (ARX application) to be
exported as *. wrl file. Normally the modeling derived
from it are IndexedFaceSet nodes which are unfavorable
for the file transfer, thus, we used VRML optimization
tools such as Vizup to improve the conversion efficiency;
Then with visual tools such as V-Realm Builder 2.0 [17],
we can recognize relatively simple parts; Finally, we use
VrmlPad as text editor to modify and improve the model.
It has been shown in practice that it can improve the
efficiency of modeling dramatically by using VRML
modeling language as base and use multiple modeling
tools collaboratively [2].
JOURNAL OF MULTIMEDIA, VOL. 9, NO. 2, FEBRUARY 2014 319
© 2014 ACADEMY PUBLISHER

Figure 2. Internal hierarchical structure
C. Model Establishment
Currently mounting machine can be divided into four
types: boom, composite, turret and large parallel system.
Boom machine works on medium speed with high
precision that can support many different types of feeders
and its price is cheap, so it is especially suitable for multi-
variety, small batch production, thus this paper uses
boom for simulation research. Take the domestic first full
visual mounting machine SMT2505 [16] as an example,
it can identify different component by its visual system
and place Chip, IC, SOIC rapidly and accurately. The
placement accuracy, placement velocity and identify
capability have reached the international level.
1) Internal Model
Without loss of generality, we analyze and abstract the
internal hierarchical structure of the machine by
referencing the relevant documents for simplicity, as Fig.
2 shows. The basic elements of mounting machine can be
divided into three parts: robot parts, the X/Z positioning
system and other ancillary parts. Through gripper
attached on the robot head, the boom mounting conducts
a series of actions such as suction- shift-positioning-
placing, mounting the components quickly and accurately
to the PCB position.
The modeling of all different parts is mainly based on
the basic modeling nodes and stretch solid modeling
under AUTOCAD. Next we are going to discuss the
generation of main parts in detail.
(1) Robot parts: As the key component of mounting
machine, it includes base, robot head and other parts.
Through gripper attached on the robot head, the boom
mounting conducts a series of actions such as suction-
shift-positioning-placing, mounting the components
quickly and accurately to the PCB position. Base's
modeling uses two cuboids doing minus operation to
generate under AutoCAD [2], the rest parts use Box node,
Cylinder node assembly, the resulting model is shown in
Fig. 3 below.
Figure 3. Robot parts model
(2) Gripper: It is used for grapping components and
uses the Cylinder node assembly for regulation shape as
shown in Fig. 4.
Figure 4. Gripper: (a) physical, (b) model
(3) Gripper location: It is used for storage of gripper
and has no corresponding node and may be carried on
with rectangular and circular to do the boolean
calculation under AutoCAD to reform the stretch solid
modeling as shown in Fig. 5.
(4) Feeder: Components to be assembled are kept in
various component feeders around the PCB. The shape is
relatively complex and usually contains tape, waffle and
bulk etc. Material modeling mainly uses the Box node,
Cylinder node assembly completed is shown in Fig. 6.
Figure 5. Gripper location model
Figure 6. Feeder model
X and Z positioning system models use the elliptic
region stretching to convert under AutoCAD. PCB
transmission mechanism can be modeling with Cylinder
node, PCB board and the rack can be simplify modeling
with the Box node [18].
The whole scene generation depends on each
component space position relationship. Impose a
Cartesian coordinate system on the work area, with the
center of z positioning system z-track 1 representing the
origin, and other parts by translation, rotation, scaling and
other geometric transformations with Transform node
assembly together, the resulting model is shown in Fig. 7
(b) below.
Figure 7. SMT2505:(a) interior,(b) internal model
320 JOURNAL OF MULTIMEDIA, VOL. 9, NO. 2, FEBRUARY 2014
© 2014 ACADEMY PUBLISHER

2) External Model
As shown in Fig. 8(a), the case of the mounting
machine can be grouped into three parts: operational
control, the shell itself and the display monitor based on
the structural features. Each of these three parts is made
up by corresponding components based on the structure
modeling principles. The geometric model of the
operational control part can be implemented by shifting,
rotating, shrinking and expanding the models of the
keyboard and electrical switch. The same can be applied
to the shell body and the display monitor geometric
models. The whole model of the outside part of mounting
machine is shown in Fig. 8(b) below.
Figure 8. SMT2505: (a) exterior,(b) external model
IV. DYNAMIC SIMULATION OF MOUNTING PROCESS
There are many methods for realization of the dynamic
simulation, such as key frame technology and kinematics
algorithm, etc. Key frame technology utilizes the
continuous play of the object movement for some key
frames specified path (a constant and orderly images) to
achieve animation effects. In VRML, a time sensor node
such as Time Sensor output clock drives various
interpolation and route changing some domain of
Transform node; Kinematics algorithm is determined by
kinematic equation of the object trajectory and rate,
without knowing its physical properties, that can be done
efficiently, In VRML, by means of the Script node
embedded JavaScript scripts, it can complete more
complex animation. Thus, according to mounting
machines work process definition, key frames or
derivation of kinematics equations is the basis and the
essential part of dynamic simulation [19]. The following
example analyzes the key steps.
A. Assembly Operation
The sequence of operations performed by such a pick-
and-place robot can be described as follows: the robot
head starts from its designated home location, moves to a
pickup slot location, then grabs a component, and moves
to the desired placement location, where the PCB is
assembled, and places it there. After placement, the robot
head moves to another pickup slot location to grab
another component and repeats the prior sequence of
operations. In case the components are not the same size,
robot also changes its gripper by moving to the gripper
location during the assembly operation. Also, finepitch
components are tested for proper pin alignment against an
upward-looking camera during their assembly. After
completing the assembly operation, the robot returns to
its home location, and waits for the next raw PCB to
arrive [20].
B. Key Frame Technology
Assumption: we need to mount three components
defined as 1, 2, 3 on PCB, which has been stored in
feeders respectively i.e., each feeder can contain one type
of components, two gripper defined as 1,2 placed in
gripper location, so, gripper1 mounts components 1,3,
gripper2 mounts components 2 in the order of 1-3-2, the
robot head starts from the home location, the movement
path is shown as in Fig. 9:
Figure 9. Movement path
Path 1: robot head moves to the gripper location, grabs
gripper 1;
Path 2: robot head moves to the feeder, gets
component 1;
Path 3: robot head moves to the desired placement
location where the PCB is assembled, and places it there;
Path 4: robot head moves to the gripper location, gets
component 3;
Path 5: robot head moves to the desired placement
location where the PCB is assembled, and places it there;
Path 6: robot head moves to the gripper location,
unloads gripper 1;
Path 7: robot head moves to the gripper location, grabs
gripper 2;
Path 8: robot head moves to the feeder, gets
component 2;
Path 9: robot head moves to the desired placement
location where the PCB is assembled, and places it there;
Path 10: robot head moves to the gripper location,
unloads gripper 2;
Path 11: robot returns to its home location.
Therefore, the action of robot head during the pick-
and-place operation can be described as follows:
Grabing gripper: in Y-direction moves down close to
the gripper then moves up to grab the gripper;
Unloading gripper: in Y-direction moves down to put
down the gripper then moves up;
Getting component: in Y-direction moves down close
to the component then moves up to get component;
Placing component: rotation around Y-axis and in Y-
direction moves down to place the component on the
PCB then moves up.
Based on the path described above and robot head
movements, the key frames (for simplicity, take the
simple model as the example) as shown in Fig. 10 can be
set to determine the coordinates of the location
throughout.
JOURNAL OF MULTIMEDIA, VOL. 9, NO. 2, FEBRUARY 2014 321
© 2014 ACADEMY PUBLISHER
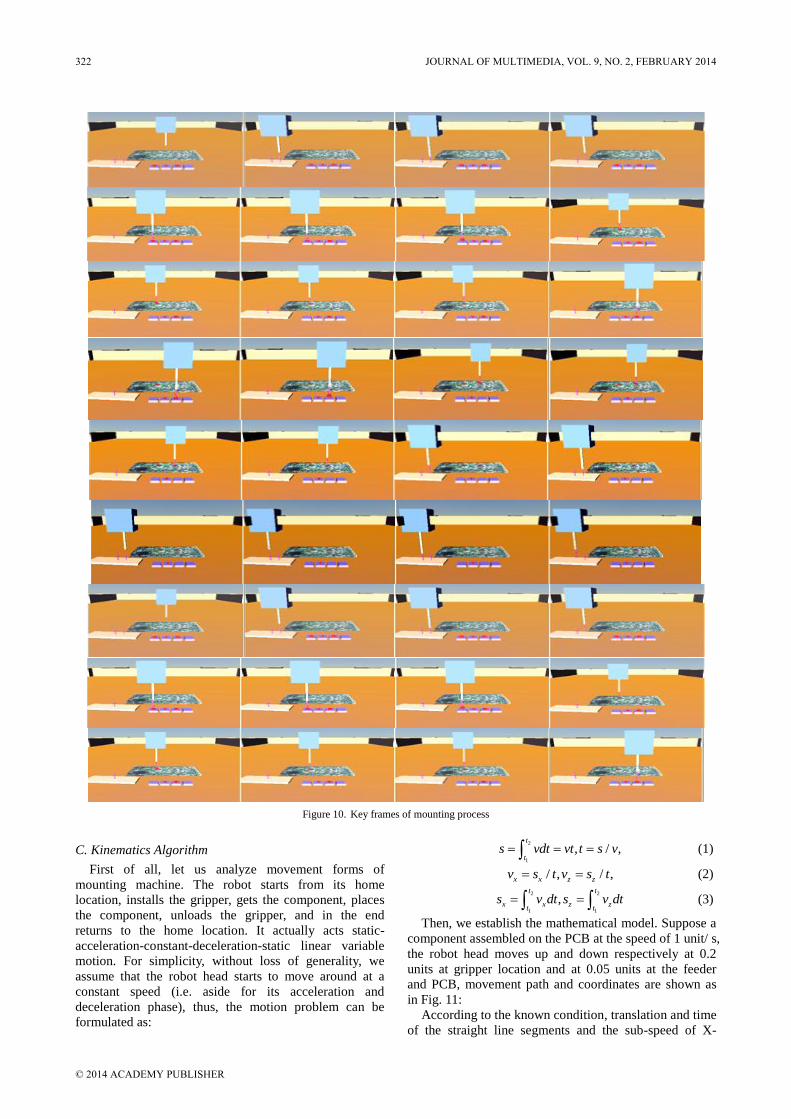
Figure 10. Key frames of mounting process
C. Kinematics Algorithm
First of all, let us analyze movement forms of
mounting machine. The robot starts from its home
location, installs the gripper, gets the component, places
the component, unloads the gripper, and in the end
returns to the home location. It actually acts static-
acceleration-constant-deceleration-static linear variable
motion. For simplicity, without loss of generality, we
assume that the robot head starts to move around at a
constant speed (i.e. aside for its acceleration and
deceleration phase), thus, the motion problem can be
formulated as:
2
1
, / ,t
ts vdt vt t s v (1)
/ , / ,x x z zv s t v s t (2)
2 2
1 1
,t t
x x z zt t
s v dt s v dt (3)
Then, we establish the mathematical model. Suppose a
component assembled on the PCB at the speed of 1 unit/ s,
the robot head moves up and down respectively at 0.2
units at gripper location and at 0.05 units at the feeder
and PCB, movement path and coordinates are shown as
in Fig. 11:
According to the known condition, translation and time
of the straight line segments and the sub-speed of X-
322 JOURNAL OF MULTIMEDIA, VOL. 9, NO. 2, FEBRUARY 2014
© 2014 ACADEMY PUBLISHER
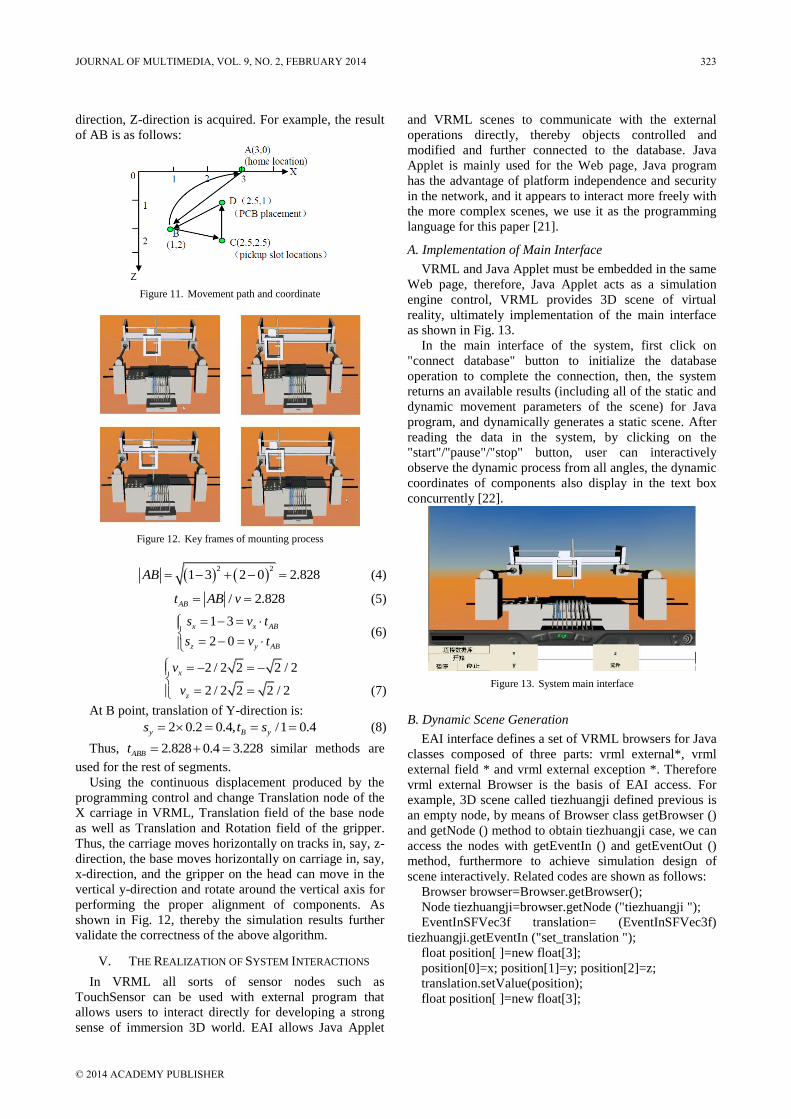
direction, Z-direction is acquired. For example, the result
of AB is as follows:
Figure 11. Movement path and coordinate
Figure 12. Key frames of mounting process
2 2
1 3 2 0 2.828AB (4)
/ 2.828ABt AB v (5)
1 3
2 0
x x AB
z y AB
s v t
s v t
(6)
2 / 2 2 2 / 2
2 / 2 2 2 / 2
x
z
v
v
(7)
At B point, translation of Y-direction is:
2 0.2 0.4, /1 0.4y B ys t s (8)
Thus, 2.828 0.4 3.228ABBt similar methods are
used for the rest of segments.
Using the continuous displacement produced by the
programming control and change Translation node of the
X carriage in VRML, Translation field of the base node
as well as Translation and Rotation field of the gripper.
Thus, the carriage moves horizontally on tracks in, say, z-
direction, the base moves horizontally on carriage in, say,
x-direction, and the gripper on the head can move in the
vertical y-direction and rotate around the vertical axis for
performing the proper alignment of components. As
shown in Fig. 12, thereby the simulation results further
validate the correctness of the above algorithm.
V. THE REALIZATION OF SYSTEM INTERACTIONS
In VRML all sorts of sensor nodes such as
TouchSensor can be used with external program that
allows users to interact directly for developing a strong
sense of immersion 3D world. EAI allows Java Applet
and VRML scenes to communicate with the external
operations directly, thereby objects controlled and
modified and further connected to the database. Java
Applet is mainly used for the Web page, Java program
has the advantage of platform independence and security
in the network, and it appears to interact more freely with
the more complex scenes, we use it as the programming
language for this paper [21].
A. Implementation of Main Interface
VRML and Java Applet must be embedded in the same
Web page, therefore, Java Applet acts as a simulation
engine control, VRML provides 3D scene of virtual
reality, ultimately implementation of the main interface
as shown in Fig. 13.
In the main interface of the system, first click on
"connect database" button to initialize the database
operation to complete the connection, then, the system
returns an available results (including all of the static and
dynamic movement parameters of the scene) for Java
program, and dynamically generates a static scene. After
reading the data in the system, by clicking on the
"start"/"pause"/"stop" button, user can interactively
observe the dynamic process from all angles, the dynamic
coordinates of components also display in the text box
concurrently [22].
Figure 13. System main interface
B. Dynamic Scene Generation
EAI interface defines a set of VRML browsers for Java
classes composed of three parts: vrml external*, vrml
external field * and vrml external exception *. Therefore
vrml external Browser is the basis of EAI access. For
example, 3D scene called tiezhuangji defined previous is
an empty node, by means of Browser class getBrowser ()
and getNode () method to obtain tiezhuangji case, we can
access the nodes with getEventIn () and getEventOut ()
method, furthermore to achieve simulation design of
scene interactively. Related codes are shown as follows:
Browser browser=Browser.getBrowser();
Node tiezhuangji=browser.getNode ("tiezhuangji ");
EventInSFVec3f translation= (EventInSFVec3f)
tiezhuangji.getEventIn ("set_translation ");
float position[ ]=new float[3];
position[0]=x; position[1]=y; position[2]=z;
translation.setValue(position);
float position[ ]=new float[3];
JOURNAL OF MULTIMEDIA, VOL. 9, NO. 2, FEBRUARY 2014 323
© 2014 ACADEMY PUBLISHER

position=((EventOutSFVec3f)
(tiezhuanji.getEventOut("translation_changed"))).getValu
e();
…
VI. CONCLUSION
In this paper after the research of structure
characteristics and working principle of mounting
machine, we establish the network application with data
driven, manufacturing–oriented visualization simulation
system that can interactively, represent the whole mount
process. Detailed product design information added
would achieve manufacturability analysis and process
optimization to provide reference for the practical
production in further research.
ACKNOWLEDGMENT
This paper is supported in part by the technical support
of military electronic pre-research project, No.
415011005.
REFERENCES
[1] H. Koriyama and Y. Yazaki, "Virtual manufacturing system", International Symposium on Semiconductor Manufacturing, 2010, pp. 5-8.
[2] Lan Li, "Modeling and simulation of mounting machine based on VRML ", 2012 Fourth International Conference on Computational and Information Sciences, Chongqing.
[3] Shujuan Guo, "Optimization on component allocation between placement machines in surface mount technology assembly line", Computer Integrated Manufacturing Systems, 2009. 15(4), pp. 817-821.
[4] Peng Yuan, "Scatter searching algorithm for multi- headed surface mounter", Electronics Process Technology, 2007. 28(6), pp. 316-320.
[5] Yijing Hu, "Mounting optimization approaches of high-speed and high-precision surface mounting machines", Eiectronics Process Technoiogy, 2006. 27(4), pp. 191-194.
[6] Nanni Zhang, "3D simulation system for key devices in surface mounting technology production line", Computer Applications and Software, 2009. 26(2), pp. 55-57.
[7] Min Ma, "Visible simulation of the key equipment in PCB fabrication", Master's degree thesis, 2007.
[8] Xiao Guo, "Visual modeling and simulation of electronic circuit manufacturing equipment of PCB board level", Master's degree thesis, 2007.
[9] Bingheng Lai, "Study of paste to pack manchine simulation based on OpenGL", Master's degree thesis, 2007.
[10] Kotak, D. B. Fleetwood, M. Tamoto, H. Gruver, W. A. "Operational scheduling for rough mills using a virtual manufacturing environment", Systems, Man, and Cybernetics, 2011 IEEE International Conference.
[11] Zhe Xu, "VRML modeling and simulation of 6DOF AUV based on MATLAB", Journal of System Simulation, 2007. 19(10), pp. 2241-2243.
[12] Hong Chang, Qusheng Li, Xinzhi Zhu; Liang Chen, "Study of PCB recovered for the SMT module of electronic product VM", computer simulation. 2009, 20(1), pp. 109-111.
[13] Haifan Zhang, "According to the Simulink imitate with realistic and dynamic system of VR Toolbox conjecture really", Control & Automation, 2007. 23(28), pp. 212-214.
[14] Xiangping Liu, "Visual running simulation of railway vehicles based on Simulink and VRML", Railway Computer Application, 2009. 18(11), pp. 1-3.
[15] Kurmicz, W. "Internet-based virtual manufacturing: a verification tool for IC designs, Quality Electronic Design, 2000. ISQED 2000". Proceedings. IEEE 2000 First International Symposium, March 2000.
[16] Ames A L, Ndaeau D R, Moreland J L. VRML 2. 0 Sourcebook. [S.1.]: John Wiley & Sons, Inc., 1997.
[17] M. sadiq, T. L. Landers, and G. D. Taylor, "A heuristic algorithm for minimizing total production time for a sequence of jobs on a suferace mount placement machine", Int. J. Productions Res, vol. 31, 1998. pp. 1327-1341
[18] Swee M. Mok, Chi-haur Wu, and D. T. Lee, "Modeling automatic assembly and disassembly operations for virtual manufacturing", IEEE Transactions on System, 2004.
[19] Sihai Zheng, Layuan Li, Yong Li, "A qoS routing protocol for mobile Ad Hoc networks based on multipath", Journal of Networks, 2012. 7(4), pp. 691-698.
[20] Ratnesh Kumar and Haomin Li, "Assembly Time Optimization for PCB Assembly", Proceedings of the American Control Conference altmore, 1994, pp. 306-310
[21] Xiaobo Wang, Xianwei Zhou, Junde Song, "Hypergraph based model and architecture for planet surface Networks and Orbit Access", Journal of Networks, 2012. 7(4), pp. 723-729.
[22] F. Larue, M. D. Benedetto, M. Dellepiane, and R. Scopigno, "From the digitization of cultural artifacts to the Web publishing of digital 3D collections: an Automatic Pipeline for Knowledge Sharing", Journal of multimedia, 2012. 7(2), pp. 132-144.
Lan Li, is a lecturer of ShanXi Normal University, China. She
received her B.S. degree in Computer Science from Southwest
Jiaotong University and her M.S. degree in Computer Science
from Xidian University in 2003. Her current research interests
include virtual reality and multimedia technology.
324 JOURNAL OF MULTIMEDIA, VOL. 9, NO. 2, FEBRUARY 2014
© 2014 ACADEMY PUBLISHER

Improved Extraction Algorithm of Outside
Dividing Lines in Watershed Segmentation Based
on PSO Algorithm for Froth Image of Coal
Flotation
Mu-ling TIAN Institute of Mechatronics Engineering, College of Electrical and Power Engineering, Taiyuan University of Technology,
Taiyuan, China
Email: [email protected]
Jie-ming Yang Institute of Mechatronics Engineering Taiyuan University of Technology, Taiyuan, China
Email: [email protected]
Abstract—It is difficult to exact accurate bubble size and to
make image recognition more reliable for forth image of
coal floatation because of low contrast and blurry edges in
froth image. An improved method of getting outside
dividing lines in watershed segmentation was proposed. In
binarization image processing, threshold was optimized
applying particle swarm optimization
algorithm(PSO)combining with 2-D maximum entropy
based gray level co-occurrence matrix. After distance
transform, outside dividing lines have been exacted by
watershed segmentation. By comparison with Otsu method,
the segmentation results have shown that the gotten external
watershed markers are relatively accurate, reasonable.
More importantly, under segmentation and over
segmentation were avoided using the improved method. So
it can be proved that extraction algorithm of outside
dividing lines based on PSO is effective in image
segmentation.
Index Terms—Froth Image in Coal Floatation; Threshold
Optimization; Particle Swarm Optimization Algorithm; On-
Class Variance Maximum Otsu Method; Distance
Transform; Image Segmentation
I. INTRODUCTION
Because flotation indexes have the extremely strong
correlation, accurate extraction of bubble in flotation
image becomes the key. In general, size characteristic of
the bubble will be obtained by watershed segmentation
for froth image. Watershed segmentation is a method of
image segmentation based on region .With fast, efficient,
accurate segmentation results, watershed segmentation
way has be pay attention to by more and more people.
Because the traditional watershed segmentation is easily
affected by the noise and the image texture details, small
basin formed by noise and small details are segmented by
error [1], This can lead to over-segmentation. On the
contrary, for the low contrast images, under-segmentation
can form because image edge is not clear [2]. In order to
solve this problem, people use the two methods mainly.
The first kind is to preprocess the image by filter; the
second kind is to use watershed segmentation algorithm
based on marker extraction. In addition, the fuzzy C-
means clustering algorithm is applied to solve over-
segmentation by merging segmentation results [3] [4].
Considering that froth images of coal flotation are
collected in floatation factory, gray distribution is
concentrated, there is low contrast in background and
foreground and bubble edges in images are blurry [5]. As
a consequence, it is difficult to segment bubbles. To solve
this problem, the marked watershed is often adopted. In
addition to the internal identifier, outside segmentation
lines should be extracted. There are several kinds of
extraction algorithm of outside segmentation lines. The
extraction way of outside dividing lines is based on
binary image processing in this paper. When gray level
image was converted into binary image, traditional
threshold selection method by one-dimensional histogram
is often used in binary image segmentation. This kind of
methods is simple and effective to implement. Its
concrete step is to make a one-dimensional histogram for
a gray image, namely, gray statistic information of the
image, and then to find the lowest valley in double peak,
which is often considered the image segmentation
threshold. The principle of this method is based on the
two gray mountains are composed from foreground and
background gray values of a image and target and
background could be separated if separating the image at
the low point of the two peaks. However, due to the
impact of lighting and other reasons, sometimes obvious
wave crests and troughs don’t appear in the one-
dimensional histogram. So it is unable to realize only to
use the gray distribution to obtain the threshold. In
addition, there are many methods for threshold selection
in binary image segmentation, such as on-class variance
JOURNAL OF MULTIMEDIA, VOL. 9, NO. 2, FEBRUARY 2014 325
© 2014 ACADEMY PUBLISHERdoi:10.4304/jmm.9.2.325-332

maximum Otsu, the method of minimum error, the
method of maximum entropy and so on. The method of
Otsu threshold segmentation is a kind of segmentation
methods based on maximum on-class variance of
histogram, in which a threshold will be gotten to make
the on-class variance maximum. In the method of
maximum entropy, a threshold will be gotten to make the
information entropy of the two kinds of distribution of
target and background maximum. The method of
maximum entropy includes one-dimensional and two-
dimensional maximum entropy method. One-dimensional
maximum entropy method depends only on the gray level
histogram of image; only considers the statistical
information of the gray of image itself, ignoring the other
pertinent information. So it is not accurate to segment
image with much noise by the gotten threshold. Two-
dimensional maximum entropy method, which not only
uses the gray information of image pixels, and fully
considers the pixel and its spatial correlation information
within the neighborhood, is suitable for all of SNR image,
and can produce better image segmentation effect. So it is
a kind of threshold selection methods with very high
practical value. It will produce good effect to segment an
image by the gotten threshold using the maximum
entropy method of 2-D gray histogram as the objective
function [6] [7] [8] [9].
Different from the commonly used method of
extracting outside dividing lines in watershed
segmentation, an improved algorithm has been proposed
in this paper.
1) Using optimized threshold by particle swarm
optimization algorithm, transform a gray image into a
binary image. Multi-threshold segmentation can make
froth image undistorted and satisfied segmentation effect.
Considering that particle swarm optimization algorithm
not only has strong searching ability and ideal
convergence but also code by real, it is more efficient to
find threshold ( , )s t which make the two-dimensional
entropy maximum. The linearly decreasing weight (LDW)
strategy more is adopted in PSO algorithm.
2) Use two dimensional-maximum entropy based on
the gray level co-occurrence matrix as the fitness function
of optimize algorithm. In binary image process, threshold
selection is one of the most a key problem. In fact, it
plays a decisive role in image segmentation in keeping
quality of image segmentation and integrity. Because
there is low contrast in froth image and bubble edges are
blur, no matter threshold method based on the histogram
or OTSU method are not suitable for threshold selection.
The double-threshold way based on two dimensional-
maximum entropy can keep bubble original appearance
and make character extraction more accurate. Gray level
co-occurrence matrix contains obvious physical meaning
and is simpler and timesaving compared with two-
dimensional histogram matrix based on gray mean. So
two dimensional-maximum entropy based on the gray
level co-occurrence matrix has been proposed as the
fitness function of optimize algorithm in this paper.
3) Segment distance image transformed by binary
image using watershed segmentation algorithm and
obtain outside segment lines. In common, there are
several kinds of extraction algorithm for outside
segmentation line. But in view of froth image
particularity that under segmentation is caused easily
because of bubble adhesion, the method to segment
distance image formed by binary image was applied in
extracting outside segment lines. Combining internal
marker, the gradient image can be segmented by
watershed accurately.
II. PROPOSED ALGORITHM OF EXTRACTING OUTSIDE
SEGMENTATION LINES
A. The Segmentation Method of Image Based on 2-D
Maximum Entropy
1. Two-dimensional histogram
The definition of two-dimensional histogram: Two-
dimensional histogram 1 2( , )Num G G refers a frequency
that level of a pixel is 1G , and mean value of gray of its
neighborhood or the gray of its adjacent points in
different direction is 2G .
Suppose that ( , )f x y is an image with the 256 gray
levels, and ( , )g x y is the average image of adjacent gray
of ( , )x y or the neighborhood image of left (right) of
( , )x y . So two-dimensional histogram 1 2( , )Num G G
can be expressed as
1 2 1 2
1 2
( , , {{ ( , )
} { ( , ) }
Num G G G G Num f x y
G g x y G
(1)
2. Two-dimensional histogram based on gray level co-
occurrence matrix
Two-dimensional histogram usually means as the
following two kinds, the gray of current point of image as
the abscissa, gray mean value of the neighborhood or the
gray of adjacent point in different directions as ordinate,
such as the adjacent points on left or right or up or down.
In general, the included information of adjacent point on
the left and up direction is less clear and important than
one of adjacent point on the right and down direction [10]
[11].
The combined frequency of gray of image and gray of
the corresponding right neighborhood point was selected
as the two-dimensional histogram. Suppose that
[ ( , )]M NF f x y is original image matrix, ( , )f x y is
gray value of coordinate ( , )x y , M N refers the size of
the image. Define that transfer matrix [ ]ij M NW n of
L L dimension is used to represent two-dimensional
histogram. Among these, ijn means the number that the
gray of current pixel is i and the gray of its right
neighborhood point is j . It can be expressed as the
following representation [12].
1 1
( , )M N
ij
l k
n l k
1, ( , ) ( , 1)
( , )0,
f l k i and f l k jl k
otherwise
(2)
326 JOURNAL OF MULTIMEDIA, VOL. 9, NO. 2, FEBRUARY 2014
© 2014 ACADEMY PUBLISHER

The combined frequency ijp is expressed as the
following representation.
/ij ijp n M N (3)
From the above significance, two-dimensional
histogram based on the pixel in the right neighborhood
means the same as gray level co-occurrence matrix. So it
can be directly calculated using the gray level co-
occurrence matrix. In contrast, it is more troublesome,
time-consuming to compute two-dimensional histogram
based on gray mean value of the neighborhood in the
right neighborhood. For example, for a froth image with
size of 512x512, time to calculate two-dimensional
histogram matrix based on gray mean is 201s; but time to
calculate two-dimensional histogram matrix based on
gray level co-occurrence matrix is 0.172s.
Besides these, because of the application in adjacent
point, two-dimensional histogram based on the pixel in
the right neighborhood contains obvious physical
meaning and represents the gray transfer of image and
change. It is obvious that two-dimensional histogram
matrix based on gray level co-occurrence matrix is
simpler and timesaving.
Figure 1. The two-dimensional histogram matrix of image
3. The physical significance of two-dimensional
histogram
The graph of definition and constraint domain of two-
dimensional histogram is shown as the followings. The
abscissa ( , )f x y is gray value at ( , )x y scale, and the
ordinate ( , )g x y gray value at the right neighborhood of
( , )x y , vector ( , )s t is segmentation threshold of image,
by which the graph is divided into four districts, namely
A, B, C and D respectively, shown below. From the
shown components of histogram matrix, compared with
elements in quadrant B and D, elements in quadrant A
and C mean that the pixel gray value in the original image
is less different than and gray value of its right
neighborhood. The characteristic is close to the properties
of internal elements in target or background. If the object
is dark, A is the object area and C is the background. The
bright object, and vice versa. For general images, most
pixels fall within the object region and background region
and are concentrated on diagonal in two areas because
gray level changes are relatively flat [13]. It is to say that
the numbers of two-dimensional histogram matrix of
image along the diagonal are large obviously, result as
figure 2.Compared with elements in quadrant A and C,
the elements in quadrant B and D mean that the pixel
gray value in original image is different from gray value
of its right neighborhood. The characteristic is close to
formation characteristics of the edge and noise, and so C
and D can be taken as the edge and noise area.
Figure 2. The sketch map of two-dimensional histogram
3. 2-D entropy function
In the image histogram matrix, supposing that the
threshold vector is ( , )s t , region entropies of A, B, C, D
were obtained by the definition of two-dimensional
entropy as the followings.
0 0
( ) ( / ) log( / ) log /s t
ij A ij A A A A
i j
H A p P p P P H P
(4)
1
1 0
( ) ( / ) log( / ) log /L t
ij B ij B B B B
i s j
H B p P p P P H P
(5)
1 1
1 1
( ) ( / ) log( / ) log /L L
ij C ij C C C C
i s j t
H C p P p P P H P
(6)
1
0 1
( ) ( / ) log( / ) log /s L
ij D ij D D D D
i j t
H D p P p P P H P
(7)
Among them:
0 0
s t
A ij
i j
P p
1
1 0
L t
B ij
i s j
P p
1 1
1 1
L L
C ij
i s j t
P p
1
0 1
s L
D ij
i j t
P p
0 0
logs t
A ij ij
i j
H p p
1
1 0
logL t
B ij ij
i s j
H p p
1 1
1 1
logL L
C ij ij
i s j t
H p p
1
0 1
logs L
D ij ij
i j t
H p p
Determination functions of entropy include local
entropy, joint entropy and the global entropy, and then
determinations are shown respectively.
Local entropy:
( ) ( )LEH H A H C (8)
Joint entropy:
( ) ( )JEH H B H D (9)
Global entropy:
JOURNAL OF MULTIMEDIA, VOL. 9, NO. 2, FEBRUARY 2014 327
© 2014 ACADEMY PUBLISHER

GE LE JEH H H (10)
B. Particle Swarm Algorithm
Particle swarm optimization (Particle Swarm
Optimization, PSO) is an evolutionary computation
technique [14] [15], which was put forward by Dr.
Eberhart and Dr. Kennedy in 1995. PSO algorithm came
from the study of prey behavior of birds and is an
optimization tool based on iteration. The basic purpose of
PSO algorithm is to find the optimal solution through
group collaboration between individual and social
information sharing.
In PSO algorithm, a bird is abstracted as particle
without mass and volume (point), whose position vector
is 1 2( , , , )i nX x x x , whose flight velocity vector I
1 2( , , )i nV v v v . Expressed as 1 2( , , , )i i i iDx x x x ,
each particle's search space is D dimension.
Correspondingly, the particle velocity vector is
1 2( , , , )i i i iDv v v v , which is used to determine the
direction and distance of particles flying. Each particle
has a fitness decided by objective function. Fitness value
is standard which is used to measure pros and cons of
each particle in the whole group of. In addition, each
particle don’t know itself best position (pbest) so far and
all the particles group experienced the best location
(gbest). gbest is the optimal value in pbest. Whether it is
pbest or gbest, evaluation is based on the fitness value.
PSO algorithm is a process in which the particles follow
the two extreme value pbest and gbest to update itself
constantly in order to find the optimal solution of the
problem. This algorithm has been widely used in the
domain of function optimization, image processing,
mechanical design, communication, robot path planning
and has achieved good results.
1
1
2
() ( )
() ( )
k k k
i i i
k
i
v v c rand pbest x
c rand gbest x
(11)
1 1K k k
i i ix x v (12)
Among them, 1, 2, ,i M , M is the total number
of particles in the group; iv is the speed of the particle;
pbest and gbest are as defined earlier; is called inertia
factor; k
ix is the current position of the particle; 1c and
2c is the learning factor; rand() is a random number
between 0 and1.
From a sociological perspective, in (11), the first part
is called inertia, which refers the ability to maintain their
original velocity and direction; second part is called
cognitive particle, which is about his "learning" for own
experiences and means that the particle movement is
originated from their own experience component; the
third part is called social cognition, which is the vector
from current a pointer to the best point of population and
reflects the collaboration and knowledge sharing between
particles. The particle is to decide the next step of
movement just through the own experience and best
experience of peers.
1. The advantages of particle swarm algorithm in
threshold optimization of image segmentation
From the original segmentation process of image by
two dimensional threshold, its essence is to search a set of
optimal solutions ( , )s t to make two dimensional entropy
maximum in two dimensional reference space of attribute
formed by the gray values of pixels and the gray values in
their neighborhood. As the dimensions increase, the
amount of calculation of this threshold algorithm will
become larger, time-consuming. It not only reduces the
complexity of the algorithm, not only meets the real-time
requirements applying particle swarm algorithm in
searching the optimal threshold by two dimensional
threshold algorithm [16]. In image processing, including
image segmentation, many people use the genetic,
immune and other stochastic optimization algorithm to
find the target value, and get good effect in [17] [18].
Considering that there are many parameters to be set in
these algorithms and set is quite different for different
image parameters, this will lead to considerable
differences in treatment effect. Compared with the
genetic, immune optimization algorithm, particle swarm
algorithm can code applying real directly with less
parameters and fast convergence speed. Accordingly, this
algorithm is not only simple and easy but also can reduce
the dimension of population. With respect to genetic,
immune algorithm, there are no crossover and mutation
operations in PSO algorithm and the particle is updated
through the internal velocity. Especially in threshold
selection of image segmentation, PSO algorithm can
realize threshold optimization effectively while
combining with 2-D maximum entropy algorithm
because is real not binary code. With fast convergence
speed, PSO algorithm has the incomparable advantages
with other algorithm and makes threshold selection
simpler, more efficient.
2. Threshold optimization process of image
segmentation based particle swarm algorithm
1) Initializing population. Set the population size N,
the dimension of each particle D . Form randomly N
particles, the position (0, 1)L , velocity ( 1,2, )iv i N ,
and interval max max[ , ]v v . Among them, L is the gray
level of image.
2) According to 2D entropy formula (8), calculate the
fitness value of each particle.
3) For each particle, determine its best location the
pbest and the current global best position gbest; the initial
pbest of each particle is initial value of each particle, the
initial gbest value is maximum value of pbest for all
particles.
4) According to (11) and (12), adjust particle velocity
and position.
5) Calculate new fitness for each particle and update
fitness.
6) For each particle, compare current fitness with that
of the best position pbest, if better, the best pbest's is
current position; find the fitness maximum of all pbest,
and update gbest;
328 JOURNAL OF MULTIMEDIA, VOL. 9, NO. 2, FEBRUARY 2014
© 2014 ACADEMY PUBLISHER

7) Whether the end condition (enough good fitness
values or reaching maxiter ) has been realized. If the end
condition hasn’t been reached, turn 4). If reached, gbest is
the optimal solution.
3. Fitness function selection in particle swarm
algorithm
Because PSO algorithm is a process to obtain the
optimal solutions to the problems by searching the best
fitness value using continuous iteration, the selection of
the fitness function is the soul of PSO algorithm.
According to the maximum entropy principle, the
threshold ( , )s t is the value which will make two-
dimensional entropy maximum. Here, the local entropy
( ) ( )LEH H A H C will be adopted as criterion of
threshold selection of image segmentation, namely,
( , ) max( )LEs t Arg H . The binary image which was
segmented using two-dimensional vector ( , )s t is
, ( , )s tf x y , and it was expressed as the formula (13).
,
0, ( , ) ( , )( , )
1, ( , ) ( , )s t
when f x y s and g x y tf x y
when f x y s or g x y t
(13)
4. The parameter selection of particle swarm algorithm
1) Population size M: The larger population scale is,
the higher searching capability of the algorithm is. But
this is at a cost of large amount of calculation. For the
specific issues, a suitable size should be found, generally
from 20 to 40. If problem is more complex and specific,
population size may be increased appropriately, here,
20M .
2) Particle dimension D : In binary image process,
threshold optimization means to find threshold ( , )s t
which make the two-dimensional entropy maximum
threshold, so, 2D .
3) Maximum speed: Maximum limit speed in each
particle reflects the particle search accuracy, namely
resolution between the current position and the best
position. If too fast, particle may be over the extreme
point; if too slow, particle can’t search outside the local
extreme point so as to fall into the local extreme area. If
velocity in some dimension exceeds the set value, it is
defined as maxv (
max 0v ). Here the maximum speed
maxv is 4, namely, speed range [ 4,4] .
4) Inertia factor : can keep the particle motion
inertia, it has the trend of searching space, and has the
ability to explore new areas. If is larger, it will has
strong global searching, but its local search ability is
weak; If is smaller, its local search ability is strong. At
present, the linearly decreasing weight (LDW) strategy
more is adopted mostly. That is
max max min max[( ) / ]iter iter (14)
Among them, max and min is the maximum and
minimum value of ; iter and maxiter are the current
iteration number and the maximum iteration number.
Typical values: max 0.9 ,
min 0.4 . Here,
max 0.95 , min 0.4 .
5) Acceleration coefficient 1c and
2c : 1c and
2c are
weights which adjust each particle moving to the Pbest
and gbest [19]. Lower values allow particles wandering
outside the target region before they are drawn back.
Higher values will make particle suddenly rush or cross
the target area. Learning factors is to adjust role and
weight of own experience and social (Group) experience
of particle in its movement. If 1 0c , it means that
particle had it experience, but had only the social
experience (social-only). As a consequence, its speed of
convergence may be faster and but it can fall local optima
in dealing with complex problems. If 2 0c , it means
that particle had itself group information, but had own
experience because there is no interaction between
individuals. In general, set 1 22, 2c c . When
1c and
2c are constants, a better solution can be gotten, but not
necessarily equal to 2. Here choose 1 22, 2c c .
6) The iteration termination condition: According to
the specific problems, set the conditions for the
termination that the maximum number of iterations
maxiter is has reached or particle swarm optimal position
has meet predetermined expectations. Here choose
max 50iter . The iteration termination condition: the
maximum number of iterations has reached maxiter or
average fitness groups of two successive generations is
less than or equal to 0.0001.
C. Distance Transformation of Binary Image
Distance transformation is a kind of operations to
transform a binary image into a grayscale image.
Distance transformation refers to each pixel into distance
between it and the nearest nonzero pixel in the image.
Finally transformed target image is grayscale using
distance representation.
For a binary image with a size of M N , a set of the
target pixels in image [ ]ijA f is expressed as
{( , ) | 1}xyM x y f , and a set of background pixels
regions is expressed as {( , ) | 0}xyB x y f . Distance
transform is to get the shortest distance between pixels in
background region pixel and target points. The gotten
image is [ ]ijD a after distance transformation, its
expression is
( , )min [( , ), ( , )]ijx y M
d D i j x y
(15)
1. Euclidean Distance
Distance transformation includes many kinds of
transformation methods, such as Euclidean distance, a
chessboard distance transform, and block distance
transform and so on. Euclidean distance transform is one
of the used most commonly. Euclidean distance
transform is a kind of accurate two norm nonlinear
distance transform, which has been applied different
JOURNAL OF MULTIMEDIA, VOL. 9, NO. 2, FEBRUARY 2014 329
© 2014 ACADEMY PUBLISHER

fields in image processing. It can be expressed as
[( , ),( , )]D i j x y .
2 2[( , ), ( , )] i- ( )D i j x y x j y ( ) (16)
III. EXPERIMENTAL RESULTS AND ANALYSIS
A. The Simulation Results of External Segmentation Lines
Based on Watershed Wegmentation
In this paper, the experimental platform was Microsoft
Windows XP Professional system, CPU of Intel Core,
main frequency of 1.86GHz, RAM of 1GB. Matlab
R2007 was used as processing software. For the image
acquired by CCD industrial camera in coal flotation
factory whose size is 512×512. In order to make the
image more clear and real it was processed by
morphological de-noising and enhancement processing,
and processed image was shown as figure 3.The image
was segmented by two kinds of threshold selection,
namely Otsu and PSO respectively.
1. Otsu method
After gray image was segmented by automatic single
threshold segmentation of on-class variance maximum
method (Otsu), the gotten threshold is 119. Firstly,
binaryzation image was obtained through threshold
segmentation and the binary image was shown as figure 4.
Secondly, the binary image was transformed by
Euclidean distance transform. Finally, external tag can be
gotten using watershed segmentation, as shown in figure
5, the image superimposed by outside dividing lines as
shown in figure 6.
2. PSO method
The gray image was segmented by double threshold
particle using swarm optimization algorithm which took
2-D maximum local entropy segmentation method of
local entropy ( ) ( )LEH H A H C as the fitness function.
After 20 times running, the algorithm converged at 35th
generation averagely, functional relation between average
fitness value and the iteration as shown in figure 7. The
obtained average optimal threshold of 20 times is
(113,112). Firstly, binaryzation image was obtained
through threshold segmentation and the binary image was
shown as figure 8. Secondly, the binary image was
transformed by Euclidean distance transform. Finally,
external tag can be gotten using watershed segmentation,
as shown in figure 9, the image superimposed by outside
dividing lines as shown in figure 10. 原图像
Figure 3. Original froth image of coal flotation
OSTU二值图像
Figure 4. The binary image by Otsu
OSTU外部分割线
Figure 5. External tag gotten by Otsu using watershed segmentation
OSTU分割边界与原图叠加图
Figure 6. The image superimposed by outside dividing lines of Otsu
PSO二值图像
Figure 7. The binary image by PSO
330 JOURNAL OF MULTIMEDIA, VOL. 9, NO. 2, FEBRUARY 2014
© 2014 ACADEMY PUBLISHER

PSO外部分割线
Figure 8. External tag gotten by PSO using watershed segmentation
PSO分割边界与原图叠加图
Figure 9. The image superimposed by outside dividing lines of PSO
0 5 10 15 20 25 30 3514
14.2
14.4
14.6
14.8
15
15.2
15.4
15.6
15.8
16
Figure 10. Functional relation between average fitness value and the iteration
B. Analysis and Conclusion
The experiment indicated that watershed ridge lines
seriously deviated from the bubble edge lines when the
binary image which was obtained using automatic single
threshold segmentation based on on-class variance
maximum Otsu was segmented by watershed after
distance transform. By comparison, when the binary
image which was obtained by optimal double thresholds
using the particle swarm algorithm was segmented by
watershed after distance transform, image segmentation is
not only has the most ideal effect, but also greatly reduce
the computational time. More important, the gotten
external watershed ridge markers are relatively accurate,
reasonable, and can accurately distinguish each bubble in
the forth image. As a result this avoids under
segmentation and over segmentation; in the meanwhile,
this created favorable conditions for the feature extraction
in bubble size of flotation image. Especially, the feature
extraction based on binary image by PSO can greatly
improve accuracy in image recognition. So it can be
proved that PSO algorithm for threshold selection of
image binaryzation is a kind of effective method.
ACKNOWLEDGEMENTS
Thanks for the support of Special Research Fund of
Doctoral Tutor Categories of Doctoral Program in higher
education (20111402110010) and Shanxi Science and
Technology Program (20120321004-03) Shanxi Science
and Technology Program (20110321005-07).
REFERENCES
[1] Zhang Guoying, Zhu Hong, XuNing, “Flotation bubble
image segmentation based on seed region boundary
growing”, Mining Science and Technology, 21(12) pp.
239–242, 2011.
[2] Shao Jianbin, Chen Gang, “bubble segmentation of image
based on watershed algorithm”, Journal of Xi'an University
of technology, 27 (2) pp. 185 – 189, 2011.
[3] Gong may, YaoYumin, “improved fuzzy clustering image
segmentation based on watershed”, Application Research
of Computers, Vol. 28, No. 12, pp. 4773–4775, Dec. 2011.
[4] Gao Jinyong, Tang Hongmei, “an image segmentation
algorithm based on improved PSO and FCM”, Journal Of
Hebei University Of Technology, Vol. 40, No. 6, pp. 6– 10,
December 2011.
[5] Yang Jieming, Yang Dandan, “a segmentation method of
flotation froth image based improved watershed algorithm”,
Coal Preparation Technology, No. 5, pp. 82–85, Oct. 2012.
[6] Chen Guo, Zuo Hongfu, “Genetic algorithm image
segmentation of the two-dimensional maximum entropy”,
Journal of computer aided design and graphics, 16(4), pp.
530–534, 2002.
[7] Pun T. A, “new method for gray level picture threshold
using the entropy of histogram”, Signal Processing, 2(3),
pp. 223–237. 1980.
[8] Kapur J N, Sahoo P K, Wong A K C, “A new method for
gray level picture threshold using the entropy of the
histogram”, ComputerVision, Graphics and Image
Processing, 29(3), pp. 273–285. 1985.
[9] Yang Haifeng, Hou Zhaozhen, Image, “segmentation using
ant colony based on 2D gray histogram” Laser and Infra.,
35(8), pp. 614-617, 2005.
[10] Nikhil R. Pal, Sankar K. Pal, “Entropic thresholding”,
Signal Processing, 16, pp. 97–108, 1989.
[11] Li Na, Li Yuanxiang, “image segmentation by two-
dimensional threshold based on adaptive particle swarm
algorithm and data field”, Journal of Computer Aided
Design Computer Graphics, Vol. 24, No. 5, pp. 628–635,
May 2012.
[12] Gu Peng, Zhang Yu, “improved segmentation algorithm
for infrared image by two dimensional Otsu”, Journal of
Image and Graphics, Vol. 16, No. 8, pp. 1425–1428, Aug.
2011.
[13] Wang Dong, Zhu Ming, “The improved threshold
segmentation method based on 2D entropy in low contrast
image”, Chinese Journal of scientific instrument, vol. 25,
No. 4 Suppl., pp. 356–357, 2004.
JOURNAL OF MULTIMEDIA, VOL. 9, NO. 2, FEBRUARY 2014 331
© 2014 ACADEMY PUBLISHER

[14] Kennedy J, Eberhant R, “Particle Swarm Optimization”,
Proceedings of the IEEE International Conference on
Neural Networks, 1942–1948, 1995.
[15] Eberhant R, Kennedy J, “A New Optimizer Using Particle
Swarm Theory”, Proceedings of the 6th International
Symposium on MicroMachine and Human Science, pp. 39–
43. 1995.
[16] Huang Hong, Li Jun, Pan Jingui, “The two dimensional
Otsu fast image segmentation algorithm based on particle
swarm optimization method”, Journal of Image and
Graphics, Vo. l 16, No. 3, pp. 377–381, 2011.
[17] Yue Zhenjun, Qiu Wangcheng, Liu Chunlin, “An adaptive
image segmentation method for targets”, Chinese Journal
of image and graphics, 9 (6), pp. 674–678, 2004.
[18] Yin Chunfang, Li Zhengming, “Application of a hybrid
genetic algorithm in image segmentation”, Computer
Simulation, 21 (8), pp. 158–160, 2004.
[19] Peiyi Zhu, Weili Xiong, et al., “D-S Theory Based on an
Improved PSO for Data Fusion”, Journal Of Networks,
VOL. 7, NO. 2, pp. 370–376, February 2012.
Muling Tian, female, born in 1969, in
Taiyuan, Shanxi Province, China. A Ph.D
candidate in Institute of Mechatronics
Engineering, Taiyuan University of
Technology. Received the bachelor's
degree in Electronic and master's degree
in mechatronic engineering from Taiyuan
University of Technology.
She is a teacher in College of
Electrical and Power Engineering, Taiyuan University of
Technology. Her main interest is focus on the image processing
and automatic control.
Jieming Yang, female, born in 1956 in Taiyuan, Shanxi
Province, China. Received the PhD degree in Mechatronics
Engineering from Taiyuan University of Technology.
She is a Professor in Taiyuan University of Technology .Her
research interest covers image processing, automatic monitoring
and control and fault diagnosis. She has hosted several
provincial projects. More than 30 academic articles are
published and there are more than ten papers cited by EI.
332 JOURNAL OF MULTIMEDIA, VOL. 9, NO. 2, FEBRUARY 2014
© 2014 ACADEMY PUBLISHER

Instructions for Authors
Manuscript Submission All paper submissions will be handled electronically in EDAS via the JMM Submission Page (URL: http://edas.info/newPaper.php?c=7325). After
login EDAS, you will first register the paper. Afterwards, you will be able to add authors and submit the manuscript (file). If you do not have an EDAS account, you can obtain one. Along with the submission, Authors should select up to 3 topics from the EDICS (URL: http://www.academypublisher.com/jmm/jmmedics.html
JMM invites original, previously unpublished, research papers, review, survey and tutorial papers, application papers, plus case studies, short research notes and letters, on both applied and theoretical aspects. Submission implies that the manuscript has not been published previously, and is not currently submitted for publication elsewhere. Submission also implies that the corresponding author has consent of all authors. Upon acceptance for publication transfer of copyright will be made to Academy Publisher, article submission implies author agreement with this policy. Manuscripts should be written in English. Paper submissions are accepted only in PDF. Other formats will not be accepted. Papers should be formatted into A4-size (8.27" x 11.69") pages, with main text of 10-point Times New Roman, in single-spaced two-column format. Authors are advised to follow the format of the final version at this stage. All the papers, except survey, should ideally not exceed 12,000 words (14 pages) in length. Whenever applicable, submissions must include the following elements: title, authors, affiliations, contacts, abstract, index terms, introduction, main text, conclusions, appendixes, acknowledgement, references, and biographies.
), and clearly state them during the registration of the submission.
Conference Version
Submissions previously published in conference proceedings are eligible for consideration provided that the author informs the Editors at the time of submission and that the submission has undergone substantial revision. In the new submission, authors are required to cite the previous publication and very clearly indicate how the new submission offers substantively novel or different contributions beyond those of the previously published work. The appropriate way to indicate that your paper has been revised substantially is for the new paper to have a new title. Author should supply a copy of the previous version to the Editor, and provide a brief description of the differences between the submitted manuscript and the previous version.
If the authors provide a previously published conference submission, Editors will check the submission to determine whether there has been sufficient new material added to warrant publication in the Journal. The Academy Publisher’s guidelines are that the submission should contain a significant amount of new material, that is, material that has not been published elsewhere. New results are not required; however, the submission should contain expansions of key ideas, examples, elaborations, and so on, of the conference submission. The paper submitting to the journal should differ from the previously published material by at least 30 percent.
Review Process
Submissions are accepted for review with the understanding that the same work has been neither submitted to, nor published in, another publication. Concurrent submission to other publications will result in immediate rejection of the submission.
All manuscripts will be subject to a well established, fair, unbiased peer review and refereeing procedure, and are considered on the basis of their significance, novelty and usefulness to the Journals readership. The reviewing structure will always ensure the anonymity of the referees. The review output will be one of the following decisions: Accept, Accept with minor changes, Accept with major changes, or Reject.
The review process may take approximately three months to be completed. Should authors be requested by the editor to revise the text, the revised version should be submitted within three months for a major revision or one month for a minor revision. Authors who need more time are kindly requested to contact the Editor. The Editor reserves the right to reject a paper if it does not meet the aims and scope of the journal, it is not technically sound, it is not revised satisfactorily, or if it is inadequate in presentation. Revised and Final Version Submission
Revised version should follow the same requirements as for the final version to format the paper, plus a short summary about the modifications authors have made and author's response to reviewer's comments.
Authors are requested to use the Academy Publisher Journal Style for preparing the final camera-ready version. A template in PDF and an MS word template can be downloaded from the web site. Authors are requested to strictly follow the guidelines specified in the templates. Only PDF format is acceptable. The PDF document should be sent as an open file, i.e. without any data protection. Authors should submit their paper electronically through email to the Journal's submission address. Please always refer to the paper ID in the submissions and any further enquiries.
Please do not use the Adobe Acrobat PDFWriter to generate the PDF file. Use the Adobe Acrobat Distiller instead, which is contained in the same package as the Acrobat PDFWriter. Make sure that you have used Type 1 or True Type Fonts (check with the Acrobat Reader or Acrobat Writer by clicking on File>Document Properties>Fonts to see the list of fonts and their type used in the PDF document). Copyright
Submission of your paper to this journal implies that the paper is not under submission for publication elsewhere. Material which has been previously copyrighted, published, or accepted for publication will not be considered for publication in this journal. Submission of a manuscript is interpreted as a statement of certification that no part of the manuscript is copyrighted by any other publisher nor is under review by any other formal publication.
Submitted papers are assumed to contain no proprietary material unprotected by patent or patent application; responsibility for technical content and for protection of proprietary material rests solely with the author(s) and their organizations and is not the responsibility of the Academy Publisher or its editorial staff. The main author is responsible for ensuring that the article has been seen and approved by all the other authors. It is the responsibility of the author to obtain all necessary copyright release permissions for the use of any copyrighted materials in the manuscript prior to the submission. More information about permission request can be found at the web site.
Authors are asked to sign a warranty and copyright agreement upon acceptance of their manuscript, before the manuscript can be published. The Copyright Transfer Agreement can be downloaded from the web site. Publication Charges and Re-print
The author's company or institution will be requested to pay a flat publication fee of EUR 360 for an accepted manuscript regardless of the length of the paper. The page charges are mandatory. Authors are entitled to a 30% discount on the journal, which is EUR 100 per copy. Reprints of the paper can be ordered with a price of EUR 100 per 20 copies. An allowance of 50% discount may be granted for individuals without a host institution and from less developed countries, upon application. Such application however will be handled case by case.
More information is available on the web site at http://www.academypublisher.com/jmm/authorguide.html.

(Contents Continued from Back Cover)
Method of Batik Simulation Based on Interpolation Subdivisions
Jian Lv, Weijie Pan, and Zhenghong Liu
Research on Saliency Prior Based Image Processing Algorithm
Yin Zhouping and Zhang Hongmei
A Novel Target-Objected Visual Saliency Detection Model in Optical Satellite Images
Xiaoguang Cui, Yanqing Wang, and Yuan Tian
A Unified and Flexible Framework of Imperfect Debugging Dependent SRGMs with Testing-Effort
Ce Zhang, Gang Cui, Hongwei Liu, Fanchao Meng, and Shixiong Wu
A Web-based Virtual Reality Simulation of Mounting Machine
Lan Li
Improved Extraction Algorithm of Outside Dividing Lines in Watershed Segmentation Based on PSO
Algorithm for Froth Image of Coal Flotation
Mu-ling TIAN and Jie-ming Yang
286
294
302
310
318
325